Le Robot Sylviculteur - [email protected]
15
Le Robot Sylviculteur « Planteur d’arbres » Projet encadré par : - Mme MENDIELA, coordinatrice de l’Ulis. - M KOURDI, professeur de technologie - Mme JEHASSE, professeur d’arts plastiques - Les AVS : Mme HIRSCH et Mme BIENVENU - Mme ASSIMPAH, professeur documentaliste - Mme PECHON, gestionnaire
Transcript of Le Robot Sylviculteur - [email protected]
Le Robot Sylviculteur « Planteur d’arbres »
Projet encadré par :
- Mme MENDIELA, coordinatrice de l’Ulis.
- M KOURDI, professeur de technologie
- Mme JEHASSE, professeur d’arts plastiques
- Les AVS : Mme HIRSCH et Mme BIENVENU
- Mme ASSIMPAH, professeur documentaliste
- Mme PECHON, gestionnaire

Règlement du projet
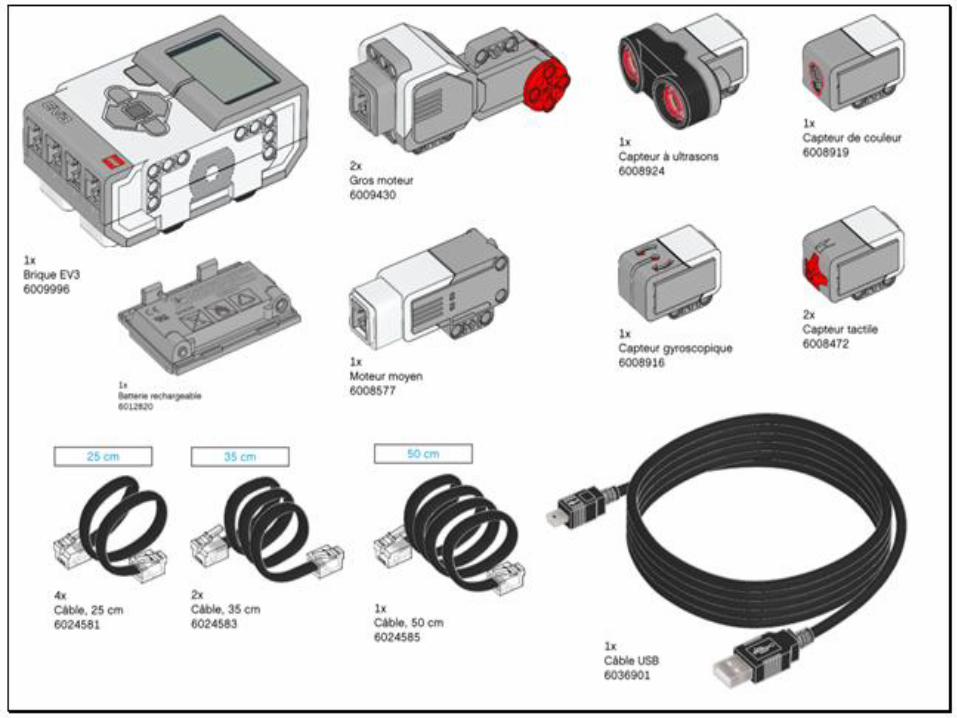
Il s’agira de concevoir un robot sylviculteur (planteur d’arbres), à savoir un robot autonome sur la base d’un 1 ensemble LEGO MINDSTORM EDUCATION EV3 de 550 pièces et d’un 1 ensemble complémentaire.
Le robot sylviculteur devra être capable de :
Se déplacer sur un circuit. Détecter et mémoriser les positions des zones à planter. Identifier l’arbre à planter. Retourner à la pépinière prendre l’arbre voulu pour le positionner à la place prévue. S’arrêter devant un piéton qui traverse la route. Prendre un rond-point.
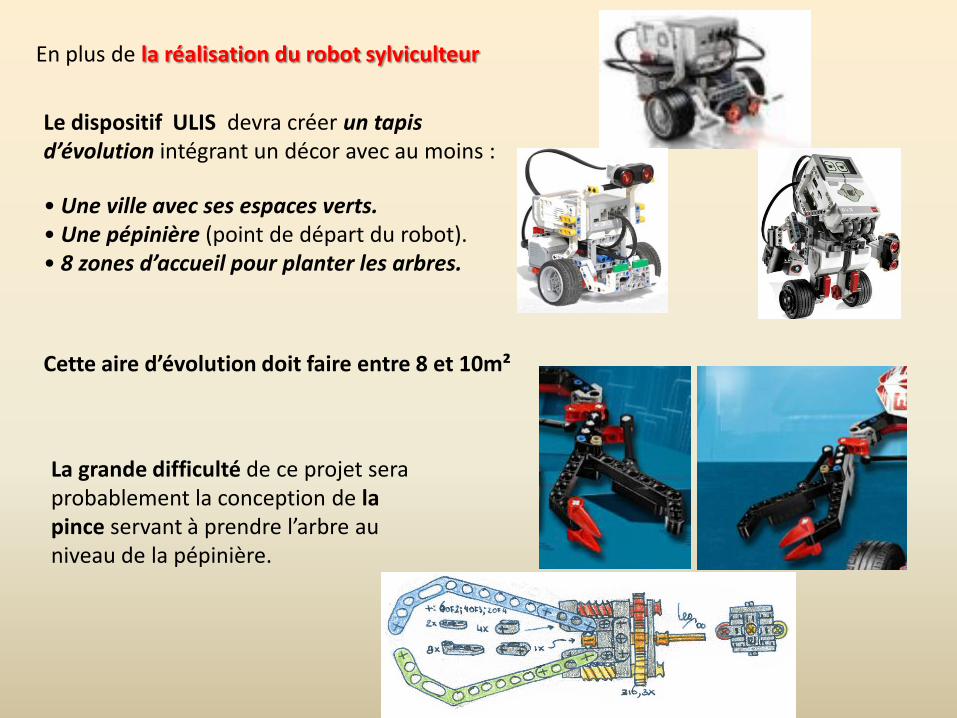
En plus de la réalisation du robot sylviculteur
Le dispositif ULIS devra créer un tapis d’évolution intégrant un décor avec au moins :
• Une ville avec ses espaces verts. • Une pépinière (point de départ du robot). • 8 zones d’accueil pour planter les arbres.
Cette aire d’évolution doit faire entre 8 et 10m²
La grande difficulté de ce projet sera probablement la conception de la pince servant à prendre l’arbre au niveau de la pépinière.
Qui dit concours dit « évaluation » et récompenses.
Finale départementale
Le jury évaluera :
• La présentation orale.
• La conception du parcours.
• La conception du robot.
• La programmation du robot.
• L’exécution du parcours par le robot.
Modèles de robot




bac principal
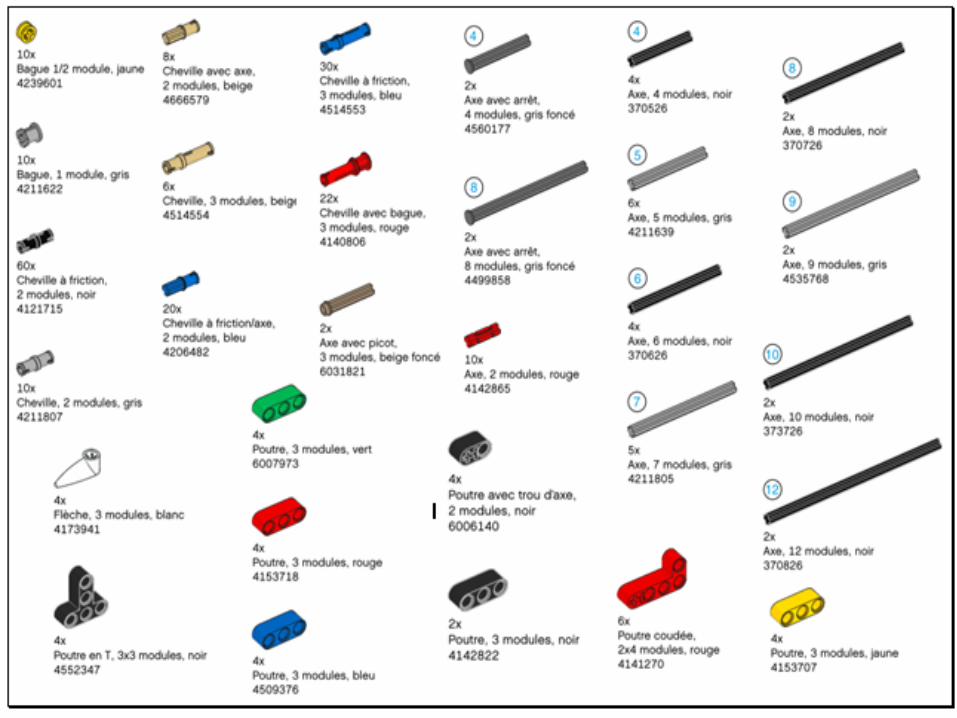
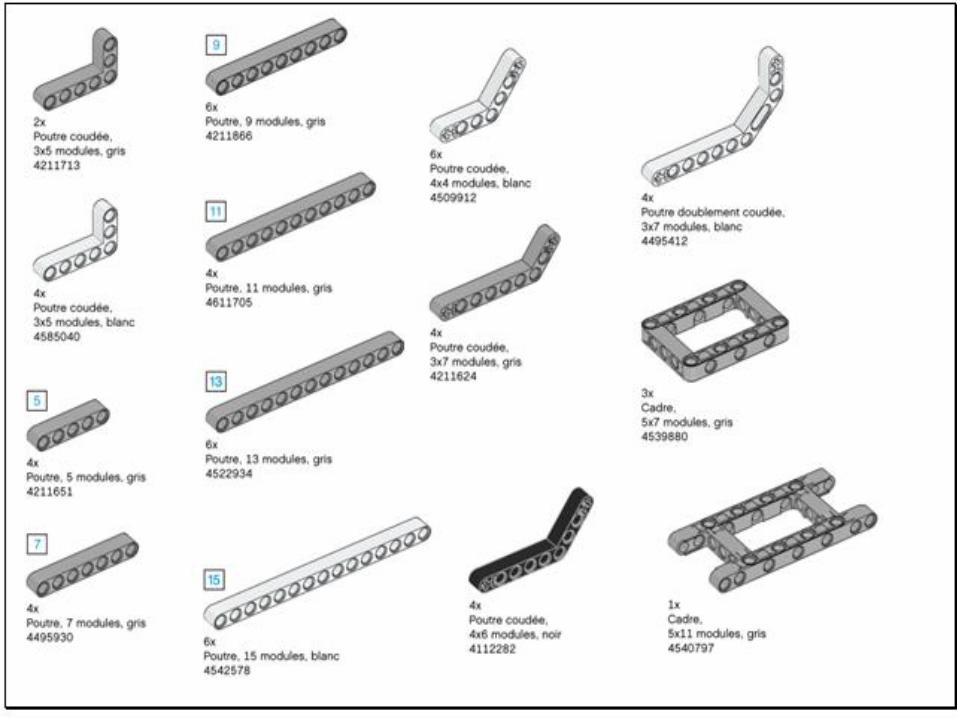
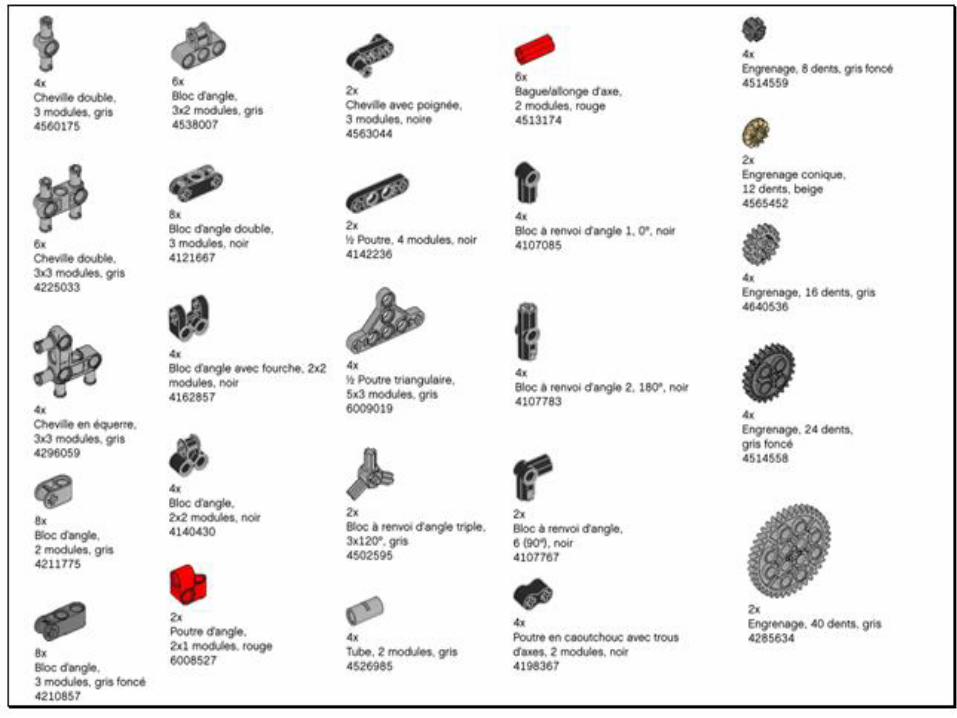
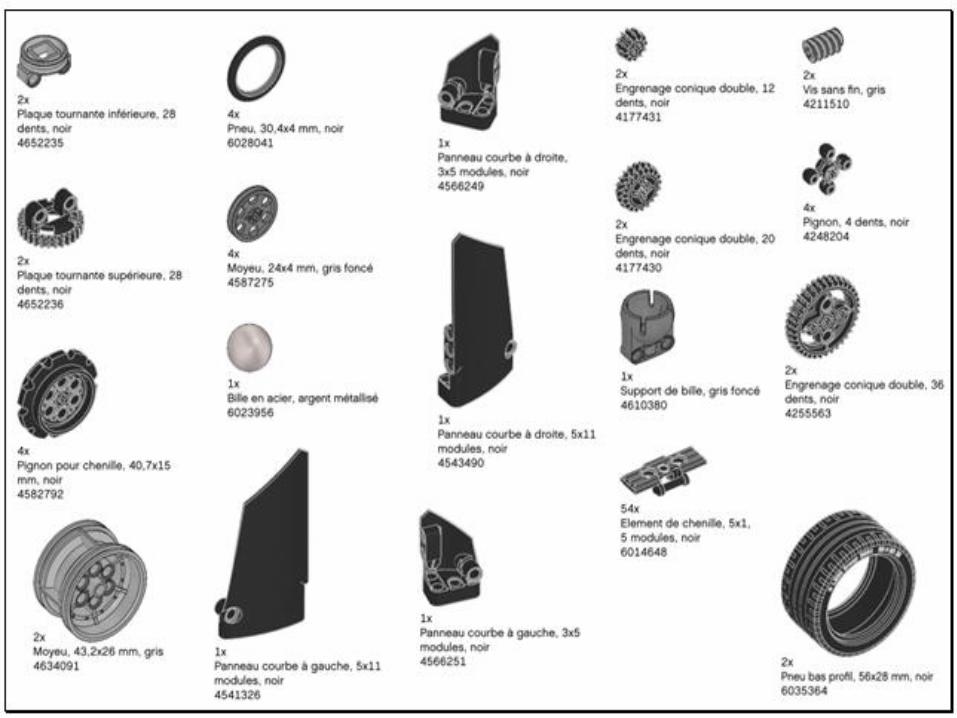

Classer les pièces