Le rôle des mécanismes de contrôle attentionnel dans des ...©moire_Nijskens… · tâche de...
104
http://lib.uliege.be https://matheo.uliege.be Le rôle des mécanismes de contrôle attentionnel dans des tâches d'apprentissage perceptivo-moteur Auteur : Nijskens, Hugo Promoteur(s) : Meulemans, Thierry Faculté : þÿFaculté de Psychologie, Logopédie et Sciences de l Education Diplôme : Master en sciences psychologiques, à finalité spécialisée en psychologie clinique Année académique : 2018-2019 URI/URL : http://hdl.handle.net/2268.2/7660 Avertissement à l'attention des usagers : Tous les documents placés en accès ouvert sur le site le site MatheO sont protégés par le droit d'auteur. Conformément aux principes énoncés par la "Budapest Open Access Initiative"(BOAI, 2002), l'utilisateur du site peut lire, télécharger, copier, transmettre, imprimer, chercher ou faire un lien vers le texte intégral de ces documents, les disséquer pour les indexer, s'en servir de données pour un logiciel, ou s'en servir à toute autre fin légale (ou prévue par la réglementation relative au droit d'auteur). Toute utilisation du document à des fins commerciales est strictement interdite. Par ailleurs, l'utilisateur s'engage à respecter les droits moraux de l'auteur, principalement le droit à l'intégrité de l'oeuvre et le droit de paternité et ce dans toute utilisation que l'utilisateur entreprend. Ainsi, à titre d'exemple, lorsqu'il reproduira un document par extrait ou dans son intégralité, l'utilisateur citera de manière complète les sources telles que mentionnées ci-dessus. Toute utilisation non explicitement autorisée ci-avant (telle que par exemple, la modification du document ou son résumé) nécessite l'autorisation préalable et expresse des auteurs ou de leurs ayants droit.
Transcript of Le rôle des mécanismes de contrôle attentionnel dans des ...©moire_Nijskens… · tâche de...
-
http://lib.uliege.be https://matheo.uliege.be
Le rôle des mécanismes de contrôle attentionnel dans des tâches
d'apprentissage perceptivo-moteur
Auteur : Nijskens, Hugo
Promoteur(s) : Meulemans, Thierry
Faculté : þÿ�F�a�c�u�l�t�é� �d�e� �P�s�y�c�h�o�l�o�g�i�e�,� �L�o�g�o�p�é�d�i�e� �e�t� �S�c�i�e�n�c�e�s� �d�e� �l ��E�d�u�c�a�t�i�o�n
Diplôme : Master en sciences psychologiques, à finalité spécialisée en psychologie clinique
Année académique : 2018-2019
URI/URL : http://hdl.handle.net/2268.2/7660
Avertissement à l'attention des usagers :
Tous les documents placés en accès ouvert sur le site le site MatheO sont protégés par le droit d'auteur. Conformément
aux principes énoncés par la "Budapest Open Access Initiative"(BOAI, 2002), l'utilisateur du site peut lire, télécharger,
copier, transmettre, imprimer, chercher ou faire un lien vers le texte intégral de ces documents, les disséquer pour les
indexer, s'en servir de données pour un logiciel, ou s'en servir à toute autre fin légale (ou prévue par la réglementation
relative au droit d'auteur). Toute utilisation du document à des fins commerciales est strictement interdite.
Par ailleurs, l'utilisateur s'engage à respecter les droits moraux de l'auteur, principalement le droit à l'intégrité de l'oeuvre
et le droit de paternité et ce dans toute utilisation que l'utilisateur entreprend. Ainsi, à titre d'exemple, lorsqu'il reproduira
un document par extrait ou dans son intégralité, l'utilisateur citera de manière complète les sources telles que
mentionnées ci-dessus. Toute utilisation non explicitement autorisée ci-avant (telle que par exemple, la modification du
document ou son résumé) nécessite l'autorisation préalable et expresse des auteurs ou de leurs ayants droit.
-
NIJSKENS Hugo, s130106
Mémoire : Le rôle des mécanismes de
contrôle attentionnel dans
des tâches d’apprentissage
perceptivo-moteur.
Mémoire présenté en vue de l’obtention du grade de Master en Psychologie Clinique, option Neuropsychologie ANNÉE ACADÉMIQUE 2018-2019 – SESSION D’AOÛT 2019
Promoteur : MEULEMANS Thierry
Lecteurs : LEJEUNE Caroline
MAJERUS Steve
-
Table des matières :
1. Introduction ................................................................................................................................... 1
2. « Revue de littérature » ................................................................................................................. 3
2.1. L’apprentissage perceptivo-moteur .............................................................................................. 3
2.1.1. Définitions ...................................................................................................................... 3
2.1.2. Conceptualisation du processus d’apprentissage ............................................................ 4
2.1.3. Variables influençant l’apprentissage perceptivo-moteur : ............................................ 9
2.2. Les mécanismes de contrôle attentionnel : ................................................................................. 14
2.2.1. Contrôle attentionnel, mémoire de travail et modèles théoriques influents : ................. 15
2.2.2. Une capacité unidimensionnelle ? ................................................................................. 21
2.2.3. Double tâche, contrôle attentionnel et apprentissage perceptivo-moteur : .................... 23
2.3. Sélection des tâches : .................................................................................................................... 29
2.3.1. Tâches principales : ...................................................................................................... 29
A. La Tâche de Dessin en Miroir (ou TDM) : ........................................................................... 29
B. La Tâche de Temps de Réaction sériel (ou TTRS) : ............................................................ 30
2.3.2. Tâche secondaire interférente : .................................................................................... 34
3. Hypothèses et questions de recherche : ..................................................................................... 39
4. Méthodologie : ............................................................................................................................. 41
4.1. Description de l’échantillon : ....................................................................................................... 41
4.2. Description du matériel utilisé : .................................................................................................. 43
4.2.1. Tâche de Dessin en Miroir (TDM) : .............................................................................. 43
4.2.2. Tâche de Temps de Réaction Sériel (TTRS) : ............................................................... 44
4.2.3. Tâche de répétition de lettres : ..................................................................................... 45
4.3. Méthodologie employée : ............................................................................................................. 48
5. Présentation des résultats : ......................................................................................................... 51
5.1. Analyses préliminaires : ............................................................................................................... 51
5.1.1. Répétition de lettres en n-1 (1-back) : ........................................................................... 51
5.1.2. Répétition de lettres en n-2 (2-back) : ........................................................................... 52
5.2. Analyses principales : ................................................................................................................... 55
5.2.1. Apprentissage procédural : Analyses sur la TDM ........................................................ 55
A. La performance quantitative : Analyse sur les temps de réalisation ................................. 55
B. La performance qualitative : Analyses sur le nombre d’erreurs ....................................... 57
C. Tâche interférente auditivo-verbale : ................................................................................... 58
5.2.2. Apprentissage implicite : Analyses sur la TTRS ........................................................... 60
-
A. Connaissance explicite de la séquence cachée : .................................................................... 60
B. Performance quantitative : Analyses sur les temps de réaction ......................................... 61
C. Performance qualitative : Analyses sur les erreurs ............................................................. 63
D. Tâche interférente auditivo-verbale : ................................................................................... 65
6. Interprétation et discussion : ...................................................................................................... 69
6.1. Apprentissage procédural : la Tâche de Dessin en Miroir ....................................................... 69
6.2. Apprentissage implicite (d’une séquence) : la Tâche de Temps de Réaction Sériel ............... 75
6.3. Comparaison des deux types d’apprentissages : ....................................................................... 83
7. Conclusions et perspectives futures : ......................................................................................... 85
8. Bibliographie : ............................................................................................................................. 89
9. Annexes : ........................................................................................... Error! Bookmark not defined.
-
Remerciements :
Tout d’abord, pour ses conseils, l’apport de ses réflexions, et l’encadrement qu’il a apporté
à ce mémoire, je tiens à remercier mon promoteur, Thierry MEULEMANS.
Ensuite, je remercie Vincent MARINELLI pour son aide précieuse dans la création du
matériel de testing utilisé dans cette étude, ainsi que pour ses conseils, sa présence permanente
et les réponses qu’il a apportées à mes questions.
Également, je remercie Marie GEURTEN pour son aide dans la réalisation du plan
d’analyse statistique et dans l’élaboration du dossier à rendre au comité d’éthique. Pour leurs
conseils et remarques constructives lors de la présentation préliminaire du mémoire, je remercie
l’équipe d’assistants de l’unité de Neuropsychologie de la Faculté de Psychologie et Sciences
de l’Education, de l’Université de Liège.
Je tiens à remercier tout particulièrement mes parents, mes frères, et mes amis pour leur
soutien permanent et inconditionnel dans la réalisation de ce mémoire, avec une mention
particulière adressée à Rik NIJSKENS pour son aide dans la relecture du présent mémoire.
Enfin, je tiens à remercier grandement chaque personne ayant participé à cette étude en tant
que sujet, et chaque personne ayant contribué de près ou de loin à la réalisation du présent
mémoire, une pensée particulière étant accordée à Mathilde GROGNA et Noa VIATOUR pour
l’aide qu’elles m’ont apporté dans le recrutement des participants de cette étude.
-
1
1. Introduction
Au cours des dernières décennies, l’intérêt des chercheurs concernant les capacités
d’apprentissage et leurs composantes sous-jacentes s’est trouvé de plus en plus accru.
Cependant, les données actuellement disponibles dans la littérature présentent un caractère
incomplet, et de nombreux débats sur des thématiques telles que l’apprentissage implicite
amènent à un manque de consensus dans le domaine, ce qui justifie l’importance d’effectuer de
nouvelles recherches. Le présent mémoire se concentre sur les capacités d’apprentissage
perceptivo-moteur, c’est-à-dire l’apprentissage et, in fine, l’automatisation d’une réponse
motrice faisant suite à la perception de stimuli. Dans le présent contexte, on se limitera à
l’apprentissage conséquent à la perception de stimuli exclusivement visuels.
L’intérêt porté actuellement à l’exploration des capacités d’apprentissage perceptivo-
moteur présente une finalité visant plus la compréhension scientifique des processus cognitifs
sous-jacents que le développement des applications cliniques. Néanmoins, on peut imaginer
qu’une meilleure compréhension de ces capacités d’apprentissage pourra apporter, dans un
futur plus ou moins proche, une exploitation plus fréquente et plus adéquate de ces capacités
d’apprentissage dans un certain nombre de situations cliniques. Il semble, par exemple, que les
capacités d’apprentissage implicite restent préservées chez des patients traumatisés crâniens ou
souffrant d’un syndrome amnésique (Meulemans, 1998). Plus concrètement, la préservation de
capacités d’apprentissage implicite permettrait d’apprendre à des personnes amnésiques de
nouvelles habiletés qui leur seraient utiles au quotidien, ce même s’ils n’ont pas une conscience
explicite d’avoir intégré ces nouvelles habiletés.
Par ailleurs, ce mémoire prend place dans la continuité du travail effectué par Lejeune,
Desmottes, Catale, et Meulemans (2015), qui visait à investiguer le rôle joué par les
mécanismes explicites de contrôle attentionnel dans les premières phases d’apprentissage à une
tâche de Dessin en Miroir chez des enfants. Les résultats obtenus supportent l’idée selon
laquelle l’implication de mécanismes explicites n’est pas une condition nécessaire pour que se
déroule l’apprentissage procédural. De plus, les auteurs suggèrent que, dans ce type de tâche,
les mécanismes explicites interviennent plutôt pour permettre un meilleur contrôle de la
performance en limitant le nombre d’erreurs commises sur une tâche qui n’a pas encore été
automatisée, plutôt que de soutenir le processus d’apprentissage en tant que tel. Cependant,
plusieurs critiques ont été émises à l’égard de ce travail. Notamment, la tâche interférente
-
2
utilisée n’a pas été administrée tout au long de l’apprentissage, mais uniquement au début et à
la fin de cet apprentissage. De plus, des réserves ont été émises quant à l’équivalence des tâches
interférentes utilisées en matière de charge cognitive induite. C’est pour tenter de répondre à
ces critiques que l’étude menée dans le cadre de ce mémoire prend place. Un des objectifs est
donc de vérifier l’hypothèse émise par Lejeune et al. (2015). Les autres objectifs sont : (1) de
comparer l’influence de l’occupation des mécanismes explicites de contrôle attentionnel (par
une tâche interférente secondaire) selon qu’on se trouve en situation d’apprentissage procédural
(comme dans une tâche de Dessin en Miroir), ou d’apprentissage implicite (comme dans une
tâche de Temps de Réaction Sériel), et (2) de vérifier si la difficulté de la tâche interférente
impacte l’apprentissage différemment selon qu’elle nécessite une mobilisation plus ou moins
importante des ressources cognitives.
Ce mémoire est divisé en plusieurs parties : la première sera consacrée à la description des
données issues de la littérature du domaine de l’apprentissage perceptivo-moteur, et plus
précisément celles qui concernent les apprentissages de type implicite et explicite/procédural
en relation avec les tâches de Temps de Réaction Sériel et de Dessin en Miroir, respectivement.
Ensuite, on décrira les diverses caractéristiques relatives à l’échantillon de sujets recrutés pour
les besoins de cette étude, ainsi que le matériel utilisé et la façon dont les épreuves
d’apprentissage ont été administrées. Cette partie sera suivie d’un exposé des analyses
statistiques menées sur les données récoltées auprès de notre échantillon, et sur les résultats
issus de ces analyses. Enfin, une partie sera consacrée à l’interprétation et la discussion de ces
résultats en regard de ce qu’on observe déjà dans la littérature, avant de conclure avec un résumé
des interprétations principales tirées des résultats de cette étude, le tout accompagné de
recommandations utiles à de futures investigations dans le domaine de l’apprentissage
perceptivo-moteur et des mécanismes de contrôle attentionnel.
-
3
2. « Revue de littérature »
2.1. L’apprentissage perceptivo-moteur
2.1.1. Définitions
En première intention, il convient de préciser que l’apprentissage perceptivo-moteur
sera ici différencié selon le type d’apprentissage qui est effectué. On va ici distinguer
l’apprentissage procédural de l’apprentissage implicite (d’une séquence). Ces deux notions sont
fréquemment confondues ou indifférenciées dans la littérature relative à l’apprentissage
perceptivo-moteur. Un des objectifs de ce mémoire étant d'examiner le rôle occupé par les
mécanismes de contrôle attentionnel dans ces deux types d’apprentissages, c’est pourquoi il est
important que ces notions soient clairement définies.
Anderson (1982) adopte, dans son modèle ACT (« Adaptative Control of Thought »),
une conception de l’apprentissage procédural qui se déroule principalement sur un mode
explicite, ce qui demande la mobilisation de ressources cognitives. Il postule que l’acquisition
de compétences implique une série de stades (cognitif, associatif et autonome) lors desquels le
savoir est d’abord stocké sous une forme déclarative, pour ensuite être converti en une
connaissance procédurale par la répétition de l’action à apprendre. Ce modèle se base sur les
travaux de Fitts (1964) qui a en premier suggéré l’existence de ces trois stades distincts.
L’apprentissage procédural sera donc considéré dans la présente recherche comme un processus
volontaire et explicite demandant la mobilisation des capacités de contrôle attentionnel.
Par ailleurs, plusieurs auteurs (Reber, 1989 ; Schacter, 1987) ont caractérisé
d’apprentissage implicite ou de mémoire implicite cette « curieuse habileté des gens à exprimer
les informations acquises au travers de la performance en l’absence de souvenir conscient [de
ces informations] » (Reber, 2013). D’autres le définissent comme étant un apprentissage non
intentionnel (Frensch, 1998), inconscient (Jimménez & Méndez, 1999), ou encore comme étant
simplement une forme d’apprentissage associatif (Cleeremans, Destrebecqz & Boyer, 1998).
En d’autres mots, l’apprentissage implicite peut se définir comme une acquisition
d’informations qui se produit sans que la personne en soit explicitement consciente (Hazeltine,
Grafton & Ivry, 1997 ; Schendan, Searl, Melrose et Stern, 2003), ce qui ne nécessite pas la
mobilisation des capacités de contrôle attentionnel.
-
4
2.1.2. Conceptualisation du processus d’apprentissage
Actuellement, plusieurs modèles ont été proposés afin de déterminer et d’expliquer les
différentes étapes qui interviennent dans l’acquisition de nouvelles compétences. L’un des
modèles les plus connus est le modèle ACT proposé par Anderson (1982). Selon lui, la nouvelle
connaissance est d’abord stockée sous forme déclarative et explicite, avant d’être compilée sous
forme procédurale et enfin affinée progressivement par l’entraînement jusqu’à automatisation.
Cette conception « Top-down » de l’apprentissage a donc pour point de départ une
connaissance explicite et cognitivement coûteuse qui s’ensuit d’étapes à réaliser dans le but
d’acquérir une nouvelle compétence. L’acquisition et l’automatisation de cette dernière vont
ensuite dépendre fortement de la disponibilité des ressources cognitives de plus haut niveau,
jusqu’à atteindre progressivement un stade lors duquel la nouvelle compétence pourra être
exécutée sans que la personne doive utiliser ces processus de plus haut niveau, dits
« contrôlés ». L’exécution du nouvel apprentissage sous forme complètement automatisée ne
nécessite donc plus la mobilisation des ressources attentionnelles de la personne, ce qui peut se
manifester par l’absence d’impact significatif sur la performance lorsqu’une tâche secondaire
interférente (nécessitant la mobilisation des ressources attentionnelles de la personne) est
exécutée simultanément (Chauvel et coll., 2012). À titre informatif, on mentionnera que
d’autres modèles conceptualisent également l’acquisition de nouvelles compétences par
l’intermédiaire de plusieurs stades distincts (Karni, Bertini, 1997 ; Willingham, 1998).
Cette conception Top-Down a reçu un support empirique conséquent au travers de
différentes tâches perceptivo-motrices telles que la poursuite rotative, le tapping, le dessin en
miroir … (Kennedy, & Raz, 2005) Par exemple, Kennedy, Partridge, et Raz (2008) ont utilisé
des tâches de poursuite rotative et de dessin en miroir qu’ils ont comparées à des mesures de
mémoire de travail. Dans leur modèle, les auteurs suggèrent que les ressources cognitives
disponibles (c.-à-d. mémoire de travail) médient la performance dans de nouveaux
apprentissages. De plus, il semblerait que le déclin avéré des capacités de mémoire de travail
avec l’âge soit en partie responsable de la diminution de la performance dans de nouveaux
apprentissages. Évidemment, ce facteur mémoire de travail n’est pas le seul qui influence la
performance dans de nouveaux apprentissages. Ce dernier point fera l’objet d’une description
plus approfondie dans la section suivante (voir Section 2.1.3, p.7).
Bien que cette conception Top-Down de l’apprentissage ait reçu un certain support
empirique, d’autres résultats amènent à considérer une hypothèse alternative conceptualisant
l’apprentissage comme un processus « Bottom-up ». Cette conception suggère que les
-
5
nouveaux apprentissages opèrent plutôt à un niveau implicite sans intervention des mécanismes
explicites. Ces derniers ne seraient donc pas des éléments primordiaux sous-tendant
l’apprentissage procédural en tant que tel, mais interviendraient plutôt dans le contrôle de la
performance qualitative (c.-à-d. contrôle des erreurs). Cette hypothèse est consistante avec les
résultats obtenus dans les études de Lejeune & coll. (2013 ; 2015). Ces auteurs ont comparé les
performances obtenues par des enfants de 7 ans (avec des capacités de contrôle attentionnel non
matures) à celles d’enfants de 10 ans (avec des capacités de contrôle attentionnel matures) et
d’adultes sur une tâche de dessin en miroir, en situation de simple et de double-tâche. Les
résultats ont montré que les enfants de 7 ans n’étaient pas affectés (tant sur les temps de
réalisation que sur le nombre d’erreurs commises) par l’introduction d’une tâche secondaire
interférente en début d’apprentissage, là où cette introduction impacte négativement la
performance chez les adultes et enfants de 10 ans. De plus, les enfants n’ayant pas encore de
capacités de contrôle attentionnel matures performent de manière similaire à ceux disposant de
capacités matures lorsqu’ils se trouvent en situation de double-tâche. À l’inverse, les seconds
obtiennent de meilleures performances que les premiers en situation de tâche simple (toujours
en début d’apprentissage). Ces résultats sont consistants avec ceux d’études précédentes qui
suggèrent que l’apprentissage moteur peut se dérouler sur un mode conscient ou inconscient
(Willingham, 1998), les enfants de 7 ans ayant effectué l’apprentissage plutôt sur un mode
inconscient, alors que ceux de 10 ans auraient plutôt effectué un apprentissage sur un mode
conscient. Dans le même ordre d’idées, d’autres auteurs ont suggéré que les performances
obtenues dans un apprentissage procédural ne sont pas exclusivement sous-tendues par des
mécanismes implicites ou explicites de manière exclusive, mais plutôt par une combinaison des
deux dans la majorité des cas (Sun, Slusarz, & Terry, 2005). De plus, ces mêmes auteurs
suggèrent que la situation dans laquelle se trouve la personne (c.-à-d. tâche simple ou double)
pourrait favoriser l’expression d’un type d’apprentissage en particulier, les personnes ayant
tendance à opérer sous la forme d’un apprentissage plutôt explicite en situation de tâche simple,
et à basculer sur un apprentissage plutôt implicite en situation de tâche double.
Enfin, Lejeune et coll. (2015) précisent que les taux d’acquisition de leurs 2 groupes
(enfants de 7 ans et ceux de 10 ans) à la tâche de dessin en miroir sont similaires, ce qui renforce
l’idée selon laquelle les mécanismes explicites (c.-à-d. le contrôle attentionnel) ne sont pas
nécessaires pour que se produise l’apprentissage. En outre, ces auteurs suggèrent que le rôle de
ces mécanismes ne soit pas tant de soutenir le processus d’apprentissage en lui-même, mais
plutôt de permettre aux sujets d’avoir un meilleur contrôle sur leur performance qualitative en
-
6
limitant le nombre d’erreurs commises lorsqu’ils effectuent une tâche procédurale qui n’est pas
encore automatisée.
Par ailleurs, là où il est clair que les capacités de contrôle attentionnel jouent un rôle
(qui reste encore à préciser) dans l’apprentissage procédural (ou explicite), l’intervention de ces
capacités dans l’apprentissage qualifié « d’implicite » est quant à elle bien plus controversée.
Selon Frensch et Miner (1994), les différences entre apprentissage implicite et explicite tiennent
dans le fait que le second (1) nécessite, à l’inverse du premier, un contrôle par l’administrateur
central, (2) peut se faire tant via un apprentissage associatif simple que par un apprentissage
conscient suivant un but, là où le premier ne se ferait que sur base de processus associatifs, et
(3) comparativement à l’apprentissage implicite, résulte en un encodage plus élaboré au sein du
système de mémoire à long terme, ce qui permet une récupération plus aisée après un délai. Ces
propositions impliquent qu’on puisse donc trouver des dissociations entre apprentissage
explicite et implicite, et que ce dernier est sous-tendu par des mécanismes automatiques qui ne
nécessitent pas la consommation de ressources attentionnelles. Cependant, ce modèle se heurte
aux résultats de certaines études qui mettent en évidence un impact d’une tâche interférente de
comptage de tonalités sur l’apprentissage implicite spécifique d’une séquence dans une tâche
de temps de réaction sériel (ou TTRS), ce qui impliquerait que les ressources attentionnelles
(supposées être occupées par la tâche interférente dans un paradigme de double-tâche) jouent
un rôle dans l’apprentissage implicite (Cohen, Ivry, & Keele, 1990). Selon le modèle de Frensch
et Miner (1994), l’effet d’interférence se manifesterait dès lors que la tâche secondaire implique
l’activation en mémoire à long terme du même type d’informations que la tâche principale
d’apprentissage implicite. Selon ces derniers, dans le cas du couplage d’une TTRS avec une
tâche de comptage de tonalités (qui implique de garder le compte du nombre de fois qu’un
certain type de bruit est diffusé), l’observation d’un effet d’interférence supposerait donc que
les activations d’informations en mémoire à long terme des deux tâches sont identiques, ce qui
paraît dur à soutenir quand on analyse précisément les processus recrutés par chacune.
En outre, comme le souligne Meulemans (1998, chap. 10), plusieurs tentatives de
modélisation de l’apprentissage implicite (dont celle de Frensch et Miner décrite ci-dessus)
existent. On se limitera ici à décrire celle qui semble correspondre le mieux à l’apprentissage
effectué dans la tâche de temps de réaction sériel : le modèle connexionniste Serial Response
Network (SRN) de Cleeremans et McClelland (1991). Ce modèle, qui a été appliqué avec succès
aux données d’une TTRS (Cleeremans et McClelland, 1991 ; Dominey, 1998), a pour vocation
de prédire l’élément de la séquence qui va suivre (au Temps t+1), sur base de l’information qui
-
7
est présentée à un certain Temps t (les unités d’entrée) et des activations issues des éléments
présentés précédemment (les unités de contexte issues du Temps t-1). Ce modèle suppose que
le réseau ne prend en compte que les informations liées à la fréquence des éléments de la
séquence cachée à apprendre : la présentation successive des différents éléments de la séquence
va donc envoyer un input aux unités cachées, qui vont-elles-mêmes envoyer un input aux unités
de sortie (modèle en 3 couches). En parallèle, les unités cachées vont créer, par le biais d’une
copie de leur propre activation (les unités de contexte), un contexte temporel qui va être utilisé
pour renforcer l’input transmis aux unités cachées à chacune de leurs présentations ultérieures.
Ainsi, l’apprentissage spécifique de l’ordre temporel de la séquence va progresser parallèlement
à l’entraînement sur la séquence, au fur et à mesure que le réseau devient sensible à des
morceaux de séquence de plus en plus longs.
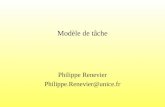
Figure 1. Le modèle SRN de Cleeremans et McClelland (1991)
Cependant, une première critique qui peut être avancée à l’égard de ce modèle (et des
modèles connexionnistes en général) est qu’il ne précise pas où se trouvent ces activations au
sein de l’architecture cognitive. La structure générale du modèle s’inspire de la physiologie de
la transmission de l’influx nerveux, avec un apprentissage qui réside dans le poids des
connexions entre les différentes unités, rendant l’information inaccessible au système de
manière directe, et par extension, rendant l’apprentissage implicite. Une seconde critique
adressée au modèle est qu’il suppose que le réseau ne tient compte que des informations liées
aux éléments de la séquence, faisant ainsi abstraction de l’influence potentielle que peuvent
-
8
avoir les stimuli distracteurs qui sont présents dans notre environnement quotidien, ou dans une
TTRS adoptant un plan expérimental intra-blocs (voir Section 2.3.1.B, p.30). Plus récemment,
le modèle Parralel Episodic Processing (ou PEP) 2.0 de Schmidt, De Hauwer, et Rothermund
(2016), bien qu’il soit initialement conçu pour expliquer l’apprentissage de contingences au
sein d’un même essai et non au cours d’essais répétés (comme dans a TTRS), apporte un
nouveau paramètre important duquel il faut tenir compte dans l’équation : l’influence des
activations issues des stimuli distracteurs. En effet, ce modèle suppose que, non seulement les
stimuli pertinents pour l’apprentissage (unités d’entrée dans le modèle SRN), mais également
les stimuli distracteurs, vont envoyer un input vers les représentations des stimuli à apprendre
(unités cachées dans le modèle SRN). Ces deux types de stimuli vont ensemble contribuer à la
création de ce que Schmidt et ses collègues appellent des « Nœuds épisodiques » (qu’on peut
superposer aux unités de contexte dans le modèle SRN), qui vont à leur tour contribuer à
l’activation de la réponse à prédire (au Temps t+1). Des liens (ou « binding ») vont donc se
créer entre les items1 (tant pour les cibles que les distracteurs). L’apprentissage spécifique de
certaines associations se fera par une combinaison de l’augmentation de la force du lien entre
certains items et la diminution de la force du lien entre d’autres items. Le modèle PEP suppose
effectivement qu’une association présentée récemment (au Temps t-1) donnera une activation
plus forte qu’une association présentée il y a plus longtemps (au Temps t-6 par exemple). Il en
découle que les associations de la séquence à apprendre vont être renforcées (car elles sont
répétées plus souvent, et ont par conséquent plus de chances d’être récentes), alors que les
associations dans les items distracteurs (répétés moins souvent, et ayant donc moins de chances
d’avoir été présenté récemment) vont s’effriter de plus en plus jusqu’à disparaître. Un autre
argument pour la prise en compte de l’influence des stimuli aléatoires dans les tâches de type
TRS réside dans le débat encore animé qui concerne le contrôle des contraintes
méthodologiques dans de nombreuses expériences ayant utilisé une TTRS. Comme le précisent
Reed et Johnson (1994), un contrôle rigoureux des caractéristiques des stimuli ne suivant pas
la séquence est nécessaire si on veut s’assurer que l’apprentissage observé est bien spécifique à
la séquence. Ces caractéristiques méthodologiques seront discutées plus en détail dans la
Section 2.3.1.B (pp.30-33). Dans le modèle SRN, il faut donc que les caractéristiques des stimuli
aléatoires soient bien contrôlées afin d’éviter tout parasitage qui rendrait l’interprétation des
résultats difficile.
1 Dans le modèle PEP 2.0 de Schmidt et coll. (2016), le binding se fait entre des noms de couleurs et la couleur dans laquelle sont présentés ces mots. Dans le cadre d’une TTRS, on peut tout aussi bien imaginer que le binding se fasse entre la position d’apparition d’un stimulus visuel et la position suivante.
-
9
Par ailleurs, afin de clôturer cette section sur la conceptualisation des processus
d’apprentissage procédural et implicite, on signalera qu’un autre débat important concernant
l’apprentissage implicite est de déterminer si la connaissance acquise par le sujet (exprimée
sous la forme d’une amélioration des temps de réaction qui est spécifique à une séquence cachée
dans une TTRS) est de nature implicite ou explicite. En effet, certains auteurs ont mis en
évidence des corrélations significatives entre des mesures explicites de connaissance de la
séquence et l’apprentissage qui a eu lieu (Curran, 1997 ; Willingham, Nissen, & Bullemer,
1989), alors que d’autres résultats montrent une absence de corrélation entre ces deux types de
mesures (Cohen, & al., 1990, Expérience 4 ; Meulemans, Van der Linden, & Perruchet, 1998).
L’interprétation même de ces corrélations et la validité des tests explicites proposés sont elles-
mêmes sujettes à caution, ce qui complique d’autant plus le débat. Cependant, ce dernier n’est
pas au cœur du sujet du présent mémoire, ce pour quoi on se limite ici à citer son existence afin
que le lecteur garde en tête que ce qu’on qualifie de « connaissance implicite » reste une
terminologie encore actuellement fort controversée dans le domaine de l’apprentissage (pour
une revue plus complète, voir Meulemans, 1998).
2.1.3. Variables influençant l’apprentissage perceptivo-
moteur :
Comme tout autre type d’apprentissage, l’apprentissage perceptivo-moteur est influencé
non seulement par une série de variables relatives au contexte dans lequel se déroule
l’expérimentation (variables contextuelles), telle que la pièce dans laquelle les tests sont
administrés ou encore le bruit ambiant, mais également par des variables relatives au participant
(variables individuelles). Ces dernières peuvent être classées en 2 catégories :
1) Les variables intra individuelles, qui sont susceptibles de varier au cours du temps pour
un même sujet. On peut citer, à titre d’exemples, le niveau de fatigue, la capacité de
concentration, la prise de substance (chez les fumeurs ou alcooliques chroniques par
exemple), le niveau de stress, la motivation, etc.
2) Les variables interindividuelles, qui constituent les variables relatives aux différences
entre les individus. On peut citer, à titre d’exemples, l’âge, le sexe, le niveau
socioculturel, etc.
-
10
Il est à noter que ces 2 catégories de variables individuelles ne sont pas mutuellement
exclusives, avec l’ensemble des variables intra individuelles pouvant s’inclure dans celui des
interindividuelles. L’intérêt de distinguer ces 2 types de variables dans cette étude réside dans
le fait que les participants se sont vus administrer des épreuves à 2 moments distincts dans le
temps, ce qui relève de la caractéristique spécifique aux variables intra individuelles.
En ce qui concerne l’apprentissage perceptivo-moteur, on s’attardera moins sur l’influence
des variables contextuelles étant donné que le contexte d’administration des épreuves a été
contrôlé de manière aussi rigoureuse que le permettait le contexte d’administration des
épreuves.
Premièrement, on va s’intéresser à l’apprentissage explicite/procédural. À l’intérieur de ce
type d’apprentissage même, les variables exercent une influence différente selon la tâche qui
est utilisée pour investiguer cet apprentissage (Kennedy, & Raz, 2005), raison pour laquelle on
se concentre ici sur la tâche de dessin en miroir (ou TDM) de manière isolée. Voici une liste
(non exhaustive) des variables susceptibles d’influencer la performance à la TDM des
participants :
✓ Selon Kennedy & Raz (2005), le sexe biologique du participant est une première
variable influençant la performance à la TDM. Selon ces auteurs, les femmes sont
significativement plus rapides que les hommes pour tracer la figure, mais les 2 groupes
ne diffèrent pas quant à l’exactitude de la performance (c.-à-d. le nombre d’erreurs
commises).
✓ Une seconde variable influençant la TDM selon ces mêmes auteurs est l’âge des
participants : en effet, Kennedy et Raz (2005) mettent en évidence une performance
significativement plus rapide et plus exacte (c.-à-d. moins d’erreurs) chez les sujets
jeunes (22-39 ans) par rapport aux sujets âgés (60 ans et plus). Concernant le taux
d’erreurs, il est à noter que les sujets d’âge moyen (40-59 ans) commettaient également
plus d’erreurs que les sujets jeunes, mais que la différence entre les deux groupes
s’estompe après les cinq premiers essais d’apprentissage, ce qui n’est pas le cas pour le
groupe de sujets âgés (et ce jusqu’à la fin des 25 essais d’apprentissage). Ces résultats
confirment ceux obtenus par O’Boyle et coll. (1995), qui mettaient déjà en évidence
des temps de réalisation à la TDM significativement moindres chez les femmes par
rapport aux hommes.
✓ Une autre variable interindividuelle à considérer pour la TDM est la latéralité des
sujets. À ma connaissance, peu d’études ont investigué les différences de performance
-
11
qui peuvent exister entre les personnes gauchères et les droitières lorsqu’elles réalisent
une TDM. Cependant, certains auteurs se sont intéressés au degré de transfert qui peut
se faire d’une main vers l’autre après l’acquisition d’un nouvel apprentissage moteur,
ce qui fournit également des données relatives aux performances des gauchers et
droitiers à une TDM. Il ressort de ces études que la latéralisation des participants
n’influence pas significativement la performance à la TDM (Bhushan, & coll., 2000 ;
Kumar, & Mandal, 2005).
✓ Le degré d’imagerie mentale impliqué dans la réalisation de la tâche constitue une
autre variable influençant la performance à la TDM ; les sujets amenés à utiliser un
degré d’imagerie supérieur obtiennent de meilleures performances que ceux qui n’y ont
pas été incités (Borresen, & Klingsporn, 1992 ; Koslow, 1987).
✓ Le niveau d’expertise préalable à l’apprentissage constitue également une variable
susceptible d’influencer la performance à la TDM. Bien que le dessin d’une figure par
le biais d’un miroir constitue une activité peu commune, des activités faisant partie
intégrante de certaines professions se rapprochent de ce type de tâche et sont
susceptibles de donner au participant un avantage par rapport à un participant
« novice ». On peut citer, à titre d’exemples possibles, les cours d’écriture inversée
dispensés dans le cadre d’études en logopédie, ou bien les professions requérant
l’utilisation de miroirs lors de certaines manipulations (dentistes et chirurgiens par
exemple). Par ailleurs, une étude menée par Helode (1983) suggère que des étudiants
ayant suivi l’enseignement secondaire technique obtiennent une meilleure performance
à la TDM que ceux n’ayant pas suivi ce type d’enseignement technique. Selon
l’auteure, cet effet serait dû à un entraînement plus fréquent des capacités de
coordination œil-main chez les premiers.
Secondairement, mais pas de manière moins importante, on va s’intéresser à l’apprentissage
implicite [d’une séquence]. Plus spécifiquement, on va explorer ici les variables qui sont
susceptibles d’influencer la performance à la Tâche de Temps de Réaction Sériel (ou TTRS). Il
convient de mentionner que dans le cas de l’apprentissage implicite d’une séquence, les
paramètres principaux influençant l’apprentissage sont les caractéristiques de la séquence elle-
même (longueur de la séquence, intervalle inter-stimuli, nombre d’essais, séparation ou non par
une séquence aléatoire, etc.) Ces caractéristiques propres à la séquence utilisée dans la TTRS
seront exposées dans une section ultérieure (voir Section 2.3.1.B, p.30). On va ici s’intéresser
-
12
aux autres variables susceptibles d’influencer l’apprentissage et qui sont propres au
participant2 :
✓ L’effet de diverses drogues psychotropes sur l’attention et sur les mesures de temps de
réaction telles que la TTRS n’est plus à prouver. Les modèles animaux, assez proches
des effets observés chez l’humain, permettent d’inférer des résultats clairs quant à
l’influence de substances pharmacologiques stimulantes ou inhibitrices sur les
performances à la TTRS (Paine, & coll., 2007). En ce qui concerne l’humain, les effets
de l’alcool et de la nicotine sur la TTRS sont importants à investiguer car ces drogues
sont socialement acceptées et, de ce fait, fréquemment utilisées. Par exemple, la
consommation d’alcool préalable à la TTRS a pour effet d’augmenter les temps de
réaction et les taux d’erreurs (Maylor, & coll., 1992). La consommation de nicotine a
quant à elle pour effet de réduire les temps de réaction et d’augmenter les réponses
prématurées (c.-à-d. augmentation de l’impulsivité), aucun effet sur l’exactitude globale
des réponses n’ayant par ailleurs été mis en évidence (Blondel, Sanger, & Moser, 2000).
✓ Selon une revue de littérature effectuée par Kosinski (2008/2017), la fatigue mentale a
pour effet de ralentir les temps de réaction. Cet effet est d’autant plus marqué lorsque la
tâche est complexe3, comme pour la TTRS. Selon cette même revue de littérature, l’âge
aurait également un effet sur les temps de réaction : contrairement à ce qu’on pourrait
croire, les adultes seraient plus rapides que les adolescents dans des tâches plus
complexes, ce qui serait dû au fait que les premiers disposent de meilleures capacités
contrôle des interférences, résultat de leurs expériences antérieures. Il est à noter que cet
effet ne se manifeste que lorsque l’ordre d’apparition des stimuli est prédictible. En ce
qui concerne les différences intersexuées, il semblerait que les temps de réaction des
hommes soient dans l'ensemble plus courts que ceux des femmes, ces dernières étant
généralement plus précises. Une hypothèse explicative de ce phénomène qui a été
avancée par les auteurs est que les hommes et les femmes utilisent des stratégies
différentes, les premiers étant plus enclins à privilégier la rapidité, alors que les
secondes seraient plus enclines à privilégier l’exactitude, au risque de manquer certains
stimuli valides.
2 Pour une revue plus complète concernant les variables influençant les temps de réaction, voir la revue de littérature effectuée par Kosinski (2008/2017). 3 L’adjectif « complexe » est utilisé ici dans un contexte de comparaison avec une tâche de temps de réaction simple similaire à la tâche d’Alerte de la batterie TAP de Zimmermann & Fimm (1994).
-
13
✓ Une variable interindividuelle primordiale à prendre en compte dans le cas de
l’apprentissage d’une séquence est la capacité en mémoire à court terme (ou MCT)
dont dispose chaque participant. Dans le but de tester l’hypothèse d’une influence de la
MCT, Frensch et Miner (1994) ont évalué les capacités de MCT de participants en leur
administrant des mesures d’empans (empan verbal de chiffres et de localisation spatiale)
et en faisant varier le niveau d’activation des stimuli en MCT par une manipulation de
l’intervalle temporel dans la présentation des stimuli lors de la TTRS (intervalle
réponse-stimulus, ou RSI, de 500 ms ou de 1500ms). Les résultats ont montré un effet
significatif de la vitesse de présentation des stimuli, les RSI courts permettant un
meilleur apprentissage de la séquence que les RSI longs. Selon les auteurs, cet effet
serait dû au fait que les stimuli présentés sur un RSI plus court ont plus de chances d’être
présents en même temps en MCT, ce qui faciliterait l’apprentissage. De plus ces derniers
ont effectué des corrélations entre les mesures d’empans et la performance à la TTRS
qui se sont révélées significatives, ce qui est confirmé par une étude de Cherry et Stadler
(1995). On peut donc affirmer qu’il existe une relation entre MCT et performance à la
TTRS. Plus précisément, lorsqu’on se réfère au modèle de la mémoire de travail (ou
MdT) de Baddeley et Hitch (1974), cette performance dépendrait plutôt du calepin
visuospatial (Frensch & Miner, 1994), autrement dit, de la MCT visuospatiale (Bo,
Jennett, & Seidler, 2011). Pour une revue plus complète à ce sujet, voir aussi Meulemans
(1998).
-
14
2.2. Les mécanismes de contrôle attentionnel :
Comme annoncé dans le titre de ce mémoire, le but de la présente étude est d’investiguer
le rôle occupé par les mécanismes de contrôle attentionnel dans de nouveaux apprentissages
perceptivo-moteurs. Autrement dit, par le biais d’une tâche secondaire interférente, on va
chercher à occuper ces capacités de contrôle pendant que le participant effectue un nouvel
apprentissage (c.-à-d. la tâche principale) en simultané. Dans ce cadre, les caractéristiques
propres à la tâche secondaire revêtent une importance toute particulière. En effet, cette dernière
doit présenter certaines caractéristiques spécifiques afin de s’assurer (ou du moins tendre vers)
que les seuls processus communs aux deux tâches (interférente et principale) soient les
mécanismes de contrôle attentionnel. Ainsi, lorsque le participant effectuera la tâche principale,
on devrait voir ressortir des différences dans le décours de l’apprentissage entre la condition où
il se produit seul (tâche simple) et celle où les capacités de contrôle attentionnel sont occupées
par une tâche secondaire interférente.
La notion de contrôle attentionnel sera une notion récurrente de ce travail. Autrement
appelée contrôle cognitif, cette dernière se réfère à la capacité d’adapter son comportement de
manière flexible aux demandes particulières de la tâche en cours (et donc dirigée vers un but).
Ceci se fait, d’une part, en priorisant le traitement des informations pertinentes par rapport à
d’autres sources d’informations en compétition, et d’autre part, en mettant l’accent sur les
comportements ayant une finalité compatible avec la tâche en cours par rapport aux
comportements habituels ou aux réponses dominantes (Braver, Gray, & Burgess, 2007). Les
capacités de contrôle attentionnel peuvent être assimilées à ce que Norman & Shallice (1980)
ont nommé le Système Attentionnel Superviseur (ou SAS), ou encore à ce que Baddeley &
Hitch (1974), dans leur modèle multicomposant de la mémoire de travail, appellent
l’Administrateur Central. Dans une revue de ce dernier modèle effectuée par Baddeley & Logie
(1999), les auteurs énoncent déjà la nature non unitaire du contrôle attentionnel, ce qui sera
confirmé ultérieurement par d’autres travaux. À titre d’exemples, on peut citer les études de
Braver et coll. (2007) ainsi que de Manard, François, Phillips, Salmon, & Collette (2017), qui
distinguent des capacités de contrôle cognitif réactif (c.-à-d. type de contrôle transitoire mis en
place après la survenue d’un item à traiter lors de la détection d’un conflit) et de contrôle
cognitif proactif (c.-à-d. type de contrôle soutenu et anticipatoire à la survenue de l’item servant
à biaiser le système de traitement de l’information avant la survenue d’un item
critique)(Collette, 2019), le premier étant préservé avec l’avancée en âge, le second étant altéré
dans le vieillissement. Par ailleurs, une étude de Miyake et coll. (2000) rapproche la notion de
-
15
contrôle cognitif de celle de fonctionnement exécutif et identifie, au moyen d’une analyse de
variable latente, trois sous composantes du contrôle cognitif/fonctionnement exécutif que sont
la flexibilité, la mise à jour, et l’inhibition. Cependant, cette étude met en évidence l’absence
de corrélation significative entre ces 3 sous-composantes et une épreuve de double tâche. Ce
dernier élément, bien que difficile à interpréter précisément, évoque l’intervention d’éventuels
autres (sous-)processus attentionnels, indépendants de ceux identifiés, intervenant dans le
contrôle de la performance en situation de double tâche. Dans le même ordre d’idées de
fragmentation des capacités de contrôle cognitif, d’autres auteurs mettent en évidence
l’existence de 5 facteurs fonctionnant de manière relativement indépendante, tout en gardant
une certaine relation entre eux (Fournier-Vicente, Larigauderie, & Gaonac’h, 2008).
Les modèles cités ci-dessus ainsi que le caractère multidimensionnel des capacités de
contrôle attentionnel vont être développés dans les sections qui suivent.
2.2.1. Contrôle attentionnel, mémoire de travail et modèles
théoriques influents :
La notion de contrôle attentionnel (ou encore contrôle cognitif) peut être rapprochée à
ce qu’on appelle aujourd’hui les fonctions exécutives (Collette, 2019). Ces fonctions forment
un ensemble de processus (les capacités de contrôle attentionnel) qui sous-tendent les actions
dirigées vers un but, ce qui va permettre à tout un chacun de s’adapter au mieux lors de la
rencontre avec une situation inédite pour laquelle les schémas de réponse habituels ne
correspondent pas ou ne sont pas suffisants. C’est donc à chaque fois que nos routines d’actions
seront mises en défaut qu’on devra diriger notre comportement de manière volontaire vers un
nouveau but grâce à l’intervention des mécanismes de contrôle attentionnel.
Bien que Luria ait été le premier à établir un modèle intégré des fonctions des régions
cérébrales frontales, Norman et Shallice (1980) sont les premiers à faire mention plus explicite,
dans leur modèle du contrôle attentionnel, de l’existence de mécanismes de contrôle cognitif
qu’ils appellent Système Attentionnel Superviseur (ou SAS). Ce modèle prend racine dans les
travaux effectués par Luria, ainsi que dans la distinction entre les traitements automatiques qui
se feraient à un niveau inconscient et les traitements conscients nécessitant la mobilisation de
notre attention (Posner, & Snyder, 1975 ; Shiffrin, & Schneider, 1977).
-
16
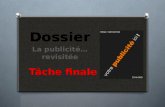
Figure 2. Modèle du contrôle attentionnel (Norman & Shallice, 1980)
Ce modèle du contrôle attentionnel (voir Figure 2) suggère qu’un « gestionnaire de
conflits » semi-automatisé permette de sélectionner les schémas d’action les plus appropriés
pour atteindre un but. On peut distinguer différents niveaux dans les schémas d’action à mettre
en place en fonction de la familiarité (et le degré d’automatisation qui s’y rapporte) relative de
la tâche à laquelle on est confrontée. Le premier niveau fait référence à des schémas d’actions
automatiques, qui sont activés lorsqu’on fait face à des situations familières (par exemple,
lorsqu’un conducteur expérimenté effectue le trajet habituel de son domicile à son lieu de
travail). Le second niveau se rapporte à des schémas d’action semi-automatiques, qui sont
activés lorsqu’on effectue une activité de routine, mais qu’un élément inattendu ayant un impact
mineur survient (par exemple, lorsque ce même conducteur expérimenté effectue le trajet
habituel de son domicile à son lieu de travail, mais qu’il se retrouve obligé de ralentir derrière
un cycliste avant de le dépasser). Le troisième et dernier niveau ne fait référence à aucun schéma
d’action préétabli de manière spécifique, mais nécessite l’intervention des processus
attentionnels contrôlés afin de faire face à une situation nouvelle (par exemple, toujours avec
ce même conducteur sur son trajet habituel, si la voiture juste devant la sienne fait un accident,
il va devoir se concentrer afin de prendre le contrôle total du véhicule et éviter l’accident). Dans
ce troisième cas de figure, le gestionnaire de conflits va être dépassé et l’intervention d’un
système contrôlé va être nécessaire : le SAS entre en jeu. Ce dernier va modifier l’activité du
gestionnaire de conflits en augmentant et/ou inhibant l’activation de certains schémas d’action
afin de permettre à un schéma de prendre le dessus sur les autres afin d’atteindre le nouvel
objectif. Ce processus contrôlé de sélection des schémas se fait de manière plus lente que
lorsque le gestionnaire de conflits intervient seul de manière (semi-)automatique.
-
17
Selon Rabbitt (1981) le contrôle attentionnel (ou contrôle exécutif) serait requis dans un
nombre important de situations variées, notamment :
1) Pour réaliser de nouvelles tâches requérant la formulation d’un but, la planification et
le choix des différentes séquences à mettre en place pour atteindre ce but, la
comparaison des différents plans selon leur probabilité de mener à l’atteinte du but, la
mise en œuvre du plan sélectionné et, éventuellement, l’amendement de ce plan en cas
d’échec.
2) Lors de la recherche volontaire d’informations en mémoire à long terme.
3) Pour inhiber la production de réponses inappropriées au contexte.
4) Pour initier de nouvelles séquences de comportement tout en interrompant les séquences
en cours.
5) Afin de détecter et corriger d’éventuelles erreurs pour permettre un (des) ajustement(s)
6) Pour maintenir l’attention de manière soutenue durant une période de temps étendue.
7) Pour coordonner la réalisation simultanée de deux tâches et contrôler les exigences
propres à chacune.
Dans la présente étude, bon nombre des situations précédemment citées vont être
impliquées. Par exemple, la TDM va constituer la situation inédite lors de laquelle le participant
doit effectuer une coordination manuelle en inversant les indices visuels perçus afin d’atteindre
le but, qui est de tracer le dessin d’une étoile en la voyant par le biais d’un miroir. Cette tâche
inédite va théoriquement requérir l’intervention du SAS, ou contrôle attentionnel, afin d’être
résolue adéquatement.
Baddeley & Logie (1999) ont rapproché la fonction occupée par le SAS avec celle occupée
par l’Administrateur Central dans le modèle de la mémoire de travail (ou MdT) de Baddeley &
Hitch (1974). Ce modèle de la mémoire de travail comptait à l’origine de sa création les 3
composantes suivantes :
✓ La boucle phonologique qui comprend elle-même 2 composantes : une première
composante de stockage temporaire des informations verbales (le stock phonologique)
durant quelques secondes, et une seconde composante qui permet de rafraîchir la trace
les informations qu’on veut maintenir en mémoire à court terme (ou MCT4). Cette
4 La MCT est à distinguer de la MdT. La première peut être définie comme une capacité de stockage passif des informations (sans qu’aucun traitement ne soit effectué sur ces informations), alors que la seconde renvoie à la manipulation des informations qui sont stockées. La MCT est donc inclue dans la MdT.
-
18
seconde composante est également appelée système de récapitulation articulatoire
(Baddeley, 2003).
✓ Le calepin visuospatial qui est un système de stockage des informations visuelles et
spatiales.
✓ L’administrateur central qu’on peut considérer comme l’équivalent du SAS. C’est un
système « supérieur » qui va coordonner les activations des deux autres systèmes
précédemment énoncés. Ces derniers sont dits « esclaves » de l’administrateur central,
qui va surtout intervenir dans les situations difficiles, nouvelles, ou quand la tâche en
cours exige à la fois qu’on maintienne actives et qu’on manipule des informations en
mémoire de travail.
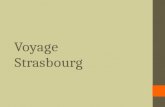
Figure 3. Modèle actualisé de la Mémoire de Travail de Baddeley
Depuis lors, ce modèle de la MdT a évolué au cours du temps pour parvenir à une
représentation actuellement plus complète des différents processus impliqués dans la mémoire
de travail (voir Figure 3). Notamment, un quatrième composant a été ajouté : le buffer
épisodique (Baddeley, 2000). Ce dernier peut être décrit comme un système à capacité limitée
dépendant étroitement des processus exécutifs, mais qui se distingue de l’administrateur central
par le fait qu’il concerne principalement le stockage des informations plutôt que le contrôle
attentionnel. Il va permettre la « communication » avec la mémoire à long terme. Le nom de
« Buffer épisodique » parle de lui-même : il permet de combiner en un seul code (« buffer »)
une série d’informations issues de sources et d’épisodes différents (« épisodique »). Non
seulement un quatrième sous-système a été ajouté, mais les trois autres sous-systèmes initiaux
ont été développés. Parmi eux, la boucle phonologique est la composante la plus connue, le
calepin visuospatial l’est un peu moins, et l’administrateur central reste le moins connu des
-
19
trois. L’historique de l’évolution du modèle de la mémoire de travail initialement proposé par
Baddeley & Hitch (1974) n’étant pas le sujet de ce mémoire, on se limitera ici à décrire plus
amplement les changements et précisions apportés au modèle et qui soient pertinents par rapport
au sujet du mémoire et au matériel utilisé (c.-à-d. les tâches principales de temps de réaction
sériel et de dessin en miroir).
A. L’administrateur central :
Commençons par le sous-système qui nous intéresse le plus dans le cadre de ce mémoire,
l’administrateur central, ou SAS. Bien que décrits par des auteurs différents dans des cadres
différents, ces deux concepts font référence à la même capacité de contrôler volontairement
notre comportement dirigé vers un but : c’est le contrôle attentionnel. Plusieurs études ont
montré que son fonctionnement repose principalement, mais pas exclusivement, sur les lobes
frontaux (Bunge, Dudukovic, Thomason, Vaidya, & Gabrieli, 2002 ; Stuss, & Knight, 2002).
Par ailleurs, bien qu’il ait été initialement théorisé comme un concept unitaire, plusieurs études
ont à présent démontré qu’il s’agit en réalité d’un concept qui peut se subdiviser en plusieurs
fonctions exécutives fonctionnant de manière relativement indépendante, bien qu’elles restent
liées entre elles. Ce caractère multidimensionnel du SAS fera l’objet d’une description plus
détaillée dans la section suivante (voir Section 2.2.2, pp.21-23).
B. Le calepin visuospatial :
Ce sous-système de la MdT a pour fonction d’intégrer les informations spatiales, visuelles,
et possiblement kinesthésiques en une représentation unifiée qui pourra être stockée et
manipulée temporairement (Baddeley, 2003a). Selon une autre revue de Baddeley (2003b) sur
le MdT, cette sous-composante visuospatiale interviendrait également dans la construction et
le maintien des images mentales. Au sein même de ce calepin visuospatial, Wheeler & Triesman
(2002) proposent une séparation des informations visuelles et spatiales qui seraient stockées
dans des registres parallèles spécifiques à chaque dimension, une compétition étant possible
entre les informations au sein de même registre, mais pas entre les deux. Selon les auteurs, la
mémorisation des objets serait dépendante de l’intégration active et « effortful » de ces deux
dimensions. À l’instar de la boucle phonologique, une distinction entre une composante de
stockage et une composante de réactivation de la trace a été proposée par Logie (1995/2014).
-
20
C. La boucle phonologique :
Cette sous-dimension de la MdT est celle dont le fonctionnement est le mieux connu
actuellement. En son sein sont présentes 2 composantes : le système de stockage temporaire de
l’information et le système qui permet de rafraîchir la trace de ces informations en MdT,
notamment grâce à la répétition subvocale, et ce qu’elles soient acoustiques ou même visuelles
si un nom est associé à l’image (Baddeley, 2003). La MCT est un système multidéterminé qui
est en lien avec plusieurs autres fonctions cognitives telles que l’attention, la mémoire à long
terme (ou MLT) ou encore le traitement de l’ordre sériel. En effet, un lien a été établi entre la
MLT et la MCT (Ericsson, & Kintsch, 1995) : le stockage temporaire d’une information en
MCT nécessite l’activation temporaire de cette information en MLT. En outre, les informations
langagières comprennent par définition une dimension séquentielle qui est particulièrement
importante dans l’apprentissage de la lecture ou du calcul par exemple. Une dissociation a été
mise en évidence entre la capacité à rappeler les items en tant que tels (l’information « Item »
qui nécessite une activation temporaire de cet item en MLT) et celle à rappeler l’ordre dans
lequel ces informations ont été présentées (Majerus, Norris, & Patterson, 2007). Ces
informations sur la boucle phonologique trouvent un intérêt dans ce travail car la tâche
secondaire interférente qui est utilisée dans la partie expérimentale est de nature auditivo-
verbale et nécessite la mobilisation des capacités de MCT verbale. En relation avec le langage,
un modèle synthétique de la MCT, le modèle A-O-WM (voir Figure 3), a été proposé par
Majerus (2013). Ce dernier comporte diverses composantes que sont l’attention (qui représente
l’administrateur central dans le modèle originellement proposé par Baddeley & Hitch), le
traitement de l’ordre sériel [de l’information langagière], le stockage des représentations
phonologiques et celui des représentations lexico-sémantiques. Chaque composante est en
relation avec les deux autres, le tout étant supervisé par les capacités attentionnelles des sujets
qui sont plus ou moins impliquées selon les exigences de la tâche.
-
21
Figure 4. Modèle A-O-WM (Majerus, 2013)
En résumé, au vu des connaissances actuelles sur le sujet, la MdT peut être décrite comme
une capacité cognitive multidimensionnelle (c.-à-d. faisant appel à d’autres systèmes cognitifs
et comprenant plusieurs sous-dimensions) intervenant dans de nombreuses situations
quotidiennes. Cette capacité demande la consommation de ressources attentionnelles, et ce
même pour des tâches simples qui ne nécessitent qu’un stockage passif de l’information. Par
ailleurs, cette consommation en ressources attentionnelles sera d’autant plus importante lorsque
la tâche à réaliser nécessite une mobilisation plus importante des capacités de contrôle
attentionnel (ou SAS, ou administrateur central) en raison de sa difficulté (gestion de double-
tâche par exemple) et/ou son caractère nouveau/inhabituel.
2.2.2. Une capacité unidimensionnelle ?
Le contrôle attentionnel constitue-t-il une capacité cognitive unidimensionnelle ? À
cette question, Norman et Shallice (1980) ainsi que Baddeley et Hitch (1974) auraient répondu
« oui » lorsqu’ils ont initialement établi leurs modèles du contrôle attentionnel et de la mémoire
de travail, respectivement. Actuellement de nouveaux éléments issus de la littérature tendent à
répondre « non » à cette question. À ce sujet, on peut citer les travaux de Miyake et coll. (2000),
qui ont isolé 3 sous-composantes exécutives de contrôle cognitif : la mise à jour, la flexibilité
et l’inhibition. Fournier-Vicente et coll. (2008) ont quant à eux isolé 5 sous-composantes
exécutives. Un point commun entre ces 2 études notables est l’absence de corrélation entre la
-
22
performance aux épreuves de double tâche et le contrôle cognitif. Plusieurs hypothèses
explicatives de ce résultat inattendu ont été avancées par les auteurs de la seconde étude. Selon
eux, il se pourrait que les tâches utilisées pour évaluer la capacité des sujets à coordonner 2
tâches simultanées ne soient pas adéquates, ou que les indicateurs utilisés ne soient pas
pertinents, ce qui semble peu probable au vu des paradigmes de double-tâches utilisés. Une
autre explication avancée par ces mêmes auteurs est que les mesures obtenues aux épreuves de
double-tâche sont relativement peu fiables, ce qui aurait par extension conduit aux faibles
corrélations observées. Cette seconde hypothèse semble plus plausible, d’autant que Baddeley
Della Sala, Gray, Papagno, & Spinnler (1997) rapportent un indice de fiabilité test-retest assez
faible pour une des combinaisons de double tâche utilisée dans l’étude de Fournier-Vicente et
coll. (2008). Une troisième et dernière hypothèse explicative avancée par les auteurs est que la
coordination de double-tâches n’est pas un construit unidimensionnel, et que chaque
combinaison spécifique de tâches fait appel à des habiletés différentes et spécifiques à cette
combinaison. Cette dernière proposition d’explication entre en directe contradiction avec
l’hypothèse de Bourke (Bourke, 1997 ; Bourke, Duncan, & Nimmo-Smith, 1996) selon laquelle
il existe un facteur général de coordination qui sous-tend la performance en situation de double-
tâche. Malgré cette contradiction, cette hypothèse explicative reste la plus plausible parmi les
3 proposées. En effet, plusieurs données issues d’auteurs différents convergent vers la même
conclusion. Tout d’abord, on rappellera que Miyake et coll. (2000) ont obtenu la même absence
de corrélation entre les mesures de leurs épreuves de double-tâche et les mesures de contrôle
cognitif. Ensuite, De Ribaupierre et Ludwig (2003) ont également émis cette hypothèse selon
laquelle la coordination de double-tâches n’est pas un construit unidimensionnel. Cette
hypothèse est confortée par des données d’imageries ne mettant en évidence aucune aire
cérébrale spécifique associée à la performance en double-tâche (Collette, & Van der Linden,
2002), ainsi que par d’autres études neuropsychologiques pointant une relation médiocre entre
les performances à des doubles-tâches et des tests exécutifs répandus (Baddeley & coll., 1997 ;
McDowell & coll., 1997).
De même, toujours en lien avec le caractère non unitaire du contrôle cognitif, des auteurs
on mit en évidence deux types de contrôles différents dont l’altération avec l’avancée en âge
s’est révélée sélective (Braver et coll., 2007 ; Manard et coll., 2017). Ils ont ainsi distingué le
contrôle réactif du contrôle proactif. Le premier serait un type de contrôle transitoire mis en
place après la survenue d’un item à traiter lors de la détection d’un conflit, préservé dans le
vieillissement. Le second serait quant à lui un type de contrôle soutenu et anticipatoire à la
-
23
survenue de l’item servant à biaiser le système de traitement de l’information avant la survenue
d’un item critique (Collette, 2019). Afin d’illustrer ces 2 types de contrôle, Manard et coll.
(2017) ont utilisé une version modifiée du test de Stroop lors de laquelle les items présentés
étaient soit majoritairement congruents (c’est-à-dire que la couleur d’impression était identique
à celle désignée par le nom) induisant un type de contrôle réactif, soit majoritairement
incongruents (la couleur d’impression était différente de celle désignée par le nom) induisant
un type de contrôle proactif.
Pour résumer, les données issues de la littérature indiquent que le contrôle attentionnel
serait plutôt une capacité multidimensionnelle au sein de laquelle on peut identifier plusieurs
fonctions exécutives différentes fonctionnant de manière relativement indépendante tout en
restant liées entre elles. De plus, il n’existerait pas de capacité cognitive commune qui
permettrait de coordonner la réalisation de deux tâches en simultané, mais plutôt des demandes
cognitives spécifiques à chaque combinaison de double-tâche.
2.2.3. Double tâche, contrôle attentionnel et apprentissage
perceptivo-moteur :
Le paradigme de double-tâche consiste à administrer deux tâches de manière simultanée
à une même personne. Ce paradigme a été couramment utilisé afin d’investiguer les
composantes et déficits de mémoire de travail (McDowell, Whyte, & D’Esposito, 1997 ;
Uittenhove, Chaabi, Camos, & Barouillet, 2019). Plus précisément, il constitue un moyen
privilégié d’évaluer le composant « administrateur central » (Sala, Baddeley, Papagno, &
Spinnler, 1995) du modèle de la mémoire de travail de Baddeley & Hitch (1974). Par ailleurs,
en relation avec les capacités de contrôle attentionnel, le paradigme de double-tâche a
également été utilisé afin d’investiguer l’apprentissage et l’automatisation de tâches perceptivos
motrices (Chauvel & coll., 2012), ce qui va principalement nous intéresser dans le cadre de ce
mémoire. La relation avec les capacités de contrôle attentionnel et l’automatisation du nouvel
apprentissage tient dans le fait que, comme le suggèrent les modèles Top-Down, tout nouvel
apprentissage nécessite la mobilisation de mécanismes de contrôle cognitivement coûteux dans
les premiers stades de l’apprentissage, avant que ce dernier ne soit automatisé au fur et à mesure
des essais, libérant ainsi les mécanismes cognitifs supérieurs pour la gestion d’autres activités
ou tâches (Anderson, 1982). Il en résulte que l’introduction d’une tâche secondaire ne devrait
pas interférer avec la performance à la tâche principale automatisée (Chauvel et coll., 2012).
-
24
En outre, il est important de souligner que ceci ne peut être vrai que si les deux tâches
(principale et interférente) ne partagent pas d’autres processus cognitifs communs que les
capacités de contrôle attentionnel. Effectivement, la charge mentale induite chez la personne
par les deux tâches effectuées simultanément est d’autant plus grande que le nombre de
processus cognitifs communs à ces tâches est important (Wickens, 2008). De plus, le
recrutement de mécanismes cognitifs communs à la tâche principale et la tâche interférente
risque de créer du « bruit » et ainsi limiter les possibilités d’interprétation des résultats.
Dans une optique d’investigation du rôle occupé par les capacités de contrôle
attentionnel dans de nouveaux apprentissages perceptivo-moteurs, l’introduction d’une tâche
interférente occupant ces capacités de contrôle cognitif a déjà été utilisée tant dans
l’investigation des capacités d’apprentissage procédurales/explicites (Bhushan & coll., 2000 ;
Lejeune & coll., 2015) qu’implicites (Röttger, Haider, Zhao, & Gaschler, 2019 ; Schumacher
& Schwarb, 2009). Cependant, la sélection précautionneuse de cette tâche revêt une importance
primordiale car cette dernière est susceptible d’introduire des biais dans l’interprétation des
futurs résultats.
Afin de limiter les possibles biais inhérents à tâche secondaire, celle-ci devait présenter les
caractéristiques suivantes :
1) Ne pas être sensible à l’apprentissage par les sujets, ce qui se traduit par une
absence d’amélioration significative de la performance au cours du temps.
Le problème qui pourrait se poser ici est le suivant : admettons qu’on observe la présence
d’un apprentissage significatif à la tâche principale, et que le même phénomène est mis en
évidence pour la tâche secondaire interférente. On serait en droit de se demander si
l’apprentissage à la tâche principale s’est effectivement produit dans une condition de double-
tâche dans laquelle le contrôle attentionnel est occupé, ou bien s’il s’est produit de manière
consécutive à la libération des ressources attentionnelles résultant de l’amélioration de la
performance à la tâche interférente. De plus, le fait que la performance à la tâche secondaire ne
soit pas sujette à un quelconque effet d’apprentissage permet de maintenir la charge cognitive
induite relativement constante au cours de la tâche.
-
25
2) Les mécanismes cognitifs recrutés ne doivent pas se superposer (ou se superposer
de manière minimale) aux mécanismes recrutés par la tâche principale, en dehors
des mécanismes de contrôle attentionnel.
Dans le « 4D Multiple Resource Model » de Wickens (2008), quatre dimensions sont
définies et permettent de sélectionner la tâche secondaire selon une simple formule basée sur
les éléments suivants :
a) Les étapes de traitement, qui comprennent la perception, la cognition et la réponse.
b) Les codes de traitement, qui comprennent le code verbal/linguistique ainsi que le code
spatial. Ils correspondent à la mobilisation des ressources particulières relatives à un
certain type de traitement (visuel ou verbal/linguistique).
c) La modalité de présentation du stimulus, qui peut être visuelle ou auditive.
d) Les canaux visuels, qui comprennent la vision focale (principalement fovéale,
interviennent dans la reconnaissance des objets et des activités nécessitant une haute
acuité visuelle, comme la lecture par exemple) et la vision ambiante (distribuée dans
l’entièreté du champ visuel, responsable de la perception de l’orientation et du
mouvement).
Figure 5. The 4D Multiple Resource Model (Wickens, 2008)
-
26
Ce modèle a pour vocation de prédire le degré d’interférence (de charge cognitive) qui
sera produit entre deux tâches à effectuer de manière simultanée. Ceci se fait sur base de deux
composantes que sont (1) l’exigence en ressources cognitives et attentionnelles et (2) la
composante de conflit entre les ressources, c’est-à-dire le degré de recouvrement entre es
ressources cognitives mobilisées par les deux tâches. Chaque composante peut varier entre 0 et
4 points, avec chaque dimension qui varie entre les scores de 0 et 2 sur chaque composante. Sur
la composante des exigences cognitives, une cote de 0 sera attribuée pour une tâche
automatisée, de 1 pour une tâche non automatisée, mais facile à exécuter, et de 2 pour une tâche
non automatisée difficile à exécuter, et ce de manière indépendante de la seconde composante
pour chaque tâche. Pour la composante de conflit, les cotes sont attribuées en fonction du
nombre de dimensions du modèle 4D (voir Figure 5, p.25) qui sont partagées par les deux
tâches à réaliser. Au total, lorsqu’on combine les 2 composantes, on obtient un score qui varie
possiblement entre 0 et 8, un score élevé indiquant une difficulté importante à exécuter les deux
tâches simultanément.
Par ailleurs, d’autres auteurs postulent que n’importe quelle tâche secondaire, aussi
simple soit-elle, peut être utilisable en tant que tâche secondaire dans un paradigme de double
tâche (Barrouillet, Bernardin & Camos, 2004 ; Barrouillet, Bernardin, Portrat, Vergauwe &
Camos, 2007). Ces derniers ont émis l’hypothèse que ce n’est pas seulement la complexité de
la tâche qui détermine la charge cognitive, mais aussi les paramètres suivants : le paramètre a,
qui représente le temps durant lequel la tâche secondaire occupe l’attention (c.-à-d. la difficulté
de la tâche), le paramètre N, qui correspond au nombre de fois que la tâche secondaire est
exécutée et le paramètre T, qui correspond à la durée totale de l’activité. Barrouillet et ses
collègues (2004) ont établi une formule de la charge cognitive (CL) qui est :
CL= 𝑎𝑁
𝑇
Par exemple, dans l’étude de Barrouillet et coll. (2004, expérience 2), un des paradigmes
de double-tâche utilisé combinait une tâche d’empan de lettres (en tâche principale) avec une
tâche d’empan calculatoire continu (en tâche secondaire interférente). Les auteurs ont demandé
aux participants de maintenir une série de lettres en mémoire et les rappeler en fin de tâche
après avoir effectué successivement une série de calculs simples. Imaginons5 que les sujets
prennent 1,763 seconde pour effectuer chaque calcul (paramètre a), et qu’on présente un total
de 64 calculs (paramètre N) sur une période totale de 250 secondes, la charge cognitive induite
5 Données fictives.
-
27
par la tâche secondaire sera de (1,763*64)/250 = 0,4513286. On remarquera que l’obtention
d’un chiffre précis nécessite de connaître la valeur de chacun des trois paramètres. Ces valeurs
sont aisées à obtenir pour les paramètres N et T qui dépendent de la méthodologie employée,
mais est plus compliquée à déterminer pour le paramètre a. Ce dernier paramètre ne peut
théoriquement s’obtenir que par la mesure du temps de réponse moyen des participants à la
tâche interférente. Or, à moins qu’on ne dispose de ce temps de latence en tant que constante
universelle pour une tâche particulière (ce qui n’existe pas à ma connaissance), on se trouve
dans l’incapacité de calculer à l’avance la charge cognitive théoriquement induite (sur base de
cette formule). Cependant, si on se contente d’une approximation globale de cette charge
cognitive dans l’optique d’une sélection préalable d’une tâche interférente, on peut contourner
ce problème en intégrant le 4D Multiple Resource Model de Wickens (2008) à la formule de la
charge cognitive établie par Barrouillet et ses collègues (2004). Le modèle de Wickens (2008)
nous permet d’obtenir une mesure globale (d’une valeur comprise entre 0 et 8) de la difficulté
à réaliser les deux tâches simultanément. On peut donc imaginer substituer cette mesure globale
au paramètre a et ainsi obtenir une formule simple de la charge cognitive induite qui puisse être
calculée à l’avance pour toute combinaison de tâches.
Reprenons comme exemple concret les 2 tâches susmentionnées utilisées dans l’étude
de Barrouillet et coll. (2004, expérience 2). Si on suppose que la liste de lettres à retenir en
tâche principale soit longue et compliquée (difficulté = 2) et que la tâche d’empan calculatoire
soit assez simple (difficulté = 1). Reprenons maintenant les quatre dimensions du modèle de
Wickens (2008) pour les présentes tâches : (1) chacune des deux exige un traitement en MdT,
(2) les codes de traitement font tous les deux appel aux capacités linguistiques (3) les modalités
de présentation sont différentes, auditive pour l’une et visuelle pour l’autre, et enfin (4) le
traitement visuel n’est requis que pour la tâche secondaire et est de type focal. Le score sur la
composante de difficulté est donc de 2+1 = 3, et de 1+1+0+0 = 2 sur la composante
d’interférence concurrente, pour un total de 3+2 = 5 = paramètre a. La formule de la charge
cognitive serait alors de (5*64)/250 = 1,28. Ceci montre bien que la formule est sensible au
changement d’unité et peut être surtout utile pour comparer à l’avance la charge cognitive
théoriquement induite par diverses tâches interférentes.
6 Ce chiffre ne donne pas une représentation précise de la CL sur une échelle normée. Il est virtuellement compris dans l’intervalle [0 ; +∞] et sa valeur dépend des unités utilisées sur les différents paramètres de l’équation.
-
28
En résumé, la sélection de la tâche interférente doit tenir compte des différents
paramètres énoncés dans le modèle 4D de Wickens (2008), ainsi que de la fréquence de
présentation des stimuli de la tâche interférente (N/T). L’intégration de ces paramètres en une
formule simple devrait permettre de fournir une estimation grossière de la charge cognitive
induite et de sélectionner plus précisément des tâches interférentes adéquates.
-
29
2.3. Sélection des tâches :
2.3.1. Tâches principales :
L’un des objectifs du présent mémoire est de comparer le rôle occupé par les
mécanismes de contrôle attentionnel dans l’apprentissage procédural et l’apprentissage
implicite [d’une séquence]. Deux tâches principales différentes et spécifiques à chaque type
d’apprentissage ont donc été proposées. La tâche d’apprentissage procédural sélectionnée est
celle du dessin en miroir, alors que celle d’apprentissage implicite est la tâche de temps de
réaction sériel.
A. La Tâche de Dessin en Miroir (ou TDM) :
La TDM consiste pour le sujet à suivre, à l’aide d’un crayon sur une feuille de papier,
un chemin prenant une forme particulière délimitée par 2 traits noirs continus, ceci en ne
voyant ce dessin que par le biais d’un miroir. Cette tâche peut effectivement être qualifiée
d’apprentissage perceptivo moteur, car (1) elle demande au sujet de réaliser de nouveaux
mouvements et traitements cognitifs (c.-à-d. une inversion des indices visuels perçus par le
biais du miroir et la coordination œil-main adéquate), ce qui constitue le nouvel apprentissage,
et (2) les indices perçus sont visuels (le dessin) et la réponse demandée est motrice (tracer en
suivant le chemin pré délimité).
Cette tâche d’apprentissage perceptivo-moteur n’en est qu’une parmi de nombreuses
autres (pour d’autres exemples, voir Gabrieli et coll., 1997), mais notre choix s’est néanmoins
porté sur la TDM. La raison principale en est qu’un des buts de ce mémoire est de répondre
aux critiques émises à l’égard de l’étude de Lejeune et coll. (2015), et que la TDM est la tâche
d’apprentissage perceptivo-moteur qui a été utilisée par les auteurs. Ce choix a donc été fait
dans un souci principal de cohérence. Par ailleurs, cette tâche présente d’autres avantages : le
matériel à utiliser reste sobre (papier, crayon et dispositif expérimental) et est facilement
transportable, ce qui permet à l’expérimentateur de se déplacer si le besoin en est. Par contre,
un désavantage relatif au dispositif expérimental est qu’une barre métallique disposée sur la
gauche entrave la performance des éventuels participants gauchers.
-
30
B. La Tâche de Temps de Réaction sériel (ou TTRS) :
Dans le cas de l’apprentissage implicite, une des tâches les plus répandues pour l’étudier
est celle de temps de réaction sériel, initialement créée par Nissen et Bullemer (1987). Il en
existe bien évidemment d’autres qu’on citera à titre informatif, telles que l’apprentissage d’une
grammaire artificielle, la classification probabiliste, ou encore l’apprentissage implicite de
catégories (Kalra, Gabrieli, & Finn, 2019). Plus concrètement, la TTRS se présente de la
manière qui suit : plusieurs carrés vides sont affichés sur un écran d’ordinateur devant lequel
se trouve le participant. Un stimulus visuel (croix, rond, ou autre) apparaît ensuite dans l’un des
carrés affichés, puis dans un autre, et ainsi de suite suivant un intervalle temporel prédéfini par
l’expérimentateur. À chaque car