Logique combinatoire et séquentielle Cours #3: GPA-140.
100
Logique combinatoire et séquentielle Cours #3: GPA-140
-
Upload
anne-simon -
Category
Documents
-
view
235 -
download
14
Transcript of Logique combinatoire et séquentielle Cours #3: GPA-140.
Logique combinatoireet séquentielle
Cours #3: GPA-140
2
Logique combinatoireet séquentielle
En logique combinatoire, aussi appelée logique booléenne, l'état des sorties est une fonction logique de l'état des entrées
En logique séquentielle, l'état des sorties est fonction de l'état des entrées et de l'état du système, ce qui implique qu'une combinaison d'entrées ne génère pas toujours la même sortie.
3
La logique combinatoire et les automatismes
La logique combinatoire peut quand même être utilisée pour étudier les automatismes séquentiel simples.
En révision du cours précédent, nous pouvons faire l’exemple de cette présentation (acétates 5-14) qui montre la marche à suivre...
4
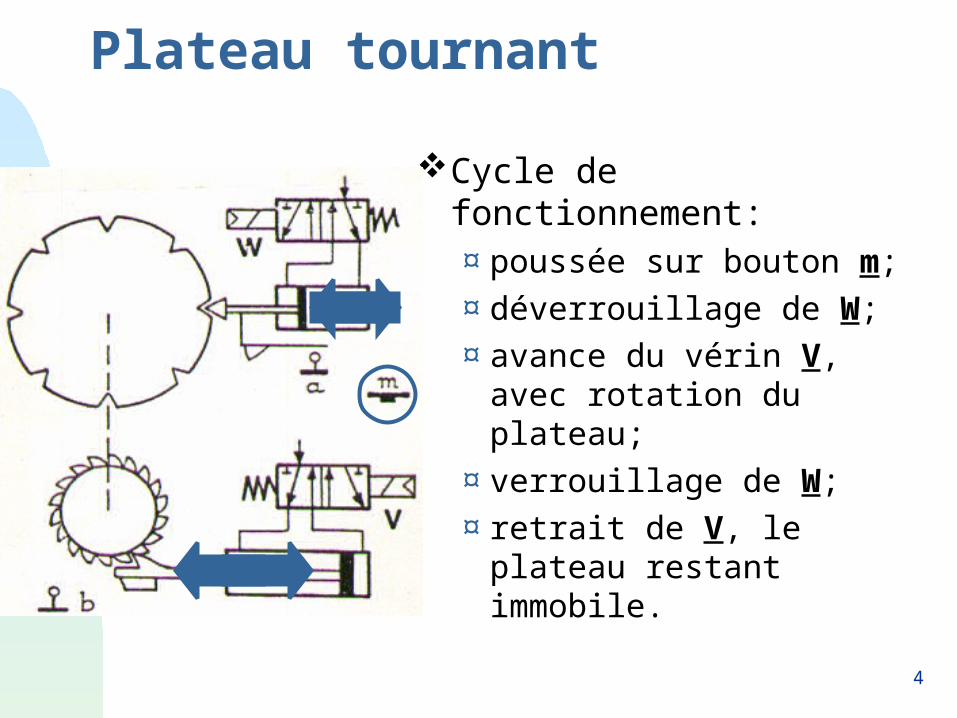
Plateau tournant
Cycle de fonctionnement:¤ poussée sur bouton m;¤ déverrouillage de W;¤ avance du vérin V, avec
rotation du plateau;¤ verrouillage de W;¤ retrait de V, le plateau
restant immobile.
5
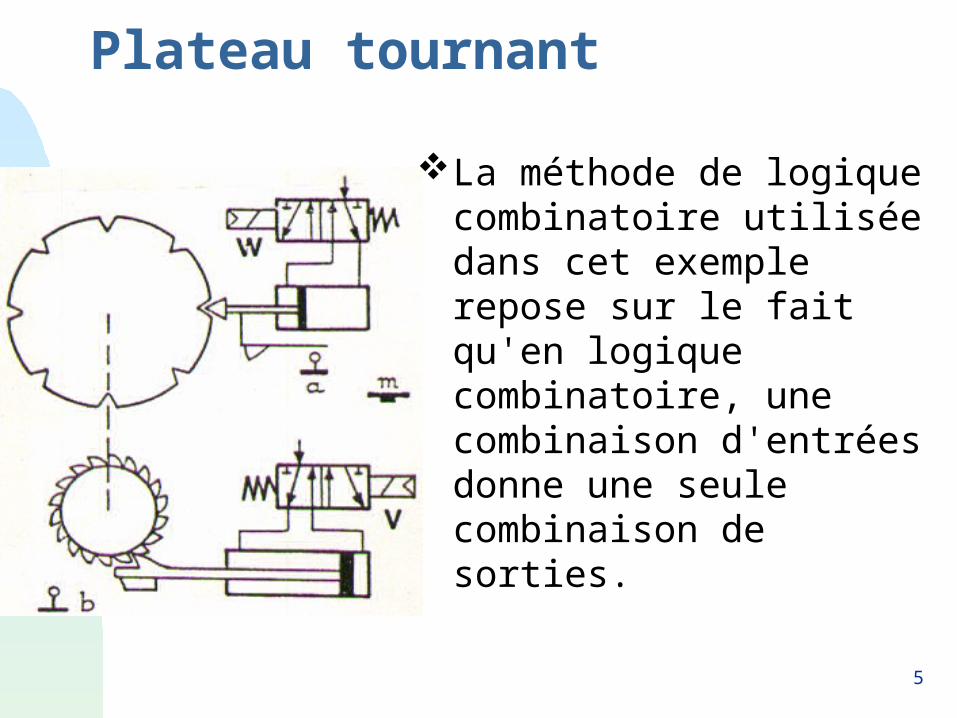
Plateau tournant
La méthode de logique combinatoire utilisée dans cet exemple repose sur le fait qu'en logique combinatoire, une combinaison d'entrées donne une seule combinaison de sorties.
6
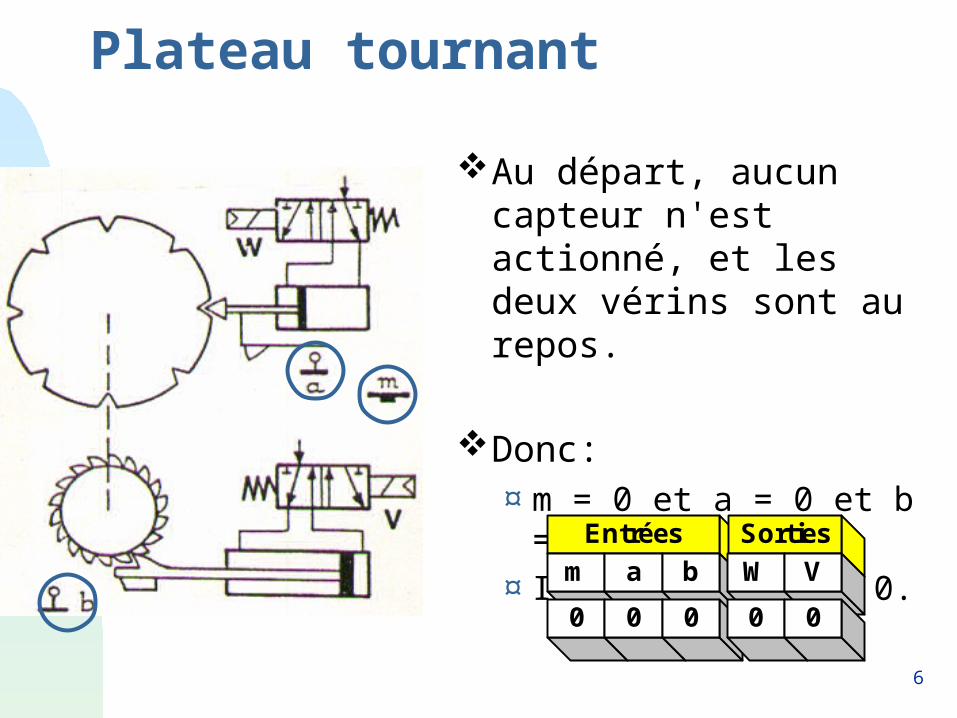
Plateau tournant
Au départ, aucun capteur n'est actionné, et les deux vérins sont au repos.
Donc:¤ m = 0 et a = 0 et b =
0:¤ Implique W = V = 0.
Entrées Sorties
m a b W V
0 0 0 0 0
7
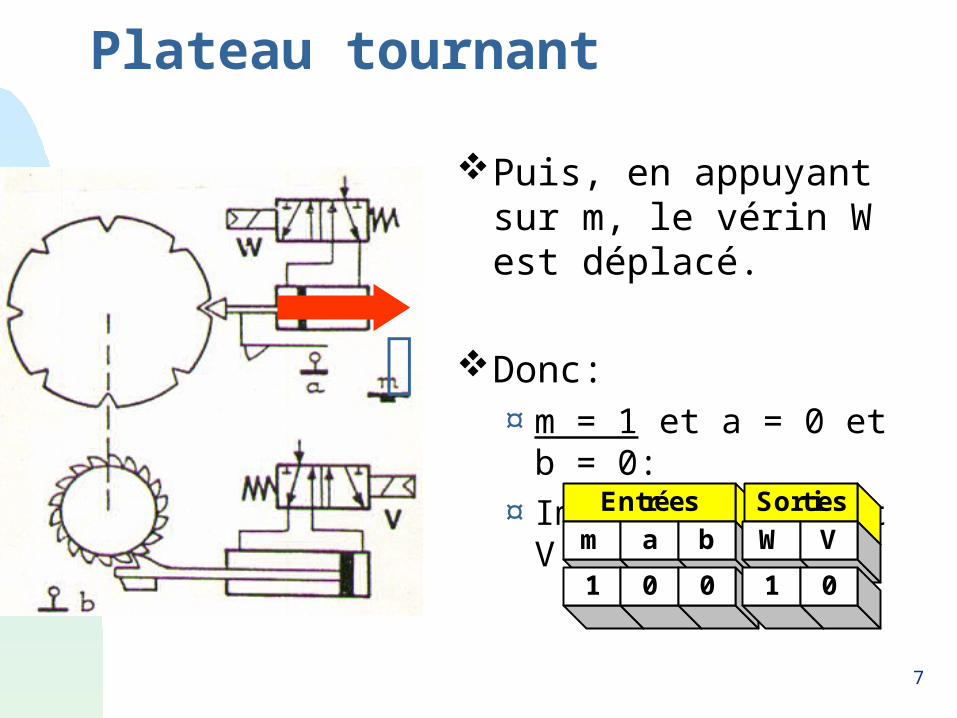
Plateau tournant
Puis, en appuyant sur m, le vérin W est déplacé.
Donc:¤ m = 1 et a = 0 et b =
0:¤ Implique W = 1 et V =
0.
Entrées Sorties
m a b W V
1 0 0 1 0
8
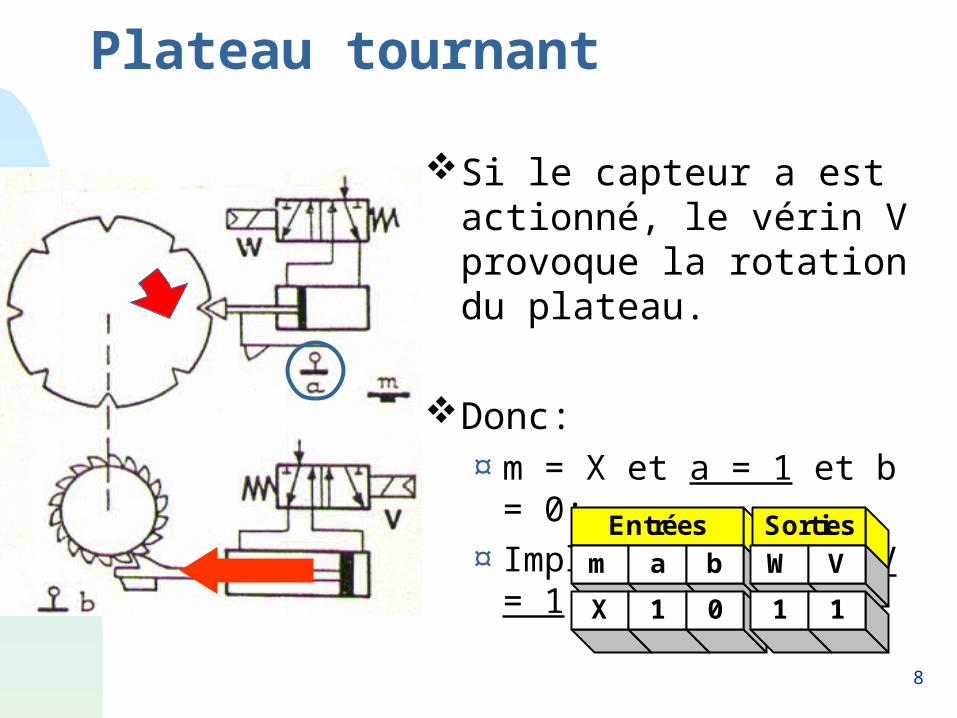
Plateau tournant
Si le capteur a est actionné, le vérin V provoque la rotation du plateau.
Donc:¤ m = X et a = 1 et b =
0:¤ Implique W = 1 et V =
1.
Entrées Sorties
m a b W V
X 1 0 1 1
9
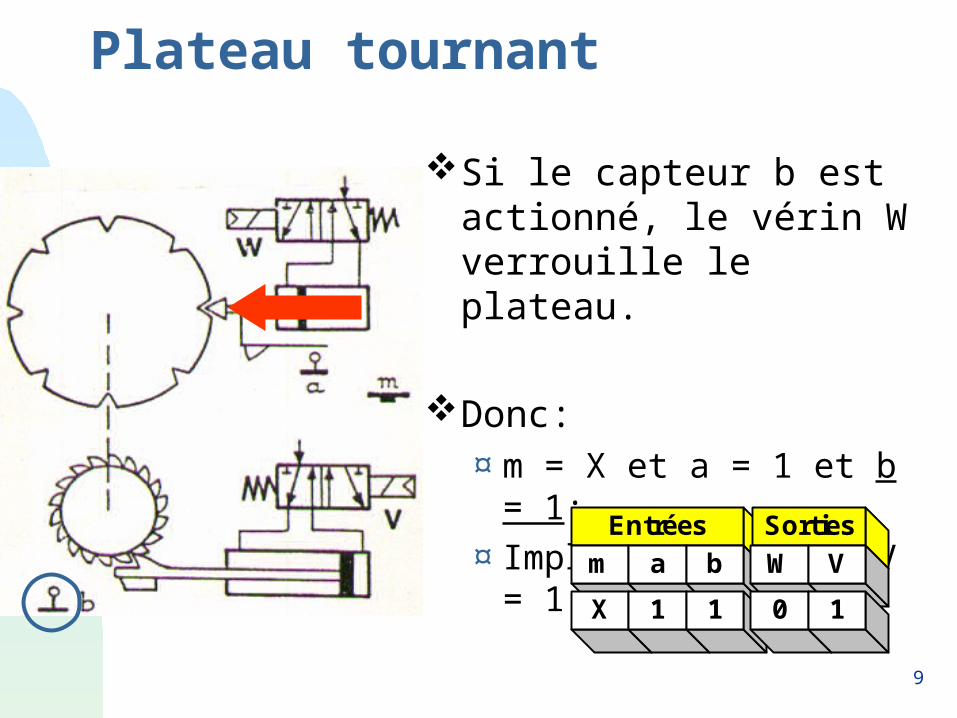
Plateau tournant
Si le capteur b est actionné, le vérin W verrouille le plateau.
Donc:¤ m = X et a = 1 et b =
1:¤ Implique W = 0 et V =
1.Entrées Sorties
m a b W V
X 1 1 0 1
10
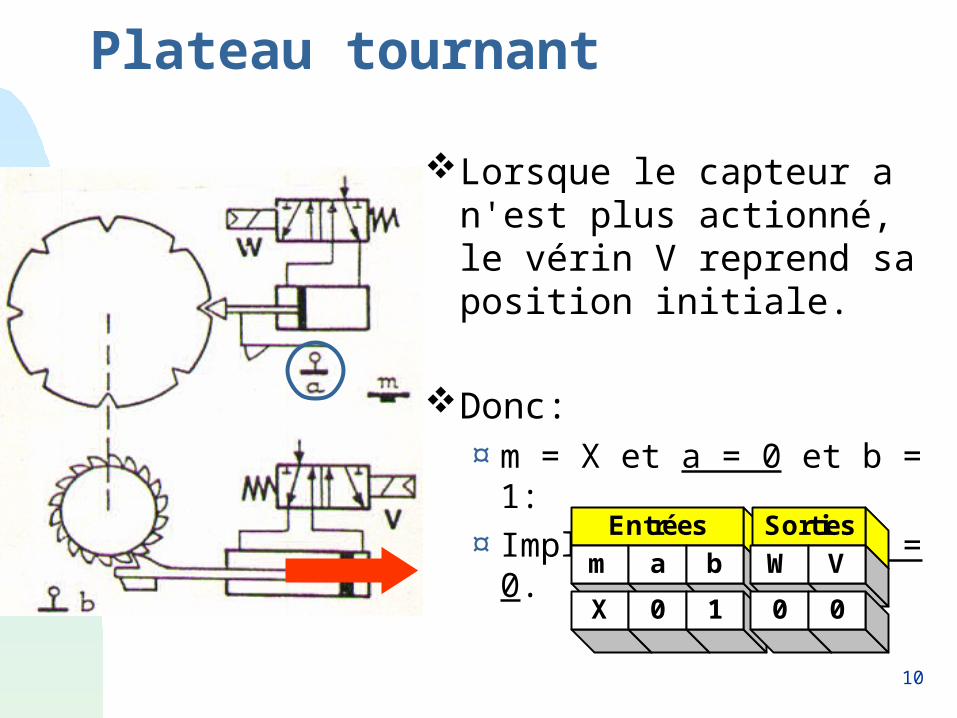
Plateau tournant
Lorsque le capteur a n'est plus actionné, le vérin V reprend sa position initiale.
Donc:¤ m = X et a = 0 et b =
1:¤ Implique W = 0 et V =
0.
Entrées Sorties
m a b W V
X 0 1 0 0
11
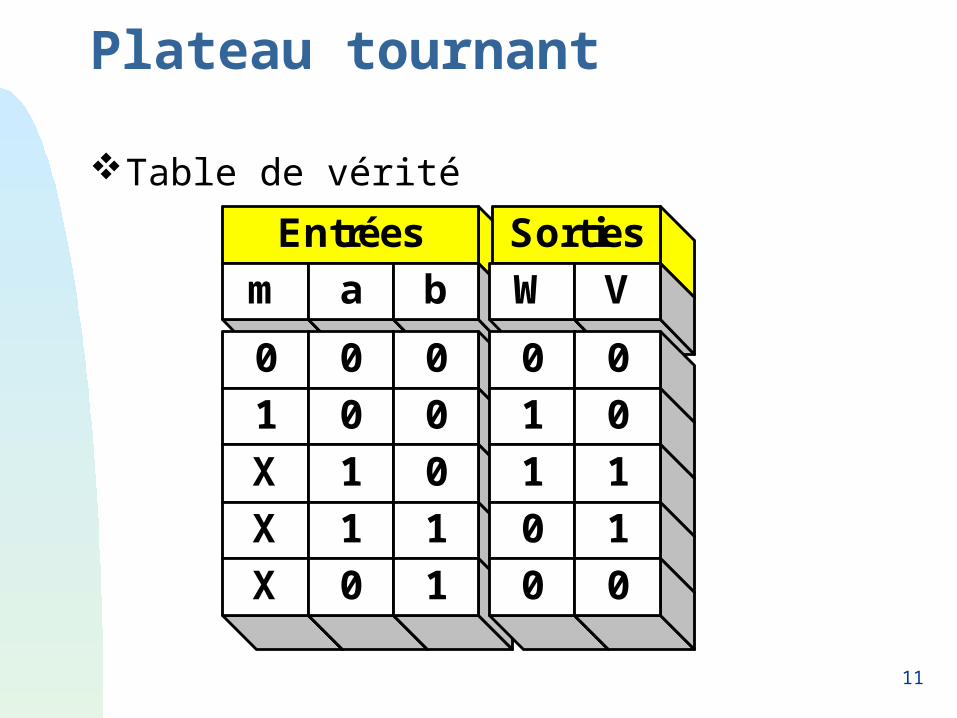
Plateau tournant
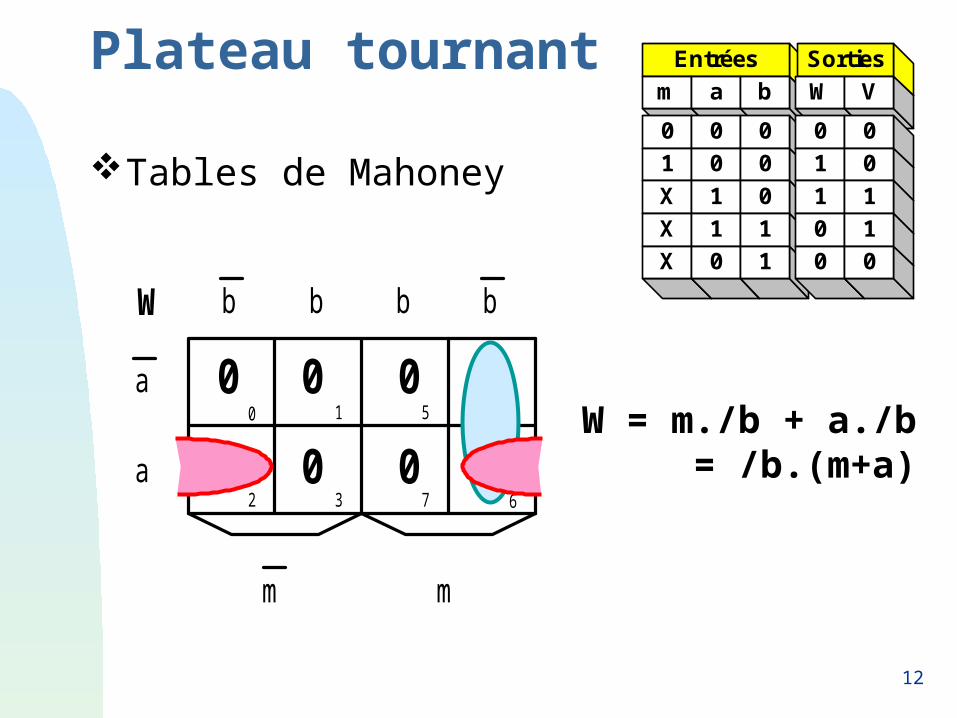
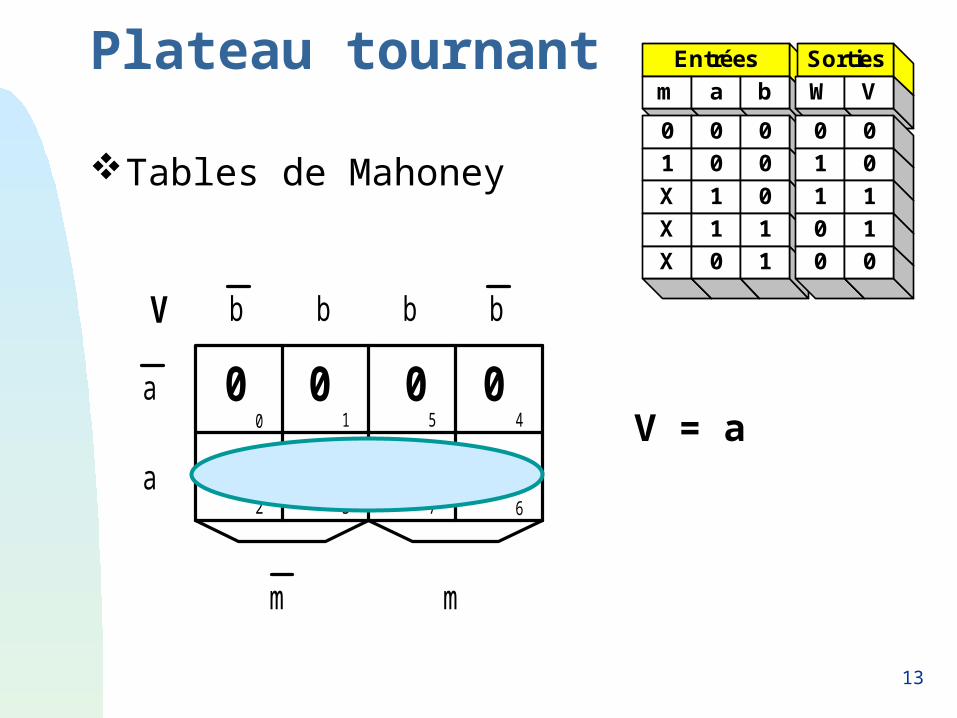
Table de vérité
Entrées Sorties
m a b W V
0 0 0 0 0
1 0 0 1 0
X 1 0 1 1
X 1 1 0 1
X 0 1 0 0
12
Plateau tournant
Tables de Mahoney
m
0 1 5 4
2 3 7 6
m
a
a
bb bb
0
1
0
0
0
0
1
1
W
W = m./b + a./b = /b.(m+a)
Entrées Sorties
m a b W V
0 0 0 0 0
1 0 0 1 0
X 1 0 1 1
X 1 1 0 1
X 0 1 0 0
13
Plateau tournant
Tables de Mahoney
m
0 1 5 4
2 3 7 6
m
a
a
bb bb
0
1
0
1
0
1
0
1
V
V = a
Entrées Sorties
m a b W V
0 0 0 0 0
1 0 0 1 0
X 1 0 1 1
X 1 1 0 1
X 0 1 0 0
14
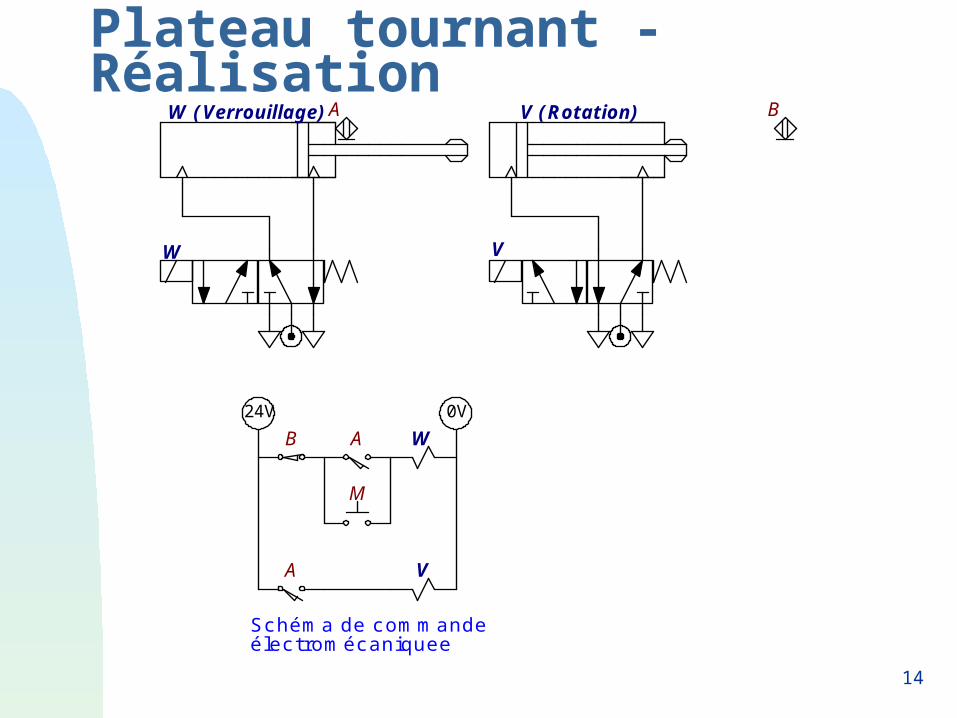
Plateau tournant - Réalisation
24V 0V
Schéma de commandeélectromécaniquee
W (Verrouillage) V (Rotation)
VW
A B
M
AB W
VA
15
Diagramme des phases
Outil servant à dénombrer les états possibles et leur enchaînement dans le temps
Montre l'évolution du niveau logique des entrées et des sorties dans le temps
Exemple: Plateau tournant
16
Diagramme des phases
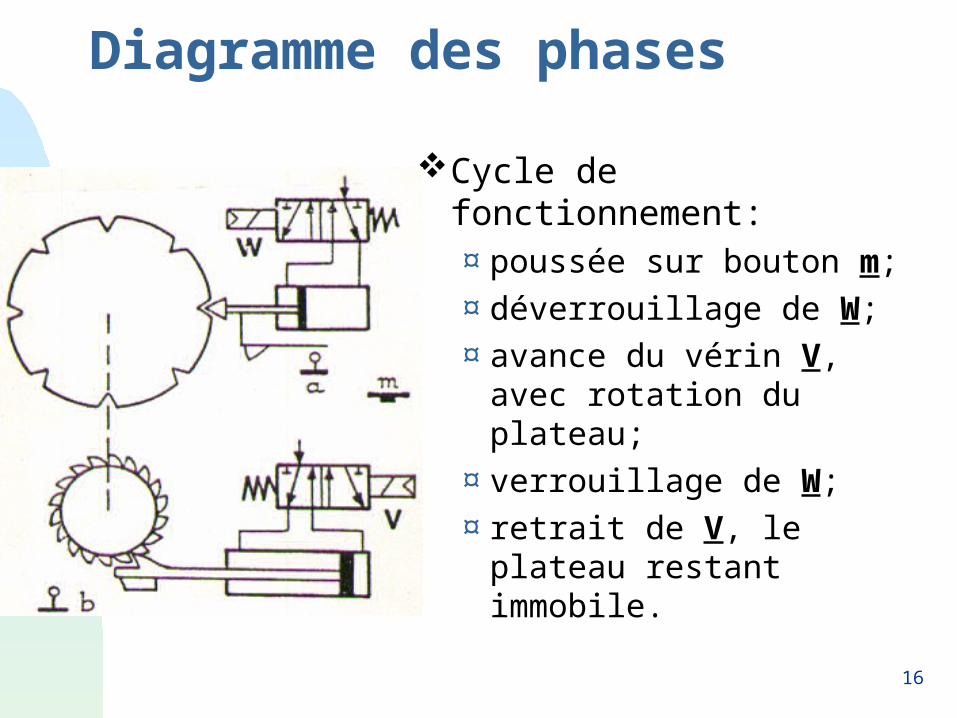
Cycle de fonctionnement:¤ poussée sur bouton m;¤ déverrouillage de W;¤ avance du vérin V, avec
rotation du plateau;¤ verrouillage de W;¤ retrait de V, le plateau
restant immobile.
17
Diagramme des phases
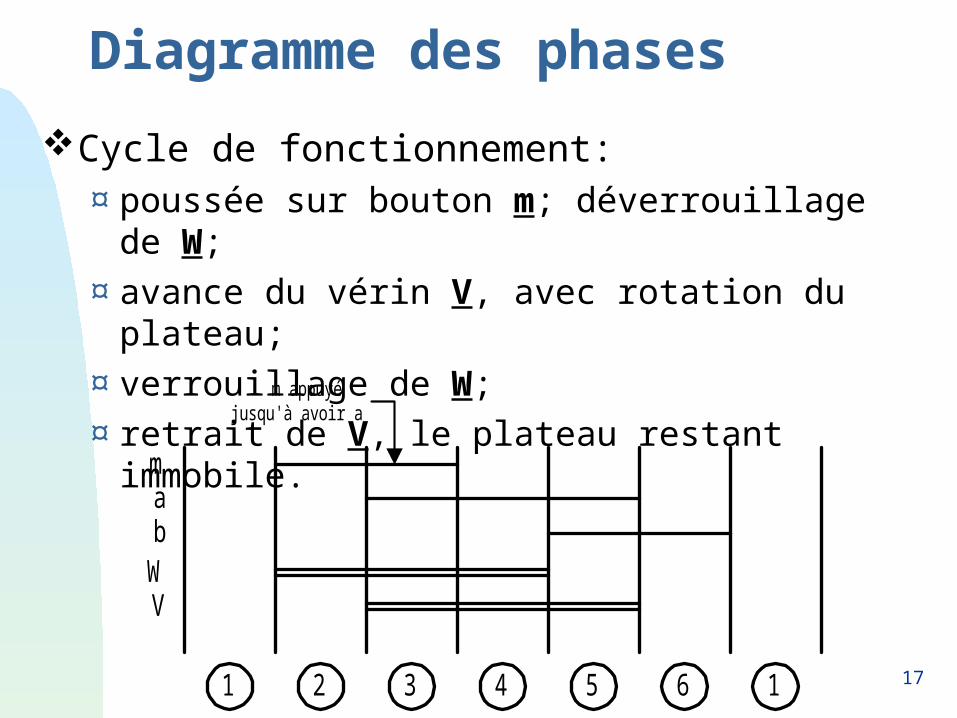
Cycle de fonctionnement:¤ poussée sur bouton m; déverrouillage de
W;¤ avance du vérin V, avec rotation du
plateau;¤ verrouillage de W;¤ retrait de V, le plateau restant immobile.
m
bW
1 2 3 4
a
V
m appuyéjusqu'à avoir a
5 6 1
18
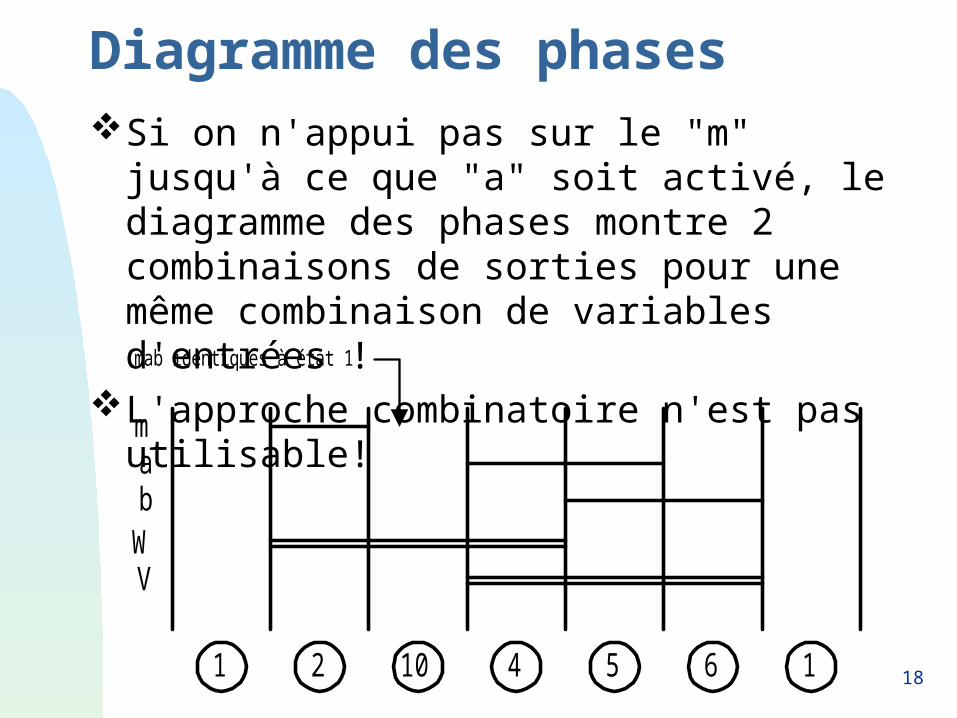
Diagramme des phasesSi on n'appui pas sur le "m" jusqu'à ce
que "a" soit activé, le diagramme des phases montre 2 combinaisons de sorties pour une même combinaison de variables d'entrées !
L'approche combinatoire n'est pas utilisable!m
bW
1 2 10 4
a
V
mab identiques à état 1
5 6 1
19
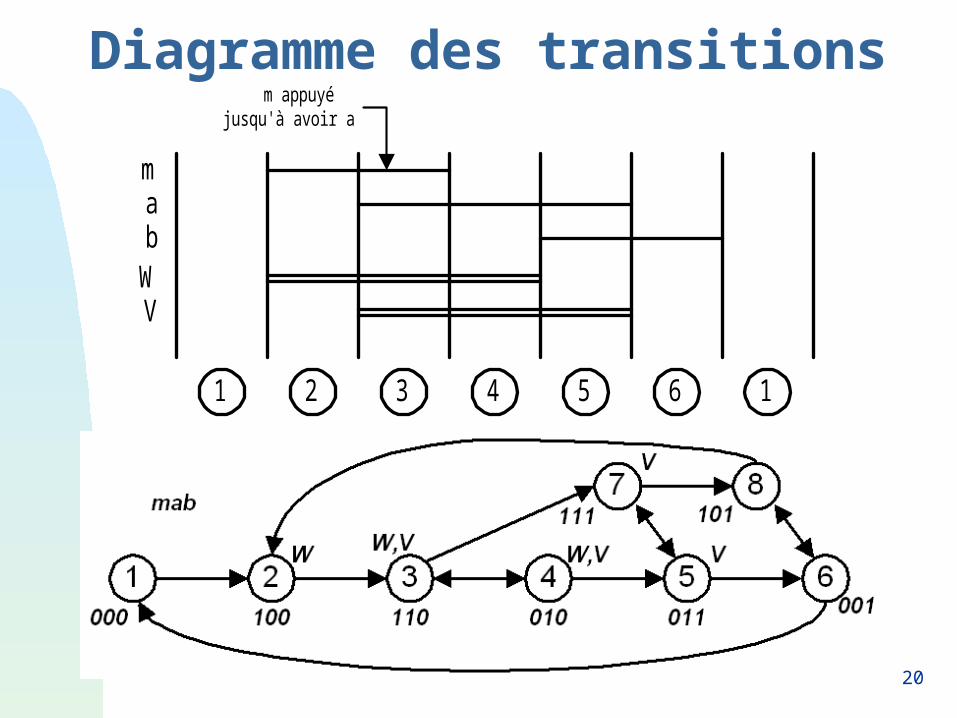
Diagramme des transitions
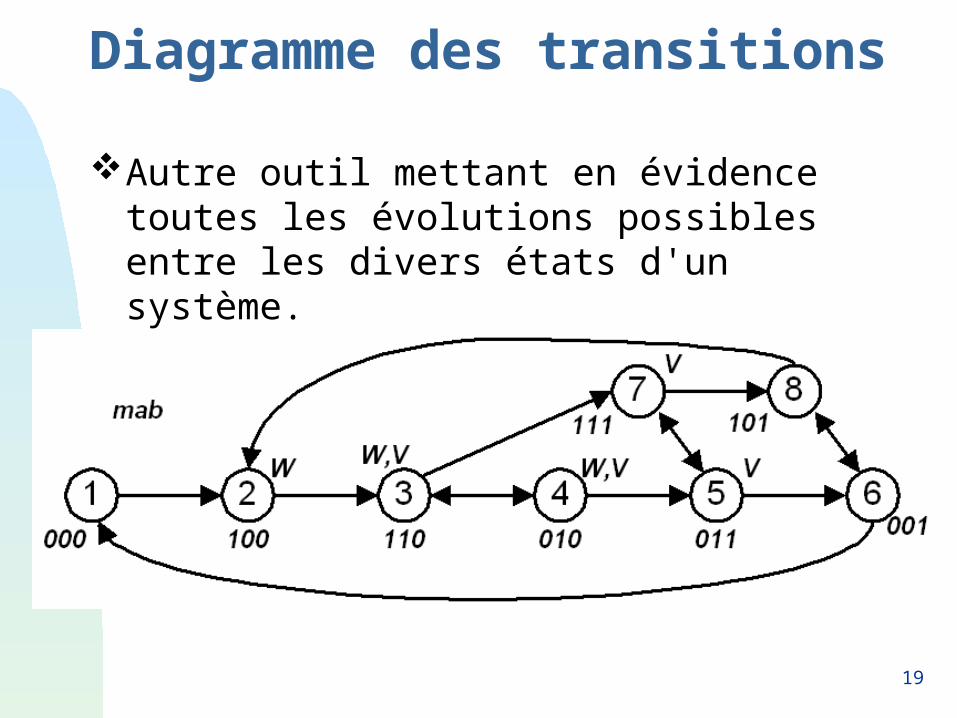
Autre outil mettant en évidence toutes les évolutions possibles entre les divers états d'un système.
20
Diagramme des transitions
m
bW
1 2 3 4
a
V
m appuyéjusqu'à avoir a
5 6 1
21
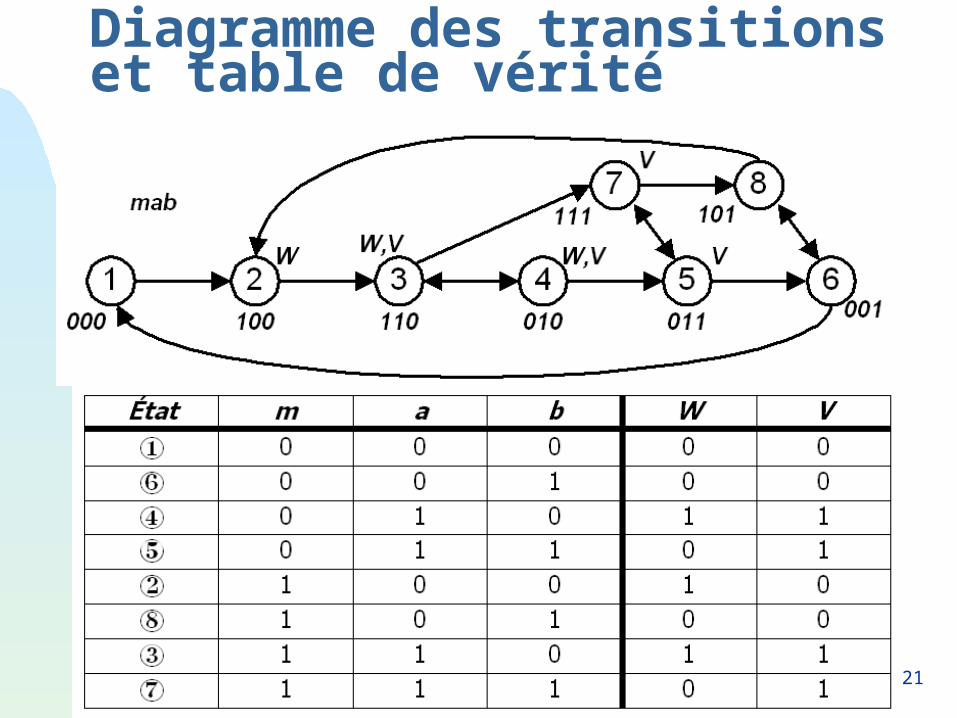
Diagramme des transitions et table de vérité
22
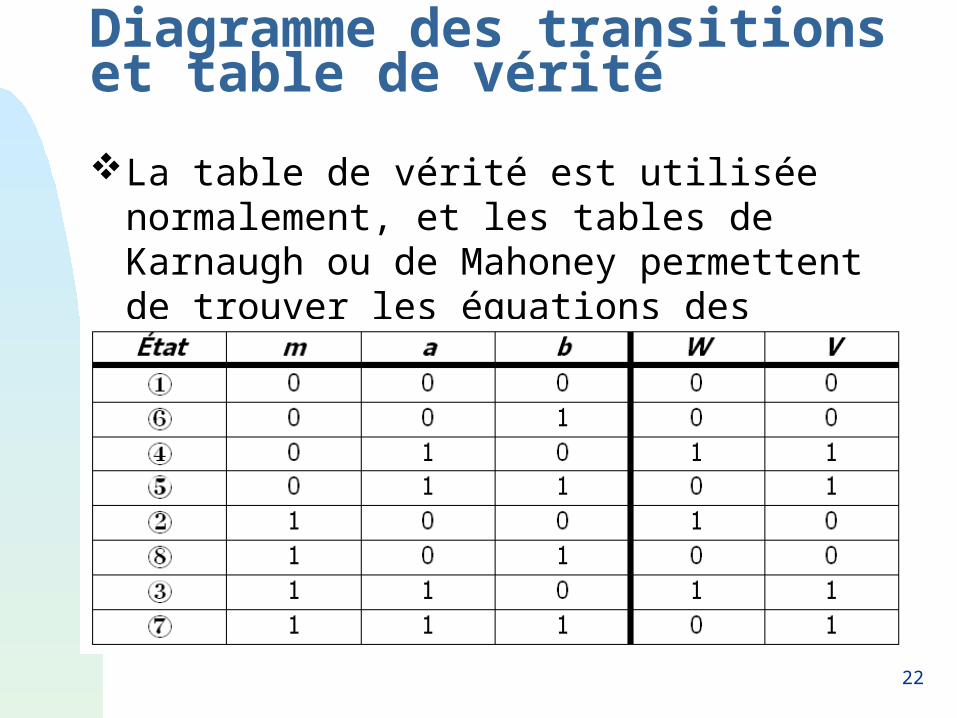
Diagramme des transitions et table de vérité
La table de vérité est utilisée normalement, et les tables de Karnaugh ou de Mahoney permettent de trouver les équations des sorties.
23
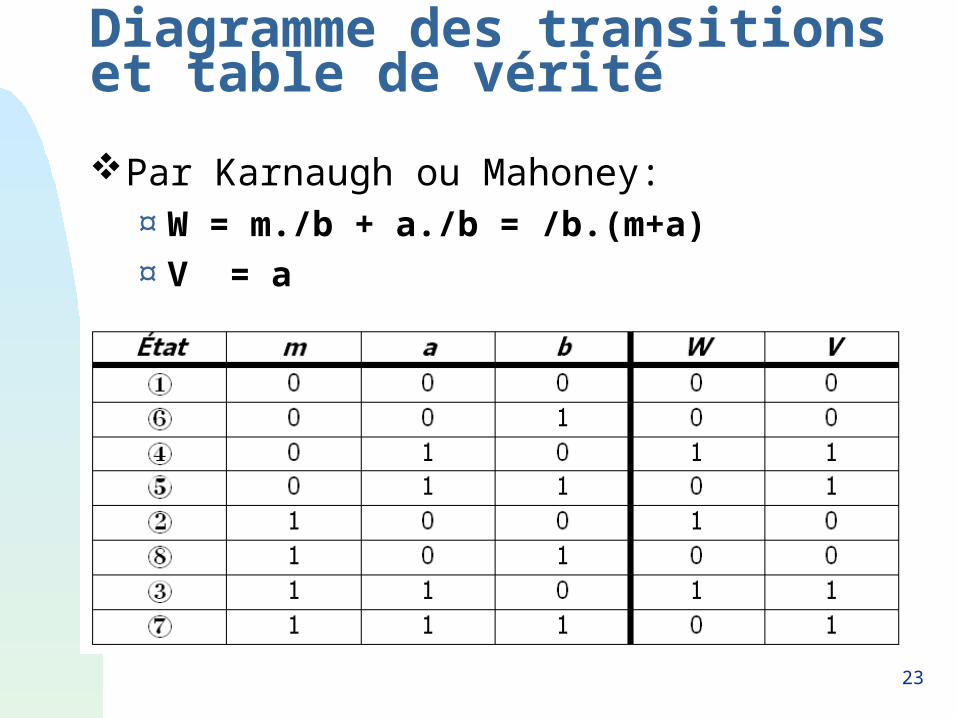
Diagramme des transitions et table de vérité
Par Karnaugh ou Mahoney:¤ W = m./b + a./b = /b.(m+a)¤ V = a
24
La logique séquentielle
Tel que mentionné dans l'exemple du plateau tournant, si on n'appui pas sur "m" jusqu'à ce que "a" soit activé, le diagramme des phases montre 2 combinaisons de sorties pour une même combinaison de variables d'entrées !
L'approche par la logique combinatoire ne peut résoudre un tel système séquentiel
Les diagrammes des phases et des transitions peuvent être utile pour identifier ces situations
25
La logique séquentielle
Exemple:¤ Le contacteur "C" d'un moteur est
commandé par deux boutons¤ Le bouton "m" pour mettre le moteur en
marche¤ Le bouton "a" pour arrêter le moteur¤ Le moteur tourne jusqu'à ce que
l'opérateur appuis sur "a"
26
La logique séquentielle
Exemple:¤ Moteur à l’arrêt:
entrées a=0, m=0 ; sortie C=0
¤ Mise en marche: entrées a=0, m=1 ; sortie C=1
¤ Moteur en marche: entrée a=0, m=0 ; sortie C=1
Problème ?¤ Pour a=0, m=0 ; sortie C=0 ou C=1
Impossible à résoudre avec l'approche combinatoire
27
La logique séquentielle
La méthode de Huffman utilise les diagrammes des phases et des transitions pour résoudre ces systèmes.¤ Dénombrer tous les états possibles;
Établir un diagramme des phases Établir un diagramme des transitions
¤ Construire la table primitive des états;¤ Construire la table réduite des états;
Définir les variables secondaires.
¤ Trouver les équations logiques des actionneurs et des variables secondaires.
28
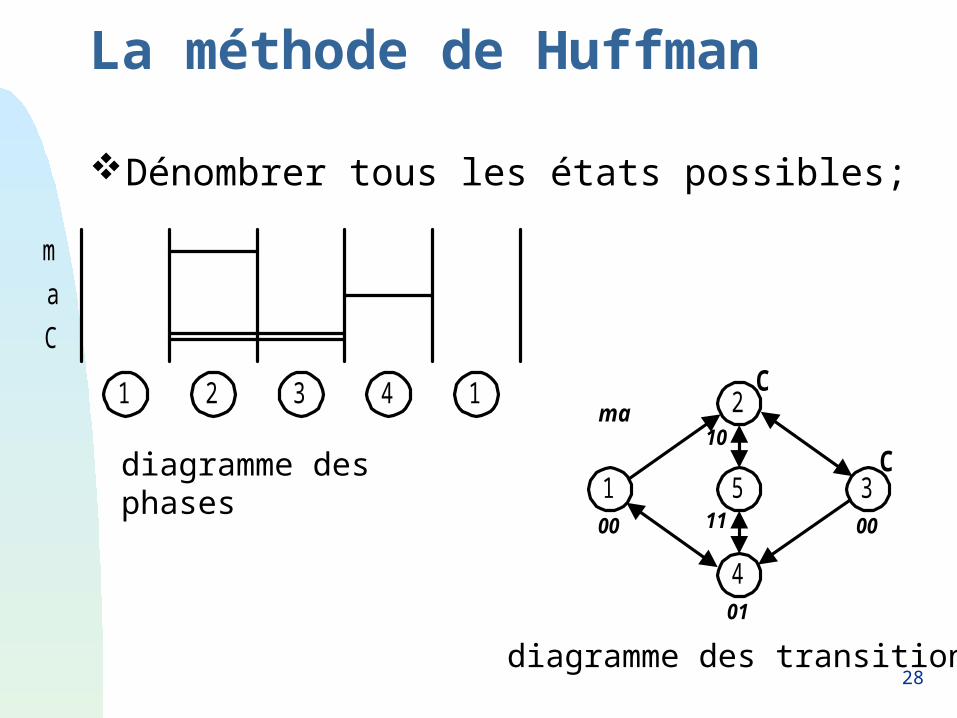
La méthode de Huffman
Dénombrer tous les états possibles;
m
a
C
1 2 3 4 1
1
ma 2
3
4
500
10
00
01
11
C
C
diagramme des phases
diagramme des transitions
29
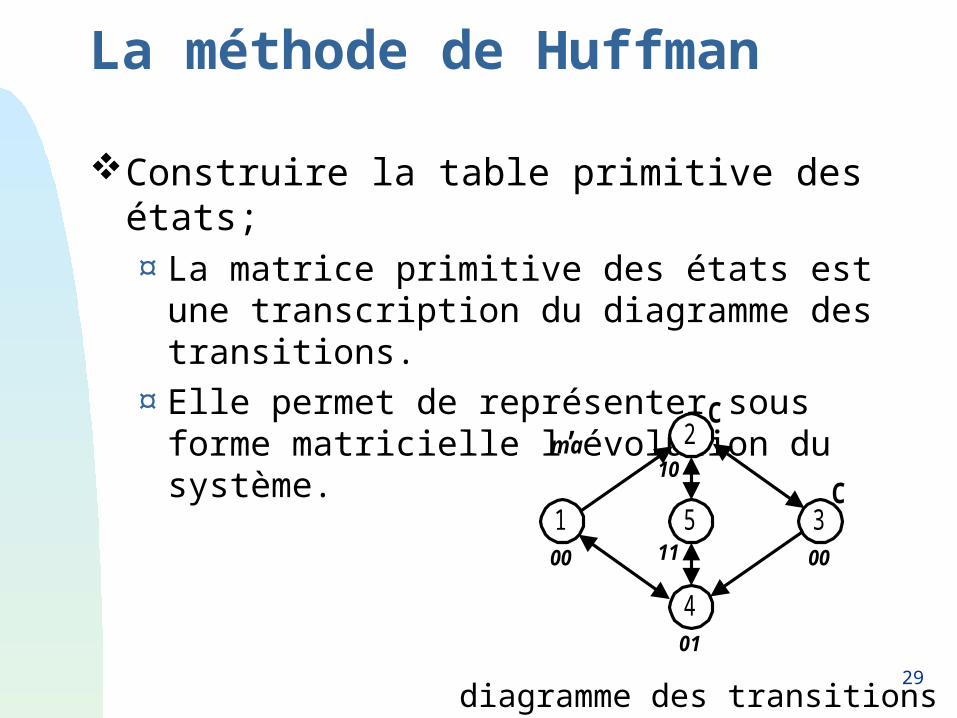
La méthode de Huffman
Construire la table primitive des états;¤ La matrice primitive des états est une
transcription du diagramme des transitions.
¤ Elle permet de représenter sous forme matricielle l’évolution du système.
1
ma 2
3
4
500
10
00
01
11
C
C
diagramme des transitions
30
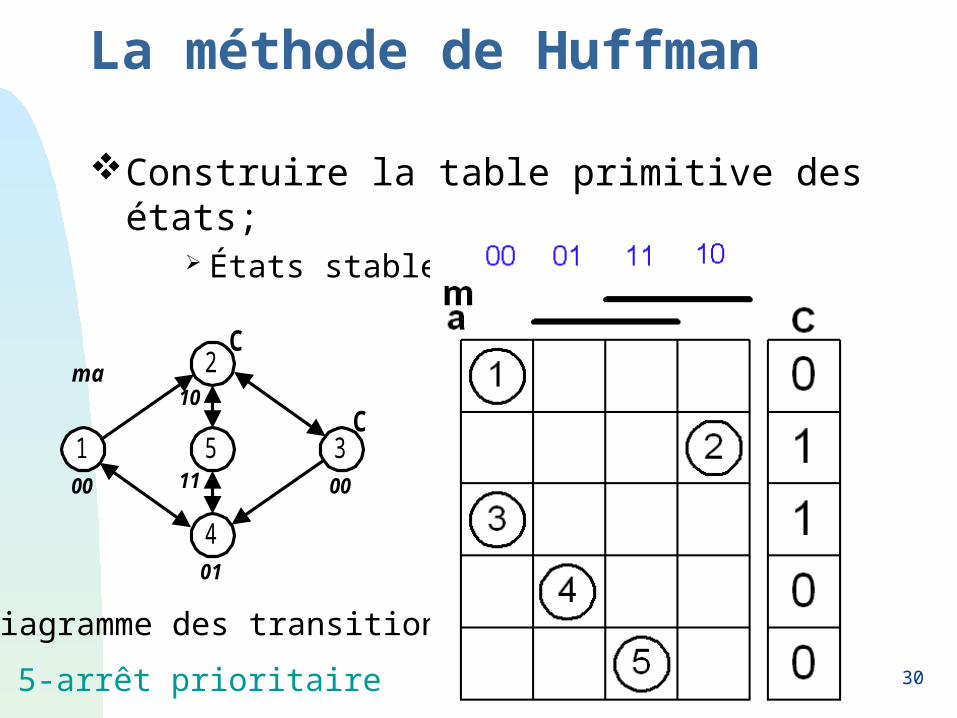
La méthode de Huffman
Construire la table primitive des états; États stables = encerclés
1
ma 2
3
4
500
10
00
01
11
C
C
diagramme des transitions
5-arrêt prioritaire
31
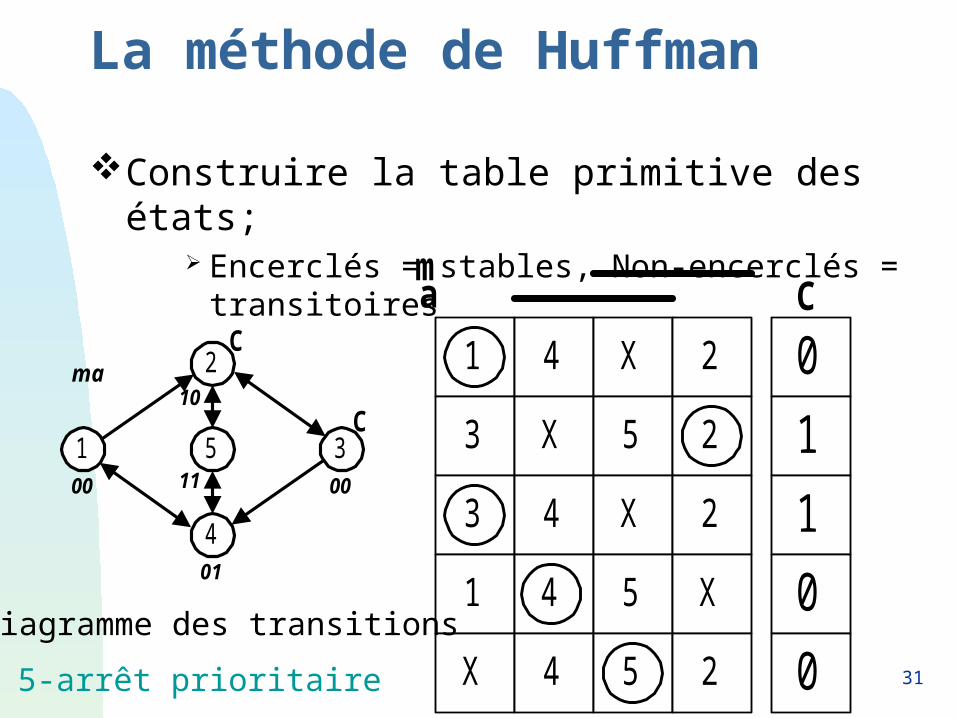
La méthode de Huffman
Construire la table primitive des états; Encerclés = stables, Non-encerclés =
transitoires
4 X 2 0C
ma
1
3 X 5 1
4 X 2 13
1 5 X 04
X 4 2 05
21
ma 2
3
4
500
10
00
01
11
C
C
diagramme des transitions
5-arrêt prioritaire
32
La méthode de Huffman
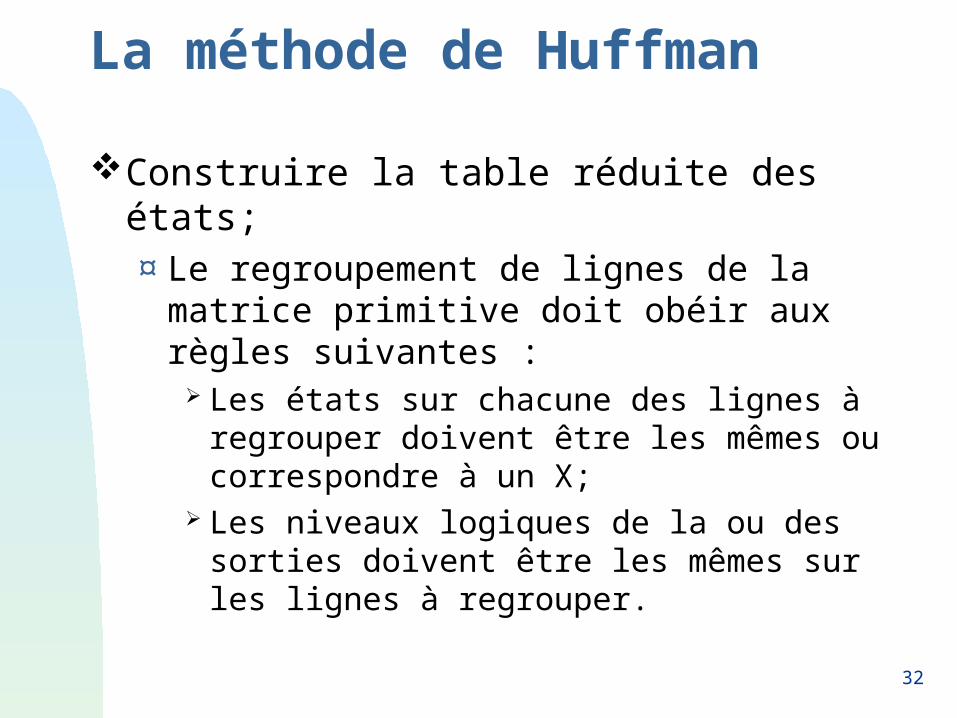
Construire la table réduite des états;¤ Le regroupement de lignes de la matrice
primitive doit obéir aux règles suivantes : Les états sur chacune des lignes à
regrouper doivent être les mêmes ou correspondre à un X;
Les niveaux logiques de la ou des sorties doivent être les mêmes sur les lignes à regrouper.
33
La méthode de Huffman
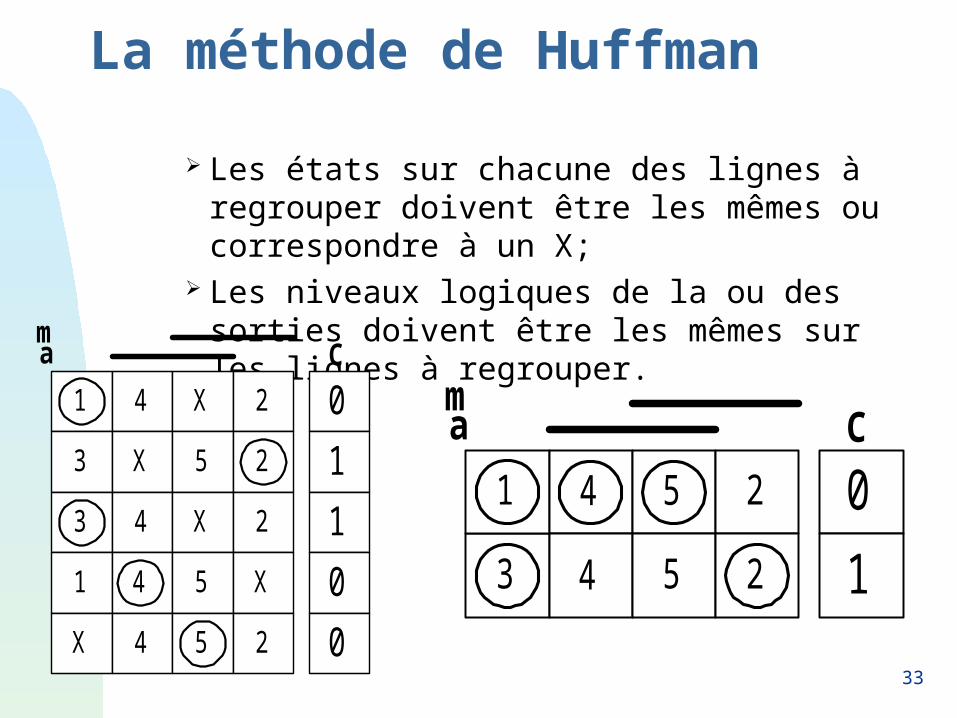
Les états sur chacune des lignes à regrouper doivent être les mêmes ou correspondre à un X;
Les niveaux logiques de la ou des sorties doivent être les mêmes sur les lignes à regrouper.
X 2 0C
ma
1
3 5 1
4 5
24
4 X 2 0C
ma
1
3 X 5 1
4 X 2 13
1 5 X 04
X 4 2 05
2
34
La méthode de Huffman
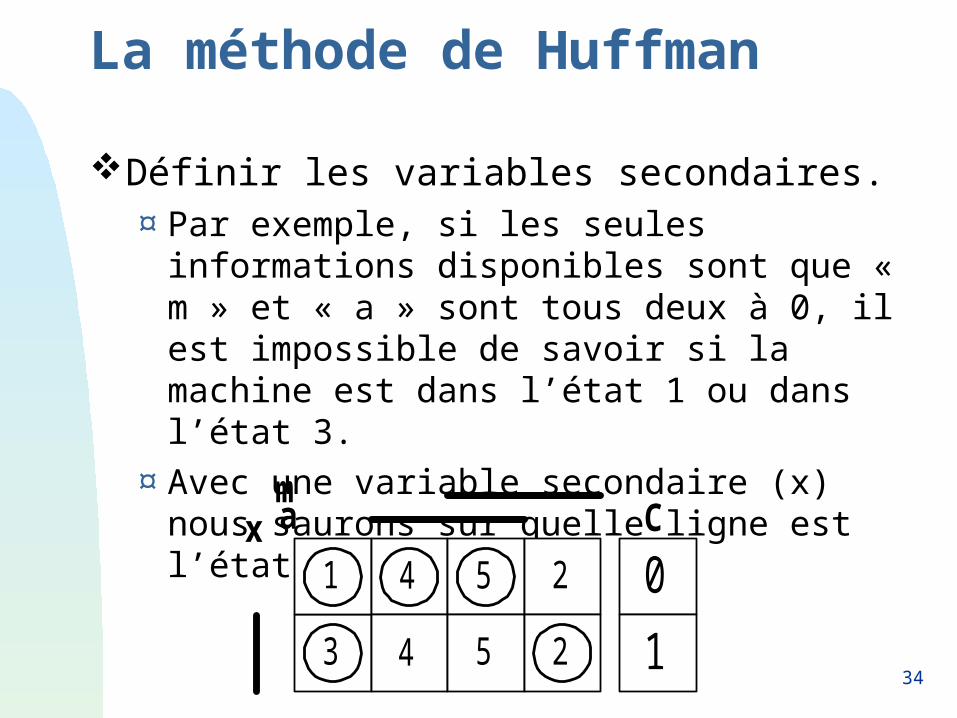
Définir les variables secondaires.¤ Par exemple, si les seules informations
disponibles sont que « m » et « a » sont tous deux à 0, il est impossible de savoir si la machine est dans l’état 1 ou dans l’état 3.
¤ Avec une variable secondaire (x) nous saurons sur quelle ligne est l’état de la machine
X 2 0C
ma
1
3 5 1
4 5
24
x
35
La méthode de Huffman
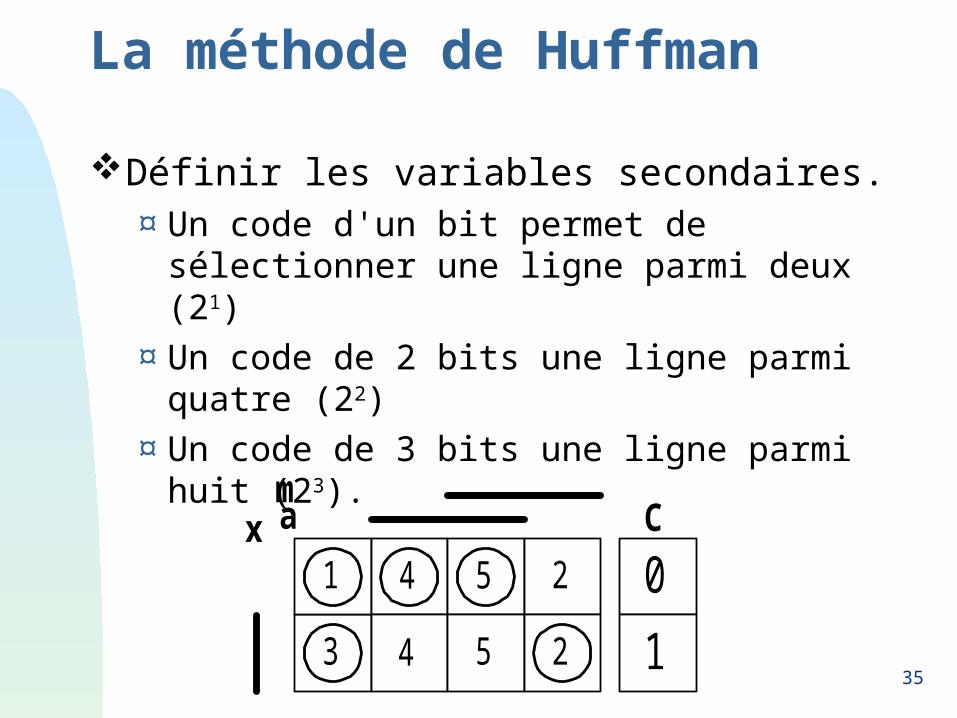
Définir les variables secondaires.¤ Un code d'un bit permet de sélectionner
une ligne parmi deux (21) ¤ Un code de 2 bits une ligne parmi quatre
(22)¤ Un code de 3 bits une ligne parmi huit (23).
X 2 0C
ma
1
3 5 1
4 5
24
x
36
La méthode de Huffman
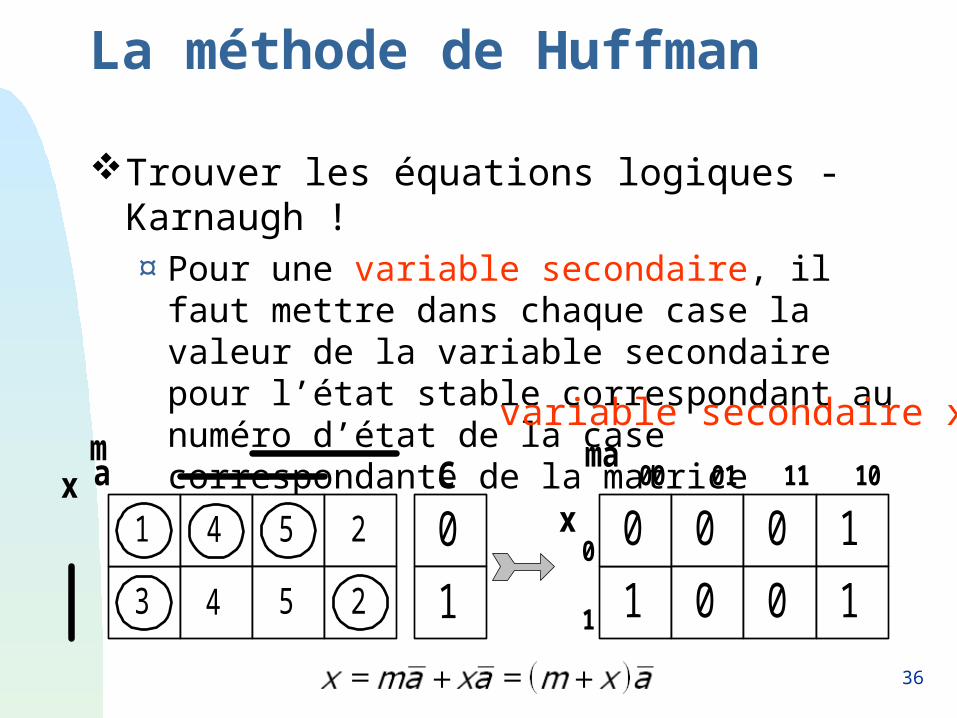
Trouver les équations logiques - Karnaugh !¤ Pour une variable secondaire, il faut mettre
dans chaque case la valeur de la variable secondaire pour l’état stable correspondant au numéro d’état de la case correspondante de la matrice contractée
X 2 0C
ma
1
3 5 1
4 5
24
x
1
0 0 0 1
ma
0 0 1
x0
1
00 01 11 10
variable secondaire x
37
La méthode de Huffman
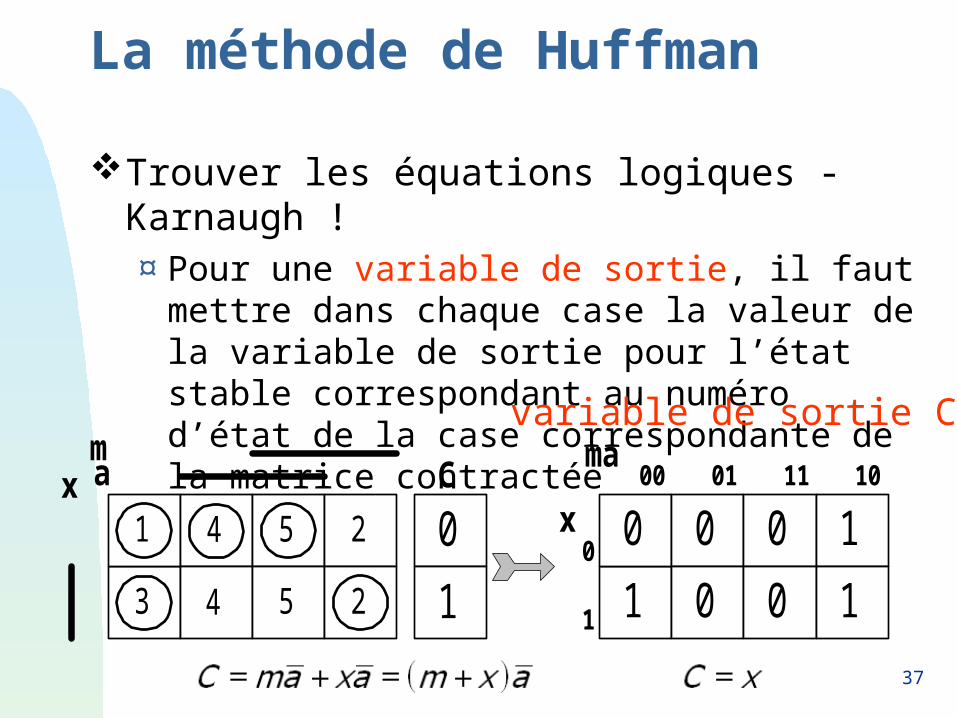
Trouver les équations logiques - Karnaugh !¤ Pour une variable de sortie, il faut mettre
dans chaque case la valeur de la variable de sortie pour l’état stable correspondant au numéro d’état de la case correspondante de la matrice contractée
X 2 0C
ma
1
3 5 1
4 5
24
x
1
0 0 0 1
ma
0 0 1
x0
1
00 01 11 10
variable de sortie C
38
La méthode de Huffman
Trouver les équations logiques - Karnaugh !
39
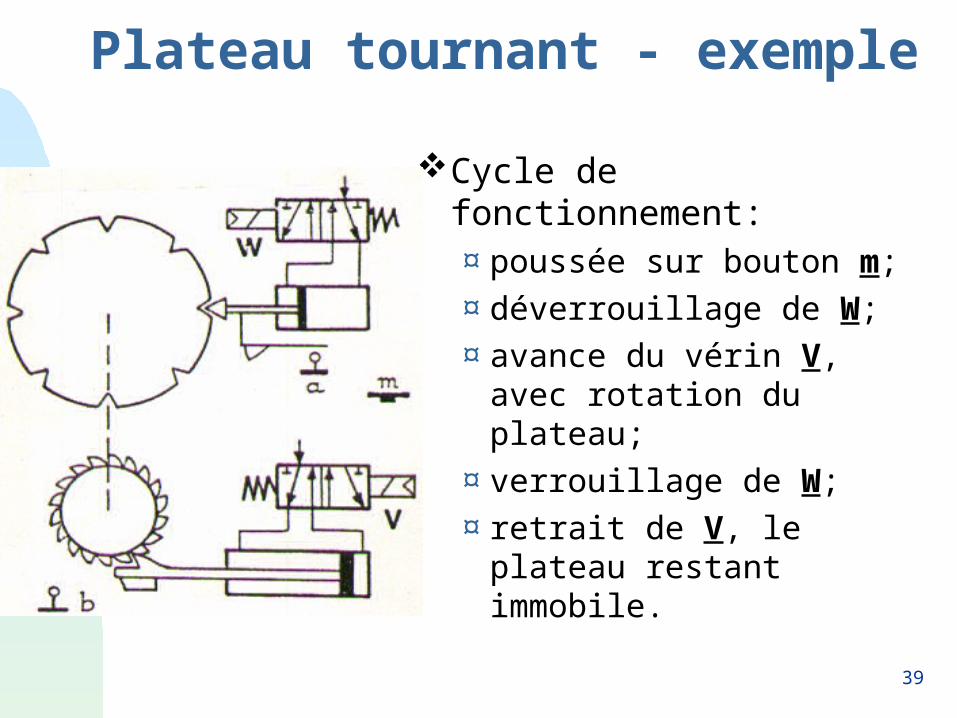
Plateau tournant - exemple
Cycle de fonctionnement:¤ poussée sur bouton m;¤ déverrouillage de W;¤ avance du vérin V, avec
rotation du plateau;¤ verrouillage de W;¤ retrait de V, le plateau
restant immobile.
40
La méthode de Huffman
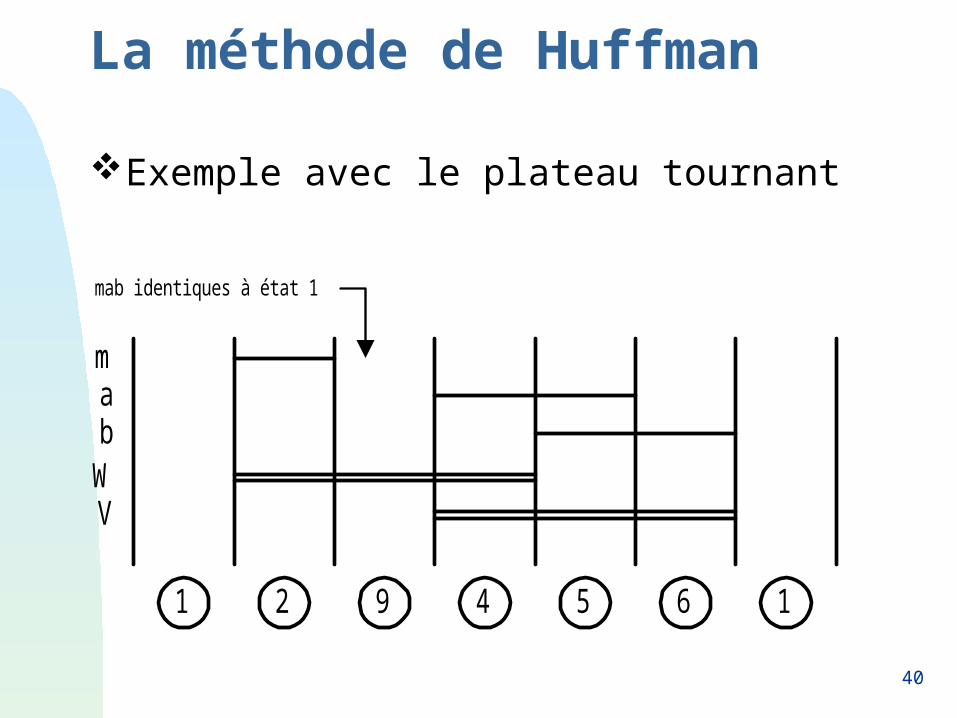
Exemple avec le plateau tournant
m
bW
1 2 9 4
a
V
mab identiques à état 1
5 6 1
41
La méthode de Huffman
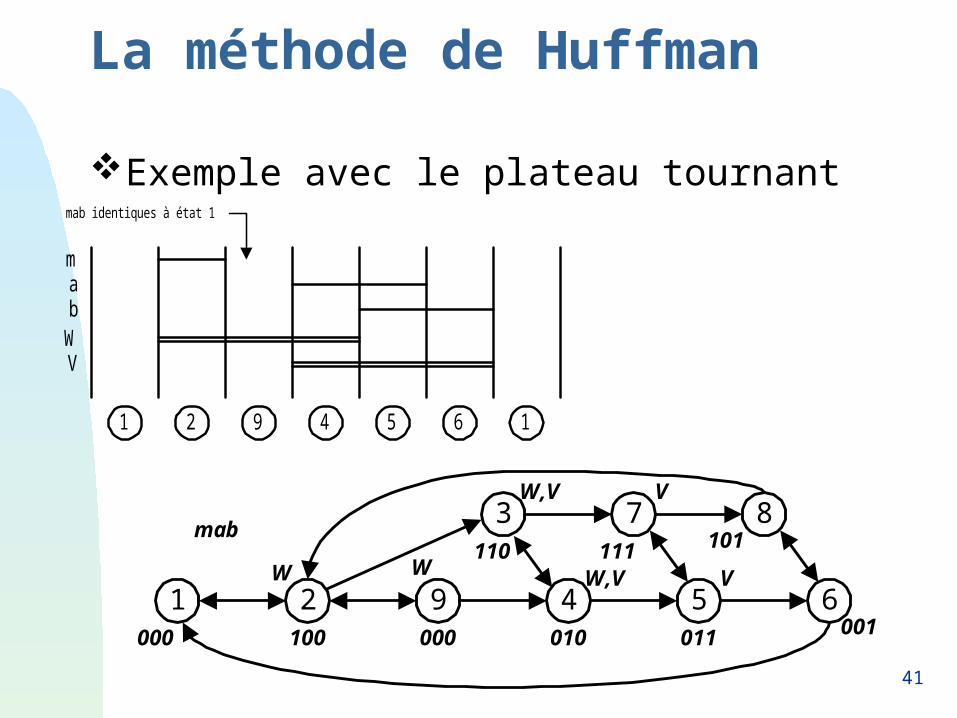
Exemple avec le plateau tournant
m
bW
1 2 9 4
a
V
mab identiques à état 1
5 6 1
000
1
mab
100
9000
4010
5011
6001
W W W,V V
7111
8101
V3W,V
110
2
42
La méthode de Huffman
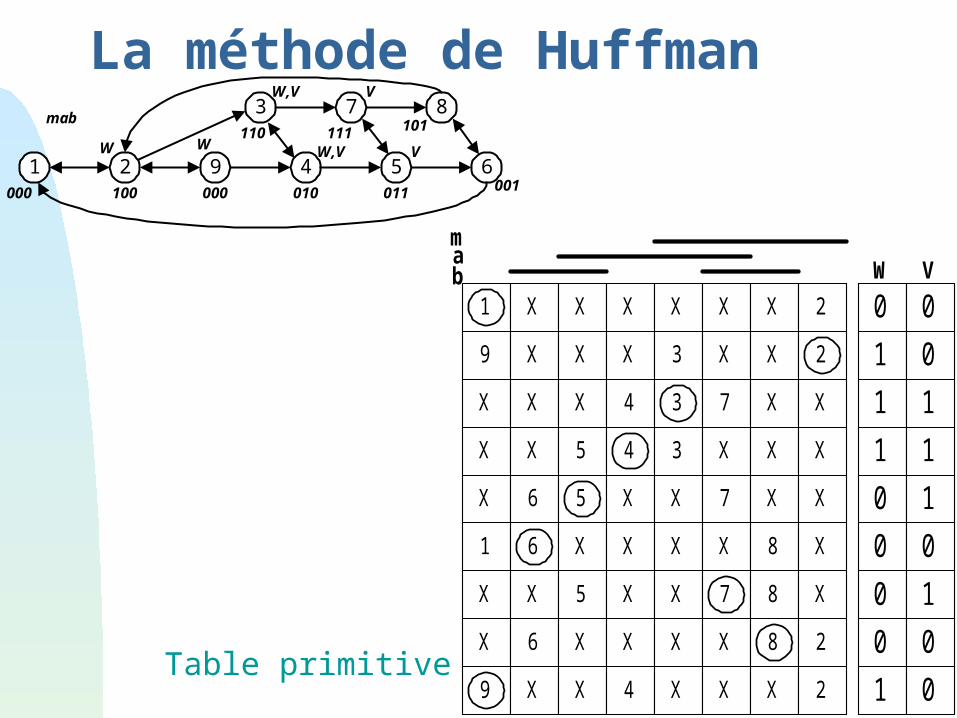
X X X 0W
ab
9 X X X 1
X X X 4 1
1
m
X X X 2
3 X X
7 X X
0V
0
1
1
1
2
3
X X 5 3 X X X4
0 1X 6 X X 7 X X5
0 01 X X X X 8 X6
0 1X X 5 X X 8 X7
0 0X 6 X X X X 28
1 0X X 4 X X X 29Table primitive
000
1
mab
100
9000
4010
5011
6001
W W W,V V
7111
8101
V3W,V
110
2
43
La méthode de Huffman
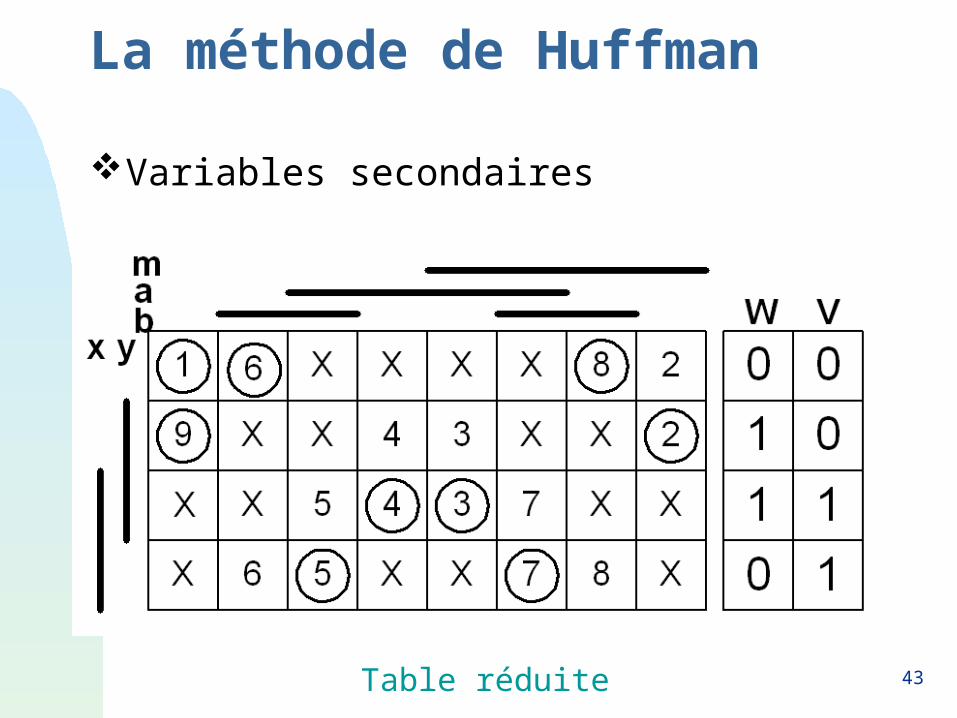
Variables secondaires
Table réduite
44
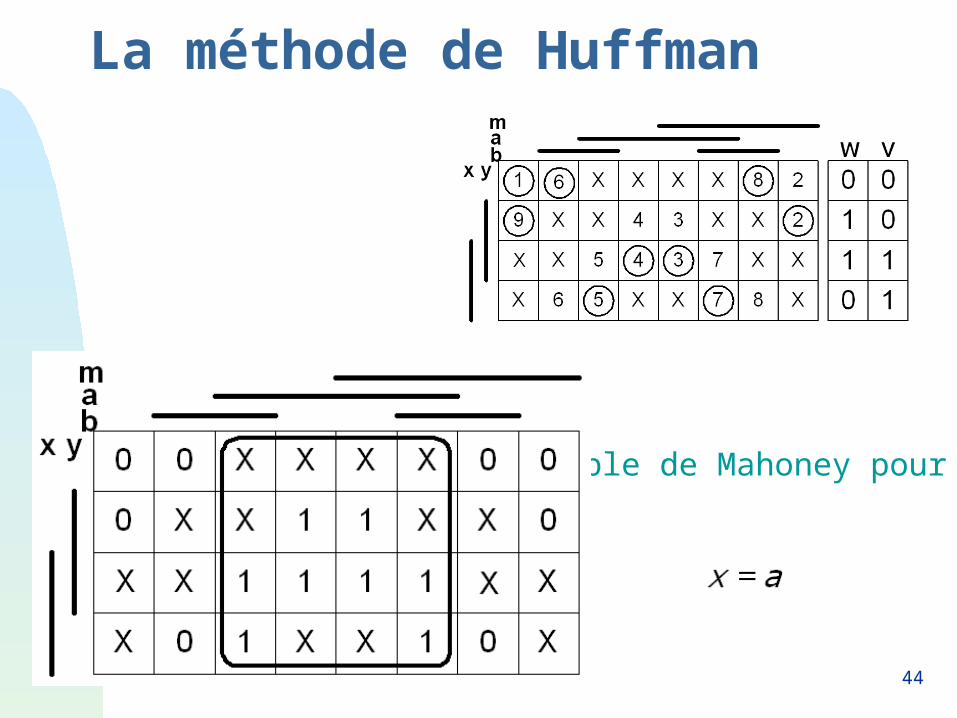
La méthode de Huffman
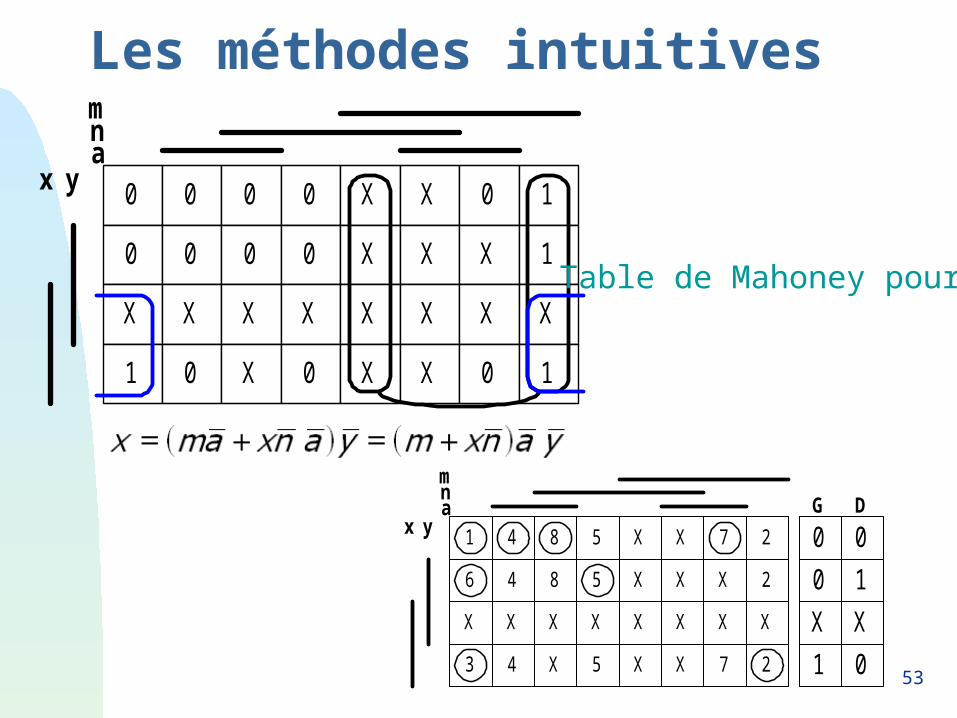
Table de Mahoney pour x
45
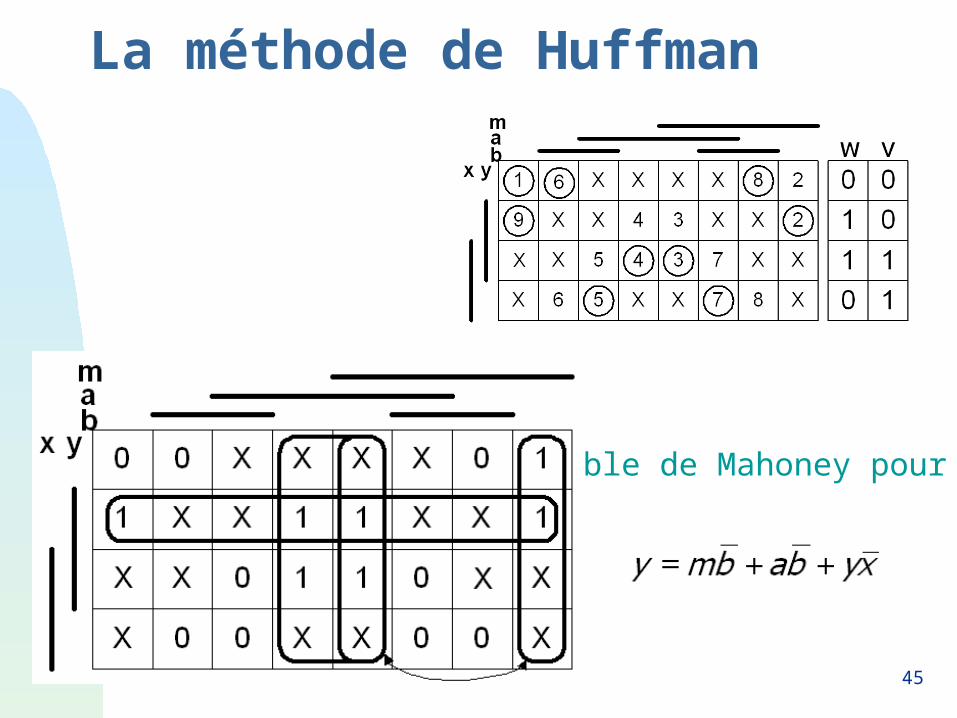
La méthode de Huffman
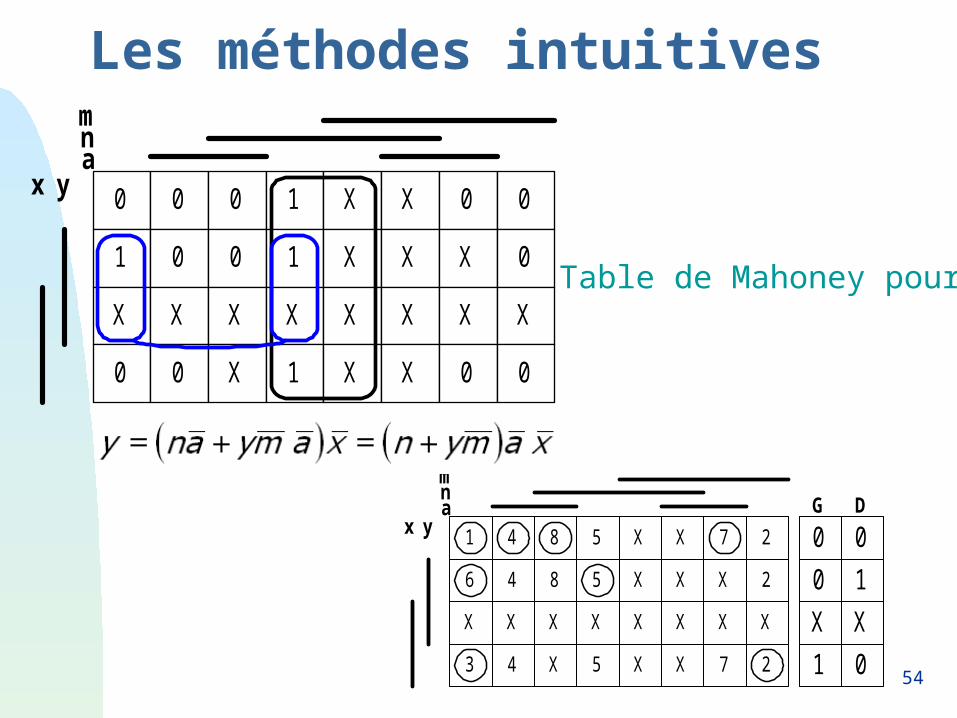
Table de Mahoney pour y
46
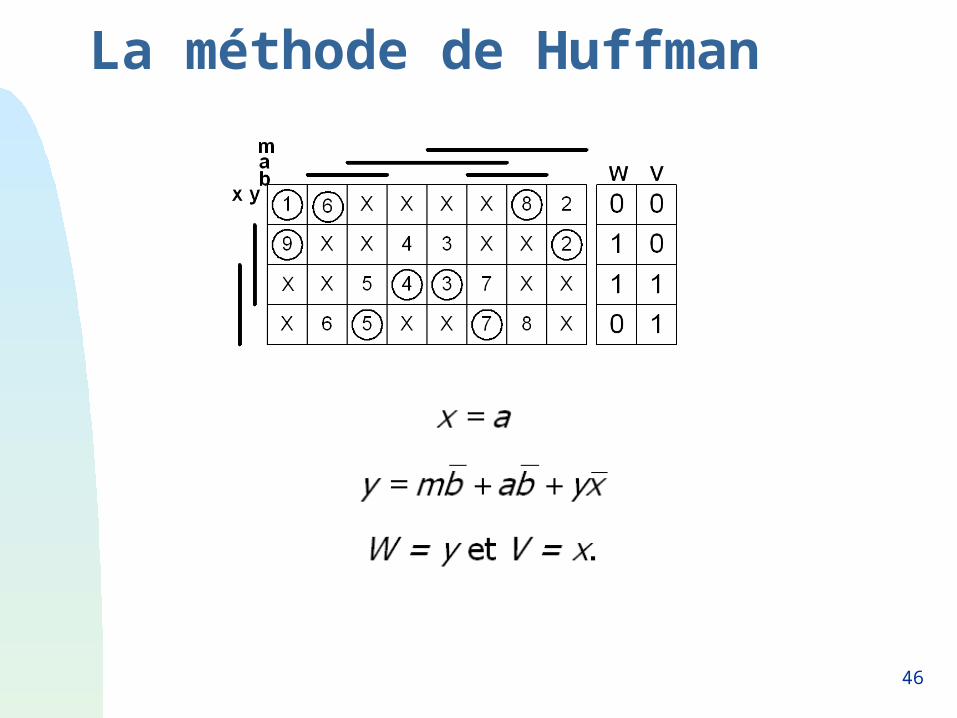
La méthode de Huffman
47
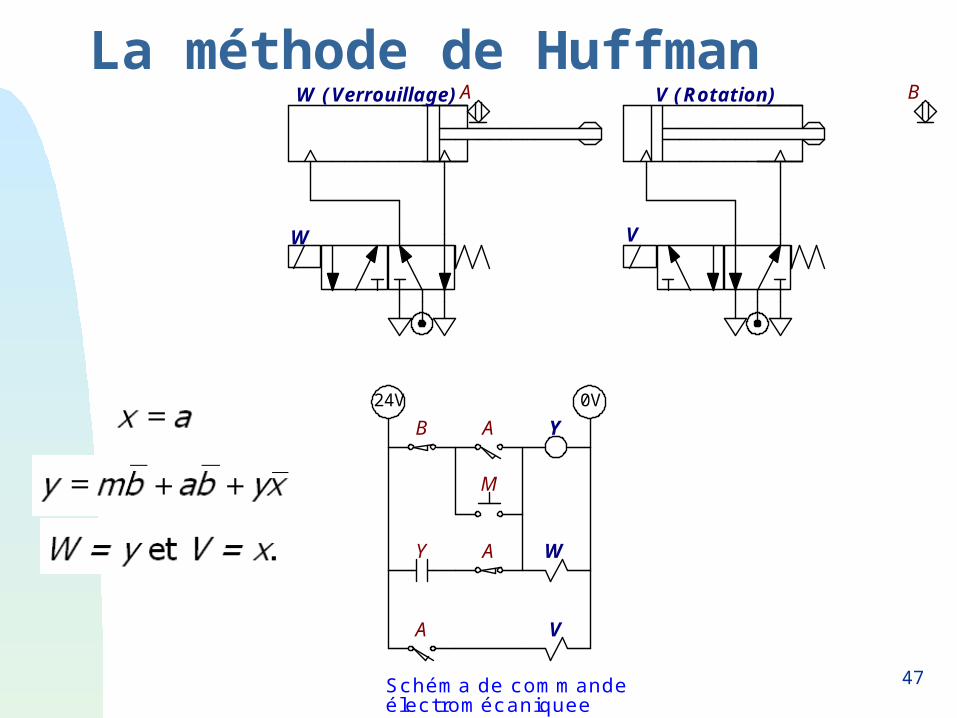
La méthode de Huffman
24V 0V
Schéma de commandeélectromécaniquee
W (Verrouillage) V (Rotation)
VW
A B
VA
M
B
W
YA
Y A

48
Les méthodes intuitives
Basées sur la méthode de HuffmanFaçon de trouver les variables secondaires
49
Les méthodes intuitives
Les variables secondaires identifiées aux sorties¤ Pour certains automatismes, on peut simplement
faire correspondre les variables secondaires aux sorties
Exemple:¤ Un moteur peut tourner vers la gauche « G » ou
vers la droite « D ». Commandé par 3 boutons : « m » et « n » qui sont verrouillés (impossibles à
actionner en même temps) et qui correspondent respectivement à une rotation à gauche et une rotation à droite;
« a » qui est le bouton d’arrêt (prioritaire)
50
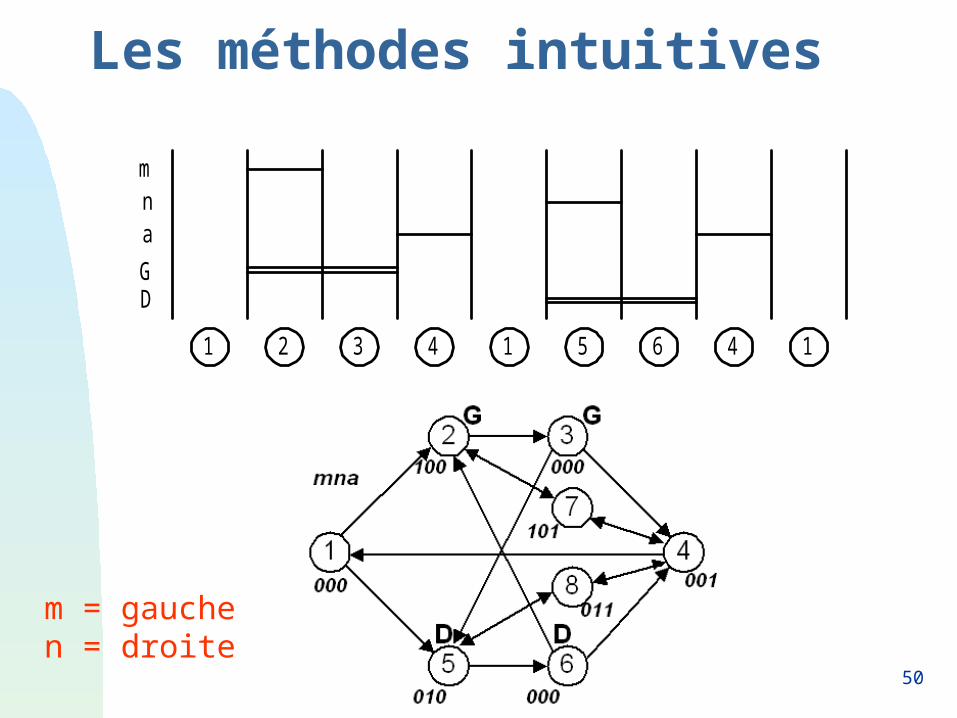
Les méthodes intuitives
m
a
G
1 2 3 4 1
n
D
5 6 4 1
m = gauchen = droite
51
Les méthodes intuitives
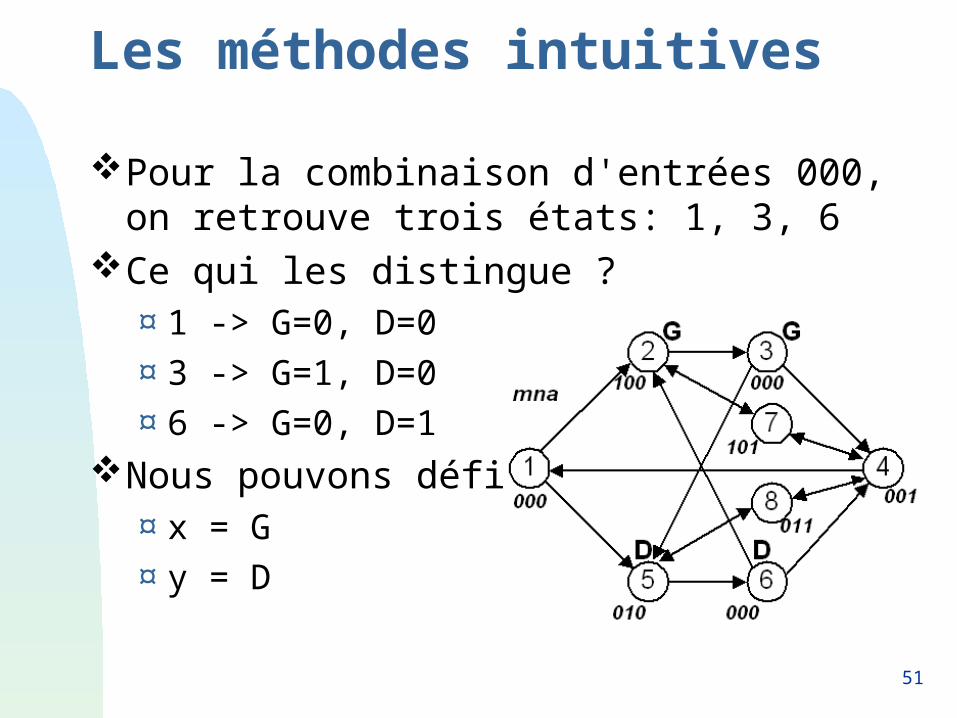
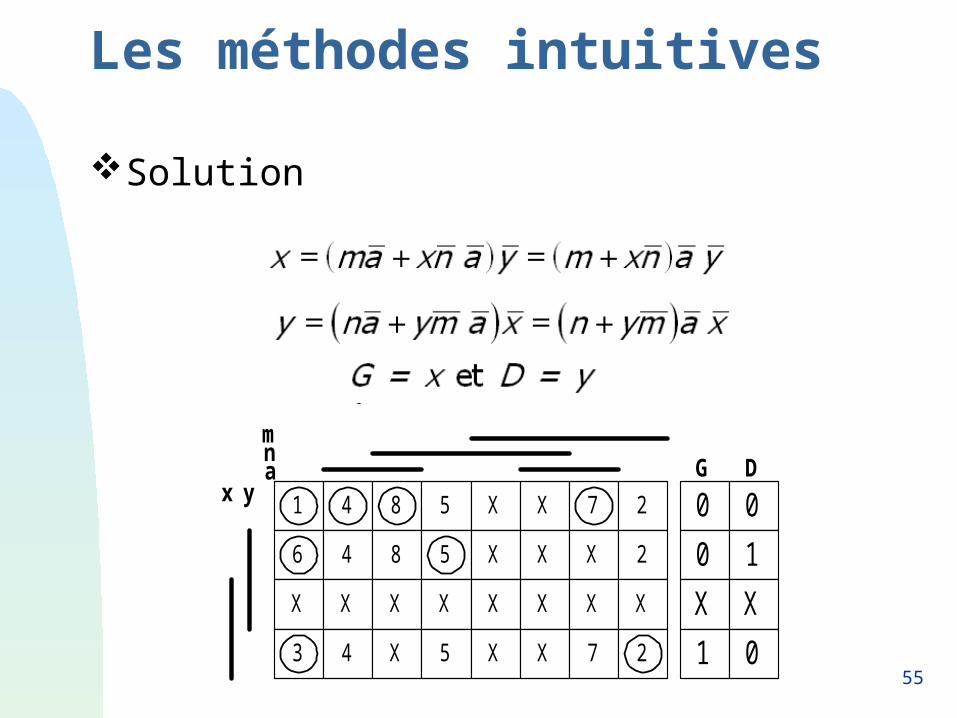
Pour la combinaison d'entrées 000, on retrouve trois états: 1, 3, 6
Ce qui les distingue ?¤ 1 -> G=0, D=0¤ 3 -> G=1, D=0¤ 6 -> G=0, D=1
Nous pouvons définir:¤ x = G¤ y = D
52
Les méthodes intuitives
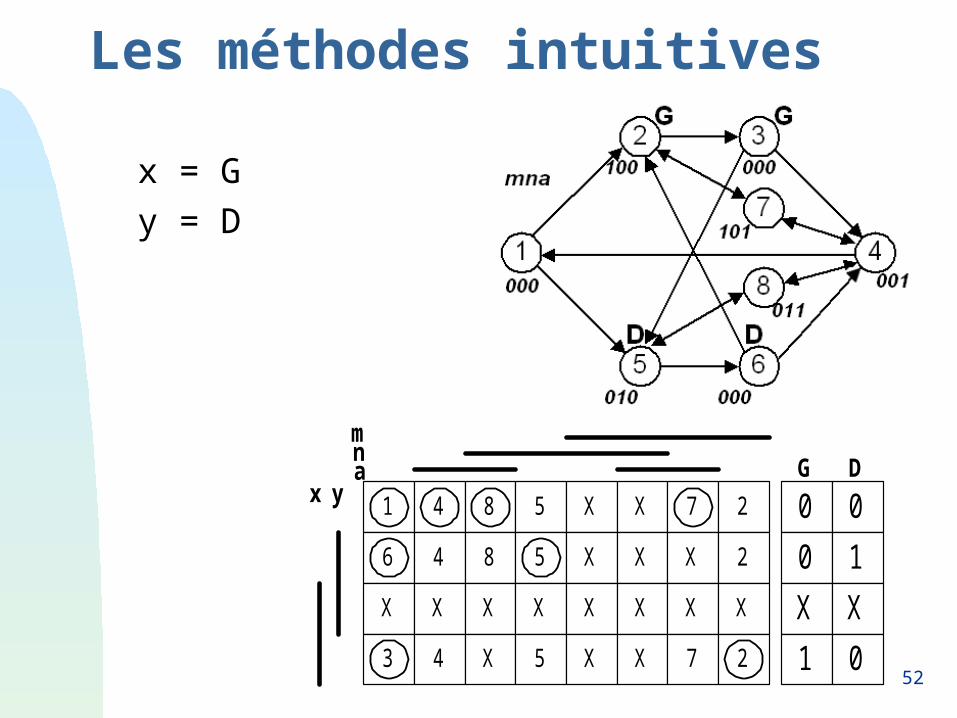
x = Gy = D
5 0G
na
1
4 8 0
X X X X X
4 X 5 1
5
m
X X 2
X X X 2
X X X X
X X 7
4yx 8 7
6
23
0D
1
X
0
53
Les méthodes intuitives
5 0G
na
1
4 8 0
X X X X X
4 X 5 1
5
m
X X 2
X X X 2
X X X X
X X 7
4yx 8 7
6
23
0D
1
X
0
0 0 0 0
na
0 0 0 0
X X X X
1 0 X 0
m
X X 0 1
X X X 1
X X X X
X X 0 1
yx
Table de Mahoney pour x
54
Les méthodes intuitives
Table de Mahoney pour y
0 0 0 1
na
1 0 0 1
X X X X
0 0 X 1
m
X X 0 0
X X X 0
X X X X
X X 0 0
yx
5 0G
na
1
4 8 0
X X X X X
4 X 5 1
5
m
X X 2
X X X 2
X X X X
X X 7
4yx 8 7
6
23
0D
1
X
0
55
Les méthodes intuitives
Solution
5 0G
na
1
4 8 0
X X X X X
4 X 5 1
5
m
X X 2
X X X 2
X X X X
X X 7
4yx 8 7
6
23
0D
1
X
0
56
La méthode géométrique
Basée sur une représentation géométrique du mouvement des actionneurs
C’est une des méthodes utilisées chez nos voisins du sud (les Américains) qui tardent à utiliser la méthode GRAFCET
Nous examinerons les cas ou il y a un ou deux actionneurs pour montrer comment fonctionne cette méthode.
57
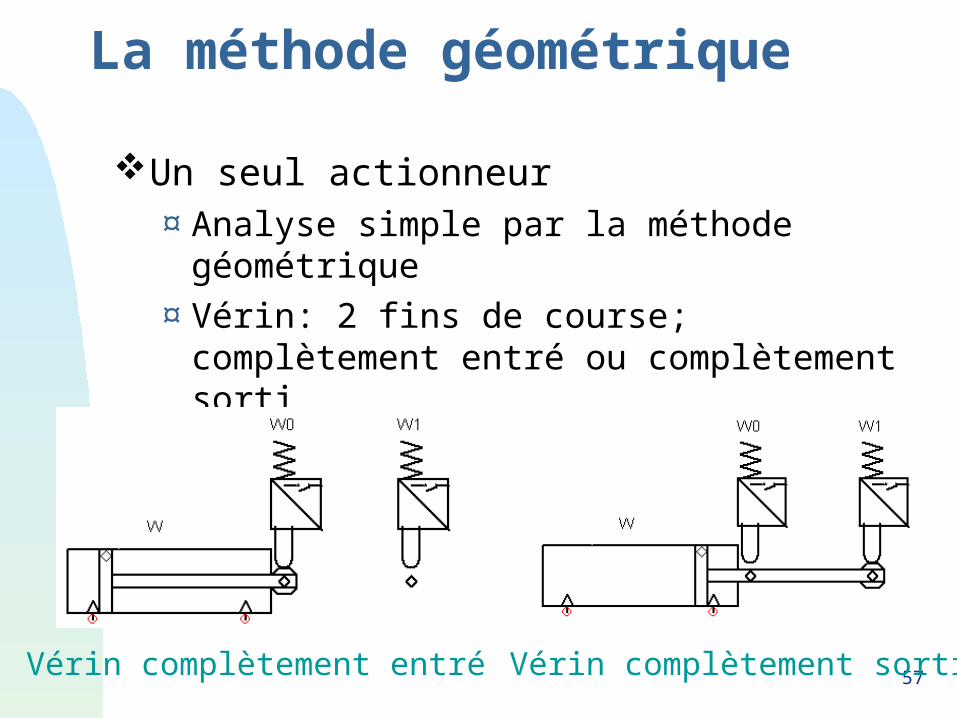
La méthode géométrique
Un seul actionneur¤ Analyse simple par la méthode
géométrique¤ Vérin: 2 fins de course; complètement
entré ou complètement sorti
Vérin complètement entré Vérin complètement sorti
58
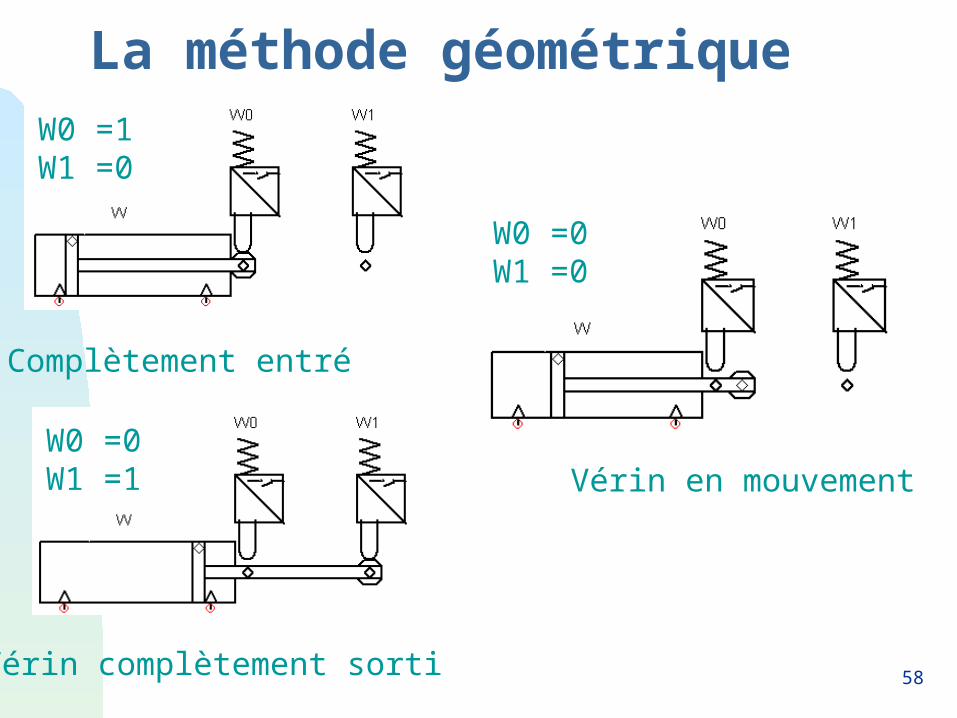
La méthode géométrique
Complètement entré
Vérin complètement sorti
Vérin en mouvement
W0 =0W1 =0
W0 =1W1 =0
W0 =0W1 =1
59
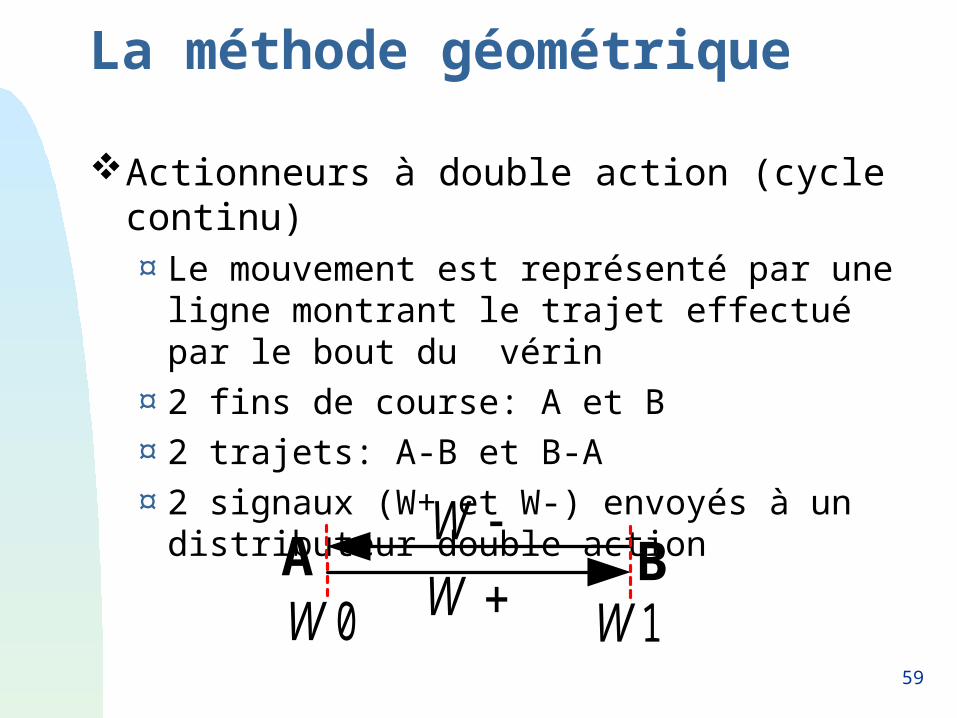
La méthode géométrique
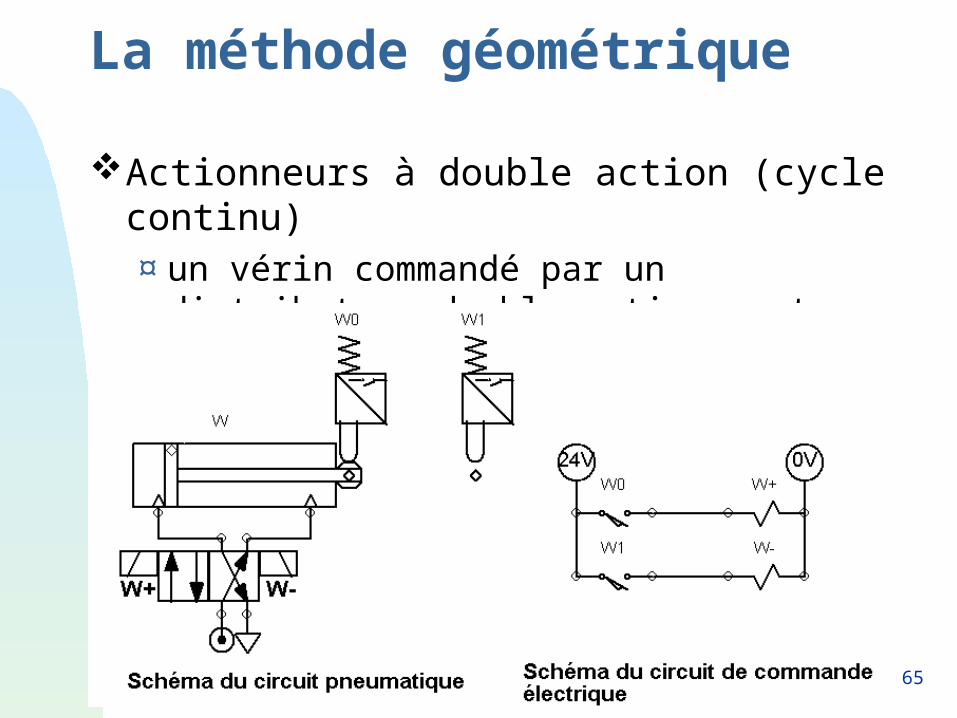
Actionneurs à double action (cycle continu)¤ Le mouvement est représenté par une
ligne montrant le trajet effectué par le bout du vérin
¤ 2 fins de course: A et B¤ 2 trajets: A-B et B-A¤ 2 signaux (W+ et W-) envoyés à un
distributeur double actionA BW 0 W 1W +
W -
60
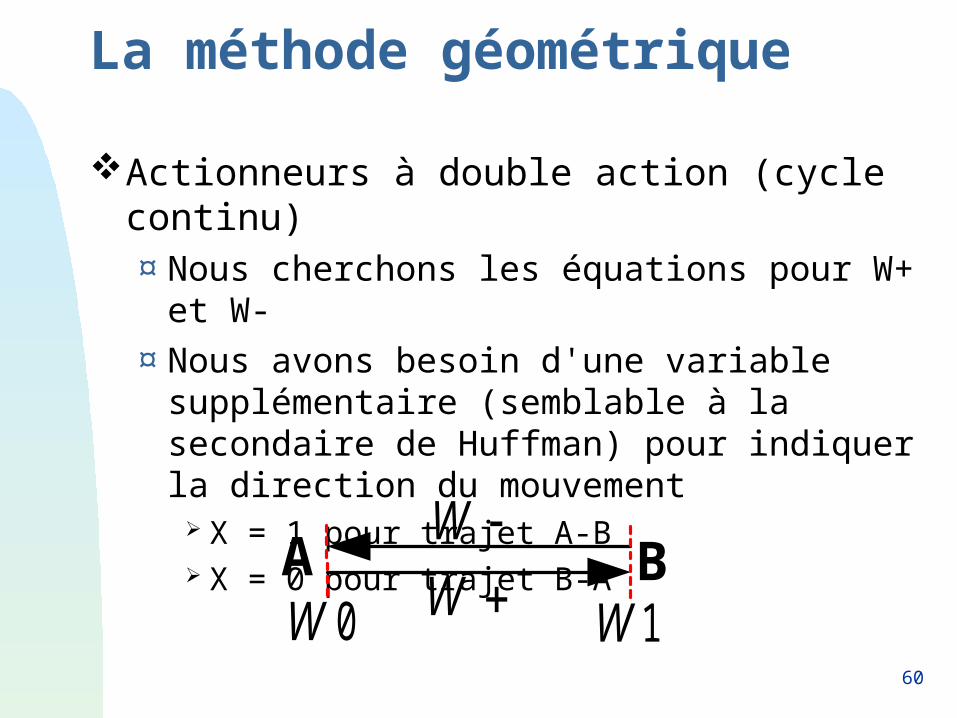
La méthode géométrique
Actionneurs à double action (cycle continu)¤ Nous cherchons les équations pour W+ et
W-¤ Nous avons besoin d'une variable
supplémentaire (semblable à la secondaire de Huffman) pour indiquer la direction du mouvement
X = 1 pour trajet A-B X = 0 pour trajet B-AA B
W 0 W 1W +W -
61
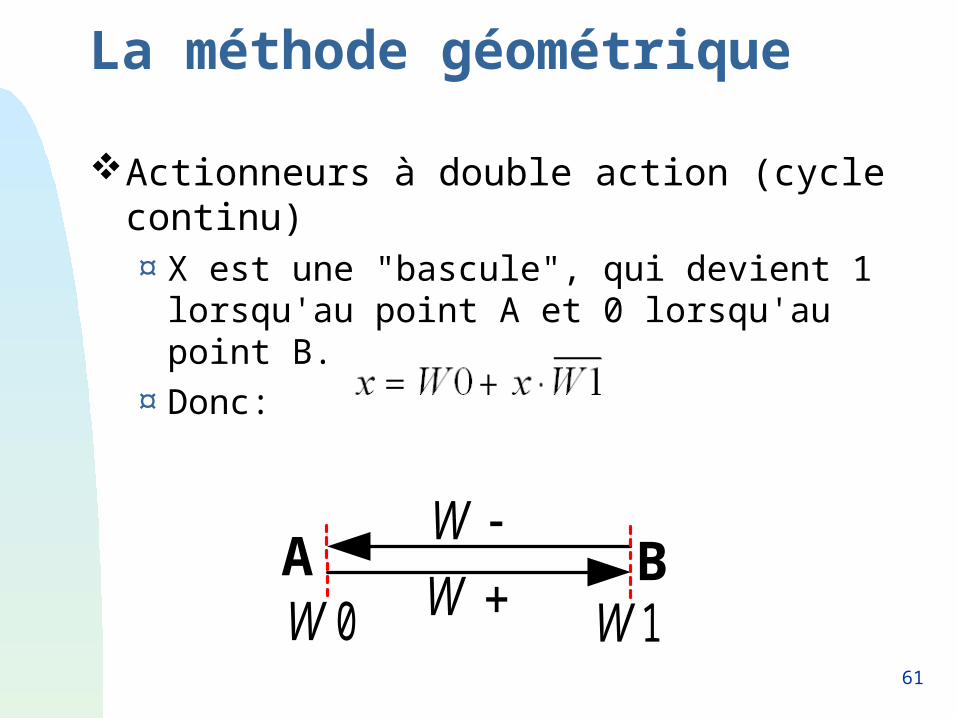
La méthode géométrique
Actionneurs à double action (cycle continu)¤ X est une "bascule", qui devient 1
lorsqu'au point A et 0 lorsqu'au point B.¤ Donc:
A BW 0 W 1W +
W -
62
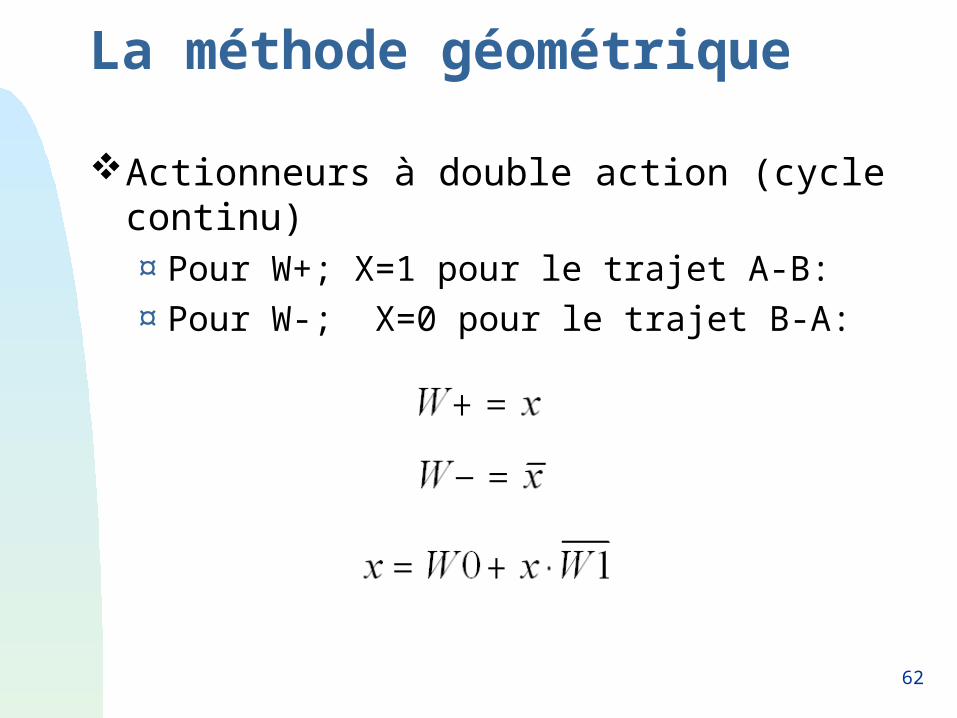
La méthode géométrique
Actionneurs à double action (cycle continu)¤ Pour W+; X=1 pour le trajet A-B:¤ Pour W-; X=0 pour le trajet B-A:
63
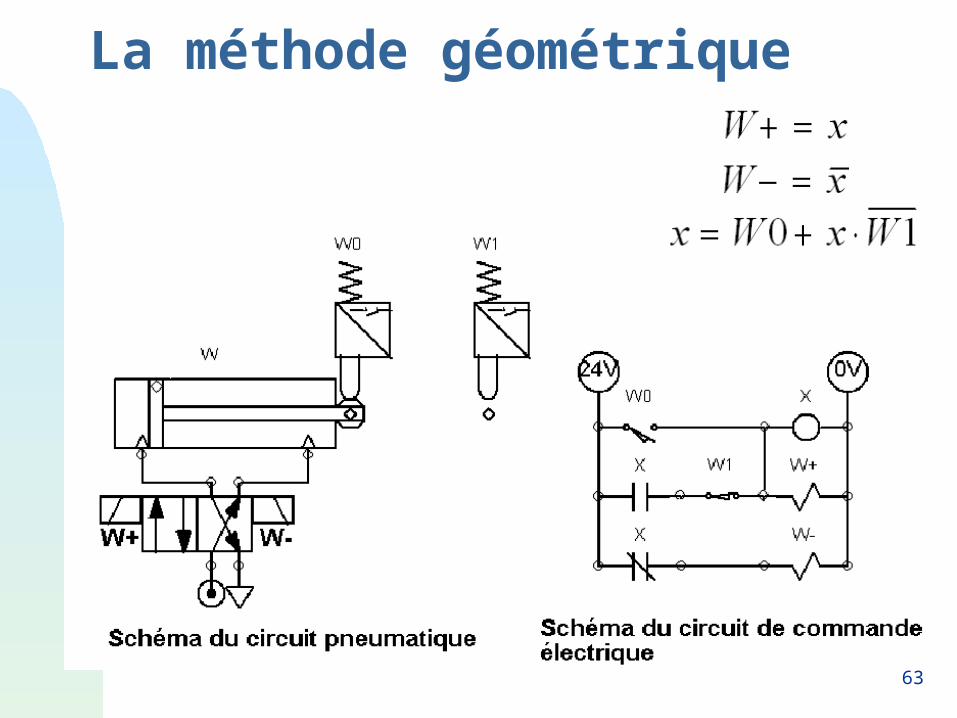
La méthode géométrique
64
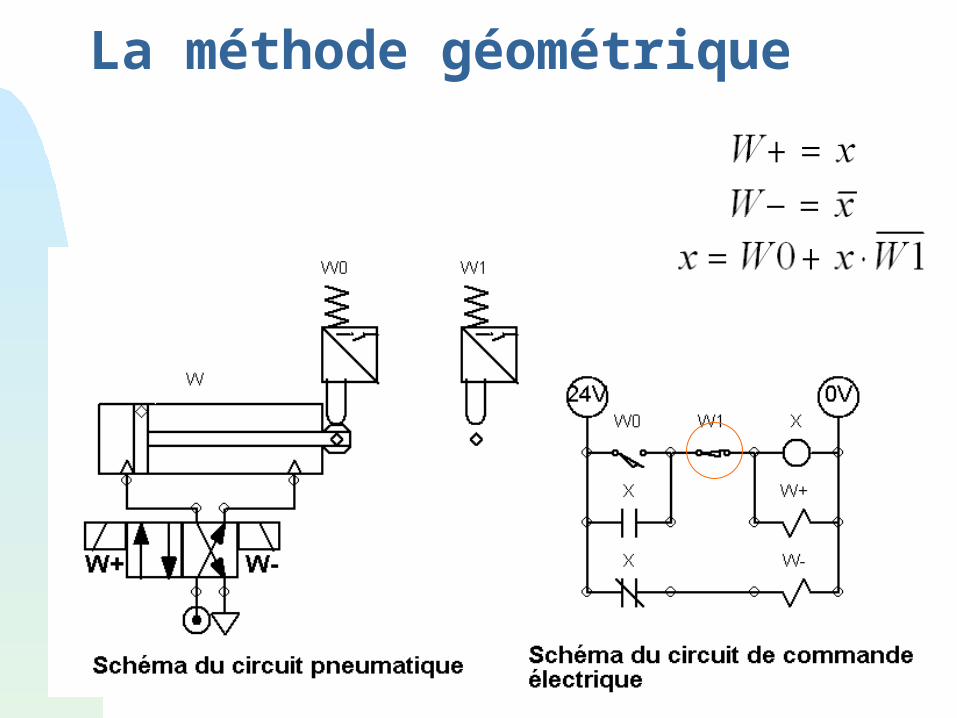
La méthode géométrique
65
La méthode géométrique
Actionneurs à double action (cycle continu)¤ un vérin commandé par un distributeur
double action peut réagir à des impulsions:
66
La méthode géométrique
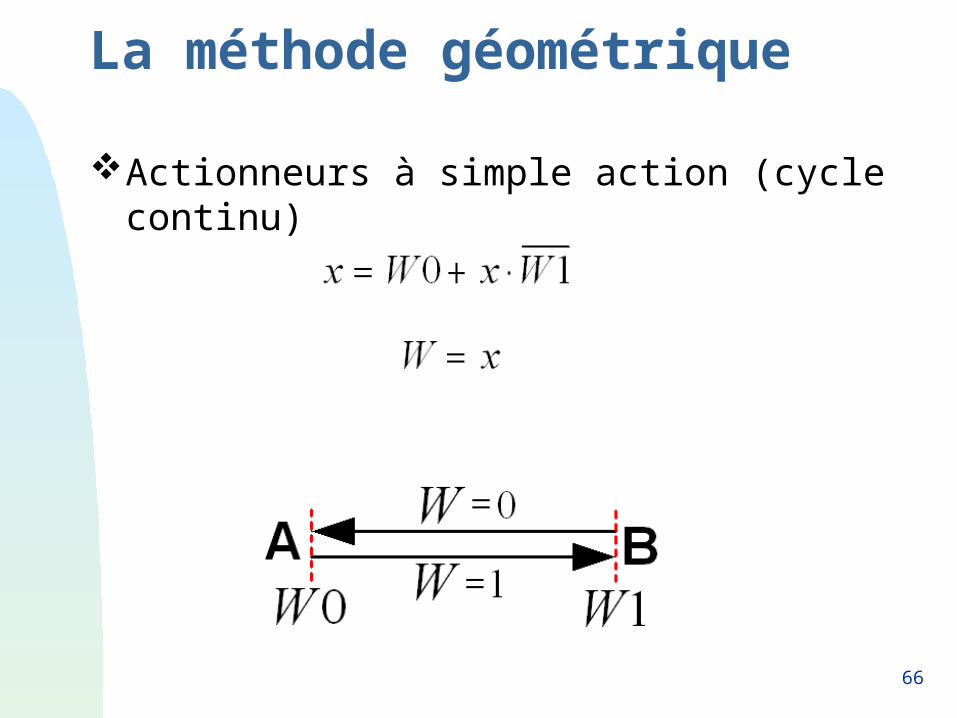
Actionneurs à simple action (cycle continu)
67
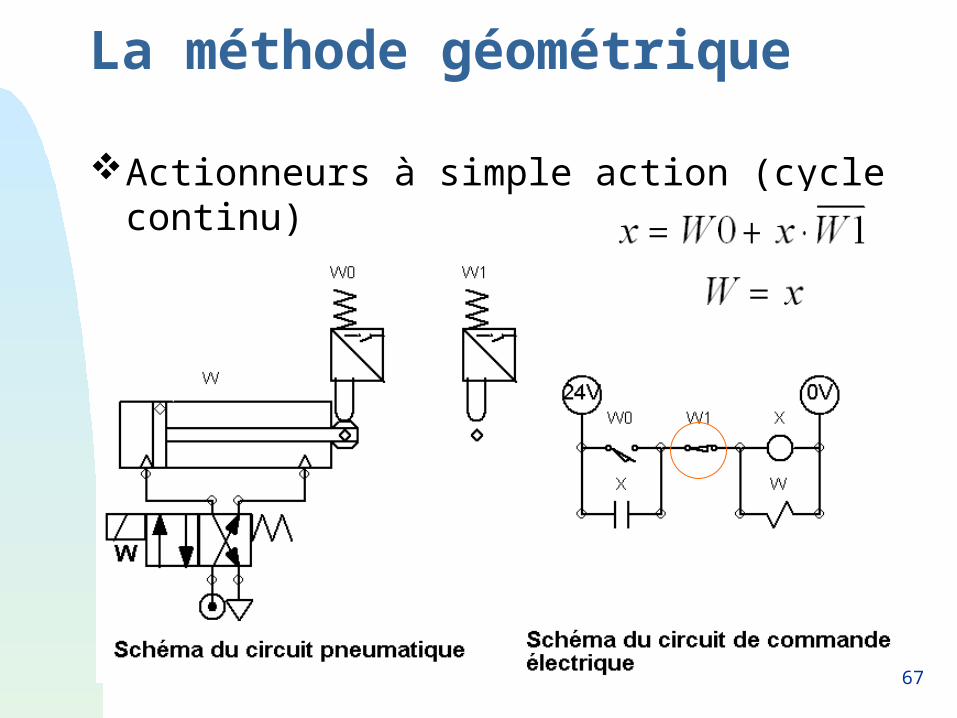
La méthode géométrique
Actionneurs à simple action (cycle continu)
68
La méthode géométrique
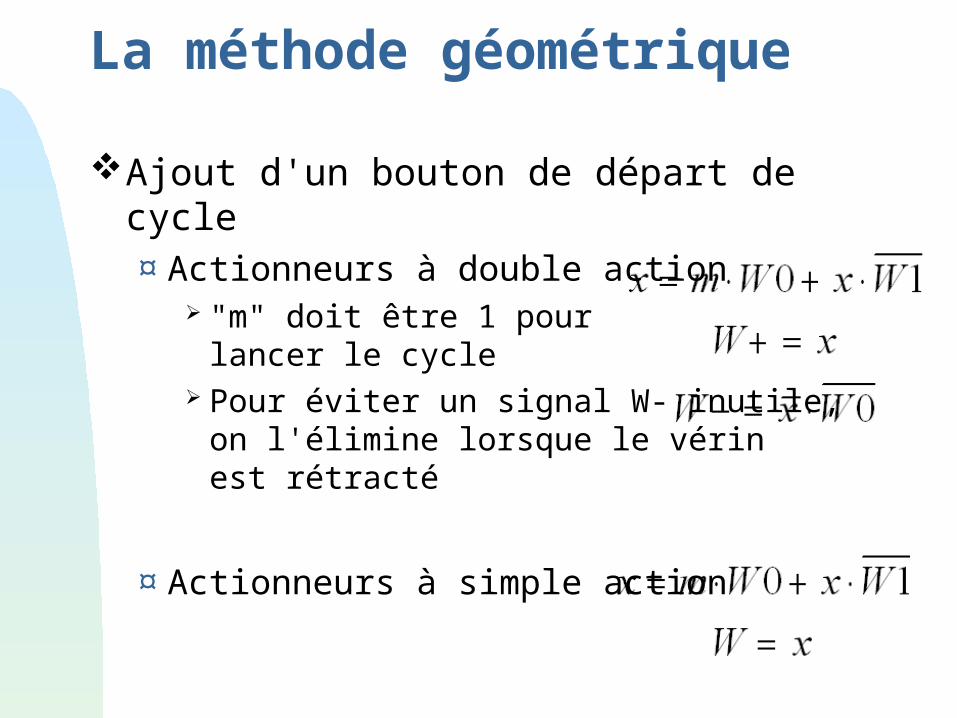
Ajout d'un bouton de départ de cycle¤ Actionneurs à double action
"m" doit être 1 pour lancer le cycle
Pour éviter un signal W- inutile,on l'élimine lorsque le vérinest rétracté
¤ Actionneurs à simple action
69
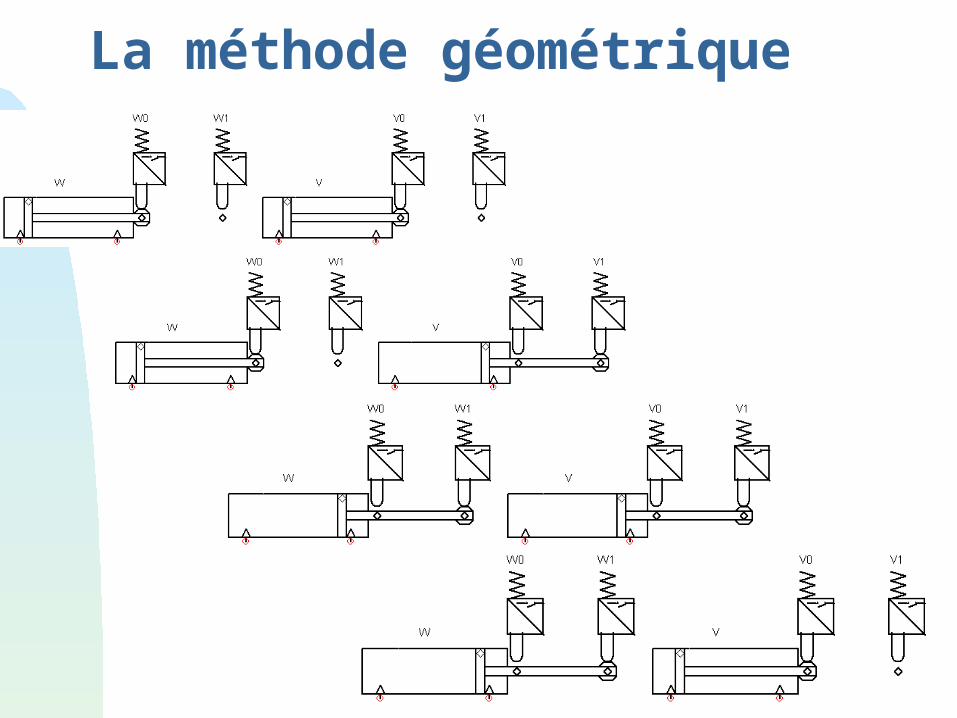
La méthode géométrique
Deux actionneurs¤ 2 vérins avec 2 fins de course; 4
combinaisons de fin de course
70
La méthode géométrique
71
La méthode géométrique
Plusieurs combinaisons de mouvements possibles avec deux vérins; 3 exemples:¤ a)Extension de W, extension de V, rétraction de
W et rétraction de V ; Cycle carré¤ b)Extension de V, extension de W, rétraction de
W et rétraction de V ; Cycle en L¤ c)Extension de V, rétraction de V, extension de
W, extension de V, rétraction de V, rétraction de W; Cycle en U
La complexité de l’analyse est augmentée, mais les bases restent celles présentées avec le cycle de va-et-vient de notre vérin.
72
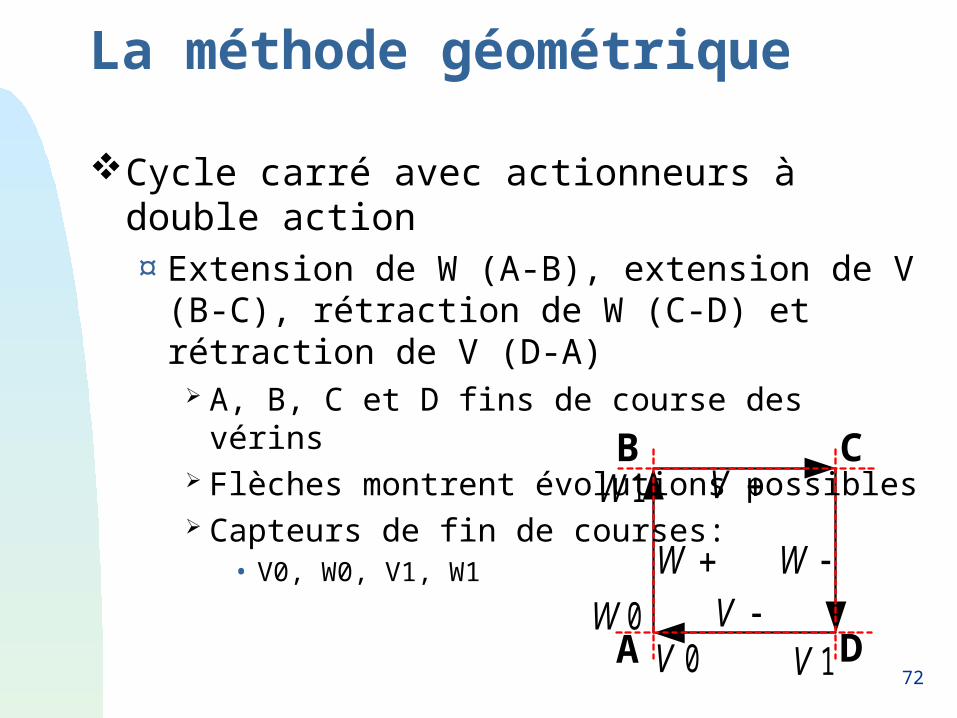
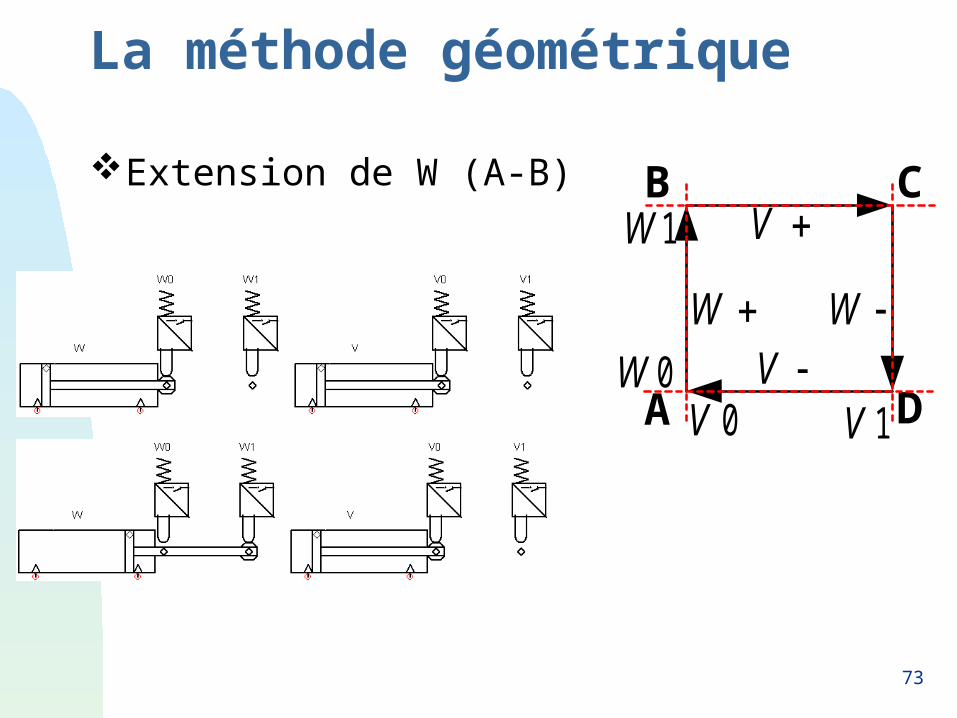
La méthode géométrique
Cycle carré avec actionneurs à double action¤ Extension de W (A-B), extension de V (B-
C), rétraction de W (C-D) et rétraction de V (D-A)
A, B, C et D fins de course des vérins Flèches montrent évolutions possibles Capteurs de fin de courses:
• V0, W0, V1, W1
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
73
La méthode géométrique
Extension de W (A-B)
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
74
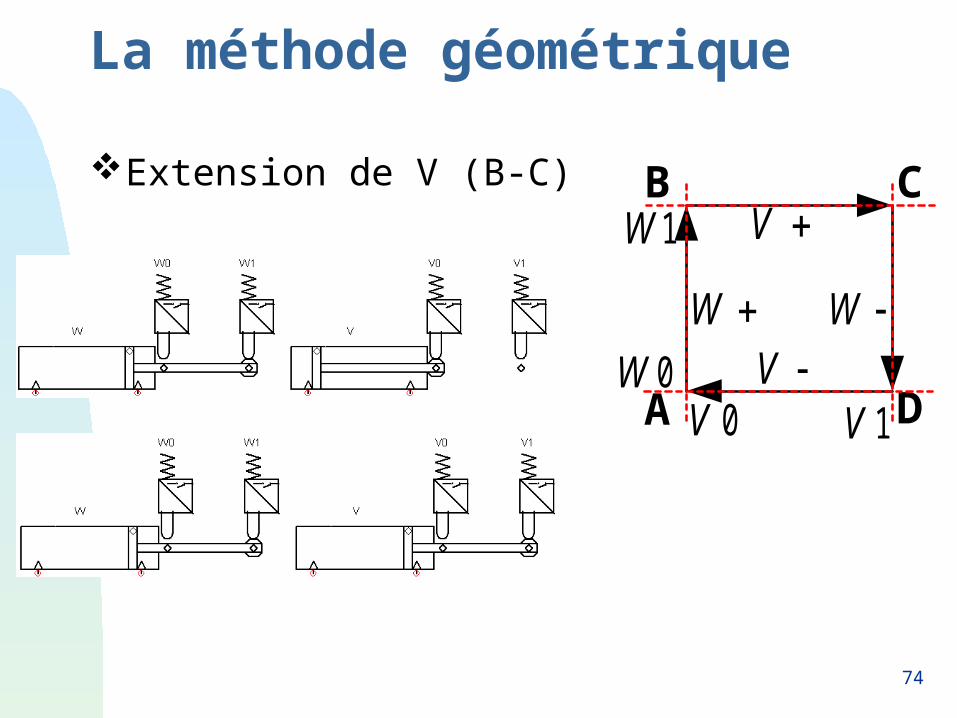
La méthode géométrique
Extension de V (B-C)
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
75
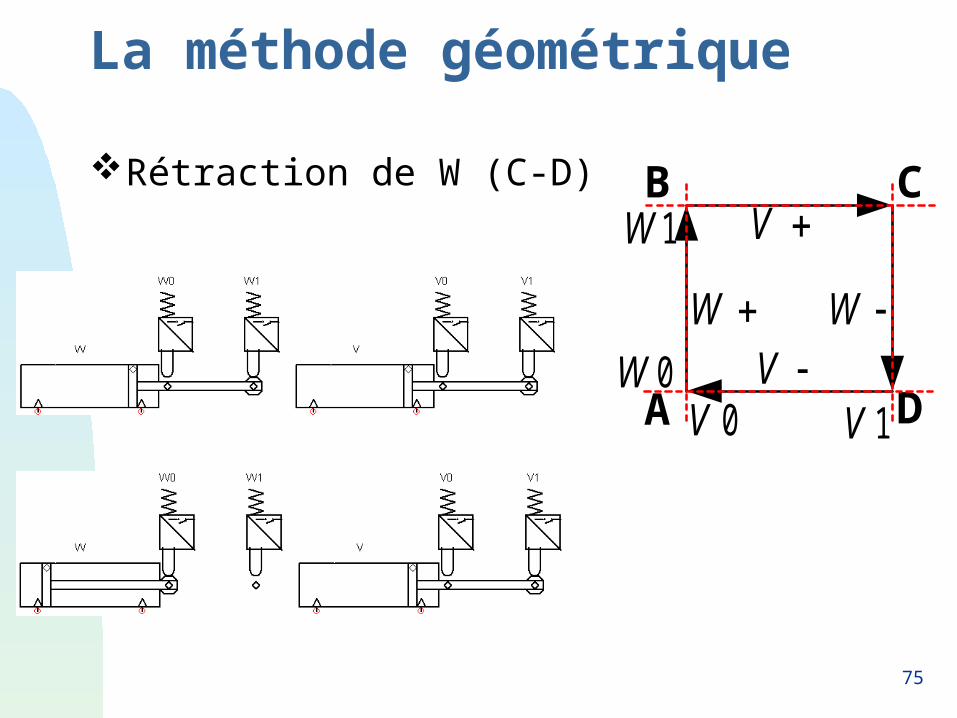
La méthode géométrique
Rétraction de W (C-D)
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
76
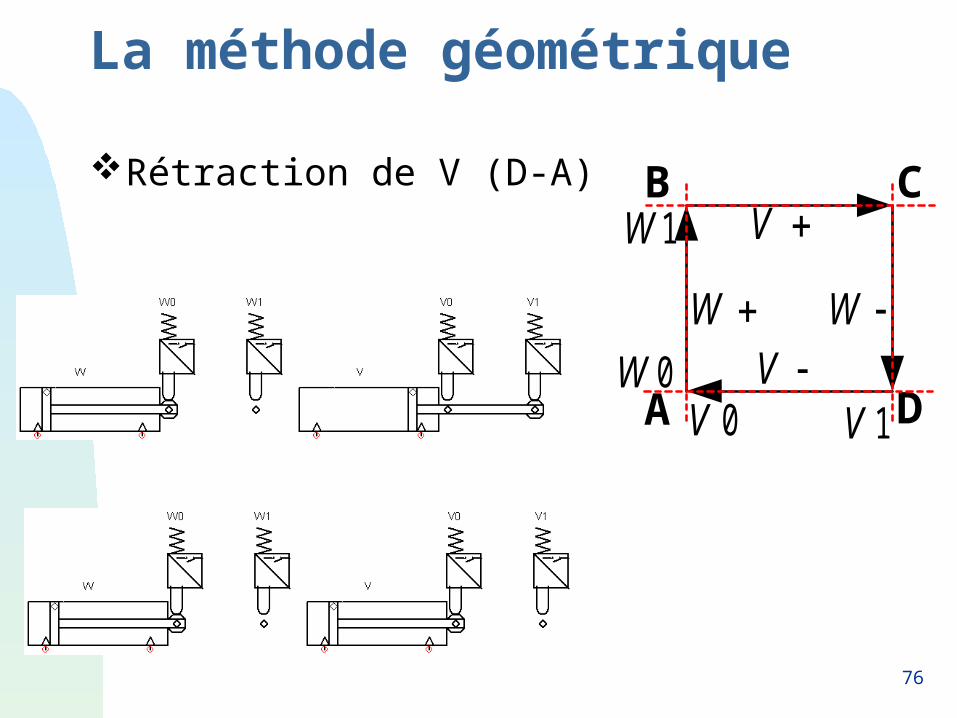
La méthode géométrique
Rétraction de V (D-A)
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
77
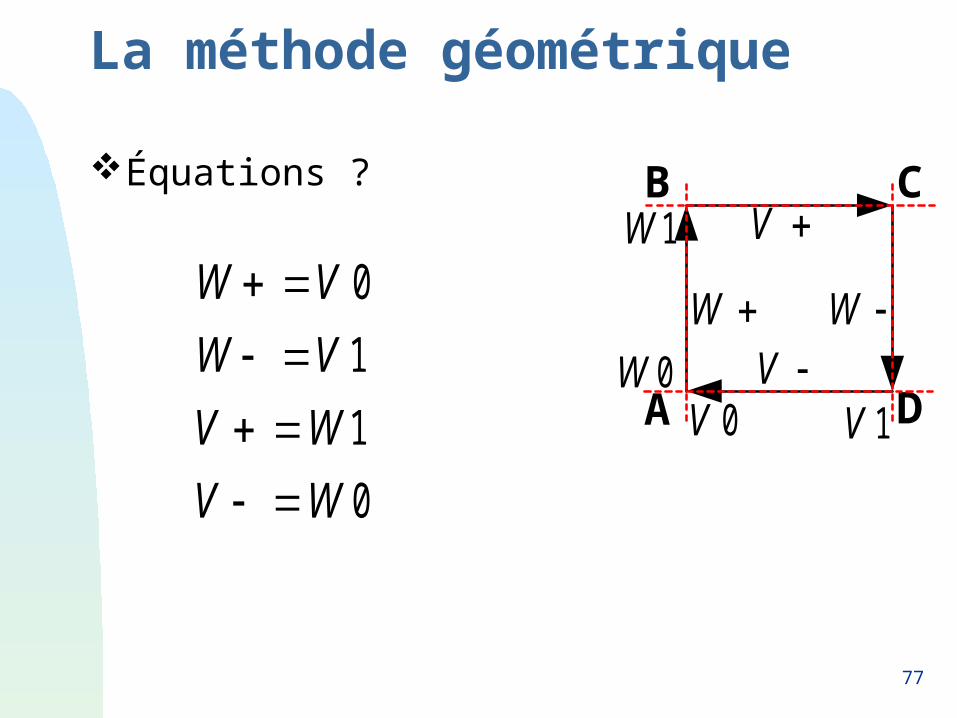
La méthode géométrique
Équations ?
A
B
D
C
V 0 V 1W 0
W 1
W +
V +
W -V -
W V
W V
V W
V W
+ - + -
0
1
1
0
78
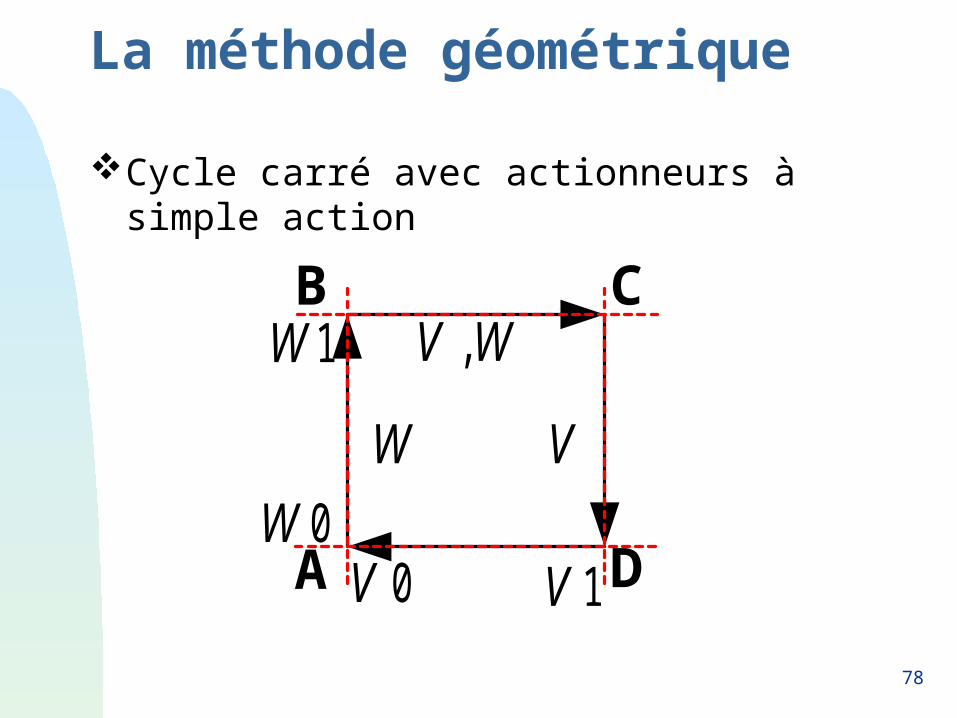
La méthode géométrique
Cycle carré avec actionneurs à simple action
A
B
D
C
V 0 V 1W 0
W 1
W
V W,
V
79
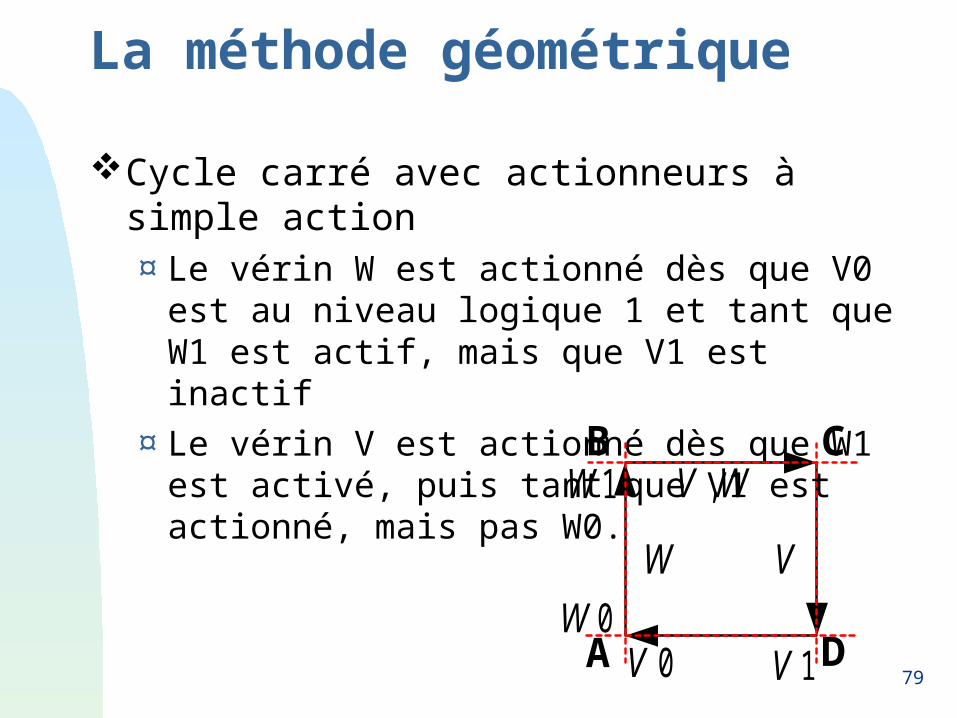
La méthode géométrique
Cycle carré avec actionneurs à simple action¤ Le vérin W est actionné dès que V0 est au
niveau logique 1 et tant que W1 est actif, mais que V1 est inactif
¤ Le vérin V est actionné dès que W1 est activé, puis tant que V1 est actionné, mais pas W0.
A
B
D
C
V 0 V 1W 0
W 1
W
V W,
V
80
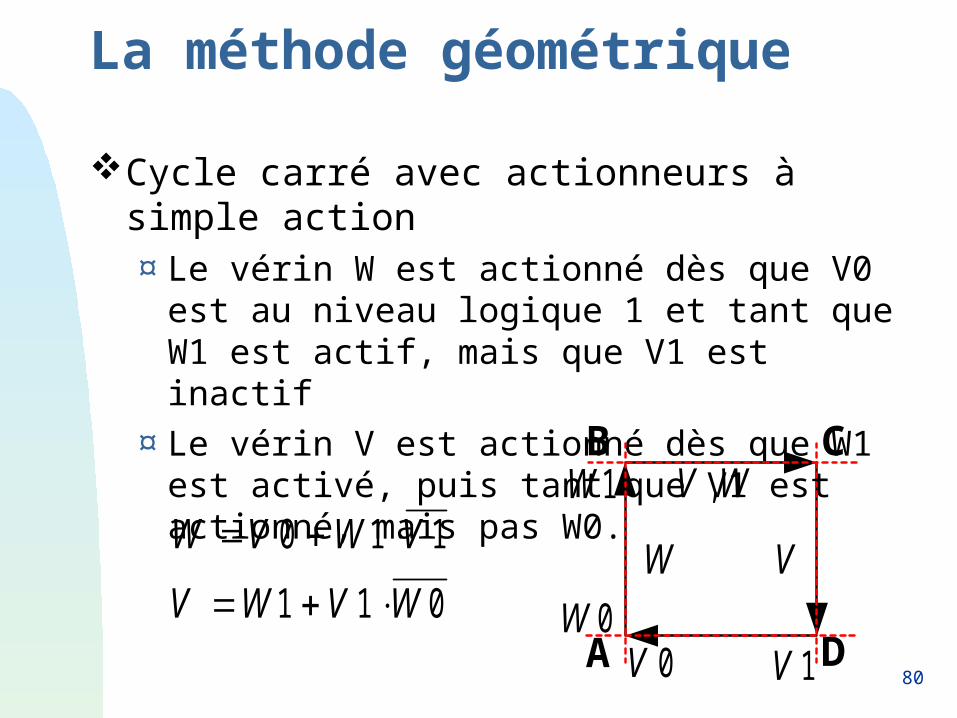
La méthode géométrique
Cycle carré avec actionneurs à simple action¤ Le vérin W est actionné dès que V0 est au
niveau logique 1 et tant que W1 est actif, mais que V1 est inactif
¤ Le vérin V est actionné dès que W1 est activé, puis tant que V1 est actionné, mais pas W0.
A
B
D
C
V 0 V 1W 0
W 1
W
V W,
VW V W V
V W V W
+
+
0 1 1
1 1 0
81
La méthode géométrique
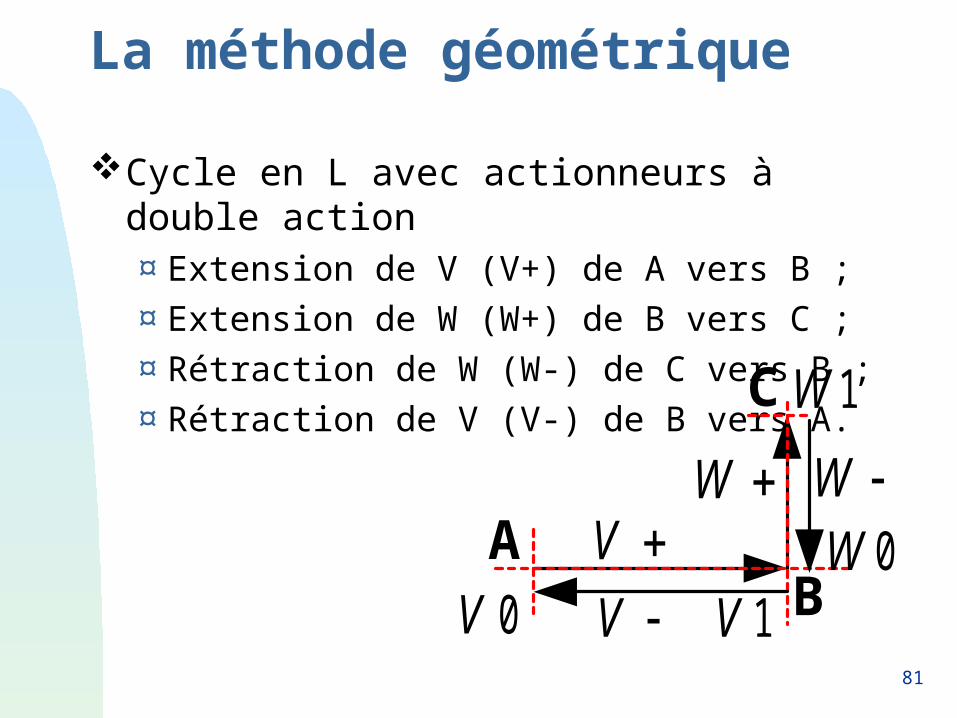
Cycle en L avec actionneurs à double action¤ Extension de V (V+) de A vers B ;¤ Extension de W (W+) de B vers C ;¤ Rétraction de W (W-) de C vers B ;¤ Rétraction de V (V-) de B vers A.
V 1W 0
W 1
AB
C
V +W + W -
V -V 0
82
La méthode géométrique
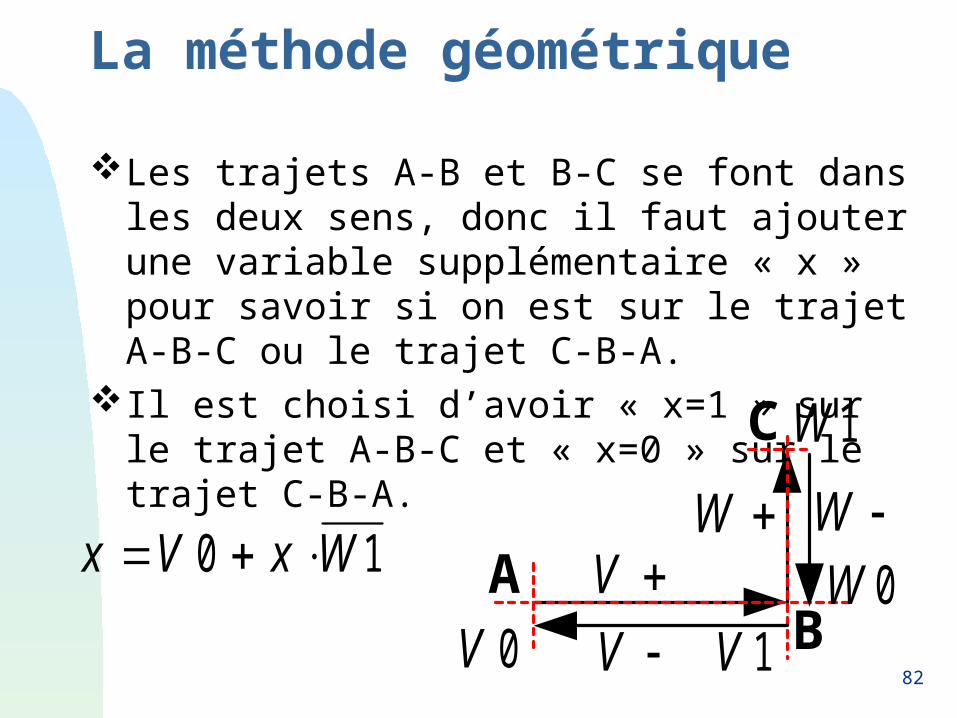
Les trajets A-B et B-C se font dans les deux sens, donc il faut ajouter une variable supplémentaire « x » pour savoir si on est sur le trajet A-B-C ou le trajet C-B-A.
Il est choisi d’avoir « x=1 » sur le trajet A-B-C et « x=0 » sur le trajet C-B-A.
V 1W 0
W 1
AB
C
V +W + W -
V -V 0
x V x W + 0 1
83
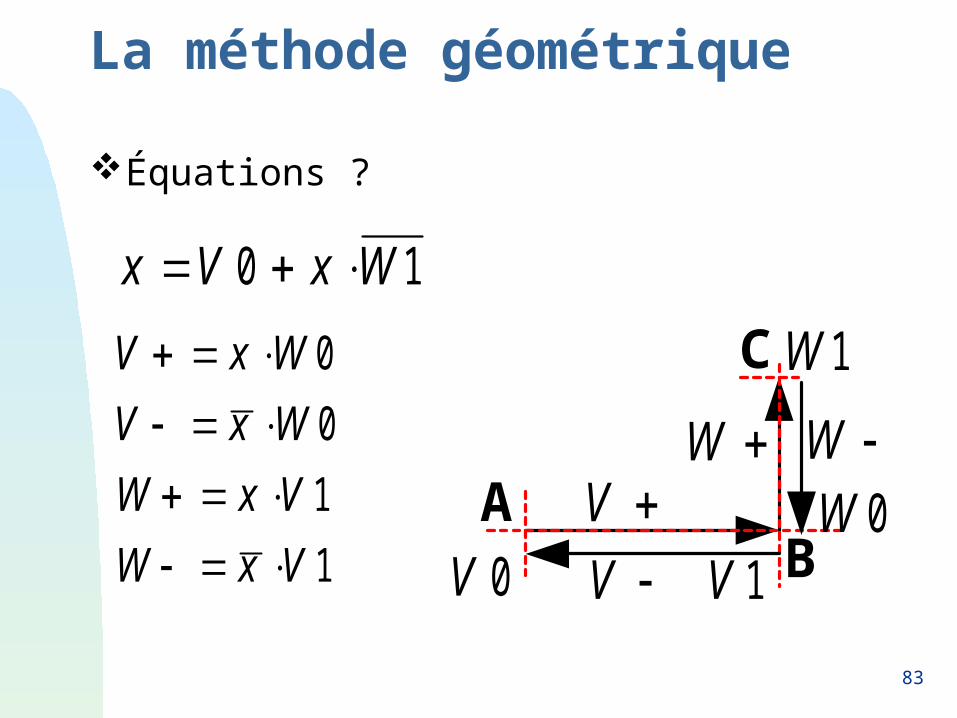
La méthode géométrique
Équations ?
V 1W 0
W 1
AB
C
V +W + W -
V -V 0
x V x W + 0 1
V x W
V x W
W x V
W x V
+ - + -
0
0
1
1
84
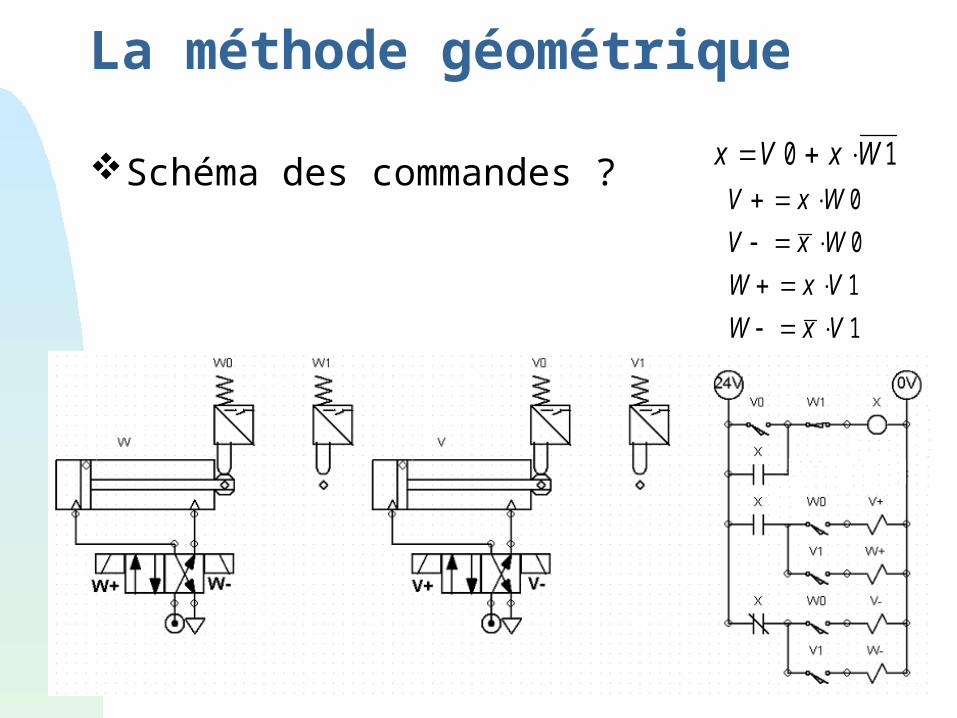
La méthode géométrique
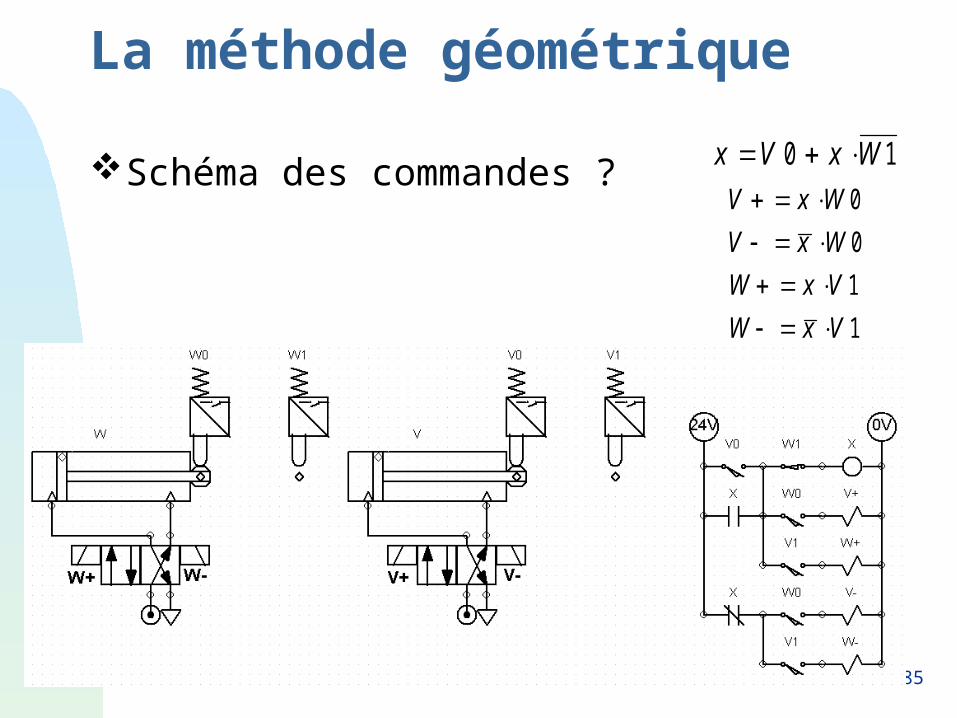
Schéma des commandes ? x V x W + 0 1
V x W
V x W
W x V
W x V
+ - + -
0
0
1
1
85
La méthode géométrique
Schéma des commandes ? x V x W + 0 1
V x W
V x W
W x V
W x V
+ - + -
0
0
1
1
86
La méthode géométrique
Exemples
87
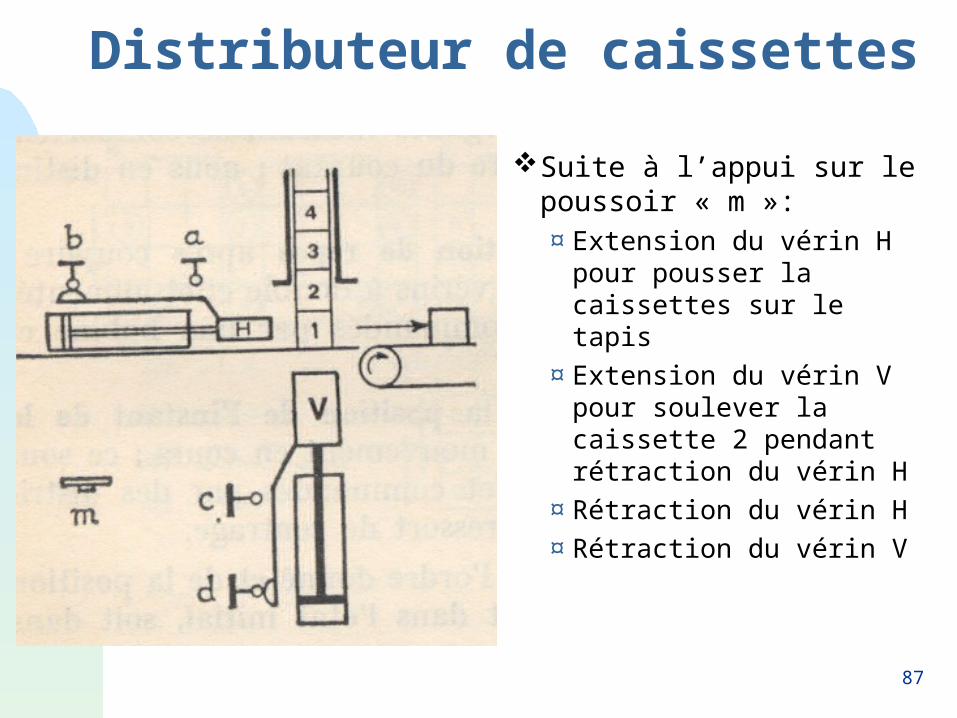
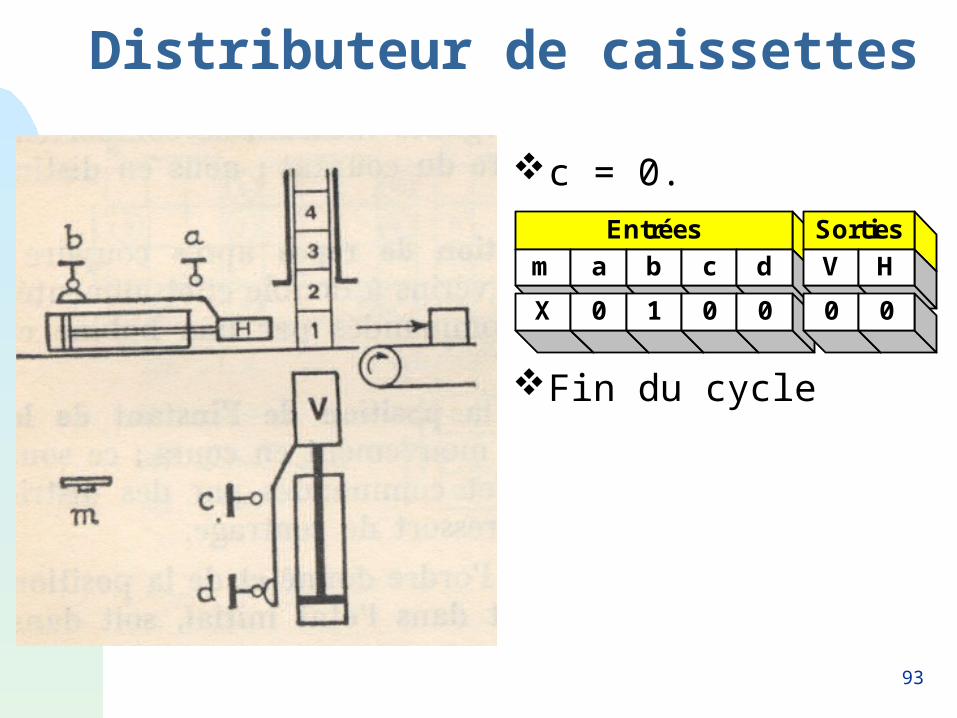
Distributeur de caissettes
Suite à l’appui sur le poussoir « m »:¤ Extension du vérin H
pour pousser la caissettes sur le tapis
¤ Extension du vérin V pour soulever la caissette 2 pendant rétraction du vérin H
¤ Rétraction du vérin H¤ Rétraction du vérin V
88
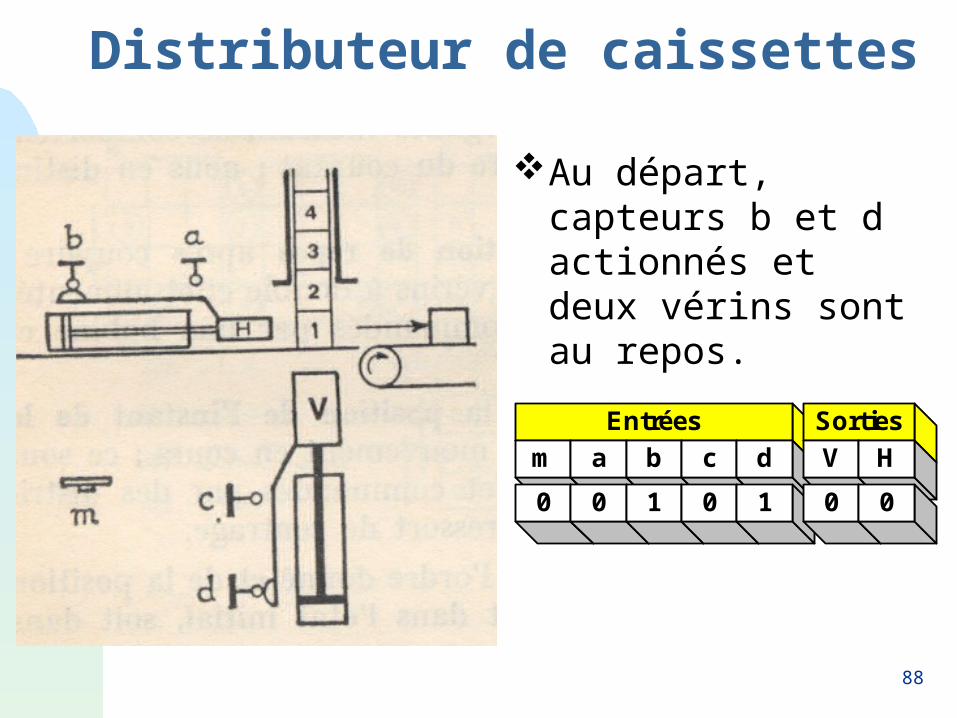
Distributeur de caissettes
Au départ, capteurs b et d actionnés et deux vérins sont au repos.
Donc:Entrées
m a b
0 0 1
c d
0 1
Sorties
V H
0 0
89
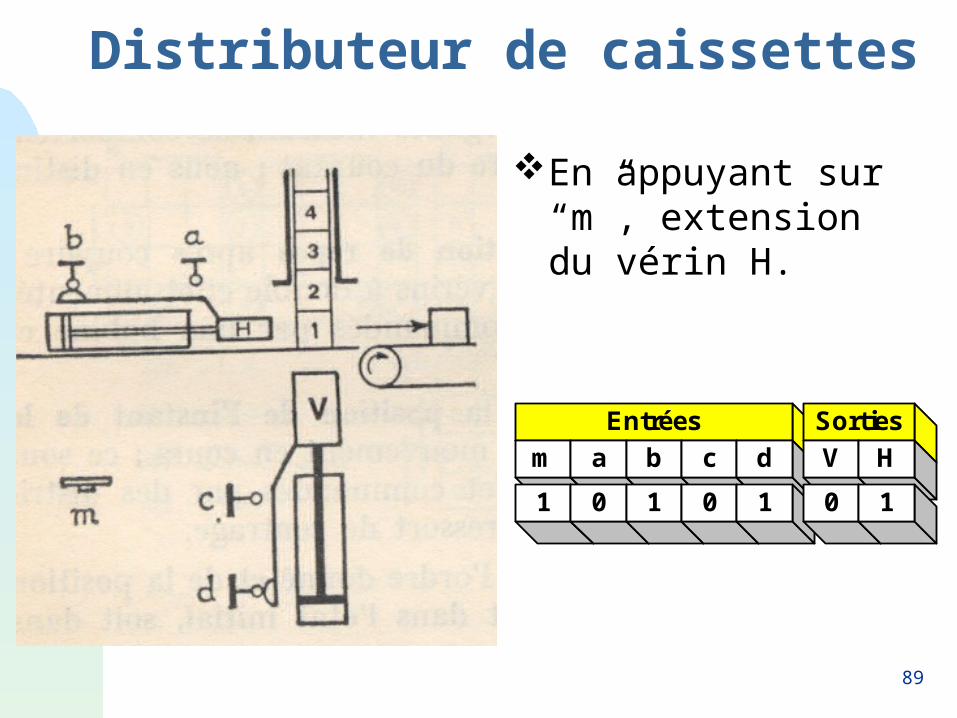
Distributeur de caissettes
En appuyant sur “m”, extension du vérin H.
Donc:Entrées
m a b
1 0 1
c d
0 1
Sorties
V H
0 1
90
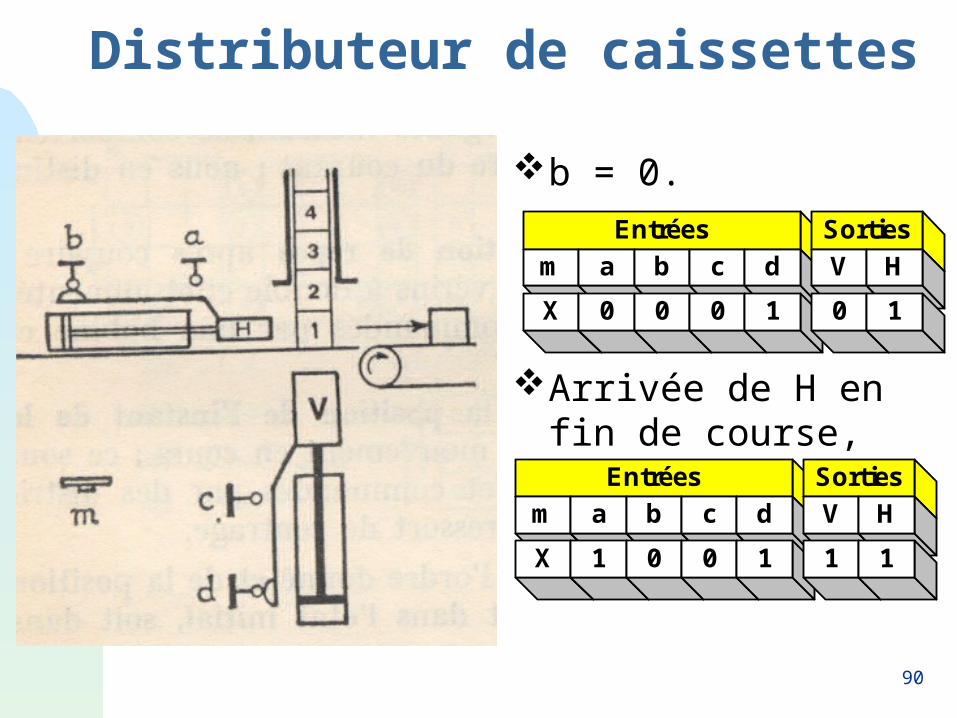
Distributeur de caissettes
b = 0.
Arrivée de H en fin de course, extension de VEntrées
m a b
X 1 0
c d
0 1
Sorties
V H
1 1
Entrées
m a b
X 0 0
c d
0 1
Sorties
V H
0 1
91
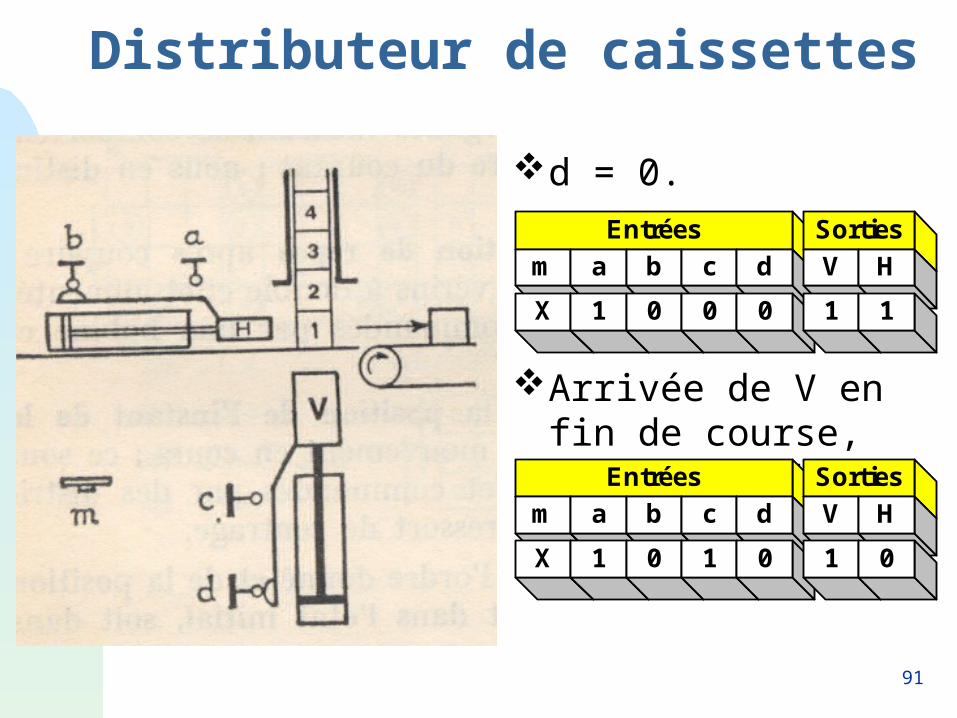
Distributeur de caissettes
d = 0.
Arrivée de V en fin de course, rentrée de HEntréesm a b
X 1 0
c d
1 0
Sorties
V H
1 0
Entrées
m a b
X 1 0
c d
0 0
Sorties
V H
1 1
92
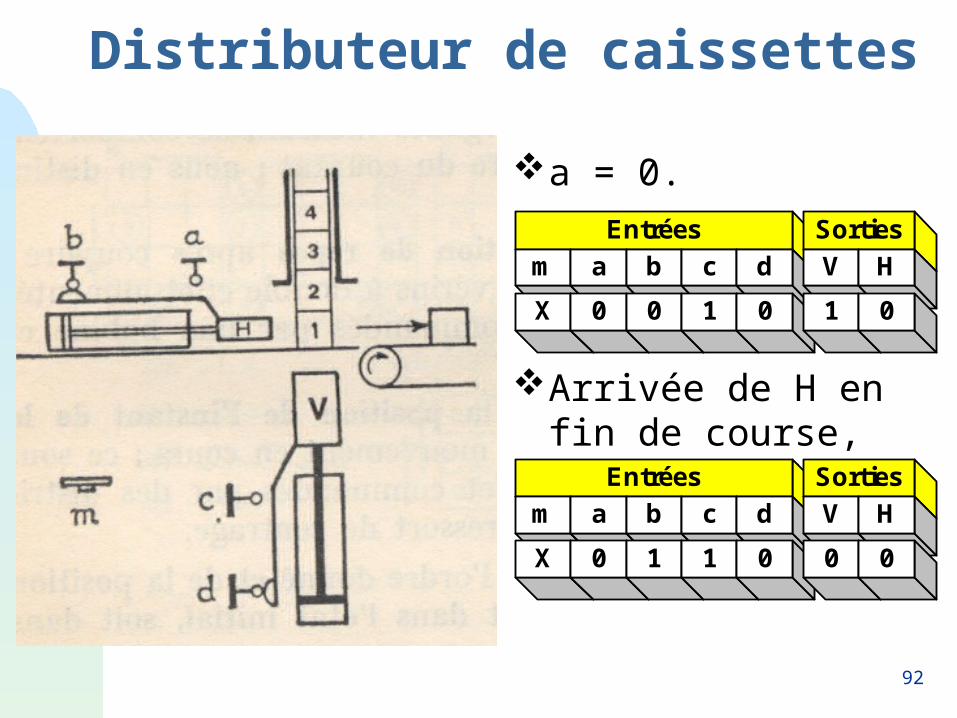
Distributeur de caissettes
a = 0.
Arrivée de H en fin de course, rentrée de VEntréesm a b
X 0 1
c d
1 0
Sorties
V H
0 0
Entrées
m a b
X 0 0
c d
1 0
Sorties
V H
1 0
93
Distributeur de caissettes
c = 0.
Fin du cycle
Entrées
m a b
X 0 1
c d
0 0
Sorties
V H
0 0
94
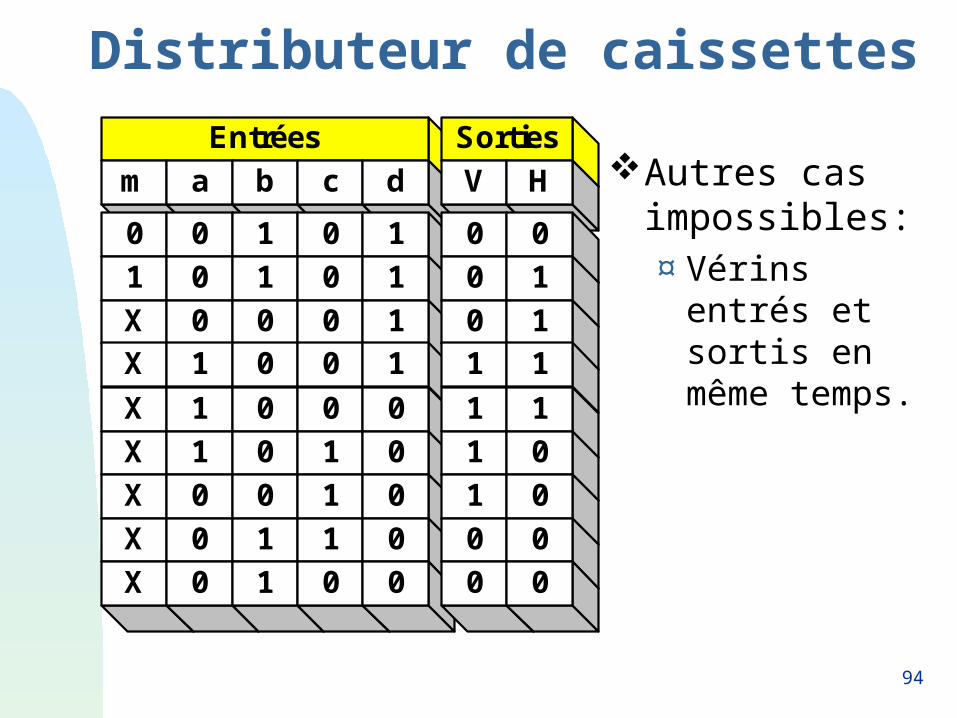
Distributeur de caissettes
Autres cas impossibles:¤ Vérins entrés
et sortis en même temps.
Entrées
m a b
0 0 1
c d
0 1
Sorties
V H
0 0
1 0 1 0 1 0 1
X 0 0 0 1 0 1X 1 0 0 1 1 1
X 1 0 0 0 1 1
X 1 0 1 0 1 0
X 0 0 1 0 1 0
X 0 1 1 0 0 0
X 0 1 0 0 0 0
95
Distributeur de caissettes
0
/D
1
D
/C
0 XC
0
D
0
/D
X 0
0
/D
1
D
0 X
1
D
0
/D
X 0
0 X
1 1
X X
X X
X X
X X
X 0
1 1
C
/C
/A
A
/B /BB
/M MH
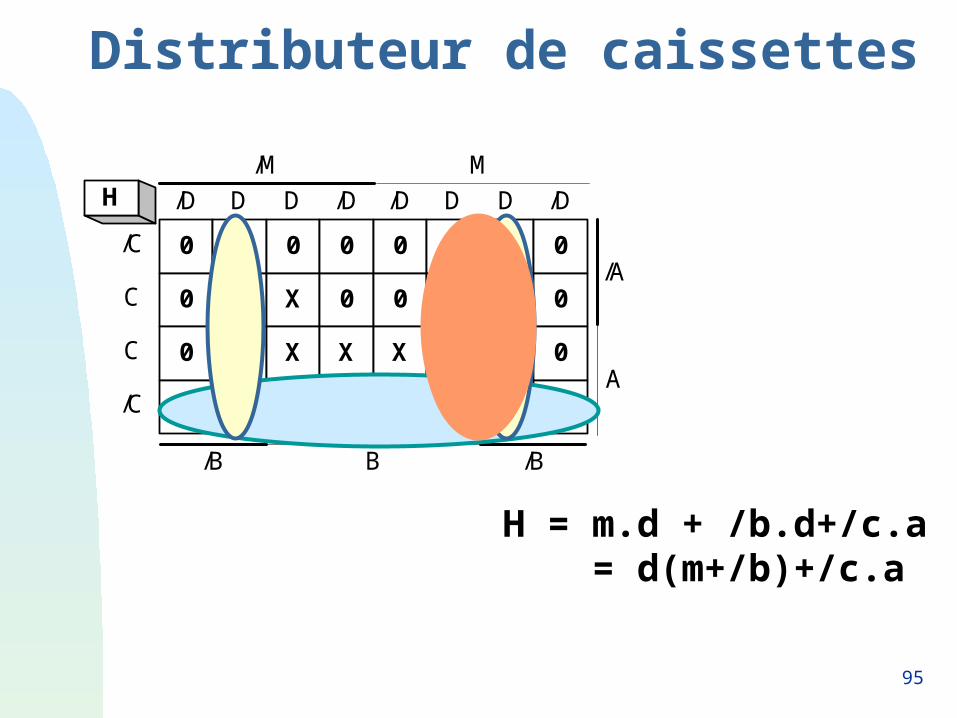
H = m.d + /b.d+/c.a = d(m+/b)+/c.a
96
Distributeur de caissettes
0
/D
0
D
/C
1 XC
0
D
0
/D
X 0
0
/D
0
D
0 X
0
D
0
/D
X 1
1 X
1 1
X X
X X
X X
X X
X 1
1 1
C
/C
/A
A
/B /BB
/M MV
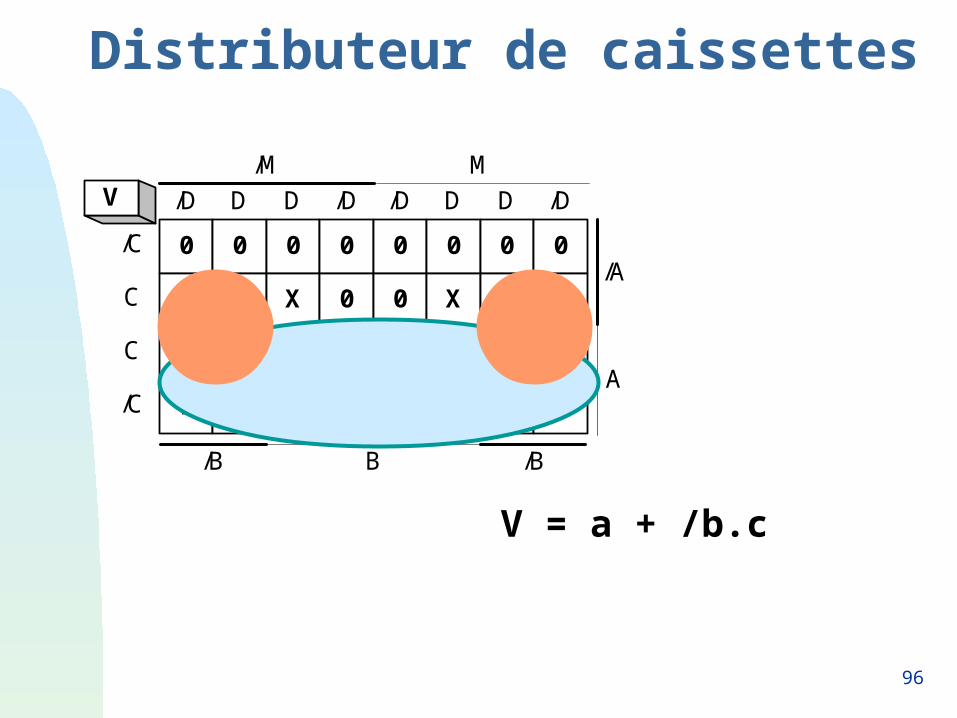
V = a + /b.c
97
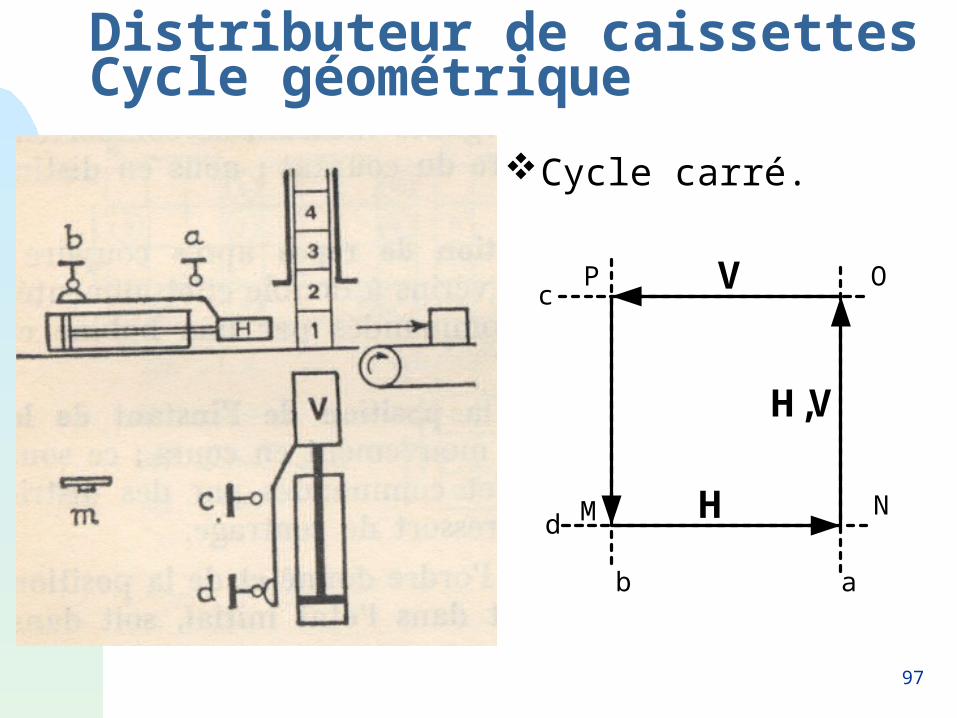
Distributeur de caissettesCycle géométrique
Cycle carré.
M N
O
d
ab
c
H
H,V
P V
98
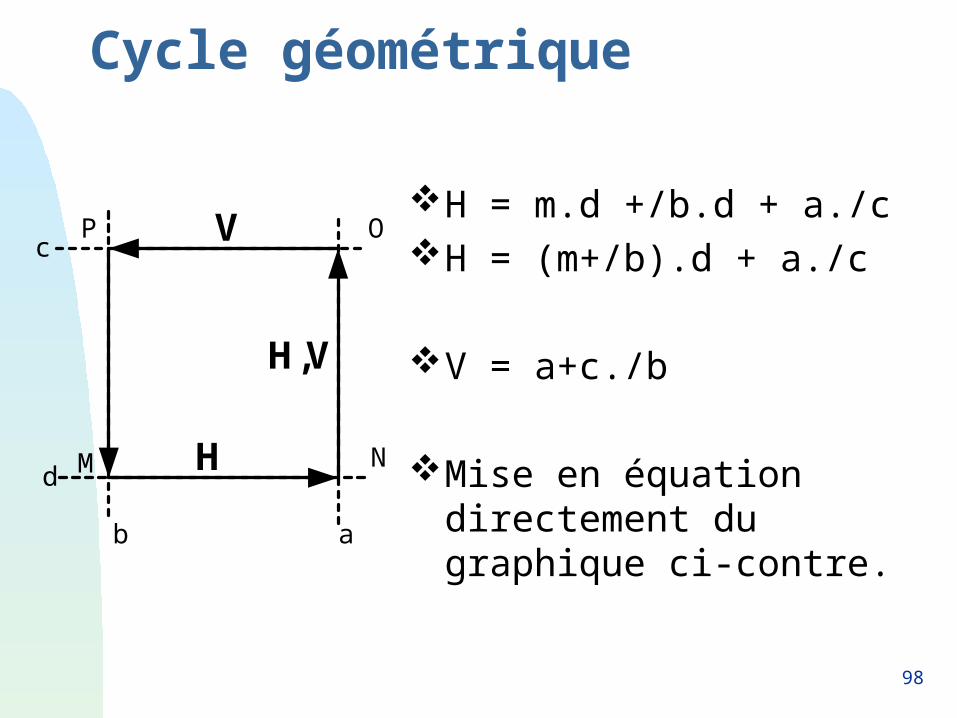
Cycle géométrique
H = m.d +/b.d + a./cH = (m+/b).d + a./c
V = a+c./b
Mise en équation directement du graphique ci-contre.
M N
O
d
ab
c
H
H,V
P V
99
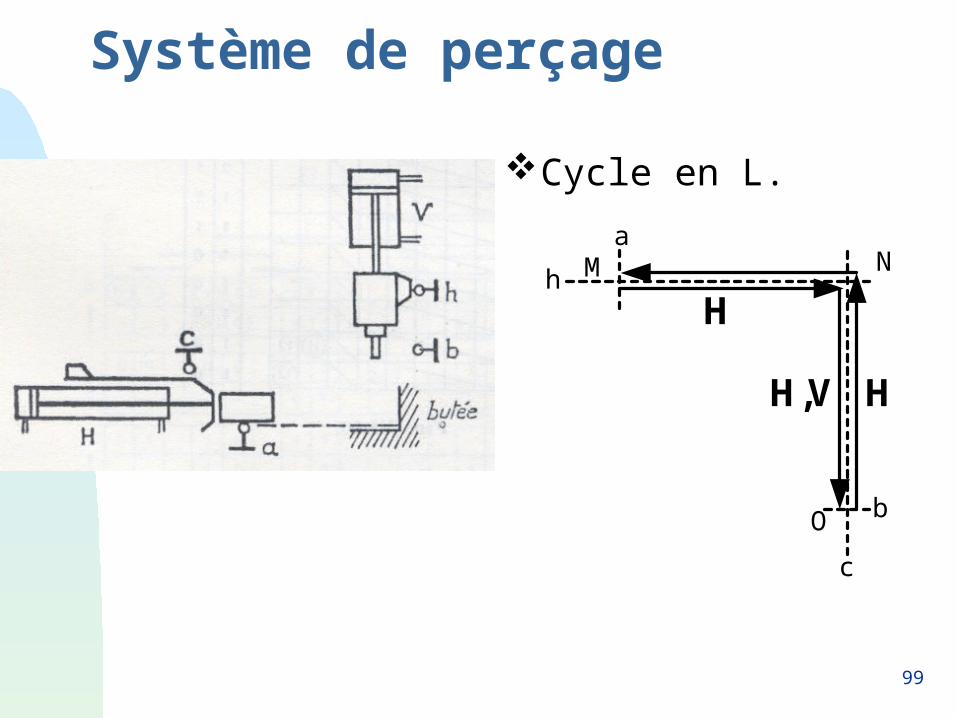
Système de perçage
Cycle en L.
M N
H
O
h
c
a
b
H,V H
100
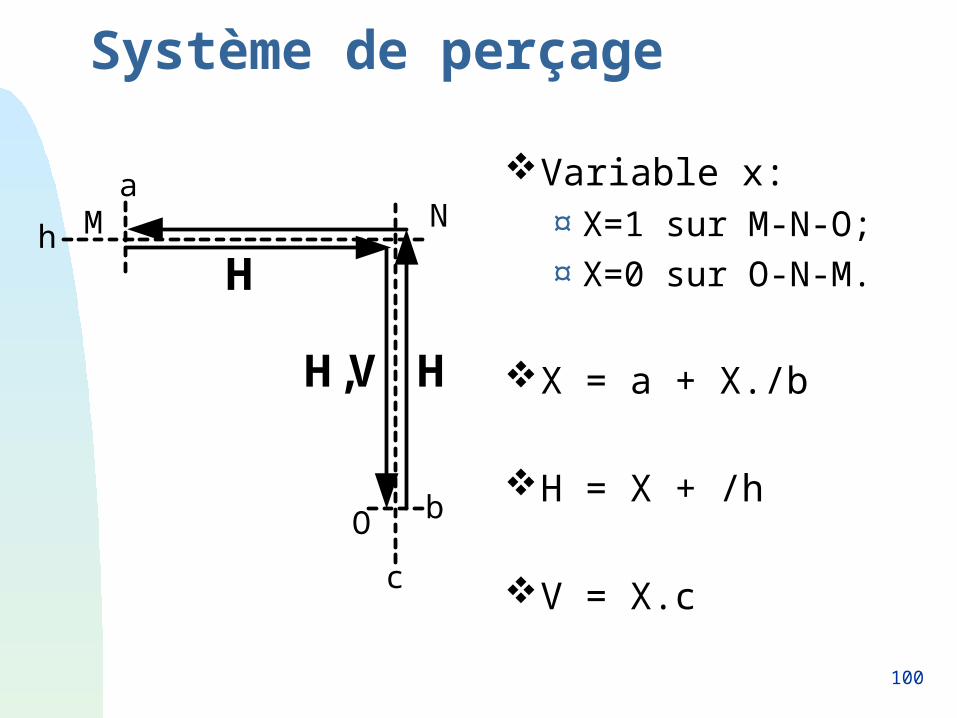
Système de perçage
Variable x:¤ X=1 sur M-N-O;¤ X=0 sur O-N-M.
X = a + X./b
H = X + /h
V = X.c
M N
H
O
h
c
a
b
H,V H