Mathématiques Appliquées à la Physiqueww2.cnam.fr/physique/MAP/2011-11-02_MAP_Fonctions.pdf ·...
40
1/40 Mathématiques Appliquées à la Physique © Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011 M M a a t t h h é é m m a a t t i i q q u u e e s s A A p p p p l l i i q q u u é é e e s s à à l l a a P P h h y y s s i i q q u u e e Gottfried Wilhelm LEIBNIZ "Outre la logique, Leibniz a développé en géométrie ce qu'il appela Geometria situs et Analysis situs, annonçant la topologie combinatoire et les premiers travaux d’Euler sur ce qui deviendra la théorie des graphes".
Transcript of Mathématiques Appliquées à la Physiqueww2.cnam.fr/physique/MAP/2011-11-02_MAP_Fonctions.pdf ·...
1/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
MMaatthhéémmaattiiqquueess AApppplliiqquuééeess àà llaa PPhhyyssiiqquuee
Gottfried Wilhelm LEIBNIZ "Outre la logique, Leibniz a développé en géométrie ce qu'il appela Geometria situs et Analysis situs, annonçant la topologie combinatoire et les premiers travaux
d’Euler sur ce qui deviendra la théorie des graphes".
2/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Table des matières
Mathématiques Appliquées à la Physique 1 1 Les fonctions 4
1.1. Définitions 4 1.1.1 Application, bijection 4
1. Exemples ......................................................................................................................................... 4 1.1.2 Fonction 4
1.1.2.1 Définition............................................................................................................................... 4 1.1.2.2 Ensemble de définition d’une fonction .................................................................................. 4 1.1.2.3 Graphe d’une fonction ........................................................................................................... 4
1.1.3 Fonction monotone 5 1.1.4 Fonction réciproque 5
2. Exemple .......................................................................................................................................... 5 1.1.5 Limite d’une fonction 6
1.1.5.1 Définition............................................................................................................................... 6 1.1.5.2 Valeurs de certaines limites de fonctions usuelles................................................................. 6 1.1.5.3 Opérations sur les limites....................................................................................................... 7 1.1.5.4 Limite d’une somme .............................................................................................................. 7 1.1.5.5 Limite du produit d’une fonction par un réel λ...................................................................... 7 1.1.5.6 Limite du quotient de deux fonctions .................................................................................... 7 1.1.5.7 Cas usuels .............................................................................................................................. 8 3. Exemples ......................................................................................................................................... 8
1.2. Continuité d’une fonction 8 4. Exemple : ........................................................................................................................................ 8 5. Exemple : continuité du potentiel créé par une boule chargée ........................................................ 9
1.3. Parité et périodicité des fonctions 9 6. Exemples :..................................................................................................................................... 10 7. Exemples :..................................................................................................................................... 10 8. Exemples :..................................................................................................................................... 11
1.4. Dérivée d’une fonction 11 1.4.1 Opérations de dérivation 12 1.4.2 Table élémentaire de dérivation 12 1.4.3 Courbure du graphe d’une fonction 13
9. Exemples : fonctions convexes et concaves .................................................................................. 14 10. Exemple : calcul de quelques dérivées.......................................................................................... 14 11. Exemple : Calcul des vecteurs vitesse et accélération en coordonnées polaires ........................... 15
1.5. Tableau de variation 16 12. Exemple : ...................................................................................................................................... 17
1.6. Extremums, point d’inflexion 17 13. Exemple : Variation de l’énergie potentielle................................................................................. 18 14. Exemple : Calcul d’un temps de parcours minimum .................................................................... 18 15. Exemple : Distribution de l’énergie cinétique............................................................................... 19
1.7. Dérivées partielles 20 16. Exemple : Les opérateurs vectoriels.............................................................................................. 21 17. Exemple : Etablissement de l’équation des ondes......................................................................... 21
1.8. Etude de quelques fonctions élémentaires 23 1.8.1 La fonction affine 23
1.8.1.1 Généralités ........................................................................................................................... 23 18. Exemples de fonctions affines....................................................................................................... 23 1.8.1.2 Cas particuliers de la fonction affine ................................................................................... 24
1.8.1.2.1 La fonction linéaire 24 19. Exemples :..................................................................................................................................... 25
1.8.1.2.2 La fonction linéaire constante ou fonction constante 25 20. Exemple de fonction constante...................................................................................................... 25
1.8.2 La fonction puissance 25
3/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.8.2.1 la fonction y = x2.................................................................................................................. 25 21. Exemple : L’oscillateur harmonique ............................................................................................. 26 1.8.2.2 La fonction x3 ...................................................................................................................... 26 22. Exemple : Loi de Kepler ............................................................................................................... 27 1.8.2.3 La fonction puissance entière xn pour n *∈ .................................................................... 27 1.8.2.4 La fonction racine carrée ..................................................................................................... 27 23. Exemple : l’écart type ................................................................................................................... 28 1.8.2.5 La fonction y = x-1 ............................................................................................................... 28 24. Exemple : Le potentiel électrostatique 1V
r⎛ ⎞⎜ ⎟⎝ ⎠
............................................................................. 29
25. Exemple : Condensateur plan 1Ce
⎛ ⎞⎜ ⎟⎝ ⎠
........................................................................................... 29
1.8.2.6 La fonction y = x-2 ............................................................................................................... 29 26. Exemple : Loi de Coulomb ........................................................................................................... 30 27. Exemple : Loi de la gravitation universelle................................................................................... 30 1.8.2.7 Pour résumer........................................................................................................................ 31
1.8.3 La fonction parabolique 31 1.8.3.1 Définition............................................................................................................................. 31 1.8.3.2 Cas où a > 0 ......................................................................................................................... 31 1.8.3.3 Cas où a < 0 ......................................................................................................................... 32
1.8.4 La fonction logarithme 32 28. Exemple : Loi de Boltzmann......................................................................................................... 33
S k ln= Ω 33 1.8.5 La fonction exponentielle ex 34
1.8.5.1 Définition............................................................................................................................. 34 29. Exemple : Taux d’accroissement d’une population ...................................................................... 34
1.8.6 La fonction e -x 35 1.8.6.1 Définition............................................................................................................................. 35 30. Exemple : L’absorption de la lumière par un matériau homogène. (Loi de Beer et Lambert) ...... 35
1.8.7 Les fonctions trigonométriques 36 1.8.7.1 La fonction sinus.................................................................................................................. 36 1.8.7.2 La fonction cosinus.............................................................................................................. 36 1.8.7.3 La fonction tangente ............................................................................................................ 37 31. Exemple : Elongation, vitesse et accélération d’un oscillateur harmonique libre non amorti ....... 38
1.8.8 Les fonctions hyperboliques 39

4/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1 Les fonctions
1.1. Définitions
1.1.1 Application, bijection Une application d’un ensemble de départ A dans un ensemble d’arrivée B fait correspondre à chaque élément de
A un élément unique (appelé image) dans l’ensemble B.
Une bijection est une application telle que chaque élément de l’ensemble d’arrivée B admet un antécédent
unique dans l’ensemble de départ E.
1. Exemples
La fonction [ ]sin : , 1, 12 2π π⎡ ⎤− → −⎢ ⎥⎣ ⎦
est une bijection.
La fonction [ ]sin : 1, 1→ − n’est pas une bijection.
1.1.2 Fonction
1.1.2.1 Définition
Une relation de A vers B, telle que tout élément de A est relié à un élément au plus (donc à zéro ou un) de B est
appelée une fonction.
La plupart des phénomènes physiques se traduisent par l’existence de fonctions mathématiques de vers .
On parle alors de fonctions réelles.
1.1.2.2 Ensemble de définition d’une fonction
Soient A et B deux ensembles inclus dans : A B⊂ ∧ ⊂ .
Soit une fonction f qui va d’un ensemble A vers un ensemble B. Si un élément x de A est relié à un élément y de
B, on écrit alors y = f(x). On dit que y est l’image de x par f.
L’ensemble A ayant une image par f s’appelle domaine de f.
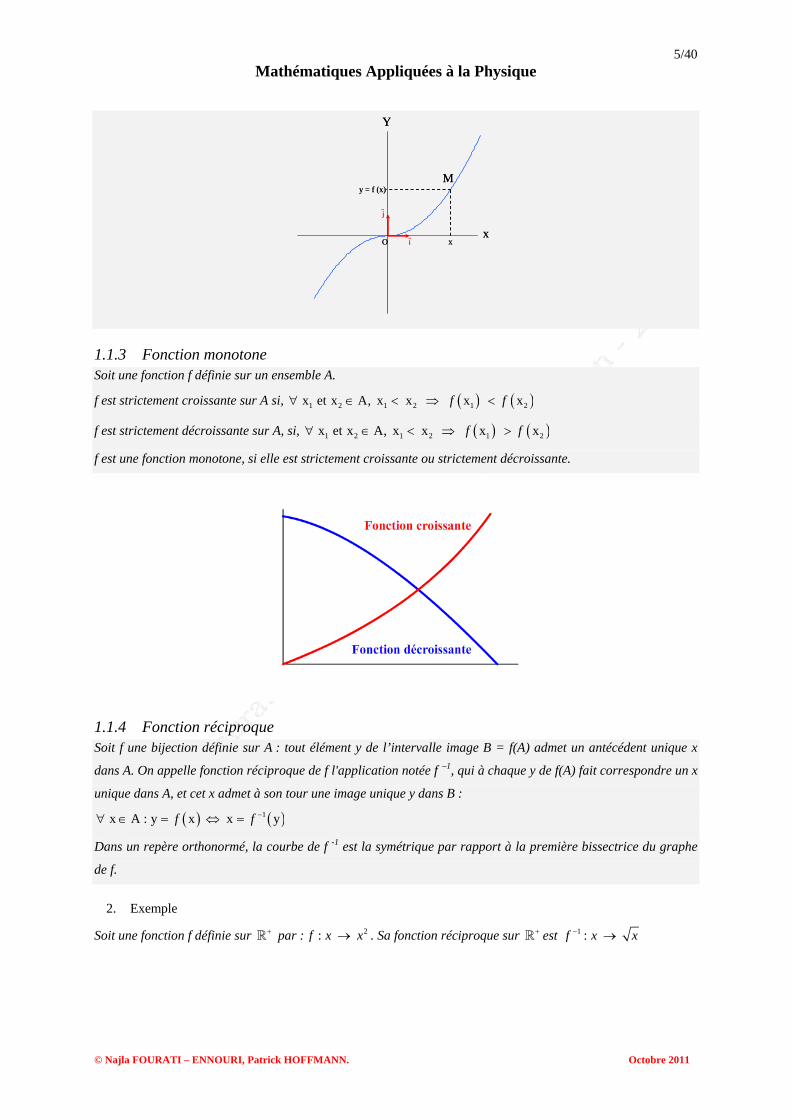
1.1.2.3 Graphe d’une fonction
Soit une fonction f définie sur un domaine A. Considérons deux axes (OX) et (OY) portant respectivement les
vecteurs de base i et j . En pratique, on choisit souvent ces axes perpendiculaires, et les vecteurs i et j
unitaires ( )i j 1= = .
A tout point M de coordonnées (x, y) on peut associer le vecteur OM x i y j= + .
L’ensemble des positions M(x, y) représente le graphe de f.
5/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
i
j
Ox
Y
M
x
y = f (x)
i
j
Ox
Y
M
x
y = f (x)
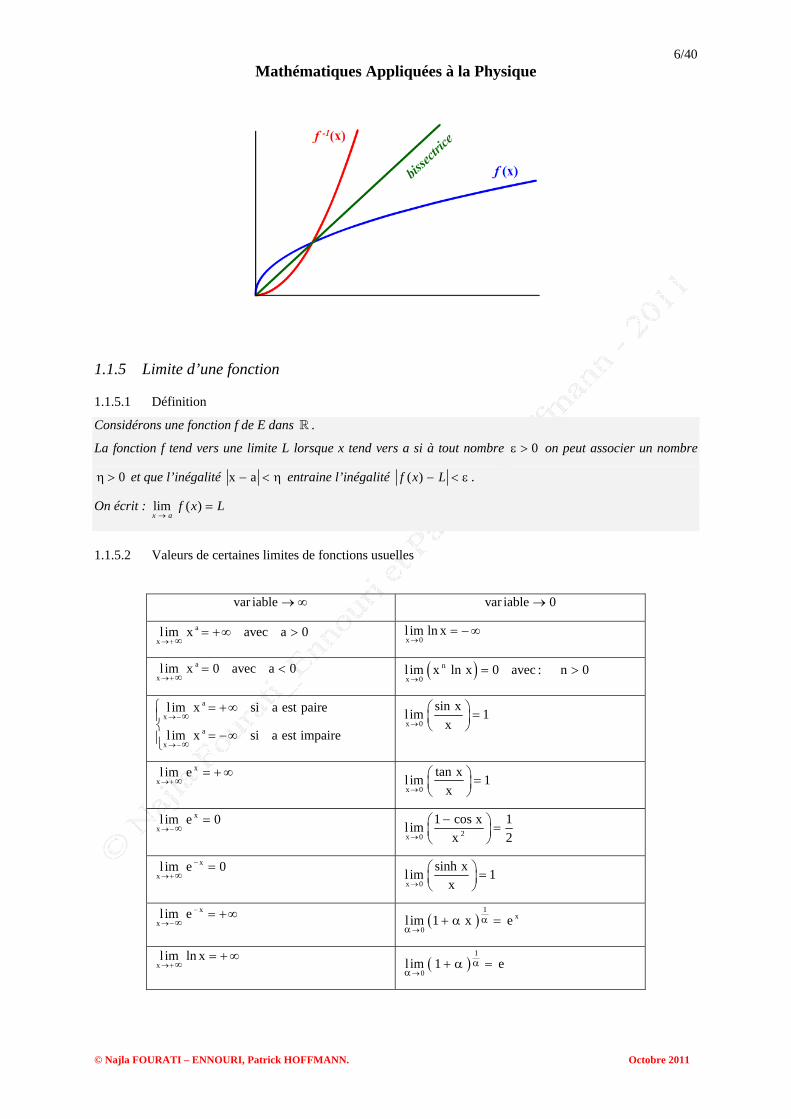
1.1.3 Fonction monotone Soit une fonction f définie sur un ensemble A.
f est strictement croissante sur A si, ( ) ( )1 2 1 2 1 2x et x A, x x x x f f ∀ ∈ < ⇒ <
f est strictement décroissante sur A, si, ( ) ( )1 2 1 2 1 2x et x A, x x x x f f ∀ ∈ < ⇒ >
f est une fonction monotone, si elle est strictement croissante ou strictement décroissante.
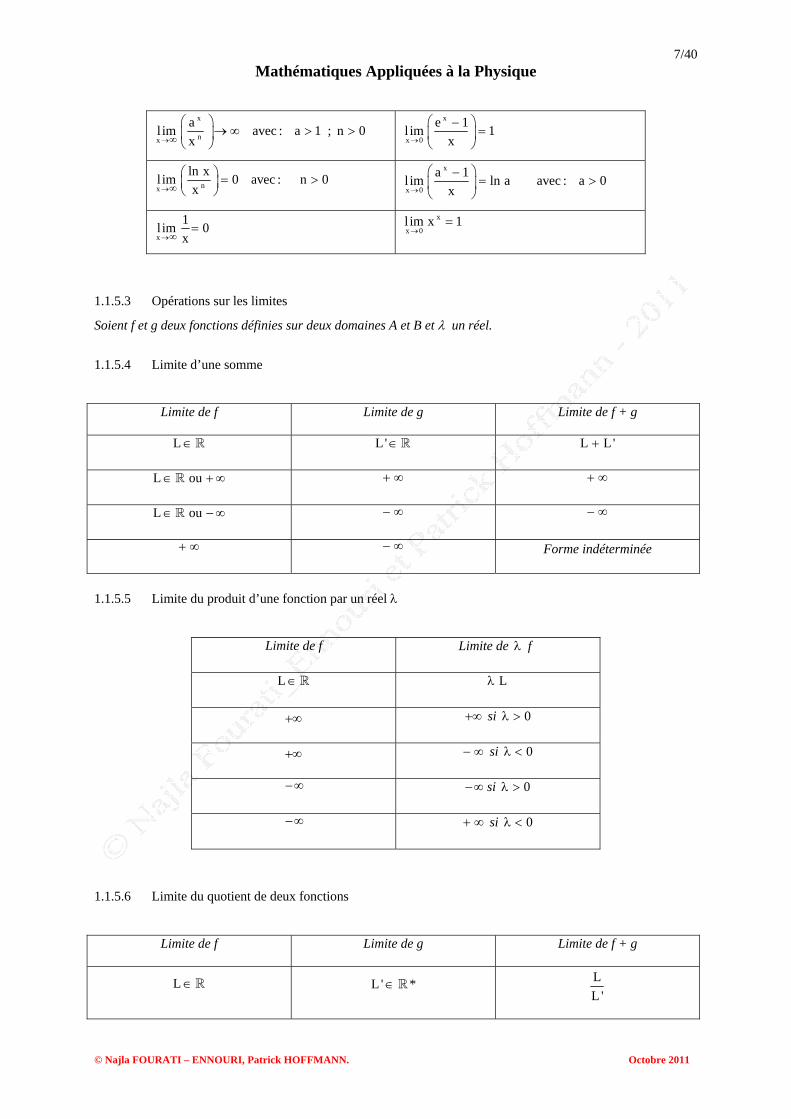
1.1.4 Fonction réciproque Soit f une bijection définie sur A : tout élément y de l’intervalle image B = f(A) admet un antécédent unique x
dans A. On appelle fonction réciproque de f l'application notée f –1, qui à chaque y de f(A) fait correspondre un x
unique dans A, et cet x admet à son tour une image unique y dans B :
( ) ( )1x A : y x x yf f −∀ ∈ = ⇔ =
Dans un repère orthonormé, la courbe de f -1 est la symétrique par rapport à la première bissectrice du graphe
de f.
2. Exemple
Soit une fonction f définie sur + par : 2:f x x→ . Sa fonction réciproque sur + est 1 :f x x− →
6/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.1.5 Limite d’une fonction
1.1.5.1 Définition
Considérons une fonction f de E dans .
La fonction f tend vers une limite L lorsque x tend vers a si à tout nombre 0ε > on peut associer un nombre
0η > et que l’inégalité x a− < η entraine l’inégalité ( ) − < εf x L .
On écrit : lim ( )→
=x a
f x L
1.1.5.2 Valeurs de certaines limites de fonctions usuelles
var iable → ∞ var iable 0→
a
xl im x avec a 0→+∞
= +∞ > x 0l im ln x
→= − ∞
a
xl im x 0 avec a 0→+∞
= < ( )n
x 0l im x ln x 0 avec : n 0
→= >
a
x
a
x
l im x si a est paire
l im x si a est impaire→−
→−
∞
∞
⎧ = +∞⎪⎨
= −∞⎪⎩
x 0
sin xl im 1x→
⎛ ⎞ =⎜ ⎟⎝ ⎠
x
xl im e→+∞
= + ∞ x 0
tan xl im 1x→
⎛ ⎞ =⎜ ⎟⎝ ⎠
x
xl im e 0→−∞
= 2x 0
1 cos x 1l imx 2→
−⎛ ⎞ =⎜ ⎟⎝ ⎠
x
xl im e 0−
→ +∞=
x 0
sinh xl im 1x→
⎛ ⎞ =⎜ ⎟⎝ ⎠
x
xl im e −
→ −∞= +∞ ( )
1x
0l im 1 x e
→α
α+ α =
xl im ln x→ +∞
= + ∞ ( )1
0l im 1 e
→α
α+ α =
7/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
x
nx
al im avec : a 1 ; n 0x→∞
⎛ ⎞→ ∞ > >⎜ ⎟
⎝ ⎠
x
x 0
e 1l im 1x→
⎛ ⎞−=⎜ ⎟
⎝ ⎠
nx
ln xl im 0 avec : n 0x→∞
⎛ ⎞ = >⎜ ⎟⎝ ⎠
x
x 0
a 1l im ln a avec : a 0x→
⎛ ⎞−= >⎜ ⎟
⎝ ⎠
x
1l im 0x→∞
= x
x 0l im x 1
→=
1.1.5.3 Opérations sur les limites
Soient f et g deux fonctions définies sur deux domaines A et B et λ un réel.
1.1.5.4 Limite d’une somme
Limite de f Limite de g Limite de f + g
L ∈ L' ∈ L L'+
L ou∈ + ∞ + ∞ + ∞
L ou∈ − ∞ − ∞ − ∞
+ ∞ − ∞ Forme indéterminée
1.1.5.5 Limite du produit d’une fonction par un réel λ
Limite de f Limite de fλ
L ∈ Lλ
+∞ +∞ si 0λ >
+∞ − ∞ si 0λ <
−∞ −∞ si 0λ >
−∞ + ∞ si 0λ <
1.1.5.6 Limite du quotient de deux fonctions
Limite de f Limite de g Limite de f + g
L ∈ L ' *∈ LL '
8/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
L ∈ ∞ 0
∞ L ' *∈ ∞
∞ 0 Forme indéterminée
0 0 Forme indéterminée
1.1.5.7 Cas usuels
La limite d’une fonction polynôme en ± ∞ est la limite du terme de plus haut degré.
La limite d’une fonction rationnelle en ± ∞ est la limite du quotient des termes de plus haut degré.
3. Exemples 3 2 3
x x
4 2 4
x x
3 2 3
6 6x x
3 2 3
x x
lim 5x 8x 3 lim 5x
lim x x 2x lim x
5x 9 x 2 5xlim lim 07 x 10 7 x
x x 2x xlim limx 2 x
→+ ∞ →+ ∞
→− ∞ →+ ∞
→+ ∞ →+ ∞
→− ∞ →+ ∞
+ + = = + ∞
− + + = − = − ∞
+ += =
+
+ += = + ∞
+
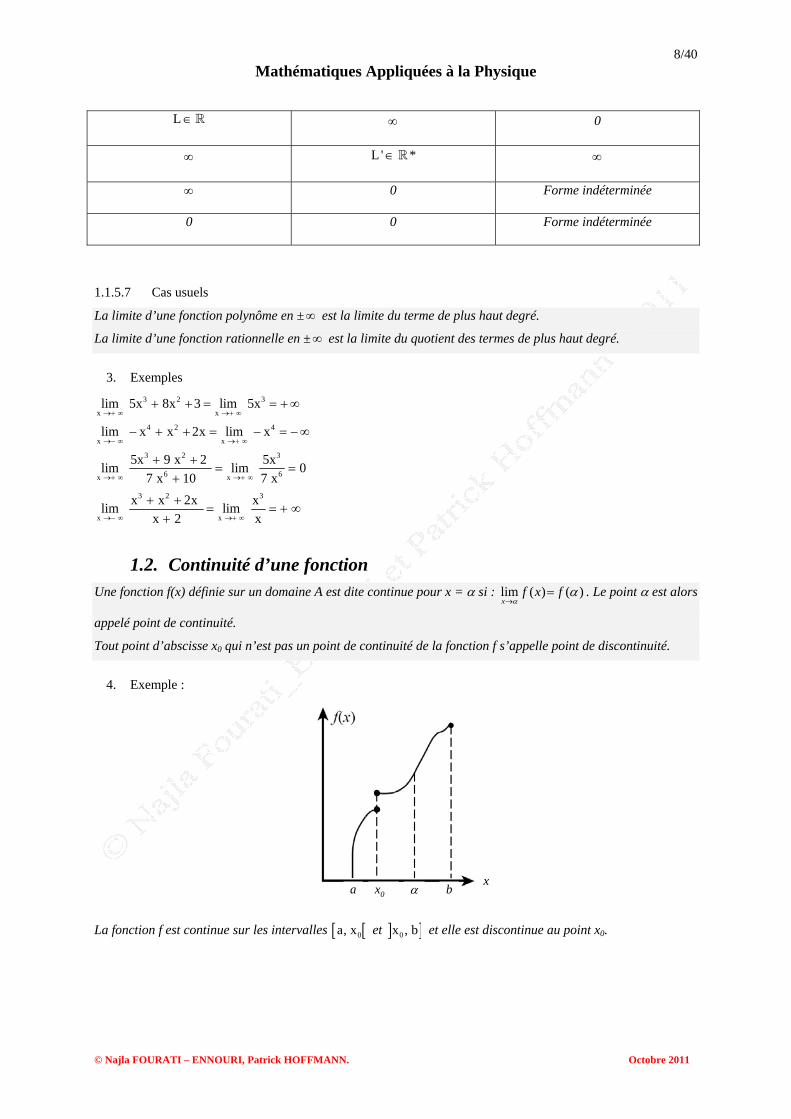
1.2. Continuité d’une fonction Une fonction f(x) définie sur un domaine A est dite continue pour x = α si : lim ( ) ( )
→=
xf x f
αα . Le point α est alors
appelé point de continuité.
Tout point d’abscisse x0 qui n’est pas un point de continuité de la fonction f s’appelle point de discontinuité.
4. Exemple :
a bx
x0 αa bx
x0 α
La fonction f est continue sur les intervalles [ [0a, x et ] ]0x , b et elle est discontinue au point x0.

9/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
5. Exemple : continuité du potentiel créé par une boule chargée
On dispose d'une sphère de centre O et de rayon R chargée uniformément en volume. Sa densité volumique est
égale à ρ et sa charge totale est égale à Q.
Le champ électrique en tout point de l’espace vaut : ( )
( )
3
20
0
3
3
⎧= ≥⎪⎪
⎨⎪ = ≤⎪⎩
ρε
ρε
r
r
RE r u si r Rr
rE r u si r R
Le potentiel électrique V(r) est calculé à partir de la relation V E(r) dr= − ∫ . On montre que :
pour r R> , 3
0
RV(r)3 rρ
=ε
pour r < R, ( )2
0
rV r Edr D6ρ
=− = − +ε∫ (D est une constante)
Comme le potentiel V est continu à la traversée d’une surface, on a alors : ( ) ( )pour r R, V r R V r R= < = >
Par conséquent : 2
0
RD2ρ
=ε
et 2
2
0
rV R2 3
⎛ ⎞ρ= −⎜ ⎟ε ⎝ ⎠
V(r)
rR
V(r) pour r < R V(r) pour r > R
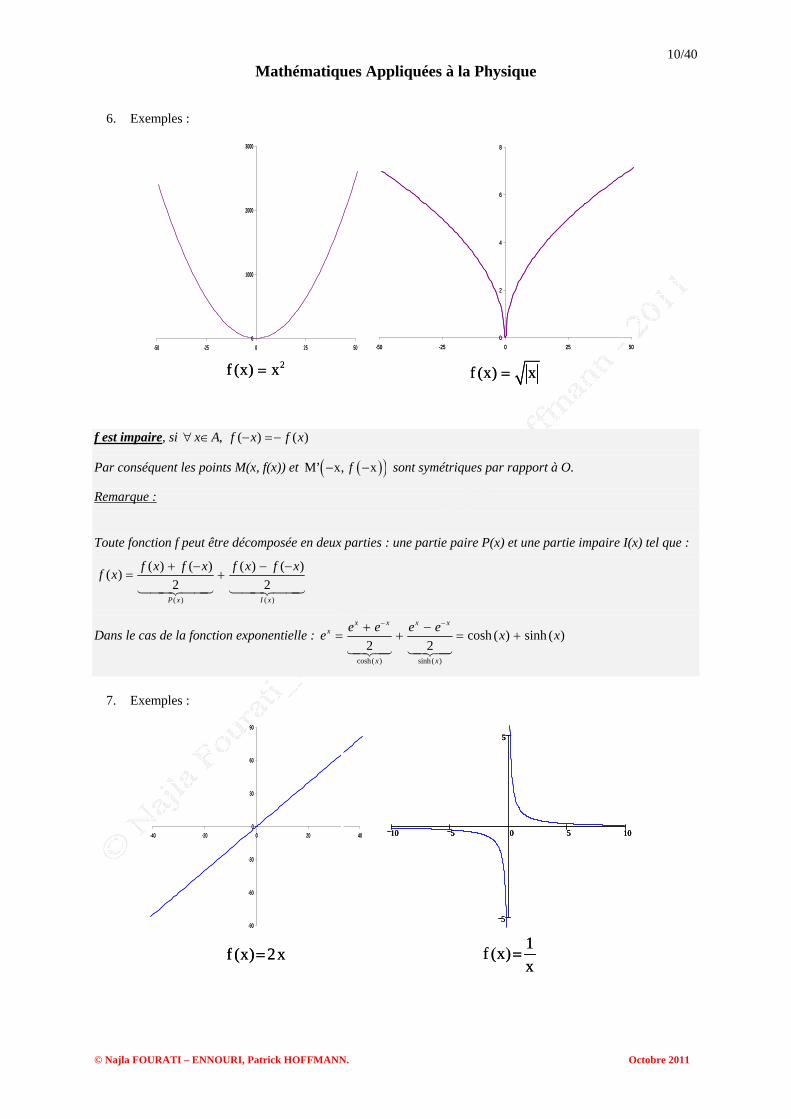
1.3. Parité et périodicité des fonctions Considérerons une fonction f définie sur un ensemble de définition A.
f est paire, si , ( ) ( )x A f x f x∀ ∈ − =
Par conséquent, les points M(x, f(x)) et ( )( )M’ x, xf− − sont symétriques par rapport à l’axe des y.
10/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
6. Exemples :
0
1000
2000
3000
-50 -25 0 25 500
2
4
6
8
-50 -25 0 25 50
2f (x) x= f (x) x=
0
1000
2000
3000
-50 -25 0 25 500
2
4
6
8
-50 -25 0 25 50
2f (x) x= f (x) x=
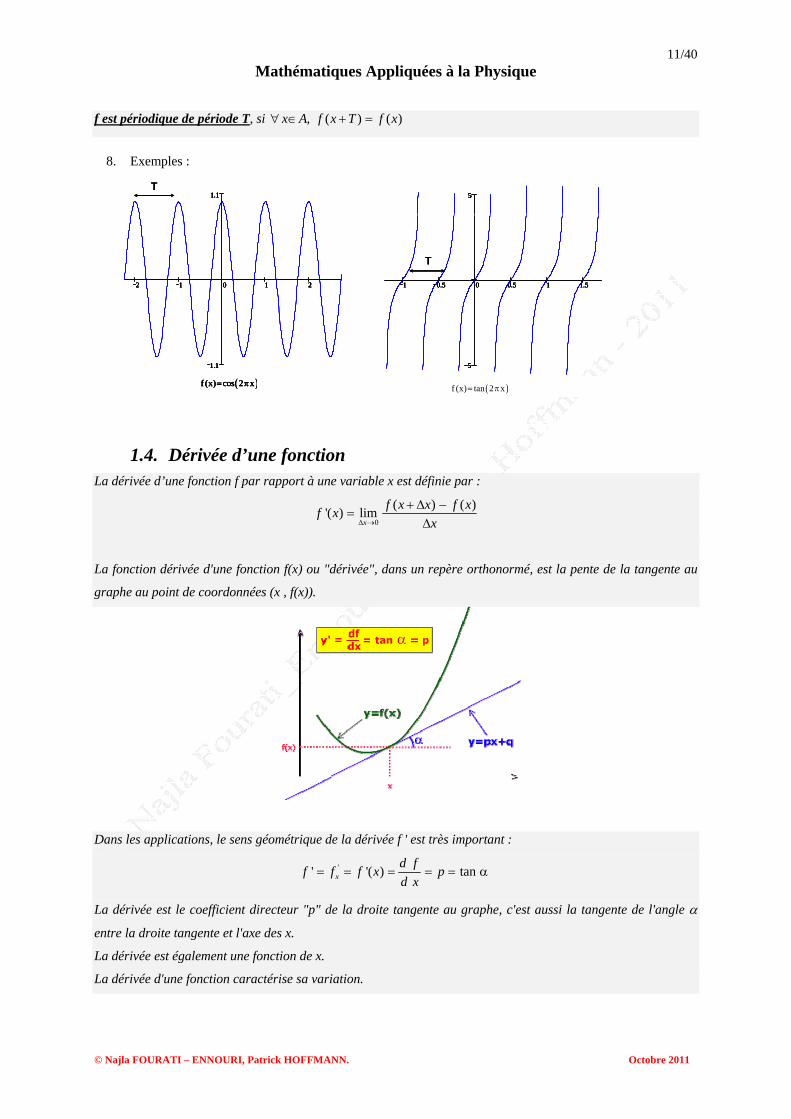
f est impaire, si , ( ) ( )x A f x f x∀ ∈ − =−
Par conséquent les points M(x, f(x)) et ( )( )M’ x, xf− − sont symétriques par rapport à O.
Remarque :
Toute fonction f peut être décomposée en deux parties : une partie paire P(x) et une partie impaire I(x) tel que :
( ) ( )
( ) ( ) ( ) ( )( )2 2
+ − − −= +
P x I x
f x f x f x f xf x
Dans le cas de la fonction exponentielle :
cosh( ) sinh( )
cosh ( ) sinh ( )2 2
x x x xx
x x
e e e ee x x− −+ −
= + = +
7. Exemples :
-90
-60
-30
0
30
60
90
-40 -20 0 20 40
f (x) 2x=
10 5 0 5 10
5
5
1f (x)x
=
-90
-60
-30
0
30
60
90
-40 -20 0 20 40
f (x) 2x=
10 5 0 5 10
5
5
10 5 0 5 10
5
5
1f (x)x
=
11/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
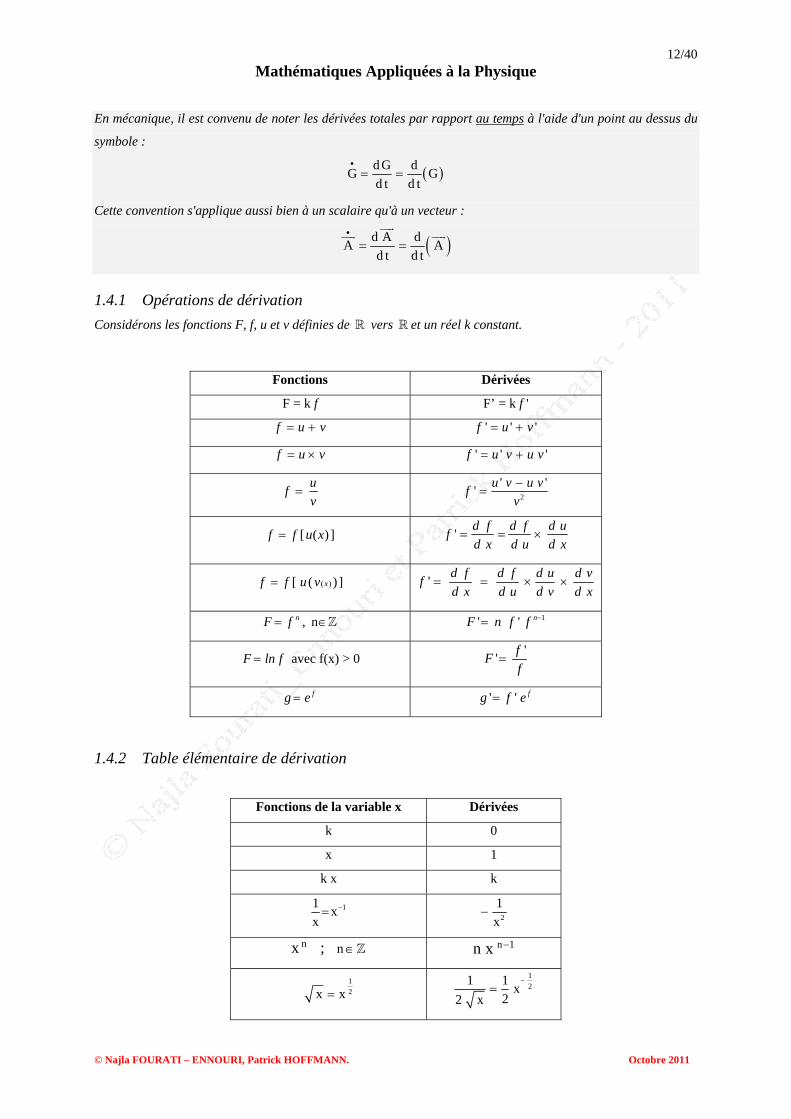
f est périodique de période T, si , ( ) ( )x A f x T f x∀ ∈ + =
8. Exemples :
2 1 0 1 2
1.1
1.1
1 0.5 0 0.5 1 1.5
5
55
5−
f x( )
1.761.25− x( )f (x) cos 2 x= π ( )f (x) tan 2 x= π
T
T
2 1 0 1 2
1.1
1.1
1 0.5 0 0.5 1 1.5
5
55
5−
f x( )
1.761.25− x( )f (x) cos 2 x= π ( )f (x) tan 2 x= π
T
T
2 1 0 1 2
1.1
1.1
1 0.5 0 0.5 1 1.5
5
55
5−
f x( )
1.761.25− x( )f (x) cos 2 x= π ( )f (x) tan 2 x= π
2 1 0 1 2
1.1
1.1
2 1 0 1 2
1.1
1.1
1 0.5 0 0.5 1 1.5
5
55
5−
f x( )
1.761.25− x
1 0.5 0 0.5 1 1.5
5
55
5−
f x( )
1.761.25− x( )f (x) cos 2 x= π ( )f (x) tan 2 x= π
TT
TT
1.4. Dérivée d’une fonction La dérivée d’une fonction f par rapport à une variable x est définie par :
0
( ) ( )'( ) limx
f x x f xf xxΔ →
+ Δ −=
Δ
La fonction dérivée d'une fonction f(x) ou "dérivée", dans un repère orthonormé, est la pente de la tangente au
graphe au point de coordonnées (x , f(x)).
Dans les applications, le sens géométrique de la dérivée f ' est très important :
'' '( ) tanxd ff f f x pd x
= = = = = α
La dérivée est le coefficient directeur "p" de la droite tangente au graphe, c'est aussi la tangente de l'angle α
entre la droite tangente et l'axe des x.
La dérivée est également une fonction de x.
La dérivée d'une fonction caractérise sa variation.
12/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
En mécanique, il est convenu de noter les dérivées totales par rapport au temps à l'aide d'un point au dessus du
symbole :
( )d G dG Gd t d t
•
= =
Cette convention s'applique aussi bien à un scalaire qu'à un vecteur :
( )d A dA Ad t d t
•
= =
1.4.1 Opérations de dérivation Considérons les fonctions F, f, u et v définies de vers et un réel k constant.
Fonctions Dérivées
F = k f F’ = k f '
f u v= + ' ' 'f u v= +
f u v= × ' ' 'f u v u v= +
ufv
= 2
' '' u v u vfv−
=
[ ( ) ]f f u x= ' d f d f d ufd x d u d x
= = ×
( )[ ( ) ]xf f u v= ' d f d f d u d vfd x d u d v d x
= = × ×
nF f= , n∈ 1' ' nF n f f −=
F ln f= avec f(x) > 0 '' fFf
=
fg e= ' ' fg f e=
1.4.2 Table élémentaire de dérivation
Fonctions de la variable x Dérivées
k 0
x 1
k x k
11 xx
−= 2
1x
−
n nx ; ∈ n 1n x −
12x x=
121 1 x
22 x−
=

13/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
;x α α ∈ 1x α −α
sin x cos x
cos x - sin x
tan x 22
11 tan xcos x
+ =
arcsin x 2
11 x−
arccos x 2
11 x−
−
arctan x 2
11 x+
ex ex
ln x 1x
sinh x cosh x
cosh x sinh x
tanh x 22
11 tanh xcosh x
− =
arsinh x 2
1x 1+
arccosh x 2
1x 1−
artanh x 2
11 x−
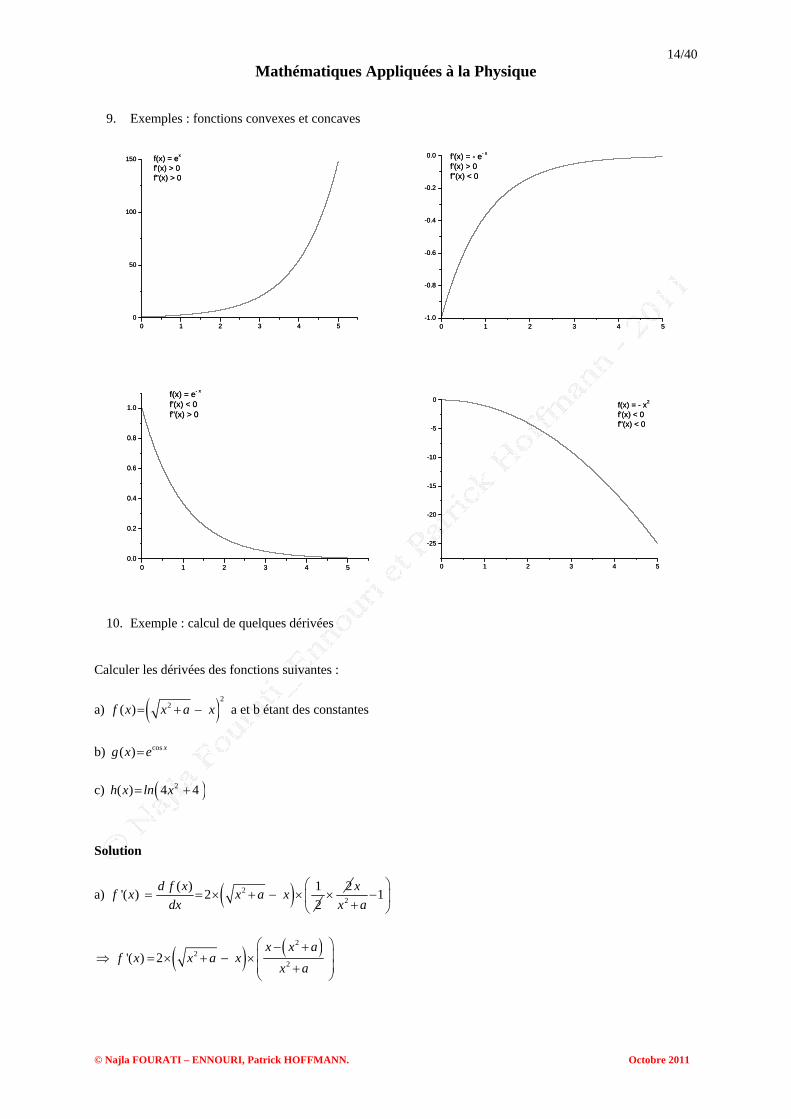
1.4.3 Courbure du graphe d’une fonction La courbure du graphe d’une fonction est déterminée à partir du signe de la dérivée seconde.
Soit f(x), une fonction deux fois continûment dérivable sur un intervalle A. La fonction f est :
- Convexe si "( ) 0f x x A> ∀ ∈ ;
- Concave si "( ) 0f x x A< ∀ ∈
14/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
9. Exemples : fonctions convexes et concaves
0 1 2 3 4 5
-25
-20
-15
-10
-5
0f(x) = - x2
f'(x) < 0f"(x) < 0
0 1 2 3 4 50.0
0.2
0.4
0.6
0.8
1.0
f(x) = e- x
f'(x) < 0f"(x) > 0
0 1 2 3 4 50
50
100
150 f(x) = ex
f'(x) > 0f"(x) > 0
0 1 2 3 4 5-1.0
-0.8
-0.6
-0.4
-0.2
0.0 f'(x) = - e- x
f'(x) > 0f"(x) < 0
0 1 2 3 4 5
-25
-20
-15
-10
-5
0f(x) = - x2
f'(x) < 0f"(x) < 0
0 1 2 3 4 50.0
0.2
0.4
0.6
0.8
1.0
f(x) = e- x
f'(x) < 0f"(x) > 0
0 1 2 3 4 50
50
100
150 f(x) = ex
f'(x) > 0f"(x) > 0
0 1 2 3 4 5-1.0
-0.8
-0.6
-0.4
-0.2
0.0 f'(x) = - e- x
f'(x) > 0f"(x) < 0
10. Exemple : calcul de quelques dérivées
Calculer les dérivées des fonctions suivantes :
a) ( )22( )f x x a x= + − a et b étant des constantes
b) cos( ) xg x e=
c) ( )2( ) 4 4h x ln x= +
Solution
a) ( )2( ) 1'( ) 22
d f xf x x a xdx
= = × + − ×2
× 2 1xx a
⎛ ⎞−⎜ ⎟+⎝ ⎠
( ) ( )22
2'( ) 2x x a
f x x a xx a
⎛ ⎞− +⎜ ⎟⇒ = × + − ×⎜ ⎟+⎝ ⎠

15/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
b) ( ) cos( )'( ) sin xd g xg x x ed x
= = −
c) 2 2
( ) 8 2'( )4 4 1
d h x x xh xd x x x
= = =+ +
11. Exemple : Calcul des vecteurs vitesse et accélération en coordonnées polaires
Dans le système de coordonnées polaires, un point M est
parfaitement repéré si on connaît :
- la distance OM = r
- l'angle ϕ que fait le segment (OM) avec l'axe (Ox).
On introduit ainsi une nouvelle base orthonormée tournante formée
de deux vecteurs unitaires ( )ru , uϕ qui constituent la base des
coordonnées polaires tel que :
ur = vecteur unitaire suivant la direction de OM
uϕ = vecteur unitaire perpendiculaire à ur dans le sens trigonométrique.
Le vecteur position est défini par la relation : rOM r u=
Dans la base ( )O, i , j , les expressions des vecteurs polaires sont :
ru cos i sin j
u sin i cos jϕ
⎧ = ϕ + ϕ⎪⎨
= − ϕ + ϕ⎪⎩
Leurs dérivées premières et secondes par rapport à ϕ sont définies par :
r
r
d u sin i cos j ud
d ucos i sin j u
d
ϕ
ϕ
⎧= − ϕ + ϕ =⎪ ϕ⎪
⎨⎪ = − ϕ − ϕ = −⎪ ϕ⎩
O
My
xi
j rϕ
ruuϕ
O
My
xi
j rϕ
O
My
xi
j rϕ
ruuϕ

16/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
( )
r
2r r
r2
u
2r r
2
u
d ud u d d u ud d d d
d ud u d ud d u ud d d d d
ϕ
ϕ
ϕ ϕϕ
−
⎧ ⎛ ⎞= = = −⎪ ⎜ ⎟⎜ ⎟ϕ ϕ ϕ ϕ⎪ ⎝ ⎠
⎪⎪⎨
−⎛ ⎞⎪= = = − =−⎜ ⎟⎪ ⎜ ⎟ϕ ϕ ϕ ϕ ϕ⎪ ⎝ ⎠
⎪⎩
Les vecteurs ru et uϕ dépendent de l’angle ϕ, qui lui-même dépend du temps t. Dériver ces vecteurs par rapport
au temps revient donc à les dériver par rapport à l’angle ϕ, qui lui-même doit être dérivé par rapport au temps.
Par conséquent :
Leurs dérivés premières par rapport aux temps sont définies par :
r r
r
d u d u d ud t d d t
d u d u d ud t d d t
•
ϕ
•ϕ ϕ
⎧ ⎛ ⎞ ϕ= × = ϕ⎪ ⎜ ⎟⎜ ⎟ϕ⎪ ⎝ ⎠
⎨⎛ ⎞ ϕ⎪ = × = −ϕ⎜ ⎟⎪ ⎜ ⎟ϕ⎝ ⎠⎩
Dans la base des coordonnées polaires la vitesse v est définie par :
( ) rr r r
dOM d d r d uv r u u r v r u r ud t d t d t d t
••ϕ= = = + ⇒ = + ϕ
Dans la base des coordonnées polaires l’accélération a est définie par :
r r
rr
r
d v d d da r u r u r u r ud t dt dt dt
d ud r d u d r du r u r u rd t d t d t d t d t
r u r u
• •• •ϕ ϕ
••• •• ϕ
ϕ ϕ
••• •ϕ
⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = + ϕ = + ϕ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
⎡ ⎤ ⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ϕ⎢ ⎥ ⎢ ⎥⎜ ⎟ ⎜ ⎟= + + ϕ + + ϕ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦ ⎣ ⎦
= + ϕ2
2 2r r2
d OMr u r u r u a r r u 2 r r ud t
•• ••• • • •••• •ϕ ϕ ϕ
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞+ ϕ + ϕ − ϕ ⇒ = = − ϕ + ϕ + ϕ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠
1.5. Tableau de variation Le tableau de variation est un intermédiaire qui permet de tracer la courbe représentative (graphe) d’une
fonction f. C'est un tableau où on indique, par des flèches "vers le haut" ou "vers le bas" si la fonction est
croissante ou décroissante. On y indique souvent aussi les limites aux bornes de l'ensemble de définition, ainsi
que quelques valeurs particulières (essentiellement aux points où la fonction change de croissance).
17/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
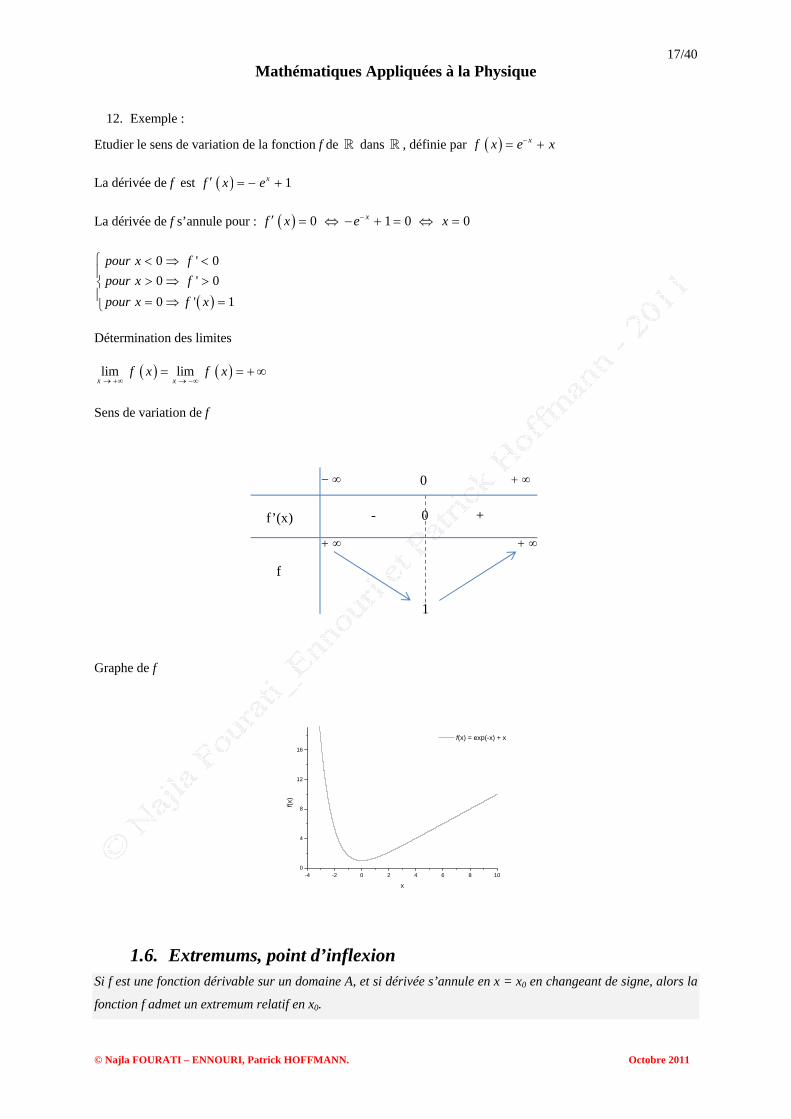
12. Exemple :
Etudier le sens de variation de la fonction f de dans , définie par ( ) xf x e x−= +
La dérivée de f est ( ) 1xf x e′ = − +
La dérivée de f s’annule pour : ( ) 0 1 0 0xf x e x−′ = ⇔ − + = ⇔ =
( )
0 ' 00 ' 00 ' 1
pour x fpour x fpour x f x
⎧ < ⇒ <⎪ > ⇒ >⎨⎪ = ⇒ =⎩
Détermination des limites
( ) ( )lim limx x
f x f x→ +∞ → −∞
= = + ∞
Sens de variation de f
f’(x)
− ∞ + ∞
f
- 0
1
+ ∞ + ∞
+
0
Graphe de f
-4 -2 0 2 4 6 8 100
4
8
12
16
f(x)
x
f(x) = exp(-x) + x
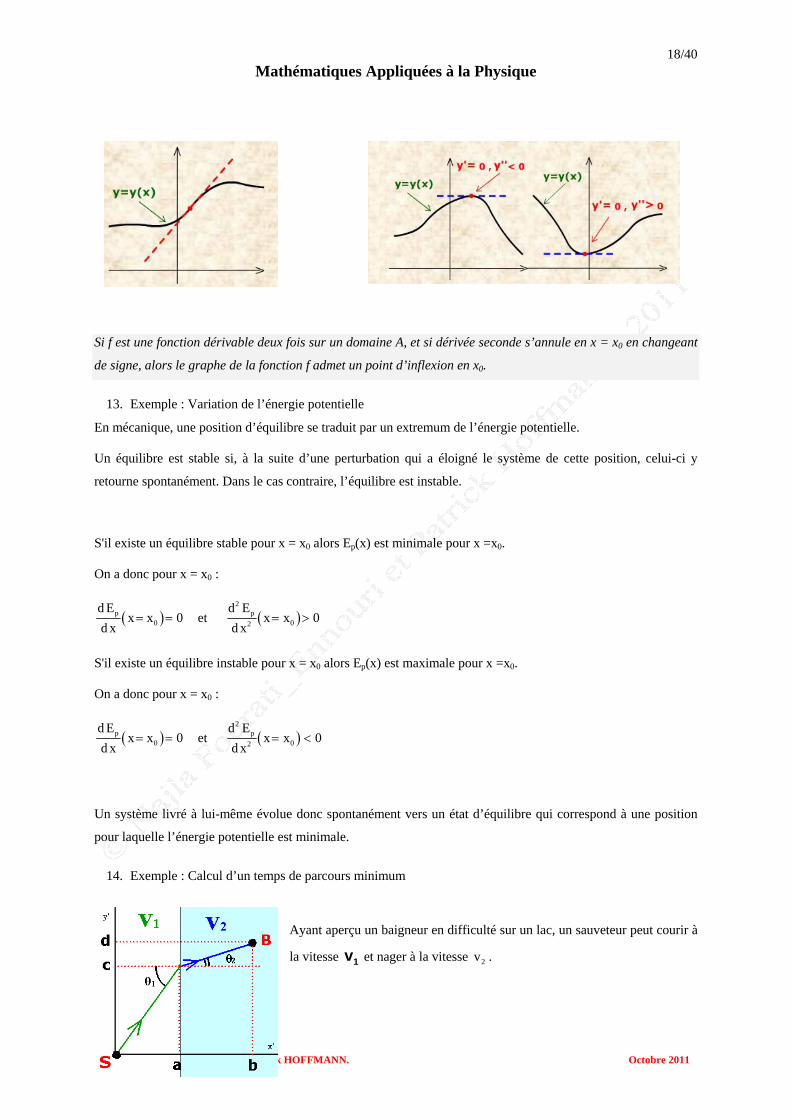
1.6. Extremums, point d’inflexion Si f est une fonction dérivable sur un domaine A, et si dérivée s’annule en x = x0 en changeant de signe, alors la
fonction f admet un extremum relatif en x0.
18/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Si f est une fonction dérivable deux fois sur un domaine A, et si dérivée seconde s’annule en x = x0 en changeant
de signe, alors le graphe de la fonction f admet un point d’inflexion en x0.
13. Exemple : Variation de l’énergie potentielle
En mécanique, une position d’équilibre se traduit par un extremum de l’énergie potentielle.
Un équilibre est stable si, à la suite d’une perturbation qui a éloigné le système de cette position, celui-ci y
retourne spontanément. Dans le cas contraire, l’équilibre est instable.
S'il existe un équilibre stable pour x = x0 alors Ep(x) est minimale pour x =x0.
On a donc pour x = x0 :
( ) ( )2
p p0 02
d E d Ex x 0 et x x 0
d x d x= = = >
S'il existe un équilibre instable pour x = x0 alors Ep(x) est maximale pour x =x0.
On a donc pour x = x0 :
( ) ( )2
p p0 02
d E d Ex x 0 et x x 0
d x d x= = = <
Un système livré à lui-même évolue donc spontanément vers un état d’équilibre qui correspond à une position
pour laquelle l’énergie potentielle est minimale.
14. Exemple : Calcul d’un temps de parcours minimum
Ayant aperçu un baigneur en difficulté sur un lac, un sauveteur peut courir à
la vitesse 1v et nager à la vitesse 2v .

19/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Trouvons la relation que doivent vérifier les quantités: 1 2 1 2v , v , etθ θ pour que le sauvetage soit effectué dans
un minimum de temps.
Le temps durant lequel le sauveteur court s'écrit est 2 2
11
a ct
v+
=
Le temps durant lequel le sauveteur nage s'écrit : ( ) ( )2 2
22
b a d ct
v− + −
=
Le temps total du sauvetage est : ( ) ( )2 22 2
2 11 2
b a d ca ct t t
v v− + −+
= + = +
Les quantités a, b et d sont les mêmes pour tous les sauvetages possibles. La seule quantité fixée par le sauveteur
est c. Pour un temps minimum il faut vérifier : d t 0dc
=
Calculons la dérivée :
( ) ( )( )( )
2 2 2 21 2
d t 1 1 1 1 1 12 c 2 d cdc v 2 v 2a c b a d c
= + − −+ − + −
( )( ) ( )2 2 2 2
1 2
d cd t 1 c 10dc v va c b a d c
−= ⇒ =
+ − + −
Ou encore : 1 1
2 2
sin vsin v
θ=
θ
15. Exemple : Distribution de l’énergie cinétique
Considérons une molécule appartenant à une population en équilibre thermodynamique.
Soit dP la probabilité pour que le module de la vitesse, soit compris entre v et v + dv :
2
2
2 Bm v
d P c e v d v−
=
c est une constante de normalisation.
L’énergie cinétique la plus probable est obtenue en résolvant : 2
2
2 Bm v
dd P e v 0d v
−⎡ ⎤⎢ ⎥= =⎢ ⎥⎣ ⎦

20/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Il vient : 2
plus probable
vm B2
⎛ ⎞=⎜ ⎟
⎝ ⎠
Cette énergie cinétique la plus probable est identifiée à la température absolue (à la constante de Boltzmann
près) : B k T=
1.7. Dérivées partielles La notion de dérivée partielle est introduite pour les fonctions de deux variables, qui peuvent être représentées
graphiquement dans l'espace R3. Le concept peut être ensuite naturellement étendu et utilisé pour les fonctions
de trois variables et plus.
Soit une fonction f (x, y) de deux variables réelles. En fixant l'une des deux variables, si on peut dériver par
rapport à l'autre variable on obtient alors une dérivée partielle.
On note
( ),f x yx
∂∂
: la dérivée par rapport à x, y étant considéré constant.
( ),f x yy
∂∂
: la dérivée par rapport à y, x étant considéré constant.
Les propriétés des dérivées ordinaires sont conservées : dérivation d'une somme et d'un produit, produit par un
scalaire, dérivation d'une fonction composée.
La différentielle de f est par définition : ( ) ( ), ,f fd f x y d x x y d yx y
∂ ∂= +
∂ ∂
Si on peut dériver de nouveau on obtient alors 4 dérivées possibles :
( )
( )
( )
( )
2
2
2
2
2
2
,
,
,
,
f fx yx x x
f fx yy y y
f fx yx y x y
f fx yy x y x
⎛ ⎞∂ ∂ ∂= ⎜ ⎟∂ ∂ ∂⎝ ⎠
⎛ ⎞∂ ∂ ∂= ⎜ ⎟∂ ∂ ∂⎝ ⎠
⎛ ⎞∂ ∂ ∂= ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠
⎛ ⎞∂ ∂ ∂= ⎜ ⎟∂ ∂ ∂ ∂⎝ ⎠

21/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
On admettra qu'en général : 2 2f fx y y x
∂ ∂=
∂ ∂ ∂ ∂
16. Exemple : Les opérateurs vectoriels
Considérons une fonction f et un vecteur A . Dans la base des coordonnées cartésiennes A peut s’écrire sous la
forme de :
( ) ( ) ( )x y zA A x,y,z i A x,y,z j A x,y,z k= + +
Dans cette même base, l'opérateur « Nabla » défini par :
i j kx y z∂ ∂ ∂
∇ = + +∂ ∂ ∂
permet de retrouver l'expression :
du gradient : grad f f i j kx y
fz
f f∂ ∂ ∂= ∇ = + +
∂ ∂ ∂
de la divergence : x y zAdiv A A
x yA A
z∂ ∂ ∂
= ∇ = + +∂ ∂ ∂
i
du rotationnel : z y x z y xrot A AA A A A A A
i j ky z z x x y
∂ ∂ ∂ ∂ ∂ ∂⎛ ⎞ ⎛ ⎞ ⎛ ⎞= ∇∧ = − + − + −⎜ ⎟ ⎜ ⎟ ⎜ ⎟∂ ∂ ∂ ∂ ∂ ∂⎝ ⎠ ⎝ ⎠ ⎝ ⎠
17. Exemple : Etablissement de l’équation des ondes
Considérons une onde mécanique qui se propage le long d’une corde, de densité linéique de masse λ, avec une
célérité c. Supposons que :
La masse de la corde est répartie uniformément par unité de longueur ;
La corde est entièrement élastique et n’a pas de frottement ;
Les mouvements transverses sont tellement petits qu’on peu considérer que chaque point de la corde se meut
perpendiculairement à l’axe des x ;
La tension de rappel de la corde est si élevée qu’on peut négliger l’apport de la force de gravitation sur la masse
(pesante) de la corde.
La célérité de l'onde c ou encore la vitesse de propagation du phénomène ondulatoire obéit à l’équation :
Tc =λ
, T étant la tension de la corde.
Etablissons l’expression de l’équation des ondes vibrantes :2 2
2 2 2
y 1 y 0x c t
∂ ∂− =
∂ ∂

22/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Étant donnée l’absence de résistance mécanique de déformation, la tension est toujours tangentielle à la courbure
de la corde en tout point (autrement il y aurait une composante perpendiculaire). De plus comme nous avons
postulé que tous les points de la corde n’effectuent qu’un mouvement strictement vertical, les composantes
horizontales de tension doivent s’équilibrer. Ainsi, si au point P la corde subit une tension T1 et qu’au point Q
elle subit une tension T2, les composantes horizontales doivent s’équilibrer 1 2T T T= = .
Appelons µ la densité linéique de masse m xΔ = λ Δ
En appliquant la deuxième loi de Newton, et en faisant les projections sur l’axe verticale on :
( )2
1 1 2 2 1 2 2
yT sin T sin m a Tsin Tsin xt
∂− θ + θ = Δ ⇒ − θ + θ = λ Δ
∂
Comme les angles θ1 et θ2 sont petits, nous pouvons faire les développements limités suivants :
1 1 1 1
2 2 2 2
sin tg pente psin tg pente p
θ ≈ θ ≈ θ ≈⎧⎨ θ ≈ θ ≈ θ ≈⎩
¨
D’où :
( ) ( )2 2
2 1 2 2
y p yT p p x Tt x t
∂ Δ ∂− = λ Δ ⇒ = λ
∂ Δ ∂
Où Δp = p2 – p1 est la différence de pentes aux deux bouts de la petite section. Nous allons prendre la limite
0Δ →x de sorte que :
2
2x 0
p p y yT lim T T Tx x x x xΔ →
⎛ ⎞Δ ∂ ∂ ∂ ∂= = =⎜ ⎟Δ ∂ ∂ ∂ ∂⎝ ⎠
Par conséquent :
2 2 2 2
2 2 2 2y y y yT
Tx t x t∂ ∂ ∂ λ ∂
= λ ⇒ =∂ ∂ ∂ ∂
Or la célérité de l'onde c obéit à l’équation : Tc =λ .
En substituant ceci dans l’équation précédente, nous obtenons : 2 2
2 2 2
u 1 ux c t
∂ ∂=
∂ ∂ ou encore :
2 2
2 2 2
u 1 u 0x c t
∂ ∂− =
∂ ∂

23/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.8. Etude de quelques fonctions élémentaires
1.8.1 La fonction affine
1.8.1.1 Généralités
Soit f une fonction définie sur un , a et b sont des coefficients constants indépendants de la variable x.
f est fonction affine de x si x , f (x) y a x b∀ ∈ = = + .
Le sens de variation de f dépend du signe de a :
si a 0 f est une fonction croissantesi a 0 f est une fonction décroissante
> ⇒⎧⎨ < ⇒⎩
Le graphe de la fonction affine est une droite de pente a et d’ordonnée à l’origine b.
Les limites de la fonction affine dépendent du signe de a.
Si a > 0
x x
x x
lim f (x) lim a x b
lim f (x) lim a x b→ + ∞ → + ∞
→ − ∞ → − ∞
= + = + ∞⎧⎪⎨ = + = − ∞⎪⎩
Si a < 0
x x
x x
lim f (x) lim a x b
lim f (x) lim a x b→ + ∞ → + ∞
→ − ∞ → − ∞
= + = − ∞⎧⎪⎨ = + = + ∞⎪⎩
18. Exemples de fonctions affines
0.00 0.02 0.040.0
0.5
1.0
1.5
2.0
2.5
U [V
]
I [A]
Caractéristique courant-tension d’un récepteur : U = E’ + r I
(E’ est la force contre électromotrice du récepteur et r sa résistance interne).
24/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
0.00 0.02 0.040.0
0.4
0.8
1.2
U [V
]I [A]
Caractéristique courant-tension d’un générateur ohmique : U = E - r I
(E est la force électromotrice du générateur et r sa résistance interne).
1.8.1.2 Cas particuliers de la fonction affine
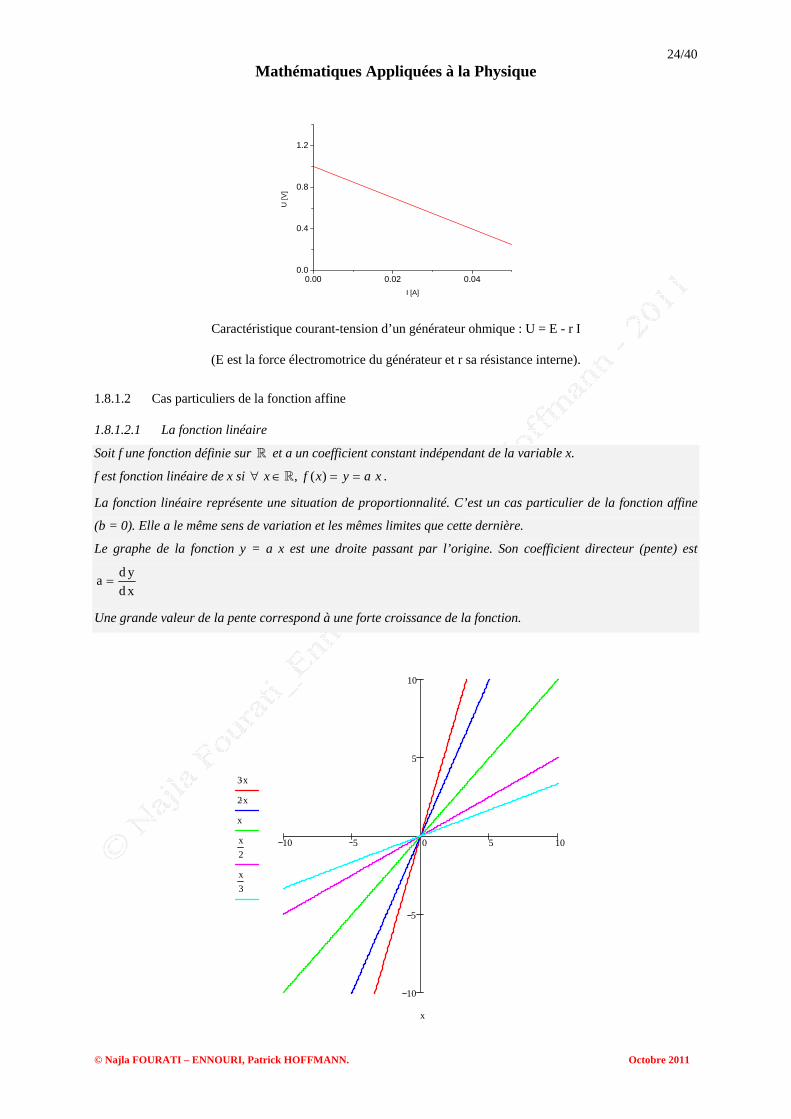
1.8.1.2.1 La fonction linéaire
Soit f une fonction définie sur et a un coefficient constant indépendant de la variable x.
f est fonction linéaire de x si , ( )x f x y a x∀ ∈ = = .
La fonction linéaire représente une situation de proportionnalité. C’est un cas particulier de la fonction affine
(b = 0). Elle a le même sens de variation et les mêmes limites que cette dernière.
Le graphe de la fonction y = a x est une droite passant par l’origine. Son coefficient directeur (pente) est
d yad x
=
Une grande valeur de la pente correspond à une forte croissance de la fonction.
10 5 0 5 10
10
5
5
10
3x⋅
2x⋅
x
x2
x3
x
25/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
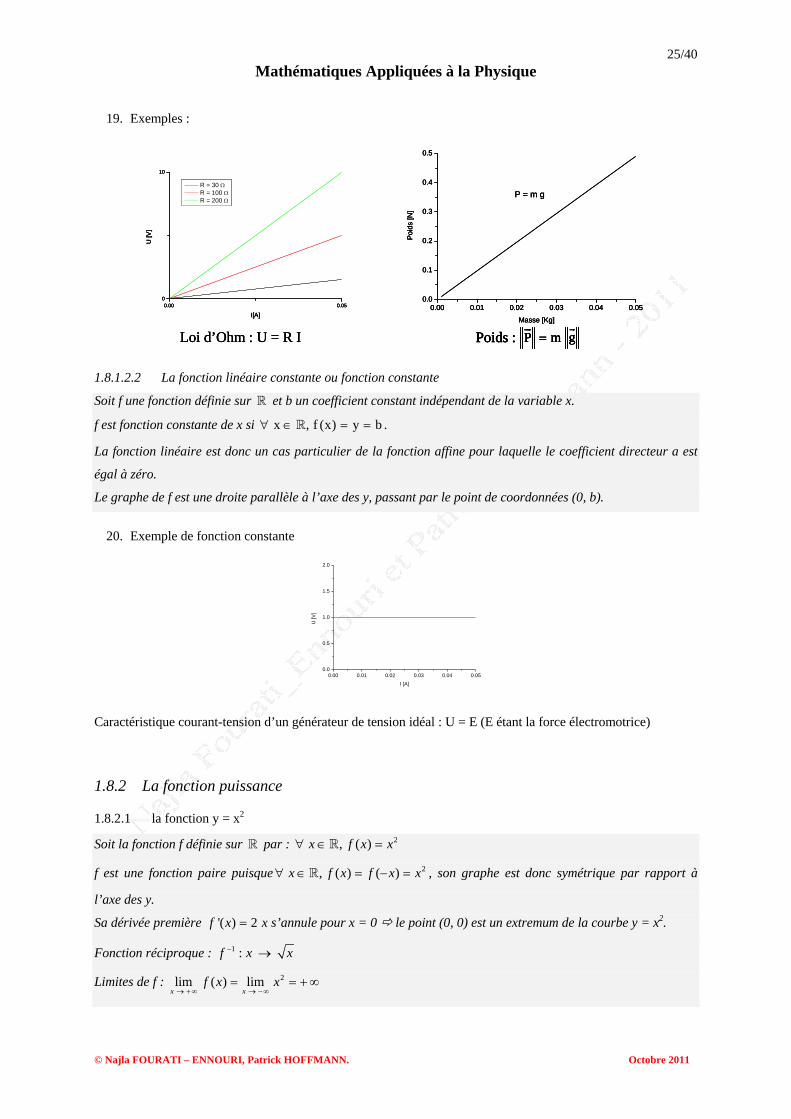
19. Exemples :
0.00 0.050
10
U [V
]
I[A]
R = 30 Ω R = 100 Ω R = 200 Ω
Loi d’Ohm : U = R I
0.00 0.01 0.02 0.03 0.04 0.050.0
0.1
0.2
0.3
0.4
0.5
P = m g
Poid
s [N
]
Masse [Kg]
Poids : P m g=
0.00 0.050
10
U [V
]
I[A]
R = 30 Ω R = 100 Ω R = 200 Ω
Loi d’Ohm : U = R I
0.00 0.050
10
U [V
]
I[A]
R = 30 Ω R = 100 Ω R = 200 Ω
Loi d’Ohm : U = R I
0.00 0.01 0.02 0.03 0.04 0.050.0
0.1
0.2
0.3
0.4
0.5
P = m g
Poid
s [N
]
Masse [Kg]
Poids : P m g=
0.00 0.01 0.02 0.03 0.04 0.050.0
0.1
0.2
0.3
0.4
0.5
P = m g
Poid
s [N
]
Masse [Kg]
Poids : P m g=Poids : P m g=
1.8.1.2.2 La fonction linéaire constante ou fonction constante
Soit f une fonction définie sur et b un coefficient constant indépendant de la variable x.
f est fonction constante de x si x , f (x) y b∀ ∈ = = .
La fonction linéaire est donc un cas particulier de la fonction affine pour laquelle le coefficient directeur a est
égal à zéro.
Le graphe de f est une droite parallèle à l’axe des y, passant par le point de coordonnées (0, b).
20. Exemple de fonction constante
0.00 0.01 0.02 0.03 0.04 0.050.0
0.5
1.0
1.5
2.0
U [V
]
I [A]
Caractéristique courant-tension d’un générateur de tension idéal : U = E (E étant la force électromotrice)
1.8.2 La fonction puissance
1.8.2.1 la fonction y = x2
Soit la fonction f définie sur par : 2, ( )x f x x∀ ∈ =
f est une fonction paire puisque 2, ( ) ( )x f x f x x∀ ∈ = − = , son graphe est donc symétrique par rapport à
l’axe des y.
Sa dérivée première '( ) 2f x x= s’annule pour x = 0 le point (0, 0) est un extremum de la courbe y = x2.
Fonction réciproque : 1 :f x x− →
Limites de f : 2lim ( ) limx x
f x x→ + ∞ → − ∞
= = + ∞

26/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Graphe de f
0
x
21. Exemple : L’oscillateur harmonique
iim iim
Le travail de la tension T d’un ressort de raideur k lorsqu’un point M passe de l'abscisse 0 à l'abscisse x est
donné par l'expression : ( ) ( ) ( )x x x 2
0 0 0O M
1W T T dl k x i dx i k x dx k x2→
= = − = − = −∫ ∫ ∫i i
La variation de l’énergie cinétique de la masse m en fonction de sa vitesse v est : 2c
1E m v2
=
1.8.2.2 La fonction x3
Soit la fonction f définie sur par : 3, ( )x f x x∀ ∈ =
F est une fonction impaire puisque , ( ) ( )x f x f x∀ ∈ − = − son graphe est symétrique par rapport à
l’origine O du repère.
Remarque : le point (0, 0) est un extremum et un point d’inflexion de la courbe y = x3.
Limites de f 3lim
lim ( )x
x
x
f x→ + ∞
→ − ∞
= + ∞
= − ∞

27/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Graphe de f
2 1.5 1 0.5 0 0.5 1 1.5 2
1.5
1
0.5
0.5
1
1.51.4
1.4−
x3
22− x
2 1.5 1 0.5 0 0.5 1 1.5 2
1.5
1
0.5
0.5
1
1.51.4
1.4−
x3
22− x
22. Exemple : Loi de Kepler
Le carré de la période de révolution est proportionnel au cube de la distance au Soleil :
2 3T K a= K est la constante de proportionnalité.
1.8.2.3 La fonction puissance entière xn pour n *∈
Soit la fonction f définie sur par : , ( ) nx f x x∀ ∈ = avec n *∈ .
f est une bijection de + dans + si n est pair, et de dans si n est impair.
Parité
La parité de f dépend de celle de n :
f est paire quand n est pair , ( ) ( ) nx f x f x x∀ ∈ − = = , son graphe est donc symétrique par rapport à l’axe
des y.
f est impaire quand n est impair , ( ) ( ) nx f x f x x∀ ∈ − = − = − , son graphe est donc symétrique par
rapport à l’origine du repère.
Dérivée
La dérivée première ( )1'( ) nf x n x −= s’annule pour x = 0 le point (0, 0) est un extremum de la courbe y = xn.
Limites de f :
Si n est paire : lim ( ) lim n
x xf x x
→ + ∞ → − ∞= = + ∞
Si n est impair : lim ( ) lim n
x xf x x
→ + ∞ → − ∞= = − ∞
1.8.2.4 La fonction racine carrée
Soit la fonction f définie sur + par : 1/2, ( )x f x x x+∀ ∈ = =

28/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
Sa dérivée première est 2' ( ) 0f x xx
+= ≠ ∀ ∈ la fonction :f x x→ n’admet pas d’extremum.
Fonction réciproque : 1 2:f x x− →
Limite de f : lim ( )x
f x x→ + ∞
= = + ∞
Graphe de f
0 50 100
5
1010
0
x
1000 x
0 50 100
5
1010
0
x
1000 x
23. Exemple : l’écart type
L'écart-type S est la mesure de dispersion la plus couramment utilisée en statistique lorsqu'on emploie la
moyenne pour calculer une tendance centrale. Il mesure donc la dispersion autour de la moyenne. En raison de
ses liens étroits avec la moyenne, l'écart-type peut être grandement influencé si cette dernière donne une
mauvaise mesure de tendance centrale.
Soit une variable y prenant un nombre fini de valeurs réelles y1, ..., yn autour de la moyenne y .
On définit l’écart quadratique σ par la relation : ( )def 21 y yn
σ = − et l'écart-type S par : defS = σ .
1.8.2.5 La fonction y = x-1
Soit la fonction f définie sur { }0 *− = par : * 1 1, ( )x f x xx
−∀ ∈ = =
La fonction 1:f xx
→ est impaire son graphe est symétrique par rapport à l’origine O du repère.
Sa dérivée première est *2
1' ( ) 0f x xx
= − ≠ ∀ ∈ la fonction 1:f xx
→ n’admet pas d’extremum
Limites de f :
x x
1 1lim lim 0x x→ + ∞ → − ∞
= =
x 0
x 0
1limx1limx
+
−
→
→
= + ∞
= − ∞
Graphe de f

29/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
10 5 0 5 10
10
5
5
107.505
7.505−
x 1−
1010− x
10 5 0 5 10
10
5
5
107.505
7.505−
x 1−
1010− x
Remarque : dans la plupart des applications physiques, les fonctions en 1x
font intervenir des variables x
positives (distance, temps, …)
24. Exemple : Le potentiel électrostatique 1Vr
⎛ ⎞⎜ ⎟⎝ ⎠
Le potentiel électrostatique créé par une charge q placée en un point O en un point M placé à une distance r de O
est :
0
qV(r) Cte4 r
= +π ε
0ε est la permittivité du vide.
Remarque : Le potentiel est toujours défini à une constante additive près.
25. Exemple : Condensateur plan 1Ce
⎛ ⎞⎜ ⎟⎝ ⎠
La capacité C d’un condensateur plan est calculée à partir de la
relation : 0 rSCe
= ε ε
S est la surface de la plus petite des armatures, e est l’épaisseur du
diélectrique, 0ε est la permittivité du vide et rε est la permittivité
relative du diélectrique qui sépare les deux armatures.
1.8.2.6 La fonction y = x-2
Soit la fonction f définie sur { }0 *− = par : * 22
1, ( )x f x xx
−∀ ∈ = =
εr
e
ε
S
eεr
e
ε
S
e

30/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
La fonction 2
1:f xx
→ est paire son graphe est symétrique par rapport à l’axe des y.
Sa dérivée première est *3
2' ( ) 0f x xx
= − ≠ ∀ ∈ la fonction 2
1:f xx
→ n’admet pas d’extremum.
Limites de f :
2 2x x
1 1lim lim 0x x→ + ∞ → − ∞
= =
x 0
x 0
1limx1limx
+
−
→
→
= + ∞
= + ∞
Graphe de f
10 5 0 5 10
5
57.485
7.406−
x 2−
1010− x
10 5 0 5 10
5
57.485
7.406−
x 2−
1010− x
26. Exemple : Loi de Coulomb
Charles de COULOMB a démontré expérimentalement que les forces
s'exerçant entre deux charges ponctuelles q et q’ au repos sont
proportionnelles à chacune des charges et inversement proportionnelles
au carré de leur distance r. Le support de ces forces est la droite qui
passe par les positions des deux charges : 20
q q 'F(r) u4 r
=π ε
27. Exemple : Loi de la gravitation universelle
Deux corps ponctuels de masse mA et mB s'attirent avec une force proportionnelle à chacune des masses, et
inversement proportionnelle au carré de la distance AB qui les sépare. Cette force a pour direction la droite
passant par le centre de gravité de ces deux corps : A BAB2
m mF(AB) G uAB
= −
G est la constante gravitationnelle.
31/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
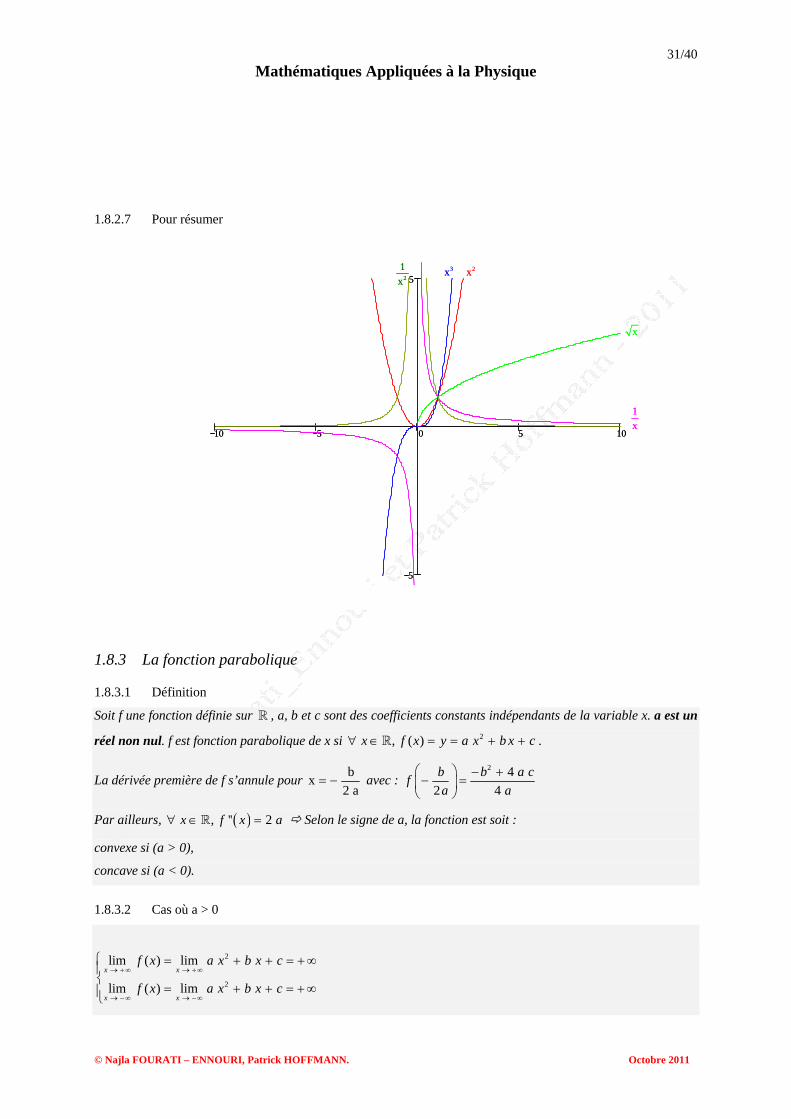
1.8.2.7 Pour résumer
10 5 0 5 10
5
57.287
7.287−
x2
x3
x
x 1−
x 2−
1010− x
x
1x
2x3x2
1x
10 5 0 5 10
5
57.287
7.287−
x2
x3
x
x 1−
x 2−
1010− x
x
1x
2x3x2
1x
1.8.3 La fonction parabolique
1.8.3.1 Définition
Soit f une fonction définie sur , a, b et c sont des coefficients constants indépendants de la variable x. a est un
réel non nul. f est fonction parabolique de x si 2, ( )x f x y a x b x c∀ ∈ = = + + .
La dérivée première de f s’annule pour bx2 a
= − avec : 2 4
2 4b b a cfa a
⎛ ⎞ − +− =⎜ ⎟
⎝ ⎠
Par ailleurs, ( ), '' 2x f x a∀ ∈ = Selon le signe de a, la fonction est soit :
convexe si (a > 0),
concave si (a < 0).
1.8.3.2 Cas où a > 0
2
2
lim ( ) lim
lim ( ) limx x
x x
f x a x b x c
f x a x b x c→ + ∞ → + ∞
→ − ∞ → − ∞
⎧ = + + = + ∞⎪⎨
= + + = + ∞⎪⎩

32/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.8.3.3 Cas où a < 0
2
2
lim ( ) lim
lim ( ) limx x
x x
f x a x b x c
f x a x b x c→ + ∞ → + ∞
→ − ∞ → − ∞
⎧ = + + = − ∞⎪⎨
= + + = − ∞⎪⎩
Graphe de f
8.9106×
1.209− 107×
5x2 900x+ 3000000+
5− x2⋅ 90x7000000−+
10001000− x
a > 0
a < 0
8.9106×
1.209− 107×
5x2 900x+ 3000000+
5− x2⋅ 90x7000000−+
10001000− x
a > 0
a < 0
1.8.4 La fonction logarithme
On appelle fonction logarithme népérien, l’unique primitive de *1x surx
+→ et qui vaut 0 en x = 1.
On note : x
0
1ln x d tt
= ∫
Le logarithme népérien est une application continue, strictement croissante et indéfiniment dérivable sur
l'intervalle ] [0, +∞
Propriétés
( )
( )
( )n
d ln x 11) x 0,d x x
2) x 0 et y 0, ln x y ln x ln y
x3) x 0 et y 0, ln ln x ln yy
4) x 0 et n , ln x n ln x
∀ > =
∀ > ∀ > × = +
⎛ ⎞∀ > ∀ > = −⎜ ⎟
⎝ ⎠
∀ > ∀ ∈ =
Limites
33/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
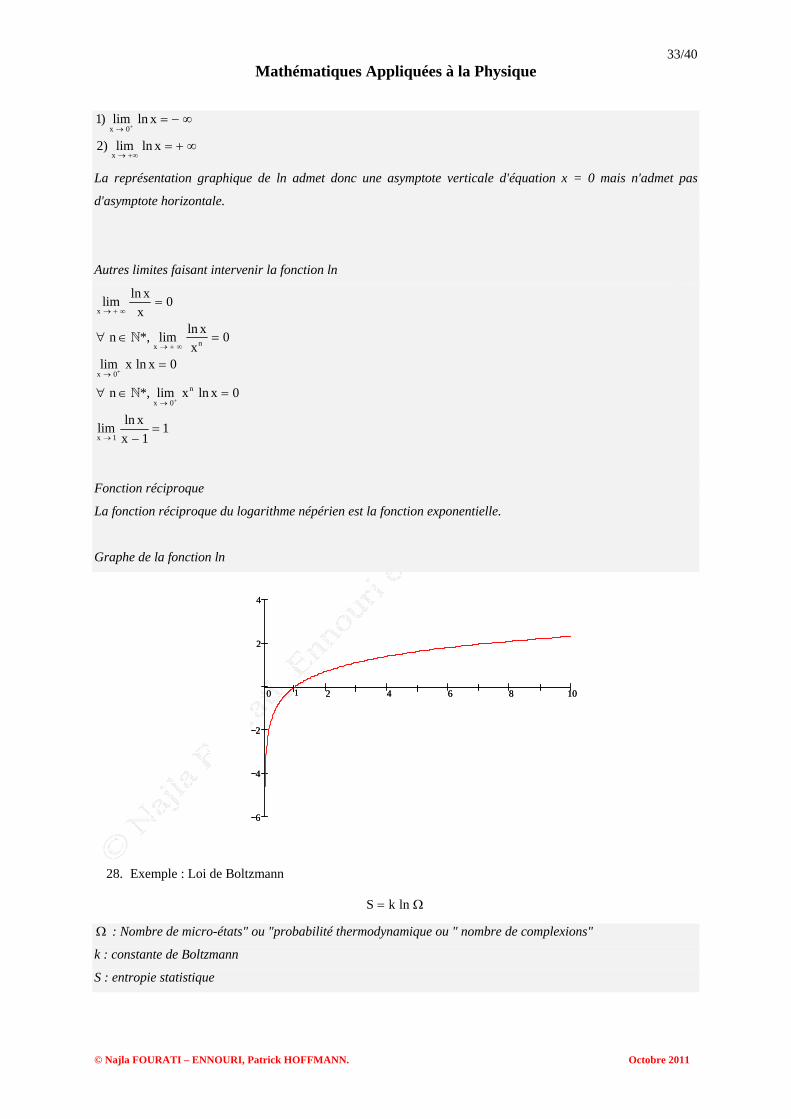
x 0
x
1) lim ln x
2) lim ln x
+→
→ +∞
= − ∞
= + ∞
La représentation graphique de ln admet donc une asymptote verticale d'équation x = 0 mais n'admet pas
d'asymptote horizontale.
Autres limites faisant intervenir la fonction ln
x
nx
x 0
n
x 0
x 1
ln xlim 0x
ln xn *, lim 0x
lim x ln x 0
n *, lim x ln x 0
ln xlim 1x 1
+
+
→ + ∞
→ + ∞
→
→
→
=
∀ ∈ =
=
∀ ∈ =
=−
Fonction réciproque
La fonction réciproque du logarithme népérien est la fonction exponentielle.
Graphe de la fonction ln
0 2 4 6 8 10
6
4
2
2
42.303
4.605−
ln x( )
100.01 x
10 2 4 6 8 10
6
4
2
2
42.303
4.605−
ln x( )
100.01 x
1
28. Exemple : Loi de Boltzmann
S k ln= Ω
Ω : Nombre de micro-états" ou "probabilité thermodynamique ou " nombre de complexions"
k : constante de Boltzmann
S : entropie statistique
34/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.8.5 La fonction exponentielle ex
1.8.5.1 Définition
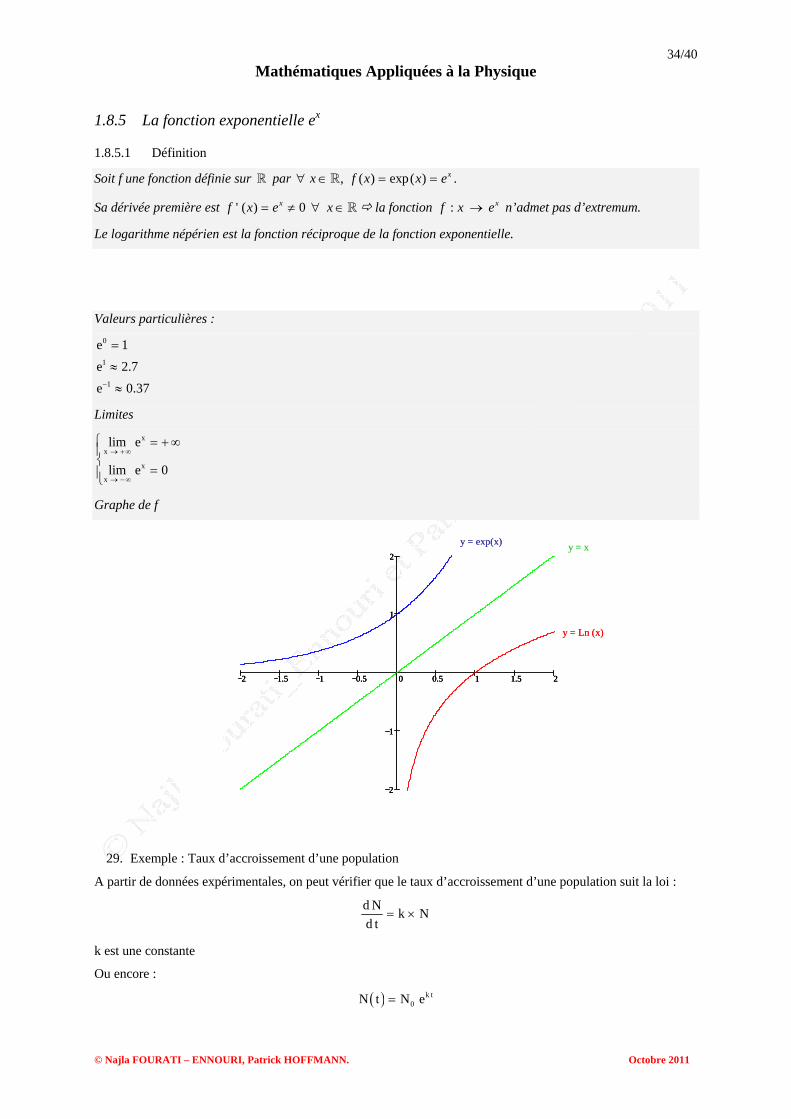
Soit f une fonction définie sur par , ( ) exp( ) xx f x x e∀ ∈ = = .
Sa dérivée première est ' ( ) 0xf x e x= ≠ ∀ ∈ la fonction : xf x e→ n’admet pas d’extremum.
Le logarithme népérien est la fonction réciproque de la fonction exponentielle.
Valeurs particulières : 0
1
1
e 1e 2.7e 0.37−
=
≈
≈
Limites x
x
x
x
lim e
lim e 0→ + ∞
→ − ∞
⎧ = + ∞⎪⎨
=⎪⎩
Graphe de f
2 1.5 1 0.5 0 0.5 1 1.5 2
2
1
1
22
2−
ln x( )
ex
x
22− x
y = Ln (x)
y = xy = exp(x)
2 1.5 1 0.5 0 0.5 1 1.5 2
2
1
1
22
2−
ln x( )
ex
x
22− x
2 1.5 1 0.5 0 0.5 1 1.5 2
2
1
1
22
2−
ln x( )
ex
x
22− x
y = Ln (x)
y = xy = exp(x)
29. Exemple : Taux d’accroissement d’une population
A partir de données expérimentales, on peut vérifier que le taux d’accroissement d’une population suit la loi :
d N k Nd t
= ×
k est une constante
Ou encore :
( ) k t0N t N e=
35/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
1.8.6 La fonction e -x
1.8.6.1 Définition
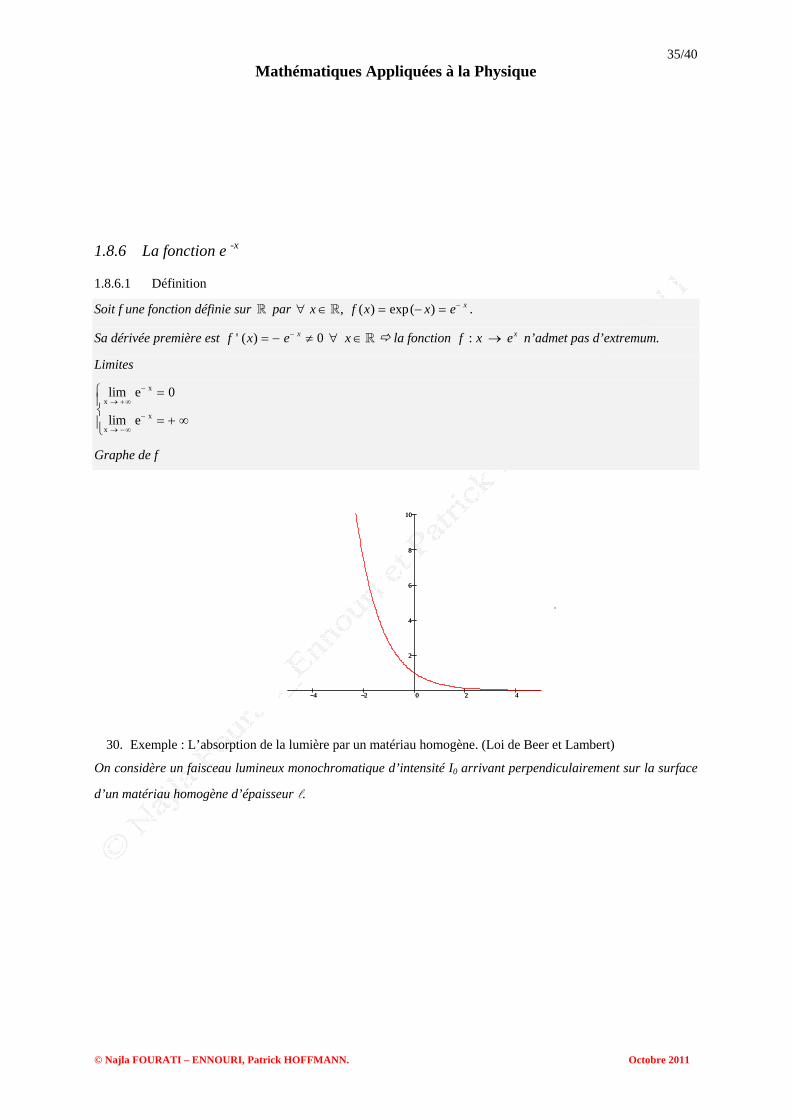
Soit f une fonction définie sur par , ( ) exp( ) xx f x x e−∀ ∈ = − = .
Sa dérivée première est ' ( ) 0xf x e x−= − ≠ ∀ ∈ la fonction : xf x e→ n’admet pas d’extremum.
Limites x
x
x
x
lim e 0
lim e
−
→ + ∞
−
→ − ∞
⎧ =⎪⎨
= + ∞⎪⎩
Graphe de f
4 2 0 2 4
2
4
6
8
1010
6.738 10 3−×
e x−
55− x
4 2 0 2 4
2
4
6
8
1010
6.738 10 3−×
e x−
55− x
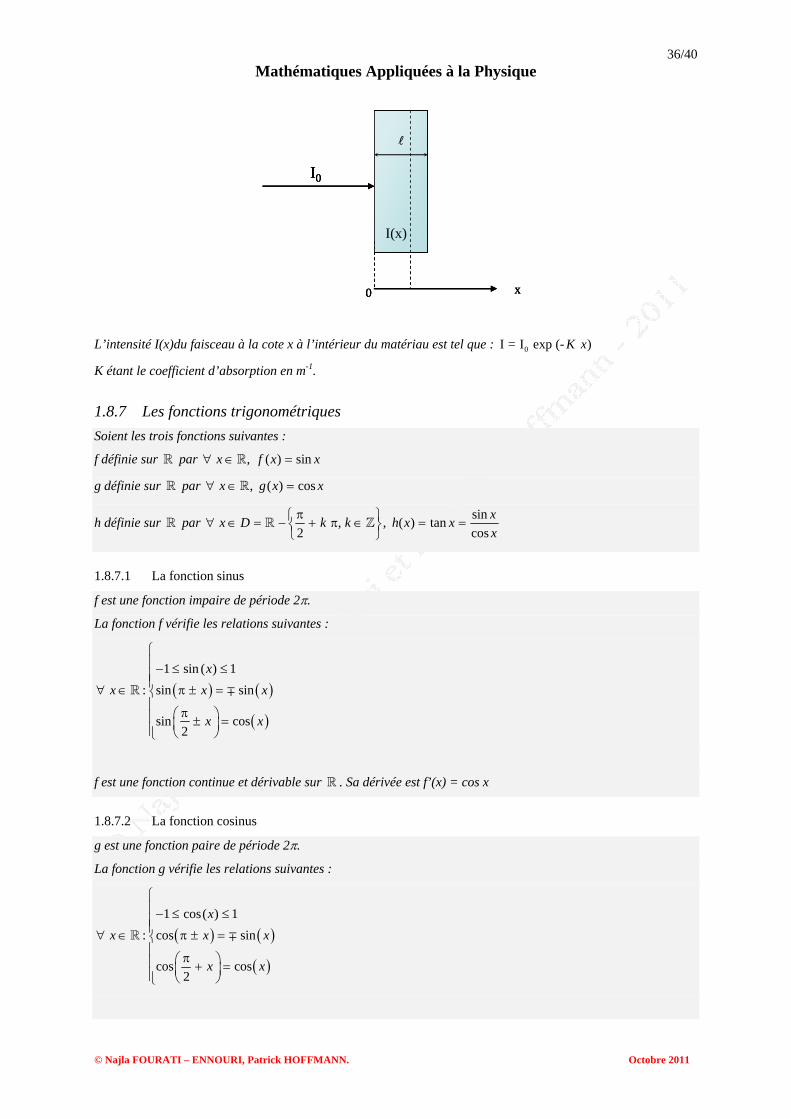
30. Exemple : L’absorption de la lumière par un matériau homogène. (Loi de Beer et Lambert)
On considère un faisceau lumineux monochromatique d’intensité I0 arrivant perpendiculairement sur la surface
d’un matériau homogène d’épaisseur .
36/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
0 x
I0
I(x)
0 x
I0
0 x
I0
I(x)
L’intensité I(x)du faisceau à la cote x à l’intérieur du matériau est tel que : 0I = I exp (- )K x
K étant le coefficient d’absorption en m-1.
1.8.7 Les fonctions trigonométriques Soient les trois fonctions suivantes :
f définie sur par , ( ) sin∀ ∈ =x f x x
g définie sur par , ( ) cosx g x x∀ ∈ =
h définie sur par sin, , ( ) tan2 cos
xx D k k h x xx
π⎧ ⎫∀ ∈ = − + π ∈ = =⎨ ⎬⎩ ⎭
1.8.7.1 La fonction sinus
f est une fonction impaire de période 2π.
La fonction f vérifie les relations suivantes :
( ) ( )
( )
1 sin ( ) 1: sin sin
sin cos2
⎧⎪− ≤ ≤⎪⎪∀ ∈ π ± =⎨⎪ π⎛ ⎞⎪ ± =⎜ ⎟⎪ ⎝ ⎠⎩
∓x
x x x
x x
f est une fonction continue et dérivable sur . Sa dérivée est f’(x) = cos x
1.8.7.2 La fonction cosinus
g est une fonction paire de période 2π.
La fonction g vérifie les relations suivantes :
( ) ( )
( )
1 cos( ) 1: cos sin
cos cos2
xx x x
x x
⎧⎪− ≤ ≤⎪⎪∀ ∈ π ± =⎨⎪ π⎛ ⎞⎪ + =⎜ ⎟⎪ ⎝ ⎠⎩
∓
37/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
g est une fonction continue et dérivable sur . Sa dérivée est g’(x) = - sin x
1.8.7.3 La fonction tangente
h est une fonction impaire de période π.
Limites
2
2
lim tan ( )
est une tangente verticalelim tan ( ) 2
x
x
x
xx
+
−
π→
π→
= +∞⎧⎪ π⎪ ⇒ =⎨ = −∞⎪⎪⎩ h est une fonction continue et dérivable sur son domaine de définition D. Sa dérivée est
22
1, '( ) 1 tan ( )cos ( )
x h x xx
∀ ∈ = = +
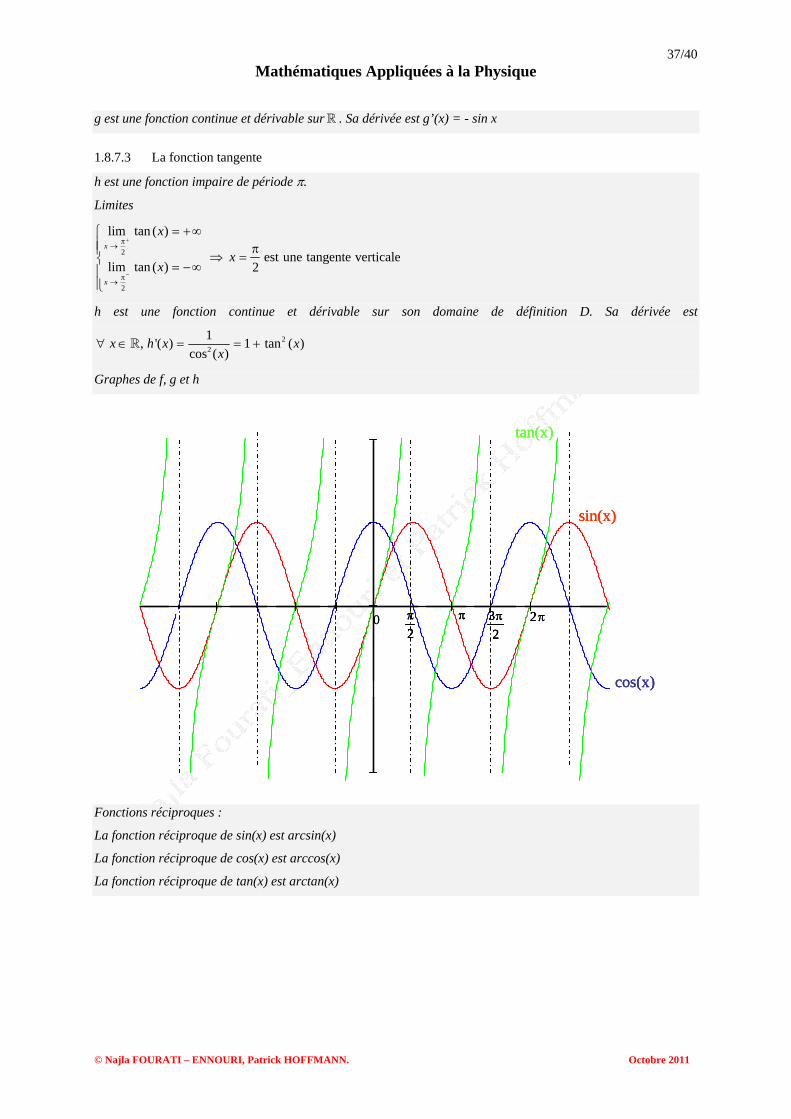
Graphes de f, g et h
2
2−
sin x( )
cos x( )
tan x( )
9.479.42− x
sin(x)
cos(x)
tan(x)
2π π 3
2π 2π0
2
2−
sin x( )
cos x( )
tan x( )
9.479.42− x
sin(x)
cos(x)
tan(x)
2π π 3
2π 2π
2
2−
sin x( )
cos x( )
tan x( )
9.479.42− x
sin(x)
cos(x)
tan(x)
2π π 3
2π 2π0
Fonctions réciproques :
La fonction réciproque de sin(x) est arcsin(x)
La fonction réciproque de cos(x) est arccos(x)
La fonction réciproque de tan(x) est arctan(x)
38/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
2
22
2−
sin x( )
arcsin x( )
3.14153.1415− x
3.142
1−
cos x( )
arccos x( )
3.143.14− x
3.14
3.14−
tan x( )
arctan x( )
1.571.57− x
sin(x) cos (x)
tan (x)arcsin(x) arccos(x)
arctan(x)
2
22
2−
sin x( )
arcsin x( )
3.14153.1415− x
3.142
1−
cos x( )
arccos x( )
3.143.14− x
3.14
3.14−
tan x( )
arctan x( )
1.571.57− x
sin(x) cos (x)
tan (x)arcsin(x) arccos(x)
arctan(x)
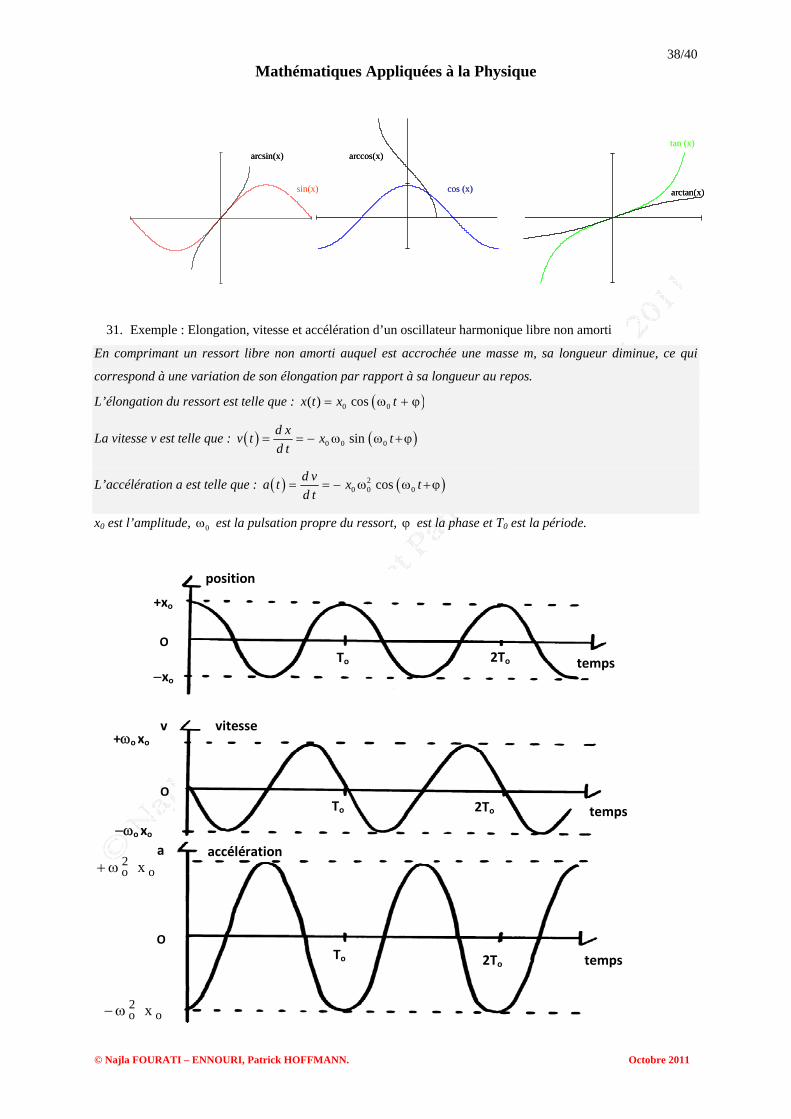
31. Exemple : Elongation, vitesse et accélération d’un oscillateur harmonique libre non amorti
En comprimant un ressort libre non amorti auquel est accrochée une masse m, sa longueur diminue, ce qui
correspond à une variation de son élongation par rapport à sa longueur au repos.
L’élongation du ressort est telle que : ( )0 0( ) cosx t x t= ω + ϕ
La vitesse v est telle que : ( ) ( )0 0 0sind xv t x td t
= = − ω ω + ϕ
L’accélération a est telle que : ( ) ( )20 0 0cosd va t x t
d t= = − ω ω +ϕ
x0 est l’amplitude, 0ω est la pulsation propre du ressort, ϕ est la phase et T0 est la période.
position
vitesse
accélération
temps
temps
temps 2To
2To
2To
To
To
To
+xo
−xo
O
+ωo xo v
−ωo xo a
2o o x+ ω
2o o x− ω
O
O

39/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
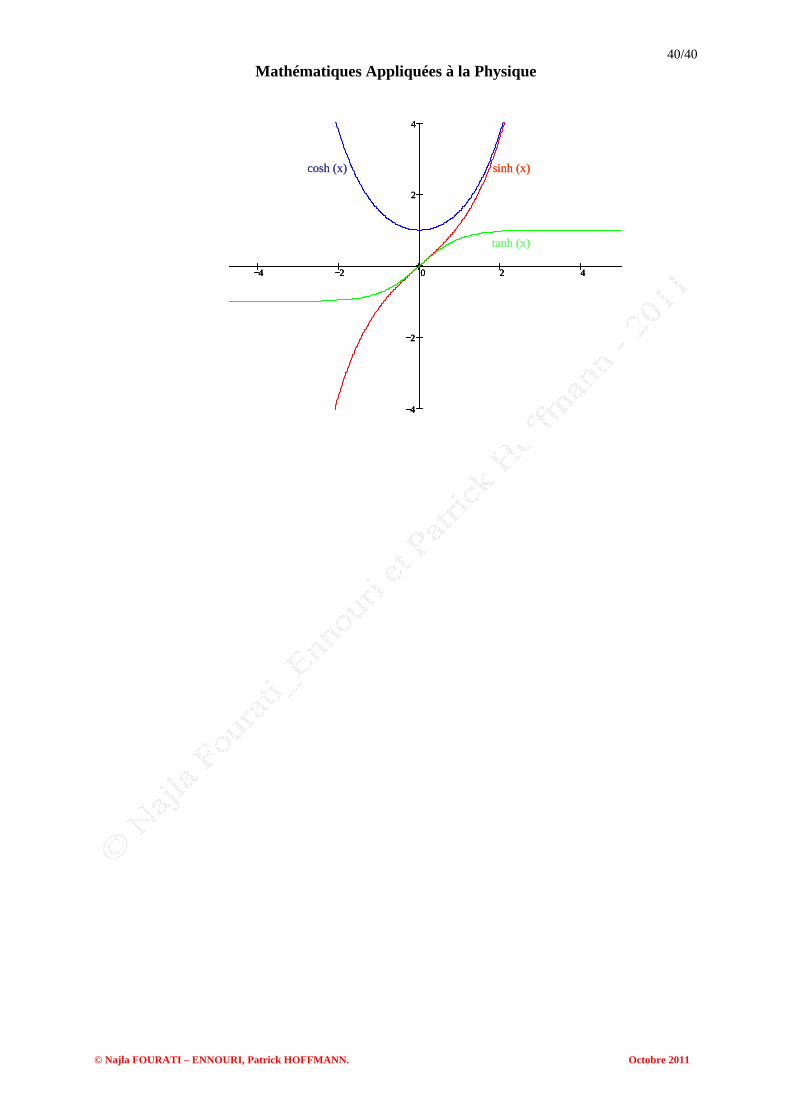
1.8.8 Les fonctions hyperboliques Les fonctions hyperboliques sont définies de la manière suivante :
, cosh ( )2
x xe ex x−+
∀ ∈ =
, sinh( )2
x xe ex x−−
∀ ∈ =
, tanhx x
x x
e ex xe e
−
−
−∀ ∈ =
+ Ces trois fonctions sont continues et dérivables sur .
( )( )
( ) 22
'cosh(x) sinh ( )'sinh(x) cosh ( )
1'tanh(x) 1 tanh (x)cosh ( )
x
x x
x
⎧⎪ =⎪⎪∀ ∈ =⎨⎪⎪ = = −⎪⎩
D’autre part :
2 2
cosh ( ) sinh ( ): cosh ( ) sinh ( )
1 cosh ( ) sinh ( )
x
x
e x xx e x x
x x
−
⎧ = +⎪
∀ ∈ = −⎨⎪ = −⎩
Fonctions réciproques :
La fonction réciproque de sinh(x) est arsinh(x)
La fonction réciproque de cosh(x) est arcosh(x)
La fonction réciproque de tanh(x) est artanh(x)
Graphes des différentes fonctions hyperboliques
40/40 Mathématiques Appliquées à la Physique
© Najla FOURATI – ENNOURI, Patrick HOFFMANN. Octobre 2011
4 2 0 2 4
4
2
2
43.534
3.534−
sinh x( )
cosh x( )
tanh x( )
55− x
sinh (x)cosh (x)
tanh (x)
4 2 0 2 4
4
2
2
43.534
3.534−
sinh x( )
cosh x( )
tanh x( )
55− x
4 2 0 2 4
4
2
2
43.534
3.534−
sinh x( )
cosh x( )
tanh x( )
55− x
sinh (x)cosh (x)
tanh (x)