Le Projet IGOSat
146
Revue des Exigences Préliminaires 09 Juillet 2015 Ionospheric & Gamma-ray Observation Satellite 1
Transcript of Le Projet IGOSat
Revue des Exigences Préliminaires
09 Juillet 2015
Ionospheric & Gamma-ray Observation Satellite
1
Revue des Exigences Préliminaires
Ordre du Jour : 14:00 - Présentation Générale / Mission / Charges Utiles 15:00 - Pause 15:15 - Présentation Technique de la Plateforme 16:15 - Pause 16:30 - Revue (Session Privée) 17:30 - Fin
2
Revue des Exigences Préliminaires
Panel de Revue
3
Présentation Générale1 - Le contexte et la mission IGOSat (Hubert Halloin)
2 - Le projet IGOSat et les Exigences Préliminaires (Marco Agnan)
3 - Le Système et les Bilans de IGOSat (Stanislas Le Grelle)
4 - La Charge Utile Scintillateur, son banc de tests, ses simulations et sa carte d’acquisition (Léa Bourhis & Asmae Ban Amar)
5 - La Charge Utile GPS et son banc de tests (Mathieu Bligny)
4
Présentation Générale
Le Contexte
Hubert Halloin
5
Le Contexte de IGOSatIonospheric and Gamma-ray Observation Satellite▪ Proposé dans le cadre du LabEx (laboratoire d’excellence) UnivEarthS; ▪ Projet conjoint des laboratoires en sciences de la Terre et de l’Univers de Paris
Diderot : APC (AstroParticule et Cosmologie), IPGP (Institut de Physique du Globe de Paris)
▪ Soutenu par le CNES ▪ Réalisation d’un centre spatial étudiant à Paris Diderot ▪ Chef de projet : Marco Agnan ▪ Objectif : réaliser et être prêt à lancer un satellite en 2017 ...
IGOSatLabEx
UnivEarths CNES Université Paris 7
Autres Universités et écoles
APC IPGP JANUSEIDD, OSAE,
UFR LAC, UFR STEP, UFR
Physique, UFR Info, ...
Paris 6, Paris 11, Centrale,
ISAE
6
0" 0" 0"
7"
0" 1"0"2" 2"
0"
0"
6"
0"
7"
2"
46"
0"
26"
8"
0"7"
6"
10"
6"
0"0"
0"
0"
0"
1"
0"0"
0"
6"
0"
0"
0"
10"
20"
30"
40"
50"
60"
70"
2012+2013"S1" 2012+2013"S2" 2013+2014"S1" 2013+2014"S2" 2014+2015"S1" 2014+2015"S2"
Nom
bre'd'étud
iants'
Semestre'
Prison"
Predoc"
M2"
M1"
L3"
L2"
8" 7"11"
58"
10"
29"
0" 2"
0"
7"
0"
11"
0"
10"
20"
30"
40"
50"
60"
70"
2012,2013"S1" 2012,2013"S2" 2013,2014"S1" 2013,2014"S2" 2014,2015"S1" 2014,2015"S2"
Nom
bre'd'étud
iants'
Semestre'
Stages"
Projets"
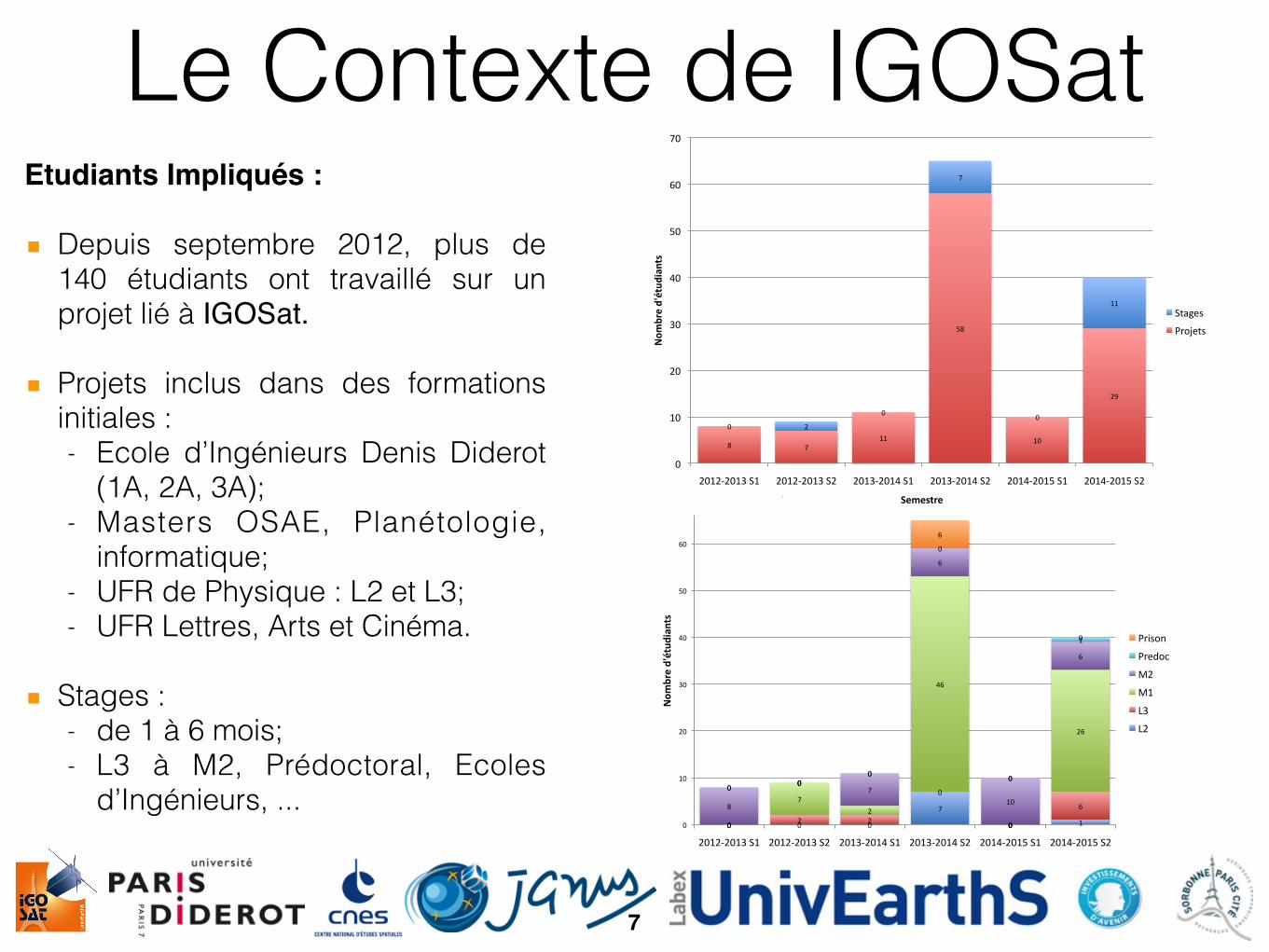
Le Contexte de IGOSatEtudiants Impliqués :
▪ Depuis septembre 2012, plus de 140 étudiants ont travaillé sur un projet lié à IGOSat.
▪ Projets inclus dans des formations initiales : - Ecole d’Ingénieurs Denis Diderot
(1A, 2A, 3A); - Masters OSAE, Planétologie,
informatique; - UFR de Physique : L2 et L3; - UFR Lettres, Arts et Cinéma.
▪ Stages : - de 1 à 6 mois; - L3 à M2, Prédoctoral, Ecoles
d’Ingénieurs, ...
7
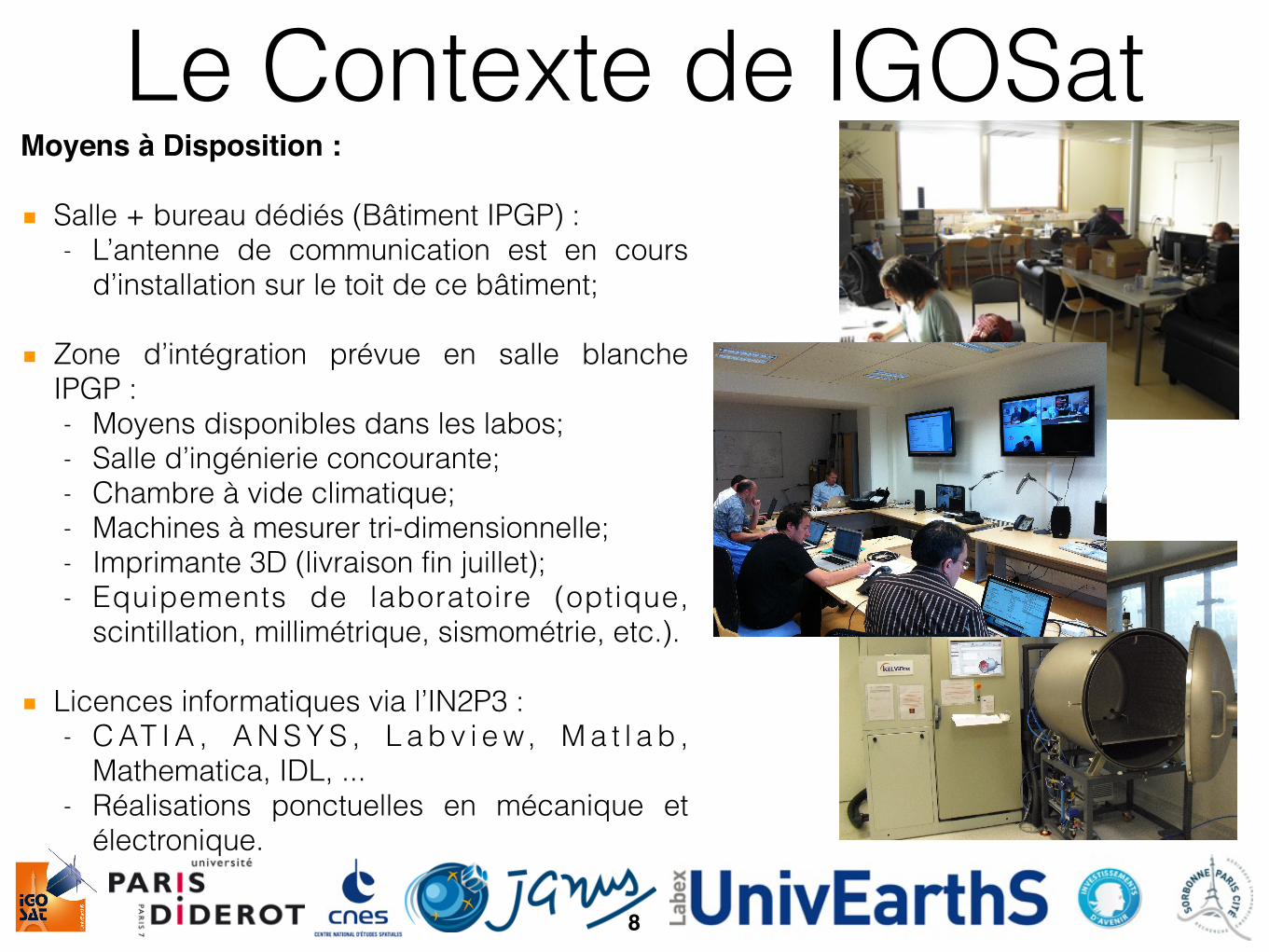
Le Contexte de IGOSatMoyens à Disposition :
▪ Salle + bureau dédiés (Bâtiment IPGP) : - L’antenne de communication est en cours
d’installation sur le toit de ce bâtiment;
▪ Zone d’intégration prévue en salle blanche IPGP : - Moyens disponibles dans les labos; - Salle d’ingénierie concourante; - Chambre à vide climatique; - Machines à mesurer tri-dimensionnelle; - Imprimante 3D (livraison fin juillet); - Equipements de laboratoire (optique,
scintillation, millimétrique, sismométrie, etc.).
▪ Licences informatiques via l’IN2P3 : - C AT I A , A N S Y S , L a b v i e w, M a t l a b ,
Mathematica, IDL, ... - Réalisations ponctuelles en mécanique et
électronique.
8
Le Contexte de IGOSatExperts :
▪ Le projet bénéficie d’experts identifiés dans différents domaines (labos et extérieurs); ▪ P. Coïsson, G. Occhipinti, Ph. Lognonné (IPGP) : sismologie et mesures du TEC; ▪ Ph. Laurent, G. Prévôt, D. Pailot (APC) : détection gamma et électrons; ▪ D. Prele, A. Tartari (APC) : Electronique et RF; ▪ G. Auvray (AMSAT) : Telecom; ▪ A. Givaudan, W. Bertoli (APC) : conception mécanique; ▪ M. Sighireanu (LIAFA), A. Petiteau (APC) : informatique et simulations; ▪ H. Inchauspé (APC) : SCAO; ▪ ...
9

Le Contexte de IGOSatPartenaires :
▪ En plus des partenaires directs (LabEx, CNES, Paris Diderot), IGOSat bénéficie du soutien de : - Campus Spatial Paris Diderot; - Omega Micro : développement de la carte EASIROC; - Accuwatt : expertise dans la gestion des batteries; - HPreC : matériaux composites haute pression (carbone); - TRAD : simulation de radiations; - Spacebel : Prestoplot; - Abvent : Google Sketchup Pro; - Airbus DS : Systema/Thermica.
▪ Des partenariats sont aussi en oeuvre avec : - l’Université des Sciences et Technologies de Hanoï / VNSC :
étudiants et station sol; - Plateforme d’Intégrat ion et de Tests / OVSQ : tests
d’environnement; - Les autres projets nanosat d’IdF ...
10
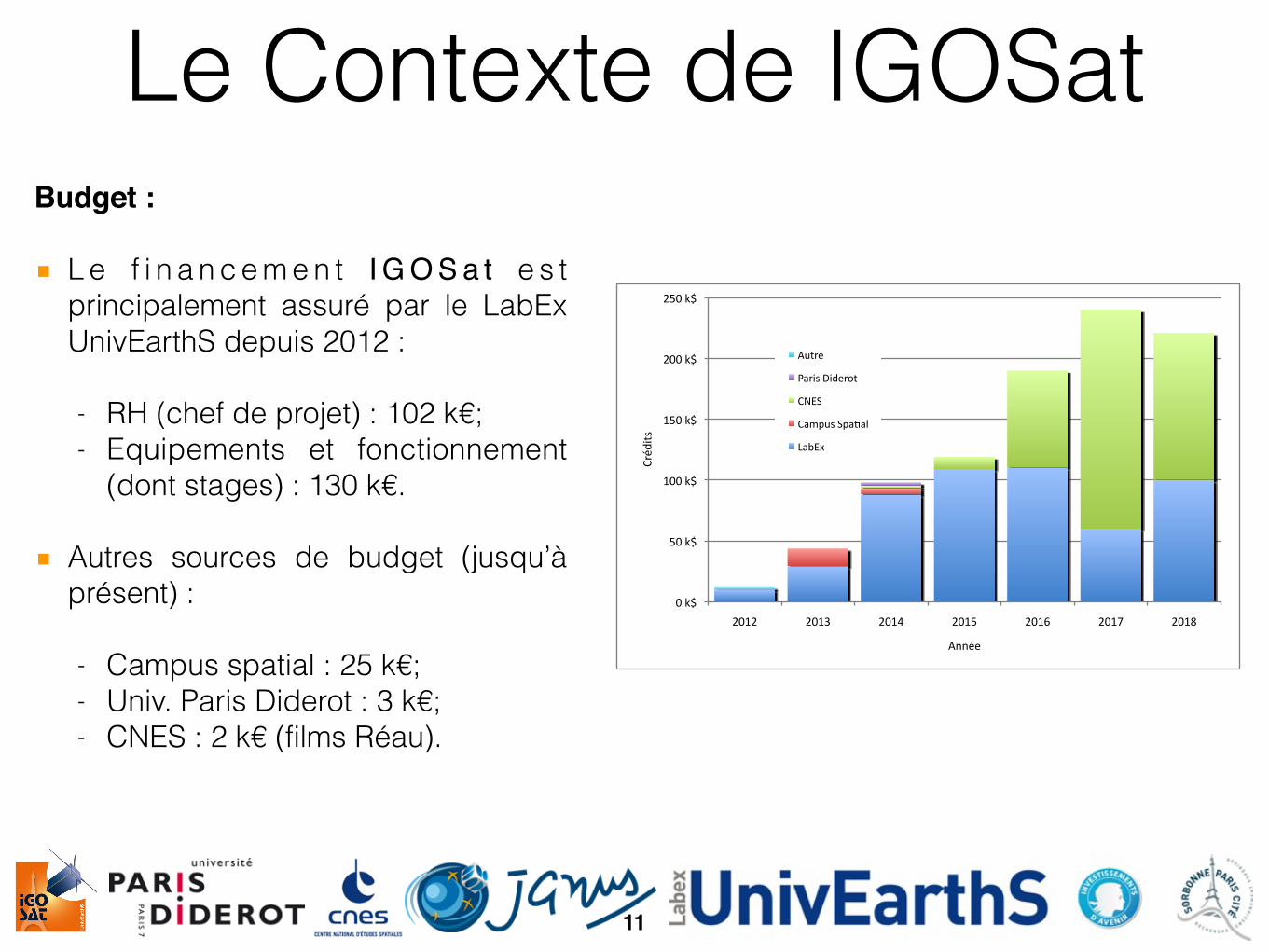
Le Contexte de IGOSatBudget :
▪ L e f i n a n c e m e n t I GOSa t e s t principalement assuré par le LabEx UnivEarthS depuis 2012 :
- RH (chef de projet) : 102 k€; - Equipements et fonctionnement
(dont stages) : 130 k€.
▪ Autres sources de budget (jusqu’à présent) :
- Campus spatial : 25 k€; - Univ. Paris Diderot : 3 k€; - CNES : 2 k€ (films Réau).
0"k$"
50"k$"
100"k$"
150"k$"
200"k$"
250"k$"
2012" 2013" 2014" 2015" 2016" 2017" 2018"
Créd
its"
Année"
Autre"
Paris"Diderot"
CNES"
Campus"SpaAal"
LabEx"
11

Le Contexte de IGOSatOutreach :
▪ Site web : www.igosat.fr - Nouveau site web en construction
…
▪ Flyers et posters;
▪ Participation à des conférences (4S, CubeSat Symposium) et expo (SpaceShow 2014);
▪ Fêtes de la Science 2013 et 2014;
▪ 3 films d’animation par des étudiants en maison d’arrêt.
UnivEarthS
LabEx
iGOSAT
Ionospheric and Gamma rayObservationsSATellite
Rejoins le projet IGOSAT et participe à la conception d’un satellite étudiant !
http://tinyurl.com/univearths-igosat [email protected]
12
Présentation Générale
La Mission
Hubert Halloin
13
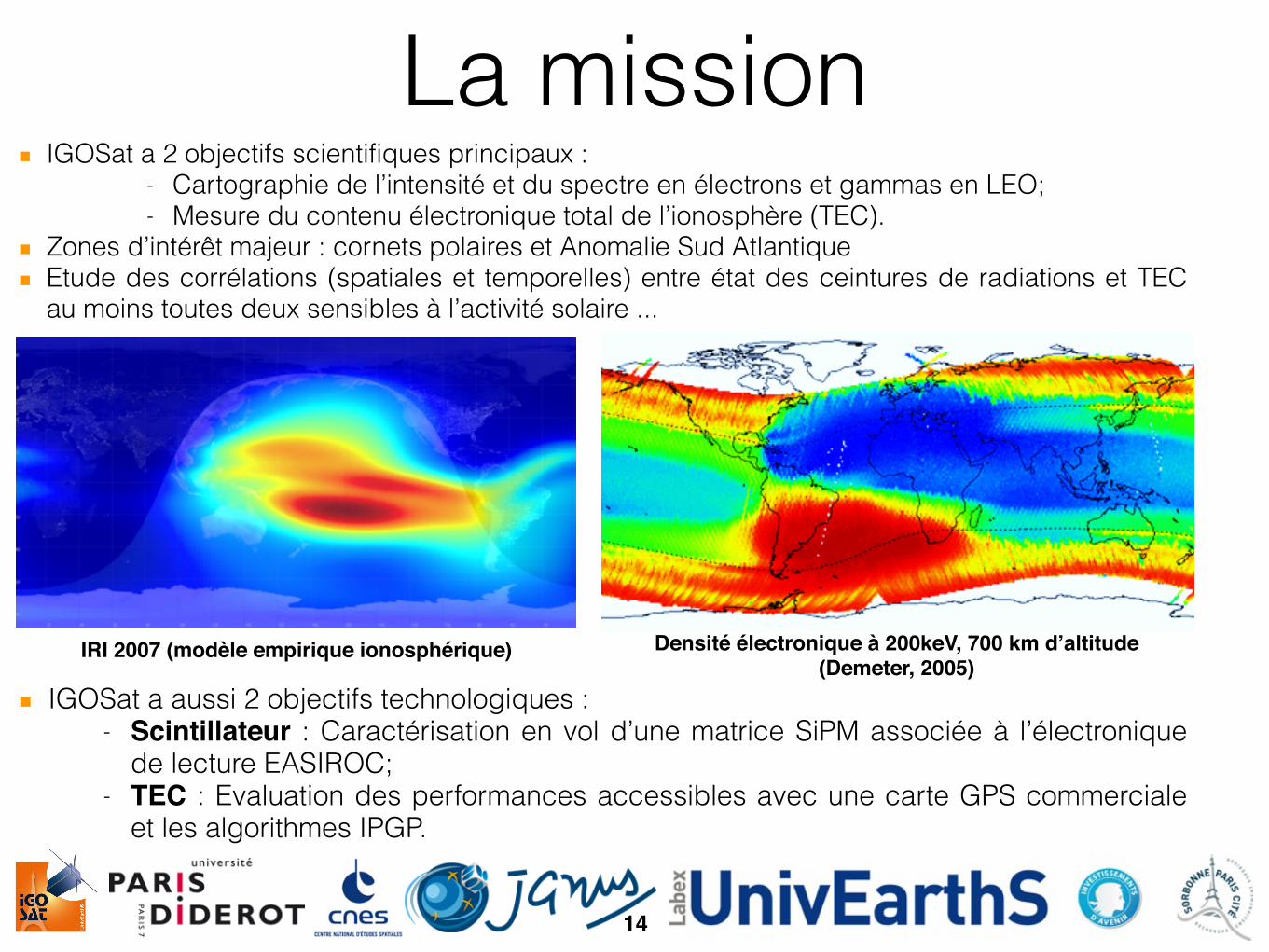
La mission▪ IGOSat a 2 objectifs scientifiques principaux :
- Cartographie de l’intensité et du spectre en électrons et gammas en LEO; - Mesure du contenu électronique total de l’ionosphère (TEC).
▪ Zones d’intérêt majeur : cornets polaires et Anomalie Sud Atlantique ▪ Etude des corrélations (spatiales et temporelles) entre état des ceintures de radiations et TEC
au moins toutes deux sensibles à l’activité solaire ...
IRI 2007 (modèle empirique ionosphérique) Densité électronique à 200keV, 700 km d’altitude (Demeter, 2005)
▪ IGOSat a aussi 2 objectifs technologiques : - Scintillateur : Caractérisation en vol d’une matrice SiPM associée à l’électronique
de lecture EASIROC; - TEC : Evaluation des performances accessibles avec une carte GPS commerciale
et les algorithmes IPGP.
14
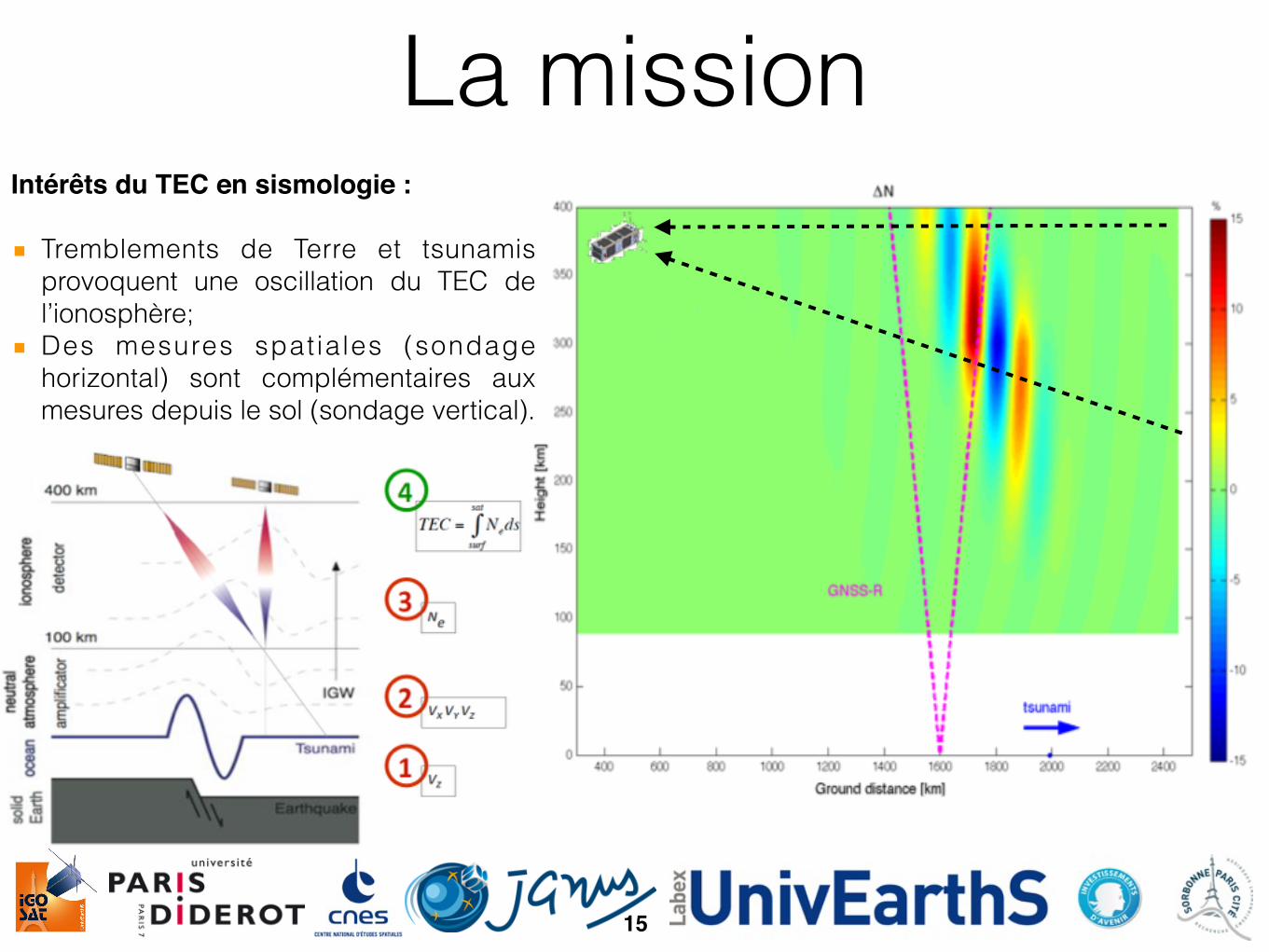
La mission Intérêts du TEC en sismologie :
▪ Tremblements de Terre et tsunamis provoquent une oscillation du TEC de l’ionosphère;
▪ Des mesures spatiales (sondage horizontal) sont complémentaires aux mesures depuis le sol (sondage vertical).
15

La missionHéritage et Innovations :
▪ Le scintillateur est constitué de 2 parties : - LaBr3 : sensible aux e- et gammas; - Plastique : sensible aux e-;
- Les mesures de coïncidence permettent d’identifier les particules incidentes.
▪ Géométrie et matériaux hérités de la mission TARANIS : - Développement et intégration de l’instrument XGRE à
l’APC; - Livraison des modèles de vol en 2015, décollage en 2017.
▪ Utilisation d’une matrice de PD à avalanche (SiPM) pour la lecture:
- Avantage : plus de HT; - 1ère utilisation spatiale ...
▪ Electronique de lecture développée par Omega Micro : - EASIROC; - Faible consommation, rad-hard, jamais testé dans
l’espace...
16
La missionProfil Mission :
▪ CubeSat 3U. ▪ Durée mission : 1 an. ▪ Orbite :
- Circulaire, polaire, (quasi)héliosynchrone;
- Altitude : ~550 km (limite SAA) -> ~650 km (LOS).
▪ Stations sol : - Paris et Hanoï.
▪ Attitude : - Pointage d’un point virtuel 300
km d’altitude au limbe, sur la trace arrière;
- Précision de pointage requise : 5 à 10°.
17
0
2
4
6
8
10
12
14
16
18
20
13/06/1500:00:00
14/06/1500:00:00
15/06/1500:00:00
16/06/1500:00:00
17/06/1500:00:00
18/06/1500:00:00
50
55
60
65
70
75
80
85
90
95
100
Puis
sanc
e [W
]
Cha
rge
batte
rie [%
]
Bilan de puissance (HAAN=3h)
05/07/2015 20:18:44
Total consomme Total recu Charge batterie
0
2
4
6
8
10
12
14
16
18
20
13/06/1500:00:00
14/06/1500:00:00
15/06/1500:00:00
16/06/1500:00:00
17/06/1500:00:00
18/06/1500:00:00
50
55
60
65
70
75
80
85
90
95
100
Puis
sanc
e [W
]
Cha
rge
batte
rie [%
]
Bilan de puissance (HAAN=0h)
05/07/2015 20:18:23
Total consomme Total recu Charge batterie
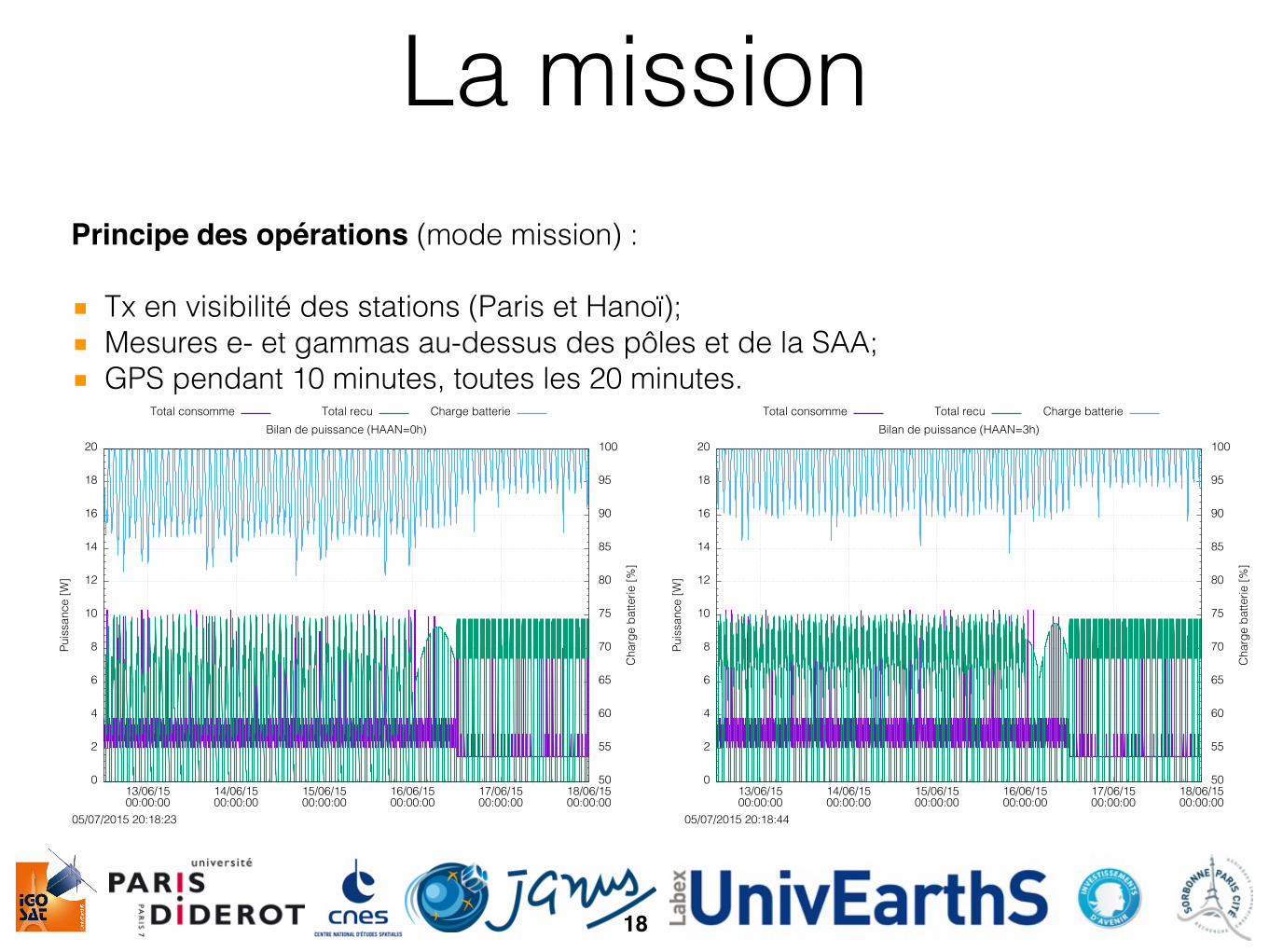
Principe des opérations (mode mission) :
▪ Tx en visibilité des stations (Paris et Hanoï); ▪ Mesures e- et gammas au-dessus des pôles et de la SAA; ▪ GPS pendant 10 minutes, toutes les 20 minutes.
La mission
18

Présentation Générale
Le Projet IGOSat
Marco Agnan
19
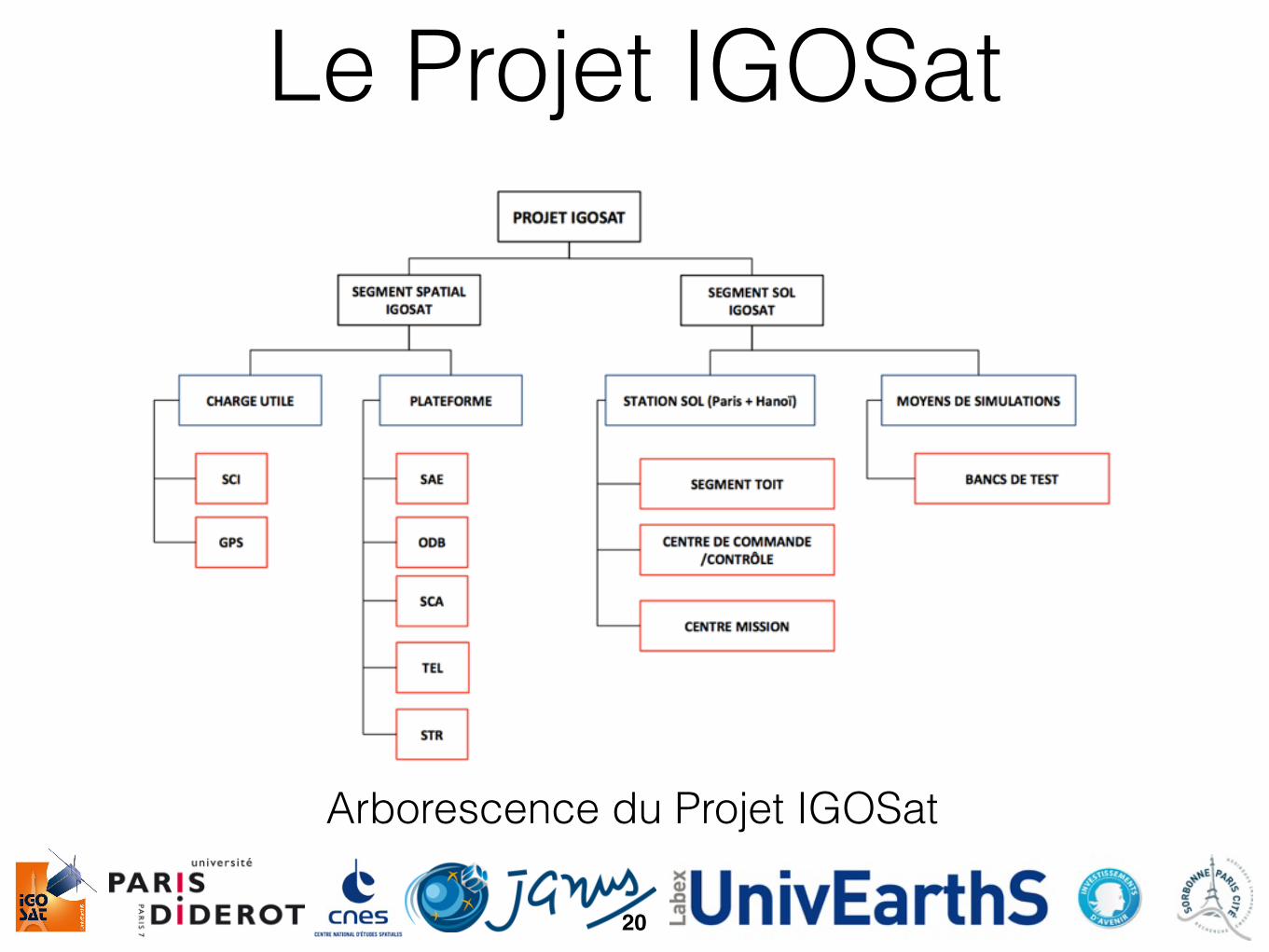
Le Projet IGOSat
Arborescence du Projet IGOSat
20
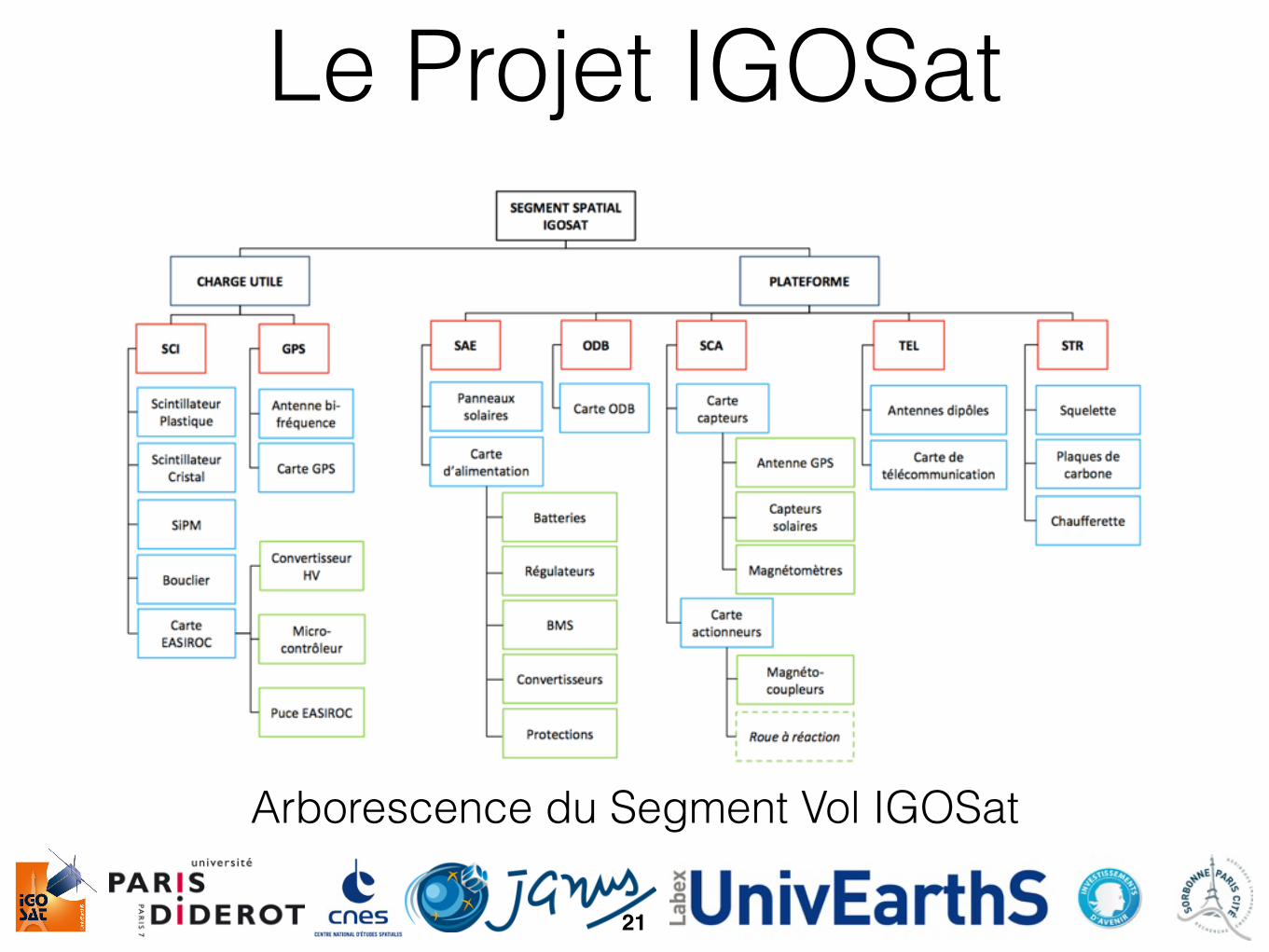
Le Projet IGOSat
Arborescence du Segment Vol IGOSat
21
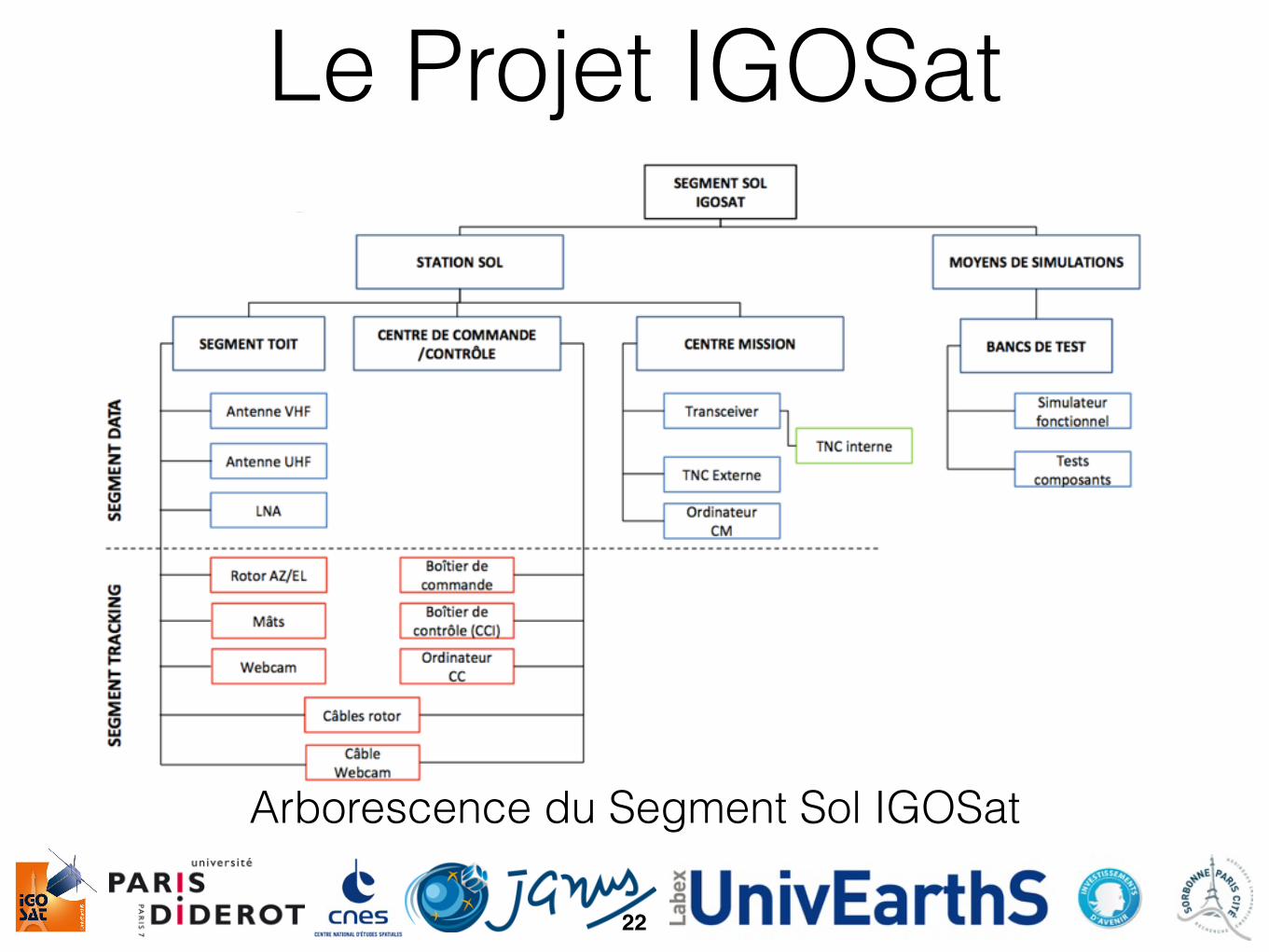
Le Projet IGOSat
Arborescence du Segment Sol IGOSat
22

Le Projet IGOSat
Planning du projet IGOSat
Phase Date Prévisionnelle Activités Associées Revue(s) Associée(s)
A Fin : 09 Juillet 2015 Etudes de faisabilité Revue des Exigences Préliminaires (REP)
B Fin : Automne 2015- Conception Architecturale - Structural & Thermal Model - Installation Station Sol
Revue de Définition Préliminaire (RDP)
C Printemps 2016 - Conception détaillée - Flat Sat / Engineering Model (?)
Revue de Conception Détaillée (RCD)
D Fin : Juin 2017- Production / Qualification Model - Integration - Livraison Flight Model
- Revue de Qualification (RQ) - Revue d’Acceptation (RA)
E Lancement prévu fin 2017 / début 2018 Opérations
- Revue d’Aptitude Opérationnelle (RAO)
- Revue d’Exploitation (REVEX)
F Fin : Avant 2042 Fin de Vie (régie par la LOS) N/A
23
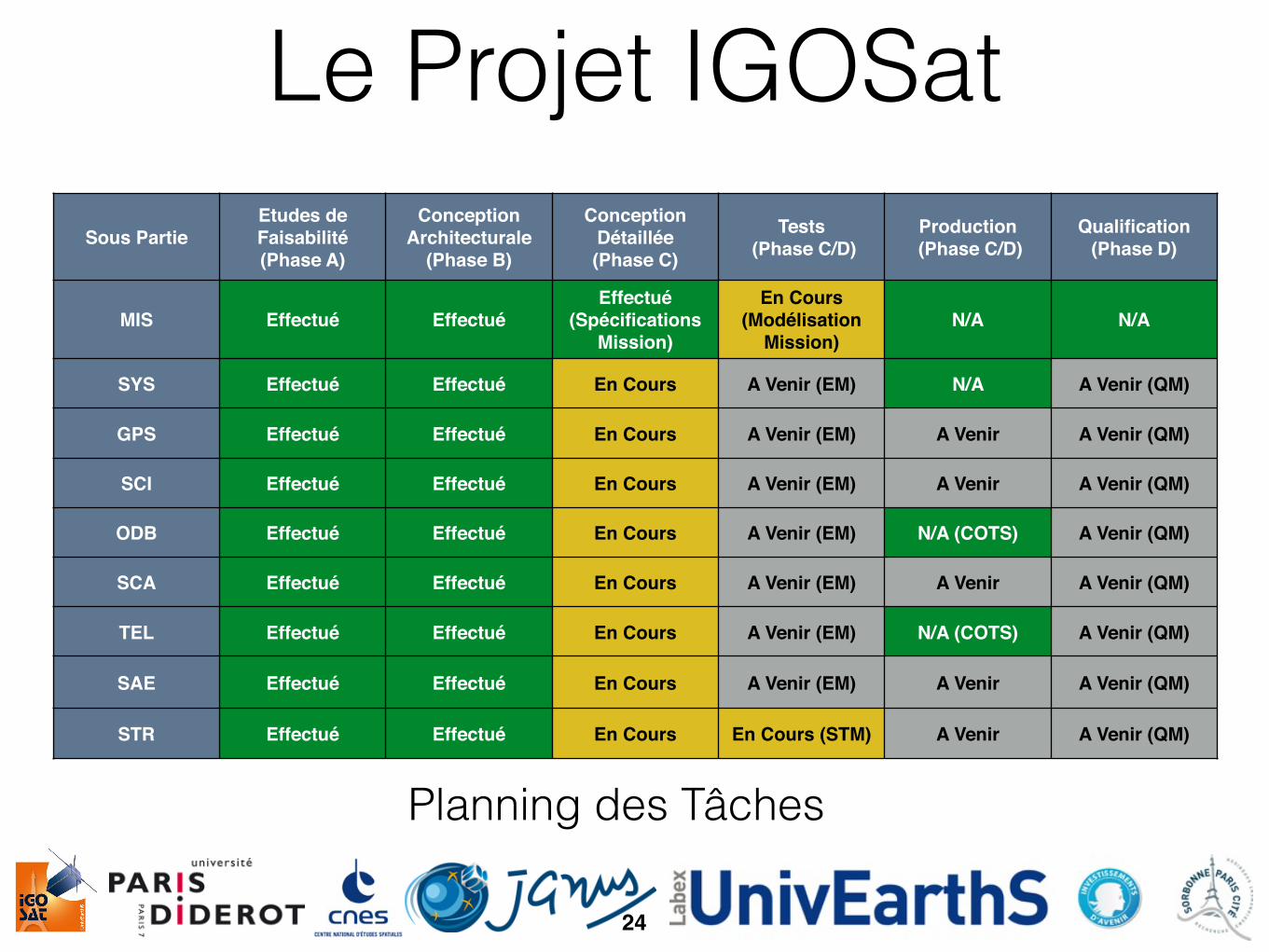
Le Projet IGOSat
Planning des Tâches
Sous PartieEtudes de Faisabilité (Phase A)
Conception Architecturale
(Phase B)
Conception Détaillée (Phase C)
Tests (Phase C/D)
Production (Phase C/D)
Qualification (Phase D)
MIS Effectué EffectuéEffectué
(Spécifications Mission)
En Cours (Modélisation
Mission)N/A N/A
SYS Effectué Effectué En Cours A Venir (EM) N/A A Venir (QM)
GPS Effectué Effectué En Cours A Venir (EM) A Venir A Venir (QM)
SCI Effectué Effectué En Cours A Venir (EM) A Venir A Venir (QM)
ODB Effectué Effectué En Cours A Venir (EM) N/A (COTS) A Venir (QM)
SCA Effectué Effectué En Cours A Venir (EM) A Venir A Venir (QM)
TEL Effectué Effectué En Cours A Venir (EM) N/A (COTS) A Venir (QM)
SAE Effectué Effectué En Cours A Venir (EM) A Venir A Venir (QM)
STR Effectué Effectué En Cours En Cours (STM) A Venir A Venir (QM)
24
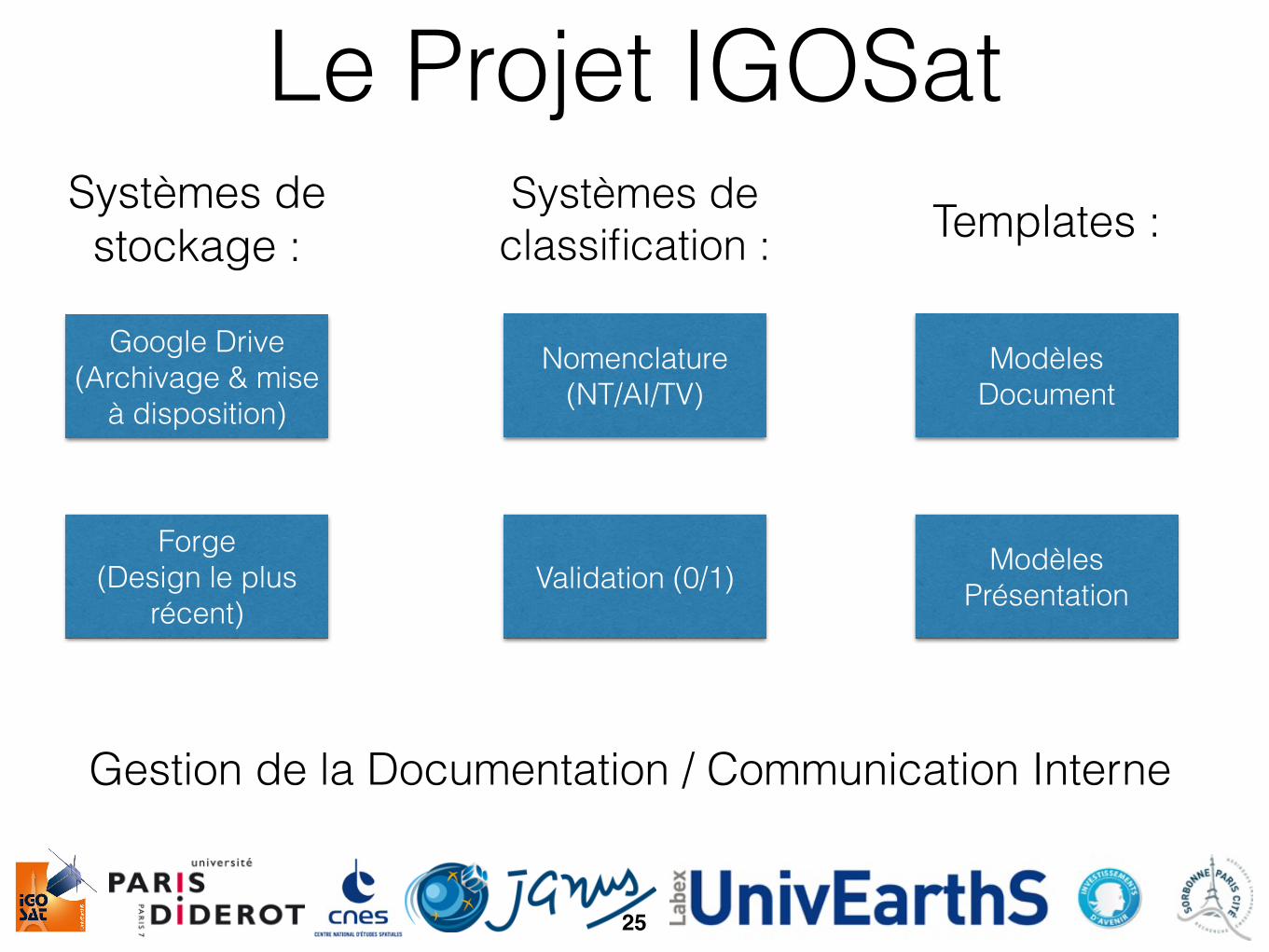
Le Projet IGOSat
Gestion de la Documentation / Communication Interne
Google Drive (Archivage & mise
à disposition)
Forge (Design le plus
récent)
Nomenclature (NT/AI/TV)
Validation (0/1)
Systèmes de stockage :
Systèmes de classification : Templates :
Modèles Document
Modèles Présentation
25
Présentation Générale
Les Exigences Préliminaires
Marco Agnan
26
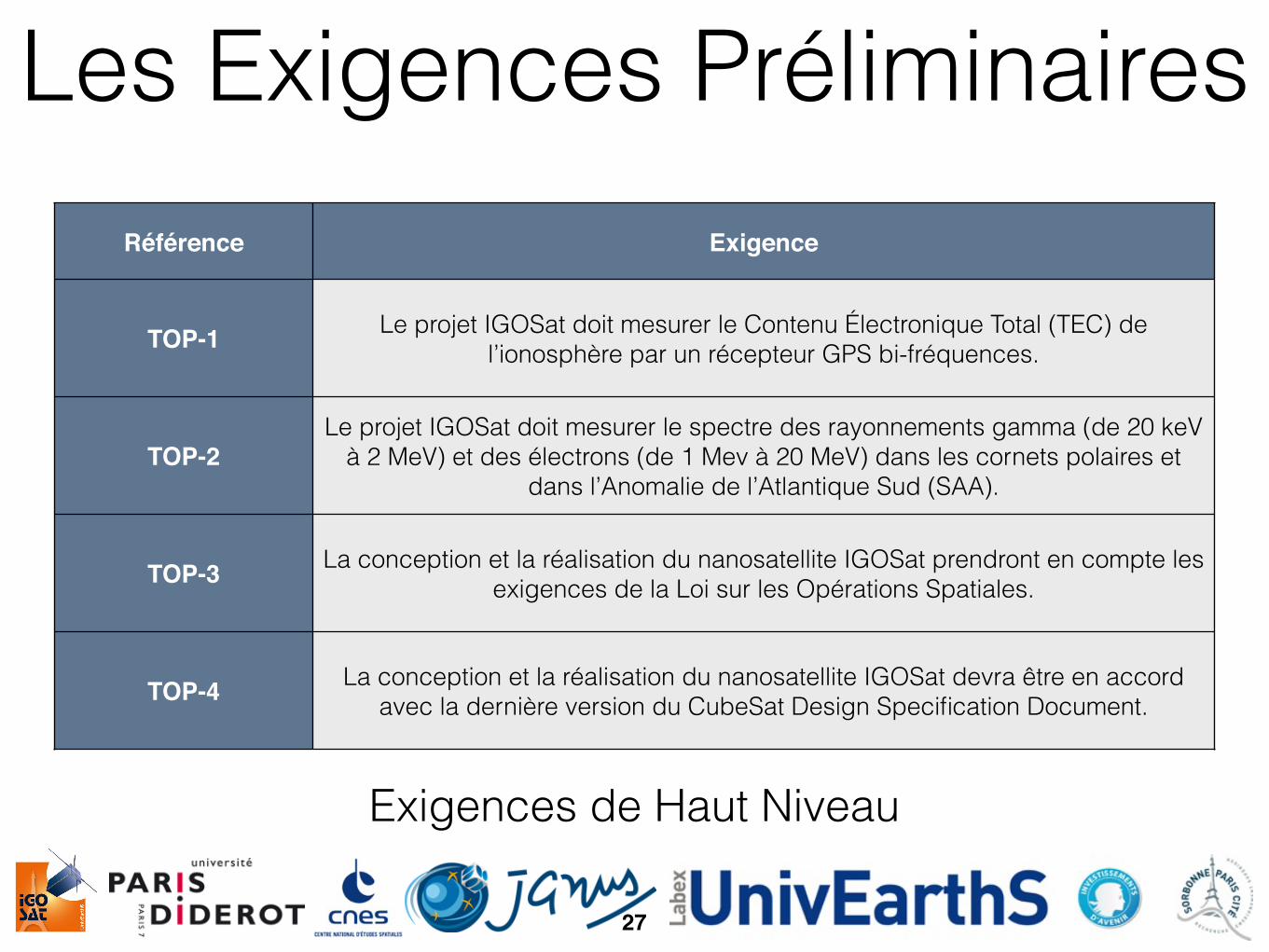
Les Exigences Préliminaires
Exigences de Haut Niveau
Référence Exigence
TOP-1 Le projet IGOSat doit mesurer le Contenu Électronique Total (TEC) de l’ionosphère par un récepteur GPS bi-fréquences.
TOP-2Le projet IGOSat doit mesurer le spectre des rayonnements gamma (de 20 keV
à 2 MeV) et des électrons (de 1 Mev à 20 MeV) dans les cornets polaires et dans l’Anomalie de l’Atlantique Sud (SAA).
TOP-3 La conception et la réalisation du nanosatellite IGOSat prendront en compte les exigences de la Loi sur les Opérations Spatiales.
TOP-4 La conception et la réalisation du nanosatellite IGOSat devra être en accord avec la dernière version du CubeSat Design Specification Document.
27
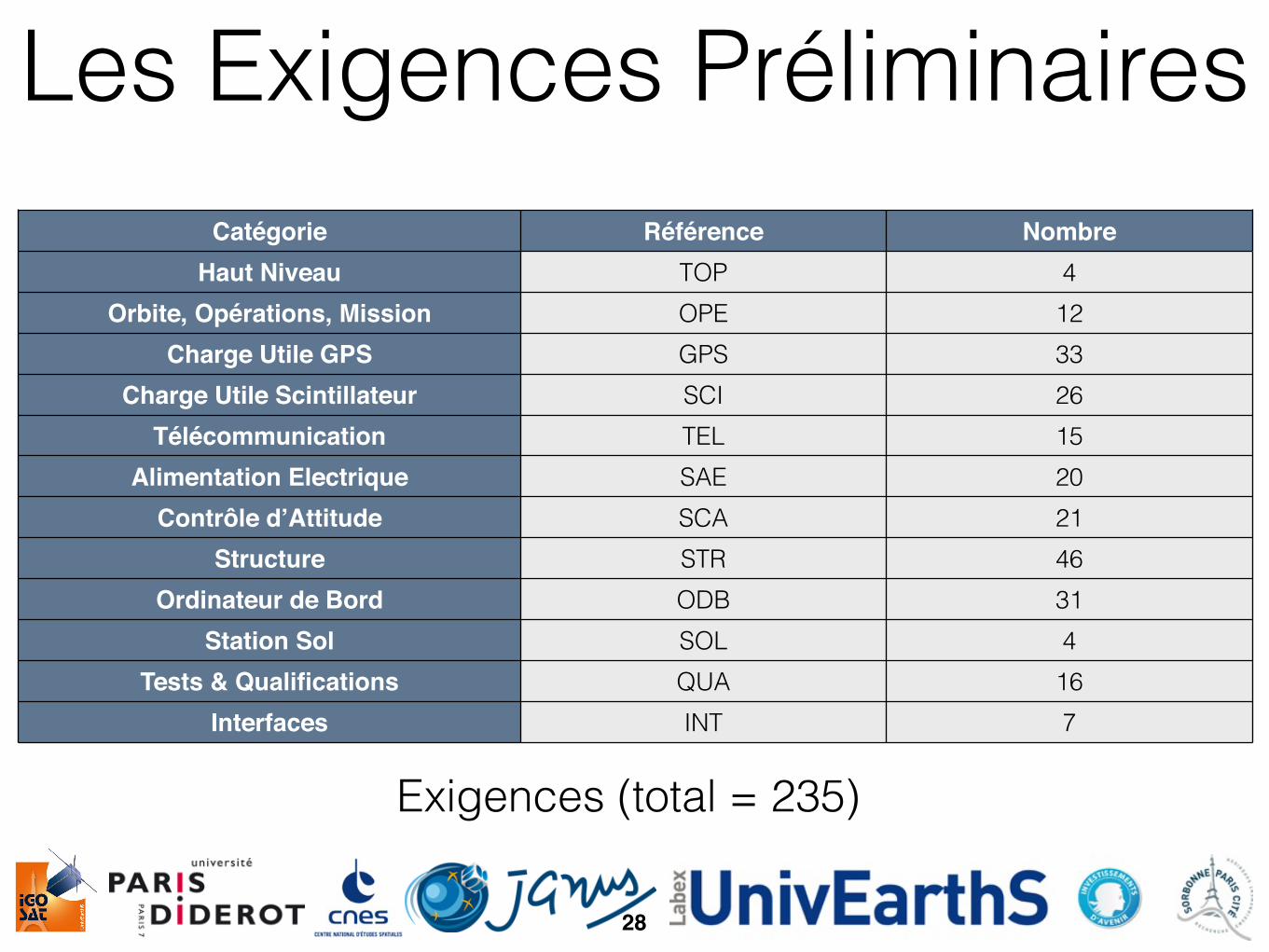
Catégorie Référence NombreHaut Niveau TOP 4
Orbite, Opérations, Mission OPE 12Charge Utile GPS GPS 33
Charge Utile Scintillateur SCI 26Télécommunication TEL 15
Alimentation Electrique SAE 20Contrôle d’Attitude SCA 21
Structure STR 46Ordinateur de Bord ODB 31
Station Sol SOL 4Tests & Qualifications QUA 16
Interfaces INT 7
Exigences (total = 235)
Les Exigences Préliminaires
28
Méthode de Validation des Exigences :
▪ Une Note Technique (NT) défini les exigences associées à un sous système;
▪ Une Note sur les Tests et Validations (TV) est rédigée pour préparer la campagne de tests;
▪ Un responsable est nommé pour la campagne de tests;
▪ La campagne de test à lieu;
▪ Une Note sur les Tests et Validations (TV) est rédigée pour conclure la campagne de tests.
Les Exigences Préliminaires
29
Présentation Générale
Le Système
Stanislas Le Grelle
30
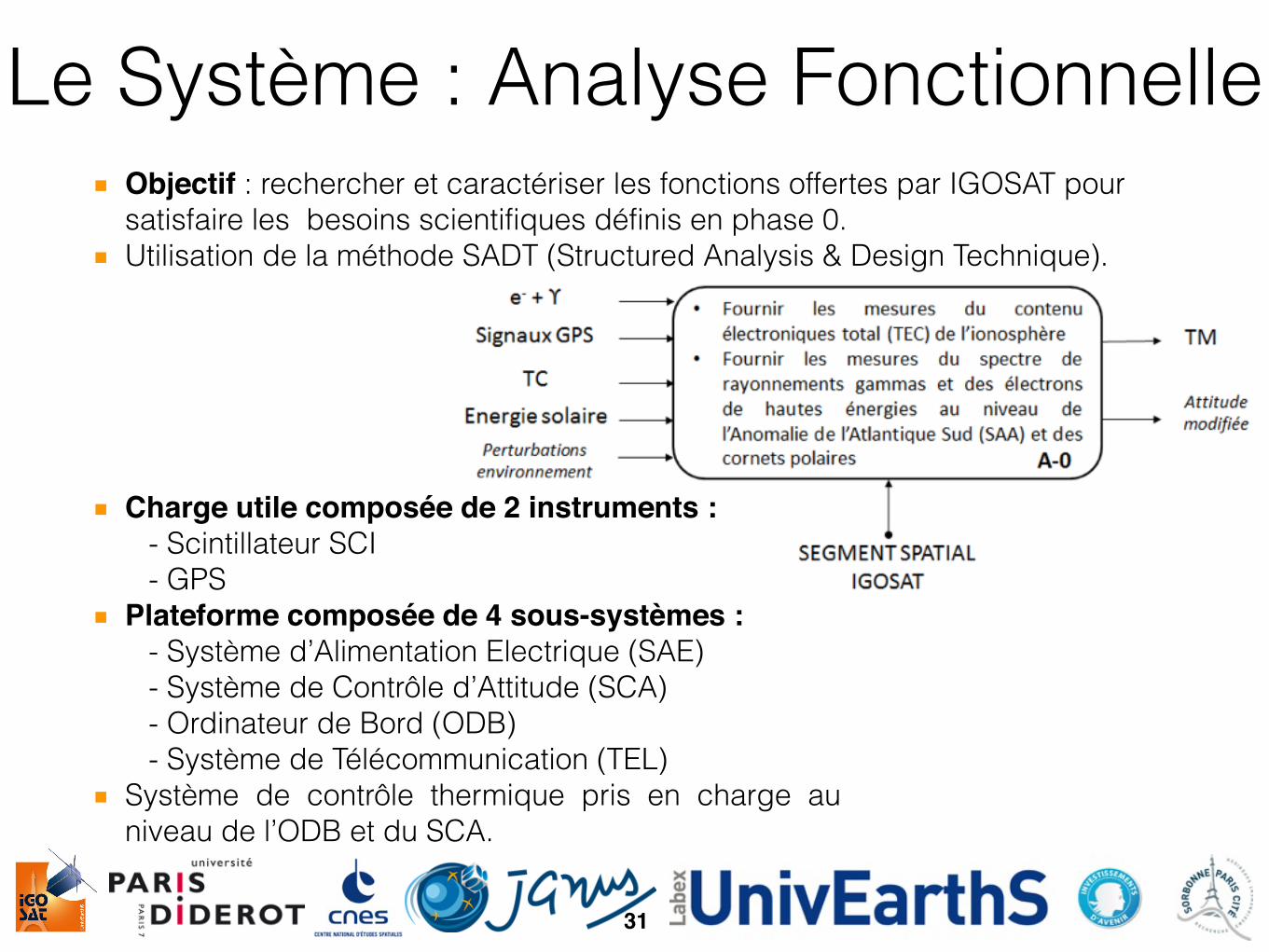
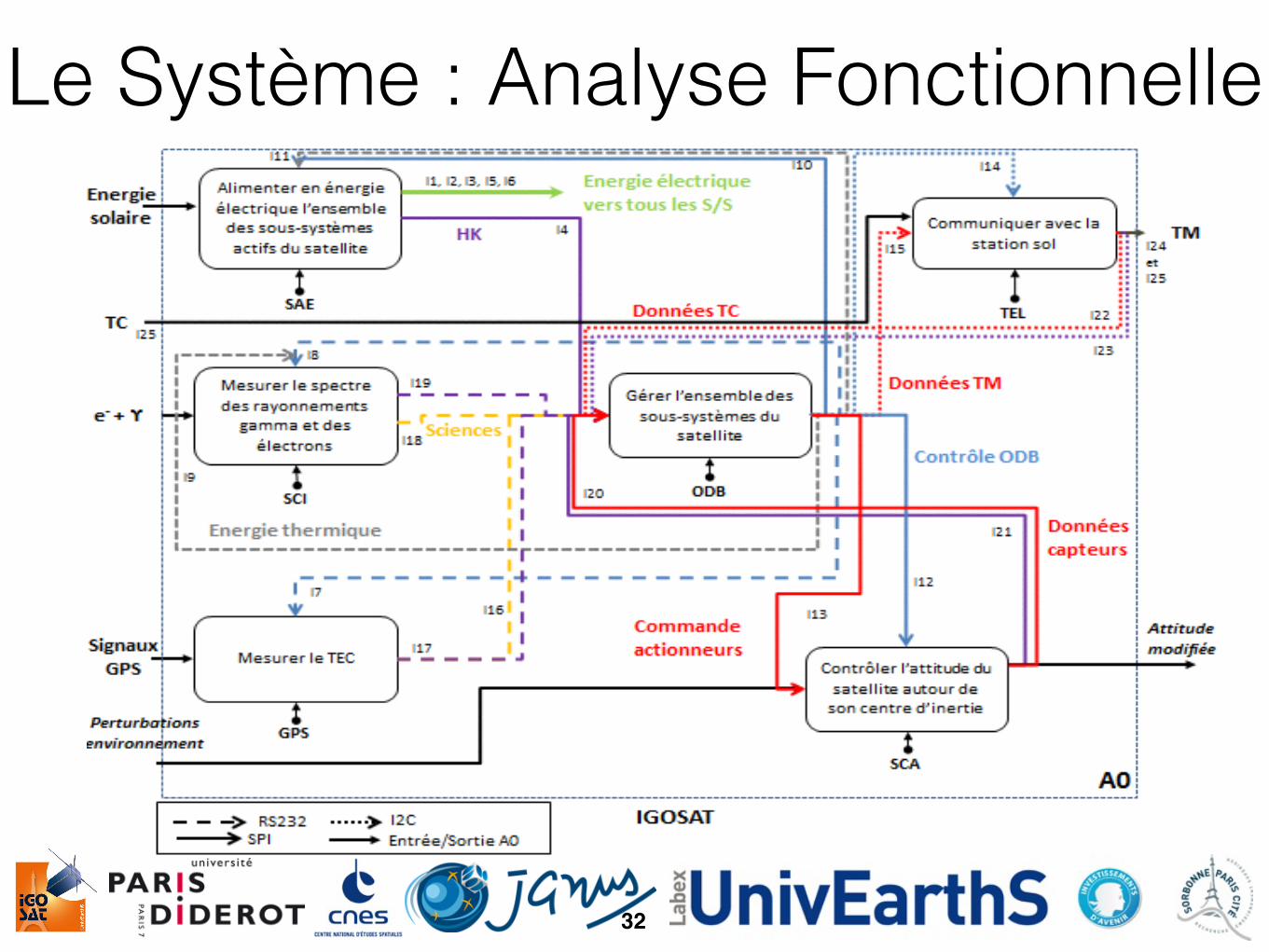
▪ Objectif : rechercher et caractériser les fonctions offertes par IGOSAT pour satisfaire les besoins scientifiques définis en phase 0.
▪ Utilisation de la méthode SADT (Structured Analysis & Design Technique).
▪ Charge utile composée de 2 instruments : - Scintillateur SCI - GPS ▪ Plateforme composée de 4 sous-systèmes : - Système d’Alimentation Electrique (SAE) - Système de Contrôle d’Attitude (SCA) - Ordinateur de Bord (ODB) - Système de Télécommunication (TEL) ▪ Système de contrôle thermique pris en charge au
niveau de l’ODB et du SCA.
Le Système : Analyse Fonctionnelle
31
Le Système : Analyse Fonctionnelle
32
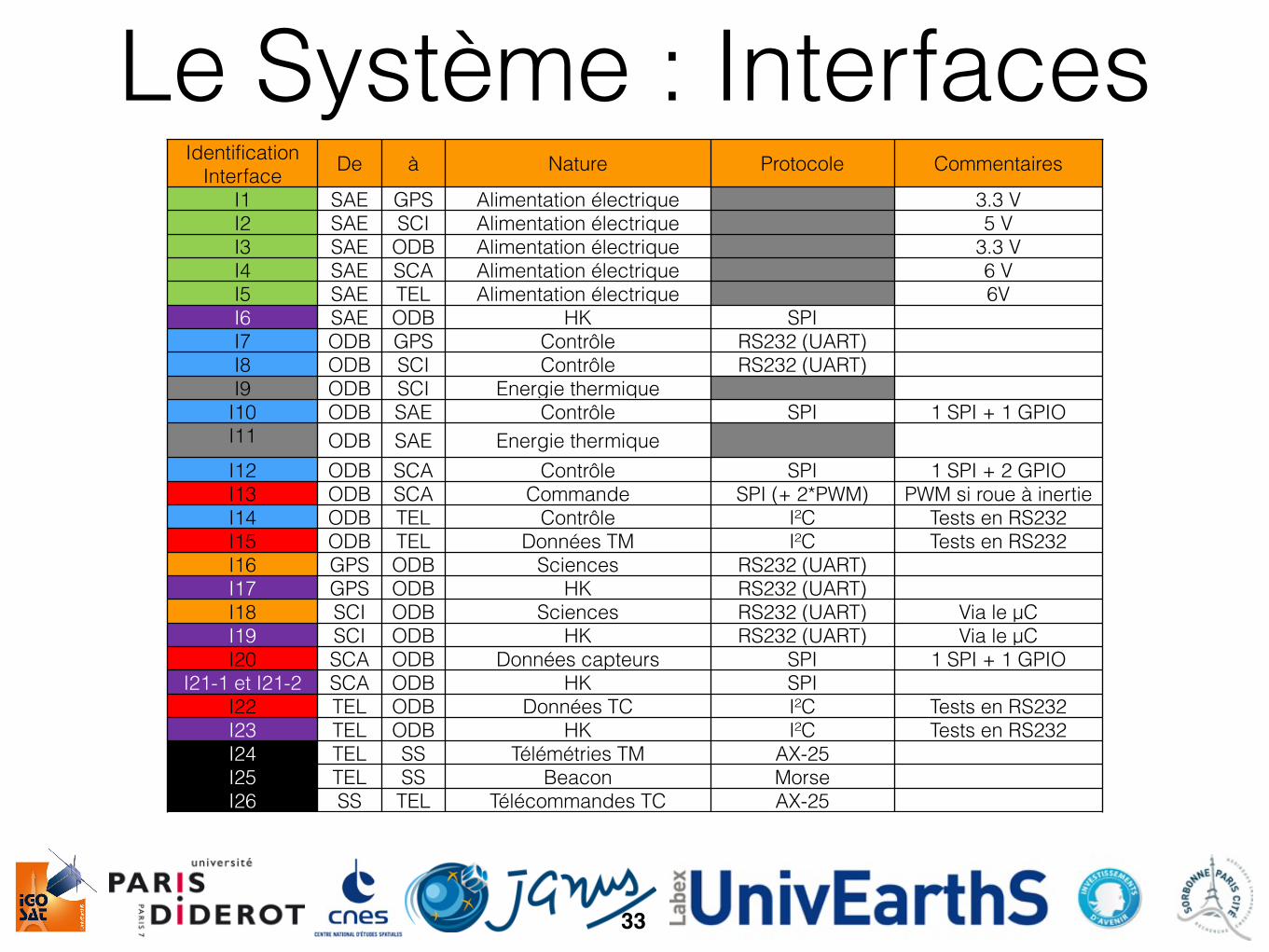
Le Système : InterfacesIdentification
Interface De à Nature Protocole Commentaires
I1 SAE GPS Alimentation électrique 3.3 VI2 SAE SCI Alimentation électrique 5 VI3 SAE ODB Alimentation électrique 3.3 VI4 SAE SCA Alimentation électrique 6 VI5 SAE TEL Alimentation électrique 6VI6 SAE ODB HK SPI I7 ODB GPS Contrôle RS232 (UART) I8 ODB SCI Contrôle RS232 (UART) I9 ODB SCI Energie thermique I10 ODB SAE Contrôle SPI 1 SPI + 1 GPIOI11 ODB SAE Energie thermique I12 ODB SCA Contrôle SPI 1 SPI + 2 GPIOI13 ODB SCA Commande SPI (+ 2*PWM) PWM si roue à inertieI14 ODB TEL Contrôle I²C Tests en RS232I15 ODB TEL Données TM I²C Tests en RS232I16 GPS ODB Sciences RS232 (UART) I17 GPS ODB HK RS232 (UART) I18 SCI ODB Sciences RS232 (UART) Via le μCI19 SCI ODB HK RS232 (UART) Via le μCI20 SCA ODB Données capteurs SPI 1 SPI + 1 GPIO
I21-1 et I21-2 SCA ODB HK SPI I22 TEL ODB Données TC I²C Tests en RS232I23 TEL ODB HK I²C Tests en RS232I24 TEL SS Télémétries TM AX-25 I25 TEL SS Beacon Morse I26 SS TEL Télécommandes TC AX-25
33
33
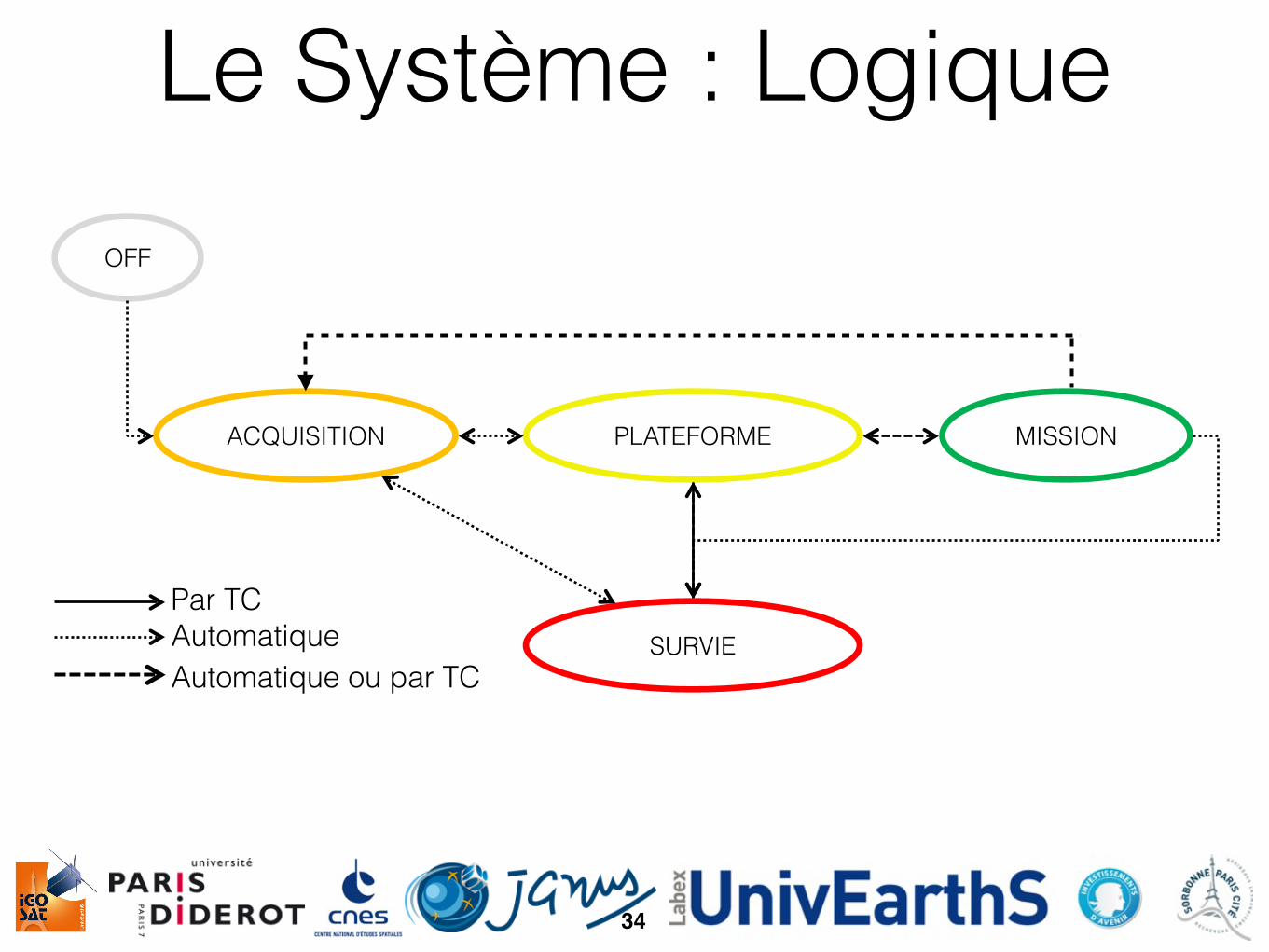
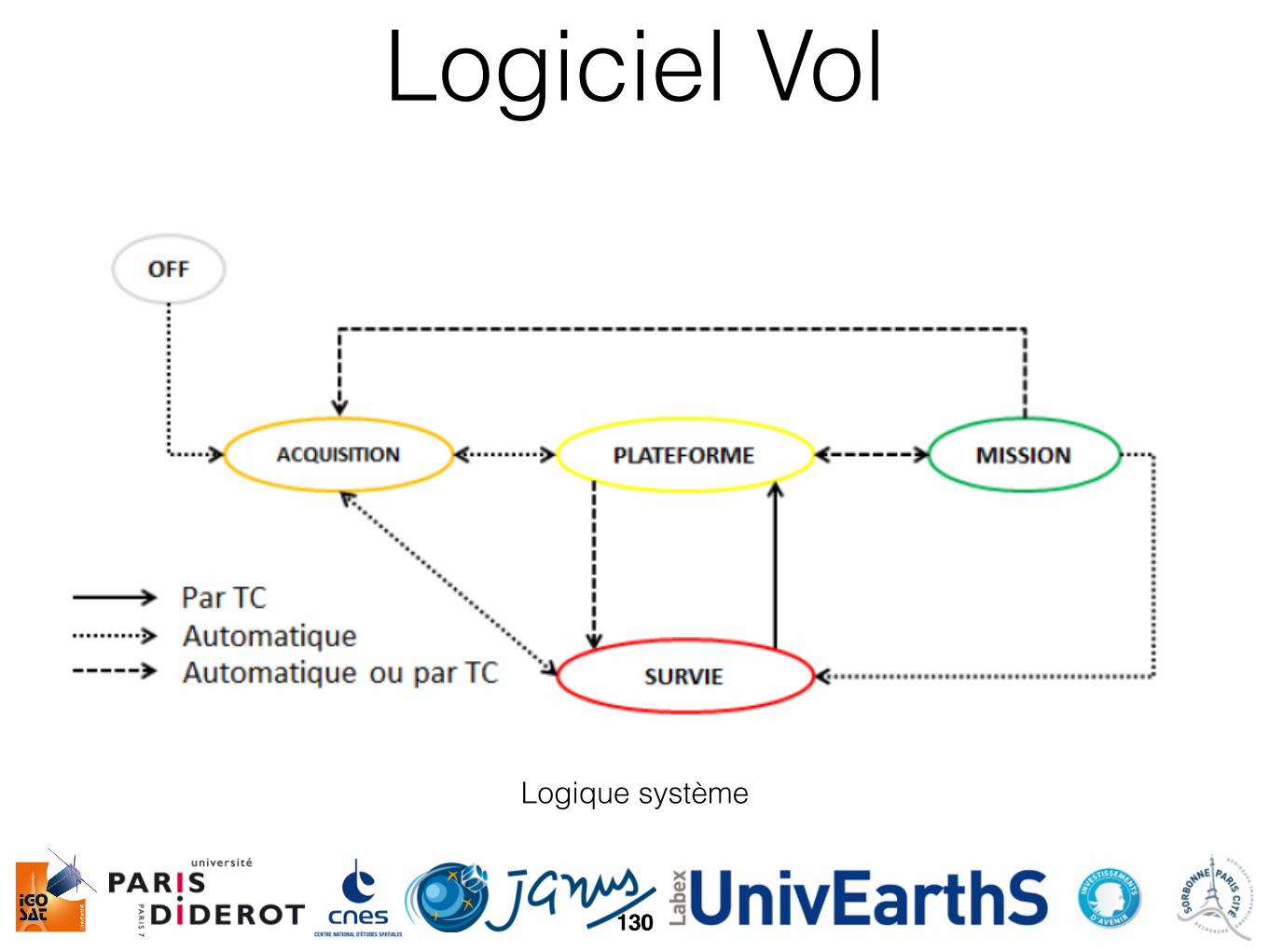
OFF
ACQUISITION PLATEFORME MISSION
SURVIE
Par TCAutomatiqueAutomatique ou par TC
Le Système : Logique
34
34

MODE SATELLITE ACQUISITION SURVIE PLATEFORME MISSION
Fonctions
GPS
SCI
COMMUNICATION
DIAGNOSTIC GROSSIER
DIAGNOSTIC FIN
CONTRÔLE
PROCESSING
INITIALISATION
ATTENTE ETAT NON NOMINAL ETAT NOMINAL
▪ Une même fonction utilisée par l’ODB peut envoyer des commandes différentes suivant le mode satellite.
▪ Mode dégradé = update du logiciel bord pour adapter le fonctionnement d’un sous-système à la panne détectée.
▪ Simulations en cours de la logique système.
Le Système : Modes
35
35
Présentation Générale
Les Bilans
Stanislas Le Grelle
36
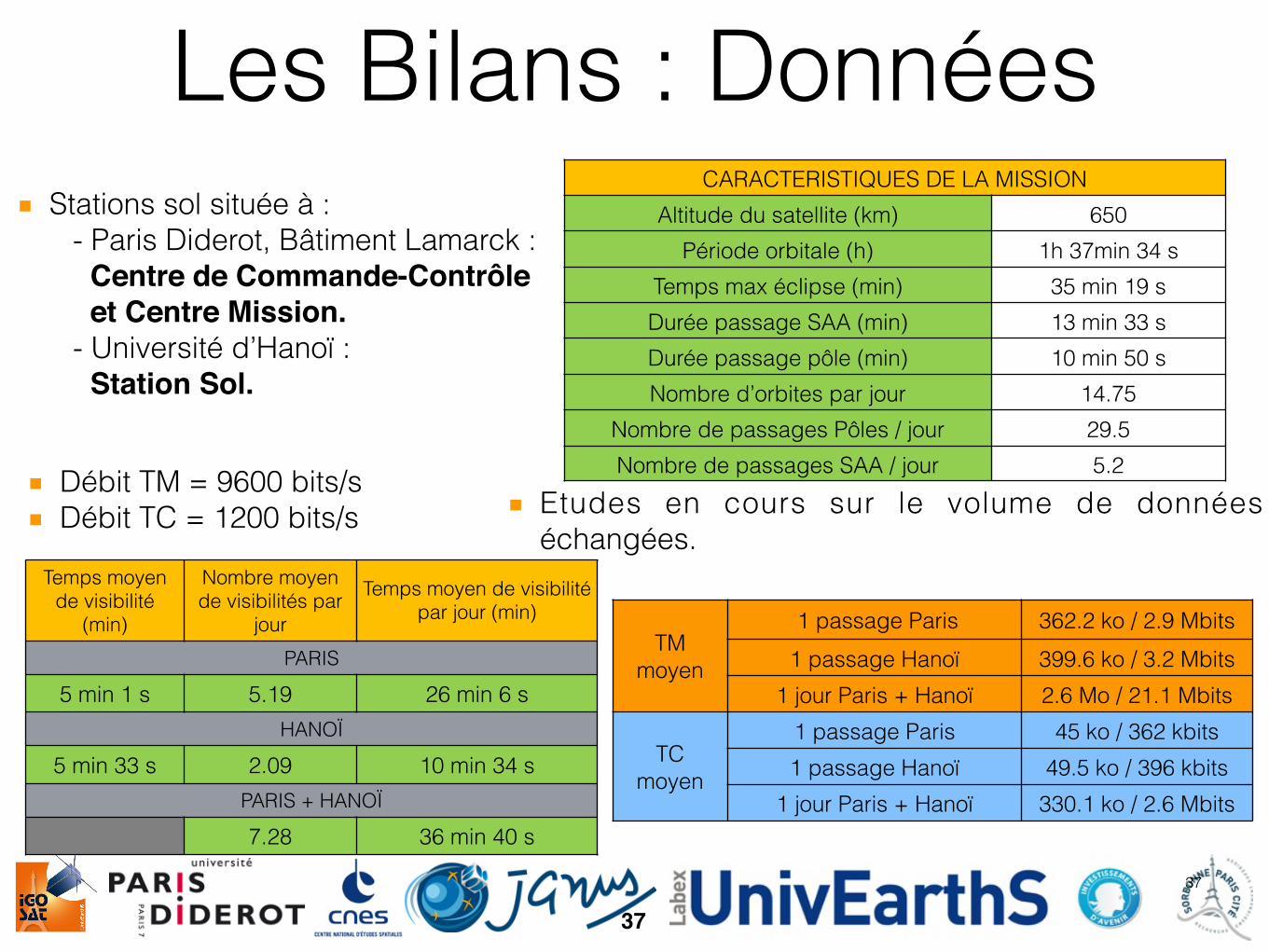
TM moyen
1 passage Paris 362.2 ko / 2.9 Mbits1 passage Hanoï 399.6 ko / 3.2 Mbits
1 jour Paris + Hanoï 2.6 Mo / 21.1 Mbits
TC moyen
1 passage Paris 45 ko / 362 kbits1 passage Hanoï 49.5 ko / 396 kbits
1 jour Paris + Hanoï 330.1 ko / 2.6 Mbits
▪ Débit TM = 9600 bits/s ▪ Débit TC = 1200 bits/s
CARACTERISTIQUES DE LA MISSIONAltitude du satellite (km) 650
Période orbitale (h) 1h 37min 34 sTemps max éclipse (min) 35 min 19 sDurée passage SAA (min) 13 min 33 sDurée passage pôle (min) 10 min 50 s Nombre d’orbites par jour 14.75
Nombre de passages Pôles / jour 29.5Nombre de passages SAA / jour 5.2
Temps moyen de visibilité
(min)
Nombre moyen de visibilités par
jour
Temps moyen de visibilité par jour (min)
PARIS
5 min 1 s 5.19 26 min 6 sHANOÏ
5 min 33 s 2.09 10 min 34 sPARIS + HANOÏ
7.28 36 min 40 s
▪ Stations sol située à : - Paris Diderot, Bâtiment Lamarck : Centre de Commande-Contrôle et Centre Mission. - Université d’Hanoï : Station Sol.
▪ Etudes en cours sur le volume de données échangées.
Les Bilans : Données
37
37
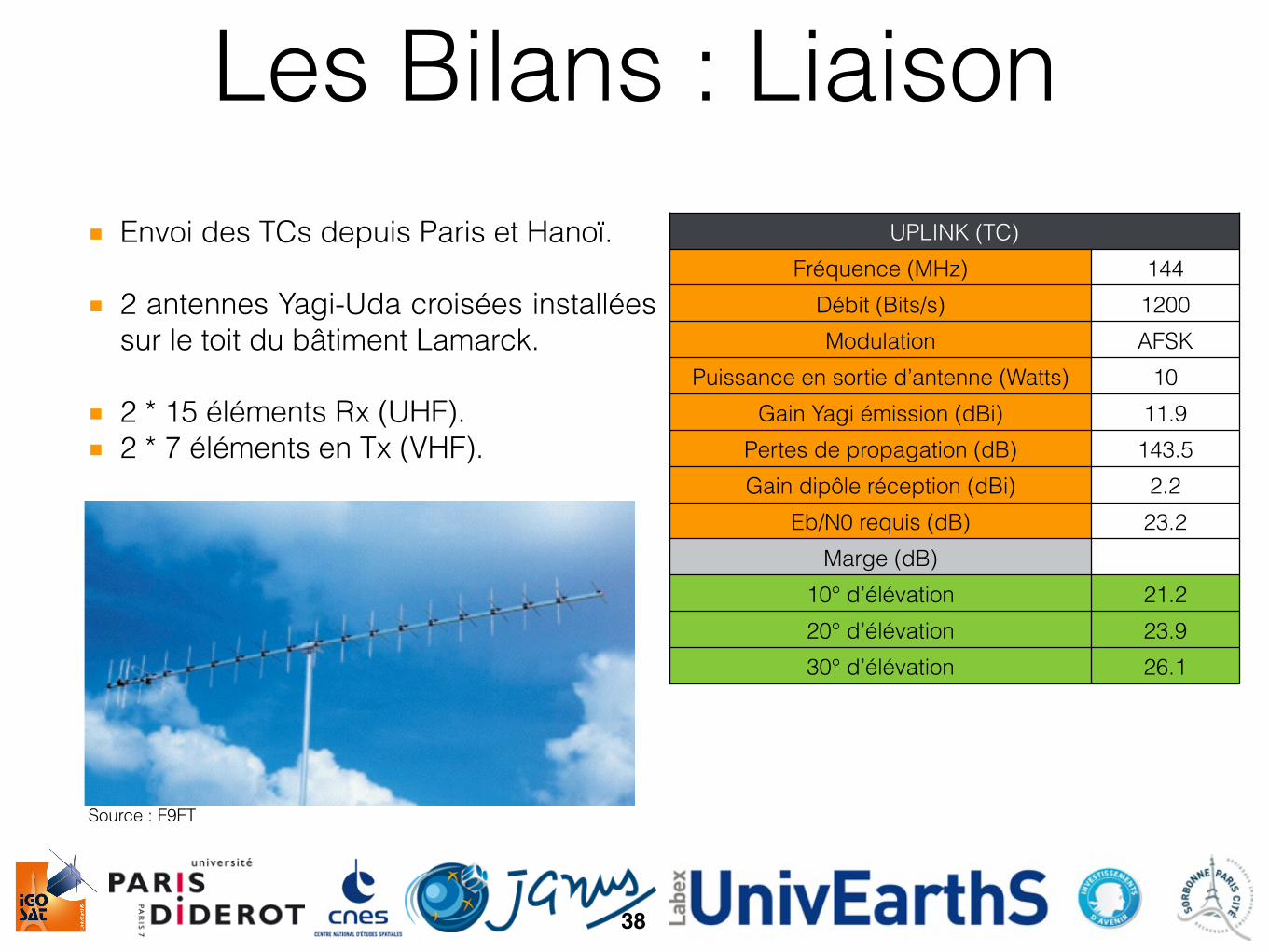
UPLINK (TC)Fréquence (MHz) 144
Débit (Bits/s) 1200Modulation AFSK
Puissance en sortie d’antenne (Watts) 10Gain Yagi émission (dBi) 11.9
Pertes de propagation (dB) 143.5Gain dipôle réception (dBi) 2.2
Eb/N0 requis (dB) 23.2Marge (dB)
10° d’élévation 21.220° d’élévation 23.930° d’élévation 26.1
▪ Envoi des TCs depuis Paris et Hanoï.
▪ 2 antennes Yagi-Uda croisées installées sur le toit du bâtiment Lamarck.
▪ 2 * 15 éléments Rx (UHF). ▪ 2 * 7 éléments en Tx (VHF).
Source : F9FT
Les Bilans : Liaison
38
38
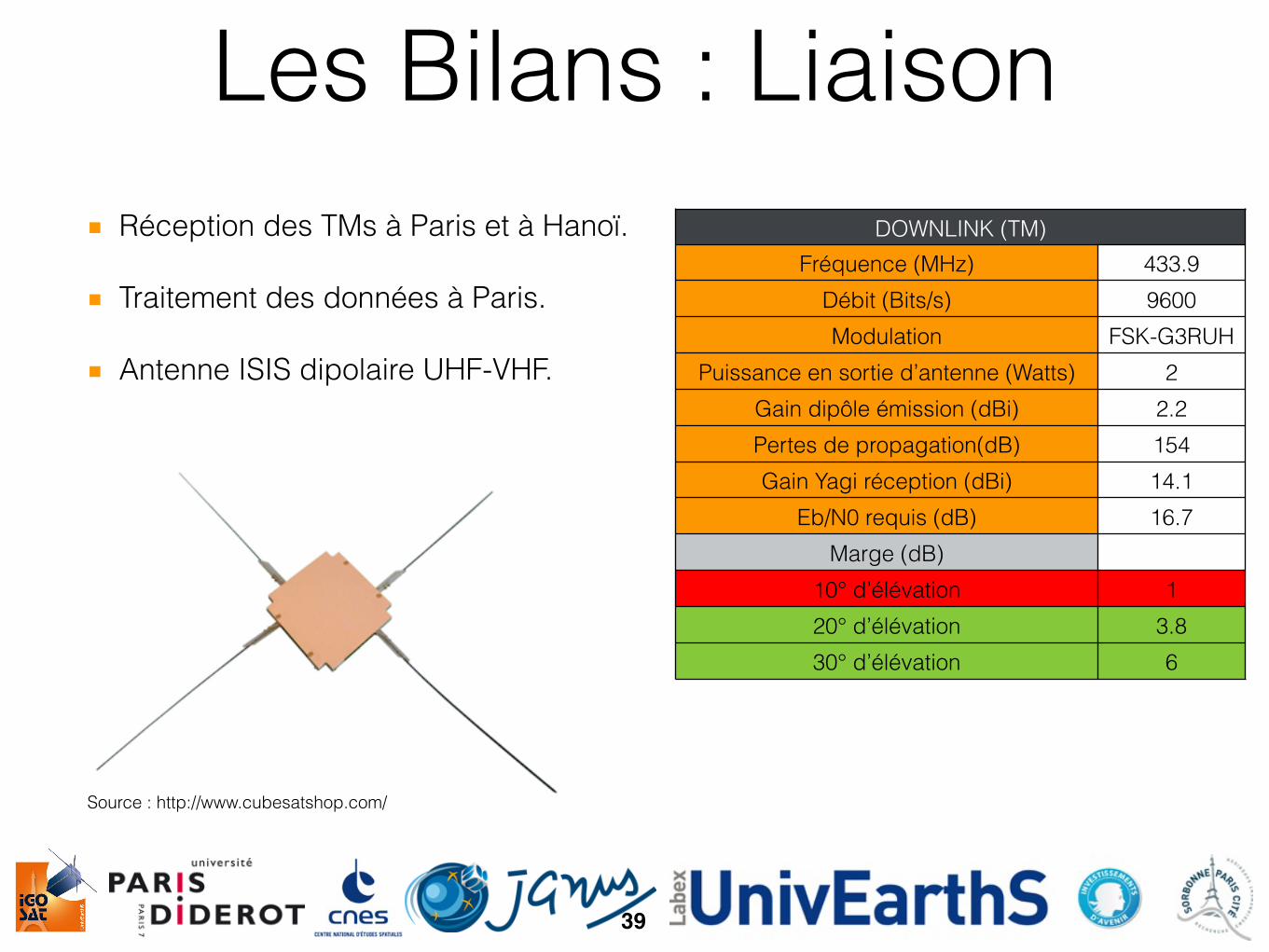
▪ Réception des TMs à Paris et à Hanoï.
▪ Traitement des données à Paris.
▪ Antenne ISIS dipolaire UHF-VHF.
Source : http://www.cubesatshop.com/
DOWNLINK (TM)Fréquence (MHz) 433.9
Débit (Bits/s) 9600Modulation FSK-G3RUH
Puissance en sortie d’antenne (Watts) 2Gain dipôle émission (dBi) 2.2Pertes de propagation(dB) 154Gain Yagi réception (dBi) 14.1
Eb/N0 requis (dB) 16.7Marge (dB)
10° d’élévation 120° d’élévation 3.830° d’élévation 6
Les Bilans : Liaison
39
39
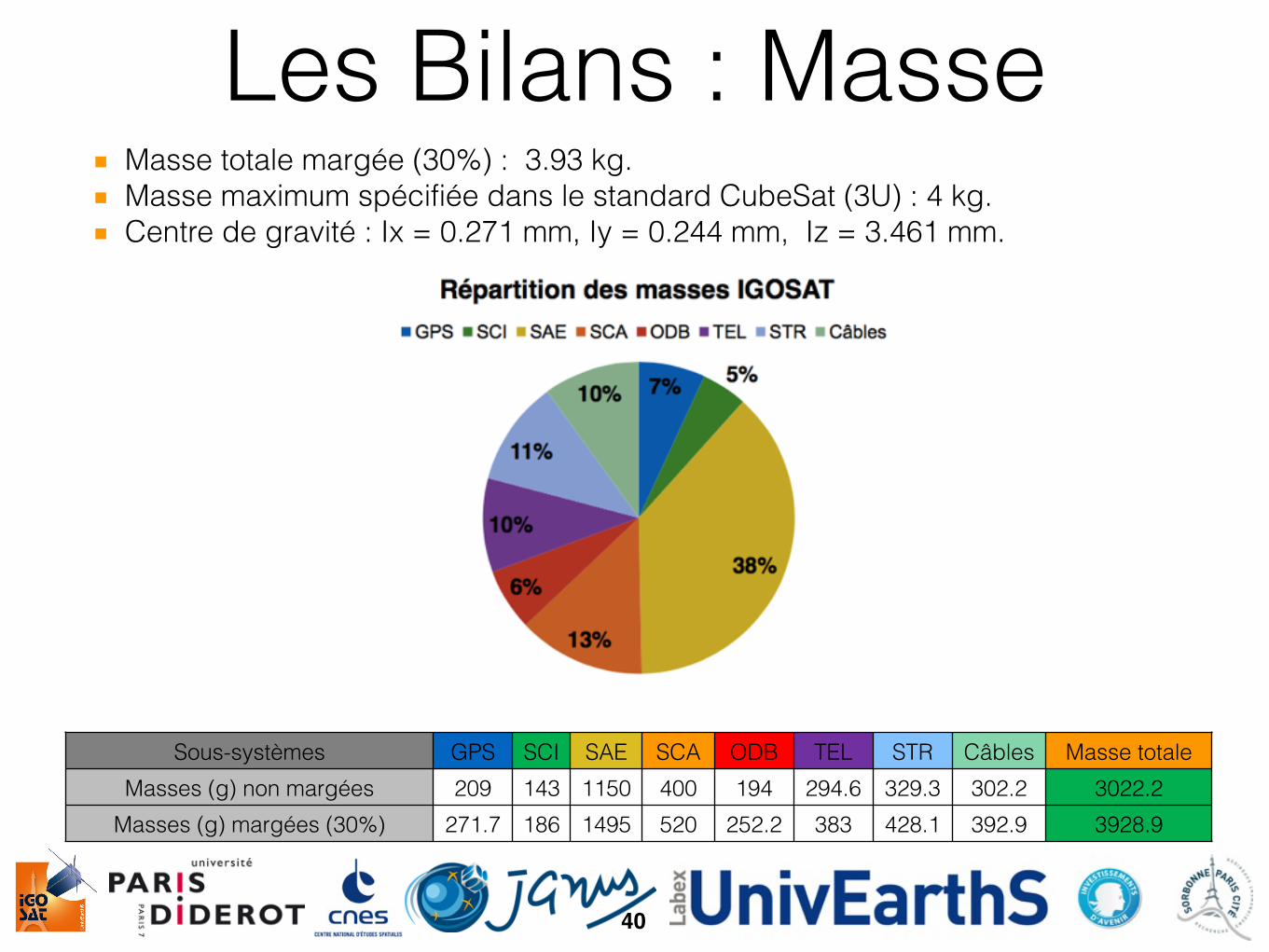
▪ Masse totale margée (30%) : 3.93 kg. ▪ Masse maximum spécifiée dans le standard CubeSat (3U) : 4 kg. ▪ Centre de gravité : Ix = 0.271 mm, Iy = 0.244 mm, Iz = 3.461 mm.
Sous-systèmes GPS SCI SAE SCA ODB TEL STR Câbles Masse totaleMasses (g) non margées 209 143 1150 400 194 294.6 329.3 302.2 3022.2
Masses (g) margées (30%) 271.7 186 1495 520 252.2 383 428.1 392.9 3928.9
Les Bilans : Masse
40
40
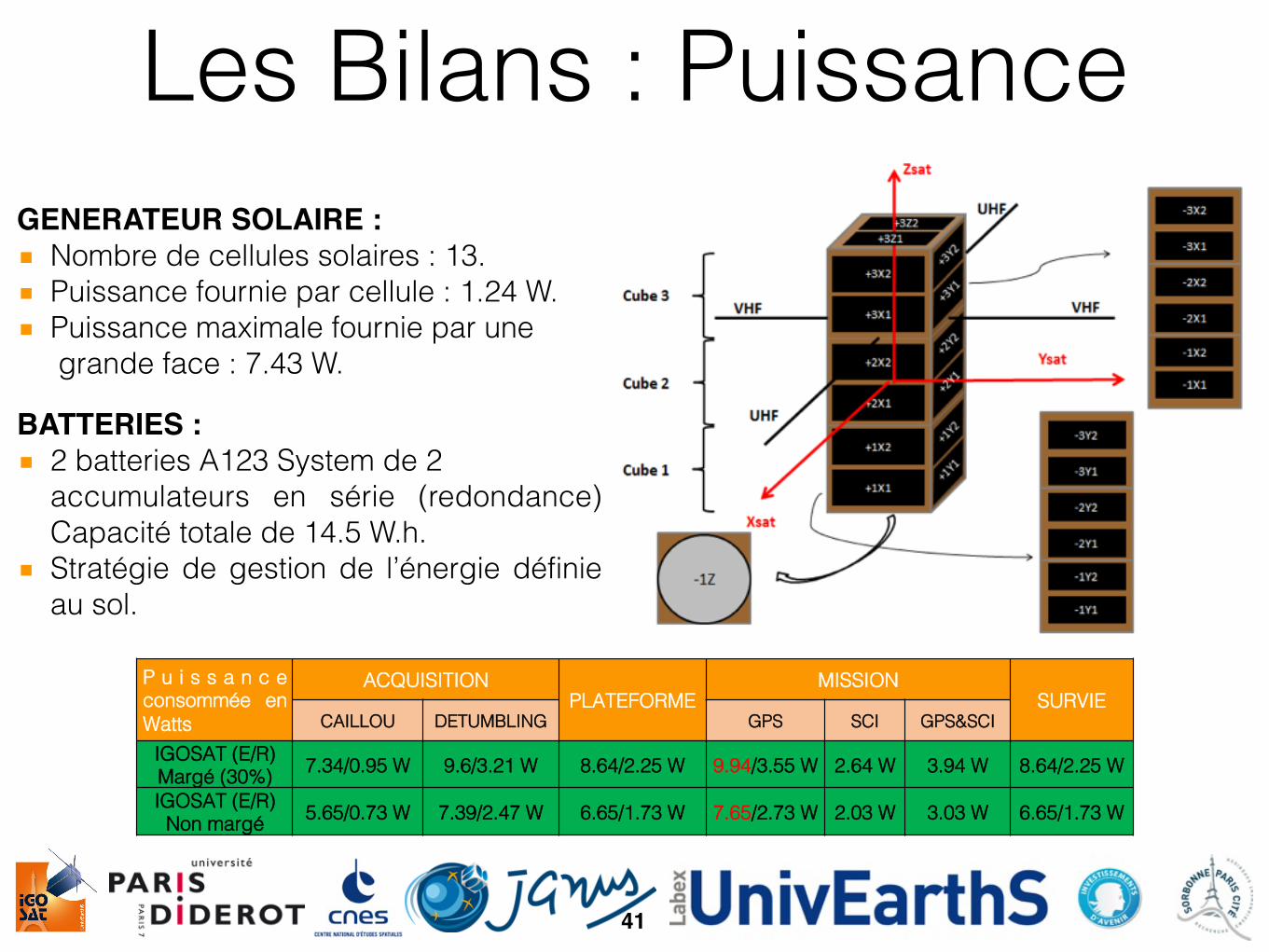
GENERATEUR SOLAIRE :▪ Nombre de cellules solaires : 13. ▪ Puissance fournie par cellule : 1.24 W. ▪ Puissance maximale fournie par une grande face : 7.43 W.
BATTERIES :▪ 2 batteries A123 System de 2
accumulateurs en série (redondance) Capacité totale de 14.5 W.h.
▪ Stratégie de gestion de l’énergie définie au sol.
Les Bilans : Puissance
41
P u i s s a n c e consommée en Watts
ACQUISITION PLATEFORME
MISSION SURVIE
CAILLOU DETUMBLING GPS SCI GPS&SCI
IGOSAT (E/R) Margé (30%) 7.34/0.95 W 9.6/3.21 W 8.64/2.25 W 9.94/3.55 W 2.64 W 3.94 W 8.64/2.25 W
IGOSAT (E/R) Non margé 5.65/0.73 W 7.39/2.47 W 6.65/1.73 W 7.65/2.73 W 2.03 W 3.03 W 6.65/1.73 W
41
Présentation Générale
La Charge Utile Scintillateur
Léa Bourhis
42
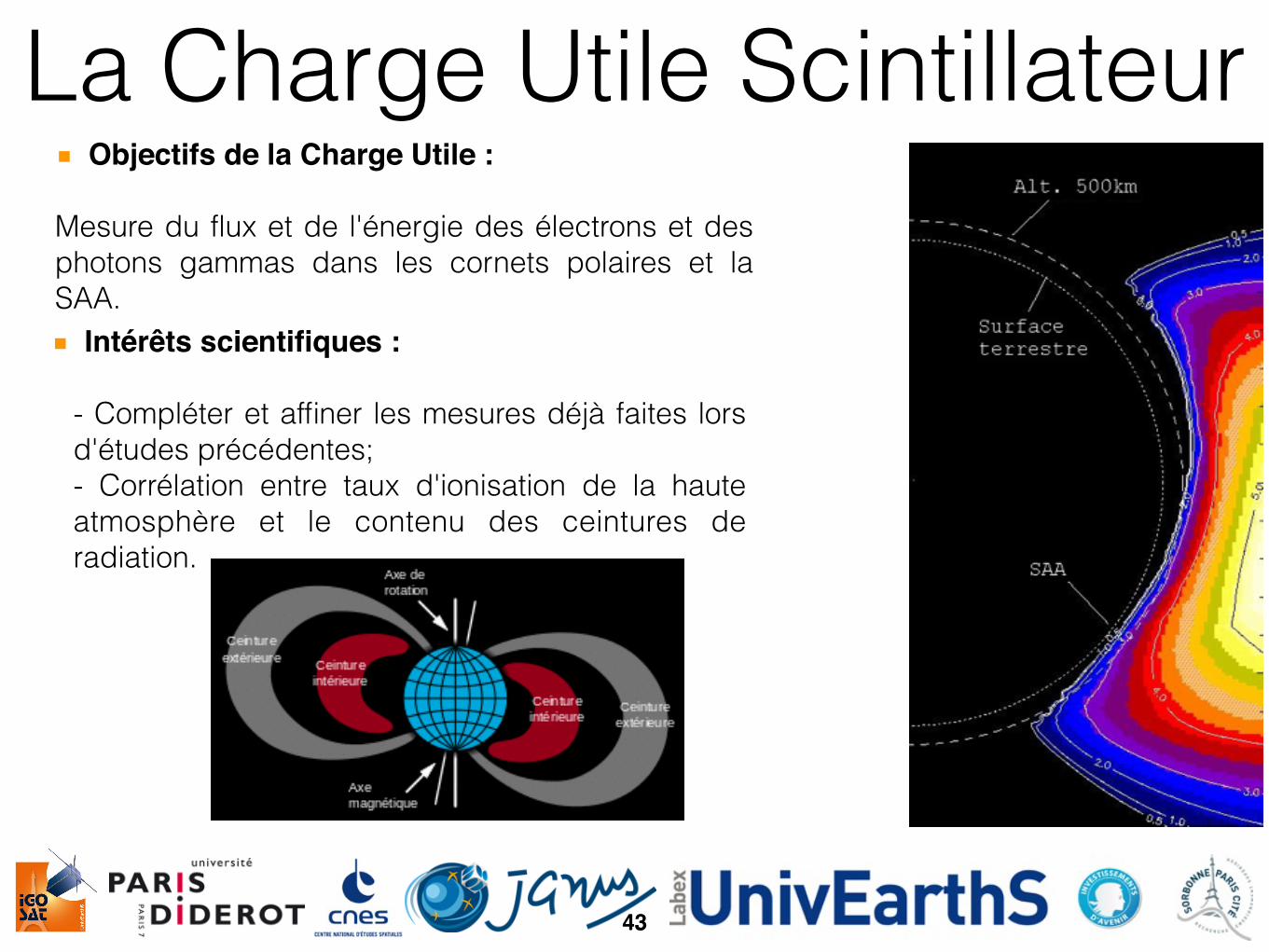
La Charge Utile Scintillateur▪ Objectifs de la Charge Utile :
Mesure du flux et de l'énergie des électrons et des photons gammas dans les cornets polaires et la SAA.
43
▪ Intérêts scientifiques :
- Compléter et affiner les mesures déjà faites lors d'études précédentes; - Corrélation entre taux d'ionisation de la haute atmosphère et le contenu des ceintures de radiation.
43

La Charge Utile Scintillateur▪ Détecteurs :- Scintillateur plastique de type BC412 sensible aux électrons (Saint Gobain); - Scintillateur cristal en LaBr3 sensible aux électrons et aux photons gammas (Saint Gobain); - SiPM (Silicon PhotoMultiplier) : semi conducteur fait de matrices de
photodiodes à avalanche (Hamamatsu).
4444
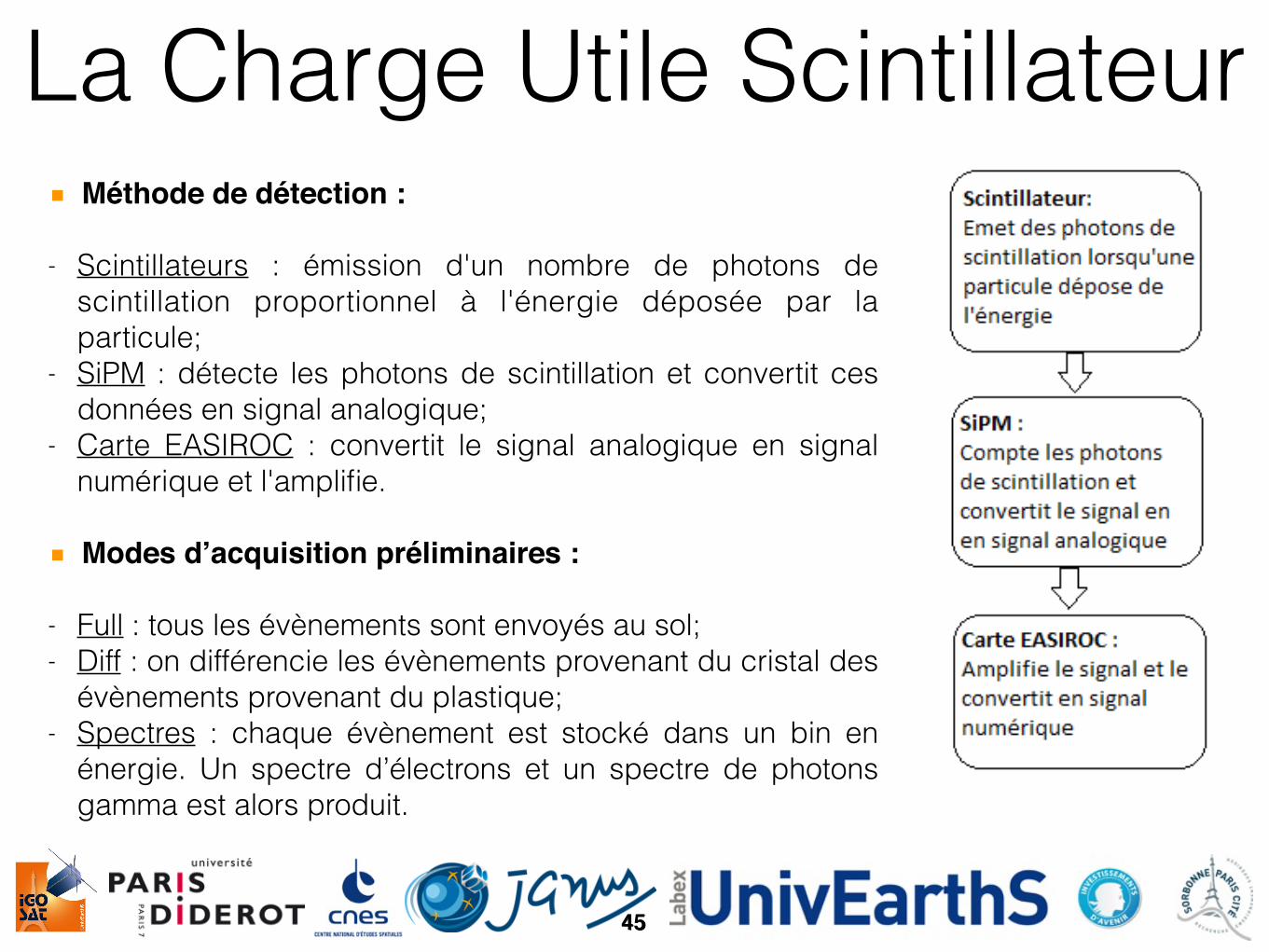
La Charge Utile Scintillateur▪ Méthode de détection :
- Scintillateurs : émission d'un nombre de photons de scintillation proportionnel à l'énergie déposée par la particule;
- SiPM : détecte les photons de scintillation et convertit ces données en signal analogique;
- Carte EASIROC : convertit le signal analogique en signal numérique et l'amplifie.
▪ Modes d’acquisition préliminaires :
- Full : tous les évènements sont envoyés au sol; - Diff : on différencie les évènements provenant du cristal des
évènements provenant du plastique; - Spectres : chaque évènement est stocké dans un bin en
énergie. Un spectre d’électrons et un spectre de photons gamma est alors produit.
4545
Présentation Générale
Simulations & Banc de Tests
Léa Bourhis
4646
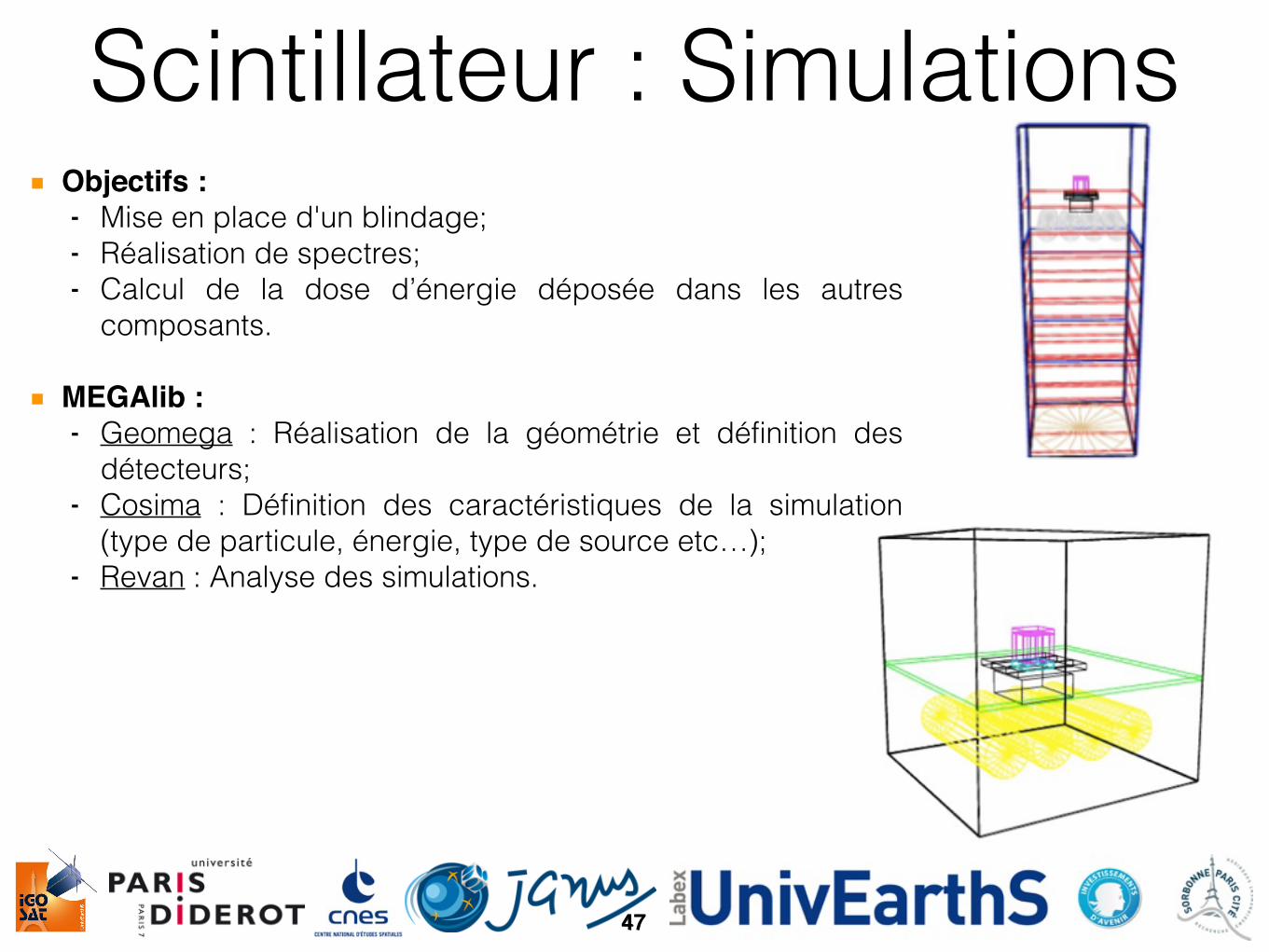
Scintillateur : Simulations▪ Objectifs :
- Mise en place d'un blindage; - Réalisation de spectres; - Calcul de la dose d’énergie déposée dans les autres
composants.
▪ MEGAlib :- Geomega : Réalisation de la géométrie et définition des
détecteurs; - Cosima : Définition des caractéristiques de la simulation
(type de particule, énergie, type de source etc…); - Revan : Analyse des simulations.
4747
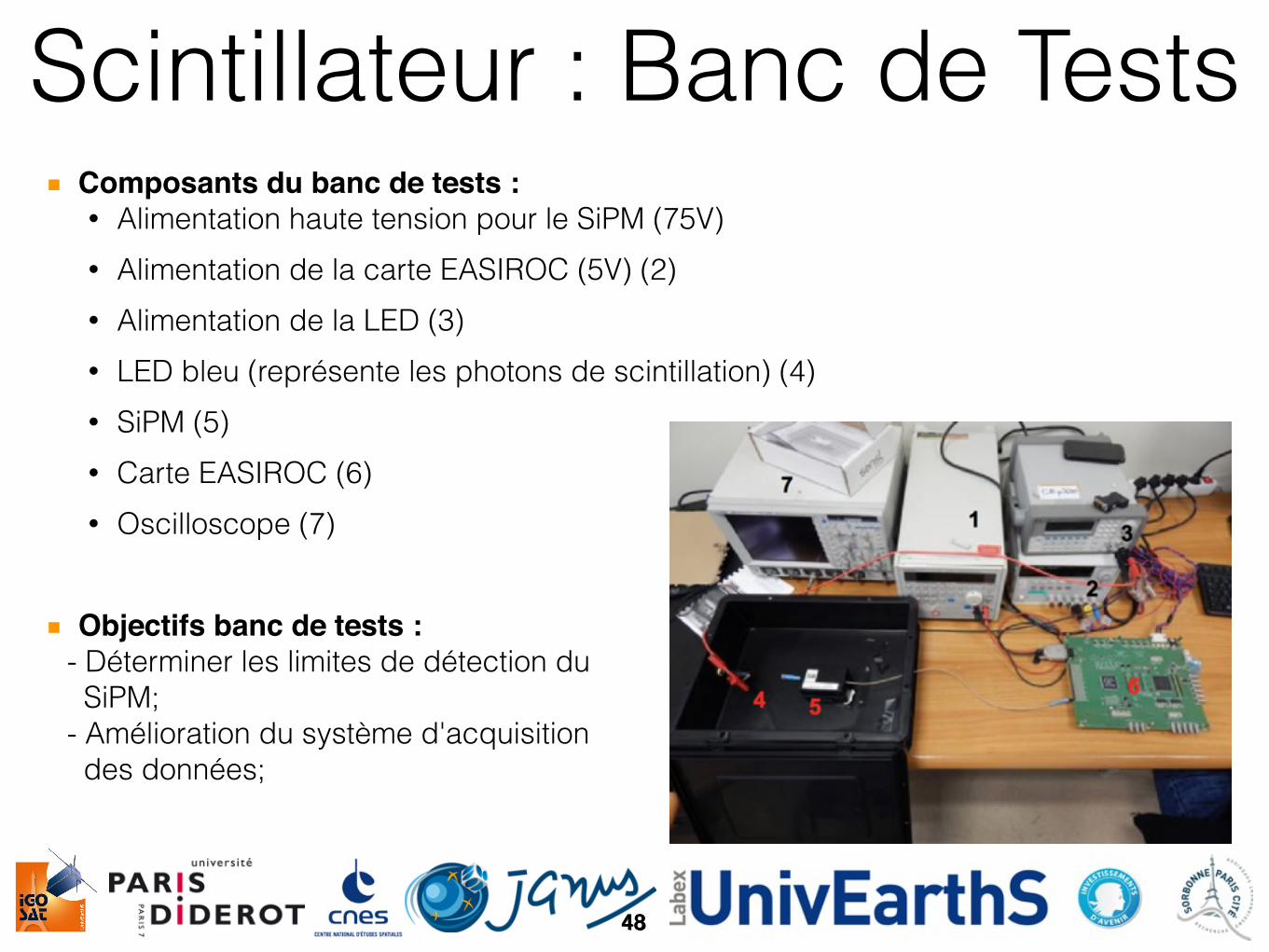
Scintillateur : Banc de Tests▪ Composants du banc de tests :
• Alimentation haute tension pour le SiPM (75V) • Alimentation de la carte EASIROC (5V) (2) • Alimentation de la LED (3) • LED bleu (représente les photons de scintillation) (4) • SiPM (5) • Carte EASIROC (6) • Oscilloscope (7)
▪ Objectifs banc de tests :- Déterminer les limites de détection du SiPM; - Amélioration du système d'acquisition des données;
4848
Présentation Générale
La Carte d’Acquisition du Scintillateur
Asmae Ban Amar
4949
Scintillateur : Carte d’Acquisition
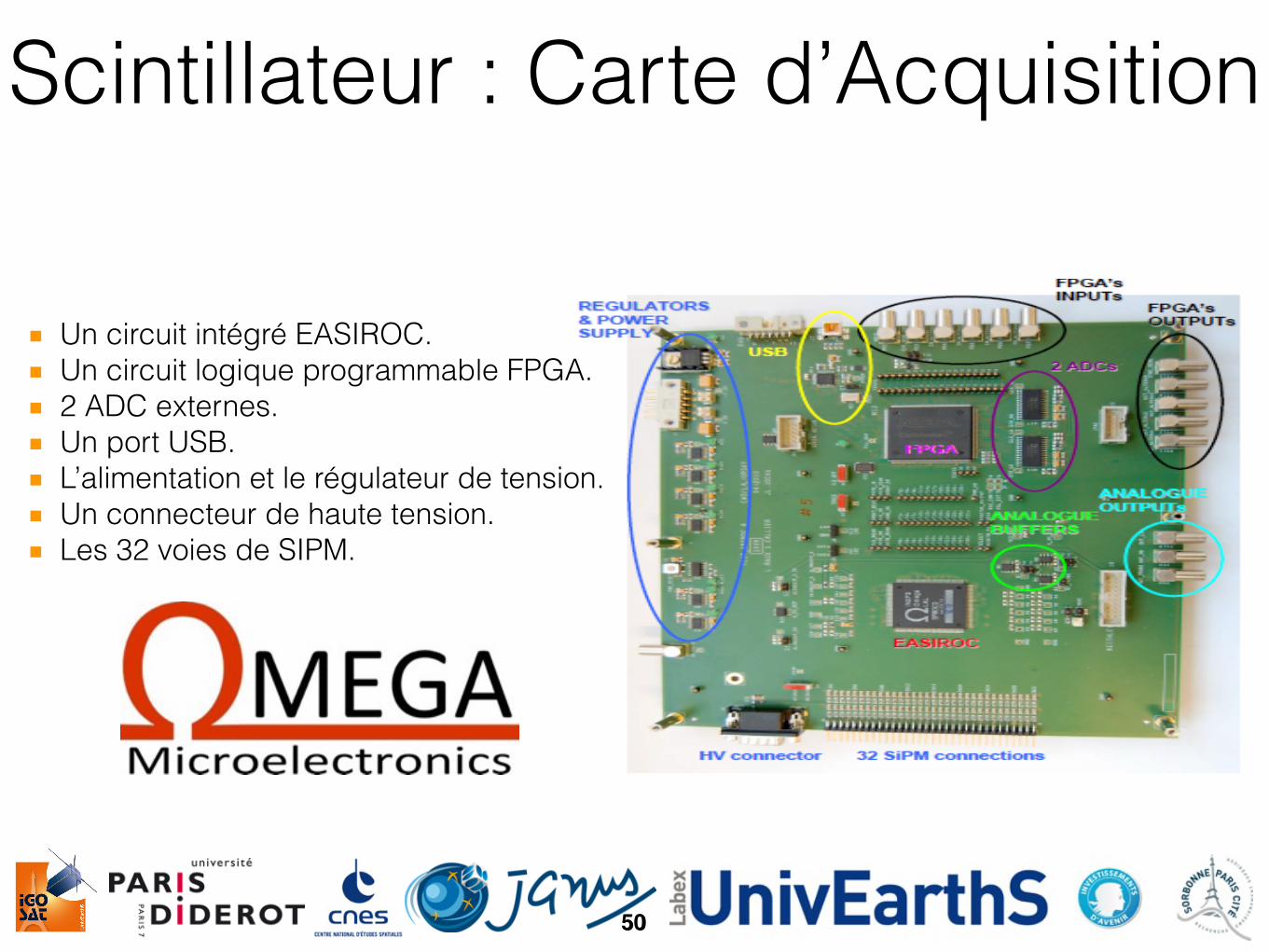
▪ Un circuit intégré EASIROC. ▪ Un circuit logique programmable FPGA. ▪ 2 ADC externes. ▪ Un port USB. ▪ L’alimentation et le régulateur de tension. ▪ Un connecteur de haute tension. ▪ Les 32 voies de SIPM.
5050

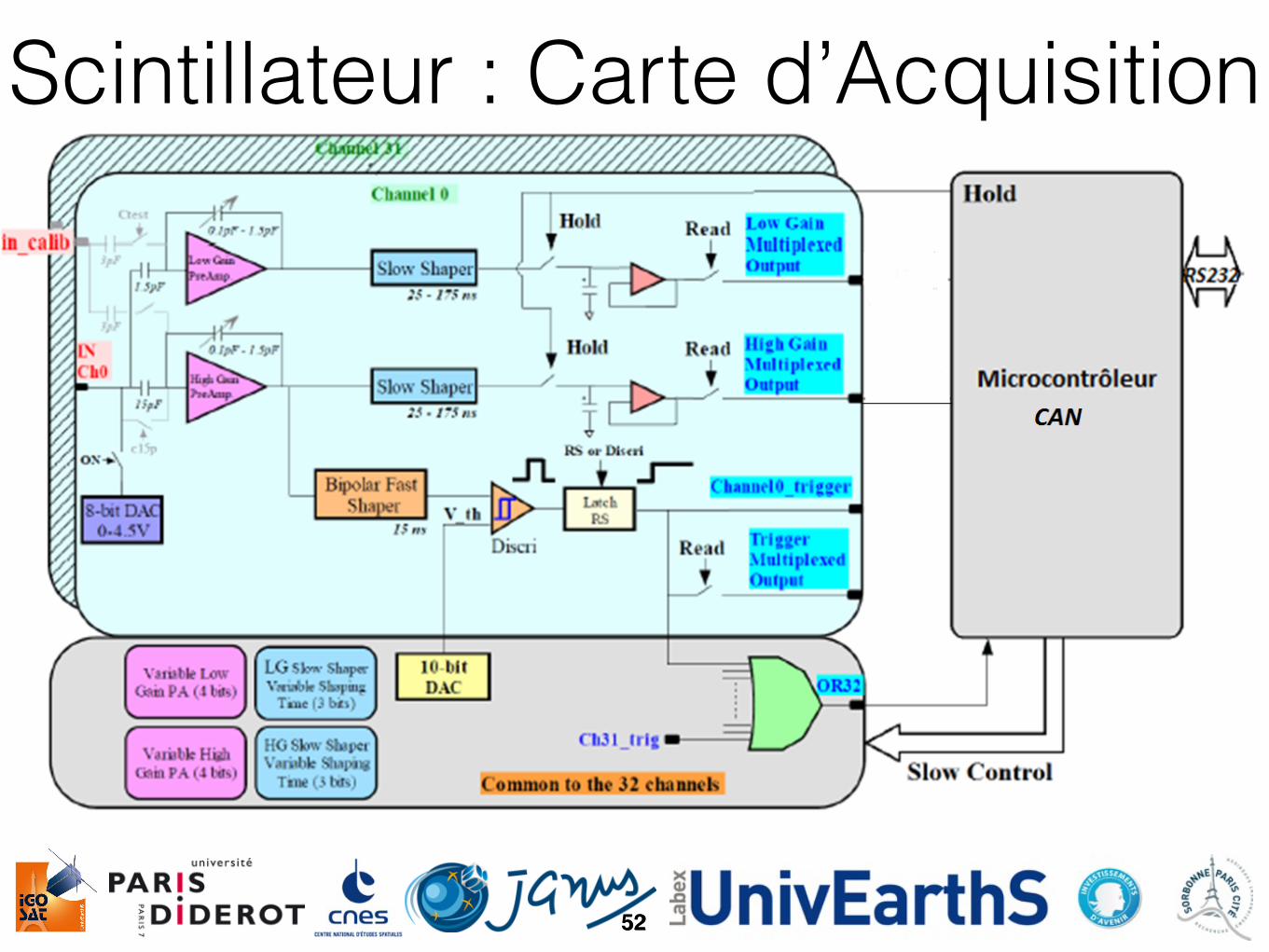
Scintillateur : Carte d’Acquisition▪ Les rôles de la puce d’acquisition sont :
- Le traitement des signaux électriques issus du SiPM; - L’Ajustement de la tension d’alimentation du SiPM par les DAC interne de la puce
EASIROC; - Envoyer les signaux analogiques de sortie qui sont traités par le microcontroleur et
par son ADC intégré.
▪ Le microcontroleur :
- Reçoit les ordres de l’ordinateur de bord; - S’occupe de transmettre les données de la carte EASIROC à l’ordinateur de bord; - Ajuste les différents paramètres de contrôle de la carte EASIROC; - Récupère les données de housekeeping; - Reçoit les commandes et transfère les données vers l’ordinateur de bord en RS232.
5151
Scintillateur : Carte d’Acquisition
5252
Scintillateur : Carte d’Acquisition
5353
Scintillateur : Carte d’Acquisition
5454
Scintillateur : Carte d’Acquisition
5555
Scintillateur : Conclusion
A venir pour la Charge Utile Scintillateur :
▪ Un premier prototype réalisé cet été; ▪ Une campagne de tests fonctionnels; ▪ Test du SiPM sous vide (aucun test n’a été réalisé pour le moment); ▪ Estimation du débit de dose durant la mission; ▪ Design mécanique attendu pour début 2016; ▪ Essais avec source radioactive début 2016; ▪ Première Version d’Ingénierie validée attendue pour mi 2016; ▪ Qualification en 2017.
5656
Présentation Générale
La Charge Utile GPS
Mathieu Bligny
5757
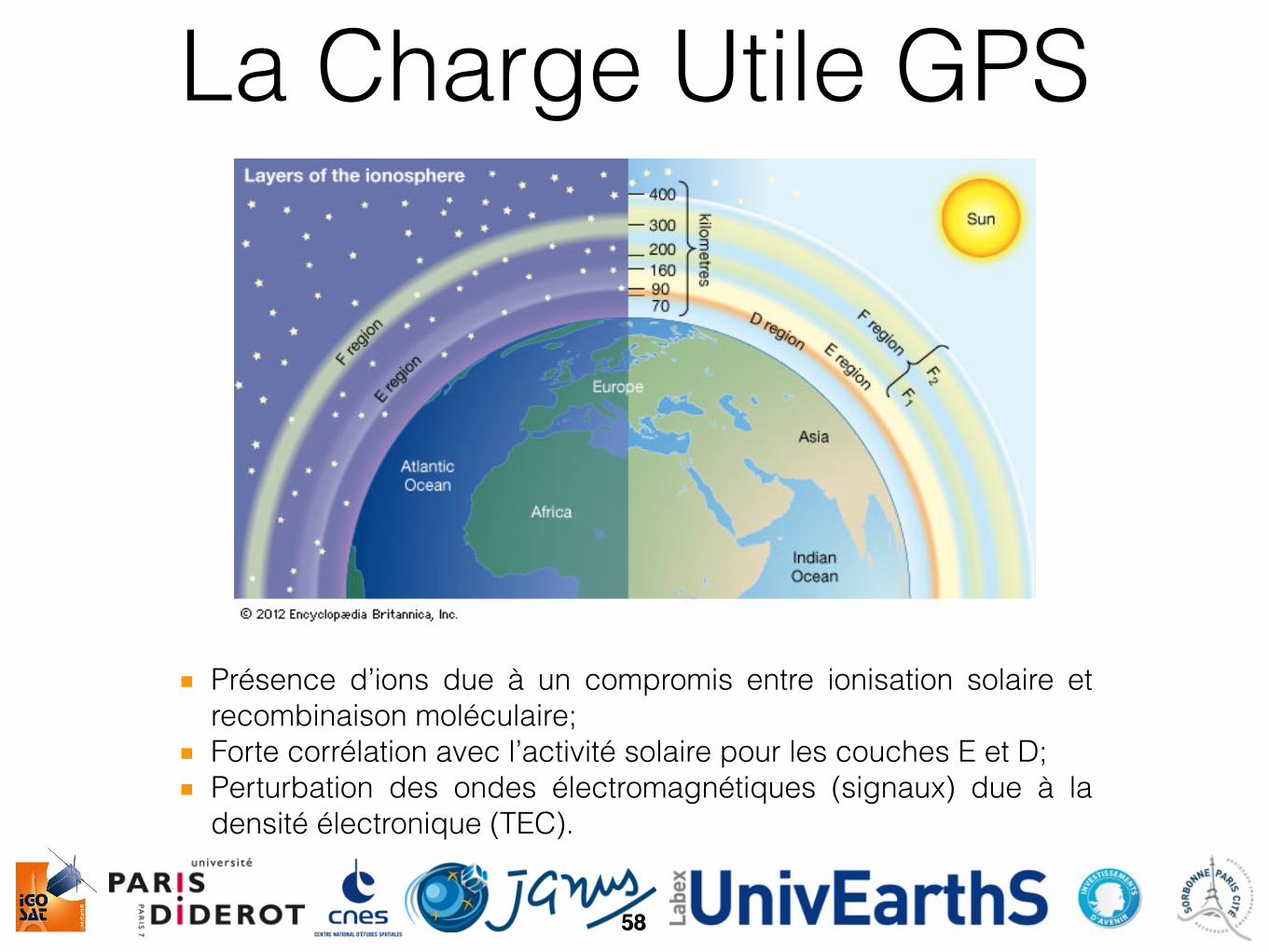
La Charge Utile GPS
▪ Présence d’ions due à un compromis entre ionisation solaire et recombinaison moléculaire;
▪ Forte corrélation avec l’activité solaire pour les couches E et D; ▪ Perturbation des ondes électromagnétiques (signaux) due à la
densité électronique (TEC).
5858

La Charge Utile GPS▪ La propagation des signaux est perturbée différemment en
fonction de sa fréquence :
▪ On peut donc déduire le TEC depuis le délai entre les signaux L1 et L2 d’un satellite GPS (f1=1575,42 MHz, f2=1227,60 MHz).
▪ 1 délai temporel de 10-9 secondes correspond à 2,85 TECU.▪ 1 délai spatial de 1 mètre correspond à 9,52 TECU.
5959
La Charge Utile GPS
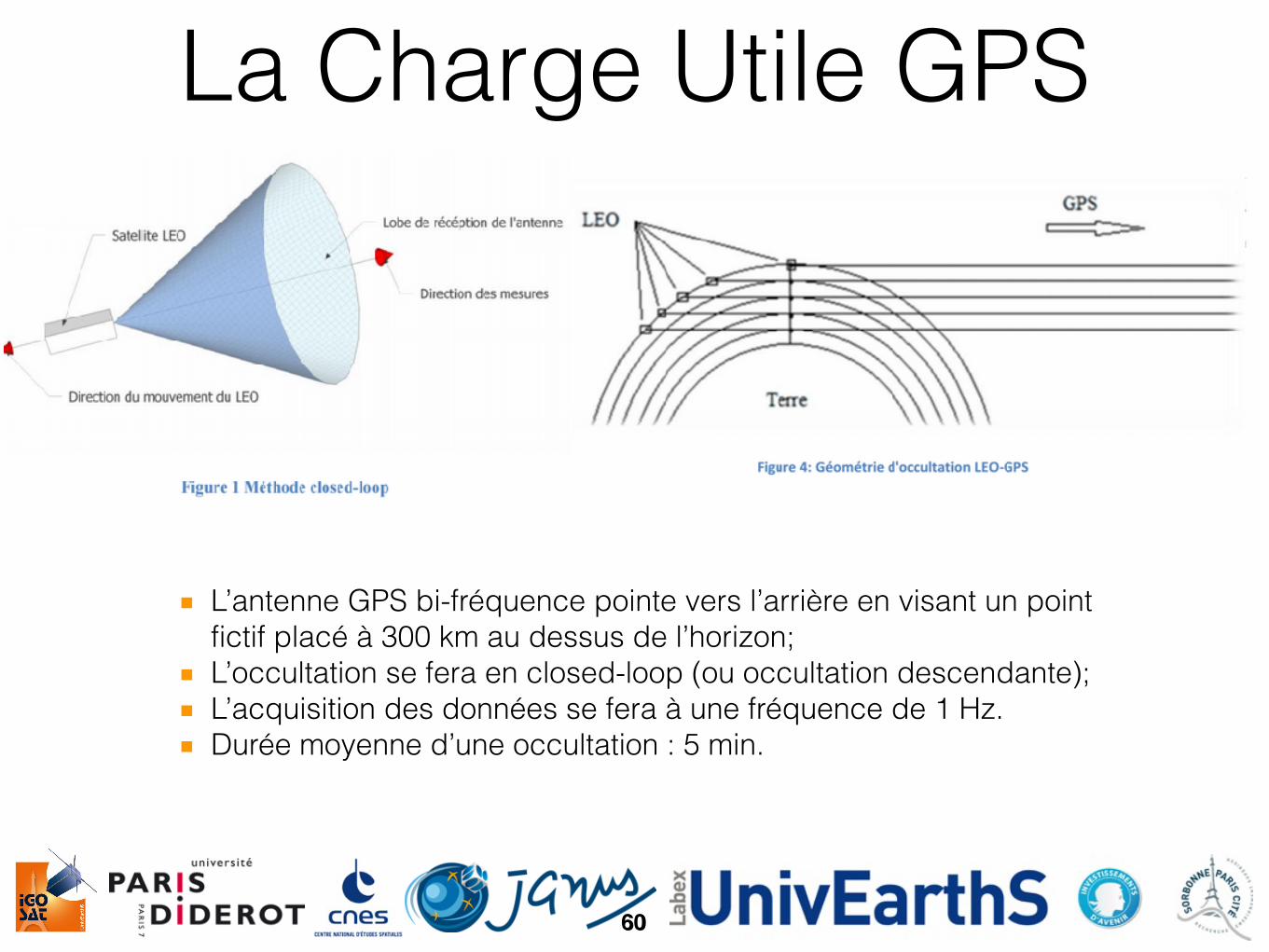
▪ L’antenne GPS bi-fréquence pointe vers l’arrière en visant un point fictif placé à 300 km au dessus de l’horizon;
▪ L’occultation se fera en closed-loop (ou occultation descendante); ▪ L’acquisition des données se fera à une fréquence de 1 Hz. ▪ Durée moyenne d’une occultation : 5 min.
6060
La Charge Utile GPS : Objectifs
Le but de l’expérience est de calculer le TEC pour :
▪ Remonter au profil vertical de densité électronique (vertical EDB), en utilisant le principe d’inversion développé par la mission COSMIC;
▪ Mettre en corrélation les donnés obtenues et l’activité solaire et des ceintures de radiations;
▪ Détecter des variations brutales de TEC (qui peuvent être dues à une activité solaire anormale, la propagation d’ondes acoustiques ou d’ondes de gravité dans l’ionosphère).
6161
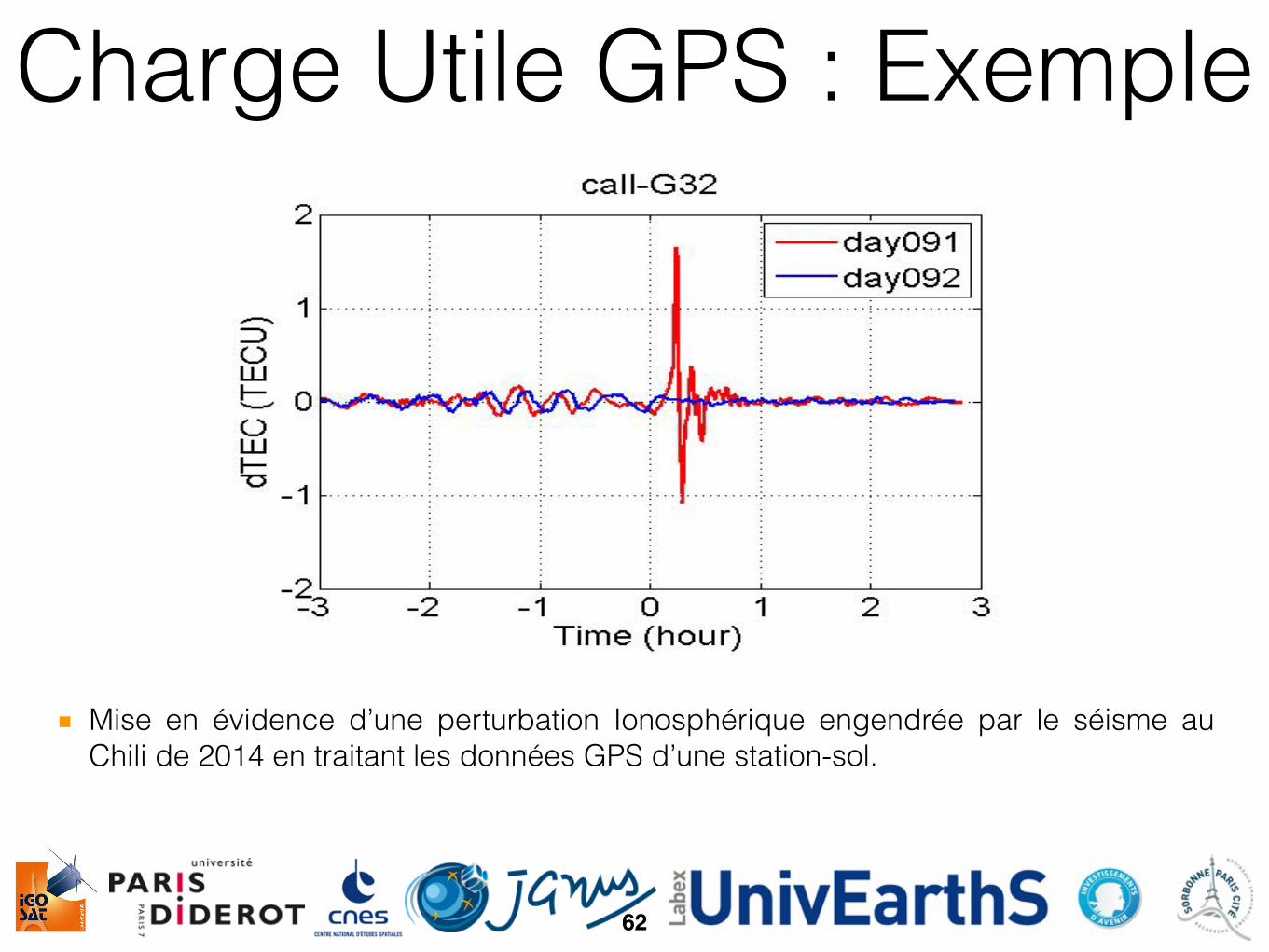
Charge Utile GPS : Exemple
▪ Mise en évidence d’une perturbation Ionosphérique engendrée par le séisme au Chili de 2014 en traitant les données GPS d’une station-sol.
6262
La Charge Utile GPS : Objectifs
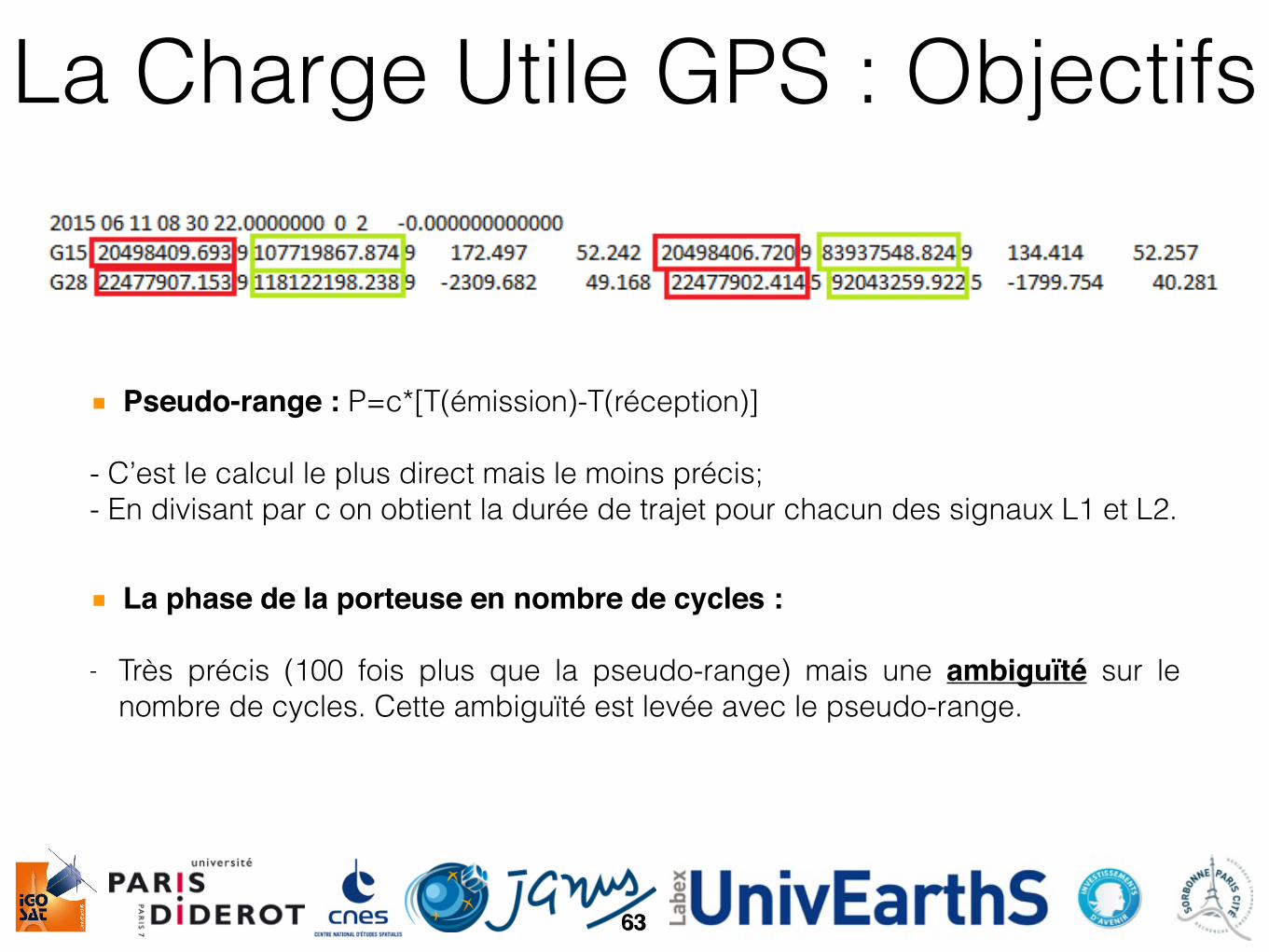
▪ Pseudo-range : P=c*[T(émission)-T(réception)]
- C’est le calcul le plus direct mais le moins précis; - En divisant par c on obtient la durée de trajet pour chacun des signaux L1 et L2.
▪ La phase de la porteuse en nombre de cycles :
- Très précis (100 fois plus que la pseudo-range) mais une ambiguïté sur le nombre de cycles. Cette ambiguïté est levée avec le pseudo-range.
6363

La Charge Utile GPS : Objectifs
▪ STEC= TEC(Phase)-<TEC(phase)>+<TEC(pdr)>-biais(sat.)-biais(réc.)-err
▪ Biais(sat.) est renseigné par les éphémérides. 1 ns -> 2,85 TECU -> n’est pas négligeable !
▪ Biais(réc.) est à déterminer;
▪ Après ces traitements, on s’attend à un écart de 1-3 TECU sur la valeur de TEC absolue (une erreur constante);
▪ Le terme err est 100 fois moindre pour les calculs basés sur la phase.
6464
Présentation Générale
Banc de Tests GPS
Mathieu Bligny
6565
66
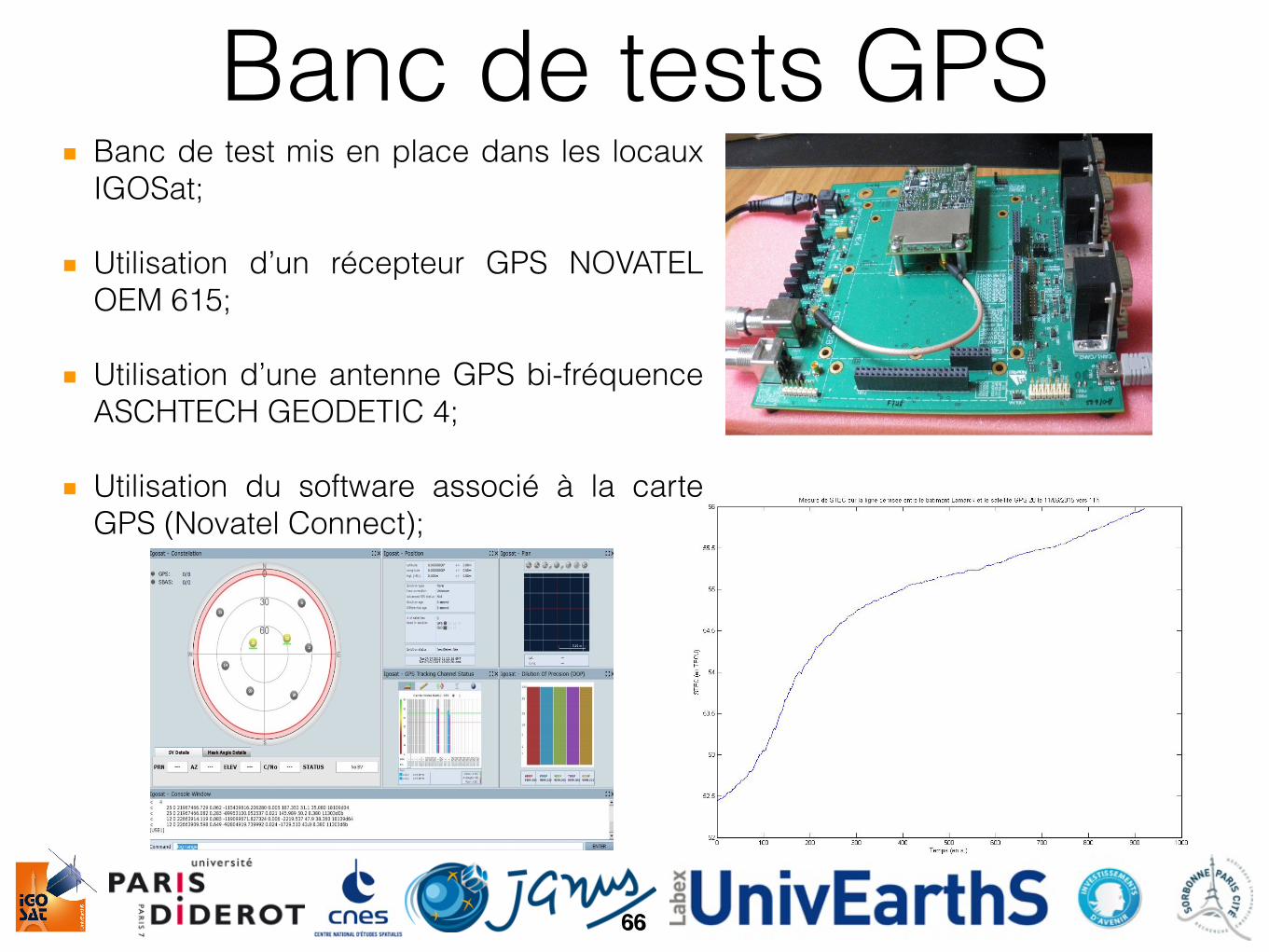
Banc de tests GPS▪ Banc de test mis en place dans les locaux
IGOSat;
▪ Utilisation d’un récepteur GPS NOVATEL OEM 615;
▪ Utilisation d’une antenne GPS bi-fréquence ASCHTECH GEODETIC 4;
▪ Utilisation du software associé à la carte GPS (Novatel Connect);
66

Banc de tests GPS
▪ A nos latitudes, on s’attend à des valeurs de VTEC comprises entre 20 et 40 TECU.
▪ Pour le STEC, on s’attend à des mesures comprises entre 20 et 120 TECU.
6767
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!Carte!de!VTEC!!vers!11h!le!11/06/2015!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(h6p://iono.jpl.nasa.gov/latest_r@_global.html)!
Posi%on'du'satellite'GPS'28'le'11/06/2015'vers'11h'
Banc de tests GPS
Ce qui a été fait :
▪ Etudes de faisabilité : - Simulations d’occultations; - Traitements de données issues de sondages ionosphériques depuis le sol.
▪ Récupération des données via un récepteur GPS (en banc de test) et une antenne bi-fréquence.
▪ Calcul du STEC.
▪ Prise en compte du biais instrumental du satellite GPS (à vérifier).
6868

Banc de tests GPSCe qu’il reste à faire :
▪ Affiner les estimations de débit télémetrique pour la charge utile GPS;
▪ Estimation du biais de notre récepteur GPS (prise en compte de son évolution au cours du temps);
▪ Utiliser l’algorithme d’inversion de la mission COSMIC pour récupérer le profil de densité électronique vertical;
▪ Vérifier expérimentalement la précision des mesures et adapter les traitements de mise en évidence de TIDs à notre traitement de données;
▪ Estimation du niveau de bruit.
6969
Fin de la présentation générale
7070
Présentation Technique
1 - Alimentation Electrique (Saïd Boufrah)
2 - Contrôle d’Attitude (Lylia Sipile, Jérémy Renaudin)
3 - Télécommunications & Station Sol (Pierre Vermot)
4 - Mechanical Studies (Pham Van Phap)
5 - Logiciels de Vol et Sol (Julien Lisita)
6 - Simulateur Fonctionnel (Léonard Panichi)
7171
Système d’Alimentation Electrique
Saïd Boufrah
Présentation Technique
7272
Alimentation Electrique
Rôles du Système d’Alimentation Electrique :
▪ Générer de l’énergie à partir des panneaux solaires;
▪ Stocker l’énergie à l'aide des batteries;
▪ Distribuer et Réguler la puissance pour les différents sous-systèmes du satellite;
▪ Protéger les différents composants du satellite.
73
Alimentation Electrique
74
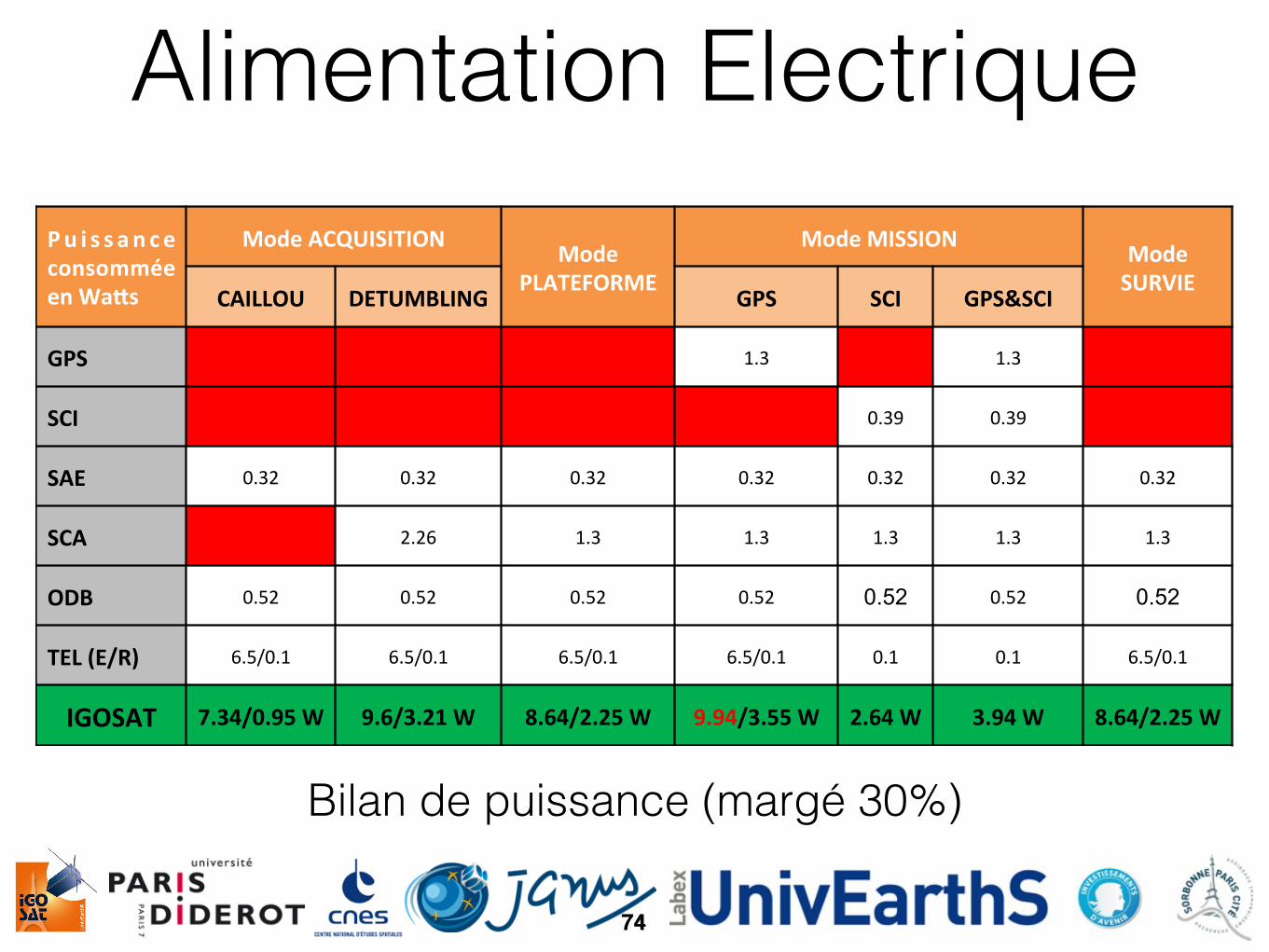
Bilan de puissance (margé 30%)
Pu i s s an c e)consommée)en)Wa.s
Mode)ACQUISITION Mode)PLATEFORME
Mode)MISSION Mode)SURVIE
CAILLOU DETUMBLING GPS SCI GPS&SCI
GPS ! ! ! 1.3 ! 1.3 !
SCI ! ! ! ! 0.39 0.39 !
SAE 0.32 0.32 0.32 0.32 0.32 0.32 0.32
SCA ! 2.26 1.3 1.3 1.3 1.3 1.3
ODB 0.52 0.52 0.52 0.52 0.52 0.52 0.52
TEL)(E/R) 6.5/0.1 6.5/0.1 6.5/0.1 6.5/0.1 0.1 0.1 6.5/0.1
IGOSAT 7.34/0.95)W 9.6/3.21)W 8.64/2.25)W 9.94/3.55)W 2.64)W 3.94)W 8.64/2.25)W
74
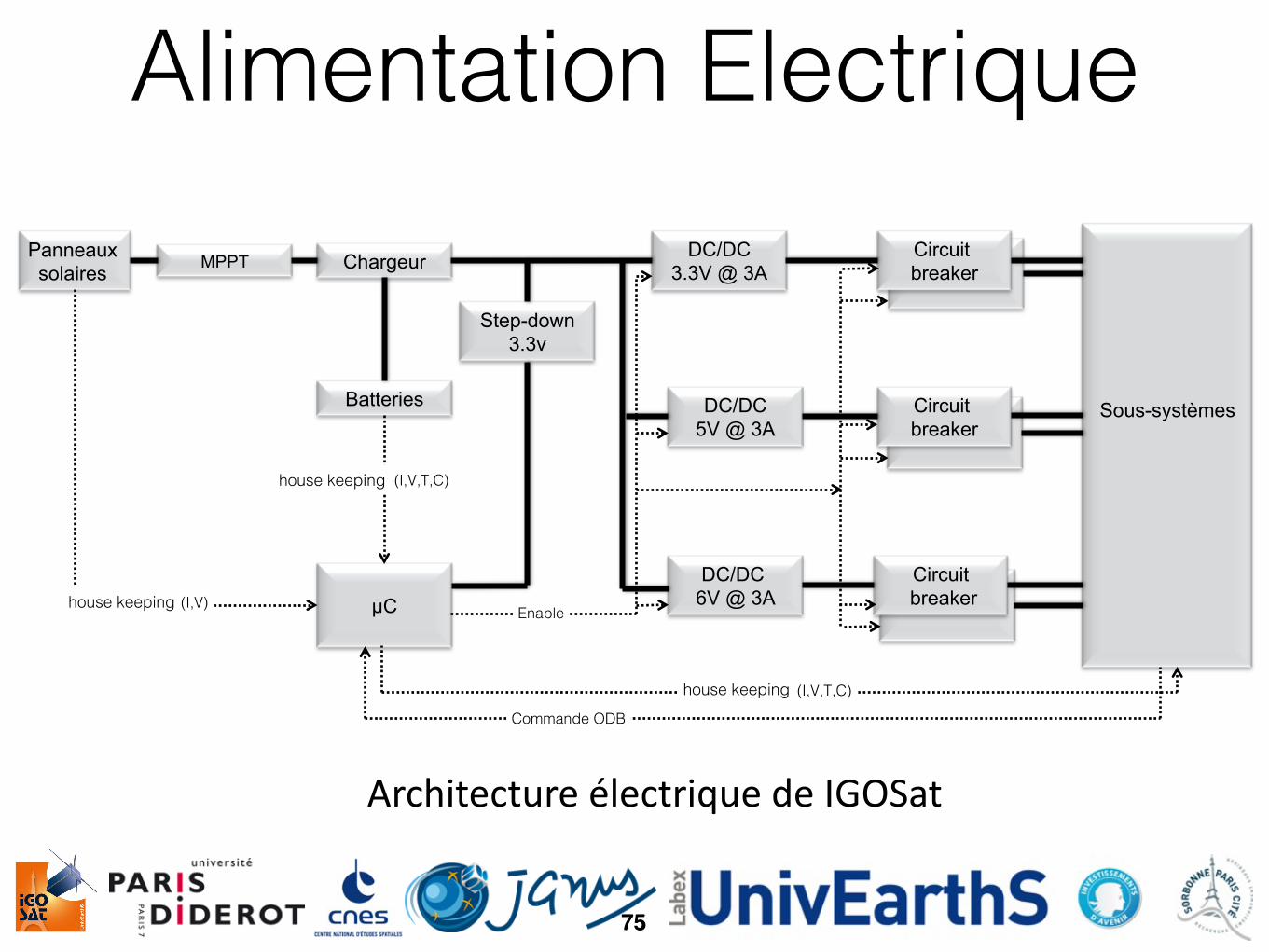
Panneaux solaires
MPPT Chargeur
Batteries
Step-down 3.3v
DC/DC 3.3V @ 3A
DC/DC 5V @ 3A
DC/DC 6V @ 3A
Circuit breaker
Circuit breaker
Circuit breaker
Sous-systèmes
µC
Télémétrie (I,V)!
Télémétrie (I,V,T,C) !
Télémétrie (I,V,T,C)!
Commande ODB!
Enable!
Alimentation Electrique
Architecture électrique de IGOSat
7575
house keeping
house keeping
house keeping
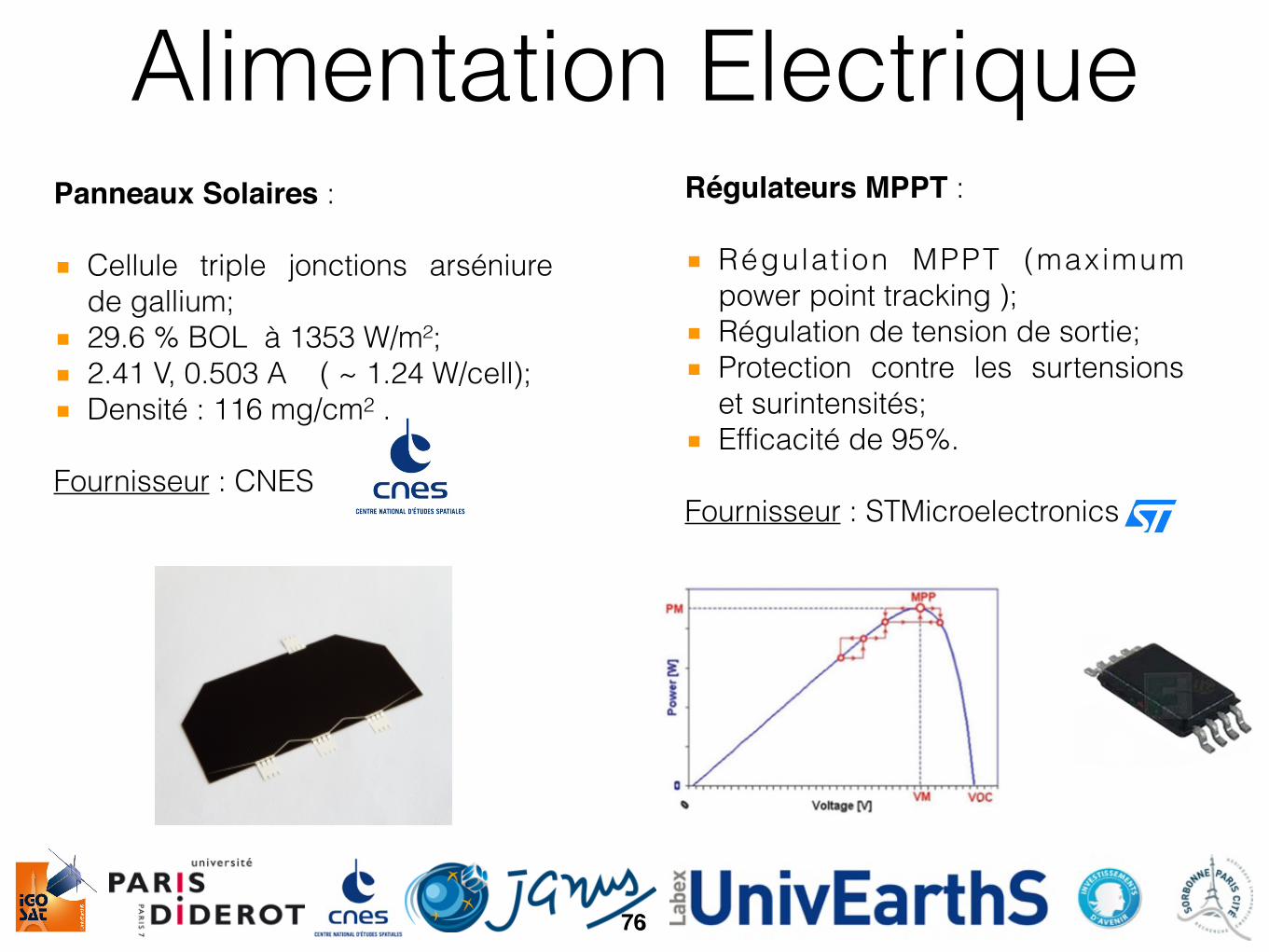
Alimentation ElectriquePanneaux Solaires :
▪ Cellule triple jonctions arséniure de gallium;
▪ 29.6 % BOL à 1353 W/m²; ▪ 2.41 V, 0.503 A ( ~ 1.24 W/cell); ▪ Densité : 116 mg/cm2 .
Fournisseur : CNES
Régulateurs MPPT :
▪ Régulat ion MPPT (maximum power point tracking );
▪ Régulation de tension de sortie; ▪ Protection contre les surtensions
et surintensités; ▪ Efficacité de 95%.
Fournisseur : STMicroelectronics
7676
Alimentation ElectriqueBMS (Battery Management System) :
▪ Chargeur de batteries (LiFePO4 ); ▪ Protection contre les surcharges et
les sous-tensions; ▪ Protection thermique pour les
batteries; ▪ Protection contre les court circuits; ▪ Fournir les indication sur l’état de
santé de la batterie.
Fournisseur :
77
Microcontroleur :
▪ Produit choisi : Atmega128D3; ▪ Bus de communication : I2C, SMBus, SPI… ▪ 8 ADC de 12 bits de résolution.
Fournisseur :
77
Alimentation ElectriqueDC/DC :
▪ Produit choisi : TPS6213x; ▪ Régu lé la tens ion de so r t ie
(abaisseur ou élévateur de tension ); ▪ Courant de charge jusqu’à 3A ; ▪ Protection contre les court circuits; ▪ Fonction ON/OFF.
Fournisseur :
Circuit Breaker :
▪ Produit choisi : LTC4210; ▪ Protection contre les évènements singuliers; ▪ Protection contre les court circuits; ▪ Protection contre les particules lourds; ▪ Fonction ON/OFF.
Fournisseur :
7878
Alimentation Electrique
79
Choix de la batterie :
▪ Besoin en énergie; ▪ Rapport capacité/poids; ▪ Nombre de cycles.
Batterie sélectionnée :
▪ Nanophosphate® APR18650M1-A ▪ Technologie : LiFePO4 ▪ Capacité nominale, Tension : 1.1 A.h , 3.3 V ▪ Cycle de vie : plus de 1000 cycles. ▪ Température de fonctionnement : -30 °C à 60 °C ▪ Poids : 39 gr.
Topologie utilisée : 2S2P -> 2.2 A.h, 6.6 V
Fournisseur : A123System
79
Alimentation Electrique
80
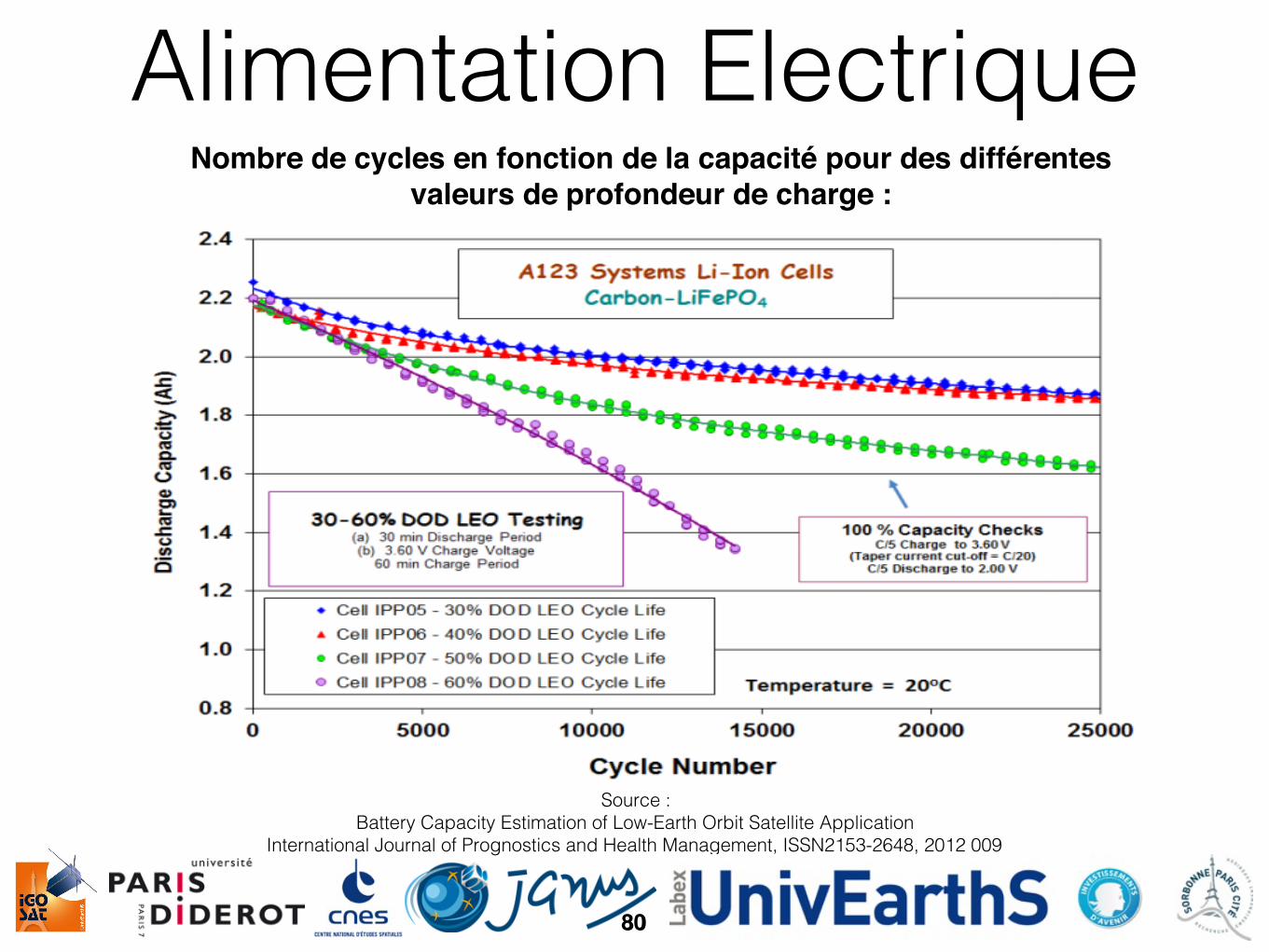
Nombre de cycles en fonction de la capacité pour des différentes valeurs de profondeur de charge :
Source :!Battery Capacity Estimation of Low-Earth Orbit Satellite Application !
International Journal of Prognostics and Health Management, ISSN2153-2648, 2012 009 !
80
Alimentation Electrique
81
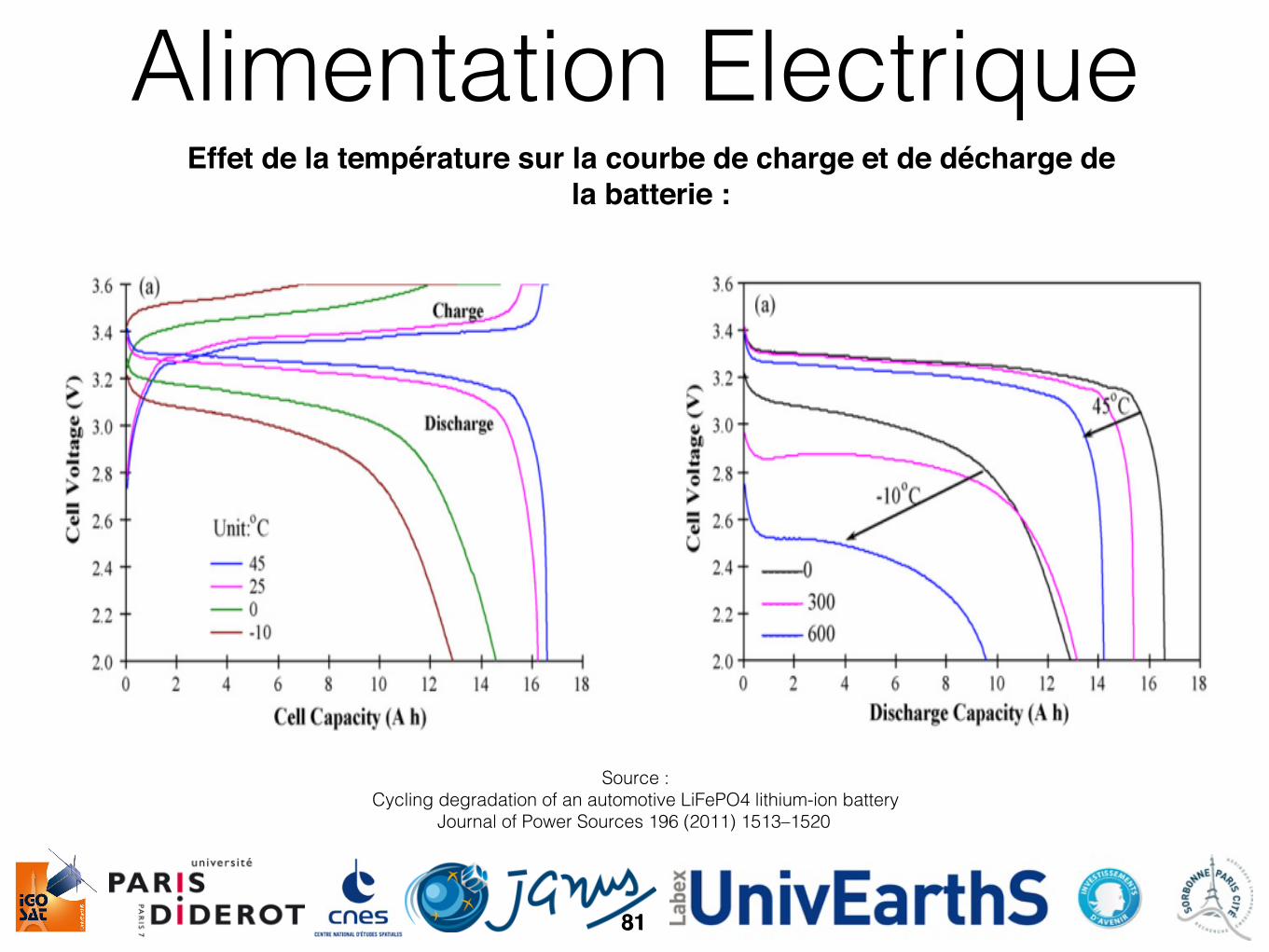
Effet de la température sur la courbe de charge et de décharge de la batterie :
Source :!Cycling degradation of an automotive LiFePO4 lithium-ion battery !
Journal of Power Sources 196 (2011) 1513–1520!
81
Alimentation Electrique
82
Ce qui a été fait :
▪ Etude approfondie sur l’architecture à mettre en oeuvre;
▪ Conception de la carte électronique sur le logiciel dédié;
▪ Choix des composants en fonct ion des contraintes d’espace.
Ce qui reste à faire :
▪ Routage de la carte électronique pour le premier prototype;
▪ Tests électriques et de fonctionnalités; ▪ Liste de recommandations pour les prochaines
modifications.
82
Contrôle d’Attitude
Lylia Sipile
Présentation Technique
8383
Système de Contrôle d’Attitude
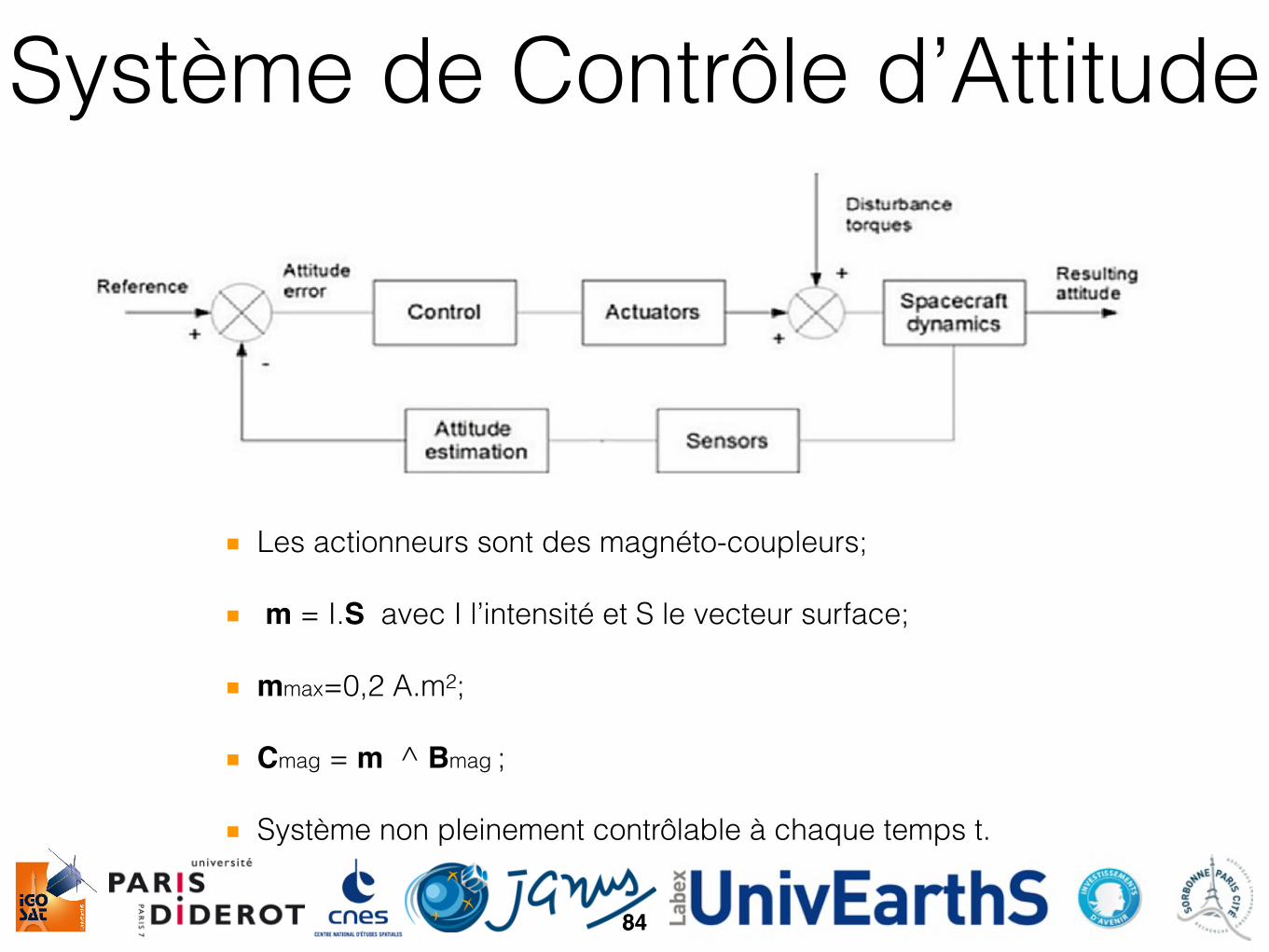
▪ Les actionneurs sont des magnéto-coupleurs;
▪ m = I.S avec I l’intensité et S le vecteur surface;
▪ mmax=0,2 A.m2;
▪ Cmag = m ^ Bmag ;
▪ Système non pleinement contrôlable à chaque temps t.
8484

Système de Contrôle d’Attitude
▪ Mode Detumbling :
- Mode après l’éjection du satellite du lanceur; - La vitesse angulaire du satellite est élevée :
40°/s sur chaque axe dans le pire cas.
▪ Objectif du contrôleur :
- Réduire la vitesse angulaire du satellite par rapport au référentiel EME2000.
8585
Système de Contrôle d’Attitude
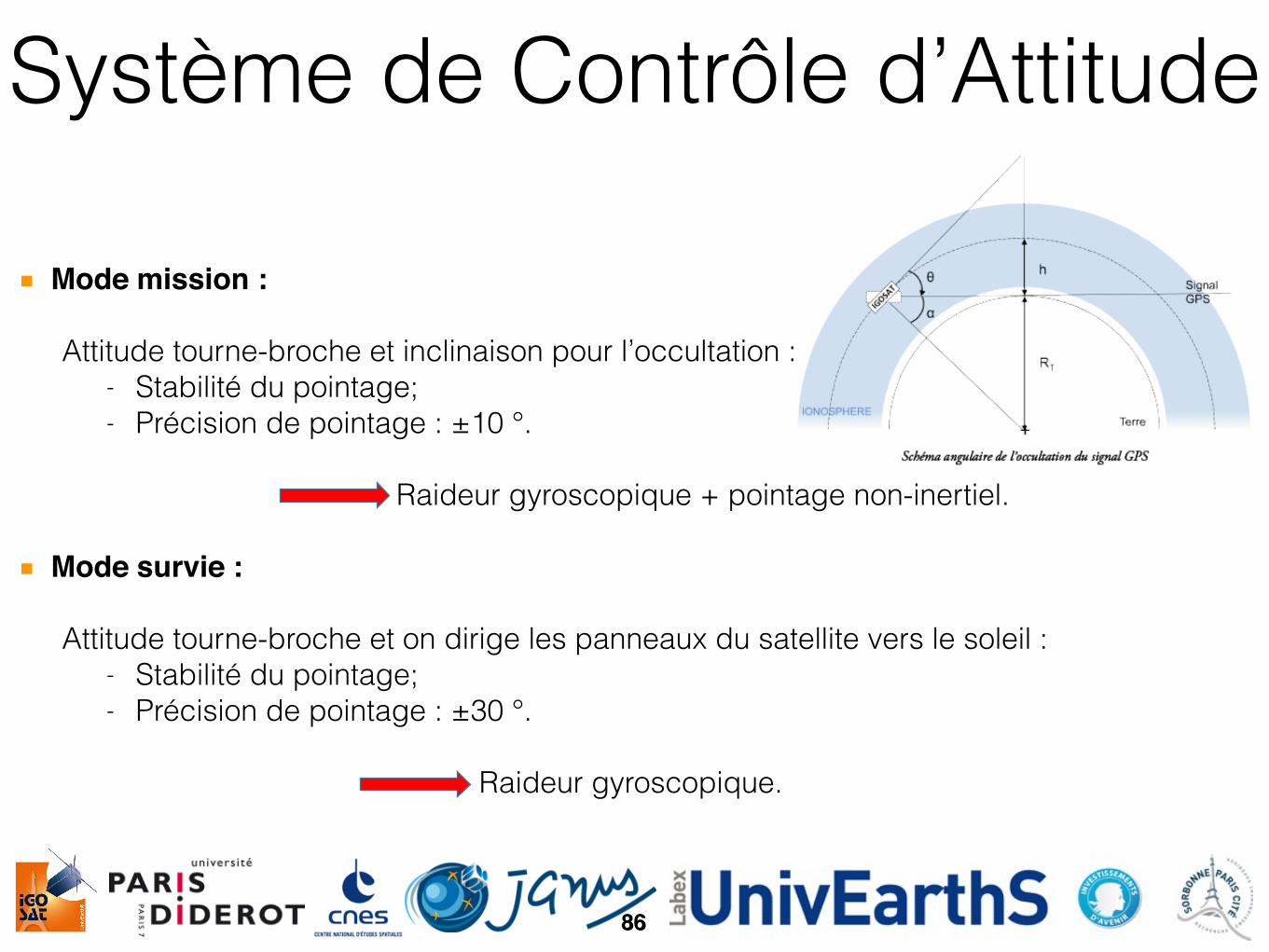
▪ Mode mission :
Attitude tourne-broche et inclinaison pour l’occultation : - Stabilité du pointage; - Précision de pointage : ±10 °.
Raideur gyroscopique + pointage non-inertiel.
▪ Mode survie :
Attitude tourne-broche et on dirige les panneaux du satellite vers le soleil : - Stabilité du pointage; - Précision de pointage : ±30 °.
Raideur gyroscopique.
8686
Système de Contrôle d’Attitude
8787

Design du Contrôleur du Système de Contrôle d’Attitude
Lylia Sipile
Présentation Technique
8888

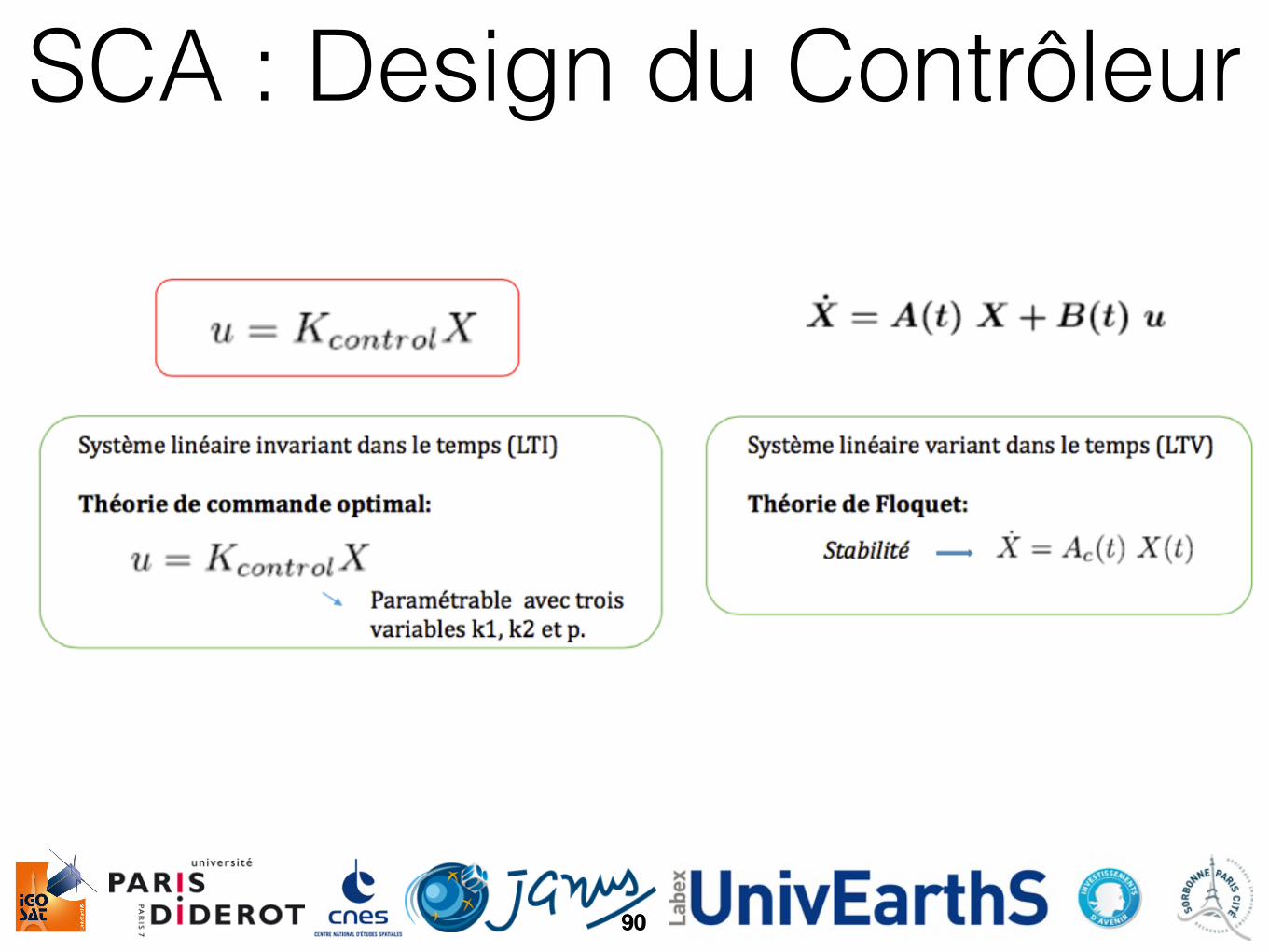
SCA : Design du Contrôleur
▪ Contrôleur rapide et robuste ▪ Erreur statique en fin de Detumbling
89
mmax=0,2 A.m2
89
SCA : Design du Contrôleur
9090

SCA : Design du Contrôleur
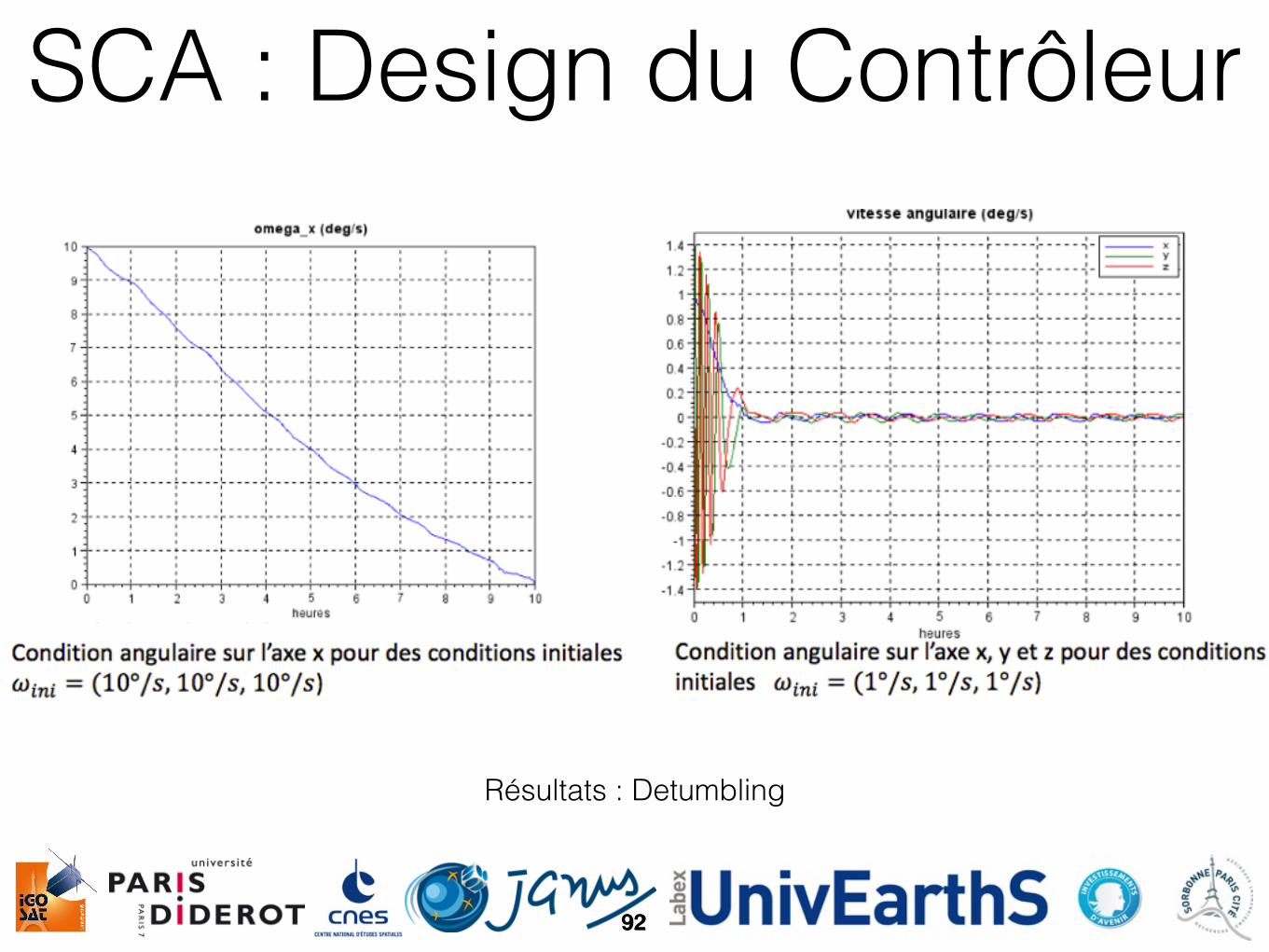
Résultats : Detumbling
9191
SCA : Design du Contrôleur
Résultats : Detumbling
9292
SCA : Design du Contrôleur
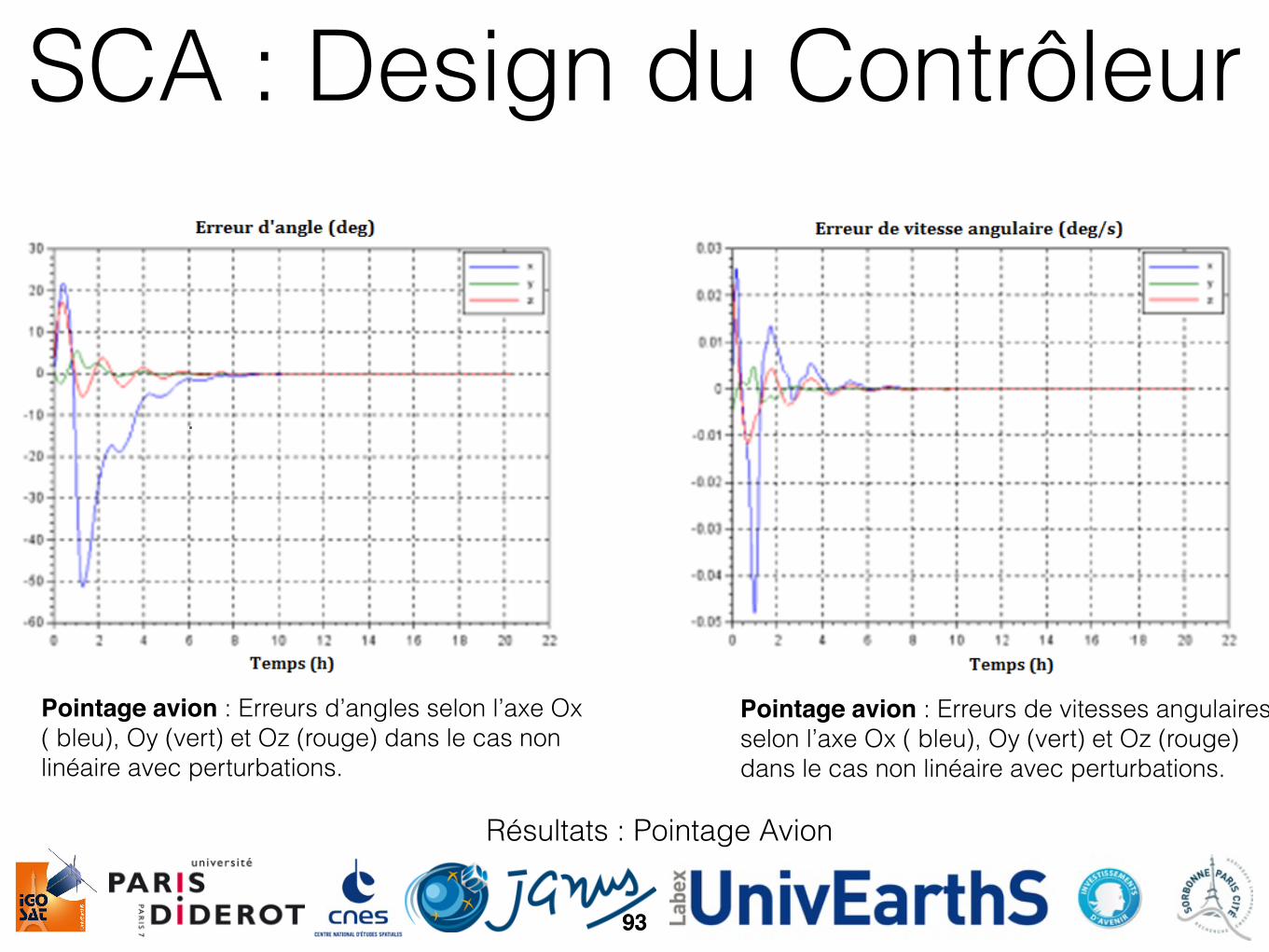
Résultats : Pointage Avion
93
Pointage avion : Erreurs de vitesses angulaires selon l’axe Ox ( bleu), Oy (vert) et Oz (rouge) dans le cas non linéaire avec perturbations.
Pointage avion : Erreurs d’angles selon l’axe Ox ( bleu), Oy (vert) et Oz (rouge) dans le cas non linéaire avec perturbations.
93

Implémentation matérielle du SCA
Jérémy Renaudin
Présentation Technique
9494
Implémentation matérielle du SCA
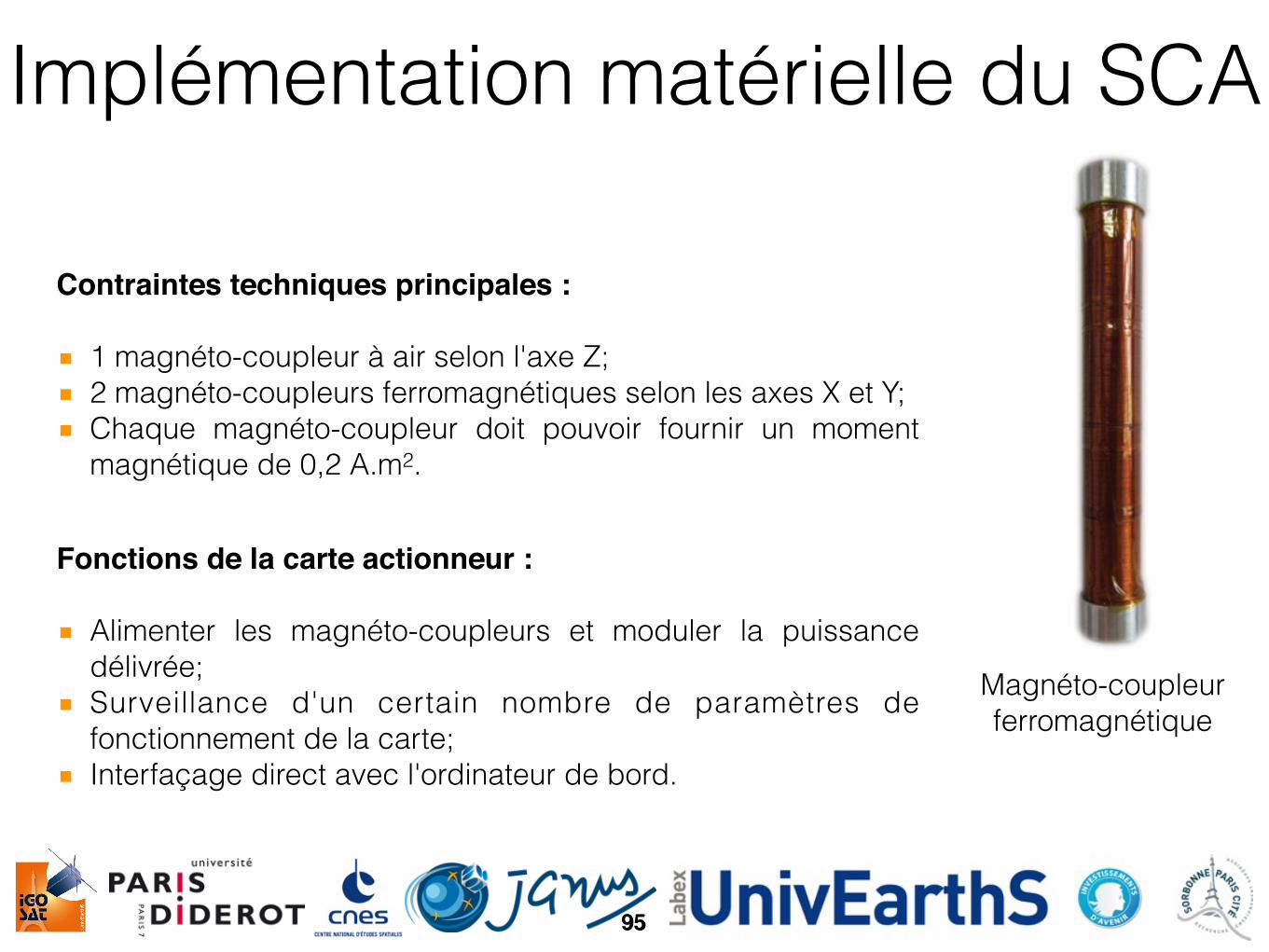
Contraintes techniques principales :
▪ 1 magnéto-coupleur à air selon l'axe Z; ▪ 2 magnéto-coupleurs ferromagnétiques selon les axes X et Y; ▪ Chaque magnéto-coupleur doit pouvoir fournir un moment
magnétique de 0,2 A.m2.
Fonctions de la carte actionneur :
▪ Alimenter les magnéto-coupleurs et moduler la puissance délivrée;
▪ Surveillance d'un certain nombre de paramètres de fonctionnement de la carte;
▪ Interfaçage direct avec l'ordinateur de bord.
Magnéto-coupleur ferromagnétique
9595
Implémentation matérielle du SCA
Dimensionnement électrique de la carte actionneur :
▪ 510 mW par magnéto-coupleurs ferromagnétiques fourni par ISIS Space (x2); ▪ 600 mW pour le magnéto-coupleurs à air de notre conception; ▪ 120 mW pour le micro-contrôleur et les composants électroniques du circuit.
Total : 1,74WSoit environ 2 W en prenant une marge de 10 %
Ce qui correspond à la puissance maximum délivrée par le circuit. La puissance consommée par les magnéto-coupleurs est moindre car modulée.
9696
Implémentation matérielle du SCA
97
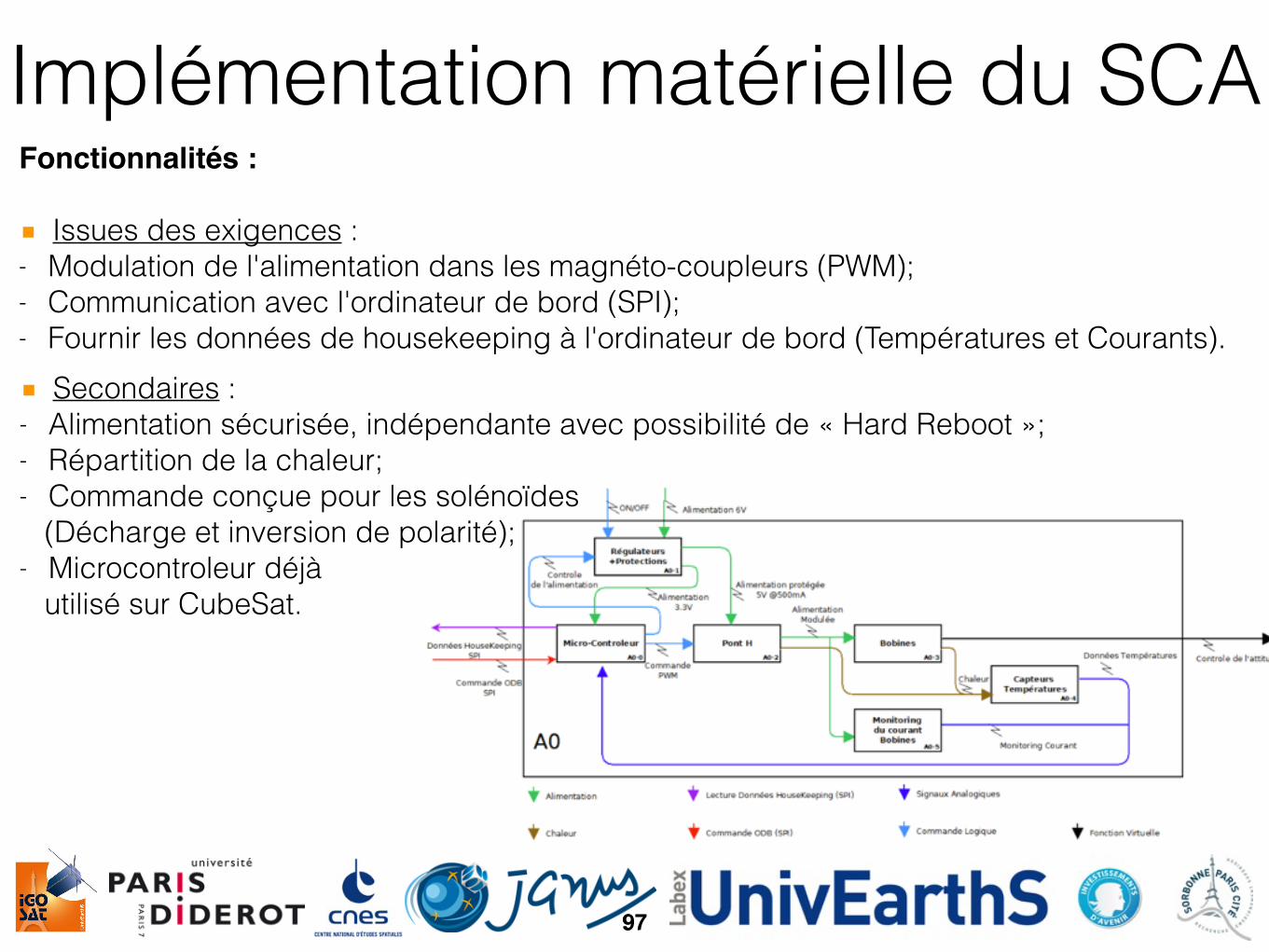
Fonctionnalités :
▪ Issues des exigences : - Modulation de l'alimentation dans les magnéto-coupleurs (PWM); - Communication avec l'ordinateur de bord (SPI); - Fournir les données de housekeeping à l'ordinateur de bord (Températures et Courants).
97
▪ Secondaires : - Alimentation sécurisée, indépendante avec possibilité de « Hard Reboot »; - Répartition de la chaleur; - Commande conçue pour les solénoïdes (Décharge et inversion de polarité); - Microcontroleur déjà utilisé sur CubeSat.
Implémentation matérielle du SCACoûts :
▪ Prix unitaire de 200 euros sans magnéto-coupleurs (réalisation de la carte par PCB Electronics, production par groupe de 3);
▪ Prix unitaire d’environ 1600 euros avec les magnéto-coupleurs (production par groupe de 3).
Prototype carte SCA Face magnéto-coupleur à air
Prototype carte SCA Face magnéto-coupleurs ferromagnétique
9898
Implémentation matérielle du SCA
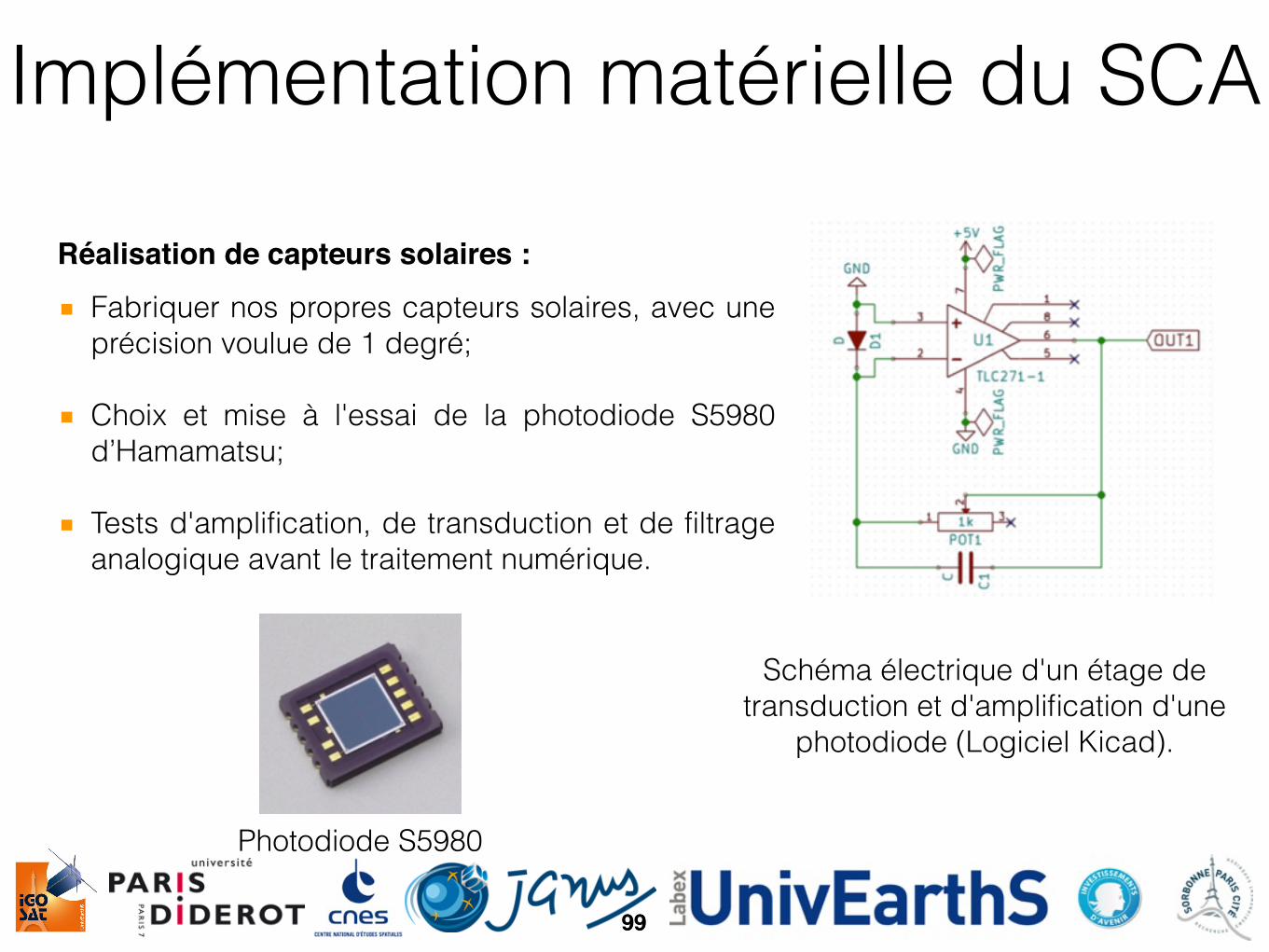
Schéma électrique d'un étage de transduction et d'amplification d'une
photodiode (Logiciel Kicad).
Réalisation de capteurs solaires :
▪ Fabriquer nos propres capteurs solaires, avec une précision voulue de 1 degré;
▪ Choix et mise à l'essai de la photodiode S5980 d’Hamamatsu;
▪ Tests d'amplification, de transduction et de filtrage analogique avant le traitement numérique.
Photodiode S5980
9999

Télécommunications & Station Sol
Pierre Vermot
Présentation Technique
100100
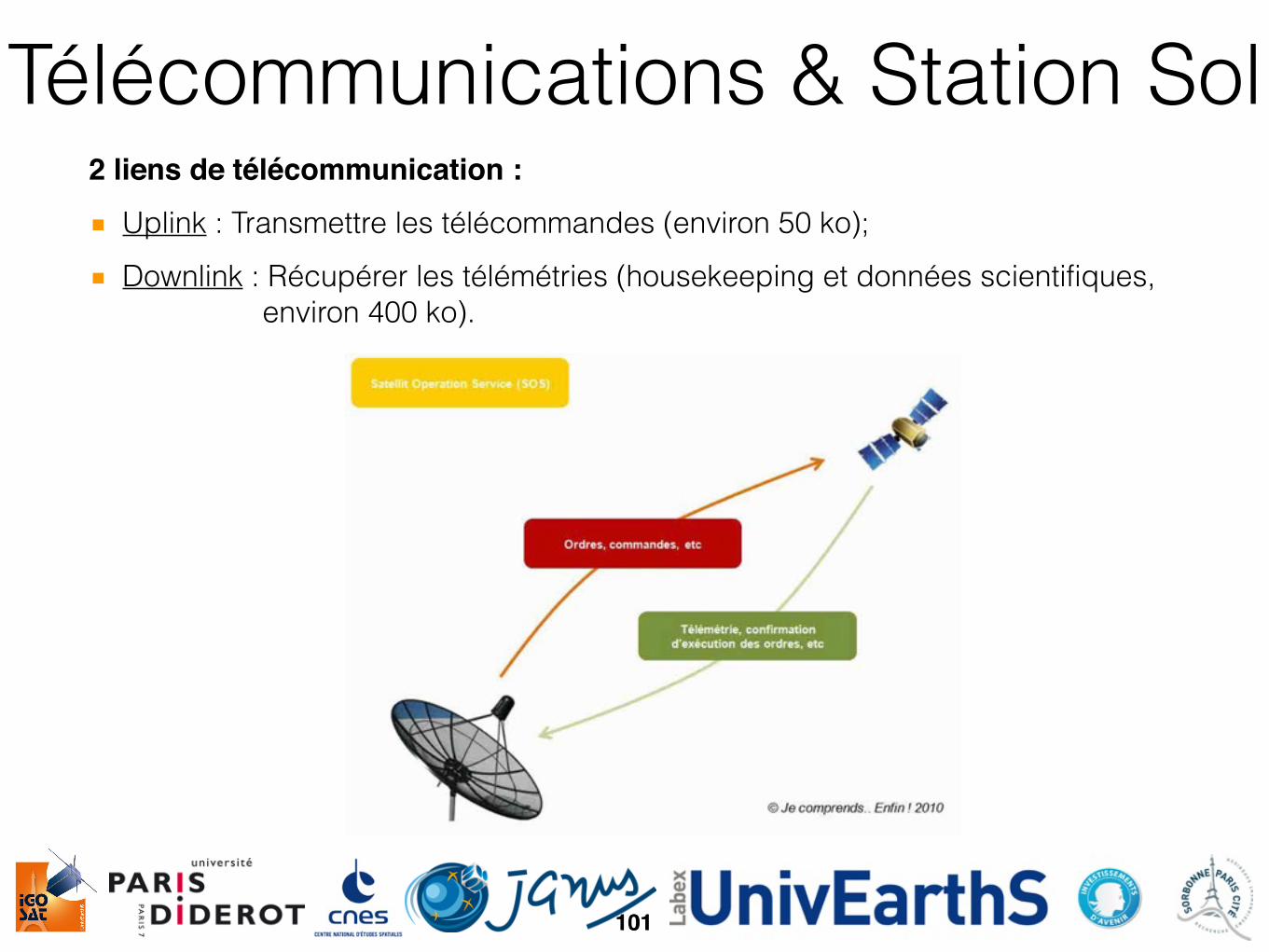
Télécommunications & Station Sol2 liens de télécommunication :
▪ Uplink : Transmettre les télécommandes (environ 50 ko);
▪ Downlink : Récupérer les télémétries (housekeeping et données scientifiques, environ 400 ko).
101101
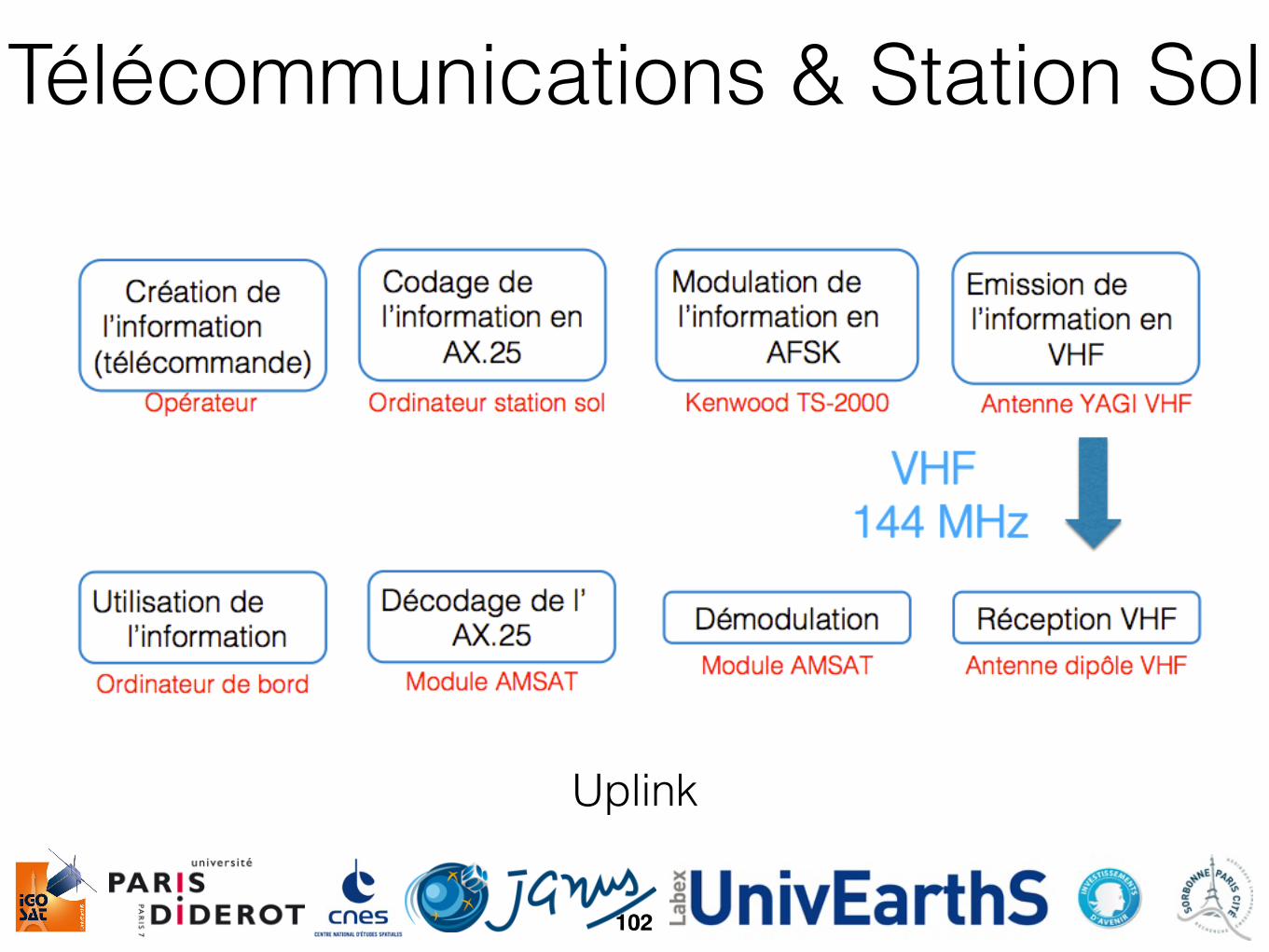
Télécommunications & Station Sol
Uplink
102102
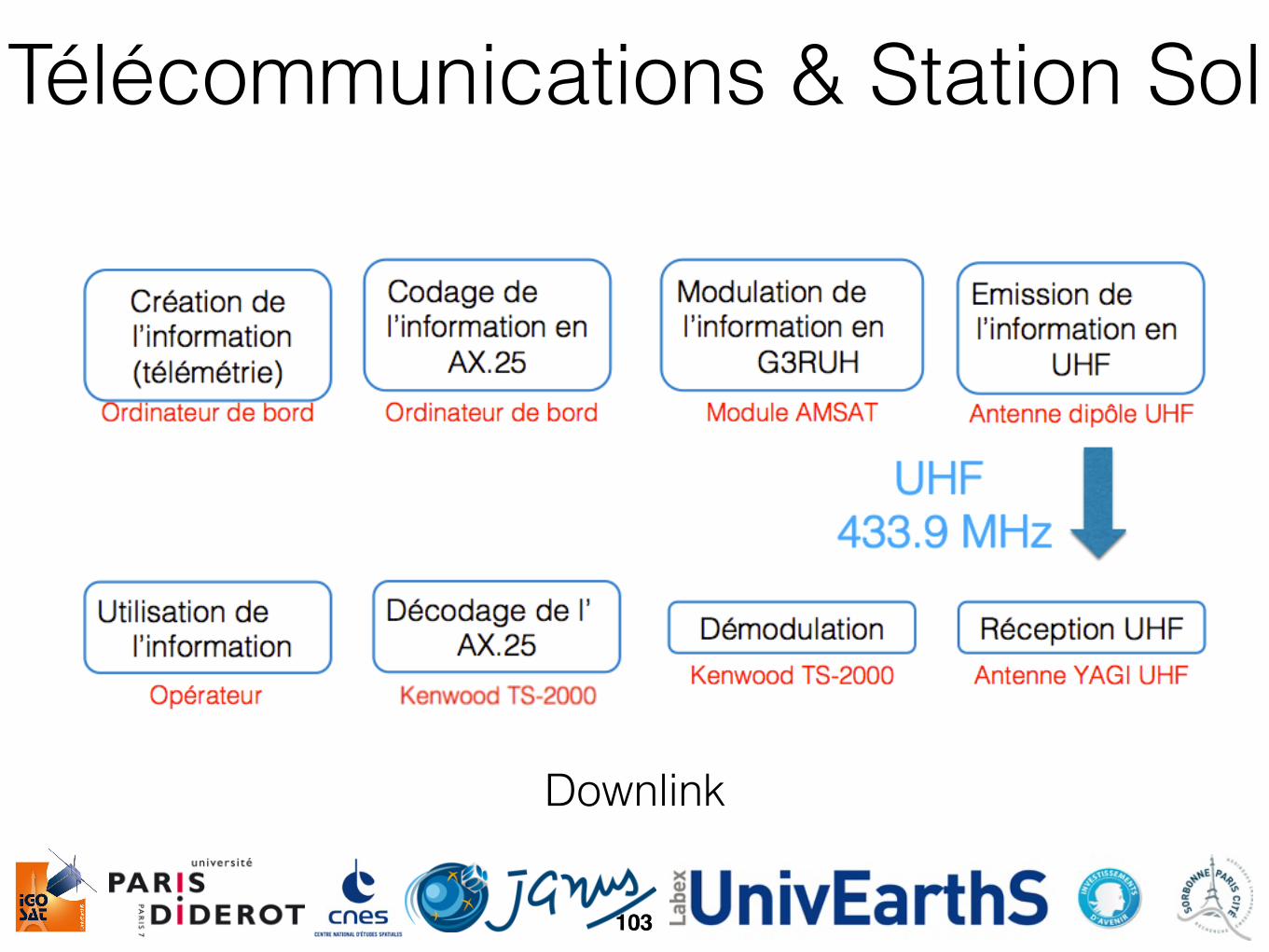
Télécommunications & Station Sol
Downlink
103103

Télécommunications & Station SolProtocole de communication par paquets :
104104
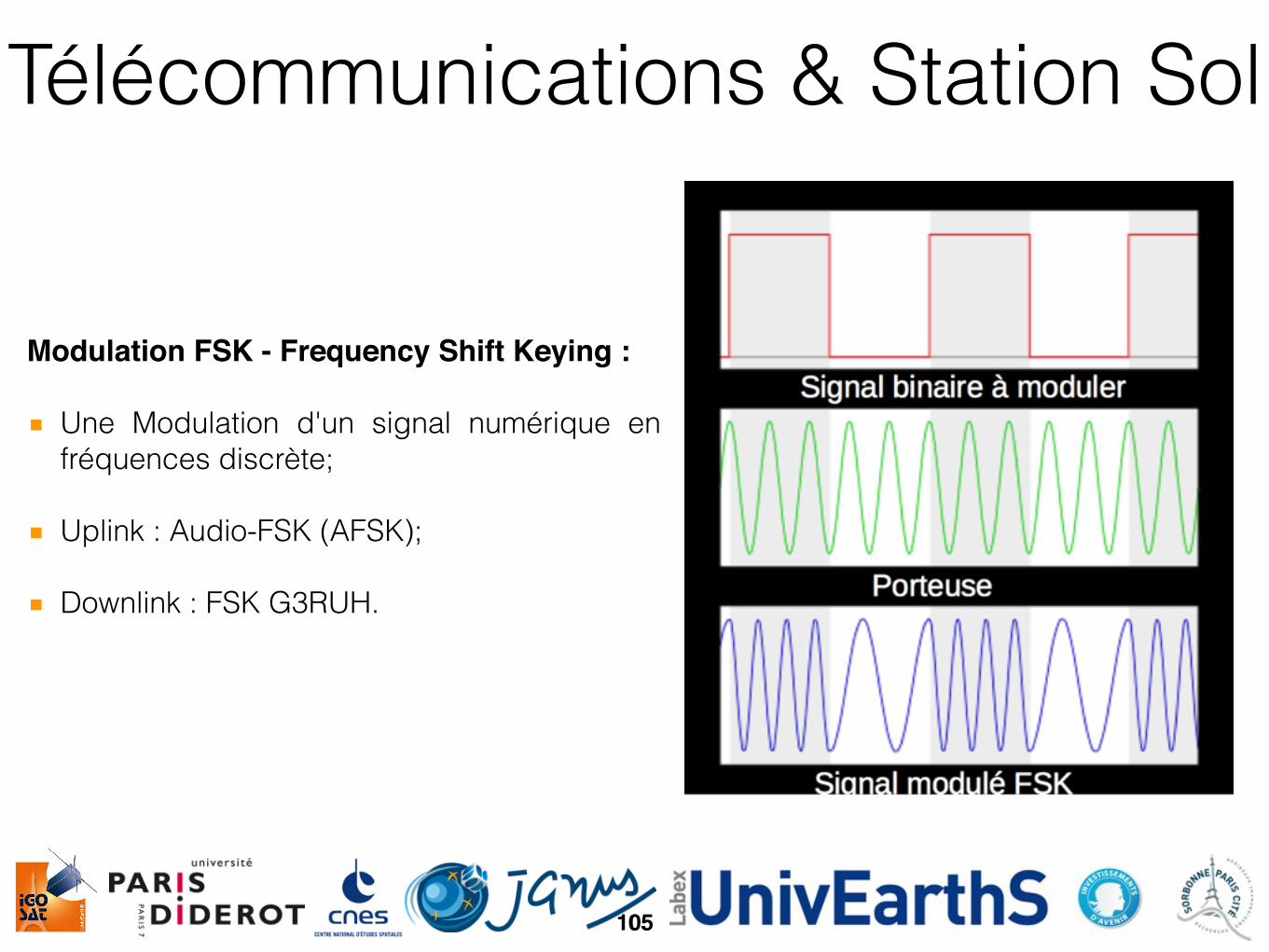
Télécommunications & Station Sol
Modulation FSK - Frequency Shift Keying :
▪ Une Modulation d'un signal numérique en fréquences discrète;
▪ Uplink : Audio-FSK (AFSK);
▪ Downlink : FSK G3RUH.
105105
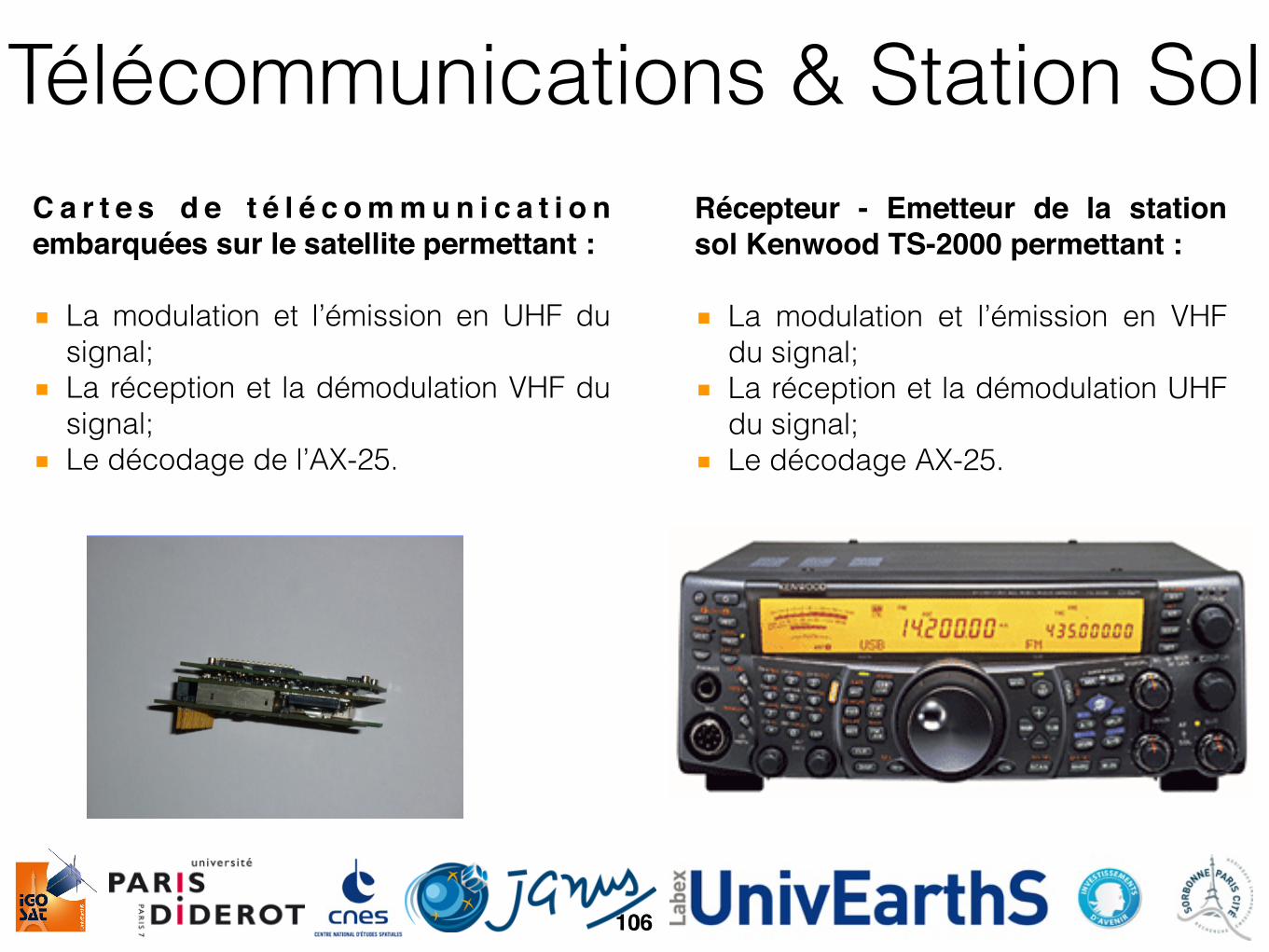
Télécommunications & Station SolC a r t e s d e t é l é c o m m u n i c a t i o n embarquées sur le satellite permettant :
▪ La modulation et l’émission en UHF du signal;
▪ La réception et la démodulation VHF du signal;
▪ Le décodage de l’AX-25.
Récepteur - Emetteur de la station sol Kenwood TS-2000 permettant :
▪ La modulation et l’émission en VHF du signal;
▪ La réception et la démodulation UHF du signal;
▪ Le décodage AX-25.
106106
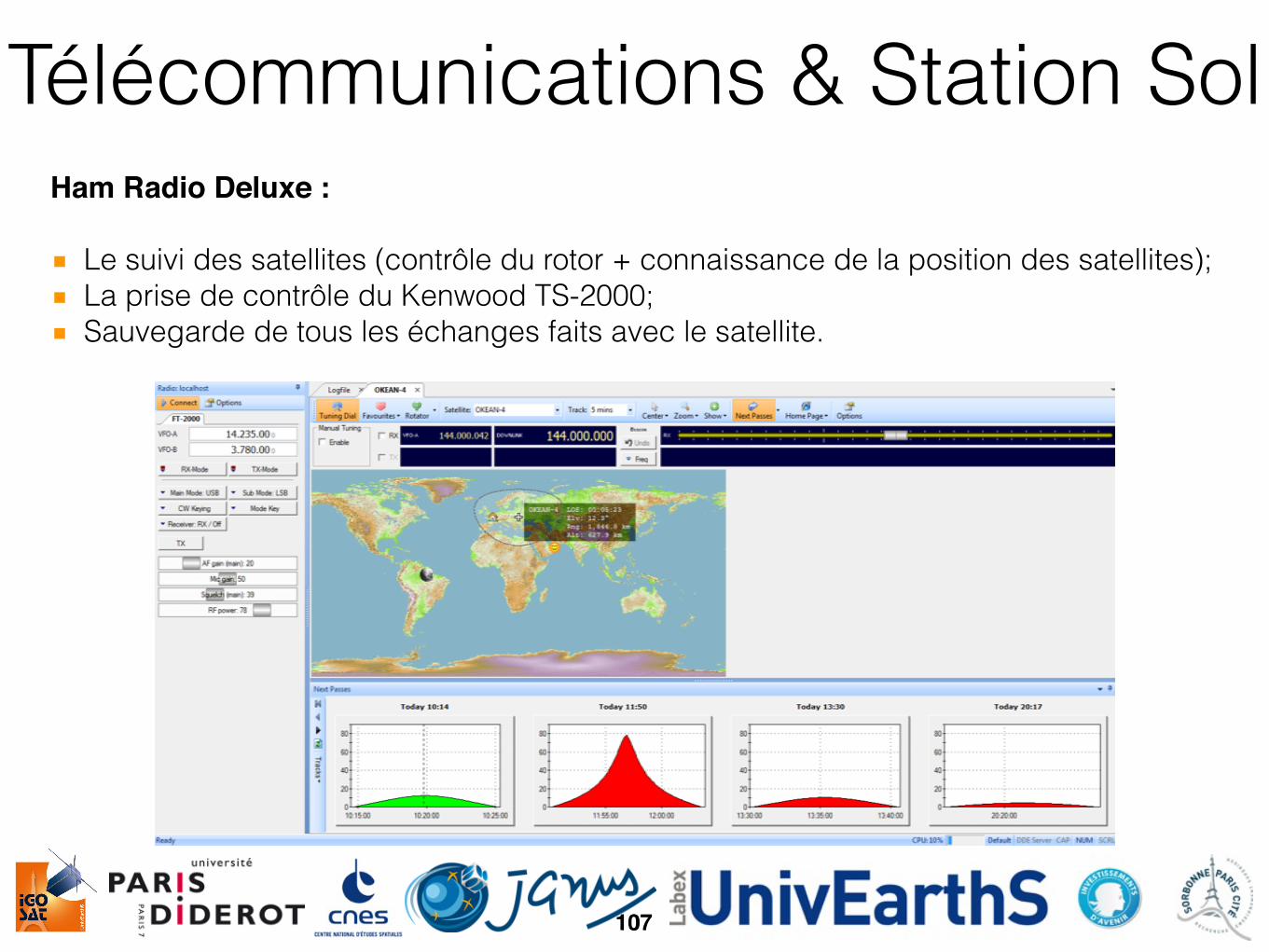
Télécommunications & Station SolHam Radio Deluxe :
▪ Le suivi des satellites (contrôle du rotor + connaissance de la position des satellites); ▪ La prise de contrôle du Kenwood TS-2000; ▪ Sauvegarde de tous les échanges faits avec le satellite.
107107
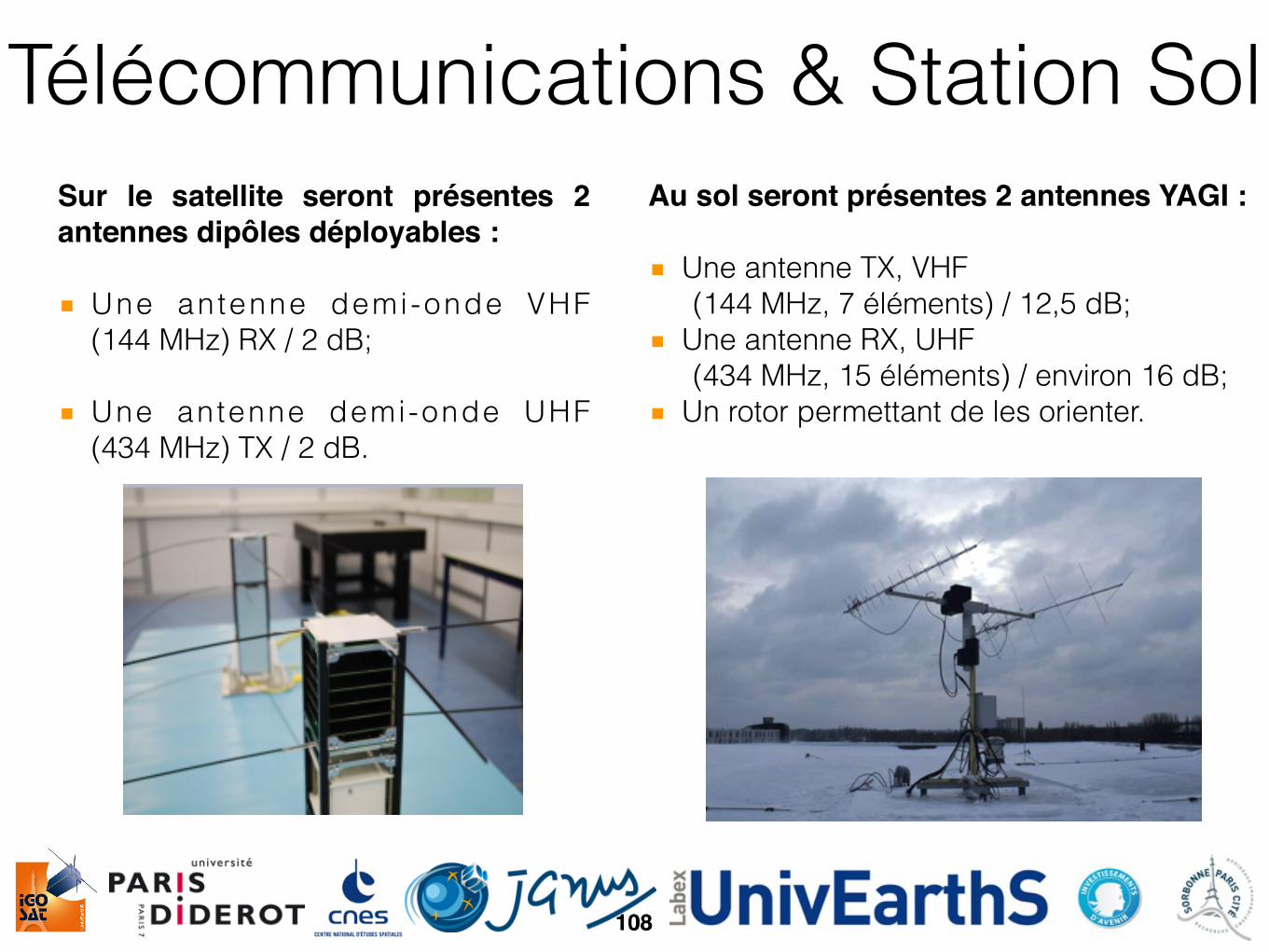
Télécommunications & Station SolAu sol seront présentes 2 antennes YAGI :
▪ Une antenne TX, VHF (144 MHz, 7 éléments) / 12,5 dB;
▪ Une antenne RX, UHF (434 MHz, 15 éléments) / environ 16 dB;
▪ Un rotor permettant de les orienter.
Sur le satellite seront présentes 2 antennes dipôles déployables :
▪ Une antenne demi-onde VHF (144 MHz) RX / 2 dB;
▪ Une antenne demi-onde UHF (434 MHz) TX / 2 dB.
108108
Télécommunications & Station Sol
109
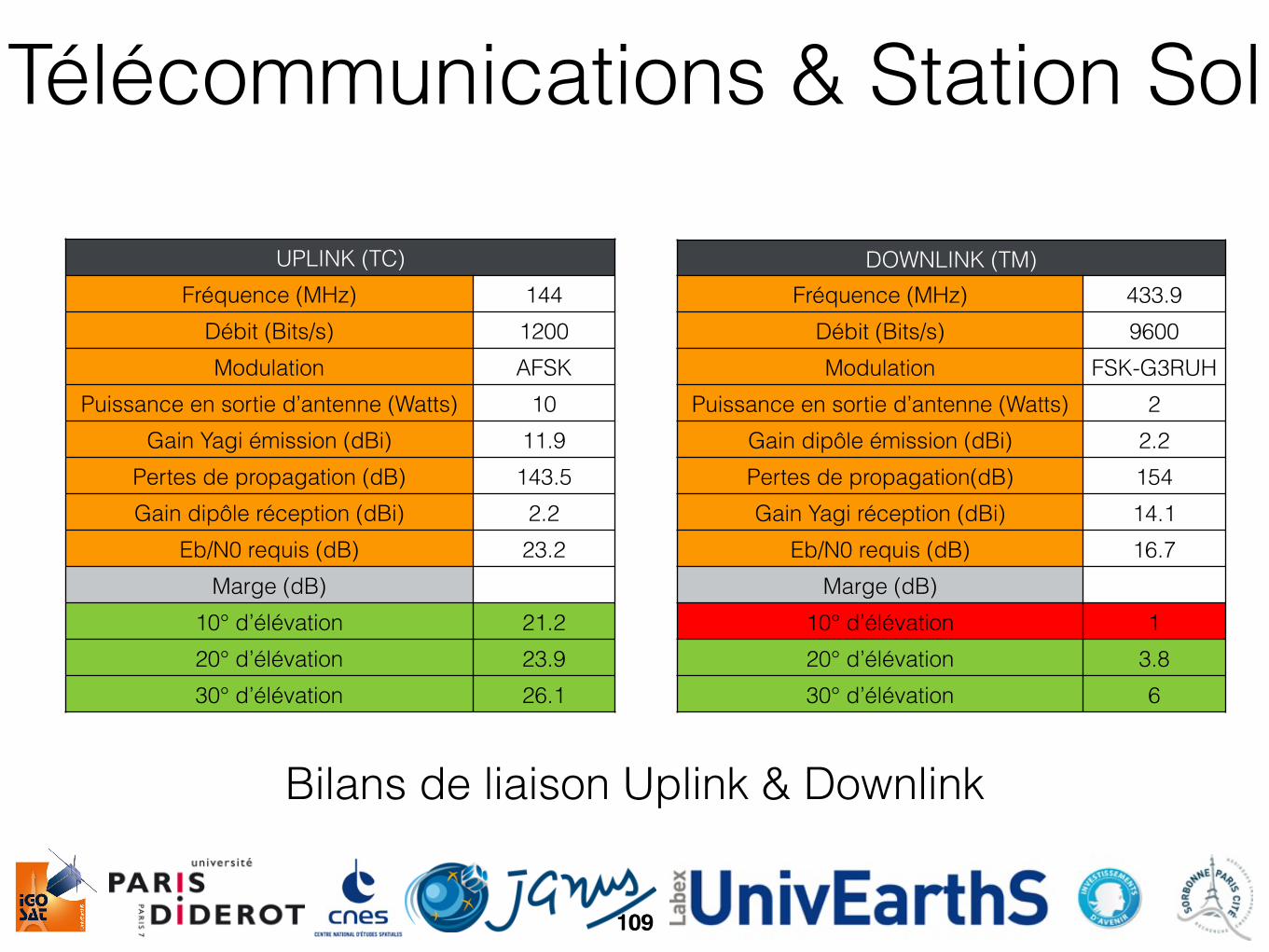
UPLINK (TC)Fréquence (MHz) 144
Débit (Bits/s) 1200Modulation AFSK
Puissance en sortie d’antenne (Watts) 10Gain Yagi émission (dBi) 11.9
Pertes de propagation (dB) 143.5Gain dipôle réception (dBi) 2.2
Eb/N0 requis (dB) 23.2Marge (dB)
10° d’élévation 21.220° d’élévation 23.930° d’élévation 26.1
DOWNLINK (TM)Fréquence (MHz) 433.9
Débit (Bits/s) 9600Modulation FSK-G3RUH
Puissance en sortie d’antenne (Watts) 2Gain dipôle émission (dBi) 2.2Pertes de propagation(dB) 154Gain Yagi réception (dBi) 14.1
Eb/N0 requis (dB) 16.7Marge (dB)
10° d’élévation 120° d’élévation 3.830° d’élévation 6
Bilans de liaison Uplink & Downlink
109
Mechanical Studies
Pham Van Phap
Présentation Technique
110110
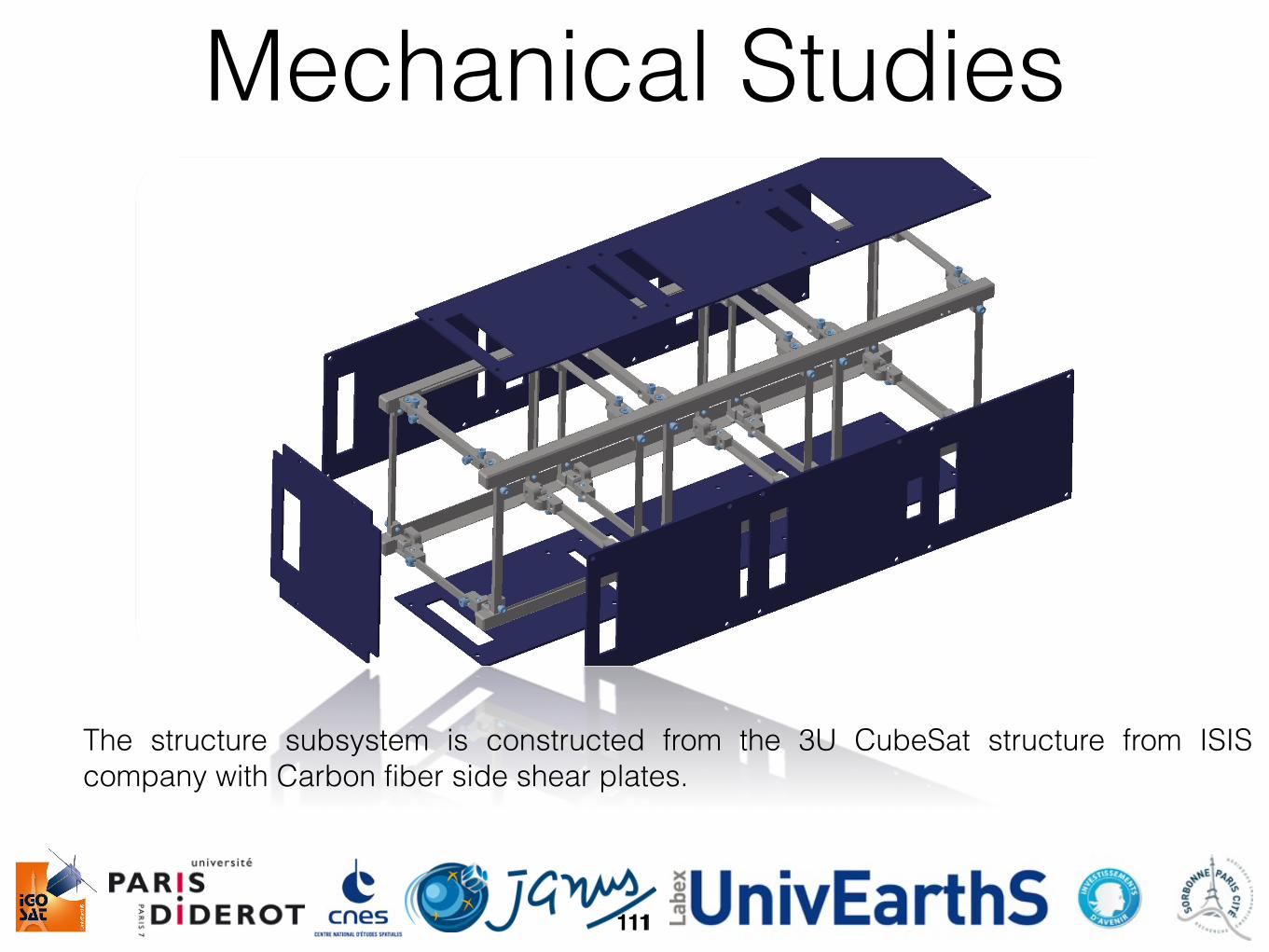
Mechanical Studies
The structure subsystem is constructed from the 3U CubeSat structure from ISIS company with Carbon fiber side shear plates.
111111

Mechanical Studies
112112
Mechanical Studies
113113
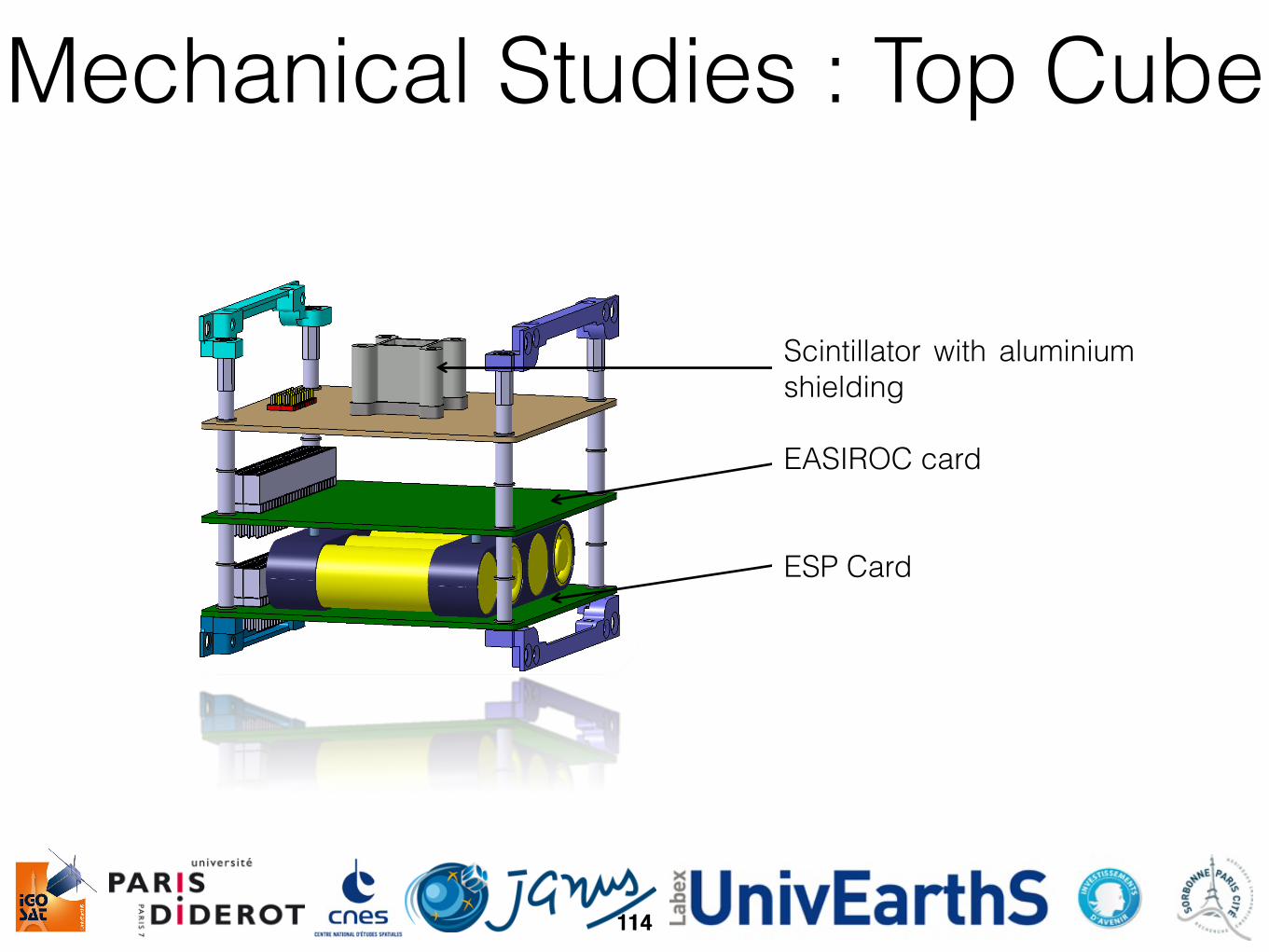
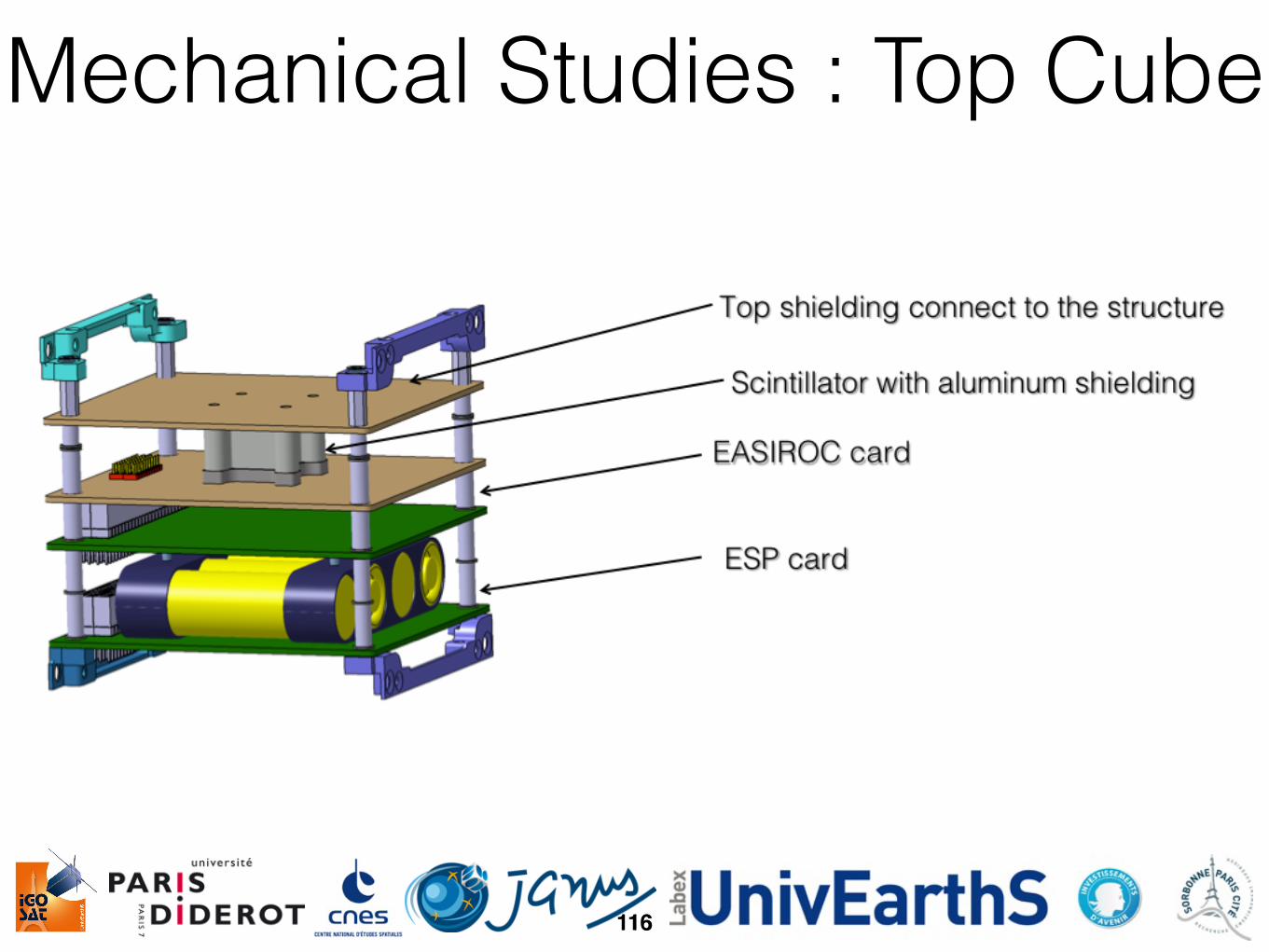
Mechanical Studies : Top Cube
Scintillator with aluminium shielding
EASIROC card
ESP Card
114114
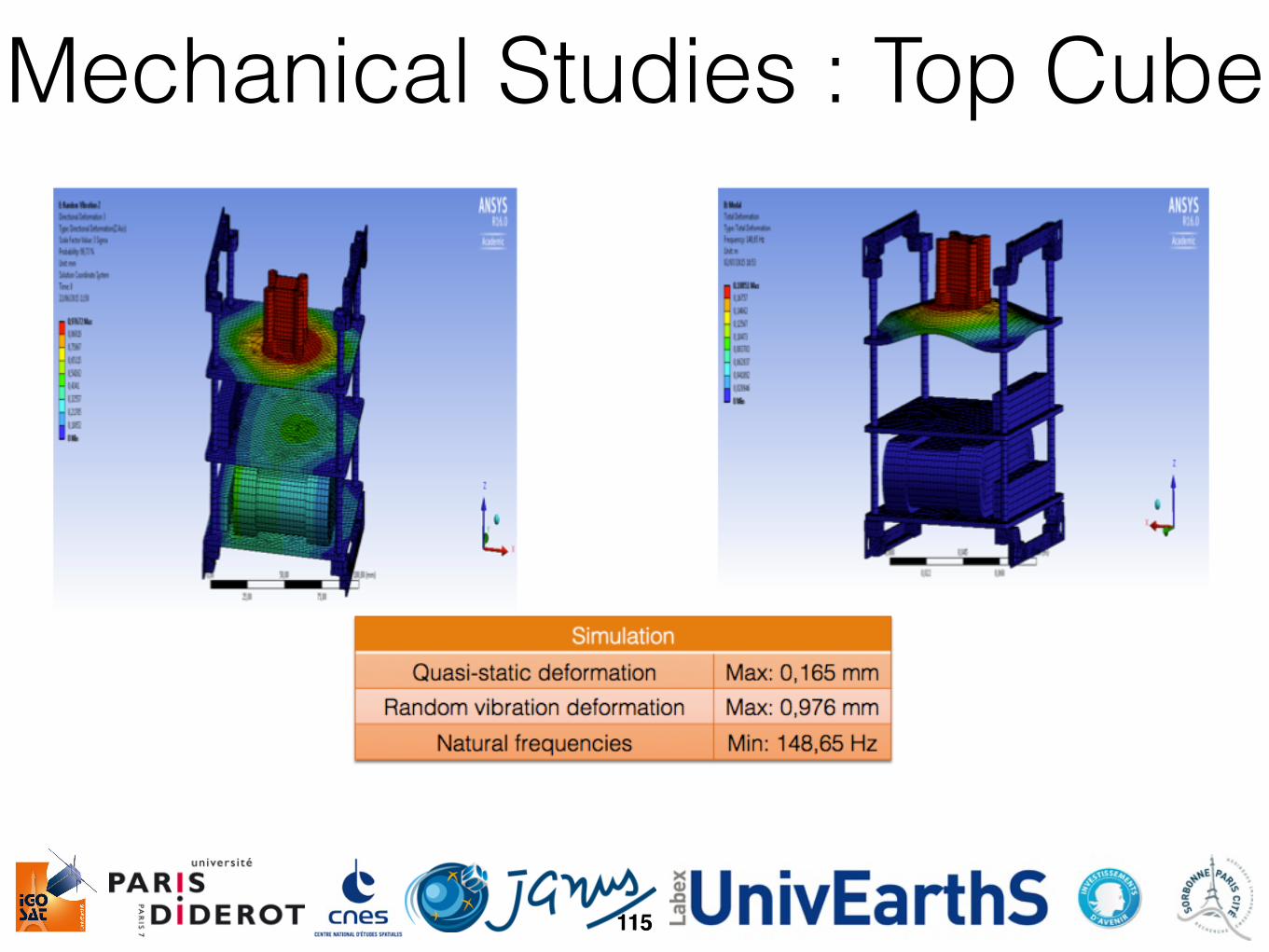
Mechanical Studies : Top Cube
115115
Mechanical Studies : Top Cube
116116

Mechanical Studies : Middle Cube
117117
Mechanical Studies : Middle Cube
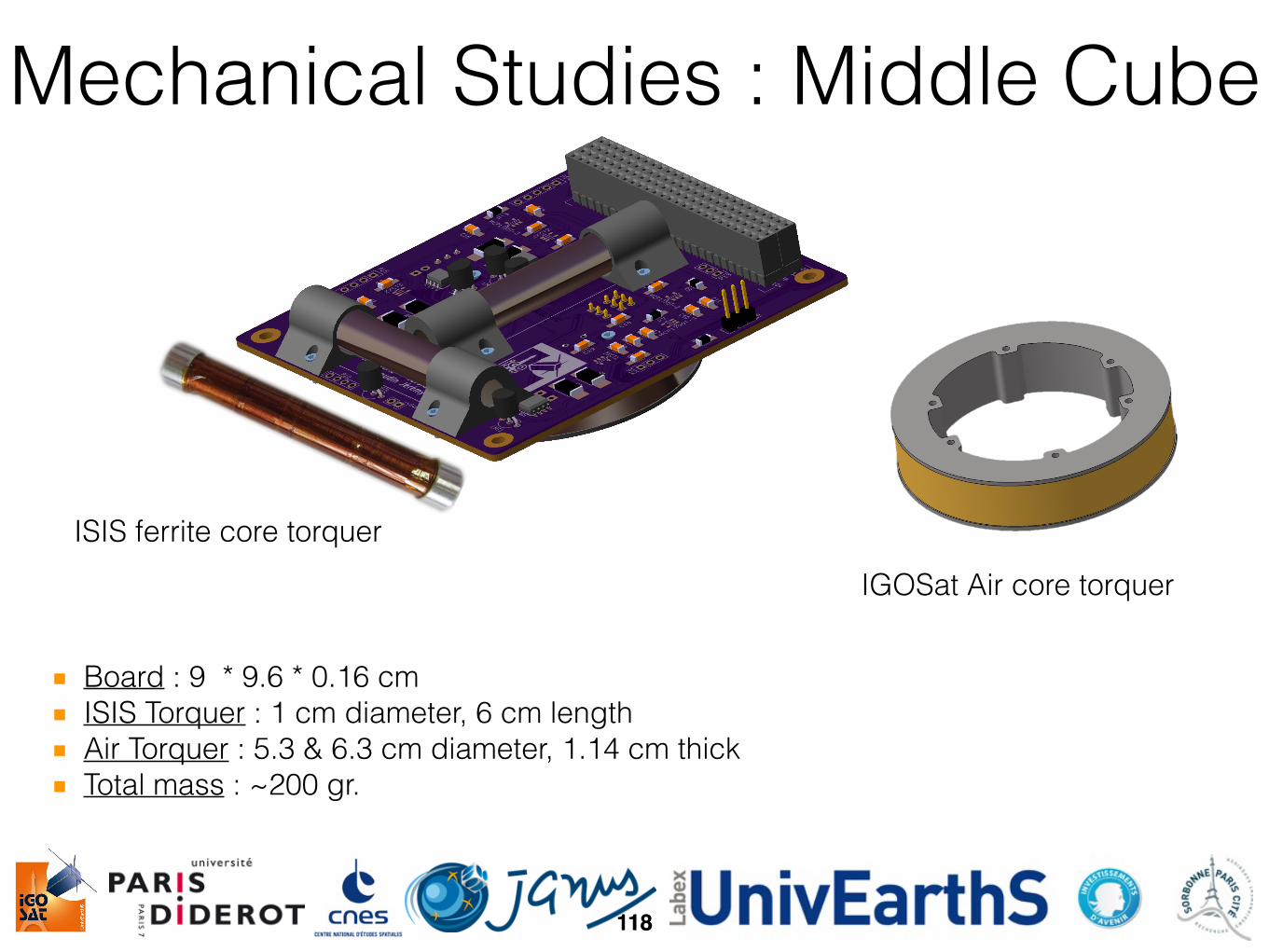
▪ Board : 9 * 9.6 * 0.16 cm ▪ ISIS Torquer : 1 cm diameter, 6 cm length ▪ Air Torquer : 5.3 & 6.3 cm diameter, 1.14 cm thick ▪ Total mass : ~200 gr.
ISIS ferrite core torquer
IGOSat Air core torquer
118118
Mechanical Studies : Middle Cube
119
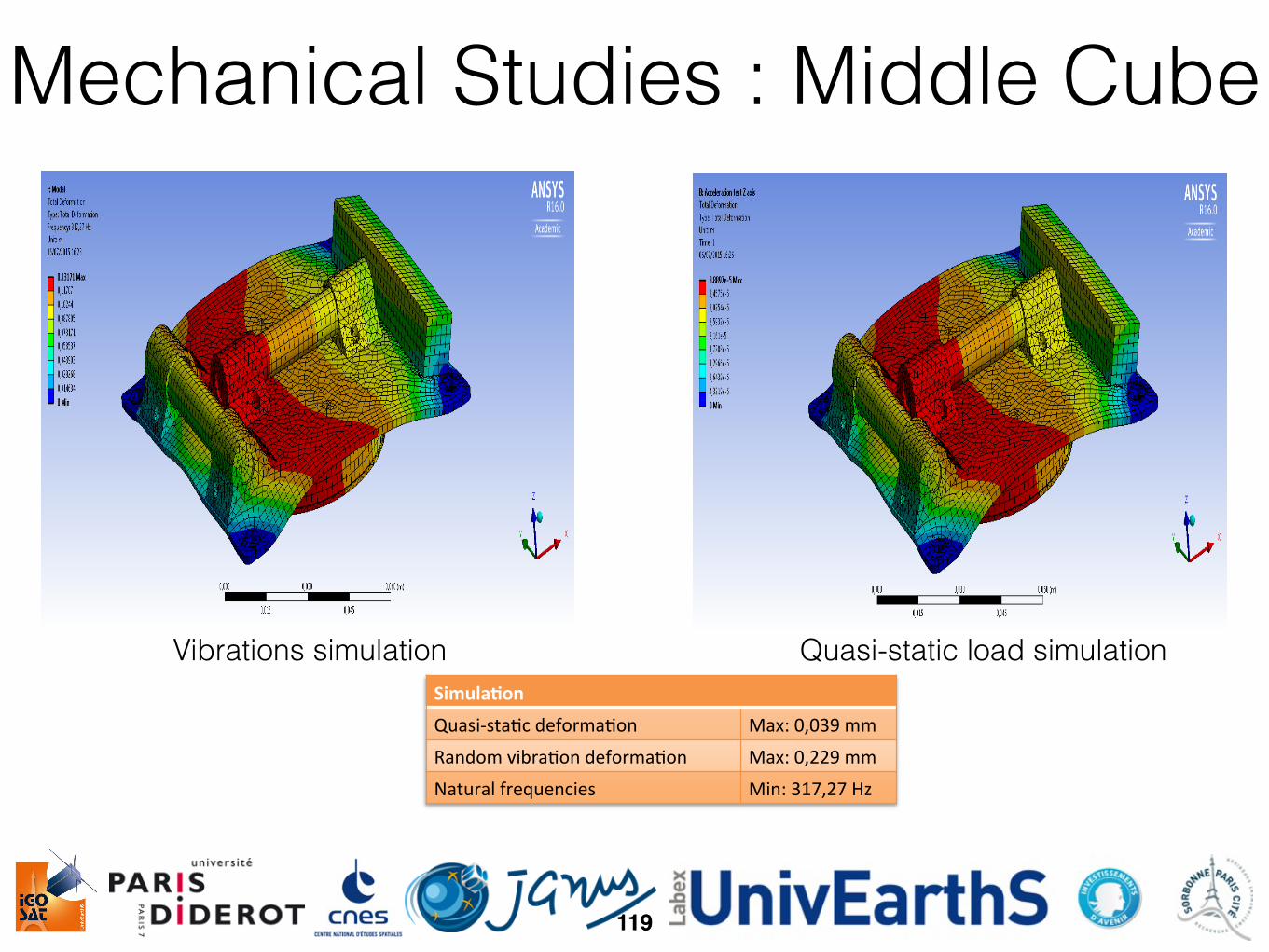
Simula'on*Quasi&sta(c*deforma(on* Max:*0,039*mm*
Random*vibra(on*deforma(on* Max:*0,229*mm*
Natural*frequencies* Min:*317,27*Hz*
119
Vibrations simulation Quasi-static load simulation

Mechanical Studies : Middle Cube
120120
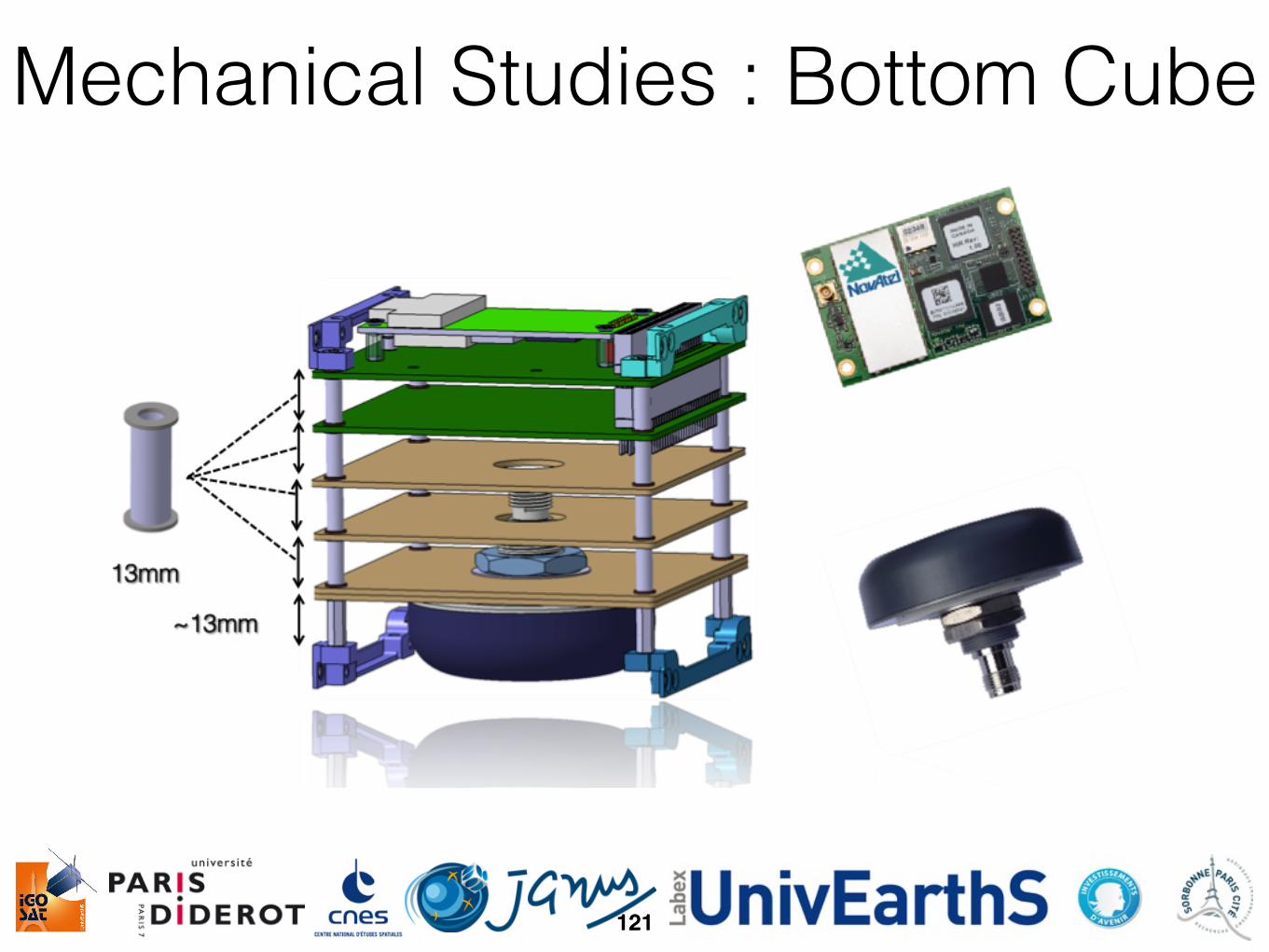
Mechanical Studies : Bottom Cube
121121

Mechanical Studies : Bottom Cube
122122
Mechanical Studies : Conclusion
Future Works :
▪ Simplify the CAD model to manufacture a real STM; ▪ Design and produce a simplified home made structure at least used for the STM; ▪ Mechanical Tests; ▪ Qualify the structure by tests; ▪ Thermal modelling (a first version has been done summer 2014 : no show stopper
identified); ▪ Thermal Tests;
123123
Logiciels Vol & Sol
Julien Lisita
Présentation Technique
124124
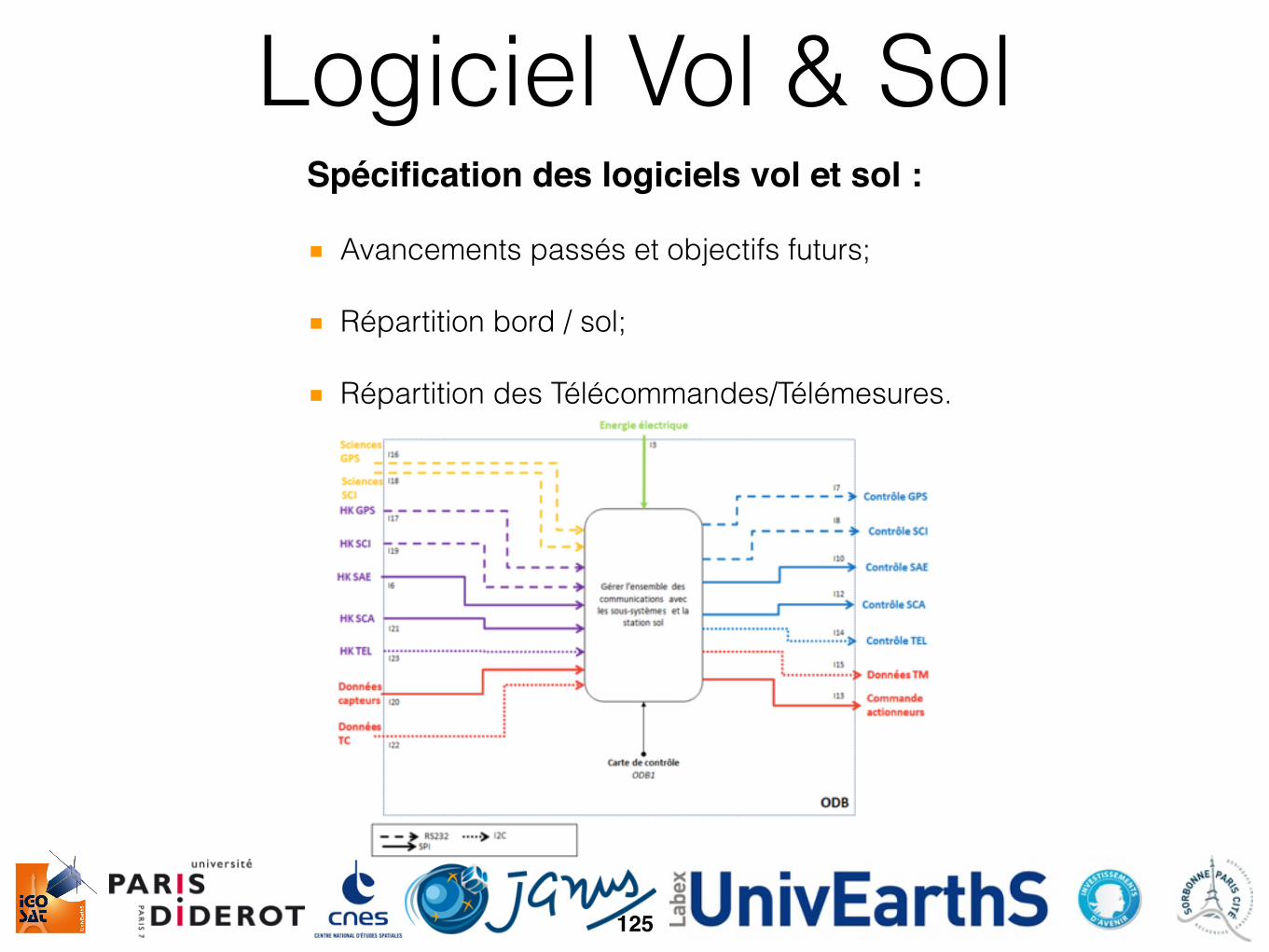
Logiciel Vol & SolSpécification des logiciels vol et sol :
▪ Avancements passés et objectifs futurs;
▪ Répartition bord / sol;
▪ Répartition des Télécommandes/Télémesures.
125
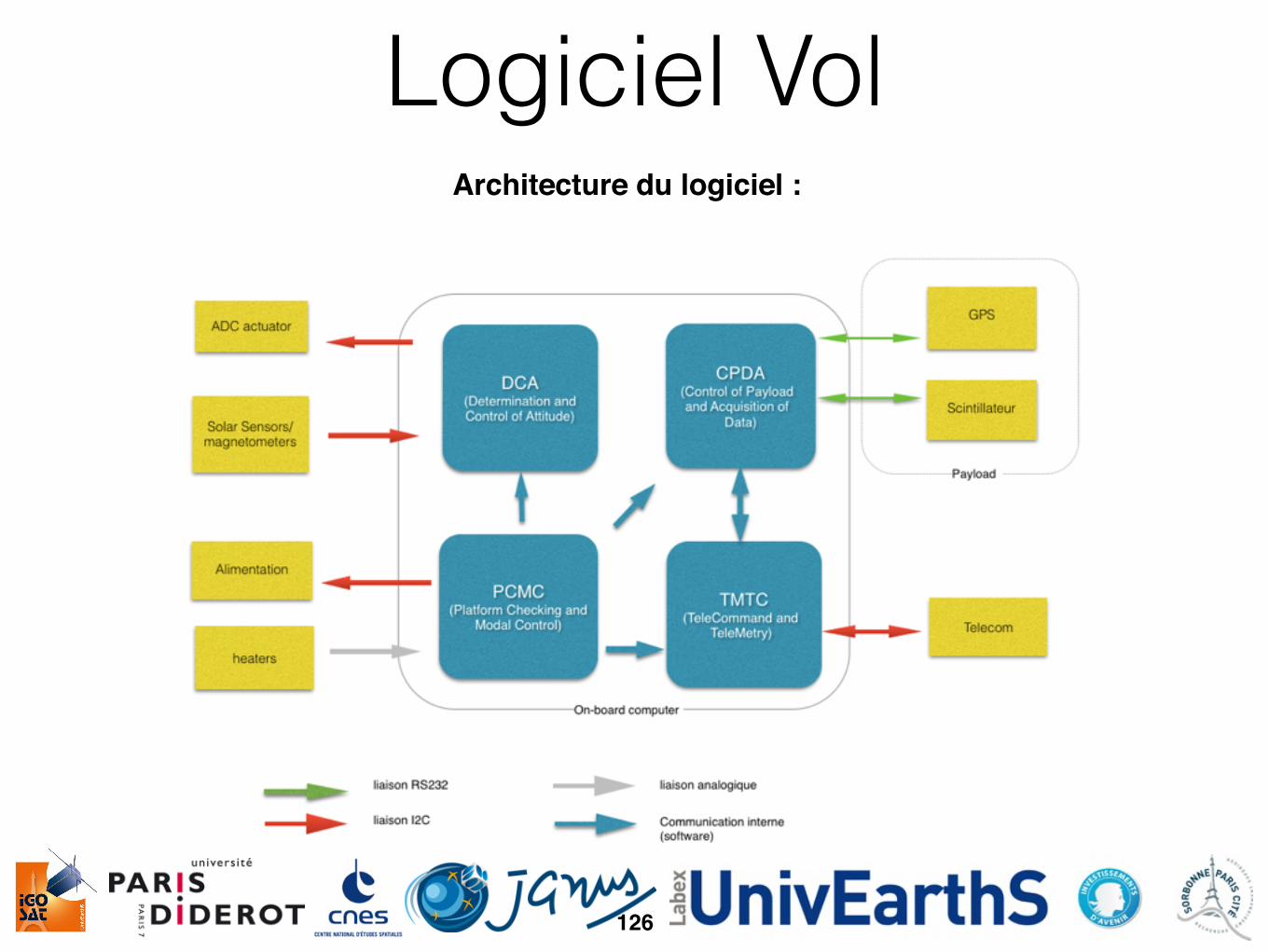
Logiciel VolArchitecture du logiciel :
126
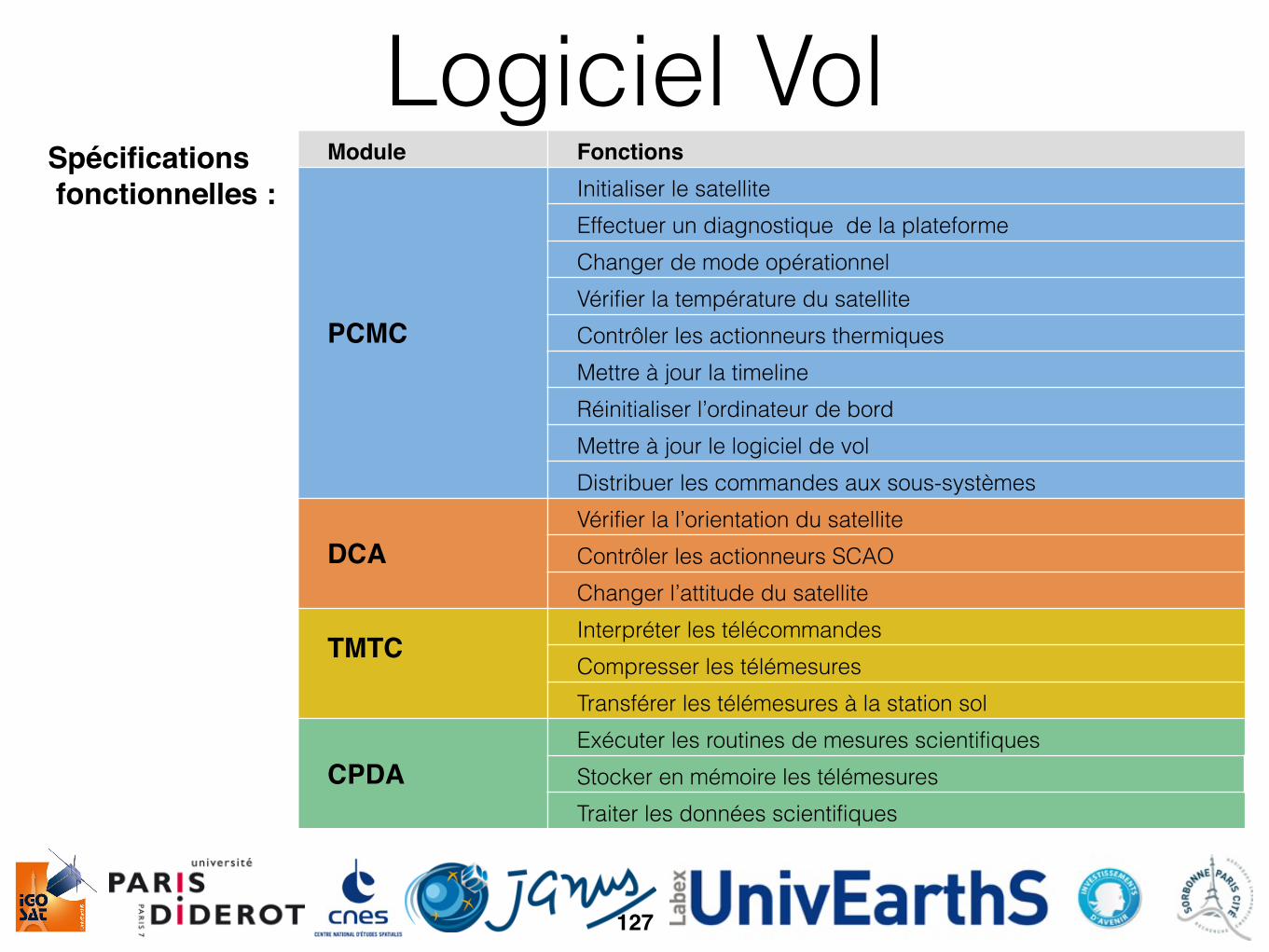
Logiciel VolSpécifications fonctionnelles :
Module Fonctions
PCMC
Initialiser le satelliteEffectuer un diagnostique de la plateformeChanger de mode opérationnelVérifier la température du satelliteContrôler les actionneurs thermiques Mettre à jour la timelineRéinitialiser l’ordinateur de bordMettre à jour le logiciel de volDistribuer les commandes aux sous-systèmes
DCAVérifier la l’orientation du satelliteContrôler les actionneurs SCAOChanger l’attitude du satellite
TMTCInterpréter les télécommandes Compresser les télémesuresTransférer les télémesures à la station sol
CPDAExécuter les routines de mesures scientifiquesStocker en mémoire les télémesuresTraiter les données scientifiques
127
Ordinateur de Bord
128
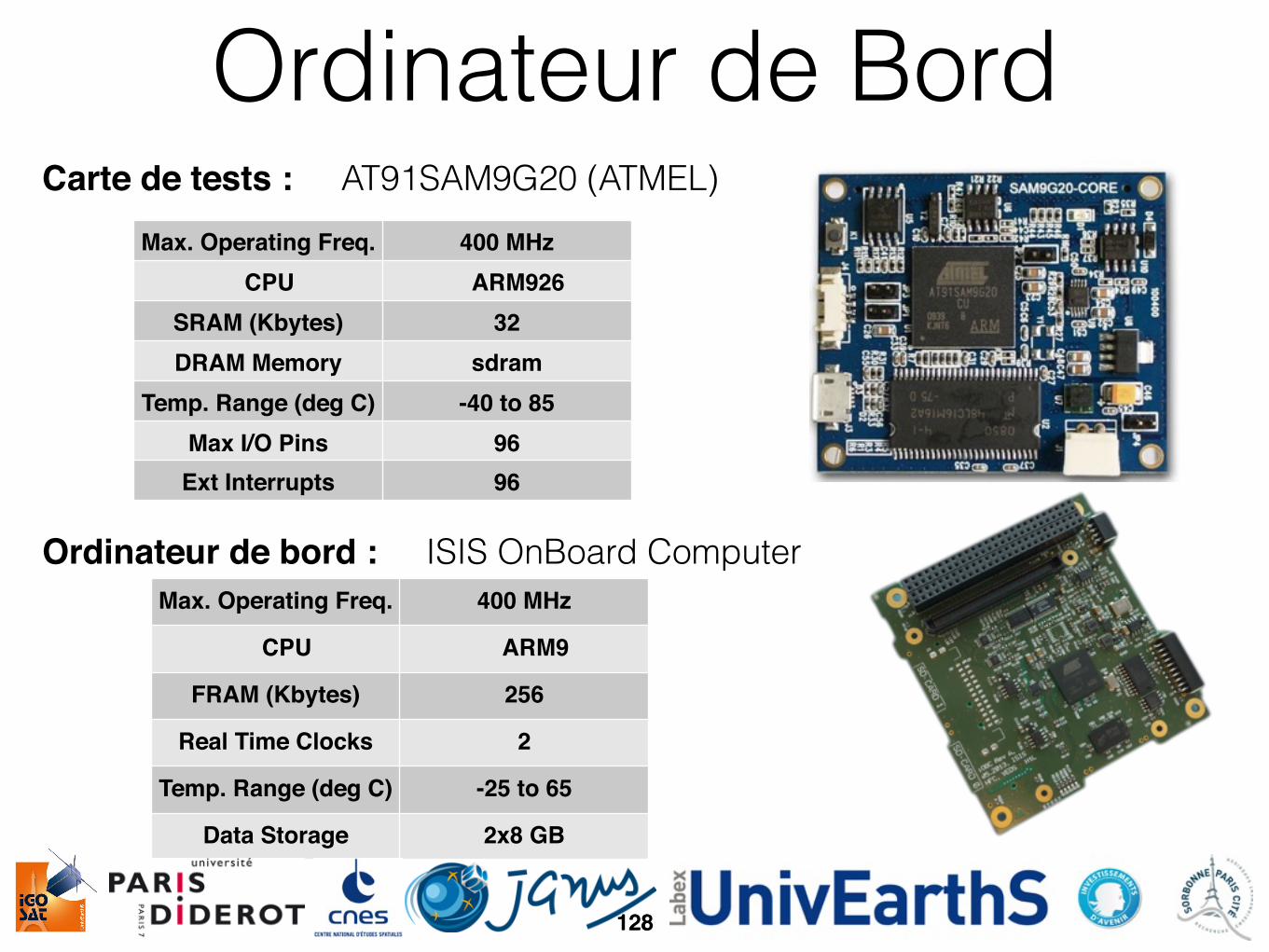
Carte de tests : AT91SAM9G20 (ATMEL)Max. Operating Freq.
(MHz)400 MHz
CPU ARM926SRAM (Kbytes) 32DRAM Memory sdram
Temp. Range (deg C) -40 to 85Max I/O Pins 96Ext Interrupts 96
Ordinateur de bord : ISIS OnBoard Computer Max. Operating Freq. 400 MHz
CPU ARM9
FRAM (Kbytes) 256
Real Time Clocks 2
Temp. Range (deg C) -25 to 65
Data Storage 2x8 GB
128

Logiciel Vol
SCADE Suite, “Correct-by-Construction” :
ESTEREL SCADE Suite : standard pour la création d’applications critiques embarquées.
▪ Optimisé pour les projets de l’aérospatiale, de l’automobile et du nucléaire;
▪ Génération automatique de code (Ada, C);
▪ Qualité du code généré :
- Absence de bugs; - Construction par des opérateurs déterministes et non ambiguës; - Validation des spécifications.
129129
Logiciel Vol
Logique système
130130
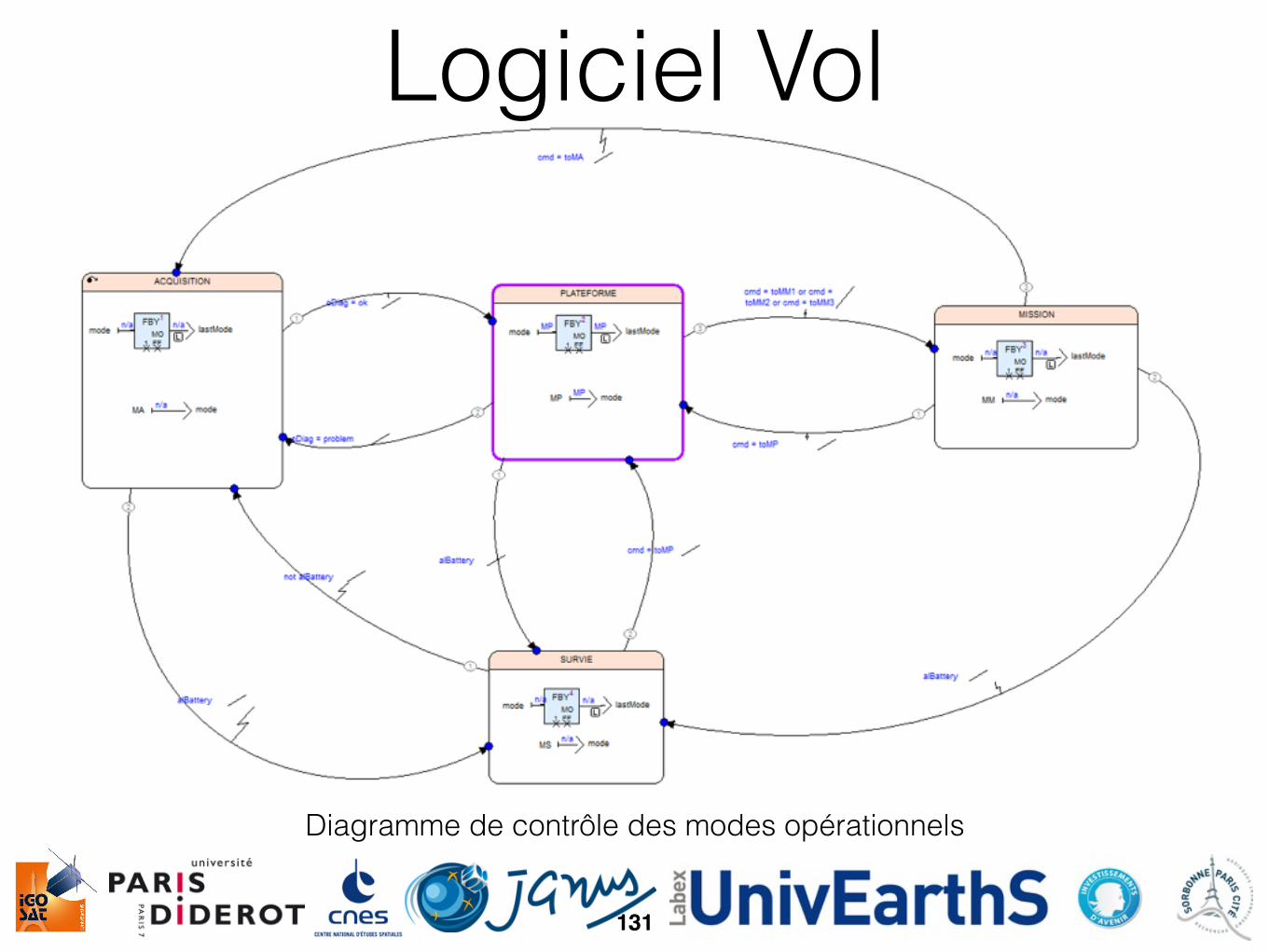
Logiciel Vol
Diagramme de contrôle des modes opérationnels
131131
Logiciel SolLe Logiciel Sol sera l’interface opérateur du centre de mission :
▪ Implémentation en Java, API utilisées;
▪ Section monitoring des données de housekeeping :
- Surveillance du satellite au sol; - Personnalisation des données HK envoyées ( intervalle de mesures, précision); - Gestion des données reçues depuis la station sol.
▪ Section planification des routines :
- Préparation et envoi des routines de mesures scientifiques; - Possible automatisation de l'envoi et de l'optimisation des routines.
132132
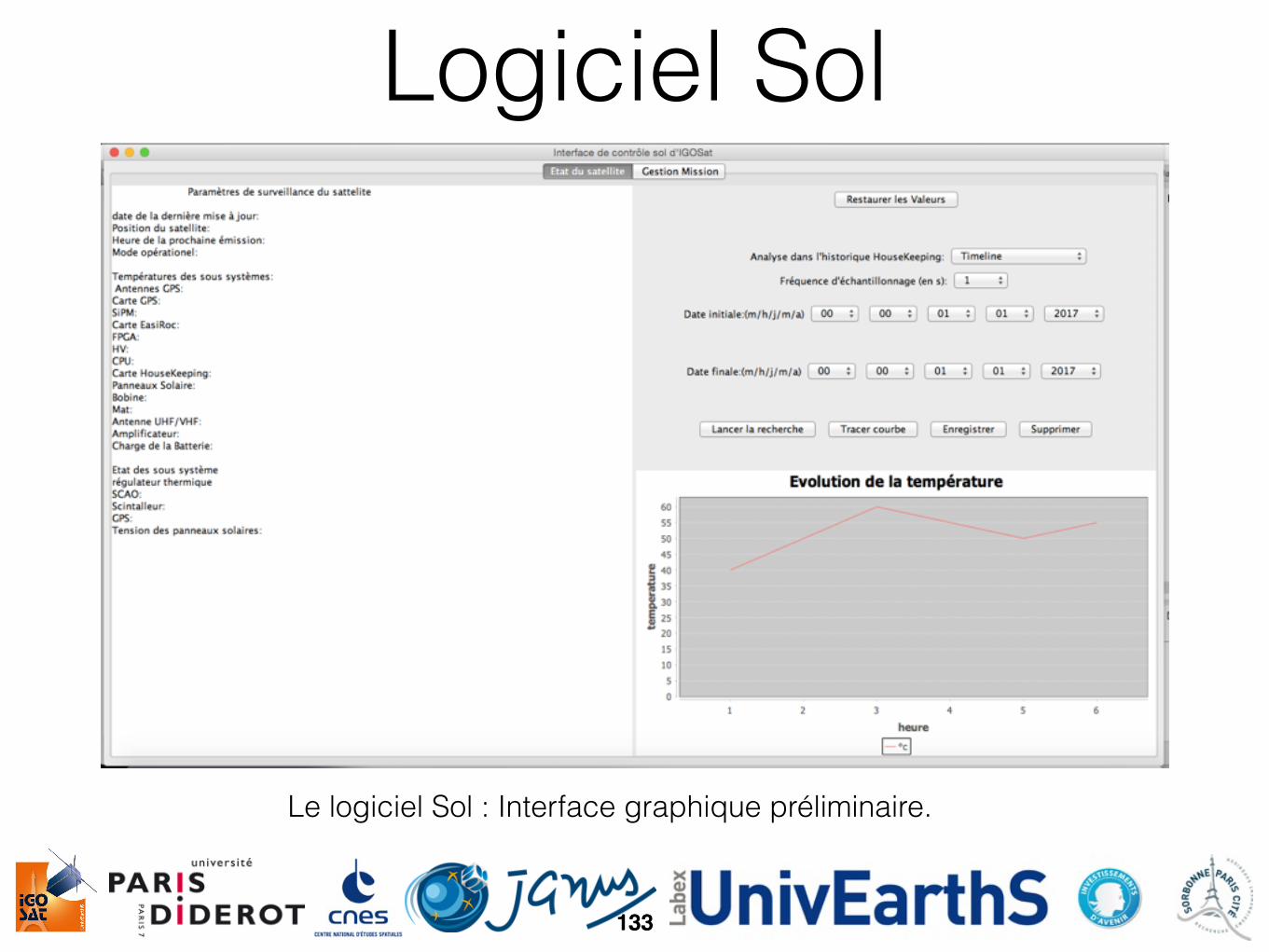
Logiciel Sol
Le logiciel Sol : Interface graphique préliminaire.
133133
Environnement de SimulationLéonard Panichi
Présentation Technique
134134

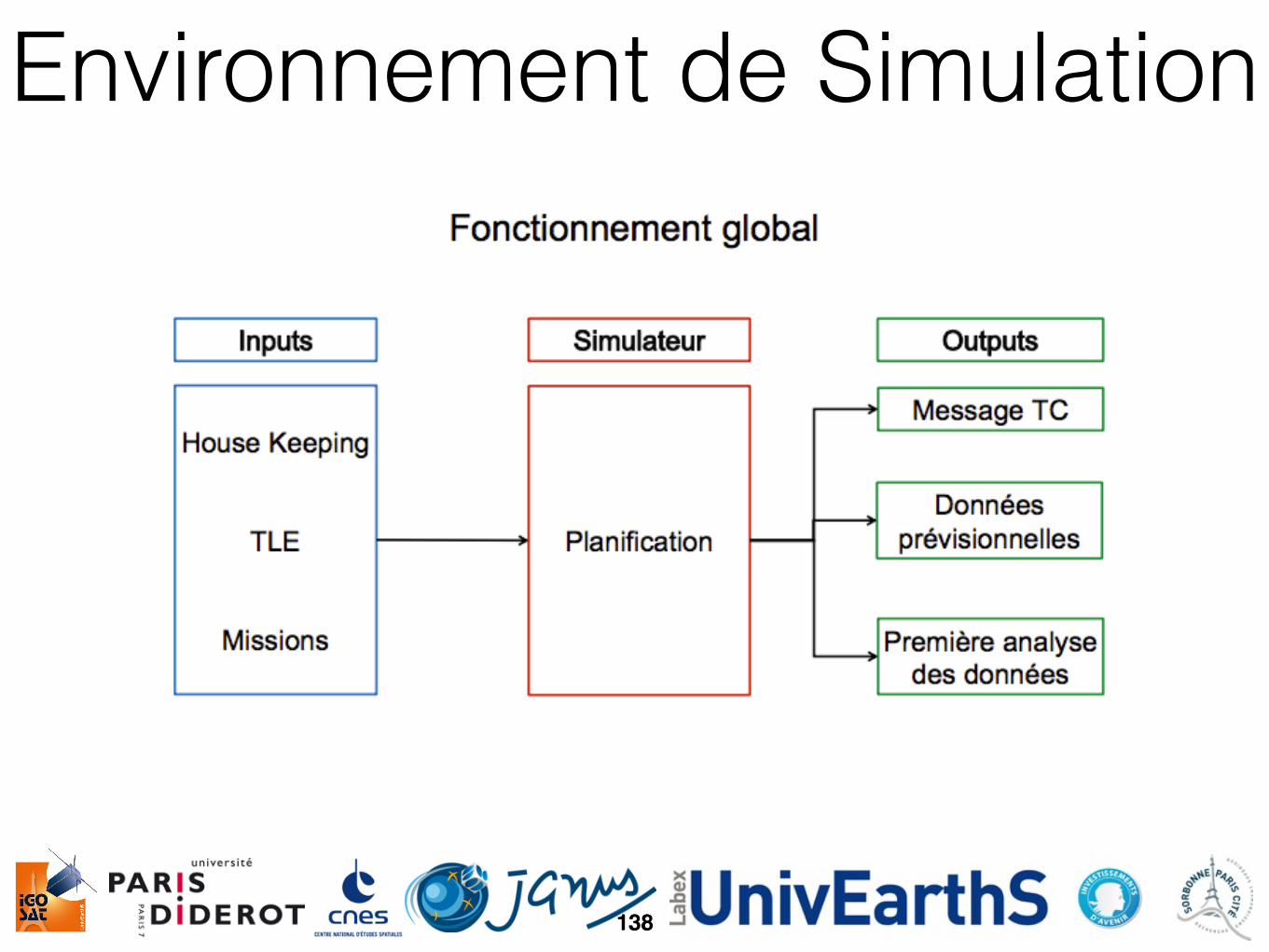
Environnement de SimulationObjectifs du simulateur fonctionnel :
▪ Envisager toutes les éventualités durant les phases de design; ▪ Planifier les opérations.
Caractéristiques du simulateur fonctionnel :
▪ Langage de programmation C++ :
- Accès à un grand nombre de librairies scientifiques; - Gain de temps au niveau du développement.
▪ Accessible à tous les types d’utilisateurs :
- Simplicité; - Portabilité.
▪ Période de rentabilisation : du développement d’IGOSAT à la fin de ses activités.
135135
Environnement de SimulationPhases de Développement d’IGOSat :
▪ Validation complémentaire du code de l’ODB; ▪ Validation du modèle de fonctionnement du satellite; ▪ Validation des routines et de leur faisabilité; ▪ Simulations au moyen de la carte AMTEL SAM9G20-EK.
Phases de Mise en Service d’IGOSat :
▪ Dialogue avec le logiciel Sol; ▪ Dimensionnement des paquets TC et TM; ▪ Mise au point des routines; ▪ Assiste la prise de décision au sol.
136136
Environnement de Simulation
137
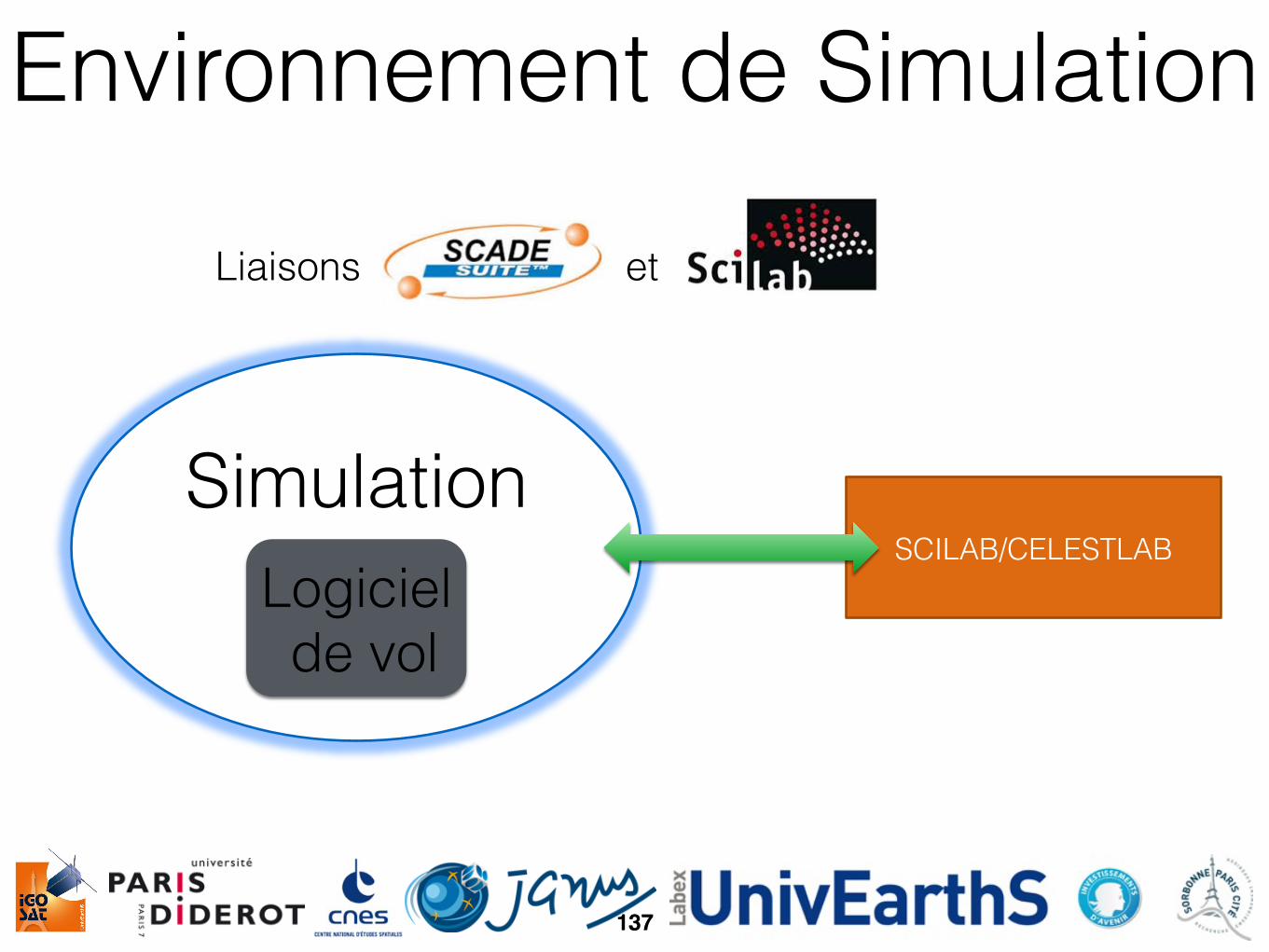
Liaisons et !
SCILAB/CELESTLAB !Logiciel de vol!
Simulation!
137
Environnement de Simulation
138138
Environnement de SimulationAutomatisation :
▪ Acquisition automatique des TLE; ▪ Lancement automatique des simulations; ▪ Fonctionnement indépendant sur serveur; ▪ Prise en compte des données de housekeeping récentes.
Autonomisation :
▪ Propagation d’orbite; ▪ Calcul de la trace du satellite; ▪ Calculs d’attitude; ▪ Mise en graphique des données calculées; ▪ Rendu graphique 3D ?
139139
Environnement de Simulation
Validation et mise à disposition :
▪ Validation du simulateur par le projet IGOSat; ▪ Simulateur utilisable, testable et modifiable par d’autres projets spatiaux
universitaires; ▪ Possibilité de s’affranchir de SCADE et d’utiliser des solutions open source moins
élaborées (Rhapsody, Simulink, Stateflow, Rose Real Time…).
140140
Présentation Technique
L’Analyse des Risques
Stanislas Le Grelle
141141
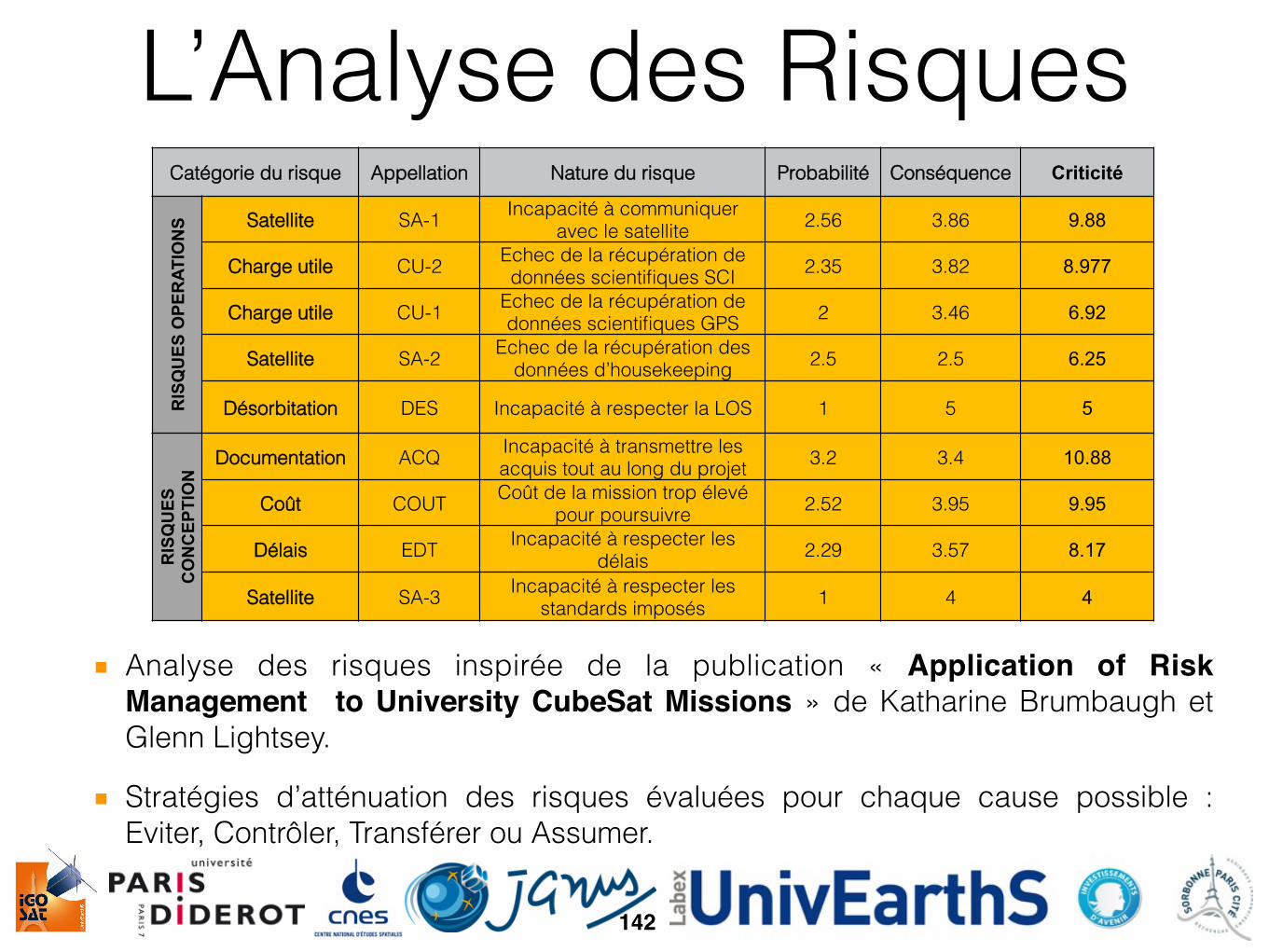
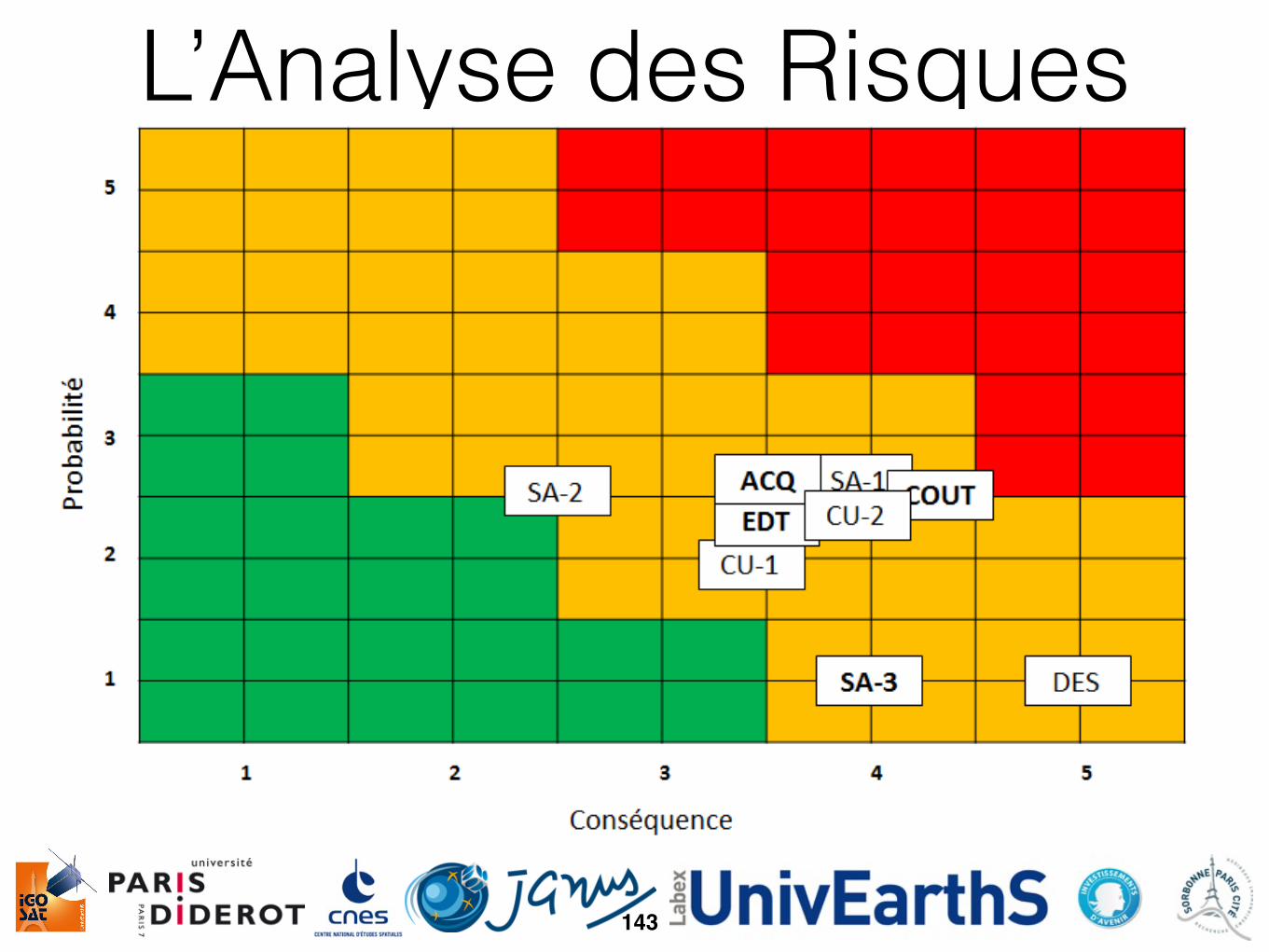
▪ Analyse des risques inspirée de la publication « Application of Risk Management to University CubeSat Missions » de Katharine Brumbaugh et Glenn Lightsey.
▪ Stratégies d’atténuation des risques évaluées pour chaque cause possible : Eviter, Contrôler, Transférer ou Assumer.
L’Analyse des Risques
142
142
Catégorie du risque Appellation Nature du risque Probabilité Conséquence Criticité R
ISQ
UES
OPE
RAT
ION
S Satellite SA-1 Incapacité à communiquer avec le satellite 2.56 3.86 9.88
Charge utile CU-2 Echec de la récupération de données scientifiques SCI 2.35 3.82 8.977
Charge utile CU-1 Echec de la récupération de données scientifiques GPS 2 3.46 6.92
Satellite SA-2 Echec de la récupération des données d’housekeeping 2.5 2.5 6.25
Désorbitation DES Incapacité à respecter la LOS 1 5 5
RIS
QU
ES
CO
NC
EPTI
ON
Documentation ACQ Incapacité à transmettre les acquis tout au long du projet 3.2 3.4 10.88
Coût COUT Coût de la mission trop élevé pour poursuivre 2.52 3.95 9.95
Délais EDT Incapacité à respecter les délais 2.29 3.57 8.17
Satellite SA-3 Incapacité à respecter les standards imposés 1 4 4
L’Analyse des Risques
143
143
Merci de votre attention
144144
Revue
145145

Revue
146146