
MEMOIRE DE FIN D’ETUDES en vue de l’obtention du DIPLOME D ...
90
N° d’ordre : 05/TCO/ TRC Année Universitaire : 2003 / 2004 UNIVERSITE D’ANTANANARIVO ------------------------ ECOLE SUPERIEURE POLYTECHNIQUE ------------------------ DEPARTEMENT TELECOMMUNICATION MEMOIRE DE FIN D’ETUDES en vue de l’obtention du DIPLOME D’INGENIEUR Spécialité : Télécommunication Option : Transmission – Réseau – Commutation par : RANDRIANANDRASANA Ndrianaja Soutenu le vendredi 28 janvier 2005 devant la Commission d’Examen composée de : Président : M. ANDRIAMIASY Zidora Examinateurs : M. RADONAMANDIMBY Edmond Jean Pierre M. RATSIMBAZAFY Andriamanga M. RAZAKARIVONY Jules Directeur de mémoire : M. RATSIHOARANA Constant OPTIMISATION DES RESEAUX WDM TOUT-OPTIQUES
Transcript of MEMOIRE DE FIN D’ETUDES en vue de l’obtention du DIPLOME D ...
N° d’ordre : 05/TCO/ TRC Année Universitaire : 2003 / 2004
UNIVERSITE D’ANTANANARIVO
------------------------
ECOLE SUPERIEURE POLYTECHNIQUE
------------------------
DEPARTEMENT TELECOMMUNICATION
MEMOIRE DE FIN D’ETUDES
en vue de l’obtention
du DIPLOME D’INGENIEUR
Spécialité : Télécommunication
Option : Transmission – Réseau – Commutation
par : RANDRIANANDRASANA Ndrianaja
Soutenu le vendredi 28 janvier 2005 devant la Commission d’Examen composée de :
Président :
M. ANDRIAMIASY Zidora
Examinateurs :
M. RADONAMANDIMBY Edmond Jean Pierre
M. RATSIMBAZAFY Andriamanga
M. RAZAKARIVONY Jules
Directeur de mémoire :
M. RATSIHOARANA Constant
OPTIMISATION DES RESEAUX WDM TOUT-OPTIQUES

N° d’ordre : 05/TCO/ TRC Année Universitaire : 2003 / 2004
UNIVERSITE D’ANTANANARIVO
------------------------
ECOLE SUPERIEURE POLYTECHNIQUE
------------------------
DEPARTEMENT TELECOMMUNICATION
MEMOIRE DE FIN D’ETUDES
en vue de l’obtention
du DIPLOME D’INGENIEUR
Spécialité : Télécommunication
Option : Transmission – Réseau – Commutation
par : RANDRIANANDRASANA Ndrianaja
Soutenu le vendredi 28 janvier 2005 devant la Commission d’Examen composée de :
Président :
M. ANDRIAMIASY Zidora
Examinateurs :
M. RADONAMANDIMBY Edmond Jean Pierre
M. RATSIMBAZAFY Andriamanga
M. RAZAKARIVONY Jules
Directeur de mémoire :
M. RATSIHOARANA Constant
OPTIMISATION DES RESEAUX WDM TOUT-OPTIQUES
REMERCIEMENTS
Je rends grâce à Dieu pour sa bonté de m’avoir donné la force et la santé durant la
réalisation de ce mémoire.
J’exprime ma gratitude à Monsieur RANDRIANOELINA Benjamin, Professeur,
Directeur de l’Ecole Supérieure Polytechnique d’Antananarivo.
Je suis particulièrement reconnaissant à Monsieur RANDRIAMITANTSOA Paul
Auguste, Professeur, Chef du Département Télécommunication.
J’adresse mes sincères remerciements à Monsieur ANDRIAMIASY Zidora, Maître de
conférence, Enseignant au sein du Département Télécommunication pour l’honneur qu’il me fait
de présider mon jury.
Je suis très reconnaissant envers Monsieur RATSIHOARANA Constant, Assistant
d’Enseignement Supérieur au sein du Département Télécommunication, directeur de ce mémoire
qui a été pour moi plus qu'un encadreur. Je le remercie pour le temps qu'il m'a accordé et ses
précieux conseils.
Je tiens à témoigner toute ma gratitude à :
- Monsieur RATSIMBAZAFY Andriamanga, Maître de conférence, Enseignant au
sein du Département Télécommunication,
- Monsieur RAZAKARIVONY Jules, Maître de conférence, Enseignant du
Département Télécommunication,
- Monsieur RADONAMANDIMBY Edmond Jean Pierre Assistant d’Enseignement
Supérieur au sein du Département Télécommunication
pour l’honneur qu’ils me font de participer à mon jury.
Je remercie tous les Enseignants et personnel de l’Ecole Supérieure Polytechnique pour la
formation durant ces cinq années.
J’adresse une pensée spéciale aux personnes qui m’ont accompagné tout au long de ce
travail.
Je termine ici en dédiant ce mémoire à mes parents qui m’ont donné le goût des études et
offert un soutien sans faille.
i
TABLE DES MATIERES
TABLE DES MATIERES ............................................................................................................................. i NOMENCLATURE ..................................................................................................................................... iv INTRODUCTION......................................................................................................................................... 1 CHAPITRE I : TRANSMISSION PAR FIBRES OPTIQUES ................................................................ 3
I.1. Propagation dans la fibre optique .......................................................................................................................3 I.1.1. Propagation d’onde lumineuse.....................................................................................................................3 I.1.2. Enoncé de la Loi de Descartes ......................................................................................................................4 I.1.3. Angle limite et condition de guidage............................................................................................................4 I.1.4. Ouverture numérique ( ON )........................................................................................................................5
I.2. Différents types de fibre optique..........................................................................................................................6 I.2.1. Propagation multimode ................................................................................................................................6
I.2.1.1. Fibre multimode à saut d'indice ............................................................................................................................6 I.2.1.2. Fibre multimode à gradient d'indice .....................................................................................................................7
I.2.2. Fibre monomode............................................................................................................................................7 I.3. Avantages des fibres optiques..............................................................................................................................8
I.3.1. Enorme bande passante ................................................................................................................................8 I.3.2. Vitesse d’information élevée.........................................................................................................................8 I.3.3. Faibles taux d’atténuation ............................................................................................................................9
I.4. Problèmes de la transmission par fibres optiques...............................................................................................9 I.4.1. Dispersion.......................................................................................................................................................9
I.4.1.1. Dispersion chromatique ........................................................................................................................................9 I.4.1.2. Dispersion intermodale .......................................................................................................................................10
I.4.2. Les atténuations...........................................................................................................................................10 I.4.2.1. Atténuation par connexion ..................................................................................................................................10 I.4.2.2. Pertes par effet de courbure ................................................................................................................................12 I.4.2.3. Pertes par microcourbures ...................................................................................................................................12
I.5. Liaison par fibres optiques ................................................................................................................................13 I.5.1. Emetteurs optiques......................................................................................................................................13
I.5.1.1. Les lasers ..............................................................................................................................................................13 I.5.1.2. Principe du laser – émission stimulée..................................................................................................................13
I.5.2. Les modulateurs ..........................................................................................................................................14 I.5.3. Récepteurs optiques ....................................................................................................................................15 I.5.4. Les Câbles à fibres optiques .......................................................................................................................15
CHAPITRE II : LA TECHNOLOGIE WDM ET LES RESEAUX TOUT-OPTIQUES.................... 16 II.1. Principe du WDM ( Wavelength Division Multiplexing )...............................................................................16 II.2. Multiplexage optique........................................................................................................................................16
II.2.1. Multiplexage temporel TDM ( Time Division Multiplexing ) ................................................................17 II.2.2. Multiplexage en longueur d’onde ( WDM ).............................................................................................17 II.2.3. Comparaison des multiplexages TDM et WDM .....................................................................................19 II.2.4. Limitation du nombre de canaux WDM..................................................................................................20
II.3. Réseaux tout-optiques ......................................................................................................................................21 II.3.1. Réseaux à fibres optiques ..........................................................................................................................21 II.3.2. Liaison tout-optique...................................................................................................................................21 II.3.3. Communication en mode connecté...........................................................................................................22
II.4. Commutateurs optiques ...................................................................................................................................22 II.4.1. Répartiteur .................................................................................................................................................22 II.4.2. Multiplexeur à insertion/extraction ( MIE ) ...........................................................................................23 II.4.3. Brasseur .....................................................................................................................................................24
II.5. Convertisseurs optiques ...................................................................................................................................25
ii
II.5.1. Conversion optoélectronique ....................................................................................................................25 II.5.2. Conversion tout-optique............................................................................................................................26 II.5.3. Brasseur convertisseur .............................................................................................................................26
II.6. Amplificateurs optiques ...................................................................................................................................27 II.6.1. Amplificateurs à semi-conducteur............................................................................................................28 II.6.2. Amplificateurs à fibres dopées..................................................................................................................28 II.6.3. Caractéristiques des amplificateurs optiques..........................................................................................29 II.6.4. Avantages des amplificateurs optiques ....................................................................................................29
II.7. Capacité de transmission des systèmes WDM .................................................................................................30 II.7.1. Accroissement du débit par longueur d'onde..........................................................................................30 II.7.2. Accroissement du nombre de longueurs d'onde......................................................................................30
CHAPITRE III : ROUTAGE TOUT-OPTIQUE ET OPTIMISATION ............................................. 32 III.1. Notion de théorie des graphes ........................................................................................................................32
III.1.1. Définition...................................................................................................................................................32 III.1.2. Graphes : concepts orientés.....................................................................................................................32 III.1.3. Graphes : concepts non orientés .............................................................................................................33 III.1.4. Degré d’un graphe....................................................................................................................................35 III.1.5. Chemin ou chaîne .....................................................................................................................................35 III.1.6. Connexité ..................................................................................................................................................35 III.1.7. Types de graphes ......................................................................................................................................36
III.1.7.1. Arbres ................................................................................................................................................................36 III.1.7.2. Graphe pondéré.................................................................................................................................................36
III.1.8. Distance dans un graphe non orienté......................................................................................................37 III.2. Modélisation d’un réseau WDM et définitions.............................................................................................37
III.2.1. Modélisation d’un réseau WDM .............................................................................................................37 III.2.2. Réseau k - fibres .......................................................................................................................................37 III.2.3. Instance de communication .....................................................................................................................38 III.2.4. Multicast....................................................................................................................................................38
III.3. Hypothèses et problématiques ........................................................................................................................38 III.3.1. Hypothèses ................................................................................................................................................38 III.3.2. Problématique dans les réseaux WDM tout-optiques ...........................................................................39
III.4. Formulation des problèmes étudiés ...............................................................................................................40 III.4.1. Problème du routage tout-optique ..........................................................................................................40
III.4.1.1. Enoncé du PROBLEME du routage optique ...................................................................................................41 III.4.1.2. Graphe de conflit...............................................................................................................................................41
III.4.2. Problème du routage optique maximum................................................................................................42 III.4.2.1. Enoncé problème du routage optique maximum .............................................................................................42 III.4.2.2. Enoncé du Problème de décision du routage optique ......................................................................................43
III.4.3. Problème de la charge..............................................................................................................................43 III.4.3.1. Charge d’un lien ...............................................................................................................................................43 III.4.3.2. Enoncé du PROBLEME de la charge ..............................................................................................................43 III.4.3.3. Enoncé du PROBLEME du routage maximum...............................................................................................44 III.4.3.4. Enoncé du PROBLEME du routage disjoint maximum..................................................................................45 III.4.3.5. Enoncé du PROBLEME du routage Disjoint ..................................................................................................45
III.5. Flot et routage optique ...................................................................................................................................45 III.5.1. Problèmes de flot ......................................................................................................................................45
III.5.1.1. Simple flot..........................................................................................................................................................45 III.5.1.2. Multiflot.............................................................................................................................................................46
III.5.2. Réduction du routage optique au multiflot ............................................................................................47 III.5.2.1. Cas du multicast ................................................................................................................................................47 III.5.2.2. Cas général........................................................................................................................................................49
III.6. Relations entre les problèmes .........................................................................................................................49 III.7. Recherche d’un flot de coût minimal avec bornes inférieures nulles : algorithme de BUSACKER et GOWEN ................................................................................................................50
iii
III.7.1. Position du problème ...............................................................................................................................50 III.7.2. Principe de l’algorithme ..........................................................................................................................51 III.7.3. Exemple d’un problème de flot à coût minimum .................................................................................52
III.8. Recherche d’un flot maximum dans un graphe : algorithme de Ford-Fulkerson.......................................52 III.8.1. Position du problème ...............................................................................................................................52 III.8.2. Principe de l’algorithme ..........................................................................................................................52 III.8.3. Graphe d’écart..........................................................................................................................................53 III.8.4. Exemple d’un problème de flot maximum.............................................................................................55
CHAPITRE IV : SIMULATION DE L’OPTIMISATION DES RESEAUX WDM TOUT- OPTIQUES : WDM SIMULATOR........................................................................................................... 56
IV.1. Le langage FORTRAN ...................................................................................................................................56 IV.1.1. Historique du FORTRAN........................................................................................................................56 IV.1.2. Structure générale ....................................................................................................................................56
IV.1.2.1. Format des lignes d’instruction ........................................................................................................................56 IV.1.2.2. Structure d'un programme ................................................................................................................................57
IV.1.3. Modularité.................................................................................................................................................58 IV.1.4. Branchement inconditionnel....................................................................................................................58 IV.1.5. Quelques points importants du langage FORTRAN.............................................................................58 IV.1.6. Les avantages du langage FORTRAN ....................................................................................................59 IV.1.7. Justification du choix du langage FORTRAN .......................................................................................59
IV.2. Représentation d’un graphe ...........................................................................................................................60 IV.2.1. Les tableaux LP et LS ..............................................................................................................................60 IV.2.2. Liste des arêtes..........................................................................................................................................61 IV.2.3. Tableau LA ...............................................................................................................................................62
IV.3. Présentation du logiciel WDM SIMULATOR ...............................................................................................62 IV.3.1. La partie STRUCTURE DU GRAPHE..................................................................................................63
IV.3.1.1. Les données nécessaires ....................................................................................................................................63 IV.3.1.2. La saisie des données.........................................................................................................................................63
IV.3.2. La partie SIMULATION ........................................................................................................................64 IV.3.2.1. Cas du Flot maximal .........................................................................................................................................64 IV.3.2.2. Cas du Coût minimal .........................................................................................................................................65
IV.3.3. La partie RESULTATS............................................................................................................................66 IV.3.3.1. Le résultat Flot Max (zone de texte)..................................................................................................................66 IV.3.3.2. Le résultat FLOT ( Tableau ) ............................................................................................................................67
V.4. Application du WDM SIMULATOR au cas de MADAGASCAR ...................................................................67 IV.4.1. Les données du réseau..............................................................................................................................68
IV.4.1.1. Les nœuds du réseau .........................................................................................................................................68 IV.4.1.2. Les arcs du réseau .............................................................................................................................................68 IV.4.1.3. Les tableaux .......................................................................................................................................................69
IV.4.2. Traitement des requêtes...........................................................................................................................70 IV.4.2.1. Flot maximal......................................................................................................................................................70 IV.4.2.2. Coût minimal .....................................................................................................................................................72
CONCLUSION............................................................................................................................................ 75 ANNEXE 1 : Preuve de la Proposition III.1 ............................................................................................ 76 ANNEXE2 : Preuve de la proposition III.2............................................................................................... 77 BIBLIOGRAPHIE ...................................................................................................................................... 78
iv
NOMENCLATURE
( )[ ]kmdBa /λ : atténuation linéique
bu : bornes inférieures de flux
uc : bornes supérieures de flux
cij : capacité de l’arc ( )ji,
d : diamètre du cœur de la fibre
( )xd− : degré entrant du sommet x
( )xd+ : degré sortant du sommet x
dB : décibel
( )yxd , : distance entre deux sommets x et y d'un graphe
( )yxf , : quantité de flot passant par l’arc ),( yx
km : kilomètre
log : logarithme népérien
m : nombre de modes
n0 : indice de réfraction de l’air
n2 : indice de réfraction de la gaine
n1 : indice de réfraction du cœur
nm : nanomètre
vm : composante suivant l’axe de propagation de la vitesse
vmin : vitesse du mode le plus lent
vmax : vitesse du mode le plus rapide
ϕ u : quantité de flot sur l’arc u
τΔ : dispersion intermodale
uγ : coût de passage d’une unité de flux sur l’arc u
[ ]dBA : atténuation en décibel
G ck, : graphe auxiliaire
( )ϕG : graphe d’écart associé à ϕ
v
Hz : hertz
Gbps : gigabit par seconde
Mb : mégabit
Mbps : mégabit par seconde
M s : multicast
( )λM : dispersion chromatique
Tb : térabit
Tbps : térabit par seconde
ATM : Asynchronous Transfer Mode
DSL : Digital Subscriber Line
DWDM : Dense Wavelength Division Multiplexing
FDM : Frequency Division Multiplexing
F-OXC : Fiber Optical Cross-Connect
IP : Internet Protocol
LASER : Ligth Amplification by Stimulated Emission of Radiation
LED : Diode Electroluminescente
MIE : Multiplexeur à insertion/extraction
OADM : Optical Add/Drop Multiplexer
OFA : Optical Fiber Amplifier
ON : Ouverture Numérique
SDH : Synchronous Digital Hierarchy
TDM : Time Division Multiplexing
TEB : taux d'erreur par élément binaire
UDWDM : Ultra - Dense Wavelength Division Multiplexing
WDM : Wavelength Division Multiplexing
WR-OXC : Wavelength Routing Optical Cross-Connect
WT-OXC : Wavelength Translating Optical Cross-Connect
1
INTRODUCTION
La nécessité pressante de disposer des réseaux de communication à très haut débit, dont les
performances dépassent largement celles que peuvent fournir les réseaux actuels, se fait jour face
au nombre croissant d’utilisateurs et à l’émergence d’applications en réseau intensives, telles que
la récupération des données sur Internet, les applications Java, les conférences à distance,
l’imagerie à temps réel. Les constructeurs des équipements de télécommunications se sont alors
lancés dans une course effrénée au développement de nouveaux systèmes. Pour traiter le
changement de nature des informations véhiculées, la solution consiste à élaborer des équipements
capables de les gérer d’une manière totalement transparente. Si cela est relativement aisé, le réel
challenge vise à traiter une quantité d’informations de plus en plus importantes.
Les choix technologiques retenus pour augmenter les capacités des réseaux favorisent le
déploiement de la fibre optique et l'exploitation beaucoup plus rapide des avancées scientifiques.
En particulier, la découverte de l’amplificateur à fibre dopée à l’erbium, composant capable
d’amplifier les signaux de longueur d’onde proche de 1,55µm transmis dans les fibres optiques,
occasionne une révolution des systèmes de télécommunications. Non seulement, l’amplification
permet d’étendre les distances de transmission mais aussi fonctionne sur une gamme de longueurs
d’onde suffisamment étendue pour être utilisable sur plusieurs canaux. Le multiplexage en
longueur d’onde apparaît alors comme le moyen d'accroître de façon significative les capacités des
transmissions par fibres optiques.
Ainsi le réseau à fibre optique constitue le réseau dorsal de communications mondiales car
la fibre optique monomode se manifeste comme le seul moyen permettant d'offrir un débit
atteignant le térabit par seconde sur les réseaux de transport. Ce débit semble nécessaire pour faire
face à l'explosion des nouveaux services liés essentiellement à l'Internet et aux multimédias. Pour
supporter un tel débit, la technologie du multiplexage de longueurs d'onde WDM est utilisée.
Ce mémoire traite le problème de l’optimisation des réseaux tout-optiques utilisant la
technologie WDM et ayant comme objectif de minimiser le nombre de longueurs d’onde utilisées.
L’importance de cette optimisation se fonde sur deux raisons. D’une part, satisfaire une certaine
demande de trafic prévue à l’avance afin de minimiser le coût global des équipements nécessaires
dans le cadre de conception et du dimensionnement d’un réseau WDM tout-optique et de l’autre
2
gérer l’utilisation des ressources optiques en assurant la possibilité d’établir ultérieurement de
nouvelles connexions dans un réseau existant. Par conséquent, le plan de ce mémoire sera
composé de quatre chapitres.
Le premier chapitre aura comme rôle de présenter une vue d’ensemble de la transmission
par fibres optiques tout en définissant le mode de propagation dans la fibre, les différents types de
fibre, les avantages et les problèmes relatifs à la transmission ainsi que la structure générale d’une
liaison par fibres optiques.
Le deuxième chapitre parlera de la technologie WDM. D’abord, le principe de cette
technologie sera présenté et avec la comparaison des deux grands types de multiplexage TDM et
WDM pour pouvoir justifier le choix du WDM. Puis, nous allons parler de l’essence d’un réseau
tout-optique utilisant les fibres optiques comme support de transmission. Enfin, des détails sur les
équipements clés des réseaux WDM, à savoir les différents types de commutateur optique, les
convertisseurs optiques, les amplificateurs optiques seront aussi évoqués dans ce chapitre.
Le troisième chapitre sera consacré au routage optique et son optimisation. Nous allons
essayer d’exposer les hypothèses et les problématiques liées à ce mémoire. Des notions de théorie
des graphes ainsi qu’une modélisation théorique des réseaux WDM tout-optiques seront aussi
avancées. Par la suite, les problèmes de l’étude seront formulés et cela suivi de la présentation de
la similitude entre les problèmes de flot dans un graphe et le routage tout-optique. Pour résoudre le
problème d’optimisation, objet de notre sujet, des algorithmes de recherche d’un flot de coût
minimal et de recherche d’un flot maximum seront explicités.
Le dernier chapitre intitulé SIMULATION DE L’OPTIMISATION DES RESEAUX
WDM TOUT-OPTIQUES s’occupera de la présentation du logiciel WDM SIMULATOR conçu
par moi-même sous FORTRAN après avoir justifié le choix de ce langage et de la représentation
d’un graphe. L’application du dit logiciel au cas de Madagascar termine ce chapitre.
Une conclusion générale est présentée à la fin de ce mémoire. Elle résume le travail
effectué ainsi que les points qui restent à étudier et à définir dans un proche avenir.
3
CHAPITRE I : TRANSMISSION PAR FIBRES OPTIQUES
I.1. Propagation dans la fibre optique [1]
I.1.1. Propagation d’onde lumineuse
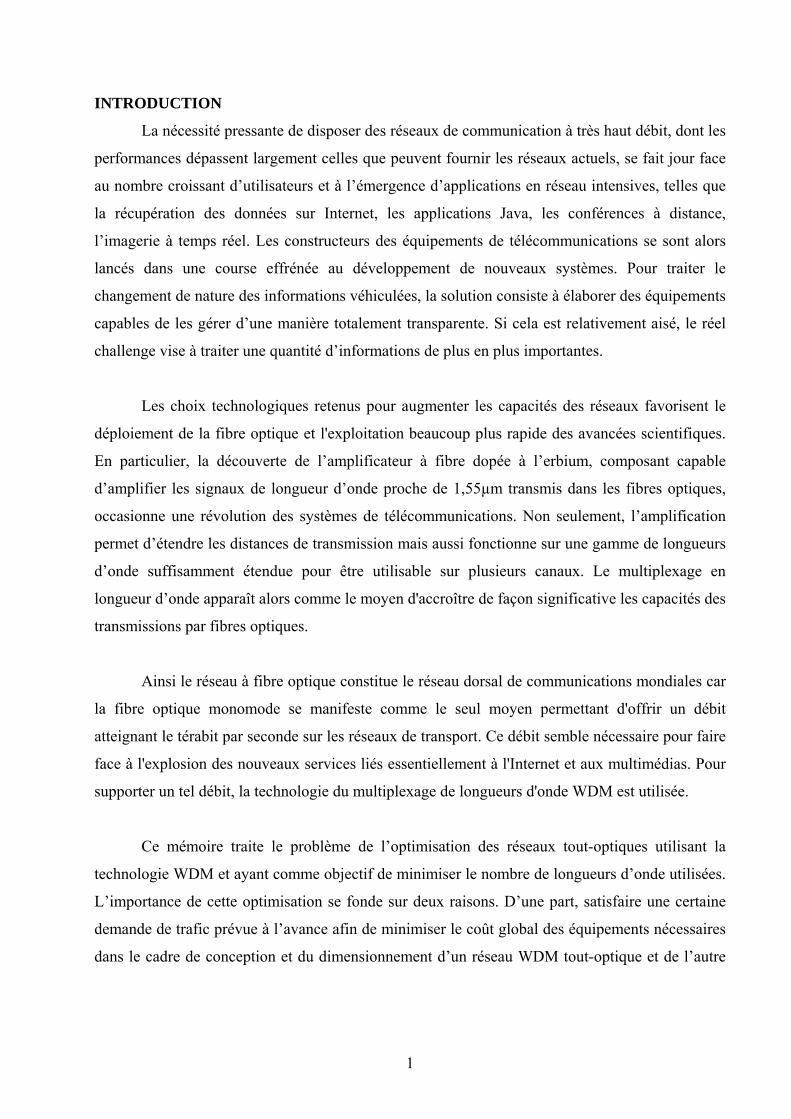
Lorsqu'un faisceau lumineux heurte obliquement la surface qui sépare deux milieux plus ou
moins transparents, il se divise en deux : une partie est réfléchie tandis que l'autre est réfractée,
c'est-à-dire transmise dans le second milieu en changeant de direction ( Figure I.1 ).
L'indice de réfraction est une grandeur caractéristique des propriétés optiques d'un matériau.
Il est obtenu en divisant la vitesse de la lumière dans le vide (Cv = 299 792 Km/s) par la vitesse de
cette même onde dans le matériau. Plus l'indice est grand, et plus la lumière est lente.
Figure I.1: Lois de Descartes
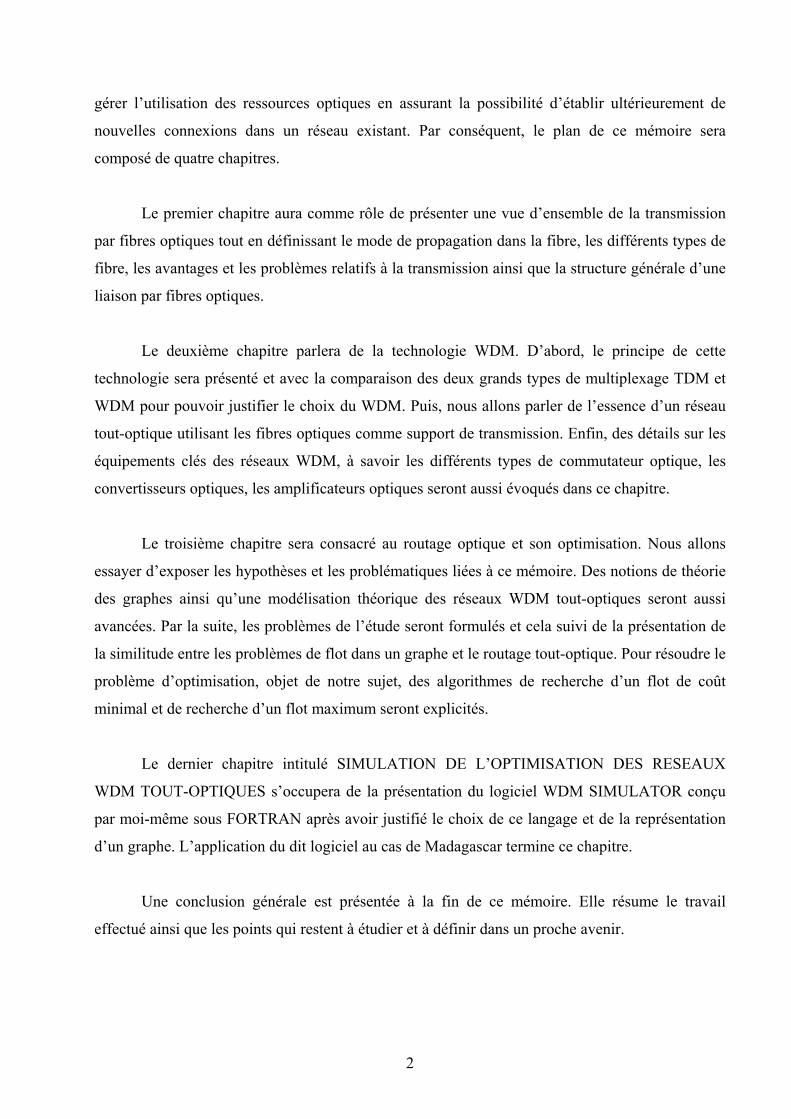
Pour guider la lumière, la fibre utilise le phénomène de réflexion totale qui se produit à
l’interface de deux milieux d’indice différent. La fibre optique comprend ainsi deux milieux : le
cœur, dans lequel l'énergie lumineuse se trouve confinée, grâce à un second milieu, la gaine, dont
l'indice de réfraction est plus faible ( Figure I.2 ).
Figure I.2: Propagation dans la fibre optique

4
Le signal lumineux est propagé à l’intérieure du cœur. La gaine optique sert essentiellement
à amener le diamètre à mμ125 , pour des raisons mécaniques. Le revêtement constitue une
protection de la fibre optique.
Figure I.3: Constitution d’une fibre optique
I.1.2. Enoncé de la Loi de Descartes
Un faisceau lumineux qui heurte la surface séparant deux milieux transparents et d’indices
de réfraction différents n1 et n2 se divise en deux rayons :
- un rayon réfléchi formant un angle i1 par rapport à la normale à l'interface des deux
milieux,
- un rayon réfracté avec un angle i2 par rapport à la même normale.
D’après la loi de Descartes, les trois rayons ( incident, réfléchi et réfracté ) sont dans le
même plan et ils sont liés par les relations :
( ) ( )inLn 1sin11sin1 = soit iL 11 = , L1 étant l’angle d’incidence. (I.1)
( ) ( )inLn 2sin21sin1 = (I.2)
( ) ( )inin 2sin21sin1 = (I.3)
I.1.3. Angle limite et condition de guidage
Si nn 12 ≺ , il est théoriquement possible d'avoir 22π
=i . Dans ce cas il n’y a pas
réfraction. On notera iiL l’ngle du rayon incident correspondant à 22π
=i .
La loi de Descartes devient alors:
( ) ( ) nniiLn 22sin2sin1 == π (I.4)
d’où ⎟⎠⎞
⎜⎝⎛=
nniiL 1
2arcsin (I.5)
5
iiL est appelé angle limite.
La condition de guidage dans le cœur est donnée par la relation :
⎟⎠⎞
⎜⎝⎛≥
nni12arcsin1 (I.6)
Sinon le rayon est réfracté dans la gaine de la fibre optique.
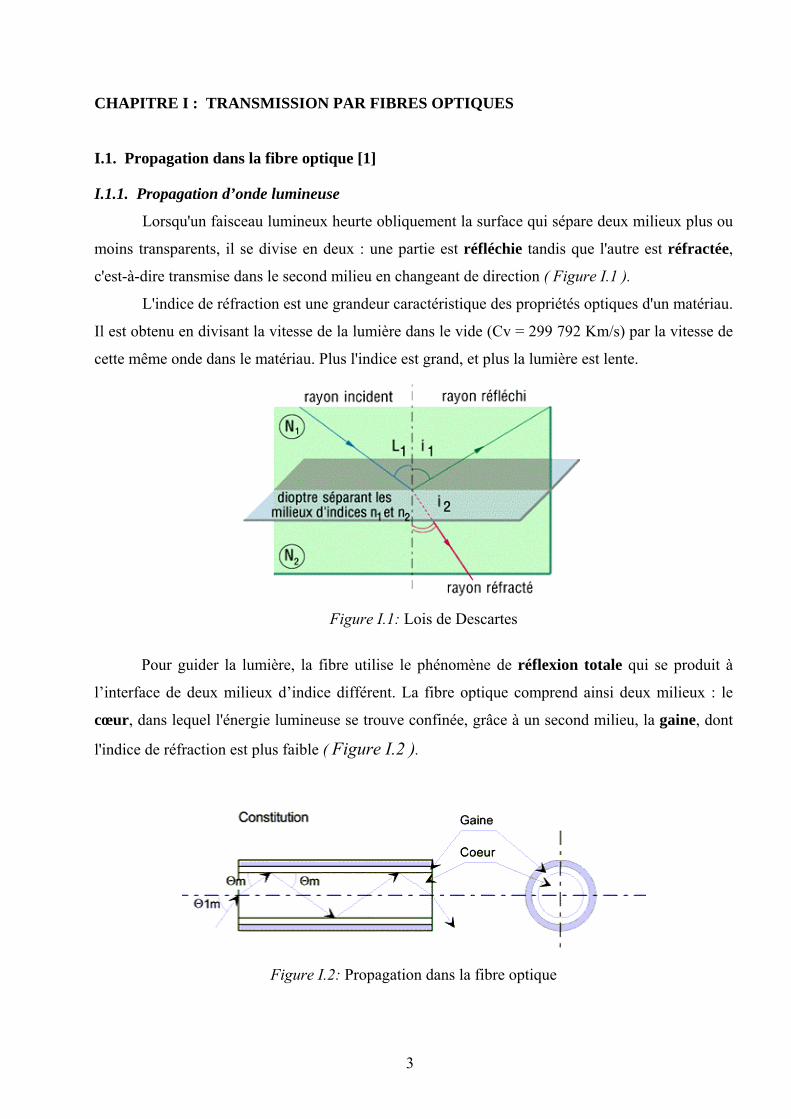
I.1.4. Ouverture numérique ( ON )
La figure ci-dessous ( Figure I.4 ) montre que pour qu'un rayon lumineux arrive à la sortie
de la fibre, il doit subir plusieurs réflexions tout au long de la fibre. Or à chaque réflexion une partie
de la lumière est réfractée et donc absorbée par la gaine. Le rayon finit alors par être complètement
atténué. Cependant il est possible de choisir l'angle d'incidence pour qu'il n’y ait pas de réfraction
soit iiLii . Le rayon injecté en entrée arrivera donc en sortie sans aucune atténuation. On définit
alors l'ouverture numérique d'une fibre optique en fonction de l'angle d'incidence limite iiL qui
permet d'assurer une transmission sans pertes théoriques.
Figure I.4: Ouverture numérique d'une fibre optique
Soit n1 l'indice de réfraction du cœur, n2 celui de la gaine et n0 celui de l'air ( 10 =n ). On
cherche l'angle incident θ0L , à l'entrée de la fibre, correspondant à l'angle limite iiL .
D'après la loi de Descartes on a : ( ) ( )θθ 1sin10sin0 nn = (I.7)
avec i121 −= πθ et 10 =n .
Soit ( ) ( ) ( ) ( )iiLnniiLnL iiL sin211cos12sin10sin −==−= πθ (I.8)
Or ( )nniiL 1
2arcsin= (I.9)
D’où ( ) ( )nnnL 2
2110sin −=θ . (I.10)

6
L’ouverture numérique ( ON ) d'une fibre est alors définie par:
( ) nnnON 22
21lim12sin1maxsin −=−== θπα (I.11)
Afin de faciliter l'injection de la lumière dans la fibre à l'entrée, on a intérêt à avoir l'angle
limite θ0L le plus grand possible. Ceci s'obtient pratiquement en choisissant des indices n1 et n2
très proches.
I.2. Différents types de fibre optique
Les rayons lumineux qui pénètrent dans le cœur, sous une incidence égale ou supérieure à
l'angle limite sont guidés par la fibre. Suivant les modes de propagation qu'elles utilisent, les fibres
optiques peuvent être classées en trois catégories:
- multimode à saut d'indice
- multimode à gradient d'indice
- monomode.
I.2.1. Propagation multimode [1], [2]
On définit le paramètre v appelé fréquence normalisée avec a le rayon du cœur par :
( )nna
v 22
210
2−=
λπ
(I.12)
Le nombre de modes m est donné par :
22vm = ( approximation vraie pour un grand nombre de modes ). (I.13)
Le rayon lumineux a donc plusieurs manières de se propager dans le cœur.
I.2.1.1. Fibre multimode à saut d'indice
Le cœur et la gaine présentent des indices de réfraction différents et constants. Le passage
d'un milieu vers l'autre est caractérisé par un saut d'indice. Le faisceau lumineux injecté à l'entrée
de la fibre va atteindre la sortie en empruntant des chemins optiques différents ce qui se traduit par
des temps de propagation différents et donc un étalement du signal transmis ( Figure I.5 ). Ce
phénomène est appelé dispersion modale.

7
Figure I.5: Fibre multimode à saut d’indice
I.2.1.2. Fibre multimode à gradient d'indice
Le cœur se caractérise par un indice variable qui augmente progressivement de n2 à
l'interface gaine-cœur jusqu'à n1au centre de la fibre ( Figure I.6 ). Là aussi les rayons lumineux
vont emprunter des chemins différents, mais un choix judicieux du profil d'indice du cœur permet
de tendre vers des temps de parcours voisins et donc de réduire l'étalement du signal.
Figure I.6: Fibre multimode à gradient d’indice
Le guidage est cette fois dû à l’effet du gradient d’indice. Les rayons guidés suivent une
trajectoire d’allure sinusoïdale. La gaine d’indice n2 n’intervient pas directement, mais élimine les
rayons trop inclinés. L’avantage essentiel de ce type de fibre est de minimiser la dispersion du
temps de propagation entre les rayons, sans utiliser pour cela l’ouverture numérique trop faible.
I.2.2. Fibre monomode [2]
Le nombre de modes se propageant dans une fibre optique est donné par la relation :
.2 ONdm λ= (I.14)
avec :
- d le diamètre du cœur de la fibre,
- λ la longueur d'onde de la lumière utilisée,
- ON l'ouverture numérique de la fibre.
8
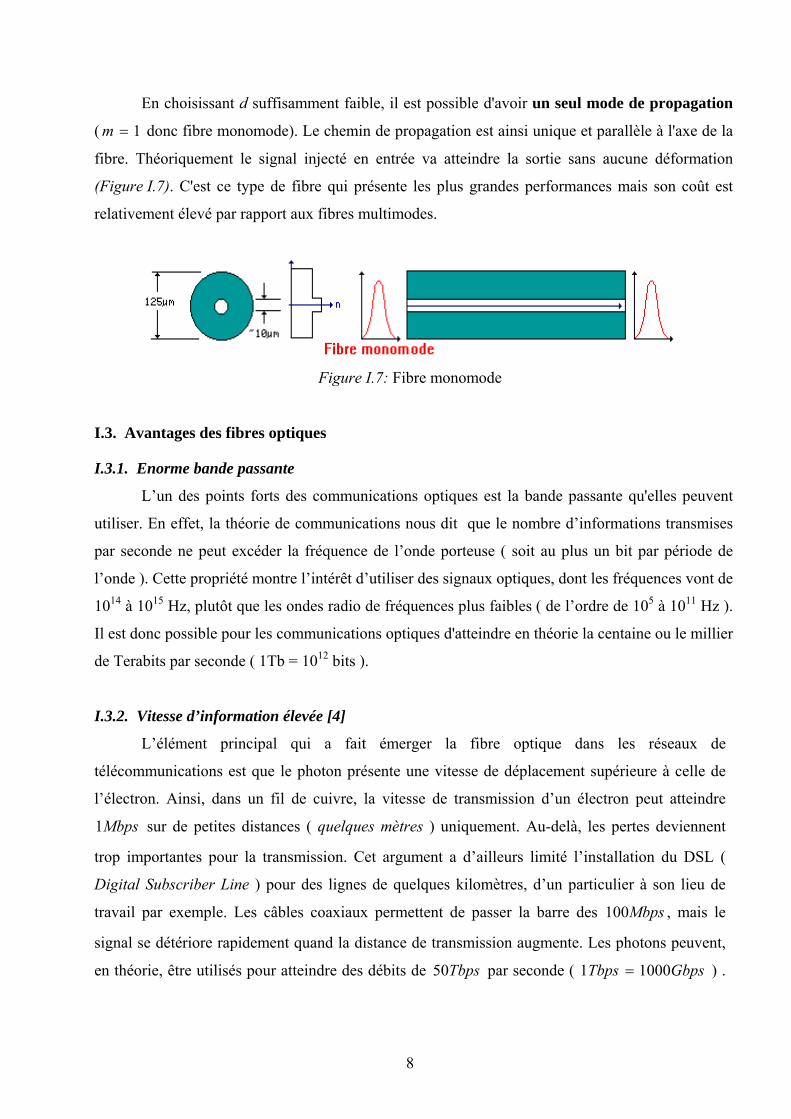
En choisissant d suffisamment faible, il est possible d'avoir un seul mode de propagation
( 1=m donc fibre monomode). Le chemin de propagation est ainsi unique et parallèle à l'axe de la
fibre. Théoriquement le signal injecté en entrée va atteindre la sortie sans aucune déformation
(Figure I.7). C'est ce type de fibre qui présente les plus grandes performances mais son coût est
relativement élevé par rapport aux fibres multimodes.
Figure I.7: Fibre monomode
I.3. Avantages des fibres optiques
I.3.1. Enorme bande passante
L’un des points forts des communications optiques est la bande passante qu'elles peuvent
utiliser. En effet, la théorie de communications nous dit que le nombre d’informations transmises
par seconde ne peut excéder la fréquence de l’onde porteuse ( soit au plus un bit par période de
l’onde ). Cette propriété montre l’intérêt d’utiliser des signaux optiques, dont les fréquences vont de
1014 à 1015 Hz, plutôt que les ondes radio de fréquences plus faibles ( de l’ordre de 105 à 1011 Hz ).
Il est donc possible pour les communications optiques d'atteindre en théorie la centaine ou le millier
de Terabits par seconde ( 1Tb = 1012 bits ).
I.3.2. Vitesse d’information élevée [4]
L’élément principal qui a fait émerger la fibre optique dans les réseaux de
télécommunications est que le photon présente une vitesse de déplacement supérieure à celle de
l’électron. Ainsi, dans un fil de cuivre, la vitesse de transmission d’un électron peut atteindre
Mbps1 sur de petites distances ( quelques mètres ) uniquement. Au-delà, les pertes deviennent
trop importantes pour la transmission. Cet argument a d’ailleurs limité l’installation du DSL (
Digital Subscriber Line ) pour des lignes de quelques kilomètres, d’un particulier à son lieu de
travail par exemple. Les câbles coaxiaux permettent de passer la barre des Mbps100 , mais le
signal se détériore rapidement quand la distance de transmission augmente. Les photons peuvent,
en théorie, être utilisés pour atteindre des débits de Tbps50 par seconde ( GbpsTbps 10001 = ) .
9
Ce constat a donc fait émerger la lumière comme porteur d’informations pour des applications à
large bande passante sur des grandes distances.
I.3.3. Faibles taux d’atténuation
L'autre intérêt des communications optiques est dû aux fibres optiques. Celles-ci sont moins
volumineuses, plus légères et relativement moins chères que les câbles électriques utilisés dans les
réseaux de générations précédentes. De plus elles présentent des taux d'atténuation du signal bien
inférieurs à ceux des câbles en cuivre; ainsi le taux de pertes de bit sont microscopiques même pour
de grandes distances : pour des débits allant jusqu'à Gbps1 , le signal présente un taux d'erreur
considéré comme nul ( < 10-9 erreurs par bit ) jusqu'à km200 . En plaçant des répéteurs le long d'un
lien, il est possible d'obtenir des liaisons optiques de plusieurs milliers de kilomètres ( comme la
fibre Europe-Australie ). Ces atouts ont permis l'explosion des liaisons intercontinentales.
I.4. Problèmes de la transmission par fibres optiques
I.4.1. Dispersion
I.4.1.1. Dispersion chromatique [5]
La dispersion représente la dépendance de la constante de propagation par rapport à la
fréquence. Elle permet de calculer la durée des impulsions au cours de leur propagation. Pour des
signaux lumineux, on parle de « dispersion chromatique », ce phénomène étant responsable de la
décomposition de la lumière blanche par un prisme de verre.
En effet, la vitesse de propagation de la lumière dans la matière transparente, définie par
l’indice de réfraction optique, est fonction de la longueur d’onde. Or une impulsion lumineuse
dans une fibre optique n’est pas parfaitement monochromatique, puisqu’un laser ne transmet pas
une fréquence unique, et puisqu’un signal transportant a une largeur spectrale non nulle. Par
conséquent, les différentes longueurs d’onde constituant le signal lumineux vont se propager à des
vitesses différentes, ce qui entraîne un élargissement temporel des impulsions qui peuvent alors se
chevaucher, provoquant des erreurs à la détection.
En outre, plus une impulsion est brève, plus sa gamme de fréquences est étendue. Aussi la
dispersion chromatique est un facteur d’autant plus limitatif que les débits sont élevés, car les
impulsions sont alors très brèves et proches les unes des autres dans le temps.
10
I.4.1.2. Dispersion intermodale [3], [5]
Une des causes de l’élargissement d’une impulsion est la dispersion intermodale. L’énergie
lumineuse injectée à l’entrée de la fibre est répartie entre différents modes :
- mode le plus lent : θθ lim= alors θ limsin1min ncv = (I.15)
- mode le plus rapide : 2πθ = alors
ncv1max = (I.16)
Les différents modes se propagent dans le cœur avec la vitesse vm :
θmncvm sin1
= (I.17)
vm étant la composante suivant l’axe de propagation de la vitesse.
Pour une fibre à saut d’indice, après un trajet d’une distance L, le décalage est :
( )n
nnncL
2211 −
=Δτ (I.18)
I.4.2. Les atténuations
I.4.2.1. Atténuation par connexion [1], [6]
Une liaison par fibres optiques nécessite toujours un couplage source-fibre ou fibre-
détecteur ; celui-ci est réalisé par des connecteurs d'extrémité. Une liaison peut également
nécessiter le raccordement de fibres entre elles. Cette connexion peut être démontable
(connecteurs fibre à fibre) ou permanente (épissurage, jointage). Toute interconnexion doit causer
le minimum de pertes.
I.4.2.1.1. Atténuation intrinsèque
Elle est due à l'assemblage de deux fibres optiques de caractéristiques opto-géométriques
différentes à savoir :
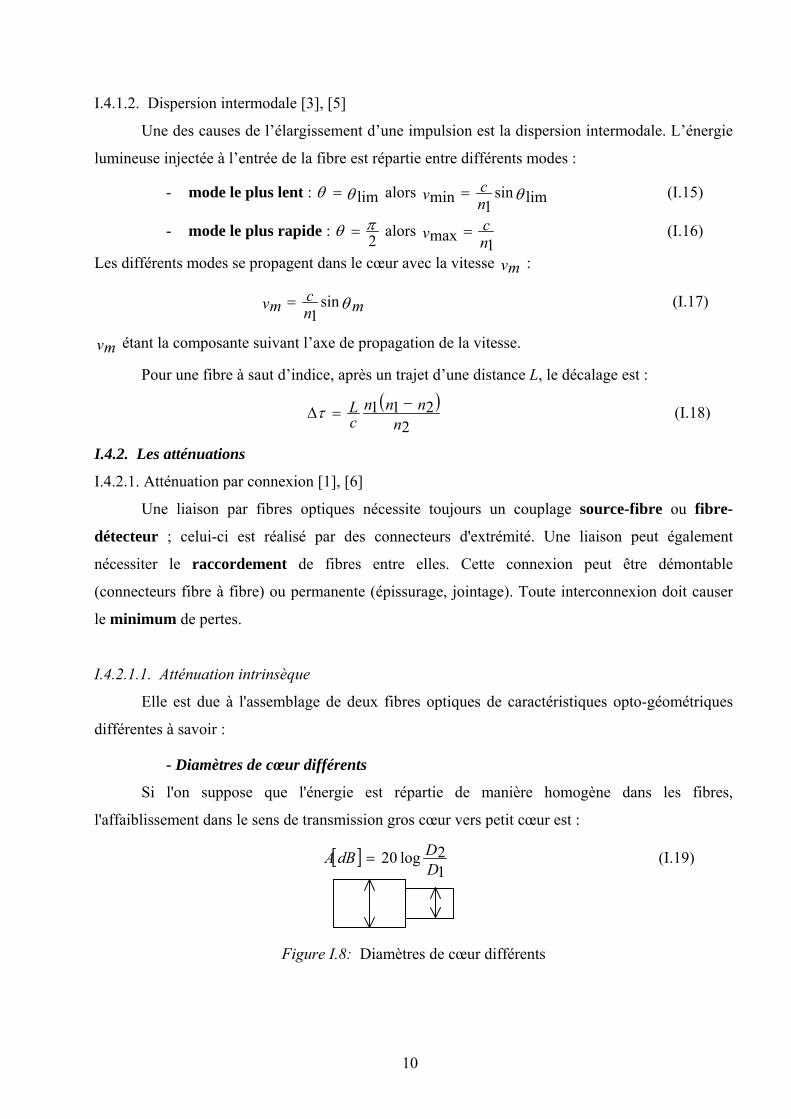
- Diamètres de cœur différents
Si l'on suppose que l'énergie est répartie de manière homogène dans les fibres,
l'affaiblissement dans le sens de transmission gros cœur vers petit cœur est :
[ ]DDdBA
12log20= (I.19)
Figure I.8: Diamètres de cœur différents
11
- Ouvertures numériques différentes
D’après les expérimentations, on peut approximer l’atténuation par :
[ ] ( )ONONdBA
21log1.0= (I.20)
- Profils d'indice différents
Si l'on connecte une fibre à saut d'indice avec une fibre à gradient d'indice, la perte est
voisine de dB3 .
I.4.2.1.2. Atténuation extrinsèque
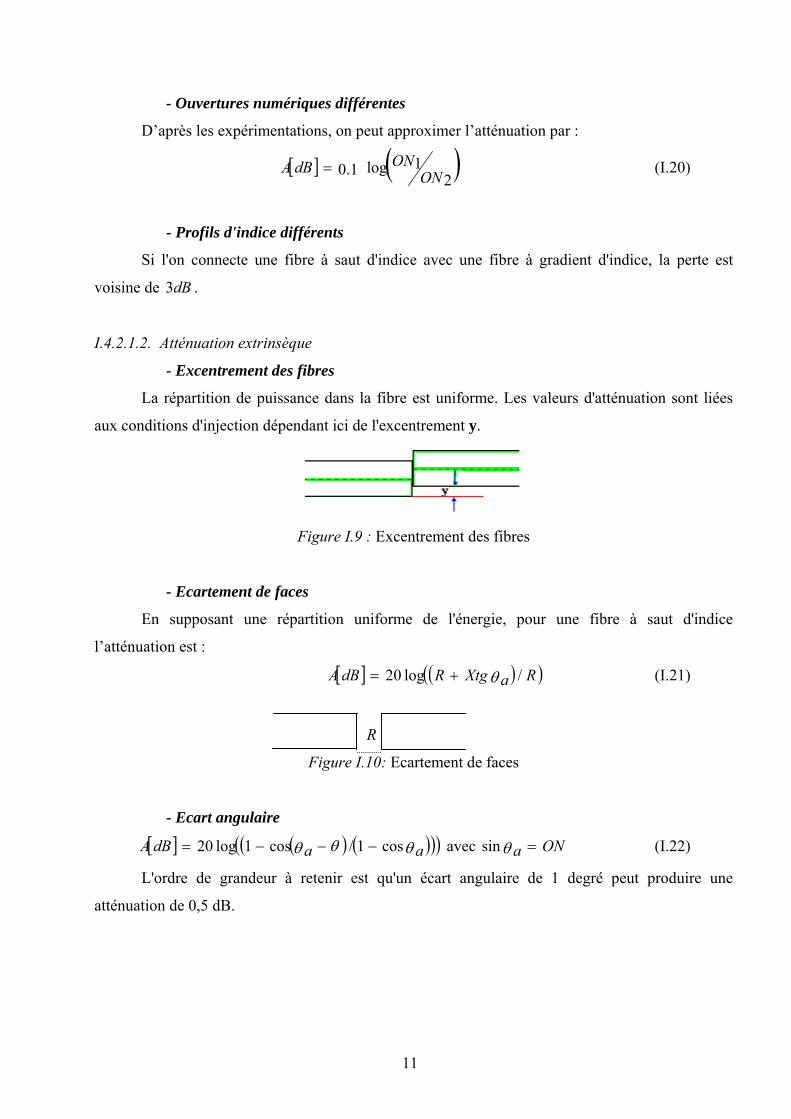
- Excentrement des fibres
La répartition de puissance dans la fibre est uniforme. Les valeurs d'atténuation sont liées
aux conditions d'injection dépendant ici de l'excentrement y.
Figure I.9 : Excentrement des fibres
- Ecartement de faces
En supposant une répartition uniforme de l'énergie, pour une fibre à saut d'indice
l’atténuation est :
[ ] ( )( )RaXtgRdBA /log20 θ+= (I.21)
R
Figure I.10: Ecartement de faces
- Ecart angulaire
[ ] ( ) ( )( )( )θθθ aadBA cos1/cos1log20 −−−= avec ONa =θsin (I.22)
L'ordre de grandeur à retenir est qu'un écart angulaire de 1 degré peut produire une
atténuation de 0,5 dB.
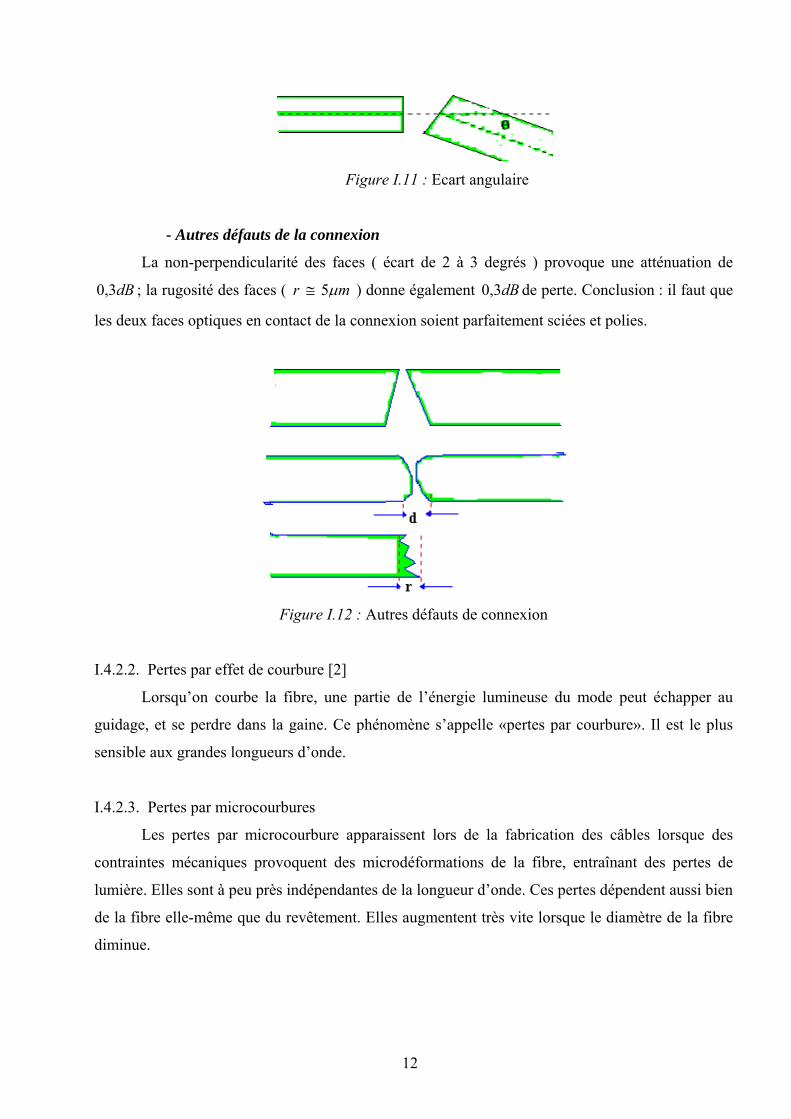
12
Figure I.11 : Ecart angulaire
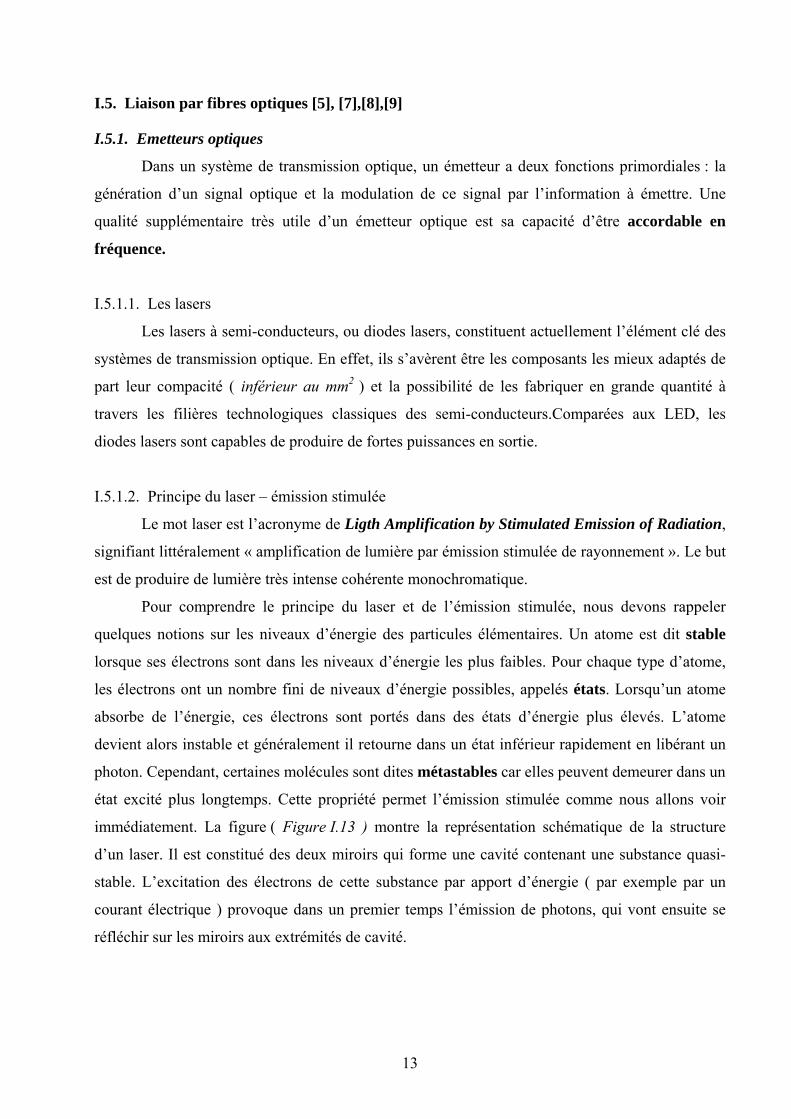
- Autres défauts de la connexion
La non-perpendicularité des faces ( écart de 2 à 3 degrés ) provoque une atténuation de
dB3,0 ; la rugosité des faces ( mr μ5≅ ) donne également dB3,0 de perte. Conclusion : il faut que
les deux faces optiques en contact de la connexion soient parfaitement sciées et polies.
Figure I.12 : Autres défauts de connexion
I.4.2.2. Pertes par effet de courbure [2]
Lorsqu’on courbe la fibre, une partie de l’énergie lumineuse du mode peut échapper au
guidage, et se perdre dans la gaine. Ce phénomène s’appelle «pertes par courbure». Il est le plus
sensible aux grandes longueurs d’onde.
I.4.2.3. Pertes par microcourbures
Les pertes par microcourbure apparaissent lors de la fabrication des câbles lorsque des
contraintes mécaniques provoquent des microdéformations de la fibre, entraînant des pertes de
lumière. Elles sont à peu près indépendantes de la longueur d’onde. Ces pertes dépendent aussi bien
de la fibre elle-même que du revêtement. Elles augmentent très vite lorsque le diamètre de la fibre
diminue.
13
I.5. Liaison par fibres optiques [5], [7],[8],[9]
I.5.1. Emetteurs optiques
Dans un système de transmission optique, un émetteur a deux fonctions primordiales : la
génération d’un signal optique et la modulation de ce signal par l’information à émettre. Une
qualité supplémentaire très utile d’un émetteur optique est sa capacité d’être accordable en
fréquence.
I.5.1.1. Les lasers
Les lasers à semi-conducteurs, ou diodes lasers, constituent actuellement l’élément clé des
systèmes de transmission optique. En effet, ils s’avèrent être les composants les mieux adaptés de
part leur compacité ( inférieur au mm2 ) et la possibilité de les fabriquer en grande quantité à
travers les filières technologiques classiques des semi-conducteurs.Comparées aux LED, les
diodes lasers sont capables de produire de fortes puissances en sortie.
I.5.1.2. Principe du laser – émission stimulée
Le mot laser est l’acronyme de Ligth Amplification by Stimulated Emission of Radiation,
signifiant littéralement « amplification de lumière par émission stimulée de rayonnement ». Le but
est de produire de lumière très intense cohérente monochromatique.
Pour comprendre le principe du laser et de l’émission stimulée, nous devons rappeler
quelques notions sur les niveaux d’énergie des particules élémentaires. Un atome est dit stable
lorsque ses électrons sont dans les niveaux d’énergie les plus faibles. Pour chaque type d’atome,
les électrons ont un nombre fini de niveaux d’énergie possibles, appelés états. Lorsqu’un atome
absorbe de l’énergie, ces électrons sont portés dans des états d’énergie plus élevés. L’atome
devient alors instable et généralement il retourne dans un état inférieur rapidement en libérant un
photon. Cependant, certaines molécules sont dites métastables car elles peuvent demeurer dans un
état excité plus longtemps. Cette propriété permet l’émission stimulée comme nous allons voir
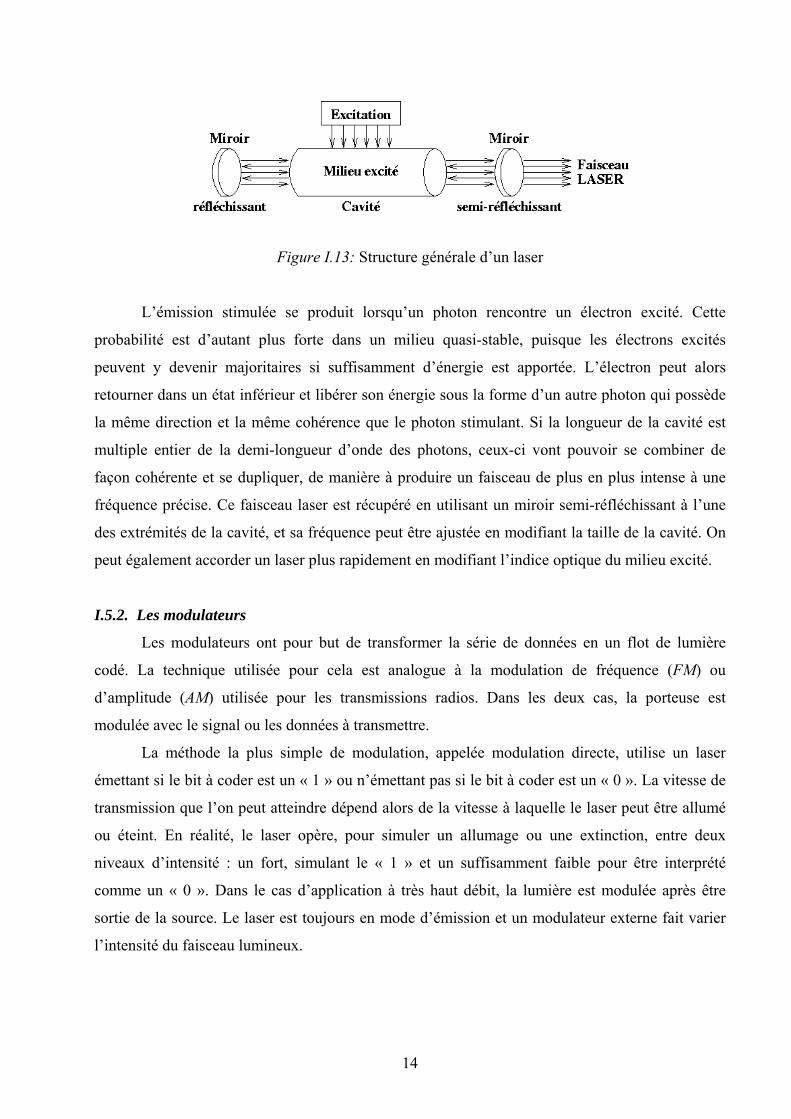
immédiatement. La figure ( Figure I.13 ) montre la représentation schématique de la structure
d’un laser. Il est constitué des deux miroirs qui forme une cavité contenant une substance quasi-
stable. L’excitation des électrons de cette substance par apport d’énergie ( par exemple par un
courant électrique ) provoque dans un premier temps l’émission de photons, qui vont ensuite se
réfléchir sur les miroirs aux extrémités de cavité.
14
Figure I.13: Structure générale d’un laser
L’émission stimulée se produit lorsqu’un photon rencontre un électron excité. Cette
probabilité est d’autant plus forte dans un milieu quasi-stable, puisque les électrons excités
peuvent y devenir majoritaires si suffisamment d’énergie est apportée. L’électron peut alors
retourner dans un état inférieur et libérer son énergie sous la forme d’un autre photon qui possède
la même direction et la même cohérence que le photon stimulant. Si la longueur de la cavité est
multiple entier de la demi-longueur d’onde des photons, ceux-ci vont pouvoir se combiner de
façon cohérente et se dupliquer, de manière à produire un faisceau de plus en plus intense à une
fréquence précise. Ce faisceau laser est récupéré en utilisant un miroir semi-réfléchissant à l’une
des extrémités de la cavité, et sa fréquence peut être ajustée en modifiant la taille de la cavité. On
peut également accorder un laser plus rapidement en modifiant l’indice optique du milieu excité.
I.5.2. Les modulateurs
Les modulateurs ont pour but de transformer la série de données en un flot de lumière
codé. La technique utilisée pour cela est analogue à la modulation de fréquence (FM) ou
d’amplitude (AM) utilisée pour les transmissions radios. Dans les deux cas, la porteuse est
modulée avec le signal ou les données à transmettre.
La méthode la plus simple de modulation, appelée modulation directe, utilise un laser
émettant si le bit à coder est un « 1 » ou n’émettant pas si le bit à coder est un « 0 ». La vitesse de
transmission que l’on peut atteindre dépend alors de la vitesse à laquelle le laser peut être allumé
ou éteint. En réalité, le laser opère, pour simuler un allumage ou une extinction, entre deux
niveaux d’intensité : un fort, simulant le « 1 » et un suffisamment faible pour être interprété
comme un « 0 ». Dans le cas d’application à très haut débit, la lumière est modulée après être
sortie de la source. Le laser est toujours en mode d’émission et un modulateur externe fait varier
l’intensité du faisceau lumineux.
15
I.5.3. Récepteurs optiques
La fonction d’un récepteur dans un système de transmission optique est de détecter et de
démoduler un signal lumineux transmis sur une fibre.
La détection consiste en la conversion du signal optique en signal électrique. La
démodulation est généralement accomplie ensuite par les techniques habituelles des systèmes de
transmission électriques.
I.5.4. Les Câbles à fibres optiques
Les câbles doivent donc apporter une protection suffisante aux fibres, afin de les soustraire
le plus possible aux contraintes mécaniques lors de leur installation et de leur utilisation. La
structure du câble dépend :
- du nombre de fibres,
- des contraintes mécaniques (traduction, écrasement, rayon de courbure minimum,...),
- de la gamme de température de fonctionnement,
- des performances demandées, en fonction des contraintes ci-dessus (affaiblissement
tout particulièrement ).
16
CHAPITRE II : LA TECHNOLOGIE WDM ET LES RESEAUX TOUT-OPTIQUES
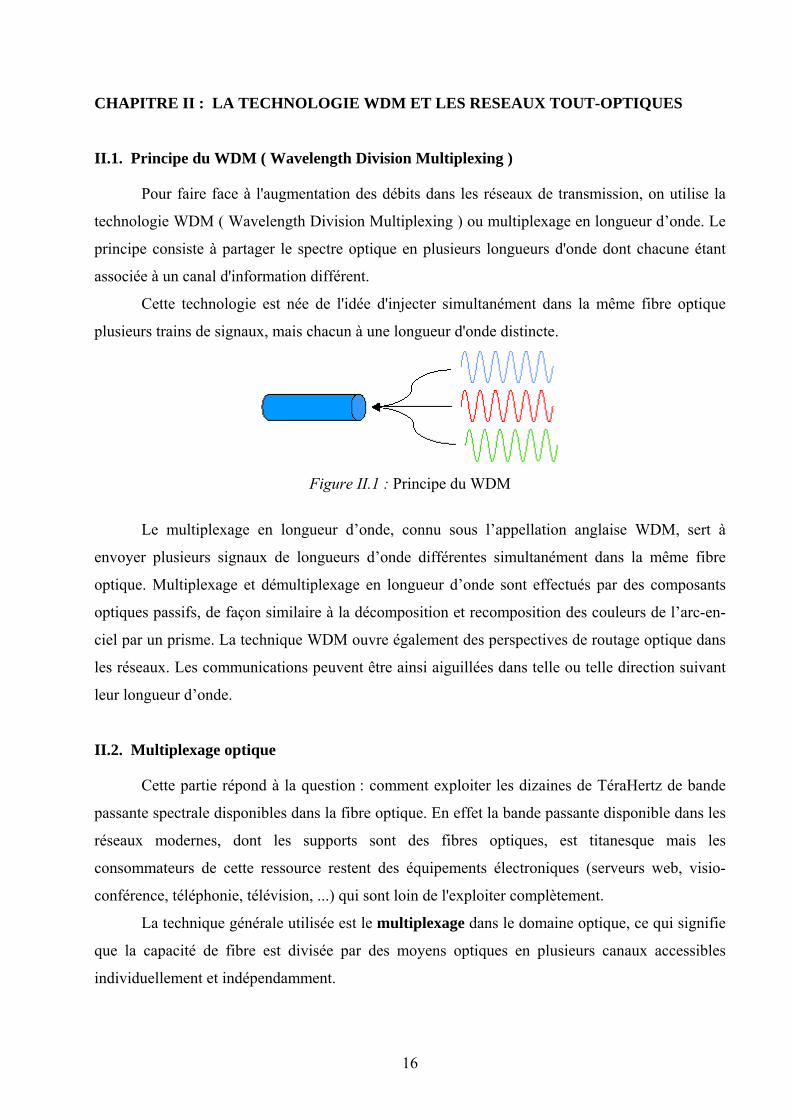
II.1. Principe du WDM ( Wavelength Division Multiplexing )
Pour faire face à l'augmentation des débits dans les réseaux de transmission, on utilise la
technologie WDM ( Wavelength Division Multiplexing ) ou multiplexage en longueur d’onde. Le
principe consiste à partager le spectre optique en plusieurs longueurs d'onde dont chacune étant
associée à un canal d'information différent.
Cette technologie est née de l'idée d'injecter simultanément dans la même fibre optique
plusieurs trains de signaux, mais chacun à une longueur d'onde distincte.
Figure II.1 : Principe du WDM
Le multiplexage en longueur d’onde, connu sous l’appellation anglaise WDM, sert à
envoyer plusieurs signaux de longueurs d’onde différentes simultanément dans la même fibre
optique. Multiplexage et démultiplexage en longueur d’onde sont effectués par des composants
optiques passifs, de façon similaire à la décomposition et recomposition des couleurs de l’arc-en-
ciel par un prisme. La technique WDM ouvre également des perspectives de routage optique dans
les réseaux. Les communications peuvent être ainsi aiguillées dans telle ou telle direction suivant
leur longueur d’onde.
II.2. Multiplexage optique
Cette partie répond à la question : comment exploiter les dizaines de TéraHertz de bande
passante spectrale disponibles dans la fibre optique. En effet la bande passante disponible dans les
réseaux modernes, dont les supports sont des fibres optiques, est titanesque mais les
consommateurs de cette ressource restent des équipements électroniques (serveurs web, visio-
conférence, téléphonie, télévision, ...) qui sont loin de l'exploiter complètement.
La technique générale utilisée est le multiplexage dans le domaine optique, ce qui signifie
que la capacité de fibre est divisée par des moyens optiques en plusieurs canaux accessibles
individuellement et indépendamment.
17
La division de la bande passante en canaux peut être réalisée, comme en électronique, dans
la dimension temporelle ou dans la dimension des fréquences ( ou longueurs d’ onde ). Dans le
premier cas, on parle de multiplexage temporel (Time Division Multiplexing, TDM ) et dans le
second cas de multiplexage en longueur d’onde ( Wavelength Division Multiplexing, WDM ).
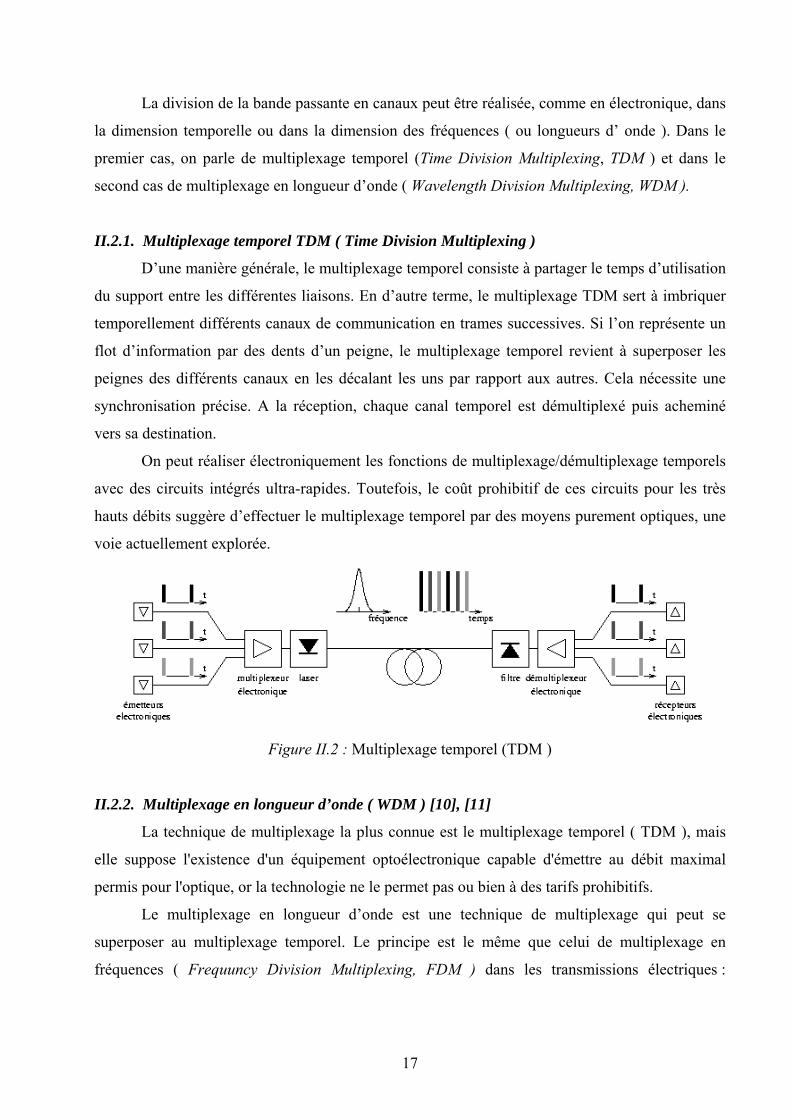
II.2.1. Multiplexage temporel TDM ( Time Division Multiplexing )
D’une manière générale, le multiplexage temporel consiste à partager le temps d’utilisation
du support entre les différentes liaisons. En d’autre terme, le multiplexage TDM sert à imbriquer
temporellement différents canaux de communication en trames successives. Si l’on représente un
flot d’information par des dents d’un peigne, le multiplexage temporel revient à superposer les
peignes des différents canaux en les décalant les uns par rapport aux autres. Cela nécessite une
synchronisation précise. A la réception, chaque canal temporel est démultiplexé puis acheminé
vers sa destination.
On peut réaliser électroniquement les fonctions de multiplexage/démultiplexage temporels
avec des circuits intégrés ultra-rapides. Toutefois, le coût prohibitif de ces circuits pour les très
hauts débits suggère d’effectuer le multiplexage temporel par des moyens purement optiques, une
voie actuellement explorée.
Figure II.2 : Multiplexage temporel (TDM )
II.2.2. Multiplexage en longueur d’onde ( WDM ) [10], [11]
La technique de multiplexage la plus connue est le multiplexage temporel ( TDM ), mais
elle suppose l'existence d'un équipement optoélectronique capable d'émettre au débit maximal
permis pour l'optique, or la technologie ne le permet pas ou bien à des tarifs prohibitifs.
Le multiplexage en longueur d’onde est une technique de multiplexage qui peut se
superposer au multiplexage temporel. Le principe est le même que celui de multiplexage en
fréquences ( Frequuncy Division Multiplexing, FDM ) dans les transmissions électriques :
18
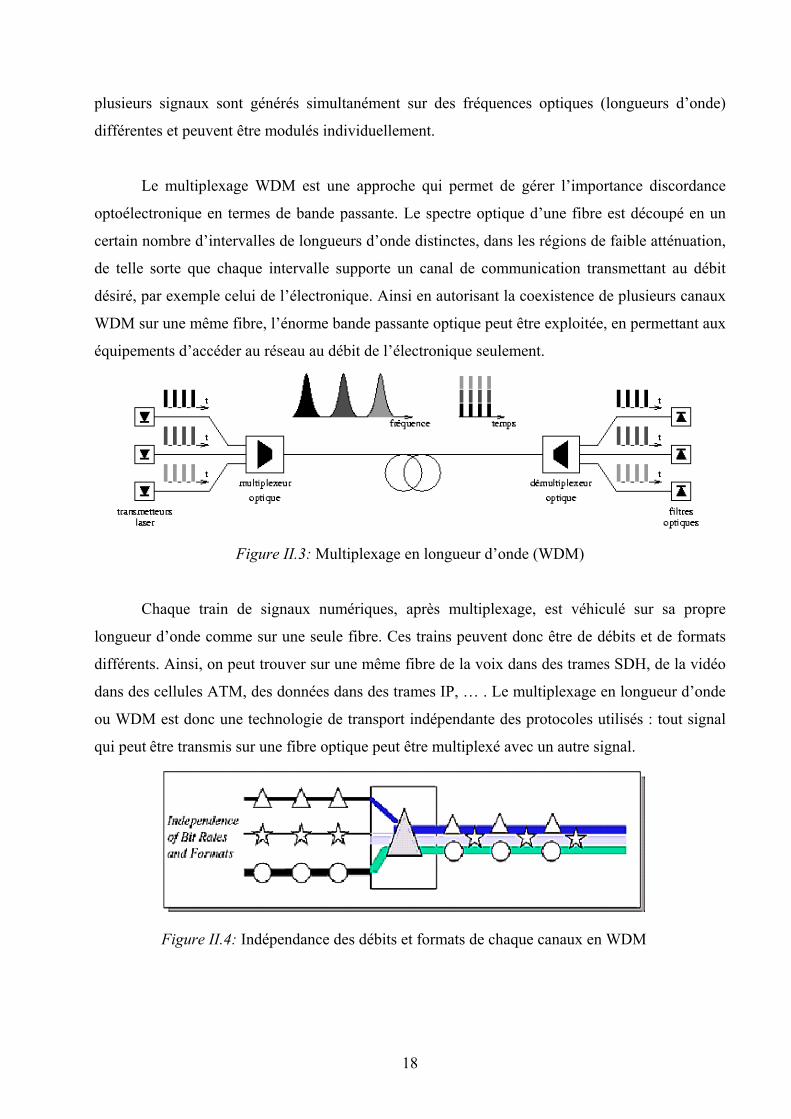
plusieurs signaux sont générés simultanément sur des fréquences optiques (longueurs d’onde)
différentes et peuvent être modulés individuellement.
Le multiplexage WDM est une approche qui permet de gérer l’importance discordance
optoélectronique en termes de bande passante. Le spectre optique d’une fibre est découpé en un
certain nombre d’intervalles de longueurs d’onde distinctes, dans les régions de faible atténuation,
de telle sorte que chaque intervalle supporte un canal de communication transmettant au débit
désiré, par exemple celui de l’électronique. Ainsi en autorisant la coexistence de plusieurs canaux
WDM sur une même fibre, l’énorme bande passante optique peut être exploitée, en permettant aux
équipements d’accéder au réseau au débit de l’électronique seulement.
Figure II.3: Multiplexage en longueur d’onde (WDM)
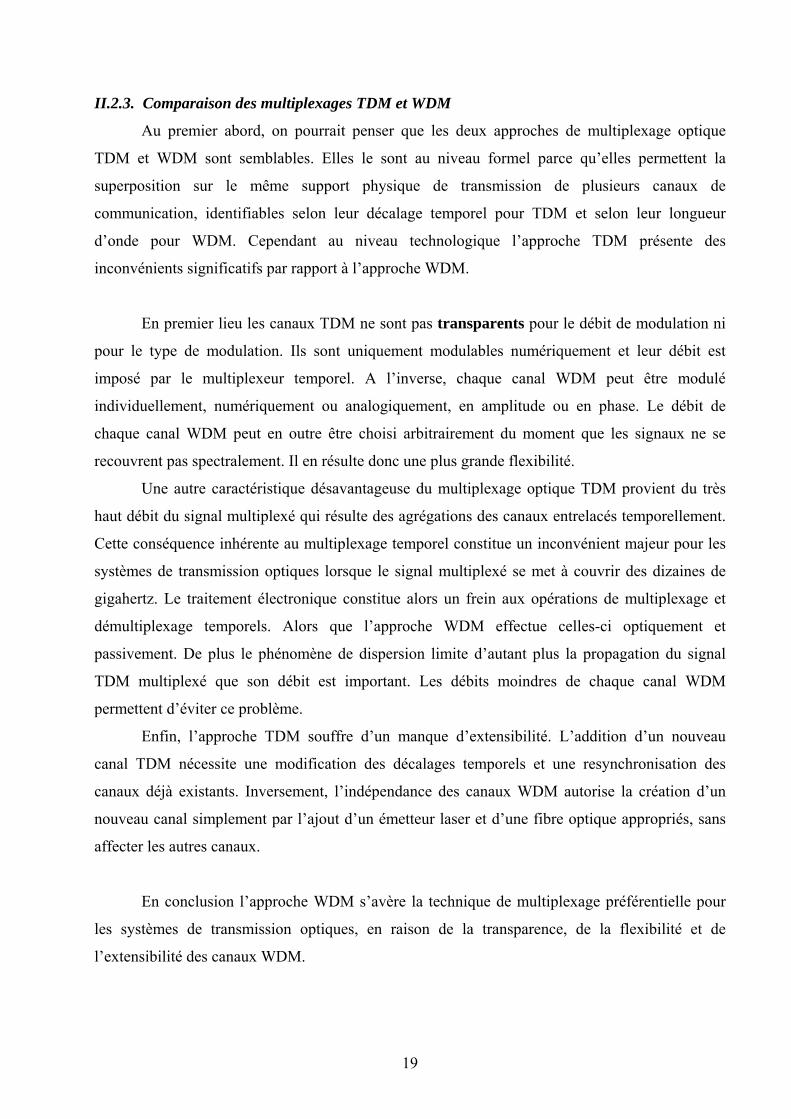
Chaque train de signaux numériques, après multiplexage, est véhiculé sur sa propre
longueur d’onde comme sur une seule fibre. Ces trains peuvent donc être de débits et de formats
différents. Ainsi, on peut trouver sur une même fibre de la voix dans des trames SDH, de la vidéo
dans des cellules ATM, des données dans des trames IP, … . Le multiplexage en longueur d’onde
ou WDM est donc une technologie de transport indépendante des protocoles utilisés : tout signal
qui peut être transmis sur une fibre optique peut être multiplexé avec un autre signal.
Figure II.4: Indépendance des débits et formats de chaque canaux en WDM
19
II.2.3. Comparaison des multiplexages TDM et WDM
Au premier abord, on pourrait penser que les deux approches de multiplexage optique
TDM et WDM sont semblables. Elles le sont au niveau formel parce qu’elles permettent la
superposition sur le même support physique de transmission de plusieurs canaux de
communication, identifiables selon leur décalage temporel pour TDM et selon leur longueur
d’onde pour WDM. Cependant au niveau technologique l’approche TDM présente des
inconvénients significatifs par rapport à l’approche WDM.
En premier lieu les canaux TDM ne sont pas transparents pour le débit de modulation ni
pour le type de modulation. Ils sont uniquement modulables numériquement et leur débit est
imposé par le multiplexeur temporel. A l’inverse, chaque canal WDM peut être modulé
individuellement, numériquement ou analogiquement, en amplitude ou en phase. Le débit de
chaque canal WDM peut en outre être choisi arbitrairement du moment que les signaux ne se
recouvrent pas spectralement. Il en résulte donc une plus grande flexibilité.
Une autre caractéristique désavantageuse du multiplexage optique TDM provient du très
haut débit du signal multiplexé qui résulte des agrégations des canaux entrelacés temporellement.
Cette conséquence inhérente au multiplexage temporel constitue un inconvénient majeur pour les
systèmes de transmission optiques lorsque le signal multiplexé se met à couvrir des dizaines de
gigahertz. Le traitement électronique constitue alors un frein aux opérations de multiplexage et
démultiplexage temporels. Alors que l’approche WDM effectue celles-ci optiquement et
passivement. De plus le phénomène de dispersion limite d’autant plus la propagation du signal
TDM multiplexé que son débit est important. Les débits moindres de chaque canal WDM
permettent d’éviter ce problème.
Enfin, l’approche TDM souffre d’un manque d’extensibilité. L’addition d’un nouveau
canal TDM nécessite une modification des décalages temporels et une resynchronisation des
canaux déjà existants. Inversement, l’indépendance des canaux WDM autorise la création d’un
nouveau canal simplement par l’ajout d’un émetteur laser et d’une fibre optique appropriés, sans
affecter les autres canaux.
En conclusion l’approche WDM s’avère la technique de multiplexage préférentielle pour
les systèmes de transmission optiques, en raison de la transparence, de la flexibilité et de
l’extensibilité des canaux WDM.
20
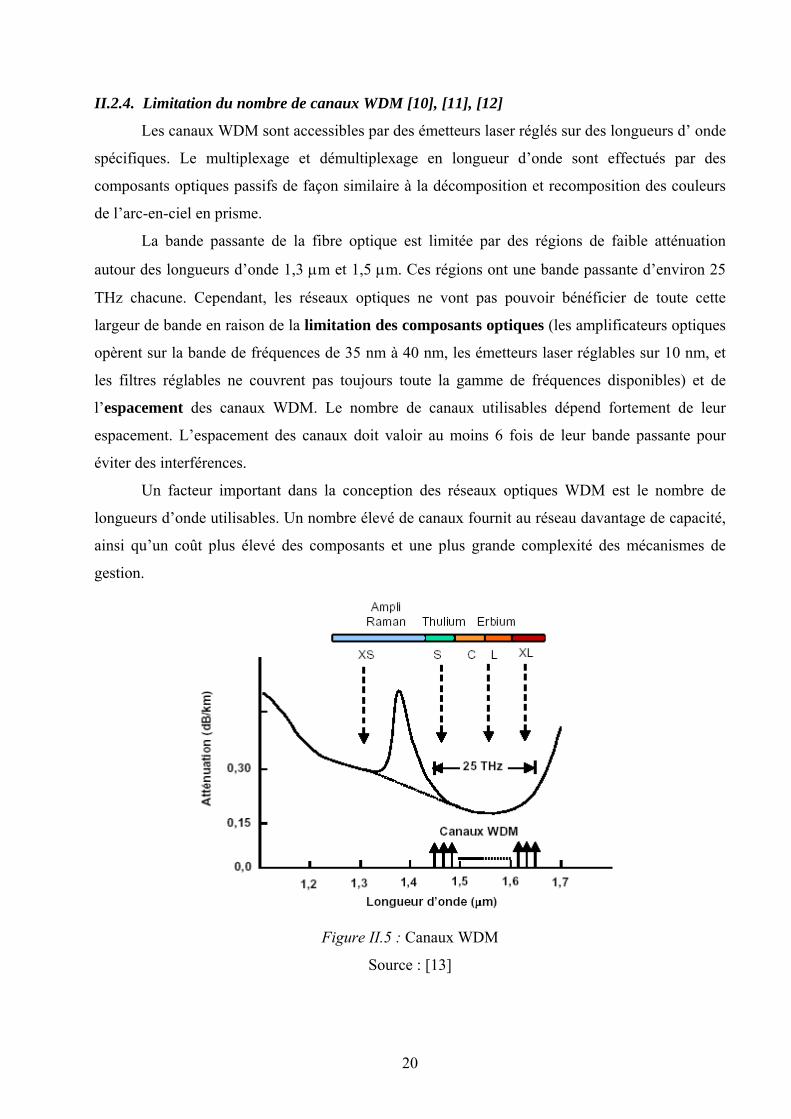
II.2.4. Limitation du nombre de canaux WDM [10], [11], [12]
Les canaux WDM sont accessibles par des émetteurs laser réglés sur des longueurs d’ onde
spécifiques. Le multiplexage et démultiplexage en longueur d’onde sont effectués par des
composants optiques passifs de façon similaire à la décomposition et recomposition des couleurs
de l’arc-en-ciel en prisme.
La bande passante de la fibre optique est limitée par des régions de faible atténuation
autour des longueurs d’onde 1,3 μm et 1,5 μm. Ces régions ont une bande passante d’environ 25
THz chacune. Cependant, les réseaux optiques ne vont pas pouvoir bénéficier de toute cette
largeur de bande en raison de la limitation des composants optiques (les amplificateurs optiques
opèrent sur la bande de fréquences de 35 nm à 40 nm, les émetteurs laser réglables sur 10 nm, et
les filtres réglables ne couvrent pas toujours toute la gamme de fréquences disponibles) et de
l’espacement des canaux WDM. Le nombre de canaux utilisables dépend fortement de leur
espacement. L’espacement des canaux doit valoir au moins 6 fois de leur bande passante pour
éviter des interférences.
Un facteur important dans la conception des réseaux optiques WDM est le nombre de
longueurs d’onde utilisables. Un nombre élevé de canaux fournit au réseau davantage de capacité,
ainsi qu’un coût plus élevé des composants et une plus grande complexité des mécanismes de
gestion.
Figure II.5 : Canaux WDM
Source : [13]
21
Remarques : [14]
La norme internationale ITU-T G 692 portant sur les interfaces optiques pour systèmes
multicanaux avec amplificateurs optiques définit un peigne de longueurs d'onde autorisées dans la
fenêtre de transmission donnée entre 1530 et 1565 nm. Elle normalise ainsi l'espacement en
nanomètre ou en Gigahertz entre deux longueurs d'onde permises de la fenêtre : 200 GHz ou 1,6
nm et 100 GHz ou 0,8 nm.
La technologie WDM est dite dense (DWDM) lorsque l'espacement utilisé est égal ou
inférieur à 100 GHz. Des systèmes à 50 GHz (0,4 nm) et à 25 GHz (0,2 nm) ont déjà été testés et
permettront d'obtenir des centaines de longueurs d'onde. Pour ces nouveaux systèmes, on parle
alors de UDWDM (Ultra - Dense Wavelength Division Multiplexing).
II.3. Réseaux tout-optiques [10], [14], [15]
II.3.1. Réseaux à fibres optiques
Les réseaux optiques d'infrastructure se présentent sous la forme de nœuds inter-connectés
par des liaisons optiques. Les nœuds rassemblent un routeur et des émetteurs-récepteurs. Le
routeur fait transiter l'information qui lui arrive d'une fibre ou d'un émetteur vers le récepteur ou la
fibre appropriée suivant qu'elle était destinée au nœud lui-même ou simplement « en transit ». Les
émetteurs/récepteurs sont soit des terminaux (serveurs,...), soit des réseaux de taille inférieure (par
exemple les réseaux d'une ville). Les liens optiques sont des câbles comprenant en général
plusieurs fibres. En effet, le coût majoritaire de l'installation d'un lien est dû aux travaux
d'enfouissement qui sont incompressibles et les opérateurs préfèrent les rentabiliser en installant
plusieurs fibres à la fois.
II.3.2. Liaison tout-optique
La plupart des réseaux actuels procèdent électroniquement au traitement de données et
utilisent la fibre optique seulement comme un support de transmission. Les opérations de
commutation et de routage sont réalisées en convertissant les signaux optiques sous leur forme
originelle ( forme électrique ). Il en résulte une grande flexibilité, cependant le débit de
l’électronique n’est pas compatible avec l’énorme bande passante de la fibre optique. De plus, la
conversion optoélectronique introduit un délai supplémentaire dans le routage des flots
d’information. Pour s’affranchir de ces limitations des composants de commutation optique,
22
capable de traiter des signaux optiques à très haut débit sans conversion optoélectronique, ont
été développés. Pour cette raison, les réseaux utilisant cette technologie de commutation sont
appelés réseaux tout-optiques.
II.3.3. Communication en mode connecté
Les réseaux WDM sont pour la plupart en mode connecté. En effet lorsqu'un émetteur
veut se mettre en communication avec un récepteur, un chemin à travers le réseau doit être
assigné à la communication. Le chemin décrit une suite de fibres allant de l'émetteur au récepteur.
La communication est alors parfaitement déterminée si la longueur d'onde utilisée sur chaque
fibre pour la communication est connue. Cet ensemble de données (chemin et longueur d’onde)
constitue le routage de la communication. Ainsi les réseaux WDM tout-optiques fonctionnent en
mode connecté : à chaque paire émetteur/récepteur voulant communiquer, il faut affecter un
chemin et une longueur d'onde sans conversion optoélectronique intermédiaire du signal
lumineux.
L’affectation de longueurs d'onde doit satisfaire une contrainte forte : deux chemins
utilisant la même fibre ne doivent pas utiliser la même longueur d'onde. Dans le cas contraire, les
signaux se brouilleraient mutuellement et les informations qu'ils transportent seraient perdues.
Ainsi des communications différentes peuvent partager un lien (fibre optique) si elles utilisent des
longueurs d’onde différentes.
II.4. Commutateurs optiques
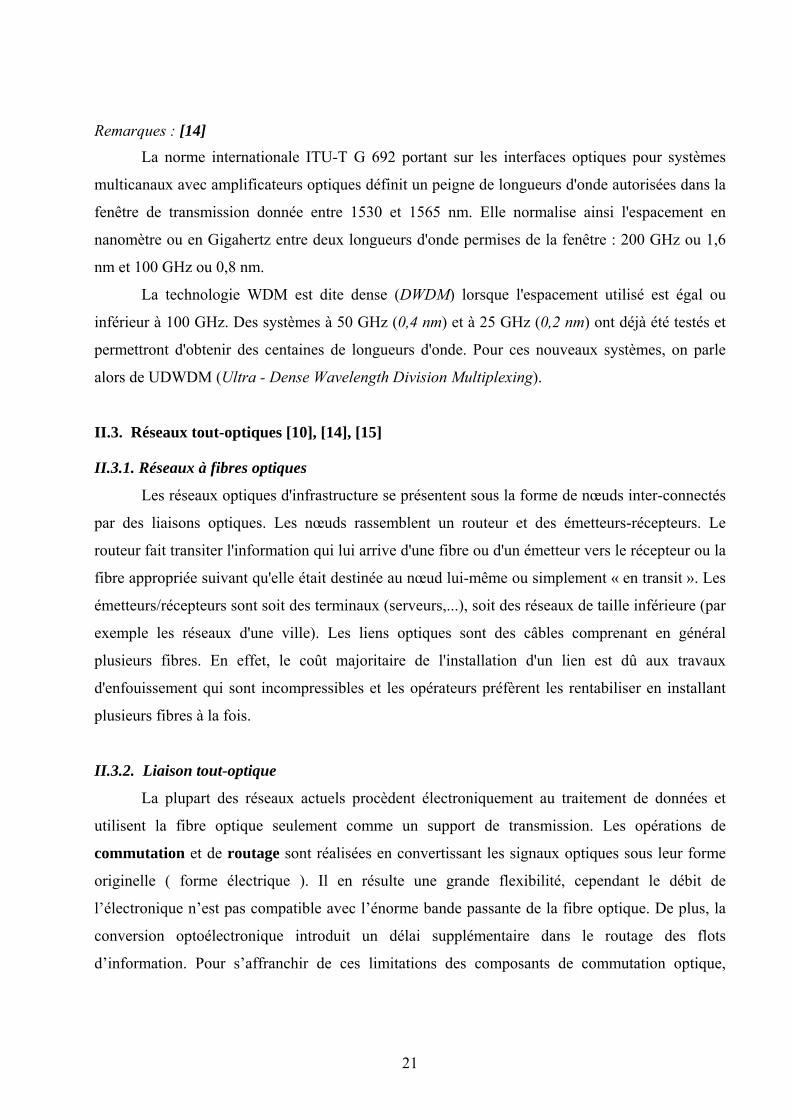
II.4.1. Répartiteur [10], [11], [16]
Un répartiteur ( Fiber Optical Cross-Connect, F-OXC ) permet d’effectuer une fonction de
commutation entre les fibres d’entée et de sortie du routeur ( Figure II.6 ). C’est le commutateur
optique le plus élémentaire et le moins coûteux en fabrication. Ce type d’équipements ne permet
pas d’effectuer les opérations de démultiplexage sur les signaux entrants ni de multiplexage sur les
signaux sortants. C’est pourquoi le répartiteur est dit insensible aux longueurs d’onde. Les
fonctions d’extraction et d’insertion avec le terminal relié au routeur sont possibles, mais c’est
alors l’ensemble des canaux WDM multiplexés qui est extrait d’une fibre d’entrée ou inséré dans
une fibre de sortie.
23
Figure II.6: schéma de principe d’un répartiteur F-OXC
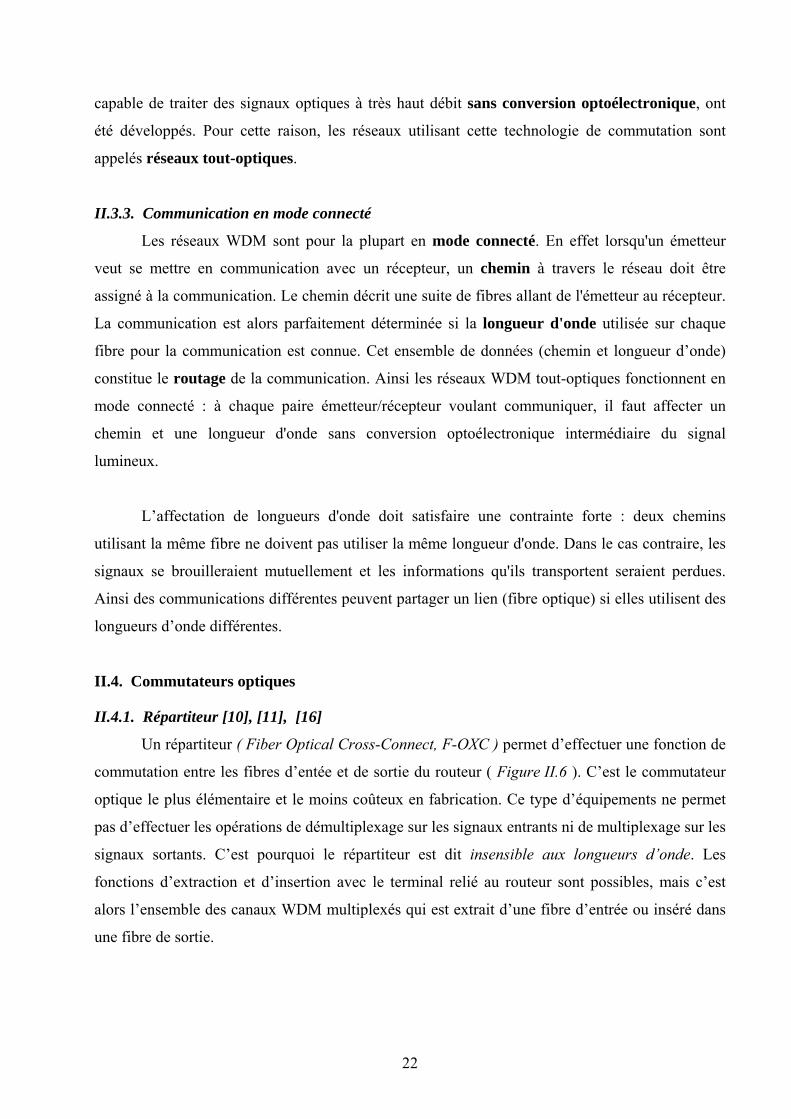
II.4.2. Multiplexeur à insertion/extraction ( MIE ) [10], [11], [16]
Un multiplexeur à insertion/extraction ( Optical Add/Drop Multiplexer, OADM ) permet
d’extraire certains canaux WDM en transit sur une fibre optique et d’en insérer d’autres. Il est
également constitué d’un démultiplexeur optique passif de commutateurs 2x2 dédiés aux
différentes longueurs d’onde et d’un multiplexeur passif comme il est montré sur la figue ci-
dessous ( Figure II.7 ). Les états des commutateurs intermédiaires contrôlés électroniquement
déterminent quels canaux WDM poursuivent leur chemin, lesquels sont extraits en vue de leur
réception locale et lesquels peuvent être insérés après émission locale. Le composant peut être
greffé directement sur une fibre optique, ou faire partie d’un nœud de routage plus complexe.
Figure II.7: Multiplexeur à insertion/extraction (MIE)
En particulier, associés avec un répartiteur, plusieurs MIE peuvent former un routeur à
MIE, comme il est représenté par la figure ci-dessous ( Figure II.8 ).
24
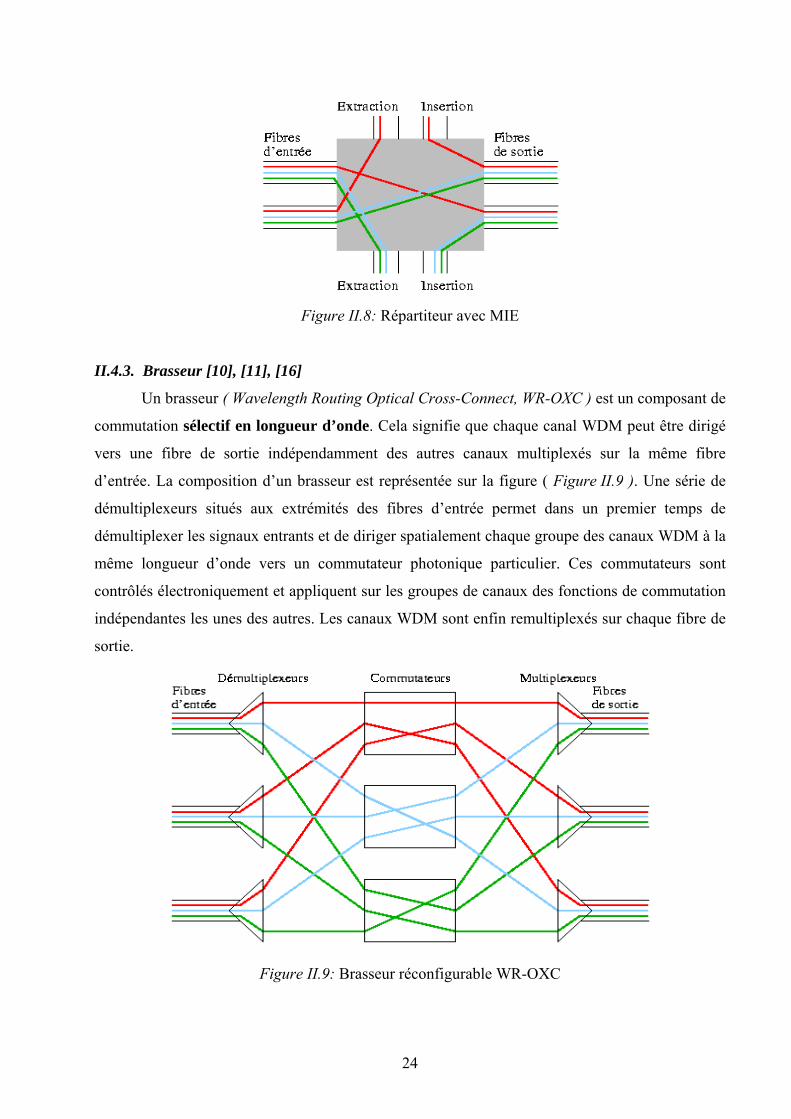
Figure II.8: Répartiteur avec MIE
II.4.3. Brasseur [10], [11], [16]
Un brasseur ( Wavelength Routing Optical Cross-Connect, WR-OXC ) est un composant de
commutation sélectif en longueur d’onde. Cela signifie que chaque canal WDM peut être dirigé
vers une fibre de sortie indépendamment des autres canaux multiplexés sur la même fibre
d’entrée. La composition d’un brasseur est représentée sur la figure ( Figure II.9 ). Une série de
démultiplexeurs situés aux extrémités des fibres d’entrée permet dans un premier temps de
démultiplexer les signaux entrants et de diriger spatialement chaque groupe des canaux WDM à la
même longueur d’onde vers un commutateur photonique particulier. Ces commutateurs sont
contrôlés électroniquement et appliquent sur les groupes de canaux des fonctions de commutation
indépendantes les unes des autres. Les canaux WDM sont enfin remultiplexés sur chaque fibre de
sortie.
Figure II.9: Brasseur réconfigurable WR-OXC
25
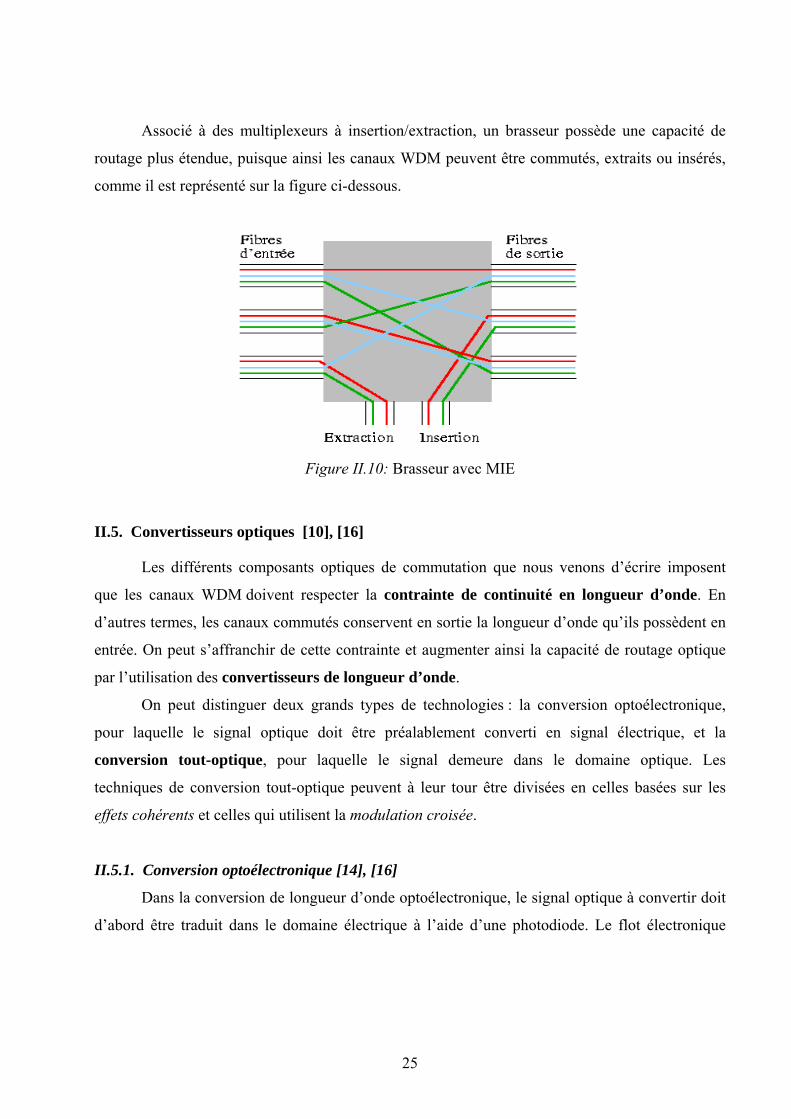
Associé à des multiplexeurs à insertion/extraction, un brasseur possède une capacité de
routage plus étendue, puisque ainsi les canaux WDM peuvent être commutés, extraits ou insérés,
comme il est représenté sur la figure ci-dessous.
Figure II.10: Brasseur avec MIE
II.5. Convertisseurs optiques [10], [16]
Les différents composants optiques de commutation que nous venons d’écrire imposent
que les canaux WDM doivent respecter la contrainte de continuité en longueur d’onde. En
d’autres termes, les canaux commutés conservent en sortie la longueur d’onde qu’ils possèdent en
entrée. On peut s’affranchir de cette contrainte et augmenter ainsi la capacité de routage optique
par l’utilisation des convertisseurs de longueur d’onde.
On peut distinguer deux grands types de technologies : la conversion optoélectronique,
pour laquelle le signal optique doit être préalablement converti en signal électrique, et la
conversion tout-optique, pour laquelle le signal demeure dans le domaine optique. Les
techniques de conversion tout-optique peuvent à leur tour être divisées en celles basées sur les
effets cohérents et celles qui utilisent la modulation croisée.
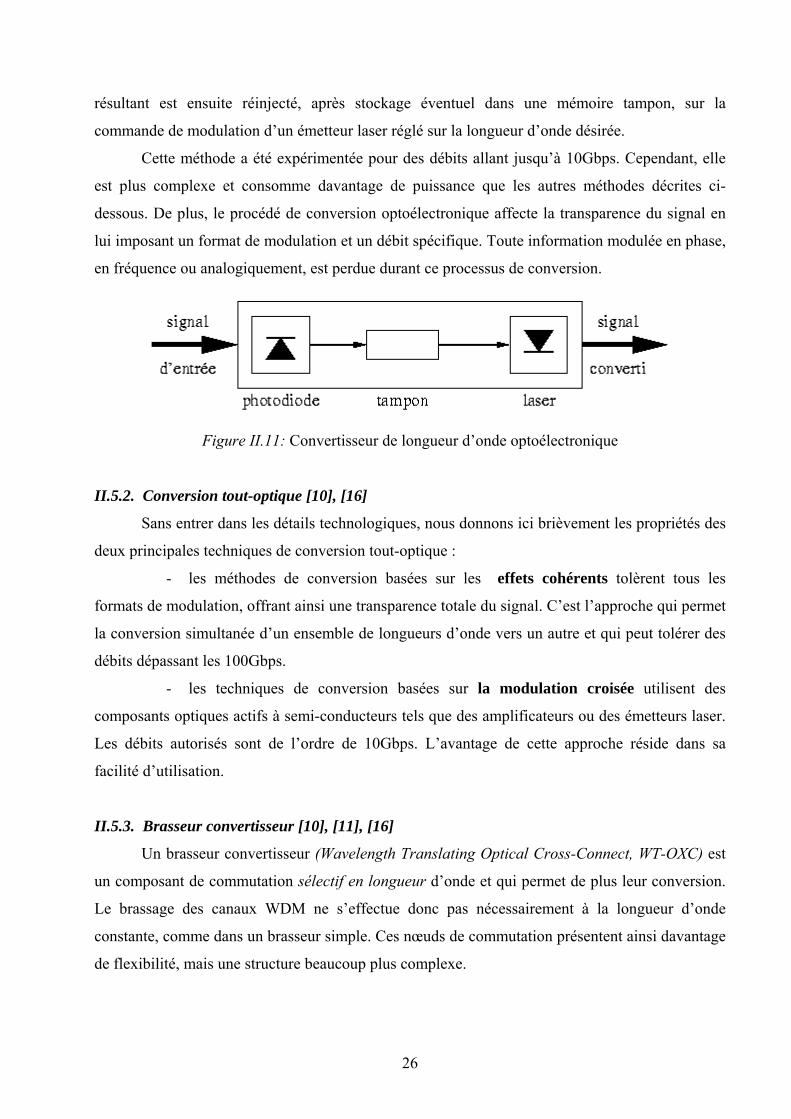
II.5.1. Conversion optoélectronique [14], [16]
Dans la conversion de longueur d’onde optoélectronique, le signal optique à convertir doit
d’abord être traduit dans le domaine électrique à l’aide d’une photodiode. Le flot électronique
26
résultant est ensuite réinjecté, après stockage éventuel dans une mémoire tampon, sur la
commande de modulation d’un émetteur laser réglé sur la longueur d’onde désirée.
Cette méthode a été expérimentée pour des débits allant jusqu’à 10Gbps. Cependant, elle
est plus complexe et consomme davantage de puissance que les autres méthodes décrites ci-
dessous. De plus, le procédé de conversion optoélectronique affecte la transparence du signal en
lui imposant un format de modulation et un débit spécifique. Toute information modulée en phase,
en fréquence ou analogiquement, est perdue durant ce processus de conversion.
Figure II.11: Convertisseur de longueur d’onde optoélectronique
II.5.2. Conversion tout-optique [10], [16]
Sans entrer dans les détails technologiques, nous donnons ici brièvement les propriétés des
deux principales techniques de conversion tout-optique :
- les méthodes de conversion basées sur les effets cohérents tolèrent tous les
formats de modulation, offrant ainsi une transparence totale du signal. C’est l’approche qui permet
la conversion simultanée d’un ensemble de longueurs d’onde vers un autre et qui peut tolérer des
débits dépassant les 100Gbps.
- les techniques de conversion basées sur la modulation croisée utilisent des
composants optiques actifs à semi-conducteurs tels que des amplificateurs ou des émetteurs laser.
Les débits autorisés sont de l’ordre de 10Gbps. L’avantage de cette approche réside dans sa
facilité d’utilisation.
II.5.3. Brasseur convertisseur [10], [11], [16]
Un brasseur convertisseur (Wavelength Translating Optical Cross-Connect, WT-OXC) est
un composant de commutation sélectif en longueur d’onde et qui permet de plus leur conversion.
Le brassage des canaux WDM ne s’effectue donc pas nécessairement à la longueur d’onde
constante, comme dans un brasseur simple. Ces nœuds de commutation présentent ainsi davantage
de flexibilité, mais une structure beaucoup plus complexe.
27
Les architectures des brasseurs convertisseurs étant aussi variées que sophistiquées, nous
ne donnons ainsi de représentation détaillée. Il faut de plus mentionner que le domaine
technologique de la conversion de longueur d’onde est en pleine évolution, et les techniques
actuelles peuvent changer rapidement.
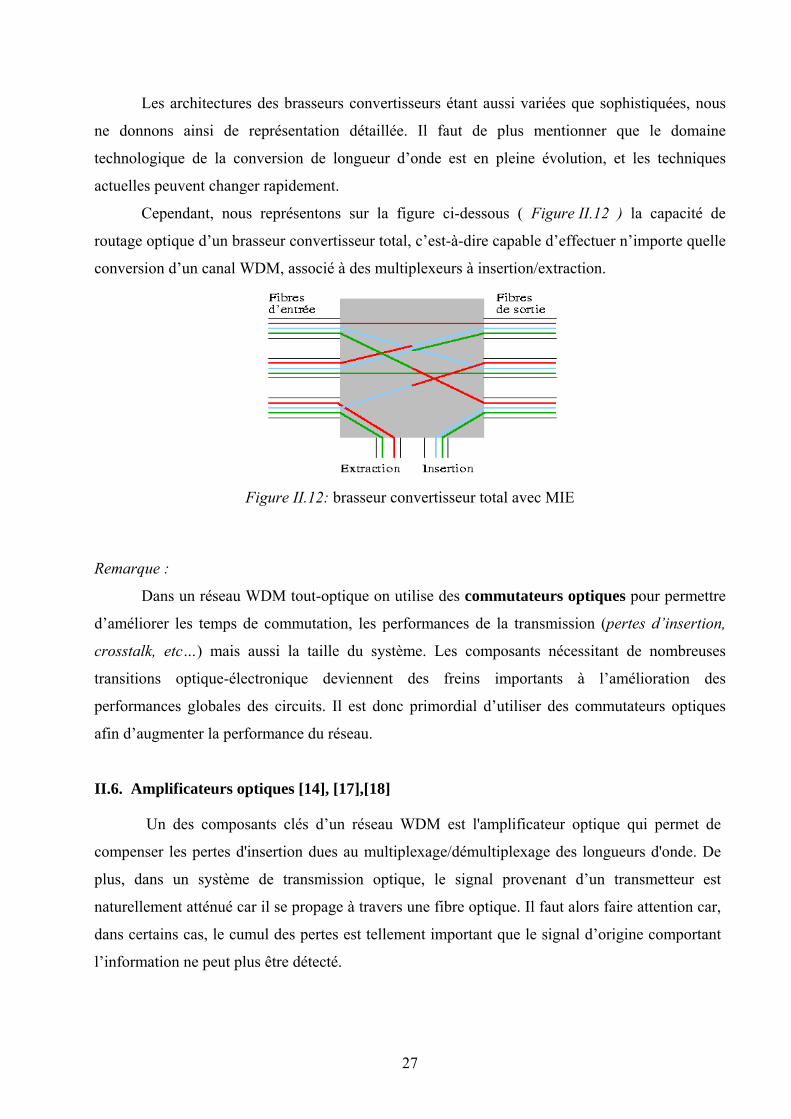
Cependant, nous représentons sur la figure ci-dessous ( Figure II.12 ) la capacité de
routage optique d’un brasseur convertisseur total, c’est-à-dire capable d’effectuer n’importe quelle
conversion d’un canal WDM, associé à des multiplexeurs à insertion/extraction.
Figure II.12: brasseur convertisseur total avec MIE
Remarque :
Dans un réseau WDM tout-optique on utilise des commutateurs optiques pour permettre
d’améliorer les temps de commutation, les performances de la transmission (pertes d’insertion,
crosstalk, etc…) mais aussi la taille du système. Les composants nécessitant de nombreuses
transitions optique-électronique deviennent des freins importants à l’amélioration des
performances globales des circuits. Il est donc primordial d’utiliser des commutateurs optiques
afin d’augmenter la performance du réseau.
II.6. Amplificateurs optiques [14], [17],[18]
Un des composants clés d’un réseau WDM est l'amplificateur optique qui permet de
compenser les pertes d'insertion dues au multiplexage/démultiplexage des longueurs d'onde. De
plus, dans un système de transmission optique, le signal provenant d’un transmetteur est
naturellement atténué car il se propage à travers une fibre optique. Il faut alors faire attention car,
dans certains cas, le cumul des pertes est tellement important que le signal d’origine comportant
l’information ne peut plus être détecté.
28
La méthode traditionnelle pour amplifier le signal est de passer par un intermédiaire
électrique qui amplifie puis reconvertit le signal en lumière. Récemment, des OFA (Optical Fiber
Amplifier) ont été développés pour supprimer cette étape de conversion. Dans le cas des systèmes
à WDM/DWDM, l’OFA le plus utilisé est l’EDFA (Erbium-Doped Fiber Amplifier).
L’amplification optique repose sur le principe de l’émission stimulée comme pour les
émetteurs laser. Les deux grands types de composants sont les amplificateurs à semi-conducteurs
et les amplificateurs à fibres dopées
II.6.1. Amplificateurs à semi-conducteur
Les amplificateurs à semi-conducteur sont constitués d’un laser à semi-conducteur modifié
en supprimant la cavité résonante. Le signal lumineux d’entrée traverse la région active du semi-
conducteur qui, par l’émission stimulée, l’amplifie.
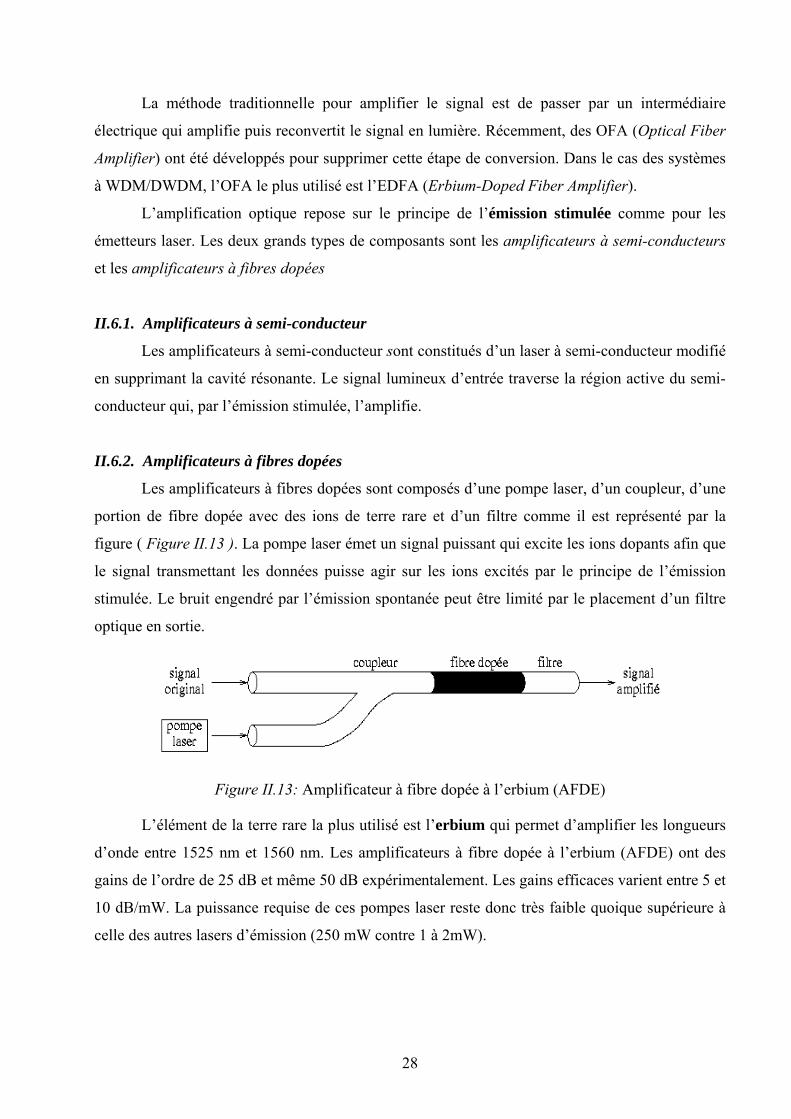
II.6.2. Amplificateurs à fibres dopées
Les amplificateurs à fibres dopées sont composés d’une pompe laser, d’un coupleur, d’une
portion de fibre dopée avec des ions de terre rare et d’un filtre comme il est représenté par la
figure ( Figure II.13 ). La pompe laser émet un signal puissant qui excite les ions dopants afin que
le signal transmettant les données puisse agir sur les ions excités par le principe de l’émission
stimulée. Le bruit engendré par l’émission spontanée peut être limité par le placement d’un filtre
optique en sortie.
Figure II.13: Amplificateur à fibre dopée à l’erbium (AFDE)
L’élément de la terre rare la plus utilisé est l’erbium qui permet d’amplifier les longueurs
d’onde entre 1525 nm et 1560 nm. Les amplificateurs à fibre dopée à l’erbium (AFDE) ont des
gains de l’ordre de 25 dB et même 50 dB expérimentalement. Les gains efficaces varient entre 5 et
10 dB/mW. La puissance requise de ces pompes laser reste donc très faible quoique supérieure à
celle des autres lasers d’émission (250 mW contre 1 à 2mW).
29
II.6.3. Caractéristiques des amplificateurs optiques [17]
Les deux principaux paramètres qui déterminent la qualité d’un amplificateur optique
sont : le gain, exprimé en décibels ( dB ), qui mesure le rapport entre la puissance du signal entrant
et celle du signal sortant et la largeur de bande des fréquences amplifiables. Notons que les
amplificateurs peuvent être également caractérisés par leur gain efficace, exprimé en décibels par
milliwatt [ ]mWdB / , qui mesure le rapport entre le gain et la puissance utilisée pour
l’amplification.
II.6.4. Avantages des amplificateurs optiques
Dans les télécommunications optiques, l’intérêt d’utiliser des tels amplificateurs optiques
plutôt qu’électroniques est énorme. Tout d’abords, ils se raccordent par simple soudure aux fibres
de transmission. Mais surtout, ils évitent les conversions optoélectroniques effectuées par les
répéteurs et donc la limitation de débit associée à ces derniers. La gamme de fréquences
qu’accepte l’amplificateur optique s’étend sur plusieurs TéraHertz, ce qui englobe très largement
le signal à amplifier. Ainsi plusieurs canaux optiques de longueurs d’onde différentes peuvent
donc être amplifiés simultanément.
En sus de pompage efficace par diode laser, la fibre dopée à l’erbium possède deux
qualités supplémentaires. D’abord, le gain c’est-à-dire le rapport d’amplification est très peu
sensible à la polarisation du signal incident ( la polarisation caractérise la direction dans laquelle le
champ électrique associé à l’onde lumineuse ). C’est un atout essentiel car l’état de polarisation
des signaux se modifie de façon aléatoire au fur et à mesure qu’ils se propagent dans la fibre.
Ensuite, l’amplificateur ne déforme pas les signaux il les amplifie à l’identique y compris
le bruit engendré par l’émission spontanée qui peut être limité par le placement d’un filtre optique
en sortie. Cette propriété subsiste dans des conditions de fonctionnement extrêmes. Par exemple,
avec une puissance d’entrée trop élevée, le gain diminue mais le signal ne subit pas de distorsion
contrairement au cas des amplificateurs électroniques.
Au trois gros atouts de l’amplificateur à fibre dopée à l’erbium ( pompage efficace,
insensibilité à la polarisation, absence de distorsion ) s’ajoute avec la compatibilité avec les fibres
standards, la faiblesse avec la perte d’énergie dans les connexions, le bruit minimal, l’insensibilité
30
à la température. Selon les applications, la plage de gain exploitable autour de la longueur d’onde
1,5 μm s’ étale sur 100 à 3 000 GHz.
II.7. Capacité de transmission des systèmes WDM
L’augmentation de capacité peut être obtenue selon deux directions que nous allons étudier
successivement.
II.7.1. Accroissement du débit par longueur d'onde
Les principales difficultés à surmonter pour augmenter le débit transmis par longueur
d'onde sont de trois ordres :
- en premier lieu, il est nécessaire de disposer, à des conditions économiquement
viables, de l'ensemble des dispositifs électroniques et optoélectroniques élémentaires permettant
d'effectuer les opérations de modulation et démodulation de la porteuse optique, régénération du
train de données incluse.
- En second lieu, transmettre un débit plus élevé impose de disposer, à performance
égale, d'un rapport signal à bruit accru ( augmenté de 6 dB pour un débit multiplié par quatre ).
Deux options peuvent être choisies par le concepteur : soit gagner sur ce rapport en augmentant la
puissance du signal utile à condition de maîtriser les effets de propagation induits ou en réduisant
le bruit par réduction de l'espacement entre amplificateurs; soit accepter un rapport signal à bruit
inférieur tout en recouvrant un taux d'erreur par élément binaire (TEB) acceptable par l'usage de
codes correcteurs d'erreurs.
- Enfin, en troisième lieu, la sensibilité aux défauts de propagation augmente avec le
débit, que ce soit pour les effets linéaires dus à la dispersion chromatique ou la dispersion de
polarisation de la fibre, ou les effets non linéaires essentiellement induits par l'effet Kerr
(dépendance de l'indice de réfraction de la fibre par rapport à l'intensité lumineuse qui la traverse).
II.7.2. Accroissement du nombre de longueurs d'onde
Les principales avancées techniques relatives aux équipements (hors amplificateurs)
concernent deux aspects :
- d'une part la sélectivité des dispositifs de démultiplexage optique, c'est-à-dire leur
capacité à avoir un taux de réjection hors bande élevé tout en maximisant la bande à 3 dB : les
innovations dans ce domaine ont été nombreuses comme l'atteste la diversification des
31
technologies utilisées (couches minces, réseaux diffractants, réseaux de guides d'onde, etc…) et
ont aussi permis de minimiser leurs pertes intrinsèques.
- D'autre part, la stabilité en fréquence des têtes optiques : les progrès ont porté aussi
bien sur la performance intrinsèque du laser que sur les dispositifs de verrouillage en fréquence
associés.
Par ailleurs, et tout aussi contraignante, la diminution de l'espacement entre canaux accroît
les effets non linéaires croisés entre les canaux qu'ils soient dus au mélange à quatre ondes ou à la
modulation de phase croisée.
Une autre voie pour augmenter le nombre de longueurs d'onde consiste à élargir la bande
d'amplification à d'autres bandes que la bande C traditionnelle ( 1535 - 1560 nm ), telles que la
bande L ( 1560 - 1610 nm ) ou la bande S ( 1500-1530 nm ). C'est donc un accroissement d'un
facteur 2 à 3 de la bande disponible qui est en jeu. Les amplificateurs fonctionnant dans ces
nouvelles bandes, obtenus par adaptation du dopant, sont ou seront disponibles. Toutefois, le gain
économique qu'ils laissent espérer mérite d'être discuté.@@@

32
CHAPITRE III : ROUTAGE TOUT-OPTIQUE ET OPTIMISATION
Le problème de routage tout-optique vaut la peine d’être étudié dans le cadre de conception
et de dimensionnement d’un réseau tout-optique en vue de satisfaire une certaine demande de
trafic prévue à l’avance. De même, il est digne d’intérêt dans un réseau tout-optique possédant
une bande passante suffisante pour satisfaire un ensemble de requêtes de connexion afin de
minimiser les ressources optiques qui se révèlent limitées par la technologie et d’assurer ainsi la
possibilité d’établir des nouvelles connexions ultérieurement.
III.1. Notion de théorie des graphes
III.1.1. Définition
Un graphe est constitué d’un ensemble de points appelés sommets ou nœuds et d’un
ensemble de couples ordonnés appelés arêtes ou arcs si ceux-ci sont orientés.
III.1.2. Graphes : concepts orientés [19]
Un graphe [ ]ϕ,,UXG = est déterminé par la donnée :
- d’un ensemble X dont les éléments sont appelés des sommets ou des nœuds. Si
( )XcardN = est le nombre de sommets, on dit que le graphe G est d’ordre N . On supposera
que les sommets sont numérotés Ni ,...,2,1= ;
- d’un ensemble U dont les éléments Uu ∈ sont des couples ordonnés de sommets
appelés des arcs. Si ( )jiu ,= est un arc de G , i est l’extrémité initiale de u et j l’extrémité
terminale de u . On notera ( ) MUcard =
ϕ est une fonction d'incidence qui à chaque arc e de U associe un couple ( )yx,
d'éléments de X non nécessairement distincts. x est l'origine de e et y est le but de e .
Graphiquement, les sommets peuvent être représentés par des points et l’arc ( )jiu ,=
sera représenté par une flèche joignant les deux points i et j ( j étant la pointe de la flèche).
Exemple :
Soit G le graphe orienté défini par }{ cbaX ,,= , }{ 654321 ,,,,, eeeeeeE =
( ) }{ bae ,1 =ϕ , ( ) { }cbe ,2 =ϕ , ( ) }{ bae ,3 =ϕ , ( ) { }bce ,4 =ϕ , ( ) }{ cce ,5 =ϕ , ( ) }{ cae ,6 =ϕ
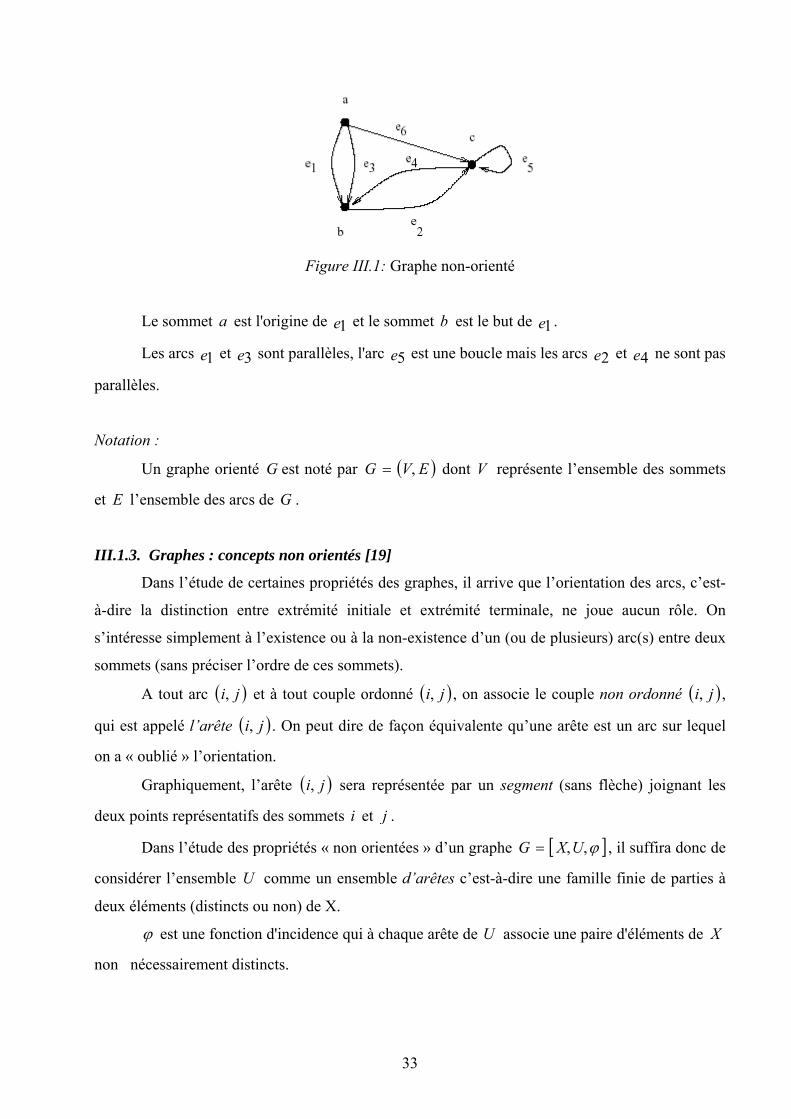
33
Figure III.1: Graphe non-orienté
Le sommet a est l'origine de e1 et le sommet b est le but de e1.
Les arcs e1 et e3 sont parallèles, l'arc e5 est une boucle mais les arcs e2 et e4 ne sont pas
parallèles.
Notation :
Un graphe orienté G est noté par ( )EVG ,= dont V représente l’ensemble des sommets
et E l’ensemble des arcs de G .
III.1.3. Graphes : concepts non orientés [19]
Dans l’étude de certaines propriétés des graphes, il arrive que l’orientation des arcs, c’est-
à-dire la distinction entre extrémité initiale et extrémité terminale, ne joue aucun rôle. On
s’intéresse simplement à l’existence ou à la non-existence d’un (ou de plusieurs) arc(s) entre deux
sommets (sans préciser l’ordre de ces sommets).
A tout arc ( )ji, et à tout couple ordonné ( )ji, , on associe le couple non ordonné ( )ji, ,
qui est appelé l’arête ( )ji, . On peut dire de façon équivalente qu’une arête est un arc sur lequel
on a « oublié » l’orientation.
Graphiquement, l’arête ( )ji, sera représentée par un segment (sans flèche) joignant les
deux points représentatifs des sommets i et j .
Dans l’étude des propriétés « non orientées » d’un graphe [ ]ϕ,,UXG = , il suffira donc de
considérer l’ensemble U comme un ensemble d’arêtes c’est-à-dire une famille finie de parties à
deux éléments (distincts ou non) de X.
ϕ est une fonction d'incidence qui à chaque arête de U associe une paire d'éléments de X
non nécessairement distincts.

34
Exemple :
Soit G défini par }{ gfdcbaX ,,,,,= , }{ 87654321 ,,,,,,, eeeeeeeeE =
( ) }{ bae ,1 =ϕ , ( ) { }cbe ,2 =ϕ , ( ) }{ce =3ϕ , ( ) }{ dce ,4 =ϕ , ( ) }{ dbe ,5 =ϕ , ( ) }{ gde ,6 =ϕ ,
( ) }{ gbe ,7 =ϕ , ( ) }{ cbe ,8 =ϕ
Figure III.2: Graphe non-orienté
On dit les sommets a et b sont adjacents, que l'arête e4 est incidente au sommet c et au
sommet d .
Les arêtes e2 et e8 sont parallèles, l'arête e3 est une boucle, le sommet f est « isolé » et
le sommet a est « pendant ».
Remarques :
- Un graphe non orienté n’est qu’un graphe orienté symétrique ; si un arc relie le
sommet a au sommet b, un autre arc relie le sommet b au sommet a : on ne trace alors qu’un trait
entre a et b que l’on appelle une « arête ».
- Un multigraphe est un graphe pour lequel il peut exister plusieurs arêtes entre deux
sommets i et j donnés.
- Un graphe est dit simple s’il est sans boucle et ne comporte jamais plus d’une arête
entre deux sommets quelconques.
- Deux arcs (deux arêtes) sont dits adjacents s’ils ont au moins une extrémité
commune.
35
III.1.4. Degré d’un graphe [20]
Dans le cas d’un graphe orienté, le « degré sortant » d’un sommet x est le nombre d’arcs
qui partent de x , noté ( )xd+ , et son « degré entrant », noté ( )xd− , est le nombre d’arcs arrivant
au sommet x .
On a la relation : Add =∑ −=∑ + ( nombre d’arcs ). (III.1)
Dans le cas d’un graphe non orienté, le degré est le nombre d’arêtes rattachées au sommet
x .
On a la relation : Ad 2=∑ . (III.2)
III.1.5. Chemin ou chaîne [20]
Un « chemin » est une succession d’arcs parcourus dans le même sens. Le nombre d’arcs
parcourus s’appelle la longueur du chemin.
On parle de « chaîne » si l’on ne tient pas compte de la direction des arcs c’est-à-dire dans
les graphes non orientés.
Si un chemin revient à son point de départ, on parle de « circuit » dans un graphe orienté,
ou de « cycle » dans un graphe non orienté.
L’adjectif « élémentaire » s’applique quand le chemin ou le cycle parcourt des sommets
distincts.
La « distance » entre deux sommets est la longueur du plus court chemin entre ces deux
sommets.
Enfin le « diamètre » d’un graphe est la plus grande distance séparant deux sommets de ce
graphe.
III.1.6. Connexité [20]
On dit qu’un graphe non orienté est « connexe » si deux éléments quelconques de ce
graphe sont reliés par au moins une chaîne.
On appelle « composante connexe » d’un graphe non orienté un sous-ensemble maximal
de sommets tels qu’il existe une chaîne entre deux sommets quelconques.
Un graphe orienté est « fortement connexe » si, quels que soient deux sommets x et y , il
existe un chemin reliant x à y et un reliant y à x .

36
Figure III.3 : Graphe à deux composantes connexes
III.1.7. Types de graphes [20]
III.1.7.1. Arbres
Ce sont des graphes non orientés connexes sans cycle ou encore des graphes non orientés
connexes dont le nombre de sommets est égal au nombre d’arêtes plus 1.
Figure III.4 : Arbre
Remarques :
Une arborescence est un graphe orienté possédant un sommet privilégié, la « racine », tel
qu'il existe un et un seul chemin depuis la racine à tout autre sommet.
On peut orienter les arêtes d'un arbre à partir de n'importe quel sommet de façon à obtenir
une arborescence.
III.1.7.2. Graphe pondéré
Quand les arêtes représentent un coût (en argent, en temps, en distance…), on leur attribue
un nombre ce qui donne un graphe pondéré.
Figure III.5 : Graphe pondéré
37
III.1.8. Distance dans un graphe non orienté [20]
On définit la distance ( )yxd , entre deux sommets x , y d'un graphe non orienté par :
- ( ) 0, =yxd si yx = .
- ( )yxd , longueur d'une plus courte chaîne reliant x à y s'il existe
- ( ) ∞=yxd , sinon
III.2. Modélisation d’un réseau WDM et définitions [21]
III.2.1. Modélisation d’un réseau WDM
Un réseau de communications tout-optique, utilisant le multiplexage en longueurs d’onde,
est modélisé par un graphe ou multigraphe orienté ( )EVG ,= , généralement symétrique. Les
sommets correspondent aux nœuds du réseau ( routeurs ) et les arcs aux liens physiques en fibre
optique. Si une fibre reliant deux nœuds x et y du réseau permet la transmission simultanément
de l longueurs d’onde, alors l’arc correspondant du graphe G aura soit une capacité l , soit il sera
transformé en l arcs parallèles, chacun ayant une capacité unitaire.
Remarques:
La représentation des réseaux tout-optiques par des graphes non-orientés ne correspond pas
à la réalité physique, puisque les communications optiques sont unidirectionnelles, mais elle peut
être prise en considération sous les hypothèses restrictives suivantes : le modèle non-orienté des
réseaux de communication tout-optiques correspond au cas où les requêtes de connexion sont
symétriques et sous la contrainte d’être routées deux à deux par des chemins symétriques et sur la
même longueur d’onde.
La modélisation d'un réseau en terme de graphes est très classique. C'est d'autant plus vrai
dans le contexte des réseaux tout-optiques WDM où l'on manipule des chemins et des couleurs (
les longueurs d'ondes ) et la plupart des résultats d'optimisation de réseaux tout-optiques sont issus
de résultats de la théorie des graphes.
III.2.2. Réseau k - fibres
Un réseau fibresk − est un multigraphe ( )EVG ,= orienté, où il y a un sommet pour un
nœud du réseau et un arc entre deux sommets pour une fibre entre les deux nœuds correspondants.
Il peut être également modélisé comme un graphe simple adjoint du paramètre k .
38
III.2.3. Instance de communication
Une instance de communication dans G est un multiensemble I de paires d'éléments de
V ( V étant l’ensemble des sommets de G ) comprenant une paire ( )yx, pour toute requête
allant du nœud représenté par x au nœud représenté par y .
III.2.4. Multicast
Nous définissons également un type particulier d'instance de communication, le multicast,
où toutes les requêtes ont le même émetteur.
Un multicast issu du sommet s dans G est un multi-ensemble,
( ){ }}{ VyysM s ∈= /, , Vs ∈ (III.3)
Remarque :
Une instance de communication sur G se décompose de manière unique en union de
multicast issus de sommets différents : M sVs
I'∈
⊕= , VV ∈' (III.4)
III.3. Hypothèses et problématiques
III.3.1. Hypothèses
Certains routeurs permettent de faire la conversion de longueur d'onde et donc permettent à
un chemin qui rentre dans le nœud avec une certaine longueur d'onde d'en ressortir avec une autre.
On peut distinguer deux types de schéma de conversion :
- la conversion totale où un chemin utilisant une longueur d'onde quelconque en
entrée peut ressortir avec n'importe quelle autre longueur d'onde toujours sous contrainte qu'il n'y
ait pas deux chemins utilisant la même longueur d'onde dans la même fibre,
- la conversion partielle où une longueur d'onde particulière ne peut être convertie
qu'en une longueur d'onde appartenant à un ensemble dépendant de la longueur d'onde de départ.
Ces deux types de routeurs existent, mais coûtent très cher et donc, dans la suite de notre
travail, nous considérerons qu’aucune conversion de longueur d'onde n'est autorisée, c'est-à-
dire qu'à un chemin est affecté une seule longueur d'onde qui est utilisée sur toutes les fibres qu'il
emprunte.
39
En théorie, une fibre peut être parcourue par un signal dans les deux sens. Cependant, les
fibres des réseaux sont en pratique unidirectionnelles pour des raisons technologiques au niveau
des nœuds. Comme le coût d'une fibre supplémentaire entre deux nœuds est minime, les réseaux
sont la plupart du temps symétriques. Nous considérerons par la suite des réseaux multifibres
symétriques ayant le même nombre de fibres entre chaque lien. Cette commodité reste proche de
la réalité puisque les fibres sont regroupées selon des câbles de tailles standardisées. Un tel réseau
où k fibres relient chaque nœud est nommé réseau fibresk − .
III.3.2. Problématique dans les réseaux WDM tout-optiques
On est en présent en mesure de définir les problèmes d’optimisation que l’on va étudier.
Ces problèmes sont reliés à l’allocation des ressources pour des requêtes de connexion dans un
réseau de communication optique qui est modélisé par un graphe ou multigraphe orienté G . Les
sommets correspondent aux nœuds du réseau et les arcs aux liens physiques en fibre optique.
Dans leur généralité, les problèmes se posant dans les réseaux WDM tout-optiques
consistent à satisfaire simultanément un ensemble de requêtes de connexion, appelé instance,
formé de couples des nœuds. Pour chaque requête, il s’agit d’attribuer un chemin dans le réseau et
d’allouer une longueur d’onde, soit tout le long du chemin, ( soit sur chaque lien formant le
chemin en cas de conversion possible) de manière à ce que deux requêtes distinctes n’utilisent pas
la même longueur d’onde sur un même lien. L’objectif dans ce cadre est de minimiser
l’utilisation des ressources optiques, c’est-à-dire le nombre total de longueurs d’onde permettant
de satisfaire l’instance donnée.
Le problème que les opérateurs voudraient résoudre est le suivant : étant données la
topologie physique d'un réseau et une instance de communication, trouver le réseau le moins
cher tel qu'il soit possible d'y réaliser l'instance.
Le coût d'un réseau optique WDM k-fibres est influencé par deux paramètres :
- le nombre de fibres par câbles, k, influe d'une part sur le coût de ces câbles, d'autre
part sur la complexité et par conséquent sur le coût des routeurs (nombres de ports, taille des
commutateurs, etc).
- le nombre de longueurs d'onde nécessaire pour réaliser une instance de
communication influe d'une part sur le coût individuel de chaque fibre ( toutes les fibres ne sont
pas capables de faire transiter le même nombre de longueurs d'onde ) et donc sur le coût des câbles
40
et d'autre part sur la complexité des routeurs ( différents types d'équipement, nombre de prismes,
... ).
Par ailleurs, il est évident que plus on utilise de fibres, plus le nombre de longueurs d'onde
nécessaire est petit et vice versa. Optimiser le coût d'un réseau revient donc à optimiser un
problème bi-critères.
Définition III.1 : Problème d’optimisation P
Un problème d’optimisation P est donné par un ensemble I d’instance ( entrées ), un
ensemble S de sortie ( sorties ), une fonction s : ( )SPI → des instances vers une partie de
solutions acceptables, une fonction NSIval →×: mesurant la qualité ( )SIval , de la solution
( )IsS ∈ pour l’instance I , et un objectif min ou max , qui consiste à trouver une solution
( )IsS ∈ qui minimise ( min ) ou maximise ( max ) ( )SIval , .
Définition III.2 : Problème de décision D
Un problème de décision D est donné par un ensemble I d’instance ( entrées ), un
ensemble S de sortie ( sorties ), une fonction s : ( )SPI → des instances vers une partie de
solutions acceptables, une fonction NSIval →×: mesurant la qualité ( )SIval , de la solution
( )IsS ∈ pour l’ instance I , un entier k et une question : « existe-t-il une solution ( )IsS ∈ telle
que ( ) kSIval ≤, ? » dans le cas d’un problème de minimisation ou « existe-t-il une solution
( )IsS ∈ telle que ( ) kSIval ≥, ? » dans le cas d’un problème de maximisation.
III.4. Formulation des problèmes étudiés
III.4.1. Problème du routage tout-optique :
Dans un réseau tout-optique, une requête de connexion entre un nœud u et un nœud v est
représentée par le couple ( )vu, . Elle est établie en réservant une longueur d’onde sur tous les liens
du chemin de u vers v. Les chemins correspondants aux différentes connexions ne doivent pas
utiliser la même longueur d’onde sur un même lien. Si les commutateurs ne permettent pas de
conversion (donc de type WR-OCX ), une connexion doit utiliser la même longueur d’onde tout le
chemin de la source vers la destination.
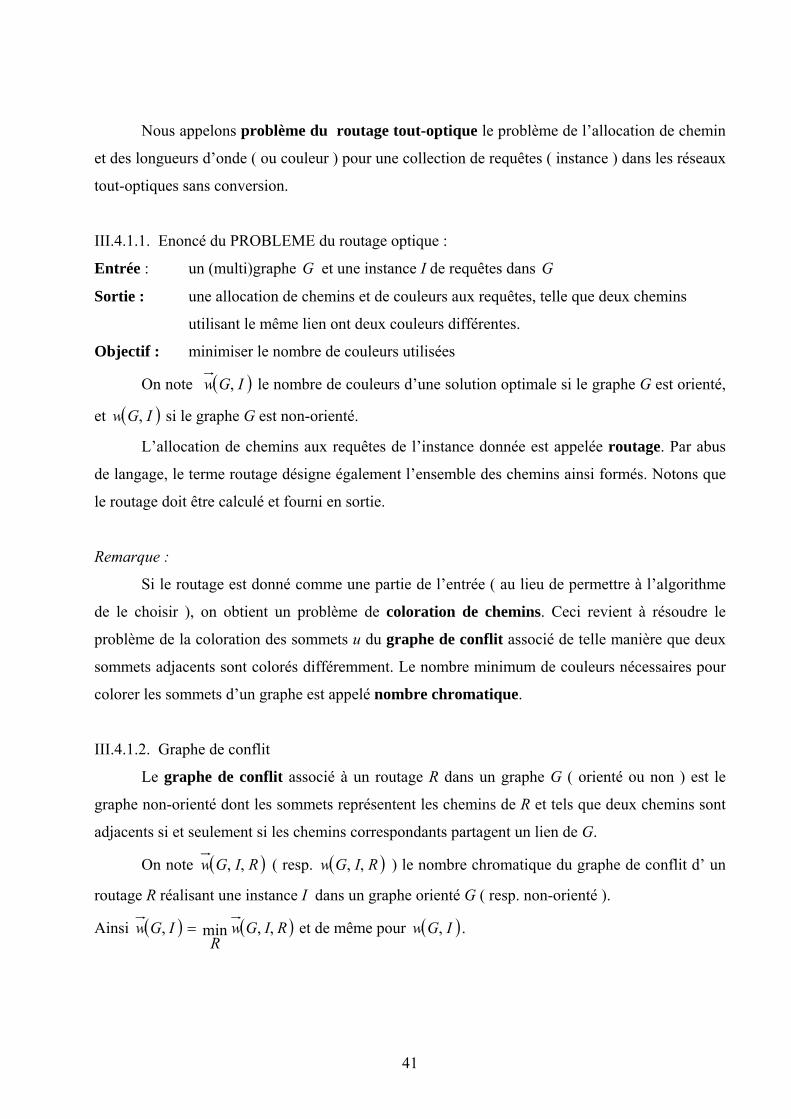
41
Nous appelons problème du routage tout-optique le problème de l’allocation de chemin
et des longueurs d’onde ( ou couleur ) pour une collection de requêtes ( instance ) dans les réseaux
tout-optiques sans conversion.
III.4.1.1. Enoncé du PROBLEME du routage optique :
Entrée : un (multi)graphe G et une instance I de requêtes dans G
Sortie : une allocation de chemins et de couleurs aux requêtes, telle que deux chemins
utilisant le même lien ont deux couleurs différentes.
Objectif : minimiser le nombre de couleurs utilisées
On note ( )IGw , le nombre de couleurs d’une solution optimale si le graphe G est orienté,
et ( )IGw , si le graphe G est non-orienté.
L’allocation de chemins aux requêtes de l’instance donnée est appelée routage. Par abus
de langage, le terme routage désigne également l’ensemble des chemins ainsi formés. Notons que
le routage doit être calculé et fourni en sortie.
Remarque :
Si le routage est donné comme une partie de l’entrée ( au lieu de permettre à l’algorithme
de le choisir ), on obtient un problème de coloration de chemins. Ceci revient à résoudre le
problème de la coloration des sommets u du graphe de conflit associé de telle manière que deux
sommets adjacents sont colorés différemment. Le nombre minimum de couleurs nécessaires pour
colorer les sommets d’un graphe est appelé nombre chromatique.
III.4.1.2. Graphe de conflit
Le graphe de conflit associé à un routage R dans un graphe G ( orienté ou non ) est le
graphe non-orienté dont les sommets représentent les chemins de R et tels que deux chemins sont
adjacents si et seulement si les chemins correspondants partagent un lien de G.
On note ( )RIGw ,, ( resp. ( )RIGw ,, ) le nombre chromatique du graphe de conflit d’ un
routage R réalisant une instance I dans un graphe orienté G ( resp. non-orienté ).
Ainsi ( ) ( )RIGwR
IGw ,,min, = et de même pour ( )IGw , .
42
Pour les graphes qui sont des arbres, le routage optique et la coloration de chemins sont
deux problèmes équivalents puisqu’un chemin élémentaire associé à une requête quelconque est
unique. La figure ci-dessous ( Figure III.6 ) montre un exemple simple d’instance de requêtes
dans un arbre orienté symétrique à six sommets dont chaque lien représente une paire d’arcs
symétriques. Cinq chemins sont dessinés correspondant aux requêtes (0,2), (1,3), (4,3), (4,5), et
(0,5). Une coloration correcte possible attribue à ces chemins les couleurs vert, rouge, vert, rouge
et bleu, respectivement. En outre, trois couleurs sont effectivement nécessaires puisque le graphe
de conflit est un cycle de longueur impaire.
Figure III.6: Un routage dans un arbre et son graphe de conflit associé
III.4.2. Problème du routage optique maximum
La situation est différente dans un réseau optique qui n’a pas la capacité suffisante pour
satisfaire tout un ensemble de requêtes simultanément. Plus exactement, ceci se produit lorsque le
nombre de longueurs d’onde disponibles est plus petit que le nombre nécessaire. Il peut alors
souhaitable de satisfaire un sous-ensemble de l’instance initiale le but étant de maximiser son
cardinal.
III.4.2.1. Enoncé problème du routage optique maximum
Entrée : un (multi)graphe G et une instance I de requêtes dans G et un entier W > 0
Sortie : une partie I’⊆ I et une allocation aux requêtes de I’ de chemins et de couleurs parmi
W possibles, telle que deux chemins utilisant le même lien ont deux couleurs
différentes.
Objectif : maximiser le cardinal de I’.
43
III.4.2.2. Enoncé du Problème de décision du routage optique
Entrée : un multigraphe G, une instance de communication I dans G et un nombre de
longueurs d'onde n.
Sortie : décider s'il est possible de satisfaire l'instance de communication en utilisant au plus
n longueurs d'onde.
III.4.3. Problème de la charge
Dans les réseaux tout-optiques permettent une conversion de longueur d’onde en une autre,
pour un nœud intermédiaire d’un chemin optique la contrainte de la coloration de chemins alloués
aux requêtes disparaît. Il résulte en faite une multicoloration de chaque chemin qui consiste à
attribuer une couleur spécifique sur chaque lien utilisé de telle sorte que deux chemins qui
partagent un lien n’ont pas la même couleur sur ce lien. Ceci ne pose aucun problème
algorithmique puisque toute stratégie d’allocation gloutonne fonctionne. Le nombre total de
longueurs d’onde nécessaire pour établir les requêtes de connexion est alors égal au nombre
maximum de chemins utilisant ce même lien.
III.4.3.1. Charge d’un lien
La charge d’un lien α pour un routage R réalisant une instance I dans un graphe G (orienté
ou non) désigne le nombre de chemins de R qui utilisent le lien α . Ce nombre est noté
( )απ ,,, RIG si G est orienté et π ( G, I, R, α ) si G est non-orienté.
La charge du routage R est alors définie comme la charge maximale des liens pour R .
C’est le nombre maximum de chemins de R qui utilisent le même lien de G. Il est noté ( )RIG ,,π
en orienté et π ( G, I, R ) en non-orienté.
Nous appelons problème de la charge le problème d’optimisation résultant du problème
du routage optique avec l’hypothèse de conversion totale des longueurs d’onde. Il s’agit de
trouver un routage R réalisant l’instance I donnée et minimisant la charge ( )RIG ,,π (ou π(G,I,R ) ).
III.4.3.2. Enoncé du PROBLEME de la charge
Entrée : un (multi)graphe G et une instance I de requêtes dans G
Sortie : une allocation de chemins aux requêtes ( un routage )
Objectif : minimiser la charge du routage
44
On note ( )IG,π la charge d’une solution optimale si le graphe G est orienté et
π ( G, I ) si le graphe G est non-orienté.
De manière évidente, la charge optimale d’un routage réalisant une instance donnée minore
le nombre optimal de longueurs d’onde pour le problème du routage optique appliqué à la même
instance. Ceci résulte immédiatement du fait que le problème de la charge est un problème
d’allocation de chemins et de longueurs d’onde, avec la liberté supplémentaire de conversion de
longueur d’onde.
Propriété :
Pour tout problème ( )IG, , ( ) ( )IGIGw ,, π≥ (III.5)
La propriété analogue est aussi valable en non-orienté. Une autre démonstration consiste à
dire que le nombre de longueurs d’onde nécessaires pour le routage optique est au moins égal au
nombre maximum de chemins devant nécessairement utilisés le même chemin ce qui correspond à
la définition de la charge minimale d’un routage.
Remarque :
Notons que pour répondre à la question « ( ) pIG ≤,π ? », étant donné un entier p, revient
à déterminer si le multiflot entier correspondant aux requêtes de I est réalisable dans le flot F p
obtenu en affectant à chaque arc de G une capacité égale à p. Il s’agit donc d’un problème très
classique en optimisation.
Comme le problème du routage optique, le problème de la charge possède son problème de
maximisation associé :
III.4.3.3. Enoncé du PROBLEME du routage maximum
Entrée : un (multi)graphe G et une instance I de requêtes dans G et un entier W > 0
Sortie : une partie I’⊆ I et une allocation de chemins aux requêtes de I’ , de charge au plus
W
Objectif : maximiser le cardinal de I’.
Dans le cas extrême où le nombre W de longueurs d’onde disponibles est réduit à 1, les
deux problèmes de maximisation précédents deviennent équivalents.
45
III.4.3.4. Enoncé du PROBLEME du routage disjoint maximum
Entrée : un (multi)graphe G et une instance I de requêtes dans G
Sortie : une partie I’⊆ I et une allocation de chemins aux requêtes de I’ telle que deux
chemins n’utilisent pas le même lien.
Objectif : maximiser le cardinal de I’.
La version décisionnelle du problème devient :
III.4.3.5. Enoncé du PROBLEME du routage Disjoint
Données : un (multi)graphe G et une instance I de requêtes dans G
Question : existe-t-il une allocation de chemins aux requêtes de I’ telle que deux chemins
n’utilisent pas le même lien ?
III.5. Flot et routage optique [21]
Dans le cas des réseaux tout-optiques WDM, on appelle demande de communication un
couple (émetteur, récepteur) qui doit être connecté par un chemin dans le réseau. Un
multiensemble de demandes de communication est appelé une instance de communication.
Réaliser une instance de communication consiste à trouver un routage optique c’est-à-dire
un multiensemble de chemins reliant chaque demande de communication de l'instance et une
affectation de longueurs d'onde à ces chemins et que ce routage soit valide c'est-à-dire qu'il
respecte la contrainte des réseaux WDM: deux chemins traversant une même fibre ne peuvent
pas se voir affecter la même longueur d'onde.
Une approche pour résoudre le problème du routage optique consiste à se ramener à un
problème de flot.
III.5.1. Problèmes de flot
Les problèmes de flot sont des problèmes fondamentaux et très souvent utiles dès qu'il
s'agit de trouver des chemins dans des graphes. Ils se divisent en deux catégories : le simple flot et
le multiflot.
III.5.1.1. Simple flot
Un problème de simple flot prend en entrée un graphe où chaque arc a une capacité et deux
sommets particuliers : la source et le puits. Le problème qui se pose alors est analogue à un

46
problème de tuyauterie: le graphe représente un réseau de tuyaux avec une source et un puits. Il
s'agit de déterminer de quelle manière un fluide injecté dans le réseau par la source avec un certain
débit va s'écouler dans les tuyaux jusqu'à sortir par le puits.
Chaque tuyau a une capacité qui est le débit maximum du fluide qui peut le traverser.
L'écoulement doit donc respecter des contraintes de capacité sur chaque arc. Enfin, suivant le
célèbre principe de conservation de la matière : rien ne se perd, rien ne se crée, au niveau des
bifurcations des tuyaux (les nœuds du réseau), autres que la source ou le puits, la quantité du
fluide qui arrive est égale a celle qui part ce qui forme des contraintes de conservation de flot. Au
niveau de la source et du puits les mêmes contraintes de conservation s'appliquent à ceci près qu'il
faut prendre en compte l'arrivée du flot à la source et sa disparition au puits.
Un problème de flot peut se formaliser par un programme linéaire. Soit ( )EVG ,= un
graphe, et REc +→: une fonction de capacité sur les arcs, d la quantité de flot à transporter,
s le sommet représentant la source et t le sommet représentant le puits. Il s'agit de trouver une
fonction REf +→: satisfaisant les contraintes suivantes :
- contrainte de capacité : { } Vyx ∈∀ , :
( ) ( )yxcyxf ,,0 ≤≤ (III.6)
- contrainte de conservation : { }tsVy ,−∈∀ :
( )( ){ }
( )( ){ }
0,,,,
=− ∑∑∈−∈− ExyxEyxx
xyfyxf (III.7)
- respect de la demande :
( )( ){ }
( )( ){ }
( )( ){ }
( )( ){ }
dtyfytfsyfysfEtyyEyxyEsyyEysy
=+−=− ∑∑∑∑∈−∈−∈−∈− ,,,,
,,,, (III.8)
( )yxf , représente la quantité de flot par l’arc ( )yx, .
Remarque :
Une unité de flot décrit un chemin de s à t. Le flot peut donc être considéré comme un
ensemble de chemins pondérés entre la source et le puits satisfaisant les contraintes de capacité : la
somme des poids des chemins traversant un même arc est inférieure à la capacité de cet arc.
III.5.1.2. Multiflot
Le problème de multiflot est une généralisation du problème de flot. Il s'agit de faire passer
plusieurs flots simultanément dans le réseau entre plusieurs couples (source, puits). Les flots

47
peuvent être considérés comme des fluides « non miscibles » dans l'analogie précédente : il y a
conservation de chaque flot indépendamment des autres. Toutefois il ne s'agit pas de plusieurs
simples flots « parallèles » car la contrainte de capacité est globale : la somme des flots traversant
un arc ne doit pas excéder sa capacité.
On note sl la source du flot l, tl
le puits du flot l et dl la quantité du flot l que l'on désire
faire passer. Il s'agit de trouver pour chaque flot l une fonction f l satisfaisant les contraintes
suivantes :
- contrainte de capacité : { } Vyx ∈∀ , :
( ) ( )yxcyxl
f l ,,0 ≤∑≤ (III.9)
- contrainte de conservation : { }tlslVyl ,, −∈∀∀ :
( ) ( ) 0,,
,,
=∑∈−
−∑∈−
⎭⎬⎫
⎩⎨⎧ ⎟
⎠⎞⎜
⎝⎛
⎭⎬⎫
⎩⎨⎧ ⎟
⎠⎞⎜
⎝⎛
xyExyx
f lyxEyxx
f l (III.10)
- respect de la demande : l∀ :
( )( ){ }
( )( ){ }
( )( ){ }
( )( ){ }
dtftfsfsf lEyy
llEyy
llEyy
llEyy
llt
yt
ys
ys
yllll
=+−=− ∑∑∑∑∈−∈−∈−∈− ,,,,
,,,,
(III.11)
( )yxf l , représente la quantité du flot l passant sur l'arc ( )yx, .
( NEf ll →∀ :, , Ndl ∈ , NEc →: )
III.5.2. Réduction du routage optique au multiflot
Le problème du routage optique se réduit en un problème de multiflot entier en passant par
un graphe auxiliaire. Cette réduction utilise la modélisation par un simple graphe des réseaux
optiques et est fondée sur la décomposition de l'instance. Comme nous l'avons vu ci-dessus, une
instance de communication I se décompose en une collection de multicast
( ) ( ){ }{ }IysysM s ∈= ,/, de telle manière que deux multicast de la collection ne soient pas issus
du même sommet. Un multicast est associé à un flot. Ainsi l'instance I est associée à un multiflot.
III.5.2.1. Cas du multicast
Le graphe auxiliaire G ck, pour une instance multicast M s dépend du nombre de fibres k
et du nombre de couleurs c. Il est le support du problème de flot. Il est commode de supposer que

48
M s est un ensemble et non un multiensemble. Une transformation simple du graphe permet dans
le cas où M s est un multiensemble de se ramener à un ensemble. En effet, si une paire ( )ys, est
en double dans M s , en créant un nouveau sommet y0 , un arc reliant y à y0 et en remplaçant
une des deux requêtes concernées par ( )ys 0, , nous éliminons ainsi une requête en double. Le
problème obtenu est équivalent pour le routage optique car l'ajout ou la suppression de sommets
ou d'arcs n'entre pas en compte dans le problème de décision (au contraire de problèmes de coût
par exemple). En réitérant le procédé, le problème du routage dans un graphe sur un multicast
représenté par un multiensemble est ramené à un problème où le multicast est un ensemble.
Supposons que le nombre de couleurs c soit égal à 1. Le graphe auxiliaire de flot Gk 1, a
comme ensemble V k 1, tous les sommets de V et Ek 1, contient tous les arcs de E. La capacité est
une fonction constante égale à k.
Si c est supérieur à 1, alors on fait c copies Gi de ce graphe. Nous désignerons le sommet
correspondant à x dans Gi par xi . Le graphe auxiliaireG ck, est construit de la façon suivante :
Vici
iV ck
=
==
1, ∪ et Eici
iE ck
=
==
1, ∪ (III.12)
On introduit le sommet S dans V, représentant la source, et dans E ck, les c arcs ( )siS, de
capacité infinie. Pour chaque requête ( )ys, , on introduit le sommet t y dans V ck, , et dans E ck,
les c arcs ( )t yyi , de capacité 1. Enfin, on introduit dans V ck, un sommet T représentant le puits,
et dans E ck, , pour chaque sommet t y , les arcs ( )Tt y , de capacité 1.
Nous noterons par ( )ysi ,γ le chemin de S à T passant par t y et par Gi , la copie de G
associée à la couleur i. On peut remarquer que ( )ysi ,γ décrit dans G un chemin de s à y.
Proposition III.1 : (voir ANNEXE 1) Pour une instance multicast M s sur le graphe G, il existe un routage de ( )M sG, utilisant
au maximum c couleurs si et seulement si G ck, admet un flot entier de quantité M s entre la
source S et le puits T.

49
III.5.2.2. Cas général
Nous considérons une instance de communication :
M slLl
lI ⊕
=
==
1 (III.13)
La construction précédente est généralisée de la manière suivante : pour chaque multicast
l, un graphe auxiliaire G ckl ,, est construit. Le graphe auxiliaire G ck, est l'union de ces graphes.
Par graphe G ckl ,, il y a une source Sl , un puits Tl et un flot f l .
Proposition III.2 : (voir ANNEXE 2) Pour une instance I sur le graphe G, il existe un routage de ( )IG, utilisant au maximum c
couleurs si et seulement si G ck, admet un multiflot entier, tel que le flot f l . partant de Sl et
ayant comme puits Tl ait une quantité correspondant au cardinal du multicast associé.
III.6. Relations entre les problèmes
Nous avons déjà montré que le problème du routage de la charge pour ( )IG, revient à
déterminer le plus petit entier p rendant réalisable un certain problème associé F p de multiflot
entier. Nous dirons qu’un sommet ( )GVx ∈ est une source ( resp. une destination ) s’il existe
( )GVy ∈ tel que ( ) Iyx ∈, ( resp. ( ) Ixy ∈, ). Le réseau de multiflot F p' associé au problème
du routage optique ( )IG, est construit à partir de G de la manière suivante :
- on commence par prendre p copies indépendantes du graphe G dont les arcs sont
munis d’une capacité unitaire. Les p copies d’un sommet ( )GVu ∈ sont notées u1, u2 , … up..
- pour chaque source ( )GVx ∈ , on ajoute un sommet xout qui est relié à un sommet
xi , pour pi ≤≤1 , par un arc ( )xixout , de capacité infinie.
- pour chaque destination ( )GVy ∈ , on ajoute un sommet yin , et le sommet yi pour
pi ≤≤1 , est relié à yin par un arc ( )yinyi , de capacité unitaire.
- à l’instance de requêtes I de G, nous associons l’instance I '
( ) ( ){ }IyxyinxoutI ∈−= ,,' dans F p' .
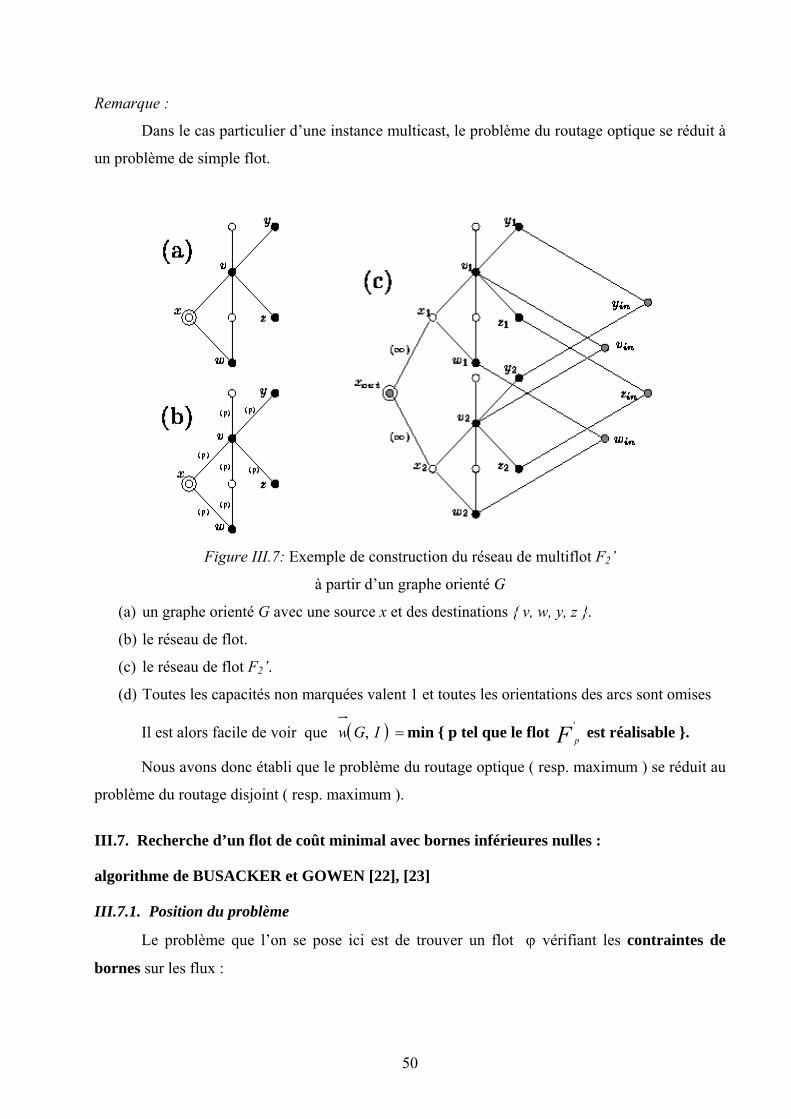
50
Remarque :
Dans le cas particulier d’une instance multicast, le problème du routage optique se réduit à
un problème de simple flot.
Figure III.7: Exemple de construction du réseau de multiflot F2’
à partir d’un graphe orienté G
(a) un graphe orienté G avec une source x et des destinations { v, w, y, z }.
(b) le réseau de flot.
(c) le réseau de flot F2’.
(d) Toutes les capacités non marquées valent 1 et toutes les orientations des arcs sont omises
Il est alors facile de voir que ( ) =IGw , min { p tel que le flot F p' est réalisable }.
Nous avons donc établi que le problème du routage optique ( resp. maximum ) se réduit au
problème du routage disjoint ( resp. maximum ).
III.7. Recherche d’un flot de coût minimal avec bornes inférieures nulles :
algorithme de BUSACKER et GOWEN [22], [23]
III.7.1. Position du problème
Le problème que l’on se pose ici est de trouver un flot ϕ vérifiant les contraintes de
bornes sur les flux :

51
uuu cb ≤≤ ϕ ( )Uu ∈∀ (III.14)
et tel que le coût total :
( ) ∑∈
=ΓUu
uuϕγϕ (III.15)
soit minimal ( Uu ∈∀ , uγ est le coût d’une unité de flux sur l’arc u ).
Dans ce problème les fonctions de coût ( )uu ϕΓ sont de la forme uu ϕγ . où uγ est le coût de
passage d’une unité de flux sur l’arc u (les coûts unitaires uγ peuvent être de signe quelconque).
III.7.2. Principe de l’algorithme
On considère ici le cas particulier où les bornes inférieures de capacité ub sont toutes
nulles, et où l’on recherche un flot de s à t de valeur v=ϕ0 imposée et de coût minimal parmi
l’ensemble de tous les flots de s à t de valeur v .
On suppose que :
- les bornes supérieures de flux uc sont entières et positives (au sens large) ;
- les coûts unitaires sur les arcs uγ sont positifs (au sens large).
Grâce à ces hypothèses, le flot nul est un flot compatible de valeur 0 et de coût minimal, et
il peut être pris comme flot de départ.
L’algorithme de Busacker-Gowen permet de déterminer la famille complète de tous les
flots de coût minimal de s à t , et de valeur v,...,2,10=ϕ en particulier, il permet de déterminer un
flot maximal de coût minimal.
L’algorithme procède par itérations : à l’itération courante k , le flot courant ϕk est
supposé être un flot de valeur ϕk0 et de coût minimal parmi l’ensemble de tous les flots de valeur
ϕk0 .
Soit ( )ϕkG le graphe d’écart relatif à ϕk ; on attribue aux arcs de ( )ϕkG les coûts γ et les
capacités c suivantes :
- si ( ) Ujiu ∈= , et cuu ≺ϕ , l’arc ( )jiu ,=+ a un coût γγ uu = et une capacité
0ϕucucu −=
52
- si ( ) Ujiu ∈= , et 0ϕu , l’arc ( )iju ,=− a un coût γγ uu −= et une
capacité ϕucu = .
Soit alors ( )ϕkP un chemin de coût minimal relativement aux coûts γ entre s et t sur le
graphe d’écart ( )ϕkG ; on note ε la capacité de ( )ϕkP (minimum des capacités des arcs qui le
composent) et on pose Pkk εϕϕ +=+ 1 où P est le vecteur associé à ( )ϕkP c’est-à-dire tel que
( ) 1=P u si ( )ϕε kPu+ et ( ) 1−=P u si ( )ϕε kPu− . Alors on démontre que ϕ 1+k est un flot de
coût minimal de valeur εϕ +k0 .
III.7.3. Exemple d’un problème de flot à coût minimum
Considérons le problème consistant à approvisionner, au moindre coût, des entrepôts à
partir des unités de production (usines) d'une compagnie. Les données du problème sont:
- le réseau de transport;
- la localisation et la capacité de production des usines (sources);
- la localisation et la demande des entrepôts (destinations);
- les coûts de transport cij sur les arcs du réseau.
Il reste à déterminer les productions des usines ainsi que les chemins utilisés pour
approvisionner les entrepôts. Il semble naturel de formuler ce problème en terme de flots sur les
chemins reliant les sources et les destinations du réseau.
III.8. Recherche d’un flot maximum dans un graphe : algorithme de Ford-Fulkerson [22]
III.8.1. Position du problème
Ce problème ultra classique consiste à maximiser le flot d'une source (origine) s à une
destination t dans un réseau dont les arcs sont munis de capacités cij . Pour résoudre le problème,
il est naturel de trouver un chemin non saturé et d'y pousser le plus grand flot possible.
III.8.2. Principe de l’algorithme
Soit [ ]UXG ,= un graphe orienté dans lequel chaque arc Uu ∈ est muni d’une capacité
0cu , et deux sommets particuliers s (source) et t (puits). Soit [ ]UXG 0,0 = le graphe déduit

53
de G en rajoutant un arc ( )st, dont les extrémités initiale et terminale sont respectivement t et s .
L’arc ( )st, est appelé arc de retour et on convient de lui attribuer le numéro 0 . Les arcs de G0
sont donc numérotés M,...,1,0 .
On dit que le vecteur ( )ϕϕϕϕ MT,...,2,1= , est un flot de s à t et de valeur ϕ0 dans
G si et seulement si le vecteur ( )ϕϕϕϕ MT,...,1,0
' = est un flot dans G0 . Pour le vecteur
( )ϕϕϕϕ MT,...,2,1= les lois de conservation aux nœuds sont donc vérifiées en tous les
sommets de G , sauf aux sommets s et t où l’on a :
∑−∈
==∑+∈ ⎟
⎠⎞⎜
⎝⎛⎟
⎠⎞⎜
⎝⎛ tu
usu
uω
ϕϕω
ϕ 0 (III.16)
La quantité ϕ0 est appelée valeur du flot circulant entre s et t dans G muni des
capacités cu ( Uu ∈ ) revient alors à déterminer un flot : ( )ϕϕϕϕ MT,...,1,0
' = dans G0
vérifiant sur chaque arc de G les contraintes de capacité : cuu ≤≤ ϕ0 Mu ,...,1=∀
et tel que la composante ϕ0 sur l’arc de retour ( )st, soit maximale.
III.8.3. Graphe d’écart
Par définition, le graphe d’écart associé à un flot ϕ vérifiant les contraintes de bornes est
le graphe ( ) ( )[ ]ϕϕ UXG ,= ayant le même ensemble de sommets que G et dont l’ensemble des
arcs, ( )ϕU est constitué de manière que à chaque arc Ujiu ∈= ),( de G , on fait correspondre
au plus deux arcs de ( )ϕG :
( )jiu ,=+ si cuu ≺ϕ
( )iju ,=− si 0ϕu
Chacun de ces arcs est muni d’une capacité (capacité résiduelle) égale à :
0ϕucu − pour l’arc u+ (s’il existe)
0ϕu pour l’arc u− (s’il existe)
Le résultat suivant montre l’intérêt de la notion de graphe d’écart pour caractériser un flot de
valeur maximale.

54
Théorème :
Soit ϕ un flot de s à t dans G , compatible avec les capacités cu , et soit ( )ϕG le graphe
d’écart associé à ϕ . Une condition nécessaire et suffisante pour que le flot ϕ soit maximum est
qu’il n’existe pas de chemin de s à t dans ( )ϕG .
Mais la notion de graphe d’écart ne permet pas seulement de vérifier l’optimalité d’une
solution, elle suggère aussi une méthode pour améliorer une solution non optimale. En effet, soit
ϕ un flot de s à t dans G , de valeur ϕ0 , qui ne vérifie pas la condition du théorème ci-dessus.
Il existe donc un chemin P s à t dans le graphe d’écart ( )ϕG , lequel correspond sur G à
une chaîne L joignant les deux sommets s et t . Par définition du graphe d’écart, si la chaîne L ,
parcourue de s vers t , emprunte un arc ( )jiu ,= dans le sens direct, alors nécessairement
cuu ≺ϕ ; si elle emprunte un arc ( )jiu ,= dans le sens inverse (de j vers i ) alors
nécessairement 0ϕu .
Notons L+ l’ensemble des arcs de L parcourus dans le sens direct, et L− l’ensemble des
arcs de L parcourus dans le sens inverse.
Pour 0ε suffisamment petit, effectuons alors les transformations :
εϕϕ += uu' pour Lu +∈
εϕϕ −= uu' pour Lu −∈
ces transformations préservent les conditions de conservation du flot en chaque sommet autre que
s et t . Par ailleurs, pour les sommets s et t , on a :
∑−∈
=+=+∑+∈ ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛∑+∈
=⎟⎠⎞⎜
⎝⎛⎟
⎠⎞⎜
⎝⎛ ⎟
⎠⎞⎜
⎝⎛ tu
usu su
uuω
ϕεϕεϖ ω
ϕϕ '0
' (III.17)
ce qui montre que la valeur du flot (le flux sur l’arc de retour) a été augmenté de ε .
Le fait que ε puisse prendre une valeur strictement positive sans que les contraintes de
bornes cessent d’être vérifiées résulte de ce que cuu ≺ϕ ( Lu +∈∀ ) et que 0ϕu ( Lu −∈∀ ).
Notons que la valeur maximale possible pour ε n’est autre que la capacité du chemin P
dans le graphe d’écart, c’est à dire { }εε −+ ,Min où :
55
{ }ϕε ucuMinLu
−+∈
=+ et { }ϕε uMinLu −∈
=− (III.18)
III.8.4. Exemple d’un problème de flot maximum
On se donne un graphe représentant les rues d’une ville, et la quantité maximum de
voitures par heure pouvant passer d’un carrefour à l’autre. On choisit deux carrefours et l’on se
demande quel est le nombre maximum de véhicules pouvant passer de l’un à l’autre par heure, et
par où ils peuvent passer.
Résoudre ce problème revient à chercher un flot de valeur maximum dans un graphe
orienté dont les arêtes sont munies d’une capacité. On va voir qu’il existe un flot maximum et
qu’on peut en calculer un, et que si les capacités sont entières, la valeur du flot maximum construit
est entière dans chaque arc.
56
CHAPITRE IV : SIMULATION DE L’OPTIMISATION DES RESEAUX WDM TOUT-
OPTIQUES : WDM SIMULATOR
IV.1. Le langage FORTRAN
IV.1.1. Historique du FORTRAN [24]
Le premier document faisant référence au langage FORTRAN ( FORmula TRANslator )
date du 10 novembre 1954. FORTRAN vient, en fait, de The IBM Mathematical Formula
Translation System. Il a été initialement conçu pour simplifier la programmation de calculs
numériques sur les plates-formes IBM 704.
La première version du FORTRAN n'est apparue qu'au début de l'année 1957 et même si
les programmes obtenus à partir de code FORTRAN étaient plus lents que ceux obtenus à partir de
codes en langage machine, le FORTRAN s'est imposé auprès de la communauté scientifique : il
était bien plus simple à écrire.
Très rapidement, il a été possible de réutiliser des codes FORTRAN sur d'autres plates-
formes que celles d'IBM.
Evidemment, ce langage était appelé à évoluer. C'est ainsi que, successivement, sont
apparus:
- 1957: FORTRAN II
- 1958: FORTRAN III
- 1962: FORTRAN IV
- 1978: FORTRAN V
Durant toute cette évolution, FORTRAN a respecté toutes les anciennes normes de
manière à assurer une transplantation rapide des anciens programmes sur les nouveaux
compilateurs.
IV.1.2. Structure générale
IV.1.2.1. Format des lignes d’instruction
L’écriture d’un programme FORTRAN obéit à un « format carte » ( fossile des temps
anciens où les programmes étaient stockés sur cartes perforées ) :
– une ligne de programme « standard » ne commence en fait qu’à la 7e colonne, les 6
premiers caractères étant remplis par des blancs.
57
– Les instructions ne doivent pas dépasser la 72e colonne. Pour prolonger une
instruction sur plusieurs lignes, il suffit d’introduire un caractère quelconque à la 6e colonne de la
ligne suivante.
– Dans la 1ère colonne, la présence d’un caractère « C » ou « * » signale que la ligne
est un commentaire : elle sera totalement ignorée par le compilateur.
– Les colonnes 1 à 5 servent à placer des « étiquettes » qui seront utilisées pour
repérer une ligne. Elles sont utilisées par exemple avec l’instruction goto ou pour les
spécifications de formats d’entrée-sortie.
Remarque :
Le Fortran ne fait aucune distinction entre majuscules et minuscules.
IV.1.2.2. Structure d'un programme
Un programme comporte généralement plusieurs modules. Ces modules peuvent figurer
dans un même fichier ou dans des fichiers différents. Lorsque les modules figurent dans des
fichiers individuels, il est possible, et c'est même fortement conseillé, de les réutiliser dans d'autres
programmes. L'inconvénient (mineur) est la nécessité d'emploi d'un fichier projet chargé de
communiquer à l'éditeur de liens les noms des différents modules à lier.
Un ensemble de modules doit, pour pouvoir être exécuté, comporter un programme
principal. Le programme principal peut faire appel à des procédures et à des fonctions qui
peuvent faire de même.
Un module comporte différentes parties :
- l'entête ou le nom du module. En FORTRAN on peut trouver:
PROGRAM nom du programme pour le programme principal
SUBROUTINE(Liste de paramètres) pour un sous-programme
FUNCTION(Liste de paramètres) pour une fonction
- les déclarations des paramètres, s'il y a lieu
- les déclarations des variables
- les initialisations et déclarations particulières
- les instructions exécutables. C'est la traduction en langage (FORTRAN) de
l'algorithme
- l'instruction FIN de module. En FORTRAN, il s'agit de END
58
Remarque :
Dans un fichier comportant plusieurs modules, il y aura autant d'instructions END que de
modules.
IV.1.3. Modularité [25]
Comme beaucoup d’autre langage, le fortran permet de définir des outils indépendants les
uns des autres et de les réutiliser à volonté avec la possibilité de les imbriquer. On appelle ces
outils routines ou sous-programmes.
Les routines sont aveugles vis-à-vis du programme qui les appelle et ne reconnaissent donc
pas les variables en dehors des siennes ( sauf spécification explicite). Pour communiquer avec le
programme appelant, les routines prennent des arguments qui peuvent être indifféremment des
arguments d’entrée ou de sortie.
En mémoire, les variables arguments sont données à la routine par leur adresse et ne sont
donc pas recopiées. Par contre, toutes les autres variables propres à la routine sont allouées dans la
« pile » ou stack (une zone de mémoire allouée temporairement, le temps d’exécution de la
routine), puis elles sont « desallouées » donc purement et simplement effacées. Le programme
appelant est donc aussi aveugle vis-à-vis des variables internes à la routine.
IV.1.4. Branchement inconditionnel
Le branchement inconditionnel permet de désigner par un numéro ou label une ligne du
programme où aller. Ce type de branchement permet de s’écarter du suivi séquentiel des
instructions. Ceci se fait à l’aide de l’instruction goto.
Remarque :
Lorsqu’on veut brancher sur une ligne sans instruction, on écrit simplement continue.
IV.1.5. Quelques points importants du langage FORTRAN
- un programme doit comporter au moins une unité ( PROGRAM ), les autres sont
optionnelles,
- les noms des unités doivent être différents,
- les noms des différentes unités sont global, ils sont donc connus de toutes les autres
unités,

59
- chaque unité de programme est compilable séparément. Cette souplesse est
intéressante puisqu’elle permet de construire des bibliothèques de sous-programmes réutilisables.
Néanmoins la compilation séparée impose certaines contraintes,
Il est impératif d’effectuer dans chaque unité toutes les déclarations de types nécessaires.
- chaque unité SUBROUTINE/FUNCTION peut appeler d’autres unités sans qu’il
existe une quelconque notion de hiérarchie entre procédure appelante ou appelée. De manière
générale on appliquera le terme de sous-programme à ces deux unités,
- le passage d’arguments entre SUBROUTINE/FUNCTION ne se fait que par
adresse.
IV.1.6. Les avantages du langage FORTRAN [25]
Le langage FORTRAN a les structures avantageuses suivantes :
- c’est un langage de haut niveau ( très lointain du binaire ou de l’assembleur ) donc
il permet d’écrire des programmes portables c’est-à-dire exécutables sur tout ordinateur. ( chaque
ordinateur a son langage d’assemblage, les programmes écrits dans ces langages ne sont plus
utilisables dès que l’on change d’ordinateur. )
- Il est exécuté après compilation (qui produit des programmes binaires).
- Il est très fiable car testé et utilisé depuis très longtemps (les années 60),
- réactualisé tout en restant compatible avec les anciennes syntaxes,
- très performant en calcul numérique,
- très lisible et simple d’utilisation.
IV.1.7. Justification du choix du langage FORTRAN
Le passage entre l’énoncé d’un algorithme dans un formalisme tel que celui qui a été
utilisé ( représentation par pseudo-langage ) dans cet ouvrage et sa traduction sous forme d’une
suite d’instructions d’un langage de programmation est généralement difficile. Cette difficulté
peut se réduire en utilisant le langage FORTRAN qui est un langage algorithmique, c’est-à-dire
plus proche de l’algorithme ( utilisation de l’instruction de branchement inconditionnel goto dans
notre cas ). De plus la réduction de la complexité en temps d’un algorithme nécessite un recours à
des structures de données plus élaborées.
Les impératifs suivants sont aussi à considérer pour écrire un programme basé sur les
théories des graphes :
60
- homogénéité : malgré le nombre et la variété des algorithmes étudiés, le maximum
d’unité a été recherché dans les notations, dans la présentation, dans le choix des structures de
données ;
- modularité : recherche du maximum de compatibilité entre les différents sous-
programmes afin de permettre, comme dans un jeu de construction, l’assemblage aisé de ces sous-
programmes en ensembles plus complexes ;
- portabilité : d’où le choix de FORTRAN qui est l’un des langages de programmation
les plus diffusés pour les applications scientifiques ;
- lisibilité et structuration des programmes : la présence de très nombreux
commentaires dans le corps même des programmes ainsi que d’un texte explicatif qui précède
chaque sous-programme afin de donner une description détaillée de l’algorithme et les différentes
données utilisées pour sa mise en œuvre. Une conséquence directe des qualités de lisibilité ainsi
obtenues est de garantir une meilleure évolutivité du programme ;
- efficacité : pour chacun des algorithmes présentés, la recherche de la meilleure
complexité possible a été le critère principal de choix, en particulier pour ce qui concerne les
structures de données.
IV.2. Représentation d’un graphe
IV.2.1. Les tableaux LP et LS
On utilise la représentation dite par listes d’adjacence, nécessitant deux tableaux :
- un premier tableau nommé LP (« liste de pointeurs ») de dimension N+1, N étant le
nombre de sommets du graphe
- un second tableau que nous désignerons par LS (« liste des sommets »), de
dimension M (cas orienté) ou 2M (cas non orienté), M étant le nombre d’arcs ou arêtes dans le
graphe
Pour chaque sommet I la liste des successeurs de I est contenue dans le tableau LS à partir
de la case numéro LP(I). On voit donc que l’ensemble des informations relatives au sommet I est
contenu entre les cases LP(I) et LP(I+1)-1 du tableau LS et on a :
d+(I) = LP(I+1) - LP(I) (cas orienté)
d(I) = LP(I+1) – LP(I) (cas non orienté)
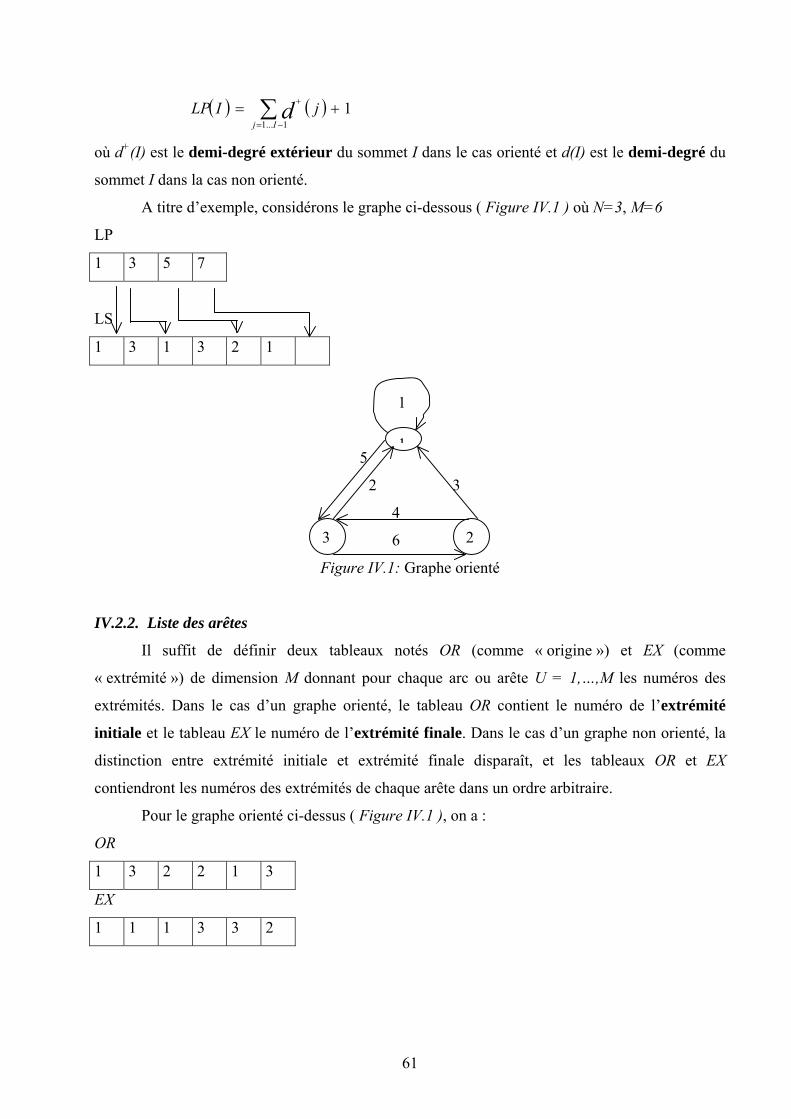
61
( ) ( )∑−=
+ +=1...1
1Ij
jILP d
où d+(I) est le demi-degré extérieur du sommet I dans le cas orienté et d(I) est le demi-degré du
sommet I dans la cas non orienté.
A titre d’exemple, considérons le graphe ci-dessous ( Figure IV.1 ) où N=3, M=6
LP
1 3 5 7
LS
1 3 1 3 2 1
1
5
2 3
4
6
Figure IV.1: Graphe orienté
IV.2.2. Liste des arêtes
Il suffit de définir deux tableaux notés OR (comme « origine ») et EX (comme
« extrémité ») de dimension M donnant pour chaque arc ou arête U = 1,…,M les numéros des
extrémités. Dans le cas d’un graphe orienté, le tableau OR contient le numéro de l’extrémité
initiale et le tableau EX le numéro de l’extrémité finale. Dans le cas d’un graphe non orienté, la
distinction entre extrémité initiale et extrémité finale disparaît, et les tableaux OR et EX
contiendront les numéros des extrémités de chaque arête dans un ordre arbitraire.
Pour le graphe orienté ci-dessus ( Figure IV.1 ), on a :
OR
1 3 2 2 1 3
EX
1 1 1 3 3 2
3
1
2
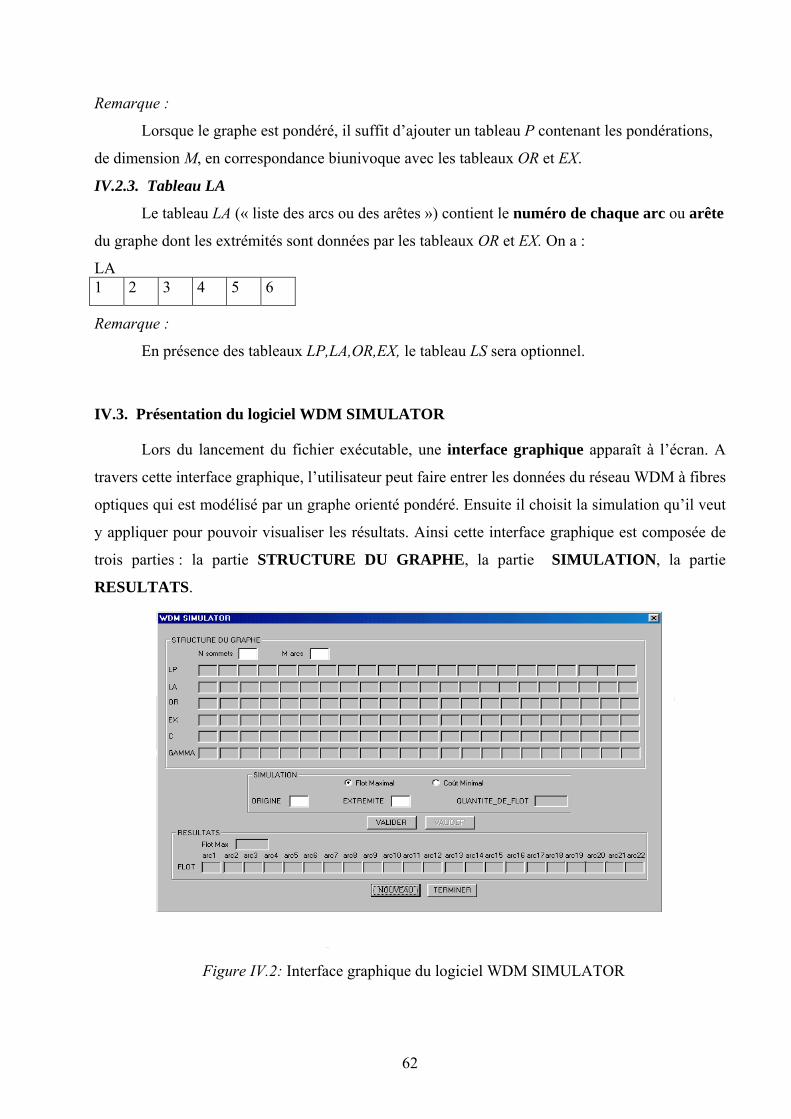
62
Remarque :
Lorsque le graphe est pondéré, il suffit d’ajouter un tableau P contenant les pondérations,
de dimension M, en correspondance biunivoque avec les tableaux OR et EX.
IV.2.3. Tableau LA
Le tableau LA (« liste des arcs ou des arêtes ») contient le numéro de chaque arc ou arête
du graphe dont les extrémités sont données par les tableaux OR et EX. On a :
LA 1 2 3 4 5 6
Remarque :
En présence des tableaux LP,LA,OR,EX, le tableau LS sera optionnel.
IV.3. Présentation du logiciel WDM SIMULATOR
Lors du lancement du fichier exécutable, une interface graphique apparaît à l’écran. A
travers cette interface graphique, l’utilisateur peut faire entrer les données du réseau WDM à fibres
optiques qui est modélisé par un graphe orienté pondéré. Ensuite il choisit la simulation qu’il veut
y appliquer pour pouvoir visualiser les résultats. Ainsi cette interface graphique est composée de
trois parties : la partie STRUCTURE DU GRAPHE, la partie SIMULATION, la partie
RESULTATS.
Figure IV.2: Interface graphique du logiciel WDM SIMULATOR
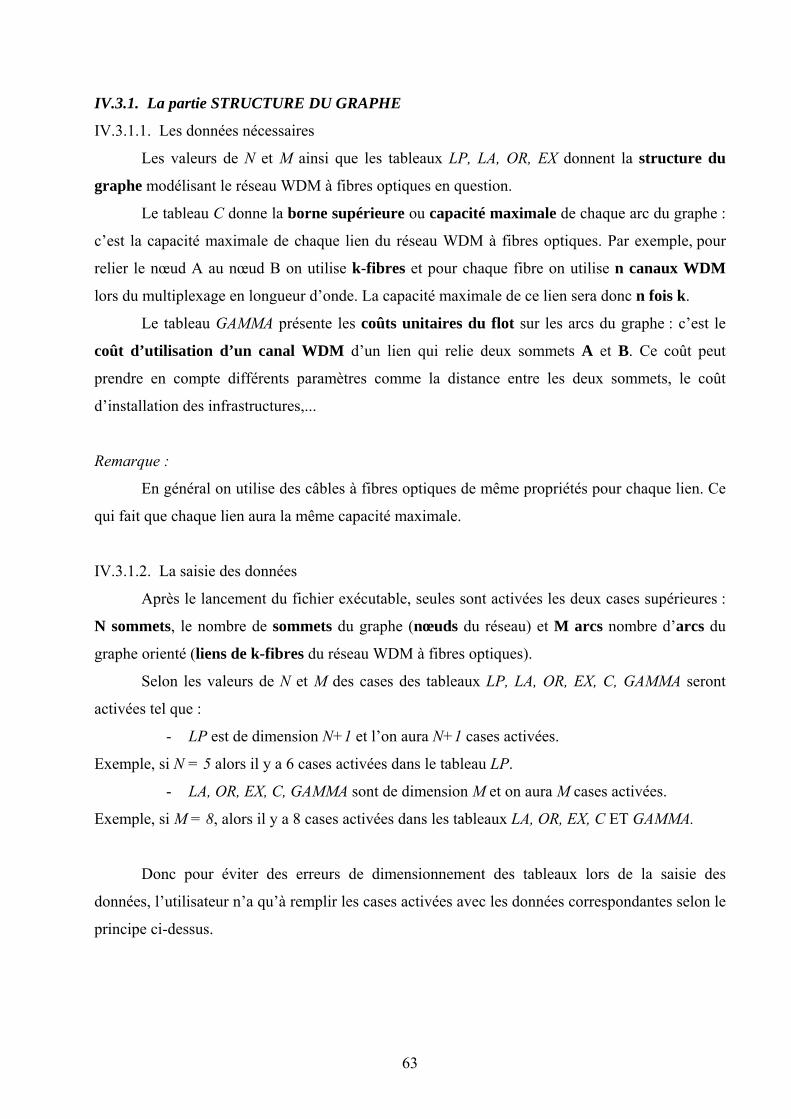
63
IV.3.1. La partie STRUCTURE DU GRAPHE
IV.3.1.1. Les données nécessaires
Les valeurs de N et M ainsi que les tableaux LP, LA, OR, EX donnent la structure du
graphe modélisant le réseau WDM à fibres optiques en question.
Le tableau C donne la borne supérieure ou capacité maximale de chaque arc du graphe :
c’est la capacité maximale de chaque lien du réseau WDM à fibres optiques. Par exemple, pour
relier le nœud A au nœud B on utilise k-fibres et pour chaque fibre on utilise n canaux WDM
lors du multiplexage en longueur d’onde. La capacité maximale de ce lien sera donc n fois k.
Le tableau GAMMA présente les coûts unitaires du flot sur les arcs du graphe : c’est le
coût d’utilisation d’un canal WDM d’un lien qui relie deux sommets A et B. Ce coût peut
prendre en compte différents paramètres comme la distance entre les deux sommets, le coût
d’installation des infrastructures,...
Remarque :
En général on utilise des câbles à fibres optiques de même propriétés pour chaque lien. Ce
qui fait que chaque lien aura la même capacité maximale.
IV.3.1.2. La saisie des données
Après le lancement du fichier exécutable, seules sont activées les deux cases supérieures :
N sommets, le nombre de sommets du graphe (nœuds du réseau) et M arcs nombre d’arcs du
graphe orienté (liens de k-fibres du réseau WDM à fibres optiques).
Selon les valeurs de N et M des cases des tableaux LP, LA, OR, EX, C, GAMMA seront
activées tel que :
- LP est de dimension N+1 et l’on aura N+1 cases activées.
Exemple, si N = 5 alors il y a 6 cases activées dans le tableau LP.
- LA, OR, EX, C, GAMMA sont de dimension M et on aura M cases activées.
Exemple, si M = 8, alors il y a 8 cases activées dans les tableaux LA, OR, EX, C ET GAMMA.
Donc pour éviter des erreurs de dimensionnement des tableaux lors de la saisie des
données, l’utilisateur n’a qu’à remplir les cases activées avec les données correspondantes selon le
principe ci-dessus.
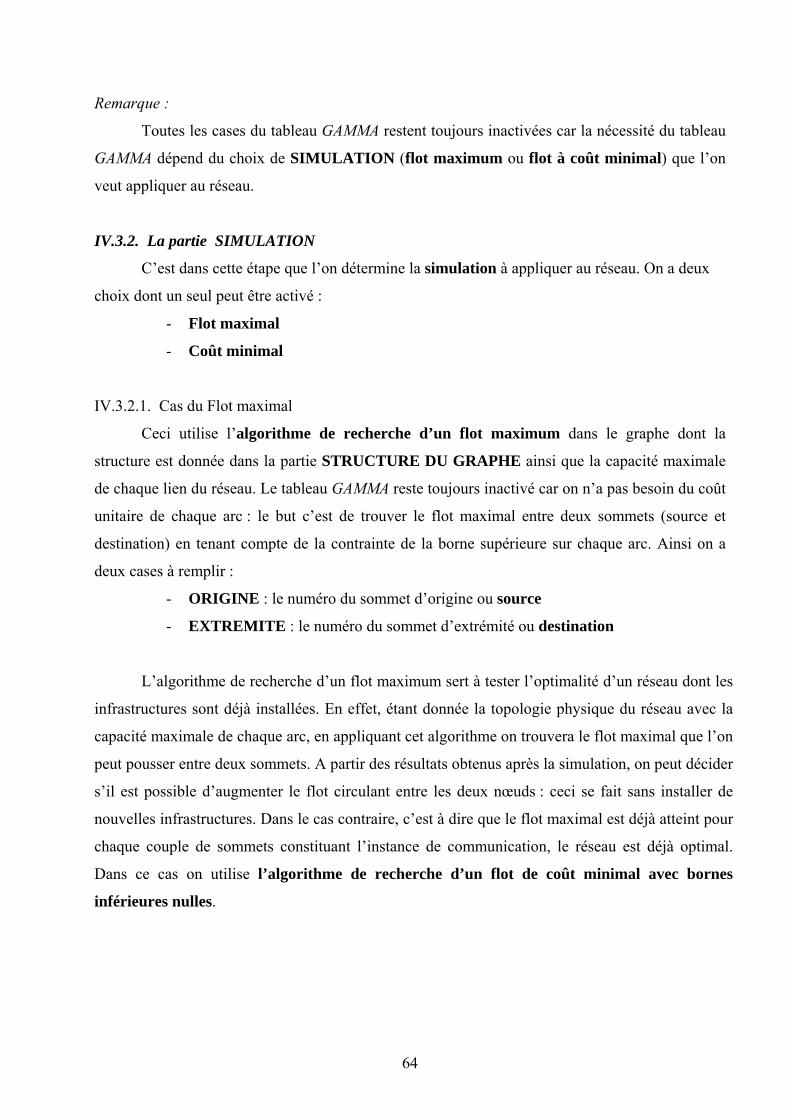
64
Remarque :
Toutes les cases du tableau GAMMA restent toujours inactivées car la nécessité du tableau
GAMMA dépend du choix de SIMULATION (flot maximum ou flot à coût minimal) que l’on
veut appliquer au réseau.
IV.3.2. La partie SIMULATION
C’est dans cette étape que l’on détermine la simulation à appliquer au réseau. On a deux
choix dont un seul peut être activé :
- Flot maximal
- Coût minimal
IV.3.2.1. Cas du Flot maximal
Ceci utilise l’algorithme de recherche d’un flot maximum dans le graphe dont la
structure est donnée dans la partie STRUCTURE DU GRAPHE ainsi que la capacité maximale
de chaque lien du réseau. Le tableau GAMMA reste toujours inactivé car on n’a pas besoin du coût
unitaire de chaque arc : le but c’est de trouver le flot maximal entre deux sommets (source et
destination) en tenant compte de la contrainte de la borne supérieure sur chaque arc. Ainsi on a
deux cases à remplir :
- ORIGINE : le numéro du sommet d’origine ou source
- EXTREMITE : le numéro du sommet d’extrémité ou destination
L’algorithme de recherche d’un flot maximum sert à tester l’optimalité d’un réseau dont les
infrastructures sont déjà installées. En effet, étant donnée la topologie physique du réseau avec la
capacité maximale de chaque arc, en appliquant cet algorithme on trouvera le flot maximal que l’on
peut pousser entre deux sommets. A partir des résultats obtenus après la simulation, on peut décider
s’il est possible d’augmenter le flot circulant entre les deux nœuds : ceci se fait sans installer de
nouvelles infrastructures. Dans le cas contraire, c’est à dire que le flot maximal est déjà atteint pour
chaque couple de sommets constituant l’instance de communication, le réseau est déjà optimal.
Dans ce cas on utilise l’algorithme de recherche d’un flot de coût minimal avec bornes
inférieures nulles.
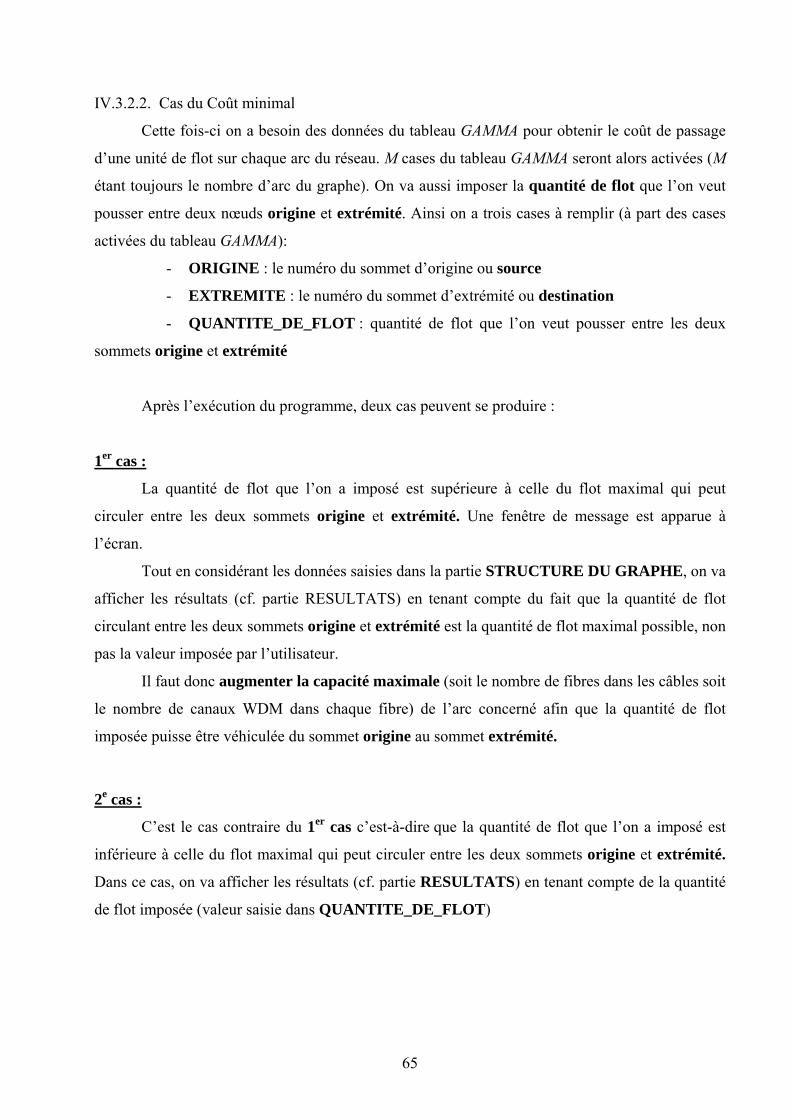
65
IV.3.2.2. Cas du Coût minimal
Cette fois-ci on a besoin des données du tableau GAMMA pour obtenir le coût de passage
d’une unité de flot sur chaque arc du réseau. M cases du tableau GAMMA seront alors activées (M
étant toujours le nombre d’arc du graphe). On va aussi imposer la quantité de flot que l’on veut
pousser entre deux nœuds origine et extrémité. Ainsi on a trois cases à remplir (à part des cases
activées du tableau GAMMA):
- ORIGINE : le numéro du sommet d’origine ou source
- EXTREMITE : le numéro du sommet d’extrémité ou destination
- QUANTITE_DE_FLOT : quantité de flot que l’on veut pousser entre les deux
sommets origine et extrémité
Après l’exécution du programme, deux cas peuvent se produire :
1er cas :
La quantité de flot que l’on a imposé est supérieure à celle du flot maximal qui peut
circuler entre les deux sommets origine et extrémité. Une fenêtre de message est apparue à
l’écran.
Tout en considérant les données saisies dans la partie STRUCTURE DU GRAPHE, on va
afficher les résultats (cf. partie RESULTATS) en tenant compte du fait que la quantité de flot
circulant entre les deux sommets origine et extrémité est la quantité de flot maximal possible, non
pas la valeur imposée par l’utilisateur.
Il faut donc augmenter la capacité maximale (soit le nombre de fibres dans les câbles soit
le nombre de canaux WDM dans chaque fibre) de l’arc concerné afin que la quantité de flot
imposée puisse être véhiculée du sommet origine au sommet extrémité.
2e cas :
C’est le cas contraire du 1er cas c’est-à-dire que la quantité de flot que l’on a imposé est
inférieure à celle du flot maximal qui peut circuler entre les deux sommets origine et extrémité.
Dans ce cas, on va afficher les résultats (cf. partie RESULTATS) en tenant compte de la quantité
de flot imposée (valeur saisie dans QUANTITE_DE_FLOT)
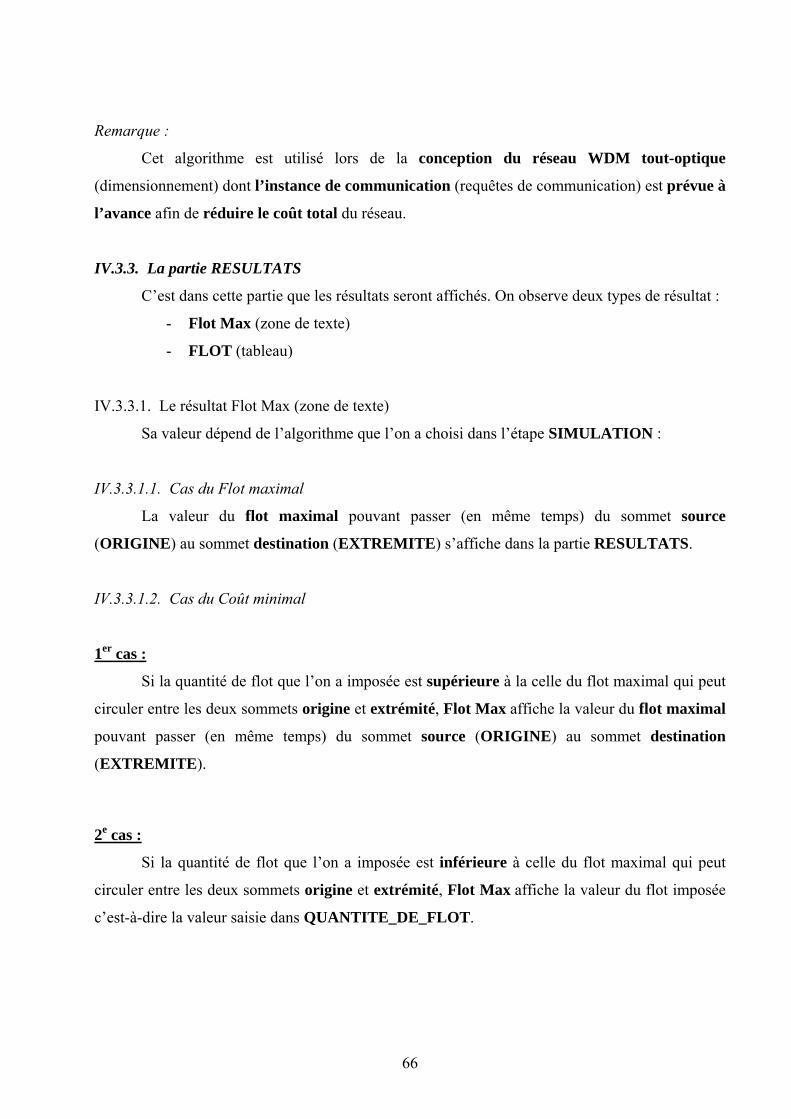
66
Remarque :
Cet algorithme est utilisé lors de la conception du réseau WDM tout-optique
(dimensionnement) dont l’instance de communication (requêtes de communication) est prévue à
l’avance afin de réduire le coût total du réseau.
IV.3.3. La partie RESULTATS
C’est dans cette partie que les résultats seront affichés. On observe deux types de résultat :
- Flot Max (zone de texte)
- FLOT (tableau)
IV.3.3.1. Le résultat Flot Max (zone de texte)
Sa valeur dépend de l’algorithme que l’on a choisi dans l’étape SIMULATION :
IV.3.3.1.1. Cas du Flot maximal
La valeur du flot maximal pouvant passer (en même temps) du sommet source
(ORIGINE) au sommet destination (EXTREMITE) s’affiche dans la partie RESULTATS.
IV.3.3.1.2. Cas du Coût minimal
1er cas :
Si la quantité de flot que l’on a imposée est supérieure à la celle du flot maximal qui peut
circuler entre les deux sommets origine et extrémité, Flot Max affiche la valeur du flot maximal
pouvant passer (en même temps) du sommet source (ORIGINE) au sommet destination
(EXTREMITE).
2e cas :
Si la quantité de flot que l’on a imposée est inférieure à celle du flot maximal qui peut
circuler entre les deux sommets origine et extrémité, Flot Max affiche la valeur du flot imposée
c’est-à-dire la valeur saisie dans QUANTITE_DE_FLOT.
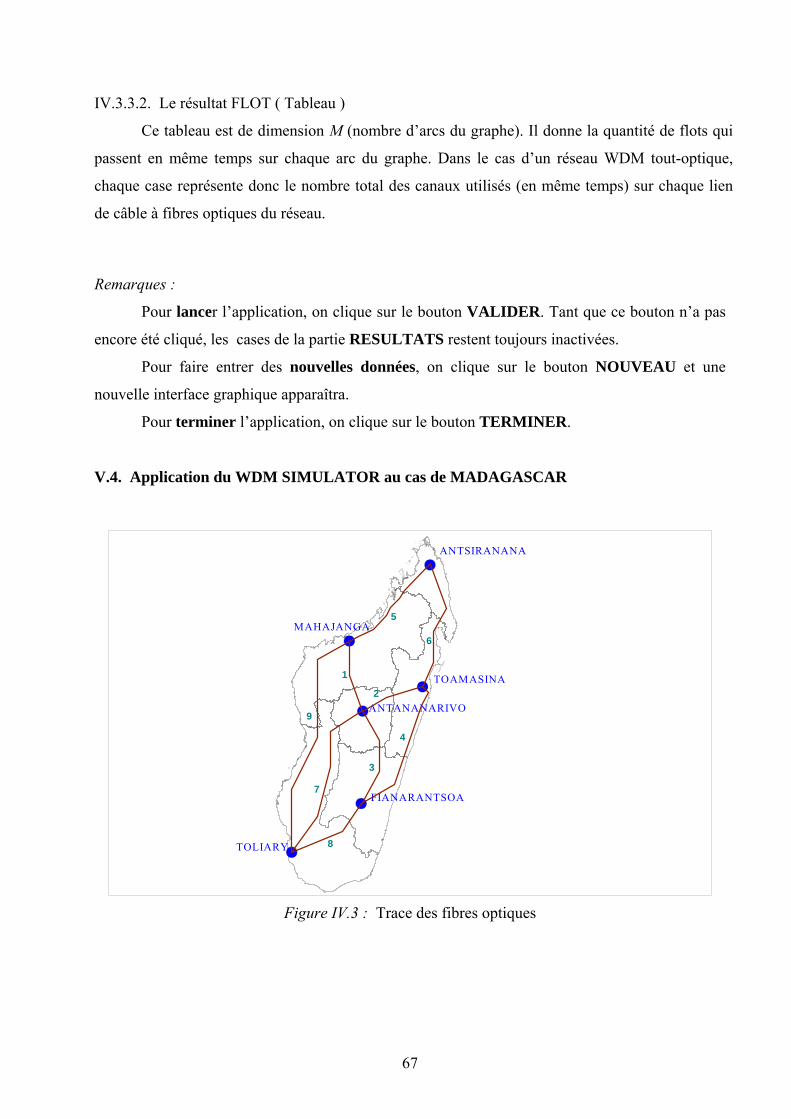
67
IV.3.3.2. Le résultat FLOT ( Tableau )
Ce tableau est de dimension M (nombre d’arcs du graphe). Il donne la quantité de flots qui
passent en même temps sur chaque arc du graphe. Dans le cas d’un réseau WDM tout-optique,
chaque case représente donc le nombre total des canaux utilisés (en même temps) sur chaque lien
de câble à fibres optiques du réseau.
Remarques :
Pour lancer l’application, on clique sur le bouton VALIDER. Tant que ce bouton n’a pas
encore été cliqué, les cases de la partie RESULTATS restent toujours inactivées.
Pour faire entrer des nouvelles données, on clique sur le bouton NOUVEAU et une
nouvelle interface graphique apparaîtra.
Pour terminer l’application, on clique sur le bouton TERMINER.
V.4. Application du WDM SIMULATOR au cas de MADAGASCAR
ANTSIRANANA
ANTANANARIVO
TOAMASINA
FIANARANTSOA
MAHAJANGA
TOLIARY
6
5
2
4
1
8
7
9
3
Figure IV.3 : Trace des fibres optiques
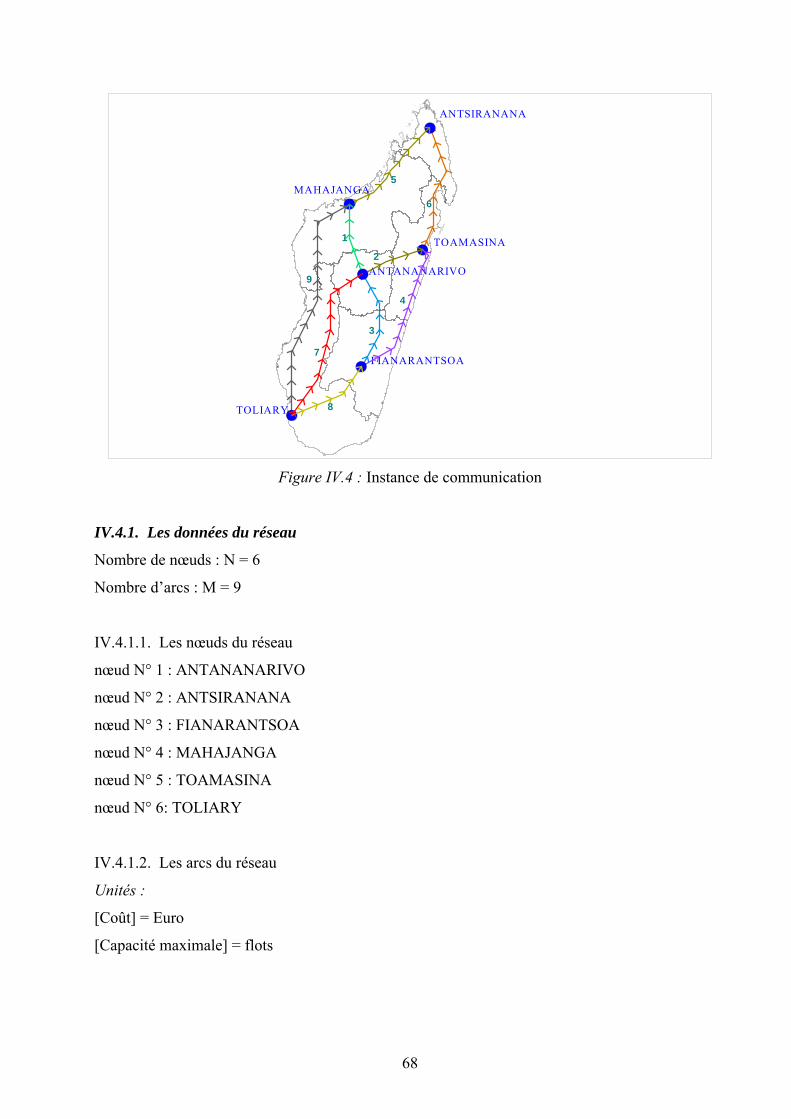
68
ANTSIRANANA
ANTANANARIVO
TOAMASINA
FIANARANTSOA
MAHAJANGA
TOLIARY
6
5
2
4
1
8
7
9
3
Figure IV.4 : Instance de communication
IV.4.1. Les données du réseau
Nombre de nœuds : N = 6
Nombre d’arcs : M = 9
IV.4.1.1. Les nœuds du réseau
nœud N° 1 : ANTANANARIVO
nœud N° 2 : ANTSIRANANA
nœud N° 3 : FIANARANTSOA
nœud N° 4 : MAHAJANGA
nœud N° 5 : TOAMASINA
nœud N° 6: TOLIARY
IV.4.1.2. Les arcs du réseau
Unités :
[Coût] = Euro
[Capacité maximale] = flots
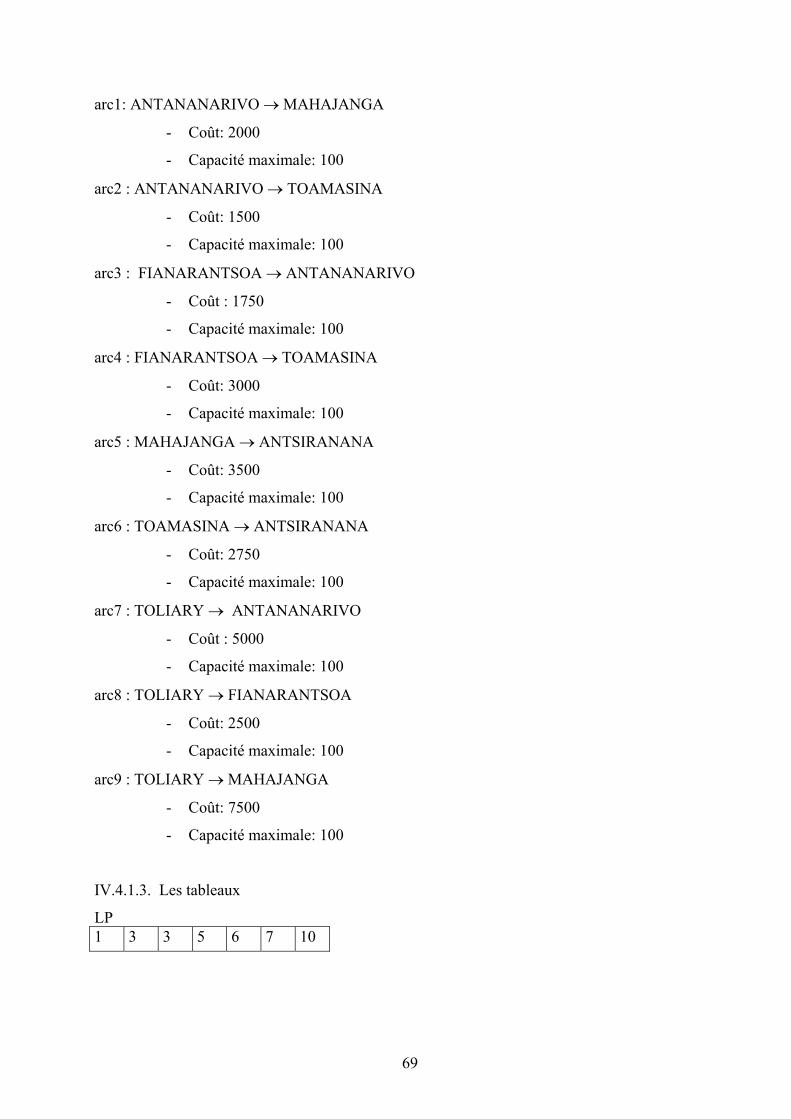
69
arc1: ANTANANARIVO → MAHAJANGA
- Coût: 2000
- Capacité maximale: 100
arc2 : ANTANANARIVO → TOAMASINA
- Coût: 1500
- Capacité maximale: 100
arc3 : FIANARANTSOA → ANTANANARIVO
- Coût : 1750
- Capacité maximale: 100
arc4 : FIANARANTSOA → TOAMASINA
- Coût: 3000
- Capacité maximale: 100
arc5 : MAHAJANGA → ANTSIRANANA
- Coût: 3500
- Capacité maximale: 100
arc6 : TOAMASINA → ANTSIRANANA
- Coût: 2750
- Capacité maximale: 100
arc7 : TOLIARY → ANTANANARIVO
- Coût : 5000
- Capacité maximale: 100
arc8 : TOLIARY → FIANARANTSOA
- Coût: 2500
- Capacité maximale: 100
arc9 : TOLIARY → MAHAJANGA
- Coût: 7500
- Capacité maximale: 100
IV.4.1.3. Les tableaux
LP 1 3 3 5 6 7 10
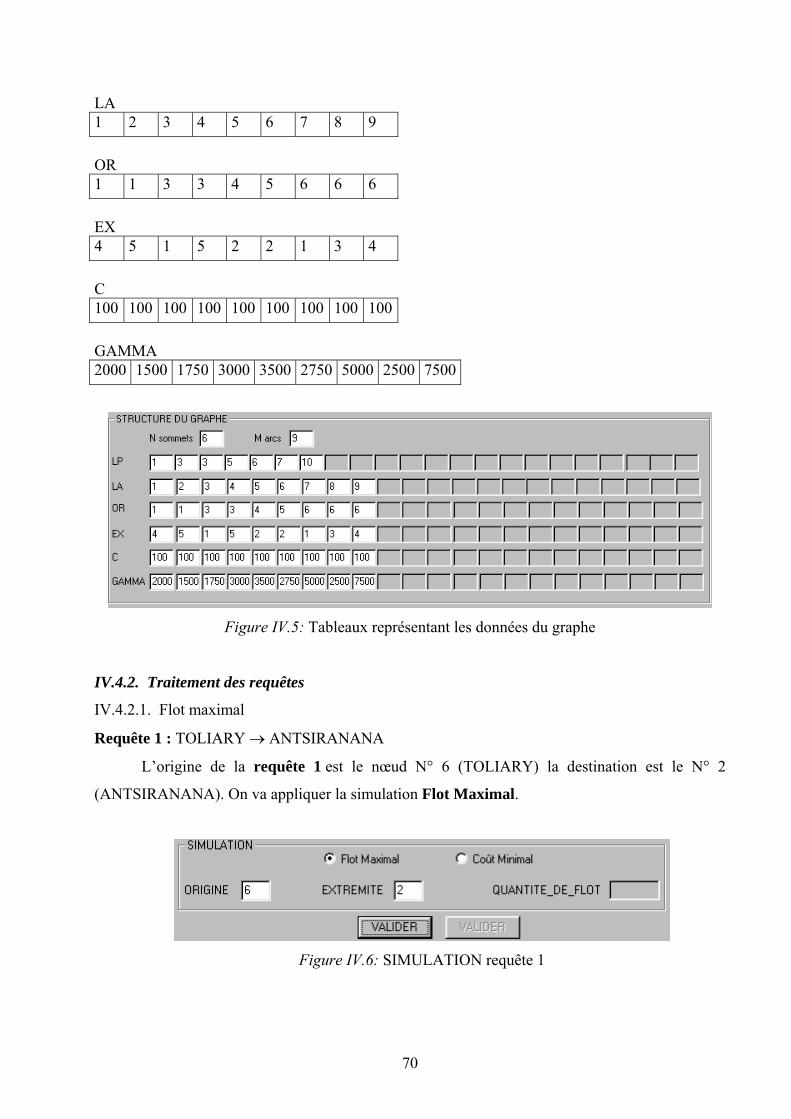
70
LA 1 2 3 4 5 6 7 8 9 OR 1 1 3 3 4 5 6 6 6 EX 4 5 1 5 2 2 1 3 4 C 100 100 100 100 100 100 100 100 100 GAMMA 2000 1500 1750 3000 3500 2750 5000 2500 7500
Figure IV.5: Tableaux représentant les données du graphe
IV.4.2. Traitement des requêtes
IV.4.2.1. Flot maximal
Requête 1 : TOLIARY → ANTSIRANANA
L’origine de la requête 1 est le nœud N° 6 (TOLIARY) la destination est le N° 2
(ANTSIRANANA). On va appliquer la simulation Flot Maximal.
Figure IV.6: SIMULATION requête 1
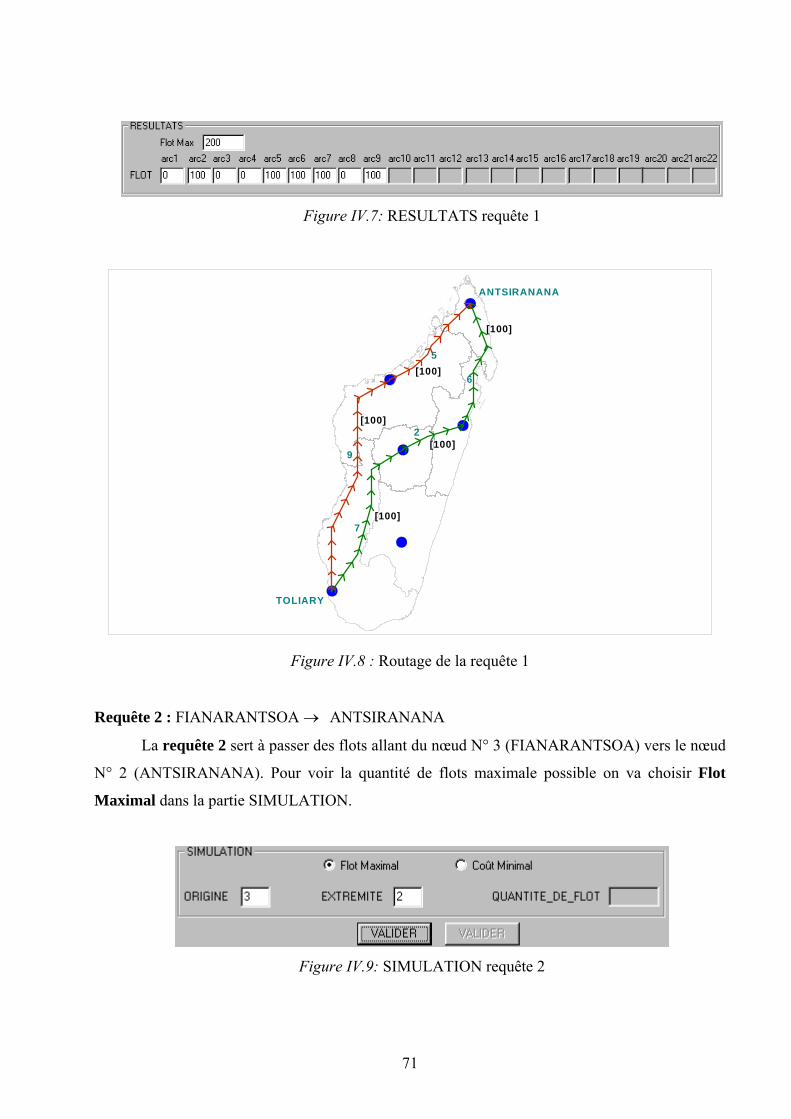
71
Figure IV.7: RESULTATS requête 1
6
5
2
7
9
[100]
ANTSIRANANA
[100]
[100]
[100]
[100]
TOLIARY
Figure IV.8 : Routage de la requête 1
Requête 2 : FIANARANTSOA → ANTSIRANANA
La requête 2 sert à passer des flots allant du nœud N° 3 (FIANARANTSOA) vers le nœud
N° 2 (ANTSIRANANA). Pour voir la quantité de flots maximale possible on va choisir Flot
Maximal dans la partie SIMULATION.
Figure IV.9: SIMULATION requête 2
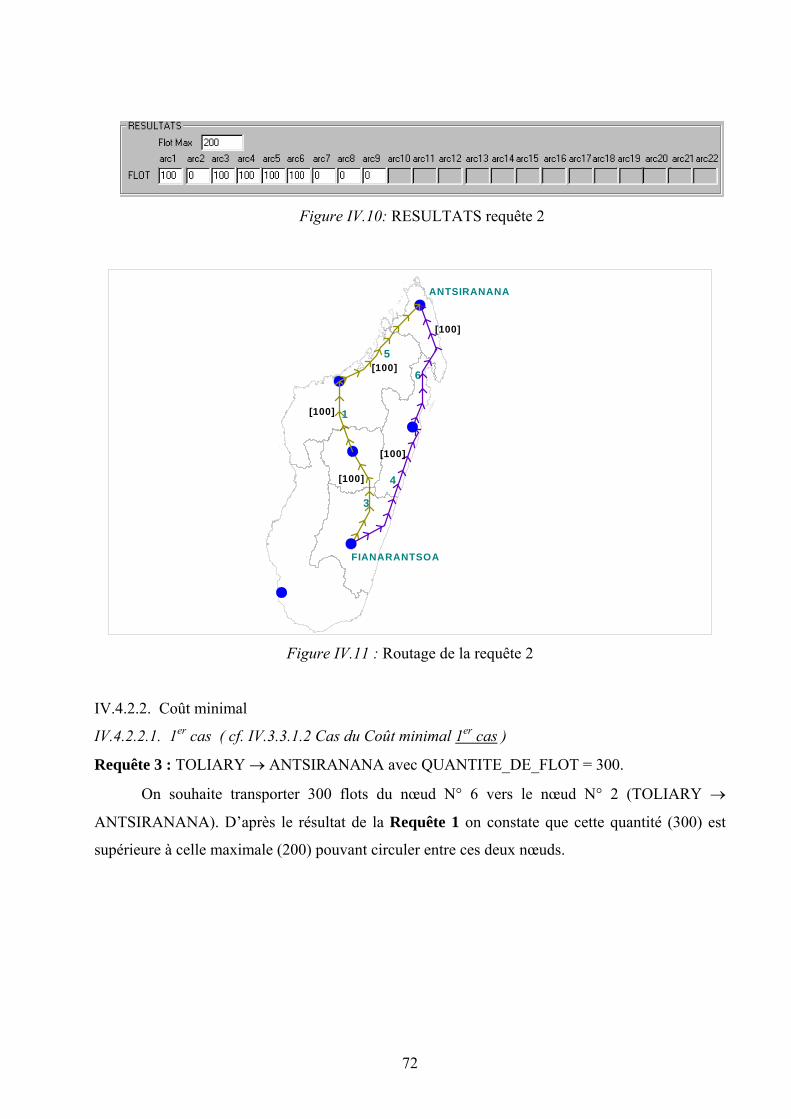
72
Figure IV.10: RESULTATS requête 2
ANTSIRANANA
[100]
6
3
4
[100]
[100]
FIANARANTSOA
1[100]
5[100]
Figure IV.11 : Routage de la requête 2
IV.4.2.2. Coût minimal
IV.4.2.2.1. 1er cas ( cf. IV.3.3.1.2 Cas du Coût minimal 1er cas )
Requête 3 : TOLIARY → ANTSIRANANA avec QUANTITE_DE_FLOT = 300.
On souhaite transporter 300 flots du nœud N° 6 vers le nœud N° 2 (TOLIARY →
ANTSIRANANA). D’après le résultat de la Requête 1 on constate que cette quantité (300) est
supérieure à celle maximale (200) pouvant circuler entre ces deux nœuds.
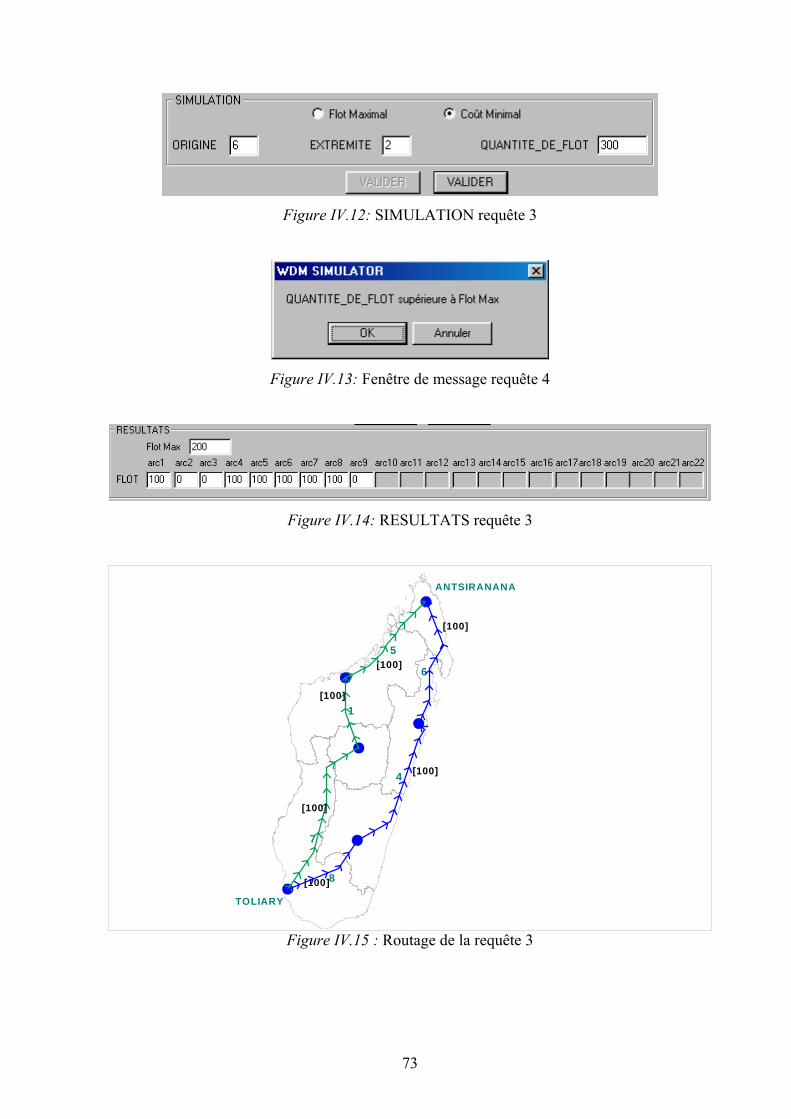
73
Figure IV.12: SIMULATION requête 3
Figure IV.13: Fenêtre de message requête 4
Figure IV.14: RESULTATS requête 3
6
5
4
8
1
7
[100]
ANTSIRANANA
[100]
[100]
[100]
[100]
[100]
TOLIARY
Figure IV.15 : Routage de la requête 3
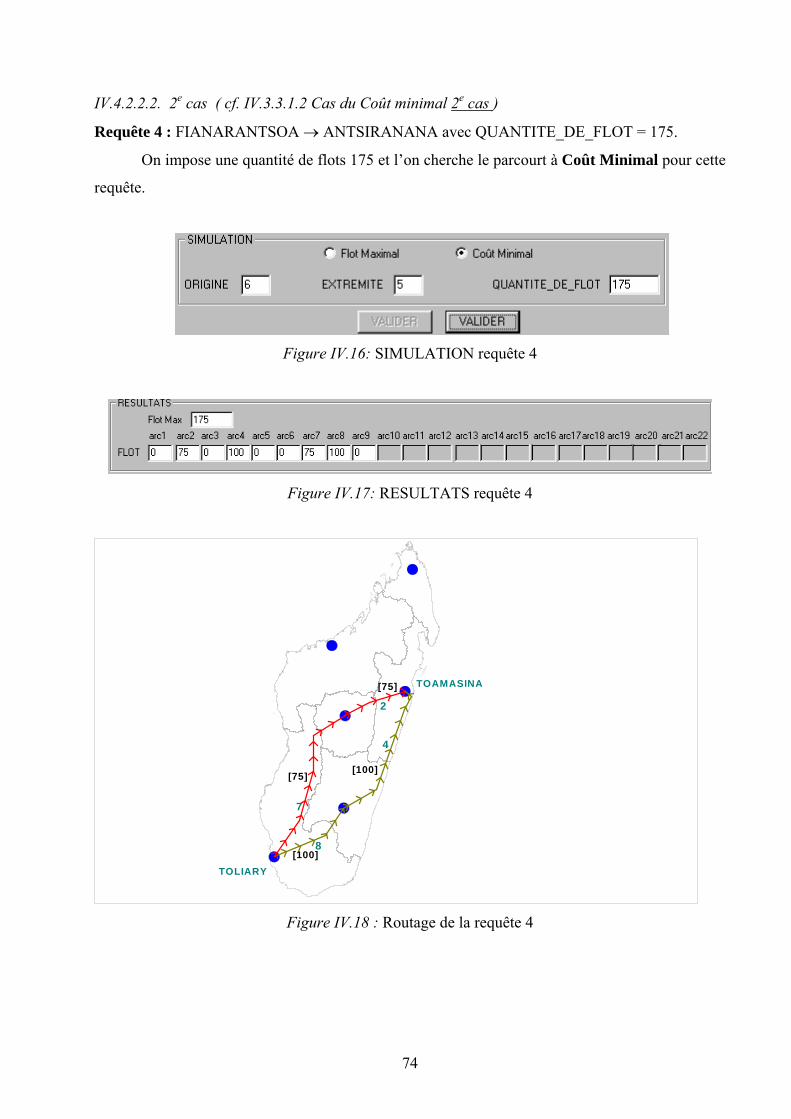
74
IV.4.2.2.2. 2e cas ( cf. IV.3.3.1.2 Cas du Coût minimal 2e cas )
Requête 4 : FIANARANTSOA → ANTSIRANANA avec QUANTITE_DE_FLOT = 175.
On impose une quantité de flots 175 et l’on cherche le parcourt à Coût Minimal pour cette
requête.
Figure IV.16: SIMULATION requête 4
Figure IV.17: RESULTATS requête 4
2
4
8
7
[75]
[100]
TOAMASINA
[75]
[100]TOLIARY
Figure IV.18 : Routage de la requête 4
75
CONCLUSION
A travers ce mémoire, nous avons pu décrire la transmission par fibres optiques tout en
partant des notions indispensables à ce propos. Puis nous avons détaillé les réseaux tout-optiques
utilisant la technologie WDM supportant un débit atteignant le térabit par séconde. Ensuite nous
sommes emmenés à étudier le problème de routage dans le cadre de conception et de
dimensionnement d’un réseau optique pour satisfaire une certaine demande de trafic prévue au
préalable. C’est ainsi que des notions théoriques des graphes sont prises comme support afin de
modéliser les réseaux WDM. Des algorithmes sont donnés en vue de résoudre les problèmes que
nous avons donnés. Ce mémoire a aussi l’intention d’apporter son humble contribution à
l’installation du backbone national à Madagascar et c’est la raison pour laquelle nous avons
appliqué le logiciel WDM SIMULATOR ainsi conçu, par moi-même, au cas de Madagascar.
Notre modélisation théorique tend à simplifier la structure réelle des réseaux de
communication optiques et les objectifs d’optimisation, tout en conservant les caractéristiques
essentielles des problèmes rencontrés en pratique. Des généralisations vers des modèles plus
larges seraient souhaitables. En particulier, nous pourrions considérer des réseaux tout-optiques
possédant des capacités limitées de conversion et des ensembles de longueurs d’onde disponibles
différents selon les liens. De plus, nous pourrions chercher à optimiser des fonctions de coût sur
les routages optiques qui prennent en compte la complexité des nœuds de commutation
nécessaires pour les réaliser.
76
ANNEXES :
ANNEXE 1 : Preuve de la Proposition III.1 [19]
Supposons qu'il existe un routage de ( )M sG, utilisant c couleurs. Considérons une
requête ( ) M sys ∈, et le chemin ( )ysi ,γ correspondant au routage. Dans le graphe auxiliaire
G ck, le chemin se réalise dans la copie Gi du graphe G, et il constitue pour G ck, , en ajoutant au
début du chemin le sommet S et à la fin t y et T, un flot de valeur 1. La contrainte de conservation
est respectée : sur un sommet xi appartenant à ce chemin, différent de la source et du puits, une
unité de flot entrant ressort vers le prochain sommet du chemin.
Le fait que nous ayons un routage implique que par un arc passent au plus k chemins
associés à la même couleur. Donc sur un arc d'une copie Gi, il n'y a pas plus de k unités de flot qui
passent.
Pour les sommets de G ck, correspondant à un destinataire y de G, un seul reçoit du flot,
celui correspondant à la couleur du chemin. Une unité de flot passe alors entre lui et t y .
Ainsi chaque t y reçoit une unité de flot, et donc T reçoit autant d'unités de flot qu'il y a de
destinataires, soit M s unités de flot.
Inversement supposons qu'il existe un flot de quantité M s entre S et T. Du fait de la
contrainte de capacité qui veut que sur chaque arc ( )Tt y , il y ait au plus une unité de flot, et du
fait que le cardinal de M s est égal au cardinal de l'ensemble des t y , on en déduit, grâce à la
contrainte de conservation, que chaque sommet t y reçoit une unité de flot. Comme le flot est
entier, il ne peut provenir pour chaque t y que d'une copie Gi. A ce flot correspond un chemin
dans G affecté de la couleur donnée par le numéro de la copie. Pour chaque requête ( )ys, , un
chemin associé à une couleur est ainsi construit dans G. Le flot respecte la contrainte de capacité,
donc sur un arc d'une copie Gi il n'y a pas plus de k unités de flot qui passent, et pour cette raison,
il n'y a pas plus de k chemins ayant la même couleur qui passent par l'arc correspondant dans G.
Nous obtenons ainsi un routage de ( )M sG, .
77
ANNEXE2 : Preuve de la proposition III.2 [19]
Supposons qu'un routage de ( )IG, existe. Chaque multicast est traité comme
précédemment. Nous obtenons un ensemble de flots suivant les chemins du routage affectés à des
copies dans G ck, selon leur couleur. Les puits Tl reçoivent un flot de quantité égale au cardinal
du multicast qui leur est associé. Les contraintes de conservation sont respectées, il suffit de
considérer chaque flot séparément et de se ramener au cas du multicast. La contrainte de capacité
est aussi respectée, pour la même raison que précédemment : il n'y a pas plus de k chemins ayant
la même couleur qui passent par un même lien dans G. La quantité totale des flots qui passe par un
arc de G ck, n'excède donc pas k. Le multiflot voulu est construit.
Supposons qu'un multiflot passe dans G ck, . Un flot détermine un ensemble de chemins,
qui rapportés dans G, satisfont un multicast de I. Ainsi I est satisfait par l'ensemble des chemins
déterminés à partir du multiflot. La contrainte de capacité est respectée, comme précédemment. La
somme des quantités de flots passant par un arc est plus petite que k, donc il n'y a pas plus de k
chemins de même couleur qui passent par un même arc. Le problème du routage est résolu avec au
maximum c couleurs.
78
BIBLIOGRAPHIE
[1] http://www.cyber.uhp-nancy.fr/demos/GTRT-002/general/index.html
[2] http://www.michaud.chez.tiscali.fr/sommaire.html
[3] Transmission des Telecommunications - Partie 2 - Chapitre 5 - Gérard Hincelin -
Electronique B8. 2003
[4] Les transmissions de données par voie optique - Chapitre 1- Gérard Hincelin - Electronique
B8. 2003
[5] I. Joindot and M. Joindot. Les Télécommunications par Fibre Optique. Collection
Technique et Scientifique des Télécommunications. Dunod, 1996
[6] http://www.iut.lannion.fr/LEMEN/MPDOC/NTPF2/SERIE2/fibrrath.htm
[7] G.P. Agrawal. Fiber-Optic Communication Systems. Wiley, 1992.
[8] K. Petermann. Laser Diode Modulation and Noise. Kluwer Academic Publishers, 1988.
[9] W. van Etten and J. van der Plaats. Fundamentals of Optical Fiber Communicatons.
Prentice-Hall, 1991.
[10] S.J.B. Yoo. Wavelength conversion technologies for WDM network applications.
IEEE/OSA Journal of Ligthwave Technology, 14:955-966, June 1996.
[11] B. Mukherjee. WDM-based local lightwave networks, Part 1 : Singlehop systems. IEEE
[12] C.A. Brackett. Dense wavelength division multiplexing networks: principles and
applications. IEEE Journal on Selected Areas in Communications, 8(6):948-964,1990
[13] Fibres optiques - Gérard Hincelin - Electronique B8. 2003
[14] T. Durhuus, B. Mikkelsen, C. Joergensen, S. L. Danielsen, and K. E. Stubkjaer.
All-optical wavelength conversion by semiconductor optical amplifiers.
IEEE/OSA Journal of Lightware Technology, 14:942-954, 1996.
[15] P. E. Green. Fiber Optic Networks. Prentice-Hall, 1993.
[16] R. Sabella and E. Iannone. Wavelength conversion in optical transport networks. Journal
of Fiber and Integrated Optics, 15(3):167-191,1996.
79
[17] M. J. O’Mahony. Optical amplifiers. In J.E. Midwinter, editor, Photonics in Switching,
volume 1, pages 147-167. Academic Publishers, 1988.
[18] E. Desurvire. Erbium-Doped Fiber Amplifiers: Principles and Applications. Wiley, New-
York, 1994.
[19] Miage Théorie des graphes et algorithmes par Joëlle Cohen 5 juillet 2002
Sopena, professeur à l' I.U.T de Technologie de l'Université Bordeaux 1.
[20] Éléments de théorie des graphes Compte rendu issu d'une présentation réalisée par Éric
Sopena, professeur à l' I.U.T de Technologie de l'Université Bordeaux 1. Août 2004
[21] Dimensionnement des réseaux WDM : Modélisation et approximation. Hervé Rivano,
MASCOTTE (CNRS-I3S-INRIA) FRANCE TELECOM R&D (DMI/ISE)
SEMINAIRE DU LIP, LYON, 29 OCTOBRE 2002
[22] GRAPHES ET ALGORITHME par M. GONDRAN ET M. MINOUX.
DUNOD informatique - 1978.
[23] THEORICAL IMPROVEMENTS IN ALGORITHMIC EFFICIENCY FOR NETWORK
FLOW PROBLEMS , J. EDMONDS ET R.M.KARP. DUNOD informatique - 1978.
[24] http ://www.softndesign.org/?page=manuels/fortran.php
[25] Fortran 90 une introduction J.P. Vilotte te P. Favreau December 5, 2002

Nom : RANDRIANANDRASANA
Prénoms: Ndrianaja
Adresse de l’auteur : LOT 3604 / IV / 021 bis Bateravola
FIANARANTSOA - 301
Madagascar
Tél : 033 14 080 82
e-mail : [email protected]
Titre de mémoire : OPTIMISATION DES RESEAUX WDM TOUT-OPTIQUES
Nombre de pages : 79
Nombre de figures : 51
Mots clés :
- fibres optiques,
- réseaux tout-optiques,
- WDM,
- optimisation,
- graphe,
- flot,
- routage optique,
- FORTRAN.
Directeur de mémoire : RATSIHOARANA Constant
Résumé : Ce mémoire traite le problème de l’optimisation des réseaux tout-optiques utilisant la
technologie WDM et ayant comme objectif de minimiser le nombre de longueurs d’onde utilisées.
Il a aussi l’intention d’apporter son humble contribution à l’installation du backbone national en
fibres optiques à Madagascar.
Abstract:
This memory treats the problem of the all - optics networks optimization using the WDM
technology and having like objective to minimize the number of wave lengths used. He also has
the intention to bring his humble contribution to the installation of the national backbone in optic
fibers in Madagascar.


















