Memoire de Fin d'Etude Ingénieur de Conception en Électricité TIOMO DUCLAIR
138
1 UNIVERSITE DE YAOUNDE I MÉMOIRE PRESENTÉ À L’ECOLE NATIONALE SUPERIEURE DE POLYTECHNIQUE POUR L’OBTENTION DU DIPLÔME D’INGÉNIEUR DE CONCEPTION OPTION : GÉNIE ÉLECTRIQUE PAR : TIOMO DUCLAIR MODELISATION ET SIMULATION D’UNE CENTRALE À JUMELAGE SOLAIRE PV-EOLIEN À MACHINE SYNCHRONE À AIMANT PERMANENT CONNECTÉE À UN RÉSEAU ÉLECTRIQUE DE DISTRIBUTION JUIN 2014
description
Modélisation et simulation d'une centrale électrique à jumélage éolien - solaire connectée à un réseau local de distribution
Transcript of Memoire de Fin d'Etude Ingénieur de Conception en Électricité TIOMO DUCLAIR

1
UNIVERSITE DE YAOUNDE I
MÉMOIRE PRESENTÉ À L’ECOLE NATIONALE SUPERIEURE DE
POLYTECHNIQUE POUR L’OBTENTION DU DIPLÔME D’INGÉNIEUR DE
CONCEPTION
OPTION : GÉNIE ÉLECTRIQUE
PAR : TIOMO DUCLAIR
MODELISATION ET SIMULATION D’UNE CENTRALE À JUMELAGE SOLAIRE
PV-EOLIEN À MACHINE SYNCHRONE À AIMANT PERMANENT CONNECTÉE
À UN RÉSEAU ÉLECTRIQUE DE DISTRIBUTION
JUIN 2014
2
RÉSUMÉ
Le présent mémoire porte sur la modélisation et la simulation d’une centrale à jumelage éolien-
solaire connectée au réseau électrique de distribution. Ce système met en œuvre une ou
plusieurs génératrices éoliennes à aimants permanents connectées à un champ solaire
photovoltaïque afin de soutenir le réseau de distribution local d’un site favorable du Cameroun.
Un tel système serait d’une très grande utilité dans les sites ou le réseau de distribution local
n’est pas capable de subvenir à tous les besoins en électricité de ladite localité; cela permettra
d’éviter des appoints aux générateurs diesel, réduisant ainsi la pollution atmosphérique et le
surcoût lié au transport du diesel jusqu’au site, ceci par l’exploitation des énergies propres
disponibles sur le terrain, que sont l’énergie du vent et celle du soleil.
Ainsi, après avoir étudié la disponibilité de ces potentiels énergétique au Cameroun, une
localité favorable a été choisie, la ville de Mora dans l’Extrême-Nord Cameroun. Ensuite, une
étude sur les différentes structures d’exploitation de ces énergies. Ceci étant fait, vint le temps
de plonger dans la modélisation et la simulation des centrales de productions éoliennes et
solaires PV ainsi que de certaines structures de contrôle qui seront proposées dans ce
document. Ces simulations ont été effectuées grâce à l’environnement MATLAB-Simulink, et
les résultats sont bien en adéquation avec ce qui est rencontré dans la littérature. Dès lors, il
était possible de simuler la centrale à jumelage et d’émettre des interprétations sur les résultats
et des perspectives pour des évolutions futures.
Mots clés :
Machine synchrone à aimants permanents, éolienne, solaire photovoltaïque, turbine, jumelage,
réseau électrique de distribution, dynamique, modélisation.

3
ABSTRACT
This report presents a dynamic modeling and simulation of a hybrid wind-solar power station,
connected to the electric power distribution network. This system consists of one or more
permanent magnet wind generators, associated to a photovoltaic field in order to sustain the
electric power distribution network of a targeted locality in Cameroon. This would be of great
utility in areas where electricity distribution is not able to provide to all needs in electricity of
the aforesaid locality; it will permit to avoid some balances with diesel generators, reducing the
atmospheric pollution and the cost bound to the transportation of the diesel to the site, by
exploiting green energy such as wind energy and solar energy.
In the course of our study, the Mora locality in Far-North Cameroon, favorable to our project
was chosen after which, we investigated on the various industries exploiting these energies.
These power stations have then been modeled and simulated, with some control systems
proposed in this document. The simulations were carried out under MATLAB–Simulink and
the results obtained where in accordance with classic expectations in the literature. The hybrid
power station has finally been simulated and the results interpreted in view of further
perspectives.
Keywords:
Permanent magnet synchronous machine, wind generator, photovoltaic, turbine, twining,
electricity distribution grid, dynamic, modeling.

4
DÉDICACES
À
Mon Père, Mr. Kemkugning Albert
Ma Mère, Mde. Mofang Tazing Marie Madeleine.
Pour tout le soutien qu’ils m’ont apporté depuis mon enfance jusqu’à aujourd’hui.
« Je pense qu’un travail fait de bon cœur, avec hardiesse, de manière logique et scientifique
obtiendra très probablement une bonne récompense. »
5
Remerciements
Je voudrais adresser premièrement mes remerciements au Dieu Tout Puissant, Juste et Saint,
manifesté, témoigné et attesté en la personne de Jésus Christ de Nazareth.
Je voudrai aussi adresser mes sincères remerciements :
Au Pr René Wamkeue (ing. Ph.D), professeur titulaire à l’UQAT (Canada) et directeur
de ce mémoire, pour les nombreux conseils et informations qu’il m’a apporté.
À mes frères, mes sœurs, et tous les membres de ma famille pour toute l’assistance
qu’ils m’ont accordée et qu’ils m’accordent encore.
À tous les frères du Seigneur Jésus, de ma promotion, sans lesquels ma formation
n’aurait jamais été la même et avec lesquels ma formation a été d’après moi
exceptionnelle.
À mon assemblée locale et à mon pasteur Ives Roger Medou pour toute la conduite
spirituelle et morale qu’il m’a enseigné pendant mes années auprès de lui.
À tous ceux qui aiment et travaillent avec tout ce qu’ils ont pour construire une société
meilleure sur le plan spirituel, académique et professionnel.
6
Table des matières
RÉSUMÉ ...................................................................................................................................... 2
ABSTRACT ................................................................................................................................. 3
DÉDICACES ............................................................................................................................... 4
Remerciements ............................................................................................................................. 5
Liste des tableaux ......................................................................................................................... 9
Liste des figures ......................................................................................................................... 10
Liste des symboles et abréviations ............................................................................................. 14
INTRODUCTION GÉNÉRALE ............................................................................................... 16
Chapitre 1: CONTEXTE ET PROBLÉMATIQUE. .................................................................. 18
I- Généralités sur les énergies renouvelables .................................................................... 19
II- Présentation du potentiel énergétique du Cameroun .................................................... 22
II.1- Évaluation du gisement éolien. .............................................................................. 22
II.5- Évaluation du gisement solaire .............................................................................. 23
III- Présentation de la localité favorable à l’exploitation : la localité Mora dans l’extrême
nord- Cameroun. .................................................................................................................... 24
IV- Problématique et objectifs de l’étude. ......................................................................... 25
Chapitre 2: ÉTAT DE L’ART SUR LES CENRALES À JUMELAGE ÉOLIEN-SOLAIRE . 27
I- Généralité sur l’énergie éolienne..................................................................................... 28
I.1- Le vent. .................................................................................................................... 28
I.2- Présentation de l’aérogénérateur ............................................................................. 28
I.3- État de l’art sur la conversion électromécanique dans les aérogénérateurs ............. 35
II- Généralité sur l'énergie solaire photovoltaïque. .......................................................... 38
II.1- L’effet photovoltaïque ............................................................................................ 38
II.2- Cellule, module et panneau photovoltaïque ........................................................... 38
II.3- Utilisation d’un générateur PV ............................................................................... 39
7
II.4- Système de stockage. ............................................................................................. 40
III- Les systèmes à jumelage éolien-solaire. ...................................................................... 41
Chapitre 3: ÉTUDE, MODÉLISATION ET SIMULATION DE L’AÉRO-GÉNÉRATEUR .. 43
I- Présentation de la centrale éolienne. ............................................................................... 44
II- Modélisation de la turbine éolienne ............................................................................ 44
II.1- Modélisation de la conversion de l’énergie éolienne ............................................. 45
II.2- Modèle du multiplicateur. ...................................................................................... 51
II.3- Modélisation de l’arbre de transmission ............................................................... 51
II.4- Implantation du modèle dans MATLAB et simulation ......................................... 52
II.5- Techniques de maximisation de la puissance extraite d’une turbine éolienne. ...... 55
III- Modélisation de la génératrice synchrone à aimant permanents. ................................ 61
III.1- Hypothèses simplificatrices .................................................................................. 62
III.2- Mise en équation de la MSAP. ............................................................................. 63
III.3- Les transformations vectorielles. .......................................................................... 64
III.4- Modélisation de la MSAP dans le repère de Park. ............................................... 66
III.5- Schéma équivalent de la MSAP. ........................................................................... 69
III.6- Modèle d’état de la GSAP. ................................................................................... 70
III.7- Modèle de la génératrice alimentant une charge (Rch,Lch) ...................................... 71
IIII.8- Simulation et résultats. ........................................................................................ 72
IV- Modélisation des convertisseurs statiques et du bus continu. ..................................... 74
IV.3- Modèle de Thevenin du réseau électrique. ........................................................... 78
V- Contrôle du couple de la GSAP. .................................................................................. 78
VI- Contrôle de la connexion au réseau. ............................................................................ 79
VII- Simulations, résultats et interprétations. ...................................................................... 82
VII.1- Simulation d’une éolienne avec maximisation de la puissance extraite sans
asservissement de vitesse ................................................................................................... 82
VII.2- Simulation de l’éolienne avec maximisation de la puissance extraite avec
asservissement de vitesse ................................................................................................... 84
8
VII.3- Simulation de l’éolienne en fonctionnement optimal avec connexion au réseau
électrique ............................................................................................................................ 87
Conclusion du Chapitre. ......................................................................................................... 91
Chapitre 4: ETUDE, MODELISATION ET SIMULATION DE LA CENTRALE SOLAIRE 92
I- Présentation de la centrale solaire photovoltaïque. ......................................................... 93
II- Modélisation de la cellule photovoltaïque. .................................................................. 93
II.1- Présentation du modèle. ......................................................................................... 93
II.2- Mise en équation du modèle d’une cellule photovoltaïque. ................................... 95
III- Modélisation du hacheur Élévateur de tension (Boost). .............................................. 98
III.1- Description qualitative. ......................................................................................... 98
III.2- Modèle mathématique du hacheur boost. ............................................................. 99
III.3- Choix des composants du hacheur. ..................................................................... 103
III.4- Simulation et résultats. .......................................................................................... 103
IV- Maximisation de la puissance extraite d’un générateur PV par la technique perturbe
and observe (P&O). .............................................................................................................. 104
IV.1- Principe. .............................................................................................................. 104
IV.2- Logigramme d’implémentation. ......................................................................... 105
IV.3- Simulation de la centrale solaire et résultats. ..................................................... 105
Conclusion du chapitre. ........................................................................................................ 108
Chapitre 5: SIMULATION ET CONTRÔLE DE LA CENTRALE À JUMELAGE EOLIEN
SOLAIRE CONNECTÉE AU RÉSEAU ÉLECTRIQUE DE DISTRIBUTION. ................... 109
I- Présentation du système. ............................................................................................... 110
II- Simulation de la centrale à jumelage éolien-solaire, résultats et discussions. ........... 112
III- Interprétation des résultats et discussions. ................................................................. 118
Conclusion du Chapitre. ....................................................................................................... 119
PROPOSITION ET DIMENSIONNEMENT APPROXIMATIF D’UN SYSTÈME
PERMETTANT D’ALIMENTER UNE INSTITUTION DE LA LOCALITÉ DE MORA. .. 120
I- Description de l’installation. ......................................................................................... 121
9
I- Dimensionnement et choix des composants ................................................................. 121
II.1- Choix de l’éolienne. ............................................................................................. 122
II.2- Dimensionnement des batteries. ........................................................................... 123
II.3- Dimensionnement des panneaux solaires ............................................................. 124
II.4- Choix de l’onduleur. ............................................................................................. 124
II.5- Prix total (approximatif) pour la mise sur pied de la centrale. ............................. 125
Conclusion générale ................................................................................................................. 126
BIBLIOGRAPHIE ................................................................................................................... 128
Annexe 1. ................................................................................................................................. 131
Annexe 2. ................................................................................................................................. 133
Annexe3 : ................................................................................................................................. 138
Liste des tableaux
Tableau 1: Avantages et inconvénients des différentes formes d’énergies renouvelables. ....... 21
Tableau 2 : Vitesses moyennes des vents à Maroua et à Kaélé (Source : LRE ) ...................... 22
Tableau 3: Valeurs moyennes de l’irradiation journalière pour différentes stations de mesure
(W h/m2) ................................................................................................................................... 23
Tableau 4 : Spécifications énergétiques de la localité de Mora. ................................................ 25
Tableau 5 : Présentation des éoliennes à MADA. ...................................................................... 36
Tableau 6: Paramètres de la turbine éolienne BERGEY XL1. .................................................. 53
Tableau 7: Caractéristiques de la GSAP utilisée pour la simulation du modèle d’état. ............. 72
Tableau 8: Paramètres de la MSAP utilisée dans la simulation. ................................................ 82
Tableau 9: Paramètres du modèle d’un module Sharp NT-R5E3E ........................................... 97

10
Liste des figures
Figure 1-1: Consommation d’énergie primaire dans le monde et prévisions. ........................... 19
Figure 1-2: Situation géographique de la localité de Mora. ....................................................... 24
Figure 2-1: Séquence de vent mesurée sur un site de « Petit Canal » (Guadeloupe). ................ 28
Figure 2-2: Conversion de l’énergie cinétique du vent en électricité. ....................................... 29
Figure 2-3: Images d’éoliennes. ................................................................................................. 29
Figure 2-4: Les différentes parties d’une éolienne ..................................................................... 30
Figure 2-5: Schéma de principe d’un système éolien. ............................................................... 31
Figure 2-6: Turbines éoliennes à axe horizontale en amont et en aval. ..................................... 32
Figure 2-7 : Différents types de turbines éoliennes à axes verticales. ....................................... 32
Figure 2-8 : Caractéristiques de puissance d’une turbine éolienne ............................................ 33
Figure 2-9 : Délimitation des zones de fonctionnement sur la caractéristique puissance-vitesse
du vent. ....................................................................................................................................... 33
Figure 2-10 : Multiplicateur de vitesse (modèle planétaire à plusieurs étages). ........................ 34
Figure 2-11: Connexion directe d’une machine asynchrone sur le réseau. ................................ 35
Figure 2-12 : Schéma de principe d’un entrainement à vitesse variable à machine synchrone à
aimants permanents. ................................................................................................................... 37
Figure 2-13: Présentation schématique d’une cellule solaire. .................................................... 39
Figure 2-14 : (a), (b)-module photovoltaïque; (c)- panneau solaire. .......................................... 39
Figure 2-15: Installation photovoltaïque autonome ................................................................... 40
Figure 2-16 : Installation photovoltaïque couplée au réseau...................................................... 40
Figure 2-17: Structure employant un bus AC. ........................................................................... 41
Figure 2-18 : Architecture classique d’un système hybride PV/éolien avec générateur diesel de
secours ........................................................................................................................................ 42
Figure 2-19: Architecture d’un système PV-éolien, avec bus DC, et connexion au réseau. ..... 42
Figure 3-1: Constitution de la chaine de production éolienne. ................................................. 44
Figure 3-2: Tube de courant autour d’une éolienne. .................................................................. 45
Figure 3-3: Illustration de la limite de Betz. .............................................................................. 46
Figure 3-4: Variation du Coefficient de puissance en fonction du coefficient de vitesse réduite
pour différent type de turbine. .................................................................................................... 47
Figure 3-5: Réseau de caractéristique CP(λ,β) d’une turbine éolienne....................................... 47
Figure 3- 6: Puissance théorique pour une éolienne donnée. ..................................................... 48

11
Figure 3-7: Système mécanique de l’éolienne. .......................................................................... 49
Figure 3- 8: Modèle simplifié de la turbine. .............................................................................. 50
Figure 3-9: La turbine éolienne avec ses paramètres d’entrée et de sorties. .............................. 51
Figure 3-10: Interaction entre la turbine, et la GSAP à travers l’arbre de transmission. ........... 51
Figure 3-11: Schéma bloc modèle de la turbine éolienne couplée à l’arbre de la génératrice. .. 52
Figure 3-12: Courbe de variation du coefficient de puissance en fonction de la vitesse réduite,
cas de la turbine BERGEY XL1. .............................................................................................. 53
Figure 3-13: Courbe de la puissance fournie par l’éolienne en fonction de la vitesse de rotation,
pour chaque vitesse du vent. ...................................................................................................... 54
Figure 3-14 : Couple éolien en fonction de la vitesse de rotation de la turbine, pour chaque
vitesse du vent. ........................................................................................................................... 54
Figure 3- 15: Le schéma de la turbine avec le système de contrôle ........................................... 55
Figure 3-16: Schéma de la turbine avec son système de contrôle. ............................................. 56
Figure 3-17: Variation de la vitesse de rotation de la machine pour une vitesse du vent fixe de
12m/s .......................................................................................................................................... 58
Figure 3-18: Puissance extraite de la turbine pour une vitesse du vent fixe de 12m/s .............. 58
Figure 3-19: Asservissement de la vitesse de rotation de la machine à la vitesse de consigne. 59
Figure 3-20: (a)-machine synchrone à aimants permanent de quelques KW. ........................... 61
Figure 3-21: Schéma d’étude pour la modélisation d’une machine synchrone. ........................ 62
Figure 3-22: Circuits équivalents du stator de la GSAP. ........................................................... 70
Figure 3-23: Résultats de la simulation de l’essai en charge. .................................................... 73
Figure 3-24: Onduleur de tension triphasé à deux niveaux connecté au réseau. ...................... 75
Figure 3- 25: Les huit configurations d’interrupteur d’un onduleur deux niveaux de tension .. 76
Figure 3-26: Schéma de principe du contrôle d’un onduleur par hystérésis bang-bang. ........... 76
Figure 3-27: Le bus continu situé entre les deux convertisseurs statiques. ............................... 77
Figure 3-28: Boucle de régulation de la tension du bus continu. ............................................... 77
Figure 3-29: Approximation du réseau électrique par un modèle de Thevenin. ........................ 78
Figure 3-30: Schéma de principe du contrôle de la GSAP. ....................................................... 79
Figure 3-31: Schéma de principe du contrôle de la liaison au réseau et de la tension du bus
continu. ....................................................................................................................................... 80
Figure 3-32: Puissance extraite de l’éolienne et vitesse de rotation de la machine. .................. 83
Figure 3-33: Allure du couple électromagnétique optimal (consigne) et effectif. ..................... 83
Figure 3-34: Courants dans les phases a, b, et c de la machine. ................................................ 83
Figure 3-35: Allure des tensions induites dans les phases de la MSAP. .................................... 84
12
Figure 3-36: Évolution de la vitesse du vent sur 14 secondes. .................................................. 84
Figure 3-37: Évolution de la vitesse de rotation de la machine et de la vitesse optimale. ......... 85
Figure 3-38: Évolution du couple électromagnétique de consigne. ........................................... 85
Figure 3-39: Couple électromagnétique produit par la MSAP. ................................................. 85
Figure 3-40: Évolution de la puissance extraite de la MSAP sur les 14 secondes. .................... 86
Figure 3-41: Évolution du courant dans la phase a de la machine sur 14 secondes................... 86
Figure 3-42: Évolution des courants dans les phases a, b et c de la MSAP sur les 0.5 dernières
secondes de la simulation. .......................................................................................................... 86
Figure 3-43: Évolution de tensions induites dans les phases a, b et c de la MSAP sur les 0.3
dernières secondes. ..................................................................................................................... 87
Figure 3-44 : Courbe de la vitesse du vent ................................................................................. 88
Figure 3-45 : Vitesse de rotation de la machine et vitesse de référence. ................................... 88
Figure 3-46 : Couple électromagnétique de référence (N.m)..................................................... 89
Figure 3-47 : Couple électromagnétique de la MSAP. .............................................................. 89
Figure 3-48 : Évolution des puissances dans l’aérogénérateur. ................................................. 89
Figure 3-49 : Courants envoyé dans le réseau, phase a. ............................................................. 90
Figure 3-50 : Zoom sur les courants en sortie de la MSAP et envoyés vers le réseau .............. 90
Figure 3-51 : Évolution de la tension du bus continu sur 12 secondes ...................................... 90
Figure 4-1: Schéma synoptique de la centrale solaire débitant sur une charge DC (pouvant être
aussi le bus continu). .................................................................................................................. 93
Figure 4-2: Schéma équivalent d’une cellule photovoltaïque. ................................................... 94
Figure 4-3: Courbes caractéristique P-V et I-V du modèle du panneau PV Sharp NT-R5E3E, à
une température constante de 25C. ........................................................................................... 97
Figure 4-4: Schéma d’un hacheur élévateur alimenté par une source de courant ...................... 98
Figure 4-5: Courbes des variations des différents paramètres du hacheur boost sur une période
de fonctionnement. ................................................................................................................... 102
Figure 4-6: Résultats de la simulation du hacheur sur une seconde. ....................................... 103
Figure 4-7: Principe de fonctionnement de l’algorithme P&O. ............................................... 104
Figure 4-8: Logigramme de fonctionnement de l’algorithme P&O. ........................................ 105
Figure 4-9: Évolution de l’ensoleillement imposé au générateur PV sur 150s. ....................... 106
Figure 4-10 : Évolution de la température (*C) imposée au générateur PV sur 150s. ............ 106
Figure 4-11: Rapport cyclique obtenu par l’algorithme P&O pour l’optimisation. ................. 106
Figure 4-12: Tension aux bornes du générateur PV. ................................................................ 107
Figure 4-13: Évolution du courant extrait du générateur PV. .................................................. 107
13
Figure 4-14: Évolution de la puissance extraite du générateur PV. ......................................... 107
Figure 5-1: Schéma descriptif de la centrale à jumelage éolien-solaire. .................................. 111
Figure 5-2: Évolution de l’ensoleillement pendant les dix secondes de la simulation. ........... 112
Figure 5-3: Évolution de la température pendant les dix secondes de la simulation. .............. 112
Figure 5-4: Évolution de la vitesse du vent pendant les dix secondes de la simulation. ......... 113
Figure 5-5: Évolution du couple électromagnétique produit par la GSAP. ............................. 113
Figure 5-6: Évolution de la vitesse de rotation de la turbine éolienne. .................................... 113
Figure 5-7: Puissance extraite du vent par la turbine (en bleu) et puissance fournie par
l’éolienne (en rouge). ............................................................................................................... 114
Figure 5-8: Évolution des tensions induites (à gauche) et des courants (à droite) dans les phases
de la GSAP dans les dernières secondes de la simulation. ...................................................... 114
Figure 5-9: Évolution du rapport cyclique du hacheur boost (commande P&O). ................... 115
Figure 5-10: Évolution de la tension aux bornes du générateur solaire PV. ............................ 115
Figure 5-11: Évolution du courant en sortie du générateur PV. .............................................. 115
Figure 5-12: Évolution de la puissance produite par le générateur PV. ................................... 116
Figure 5-13: Évolution de la tension du bus continu pendant la simulation. ........................... 116
Figure 5-14: Évolution du courant dans la phase a de la ligne d’interconnexion entre la centrale
et le réseau électrique de distribution.. ..................................................................................... 116
Figure 5-15: Zoom sur les courants dans les phases a, b et c de la ligne d’interconnexion entre
la centrale et le réseau électrique de distribution……………………………………………124
Figure 5- 16: Évolution des puissances produites dans la centrale…………………………..125
14
Liste des symboles et abréviations
MSAP : Machine Synchrone à Aimants Permanents
GSAP : Génératrice Synchrone à Aimants Permanents
IGBT: Insulated Gate Bipolar Transistor
MLI: Modulation de Largeur d’Impulsions
MCC : Mode de Conduction Continu
P : matrice de Park
f : coefficient de frottements visqueux (Nms/rd)
G : facteur de multiplication du multiplicateur de vitesse
p : nombre de paire de pôles
Cem : Couple électromagnétique de la machine (N.m)
Cf : Couple résistant du aux frotements (N.m)
Ceol : Couple aérodynamique (N.m)
Cg : Couple issu du multiplicateur de vitesse (N.m)
Cem_ref : Couple électromagnétique de référence (N.m)
Jm : inertie de la machine (Kg.m2)
Jt : inertie de la turbine (Kg.m2)
J : Inertie totale (Kg.m2)
Ωt : vitesse de rotation de la turbine (rad/s)
Ωm : vitesse de rotation du rotor de la machine (rad/s)
Ωref : vitesse de rotation de référence (rad/s)
Peol : Puissance d’entrainement aérodynamique de la turbine éolienne (Watt)

15
β : angle de calage de la turbine éolienne
λ : vitesse réduite
ρ : masse volumique de l’air (Kg/m3)
S : surface active de la voilure de la turbine éolienne (m2)
R : rayon de la turbine éolienne (m)
Cp : Coefficient de puissance de la turbine éolienne
Vv : vitesse du vent (m/s)
iabc : vecteur de courants au stator de la machine, dans les axes a, b et c (A)
i0dq : vecteur de courants au stator de la machine, dans les axes 0, d et q (A)
iC : courant traversant le condensateur du bus continu (A)
vabc : vecteur de tensions, dans les axes a, b, c (V)
v0dq : vecteur de tensions, dans les axes 0, d, q (V)
Фf : amplitude du flux induit par les aimants permanents du rotor dans les enroulements
statoriques (Wb)
λabc : matrice des flux induits au stator de la machine, dans les axes a, b, c
λ0dq : matrice des flux induits au stator de la machine, dans les axes 0, d, q
R : résistance d’un enroulement statorique (Ω)
Labc : matrice des inductances au stator suivant le repère axes a, b, c (H)
L0dq : matrice des inductances au stator, suivant le repère 0, d, q (H)
C : capacité du bus continu (F)
Vdc : tension du bus continu (V)
16
INTRODUCTION GÉNÉRALE
Pour un pays dans sa marche vers l’émergence, il est impératif d’avoir une maitrise totale sur
toutes les ressources énergétiques disponibles sur son territoire. Le Cameroun possède un
potentiel énergétique intense, et aussi diversifié que réparti sur toute sa surface, mais encore
très peu exploité. En effet, les réseaux interconnectés nord et sud qui sont alimentés par des
centrale à énergie hydrauliques et faucilles ne desservent pas à temps continus toutes les
localités du pays.
Par ailleurs, pour les sites de consommations éloignés des grandes centrales de production
hydro-électriques, la flambée des prix des hydrocarbures, la sous-exploitation du potentiel
hydro-électrique disponible et surtout le cout élevé et la difficulté d’entretien des grandes
lignes de transport imposent que l’on s’attarde sur l’exploitation des ressources en énergies
renouvelables disponibles sur le site de consommation et pouvant soutenir les réseaux de
distribution existant dans les localités éloignés des centres de production; d’autant plus que ces
ressources offrent une plus grande sureté d’approvisionnement des consommateurs tout en
respectant l’environnement.
La partie septentrionale du Cameroun est pourvue d’un grand potentiel en énergie renouvelable
avec la plus importante : le soleil. De plus, l’on dispose des localités telles que celle de Mora
dans l’extrême nord Cameroun, ou on observe une insolation moyenne annuelle de 5.82
KWh/m2/jour, et une vitesse moyenne du vent moyenne supérieure à 3.9m/s et pouvant
atteindre une moyenne de 11.5m/s pour le mois d’Avril [1]. De tels sites sont favorables non
seulement à l’exploitation de l’énergie solaire via le photovoltaïque, mais aussi de l’énergie
éolienne.
C’est donc dans un souci d’optimisation de l’exploitation du potentiel en énergie renouvelable
d’une telle localité que le travail présenté dans ce document se situe. Nous avons pour objectif
de modéliser et de simuler une structure adéquate pour l’exploitation optimale simultanée de
ces deux formes d’énergie en vue d’observer le comportement dynamique qu’aura une telle
centrale dans les conditions environnementales de certaines localités du Cameroun.
Le premier chapitre présente le contexte dans lequel le travail a été effectué. Il comprend un
rappel sur la situation énergétique du Cameroun, des généralités sur la production d’électricité
17
à partir de l’énergie solaire et de l’énergie éolienne. Il s’achève par une brève présentation du
site d’étude et la problématique.
Le deuxième chapitre présente l’état de l’art sur les centrales à jumelage éolien-solaire. Dans
ce chapitre, une revue des différentes technologies employées pour l’exploitation de ces deux
formes d’énergie est effectuée, ainsi que les avantages et inconvénients qu’offrent ces
alternatives.
Après ceci, nous effectuerons des études du fonctionnement des aérogénérateurs et des
générateurs photovoltaïques, suivi de la modélisation et la simulation de quelques essais sur
ces différents compartiments de notre centrale hybrides.
Viendra donc le moment de faire la simulation de notre centrale hybride débitant dans le réseau
électrique de distribution local. Nous proposerons aussi un dimensionnement de notre structure
en vue de son implémentation éventuelle pour l’alimentation d’une institution de la localité de
Mora.
Ce document s’achève par une conclusion et des perspectives en vue de la réalisation
proprement dite du projet ainsi étudié.

18
Chapitre 1
CONTEXTE ET PROBLÉMATIQUE.
Étant donné l’accroissement incessant de la demande en électricité dans le monde et
particulièrement dans notre pays, il devient de plus en plus nécessaire d’exploiter de manière
optimale tant au niveau économique qu’écologique toutes les ressources énergétiques
disponibles sur la planète.
Ce chapitre vise donc à présenter la situation du monde en général et du Cameroun en
particulier quant à la disponibilité et à l’exploitation des ressources en énergies renouvelables
de diverses formes. Ensuite, nous situerons le jumelage éolien-solaire dans son contexte
socioéconomique. À la fin de ce chapitre, nous préciserons la problématique qui retiendra
notre attention tout au long de ce mémoire.
19
I- Généralités sur les énergies renouvelables
Dans le cadre du développement durable, face au double enjeu planétaire posé par
l’épuisement prochain des ressources énergétiques fossiles et les problèmes posés vis à vis du
respect de l’environnement, de fortes incitations poussent au développement des énergies
renouvelables. En effet, la consommation mondiale d’énergie ne cesse de croître des questions
cruciales sur l’effet de serre et l’amenuisement des ressources énergétiques.
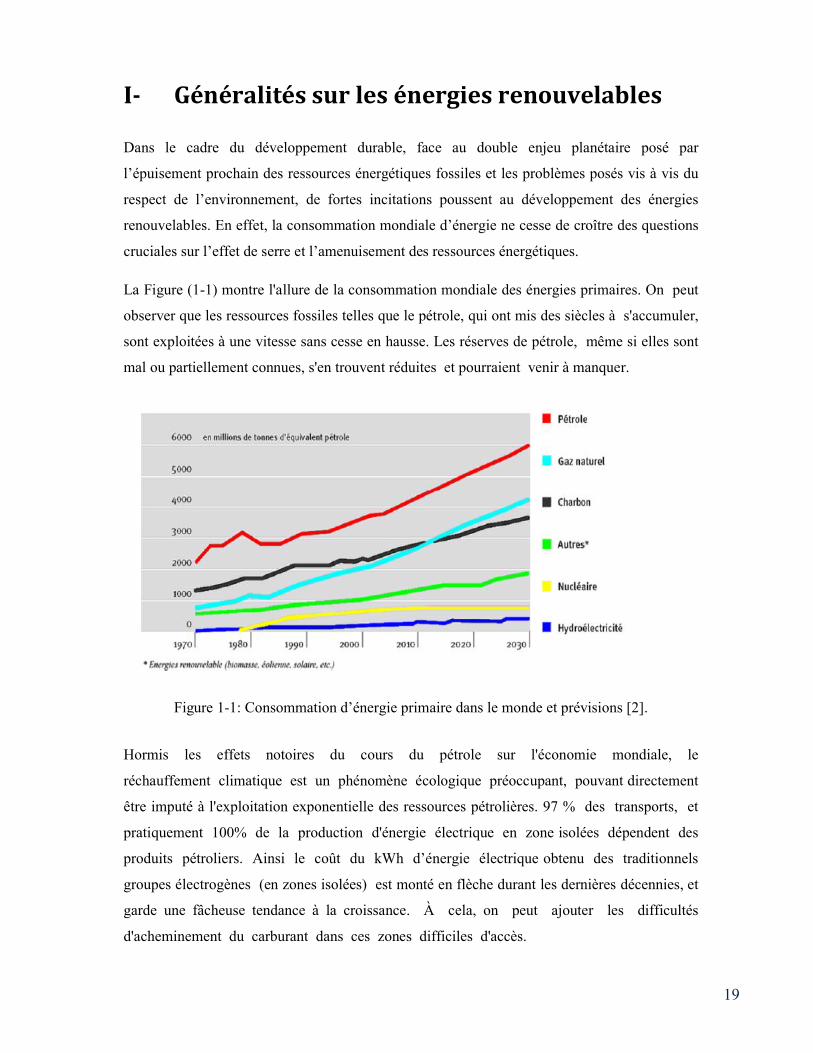
La Figure (1-1) montre l'allure de la consommation mondiale des énergies primaires. On peut
observer que les ressources fossiles telles que le pétrole, qui ont mis des siècles à s'accumuler,
sont exploitées à une vitesse sans cesse en hausse. Les réserves de pétrole, même si elles sont
mal ou partiellement connues, s'en trouvent réduites et pourraient venir à manquer.
Figure 1-1: Consommation d’énergie primaire dans le monde et prévisions [2].
Hormis les effets notoires du cours du pétrole sur l'économie mondiale, le
réchauffement climatique est un phénomène écologique préoccupant, pouvant directement
être imputé à l'exploitation exponentielle des ressources pétrolières. 97 % des transports, et
pratiquement 100% de la production d'énergie électrique en zone isolées dépendent des
produits pétroliers. Ainsi le coût du kWh d’énergie électrique obtenu des traditionnels
groupes électrogènes (en zones isolées) est monté en flèche durant les dernières décennies, et
garde une fâcheuse tendance à la croissance. À cela, on peut ajouter les difficultés
d'acheminement du carburant dans ces zones difficiles d'accès.
20
L’autre argument qui milite à l’avantage des sources renouvelables est lié à la pérennité des
ressources en énergies. Dans le courant de 21ème siècle, le paysage énergétique va radicalement
changer car plusieurs ressources fossiles risquent de disparaître [3]. De nouvelles ressources
associées à des technologies performantes et fiables sont indispensables pour « tenter » de
maintenir le niveau de la production énergétique mondiale. Il existe plusieurs ressources en
énergies renouvelables : l'énergie hydraulique, l'énergie éolienne, l'énergie solaire thermique et
photovoltaïque, l’énergie produite par les vagues et la houle ainsi que les courants marins, la
géothermie et la biomasse. Ces ressources en énergie sont pratiquement inépuisables et
propres. Dans le contexte économique actuel où l’on ne chiffre qu’une partie des coûts en
occultant certains « coûts collatéraux » (démantèlement de centrales, pollution,…) les
installations à énergie renouvelable peuvent encore aujourd’hui avoir un coût important
(exemple des panneaux solaires photovoltaïques) et sont donc plutôt réservées à des pays
développés où elles peuvent dans d’autres cas être assez peu onéreuses (exemple de la
combustion de la biomasse) et peuvent être utilisées dans les pays en voie de développement.
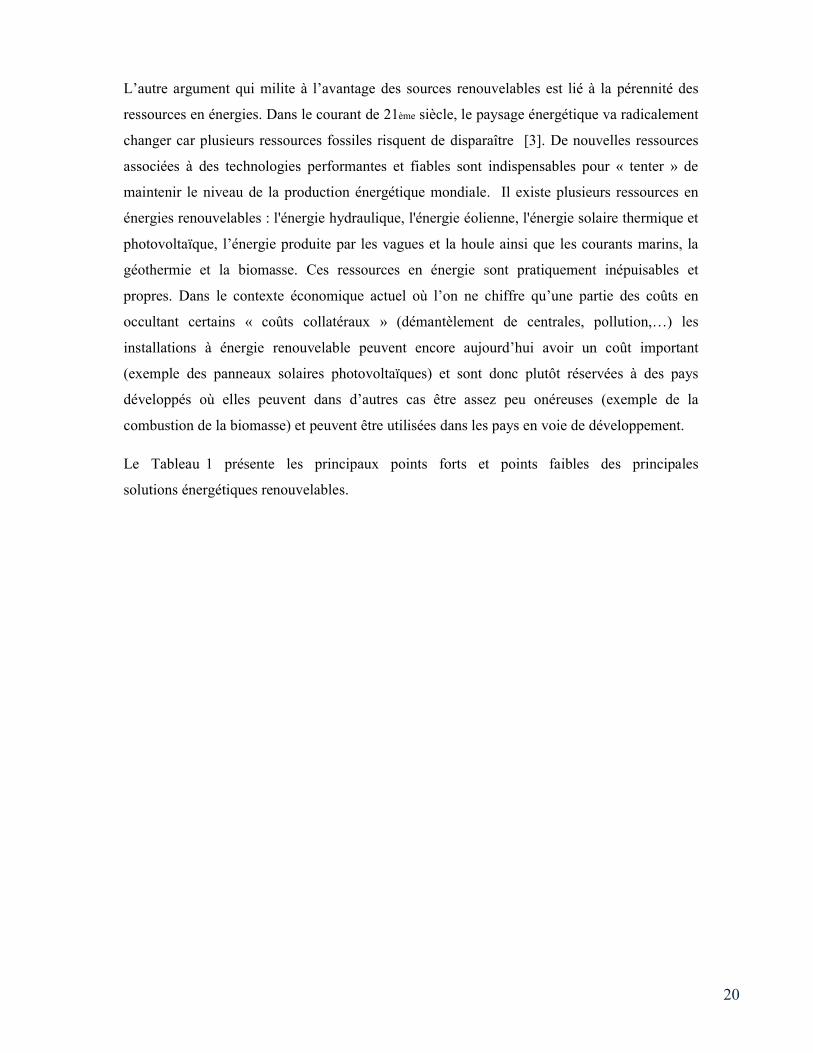
Le Tableau 1 présente les principaux points forts et points faibles des principales
solutions énergétiques renouvelables.
21
Technologie Avantages Inconvénients
Solaire - Les panneaux solaires nécessitent très
peu d’entretien et réduisent
considérablement la facture domestique
d’électricité ;
- Les panneaux solaires sont simples et
rapides à installer ;
- Le système est silencieux et sans
danger pour la santé;
- Les prix de fabrication et d’installation
des panneaux sont assez élevés ;
- Il est impossible d’obtenir une
autonomie énergétique complète par le
biais de panneaux solaires seulement ;
- Le rendement énergétique est plutôt
faible.
Éolienne - L’énergie éolienne ne nécessite aucun
carburant, ne génère aucun gaz à effet de
serre et ne produit pratiquement aucun
déchet ;
- Les frais de fonctionnement sont
limités et les coûts de production sont
prévisibles et se stabilisent à long terme ;
- La ressource principale (le vent) est à
100% renouvelable et son exploitation ne
comporte pratiquement aucun effet
néfaste pour l’environnement.
- Les vents peuvent parfois souffler à
des intensités irrégulières ;
- Impossibilité d'emmagasinage de la
source (le vent);
- La production dépend de l’intensité
des vents et non de la demande en
énergie;
- Des dispositifs externes de
stabilisation sont en général nécessaires
Hydraulique - L’exploitation de barrages et de
centrales hydroélectriques ne génère
aucun déchet toxique;
- Les infrastructures ont une très longue
durée de vie et les coûts d’exploitation
sont maîtrisables;
- Possibilité d’emmagasiner de l’eau
dans les barrages et de produire une
- énergie de grande qualité très
rapidement lors des périodes de forte
demande.
- Les coûts d’installation d’une centrale
hydroélectrique sont très importants;
- Les écosystèmes aquatiques originels
et les débits saisonniers naturels des
cours d’eau peuvent être bouleversés par
les installations;
- Inondation de grands espaces fertiles
nécessitant souvent le déplacement des
populations locales.
Biomasse - Les ressources naturelles nécessaires
sont disponibles en quantités abondantes
- La biomasse génère peu d’émissions
polluantes;
- La biomasse possède un faible
rendement énergétique ;
- Utilisation de ressources naturelles
précieuses comme source d’énergie (ex. :
les céréales pour la fabrication de
l’éthanol).
Tableau 1: Avantages et inconvénients des différentes formes d’énergies renouvelables.
22
II- Présentation du potentiel énergétique du
Cameroun
Le terme potentiel ici, renvoi à l’abondance, la disponibilité en un lieu précis et à un moment
donné d’une certaine ressource et dans le cas échéant on parlera de la disponibilité des
ressources énergétiques au Cameroun. L’évaluation du potentiel énergétique d’un site donné
repose sur bon nombre de critères parmi lesquels la ventilation moyenne, l’ensoleillement
moyen, la stratification de l’intimité du globe, le débit volumique et la masse des déchets
agricoles par exemple.
II.1- Évaluation du gisement éolien.
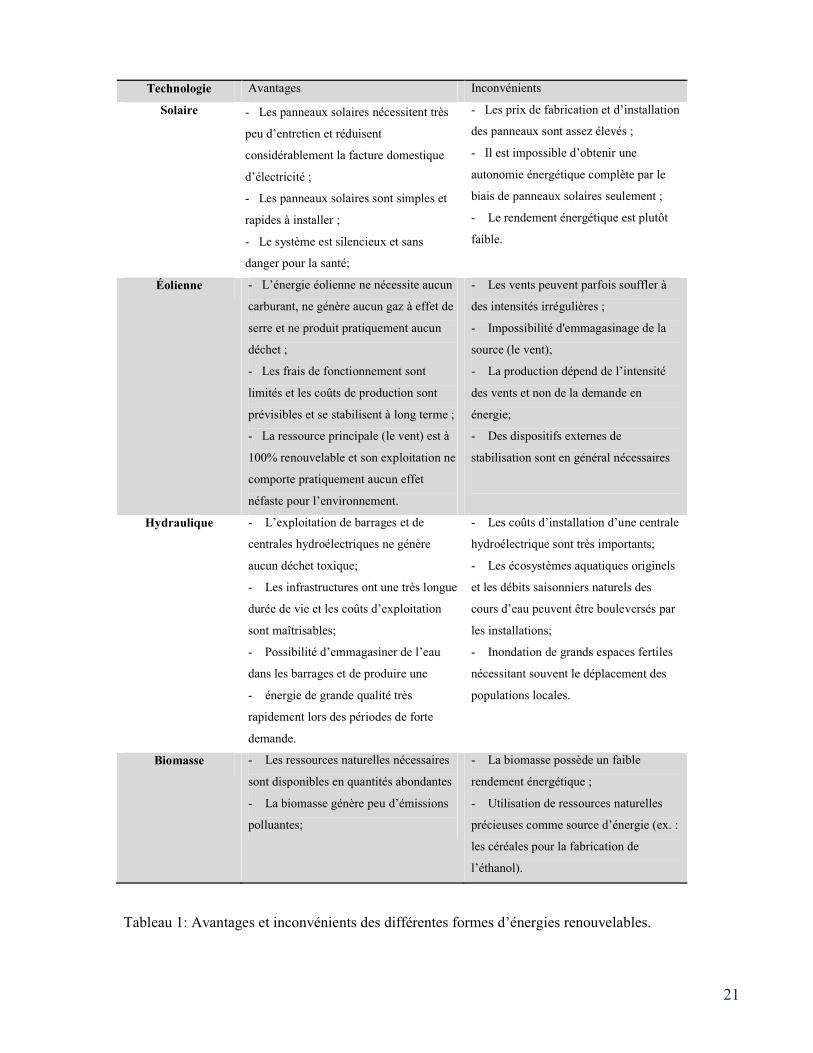
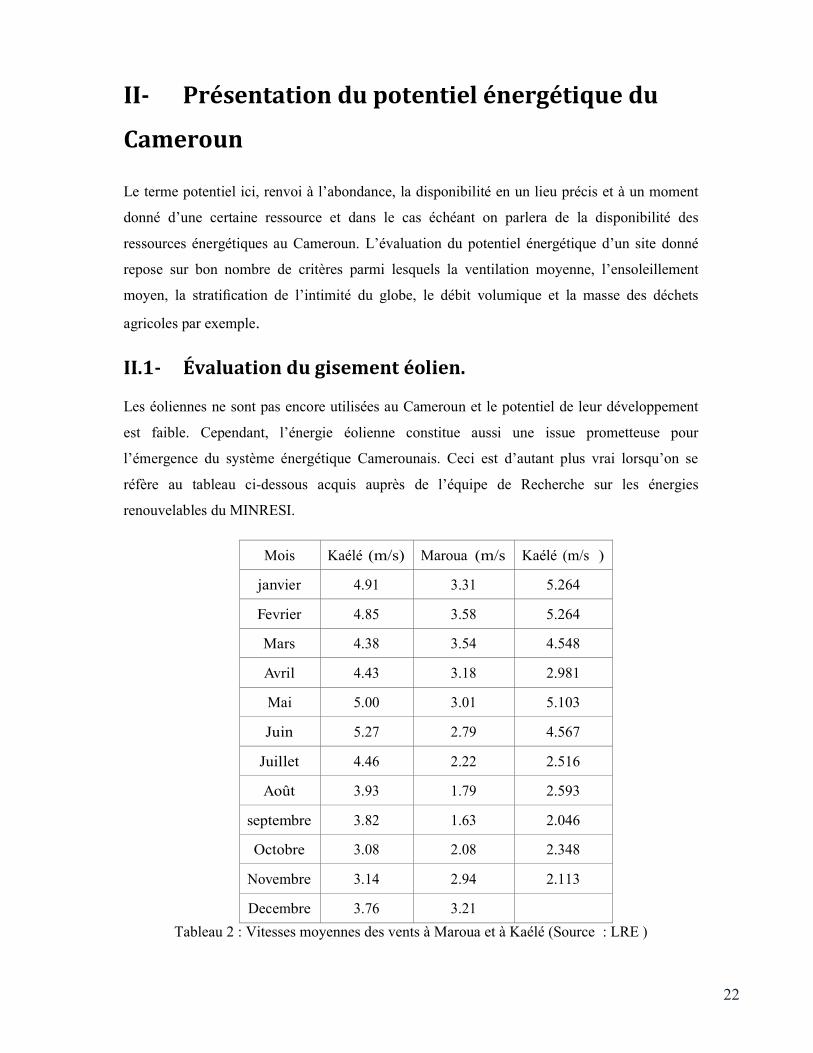
Les éoliennes ne sont pas encore utilisées au Cameroun et le potentiel de leur développement
est faible. Cependant, l’énergie éolienne constitue aussi une issue prometteuse pour
l’émergence du système énergétique Camerounais. Ceci est d’autant plus vrai lorsqu’on se
réfère au tableau ci-dessous acquis auprès de l’équipe de Recherche sur les énergies
renouvelables du MINRESI.
Mois Kaélé (m/s) Maroua (m/s Kaélé (m/s )
janvier 4.91 3.31 5.264
Fevrier 4.85 3.58 5.264
Mars 4.38 3.54 4.548
Avril 4.43 3.18 2.981
Mai 5.00 3.01 5.103
Juin 5.27 2.79 4.567
Juillet 4.46 2.22 2.516
Août 3.93 1.79 2.593
septembre 3.82 1.63 2.046
Octobre 3.08 2.08 2.348
Novembre 3.14 2.94 2.113
Decembre 3.76 3.21
Tableau 2 : Vitesses moyennes des vents à Maroua et à Kaélé (Source : LRE )
23
Par ailleurs, 04 mâts d’expérimentation sont installés respectivement dans les localités de Nziih
dans la Menoua, les monts Fundong dans le Boyo, les monts Bamboutos et le col de Bana dans
le Haut Nkam. Le potentiel éolien estimé dans ces sites pourrait apporter quelques 100 MW.
D’autres expériences vont bientôt démarrer dans l’Adamaoua.
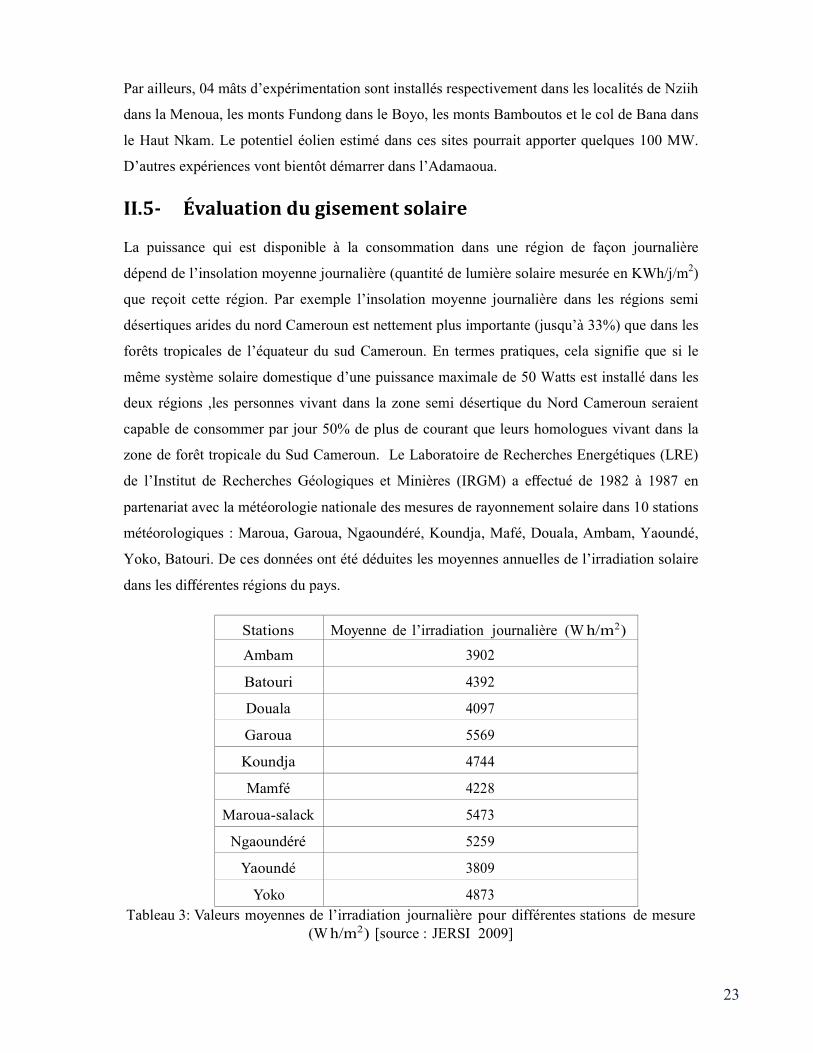
II.5- Évaluation du gisement solaire
La puissance qui est disponible à la consommation dans une région de façon journalière
dépend de l’insolation moyenne journalière (quantité de lumière solaire mesurée en KWh/j/m2)
que reçoit cette région. Par exemple l’insolation moyenne journalière dans les régions semi
désertiques arides du nord Cameroun est nettement plus importante (jusqu’à 33%) que dans les
forêts tropicales de l’équateur du sud Cameroun. En termes pratiques, cela signifie que si le
même système solaire domestique d’une puissance maximale de 50 Watts est installé dans les
deux régions ,les personnes vivant dans la zone semi désertique du Nord Cameroun seraient
capable de consommer par jour 50% de plus de courant que leurs homologues vivant dans la
zone de forêt tropicale du Sud Cameroun. Le Laboratoire de Recherches Energétiques (LRE)
de l’Institut de Recherches Géologiques et Minières (IRGM) a effectué de 1982 à 1987 en
partenariat avec la météorologie nationale des mesures de rayonnement solaire dans 10 stations
météorologiques : Maroua, Garoua, Ngaoundéré, Koundja, Mafé, Douala, Ambam, Yaoundé,
Yoko, Batouri. De ces données ont été déduites les moyennes annuelles de l’irradiation solaire
dans les différentes régions du pays.
Stations Moyenne de l’irradiation journalière (W h/m2)
Ambam 3902
Batouri 4392
Douala 4097
Garoua 5569
Koundja 4744
Mamfé 4228
Maroua-salack 5473
Ngaoundéré 5259
Yaoundé 3809
Yoko 4873
Tableau 3: Valeurs moyennes de l’irradiation journalière pour différentes stations de mesure (W h/m2) [source : JERSI 2009]

24
III- Présentation de la localité favorable à
l’exploitation : la localité Mora dans l’extrême
nord- Cameroun.
Mora est une localité située à 60 Km de la ville de Maroua, dans le département du Mayo Sava
(extrême nord). Sa population a été évaluée à 55 488 habitants [4]. Sa situation géographique
est donnée sur le plan de la figure ci-dessous.
Figure 1-2: situation géographique de la localité de Mora.
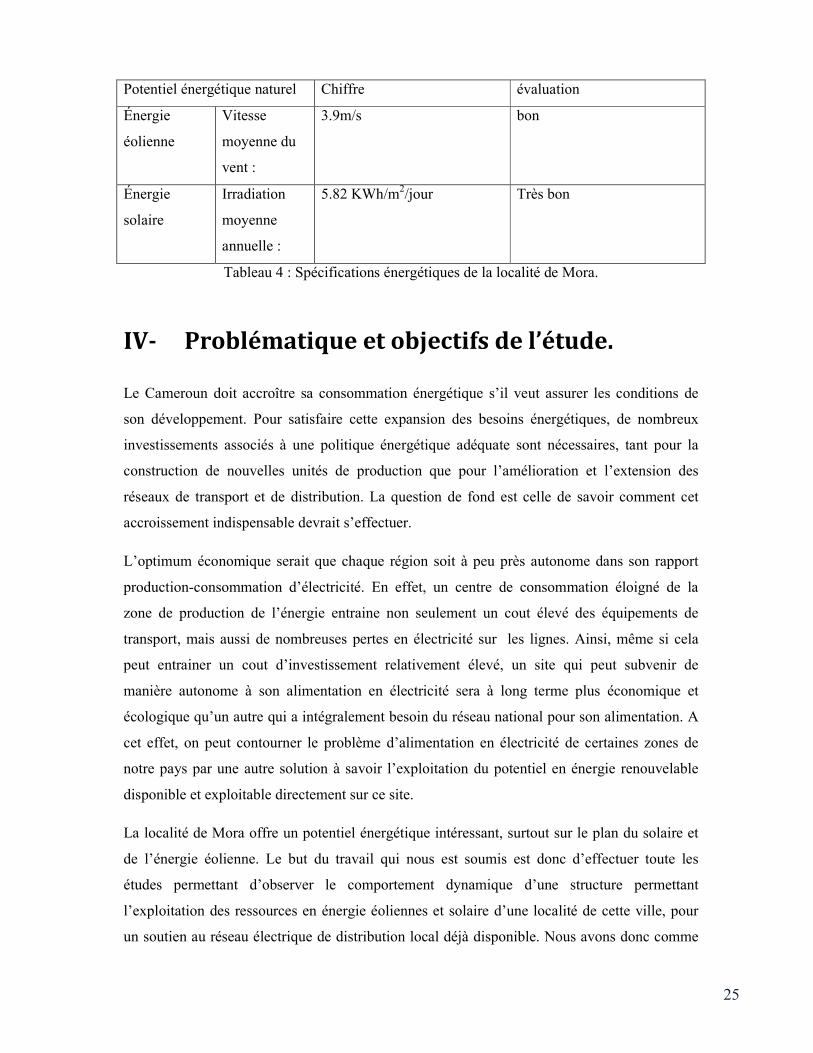
Situation énergétique de la localité de Mora.
Bien que le réseau électrique national s’étende jusqu’à cette localité, les coupures en électricité
y sont fréquentes et parfois pour de longues durées. La possibilité pour les institutions de cette
ville s’il y a suffisamment de fond, de s’alimenter par la voie des énergies renouvelables
disponibles sur place sera donc une très bonne alternative. Le tableau ci-dessous contient les
moyennes par années des données sur les ressources d’énergies disponibles dans cette localité
(source : Retscreen Internationnal).
25
Potentiel énergétique naturel Chiffre évaluation
Énergie
éolienne
Vitesse
moyenne du
vent :
3.9m/s bon
Énergie
solaire
Irradiation
moyenne
annuelle :
5.82 KWh/m2/jour Très bon
Tableau 4 : Spécifications énergétiques de la localité de Mora.
IV- Problématique et objectifs de l’étude.
Le Cameroun doit accroître sa consommation énergétique s’il veut assurer les conditions de
son développement. Pour satisfaire cette expansion des besoins énergétiques, de nombreux
investissements associés à une politique énergétique adéquate sont nécessaires, tant pour la
construction de nouvelles unités de production que pour l’amélioration et l’extension des
réseaux de transport et de distribution. La question de fond est celle de savoir comment cet
accroissement indispensable devrait s’effectuer.
L’optimum économique serait que chaque région soit à peu près autonome dans son rapport
production-consommation d’électricité. En effet, un centre de consommation éloigné de la
zone de production de l’énergie entraine non seulement un cout élevé des équipements de
transport, mais aussi de nombreuses pertes en électricité sur les lignes. Ainsi, même si cela
peut entrainer un cout d’investissement relativement élevé, un site qui peut subvenir de
manière autonome à son alimentation en électricité sera à long terme plus économique et
écologique qu’un autre qui a intégralement besoin du réseau national pour son alimentation. A
cet effet, on peut contourner le problème d’alimentation en électricité de certaines zones de
notre pays par une autre solution à savoir l’exploitation du potentiel en énergie renouvelable
disponible et exploitable directement sur ce site.
La localité de Mora offre un potentiel énergétique intéressant, surtout sur le plan du solaire et
de l’énergie éolienne. Le but du travail qui nous est soumis est donc d’effectuer toute les
études permettant d’observer le comportement dynamique d’une structure permettant
l’exploitation des ressources en énergie éoliennes et solaire d’une localité de cette ville, pour
un soutien au réseau électrique de distribution local déjà disponible. Nous avons donc comme
26
préoccupation la modélisation et la simulation d’une centrale à jumelage éolien-solaire qui
pourrait être implantée dans cette localité.
Les objectifs poursuivis par cette étude sont donc :
- Présentation du synoptique du système éolien-solaire à développer
- La modélisation de la turbine éolienne
- La modélisation de la machine synchrone à aimant permanents
- La simulation de quelques essais dynamiques de la MSAP
- La modélisation et la simulation des caractéristiques de la centrale solaire
- La commande vectorielle de la MSAP
- Modélisation et commande de l'onduleur
- Simulation du système éolien/solaire
- Dimensionnement et choix des composants d'un prototype.
27
Chapitre 2
ÉTAT DE L’ART SUR LES CENRALES À
JUMELAGE ÉOLIEN-SOLAIRE
Les technologies de captation des énergies renouvelables dérivées du soleil n’ont pas cessé
d’évoluer tout au long de ces décennies.
En effet, concernant l’énergie éolienne, C'est au début des années quarante que de vrais
prototypes d'éoliennes à pales profilées ont été utilisés avec succès pour générer de
l'électricité. Plusieurs technologies sont utilisées pour capter l'énergie du vent et les structures
des capteurs sont de plus en plus performantes; celles-ci pour la plupart utilisant des machines
synchrones et asynchrones. Les stratégies de commande de ces machines et leurs éventuelles
interfaces de connexion au réseau doivent permettre de capter un maximum d'énergie sur une
plage de variation de vitesse de vent la plus large possible, ceci dans le but d'améliorer la
rentabilité des installations éoliennes.
De même que pour l’énergie éolienne, depuis la découverte en 1839 de « l’effet
photovoltaïque » par E. Becquerel [5] transformant directement la lumière du soleil en
électricité, des avancées fulgurantes ont été réalisées tant au niveau des technologies de
fabrication des panneaux solaires, qu’à celui de l’exploitation optimale de ceux-ci.
Nous nous proposons donc avant d’aborder la modélisation de la centrale à jumelage, de faire
une revue des différentes avancées déjà réalisées sur le sujet.
28
I- Généralité sur l’énergie éolienne.
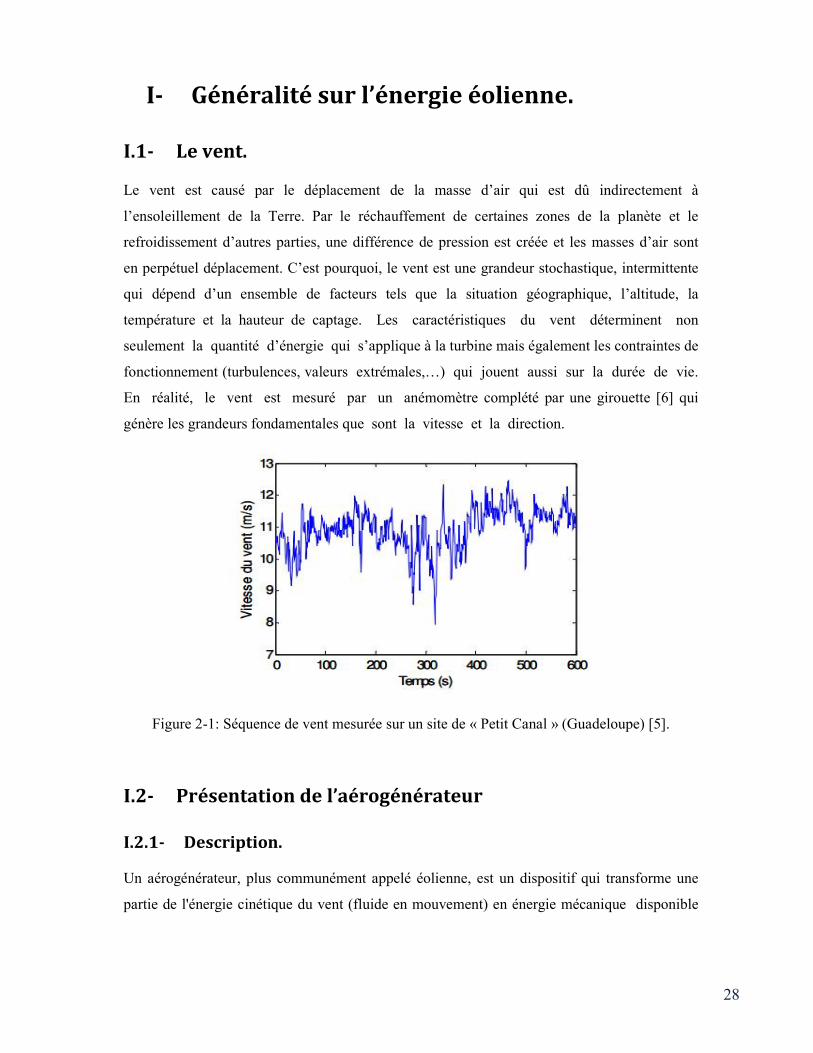
I.1- Le vent.
Le vent est causé par le déplacement de la masse d’air qui est dû indirectement à
l’ensoleillement de la Terre. Par le réchauffement de certaines zones de la planète et le
refroidissement d’autres parties, une différence de pression est créée et les masses d’air sont
en perpétuel déplacement. C’est pourquoi, le vent est une grandeur stochastique, intermittente
qui dépend d’un ensemble de facteurs tels que la situation géographique, l’altitude, la
température et la hauteur de captage. Les caractéristiques du vent déterminent non
seulement la quantité d’énergie qui s’applique à la turbine mais également les contraintes de
fonctionnement (turbulences, valeurs extrémales,…) qui jouent aussi sur la durée de vie.
En réalité, le vent est mesuré par un anémomètre complété par une girouette [6] qui
génère les grandeurs fondamentales que sont la vitesse et la direction.
Figure 2-1: Séquence de vent mesurée sur un site de « Petit Canal » (Guadeloupe) [5].
I.2- Présentation de l’aérogénérateur
I.2.1- Description.
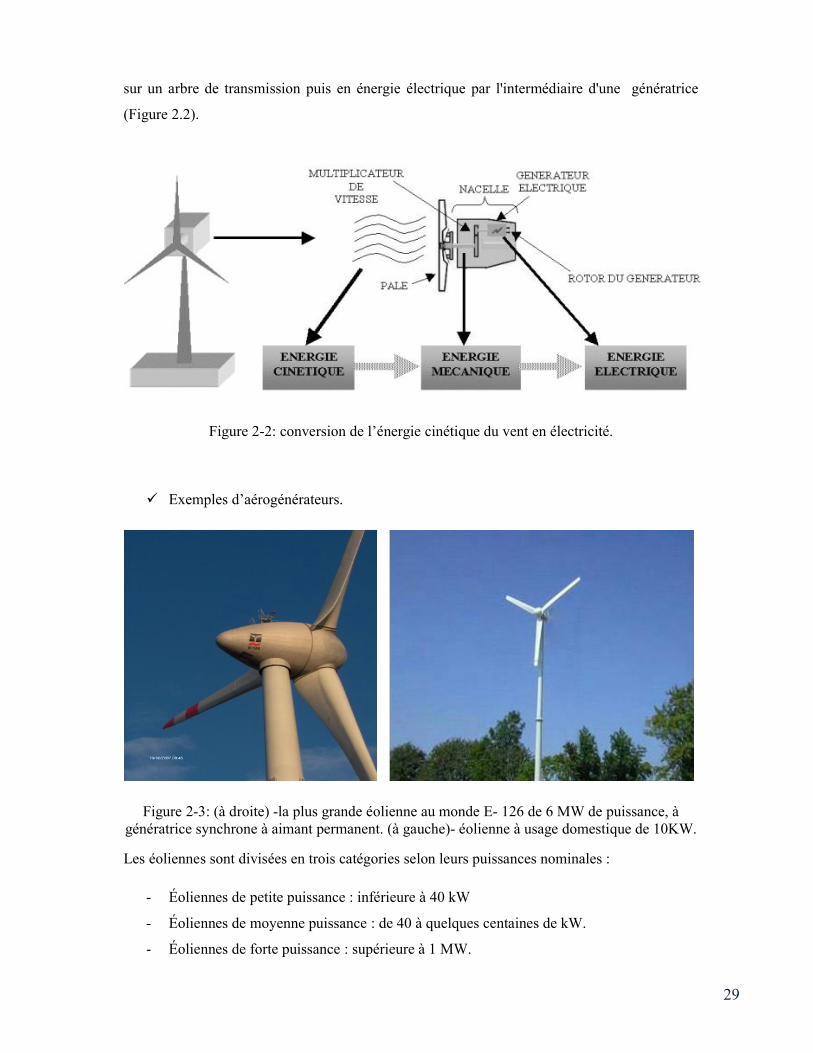
Un aérogénérateur, plus communément appelé éolienne, est un dispositif qui transforme une
partie de l'énergie cinétique du vent (fluide en mouvement) en énergie mécanique disponible
29
sur un arbre de transmission puis en énergie électrique par l'intermédiaire d'une génératrice
(Figure 2.2).
Figure 2-2: conversion de l’énergie cinétique du vent en électricité.
Exemples d’aérogénérateurs.
Figure 2-3: (à droite) -la plus grande éolienne au monde E- 126 de 6 MW de puissance, à génératrice synchrone à aimant permanent. (à gauche)- éolienne à usage domestique de 10KW.
Les éoliennes sont divisées en trois catégories selon leurs puissances nominales :
- Éoliennes de petite puissance : inférieure à 40 kW
- Éoliennes de moyenne puissance : de 40 à quelques centaines de kW.
- Éoliennes de forte puissance : supérieure à 1 MW.
30
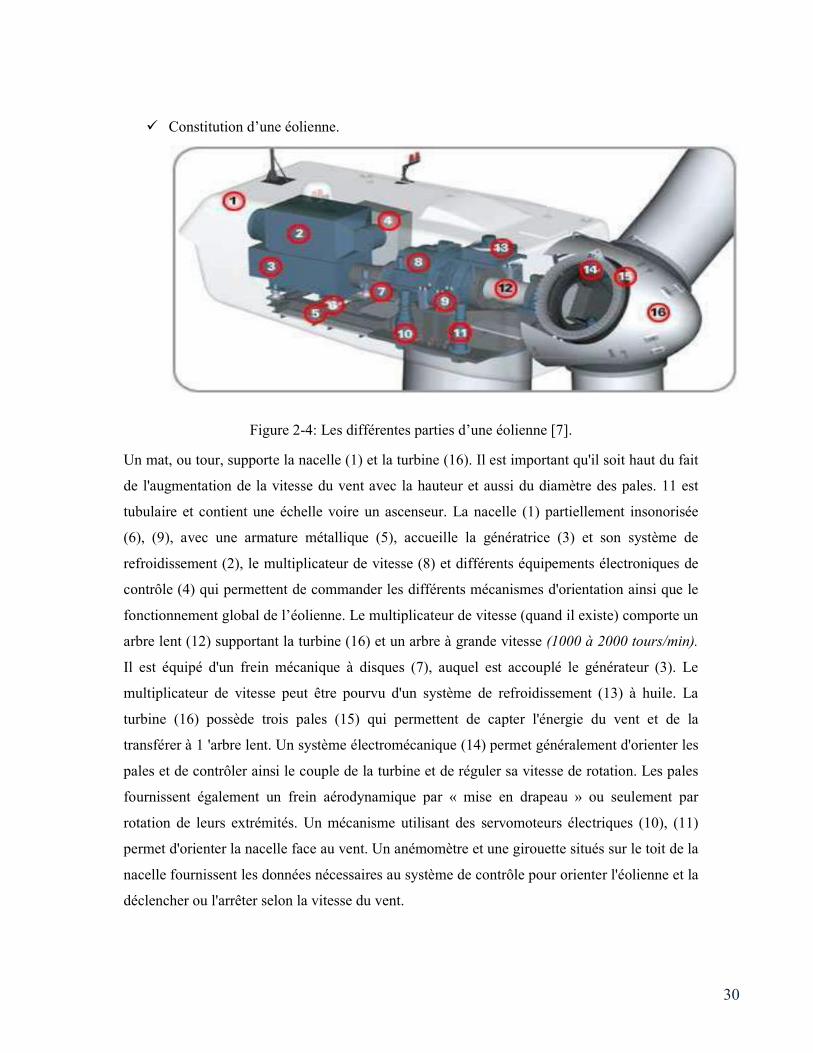
Constitution d’une éolienne.
Figure 2-4: Les différentes parties d’une éolienne [7].
Un mat, ou tour, supporte la nacelle (1) et la turbine (16). Il est important qu'il soit haut du fait
de l'augmentation de la vitesse du vent avec la hauteur et aussi du diamètre des pales. 11 est
tubulaire et contient une échelle voire un ascenseur. La nacelle (1) partiellement insonorisée
(6), (9), avec une armature métallique (5), accueille la génératrice (3) et son système de
refroidissement (2), le multiplicateur de vitesse (8) et différents équipements électroniques de
contrôle (4) qui permettent de commander les différents mécanismes d'orientation ainsi que le
fonctionnement global de l’éolienne. Le multiplicateur de vitesse (quand il existe) comporte un
arbre lent (12) supportant la turbine (16) et un arbre à grande vitesse (1000 à 2000 tours/min).
Il est équipé d'un frein mécanique à disques (7), auquel est accouplé le générateur (3). Le
multiplicateur de vitesse peut être pourvu d'un système de refroidissement (13) à huile. La
turbine (16) possède trois pales (15) qui permettent de capter l'énergie du vent et de la
transférer à 1 'arbre lent. Un système électromécanique (14) permet généralement d'orienter les
pales et de contrôler ainsi le couple de la turbine et de réguler sa vitesse de rotation. Les pales
fournissent également un frein aérodynamique par « mise en drapeau » ou seulement par
rotation de leurs extrémités. Un mécanisme utilisant des servomoteurs électriques (10), (11)
permet d'orienter la nacelle face au vent. Un anémomètre et une girouette situés sur le toit de la
nacelle fournissent les données nécessaires au système de contrôle pour orienter l'éolienne et la
déclencher ou l'arrêter selon la vitesse du vent.

31
Dans ce qui suit, nous étudierons les alternatives les plus souvent adoptées dans la littérature
pour les principales composantes (et aussi les plus complexes) d’une éolienne, à savoir la
turbine, le multiplicateur de vitesse, et la génératrice.
I.2.2- Présentation de la turbine éolienne.
La turbine éolienne est la partie de l’aérogénérateur qui permet de convertir l’énergie cinétique
du vent en énergie mécanique.
I.2.2.1- Classement des Turbines Éoliennes
Il existe différentes façons de classer les turbines éoliennes mais celles-ci appartiennent
principalement à deux groupes selon l’orientation de leur axe de rotation : celles à axe
horizontal et celles à axe vertical.
Figure 2-5: Schéma de principe d’un système éolien.
Turbines Éoliennes à Axe Horizontal (HAWT)
Une turbine à axe de rotation horizontal demeure face au vent, comme les hélices des avions et
des moulins à vent. Elle est fixée au sommet d’une tour, ce qui lui permet de capter une
quantité plus importante d’énergie éolienne. La plupart des éoliennes installées sont à axe
horizontal. Ce choix présente plusieurs avantages, comme la faible vitesse d’amorçage (cut-
in) et un coefficient de puissance (rapport entre la puissance obtenue et la puissance de la
masse d’air en mouvement) relativement élevé.
32
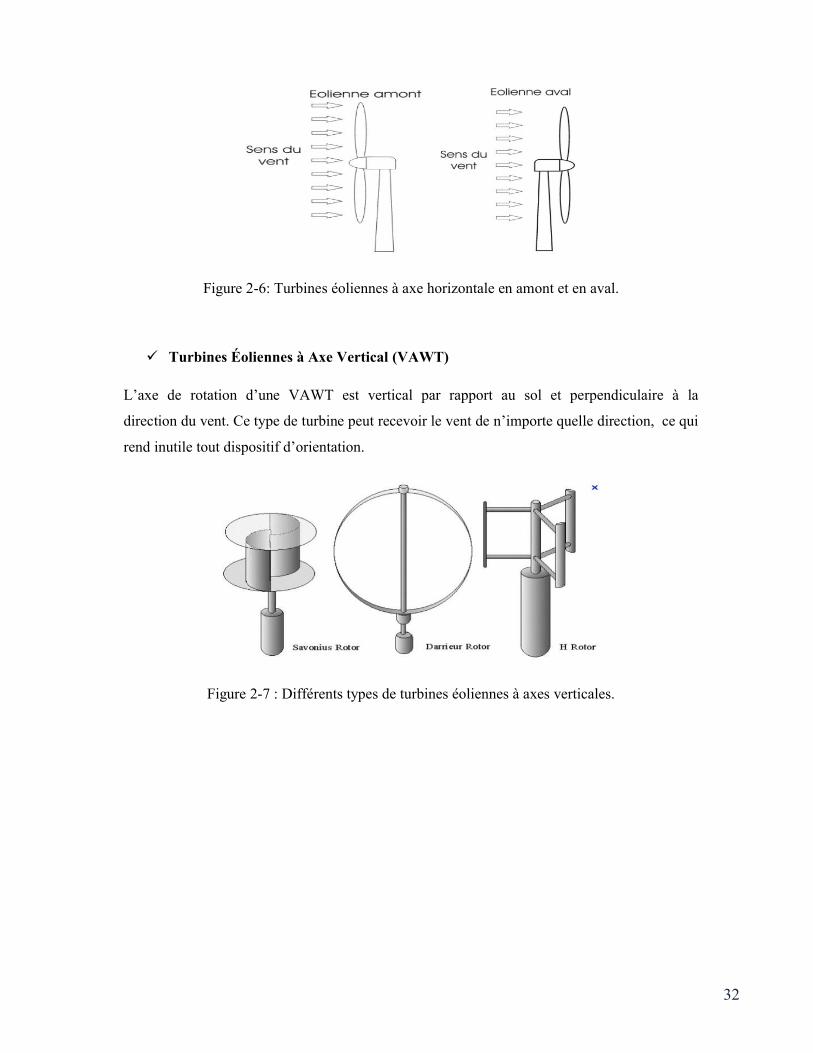
Figure 2-6: Turbines éoliennes à axe horizontale en amont et en aval.
Turbines Éoliennes à Axe Vertical (VAWT)
L’axe de rotation d’une VAWT est vertical par rapport au sol et perpendiculaire à la
direction du vent. Ce type de turbine peut recevoir le vent de n’importe quelle direction, ce qui
rend inutile tout dispositif d’orientation.
Figure 2-7 : Différents types de turbines éoliennes à axes verticales.
33
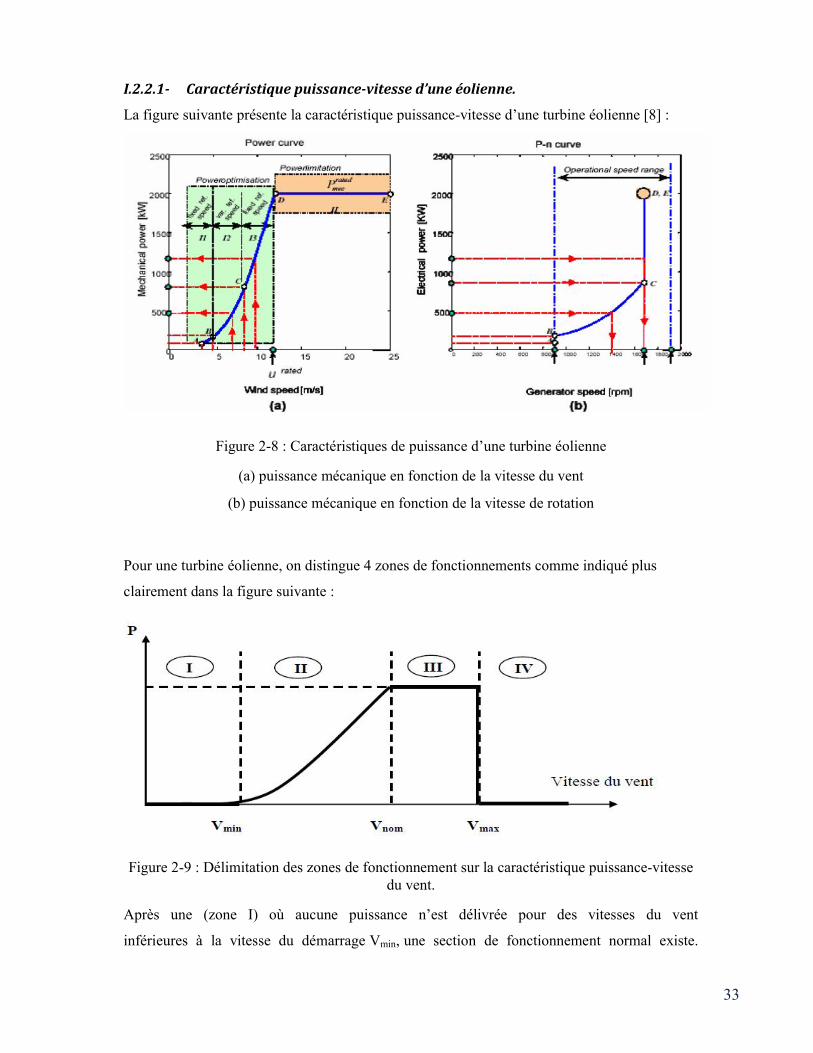
I.2.2.1- Caractéristique puissance-vitesse d’une éolienne.
La figure suivante présente la caractéristique puissance-vitesse d’une turbine éolienne [8] :
Figure 2-8 : Caractéristiques de puissance d’une turbine éolienne
(a) puissance mécanique en fonction de la vitesse du vent
(b) puissance mécanique en fonction de la vitesse de rotation
Pour une turbine éolienne, on distingue 4 zones de fonctionnements comme indiqué plus
clairement dans la figure suivante :
Figure 2-9 : Délimitation des zones de fonctionnement sur la caractéristique puissance-vitesse du vent.
Après une (zone I) où aucune puissance n’est délivrée pour des vitesses du vent
inférieures à la vitesse du démarrage Vmin, une section de fonctionnement normal existe.

34
Si on extrait alors la puissance maxi male de la turbine grâce à un contrôle MPPT. Celle-ci
évolue alors selon le cube de la vitesse du vent (zone II). Quand la puissance nominale Pn est
atteinte, les paramètres de la turbine (angle de calage β) doivent évoluer de façon à la limiter
(zone III) [9]; en effet Divers éléments de l’aérogénérateur sont dimensionnés en fonction
des charges, vitesse de rotation et puissances correspondantes à cette vitesse de vent. Ces
éléments ne peuvent pas supporter des valeurs de ces grandeurs supérieures à certaine limite
[9]. Lorsque la vitesse du vent devient trop importante (zone IV), les pales de la turbine sont
mises en drapeaux (β=90) pour ne pas détériorer le générateur éolien.
I.2.3- La boite de vitesses.
Une boite de vitesses élévatrice est habituellement nécessaire pour adapter les deux vitesses de
rotation. La boite de vitesses d’une turbine éolienne doit être extrêmement robuste (heavy
duty). L’idéal serait que le générateur électrique puisse aussi fonctionner à vitesse
variable comme celle du vent. Cette approche implique toutefois un convertisseur électronique
pour adapter la fréquence de fonctionnement du générateur à celle du réseau. Le surcoût n’est
pas négligeable.
Figure 2-10 : Multiplicateur de vitesse (modèle planétaire à plusieurs étages).
Rendement de la Boîte de Vitesses
Les pertes de puissance dans les boîtes de vitesse modernes sont peu importantes. Néanmoins,
le rendement de la boîte de vitesse ne peut pas être complètement ignoré, particulièrement pour
35
une turbine éolienne [10]. La friction entre les dents et les ruptures du flux de l’huile sont les
causes principales de pertes dans la boîte de vitesse.
Entrainement Direct
Une solution au problème du surdimensionnement de la boîte de vitesse est simplement de
l’éliminer en utilisant un système où le rotor est connecté directement au générateur. Les
générateurs à attaque directe capables de travailler aux faibles vitesses de rotation des turbines
éoliennes sont en développement, mais les conceptions actuelles sont plus lourdes que les
générateurs conventionnels. Ce type d’entraînement direct du générateur est aussi dénommé
fonctionnement « gearless » de la turbine éolienne.
I.3- État de l’art sur la conversion électromécanique dans les
aérogénérateurs
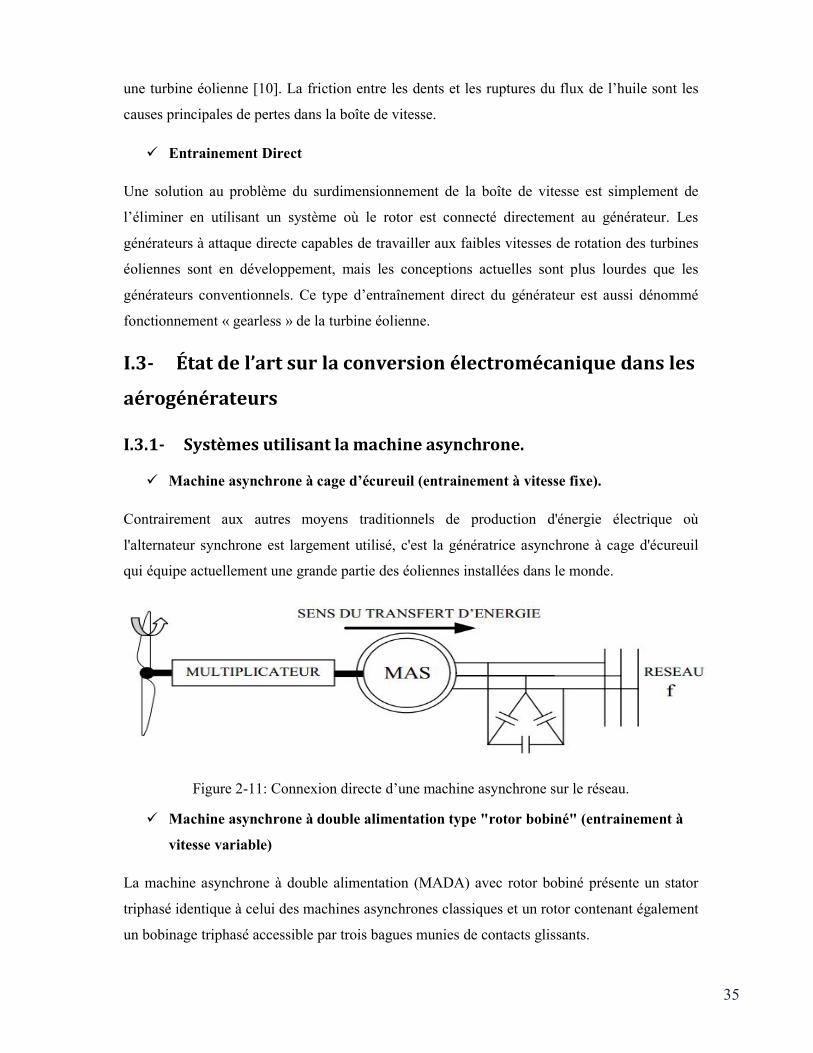
I.3.1- Systèmes utilisant la machine asynchrone.
Machine asynchrone à cage d’écureuil (entrainement à vitesse fixe).
Contrairement aux autres moyens traditionnels de production d'énergie électrique où
l'alternateur synchrone est largement utilisé, c'est la génératrice asynchrone à cage d'écureuil
qui équipe actuellement une grande partie des éoliennes installées dans le monde.
Figure 2-11: Connexion directe d’une machine asynchrone sur le réseau.
Machine asynchrone à double alimentation type "rotor bobiné" (entrainement à
vitesse variable)
La machine asynchrone à double alimentation (MADA) avec rotor bobiné présente un stator
triphasé identique à celui des machines asynchrones classiques et un rotor contenant également
un bobinage triphasé accessible par trois bagues munies de contacts glissants.
36
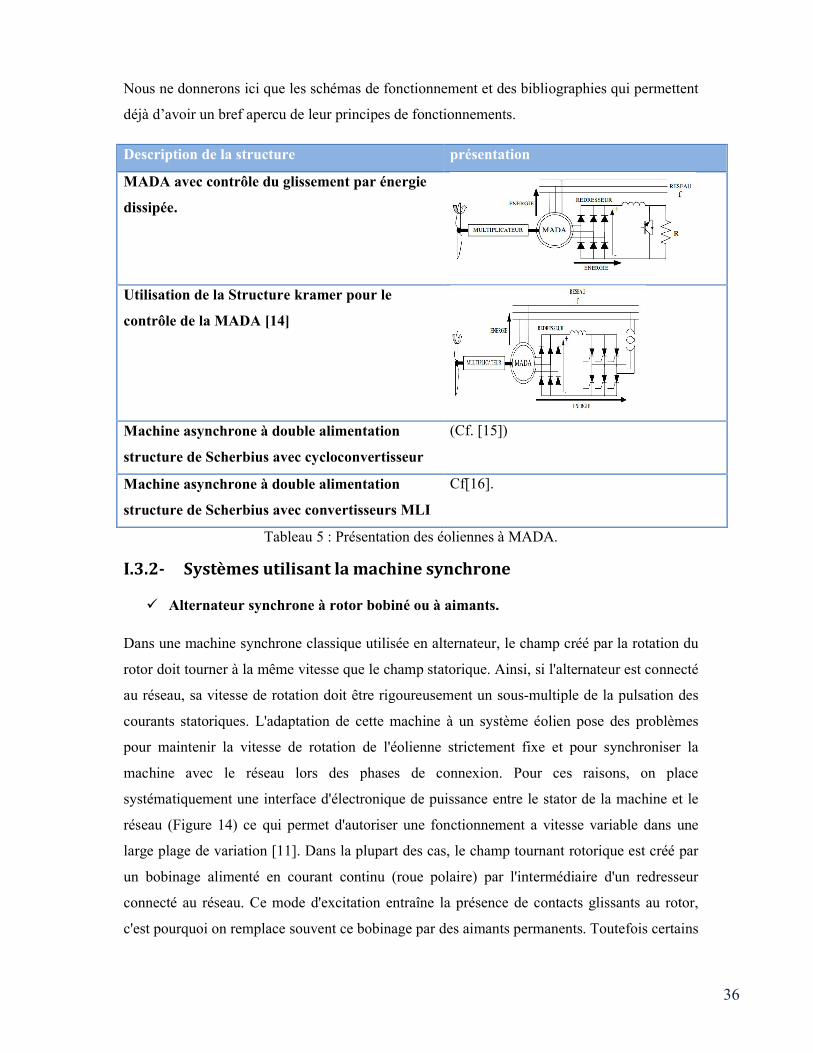
Nous ne donnerons ici que les schémas de fonctionnement et des bibliographies qui permettent
déjà d’avoir un bref apercu de leur principes de fonctionnements.
Description de la structure présentation
MADA avec contrôle du glissement par énergie
dissipée.
Utilisation de la Structure kramer pour le
contrôle de la MADA [14]
Machine asynchrone à double alimentation
structure de Scherbius avec cycloconvertisseur
(Cf. [15])
Machine asynchrone à double alimentation
structure de Scherbius avec convertisseurs MLI
Cf[16].
Tableau 5 : Présentation des éoliennes à MADA.
I.3.2- Systèmes utilisant la machine synchrone
Alternateur synchrone à rotor bobiné ou à aimants.
Dans une machine synchrone classique utilisée en alternateur, le champ créé par la rotation du
rotor doit tourner à la même vitesse que le champ statorique. Ainsi, si l'alternateur est connecté
au réseau, sa vitesse de rotation doit être rigoureusement un sous-multiple de la pulsation des
courants statoriques. L'adaptation de cette machine à un système éolien pose des problèmes
pour maintenir la vitesse de rotation de l'éolienne strictement fixe et pour synchroniser la
machine avec le réseau lors des phases de connexion. Pour ces raisons, on place
systématiquement une interface d'électronique de puissance entre le stator de la machine et le
réseau (Figure 14) ce qui permet d'autoriser une fonctionnement a vitesse variable dans une
large plage de variation [11]. Dans la plupart des cas, le champ tournant rotorique est créé par
un bobinage alimenté en courant continu (roue polaire) par l'intermédiaire d'un redresseur
connecté au réseau. Ce mode d'excitation entraîne la présence de contacts glissants au rotor,
c'est pourquoi on remplace souvent ce bobinage par des aimants permanents. Toutefois certains
37
d'entre eux sont réalisés à l'aide de terres rares et sont par conséquent très coûteux, bien que
leur utilisation de plus en plus fréquente tende à faire baisser leur prix. De plus, les variations
importantes de couples électromagnétiques qui peuvent avoir lieu dans un système éolien
risquent d'entraîner une démagnétisation des aimants lorsqu'ils sont constitués de matériaux
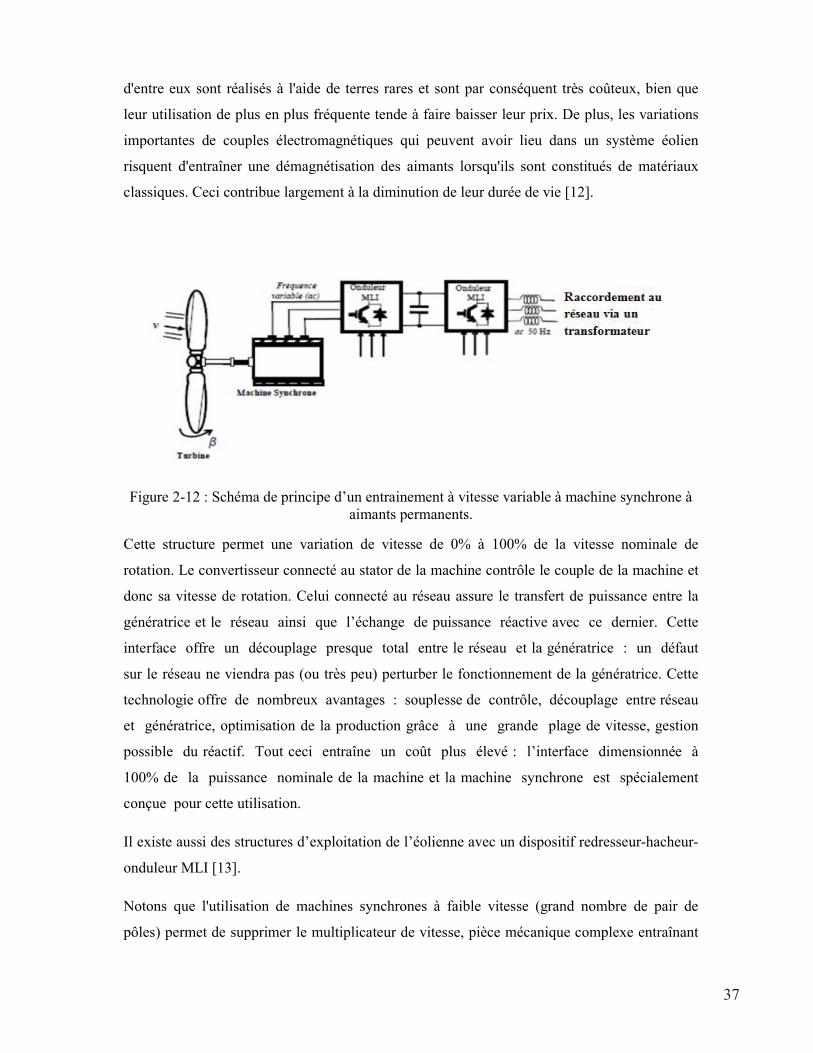
classiques. Ceci contribue largement à la diminution de leur durée de vie [12].
Figure 2-12 : Schéma de principe d’un entrainement à vitesse variable à machine synchrone à aimants permanents.
Cette structure permet une variation de vitesse de 0% à 100% de la vitesse nominale de
rotation. Le convertisseur connecté au stator de la machine contrôle le couple de la machine et
donc sa vitesse de rotation. Celui connecté au réseau assure le transfert de puissance entre la
génératrice et le réseau ainsi que l’échange de puissance réactive avec ce dernier. Cette
interface offre un découplage presque total entre le réseau et la génératrice : un défaut
sur le réseau ne viendra pas (ou très peu) perturber le fonctionnement de la génératrice. Cette
technologie offre de nombreux avantages : souplesse de contrôle, découplage entre réseau
et génératrice, optimisation de la production grâce à une grande plage de vitesse, gestion
possible du réactif. Tout ceci entraîne un coût plus élevé : l’interface dimensionnée à
100% de la puissance nominale de la machine et la machine synchrone est spécialement
conçue pour cette utilisation.
Il existe aussi des structures d’exploitation de l’éolienne avec un dispositif redresseur-hacheur-
onduleur MLI [13].
Notons que l'utilisation de machines synchrones à faible vitesse (grand nombre de pair de
pôles) permet de supprimer le multiplicateur de vitesse, pièce mécanique complexe entraînant
38
des pertes et des pannes fréquentes mais l'augmentation du nombre de pôles implique une
machine de très grand diamètre représentant un barrage important pour l'écoulement du vent.
Cette configuration de l’éolienne sera celle qui attirera notre attention dans le cadre de ce
mémoire.
Autres systèmes à machine synchrones rencontrées dans la littérature.
- Machine synchrone à aimants permanents discoïde [14].
- Machine synchrone vernier à aimants [15].
- Machine synchrone à aimant permanent à rotor extérieurs [16].
II- Généralité sur l'énergie solaire
photovoltaïque.
II.1- L’effet photovoltaïque
L’effet photovoltaïque se manifeste par l’apparition d'une différence de potentiel à la
jonction entre un métal et un semi-conducteur ou entre deux semi-conducteurs lorsque
le dispositif reçoit un rayonnement lumineux de longueur d’onde adéquate. Ainsi une
cellule photovoltaïque peut convertir l'énergie solaire en énergie électrique en mettant en
jeu ce phénomène physique optoélectronique. Industriellement les matériaux les plus
utilisés sont à base de silicium. Les performances de rendement énergétique atteintes
industriellement sont de 13 à 14 % pour les cellules à base de silicium monocristallin,
11 à 12 % avec du silicium polycristallin et enfin 7 à 8% pour le silicium amorphe [17].
II.2- Cellule, module et panneau photovoltaïque
Dans la figure (2-13) un échantillon schématique d’une configuration de la cellule solaire. Elle
se compose d’un abri du verre (g), un encapsulant (e), et un métal en arrière contact (m) afin de
réduire les pertes par réflexion du rayonnement incident [18]. La jonction p-n de ces deux
matériaux fonctionne comme une diode. Lorsque cette diode est exposée à des photons dont
l’énergie (hv) est supérieure à celle de l’énergie du matériau, appelée l’énergie de
bande gap (Eg), le nombre d’électrons libres du semi-conducteur de type-p et celui de

39
trous du semi-conducteur de type-n augmente considérablement. Si les photons incidents
ont une énergie inférieure à Eg, ils ne seront pas absorbés c'est-à-dire leurs énergies ne
contribuent pas à la conversion photovoltaïque.
Figure 2-13: Présentation schématique d’une cellule solaire.
Typiquement une cellule photovoltaïque produit moins de 2 Watts sous approximativement 0,5
Volt. Une association série de plusieurs cellules donne un module et une association
série et/ou parallèle de plusieurs modules permet de réaliser un panneau solaire photovoltaïque.
Le passage d’un module à un panneau se fait par l’ajout de diodes de protection, une
en série pour éviter les courants inverses et une en parallèle, dite diode by-pass, qui
n’intervient qu’en cas de déséquilibre d’un ensemble de cellules pour limiter la tension inverse
aux bornes de cet ensemble et minimiser la perte de production associée.
Figure 2-14 : (a), (b)-module photovoltaïque; (c)- panneau solaire.
II.3- Utilisation d’un générateur PV
On distingue le cas d’installations autonomes, l'énergie produite par les panneaux solaires
photovoltaïques est utilisée immédiatement (pompage, ventilation, etc.…) ou stockée dans des
batteries pour une utilisation différée. Le courant continu produit alimente directement des
appareils prévus à cet effet ou est transformé en 230 Volts alternatif.
(c)

40
Figure 2-15: Installation photovoltaïque autonome [17].
Le système peut également être connecté au réseau. L'avantage du raccordement est de se
dispenser du coûteux et problématique stockage de l’électricité. Dans ses versions les plus
économiques l’onduleur ne peut fonctionner qu’en présence du réseau, une éventuelle panne de
ce dernier rend inopérationnel le système de production d’origine renouvelable. Un onduleur
réversible est nécessaire si on a une charge à courant continu. Si la consommation locale est
supérieure à la production de la centrale, l'appoint est fourni par le réseau. Dans le cas
contraire, l'énergie est fournie au réseau public et sert à alimenter les consommateurs voisins.
Figure 2-16 : Installation photovoltaïque couplée au réseau [17].
II.4- Système de stockage.
Dans une installation PV, le stockage correspond à la conservation de l’énergie produite par le
générateur PV, en attente pour une utilisation ultérieure. La gestion de l’énergie solaire
nécessite s’envisager des stockages suivant les conductions météorologiques et qui vont
répondre à deux fonction principales :
- Fournir à l’installation de l’électricité lorsque le générateur PV n’en produit pas (la nuit
ou par mauvais temps par exemple)

41
- Fournir à l’installation des puissances plus importantes que celles fournies par le
générateur PV.
III- Les systèmes à jumelage éolien-solaire.
Les systèmes de puissance qui utilisent plusieurs sources de génération sont appelés «
systèmes de puissance hybrides ». Pour fournir de l’électricité à une communauté
éloignée, ces systèmes intègrent différents composants : production, stockage,
conditionnement de puissance et systèmes de commande.
Les systèmes hybrides classiques sont composés d’un bus à courant continu (figure 2-18) pour
le groupe de batteries et d’un autre à courant alternatif (AC) pour le générateur et la
distribution. Les sources renouvelables peuvent être connectées au bus AC ou au bus DC,
selon la taille et la configuration du système. Les systèmes produisant de l’énergie pour
plusieurs maisons et/ou points de consommation fournissent habituellement de la
puissance en courant alternatif ; quelques charges peuvent toujours se raccorder au bus DC.
Ce type de système peut produire quelques kilowattheures (kWh) jusqu’à plusieurs
mégawattheures (MWh) par jour. Les systèmes qui alimentent de petites charges, de
l’ordre de quelques kWh/jour, utilisent de préférence le bus DC uniquement. Pour des
charges plus importantes, les systèmes utilisent plutôt le bus AC (figure 2-17) comme point
principal de connexion. La tendance est alors que chaque source possède son convertisseur
avec sa propre commande intégrée, ce qui permet une coordination de la production. Des
écarts importants existent entre les différentes configurations possibles.
Pour les systèmes en site isolé, une solution couramment employée consiste à associer
les aérogénérateurs ou bien les générateurs photovoltaïques à un ou des groupes
électrogènes, souvent diesel.
Figure 2-17: Structure employant un bus AC.
42
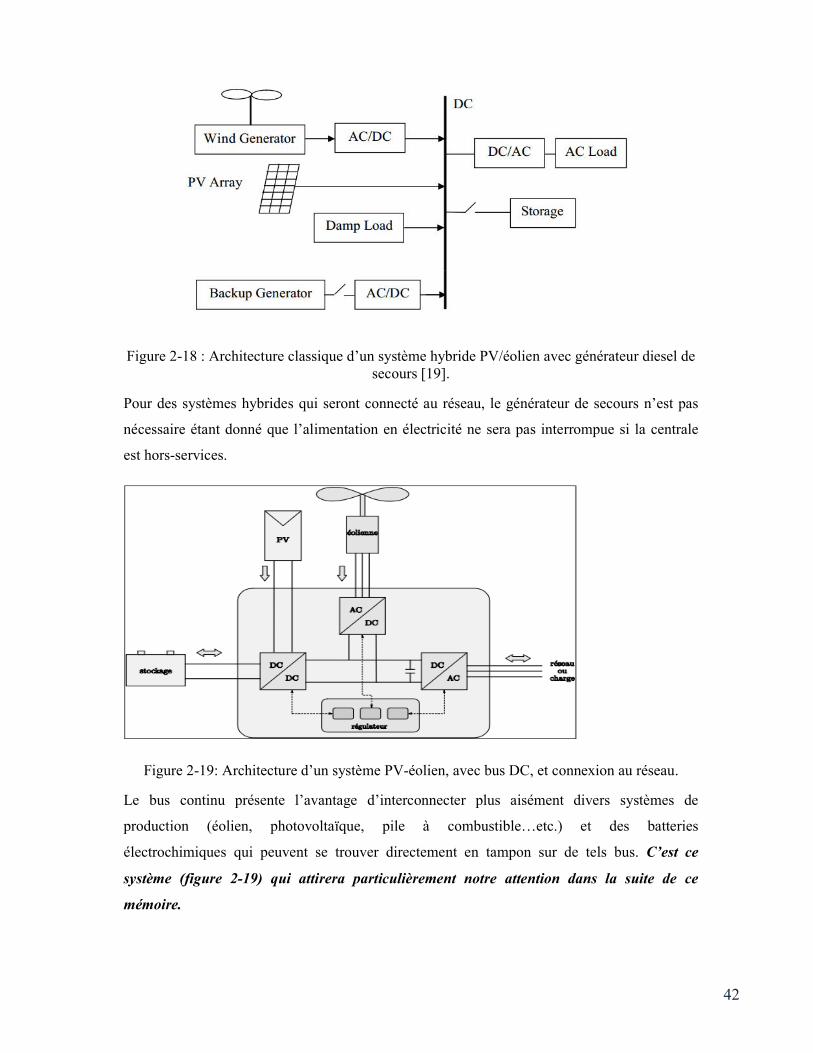
Figure 2-18 : Architecture classique d’un système hybride PV/éolien avec générateur diesel de secours [19].
Pour des systèmes hybrides qui seront connecté au réseau, le générateur de secours n’est pas
nécessaire étant donné que l’alimentation en électricité ne sera pas interrompue si la centrale
est hors-services.
Figure 2-19: Architecture d’un système PV-éolien, avec bus DC, et connexion au réseau.
Le bus continu présente l’avantage d’interconnecter plus aisément divers systèmes de
production (éolien, photovoltaïque, pile à combustible…etc.) et des batteries
électrochimiques qui peuvent se trouver directement en tampon sur de tels bus. C’est ce
système (figure 2-19) qui attirera particulièrement notre attention dans la suite de ce
mémoire.
43
Chapitre 3
ÉTUDE, MODÉLISATION ET SIMULATION
DE L’AÉRO-GÉNÉRATEUR
La modélisation des systèmes de jumelage éolien-solaire vise en premier lieu l'obtention
d'un outil de dimensionnement et d'investigation sur ces structures. Bon nombre de
travaux ont été menés dans ce sens. La modélisation des éoliennes et les systèmes
hybrides éolien-solaire y sont abordés à travers diverses techniques d'analyse mathématique.
Les études font très souvent usage des concepts généraux liés à la théorie des
systèmes, leur linéarisation autour d'un point de fonctionnement, et leur stabilisation
(analyse des valeurs propres).
Dans ce chapitre, nous nous fixons pour objectif de développer les modèles des différentes
parties d’un aérogénérateur; la simulation de quelques essais sur la turbine et sur la MSAP sera
effectuée, ensuite, nous feront une simulation de l’ensemble pour un profil de vent déterminé.
44
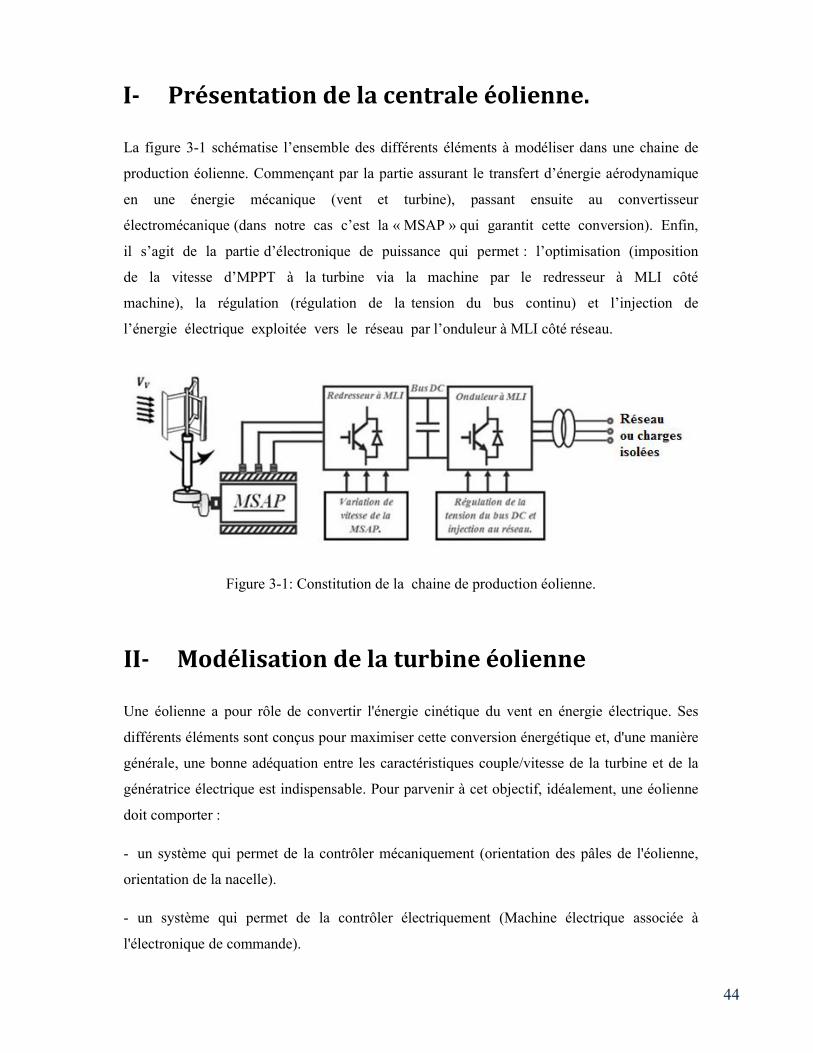
I- Présentation de la centrale éolienne.
La figure 3-1 schématise l’ensemble des différents éléments à modéliser dans une chaine de
production éolienne. Commençant par la partie assurant le transfert d’énergie aérodynamique
en une énergie mécanique (vent et turbine), passant ensuite au convertisseur
électromécanique (dans notre cas c’est la « MSAP » qui garantit cette conversion). Enfin,
il s’agit de la partie d’électronique de puissance qui permet : l’optimisation (imposition
de la vitesse d’MPPT à la turbine via la machine par le redresseur à MLI côté
machine), la régulation (régulation de la tension du bus continu) et l’injection de
l’énergie électrique exploitée vers le réseau par l’onduleur à MLI côté réseau.
Figure 3-1: Constitution de la chaine de production éolienne.
II- Modélisation de la turbine éolienne
Une éolienne a pour rôle de convertir l'énergie cinétique du vent en énergie électrique. Ses
différents éléments sont conçus pour maximiser cette conversion énergétique et, d'une manière
générale, une bonne adéquation entre les caractéristiques couple/vitesse de la turbine et de la
génératrice électrique est indispensable. Pour parvenir à cet objectif, idéalement, une éolienne
doit comporter :
- un système qui permet de la contrôler mécaniquement (orientation des pâles de l'éolienne,
orientation de la nacelle).
- un système qui permet de la contrôler électriquement (Machine électrique associée à
l'électronique de commande).

45
Dans cette partie un modèle analytique de la turbine éolienne est décrit ainsi que l'identification
des différents paramètres qui régissent le fonctionnement de cette dernière à savoir le
coefficient de puissance ( Сp ), l'angle de calage ( ß) et la vitesse spécifique du vent ( λ).
II.1- Modélisation de la conversion de l’énergie éolienne
a- Loi de Betz
Considérons le système éolien à axe horizontal représenté sur la Figure IV.1 sur lequel on a
représenté la vitesse du vent en amont de l'aérogénérateur V1, et V2 en aval. En supposant que
la vitesse du vent traversant le rotor est égale à la moyenne entre la vitesse du vent non
perturbé à l’avant de l’éolienne V1 et la vitesse du vent après passage à travers le rotor soit :
1 2
2
V VV
(3.1)
La masse d'air en mouvement de densité ρ traversant une surface S des pales en une seconde
est :
1 2
2
V Vm S
(3.2)
La puissance Pm alors extraite s'exprime par la moitié du produit de la masse et de la
diminution de la vitesse du vent (seconde loi de Newton).
2 21 2( )
2m
V VP m
(3.3)
Soit en remplaçant m par son expression dans (IV.2) :
2 21 2 1 2( )
4m
V V V VP S
(3.4)
Figure 3-2: Tube de courant autour d’une éolienne.
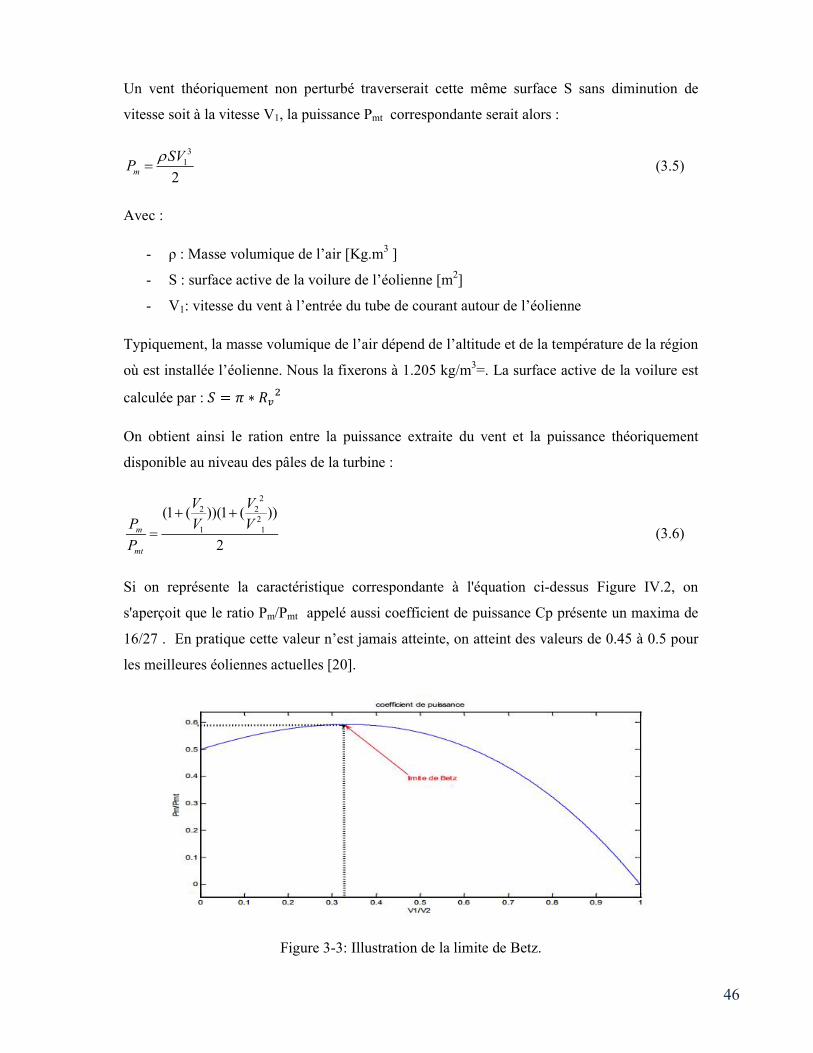
46
Un vent théoriquement non perturbé traverserait cette même surface S sans diminution de
vitesse soit à la vitesse V1, la puissance Pmt correspondante serait alors :
31
2m
SVP
(3.5)
Avec :
- ρ : Masse volumique de l’air [Kg.m3 ]
- S : surface active de la voilure de l’éolienne [m2]
- V1: vitesse du vent à l’entrée du tube de courant autour de l’éolienne
Typiquement, la masse volumique de l’air dépend de l’altitude et de la température de la région
où est installée l’éolienne. Nous la fixerons à 1.205 kg/m3=. La surface active de la voilure est
calculée par : = ∗
On obtient ainsi le ration entre la puissance extraite du vent et la puissance théoriquement
disponible au niveau des pâles de la turbine :
22 2
21 1
(1 ( ))(1 ( ))
2m
mt
V V
P V V
P
(3.6)
Si on représente la caractéristique correspondante à l'équation ci-dessus Figure IV.2, on
s'aperçoit que le ratio Pm/Pmt appelé aussi coefficient de puissance Cp présente un maxima de
16/27 . En pratique cette valeur n’est jamais atteinte, on atteint des valeurs de 0.45 à 0.5 pour
les meilleures éoliennes actuelles [20].
Figure 3-3: Illustration de la limite de Betz.

47
C'est cette limite théorique appelée limite de Betz qui fixe la puissance maximale extractible
pour une vitesse de vent donnée. Cette limite n'est en réalité jamais atteinte et chaque éolienne
est définie par son propre coefficient de puissance exprimé en fonction de la vitesse relative λ
représentant le rapport entre la vitesse de l'extrémité des pales de l'éolienne et la vitesse du
vent.
Les performances de la turbine éolienne à vitesses variables et à réglage par orientation de
palle sont déterminées par les caractéristiques des courbes représentant les variations du
coefficient de puissance en fonction de la vitesse spécifique pour différents angles de calage
(inclinaison de l’axe de référence par rapport au plan de rotation). Ces courbes peuvent être
obtenues à partir des relevés réels réalisés sur différentes catégories d'éoliennes, ou par des
formules non linéaires [21]. Les figures suivantes en donnent des esquisses pour différentes
types de turbines.
Figure 3-4: Variation du Coefficient de puissance en fonction du coefficient de vitesse réduite
pour différent type de turbine [10].
Figure 3-5: Réseau de caractéristique CP(λ,β) d’une turbine éolienne [22].
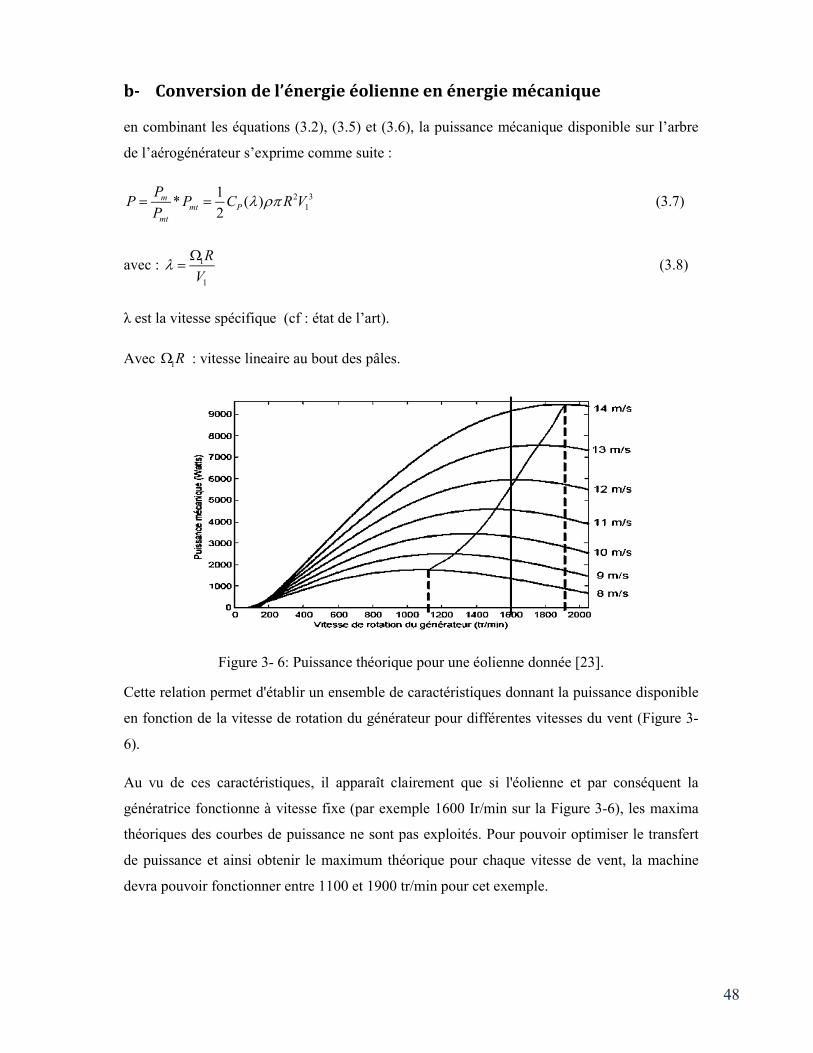
48
b- Conversion de l’énergie éolienne en énergie mécanique
en combinant les équations (3.2), (3.5) et (3.6), la puissance mécanique disponible sur l’arbre
de l’aérogénérateur s’exprime comme suite :
2 31
1* ( )
2m
mt P
mt
PP P C R V
P (3.7)
avec : 1
1
R
V
(3.8)
λ est la vitesse spécifique (cf : état de l’art).
Avec 1R : vitesse lineaire au bout des pâles.
Figure 3- 6: Puissance théorique pour une éolienne donnée [23].
Cette relation permet d'établir un ensemble de caractéristiques donnant la puissance disponible
en fonction de la vitesse de rotation du générateur pour différentes vitesses du vent (Figure 3-
6).
Au vu de ces caractéristiques, il apparaît clairement que si l'éolienne et par conséquent la
génératrice fonctionne à vitesse fixe (par exemple 1600 Ir/min sur la Figure 3-6), les maxima
théoriques des courbes de puissance ne sont pas exploités. Pour pouvoir optimiser le transfert
de puissance et ainsi obtenir le maximum théorique pour chaque vitesse de vent, la machine
devra pouvoir fonctionner entre 1100 et 1900 tr/min pour cet exemple.
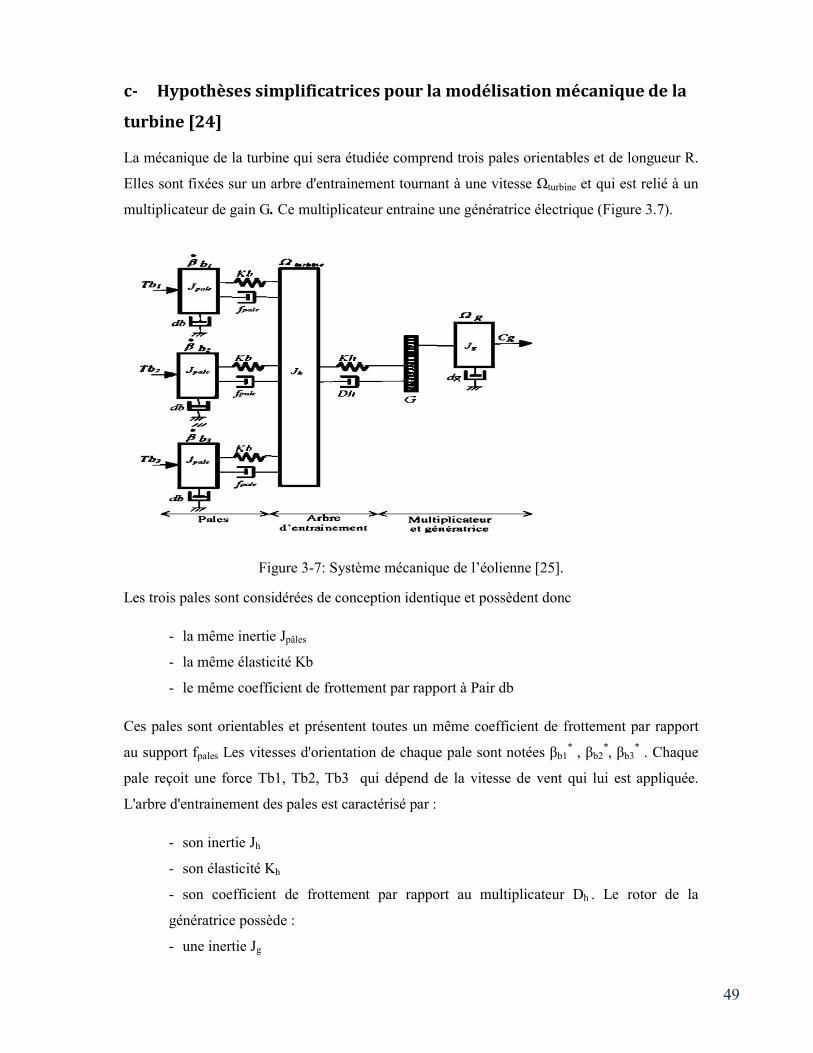
49
c- Hypothèses simplificatrices pour la modélisation mécanique de la
turbine [24]
La mécanique de la turbine qui sera étudiée comprend trois pales orientables et de longueur R.
Elles sont fixées sur un arbre d'entrainement tournant à une vitesse Ωturbine et qui est relié à un
multiplicateur de gain G. Ce multiplicateur entraine une génératrice électrique (Figure 3.7).
Figure 3-7: Système mécanique de l’éolienne [25].
Les trois pales sont considérées de conception identique et possèdent donc
- la même inertie Jpâles
- la même élasticité Kb
- le même coefficient de frottement par rapport à Pair db
Ces pales sont orientables et présentent toutes un même coefficient de frottement par rapport
au support fpales Les vitesses d'orientation de chaque pale sont notées βb1* , βb2
*, βb3* . Chaque
pale reçoit une force Tb1, Tb2, Tb3 qui dépend de la vitesse de vent qui lui est appliquée.
L'arbre d'entrainement des pales est caractérisé par :
- son inertie Jh
- son élasticité Kh
- son coefficient de frottement par rapport au multiplicateur Dh . Le rotor de la
génératrice possède :
- une inertie Jg
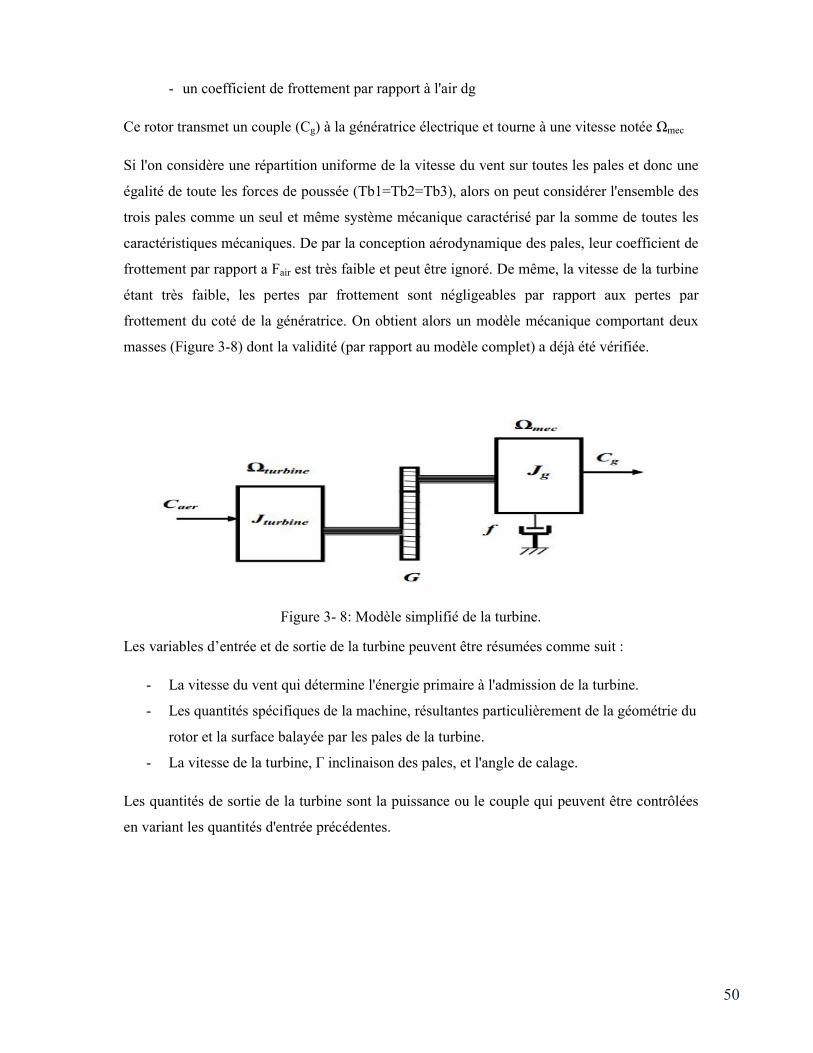
50
- un coefficient de frottement par rapport à l'air dg
Ce rotor transmet un couple (Cg) à la génératrice électrique et tourne à une vitesse notée Ωmec
Si l'on considère une répartition uniforme de la vitesse du vent sur toutes les pales et donc une
égalité de toute les forces de poussée (Tb1=Tb2=Tb3), alors on peut considérer l'ensemble des
trois pales comme un seul et même système mécanique caractérisé par la somme de toutes les
caractéristiques mécaniques. De par la conception aérodynamique des pales, leur coefficient de
frottement par rapport a Fair est très faible et peut être ignoré. De même, la vitesse de la turbine
étant très faible, les pertes par frottement sont négligeables par rapport aux pertes par
frottement du coté de la génératrice. On obtient alors un modèle mécanique comportant deux
masses (Figure 3-8) dont la validité (par rapport au modèle complet) a déjà été vérifiée.
Figure 3- 8: Modèle simplifié de la turbine.
Les variables d’entrée et de sortie de la turbine peuvent être résumées comme suit :
- La vitesse du vent qui détermine l'énergie primaire à l'admission de la turbine.
- Les quantités spécifiques de la machine, résultantes particulièrement de la géométrie du
rotor et la surface balayée par les pales de la turbine.
- La vitesse de la turbine, Г inclinaison des pales, et l'angle de calage.
Les quantités de sortie de la turbine sont la puissance ou le couple qui peuvent être contrôlées
en variant les quantités d'entrée précédentes.

51
Figure 3-9: La turbine éolienne avec ses paramètres d’entrée et de sorties.
Ces hypothèses étant faites, de l’équation (3.8) on peut obtenir le couple éolien Caer :
3 2( )1
2m P v
aer
turbine
P C R VC
(3.9)
II.2- Modèle du multiplicateur.
Le rôle du multiplicateur est de transformer la vitesse mécanique de la turbine en vitesse de la
génératrice, et le couple aérodynamique en couple du multiplicateur selon les formules
mathématiques suivantes :
aer
g
CG
C (3.10)
mec
turb
G
(3.11)
II.3- Modélisation de l’arbre de transmission
La figure ci-dessous présente l’interaction entre la turbine et la GSAP.
Figure 3-10: Interaction entre la turbine, et la GSAP à travers l’arbre de transmission.
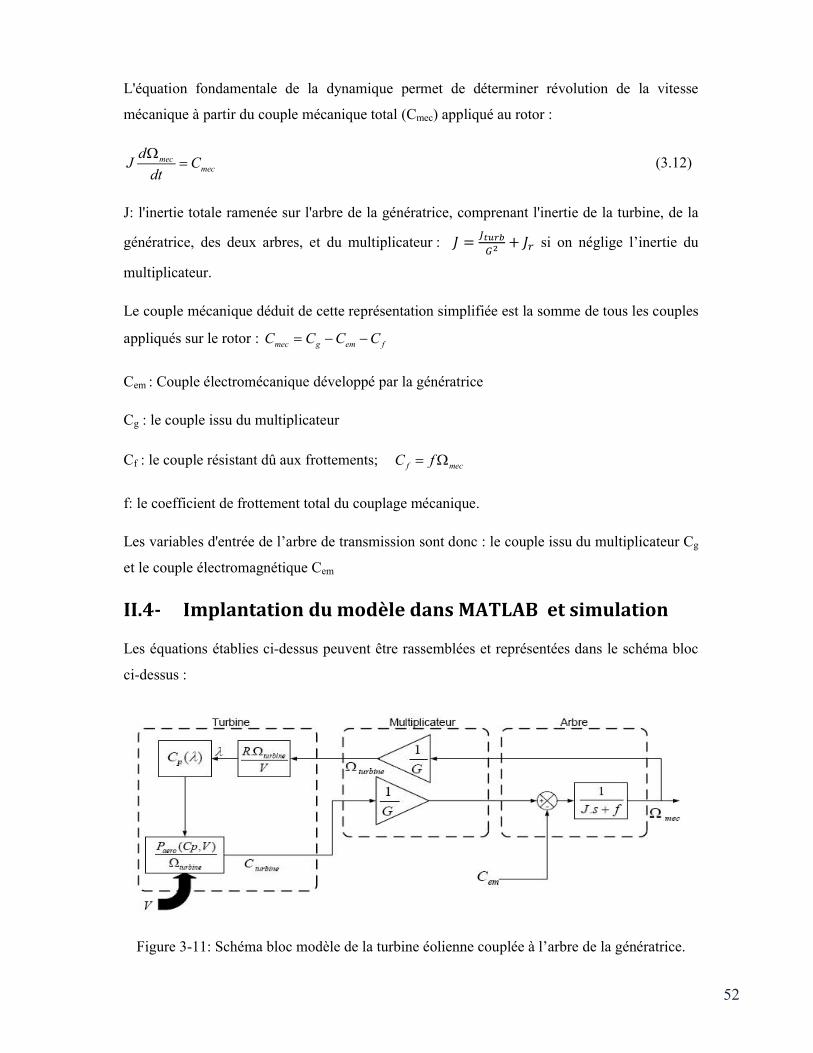
52
L'équation fondamentale de la dynamique permet de déterminer révolution de la vitesse
mécanique à partir du couple mécanique total (Cmec) appliqué au rotor :
mecmec
dJ C
dt
(3.12)
J: l'inertie totale ramenée sur l'arbre de la génératrice, comprenant l'inertie de la turbine, de la
génératrice, des deux arbres, et du multiplicateur : =
+ si on néglige l’inertie du
multiplicateur.
Le couple mécanique déduit de cette représentation simplifiée est la somme de tous les couples
appliqués sur le rotor : mec g em fC C C C
Cem : Couple électromécanique développé par la génératrice
Cg : le couple issu du multiplicateur
Cf : le couple résistant dû aux frottements; f mecC f
f: le coefficient de frottement total du couplage mécanique.
Les variables d'entrée de l’arbre de transmission sont donc : le couple issu du multiplicateur Cg
et le couple électromagnétique Cem
II.4- Implantation du modèle dans MATLAB et simulation
Les équations établies ci-dessus peuvent être rassemblées et représentées dans le schéma bloc
ci-dessus :
Figure 3-11: Schéma bloc modèle de la turbine éolienne couplée à l’arbre de la génératrice.

53
A partir de ce schéma, le modèle de la turbine a été implanté dans l’environnement MATLAB-
Simulink.
La turbine choisie pour notre modèle est la turbine BERGEY XL.1; ses paramètres sont
donnés dans le tableau 6 ci-dessous [26]. La figure IV.8 donne le tracé de la variation du
coefficient de puissance en fonction de la vitesse réduite; il y apparait clairement un maximum
de 0.442 pour une vitesse réduite de 6.9
Figure 3-12: Courbe de variation du coefficient de puissance en fonction de la vitesse réduite, cas de la turbine BERGEY XL1.
Cette courbe est approchée par la fonction polynomiale :
8 7 6 6 4 5 3 4 2 3
2 2 2 3
3.89 10 4.21 10 2.1 10 3.1 10 1.64 10
1.76 10 1.74 10 1.93 10
PC
(3.13)
Paramètre Valeur unité
Rayon de la voilure Rv=1.25 m
Masse de la turbine Mt= 34 Kg
Inertie de la turbine Jt = 1.5 Kg.m2
Coefficient de frottements Ft = 0.025 N.m.s.rad-1
Tableau 6: Paramètres de la turbine éolienne BERGEY XL1.
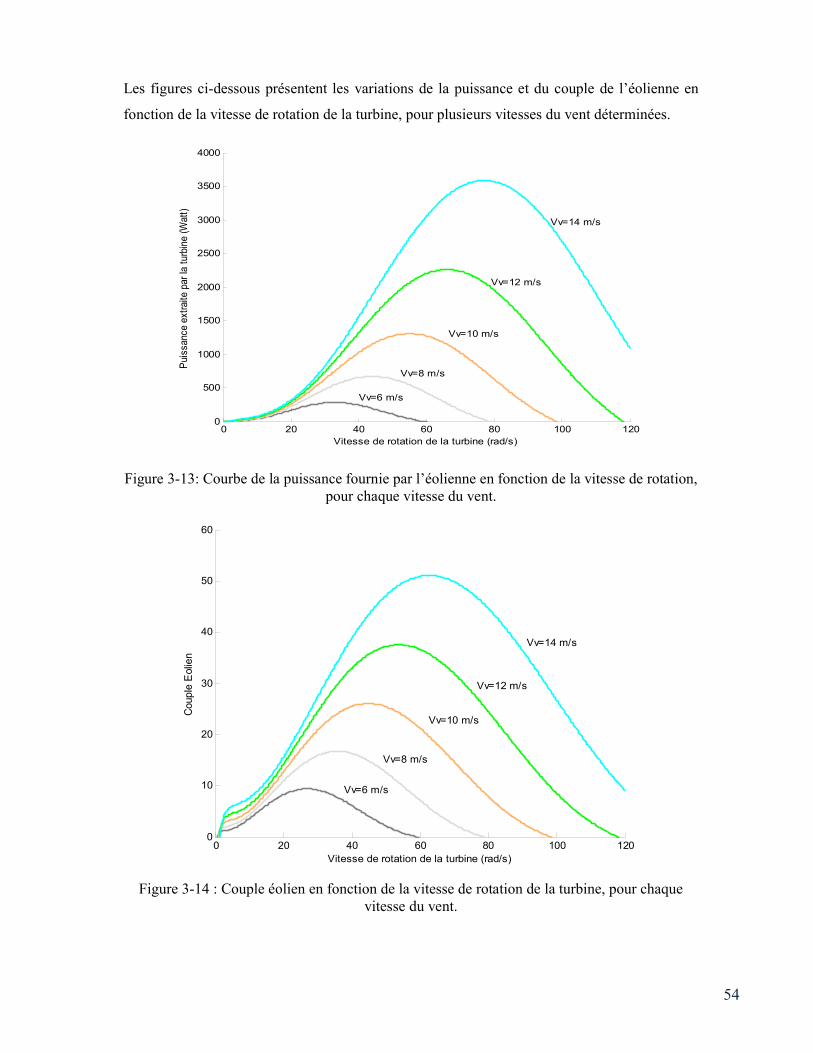
54
Les figures ci-dessous présentent les variations de la puissance et du couple de l’éolienne en
fonction de la vitesse de rotation de la turbine, pour plusieurs vitesses du vent déterminées.
Figure 3-13: Courbe de la puissance fournie par l’éolienne en fonction de la vitesse de rotation, pour chaque vitesse du vent.
Figure 3-14 : Couple éolien en fonction de la vitesse de rotation de la turbine, pour chaque vitesse du vent.
0 20 40 60 80 100 1200
500
1000
1500
2000
2500
3000
3500
4000
Vitesse de rotation de la turbine (rad/s)
Pui
ssan
ce e
xtra
ite p
ar la
tur
bine
(W
att)
Vv=6 m/s
Vv=10 m/s
Vv=12 m/s
Vv=8 m/s
Vv=14 m/s
0 20 40 60 80 100 1200
10
20
30
40
50
60
Vitesse de rotation de la turbine (rad/s)
Couple
Eolie
n
Vv=10 m/s
Vv=12 m/s
Vv=14 m/s
Vv=8 m/s
Vv=6 m/s

55
II.5- Techniques de maximisation de la puissance extraite
d’une turbine éolienne.
Nous présenterons dans cette partie deux techniques utilisés couramment pour maximiser la
puissance extraite d’une turbine éolienne [27], [22]. Toutes deux exigent une connaissance des
courbes caractérisant le coefficient de puissance de l’éolienne. Ainsi, constructeur de l’éolienne
des essais de caractérisation (soufflerie) ou des simulations du profil de pales et apporte des
résultats (à l’exemple de celui de la figure 3-12) qui seront nécessaires au contrôle de la turbine
éolienne.
II.5.1- Maximisation de la puissance par asservissement de la vitesse.
Le paramètre utilisé pour asservir la vitesse de rotation de la machine est le couple
électromagnétique de référence. Nous supposerons dans un premier temps que le contrôle de ce
couple (effectué au niveau de la machine) a déjà été réalisé. Ainsi si nous avons KΩ(s) comme
fonction de transfert du correcteur de vitesse, on obtient les relations :
_ ( ) ( )em ref ref mecC K s (3.14)
_em em refC C (3.15)
Ou Ωref est la vitesse de référence, qui doit être fixée de manière à optimiser la puissance
extraite de la turbine.
Figure 3- 15: Le schéma de la turbine avec le système de contrôle
Or la vitesse de la turbine correspond à turbine
v
R
V
; la vitesse de référence de la turbine
correspond à la valeur optimale de la vitesse spécifique λopt qui dans le cas de notre turbine est
de 0.78.
_
v opt
turbine ref
V
R
(3.16)
1
+
Ωmec
Cg
Cem
Cem_ref -
++
-
Ωref KΩ(s)

56
Avec _ref turbine refG (3.17)
Conception du correcteur de vitesse.
L’action du correcteur de vitesse doit accomplir deux tâches:
- Il doit asservir la vitesse mécanique à sa valeur de référence.
- Il doit atténuer l’action du couple éolien qui constitue une entrée perturbatrice.
Nous utiliserons pour résoudre ce problème un régulateur PI avec anticipation.
L’intégration du système de contrôle nous donne le schéma suivant.
Figure 3-16: Schéma de la turbine avec son système de contrôle.
On peut alors écrire l’équation :
( ) ( )mec ref gF s P s C (3.18)
Où F(s) est la fonction de transfert de la référence de vitesse, P(s) est la fonction de transfert de
la perturbation Cg. On obtient :
1 02
1 0
( )( )
b s bF s
Js f b s b
(3.19)
21 0
( )( )
sP s
Js f b s b
(3.20)
Au regard de l’équation (3.20), on remarque que plus b0 sera grand plus l’action de Cg
considéré comme une perturbation sera atténuée.
La pulsation naturelle et le coefficient d’amortissement [28] sont donnés par :
+
1
+
Ωmec
Cg
Cem
Cem_ref -
++
-
Ωref T(s)

57
0
1 1
2
n
n
bw
J
f b
J w
(3.21)
Donc pour imposer un temps de réponse et un facteur d’amortissement donné on a :
20 nb w J (3.22)
1 2 nb w J f (3.23)
L’équation (3-19) montre que la fonction de transfert en boucle fermée F contient un zéro; ce
zéro a un impact significatif sur la réponse du système, notamment sur le dépassement [28].
L’utilisation d’un préfiltre permettra d’améliorer significativement la réponse du système; nous
prendrons donc comme préfiltre 0
1 0
( )b
T sb s b
.
Simulation et résultats.
Considérons comme objectif un temps de réponse à 2% égale à 1s (le système a une très
grande inertie) et un facteur d’amortissement de ζ=1; sachant que 4
( )n
T s
, on obtient
4n .
On a les paramètres :
- 2
turbr
JJ J
G (3.24)
Jr est l’inertie du rotor de la machine sera négligée devant celle de la turbine; Jturb=1.5Kg.m2;
notre système est à entrainement direct : G=1.
- t mf f f (3.25)
ft est le coefficient de frotements dues à la turbine, et fm celui due à la MSAP; ft est négligeable
devant fm [11]. On a donc f = fm = 0.025 N.m.s/rad (les paramètres de la machine seront
entièrement donnés dans la partie suivante du chapitre).
Les équations (3.22) et (3.23) nous donnent :

58
0
1
24
11.975
b
b
(3.26)
- Pour une vitesse du vent de 12m/s, on obtient une vitesse de référence de 66.24m/s; la
courbe de la vitesse de rotation de la machine est alors donnée ci-dessous.
Figure 3-17: Variation de la vitesse de rotation de la machine pour une vitesse du vent fixe de 12m/s
Figure 3-18: Puissance extraite de la turbine pour une vitesse du vent fixe de 12m/s
- Pour une vitesse du vent variant selon l’équation suivante :
() = 10 + 0.2(0.1047) + 2(0.2665) + (1.2930) + 0.2(3.6645)
0 0.5 1 1.5 2 2.5 3 3.5 410
20
30
40
50
60
70
80
X: 3.53
Y: 66.24
temps (secondes)
vi
tess
e de
rot
atio
n de
la m
achi
ne e
t ré
fére
nce
(rad
/s) wr (rad/s)
vitesse optimale (consigne)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
500
1000
1500
2000
2500
temps (secondes)
puis
sanc
e ex
traite
de
l'éol
ienn
e (W
)

59
Le résultat obtenu est donné sur la figure suivante (temps en seconde).
Figure 3-19: Asservissement de la vitesse de rotation de la machine à la vitesse de consigne.
II.5.2- Maximisation de la puissance extraite de la turbine sans
asservissement de vitesse.
En pratique, une mesure précise de la vitesse du vent est difficile à réaliser. Ceci pour
deux raisons :
- L’anémomètre est situé derrière le rotor de la turbine, ce qui donne une lecture erronée
de la vitesse du vent.
- Ensuite, le diamètre de la surface balayée par les pales étant important une variation
sensible du vent apparait selon la hauteur où se trouve l’anémomètre. L’utilisation
d’un seul anémomètre conduit donc à n’utiliser qu’une mesure locale de la vitesse du
vent qui n’est donc pas suffisamment représentative de sa valeur moyenne apparaissant
sur l’ensemble des pales.
Une mesure erronée de la vitesse conduit donc forcément à une dégradation de la puissance
captée selon la technique d’extraction précédente. C’est pourquoi la plupart des turbines
éoliennes sont contrôlées sans asservissement de la vitesse [27].
0 10 20 30 40 50 6010
20
30
40
50
60
70
80
temps (secondes)
vite
sse
de r
otat
ion
de la
mac
hin
e et
réf
ére
nce
(rad
/s)
wr (rad/s)
consigne

60
Cette seconde structure de commande repose sur l’hypothèse que la vitesse du vent varie très
peu en régime permanent. Dans ce cas, à partir de l’équation dynamique de la turbine, on
obtient :
mecg em f
dJ C C C
dt
(3.27)
Si on néglige l’effet du couple de frottements visqueux (Cf = 0), on a alors em gC C . Ainsi, le
couple électromagnétique de référence peut être obtenu à partir d’une estimation du couple
éolien :
_eol
em ref
CC
G (3.28)
Sachant que :
3
( , )2
eol P
S VP C
(3.29)
Et eoleol
turbine
PC
(3.30)
On obtient :
31
2eol P v
turbine
SC C V
(3.31)
Avec mecturbine
G
(3.32)
La mesure de la vitesse du vent apparaissant au niveau de la turbine étant délicate, une
estimation de sa valeur peut être obtenue à partir de l’´équation suivante :
_turbine
v estimée
RV
(3.33)
En remplaçant les équations (3.31) et (3.32) dans (3.33), on obtient :
23
3 32mecP
eol
C S RC
G
(3.34)
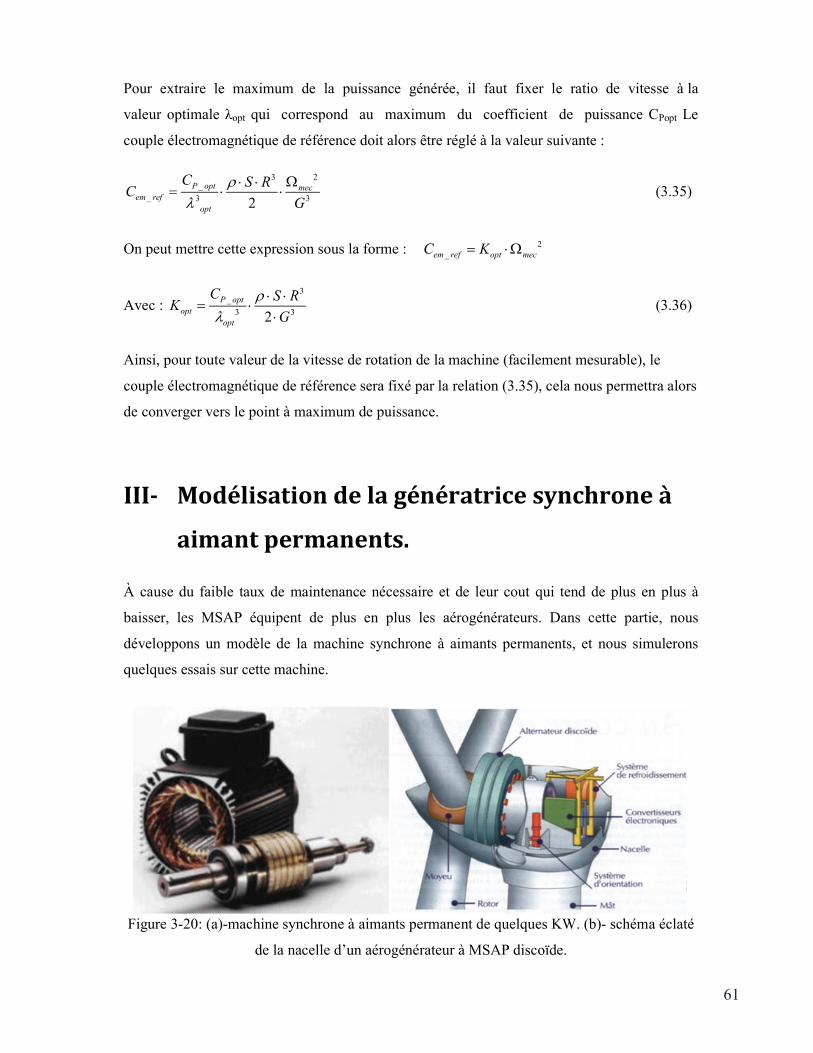
61
Pour extraire le maximum de la puissance générée, il faut fixer le ratio de vitesse à la
valeur optimale λopt qui correspond au maximum du coefficient de puissance CPopt Le
couple électromagnétique de référence doit alors être réglé à la valeur suivante :
23_
_ 3 32
P opt mecem ref
opt
C S RC
G
(3.35)
On peut mettre cette expression sous la forme : 2_em ref opt mecC K
Avec : 3
_
3 32
P opt
opt
opt
C S RK
G
(3.36)
Ainsi, pour toute valeur de la vitesse de rotation de la machine (facilement mesurable), le
couple électromagnétique de référence sera fixé par la relation (3.35), cela nous permettra alors
de converger vers le point à maximum de puissance.
III- Modélisation de la génératrice synchrone à
aimant permanents.
À cause du faible taux de maintenance nécessaire et de leur cout qui tend de plus en plus à
baisser, les MSAP équipent de plus en plus les aérogénérateurs. Dans cette partie, nous
développons un modèle de la machine synchrone à aimants permanents, et nous simulerons
quelques essais sur cette machine.
Figure 3-20: (a)-machine synchrone à aimants permanent de quelques KW. (b)- schéma éclaté
de la nacelle d’un aérogénérateur à MSAP discoïde.

62
Un schéma représentatif qui peut être utilité pour la modélisation de la GSAP est donné à la
figure IV.17 ci-dessous.
Figure 3-21: Schéma d’étude pour la modélisation d’une machine synchrone.
Le vecteur flux Ψ présent dans l'entrefer de la machine est la résultante du flux créé par les
bobinages statoriques Ψs et du flux rotorique Ψr créé par la rotation de la roue polaire constitué
d’aimants permanents dans le cas de la MSAP.
Pour mettre en équation le comportement électromagnétique de la génératrice, on part de la
description électrique régissant le comportement de chaque bobine du modèle. Ainsi, le
système de tension ci-dessous présente les différentes tensions au niveau des bobines du stator.
aa a a
bb b b
cc c c
dv R i
dt
dv R i
dt
dv R i
dt
(3.37)
λa, λb, λc sont respectivement les flux induits dans les enroulements a, b et c de la machine
III.1- Hypothèses simplificatrices
Le modèle mathématique de la machine synchrone a aimants permanents développé ici obéit à
certaines hypothèses simplificatrices :
- L’absence de la saturation dans le circuit magnétique (1).

63
- La distribution sinusoïdale de la force magnétomotrice (fmm), créée par les
enroulements du stator (2).
- L’hystérésis, les courants de Foucault, l’effet de peau sont négligé (3).
- L’effet des encoches est négligé (4).
- La résistance des enroulements ne varie pas avec la température (5).
La structure de la machine à aimants permanents comporte un enroulement triphasé au stator.
L’excitation est créée par les aimants permanents au niveau du rotor, ces derniers sont
supposés de perméabilité voisine de celle de l’air.
III.2- Mise en équation de la MSAP.
Les hypothèses (1) et (2) nous permettent d’écrire les expressions des flux dans les
enroulements a, b et c:
sin( )
2sin( )
3
2sin( )
3
a aa a ab b ac c f
b ba a bb b bc c f
c ca a cb b cc c f
L i L i L i
L i L i L i
L i L i L i
(3.38)
Фf est le flux magnétique induit par les aimants du rotor.
NB : nous nous situons dans le cas d’une machine sans barres d’amortisseurs au rotor.
Ces hypothèses nous permettent d’écrire :
a b c
aa bb cc
R R R R
L L L L
(3.39)
L’équation (3.37) sous forme matricielle s’écrit :
[ ][ ] [ ] abc
abc abc
dv R i
dt
(3.40)
L’expression de λabc pour une machine synchrone à aimant permanents à pôles saillants est
donné à l’équation (3.41) [29]:

64
1 2 1 2 1 2
1 2 1 2 1 2
1 2 1 2 1 2
cos(2 ) ( cos(2 )) ( cos(2 ))sin(3 3
2( cos(2 )) cos(2 ) ( cos(2 )) [ ]
3 3
2( cos(2 )) ( cos(2 )) cos(2 )
3 3
a a m a m a
abc m a a a m a abc
m a m a a a
L L L L L L
L L L L L L i
L L L L L L
)
2sin( )
3
2sin( )
3
f
Notons que d
dt
avec p , Ω étant la vitesse de rotation du rotor, p le nombre de pairs
de pôles.
Les équations (3.40) et (3.41) définissent le modèle de la partie électrique de la MSAP.
III.3- Les transformations vectorielles.
Un asservissement de grandeurs triphasées non transformées serai inutilement complexe. Des
transformations vectorielles permettent de simplifier le modèle en utilisant des tensions et des
courants qui sont vues dans un repère tournant comme nous allons le détailler ci-dessous.
1- La transformation de Concordia.
Un système de tensions (ou de courants) triphasé équilibré est lié : = − −
L’idée est du départ est de produire un système de tensions libres. On utilise pour cela la
transformée de Concordia, qui permet de passer à un repère orthogonal.
0
1 1 1
1 1 12 [ ]
3 2 2
3 30
2 2
a a
b b
c c
v v v
v v Co v
v v v
(3.42)
L’inverse de la transformée de Concordia :
1
1 2 0
1 1 3[ ] 1
3 2 2
1 31
2 2
Co
; 0
1[ ]a
b
c
v v
v Co v
v v
(3.43)

65
Cette transformation permet donc de passer d’un système triphasé à un système diphasé +
composante homopolaire tout en conservant la puissance. La composante homopolaire est
nulle si le système triphasé est équilibré.
2- La transformation de Park
La transformée de Concordia appliquée au stator d’une machine permet d’arriver à un repère
diphasé fixe (ce qui est un bon résultat) mais au rotor, on obtient un système diphasé à axes
tournants.
Il est possible de rendre le système de vecteur diphasé obtenu au rotor indépendant de θ en la
multipliant par une matrice de rotation orthogonale ρ(θ) :
1 0 0
( ) 0 cos( ) sin( )
0 sin( ) cos( )
(3.44)
On a alors : 0 0
[ ( )]d
q
v v
v v
v v
(3.45)
Matrice de rotation inverse :
1
1 0 0
( ) 0 cos( ) sin( )
0 sin( ) cos( )
(3.46)
La matrice ρ(θ) permet de passer d’un système diphasé rotorique tournant à un système
diphasé fixe tout en conservant les puissances.
La transformation de Park est la combinaison de la transformée de Concordia et de la rotation :
[ ] [ ( )][ ]P Co ;
0
[ ( )]a
d abc b
q c
v v
v P v
v v

66
0
1 1 1
2 2 2
2 2 2cos( ) cos( ) cos( )
3 3 3
2 2sin( ) sin( ) sin( )
3 3
a
d b
q c
v v
v v
v v
(3.47)
Transformation de Park inverse :
0 0 0
10
1cos( ) sin( )
2
2 1 2 2[ ] [ ] cos( ) sin( )
3 3 32
1 2 2cos( ) sin( )
3 32
a
b d dq d d
c q q q
v v v v
v P v P v v
v v v v
(3.48)
La transformée de Park permet de passer d’un système de tension ou de courant triphasé
tournant à un système diphasé fixe.
Très souvent, on rencontre comme matrice de Park la matrice :
1 1 1
2 2 2
2 2 2[ ] sin( ) sin( ) sin( )
3 3 3
2 2cos( ) cos( ) cos( )
3 3
abcP
, avec 10
1 sin( ) cos( )
2 2[ ] [ ] 1 sin( ) cos( )
3 3
2 21 sin( ) cos( )
3 3
dq abcP P
Cette matrice ne conserve pas la puissance, mais a l’avantage de donner une forme plus
intéressante au couple électromagnétique. C’est celle-ci que nous utiliserons dans la suite de
l’étude.
III.4- Modélisation de la MSAP dans le repère de Park.
Les équations (3.40) et (3.41) nous amènent à :
1 1 10 0 0[ ] [ ] [ ][ ] [ ] ([ ] [ ])dq dq dq
dP V R P I P
dt (3.49)
En multipliant l’équation (3.49) par [P], on obtient :

67
10 0 0[ ] [ ][ ] [ ] ([ ] [ ])dq dq dq
dV R I P P
dt (3.50)
10 0 0 0[ ] [ ][ ] [ ] ([ ] )[ ] ([ ])dq dq dq dq
d dV R I P P
dt dt
(3.51)
On montre que :
1
0 0 0
[ ] ([ ] ) 0 0 1
0 1 0
d dP P
dt dt
(3.52)
On obtient alors :
00 0
dd d q
q
q q d
dv Ri
dt
d dv Ri
dt dt
d dv Ri
dt dt
(3.53)
Calcul de la puissance instantanée dans le repère de Park.
On sait que :
( ) ( )Ti abc abcp v i (3.54)
Avec : 1
0
10
[ ]
[ ]abc dq
abc dq
i P i
v P v
1 1
0 0( ) ([ ] ) [ ]T Ti dq dqp v P P i
En effectuant le développement, on obtient :
0 0
3[( ) 2 ]
2i q q d dp v i v i v i (3.55)
Pour une machine avec stator en étoile, le courant homopolaire est nul, ce qui nous conduit à :
3[( )]
2i q q d dp v i v i (3.56)
Les équations (3.53) et (3.56) permettent d’obtenir :

68
2 23( ) ( )
2
qdi d q d q q d d q
dd d dp Ri Ri i i i i
dt dt dt dt
(3.57)
Notons que [29]:
- La dissipation thermique est donnée par 2 23
2J d qP Ri Ri
- Le terme 3
2
qdd q
ddi i
dt dt
traduit le taux de changement de l’énergie magnétique
emmagasinée.
- La puissance active utilisée pour la conversion électromécanique est donnée par
3
2e d q q d
dP i i
dt
Or on sait que : e eP C , avec 1 d
p dt
ce qui nous permet d’écrire l’équation du couple
électromagnétique :
3
2e d q q dC p i i (3.58)
Détermination de λ0dq
Sachant que 0 [ ]dq abcP , l’équation (3.41) nous permet d’écrire l’équation (3.59):
1 2 1 2 1 2
10 1 2 1 2 1 2 0
1 2 1 2 1 2
cos(2 ) ( cos(2 )) ( cos(2 ))3 3
2[ ] ( cos(2 )) cos(2 ) ( cos(2 )) [ ] [
3 3
2( cos(2 )) ( cos(2 )) cos(2 )
3 3
a a m a m a
dq m a a a m a
m a m a a a
L L L L L L
P L L L L L L P i
L L L L L L
sin( )
2] [ ] sin( )
3
2sin( )
3
dq fP
Après simplifications, on obtient :
0
0 0
0 0 0
0 0 [ ] 1
0 0 0dq d dq f
q
L
L i
L
0 0 0
d d d f
q q q
L i
L i
L i
(3.60)
Avec :

69
0 1 1
1 1 2
1 1 2
2
3
2
3
2
a m
d a m a
q a m a
L L L
L L L L
L L L L
(3.61)
L’équation (3.53) permet alors d’écrire les équations de tensions de la MSAP dans le repère de
Park :
00 0 0
dd d d q e q
q
q q q d e d e f
div Ri L
dt
div Ri L L i
dt
div Ri L L i
dt
(3.62)
Expression du couple électromagnétique.
L’expression finale du couple électromagnétique peut être déduite des équations (3.58) et
(3.60) :
3( )
2e f q d d qT p L L i i (3.63)
Pour une machine à pôles lisses, Ld = Lq, ce qui conduit à l’expression du couple :
3
2e f qT p i (3.64)
Implantation du modèle dans MATLAB-Simulink.
Les équations écrites précédemment ont été intégrés dans l’environnement Simulink de
MATLAB, pour une simulation de la machine, une image du modèle est donnée dans
l’Annexe 2.
III.5- Schéma équivalent de la MSAP.
L’utilisation d’un circuit équivalent s’avère particulièrement importante dans plusieurs cas
d’étude de la MSAP; notamment l’étude du comportement de la machine lorsqu’elle est
insérée dans un large système électrique, ou l’étude du régime de court-circuit de cette
machine.
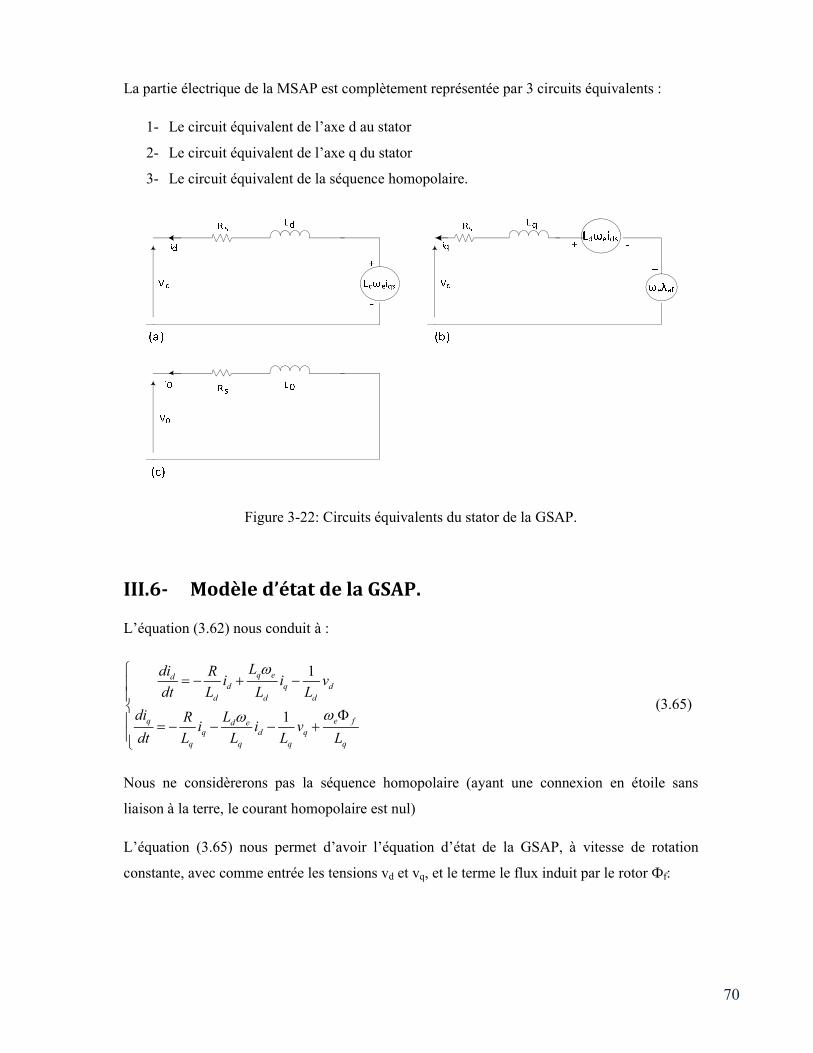
70
La partie électrique de la MSAP est complètement représentée par 3 circuits équivalents :
1- Le circuit équivalent de l’axe d au stator
2- Le circuit équivalent de l’axe q du stator
3- Le circuit équivalent de la séquence homopolaire.
Figure 3-22: Circuits équivalents du stator de la GSAP.
III.6- Modèle d’état de la GSAP.
L’équation (3.62) nous conduit à :
1
1
q edd q d
d d d
q e fd eq d q
q q q q
Ldi Ri i v
dt L L L
di LRi i v
dt L L L L
(3.65)
Nous ne considèrerons pas la séquence homopolaire (ayant une connexion en étoile sans
liaison à la terre, le courant homopolaire est nul)
L’équation (3.65) nous permet d’avoir l’équation d’état de la GSAP, à vitesse de rotation
constante, avec comme entrée les tensions vd et vq, et le terme le flux induit par le rotor Фf:

71
10 0
[ ][ ]
10
q e
ddd ddq
dq qed e
fq qq q
LRv
LL Ld ii v
L Rdt
L LL L
(3.66)
III.7- Modèle de la génératrice alimentant une charge (Rch,Lch)
L’équation qui modélise la charge est donnée par :
abcabc abc
div Ri L
dt ; le même raisonnement fait à partir de l’équation (3.49) nous conduit à :
dd ch d ch e ch q
q
q ch q ch e ch d
div R i L L i
dt
div R i L L i
dt
(3.67)
L’intégration de l’équation (3.67) dans l’équation (3.62) nous amène à :
d dch d ch e ch q s d d q e q
q q
ch q ch e ch d s q q d e d e f
di diR i L L i R i L L i
dt dt
di diR i L L i R i L L i
dt dt
(3.68)
Ce qui donne :
( ) ( ) ( ) 0
( ) ( ) ( ) 0
dch s d ch d e ch q q
q
ch s q ch q e ch q d e f
diR R i L L L L i
dt
diR R i L L L L i
dt
(3.69)
On en déduit le modèle d’état :
0q chs chd
e
q ch d ch d
e fqq d ch s ch
q che
q ch q ch
L LR RdiL L L L idt
idi L L R RL L
dt L L L L
(3.70)
Comme établi plus haut :

72
mecg em f
dJ C C C
dt
(3.71)
avec ωe = pΩmec.
IIII.8- Simulation et résultats.
Paramètres de la GSAP utilisée.
Désignation Valeur
Tension nominale VN = 90 V
Courant nominal IN = 4.8 A
Puissance nominale PN = 600 W
Nombre de pairs de pôles p = 17
Résistance des enroulements Rs = 1.137 Ω
Inductance synchrone Ls = 2.7 mH
Flux induit par les aimants Фf = 0.15 Wb
Coefficient de frottements f = 0.06 N.m.s/rad
Inertie de la GSAP J = 0.1 Kg.m2
Tableau 7: Caractéristiques de la GSAP utilisée pour la simulation du modèle d’état.
À partir de l’équation (3.66), nous obtenons alors la matrice d’état pour un angle électrique de
la machine 2 50e :
421.11 314.16
314.16 421.11A
;
Les valeurs propres de A sont :
2
1
22
( 4.211 3.1414 ) 10
( 4.211 3.1414 ) 10
i
i
On voit que la matrice d’état est à valeur propres à paries réelles strictement négatives, on peut
donc conclure de la stabilité du système.
La machine a été simulée avec une charge de Rch = 20 Ω; Lch = 0.002 H, un couple mécanique
de 18 N.m sur 1.5 secondes, et une baisse brusque à 10 N.m de ce couple du Le script est
donné en Annexe 1. On obtient les courbes suivantes
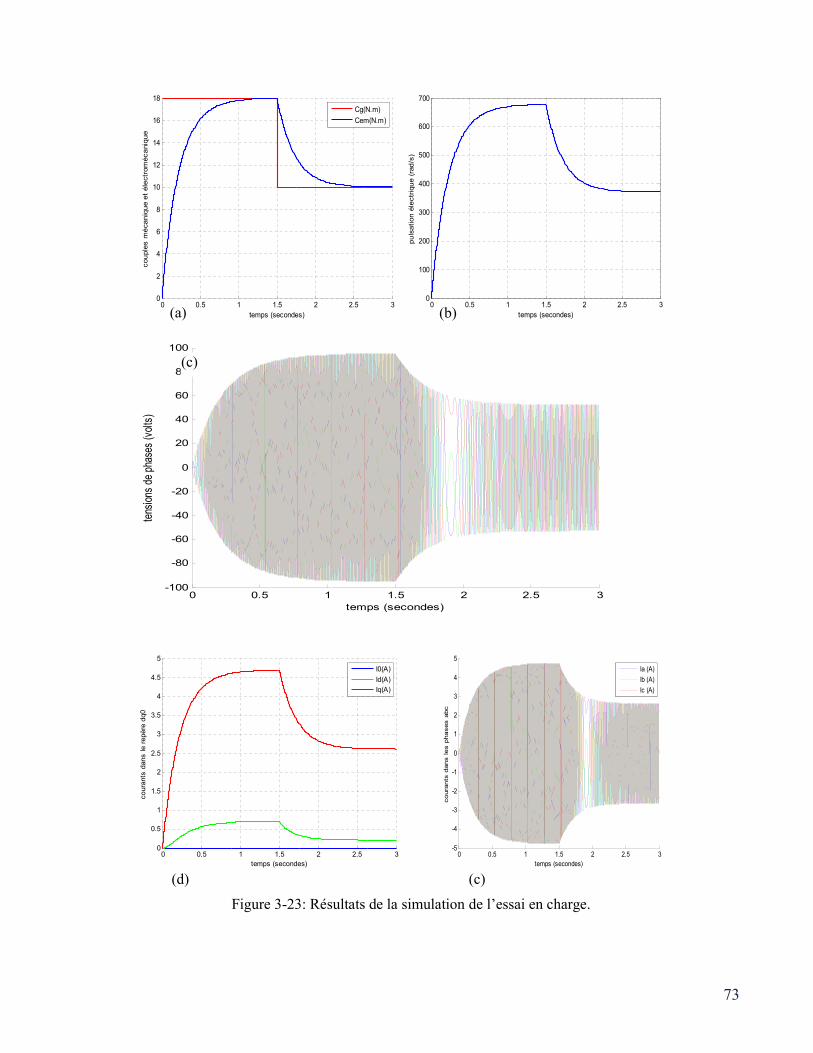
73
Figure 3-23: Résultats de la simulation de l’essai en charge.
0 0.5 1 1.5 2 2.5 30
2
4
6
8
10
12
14
16
18
temps (secondes)
cou
ple
s m
éca
niq
ue e
t é
lectr
om
éca
niq
ue
Cg(N.m)
Cem(N.m)
0 0.5 1 1.5 2 2.5 30
100
200
300
400
500
600
700
temps (secondes)
pu
lsa
tion
éle
ctr
iqu
e (
rad
/s)
0 0.5 1 1.5 2 2.5 3-100
-80
-60
-40
-20
0
20
40
60
80
100
temps (secondes)
tens
ions
de
phas
es (v
olts
)
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
temps (secondes)
coura
nts
dans le r
epère
dq0
I0(A)
Id(A)
Iq(A)
0 0.5 1 1.5 2 2.5 3-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (secondes)
coura
nts
dans les p
hases a
bc
Ia (A)
Ib (A)
Ic (A)
(a) (b)
(c)
(d) (c)

74
Interprétation des résultats
Lors de l’application d’un couple d’entrainement de 18 N.m, la vitesse de rotation Ω
augmente (en accord avec l’équation mécanique) (Figure 3-23.a), ce qui engendre un
accroissement de la tension Vq, ensuite le courant iq commence à augmenter en manifestant un
couple électromagnétique Cem qui tend à s’opposer au couple d’entrainement Cg, une fois ces
deux couples sont égaux, le régime établi sera atteint, la vitesse sera fixée ainsi que les tensions
statoriques et leur fréquence. En diminuant le couple Cg = 18 N.m à t = 0.2s , la
machine va ralentir, la tension va diminuer en limitant le courant iq, ce qui en résulte
une diminution du couple électromagnétique jusqu'à ce qu’il soit égal au Cg,
10 .em gC C N m (l’égalité des deux couples est supposée en valeur absolue, sinon, Cem et Cg
sont de signes opposés), la diminution de la vitesse provoque la réduction de la tension
et de la fréquence, comme il est illustré dans les résultats de simulation à partir de 0.2s. Les
grandeurs électriques sur l’axe d sont de petites valeurs à cause des thermes de
couplage q q pL i qui sont plus inferieurs que la FEM apparente sur l’axe q. Il est clair
donc, que la puissance électrique de la charge est directement liée à la puissance mécanique
fournie.
IV- Modélisation des convertisseurs statiques et
du bus continu.
IV.1- Modélisation des convertisseurs statiques.
Comme présenté à la figure 3-1, la chaîne de conversion électronique est composée de deux
onduleurs couplés sur un bus continu commun. De manière générale, le redresseur MLI
permet la conversion de courants triphasés alternatifs en un courant continu et l’onduleur
MLI, d’une tension continue en tensions triphasées de signe alternatif. L’onduleur étudié
est bidirectionnel en courant et classiquement composé de trois cellules de commutation.
Chacune est composée de deux transistors IGBT qui sont connectés à deux diodes en
antiparallèle. Pour cette étude, les semi-conducteurs seront considérés comme idéaux : pas de
pertes et les commutations sont instantanées.
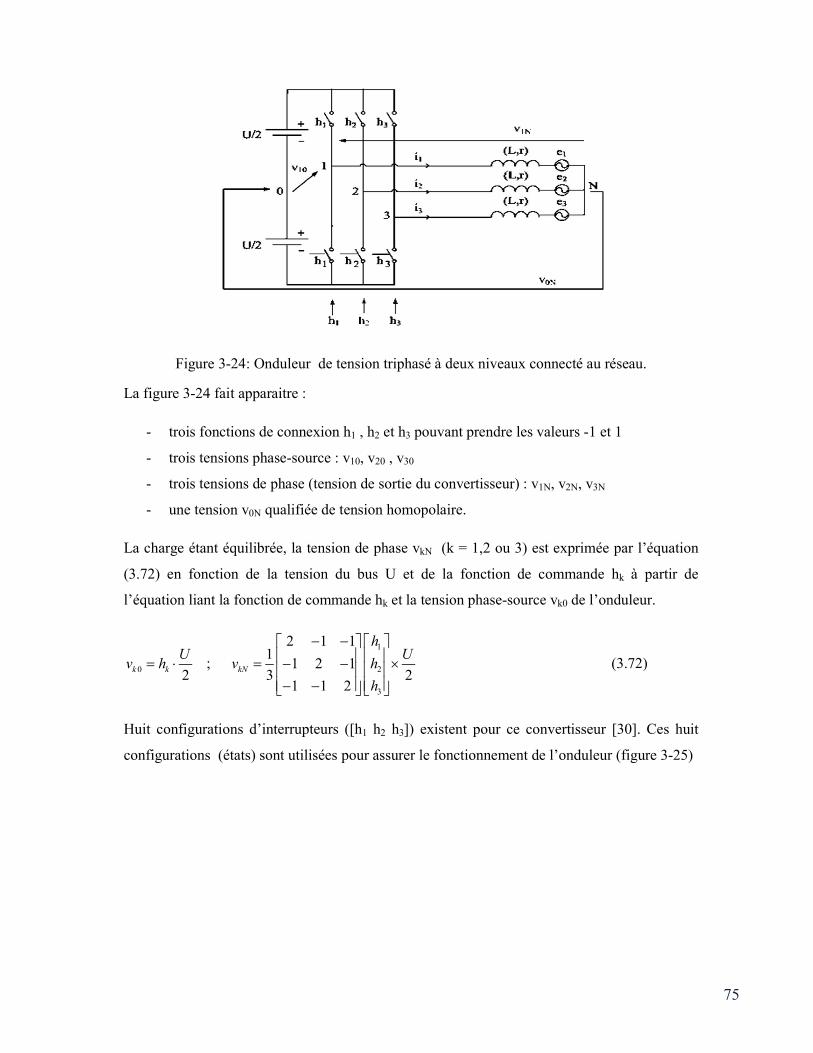
75
Figure 3-24: Onduleur de tension triphasé à deux niveaux connecté au réseau.
La figure 3-24 fait apparaitre :
- trois fonctions de connexion h1 , h2 et h3 pouvant prendre les valeurs -1 et 1
- trois tensions phase-source : v10, v20 , v30
- trois tensions de phase (tension de sortie du convertisseur) : v1N, v2N, v3N
- une tension v0N qualifiée de tension homopolaire.
La charge étant équilibrée, la tension de phase vkN (k = 1,2 ou 3) est exprimée par l’équation
(3.72) en fonction de la tension du bus U et de la fonction de commande hk à partir de
l’équation liant la fonction de commande hk et la tension phase-source vk0 de l’onduleur.
02
k k
Uv h ;
1
2
3
2 1 11
1 2 13 2
1 1 2kN
hU
v h
h
(3.72)
Huit configurations d’interrupteurs ([h1 h2 h3]) existent pour ce convertisseur [30]. Ces huit
configurations (états) sont utilisées pour assurer le fonctionnement de l’onduleur (figure 3-25)

76
Figure 3- 25: Les huit configurations d’interrupteur d’un onduleur deux niveaux de tension
Contrôle par hystérésis « bang-bang » d’un onduleur triphasé [30].
L’objectif est de contrôler le courant en sortie de l’onduleur; dans ce mode de contrôle, les trois
bras sont régis par la même règle : dès qu’une erreur εik dépasse sa bande, la fonction de
commande du bras hk commute d’où l’origine du nom de ce contrôle dit hystérésis bang-bang.
La Figure 3-26 présente le schéma de principe du contrôle direct par hystérésis bang-bang.
Figure 3-26: Schéma de principe du contrôle d’un onduleur par hystérésis bang-bang.

77
IV.2- Modélisation du bus continu.
iDC1 iDC2IC
Onduleur MLI 1 chargé de la commande
MPPT de l’éolienne
Onduleur MLI 2 chargé
d’assurer la liaison au
réseau
Figure 3-27: le bus continu situé entre les deux convertisseurs statiques.
On peut écrire :
1 2c DC DCi i i
Avec : 1 1 1 1 1 1 1
2 2 2 2 2 2 2
DCC
DC a a b b c c
DC a a b b c c
dVi C
dt
i S i S i S i
i S i S i S i
(3.73)
On obtient alors l’équation du bus continu :
1 1 2 2
1( ) ( )T TDC
abc abc abc abc
dVS i S i
dt C (3.74)
NB : Pour effectuer le jumelage, nous connecterons le générateur solaire photovoltaïque au bus
continu en ajoutant à l’équation (3.74) le courant produit par le générateur PV.
Contrôle de la tension du bus continu.
La régulation de la tension du bus continu a pour but de la maintenir à une valeur de
référence constante, en contrôlant le processus de chargement et de déchargement du
condensateur. Dans un premier temps, nous considèrerons le bus continu comme commandé
par le courant injecté dans le condensateur iC, ceci nous permettra de déterminer les
coefficients du correcteur que nous utiliserons dans le système complet.
Figure 3-28: Boucle de régulation de la tension du bus continu.
+
1
VDC_ref + -
IC
VDC

78
La fonction de transfert en boucle fermée est :
2( )
p i
p i
K s KT s
C s K s K
(3.75)
Les paramètres du contrôleur peuvent donc être déterminés par :
2
2i n
p n
K C
K C
(3.76)
et avec n et , respectivement la pulsation et l’amortissement du système en boucle fermée.
IV.3- Modèle de Thevenin du réseau électrique.
Pour des fins de simulation, le réseau électrique ainsi que la ligne de connexion de la centrale à
celui-ci et le transformateur de couplage peuvent être modélisés par un circuit contenant une
résistance, une impédance et une source de tension triphasée en séries comme le montre la
figure ci-dessous.
Figure 3-29: Approximation du réseau électrique par un modèle de Thevenin.
V- Contrôle du couple de la GSAP.
Parmi les différentes structures de commandes des machines synchrones, nous citons : la
commande vectorielle avec alimentation en tension et régulation en courant. Lorsque
l’on souhaite simplifier la commande, il est possible de réguler les courants «ia, ib et ic» à
l’aide de comparateurs à hystérésis. Il s’agit d’un contrôle des courants dans les trois
phases en tout ou rien. On maintient, à l’aide de trois comparateurs à hystérésis, les courants
dans les enroulements, à l’intérieur d’une bande de largeur donnée. Cette bande est centrée sur
les courants de références issus de la transformation inverse de Park, dans ce cas il n’est plus
nécessaire d’insérer d’autres correcteurs. La figure suivante donne le principe de cette
commande.

79
Figure 3-30: Schéma de principe du contrôle de la GSAP.
L’équation (3.64) montre que le couple électromagnétique exprimé dans le repère de Park ne
dépend que du courant iq (dans le cas ou ( )d q dL L i peut être négligé). Ainsi, contrôler le
couple électromagnétique de la machine revient à contrôler le courant iq. pour une
minimisation des pertes Joules dans la machine, il convient de fixer le courant de référence
id_ref à zéro.
VI- Contrôle de la connexion au réseau.
L’onduleur MLI installé après le bus continu a pour objectif d’envoyer la puissance extraite de
l’éolienne tout en maintenant la tension du bus à sa valeur de référence pour un fonctionnement
optimal du système. La figure ci-dessous présente une des structures de contrôle les plus
simples et basique de la connexion au réseau avec contrôle de la tension du bus continu.

80
Figure 3-31: Schéma de principe du contrôle de la liaison au réseau et de la tension du bus continu.
La puissance disponible à l’entrée du bus continu peut être déterminée par : 1bus DC DCP V I ;
étant donné que seule la MSAP alimente ce bus, on a 1 1 1 1 1 1 1mach a a b b c cI I S i S i S i . La
puissance de référence qui sera injectée au réseau peut être calculée en soustrayant de cette
puissance la puissance qui sera utilisée pour charge le condensateur (les pertes dans les
onduleurs sont négligées dans le système de contrôle).
_reseau ref bus cond DC mach DC cond refP P P P V I V I (3.77)
Les puissances active et réactive dans le repère stationnaire de Concordia sont exprimées par
les deux équations suivantes :
_ _ _ _
_ _ _ _
ref res ref res ref
ref res ref res ref
P V I V I
Q V I V I
(3.78)
Ainsi, pour imposer les puissances actives et réactives qui transitent vers le réseau, nous
pouvons imposer les courants de référence par l’équation :
81
_ _
_ 2 2_ _
_ _
_ 2 2_ _
ref res ref res
ref
res res
ref res ref res
ref
res res
P V Q VI
V V
P V Q VI
V V
(3.79)
Condition de fonctionnement et choix de la tension du bus continu.
Le redresseur MLI étant de nature survolteur, son bus continu doit être de tension
suffisamment haute pour assurer le pilotage de la génératrice à vitesse de vent
maximale. L’association machine synchrone – redresseur MLI à six interrupteurs –
condensateur, doit satisfaire un niveau de tension du bus continu suffisamment élevé, pour
que la commande de la machine puisse être réalisée. Dans le cas des fortes valeurs de la vitesse
du vent, la tension induite au stator de la génératrice devient élevée selon la vitesse de
rotation comme l’indique l’équation (3.80). Pour simplifier l’analyse, on fait ici l’hypothèse
de ne pas tenir compte des pertes et des distorsions dans la machine, ce qui permet d’assimiler
les forces électromotrices aux tensions de la machine.
maxmax3abE p (3.80)
La condition de commandabilité du redresseur définie par la relation (3.81) , impose le
minimum de tension du côté du bus continu (tension batterie) en fonction de la
tension maximale composée aux bornes de la machine.
maxDC abU E (3.81)
En supposant que le fonctionnement de la chaine est dans le point MPPT, la tension de bus
continu minimale, en fonction de la vitesse du vent, peut ainsi être déterminée :
max3 opt
DC vU p VR
(3.82)
Il est clair qu’en pratique, il convient de prendre une valeur supérieure à celle correspondant au
maximum de la vitesse du vent admissible pour la turbine.

82
VII- Simulations, résultats et interprétations.
VII.1- Simulation d’une éolienne avec maximisation de la
puissance extraite sans asservissement de vitesse
Les paramètres de la GSAP utilisée dans les simulations qui suivront sont donnés dans le
tableau ci-dessous [31].
Désignation Valeur
Puissance nominale Pnom=7.4 KW
Puissance maximale Pmax=10.6 KW
Résistance des bobinages du stator RS = 1.36 Ω
Inductance au stator (axe d) Ld = 12.5 mH
Inductance au stator (axe q) Lq = 12.5 mH
Nombre de paires de pôles P=6
Courant nominal Inom = 15 A
Courant maximal Imax = 20 A
Tableau 8: Paramètres de la MSAP utilisée dans la simulation.
La simulation a été effectuée avec la même turbine éolienne que précédemment, l’optimisation
de l’exploitation de la turbine (contrôle MPPT) a été faite sans asservissement de vitesse, en
fixant le couple électromagnétique comme décrit dans la partie (IV.I.5.2), avec une vitesse du
vent de 12 m/s. Les résultats obtenus montrent que le contrôle par hystérésis permet (même si
le nombre de commutation est relativement élevé) d’arriver à un taux de distorsion harmonique
du courant relativement faible, avec une stratégie de contrôle simple.
Ces résultats sont donnés dans les figures suivantes.

83
Figure 3-32: Puissance extraite de l’éolienne et vitesse de rotation de la machine.
Figure 3-33: Allure du couple électromagnétique optimal (consigne) et effectif.
Figure 3-34: Courants dans les phases a, b, et c de la machine.
0 1 2 3 4 5 6 7 8 9 100
500
1000
1500
2000
2500
temps (secondes)
pu
issa
nce
extr
aite
de
l'é
olie
nn
e (
Watt
)
0 1 2 3 4 5 6 7 8 9 1020
25
30
35
40
45
50
55
60
65
70
temps (secondes)
vite
sse
de r
ota
tio
n (
rad/s
)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
temps (secondes)
Couple
eolie
n o
ptim
al (N
.m)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
temps (secondes)
couple
ele
ctr
om
agnetique (
N.m
)
6.5 6.52 6.54 6.56 6.58 6.6 6.62-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (secondes)
coura
nts
dans les
phase
s (
A)
phase a
phase b
phase c
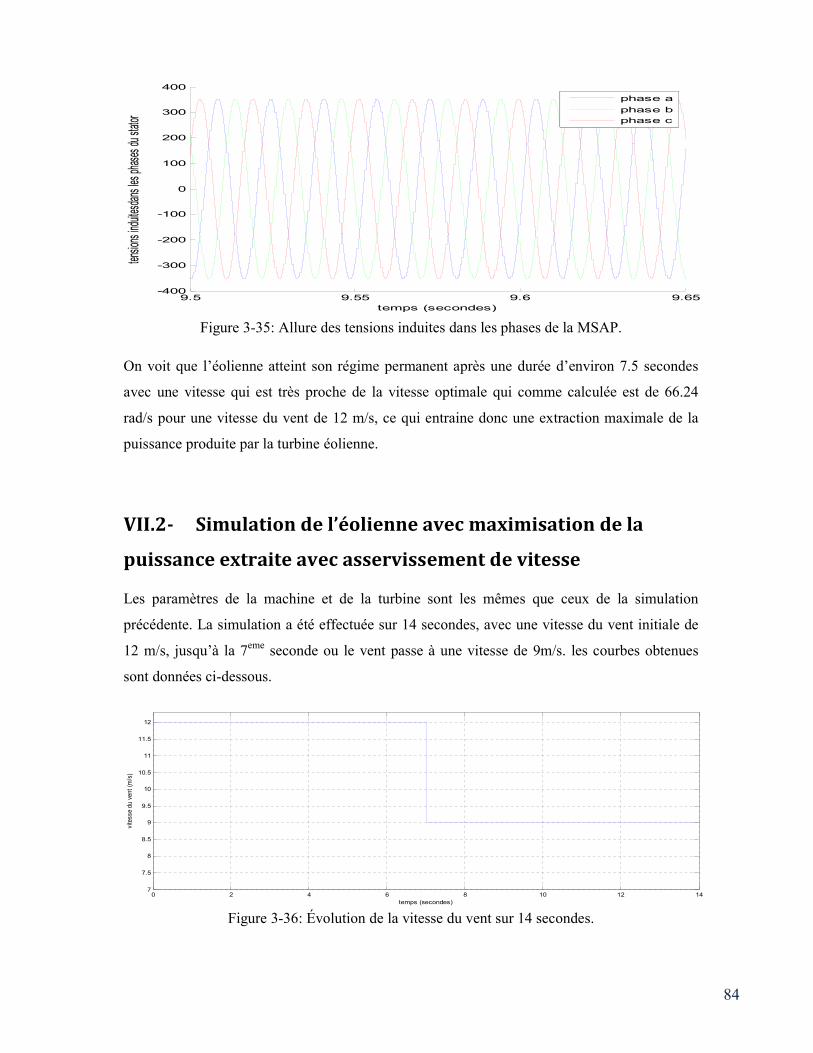
84
Figure 3-35: Allure des tensions induites dans les phases de la MSAP.
On voit que l’éolienne atteint son régime permanent après une durée d’environ 7.5 secondes
avec une vitesse qui est très proche de la vitesse optimale qui comme calculée est de 66.24
rad/s pour une vitesse du vent de 12 m/s, ce qui entraine donc une extraction maximale de la
puissance produite par la turbine éolienne.
VII.2- Simulation de l’éolienne avec maximisation de la
puissance extraite avec asservissement de vitesse
Les paramètres de la machine et de la turbine sont les mêmes que ceux de la simulation
précédente. La simulation a été effectuée sur 14 secondes, avec une vitesse du vent initiale de
12 m/s, jusqu’à la 7eme seconde ou le vent passe à une vitesse de 9m/s. les courbes obtenues
sont données ci-dessous.
Figure 3-36: Évolution de la vitesse du vent sur 14 secondes.
9.5 9.55 9.6 9.65-400
-300
-200
-100
0
100
200
300
400
temps (secondes)
tensio
ns in
duite
sdan
s les
phas
es du
stato
r
phase a
phase b
phase c
0 2 4 6 8 10 12 147
7.5
8
8.5
9
9.5
10
10.5
11
11.5
12
temps (secondes)
vite
sse
du v
ent
(m/s
)
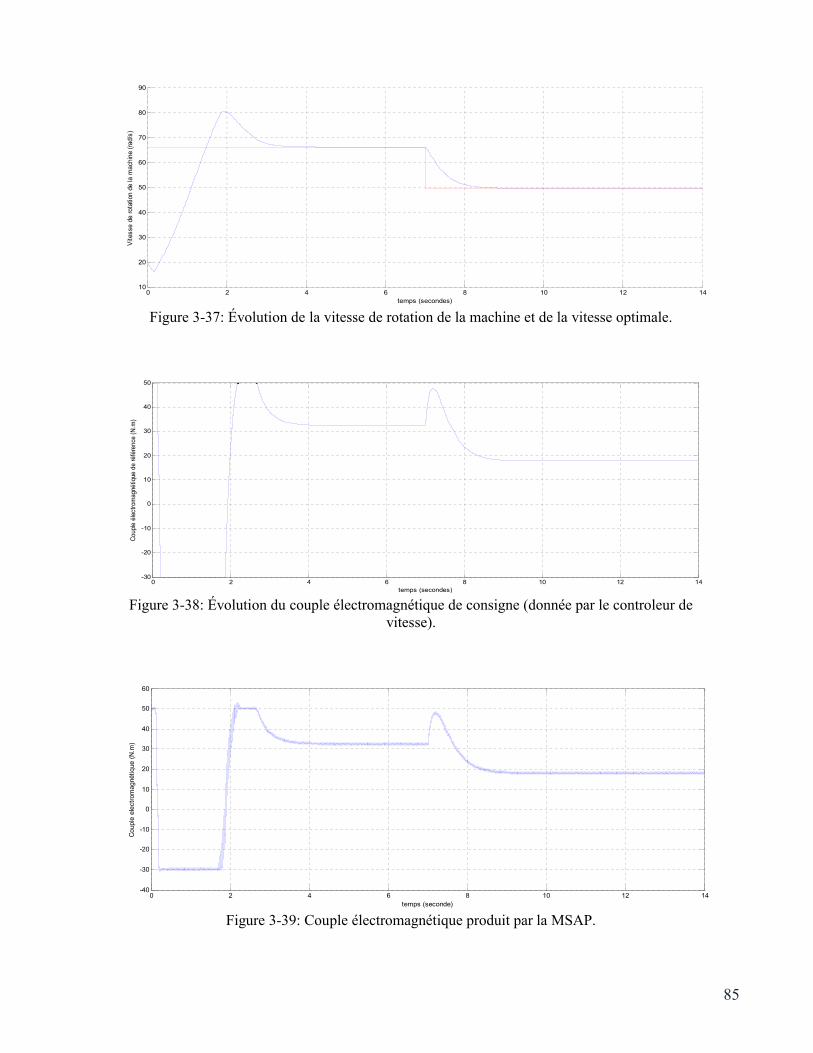
85
Figure 3-37: Évolution de la vitesse de rotation de la machine et de la vitesse optimale.
Figure 3-38: Évolution du couple électromagnétique de consigne (donnée par le controleur de vitesse).
Figure 3-39: Couple électromagnétique produit par la MSAP.
0 2 4 6 8 10 12 1410
20
30
40
50
60
70
80
90
temps (secondes)
Vit
esse
de
rota
tion
de
la m
ach
ine
(ra
d/s
)
0 2 4 6 8 10 12 14-30
-20
-10
0
10
20
30
40
50
temps (secondes)
Cou
ple
élec
trom
agné
tique
de
réfé
renc
e (N
.m)
0 2 4 6 8 10 12 14-40
-30
-20
-10
0
10
20
30
40
50
60
temps (seconde)
Co
uple
ele
ctr
oma
gnétiq
ue (
N.m
)

86
Figure 3-40: Évolution de la puissance extraite de la MSAP sur les 14 secondes.
Figure 3-41: Évolution du courant dans la phase a de la machine sur 14 secondes.
Figure 3-42: Évolution des courants dans les phases a, b et c de la MSAP sur les 0.5 dernières secondes de la simulation.
0 2 4 6 8 10 12 14-3000
-2000
-1000
0
1000
2000
3000
4000
5000
temps (secondes)
puis
san
ce e
xtr
aite
de la
MS
AP
(W
att
)
0 2 4 6 8 10 12 14-8
-6
-4
-2
0
2
4
6
8
temps (secondes)
Coura
nt
dans la p
hase a
(A
)
13.7 13.75 13.8 13.85 13.9 13.95 14-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
temps (secondes)
Co
ura
nt
da
ns
les p
ha
ses a
,b,c
(A
)
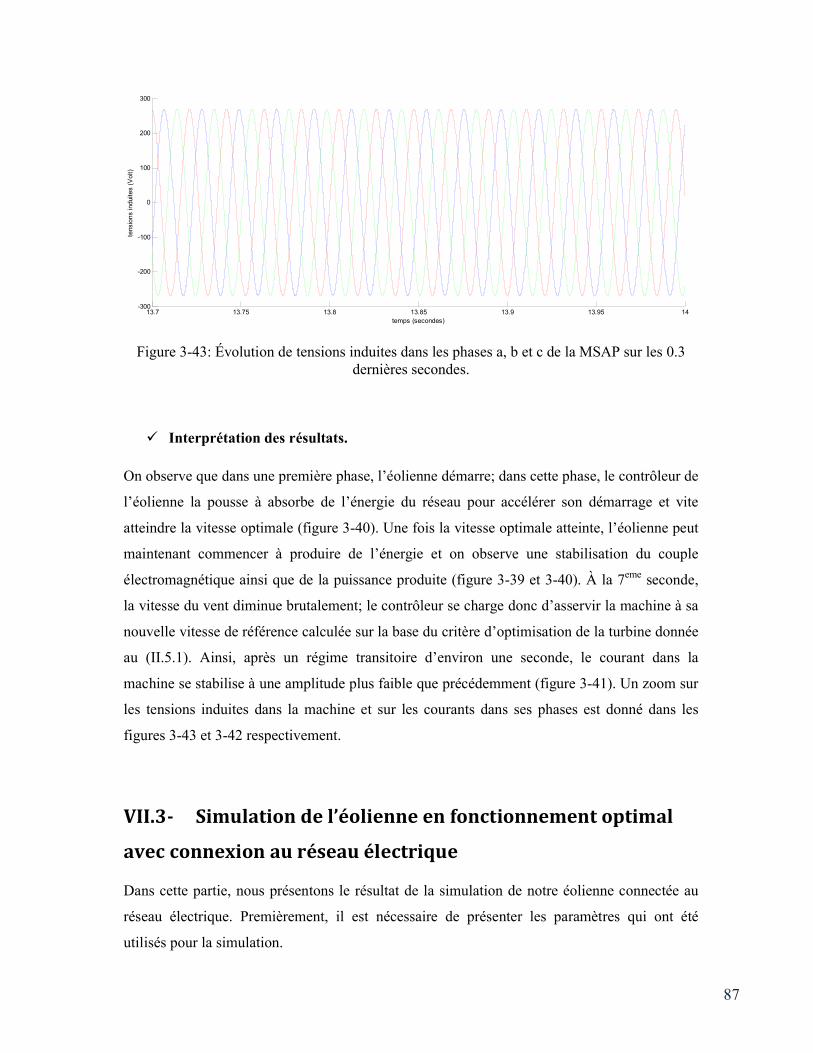
87
Figure 3-43: Évolution de tensions induites dans les phases a, b et c de la MSAP sur les 0.3 dernières secondes.
Interprétation des résultats.
On observe que dans une première phase, l’éolienne démarre; dans cette phase, le contrôleur de
l’éolienne la pousse à absorbe de l’énergie du réseau pour accélérer son démarrage et vite
atteindre la vitesse optimale (figure 3-40). Une fois la vitesse optimale atteinte, l’éolienne peut
maintenant commencer à produire de l’énergie et on observe une stabilisation du couple
électromagnétique ainsi que de la puissance produite (figure 3-39 et 3-40). À la 7eme seconde,
la vitesse du vent diminue brutalement; le contrôleur se charge donc d’asservir la machine à sa
nouvelle vitesse de référence calculée sur la base du critère d’optimisation de la turbine donnée
au (II.5.1). Ainsi, après un régime transitoire d’environ une seconde, le courant dans la
machine se stabilise à une amplitude plus faible que précédemment (figure 3-41). Un zoom sur
les tensions induites dans la machine et sur les courants dans ses phases est donné dans les
figures 3-43 et 3-42 respectivement.
VII.3- Simulation de l’éolienne en fonctionnement optimal
avec connexion au réseau électrique
Dans cette partie, nous présentons le résultat de la simulation de notre éolienne connectée au
réseau électrique. Premièrement, il est nécessaire de présenter les paramètres qui ont été
utilisés pour la simulation.
13.7 13.75 13.8 13.85 13.9 13.95 14-300
-200
-100
0
100
200
300
temps (secondes)
tensio
ns induites (
Volt)

88
Paramètres du contrôleur de la tension du bus continu.
Si nous fixons un facteur d’amortissement à 0.7 et le temps de réponse du système en boucle
fermée à 0.05s, on obtient les paramètres du contrôleur :
6.5306
0.08i
p
K
K
(IV.53)
Les autres paramètres.
Les paramètres de la turbine et de la MSAP sont les mêmes que celles des simulations
précédentes. La simulation a été effectuée sur 11 secondes avec une vitesse du vent variant de
manière continue comme le montre la figure 3-44.
Résultats de la simulation.
Figure 3-44 : Courbe de la vitesse du vent (grandeur d’entrée de la centrale).
Figure 3-45 : Vitesse de rotation de la machine et vitesse de référence.
0 2 4 6 8 10 1210
10.5
11
11.5
12
12.5
13
13.5
temps (secondes)
Vit
esse
du
ven
t (m
/s)
0 2 4 6 8 10 1210
20
30
40
50
60
70
80
temps (secondes)
vitess
e d
e r
ota
tion (
rad/s
)
vitesse de rotation
vitesse de référence

89
Figure 3-46 : Couple électromagnétique de référence (N.m).
Figure 3-47 : Couple électromagnétique de la MSAP.
Figure 3-48 : Évolution des puissances dans l’aérogénérateur : PMsap=puissance en sortie de la MSAP; Pturb =puissance recueillie par la turbine éolienne; PReseau=puissance envoyée au
réseau.
0 2 4 6 8 10 12-30
-20
-10
0
10
20
30
40
50
60
temps (secondes)
Couple
éle
ctr
om
agnétiq
ue d
e r
éfé
rence (
N.m
)
0 2 4 6 8 10 12-30
-20
-10
0
10
20
30
40
50
60
temps (secondes)
Couple
éle
ctr
om
agnétique (
N.m
)
0 2 4 6 8 10 12-3000
-2000
-1000
0
1000
2000
3000
4000
temps (secondes)
Pui
ssa
nce
s d
ans
la c
ent
rale
(W
att
)
PMsap
PTurb
PReseau
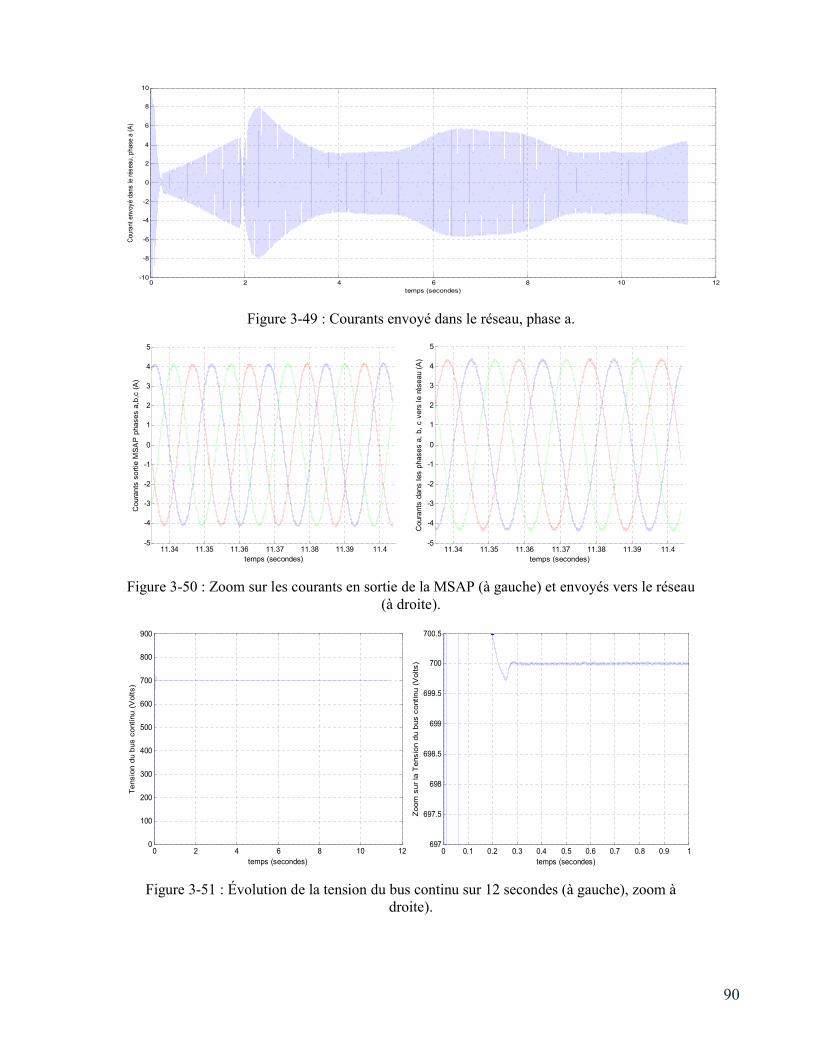
90
Figure 3-49 : Courants envoyé dans le réseau, phase a.
Figure 3-50 : Zoom sur les courants en sortie de la MSAP (à gauche) et envoyés vers le réseau (à droite).
Figure 3-51 : Évolution de la tension du bus continu sur 12 secondes (à gauche), zoom à droite).
0 2 4 6 8 10 12-10
-8
-6
-4
-2
0
2
4
6
8
10
temps (secondes)
Cou
rant
env
oyé
dans
le r
ésea
u, p
hase
a (
A)
11.34 11.35 11.36 11.37 11.38 11.39 11.4-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (secondes)
Coura
nts
sort
ie M
SA
P p
hases a
,b,c
(A
)
11.34 11.35 11.36 11.37 11.38 11.39 11.4-5
-4
-3
-2
-1
0
1
2
3
4
5
temps (secondes)
Coura
nts
dans les p
hase
s a
, b
, c v
ers
le r
ése
au (
A)
0 2 4 6 8 10 120
100
200
300
400
500
600
700
800
900
temps (secondes)
Te
nsio
n d
u b
us c
ontinu
(V
olts)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1697
697.5
698
698.5
699
699.5
700
700.5
temps (secondes)
Zo
om
su
r la
Te
nsio
n d
u b
us c
ontin
u (
Vo
lts
)
91
Interprétation des résultats.
A t=0 s, l’anticipation du contrôleur de vitesse provoque une absorption brutale de la puissance
produite par la machine, ce qui en provoque le ralentissement et une montée de la tension du
bus continu ; cet effet néfaste peut être réduit en limitant la plage de sortie de la commande du
couple. Ensuite, l’éolienne augmente son accélération en tirant de la puissance du réseau (pour
supprimer cette option, on peut aussi empêcher le contrôleur d’imposer un couple
électromagnétique de référence négatif). La monté en vitesse se produit jusqu’à ce que
l’éolienne dépasse sa vitesse optimale, dès lors on entre dans une phase de freinage par
récupération de l’énergie avec un envoie de cet énergie vers le réseau ; l’éolienne et son
système de contrôle se chargent alors de traquer la vitesse de rotation optimale pour chaque
variation du vent, afin d’envoyer le plus de puissance vers le réseau.
Conclusion du Chapitre.
Ce Chapitre consistait en un parcourt de tous les éléments d’une centrale éolienne, une
modélisation et une simulation de ceux-ci. Nous pouvons constater la robustesse et la
simplicité du contrôle par hystérésis des onduleurs MLI, et que des deux modes de contrôle
MPPT de la turbine éolienne que nous avons développé, le contrôle par asservissement de
vitesse permet une meilleure réponse du système, quoique dans la réalité, une mesure de
précise de la vitesse du vent est difficile à effectuer ; le contrôle sans asservissement de vitesse
permet bien d’atteindre la vitesse de rotation optimale mais avec un délais d’attente plus long.

92
Chapitre 4
ETUDE, MODELISATION ET SIMULATION
DE LA CENTRALE SOLAIRE
Comme nous l’avons présenté dans les chapitres précédents, une centrale solaire photovoltaïque
permet de convertir directement le rayonnement solaire en électricité au moyen de l’effet
photovoltaïque. L’exploitation d’une telle centrale nécessite l’utilisation de dispositifs divers
d’électronique de puissance avec des stratégies de contrôles dont le critère principal est la
maximisation de la puissance extraite de la centrale. Ainsi, avant l’implantation d’une centrale, il
est d’un grand atout d’utiliser les puissants outils de calculs dont nous disposons aujourd’hui (à
l’exemple de MATLAB) pour simuler le fonctionnement de celle-ci et valider les stratégies de
contrôle. C’est donc ce qui fera l’objet de ce chapitre.
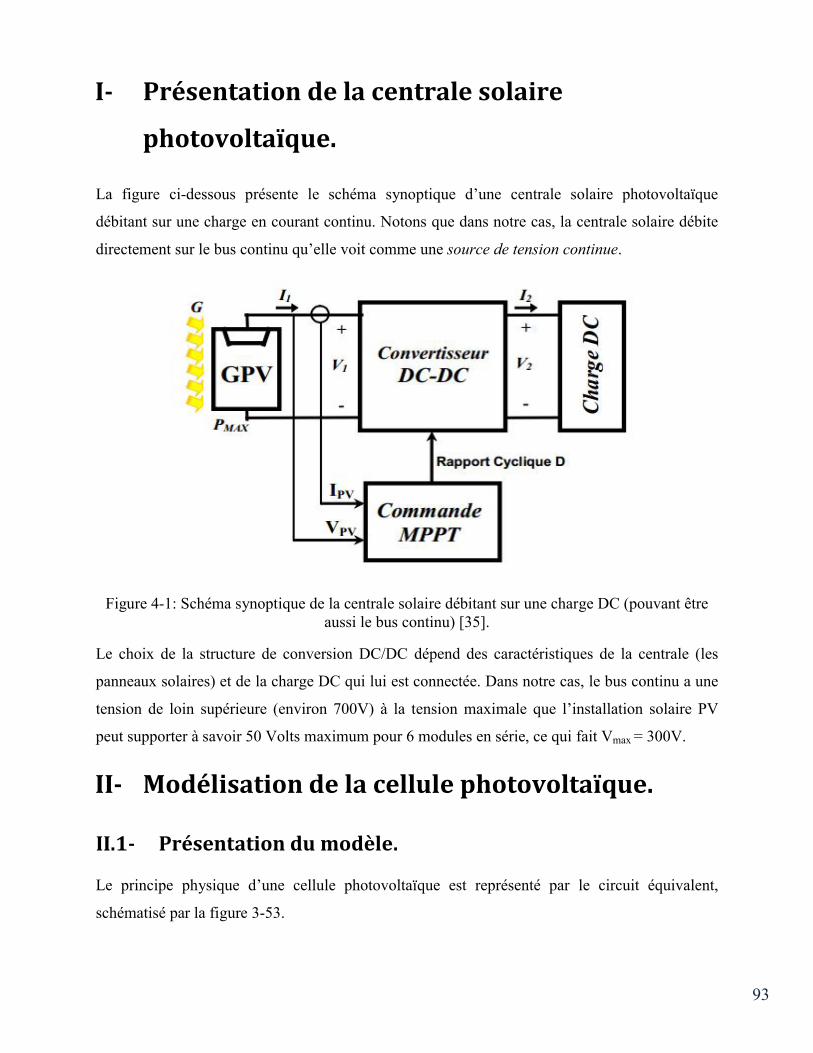
93
I- Présentation de la centrale solaire
photovoltaïque.
La figure ci-dessous présente le schéma synoptique d’une centrale solaire photovoltaïque
débitant sur une charge en courant continu. Notons que dans notre cas, la centrale solaire débite
directement sur le bus continu qu’elle voit comme une source de tension continue.
Figure 4-1: Schéma synoptique de la centrale solaire débitant sur une charge DC (pouvant être aussi le bus continu) [35].
Le choix de la structure de conversion DC/DC dépend des caractéristiques de la centrale (les
panneaux solaires) et de la charge DC qui lui est connectée. Dans notre cas, le bus continu a une
tension de loin supérieure (environ 700V) à la tension maximale que l’installation solaire PV
peut supporter à savoir 50 Volts maximum pour 6 modules en série, ce qui fait Vmax = 300V.
II- Modélisation de la cellule photovoltaïque.
II.1- Présentation du modèle.
Le principe physique d’une cellule photovoltaïque est représenté par le circuit équivalent,
schématisé par la figure 3-53.
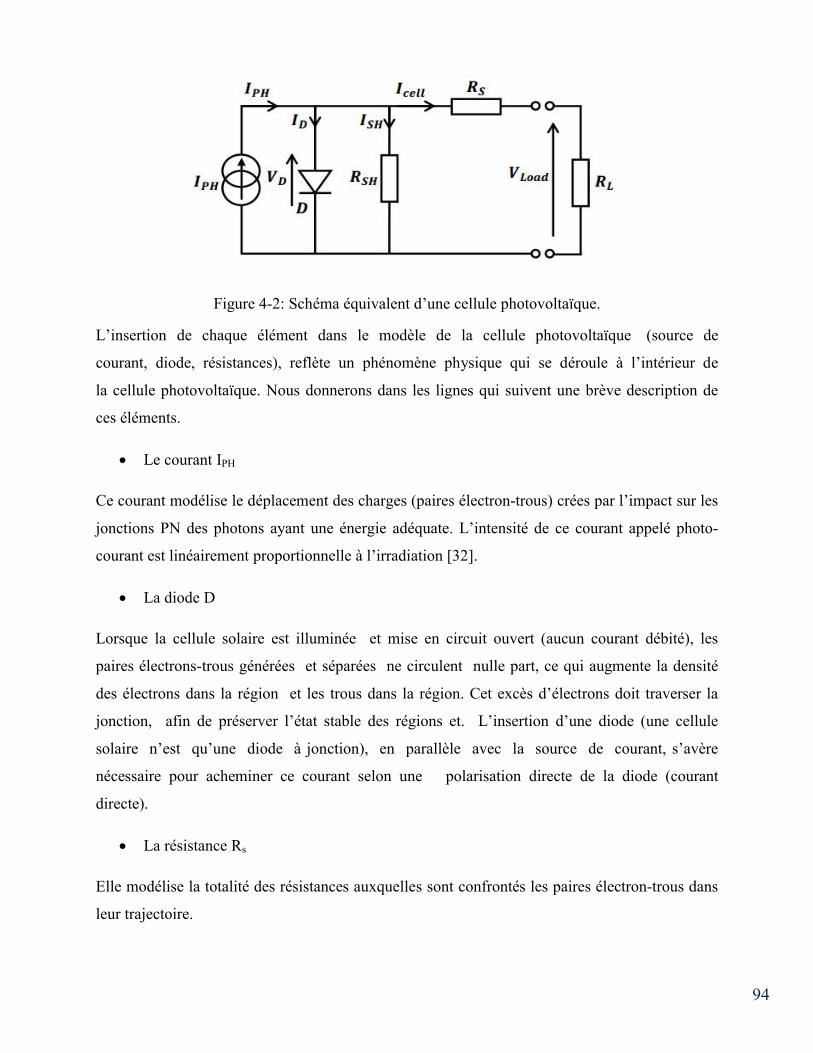
94
Figure 4-2: Schéma équivalent d’une cellule photovoltaïque.
L’insertion de chaque élément dans le modèle de la cellule photovoltaïque (source de
courant, diode, résistances), reflète un phénomène physique qui se déroule à l’intérieur de
la cellule photovoltaïque. Nous donnerons dans les lignes qui suivent une brève description de
ces éléments.
Le courant IPH
Ce courant modélise le déplacement des charges (paires électron-trous) crées par l’impact sur les
jonctions PN des photons ayant une énergie adéquate. L’intensité de ce courant appelé photo-
courant est linéairement proportionnelle à l’irradiation [32].
La diode D
Lorsque la cellule solaire est illuminée et mise en circuit ouvert (aucun courant débité), les
paires électrons-trous générées et séparées ne circulent nulle part, ce qui augmente la densité
des électrons dans la région et les trous dans la région. Cet excès d’électrons doit traverser la
jonction, afin de préserver l’état stable des régions et. L’insertion d’une diode (une cellule
solaire n’est qu’une diode à jonction), en parallèle avec la source de courant, s’avère
nécessaire pour acheminer ce courant selon une polarisation directe de la diode (courant
directe).
La résistance Rs
Elle modélise la totalité des résistances auxquelles sont confrontés les paires électron-trous dans
leur trajectoire.
95
La résistance RSH
Il s’agit du phénomène de recombinaison des charges. Parfois, la séparation des charges
libres (électrons -trous) par le champ interne de la jonction, peut ne pas être accomplie, car un
phénomène de recombinaison très rapide se manifeste (les électrons et les trous se recombinent
dès qu’ils sont générés). Dès que ces paires sont générées, un photo-courant apparaitra, mais ce
dernier ne va pas parcourir la charge, ni la diode (les charges libres n’ont pas quitté la région),
il doit être acheminé par une autre voie (recombinaison des charges), c’est pourquoi nous
devons insérer une résistance de grande valeur en parallèle, aussi, avec la source de courant
modélisant ce phénomène.
II.2- Mise en équation du modèle d’une cellule
photovoltaïque.
La mise en équation du modèle de la cellule photovoltaïque, consiste à déterminer la
relation entre la tension et le courant de sortie en fonction des paramètres cités ci-dessus.
L’équation caractéristique pour le modèle à une diode (figure 4-2) classiquement utilisé est
donné par :
( )exp 1s s
PH sat
SH
q V R I V R II I I
n k T R
(4.1)
- V est la tension aux bornes du module et I le courant en sortie.
- Isat est le courant de saturation (inverse) de la diode et dépend fortement de la
température.
- q est la charge électrique de l’électron, q=1.602177*10-19 coulombs.
- k est la constante de Boltzmann, k=1.38*10-23 [J/K].
- T est la température de la jonction [K]
- n est le facteur d’idéalité de la jonction.
Ou on a l’expression du courant dans la diode D :
( )exp 1s
D sat
q V R II I
n k T
(4.2)

96
Et dans la résistance shunt :
sSH
P
V R II
R
(4.3)
D’après les recherches déjà menées [33], on a constaté qu’un meilleur rajustement du modèle de
l’équation (4.1) est obtenu en tenant compte de la dépendance de la température T sur le
courant de saturation Isat selon l’équation:
3
,0
0
0 0
1 1( ) ( ) exp G
sat sat
TI T I T
T k T T
(4.4)
On pose h=Isat(T0) et ,0Gpk
Aussi, le photo-courant IPH, la résistance série RS, et le facteur d’idéalité n peuvent être
représenté par les équations suivantes [33]:
0 0
0
1 ( )
m
PH PH
GI I G G
G
(4.5)
0 01 ( )s sR R G G (4.6)
0( / )n v w G G (4.7)
Avec : G0 = 1000 W/m2 ; IPH0, m, λ, v, w sont les paramètres ajustés après une analyse de
régression sur des relevés expérimentaux.
Après introduction d’un terme modélisant la variation de la résistance shunt et du courant dans la
diode D avec l’ensoleillement, on obtient :
3
0 0
0 0 0 0
0 0 0 0
0 0
1 11 ( ) exp
( [1 ( )] [1 ( )]exp 1
( / )
m s
PH
r
s s
p
G G TI I G G h p
G G T T T
V R G G I V R G G Iq G
kT v w G G G R
(4.8)
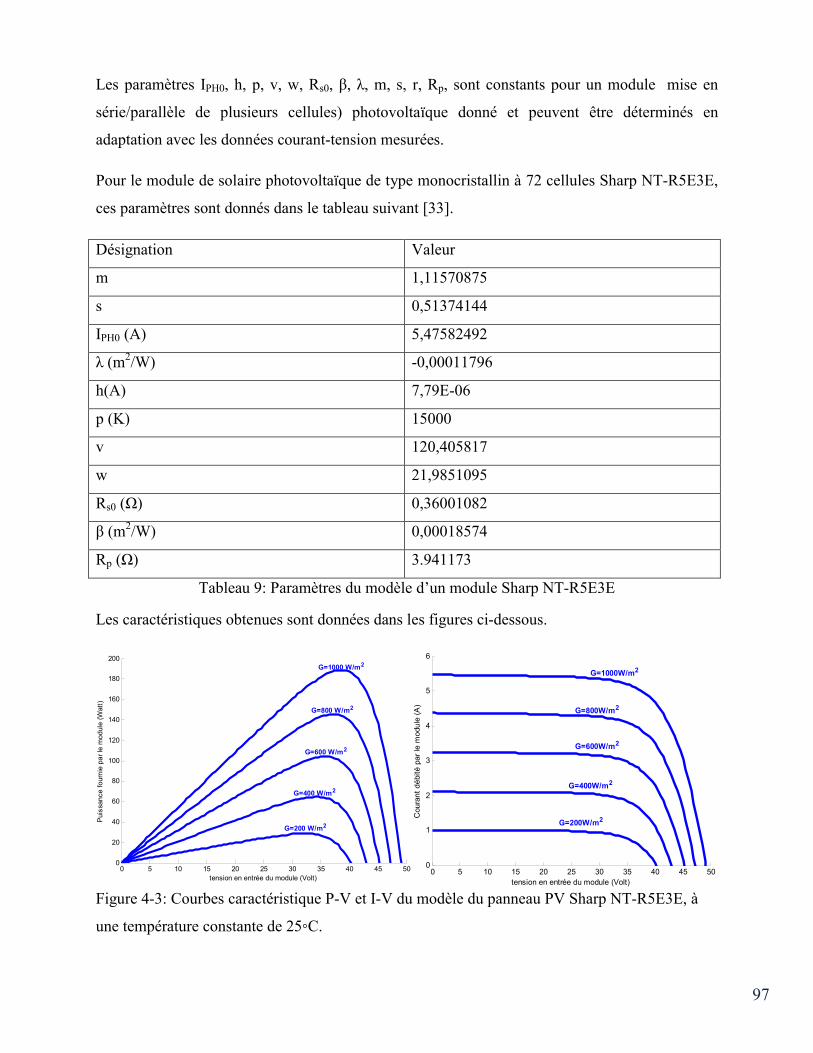
97
Les paramètres IPH0, h, p, v, w, Rs0, β, λ, m, s, r, Rp, sont constants pour un module mise en
série/parallèle de plusieurs cellules) photovoltaïque donné et peuvent être déterminés en
adaptation avec les données courant-tension mesurées.
Pour le module de solaire photovoltaïque de type monocristallin à 72 cellules Sharp NT-R5E3E,
ces paramètres sont donnés dans le tableau suivant [33].
Désignation Valeur
m 1,11570875
s 0,51374144
IPH0 (A) 5,47582492
λ (m2/W) -0,00011796
h(A) 7,79E-06
p (K) 15000
v 120,405817
w 21,9851095
Rs0 (Ω) 0,36001082
β (m2/W) 0,00018574
Rp (Ω) 3.941173
Tableau 9: Paramètres du modèle d’un module Sharp NT-R5E3E
Les caractéristiques obtenues sont données dans les figures ci-dessous.
Figure 4-3: Courbes caractéristique P-V et I-V du modèle du panneau PV Sharp NT-R5E3E, à
une température constante de 25C.
0 5 10 15 20 25 30 35 40 45 500
20
40
60
80
100
120
140
160
180
200
tension en entrée du module (Volt)
Puis
sance f
ourn
ie p
ar
le m
odule
(W
att
)
G=200 W/m2
G=400 W/m2
G=600 W/m2
G=800 W/m2
G=1000 W/m2
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
tension en entrée du module (Volt)
Coura
nt
débité p
ar
le m
odule
(A
)
G=1000W/m2
G=800W/m2
G=600W/m2
G=400W/m2
G=200W/m2
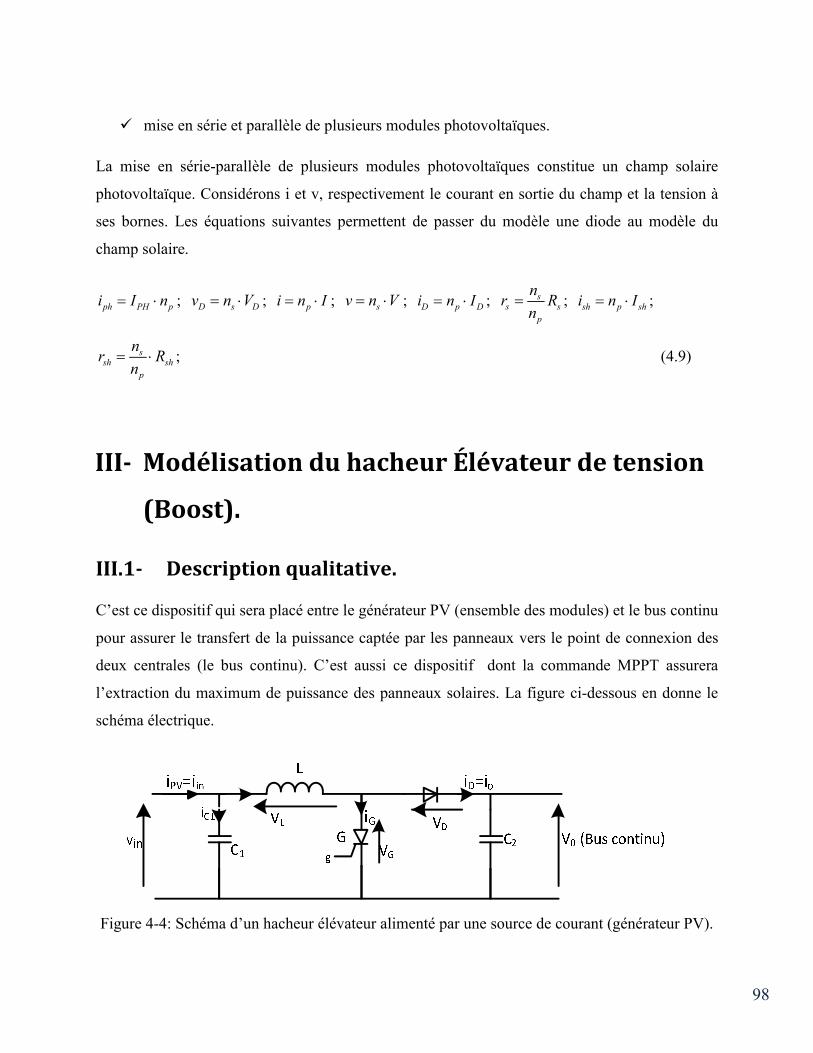
98
mise en série et parallèle de plusieurs modules photovoltaïques.
La mise en série-parallèle de plusieurs modules photovoltaïques constitue un champ solaire
photovoltaïque. Considérons i et v, respectivement le courant en sortie du champ et la tension à
ses bornes. Les équations suivantes permettent de passer du modèle une diode au modèle du
champ solaire.
ph PH pi I n ; D s Dv n V ; pi n I ; sv n V ; D p Di n I ; ss s
p
nr R
n ; sh p shi n I ;
ssh sh
p
nr R
n ; (4.9)
III- Modélisation du hacheur Élévateur de tension
(Boost).
III.1- Description qualitative.
C’est ce dispositif qui sera placé entre le générateur PV (ensemble des modules) et le bus continu
pour assurer le transfert de la puissance captée par les panneaux vers le point de connexion des
deux centrales (le bus continu). C’est aussi ce dispositif dont la commande MPPT assurera
l’extraction du maximum de puissance des panneaux solaires. La figure ci-dessous en donne le
schéma électrique.
Figure 4-4: Schéma d’un hacheur élévateur alimenté par une source de courant (générateur PV).

99
Fonctionnement.
Quand l’interrupteur G est commandé pour la fermeture, le circuit est séparé en deux parties (à
cause de la diode) : à gauche, la source (courant iPV entrant) charge l’inductance L (notons qu’au
régime permanent, la décharge du condensateur C1 de grande capacité peut être négligée); à
droite, le condensateur C2 permet de maintenir la tension V0 aux bornes de la charge. Quand
l’interrupteur G s’ouvre, le condensateur chargé à la tension Vin et pouvant maintenant être
considéré comme une source de tension en entrée ainsi que l’énergie emmagasinée dans
l’inductance L vont ensemble alimenter le circuit à droite à travers la diode qui entre aussitôt en
conduction, jusqu’à ce que le courant iL s’annule et tend à s’inverser.
III.2- Modèle mathématique du hacheur boost.
Soient :
- g : commande de l’interrupteur G tel que G est fermé si g=1 et G est ouvert si g=0;
- h : la variable qui modélise la conduction (h=1) ou non (h=0) de la diode D
Ainsi, si (1 ) 0D Li g i , alors h=0 sinon (la diode s’ouvre) , h=1.
Lorsque g=1 (interrupteur fermé), [0; ]t T :
Le système est régi par les équations suivantes :
1 1( ) ( )inC in L
dVi t C i i t
dt (4.10)
2 2( ) oC o
dVi t C i
dt (4.11)
( )( )L
L i
di tv L V t
dt (4.12)
Lorsque g=0 (interrupteur ouvert), [ ; ]t T T :
Le système devient régi par les équations suivantes :

100
1 1
( )( ) ( ) ( )i
C in L
dV ti t C i t i t
dt (4.13)
2 2
( )( ) ( ) ( )o
C L o
dV ti t C i t i t
dt (4.14)
( )( ) ( ) ( )L
L i o
di tv t L V t V t
dt (4.15)
Si nous utilisons les fonctions de connexion g et h, hacheur Boost idéal peut alors être modélisé
en utilisant les équations suivantes :
[(1 ) ]S Li g i h (4.16)
(1 )Lin o
diL V g V h
dt (4.17)
1in
PV L
dVC i i
dt (4.18)
En général, pour adapter ce modèle à la réalité, on ajoute au modèle précédent la résistance
interne de l’inductance [32], RL; l’équation (4.17) devient alors :
(1 )Lin L L o
diL V R i g V h
dt (4.19)
Commande du hacheur.
Très souvent, le hacheur est commandé à fréquence fixe avec variation du rapport cyclique; le
rapport cyclique α étant égale au temps d’ouverture de l’interrupteur G divisé par la période. Les
courbes obtenues dans le cas d’une conduction continue (le courant dans l’inductance ne
s’annule jamais) sont présentées à la figure 4-5 [34].
Calcul du rapport de conversion.
A partir des équations (4.10)-(4.12) , on a pendant la première partie de la période (g=1):

101
1
2
C L
C o
L i
i I I
I I
v V
(4.20)
Pendant la deuxième partie (g=0) :
1
2
C in L
C L o
L in o
i I I
I I I
v V V
(4.21)
La moyenne d’une variable x sur une période T est donnée par :
[0, ] [ , ]
1 1( ) ( ) ( ) ( )
t T t T t T
T T Tt t t Ts
x t x d x d x dT T
(4.22)
Si nous considérons un mode de conduction continu ou MCC (le courant ne s’annule pas dans
l’inductance) L’application d’une moyenne sur les équations (4.20)-(4.21) nous permet d’écrire :
1
2
( ) ( ) '( ) 0
( ) (- ) ' ( - ) 0
( ) '( ) 0
C in L in L
C o L o
L in in o
i t I I I I
i t I I I
v t V V V
(4.23)
De l’équation (4.23), on peut alors tirer le rapport de conversion en MCC:
1 1( )
' 1o
in
VM
V
(4.24)
Les figures ci-dessous présentent les courbes obtenues en MCC.

102
Figure 4-5: Courbes des variations des différents paramètres du hacheur boost sur une période de fonctionnement; (a) : Tension de commande de l’interrupteur; (b) : tension aux bornes de
l’inductance; (c) : courant dans l’inductance; (d) : courant dans l’interrupteur ; (e) :tension au bornes de l’interrupteur; (f) :courant dans la diode D.
Puisque dans notre cas la tension en sortie du hacheur est fixe (bus continu), le contrôle de la
tension aux bornes du générateur PV se fera au travers du rapport cyclique à fréquence fixe par
la formule :
(1 )PV BusV V (4.25)

103
III.3- Choix des composants du hacheur.
III.4- Simulation et résultats.
Le hacheur a été simulé avec un condensateur en entrée de C1 = 1000μF, et une inductance de
1mH; les résultats de la simulation montrent bien que si nous considérons la sortie comme reliée
à une source de tension (le bus continu étant stabilisé par un mécanisme externe), l’entrée
comme étant une source de courant (le générateur PV), et le hacheur en MCC, alors la tension
d’entrée du hacheur peut être commandée par la variation du rapport cyclique du hacheur selon
l’équation (4.25). la simulation a été effectuée à une fréquence de f=50KHz, une source de
courant en entrée de 3 A, une source de tension de 700V , un rapport cyclique de 0.7 pour un
temps allant de 0 à 0.5 secondes, à t=0.5s, ce rapport cyclique passe brutalement de 0.7 à 0.85.
Figure 4-6: Résultats de la simulation du hacheur sur une seconde.
On se rend bien compte qu’au régime permanent, la tension en entrée prend une valeur très
proche de (1 )oV .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
0
50
100
150
200
250
X: 0.6642
Y: 102.6
temps (secondes)
tens
ion
en e
ntré
e du
gén
érat
eur
PV
(V
olt)
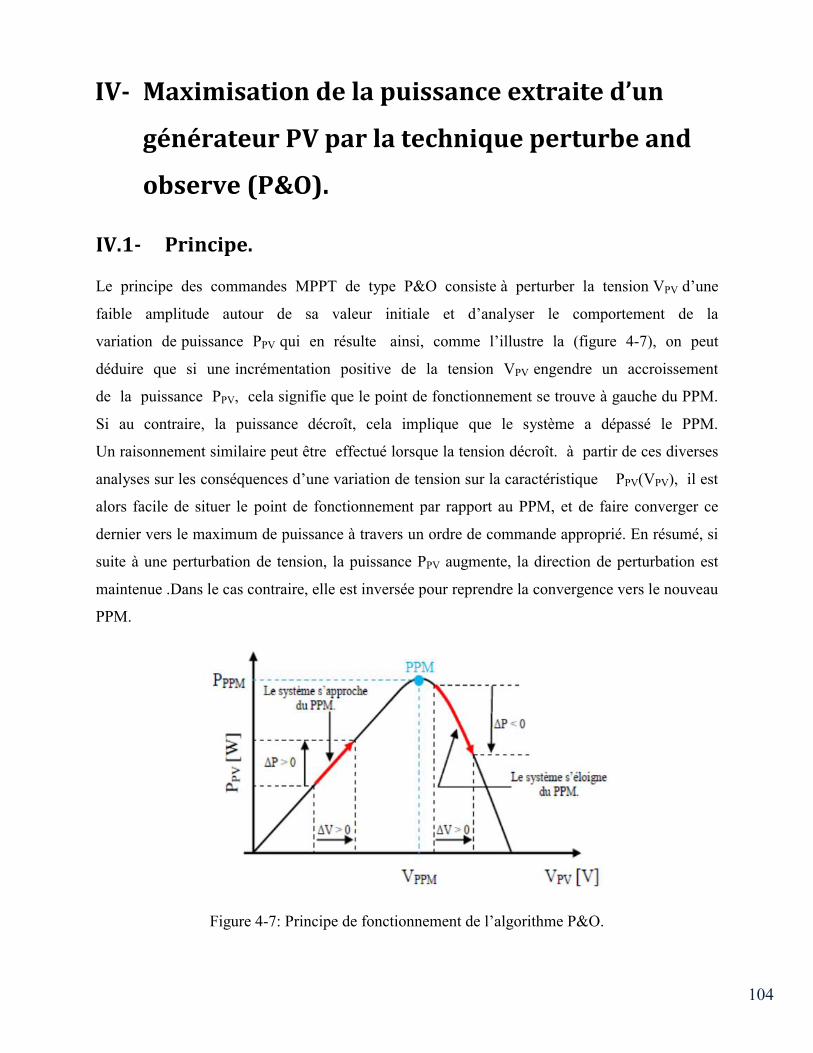
104
IV- Maximisation de la puissance extraite d’un
générateur PV par la technique perturbe and
observe (P&O).
IV.1- Principe.
Le principe des commandes MPPT de type P&O consiste à perturber la tension VPV d’une
faible amplitude autour de sa valeur initiale et d’analyser le comportement de la
variation de puissance PPV qui en résulte ainsi, comme l’illustre la (figure 4-7), on peut
déduire que si une incrémentation positive de la tension VPV engendre un accroissement
de la puissance PPV, cela signifie que le point de fonctionnement se trouve à gauche du PPM.
Si au contraire, la puissance décroît, cela implique que le système a dépassé le PPM.
Un raisonnement similaire peut être effectué lorsque la tension décroît. à partir de ces diverses
analyses sur les conséquences d’une variation de tension sur la caractéristique PPV(VPV), il est
alors facile de situer le point de fonctionnement par rapport au PPM, et de faire converger ce
dernier vers le maximum de puissance à travers un ordre de commande approprié. En résumé, si
suite à une perturbation de tension, la puissance PPV augmente, la direction de perturbation est
maintenue .Dans le cas contraire, elle est inversée pour reprendre la convergence vers le nouveau
PPM.
Figure 4-7: Principe de fonctionnement de l’algorithme P&O.

105
IV.2- Logigramme d’implémentation.
La figure 4-8 présente le logigramme du système de contrôle de l’éolienne basé sur l’algorithme
P&O.
Figure 4-8: Logigramme de fonctionnement de l’algorithme P&O.
IV.3- Simulation de la centrale solaire et résultats.
La centrale solaire constituée a été simulée pendant une durée de 14 secondes, avec les profils
d’ensoleillement et de températures données dans les figures 4-9 et 4-10, un pas de variation de
la tension deltaV=10Volts, les mêmes paramètres du hacheur et du module PV que donnés
précédemment. La configuration des panneaux étant de 6 en série sur 6 en parallèle.
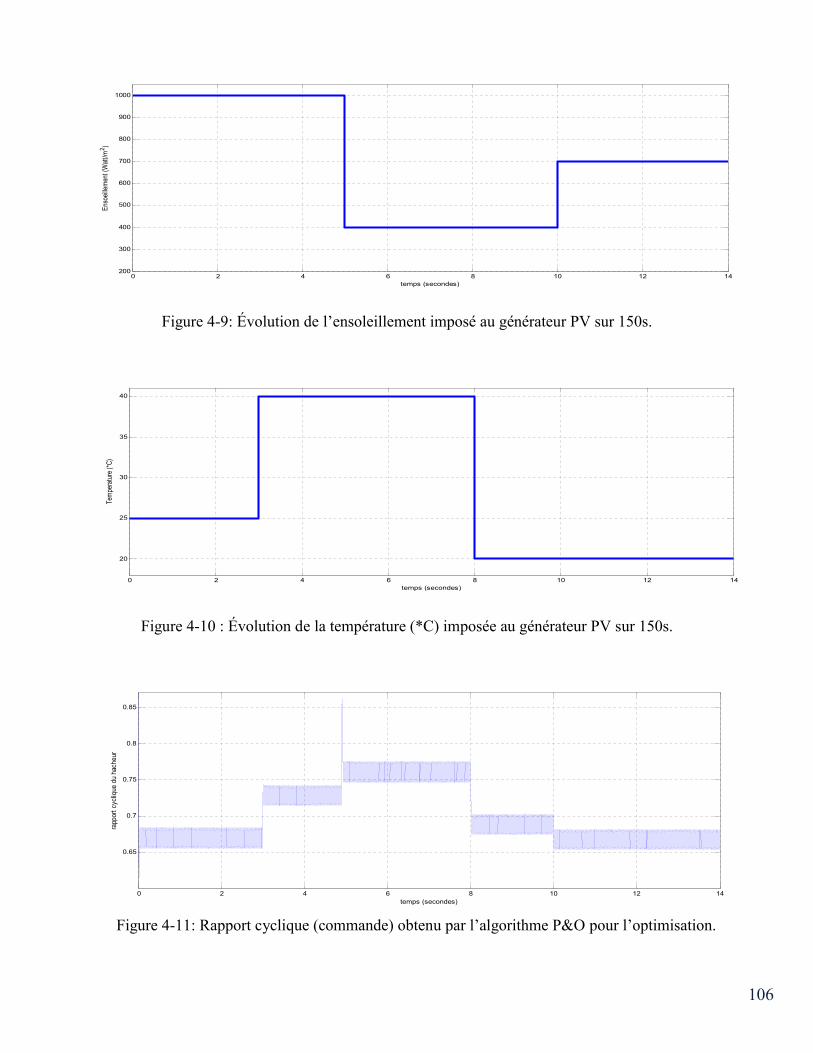
106
Figure 4-9: Évolution de l’ensoleillement imposé au générateur PV sur 150s.
Figure 4-10 : Évolution de la température (*C) imposée au générateur PV sur 150s.
Figure 4-11: Rapport cyclique (commande) obtenu par l’algorithme P&O pour l’optimisation.
0 2 4 6 8 10 12 14200
300
400
500
600
700
800
900
1000
temps (secondes)
Ens
oeill
emen
t (W
att/
m2 )
0 2 4 6 8 10 12 14
20
25
30
35
40
temps (secondes)
Tem
pera
ture
(*C
)
0 2 4 6 8 10 12 14
0.65
0.7
0.75
0.8
0.85
temps (secondes)
rapp
ort
cycl
ique
du
hach
eur
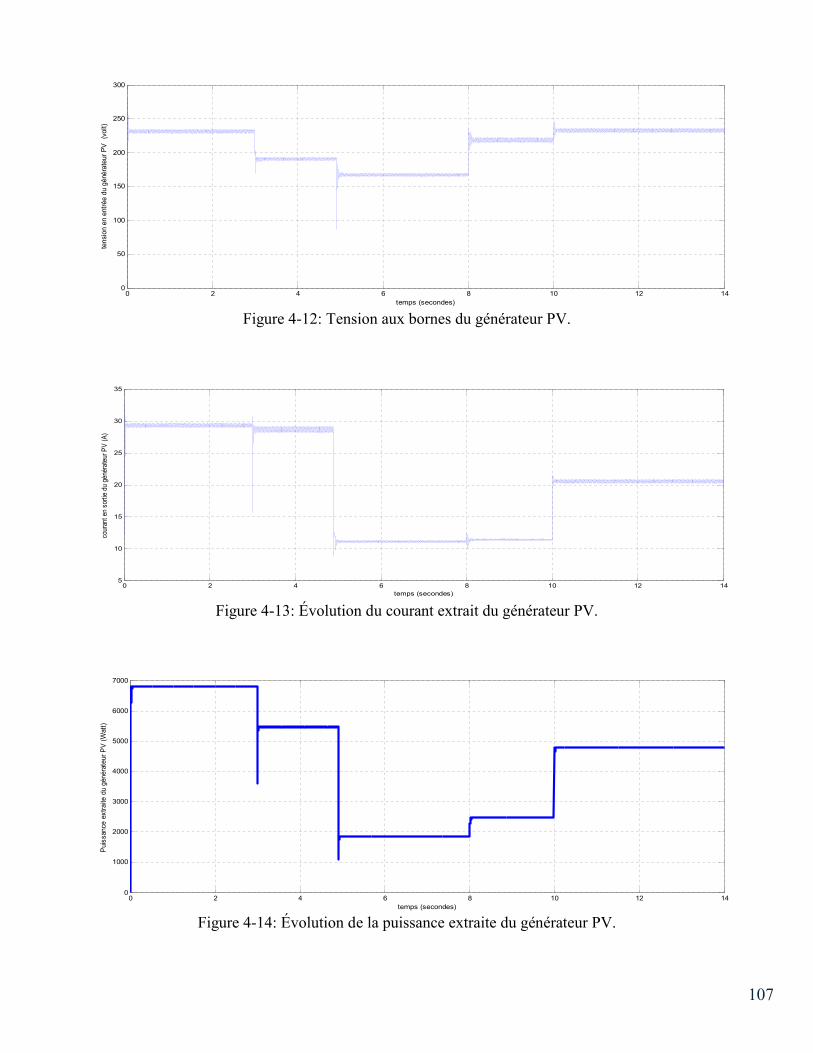
107
Figure 4-12: Tension aux bornes du générateur PV.
Figure 4-13: Évolution du courant extrait du générateur PV.
Figure 4-14: Évolution de la puissance extraite du générateur PV.
0 2 4 6 8 10 12 140
50
100
150
200
250
300
temps (secondes)
ten
sio
n e
n e
ntré
e d
u g
éné
rate
ur
PV
(v
olt
)
0 2 4 6 8 10 12 145
10
15
20
25
30
35
temps (secondes)
cour
ant e
n so
rtie
du g
énér
ateu
r PV
(A
)
0 2 4 6 8 10 12 140
1000
2000
3000
4000
5000
6000
7000
temps (secondes)
Pui
ssa
nce
extr
aite
du
gén
érat
eur
PV
(W
att)
108
Interprétation.
Ces courbes montrent que pour chaque variation de l’ensoleillement et de la température, le système
de contrôle P&O adapte la tension en entrée du générateur PV pour que la puissance extraite de
celui-ci soit maximale. Par exemple, pour un ensoleillement de 1000W/m2 et une température de 25
degrés (les 3 premières secondes), les caractéristiques du constructeur donnés en annexe montrent
que la tension à laquelle le panneau débitera sa puissance optimale est d’environ 38V, ce qui fait
environ 230V pour les 6 panneaux en série, ce qui est bien le résultat obtenu.
Conclusion du chapitre.
Les études menées dans ce chapitre ont permis de démontrer la validité du modèle utilisé pour le
générateur solaire photovoltaïque Sharp NT-R5E3E, et nous constatons bien que l’algorithme
P&O permet d’optimiser l’exploitation de ce générateur même dans des conditions changeantes
avec le temps, dans certaines limites.
109
Chapitre 5
SIMULATION ET CONTRÔLE DE LA
CENTRALE À JUMELAGE EOLIEN SOLAIRE
CONNECTÉE AU RÉSEAU ÉLECTRIQUE DE
DISTRIBUTION.
Dans les chapitres précédents, les systèmes éoliens et solaires photovoltaïques ont été analysés
dans leur fonctionnement dynamique. Ainsi, nous avons pu mettre en évidence leur complexité
ainsi que la nécessité d’effectuer des simulations de celles-ci et de leurs systèmes de contrôle.
Ce chapitre vise une simulation du fonctionnement dynamique de la centrale à jumelage éolien-
solaire PV pourvue des systèmes de contrôle qui ont déjà été présentés et qui seront adaptés à la
configuration globale du système.
110
I- Présentation du système.
L’exploitation simultanée des deux sources d’énergie renouvelables que sont le vent et le soleil
nécessite une coordination précise des systèmes de contrôle des différentes parties de la centrale.
En effet, chaque partie de la centrale doit pouvoir fonctionner ou non en présence ou en absence
de l’autre partie; c’est à dire que si l’énergie éolienne est indisponible, et que le solaire l’est, la
centrale doit pouvoir envoyer l’énergie produite par le générateur solaire PV vers le réseau,
pareillement pour le cas inverse. Si aucune des deux énergies n’est disponible, il faut que la
centrale s’arrête et ne débite ni ne retire rien du réseau de distribution. Par ailleurs, l’énergie
envoyée dans le réseau doit être de bonne qualité; or le taux de distorsion harmonique en courant
(THDI) pour l’onduleur assurant le transit de puissance vers le réseau, étant directement lié à la
largeur de la bande d’hystérésis du contrôleur de cet onduleur, celle-ci doit donc être la plus
faible possible, il en résulte un nombre de commutation élevé des interrupteurs et plus de pertes.
La figure suivante donne un schéma descriptif de la centrale et de ses différentes parties.
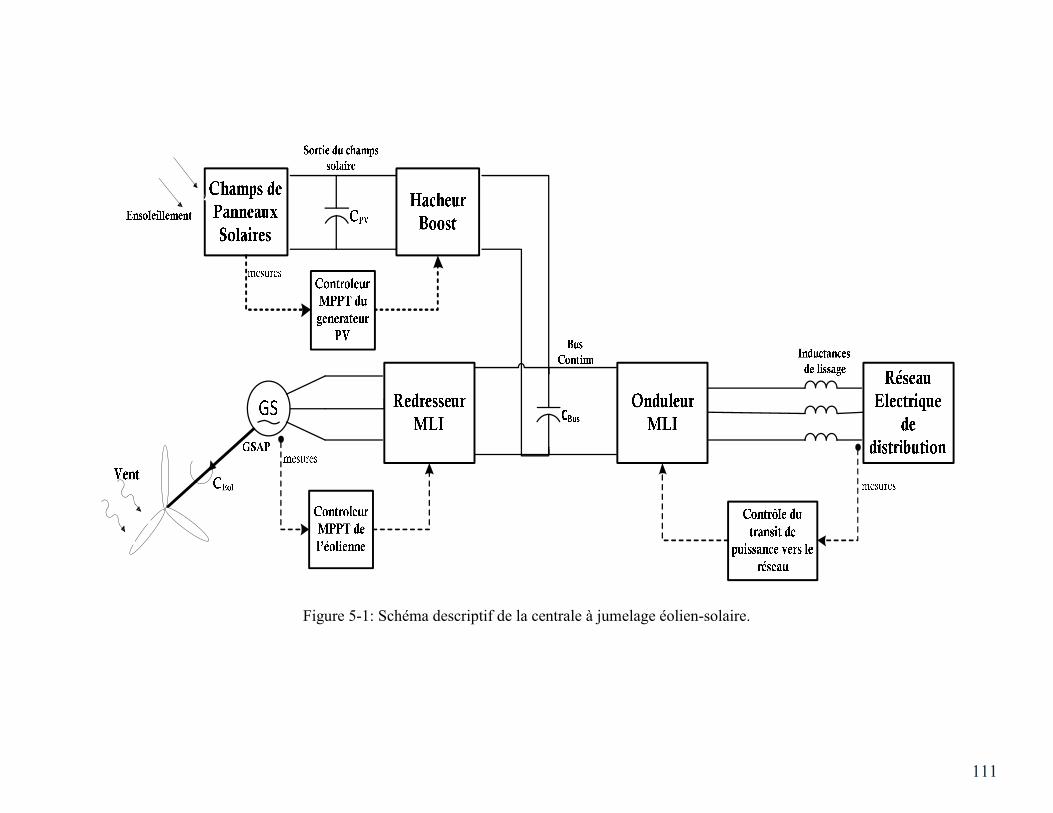
111
Figure 5-1: Schéma descriptif de la centrale à jumelage éolien-solaire.
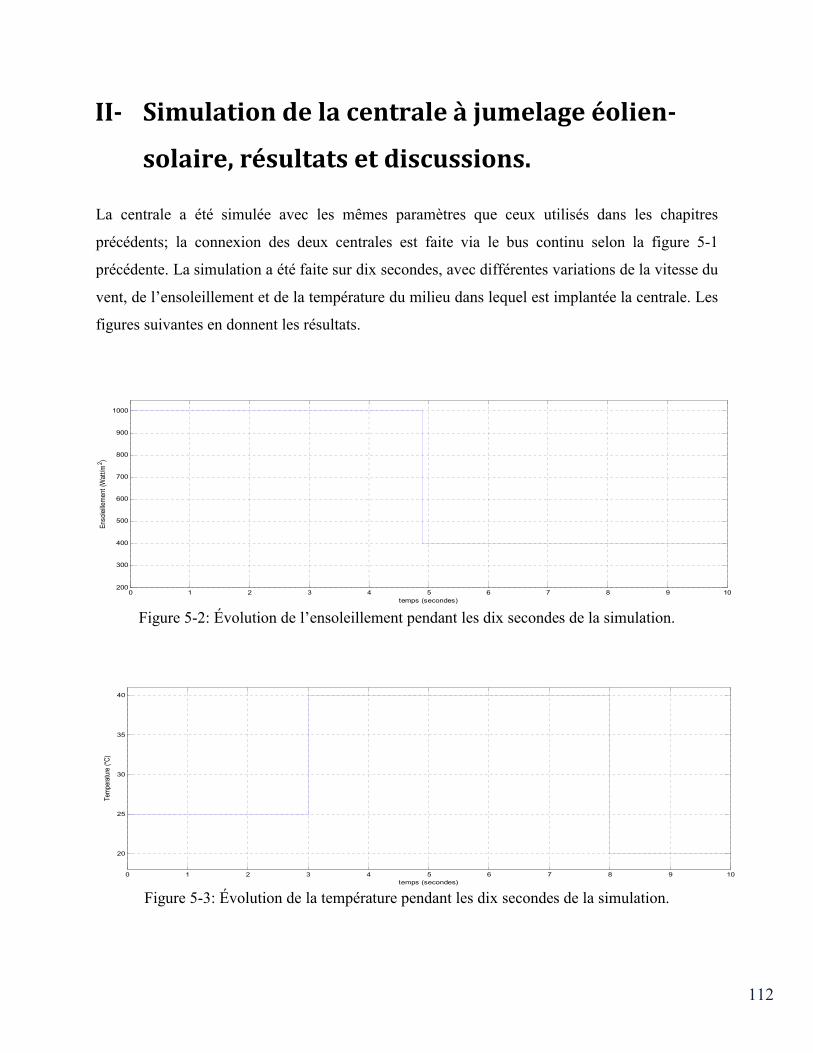
112
II- Simulation de la centrale à jumelage éolien-
solaire, résultats et discussions.
La centrale a été simulée avec les mêmes paramètres que ceux utilisés dans les chapitres
précédents; la connexion des deux centrales est faite via le bus continu selon la figure 5-1
précédente. La simulation a été faite sur dix secondes, avec différentes variations de la vitesse du
vent, de l’ensoleillement et de la température du milieu dans lequel est implantée la centrale. Les
figures suivantes en donnent les résultats.
Figure 5-2: Évolution de l’ensoleillement pendant les dix secondes de la simulation.
Figure 5-3: Évolution de la température pendant les dix secondes de la simulation.
0 1 2 3 4 5 6 7 8 9 10200
300
400
500
600
700
800
900
1000
temps (secondes)
Ens
olei
llem
ent
(Wat
t/m2 )
0 1 2 3 4 5 6 7 8 9 10
20
25
30
35
40
temps (secondes)
Tem
pera
ture
(*C
)

113
Figure 5-4: Évolution de la vitesse du vent pendant les dix secondes de la simulation.
Résultats sur le fonctionnement interne de l’éolienne.
Figure 5-5: Évolution du couple électromagnétique produit par la GSAP.
Figure 5-6: Évolution de la vitesse de rotation de la turbine éolienne.
0 1 2 3 4 5 6 7 8 9 108
8.5
9
9.5
10
10.5
11
11.5
12
12.5
temps (secondes)
vite
sse
du v
ent
(m/s
)
0 1 2 3 4 5 6 7 8 9 10
-20
0
20
40
60
80
100
temps (secondes)
Cou
ple
élec
trom
agné
tique
(N.m
)
0 1 2 3 4 5 6 7 8 9 1010
20
30
40
50
60
70
80
temps (secondes)
vite
sse
de ro
tatio
n de
la G
SA
P (r
ad/s
)

114
Figure 5-7: Puissance extraite du vent par la turbine (en bleu) et puissance fournie par l’éolienne (en rouge).
Figure 5-8: Évolution des tensions induites (à gauche) et des courants (à droite) dans les phases de la GSAP dans les dernières secondes de la simulation.
Résultats sur le fonctionnement interne du générateur PV.
9.93 9.94 9.95 9.96 9.97 9.98 9.99 10-300
-200
-100
0
100
200
300
temps (secondes)
tensio
ns in
du
ite
s a
u s
tato
r (V
olt)
9.93 9.94 9.95 9.96 9.97 9.98 9.99 10-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
temps (secondes)
Coura
nts
dans les p
hases d
e la G
SA
P (
A)
0 1 2 3 4 5 6 7 8 9 10
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
temps (secondes)
Puis
sa
nces d
an
s l'é
olie
nne
(W
att
)
Puissance extraitede la turbine
Puissance fourniepar la GSAP
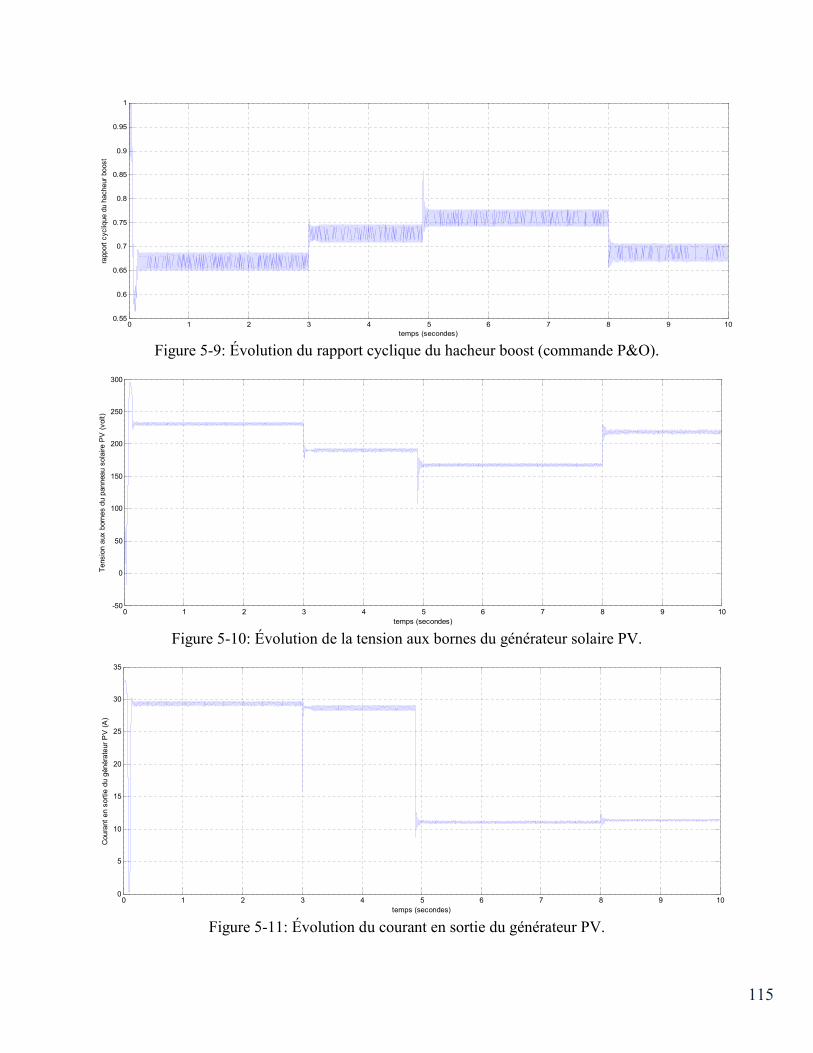
115
Figure 5-9: Évolution du rapport cyclique du hacheur boost (commande P&O).
Figure 5-10: Évolution de la tension aux bornes du générateur solaire PV.
Figure 5-11: Évolution du courant en sortie du générateur PV.
0 1 2 3 4 5 6 7 8 9 100.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
temps (secondes)
rapp
ort
cyc
liqu
e du
ha
che
ur b
oos
t
0 1 2 3 4 5 6 7 8 9 10-50
0
50
100
150
200
250
300
temps (secondes)
Tensio
n a
ux b
orn
es
du p
anneau s
ola
ire P
V (
volt)
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
25
30
35
temps (secondes)
Cou
rant
en s
ort
ie d
u g
én
éra
teur
PV
(A
)
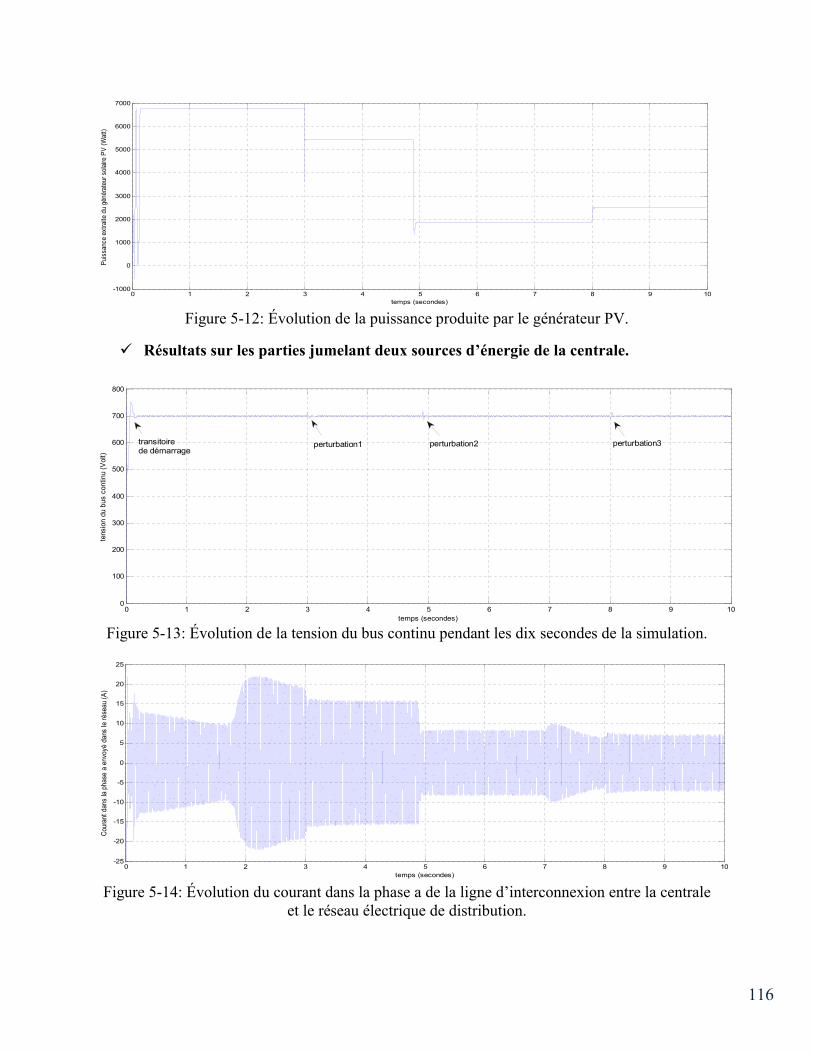
116
Figure 5-12: Évolution de la puissance produite par le générateur PV.
Résultats sur les parties jumelant deux sources d’énergie de la centrale.
Figure 5-13: Évolution de la tension du bus continu pendant les dix secondes de la simulation.
Figure 5-14: Évolution du courant dans la phase a de la ligne d’interconnexion entre la centrale et le réseau électrique de distribution.
0 1 2 3 4 5 6 7 8 9 10-1000
0
1000
2000
3000
4000
5000
6000
7000
temps (secondes)
Pui
ssan
ce e
xtra
ite d
u gé
néra
teur
sol
aire
PV
(W
att)
0 1 2 3 4 5 6 7 8 9 100
100
200
300
400
500
600
700
800
temps (secondes)
tens
ion
du
bu
s co
ntin
u (V
olt)
perturbation1 perturbation2 perturbation3transitoirede démarrage
0 1 2 3 4 5 6 7 8 9 10-25
-20
-15
-10
-5
0
5
10
15
20
25
temps (secondes)
Cou
rant
dan
s la
pha
se a
env
oyé
dans
le r
ésea
u (A
)
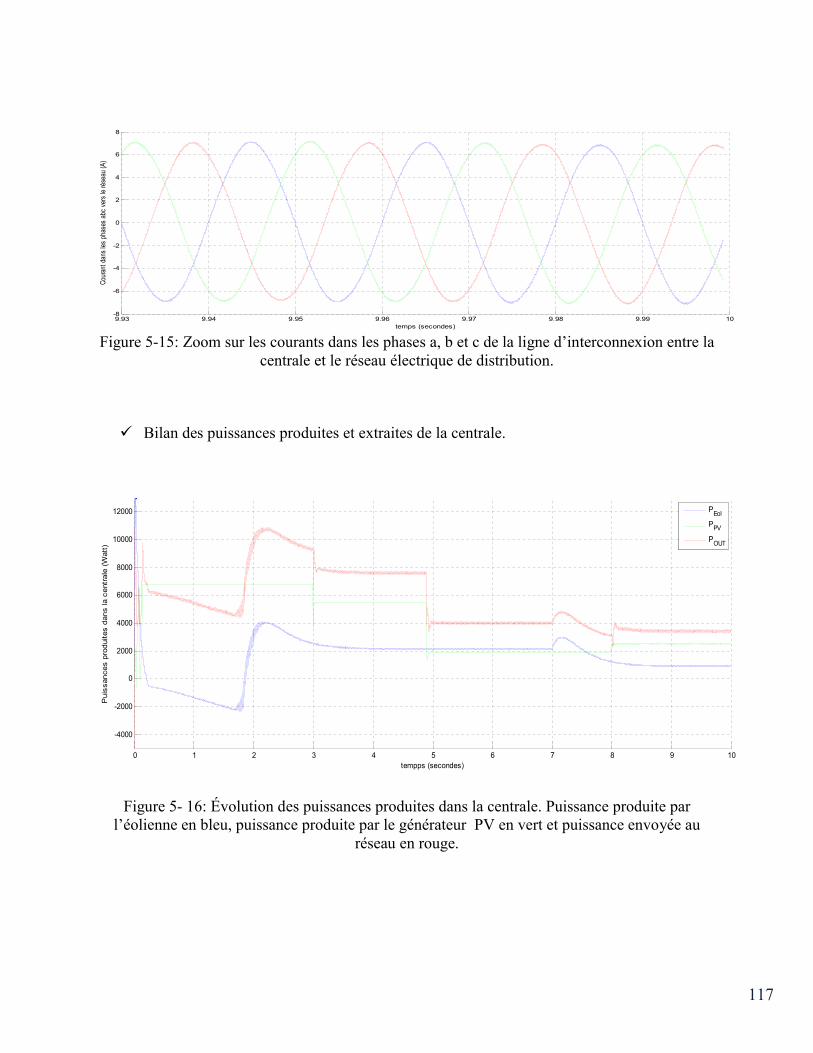
117
Figure 5-15: Zoom sur les courants dans les phases a, b et c de la ligne d’interconnexion entre la centrale et le réseau électrique de distribution.
Bilan des puissances produites et extraites de la centrale.
Figure 5- 16: Évolution des puissances produites dans la centrale. Puissance produite par l’éolienne en bleu, puissance produite par le générateur PV en vert et puissance envoyée au
réseau en rouge.
9.93 9.94 9.95 9.96 9.97 9.98 9.99 10-8
-6
-4
-2
0
2
4
6
8
temps (secondes)
Cou
rant
dan
s le
s ph
ases
abc
ver
s le
rése
au (A
)
0 1 2 3 4 5 6 7 8 9 10
-4000
-2000
0
2000
4000
6000
8000
10000
12000
tempps (secondes)
Pu
issan
ce
s p
rod
uites d
an
s la
ce
ntr
ale
(W
att
)
PEol
PPV
POUT
118
III- Interprétation des résultats et discussions.
Les figures 5-5 jusqu’à 5-8 montrent que le fonctionnement optimal de la centrale éolienne n’est
pas affecté par l’interconnexion des deux centrales, de même que pour les figures 5-9 jusqu’à 5-
12 qui montrent que le générateur PV peut fonctionner de manière optimale, même s’il débite sur
un même point de connexion (le bus continu) que l’éolienne à MSAP. En effet, la tension du bus
continu étant stabilisée par un système distribué, autonome et performant, ces deux centrales
voient ce point comme une source de tension, et dès lors, leur jumelage ne pose aucun problème.
La figure 5-16 montre que pendant les phases de démarrage ou l’éolienne a besoin d’énergie (de
t=0 à t=1.8s), la présence d’une énergie fournie par le générateur PV fait que malgré l’absorption
de puissance de l’éolienne, aucune énergie n’est prise du réseau, au contraire, une partie de
l’énergie produite par le générateur PV est utilisée par l’éolienne, et l’autre est envoyée au
réseau.
Pendant les périodes où les deux centrales peuvent produire, la centrale débite une puissance
maximale vers le réseau; ce sont ces périodes où on a une bonne vitesse du vent et un bon
ensoleillement (de t=1.8s à t=3s).
Lorsque l’ensoleillement diminue (présence d’un nuage ou couché du soleil), une bonne vitesse
du vent permet de maintenir une bonne production de la centrale comme le montre la figure 16
de t=3s à t=4.9s.
Il existe des moments où la vitesse du vent et l’ensoleillement sont tous deux faibles (de t=4.9s à
t=8s); pendant cette période, la centrale débite une faible puissance, c’est l’énergie provenant des
autres centrales du réseau qui sera utilisée pour alimenter la localité.
Il existe aussi des périodes où la vitesse du vent baisse mais l’ensoleillement est relativement
élevé (de t=8s à t=10s), la centrale peut alors continuer à débiter en fonction de l’ensoleillement
disponible sur le site.
119
Conclusion du Chapitre.
Ce chapitre nous a permis de simuler le fonctionnement dynamique d’une centrale à jumelage
éolien-solaire PV; et au vue des résultats obtenus, nous pouvons dire que le jumelage éolien-
solaire présente un bon atout quant à la disponibilité de ces deux ressources dans le temps, et
qu’une bonne régulation de la tension du bus continu permet un fonctionnement autonome et
optimal des deux parties de la centrale, et donc de la centrale complète.

120
Chapitre 6
PROPOSITION ET DIMENSIONNEMENT
APPROXIMATIF D’UN SYSTÈME
PERMETTANT D’ALIMENTER UNE
INSTITUTION DE LA LOCALITÉ DE MORA.
Dans ce chapitre, on considère une villa moderne construite dans la localité de Mora (décrite au
chapitre I ) ayant une puissance installée de 50KW. L’objectif de ce chapitre est de dimensionner
les différents équipements qui permettront d’alimenter cette habitation par une exploitation
simultanée et en connexion avec un réseau électrique de distribution (ou un générateur diesel de
secours), des énergies du vent et du soleil disponibles dans cette localité.
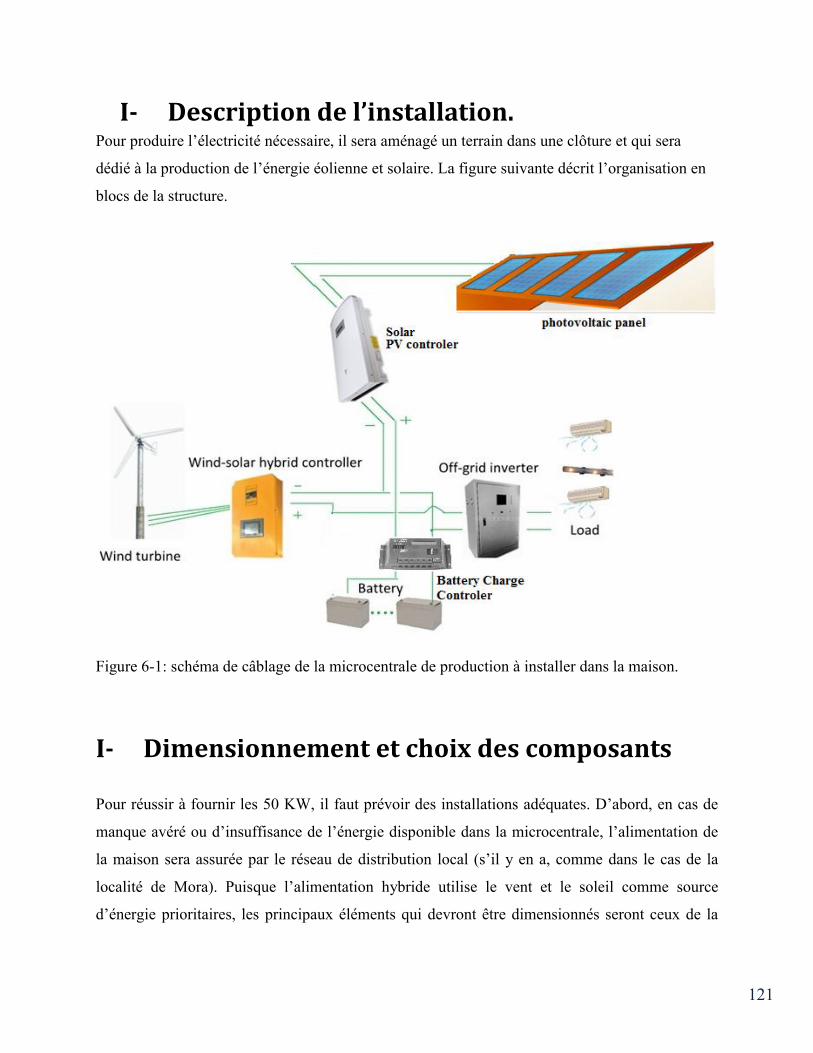
121
I- Description de l’installation. Pour produire l’électricité nécessaire, il sera aménagé un terrain dans une clôture et qui sera
dédié à la production de l’énergie éolienne et solaire. La figure suivante décrit l’organisation en
blocs de la structure.
Figure 6-1: schéma de câblage de la microcentrale de production à installer dans la maison.
I- Dimensionnement et choix des composants
Pour réussir à fournir les 50 KW, il faut prévoir des installations adéquates. D’abord, en cas de
manque avéré ou d’insuffisance de l’énergie disponible dans la microcentrale, l’alimentation de
la maison sera assurée par le réseau de distribution local (s’il y en a, comme dans le cas de la
localité de Mora). Puisque l’alimentation hybride utilise le vent et le soleil comme source
d’énergie prioritaires, les principaux éléments qui devront être dimensionnés seront ceux de la
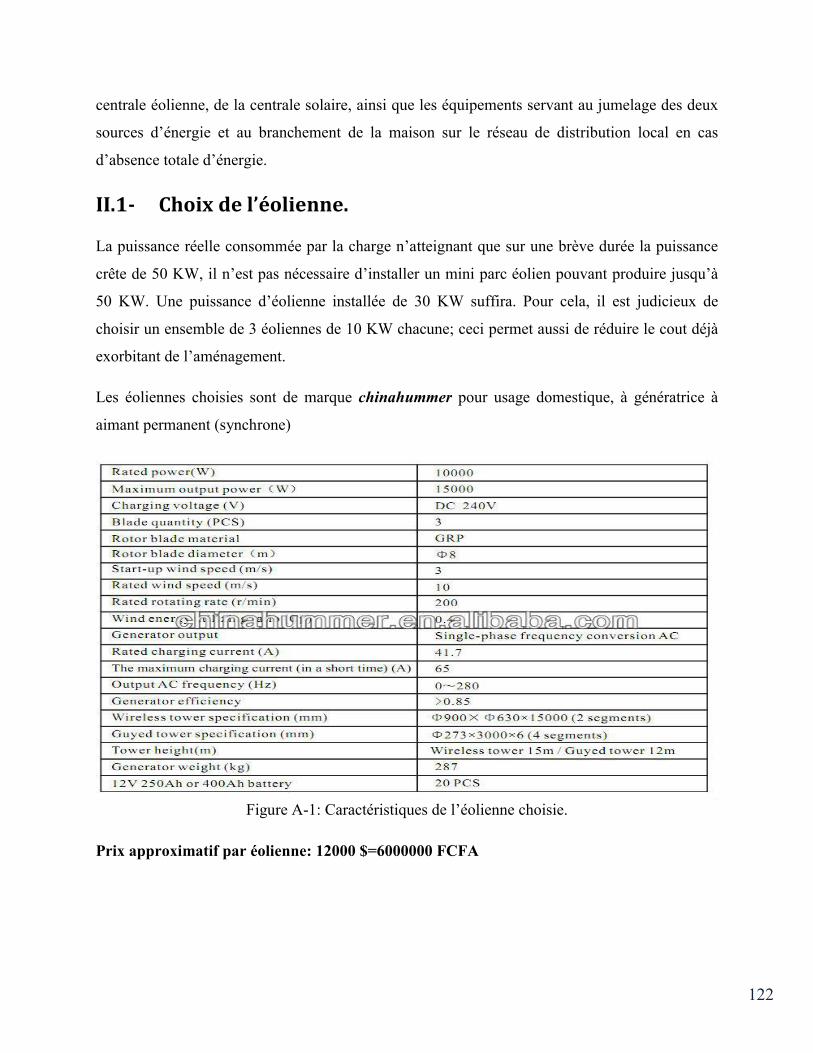
122
centrale éolienne, de la centrale solaire, ainsi que les équipements servant au jumelage des deux
sources d’énergie et au branchement de la maison sur le réseau de distribution local en cas
d’absence totale d’énergie.
II.1- Choix de l’éolienne.
La puissance réelle consommée par la charge n’atteignant que sur une brève durée la puissance
crête de 50 KW, il n’est pas nécessaire d’installer un mini parc éolien pouvant produire jusqu’à
50 KW. Une puissance d’éolienne installée de 30 KW suffira. Pour cela, il est judicieux de
choisir un ensemble de 3 éoliennes de 10 KW chacune; ceci permet aussi de réduire le cout déjà
exorbitant de l’aménagement.
Les éoliennes choisies sont de marque chinahummer pour usage domestique, à génératrice à
aimant permanent (synchrone)
Figure A-1: Caractéristiques de l’éolienne choisie.
Prix approximatif par éolienne: 12000 $=6000000 FCFA
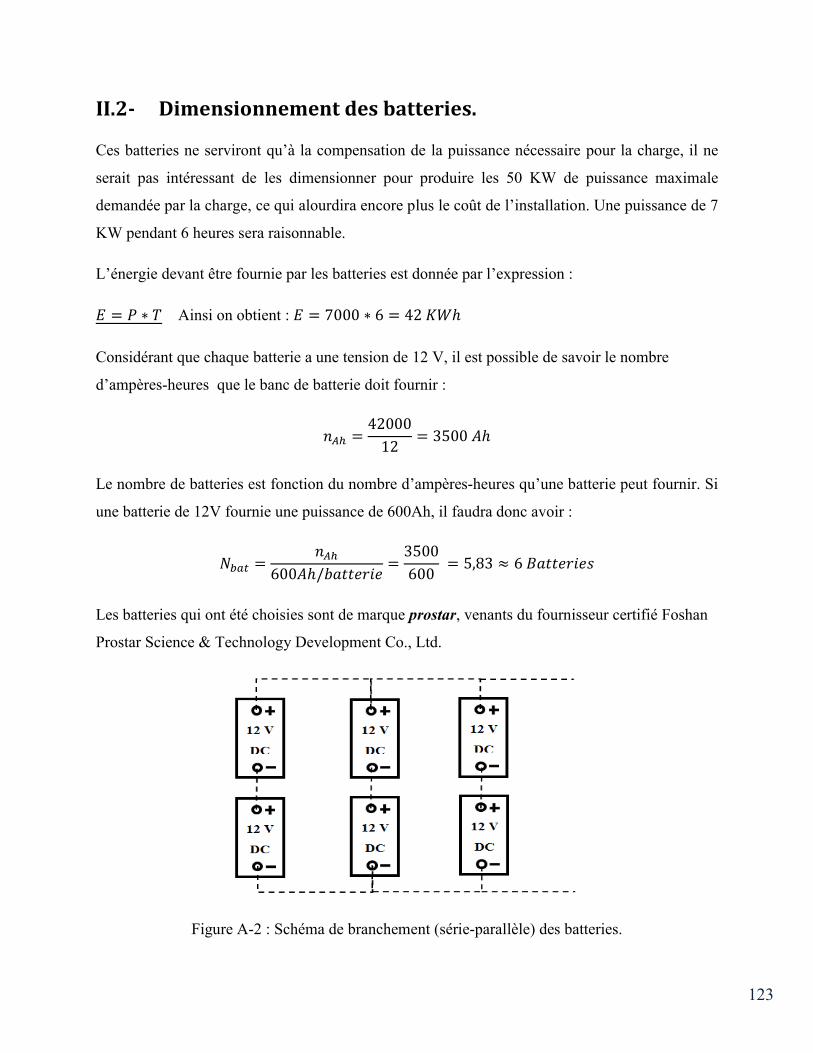
123
II.2- Dimensionnement des batteries.
Ces batteries ne serviront qu’à la compensation de la puissance nécessaire pour la charge, il ne
serait pas intéressant de les dimensionner pour produire les 50 KW de puissance maximale
demandée par la charge, ce qui alourdira encore plus le coût de l’installation. Une puissance de 7
KW pendant 6 heures sera raisonnable.
L’énergie devant être fournie par les batteries est donnée par l’expression :
= ∗ Ainsi on obtient : = 7000 ∗ 6 = 42ℎ
Considérant que chaque batterie a une tension de 12 V, il est possible de savoir le nombre
d’ampères-heures que le banc de batterie doit fournir :
=42000
12= 3500ℎ
Le nombre de batteries est fonction du nombre d’ampères-heures qu’une batterie peut fournir. Si
une batterie de 12V fournie une puissance de 600Ah, il faudra donc avoir :
=
600ℎ/=3500
600= 5,83 ≈ 6
Les batteries qui ont été choisies sont de marque prostar, venants du fournisseur certifié Foshan
Prostar Science & Technology Development Co., Ltd.
Figure A-2 : Schéma de branchement (série-parallèle) des batteries.
124
NB : Ce dimensionnement n’est valable que si la considération sselon laquelle il y a une source
d’énergie alternative réseau de distribution local ou générateur diesel) est faite.
Prix approximatif par batteries : 65 $ = 32500 FCFA
II.3- Dimensionnement des panneaux solaires
Il serait raisonnable de dimensionner les panneaux solaires photovoltaïques pour qu’ils puissent
produire suffisamment d’énergie pour recharger les batteries en une journée.
Ainsi, en considérant un ensoleillement moyen de 5 heures en une journée, nous pouvons utiliser
l’équation :
=
∗ ∗ =
42000
5 ∗ 0.97 ∗ 0.7= 12371.13
Les panneaux solaires choisis ont une puissance nominale de 175 W chacun, il en faudra donc
(environ) 70 pour constituer notre centrale.
Le panneau solaire de Sharp dont les caractéristiques ont été présentées précédemment sera idéal
pour l’installation.
Prix approximatif par module : 1 273,74 $=636,870 FCFA
II.4- Choix de l’onduleur.
L’onduleur constitue une interface entre le dispositif de production de l’électricité et la charge, et
doit donc pouvoir faire transiter la puissance maximale vers celle-ci.
L’onduleur choisi est l’onduleur Ssi100k3g-b fabriquée par l’entreprise cetcsolar de puissance
nominale 50 KW, pouvant fonctionner de manière indépendante et ainsi alimenter la charge.
Prix de l’onduleur : 5000 $ = 2,500,000 FCFA

125
II.5- Prix total (approximatif) pour la mise sur pied de la
centrale.
La centrale peut alors être évaluée en sommant tous les prix liés à l’achat des équipements
donnés ci-dessus, que nous ajouterons de 30% pour les frais liés à l’installation de la centrale.
= , , ∗ .
= ,,
Considérons l’éolienne comme produisant sa puissance nominale pendant 6 heures de la journée
(moyenne sur toute l'année); alors, sachant que l’énergie produite par les panneaux solaire à
précédemment été calculée pour une valeur de 42 KWh, on a l’énergie produite par journée :
= ∗ +=
Si nous considérons une durée du retour sur investissement de 20 ans, nous pouvons alors
calculer le prix du KWh :
=
∗ ∗ ≈ .
≈ /
Rendement de l’alimentation.
Sachant que le prix du kWh actuel pour les petits ménages est d’environ 75 FCFA, la réalisation
d’une centrale hybride autonome utilisant l’énergie solaire et l’énergie éolienne est nettement
rentable sur le plan économique pour une telle localité.

126
Conclusion générale
Cette étude nous a permis de modéliser et de simuler une centrale à jumelage éolien-solaire. Le
système étudié met en œuvre un ensemble d'équipements, très différents, destinés à
cohabiter dans une structure débitant dans un réseau électrique existant. Pour mieux cerner
la nature des interactions entre les différents sous-ensembles de ce système, une approche
d'étude de la dynamique de chaque sous système a été adoptée. Ainsi, l’étude du jumelage
a été axée autour des éléments clés du système que sont le générateur éolien, le générateur
solaire photovoltaïque, et le système de connexion des deux structures entre elles et au réseau.
De prime abord, nous avons situé le problème dans le contexte Camerounais, en montrant que
pour certaines localités de ce pays comme celle de Mora qui présentent un potentiel non
négligeable sur le plan éolien et solaire, il serait d’un très grand avantage d’utiliser ces ressources
énergétiques pour constituer un appoint au réseau électrique qui y est déjà installé. Au chapitre 2,
nous avons fait une brève revue des différentes méthodes qui sont rencontrées dans la littérature
pour résoudre le problème de jumelage des deux sources d’énergie. Ainsi, nous avons pu choisir
une structure adaptée pour notre centrale.
Les analyses de l’aérogénérateur et de la centrale solaire ont été effectuées sur tous leurs
différents aspects. Ainsi, les équations dynamiques mécaniques, électromécaniques et électriques
ont été présentées. Ces analyses ont permis de construire des modèles des différents systèmes
en vue d'analyser leurs performances. Ainsi, le dimensionnement des dispositifs de stabilisation
et de régulation, notamment des régulateur PI, et à hystérésis ont été effectués en vue du contrôle
MPPT de la turbine éolienne, et du contrôle de la tension du bus continu. Par ailleurs, le contrôle
du générateur PV par la méthode Perturbe and Observe a aussi été présenté et modélisé.
Ces différents modèles ont été implantés et simulés à l’aide du logiciel MATLAB/Simulink, ce
qui a permis de montrer l’effectivité du fonctionnement des différentes méthodes élaborées. Des
essais ont été simulés avec différents profils du vent, de l’ensoleillement et de la température,
afin d’observer le comportement dynamique de la centrale à jumelage qui a été modélisée. Une
127
proposition de dimensionnement en vue d’une éventuelle implantation de cette centrale dans une
localité comme celle de Mora a aussi été effectuée.
Les études effectuées dans ce mémoire étaient dans l’optique de constituer des modèles et de les
simuler; cependant, les modèles constitués n’ont pas été confrontés à des données réelles. Malgré
la vraisemblance de ceux-ci, il est donc difficile d’affirmer avec certitude la précision de ces
derniers. Par ailleurs, aucune étude n’a été faite pour la minimisation des pertes dans les
différents convertisseurs statiques d’électronique de puissance utilisés; pourtant, la faiblesse de la
largeur de la bande des contrôleurs à hystérésis entraine un nombre de commutation élevé. Il
serait donc très intéressant de concevoir un système de contrôle général permettant de réduire les
pertes dans les dispositifs d'électronique de puissance de l'installation.
128
BIBLIOGRAPHIE
[1] Documentation disponible sur internet, site : www.getamap.net, Avril 2014.
[2] "World Energy Outlook ", International Energy Agency (IEA), OECD/IEA, 2008.
[3] Survey Of Energy Resources. http://www.worldenergy.org
[4] documentation disponible sur internet, site: www.revafrique.com
[5] « Les piles solaires, le composant et ces applications » Edition.Masson (1985).
[6]G. L. Johnson, “Wind energy systems”, Electronic Edition, December, 2001.
[7] Documentation GE WIND Disponible en ligne sur http;\\WWW.GEPOWER.COM. mARS 2010
[8] A.D. Hansen, C.Jauch, P.Sorensen, F.Iov, F. Blaabjergm, « Dynamic wind turbine models in power system simulation tool DigSILENT », projet de recherche, laboratoire national de Riso, Roskilde, Décembre 2003
[9]H.Camblong, « Minimisation de l’impact des perturbations d’origine éolienne dans la génération d’électricité par des aérogénérateurs a vitesse variable», Thèse de doctorat, 18 décembre 2003, Ecole Nationale Supérieure d’Arts et Métiers Centre de Bordeaux, No d’ordre : 2003-22.
[10]E. Hau, «Wind Turbines», Springer,2006.
[11] B. Raison, A. Morales, M. Crappe, « L'Energie Electrique Eolienne, Partie I : Présentation Générale et Approche Probabilistique », Revue Internationale de Génie Electrique, Vol. 5/3-4 – 2002, pp. 405-484.
[12] T. Weigel, « Demagnetization effect in synchronous machine with permanent magnets », Proceedings of the 33rd International Symposium on Electrical Machines, 1997, pp 99-104.
[13] S. Heier, « Grid Integration of Wind Energy Conversion Systems» , Publications John Wiley & Sons, ISBN 0-471-97143-X, 1998.
[14] R. Michaux, P. Letellier, «Les Machines Discoïdes à Champ Axial dans les Systèmes de Production Electrique », Revue de l'Électricité et de l'Électronique, N° 3, Mars 1997, pp. 37-42.
[15] A. Toba, T. A. Lipo «Generic Torque-Maximizing Design Methodology of SurfacePermanent-Magnet Vernier Machine » IEEE Trans Ind. Appl., vol 36, n°6, Nov 2000, pp.1539-1546.
[16] A.M. El-Refaie, T.M. Jahns, « Comparison of Synchronous PM Machine Types for Wide Constant-Power Speed Range Operation », IAS’05, 2005.

129
[17] Olivier Gergaud, «Modélisation énergétique et optimisation économique d'un système de production éolien et photovoltaïque couplé au réseau et associé à un accumulateur », Thèse de doctorat, 9 décembre 2002, Antenne de Bretagne de l’École Normale Supérieure de Cachan.
[18] A. buyers « les système photovoltaïques » guide, Canada 2002 .article pdf.
[19] M. Hashem Nehrir, Brock J. LaMeres, Giri Venkataramanan, Victor Gerez, L. A. Alvarado, «An Approach to Evaluate the General Performance of Stand-Alone Wind/Photovoltaic Generating Systems», IEEE transactions on energy conversion, vol. 15, no. 4, december 2000.
[20] Vincent Rogez, «Modélisation simplifiée de sources de production décentralisée pour des études de dynamique des réseaux. Application à l’intégration d’une production éolienne dans un réseau de distribution insulaire», thèse de doctorat, 17 Décembre 2004, Centre Nationale de Recherche Technologique de Lille.
[21] E.Peeters, J.Van Bael, P. Van Tichelen, «Different 600kW designs of an axial flux permanent magnet machine for wind turbine», WSEAS Transctions on Power Systems, Juin 2007, Issue 6, vol. 2, pp 145-151.
[22] Tommy Andy Theubou Tameghe, «modélisation et simulation d’un système de jumelageéolien-diesel alimentant une charge locale », programme de maîtrise en ingénierie de l'université du québec à chicoutimi, aout 2012.
[23] F.Poitiers ; « Etude et Commande de génératrices asynchrones pour l'utilisation de l'énergie éolienne : - Machine asynchrone à cage autonome - Machine asynchrone à double alimentation reliée au réseau», Thèse de doctorat, 19 Décembre 2003. Ecole polytechnique de l'université de Nantes.
[24]T.Burton, D.Sharpe, N.Jenkins, E.Bossanyi « Wind Energy Handbook», John Wiley & Sons, 2001
[25] S. El Aimani, « Modélisation de différentes technologies d'éolienne intégrées dans un réseau de moyenne tension », Thèse de Doctorat d'État en Electronique et Génie Électrique Éecole Centrale de Lille (ECL), 2005.
[26]Duc-Hoan TRAN, « Conception Optimale Intégrée d’une chaîne éolienne « passive » : Analyse de robustesse, validation expérimentale », thèse de doctora en génie electrique de l'université de Toulouse,2010
[27] Bouhedda Ali, «Contribution à l'étude de systèmes de commande d'une éolienne», Memoire de magister en électrotechnique de l'université de Mouloud Mammeri. Tizi-ouzou, Juillet 2011.
[28]Richard C. Dorf, Robert H. Bishop, «Modern Control Systems Eleventh edition», Pearson International Edition,2008.
[29] R. Krishnan, «Permanent Magnet Synchronous and Brushless DC Motor Drives», Electrical and Computer Engineering Department Virginia Tech Blacksburg, Virginia, U.S.A. © 2010, pp 225-276.
130
[30] Sophie FERNANDEZ, « Comparaison des performances électriques d’un onduleur triphasé deux niveaux à commandes directes et indirectes connecté au réseau », Thèse de doctora de l'université de lille 1,Octobre 2013.
[31] M. VAN DESSEL, G. DECONINCK «Power electronic grid connection of PM synchronous generator for wind turbines» IEEE DE NAYER Instituut – Dept. Industr. Wetensch, 2008.
[32]Souleymane N., Ibrahima LY, Fabé I., Ould H., Grégoire S., « modélisation et simulation sous MATLAB/Simulink de la chaine d’alimentation d’une station relais de télécommunications en énergie solaire photovoltaïque dans une zone isolée du réseau électrique », journal des sciences, Vol. 9, N° 2 (2009) 45 – 55.
[33]I. Hadj Mahammed, S. Boualit, A. Hadj Arab, F. Youcef Ettoumi, S. Semaoui, « Application d’un modèle généralisé de courant – tension d’une cellule photovoltaïque pour des mesures extérieures sur le module de type monocristallin, Sharp NT-R5E3E », Revue des Énergies Renouvelables CER’07 Oujda (2007)149 – 152.
[34] GASSAB Samir, « Modélisation d’une centrale à énergie renouvelable photovoltaïque-éolienne », mémoire de magister en électrotechnique, université FERHAT ABBAS – SETIF UFAS (ALGERIE), Décembre 2011.
[35] Maite Sanchez Rodriguez, "Réalisation d'un étage d'adaptation pour générateur photovoltaique à partir d'un girateur de puissance", mémoire présenté en vue de l'obtention d'un diplome d'ingénieur Technique Industriel, Université Rovira I Virgili, juin 2008
[36] KANMEGNE TSEUMEGNE Igor Boris, « dimensionnement des principaux equipements d’une centrale hybride autonome de production d’energie electrique (solaire –biomasse) : cas de la localite isolee de boujounkoura (adamaoua) », mémoire de fin d’étude d’ingénieur de conception du génie électrique, Université de Yaoundé 1-ENSP, 2013
131
Annexe 1.
codes Matlab pour les différentes simulations
Script pour la simulation de l’essai en charge de la GSAP.
% simulation de la GSAP alimentant une charge Rch=20, et Lch=0.002 % toutes les variables sont dans le système international. clear all; close all; % insertion des paramètres de la machine et de la charge Ld=2.7e-3; % inductance au stator sur l'axe d Lq=2.7e-3; % inductance au stator sur l'axe q Rs=1.137; % Résistance des enroulements statorique phiF=0.15; % flux induit par les aimants au stator p=17; % nombre de paires de pôles de la machine J=0.1; % moment d'inertie du rotor de la machine Rch=20; % Résistance de la charge alimentée par la machine Lch=0.002; % inductance de la charge alimentée par la machine %initialisation n=1; % numéro de la simulation id=0; % la machine est avec un courant dans l'axe d nul iq=0; % la machine est avec un courant dans l'axe d nul Cg=18; % Couple mécanique appliquée à la génératrice Om=0; % Vitesse du rotor de la machine nul au debut de la simulation Cf=0; % Couple du aux frottements négligé we=0; % pulsation électrique de la machine nulle au debut de la simulation v0dq(:,1)=[0 ; 0 ; we*phiF]; % tenisons dans les axes 0dq au stator i0dq(:,1)=[0 ; id ; iq]; % courants dans les axes 0dq au stator Cem=1.5*p*phiF*iq; % Couple electromagnétique au démarrage CemVect=Cem; % Vecteur permettant d'enregistrer le couple électromagnétique weVect=we; % Vecteur permettant d'enregistrer l'évolution de la vitesse de rotation x=[id ; iq]; tp=2*pi/3; P1=[1 0 1 ; 1 sin(-tp) sin(tp) ; 1 cos(-tp) cos(tp)]; %inverse de la matrice de park pour theta=0 vabc(:,1)=P1*v0dq(:,1); % tensions dans les axes a,b,c du stator au démarrage iabc(:,1)=P1*i0dq(:,1); % courants dans les axes a,b,c du stator au démarrage dt=0.0001; for t=0:dt:3 n=n+1; dOm=dt*((Cg-Cem-Cf)/J); % calcul de la variation de la vitesse de rotation de la MSAP Om=Om+dOm; % mise à jour de la vitesse de rotation de la machine

132
we=Om*p; % mise à jour de la pulsation électrique de la MSAP wst=we*t; %angle de phase au stator % Calcul des matrices du modèle d'état A=[-(Rs+Rch)/(Lq+Lch) we*(Lq+Lch)/(Ld+Lch) ; -we*(Ld+Lch)/(Lq+Lch) -(Rs+Rch)/(Lq+Lch)]; B=[0 ; we/(Lq+Lch)]; % Calcul des variables d'état (les courants dans les axes 0dq au % stator) dxdt=A*x+B*phiF; x=x+dxdt*dt; i0dq(:,n)=[0 ; x(1) ; x(2)]; Cem=1.5*p*phiF*x(2); % Calcul du couple électromagnétique %calcul de Vdq vd=Rch*x(1)+Lch*dxdt(1)-we*Lch*x(2); vq=Rch*x(2)+Lch*dxdt(2)+we*Lch*x(1); v0dq(:,n)=[0 ; vd ; vq]; %calcul de vabc et iabc P1=[1 sin(wst) cos(wst) ; 1 sin(wst-tp) cos(wst-tp) 1 sin(wst+tp) cos(wst+tp)]; vabc(:,n)=P1*v0dq(:,n); iabc(:,n)=P1*i0dq(:,n); %enregistrement des autres variables CemVect(n)=Cem; weVect(n)=we; % test sur le temps pour changer la valeur du couple mécanique if t==1.5 Cg=10; end end % Tracé des courbes des tensions obtenues hold time=0:0.0001:(t+0.0001); plot(time, vabc(1,:)); plot(time, vabc(2,:),'color','green'); plot(time, vabc(3,:),'color','red');
Script pour la simulation du panneau solaire photovoltaïque Sharp NT-
R5E3E.
% Simulation du panneau solaire photovoltaique Sharp NT-R5E3E
% insertion des différents paramètres
m=1.11570875; s=0.51374144; r=0.99679453; Iph0=5.47582492; L=-0.00011796;
h=7.79E-06; p=15000; v=120.405817; w=21.9851095 ; Rs0=0.36001082; B=0.00018574; Rp=394.117307; q=1.602177e-19; K=1.38e-23; G0=1000; % déclaration des Symbolic objects pour obtenir une expression paramétrique
133
% du courant en sortie du panneau syms I U T syms G % insertion de la fonction à anuler pour retrouver la valeur du courant % produit par le panneau solaire PV Fx=-I+Iph0*((G/G0)^m)*(1+L*(G-G0))-h*((G/G0)^s)*((T/T0)^3)*exp(-p*(1/T-1/T0))* (exp((q/(K*T))*((U+Rs0*(1+L*(G-G0))*I)/(v+w*(G/G0))))-1)-((G/G0)^r)* ((U+Rs0*(1+B*(G-G0))*I)/Rp); FxFunc=matlabFunction(Fx); % insertions des données d'entrée du modèle T0=273+25; % temperature du site en Kelvin u=0:0.5:50; % tension aux bornes du module PV (volt) E=[200 400 600 800 1000]; % Ensoleillement sur le site (Watt/m^2) for k=1:length(E) for n=1:length(u) i(n)=fsolve(@(x)FxFunc(E(k),x,T,u(n)),0); end end plot(u, u.*i) axis([0 50 0 200])
Annexe 2.
Implantation des différents blocs dans le logiciel MATLAB-Simulink

134
Figure A-3: Implantation du modèle de la MSAP sur MATLAB-Simulink.

135
Figure A-4 : Implantation du modèle de la turbine éolienne sur MATLAB-Simulink

136
Figure A-5: Implantation du hacheur boost sur MATLAB-Simulink
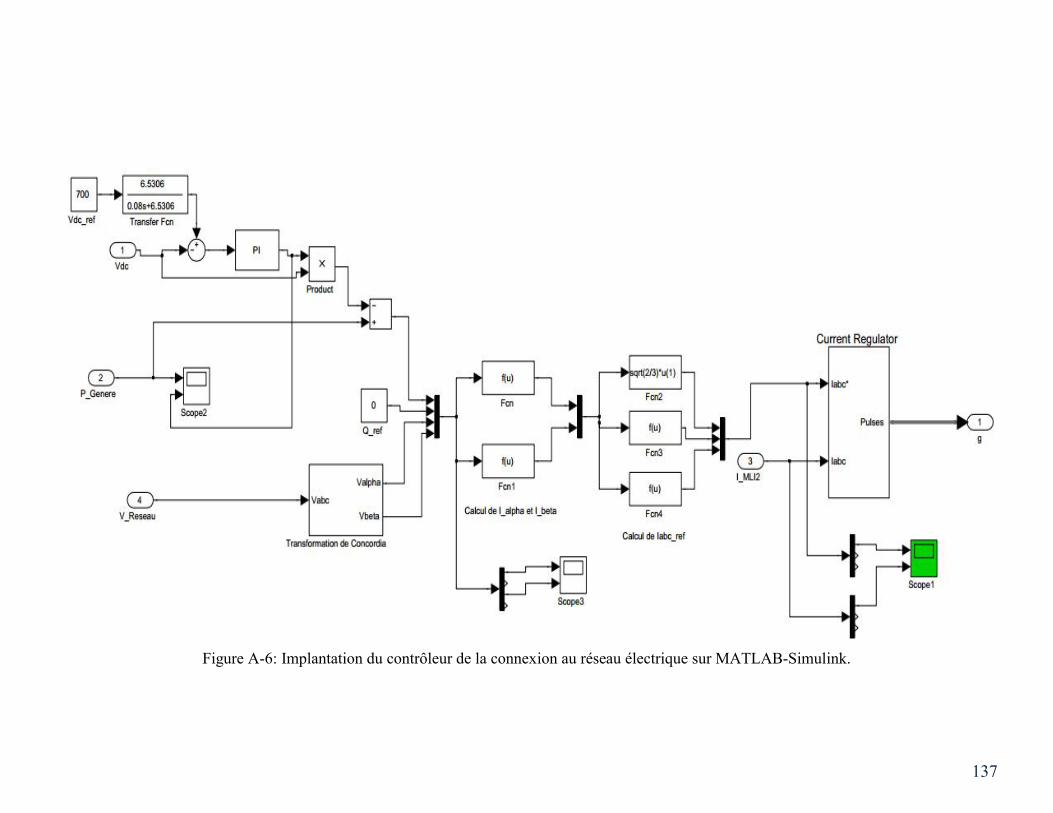
137
Figure A-6: Implantation du contrôleur de la connexion au réseau électrique sur MATLAB-Simulink.
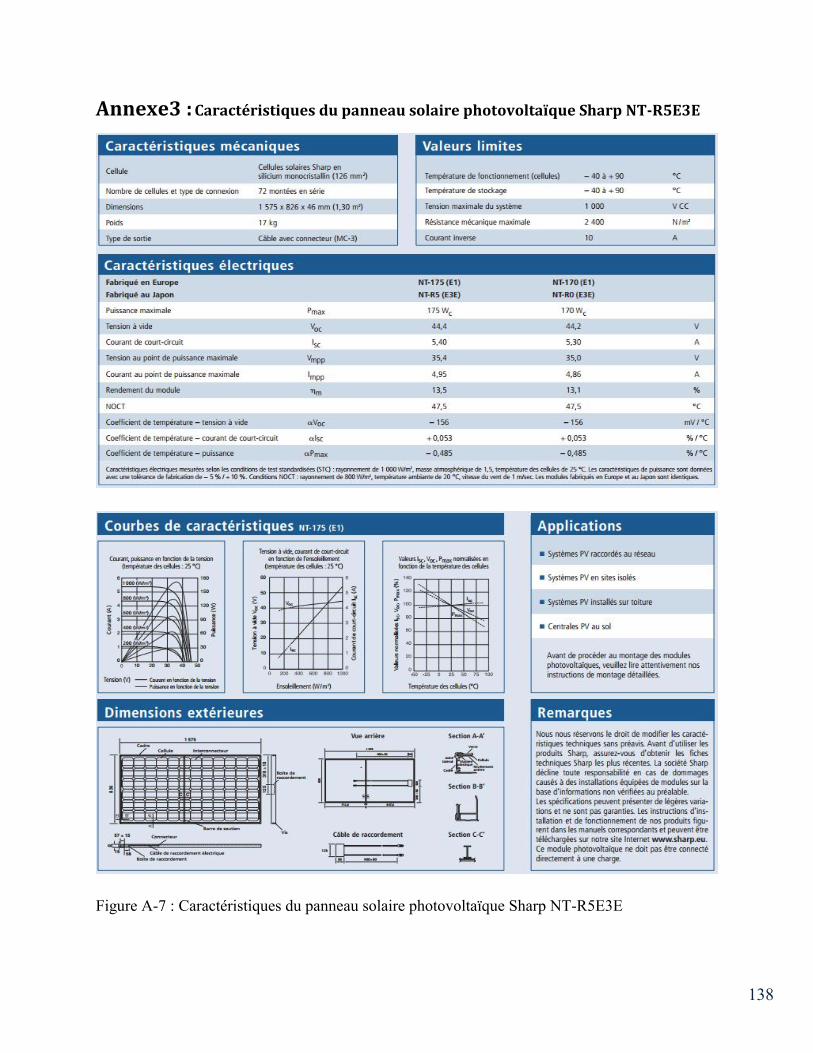
138
Annexe3 : Caractéristiques du panneau solaire photovoltaïque Sharp NT-R5E3E
Figure A-7 : Caractéristiques du panneau solaire photovoltaïque Sharp NT-R5E3E