MECANIQUE APPLIQUEE Examen
6
MECANIQUE APPLIQUEE Examen Chaque exercice est à rendre sur une copie séparée Tout formulaire autorisé, calculatrice fournie EXERCICE 1: AMORTISSEURS DE VEHICULE Les suspensions (partie ressort) et les amortisseurs (partie vérin) de véhicule automobile sont des composants clefs pour le confort des passagers et la tenue de route. Les amortisseurs et les suspensions contribuent au maintien du contact entre le pneu et la route. Leurs rôles sont complémentaires. Les amortisseurs ne jouent pas seulement un rôle en matière de confort de conduite mais aussi de sécurité. Ils contribuent en effet au maintien du contact entre le pneu et la route, impactant directement la qualité du freinage et de la direction du véhicule. La tenue de route, en particulier dans les virages, est ainsi liée au niveau d’usure des amortisseurs. Vues d’ensemble suspension + amortisseur de véhicule On considère un véhicule de masse M = 1.4 tonnes qu’on considèrera répartie également sur les 4 suspensions. Celles-ci sont constituées de ressorts de raideur k. Ces ressorts en acier de module élastique de cisaillement égal à G=80000 N/mm 2 ont les caractéristiques suivantes : - Nombre de spires : n = 6 - Diamètre d’enroulement des spires : D = 55 mm - Diamètre du fil : d = 12 mm En dessous de 1Hz les fréquences d’oscillations du véhicule peuvent perturber la physiologie des passagers et les rendre malades. Il est donc important de vérifier le dimensionnement des suspensions et des amortisseurs. Q1 : Compte tenu de la relation classique de comportement des ressorts hélicoïdaux, ci- dessous, déterminer la raideur k des ressorts qui constituent les suspensions. On rappelle qu’un ressort spiral soumis à une traction axiale F s’allonge d’une longueur ∆L : Année Universitaire 2019-2020 GM3
Transcript of MECANIQUE APPLIQUEE Examen

MECANIQUE APPLIQUEE
Examen
Chaque exercice est à rendre sur une copie séparée Tout formulaire autorisé, calculatrice fournie
EXERCICE 1: AMORTISSEURS DE VEHICULE
Les suspensions (partie ressort) et les amortisseurs (partie vérin) de véhicule automobile sont des composants clefs pour le confort des passagers et la tenue de route. Les amortisseurs et les suspensions contribuent au maintien du contact entre le pneu et la route. Leurs rôles sont complémentaires. Les amortisseurs ne jouent pas seulement un rôle en matière de confort de conduite mais aussi de sécurité. Ils contribuent en effet au maintien du contact entre le pneu et la route, impactant directement la qualité du freinage et de la direction du véhicule. La tenue de route, en particulier dans les virages, est ainsi liée au niveau d’usure des amortisseurs.
Vues d’ensemble suspension + amortisseur de véhicule
On considère un véhicule de masse M = 1.4 tonnes qu’on considèrera répartie également sur les 4 suspensions. Celles-ci sont constituées de ressorts de raideur k. Ces ressorts en acier de module élastique de cisaillement égal à G=80000 N/mm2 ont les caractéristiques suivantes :
- Nombre de spires : n = 6
- Diamètre d’enroulement des spires : D = 55 mm
- Diamètre du fil : d = 12 mm
En dessous de 1Hz les fréquences d’oscillations du véhicule peuvent perturber la physiologie des passagers et les rendre malades. Il est donc important de vérifier le dimensionnement des suspensions et des amortisseurs.
Q1 : Compte tenu de la relation classique de comportement des ressorts hélicoïdaux, ci-dessous, déterminer la raideur k des ressorts qui constituent les suspensions.
On rappelle qu’un ressort spiral soumis à une traction axiale F s’allonge d’une longueur ∆L :
Année Universitaire 2019-2020 GM3

3
4
8nFDL
Gd∆ =
Q2 : Compte de l’hypothèse simplificatrice faite plus haut, donner une estimation de la fréquence propre f0 du véhicule à vide. Que devient cette valeur avec 4 passagers de 80kg ? Conclure quant au risque de nausée. Afin d’éviter les oscillations on choisit des amortisseurs de telle sorte que le retour en position initiale soit le plus rapide possible après un chaos ou un nid de poule. C’est-à-dire que la valeur de l’amortissement corresponde à la valeur de l’amortissement critique ac. Q3 : Déterminer la valeur de l’amortissement a nécessaire pour le choix des amortisseurs du véhicule. Après essais, le constructeur automobile de ce véhicule modélisé comme un oscillateur linéaire à 1 DDL caractérisé par une suspension de raideur k et un amortisseur d’amortissement a souhaite améliorer le confort en doublant la fréquence propre non amortie f0 sans modifier le taux d’amortissement ξ. Q4 : Comment doit-on définir les nouvelles caractéristiques a’ et k’ de l’amortisseur et de la suspension ? On écrira ces nouvelles valeurs comme des proportions des anciennes, c’est à dire :
a' = α a et k’ = β k en précisant les valeurs de α et β. Annexe : des relations classiques du cours de vibration
EXERCICE 2 : UN CAS PRATIQUE DE POUTRE EN FLEXION La rigidité et la résistance d’un plongeoir sont des éléments de sécurité important qu’il convient de ne pas négliger notamment dans les lieux publics susceptibles d’accueillir des personnes en surpoids comme sur l’exemple de l’illustration. Les GM3 sont sollicités pour valider le dimensionnement ! On considère la modélisation ci-dessus dans laquelle on néglige le poids propre du plongeoir devant celui de la personne qui sera noté P. La charge est appliquée verticalement en B et le plongeoir est en appuis en A et O. O est l’origine des x !

Mise en situation et modélisation
Q1 Calculer les réactions aux appuis RA et RO. Commenter les signes et les sens des actions. Q2 Déterminer l’expression du moment fléchissant le long de la poutre sur chacun des tronçons AO et OB et tracer le diagramme correspondant. Préciser la section la plus sollicitée et la valeur de Mf en ce point.
Q3 On suppose que la section droite du plongeoir est un rectangle plein identique sur toute sa longueur L (ce qui n’est pas tout à fait vrai). Les dimensions transversales sont données ci-dessous. Quelle est la valeur du moment quadratique I de cette poutre par rapport à l'axe matérialisé par le trait d’axe ? Calculer la contrainte maximale σxx dans la section la plus critique. Commenter le niveau de contrainte obtenu.
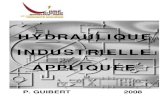
Q4 Par une méthode de votre choix que vous détaillerez, déterminer la flèche en B, c’est-à-dire, le déplacement vertical du point B. A toutes fins utiles, le sujet vous propose le tableau des intégrales de Mohr.
EXERCICE 3 : ETUDE POUR LA SIMULATION D’UN CRASH-TEST
Pour une étude des sollicitations auxquelles est soumis le passager d’un véhicule automobile au moment d’un choc, on utilise le modèle suivant:
• Une cellule S assimilée à un solide en translation rectiligne (le véhicule) de direction x
par rapport à un repère R0 (O, 0x
, 0y
, 0z
). I est un point de ce véhicule
et on note R le repère (I, 0x
, 0y
, 0z
) lié au solide S. On pose : 0 0( / ) ( ).V I R V t x=
,
V(t) étant une fonction dérivable connue. • Un mannequin sanglé rigidement sur le siège, cet ensemble étant schématisé par
deux solides. o Un solide S1, mobile en rotation par rapport au solide S autour de l’axe (I,
0z
). Le point I est le centre de l’articulation entre S1 et S. Soit α1(t) l’angle
de rotation de S1 par rapport au solide S. On notera R1(I, x
1, y
1, 0z
) le
repère lié au solide S1 avec α1(t)=( 0x
, x
1). Le centre de gravité de S1 est situé au point G1 avec 1 1IG a y=
.

o Un solide S2, mobile en rotation par rapport à S1 autour de l’axe (H, 0z
). Le point H est situé au centre de l’articulation entre S2 et S1 avec 1IH y=
ℓ .
Soit α2(t) l’angle de rotation de S2 par rapport au solide S1. On notera R2
le repère (H, x
2, y
2, z
0) lié au solide S2 avec α2(t)=( x
1, x
2) l’angle entre que fait le repère R2 par rapport à R1. Le centre de gravité de S2 est situé au point G2 tel que 2 2HG b y=
et le moment d’inertie autour de l’axe
H z
0 est noté C2. o Entre S1 et S2 est situé un dispositif élastique (E) qui simule la rigidité du
cou du passager. Ce dispositif exercice sur S2 un couple de la forme : C(ES2)=-K2α2 autour de l’axe z
0
Q0 Faire une figure de calcul représentant les deux rotations α1 et α2. Pour gagner un peu de temps dans les calculs préliminaires, on donne :
- Les vecteurs vitesses de rotation de R1/R0 et de R2/R0 s’écrivent à l’aide des angles α1 et α2 et leur dérivée par rapport au temps sous la forme :
( )( ) ( )
01 0 1
02 0 1 2
/
/
R R z
R R z
α
α α
Ω =
Ω = +
ɺ
ɺ ɺ
- En fonction des données du problème, notamment V, α1 et α2, les vecteurs vitesses des points I, H et G2 par rapport au repère R0 s’écrivent :
( )( )( ) ( )
00
0 10 1
0 1 22 0 1 1 2
/
/
/
V I R V x
V H R V x x
V G R V x x b x
α
α α α
=
= −
= − − +
ɺℓ
ɺ ɺ ɺℓ
Q1 Faire un graphe de liaison qui représente les solides par des cercles et les liaisons par des liens rectilignes (on supposera que la liaison véhicule – sol est un guidage en translation). On précisera les actions mécaniques en présence par des flèches.

On s’intéresse au mouvement de la tête et du corps au moment de l’impact représenté par une forte décélération de V(t). Il faut donc écrire deux relations différentielles en α1 et α2.
Q2 En vous appuyant sur le graphe des liaisons, choisir les deux projections du PFD qui répondent au besoin : deux équations différentielles qui ne font pas intervenir les actions de liaison. Une seule sera développée dans la suite mais en Q2 on n’attend pas de calcul mais des justifications des choix faits.
Q3 Exprimer le moment cinétique de la tête du mannequin S2 par rapport au centre de l’articulation H dans le mouvement par rapport au repère fixe R0.
Q4 En déduire, en fonction des données du problème, la projection du moment dynamique de la tête du mannequin S2 par rapport au centre de l’articulation H dans le mouvement par rapport au repère fixe R0. C'est-à-dire le terme 0 2 0( ) . ( / )Ht z S Rδ∆ =
Q5 Faire le bilan des actions mécaniques qui s’exercent sur la tête du mannequin S2 et calculer le moment de ces actions par rapport au centre de l’articulation H. C'est-à-dire le terme 20 2( ) . ( )HM t z M S S= →
.
Q6 On considère que la ceinture de sécurité est très rigide et qu’en première approximation α1 et reste constant (α1=0 correspondant au siège « droit ») à tout instant. Montrer que l’équation ∆(t)=M(t) devient :
( )2 2 2 2 2 2 2sin cosC K m b g Vα α α α+ = + ɺɺɺ
On suppose une décélération brutale du véhicule telle que :
( )V t γ= −ɺ
Où γ est une constante positive évaluée à γ=Vo/T où Vo est la vitesse du véhicule juste avant l’impact et T la durée de l’impact avant l’arrêt complet du véhicule. On fait aussi l’hypothèse que α2 reste petit au voisinage de la position α2=0 « tête verticale ».
Q7 Que devient l’équation trouvée en Q5 si α2(t) est « petit » ainsi que ses dérivées ? On mettra cette équation sous la forme 2
2 2 Cα ω α+ =ɺɺ où C et ω sont des expressions des
paramètres C2, K2, m2, b, g et γ que l’on précisera.
On retient une solution de la forme : α2(t) = a sin(ωt) + b cos(ωt) + c
Q8 A l’instant t=0 l’angle α2 et sa dérivée son nuls. Déterminer les constantes a et b et c et récapituler l’expression de α2(t). En déduire l’expression du couple maximal encaissé par le cou du mannequin en fonction de Vo, T, K2 et des autres données du problème.

ANNEXE : INTEGRALES DE MOHR
avec : α = aℓ et β =
bℓ = 1 - α