
Le Filtrage des Signaux Numériques -...
121
Transcript of Le Filtrage des Signaux Numériques -...
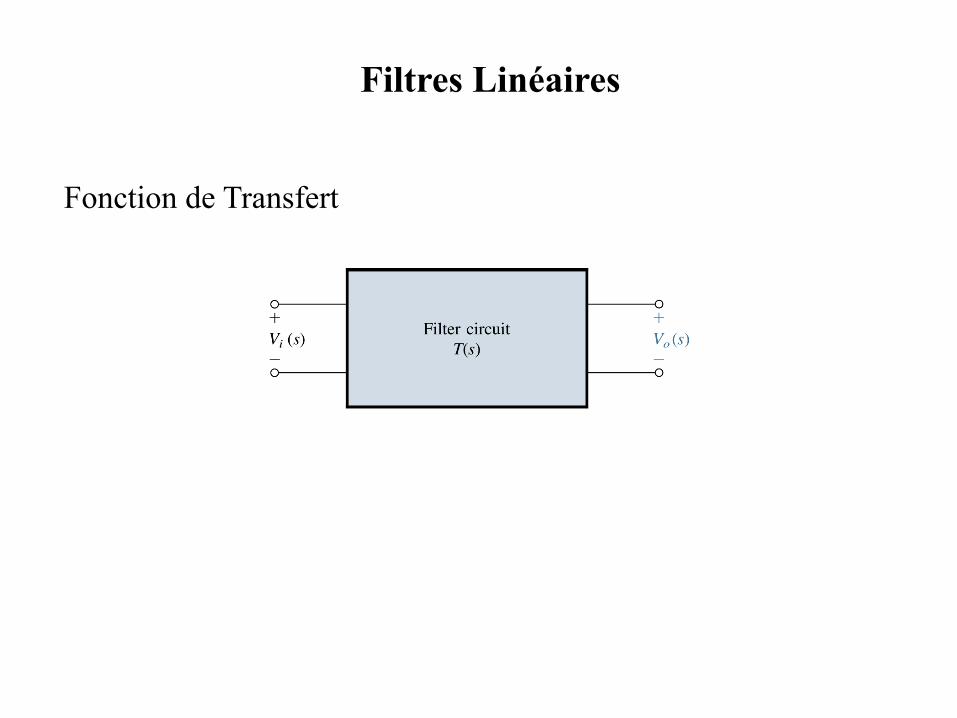
Filtres Linéaires
Fonction de Transfert
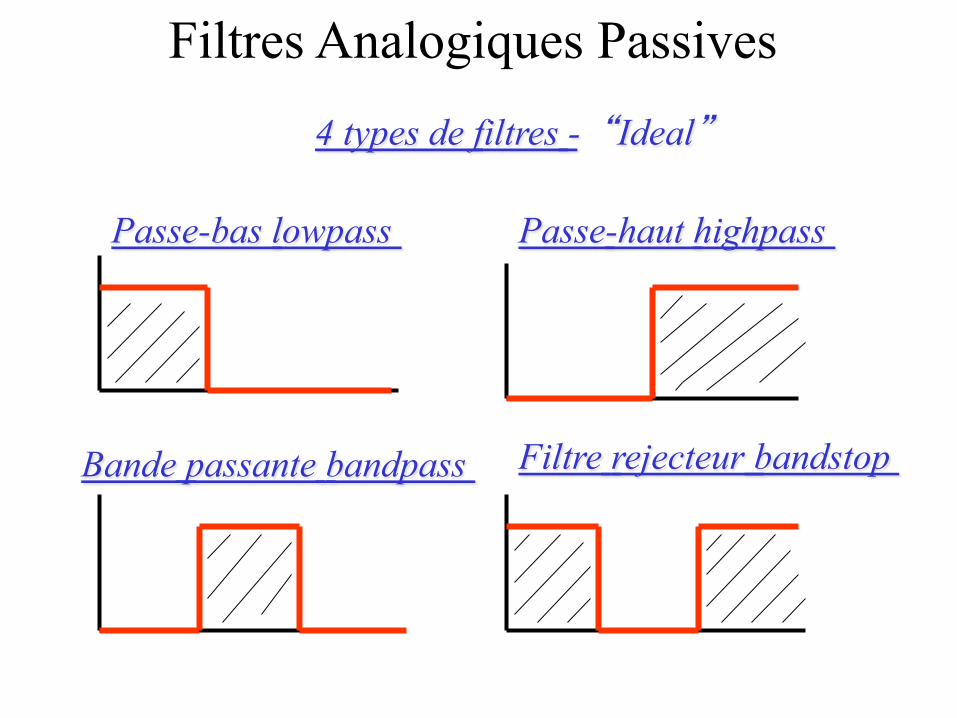
Filtres Analogiques Passives 4 types de filtres - “Ideal”
Passe-bas lowpass Passe-haut highpass
Bande passante bandpass Filtre rejecteur bandstop
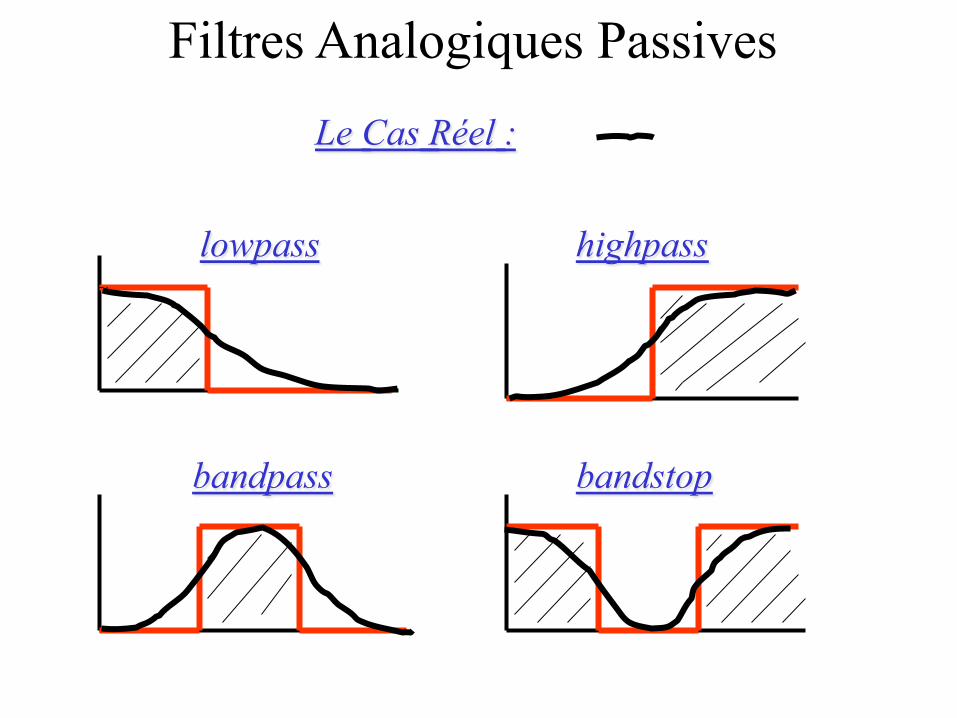
Le Cas Réel :
lowpass highpass
bandpass bandstop
Filtres Analogiques Passives
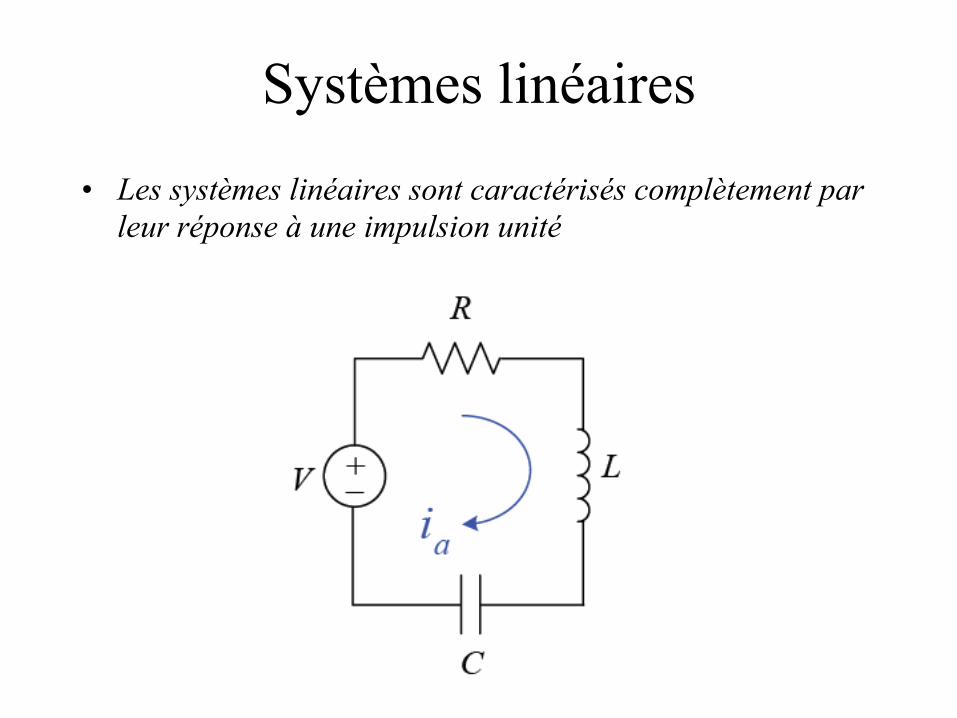
Systèmes linéaires
• Les systèmes linéaires sont caractérisés complètement par leur réponse à une impulsion unité
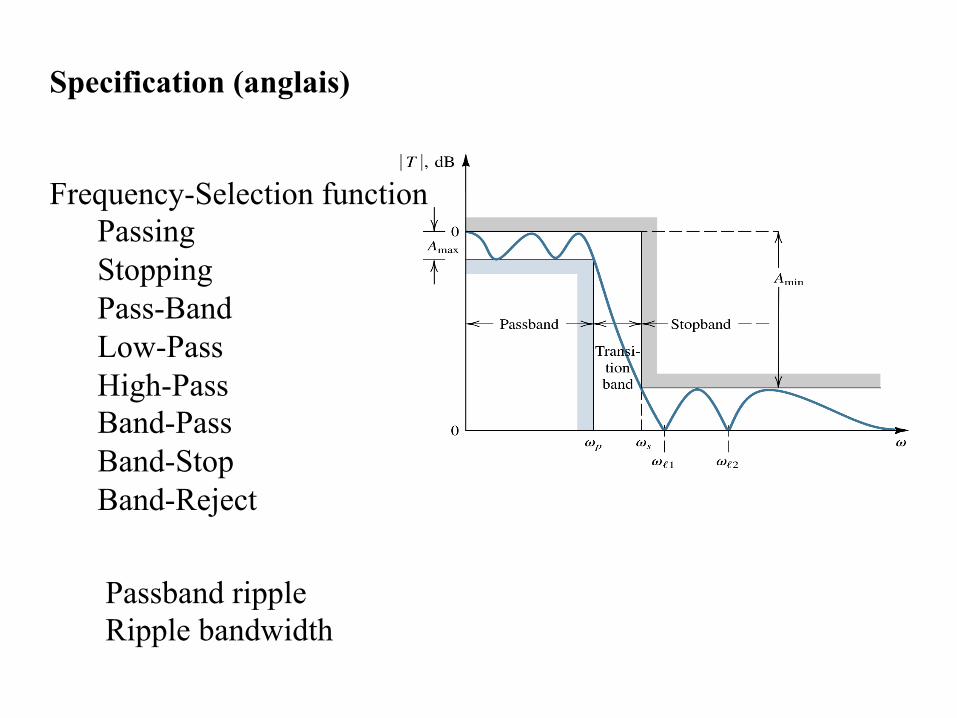
Specification (anglais)
Frequency-Selection function Passing Stopping Pass-Band Low-Pass High-Pass Band-Pass Band-Stop Band-Reject
Passband ripple Ripple bandwidth
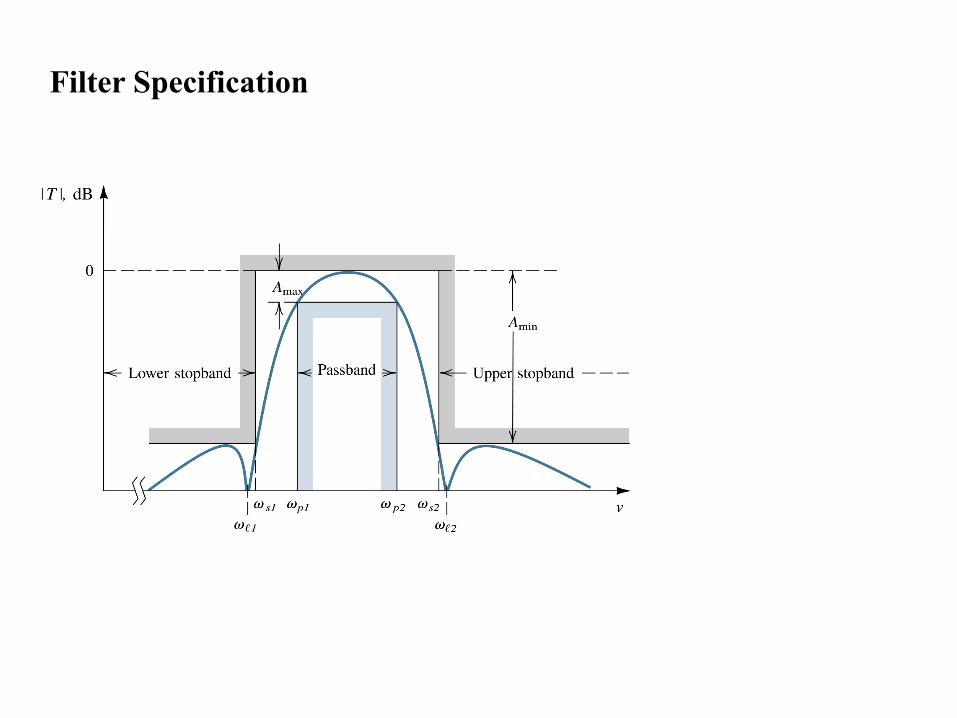
Filter Specification
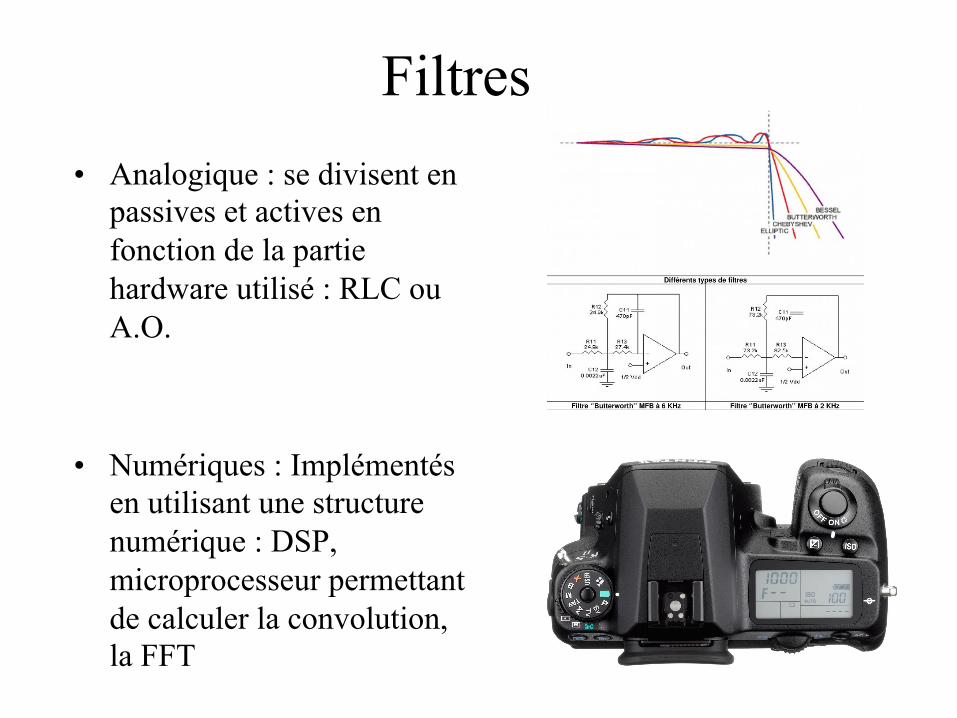
Filtres • Analogique : se divisent en
passives et actives en fonction de la partie hardware utilisé : RLC ou A.O.
• Numériques : Implémentés en utilisant une structure numérique : DSP, microprocesseur permettant de calculer la convolution, la FFT
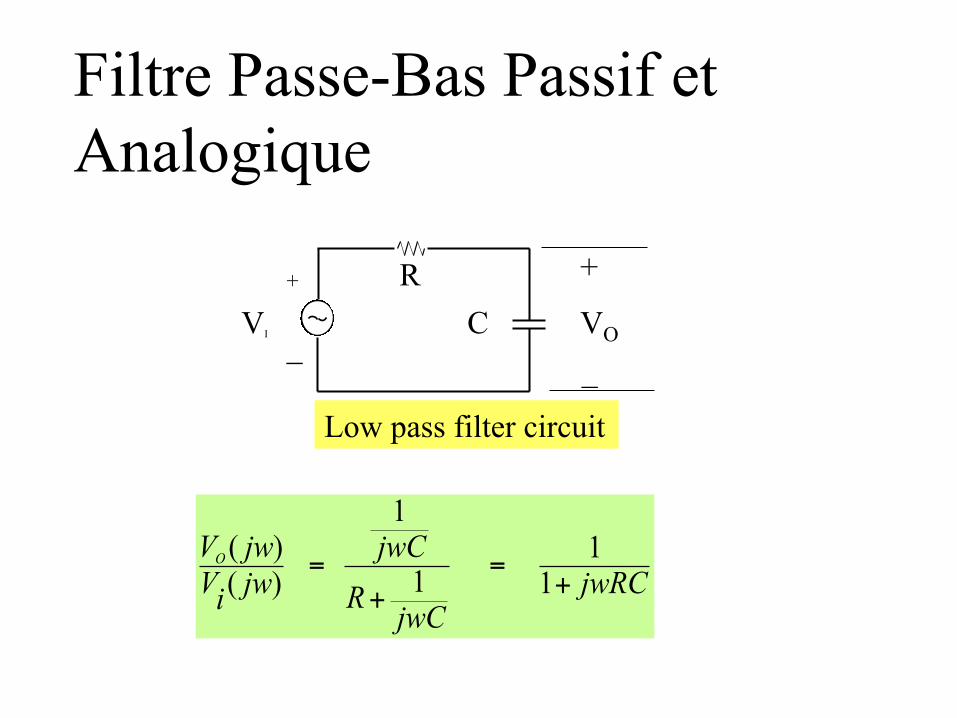
R C VI VO
+
_
+
_
1( ) 1
1( ) 1OV jw jwCV jw jwRCRi jwC
= =++
Low pass filter circuit
Filtre Passe-Bas Passif et Analogique
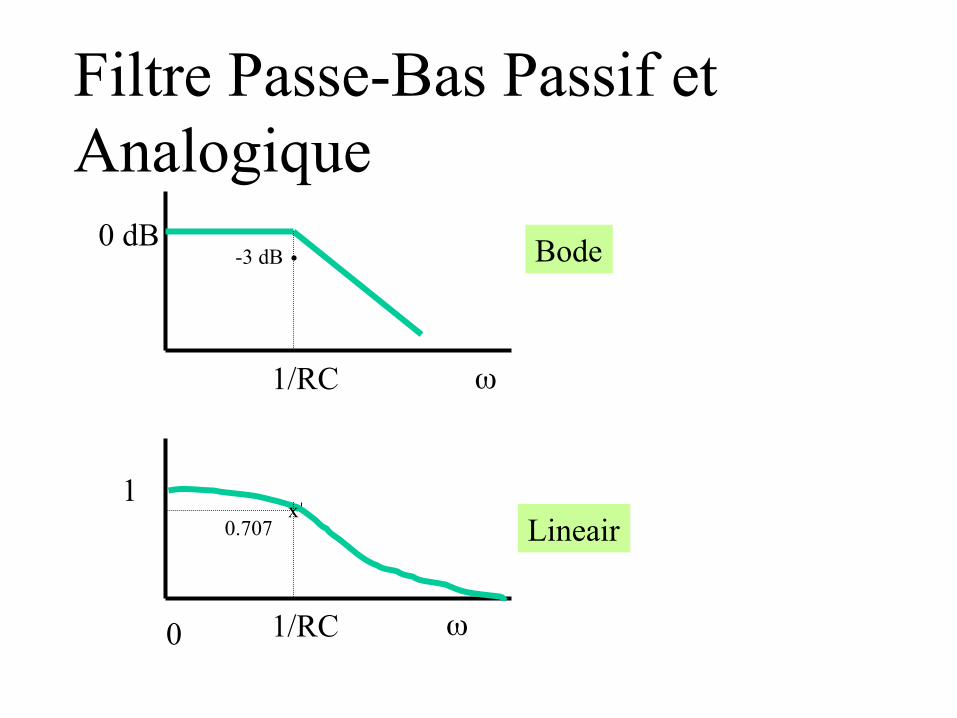
0 dB
1
ω
ω 0
1/RC
1/RC
Bode
Lineair
. -3 dB
x 0.707
Filtre Passe-Bas Passif et Analogique
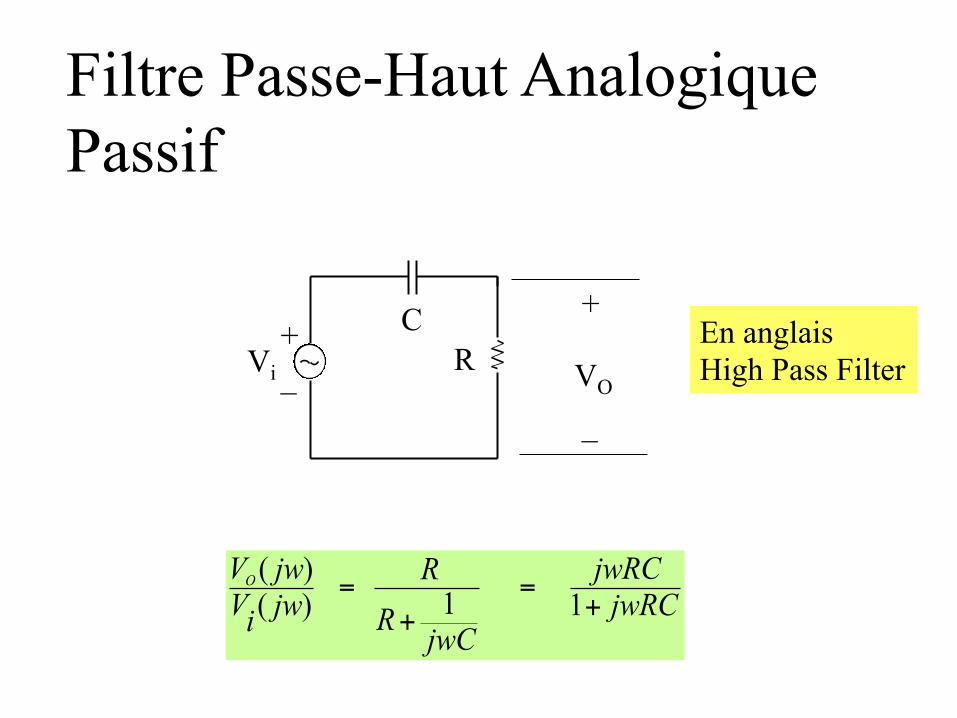
C R Vi VO
+
_
+ _
( )1( ) 1
OV jw jwRCRV jw jwRCRi jwC
= =++
En anglais High Pass Filter
Filtre Passe-Haut Analogique Passif
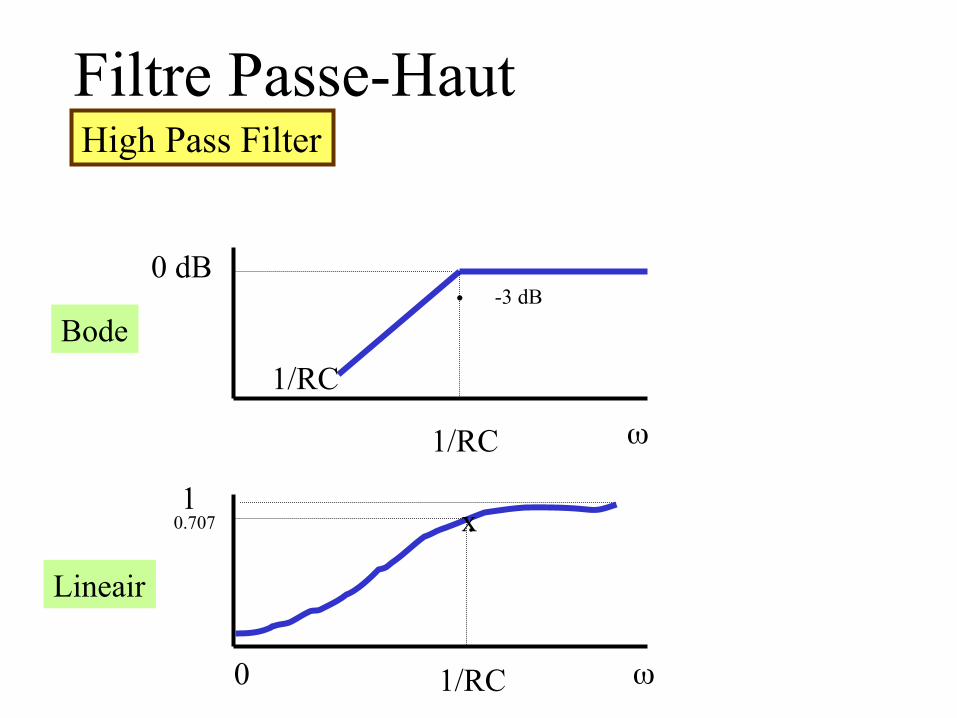
High Pass Filter
0 dB
.
. -3 dB
0 ω
ω
1/RC
1/RC
1/RC
1 0.707
Bode
Lineair
x
Filtre Passe-Haut
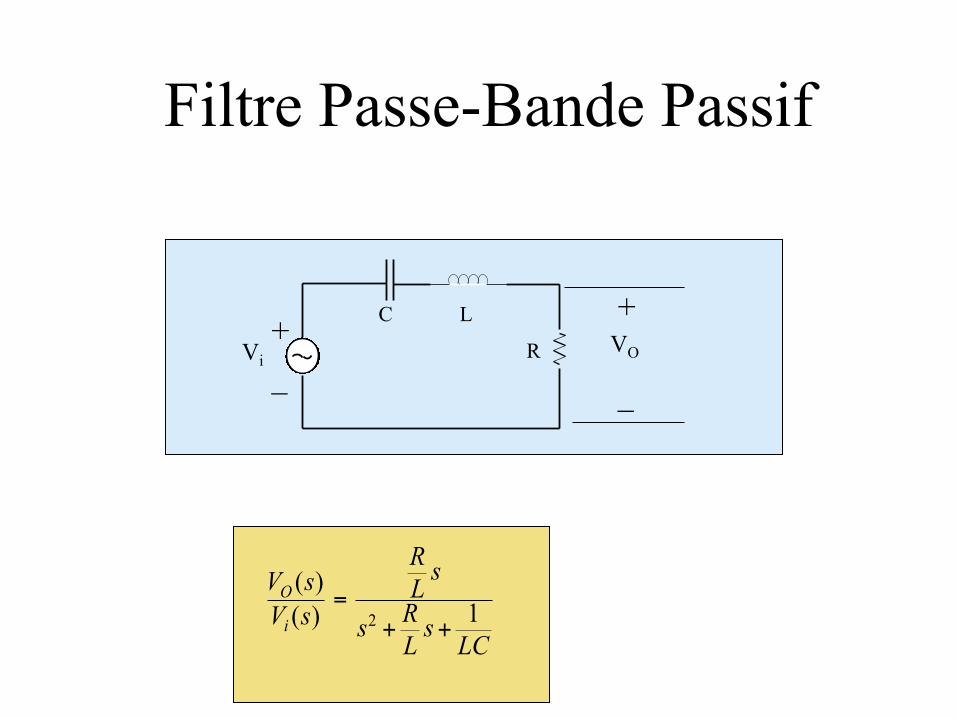
C L
R Vi VO +
_
+ _
2
( )1( )
O
i
R sV s LRV s s sL LC
=+ +
Filtre Passe-Bande Passif
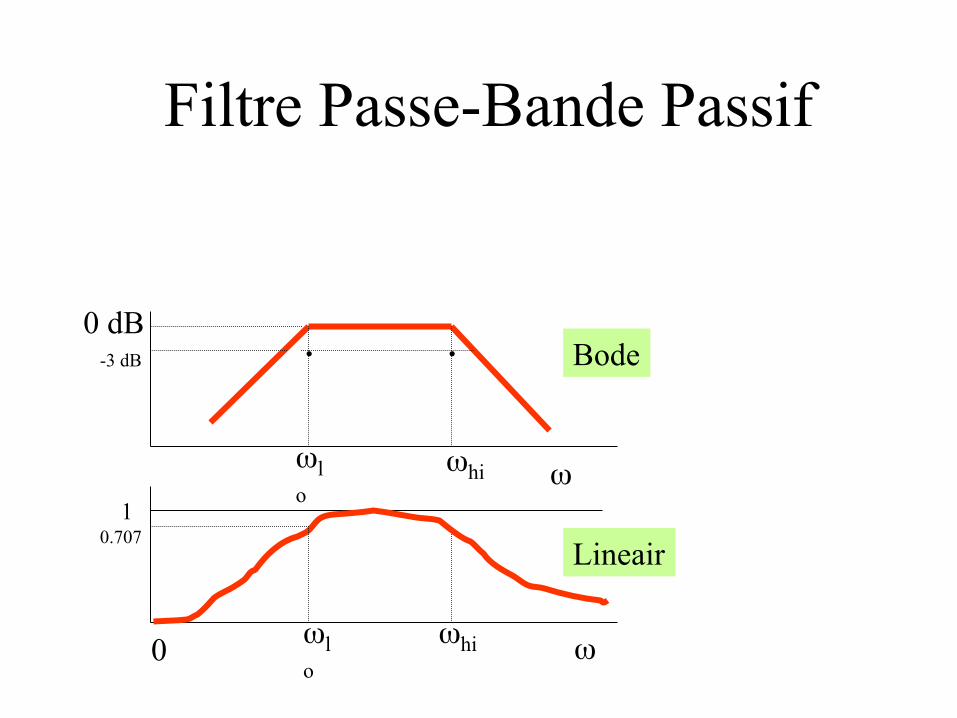
ω
ω 0
0 dB -3 dB
ωlo
ωhi
.
. .
. 1 0.707
Bode
Lineair
ωlo
ωhi
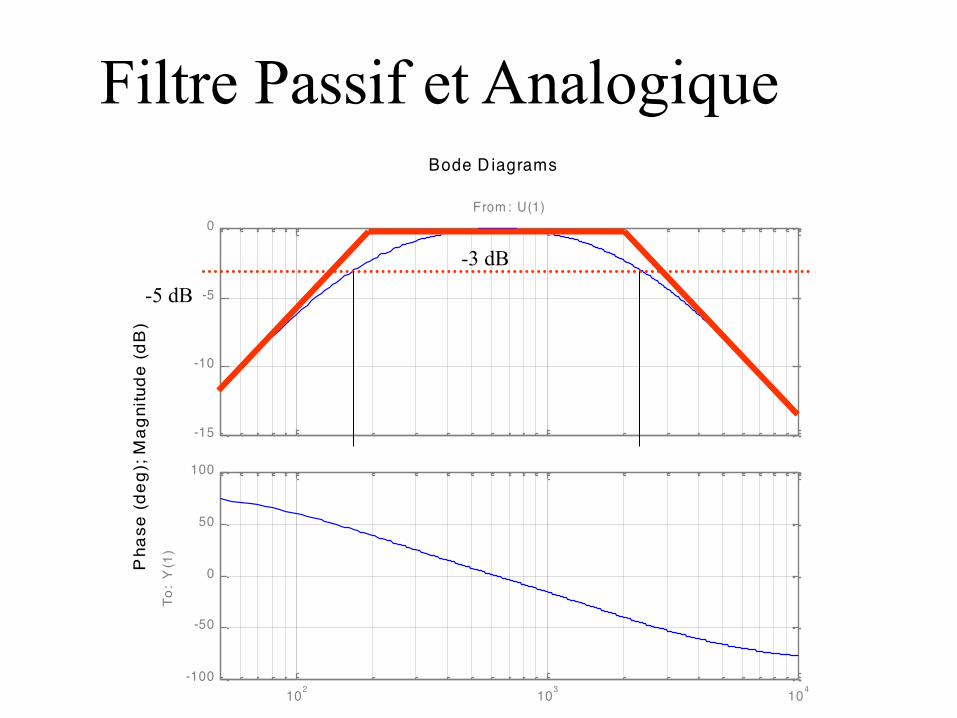
Filtre Passe-Bande Passif
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode D iagrams
-15
-10
-5
0From : U(1)
102 103 104-100
-50
0
50
100
To:
Y(1
)
-3 dB
-5 dB
Filtre Passif et Analogique
Filtre Passe-Bande
Exemple Matlab
N = 10; %order butterworth ordre 10 [ZB, PB, KB] = buttap(N); numzb = poly([ZB]); denpb = poly([PB]); wo = 600; bw = 200; % wo freq centrale % bw bandwidth
[numbbs,denbbs] = lp2bs(numzb,denpb,wo,bw); w = 1:1:1200; Hbbs = freqs(numbbs,denbbs,w); Hb = abs(Hbbs); plot(w,Hb) grid xlabel('Amplitude') ylabel('frequency (rad/sec)') title('10th order Butterworth filter')
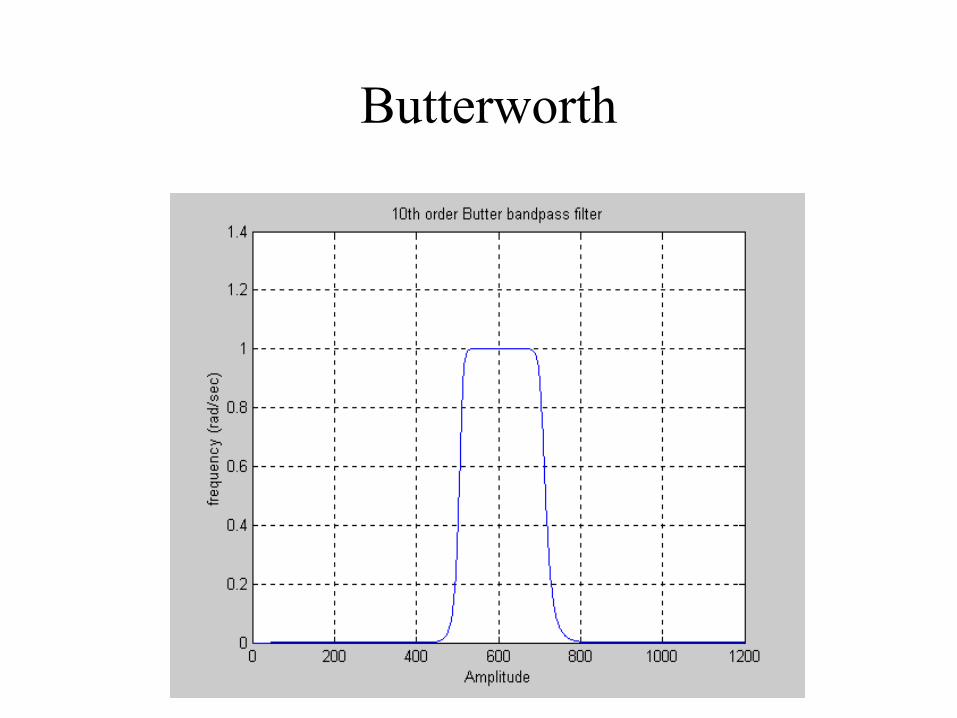
Butterworth
Exemple
num = [1 0 300000]; den = [1 3100 300000]; w = 1 : 5 : 10000; Bode(num,den,w)
Filtre Rejecteur
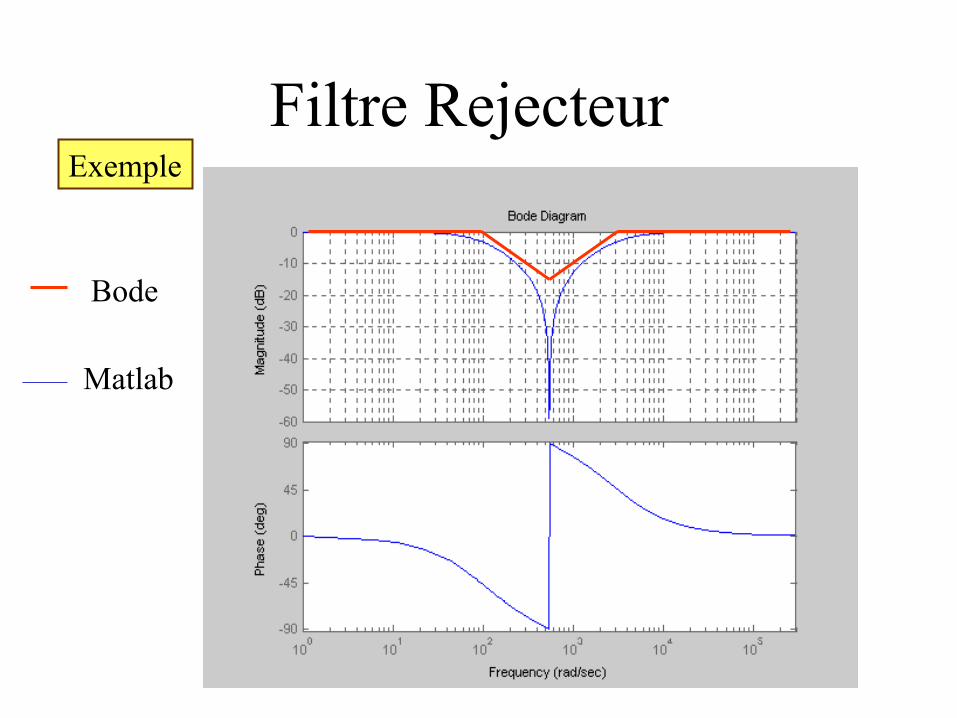
Exemple
Bode
Matlab
Filtre Rejecteur
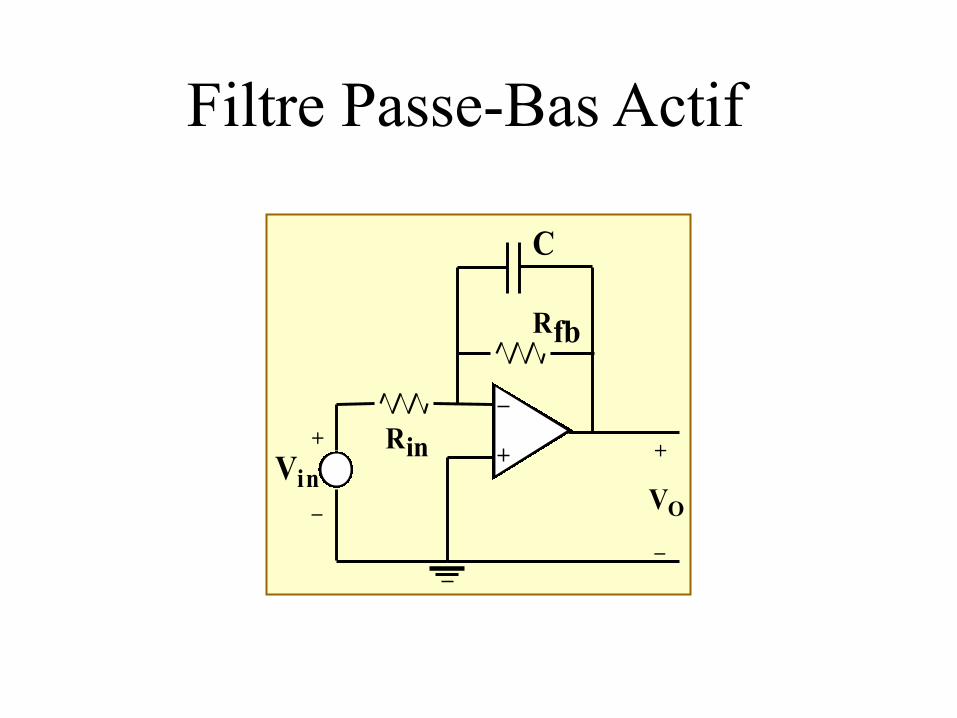
VinVO
C
Rfb
+
_
+
_
Rin
Filtre Passe-Bas Actif
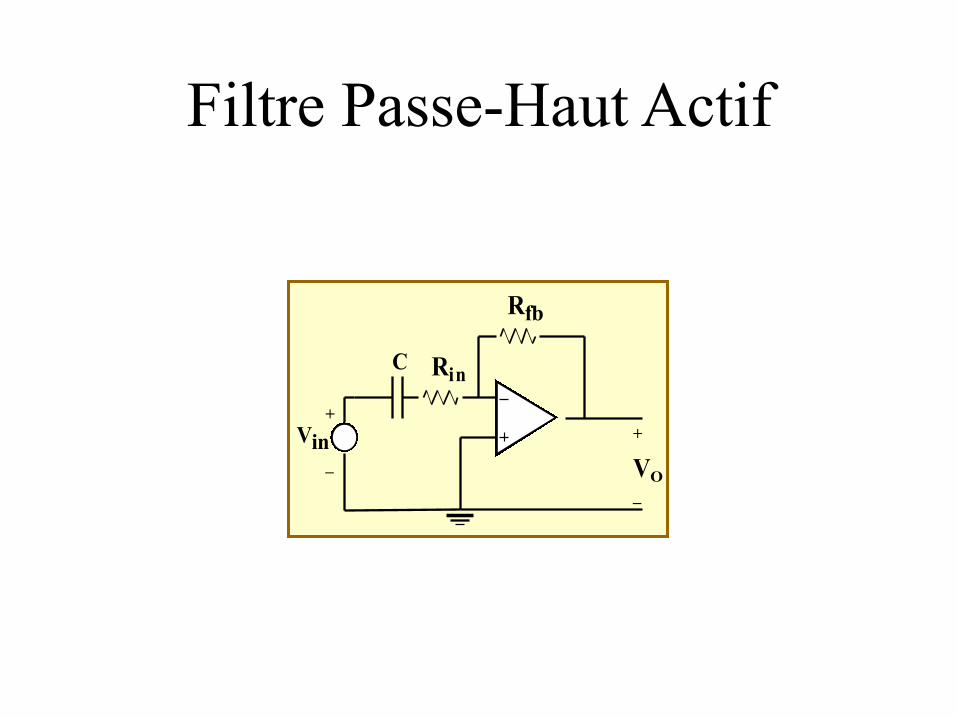
RinC
Vin
Rfb
VO+
_
+
_
Filtre Passe-Haut Actif
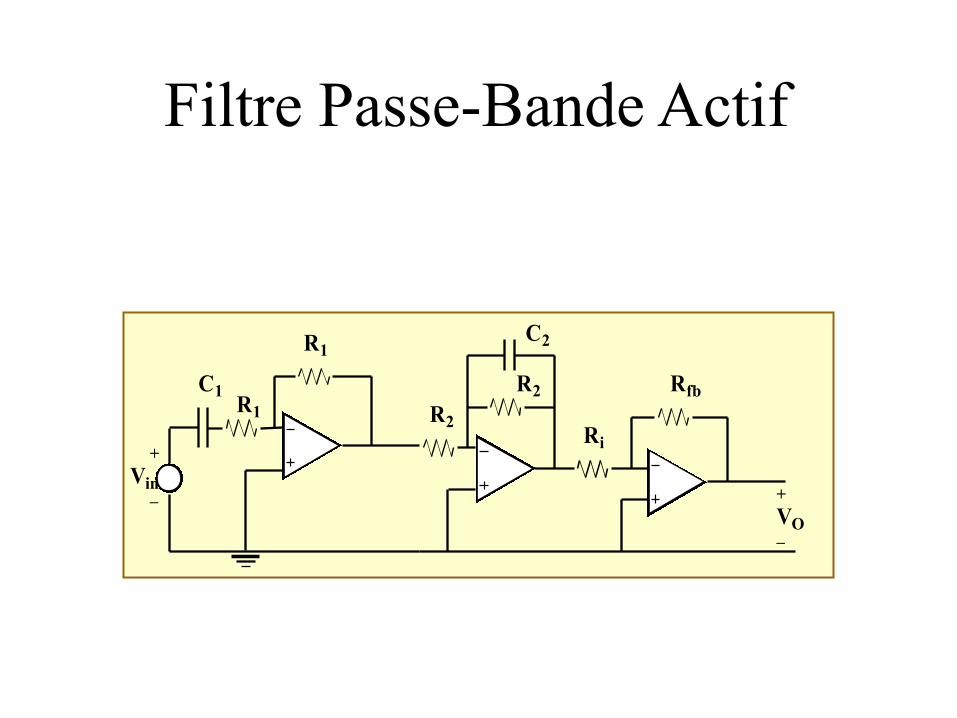
Vin
R1
R1C1
C2
R2R2
Rfb
Ri
VO
+
+
_
_
Filtre Passe-Bande Actif
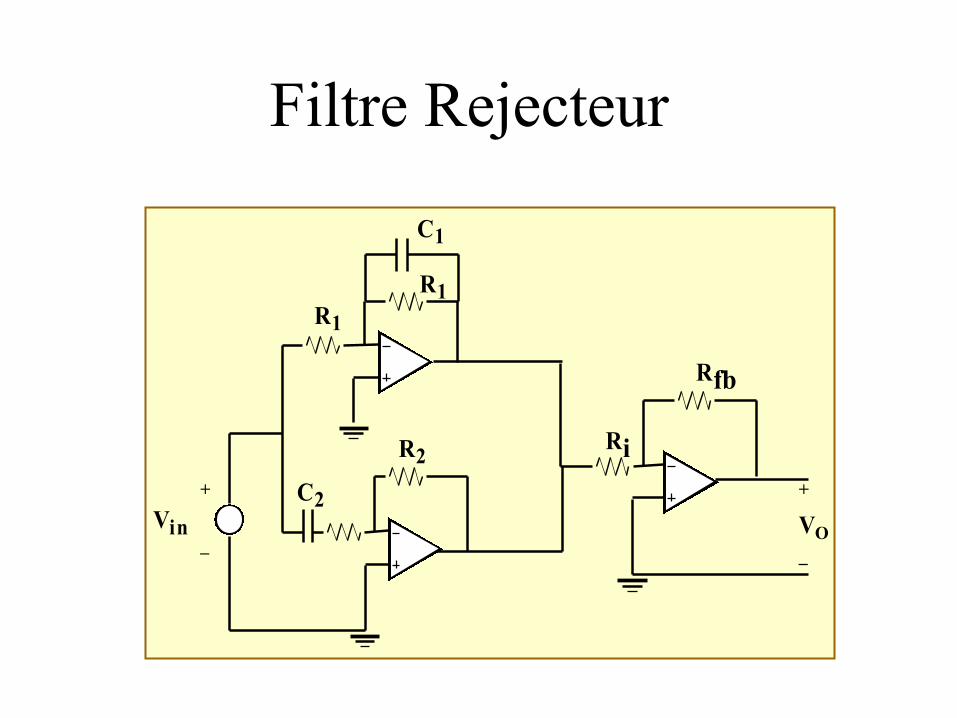
Vin
R1R1
C1
C2
R2 Ri
Rfb
VO
+
_
+
_
Filtre Rejecteur
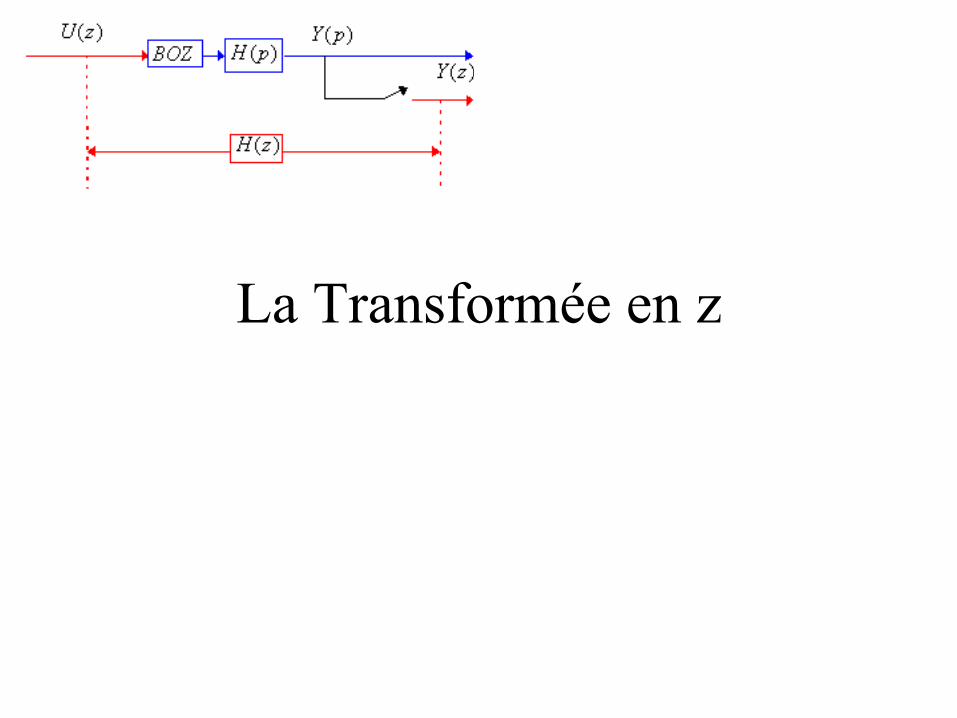
La Transformée en z
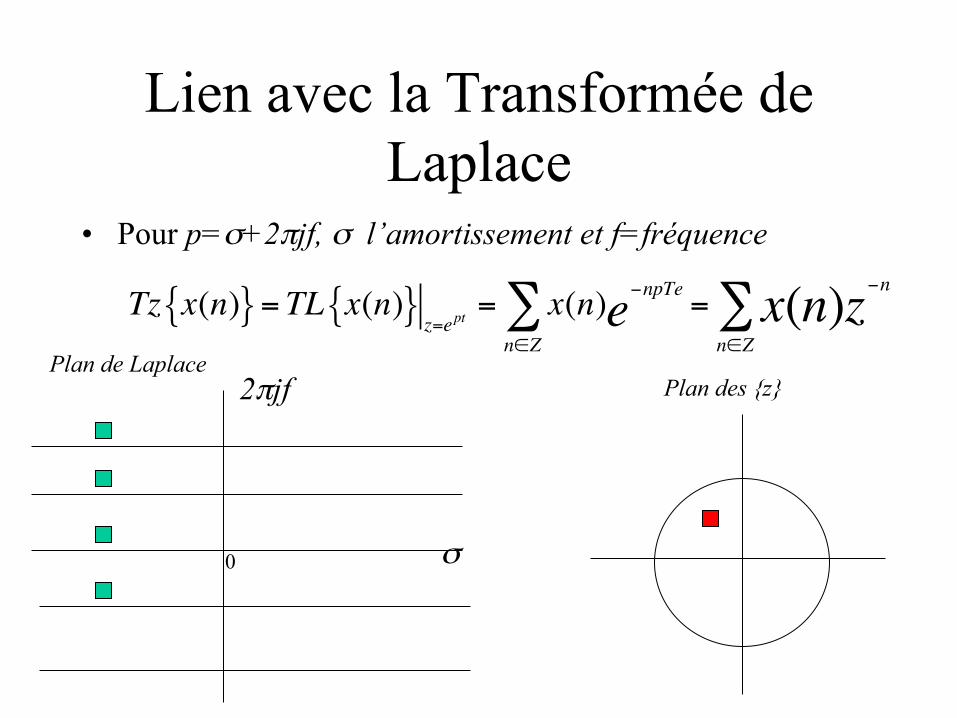
Lien avec la Transformée de Laplace
• Pour p=σ+2πjf, σ l’amortissement et f=fréquence
Tz x(n){ }= TL x(n){ }z=ept
= x(n) −npTeen∈Z∑ =
−nx(n)zn∈Z∑
0 σ
2πjf Plan de Laplace
Plan des {z}
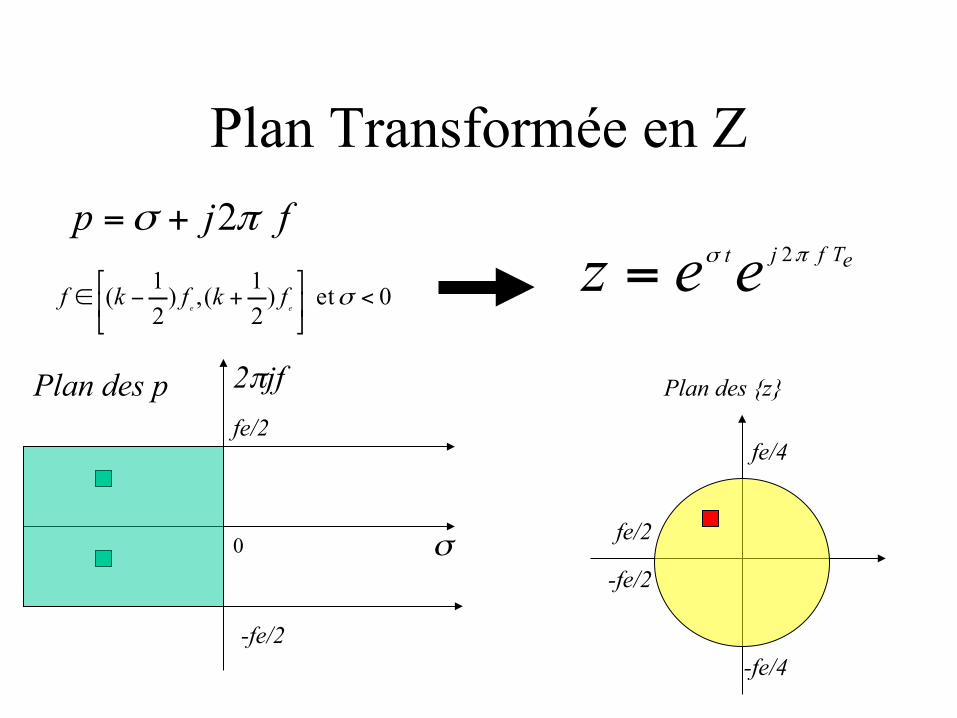
Plan Transformée en Z
0 σ
2πjf Plan des {z}
fe/4
fe/2
-fe/2
-fe/4
Plan des p fe/2
-fe/2
0et )21(,)
21( <⎥
⎦
⎤⎢⎣
⎡+−∈ σ
eefkfkf
fjp 2πσ +=eTfjteez 2 πσ=
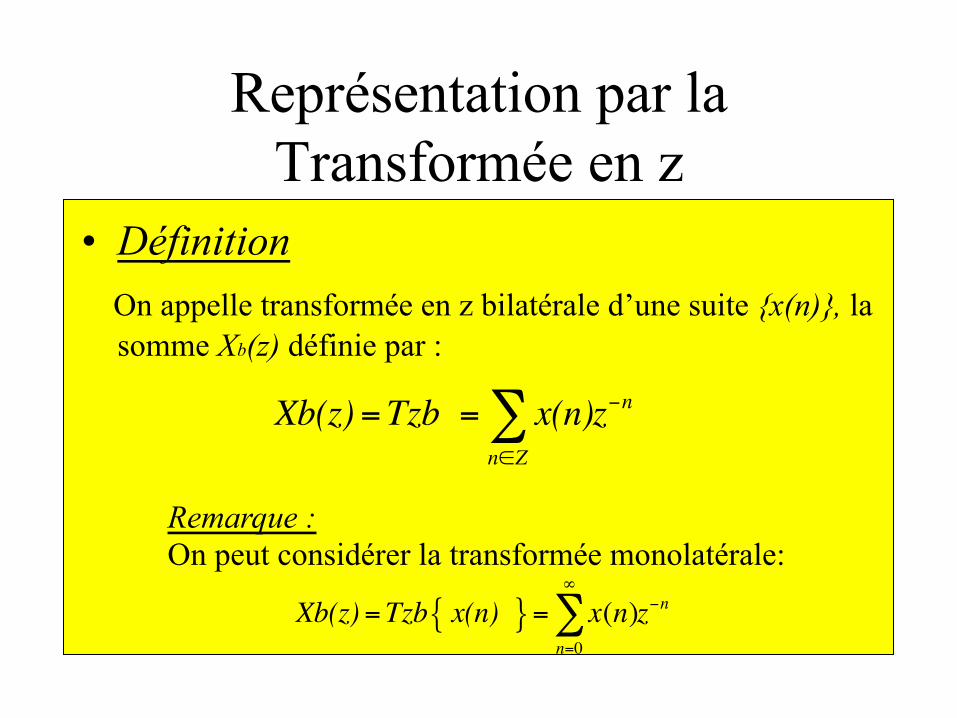
Représentation par la Transformée en z
• Définition On appelle transformée en z bilatérale d’une suite {x(n)}, la
somme Xb(z) définie par :
Xb(z) = Tzb = x(n)n∈Z∑ z−n
Remarque : On peut considérer la transformée monolatérale:
Xb(z) = Tzb x(n){ }= x(n)n=0
∞
∑ z−n
Propriétés • Linéarité
• Shift (retard ou avance)
• Inversion dans le temps
)()()()()()( zbYzaXzWnbynaxnw +=↔+=
)()( 0
0zXznnx n−↔−
)()( 1−↔− zXnx
Attention au domaine de convergence
Propriétés • Multiplication par une exponentielle
• Convolution
• La transformée en z n’a pas de sens que si l’on précise le domaine de convergence
Le domaine de convergence d’un signal causal est un ????
)()( 1 zXnxn αα −↔
)()()()()()( zHzXzYnhnxny =↔∗=
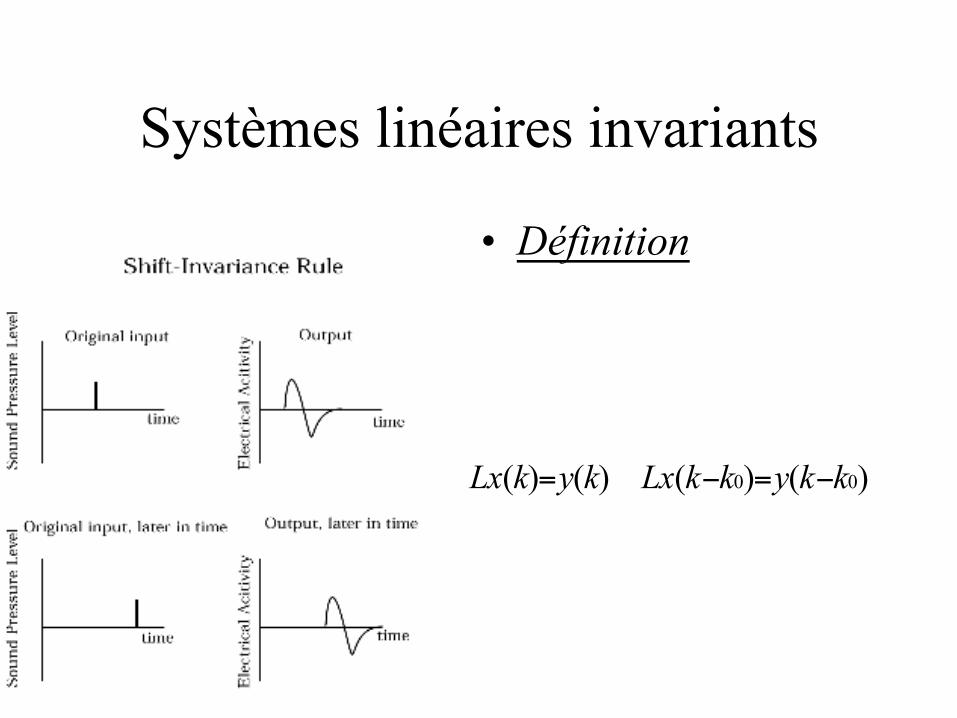
Systèmes linéaires invariants
• Définition
)()( )()( 00 kkykkLxkykLx −=−=
Signaux Déterministes
• Dans un contexte de logique câblée ou programmée, il est immédiat de créer certains signaux déterministe:
• Par contre il est moins facile de créer des signaux plus élaborés comme par exemple:
)()(
)()(
ntriangnx
nrectnx
N
N
=
=
) u(n)nTπf() (ααa y(n) ee 02cosexp=
Systèmes discrets
• Un système est discret lorsque toutes les grandeurs variables du système sont des signaux discrets.
• La réponse du système ne dépend pas uniquement des signaux discrets d’entrée mais aussi de l’état interne du système, donc nous avons une relation de récurrence
• Si le système est linéaire et invariant dans le temps nous avons l’équation de type récurrence :
Systèmes discrets
∑∑==
−=−M
mm
N
nn mkxankyb
00)()(
Exemple (l’importance des conditions initiales)
)()(0 0)(
tukxkky
=<∀=
)(1
)(1)(
1)1(1)2(1)0()1()1(1)1()0()0(
1
2
kuaaky
aaayyaayxy
ayxy
k
+
−−=
+−=−=
−=−=
=−−=
+
Relation de récurrence et transformée en z monolatérale
• Considérons la relation de récurrence:
• La Transformée en z est :
0)2( )1( )(21
=−+−+ nybnybny b1 et b2 ctes
{ } { }zbzbybybybz zY 2
2
1
1
1
221
1 )1( )2( )1( )(
−−
−
+
++
−+−+−−=
35
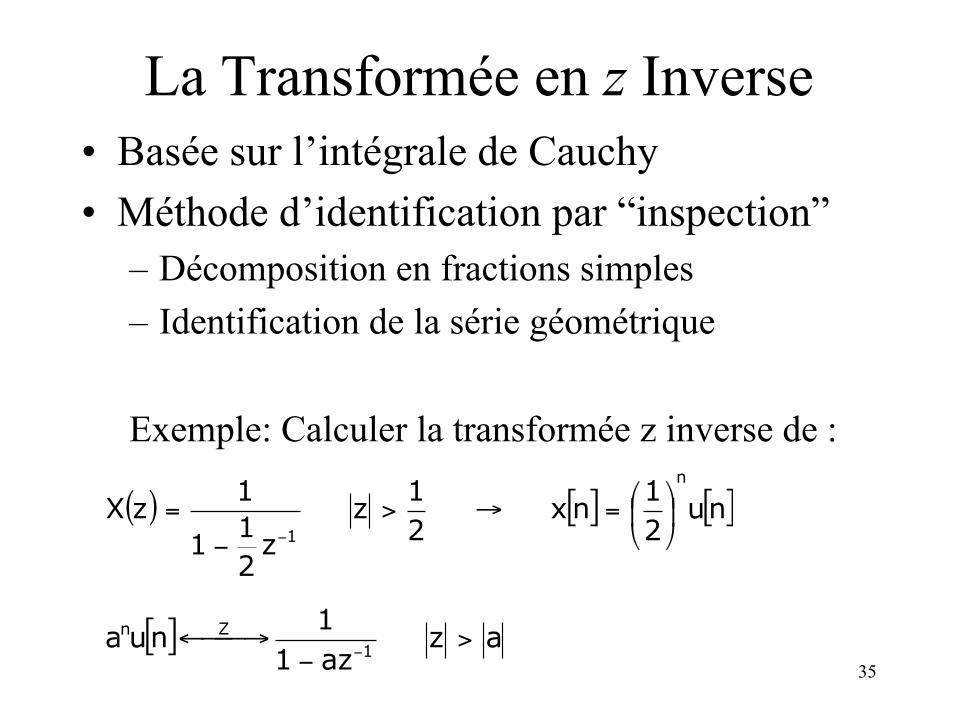
La Transformée en z Inverse • Basée sur l’intégrale de Cauchy • Méthode d’identification par “inspection”
– Décomposition en fractions simples – Identification de la série géométrique Exemple: Calculer la transformée z inverse de :
[ ] az az11nua 1
Zn >−
⎯⎯ →←−
( ) [ ] [ ]nu21nx
21z
z211
1zXn
1⎟⎠
⎞⎜⎝
⎛=→>
−=
−
36
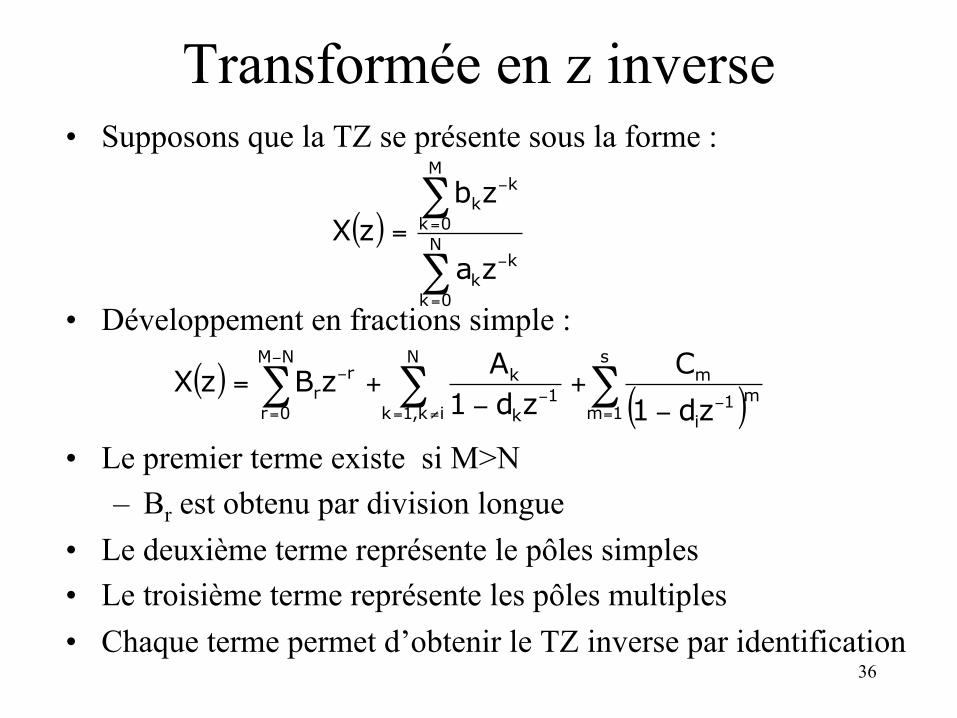
Transformée en z inverse • Supposons que la TZ se présente sous la forme :
• Développement en fractions simple :
• Le premier terme existe si M>N
– Br est obtenu par division longue • Le deuxième terme représente le pôles simples • Le troisième terme représente les pôles multiples • Chaque terme permet d’obtenir le TZ inverse par identification
( )∑
∑
=
−
=
−
= N
0k
kk
M
0k
kk
za
zbzX
( )( )∑∑∑
=−
≠=−
−
=
−
−+
−+=
s
1mm1
i
mN
ik,1k1
k
kNM
0r
rr
zd1C
zd1AzBzX
37
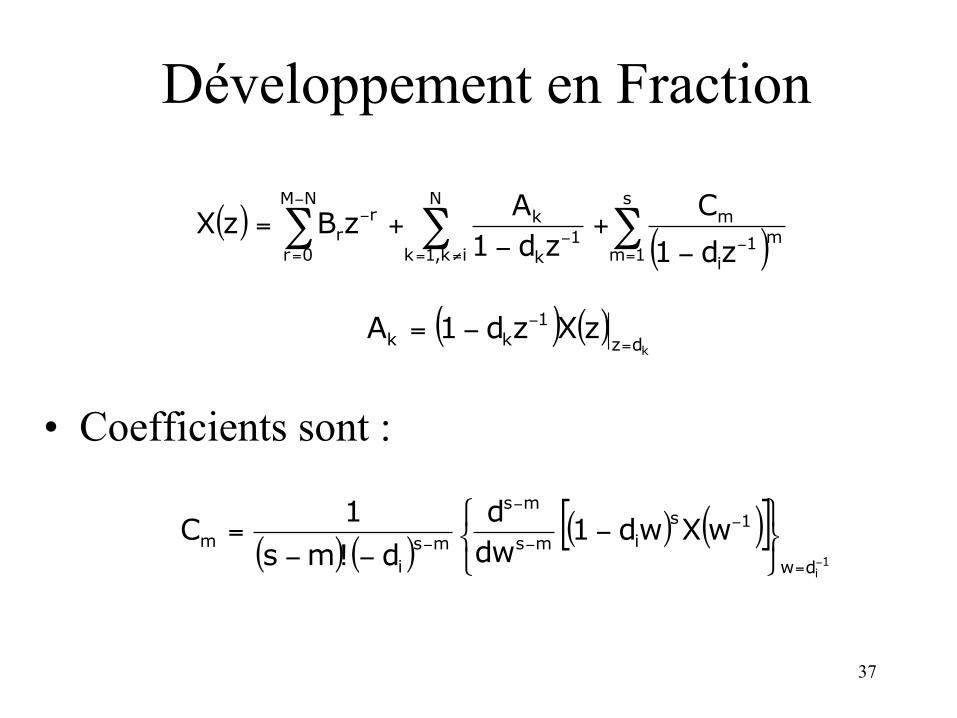
Développement en Fraction
• Coefficients sont :
• Easier to understand with examples
( )( )∑∑∑
=−
≠=−
−
=
−
−+
−+=
s
1mm1
i
mN
ik,1k1
k
kNM
0r
rr
zd1C
zd1AzBzX
( ) ( )kdz
1kk zXzd1A
=
−−=
( ) ( )( ) ( )[ ]
1idw
1sims
ms
msi
m wXwd1dwd
d!ms1C
−=
−−
−
−⎭⎬⎫
⎩⎨⎧
−−−
=
38
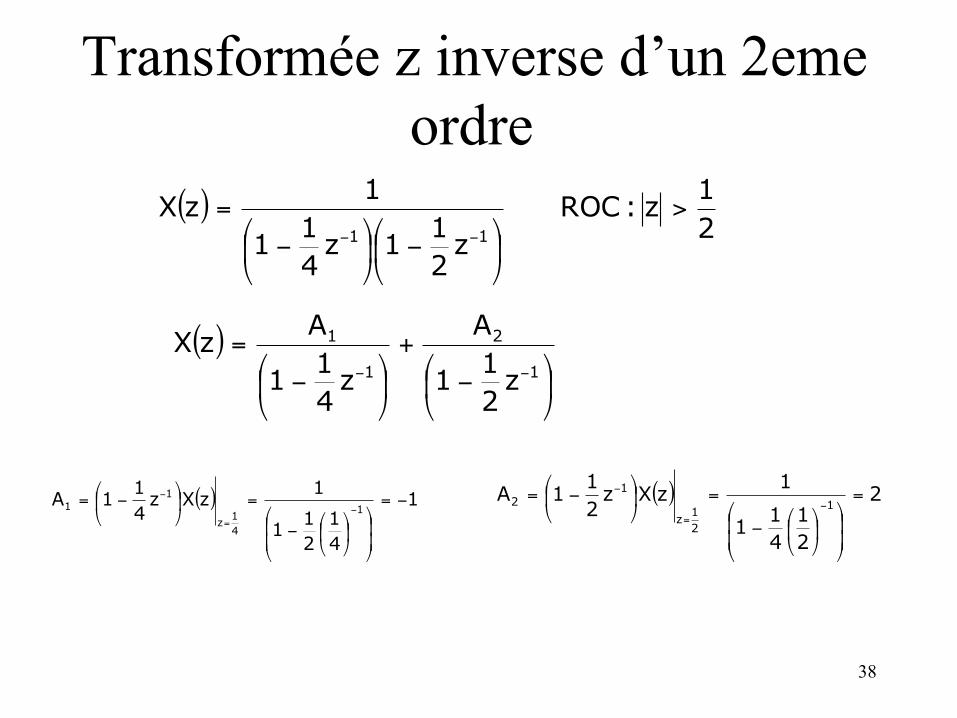
Transformée z inverse d’un 2eme ordre
( )21z :ROC
z211z
411
1zX11
>
⎟⎠
⎞⎜⎝
⎛−⎟
⎠
⎞⎜⎝
⎛−
=−−
( )⎟⎠
⎞⎜⎝
⎛−
+
⎟⎠
⎞⎜⎝
⎛−
=−− 1
2
1
1
z211
A
z411
AzX
( ) 1
41
211
1zXz411A
1
41z
11 −=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠
⎞⎜⎝
⎛−
=⎟⎠
⎞⎜⎝
⎛−=
−=
− ( ) 2
21
411
1zXz211A
1
21z
12 =
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠
⎞⎜⎝
⎛−
=⎟⎠
⎞⎜⎝
⎛−=
−=
−
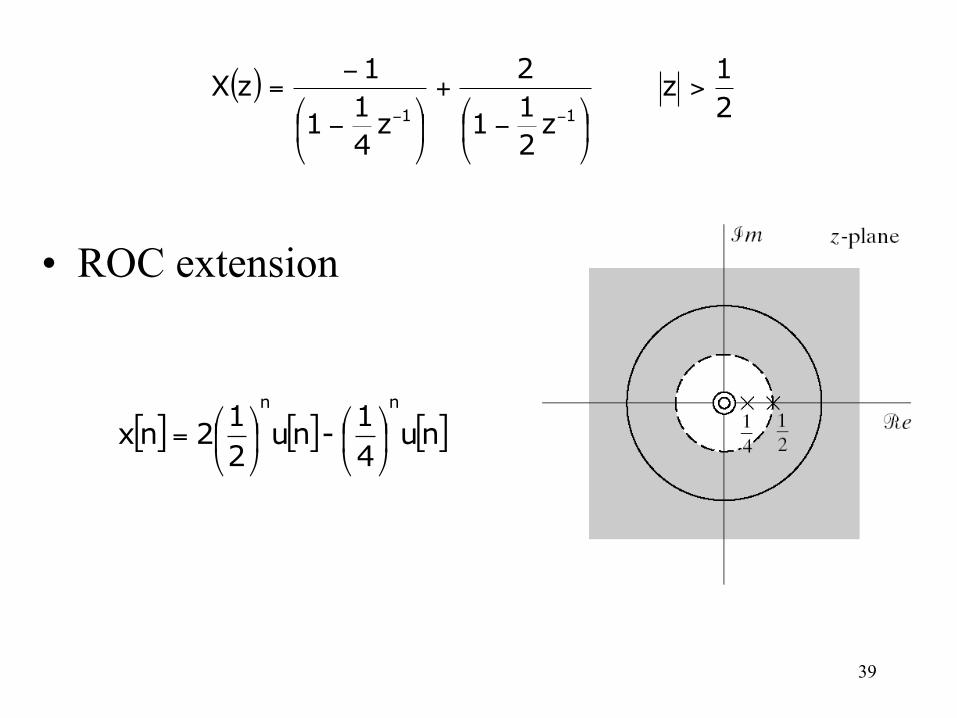
39
• ROC extension
( )21z
z211
2
z411
1zX11
>
⎟⎠
⎞⎜⎝
⎛−
+
⎟⎠
⎞⎜⎝
⎛−
−=
−−
[ ] [ ] [ ]nu41-nu
212nx
nn
⎟⎠
⎞⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛=
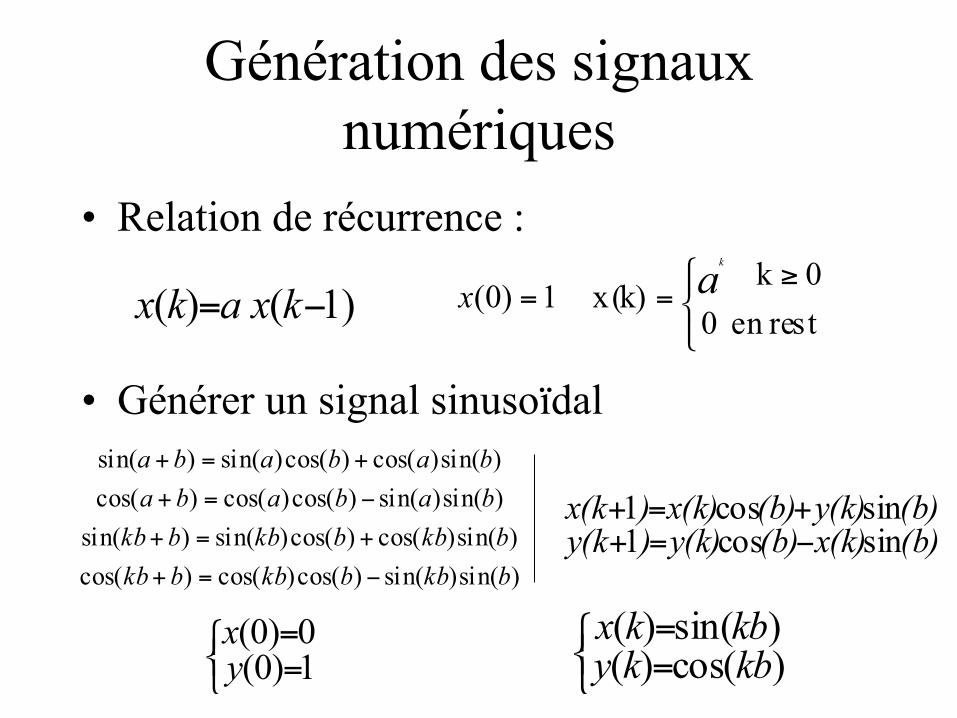
Génération des signaux numériques
• Relation de récurrence :
• Générer un signal sinusoïdal
)1( )( −= kxakx ⎪⎩
⎪⎨⎧ ≥
==resten 0
0k x(k)1)0( ak
x
)sin()sin()cos()cos()cos()sin()cos()cos()sin()sin()sin()sin()cos()cos()cos()sin()cos()cos()sin()sin(
bkbbkbbkbbkbbkbbkbbabababababa
−=+
+=+
−=+
+=+
(b)x(k)(b)y(k))y(k(b)y(k)(b)x(k))x(k
sincos1sincos1
−=++=+
⎩⎨⎧
==1)0(0)0(
yx
⎩⎨⎧
==
)cos()()sin()(
kbkykbkx
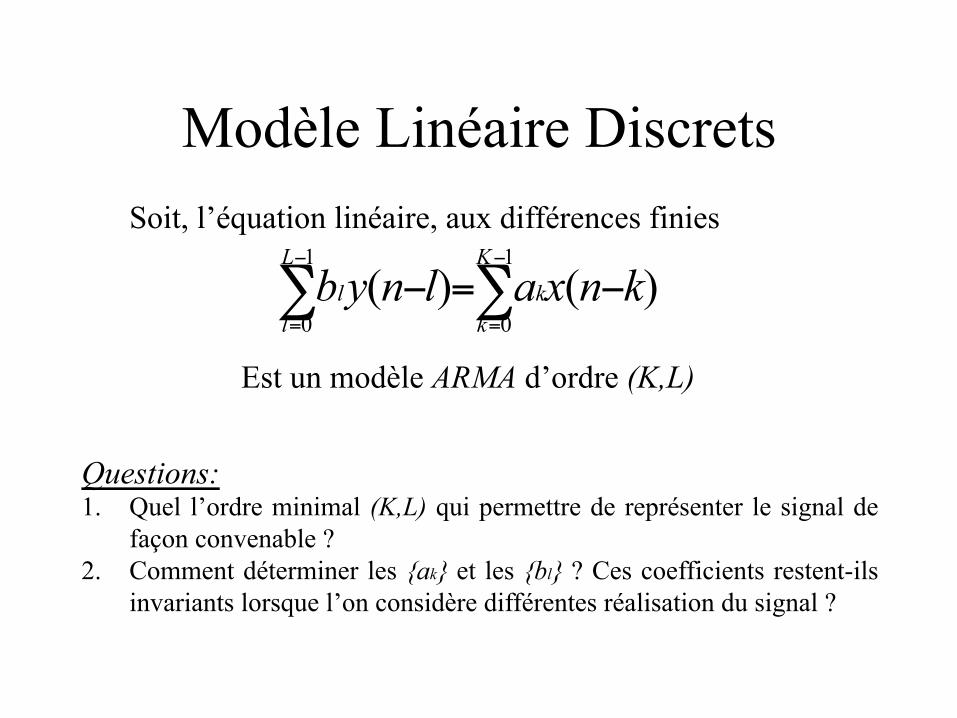
Modèle Linéaire Discrets
∑∑−
=
−
=−=−
1
0
1
0)()(
K
kk
L
ll knxalnyb
Soit, l’équation linéaire, aux différences finies
Est un modèle ARMA d’ordre (K,L)
Questions: 1. Quel l’ordre minimal (K,L) qui permettre de représenter le signal de
façon convenable ? 2. Comment déterminer les {ak} et les {bl} ? Ces coefficients restent-ils
invariants lorsque l’on considère différentes réalisation du signal ?
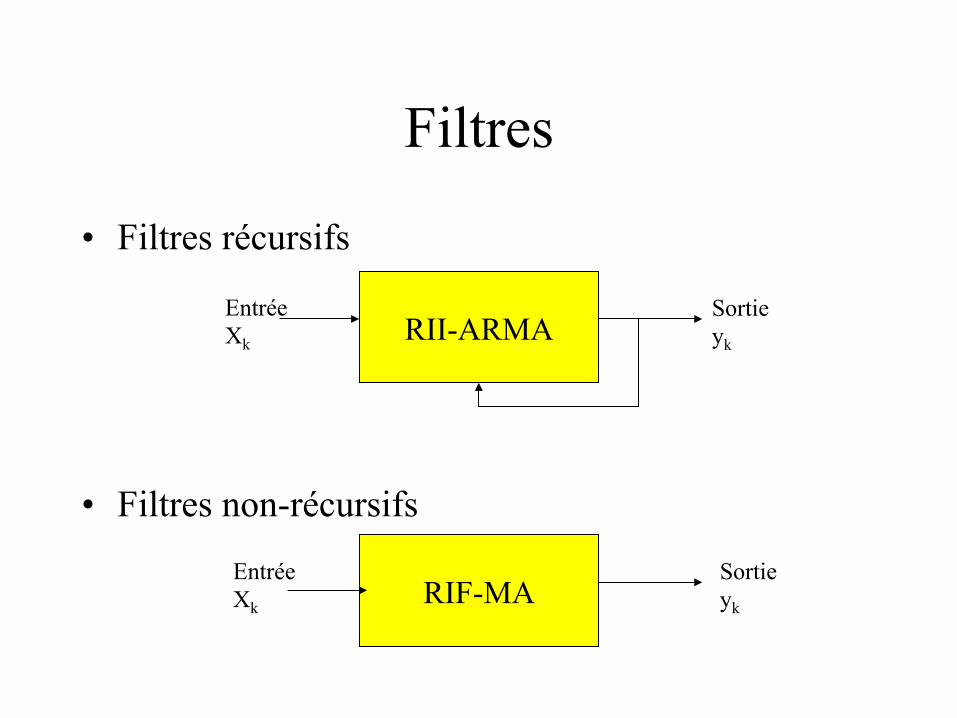
Filtres
• Filtres récursifs
• Filtres non-récursifs
RII-ARMA Entrée Xk
Sortie yk
Entrée Xk RIF-MA
Sortie yk
Stabilité des Modèles ARMA
• La CNS pour qu’un système linéaire, de réponse impulsionnelle {h(n)} soit stable est que :
• La stabilité d’un système AR ou ARMA exige que les pôles de la fonction de transfert H(z) soient à l’intérieur du cercle unité du plan {z}
ésommabilitnhn
)(0
∞<∑∞
=
Filtrage Numérique
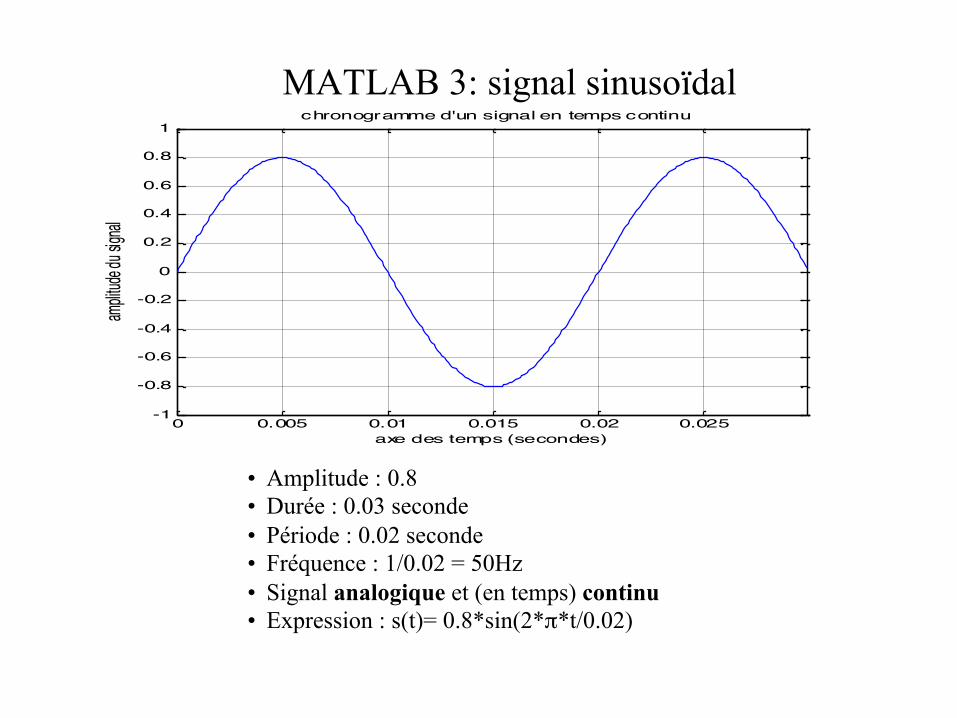
MATLAB 3: signal sinusoïdal
0 0.005 0.01 0.015 0.02 0.025-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1chronogramme d'un signal en temps continu
axe des temps (secondes)
amplit
ude du
signal
• Amplitude : 0.8 • Durée : 0.03 seconde • Période : 0.02 seconde • Fréquence : 1/0.02 = 50Hz • Signal analogique et (en temps) continu • Expression : s(t)= 0.8*sin(2*π*t/0.02)
Page 46
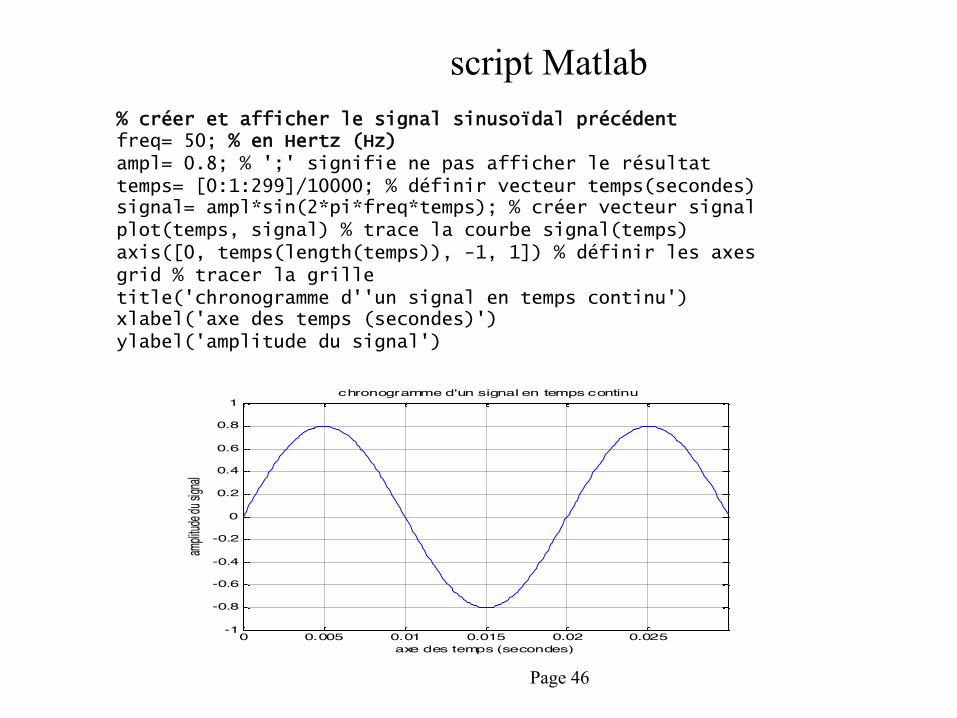
script Matlab % créer et afficher le signal sinusoïdal précédent freq= 50; % en Hertz (Hz) ampl= 0.8; % ';' signifie ne pas afficher le résultat temps= [0:1:299]/10000; % définir vecteur temps(secondes) signal= ampl*sin(2*pi*freq*temps); % créer vecteur signal plot(temps, signal) % trace la courbe signal(temps) axis([0, temps(length(temps)), -1, 1]) % définir les axes grid % tracer la grille title('chronogramme d''un signal en temps continu') xlabel('axe des temps (secondes)') ylabel('amplitude du signal')
0 0.005 0.01 0.015 0.02 0.025-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1chronogramme d'un signal en temps continu
axe des temps (secondes)
amplit
ude du
signal
Page 47
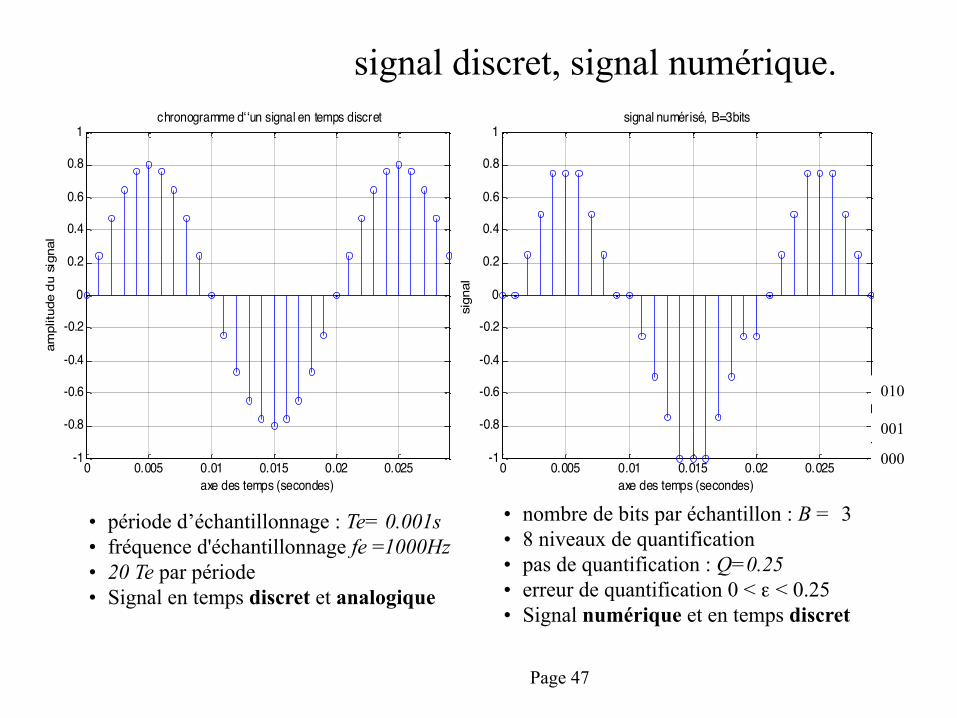
signal discret, signal numérique.
0 0.005 0.01 0.015 0.02 0.025-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1signal numérisé, B=3bits
axe des temps (secondes)si
gnal
0 0.005 0.01 0.015 0.02 0.025-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1chronogramme d‘‘un signal en temps discret
axe des temps (secondes)
ampl
itude
du
sign
al
000
• période d’échantillonnage : Te= 0.001s • fréquence d'échantillonnage fe =1000Hz • 20 Te par période • Signal en temps discret et analogique
001
010
• nombre de bits par échantillon : B = 3 • 8 niveaux de quantification • pas de quantification : Q=0.25 • erreur de quantification 0 < ε < 0.25 • Signal numérique et en temps discret
Page 48
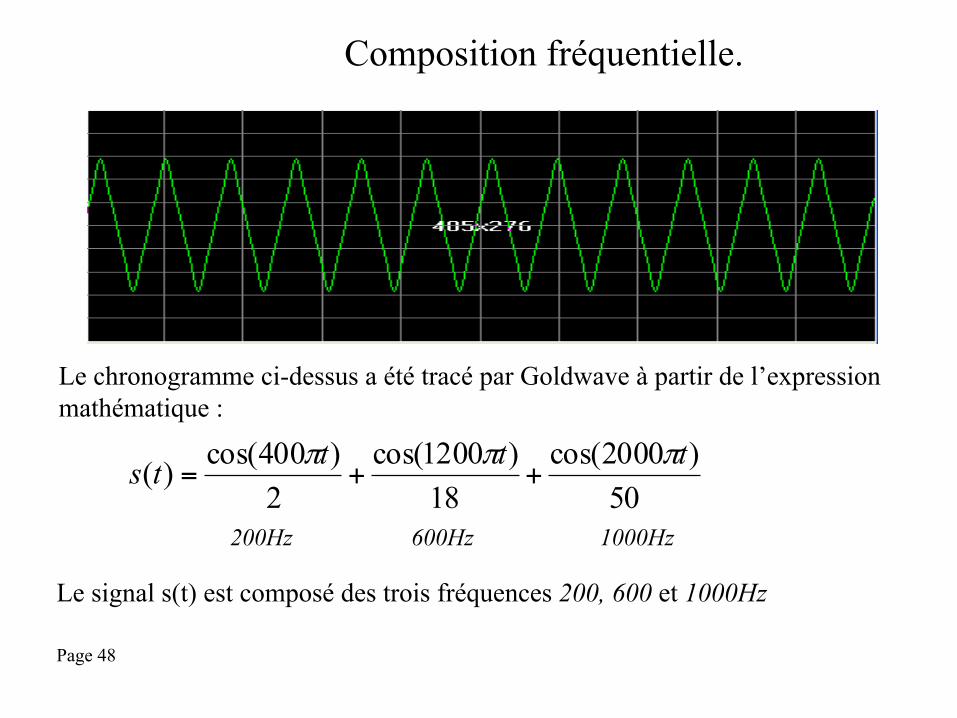
Composition fréquentielle.
50)2000cos(
18)1200cos(
2)400cos()( tttts πππ
++=
Le signal s(t) est composé des trois fréquences 200, 600 et 1000Hz
Le chronogramme ci-dessus a été tracé par Goldwave à partir de l’expression mathématique :
200Hz 600Hz 1000Hz
Page 49
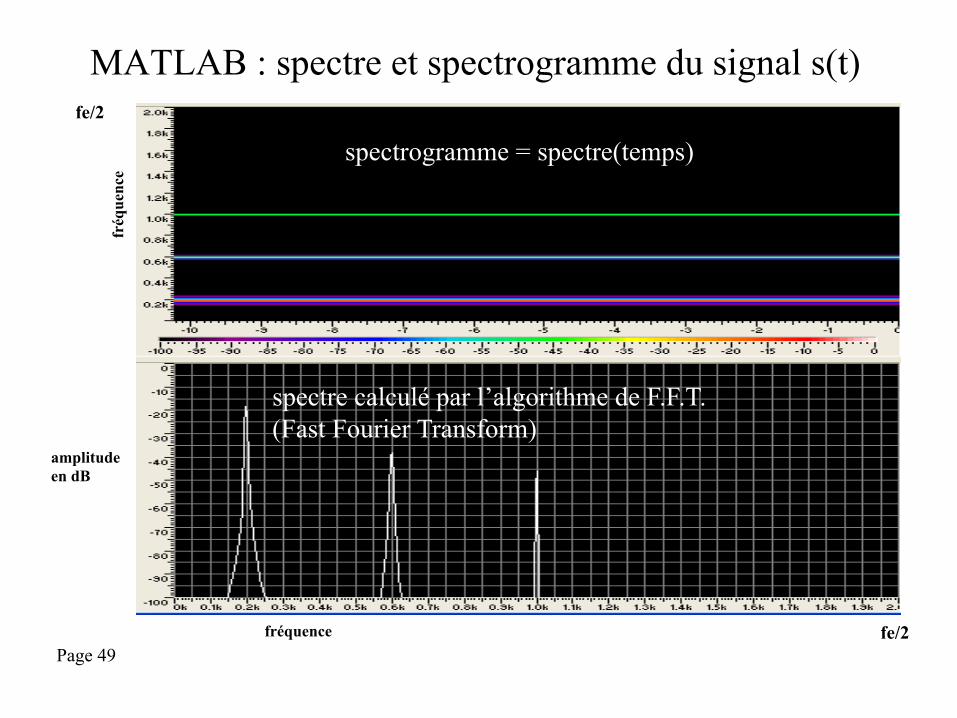
MATLAB : spectre et spectrogramme du signal s(t)
spectrogramme = spectre(temps)
spectre calculé par l’algorithme de F.F.T. (Fast Fourier Transform)
fréquence
fréq
uenc
e
amplitude en dB
fe/2
fe/2
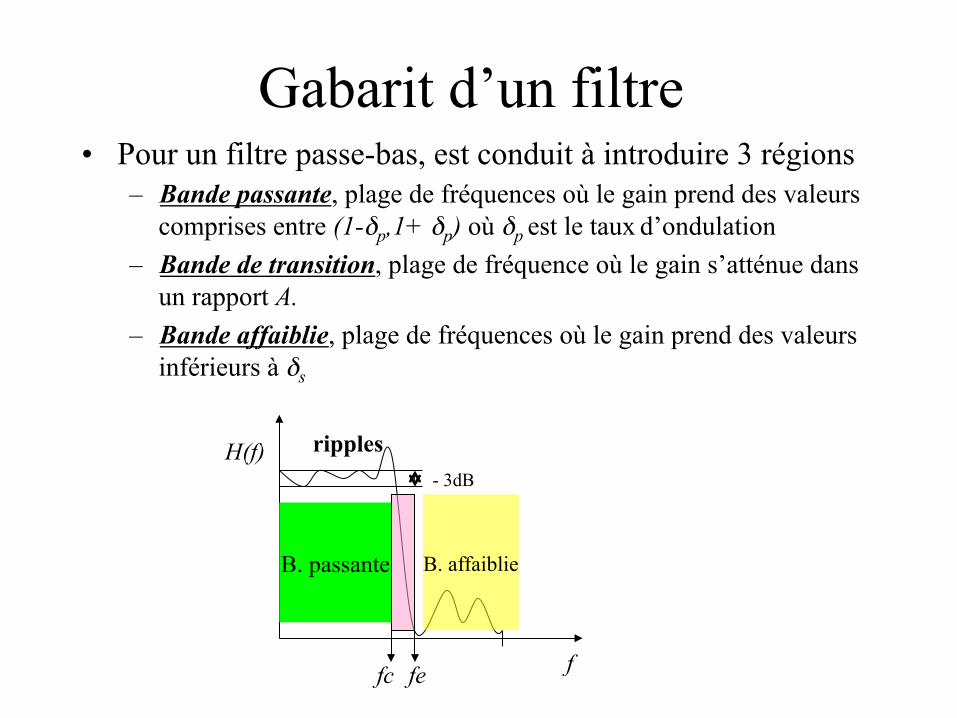
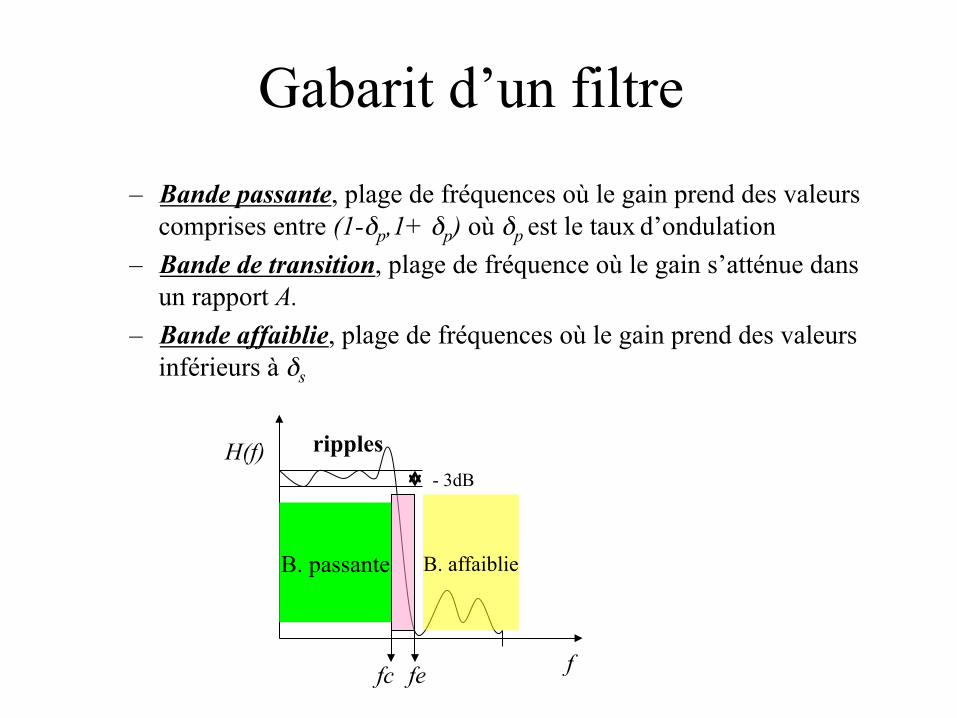
Gabarit d’un filtre • Pour un filtre passe-bas, est conduit à introduire 3 régions
– Bande passante, plage de fréquences où le gain prend des valeurs comprises entre (1-δp,1+ δp) où δp est le taux d’ondulation
– Bande de transition, plage de fréquence où le gain s’atténue dans un rapport A.
– Bande affaiblie, plage de fréquences où le gain prend des valeurs inférieurs à δs
B. affaiblie B. passante
f
H(f)
fe
- 3dB
fc
ripples
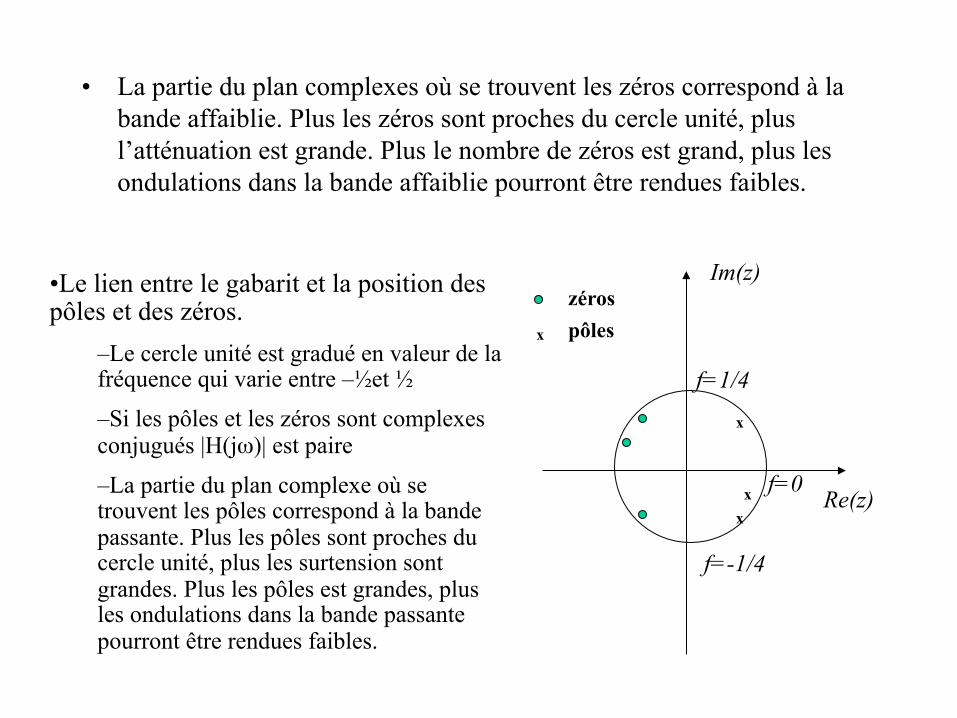
• La partie du plan complexes où se trouvent les zéros correspond à la bande affaiblie. Plus les zéros sont proches du cercle unité, plus l’atténuation est grande. Plus le nombre de zéros est grand, plus les ondulations dans la bande affaiblie pourront être rendues faibles.
Im(z)
Re(z) x
x
x
x
zéros pôles
f=0
f=1/4
f=-1/4
• Le lien entre le gabarit et la position des pôles et des zéros.
– Le cercle unité est gradué en valeur de la fréquence qui varie entre –½et ½
– Si les pôles et les zéros sont complexes conjugués |H(jω)| est paire
– La partie du plan complexe où se trouvent les pôles correspond à la bande passante. Plus les pôles sont proches du cercle unité, plus les surtension sont grandes. Plus les pôles est grandes, plus les ondulations dans la bande passante pourront être rendues faibles.
Synthèse d’un filtre réel à temps continu
• Problème : Comment réaliser en numérique un filtrage analogique ? – Donc, si xa(t) et ya(t) sont les signaux d’entrée et de
sortie d’un filtre analogique: comment fabriquer les échantillons de ya(t) à partir de ceux de xa(t) ?
Solution : • Soit le filtrage linéaire réel analogique défini par l’équation en
fréquence :
Si Xa(f)=0 pour |f|>B, alors Ya(f) est lui-même à bande limitée B. On prend Fe=1/Te>2B
• L’expression des échantillons ye(n)=ya(nT) en fonction des échantillons x e(n)=xa(nTe) s’écrit
) () () ( fXfHfY aaa =
)e(H)e(X)e(Ynhtxny fjπe
fjπe
nfjeeee
n 2n 2 2 ~ )(~*)()( =⇔= π
Où est la périodisée de )e(H nfjπe
2~ B/febfrectfFeH bba =− où )( )( ),(
Conclusion
• C’est donc un filtrage à temps discret dont la réponse en fréquence s’obtient par troncature de Ha à la bande (-B,B) suivie d’une division de l’axe des fréquences par Fe
Preuve
• En utilisant la formule de Poisson:
Et en posant
∑∑∑
∈
∈∈
−−=
−==
Zkeaeae
Zkeae
fnj
Zne
fje
FfkXFfkHF
FfkYFnyY ee))(( ))((
))(( )( )( 22 ππ
: aon )( )()(~),( frectfFeHfH bbaa −=
∑∑∈∈
−−=Zk
eaZk
eaefj
e FfkHFfkXFY e ))((~))(( )( 2 π
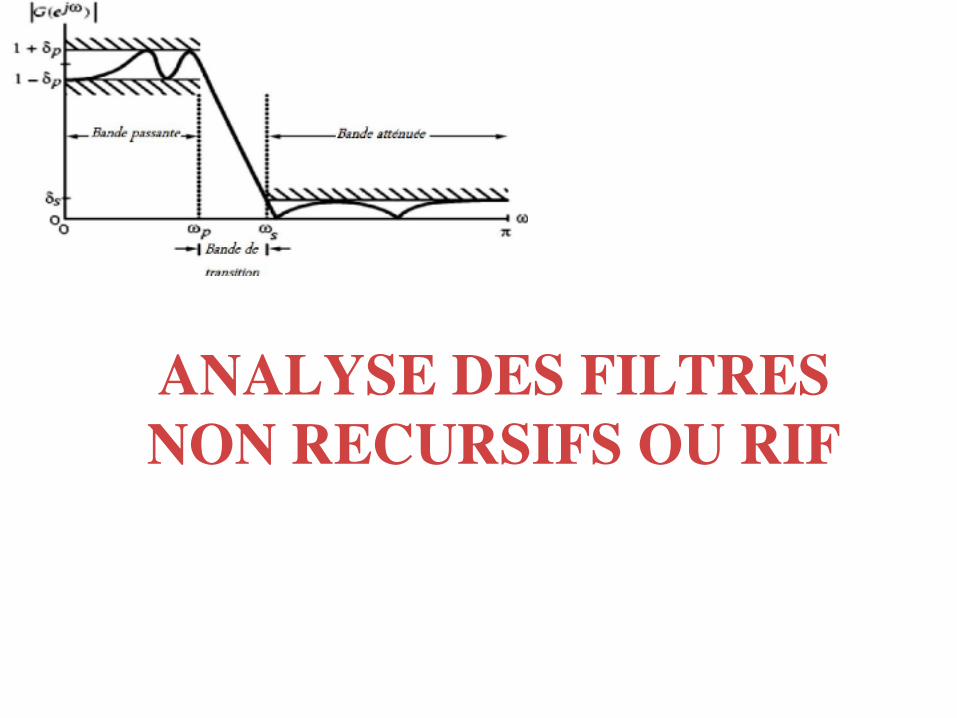
ANALYSE DES FILTRES NON RECURSIFS OU RIF
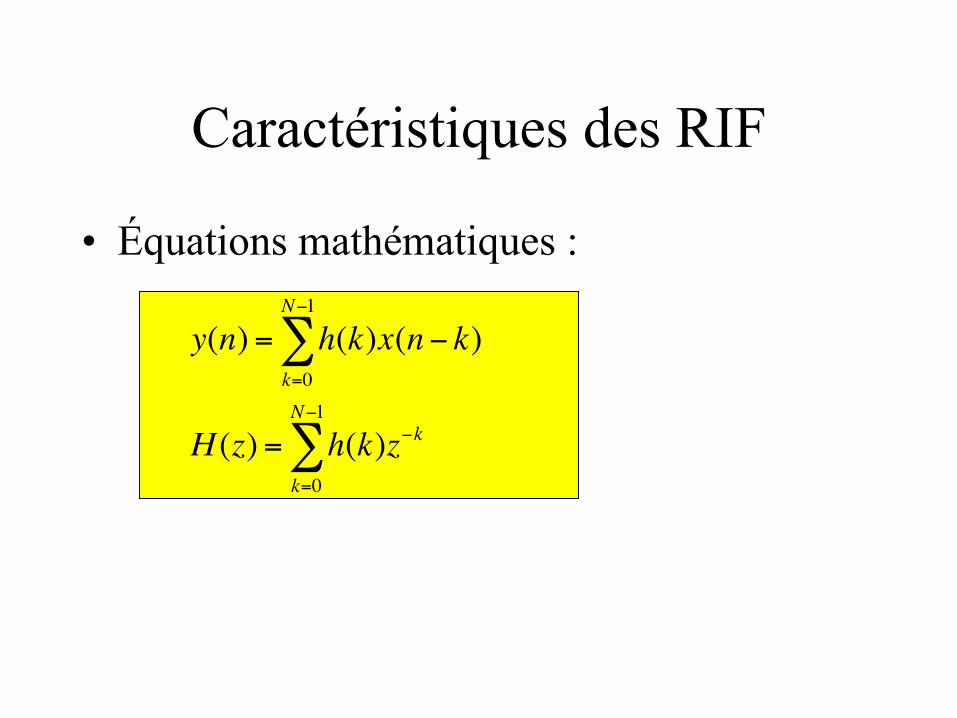
Caractéristiques des RIF
• Équations mathématiques :
y(n) = h(k)x(n− k)k=0
N−1
∑
H (z) = h(k)z−kk=0
N−1
∑
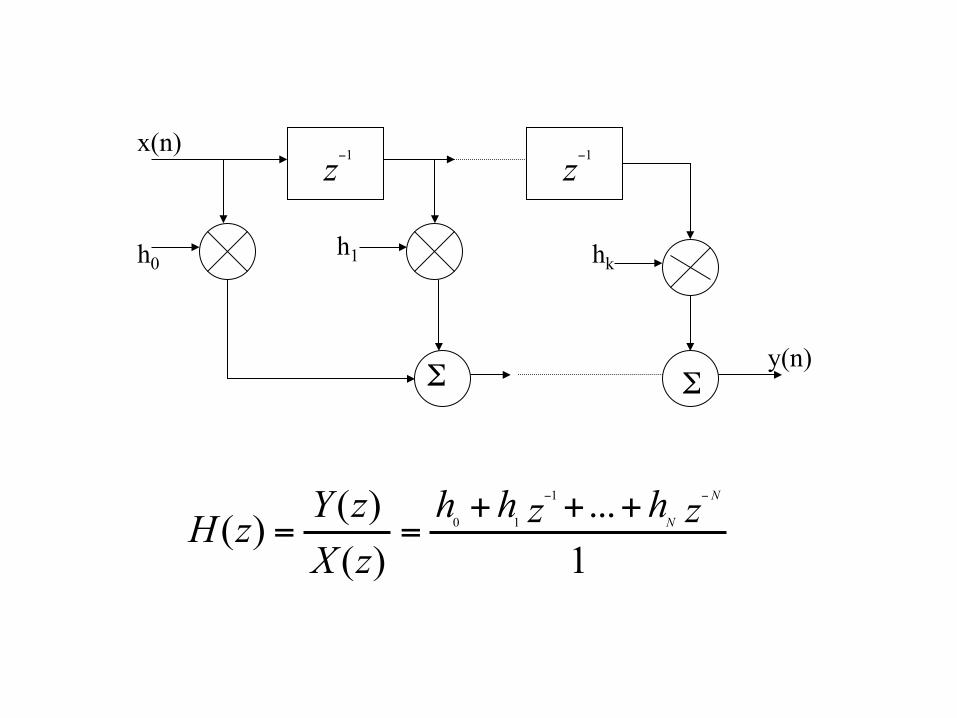
ΣΣ
z 1− z 1−x(n)
hk h1 h0
y(n)
1...
)()()(
1
10 zhzhhzXzYzH
N
N
−− +++==
Filtre à réponse impulsionelle finie (RIF)
Stabilité : un filtre RIF est stable Phase linéaire: si la réponse impulsionelle
vérifie
110 ... −−−++= LnLnn xhxhy
,N][L hh LN L 0 ∈∀= −
Remarque: conséquence directe de la symétrie de la réponse impulsionelle
Démonstration de la phase linéaire
• N=7 • h(n)=h(N-1-n) ou h(n)=-h(N-1-n)
)4()2( ; )5()1( ; )6()0( hhhhhh ===
∑=
−==6
0
)()()(k
Tjktj ekheHH ωωω
)))(2())(1())(0(()( 22333 TjTjTjTjTjTjTj eeheeheeheH ωωωωωωωω −−−− +++++=
Exemple
• Considérons le filtre RIF, dont la réponse :
Sa réponse en fréquence est :
{ }3210 0 2 13 0 ,,,pour n et hh, hhh n ≠===
πf ))( hπf )( (hehehehhH
ee
jππ
fjfjfjfj
6cos3cos )(
1 03
63
42
210
2
−+−=+++=
−
−−− ππππ
Filtre Design
• Spécifications du filtre • Calcul des coefficients • Réalisation • Analyse de la quantification des coefficients du filtre • Implémentation
Spécifications :
Soit un filtre passe-bas utilisé pour la réduction du bruit physiologique :
• La bande passante 10Hz • La bande d’arrêt < 20 Hz • L’atténuation dans la bande d’arrêt < 30dB • Les oscillation dans la bande passante « ripple » <0.026 dB
• La fréquence d’échantillonnage 256 Hz
Gabarit d’un filtre – Bande passante, plage de fréquences où le gain prend des valeurs
comprises entre (1-δp,1+ δp) où δp est le taux d’ondulation – Bande de transition, plage de fréquence où le gain s’atténue dans
un rapport A. – Bande affaiblie, plage de fréquences où le gain prend des valeurs
inférieurs à δs
f fe fc
B. affaiblie B. passante
H(f) - 3dB
ripples
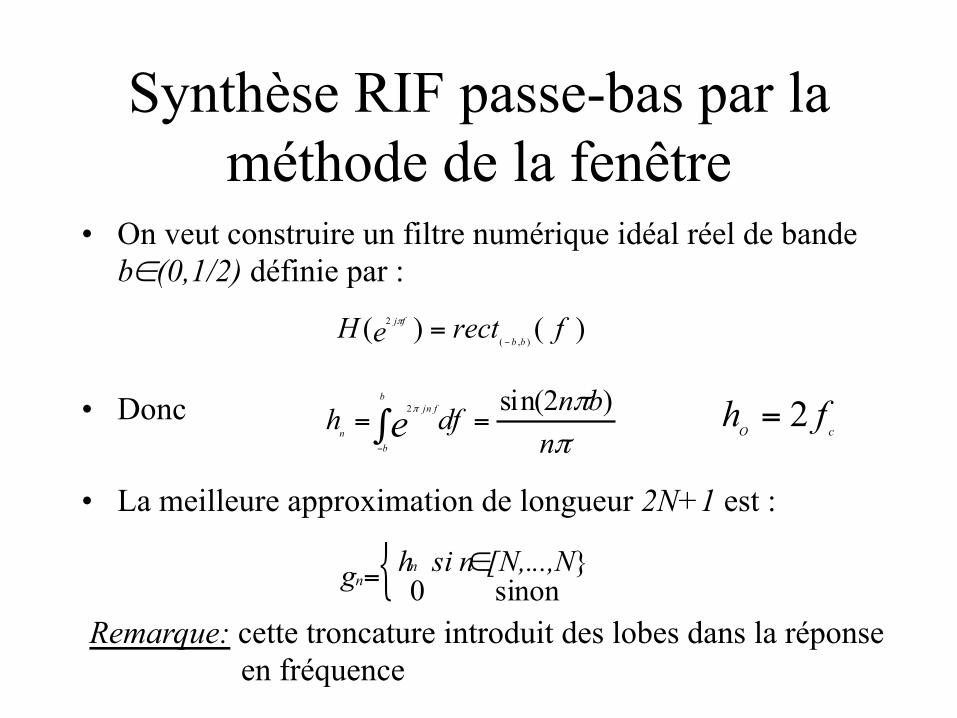
Synthèse RIF passe-bas par la méthode de la fenêtre
• On veut construire un filtre numérique idéal réel de bande b∈(0,1/2) définie par :
• Donc
• La meilleure approximation de longueur 2N+1 est :
) () (),(
2 frecteHbb
fj
−=π
πππ
nbndfh
b
b
fjn
n e)2sin( 2
== ∫−
{ sinon 0} [N,...,Nsi nhg n
n∈=
Remarque: cette troncature introduit des lobes dans la réponse en fréquence
cOfh 2=
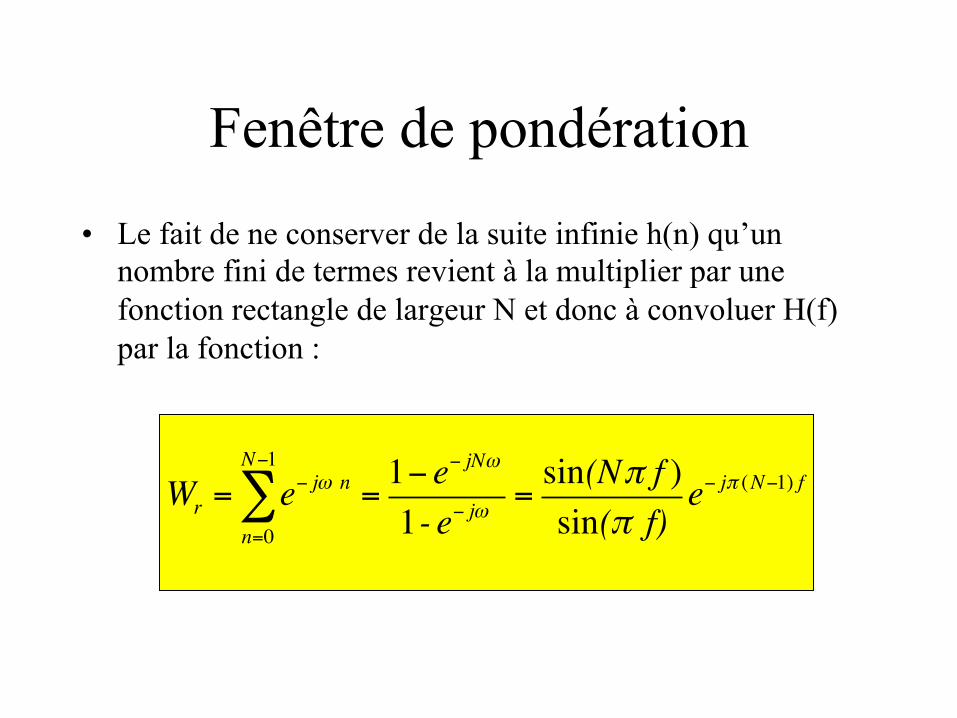
Fenêtre de pondération
• Le fait de ne conserver de la suite infinie h(n) qu’un nombre fini de termes revient à la multiplier par une fonction rectangle de largeur N et donc à convoluer H(f) par la fonction :
Wr = e− jω n
n=0
N−1
∑ =1− e− jNω
1- e− jω=
sin(Nπ f )sin(π f)
e− jπ (N−1) f
Algorithme 1. On se donne le gain complexe H(f) à réaliser et le nombre N de
coefficients du filtre 2. On détermine les coefficients h(n) par la formule précédente en
limitant le calcul à N valeurs réparties de façon symétrique autour de n
3. On multiplie terme à terme la suite obtenue par une suite w(n) appelée fenêtre de pondération
Synthèse RIF passe-bande à partir d’un RIF passe-bas
• Soit hn la réponse impulsionnelle d’un filtre passe-bas de bande B. • Considérons le filtre de réponse impulsionnelle:
• Par TFtd on en déduit que l’expression du gain complexe de gn:
• Conclusion : Si hn est filtre passe-Bas de bande B, gn est un passe-bande centré autour de f0 de bande 2B
ehehnfhg nfjn
nfjnnn
00 220 ) 2cos(2 πππ −+==
)()()( )(2)(22 00 eee ffjffjfj HHG −+ += πππ
Fenêtre de pondération
• Sont des fenêtres qui présentent des lobes secondaires de moindre amplitudes.
• Conséquence: l’élargissement de la bande de transition. • Exemple: Hamming
• Remarque: la pondération utilisée conserve la symétrie de la fenêtre et donc la propriété de phase linéaire
wH (n) = 0.54+ 0.46cos(2πn/N) où n ∈ −N / 2,..., N / 2{ }gn = hn ×wn
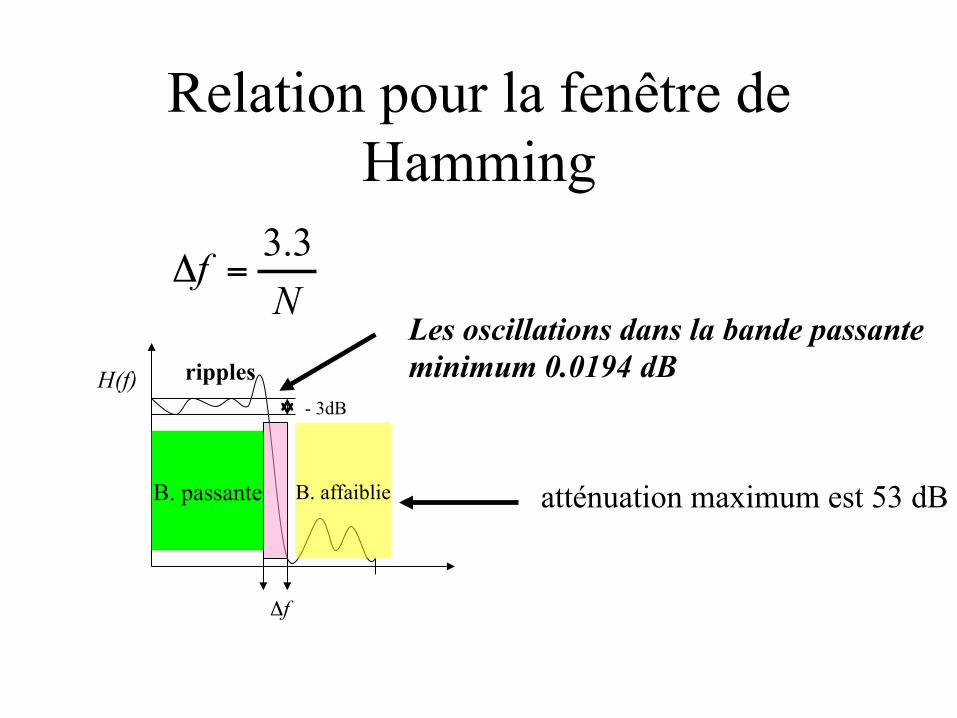
Relation pour la fenêtre de Hamming
B. affaiblie B. passante
H(f) - 3dB
ripples
fΔ
Nf 3.3=Δ
atténuation maximum est 53 dB
Les oscillations dans la bande passante minimum 0.0194 dB
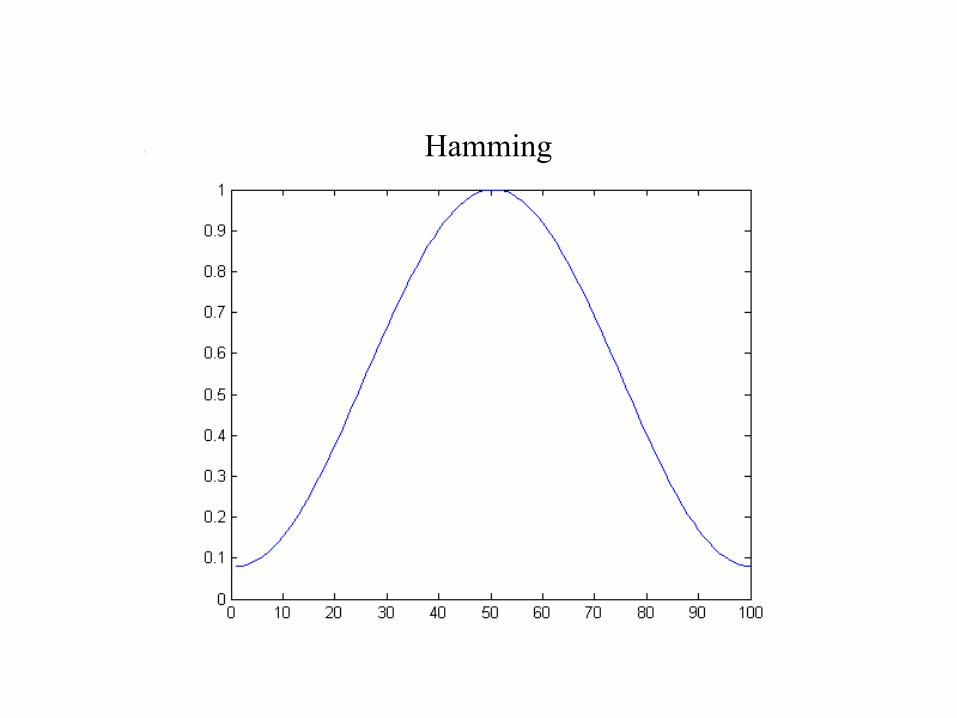
Hamming
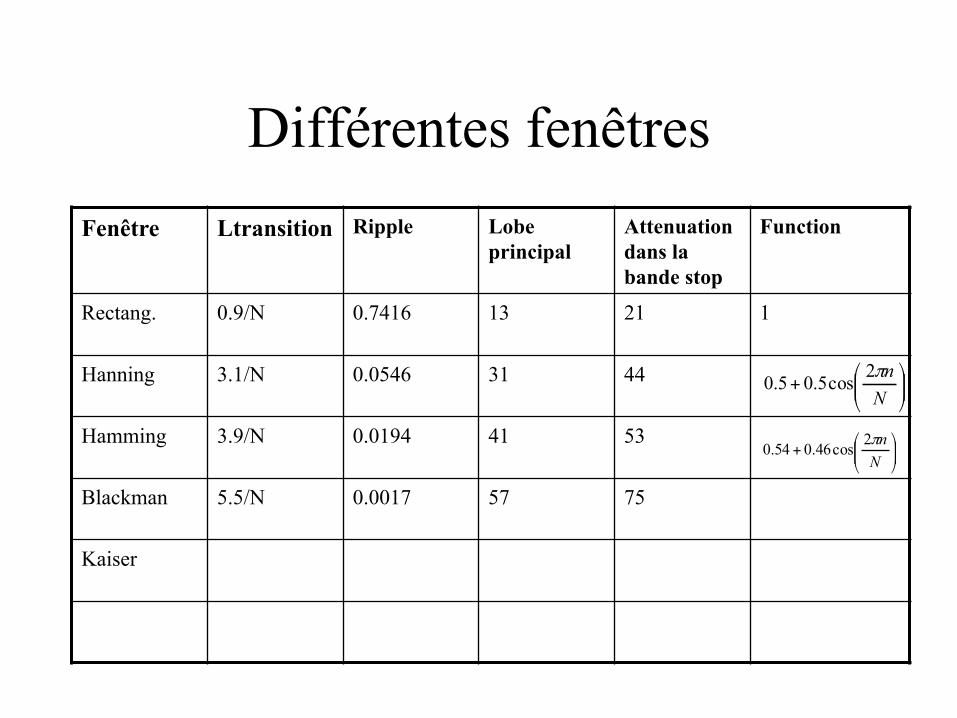
Différentes fenêtres Fenêtre Ltransition Ripple Lobe
principal Attenuation dans la bande stop
Function
Rectang. 0.9/N 0.7416 13 21 1
Hanning 3.1/N 0.0546 31 44
Hamming 3.9/N 0.0194 41 53
Blackman 5.5/N 0.0017 57 75
Kaiser
⎟⎟⎠
⎞⎜⎜⎝
⎛+
Nnπ2cos5.05.0
⎟⎟⎠
⎞⎜⎜⎝
⎛+
Nnπ2cos46.054.0
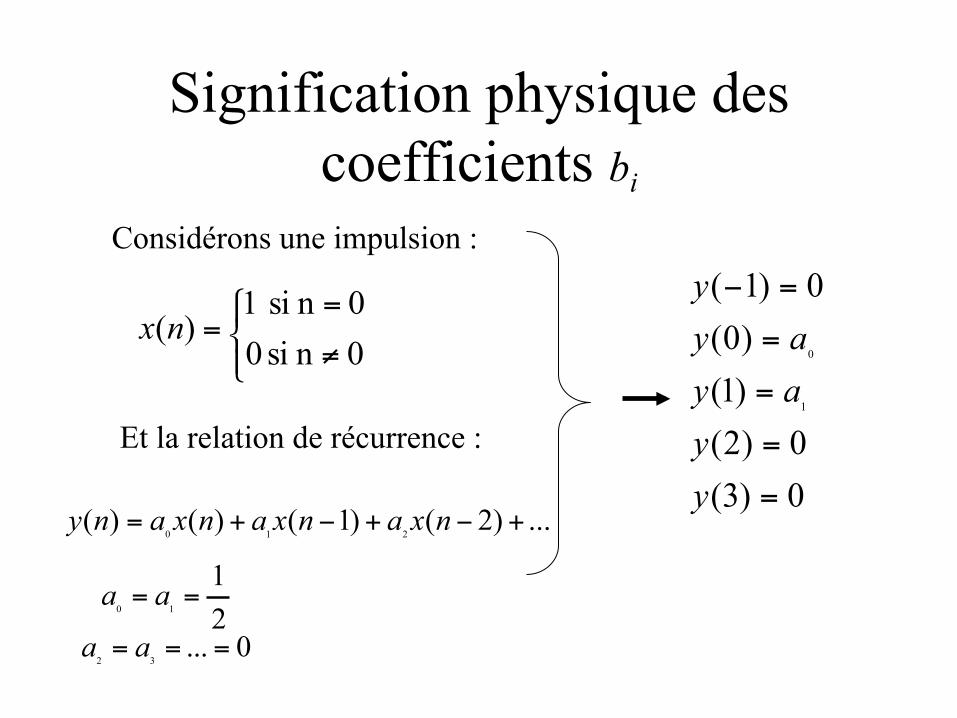
Signification physique des coefficients bi
⎪⎩
⎪⎨⎧
≠
==
0n si 00n si 1
)(nx
Considérons une impulsion :
Et la relation de récurrence :
...)2()1()()(210
+−+−+= nxanxanxany0)3(0)2(
)1()0(
0)1(
1
0
=
=
=
=
=−
yy
ayay
y
0...21
32
10
===
==
aa
aa
Remarques
• On peut dire que la suite a0 ,a1, … constitue la réponse du filtre à une impulsion
• Le milieu de la réponse a pour abscisse :
• On peut estimer que le filtre introduit un retard et que la réponse impulsionnelle est symétrique par rapport à ce point.
2eT
=τ
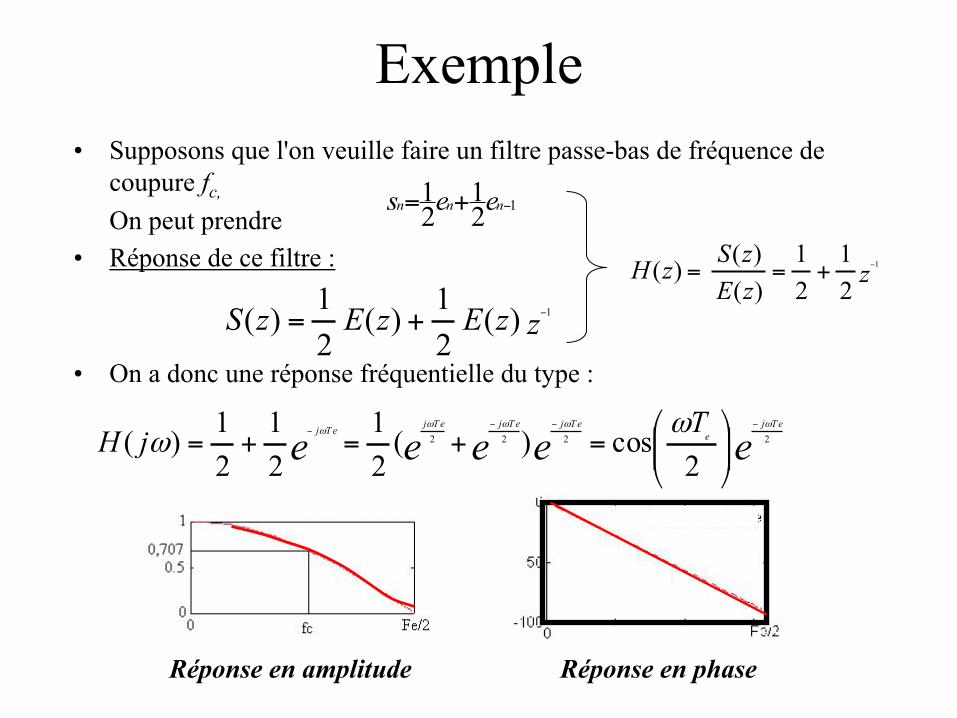
Exemple • Supposons que l'on veuille faire un filtre passe-bas de fréquence de
coupure fc,
On peut prendre • Réponse de ce filtre :
• On a donc une réponse fréquentielle du type :
Réponse en amplitude Réponse en phase
121
21
−+= nnn ees
zzEzEzS 1 )( 21 )(
21)( −+=
zzEzSzH 1
21
21
)()( )( −+==
eeeeeTej
eTejT ejT ej
T ej TjH 2222
2cos)(
21
21
21)(
ωωωωω ω
ω−−−
−
⎟⎟⎠
⎞⎜⎜⎝
⎛=+=+=
L' équation de récurrence • Ex: y(n)=x(n)-x(n-1) dérivateur mais avec • des résultats très moyens sauf pour les basses fréquence.
Exemple
• Déterminer les coefficients d’un filtre RIF passe-bas avec les fréquences suivantes pour la bande passante et la bande d’arrêt 1kH et 4.3 kHz. Utiliser une fenêtre de Hamming et considérer la fréquence d’échantillonnage de 10kHz.
Solution
fN
Δ≈
3.3
Conclusion
• Il existe des méthodes de conception de filtre RIF simple à mettre en œuvre
• Phase linéaire, donc pas de dispersion • Stabilité • Cher en réalisation • Le retard entre l’entrée et la sortie peut être relativement
longue • Implémentation possible sur tous les DSP

ANALYSE DES FILTRES RECURSIFS OU RII
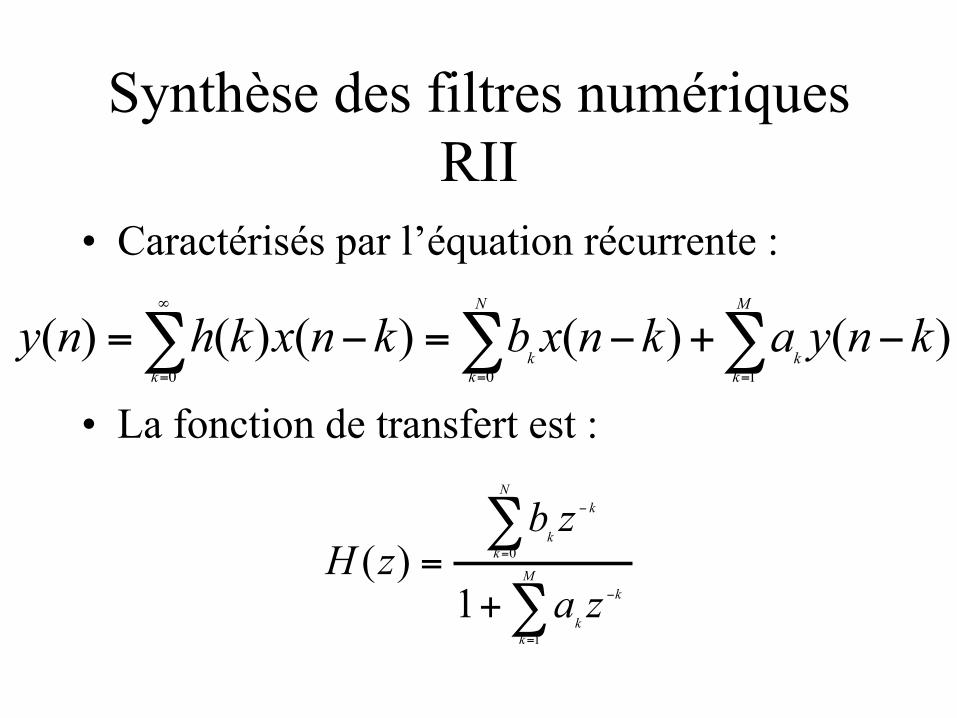
Synthèse des filtres numériques RII
• Caractérisés par l’équation récurrente :
• La fonction de transfert est :
∑∑ ∑=
∞
= =
−+−=−=M
kk
k
N
kk
knyaknxbknxkhny10 0
)()()()()(
∑
∑
=
−
=
−
+= M
k
k
k
N
k
k
k
za
zbzH
1
0
1)(
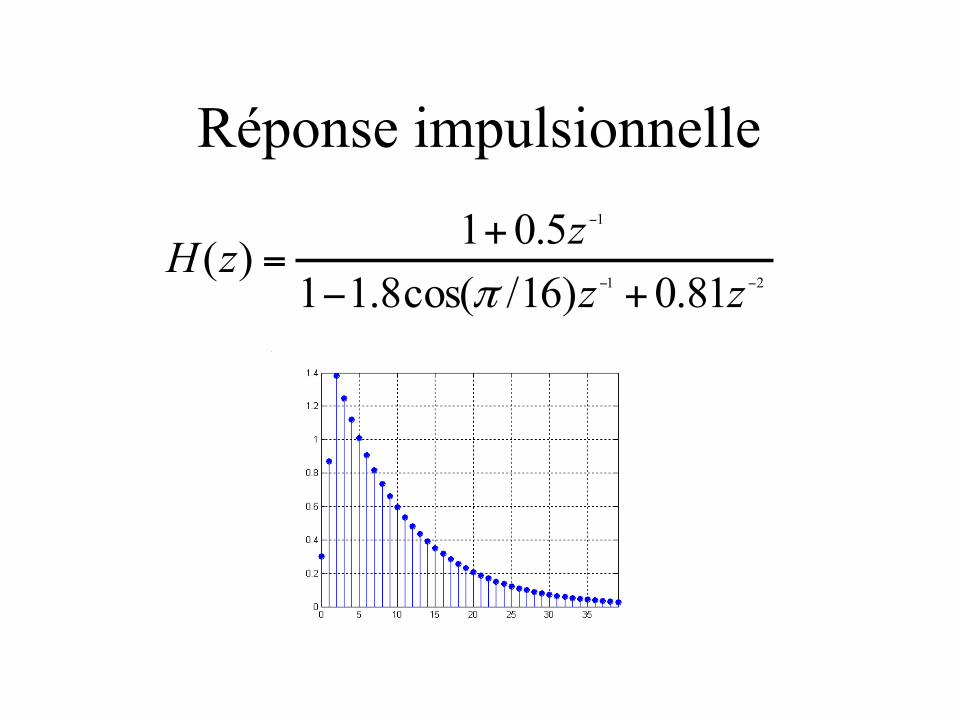
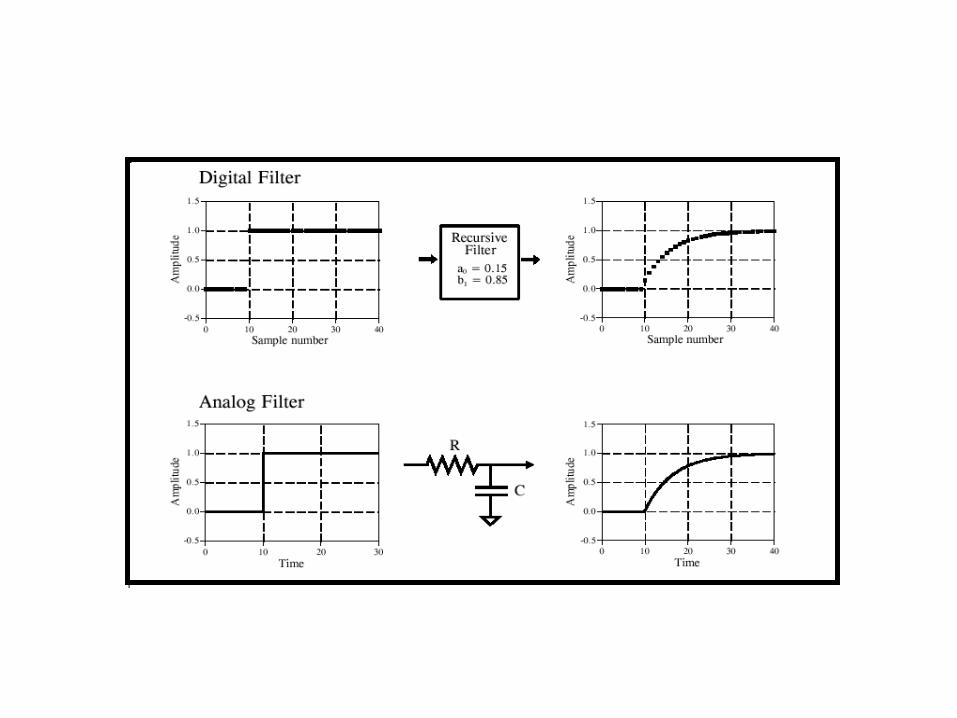
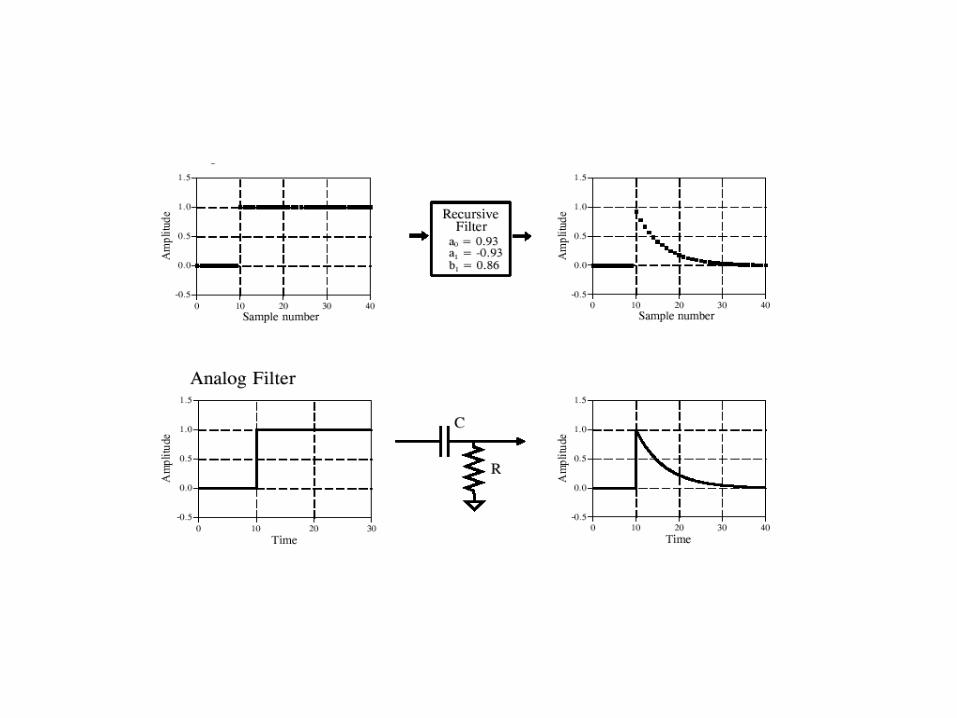
Réponse impulsionnelle
21
1
81.0)16/cos(8.115.01)(
−−
−
+−
+=
zzzzH
π
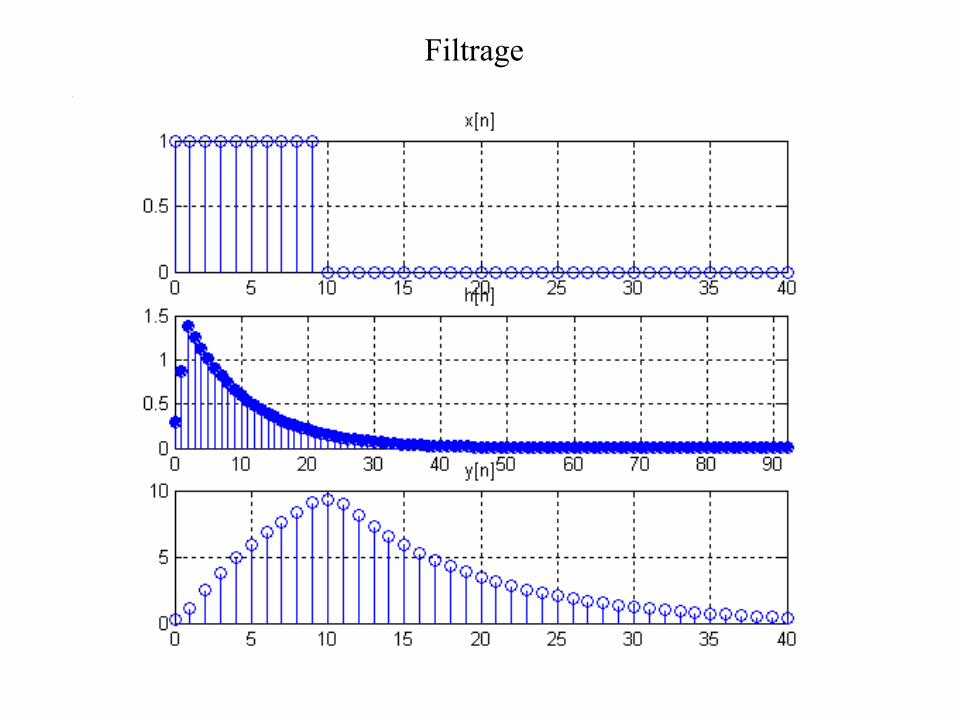
Filtrage
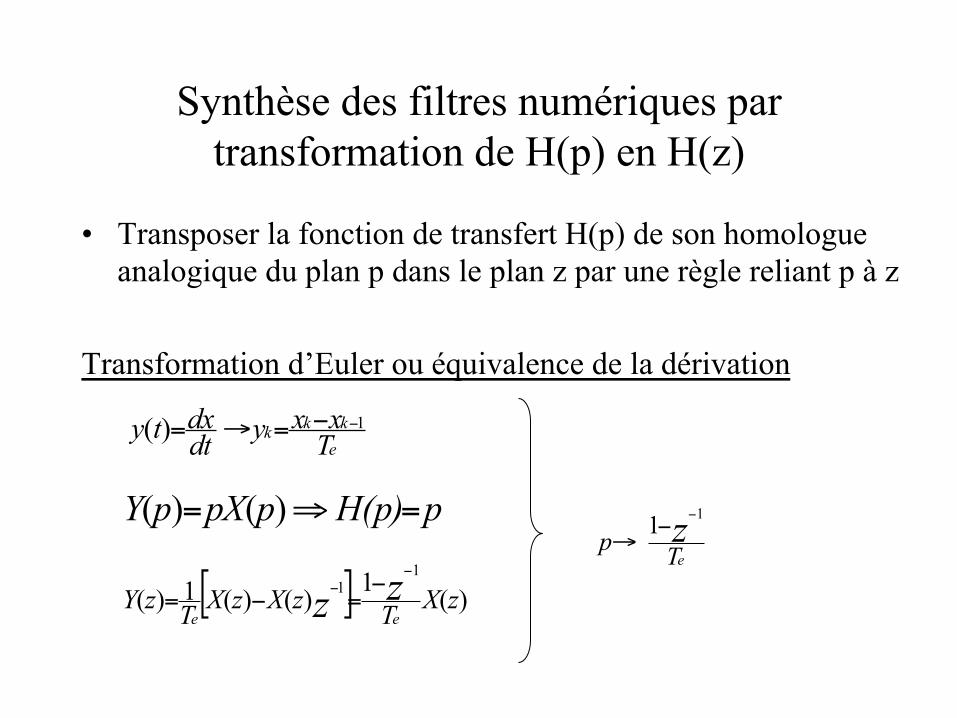
Synthèse des filtres numériques par transformation de H(p) en H(z)
• Transposer la fonction de transfert H(p) de son homologue analogique du plan p dans le plan z par une règle reliant p à z
Transformation d’Euler ou équivalence de la dérivation
ekkk Txxydt
dxty 1 )( −−=→=
p H(p)ppXpY =⇒= )()(
[ ] )(1)()(1)(1
1 zXTzXzXTzYeezz−
− −=−=
eTp z 11 −
−→
Synthèse d’un filtre numérique passe-bas du 1er ordre
• Soit la fonction de transfert :
• La réponse impulsionnelle :
• La réponse indicielle :
RC 1
1)( =+
= ττ p
pH
)( 1)(t
tueRC
th RC−
=
)(1)( tuets RCt
ind ⎥⎦⎤
⎢⎣⎡ −=
−
• En utilisant la transformation précédente :
• L’équation aux différence est :
11
1)(−−⎟
⎟⎠
⎞⎜⎜⎝
⎛+
=
zTT
zH
ee
ττ
k
e
k
e
e
kx
T
y
T
Tyττ
τ
++
+=
−
1
1
11
Application
)1Ck 1( 1 µτ === Rms
sTe
µ100=Équation ????* Réponse impulsionnelle x1=1 xk=0 k>1 Réponse indicielle xk=1 k>=1 Conditions initiales y0=1
RII versus RIF
• La complexité d'un filtre RII est moindre que celle d'un filtre RIF du même ordre. Cette propriété peut être utile sur les plateformes limitées en puissance de calcul
• Généralement, les filtres RIF sont moins sensibles aux erreurs de quantification que les filtres RII. L'absence de récursivité empêche les erreurs cumulatives.
• Un filtre RIF est moins sélectif qu'un filtre RII du même ordre. C'est-à-dire que la transition entre la bande passante et la bande rejetée est moins rapide que dans le cas du filtre RII.
• Contrairement à un RII, un filtre RIF peut avoir une réponse impulsionnelle symétrique et introduire un retard sur le signal mais aucun déphasage.
Le choix du filtre RIF/RII
• RIF peuvent avoir une phase linéaire : Applications transmission de données, audio, traitement d’images
• RII la phase est non-linéaire • RIF toujours stable • L’effet de la limitation du nombre de bits est moins sévère
pour les RIF que pour les RII • RIF nécessitent un nombre de coefficient supérieure au RII • Les filtres analogiques peuvent être transformés facilement
en RII
Quand RII/RIF ?
• RII pour des filtres avec une bande de transition faible
• RII pour des gains importants • RIF quand le nombre de coefficients est réduit :
les DSP conçus pour RIF

Les banc de filtres
Traitement Multicadence • Un système multicadence est caractérisé par le fait que des cadences
de traitement différentes sont présentes simultanément en divers points de la chaîne de calcul
• Exemple: les opérations de sur et de sous-échantillonnage • Avantage: gain en termes d’efficacité de calcul
Applications du traitement du signal
« multicadence »
• Filtrage bande étroite : Audio numérique
• Le codage en sous-bandes
• La conversion analogique/digitale (Σ-Δ)
• Transmultiplexeurs (OFDM)
• MPEG audio/vidéo
• ………
Problématique Les systèmes de communications mobiles (GSM) ou interactifs sur câbles sont des systèmes où divers utilisateurs sont autorisés à communiquer simultanément.
L'accès multiple est classiquement résolu en ayant recours au multiplexage temporel des signaux (GSM) où l'attribution de codes différents (code division multiple acces). Pour les réseaux CATV interactifs, il a récemment été proposé d'attribuer à chaque utilisateur une forme d'onde qui est en fait une fonction de base d'une transformation de Fourier discrète. Cette technique a été baptisée OFDMA (orthogonal frequency division multipleacces).
Solution: • Structures en bancs de filtres (systèmes sous-bandes) , qui sont plus
généraux que les systèmes à transformation orthogonale.
Introduction Un banc de filtre est un ensemble de filtres numériques travaillant en
parallèle et découpant la bande de fréquence en K sous bandes.
Le traitement du signal numérique traditionnel utilise des blocs comme: l’additionneur, multiplicateurs et des le retard. Dans les systèmes banc de filtres, nous avons deux nouveaux bloc Décimateur
Expandeur
M↓
L↑
Sur-échantillonnage • Consiste à effectuer une interpolation sur une suite x(n) en calculant
M-1 valeurs intermédiaires entre deux points consécutifs
Sous-échantillonnage • Consiste à calculer, à partir d’une suite échantillonnée à fe, les valeurs
de la même suite qui aurait été échantillonnée à fe/M
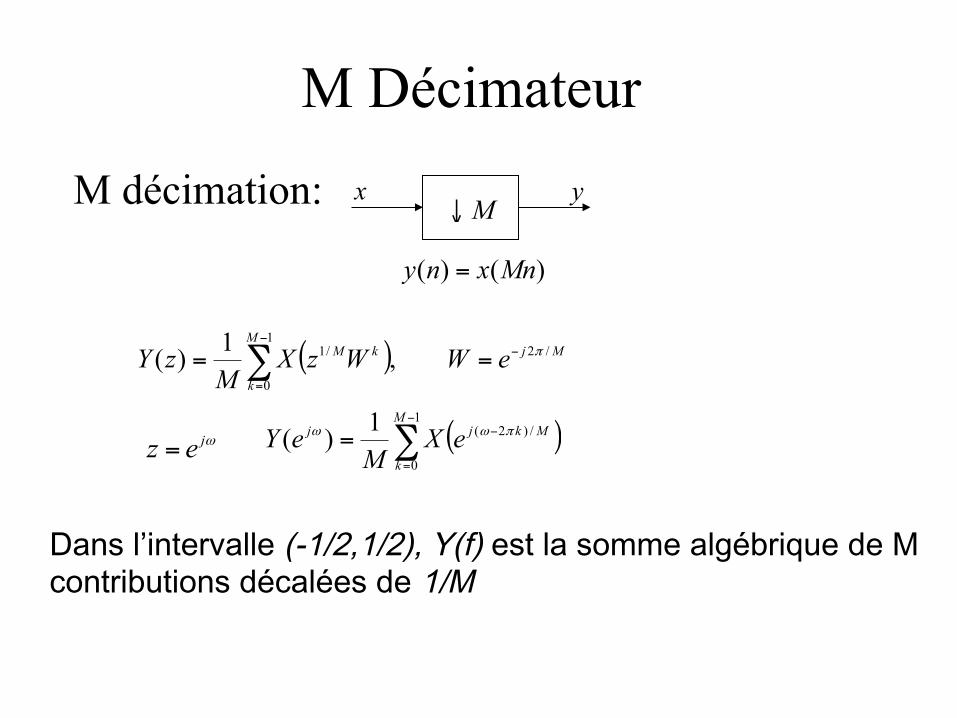
M Décimateur M décimation:
M↓x y
)()( Mnxny =
( ) MjM
k
kM eWWzXM
zY /21
0
/1 ,1)( π−−
=
== ∑
( )∑−
=
−=1
0
/)2(1)(M
k
Mkjj eXM
eY πωωωjez =
Dans l’intervalle (-1/2,1/2), Y(f) est la somme algébrique de M contributions décalées de 1/M
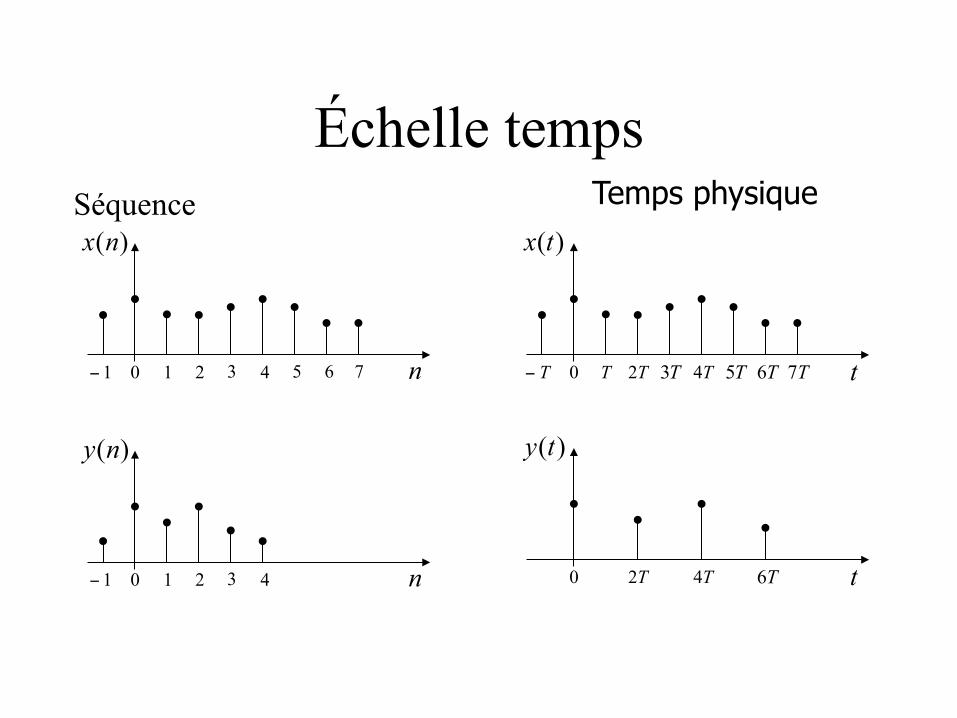
Échelle temps Séquence
n
)(nx
1 21− 3 4 5 6 70
n
)(ny
1 21− 3 40
t
)(tx
T T2T− T3 T4 T5 T6 T70
t
)(ty
T2 T4 T60
Temps physique
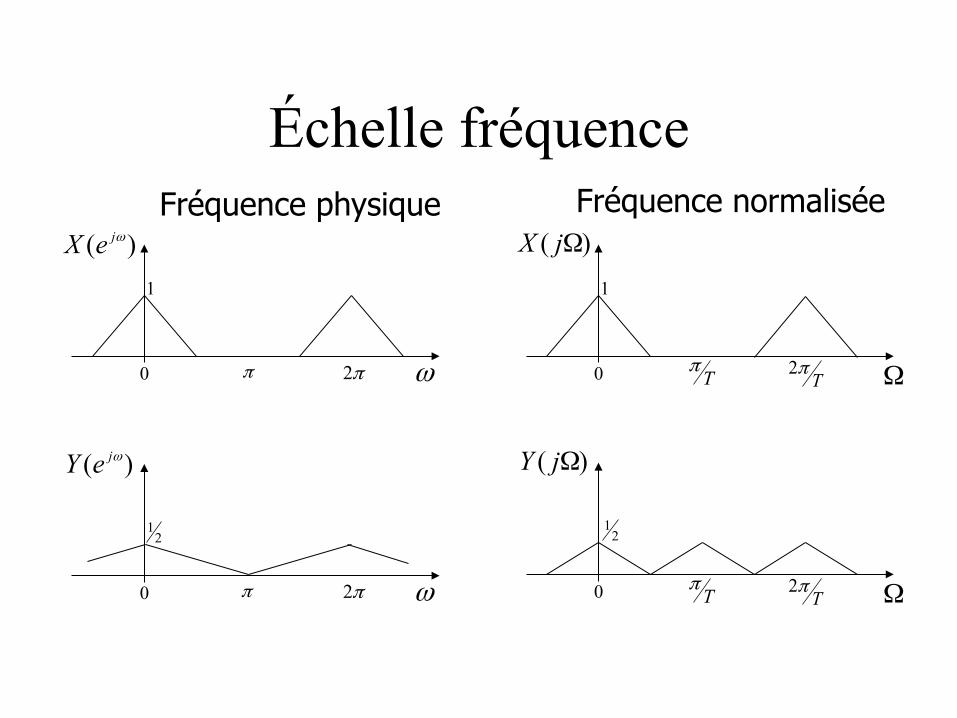
Échelle fréquence
ω
)( ωjeY
π π20
ω
)( ωjeX
π π20
1
21
Ω
)( ΩjX
Tπ
Tπ20
1
Ω
)( ΩjY
Tπ
Tπ20
21
Fréquence physique Fréquence normalisée
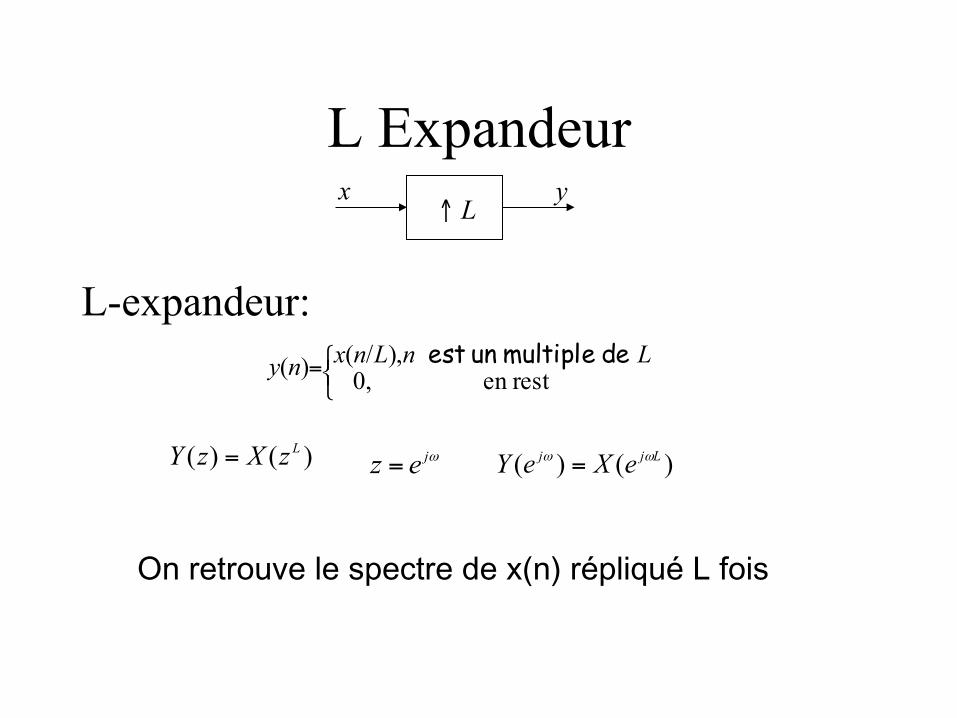
L Expandeur
L-expandeur:
L↑x y
⎩⎨⎧=
de multiple un estresten ,0
),/()( LnLnxny
)()( LzXzY = ωjez = )()( Ljj eXeY ωω =
On retrouve le spectre de x(n) répliqué L fois
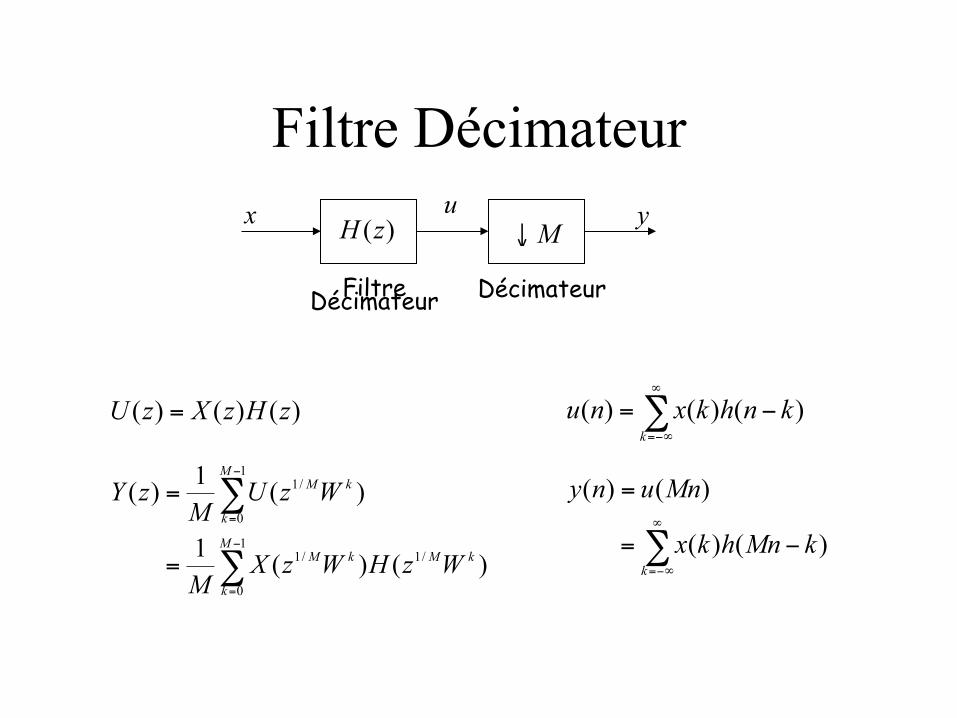
Filtre Décimateur )(zH M↓
x y
Filtre Décimateur Décimateur
u
)()()( zHzXzU =
∑
∑−
=
−
=
=
=
1
0
/1/1
1
0
/1
)()(1
)(1)(
M
k
kMkM
M
k
kM
WzHWzXM
WzUM
zY
∑∞
−∞=
−=k
knhkxnu )()()(
∑∞
−∞=
−=
=
k
kMnhkx
Mnuny
)()(
)()(
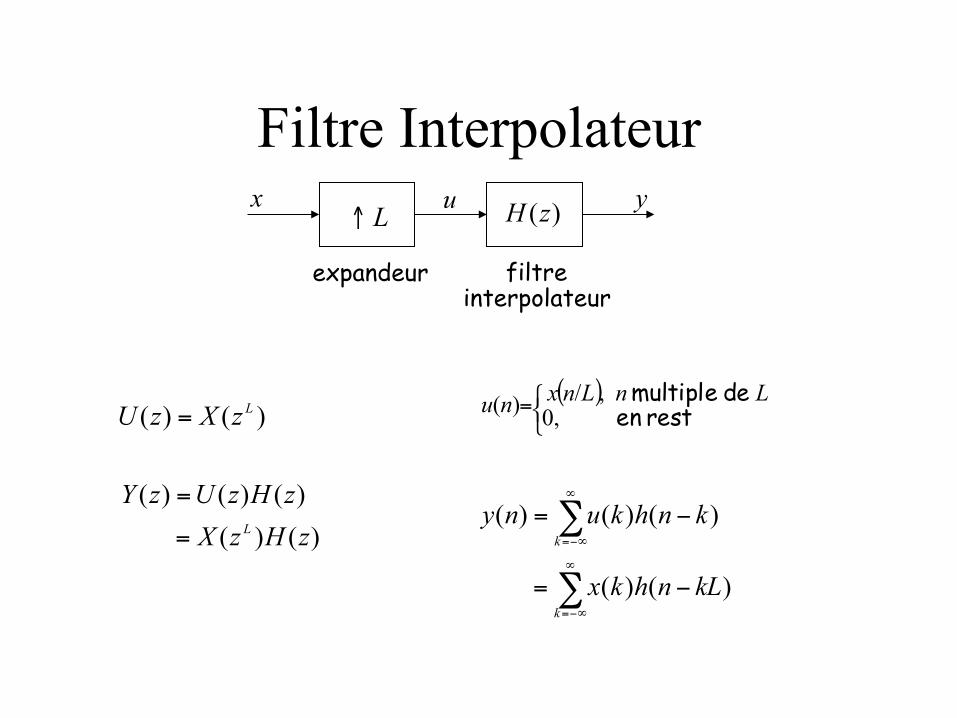
Filtre Interpolateur L↑
x y)(zHu
filtre interpolateur
expandeur
)()( LzXzU =
)()()()()(zHzXzHzUzY
L=
=
( )⎩⎨⎧= rest en
de multiple ,0
,/)( LnLnxnu
∑
∑∞
−∞=
∞
−∞=
−=
−=
k
k
kLnhkx
knhkuny
)()(
)()()(
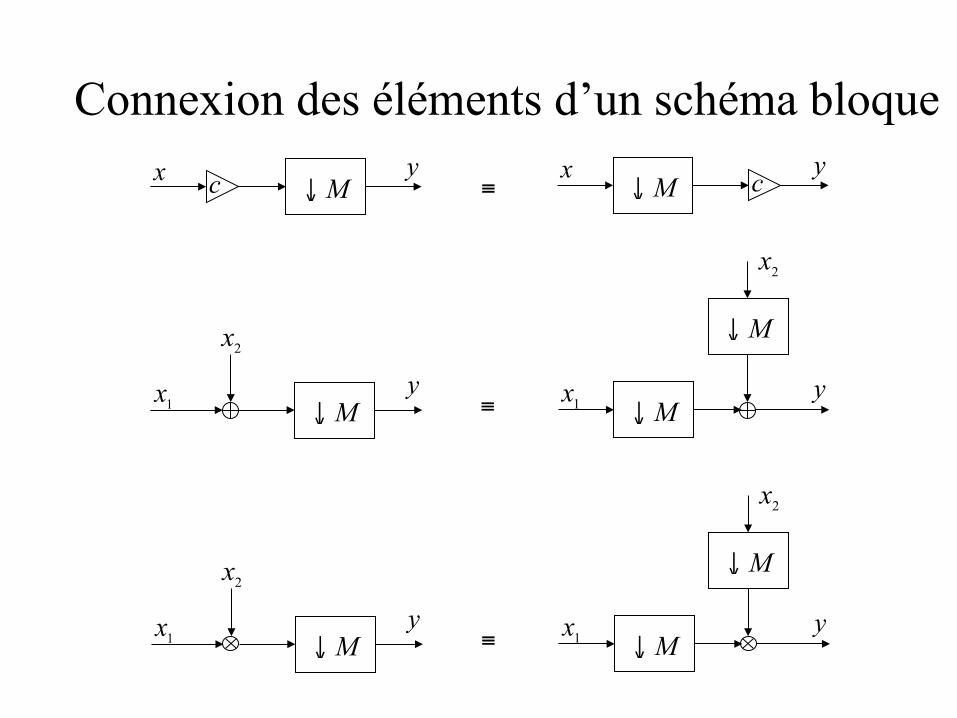
Connexion des éléments d’un schéma bloque
≡ M↓ cx yM↓c yx
M↓1x
2x
yM↓
y
2x
M↓
1x≡
M↓1x
2x
yM↓
y
2x
M↓
1x≡
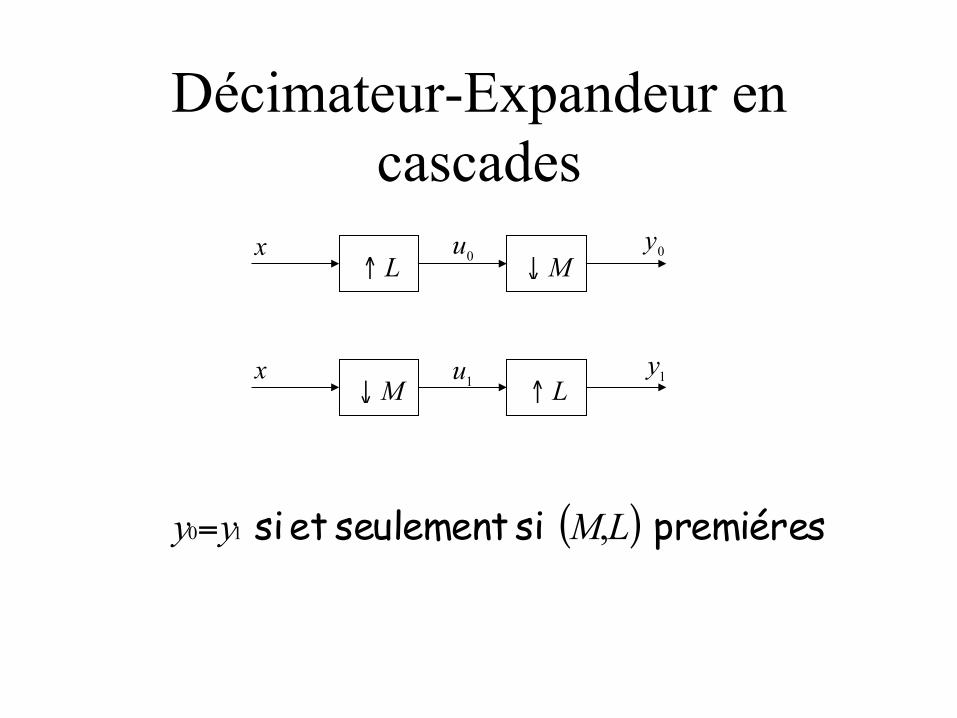
Décimateur-Expandeur en cascades
M↓ L↑
M↓L↑x
x
0u
1u
0y
1y
( ) premiéres si seulement et si , 10 LMyy =
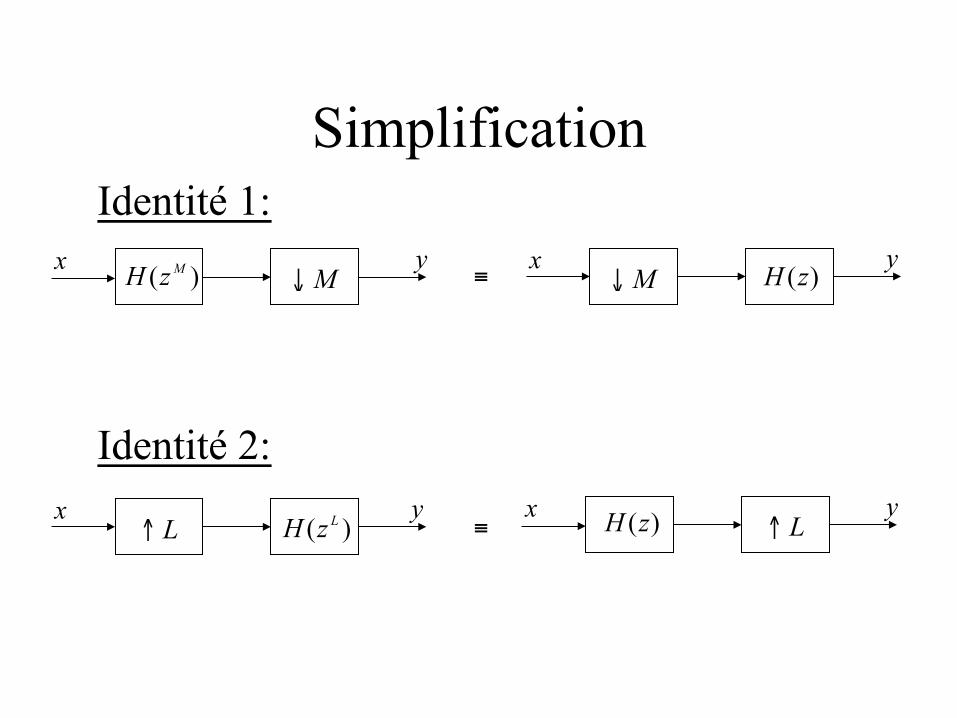
Simplification Identité 1: Identité 2:
≡ M↓ )(zHx y)( MzH M↓
x y
≡L↑ )( LzHx y )(zH L↑
x y
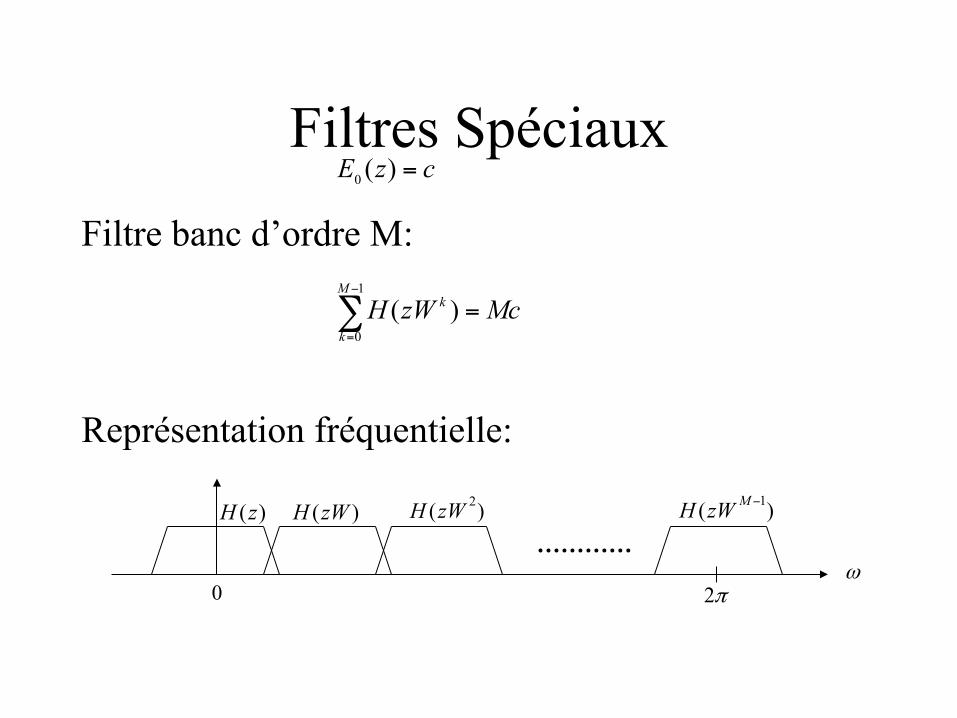
Filtres Spéciaux
Filtre banc d’ordre M: Représentation fréquentielle:
czE =)(0
∑−
=
=1
0
)(M
k
k MczWH
)(zH )(zWH )( 2zWH )( 1−MzWH
π20ω
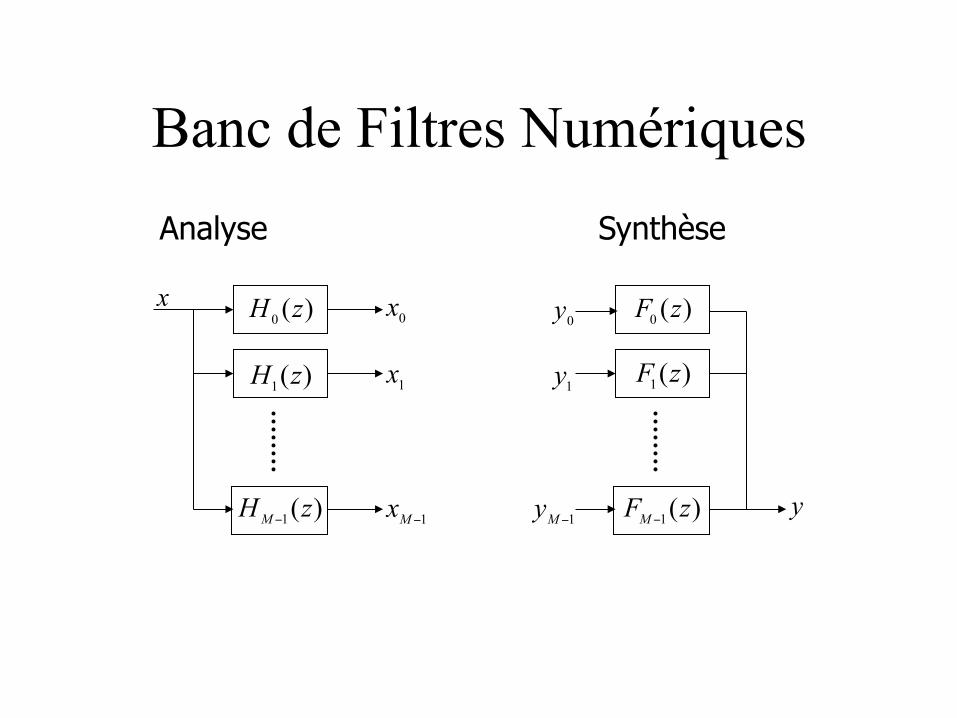
Banc de Filtres Numériques
)(0 zH
)(1 zH
)(1 zHM −
x0x
1x
1−Mx
)(0 zF
)(1 zF
)(1 zFM −
0y
1y
1−My y
Analyse Synthèse
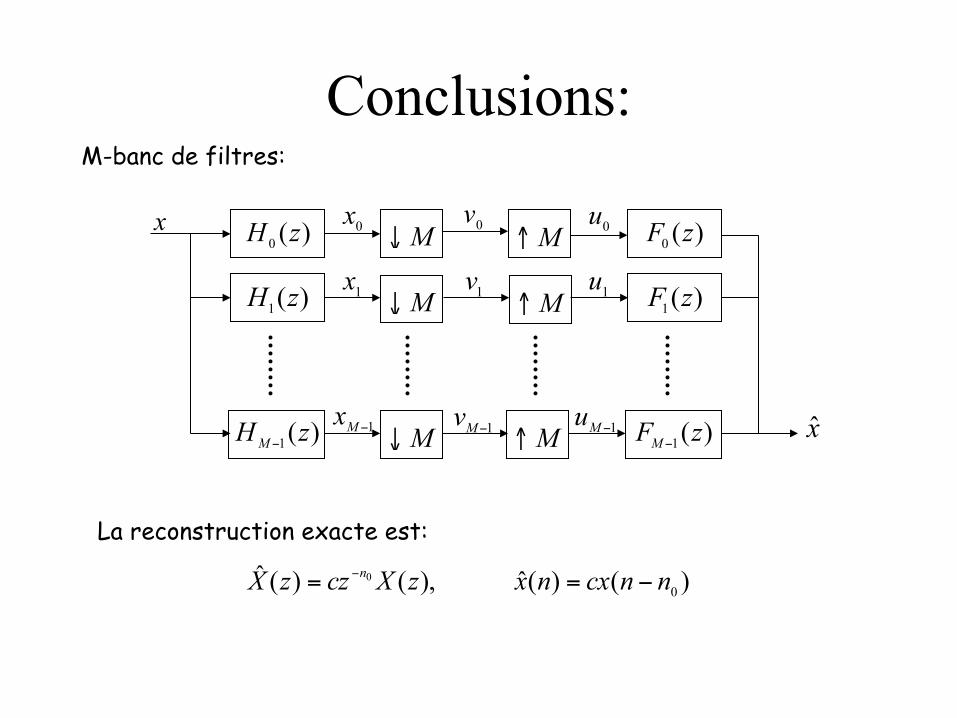
Conclusions:
)(0 zH
)(1 zH
)(1 zHM −
x 0x
1x
1−Mx
)(0 zF
)(1 zF
)(1 zFM −
0u
1u
1−Mu x̂
M↓ M↑
M↑
M↑
M↓
M↓
0v
1v
1−Mv
M-banc de filtres:
)()(ˆ),()(ˆ 00 nncxnxzXczzX n −== −
La reconstruction exacte est:
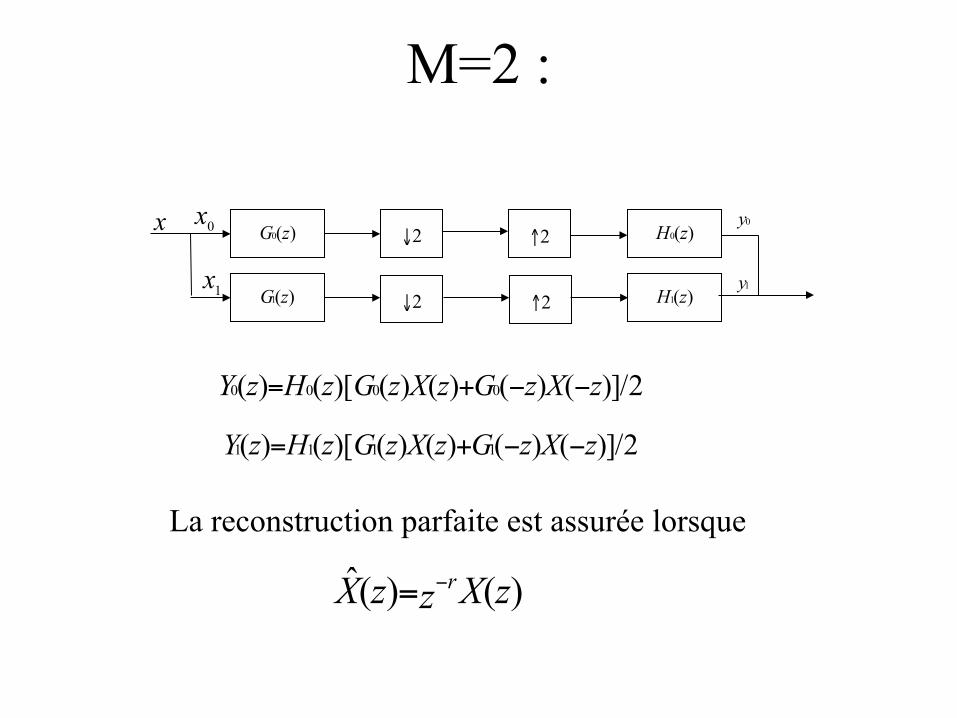
M=2 :
2↓)(0 zG
)(1 zG )(1 zH2↑2↓
2↑ )(0 zH0x
1x
0y
1y
x
2/)]()()()()[()(
2/)]()()()()[()(
1111
0000
zXzGzXzGzHzY
zXzGzXzGzHzY
−−+=
−−+=
La reconstruction parfaite est assurée lorsque
)()(ˆ zXzzX r−=
• QMF: G1(z)=G0(-z)
• CQF: G1(z)=(-z) -N G0(-z -1)
0)()()()(
2)()()()(
1100
1100
=−+−
=+ −
zHzGzHzG
zzHzGzHzG r
Transmission Numérique
Types de transmission
• Transmission en bande de base: les signaux sont transmis tels qu’ils sortent de la source
• Transmission par modulation: transposer le signal en autre contenant la même information, mais avec une modification en fréquence du signal – Permet le multiplexage fréquentiel – Adaptation aux condition d’un milieu de transmission
Quantité d’information • La quantité d’information I contenue dans un caractère est :
• Quantité d’information moyenne d’une source Entropie Soit une source ayant émis un message de m caractère issus d’un alphabet de n caractère alors
)(log2 ixpI −=
)(log)()( 21
in
ii xpxpXH ∑
=
−=
Message numérique en bande de base
• Le message numérique est une suite {dk} de v.a. à valeurs dans {0,1}
• Le modulateur associe de façon bijective à chacun de 2k message possible un signal à temps continue x(t)
• Exemple: le signal numérique est engendré à partir d’une impulsion h(t) décalée et modulée par dk
• Où Tb est l’intervalle de temps entre l’émission de 2 bits
∑=
−=K
kbk kTthdtx
1)( )(
bb TD 1=
Transmission binaire • On considère un alphabet fini à M symboles
• On choisit un codage qui associe à toute suite de m bits du message numérique un symbole ak de l’alphabet A
• Le modulateur fournit le signal numérique:
• Donc
2mM=
bk
k mTkT) où Th(tax(t) =−=∑
baud log1
2(M)D
TRb==
Codage de Gray 100 -7 101 -5 111 -3 110 -1 010 1 011 3 001 5 000 7
Modulation sur fréquence porteuse
• On associe à un symbole dans l’intervalle de temps (kT,(k+1)T) le signal: x(t)=A cos(2πf0t+Φk)
L’enveloppe complexe de x(t) a pour expression
∑ =−=k
kkTkb )(jφkT) a(trectaAt)x exp(
Introduction • Lors de transmission sont émis, soit des signaux analogique numérisés
soit des données purement et initialement numérique
• La suite des valeurs binaires obtenues est transformée en une série d’impulsion destinée à être transmises c’est la transmission PCM
• En modulation numérique différentielle dite DPCM sont transmis des différences en amplitude des échantillons successifs
Modulation PCM • Supposons que le signal analogique à transmettre ait quantifié en
amplitude sur q niveaux représentés par des nombres binaires de n bits : q=2n Donc, il faut transmettre n impulsions binaires pour chaque échantillons soit nFe impulsion par seconde.
• Le débit de moments est donc :
• La bande passante nécessaire à la transmission PCM d’un signal analogique dont le spectre est borné par par valeur supérieure à fmax=Fe/2 est :
(Bd) nFeM=
max22 nfFnMB e===
Modulation delta
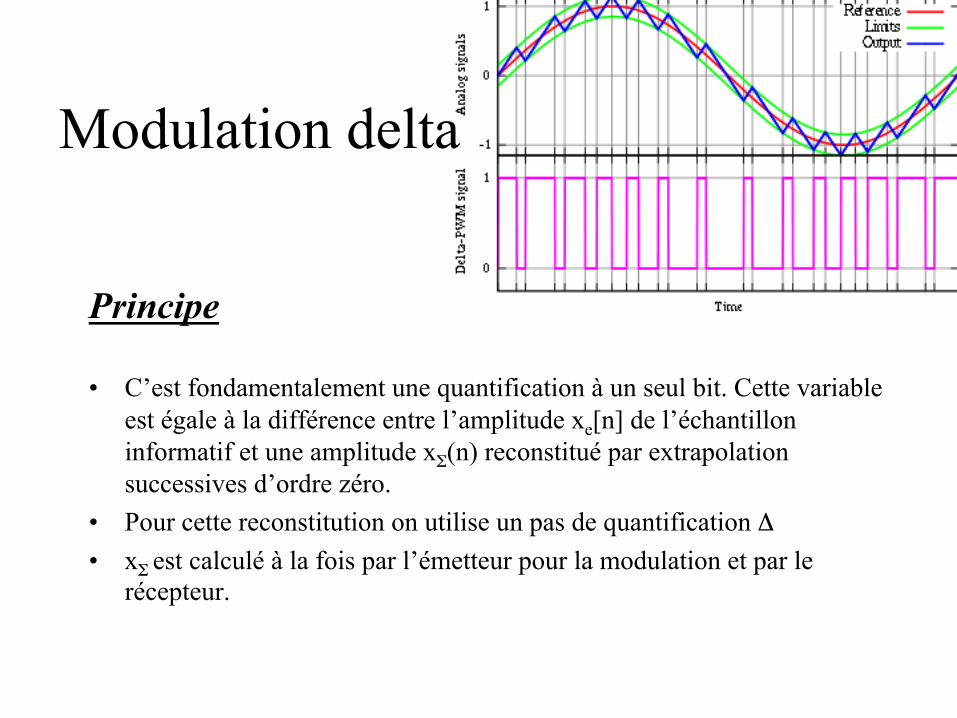
Principe • C’est fondamentalement une quantification à un seul bit. Cette variable
est égale à la différence entre l’amplitude xe[n] de l’échantillon informatif et une amplitude xΣ(n) reconstitué par extrapolation successives d’ordre zéro.
• Pour cette reconstitution on utilise un pas de quantification Δ • xΣ est calculé à la fois par l’émetteur pour la modulation et par le
récepteur.
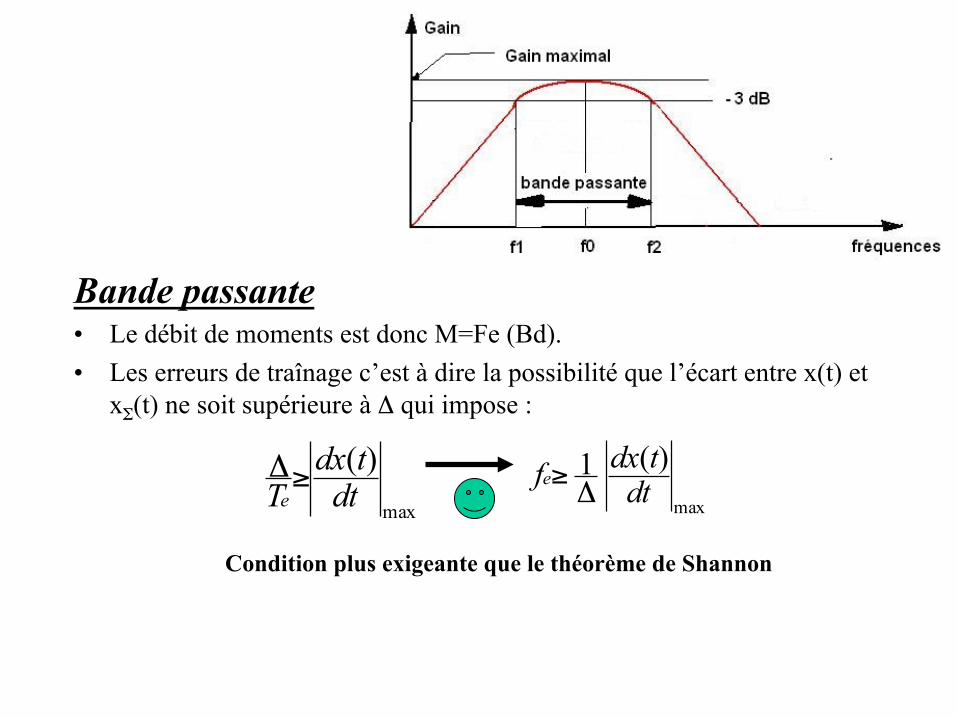
Bande passante • Le débit de moments est donc M=Fe (Bd). • Les erreurs de traînage c’est à dire la possibilité que l’écart entre x(t) et
xΣ(t) ne soit supérieure à Δ qui impose :
max
)(dttdx
Te≥Δ
max
)( 1 dttdxfe
Δ≥
Condition plus exigeante que le théorème de Shannon