Montage préparé par : André Ross Professeur de mathématiques Cégep de Lévis-Lauzon André Ross...
27
Montage préparé par : André Ross Professeur de mathématiques Cégep de Lévis-Lauzon Transformations S Cliquer pour la suite. Revenir à la diapositive précédente. Aller à la diapositive suivante. Légende
-
Upload
sybille-bertrand -
Category
Documents
-
view
132 -
download
4
Transcript of Montage préparé par : André Ross Professeur de mathématiques Cégep de Lévis-Lauzon André Ross...

Montage préparé par :Montage préparé par :
André Ross
Professeur de mathématiques
Cégep de Lévis-Lauzon
André Ross
Professeur de mathématiques
Cégep de Lévis-Lauzon
TransformationsTransformations
S Cliquer pour la suite.
Revenir à la diapositive précédente.
Aller à la diapositive suivante.
Légende

Nous avons vu dans la présentation précédente qu’il est possible en
imposant des contraintes sur la variation des scalaires. Nous verrons
maintenant qu’il est possible par les transformations de déplacer et de
déformer ces objets.
Introduction
Cela nous permettra d’établir des relations entre la géométrie,
l’algèbre, les systèmes d’équations et les opérations matricielles.

, un vecteur fixe de V. On appelle translation de vecteur , qui à un vec-teur
, la transformation, notée
, le sous-ensemble contenant tous les vecteurs de la forme :
Soit :
Translation
, fait correspondre le vecteur
DÉFINITION
Soit V, un espace vectoriel et
DÉFINITION
Translations
rr Tr
v r v.
Tr (v )
+
r v+=
Soit E est un sous-ensemble de V, on appelle translaté de E par r
r e+ e, où E
Sous-ensemble translaté
S

Exemple 7.3.1
S
Les points du triangle sont décrits vectoriellement par :
(x; y) = a(2; 1) + b(1; 3)
Donner la description vectorielle et la description paramétrique du triangle E construit sur les vecteurs :
u v= (2; 1) et = (1; 3)
La description paramétrique des points du triangle est :
où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1
x = 2a + b
y = a + 3b
où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1
w u= a + b voù 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1En coordonnées cartésiennes, cela donne :
S
0 ≤ a ≤ 1, 0 ≤ b ≤ 1
et a + b ≤ 1
Donner la description vectorielle et la description paramétrique du triangle E translaté par le vecteur r = (–2; 3).
Les points du triangle translaté sont décrits vectoriellement par :
Tr (w ) r += ua + b v
(x; y) = (–2; 3) + a(2; 1) + b(1; 3)
x = –2 + 2a + b
y = 3 + a + 3b

Exemple 7.3.2
S
Les points du parallélépipède sont décrits vectoriellement par :
(x; y; z) = a(2; –1; 3) + b(1; 4; 2) + c(–2; 1; 2)
Donner la description vectorielle et la description paramétrique du parallélépipède construit sur les vecteurs :
u v= (2; –1; 3), = (1; 4; 2) et w = (–2; 1; 2)
La description paramétrique des points du parallélépipède est :
où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et 0 ≤ c ≤ 1
x = 2a + b – 2c
y = –a + 4b + c
z = 3a + 2b + 2c
où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et 0 ≤ c ≤ 1
x = 2a + b – 2c
y = 2 –a + 4b + c
z = 5 +3a + 2b + 2c
Donner la description vectorielle et la description paramétrique du parallélépipède translaté par le vecteur r = (0; 2; 5).
S
La description paramétrique des points du parallélépipède translaté est :

de V tel que :
de U, il existe un et un seul vecteur
Transformation
Soit U et V deux espaces vectoriels sur un corps K, et soit T, une application de U dans V (T : U V). On dit que T est une trans-formation de U dans V si et seulement si :
DÉFINITION
Transformation
u
uT(
Pour tout vecteur v
) = v
RemarqueUne application est une fonction dont le domaine est égal à l’ensemble de départ, ce qui signifie que la fonction est définie pour tous les éléments de l’ensemble de départ. En d’autres mots, chaque élément de l’ensemble de départ a une et une seule image. Un élément de l’ensemble de départ ne peut avoir deux images, mais un élément de l’espace d’arrivée peut avoir deux préimages.

Transformations linéaires
Jusqu’à maintenant, nous avons considéré les matrices comme de
simples tableaux de nombres. Nous allons maintenant les considérer
d’un point de vue géométrique et voir qu’elles constituent des outils
permettant de transformer les figures géométriques.
Pour étudier ces transformations, nous adapterons l’écriture des
points et des vecteurs à l’écriture matricielle en les représentant sous
forme de matrices colonnes (ou de vecteurs colonnes).

L’image de
Considérons la fonction de R2 dans R2 définie par :T(x; y) = (x – 2y; 2x – y)
Mise en situation
S
On peut représenter les vecteurs et la transformation par des matrices. Ainsi, on a :
u =
u = (3; 2) est donnée par :
T(3; 2) = (3 – 2 2 ; 2 3 – 2) = (–1; 4)
3
2et T =
1
2
–2
–1, d’où : T(3; 2) = 1
2
–2
–1
3
2
–1
4• =
De la même façon : T(–1; 2) =1
2
–2
–1
–1
2
–5
–4• =
SSS
Considérons le triangle construit sur les vecteurs (3; 2) et (–1; 2).
Les points de ce triangle sont décrits par :
S
x = 3a – by = 2a + 2b
E : , où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1
De façon générale, on a : T(x; y) =12
–2–1
xy
x – 2y2x – y
• =
T(E) =1
2
–2
–1• =
Par les propriétés des opérations matricielles, on a alors :3a – b
2a + 2b
–a – 5b
4a – 4b
, où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1
S

–2 3a 1 –2 –b
–b
2b
2 –1 2a –1+
2b
3a – b
2a + 2b
Propriétés de linéarité
SSSS
Pour calculer l’image du triangle par la transformation, nous avons utilisé deux propriétés des opérations sur les matrices. En effet, l’image du triangle translaté est donné par la combinaison linéaire avec contraintes des images des vecteurs, soit :
1
2
–2
–1
u + b v )= T(aa T( u) + b T( v )
T(E) = a3
2
1
2
–2
–1+ b
–1
2, où 0 ≤ a ≤ 1, 0 ≤ b ≤ 1 et a + b ≤ 1
1=
2
, par la multiplication d’une matrice par un scalaire;
1
2
–2
–1=
3a
2a+ , par la distributivité;
1
2
–2
–1= , par l’addition des matrices.
En utilisant la notation des vecteurs, cela signifie que :
Cette égalité regroupe les deux propriétés de linéarité.

La deuxième propriété signifie que l’image par T du produit d’un vecteur par un scalaire est égale au produit de l’image du vecteur par ce scalaire.
Propriétés de linéarité
S
Les transformations représentables par des matrices T ont deux propriétés particulièrement intéressantes que l’on appelle propriétés de linéarité. Symboliquement, celles-ci s’écrivent :
u + v )T( = T( u ) + T( v ) uT(k ) = k T( u )
Géométriquement, la première propriété signifie que l’image par T d’une somme de vecteurs est égale à la somme des images par T de ces vecteurs.

de U, et pour tout k K :
Transformation liéaire
Soit U et V, deux espaces vectoriels sur un corps K, et soit T, une transformation de U dans V (T : U V). On dit que T est une transformation linéaire de U dans V si et seulement si :
DÉFINITION
Transformation linéaire
uua) T(
Pour tout vecteur + v
THÉORÈME
et
v) +T( ) = u T( v )
ub) T(k )k T( ) = u
Transformation linéaire et matrice
Soit T, une transformation de U dans V, où U et V sont deux espaces vectoriels sur un corps K. T est linéaire si et seulement si elle est représentable par une matrice.

SSS
Considérons la situation suivante :
Représentation par une matrice
Les vecteurs (0; –2) et (4; 5) forment une base de R2, et l’image de ces vecteurs par la transformation T est connue.
a b
c dOn cherche donc une matrice A = telle que :
a b
c d
0
–2
6
–4= et
a b
c d
4
5
5
–2=
En effet, T(0; –2) = (6; –4) et T(4; 5) = (5; –2).
On doit donc avoir :a b
c d
0
–2
6
–4=
4
5
5
–2
En multipliant les deux membres par la matrice inverse, on obtient :
a b
c d=
6
–4
5
–2
a b
c d=
6
–4
5
–2
0
–2
4
5
0
–2
4
5
–1 0
–2
4
5
–1
0
–2
4
5
–1Cela donne :
Par la méthode de la matrice adjointe, on trouve :
det A = 8, cof A = 5
–4
2
0, adi A =
5
2
–4
0et A–1 =
5
2
–4
0
1
8
a b
c d=
6
–4
5
–2
On trouve donc :
5
–4
2
0
1
8=
1
840
–24
–24
16=
5
–3
–3
2
Algébriquement, la transformation linéaire est définie par :
T(x; y) = 5
–3
–3
2
x
y=
5x – 3y
–3x + 2y= (5x – 3y; –3x + 2y)
Géométriquement, l’effet de la transformation linéaire sur une base est donné par :
T(x; y) = (5x – 3y; –3x + 2y)
On obtient donc :

SSS
Décrire par une matrice la transformation linéaire de R2 dans R3 pour laquelle on donne les correspondances suivantes :
T(5; 3) = (4; –3; 1) et T(2; 1) = (2; –2; 0)
Exemple 7.3.3
b
c d
e f
a
Les vecteurs (5; 3) et (2; 1) étant linéairement indépendants, ils forment donc une base de R2. L’espace de départ étant de dimension 2, la matrice cherchée a donc deux colonnes; l’espace d’arrivée étant de dimension 3, la matrice cherchée a trois lignes. On cherche une matrice de la forme :
ou :
telle que :
b
c d
e f
a5
3=
4
–3
1et
b
c d
e f
a2
1=
2
–2
0
b
c d
e f
a5
3=
4
–3
1
2
1
2
–2
0
En multipliant par la matrice inverse, on obtient :b
c d
e f
a5
3
2
1=
4
–3
1
2
–2
0
5
3
2
1
–15
3
2
1
–1
La matrice cherchée est donc :b
c d
e f
a
=
4
–3
1
2
–2
0
5
3
2
1
–1
det A = 5 – 6 = –1, cof A = 1
–2
–3
5, adj A =
1
–3
–2
5
1
–1=
4
–3
1
2
–2
0
1
–3
–2
5=
2
–3
–1
–2
4
2
La transformation est alors :
T(x; y) =
2
–3
–1
–2
4
2
= x
y
2x – 2y
–3x + 4y
–x + 2y
= (2x – 2y; –3x + 4y; –x + 2y)

b c
d e f
a b c
d e f
a
SS
Décrire par une matrice la transformation linéaire de R3 dans R2 pour laquelle on donne les correspondances suivantes :
T(1; 2; 1) = (9; 3), T(3; 1; –1) = (8; 7) et T(–1; 4; 4) = (14; 0)
Exercice
Calculons le déterminant dont les éléments sont les composantes des vecteurs (1; 2; 1), (3; 1; –1) et (–1; 4; 4).
telle que :1
2
1
3
1
–1
–1
4
4
8
7
14
03
9=
D’où :b c
d e f
a 8
7
14
03
9=
1
2
1
3
1
–1
–1
4
4
–1
Les vecteurs sont donc linéairement indépendants et forment une base de R3. L’espace de départ étant de dimension 3, la matrice cherchée a donc trois colonnes; l’espace d’arrivée étant de dimension 2, la matrice cherchée a deux lignes. On cherche une matrice de la forme :
1 2 1
3 1 –1
–1 4 4=
L1
L2–3L1
L3 + L1
1 2 1
0 –5 –4
0 6 5= 1(–25 + 24) = –1 ≠ 0
Par la méthode de la matrice adjointe, on trouve alors :
det A = –1, cof A = , adj A =
8
–11
13
–4
5
–6
–3
4
–5
8
–4
–3
–11
5
4
13
–6
–5
b c
d e f
a 8
7
14
03
9=
On a donc : –8
4
3
11
–5
–4
–13
6
5
2
4
3
–2
1
3=
La transformation est alors donnée par:
T(x; y; z) = 2
4
3
–2
1
3
xy
z=
2x + 3y + z
4x – 2y + 3z
et T(x; y; z) = (2x + 3y + z; 4x – 2y + 3z) S

Nous présentons maintenant quelque transformations particulières, ce sont :
Transformations particulières
• l’étirement-compression dans une direction;
• l’homothétie de rapport k;
• la rotation autour de l’origine.
Pour déterminer la matrice associée à la transformation, on
déterminera d’abord l’image d’une base, puis on procédera comme
dans les situations précédentes.

, un vecteur non nul. On appelle étirement-compression dans la direction de
Étirement-compression dans une direction
Étirement-compression dans une direction
Soit k, un scalaire et
DÉFINITION
u
uT( k ) =
u
la transformation linéaire pour laquelle :
u
et uT( ) = u , pour tout u orthogonal à u
u
uk
u

SSS
Déterminer la transformation linéaire dont l’effet est un étirement de facteur 2 dans la direction du vecteur (2; 1).
Exemple 7.3.4
Les vecteurs (2; 1) et (–1; 2) forment une base de R2 . De plus :
T(2; 1) = (4; 2) et T(–1; 2) = (–1; 2)
a bc dOn cherche donc une matrice telle que :
a b
c d
2
1
4
2=
–1
2
–1
2
En multipliant les deux membres par la matrice inverse, on obtient :
a b
c d=
4
2
–1
2
a b
c d=
4
2
–1
2
2
1
–1
2
2
1
–1
2
–1 2
1
–1
2
–1
2
1
–1
2
–1Cela donne :
Par la méthode de la matrice adjointe, on trouve :
det A = 5, cof A = 2
1
–1
2, adi A =
2
–1
1
2et A–1 =
2
–1
1
2
1
5
a b
c d=
4
2
–1
2
On trouve donc :
2
–1
1
2
1
5=
1
59
2
2
6
Algébriquement, la transformation linéaire est définie par :
T(x; y) = 9
2
2
6
x
y=
9x + 2y
2x + 6y
On obtient donc :
1
5
1
5(9x + 2y; 2x + 6y) T(x; y) =
1
5

Étirement-compression dans une direction
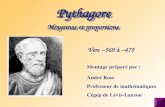
Regardons l’effet de la transfor-mation sur le triangle construit sur les vecteurs (5; 0) et (0; 5) dont les images sont :
T(5; 0) = (9; 2) et T(0; 5) = (2; 6)
Cette illustration donne l’image avant et après la transformation. En pratique, la transformation doit se faire graduellement.
On aurait pu définir cette transformation en donnant les correspondances T(5; 0) = (9; 2) et T(0; 5) = (2; 6). On aurait trouvé la même règle de correspondance.
Remarque
Pour savoir dans quelle direction se fait l’étirement-compression, il aurait alors fallu résoudre le système d’équations obtenu en posant :
T(x; y) = k(x; y)

1
5
Étirement-compression dans une direction
Résolvons l’équation donnée par T(x; y) = k(x; y).
On cherche alors (x; y) tel que (9x + 2y; 2x + 6y) = k(x; y)
Cela donne (9x + 2y; 2x + 6y) = 5k(x; y) d’où :
9x + 2y = 5kx
2x + 6y = 5ky
(9 –5k)x + 2y = 0
2x + (6 – 5k)y = 0et
Par la méthode de Gauss, on obtient :
9 – 5k 2
2 6 – 5k
0
0≈
L1
(9 – 5k)L2 – 2L1
9 – 5k 2
0 25(k2 – 3k + 2)
0
0
Le système admet une infinité de solution pour k2 – 3k + 2 = 0, En factorisant, on obtient (k – 1)(k – 2) = 0. Cela donne k = 1 ou k = 2.
SS
En substituant dans le système d’équations, on obtient :
Pour k = 1,4x + 2y = 0
2x + y = 0Pour k = 2,
–x + 2y = 0
2x – 4y = 0
On obtient une infinité de solutions décrites par :
{(x; y) | y = –2x }
dont la forme générale est :
(a; –2a) = a(1; –2)
et : T(a; –2a) = (a; –2a) Tous les vecteurs sur la droite d’équation y = –2x sont leur propre image par la transfor-mation T.
On obtient une infinité de solutions décrites par :
{(x; y) | y = x/2 }
dont la forme générale est :
(2b; b) = b(2; 1)
et T(2b; b) = (4b; 2b)
Tous les vecteurs sur la droite d’équation y = x/2 subissent un étirement d’un facteur 2.
On peut le vérifier par le produit :
1
5
9
2
2
6
a
–2a=
1
5
5a
–10a
=a
–2a
S
On peut le vérifier par le produit :
1
5
9
2
2
6
2b
b=
1
5
20b
10b
=4b
2b

est appelé vecteur propre de T si son image par T lui est colinéaire. c’est-à-dire s’il existe un scalaire tel que :
Soit T, une transformation linéaire de Rn dans Rn. Un vecteur non nul
Vecteur propre et valeur propre
Vecteur propre et valeur propre
DÉFINITION
u
T( u ) = uLe scalaire est appelé valeur propre de la transformation T.
Dans l’exemple précédent, la transformation a deux valeurs propres k = 1 et k = 2. Puisqu’il s’agit d’un étirement compression dans une seule direction. On peut cependant avoir un étirement-compression selon un rapport dans une direction et selon un autre rapport dans la direction perpendiculaire. Dans R3, on aura trois valeurs propres.
Remarque

SS
Déterminer la transformation linéaire dont l’effet est un étirement de facteur 3 dans la direction du vecteur (1; 3) et d’un facteur 2 dans la direction perpendiculaire.
Exercice
Les vecteurs (1; 3) et (–3; 1) forment une base de R2 . De plus :
T(1; 3) = (3; 9) et T(–3; 1) = (–6; 2)
a bc d
On cherche telle que :a b
c d
1
3
3
9=
–3
1
–6
2
a b
c d=
3
9
–6
2
1
3
–3
1
–1
Trouvons la matrice inverse par la méthode de la matrice adjointe :
det A = 10, cof A = 1
3
–3
1, adi A =
1
–3
3
1et A–1 =
1
–3
3
1
1
10
En isolant la matrice cherchée dans cette équation, on obtient :
a b
c d=
3
9
–6
2On trouve donc :
1
–3
3
1
1
10=
1
10
21
3
3
29
Algébriquement, la transformation linéaire est définie par :
T(x; y) = 21
3
3
29
x
y=
21x + 3y
3x + 29y
1
10
1
10
D’où : 1
10(21x + 3y; 3x + 29y) T(x; y) =
SS

On appelle homothétie de rapport k une transformation linéaire dont l’effet est un étirement-compression dans toutes les directions.
Homothétie de rapport k
Homothétie de rapport k
DÉFINITION

Dans R2, l’image d’un vecteur quelconque par une homothétie de
rapport k est donnée par T(x; y) = k(x; y). On peut facilement
déterminer sa matrice à partir de l’image des vecteurs de la base
orthonormée. En effet :T(1; 0) = (k; 0) et T(0; 1) = (0; k)
Homothétie de rapport k
La première colonne est l’image par T du vecteur
On trouve donc la matrice scalaire : T = k
0
0
k
La deuxième colonne est l’image par T du vecteur
i
j
= (1; 0).
= (0; 1).
Dans le cas d’une homothétie de rapport k, tous les vecteurs sont des vecteurs propres et la valeur propre est = k.
Remarque

On appelle rotation d’un angle autour de l’origine la trans-formation linéaire qui a pour effet de faire tourner tous les vecteurs du plan d’un angle autour de l’origine.
Rotation autour de l’origine
Rotation autour de l’origine
DÉFINITION
Dans le cas d’une rotation autour de l’origine, il n’y a pas de vecteur propre ni de valeur propre.
Remarque

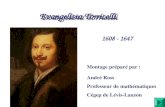
Pour déterminer la matrice d’une rotation d’un angle dans R2, considérons les vecteurs de la base orthonormée :
= (1; 0) et
On constate assez facilement, à partir du graphique ci-contre que :
T(1; 0) = (cos ; sin ) et T(0; 1) = (–sin ; cos )
= (0; 1)i j
La matrice est donc : T = cos sin
–sin cos
cos
sin cos
–sin

Conclusion
La translation d’un objet dans le plan ou dans l’espace se décrit par l’addition d’un vecteur à l’ensemble des vecteurs position des points de cet objet.
Il y a des transformations plus complexes des objets qui font appel à des outils mathématiques plus sophistiqués.
La déformation d’un objet conservant la linéarité l’alignement de points se fait par une transformation linéaire, ce qui se traduit algébriquement par le produit de matrices.
Une transformation conserve la linéarité lorsque les images de points alignés sont des points alignés.

ExercicesAlgèbre linéaire et géométrie vectorielle avec applications en sciences de la nature, Section 7.4, p. 211 no. 1 à 19
LectureAlgèbre linéaire et géométrie vectorielle avec applications en sciences de la nature, Section 7.3, p. 195 à 202.