
Logique floue - Implication de Mamdani
17
Logique floue implication de Mamdani
-
Upload
yassine-zahraoui -
Category
Documents
-
view
849 -
download
1
Transcript of Logique floue - Implication de Mamdani
Logique floueimplication de Mamdani
• La logique floue repose sur la théorie des ensembles flous développée par Zadeh [ZAD 65].
• A coté d'un formalisme mathématique fort développé.

• Les notions de température moyenne ou de courant faible sont relativement difficiles à spécifier de manière précise.
• On peut définir le degré d'appartenance de la variable température à l'ensemble "faible" comme le "degré de vérité" de la proposition "la température est faible".

• En logique booléenne, le degré d'appartenance ( μ ) ne peut prendre que deux valeurs ( 0 ou 1 ). La température peut être :
• Elle ne peut pas s’appartenir à deux ensembles ou plus à la fois.
• En logique floue, le degré d'appartenance devient une fonction qui peut prendre une valeur réelle comprise entre 0 et 1 inclus.
• Le degré d’appartenance permet de quantifier le fait que la température puisse être considérée comme moyenne.
• Dans ce cas, la température peut être considérée, à la fois, comme faible avec un degré d'appartenance de 0,2 et comme moyenne avec un degré d'appartenance de 0,8 ( figure 1.2 ).

• L'univers de discours est l'ensemble des valeurs réelles que peut prendre la variable floue x et μA(x) est le degré d'appartenance de l'élément x à l'ensemble flou A ( figure 1.3 ).

• Dans notre exemple, la variable floue est la température, l'univers de discours est l'ensemble des réels de l'intervalle [0, 40]. On attribue à cette variable trois sous-ensembles flous: faible, moyenne et élevée. Chacun est caractérisé par sa fonction degré d'appartenance:

• On peut définir la fonction degré d'appartenance μmoyenne sur tout l'univers de discours :
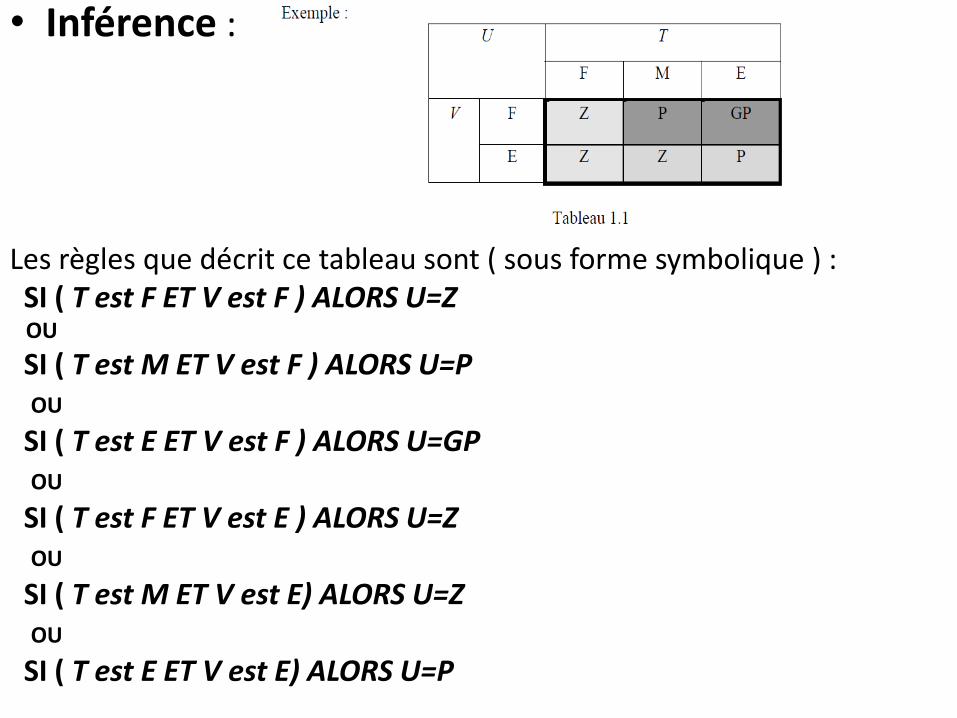
• Inférence :
Les règles que décrit ce tableau sont ( sous forme symbolique ) :SI ( T est F ET V est F ) ALORS U=ZOU
SI ( T est M ET V est F ) ALORS U=POU
SI ( T est E ET V est F ) ALORS U=GPOU
SI ( T est F ET V est E ) ALORS U=ZOU
SI ( T est M ET V est E) ALORS U=ZOU
SI ( T est E ET V est E) ALORS U=P
Méthode d'inférence Max-Min
• Cette méthode réalise l'opérateur "ET" par la fonction "Min", la conclusion "ALORS" de chaque règle par la fonction "Min" et la liaison entre toutes les règles (opérateur "OU") par la fonction Max.
• La dénomination de cette méthode, dite Max-Min ou "implication de Mamdani", est due à la façon de réaliser les opérateurs ALORS et OU de l'inférence.

• Reprenons l'exemple SI (T est M ET V est F) ALORS U=P OU SI (T est E ET V est F) ALORS U=GP où seulement deux règles sont activées :

Exemple d’application:• Pour mieux illustrer le concept d'un contrôleur flou, on comparera
la performance d'un contrôleur PID classique avec le contrôleur flou. Le système sous étude est le suivant:
• En utilisant les méthodes classiques, on trouve que le contrôleur PID idéal a les valeurs suivantes:
• On utilisera la réponse à une entrée échelon du système avec PID pour comparer la performance.

• Le système avec contrôleur flou et contrôleur PID devrait être le suivant:
• Pour le système simple sous étude, on n’utilise que l'erreur comme variable de contrôle.
• On a donc un système très simple, avec une entrée et une sortie. Dans plusieurs systèmes flous, on utilise aussi la dérivée de l'erreur, et on obtient alors un système à deux entrées, une sortie.
• Il faut utiliser un peu de jugement dans le design du contrôleur flou. Il ne faut pas simplement créer des fonctions d'appartenance de toute façon. Il faut quand même étudier le système en détail.
• Une chose importante à remarquer est la valeur finale du système en boucle ouverte. Ceci déterminera la sortie du contrôleur quand l'erreur est nulle. Pour le système sous étude, la valeur finale due à une entrée échelon unitaire est:

• La valeur finale est donc 0.5. Le contrôleur devra donc avoir un gain de
• Il faut aussi bien choisir les limites du système (limites de l'entrée et de la sortie). Dans ce cas-ci, l'entrée utilisée est une entrée échelon unitaire. On choisit donc de développer les fonctions d'appartenance du contrôleur flou pour l'entrée entre -1 et +1.
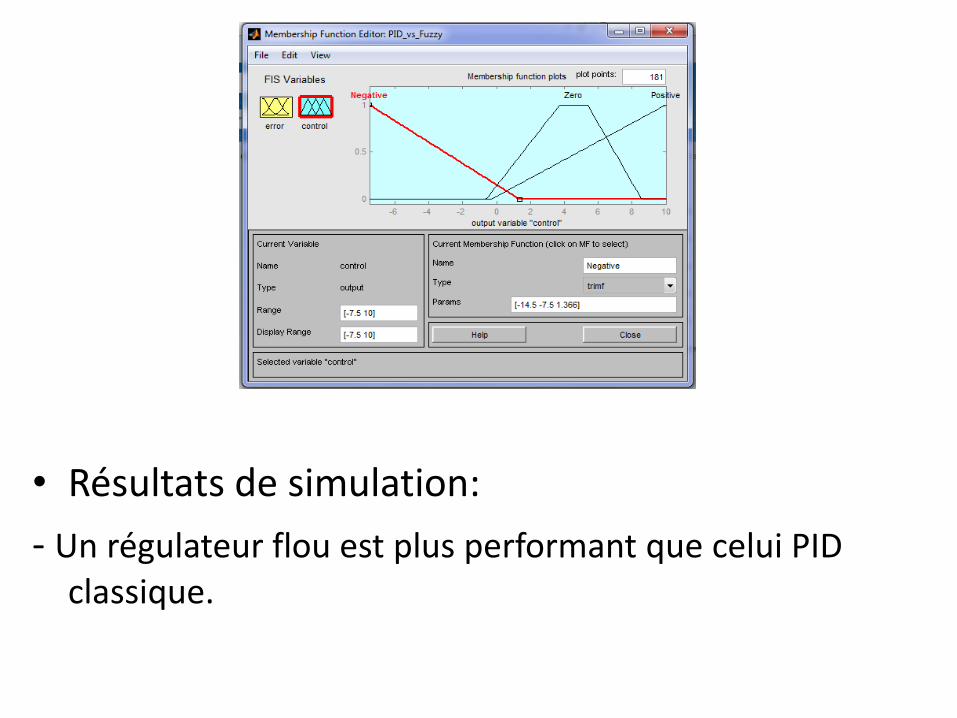
• Résultats de simulation:
- Un régulateur flou est plus performant que celui PID classique.



















