Mémoire Final
42
ISET – Technologie Force Introduction Générale Nous nous assistons de jour en jour à un monde en mutation continue, dominé de plus en plus par ceux qui maîtrisent la technologie. L'électronique et l'informatique sont à l'origine de la dernière révolution industrielle et deviennent indiscutablement les principales issues vers la maîtrise de cette technologie. Dans le domaine industriel, nous avo ns de plus en plus tendanc e à réaliser des applications et des projets industriels adéquats à la progression technologique. Et c'est dans ce sens que nous avons abordé notre projet de fin d'études qui a pour thématique la conception e t la réalisation d'une carte universelle basée s ur un PIC qui permet de com man der des por tai ls utilis ant des mot eu rs à cou rant co ntin u ou altern atif, tou t en réalisant la protection contre les surcharges et les courts circuits suite à un blocage éventuel du portail. L’apport de notre projet par rapport aux autres cartes de commande est le caractère universel. En effet, dans un endroit utilisant un portail automatique plusieurs pannes sont susceptibles d’être décle nchés , la répar ation et le diagn ostic de telles cartes néce ssite un temps importa nt. Influencé par ce s observatio ns et ce s limites, un nouveau besoin de créat ion d’une carte universe lle , facile à impla nte r à to ut moment sa ns pert e de temps , es t de plus en pl us indispensable… Notre proje t est réalisé autour d’un microc ontrôle ur pic 16F876 qu i présente l’unité de traitement capable de gérer les entrés et les sorties de notre carte universelle. Nous avons essayé dans cette mémoire d'assurer une présentation claire et structurée qui perme tte un repérage facile de l'informa tion reche rchée et une lecture effica ce. Pour le faire, nous allons tout d’abord introduire dans le premier cha pitre une présentation générale de notre projet ou on a mis le focus sur le cahier des charg es, la prése ntation du proje t et une étude préliminaire. Le deuxiè me chapitre intitulé spéc ification serv ira à définir notre système et ses différents blocs. Le troisième, nommé conception étudiera la conce ption software et hardware. Dans le quatrième chapitre, on s’occupe de la partie réalisation et implémentation de notre carte universelle. Enfin, nous allons conclure notre travail par une conclusion générale et les futures perspectives. 1
-
Upload
amal-bougarech -
Category
Documents
-
view
240 -
download
0
Transcript of Mémoire Final
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 1/42
ISET – Technologie Force
Introduction Générale
Nous nous assistons de jour en jour à un monde en mutation continue, dominé de plus en
plus par ceux qui maîtrisent la technologie. L'électronique et l'informatique sont à l'origine de la
dernière révolution industrielle et deviennent indiscutablement les principales issues vers la
maîtrise de cette technologie. Dans le domaine industriel, nous avons de plus en plus tendance
à réaliser des applications et des projets industriels adéquats à la progression technologique.
Et c'est dans ce sens que nous avons abordé notre projet de fin d'études qui a pour
thématique la conception et la réalisation d'une carte universelle basée sur un PIC qui permet
de commander des portails utilisant des moteurs à courant continu ou alternatif, tout en
réalisant la protection contre les surcharges et les courts circuits suite à un blocage éventuel du portail.
L’apport de notre projet par rapport aux autres cartes de commande est le caractère universel.
En effet, dans un endroit utilisant un portail automatique plusieurs pannes sont susceptibles
d’être déclenchés, la réparation et le diagnostic de telles cartes nécessite un temps important.
Influencé par ces observations et ces limites, un nouveau besoin de création d’une carte
universelle, facile à implanter à tout moment sans perte de temps, est de plus en plus
indispensable… Notre projet est réalisé autour d’un microcontrôleur pic 16F876 qui présente l’unité de
traitement capable de gérer les entrés et les sorties de notre carte universelle.
Nous avons essayé dans cette mémoire d'assurer une présentation claire et structurée qui
permette un repérage facile de l'information recherchée et une lecture efficace. Pour le faire,
nous allons tout d’abord introduire dans le premier chapitre une présentation générale de notre
projet ou on a mis le focus sur le cahier des charges, la présentation du projet et une étude préliminaire. Le deuxième chapitre intitulé spécification servira à définir notre système et ses
différents blocs. Le troisième, nommé conception étudiera la conception software et hardware.
Dans le quatrième chapitre, on s’occupe de la partie réalisation et implémentation de notre carte
universelle. Enfin, nous allons conclure notre travail par une conclusion générale et les futures
perspectives.
1
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 2/42
ISET – Technologie Force
Chapitre 1hapitre 1 :
Présentation Généralerésentation Générale
Section 1 : Cahier des charges.
Section 2 : Présentation du projet.
Section 3 : Etude préliminaire
Section 1 : Cahier des charges
2
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 3/42
ISET – Technologie Force
Objectif :
Ce projet de fin d’études a pour objectif d’étudier, de concevoir et de réaliser une carte de
commande universelle à base d’un pic 16F876 permettant de commander un système à partir de
ses entrées et ses sorties.Les entrées :
Entrée start
Entrée stop
Entrée photocellule
Les butés fin de course
Les sorties :
Moteurs
Lampe clignotant
Travail demandé :
Etude et conception de la carte de commande
Conception du programme coté PIC
Réalisation du système complet
Test final et validation
3
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 4/42
ISET – Technologie Force
Section 2 : Présentation du projet
1. Etude de l’existant :
1.1 Introduction :
De nos jours, et suite a l’évolution de l’industrie aux enjeux d’assurer le plus de confort pour
l’être humain, des nouvelles idées ont étés inventé dans divers domaines par exemple les portails automatiques étaient l’une des technologies visée pour faciliter les taches à l’utilisateur
d’où la création des porte semi-automatique puis automatique. Cette technologie est
actuellement au cœur de la vie moderne.
Des tels portails donnent beaucoup de confort à l’utilisateur. En effet, cela lui permet
d’éviter de descendre et de se déplacer pour ouvrir la porte du garage, puis le fermer de
nouveau. Actuellement, une variété de portes existe dans le marché, on peut opter pour un
portail automatique en acier, en aluminium ou même en bois. De point de vue technique,
l’ouverture de telles portes peut se faire avec des battants ouvrants ou coulissants sur un rail.
Concernant la commande à distance, une télécommande permettra de commander le portail.
1.2 Automatisme de portail :
La variété de systèmes d'automatisme de portail offre l'avantage de répondre à tous les cas de
configuration. Selon que le portail est déjà posé ou non lors de l'installation, on n'optera pas
pour la même solution. Une éventuelle déclivité du terrain peut aussi imposer un modèle
d'automatisme plutôt qu'un autre. Il existe beaucoup d'autres critères comme le style de bâti
autour du portail, les impératifs budgétaires ou encore l'espace disponible pour l'ouverture.
1.3 Diversité :
La diversité dans les automatismes de portail ou automatismes pour porte de garage ou bien
encore pour les moteurs de portail coulissant, conduit à un large choix :
automatisme pour portail à battants
automatisme pour portail coulissant
automatisme pour porte de garage automatisme pour stores
4
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 5/42
ISET – Technologie Force
automatisme pour volets
accessoires pour la domotique.
2. Problématique
La complication des algorithmes de codage et de décodages des cartes électroniques étaitl’une des solutions les plus pertinentes pour maximiser le confort et la sécurité des utilisateurs
Malheureusement, la technologie présente toujours des failles et des contraintes et crée
toujours de nouvelles besoins, en cas de pannes des portails automatique, pratiquement causé
par la carte électronique de commande, il est devenu très difficile et presque impossible d’en
réparer suite à la complications des systèmes qui sont derrières, d’où les réparateurs tendent à
remplacer tout le system par un autre. Cette problématique c’est posé comme un handicap
envers les réparateurs d’où le besoin de créer une carte électronique universelle qui serasusceptibles d’ouvrir n’importe quelle porte.
C'est dans ce cadre que nous aborderions notre projet de fin d'études qui a pour thème la
conception et la réalisation d’une carte universelle pour automatiser plusieurs type de portails.
3. Cadre du projet :
Le projet de fin d’étude fait partie intégrante de l’Institut Supérieur des Etudes
Technologiques de Sfax (ISET SFAX) et la société Technologie Force. En effet, le projet a pour but l’intervention pratique permettant à l’étudiant d’appliquer ses connaissances scientifiques et
techniques, de tester ses facultés et de confronter les savoirs théoriques parés à la pratique
professionnelle.
Présentation de la société
La société Technologie Force TF est une société de sous-traitance électrique et électronique
industrielle, qui est fondée en 2002 par son gérant Mr Abid Ahmed à l'adresse route Gremda
Km 6
TF est introduite dans les marchés nationaux et s'est formée une porte feuille de clients
importants tel que: société JMAL, ARMOFLEX, MED LIGHT, MATEM…
TF est capable de répondre à la demande de ses clients dans le domaine de l'électricité et de
l'électronique industrielle:
Câblage des armoires électriques.
Réalisation des cartes électroniques.
Réparation des équipements industriels.
Régulation & Automatisme.
5
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 6/42
ISET – Technologie Force
A-0
A-0
Automatisme d’un portail
Porte en position initiale
Porte en position finaleOUVRIR OU FERMER
UN PORTAIL
AUTOMATIQUE
R
églages
Énergie électrique
Commande à distance
Fonctionnement automatique
Perte
Au sein de cette société on applique nos connaissances dans l’électronique et
l’électricité industrielle sous la tutelle de Mr Abid Ahmed qui fait de son mieux de nous
approcher et indiquer les choix, les méthodes de travail, la connaissance du savoir faire, la
rapidité dans les interventions.
Section 3 : Etude préliminaire
Introduction :
L'objectif fixé pour ce projet impose la réalisation d'une carte universelle basée sur un PIC
qui permet de faire fonctionner n’importe quel moteur (à courant continu ou alternative) toute
en réalisant la protection contre les surcharges et les courts circuits suite à un blocage éventueldu portail et qui doit être capable de gérer les entrés et les sorties à tout moment.
Analyse fonctionnelle
La fonction d’usage est de commander l’ouverture ou la fermeture d’un portail de manière
sécurisée, par un ordre transmis de manière distante, sans intervention mécanique de
l’utilisateur sur la porte de garage.
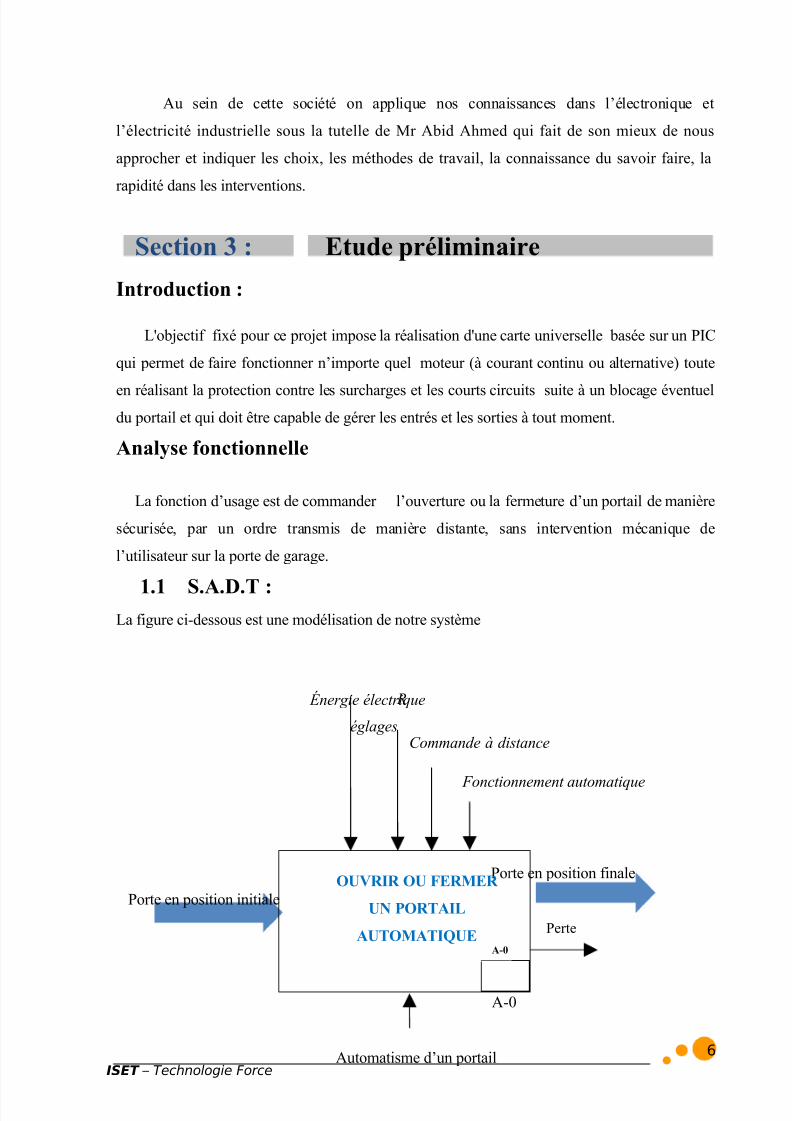
1.1 S.A.D.T :La figure ci-dessous est une modélisation de notre système
6
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 7/42
ISET – Technologie Force
Figure 1.1 : Modélisation du système
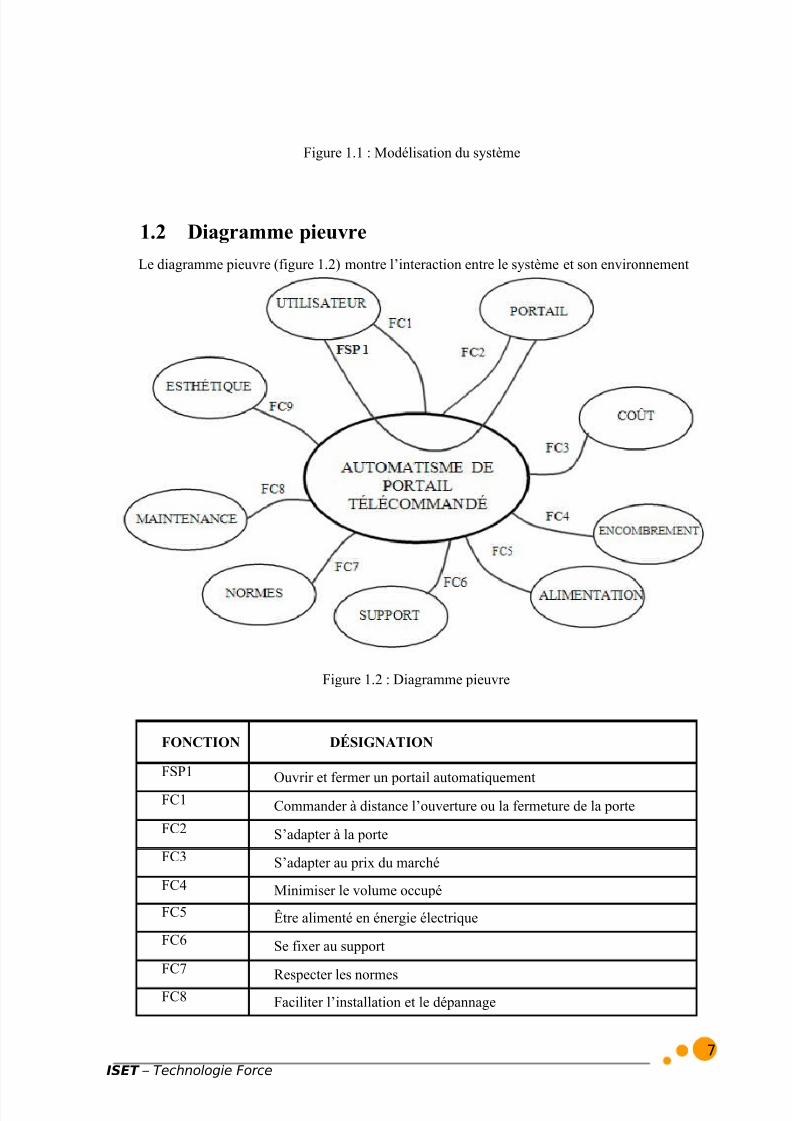
1.2 Diagramme pieuvre
Le diagramme pieuvre (figure 1.2) montre l’interaction entre le système et son environnement
Figure 1.2 : Diagramme pieuvre
FONCTION DÉSIGNATION
FSP1
Ouvrir et fermer un portail automatiquementFC1 Commander à distance l’ouverture ou la fermeture de la porte
FC2 S’adapter à la porte
FC3 S’adapter au prix du marché
FC4 Minimiser le volume occupé
FC5 Être alimenté en énergie électrique
FC6 Se fixer au support
FC7Respecter les normes
FC8 Faciliter l’installation et le dépannage
7
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 8/42
ISET – Technologie Force
FC9 Être agréable à l’œil
Tableau 1.1 : désignation des fonctions du diagramme pieuvre
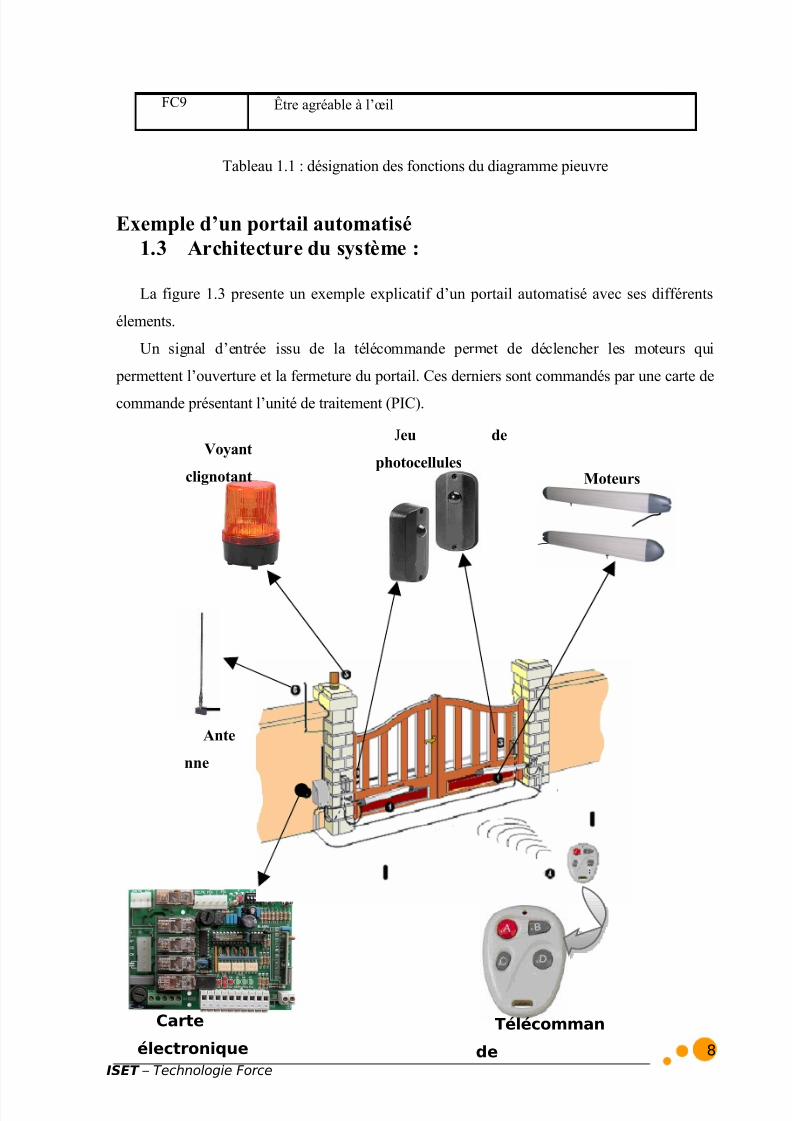
Exemple d’un portail automatisé1.3 Architecture du système :
La figure 1.3 presente un exemple explicatif d’un portail automatisé avec ses différents
élements.
Un signal d’entrée issu de la télécommande permet de déclencher les moteurs qui
permettent l’ouverture et la fermeture du portail. Ces derniers sont commandés par une carte de
commande présentant l’unité de traitement (PIC).
8
Télécomman
de
Carte
électronique
Voyant
clignotant Moteurs
Jeu de
photocellules
Ante
nne
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 9/42
ISET – Technologie Force
Figure 1. 3 : exemple d’un portail automatisé
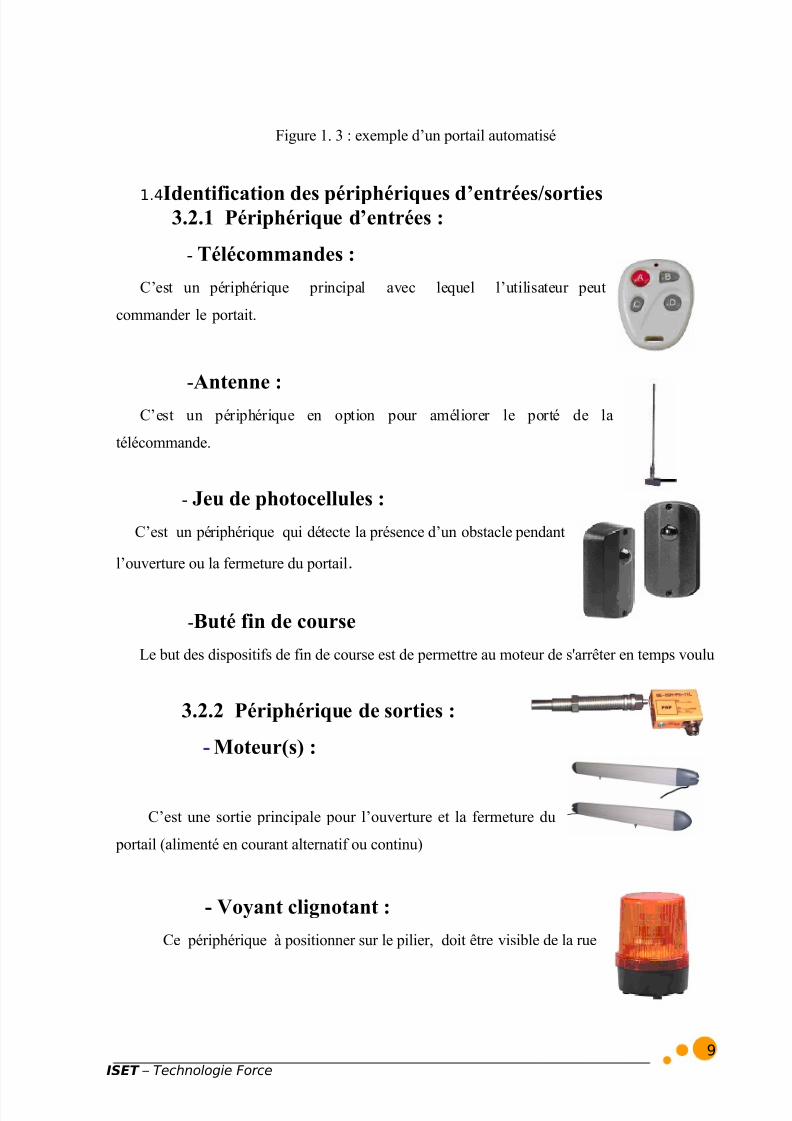
1.4Identification des périphériques d’entrées/sorties3.2.1 Périphérique d’entrées :
- Télécommandes :
C’est un périphérique principal avec lequel l’utilisateur peut
commander le portait.
-Antenne :C’est un périphérique en option pour améliorer le porté de la
télécommande.
- Jeu de photocellules :
C’est un périphérique qui détecte la présence d’un obstacle pendant
l’ouverture ou la fermeture du portail.
-Buté fin de course
Le but des dispositifs de fin de course est de permettre au moteur de s'arrêter en temps voulu
3.2.2 Périphérique de sorties :
- Moteur(s) :
C’est une sortie principale pour l’ouverture et la fermeture du
portail (alimenté en courant alternatif ou continu)
- Voyant clignotant :
Ce périphérique à positionner sur le pilier, doit être visible de la rue
9
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 10/42
ISET – Technologie Force
Chapitre 2hapitre 2 :
Spécificationpécification
Introduction
Mise en œuvre
Conclusion
10
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 11/42
ISET – Technologie Force
Introduction :
Dans ce chapitre mous allons essayer de traduire les exigences du cahier des charges en une
représentation abstraite permettant de décrire le comportement et l’environnement du système
sans entrer dans les détails techniques, et cela en essayant d’établir une liste des besoins auxquels le système doit répondre en cherchant une réponse à la question « Quoi Faire ? ». Cette
expression doit modéliser et formaliser la réalité, d’une manière formelle, pour inciter la
compréhension du système.
Le développement d’un système nécessite l’adoption d’une méthode appropriée à sa nature
et à son domaine d’exploitation.
En effet, on va faire recoure à la méthode « S.A.R.T » (Analyse Structuré du Temps Réel) et
avec la variante « Ward et Mellor » qui se base sur l’analyse structurée pour spécifier etconcevoir les systèmes temps réel.
Cette approche doit présenter en premier lieu le diagramme de contexte, le diagramme
préliminaire et les diagrammes des flots de données. En deuxième lieu, un dictionnaire de
données qui définit tous les termes et les mots techniques utilisés au paravent.
Mise en œuvre :
2.1 Diagramme de contexte de données :
C’est un diagramme abstrait, qui représente tout le système à modéliser. Ce diagramme ne
contient que les processus dont le nom traduit leur fonction d’usage dans le système. Il est le
seul diagramme dans le quel les interfaces entre le système et son environnement sont
représentées.
Figure 2.1 : Diagramme de contexte
11
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 12/42
ISET – Technologie Force
2.2 Diagramme préliminaire :
C’est le diagramme qui fait apparaître la décomposition de système en sous-systèmes et ne
processus primitif qui correspondent aux fonctions principales.
Chaque sous-système peut être considéré à son tour comme un système décomposable ensous-système .Ce diagramme contient dix transitions qui sont structurées de la manière
suivante :
Figure 2.2 : Diagramme Préliminaire Contrôler portail
2.3 Spécification de transformation de contrôle :
La seconde étape de la méthode S.A.R.T est la spécification de chaque transformation de
contrôle. Elle montre l’évolution dynamique du système. Cette spécification développe la
séquence d’exécution des transformations des données décrites dans les schémas des
transformations.
12

5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 13/42
ISET – Technologie Force
Figure 2.3: Spécification de transformation de contrôle « Contrôler portail »
Conclusion :La spécification est une étape préliminaire dans le cycle de vie d'un système. Elle permet de
répondre à la question « Quoi Faire ? ». Plusieurs méthodes sont utilisées pour ce but. Dans ce
chapitre, on a fait appel à la méthode S.A.R.T (Analyse Structuré du Temps Réel) pour spécifier
les besoins de notre système tout en établissant des différents diagrammes à savoir le
diagramme de contexte, le diagramme préliminaire et le diagramme d’état transition.
13
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 14/42
ISET – Technologie Force
Chapitre 3hapitre 3 :
Conceptiononception
1. Introduction
2. Conception hardware
3. Conception software :
4. Conclusion
14
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 15/42
ISET – Technologie Force
1. Introduction
Dans ce chapitre on a essayé de concevoir le système d’une façon générale. Cette partie
consiste à étudier la conception du system.
2. Conception hardware2.1 Conception préliminaire
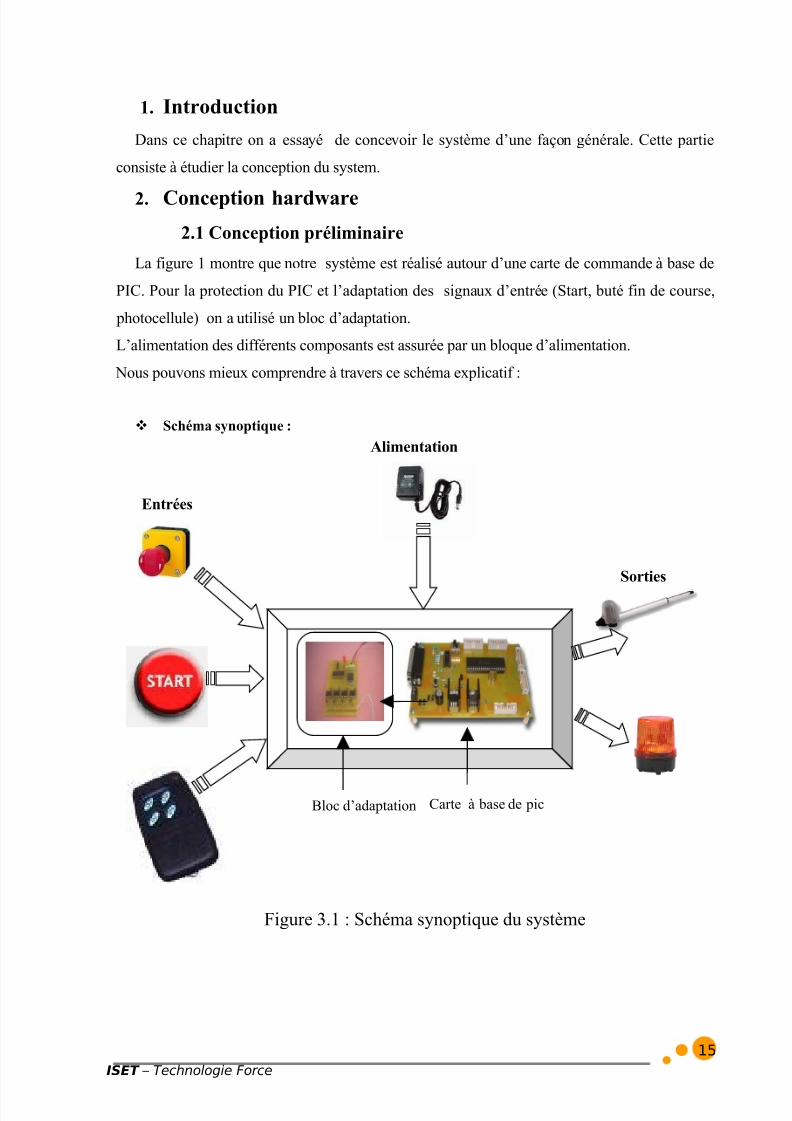
La figure 1 montre que notre système est réalisé autour d’une carte de commande à base de
PIC. Pour la protection du PIC et l’adaptation des signaux d’entrée (Start, buté fin de course,
photocellule) on a utilisé un bloc d’adaptation.
L’alimentation des différents composants est assurée par un bloque d’alimentation.
Nous pouvons mieux comprendre à travers ce schéma explicatif :
Schéma synoptique :
Figure 3.1 : Schéma synoptique du système
15
Sorties
Entrées
Bloc d’adaptation Carte à base de pic
Alimentation
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 16/42
ISET – Technologie Force
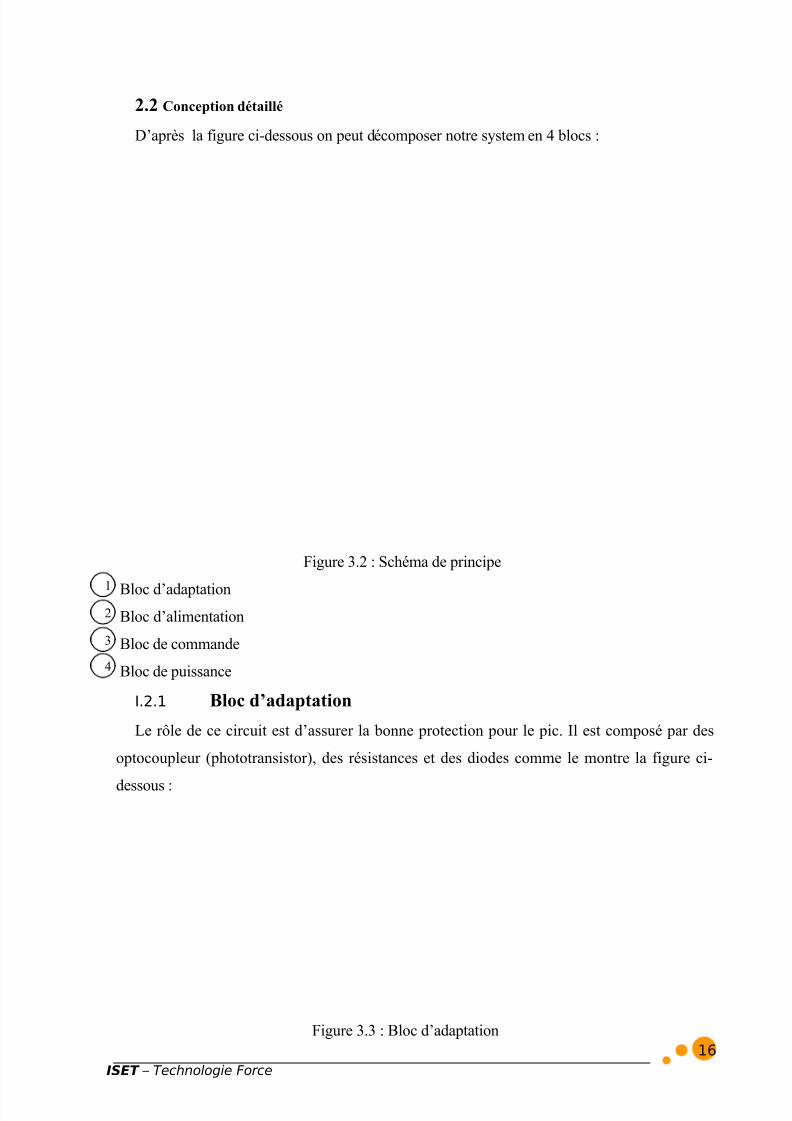
2.2 Conception détaillé
D’après la figure ci-dessous on peut décomposer notre system en 4 blocs :
Figure 3.2 : Schéma de principe
Bloc d’adaptationBloc d’alimentation
Bloc de commande
Bloc de puissance
I.2.1 Bloc d’adaptation
Le rôle de ce circuit est d’assurer la bonne protection pour le pic. Il est composé par des
optocoupleur (phototransistor), des résistances et des diodes comme le montre la figure ci-
dessous :
16
1
2
3
4
Figure 3.3 : Bloc d’adaptation
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 17/42
ISET – Technologie Force
Nomenclature des composantes
Nombre Nom Description Désignation et valeurs
01 J1 Borné Borné de706 R1…….R6 Résistance 20k Ω06 U1…...U6 Optocoupleur Sfh615a
06 LED1…..LED6 Diode LED Ø3 mm
06 D1…...D6 Diode
Tableau 3.1 : Nomenclature des composantes (bloc de d’adaptation)
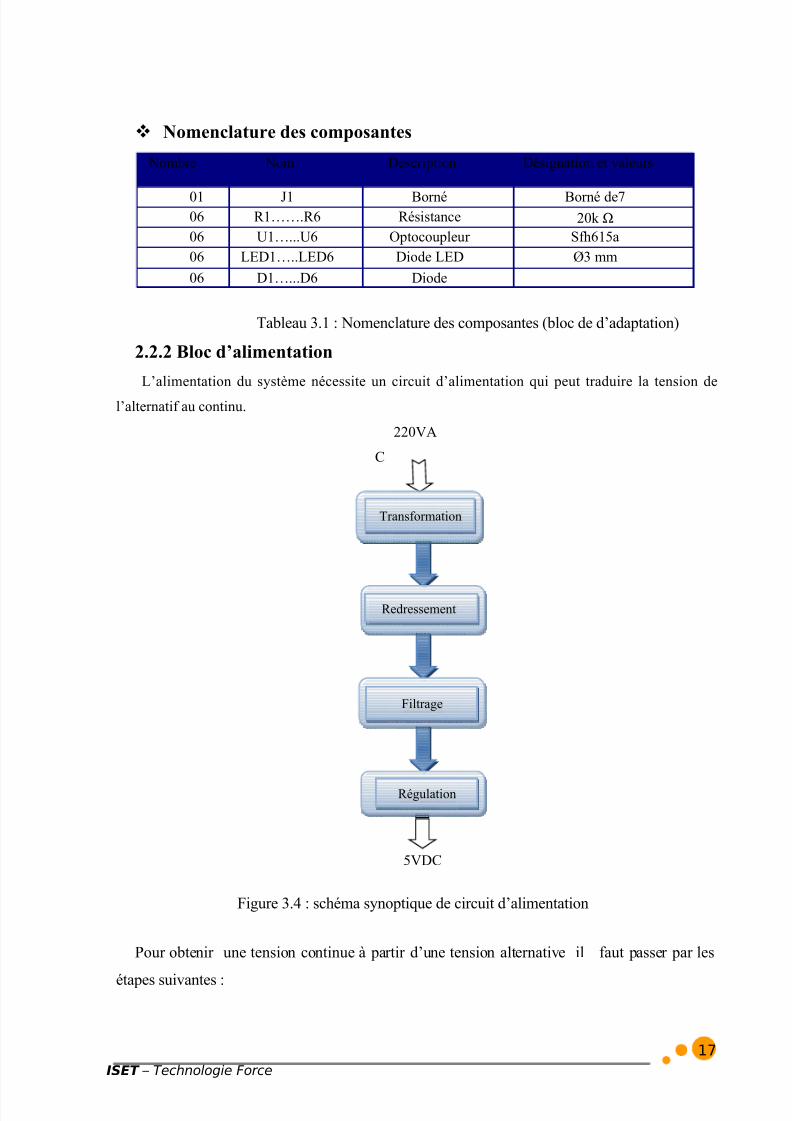
2.2.2 Bloc d’alimentation
L’alimentation du système nécessite un circuit d’alimentation qui peut traduire la tension de
l’alternatif au continu.
Pour obtenir une tension continue à partir d’une tension alternative il faut passer par les
étapes suivantes :
17
Figure 3.4 : schéma synoptique de circuit d’alimentation
220VA
C
5VDC
Redressement
Filtrage
Régulation
Transformation
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 18/42
ISET – Technologie Force
BR1
GBPC800
1 2
J7CONN-H2
C4470u
VI1
VO3
G N D
2
U147812
VI1
VO3
G N D
2
U137805
C6470u
C7470u
C522n
C822n
+5v+12v
FUSE3A
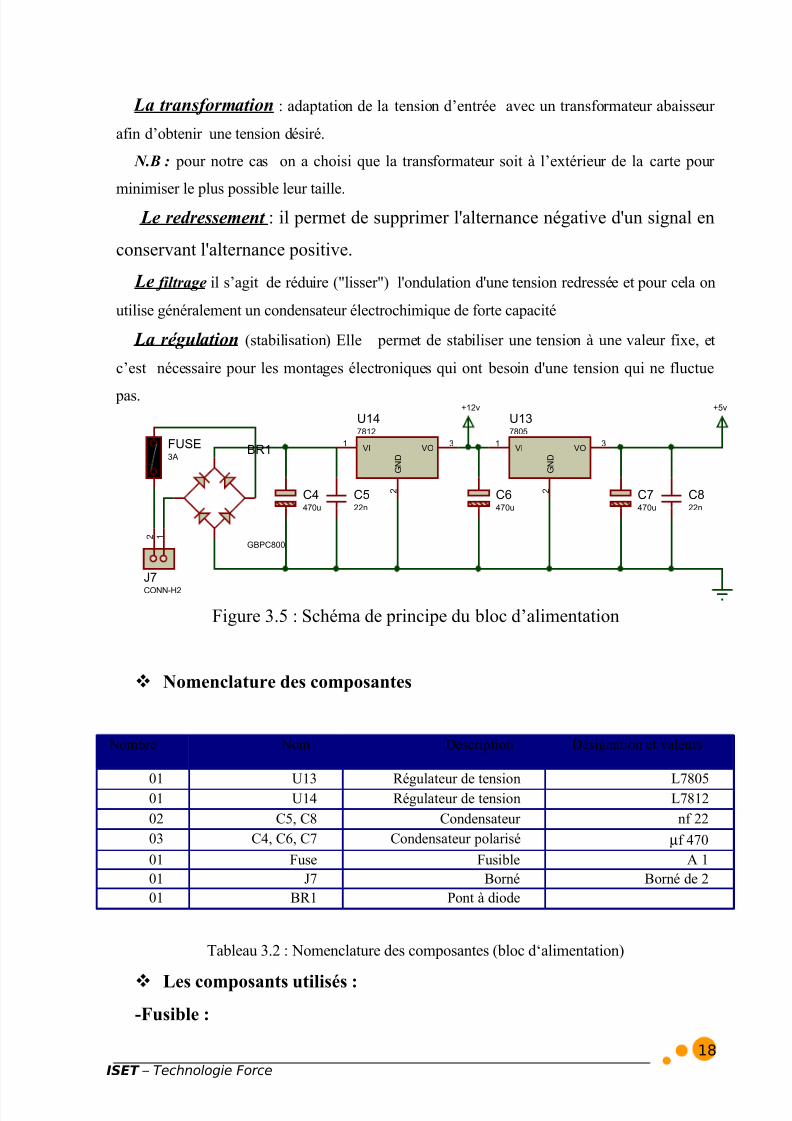
La transformation : adaptation de la tension d’entrée avec un transformateur abaisseur
afin d’obtenir une tension désiré.
N.B : pour notre cas on a choisi que la transformateur soit à l’extérieur de la carte pour
minimiser le plus possible leur taille. Le redressement : il permet de supprimer l'alternance négative d'un signal en
conservant l'alternance positive.
Le filtrage il s’agit de réduire ("lisser") l'ondulation d'une tension redressée et pour cela on
utilise généralement un condensateur électrochimique de forte capacité
La régulation (stabilisation) Elle permet de stabiliser une tension à une valeur fixe, et
c’est nécessaire pour les montages électroniques qui ont besoin d'une tension qui ne fluctue
pas.
Figure 3.5 : Schéma de principe du bloc d’alimentation
Nomenclature des composantes
Nombre Nom Description Désignation et valeurs
01 U13 Régulateur de tension L780501 U14 Régulateur de tension L7812
02 C5, C8 Condensateur 22nf 03 C4, C6, C7 Condensateur polarisé 470µf 01 Fuse Fusible 1A01 J7 Borné Borné de 201 BR1 Pont à diode
Tableau 3.2 : Nomenclature des composantes (bloc d‘alimentation)
Les composants utilisés :-Fusible :
18
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 19/42
ISET – Technologie Force
C1100n
C2100n
X1
CRYSTAL
R12 10k
R11 10k
R10 10k
RA0/AN02
RA1/AN13
RA2/AN2/VREF-4
RA4/T0CKI6
RA5/AN47
OSC1/CLKIN9
OSC2/CLKOUT10
RC1/T1OSI12
RC2/CCP113
RC314
RB7/PGD28
RB6/PGC27
RB526
RB425
RB3/PGM24
RB223
RB122
RB0/INT21
RC7/RX/DT18
RC6/TX/CK17
RC516
RC415
RA3/AN3/VREF+5
RC0/T1OSO/T1CKI11
MCLR/Vpp/THV1
U7
PIC16F870
R9 10k
1B1
1C16
2B2
2C15
3B3
3C14
4B4
4C13
5B5
5C12
6B6
6C11
7B7
7C10
COM9
U10
ULN2003A
R810k
R710k
LED7
LED
LED8
LED
C3100n
R?10k
+5v
SWITCH1
1 2 3
J8CONN-SIL3
+5v
+24v
OF F
ON
1 2 3 4
8 7 6 5
DSW1DIPSW_4
R17
R16
U8
U9
R L 1
R L 2
U 1
U 2
U 3
U 4
U 5
U 5
Figure 3.6 : Schéma de principe du bloc de commande
Un fusible est un composant conducteur d'électricité qui accepte de laisser passer un courant
jusqu'à une certaine valeur, sans fondre. Au delà de cette valeur de courant limite, il fond et
empêche ainsi le courant de continuer sur sa lancée.
- Pont diode :Un pont de diodes ou pont de Graëtz est un assemblage de quatre diodes montées en pont,
qui redresse le courant alternatif en courant continu, c’est-à-dire ne circulant que dans un seul
sens
- Condensateurs (filtrage)
Le rôle du condensateur de filtrage, généralement un électro-chimique de forte capacité, est
de réduire l'ondulation d'une tension redressée lorsqu'on passe, par exemple dans une
alimentation, d'une tension alternative à une tension continue. Il permet, en quelque sorte, de"lisser" la tension ondulée.
Le condensateur de filtrage est monté en parallèle avec la sortie du pont de diodes.
La présence du condensateur de filtrage permet de réduire fortement ("lisser") l'ondulation
de la tension redressée
-Régulateur
Un régulateur sert à réguler ou stabiliser un potentiel sur sa broche de sortie, il peut être fixe
ou réglable (vis de réglage 25 tours) et être positif ou négatif par rapport à la masse (ex: 7805 positif avec en sortie +5V et 7905 négatif avec en sortie -5V).
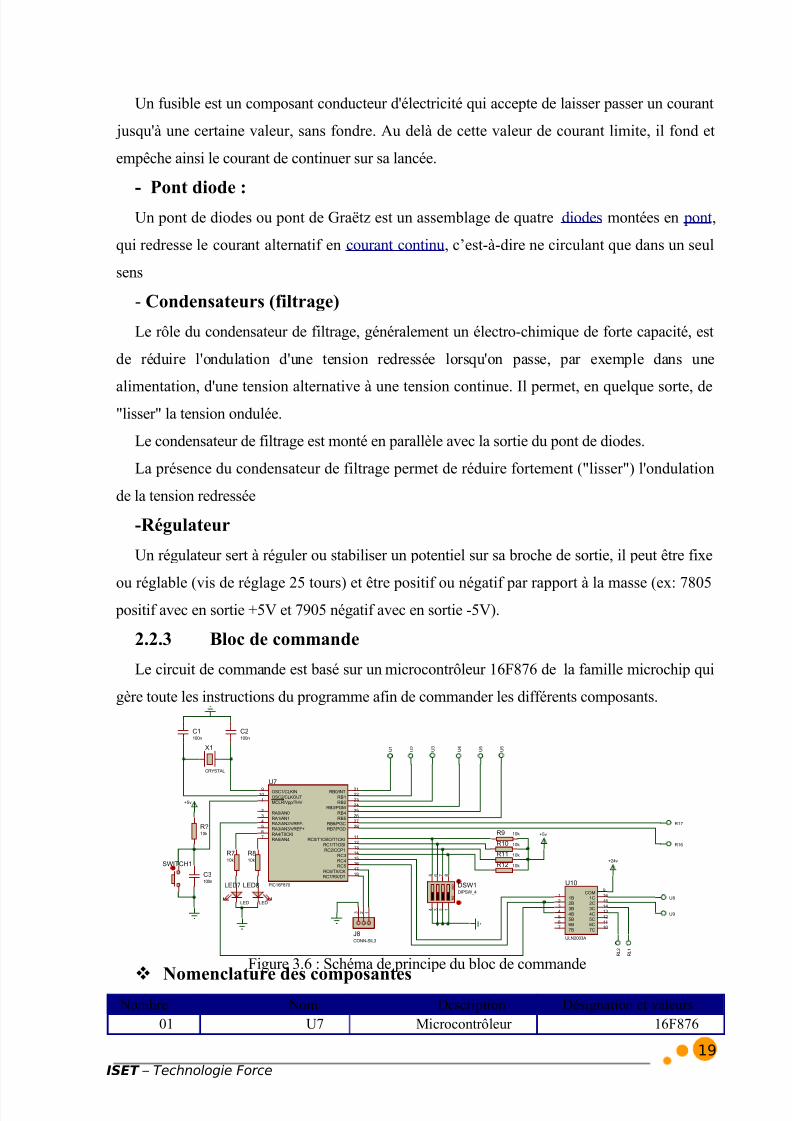
2.2.3 Bloc de commande
Le circuit de commande est basé sur un microcontrôleur 16F876 de la famille microchip qui
gère toute les instructions du programme afin de commander les différents composants.
Nomenclature des composantes Nombre Nom Description Désignation et valeurs
01 U7 Microcontrôleur 16F876
19
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 20/42
ISET – Technologie Force
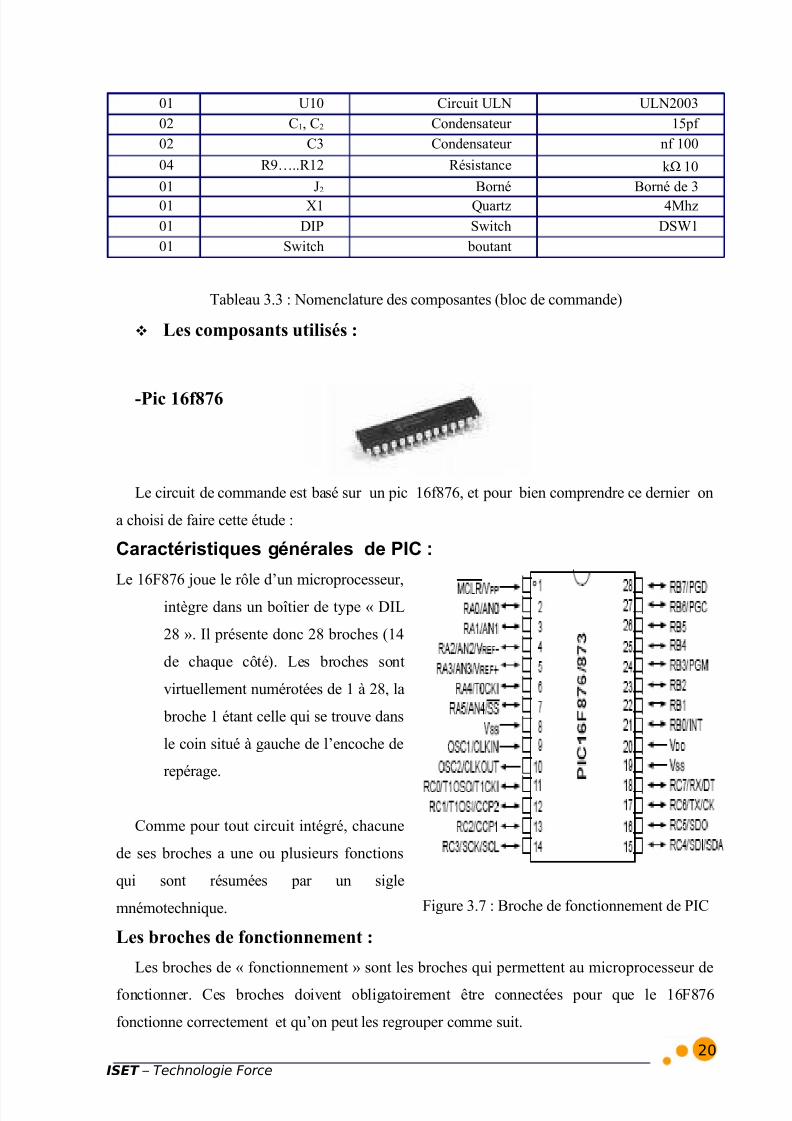
Figure 3.7 : Broche de fonctionnement de PIC
01 U10 Circuit ULN ULN2003
02 C1, C2 Condensateur 15pf
02 C3 Condensateur 100nf
04 R9…..R12 Résistance 10k Ω01 J2 Borné Borné de 301 X1 Quartz 4Mhz
01 DIP Switch DSW1
01 Switch boutant
Tableau 3.3 : Nomenclature des composantes (bloc de commande)
Les composants utilisés :
-Pic 16f876
Le circuit de commande est basé sur un pic 16f876, et pour bien comprendre ce dernier on
a choisi de faire cette étude :
Caractéristiques générales de PIC :
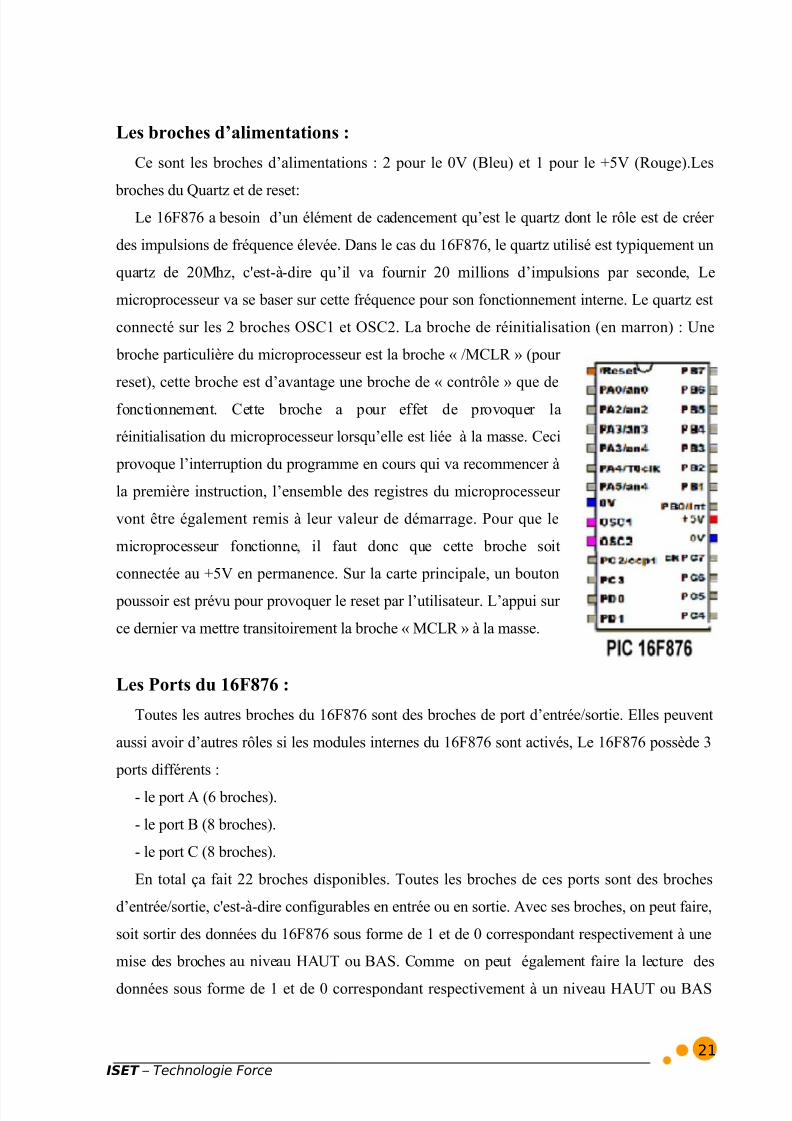
Le 16F876 joue le rôle d’un microprocesseur,intègre dans un boîtier de type « DIL
28 ». Il présente donc 28 broches (14
de chaque côté). Les broches sont
virtuellement numérotées de 1 à 28, la
broche 1 étant celle qui se trouve dans
le coin situé à gauche de l’encoche de
repérage.
Comme pour tout circuit intégré, chacune
de ses broches a une ou plusieurs fonctions
qui sont résumées par un sigle
mnémotechnique.
Les broches de fonctionnement :
Les broches de « fonctionnement » sont les broches qui permettent au microprocesseur de
fonctionner. Ces broches doivent obligatoirement être connectées pour que le 16F876
fonctionne correctement et qu’on peut les regrouper comme suit.
20
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 21/42
ISET – Technologie Force
Les broches d’alimentations :
Ce sont les broches d’alimentations : 2 pour le 0V (Bleu) et 1 pour le +5V (Rouge).Les
broches du Quartz et de reset:Le 16F876 a besoin d’un élément de cadencement qu’est le quartz dont le rôle est de créer
des impulsions de fréquence élevée. Dans le cas du 16F876, le quartz utilisé est typiquement un
quartz de 20Mhz, c'est-à-dire qu’il va fournir 20 millions d’impulsions par seconde, Le
microprocesseur va se baser sur cette fréquence pour son fonctionnement interne. Le quartz est
connecté sur les 2 broches OSC1 et OSC2. La broche de réinitialisation (en marron) : Une
broche particulière du microprocesseur est la broche « /MCLR » (pour
reset), cette broche est d’avantage une broche de « contrôle » que de
fonctionnement. Cette broche a pour effet de provoquer la
réinitialisation du microprocesseur lorsqu’elle est liée à la masse. Ceci
provoque l’interruption du programme en cours qui va recommencer à
la première instruction, l’ensemble des registres du microprocesseur
vont être également remis à leur valeur de démarrage. Pour que le
microprocesseur fonctionne, il faut donc que cette broche soit
connectée au +5V en permanence. Sur la carte principale, un bouton
poussoir est prévu pour provoquer le reset par l’utilisateur. L’appui sur
ce dernier va mettre transitoirement la broche « MCLR » à la masse.
Les Ports du 16F876 :
Toutes les autres broches du 16F876 sont des broches de port d’entrée/sortie. Elles peuvent
aussi avoir d’autres rôles si les modules internes du 16F876 sont activés, Le 16F876 possède 3
ports différents :
- le port A (6 broches).
- le port B (8 broches).
- le port C (8 broches).
En total ça fait 22 broches disponibles. Toutes les broches de ces ports sont des broches
d’entrée/sortie, c'est-à-dire configurables en entrée ou en sortie. Avec ses broches, on peut faire,
soit sortir des données du 16F876 sous forme de 1 et de 0 correspondant respectivement à une
mise des broches au niveau HAUT ou BAS. Comme on peut également faire la lecture des
données sous forme de 1 et de 0 correspondant respectivement à un niveau HAUT ou BAS
21
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 22/42
ISET – Technologie Force
présent sur ces broches. La structure de chaque port, à quelques variations prêtes, est grosso
modo la même :
- chaque port est configuré par un registre de port, nommé TRIS suivi par la lettre du
port. Ainsi le port A est configuré par le registre TRISA. Chaque bit de ces registres (TRIS ou
DDR) détermine le sens de communication des broches du port.
- chaque port possède logiquement un registre de données associé. Pour chaque broche
configurée en sortie.
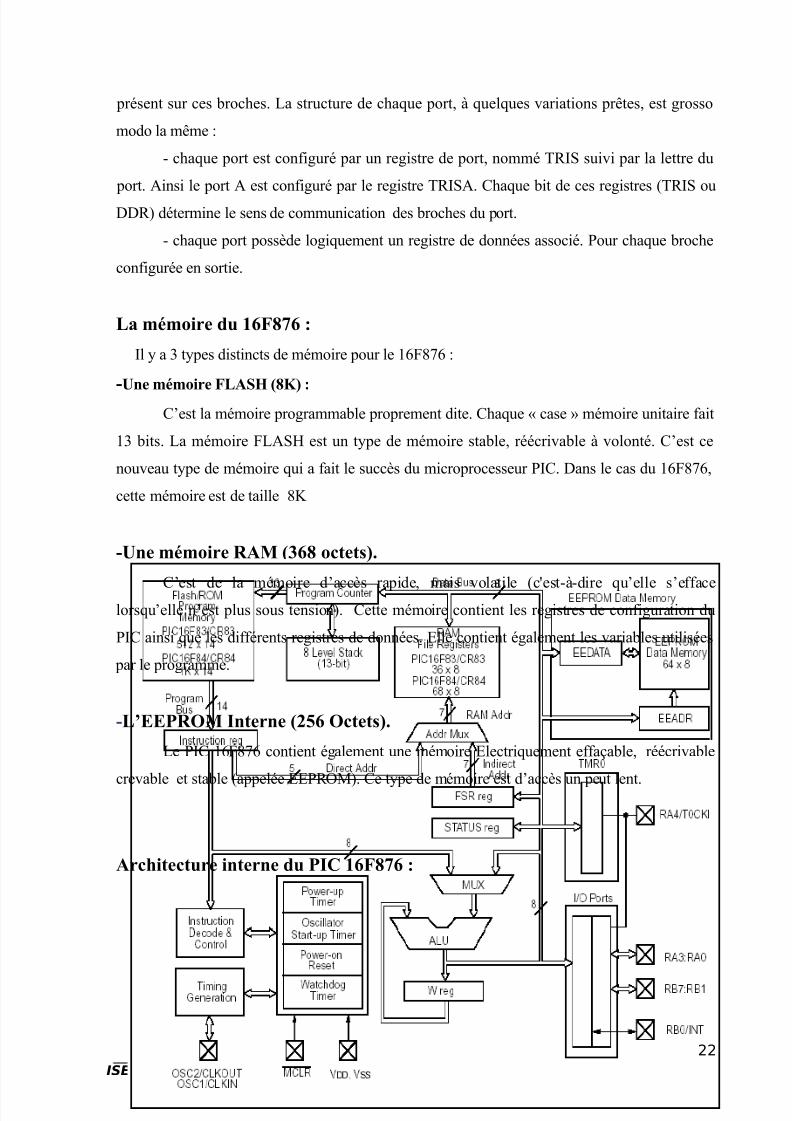
La mémoire du 16F876 :
Il y a 3 types distincts de mémoire pour le 16F876 :
-Une mémoire FLASH (8K) :C’est la mémoire programmable proprement dite. Chaque « case » mémoire unitaire fait
13 bits. La mémoire FLASH est un type de mémoire stable, réécrivable à volonté. C’est ce
nouveau type de mémoire qui a fait le succès du microprocesseur PIC. Dans le cas du 16F876,
cette mémoire est de taille 8K
-Une mémoire RAM (368 octets).
C’est de la mémoire d’accès rapide, mais volatile (c'est-à-dire qu’elle s’effacelorsqu’elle n’est plus sous tension). Cette mémoire contient les registres de configuration du
PIC ainsi que les différents registres de données. Elle contient également les variables utilisées
par le programme.
-L’EEPROM Interne (256 Octets).
Le PIC 16F876 contient également une mémoire Electriquement effaçable, réécrivable
crevable et stable (appelée EEPROM). Ce type de mémoire est d’accès un peut lent.
Architecture interne du PIC 16F876 :
22
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 23/42
ISET – Technologie Force
Figure 3.8: Architecture interne du PIC 16F876
Choix du pic
On a choisi le 16f876 car :
Il possède des entrées analogiques
Nombre de broche d’entrée/sortie important (satisfaire à notre besoin)
Utilisation des entrées analogiques
On a utilisé 2 entrées analogique l’une pour fixé la valeur de la consigne sur la quelle on va
faire notre comparaison et l’autre issu de la tension du moteur
Pour la comparaison on va jouer sur la tension c’est-à-dire au blocage du moteur le courant
va augmenter d’où la tension sera diminuée et suivant le programme qu’on a déjà élaboré, le pic
va lire cette mesure et va faire sa comparaison et on aboutira à deux conditions :
• Si la mesure égale à la consigne le moteur fonctionne normalement.
• Si la mesure est inférieure à la consigne le pic va donner l’ordre de l’arrêt du moteur
Pour les autres ports d’entrées du pic, qui sont relié avec l’environnement extérieur, on a
utilisé un opto-coupleur (Phototransistor) branché avec une diode et une résistance en série pour
chaque entrée afin d’assurer une bonne protection pour le pic.
23
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 24/42
ISET – Technologie Force
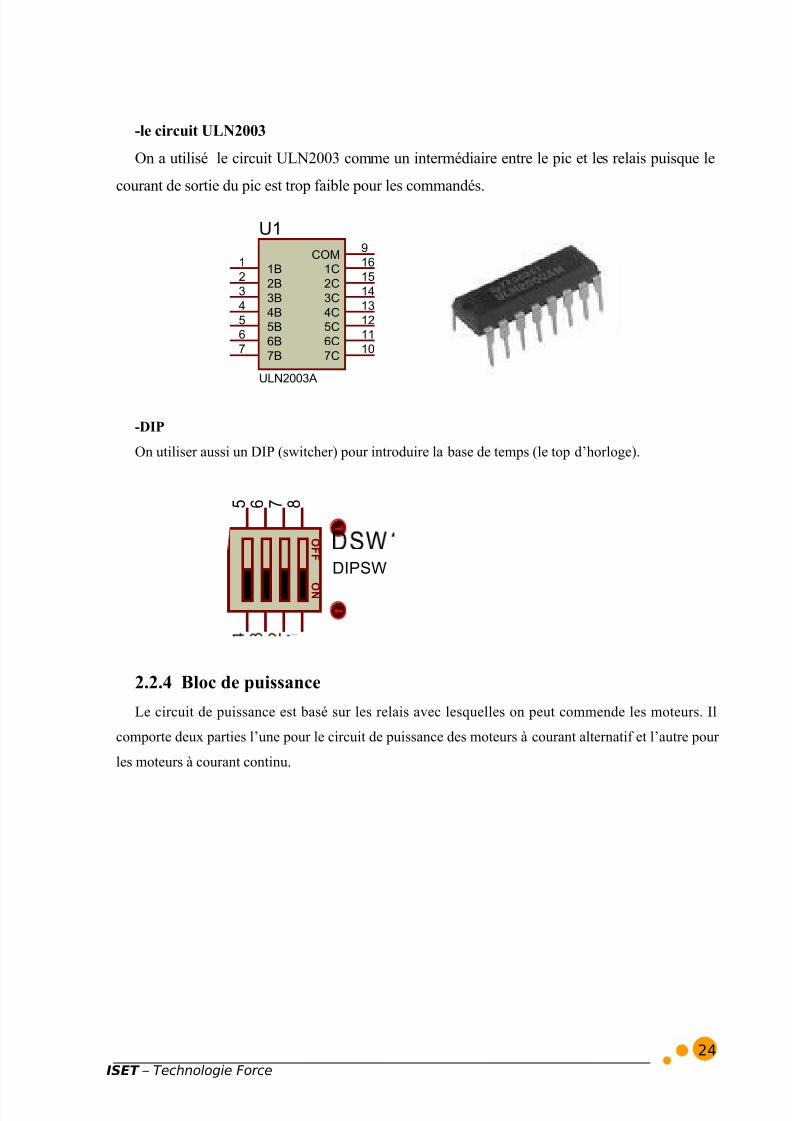
-le circuit ULN2003
On a utilisé le circuit ULN2003 comme un intermédiaire entre le pic et les relais puisque le
courant de sortie du pic est trop faible pour les commandés.
-DIP
On utiliser aussi un DIP (switcher) pour introduire la base de temps (le top d’horloge).
2.2.4 Bloc de puissance
Le circuit de puissance est basé sur les relais avec lesquelles on peut commende les moteurs. Il
comporte deux parties l’une pour le circuit de puissance des moteurs à courant alternatif et l’autre pour
les moteurs à courant continu.
24
OF F
ON
8 7 6 5
DIPSW
1B1
1C16
2B2
2C15
3B3
3C14
4B4
4C13
5B5
5C12
6B6
6C11
7B7
7C10
COM9
U1
ULN2003A
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 25/42
ISET – Technologie Force
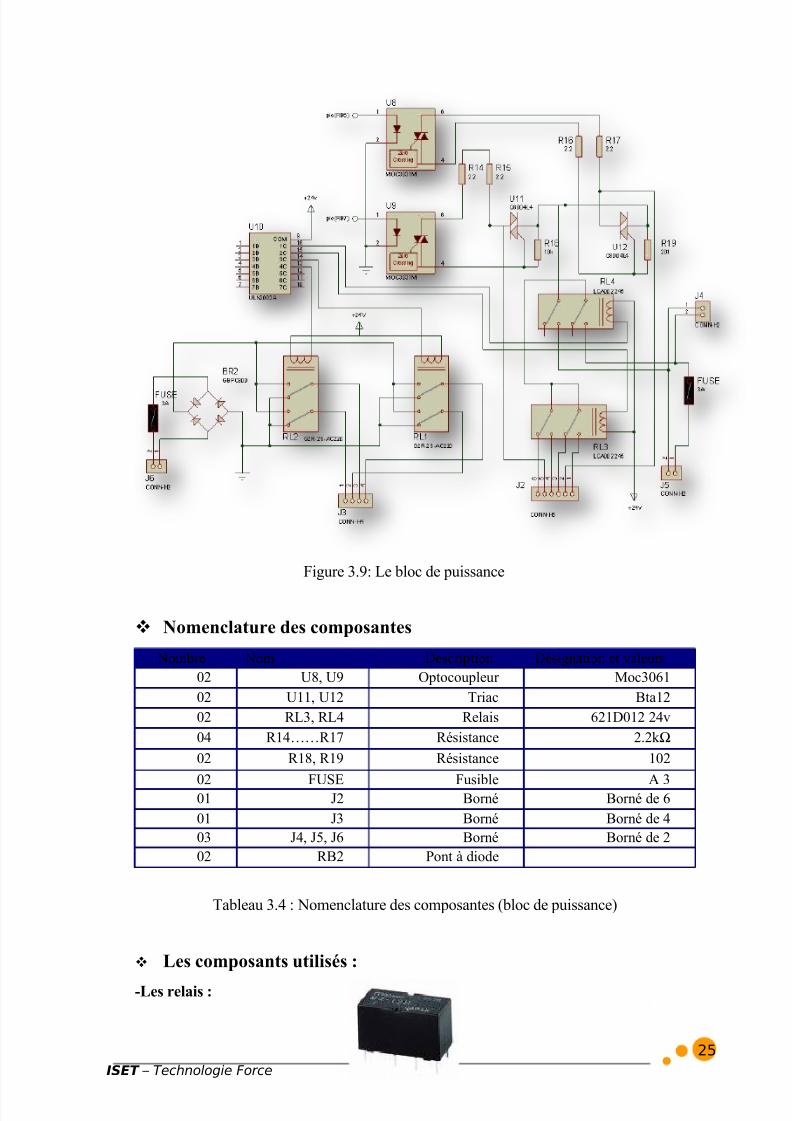
Figure 3.9: Le bloc de puissance
Nomenclature des composantes
Nombre Nom Description Désignation et valeurs02 U8, U9 Optocoupleur Moc3061
02 U11, U12 Triac Bta1202 RL3, RL4 Relais 621D012 24v
04 R14……R17 Résistance 2.2kΩ
02 R18, R19 Résistance 102
02 FUSE Fusible 3A01 J2 Borné Borné de 6
01 J3 Borné Borné de 403 J4, J5, J6 Borné Borné de 202 RB2 Pont à diode
Tableau 3.4 : Nomenclature des composantes (bloc de puissance)
Les composants utilisés :
-Les relais :
25
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 26/42
ISET – Technologie Force
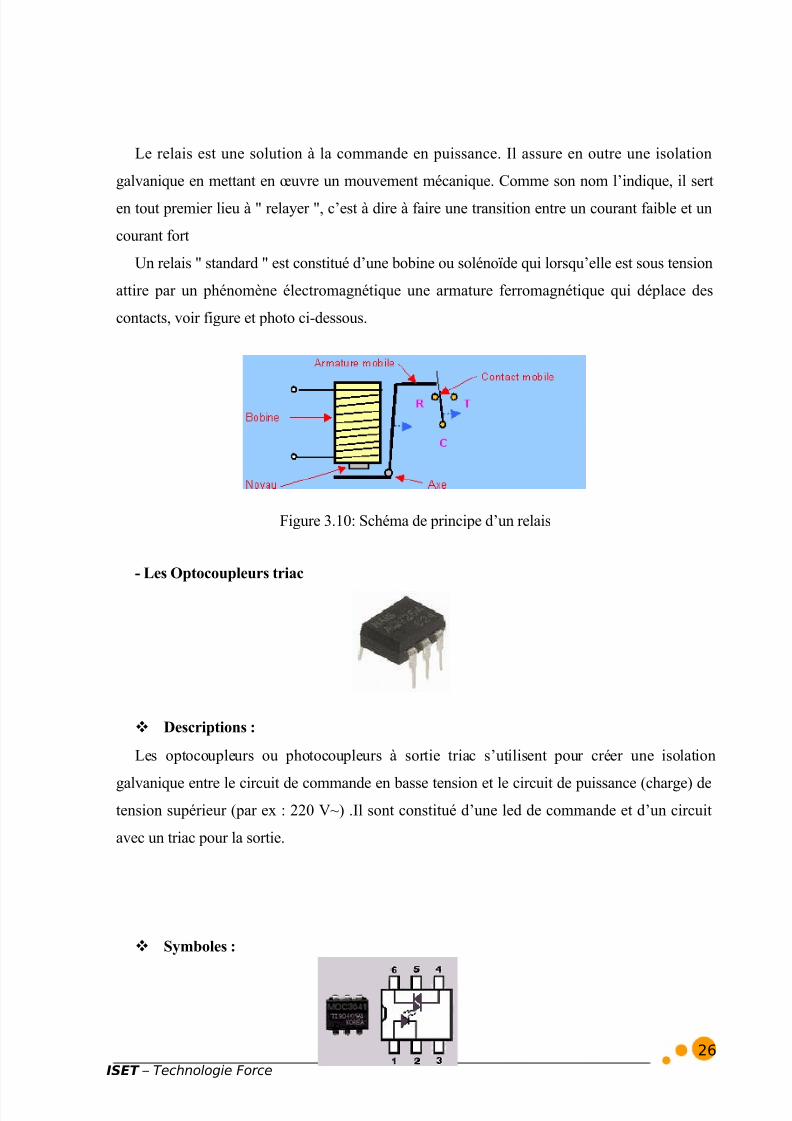
Le relais est une solution à la commande en puissance. Il assure en outre une isolation
galvanique en mettant en œuvre un mouvement mécanique. Comme son nom l’indique, il sert
en tout premier lieu à " relayer ", c’est à dire à faire une transition entre un courant faible et un
courant fort
Un relais " standard " est constitué d’une bobine ou solénoïde qui lorsqu’elle est sous tension
attire par un phénomène électromagnétique une armature ferromagnétique qui déplace des
contacts, voir figure et photo ci-dessous.
Figure 3.10: Schéma de principe d’un relais
- Les Optocoupleurs triac
Descriptions :
Les optocoupleurs ou photocoupleurs à sortie triac s’utilisent pour créer une isolation
galvanique entre le circuit de commande en basse tension et le circuit de puissance (charge) detension supérieur (par ex : 220 V~) .Il sont constitué d’une led de commande et d’un circuit
avec un triac pour la sortie.
Symboles :
26
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 27/42
ISET – Technologie Force
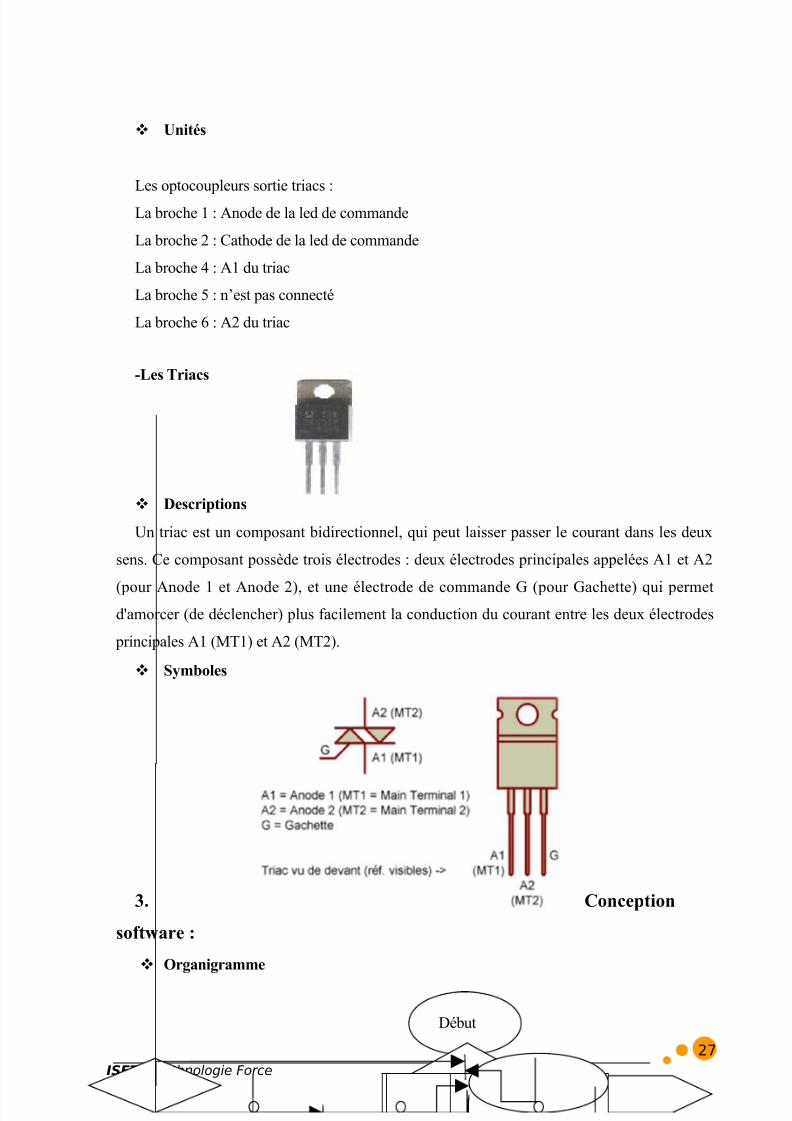
Unités
Les optocoupleurs sortie triacs :
La broche 1 : Anode de la led de commande
La broche 2 : Cathode de la led de commande
La broche 4 : A1 du triac
La broche 5 : n’est pas connecté
La broche 6 : A2 du triac
-Les Triacs
Descriptions
Un triac est un composant bidirectionnel, qui peut laisser passer le courant dans les deux
sens. Ce composant possède trois électrodes : deux électrodes principales appelées A1 et A2
(pour Anode 1 et Anode 2), et une électrode de commande G (pour Gachette) qui permetd'amorcer (de déclencher) plus facilement la conduction du courant entre les deux électrodes
principales A1 (MT1) et A2 (MT2).
Symboles
3. Conception
software :
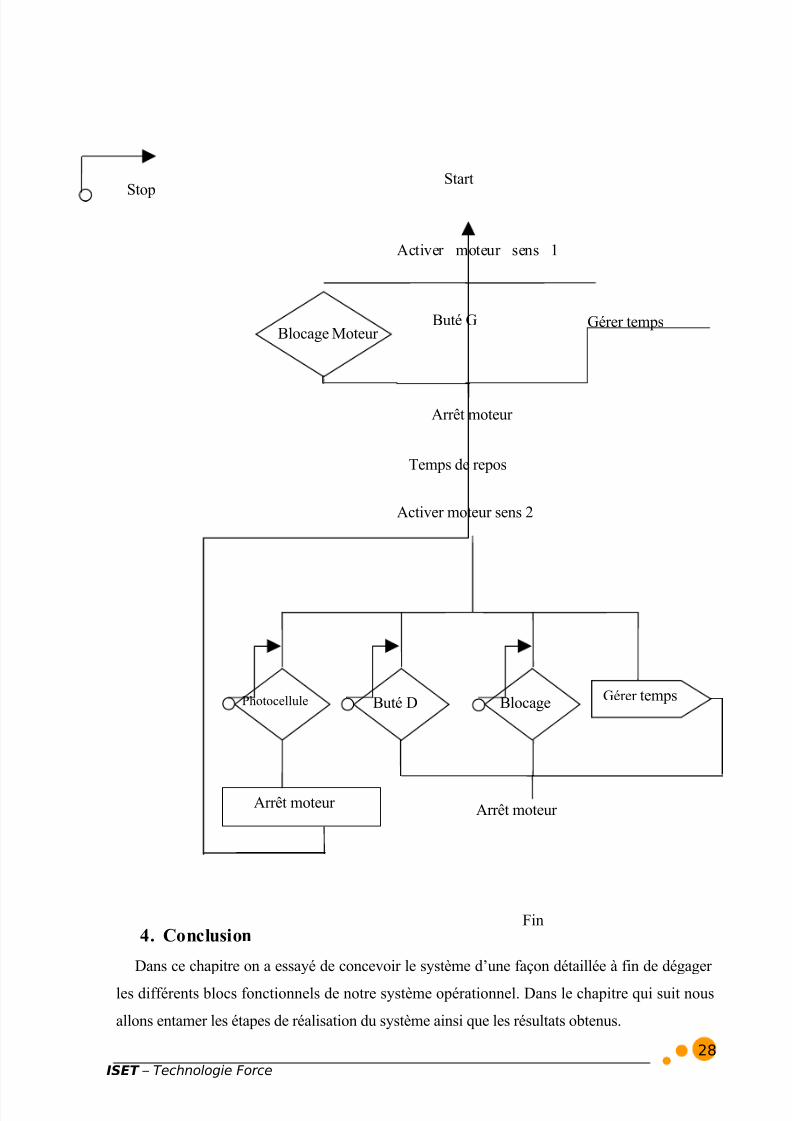
Organigramme
27
Début
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 28/42
ISET – Technologie Force
4. Conclusion
Dans ce chapitre on a essayé de concevoir le système d’une façon détaillée à fin de dégager
les différents blocs fonctionnels de notre système opérationnel. Dans le chapitre qui suit nous
allons entamer les étapes de réalisation du système ainsi que les résultats obtenus.
28
Start
Activer moteur sens 1
Blocage Moteur Buté G Gérer temps
Arrêt moteur
Temps de repos
Activer moteur sens 2
Gérer temps
Arrêt moteur Arrêt moteur
Stop
Fin
Photocellule Buté D Blocage

5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 29/42
ISET – Technologie Force
29
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 30/42
ISET – Technologie Force
Chapitre 4hapitre 4 : Réalisationéalisation
1. Introduction
2. Réalisation matérielle
3. Réalisation logicielle
4. Conclusion
30
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 31/42
ISET – Technologie Force
Introduction
Cette étape consiste à réaliser et à valider le système désiré. Elle contient une partie
matérielle et une partie logicielle. L’aspect matériel doit respecter la disposition correcte des
composants. L’aspect logiciel concerne les outils qui servent pour la compilation ou lasimulation et programmation.
1. Réalisation matérielle :
Réalisation du circuit imprimé :
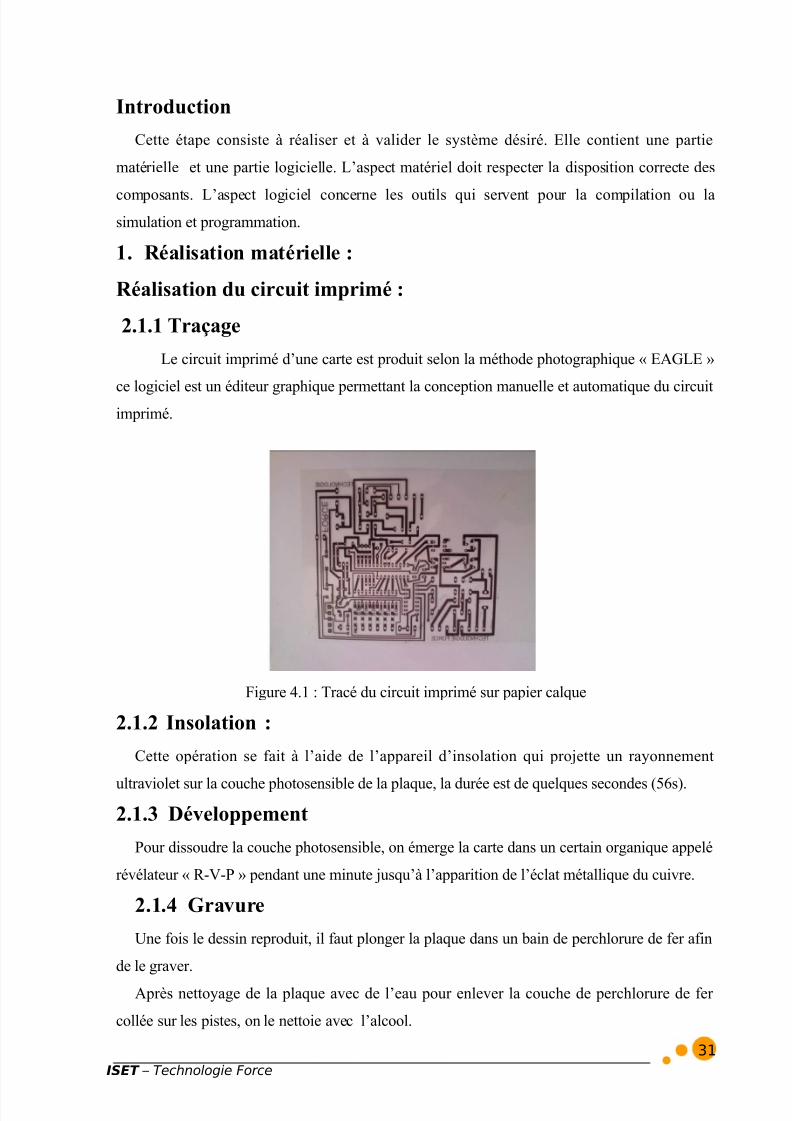
2.1.1 Traçage
Le circuit imprimé d’une carte est produit selon la méthode photographique « EAGLE »
ce logiciel est un éditeur graphique permettant la conception manuelle et automatique du circuitimprimé.
Figure 4.1 : Tracé du circuit imprimé sur papier calque
2.1.2 Insolation :
Cette opération se fait à l’aide de l’appareil d’insolation qui projette un rayonnement
ultraviolet sur la couche photosensible de la plaque, la durée est de quelques secondes (56s).
2.1.3 Développement
Pour dissoudre la couche photosensible, on émerge la carte dans un certain organique appelé
révélateur « R-V-P » pendant une minute jusqu’à l’apparition de l’éclat métallique du cuivre.
2.1.4 Gravure
Une fois le dessin reproduit, il faut plonger la plaque dans un bain de perchlorure de fer afin
de le graver.
Après nettoyage de la plaque avec de l’eau pour enlever la couche de perchlorure de fer
collée sur les pistes, on le nettoie avec l’alcool.
31
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 32/42
ISET – Technologie Force
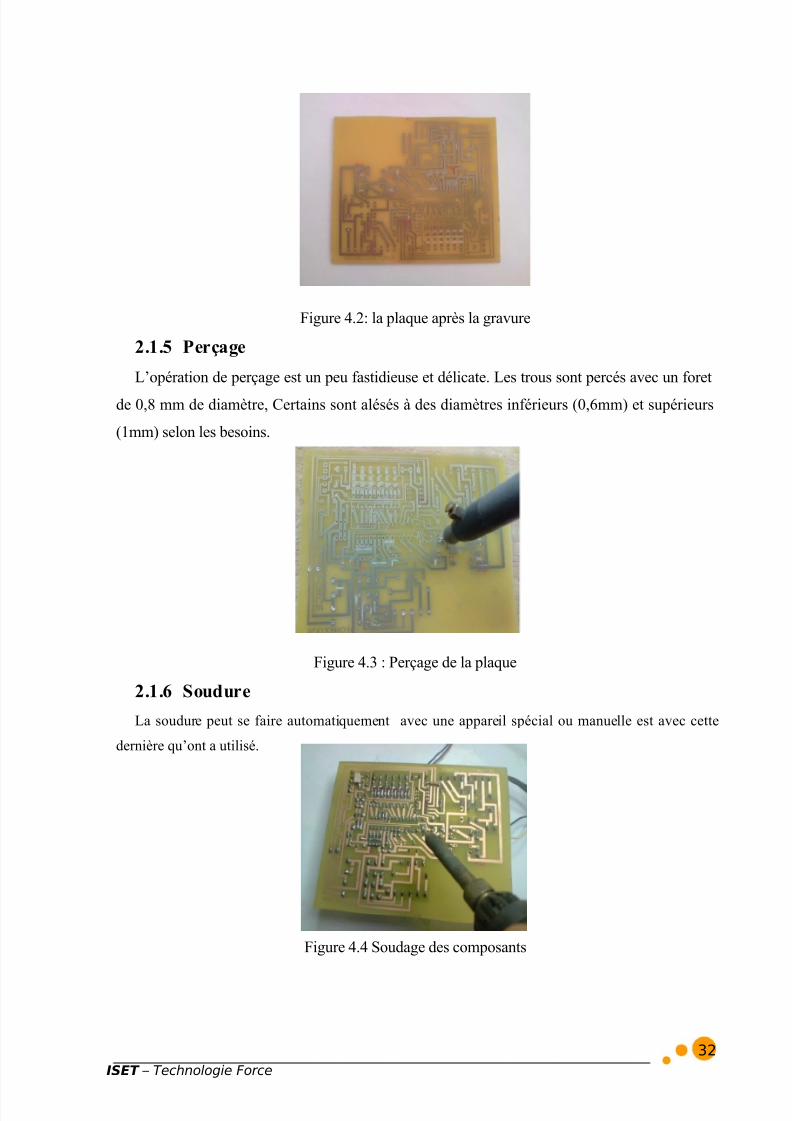
Figure 4.2: la plaque après la gravure
2.1.5 Perçage
L’opération de perçage est un peu fastidieuse et délicate. Les trous sont percés avec un foret
de 0,8 mm de diamètre, Certains sont alésés à des diamètres inférieurs (0,6mm) et supérieurs
(1mm) selon les besoins.
Figure 4.3 : Perçage de la plaque
2.1.6 Soudure
La soudure peut se faire automatiquement avec une appareil spécial ou manuelle est avec cette
dernière qu’ont a utilisé.
Figure 4.4 Soudage des composants
32
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 33/42
ISET – Technologie Force
Implantation des composants :
Après la réalisation du circuit imprimé, on passe à l’implantation par la mise en place des
nombreux « straps » nécessaires. Les composants sont relativement serrés, pour cela on a
implanté en premier lieu les éléments de base profils tel que les résistances, les diodes puis lesautres composants. On doit faire attention à la polarisation des composants comme les capacités
chimiques et l’introduction des ports dans le bon sens.
On poursuivra par la pose des supports des circuits intégrés.
Circuit imprimé de la carte réalisée :
Pendant l’étude du circuit imprimé on a essayé de minimiser le maximum la taille de la
carte pour qu’on puisse l’introduire dans n’importe quelle boîtier. Pour cela on a utilisé des
composants CMC.
• Qu'et-ce qu'un CMS ?
CMS = Composant Monté en Surface (SMC = Surface Mount Component)
Ces composants sont donc montés sur un circuit imprimé sans "trous". On retrouve
quasiment la totalité des composants traditionnels sous forme de CMS, bien sur résistances,
condensateurs (chimiques ou non), selfs, transistors, circuit intégrés, leds, interrupteurs,
connecteurs, fusibles, etc...
L'avantage d'un CMS est qu'il occupe moins de place, donc permet l'implantation d'un plus
grand nombre de composants sur une surface donnée. D'autre part on peut implanter des
composants de chaque coté du circuit imprimé en vis à vis.
L'inconvénient principal c'est que sorti du contexte industriel il est plutôt difficile d'emploi
pour un bricoleur (repérage de sa valeur, préhension, réparation), mais avec de la patience il est
possible d'obtenir de bons résultats.
33
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 34/42
ISET – Technologie Force
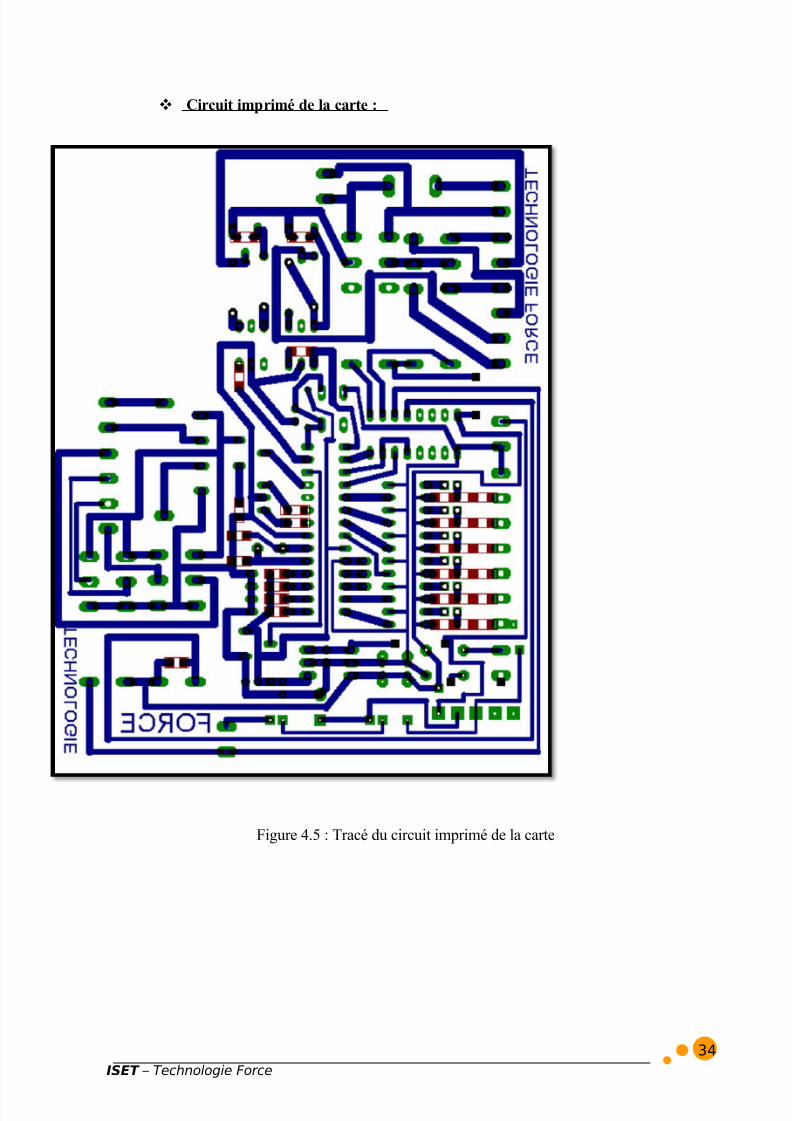
Circuit imprimé de la carte :
Figure 4.5 : Tracé du circuit imprimé de la carte
34
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 35/42
ISET – Technologie Force
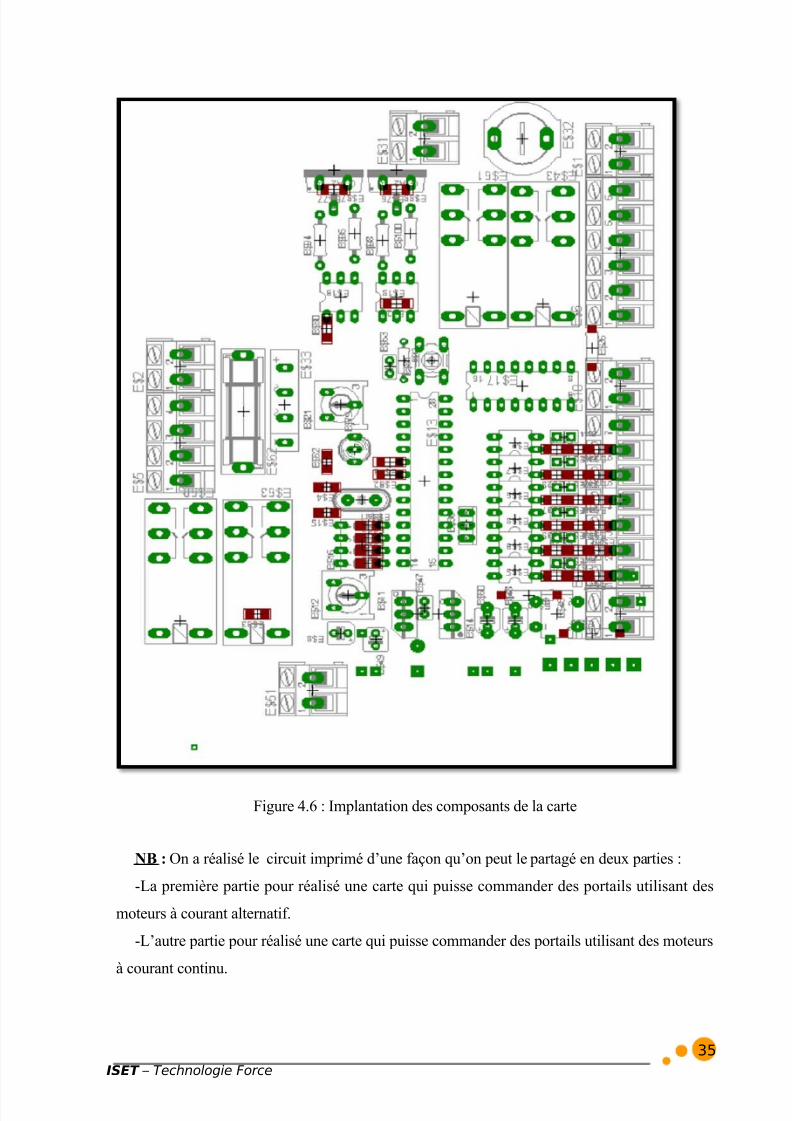
Figure 4.6 : Implantation des composants de la carte
NB : On a réalisé le circuit imprimé d’une façon qu’on peut le partagé en deux parties :
-La première partie pour réalisé une carte qui puisse commander des portails utilisant des
moteurs à courant alternatif.
-L’autre partie pour réalisé une carte qui puisse commander des portails utilisant des moteurs
à courant continu.
35
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 36/42
ISET – Technologie Force
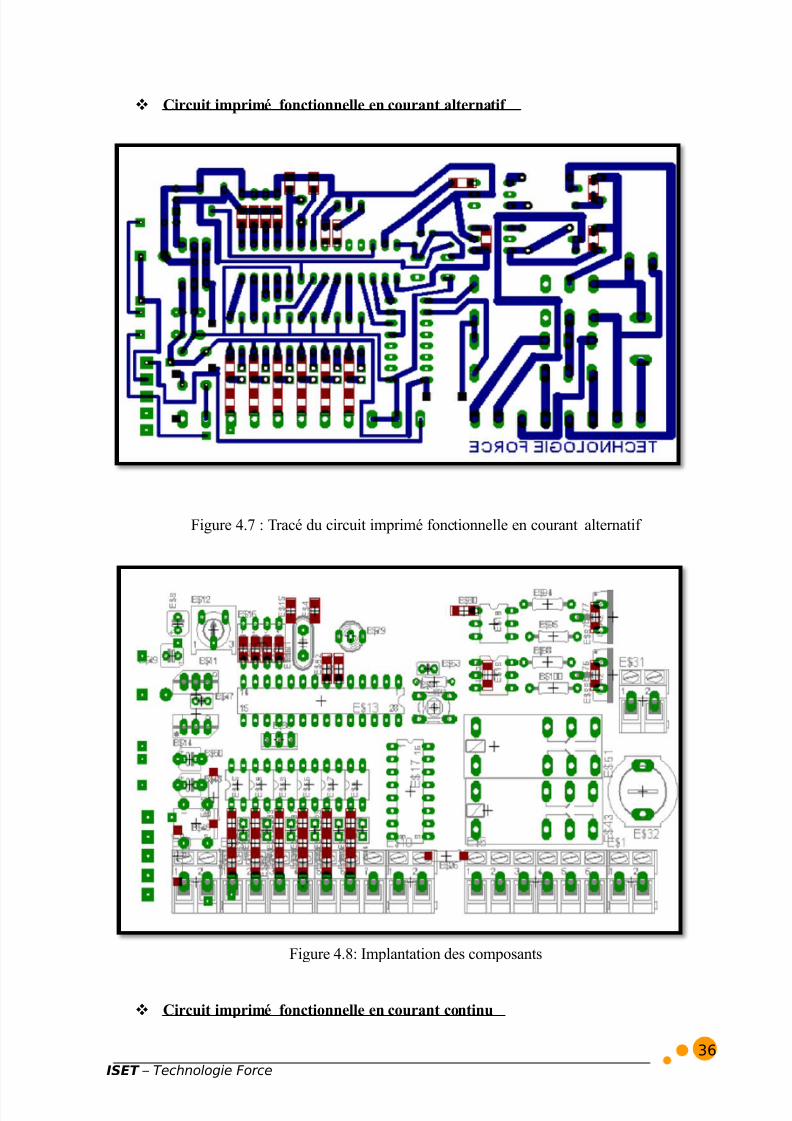
Circuit imprimé fonctionnelle en courant alternatif
Figure 4.7 : Tracé du circuit imprimé fonctionnelle en courant alternatif
Figure 4.8: Implantation des composants
Circuit imprimé fonctionnelle en courant continu
36
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 37/42
ISET – Technologie Force
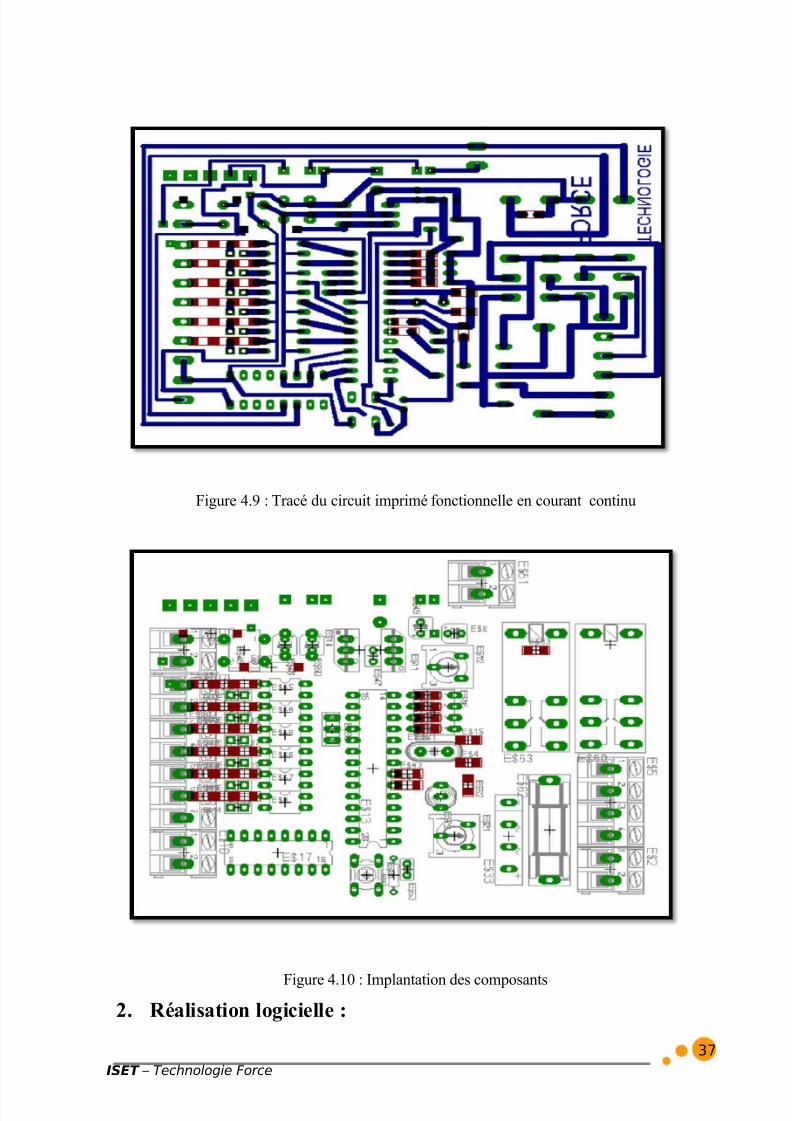
Figure 4.9 : Tracé du circuit imprimé fonctionnelle en courant continu
Figure 4.10 : Implantation des composants
2. Réalisation logicielle :
37
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 38/42
ISET – Technologie Force
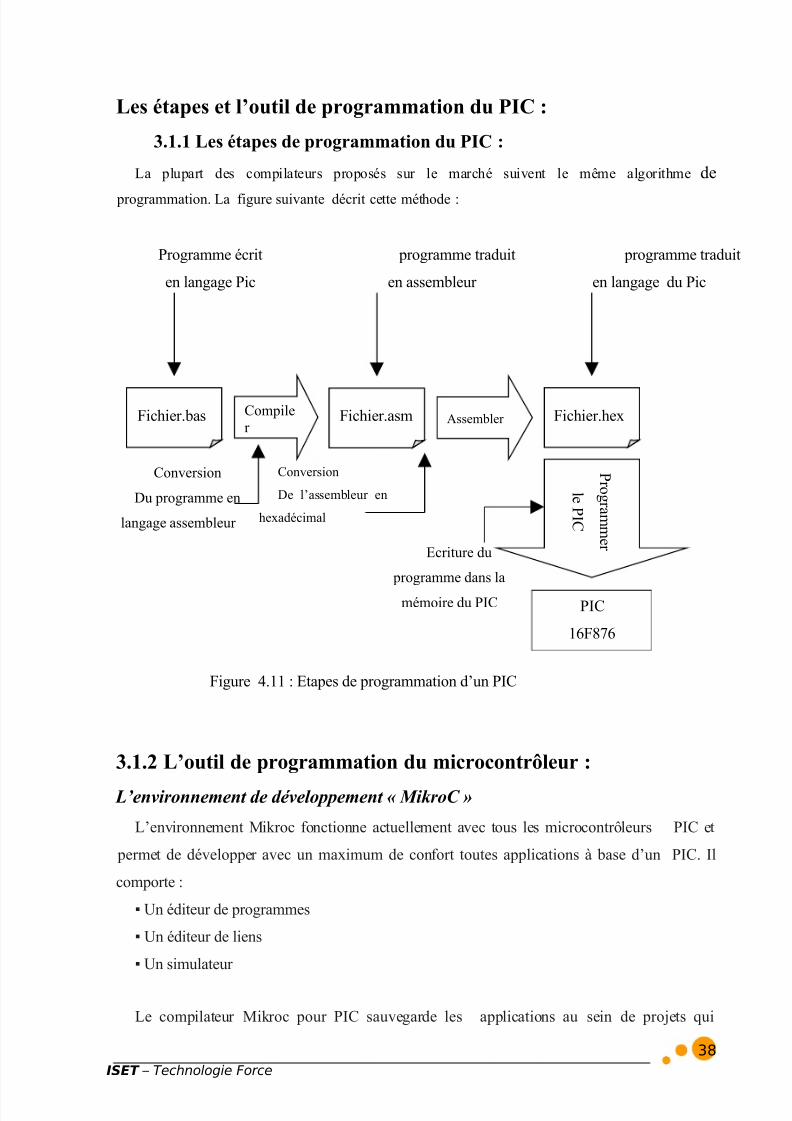
Les étapes et l’outil de programmation du PIC :
3.1.1 Les étapes de programmation du PIC :
La plupart des compilateurs proposés sur le marché suivent le même algorithme de
programmation. La figure suivante décrit cette méthode :
Programme écrit programme traduit programme traduit
en langage Pic en assembleur en langage du Pic
Figure 4.11 : Etapes de programmation d’un PIC
3.1.2 L’outil de programmation du microcontrôleur :
L’environnement de développement « MikroC »
L’environnement Mikroc fonctionne actuellement avec tous les microcontrôleurs PIC et
permet de développer avec un maximum de confort toutes applications à base d’un PIC. Il
comporte :
Un éditeur de programmes
Un éditeur de liens
Un simulateur
Le compilateur Mikroc pour PIC sauvegarde les applications au sein de projets qui
38
Fichier.bas Fichier.asm Fichier.hexAssembler Compiler
Conversion
Du programme en
langage assembleur
Conversion
De l’assembleur en
hexadécimal
Ecriture du
programme dans la
mémoire du PIC
Programmer
lePIC
PIC
16F876
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 39/42
ISET – Technologie Force
s’apparentent à un fichier ‘projet’ unique (avec l’extension .ppc) ainsi qu’à un ou plusieurs
fichiers sources (avec l’extension .c).
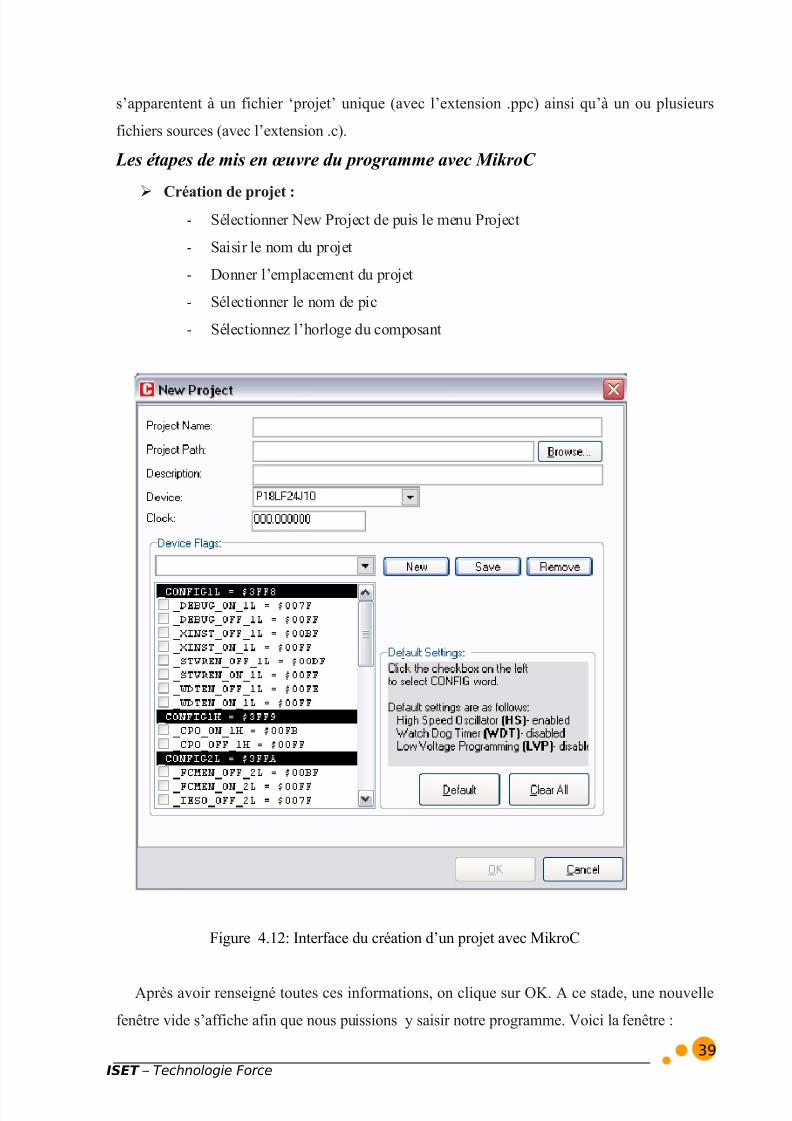
Les étapes de mis en œuvre du programme avec MikroC
Création de projet :- Sélectionner New Project de puis le menu Project
- Saisir le nom du projet
- Donner l’emplacement du projet
- Sélectionner le nom de pic
- Sélectionnez l’horloge du composant
Figure 4.12: Interface du création d’un projet avec MikroC
Après avoir renseigné toutes ces informations, on clique sur OK. A ce stade, une nouvelle
fenêtre vide s’affiche afin que nous puissions y saisir notre programme. Voici la fenêtre :
39
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 40/42
ISET – Technologie Force
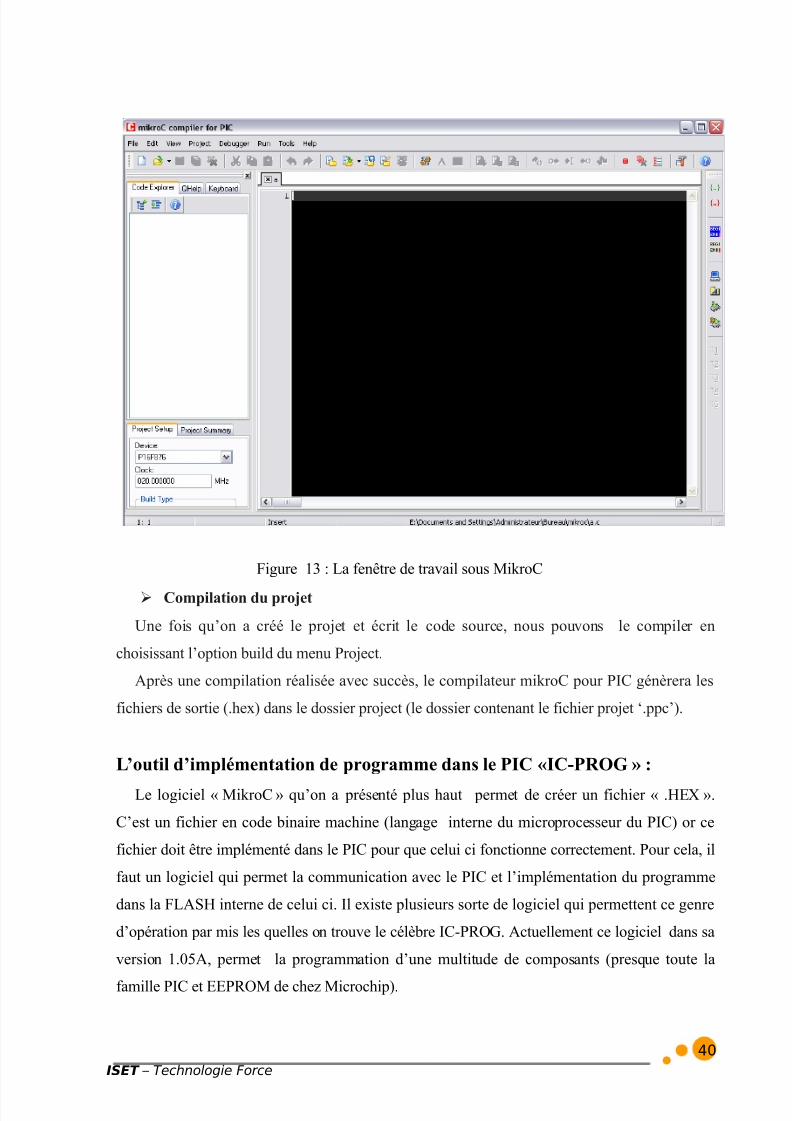
Figure 13 : La fenêtre de travail sous MikroC
Compilation du projet
Une fois qu’on a créé le projet et écrit le code source, nous pouvons le compiler en
choisissant l’option build du menu Project.
Après une compilation réalisée avec succès, le compilateur mikroC pour PIC génèrera les
fichiers de sortie (.hex) dans le dossier project (le dossier contenant le fichier projet ‘.ppc’).
L’outil d’implémentation de programme dans le PIC «IC-PROG » :
Le logiciel « MikroC » qu’on a présenté plus haut permet de créer un fichier « .HEX ».
C’est un fichier en code binaire machine (langage interne du microprocesseur du PIC) or ce
fichier doit être implémenté dans le PIC pour que celui ci fonctionne correctement. Pour cela, il
faut un logiciel qui permet la communication avec le PIC et l’implémentation du programme
dans la FLASH interne de celui ci. Il existe plusieurs sorte de logiciel qui permettent ce genre
d’opération par mis les quelles on trouve le célèbre IC-PROG. Actuellement ce logiciel dans sa
version 1.05A, permet la programmation d’une multitude de composants (presque toute la
famille PIC et EEPROM de chez Microchip).
40
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 41/42
ISET – Technologie Force
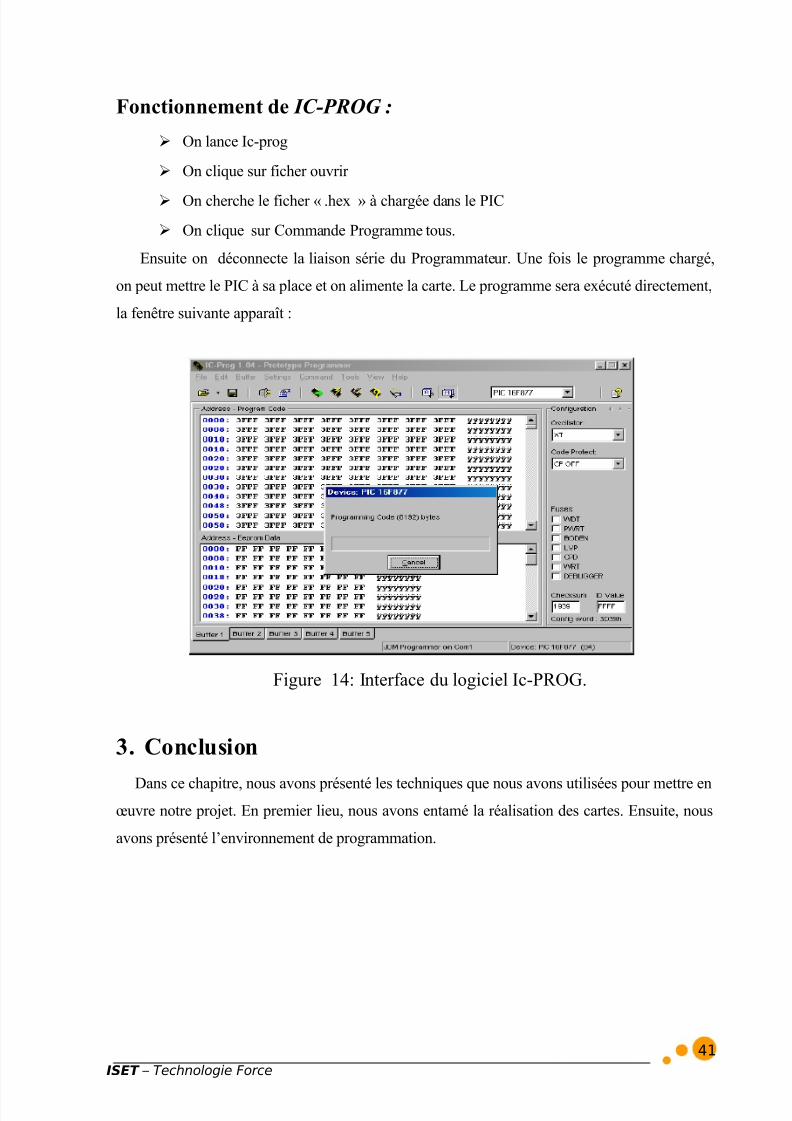
Fonctionnement de IC-PROG :
On lance Ic-prog
On clique sur ficher ouvrir
On cherche le ficher « .hex » à chargée dans le PIC
On clique sur Commande Programme tous.
Ensuite on déconnecte la liaison série du Programmateur. Une fois le programme chargé,
on peut mettre le PIC à sa place et on alimente la carte. Le programme sera exécuté directement,
la fenêtre suivante apparaît :
Figure 14: Interface du logiciel Ic-PROG.
3. Conclusion
Dans ce chapitre, nous avons présenté les techniques que nous avons utilisées pour mettre enœuvre notre projet. En premier lieu, nous avons entamé la réalisation des cartes. Ensuite, nous
avons présenté l’environnement de programmation.
41
5/13/2018 M moire Final - slidepdf.com
http://slidepdf.com/reader/full/memoire-final-55a8235763de7 42/42
ISET – Technologie Force
Conclusion et Perspectives
Ce projet a été mené au sein de l’entreprise Technologie Force. Il a des apports
bénéfiques sur plusieurs niveaux. En effet, nous avons pu approfondir nos connaissances dans
des nouvelles technologies
Notre intérêt dans ce projet fût la conception et la réalisation d’une carte universelle
pour la commande des portails, pour mener ce projet à terme, trois grandes parties ont été
dégagées :
Une première partie était l’étude de l’existant pour la commande des portails et
une recherche des documents et apprentissage de quelques techniques de l’électronique.
Une deuxième partie était l’étude et la conception du système. Ceci a mené à
l’étude présentée au niveau du chapitre conception. La troisième partie concerne la réalisation des différantes cartes du projet et aussi
la réalisation d’un programme d’acquisition, Ceci a mené à l’étude présentée au niveau du
chapitre réalisation et puis une fois les composons sont implémentés une partie de tests
comparatifs était nécessaire pour mettre en évidence la crédibilité de notre système.
Avant de clôturer remarquons qu’il est possible de rajouter diverses améliorations à
notre projet de fin d’études.
Citons par exemple : L’ajout d’un module X-MAS (équipé d’une carte SIM) pour utilisez le téléphone
portable comme une simple télécommande
Utilisation d’un codeur (qui convertit un déplacement linéaire ou rotatif en
signaux numériques ou en impulsions) pour la mémorisation des limites de l’ouverture et la
fermeture du portail
Finalement, l’avantage de mener ce projet fut triple, du fait qu’il nous a permit de
maîtriser l’environnement de programmation des PIC et de conception et la réalisation descartes électroniques enfin, d’épanouir nos capacités de communication dans un environnement
professionnel.
42