Mesure de la visibilité météorologique par imagerie : Une approche modèle R.Babari...
20
Mesure de la visibilité météorologique par imagerie : Une approche modèle 6-10 juin 2011
-
Upload
hamnet-charlot -
Category
Documents
-
view
112 -
download
0
Transcript of Mesure de la visibilité météorologique par imagerie : Une approche modèle R.Babari...

Mesure de la visibilité météorologique par
imagerie : Une approche modèle
R.Babari N.Hautière E.Dumont N.Paparoditis²
UniversitéParis-Est,LEPSIS,IFSTTAR
,58bdLefebvre75732Paris-France
² UniversitéParis-Est,MATIS,IGN.
73avenuedeParis94160SAINTMANDÉ-France
6-10 juin 2011

• Par temps de brouillard ou de brume, la visibilité est réduite et représente une source de paralysie pour les transports. Les accidents sont plus nombreux et plus grave.
• Les stations météorologiques et les aéroports sont équipés d’instruments rares et coûteux pour mesurer la visibilité (10.000 €),
• Problème multinationales : 700 décès annuels liés au phénomènes de brouillard aux États-Unis, 100 en France,
• IFSTTAR (ex LCPC/INRETS) cherche à exploiter les milliers de caméras de surveillance à faible coût (100 €) déjà installées dans le réseau routier pour estimer la visibilité et informer les usagers des limitations de vitesse à respecter,
• METEO-France vise à intégrer ces informations de visibilité météorologique dans ses modèles de prévision.
I-1 - Contexte

Plan• Contexte
– Physique de la visibilité– Méthodes d’estimation de la visibilité (état de
l’art)
• Méthode proposée– Acquisitions d’images– Proposition d’une nouvelle méthode
• Résultats• Conclusion
16 minutes

3/16
)e-(1 Le LL -kdf
-kd0
•. Luminance d’un objet
•. extinction de l’atmosphère• Effet de voile atmosphérique
• Le facteur extinction «k» dépend de la densité et de la taille des gouttelettes d'eau et des particules
Soleil
Diffusion de la lumière
[Koschmieder]
II -1- Physique de la visibilité : Transparence de l’atmosphère
Distance « d »
Camera à faible coût

4/16
• [Duntley] a donné une loi d’atténuation des contrastes dans l’image :
• VMet correspond à la plus grande distance pour laquelle un objet noir Lb=0 sur fond du ciel Lf de dimension convenable peut être reconnu avec un contraste C de 5%.
• C/C0=0.05 correspond à distance de visibilité Vmet =3/k
• VMet est mesurée :
1. Par appareil optique (visibilimètre)2. Par caméra en faisant des hypothèses sur la distance d de la scène.
• Modèle 3d de la route,• Présence de points d’intérêts dont on connaît la distance,• Distribution uniforme de points 3d dans la scène.
II -1- Physique de la visibilité
dk
f
f eCL
LLC .
01 .

• Le transmissiomètre exploite l’extinction d’un rayon lumineux au cour de son trajet,
• Le diffusomètre mesure l’intensité lumineuse d’un faisceau lumineux envoyé par une source et rétro diffusée par l’atmosphère,
• Coût très élevé de l’ordre de 8.000€
• 10% d’erreur de mesure sur une plage de 0- 50km
II -3- Mesure physique de la visibilité
Fig : Schéma de principe de fonctionnementd’un transmissiomètre
Fig : Schéma de principe de fonctionnementd’un diffusiomètre 6/1
6

7/16
USA : projet Clarus (FHWA-MIT)
- Estimateurs à partir des caractéristiques de l’image -Décision en logique floue - Quartes classes de visibilité (1km - 5km – 10km)
• Visibilité sur plusieurs km : Corrélation entre des caractéristiques dans l’image et la VMet ( Aucune précision donnée ).
II -4- Méthodes d’estimation de la visibilité de jour par caméra
-Européen Project SafeSpot: Hautière et al.
-Détection des marquage de la route (> 5%)
• Hypothèses : - route plane- La calibration de la caméra est nécessaire
•Visibilité routière : 0-400 m avec une précision de 10 %
• JAPAN : Caractéristiques fréquentielles• de l’image (WIPS)- identification de faible visibilité- Corrélation avec des données réels : 0.86
Notre objectif est de proposer une estimation de la visibilité Avec précision et sur plusieurs kilomètres

III -1- Acquisitions d’images et de données à Trappes
• Site instrumenté de Météo-France à Trappes – Visibilité DF320 (DEGREANE
HORIZON) (0 à 35km)– Éclairement LU320 (0 à
10000 lux) • Installation d'une caméra
– 640 x 480 – 8 bits/pixel
• Appariement des données météorologiques avec les images
Fig : Des images avec différents conditions d’ éclairage, présence d'ombres et conditions nuageuses,
Fig : Variation de la luminance et de la visibilité météorologique durant trois jours d’observation
8/16

III -2- Gradient et Vmet : recherche d’une corrélation
9/16
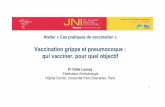
• Nous cherchons une corrélation entre le gradient dans l‘image et la distance de visibilité mesuré durant l’acquisition de cette image.
• Nous calculons le gradient de l’intensité centré en chaque pixel
Fig : Gradient dans l’image : visibilité réduite par le brouillard
• Le gradient vient de :-discontinuités en profondeur,- discontinuités dans l'orientation
de surfaces- les changements dans les
propriétés du matériau et
-les variations dans l'illumination. Fig : Gradient dans l’image Bonne visibilité
W
i
H
jji
L GE0 0
,

III -3- Pourquoi les surfaces diffuses ?
10/16
Dans les zones lambertiennes de l’image, le gradient est invariant au changement d’illumination. Le gradient ne variera qu’en fonction des conditions de visibilité.
Ef
E2
E1
L
LL
..
2
1
dkeG .12 ).(
• A une distance « d » et pour une visibilité « V » :
.)).(,( .,
dkji ejiG
Diffuse (bois)
Spéculaire (miroir)
Comportementquelconque(route)

III-4-Recherche de surfaces diffuses dans la
scène?
SpéculaireDiffuse
DiffuseSpéculaire
),( ,, scènejiLji LLcorrP
• Nous attribuons la corrélation temporelle entre l'illumination globale et la luminance d'un pixel, comme la confiance que le pixel appartient à une zone diffuse de la scène.
11/16
• Nous ne supposons pas que toutes les surfaces ont un comportement diffus, mais nous les sélectionner dans l'image.

IV -1- Proposition d’une nouvelle methode
12/16
Fig : Module du gradient de Sobel dans l’image : convolution de l’imageavec la dérivée première de la gaussienne
Fig : Probabilité pour que la surface soit lambertienne : présente la matrice des plus forte corrélation avec le changement d'éclairage global dans le temps.
W
i
H
j
Lji
jiL PA
GE
0 0,
, .

• L’amélioration que nous apportons permet d’avoir une estimation non dispersée et donc plus précise,
• plus stable en fonction des variations de l’éclairement et donc une mesure reproductible.
IV -2- Contribution principale
Fig : Données entre le module du gradient de Sobel pris sur tout l’image et la visibilité
Météorologique (dispersées)
Fig : Données entre le module du gradient de Sobel pris sur les zones lambertiennes de
l’image et la visibilité météorologique
W
i
H
j
Lji
jiL PA
GE
0 0,
, .
W
i
H
jji
L GE0 0
,
13/16

14/16
V –1-Modèle de l’histogramme normalisé des distances : « H »
Distances dans la scènes
Objets dans la scène correspondant à des gradients Lembertiens dans l'image
Plan Image
W
i
H
j
Ljiji
L PGE0 0
,, .
),(.)).(,( )(
),(3
0 0
jiPejiE tV
jidW
i
H
j
L
(1)
(2)
(3)max
3
( )
0
( ).( ) .dd
L V tS i
i
E d e H
(4)

15/16
W
i
H
j
Lji
L PGEji
0 0,.,
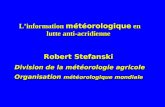
Application Brouillard Brume Qualité de l’atm
Corrélation
Range de visibilité 0-1 km 1-5 km 5-16 km R2
ΔV/V 25 % 26 % 33 % 0.95
V -2-Résultats et précision
R²=0,95

• Nous proposons une méthode qui relient la visibilité météorologique à la somme des gradients de Sobel des surfaces Lambertiennes (diffuses) ,
• nous avons démontré et validé que cet estimateur que nous proposons est robuste aux changements d'éclairage en se comparant à des données réelles de visibilimètres,
• Notre méthode est déployable sur le réseau de caméras déjà installées le long du réseau routiers et donc peut avoir un impact sur la sécurité de la circulation à faible coût.
• Une fois déployé, notre concept devrait accroître la qualité et la précision spatiale de l'information de visibilité:
– peuvent se nourrir dans les systèmes de prévisions météorologiques.– peut informer les conducteurs des limites de vitesse dans des conditions
de faible visibilité.
• Ce travail a donné à la fois une base théorique et pratique d'envisager le déploiement de notre "futur visibilitimeter routier en temps réel" capable de sauver des vies humaines.
V -Conclusion
16/16

Perspectives

Résumé :
La mesure de la visibilité météorologique est un élément important pour la sécurité des transports routiers et aériens. Nous proposons dans cette présentation un estimateur de visibilité météorologique par une caméra fixe, basé sur le module du gradient sélectionné dans des zones dont le comportement suit une loi de réflexion de Lambert vis à vis des conditions d’éclairage. La réponse de cet estimateur est issue d’une modélisation basée sur l’hypothèse de l’uniformité des profondeurs dans la scène et calibrée avec des données provenant de visibilimètre. Les résultats sont ensuite comparés avec des données référence et donnent une erreur moyenne de 30 % pour 160 images prises dans différentes conditions d’éclairage de jour (10 à 8000 cd/m2 ) et de visibilité (jusqu’à 16 km). Titre de la présentation : Mesure robuste de la visibilité météorologique par caméra routière Résumé : La mesure de la visibilité météorologique est un élément important pour la sécurité des transports routiers et aériens. Nous proposons dans cette présentation un estimateur de visibilité météorologique par une caméra fixe, basé sur le module du gradient sélectionné dans des zones dont le comportement suit une loi de réflexion de Lambert vis à vis des conditions d’éclairage. La réponse de cet estimateur est issue d’une modélisation basée sur l’hypothèse de l’uniformité des profondeurs dans la scène et calibrée avec des données provenant de visibilimètre. Les résultats sont ensuite comparés avec des données référence et donnent une erreur moyenne de 30 % pour 160 images prises dans différentes conditions d’éclairage de jour (10 à 8000 cd/m2 ) et de visibilité (jusqu’à 16 km). .

Publications :• Babari, R., Hautière, N., Dumont, E. and Paparoditis, N.
Mesure robuste de la visibilité météorologique par caméra. In MajecSTIC 2010, Bordeaux, France, 2010.
• Hautière, N., Babari, R., Dumont, E., Brémond, R. and Paparoditis, N. Estimating Meteorological Visibility using Cameras: A Probabilistic Model-Driven Approach. In Asian Conference on Computer Vision (ACCV'10), Queenstown, New Zealand, 2010.
• Babari, R., Hautière, N., Dumont, E., Paparoditis, N. and Misener, J. Visibility Monitoring Using Conventional Roadside Cameras: Shedding Light on and Solving Multinational Road Safety Problem. In Transportation Research Board Annual Meeting Compendium of Papers, Washington, D.C., USA, 2011.
• Babari, R., Hautière, N., Dumont, E. and Paparoditis, N. Mesure de la visibilité météorologique par imagerie : Une approche modèle. In ORASIS 2011, Praz-sur-Arly, France, 2011.