LES RESEAUX DE TERRAINS Olivier Snoeck 2020 Introduction ...
14
Réseaux de terrain – Cours– Août 2020 Page 1 sur 14 LES RESEAUX DE TERRAINS Olivier Snoeck 2020 Introduction & RF & KNX Master 2 SMaRT Réseaux de Terrains : mécanismes de communication entre un système de commande et une partie opérative (Système Automatisé de Production) [http://master-ase.univ-lille1.fr/SMaRT] Les réseaux de terrain sont très nombreux ! Il faut d’abord connaître la différence entre un réseau et un réseau de terrain. Puis, nous allons voir quelques exemples de réseaux de terrains. Ces réseaux ont des besoins relativement simi- laires et ce, dans les différents domaines d'application. Ceci est dû en grande partie à l'histoire qui a conduit à des difficultés et des retards de normalisation qui est venu après le besoin d’un réseau de terrain. Les solutions techniques ont ainsi été multipliées ces dernières années : Elles mettent en évi- dence aussi bien au niveau Medium Access Control qu'au niveau Application des principes gé- néraux ou des paradigmes comme centralisé ou distribué, périodique ou apériodique, synchrone ou asynchrone. Les réseaux informatiques ont des applications dans différents domaines : A Mobile (vélo, automobile, tracteur, camion, bateau, avion,...) : le bus CAN 1 et le bus LIN 2 sont des bus de terrains très usités dans ces domaines. Le bus LIN peut-être considéré comme un sous-réseau du bus LIN. B Domestique (habitation, école, hôpital, le tertiaire,…la domotique ou le Smart Building) : le protocole KNX (ou Konnex), le protocole IFTT 3 , le Wifi 4 , BACnet, LonTalk TM5 , DALI 6 , ModBus. C Entreprise : le bus Profibus, AS-i, CAN, MODBUS, …. D Le bus d’entreprise ETHERNET : le TCP/IP E le HTTP, le FTP au niveau mondial De quel terrain parle-t-on ? Smart-Factories, Smart-Buildings, Smart-Cities, Smart-Grids... l’apparition récente d’une multi- tude de termes « Smart » est le signe de profonds changements d’ordre technologiques, organi- sationnels ou sociétaux. En effet, la transformation numérique annoncée est en cours, apportant son lot de promesses et d’incertitudes. Smart-Cities : La ville de demain sera nécessairement plus intelligente, car elle devra apporter des réponses concrètes au changement climatique, notamment au travers d’une gestion durable et optimale de sa consommation énergétique. Le principe même de Smart-City repose en grande 1 CAN : Controller Area Network : Liaison série / Asynchrone / half duplex / 2fils / 20 à 30 nœuds max (selon la vitesse) / bits dominants & récessifs / distance maximale : 40 mètres à 20km (selon le composant) 2 LIN : Local Interconnect Network : Liaison série / Asynchrone / half duplex / 2fils / 16 nœuds max / bits dominants & récessifs 3 IFTT : If This Then That (générer tel événement dans telle situation) 4 Le Wifi est une norme d’un réseau local sans fil (WLAN) : Wireless Fidelity 5 Le nombre de stations dans un réseau LON™ peut être très important : 32000 et ce protocole peut communiquer avec tous les supports physique de communication 6 DALI : Digital Addressable Lighting Interface
Transcript of LES RESEAUX DE TERRAINS Olivier Snoeck 2020 Introduction ...

Réseaux de terrain – Cours– Août 2020 Page 1 sur 14
LES RESEAUX DE TERRAINS Olivier Snoeck
2020
Introduction & RF & KNX Master 2 SMaRT
Réseaux de Terrains : mécanismes de communication entre un système de commande et une partie opérative (Système Automatisé de Production) [http://master-ase.univ-lille1.fr/SMaRT]
Les réseaux de terrain sont très nombreux !
Il faut d’abord connaître la différence entre un réseau et un réseau de terrain. Puis, nous allons voir quelques exemples de réseaux de terrains. Ces réseaux ont des besoins relativement simi-laires et ce, dans les différents domaines d'application. Ceci est dû en grande partie à l'histoire qui a conduit à des difficultés et des retards de normalisation qui est venu après le besoin d’un réseau de terrain.
Les solutions techniques ont ainsi été multipliées ces dernières années : Elles mettent en évi-dence aussi bien au niveau Medium Access Control qu'au niveau Application des principes gé-néraux ou des paradigmes comme centralisé ou distribué, périodique ou apériodique, synchrone ou asynchrone.
Les réseaux informatiques ont des applications dans différents domaines :
A Mobile (vélo, automobile, tracteur, camion, bateau, avion,...) : le bus CAN1 et le bus LIN 2 sont des bus de terrains très usités dans ces domaines. Le bus LIN peut-être considéré comme un sous-réseau du bus LIN.
B Domestique (habitation, école, hôpital, le tertiaire,…la domotique ou le Smart Building) : le protocole KNX (ou Konnex), le protocole IFTT3, le Wifi4, BACnet, LonTalkTM5, DALI6, ModBus.
C Entreprise : le bus Profibus, AS-i, CAN, MODBUS, …. D Le bus d’entreprise ETHERNET : le TCP/IP
E le HTTP, le FTP au niveau mondial
De quel terrain parle-t-on ?
Smart-Factories, Smart-Buildings, Smart-Cities, Smart-Grids... l’apparition récente d’une multi-tude de termes « Smart » est le signe de profonds changements d’ordre technologiques, organi-sationnels ou sociétaux. En effet, la transformation numérique annoncée est en cours, apportant son lot de promesses et d’incertitudes.
Smart-Cities : La ville de demain sera nécessairement plus intelligente, car elle devra apporter des réponses concrètes au changement climatique, notamment au travers d’une gestion durable et optimale de sa consommation énergétique. Le principe même de Smart-City repose en grande
1 CAN : Controller Area Network : Liaison série / Asynchrone / half duplex / 2fils / 20 à 30 nœuds max (selon la vitesse) / bits dominants & récessifs / distance maximale : 40 mètres à 20km (selon le composant) 2 LIN : Local Interconnect Network : Liaison série / Asynchrone / half duplex / 2fils / 16 nœuds max / bits dominants & récessifs 3 IFTT : If This Then That (générer tel événement dans telle situation) 4 Le Wifi est une norme d’un réseau local sans fil (WLAN) : Wireless Fidelity 5 Le nombre de stations dans un réseau LON™ peut être très important : 32000 et ce protocole peut communiquer avec tous les supports physique de communication
6 DALI : Digital Addressable Lighting Interface

Réseaux de Terrains – Cours – Août 2020 Page 2 sur 14
partie sur l’existence de bâtiments intelligents, connectés entre eux et capables de gérer leur consommation énergétique.
Smart-Factories : L’entreprise de demain sera également plus intelligente, car il faut aller plus vitre, avec plus de qualité, avec moins de stocks, avec moins de matières premières et en pré-servant la santé des personnels.
Smart-Grids : De même, les réseaux d’énergies doivent tenir compte des différentes variables telles que l’ensoleillement, la force du vent, la force des marées,… pour piloter la production d’énergie afin d’assurer une énergie « éternelle » aux consommateurs, quelques soit leur con-sommation. Il est également envisager que les producteurs d’énergies soient en mesure de pilo-ter l’énergie consommée par les consommateurs (radiateurs, charges des voitures élec-triques,….)
Les Réseaux Informatiques sont donc partout…
Pourquoi cette agitation se produit-elle maintenant? Comme souvent, elle provient d’une combi-naison de petites innovations qui, réunies, ont permis d’atteindre le seuil critique de déclenche-ment :
Les technologies de bus de terrain, en utilisant des protocoles et normes parfois propriétaires (LON, KNX, DALI, CAN, ModBus, M-Bus, ZigBee, Z-Wave), ont exploré de nombreux domaines verticaux. Ceux-ci ont progressivement commencé à se chevaucher lorsque les cas d’utilisation se sont complexifiés, et des protocoles ont émergé pour faciliter l’interopérabilité (par exemple BACnet et oBix). Mais les déploiements de bus de terrain actuels continuent à exploiter des ré-seaux parallèles qui ne collaborent pas. La nécessité d’une technologie réseau commune qui pourrait travailler au-dessus de n’importe quelle couche physique, comme IP, est à présent une évidence.
Malgré le besoin d’une technologie de mise en réseau indépendante des technologies de com-munication des bus de terrain, IP n’a pas été envisagé pour les couches physiques à faible débit car la taille importante de ses en-têtes le rend inefficace. La technologie 6LowPAN corrige ce problème en utilisant la technologie IP pour des réseaux de faible débit.
Les réseaux de bus de terrain locaux mettent en place des algorithmes pour optimiser les sys-tèmes CVC (Chauffage, Ventilation, Climatisation) dans les locaux tertiaires et les habitations. Les exigences d’efficacité énergétique des nouveaux bâtiments ont créé un besoin d’algorithmes encore plus complexes, comme la régulation prédictive qui tient compte des prévisions météo ou le déplacement de charge qui optimise la part CO2 de l’électricité. Dans de nombreux secteurs d’automatisation, les outils de pointe exigent que le bus de terrain local collabore avec des appli-cations centralisées hébergées et des sources de données.
De même, les technologies radio à faible débit, adaptées aux objets autonomes fonctionnant sur batterie (piles CR2032 ou autre) et à très faible coût, sont apparues, permettant d’envisager un accès Internet partout, pour tout objet, dans les années qui viennent.
Voici un petit exemple de différents réseaux obtenus sur Radiospares.
Les ondes radiofréquences
Quand on parle de liaison par radiofréquence, la première caractéristique à identifier est la fré-quence de ses ondes RF. Les fréquences RF ne sont pas toutes librement utilisables ou sans contrainte. Ainsi les opérateurs doivent acheter des bandes de fréquences à l’État. Par contre, les licences ISM (industrial scientific and médical) sont libres de droits. Toutefois «libres» ne veut

Réseaux de terrain – Cours– Août 2020 Page 3 sur 14
pas dire sans contrainte et les puissances d’émission sont limitées. L’émission peut être unid i-rectionnelle comme dans le cas d’un capteur de température qui envoie seulement une donnée, ou bidirectionnelle dans le cas d’un téléphone portable.
Une autre caractéristique des objets connectés est sa portée. La portée est la distance à laquelle les ondes ne sont plus captables par les objets. Cette portée définit alors un disque de couverture dans lequel les objets peuvent être adressés. Le disque de couverture radio s’appelle une cellule. Pour former un réseau cellulaire, il faut considérer que la cellule est octogonale. Ainsi, six cellules contiguës vont être pilotées par une station de base et former un réseau.
Pour que ce système cellulaire fonctionne, il faut que chaque cellule opère à des fréquences RF différentes pour éviter les brouillages en bord de cellule. Évidemment, il faut également une coor-dination des stations de base.Une autre caractéristique majeure d’une communication est son débit. Le débit se mesure en bits par seconde. Pour transmettre une température le débit néces-saire sera de quelques dizaines de bits/s alors que pour télécharger un film HD en 10 secondes il faudra un débit de 10 Gb/s.L’autonomie d’un objet connecté est également une performance capitale qui mesure le temps maximal entre deux charges d’un accumulateur. L’autonomie est fortement dépendante des capacités de l’objet et notamment du débit des communications. Elle peut varier d’une journée dans le cas des téléphones portables à une dizaine d’années dans le cas d’un détecteur de fumée connecté.L’intégration de l’électronique d’un objet connecté dépen-dra fortement de sa technologie. Elle détermine l’autonomie et les capacités de transmission d’un objet. Un téléphone qui opère en 4G, Wifi et Bluetooth aura évidemment une technologie diffé-rente d’une montre connectée qui n’opère qu’en Bluetooth. L’intégration et le coût sont primor-diaux pour aboutir à la miniaturisation d’une électronique communicante.
Les infrastructures réseaux
Les infrastructures de réseaux sont classifiées en trois principales catégories.
Les réseaux très courte distance
Les réseaux personnels ou wpan (wireless personal area network) sont des réseaux qui utilisent principalement la technologie bluetooth permettant l’interconnexion des objets de proximité comme les oreillettes, les enceintes sans fil mais également le transfert de données peu volumi-neuses.
Les réseaux de capteurs ou wsn (wireless sensor network) sont des réseaux dédiés à la collecte d’informations issues de capteurs de température, d’humidité, de présence, de fumée, ... et qui sont installés principalement dans les environnements industriels et domestiques.Les réseaux corporels ou wban (wireless body area network) sont des réseaux portés sur le corps humain ou animal. Ils sont interconnectés avec l’infrastructure de wpan ou de réseau local.
Les réseaux moyenne distance
Les réseaux moyenne distance ou réseaux locaux wlan (wireless local area network) sont exclu-sivement centrés autour de la technologie wifi qui ne cesse d’évoluer depuis 1996.
Les réseaux longue distance
Les réseaux longue distance ou wwan (wireless wide area network) sont principalement les ré-seaux de téléphonie mobile 2g, 3g, 4g mais également les réseaux métropolitains de type wimax.Le réseau iot quant à lui est en phase de déploiement de réseaux de type LPWAN (low power wan), c’est à dire longue distance et faible consommation d’énergie.Cette classification s’appuie sur des critères spécifiques ; les principaux critères de classification sont le débit (du kilo

Réseaux de Terrains – Cours – Août 2020 Page 4 sur 14
bits au méga bits par seconde), la portée (du cm au km), la consommation d’énergie (du micro-Watt au Watt), l’autonomie (d’une heure à dix ans) et le coût (de 10 centimes à une centaine d’euros).
La figure représentée ici a pour but de synthétiser les différentes infrastructures de réseaux en intégrant les quatre premiers critères que nous venons d’énoncer.
Les distances indiquées ici correspondent à une valeur optimale généralement données dans un contexte de transmission en champ libre c’est à dire en visée directe sans obstacle. Les distances réelles constatées sont souvent inférieures à cause des perturbations de l’environnement (bâti-ments, végétation, le relief à l’extérieur, la nature des murs) et la présence humaine à l’intérieur.
Aujourd’hui quasiment tous les téléphones portables sont dotés d’un composant bluetooth et nfc permettant ainsi de communiquer avec des objets connectés utilisant l’une ou l’autre voire les deux technologies.Certains objets connectés sont également dotés d’une interface wifi dans la mesure où le volume d’informations échangées est important et surtout que l’objet puisse dispo-ser d’une source d’énergie suffisante pour son alimentation statique.Pour agréger ces différents modes de communication, des passerelles appelées aussi gateway en langage réseaux sont indispensables pour effectuer le lien d’une technologie à une autre. Par exemple, une donnée issue d’un réseau personnel, transmise par un objet connecté en bluetooth, sera nécessairement retransmise ou relayée en wifi ou lora par exemple pour être enfin transmise à un serveur de collecte sur le cloud.

Réseaux de terrain – Cours– Août 2020 Page 5 sur 14
Le spectre RF
« Les fréquences radioélectriques appartiennent au domaine de l’état et celui-ci a confié à l’agence nationale des fréquences d’émission de planification, de gestion de l’implémentation des émetteurs, de contrôle et enfin de délivrance de certaines autorisations et certificats radio. »Agence Nationale des Fréquences Radio (ANFR) – http://www.anfr.fr
Chaque gamme de fréquences présente des propriétés de propagation propre. Par exemple quand on opère dans la gamme des ondes longues de 150 kHz à 280 kHz, les ondes suivent la courbure de la terre et par conséquent la portée peut atteindre 1000 km si l’on utilise des émet-teurs de plusieurs MW.
En ondes courtes de 2,3 à 26 MHz, les ondes se réfléchissent sur la ionosphère et par rebond leur portée et va ainsi au-delà de l’horizon.
Enfin, en intermédiaire, les ondes dites moyennes de 520 kHz en 1620 kHz opèrent entre ondes de sol et réflexions ionosphériques. La portée est plus limitée, à l’échelle d’un pays par exemple.
Quand la fréquence dépasse les 30 MHz, la propagation se fait en ligne droite.
Pour les objets connectés, le spectre est découpé en tranches. A chaque bande de fréquences correspond une gamme d’applications bien définies par l’arcep et l’anfr.
La téléphonie mobile opère sur des bandes licenciées, on y voit la bande de la 4g dite alors de 790 à 862 MHz. Puis de haut en bas et de gauche à droite, on a des bandes de libre pour les communications courte distance nfc et rfid. On a aussi le bluetooth, le wifi et le zigbee (qui est aussi un wifi plus frugal en énergie mais au prix d’un débit plus faible).
Pour les communications longue distance de machine à machine, c’est à dire pour les objets connectés, on trouve deux bandes d’utilisation mais avec des contraintes suivantes : une puis-sance rayonnée inférieure à 25 ou 500 mW et un taux d’occupation par dispositif inférieur à 1 % ou 10 % du temps. Ces deux points :puissance et temps d’émission limité sont parmi les

Réseaux de Terrains – Cours – Août 2020 Page 6 sur 14
conditions à respecter pour utiliser ces bandes libres. Ce sont sur ces bandes que les réseaux d’objets connectés dit longue portée opèrent, comme par exemple le réseau sigfox et sur you-tube.
Ces bandes sont en effet libres de toute licence, ce qui permet un modèle économique low cost pour un déploiement de masse et les contraintes d’utilisation de ces bandes ne posent pas de problème pour adresser le domaine des objets connectés faibles. Puissance rayonnée et temps d’utilisation riment tous deux avec frugalité de consommation des objets et donc une autonomie dépassant 10 ans.
La première génération de rfid s’appuie exclusivement sur l’utilisation radio en basses fréquences appelées aussi LF pour Low Frequency à 125 et 134 kHz.
Les évolutions de rfid ont amené l’utilisation des ultra hautes fréquences appelées aussi UHF pour ultra high frequency à 433, 850 et 950 MHz généralement utilisées pour des applications de logistique. Par exemple la lecture massive d’objets à longue distance, c’est-à-dire sur quelques dizaines de mètres.
La technologie nfc quant à elle se caractérise par l’utilisation de la haute fréquence ou HF pour high frequency à 13,56 MHz. C’est une technologie d’identification radio qui se caractérise par une commune communication en champ proche. Cette technologie a connu un essor dès lors qu’elle a été intégrée sur les terminaux portables tels que les smartphones
Bilan de puissance
La puissance reçue est proportionnelle à la puissance émise et inversement proportionnelle au carré de la distance séparant émetteur et récepteur et du carré de la fréquence. Le coefficient de proportionnalité k dépend des antennes d’émission et de réception, de l’absorption atmosphé-rique et des réflexions multiples.
𝑃𝑟 = 𝑘.𝑃𝑒
𝑓². 𝑑²
Protocoles de communication
Implémentation d’un protocole
Le protocole à mettre en place doit s’assurer de la bonne transmission d’un message de données, désigné par data, qui sera émis par le nœud émetteurs. Le récepteur devra confirmer la bonne réception de data par un message d’acquittement désigné par ACK.
Si l’émetteur ne reçoit pas l’acquittement alors il doit remettre data jusqu’à trois répétitions. Au bout de quatre envois non acquittés la couche supérieure sera prévenue qu’il est impossible de contacter le récepteur.

Réseaux de terrain – Cours– Août 2020 Page 7 sur 14
Il faut spécifier le format des messages échangés : cela consiste à reprendre la question «quel doit être le contenu des messages transmis et reçus pour arriver à l’objectif fixé ?».
Par exemple, si l’identifiant d’un émetteur doit être connu du récepteur alors le message doit contenir l’identifiant du nœud émetteur. Dans ce cas, un premier message data devra comporter la température à transmettre ainsi qu’un identifiant indiquant que la donnée est une température exprimée en degrés Celsius et une troisième information qui identifiera le numéro de la mesure. A chaque nouvelle température ce numéro sera augmenté. Enfin une dernière information iden-tifiera le thermomètre de façon unique pour le cas où il y aurait plusieurs thermomètres sur un même nœud du réseau.
Parce que le protocole demande une confirmation du récepteur, un second message d’acquitte-ment doit être spécifié. On désignera ce message par à ACK. Il reprendra l’identifiant du thermo-mètre et le numéro de la mesure.
Protocole BC
L’une des contraintes majeures dans le domaine des objets connectés est la consommation éner-gétique de l’objet. Même s’il dispose de moyens technologiques pour se recharger tout seul, comme par exemple par la lumière du soleil ou par l’énergie produite par ses propres mouve-ments, il sera presque toujours considéré comme contraint en énergie et donc devra déployer des ruses pour limiter sa propre dépendance énergétique.
La communication réseau est un poste potentiellement très consommateur d’énergie sur un objet connecté.
Les techniques de modulation et de démodulation du signal sont de plus en plus évoluées et de ce fait le processeur utilisé pour le traitement du signal est généralement gourmand, notamment quand il est en mode de réception.
Le mode émission est lui aussi gourmand mais quand un message doit être transmis, sa longueur est connue et on peut facilement prédire l’énergie nécessaire pour l’envoyer.
En mode réception, cette tâche est plus complexe car il faut commencer par se mettre à la dis-position du nœud émetteur ce qui n’est pas forcément simple à prédire. Les nœuds doivent être synchronisés car si un nœud émetteur envoie un message à un récepteur alors que celu i-ci est désactivé pour économiser de l’énergie, le message sera tout simplement perdu et l’émetteur aura dépensé de l’énergie pour rien.
Cependant, il existe des techniques pour qu’un émetteur puisse réveiller un récepteur à distance par l’envoi de messages comme c’est le cas avec nfc ou rfid : l’une des techniques les plus

Réseaux de Terrains – Cours – Août 2020 Page 8 sur 14
courantes est la technique du rendez-vous où 2 nœuds auront un rendez- vous l’un avec l’autre dans un futur plus ou moins proche pour s’échanger des données. D’ici le rendez-vous, les deux nœuds peuvent choisir d’économiser de l’énergie en se mettant en veille, communiquer avec d’autres nœuds ou faire autre chose.
La technique de rendez-vous est très utilisée dans les technologies bluetooth et zigbee.
Bien entendu, la fréquence de ces rendez-vous a un impact direct sur la consommation d’énergie. Plus les rendez-vous sont rares, plus l’économie d’énergie est forte. Cependant, si les rendez-vous sont trop rares, les possibilités de communication seront également rares. Ceci aura pour conséquence d’augmenter la latence du réseau forçant l’utilisateur à patienter pour obtenir une réponse ce qui n’est pas toujours acceptable : dans une application domotique, il sera très incon-fortable d’attendre cinq ou dix secondes qu’une lumière s’allume après avoir appuyé sur un inter-rupteur.
Pour que la technique des rendez-vous soit la plus performante possible, il faut que les rendez-vous soient gérés de manière dynamique en fonction des contraintes de l’application.
Classes et modes de communication
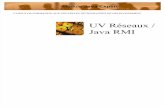
Le réseau lora a défini trois classes de communication possibles des objets vers le réseau. Ces classes sont identifiées sur la figure ci-dessous :
On lit en abscisse la latence du réseau en réception, c’est à dire le temps que peut mettre une donnée à parvenir aux serveurs applicatifs depuis le capteur et vice versa.

Réseaux de terrain – Cours– Août 2020 Page 9 sur 14
On lit en ordonnée la durée de vie de la batterie sans compter que de nombreux objets de la classe C sont dépourvus de batteries puisqu’ils sont alimentés sur secteur.
La classe A est dédiée aux capteurs alimentés sur piles ou actionneurs sans contrainte de la-tence. Cette classe correspond à une communication la plus économe en énergie.
La classe B est destinée aux actionneurs alimentés sur piles mais efficaces en énergie avec une latence contrôlée de la liaison descendante. Cette communication dite temporisée est synchroni-sée par mécanisme de balises, d’où le terme de beacon (balise) transmises périodiquement par les passerelles. Les objets utilisant cette classe B devront se synchroniser grâce aux balises sur les fenêtres de réception.
La classe C est destinée aux actionneurs alimentés sur secteur. Les dispositifs peuvent se per-mettre d’écouter en continu le canal radio et il n’y a pas de latence pour la communication de la liaison descendante.
La latence de la classe A est plus importante que celle de la classe C car en classe A les com-munications des objets ne sont pas contraints temporellement. Par contre les objets appartenant à la classe A sont plus autonomes et doivent avoir une durée de vie de batterie d’au moins 10 ans comme le préconise la norme.
Module Lora - 2Mo de mémoire Flash - 16mm x 23mm
Les réseaux câblés
BACnet, LonWorks, KNX : à quoi servent les bus de terrain interopérables ?
L’interopérabilité permet d’installer sans difficulté sur un même réseau des automates de con-
trôle-commande provenant de différents fabricants pour obtenir un meilleur service et plus
d’économies.
Les buts de toute installation de GTB (Gestion Technique des Bâtiments) sont premièrement de
garantir le confort du bâtiment et le fonctionnement des installations techniques, deuxièmement
d’économiser l’énergie, donc de l’argent, troisièmement de faciliter la maintenance : encore des
économies.
Interopérable est le mot clef. Pour que des automates puissent partager un même réseau ou
bus de terrain, ils doivent parler le même langage. Quinze ans en arrière, chaque constructeur
de système de GTB avait son propre langage. Il n’était pas simple de faire communiquer un
automate Siemens avec un automate Tac ou encore avec un Sauter, par exemple. Pourtant, un
seul constructeur ne peut peut-être pas répondre à tous les besoins de la GTB d’un bâtiment :
piloter au mieux le chauffage, le rafraîchissement, la ventilation, l’éclairage, les ascenseurs, les
accès, le groupe électrogène de secours, l’arrosage de la pelouse, etc. Certains sont

Réseaux de Terrains – Cours – Août 2020 Page 10 sur 14
traditionnellement plus forts en chauffage, tandis que d’autres possèdent une expertise unique
dans le contrôle de l’éclairage.
L’idée d’un protocole ouvert interopérable est simple. On imagine un langage informatique dont
toutes les ressources sont publiées (protocole interopérable) de manière à ce que tous les
constructeurs intéressés (protocole ouvert) puissent s’en servir. Puis on met au point une mé-
thode pour vérifier que tous les automates déclarés parlent bien ce langage commun : c’est la
certification.
Trois principaux protocoles ouverts
Trois grands langages ou protocoles ouverts interopérables sont disponibles aujourd’hui :
BACnet, EIB/KNX et LonWorks. Ces trois protocoles sont devenus des normes EN, ISO ou les
deux. Ils n’ont pas la même origine et ont été développés dans des buts différents. Ce qui ex-
plique les nuances qui existent entre eux aujourd’hui. BACnet est un « protocole de protocoles
» (www.big-eu.org).
Le but d’un bus pour la GTB : la simplification !
Sans bus, les interrupteurs sont tous câblés :
Calculons (approximativement) la longueur de fil pour une chambre de 4mx3mx2,4m et une
porte.
….
Pour les grands bâtiments, les câblages sont en fait encore plus importantes et si l’on choisi
des systèmes électriques classiques, on observe les défauts suivants :
• un câblage complexe, fastidieux, et donc coûteux.
• Ont un rapport fonctionnalité / quantité de câble défavorable, c’est à dire qu’ils nécessi-
tent de grandes quantités de câbles pour peu de fonctionnalités (éclairage).
• Ne sont pas flexibles, ajouter par exemple un point de commande (interrupteur) est très
lourd.
• N’ont pas de séparation entre la puissance et la commande, les interrupteurs classiques
contrôlent directement les charges électriques → danger
• Sont complexes à dépanner : il faut trouver où sont les boites de dérivation et y accéder.

Réseaux de terrain – Cours– Août 2020 Page 11 sur 14
La meilleure alternative est un système de bus
La meilleure alternative est appelée TIC, qui est l’abréviation de Technologie pour l’Information
et la Communication. Ou autrement dit, l’alternative est un concept basé sur la TIC. Les trois
aspects clés de ce concept sont:
• Remplacer TOUS les interrupteurs classiques (indépendamment du type) par des bou-
tons poussoirs étant en mesure de communiquer ou de connecter des boutons poussoirs
/ interrupteurs classiques pour être capable de communiquer.
• Ajouter à TOUTES les charges électriques (indépendamment du type), une interface ca-
pable de communiquer ou de contrôler des charges électriques indirectement avec des
interrupteurs étant capable de communiquer.
• Lier tous les appareils étant capable de communiquer via un câble dédié à très basse
tension. Ce concept est appelé ‘Système de Bus’ et le câble de liaison est appelé ‘Câble
Bus’ ou ‘Bus’.
Conclusion – Un participant (de bus) est constitué de: 1/ Un microcontrôleur (μC)- 2/ Un émet-
teur-récepteur de bus 3/ Un module d’application
La combinaison d’un microcontrôleur et d’un émetteur-récepteur de bus est appelé unité d’ac-
cès au bus (Bus Access Unit – BAU)
I. Composants
Participants
Un système de bus doit être vu comme un ensemble de participants de bus. Comme expliqué
ci-dessus, un participant (de bus) consiste en un microcontrôleur, un émetteur-récepteur de bus
et un module d’application.
Les participants KNX peuvent être divisés en deux groupes: Les participants actifs et les partici-
pants passifs. Les participants passifs n’embarquent pas de TIC (Technologie pour l’Information
et la Communication), ils ont ‘seulement’ un rôle de soutien ou indirect; c’est à dire qu’ils ne
communiquent pas avec d’autres participants, mais sont absolument nécessaires afin de mettre
en place les systèmes de bus. Un exemple de participants passifs est l’alimentation. L’autre
groupe, à savoir les participants actifs peuvent être triés dans les catégories de participants sui-
vantes:
• Interfaces: leur rôle est de connecter un PC avec un système de bus
• Coupleurs: Leur rôle est d’optimiser l’efficacité de la communication des systèmes de
bus
• Capteurs: Ils émettent des informations dans les systèmes de bus, par exemple ‘Tempé-
rature de salon demandé = 22,5°C’
• Actionneurs: Ils relient des charges électriques (classiques) avec les systèmes de bus,
par exemple une lampe reliée à une sortie de l’actionneur d’éclairage

Réseaux de Terrains – Cours – Août 2020 Page 12 sur 14
A propos des capteurs et actionneurs
Les modules d’application des capteurs convertissent généralement des signaux analogiques
ou des actions de l’utilisateur, comme:
• température
• opération d’appui sur bouton poussoir
• détection de pluie
• vitesse de vent
• manipulation d’écran tactile
• etc.
Les modules d’applications pour actionneurs sont généralement connectés avec:
• Une charge électrique (par exemple un ballast d’éclairage via des relais)
• Des systèmes CVC (Chauffage + Ventilation + Climatisation) via des valves
• etc.
Les modules d’application sont électroniquement connectés aux microcontrôleurs.
Système de bus = modifications faciles
Faire des modifications sur un système de bus peut généralement être séparé en deux tâches
distinctes:
• Physiquement ajouter et / ou supprimer et / ou remplacer des participants.
• Modifier les fonctionnalités de participants.
La première partie a déjà été adressée plus tôt, à savoir apporter des modifications à la partie
électrique d’un système de bus est facile et de plus sécuritaire grâce à la très basse tension.
C’est également le cas pour les actionneurs; ils sont généralement installés dans une armoire
électrique, et donc en sécurité et bien cachés de tout utilisateur de l’installation.
Équipement nécessaire pour modifier les systèmes de bus
L’équipement nécessaire pour modifier des systèmes de bus est :
• Un PC avec un outil logiciel embarqué
• Une interface connectant le bus à un PC
L’outil logiciel pour KNX est appelé ETS, qui est l’abréviation de Engineering Tool Software.

Réseaux de terrain – Cours– Août 2020 Page 13 sur 14
Les fonctionnalités de participant sont sauvegardées dans la mémoire de chaque participant.
Pour changer la fonctionnalité d’un participant, son image mémoire doit être modifiée, et c’est
exactement le rôle d’ETS: Modifier la mémoire de participants.
Conclusion: Modifier une installation KNX signifie reprogrammer avec ETS. Modifier un sys-
tème classique signifie recâbler, ce qui représente encore une fois une tâche très lourde.
Travailler avec ETS est très pratique
Les tâches typiques d’ETS sont :
• Réglage fin des fonctionnalités: Par exemple mettre en œuvre une fonction de minuterie
pour l’actionneur E2. Cette minuterie commutera automatiquement E2 à off après une
temporisation, c’est par exemple très pratique pour les résidents d’un bâtiment et permet
de plus de réaliser des économies d’énergie.
• Modification des fonctionnalités: Par exemple pour faire en sorte qu’un capteur (point de
commande) commute E2 à la place d’E1.
• Ajout de fonctionnalités: Par exemple un actionneur pilotant déjà E1 pourra également
commuter E2 (étant donné qu’il existe toujours au moins un canal de sortie disponible).
• Extension des fonctionnalités existantes: Pour, par exemple, ajouter un capteur addition-
nel (point de commande) pour E2

Réseaux de Terrains – Cours – Août 2020 Page 14 sur 14
L’adresse de groupe
Un lien virtuel dans KNX = Adresse de groupe
Les captures suivantes illustrent comment il est pratique de travailler avec ETS.
Mais d’abord :
• Rappelez-vous: Dans les systèmes de bus, capteurs et actionneurs sont virtuellement
reliés en échangeant des messages.
• Dans KNX, ce type de message est appelé Télégramme.
• Chaque lien virtuel peut être défini comme une fonction comme chaque identifiant de
fonction représente une charge électrique de l’installation, comme par exemple ‘E1’.
• Dans KNX, ce type de lien virtuel est appelé Adresse de Groupe.
Prenons l’exemple de ce montage :
Situation initiale :
‘E1’ est le nom de l’adresse de groupe = 0 / 0 / 1, cette Adresse de Groupe représente tous les
participants qui sont impliqués dans cette fonction. Dans la situation initiale, seuls deux partici-
pants sont présents dans la fonction E1:
• Un capteur, le participant ‘1.1.10’
• Un actionneur, le participant ‘1.1.100
On désire ajouter plus de capteurs dans le groupe E1 :
Les actionneurs ajoutés sont les participants ‘1.1.101’ à ‘1.1.103’.