
Ministère de L'Enseignement Supérieur et de la...
90
Ministère de L'Enseignement Supérieur et de la Recherche Scientifique Université MOHAMED BOUDIAF de M’sila Faculté de Technologie Département de Génie Electrique Synthèse du cours Machines Electriques à Courant Continu et Transformateur Pour : 3 eme année Licence Electrotechnique Par : Dr. BELHAMDI SAAD Maître de Conférences en Electrotechnique à l’Université MOHAMED BOUDIAF de M’sila 2014/2015
Transcript of Ministère de L'Enseignement Supérieur et de la...

Ministère de L'Enseignement Supérieur et de la
Recherche Scientifique
Université MOHAMED BOUDIAF de M’sila
Faculté de Technologie
Département de Génie Electrique
Synthèse du cours
Machines Electriques à Courant
Continu et Transformateur
Pour : 3eme année Licence Electrotechnique
Par :
Dr. BELHAMDI SAAD
Maître de Conférences en Electrotechnique à l’Université MOHAMED
BOUDIAF de M’sila
2014/2015

Avant propos
L’ensemble des chapitres présentés dans ce document ont été effectués au sein du
Laboratoire : LGE de Génie Electrique de l’Université Mohamed Boudiaf de M'sila.
Le recueil présenté contient trois parties à savoir :
- Rappel sur le Magnétostatique est Les Circuits Magnétiques
- Machine électrique à courant continu
- Transformateur.
Ce recueil est destiné aux étudiants Licence Electrotechniques, Electromécanique.
Cette partie sera consacrée à l'étude des circuits magnétiques et les machines électriques à
courant continu. Celles-ci sont constituées de circuits électriques (conducteurs)
étroitement imbriqués dans un circuit magnétique (fer en général), séparé par un isolant.
Nous commencerons par une étude simple des matériaux ferromagnétiques et leur
agencement en un circuit magnétique. Nous expliquerons le fonctionnement des diverses
machines et en donnerons un modèle élémentaire. Les machines seront, dans l'ordre,
machines à courant continu sous forme de moteur ou génératrice, les transformateurs.
Le but de ce recueil est de familiariser l’étudiant avec : Les principes de
fonctionnement de la machine électrique.
J’espère que ce recueil sera apprécié par mes collègues et les étudiants et je serais très
heureux de recevoir avec reconnaissance leurs remarques, critiques et suggestions.
Dr. S. BELHAMDI


Table des matières
Introduction Générale……………………………………………………...……………………………….1
Chapitre I : Rappel sur le Magnétostatique est Les Circuits Magnétiques
1. Phénomènes fondamentaux ......................................................................................................................... 2
Champ de forces magnétiques ........................................................................................................................ 2 2. 1.Champ magnétique ................................................................................................................................... 3
2.2 Induction magnétique ................................................................................................................................ 3 2.3 - Perméabilité du milieu ............................................................................................................................ 3 2.4 - Induction crée en un point par un conducteur ......................................................................................... 4
2.5 - Calcul du module du champ .................................................................................................................... 5 3 - Flux d'induction magnétique ...................................................................................................................... 5 4 - Lois fondamentales de l'électromagnétisme ............................................................................................... 6
4.2 - Loi de Laplace ......................................................................................................................................... 6 4.2.1 - Caractéristiques de la force électromagnétique ................................................................................ 6
4.3 - Loi de Faraday ......................................................................................................................................... 7 4.4 - Loi de Lenz .............................................................................................................................................. 8
5. Circuit magnétique ...................................................................................................................................... 8 5.1. Caractéristique B(H) d'un matériau magnétique ................................................................................... 9 6. Force magnétomotrice ............................................................................................................................. 9
7. Théorème d’Ampère pour les circuits magnétiques…………………………………..………………....10
Chapitre II MACHINE A COURANT CONTINU
2.1 Généralités ............................................................................................................................................... 14
2.2. Symbole .................................................................................................................................................. 15 2.3. Principe de fonctionnement .................................................................................................................... 15
Cas Générateur ........................................................................................................................................... 15 Cas Moteur ............................................................................................................................................. 16
2.4. Constitution d’une machine à courant continu ....................................................................................... 16
l’inducteur ...................................................................................................................................................... 17 l’induit ............................................................................................................................................................ 17
le collecteur ................................................................................................................................................ 18 F.é.m. réellement obtenue .......................................................................................................................... 18 Bobinage de l’induit ...................................................................................................................................... 19 Formule générale de la Force électromotrice ................................................................................................ 21 2.5. Etude de l’induit en charge ..................................................................................................................... 22
2.5.1. Réaction magnétique de l’induit .......................................................................................................... 22
2.5.2-Répartition du flux magnétique en charge............................................................................................ 23 2.5.3. Compensation de la réaction magnétique de l’induit........................................................................... 24
2.6. Fonctionnement en génératrice ............................................................................................................... 26 2.6.1. Equation aux tensions d’une génératrice à courant continu ................................................................ 26
2.6.2. Bilan des puissances et rendement ...................................................................................................... 26 2.6.3. Génératrice à excitation séparée .......................................................................................................... 29 2.6.4. Génératrice à excitation shunt ............................................................................................................. 31 2.6.5. Génératrice à excitation série .............................................................................................................. 32 2.6.6. Excitation à excitation composée ........................................................................................................ 33
2.7. Fonctionnement en Moteur ..................................................................................................................... 34 2.7.1. Equation aux tensions d’un Moteur à courant continu ........................................................................ 34 2.7.2. Bilan Energétique et rendement .......................................................................................................... 35
2.7.3. Moteur à excitation séparée .............................................................................................................. 38 2.7.4. Moteur à excitation shunt ................................................................................................................. 40
2.7.5. Moteur à excitation série ..................................................................................................................... 41
2.7.6. Moteur à excitation composée ............................................................................................................. 42 2.8. Etude de démarrage d’un moteur à courant continu ............................................................................... 43 2.9. Freinage d’un moteur à courant continu ................................................................................................. 46 2.9.1. Freinage rhéostatique ........................................................................................................................... 46
2.9.2. Freinage par récupération ................................................................................................................ 47
2.10. Réglage de vitesse d’un moteur à courant continu .............................................................................. 47
Chapitre III Les Transformateurs
PARTIE N°1 : LE TRANSFORMATEUR MONOPHASE
3.1 Définition ................................................................................................................................................. 49 3.2. Symboles ................................................................................................................................................. 49
3.3. Principe – Équations ............................................................................................................................... 49
3.4. Modèle du transformateur réel ................................................................................................................ 54
1. Schéma électrique équivalent à vide ......................................................................................................... 54 2. Schéma électrique équivalent en charge ................................................................................................ 54
3.5. Modèle de Kapp ...................................................................................................................................... 55
3.6. Bilan énergétique et Rendement ............................................................................................................. 58
PARTIE N°2 : LE TRANSFORMATEUR TRIPHASE
4.1 Constitution .............................................................................................................................................. 62
4.2. Indice horaire .......................................................................................................................................... 64 4.3. Couplage des Enroulements ................................................................................................................... 64 4.4. Grandeurs nominales .............................................................................................................................. 68 4.5. Etude électriques des transformateurs triphasés .................................................................................... 69 4.5.1. Schéma équivalent par phase ........................................................................................................... 69
4.5.2. Schéma ramène au secondaire ............................................................................................................. 69 4.6. Rendement .............................................................................................................................................. 70 TP 01 : Génératrice à excitation séparée ....................................................................................................... 72

TP 02 : Moteur à excitation séparée ….. ................................................................................................... 75
TP 03 : Moteur à excitation shunt .............................................................................................................. 77 TP 04 : Moteur à excitation série ................................................................................................................... 79 TP 05 : transformateur monophasée .............................................................................................................. 80 Bibliographie ................................................................................................................................................. 84

1
Introduction Générale
La machine électrique à courant continu est un convertisseur électromécanique
permettant la conversion bidirectionnelle de l’énergie. Suivant la méthode de création
du champ magnétique, on distingue les excitations électromagnétiques.
Les dynamos à courant continu ont été les premiers convertisseurs électromécaniques
utilisés. Leur usage est en régression très nette en particulier en tant que générateurs
de courant.
Les moteurs à courant continu restent très utilisés dans le domaine de l’automobile
(ventilateurs, lève-vitre, etc.) ainsi qu’en tant que « moteur universel » dans
l’électroménager et l’outillage. Dans le domaine des puissances supérieure au
mégawatt, les sous-marins seront les seuls utilisateurs de machines à courant continu
afin d’assurer leur propulsion. En effet, pour éviter de « rayonner » du 50 ou du 60
Hertz qui les rendrait facilement détectables, les sous-marins utilisent des circuits de
distribution de l’énergie électrique à tensions continues.
En première partie un rappel sur Magnétostatique et les circuits magnétiques
nécessaire pour l’étude des machines électrique à courant continu, en deuxième partie,
aux transformateur monophasé et triphasée en troisième partie. Rappelant pour
chaque partie les principaux fondements théoriques et les outils de calculs.

2
Chapitre 1 : Rappel sur le Magnétostatique est Les Circuits Magnétiques
1 - phénomènes fondamentaux
1.1 - Aimants naturels
Ce sont des oxydes de fer qui ont la propriété naturelle d'attirer le fer et d'autres
substances,
1.2 - Aimants artificiels
En frottant un barreau d'acier avec un aimant naturel, on obtient un aimant artificiel,
1.3 - Propriétés magnétiques des substances
Substances paramagnétiques : faiblement attirées par un aimant (oxygène, air, ....),
Substances diamagnétiques : faiblement repassés (tout les gazes, le plomb, le zinc, l'or)
Substances ferromagnétiques : fortement attirés (fer, acier, fonte, ...),
1.4 - Actions naturelles des pôles
Les pôles de mêmes noms se repoussent,
Les pôles de noms contraires s'attirent,
Les actions magnétiques décroissent très vite lorsque la distance croît,
1.5 - Champ de forces magnétiques
Dans l'espace qui environne un aimant, tous les corps sont soumis à des forces, on dit que
cet espace est le siège d'un champ de forces magnétiques,
Lorsque l'action directive subie par un aimant est identique en tous les points d'un lieu, on
dit que le champ est uniforme,
1.6 - Spectre magnétique d'un aimant
Les lignes d'induction sont dirigées :
A l'extérieur : du pôle Nord au pôle Sud,
A l'intérieur : du pôle Sud au pôle Nord,

3
2. Champ magnétique - Induction
2.1 - Champ magnétique
Le champ magnétique de l'aimant c'est l'espace autour de l'aimant et dans lequel il fait
sentir son influence,
Le champ est une région de l'espace ou il existe un état magnétique susceptible de
manifester par des forces,
Le champ magnétique se représente par le vecteur H (Henry),
2.2 - Induction magnétique
Si l'on place dans un champ magnétique :
- Un conducteur parcouru par un courant, Un aimant, Une charge électrique (exemple :
un électron), Les différents composants vont subir une force qui dépendra du champ
magnétique et du milieu. A chaque point d'un espace le champ magnétique sera associée
un vecteur induction magnétique (vecteur champ magnétique B (Tesla),
Les éléments du vecteur champ magnétique en un point :
- Son origine est le point considéré,
- Sa direction est tangente à la ligne de champ qui passe par le point,
- Son sens est celui dans lequel cette ligne de champ est orientée,
- Sa valeur (module ou norme du vecteur) dépend de la distance du point à la source de
magnétisme et des caractéristiques de celle-ci, Les forces dépendent de B : B = fonction
(H, milieu)
2.3 - Perméabilité du milieu
r .0 avec
1airl'arapportparmatériauund'relativetéperméabili
014airl'deteperméabili
m
Hmilieudutéperméabililaecaractéris
7
0
r
m
H
m
AH
TB
HB
en
en
en
avec.

4
2.4 - Induction crée en un point par un conducteur
Le problème consiste à déterminer B dans le cas d'un conducteur dont la longueur et la
forme géométrique sont parfaitement définies,
2.4.1 - Conducteur rectiligne
Le champ est de révolution autour du fil. Pour trouver le sens du champ,il existe
plusieurs règles pratiques :
- Règle du bon homme d'Ampère,
- Règle de la main droite,
- Règle du tire-bouchon maxwell,
Il suffit d'appliquer l'une des trois règles pour retrouver le sens du courant qui produit des
lignes de champ dont le sens est connu,
2.4.2 - Conducteur circulaire
Formes du spectre :
Vers le centre de la spire, les lignes de champ
sont pratiquement des droites,
En se rapprochant des points où la spire coupe le
plan, les lignes se courbent de plus en plus,
Autour des traversées du plan on voit des courbes fermées qui sont des cercles à peine
déformés,
Sens des lignes de champ :
Les règles 1, 2 et 3 s'appliquent directement,
Faces de la spire :
Pour retenir le nom d'une face, il suffit d'inscriredans celle-ci, celles des deux lettres N ou
S qui a les flèches dans le sens du courant,

5
2.5 - Calcul du module du champ
Soit N le nombre de spires traversées par le courant I, sur une ligne de champ de
longueur l, le module du vecteur champ est (théorème d'Ampère) :
I
INBINIB
.....
La formule est la même que pour une bobine longue ou un conducteur rectiligne,
I
I
R
IB
.
.2
.
3 - Flux d'induction magnétique (flux magnétique)
Considérons un espace à l'intérieur duquel une induction magnétique est uniformément
distribuée,
On appelle flux du vecteur constant B
, à travers une surface plane qui lui est
perpendiculaire, le produit du module B
par l'air S de la surface :
Wb
mS
TB
SBen
en
en
avec.2
Une surface oblique doit être remplacée par sa projection sur un plan perpendiculaire aux
lignes de champ,
Soit α l (angle de la surface et de sa projection, cet angle est aussi celui de B
et de la
norme N
(ou perpendiculaire) à la surface. Le flux est alors :
SBBS .)cos(

6
4 - Lois fondamentales de l'électromagnétisme
4.1 - Introduction
L'électromagnétisme c'est l'étude des phénomènes magnétiques crées par les charges
électriques plus interaction entre champ magnétique et courant électrique,
Expérience fondamentale :
Lorsqu'on ferme l'interrupteur K un courant I passe dans le circuit et l'aiguille aimantée
placée à proximité du fil conducteur s'oriente vers une direction déterminée,
4.2 - Loi de Laplace
Un conducteur traversé par un courant électrique et placé dans un champ magnétique est
soumis à une force électromagnétique ou force de Laplace,
4.2.1 - Caractéristiques de la force électromagnétique
Point d'application : La longueur qui est placée dans le champ magnétique est appelée
longueur active. C'est elle qui participe à la création de la force électromagnétique. Le
point d'application de F est donc au milieu de la longueur active,
Direction : La direction est perpendiculaire à B et I (c'est-à-dire à l) donc ⊥ au plan (B, I),
Sens : Le sens de F est donné par l'une des règles suivantes :
La règle des trois doigts de la main droite
Faisons correspondre les trois premiers doigts et les trois grandeurs, force (sens du
déplacement), intensité et le champ de la façon suivante :
Pouce Force Index Intensité Majeur Champ
sse
ce
Pous
gnétisme
jeur
Ma
tensité
dex
In

7
La règle de Bon homme d'ampère
Le bon homme d'ampère couché sur le fil, le courant lui entrant par les pieds et sortant par
la tête. Il regarde fuir les lignes de champs alors sa gauche indique le sens de F,
4.2.2 - Formule
Si le conducteur de longueur active l est rectiligne et placé dans un champ uniforme B on
aura
NenF
menl
AenI
TenB
aveclIBF sin...
Cas particulier :
Le fil et le vecteur sont perpendiculaires : α= 90° ⇒F = B.I.l
Le vecteur champ est parallèle au fil : α= 0° ⇒F = 0
4.3 - Loi de Faraday
Expérience
Cette expérience nécessite un aimant, une bobine et un galvanomètre (appareil qui mesure
de très faible intensité de courant),
Aimant immobile ⇒il ne se passe rien Aimant mobile :
- Lorsqu'on déplace l'aimant, l'aiguille du
galvanomètre se déplace indiquant l'existence
du courant,
- Ce courant est appelé courant induit, la f.e.m
crée dans le circuit est appelée aussi f.e.m
Cette f.e.m est crée par la variation du flux magnétique à travers la bobine (crée par le
déplacement de l'aimant) d'où la loi de Faraday,

8
Loi de Faraday
Toute variation de flux à travers un circuit électrique fermé donne naissance à un courant
induit, l'existence du courant coïncide avec celle de la variation de flux, si le circuit est
ouvert, il y a force électromotrice induite,
4.4 - Loi de Lenz
Lorsqu'on approche l'aimant, l'aiguille se déplace dans le sens indiqué dans la figure.
Le courant induit crée un flux qui s'oppose au flux extérieur lorsqu'on approche le pôle
Nord da la bobine,
0if
Lorsqu'on éloigne l'aimant l'aiguille se déplace dans l'autre sens.
Le courant induit crée un flux quia le même sens que le flux extérieur lorsqu'on éloigne le
pôle Nord de l'aimant.
0if
Dans ces deux cas le flux crée par le courant induit s'oppose à la variation du flux
extérieur d'ou la loi de Lenz,
Loi de Lenz
Le courant induit est tel que par ses effets s'oppose à la cause qui lui a donné naissance :
dt
de
5. Circuit magnétique
Les phénomènes magnétiques dus à des courants ou des aimants sont caractérisés par
deux champs décrits par des vecteurs, le champ d'excitation H
et le champ d’induction B
.
Un circuit magnétique est un ensemble de matériaux magnétiques constituant le noyau,
éventuellement séparés par des portions d'air (appelé entrefer) qui canalise le flux de
l'induction B
produit par une ou des bobines parcourues par des courants et entourant
ce circuit ou par des aimants permanents insérés dans ce circuit.

9
5.1. Caractéristique B(H) d'un matériau magnétique
On a vu que la relation entre la densité de flux et le champ magnétique est B = µH.
Dans le vide (ou l'air), cette caractéristique prend la forme d'une relation linéaire. Le vide
est un milieu linéaire, homogène (la qualité est uniforme) et isotropique (les propriétés sont
les mêmes dans toutes les directions). La relation B(H) du vide est donne dans la figure
(1.1). Pour un matériau magnétique, la relation B(H) est :
HB r0
Figure 1.1 Relation B(H) du vide
Ou µr est la perméabilité relative du matériau. Pour la plupart des matériaux, la
perméabilité n'est pas constante, et la relation B(H) est non-linéaire.
La caractéristique de magnétisation AC d'un matériau magnétique donne une courbe du
type hystérésis, comme à la figure 1.2.
Figure 1.2 Courbe hystérésis typique
6. Force magnétomotrice
Pour avoir des flux élevés, les circuits magnétiques sont essentiellement réalisés avec des
matériaux ferromagnétiques (en circuit fermé). En effet, dans l'air ou un matériau
quelconque, les lignes de champ produites par un bobinage parcouru par un courant ne sont
pas canalisées et le flux conséquent (paquet de lignes de champ) produit ne prend que des
valeurs très faibles. En revanche, dans le fer, les lignes de champs sont "concentrées" dans
la matière ce qui produit de grandes valeurs du flux.
B
H
10
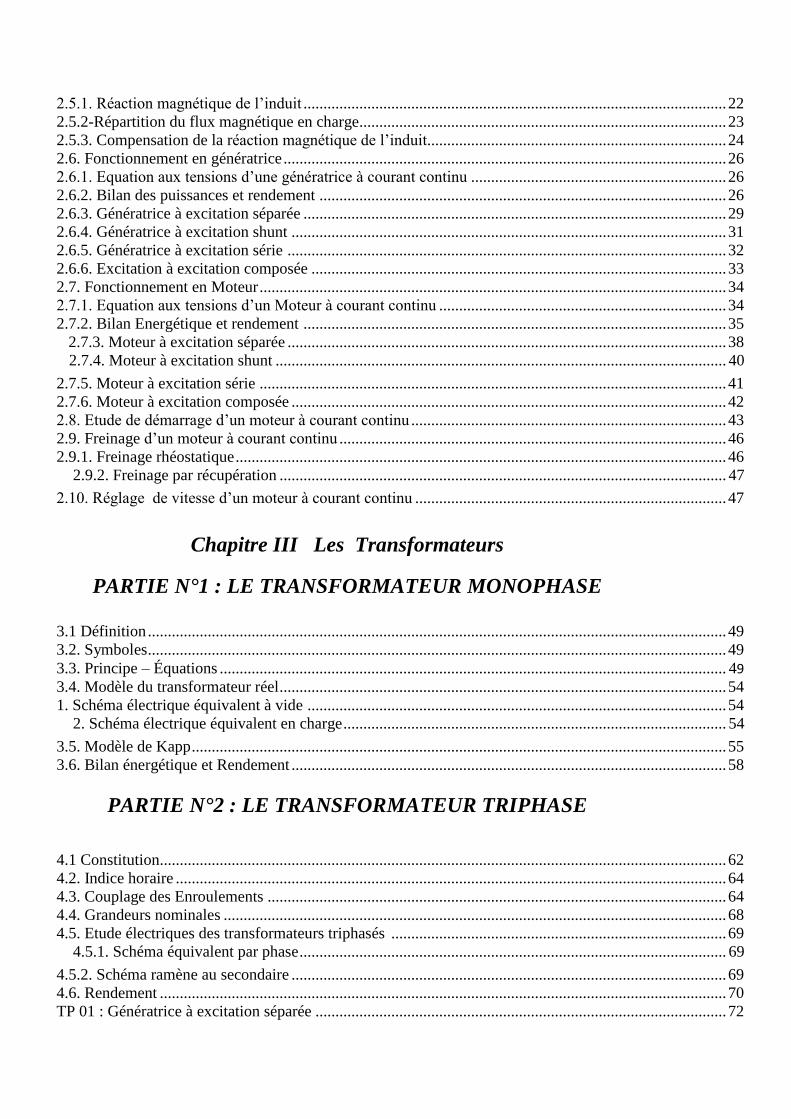
La bobine crée alors une force magnétomotrice qui fait circuler un flux magnétique dans le
milieu. L'allure classique d'un circuit magnétique est donc représentée ci-dessous.
Figure 1.3 -Enroulement autour d'un noyau magnétique.
La force magnétomotrice produite est reliée au courant qui circule et au nombre de tours
dans la bobine : Théorème d’Amère : NIHdl
La densité de flux dans le noyau est égale à :
l
INHB
..
et
l
μ.S.N.IB.SΦ d’où la relation d’Hopkinson :
La reluctance d'un circuit de surface S, de longueur moyenne l et perméabilité µ est :
μ.S
lavec. NI
7. Théorème d’Ampère pour les circuits magnétiques
Une bobine de N spire parcouru par un courant I et enroulée autour d'un circuit magnétique
produit une f.m.m (N.I), elle exprime en (A.t).
Le théorème d’Ampère applique le long du circuit fermé au centre du noyau.
332211
31 2
lHlHlHHdlHdlHdlNIHdl
La comparaison avec la loi de Kirchhoff écrite le long d’une maille électrique renfermant
trois résistances et une force électromotrice f.é.m. (V). V=V1+V2+V3
N
I
S
N
I
R2
R1
R3
I V
Circuit magnétique Circuit électrique

11
f.m.m est considère comme une augmentation ou source de potentiel magnétique (N.I) et
les termes H.l comme des chutes de potentiel magnétique, par analogique avec la source de
potentiel électrique V et les chutes de potentiel électrique V1, V2, V3.
Analogie avec la loi d’Ohm
Loi d’Hopkinson Loi d’Ohm
mmF ..
U=R I
F.m.m : force
magnétomotrice en A ou A.t
U : tension en V
Φ : flux magnétique en Wb I : intensité en A
: réluctance en Henrys-1
H-1
R : résistance en
Ω
Exemples d’applications de l’analogie par schéma équivalent
1. Circuit avec entrefer :
2.
Circuit avec deux tronçons
S
N
I
Figure 1.5 Circuit à deux mailles
Figure 1.4 Circuit à une maille
N
I
b
a

12
La branche à gauche est le siège d’une augmentation F.m.m est une chute de potentiel
magnétique (Hl), la chute de potentiel entre les points a, b peut s’exprime dans chaque
branche comme suit :
2211.. lHlHHlmmF 21
Calcul de l’inductance propre d’un circuit
L’inductance d’un circuit est définie par le rapport entre le flux total vu par le bobinage
(composé de N spires) divisé par le courant d’excitation :
2NL
NIavec
I
N
IL t
Tout comme la réluctance, une inductance peut varier avec l’intensité du champ donc du
courant.

13
Chapitre II
MACHINE A COURANT CONTINU

14
2. Présentation
2.1 Généralités
La machine à courant continu est un convertisseur d'énergie, totalement réversible,
elle peut fonctionner soit en moteur, convertissant de l'énergie électrique en énergie
mécanique, soit en génératrice, convertissant de l'énergie mécanique en énergie
électrique. Dans les deux cas un champ magnétique est nécessaire aux différentes
conversions. Cette machine est donc un convertisseur électromécanique.
Fonctionnement en génératrice
Fonctionnement en moteur
L'énergie mécanique se caractérise par un couple de moment Cm associé à une
vitesse angulaire , le produit de ces deux grandeurs définit la puissance
mécanique :
Pméca Puissance mécanique en watts [W]
Pméca = Cm. Cm Moment du couple mécanique en newton- mètres [Nm]
La vitesse angulaire en radians par seconde [rad.s-1
]
L'énergie électrique est évaluée par un courant continu I et une tension
continue U, la puissance électrique sera le produit de ces deux grandeurs :
Pélec Puissance électrique en watts [W]
Pélec = U.I U La tension en volts [V]
I L’intensité du courant en ampères [A]
Champ magnétique
I
Génératrice U
Cm.Energie
Mécanique
Energie
Electrique
Pélec= U.I Pméca= Cm.
Champ magnétique
I
Moteur U
Cm.Energie
Electrique
Energie
Mécanique
Pméca= Cm.
Pélec= U.I

15
2.2. Symbole
Voici les différents symboles employés pour représenter la machine à courant
continu, selon qu’elle fonctionne en génératrice (dynamo) ou en moteur et selon le
type d’excitation employée.
ou
Figure 2.1 Symbole du M.C.C
2.3. Principe de fonctionnement
Cas Générateur
Dan un repère, un conducteur de longueur L est en mouvement à vitesse constante V
dans un champ B
uniforme et orthogonal au plan de mouvement du conducteur
(figure 2.2).
(Main gauche)
Figure 2.2. Barre en translation dans le champ B.
Entre t et dt, la barre parcourt la distance élémentaire dy=V.dt
Le flux coupé par le conducteur est alors : dyLBd ..
En appliquant (en module) la loi de Faraday, on obtient l’expression de la f.e.m.
induite : VLBdt
de ..
Rq : Si l’induction ou la vitesse changent de sens, le sens du flux change et la f.e.m.
change de signe
Courant induit(I)
Déplacement(V)
Champ(B)

16
Cas Moteur
Un conducteur (une barre) de longueur l qui est placé dans un champ magnétique B
et est parcouru par un courant I, est alors soumis à une force électromagnétique de
Laplace dont le sens est donné par la règle des trois doigts de la main droite. La
figure suivante montre le conducteur placé dans un champ magnétique et la force F à
laquelle il est soumis.
Figure 2.3. Barre place dans un champ B.
BdlIdF ..
2.4. Constitution d’une machine à courant continu
Une machine à courant continu comprend quatre parties principales :
– l’inducteur ;
– l’induit ;
– le collecteur ;
– les balais également appelés charbon.
Figure.2.4 Constitution d’une machine à courant continu

17
L'inducteur :
Il est formé soit d'aimants permanents en ferrite soit de bobines placées autour des
noyaux polaires. Lorsque les bobines sont parcourues par un courant continu, elles
créent un champ magnétique dans le circuit magnétique de la machine notamment
dans l'entrefer, espace séparant la partie fixe et la partie mobile, où se situent les
conducteurs.
L'induit :
L’induit est composé d’un ensemble de bobines identiques réparties uniformément
autour d’un noyau cylindrique. Il est monté sur un arbre et tourne entre les pôles de
l’inducteur. L’induit constitue un ensemble de conducteurs qui coupent les lignes de
champ magnétique. Les bobines sont disposées de telle façon que leurs deux côtés
coupent respectivement le flux provenant d’un pôle nord et d’un pôle sud de
l’inducteur.

18
Collecteur et balais :
Le collecteur est un ensemble cylindrique de lames de cuivre isolées les unes des
autres par des feuilles de mica. Le collecteur est monté sur l’arbre de la machine, mais
isolé de celui-ci. Les deux fils sortant de chaque bobine de l’induit sont
successivement et symétriquement soudés aux lames du collecteur, les balais portés
par l’inducteur frottent sur le collecteur.
F.é.m. réellement obtenue
Prenons par exemple un induit comportant 8 conducteurs comme le montre la figure 2
5 (n = 8) et étudions la tension obtenue. Le nombre de conducteurs étant fini, la
tension obtenue entre B et B’ ne sera pas rigoureusement constante. Les schémas de la
figure 2. 5 représentent le circuit de l’induit et les f.é.m. des conducteurs. Les f.é.m. 1-
1’, 2-2’, ... ont respectivement même module.
À l’instant t, les conducteurs 1 et 1’, par exemple, sont en contact avec les balais.
Pendant le passage des conducteurs sous les balais, la tension varie : elle est maximale
quand 1 et 1’ sont sur la ligne neutre. Quand 1 et 1’ quittent les balais, 4’ et 4 les
remplacent à t +Δt ; les noms des conducteurs changent mais la répartition des f.é.m.
reste identique.
On obtient une tension ondulée comme le montre la figure 2. 6. L’ondulation est
d’autant plus faible que le nombre n de conducteurs est élevé (Δt petit).
La tension maximale est sensiblement égale à n.N.Φ et on peut en général négliger
l’ondulation qui ne représente que quelques pour cents de la tension.

19
Figure 2. 5 – F.é.m. produite dans une machine à courant continu.
Figure 2. 6 – Tension ondulée produite par une machine à courant continu
Bobinage de l’induit ; collecteur
Il existe de nombreux procédés de mise en série des conducteurs de l’induit. D’autre
part, les balais ne frotteront pas directement sur les conducteurs mais sur des lames de
cuivre reliées aux conducteurs et constituant le collecteur.
Exemple de réalisation:
Les connexions sont effectuées à l’avant et à l’arrière de l’induit et, à la figure 2. 7 on
représente la surface latérale de l’induit. Les flèches indiquent le sens des f.é.m. à
l’instant t. On réalise en fait la mise en série représentée sur la figure 2. 7, mais
comme 1 = 1’,2=2
’,3=3
’4=4
’, la tension entre les balais B et B’ est la même que
précédemment.
N S

20
Figure 2. 7 – Exemple de bobinage de l’induit d’une machine à courant continu.
La largeur de la section : celle-ci est défini par le pas arrière y1 on pas de section,
c’est la différence entre les numéros des faisceaux retour et aller d’une même section.
Les connexions entre les sections consécutives de l’enroulement : celle-ci sont
définies par le pas avant y2, c’est la différence entre le numéro du faisceau allés d’une
section et le numéro de retour de la section précédente.
Les connexions aux collecteurs : elles sont données par le pas aux collecteurs yc,
c’est le nombre d’intervalles isolants que l’on compte entre deux lame du collecteurs aux
quelle sont reliées les extrémités d’une même section. pas résultant 21 yyy .
Classification des enroulements : pour passer du faisceau retour de la
première section au faisceau aller de la deuxième section deux solutions sont
possible.
1. Revenir en arrière : le deuxième faisceau aller est séparé du premier faisceau
allé par deux intervalles y=2. L’enroulement est dit imbrique.
Ces caractéristiques sont les suivantes : 2a=2p, y=2, yc=1,
21 211 yyyetp
Sy
S : section, le signe(+) correspondant à un pas allongé, le signe(-) à un pas raccourci.
Lames du collecteur
a
b a
b
21
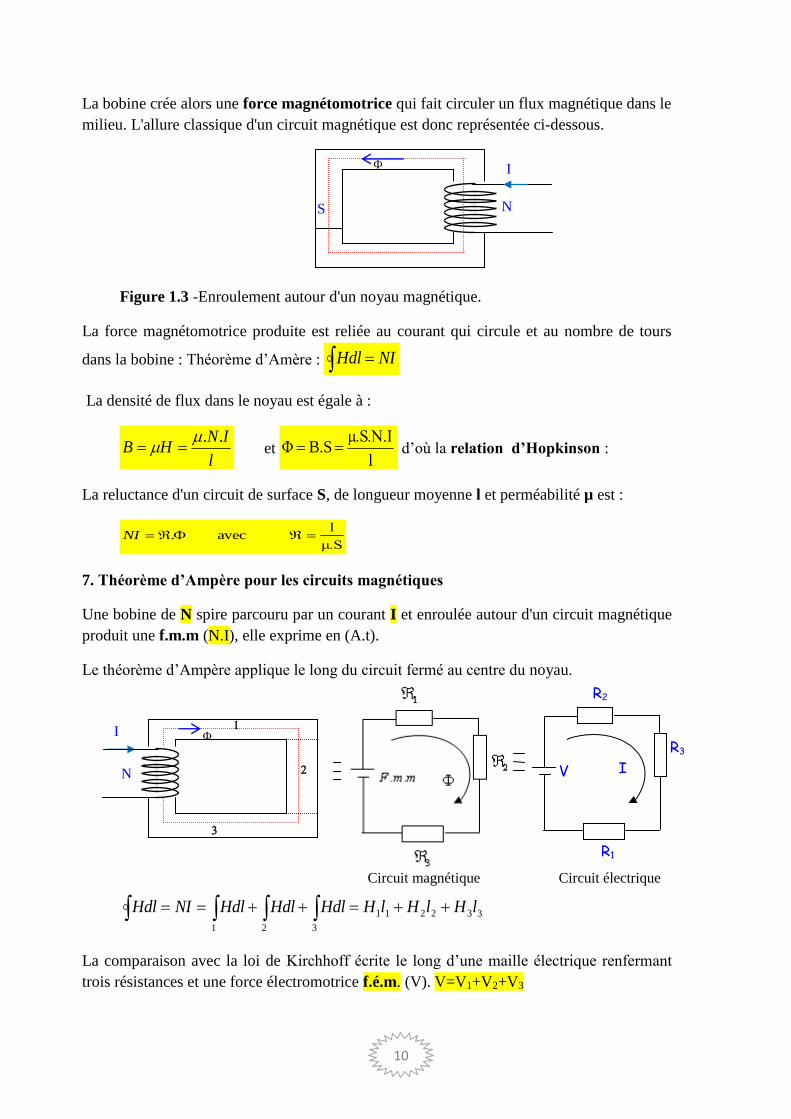
2. Continue dans le même sens : le deuxième faisceau aller est placé sous le pôle
suivant. En schéma panoramique la section consécutives forment des ondulations
l’enroulement est dit ondule. 2a=2,2S=F, F : faisceau
2,
22211
yy
p
Syyyet
p
Sy c
Formule générale de la Force électromotrice
Nous savons qu’une bobine en mouvement dans un champ magnétique voit apparaître
à ses bornes une force électromotrice (f.é.m.) donnée par la loi de Faraday:
Sur ce principe, la machine à courant continu est le siège d’une f.é.m. E :
Na
pE
2
Avec :
p : le nombre de paires de pôles
a : le nombre de paires de voies d’enroulement
N : le nombre de conducteurs (ou de brins - deux par spires)
: flux maximum à travers les spires (en Webers - Wb)
: vitesse de rotation (en rad.s-1
)
Finalement:
KE
avec K p
2aN
Si de plus la machine fonctionne à flux constants
E K' avec K' K

22
2.5. Etude de l’induit en charge
2.5.1. Réaction magnétique de l’induit
On rappelé que l’induit est le siège :
- E :f.e.m : dans le cas d’une génératrice
- E’ :f.c.e.m : dans le cas d’un moteur
Dans les deux cas chaque conducteur actif de l’induit sera traversé par un
courant a2
1, ces courants créent un flux magnétique d’induit dit de réaction
magnétique de l’induit(R.M.I) qui d’après (LENZ) s’oppose au flux à vide. On aura
ainsi :
EEchch
(Malgré qu’on maintient l’excitation constante)
Les modèles équivalents de l’induit lors d’un fonctionnement générateur ou
moteur sont données par les schémas suivants ;
On note : hm(I)=E-Ech: chute de tension provoquée par la réaction magnétique de
l’induit.
Ra(Ω): Résistance mesurée entre bornes de l’induit.
Par conséquent, en charge, la loi des mailles appliquée à l’induit donne ;
U = E – (RaIa+hm), dans le cas d’une génératrice
U = E – (hm - RaIa), dans le cas d’un moteur
La réaction magnétique de l’induit croit avec la charge.
<q
Figure 2.8: Schéma équivalent de l’induit

23
2.5.2-Répartition du flux magnétique en charge
La réaction magnétique de l’induit distorde les lignes de champ de telle sorte que la
ligne neutre magnétique sera décalée :
-Dans le sens de rotation pour une génératrice.
-Dans le sens contraire pour un moteur.
Ce décalage est d’autant plus important que la charge est plus intense. Il en résulte
que les balais placés sur l’axe interpôlaire ne collectent plus une f.e.m maximale car
une partie des conducteurs auront de f.e.m opposées au reste de conducteurs.
Inducteur seul
Induit seul
Induit et inducteur
Figure 2.9 : Répartition de champ

24
2.5.3. Compensation de la réaction magnétique de l’induit
Pour remédier aux problèmes causés par la R.M.I, qui :
- En génératrice, la diminution du flux provoque une chute de tension.
- En moteur, la diminution du flux peut entrainer l’emballement de vitesse.
On peut :
Soit décaler les balais et augmenter l’entrefer à la corne de la sortie. Cette
solution est valable pour les machines de faible puissance et ayant un seul sens de
rotation.
Soit utiliser un enroulement de compensation, placés dans des encoches
pratiquées sur les pièces polaires, qui traversé par le courant induit produira
une force magnétomotrice qui s’oppose aux ampère-tour de l’induit.
Figure 2. 10: Enroulement de compensation
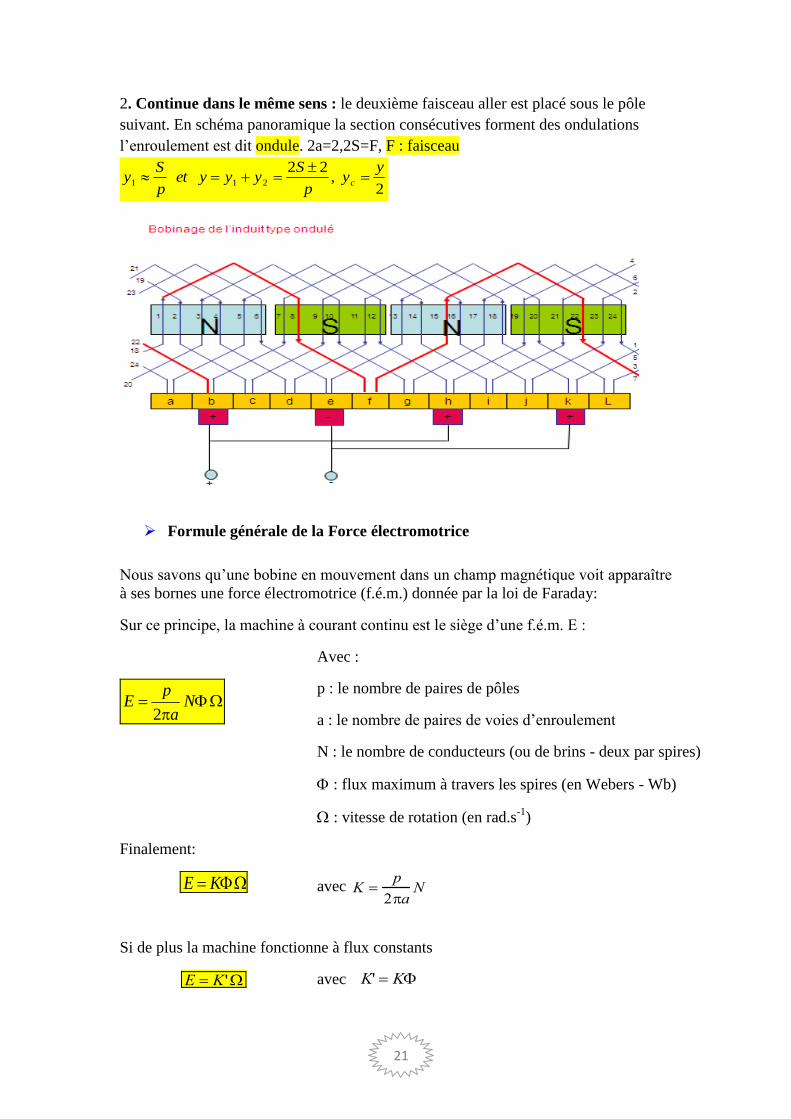
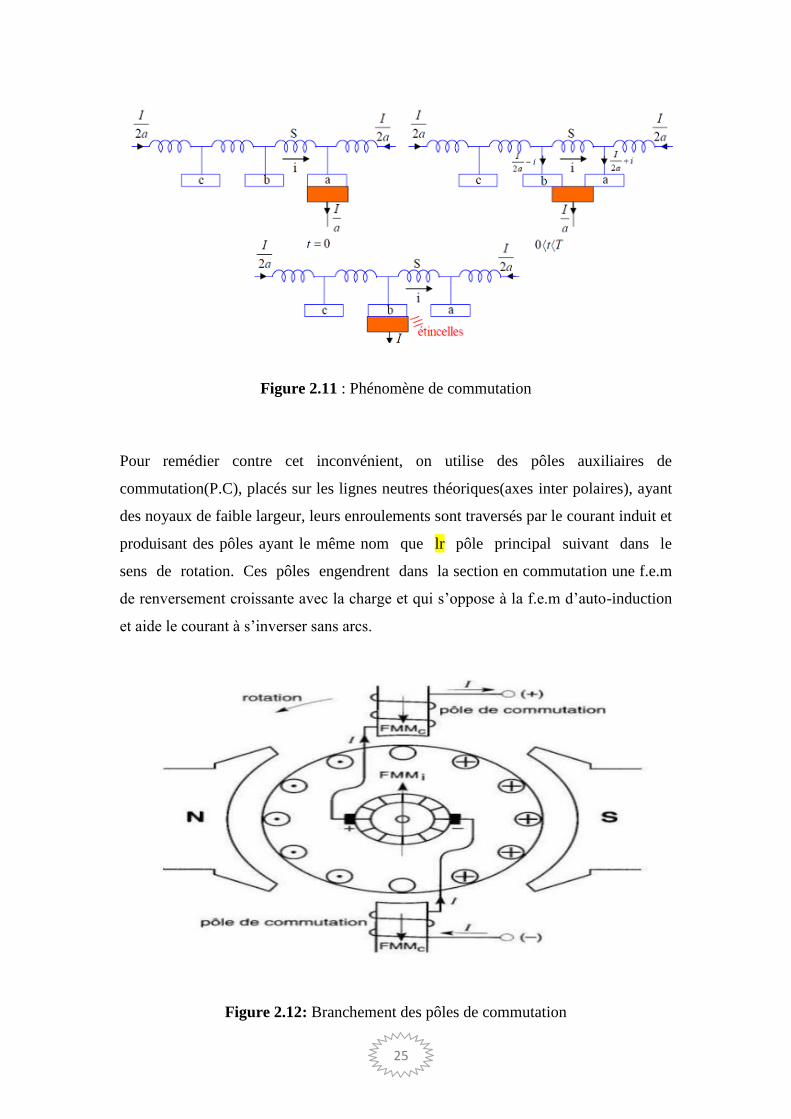
2.5.4. Problème de commutation
On rappelle qu’entre deux lames consécutives, il y’a toujours une section.la
commutation est l’inversion du courant dans une section. Lorsque la génératrice
tourne, les lames se déplacent selon de la flèche en pointillé. Cette inversion entraine
des petits arcs, qui peuvent détériorer les lames et les balais.
25
Figure 2.11 : Phénomène de commutation
Pour remédier contre cet inconvénient, on utilise des pôles auxiliaires de
commutation(P.C), placés sur les lignes neutres théoriques(axes inter polaires), ayant
des noyaux de faible largeur, leurs enroulements sont traversés par le courant induit et
produisant des pôles ayant le même nom que lr pôle principal suivant dans le
sens de rotation. Ces pôles engendrent dans la section en commutation une f.e.m
de renversement croissante avec la charge et qui s’oppose à la f.e.m d’auto-induction
et aide le courant à s’inverser sans arcs.
Figure 2.12: Branchement des pôles de commutation

26
2.6. Fonctionnement en Génératrice
2.6.1. Equation aux tensions d’une génératrice à courant continu
La génératrice à courant continu est constituée d'un inducteur et d'un induit, tels
qu'ils sont caractérisés par leurs résistances internes respectivement Rex et Ra,
comme le montre la figure suivante :
Dans le cas générateur est compensée hm=0
Dans le cas générale, lorsque la machine est non compensée 0mh
hm=E-Ech
2.6.2. Bilan des puissances et Rendement
Le bilan des puissances décline toutes les puissances, depuis la puissance absorbée
d’origine mécanique jusqu’à la puissance utile de nature électrique.
Entre ces deux termes, l’étude se portera sur toutes les pertes aussi bien mécaniques
qu’électriques, et enfin une puissance sera étudiée tout particulièrement, elle
correspond au passage de la puissance mécanique à la puissance électrique.
Le bilan, peut être résumé à l’aide schéma suivant :
Bilan des puissances d’une génératrice
Pertes collectives
Pc
Puissance utile
Pu
Pertes par effet Joule
Pj=pja+pjex
Puissance
Absorbée
Pa
Puissance
Électromagnétique
Pem
Puissance électrique Puissance mécanique
U = E - RaIa
U = E – (RaIa+hm)
Figure 2.13. Schéma équivalent d'une génératrice à courant continu.

27
La génératrice reçoit une puissance Pa, produit du moment du couple mécanique Cm
provenant d’un système auxiliaire et de la vitesse angulaire
Toutes les puissances mises en jeu dans ce bilan peuvent être calculées à partir des
relations qui suivent.
Cu Le moment du couple utile [Nm]
Cu = Ce+Cp Ce Le moment du couple électromagnétique en [Nm]
Mécanique Cp Le moment du couple de pertes en [Nm]
Pc Les pertes collectives en watts [W]
Pc = Cp. Cp Le moment du couple de pertes en [Nm]
Mécanique La vitesse angulaire en en radians par seconde [rad.s-1
]
Pem La puissance électromagnétique en watts [W]
Pem = Cem Cem Le moment du couple électromagnétique en [Nm]
Mécanique La vitesse angulaire en en radians par seconde [rad.s-1
]
Pem La puissance électromagnétique en watts [W]
Pem = Ech a Ech La fem de la génératrice en volts [V]
Electrique Ia L’intensité du courant dans l’induit en [A]
Pj Les pertes par effet Joule de l'induit en watts [W]
Pja = Ra a² Ra La résistance de l’induit en ohms []
Ia² L’intensité du courant dans l’induit en ampères² [A²]
Pex La puissance absorbée par l’inducteur en watts [W]
Pjex = Uex.Iex Uex La tension d’alimentation de l’inducteur en volts [V]
Iex L’intensité du courant dans l’inducteur en ampères [A]

28
Pex La puissance absorbée par l’inducteur en watts [W]
Pjex = Rex.Iex² Rex La résistance de l’inducteur en ohms []
Iex² L’intensité du courant dans l’inducteur en ampères² [A²]
Pu La puissance utile en watts [W]
Pu a U La tension délivrée par l’induit de la génératrice en [V]
Electrique Ia L’intensité du courant dans l’induit en ampères [A]
Le bilan met en évidence le fait que la puissance absorbée est obligatoirement la
puissance la plus importante, elle ne cesse de diminuer en progressant vers la
puissance utile qui est évidemment la plus faible, ainsi :
Pem La puissance électromagnétique en watts [W]
Pem = Pa - Pc Pa La puissance absorbée en watts [W]
Mécanique Pc Les pertes collectives en watts [W]
et
Pu La puissance utile en watts [W]
Pu = Pem – Pj Pem La puissance électromagnétique en watts [W]
Electrique Pj Les pertes par effet Joule en watts [W]
Donc
Pu La puissance utile en watts [W]
Pu = Pa - Pc – Pj Pa La puissance absorbée en watts [W]
Mécanique Pc Les pertes collectives en watts [W]
Electrique Pj Les pertes par effet Joule en watts [W]
Pc représente la somme des pertes mécaniques et des pertes magnétiques dans
la génératrice. Cp est le moment du couple de pertes correspondant à cette
puissance perdue.
Les pertes magnétiques dues à l'hystérésis et aux courants de Foucault se
produisent dans les tôles du rotor.

29
Les pertes mécaniques dues aux frottements se situent au niveau des paliers.
Le rendement est le rapport entre la puissance électrique utile et la puissance
mécanique absorbée par l’induit, d’où :
η Rendement de la génératrice [sans unités]
a
u
P
Pη Pu La puissance utile en watts [W]
Pa La puissance absorbée en watts [W]
2.6.3. Génératrice à excitation séparée
a. Fonctionnement à vide et à fréquence de rotation constante
L’induit de la machine est entraîné par une source extérieure à la fréquence de
rotation n. Nous dirons que la génératrice fonctionne à vide lorsqu’elle ne débite
aucun courant.
Figure 2.14 Modèle équivalent d’une génératrice à vide
La tension U0 mesurée directement sur l’induit de la génératrice est exactement égale
à la f.e.m E0 de la machine car l’intensité du courant est nulle, il n’y a donc pas de
chute de tension due à la résistance de l’induit.
I0 = 0 A
E0
Ra
Moteur d'entraînement
n0
Inducteur non
représenté
Induit
U0
Figure 2.13 Fonctionnement d’une génératrice à vide
U0
Rex
I=0 Iex
Uex
Moteur
+
-
Ra
G

30
Caractéristique à vide E=f (e) à n constante
La caractéristique à vide est déterminée pour
une vitesse n constante et un courant I nul,
elle est exprimée sous la forme suivante :
Figure 2.15 Caractéristique d’une génératrice à vide
b. Fonctionnement en charge
La génératrice est entraînée par un moteur auxiliaire, elle débite un courant d’intensité
I dans un rhéostat de charge.
Figure 2.17 Caractéristique d’une génératrice en charge
Rhéostat de
charge
Rex
Ia Iex
Uex
Moteur
+
-
Ra
G
Figure 2.16 Fonctionnement d’une génératrice en charge

31
c. Caractéristique de réglage Ie=f (I) à U constante et n constante
Figure 2.18 Caractéristique de réglage
2.6.4. Génératrice à excitation shunt
La génératrice est à excitation shunt lorsque le circuit inducteur est en parallèle
avec le circuit de l’induit. Ia=Ie+I
Phénomène d'amorçage
Un entraînement de la machine fait naître une f.e.m induite rémanente Er, fait à son
tour circuler un petit courant Ie qui augmente la f.e.m d'ou l'augmentation de I jusqu'à
égalité de (Rex+Rh)Ie et E0.
Droite des inducteurs
A vide la génératrice ne débite par un courant de charge I=0 d'où les relations
suivantes E0(Ie)=U (1), et (Rex+Rh) Iex =U (2).
On a alors E0(Ie) = (Rex+Rh)Iex et U=(Rex+Rh)Iex donnent un point de
fonctionnement P qui est le point de fonctionnement nominal de la génératrice en
charge. La relation ex
exhI
URR est appelée droite des inducteurs, c'est la droite
d'amorçage de la génératrice en courant continu.
Figure 2.19.Fonctionnement d’un générateur shunt

32
Figure 2.20 Caractéristique à vide d'une génératrice à excitation shunt
Caractéristique en charge U=f(I) : on appelle caractéristique en charge, une
caractéristique externe à résistance du circuit inducteur constante.
2.6.5. Génératrice à excitation série
Soit une génératrice à courant continu à excitation série comme le montre la
figure suivante où l'induit et l'inducteur sont alimentés en série par la même
source de tension. I=Ia=Ie
Figure 2.22 Génératrice à excitation série
Phénomène d'amorçage
Pour entraîner l'amorçage de la machine il faut que :
la machine soit fermée sur une charge 0 eII ;
α αc
Droite d’amorçage
P
Figure 3.21 Fonctionnement d’une génératrice en charge

33
le flux rémanent Φ existe ;
la résistance de la charge soit inférieure à la résistance critique (pour provoquer
l'amorçage) ;
Caractéristiques en charge à une vitesse n constante U=f(I)
U=E-(Ra+r)I
a. Zone linéaire
La f.e.m est de la forme E0 = k Ie et le courant de l'induit Ie=I ce qui implique E0
= k I, d'où la tension U peut être exprimée par la relation suivante U= αI avec
α=k-(Ra+r), c'est une droite de pente positive α.
b. Zone saturée
A la saturation de la machine la f.e.m sera constante, qu'on peut mettre U sous la forme
U=β-γI, avec β= E0 et γ= Ra+r, c'est une droite de pente négative.
Figure 2.23 Caractéristique en charge d'une génératrice à excitation série
2.6.6. Excitation à excitation Composée "Compound"
Phénomène d'amorçage
La génératrice à excitation composée porte dans son inducteur deux
enroulements, le premier à excitation shunt de Nj spires "beaucoup de spires et
de fil fin", le second à excitation série de Ns spires "Quelques spires et de gros
fil", tel que Nj>>Ns.
Mode de branchement
On distingue deux modes de branchement :
a. Courte dérivation
L'enroulement Nj est shunté directement avec l'induit de la génératrice fig.2.24

34
Figure 2.24. Génératrice à excitation composée de courte dérivation
b. Longue dérivation
L'enroulement Nj est shunté en série avec Ns, et tous les deux sont montés en
parallèle avec l'induit de la génératrice fig.2.25
Figure 2. 25. Génératrice à excitation composée de longue dérivation
2.7. Fonctionnement en Moteur
2.7.1. Equation aux tensions d’un Moteur à courant continu
Les conducteurs de l’induit du moteur en rotation coupent le flux inducteur et sont le
siège d’une f.c.e.m E’.
La f.c.e.m est proportionnelle :
- au nombre N de conducteurs actifs de l’induit
- à la fréquence de rotation n de l’induit
- au flux dans l’entrefer
Figure 2.26. Schéma équivalent d'un moteur
à courant continu
E’ = N n
U=E’ + Ra.Ia
Uex

35
Fréquence de rotation
Elle s’obtient à partir de l’expression de la force contre-électromotrice, soit :
.
.
N
IRUn aa
2.7.2. Bilan Energétique et Rendement
Le bilan des puissances décline toutes les puissances, depuis la puissance absorbée
d’origine électrique jusqu’à la puissance utile de nature mécanique.
Entre ces deux termes, l’étude se portera sur toutes les pertes aussi bien mécaniques
qu’électriques, et enfin une puissance sera étudiée tout particulièrement, elle
correspond au passage de la puissance électrique à la puissance mécanique.
Le bilan, peut être résumé à l’aide schéma suivant :
Bilan des puissances d’un moteur
Toutes les puissances mises en jeu dans ce bilan peuvent être calculées à partir des
relations qui suivent. Le moteur reçoit une puissance Pa, produit de la tension,
appliquée sur les bornes de l’induit et de l’intensité du courant qui le traverse.
Pa La puissance absorbée en watts [W]
Pa U La tension aux bornes de l’induit en volts [V]
Electrique I L’intensité du courant [A]
Cu Le moment du couple utile [Nm]
Cu = Ce-Cp Ce Le moment du couple électromagnétique en [Nm]
Mécanique Cp Le moment du couple de pertes en [Nm]
c
emu
PCC
Pertes par effet Joule Pj
Puissance utile
Pu
Pertes collectives
Pc
Puissance
Absorbée
Pa
Puissance
Électromagnétique
Pem
Puissance mécanique Puissance électrique

36
Pjex Les pertes joule dans l’inducteur en [W]
Pjex = Uex.Iex Uex La tension aux bornes de l’inducteur en volts [V]
Electrique Iex L’intensité du courant dans l’inducteur en [A]
Pjex La puissance absorbée par l’inducteur en watts [W]
Pjex = RexIex² Rex La résistance de l’inducteur en ohms []
Electrique Iex² L’intensité du courant dans l’inducteur en ampères² [A²]
Pex La puissance absorbée par l’inducteur en watts [W]
Pjex =ex
2
ex
R
U Uex² La tension d’alimentation de l’inducteur en volts² [V²]
Electrique Rex La résistance de l’inducteur en ohms []
Pja Les pertes par effet Joule dans l’induit en watts [W]
Pja = Ra a² Ra La résistance de l’induit en ohms []
Electrique Ia² L’intensité du courant dans l’induit en ampères² [A²]
Pem La puissance électromagnétique en watts [W]
Pem = E’ch Ech La f.c.e.m du moteur en charge [V]
Electrique I L’intensité du courant en [A]
Pem La puissance électromagnétique en watts [W]
Pem = Cem Cem Le moment du couple électromagnétique en [Nm]
Mécanique La vitesse angulaire en radians par seconde [rad.s-1
]
Pc Les pertes collectives en watts [W]
Pc = Cp Cp Le moment du couple de pertes en [Nm]
Mécanique La vitesse angulaire en [rad.s-1
]

37
Pu La puissance utile en watts [W]
Pu= Cu Cu Le moment du couple mécanique en [Nm]
Mécanique La vitesse angulaire en [rad.s-1
]
Pem La puissance électromagnétique en watts [W]
Pem = Pa – Pj Pa La puissance absorbée en watts [W]
Electrique Pj Les pertes par effet Joule en watts [W]
Pu La puissance utile en watts [W]
Pu = Pem – Pc Pem La puissance électromagnétique en watts [W]
Mécanique Pc Les pertes collectives en watts [W]
Pu La puissance utile en watts [W]
Pu = Pa – Pj – Pc Pa La puissance absorbée en watts [W]
Electrique Pj Les pertes par effet Joule en watts [W]
Mécanique Pc Les pertes collectives en watts [W]
Pc représente la somme des pertes mécaniques et des pertes magnétiques dans
le moteur. Cp est le moment du couple de pertes correspondant à cette
puissance perdue.
Les pertes magnétiques dues à l'hystérésis et aux courants de Foucault se
produisent dans les tôles du rotor.
Les pertes mécaniques dues aux frottements se situent au niveau des paliers.
Le rendement est donc :
Rendement du moteur [sans unités]
a
u
P
Pη Pu La puissance utile en watts [W]
Pa La puissance absorbée en watts [W]
Dans le cas d’un moteur séparé la puissance absorbe est :
Pa1 = U.Ia +UexIex [W]

38
Le rendement est donc :
Rendement du moteur [sans unités]
1a
u
P
Pη Pu La puissance utile en watts [W]
Pa1 La puissance absorbée en watts [W]
2.7.3. Moteur à excitation séparée
On dispose d'un moteur à courant continu dont l'excitation est indépendante
comme le montre la figure suivante où l'induit et l'inducteur sont alimentés
séparément par deux sources de tensions différentes.
IKC
KE
IREU
em
aa
..
..
'
Caractéristique en charge Ω(I)
A partir des équations précédentes on obtient l'expression de la vitesse de rotation
en fonction de I :
.
.
K
IRU aa
Figure 2.27.Caractéristique de la Vitesse
U=cte
Iex=cte
Ia

39
Caractéristique en charge U(I).
La caractéristique naturelle est définie par sa vitesse constante n et son courant
d'excitation constant Iex.
Figure 2.28.Caractéristique en charge
Caractéristique en charge C(Ia).
Figure 2.29.Caractéristique du couple
Point de fonctionnement
Le point de fonctionnement se trouve sur l’intersection de la caractéristique mécanique du
moteur et de la courbe qui caractérise le moment du couple résistant de la charge.
En régime permanent
Cu = Cr
ΔU
U=cte
Iex=cte
Cp
Cu [Nm]
Ce [Nm]
Ia Ia0
0 n’ n [tr.min-1
]
Point de fonctionnement
Cu [Nm]
Cr [Nm]
Cu’
40
Cu Le moment du couple utile en [Nm]
Cr Le moment du couple résistant en [Nm]
Le point de fonctionnement donne graphiquement n’, la fréquence de rotation du moteur ainsi
que Cu’ le moment du moment du couple utile.
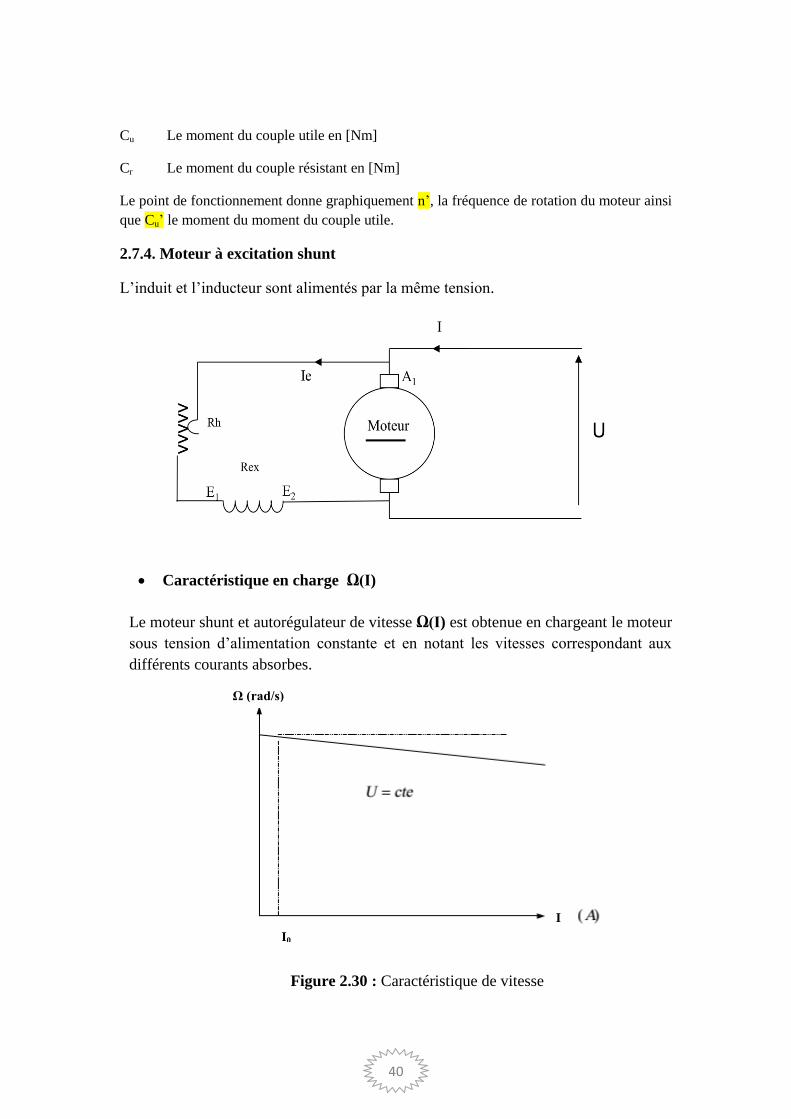
2.7.4. Moteur à excitation shunt
L’induit et l’inducteur sont alimentés par la même tension.
Caractéristique en charge Ω(I)
Le moteur shunt et autorégulateur de vitesse Ω(I) est obtenue en chargeant le moteur
sous tension d’alimentation constante et en notant les vitesses correspondant aux
différents courants absorbes.
Figure 2.30 : Caractéristique de vitesse
Ω (rad/s)
I
I0

41
Caractéristique de couple Ce=f(I) : en tenant compte de l’expression du
couple électromagnétique IKCem .. , le graphe Ce=f(I) est sensiblement une
droite passant par l’origine. D’autre part le couple utile est un peu plus faible que le
couple électromagnétique la courbe Cu=f(I) sera un peu au dessous de la précédente.
Figure 2.31 : Caractéristique de couple
2.7.5. Moteur à excitation série
Les bobinages d'inducteur et d'induit d'un moteur à excitation série sont reliés
en série(Ie=I=Ia).
IIKC
IKE
IREU
rRR
em
tot
atot
Caractéristique de vitesse Ω(I).
Le moteur série s’emballe à vide on remarquera qu’à vide le courant absorbé I0
étant très faible, la vitesse est très grande.
Figure 2.32: Caractéristique de vitesse

42
Caractéristique mécanique Cu(n)
Le moteur est autorégulateur de puissance, la puissance du moteur reste
sensiblement constante.
Figure 2.33 : Caractéristique mécanique d’un moteur à excitation série.
2.7.6. Moteur à excitation composée
Le moteur à excitation séparée ne s’emballe pas à vide et répercute sur le courant I
tout accroissement de couple ; le moteur série s’emballe. Pour présenter les
avantages, on utilise un moteur comportant sur les pôles deux inducteurs :
– l’un dérivé, comportant Ne spires, branché en parallèle et parcouru par le
courant I e ;
– l’autre série, comportant Ns spires, branché en série, parcouru par le courant I
La force magnétomotrice est donc ININ see , le signe dépendant des sens relatifs
des enroulements : (+) montage additif (-) montage soustractif.
Figure 2.34 : Schéma d’une machine à courant continu à excitation composée.
Cu
n

43
Caractéristique Mécaniques
Les caractéristiques du moteur composé sont évidement intermédiaire entre celles du
moteur shunt et celle du moteur série.
Figure 2.35 : Caractéristiques mécaniques d’un moteur à excitation composée.
2.8. Etude de démarrage d’un moteur à courant continu
On ne peut brancher directement à la source d'alimentation que des moteurs de faible
puissance. Pour les moteurs puissants, le courant au démarrage peut atteindre des
valeurs très élevées de l'ordre de (10 à 100 fois) fois le courant nominal du moteur,
a
dR
UI en shunt et
sa
dRR
UI
en série, ce qui entraînerait :
- un échauffement instantané de l’induit très élevé ;
- une chute de tension inadmissible sur le réseau d’alimentation ;
- un couple de démarrage lui aussi très supérieur au couple nominal et risquant de
rompre l’accouplement.
On à trois possibilités pratique pour réduire ce courant.
Si on dispose d’une tension continue réglable : démarrer sous tension réduite
et la faire croitre ensuite progressivement.
Utilise un rhéostat de démarrage : c.à.d. insérer en série dans le circuit
d’induit des résistances qui serait ensuite court-circuit manuellement lorsque le
moteur prendre la vitesse. La résistance de l'induit étant très faible, le courant est
donc très important. Pour limiter ce courant à une valeur raisonnable (1, 2 à deux fois
le courant nominal), on va brancher en série avec l'induit une résistance
additionnelle.
n
n
nn
nn

44
Cette résistance est appelée résistance de démarrage RD. Après un certain temps de
démarrage, le moteur a atteint une vitesse suffisante et donc une f.c.é.m. E' suffisante
pour nous retrouver dans le cas d de la figure suivante.
Le courant a considérablement diminué puisque E' n'est plus nulle, on peut donc
éliminer RD pour terminé le démarrage et nous retrouver dans le cas a.
Principe du démarrage par élimination de résistance :
Dans la pratique, RD sera constituée de plusieurs résistances en série que nous
éliminerons progressivement les unes après les autres au fur et à mesure que le
courant diminue. C'est cette élimination qui peut se faire manuellement ou de façon
automatique et qui constitue "le démarrage par élimination de résistance".
Mais attention ! Il ne faut en aucun cas que cette résistance n'affecte le courant
inducteur, car une diminution de ce courant conduirait à un emballement du
moteur.
Démarrage manuel :
Le principe du démarreur manuel est simple. Il permet d'insérer la série de résistances
dans le circuit de l'induit au démarrage. Le courant induit est donc diminué.
Progressivement, on met manuellement hors-circuit ces résistances. Ainsi, le courant
augmente et la vitesse du moteur atteint sa valeur nominale.
Construction :
Le démarreur manuel est composé des éléments suivants :
- une série de résistances raccordées sur des plots en cuivre ;

45
- une manette avec contact électrique se déplaçant sur les plots ;
- une bobine de maintien de la manette.
La figure suivante montre le schéma d'un démarreur raccordé à un moteur à courant
continu à excitation shunt.
Schéma de branchement d'un rhéostat de démarrage :
2. Fonctionnement
Lorsque la manette de contact 1 est sur le plot mort M, le circuit du moteur est
ouvert. Le moteur est à l'arrêt.
Lorsqu'on déplace la manette du plot M au plot N à l'aide de la poignée 2, la
résistance totale du circuit vaut (R1+R2+R3+R4) le courant initialement consommé est
donc réduit.
Utiliser une boite automatique : qui réalise le montage la même fonction qu’un
rhéostat de démarrage mais automatiquement (avec des relais commande par les
valeurs de la f.e.m soit par la valeur du courant).

46
2.9. Freinage d’un moteur à courant continu
Si on coupe l’alimentation de l’induit, d’un moteur alimenté par une tension Un et
tournant à une vitesse Ω0, le moteur ne s’arrête pas instantanément. Il décélère mais il
continu à tourner sous l’effet de l’énergie cinétique emmagasinée dans la partie
tournante du système d’entrainement figure2.
Pour assurer un arrêt rapide, on doit appliquer un couple de freinage
électromagnétique dont le principe consiste à faire circuler dans l’induit un courant de
sens approprie.
Freinage dynamique.
Freinage par inversion.
1. Freinage dynamique :
Le principe de freinage dynamique consiste à brancher une résistance Rf aux
bornes de l’induit lors de l’arrêt (figure2). Le branchement de cette résistance aux
bornes de l’induit assure la circulation d’un courant d’induit dans le sens inverse. Il
en résulte un couple de freinage.
kER
EUI
a
a ,
2. Freinage par inversion : on peut arrêter un moteur encoure plus rapidement
en utilisant le freinage par inversion, cette méthode consiste à inversion brutalement
le sens du courant dans l’induit en interversion les bornes de la source.
En marche normale (moteur), le courant Ia absorbée par l’induit vaut : a
c
aR
EUI
I est 50 fois supérieur à In, dangereux même pour les protections, on le limite par R,
dans ce cas il faut ouvrir immédiatement l’interrupteur si non le moteur tourne dans
l’autre sens, car même pour E=0, il reste le courant a
s
aR
EI

47
2.10. Réglage de vitesse d’un moteur à courant continu
On considère un moteur shunt :
K
IRUn aa
Force contre électromotrice ..nKE
Pour un courant Ia donné, c.a.d pour certain charge n dépend de U, Ra et Φ
a. Action sur Ra : si on augmente la résistance du circuit induit au moyen d’un
rhéostat on diminue la vitesse, cette méthode et théoriquement possible, n’est
pas très bonne à cause des pertes par effet joule.
b. Action sur Φ : si on a un rhéostat dans le circuit de champ, une augmentation
de Rex se traduit à une Ua constant par une diminution du courant d’excitation
Iex et donc aussi du flux. donc par augmentation de la vitesse, cette méthode ne
permet pas d’obtenir des variations de la vitesse dans une large gamme.
c. Action sur Ua : si on diminue la tension d’alimentation le courant d’excitation
Iex diminue, donc aussi Φ, et la vitesse peut diminue ou augmente selon la
valeur de Φ.

48
Chapitre III
Les Transformateurs
PARTIE N°1 :
LE TRANSFORMATEUR MONOPHASE

49
TRANSFORMATEUR MONOPHASE
3.1. Définition
Un transformateur est un convertisseur « alternatif-alternatif » qui permet de modifier
la valeur efficace d’une tension alternative en maintenant la fréquence et la forme de
l’onde inchangées.
Les transformateurs sont des machines entièrement statiques, cette absence de
mouvement est d’ailleurs à l’origine de leur excellent rendement. Leur utilisation est
primordiale pour le transport de l’énergie électrique où l’on préfère « transporter des
volts plutôt que des ampères».
3.2. Symboles
On représente les deux symboles les plus usuels du transformateur monophasé sur la
figure 2.1. Les deux symboles représentés font apparaître la convention dite « des
points ». Celle-ci permet de repérer les sens conventionnels des tensions. Une fois ce
sens repéré, il faut ensuite orienter les courants de telle manière à toujours faire
apparaître le primaire en récepteur et le secondaire en générateur. C’est uniquement
en respectant ces conventions que les relations fondamentales s’appliquent sans souci
de signe.
Figure 3.1 Symboles du transformateur.
3.3. Principe – Équations
a. Constitution – Principe
Un transformateur comprend :
– Un circuit magnétique fermé :
* de perméabilité magnétique aussi haute que possible afin de faciliter le plus possible
le passage des lignes de champ magnétique ;
* d’hystérésis aussi faible que possible pour limiter les pertes ;
* feuilleté (tôles de 0,2 à 0,3 mm d’épaisseur) afin de limiter les courants de Foucault.
* de résistance électrique aussi élevée que possible, toujours dans le but d’affaiblir les
courants de Foucault, à cette fin on utilise des aciers au silicium (2 à 3 %).
– Deux enroulements (bobines) :
V1 V1 V2 V2

50
*le primaire alimenté par un générateur de tension alternative de tension V1 et
comportant N1 spires. Il absorbe le courant I1. Le primaire transforme l’énergie
électrocinétique reçue en énergie magnétique. C’est un récepteur d’énergie électrique
qui transforme cette énergie en énergie magnétique ;
* le secondaire comporte N2 spires ; il fournit, sous la tension V2, un courant I2 au
dipôle récepteur. Le secondaire transforme l’énergie magnétique reçue du primaire en
énergie électrocinétique. C’est un générateur d’énergie électrique. Les deux
enroulements sont isolés électriquement, mais magnétiquement couplés par le flux.
Figure 3.2 transformateur monophasé
Nous choisissons un sens arbitraire pour le flux
champ. Les autres signes en découlent. Les sens des courants i1 (t) et i2 (t) sont pris de
telle façon que les flux créés soient positifs donc additifs. Le primaire est un
récepteur, nous adoptons la convention « récepteur », le secondaire est un générateur,
nous adoptons la convention « générateur ».
b. Transformateur monophasé parfait
Un transformateur parfait :
pas de fuite magnétique
pas de pertes Joule (r1=r2=0).
enroulement sont fuite magnétique.
la perméabilité est infinie (réluctance nulle).
Figure 3.3 transformateur monophasé parfait
u1 (t) u2 (t)
i1 (t)
i2 (t)
e1 (t) e2 (t)
u2
e2
i2(t)
e1
i1(t)
u1
51
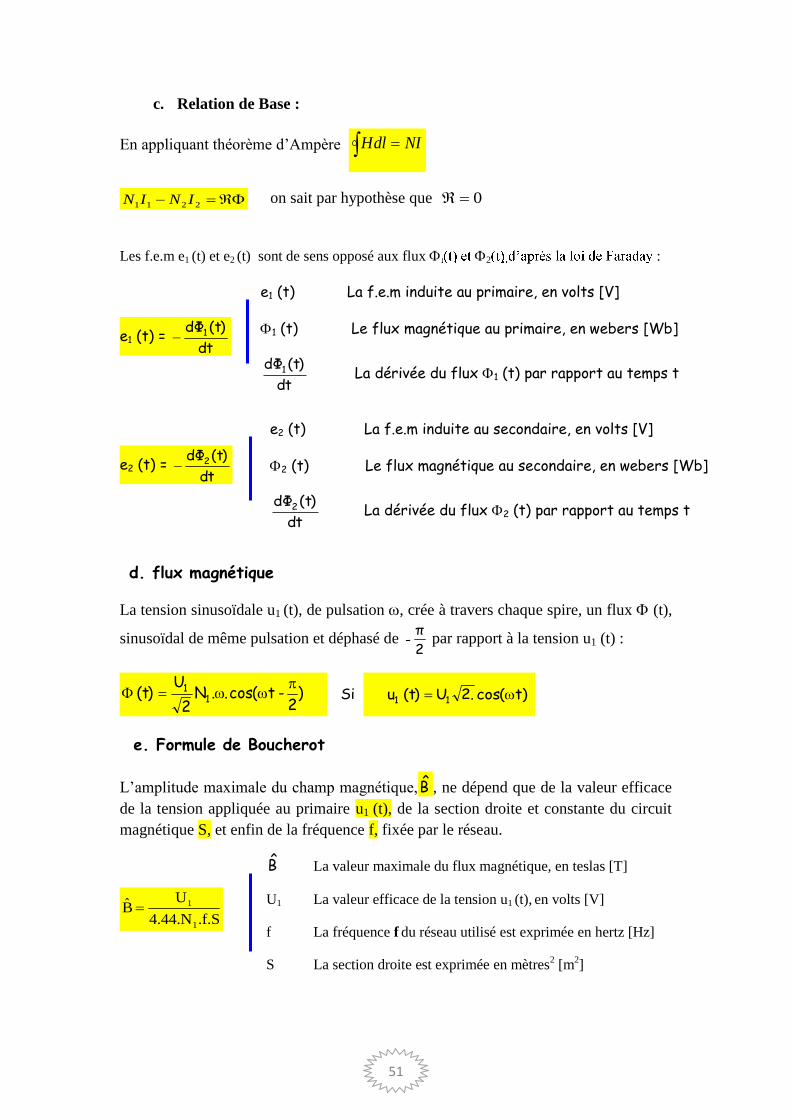
c. Relation de Base :
En appliquant théorème d’Ampère NIdlH
2211 ININ on sait par hypothèse que 0
Les f.e.m e1 (t) et e2 (t) sont de sens opposé aux flux 2 :
e1 (t) = dt
(t)dΦ1
e2 (t) = dt
(t)dΦ2
d. flux magnétique
La tension sinusoïdale u1 (t), de pulsation , crée à travers chaque spire, un flux (t),
sinusoïdal de même pulsation et déphasé de 2
π- par rapport à la tension u1 (t) :
)2
- tcos(..N2
U(t) 1
1 Si )tcos(.2U (t) u 11
e. Formule de Boucherot
L’amplitude maximale du champ magnétique, B , ne dépend que de la valeur efficace
de la tension appliquée au primaire u1 (t), de la section droite et constante du circuit
magnétique S, et enfin de la fréquence f, fixée par le réseau.
.f.S4.44.N
UB
1
1
e1 (t) La f.e.m induite au primaire, en volts [V]
1 (t) Le flux magnétique au primaire, en webers [Wb]
dt
(t)dΦ1 La dérivée du flux 1 (t) par rapport au temps t
e2 (t) La f.e.m induite au secondaire, en volts [V]
2 (t) Le flux magnétique au secondaire, en webers [Wb]
dt
(t)dΦ2 La dérivée du flux 2 (t) par rapport au temps t
B La valeur maximale du flux magnétique, en teslas [T]
U1 La valeur efficace de la tension u1 (t), en volts [V]
f La fréquence f du réseau utilisé est exprimée en hertz [Hz]
S La section droite est exprimée en mètres2 [m
2]

52
Attention la relation précédente n’est vraie qu’en utilisant les données du primaire V1
et N1, en effet la valeur maximale du champ magnétique B ne se retrouve pas dans
tous les cas au secondaire, notamment lorsque l’on tient compte des pertes
magnétiques.
Le rapport de transformation du transformateur
Nous appelons m, le rapport de transformation du transformateur. Cette grandeur est,
par définition, le rapport entre le nombre de spires au secondaire par rapport au
nombre de spires au primaire, soit :
1
2
N
Nm
Les relations entre les tensions pour le transformateur parfait
A chaque instant, chaque spire est traversée par le même flux magnétique.
Au primaire : e1 (t) =-N1dt
(t)d u1 (t) = - e1 (t)
Au secondaire : e2 (t) = N2dt
(t)d u2(t)=e2(t)
1
2
1
2
2
2
1
1
dt
dΦ
N
N
e
e
N
e
N
e
1
2
1
2
1
2
N
N
u
u
e
e
Cette relation indique que les tensions u1 (t) et u2 (t) sont en opposition de phase.
La relation entre les valeurs efficaces V1 et V2 ne tient pas compte du déphasage :
m = 1
2
V
V
m Rapport de transformation [sans unités]
N2 Le nombre de spires au secondaire [sans unités]
N1 Le nombre de spires au primaire [sans unités]
m Rapport de transformation [sans unités]
V2 La valeur efficace de la tension u2 (t), en volts [V]
V1 La valeur efficace de la tension u1 (t), en volts [V]

53
Les relations entre les intensités
Dans tous les cas que nous étudierons, le transformateur sera considéré comme parfait
pour les courants, ainsi pour tous courants non nuls, la relation entre les valeurs
efficaces I1 et I2 s’exprime ainsi :
m = 2
1
I
I
f. Diagramme de Fresnel
Un transformateur parfait est alimenté au primaire par une tension sinusoïdale u1 (t). Il
alimente une charge Zc, telle que le courant i2 (t) présente un déphasage d’un angle 2
avec la tension u2 (t).
Figure 3.4 Schéma équivalant d’un transformateur parfait
Il est possible d’évaluer l’intensité i1 (t) du courant appelé au primaire à l’aide d’un
diagramme de Fresnel. Ce courant dépend de la charge appliquée au secondaire.
Figure 3.5 Diagramme de Fresnel
La valeur de l’intensité efficace du courant I2 dépend de la charge appliquée au
secondaire, il en est de même pour le facteur de puissance cos 2. Ces deux grandeurs
imposent la valeur de l’intensité efficace du courant I1 appelé au primaire, ainsi que le
facteur de puissance du primaire, sachant que 1 = 2.
m Rapport de transformation [sans unités]
I1 La valeur efficace de l’intensité i1 (t), en ampères [A]
I2 La valeur efficace de l’intensité i2 (t), en ampères [A]
1
2
V2
I2
V1
I1
i2 (t)
i1 (t)
u1 (t) u2 (t)
Zc

54
3.4. Modèle du transformateur réel
1) Schéma électrique équivalent à vide
Le transformateur monophasé réel est équivalent à vide (I2=0) à une bobine à noyau
ferromagnétique et peut donc se modéliser par le même schéma électrique :
Figure 3.6 transformateur à vide
Détermination de Rfer et de Lm : on mesure V1, I10 et P10
En négligeant l’influence la chute de tension aux bornes de f1 et r1, on a :
10
2
1fer P
VR
et r10
1m I
VL avec
2
a10
2
10r10 III et fer
1a10 R
VI
1010110 cos IVP
Important
en réalité, le courant I10 n’est pas sinusoïdal (circuit magnétique non linéaire)
il apparaît au secondaire du transformateur une tension V20 telle que mV
V
1
20
2) Schéma électrique équivalent en charge
Théorème d’Ampère :
A vide : 1010 IN
En charge : 2211 ININch
Or ch0 car le flux est forcé par la valeur efficace de V1 :
fNEV 111 44,4 (formule de Boucherot)
D’où 22101112211101 ININININININ soit 2101 ImII
r1
I10r I10a
Lm Rfer
I10
v1~
f1

55
L’augmentation des Ampères-tours au primaire compense les Ampères-tours
appelés au secondaire.
Le courant 2Im correspond au courant appelé au primaire par un transformateur
parfait débitant au secondaire un courant I2 ; on en déduit le schéma équivalent au
transformateur réel:
Figure 3.7 transformateur réel en charge
3.5. Modèle de Kapp
L’approximation de Kapp consiste à négliger le courant I10 devant I1 lorsque le
transformateur fonctionne en charge. Vu du secondaire, le transformateur est alors
équivalent à une f.e.m. (Es) en série avec une impédance (Zs) :
Figure 3.8 schéma équivalant ramène au secondaire
avec : 201s VVmE
sss jXRZ
21
2
s rrmR
)m(X f2f1
2
s
Zcharge V2
I2
Zs
Es
Rs jXs
I1
v2~
I2
TP
mI2 r1
I0r I10a
I10
Lm Rfer v1~
f1
r2
f2
56
Remarque :
Les grandeurs du primaire sont multipliées par m2 lorsqu’elles sont rapportées au
secondaire
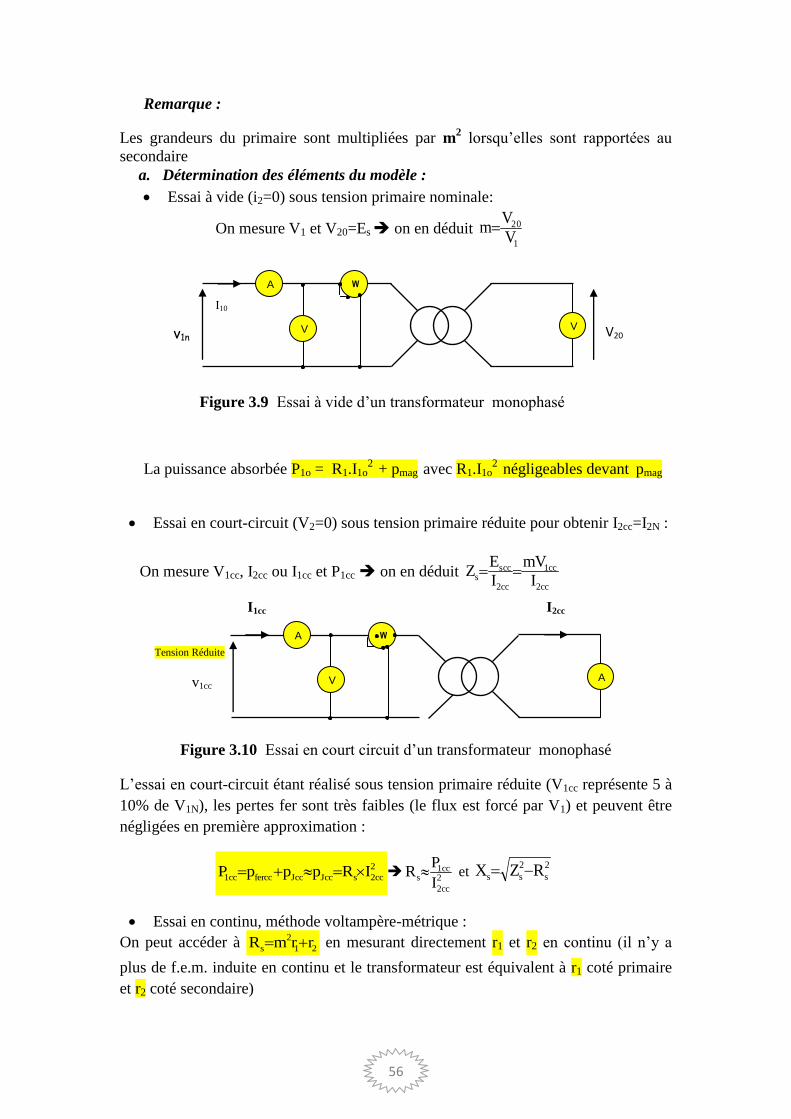
a. Détermination des éléments du modèle :
Essai à vide (i2=0) sous tension primaire nominale:
On mesure V1 et V20=Es on en déduit 1
20
V
Vm
I10
Figure 3.9 Essai à vide d’un transformateur monophasé
La puissance absorbée P1o = R1.I1o2
+ pmag avec R1.I1o2
négligeables devant pmag
Essai en court-circuit (V2=0) sous tension primaire réduite pour obtenir I2cc=I2N :
On mesure V1cc, I2cc ou I1cc et P1cc on en déduit cc2
cc1
cc2
sccs I
mV
I
EZ
Figure 3.10 Essai en court circuit d’un transformateur monophasé
L’essai en court-circuit étant réalisé sous tension primaire réduite (V1cc représente 5 à
10% de V1N), les pertes fer sont très faibles (le flux est forcé par V1) et peuvent être
négligées en première approximation :
2
cc2sJccJccfercccc1 IRpppP 2
cc2
cc1s
I
PR et
2
s
2
ss RZX
Essai en continu, méthode voltampère-métrique :
On peut accéder à 21
2
s rrmR en mesurant directement r1 et r2 en continu (il n’y a
plus de f.e.m. induite en continu et le transformateur est équivalent à r1 coté primaire
et r2 coté secondaire)
v1n
W A
1
V
1
V
2
V20
Tension Réduite
v1cc
I1cc
W A
1
V
1
A
2
I2cc

57
b. Exploitation du modèle de Kapp
Un des objectifs de la modélisation du transformateur est de prédire la chute de
tension en charge 2202 VVV
Le transformateur débite dans une charge un courant I2 avec un facteur de puissance
cos2 .
V2 = V20 - Rs.I2 - Uxs
Figure 3.11 diagramme de Fresnel (charge inductive)
Calcul de la valeur approchée de la chute de tension :
V2 = V20 – V2
V20 = OA +AC’ + C’D et V2 = AD
On considère que les points B’ et D sont confondus.
Il vient alors :
V20 = OA +AC’ C’B’
V2 AB’ = RS.I2.cos + XS.I2.sin Charge inductive
V2 = RS.I2 Charge résistive
V2 = RS.I2.cos2 - XS.I2.sin2 Charge capactive
V2
I2 2
V20
B
UXS
URs
A
C B’
C’ D
Cercle de rayon V20
o
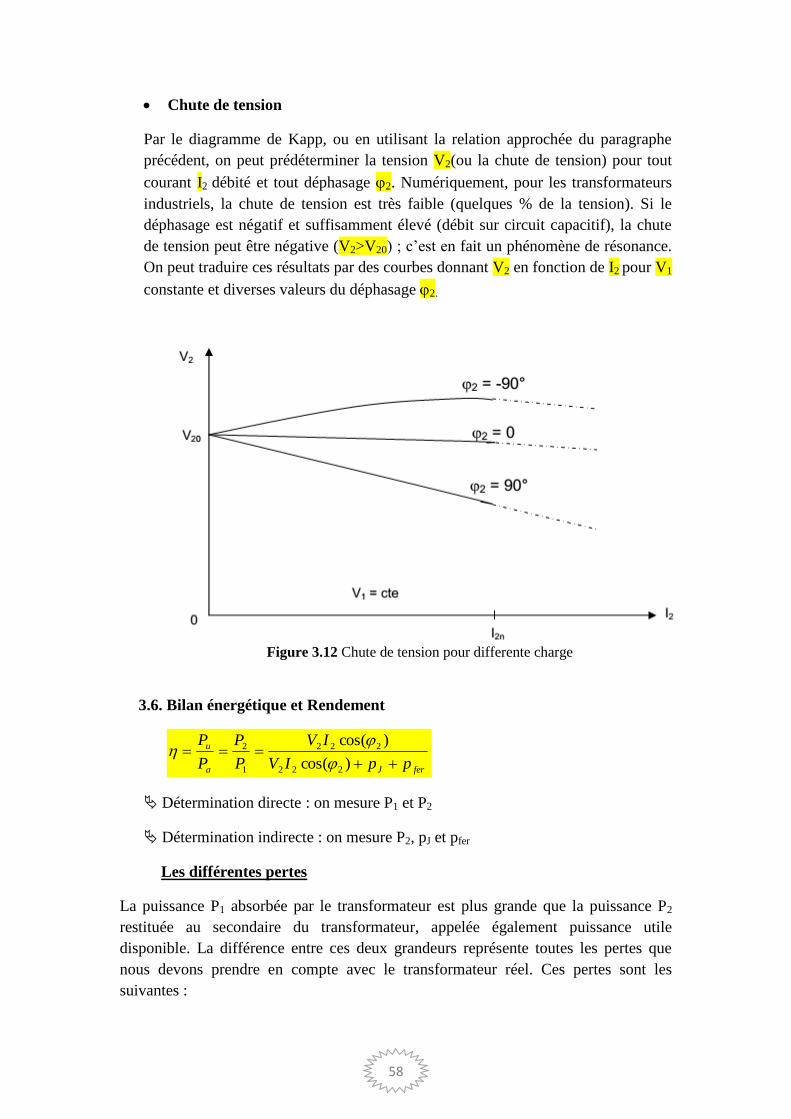
58
Chute de tension
Par le diagramme de Kapp, ou en utilisant la relation approchée du paragraphe
précédent, on peut prédéterminer la tension V2(ou la chute de tension) pour tout
courant I2 débité et tout déphasage 2. Numériquement, pour les transformateurs
industriels, la chute de tension est très faible (quelques % de la tension). Si le
déphasage est négatif et suffisamment élevé (débit sur circuit capacitif), la chute
de tension peut être négative (V2>V20) ; c’est en fait un phénomène de résonance.
On peut traduire ces résultats par des courbes donnant V2 en fonction de I2 pour V1
constante et diverses valeurs du déphasage 2.
Figure 3.12 Chute de tension pour differente charge
3.6. Bilan énergétique et Rendement
ferJa
u
ppIV
IV
P
P
P
P
)cos(
)cos(
222
222
1
2
Détermination directe : on mesure P1 et P2
Détermination indirecte : on mesure P2, pJ et pfer
Les différentes pertes
La puissance P1 absorbée par le transformateur est plus grande que la puissance P2
restituée au secondaire du transformateur, appelée également puissance utile
disponible. La différence entre ces deux grandeurs représente toutes les pertes que
nous devons prendre en compte avec le transformateur réel. Ces pertes sont les
suivantes :

59
Les pertes par effet Joule
Les pertes par effet Joule, appelées également pertes dans le cuivre, sont notées pj ou
pc. Ce sont les pertes occasionnées par le passage du courant dans les enroulements du
primaire et du secondaire. Ces pertes sont proportionnelles au carré de la valeur
efficace de l’intensité du courant qui traverse chaque enroulement.
Les pertes Joules sont déterminées soit :
-à partir de r1 et r2 ou Rs: 2
2s
2
22
2
11jIRIrIrp
-à partir de l’essai en court-circuit : JccferccJcccc1
pppP et JNJcc
pp si N2cc2
II
Les pertes magnétiques
Les pertes magnétiques, appelées aussi pertes dans le fer sont notées pmag ou pfer. Ce
sont les pertes dues aux fuites magnétiques, à l’hystérésis et enfin aux courants de
Foucault. Ces pertes ne dépendent que de la valeur efficace V1 de la tension u1 (t),
appliquée au primaire.
Les pertes fer sont déterminées à partir de l’essai à vide :
-0J100fer0fer0J10
pPpppP et ferN0fer
pp si l’essai est réalisé sous tension primaire
nominale.
Figure 3.13 Bilan de Puissance
o La puissance absorbée au primaire
1111 cosIVP
o La puissance restituée au secondaire
magj12222 ppPcosIVP
o Au niveau des puissances réactives
1111 sinIVQ
2222 sinIVQ
Pertes par Effet Joule
pj
Puissance utile
Pu=P2
Pertes magnétiques
pmag
Puissance
Absorbée
Pa=P1

60
3.7. La plaque signalétique
Les tensions indiquées sur la plaque signalétique sont la valeur nominale V1n de la tension u1
(t) au primaire et la valeur efficace de la tension à vide V2o de la tension u2 (t) au secondaire.
Il est également indiqué la puissance apparente nominale Sn ainsi que la fréquence nominale f
d’utilisation du transformateur, facteur de puissance cos2. La plaque signalétique permet de
calculer rapidement les grandeurs n’y figurant pas à l’aide des relations vues précédemment.

61
PARTIE N°2 :
MACHINE STATIQUE A COURANT ALTERNATIF
LE TRANSFORMATEUR TRIPHASE

62
4.1 Constitution
Un transformateur triphasé est constitué, au départ, de l'association de 3
transformateurs monophasés dont les 3 primaires et les 3 secondaires sont connectés
soit en étoile, soit en triangle (figure 4.1).
Figure 4.1
Les 3 primaires sont alimentés par une source de tension alternative triphasée
équilibrée. Par conséquent, les 3 courants magnétisants et donc les 3 flux dans les
trois noyaux forment eux aussi un système triphasé équilibré dont la somme est nulle.
Si on réunit les 3 circuits magnétiques, le montant commun aux trois circuits est donc
parcouru par un flux nul et il peut être supprimé (tout comme le fil neutre dans les
circuits triphasés équilibrés connectés en étoile-étoile) (fig. 4.2).
Figure 4.2

63
Pour des raisons de facilité de construction et d'encombrement, on ramène
généralement les 3 montants subsistants dans un même plan (figure 4.3).
Figure 4.3.
Cette disposition introduit une dissymétrie en ce qui concerne la colonne centrale car,
correspondant à un chemin magnétique plus court que les deux autres, sa force
magnétomotrice est plus petite. Il en résulte que le courant magnétisant de la phase
bobinée sur cette colonne est plus petit. On ne s’étonnera donc pas de trouver lors du
fonctionnement à vide du transformateur un courant de ligne différent des deux
autres. Si la connexion est faite en étoile, ce courant sera plus petit que les deux
autres. Si la connexion est faite en triangle, il sera plus grand que les deux autres.
Repérage de la plaque a bornes
Les bornes HT sont repérées par les lettres capitales A, B et C et les bornes BT par
les minuscules a, b et c.
Dans le cas où le neutre est disponible
et distribué, on trouve une borne
supplémentaire.

64
4.2. Indice horaire
Le fait d'effectuer les connections en étoile ou en triangle, de permuter ou non les
phases, d'inverser ou non le sens des enroulements permet d'introduire un retard des
grandeurs secondaires par rapport aux grandeurs primaires qui peut être n'importe
quel multiple de 30°.
Comme il y a 12 positions possibles, on a l'habitude en électrotechnique d'indiquer ce
déphasage sous la forme d'un "indice horaire". Par exemple, un indice horaire de 2
correspond à un retard des grandeurs secondaires de 60°.
On peut montrer que, moyennant des règles de bonne connexion, on peut toujours
ramener le déphasage entre grandeurs correspondantes primaires et secondaires à
0°, 30° ou 60°.
4.3. Couplage des Enroulements
Sur chacune des colonnes sont disposés un enroulement primaire et un
enroulement secondaire.
Les trois enroulements primaires peuvent être couplés en triangle ou en étoile.
Les trois enroulements secondaires peuvent être couplés en triangle, en étoile
ou en Zig-Zag.
Dans ce dernier cas le bobinage secondaire est constitué de deux bobines
comportant chacune une moitié des spires secondaires.
Chaque mode de couplage
est symbolisé par une lettre
: étoile : Y ou y; triangle:
D ou d; Zigzag : z.
Couplages
Étoiles-Y Triangle D Zig-zag Z
Coté HT Y D
Coté BT y d z
VAN
Van
5h
Exemple de couplage horaire 5 heures
( = 150°) (530°=150°)

65
Il en résulte six combinaisons possibles de couplage :
Y-y ou Y-d ou Y-z ou D-y ou D-d ou D-z, pour le cas ou le transformateur est
abaisseur.
d-D ou d-Y ou d-Z ou y-D ou y-Y ou y-Z, pour le cas ou le transformateur est
élévateur.
Rq :
La lettre majuscule correspond à la plus haute tension (le plus souvent le
primaire) et la lettre minuscule à la plus basse tension.
Le couplage Zig-zag est utilisé en cas de débit sur charge déséquilibrée
importante (transformateur de distribution) ; ce couplage est réalisé en usine et
n’est pas modifiable. Il possède la particularité de répartir la surcharge sur 2
phases lors d’un déséquilibre.
Exemple de couplages :
Couplage Yy0
Avantage du couplage étoile :
* La tension mesurée aux bornes des enroulements est √3 fois plus faible que la
tension mesurée entre phases : non négligeable lorsqu’on travaille en H.T.
Inconvénient du couplage étoile :
* Un fonctionnement déséquilibré n’affecte qu’une seule phase.
Schéma de connexion
Diagramme vectorielle Y-y0

66
Triangle-étoile -11h (D-y11)
Avantage du couplage triangle :
* Le courant d’enroulement est √3 fois plus faible que le courant de ligne.
Inconvénient du couplage triangle :
* Ne possède pas de point neutre.
Rapport de Transformation
Le rapport de transformation en monophasé : 1
2
1
20
N
N
V
Vm
Il est égal au rapport de la tension U1, entre deux fils de phase de la ligne
primaire à la tension U20. Entre deux fils de phase de la ligne secondaire à vide.
1
201
U
Um
Les tensions U20 et U1, ne sont égales aux tensions aux bornes des enroulements
que pour un couplage triangle.
Le rapport de transformation est étroitement lié au type de couplage retenu pour le
primaire et le secondaire.
Schéma de connexion
Diagramme vectorielle D-y11

67
Couplage Dd
1
21U
Umm
Couplage Yy
1
2
1
2
3.
3.1
U
U
U
Umm
Couplage Dy
mU
Um .331
1
2
Couplage Yd
3.31
1
2 m
U
Um
Couplage Dz
3' 2U
E 3'.2 EU
cos...2²²' 2121 EEEEE
221
EEE 120
EE .2
3'
2
3..
2
3.31
1
mU
Em
Couplage Yz
2
3..
3
3.
2
31
1
mU
Em

68
Tableau résumant Indice horaire suivant le couplage :
Groupe d’indice horaire :
On définie quatre groupes de couplage suivants :
Groupe Indices Couplages
I 0, 4,8 Yy Dd Dz
II 2, 6,10 Yy Dd Dz
III 1,5 Dy Yz Yd
IV 7,11 Dy Yz Yd
4.4. Grandeurs nominales
La tension nominale
C’est la tension composée au primaire ou/et au secondaire. C’est celle aux bornes
d’un enroulement uniquement dans le cas du couplage triangle.
Le courant nominal
C’est le courant admissible dans un fil de ligne.
La puissance apparente nominale
C’est 3 fois le produit des valeurs nominales de la tension et du courant.
N1N1N2N2N IU3IU3S

69
Connaissant la puissance nominale du transformateur, on peut donc calculer le
courant nominal de ligne au primaire et au secondaire à partir de la connaissance des
tensions nominales correspondantes; ainsi :
- pour un transformateur dont le primaire est en étoile, on trouve :
N1ph
N1ph
N1phN1ph
N1ph
N
N1
N
N1 IU3
IU3
U3
S
U3
SI
- pour un transformateur dont le primaire est en triangle, on trouve :
N1ph
N1ph
N1phN1ph
N1ph
N
N1
N
N1 I3U3
IU3
U3
S
U3
SI
4.5. Etude électriques des transformateurs triphasés :
4.5.1. Schéma équivalent par phase
Le transformateur triphasé débitant sur une charge équilibrée est équivalent à trois
transformateurs monophasés et sera donc tributaire d’un schéma équivalent
monophasé conforme à celui d’un transformateur monophasé.
Le schéma équivalent par phase est le suivant :
Figure 4.4 Schéma du transformateur par phase
4.5.2. Schéma ramène au secondaire :
Figure 4.5 Schéma du transformateur ramène au secondaire
I1
I10r
V2~
I2
I10a
I10
Lm Rfer V1~
r2c
c ccx2
I1
V2
~
I2
mI2 r1
I10r I10a
I10
Lm Rfer V1
~
f1
r2 f2

70
o Détermination des éléments du schéma électrique :
Essai à vide :
10
2
1
2
1
10
33
P
VR
R
VPP fer
fer
fer
10
2
1
2
1
10
33
Q
VX
wL
VQ m
m
Essai en court-circuit :
2
2
22
2
222.3
3cc
cc
cccccccci
PrirP
cc
cc
cc
cccccccccc
i
U
i
VZetxrZ
2
2
2
22
22
22.3
2
2
2
22 ccccccrZx
4.6. Rendement
Quel que soit le couplage retenu, le rendement du transformateur triphasé est :
12
2
pertesP
P
Avec : 2222 cos3 IUP
Pertes : Pertes fer + Pertes joules (Pertes fer = essai à vide ; Pertes joules = essai
en court circuit) 2
223 irp j jfer pp simax

71
4.6. La plaque signalétique
Indication du couplage du
primaire, du couplage du
secondaire et de l'indice
horaire.
Tension secondaire du
transformateur.
Intensité du courant circulant
dans le secondaire du
transformateur.
La fréquence nominale de
fonctionnement recommandée
par le constructeur est de 50
hertz.
Puissance
apparente
nominale
Intensité du courant
circulant dans le primaire du
transformateur.
Masses du transformateur, de
l'enveloppe et du
transformateur (sans ses
roulettes) monté dans son
enveloppe.
F1 : Classe de comportement au feu
C2 : Classe climatique
E2 : Classe d’environnement
Numéro de série
Refroidissement du transformateur
Il est assuré par convection naturelle
(AN) ou par convection forcée (AF) à
l'aide de ventilateurs montés sur le
transformateur. Une ventilation du local
peut aussi être nécessaire si la
température ambiante devient supérieure
à 20°C, si le local est exigu ou mal
ventilé, ou si des surcharges fréquentes
se produisent.
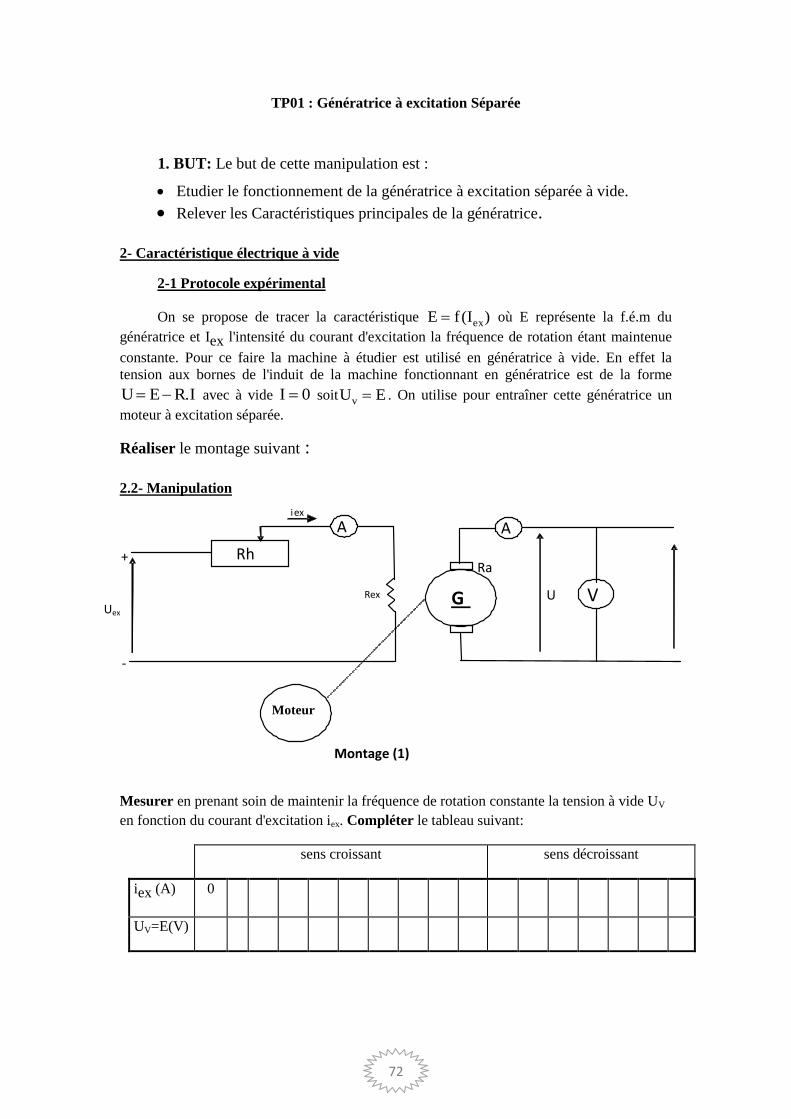
72
TP01 : Génératrice à excitation Séparée
1. BUT: Le but de cette manipulation est :
Etudier le fonctionnement de la génératrice à excitation séparée à vide.
Relever les Caractéristiques principales de la génératrice.
2- Caractéristique électrique à vide
2-1 Protocole expérimental
On se propose de tracer la caractéristique E f Iex ( ) où E représente la f.é.m du
génératrice et Iex l'intensité du courant d'excitation la fréquence de rotation étant maintenue
constante. Pour ce faire la machine à étudier est utilisé en génératrice à vide. En effet la
tension aux bornes de l'induit de la machine fonctionnant en génératrice est de la forme
U E R I . avec à vide I 0 soitU Ev . On utilise pour entraîner cette génératrice un
moteur à excitation séparée.
Réaliser le montage suivant :
2.2- Manipulation
Mesurer en prenant soin de maintenir la fréquence de rotation constante la tension à vide UV
en fonction du courant d'excitation iex. Compléter le tableau suivant:
sens croissant sens décroissant
iex (A) 0
UV=E(V)
Montage (1)
i ex
Uex
Rh
A
V U
Moteur
Rex
+
-
Ra
A
G
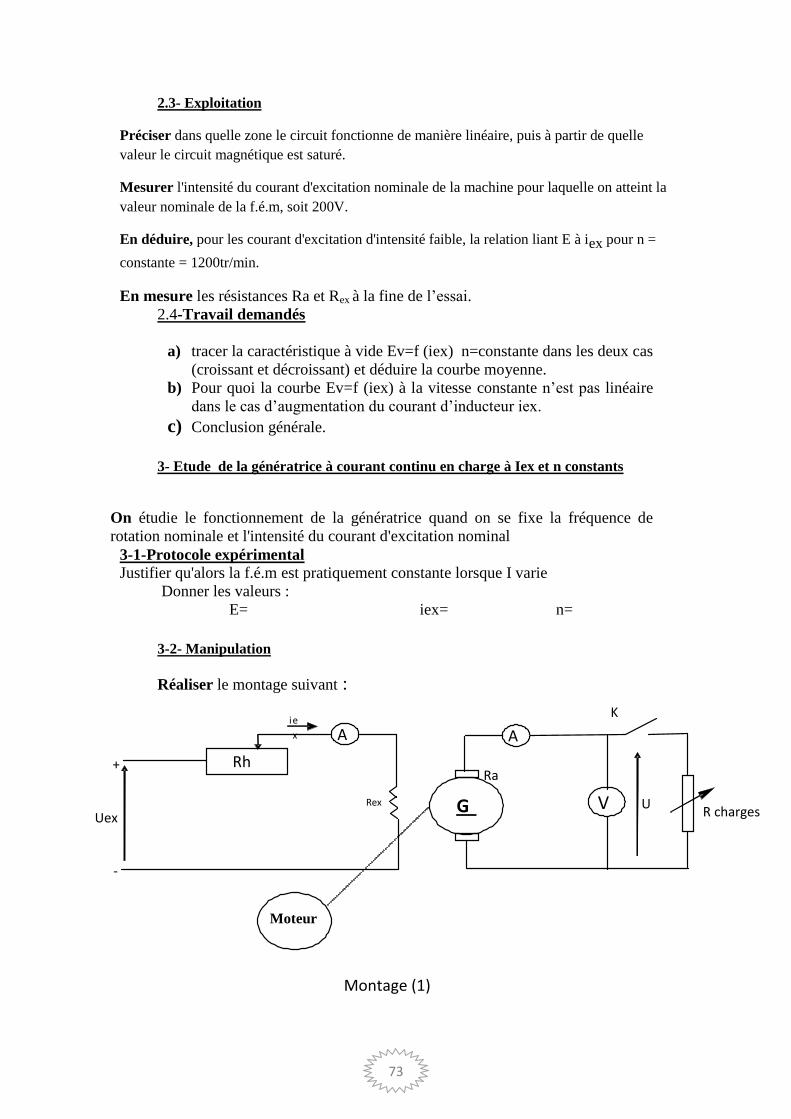
73
2.3- Exploitation
Préciser dans quelle zone le circuit fonctionne de manière linéaire, puis à partir de quelle
valeur le circuit magnétique est saturé.
Mesurer l'intensité du courant d'excitation nominale de la machine pour laquelle on atteint la
valeur nominale de la f.é.m, soit 200V.
En déduire, pour les courant d'excitation d'intensité faible, la relation liant E à iex pour n =
constante = 1200tr/min.
En mesure les résistances Ra et Rex à la fine de l’essai.
2.4-Travail demandés
a) tracer la caractéristique à vide Ev=f (iex) n=constante dans les deux cas
(croissant et décroissant) et déduire la courbe moyenne.
b) Pour quoi la courbe Ev=f (iex) à la vitesse constante n’est pas linéaire
dans le cas d’augmentation du courant d’inducteur iex.
c) Conclusion générale.
3- Etude de la génératrice à courant continu en charge à Iex et n constants
On étudie le fonctionnement de la génératrice quand on se fixe la fréquence de
rotation nominale et l'intensité du courant d'excitation nominal
3-1-Protocole expérimental
Justifier qu'alors la f.é.m est pratiquement constante lorsque I varie
Donner les valeurs :
E= iex= n=
3-2- Manipulation
Réaliser le montage suivant :
Montage (1)
i ex
Uex
Rh
A
V U
Moteur
Rex
+
-
Ra
A
G R charges
K

74
a) Sans les pôles de Commutation
La charge Rch dans la valeur maximale, l'interrupteur K est toujours ouvert, on
mesure la tension entre les bornes de génératrice
En lire chaque fois la valeur de Ia et de tension U, à l'instant de fermeture K
(dans ce cas le courant circule dans la charge et la tension aux borne de
génératrice doit être varie).
Rq la vitesse de rotation doit être constante. Compléter alors le tableau en charge.
U(V)
Ia(A)
b) Avec les pôles de Commutation Dans cette essai en place les pôles de commutation qui sont en série avec l'induit,
en applique les mêmes étapes de (a).
U(V)
Ia(A)
4-Caractéristique de réglage
C'est une caractéristique représentant en ordonnées les courants de charge
et en abscisses les courants d'excitation (respectivement Ia et iex) ou
inversement. La tension U et la vitesse de rotation n sont maintenues
constantes.
Compléter alors le tableau iex=f(Ia)
iex(A)
Ia(A)
En mesure les résistances Ra et Rc1c2 (résistance de commutation), Rex à la
fine de l’essai.
5-Travail demandés
d) tracer la caractéristique de charge U=f(Ia) et déduire la caractéristique
h(Ia)= Ev-U , h(Ia)=RaIa +hm
La caractéristique URa =Ra.Ia, et la caractéristique hm= h(Ia) –Ra.Ia
dans les deux cas dans le même papier et compares ces résultats.
e) Trace la caractéristique de régalage iex=f(Ia).
f) Conclusion générale

75
TP 02 : MOTEUR à excitation séparée
1. BUT: Le but de cette manipulation est :
Mettre en évidence les deux modes de fonctionnement de la machine à courant
continu à excitation indépendante.
Induit sous tension constante et charge variable.
Induit sous tension variable.
On se propose d'alimenter l'induit sous une tension U variable de manière à ce qu'il soit
parcouru par un courant I; l'inducteur alimenté par une tension Ue fixe sera parcouru par un
courant d'intensité Ie appelé courant d'excitation.
On dispose d'une alimentation continue réglable et d'une alimentation continue fixe, par
ailleurs le frein à poudre permettra d'appliquer au moteur un couple résistant variable (réglé et
non automatiquement), la mesure du moment du couple résistant Cr est assurée par une jauge
de contrainte associée à l'électronique adéquate.
2. Expérimentation
Démarrage du moteur
Démarrer le moteur selon le protocole établi ci-dessus. Dès que le moteur commence à
tourner, vérifier que le sens de rotation est correct (flèche sur la dynamo tachymétrie) et que
toutes les grandeurs indiquées sont positives.
Montage (1)
i ex
Uex M
Rh
A
V U
Frein
Rex
+
-
Ra
A
+
-

76
1) Fonctionnement sous tension d’induit constante et charge variable
Relevés de Cu = f(n) et Cu = f(I) à U = cte et Ie = cte.
Faire varier manuellement le moment Cr du couple résistant en relevant une dizaine de points
répartis sur la plage de variation de Cr
U = constante et vérifier que Ie ne varie pas.
Cu(Nm) 0
I(A)
n(tr/mn)
a)Tracer Cu(n) et Cu(I ).
2) Fonctionnement sous tension d’induit variable
Etude de n = f(U) à charge constante et Ie = cte
a) Ie ayant la même valeur que ci-dessus, régler Cu à 1,2N.m
b) Procéder au relevé des données point par point dans un tableau de mesures comprenant
toutes les variables de l’expérimentation. Faire varier U de 0 à 220V, en répartissant une
dizaine de points sur sa plage de variation, en maintenant Cu = 1,2 N.m et en vérifiant que Ie
ne varie pas.
U (V)
I(A)
n(tr/mn)
c) Tracer n = f(U)
Exploitation des résultats
1) A partir de Cu(n) déterminer:
a) La fréquence de rotation à vide n0.
b) Les fréquences de rotation n1pour Cu =0,5 N.m, n pour Cu =1 N.m et n2 pour Cu =1,5N.m,
1-n2)/n pour Cu variant de 1N.m.
2) A partir de n = f(U):
a) Justifier les valeurs prises par l’intensité du courant d’induit dans la série de mesures.
c)Calcul des rendements de l'induit et du moteur pour U=220V dans les conditions du
deuxième essai n = f(U).On explicitera tous les calculs, compléter le diagramme suivant.

77
TP 03 : MOTEUR à excitation shunt
1. BUT: Le but de cette manipulation est :
Il s'agit de relever sous tension d'alimentation constante et égale à Un,
les caractéristiques en charge d'un moteur à excitation shunt.
Rappel théorique
Dans la machine shunt, le circuit induit et le circuit inducteur sont en parallèle, ce qui revient
à imposer l'égalité des tensions Ua=Uex=U
U: désigne la tension aux bornes de la machine.
Lorsqu’un moteur shunt fonctionne en régime permanent, une partie relativement
faible de Iex passe dans l'inducteur et crée un flux, et l'autre partie Ia passe dans
l'induit et crée le couple, on a :
I=Ia+Iex
Le couple est proportionnel au flux d'inducteur et au courant d'induit :
C=K* *Ia
Expérimentation
A- Démarrage du moteur
Démarrer le moteur selon le protocole établi ci-dessus. Dès que le moteur commence à
tourner, vérifier que le sens de rotation est correct et que toutes les grandeurs indiquées sont
positives.
Réaliser le montage suivant :
1-Relever la plaque signalétique du moteur et calculer la valeur nominale du
couple.
2- Régler la tension d'alimentation d'induit à la valeur nominale Uan "Uan reste
constante lors de la manipulation".
3- Faire varier le couple C " C prend des valeur entre 0 N.m et Cn "
4- pour chaque valeur du couple, relever la vitesse N, le courant d'induit Ia et le
courant d'excitation Iex.
M
A
V
Frein
Rex
Ra
A
+
-
U

78
B
1-Réaliser le montage 2 2- Pour un couple de 1 N.m, faire varier le courant d'excitation en agissant sur la résistance
variable.
3- Pour chaque valeur du courant d’excitation, relever la vitesse de rotation
TRAVAIL DEMANDE
A
1- compléter le tableau des résultats en calculant Itot P1, P2 et rendement.
2- Tracer sur une feuille millimétrée les caractéristiques de charge N, Ia, P1, P2.
Rendement en fonction du couple C." en traçant toutes les caractéristiques sur une
seule feuille ".
3- Noter le couple nominal sur les différentes courbes tracées et déduire les valeurs
nominales.
B
Tracer la caractéristique vitesse- courant d'excitation N=(Iex) Conclusions générales.
Montage (2)
M
A
V
Frein
Rex
Ra
A
+
-

79
TP 04 : MOTEUR à excitation série
1. BUT: Le but de cette manipulation est :
Il s'agit de relever sous tension d'alimentation constante et égale à Un,
les caractéristiques électromagnétique C =f(I) et mécanique C= f (N)
2. Rappel théorique
Dans la machine série, l’inducteur est traversé par le courant d’induit, il comporte peut de
spires de grosses sections. Ce qui revient à imposer l’égalité des courants suivante:
I=Ia=Iex
Relations essentielles:
F.c.e.m
E=K N
Tension d’alimentation
U=E+Req I
Req : résistance équivalente de l’induit et l’inducteur
Expérimentation
A- Démarrage du moteur
Démarrer le moteur selon le protocole établi ci-dessus. Dès que le moteur commence à
tourner, vérifier que le sens de rotation est correct et que toutes les grandeurs indiquées sont
positives.
Réaliser le montage suivant :
N.B
Un moteur série ne doit jamais fonctionner à vide sous sa tension
nominale. 1-Relever la plaque signalétique du moteur et calculer la valeur nominale du couple.
2- Régler la tension d'alimentation d'induit à la valeur nominale Uan.
3- Faire varier le couple C " C prend des valeur entre 0 N.m et Cn "
4- Pour chaque valeur du couple, relever la vitesse N, le courant I.
4-TRAVAIL DEMANDE
Montage (1)
V Frein M
Ra
A +
-
U
r

80
1- Compléter le tableau des résultats en calculant P1, P2 et rendement.
2- Tracer sur une feuille millimétrée les caractéristiques
- électromagnétique C=f(I)
- Mécanique C=f(N)
3- Tracer les caractéristiques de charge P1, P2. Rendement en fonction du
couple C." en traçant toutes les caractéristiques sur une seule feuille ". 4- Conclusions générale.
TP 05 : Transformateur monophasé
But : Etudier le fonctionnement à vide et en charge d’un transformateur ; détermination du
rendement et du modèle équivalent au secondaire.
1. Etude du transformateur à vide.
1.1Avant de réaliser le travail ci-dessous, on effectuera la mesure de la résistance R1 du
primaire, d'abord à l'ohmmètre puis par une méthode voltampèremétrique avec I1n. (me faire
vérifier avant la mise sous tension).
1.2 Montage :
Il s'agit ici d'étudier sous différentes tensions primaires le comportement du transformateur
lorsque celui-ci n'est pas chargé.
L'autotransformateur incorporé à la table permet d'obtenir une tension sinusoïdale de valeur
efficace variable à partir d'une tension sinusoïdale de valeur efficace donnée.
Réaliser le montage ci-dessous décrit: faire vérifier.
A W
V V~
autotransformateur transformateur étudié
I P
UU
1V 1V
2V1V
1.3 Réaliser le montage
1.4 Pour 6 valeurs de U1V comprises entre 0,2.U1V et 1,2.U1V (si possible):
Mesurer : ¤ U1V ; ¤ U2V ; ¤ I1V ; ¤ P1V
Calculer : ¤ les pertes par effet Joule à vide :PjV= R1.I1V2 et constater qu'elles sont toujours
négligeables devant P1V

81
¤ Les pertes dans le fer : Pf= P1V- PjV (voir le bilan des puissances).
1.5 Tracer : sur une même feuille : ¤ U2V=f(U1v) commenter et en déduire le rapport de
transformation: m
¤ Pf= f(U10) commenter en mettant en évidence que les pertes
fer croissent plus vite que la tension.
2. Etude du transformateur en court-circuit sous tension réduite.
2.1 Schéma de montage
Cet essai doit être réalisé avec prudence: un court-circuit sous une tension proche du nominal
amènerait le transformateur à être parcouru par des courants très supérieurs aux nominaux
tant au niveau du primaire que du secondaire; la conséquence, si les disjoncteurs et les
fusibles ne sont pas assez rapides, serait alors la destruction du transformateur et des appareils
de mesure.
Réaliser le montage ci-dessous avec l'autotransformateur réglé de façon à avoir U1cc= 0.
A W
V~
autotransformateur transformateur étudié
I P
U1cc
1cc1cc2ccI
2.2 Mode opératoire :
Amener U1cc progressivement à une valeur telle que la valeur des courants soient proches
de celles des courants nominaux du transformateur : soit I2cc= I2n et I1cc= I1n à peu prés ;
En fait on ne mesure ici que I1cc de façon à réaliser un court circuit franc ce qui ne serait pas
le cas en présence d'un ampèremètre mesurant I2cc, celui-ci ayant forcément une résistance.
On admettra donc, et ce en s'appuyant sur les résultats de l'étude en charge que le
transformateur est parfait pour les courants lorsque ceux-ci sont élevés : I1cc= m.I2cc.
On pourra éventuellement le vérifier (assez mal !) en employant une pince ampèremétrique et
en mesurant la valeur de I2cc.
2.3Mesure : Dans ces conditions, mesurer : ¤ U1cc ; ¤ I1cc ; ¤ P1cc
2.4Exploitation :
Vérifier que les pertes fer correspondant à la tension U1cc (voir les résultats du 1) sont
négligeables devant P1cc
En déduire que la puissance absorbée lors de cet essai correspond essentiellement à de l'effet
Joule dans les enroulements : P1cc= R1.I1cc2+R2.I2cc
2= Rs.I2cc2 avec Rs= R2+m2.R1 .

82
2.5 Résistance ramenée au secondaire :
Déterminer alors la valeur de la résistance, RP
Iscc
1cc
22
, ramenée au secondaire : Comparer
à la valeur obtenue par le calcul à partir des résistances mesurées .
2.6 Modèle de Thévenin au secondaire :
En exploitant le modèle de Thévenin du transformateur, ramené au secondaire,
dans le cas du court-circuit, on peut écrire : Es= m.U1cc= Zs.I2cc.
Déterminer l'impédance ramenée au secondaire, Zs, du transformateur étudié :
Zm U
Im
U
Is
cc
cc
cc
cc
.
.1
2
2 1
1
Cette impédance pouvant s'écrire : Z X Rs s
2
s
2 .
Déterminer la réactance de fuite ramenée au secondaire : Xs.
3. Etude du transformateur en charge
Cette étude est destinée à montrer les différences qui existent entre le transformateur réel et le
modèle, étudié en cours, du transformateur idéal.
3.1Etude sur une charge résistive :
3.1.1Montage :
Réaliser le montage ci dessous qui permet une étude en charge résistive (cos2= 1) du
transformateur.
On utilisera, de préférence, des appareils RMS car les courants ne sont pas vraiment
sinusoïdaux lorsqu'un transformateur travaille avec son circuit magnétique saturé.
A W
V
transformateur étudié
I P
Usecteur~
11
1n VU2
AI 2
Rhéostat de charge
3.1.2 Mesures :
Pour 6 valeurs de I2 comprises entre 0 et 1,25.I2n (il est impératif de travailler à I2 croissant
donc à R décroissant), mesurer :
¤ I2; ¤ U2; ¤ I1; ¤ P1; ¤ U1n (qui ne devrait pas varier)
puis calculer ¤ m= U2/U1V; ¤ m’= I1/I2; ¤ P2= U2.I2.cos2 ; ¤ = P
P
2
1

83
Tracer sur une même feuille : ¤ U2= f(I2) ; ¤ P2= f(I2) ; ¤ P1= f(I2)
et sur une autre ¤ m=U2/U1V=f(I2) ; ¤ m’=I1/I2 =f(I2) et = P
P
2
1
= f(I2)
3.1.4. Exploitation générale des résultats .
Pour la valeur nominale de l'intensité secondaire et sur charge résistive :
Déterminer, de manière théorique, la valeur de U2 : ¤ par la méthode de Fresnel ¤ grâce à
la formule approchée. ¤ Comparer au résultat mesuré lors de l'étude du transformateur en
charge.
Déterminer le rendement par la méthode des pertes séparées.
¤ Comparer au rendement déterminé de manière directe dans 3.

84
BIBLIOGRAPHIE
1. Auger, A., Schémas d'électricité, Edition de la Capitelle, 1988.
2. J. Pichoir, Cours d'Electrotechnique - machines électriques, vol. 3, Masson, Paris,
1965.
3.Caliez, A., Joffin, G., Lehalle, B., Technologie d'électrotechnique, Collection
A. Capliez, Edition Casteilla, 1994.
4. Chabloz. A., Technologie des matériaux à l’usage des professions de
l’électricité, Edition Delta & Spes S. A. 1983.
5. Hubert Largeaud., Le schéma électrique. EYROLLES, troisième édition, 1998.
6. Moteur Electriques industriels, Editions Dunod, 2005.
7. Machine Electrique, Editions Hermes Science, 2000.
8. Machine Electrique- Electronique de puissance, Editions Dunod, 1985, Alain
Hebert, Claude Naudet et Michel Pinard.
9. G. Grellet and G. Clerc, Actionneurs électriques : principes, modèles, commandes,
1997.


















