Lois Cons Ti Tut Ives en Grandes
56
Ecole Nationale d'Ingénieurs de Tarbes Version v. 2.0 - 2007 - Laboratoire génie de Production - Equipe C.M.A.O Ecole Nationale d'Ingénieurs de Tarbes - 47 av d'Azereix BP 1629 - 65016 Tarbes cedex France Grandes Transformations Thermomécaniques Rapides Notes de Cours
Transcript of Lois Cons Ti Tut Ives en Grandes

Ecole Nationale d'Ingénieurs de Tarbes
Version v. 2.0
- 2007 -
Laboratoire génie de Production - Equipe C.M.A.OEcole Nationale d'Ingénieurs de Tarbes - 47 av d'Azereix BP 1629 - 65016 Tarbes cedex France
Gra
ndes
Tra
nsfo
rmat
ions
The
rmom
écan
ique
s R
apid
es
Notes de Cours

Lois Constitutives en GrandesDéformations
Olivier PANTALE
9 octobre 2008


i
Table des matières
Notations 1
1 Lois constitutives en grandes déformations 3
1.1 Principes généraux d’écriture des lois de comportement . . . . . . . . . . . . . . . 3
1.1.1 Principe d’admissibilité physique . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.2 Principe d’équiprésence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3 Déterminisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.4 Principe d’action locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.5 Principe d’indépendance vis à vis de l’observateur (objectivité) . . . . . . . 4
1.1.6 Principe de respect des propriétés du matériau . . . . . . . . . . . . . . . . 5
1.2 Principe d’indifférence matérielle ou objectivité . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Conditions d’invariance par changement de référentiel . . . . . . . . . . . . 5
1.2.2 Notion de référentiel et de repère . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3 Remarques sur le principe d’objectivité . . . . . . . . . . . . . . . . . . . . . 8
1.2.4 Opérations sur des grandeurs objectives . . . . . . . . . . . . . . . . . . . . 8
1.2.5 Grandeurs objectives et non-objectives . . . . . . . . . . . . . . . . . . . . . 9
1.3 Application aux lois élasto-plastiques . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Forme canonique des lois de comportement . . . . . . . . . . . . . . . . . . 12
1.3.2 Cas de la dérivée temporelle des contraintes de Cauchy . . . . . . . . . . . 12
1.3.3 Ecriture d’une dérivée temporelle objective . . . . . . . . . . . . . . . . . . . 14
1.3.4 Les dérivées corotationnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.5 Forme canonique dans le système d’axes entraînés . . . . . . . . . . . . . . 16
1.3.6 Equation constitutive pour un matériau élasto-plastique . . . . . . . . . . 17
1.3.7 Forme canonique dans le système d’axes entraînés . . . . . . . . . . . . . . 19
1.3.8 Critère de plastification de Von-Mises . . . . . . . . . . . . . . . . . . . . . . 20
1.3.9 Ecrouissage isotrope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.10Récapitulatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Intégration temporelle des lois de plasticité . . . . . . . . . . . . . . . . . . . . . . 24
1.4.1 Présentation du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.4.2 Partition de l’opérateur élastoplastique . . . . . . . . . . . . . . . . . . . . . 24
1.4.3 Algorithme du retour radial pour un matériau élasto-plastique . . . . . . . 28
Olivier PANTALE Année universitaire 2008/2009

ii TABLE DES MATIÈRES
2 Exercices et applications 33
2.1 Barre en traction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2 Disque en traction périphérique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3 Cylindre creux élastoplastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Sphère creuse élastoplastique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Compléments mathématiques 37
3.1 Les espaces Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Application linéaire et notion de tenseur . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.1 Produit tensoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.2 Propriétés des tenseurs d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.3 Tenseur d’ordre n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3 Les espaces R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3.1 Symbole de Kronecker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.2 Symbole de permutation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.3 L’opérateur formel nabla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.4 Le gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3.5 La divergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3.6 Le rotationnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3.7 Le Laplacien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3.8 Théorème de la divergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4 Tenseurs réels d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4.1 Dérivée d’un tenseur du second ordre . . . . . . . . . . . . . . . . . . . . . . 45
3.4.2 Dérivée de produits de tenseurs du second ordre . . . . . . . . . . . . . . . 45
3.4.3 Valeurs propres et vecteurs propres d’un tenseur . . . . . . . . . . . . . . . 45
3.5 Tenseurs symétriques réels d’ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.5.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.5.2 Dérivée d’un tenseur symétrique réel . . . . . . . . . . . . . . . . . . . . . . 46
3.6 Tenseur symétriques définis positifs . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.6.1 Puissances non entières d’un tenseur symétrique défini positif . . . . . . . 46
3.6.2 Logarithme népérien d’un tenseur symétrique défini positif . . . . . . . . . 47
3.7 Tenseurs orthogonaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7.1 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7.2 Notions de rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.8 Décomposition polaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.8.1 Décomposition polaire en 2 dimensions . . . . . . . . . . . . . . . . . . . . 48
3.8.2 Décomposition polaire en 3 dimensions . . . . . . . . . . . . . . . . . . . . 48
Année universitaire 2008/2009 Olivier PANTALE

1
Notations
D’un point de vue général, il est habituel de constater que dans le domaine de la mécanique,comme dans d’autres domaines sûrement, une des principales difficultés vient de la non ho-mogénéité des notations entre les différents auteurs. Il est alors aisé de rendre complètementincompréhensible la moindre théorie lorsque l’on décide de changer de notation. La notionde notation universelle n’étant pas encore d’actualité (même si certaines conventions peuventêtre assimilées à des concepts universels), on présente alors ci-dessous le jeu de notationutilisé tout au long de ce document.
D’une manière générale, les diverses quantités scalaires, vectorielles, matricielles, etc... sontnotées comme suit :
a Scalaire−→a VecteurA Tenseur d’ordre 2 ou matriceA Tenseur d’ordre 4
Le détail des diverses notations utilisées dans ce document est donné ci-dessous :
−→b Vecteur des forces externes volumiquesB Matrice des dérivées des fonctions d’interpolation : B = ∂N/∂−→xC Tenseur de comportement élastique de HookeD Partie symétrique du tenseur des vitesses de déformation : D = 1
2
(L + LT
)E Module de Young du matériauE Tenseur des déformations de Green-Lagrange∆e Tenseur incrément de déformation logarithmiqueI Tenseur de Kronecker, tenseur unitaire du deuxième ordreI Tenseur unitaire du quatrième ordref Fonction de chargeF Tenseur gradient de déformation F = ∂−→x /∂−→X−−→F int Vecteur des efforts internes−−→F ext Vecteur des efforts externesG Module de cisaillement du matériauJ Jacobien de la transformation domaine physique/parentK Module de compressibilité du matériauK Matrice de rigidité
L Tenseur des vitesses de déformation L =•F F−1
M Matrice de massen Direction de l’écoulement plastiqueN Matrice des fonctions d’interpolationq Variable d’hérédité dans la formulation élastoplastiqueR Tenseur de rotations Déviateur du tenseur des contraintes de CauchyT Température du matériauT0 Température de référence du matériauTmelt Température de fusion du matériauU Tenseur de déformation pure droitV Tenseur de déformation pure gauche
Olivier PANTALE Année universitaire 2008/2009

2 Notations
W Partie anti-symétrique du tenseur des vitesses de déformation : W = 12
(L− LT
)−→x Coordonnées spatiales d’un point matériel−→X Coordonnées de référence d’un point matériel
α Backstressεp Déformation plastique équivalenteφ φ = s−α−→φ Mouvement des points matérielsΓ Incrément d’écoulement plastique Γ =
∫ tn+1
tnΛdt
Γx Frontière du domaine de référenceΛ Scalaire représentant la norme de l’écoulement plastiqueν Coefficient de Poisson du matériauΩx Configuration ou domaine actuelΩX Configuration ou domaine de référenceρ Masse volumique du matériauσv Limite apparente d’élasticité du matériauσv0 Limite d’élasticité initiale du matériauσv∞ Limite asymptotique de plasticité du matériauσ Tenseur des contraintes de Cauchyσ Contrainte équivalente de von Mises
Année universitaire 2008/2009 Olivier PANTALE

3
- Chapitre 1 -
Lois constitutives en grandesdéformations
1.1 Principes généraux d’écriture des lois de comportement
Dans le cadre de la mécanique des milieux continus, on cherche à prévoir sur la base deconditions initiales et de conditions aux limites le mouvement d’un milieu continu auquelon associe une variable thermodynamique (la température). Dans la théorie des solides dé-formables, on cherche à déterminer une fonction vectorielle −→x (
−→X, t) et une fonction scalaire
T (−→X, t). Ces fonctions sont nommées variables indépendantes (bien que faux en toute rigueur)
ou bien variables observables externes.
−→x =−→φ (−→X, t) T = T (
−→X, t) (1.1)
On a précédemment établi les lois de conservation du milieu continu. Ces équations ont pourécriture dans la configuration courante :
•ρ +ρvi,i = 0σij,j + ρfi = ρ
•vi
ρ•e= σijDij + ρr − qi,i
(1.2)
A cet ensemble d’équations, il convient d’ajouter l’inégalité de Clausius-Duhem [?] [?] :
D = −ρ(•ψ +
•T η) + σijDij − qigi
T≥ 0 (1.3)
L’ensemble de ces équations n’est pas intégrable tel quel. C’est évident car on n’a pas introduitoù que ce soit de notion concernant le matériau étudié ou la nature même de la physique dumatériau (liquide, solide...). Afin de caractériser le comportement du matériau, on doit ajouterau système précédent les équations constitutives ou équations de comportement du matériauétudié. D’une manière générale, ces équations lient les variables σ, ψ, η et−→q d’un point matérielà l’histoire du matériau et la température au voisinage du point considéré.
La théorie générale d’écriture des lois de comportement est née vers les années 1950 suiteaux travaux de Rivlin, Green, Oldroyd ou Truesdell. Les travaux de Green, Rivlin et Colemanont permis d’établir une théorie thermodynamique des équations de constitution. Dans le
Olivier PANTALE Année universitaire 2008/2009

4 Lois constitutives en grandes déformations
cas général de la formulation des équations constitutives, il convient de respecter un certainnombre de principes :
– admissibilité physique– équiprésence– déterminisme– action locale– indépendance vis à vis de l’observateur (objectivité)– respect des propriétés du matériau
1.1.1 Principe d’admissibilité physique
Les lois constitutives doivent énoncer des processus physiquement admissibles et doiventdonc être cohérentes avec les lois de conservation et l’inégalité de Clausius-Duhem. Au coursdes 25 dernières années, les lois de conservation ont été bâties à partir de l’inégalité deClausius-Duhem. Néanmoins, certains travaux révèlent des insuffisances de telles méthodes.
1.1.2 Principe d’équiprésence
Une quantité apparaissant dans une équation constitutive doit apparaître dans toutes leséquations constitutives du même matériau. En pratique, on peut effectuer des hypothèsessimplificatrices (omettre une ou plusieurs variables) si on juge que l’influence est non signifi-cative.
1.1.3 Déterminisme
Egalement appelée hérédité de mémoire, ce principe énonce que les variables constitutives àl’instant t sont fonction de toute l’histoire du mouvement du matériau et de la températuredu solide jusqu’à l’instant t, mais non au delà.
Les grandeurs caractéristiques du système deviennent donc des fonctionnelles de l’histoirede la déformation et de l’histoire de la température. Ces fonctionnelles dépendent de toutel’histoire passée du matériau. Il est cependant légitime de penser que certains systèmes sesouviennent moins bien du passé lointain que du passé récent. C’est un phénomène de mé-moire évanescente ou “fading memory”. On peut considérer que les valeurs des fonctionnellesconsidérées ne sont pas affectées de manière significative par leurs valeurs prises dans unpassé lointain.
1.1.4 Principe d’action locale
Les variables constitutives en un point du solide ne sont pas affectées de manière appréciablepar les valeurs des variables indépendantes en des points matériels distants de l’endroit oùelles sont évaluées. Les caractéristiques d’un système en un point −→x sont seulement fonctiondes valeurs des variables d’état (et de leurs dérivées) en ce point −→x .
Dans les formulations éléments finis, une grandeur A(−→X, t), lorsqu’elle est suffisamment dif-
férentiable peut être développée en série de Taylor autour d’un point −→x0. Pour tout point −→xvoisin de −→x0, la série de Taylor tronquée à un nombre fini de termes permet de représentercorrectement A(
−→X, t). C’est la base des formulations éléments finis.
1.1.5 Principe d’indépendance vis à vis de l’observateur (objectivité)
Les lois de la physique sont soumises à un certain nombre de principes d’invariance dans unchangement de référentiel. Les équations de la mécanique des milieux continus doivent êtreindépendantes de l’orientation des axes (invariance tensorielle) et du mouvement du systèmede référence (mouvement de l’observateur), c’est à dire être invariantes quand on superposeun mouvement de corps rigide au mouvement du matériau. On dit alors que les équationsd’équilibre obéissent à un principe d’objectivité.
Année universitaire 2008/2009 Olivier PANTALE

1.2 Principe d’indifférence matérielle ou objectivité 5
1.1.6 Principe de respect des propriétés du matériau
Les équations constitutives sont invariantes, quand à leur forme vis à vis d’un certain groupede transformations des coordonnées matérielles, c’est à dire que les équations sont compa-tibles avec les symétries du matériau.
1.2 Principe d’indifférence matérielle ou objectivité
1.2.1 Conditions d’invariance par changement de référentiel
Les équations de comportement, qui relient les contraintes et les déformations doivent êtreexprimées avec des termes indépendants de l’observateur. La localisation d’un point matérielpour deux observateurs différents est différente. De même, la vitesse d’un point matériel estdifférente pour deux observateurs en mouvement relatif. La position et la vitesse ne sont doncpas des grandeurs objectives.
Par ailleurs, la notion de distance entre deux points et d’angle entre deux vecteurs est elle,indépendante de l’observateur.
1.2.2 Notion de référentiel et de repère
Dans le cadre de la mécanique des milieux continus, on a généralement recours à l’utilisationd’un référentiel que l’on désignera par le terme de “observateur”. Le référentiel est assimilableà un corps rigide muni d’une base de temps. Dans ce référentiel, l’origine des temps et unrepère (système de coordonnées) sont choisis librement.
Ce repère, souvent choisi orthonormé pour des raisons de commodité permet d’identifierchaque particule
−→M à l’instant t à l’aide de ses coordonnées. Le choix d’un référentiel et d’un
système de coordonnées sont deux concepts différents.
Deux observateurs distincts voient différemment un même phénomène physique. La manièredont chacun perçoit le phénomène dépend de son choix de système de coordonnées (repère). Ilconvient de bien différencier la notion de changement de repère (changement de coordonnées)de celle de changement de référentiel (changement d’observateur). Par abus de langage, cesdeux notions sont bien souvent confondues.
1.2.2.1 Exemple illustratif
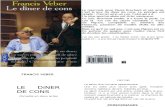
On considère 2 bateaux A et B sur une mer calme comme illustré sur la figure 1.1. Chacundes bateaux est muni d’un repère local RA et RB, ainsi que d’un repère temporel synchronecomportant la même origine des temps (pour simplifier), c’est à dire que tA = tB = t.
Si on considère maintenant 2 repères RA1 et RA2 sur le bateau A, le passage du repère RA1
au repère RA2 est un changement de repère simple (changement de coordonnées) car les 2repères sont animés du même mouvement de corps rigide (le mouvement du bateau A). Lesrelations de passage de RA1 à RA2 sont invariantes dans le temps. Par contre, si on considèremaintenant le passage de RA à RB (changement de référentiel ou d’observateur), les relationsdéfinissant ce changement doivent prendre en compte le mouvement relatif indépendant deces deux repères.
On supposera pour la suite qu’à l’instant initial (t = 0), les deux référentiels coïncident et qu’àl’instant t la configuration est celle donnée sur la figure 1.1. Dans cette configuration, l’origine−→OA vue de
−→OB s’exprime à l’aide du vecteur position −→c (t). La position du point M est alors
donnée par :
– le vecteur −→xA dans le référentiel RA– le vecteur −→xB dans le référentiel RB
Olivier PANTALE Année universitaire 2008/2009

6 Lois constitutives en grandes déformations
Bateau A
Bateau B
x
x'
α
α
θ
θ
M
x
R
R
A
B
A
B
A
O
O
c(t)
x"
B
Photo 1.1 – Représentation schématique des référentiels
Le bateau A communique au bateau B la position du point M (angle α et distance) dans sonpropre référentiel. Si au niveau du bateau B, on reporte ces indications dans le référentielcourant, on constate que la simple somme vectorielle
−→x′ + −→c (t) ne pointe pas sur le point
matériel M .
Il faut donc tenir compte de la rotation relative des deux référentiels et faire tourner le vecteur−→x′ d’un angle θ pour obtenir le vecteur
−→x′′. Cette rotation peut s’exprimer en toute généralité à
l’aide d’un tenseur orthogonal Q(t) tel que QT (t)Q(t) = I, donc par suite on écrit :
−→x′′ = Q(t)
−→x′ (1.4)
et la somme vectorielle s’écrit alors :
−→xB = −→c (t) +−→x′′ = −→c (t) + Q(t)
−→x′ (1.5)
Si les coordonnées de−→x′ et −→xA sont identiques dans les repères respectifs, on a alors :
−→xB(−→X,t) = Q(t)−→xA(
−→X, t) +−→c (t) (1.6)
Soit sous forme indicielle :
xBi(Xj , t) = Qij(t)xAj
(Xk, t) + ci(t) (1.7)
1.2.2.2 Invariance dans un changement de repère
Pour un même observateur, les lois de la mécanique des milieux continus doivent être inva-riantes vis à vis du système de coordonnées choisi. Les lois constitutives doivent donc êtreformulées en fonction de termes indépendants du repère choisi.
Si on choisit A,Bi, Cij , Dijk, ... ensemble de tenseurs de multiplicité quelconque pour défi-nir une loi constitutive de la forme f(A,Bi, Cij , Dijk, ...) = 0, le principe d’invariance im-pose alors que la relation définie ci-dessus doit être satisfaite si on remplace les variablesA,Bi, Cij , Dijk, ... par :
A = A scalaireBi = QiABA vecteurCij = QiAQjBCAB tenseur ordre 2Dijk = QiAQjBQkCDABC tenseur ordre 3Eijkl = QiAQjBQkCQlDEABCD tenseur ordre 4
Soit matriciellement sous la forme suivante :
Année universitaire 2008/2009 Olivier PANTALE

1.2 Principe d’indifférence matérielle ou objectivité 7
A = A−→B = Q
−→B
C = QCQT
D = Q[QDQT ]E = Q[QEQT ]QT
1.2.2.3 Invariance dans un changement de référentiel
Les équations constitutives doivent non seulement obéir à un principe d’invariance dans unchangement de repère à t fixé, mais elles doivent de plus obéir à un principe d’invariancedans un changement de référentiel dans la configuration courante. Ce principe requiert queles équations constitutives soient formulées en termes de grandeurs objectives (c’est à direindépendantes du mouvement de l’observateur).
Si l’on décrit le mouvement en variables Lagrangiennes, les tenseurs Lagrangiens, définis dansla configuration de référence sont insensibles au changement de référentiel sur la configura-tion courante.
Si l’on décrit le mouvement en variables d’Euler, en rapportant les grandeurs dans la configu-ration actuelle, lors d’un changement de repère défini par −→c (t) et Q(t), le principe d’objectivitéconduit alors à n’introduire dans les équations de comportement que des grandeurs ellesmêmes objectives.
Définition : Soit Aij..kAB..C un tenseur de type mixte (comportant à la fois des indices matérielsAB..C et spatiaux ij..k). Ce tenseur est objectif ou intrinsèque (ou indépendant du référentiel)si lors d’un changement de référentiel sur la configuration courante il se transforme suivantla règle :
Aij..kAB..C = QilQjm..QknAlm..nAB..C (1.8)
Les indices matériels AB..C demeurent non affectés.
En utilisant une équation de comportement fonction de quantités objectives ou de leurs com-binaisons linéaires, le principe d’objectivité est alors trivialement satisfait, ainsi :
f(A,Bi, Cij , Dijk, Eijkl) = f(A∗, B∗i , C∗ij , D
∗ijk, E
∗ijkl) = 0 (1.9)
Si f , −→g et H sont des fonctions constitutives scalaire, vectorielle et tensorielle respectivement,d’un tenseur A, un vecteur −→v et un scalaire s (tous trois spatiaux), on doit alors avoir quelque soit le tenseur Q(t) orthogonal :
f(A∗,−→v ∗, s∗) = f(QAQT ,Q−→v , s) = f(A,−→v , s)−→g (A∗,−→v ∗, s∗) = −→g (QAQT ,Q−→v , s) = Q−→g (A,−→v , s)H(A∗,−→v ∗, s∗) = H(QAQT ,Q−→v , s) = QH(A,−→v , s)QT
(1.10)
Par extension, si on considère une fonctionnelle H à valeur tensorielle (par exemple les contraintesde Cauchy), dépendant d’un tenseur A, un vecteur −→v et un scalaire s, on a alors :
σ(−→X, t) = H[A(
−→X, t),−→v (
−→X, t), s(
−→X, t)] (1.11)
Après changement de référentiel :
σ∗(−→X, t) = H[A∗(
−→X, t),−→v ∗(−→X, t), s∗(−→X, t)] (1.12)
Si A, −→v , s, et σ sont des grandeurs intrinsèques, on a :
A∗(−→X, t) = Q(t)A(
−→X, t)QT (t)
−→v ∗(−→X, t) = Q(t)−→v (−→X, t)
s∗(−→X, t) = s(
−→X, t)
σ∗(−→X, t) = Q(t)σ(
−→X, t)QT (t)
(1.13)
La condition sur la fonctionnelle H est alors donnée par :
H[A(−→X, t),−→v (
−→X, t), s(
−→X, t)] = QTH[QA(
−→X, t)QT ,Q−→v (
−→X, t), s(
−→X, t)]Q (1.14)
quel que soit Q(t) tenseur orthogonal.
Olivier PANTALE Année universitaire 2008/2009

8 Lois constitutives en grandes déformations
1.2.3 Remarques sur le principe d’objectivité
Remarque 1 : Le Principe d’objectivité n’est pas une conséquence du principe d’invariancede Galilée de la mécanique classique. En réalité, le groupe de Galilée est un sous groupe dugroupe Euclidien obtenu en posant Q(t) = I et −→c (t) = −→v t où −→v est un vecteur constant. Pourune transformation de Galilée, on a simplement :
−→X ′ =
−→X +−→v t (1.15)
Remarque 2 : Il importe de ne pas confondre la propriété d’objectivité avec la propriété d’in-variance vis-à-vis du système de coordonnées qui stipule que la réponse d’un matériau nepeut être modifiée lorsqu’on change de système de coordonnées. Cette dernière condition estautomatiquement rencontrée lorsque les équations constitutives sont écrites sous forme ten-sorielle.
Remarque 3 : Le cadre de travail est celui de la mécanique classique ou Newtonienne et neconsidère donc pas d’effets relativistes qui pourraient devenir importants. Si les mouvementsétaient effectués à des vitesses proches de celle de la lumière dans le vide.
Remarque 4 : Il ne faut pas non plus identifier la notion de symétrie par rapport à l’espace(qui est directement liée au Principe d’objectivité) avec la notion de symétrie matérielle (liéeaux propriétés propres du matériau et débouchant sur la notion d’isotropie).
Remarque 5 : Le principe d’indifférence matérielle est sans objet si on se limite à l’étude despetites déformations, puisque les rotations y sont négligées par hypothèse. Dans ce cas, seulle principe d’invariance de Galilée est à respecter.
Remarque 6 : Il faut aussi faire remarquer que ce sont uniquement les équations constitu-tives de la Mécanique des Milieux Continus qui doivent satisfaire au Principe d’objectivité.Ainsi, les équations de conservation n’y obéissent pas nécessairement. En particulier, on saitque l’équation de la quantité de mouvement n’est pas invariante vis-à-vis de la transformationà cause de la non-objectivité de l’accélération. L’équation de Newton est uniquement valabledans un repère Galiléen. S’il est non-Galiléen, il importe d’ajouter deux termes représentantles accélérations d’entraînement et de Coriolis pour obtenir une équation obéissant au Prin-cipe d’objectivité. Cette question du non respect du Principe d’objectivité par les équations deconservation est toujours une question ouverte.
1.2.4 Opérations sur des grandeurs objectives
On montre facilement que les combinaisons linéaires de grandeurs objectives sont elles mêmesdes grandeurs objectives :
A∗B∗ = QAQTQBQT = QABQT = (AB)∗ (1.16)
de même, on montre que :(A∗)n = QAnQT (1.17)
et de même pour le double produit contracté, on écrit :
A∗ijB∗ij = QiAQiBAABQiAQiBBAB = AijBij (1.18)
Mais les dérivées temporelles de grandeurs objectives ne sont pas toujours des grandeurs ellesmêmes objectives, ainsi, pour une quantité scalaire, la dérivée est objective :
•ρ∗=
•ρ (1.19)
Mais, la dérivée temporelle d’un vecteur objectif −→v s’écrit :•−→v ∗=
•(Q−→v )=
•Q −→v +Q
•−→v 6= Q•−→v (1.20)
et la dérivée temporelle d’un tenseur objectif A s’écrit de même :
•A∗=
•Q AQT + Q
•A QT + QA
•QT 6= Q
•A QT (1.21)
Ceci est dû à ce que la différence entre les deux tenseurs relatifs à deux instants différentsdépend du mouvement du système de référence entre ces deux instants.
Année universitaire 2008/2009 Olivier PANTALE

1.2 Principe d’indifférence matérielle ou objectivité 9
1.2.5 Grandeurs objectives et non-objectives
1.2.5.1 Caractère intrinsèque de certaines variables de champ
En mécanique de milieux continus, les variables suivantes ont un caractère intrinsèque :
– la masse spécifique : ρ = ρ∗
– l’énergie interne spécifique : u = u∗
– l’énergie libre spécifique : ψ = ψ∗
– l’enthalpie spécifique : h = h∗
– la température : T = T ∗
– l’entropie spécifique : η = η∗
– la production interne de chaleur : r = r∗
De plus, les forces de volume (−→b ∗ = Q
−→b ), les forces de contact (
−→t ∗ = Q−→t ) et le vecteur flux de
chaleur (−→q ∗ = Q−→q ) sont des vecteurs objectifs.
L’ensemble de ces équations sont des postulats de base acceptés tels quels. Les grandeursmises en jeu possèdent donc un caractère propre, indépendant de tout mouvement rigide sesuperposant à la déformation du milieu.
1.2.5.2 Grandeurs géométriques
Le temps n’est pas une grandeur objective car entre deux référentiels, on sait que t∗ = t−a 6= t,par contre, la différentielle du temps est objective (dt∗ = dt), c’est donc elle qui est utilisée dansla formulation des lois de comportement.
Le vecteur position n’est pas une grandeur objective (−→x ∗ = Q−→x +−→c 6= Q−→x ). Dans les équationsde comportement, on utilisera donc le gradient de déformation F qui lui est objectif (commeon le montre plus loin).
Le vecteur déplacement, la vitesse et l’accélération ne sont pas des grandeurs objectives nonplus.
−→u ∗ = −→x −−→X = Q−→x +−→c −−→X 6= Q−→u (1.22)
−→v ∗ =d−→x ∗dt∗
= Q•−→x +
•Q −→x+
•−→c 6= Q−→v (1.23)
Par contre, le vecteur −→p reliant deux points −→x et −→y de la même configuration est objectif :
−→p ∗ = −→y ∗ −−→x ∗ = (Q−→y +−→c )− (Q−→x +−→c ) = Q(−→y −−→x ) = Q−→p (1.24)
donc la distance entre deux points, l’angle de deux vecteurs sont objectifs, il en est donc demême pour la normale à une surface.
1.2.5.3 Grandeurs à caractère thermique
La dérivée temporelle de la température est objective, en admettant que T ∗ = T comme indiquéau paragraphe 1.2.5.1 :
dT ∗
dt∗=dT
dt(1.25)
Le gradient de température est lui aussi une quantité objective :
∂T ∗
∂x∗i=
∂T
∂xj
∂xj∂x∗i
=∂T
∂xjQ−1ij = Qij
∂T
∂xj(1.26)
On peut alors montrer à partir de cette relation que la loi de Fourier est objective.
Olivier PANTALE Année universitaire 2008/2009

10 Lois constitutives en grandes déformations
1.2.5.4 Grandeurs cinématiques
Le tenseur gradient de déformation F est objectif, en effet :
F ∗iA =∂x∗i∂XA
=∂x∗i∂xj
∂xj∂XA
= QijFjA (1.27)
soit donc sous forme tensorielleF∗ = QF (1.28)
On pourrait penser à la vue de la relation précédente que F n’est pas un tenseur objectif car ilne se comporte pas comme un tenseur (A = QAQT ) mais plutôt comme un vecteur. Il convientdonc de rappeler le caractère bipoint du tenseur F et la définition d’un tenseur mixte objectifdonnée précédemment (au paragraphe 1.2.2.3). A partir de la connaissance de l’objectivité dutenseur F, on déduit que le Jacobien (mesure de la variation de volume) est objectif car :
J∗ = det F∗ = det Q det F = det F = J (1.29)
1.2.5.5 Tenseurs de déformation et de contrainte
Le théorème de décomposition polaire donne comme écriture :
R∗U∗ = QRU (1.30)
V∗R∗ = QVR = QVQTQR (1.31)
En vertu de l’unicité de la décomposition polaire et de l’orthogonalité du produit QR, on obtientalors les relations suivantes :
R∗ = QR U∗ = U V∗ = QVQT
R∗iA = QijRjA U∗AB = UAB V ∗ij = QikVklQlj(1.32)
Ces trois tenseurs sont objectifs, il convient de faire attention à l’écriture tensorielle, quimasque le caractère Lagrangien, Eulérien ou mixte de la nature des tenseurs, ce qui rendl’interprétation de l’objectivité ou non d’un tenseur difficile à faire d’un premier abord.
En ce qui concerne les autres tenseurs associés aux déformations du milieu, par définitionon a :
C = FTF ⇒ C∗ = F∗T
F∗ = FTF = C et C∗AB = CAB
B = FFT ⇒ B∗ = F∗F∗T
= QFFTQT = QBQT et B∗ij = QikBklQlj(1.33)
de même :E =
12
(C− I)⇒ E∗ = E et E∗AB = EAB (1.34)
Ainsi que la dérivée temporelle du tenseur de Cauchy-Green à droite qui s’écrit sous la forme :
•C∗ =
•(F∗
T
F∗)
=•
F∗T
F∗ + F∗T •
F∗
=•
FT QTQF + FT•
QT QF + FTQT•Q F + FTQTQ
•F
=•
FT F + FT•F
=•C
car QTQ = I⇒•
(QTQ)= 0
On peut faire la même démonstration pour le tenseur E dont la dérivée temporelle est elleaussi objective.
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 11
Les tenseurs L, D et W se transforment suivant les mêmes types de règles. Le tenseur gradientdes vitesses L n’est pas objectif car son écriture est telle que :
L =•F F−1 ⇒ L∗ =
•F∗ F∗
−1(1.35)
or on peut montrer que :
F∗ = QF ,•
F∗=•Q F + Q
•F , F∗
−1= F−1QT (1.36)
par suite, on obtient :
L∗ =•Q QT + QLQT (1.37)
Le taux de déformation D, partie symétrique du tenseur gradient des vitesses L est objectif,on montre ainsi que :
D∗ =12Q(L + LT )QT = QDQT (1.38)
On remarque ainsi que le tenseur gradient des vitesses L n’est pas objectif, mais que le tenseurtaux de déformation D, qui est une combinaison du tenseur L, lui, est objectif.
Par contre, le tenseur des taux de rotations W est non objectif, donc ne peut pas être pris encompte dans les lois de comportement.
W∗ = QWQT+•Q QT (1.39)
la partie non objective•Q QT correspond à la vitesse de rotation relative des deux référentiels.
Le tenseur des contraintes de Cauchy σ quand à lui est un tenseur objectif, c’est à dire quel’on écrira :
σ∗ = QσQT (1.40)
de même pour les deux tenseurs des contraintes de Piola-Kirchhoff.
1.3 Application aux lois élasto-plastiques
Un matériau élasto-plastique est un matériau simple pour lequel les contraintes de Cauchyau temps t dépendent de l’histoire du gradient de déformation F et sont des fonctionnelles decette grandeur uniquement (dans le cas isotherme).
σ(−→X, t) = Hτ≤tF(
−→X, τ) (1.41)
dans le cas d’un matériau élastique (les valeurs des contraintes σ ne sont fonction que de F àl’instant t), on écrit :
σ(−→X, t) = HF(
−→X, t) (1.42)
avec H fonction et non fonctionnelle.
Le principe d’objectivité précédemment énoncé se traduit alors par :
Hτ≤tF(τ) = QTHτ≤tQ(τ)F(, τ)Q (1.43)
avec QT (τ)Q(τ) = I ∀τ ≤ t. Si on prend le cas particulier où Q(τ) = RT (τ) avec R(τ) tenseur derotation issu de la décomposition polaire de F(τ) = R(τ)U(τ), on a alors :
σ(−→X, t) = Hτ≤tF(τ) = R(t)Hτ≤tU(τ)RT (t) (1.44)
Ainsi le tenseur des contraintes de Cauchy au temps t est entièrement déterminé par lavaleur courante de R(t) et l’histoire du tenseur des déformations pures à droite U, ou ce quiest équivalent, le tenseur des déformations de Green-Lagrange E.
E =12
(C− I) et C = U2 (1.45)
Olivier PANTALE Année universitaire 2008/2009

12 Lois constitutives en grandes déformations
Si le matériau est élastique, la notion d’histoire étant sans effet, on obtient alors directement :
σ(−→X, t) = R(t)HU(t)RT (t) (1.46)
en utilisant alors R = FU−1 et J = det F = det U puisque det R = 1, on écrit alors :
σ(−→X, t) =
1J
F(t)[det U(t)U−1(t)Hτ≤tU(τ)U−1T
(t)]FT (t) (1.47)
le terme entre crochets est une fonction de U et de son histoire uniquement, on le noteraH′τ≤tU(τ) soit donc :
σ(−→X, t) =
1J
F(t)H′τ≤tU(τ)FT (t) (1.48)
On déduit alors que le tenseur des contraintes de Piola-Kirchhoff est donné par la relation :
s(−→X, t) = H
′τ≤tU(τ) (1.49)
Par suite, on montre alors dans le cas d’un matériau élastique que le comportement est donnépar les relations suivantes :
s(−→X, t) = λtr[E]I + 2µE (1.50)
σ(−→X, t) = λtr[A]I + 2µA (1.51)
soit en notation indicielle :σij(−→X, t) = HijklAkl (1.52)
avec Hijkl = λδijδkl + µ(δikδjl + δilδjk)
1.3.1 Forme canonique des lois de comportement
On se place ici dans le cas de l’étude des matériaux hypo-élastiques, c’est à dire les matériauxpour lesquels il existe une fonction tensorielle f telle que l’évolution des contraintes de Cauchyest de la forme : •
σ= f(σ,L) (1.53)
et plus exactement, la contrainte de Cauchy dépendant de l’ordre dans lequel le corps a étésollicité et non de la vitesse des sollicitations précédentes (principe d’invariance temporelle),on écrit : •
σ= f(σ)L (1.54)
Cette classification exclue les matériaux ayant un caractère visqueux de la classe des maté-riaux hypo-élastiques, mais on peut facilement généraliser en considérant une non astreinteau principe d’invariance temporelle.
Le principe d’objectivité indique alors que la fonctionnelle f doit être mathématiquement iso-trope en σ. Le tenseur des contraintes de Cauchy est objectif, on l’a montré précédemment,mais la dérivée temporelle de σ ainsi que L ne le sont pas. On peut donc dans un premiertemps remplacer L par sa partie symétrique D qui est objective, mais il convient alors d’intro-duire une dérivée temporelle objective du tenseur des contraintes de Cauchy σ.
1.3.2 Cas de la dérivée temporelle des contraintes de Cauchy
On a montré précédemment que la dérivée temporelle des contraintes de Cauchy n’est pasobjective. En effet, de σ∗ = QσQT , on déduit :
•σ∗= Q
•σ QT+
•Q σQT + Qσ
•QT
(1.55)
L’emploi direct de la dérivée temporelle•σ dans les équations de comportement n’est donc
pas possible en grandes transformations. Cet emploi conduit à des aberrations comme celledécrite ci-après.
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 13
X2
x2
X1 x1
e1
e2
X2
x2X1
x1
e'1e'2
θe1
e2
Photo 1.2 – déformation plane d’une structure par élongation autour de l’axe 1 et rotationrigide autour de l’axe 3.
On considère une structure soumise à un état plan de déformation comme indiqué sur lafigure 1.2.
Les positions xi sont données en fonction des positions Xi par les relations :
x1 = h1(t)X1 , x2 = h2(t)X2 , x3 = X3 (1.56)
Le facteur hi étant indépendant des coordonnées, et égal au rapport de la longueur courantesur la longueur initiale, on écrit alors :
FR =∂−→x∂−→X
=[h1 00 h2
](1.57)
On en déduit alors la forme du gradient des vitesses L :
LR =•
FR F−1R =
•h1h1
0
0•h2h2
=[k1 00 k2
](1.58)
et les taux de déformation D et de rotation W par les relations :
DR =[k1 00 k2
]et WR =
[0 00 0
](1.59)
L’équation constitutive se traduit alors par la relation•σR= gR(σR)DR.
On considère maintenant le deuxième cas, c’est à dire que l’on superpose à la déformation une
vitesse de rotation angulaire•θ autour de −→e 3. La précédente analyse est parfaitement adaptée
à un observateur lié à la structure, et tournant avec celle-ci.
Dans le repère fixe, les positions sont données par :x1 = h1(t) cos θX1 − h2(t) sin θX2
x2 = h1(t) sin θX1 + h2(t) cos θX2(1.60)
Soit donc :
F =[h1(t) cos θ −h2(t) sin θh1(t) sin θ h2(t) cos θ
]= QTFR (1.61)
avec :
QT =[
cos θ − sin θsin θ cos θ
](1.62)
Q est la matrice de rotation orthogonale de changement d’axes. On écrit alors par définitiondu gradient des vitesses L :
L =•F F−1 =
•(QTFR) (QTFR)−1
= (•QT
FR + QT•
FR)(F−1R Q−T )
=•QT
Q + QTLRQ= QTLRQ + ω
Olivier PANTALE Année universitaire 2008/2009

14 Lois constitutives en grandes déformations
avec ω =•QT
Q =•θ
[0 −11 0
]Par suite, on écrit alors :
D = QTDRQ et W = QTWRQ + ω = ω (1.63)
Dans le référentiel fixe, la contrainte est donnée par σ, dans le référentiel mobile par σR et :
σR = QσQT ou σ = QTσRQ (1.64)
soit :•σ=
•(QTσRQ)=
•QT
σRQ + QT •σR Q + QTσR•Q (1.65)
en utilisant le fait que Q est orthogonal, soit QQT = QTQ = I on écrit alors :
•σ =
•QT
σRQ + QT •σR Q + QTσR•Q
=•QT
QQTσRQ + QT •σR Q + QTσRQQT•Q
=•QT
Qσ + QT •σR Q + σQT•Q
= QT •σR Q + Wσ + σWT
Comme W est antisymétrique, on écrit alors WT = −W et
•σ= QT •σR Q + Wσ − σW︸ ︷︷ ︸
terme parasite
(1.66)
Le terme parasite Wσ − σW représente un accroissement fictif et indésirable des contraintesdû à la rotation relative des deux tenseurs. En effet, si on suppose que la structure est précon-
trainte σ 6= 0 et tourne sans se déformer (k1 = k2 = 0,•θ 6= 0), on en déduit alors que D = DR = 0.
Par suite, dans le référentiel tournant on écrit :
•σR= gR(σR)DR = 0 (1.67)
et dans le référentiel fixe : •σ= g(σ)D = 0 (1.68)
or : •σ= QT •σR Q + Wσ − σW = Wσ − σW 6= 0 (1.69)
Cette équation traduit donc une contradiction avec l’énoncé du problème. Il est donc pri-mordial d’utiliser dans toute loi de comportement des termes objectifs sous peine de voir sedévelopper des contraintes indésirables au sein du matériau. On conviendra donc d’utiliserdans les lois de comportement la partie symétrique du tenseurs des vitesses de déformationsD en lieu et place de L qui n’est pas objectif, et une dérivée temporelle objective du tenseur
des contraintes de Cauchy σ, notée∇σ.
Remarque : Dans le cadre de l’étude en petites déformations, on montre facilement que la
matrice Q se réduit à l’identité (les rotations étant négligeables), par suite•Q= 0 et W = 0 ce
qui supprime le terme parasite dans l’équation de comportement.
1.3.3 Ecriture d’une dérivée temporelle objective
Le moyen le plus simple d’obtenir une dérivée temporelle objective des contraintes de Cauchy
consiste à définir un nouveau taux de contrainte∇σJ
en soustrayant à la dérivée matérielle•σ
le terme parasite, soit :∇σJ
=•σ −Wσ + σW (1.70)
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 15
Cette forme de dérivée est objective puisque, dans un changement de référentiel, pour letenseur des contraintes de Cauchy, on écrit :
σ∗ = QσQT (1.71)
en dérivant cette expression, on obtient :
•σ∗=•Q σQT + Q
•σ QT + Qσ
•QT
(1.72)
Par définition, on a établi la non objectivité de W au paragraphe 1.2.5.5 en écrivant
W∗ = QWQT+•Q QT (1.73)
soit :W∗Q = QWQTQ+
•Q QTQ = QW+
•Q (1.74)
et : •Q= W∗Q−QW (1.75)
en transposant cette expression, il vient alors :
•QT
= WQT −QTW∗ (1.76)
Par suite, on écrira :
•σ∗
=•Q σQT + Q
•σ QT + Qσ
•QT
= (W∗Q−QW)σQT + Q•σ QT + Qσ(WQT −QTW∗)
= W∗QσQT −QWσQT + Q•σ QT + QσWQT −QσQTW∗
= W∗σ∗ −QWσQT + Q•σ QT + QσWQT − σ∗W∗
soit : •σ∗−W∗σ∗ + σ∗W∗ = Q[
•σ −Wσ + σW]QT (1.77)
et donc par suite et finalement :∇σJ∗
= Q∇σJ
QT (1.78)
Cette dérivée temporelle est donc objective, elle porte le nom de dérivée de Jaumann descontraintes de Cauchy. Elle traduit la variation du tenseur des contraintes perçue par un ob-servateur lié au mouvement d’un point matériel (c’est à dire subissant une rotation identiqueà celle du milieu matériel).
D’autres formes de dérivées temporelles objectives existent (Truesdell, Lie, Cotter-Rivlin, Durban-Baruch...), l’étude et les conséquences de l’utilisation de telles dérivées sort du cadre de cecours.
1.3.4 Les dérivées corotationnelles
A partir de la définition de la dérivée de Jaumann, on remarque qu’elle est définie à l’aide d’unematrice orthogonale Q et générée par une matrice anti-symétrique W. L’étude des transforma-tions de coordonnées durant un changement de repère conduit à la définition d’une matriceantisymétrique ω permettant de générer un groupe de matrices de rotation ρ dépendant dutemps en résolvant le système suivant : •
ρ= ωρρ(t = t0) = I
(1.79)
La matrice orthogonale ρ ainsi définie permet d’écrire un changement de référentiel orthogonalde même origine que le référentiel d’origine. Les lois de transformation sont données par :
V′ijk.. = ρaiρbjρck...Vabc... (1.80)
Olivier PANTALE Année universitaire 2008/2009

16 Lois constitutives en grandes déformations
et la loi de transformation d’une dérivée temporelle est donnée par la relation :
•V
′
ijk..= ρaiρbjρck...(•V abc... −ωarVrbc... − ωbrVarc... − ωcrVabr...) (1.81)
Dans le cas d’un vecteur, on écrira donc :−→p ′ = ρT−→p•−→p′
= ρT (•−→p −ω−→p )
(1.82)
Pour un tenseur du second ordre, on écrit : V′
= ρTVρ•V′
= ρT (•V −ωV + Vω)ρ
(1.83)
soit :
ρ•V′
ρT =•V −ωV + Vω (1.84)
La dérivée corotationnelle des contraintes de Cauchy est alors donnée par :
∇σc
= ρ[d
dt(ρTσρ)]ρT =
•σ −ωσ + σω (1.85)
avec•ρ= ωρ ou
•ρT
= −ρTω.
La dérivée corotationnelle possède une forme d’écriture relativement complexe, sauf lorsqu’elleest écrite dans un référentiel bien choisi, généré à partir d’un système d’axes mobiles (ouentraînés) noté −→e ′ et de même origine que −→e , ayant une vitesse angulaire ω avec le repère−→e . Ainsi, dans le référentiel entraîné, on peut définir un nouveau tenseur des contraintes deCauchy (tenseur des contraintes corotationnelles de Cauchy) σc par la relation suivante :
σc = ρTσρ σ = ρσcρT (1.86)
pour lesquelles on écrit donc :
•σc
= ρT (•σ −ωσ + σω)ρ = ρT
∇σc
ρ (1.87)
Ainsi, dans le repère entraîné, la dérivée corotationnelle se réduit donc à une simple dérivéetemporelle. La difficulté réside alors dans l’évaluation de la matrice ω en fonction du temps.
1.3.5 Forme canonique dans le système d’axes entraînés
Suite au changement de repère dans les axes entraînés, les dérivées objectives corotation-nelles des contraintes de Cauchy se réduisent à de simples dérivées temporelles. Pour effec-tuer l’intégration le long d’un chemin de déformation de l’équation constitutive canonique,le second membre de cette équation doit être exprimé dans le même système d’axes que lepremier. Ainsi, on définit alors :
Le taux de déformation corotationnel :
Dc = ρTDρ (1.88)
Le tenseur matériel corotationnel :Mc = ρT [ρTMρ]ρ (1.89)
Le principe d’objectivité implique alors que le tenseur M doit être mathématiquement iso-trope. Si outre les contraintes de Cauchy, le tenseur M dépend de grandeurs scalaires A outensorielles B, on a alors :
Mc(σ, A,B) = ρT [ρTM(σ, A,B)ρ]ρ= M(ρTσρ,A, ρTBρ)
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 17
soit donc :Mc(σ, A,B) = M(σc, Ac,Bc) (1.90)
Si B représente la loi d’évolution d’une variable interne tensorielle (par exemple α dans uneloi d’écrouissage cinématique), il est alors impératif que cette loi soit décrite avec la mêmedérivée objective que celle des contraintes de Cauchy. L’équation canonique s’écrit alors sousla forme : •
σc
= Mc : Dc (1.91)
Ainsi, l’emploi d’une dérivée corotationnelle, définie à l’aide d’une matrice de rotation ρ(t)permet de ramener le problème de l’intégration temporelle des équations constitutives engrandes transformations à un problème d’intégration équivalent en petites déformations dansles axes mobiles.
1.3.6 Equation constitutive pour un matériau élasto-plastique
On s’intéresse maintenant à la description du comportement élastoplastique des matériaux.On supposera connues les bases des développements élastoplastiques classiques en petitesdéformations. Dans les matériaux hypoélastiques classiques, le temps n’a pas sa valeur com-mune mais joue le rôle d’une variable cinématique descriptive toujours strictement croissantependant l’évolution. On écrit alors :
∇σ= M : D (1.92)
ou dans les axes corotationnels : •σc
= Mc : Dc (1.93)
Le tenseur M caractérise le comportement du matériau élastoplastique. L’établissement de laforme de M se déroule selon les étapes suivantes :
– décomposition du tenseur taux de déformation en sa partie élastique et plastique– introduction de la fonction de charge– introduction d’une loi d’écoulement associée à la partie plastique du tenseur taux de défor-
mation
1.3.6.1 Décomposition du tenseur taux de déformation
Dans le cas où l’on est en présence de déformations irréversibles en plus des déformationsélastiques, puisque la déformation totale est la somme des deux précédentes, il est néces-saire de déterminer la contribution respective à la déformation totale. Dans le cas des petitesdéformations, on utilise une décomposition additive des déformations de la forme :
ε = εe + εp (1.94)
ou •ε=•εe +
•εp (1.95)
Dans le cas des grandes déformations cette décomposition additive n’est plus possible, onutilise alors généralement la décomposition suivante :
D = De + Dp (1.96)
qui en toute rigueur n’est elle non plus pas licite. Néanmoins, la majorité des numériciensutilisent cette relation. En toute rigueur une évaluation plus fine permettrait entre autre dequantifier la quantité de chaleur générée par déformation plastique autrement que au traversd’un coefficient empirique.
Une fois cette décomposition adoptée, la partie élastique étant liée à la vitesse de contrainte(objective) par la loi de Hooke généralisée, on écrit :
∇σ= M : D = H : De = H : (D−Dp) (1.97)
Olivier PANTALE Année universitaire 2008/2009

18 Lois constitutives en grandes déformations
ou bien : •σ= Hc : Dc
e = Hc : (Dc −Dcp) (1.98)
avec :σc = ρTσρ Hc = ρT [ρTHρ]ρDc = ρTDρ Dc
e = ρTDeρ Dcp = ρTDpρ
(1.99)
1.3.6.2 Introduction de la fonction de charge
Les théories élastoplastiques reposent sur la définition de 3 domaines dans l’espace descontraintes délimitant 3 zones distinctes comme indiqué sur la figure 1.3. La première estla zone où le comportement est élastique. La deuxième zone est la surface limite du domaineélastique (surface de plasticité ou fonction de charge), c’est la zone où apparaissent les dé-formations irréversibles. La troisième zone est le domaine extérieur à la surface de plasticité,son accès est interdit.
domaine interdit
surface de plasticité
domaine élastique
Photo 1.3 – Représentation schématique de la surface de plasticité dans l’espace descontraintes
La manière la plus commode d’exprimer un critère de plasticité est de l’écrire sous la formef(σ,q) = 0 avec q représentant un ensemble de paramètres d’hérédité (scalaires, vecteurs,tenseurs) dont la valeur n’est modifiée que lors de déformations plastiques.
– la zone élastique est caractérisée par : f(σ,q) < 0– la zone plastique est caractérisée par : f(σ,q) = 0– la zone interdite est caractérisée par : f(σ,q) > 0
Le principe d’objectivité implique que la surface de charge soit décrite avec des termes objec-tifs, c’est à dire indépendants du mouvement de l’observateur. La fonction f doit donc êtremathématiquement isotrope de ses arguments, et on a :
f∗(σ,q) = f(σ∗,q∗) (1.100)
avec σ∗ = QσQT déjà démontré et q∗ = Q[q] avec :
– Q[q] = QqQT si q est un tenseur– Q[q] = Qq si q est un vecteur– Q[q] = q si q est un scalaire
Ici se pose alors le choix de la dérivée à utiliser pour évaluer∇f . Ce choix n’est pas trivial et
l’abondance d’articles justifiant (ou non) tel ou tel choix laisse généralement le novice totale-ment perplexe. Quoi qu’il en soit, nous adopterons pour la suite, une formulation basée surune dérivée corotationnelle pour f .
1.3.6.3 Introduction d’une loi d’écoulement associée
Comme dans le cadre des petites déformations, on suppose que durant la déformation plas-tique, le matériau obéit à une loi d’écoulement associée (dirigée selon la normale à la surfacede charge) telle que :
Dpij = λ
∂f
∂σij(1.101)
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 19
Si la norme de ∂f∂σ est notée ε et sa direction par le tenseur unitaire n (normale) on obtient :
Dpij = Λnij avec Λ = λε (1.102)
Les paramètres d’hérédité suivent une loi d’évolution du type :
∇q= Λr(σ,q) (1.103)
On suppose ici que l’on a des lois d’écoulement associées. Mais on peut de la même manièretraiter le cas des écoulements non associés en considérant que n est le tenseur unitairedonnant la direction de l’écoulement, ainsi, on écrit alors :
n =∂g∂σ√∂g∂σ : ∂g
∂σ
(1.104)
avec g représentant une fonction à laquelle l’écoulement et normal. Si f = g on retrouve le casde la plasticité associée, si f 6= g la plasticité non-associée (et la relation n = ε ∂f∂σ n’est plusvalable). C’est le cas notamment pour le traitement du contact.
1.3.7 Forme canonique dans le système d’axes entraînés
La formulation élastoplastique repose sur les équations fondamentales suivantes :
Dpij = Λnij et
∇q= Λr(σ,q) (1.105)
de plus, on peut introduire la dissipation plastique sous la forme :
•ωp=
Λρσ : n (1.106)
Toutes les grandeurs en jeu étant corotationnelles, elles peuvent être écrites dans les axescorotationnels en remplaçant les dérivées objectives corotationnelles par de simples dérivéestemporelles :
Dc = QDQT Dce = QDeQ
T Dcp = QDpQ
T
σc = QσQT nc = QnQT Λc = Λ•ωp
c=•ωp qc = Q[q]
(1.107)
On peut alors écrire les équations constitutives dans les axes corotationnels sous la formedécrite ci dessous.
Equation constitutive :•σij= Hijkl(Dkl −Dp
kl) = MijklDkl (1.108)
Surface de plasticité :f(σ,q) = 0 (1.109)
Equation de consistance :•f=
∂f
∂σij
•σij +
∂f
∂q(k)
•q(k)= 0 (1.110)
Loi d’écoulement :
Dpij =
•εpij= Λnij (1.111)
avec
nij =∂g∂σij√∂g∂σij
∂g∂σij
et g = f si plasticite associee (1.112)
Loi d’évolution des paramètres d’hérédité :
•q(k)= Λr(k)(σ,q) (1.113)
Olivier PANTALE Année universitaire 2008/2009

20 Lois constitutives en grandes déformations
Dissipation plastique :•ωp=
Λσijnijρ
(1.114)
En combinant les équations précédentes, on obtient le paramètre de consistance Λ sous laforme suivante :
Λ =∂f∂σij
HijklDkl
∂f∂σij
Hijklnkl − ∂f
∂q(k) r(k)(σ,q)(1.115)
qui est objectif car uniquement composé de grandeurs objectives.
On en déduit alors :•σij= MijklDkl (1.116)
avec :
Mijkl = Hijkl −Hijmn
∂f∂σrs
Hrsklnmn∂f∂σrs
Hrsmnnmn − ∂f
∂q(k) r(k)(σ,q)(1.117)
Cette forme est semblable à celle obtenue dans le cas des petites déformations, le caractèreélastoplastique permet des déformations purement élastiques dans le cas où le paramètre deconsistance Λ est nul. Les paramètres d’hérédité ne varient alors pas et le tenseur M se réduitau tenseur de Hooke H. Les conditions générales de charge et de décharge s’écrivent alorssous la forme de Kuhn-Tucker [?] d’un problème d’optimisation :
Λ ≥ 0 f(σ,q) ≤ 0 Λf(σ,q) = 0 (1.118)
Ces conditions doivent être remplies simultanément pour tout processus admissible :
– déformation élastique : f ≤ 0⇒ Λ = 0– déformation plastique : Λ > 0⇒ f = 0
1.3.8 Critère de plastification de Von-Mises
Dans le cas particulier du critère de plastification de Von-Mises, la surface de charge estdonnée par la relation :
f(σij , σv, αij) = f(φij , σv) =12φijφij − 1
3σ2v = 0 (1.119)
avec φij = sij − αij, où sij est le déviateur des contraintes corotationnelles de Cauchy, et lesparamètres d’hérédité sont :
– le scalaire σv donnant la limite apparente d’élasticité– le tenseur αij donnant la position du centre de la surface de charge dans l’espace corota-
tionnel des contraintes (back-stress).
Remarque : Le critère de Von-Mises n’étant fonction que du deuxième invariant du tenseur φ,les matériaux répondant à ce critère sont qualifiés de matériaux élastoplastiques de type J2.
1.3.9 Ecrouissage isotrope
Les déformations élastiques correspondent physiquement à des distorsions du réseau cristal-lin, et les déformations plastiques à des glissements de dislocations au sein du matériau. Lesobservations expérimentales montrent de plus que les matériaux soumis à des déformationsélastoplastiques voient leur résistance à la déformation augmenter avec celle-ci (phénomèned’écrouissage).
Dans un modèle d’écrouissage isotrope, la surface de plasticité peut se dilater de manièreuniforme dans toutes les directions de l’espace des contraintes et reste donc homothétique àla surface initiale. Un seul paramètre d’hérédité est donc nécessaire pour définir l’histoire de
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 21
la charge. On utilisera ici la limite d’élasticité apparente σv supposée uniquement fonction de
la déformation plastique équivalente•ε :
εp(t) = εp(t0) +∫ t
t0
•εp dt = εp(t0) +
∫ t
t0
√23DpijD
pijdt (1.120)
la dérivée de σv par rapport à εp est appelée coefficient d’écrouissage, et a la forme :
h′
=dσv(εp)dεp
(1.121)
soit :•σv= h
′ •εp= h
′√
23DpijD
pij (1.122)
•σv=
√23h′Λ (1.123)
pour l’écrouissage isotrope : riso(σ, σv) =√
23h′
avec :
– h′> 0 : durcissement
– h′
= 0 : élastique parfaitement plastique– h
′< 0 : adoucissement
On peut alors particulariser la loi de comportement générale et écrire la forme analytique deM. Pour un écrouissage isotrope, on a alors le critère de plasticité de Von-Mises sous la forme :
f(σij , σv) =12sijsij − 1
3σ2v = 0 (1.124)
et la loi d’écoulement :Dpij = τ
∂f
∂σij= τ
∂f
∂sij= τsij (1.125)
L’incompressibilité de la déformation plastique s’écrit alors immédiatement puisque :
trDp = Dpii = τsii = 0 (1.126)
A l’aide du critère de Von-Mises, on définit alors la normale à la surface de charge (dans ladirection de l’écoulement) par :
nij =sij√sklskl
=sij√23σv
(1.127)
ou :
sij =
√23σvnij (1.128)
On montre donc facilement que n est unitaire puisque : nijnij = 1 et nii = 0.
De plus, on montre que n est objective :
n∗ =s∗√s∗ : s∗
=QsQT
√s : s
= QnQT (1.129)
de ces propriétés, on déduit alors les écritures suivantes :
Λ =nijDij
1 + h′
3G
(1.130)
et :Dpij =
nklDkl
1 + h′
3G
nij (1.131)
D’où l’écriture de M sous la forme :
Mijkl = Hijkl − 2G
1 + h′
3G
sijsklσ2v
(1.132)
Olivier PANTALE Année universitaire 2008/2009

22 Lois constitutives en grandes déformations
1.3.9.1 Ecrouissage isotrope linéaire
Le coefficient h′
est une constante et l’on écrit : σv = σ0v + h
′εp avec :
– σv : limite apparente d’élasticité.– σ0
v : limite d’élasticité initiale.
Le coefficient d’écrouissage peut être relié à la pente de la courbe d’écrouissage par la relation :
h′
=EETE − ET (1.133)
On peut également approximer la courbe σv = σv(εp) par une fonction analytique non-linéairedont on évalue la dérivée h
′= dσv
dεp en tout point.
1.3.9.2 Ecrouissage cinématique
Afin de prendre en compte l’effet Bauschinger, on introduit un écrouissage plus complexe quel’écrouissage isotrope. On suppose dans l’écrouissage cinématique que lors d’un chargementplastique, la surface de plasticité se translate sans se déformer dans l’espace des contraintes.Les paramètres d’hérédité sont groupés dans un tenseur α (back-stress en anglais), nul quandle matériau est vierge et représentant la position du centre de la surface de charge dansl’espace des contraintes. Une forme simple d’évolution de α est donnée par :
•α=
23h′′Dp (1.134)
avec h′′
constante si l’écrouissage est linéaire, et pouvant être fonction de α, Dp et εp. D’autresformes pour α existent. Le critère de plasticité de Von-Mises s’écrit alors sous la forme :
f(sij , αij , σv) =12
(sij − αij)(sij − αij)− 13σ2v = 0
=12φijφij − 1
3σ2v = 0
avec φij = sij − αij.Le tenseur élasto-plastique a alors la forme :
Mijkl = Hijkl − 2G
1 + h′′
3G
nijnkl (1.135)
1.3.9.3 Ecrouissage mixte
C’est une combinaison des deux écrouissages précédents, comportant simultanément un gon-flement et une translation de la surface de charge. Le coefficient d’écrouissage h est unecombinaison de h
′(écrouissage isotrope) et h
′′(écrouissage cinématique).
h′
= δh
h′′
= (1− δ)h ⇒ h = h′+ h
′′(1.136)
avec δ paramètre matériel 0 ≤ δ ≤ 1.
– δ = 0 écrouissage cinématique.– δ = 1 écrouissage isotrope.
On a alors :•σv= δh
•εp= δh
√23DpijD
pij =
√23δhΛ (1.137)
et :•αij=
23
(1− δ)hDpij =
23
(1− δ)hΛnij (1.138)
Le tenseur élasto-plastique a alors la forme :
Mijkl = Hijkl − 2G1 + h
3G
nijnkl (1.139)
Année universitaire 2008/2009 Olivier PANTALE

1.3 Application aux lois élasto-plastiques 23
1.3.10 Récapitulatif
Donc, dans les axes corotationnels, l’équation constitutive d’un matériau élasto-plastique peuts’écrire sous la forme :
σij = [Hijkl − 2Gγnijnkl]Dkl (1.140)
avec : γ = 0 evolution elastiqueγ > 0 evolution plastique
(1.141)
Les equations constitutives élasto-plastiques dans les axes corotationnels pour un matériauà écrouissage mixte avec critère de Von-Mises sont alors décrites par les relations suivantes.
Loi constitutive :•σij= Hijkl(Dkl −Dp
kl) = MijklDkl (1.142)
Hijkl = Kδijδkl + 2G(δikδjl − 13δijδkl) (1.143)
Mijkl = Hijkl − 2Gγnijnkl (1.144)
avec : γ = 0 evolution elastiqueγ = 1
1+ h3G
evolution plastique (1.145)
Critère de Von-Mises :
f =
√32φijφij − σv = 0 avec φij = sij − αij (1.146)
Loi d’écoulement associée :
Dpij =
•εpij= Λnij nij =
φij√φklφkl
(1.147)
Lois d’évolution des paramètres d’hérédité :
•σv=
√23δh′Λ ou
•εp=
√23
Λ (1.148)
•αij=
23
(1− δ)h′′Λnij (1.149)
avec :
Λ =
0 evolution elastiquenijDij
1+ h3G
evolution plastique(1.150)
– δ = 0 écrouissage cinématique– δ = 1 écrouissage isotrope– δ ∈ [0, 1] écrouissage mixte
et pour un écrouissage non-linéaire :
h′
= h′(εp) =
dσvdεp
et h′′
= h′′(εp) =
dα
dεp(1.151)
avec α =√
32α : α
Dissipation plastique :•ωp= Λ
σijnijρ
(1.152)
Olivier PANTALE Année universitaire 2008/2009

24 Lois constitutives en grandes déformations
1.4 Intégration temporelle des lois de plasticité
1.4.1 Présentation du problème
On a vu précédemment que l’utilisation d’équations constitutives écrites dans les axes co-rotationnels permet d’utiliser un schéma d’intégration de la loi constitutive élasto-plastiqueidentique à celui utilisé en petites déformations. En utilisant une dérivée de Jaumann et uneformulation Lagrange actualisée (le tenseur gradient de déformation et les tenseurs incré-ments de déformation sont calculés par rapport à la dernière configuration équilibrée connue),en notant F le gradient de déformation, il vient :
F10 = F(t1) = F = RU (1.153)
En négligeant les variations de volume lors de l’incrément, la relation d’actualisation descontraintes s’écrit alors :
σ1 = R(σ0 + ∆σc)RT (1.154)
avec :
∆σc = σc1 − σc0 =∫ t1
t0
•σc dt =
∫ t1
t0
Mc : Dcdt (1.155)
La difficulté principale ici réside dans la détermination du tenseur R issu de la décompositionde F = RU. Généralement, on utilise alors une méthode basée sur le calcul des valeurs propreset des vecteurs propres de F (par exemple la méthode de Jacobi (paragraphe ??) [?] [?]),donnant alors la composition du tenseur U de manière itérative en 3D et exacte en 2D (voirparagraphe 3.8). Puis, dans un deuxième temps, on évalue alors la valeur du tenseur R enutilisant R = FU−1.
Pour un matériau élastique, le tenseur Mc est égal à une constante et s’identifie au tenseurde Hooke :
Hijkl = Kδijδkl + 2G(δikδjl − 13δijδkl) (1.156)
On a alors :
∆σc = H :∫ t1
t0
Dcdt = H : ∆ec (1.157)
avec :
∆ec =∫ t1
t0
Dcdt (1.158)
Dans un comportement élasto-plastique, au cours de l’évolution du matériau, le tenseur Mc
n’est plus constant. Généralement, l’intégration se base alors sur une technique de partitionde l’opérateur élasto-plastique. Cette technique fait l’objet du prochain paragraphe.
1.4.2 Partition de l’opérateur élastoplastique
le concept de partition d’un opérateur linéaire peut être appliqué au problème de l’intégrationdes lois constitutives élastoplastiques. On a alors :
problème prédicteur élastique correcteur plastiqueDe De = D De = 0
Dp = Λn Dp = 0 Dp = Λn•q= Λr(σ,q)
•q= 0
•q= Λr(σ,q)
Le prédicteur élastique σe dans l’espace des contraintes corotationnelles est obtenu en in-tégrant
•σ= H : D avec comme condition initiale σ(t0) = σ0. Si le prédicteur élastique ainsi
obtenu est extérieur à la surface de charge, il est alors utilisé comme condition initiale pour lecorrecteur plastique obtenu en intégrant
•σ= −H : Dp. Cette opération consiste à restaurer la
compatibilité des contraintes finales avec la fonction de charge f comme indiqué sur la figure1.4.
Sans l’hypothèse capitale D = De + Dp, cette partition est impossible.
Année universitaire 2008/2009 Olivier PANTALE

1.4 Intégration temporelle des lois de plasticité 25
σ
σ
σn+1
n
n+1e
Photo 1.4 – schématisation du principe du retour radial
1.4.2.1 Evaluation du prédicteur élastique
Dans l’espace des contraintes corotationnelles, avec la condition initiale σ(t0) = σ0, le prédic-teur élastique corotationnel est donné par :
•σ= H : D (1.159)
soit :σe = σ0 + M : ∆e (1.160)
et :σev = σ0
v αe = α0 (1.161)
avec ∆e grandeur corotationnelle dépendant du schéma d’intégration choisi :
∆ec =∫ t1
t0
Dcdt = ∆tDc12
(1.162)
si on utilise un schéma d’intégration corotationnel de Hughes.
Par rapport à un schéma en petites déformations, le schéma d’évaluation du prédicteur élas-tique est quasiment identique si ce n’est l’intervention d’un incrément de déformation nonlinéaire. Lorsque la valeur du prédicteur élastique est obtenue, on teste si le critère de Von-Mises est respecté ou non :
fe =12φe : φe − 1
3(σ0v)2 (1.163)
avec φe = se − αe.– Si fe ≤ 0, l’incrément est élastique.– Si fe > 0, l’incrément est au moins en partie plastique, il faut alors corriger la partie dévia-
torique des contraintes et les variables d’hérédité.
1.4.2.2 Evaluation du correcteur plastique
Dans le cas où l’évaluation du correcteur plastique est nécessaire, on doit intégrer les équa-tions ci-dessous :
•s=•scorr= −2GDp
Dp =•εp= Λ(t)n(t)
•σv=
√23δhΛ(t)
•α= 2
3 (1− δ)hΛ(t)n(t)
(1.164)
avec n(t) normale unitaire extérieure à la surface de charge donnée par la relation :
n(t) =φ(t)√
φ(t) : φ(t)(1.165)
et avec :
Λ(t) =n(t) : D(t)
1 + h3G
(1.166)
Olivier PANTALE Année universitaire 2008/2009

26 Lois constitutives en grandes déformations
On a de plus la contrainte f [σ(t), σv(t), α(t)] = 0 ∀t soit :
12φ : φ− 1
3σ2v = 0 (1.167)
Dans un premier temps, on considérera un écrouissage linéaire (h=cte).
Pour ce qui est de l’intégration de la partie plastique, plusieurs méthodes existent parmilesquelles :
– la méthode de la rigidité tangente : purement explicite– la méthode de la normale moyenne : schéma du point milieu– la méthode du retour radial : méthode implicite
Le premier des 3 schémas n’étant pas inconditionnellement stable, il a peu à peu été aban-donné dans les codes de calcul. Le caractère particulier du retour radial, lié à la simplicité decette méthode d’intégration nous ammène à le détailler dans le paragraphe suivant.
1.4.2.3 Méthode du retour radial
Le problème de l’intégration des lois élasto-plastiques est un problème à déformations contrô-lées. L’algorithme du retour radial consiste à projeter un point de l’espace des contraintes(le prédicteur élastique) sur un convexe (la surface de plasticité) selon la plus petite distanceentre le point et le convexe. Dans le cas particulier de la plasticité de Von-Mises, cette projec-tion peut être déterminée analytiquement, on parle alors d’algorithme de retour radial.
Cas de l’écrouissage linéaire : La méthode du retour radial débute par l’évaluation d’unprédicteur élastique φe pour le déviateur des contraintes de Cauchy. Le terme correctif estévalué en supposant que la normale n(t) est constante au cours du temps, sa valeur étantcalculée à partir du prédicteur élastique φe par :
n(t) =φe(t)√
φe(t) : φe(t)(1.168)
Le terme correctif a alors la forme :
scorr = 2Gn∫ t1
t0
Λ(t)dt (1.169)
où on pose :
Γ =∫ t1
t0
Λ(t)dt (1.170)
Donc Γ est la grandeur à déterminer, ce qui permet d’écrire alors :
s1ij = s0
ij − 2GΓnij (1.171)
Les lois d’évolution des variables d’hérédité s’écrivent alors :
•εp1=
•εp0 +
√23
Γ (1.172)
Donc, compte tenue que l’on considère un écrouissage linéaire (h = cte), on obtient :
σ1v = σ0
v +
√23δhΓ (1.173)
Les paramètres internes d’hérédité sont alors donnés par :
α1ij = α0
ij +23
(1− δ)hΓnij (1.174)
Année universitaire 2008/2009 Olivier PANTALE

1.4 Intégration temporelle des lois de plasticité 27
D’où on déduit alors :
φ1ij = s1
ij − α1ij = seij − 2GΓnij − α0
ij −23
(1− δ)hΓnij
= φeij − γΓnij
avec γ = 2G− 23 (1− δ)h
La définition de la normale n (φeijnij =√φeijφ
eij avec nijnij = 1) conduit alors à :
φ1ijφ
1ij = (φeij − γΓnij)2
= φeijφeij − 2γΓnijφeij + γ2Γ2nijnij
= φeijφeij − 2γΓnijφeij + γ2Γ2
En posant alors µ2 = φeijφeij soit donc n = φe
µ , on obtient donc :
φ1ijφ
1ij = µ2 − 2γΓµ+ γ2Γ2 = (µ− γΓ)2 (1.175)
Comme φ1 doit satisfaire le critère de Von-Mises en t = t1 et que pour la surface de charge on
a R =√
23σ
1v, on a alors :
R =√φ1 : φ1 = µ− γΓ
=
√23σ0v +
23δhΓ
D’où l’expression finale donnant la valeur de Γ sous la forme suivante :
Γ =µ−
√23σ
0v
2G(1 + h
3G
) =
√φe : φe −
√23σ
0v
2G(1 + h
3G
) (1.176)
relation permettant analytiquement de déterminer toutes les valeurs inconnues à t = t1.
Cas de l’écrouissage non-linéaire Précédemment, nous avons supposé que l’écrouissageétait linéaire (h = cte). Dans le cas d’un écrouissage non-linéaire, h n’est plus constant, et Γ nepeut plus être déterminé analytiquement. Si on connaît les fonctions σv = σv(εp) et α = α(εp),Γ peut alors être déterminé de manière itérative en imposant le respect du critère de plasticitéen t = t1. On a alors :
h′
=dσvdεp
et h′′
=dα
dεp(1.177)
avec α =√
32α : α
Si α = αa + αbεp avec αa et αbconstantes, alors h′′
= αb = cte, et le problème est alors traité demanière linéaire avec :
∆εp = εp1 − εp0 =
√23
Γ (1.178)
et :
α1 ' α0 +23h′′(εp1/2)Γn ' α0 +
√23
∆αn (1.179)
qui est une fonction de Γ puisque εp1 l’est, et le critère de Von-Mises en t = t1 s’écrit alors sousla forme :
f(Γ) = φ1 : φ1 − 23
(σv)2 = (s1 − α1) : (s1 − α1)− 23
(σ1v)2 (1.180)
Soit finalement :
f(Γ) = (se − 2GΓn− α1(Γ)) : (se − 2GΓn− α1(Γ))− 23
(σv(Γ))2 = 0 (1.181)
équation où la seule inconnue est le scalaire Γ. La méthode de Newton-Raphson appliquéede manière locale (1 équation à 1 inconnue) permet alors de déterminer la valeur de Γ. Lenombre d’itérations nécessaire est généralement très réduit.
Olivier PANTALE Année universitaire 2008/2009

28 Lois constitutives en grandes déformations
1.4.3 Algorithme du retour radial pour un matériau élasto-plastique
1) Evaluation des termes géométriques non linéaires corotationnels ∆ec :
2) Evaluation du prédicteur élastique :
pe = p0 +Ktr(∆ec) (1.182)
se = s0 + 2Gdev(∆ec) (1.183)
φe = se − α0 (1.184)
3) Evaluation du critère de plasticité :
f =√φe : φe −
√23
(σ0v) (1.185)
si f ≤ 0
p1 = pes1 = seα1 = α0
fin du traitement (1.186)
4) Evaluation de la normale extérieure :
n =φe√φe : φe
(1.187)
5) Evaluation de Γ :
cas de l’écrouissage linéaire :
Γ =
√φe : φe −
√23σ
0v
2G(1 + h
3G
) (1.188)
cas de l’écrouissage non-linéaire :
f(Γ) = (se − 2GΓn− α1(Γ)) : (se − 2GΓn− α1(Γ))− 23
(σv(Γ))2 = 0 (1.189)
avec résolution itérative de l’équation précédente
6) Actualisation des grandeurs :s1 = se − 2GΓn (1.190)
εp1 = εp0 +
√23
Γ (1.191)
cas de l’écrouissage linéaire :
σ1v = σ0
v +
√23δhΓ (1.192)
α1 = α0 +23
(1− δ)gΓn (1.193)
cas de l’écrouissage non-linéaire :σ1v = σ1
v(εp) (1.194)
α1 = α0 +
√23
∆αn avec∆α = α(εp1)− α(εp0) (1.195)
Année universitaire 2008/2009 Olivier PANTALE

1.4 Intégration temporelle des lois de plasticité 29
Notes personnelles
Olivier PANTALE Année universitaire 2008/2009

30 Lois constitutives en grandes déformations
Notes personnelles
Année universitaire 2008/2009 Olivier PANTALE

1.4 Intégration temporelle des lois de plasticité 31
Notes personnelles
Olivier PANTALE Année universitaire 2008/2009

32 Lois constitutives en grandes déformations
Année universitaire 2008/2009 Olivier PANTALE

33
- Chapitre 2 -
Exercices et applications
2.1 Barre en traction
On considère la poutre rectangulaire définie sur la figure ci-dessous soumise à une traction àvitesse constante suivant l’axe −→x1. Le champ de positions et le champ de vitesses sont définispar les relations xi(
−→X, t) = hi(t)Xi et vi(
−→X, t) = kixi(
−→X, t) (avec i = 1, 2, 3).
x
x
x
1
2
3
1. Afin de simplifier le problème, on suppose que la poutre est soumise à de la tractionuniaxiale d’axe −→x1 sans contractions latérales. En déduire l’expression du tenseur gra-dient de déformation F et du tenseur gradient des vitesses L. Déduire de ce qui précèdel’écriture des tenseurs U,V,R et W,D.
2. Dans un premier temps, on considère un comportement purement élastique du matériaudécrit par la relation ci dessous:
∇σJ
= H : D = λtr[D]I + 2GD
où∇σJ
est la dérivée de Jaumann du tenseur des contraintes σ, I est le tenseur unité et Get λ sont les coefficients de Lamé du matériau. Exprimer alors le tenseur des contraintesσ en fonction de λ,G, k, t. Donner l’expression de la contrainte équivalente de Von-Miseset préciser le domaine de validité (date t) pour le tenseur des contraintes ainsi exprimé.
3. On considère maintenant que le matériau est élasto-plastique à écrouissage isotropelinéaire. A partir de l’équation:
∇σJ
= λtr[D]I + 2GD− 2G1 + h
3G
(n : D)n
Olivier PANTALE Année universitaire 2008/2009

34 Exercices et applications
où h est le coefficient d’écrouissage et n = φ√φ:φ
avec φ déviateur de σ. Intégrer l’équationde comportement élasto-plastique et expliciter le tenseur des contraintes σ en fonctionde (λ,G, h, k, t, σ0).
2.2 Disque en traction périphérique
On considère ici le cas d’un disque élasto-plastique de rayon extérieur r2 et d’axe −→z soumis àun déplacement radial à vitesse constante imposé de la périphérie.
z
r
Dans le système d’axes cylindriques (r, θ, z) les développements cinématiques ont conduit àl’écriture du champ de positions sous la forme:
r = h1r0
z = h2z0
avec r0 et z0 coordonnées initiales d’un point et hi(t = 0) = 1. On peut ainsi montrer facilement(et non demandé) que les tenseurs F et D s’écrivent sous la forme suivante:
F =
h1 0 00 h1 00 0 h2
D =
k1 0 00 k1 00 0 k2
avec ki =
•hi
hi(sans sommation sur l’indice répété) soit kit = ln[hi(t)].
Dans le cas élastique, si le bord supérieur est libre de tout effort externe (σzz = szz + p = 0), onmontre que les contraintes se mettent sous la forme:
•p= K tr[D] et
•s= 2GDd
soit finalement:σrr = σθθ =
Ek1t
1− νLa loi d’écrouissage linéaire isotrope du matériau est donnée par la relation σv = σ0
v + hεp
1. A partir de la définition du critère de von Mises et sachant que l’entrée en plastification sefait à compter de σ0
v, donner le domaine de validité temporel du comportement élastique.Etablir les valeurs de σrr et σθθ au moment de l’entrée en plasticité de la structure.
2. En régime plastique, ré-écrire les équations d’évolution des contraintes dans le domaineplastique conformément au schéma d’intégration basé sur l’utilisation du retour radialpour le calcul des contraintes.
3. Etablir les expressions de tr[D] et Dd. Compte tenu que D est constant, montrer quel’évolution du déviateur des contraintes est décrite par:
•s= 2GγDd avec γ = 1− 1
1 + h3G
4. Le bord supérieur étant libre d’efforts, à partir de•σzz= 0 déterminer la relation k2 =
f(k1, G, γ,K). A partir de l’écriture de•s, intégrer les équations de comportement et en
déduire les contraintes au sein du matériau en fonction du temps.
Année universitaire 2008/2009 Olivier PANTALE

2.3 Cylindre creux élastoplastique 35
2.3 Cylindre creux élastoplastique
On considère un cylindre creux élastoplastique infiniment long soumis à une pression in-terne. On se place dans un repère de coordonnées cylindriques (r, θ, z). Les développementscinématiques, en considérant le matériau incompressible, ont conduit au résultat suivant:
Le mouvement d’une particule quelconque du cylindre a comme coordonnée radiale couranter(t) = r à l’instant t et comme coordonnée radiale initiale r0 à l’instant t0. On peut ainsimontrer facilement (et non demandé) que le tenseur F s’écrit sous la forme suivante:
F =
r0r 0 00 r
r00
0 0 1
On considère dans cette application un comportement élastoplastique à écrouissage linéairecomme indiqué sur la figure 2.2
1. Donner l’expression du tenseur gradient des vitesses L, en déduire les expressions destenseurs D et W.
2. Dans un premier temps, on considère un comportement purement élastique du matériaudécrit par la relation ci-dessous:
∇σJ
= H : D = λtr[D]I + 2GD
où∇σJ
est la dérivée de Jaumann du tenseur des contraintes σ, I est le tenseur unitéd’ordre 2 et G et λ sont les coefficients de Lamé du matériau. Déterminer alors letenseur des contraintes σ en fonction de G, r0 et r ainsi que le domaine de validité ducomportement élastique en fonction de σ0
v , G, r0.
3. Quelles sont les valeurs des contraintes au sein du matériau lors de la fin de la phaseélastique.
σ
σ
ε
0
E
ET
v
Figure 2.1: Comportement élastoplastique linéaire
4. On considère maintenant le comportement élastoplastique décrit sur la figure 2.2 qui estpiloté par la relation:
∇σJ
= λtr[D]I + 2GD− 2G1 + h
3G
(n : D)n
Intégrer l’équation de comportement et expliciter le tenseur des contraintes σ en fonctionde G, h, σ0
v , r0 et r.
2.4 Sphère creuse élastoplastique
On considère une sphère creuse élastoplastique soumise à une pression interne. Pour desraisons évidentes de symétrie, on se place dans un repère de coordonnée sphériques (r, θ, ϕ).
Olivier PANTALE Année universitaire 2008/2009

36 Exercices et applications
Dans le système d’axes sphériques, les développements cinématiques, en considérant le matériauincompressible, ont conduit au résultat suivant:
On désigne par r0 la coordonnée radiale initiale d’un point de coordonnée courante r. On peutainsi montrer facilement (et non demandé) que le tenseur F s’écrit sous la forme suivante:
F =
r20r2 0 00 r
r00
0 0 rr0
On considère dans cette application un comportement élastoplastique à écrouissage linéairecomme indiqué sur la figure 2.2
σ
σ
ε
0
E
ET
v
Figure 2.2: Comportement élastoplastique linéaire
1. Donner l’expression du tenseur gradient des vitesses L, en déduire les expressions des
tenseurs D et W. On posera pour simplifier l’écriture k =•rr
2. On considère un écrouissage de la forme σv = σ0v + hεp. Définir les différents paramètres
de cette expression et établir l’expression de h à partir des données de la figure 2.2.
3. Dans un premier temps, on considère un comportement purement élastique du matériaudécrit par la relation ci-dessous:
∇σJ
= H : D = λtr[D]I + 2GD
où∇σJ
est la dérivée de Jaumann du tenseur des contraintes σ, I est le tenseur unitéd’ordre 2 et G et λ sont les coefficients de Lamé du matériau. Déterminer alors le tenseurdes contraintes σ en fonction de G, k, t ainsi que le domaine de validité temporel ducomportement élastique.
4. On considère maintenant le comportement élastoplastique régi par la relation:
∇σJ
= λtr[D]I + 2GD− 2G1 + h
3G
(n D)n
Intégrer l’équation de comportement et expliciter le tenseur des contraintes σ.
Année universitaire 2008/2009 Olivier PANTALE

37
- Chapitre 3 -
Compléments mathématiques
Dans cette partie Annexe 3, on présente un ensemble de compléments mathématiques des-tinés à aider le lecteur dans l’étude du document.
3.1 Les espaces Rn
L’espace à n dimensions Rn est l’ensemble des n-uplets de nombres réels rangés en colonnecomme indiqué ci-dessous:
−→x =
x1
x2
...xn
(3.1)
que l’on nomme communément un vecteur. Les divers nombres x1, x2, ...xn sont les com-posantes du vecteur −→x . Dans cet espace à n dimensions, si les −→ei = (−→e1 ,
−→e2 , ...,−→en) dénotent
une base orthonormée(1) de l’espace vectoriel à n dimensions, le vecteur −→x introduit ci-dessuss’écrit alors:
−→x =n∑i=1
xi−→ei (3.2)
La convention d’Enstein sur les indices répétés consiste à omettre le signe∑ni=1 dans la rela-
tion précédente que l’on écrit alors sous la forme simplifiée ci-dessous:
−→x = xi−→ei (3.3)
Il s’agit d’une sommation par le fait que le même indice se répète deux fois dans le mêmemonôme.
• Cet indice (i ici) est appelé indice muet. Il doit apparaître exactement deux fois dans unmonôme.
• Le nom de cet indice muet est totalement indifférent et peut être changé −→x = xi−→ei = xj
−→ej .(1)Dans le cas où la base n’est pas orthogonale, c’est à dire si la base −→ei n’est pas confondue avec sa base duale−→
ei , il est alors nécessaire de distinguer les variances. On doit alors introduire la notion de coordonnées variantes etcovariantes pour la représentation du vecteur −→x selon la base que l’on utilise.
Olivier PANTALE Année universitaire 2008/2009

38 Compléments mathématiques
• Un indice non muet est appelé indice réel. Dans un monôme il ne peut apparaître qu’uneseule fois.
• De plus, dans une égalité ou une somme de monômes, les indices réels de chaquemonôme doivent être les mêmes et être placés à la même hauteur.
En cas de non respect de cette convention d’Enstein, une expression donnée est incorrecte.
Cette notation étant mise en place, le produit scalaire de deux vecteurs −→v et −→w (noté enutilisant l’opérateur ·) est le scalaire défini par la relation:
−→v · −→w = −→v T−→w = ‖−→v ‖ ‖−→w ‖ cos(−→v ,−→w ) = viwi (3.4)
où le symbole ()T désigne l’opérateur de transposition. Si le produit scalaire de deux vecteurs−→v et −→w (non nuls) est nul, les vecteurs sont orthogonaux. On remarque que dans le cas d’unebase orthonormée, les composantes d’un vecteur sont aussi les produits scalaires avec lesvecteurs de la base. Ainsi, si −→ei est orthonormée, si vi sont les composantes de −→v dans cettebase, on peut écrire: −→v = vi
−→ei = (−→v .−→ei )−→ei (3.5)
Le module d’un vecteur −→v ou norme est le scalaire défini par la relation:
‖−→v ‖ = |−→v | =√−→v .−→v =
√−→v T−→v =√vivi (3.6)
3.2 Application linéaire et notion de tenseur
Soient V et W deux sous-espaces vectoriels de Rn et soient −→v et −→w deux éléments de V. SoitA(V) une application (fonction) de V dans W.
• Le domaine de A est V.
• Le contre-domaine ou range de A = R(A) ⊂ W est l’ensemble des:
−→z ∈ Rn : −→z = A(−→v ),∀−→v ∈ V (3.7)
• Le null-space de A = N.S.(A) ⊂ W est l’ensemble des éléments de V tels que A(−→v ) =−→0 .
Si l’application A préserve la notion de somme, c’est-à-dire si:
A(−→v +−→w ) = A(−→v ) + A(−→w ) (3.8)
et la notion de produit par un scalaire α ∈ R:
A(α−→v ) = αA(−→v ) (3.9)
alors l’application A est dite linéaire.
Si les espaces vectoriels V et W sont de dimension n finie, on définit un tenseur d’ordre 2comme l’application linéaire A qui applique V sur W. A cette application linéaire, on peut as-socier la matrice A de dimension n×n et de composantes Aij. On constate que les composantesd’un tenseur dépendent du système de coordonnées défini par la base −→ei = (−→e1 ,
−→e2 , ...,−→en), et on
écrit généralement:A−→ei = Aij
−→ej (3.10)
Cette analogie avec la notion de matrice permet de définir certaines propriétés caractéristiquesdes tenseurs d’ordre 2 comme la transposée, le symétrique ou l’extraction des valeurs etvecteurs propres.
Année universitaire 2008/2009 Olivier PANTALE

3.2 Application linéaire et notion de tenseur 39
3.2.1 Produit tensoriel
Le produit tensoriel de deux vecteurs −→v et −→w est le tenseur du second ordre A défini par larelation:
A = −→v ⊗−→w ou Aij = (−→v ⊗−→w )ij = viwj (3.11)
Un certain nombre de propriétés sont associées au produit tensoriel, parmi lesquelles, onpeut citer sans les démontrer:
(−→v ⊗−→w )T = −→w ⊗−→v (3.12)
A (−→v ⊗−→w ) = (A−→v )⊗−→v (3.13)
(−→v ⊗−→w ) A = −→w ⊗ AT−→v (3.14)
3.2.2 Propriétés des tenseurs d’ordre 2
Un certain nombre de propriétés des tenseur d’ordre 2 peuvent être facilement établies:
3.2.2.1 Transposé d’un tenseur
Le tenseur transposé d’un tenseur est obtenu en échangeant les indices: le transposé de Aijest Aji. On le note AT .
3.2.2.2 Inverse d’un tenseur
Pour un tenseur régulier A tel que det A 6= 0, il existe un tenseur unique appelé le tenseurinverse A−1 qui satisfait la relation AA−1 = A−1A = I.
3.2.2.3 Tenseur symétrique et antisymétrique
On dit qu’un tenseur est symétrique lorsqu’il est égal à son transposé, c’est à dire lorsqueAT = A.
On dit qu’un tenseur est antisymétrique lorsque il est égal à l’opposé de son transposé, c’està dire lorsque AT = −A. Dans ce cas, on montre facilement que les composantes diagonalesde A (les Aii) sont tous nuls.
On peut décomposer de manière unique tout tenseur A en la somme d’un tenseur symétriqueAS et d’un tenseur antisymétrique AA et on écrit alors A = AS + AA.
3.2.2.4 Trace d’un tenseur
On peut ainsi définir la trace d’un tenseur A d’ordre 2 comme la somme des composantes desa diagonale:
tr[A] = Aii (3.15)
par analogie avec la trace d’une matrice A de taille m × n qui est définie par la relation plusgénérale:
tr[A] =min(m,n)∑
i=1
Aii (3.16)
Olivier PANTALE Année universitaire 2008/2009

40 Compléments mathématiques
3.2.2.5 Produit contracté de deux tenseurs
Le produit contracté ou produit matriciel de deux tenseurs d’ordre 2 A et B est le tenseurd’ordre 2 C défini par la relation:
C = A · B︸ ︷︷ ︸notation
tensorielle
= ATB︸︷︷︸notation
matricielle
ou Cij = AikBkj (3.17)
Le double produit contracté de deux tenseurs d’ordre 2 A et B est le scalaire a défini par larelation:
a = A : B = AijBij = tr[ATB] (3.18)
on peut ainsi noter que la trace du tenseur A est le produit contracté du tenseur A par lamatrice identité. On a ainsi:
tr[A] = Aii = Aijδij = A : I (3.19)
On est en mesure également de montrer les propriétés suivantes:
A : (B · C) = (B · C) : A commutativité de :A : (B · C) = AT : (CT · BT ) transposition des opérandes de :A : (B · C) = (BT · A) : C transport de B à travers :A : (B · C) = (A · CT ) : B transport de C à travers :
A partir de la définition du double produit contracté, on peut définir la norme d’un tenseurd’un tenseur d’ordre 2 A par la relation suivante:
‖A‖ =√
A : A (3.20)
3.2.3 Tenseur d’ordre n
On peut généraliser la notion de tenseur d’ordre 2 à un tenseur d’ordre n. Un tenseur d’ordren est un être mathématique qui à tout élément −→v de l’espace vectoriel V associe un tenseurd’ordre n − 1 au moyen d’une expression linéaire et homogène en les composantes de −→v .Ainsi, d’après cette définition, un scalaire est assimilable à un tenseur d’ordre 0, un vecteurest assimilable à un tenseur d’ordre 1. Par convention les tenseurs d’ordre 0 sont en faitdes scalaires, et ces scalaires sont invariants dans un changement de base de V. Tous lesnombres réels ne sont pas des scalaires. Ainsi, on peut remarquer que le produit scalaire dedeux vecteurs −→v et −→w est un scalaire car il est indépendant de la base dans laquelle on lecalcule:
a = v′iw′i = AijvjBkiwk = BkiAijvjwk = δkjvjwk = viwi (3.21)
avec A et B matrices de changement de base. Par contre la composante d’un vecteur est unnombre réel mais pas un scalaire car variable dans un changement de base:
v′i = Aijvj 6= vj (3.22)
En ce qui concerne les tenseurs d’ordre 1, on peut aisément et sans problème les confondreavec des vecteurs et inversement. Suivant ceci, on peut écrire la relation suivante:
−→v (−→w ) = −→v .−→w (3.23)
3.3 Les espaces R3
L’ensemble des points de l’espace à 3 dimensions fournit un premier exemple d’espace R3. Achacun des points M de l’espace, correspond le triplet de nombres (x1, x2, x3) appelés coor-données du point M . Dans cet espace, conformément à ce qui a été présenté précédemment,si le champ de tenseurs est d’ordre 0, on dit que l’on a affaire à un champ de scalaires,s’il est d’ordre 1, c’est un champ de vecteurs, s’il est d’ordre supérieur à 1, c’est un champde tenseurs. Tous les champs présentés ci-après sont supposés suffisamment continus etdérivables.
Année universitaire 2008/2009 Olivier PANTALE

3.3 Les espaces R3 41
3.3.1 Symbole de Kronecker
Le Symbole de Kronecker δij a la signification suivante:
δij =
1 si i = j
0 si i 6= j(3.24)
Lorsque l’un des indices de δ est sommé dans un monôme, on peut simplifier le monôme,comme par exemple:
Aijδki = Akj ; ej = δjiei (3.25)
3.3.2 Symbole de permutation
Le symbole de permutation de Levi-Civita, noté ε (lettre grecque epsilon), est un tenseurantisymétrique d’ordre 3 qui peut être défini par la relation suivante:
εijk = −→ei · (−→ej ×−→ek)
avec −−→ei,j,k vecteurs unitaires d’un trièdre orthonormé direct. Ainsi εijk ne peut prendre quetrois valeurs : −1, 0 ou 1. En 3 dimensions on peut figurer le Symbole de Levi-Civita commesuit :
εijk =
+1 si (i, j, k) est (1, 2, 3), (2, 3, 1) or (3, 1, 2),−1 si (i, j, k) est (3, 2, 1), (1, 3, 2) or (2, 1, 3),0 autrefois: i = j or j = k or k = i,
Ce symbole de permutation a les propriétés suivantes:
εijkεimn = δjmδkn − δjnδkmεijkAjk = 0 si A est symétriqueεijkεpjk = 2δipεijkεijk = 6
(3.26)
A partir de la définition du symbole de permutation, on peut également exprimer le produitvectoriel de deux vecteurs −→v et −→w de composantes respectives vi et wj par la relation suivante:
−→v ∧ −→w i = εijkvjwk (3.27)
3.3.3 L’opérateur formel nabla
L’opérateur nabla−→∇ tire son nom d’une lyre antique qui avait la même forme de triangle
pointant vers le bas. Il s’agit d’un opérateur formel de R3 défini en coordonnées cartésiennespar la relation suivante:
−→∇ =∂
∂−→x (3.28)
On le qualifie d’ailleurs de pseudovecteur. Il ne contient certes pas de valeurs scalaires, maison va utiliser ses éléments constitutifs très exactement comme on aurait utilisé les valeursscalaires composant un vecteur. La notation nabla fournit un moyen commode pour exprimerles opérateurs vectoriels en coordonnées cartésiennes.
3.3.4 Le gradient
Le gradient s’applique à un champ de tenseurs d’ordre n et le transforme en un champ detenseurs d’ordre n+ 1. Pratiquement, le gradient indique la direction de la plus grande varia-tion du champ considéré, et l’intensité de cette variation.
Olivier PANTALE Année universitaire 2008/2009

42 Compléments mathématiques
3.3.4.1 Gradient d’un champ scalaire
Les champs scalaires sont des champs tensoriels d’ordre 0. Le gradient d’un champ scalairef(M) est le champ vectoriel défini par:
−−→gradf(M) =
−→∇f(M) = ∂if(M)−→ei = [∂f(M)∂x1
,∂f(M)∂x2
,∂f(M)∂x3
]T (3.29)
avec les propriétés suivantes:
−−→grad(f1 + f2) =
−−→gradf1 +
−−→gradf2
−−→grad(λf) = λ
−−→grad(f)
−−→grad(f1f2) = (
−−→gradf1)f2 + f1(
−−→gradf2)
En coordonnées cylindriques (−→er ,−→eθ ,−→ez), le gradient d’un champ scalaire f s’écrit:
−−→gradf =
∂f
∂r−→er +
1r
∂f
∂θ−→eθ +
∂f
∂z−→ez (3.30)
En coordonnées sphériques (−→er ,−→eθ ,−→eϕ), le gradient d’un champ scalaire f s’écrit:
−−→gradf =
∂f
∂r−→er +
1r
∂f
∂θ−→eθ +
1rsinθ
∂f
∂ϕ−→eϕ (3.31)
3.3.4.2 Gradient d’un champ vectoriel
Les champs vectoriels sont des champs tensoriels d’ordre 1. Le gradient d’un champ vectoriel−→v (M) est le champ tensoriel donné par la relation suivante:
−−→grad−→v (M) =
−→∇−→v (M) (3.32)
qui s’écrit en coordonnées cartésiennes:−−→grad−→v (M)
ij
=∂vi(M)∂xj
(3.33)
Il convient de noter que généralement, le gradient d’un champ vectoriel −→v (M) est un tenseurnon symétrique.
3.3.5 La divergence
La divergence s’applique à un champ de tenseurs d’ordre n et le transforme en un champ detenseurs d’ordre n− 1. Pratiquement, la divergence d’un champ vectoriel exprime sa tendanceà fluer localement hors d’un petit volume entourant le point M où est calculée la divergence.On peut définir la divergence à partir de l’opérateur
−→∇ selon la relation suivante:
div−→v =−→∇ · −→v (3.34)
La divergence peut être vue, formellement, comme le produit scalaire de l’opérateur nablapar le vecteur n générique z du champ auquel elle est appliquée, ce qui justifie la notation−→∇·. Bien entendu, cette définition se généralise naturellement en dimension quelconque. Ladéfinition indépendante du choix de la base est :
div−→v =−→∇ · −→v = tr[
−→∇−→v ] (3.35)
Année universitaire 2008/2009 Olivier PANTALE

3.3 Les espaces R3 43
3.3.5.1 Divergence d’un champ vectoriel
La divergence d’un champ vectoriel −→v (M) est le champ scalaire donné par la relation:
div(−→v (M)) =−→∇ · −→v (M) = tr[
−→∇−→v (M)] (3.36)
qui s’écrit en coordonnées cartésiennes:
div(−→v (M)) =∂v1(M)∂x1
+∂v2(M)∂x2
+∂v3(M)∂x3
(3.37)
En coordonnées cylindriques (−→er ,−→eθ ,−→ez), la divergence d’un champ vectoriel −→v s’écrit:
div−→v =1r
∂
∂r(rvr) +
1r
∂vθ∂θ
+∂vz∂z
En coordonnées sphériques (−→er ,−→eθ ,−→eϕ), la divergence d’un champ vectoriel −→v s’écrit:
div−→Av =
1r2
∂
∂r(r2vr) +
1rsinθ
∂
∂θ(sinθvθ) +
1rsinθ
∂vϕ∂ϕ
3.3.5.2 Divergence d’un champ tensoriel d’ordre 2
La divergence d’un champ tensoriel d’ordre 2 A(M) est le champ vectoriel −→v (M) défini par larelation: −→v (M) = div A(M) =
−→∇ · A(M) (3.38)
qui s’écrit en coordonnées cartésiennes:
vi(M) =∂Aij(M)∂xj
(3.39)
3.3.6 Le rotationnel
La divergence s’applique à un champ de tenseurs d’ordre n et le transforme en un champde tenseurs d’ordre n. Plus difficile à se représenter aussi précisément que le gradient et ladivergence, il exprime la tendance qu’a un champ à tourner autour d’un point : sa circulationlocale sur un petit lacet entourant le point M est non nulle. On définit ainsi que le rotationneldu champ des vitesses
−−−→V (M) =
−→Ω0 ∧ −−→OM d’un solide qui tourne à vitesse constante
−→Ω0 est
constant, dirigé selon l’axe de rotation et orienté de telle sorte que la rotation ait lieu, parrapport à lui, dans le sens direct et vaut simplement 2 · −→Ω0. On peut définir le rotationel àpartir de l’opérateur
−→∇ selon la relation suivante:
−→rot −→v =
−→∇ ∧−→v (3.40)
Conformément à la définition du produit vectoriel, le rotationel d’un vecteur −→v de com-posantes vi s’exprime par la relation suivante:
rot −→v i = εijk∂vk∂xj
(3.41)
En coordonnées cylindriques (−→er ,−→eθ ,−→ez), le rotationel d’un champ vectoriel −→v s’écrit:
−→rot−→v = (
1r
∂vz∂θ− ∂vθ
∂z)−→er + (
∂vr∂z− ∂vz
∂r)−→eθ +
1r
(∂
∂r(rvθ)− ∂vr
∂θ)−→ez
En coordonnées sphériques (−→er ,−→eθ ,−→eϕ), le rotationel d’un champ vectoriel −→v s’écrit:
−→rot−→v =
1rsinθ
(∂
∂θ(sinθvϕ)− ∂vθ
∂ϕ)−→er + (
1rsinθ
∂vr∂ϕ− 1r
∂
∂r(rvϕ))−→eθ +
1r
(∂
∂r(rvθ)− ∂vr
∂θ)−→eϕ
Olivier PANTALE Année universitaire 2008/2009

44 Compléments mathématiques
3.3.7 Le Laplacien
Le Laplacien d’un champ est égal à la somme des dérivées secondes de ce champ par rapport àchacune des variables. Cette définition a un sens aussi bien pour un champ de scalaires quepour un champ de vecteurs. On parle respectivement de Laplacien scalaire et de Laplacienvectoriel. Le Laplacien scalaire d’un champ de scalaires est un champ de scalaires alors quele Laplacien vectoriel d’un champ de vecteurs est un champ de vecteurs. L’une des notationcommunémant utilisée pour le définir , ∇2, invite à le considérer formellement comme le carréscalaire de l’opérateur nabla
−→∇.
3.3.7.1 Laplacien d’un champ scalaire
Le Laplacien d’un champ scalaire f(M) est le champ scalaire donné par la relation:
∇2f(M) = ∂iif(M) =∂2f(M)∂x2
1
+∂2f(M)∂x2
2
+∂2f(M)∂x2
3
(3.42)
En coordonnées cylindriques (−→er ,−→eθ ,−→ez), le Laplacien d’un champ scalaire f s’écrit:
∆f =1r
∂
∂r(r∂f
∂r) +
1r2
∂2f
∂θ2+∂2f
∂z2
En coordonnées sphériques (−→er ,−→eθ ,−→eϕ), le Laplacien d’un champ scalaire f s’écrit:
∆f =1r2
∂
∂r(r2 ∂f
∂r) +
1r2sinθ
∂
∂θ(sinθ
∂f
∂θ) +
1r2sin2θ
∂2f
∂ϕ2
3.3.7.2 Laplacien d’un champ vectoriel
Le Laplacien d’un champ vectoriel −→v est un vecteur défini par le Laplacien scalaire de chacunedes composantes du champ vectoriel, ainsi en coordonnées cartésiennes, il est défini par :
∇2−→v =
∇2v1
...∇2vn
(3.43)
3.3.8 Théorème de la divergence
On considère f(M) un champ scalaire et −→v (M) un champ vectoriel continûment dérivablessur Ω, sous ensemble de R3. Le théorème de la divergence indique que :∫
Ω
div −→v (M)dΩ =∫
Γ
−→v (M).−→n dΓ (3.44)
et: ∫Ω
−−→grad f(M)dΩ =
∫Γ
f(M)−→n dΓ (3.45)
avec Γ qui désigne la frontière de Ω et −→n la normale unitaire extérieure à Γ conformément àla figure ?? page ??.
3.4 Tenseurs réels d’ordre 2
On reprend ce que l’on a écrit précédemment concernant les tenseurs et on restreint l’étudeau seul cas des tenseurs d’ordre 2.
Année universitaire 2008/2009 Olivier PANTALE

3.4 Tenseurs réels d’ordre 2 45
3.4.1 Dérivée d’un tenseur du second ordre
D’une manière générale, soit un tenseur du second ordre fonction d’un paramètre t:
A(t) = Aij(t)(−→ei (t)⊗−→ej (t)) (3.46)
Sa dérivée par rapport à t est alors écrite sous la forme:
∂A∂t
=∂Aij∂t
(−→ei ⊗−→ej ) +Aij(∂−→ei∂t⊗−→ej ) +Aij(−→ei ⊗ ∂−→ej
∂t) (3.47)
Si la base −→e1 ,−→e2 ,−→e3 est fixe (les composantes ei sont indépendantes de t), alors les deux
derniers termes sont nuls. et on écrit:
∂A∂t
=∂Aij∂t
(−→ei ⊗−→ej ) (3.48)
3.4.2 Dérivée de produits de tenseurs du second ordre
On montre les propriétés suivantes concernant les dérivées des produits de tenseurs:
• produit tensoriel:∂(A⊗ B)
∂t=∂A∂t⊗ B + A⊗ ∂B
∂t(3.49)
• produit tensoriel contacté une fois:
∂(A · B)∂t
=∂A∂t· B + A · ∂B
∂t(3.50)
en particulier:∂(A · A)∂t
=∂A∂t· A + A · ∂A
∂t6= 2A · ∂A
∂t(3.51)
• produit tensoriel contracté deux fois:
∂(A : B)∂t
=∂A∂t
: B + A :∂B∂t
(3.52)
en particulier:∂(A : A)
∂t=∂A∂t
: A + A :∂A∂t
= 2A :∂A∂t
(3.53)
Remarque: La dérivée de la norme d’un tenseur du second ordre s’écrit alors:
∂ ‖A‖∂t
=∂A∂t
:A‖A‖ (3.54)
3.4.3 Valeurs propres et vecteurs propres d’un tenseur
Soit un tenseur A. Si un vecteur −→v est tel que l’on peut écrire:
A−→v = λ−→v (3.55)
c’est à dire si l’application linéaire définie par le tenseur A transforme le vecteur −→v en unvecteur colinéaire à lui même, alors, le vecteur −→v est un vecteur propre de A et le scalaire λest une valeur propre de A.
Olivier PANTALE Année universitaire 2008/2009

46 Compléments mathématiques
3.5 Tenseurs symétriques réels d’ordre 2
3.5.1 Définition
Un tenseur du second ordre A est symétrique si pour tout couple de vecteurs −→x et −→y on a:−→x · A · −→y = −→y · A · −→x (3.56)
la symétrie entraîne alors que le polynôme caractéristique a n racines réelles et que lesvecteurs propres associés sont orthogonaux entre eux. Pour les tenseurs symétriques réels,on peut donc toujours construire une base propre orthonormée. Tout tenseur symétrique Aest donc la somme de trois tenseurs uniaxiaux:
A =n∑k=1
λk−→uk ⊗−→uk (3.57)
Ses composantes dans une base propre orthonormée se rangent dans une matrice diagonale:λ1 0 · · · 00 λ2 · · · 0...
.... . .
...0 0 · · · λn
(3.58)
3.5.2 Dérivée d’un tenseur symétrique réel
La dérivée d’un tenseur symétrique réel A est un tenseur symétrique:
∂A∂t
=n∑i=1
∂λi∂t
(−→ui ⊗−→ui) +3∑i=1
λi
(∂−→ui∂t⊗−→ui +−→ui ⊗ ∂−→ui
∂t
)(3.59)
3.6 Tenseur symétriques définis positifs
Les tenseurs symétriques définis positifs sont des tenseurs réels symétriques A tels que :−→v · A · −→v > 0 ∀−→v ∈ V (3.60)
si −→vk est un vecteur propre associé à la valeur propre λk, il vient alors:−→vk · (λk−→vk) = λk ‖−→vk‖2 => 0 (3.61)
Les valeurs propres d’un tenseur symétrique défini positif A sont donc des réels positifs, etses invariants sont positifs. En particulier, le déterminant est donc positif, et A−1 existe. A−1
a alors les mêmes vecteurs propres que A, et les valeurs propres de A−1 sont les inverses desvaleurs propres de A.
3.6.1 Puissances non entières d’un tenseur symétrique défini positif
Soit A un tenseur symétrique défini positif, et soient λi ses valeurs propres et soient −→ui unebase propre orthonormée:
A =n∑i=1
λi(−→ui ⊗−→ui) (3.62)
On définit les puissances réelles de A par leurs composantes dans la base propre:
Am =n∑i=1
λmi (−→ui ⊗−→ui) =n∑i=1
expm lnλi(−→ui ⊗−→ui) (3.63)
car les λi sont tous positifs. Ce sont des tenseurs symétriques définis positifs de même basepropre que A. Les valeurs propres sont λmi . En particulier, on peut écrire:
√A = A
12 =
n∑i=1
√λi(−→ui ⊗−→ui) (3.64)
Année universitaire 2008/2009 Olivier PANTALE

3.7 Tenseurs orthogonaux 47
3.6.2 Logarithme népérien d’un tenseur symétrique défini positif
On définit le logarithme népérien d’un tenseur symétrique défini positif A par ses composantesdans la base propre de A:
ln A =n∑i=1
lnλi(−→ui ⊗−→ui) (3.65)
ln A est symétrique, non défini positif, mais de même base que A.
3.7 Tenseurs orthogonaux
Les tenseurs orthogonaux sont les tenseurs du second ordre tels que:
Q ·QT = I⇐⇒ QT = Q−1 (3.66)
3.7.1 Propriétés
Si Q est un tenseur du second ordre orthogonal, si T et U sont des tenseurs du second ordrequelconques, et si −→v et −→w sont des vecteurs, on montre facilement les propriétés suivantes:
Q orthogonal⇒ QT orthogonal‖Q · V‖ = ‖V‖ conservation de la norme des vecteurs(Q · −→v ) · (Q · −→w ) = −→v · −→w conservation du produit scalaire des vecteurs(Q · −→v ) ∧ (Q · −→w ) = −→v ∧ −→w conservation du produit vectoriel des vecteurstr(Q · T ·QT ) = tr(T) conservation du premier invariant(Q · T ·QT )II = TII conservation du second invariantdet(Q · T ·QT ) = det(T) conservation du troisième invariant∥∥∥Q · T ·QT
∥∥∥ = ‖T‖ conservation de la norme des tenseurs
(Q · T ·QT ) : (Q · U ·QT ) = T : U conservation du produit scalaire des tenseurs(Q · T ·QT ) · (Q · U ·QT ) = T · U conservation du produit interne des tenseurs
Si T est un tenseur du second ordre, on a l’égalité:
(Q · T ·QT )n = Q · Tn ·QT ∀n ∈ N (3.67)
Si T est un tenseur symétrique défini positif du second ordre, on a l’égalité:
(Q · T ·QT )α = Q · Tα ·QT ∀α ∈ R (3.68)
Les valeurs propres de T et Q · T · QT (si elles existent) sont les mêmes. Si−→t est un vecteur
propre de T, alors Q · −→t est vecteur propre de Q · T ·QT .
3.7.2 Notions de rotation
Les tenseur orthogonaux dont le déterminant vaut 1 sont des rotations. Le théorème deCaley-Hamilton(2) [?] permet alors de montrer que l’une des valeurs propres est réelle etvaut λ1 = 1. En notant alors ω le vecteur propre unitaire associé, on peut montrer quel’endomorphisme associé à Q est une rotation autour du vecteur propre réel ω de Q, d’unangle(3) θ = ± arccos
(QI−1
2
).
(2)Le théorème de Caley-Hamilton précise que si A est un tenseur du second ordre quelconque, A vérifie l’équationA3 + AIA2 + AIIA + AIII = 0, avec AI , AII , AIII les 3 invariants scalaires du tenseur A.
(3)L’ambiguïté de signe provient du fait que le vecteur propre ω est de sens arbitraire.
Olivier PANTALE Année universitaire 2008/2009

48 Compléments mathématiques
3.8 Décomposition polaire
La décomposition polaire du tenseur F s’écrit F = RU = VR.
3.8.1 Décomposition polaire en 2 dimensions
En deux dimensions, ces calculs sont grandement facilités et la décomposition polaire peutêtre obtenue analytiquement à l’aide du théorème de Caley-Hamilton. Il est aisé de calculer Uà partir de C = FTF = U2.
On pose alors:
F = RU =[F11 F12
F21 F22
](3.69)
On en déduit alors l’écriture suivante:
U =1√A
[F 2
11 + F 221 + F11F22 − F12F21 F11F12 + F21F22
sym F 222 + F 2
12 + F11F22 − F12F21
](3.70)
avec: A = (F11 + F22)2 + (F21 − F12)2
Ainsi que l’expression de R donnée par:
R =[
cos θ sin θ− sin θ cos θ
](3.71)
avec cos θ = F11+F22√A
et sin θ = F12−F21√A
A partir de la définition de R, on obtient facilement les expressions de U et V par les relations:
U = RTF et V = FRT (3.72)
3.8.2 Décomposition polaire en 3 dimensions
Dans le cas tridimensionnel, les calculs sont un peu plus compliqués. Le tenseur U peut êtredéterminé à partir de son carré C = FTF = U2 à l’aide d’un développement spectral du type:
U =√
U2 =3∑k=1
√λk−→nk ⊗−→nk (3.73)
où:
• λk est la k ième valeur propre de FTF
• −→nk est le k ième vecteur propre de FTF
Le tenseur U−1 peut être déterminé de la même manière en utilisant:
U−1 =3∑k=1
1√λk
−→nk ⊗−→nk (3.74)
Le tenseur de rotation R est alors déduit de ce qui précède par:
R = FU−1 (3.75)
Les valeurs et vecteurs propres de C = FTF peuvent être évalués à l’aide de la méthode deJacobi.
Année universitaire 2008/2009 Olivier PANTALE

BIBLIOGRAPHY 49
Bibliography
[1] K. J. Bathe. Finite Element Procedures in Engineering Analysis. Prentice-Hall - Inc -Englewood Cliffs - New Jersey 07632, 1982.
[2] T. Belytschko, W. K. Liu, and B. Moran. Nonlinear Finite Element for Continua and Struc-tures. Wiley, 8 2000.
[3] G. Duvaut. Mécanique des Milieux Continus. Masson, 1990.
[4] M. Geradin and D. Rixen. Théorie des vibrations - application à la dynamique des struc-tures. Masson, 1993.
[5] P. Germain and P. Muller. Introduction à la Mécanique des Milieux Continus. Masson,1990.
[6] T. J. R. Hughes. The Finite Element Method; Linear Static and Dynamic Finite ElementAnalysis. Prentice Hall, 1987.
[7] J. Lemaitre and J. L. Chaboche. Mécanique des Matériaux Solides. Masson, 1985.
[8] J. P. Ponthot. Traitement unifié de la mécanique des milieux continus en grandes transfor-mations par la méthode des éléments finis. PhD thesis, Faculté des Sciences Appliquées- Université de Liege, 1997.
[9] J. C. Simo and T. J. R. Hughes. Computational inelasticity. Springer, 1998.
[10] O. C. Zienkiewicz and R. L. Taylor. The Finite Element Method (Fourth Edition) Volume Iand II. McGRAW-HILL BOOK COMPANY, 1987.
Olivier PANTALE Année universitaire 2008/2009

50 BIBLIOGRAPHY
Année universitaire 2008/2009 Olivier PANTALE

51
Index
Action locale, 4Admissibilité physique, 4Application linéaire, 38
Bauschinger, 22
Caley-Hamilton (théorème de), 47Cauchy (contraintes de), 7Cauchy (dérivée corotationnelle), 16Cauchy (dérivée temporelle de), 12Cauchy-Green (tenseur de), 10Clausius-Duhem (inégalité de), 3Convention d’Enstein, 37Corotationnelles (dérivées), 15
Divergenced’un champ tensoriel d’ordre 2, 43d’un champ vectoriel, 43
Décomposition polaire, 10, 48Déterminisme, 4
Ecrouissage cinématique, 22Ecrouissage isotrope, 22Ecrouissage mixte, 22Equiprésence, 4
Fonction de charge, 18
Gradientd’un champ scalaire, 42d’un champ vectoriel, 42
Hooke (loi de), 17
Indicemuet, 37réel, 38
Jacobi (méthode de), 24Jaumann (dérivée de), 15
Khun-Tucker, 20
Laplaciend’un champ scalaire, 44d’un champ vectoriel, 44
Normed’un tenseur, 40d’un vecteur, 38
Objectivité, 4, 5Opérateur
Divergence, 42
Gradient, 41Laplacien, 44Nabla, 41Rotationnel, 43
Produitcontracté, 40contracté double, 40matriciel, 40tensoriel, 39vectoriel, 41
Repère, 5Retour radial, 26Référentiel, 5
Symbolede Kronecker, 41de permutation, 41
Tenseurordre n, 40ordre 2, 38orthogonal, 47
Tenseur objectif, 7théorème de la divergence, 44Trace
d’un tenseur, 39d’une matrice, 39
Von-Mises (contrainte équivalente de), 20
Olivier PANTALE Année universitaire 2008/2009




![[Stm32f] Tut-02 Gpio - Hienclubvn](https://static.fdocuments.fr/doc/165x107/55cf9854550346d033970439/stm32f-tut-02-gpio-hienclubvn.jpg)




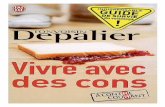






![An01 Cons Fr[1]](https://static.fdocuments.fr/doc/165x107/55cf9aa2550346d033a2aefd/an01-cons-fr1.jpg)

