Les points de Lagrange - Astrosurf
69
Les points de Lagrange Didier Levavasseur le 19 juin 2004 M 1 M 2 C y . x. Ω Ω x 1 x 2 x 1 x 2 2 3 2 ⋅ x 2 −x 1 − 3 2 ⋅ x 2 −x 1 L 4 L 5 π/3 π/3 L 2 L 5 L 1 L 3 M 1 M 2 C y,y x ,x. Ω Ω L 4 L 5 épicycle libration L 4
Transcript of Les points de Lagrange - Astrosurf

Les points de Lagrange
Didier Levavasseurle 19 juin 2004
M1
M2
C
y.
x.
Ω
Ωx1 x2
x1 x2
2
32 ⋅x2 −x1
−32⋅x2 −x1
L4
L5
π/3 π/3
L2
L5
L1L3
M1
M2
C
y,y
x ,x.
Ω
Ω
L4
L5
épicycle
libration
L4


Les points de Lagrange 1
Les points de Lagrange
Rappels
Nous rappelons ici les quelques lois fondamentales à partir desquelles nous allons mener l'étude despoints de Lagrange.
Commençons par les 3 lois du mouvement de Newton :– 1ere loi du mouvement de Newton ou principe d'inertie : en l'absence d'application de toute force
F , un objet M de masse m reste au repos ou en mouvement rectiligne uniforme (à vitesseconstante)
– 2eme loi du mouvement de Newton ou Relation Fondamentale de la Dynamique (RFD) bienconnue de nos manuels scolaires : F=m⋅a où a est le vecteur accélération résultant de la
dérivée seconde par rapport au temps du vecteur position r , soit a=d 2 rdt 2 . Cette relation
n'est applicable que dans un repère galiléen : un moyen de contrôler le caractère galiléen d'unrepère est de vérifier que les mouvements y obéissent bien à la RFD. Un repère est galiléen (ouinertiel) lorsqu'il est au repos ou en mouvement rectiligne uniforme par rapport à un autre repèregaliléen : tous les corps célestes étant animés d'un mouvement de rotation, il n'existe donc pas devéritable repère galiléen mais seulement des repères galiléens approchés. Le repère galiléenutilisé pour l'étude du problème des 2 corps est un repère orthonormé accroché sur leur centre demasse C.
– 3eme loi du mouvement de Newton ou principe de l'action-réaction : si un système A exerce uneforce F sur un système B alors le système B exerce une force −F sur le système A.
Enchaînons par la loi de la gravitation universelle également énoncée par Newton et qui exprime la
force qu'exerce un corps M1 sur un corps M2 : F 1→2=−Gm1 ⋅m2
r2 ⋅u12 où G est la constante de
gravitation universelle, r la distance séparant les deux corps de masses respectives m1 et m2 etu12 le vecteur unité radial (dirigé de 1 vers 2) :
Force d’attraction gravitationnelle F
Et terminons par les lois de Kepler :– 1ere loi de Kepler : les planètes décrivent des ellipses dont le Soleil occupe l'un des foyers– 2eme loi de Kepler ou loi des aires : le rayon vecteur qui joint une planète au Soleil balaie des aires
égales en des temps égaux– 3eme loi de Kepler : le carré de la durée de révolution est proportionnel au cube du demi-grand axe

Les points de Lagrange 2
Soit plus précisément dans le cadre du problème des 2 corps M1 et M2 (voir figure suivante) :– 1ere loi de Kepler : les 2 corps décrivent des ellipses dont l'un des foyer est leur centre de masse C– 2eme loi de Kepler ou loi des aires : le rayon vecteur qui joint le centre d'un corps au centre de
masse C balaie des aires égales en des temps égaux– 3eme loi de Kepler : le carré de la durée de révolution Tr est proportionnel au cube du demi-grand
axe a avec a=a1 a2 , soit T r=2 ⋅⋅ a3
où =1 2 =G⋅m1 G⋅m2 , µ1 et µ2 étant
les coefficients gravitationnels respectifs des corps M1 et M2.
M1 M2C
y.
x.
Ellipse de demi-grand axe a1,de foyer C et période Tr
Ellipse de demi-grand axe a2,de foyer C et période Tr
a1 =m2
m1⋅a2
T r=2 ⋅⋅ a1 a23
G⋅m1 m2
Orbites Képleriennes
Le problème restreint des 3 corps
Considérons pour commencer un système à 2 corps M1 et M2 de masses respectives m1 et m2. Nousavons déjà démontré que ces 2 corps décrivent une ellipse autour de leur centre de masse Cconformément aux lois de Kepler avec la période de révolution Tr définie précédemment.
Ajoutons maintenant un troisième corps M3 : il est clair que ce nouveau corps va exercer une forced'attraction gravitationnelle sur chacun des corps M1 et M2, et venir ainsi perturber la bellemécanique céleste qui n'obéira plus aux lois simples énoncées dans le cadre du problème des 2corps. Pour s'en sortir il va falloir faire des hypothèses simplificatrices.
Une de ces hypothèses est que le corps M3 possède une masse m3 suffisamment faible pour que lemouvement des corps M1 et M2 continue de suivre les lois définies pour un système à 2 corps, d'oùle terme de problème restreint des 3 corps.
La deuxième hypothèse est que M1 et M2 suivent des orbites circulaires, donc tournent autour de C àune vitesse angulaire constante ω telle que :
= a3
[1]
où a est la distance (constante) entre les corps M1 et M2.

Les points de Lagrange 3
A partir de là, nous allons chercher les solutions statiques dans le repère tournant à la vitesse ω etdans le plan de symétrie (nous verrons par la suite que cette restriction ne modifie en rien lesconclusions car l'analyse en z est découplée de l'analyse en x et y), c'est à dire les solutions dont laposition est invariante par rapport aux 2 corps principaux selon la figure suivante :
M1 M2
C
y.
x.
r1 =m2
m1⋅r2
Ω
Ω
M3
d 1 d 2
r1 r2
r
d 1=r−r1
d 2=r−r2 r1 r2 =a=cste
Géométrie du problème des 3 corps dans le plan de symétrie (z=0)
La force d'attraction gravitationnelle en M3 s'exprime immédiatement à partir de la loi de lagravitation universelle comme la somme vectorielle des forces exercées par M1 et M2 :
F=−1 ⋅m3
∥d 1 ∥3 ⋅d 1−
2 ⋅m3
∥d 2 ∥3 ⋅d 2
[2]
Soit en prenant comme référence le centre de masse C choisi comme origine des coordonnéescartésiennes :
F=−1 ⋅m3
∥r−r 1 ∥3 ⋅r−r 1−
2 ⋅m3
∥r−r 2 ∥3 ⋅r−r 2 [3]
Les coordonnées des différents vecteurs s'écrivent comme suit dans le repère tournant (C,xΩ,yΩ) :– r : x , y– r 1 :x1 , 0– r 2 : x2 , 0
Dans l'hypothèse d'orbites circulaires, x1 et x2 sont invariants dans le temps et vérifient les relationssuivantes exprimant respectivement l'hypothèse de l'origine des coordonnées prise au centre demasse et la distance entre les 2 corps M2 et M1 :
1 ⋅x1 2 ⋅x2 =0 [4]
x2 −x1 =a [5]

Les points de Lagrange 4
Nous pouvons alors aisément donner les coordonnées du vecteur F dans le repère en rotationque nous avons défini précédemment :
Fxx , y=−1 ⋅m3
[ x−x12 y
2 ]3 /2⋅x−x1−
2 ⋅m3
[x−x22 y
2 ]3 /2⋅x−x2 [6']
Fyx , y=−1 ⋅m3
[x−x12 y
2]3 /2⋅y−
2 ⋅m3
[x−x22 y
2 ]3 /2⋅y [6'']
Ces 2 expressions nous servirons plus tard tant pour le calcul de la position des points de Lagrangeque pour l'étude de leur stabilité.
Loi du mouvement dans un référentiel en rotation uniforme
Nous avons établi au paragraphe précédent l'expression de la force d'attraction gravitationnelle dansun repère tournant avec la vitesse de rotation constante ω donnée par la relation [1] conformémentà la 3ème loi de Kepler énoncée pour les orbites circulaires.
Nous allons maintenant chercher à exprimer la RFD dans ce référentiel en rotation. Un calcul sansdifficulté particulière permet d'exprimer l'accélération dans le repère galiléen (C,x,y) dans lesystème d'axes du repère tournant (C,xΩ,yΩ) et de transposer la 2ème loi du mouvement dans unréférentiel en rotation uniforme (Annexe A) :
m⋅d 2 xt
dt2 =m⋅2 ⋅xt 2 ⋅m⋅⋅d yt
dtFxx , y
[7']
m⋅d 2 yt
dt 2 =m⋅2 ⋅yt −2 ⋅m⋅⋅d xt
dtFyx , y
[7'']
La transposition de la RFD dans un repère en rotation fait apparaître 2 termes correctifs :– le premier terme à droite de l'égalité représente la force centrifuge– le deuxième terme à droite de l'égalité représente la force de Coriolis
Ces deux forces sont des forces d'inertie et ne sont liées à aucune interaction physique avec le corpsdont on étudie le mouvement : ce sont des pseudo-forces qui n'apparaissent à l'observateur qu'enréaction à son mouvement de rotation comme nous allons l'expliciter plus loin. Les forces d'inertien'interviennent jamais lorsque l'on se place dans un repère galiléen (dans lequel l'observateur nesubit pas d'accélération) mais permettent d'écrire la RFD dans des repères non galiléens (danslesquels l'observateur subit une accélération). Les conclusions et les prédictions ne changent bienévidemment pas que l'on se place dans un repère galiléen ou non galiléen : il est cependant parfoisbeaucoup plus facile de résoudre un problème dans un repère non galiléen. Les forces d'inertie sontappelées pseudo-forces ou forces fictives car leur présence dépend du repère dans lequel lesmouvements sont étudiés au contraire des interactions physiques qui sont quant à elles toujoursprésentes. De plus, les forces d'inertie ne peuvent être compensées que par des interactionsphysiques (ou forces réelles).
Quelques expériences virtuelles sont proposées dans les paragraphes suivants pour permettre desentir physiquement ce que représentent ces deux forces d'inertie : nous allons considérer un planfixe constituant un référentiel galiléen au-dessus duquel un plateau est en rotation à vitesseangulaire constante ω autour d'un axe C ; les mouvements sur le plateau tournant se font sans aucunfrottement (on peut imaginer que le plateau tournant génère un coussin d'air par exemple) ; lesmouvements projetés dans le plan fixe respectent bien évidemment les 3 lois du mouvement deNewton.

Les points de Lagrange 5
Plan fixe
C
Pr
Plateau tournant
ω>0
Référentiel en rotation uniforme et référentiel galiléen
La force centrifuge
Imaginons un objet M de masse m maintenu solidaire du plateau tournant au point P à la distance rdu centre de rotation C. Que se passe-t-il si on lâche cet objet à l'instant t=0? Le corps M part enligne droite tangentiellement à la trajectoire circulaire à la vitesse v=⋅r à partir du point P0 quiest la projection de P dans le référentiel galiléen à l'instant t=0, ceci conformément au principed'inertie. Vu de P, le point P0 parcourt un arc de cercle de rayon r à la vitesse angulaire ω . La figuresuivante traduit donc l'évolution temporelle de la position de M vue du point P :
Trajectoires vues dans le référentiel galiléen et dans le référentiel en rotationCas d'un objet M lâché à l'instant t=0
et permet d'écrire immédiatement les coordonnées de M :
xt =r⋅sin ⋅t −cos ⋅t ⋅⋅r⋅tyt =r⋅cos ⋅t sin ⋅t ⋅⋅r⋅t
[8]
C
y.
x.
Ω
Ω
P
P0
π/2 – ω.t
ω.tr
Mω.r.t π-ω.t

Les points de Lagrange 6
La dérivée seconde par rapport au temps de ces 2 expressions donne l'accélération de M par rapportà P :
d 2 xt
dt 2 =sin ⋅t ⋅2 ⋅rcos⋅t ⋅3 ⋅r⋅t [9']
d 2 yt
dt2 =cos ⋅t ⋅2 ⋅r−sin ⋅t ⋅3 ⋅r⋅t [9'']
Cette accélération s'écrit à l'instant t=0 :
d 2 x0
dt2 =0
d 2 y0
dt2 =2 ⋅r
[10]
et traduit le fait qu'il a fallu jusqu'à cet instant t=0 compenser la tendance de l'objet M à s'évaderselon l'axe yΩ sous l'action de la force centrifuge FC d'amplitude FC=m⋅2 ⋅r en luiappliquant une force centripète de même amplitude correspondant à l'interaction physiquenécessaire au maintien du mouvement circulaire uniforme de vitesse angulaire ω et qui seuleapparaît lorsque l'on se place dans un référentiel galiléen.
La force centrifuge traduit le fait que les corps ont tendance à poursuivre leur trajectoire en lignedroite et donc à s'opposer au mouvement circulaire : ainsi un observateur placé sur un plateautournant se sentira irrémédiablement éjecté vers l'extérieur du plateau tournant par la forcecentrifuge, tout comme le PC portable sur lequel j'écris ces lignes et qui n'arrête pas de se balader àdroite et à gauche au gré des mouvements du train ou le passager d'une voiture qui se retrouveplaqué contre une portière dans un virage.
Donc lorsque l'on se place dans le repère galiléen que nous avons défini, le mouvement circulaireuniforme de 2 corps célestes s'explique par la présence d'une force réelle centripète (interactionphysique gravitationnelle) et une vitesse tangentielle suffisante pour que la distance au centre demasse reste constante malgré la « chute » vers le centre de masse provoquée par la force degravitation : en d'autres termes, sur un intervalle de temps Δt la force gravitationnelle va tendre àrapprocher le corps du centre de masse C d'une distance d tandis que conformément au principed'inertie celui-ci va tendre à s'éloigner de C de cette même distance d. Lorsque l'on accompagne les2 corps célestes dans leur mouvement de rotation, ils apparaissent immobiles donc soumis à aucuneforce : l'interaction gravitationnelle toujours présente doit être alors compensée par une autre forcequi est la force centrifuge de même amplitude mais de direction opposée.

Les points de Lagrange 7
C
M2
M1
FG
FG
dans le repère galiléen, les corps M
1 et M
2 sont animés d'un
mouvement de rotation : il n'y apas de force centrifuge
C
M2
M1
FG
FG
FC
FC
dans le référentiel en rotationuniforme, les corps M
1 et M
2
sont immobiles : la force centrifuge apparaît
Mouvement planétaire circulaire uniforme de vitesse angulaire ωvu dans le repère galiléen et vu dans le repère en rotation
La force centrifuge intervient dans le calcul de la position des points de Lagrange comme dansl'étude de leur stabilité.
Les équations [9'] et [9''] nous apprennent également que l'objet M ne va pas s'éloigner en suivantexactement une trajectoire radiale : il va tout d'abord comme le montre [9'] se décaler par rapport àcette trajectoire radiale (vers la droite pour une rotation dans le sens trigonométrique et vers lagauche pour une rotation dans le sens horaire) pour finalement décrire un mouvement en spirale ...sous l'action de la force de Coriolis.
La force de Coriolis
Reprenons l'expérience précédente en communiquant à notre objet M à l'instant t=0 unaccroissement de vitesse dv selon l'angle α comme illustré figure suivante :
C
y.
x.
Ω
Ω
Mdv
αP
P confonduavec P
0 à t=0
Accroissement de vitesse de l'objet M lancé à l'instant t=0par un observateur placé au point P

Les points de Lagrange 8
Un raisonnement identique nous permet de tracer l'évolution temporelle de la position de M vue deP :
C
y.
x.
Ω
Ω
P
P0
π/2 – ω.t
ω.tr
M
ω.r.t π-ω.t
dv.tα-ω.tα
Trajectoires vues dans le référentiel galiléen et dans le référentiel en rotationCas d'un objet M lancé à l'instant t=0
et d'exprimer les coordonnées de M :
xt =r⋅sin ⋅t −cos⋅t ⋅⋅r⋅tcos−⋅t ⋅dv⋅tyt =r⋅cos⋅t sin ⋅t ⋅⋅r⋅tsin −⋅t ⋅dv⋅t
[11]
puis l'accélération de M par rapport à P :
d 2 xt
dt2 =sin ⋅t ⋅2 ⋅rcos ⋅t ⋅3 ⋅r⋅t2 ⋅⋅dv⋅sin −⋅t −2 ⋅dv⋅t⋅cos −⋅t
d 2 yt
dt2 =cos ⋅t ⋅2 ⋅r−sin ⋅t ⋅3 ⋅r⋅t−2 ⋅⋅dv⋅cos −⋅t −2 ⋅dv⋅t⋅sin −⋅t
[12]
qui s'écrit à l'instant t=0 :
d 2 x0
dt2 =2 ⋅⋅dv⋅sin
d 2 y0
dt2 =2 ⋅r−2 ⋅⋅dv⋅cos
[13]
en faisant apparaître le terme d'abscisse 2 ⋅⋅dv⋅sin et d'ordonnée −2 ⋅⋅dv⋅cos mettant en évidence la force de Coriolis agissant vers la droite du vecteur dv (d'abscissedv⋅cos et d'ordonnée dv⋅sin ) pour une rotation dans le sens trigonométrique et vers la
gauche pour une rotation dans le sens horaire. Un cas intéressant est celui pour lequel α=0 etdv=⋅r , la vitesse instantanée induite par le mouvement de rotation se trouvant alors
parfaitement compensée, l'objet M apparaît immobile dans le repère galiléen mais en rotationuniforme de centre C à la vitesse angulaire ω dans le repère tournant impliquant donc une forcecentripète FG de module FG=m⋅2 ⋅r résultant de la combinaison des forces centrifuge et deCoriolis, et ne correspondant de ce fait à aucune interaction physique. Un autre cas intéressant est

Les points de Lagrange 9
celui pour lequel α=-90° correspondant au lancement de l'objet M vers le point C : dans ce casl'objet M déviera vers la gauche ou vers la droite, selon le sens de rotation, sous l'action de la forcede Coriolis sans jamais atteindre le point C :
C
M
vG
C
M
vG
traje
ctoi
re p
assa
nt à
droi
tetrajectoire passant à gauche
Cas d'un objet lancé dans un référentiel tournanten direction de l'axe de rotation
La force de Coriolis n'intervient pas dans le calcul de la position des points de Lagrange maisintervient en revanche dans l'étude de leur stabilité.
Rapprochement des forces centrifuge et de Coriolis
Il apparaît donc des similitudes dans les mécanismes générant la force centrifuge et la force deCoriolis. Ces similitudes résultent de la combinaison du mouvement circulaire de vitesse angulaireω de l'observateur et du mouvement naturel rectiligne uniforme de vitesse vi du corps M dans lerepère galiléen.
Lorsque l'on considère dans le repère galiléen le vecteur vitesse instantané v i , le mouvementcirculaire de l'observateur génère une force orthogonale F i vers la droite du vecteur vitesselorsque la rotation s'effectue dans le sens trigonométrique et vers la gauche lorsque la rotations'effectue dans le sens horaire, d'une amplitude F i=2 ⋅m⋅⋅vi . Lorsque le corps M est immobiledans le repère galiléen, il est pour l'observateur animé d'un mouvement circulaire de vitesseangulaire ω donc soumis à une force centripète FG de module FG=m⋅2 ⋅r .
Maintenant, lorsque le corps M est immobile dans le repère en rotation, il est en fait animé d'unmouvement circulaire dans le repère galiléen et son vecteur vitesse instantané, tangentiel à satrajectoire, prend la valeur v t=⋅r et est donc responsable d'une force centrifuge F t demodule F t=2 ⋅m⋅2 ⋅r . Cette force centrifuge F t additionnée à la force centripète FG nousdonne la force centrifuge FC d'amplitude FC=m⋅2 ⋅r à laquelle est soumis un corps Mimmobile dans le référentiel tournant. Si de plus, on communique une vitesse supplémentaire v l
dans le référentiel local, la force de Coriolis F co d'amplitude F co=2 ⋅m⋅⋅v l apparaîtconformément au mécanisme précédent avec v i=v tv l et F i=F tF co comme l'illustrentles figures suivantes :

Les points de Lagrange 10
C
M
FG
C
M
FG
FCFC
vl
vt
vi
F t
F co
F i
vl
v t
vi
F t
F co
F i
Construction géométrique de la force centrifuge et de la force de Coriolisà partir des vitesses instantanées vues dans le repère galiléen
Les points de Lagrange
Le report de [6'] et [6''] respectivement dans [7'] et [7''] permet donc d'écrire les équations quirégissent les mouvements des corps célestes dans le référentiel en rotation défini par le mouvementcirculaire de M1 et M2 autour de leur centre de masse C. Ces équations s'écrivent pour les solutionsstatiques (dérivées premières et secondes nulles) qui nous intéressent dans le cadre du problèmerestreint des 3 corps :
m3 ⋅2 ⋅x−
1 ⋅m3
[x−x12 y
2 ]3 /2⋅x−x1−
2 ⋅m3
[x−x22 y
2 ]3 /2⋅x−x2=0 [14']
m3 ⋅2 ⋅y−
1 ⋅m3
[x−x12 y
2 ]3 /2⋅y−
2 ⋅m3
[x−x22 y
2 ]3 /2⋅y=0 [14'']
Les points de Lagrange sont donc les points du plan orbital pour lesquels la force centrifugecompense la force d'attraction gravitationnelle combinée des corps M1 et M2. Pour déterminerla position de ces points, il suffit de résoudre le système d'équations précédent après simplification :
2 ⋅x−1
[x−x12 y
2 ]3 /2⋅x−x1−
2
[x−x22 y
2 ]3 /2⋅ x−x2=0 [15']
2 ⋅y−1
[x−x12 y
2 ]3 /2⋅y−
2
[ x−x22 y
2 ]3 /2⋅y=0 [15'']
Position des points L1, L2 et L3
Considérons d'abord le cas yΩ=0, correspondant aux points d'équilibre placés sur la droite reliant les2 corps M1 et M2. Les abscisses des points recherchés sont les solutions de l'équation [15'] écritedans ce cas particulier :
2 ⋅x−1
[x−x12 ]3 /2
⋅ x−x1−2
[x−x22 ]3 /2
⋅x−x2=0 [16]

Les points de Lagrange 11
La résolution de cette équation conduit à la détermination de la position des points de Lagrange L1,L2 et L3 (Annexe B), qui sont placés respectivement entre M1 et M2, au-delà de M2 et au-delà de M1 :
M1
M2
L3
L1
L2
m2
m1
0 ∞ ∞m2
m1
0m2
m1
0 ∞
0 1 2-1
Position des points de Lagrange L1, L2 et L3
La position exacte de ces 3 points dépend du rapport de masse m2/m1. Lorsque ce rapport est prochede zéro, ce qui correspond a tous les cas rencontrés dans le système solaire, L3 estapproximativement symétrique de M2 par rapport à M1 tandis que L1 et L2 sont placéssymétriquement de part et d'autre et proches de M2 :
M1
M2
L3
L1
L2
0-1 1x.Ω
Cas particulier d'un système planétaire, m2/m1#0
Dans le cas Terre/Soleil le rapport m2/m1 est égal à 1/332946 :– L3 se situe à 149,6 millions de kilomètres de l'autre côté du Soleil à l'opposé de la Terre– L1 se situe à 1,51 millions de kilomètres de la Terre dans la direction du Soleil. L'observatoire
solaire SOHO est placé en L1.– L2 se situe à 1,49 millions de kilomètres de la Terre dans la direction opposée au Soleil. Les
projets d'observatoires astronomiques MAP (Microwave Anisotropy Probe) et NGST (NextGeneration Space Telescope) sont prévus en L2.
Position des points L4 et L5
Considérons maintenant le cas yΩ≠0, correspondant aux points d'équilibre placés en dehors de ladroite reliant les 2 corps M1 et M2. L'équation [15''] se simplifie et les coordonnées des pointsrecherchés sont alors les solutions du système d'équations :
2 ⋅x−1
[x−x12 y
2 ]3 /2⋅x−x1−
2
[x−x22 y
2 ]3 /2⋅x−x2=0 [17']
2 −1
[x−x12 y
2 ]3 /2−
2
[x−x22 y
2 ]3 /2=0 [17'']

Les points de Lagrange 12
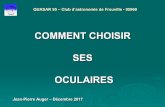
La résolution de ce système d'équations conduit à la détermination de la position des points deLagrange L4 et L5 (Annexe C). La position de ces 2 points ne dépend pas du rapport de masse m2/m1.Ils sont placés symétriquement de part et d'autre de l'axe reliant les 2 corps M1 et M2, chacun d'entreeux formant avec M1 et M2 un triangle équilatéral :
M1
M2
C
y.
x.
Ω
Ωx1 x2x1 x2
2
32 ⋅x2 −x1
−32⋅x2 −x1
L4
L5
π/3 π/3
Position des points de Lagrange L4 et L5
Approche énergétique – énergie potentielle
Nous avons vu lors de l'étude du problème des 2 corps que les orbites elliptiques sont les trajectoiresà énergie constante définies par :
V 2
2 −r=−
2 ⋅a
[18]
où V est la vitesse de l'objet sur l'orbite, r la distance au centre de masse C pris comme origine et ale demi-grand axe de l'orbite elliptique.
Le terme V 2
2 représentant l'énergie cinétique Ec, −
r
l'énergie potentielle, l'équation [18]
montre que la vitesse est maximale au plus près du centre de masse C (périastre) et minimale auplus loin (apoastre).
Un développement conduisant à un résultat similaire peut être conduit dans le cas du problème des3 corps. L'étude de la stabilité des points de Lagrange va être conduite à partir de certains résultatsintermédiaires de ce développement.
On définit UΩ par :
Fxx , y=m3 ⋅∂Ux , y
∂ x[19']
Fyx , y=m3 ⋅∂Ux , y
∂ y[19'']

Les points de Lagrange 13
Nous pouvons alors écrire les équations [7'] et [7''] sous la forme :
d 2 x t
dt2 =2 ⋅xt 2 ⋅⋅d yt
dt∂Ux , y
∂ x[20']
d 2 yt
dt2 =2 ⋅yt −2 ⋅⋅d xt
dt∂Ux , y
∂ y[20'']
En posant U P=U1 2⋅2 ⋅x
2 t y2 t , il vient alors :
d 2 xt
dt 2 =2 ⋅⋅d yt
dt∂U P x , y
∂ x[21']
d 2 yt
dt2 =−2 ⋅⋅d xt
dt∂U P x , y
∂ y[21'']
On élimine le terme de Coriolis en réalisant d xt
dt⋅[21 ' ]
d yt dt
⋅[21 ' ' ] :
d xt dt
⋅ddtd xt
dt d yt dt
⋅ddtd yt
dt =∂U P x , y∂ x
⋅d xt
dt∂U P x , y
∂ y⋅d yt
dt[22]
Soit :
1 2⋅ddt[d xt
dt 2
d yt dt
2 ]=d U P x , ydt
[23]
On reconnaît dans le terme de gauche la vitesse exprimée dans le repère en rotation V et ilvient :
ddt[V
2
2 −U P x , y]=0 [24]
Les solutions du problème des 3 corps sont donc les trajectoires à énergie totale constante vérifiantl'équation suivante, de forme similaire à l'équation [18] établie dans le cadre du problème des 2corps :
V 2
2 −U P x , y=U [25]
où le terme V
2
2 représente l'énergie cinétique Ec, -UP l'énergie potentielle et U l'énergie totale
(invariante dans le temps).

Les points de Lagrange 14
Il est possible de tracer les courbes pour lesquelles l'énergie potentielle UP est constante(équipotentielles) : les points de Lagrange correspondant aux extremums d'énergie potentielle
vérifiant donc ∂U P x , y
∂ x=0 et
∂U P x , y∂ y
=0 , et pour lesquels V =0 . Il faut
remarquer ici que les trajectoires à vitesse V constante sont précisément ces équipotentielles :lorsque cette vitesse dans le repère en rotation est nulle, cela correspond à un maximum local dupotentiel, l'équipotentielle correspondante étant alors réduite à un point ; resterait pour finir àidentifier la relation liant VΩ et U.
La combinaison des équations [6'] et [6''] avec [19'] et [19''] donne :
∂Ux , y∂ x
=−1
[x−x12 y
2 ]3 /2⋅x−x1−
2
[x−x22 y
2 ]3 /2⋅x−x2 [26']
∂Ux , y∂ y
=−1
[x−x12 y
2]3/2⋅y−
2
[x−x22 y
2 ]3 /2⋅y [26'']
La primitive correspondante est évidente :
Ux , y=1
[ x−x12 y
2]1 /2
2
[x−x22 y
2 ]1/2[27]
Et il vient immédiatement :
U P x , y=1
[x−x12 y
2]1 /2
2
[x−x22 y
2 ]1 /21
2⋅2 ⋅x
2 y2 [28]
En posant r=2
1
, la vitesse angulaire ω s'écrit d'après [1] :
= 1 ⋅1 ra3
[29]
La combinaison des 2 équations [4] et [5] permet de donner les abscisses de M1 et M2 dans le repère(C,xΩ,yΩ) :
x1 =−a⋅r
1r
[30]
x2 =a
1r
[31]

Les points de Lagrange 15
Le report de [29], [30] et [31] dans [28] donne en posant u=xa
et v=ya
:
U P u , v={ 1
[u r
1r
2
v2 ]1/2
r
[u− 1 1r
2
v2 ]1 /2
1 2⋅1 r⋅[u2 v2 ]}⋅1
a [32]
Les figures suivantes montrent, pour différents rapports de masse µr entre les corps M1 et M2, letracé des équipotentielles du potentiel normalisé UE définit à partir de l'équation [32] par :
U E u , v =1
[u r
1r
2
v2 ]1 /2
r
[u− 1 1r
2
v2 ]1 /2
1 2⋅1 r⋅[u2 v2 ]
[33]
Équipotentielles pour un rapport m2/m1 de 1
L4
L5
L3 L2L1

Les points de Lagrange 16
Équipotentielles pour un rapport m2/m1 de 0,1
Équipotentielles pour un rapport m2/m1 de 0,01
L3 L1 L2
L4
L5
L3 L1 L2
L4
L5

Les points de Lagrange 17
Stabilité des points de Lagrange
L'étude de la stabilité des points de Lagrange consiste à examiner les conséquences de petitsmouvements autour des points L1 à L5 : si le corps M3 rejoint alors naturellement le point deLagrange considéré, celui-ci est stable ; dans le cas contraire il est instable, il n'est alors pas possiblepour un objet céleste d'y rester naturellement (un véhicule spatial ne pourra y stationner durablementqu'en utilisant un propulseur).
Ces petits mouvements se traduisent par le jeu d'équations suivant :
x=x0 xy= y0 y
[34]
où x0 et y0 sont des constantes correspondant aux coordonnées des points de Lagrange telles que ∂U P x0, y0
∂ x=0 et
∂U P x0, y0∂ y
=0 , δxΩ et δyΩ des fonctions du temps correspondants aux
petits mouvements.
On obtient immédiatement par Développement Limité :
∂U P x0 x , y0 y∂ x
=∂U P x0, y0
∂ x∂2U P x0, y0
∂ x2 ⋅ x
∂2U P x0, y0∂ x⋅∂ y
⋅ y
∂U P x0 x , y0 y∂ y
=∂U P x0, y0
∂ y∂2U P x0, y0∂ y⋅∂ x
⋅ x∂2U P x0, y0
∂ y2 ⋅ y
[35]
et l'on peut écrire les équations linéarisées du mouvement autour des points de Lagrange enreportant [35] dans [21'] et [21''] :
d 2 xt
dt2 =2 ⋅⋅d yt
dt∂2U P x0, y0
∂ x2 ⋅ xt
∂2U P x0, y0∂ x⋅∂ y
⋅ yt [36']
d 2 yt
dt2 =−2 ⋅⋅d xt
dt∂2U P x0, y0∂ y⋅∂ x
⋅ xt ∂2U P x0, y0
∂ y2 ⋅ yt [36'']
L'analyse de la stabilité des systèmes linéaires appliquée aux points de Lagrange (Annexe D) vanous permettre de conclure sur leur stabilité temporelle. L'examen des courbes d'équipotentielles(Annexe E) est déjà un indicateur précieux : elles ne sont pas fermées autour de L1, L2 et L3
(potentiel en forme de selle de cheval), on peut donc conclure intuitivement qu'un objet dérivantlégèrement de la position d'équilibre s'en éloignera irrémédiablement et que ces 3 points sont doncinstables ; elles sont fermées autour de L4 et L5 mais, le potentiel y formant un puits, ces points nedevraient pas être stables, cependant l'étude mathématique montre le contraire à la condition que lerapport de masse m2/m1 reste inférieur à 1/25 environ .... ceci grâce à la force de Coriolis. Lesfigures suivantes indiquent le signe du gradient de potentiel donc l'orientation du champ de forcegravitationnel autour des 5 points de Lagrange :

Les points de Lagrange 18
L1à3 L4/5++ ++
+
+
–
–
Gradient de potentiel autour des points de Lagrange
L'étude mathématique de la stabilité des points L1, L2 et L3 conclut à leur instabilité : la moindredérive initiale depuis la position d'équilibre se traduira par une croissance exponentielle de cettedérive de sorte qu'un objet ne peut y être maintenu qu'artificiellement ; aucune chance donc d'ytrouver le moindre astéroïde, sauf de façon temporaire. La vitesse de cette dérive exponentielleet / dépend de la vitesse de rotation ω des 2 corps principaux et de leur rapport de masse µr :
pour le couple Terre-Soleil, la constante de temps τ est approximativement égale à 23 jours pour L1
et L2, et à 57 ans pour L3. Le propulseur de l'observatoire européen SOHO placé en L1 est allumétoutes les 8 semaines environ pour corriger cette dérive.
L'étude mathématique de la stabilité des points L4 et L5 indique que ce sont des points de libration et
conclut à leur stabilité tant que le rapport de masse m2/m1 vérifie la relation r25 2
−3 2 ⋅69 ou
r25 2
3 2 ⋅69 .
Cette condition est largement vérifiée pour toutes les planètes du système solaire par rapport auSoleil ainsi que pour tous les satellites des planètes du système solaire par rapport à leur planète. Ilest donc au premier ordre tout à fait possible de trouver des corps célestes en L4 et L5 : c'est le casdes planètes troyennes que l'on trouve sur l'orbite de Jupiter à 60° en aval et en amont de la planètegéante, et c'est d'ailleurs, avec les astéroïdes troyens de Mars et le troyen de Neptune découvert en2001, le seul exemple de ce type connu dans le système solaire (Achille et Hector furentrespectivement les premiers à être découverts en 1906 et 1907, soit près de 130 ans après lesprédictions de Joseph Lagrange ; les premiers troyens martiens furent découverts en 1990). Lesplanètes troyennes oscillent avec des périodes longues autour des points L4 et L5 : en effet, unobjet situé initialement en L4 ou L5 va s'en éloigner sous l'action du gradient de potentiel, prendre dela vitesse et subir l'action de la force de Coriolis pour voir sa trajectoire s'enrouler et décrire uneorbite le plus souvent complexe autour du point de Lagrange. La recherche des mouvementspériodiques autour de L4 et L5 (Annexe F) donne un mouvement vertical (selon l'axe z) avec unepériode égale à la période de rotation Tr des 2 corps principaux (la période de ce mouvementvertical stable est différente de Tr pour L1, L2 et L3 ) et un mouvement dans le plan (x,y) résultant dela combinaison de deux orbites elliptiques de période courte T1 (épicycle) et de période longue T2
(libration) dont l'excentricité est respectivement au premier ordre égale à 32
et 1−3 ⋅r :
T 1 =2
1 1 −27 ⋅r
1r2
1 2
⋅T r
T 2 =2
1 −1 −27 ⋅r
1r2
1 2
⋅T r
[37]

Les points de Lagrange 19
Le tableau suivant donne les périodes courte et longue de ces orbites elliptiques pour toutes lesplanètes du système solaire à l'exception de Pluton :
Planète Rapport demasse µr
Période derévolution Tr
Vitesseangulaire ω
Troyenspériode courte
Troyenspériode longue
Mercure 1 / 6 023 000 87,969 j 8,267 10-7 rad/s 87,969 j 227 a 185 jVénus 1 / 407 700 224,7 j 3,194 10-7 rad/s 224,7 j 151 a 70 jTerre 1 / 332 946 365,25 j (1 a) 1,991 10-7 rad/s 1 a 222 a 33 jMars 1 / 3 098 710 1 a 321 j 1,060 10-7 rad/s 1 a 321 j 1 273 a 2 jJupiter 1 / 1 047 11 a 328 j 1,679 10-8 rad/s 11 a 328 j 147 a 134 jSaturne 1 / 3 498 29 a 177 j 6,759 10-9 rad/s 29 a 177 j 670 a 45 jUranus 1 / 22 869 84 a 12 j 2,370 10-9 rad/s 84 a 12 j 4 889 a 349 jNeptune 1 / 19 314 164 a 291 j 1,208 10-9 rad/s 164 a 291 j 8 812 a 189 j
Période des astéroïdes Troyens pour le système solaire
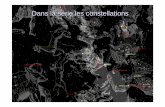
Ces orbites elliptiques élémentaires sont parcourues dans le sens opposé au sens de rotation des 2corps principaux : si les corps M1 et M2 tournent autour de leur centre de masse C dans le senstrigonométrique alors les objets en L4 et L5 orbitent sur les 2 ellipses élémentaires dans le senshoraire, sous l'action de la force de Coriolis. Autre caractéristique remarquable : les demi-grandsaxes des 2 ellipses ont exactement la même orientation (même azimut).
M1
M2
C
y,y
x ,x.
Ω
Ω
L4
L5
épicycle
libration
Mouvement composé autour des points L4 et L5

Les points de Lagrange 20
Ellipse de période courte (épicycle) autour de L4 pour µr=0,01Excentricité de 0,8698 environ
Ellipse de période longue (libration) autour de L4 pour µr=0,01Excentricité de 0,9845 environ
Excentricité des ellipses élémentaires

Les points de Lagrange 21
Azimut du demi-grand axe des ellipses élémentaires pour L4
(azimut identique pour les 2 types d'ellipse)
Trajectoire de libration autour de L4 pour µr=0,01Conditions initiales x0 =100 m , y0 =100 m , x0 =0 , y0 =0

Les points de Lagrange 22
Trajectoire de libration autour de L4 pour µr=0,01Conditions initiales x0 =100 m , y0 =1000 m , x0 =0 , y0 =107 ⋅
Pour finir l'examen des équipotentielles fait apparaître les orbites à vitesse constante dont certainessont remarquables :– orbite en fer à cheval : l'orbite englobe L4 et L5 en passant de part et d'autre de L3 et en marquant
un large arrondi à l'approche du corps M2
– orbite en lame de faucille : l'orbite englobe L4 ou L5 en marquant un large arrondi à l'approche ducorps M2 et en formant une pointe à l'approche de L3
Bibliographie :[R1] Marzari F. et al, Origin and Evolution of Trojan Asteroids[R2] Cornish Neil J., The Lagrange Points

Les points de Lagrange – référentiel en rotation uniforme A1
Annexe A - Référentiel en rotation uniforme
Changement de repère
Le passage du référentiel galiléen (C,x,y) au référentiel en rotation (C,xΩ,yΩ) s'effectue en appliquant
la matrice de rotation M= cos⋅t sin ⋅t −sin ⋅t cos ⋅t :
xt =cos ⋅t ⋅x t sin ⋅t ⋅y t yt =−sin ⋅t ⋅x t cos⋅t ⋅y t
[1]
Le passage du référentiel en rotation (C,xΩ,yΩ) au référentiel galiléen (C,x,y) s'effectue en appliquant
la matrice de rotation M−1 =cos⋅t −sin ⋅t sin ⋅t cos⋅t :
x t =cos⋅t ⋅xt −sin ⋅t ⋅yt y t =sin ⋅t ⋅xt cos⋅t ⋅yt
[2]
On remarquera que la relation M⋅M−1 = I est bien évidemment vérifiée.
La transcription de la Relation Fondamentale de la Dynamique (RFD) dans un repère en rotationuniforme consiste à transposer l'accélération et la force appliquée dans le système de coordonnéesdu référentiel en rotation :
m⋅d 2 rdt 2
= F[3]
Transposition de la vitesse et de l'accélération
La vitesse dans le référentiel galiléen s'écrit dans le système de coordonnées du référentiel enrotation à partir du système d'équations [2] :
d x t dt
=−⋅sin ⋅t ⋅xt cos ⋅t ⋅d xt
dt−⋅cos ⋅t ⋅yt −sin ⋅t ⋅
d yt dt
[4']
d y t dt
=⋅cos ⋅t ⋅xt sin ⋅t ⋅d xt
dt−⋅sin ⋅t ⋅yt cos ⋅t ⋅
d yt dt
[4'']
L'accélération dans le référentiel galiléen s'écrit alors dans le système de coordonnées du référentielen rotation en dérivant [4'] et [4''] :
d 2 x t dt 2 =−2 ⋅cos ⋅t ⋅xt −sin ⋅t ⋅yt
−2 ⋅⋅sin ⋅t ⋅d xt
dtcos ⋅t ⋅
d yt dt
cos ⋅t ⋅d 2 xt
dt 2 −sin ⋅t ⋅d 2 yt
dt2
[5']

Les points de Lagrange – référentiel en rotation uniforme A2
d 2 y t dt 2 =−2 ⋅sin ⋅t ⋅xt cos ⋅t ⋅yt
2 ⋅⋅cos ⋅t ⋅d xt
dt−sin ⋅t ⋅
d yt dt
sin ⋅t ⋅d 2 xt
dt 2 cos ⋅t ⋅d 2 yt
dt 2
[5'']
2ème loi du mouvement dans un référentiel en rotation
Il reste maintenant à transposer l'accélération dans le repère en rotation à partir des équations [5'] et[5''] en appliquant la matrice de rotation M :
d 2 x t dt 2
=−2 ⋅xt −2 ⋅⋅d yt
dtd 2 xt
dt2 [6']
d 2 y t dt2
=−2 ⋅yt 2 ⋅⋅d xt
dtd 2 y t
dt2 [6'']
La décomposition de l'équation [3] selon les coordonnées xΩ et yΩ donne le système d'équationssuivant qui décrit alors la trajectoire d'un corps soumis à une force F dans un référentiel enrotation uniforme à la vitesse angulaire ω :
m⋅d 2 xt
dt2 =m⋅2 ⋅xt 2 ⋅m⋅⋅d yt
dtFxt [7']
m⋅d 2 yt
dt2 =m⋅2 ⋅y t −2 ⋅m⋅⋅d xt
dtFyt
[7'']
La transposition de la RFD dans un repère en rotation uniforme fait donc apparaître 2 termescorrectifs :– le premier terme à droite de l'égalité représente la force centrifuge– le deuxième terme à droite de l'égalité représente la force de Coriolis

Les points de Lagrange – points L1 à L3 B1
Annexe B - Les points de Lagrange L1, L2 et L3
Rappels
Les points d'équilibre d'ordonnée nulle sont les solutions de l'équation suivante :
2 ⋅x−1
[x−x12 ]3 /2
⋅ x−x1−2
[x−x22 ]3 /2
⋅x−x2=0 [1]
pour laquelle on a :
= 1 2
a3[2]
1 ⋅x1 2 ⋅x2 =0 [3]
x2 −x1 =a [4]
où a positif est le rayon de l'orbite avec x2>0 et x1<0.
Position des points L1, L2 et L3
Pour poursuivre la résolution de [1] , il faut considérer 3 cas, suivant les signes de xΩ-x1 et xΩ-x2 :
2 ⋅xs1 ⋅1
x−x12 s2 ⋅
2
x−x22 =0 [5]
avec :– (s1,s2) = ( 1, 1), pour le point L3 ,xΩ-x1<0 et xΩ-x2<0– (s1,s2) = (-1, 1), pour le point L1 , xΩ-x1>0et xΩ-x2<0– (s1,s2) = (-1,-1), pour le point L2 , xΩ-x1>0et xΩ-x2>0
En posant r=2
1
, la vitesse angulaire ω s'écrit :
= 1 ⋅1 ra3
[6]
La combinaison des 2 équations [3] et [4] permet de donner les abscisses de M1 et M2 dans le repère(C,xΩ,yΩ) :
x1 =−a⋅r
1r
[7]
x2 =a
1r
[8]

Les points de Lagrange – points L1 à L3 B2
Le report de [6], [7] et [8] dans [5] permet d'écrire :
1r
a3 ⋅xs1 ⋅1
x a⋅r
1r
2 s2 ⋅r
x− a1r
2 =0 [9]
soit après normalisation de xΩ par rapport au rayon a de l'orbite en posant le changement de variable
u=xa
:
1r⋅us1 ⋅1
u r
1r
2 s2 ⋅r
u− 1 1r
2 =0 [10]
La résolution de cette dernière équation par une méthode numérique dans chacun des 3 casidentifiés permet de donner l'abscisse normalisée par rapport au rayon de l'orbite des points L1, L2 etL3 en fonction du rapport de masses m2/m1 :
Abscisse relative de L1

Les points de Lagrange – points L1 à L3 B3
Abscisse relative de L2
Abscisse relative de L3

Les points de Lagrange – points L1 à L3 B4
Distance relative de L1 à M2
Distance relative de L2 à M2

Les points de Lagrange – points L1 à L3 B5
Distance relative de L3 à M1


Les points de Lagrange – points L4 et L5 C1
Annexe C - Les points de Lagrange L4 et L5
Rappels
Les points d'équilibre d'ordonnée non nulle sont les solutions du système d'équations suivant :
2 ⋅x−1
[x−x12 y
2 ]3 /2⋅x−x1−
2
[x−x22 y
2 ]3 /2⋅x−x2=0 [1']
2 −1
[x−x12 y
2 ]3 /2−
2
[x−x22 y
2 ]3 /2=0 [1'']
pour lequel on a :
= 1 2
a3[2]
1 ⋅x1 2 ⋅x2 =0 [3]
x2 −x1 =a [4]
où a positif est le rayon de l'orbite avec x2>0 et x1<0.
Position des points L4 et L5
Le report de [2] et [4] dans [1''] permet d'écrire :
1 2
x2 −x13 =
1
[x−x12 y
2 ]3 /2
2
[x−x22 y
2 ]3 /2[5]
dont une solution particulièrement évidente est :
[ x−x12 y
2 ]3/2=x2 −x13 [6']
[x−x22 y
2 ]3/2= x2 −x13 [6'']
On montre que les solutions définies par [6'] et [6''] vérifient également [1'] en reportant [6'], [6''],[2] et [4] dans l'équation [1'] :
1 2
x2 −x13⋅x−
1
x2 −x13 ⋅x−x1−
2
x2 −x13 ⋅x−x2=0 [7]
qui après simplification donne l'équation [3].
Les équations [6'] et [6''] peuvent se réécrire sous la forme :
[x−x12 y
2 ]1/2=x2 −x1 [8'][ x−x2
2 y2 ]1/2=x2 −x1 [8'']

Les points de Lagrange – points L4 et L5 C2
et montrent que les solutions recherchées forment un triangle équilatéral avec M1 et M2 , sont doncau nombre de 2, notées L4 et L5, et présentent une symétrie par rapport à l'axe des abscisses (C,xΩ) :
x=x1 x2
2[9]
soit en reportant [9] dans [8'] :
y=±32⋅x2 −x1 [10]
En posant r=2
1
, on extrait des équations [3] et [4] les abscisses des corps M1 et M2 dans le
repère (C,xΩ,yΩ) :
x1 =−a⋅r
1 r
[11]
x2 =a
1 r[12]
Ce qui permet à partir des relations [9] et [10] de donner les coordonnées des points L4 et L5 dans lerepère (C,xΩ,yΩ) :
L4 :a2⋅
1−r
1r
, 32⋅a
L5 :a2⋅
1−r
1r
,−32⋅a

Les points de Lagrange – stabilité D1
Annexe D - Stabilité des points de Lagrange
Système différentiel de dimension 2 et degré 2
Un tel système est régit par les 2 équations différentielles suivantes :
xa2 ⋅xb2 ⋅ya1 ⋅xb1 ⋅y=0 yc2 ⋅xd 2 ⋅yc1 ⋅xd 1 ⋅y=0
[1]
Soit après application de la transformée de Laplace :
p2 a2 ⋅pa1⋅X pb2 ⋅pb1⋅Y p−x0 ⋅p x0 a2 ⋅x0 b2 ⋅y0 =0 [2']c2 ⋅pc1⋅X p p2 d 2 ⋅pd 1⋅Y p− y0 ⋅p y0 c2 ⋅x0 d 2 ⋅y0 =0 [2'']
où x0 , y0 , x0 et y0 sont les conditions initiales.
En posant p2 d 2 ⋅pd 1⋅[2 ' ]−b2 ⋅pb1⋅[2 ' ' ] et p2 a2 ⋅pa1⋅[2 ' ' ]−c2 ⋅pc1⋅[2 ' ]il vient respectivement :
X p= p2d 2 pd 1x0 p x0a2 x0b2 y0−b2 pb1 y0 p y0c2 x0d 2 y0
p2d 2 pd 1 p2a2 pa1−c2 pc1b2 pb1
Y p= p2a2 pa1 y0 p y0c2 x0d 2 y0−c2 pc1x0 p x0a2 x0b2 y0
p2d 2 pd 1 p2a2 pa1−c2 pc1b2 pb1
[3]
La stabilité d'un système différentiel de dimension 2 et degré 2 est donc assurée à la condition que lepolynôme p2d 2⋅pd 1 p
2a2⋅pa1−c2⋅pc1b2⋅pb1 ne présente pas de zéro λ àpartie réelle α positive auquel cas la réponse temporelle du système serait divergente selon
e⋅t⋅e j⋅⋅t qui est la transformée de Laplace inverse de 1
p−− j⋅ , autrement dit si
l'équation caractéristique 2d 2⋅d 12a2⋅a1−c2⋅c1b2⋅b1=0 ne présente pas
de racine à partie réelle positive.
Application aux points de Lagrange
Les équations linéarisées du mouvement autour des points de Lagrange sont caractéristiques d'unsystème de dimension 2 et degré 2 :
d 2 xt
dt2 =2 ⋅⋅d yt
dt∂2U P x0, y0
∂ x2 ⋅ xt
∂2U P x0, y0∂ x⋅∂ y
⋅ yt
d 2 yt
dt2 =−2 ⋅⋅d xt
dt∂2U P x0, y0∂ y⋅∂ x
⋅ xt ∂2U P x0, y0
∂ y2 ⋅ yt
[4]

Les points de Lagrange – stabilité D2
Sachant que :
U P x , y=1
[x−x12 y
2]1 /2
2
[x−x22 y
2 ]1 /21
2⋅2 ⋅x
2 y2 [5]
Il vient sans difficulté particulière :
∂U P x , y∂ x
=−1 ⋅x−x1
[x−x12 y
2]3 /2−
2 ⋅ x−x2
[x−x22 y
2 ]3 /22 ⋅x [6]
∂U P x , y∂ y
=−1 ⋅y
[x−x12 y
2]3 /2−
2 ⋅y[x−x2
2 y2 ]3 /2
2 ⋅y [7]
∂2 U P x , y∂ x⋅∂ y
=3 ⋅1 ⋅x−x1⋅y
[x−x12 y
2]5 /23 ⋅
2 ⋅x−x2⋅y[x−x2
2 y2 ]5/2
[8]
∂2 U P x , y∂ y⋅∂ x
=3 ⋅1 ⋅x−x1⋅y
[x−x12 y
2]5 /23 ⋅
2 ⋅x−x2⋅y[x−x2
2 y2 ]5/2
[9]
∂2 U P x , y
∂ x2 =
3 ⋅1 ⋅x−x12
[ x−x12 y
2]5 /2
3 ⋅2 ⋅x−x22
[ x−x22 y
2 ]5 /22
−1
[x−x12 y
2]3 /2−
2
[x−x22 y
2 ]3 /2
[10]
∂2 U P x , y
∂ y2 =
3 ⋅1 ⋅y2
[ x−x12 y
2]5 /2
3 ⋅2 ⋅y2
[ x−x22 y
2 ]5 /22
−1
[x−x12 y
2]3 /2−
2
[x−x22 y
2 ]3 /2
[11]
On rappelle que :
x1 =−a⋅r
1r
[12]
x2 =a
1r
[13]
2 =1 ⋅1 r
a3[14]
où r=2
1
est le rapport des masses m2/m1.

Les points de Lagrange – stabilité D3
Le système d'équations [4] est donc un cas particulier du système [1] où a2=d2=0, c1=b1 et c2=-b2. Lastabilité d'un point de Lagrange est donc vérifiée si les solutions de l'équation suivante ne présententpas de partie réelle positive :
4 a1 d 1 c22⋅2 a1 ⋅d 1 −c1
2 =0 [15]
avec :
a1 =−∂2 U P x0, y0
∂ x2
[16]
c1 =−∂2 U P x0, y0∂ y⋅∂ x
[17]
d 1 =−∂2 U P x0, y0
∂ y2
[18]
c2 =2 ⋅ [19]
où (x0,y0) sont les coordonnées du point de Lagrange considéré.
En posant λ2=Χ dans [15] l'équation caractéristique se réécrit sous la forme réduite :
X 2 a1 d 1 c22⋅Xa1 ⋅d 1 −c1
2 =0 [20]
L'équation [20] possède 2 racines X1 et X2. Lorsque l'une de ces 2 racines au moins est réellepositive, imaginaire pure ou complexe, une des 2 solutions de λ2=Χ possède une partie réellepositive et le point de Lagrange est instable. Reste à examiner le cas où ces 2 racines sont réellesnégatives : les 4 solutions définies par λ2=Χ1 et λ2=Χ2 sont alors imaginaires pures et c'est donc leseul cas où le point de Lagrange est stable ; en fait, les racines de l'équation caractéristique [15]étant imaginaires pures, le point de Lagrange est en limite de stabilité et est donc un point delibration et non pas un point d'accrétion. Il faut donc s'attendre à trouver dans la région des points deLagrange stables des objets qui vont osciller en xΩ et en yΩ autour du point de Lagrange.
Stabilité des points L1, L2 et L3
On rappelle que l'ordonnée yΩ de ces trois points est égale à zéro et que l'abscisse xΩ est obtenue parrésolution numérique de l'équation :
2 ⋅xs1 ⋅1
x−x12 s2 ⋅
2
x−x22 =0 [21]
avec :– (s1,s2) = ( 1, 1), pour le point L3 ,xΩ-x1<0 et xΩ-x2<0– (s1,s2) = (-1, 1), pour le point L1 , xΩ-x1>0et xΩ-x2<0– (s1,s2) = (-1,-1), pour le point L2 , xΩ-x1>0et xΩ-x2>0

Les points de Lagrange – stabilité D4
Ce qui permet d'écrire immédiatement à partir de [9], [10], [11], [16], [17] et [18] :
a1 =−2 −2 ⋅1 ⋅s1
x−x13 −
2 ⋅2 ⋅s2
x−x23 [22]
c1 =0 [23]
d 1 =−2 1 ⋅s1
x−x13
2 ⋅s2
x−x23 [24]
L'équation caractéristique réduite se simplifie donc légèrement en :
X 2 a1 d 1 c22⋅Xa1 ⋅d 1 =0 [25]
Pour continuer la résolution nous allons poser X n= X2 et chercher les racines Xn1 et Xn2 de
l'équation caractéristique réduite normalisée :
X n2 a1
2 d 1
2 c2
2
2 ⋅X na1
2⋅d 1
2=0 [26]
Soit après le changement de variable u=xa
dans [19], [22] et [24] en tenant compte de [12],
[13] et [14] :
a1
2=−1 −
2 ⋅s1
1r
u r
1r
3 −
2 ⋅r⋅s2
1r
u− 1 1r
3 [27]
d 1 =−1
s1
1r
u r
1r
3
r⋅s2
1r
u− 1 1r
3 [28]
c22
2 =4 [29]

Les points de Lagrange – stabilité D5
u étant solution de l'équation [21] réécrite avec le changement de variable u=xa
:
1r⋅us1 ⋅1
u r
1r
2 s2 ⋅r
u− 1 1r
2 =0 [30]
La résolution de l'équation [26] par des méthodes numérique donne pour L1, L2 et L3 les résultatsprésentés figures suivantes. Ces résultats montrent que dans ces 3 cas, le discriminant de [26] étantpositif les 2 racines Xn1 et Xn2 sont réelles. La racine positive, que l'on note arbitrairement Xn1, estcaractéristique d'un système linéaire instable de constante de temps :
= 1 X n1⋅
[31]
Pour la Terre, le rapport de masse avec le Soleil µr est 1 / 332946 et on obtient :– pour L1 : Xn1#6,24284 et Xn2#-4,267027 soit τ1#23,27 jours– pour L2 : Xn1#6,301321 et Xn2#-4,29644 soit τ1#23,16 jours– pour L3 : Xn1#7,872876 10-6 et Xn2#-1,00005 soit τ1#56,7 ans
Dérivée seconde selon x du potentiel en L1

Les points de Lagrange – stabilité D6
Dérivée seconde selon y du potentiel en L1
Discriminant de l'équation caractéristique en L1

Les points de Lagrange – stabilité D7
Solutions de l'équation caractéristique en L1
Dérivée seconde selon x du potentiel en L2

Les points de Lagrange – stabilité D8
Dérivée seconde selon y du potentiel en L2
Discriminant de l'équation caractéristique en L2

Les points de Lagrange – stabilité D9
Solutions de l'équation caractéristique en L2
Dérivée seconde selon x du potentiel en L3

Les points de Lagrange – stabilité D10
Dérivée seconde selon y du potentiel en L3
Discriminant de l'équation caractéristique en L3

Les points de Lagrange – stabilité D11
Solutions de l'équation caractéristique en L3
Stabilité des points L4 et L5
Les coordonnées de ces 2 points sont :
L4 :a2⋅
1−r
1r
, 32⋅a
L5 :a2⋅
1−r
1r
,−32⋅a
Ce qui permet d'écrire à partir de [9], [10], [11], [12], [13], [14], [16], [17] et [18] :
a1 =−3 4⋅2 [32]
c1 =−3 ⋅3⋅
4⋅
1−r
1r
⋅2 avec ε=+1 pour L4 et ε=-1 pour L5 [33]
d 1 =−9 4⋅2 [34]
L'équation caractéristique réduite [20] s'écrit alors dans le cas de L4 et L5 :
X 2 2 ⋅X27 4⋅
r
1r2⋅
4 =0 [35]

Les points de Lagrange – stabilité D12
Nous allons donc chercher à quelle condition les 2 racines X1 et X2 de l'équation précédente sontréelles et négatives :
X 1 =2
2⋅−1 −1−
27 ⋅r
1r2 [36]
X 2 =2
2⋅−1 1−
27 ⋅r
1r2 [37]
Si ces 2 racines sont réelles alors elles sont négatives, ce qui se traduit par la condition
1−27 ⋅r
1r2 0 .
Les 2 racines µr1 et µr2 de l'équation 1−27 ⋅r
1r2 =0 sont :
r1=25 2
− 3 2 ⋅69
r2=25 2
3 2 ⋅69= 1
r1
Le terme 1−27 ⋅r
1r2 est toujours inférieur ou égal à 1, et n'est négatif que pour µr1<µr<µr2.
Les points de Lagrange L4 et L5 sont donc stables lorsque le rapport de masse µr=m2/m1 respecte lacondition :
r25 2
−3 2 ⋅69 ou r
25 2
3 2 ⋅69

Les points de Lagrange – équipotentielles E1
Equipotentielles autour de L5 pour un rapport m2/m1 de 0,1
Equipotentielles autour de L4 pour un rapport m2/m1 de 0,1
●L4
●L5

Les points de Lagrange – équipotentielles E2
Equipotentielles autour de L3 pour un rapport m2/m1 de 0,1
Equipotentielles autour de L1 pour un rapport m2/m1 de 0,1
●L3
L1●

Les points de Lagrange – équipotentielles E3
Equipotentielles autour de L2 pour un rapport m2/m1 de 0,1
Equipotentielles autour de L5 pour un rapport m2/m1 de 0,01
●L2
●L5

Les points de Lagrange – équipotentielles E4
Equipotentielles autour de L4 pour un rapport m2/m1 de 0,01
Equipotentielles autour de L3 pour un rapport m2/m1 de 0,01
●L4
●L3

Les points de Lagrange – équipotentielles E5
Equipotentielles autour de L1 et L2 pour un rapport m2/m1 de 0,01
●L2L1●


Les points de Lagrange – mouvements périodiques F1
Annexe F - Mouvements périodiques autour de L4 et L5
Extension à la 3ème dimension (axe zΩ)
Nous pouvons conduire un raisonnement tout à fait identique à celui que nous avons suiviprécédemment pour construire les équations linéarisées du mouvement autour des points deLagrange étendu à la 3ème dimension.
La RFD s'exprime immédiatement dans les 3 dimensions du référentiel en rotation (C,xΩ,yΩ,zΩ) àpartir des expressions établies dans le cadre du problème réduit aux 2 dimensions xΩ et yΩ :
m3 ⋅d 2 xt
dt 2 =m3 ⋅2 ⋅xt 2 ⋅m3 ⋅⋅
d yt dt
Fxx , y , z
m3 ⋅d 2 yt
dt 2 =m3 ⋅2 ⋅yt −2 ⋅m3 ⋅⋅
d xt dt
Fy x , y , z[1]
m3 ⋅d 2 zt
dt2 =Fzx , y , z
On définit de la même manière UΩ par :
Fx x , y , z=m3 ⋅∂U x , y , z
∂ x
Fyx , y , z=m3 ⋅∂Ux , y , z
∂ y[2]
Fzx , y , z=m3 ⋅∂Ux , y , z
∂ z
Nous pouvons alors écrire le jeu d'équations [1] sous la forme :
d 2 xt
dt2 =2 ⋅xt 2 ⋅⋅d yt
dt∂Ux , y , z
∂ xd 2 yt
dt2 =2 ⋅yt −2 ⋅⋅d xt
dt∂Ux , y , z
∂ y[3]
d 2 zt
dt2 =∂Ux , y , z
∂ z
En posant U P=U1 2⋅2 ⋅x
2 t y2 t , il vient alors :
d 2 xt
dt 2 =2 ⋅⋅d yt
dt∂U P x , y , z
∂ xd 2 yt
dt2 =−2 ⋅⋅d xt
dt∂U P x , y , z
∂ y[4]
d 2 zt
dt2 =∂U P x , y , z
∂ z

Les points de Lagrange – mouvements périodiques F2
Avec :
U P x , y , z=1
[x−x12 y
2 z2]1/2
2
[ x−x22 y
2 z2 ]1 /2
1 2⋅2 ⋅x
2 y2 [5]
où en posant r=2
1
et a étant le rayon de l'orbite :
= 1 ⋅1 ra3
[6]
x1 =−a⋅r
1r
[7]
x2 =a
1r
[8]
Les petits mouvements autour des points de Lagrange se traduisent par le jeu d'équations suivant :
x=x0 xy= y0 yz=z0 z
[9]
où x0, y0 et z0 sont des constantes correspondant aux coordonnées des points de Lagrange telles que ∂U P x0, y0, z0
∂ x=0 ,
∂U P x0, y0, z0∂ y
=0 et ∂U P x0, y0, z0
∂ z=0 , δxΩ , δyΩ et δzΩ des
fonctions du temps correspondants aux petits mouvements. Les points de Lagrange étant placésdans le plan orbital, z0 est nul.
On obtient immédiatement par Développement Limité :
∂U P x0 x , y0 y , z0 z∂ x
=∂U P x0, y0, z0
∂ x∂2U P x0, y0, z0
∂ x2 ⋅ x
∂2U P x0, y0, z0
∂ x⋅∂ y⋅ y
∂2U P x0, y0, z0∂ x⋅∂ z
⋅ z
∂U P x0 x , y0 y , z0 z∂ y
=∂U P x0, y0, z0
∂ y∂2U P x0, y0, z0
∂ y⋅∂ x⋅ x
∂2U P x0, y0, z0
∂ y2 ⋅ y
∂2U P x0, y0, z0∂ y⋅∂ z
⋅ z
∂U P x0 x , y0 y , z0 z∂ z
=∂U P x0, y0, z0
∂ z∂2U P x0, y0, z0
∂ z⋅∂ x⋅ x
∂2U P x0, y0, z0
∂ z⋅∂ y⋅ y
∂2U P x0, y0, z0∂ z
2 ⋅ z
[10]

Les points de Lagrange – mouvements périodiques F3
et l'on peut écrire les équations linéarisées du mouvement autour des points de Lagrange enreportant [10] dans [4] :
d 2 xt
dt2 =2 ⋅⋅d yt
dt∂2U P x0, y0, z0
∂ x2 ⋅ xt
∂2U P x0, y0, z0∂ x⋅∂ y
⋅ yt
∂2U P x0, y0, z0
∂ x⋅∂ z⋅ zt
d 2 yt
dt2 =−2 ⋅⋅d xt
dt∂2U P x0, y0, z0
∂ y⋅∂ x⋅ xt
∂2U P x0, y0, z0∂ y
2 ⋅ yt
∂2U P x0, y0, z0
∂ y⋅∂ z⋅ zt
[11]
d 2 zt
dt2 =∂2U P x0, y0, z0
∂ z⋅∂ x⋅ xt
∂2U P x0, y0, z0∂ z⋅∂ y
⋅ yt ∂2U P x0, y0, z0
∂ z2 ⋅ zt
De l'équation [5] nous tirons sans difficulté particulière :
∂2 U P x , y , z∂ x⋅∂ y
=3 ⋅1 ⋅x−x1⋅y
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅x−x2⋅y
[ x−x22 y
2 z2 ]5/2
[12]
∂2 U P x , y , z∂ y⋅∂ x
=3 ⋅1 ⋅x−x1⋅y
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅x−x2⋅y
[ x−x22 y
2 z2 ]5/2
[13]
∂2 U P x , y , z∂ x⋅∂ z
=3 ⋅1 ⋅x−x1⋅z
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅x−x2⋅z
[ x−x22 y
2 z2 ]5/2
[14]
∂2 U P x , y , z∂ z⋅∂ x
=3 ⋅1 ⋅x−x1⋅z
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅x−x2⋅z
[ x−x22 y
2 z2 ]5/2
[15]
∂2 U P x , y , z∂ y⋅∂ z
=3 ⋅1 ⋅y⋅z
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅y⋅z
[ x−x22 y
2 z2 ]5/2
[16]
∂2 U P x , y , z∂ z⋅∂ y
=3 ⋅1 ⋅y⋅z
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅y⋅z
[ x−x22 y
2 z2 ]5/2
[17]
∂2 U P x , y , z
∂ x2 =
3 ⋅1 ⋅ x−x12
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅x−x2
2
[x−x22 y
2 z2 ]5 /2
2
−1
[x−x12 y
2 z2]3 /2
−2
[ x−x22 y
2 z2 ]3 /2
[18]

Les points de Lagrange – mouvements périodiques F4
∂2 U P x , y , z
∂ y2 =
3 ⋅1 ⋅y2
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅y
2
[x−x22 y
2 z2]5/2
2
−1
[x−x12 y
2 z2]3 /2
−2
[x−x22 y
2 z2]3 /2
[19]
∂2 U P x , y , z
∂ z2 =
3 ⋅1 ⋅z2
[x−x12 y
2 z2]5 /2
3 ⋅2 ⋅z
2
[x−x22 y
2 z2]5 /2
−1
[x−x12 y
2 z2]3 /2
−2
[x−x22 y
2 z2]3 /2
[20]
Le système d'équations [11] se réécrit alors en tenant compte de la valeur nulle de z0 :
d 2 xt
dt2 =2 ⋅⋅d yt
dt∂2U P x0, y0, z0
∂ x2 ⋅ xt
∂2U P x0, y0, z0∂ x⋅∂ y
⋅ yt [21']
d 2 yt
dt 2 =−2 ⋅⋅d xt
dt∂2U P x0, y0, z0
∂ y⋅∂ x⋅ xt
∂2U P x0, y0, z0∂ y
2 ⋅ yt [21'']
d 2 zt
dt 2 =∂2U P x0, y0, z0
∂ z2 ⋅ zt [21''']
L'étude des mouvements autour des points de Lagrange peut donc se découper en 2 problèmesindépendants : d'une part l'étude des mouvements dans le plan de symétrie (xΩ,yΩ) et d'autre partl'étude des mouvements selon l'axe zΩ. Ceci justifie l'approche intuitive qui consiste à n'étudier lesmouvements que dans le plan de symétrie mais ne dispense pas de résoudre l'équation dumouvement linéarisée en zΩ.
L'équation [21'''] est caractéristique d'un mouvement sinusoïdal d'amplitude d et de phase θ0
arbitraires dont la pulsation Ωz est égale à −∂2U P x0, y0, z0∂ z
2 : z t =d⋅sin z⋅t0 .
Autour des points L4 et L5 cette pulsation Ωz est égale à ω et définit un mouvement sinusoïdalvertical de période égale à la période de rotation des 2 corps principaux.
Autour de L1 à L3, la pulsation Ωz s'écrit :
Z= 1
∣x0 −x1∣3
2
∣x0 −x2∣3
[22]
Soit en tenant compte de [6], [7], [8] et après le changement de variable u=x0
a :
Z= 1 1r
⋅[ 1
∣u r
1r∣3
r
∣u− 1 1r
∣3]⋅ [23]

Les points de Lagrange – mouvements périodiques F5
La période normalisée du mouvement vertical par rapport à la période de rotation des 2 corpsprincipaux s'écrit alors :
T Zn=1
1 1r
⋅[ 1
∣u r
1r∣3
r
∣u− 1 1r
∣3] [24]
où u est toujours la solution de l'équation suivante :
1r⋅us1 ⋅1
u r
1r
2 s2 ⋅r
u− 1 1r
2 =0 [25]
avec :– (s1,s2) = ( 1, 1), pour le point L3
– (s1,s2) = (-1, 1), pour le point L1
– (s1,s2) = (-1,-1), pour le point L2
Période normalisée du mouvement sinusoïdal en z au point L3

Les points de Lagrange – mouvements périodiques F6
Période normalisée du mouvement sinusoïdal en z au point L1
Période normalisée du mouvement sinusoïdal en z au point L2

Les points de Lagrange – mouvements périodiques F7
Forme paramétrique généralisée des ellipses
L'équation d'une ellipse s'écrit habituellement sous la forme paramétrique suivante :
x=a⋅cosy=b⋅sin
[26]
où :– a est le demi-grand axe (a>0)– b est le demi-petit axe (b>0)– θ est l'argument sur l'ellipse avec =⋅t
Cette forme paramétrique simplifiée suppose que le demi-grand axe est orienté suivant l'axe xΩ et ilconvient d'utiliser une forme introduisant l'azimut α du demi-grand axe de l'ellipse dans le plan(xΩ,yΩ) par rapport au système d'axes et l'offset φ de l'argument :
x=a⋅cos⋅cos−b⋅sin⋅sin⋅cos−a cos⋅sin−b⋅sin⋅cos⋅siny=a⋅sin⋅cosb⋅cos⋅sin⋅cos−a sin⋅sinb⋅cos⋅cos⋅sin
[27]
L'identification membre à membre avec l'expression :
x=A⋅cosB⋅siny=C⋅cosD⋅sin
[28]
donne les 4 équations suivantes :
a⋅cos⋅cos−b⋅sin⋅sin=A [29']−a cos⋅sin−b⋅sin⋅cos=B [29'']a⋅sin⋅cosb⋅cos⋅sin=C [29''']−a sin⋅sinb⋅cos⋅cos=D [29'v]
La combinaison [29']2+[29'']2+[29''']2+[29'v]2 aboutit à :
a2 b2 =A2 B2 C 2 D2 [30]
La combinaison [29']*[29'']+[29''']*[29'v] aboutit à :
sin⋅cos⋅b2 −a2=A⋅BC⋅D [31]
La combinaison [29']*[29''']+[29'']*[29'v] aboutit à :
−sin⋅cos⋅b2 −a2=A⋅CB⋅D [32]
La combinaison [29']*[29'v]-[29'']*[29'''] aboutit à :
a⋅b=A⋅D−B⋅C [33]

Les points de Lagrange – mouvements périodiques F8
Le report de [33] dans [30] donne a4 −A2 B2 C 2 D2⋅a2 A⋅D−B⋅C 2 =0 dont on neretient que la racine positive la plus grande comme valeur du demi-grand axe a :
a=1 2⋅AD2 B−C 21
2⋅A−D2 BC 2 [34]
Le report de [34] dans [33] nous donne alors la valeur du demi-petit axe b :
b= 2 ⋅A⋅D−B⋅C AD2 B−C 2A−D2 BC 2
[35]
On rappelle que l'excentricité e d'une ellipse est reliée aux demi-axes a et b par la relation :
e=a2−b2
a= ab 2−1
ab
[36]
Il ne reste plus au final qu'à résoudre l'équation [32] par une méthode numérique pour déterminerl'azimut de l'ellipse.
Trajectoires des corps célestes autour de L4 et L5
Nous avons déjà déterminé lors de l'étude de la stabilité des points de Lagrange que les trajectoiresdes objets en L4 et L5 sont décrites par les transformées de Laplace des coordonnées spatiales xΩ(t)et yΩ(t) :
X p= p2d 1x0 p x0−c2 y0−−c2 pc1 y0 p y0c2 x0
p2d 1 p2a1−c2 pc1−c2 pc1
Y p= p2a1 y0 p y0c2 x0−c2 pc1x0 p x0−c2 y0
p2d 1 p2a1−c2 pc1−c2 pc1
[37]
où :
x0 , y0 , x0 et y0 sont les conditions initiales
c2 =2 ⋅ [38]
a1 =−3 4⋅2 [39]
c1 =−3 ⋅3⋅
4⋅
1−r
1r
⋅2 avec ε=+1 pour L4 et ε=-1 pour L5 [40]
d 1 =−9 4⋅2 [41]

Les points de Lagrange – mouvements périodiques F9
Nous avons également montré que le dénominateur des expressions de X(p) et Y(p), p2d 1⋅ p
2a1−c2 pc1⋅−c2 pc1 , peut s'écrire sous la forme p2 −X 1⋅ p2 −X 2
avec :
X 1 =2
2⋅−1 −1−
27 ⋅r
1r2
X 2 =2
2⋅−1 1−
27 ⋅r
1r2
[42]
Nous pouvons réécrire cette factorisation de façon à faire apparaître les formes élémentaires de latransformée de Laplace :
p2d 1⋅ p2a1−c2 pc1⋅−c2 pc1= p
2 12⋅ p2 2
2 [43]
avec :
1 =2
⋅1 1−27 ⋅r
1r2
1 2
2 =2
⋅1 −1−27 ⋅r
1r2
1 2
[44]
Il reste à conduire la décomposition en éléments simples de X(p) et Y(p) :
X p=x⋅px
p2 12
x⋅px
p2 22
Y p= y⋅p y
p2 12
y⋅p y
p2 22
[45]
pour obtenir immédiatement l'expression temporelle des cordonnées d'un objet en L4 et L5 :
xt =x⋅cos1 ⋅t x
1
⋅sin 1 ⋅t x⋅cos2 ⋅t x
2
⋅sin 2 ⋅t
yt = y⋅cos1 ⋅t y
1
⋅sin 1 ⋅t y⋅cos2 ⋅t y
2
⋅sin 2 ⋅t
[46]

Les points de Lagrange – mouvements périodiques F10
montrant que les mouvements autour de L4 et L5 dans le plan (x,y) résultent exclusivement de lacombinaison de deux orbites elliptiques de période courte T1 (épicycle) et de période longue T2
(libration) :
T 1 =2
1 1 −27 ⋅r
1r2
1 2
⋅T r
T 2=2
1 −1 −27 ⋅r
1r2
1 2
⋅T r
[47]
où Tr est la période de révolution des 2 corps principaux M1 et M2.
Période des ellipses d'épicycle et de librationnormalisée par rapport à Tr
Les expressions de X(p) et Y(p) définies par la relation [37] peuvent s'écrire sous la forme :
X p=Ax⋅p
3 Bx⋅p2 C x⋅pDx
p2 12⋅ p2 2
2
Y p=A y⋅p
3 B y⋅p2 C y⋅pD y
p2 12⋅ p2 2
2
[48]

Les points de Lagrange – mouvements périodiques F11
avec :
Ax=x0
Bx= x0
C x=d 1 ⋅x0 c2 ⋅y0 c22 ⋅x0 −c1 ⋅y0
Dx=d 1 ⋅x0 −d 1 ⋅c2 ⋅y0 −c1 ⋅y0 −c1 ⋅c2 ⋅x0
[49]
A y= y0
B y= y0
C y=a1 ⋅y0 −c2 ⋅x0c22 ⋅y0 −c1 ⋅x0
D y=a1 ⋅y0 a1 ⋅c2 ⋅x0 −c1 ⋅x0 c1 ⋅c2 ⋅y0
[50]
L'identité entre les équations [45] et [48] donne :
x=Ax⋅1
2 −C x
12 −2
2 , x=Bx⋅1
2 −Dx
12 −2
2 , x=C x−Ax⋅2
2
12 −2
2 , x=Dx−Bx⋅2
2
12 −2
2 [51]
y=A y⋅1
2 −C y
12 −2
2 , y=B y⋅1
2 −D y
12 −2
2 , y=C y−A y⋅2
2
12 −2
2 , y=D y−B y⋅2
2
12 −2
2 [52]
L'équation [46] permet alors de tracer les trajectoires du corps M3 autour des points de Lagrange L4
et L5 à partir des conditions initiales en position x0 , y0 et en vitesse x0 , y0 en tenantcompte des relations [49], [50], [51], [52], [38], [39], [40], [41] et [44] , soit par exemple :
Trajectoire de libration autour de L4 pour µr=0,01Conditions initiales x0 =100 m , y0 =100 m , x0 =0 , y0 =0

Les points de Lagrange – mouvements périodiques F12
Trajectoire de libration autour de L4 pour µr=0,01Conditions initiales x0 =100 m , y0 =1000 m , x0 =0 , y0 =107 ⋅
Ces tracés montrent clairement que conformément au mécanisme de la force de Coriolis, lestrajectoires des objets s'enroulent autour des points de Lagrange dans le sens opposé au sens derotation des 2 corps principaux : nous avons choisi par pure convention dans nos calculs ω>0, c'està dire un mouvement de rotation des 2 corps principaux dans le sens trigonométrique.
L'évolution des objets autour des points L4 et L5 est très précisément décrite par l'équationparamétrique [46]. Cependant cette formulation rigoureuse est difficile à manipuler pour faireressortir les paramètres fondamentaux des ellipses d'épicycle et de libration. Une approche par lesnombres complexes, plus simple, va nous permettre au paragraphe suivant de mettre facilement enévidence certaines caractéristiques remarquables de ces 2 mouvements elliptiques élémentaires.
Mouvements elliptiques élémentaires autour de L4 et L5
Nous recherchons les solutions du type ellipse dans le plan complexe :
xt =d x⋅ej⋅⋅t
yt =− j⋅d y⋅ej⋅⋅t
[53]
qui vérifient les équations du mouvement linéarisées :
xt =c2 ⋅yt −a1 ⋅xt −c1 ⋅yt yt =−c2 ⋅xt −c1 ⋅xt −d 1 ⋅yt
[54]

Les points de Lagrange – mouvements périodiques F13
Les dérivées premières et secondes s'écrivent immédiatement :
xt = j⋅d x⋅ej⋅⋅t
yt =⋅d y⋅ej⋅⋅t
[55]
xt =−2 ⋅d x⋅e
j⋅⋅t
yt = j2 ⋅d y⋅ej⋅⋅t
[56]
et le report de [53], [55] et [56] dans [54] donne :
2 −a1⋅d xc2 ⋅ j⋅c1⋅d y=0 j⋅2 −d 1⋅d yc1 j⋅c2 ⋅⋅d x=0
[57]
que l'on transforme sans difficulté en :
d x=−c2 ⋅ j⋅c1
2 −a1
⋅d y[58']
4 −a1 d 1 c22⋅2 a1 ⋅d 1 −c1
2 =0 [58'']
En posant Ω2=Χ, l'équation [58''] se réécrit sous la forme réduite :
X 2 −a1 d 1 c22⋅Xa1 ⋅d 1 −c1
2 =0 [59]
soit :
X 2 −2 ⋅X27 4⋅
r
1r2⋅
4 =0 [60]
dont les 2 racines X1 et X2 :
X 1 =2
2⋅1 1−
27 ⋅r
1r2
X 2 =2
2⋅1 −1−
27 ⋅r
1r2
[61]
sont réelles tant que le rapport de masse µr=m2/m1 respecte la condition de stabilité déjà définie
r25 2
− 3 2 ⋅69 ou r
25 2
3 2 ⋅69 .

Les points de Lagrange – mouvements périodiques F14
En reportant [58'] dans [53], il vient après conservation de la partie réelle et normalisation parrapport à dy :
xt =−c2 ⋅2 −a1
⋅cos ⋅t c1
2 −a1
⋅sin ⋅t [62]
yt =sin ⋅t
L'identification de [62] avec [28] donne :
A=−c2 ⋅2 −a1
B=c1
2 −a1
[63]
C=0D=1
Le report de [63] dans [33] conduit à a⋅b=A et montre que A doit être positif. Le rapport
doit donc être négatif, traduisant le fait que les ellipses élémentaires s'enroulent autour des points deLagrange dans le sens opposé au sens de rotation des 2 corps principaux sous l'action de la force deCoriolis.
Il convient donc de retenir pour Ω les valeurs suivantes déduites de [61] :
−1 =−2
⋅1 1−27 ⋅r
1r2
1 2
−2 =−2
⋅1 −1−27 ⋅r
1r 2
1 2
[64]
Le jeu d'équations [62] se réécrit en tenant compte de [38], [39] et [40] :
xt =−2 ⋅
⋅cos ⋅t −
3 ⋅3⋅4
⋅1 −r
1 r
⋅sin ⋅t
2
2 3 4
[65]
yt =sin ⋅t
avec ε=+1 pour L4 et ε=-1 pour L5 , Ω égal à Ω-1 ou Ω-2 selon [64].

Les points de Lagrange – mouvements périodiques F15
On peut alors tracer grâce à la relation [65] le facteur de forme de l'ellipse d'épicycle (périodecourte) pour Ω égal à Ω-1 et de l'ellipse de libration (période longue) pour Ω égal à Ω-2 :
Ellipse de période courte (épicycle) autour de L4 pour µr=0,01Excentricité de 0,8698 environ
Ellipse de période longue (libration) autour de L4 pour µr=0,01Excentricité de 0,9845 environ
Le jeu d'équations [63] s'écrit en tenant compte de [38], [39] et [40] :
A=−2 ⋅
2
2 3 4
B=−
3 ⋅3⋅4
⋅1 −r
1 r
2
2 3 4
[66]
C=0D=1

Les points de Lagrange – mouvements périodiques F16
Les équations [32], [34], [35] et [36] permettent alors de tracer le rapport demi-grand axe sur demi-petit axe, l'excentricité et l'azimut du demi-grand axe en fonction du rapport de masse m2/m1 à lafois pour les ellipses d'épicycle et les ellipses de libration :
Rapport demi-grand axe sur demi-petit axedes ellipses élémentaires
Excentricité des ellipses élémentaires

Les points de Lagrange – mouvements périodiques F17
Azimut du demi-grand axe des ellipses élémentaires pour L4
(azimut identique pour les 2 types d'ellipse)