Motorisation, pilotage, instrumentation d'un fauteuil ...
35
Motorisation, pilotage, instrumentation d'un fauteuil électrique Licence Professionnelle VEGA : IUT Belfort Montbéliard 2013/2014 SAHIN Mustafa LOPEZ Jhonatan
Transcript of Motorisation, pilotage, instrumentation d'un fauteuil ...

Motorisation, pilotage, instrumentation d'un fauteuil électrique
Licence Professionnelle VEGA : IUT Belfort Montbéliard
2013/2014
SAHIN Mustafa LOPEZ Jhonatan
1 - Introduction générale 2 – Les différents organes
3 – Le protocole I²C
4 – Les tests et les essais
5 - Conclusion
Plan
2
1 – Introduction générale
3
Objectifs
Difficultés
Intérêt
Synoptique
Déroulements
Création et mise en place de nouvelles lois de commandes afin de commander le fauteuil à l’aide d’un joystick et effectuer une visualisation de vitesse, grâce aux deux capteur inductifs.
1 – Introduction générale
4
Objectifs
Difficultés
Intérêt
Synoptique
Déroulements
1 – Introduction générale
5
Objectifs
Difficultés
Intérêt
Démarches
Déroulements
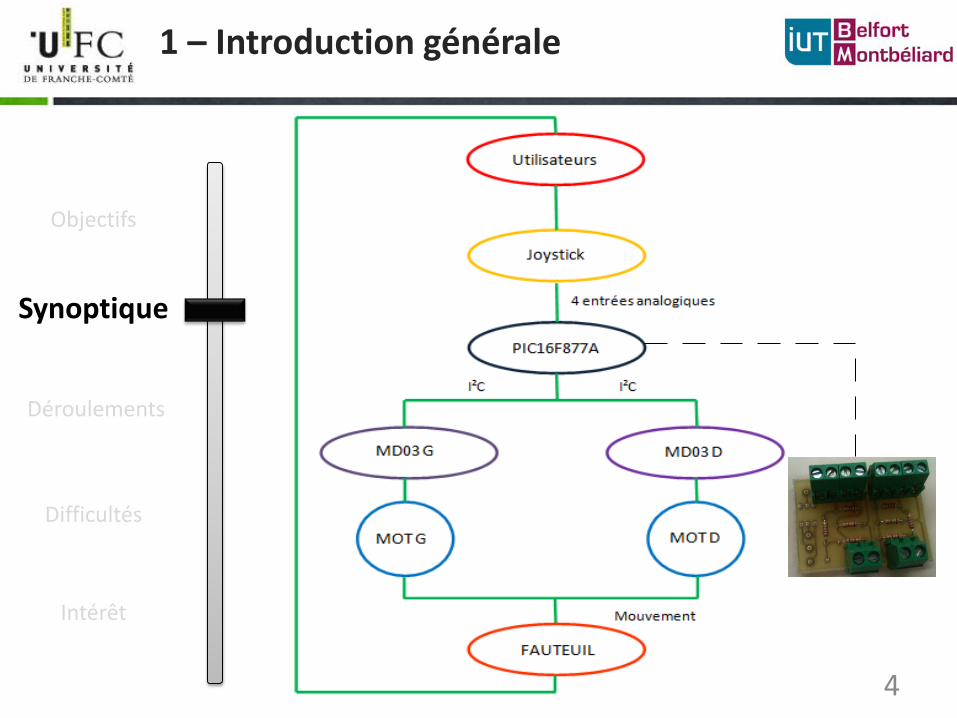
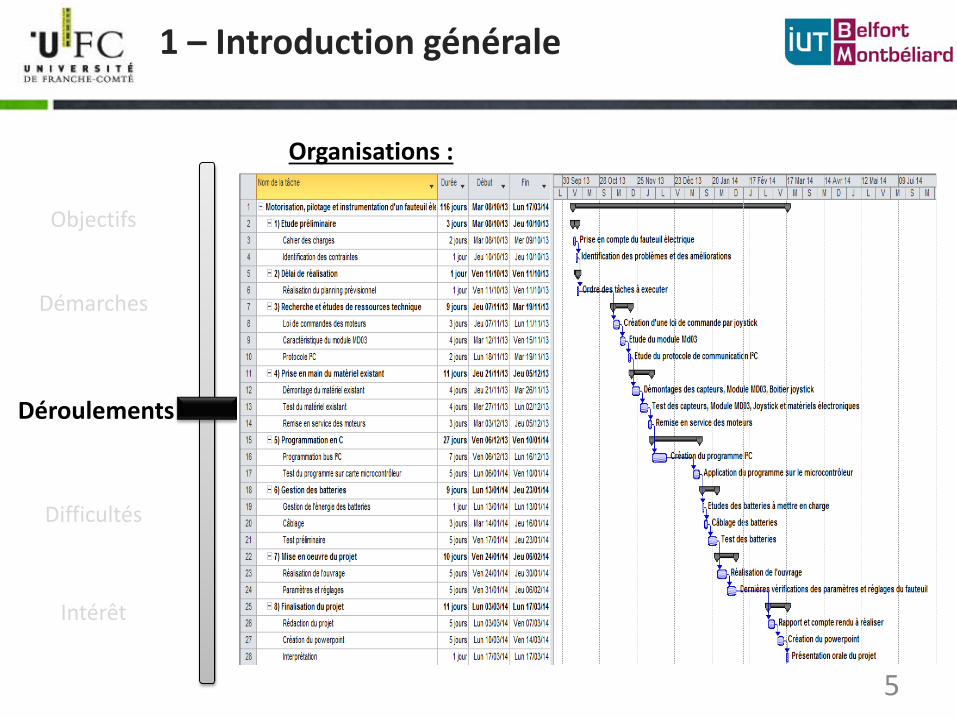
Organisations :
1 – Introduction générale
6
Objectifs
Difficultés
Intérêt
Démarches
Déroulements
Difficultés rencontrées : Programmation I²C. Pas de documentation. Certains composants n’ont pas supporté lors des
interventions.
1 – Introduction générale
7
Objectifs
Difficultés
Intérêt
Démarches
Déroulements
Se déplacer avec facilité… Un fauteuil électrique permet aux personnes à mobilité réduite de se déplacer avec facilité. Il répond aux besoins, qui, malgré leur mobilité limitée, désirent se déplacer librement.
1 - Introduction générale
2 – Les différents organes 3 – Le protocole I²C
4 – Les tests et les essais
5 - Conclusion
Plan
8
2- Les différents organes
9
Situation initiale
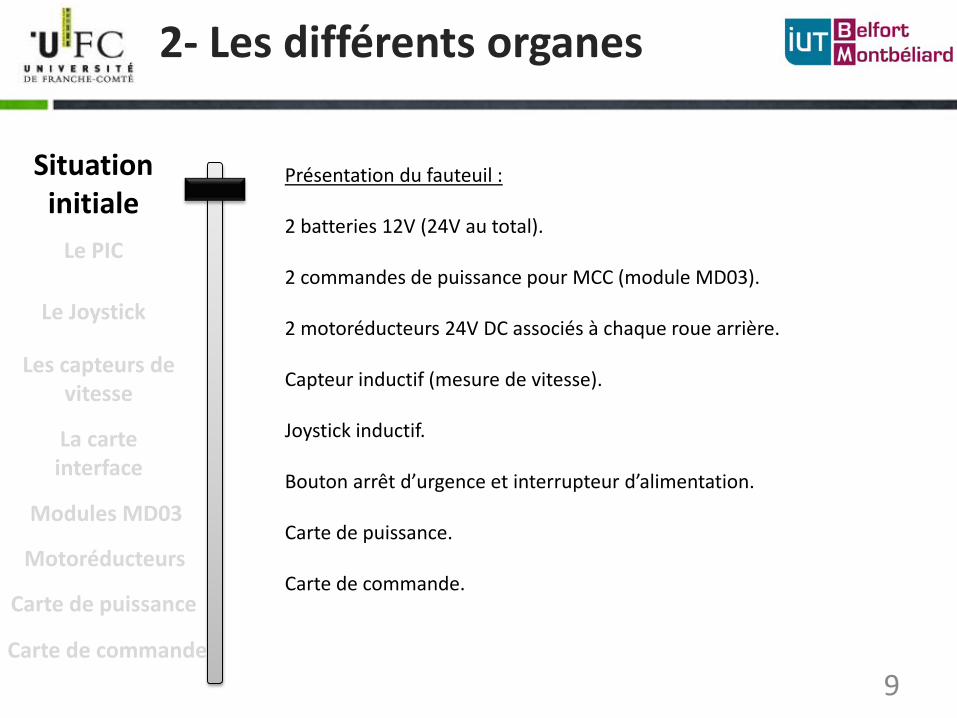
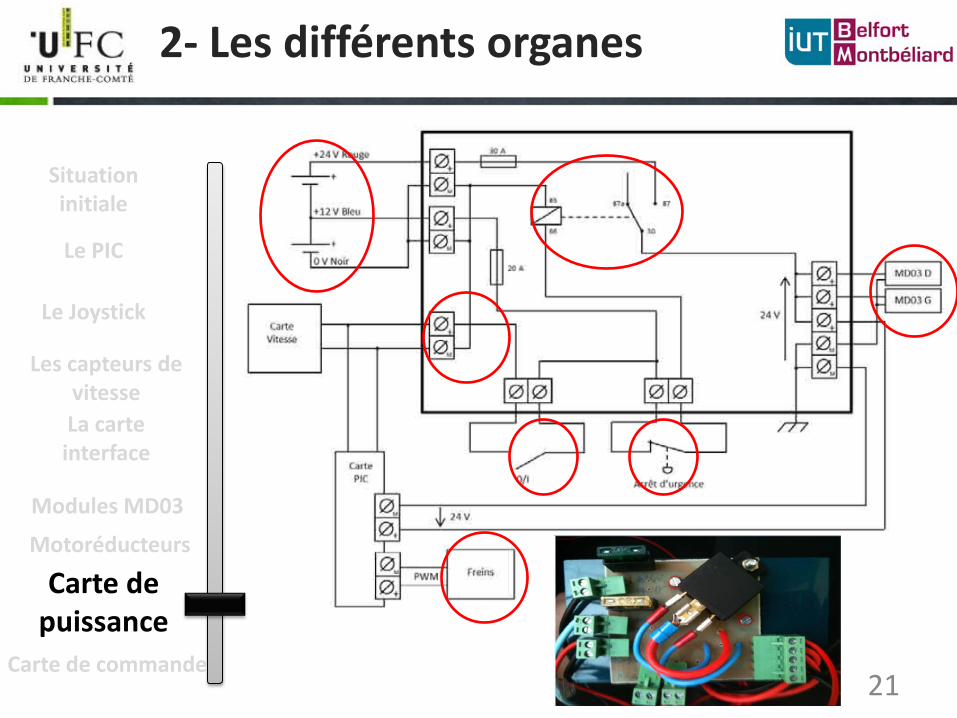
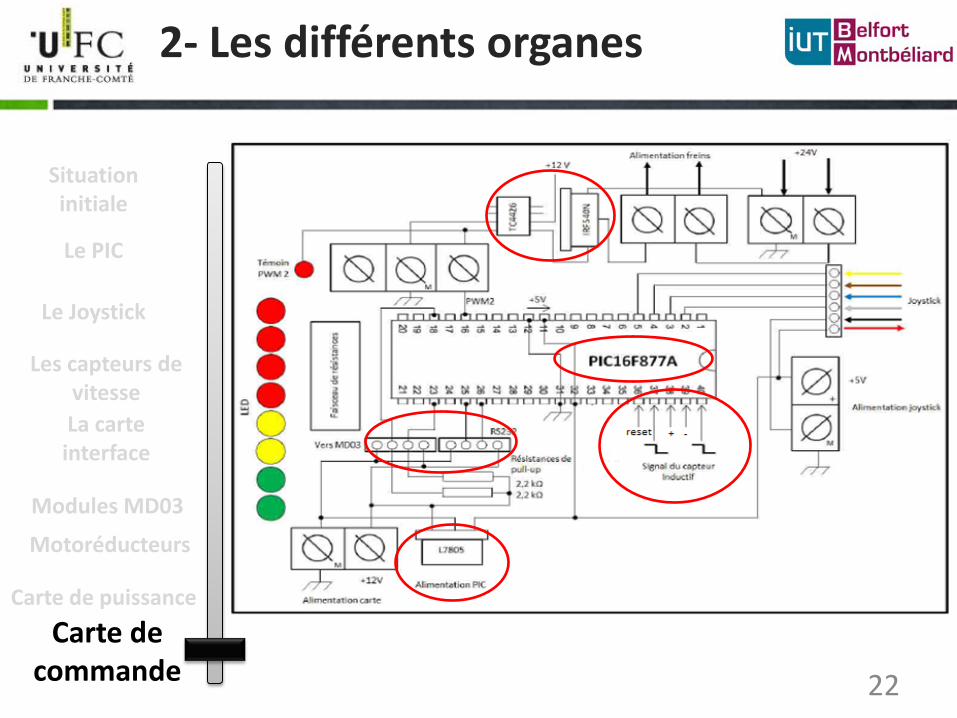
Présentation du fauteuil : 2 batteries 12V (24V au total). 2 commandes de puissance pour MCC (module MD03). 2 motoréducteurs 24V DC associés à chaque roue arrière. Capteur inductif (mesure de vitesse). Joystick inductif. Bouton arrêt d’urgence et interrupteur d’alimentation. Carte de puissance. Carte de commande.
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
2- Les différents organes
10
Situation initiale
Les capteurs de vitesse
Modules MD03
Le PIC
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
2- Les différents organes
11
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
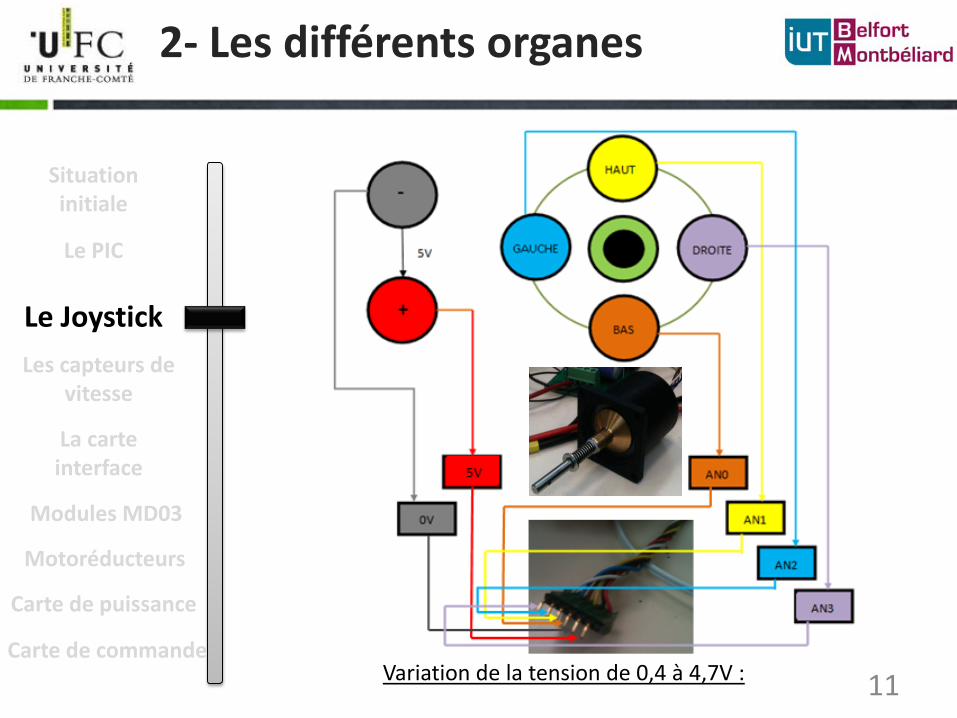
Situation initiale
Variation de la tension de 0,4 à 4,7V :
2- Les différents organes
12
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
Situation initiale
13
2- Les différents organes
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
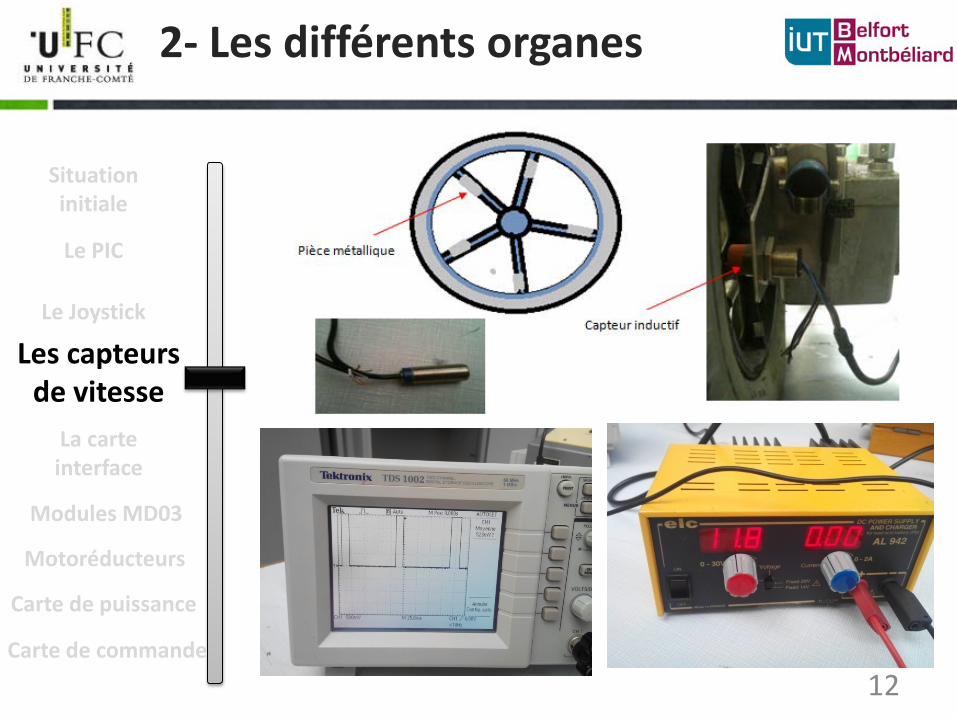
Situation initiale
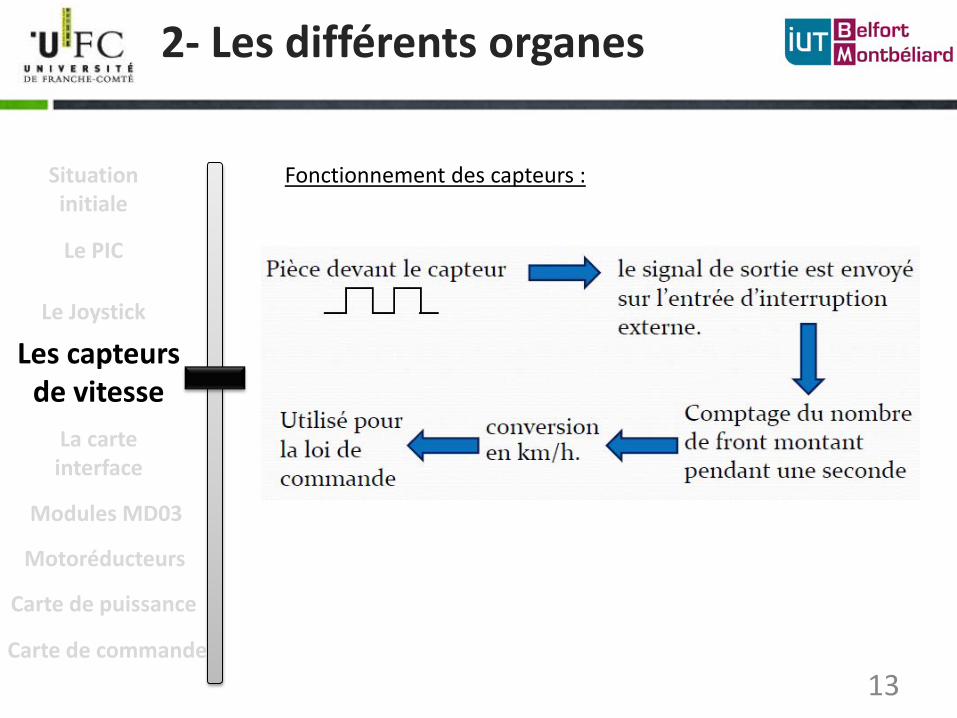
Fonctionnement des capteurs :
2- Les différents organes
14
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
Situation initiale
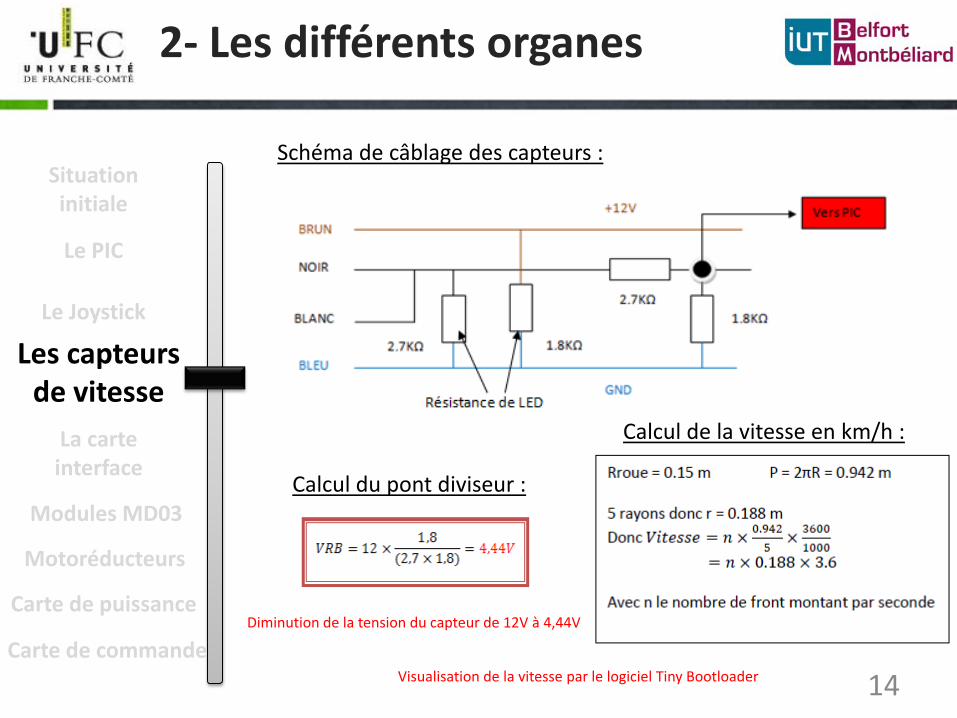
Schéma de câblage des capteurs :
Diminution de la tension du capteur de 12V à 4,44V
Calcul du pont diviseur :
Calcul de la vitesse en km/h :
Visualisation de la vitesse par le logiciel Tiny Bootloader
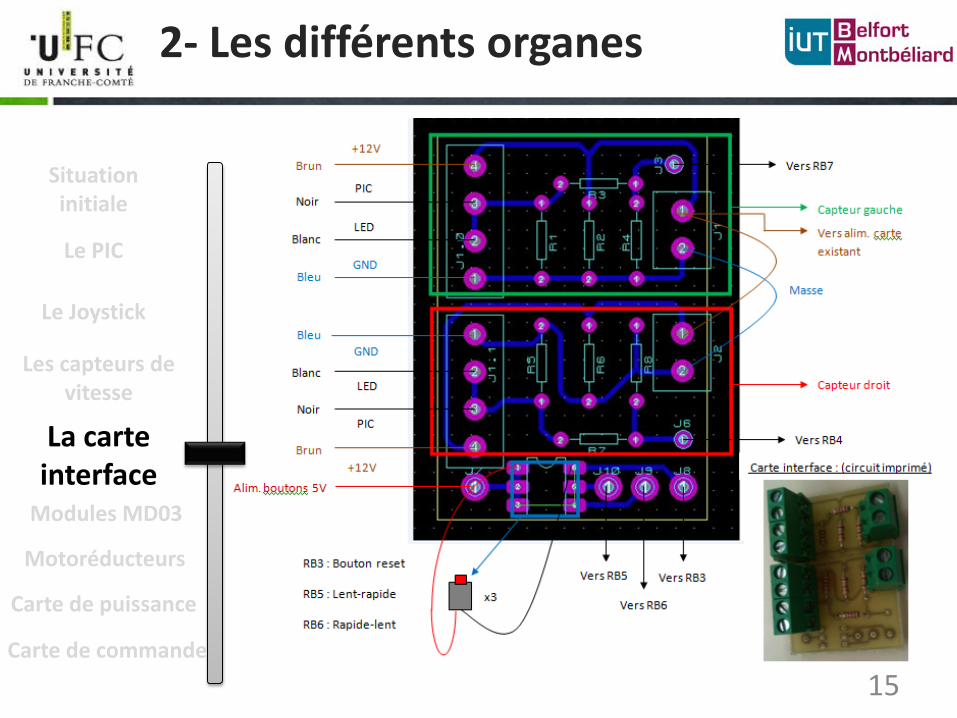
2- Les différents organes
15
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
Situation initiale
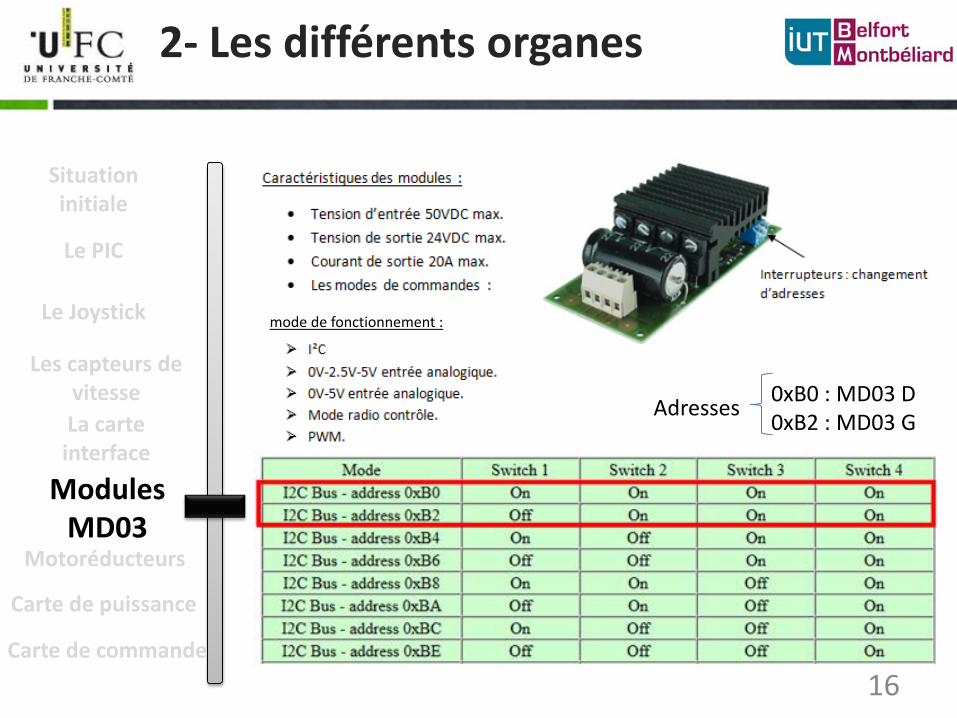
2- Les différents organes
16
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
Situation initiale
mode de fonctionnement :
0xB0 : MD03 D 0xB2 : MD03 G Adresses
2- Les différents organes
17
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Motoréducteurs
Carte de puissance
Carte de commande
Situation initiale
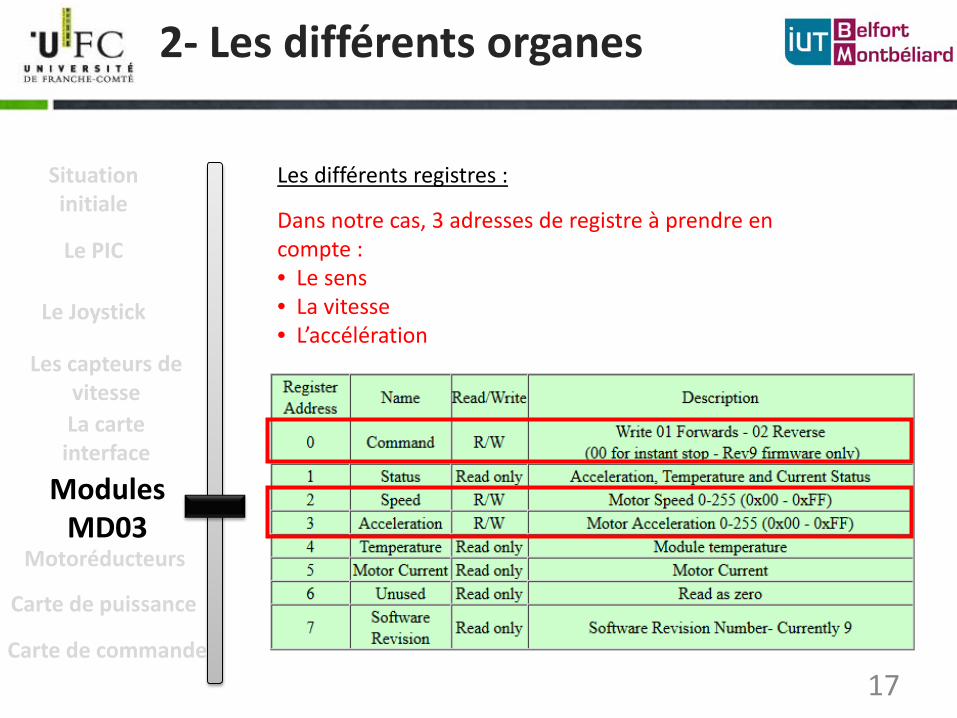
Les différents registres :
Dans notre cas, 3 adresses de registre à prendre en compte : • Le sens • La vitesse • L’accélération
2- Les différents organes
18
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance
Carte de commande
Situation initiale
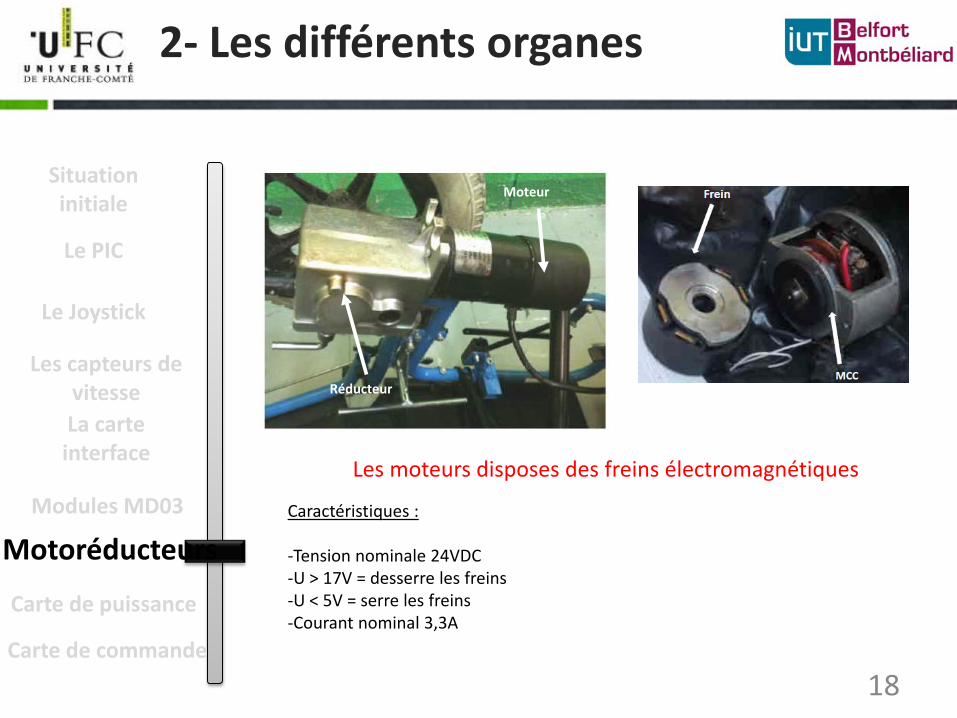
Motoréducteurs
Réducteur
Moteur
Les moteurs disposes des freins électromagnétiques
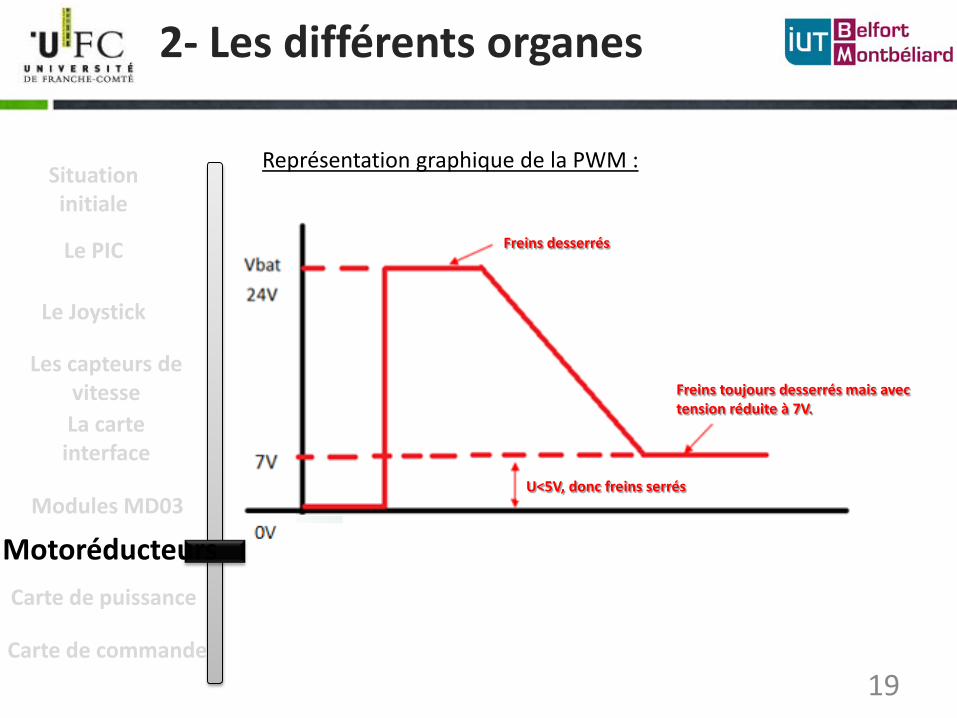
Caractéristiques : -Tension nominale 24VDC -U > 17V = desserre les freins -U < 5V = serre les freins -Courant nominal 3,3A
2- Les différents organes
19
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance
Carte de commande
Situation initiale
Motoréducteurs
Représentation graphique de la PWM :
Freins desserrés
Freins toujours desserrés mais avec tension réduite à 7V.
U<5V, donc freins serrés
2- Les différents organes
20
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance
Carte de commande
Situation initiale
Motoréducteurs
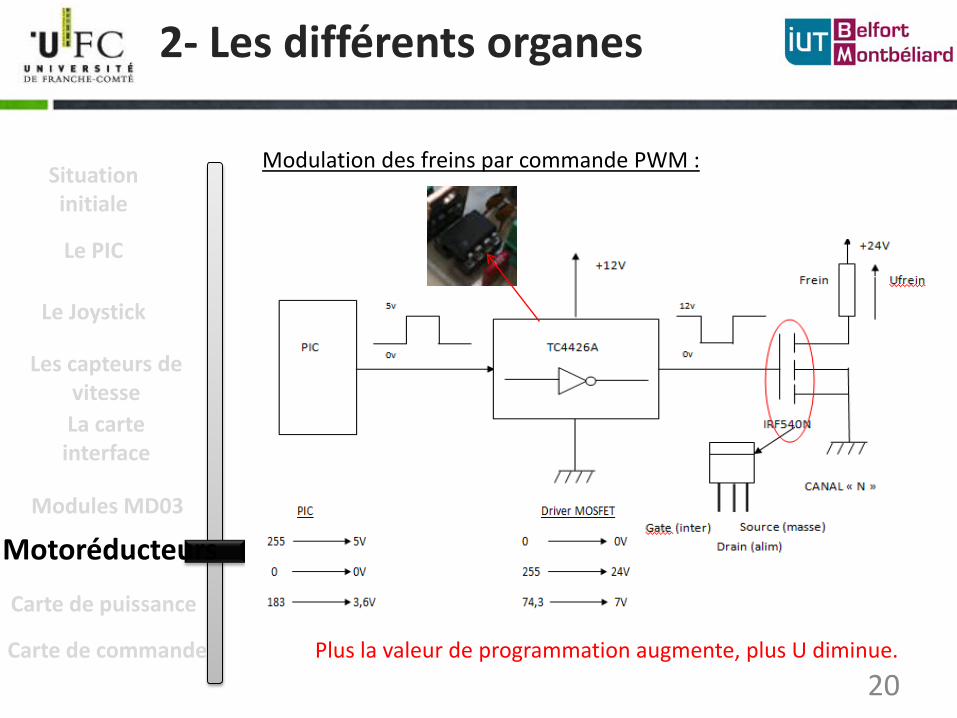
Modulation des freins par commande PWM :
Plus la valeur de programmation augmente, plus U diminue.
2- Les différents organes
21
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance
Carte de commande
Situation initiale
Motoréducteurs
2- Les différents organes
22
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance Carte de
commande
Situation initiale
Motoréducteurs
2- Les différents organes
Le PIC
Les capteurs de vitesse
Modules MD03
Le Joystick
La carte interface
Carte de puissance Carte de
commande
Situation initiale
Motoréducteurs
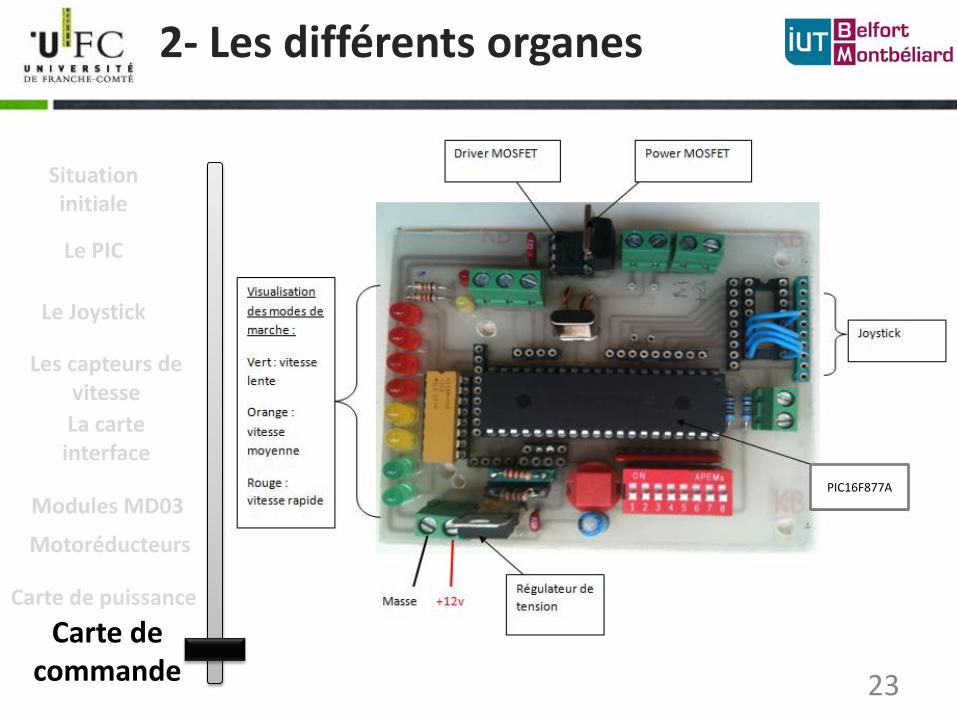
23
PIC16F877A
1 - Introduction générale
2 – Les différents organes
3 – Le protocole I²C 4 – Les tests et les essais
5 - Conclusion
Plan
24
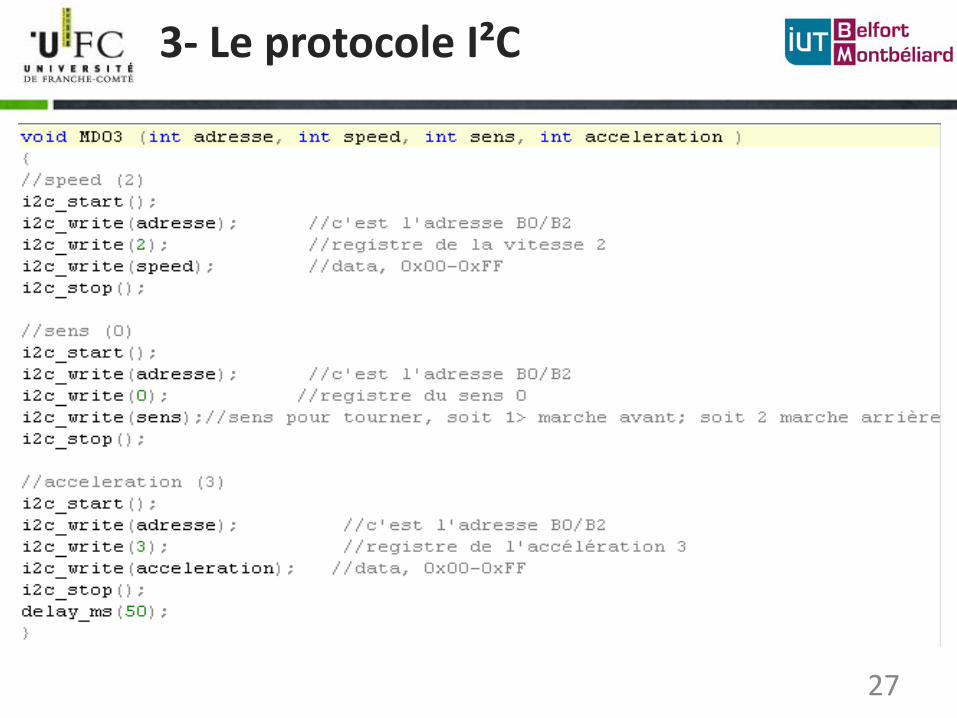
3- Le protocole I²C
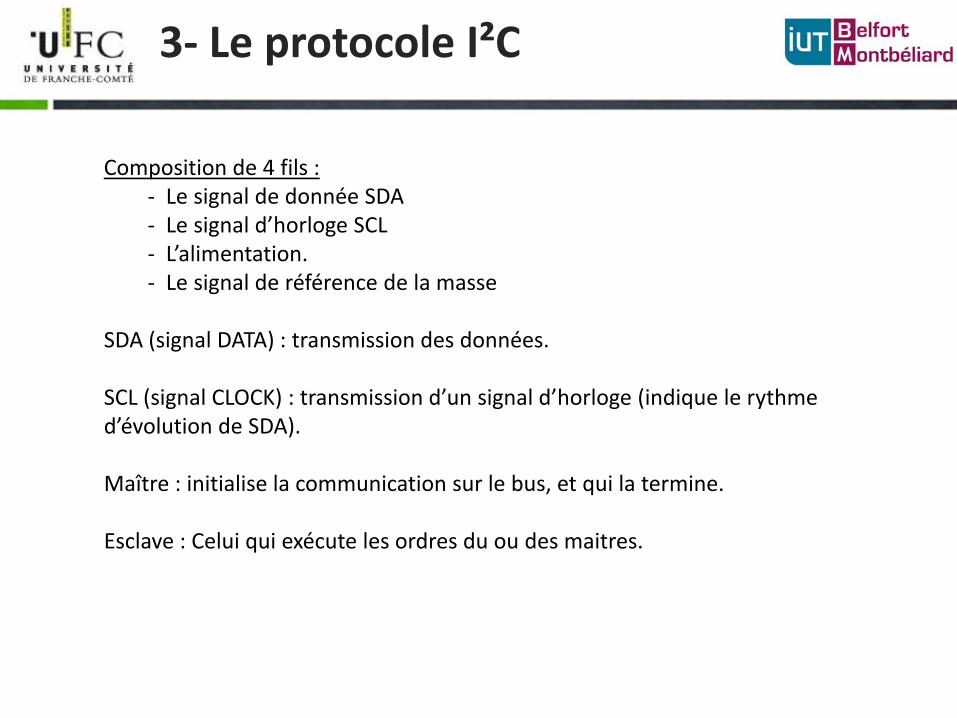
Composition de 4 fils : - Le signal de donnée SDA - Le signal d’horloge SCL - L’alimentation. - Le signal de référence de la masse SDA (signal DATA) : transmission des données. SCL (signal CLOCK) : transmission d’un signal d’horloge (indique le rythme d’évolution de SDA). Maître : initialise la communication sur le bus, et qui la termine. Esclave : Celui qui exécute les ordres du ou des maitres.
26
3- Le protocole I²C
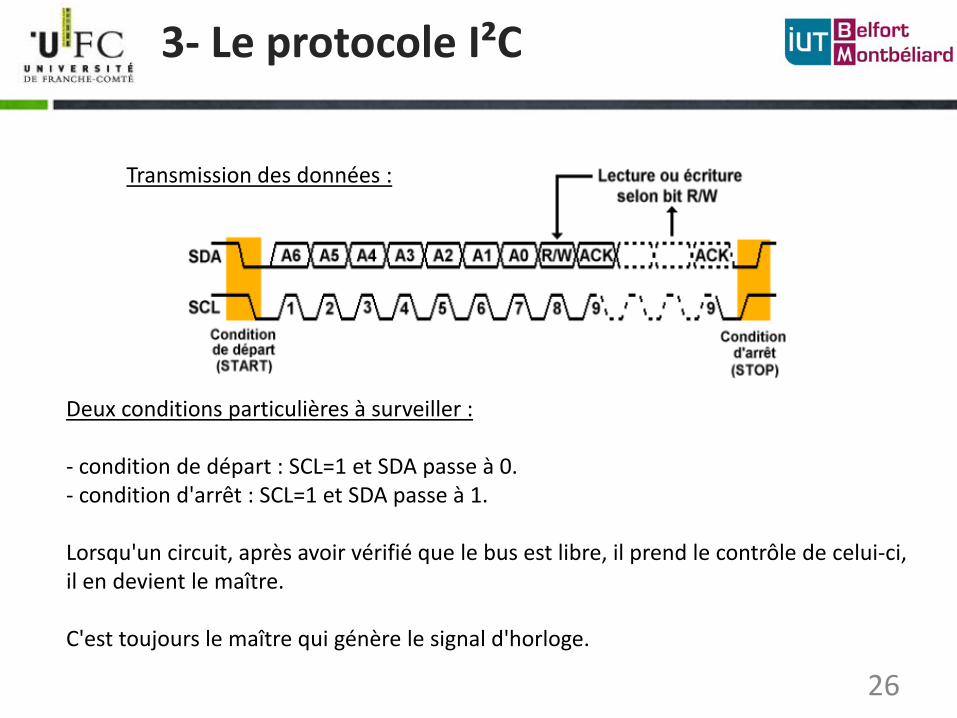
Transmission des données :
Deux conditions particulières à surveiller : - condition de départ : SCL=1 et SDA passe à 0. - condition d'arrêt : SCL=1 et SDA passe à 1.
Lorsqu'un circuit, après avoir vérifié que le bus est libre, il prend le contrôle de celui-ci, il en devient le maître. C'est toujours le maître qui génère le signal d'horloge.
3- Le protocole I²C
27
1 - Introduction générale
2 – Les différents organes
3 – Le protocole I²C
4 – Les tests et les essais 5 - Conclusion
28
Plan Plan
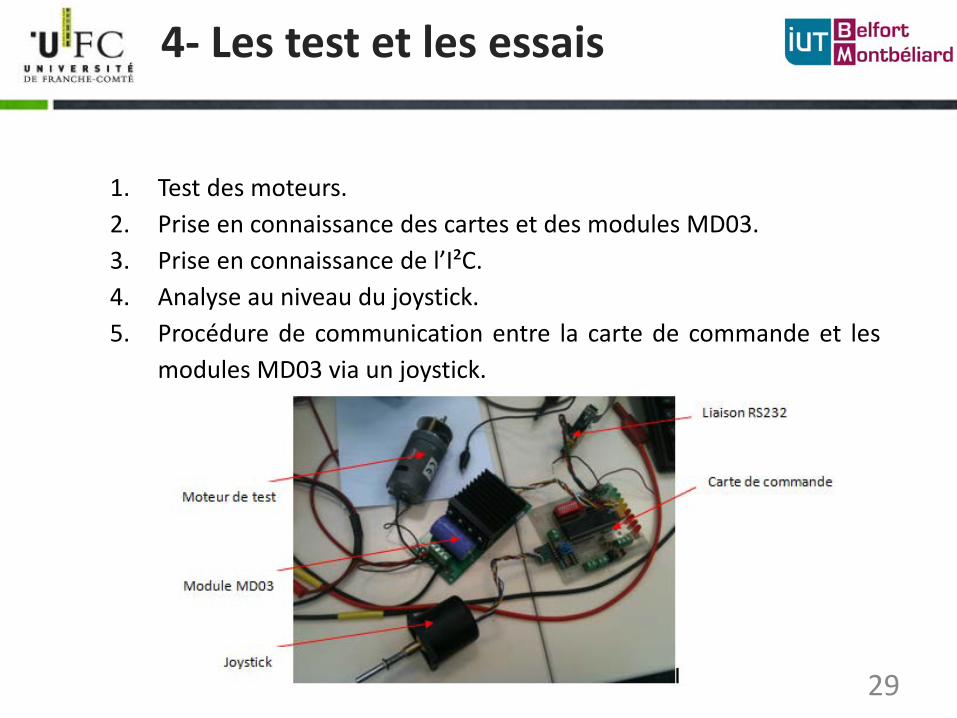
1. Test des moteurs. 2. Prise en connaissance des cartes et des modules MD03. 3. Prise en connaissance de l’I²C. 4. Analyse au niveau du joystick. 5. Procédure de communication entre la carte de commande et les
modules MD03 via un joystick.
29
4- Les test et les essais
30
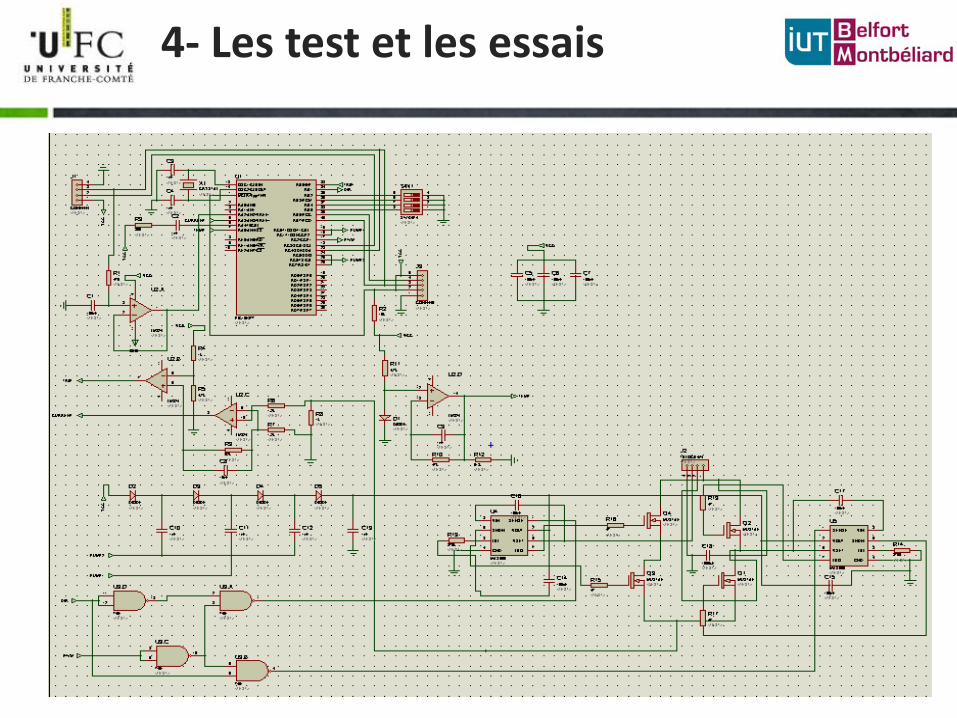
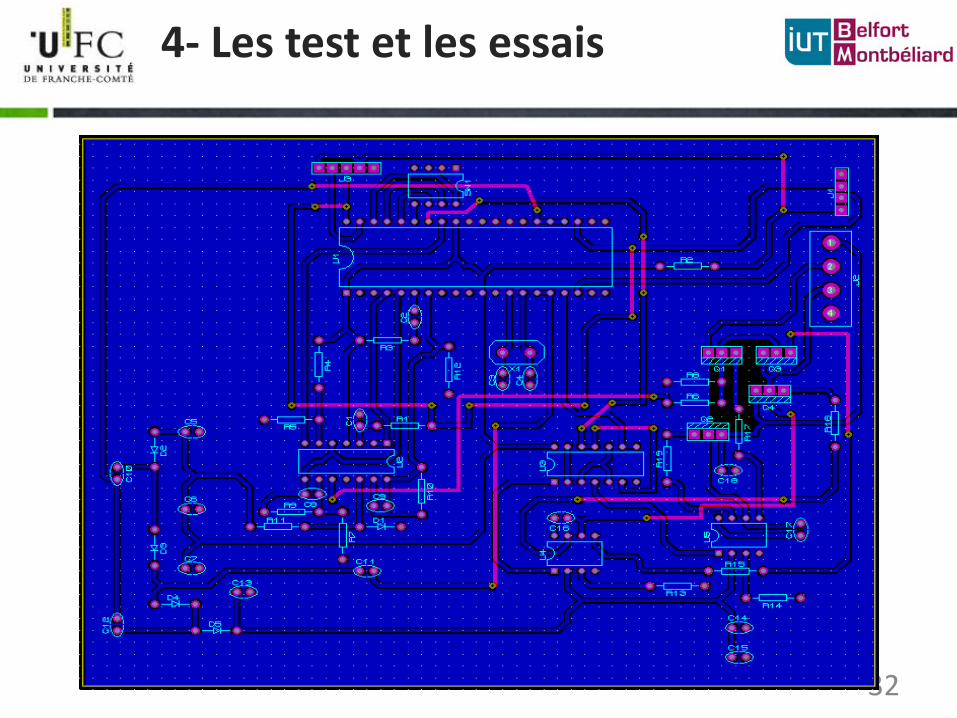
4- Les test et les essais
6. Obtention du signal par l’oscilloscope pour les capteurs de vitesse. 7. Conversion de cette vitesse et visualisation par Tiny Bootloader. 8. Test au niveau des freins et mise en place d’une modulation par PWM. pour gagner en autonomie. 9. Elaboration d’une carte interface. 10. Câblage.
31
4- Les test et les essais
32
4- Les test et les essais
1 - Introduction générale
2 – Les différents organes
3 – Le protocole I²C
4 – Les test et les essais
5 - Conclusion
5 – Conclusion
33
Ce que ce projet nous a apporté : - Notions en électronique et électrotechnique. - Utilisation de l’I²C. - Le travail en groupe. - Une bonne expérience pour notre futur vie professionnelle.
5- Conclusion
34
Merci pour votre attention…
Licence Professionnelle VEGA : IUT Belfort Montbéliard
2013/2014
SAHIN Mustafa LOPEZ Jhonatan