L'anticipation et sa représentation dans les IHS en...
229
Université Bordeaux 1 Les Sciences et les Technologies au service de l’Homme et de l’environnement THÈSE PRÉSENTÉE A L’UNIVERSITÉ BORDEAUX 1 ÉCOLE DOCTORALE DES SCIENCES PHYSIQUES ET DE L’INGENIEUR Par Sami LINI POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : Cognitique L’anticipation et sa représentation dans les interfaces homme-système en aéronautique : une approche d’ingénierie cognitique Directeur de recherche : Pr. Bruno Vallespir/D. Pierre-Alexandre Favier Soutenue le : 18/09/2013 Devant la commission d’examen formée de : M. Régis MOLLARD Professeur, Université Paris V Rapporteur M. Julien CEGARRA MCU HDR, UFR Champollion Albi Rapporteur M. Thierry BELLET CR, IFSTTAR Examinateur M. Jean-Philippe DOMENGER Professeur, Université Bordeaux 1 Examinateur M. Bernard CLAVERIE Professeur, IPB Examinateur M. Bruno VALLESPIR Professeur, Université Bordeaux 1 Directeur de thèse M. Pierre-Alexandre FAVIER MCU, IPB Co-directeur de thèse M. Sylvain HOURLIER Docteur en médecine, Thales Avionics Co-directeur industriel M. Pierre GAUD Pilote de ligne, Air France Membre invité
-
Upload
trinhnguyet -
Category
Documents
-
view
216 -
download
0
Transcript of L'anticipation et sa représentation dans les IHS en...
Université Bordeaux 1
Les Sciences et les Technologies au service de l’Homme et de l’environnement
THÈSE
PRÉSENTÉE A
L’UNIVERSITÉ BORDEAUX 1
ÉCOLE DOCTORALE DES SCIENCES PHYSIQUES ET DE L’INGENIEUR
Par Sami LINI
POUR OBTENIR LE GRADE DE
DOCTEUR
SPÉCIALITÉ : Cognitique
L’anticipation et sa représentation dans les interfaces homme-système en aéronautique :
une approche d’ingénierie cognitique
Directeur de recherche : Pr. Bruno Vallespir/D. Pierre-Alexandre Favier
Soutenue le : 18/09/2013
Devant la commission d’examen formée de : M. Régis MOLLARD Professeur, Université Paris V Rapporteur
M. Julien CEGARRA MCU HDR, UFR Champollion Albi Rapporteur
M. Thierry BELLET CR, IFSTTAR Examinateur
M. Jean-Philippe DOMENGER Professeur, Université Bordeaux 1 Examinateur
M. Bernard CLAVERIE Professeur, IPB Examinateur
M. Bruno VALLESPIR Professeur, Université Bordeaux 1 Directeur de thèse
M. Pierre-Alexandre FAVIER MCU, IPB Co-directeur de thèse
M. Sylvain HOURLIER Docteur en médecine, Thales Avionics Co-directeur industriel
M. Pierre GAUD Pilote de ligne, Air France Membre invité


A Papa, A partir d’ici je marcherai dans mes propres traces.
A Maman et Ines
A Koliane

Sami LINI - 2013 1
Résumé
L’aéronautique civile commerciale poursuit l’objectif du déplacement de biens ou de personnes, par les airs, en maintenant un niveau optimal de sécurité. Depuis plus de trente ans, en dépit de cadres normatifs de plus en plus stricts et d’automatismes de plus en plus performants, le rapport entre performance visée et risque encouru ne progresse plus.
Le facteur humain constitue un levier d’action majeur pour franchir ce plancher de verre. Dans le cadre contraint de l’aéronautique, la conception d’outils visant à assister la cognition des pilotes est ainsi une direction d’avenir. L’anticipation a été identifiée comme un processus central dans la gestion des ressources cognitives. Dans une démarche de cognitique, nous avons ainsi entrepris la conception d’un outil d’aide à l’anticipation en impliquant des pilotes à chaque étape des développements.
D’une analyse de l’activité sur la base d’enregistrements en cockpit et d’entretiens, nous avons construit un modèle de l’activité réelle des pilotes lors de la descente et l’approche sur l’aéroport de Rio de Janeiro. L’étude bibliographique mit en lumière des points critiques relevant de l’anticipation et nécessitant une expérimentation préliminaire. Les résultats expérimentaux conciliés à nos hypothèses de compréhension de l’anticipation achevèrent le cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation. Un algorithme de planification dynamique exploitant notre modèle de l’activité fut conçu et implémenté au sein d’ASAP (Anticipation Support for Aeronautical Planning) le démonstrateur de concept industriel de Thales Avionics. 36 pilotes civils commerciaux participèrent enfin à son évaluation en simulateur.
Mots-clés : Anticipation, Interfaces Homme-Système, Ingénierie Cognitique, Aéronautique civile, Gestion des connaissances, Algorithme de planification dynamique, Conception et évaluation centrée utilisateurs

Sami LINI - 2013 2
The anticipation process and its representation in human-systems interfaces in the context of civil aviation: a cognitics
engineering approach
Abstract Civil aviation pursues the objective of moving people or goods through the air with an
optimal level of safety. For more than thirty years, despite a stricter and stricter regulatory framework and highly reliable automation, the ratio between performance and acceptable risk is not improving anymore.
Human factors are a major action lever to break this glass floor. In the constrained context of aviation, designing tools aiming at assisting pilots’ cognition is thus a promising direction. Anticipation has been identified central in the process of cognitive resources management. In a human factors engineering approach, we undertook the design of an anticipation support tool involving pilots at each step of the development.
From an activity analysis performed on the basis of in-cockpit recordings and interviews we constructed a model of the actual pilots’ activity during the descent and approach phases on Rio de Janeiro airport. The state of the art highlighted the key elements related to anticipation which could take benefit of a preliminary experiment. Experimental results brought together with our hypotheses about how anticipation works completed the requirements of the functional core of our anticipation support tool. A dynamic planning algorithm was then designed and implemented within ASAP (Anticipation Support for Aeronautical Planning), Thales Avionics’ proof of concept. 36 commercial pilots took part to its evaluation in a simulated environment.
Keywords: Anticipation, Human-System Interactions, Cognitics engineering, Civil aviation, Knowledge management, Dynamic planning algorithm, User-centered design and evaluation
Sami LINI - 2013 3
Remerciements
Je commencerai ces remerciements par un mot pour les membres du jury. Je suis fier et heureux qu’ils aient accepté de me consacrer ce temps et les en remercie très sincèrement. Un mot particulier pour mes rapporteurs, le Pr. Régis Mollard et le D. Julien Cegarra, pour leurs remarques à la fois impartiales et bienveillantes, cette étape en a été grandement allégée, je les en remercie chaleureusement.
J’aimerais ensuite remercier mon directeur de thèse, le Pr. Bruno Vallespir, pour avoir encadré ce travail doctoral en me laissant une grande liberté, et pour avoir su tout rendre plus simple, le cadre ne s’y prêtait pas toujours. Je lui suis également reconnaissant pour ses conseils et remarques avisés que j’ai appris à apprécier et valoriser à mesure de l’avancement de ce travail.
J’aimerais également remercier mon responsable industriel chez Thales Avionics, Sylvain Hourlier, pour ses conseils avisés, son exigence bienveillante et ses relectures ainsi que Denis Bonnet pour m’avoir accordé leur confiance. Un merci également à Xavier Servantie pour avoir été souvent présent lors d’une première année pas toujours aussi simple que je l’aurais voulu.
Je souhaiterais ensuite exprimer mes chaleureux remerciements à Jean-Marc André, directeur de la recherche à l’Ecole Nationale de Cognitique et responsable du groupe Cognitique au Laboratoire de l’Intégration du Matériau au Système, pour m’avoir, dans l’ordre, orienté vers cette opportunité de thèse, accueilli dans son laboratoire, et enfin supporté avec mon mauvais caractère et mes « coups de gueule » plus ou moins opportuns. J’espère que dans la liste il n’en retiendra pas que les derniers éléments. Je souhaiterais également exprimer un mot de remerciement au Pr. Bernard Claverie pour m’avoir accueilli dans son école et ses locaux.
Je crois Pierre-Alexandre Favier suffisamment pudique pour ne pas lui exprimer trop outrancièrement toute ma gratitude à son égard. A la place de mots qui ne voudraient pas dire grand-chose, je lui dirai qu’elle est exponentielle au nombre de cigarettes et de cafés partagés. Je ne pourrais cependant pas passer sous silence combien son encadrement a dépassé ses prérogatives, tant dans le périmètre des activités que dans les relations que nous avons tissées. Je lui en suis infiniment reconnaissant. Il est celui sans qui cette thèse n’aurait sans doute jamais existé.
Je souhaiterais remercier Axel Johnston et Christophe Bey dans le même temps, tant leurs arrivées quasi-simultanées au laboratoire et nos interactions ensemble le rendent naturel. Le retour du premier à Bordeaux a été très agréablement inattendu. L’arrivée du second a commencé par des irruptions impromptues dans mon bureau, pour l’aider à compléter des dossiers, sur des détails qui méritaient 15 minutes, et finissaient par de grands schémas au tableau, retraçant l’histoire de l’aviation ou de l’Arizona et du Nouveau Mexique, 4 passionnantes heures plus tard. Ils ont tous deux tout autant intégralement transformé mon quotidien, un peu triste lors de cette première année. Je ne ferai pas le panégyrique de leurs qualités humaines, j’espère qu’ils savent tout le bien que je pense d’eux.
Il serait cependant tout à fait injuste de ne leur rendre hommage que sur les plans humains et personnels, tant ce manuscrit leur doit. Leur implication et leur dévouement ont été là encore bien au-delà de ce que j’aurais été en droit d’espérer. Tout le mérite du travail mené en particulier lors de l’expérimentation finale revient à leur support et leur participation continus, du premier au dernier jour. Je les en remercie de tout cœur, j’espère qu’en retour j’ai été à la hauteur de ce qu’ils m’ont apporté.
Je veux également adresser un mot de remerciement particulier à Franck Labat et Audrey Traineau pour leur support et leur participation majeure à la partie informatique de ce travail. La vie d’informaticien(ne) n’a pas dû être tous les jours facile dans notre bureau.

Sami LINI - 2013 4
Un mot également pour Jean-Christophe Paris, avec qui, malgré la distance, j’aurai longuement échangé, tant scientifiquement qu’informellement, sur les hauts et les bas de nos travaux de thèse respectifs. Bordeaux et Lyon n’ont jamais paru aussi près, c’était précieux de pouvoir partager cela et je l’en remercie très chaleureusement.
Je souhaiterais ensuite remercier tout particulièrement Pierre Gaud, pour sa disponibilité, sa gentillesse, et tout ce qu’il a apporté à ce travail, ainsi que tous les pilotes commerciaux ou amateurs nous ayant assistés à un moment ou un autre dans notre démarche :
Jean-Michel Bidot, Jean-Louis Barrière, Antoine Amar, Sébastien Polénor, Cécilia Marx, Eric Eyssautier, Raphael Ventura, Laurent Marcel, Jean-François Assante di Cupillo, Dominique Plot, Franck Del Borrello, Philippe Borghini, Oury Diallo, Pascal Roger, Philippe Costeseque, Marc Villeneuve, Jonathan Floquet, Guillaume Genoud, Pierre Huby, Cédric Experton, Philippe Laverne (merci pour la session simu !), Bruno Desenlis, David Grelier, Virginie Castel, Sebastien Fray, Arnaud Muller, Erwan Rouan, Mathieu Emmery, Pascal Floquet, Nicolas Pacros, Didier Cohendet, Jimmy Crifo, Arnaud Kervella, Xavier Devars, Gaetan Siri, Antoine Malauzat, Patrick Verhée, Audrey Lescarret, Yves Danto, Pascal Fouillat, Franck Cazaurang. Un grand merci pour leur gentillesse, leur patience quand tout ne marchait pas comme on l’aurait voulu, leur intérêt spontané à l’égard de notre démarche, et pour toutes les discussions qui ont suivi : la prise en compte du facteur humain mène aussi à de beaux moments humains.
Un merci tout particulier à Jérôme Breuzet pour avoir communiqué aussi largement notre appel à participation. Cet email a transformé ma fin de thèse, je lui en suis extrêmement reconnaissant.
Une pensée particulière pour Véronique Lespinet-Najib, qui m’aura accordé sa confiance pour ses TD, et qui m’aura aidé chaque fois que je l’aurai sollicitée. Je l’en remercie sincèrement.
Un merci à Bruno Baracat pour son expertise et son aide sur la mesure et l’analyse des données cardiaques, je n’aurais pas fait grand-chose sans lui.
Enfin, viennent les remerciements très personnels, ceux qui s’adressent à des gens qui diront ou penseront peut-être qu’ils n’ont rien fait ou n’y sont pas pour grande chose, et sans lesquels les matins auraient parfois été plus compliqués, les épreuves plus difficiles à surmonter ou l’ambition à se dépasser bien moindre, et qui sont également ceux qui auront eu à subir mes bons et surtout mes très mauvais jours.
Ma mère, qui ne me donne jamais moins que tout, pour qui, je l’espère, la lecture de ce manuscrit saura lui procurer la fierté qui compensera un petit peu mes absences (dépassera-t-elle celle qu’elle a connu quand j’ai réparé ma machine à laver ?).
Koliane, mon soutien indéfectible, la douceur de mes jours tristes, chaque jour un peu plus proches.
Ines, ma sœur, pour ses relectures avisées et pour être toujours présente quand j’en ai besoin.
Ma grand-mère, qui sera bien surprise de se voir citée ici : la fierté dans ses yeux est une immense source de motivation.
Géraldine, sans l’aide de laquelle l’expérimentation finale de cette thèse n’aurait jamais connu ce succès.
Enfin, mes oncles Negib et Naceur, j’espère qu’ils trouveront dans ce travail l’héritage que je retrouve en eux.
A eux tous, je leur adresse des remerciements du fond de mon cœur, à hauteur de combien je les aime.
Sami LINI - 2013 5
Sommaire
Résumé ......................................................................................................................................... 1
Abstract ........................................................................................................................................ 2
Remerciements ............................................................................................................................ 3
Sommaire ..................................................................................................................................... 5
Liste des figures ......................................................................................................................... 10
Table des tableaux ..................................................................................................................... 15
Glossaire ..................................................................................................................................... 17
Introduction ............................................................................................................................... 19
De la nécessité d’une approche centrée sur l’Homme ........................................................ 20
Une démarche d’ingénierie cognitique : ingénierie technique et humaine ...................... 22
Organisation de la thèse ........................................................................................................ 24
Chapitre 1. Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro ............................................................................................................................... 27
Introduction ................................................................................................................. 28 1.1
L’activité : cas de la phase de descente sur l’aéroport international de Rio de 1.2Janeiro ....................................................................................................................................... 28
Les acteurs .................................................................................................................... 29 1.3
L’activité ....................................................................................................................... 31 1.4
1.4.1 En amont : le briefing avant-descente ................................................................ 32
1.4.2 Piloter : contrôler l’attitude de l’avion ............................................................... 35
1.4.3 Naviguer : suivre une trajectoire ........................................................................ 38
1.4.4 Communiquer : maintenir la communication avec le sol et le personnel navigant commercial ................................................................................................................... 41
1.4.5 Gérer les systèmes ............................................................................................... 42
Analyse de l’activité ..................................................................................................... 43 1.5
Conclusion .................................................................................................................... 45 1.6
En résumé .............................................................................................................................. 46
Chapitre 2. Etat de l’art autour de l’anticipation .................................................................. 47
Définition ...................................................................................................................... 48 2.1
Le cadre : un environnement dynamique .................................................................. 49 2.2
Gestion des ressources cognitives .............................................................................. 50 2.3
Sami LINI - 2013 6
2.3.1 Modèles de la gestion des ressources ................................................................ 51
2.3.2 Mesure de la charge cognitive ............................................................................. 54
Économie des ressources cognitives .......................................................................... 56 2.4
2.4.1 Schématisation ..................................................................................................... 56
2.4.2 Niveaux de contrôle ............................................................................................. 59
2.4.3 Principe de suffisance .......................................................................................... 61
2.4.4 Anticipation .......................................................................................................... 61
Conscience de la situation ........................................................................................... 62 2.5
2.5.1 Modèle d'Endsley ................................................................................................. 62
2.5.2 Compréhension de la situation ........................................................................... 64
2.5.3 Conscience de la situation et charge cognitive .................................................. 65
Mémoire ........................................................................................................................ 66 2.6
2.6.1 Mémoire de travail ............................................................................................... 66
2.6.2 Mémoire à long terme et mémoire de travail long terme ................................. 67
Gestion du temps ......................................................................................................... 68 2.7
2.7.1 Psychologie du temps .......................................................................................... 69
2.7.2 Temps et contrôle cognitif .................................................................................. 71
2.7.3 Distance de projection au but ............................................................................. 72
Planification.................................................................................................................. 74 2.8
Anticipation .................................................................................................................. 75 2.9
2.9.1 Anticipation et profondeur temporelle .............................................................. 75
2.9.2 Découpage temporel et en strates ...................................................................... 76
2.9.3 Anticipation subsymbolique ............................................................................... 77
2.9.4 Anticipation symbolique ..................................................................................... 77
Conclusion ............................................................................................................... 82 2.10
En résumé .............................................................................................................................. 83
Chapitre 3. Expérimentation préliminaire ............................................................................ 85
Introduction ................................................................................................................. 86 3.1
Hypothèses exploratoires ........................................................................................... 87 3.2
Plan d’expérimentation ............................................................................................... 88 3.3
3.3.1 Guidage ................................................................................................................. 88
3.3.2 Description de la tâche ........................................................................................ 89
3.3.3 Variables dépendantes ........................................................................................ 93
3.3.4 Matériel et participants ....................................................................................... 97
Sami LINI - 2013 7
3.3.5 Déroulement de la passation. .............................................................................. 98
3.3.6 Traitement des données ...................................................................................... 98
Résultats ....................................................................................................................... 98 3.4
3.4.1 Effet du délai de présentation ............................................................................. 99
3.4.2 Corrélation entre la profondeur temporelle choisie par l’utilisateur et les mesures de charge ..................................................................................................................... 101
3.4.3 Effets de l’expertise ............................................................................................ 102
Discussion ................................................................................................................... 105 3.5
Conclusions ................................................................................................................ 109 3.6
En résumé ............................................................................................................................ 110
Chapitre 4. L’anticipation : pistes de réflexion ................................................................... 111
Introduction ............................................................................................................... 112 4.1
Recontextualisation : les éléments-clés ................................................................... 112 4.2
Confrontation des éléments-clés de la littérature à un environnement opérationnel4.3 ..................................................................................................................................... 113
Description du modèle .............................................................................................. 118 4.4
4.4.1 Introduction ....................................................................................................... 118
4.4.2 Niveau 1 : métapolitique ................................................................................... 119
4.4.3 Niveau 2 : politique ............................................................................................ 120
4.4.4 Niveau 3 : mise en œuvre .................................................................................. 120
Conclusion ................................................................................................................. 123 4.5
En résumé ............................................................................................................................ 124
Chapitre 5. Algorithme de planification dynamique .......................................................... 125
Le besoin ..................................................................................................................... 126 5.1
Cahier des charges ..................................................................................................... 126 5.2
Etat de l’art des approches de planification............................................................. 127 5.3
5.3.1 L’approche statique ........................................................................................... 127
5.3.2 L’approche dynamique ...................................................................................... 134
Contribution ............................................................................................................... 138 5.4
5.4.1 Structure des données ....................................................................................... 139
5.4.2 Modèle d’exécution ............................................................................................ 140
5.4.3 Algorithmes de propagation ............................................................................. 141
5.4.4 Algorithmes Q3PM rétrograde et antérograde ................................................ 142
5.4.5 Déroulé complet de l’algorithme et illustration .............................................. 143
Prototype .................................................................................................................... 146 5.5

Sami LINI - 2013 8
Conclusion ................................................................................................................. 148 5.6
En résumé ............................................................................................................................ 148
Chapitre 6. ASAP (Anticipation Support for Aeronautical Planning) ................................ 149
Etat de l’art : les supports d’aide à l’anticipation .................................................... 150 6.1
Présentation d’ASAP .................................................................................................. 151 6.2
6.2.1 Le « task panel » : panneau des tâches à effectuer .......................................... 151
6.2.2 Le « vertical display » : panneau « profil vertical » ......................................... 153
6.2.3 Panneau « cartographie » : map display .......................................................... 155
Conclusion .................................................................................................................. 156 6.3
En résumé ............................................................................................................................ 156
Chapitre 7. Evaluation centrée pilotes ................................................................................ 157
Introduction ............................................................................................................... 158 7.1
Objectifs et hypothèses .............................................................................................. 158 7.2
Plan d’expérimentation ............................................................................................. 158 7.3
7.3.1 Description de la tâche ...................................................................................... 158
7.3.2 Variables dépendantes ...................................................................................... 162
7.3.3 Matériel et participants ..................................................................................... 167
7.3.4 Déroulement de la passation ............................................................................ 169
7.3.5 Traitement des données .................................................................................... 170
Résultats ..................................................................................................................... 170 7.4
7.4.1 Types de données collectées ............................................................................. 170
7.4.2 Note sur les données portant sur l’utilisation d’ASAP .................................... 170
7.4.3 Premier scenario : descente nominale ............................................................. 175
7.4.4 Second scenario : circuit d’attente et dégagement .......................................... 177
Discussion ................................................................................................................... 183 7.5
7.5.1 Premier scénario : descente nominale ............................................................. 183
7.5.2 Second scénario : attente et dégagement ......................................................... 185
Conclusions ................................................................................................................ 186 7.6
En résumé ............................................................................................................................ 187
Chapitre 8. Conclusions, limites et perspectives ................................................................ 189
A propos du cadre expérimental .............................................................................. 190 8.1
A propos de la démarche d’ingénierie cognitique ................................................... 191 8.2
A propos du cœur fonctionnel d’ASAP ..................................................................... 192 8.3
Valorisation scientifique ......................................................................................................... 195
Sami LINI - 2013 9
Conférences internationales à comité de lecture .............................................................. 195
Chapitre d’ouvrage .............................................................................................................. 195
Articles.................................................................................................................................. 195
Brevets .................................................................................................................................. 195
Références ................................................................................................................................ 197
Annexes .................................................................................................................................... 208
Annexe I : Formulaire de Consentement libre, éclairé et exprès (expérimentation préliminaire) ................................................................................................................................... 209
Annexe II : Formulaire d’informations générales (expérimentation préliminaire) ........... 210
Annexe III : Formulaire d’informations personnelles (expérimentation préliminaire) ..... 212
Annexe IV : Détails de l’implémentation de l’algorithme .................................................... 213
Annexe V : Formulaire d’informations générales (expérimentation finale) ...................... 221
Annexe VI : Formulaire d’informations personnelles (expérimentation finale) ................ 223
Annexe VII : Scripts scénarios (expérimentation finale) ..................................................... 224

Sami LINI - 2013 10
Liste des figures
Figure 1 : Taux d’accidents et d’incidents par an (Boeing, 2011) .................................................. 20
Figure 2 : Modèle de l’erreur humaine d’après Reason (1990) ....................................................... 21
Figure 3 : Répartition des incidents et accidents en fonction des phases de vol, en court courrier (Boeing, 2011) ................................................................................................................................................ 29
Figure 4 : Exemple de répartition des tâches entre commandant de bord et officier pilote de ligne et entre pilote en fonction et pilote non en fonction pour un Boeing 747 (Boeing, 2000) ................................................................................................................................................................................................ 30
Figure 5 : Checklists Boeing 747-400 .......................................................................................................... 33
Figure 6 : Carte STAR (Standard Terminal Arrival Route) Air France (septembre 2012) pour l’approche sur l’aéroport de Rio de Janeiro en venant du Nord-Ouest pour un atterrissage en piste 10. ......................................................................................................................................................................... 34
Figure 7 : Cockpit de Boeing 747-400 : le manche est face au pilote, la poignée des gaz entre les deux pilotes..................................................................................................................................................... 35
Figure 8 : Cockpit des Boeing 707 (1959, en haut) et 787 (2011, en bas) .................................. 36
Figure 9 : Ecran de visualisation des paramètres de vol Boeing (Primary Flight Display, PFD) ...................................................................................................................................................................................... 37
Figure 10 : Ecran de visualisation des paramètres de route (Navigation Display, ND) de Boeing 747-400 ............................................................................................................................................................... 38
Figure 11 : Panneau de contrôle (MCDU) de l’ordinateur de bord (Flight Management System) ................................................................................................................................................................................ 39
Figure 12 : Exemple de panneau de guidage (Flight Control Unit ou Mode Control Panel) ................................................................................................................................................................................................ 40
Figure 13 : Système de supervision centralisée de l’avion (ECAM, Electronic Centralized Aircraft Monitoring) Boeing. ....................................................................................................................................... 42
Figure 14 : Séquence des dernières tâches menant à l’atterrissage sur l’aéroport de Rio de Janeiro piste 10. ............................................................................................................................................................... 44
Figure 15 : Extrait de notre graphe des tâches pour l’activité « descente en Boeing 747 sur l’aéroport de Rio de Janeiro » ..................................................................................................................................... 45
Figure 16 : Positionnement relatif des concepts cognitifs liés à l’anticipation dans une dynamique temporelle .................................................................................................................................................. 49
Figure 17 : Gestion des ressources cognitives dans le temps .......................................................... 51
Figure 18 : Théorie de la ressource unique (Kahneman, 1973) ...................................................... 52
Figure 19 : Processus limités par les données et processus limités par les ressources (Norman & Bobrow, 1975) ......................................................................................................................................... 52
Figure 20 : Théorie des ressources multiples (Navon & Gopher, 1979) ..................................... 53
Figure 21 : Modèle 4D (Wickens, 1984) .................................................................................................... 54
Figure 22 : Evolution de la performance en fonction de l’investissement en ressources (Wickens & Hollands, 2000) ....................................................................................................................................... 55
Sami LINI - 2013 11
Figure 23 : Loi de Yerkes & Dodson (1908) ............................................................................................. 55
Figure 24 : Les hiérarchies d'abstraction et de raffinement, d’après Rasmussen (1986) .... 57
Figure 25 : Modèle SRK, d'après Rasmussen (1983) ........................................................................... 60
Figure 26 : Conscience de la situation dans le cadre de la dynamique temporelle ................. 62
Figure 27 : Modèle de la conscience de la situation (Endsley, 1995) ........................................... 63
Figure 28 : Modèle multi-fils, d'après Amalberti (1996) ................................................................... 65
Figure 29 : Corrélation diminution de la charge/conscience de la situation, Wickens (2008) ................................................................................................................................................................................................ 65
Figure 30 : Mémoire dans une perspective de dynamique temporelle ........................................ 66
Figure 31 : Mémoire de travail, Baddeley (1986), présenté dans Gaonac'h & Larigauderie (2000) .................................................................................................................................................................................. 66
Figure 32 : Modèle de Norman & Shallice (1980), simplifié par Baddeley (1986) ................. 67
Figure 33 : Modèle de la mémoire de travail long terme, Ericsson & Kintsch (1995) ........... 68
Figure 34 : Psychologie du temps et dynamique temporelle ........................................................... 69
Figure 35 : Relations possibles (et leurs transposées) entre deux intervalles de temps (Allen & Koomen, 1983) ............................................................................................................................................... 71
Figure 36 : temps et contrôle cognitif, d'après Hollnagel (1998) ................................................... 72
Figure 37 : Charge cognitive fonction de la distance perçue au but et de l'estimation du temps disponible, d'après Hancock & Caird (1993) ......................................................................................... 73
Figure 38 : Incertitude des projections en fonction du temps, d'après Reynolds (2006) .... 73
Figure 39 : Exemple de hiérarchisation dans la planification (d'après Sacerdoti (1977) dans Hoc & Nguyen-Xuan (1987)) ........................................................................................................................... 75
Figure 40 : Modèle hiérarchique de fenêtres temporelles d'anticipation d’après Tanida & Pöppel (2006) ................................................................................................................................................................... 76
Figure 41 : Le changement de perception, en profondeur ou en relief, est possible après environ 3 secondes ......................................................................................................................................................... 77
Figure 42 : Schéma d'un système basique de réafférence dans McFarland & Zayan (2001) d'après von Holst & Mittelstaedt (1950) ............................................................................................................... 78
Figure 43 : Modèle de l’Architecture Cognitive de Contrôle Dynamique (Hoc & Amalberti, 1994) .................................................................................................................................................................................... 79
Figure 44 : Modèle ECOM (Hollnagel, 2003) ........................................................................................... 80
Figure 45 : Dimension cognitive du modèle de contrôle dynamique de situation (Hoc & Amalberti, 2007). ............................................................................................................................................................ 81
Figure 46 : Exemple de création du guidage « radar » à partir du graphe des tâches issu de l’analyse de l’activité ...................................................................................................................................................... 89
Figure 47 : (a) Présentation du simulateur : le sujet est installé sur le siège de droite, l’interface se situe à sa gauche sur l’écran supérieur ; (b) Cockpit de B-747 simulé par le logiciel X-Plane 9, présenté sur l’écran face au sujet, à droite. .................................................................................... 90
Figure 48 : Interface de présentation des tâches (ici pour la modalité personnalisée, en haut à droite le curseur de réglage de taille de la fenêtre, à gauche la ligne repère).......................... 91
Figure 49 : Interface réelle de présentation des tâches au lancement du scénario : modalités 24 minutes (haut) et 30 secondes (bas) ........................................................................................... 92

Sami LINI - 2013 12
Figure 50 : Tracé ECG : la première déflexion négative est l’onde Q (activation septale), la première déflexion positive est l’onde R (activation pariétale du ventricule gauche), la seconde déflexion négative est l’onde S (activation basale du ventricule gauche) (Kramer, 1990) .............. 93
Figure 51 : Positionnement des électrodes suivant le triangle d’Einthoven.............................. 94
Figure 52 : Tachogramme : en abscisse, le temps (en minutes), en ordonnée, l’intervalle R-R inter-battements (en secondes). ........................................................................................................................... 94
Figure 53 : Logiciel Tholos (Cegarra & Chevalier, 2008) pour la présentation du NASA-TLX ................................................................................................................................................................................................ 96
Figure 54: Saïtek Pro Flight Switch Panel and Saïtek Flight Multi Panel ..................................... 97
Figure 55 : Biopac MP36 : appareillage pour l’enregistrement de mesures cardiaques ...... 97
Figure 56 : Variabilité du rythme cardiaque (moyenne des sommes des composantes hautes et basses fréquences, et écart-types) en fonction de la modalité de présentation de l’information sur l’ensemble des sujets. (* : différence significative entre profondeur temporelle de présentation comparées deux à deux, p<.05) ............................................................................................... 99
Figure 57 : Moyenne de NTLX (sur 100) et écart-types en fonction de la modalité de présentation de l’information sur l’ensemble des sujets ............................................................................. 100
Figure 58 : Moyenne des temps de réaction (en secondes) et écart-types en fonction de la modalité de présentation de l’information sur l’ensemble des sujets (** : p<0,01)......................... 101
Figure 59 : Variabilité du rythme cardiaque (moyenne des sommes des composantes hautes et basses fréquences, et écart-types) en fonction de la modalité de présentation (D0.5, D24, DPerso) de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts) ............................................................................................................................................................................ 103
Figure 60 : Moyenne de NTLX (sur 100) et écart-types en fonction de la modalité de présentation de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts) ............................................................................................................................................................................ 103
Figure 61 : Moyenne de RT (en secondes) et écart-types en fonction de la modalité de présentation de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts) ............................................................................................................................................................................ 104
Figure 62 : Corrélation disponibilité des données/charge cognitive pour un processus limité par les données ................................................................................................................................................ 106
Figure 63 : Relation entre niveau de contrôle et nombre d’éléments affichés à l’écran (6 éléments est la valeur vers laquelle convergent les sujets de notre étude) ........................................ 108
Figure 64 : Exemple d’un raid (COMAO) issu de l’interface de contrôle d’un exercice militaire de grande ampleur : gestion stratégique d’ensemble (en haut) et gestion tactique et déconfliction inter-patrouille en fonction des paramètres de vol (en bas) ......................................... 115
Figure 65: Structure en trois couches du modèle de l’anticipation ........................................... 119
Figure 66: Processus d’activation/inhibition ..................................................................................... 121
Figure 67: Projection en fonction de la distance à l’objectif et de la sensibilité. ................... 122
Figure 68 : Le graphe de planification alterne les niveaux d’états (cercles) et d’actions. Les lignes grises horizontales entre niveaux d’états indiquent l’absence de changement d’état qui ouvre la possibilité qu’un état n’ayant pas été modifié persiste jusqu’au niveau suivant. ............ 129
Figure 69 : Graphe de planification pour le problème « organisation d’un dîner romantique surprise » étendu au niveau 2. ...................................................................................................... 131

Sami LINI - 2013 13
Figure 70 : Graphe de planification pour le problème « organisation d’un dîner romantique surprise » étendu au niveau 4. Même si aucune nouvelle action n’est disponible en ajoutant ce niveau, les états dîner et cadeau peuvent bénéficier d’une absence de changement d’état, cela ouvre donc des possibilités supplémentaires de résolution. .............................................. 132
Figure 71 : L’un des quatre plans résolvant le problème. Les actions en noir sont exécutées, celles en gris non. ................................................................................................................................... 132
Figure 72 : Ordonnancement des tâches et des étapes. Les étapes sont les nœuds, les tâches sont les arcs entre deux nœuds................................................................................................................ 133
Figure 73 : Réseau de PERT, dates au plus tôt et au plus tard. ..................................................... 134
Figure 74 : Problème du robot et de la barre : a) séquence téléoréactive ; b) configuration du monde ......................................................................................................................................................................... 137
Figure 75 : Les quatre pas pour franchir une transition ................................................................. 140
Figure 76 : Numérotation des étapes pour un parcours en largeur (de 1 à 7) ...................... 141
Figure 77 : Exemple d’algorithme de parcours en largeur d’un graphe (source Wikipédia) ............................................................................................................................................................................................. 142
Figure 78: Graphe réel des tâches............................................................................................................. 143
Figure 79 : Déroulé de l’algorithme sur un exemple simple .......................................................... 143
Figure 80 : Panneau temporel du prototype statique de validation de l’algorithme de propagation : 17h00 et altitude égale à 1000ft pour l’image de gauche, 17h10 et altitude égale à 2000ft pour l’image de droite ................................................................................................................................. 146
Figure 81: Panneau altitude du prototype statique de validation de l’algorithme de propagation .................................................................................................................................................................... 147
Figure 82 : Panneau de présentation des tâches à effectuer avec les marges temporelles de faisabilité ......................................................................................................................................................................... 152
Figure 83 : Panneau de présentation de la trajectoire verticale avec les contraintes et marges de faisabilité (au-dessus des points de passage) ............................................................................ 153
Figure 84 : Procédé d’affichage séquentiel de représentations bidimensionnelles d’une trajectoire verticale et d’une trajectoire latérale associées à une trajectoire tridimensionnelle 154
Figure 85 : Panneau cartographiques de l’interface ASAP ............................................................. 155
Figure 86 : Vue globale du simulateur. ................................................................................................... 159
Figure 87 : Cartes d’approche du scénario 1. En rouge la trajectoire à suivre. Ce scénario est une descente sans incident. .............................................................................................................................. 161
Figure 88 : Cartes d’approche du scénario 2. En rouge la trajectoire à suivre. Le second scénario est une descente présentant un circuit d’attente. ........................................................................ 162
Figure 89 : Structures neuronales et voies contrôlant le diamètre pupillaire ....................... 164
Figure 90 : Oculomètre portatif Tobii Glasses, son boitier d’acquisition et les marqueurs infrarouges (d’après Tobii Glasses Eye Tracker User Manual). ................................................................ 165
Figure 91 : Procédure de calibration (d’après Tobii Glasses Eye Tracker User Manual). . 166
Figure 92 : Vue depuis le siège du pilote ............................................................................................... 167
Figure 93 : Interface de réponse au questionnaire 3D-SART et cockpit X-Plane 9 présenté aux pilotes. ...................................................................................................................................................................... 168
Figure 94 : Exemples de vues égocentrée (à gauche, le point rouge représente la position de la vision centrale) et allocentrée (à droite) ................................................................................................. 171
Sami LINI - 2013 14
Figure 95 : Position et coordonnées du regard et des marqueurs infrarouges sur une image issue de la caméra de l’oculomètre (référentiel égocentré) ....................................................................... 172
Figure 96 : Positionnement des marqueurs infrarouges dans le simulateur ......................... 172
Figure 97 : Cartes de chaleur des écrans de présentation du questionnaire 3D-SART et du cockpit .............................................................................................................................................................................. 173
Figure 98 : Cartes de chaleur incorporées dans la vue globale : les cartes de chaleur, justes à une échelle locale, laissent ici à penser que les deux écrans ont été tout autant regardés, ce qui est faux.............................................................................................................................................................................. 174
Figure 99: Moyennes et écarts-types des scores globaux au questionnaire 3D-SART en fonction des groupes pour le scénario 1. (ASAP vs NOASAP, * : différences significatives, p<0,05) ............................................................................................................................................................................................. 175
Figure 100 : Moyennes et écarts-types des scores globaux au NASA-TLX (/100) en fonction des groupes pour le scenario 2 (ASAP vs NOASAP, * : différences significatives, p<0,05) ............ 178
Figure 101: Moyennes et écarts-types du temps de réaction (en ms) à la dimension “supply” de la 3D-SART en fonction des groupes (ASAP vs NOASAP) pour le scenario 2 .............. 179
Figure 102: Moyennes et écarts-types du rapport de dilatation pupillaire (en pourcentage du diamètre pupillaire moyen lors de la phase de calibration) en fonction des groupes pour le scénario 2 (ASAP vs NOASAP, * : différences significatives, p<0,05) ..................................................... 180
Figure 103: Moyennes et écarts-types du temps nécessaire (en mm:ss) à la prise de décision en fonction des groups (ASAP vs NOASAP, * : différences significatives, p<0,05).......... 181
Figure 104 : Moyennes et écarts-types du temps de prise de décision ramené au temps de tours d’attente en fonction des groupes (ASAP vs NOASAP, ** : différences très significatives, p<0,01) ............................................................................................................................................................................. 182
Figure 105: Moyenne et écarts-types des notations des solutions de dégagement par un jury en fonction des groupes (ASAP vs NOASAP, * : différences significatives, p<0,05) ................ 183

Sami LINI - 2013 15
Table des tableaux
Tableau 1 : Données descriptives des sujets ayant pris part à l’expérimentation retenus .. 98
Tableau 2 : Moyenne et écart-type pour HRV (somme des composantes haute et basse fréquences exprimée en Hz/s²) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de sujets ......................................................................................................................................................... 99
Tableau 3 : Moyenne et écart-type pour NTLX (en score sur 100) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de sujets ................................................... 100
Tableau 4 : Moyenne et écart-type pour RT (en secondes) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de sujets ............................................................................ 101
Tableau 5 : Moyenne et écart-type des profondeurs temporelles choisies (DPrés en minute) du nombre d’interactions avec le curseur de définition de taille de la fenêtre (nbInter). n Nombre de sujets ......................................................................................................................................................... 102
Tableau 6 : U de Mann-Whitney et p-value pour la comparaison naïfs/experts pour la variable HRV .................................................................................................................................................................. 102
Tableau 7 : U de Mann-Whitney et p-value pour la comparaison naïfs/experts pour la variable NTLX ................................................................................................................................................................ 103
Tableau 8 : Moyenne et écart-type des profondeurs temporelles choisies (DPrés en minute) par les experts, les naïfs et la population totale. n = Nombre de sujets ............................... 104
Tableau 9 : Moyenne et écart-type du nombre d’interactions avec le curseur de définition de taille de la fenêtre (nbInter) par les experts, les naïfs et la population totale. n = Nombre de sujets ................................................................................................................................................................................. 105
Tableau 10 : Aperçu de la grille d'analyse de la première série d'entretiens avec le chef de mission ............................................................................................................................................................................. 113
Tableau 10 : Répartition en âge et expérience suivant les groupes ASAP/NOASAP et NOASAP/ASAP (moyennes et écarts-types) ..................................................................................................... 169
Tableau 11 : Moyenne et écart-type pour les scores globaux au questionnaire 3D-SART en fonction en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets ..................................... 175
Tableau 12 : Résultats de l’analyse de la variance à mesures répétées des scores au questionnaire 3D-SART (3DSD/3DSS/3DSU) le long du scénario en fonction des groupes. ....... 176
Tableau 13 : Résultats de l’analyse de la variance à mesures répétées des temps de réaction au questionnaire 3D-SART (3DSDTime/3DSSTime/3DSUTime) le long du scénario en fonction des groupes. ................................................................................................................................................. 176
Tableau 14 : Résultats de l’analyse de la variance à mesures répétées des scores au questionnaire 3D-SART (3DSO/3DSD/3DSS/3DSU) le long du scénario en fonction des groupes. ............................................................................................................................................................................................. 177
Tableau 15 : Moyenne et écart-type pour les scores globaux au NASA-TLX en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets ........................................................................................ 178
Tableau 16 : Moyenne et écart-type pour les temps de réaction (en ms) à la dimension « supply » de la 3D-SART en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets .... 179

Sami LINI - 2013 16
Tableau 17 : Moyenne et écart-type pour le ratio de dilatation pupillaire (en % de la moyenne du diamètre pupillaire de la phase de calibration) en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets ............................................................................................................................. 180
Tableau 18 : Moyenne et écart-type pour les temps de prise de décision de dégagement en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets ............................................................. 181
Tableau 19 : Moyenne et écart-type pour les temps de prise de décision ramenés aux temps de tours d’attente en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets .... 182
Tableau 20 : Moyenne et écart-type pour les scores des évaluations des solutions de dégagement en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets ............................. 183

Sami LINI - 2013 17
Glossaire
Airmanship : Mise en œuvre des connaissances, compétences et expériences aéronautiques favorisant des opérations aériennes sûres et efficientes ; elle est acquise par l’expérience et des connaissances initiales
Anticipation Support for Aeronautical Planning : voir ASAP
ASAP (Anticipation Support for Aeronautical Planning) : Démonstrateur de concept industriel développé par Thales Avionics
Checklist : Liste de vérification des tâches réalisées pour valider une procédure ou une phase de vol.
Commandant de bord : Pilote légalement en charge de l’aéronef et de la prise des décisions finales. L’expertise et l’ancienneté permettent aux pilotes d’accéder à cette qualification
Crew Resource Management : voir CRM
CRM (Crew Resource Management) : Gestion efficace des ressources dans le cockpit ; l’objectif premier est la synergie d’équipe, mais participe également à l’amélioration de la gestion des risques, des pratiques et de la culture professionnelle liée à la sécurité
Décrochage : Phénomène aéronautique se produisant quand l’aéronef perd brusquement sa portance et tombe alors comme une pierre. Ce phénomène relève d’une incidence trop importante entre la direction du vent relatif et la surface des ailes et est favorisé par une faible vitesse.
Dégagement : Alternative en cas d’impossibilité d’atterrissage à destination
Déroutement : Terrain de secours accessible en route
Estimated Time of Arrival : voir ETA
ETA (Estimated Time of Arrival) : Heure estimée d’arrivée à destination (à l’aéroport ou au stand)
Hierarchical Task Analysis : voir HTA
HTA (Hierarchical Task Analysis) : Analyse hiérarchisée de la tâche, méthodologie d’étude et de modélisation de l’activité
Instrument Landing System : voir ILS
ILS (Instrument Landing System) : Système d’atterrissage aux instruments reposant sur des moyens de radiocommunication et consistant en un guidage spatial de l’aéronef de précision, permettant un atterrissage en conditions météorologiques très dégradées.
GLIDE :Composante verticale du guidage de l’aéronef indiquant une pente idéale vers l’aéroport de destination.
Navigation Display : voir ND
ND (Navigation Display) : Ecran présentant le plan horizontal de navigation, typiquement de type cartographique
Officier Pilote de Ligne : voir OPL
OPL (Officier Pilote de Ligne, dit copilote) : Titre donné au pilote assistant le commandant de bord.
PF (Pilot Flying) : Nom donné au pilote chargé du pilotage et de la navigation de l’aéronef

Sami LINI - 2013 18
PFD (Primary Flight Display) : Ecran de visualisation des instruments premiers nécessaires au vol
Pilot Flying : voir PF
Pilot Monitoring : voir PM
Pilot Non Flying : voir PNF
PM (Pilot Monitoring) : Nom donné au pilote chargé de la surveillance des systèmes et d’assister le PF
PNF (Pilot Non Flying) : Ancien nom donné au PM
Portance : En aérodynamique, force s’opposant au poids de l’avion.
Primary Flight Display : voir PFD
Remise de gaz : Manœuvre consistant à interrompre l’atterrissage ou la phase d’approche
Standard Terminal Arrival Route : voir STAR
STAR (Standard Terminal Arrival Route) : Trajectoire à suivre à l’arrivée sur un aéroport, représentée sur les cartes par la projection de la trajectoire et les altitudes de survol.
Stress test : Forme d’évaluation et de tests intenses et minutieux visant à déterminer la stabilité d’un système ou d’une entité
TEM (Threat & Error Management) : Méthodologie d’analyse de la situation et de prise de décision collaborative d’équipage consistant à identifier les menaces, les moyens d’y répondre et les actions à entreprendre.
Threat & Error Management : voir TEM
Trainée : En aérodynamique, force qui s’oppose à l’avancement de l’avion.
Volets : Dispositifs permettant d’augmenter la portance de l’aéronef au détriment de la trainée.
Waypoint : Point de passage sur la route suivie aidant la navigation
Sami LINI - 2013 19
Introduction
Introduction
De la nécessité d’une approche centrée
sur l’Homme
Sami LINI - 2013 20
De la nécessité d’une approche centrée sur l’Homme L’objectif du transport aérien est le déplacement de biens ou de personnes, d’un point A à
un point B, par la voie aérienne et avec un niveau de sécurité optimal. A cette fin, un ensemble de moyens matériels et de réglementations est mis en place pour permettre aux acteurs impliqués de parvenir à cet objectif. Ces acteurs sont multiples : depuis les pilotes, en passant par les compagnies aériennes, les contrôleurs aériens, le personnel au sol et le personnel navigant commercial, jusqu’aux passagers eux-mêmes : tous collaborent pour une amélioration permanente de la sécurité aérienne.
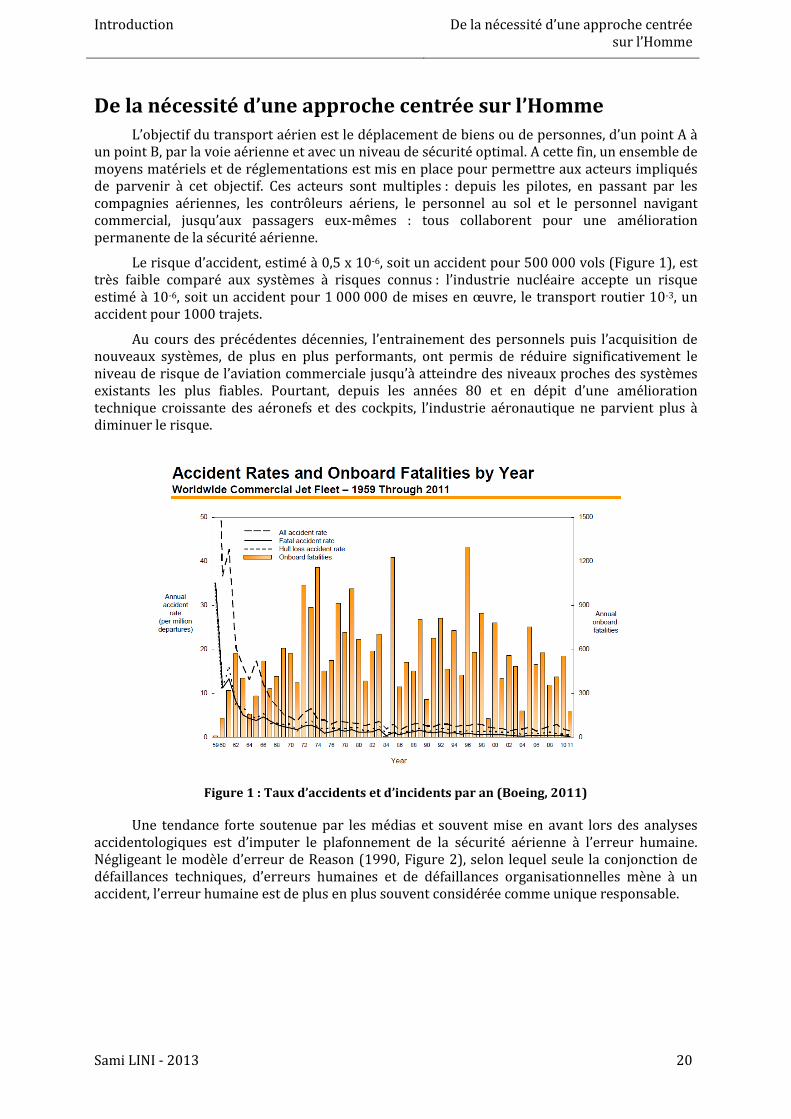
Le risque d’accident, estimé à 0,5 x 10-6, soit un accident pour 500 000 vols (Figure 1), est très faible comparé aux systèmes à risques connus : l’industrie nucléaire accepte un risque estimé à 10-6, soit un accident pour 1 000 000 de mises en œuvre, le transport routier 10-3, un accident pour 1000 trajets.
Au cours des précédentes décennies, l’entrainement des personnels puis l’acquisition de nouveaux systèmes, de plus en plus performants, ont permis de réduire significativement le niveau de risque de l’aviation commerciale jusqu’à atteindre des niveaux proches des systèmes existants les plus fiables. Pourtant, depuis les années 80 et en dépit d’une amélioration technique croissante des aéronefs et des cockpits, l’industrie aéronautique ne parvient plus à diminuer le risque.
Figure 1 : Taux d’accidents et d’incidents par an (Boeing, 2011)
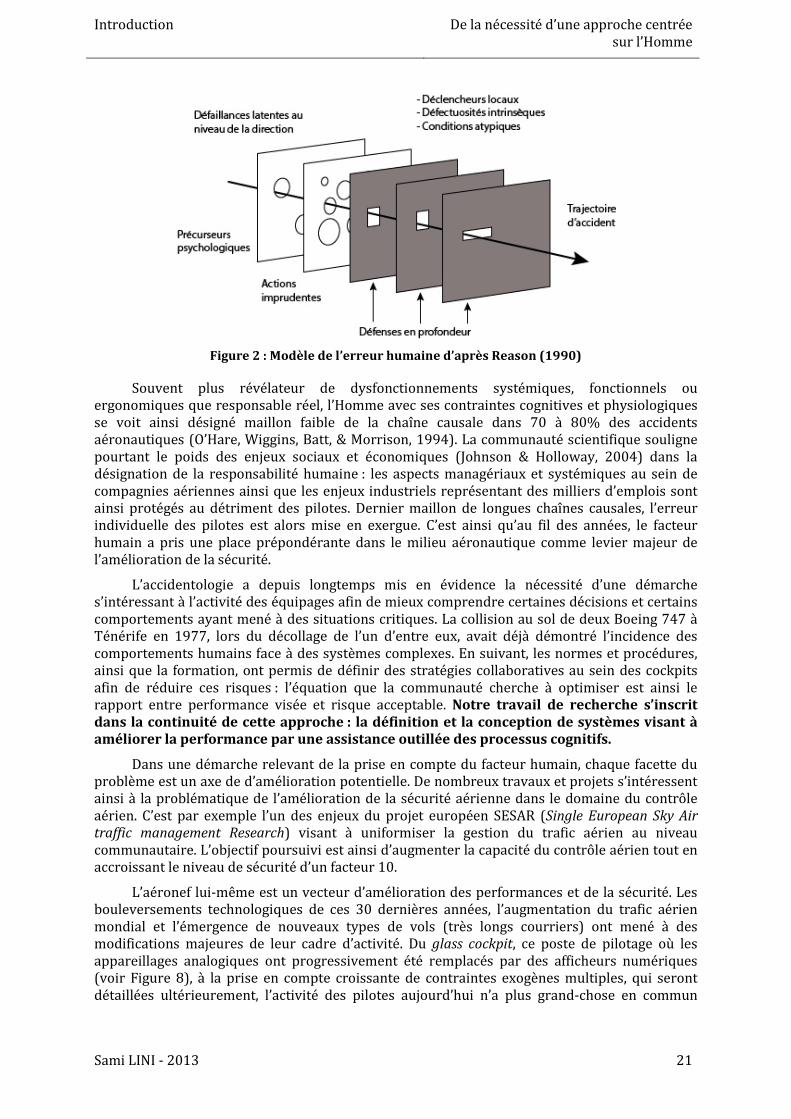
Une tendance forte soutenue par les médias et souvent mise en avant lors des analyses accidentologiques est d’imputer le plafonnement de la sécurité aérienne à l’erreur humaine. Négligeant le modèle d’erreur de Reason (1990, Figure 2), selon lequel seule la conjonction de défaillances techniques, d’erreurs humaines et de défaillances organisationnelles mène à un accident, l’erreur humaine est de plus en plus souvent considérée comme unique responsable.
Introduction
De la nécessité d’une approche centrée
sur l’Homme
Sami LINI - 2013 21
Figure 2 : Modèle de l’erreur humaine d’après Reason (1990)
Souvent plus révélateur de dysfonctionnements systémiques, fonctionnels ou ergonomiques que responsable réel, l’Homme avec ses contraintes cognitives et physiologiques se voit ainsi désigné maillon faible de la chaîne causale dans 70 à 80% des accidents aéronautiques (O’Hare, Wiggins, Batt, & Morrison, 1994). La communauté scientifique souligne pourtant le poids des enjeux sociaux et économiques (Johnson & Holloway, 2004) dans la désignation de la responsabilité humaine : les aspects managériaux et systémiques au sein de compagnies aériennes ainsi que les enjeux industriels représentant des milliers d’emplois sont ainsi protégés au détriment des pilotes. Dernier maillon de longues chaînes causales, l’erreur individuelle des pilotes est alors mise en exergue. C’est ainsi qu’au fil des années, le facteur humain a pris une place prépondérante dans le milieu aéronautique comme levier majeur de l’amélioration de la sécurité.
L’accidentologie a depuis longtemps mis en évidence la nécessité d’une démarche s’intéressant à l’activité des équipages afin de mieux comprendre certaines décisions et certains comportements ayant mené à des situations critiques. La collision au sol de deux Boeing 747 à Ténérife en 1977, lors du décollage de l’un d’entre eux, avait déjà démontré l’incidence des comportements humains face à des systèmes complexes. En suivant, les normes et procédures, ainsi que la formation, ont permis de définir des stratégies collaboratives au sein des cockpits afin de réduire ces risques : l’équation que la communauté cherche à optimiser est ainsi le rapport entre performance visée et risque acceptable. Notre travail de recherche s’inscrit dans la continuité de cette approche : la définition et la conception de systèmes visant à améliorer la performance par une assistance outillée des processus cognitifs.
Dans une démarche relevant de la prise en compte du facteur humain, chaque facette du problème est un axe de d’amélioration potentielle. De nombreux travaux et projets s’intéressent ainsi à la problématique de l’amélioration de la sécurité aérienne dans le domaine du contrôle aérien. C’est par exemple l’un des enjeux du projet européen SESAR (Single European Sky Air traffic management Research) visant à uniformiser la gestion du trafic aérien au niveau communautaire. L’objectif poursuivi est ainsi d’augmenter la capacité du contrôle aérien tout en accroissant le niveau de sécurité d’un facteur 10.
L’aéronef lui-même est un vecteur d’amélioration des performances et de la sécurité. Les bouleversements technologiques de ces 30 dernières années, l’augmentation du trafic aérien mondial et l’émergence de nouveaux types de vols (très longs courriers) ont mené à des modifications majeures de leur cadre d’activité. Du glass cockpit, ce poste de pilotage où les appareillages analogiques ont progressivement été remplacés par des afficheurs numériques (voir Figure 8), à la prise en compte croissante de contraintes exogènes multiples, qui seront détaillées ultérieurement, l’activité des pilotes aujourd’hui n’a plus grand-chose en commun

Introduction
Une démarche d’ingénierie cognitique :
ingénierie technique et humaine
Sami LINI - 2013 22
avec celle des frères Wright en 1903. La prise en compte de ce contexte nouveau et évolutif est un impératif pour la réussite de notre démarche de conception.
Dans le cadre de ce travail financé par Thales Avionics, une autre approche est ainsi défendue : l’amélioration de la performance en collaboration étroite avec des pilotes, positionnés au centre des boucles de conception puis de décision en vol. Cette approche constitue une démarche de conception anthropocentrée d’un outil augmentant leur cognition en tant qu’acteurs premiers de leur situation au sein du cockpit.
Une démarche d’ingénierie cognitique : ingénierie technique et humaine
Une critique récurrente provenant de la communauté des pilotes concerne le fait que les cockpits sont de plus en plus conçus par des ingénieurs pour des ingénieurs et non pour des pilotes. La normalisation et les contraintes de certification dirigent la démarche d’ingénierie dans un but essentiel de diminution du risque au détriment de l’activité réelle des équipages et de leur performance. Cette approche visant à concevoir les systèmes techniques et à en offrir l’interaction aux utilisateurs souffre ainsi du manque d’adéquation aux besoins et usages des pilotes.
Pour autant, la démarche inverse visant à mettre exclusivement l’utilisateur au centre de la boucle de conception est également vivement contestée par les concepteurs. Les démarches ergonomiques mèneraient ainsi bien souvent à des solutions idéales pour les usagers mais impossibles à mettre en œuvre techniquement ou dans les délais impartis. Un autre argument tend également à mettre en avant le fait que, comme les exemples de l’iPod et de l’iPhone l’auraient bien montré, les véritables ruptures dans les usages seraient survenues quand les utilisateurs ont été surpris. Steve Jobs disait à ce propos « Bien souvent, les gens ne savent pas ce qu'ils veulent avant qu'on le leur montre ».
Ces deux points de vue ne sont pourtant pas incompatibles, ce que nous illustrerons au travers de ce manuscrit. L’ingénierie cognitive, sous-ensemble de l’ingénierie humaine, vise à prendre en compte les contraintes ontologiques de la cognition humaine pour les intégrer et fonder la conception de systèmes. Le courant anglo-saxon du cognitive engineering est, lui, défini par l’International Ergonomics Association de la manière suivante : « le cognitive engineering s’intéresse aux processus mentaux, tels que la perception, la mémoire, le raisonnement et la réponse motrice, comme ayant une influence sur les interactions entre humains et avec d’autres éléments d’un système. Les thématiques de la charge mentale, de la prise de décision, de la performance experte, des interactions homme-machine, de la fiabilité humaine, du stress au travail et de la formation relèvent du cognitive engineering, car ils peuvent relever de la conception homme système »1.
Il s’agit en cela d’une démarche qui non seulement ne s’oppose pas à l’ingénierie classique, laquelle met la technologie au centre de sa réflexion, mais la complète de contraintes supplémentaires poursuivant le même objectif de concevoir le produit répondant le mieux possible au cahier des charges fourni.
Ce travail s’inscrit dans le champ de la Cognitique qui se positionne à la croisée des deux mondes. Jean-Michel Truong la définit comme « la discipline scientifique et pratique technique, branche de l'informatique, qui a pour objet l'acquisition et la représentation formelle des connaissances et des modes de raisonnement, en vue de leur simulation à l'aide d'ordinateurs » (Claverie, 2005). Une autre définition citée par Carrilho (2012) illustre mieux encore notre approche : « la science du traitement de la connaissance ; ensemble des méthodes et techniques visant à adapter la technologie aux capacités, limites, et préférences humaines ». Nous nous situerons donc à l’intersection de l’ingénierie technique et de l’ingénierie cognitive, dans
1 Source http://en.wikipedia.org/wiki/Cognitive_engineering

Introduction
Une démarche d’ingénierie cognitique :
ingénierie technique et humaine
Sami LINI - 2013 23
une démarche d’intégration technique des contraintes ontologiques de l’Homme : l’ingénierie cognitique.
La démarche se doit en conséquence d’être holistique. Elle se doit ainsi de considérer les aspects tant techniques qu’humains non comme des solutions en tant que telles mais comme des paramètres de l’équation performance/sécurité/coût. C’est justement cette équation, qui caractérise l’environnement de travail actuel des pilotes, que l’industrie aéronautique et les organismes de régulation cherchent à optimiser.
La performance en aviation commerciale est normée ; la sécurité est quant à elle définie par l’exploitant et correspond à un segment du marché auquel il aspire. Le marché pour sa part contraint les coûts tant en acquisition de matériel qu’en entrainement pour les hommes. A ce cadre s’ajoute le fait que les dernières décennies ont vu le contexte du transport aérien se complexifier considérablement. Sans que la liste soit exhaustive, les contraintes à prendre en compte par les pilotes sont multiples et pas toujours mutuellement compatibles :
• contraintes sonores aux abords des aéroports pour minimiser l’inconfort des riverains : des fenêtres d’autorisation d’atterrissage sont aujourd’hui définies dans la plupart des grands aéroports mondiaux pour limiter le trafic aérien nocturne nuisant aux riverains ;
• contraintes tant économiques qu’écologiques pour diminuer la consommation de kérosène : afin de limiter les coûts liés à l’augmentation du prix du pétrole, et diminuer l’empreinte écologique du transport aérien, des instructions précises sur les domaines de vol ainsi que sur les configurations aérodynamiques au décollage et à l’atterrissage sont aujourd’hui données aux pilotes ;
• contraintes imposées par les politiques des compagnies : afin d’augmenter la rentabilité, les emplois du temps sont de plus en plus serrés, les retards ont de plus en plus de conséquences économiques pour les compagnies aériennes ;
• contraintes géopolitiques : certains pays pratiquent des autorisations temporaires de survol suivant des couloirs définis, dans d’autres, la situation géopolitique n’autorise pas toujours les situations les moins risquées. Ainsi, l’ampleur des réactions autour de l’atterrissage en urgence d’un Airbus A330 Air France à Damas en pleine crise syrienne (août 2012) est révélateur des pressions extérieures auxquelles les décisions des pilotes sont soumises.
Dans un tel contexte, deux approches sont envisagées afin d’atteindre l’objectif d’une amélioration des performances des pilotes : réduire la complexité des systèmes avec lesquels ceux-ci interagissent ou fournir les moyens d’augmenter les ressources à disposition des équipages. La première option nécessiterait une refonte complète du cockpit tel qu’il existe aujourd’hui. Cette option est donc bien plus coûteuse et hasardeuse que la seconde qui envisage de miser sur l’augmentation des ressources à disposition des équipages.
Plusieurs possibilités s’offrent alors. En tout premier lieu, la sélection doit permettre de retenir les profils en adéquation avec le programme pédagogique (compétences/capacités) visant à atteindre les objectifs de formation requis. L’entrainement a ensuite pour vocation d’approfondir et de pérenniser ces savoirs, rendant possible de meilleures performances à un coût cognitif moindre. Il est rapidement constaté que le rapport coût financier/progression est exponentiel, particulièrement en environnement contraint : quand un pilote est en formation, il ne vole pas pour la compagnie.
D’un point de vue quantitatif, l’augmentation des ressources humaines au sein du cockpit va à contre-courant de l’Histoire aéronautique : nous le présenterons, l’équipage est passé de deux pilotes et un mécanicien (voire plus encore avant) à deux pilotes seulement. Inversement, nous reviendrons également dessus, une augmentation de l’intelligence artificielle au sein des automates mène à sortir les équipages de la boucle de conscience de la situation et de décision.

Introduction
Organisation de la thèse
Sami LINI - 2013 24
Ainsi, la dernière possibilité réside dans une amélioration de l’usage des outils cognitifs naturels pour favoriser une meilleure gestion de la charge cognitive : délégation, distribution dynamique des priorités et anticipation/planification sont ainsi quelques-uns de ces outils. Une limite majeure à la délégation efficace au sein des équipages est la confiance : la procédure seule ne palie pas le manque de confiance entre des acteurs qui n’interagissent qu’une à deux fois par an en équipage constitué et se connaissent trop peu. Cette limite concerne également la délégation à des automates, nous y reviendrons.
Distribution dynamique des priorités et anticipation sont des processus intimement liés : une bonne anticipation aide à une bonne distribution dynamique des priorités qui permet de meilleures prises de décision. L’anticipation, nous le présenterons en détails, permet, elle, de « donner du temps au temps » : en permettant une meilleure gestion distribuée dans le temps des tâches à réaliser, elle permet de dégager de la disponibilité cognitive pour gérer l’imprévu.
C’est en s’inscrivant dans le prolongement de cette réflexion, que Thales Avionics et l’Ecole Nationale Supérieure de Cognitique se sont associées au sein du laboratoire HEAL (Human Engineering for Aerospace Lab.) pour étudier, définir et concevoir un outil permettant d’améliorer la capacité d’anticipation de pilotes. Cela constitue tout l’objet de ce travail de thèse.
L’objectif de ce manuscrit tiendra donc tant à mettre en évidence les résultats collectés et les enseignements tirés de la conception de cet outil qu’à mettre en lumière la démarche de Cognitique mise en œuvre tout au long de ces trois années : une démarche d’ingénierie intégrée et appliquée, à la croisée des disciplines, mêlant facteur humain et informatique, physiologie et traitement du signal, psychologie, statistiques et gestion des connaissances, avec un souci permanent de concilier usages, par une implication rapprochée d’utilisateurs finaux, et faisabilité technique, avec l’impératif industriel d’applicabilité.
Organisation de la thèse Nous entamerons notre propos lors du Chapitre 1 par la présentation du cadre d’activité
en partant d’une analyse générale de ce qui constitue le métier de pilote de ligne en 2013. Les différentes contraintes et catégories d’activités seront ainsi détaillées de sorte à mettre en évidence les axes d’assistance envisageables dans le cadre de notre projet. Les moyens à disposition et leur usage sont présentés afin de fournir une vision globale des problématiques rencontrées dans le cadre du cockpit. Nous mettrons en avant le basculement progressif, induit par l’entrée progressive d’une automatisation massive dans les cockpits et l’augmentation du trafic aérien mondial, d’une activité dirigée par la nécessité de piloter l’aéronef et d’en assurer la navigation à une activité de communication et de supervision de systèmes complexes. Nous présenterons enfin la démarche d’analyse d’activité menée pour modéliser les phases de descente et d’approche sur l’aéroport international de Rio de Janeiro en provenance de Paris à partir de données d’activité.
Ce travail de contextualisation ne saurait suffire en soi dans la démarche d’ingénierie cognitique que nous menons. Le Chapitre 2 sera donc dédié à un état de l’art, particulièrement en psychologie cognitive, se rapportant au processus cognitif « anticipation ». Nous en identifierons les composantes clés et les détaillerons. Au fur et à mesure de la présentation et avec une volonté de ne se fermer à aucun courant de pensée, nous mettrons en évidence les éléments qui serviront à alimenter notre réflexion et le cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation. Nous identifierons également l’absence de modèle dans la littérature traitant précisément de notre problématique de l’anticipation en environnement aéronautique, que nous qualifierons de dynamique. Cette revue de littérature mettra en lumière la nécessité de traiter de la question du compromis cognitif entre performance souhaitée et investissement dans la tâche. Ce point qui sera identifié comme crucial dans notre démarche de conception permettra de poser les hypothèses de notre expérimentation préliminaire.
Introduction
Organisation de la thèse
Sami LINI - 2013 25
Le Chapitre 3 sera en conséquence dédié à la présentation, l’analyse et la discussion des résultats expérimentaux de cette étude préliminaire. Ayant identifié la criticité de la question du compromis entre performance et coût cognitif, nous en établirons le lien à la problématique de la surcharge informationnelle (display clutter). Poursuivant l’objectif de concevoir un support présentant des informations distribuées dans le temps, la question de l’horizon temporel optimal pour une information supportant l’activité sans la grever se posera. Avec la volonté de concevoir une expérimentation permettant la validation des hypothèses posées et du contexte expérimental envisagé pour l’expérimentation finale, nous présenterons notre étude impliquant des pilotes civils et des sujets naïfs de l’aéronautique et se déroulant dans un contexte de simulation aéronautique. Les résultats nous permettront d’observer l’apparition d’un compromis entre quantité d’informations affichées et coût cognitif de cette même information afin d’atteindre un niveau de performance satisfaisant. Les résultats alimenteront tant le cahier des charges du cœur fonctionnel de notre support à l’anticipation que notre compréhension du processus cognitif « anticipation ».
Le Chapitre 4 poursuivra ainsi naturellement l’objectif de poser les bases de ce qui constitue notre hypothèse de compréhension du processus « anticipation ». Après avoir repositionné le contexte en revenant sur les éléments-clés identifiés dans les parties précédentes, nous présenterons un exemple opérationnel centré sur les aspects relevant de l’anticipation issu d’entretiens réalisés avec un pilote de chasse. Le choix d’un exemple issu de l’aéronautique de combat est dicté tant par le niveau de contraintes temporelles et d’exigence en termes de performance et de risque associé. Nous y retrouverons ainsi l’ensemble des éléments attendus et disposerons ainsi d’un socle opérationnel sur lequel construire un ensemble d’hypothèses visant à poser les bases d’une proposition théorique décrivant le fonctionnement cognitif de l’anticipation. A cette fin, et poursuivant l’objectif d’un travail à la croisée des communautés scientifiques, nous puiserons les éléments répondant à notre problématique dans divers champs disciplinaires. La proposition ne saurait être qualifiée de modèle complet en l’état actuel mais nous fournit des éléments de compréhension précieux pour l’élaboration du cahier des charges de notre cœur fonctionnel.
C’est ainsi sur la base du cahier des charges définis que nous débuterons le Chapitre 5. Après être revenu sur chacune des fonctionnalités, nous identifierons que leur implémentation relève d’un problème de planification. Nous procéderons alors à une revue de littérature présentant les principaux courants de résolution de ce problème de planification. Les philosophies et les limites de chacune de ces approches nous permettront de progressivement raffiner notre besoin et de conclure sur la nécessité d’une proposition originale pour pleinement répondre à notre problématique. Nous enchainerons sur la description détaillée de notre proposition et plus spécifiquement sur l’algorithme Q3PM qui en constitue le cœur. Nous en illustrerons le fonctionnement sur un exemple joué issu de données réelles. Enfin, nous présenterons le prototype développé pour tester les modèles et équations. Cette phase de validation réalisée, notre cœur fonctionnel peut être implémenté dans l’outil d’aide à l’anticipation.
Le Chapitre 6 fera ainsi la présentation d’ASAP (Anticipation Support for Aeronautical Planning), l’outil d’aide à l’anticipation développé par Thales Avionics en parallèle des travaux présentés et alimenté par nos résultats de recherche intermédiaires. C’est au sein de cette interface qu’est implémenté notre algorithme, ce qui en constituera le cœur fonctionnel orienté vers les fonctionnalités assistant l’anticipation. Nous présenterons ainsi la philosophie de l’interface et mettrons en avant l’articulation avec notre algorithme et l’apport de ce dernier en termes fonctionnels.
La présentation d’ASAP permettra enfin d’aborder le Chapitre 7 au cours duquel nous reviendrons en détails sur l’évaluation centrée pilotes des fonctionnalités implémentées au sein de l’interface. Revenant sur l’état de l’art présenté dans les parties précédentes, les hypothèses de cette étude viseront à valider tant le cœur fonctionnel développé que la démarche en cognitique menant de front prise en compte des contraintes utilisateurs et implémentation dans
Introduction
Organisation de la thèse
Sami LINI - 2013 26
un processus d’alimentation réciproque. Ainsi, lors de cette évaluation, 36 pilotes commerciaux prendront part à des scenarii réalistes reproduisant des phases de vol réelles impliquant l’utilisation de l’interface ASAP. En nous appuyant sur les conclusions expérimentales tirées de l’évaluation préliminaire, nous mettrons en œuvre un ensemble de mesures de la charge cognitive, de la conscience de la situation et de la performance en termes de prise de décision pour évaluer l’effet de l’interface ASAP. Les résultats significatifs mettront en évidence un effet bénéfique sur les trois variables considérées pour les pilotes dotés de l’interface. Des conclusions expérimentales et des perspectives seront tirées des résultats et des retours opérationnels de la part des pilotes.

Sami LINI - 2013 27
Chapitre 1.
Analyse de l’activité : la phase de
descente sur l’aéroport
international de Rio de Janeiro

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Introduction
Sami LINI - 2013 28
Introduction 1.1La première phase de toute démarche impliquant l’utilisateur final est la définition de son
environnement d’activité. Le métier de pilote de ligne est aujourd’hui bien plus complexe que le simple déplacement d’un point A à un point B en respectant les impératifs normés de sécurité. L’analyse de l’activité réelle de pilotes commerciaux pose ainsi la première pierre de la démarche de conception du cœur fonctionnel de notre support d’aide à l’anticipation.
Nous commencerons ainsi par décrire l’activité effective (Leplat & Hoc, 1983), en nous intéressant plus particulièrement à un cas précis : les phases de descente et d’approche de l’aéroport international de Rio de Janeiro. Nous identifierons les multiples évolutions du métier, conditionnées par l’arrivée progressive d’automatismes de plus en plus performant dans le cockpit. La description détaillée des moyens à disposition de l’équipage dans le cadre du cockpit permettra de mettre en évidence la complexité à combiner l’activité de pilotage telle que l’histoire aéronautique l’a toujours construite et telle qu’elle est prescrite aujourd’hui. Nous présenterons enfin la démarche de capitalisation des connaissances et de modélisation de l’activité, réalisée à partir d’entretiens et d’un enregistrement en vol.
L’activité : cas de la phase de descente sur l’aéroport 1.2international de Rio de Janeiro Un vol se décompose en diverses phases :
• briefing avant vol : les pilotes étudient la mission (trajectoire, météo, état de l’aéronef, déroutement, dégagement2) ;
• mise en route et roulage : l’avion se déplace de son point de stationnement à la piste de décollage ;
• décollage : les pilotes mettent l’avion en accélération puis en rotation jusqu’à ce que l’aéronef quitte la piste ;
• montée : les hypersustentateurs (volets/becs, moyens aérodynamiques permettant de maintenir la portance de l’avion à vitesse réduite) et le train d’atterrissage sont progressivement rentrés et l’avion monte jusqu’à son altitude3 de croisière. Durant cette phase, l’avion suit une trajectoire préétablie ;
• croisière : l’avion vole à altitude quasi-constante et à vitesse4 régulière, il s’agit généralement de la phase la plus longue pour laquelle l’avion est optimisé ;
• descente : l’avion quitte son altitude de croisière et se met en descente vers l’aéroport de destination, les hypersustentateurs sont sortis progressivement. Durant cette phase, l’avion suit une trajectoire préétablie ;
• atterrissage : l’avion s’aligne sur la piste, les hypersustentateurs sont sortis de même que le train d’atterrissage. Si la stabilisation de l’avion est assurée, les pilotes viennent toucher la piste des roues et freinent. Dans le cas contraire, ils accélèrent et remontent pour se représenter face à la piste (remise de gaz).
• roulage retour et coupure : l’avion se déplace vers son point de stationnement pour débarquer les passagers et les pilotes réalisent la coupure des réacteurs.
• débriefing après vol : les pilotes font le bilan du vol (réalisation du vol, état de l’aéronef, météo, consommation de kérosène…)
2 Voir glossaire 3 La norme aéronautique veut que l’altitude soit exprimée en pieds (feet, ft). Cette unité sera utilisée
tout le long de ce travail. 4 La vitesse est, elle, exprimée en nœuds (knots, kts). De la même façon, toutes les vitesses seront
exprimées dans cette unité.
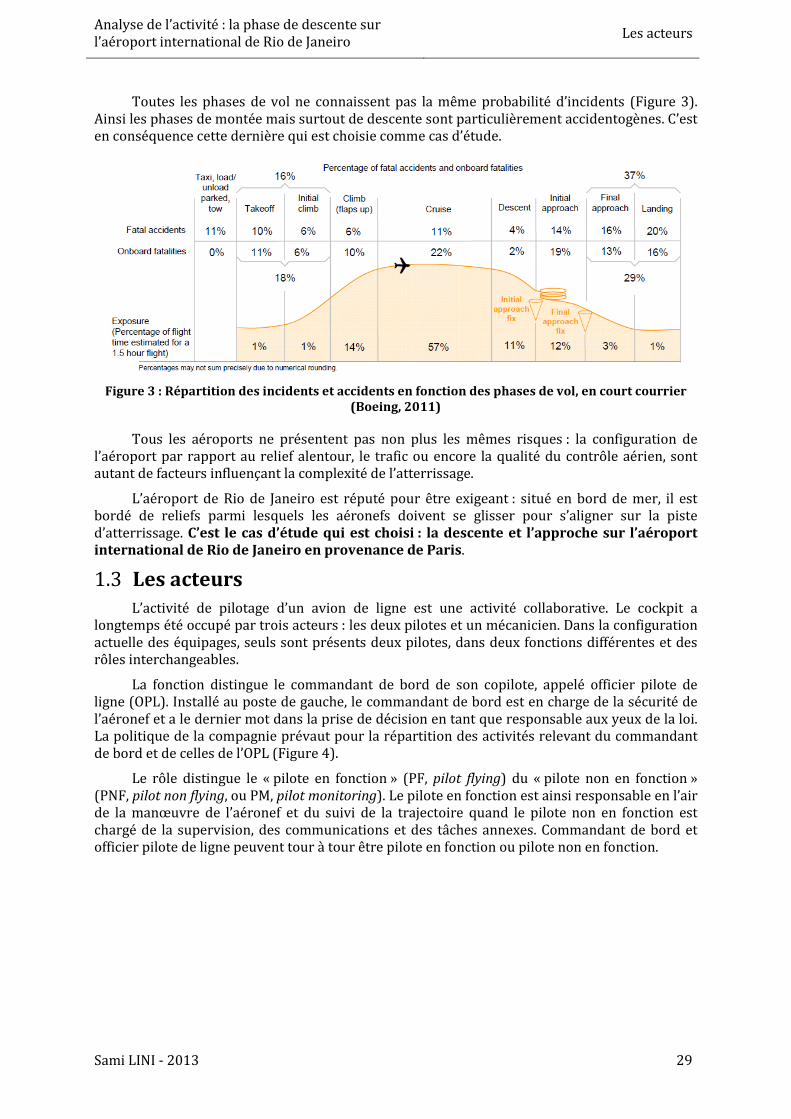
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Les acteurs
Sami LINI - 2013 29
Toutes les phases de vol ne connaissent pas la même probabilité d’incidents (Figure 3). Ainsi les phases de montée mais surtout de descente sont particulièrement accidentogènes. C’est en conséquence cette dernière qui est choisie comme cas d’étude.
Figure 3 : Répartition des incidents et accidents en fonction des phases de vol, en court courrier
(Boeing, 2011)
Tous les aéroports ne présentent pas non plus les mêmes risques : la configuration de l’aéroport par rapport au relief alentour, le trafic ou encore la qualité du contrôle aérien, sont autant de facteurs influençant la complexité de l’atterrissage.
L’aéroport de Rio de Janeiro est réputé pour être exigeant : situé en bord de mer, il est bordé de reliefs parmi lesquels les aéronefs doivent se glisser pour s’aligner sur la piste d’atterrissage. C’est le cas d’étude qui est choisi : la descente et l’approche sur l’aéroport international de Rio de Janeiro en provenance de Paris.
Les acteurs 1.3L’activité de pilotage d’un avion de ligne est une activité collaborative. Le cockpit a
longtemps été occupé par trois acteurs : les deux pilotes et un mécanicien. Dans la configuration actuelle des équipages, seuls sont présents deux pilotes, dans deux fonctions différentes et des rôles interchangeables.
La fonction distingue le commandant de bord de son copilote, appelé officier pilote de ligne (OPL). Installé au poste de gauche, le commandant de bord est en charge de la sécurité de l’aéronef et a le dernier mot dans la prise de décision en tant que responsable aux yeux de la loi. La politique de la compagnie prévaut pour la répartition des activités relevant du commandant de bord et de celles de l’OPL (Figure 4).
Le rôle distingue le « pilote en fonction » (PF, pilot flying) du « pilote non en fonction » (PNF, pilot non flying, ou PM, pilot monitoring). Le pilote en fonction est ainsi responsable en l’air de la manœuvre de l’aéronef et du suivi de la trajectoire quand le pilote non en fonction est chargé de la supervision, des communications et des tâches annexes. Commandant de bord et officier pilote de ligne peuvent tour à tour être pilote en fonction ou pilote non en fonction.

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Les acteurs
Sami LINI - 2013 30
Figure 4 : Exemple de répartition des tâches entre commandant de bord et officier pilote de ligne
et entre pilote en fonction et pilote non en fonction pour un Boeing 747 (Boeing, 2000)

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 31
Un ensemble de moyens et de ressources sont mis à leur disposition pour atteindre l’objectif d’un transport en toute sécurité : des moyens matériels, encadrés par des normes et procédures. Le cockpit est l’un des vecteurs de l’accomplissement de l’objectif, tout comme le sont les manuels et cartes à disposition des pilotes, ainsi que les procédures de prise de décision d’équipage (Crew Resource Management, CRM5). Plusieurs méthodologies de prise de décision collaborative existent. Parmi elles, le Threat & Error Management (gestion des menaces et des erreurs, TEM), qui sera présenté ultérieurement, et FORDEC sont particulièrement utilisées.
FORDEC est un acronyme signifiant :
• Facts : les faits, identification du problème • Options : les options, quelles sont les possibilités envisageables (attente,
dégagement, atterrissage immédiat…) • Risks : les risques (ou bénéfices), quel est le versant de chaque solution (l’aéroport
est plus loin mais la piste d’atterrissage est plus longue) • Decide : prise de décision, quelle solution est choisie • Execute : exécution de la solution choisie • Check : vérification, tout s’est-il passé comme prévu, que reste-t-il à faire.
Cette méthodologie présente la particularité qu’il est demandé à l’officier pilote de ligne de donner son avis en premier sur chacun des points avant que le commandant de bord ne donne le sien. Une inhibition hiérarchique potentielle de l’OPL à l’égard de son supérieur n’interfère donc pas avec l’évaluation de la situation.
Dans un milieu avec une telle exigence de sécurité, les normes et réglementations sont strictement encadrées par plusieurs institutions. Ainsi, on distingue au niveau mondial l’Organisation de l’Aviation Civile Internationale (OACI, autrement appelée ICAO, International Civil Aviation Organization), aux Etats-Unis la Federal Aviation Authority (FAA) ou encore en Europe l’Agence Européenne de Sécurité Aérienne (AESA, également appelée EASA, European Aviation Safety Agency). Ces institutions sont en charge des activités de réglementation et de certification (Dehais, 2004) :
• des procédures génériques de vol (documentation de vol) ; • de l’exploitation et l’entretien des aéronefs ; • des pilotes ; • des contrôleurs aériens.
Les avionneurs émettent des procédures concernant les avions livrés (mise en œuvre) et les compagnies complètent ces procédures en établissant des listes de tâches (checklist6) décrivant les actions essentielles à réaliser pour chaque segment de vol afin de passer au segment suivant (Dehais, 2004). Ces checklists, rédigées à partir de l’activité effective7 de pilotes de la compagnie, sont ensuite soumises à l’approbation et l’homologation des organismes certificateurs de référence.
L’activité 1.4Historiquement, l’activité de l’équipage se découpe en quatre catégories hiérarchisées :
piloter, naviguer, communiquer et gérer les systèmes. Cette partie illustrera l’inversion progressive de l’importance des deux premières catégories, historiquement prégnantes, au
5 Voir glossaire 6 Voir glossaire 7 On distingue l’activité prescrite, théorique telle que décrite dans les manuels, de l’activité effective,
réelle, des opérateurs, avec toutes ses déviations au cadre théorique initial.
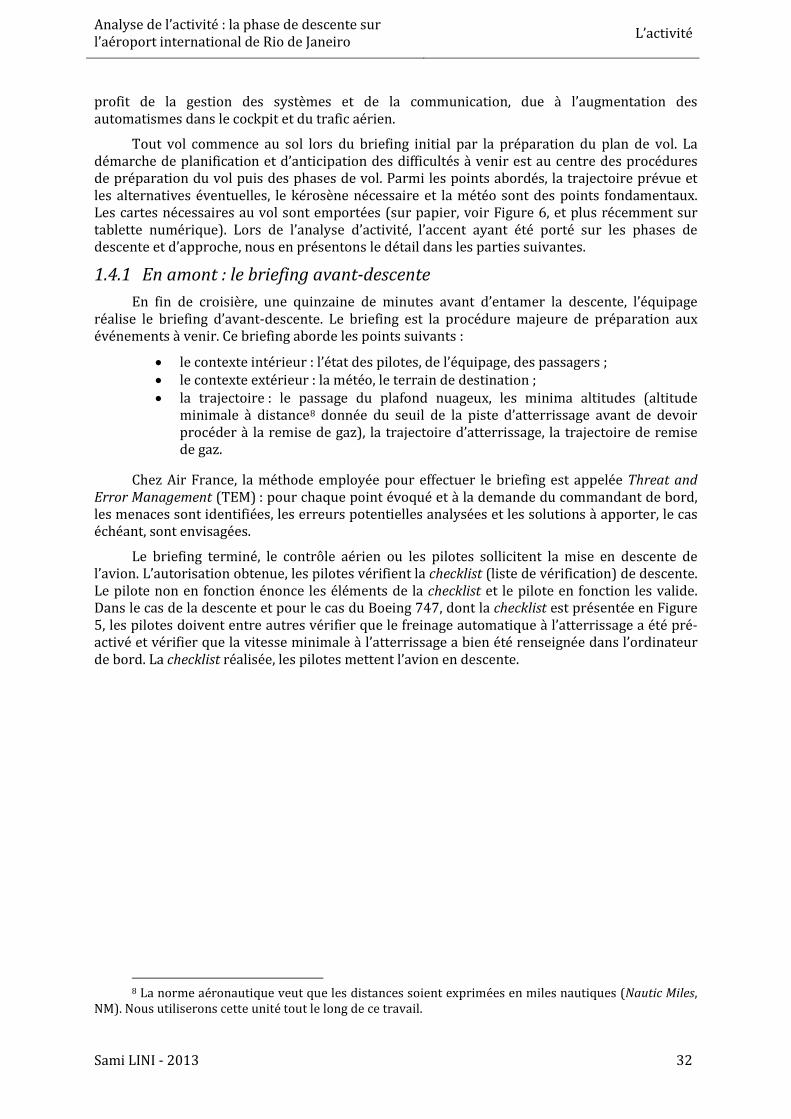
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 32
profit de la gestion des systèmes et de la communication, due à l’augmentation des automatismes dans le cockpit et du trafic aérien.
Tout vol commence au sol lors du briefing initial par la préparation du plan de vol. La démarche de planification et d’anticipation des difficultés à venir est au centre des procédures de préparation du vol puis des phases de vol. Parmi les points abordés, la trajectoire prévue et les alternatives éventuelles, le kérosène nécessaire et la météo sont des points fondamentaux. Les cartes nécessaires au vol sont emportées (sur papier, voir Figure 6, et plus récemment sur tablette numérique). Lors de l’analyse d’activité, l’accent ayant été porté sur les phases de descente et d’approche, nous en présentons le détail dans les parties suivantes.
1.4.1 En amont : le briefing avant-descente En fin de croisière, une quinzaine de minutes avant d’entamer la descente, l’équipage
réalise le briefing d’avant-descente. Le briefing est la procédure majeure de préparation aux événements à venir. Ce briefing aborde les points suivants :
• le contexte intérieur : l’état des pilotes, de l’équipage, des passagers ; • le contexte extérieur : la météo, le terrain de destination ; • la trajectoire : le passage du plafond nuageux, les minima altitudes (altitude
minimale à distance8 donnée du seuil de la piste d’atterrissage avant de devoir procéder à la remise de gaz), la trajectoire d’atterrissage, la trajectoire de remise de gaz.
Chez Air France, la méthode employée pour effectuer le briefing est appelée Threat and Error Management (TEM) : pour chaque point évoqué et à la demande du commandant de bord, les menaces sont identifiées, les erreurs potentielles analysées et les solutions à apporter, le cas échéant, sont envisagées.
Le briefing terminé, le contrôle aérien ou les pilotes sollicitent la mise en descente de l’avion. L’autorisation obtenue, les pilotes vérifient la checklist (liste de vérification) de descente. Le pilote non en fonction énonce les éléments de la checklist et le pilote en fonction les valide. Dans le cas de la descente et pour le cas du Boeing 747, dont la checklist est présentée en Figure 5, les pilotes doivent entre autres vérifier que le freinage automatique à l’atterrissage a été pré-activé et vérifier que la vitesse minimale à l’atterrissage a bien été renseignée dans l’ordinateur de bord. La checklist réalisée, les pilotes mettent l’avion en descente.
8 La norme aéronautique veut que les distances soient exprimées en miles nautiques (Nautic Miles,
NM). Nous utiliserons cette unité tout le long de ce travail.
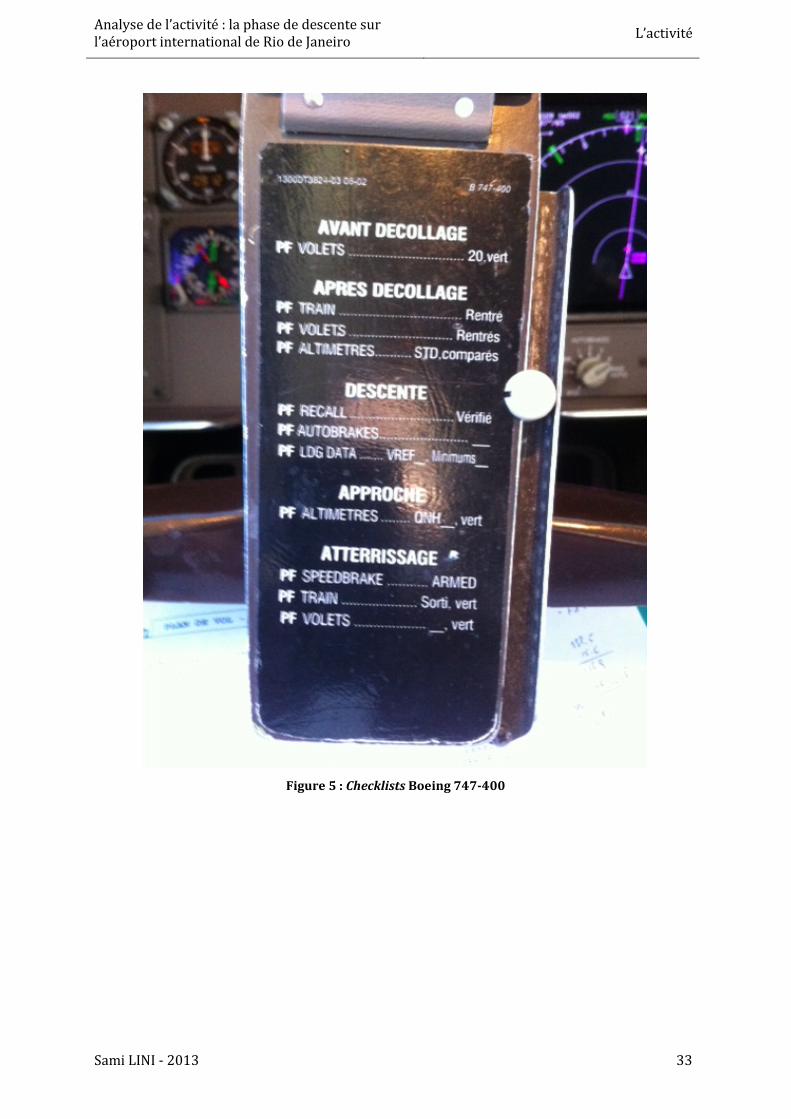
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 33
Figure 5 : Checklists Boeing 747-400

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 34
Figure 6 : Carte STAR (Standard Terminal Arrival Route) Air France (septembre 2012) pour
l’approche sur l’aéroport de Rio de Janeiro en venant du Nord-Ouest pour un atterrissage en piste 10.
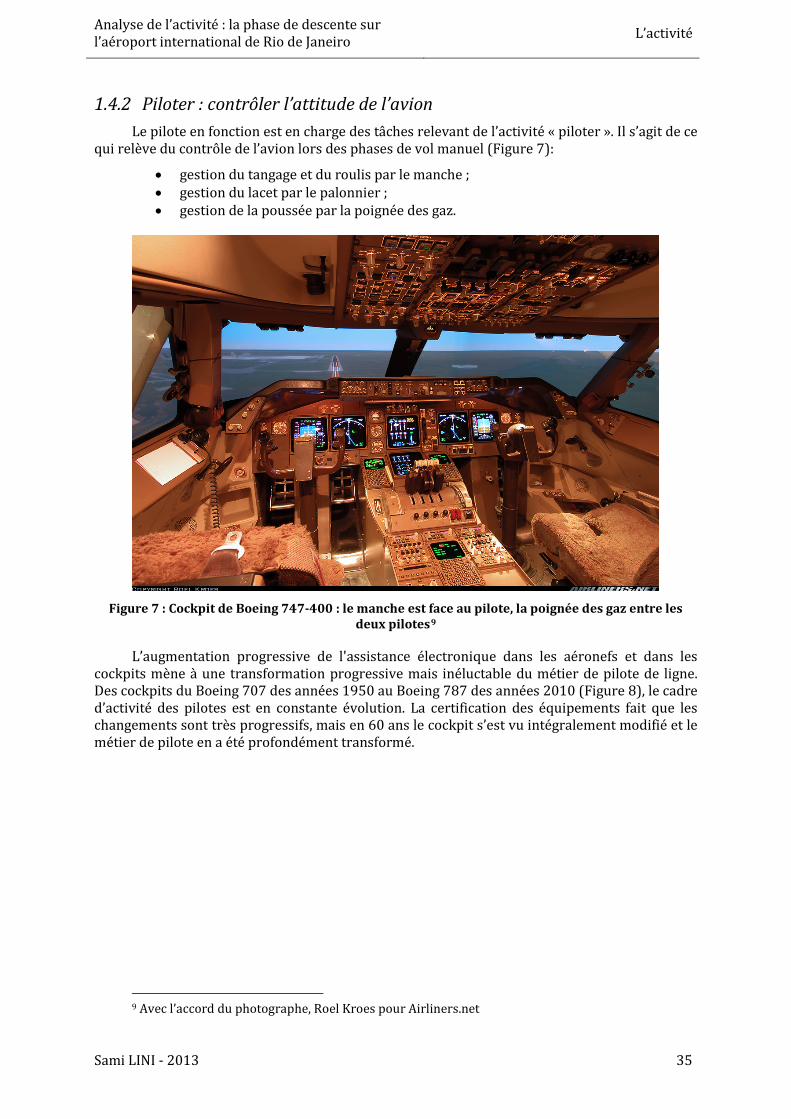
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 35
1.4.2 Piloter : contrôler l’attitude de l’avion Le pilote en fonction est en charge des tâches relevant de l’activité « piloter ». Il s’agit de ce
qui relève du contrôle de l’avion lors des phases de vol manuel (Figure 7):
• gestion du tangage et du roulis par le manche ; • gestion du lacet par le palonnier ; • gestion de la poussée par la poignée des gaz.
Figure 7 : Cockpit de Boeing 747-400 : le manche est face au pilote, la poignée des gaz entre les
deux pilotes9
L’augmentation progressive de l'assistance électronique dans les aéronefs et dans les cockpits mène à une transformation progressive mais inéluctable du métier de pilote de ligne. Des cockpits du Boeing 707 des années 1950 au Boeing 787 des années 2010 (Figure 8), le cadre d’activité des pilotes est en constante évolution. La certification des équipements fait que les changements sont très progressifs, mais en 60 ans le cockpit s’est vu intégralement modifié et le métier de pilote en a été profondément transformé.
9 Avec l’accord du photographe, Roel Kroes pour Airliners.net
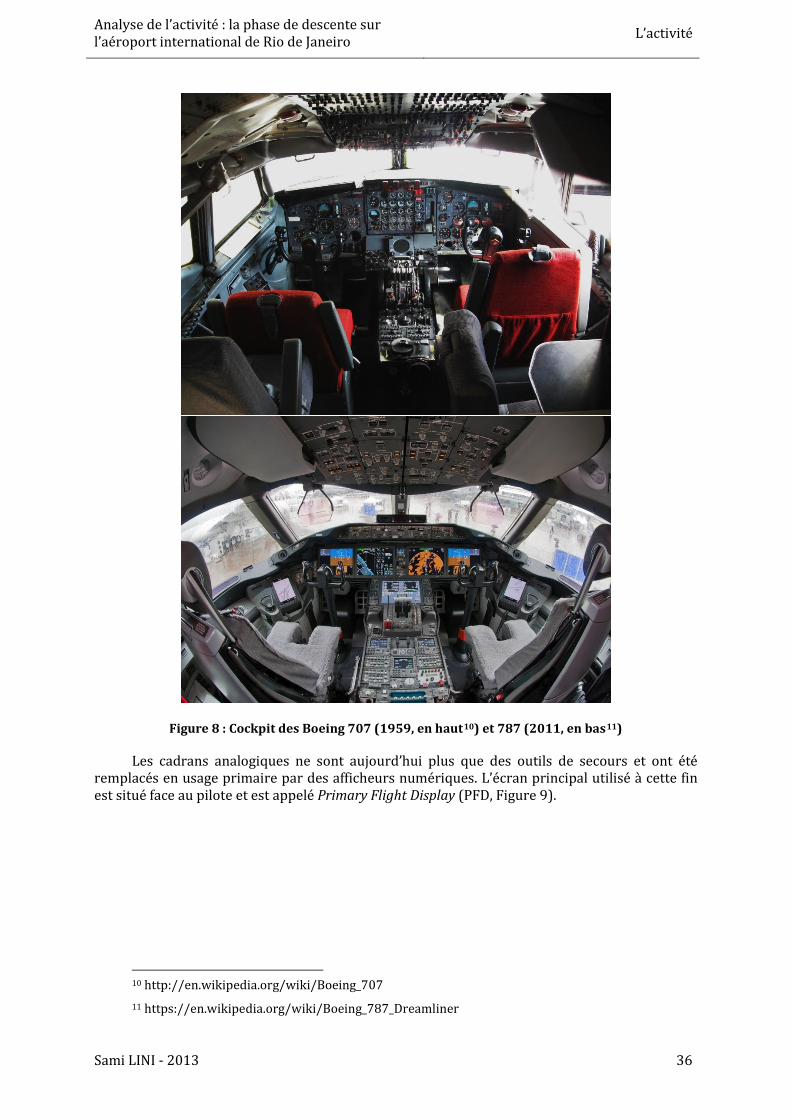
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 36
Figure 8 : Cockpit des Boeing 707 (1959, en haut10) et 787 (2011, en bas11)
Les cadrans analogiques ne sont aujourd’hui plus que des outils de secours et ont été remplacés en usage primaire par des afficheurs numériques. L’écran principal utilisé à cette fin est situé face au pilote et est appelé Primary Flight Display (PFD, Figure 9).
10 http://en.wikipedia.org/wiki/Boeing_707 11 https://en.wikipedia.org/wiki/Boeing_787_Dreamliner

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 37
Figure 9 : Ecran de visualisation des paramètres de vol Boeing (Primary Flight Display, PFD)12
Le Primary Flight Display est utilisé pour représenter :
• l’horizon artificiel, c’est-à-dire l’assiette de l’aéronef par rapport à l’horizon (zone centrale de l’écran) ;
• la vitesse air de l’aéronef (réglette gauche, 250 nœuds affichés), c’est-à-dire sa vitesse mesurée dans la masse d’air dans laquelle il est situé, qui est fonction de la densité et de la température de l’environnement ;
• les vitesses limites : sur l’indicateur de vitesse, la valeur maximale tolérée par l’avion est affichée ainsi que la vitesse minimale avant décrochage13 (chute brutale de l’avion par perte de la portance) ;
• la consigne de vitesse donnée par le pilote automatique et représentée par l’ergot magenta sur l’indicateur de vitesse (réglette à gauche de l’écran) ;
• le niveau de vol ou son altitude barométrique corrigée (réglette droite, 38000 pieds affichés) : son altitude par rapport au niveau théorique de la mer au-dessus d’une certaine altitude puis son altitude par rapport au terrain de destination (valeur moyenne de pression dans la région du terrain) ;
• la consigne d’altitude donnée par le pilote automatique et représentée par l’ergot magenta sur l’indicateur d’altitude (réglette à droite de l’écran) ;
• la vitesse verticale (réglette à l’extrémité droite) qui indique un taux de descente de l’aéronef en pieds par minute ou en degré de pente ;
• le cap de l’aéronef (rose en bas de l’écran) en degrés ; • les différents modes du pilote automatique (zone supérieure) ; • le directeur de vol (voir plus bas).
La surveillance des paramètres de vol est une activité continue afin d’assurer la gestion de l’aérodynamique et du respect des contraintes de la trajectoire (altitude, vitesse). Ces contraintes se justifient par la bonne gestion du trafic dans les zones chargées, le relief ou encore les zones interdites ou réglementées. Le PF travaille donc à respecter les contraintes et à adapter
12 http://en.wikipedia.org/wiki/Electronic_flight_instrument_system 13 Voir glossaire
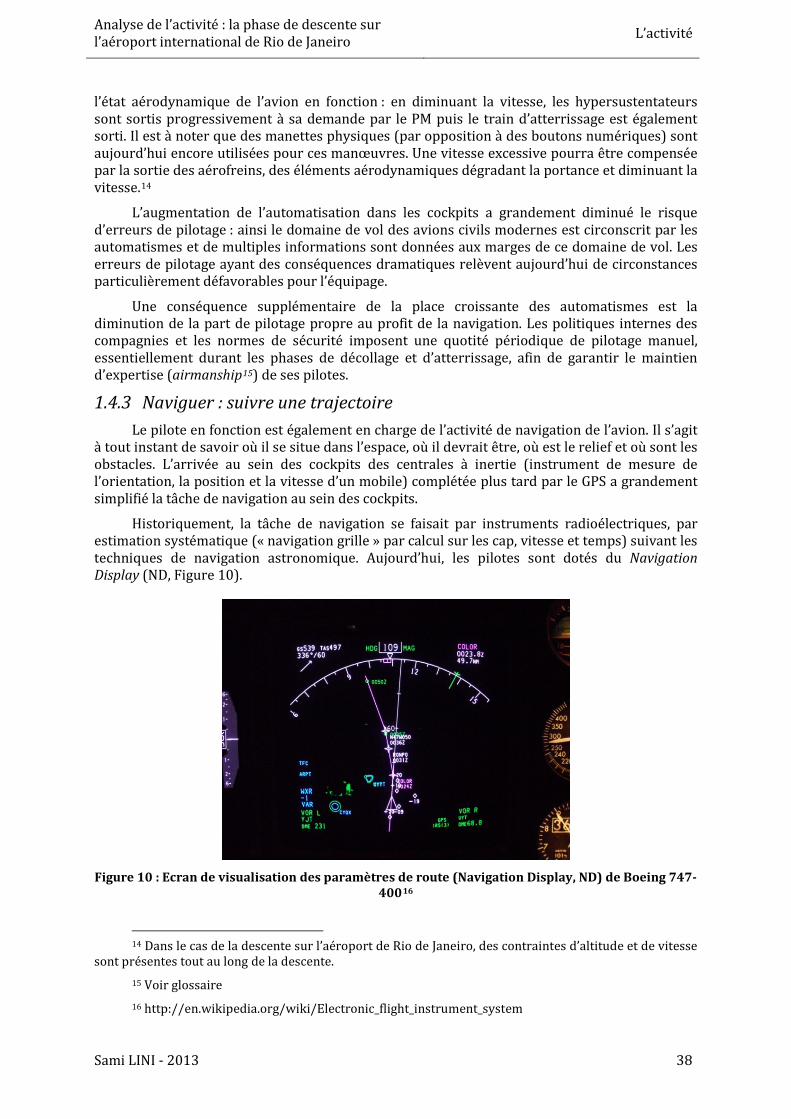
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 38
l’état aérodynamique de l’avion en fonction : en diminuant la vitesse, les hypersustentateurs sont sortis progressivement à sa demande par le PM puis le train d’atterrissage est également sorti. Il est à noter que des manettes physiques (par opposition à des boutons numériques) sont aujourd’hui encore utilisées pour ces manœuvres. Une vitesse excessive pourra être compensée par la sortie des aérofreins, des éléments aérodynamiques dégradant la portance et diminuant la vitesse.14
L’augmentation de l’automatisation dans les cockpits a grandement diminué le risque d’erreurs de pilotage : ainsi le domaine de vol des avions civils modernes est circonscrit par les automatismes et de multiples informations sont données aux marges de ce domaine de vol. Les erreurs de pilotage ayant des conséquences dramatiques relèvent aujourd’hui de circonstances particulièrement défavorables pour l’équipage.
Une conséquence supplémentaire de la place croissante des automatismes est la diminution de la part de pilotage propre au profit de la navigation. Les politiques internes des compagnies et les normes de sécurité imposent une quotité périodique de pilotage manuel, essentiellement durant les phases de décollage et d’atterrissage, afin de garantir le maintien d’expertise (airmanship15) de ses pilotes.
1.4.3 Naviguer : suivre une trajectoire Le pilote en fonction est également en charge de l’activité de navigation de l’avion. Il s’agit
à tout instant de savoir où il se situe dans l’espace, où il devrait être, où est le relief et où sont les obstacles. L’arrivée au sein des cockpits des centrales à inertie (instrument de mesure de l’orientation, la position et la vitesse d’un mobile) complétée plus tard par le GPS a grandement simplifié la tâche de navigation au sein des cockpits.
Historiquement, la tâche de navigation se faisait par instruments radioélectriques, par estimation systématique (« navigation grille » par calcul sur les cap, vitesse et temps) suivant les techniques de navigation astronomique. Aujourd’hui, les pilotes sont dotés du Navigation Display (ND, Figure 10).
Figure 10 : Ecran de visualisation des paramètres de route (Navigation Display, ND) de Boeing 747-
40016
14 Dans le cas de la descente sur l’aéroport de Rio de Janeiro, des contraintes d’altitude et de vitesse
sont présentes tout au long de la descente. 15 Voir glossaire 16 http://en.wikipedia.org/wiki/Electronic_flight_instrument_system

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 39
Le Navigation Display est utilisé pour représenter :
• la route suivie : le trait magenta, la position de l’avion par rapport à la route est représentée par le triangle blanc au centre de l’écran ;
• les points de passage (waypoints17) : les noms sont affichés sur la route, le prochain point de passage est affiché dans la partie supérieure droite avec le temps et la distance avant passage vertical ;
• le cap : affiché numériquement en haut de l’écran et les différentes consignes ayant trait au cap affichées sur la rose (graduée en degrés) dans la partie supérieure de l’écran ;
• la vitesse air réelle, la vitesse et le sens du vent et la vitesse sol (vitesse air réelle – vitesse du vent) en résultant dans la partie supérieure gauche ;
• des informations sur les moyens de navigation radio, affichés en bas à droite et à gauche, en vert : nom (trigramme) des stations au sol identifiées et la distance mesurée les séparant de la position actuelle de l’avion (Distance Measuring Equipment, DME) ;
• des informations météorologiques et de relief, en surimpression.
Le ND est le moyen à disposition des pilotes afin de superviser le bon suivi de la trajectoire. Cette trajectoire provient elle-même du Flight Management System (FMS), l’ordinateur de bord, au sein duquel la trajectoire tant sur le plan horizontal que vertical a été enregistrée par les pilotes préalablement au vol, en utilisant une interface physique disponible pour chaque pilote sur la zone centrale du cockpit, le MCDU (Multi Control Display Unit, voir Figure 11). Les points de passage et les contraintes éventuelles de passage (vitesse, altitude) sont renseignés et le FMS peut être activé pour suivre automatiquement le plan de vol.
Figure 11 : Panneau de contrôle (MCDU) de l’ordinateur de bord (Flight Management System)18
La navigation tout automatique est le dernier degré d’assistance. Pour un contrôle plus manuel, le cockpit est équipé d’un système contrôlant le guidage de l’avion, le FCU (Flight
17 Voir glossaire 18 http://fr.wikipedia.org/wiki/Système_de_gestion_de_vol
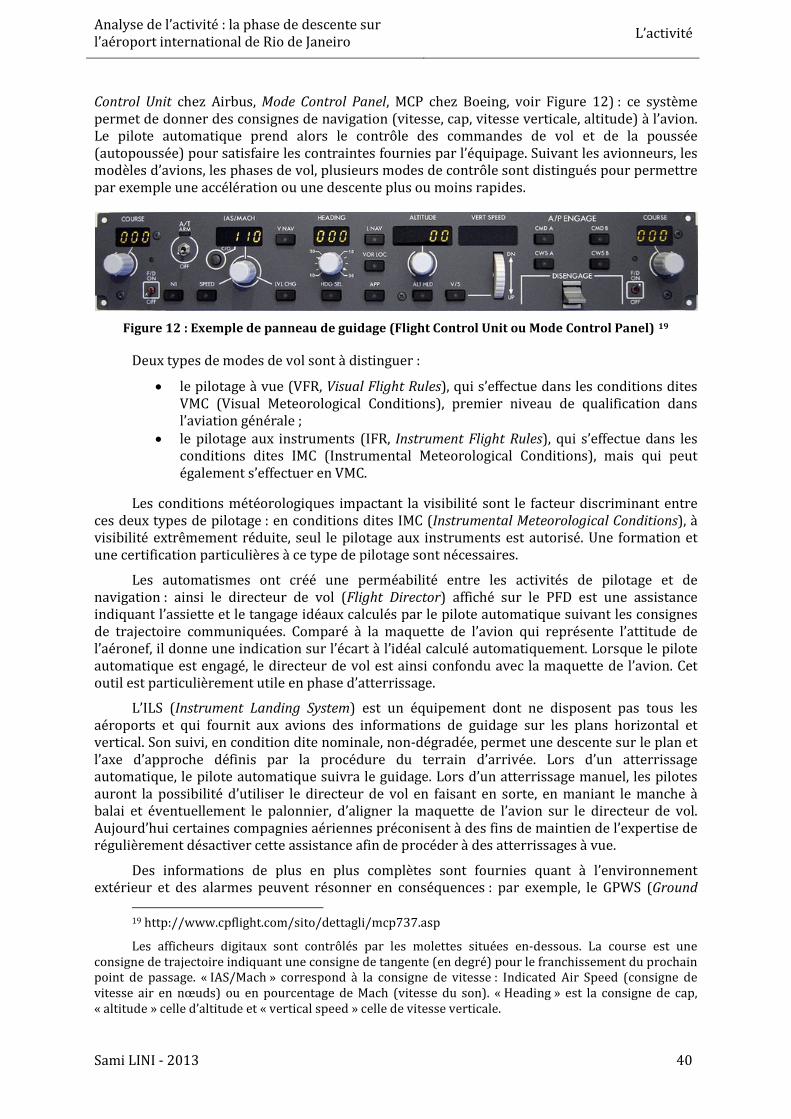
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 40
Control Unit chez Airbus, Mode Control Panel, MCP chez Boeing, voir Figure 12) : ce système permet de donner des consignes de navigation (vitesse, cap, vitesse verticale, altitude) à l’avion. Le pilote automatique prend alors le contrôle des commandes de vol et de la poussée (autopoussée) pour satisfaire les contraintes fournies par l’équipage. Suivant les avionneurs, les modèles d’avions, les phases de vol, plusieurs modes de contrôle sont distingués pour permettre par exemple une accélération ou une descente plus ou moins rapides.
Figure 12 : Exemple de panneau de guidage (Flight Control Unit ou Mode Control Panel) 19
Deux types de modes de vol sont à distinguer :
• le pilotage à vue (VFR, Visual Flight Rules), qui s’effectue dans les conditions dites VMC (Visual Meteorological Conditions), premier niveau de qualification dans l’aviation générale ;
• le pilotage aux instruments (IFR, Instrument Flight Rules), qui s’effectue dans les conditions dites IMC (Instrumental Meteorological Conditions), mais qui peut également s’effectuer en VMC.
Les conditions météorologiques impactant la visibilité sont le facteur discriminant entre ces deux types de pilotage : en conditions dites IMC (Instrumental Meteorological Conditions), à visibilité extrêmement réduite, seul le pilotage aux instruments est autorisé. Une formation et une certification particulières à ce type de pilotage sont nécessaires.
Les automatismes ont créé une perméabilité entre les activités de pilotage et de navigation : ainsi le directeur de vol (Flight Director) affiché sur le PFD est une assistance indiquant l’assiette et le tangage idéaux calculés par le pilote automatique suivant les consignes de trajectoire communiquées. Comparé à la maquette de l’avion qui représente l’attitude de l’aéronef, il donne une indication sur l’écart à l’idéal calculé automatiquement. Lorsque le pilote automatique est engagé, le directeur de vol est ainsi confondu avec la maquette de l’avion. Cet outil est particulièrement utile en phase d’atterrissage.
L’ILS (Instrument Landing System) est un équipement dont ne disposent pas tous les aéroports et qui fournit aux avions des informations de guidage sur les plans horizontal et vertical. Son suivi, en condition dite nominale, non-dégradée, permet une descente sur le plan et l’axe d’approche définis par la procédure du terrain d’arrivée. Lors d’un atterrissage automatique, le pilote automatique suivra le guidage. Lors d’un atterrissage manuel, les pilotes auront la possibilité d’utiliser le directeur de vol en faisant en sorte, en maniant le manche à balai et éventuellement le palonnier, d’aligner la maquette de l’avion sur le directeur de vol. Aujourd’hui certaines compagnies aériennes préconisent à des fins de maintien de l’expertise de régulièrement désactiver cette assistance afin de procéder à des atterrissages à vue.
Des informations de plus en plus complètes sont fournies quant à l’environnement extérieur et des alarmes peuvent résonner en conséquences : par exemple, le GPWS (Ground
19 http://www.cpflight.com/sito/dettagli/mcp737.asp
Les afficheurs digitaux sont contrôlés par les molettes situées en-dessous. La course est une consigne de trajectoire indiquant une consigne de tangente (en degré) pour le franchissement du prochain point de passage. « IAS/Mach » correspond à la consigne de vitesse : Indicated Air Speed (consigne de vitesse air en nœuds) ou en pourcentage de Mach (vitesse du son). « Heading » est la consigne de cap, « altitude » celle d’altitude et « vertical speed » celle de vitesse verticale.
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 41
Proximity Warning System) informe les pilotes de leur position par rapport à la verticale du sol et émet des alarmes en cas de situation à risque.
Sur le terrain de Rio de Janeiro, la tâche de navigation est importante compte tenu du relief environnant. L’accident du vol 965 American Airlines en décembre 1995 en Colombie est une illustration de l’importance de l’activité de navigation dans un cadre hautement automatisé. En approche nocturne sur l’aéroport de Cali, une mauvaise compréhension avec le contrôle aérien mène les deux pilotes à se plonger dans les cartes d’approche. A la reprise du contrôle de l’avion, ceux-ci ne se repèrent plus dans l’espace et empruntent la vallée parallèle à celle menant à l’aéroport. La mauvaise reconfiguration du FMS leur est fatale et l’avion heurte la montagne sans qu’ils aient eu le temps d’identifier la menace.
1.4.4 Communiquer : maintenir la communication avec le sol et le personnel navigant commercial
Dans un contexte de trafic aérien toujours croissant, l’importance du contrôle aérien est capitale. La responsabilité du bon déroulement de ce contrôle en impute autant au personnel au sol qu’aux pilotes de chaque avion contrôlé. La part de communication dans leur activité est ainsi devenue de plus en plus importante.
Les pilotes ont à leur disposition un panneau de contrôle de la radio. Un élément complexifiant concerne la double utilité du panneau radio lequel sert également à des fins de navigation, les balises au sol (VOR, Very high frequency Omndirectional Range) étant des balises radio. Ainsi des fonctions de localisation radio des stations au sol permettent d’alimenter le module de navigation (zones inférieures gauche et droite du ND, voir Figure 10).
Pour la communication avec le contrôle au sol, les pilotes disposent de plusieurs canaux, lesquels peuvent accueillir une fréquence active et une fréquence en attente. La topologie du contrôle aérien actuel fait que ces moyens sont beaucoup utilisés : ainsi, pour le vol Paris-Rio de Janeiro étudié, lors de la croisière, les pilotes sont en contact avec le contrôle croisière, lequel a une fréquence qui lui est propre (suivant de larges zones de l’Atlantique Sud pour le vol étudié). En se rapprochant du Brésil, il leur est demandé de basculer sur le contrôle régional. Plusieurs fréquences possibles leur ont été communiquées plus tôt, et l’information est raffinée peu avant. Le début de la descente se fait avec le contrôle régional, lequel passe ensuite la main au contrôle approche. Celui-ci a également une fréquence qui lui est propre et passe ensuite au contrôle tour. Sur les aéroports ayant le trafic le plus élevé, les aéronefs peuvent subir jusqu’à une dizaine de changements de fréquence le long de la descente.
La dimension locale du contrôle est également importante. Si l’anglais aéronautique est très codifié, il n’en demeure pas moins que certains accents sont plus compliqués que d’autres à la compréhension. De la même façon, la qualité du contrôle est très dépendante des cultures aéronautiques. Certains aéroports en Afrique ou en Amérique du Sud sont réputés pour nécessiter une attention plus soutenue de la part des équipages. L’aéroport de Rio de Janeiro a la réputation d’être parfois compliqué en termes de contrôle aérien.
Responsable du nombre de changements de fréquences durant le vol, l’augmentation du trafic aérien induit également une augmentation du guidage des aéronefs par les contrôleurs aériens. Ce guidage nécessite des communications régulières avec les équipages, lesquels attendent d’être contactés. La qualité de la communication et les difficultés éventuellement induites par les différences de prononciation rencontrées autour du monde font que la simple tâche de surveillance de la radio est devenue l’une des plus importantes pour le PNF.
Une part de la communication est également dédiée à la communication avec le personnel navigant communicant et les passagers afin de les informer des événements à venir et prendre acte des événements se produisant à bord.
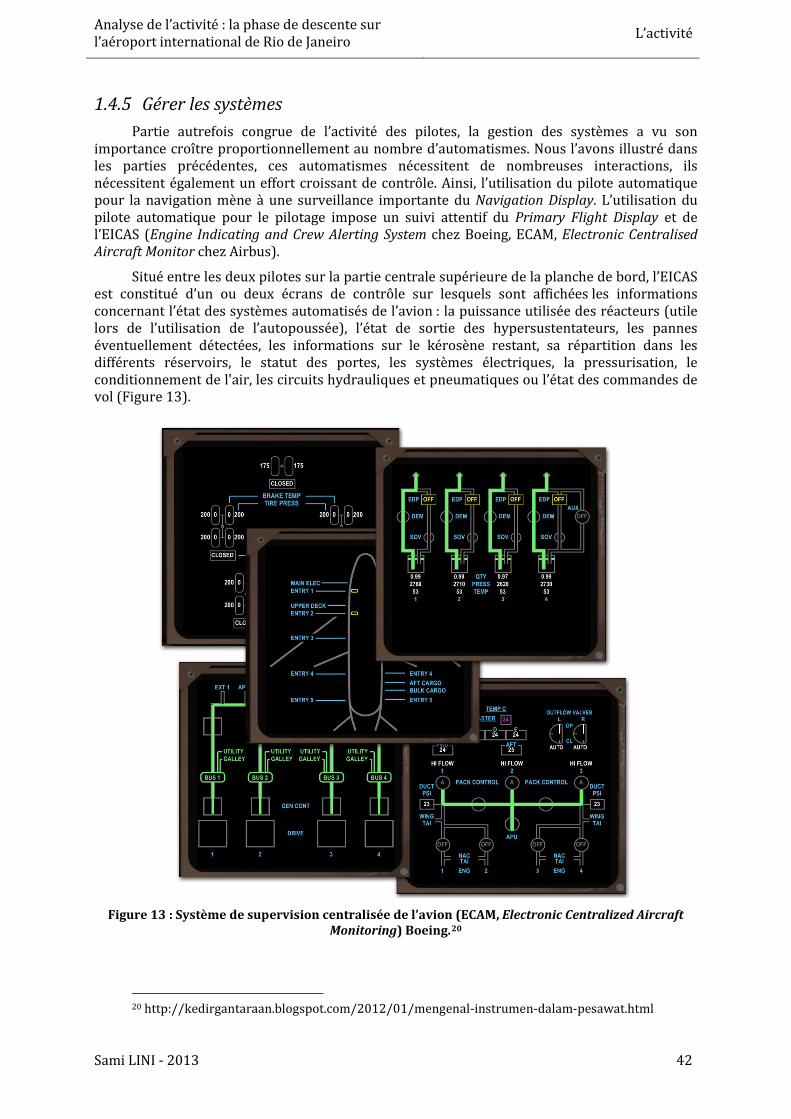
Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
L’activité
Sami LINI - 2013 42
1.4.5 Gérer les systèmes Partie autrefois congrue de l’activité des pilotes, la gestion des systèmes a vu son
importance croître proportionnellement au nombre d’automatismes. Nous l’avons illustré dans les parties précédentes, ces automatismes nécessitent de nombreuses interactions, ils nécessitent également un effort croissant de contrôle. Ainsi, l’utilisation du pilote automatique pour la navigation mène à une surveillance importante du Navigation Display. L’utilisation du pilote automatique pour le pilotage impose un suivi attentif du Primary Flight Display et de l’EICAS (Engine Indicating and Crew Alerting System chez Boeing, ECAM, Electronic Centralised Aircraft Monitor chez Airbus).
Situé entre les deux pilotes sur la partie centrale supérieure de la planche de bord, l’EICAS est constitué d’un ou deux écrans de contrôle sur lesquels sont affichées les informations concernant l’état des systèmes automatisés de l’avion : la puissance utilisée des réacteurs (utile lors de l’utilisation de l’autopoussée), l’état de sortie des hypersustentateurs, les pannes éventuellement détectées, les informations sur le kérosène restant, sa répartition dans les différents réservoirs, le statut des portes, les systèmes électriques, la pressurisation, le conditionnement de l'air, les circuits hydrauliques et pneumatiques ou l’état des commandes de vol (Figure 13).
Figure 13 : Système de supervision centralisée de l’avion (ECAM, Electronic Centralized Aircraft
Monitoring) Boeing.20
20 http://kedirgantaraan.blogspot.com/2012/01/mengenal-instrumen-dalam-pesawat.html

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Analyse de l’activité
Sami LINI - 2013 43
De multiples assistants demandent également l’attention des pilotes. Par exemple, des systèmes anticollisions en vol ont été mis en place (TCAS : Traffic alert and Collision Avoidance System) afin d’informer en temps réel des aéronefs alentours présentant des risques de collision et le cas échéant prendre une décision automatiquement en accord avec l’aéronef présentant un risque (monter vs descendre).
Analyse de l’activité 1.5Les manuels et procédures de vol n’offrent qu’un aperçu théorique du métier de pilote.
Dans la démarche d’ingénierie cognitique qu’a été la nôtre, il était indispensable de confronter les connaissances théoriques à la réalité de terrain via une démarche de capitalisation des connaissances. L’enjeu est la modélisation de l’activité effective des pilotes à des fins de spécifications du cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation et de la construction d’une base de connaissances exploitable informatiquement.
En 2010, un pilote-instructeur, commandant de bord sur Boeing 747, nous a accueillis dans son cockpit sur un vol Paris-Rio de Janeiro. Des enregistrements audio et vidéo ont alors été effectués. Un entretien mené à la même période compléta ce qui constituera le matériau de base de notre analyse de l’activité. Deux méthodes sont utilisées à cette fin.
Dans un premier temps, la méthode MASK (Method for Analyzing and Structuring Knowledge, Matta, Ermine, Aubertin, & Trivin, 2002) permit la modélisation à la fois de l’activité et des concepts, connaissances et savoir-faire afférents. Il s’agit d’une méthode de capitalisation des connaissances visant à la représentation de systèmes complexes et des phénomènes en leurs seins. Wikipédia en donne la définition suivante (“MASK méthode d’ingéniérie des connaissances,” 2013) : « MASK est une méthode d'analyse préalable à la mise en place d'un système opérationnel de gestion des connaissances, c'est-à-dire un système, informatisé ou pas, qui contient des connaissances, des savoir- faire et dont le but est soit de faire partager, soit de capitaliser, soit de servir à la création de la connaissance dans l'organisation. Elle propose donc une étape entre l'approche stratégique, qui vise à mettre en place des objectifs de gestion des connaissances à l'échelle de l'entreprise, et l'approche opérationnelle qui est l'implémentation effective d'un système ». Dans le cadre d’une activité technique telle qu’elle a été présentée, et poursuivant l’objectif de la modélisation de l’activité effective de l’opérateur et de la construction d’une base des connaissances exploitable informatiquement durant la suite de notre projet, cette méthodologie est adéquate.
Le temps suivant consista à modéliser le déroulement de l’ensemble des tâches effectuées. A ce stade, un modèle de la tâche fut défini, modèle qui sera réemployé lors de l’implémentation du cœur fonctionnel de notre outil d’aide à l’anticipation (voir Chapitre 5). Formellement, nous définissons une tâche comme une action de l’équipage influant sur l’état du monde tel qu’il était alors connu et le modifiant. Une tâche peut ou non disposer de prédécesseurs et de successeurs, qui sont d’autres tâches, définies de la même manière, avec lesquelles elle entretient des relations de causalités respectivement rétrogrades ou antérogrades. Une tâche peut ou non disposer de préconditions de mise en œuvre, qui sont des états du monde conditionnant sa faisabilité. Une tâche dispose de postconditions, qui définissent les modifications induites par la réalisation de la tâche sur l’état du monde.
Préconditions et postconditions peuvent avoir deux statuts. Elles peuvent être génériques à tout plan de vol : par exemple, la vitesse maximale de l’aéronef pour la sortie du train d’atterrissage sans l’endommager est une contrainte portant sur la sortie du train d’atterrissage qui ne dépend pas du plan de vol suivi. Elles peuvent également être spécifiques à un plan de vol donné : pour l’approche finale sur l’aéroport de Rio de Janeiro, le GLIDE21 (composante verticale de l’ILS assurant le guidage de l’aéronef sur le plan vertical) doit être capturé à 4000 pieds.
21 Voir glossaire

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Analyse de l’activité
Sami LINI - 2013 44
A des fins d’illustration, reprenons ces deux exemples lors d’une séquence décrivant de manière simplifiée les dernières tâches avant le toucher des roues (Figure 14). La première tâche est la capture du GLIDE22. Dans le cadre de la descente sur Rio de Janeiro et pour l’approche retenue, cette capture s’effectue au point MUSO (latitude : -22.85722222, longitude : -43.46527778, altitude : 4000 ft). Afin d’atterrir, le train d’atterrissage doit être sorti. Le train ne peut être sorti sans être endommagé au-dessus de 220 kts. De la même manière, les volets23 doivent être sortis, et sont également soumis à une contrainte sur la vitesse (<190 kts), afin de ne pas les endommager. La faisabilité de la tâche suivante, la checklist avant atterrissage, ne repose que sur la réalisation de ses deux prédécesseurs : les sorties des trains et des volets sont indispensables à la validation de cette checklist. Le toucher des roues conclut notre exemple : cette tâche doit être réalisée à l’aéroport de Rio de Janeiro (contraintes de latitude, longitude et altitude) à la vitesse dite de référence (vitesse maximale de toucher des roues, dans la configuration considérée pour notre exemple simplifié).
Figure 14 : Séquence des dernières tâches menant à l’atterrissage sur l’aéroport de Rio de Janeiro
piste 10.
En suivant, fut donc défini l’ensemble des tâches à réaliser, leurs liens de causalité, leur enchaînement temporel et les préconditions et postconditions pour chacune d’entre elles. La confrontation du modèle de l’activité aux connaissances, compétences et savoir-faire théoriques permit la construction d’un modèle contextualisé de l’activité effective. Cette première modélisation fut soumise à deux pilotes de ligne, indépendants du premier rencontré, pour correction, raffinement et validation.
A des fins d’exploitation opérationnelle et dans un but de vérification, une seconde modélisation fut réalisée sur la base de la première en utilisant la méthode d’analyse hiérarchisée de la tâche (Hierarchical Task Analysis, HTA, Annett & Stanton, 2000). Cette méthode se prête à l’activité modélisée par son aspect hiérarchisé qui correspond bien au découpage en phases de vol validées par des checklists. L’activité fut découpée en niveaux hiérarchiques comprenant les sous-tâches des niveaux supérieurs.
Ce travail fut réalisé avec le concours d’un ancien pilote de chasse disposant de la qualification pilote de ligne (ATPL, Airline Transport Pilot Licence). Début 2012, cette seconde
22 Voir glossaire 23 Voir glossaire

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
Conclusion
Sami LINI - 2013 45
modélisation est alors présentée lors de plusieurs entretiens successifs au premier pilote-instructeur pour corrections, validation et raffinement avec son recul opérationnel.
Cette modélisation met en avant l’aspect fondamentalement parallélisé de l’activité des pilotes (voir Figure 15). De nombreux sous-buts doivent être coordonnés dans un travail collaboratif en utilisant une somme d’instruments différents. Les pilotes n’ont plus le besoin d’avoir l’entendement complet du fonctionnement de l’ensemble des automatismes, deux éléments sont chargés de compenser et permettre la bonne réalisation de leur activité. Le premier est d’offrir les moyens d’une représentation cohérente de la situation. Si un effort important a été mis en œuvre au travers du cockpit pour favoriser cette bonne représentation, celle-ci est sensiblement complexifiée par le nombre de systèmes différents leur fournissant des éléments de cette représentation.
Figure 15 : Extrait de notre graphe des tâches pour l’activité « descente en Boeing 747 sur
l’aéroport de Rio de Janeiro »24
Le second élément est d’offrir les moyens d’une représentation cohérente de l’effet de leurs actions et des initiatives éventuelles du système. Dans les faits, de nombreux modes d’action des automatismes sont soit inconnus des pilotes soit mal compris, ce qui peut avoir des conséquences désastreuses. Dans la liste des éléments contributifs à l’accident du vol AF447 entre Rio de Janeiro et Paris en juin 2009 peut-on ainsi trouver, dans la longue chaîne causale ayant mené au drame, une incompréhension des pilotes à l’égard d’une loi de commande alternative (BEA, 2012).
Le modèle hiérarchisé d’activité met donc en évidence des éléments fondamentaux de l’activité des pilotes à prendre en compte dans notre démarche de conception et fournit une base de connaissances chronologique et causale de l’ensemble des tâches à réaliser et des conditions pour pouvoir les réaliser. Cette base de connaissances sera un socle de travail essentiel pour la définition du cahier des charges du cœur fonctionnel de notre support à l’anticipation (voir Chapitre 5).
Conclusion 1.6En l’espace de 50 ans, l’arrivée massive des automatismes a transformé le métier de pilote
de ligne. La communauté, de manière un peu caricaturale, fait souvent le constat suivant : les modifications du cockpit ont induit un changement progressif du profil de l’utilisateur cible, de pilote avec des connaissances en ingénierie à ingénieur avec des connaissances en pilotage.
24 Voir Annexes pour le graphe complet

Analyse de l’activité : la phase de descente sur l’aéroport international de Rio de Janeiro
En résumé
Sami LINI - 2013 46
Les compétences en pilotage et en navigation, prégnantes dans la première ère de l’histoire de l’aviation ont vu leur part grignotée par la nécessité de communiquer de plus en plus, dans un environnement de trafic aérien mondial à très forte croissance, et de surveiller le bon fonctionnement des automatismes. Le choc générationnel actuel met face à face des pilotes ayant subi l’arrivée des automatismes et ceux ayant grandi avec, deux philosophies de pilotage qui aujourd’hui partagent l’espace aérien et bien souvent les cockpits.
L’analyse de l’activité menée a mis en évidence l’articulation entre les tâches relevant des quatre catégories d’activité (piloter, naviguer, communiquer, gérer les systèmes) ainsi que les contraintes auxquelles elles sont soumises. Elle a permis de mettre en lumière l’aspect fondamentalement anticipatoire des procédures actuelles et donc le potentiel pour un outil d’aide à l’anticipation en offrant une gestion continue dans le temps.
La base de connaissances qui en a résulté fonde le cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation et la structure choisie pour cette modélisation en permettra l’exploitation informatisée (Chapitre 5).
En résumé
• L’activité des pilotes est historiquement découpée hiérarchiquement en quatre catégories : piloter, naviguer, communiquer, gérer les systèmes.
• L’augmentation de l’automatisation dans les cockpits conjointement à l’augmentation du trafic aérien mondial a augmenté la part des activités de communication et de gestion des systèmes au détriment des tâches de pilotage et de navigation.
• Une analyse hiérarchisée de la tâche basée sur des enregistrements en vol et des entretiens nous a permis de modéliser l’activité des pilotes lors de la phase de descente sur l’aéroport de Rio de Janeiro en provenance de Paris.
• Cette analyse de la tâche fonde le cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation et fournit une base de connaissances qui sera exploitée informatiquement.
Sami LINI - 2013 47
Chapitre 2.
Etat de l’art autour de
l’anticipation

Etat de l’art autour de l’anticipation
Définition
Sami LINI - 2013 48
Définition 2.1Le terme anticiper est communément employé dans la langue française, il n’en demeure
pas moins difficile à définir précisément. Il est souvent confondu et employé en lieu et place de prédire, prévoir ou se projeter. Une idée reste commune à ces concepts, il s’agit d’un processus qui s’inscrit à la fois dans le présent et dans l’avenir.
Le dictionnaire Le grand Robert de la langue française (“Anticipation,” 2012) donne un premier éclairage. Etymologiquement, anticiper vient du latin anticipare qui signifie « prendre par avance, prendre les devants », de ante « avant », et capere « prendre ». Il y a dans cette étymologie une idée d’avance sur le temps mais également d’action. Cette idée se trouve aussi dans la définition qui nous en est donnée dans la langue française : Anticipation : Action de devancer dans l'ordre du temps ; exécution anticipée (d'un acte, d'une chose).
Cela distingue l’anticipation de la prédiction, laquelle se trouve définie de la manière suivante : Prédire : Dire (l'avenir), annoncer comme devant être ou se produire (un événement qui n'a pas une forte probabilité). Dans prédire, tout comme prévoir, l’étymologie parle d’elle-même, il s’agit de dire, de voir en avance ce qui va se produire, pas d’agir. Le sujet est dans une forme d’attente, de passivité.
Les choses ne sont cependant pas si tranchées. En langue anglaise, anticipation est défini comme suit : “Anticipation : the fact of seeing that something might happen in the future and perhaps doing something about it now." (“Anticipation,” 2005). En anglais, il ne s’agit donc pas forcément d’agir. Le synonyme qui est proposé au verbe to anticipate est to expect qui signifie « escompter, prévoir, s’attendre à » (“Anticipation,” 2010), et ne contient pas non plus d’idée d’action. Français et anglais ne s’accordent donc pas sur la définition. L’un l’envisage sous le versant de l’action, quand l’autre l’envisage sous celui de la « modélisation », d’une construction mentale de l’évolution de la situation.
Les deux champs disciplinaires sous lesquels est placé ce travail fournissent leur propre définition. En psychologie, Sutter (1983) définit l’anticipation comme un « mouvement par lequel l’homme se porte de tout son être au-delà du présent dans un avenir, proche ou lointain, qui est essentiellement son avenir ». Si cette définition n’envisage pas exclusivement d’agir, elle fait émerger l’idée de se projeter : anticiper c’est également se représenter soi et son environnement dans une dynamique d’évolution et d’adaptation. Minkowski (1968) le qualifie de « greffe d’avenir dans le présent ».
Une nouvelle idée émerge de la définition que donne Rosen (1985) d’un système anticipatif en informatique : « Un système anticipatif est un système qui contient un modèle prédictif de lui-même et/ou de son environnement lui permettant de changer son état en fonction des prédictions sur les instants futurs ». En informatique, anticiper comporte deux phases : une phase de prédiction et une phase d’utilisation de la prédiction. Il s’agit donc d’un système qui dispose d’une forme de « mémoire du futur », une base de données lui permettant d’inférer sur l’évolution de la situation en fonction de situations similaires déjà rencontrées.
La psychologie cognitive s’est particulièrement posé la question de définir le concept « anticipation ». Cellier (1996) le définit de la façon suivante : « activité consistant à évaluer l’état futur d’un processus dynamique, à déterminer, en fonction de la représentation du processus dans le futur, le type d’actions à entreprendre et le moment où elles doivent être mises en œuvre et enfin à évaluer mentalement les possibles de ces actions. Elle est dépendante de l’objectif général attribué à un opérateur dans une situation dynamique qui est de garder le processus, physique ou autre, dans des limites acceptables, et donc d’éviter la propagation de perturbations. Elle obéit aussi à une logique de réduction de la complexité d’une situation. Elle est, enfin, moyen de gérer des ressources individuelles. » .
L’ensemble des idées précédentes est contenu dans cette définition : évaluation de l’évolution de la situation, simulation mentale et inscription dans la temporalité et l’action. Quelques points supplémentaires sont cependant présentés : l’aspect orienté vers un but,
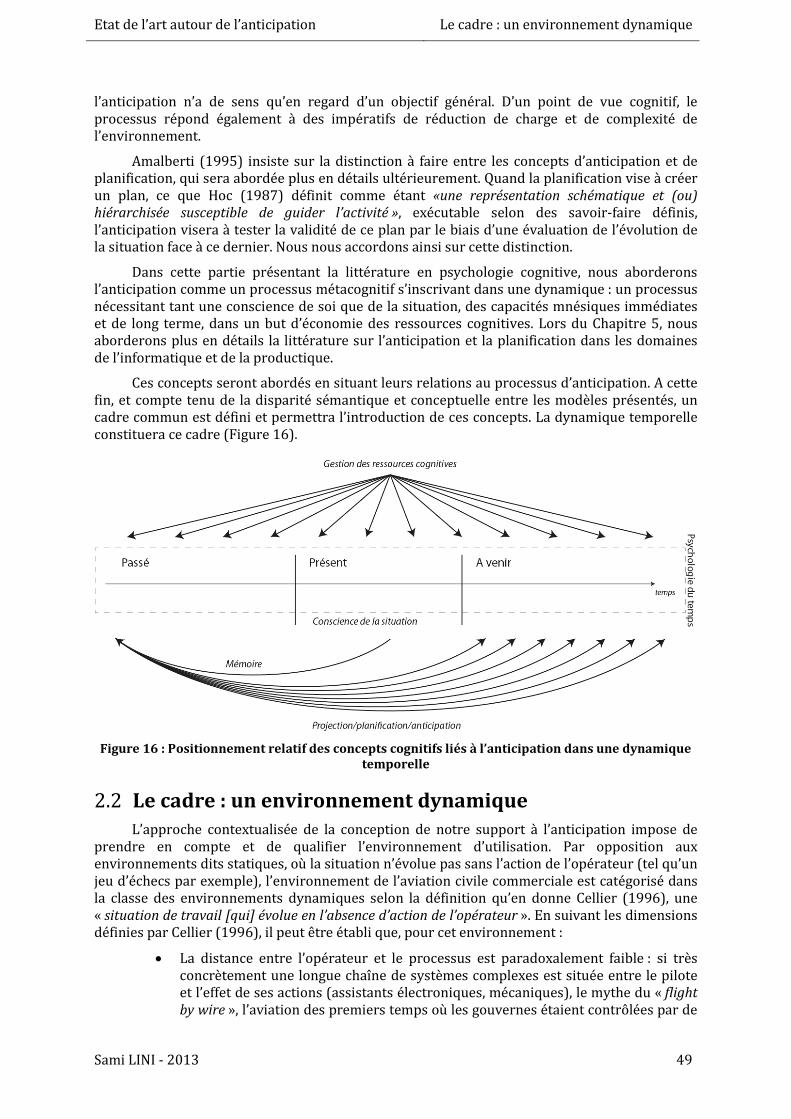
Etat de l’art autour de l’anticipation
Le cadre : un environnement dynamique
Sami LINI - 2013 49
l’anticipation n’a de sens qu’en regard d’un objectif général. D’un point de vue cognitif, le processus répond également à des impératifs de réduction de charge et de complexité de l’environnement.
Amalberti (1995) insiste sur la distinction à faire entre les concepts d’anticipation et de planification, qui sera abordée plus en détails ultérieurement. Quand la planification vise à créer un plan, ce que Hoc (1987) définit comme étant «une représentation schématique et (ou) hiérarchisée susceptible de guider l’activité », exécutable selon des savoir-faire définis, l’anticipation visera à tester la validité de ce plan par le biais d’une évaluation de l’évolution de la situation face à ce dernier. Nous nous accordons ainsi sur cette distinction.
Dans cette partie présentant la littérature en psychologie cognitive, nous aborderons l’anticipation comme un processus métacognitif s’inscrivant dans une dynamique : un processus nécessitant tant une conscience de soi que de la situation, des capacités mnésiques immédiates et de long terme, dans un but d’économie des ressources cognitives. Lors du Chapitre 5, nous aborderons plus en détails la littérature sur l’anticipation et la planification dans les domaines de l’informatique et de la productique.
Ces concepts seront abordés en situant leurs relations au processus d’anticipation. A cette fin, et compte tenu de la disparité sémantique et conceptuelle entre les modèles présentés, un cadre commun est défini et permettra l’introduction de ces concepts. La dynamique temporelle constituera ce cadre (Figure 16).
Figure 16 : Positionnement relatif des concepts cognitifs liés à l’anticipation dans une dynamique
temporelle
Le cadre : un environnement dynamique 2.2L’approche contextualisée de la conception de notre support à l’anticipation impose de
prendre en compte et de qualifier l’environnement d’utilisation. Par opposition aux environnements dits statiques, où la situation n’évolue pas sans l’action de l’opérateur (tel qu’un jeu d’échecs par exemple), l’environnement de l’aviation civile commerciale est catégorisé dans la classe des environnements dynamiques selon la définition qu’en donne Cellier (1996), une « situation de travail [qui] évolue en l’absence d’action de l’opérateur ». En suivant les dimensions définies par Cellier (1996), il peut être établi que, pour cet environnement :
• La distance entre l’opérateur et le processus est paradoxalement faible : si très concrètement une longue chaîne de systèmes complexes est située entre le pilote et l’effet de ses actions (assistants électroniques, mécaniques), le mythe du « flight by wire », l’aviation des premiers temps où les gouvernes étaient contrôlées par de
Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 50
simples câbles, perdure. Dans les faits, ce que le milieu aéronautique appelle « airmanship25 », la capacité d’un pilote à piloter son avion à la main, tel que cela existe encore en aviation de chasse par exemple, tend à disparaître au profit d’une nouvelle génération de pilotes (péjorativement qualifiés de « pilotes gameboy » dans la communauté) ayant grandi avec l’informatique et plus à l’aise avec les automatismes qu’avec les commandes de vol manuelles ;
• L’affichage de variables est à la fois continu et discret (cadrans) ce qui entraîne de la complexité dans la manipulation des valeurs et l’articulation des représentations d’évolution ;
• La dynamique d’évolution du processus peut varier du très court, pour certains changements de fréquences radio par exemple, ou en cas de crise, à très long, à l’échelle d’un vol par exemple. La coexistence de ces différentes temporalités entremêlées est un facteur de complexité supplémentaire ;
• Le processus est relativement stable durant la phase de croisière, avant de devenir de plus en plus instable en phase de descente où de nombreux éléments sont à prendre en compte, et où l’exigence en matière de surveillance, diagnostic, anticipation est élevée, ce qui se traduit par une augmentation progressive de la charge, et une diminution des activités annexes au profit des tâches relevant de la sécurité de l’aéronef (voir plus haut).
L’ensemble de ces dimensions sera à prendre en compte dans la conception de notre support à l’anticipation : ainsi la mise en regard des temporalités des différents processus et la mise en cohérence des variables de vol considérées doivent être des axes de présentation de l’information permettant une diminution de la complexité de l’environnement. Ce support devra également permettre de représenter la charge à venir induite par la variation de la stabilité du processus afin d’en permettre la bonne anticipation (voir plus bas).
Enfin, il devra offrir un support aux deux générations de pilotes : dans les situations le nécessitant, il devra permettre de favoriser l’utilisation des assistants adéquats aux pilotes des générations précédentes, parfois plus réticents à leur utilisation, et d’offrir les moyens de compenser le manque, parfois décrié, d’airmanship des nouvelles générations26.
Gestion des ressources cognitives 2.3La question de la gestion des ressources cognitives est centrale à toute la littérature en
psychologie cognitive. L’idée d’une forme de « carburant » aux processus cognitifs qu’il serait possible d’évaluer afin de déterminer les marges et limites des opérateurs est investiguée depuis plus de cent ans (Yerkes & Dodson, 1908).
Au sein du cadre commun de la dynamique temporelle que nous avons défini pour cet état de l’art, le principe de gestion des ressources cognitives repose sur la capacité à allouer des ressources dans l’instant présent, en fonction tant des ressources utilisées que des ressources nécessaires (Figure 17), ce que nous détaillerons dans cette partie.
25 Voir glossaire 26 Ce second point est plus polémique : il pose la question tant de la formation que de la répartition
des rôles induite par les cockpits modernes. Un courant de pensée tend aujourd’hui à envisager deux rôles parfaitement distincts entre les deux pilotes : un gestionnaire de système pour la supervision des automatismes et un pilote doté d’un bon airmanship pour le pilotage et la navigation, particulièrement en situation dégradée, répartition que l’on retrouve en aviation militaire.

Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 51
Figure 17 : Gestion des ressources cognitives dans le temps
C’est tout le propos du support envisagé : il doit permettre l’amélioration de la sécurité dans les cockpits en offrant les moyens d’une meilleure gestion des ressources cognitive durant le vol. Il nous est donc nécessaire de définir ce qu’est la charge cognitive et des modèles nous offrant les moyens de mieux la comprendre afin d’atteindre notre objectif.
Des mesures de performance en divers contextes ont depuis longtemps mis en évidence l’existence d’une forme de « coût cognitif », supposant par là même l’existence d’une variable « ressources cognitives ». La question de la métaphore de représentation se pose très tôt : traitant d’une forme d’ « énergie », c’est tout naturellement que les premiers modèles s’inspirent de systèmes économiques et thermodynamiques ou hydrauliques. Problématique de l’offre et de la demande pour les modèles d’inspiration économique, réservoir(s) d’énergie ou de liquide se vidant parallèlement ou séquentiellement pour ceux d’inspiration thermodynamique et hydraulique.
L’aspect systémique de ces représentations ne parvient cependant pas à expliquer la dynamique hautement adaptative des systèmes biologiques : évolutions des performances liées à des critères motivationnels, ou à un état de fatigue par exemple. Inversement, une métaphore de modélisation se rapprochant trop de la biologie se verrait reprocher l’absence de relations pleinement démontrées aujourd’hui entre mécanismes physiologiques et psychologiques, comme le soulignent Hancock & Szalma (2002). L’approche même du processus de modélisation soulève de nombreuses questions, mettant en avant la difficulté à faire émerger une théorie unifiée de la gestion des ressources cognitives.
En situation de pilotage de son aéronef, le pilote se trouve confronté en permanence à des situations demandant une gestion parallèle ou séquentielle de tâches. Nous présentons dans cette partie, les deux courants théoriques principaux nous éclairant sur cette gestion des tâches - la théorie de la source unique de ressources et la théorie des sources multiples - avant d’aborder le sujet de la mesure effective de la charge et des processus d’économie des ressources cognitives.
2.3.1 Modèles de la gestion des ressources
2.3.1.1 Une source unique de ressources La première pierre pour une théorie d’une source unique de ressources cognitives est
posée par Moray (1967). En s’appuyant sur la théorie de l’information, il émet l’hypothèse que l’homme possède un processeur central de capacité limitée. Les opérations mentales effectuées sur les influx sensoriels consomment de la capacité, qui peut être divisée parmi différentes structures de traitement en cas de tâches parallèles. La capacité allouée à une structure de traitement donnée est assujettie à la demande de la tâche.
Ce courant théorique est complété par Kahneman (1973) selon qui l’homme disposerait d’une réserve limitée de « capacité » disponible pour un ensemble de tâches (Figure 18). La performance dépendrait du degré d'allocation de cette capacité à la tâche réalisée. Il est supposé que le montant de capacité disponible est limité et fonction d’un niveau d’activation. Une
Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 52
stratégie d'allocation déterminerait l'allocation de la capacité aux diverses activités, la stratégie adoptée dépendant de caractéristiques intrinsèques de l'individu et de critères motivationnels, menant à une bonne ou au contraire une mauvaise gestion des ressources. Cette contribution à la théorie ajoute l’idée de rapport à la performance. Elle envisage également que l’allocation de capacité ne dépende pas que de la tâche mais également de l’individu.
Figure 18 : Théorie de la ressource unique (Kahneman, 1973)
Ce n’est finalement que dans (Norman & Bobrow, 1975) qu’apparaît le terme de « ressource ». A cette contribution lexicale est ajoutée une distinction concernant la performance. La variation de performance s’expliquerait par des contraintes sur les tâches qui seraient de deux types : les contraintes sur les ressources et les contraintes sur les données. Sur des tâches limitées par les ressources, une augmentation des ressources allouées améliorerait la performance, au contraire des tâches limitées par les données qui ne seraient pas sensibles à l’augmentation de ressources allouées, comme l’illustre la Figure 19.
Figure 19 : Processus limités par les données et processus limités par les ressources (Norman &
Bobrow, 1975)
Navon & Gopher (1979) développent l’idée de tâches limitées par les données en introduisant le paramètre sujet-tâche. Ce paramètre regroupe les caractéristiques de la tâche, telles que la qualité des données, l’environnement ainsi que les propriétés permanentes et les états ponctuels du sujet. Il permet ainsi de définir le cadre de contraintes au sein duquel les ressources sont sélectionnées et allouées pour une meilleure performance.

Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 53
Une idée nouvelle est alors soumise : les ressources ne seraient pas en quantité fixée mais auraient une certaine flexibilité qui leur permettrait une dynamique de variation en fonction d’une activation. Dans certaines situations, une augmentation de la charge liée à la tâche augmenterait l’activation et permettrait la mise à disposition d’une plus grande quantité de ressources.
Le paradigme de la double tâche, consistant à faire réaliser deux tâches en parallèle afin d’observer les variations de performances, souligne en certaines circonstances une limitation majeure de ce modèle. Il ne parvient par exemple pas à expliquer pourquoi certaines tâches peuvent être menées parfaitement en parallèle sans diminution de performance sur aucune des tâches.
L’adaptation de stratégie en fonction de l’estimation de la charge de Sperandio (1977) que nous présenterons plus en détails plus loin, en est une illustration. Une autre situation ne peut être expliquée : dans le cas de deux tâches interférant chacune avec une troisième, il arrive que la plus difficile des deux interfère moins que l’autre sur la troisième. Il semblerait donc qu’il faille dissocier la difficulté de la structure même de la tâche.
2.3.1.2 Plusieurs sources de ressources L’alternative à la théorie de la source unique de ressources est la théorie des sources
multiples de ressources. Navon & Gopher (1979) considèrent que l’homme possède un processeur multicanal, une structure de traitement permettant une utilisation en parallèle de ressources différenciées (Figure 20). Chaque canal a sa propre capacité qui peut être partagée par plusieurs processus. L’impact sur les ressources d’un changement dans la difficulté de la tâche ne serait pas purement quantitatif, c’est-à-dire énergétique, mais également qualitatif, autrement dit structurel.
Figure 20 : Théorie des ressources multiples (Navon & Gopher, 1979)
Afin de répondre aux interrogations soulevées par le premier courant théorique, à partir d’une étude comparative des expériences menées sur le partage des ressources, Wickens (1984) construit le modèle 4D (Figure 21). Dans des paradigmes de double tâche, une corrélation est établie entre structures de traitement de l’information et un « phénomène d’insensibilité à la difficulté », qui se caractérise par une constance dans la performance en dépit d’une augmentation de la difficulté de la deuxième tâche. Ce modèle présente en conséquence quatre dimensions dichotomiques : pour le type de matériel manipulé le spatial est opposé au verbal, pour la modalité sensorielle impliquée, la vision à l’audition, l'étape de traitement d'information oppose perception/traitement à réponse, enfin le mode de réponse, moteur à vocal.

Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 54
Figure 21 : Modèle 4D (Wickens, 1984)
Il est alors établi que deux tâches interfèreront d'autant moins qu'elles auront des demandes de ressources séparées. Une tâche auditivo-verbale et une tâche visuo-spatiale seront moins dégradées que deux tâches auditivo-verbales. Il s’agit donc de la composante structurelle de la problématique de la gestion des ressources qui est traitée ici, l’aspect énergétique étant mis de côté.
Gopher (1986) le souligne : traiter du problème de la gestion des ressources, c’est essayer de définir les deux faces d’une même pièce. D’une part, la problématique énergétique : d’où viennent les ressources cognitives, comment expliquer la corrélation entre performance et excitabilité ? D’autre part la problématique structurelle : comment sont-elles allouées, comment expliquer les phénomènes d’interférence en double tâche, les phénomènes de stress ?
Les modèles et courants traitant d’une face de la pièce ne parviennent pas aujourd’hui à traiter l’autre, il s’agit d’un défi majeur dans la compréhension de la gestion des ressources cognitives. En l’absence de consensus de la communauté autour de la question, nous retenons l’idée d’une forme d’énergie alimentant et limitant les processus cognitifs, laquelle, à défaut de pouvoir être modélisée, peut être mesurée.
2.3.2 Mesure de la charge cognitive A défaut de définir précisément ce que sont les ressources mentales, la littérature,
(Kahneman & Beatty, 1966, Bi & Salvendy, 1994), étaie l’hypothèse qu’il est possible d’évaluer ce que la littérature appelle la charge mentale, ou charge cognitive. Nous retiendrons ici la définition qu’en donnent Cegarra & Chevalier (2008) : « la charge cognitive présuppose que les processus cognitifs ont un coût tiré d’une réserve limitée de ressources cognitives. En conséquence, la charge cognitive est souvent définie comme le rapport entre la demande de la tâche et les ressources humaines disponibles ». Cegarra & Chevalier (2008) distinguent et comparent trois types de mesures : mesures de performance, mesures subjectives et mesures physiologiques.
2.3.2.1 Mesures de performance Dans le cas de mesures de performances, divers indices de performances sont mesurés,
dépendant de la tâche effectuée : temps de réaction, rapidité, ou encore nombre d’erreurs, sur la
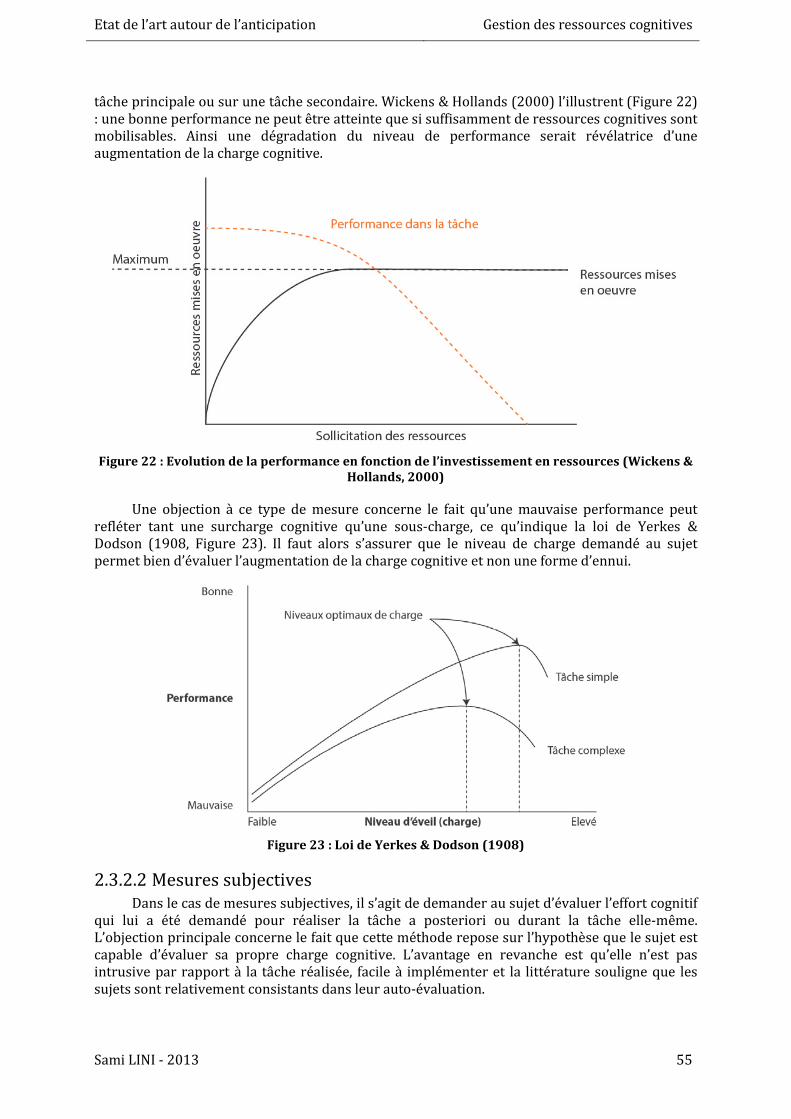
Etat de l’art autour de l’anticipation
Gestion des ressources cognitives
Sami LINI - 2013 55
tâche principale ou sur une tâche secondaire. Wickens & Hollands (2000) l’illustrent (Figure 22) : une bonne performance ne peut être atteinte que si suffisamment de ressources cognitives sont mobilisables. Ainsi une dégradation du niveau de performance serait révélatrice d’une augmentation de la charge cognitive.
Figure 22 : Evolution de la performance en fonction de l’investissement en ressources (Wickens &
Hollands, 2000)
Une objection à ce type de mesure concerne le fait qu’une mauvaise performance peut refléter tant une surcharge cognitive qu’une sous-charge, ce qu’indique la loi de Yerkes & Dodson (1908, Figure 23). Il faut alors s’assurer que le niveau de charge demandé au sujet permet bien d’évaluer l’augmentation de la charge cognitive et non une forme d’ennui.
Figure 23 : Loi de Yerkes & Dodson (1908)
2.3.2.2 Mesures subjectives Dans le cas de mesures subjectives, il s’agit de demander au sujet d’évaluer l’effort cognitif
qui lui a été demandé pour réaliser la tâche a posteriori ou durant la tâche elle-même. L’objection principale concerne le fait que cette méthode repose sur l’hypothèse que le sujet est capable d’évaluer sa propre charge cognitive. L’avantage en revanche est qu’elle n’est pas intrusive par rapport à la tâche réalisée, facile à implémenter et la littérature souligne que les sujets sont relativement consistants dans leur auto-évaluation.

Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 56
De nombreuses échelles existent, les plus utilisées sont la MCH (Modified Cooper-Harper scale, Wierwille & Casali, 1983) et le NASA-TLX (National Aeronautics and Space Administration Task Load indeX, Hart & Staveland, 1988)
2.3.2.3 Mesures physiologiques Reposant sur l’hypothèse que des variations de la charge cognitive impliquent des
variations physiologiques, le diamètre pupillaire, l’arythmie cardiaque ou encore le rythme respiratoire sont mesurés. Par covariance supposée, ces mesures vont nous renseigner sur la charge cognitive du sujet. Les contraintes liées à l’aspect physiologique des mesures, contraintes temporelles, caractère invasif, limitent leur utilisation à certains types de tâches.
Cegarra & Chevalier (2008) soulignent enfin l’intérêt de croiser les types de mesure afin de s’affranchir des limites de chaque méthode. Dans le contexte d’un travail visant à concevoir, et évaluer, un moyen de mieux gérer la charge cognitive, ce principe sera le principe maître que nous suivrons pour toute démarche de mesure de la charge cognitive : l’emploi de mesures indépendantes et croisées et la vérification systématique qu’elles évoluent dans le même sens.
Pour pallier une augmentation trop importante de la charge, deux axes sont empruntés dans la conception d’aide à l’opérateur : le délester de sa charge en prenant en charge automatiquement certaines tâches qui lui étaient attribuées, ou l’aider à mieux répartir sa charge. Dans le contexte qui est le nôtre, il est impératif de maintenir l’opérateur au centre de la boucle, nous ne pouvons donc qu’opter pour la seconde alternative.
Économie des ressources cognitives 2.4Le principe d’économie des ressources cognitives s’entend plus comme un moyen
d’optimisation que comme un simple procédé de diminution de la consommation en ressources cognitives : des raccourcis cognitifs existent face à des situations déjà connues, et des moyens permettent de se prémunir de ce qui est mal connu. Représentation mentale, capacité d’abstraction, principe de suffisance et anticipation sont quelques-uns de ces moyens.
2.4.1 Schématisation
2.4.1.1 Hiérarchisation Dans le cadre de l’activité de planification, Hoc (1987) souligne que l’élaboration de
structures de représentation de la situation comprend nécessairement un découpage de cette structure. La hiérarchie de raffinement introduite par Rasmussen (1986) décompose un système en ses sous-parties (Figure 24). Orthogonalement est distinguée une seconde hiérarchisation, d’abstraction, s’appuyant sur une autre relation entre sous-parties : la relation entre une fonction et sa mise en œuvre.

Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 57
Figure 24 : Les hiérarchies d'abstraction et de raffinement, d’après Rasmussen (1986)
Ce découpage permet la mise en regard de plusieurs types de représentation de l’objet ou de la situation considérée. Ces différentes représentations sont complémentaires et doivent pouvoir être intégrées dans la conception de notre support d’aide à l’anticipation. Ainsi, la représentation de la situation doit pouvoir être considérée au travers de différents prismes qui seront autant de clés de compréhension de cette situation.
Nous nous accordons sur la définition de la schématisation que donne Hoc 1987) : « la schématisation [s’entend] comme une activité de construction de représentations schématiques, en remontant l’une ou l’autre de ces deux hiérarchies de représentations ».
Une illustration de ce découpage se trouve dans la différence entre experts et novices dans un cadre de résolution de problème : l’expert se caractérise par sa capacité à s’élever dans les strates de ses schémas. Quand le novice gère la situation au bout de la chaîne, l’expert est capable d’avoir une vision plus macroscopique et d’avancer progressivement vers un niveau de détails plus fin. Larkin & Reif (1979) l’illustrent en résolution de problèmes de physique : quand le débutant s’oriente vers une résolution algébrique du problème en traitant immédiatement les variables comprises dans l’énoncé, l’expert décrit physiquement le problème, parvient à en faire une particularisation d’un schéma plus général, avant d’appliquer ces principes physiques à la résolution algébrique.
2.4.1.2 Structures schématiques On distingue ainsi aux structures schématiques trois rôles principaux au sein de la
cognition humaine : un rôle heuristique, de diminution de la charge cognitive et d’élévation du niveau de contrôle.
Dans le cadre de la résolution de problèmes, Lindsay, Norman, & Jobin (1980) nous donnent la définition suivante de la stratégie heuristique : « une technique de résolution incertaine dont l'usage n'est justifié que par le constat d'une efficacité antérieure dans des problèmes analogues ». Ainsi, l’utilisation d’un plan permet d’éviter une analyse trop microscopique de la situation. Pour autant il ne s’agit que d’une simplification du problème en cours, laquelle sera spécifiée, voire invalidée, dans le pire des cas, par un recueil d’indices environnementaux au cours de l’activité guidée par ce même plan.
Face à des situations nouvelles, une stratégie de résolution de problème va consister en la translation de plans existants par transfert ou analogie : le plan est alors simplement adapté à la nouvelle situation, ce qui peut présenter un coût cognitif inférieur à la création d’une nouvelle solution ad hoc, ce que confirme Amalberti (1996).

Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 58
En s’appuyant sur la hiérarchie d’abstraction, l’activité de planification permet également une diminution de la charge cognitive suivant deux axes. Chase & Simon (1973) illustrent l’économie de stockage en mémoire liée à l’utilisation de plans, par la mise en place de configurations optimales d’informations stockées : aux échecs, ils mettent en évidence de meilleures performances mnésiques chez l’expert pour reconstituer des configurations réalistes que face à des configurations aléatoires, ce qui n’apparaît pas chez le novice. Cela met en évidence l’existence de relations stratégiques entre les pièces, et donc de configurations mnésiques de haut niveau dans la hiérarchie d’abstraction.
Les relations entre parties mises en avant dans la hiérarchie d’abstraction permettent également une économie sur le traitement des informations : l’aspect modulaire de cette hiérarchisation permet de ne prendre en compte que les relations entre éléments ayant été conçus de proche en proche, et de ne traiter que les relations entre modules pour les éléments éloignés.
La hiérarchie de raffinement est le support du dernier rôle attribué aux plans : l’élévation du niveau de contrôle de l’activité. Par une représentation de niveau supérieur, on détermine les raisons des relations qui apparaissent au niveau inférieur, en l’occurrence entre fonction et mise en œuvre. L’exemple qu’en donne Hoc (1987) est la gestion d’incident durant laquelle on agira au niveau d’abstraction le plus élevé afin de gérer la situation au niveau global avant d’affiner sa vision de la situation et de se pencher sur l’élément physique déficient.
Dans le cadre de la définition du cahier des charges du cœur fonctionnel de notre support d’aide à l’anticipation, ces éléments plaident pour une représentation des informations sur la situation suivant une hiérarchisation par niveau de raffinement. Nous reviendrons plus tard sur les difficultés d’une hiérarchisation fonctionnelle dans notre domaine.
La première caractéristique des plans est leur aspect fondamentalement schématique, la seconde est leur caractère anticipatoire. Plusieurs concepts de psychologie cognitive expriment cette caractéristique. La notion de schème introduite par Piaget (1952), définie par Piaget & Buscaglia (1967) comme étant « ce qui, dans une action, est ainsi transposable, généralisable ou différentiable d’une situation à la suivante, autrement dit ce qu’il y a de commun aux diverses répétitions ou applications de la même action », va ainsi dans cette direction : toute action sur le réel se ferait en regard d’un schème antérieurement constitué et adapté pour la situation actuelle.
La conséquence directe de ce postulat est qu’il est nécessaire d’adjoindre à la conception que nous avions jusque-là du plan l’idée d’attentes de ce que sera le réel. Le phénomène de « résistance du réel » fait opposition à ces attentes : des infirmations portées par la situation sur les anticipations du schème évoqué. Piaget (1975) note cependant le primat des informations confirmant le schème sélectionné sur les informations l’infirmant, ces dernières n’étant perçues qu’en cas de résistance de l’objet de l’action à cette action.
Vergnaud (1985) insiste sur la relation du schème au réel en soulignant le fait que « l’adaptation au réel ne peut pas avoir d’autres critères que celui de la conformité entre les attentes du sujet et les effets qui se produisent, et celui de l’action efficace ». Ainsi « La représentation ne peut pas être fonctionnelle si elle ne joue pas de rôle dans le réglage de l’action et des attentes du sujet ». Cela souligne la nécessité d’un isomorphisme entre le plan et la réalité, validé par une mise en action de ce plan. Denecker (1999) postule que le schème organise le comportement d’un sujet en découpant le réel en objets. La représentation ainsi constituée pourra faire l’objet d’opérations, d’inférences, de règles d’action ou encore de prédictions et d’attentes.
Le concept de schéma apporte un élément supplémentaire. Bartlett (1932) le définit ainsi : « une organisation active de réactions passées ou d’expériences passées, que l’on doit toujours supposer à l’œuvre dans toute réponse organique bien adaptée. Ceci veut dire que, à chaque fois que le comportement se révèle ordonné et régulier, une réponse particulière n’est rendue possible que par sa relation à d’autres réponses similaires qui ont été organisées séquentiellement, mais qui

Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 59
opèrent néanmoins comme une masse unitaire et non comme des éléments individuels venant l’un après l’autre ».
Denecker (1999) distingue ainsi trois aspects fondamentaux : le fait qu’il s’agit d’une structure mentale inconsciente, qu’il est constitué d’expériences passées, et qu’il constitue en mémoire à long terme un ensemble de structures de connaissances actives plutôt que d’images passives ; il s’agit d’une reconstruction du passé, et non d’une reproduction. Reason (1990) souligne un phénomène à rapprocher de la résistance du réel piagétienne, à savoir une déviation des perceptions, souvenirs, pensées et actions vers le familier et l’attendu.
Hoc (1987) citant (Bobrow & Norman, 1975) définit les propriétés suivantes pour le schéma : il n’est pas entièrement spécifié et représente des relations entre variables et des contraintes sur ces variables. Celles-ci seront particularisées lors de la mise en œuvre grâce à des indices de l’environnement, qui conditionnent sa mise en application. C’est ce qui pourrait être qualifié de composante circonstancielle. Les schémas sont en relation les uns avec les autres selon diverses dimensions telles qu’analogie, métaphore ou encore généralisation. Pour illustrer ce propos, Hoc & Nguyen-Xuan (1987) proposent l’exemple du restaurant : les sujets disposent de connaissances génériques sur les restaurants comme « SI pile de plateaux ALORS self-service », « SI comptoir plastique ALORS fast food ».
Amalberti (1996) précise cette idée en ajoutant que cette structure de données est destinée à représenter des situations génériques, des séquences d’événements, des procédures, ce que le langage courant peut intercepter par le terme de stéréotype. Son contenu permet de comprendre la situation comme un tout finalisé orienté vers un but. Il s’agit en cela d’un modèle mental du monde qui présente un bon compromis entre complexité et efficacité opérationnelle : plus il est simplifié, plus il est facile à utiliser, mais plus il est caricatural de la réalité.
Simon (1982) affirme que cette structure schématique répond très pragmatiquement à l’impossibilité psychologique de tout percevoir, tout savoir, tout comprendre et tout faire. Amalberti (1996) montre enfin que chez l’expert, le schéma est optimisé pour atteindre son but à moindre coût cognitif, en utilisant toutes les propriétés de l’environnement. Amalberti (2001) insiste sur la composante prédictive de ce modèle mental : ce dernier permet une évaluation de l’évolution de la situation. Il s’agit d’une fonction essentielle permettant à l’opérateur de ne pas être dans de la pure réactivité, ce qui dégraderait considérablement ses performances.
Nous retiendrons l’idée de structures mentales destinées à contrôler l’action, lacunaires et spécifiables par des éléments contextuels de l’environnement, orientées vers un objectif défini et disposant d’un modèle prédictif interne quant à l’évolution de la situation. Cette idée servira de socle à notre modèle de la tâche exploité dans le plan d’activité fondant le cœur fonctionnel de notre outil (voir Chapitre 5) : dans une démarche d’ingénierie cognitique, nous poursuivons l’objectif d’utiliser des structures informatiques se rapprochant le plus possible du fonctionnement cognitif.
Nous retenons également l’idée d’une hiérarchisation de ces structures mentales, avec des structures flexibles et adaptables mais peu efficaces et d’autres plus rigides et contraintes en termes de situation d’emploi mais plus efficaces. Ces idées seront exploitées dans l’effort de modélisation du processus cognitif « anticipation » (voir Chapitre 4). La notion de niveau de contrôle s’intéresse également à cette seconde idée.
2.4.2 Niveaux de contrôle Dans le modèle Skills, Rules, Knowledge, couramment désigné par SRK, Rasmussen (1983)
classe les comportements humains en trois catégories : comportements basés sur des habiletés, des règles et des connaissances (Figure 25).
Les comportements basés sur des habiletés sont réalisés automatiquement et ne nécessitent pas une allocation consciente des ressources attentionnelles. Des comportements de ce type sont observés quand la performance est déterminée par l’utilisation de modèles
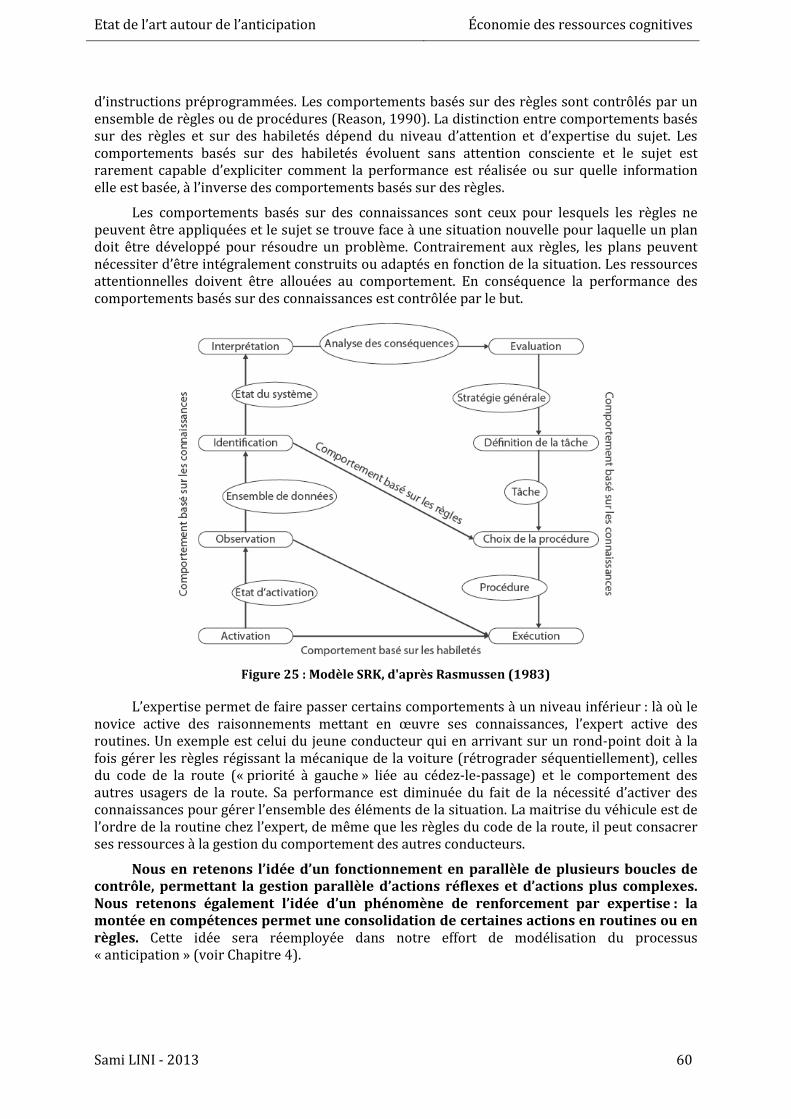
Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 60
d’instructions préprogrammées. Les comportements basés sur des règles sont contrôlés par un ensemble de règles ou de procédures (Reason, 1990). La distinction entre comportements basés sur des règles et sur des habiletés dépend du niveau d’attention et d’expertise du sujet. Les comportements basés sur des habiletés évoluent sans attention consciente et le sujet est rarement capable d’expliciter comment la performance est réalisée ou sur quelle information elle est basée, à l’inverse des comportements basés sur des règles.
Les comportements basés sur des connaissances sont ceux pour lesquels les règles ne peuvent être appliquées et le sujet se trouve face à une situation nouvelle pour laquelle un plan doit être développé pour résoudre un problème. Contrairement aux règles, les plans peuvent nécessiter d’être intégralement construits ou adaptés en fonction de la situation. Les ressources attentionnelles doivent être allouées au comportement. En conséquence la performance des comportements basés sur des connaissances est contrôlée par le but.
Figure 25 : Modèle SRK, d'après Rasmussen (1983)
L’expertise permet de faire passer certains comportements à un niveau inférieur : là où le novice active des raisonnements mettant en œuvre ses connaissances, l’expert active des routines. Un exemple est celui du jeune conducteur qui en arrivant sur un rond-point doit à la fois gérer les règles régissant la mécanique de la voiture (rétrograder séquentiellement), celles du code de la route (« priorité à gauche » liée au cédez-le-passage) et le comportement des autres usagers de la route. Sa performance est diminuée du fait de la nécessité d’activer des connaissances pour gérer l’ensemble des éléments de la situation. La maitrise du véhicule est de l’ordre de la routine chez l’expert, de même que les règles du code de la route, il peut consacrer ses ressources à la gestion du comportement des autres conducteurs.
Nous en retenons l’idée d’un fonctionnement en parallèle de plusieurs boucles de contrôle, permettant la gestion parallèle d’actions réflexes et d’actions plus complexes. Nous retenons également l’idée d’un phénomène de renforcement par expertise : la montée en compétences permet une consolidation de certaines actions en routines ou en règles. Cette idée sera réemployée dans notre effort de modélisation du processus « anticipation » (voir Chapitre 4).
Etat de l’art autour de l’anticipation
Économie des ressources cognitives
Sami LINI - 2013 61
2.4.3 Principe de suffisance Dans la réalisation de sa tâche le sujet se trouve en permanence en position d’ajuster
dynamiquement un compromis entre son exigence vis-à-vis de sa performance et la perception qu’il a de ses propres ressources pour y parvenir : c’est le principe de suffisance.
Un exemple connu est celui présenté par Sperandio (1977) dans le cadre de la régulation de trafic aérien. De prime abord, face à la problématique de l’augmentation de la quantité d’informations à gérer par un contrôleur aérien, une hypothèse d’une diminution proportionnelle de la performance pourrait être attendue, qui en l’occurrence se traduirait par une augmentation des erreurs commises.
Dans les faits, il n’en est rien, car face à l’augmentation du niveau d’exigence de la tâche, ici le nombre d’avions à contrôler simultanément, les contrôleurs font varier leur stratégie opératoire : face à des situations simples, ils n’appliquent pas les modes opératoires les plus simples, mais couvrent le maximum d’indices de performance annexes à la seule sécurisation de l’espace aérien (rapidité d’écoulement des flux, économie de carburant, charge de travail des équipages, etc…), ce qui nécessite des raisonnements plus fins, et une prise d’informations plus régulière.
Pour compenser une dégradation de la performance, face à des situations pouvant être jugées difficiles, il y a adoption de modes opératoires efficaces : la sécurité est le seul critère pris en compte, les procédures sont stéréotypées, standard, la flexibilité devient très faible. Finalement, cette variation de la stratégie opératoire se traduit par un niveau global de performance (quelle que soit la difficulté de la situation) constant.
Nous en retenons l’idée de la recherche d’un compromis entre niveau de performance acceptable et coût cognitif et de processus d’adaptation permettant la recherche de ce compromis. Nous identifions ici la difficulté à précisément définir les moyens et les conditions d’un changement de stratégie cognitive : suivant une courbe en tout ou rien ou au contraire en suivant une procession continue, selon une estimation subjective de la complexité de la situation de manière anticipatoire ou au contraire en réaction à une dégradation de la performance. Dans l’effort de modélisation du processus « anticipation » (voir Chapitre 4), nous aborderons l’idée d’une structure de contrôle en charge de la politique de gestion des stratégies.
2.4.4 Anticipation Par la contrainte que lui imposent ses ressources cognitives, l’opérateur humain est limité
dans sa performance face aux événements imprévus. L’anticipation est un moyen de s’affranchir de cette limitation de plusieurs manières.
Un premier moyen consiste à étaler dans le temps les traitements cognitifs : Amalberti (1995) soumet l’exemple de la préparation d’une réponse par avance à une conjoncture d’événements probables. Cet exemple s’inscrit dans la continuité du modèle SRK présenté au paragraphe précédent : face à une situation complexe nécessitant la mise en œuvre de connaissances pour construire une réponse, l’anticipation permet de construire une routine prête à l’usage au moment opportun. Amalberti (1996) explicite cette idée : l’opérateur évite tant que faire se peut les situations complexes en regard de ses savoir-faire, et se prépare à celles qu’il ne peut éviter en pré-organisant ses réponses. Nous qualifions cette situation d’anticipation par préparation à l’action, par opposition à ce que nous qualifierons d’anticipation par pro-action que nous évoquerons plus tard.
Au sein d’un système complexe, tel qu’un cockpit, l’opérateur peut se trouver face à une situation où coexistent plusieurs dynamiques temporelles distinctes (inertie de l’avion, transmission d’informations via la radio, etc…), Leplat & Rocher (1985) soulignent qu’alors l’anticipation permet d’exploiter les tolérances temporelles induites par ces dynamiques. Nous
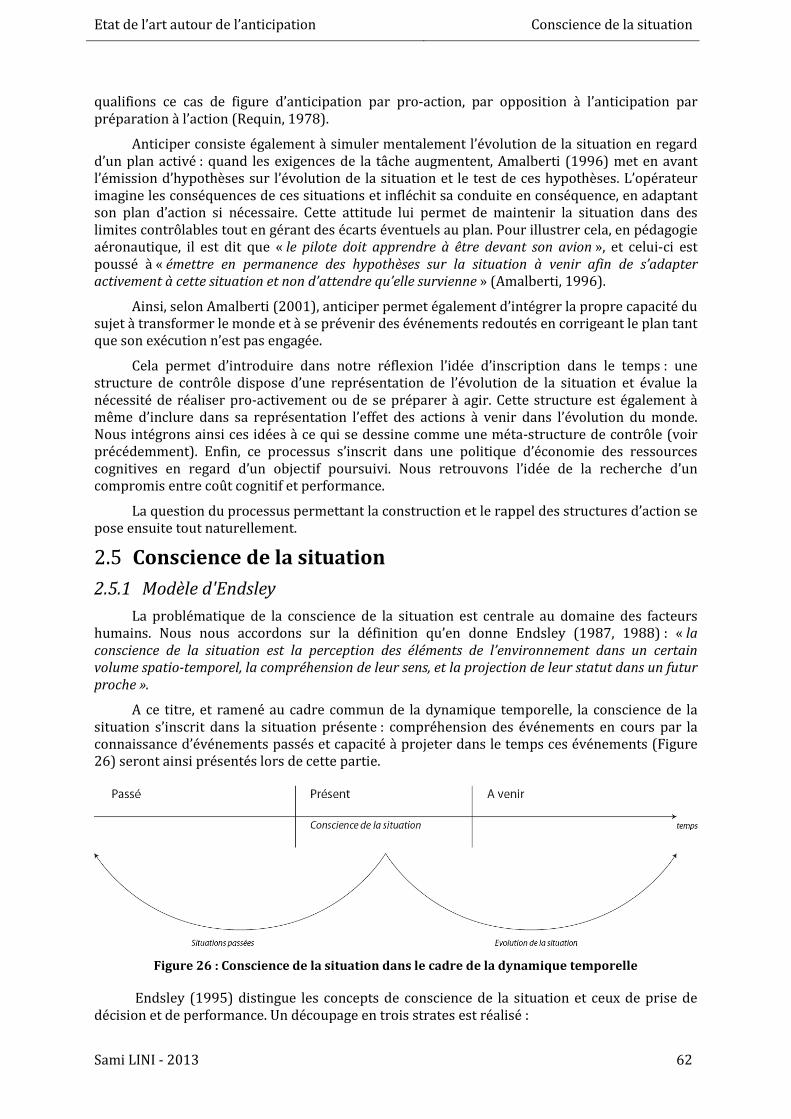
Etat de l’art autour de l’anticipation
Conscience de la situation
Sami LINI - 2013 62
qualifions ce cas de figure d’anticipation par pro-action, par opposition à l’anticipation par préparation à l’action (Requin, 1978).
Anticiper consiste également à simuler mentalement l’évolution de la situation en regard d’un plan activé : quand les exigences de la tâche augmentent, Amalberti (1996) met en avant l’émission d’hypothèses sur l’évolution de la situation et le test de ces hypothèses. L’opérateur imagine les conséquences de ces situations et infléchit sa conduite en conséquence, en adaptant son plan d’action si nécessaire. Cette attitude lui permet de maintenir la situation dans des limites contrôlables tout en gérant des écarts éventuels au plan. Pour illustrer cela, en pédagogie aéronautique, il est dit que « le pilote doit apprendre à être devant son avion », et celui-ci est poussé à « émettre en permanence des hypothèses sur la situation à venir afin de s’adapter activement à cette situation et non d’attendre qu’elle survienne » (Amalberti, 1996).
Ainsi, selon Amalberti (2001), anticiper permet également d’intégrer la propre capacité du sujet à transformer le monde et à se prévenir des événements redoutés en corrigeant le plan tant que son exécution n’est pas engagée.
Cela permet d’introduire dans notre réflexion l’idée d’inscription dans le temps : une structure de contrôle dispose d’une représentation de l’évolution de la situation et évalue la nécessité de réaliser pro-activement ou de se préparer à agir. Cette structure est également à même d’inclure dans sa représentation l’effet des actions à venir dans l’évolution du monde. Nous intégrons ainsi ces idées à ce qui se dessine comme une méta-structure de contrôle (voir précédemment). Enfin, ce processus s’inscrit dans une politique d’économie des ressources cognitives en regard d’un objectif poursuivi. Nous retrouvons l’idée de la recherche d’un compromis entre coût cognitif et performance.
La question du processus permettant la construction et le rappel des structures d’action se pose ensuite tout naturellement.
Conscience de la situation 2.52.5.1 Modèle d'Endsley
La problématique de la conscience de la situation est centrale au domaine des facteurs humains. Nous nous accordons sur la définition qu’en donne Endsley (1987, 1988) : « la conscience de la situation est la perception des éléments de l’environnement dans un certain volume spatio-temporel, la compréhension de leur sens, et la projection de leur statut dans un futur proche ».
A ce titre, et ramené au cadre commun de la dynamique temporelle, la conscience de la situation s’inscrit dans la situation présente : compréhension des événements en cours par la connaissance d’événements passés et capacité à projeter dans le temps ces événements (Figure 26) seront ainsi présentés lors de cette partie.
Figure 26 : Conscience de la situation dans le cadre de la dynamique temporelle
Endsley (1995) distingue les concepts de conscience de la situation et ceux de prise de décision et de performance. Un découpage en trois strates est réalisé :

Etat de l’art autour de l’anticipation
Conscience de la situation
Sami LINI - 2013 63
• Le niveau 1 correspond à la perception des éléments dans l’environnement : statuts, attributs et dynamique des éléments pertinents. A ce niveau, par exemple, le pilote perçoit les éléments environnant : aéronefs, montagnes ou encore des témoins lumineux avec leurs caractéristiques, la taille, la couleur, la vitesse, ou encore la position.
• Le niveau 2 correspond à la compréhension de la situation actuelle : il s’agit d’une synthèse des éléments disjoints du niveau 1. Il y a conscience des éléments en présence et inclusion de leur signification à la lumière de buts opérationnels. Concrètement, à ce niveau, un pilote de chasse comprend que l’apparition de plusieurs aéronefs ennemis situés à une certaine distance les uns des autres et dans un certain contexte géographique indique certains éléments sur leurs objectifs.
• Le niveau 3 correspond enfin à la projection d’états futurs. Celle-ci est rendue possible par la connaissance des statuts et de la dynamique des éléments, ainsi que la compréhension de la situation issue des niveaux 1 et 2. Là encore, concrètement, un pilote de chasse sait qu’un aéronef ennemi dans une certaine position et un certain lieu a une probabilité d’attaquer d’une certaine manière.
Ce dernier niveau souligne le caractère indissociable des concepts de conscience de la situation et d’anticipation.
La Figure 27 illustre le fonctionnement de la conscience de la situation selon Endsley (1995) : les influx sensoriels stockés dans un magasin sensoriel court terme permettent un filtrage à gros grain en mémoire à long terme. Les informations de perception dirigent vers un schéma qui orientera la compréhension et l’interprétation de la situation.
Figure 27 : Modèle de la conscience de la situation (Endsley, 1995)
Baumann & Krems (2009) en s’appuyant sur (Kintsch, 1998) complètent ce modèle : les informations perçues activent des réseaux de connaissances stockées dans la mémoire à long
Etat de l’art autour de l’anticipation
Conscience de la situation
Sami LINI - 2013 64
terme. A partir de ce réseau de connaissances est construite une représentation cohérente en suivant un processus de type contrainte/satisfaction : les éléments compatibles sont activés, les éléments incompatibles supprimés. L’expertise permet au sujet d’ajouter des attentes quant à l’évolution de la situation. Ces attentes sont liées à des schémas qui sont activés quand certains motifs d’indices sensoriels sont rencontrés dans l’environnement.
La compréhension de la situation consiste ainsi tant à donner de la cohérence aux faits qu’à les expliquer et à en prédire l'évolution. Il s’agit donc d’un mécanisme reposant sur un double rapport à la temporalité : à rebours pour expliquer la cause, et dans l’avenir pour prédire. Toute compréhension s’entend en regard d’un objectif, il s’agit donc de construire une représentation juste à l’instant donné en fonction du but poursuivi.
Dans cette démarche, Richard (1990) distingue quatre processus de construction de la représentation de la situation :
• la particularisation d’un schéma est à rapprocher de l’activité de diagnostic : les indices environnementaux activent plusieurs schémas concurrents, de l’information complémentaire est nécessaire pour affiner le choix. L’erreur la plus fréquente dans ce cas-là est due à la surinterprétation des faits recueillis : simplification et limitation du nombre de faits, tendances à les assigner à des hypothèses existantes ;
• la particularisation à une situation : c’est le cas de l’utilisation de schémas moins développés ou spécialisés ;
• la construction d’un réseau de relations : dans le cas de situations nouvelles ne permettant pas les deux cas précédent ;
• l’analogie : la situation ne présente pas les conditions strictes d’application du schéma mais seulement des conditions approchées de sorte qu’on ne se situe pas dans l’un des cas précédents.
Plusieurs idées fondamentales sont ici retenues. En tout premier lieu, le fait qu’il n’y a pas d’anticipation sans perception et compréhension de la situation. Il s’agit donc d’un processus cognitif reposant à la fois sur la capacité à percevoir puis interpréter des indices sensoriels. Le second point concerne l’idée de réseaux de connaissances congruentes validées par satisfaction de contraintes. Par satisfaction de contraintes est entendu le processus de validation des attentes qu’ont ces connaissances à l’égard de l’environnement. Nous retrouvons dans la notion d’attentes l’idée de modèle prédictif de l’évolution du monde. Enfin, plusieurs procédés permettent la construction de solutions aux problèmes rencontrés, mais la plupart reposent sur l’utilisation plus ou moins fidèle de solutions existantes.
2.5.2 Compréhension de la situation Comprendre la situation c’est entrer dans un processus dynamique de réactualisation mais
également de raffinements successifs de sa représentation : détecter les insuffisances de cette dernière et rechercher les éléments d’enrichissement pertinents, tout en acceptant qu’à chaque instant des pans entiers de la situation demeurent incompris. C’est le modèle multi-fils d’Amalberti (1996) : l’opérateur gère ces zones comme des préoccupations pour lesquelles il libérera du temps afin de les traiter. Deux solutions pour les limiter s’offrent à lui : un contrôle en largeur visant à ouvrir le moins de « fils » possibles ou à les traiter le plus vite possible, et un contrôle en profondeur laissant le temps agir sur ces préoccupations « secondaires », comme l’illustre la Figure 28.

Etat de l’art autour de l’anticipation
Conscience de la situation
Sami LINI - 2013 65
Figure 28 : Modèle multi-fils, d'après Amalberti (1996)
Il apparaît au final un ensemble de liens entre compréhension, décision et action : si les contraintes temporelles portant sur la décision sont très fortes, l’opérateur préférera l’automatiser, quitte à ce que cette décision ne soit pas prise pleinement à bon escient, et ce d’autant plus qu’elle reste compatible avec d’autres diagnostics à plus long terme.
2.5.3 Conscience de la situation et charge cognitive Si le mécanisme de conscience de la situation est coûteux cognitivement, Wickens (2008)
illustre en Figure 29 l’importance de maintenir un compromis entre conscience de la situation et charge de travail : toute diminution de la charge de travail par une prise en charge automatique de certains aspects de la tâche diminue également la conscience de la situation.
Figure 29 : Corrélation diminution de la charge/conscience de la situation, Wickens (2008)
Dans l’optique qu’est celle d’une meilleure gestion des ressources cognitives, il nous apparaît fondamental de maintenir l’opérateur au centre de la boucle d’action/décision.
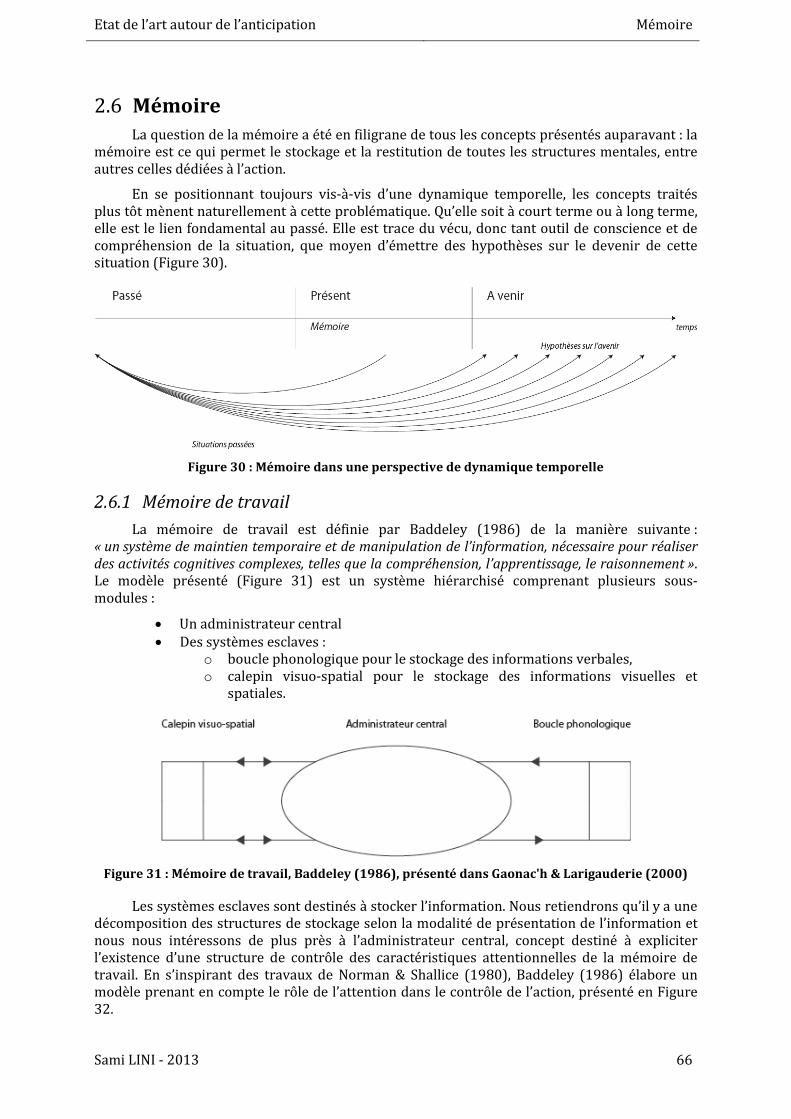
Etat de l’art autour de l’anticipation
Mémoire
Sami LINI - 2013 66
Mémoire 2.6La question de la mémoire a été en filigrane de tous les concepts présentés auparavant : la
mémoire est ce qui permet le stockage et la restitution de toutes les structures mentales, entre autres celles dédiées à l’action.
En se positionnant toujours vis-à-vis d’une dynamique temporelle, les concepts traités plus tôt mènent naturellement à cette problématique. Qu’elle soit à court terme ou à long terme, elle est le lien fondamental au passé. Elle est trace du vécu, donc tant outil de conscience et de compréhension de la situation, que moyen d’émettre des hypothèses sur le devenir de cette situation (Figure 30).
Figure 30 : Mémoire dans une perspective de dynamique temporelle
2.6.1 Mémoire de travail La mémoire de travail est définie par Baddeley (1986) de la manière suivante :
« un système de maintien temporaire et de manipulation de l’information, nécessaire pour réaliser des activités cognitives complexes, telles que la compréhension, l’apprentissage, le raisonnement ». Le modèle présenté (Figure 31) est un système hiérarchisé comprenant plusieurs sous-modules :
• Un administrateur central • Des systèmes esclaves :
o boucle phonologique pour le stockage des informations verbales, o calepin visuo-spatial pour le stockage des informations visuelles et
spatiales.
Figure 31 : Mémoire de travail, Baddeley (1986), présenté dans Gaonac'h & Larigauderie (2000)
Les systèmes esclaves sont destinés à stocker l’information. Nous retiendrons qu’il y a une décomposition des structures de stockage selon la modalité de présentation de l’information et nous nous intéressons de plus près à l’administrateur central, concept destiné à expliciter l’existence d’une structure de contrôle des caractéristiques attentionnelles de la mémoire de travail. En s’inspirant des travaux de Norman & Shallice (1980), Baddeley (1986) élabore un modèle prenant en compte le rôle de l’attention dans le contrôle de l’action, présenté en Figure 32.

Etat de l’art autour de l’anticipation
Mémoire
Sami LINI - 2013 67
Figure 32 : Modèle de Norman & Shallice (1980), simplifié par Baddeley (1986)
La plupart des comportements sont contrôlés automatiquement sans nécessité d’un contrôle attentionnel. Cependant, en certaines circonstances, lorsque les processus automatiques ne permettent pas d’atteindre le niveau de performance poursuivi, en cas de risque ou de tâche difficile, de situation inconnue ou peu connue, si le plan d’action défini doit être modifié, ou que des réponses habituellement fortes doivent être contrariées ou empêchées, l’action doit être contrôlée par l’attention. Deux axes sont alors développés par ce modèle :
• le mécanisme de résolution de conflits sélectionne parmi les actions en cours la plus pertinente et évite les actions non appropriées ; il est particulièrement valable dans le cas de compétences bien rodées, permettant à l’activité un déroulement relativement automatique,
• le système attentionnel de supervision (SAS) interrompt les comportements en cours ou inhibe les comportements habituels, il permet alors un choix dans les comportements valides pour la situation en cours ; il intervient particulièrement dans les activités de planification et dans les situations évoquées plus haut.
Ce modèle fait émerger l’existence de différents types de comportements et d’une autorité de régulation de ces comportements permettant la gestion adéquate de situations sortant de l’ordinaire ou nécessitant plus de ressources cognitives. Nous en retiendrons qu’il est possible de naviguer entre ces différents états attentionnels selon la demande de l’environnement sous le contrôle d’une supervision de plus haut niveau.
2.6.2 Mémoire à long terme et mémoire de travail long terme La problématique des tâches complexes soulève des questions concernant leur gestion
mnésique. En effet, celles-ci requièrent à la fois de maintenir de grandes quantités d’information en mémoire et il est constaté empiriquement qu’il est tout à fait possible à l’opérateur d’effectuer des interruptions et des reprises d’activité dans de bonnes conditions. La mémoire de travail telle que la définit Baddeley (1986) n’est pas censée tant supporter.
C’est en mémoire à long terme que l’opérateur stocke l’ensemble de ses connaissances permanentes. Sans limite de taille ou de durée de rétention des informations, les informations
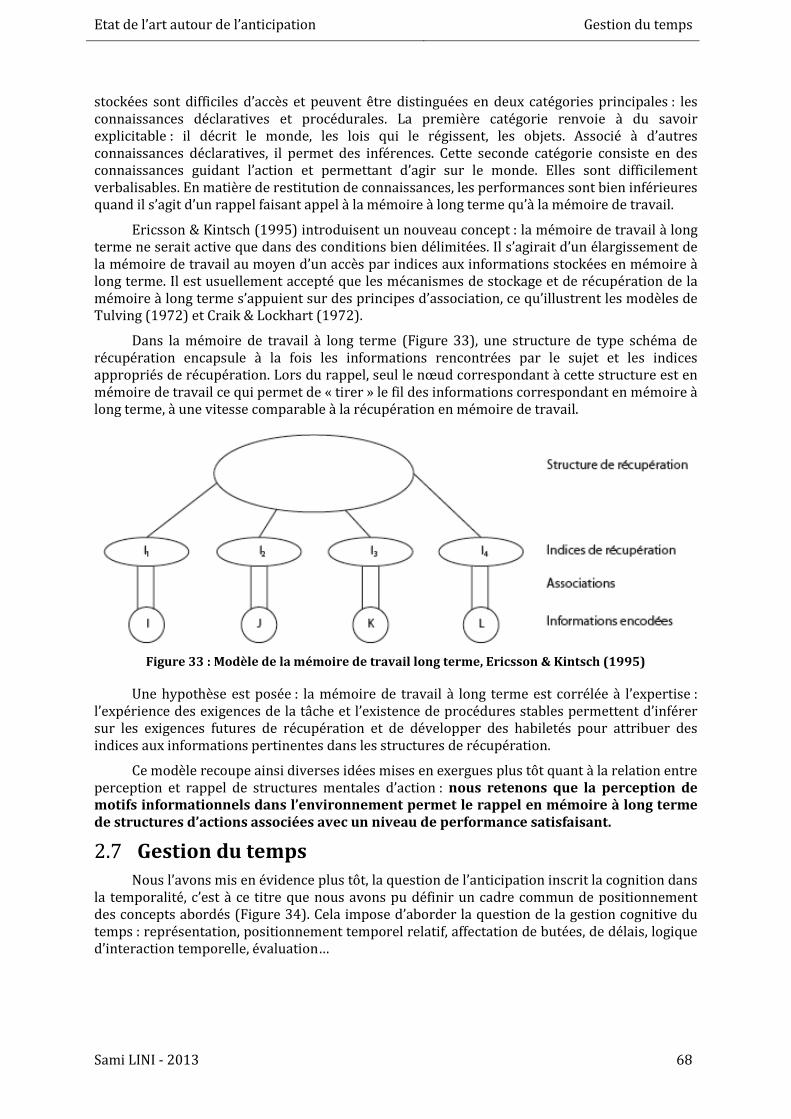
Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 68
stockées sont difficiles d’accès et peuvent être distinguées en deux catégories principales : les connaissances déclaratives et procédurales. La première catégorie renvoie à du savoir explicitable : il décrit le monde, les lois qui le régissent, les objets. Associé à d’autres connaissances déclaratives, il permet des inférences. Cette seconde catégorie consiste en des connaissances guidant l’action et permettant d’agir sur le monde. Elles sont difficilement verbalisables. En matière de restitution de connaissances, les performances sont bien inférieures quand il s’agit d’un rappel faisant appel à la mémoire à long terme qu’à la mémoire de travail.
Ericsson & Kintsch (1995) introduisent un nouveau concept : la mémoire de travail à long terme ne serait active que dans des conditions bien délimitées. Il s’agirait d’un élargissement de la mémoire de travail au moyen d’un accès par indices aux informations stockées en mémoire à long terme. Il est usuellement accepté que les mécanismes de stockage et de récupération de la mémoire à long terme s’appuient sur des principes d’association, ce qu’illustrent les modèles de Tulving (1972) et Craik & Lockhart (1972).
Dans la mémoire de travail à long terme (Figure 33), une structure de type schéma de récupération encapsule à la fois les informations rencontrées par le sujet et les indices appropriés de récupération. Lors du rappel, seul le nœud correspondant à cette structure est en mémoire de travail ce qui permet de « tirer » le fil des informations correspondant en mémoire à long terme, à une vitesse comparable à la récupération en mémoire de travail.
Figure 33 : Modèle de la mémoire de travail long terme, Ericsson & Kintsch (1995)
Une hypothèse est posée : la mémoire de travail à long terme est corrélée à l’expertise : l’expérience des exigences de la tâche et l’existence de procédures stables permettent d’inférer sur les exigences futures de récupération et de développer des habiletés pour attribuer des indices aux informations pertinentes dans les structures de récupération.
Ce modèle recoupe ainsi diverses idées mises en exergues plus tôt quant à la relation entre perception et rappel de structures mentales d’action : nous retenons que la perception de motifs informationnels dans l’environnement permet le rappel en mémoire à long terme de structures d’actions associées avec un niveau de performance satisfaisant.
Gestion du temps 2.7Nous l’avons mis en évidence plus tôt, la question de l’anticipation inscrit la cognition dans
la temporalité, c’est à ce titre que nous avons pu définir un cadre commun de positionnement des concepts abordés (Figure 34). Cela impose d’aborder la question de la gestion cognitive du temps : représentation, positionnement temporel relatif, affectation de butées, de délais, logique d’interaction temporelle, évaluation…
Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 69
Figure 34 : Psychologie du temps et dynamique temporelle
Au sein d’environnements dynamiques, deux types de stratégie de gestion temporelle s’opposent : stratégies réactive et anticipative. Nous illustrons les conséquences de cette dichotomie sur la gestion des ressources cognitives, en nous interrogeant sur le lien entre charge et distance perçue à l’objectif. Enfin, nous mettons en avant les moyens d’inscrire projet d’action et action dans le temps avec les concepts de planification et d’anticipation.
2.7.1 Psychologie du temps
2.7.1.1 Représentation temporelle Michon (1985, 1990, 1993) définit le temps comme le « produit expérimental conscient des
processus permettant à l’organisme (humain) de s’organiser de manière adaptative de sorte à ce que son comportement demeure syntonisé aux relations séquentielles (c’est-à-dire l’ordre) de l’environnement ». Sous cet angle, le temps n’est plus un concept auquel il convient de définir des attributs, ni même peut-on encore le considérer comme une propriété intrinsèque de notre monde, mais comme une cooccurrence de processus permettant une synchronisation à l’évolution de l’environnement. Cela implique que la cognition temporelle appartient au domaine des connaissances déclaratives, les représentations temporelles étant alors une forme de cognition de haut niveau. Friedman (1990) montre alors que l’appréhension du temps repose sur des habiletés :
• capacité d’évaluation de son évolution : simultanéité et succession, durée perçue et estimée, durée de l’intervalle, interaction temps/espace/vitesse ;
• positionnement d’événements en son sein : datation directe, ordre chronologique, distance au présent, localisation à partir de repères.
Ces habiletés permettent la construction de structures de représentations temporelles permettant une « manipulation mentale » du temps. La littérature de la psychologie du temps a donné naissance à pléthore de concepts visant à définir ces structures : scripts temporels, (Huttenlocher, Hedges, & Prohaska, 1992), systèmes de références temporelles (Robinson, 1986), ou encore cadre temporel (Valax, 1986).
Nous en retenons deux idées principales. La première concerne l’articulation autour d’événements récurrents. Chez les cultivateurs-éleveurs, (Valax, 1986) définit que le plan est déterminé autour de tâches pivots répétées quotidiennement et de butées temporelles, points avant et au-delà desquels la mise en œuvre du plan n’est plus pertinente.
Lories, Dubois, & Gaussin (1997) affirment que dans le cadre d’une estimation temporelle, les sujets tendent à extraire des invariants statistiques quant au fonctionnement du système, pour utiliser, au sein de leur activité, une heuristique d’ancrage/ajustement, ce que Tversky & Kahneman (1974) posaient comme étant la stratégie consistant à réaliser une estimation à partir d’une valeur initiale, ajustée par la suite en fonction d’éléments de l’environnement.
Deux systèmes permettent de s’offrir des marges de tolérance : les tâches sont toujours planifiées avec un peu de flexibilité pour absorber le retard éventuel d’un prédécesseur, et des tâches libres, non contraintes par un « quand agir », peuvent être insérées dans des moments de calme.
Le processus d’anticipation joue un rôle prépondérant dans la situation évoquée ici : par simulation de l’évolution de sa charge cognitive à venir, l’opérateur joue de la temporalité pour
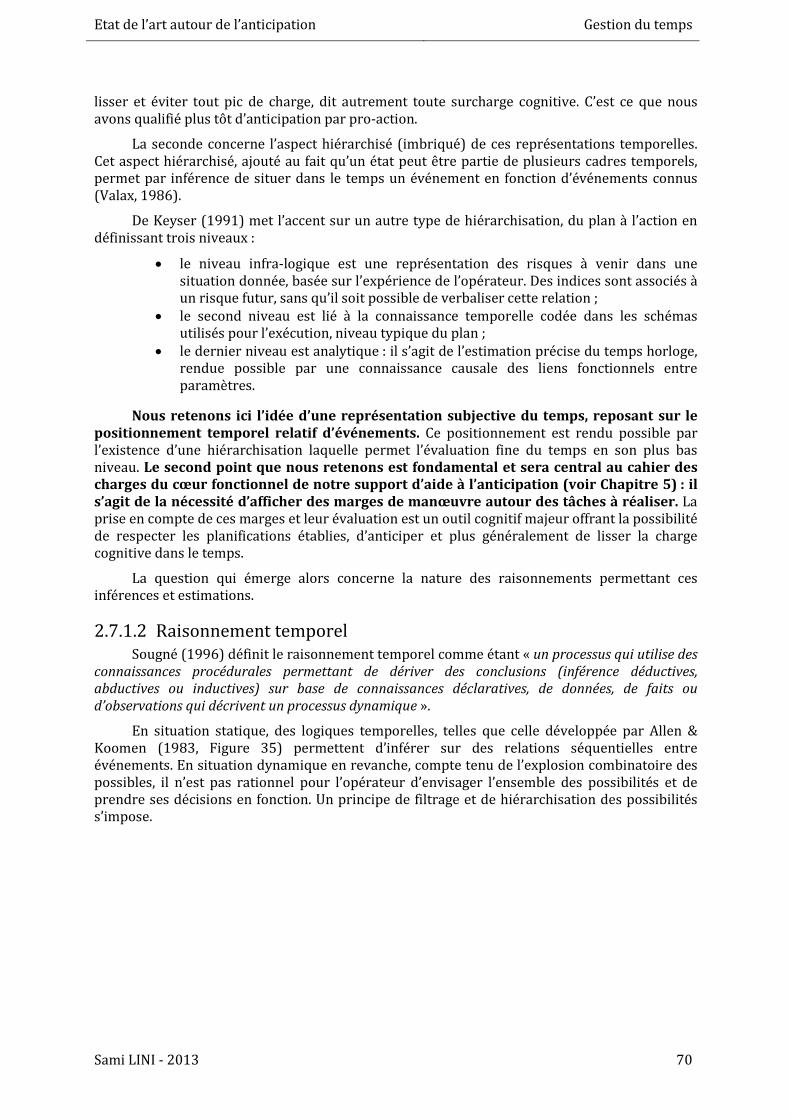
Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 70
lisser et éviter tout pic de charge, dit autrement toute surcharge cognitive. C’est ce que nous avons qualifié plus tôt d’anticipation par pro-action.
La seconde concerne l’aspect hiérarchisé (imbriqué) de ces représentations temporelles. Cet aspect hiérarchisé, ajouté au fait qu’un état peut être partie de plusieurs cadres temporels, permet par inférence de situer dans le temps un événement en fonction d’événements connus (Valax, 1986).
De Keyser (1991) met l’accent sur un autre type de hiérarchisation, du plan à l’action en définissant trois niveaux :
• le niveau infra-logique est une représentation des risques à venir dans une situation donnée, basée sur l’expérience de l’opérateur. Des indices sont associés à un risque futur, sans qu’il soit possible de verbaliser cette relation ;
• le second niveau est lié à la connaissance temporelle codée dans les schémas utilisés pour l’exécution, niveau typique du plan ;
• le dernier niveau est analytique : il s’agit de l’estimation précise du temps horloge, rendue possible par une connaissance causale des liens fonctionnels entre paramètres.
Nous retenons ici l’idée d’une représentation subjective du temps, reposant sur le positionnement temporel relatif d’événements. Ce positionnement est rendu possible par l’existence d’une hiérarchisation laquelle permet l’évaluation fine du temps en son plus bas niveau. Le second point que nous retenons est fondamental et sera central au cahier des charges du cœur fonctionnel de notre support d’aide à l’anticipation (voir Chapitre 5) : il s’agit de la nécessité d’afficher des marges de manœuvre autour des tâches à réaliser. La prise en compte de ces marges et leur évaluation est un outil cognitif majeur offrant la possibilité de respecter les planifications établies, d’anticiper et plus généralement de lisser la charge cognitive dans le temps.
La question qui émerge alors concerne la nature des raisonnements permettant ces inférences et estimations.
2.7.1.2 Raisonnement temporel Sougné (1996) définit le raisonnement temporel comme étant « un processus qui utilise des
connaissances procédurales permettant de dériver des conclusions (inférence déductives, abductives ou inductives) sur base de connaissances déclaratives, de données, de faits ou d’observations qui décrivent un processus dynamique ».
En situation statique, des logiques temporelles, telles que celle développée par Allen & Koomen (1983, Figure 35) permettent d’inférer sur des relations séquentielles entre événements. En situation dynamique en revanche, compte tenu de l’explosion combinatoire des possibles, il n’est pas rationnel pour l’opérateur d’envisager l’ensemble des possibilités et de prendre ses décisions en fonction. Un principe de filtrage et de hiérarchisation des possibilités s’impose.

Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 71
Figure 35 : Relations possibles (et leurs transposées) entre deux intervalles de temps (Allen &
Koomen, 1983)
La théorie pragmatique du raisonnement de (Cheng & Holyoak, 1985), complétée par (Holyoak & Spellman, 1993), défend l’idée d’une combinaison de représentations symboliques de connaissances et d’une mécanique de satisfaction de contraintes pour expliquer le raisonnement humain. Ainsi, « les schémas [seraient] des structures plus abstraites que les connaissances spécifiques au contenu mais plus particulières que les règles d’inférence d’utilité générale ».
L’approche de Smith, Langston & Nisbett (1992) considère que le raisonnement peut être produit par recours à des exemples stockés en mémoire, par application de règles et par combinaison des deux. Les prémisses évoquent un exemple, donnant accès à une règle, ou une règle activée évoque un exemple.
En s’accordant sur ce dernier point de vue, nous justifions notre approche contextualisée : la conception d’un modèle à capacité prédictive en est grandement simplifiée.
2.7.2 Temps et contrôle cognitif Hollnagel (1998) apporte une nouvelle dimension à la réflexion sur la schématisation et le
contrôle cognitif, abordée précédemment. La Figure 36 illustre la définition de quatre types de contrôle, fonction de la perception du temps disponible, et de la familiarité de la situation :
• La perception d’un temps disponible élevé, quelle que soit la familiarité de la situation, mène à un contrôle stratégique de la situation : il s’agit de cas de planification à long terme ;
• Une familiarité élevée de la situation et/ou une perception du temps disponible relativement important mènent à un contrôle tactique de la situation : il s’agit de cas d’exécutions procédurales, basées sur une planification à moyen terme ;
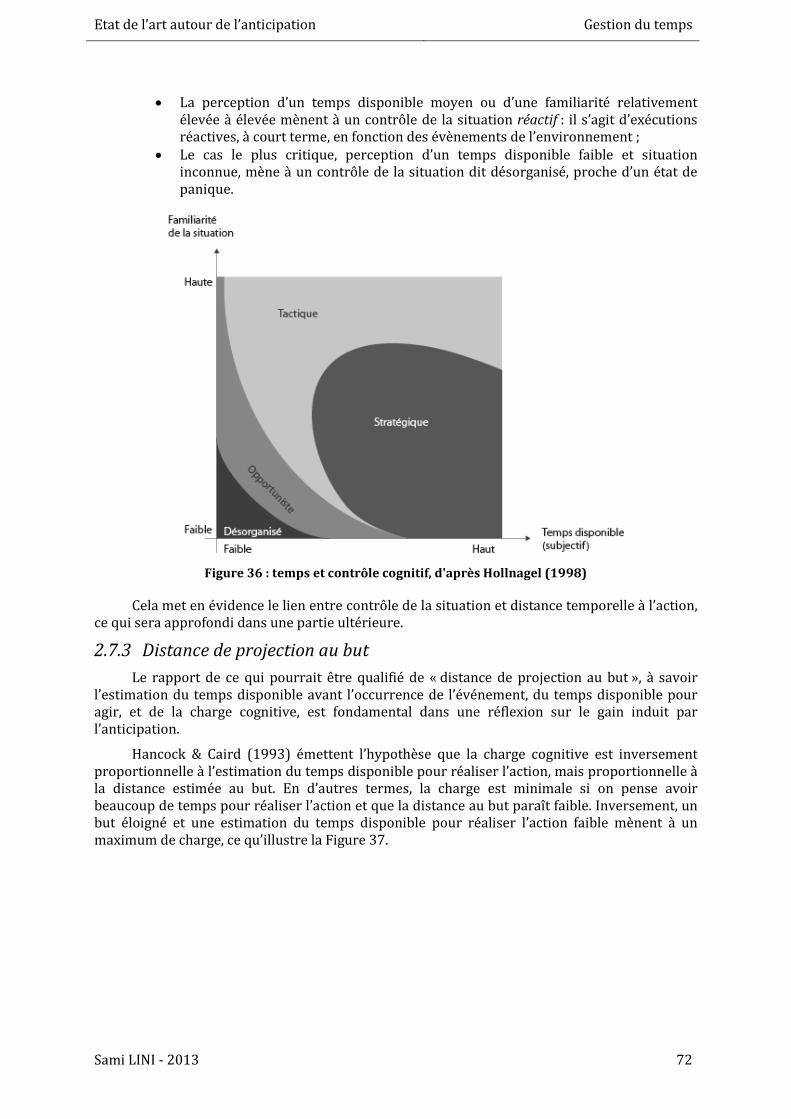
Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 72
• La perception d’un temps disponible moyen ou d’une familiarité relativement élevée à élevée mènent à un contrôle de la situation réactif : il s’agit d’exécutions réactives, à court terme, en fonction des évènements de l’environnement ;
• Le cas le plus critique, perception d’un temps disponible faible et situation inconnue, mène à un contrôle de la situation dit désorganisé, proche d’un état de panique.
Figure 36 : temps et contrôle cognitif, d'après Hollnagel (1998)
Cela met en évidence le lien entre contrôle de la situation et distance temporelle à l’action, ce qui sera approfondi dans une partie ultérieure.
2.7.3 Distance de projection au but Le rapport de ce qui pourrait être qualifié de « distance de projection au but », à savoir
l’estimation du temps disponible avant l’occurrence de l’événement, du temps disponible pour agir, et de la charge cognitive, est fondamental dans une réflexion sur le gain induit par l’anticipation.
Hancock & Caird (1993) émettent l’hypothèse que la charge cognitive est inversement proportionnelle à l’estimation du temps disponible pour réaliser l’action, mais proportionnelle à la distance estimée au but. En d’autres termes, la charge est minimale si on pense avoir beaucoup de temps pour réaliser l’action et que la distance au but paraît faible. Inversement, un but éloigné et une estimation du temps disponible pour réaliser l’action faible mènent à un maximum de charge, ce qu’illustre la Figure 37.
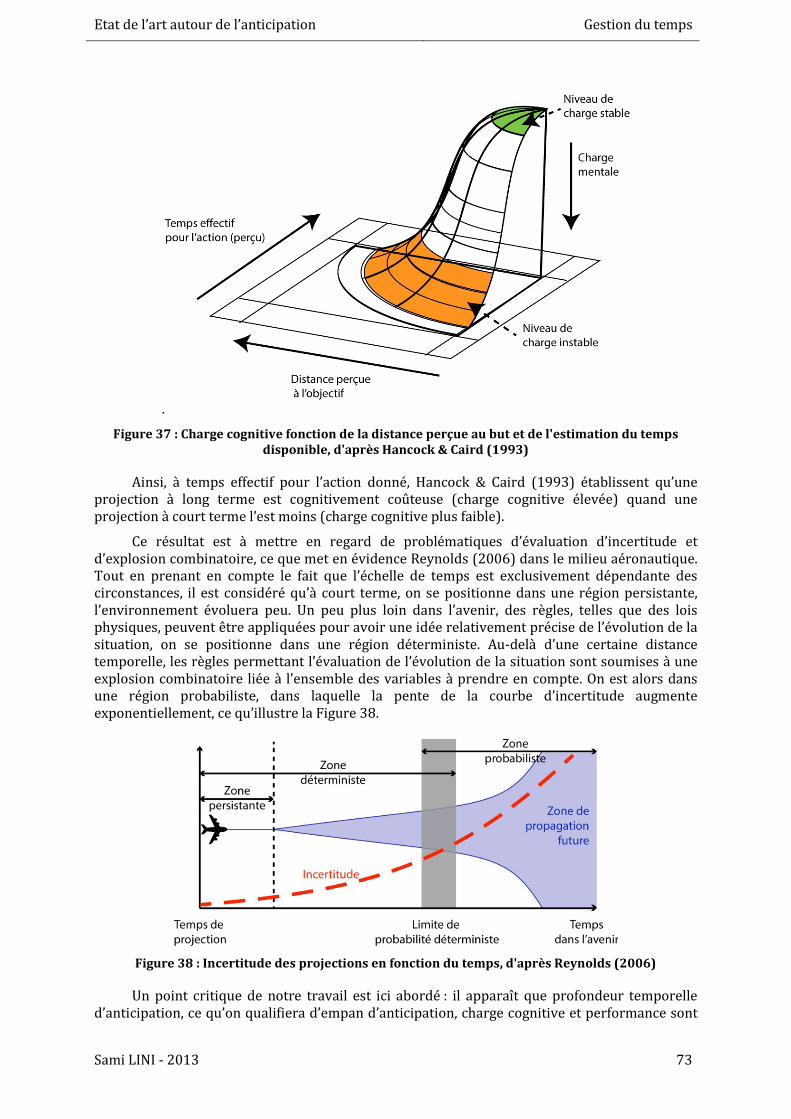
Etat de l’art autour de l’anticipation
Gestion du temps
Sami LINI - 2013 73
.
Figure 37 : Charge cognitive fonction de la distance perçue au but et de l'estimation du temps disponible, d'après Hancock & Caird (1993)
Ainsi, à temps effectif pour l’action donné, Hancock & Caird (1993) établissent qu’une projection à long terme est cognitivement coûteuse (charge cognitive élevée) quand une projection à court terme l’est moins (charge cognitive plus faible).
Ce résultat est à mettre en regard de problématiques d’évaluation d’incertitude et d’explosion combinatoire, ce que met en évidence Reynolds (2006) dans le milieu aéronautique. Tout en prenant en compte le fait que l’échelle de temps est exclusivement dépendante des circonstances, il est considéré qu’à court terme, on se positionne dans une région persistante, l’environnement évoluera peu. Un peu plus loin dans l’avenir, des règles, telles que des lois physiques, peuvent être appliquées pour avoir une idée relativement précise de l’évolution de la situation, on se positionne dans une région déterministe. Au-delà d’une certaine distance temporelle, les règles permettant l’évaluation de l’évolution de la situation sont soumises à une explosion combinatoire liée à l’ensemble des variables à prendre en compte. On est alors dans une région probabiliste, dans laquelle la pente de la courbe d’incertitude augmente exponentiellement, ce qu’illustre la Figure 38.
Figure 38 : Incertitude des projections en fonction du temps, d'après Reynolds (2006)
Un point critique de notre travail est ici abordé : il apparaît que profondeur temporelle d’anticipation, ce qu’on qualifiera d’empan d’anticipation, charge cognitive et performance sont
Etat de l’art autour de l’anticipation
Planification
Sami LINI - 2013 74
liés. Dans le cadre d’un environnement dynamique parfois instable, où l’incertitude peut en certaine circonstance être importante, la question de l’impact de la profondeur temporelle d’anticipation sur la charge cognitive et la performance est une donnée fondamentale à prendre en compte pour la conception de notre outil d’aide à l’anticipation. Nous traiterons de ce point fondamental lors de notre étude préliminaire (voir Chapitre 3).
Planification 2.8Hoc (1987) définit la planification comme « l’élaboration et (ou) la mise en œuvre de
plans ». La définition, que nous rappelons, du concept de plan, «une représentation schématique et (ou) hiérarchisée susceptible de guider l’activité », fait le lien avec le thème abordé plus tôt de schématisation.
Si nous nous penchons sur les termes employés, il est noté dans un premier temps la subjectivité sous-jacente à l’idée de représentation. Le terme est ici employé en opposition au terme de traitement, qui sous-entend l’emploi de procédures. Il s’agit de représenter l’information, pas de la traiter effectivement. La définition nous indique également que le plan ne guide pas forcément l’activité, il n’est que « susceptible de la guider ». L’activité pourra donc suivre la structure du plan mais également s’en affranchir.
Dans un second temps, nous soulignons les termes schématique et hiérarchisée : la représentation est à un bas niveau de détails et il y a mise en place d’une stratégie de raffinements successifs. Si la représentation est située suffisamment haut dans la hiérarchie de raffinement de Rasmussen (1986), alors elle mettra en évidence des relations entre parties d’un objet, ne pouvant être exprimée à un niveau plus microscopique. Hoc (1987) donne ainsi l’exemple du rapport d’expérience structuré en parties (problématique, méthode, résultats, interprétation) dont les relations relatives ne pourraient être traitées si elles n’étaient pas distinguées. Au sens de la hiérarchie d’abstraction, elle fait apparaître des relations entre éléments qui ne peuvent être traitées qu’au niveau de l’architecture fonctionnelle d’un système et non au niveau de sa mise en œuvre.
De la même façon, si le plan est défini à un niveau plus élevé que celui de la mise en œuvre de l’activité, il est souvent lui-même hiérarchisé : il met alors en évidence différents niveaux dans sa structure et les relations entre eux, ce qui sera utile lorsque les modalités d’exécution d’une procédure seront liées à celles d’une autre sous-procédure exécutée ultérieurement. La planification est donc également une activité de séquençage d’opérations précédant leur exécution, ce qu’illustre la Figure 39. A la manière de Hoc (1987), nous confondrons ainsi l’élaboration définie plus haut et la mise en action de plans pour définir l’activité de planification.
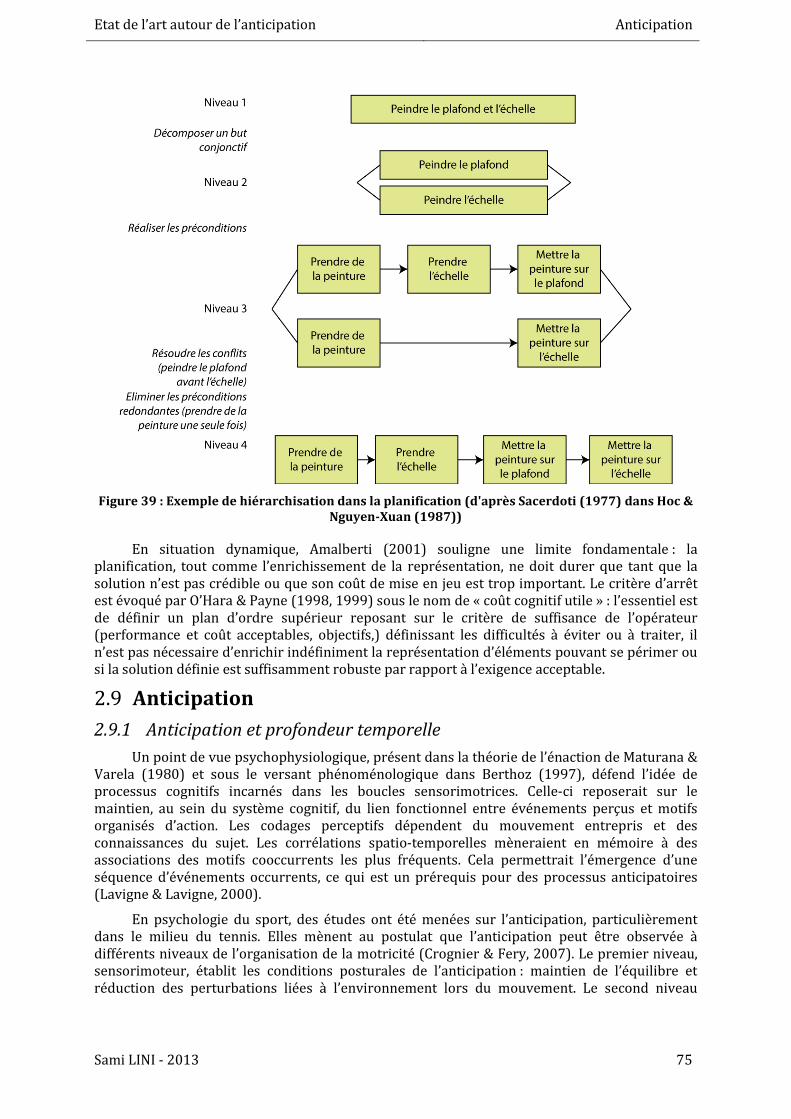
Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 75
Figure 39 : Exemple de hiérarchisation dans la planification (d'après Sacerdoti (1977) dans Hoc &
Nguyen-Xuan (1987))
En situation dynamique, Amalberti (2001) souligne une limite fondamentale : la planification, tout comme l’enrichissement de la représentation, ne doit durer que tant que la solution n’est pas crédible ou que son coût de mise en jeu est trop important. Le critère d’arrêt est évoqué par O’Hara & Payne (1998, 1999) sous le nom de « coût cognitif utile » : l’essentiel est de définir un plan d’ordre supérieur reposant sur le critère de suffisance de l’opérateur (performance et coût acceptables, objectifs,) définissant les difficultés à éviter ou à traiter, il n’est pas nécessaire d’enrichir indéfiniment la représentation d’éléments pouvant se périmer ou si la solution définie est suffisamment robuste par rapport à l’exigence acceptable.
Anticipation 2.92.9.1 Anticipation et profondeur temporelle
Un point de vue psychophysiologique, présent dans la théorie de l’énaction de Maturana & Varela (1980) et sous le versant phénoménologique dans Berthoz (1997), défend l’idée de processus cognitifs incarnés dans les boucles sensorimotrices. Celle-ci reposerait sur le maintien, au sein du système cognitif, du lien fonctionnel entre événements perçus et motifs organisés d’action. Les codages perceptifs dépendent du mouvement entrepris et des connaissances du sujet. Les corrélations spatio-temporelles mèneraient en mémoire à des associations des motifs cooccurrents les plus fréquents. Cela permettrait l’émergence d’une séquence d’événements occurrents, ce qui est un prérequis pour des processus anticipatoires (Lavigne & Lavigne, 2000).
En psychologie du sport, des études ont été menées sur l’anticipation, particulièrement dans le milieu du tennis. Elles mènent au postulat que l’anticipation peut être observée à différents niveaux de l’organisation de la motricité (Crognier & Fery, 2007). Le premier niveau, sensorimoteur, établit les conditions posturales de l’anticipation : maintien de l’équilibre et réduction des perturbations liées à l’environnement lors du mouvement. Le second niveau

Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 76
concerne l’action elle-même : avance ou retard du sujet par rapport à la stimulation à laquelle il doit répondre. Enfin, au troisième niveau, il s’agit de la planification de l’action à plus long terme.
Dans les deux premiers niveaux, une distinction est également faite entre anticipation « perceptive », la capacité à prédire les caractéristiques spatiales et temporelles d’un objet en déplacement quand celui-ci n’est plus visible, et « effectrice », qui fait coïncider prédiction et réponse motrice (Poulton, 1957).
Denecker (1999) effectue la distinction entre anticipation symbolique et anticipation subsymbolique. La première est inconsciente, procédurale et très court terme. Elle permet d’expliquer les conduites adaptatives. Elle est proche de l’idée d’expertise perceptivo-motrice(Crognier & Fery, 2007). La seconde est accessible au niveau verbal et repose sur la mobilisation de systèmes de connaissances. Elle est proche de l’idée d’expertise perceptivo-cognitive (Crognier & Fery, 2007). Elle se prête aux empans temporels plus longs (au-delà de quelques secondes, voir paragraphe suivant).
2.9.2 Découpage temporel et en strates La relation au temps n’est pas uniquement contrainte par la perception subjective de son
évolution. La neurophysiologie impose une granularité temporelle que mettent en avant Tanida & Pöppel (2006) dans leur modèle hiérarchisé de l’anticipation (Figure 40). De la même manière que présenté par Hollnagel (1998), trois strates de niveaux supérieurs sont définies : niveau de manœuvre, niveau tactique segmenté et niveau stratégique. Chacun de ces niveaux a une granularité temporelle qui lui est propre et qui mène à définir des étapes intermédiaires plus ou moins éloignées, l’aspect hiérarchique du modèle imposant que les niveaux soient emboités les uns dans les autres avec pour visée finale l’atteinte d’un but.
Ainsi, au plus bas de la hiérarchie, l’intégration des informations sensorimotrices se fait dans un domaine temporel de l’ordre de 30 à 40 millisecondes. Les éléments corroborant cette fenêtre temporelle proviennent d’études tant sur les cellules dans le système sensorimoteur que sur les potentiels évoqués, ou encore des observations de temps de réaction ou de latence de mouvements oculaires.
Figure 40 : Modèle hiérarchique de fenêtres temporelles d'anticipation d’après Tanida & Pöppel
(2006)
Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 77
La strate hiérarchique supérieure, qualifiée de niveau de contrôle anticipatif, se positionne sur une fenêtre de temps de l’ordre de 2 à 3 secondes, ce qui est un ordre de grandeur classique à propos d’opérations mentales. La Figure 41 illustre ce phénomène : la figure peut être vue en profondeur ou en relief, mais pour passer de l’un à l’autre un délai d’environ 3 secondes est nécessaire. Cela est également valide pour le contrôle sensorimoteur : Miyake & Onishi (2004) montrent que s’il est demandé à un sujet de se synchroniser sur une séquence régulière de stimuli auditifs en tapant avec le doigt, les stimuli sont anticipés avec une très faible variance de l’ordre de quelques dizaines de millisecondes. Cela n’est cependant possible que si la fenêtre temporelle est de quelques secondes, au-delà de 5 secondes, les performances diminuent de manière importante, les sujets préférant être dans la réaction que dans l’anticipation.
Figure 41 : Le changement de perception, en profondeur ou en relief, est possible après environ 3
secondes
2.9.3 Anticipation subsymbolique Nous avons fait la distinction plus tôt entre anticipation par préparation à l’action et pro-
action. Les travaux en environnement très dynamiques, dans le milieu de la psychophysiologie du sport en particulier, mettent en évidence le fait que la préparation à l’action permet d’être prêt à agir à la réponse de l’adversaire. Henneman (1989) définit les ajustement préparatoires comme étant les « processus adaptatifs préalables à l’apparition du signal d’exécution dont l’objectif est d’assister voire de faciliter la réalisation du programme moteur, et la conséquence, de réduire la durée des temps de réponse ».
Ainsi, dans le milieu du tennis, le joueur cherche à lever l’incertitude temporelle, spatiale ou événementielle pour accélérer le processus de décision. La théorie du traitement de l’information appliquée à l’étude du tennis a pour hypothèse principale que les délais de traitement sont réduits si des indices visuels pertinents sont extraits du mouvement de frappe de l’adversaire. Dans un environnement sous très forte contrainte temporelle, anticiper permet donc de dégager des marges de manœuvre. L’aéronautique civile est un environnement dont la dynamique permet la mobilisation de connaissances et ne nécessite donc pas l’emploi de routines subsymboliques. Nous nous intéresserons donc surtout à l’anticipation symbolique.
2.9.4 Anticipation symbolique Si la littérature présentée jusqu’à présent a permis d’identifier les concepts et contraintes
clés à l’anticipation, la question de son fonctionnement reste un point critique en suspens. Tanida & Pöppel (2006) proposent à cette fin une généralisation du principe de réafférence de Von Holst & Mittelstaedt (1950). Ce principe, qui permet de répondre au problème de la relation entre posture et mouvement, postule que lors du mouvement, le cerveau distingue la stimulation exafférente (qui résulte uniquement de facteurs situés en dehors du corps) de la stimulation réafférente (qui est le résultat de mouvements du corps).
La commande motrice ne cause pas seulement un certain type de mouvements musculaires mais elle produit aussi une copie neurale (la copie efférente) qui correspond à l’input sensoriel attendu d’après le comportement réalisé ? Le cerveau fait alors une comparaison entre la copie efférente et l’information sensorielle entrante, tel qu’on peut le voit
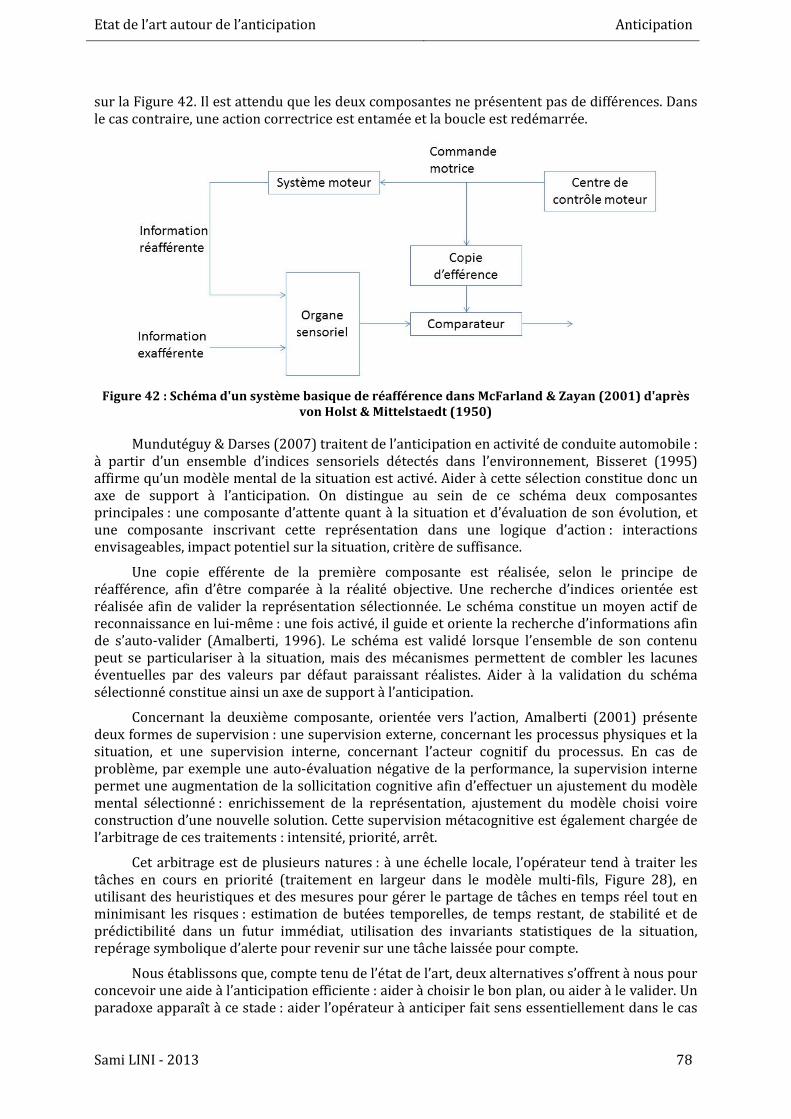
Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 78
sur la Figure 42. Il est attendu que les deux composantes ne présentent pas de différences. Dans le cas contraire, une action correctrice est entamée et la boucle est redémarrée.
Figure 42 : Schéma d'un système basique de réafférence dans McFarland & Zayan (2001) d'après
von Holst & Mittelstaedt (1950)
Mundutéguy & Darses (2007) traitent de l’anticipation en activité de conduite automobile : à partir d’un ensemble d’indices sensoriels détectés dans l’environnement, Bisseret (1995) affirme qu’un modèle mental de la situation est activé. Aider à cette sélection constitue donc un axe de support à l’anticipation. On distingue au sein de ce schéma deux composantes principales : une composante d’attente quant à la situation et d’évaluation de son évolution, et une composante inscrivant cette représentation dans une logique d’action : interactions envisageables, impact potentiel sur la situation, critère de suffisance.
Une copie efférente de la première composante est réalisée, selon le principe de réafférence, afin d’être comparée à la réalité objective. Une recherche d’indices orientée est réalisée afin de valider la représentation sélectionnée. Le schéma constitue un moyen actif de reconnaissance en lui-même : une fois activé, il guide et oriente la recherche d’informations afin de s’auto-valider (Amalberti, 1996). Le schéma est validé lorsque l’ensemble de son contenu peut se particulariser à la situation, mais des mécanismes permettent de combler les lacunes éventuelles par des valeurs par défaut paraissant réalistes. Aider à la validation du schéma sélectionné constitue ainsi un axe de support à l’anticipation.
Concernant la deuxième composante, orientée vers l’action, Amalberti (2001) présente deux formes de supervision : une supervision externe, concernant les processus physiques et la situation, et une supervision interne, concernant l’acteur cognitif du processus. En cas de problème, par exemple une auto-évaluation négative de la performance, la supervision interne permet une augmentation de la sollicitation cognitive afin d’effectuer un ajustement du modèle mental sélectionné : enrichissement de la représentation, ajustement du modèle choisi voire construction d’une nouvelle solution. Cette supervision métacognitive est également chargée de l’arbitrage de ces traitements : intensité, priorité, arrêt.
Cet arbitrage est de plusieurs natures : à une échelle locale, l’opérateur tend à traiter les tâches en cours en priorité (traitement en largeur dans le modèle multi-fils, Figure 28), en utilisant des heuristiques et des mesures pour gérer le partage de tâches en temps réel tout en minimisant les risques : estimation de butées temporelles, de temps restant, de stabilité et de prédictibilité dans un futur immédiat, utilisation des invariants statistiques de la situation, repérage symbolique d’alerte pour revenir sur une tâche laissée pour compte.
Nous établissons que, compte tenu de l’état de l’art, deux alternatives s’offrent à nous pour concevoir une aide à l’anticipation efficiente : aider à choisir le bon plan, ou aider à le valider. Un paradoxe apparaît à ce stade : aider l’opérateur à anticiper fait sens essentiellement dans le cas
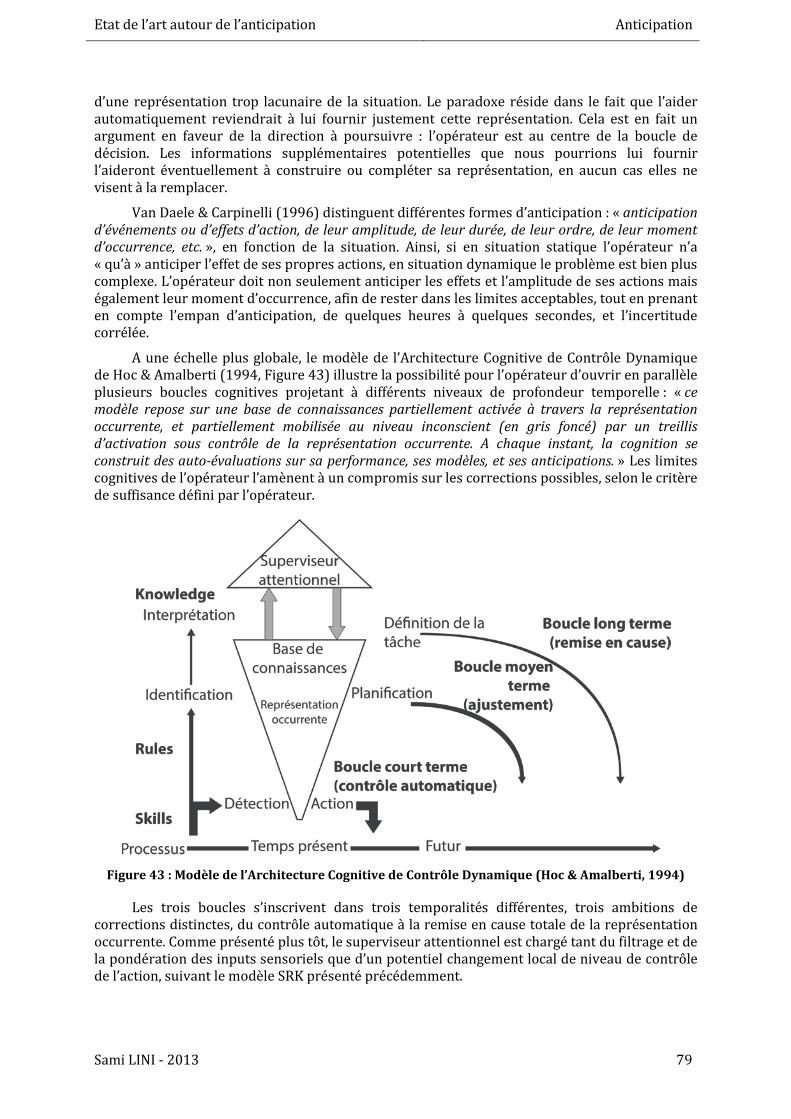
Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 79
d’une représentation trop lacunaire de la situation. Le paradoxe réside dans le fait que l’aider automatiquement reviendrait à lui fournir justement cette représentation. Cela est en fait un argument en faveur de la direction à poursuivre : l’opérateur est au centre de la boucle de décision. Les informations supplémentaires potentielles que nous pourrions lui fournir l’aideront éventuellement à construire ou compléter sa représentation, en aucun cas elles ne visent à la remplacer.
Van Daele & Carpinelli (1996) distinguent différentes formes d’anticipation : « anticipation d’événements ou d’effets d’action, de leur amplitude, de leur durée, de leur ordre, de leur moment d’occurrence, etc. », en fonction de la situation. Ainsi, si en situation statique l’opérateur n’a « qu’à » anticiper l’effet de ses propres actions, en situation dynamique le problème est bien plus complexe. L’opérateur doit non seulement anticiper les effets et l’amplitude de ses actions mais également leur moment d’occurrence, afin de rester dans les limites acceptables, tout en prenant en compte l’empan d’anticipation, de quelques heures à quelques secondes, et l’incertitude corrélée.
A une échelle plus globale, le modèle de l’Architecture Cognitive de Contrôle Dynamique de Hoc & Amalberti (1994, Figure 43) illustre la possibilité pour l’opérateur d’ouvrir en parallèle plusieurs boucles cognitives projetant à différents niveaux de profondeur temporelle : « ce modèle repose sur une base de connaissances partiellement activée à travers la représentation occurrente, et partiellement mobilisée au niveau inconscient (en gris foncé) par un treillis d’activation sous contrôle de la représentation occurrente. A chaque instant, la cognition se construit des auto-évaluations sur sa performance, ses modèles, et ses anticipations. » Les limites cognitives de l’opérateur l’amènent à un compromis sur les corrections possibles, selon le critère de suffisance défini par l’opérateur.
Figure 43 : Modèle de l’Architecture Cognitive de Contrôle Dynamique (Hoc & Amalberti, 1994)
Les trois boucles s’inscrivent dans trois temporalités différentes, trois ambitions de corrections distinctes, du contrôle automatique à la remise en cause totale de la représentation occurrente. Comme présenté plus tôt, le superviseur attentionnel est chargé tant du filtrage et de la pondération des inputs sensoriels que d’un potentiel changement local de niveau de contrôle de l’action, suivant le modèle SRK présenté précédemment.

Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 80
Hollnagel (2003) reformule (Figure 44) le modèle COCOM que nous avons présenté plus tôt (Figure 36) en y apportant une dimension dynamique. Quatre boucles de contrôle coexistent et poursuivent des objectifs distincts. Le ciblage (tracking) est une boucle comportementale court terme visant à éliminer les éléments parasites de l’environnement. Les boucles de régulation, surveillance et suivi permettent l’introduction d’objectifs de plus en plus haut niveau aux boucles précédentes.
Figure 44 : Modèle ECOM (Hollnagel, 2003)
Nous retenons l’idée de boucles parallèles de différents niveaux de contrôle, s’alimentant mutuellement et permettant l’équilibre entre comportement réactif et anticipatoire.
L’idée d’un fonctionnement parallèle et d’un équilibre entre réaction et anticipation est également centrale au modèle de contrôle dynamique de situation de Hoc & Amalberti (2007) (Figure 45). Le croisement de deux dimensions dichotomiques permet la définition de quatre types de contrôle cognitif.
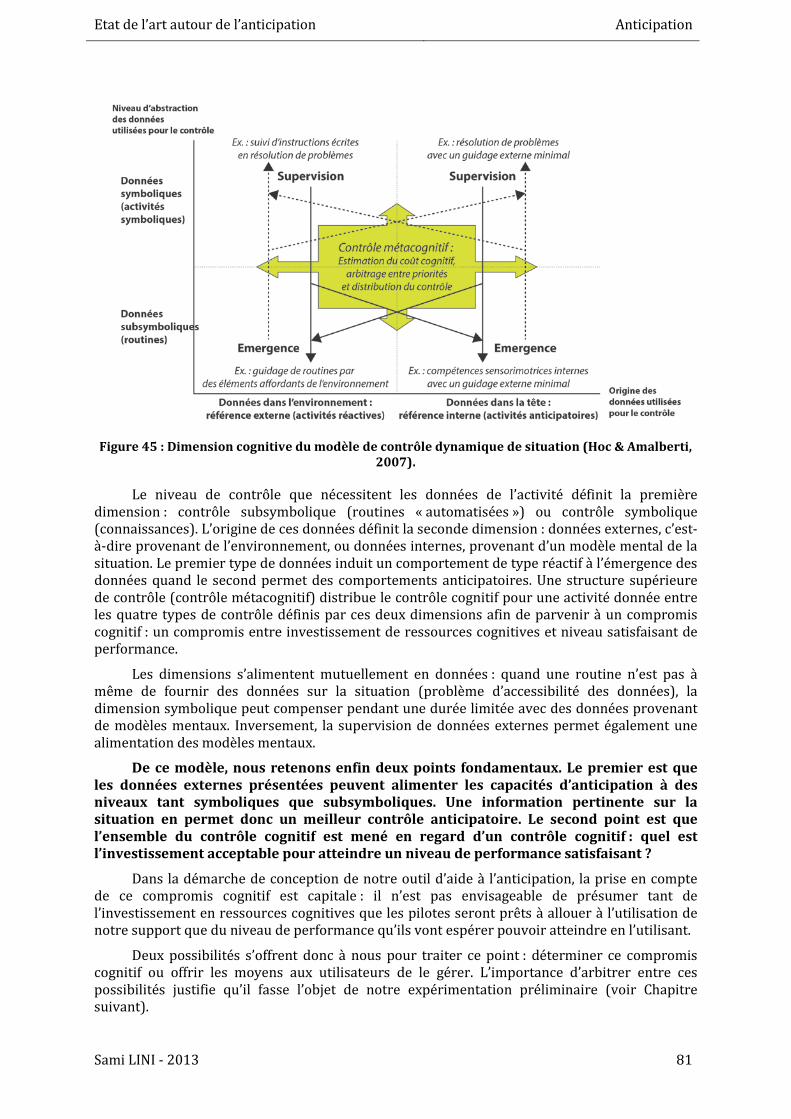
Etat de l’art autour de l’anticipation
Anticipation
Sami LINI - 2013 81
Figure 45 : Dimension cognitive du modèle de contrôle dynamique de situation (Hoc & Amalberti,
2007).
Le niveau de contrôle que nécessitent les données de l’activité définit la première dimension : contrôle subsymbolique (routines « automatisées ») ou contrôle symbolique (connaissances). L’origine de ces données définit la seconde dimension : données externes, c’est-à-dire provenant de l’environnement, ou données internes, provenant d’un modèle mental de la situation. Le premier type de données induit un comportement de type réactif à l’émergence des données quand le second permet des comportements anticipatoires. Une structure supérieure de contrôle (contrôle métacognitif) distribue le contrôle cognitif pour une activité donnée entre les quatre types de contrôle définis par ces deux dimensions afin de parvenir à un compromis cognitif : un compromis entre investissement de ressources cognitives et niveau satisfaisant de performance.
Les dimensions s’alimentent mutuellement en données : quand une routine n’est pas à même de fournir des données sur la situation (problème d’accessibilité des données), la dimension symbolique peut compenser pendant une durée limitée avec des données provenant de modèles mentaux. Inversement, la supervision de données externes permet également une alimentation des modèles mentaux.
De ce modèle, nous retenons enfin deux points fondamentaux. Le premier est que les données externes présentées peuvent alimenter les capacités d’anticipation à des niveaux tant symboliques que subsymboliques. Une information pertinente sur la situation en permet donc un meilleur contrôle anticipatoire. Le second point est que l’ensemble du contrôle cognitif est mené en regard d’un contrôle cognitif : quel est l’investissement acceptable pour atteindre un niveau de performance satisfaisant ?
Dans la démarche de conception de notre outil d’aide à l’anticipation, la prise en compte de ce compromis cognitif est capitale : il n’est pas envisageable de présumer tant de l’investissement en ressources cognitives que les pilotes seront prêts à allouer à l’utilisation de notre support que du niveau de performance qu’ils vont espérer pouvoir atteindre en l’utilisant.
Deux possibilités s’offrent donc à nous pour traiter ce point : déterminer ce compromis cognitif ou offrir les moyens aux utilisateurs de le gérer. L’importance d’arbitrer entre ces possibilités justifie qu’il fasse l’objet de notre expérimentation préliminaire (voir Chapitre suivant).

Etat de l’art autour de l’anticipation
Conclusion
Sami LINI - 2013 82
Conclusion 27 2.10Partis de la définition de ce qu’est l’anticipation pour le sens commun, nous avons
progressivement abordés les différents concepts en alimentant la compréhension. Inscrits dans une dynamique temporelle, ces concepts nous ont fournis les éléments-clés nécessaires tant à la présentation de notre hypothèse de fonctionnement du processus cognitif « anticipation » (Chapitre 4) qu’à la rédaction du cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation (Chapitre 5).
Nous en avons ainsi mis en avant la dimension fondamentalement orientée vers l’économie de ressources cognitives et en avons identifié l’apport dans les processus de gestion de la charge cognitive. Nous avons ensuite abordé son importance dans le processus de conscience de la situation et le mécanisme permettant sa mise en œuvre. La question de la mémoire nous a permis de mettre en évidence un principe de complétion progressive de la représentation de la situation par mise en correspondance d’indices sensoriels dans l’environnement et modèles mentaux schématiques d’action. En psychologie du temps, nous avons présenté les outils cognitifs permettant la gestion du temps et mis en exergue la question du rapport à la distance temporelle d’action et à l’incertitude.
En abordant la question de l’anticipation elle-même, nous avons enfin mis en regard les modèles de la littérature abordant les questions des niveaux de contrôle cognitifs, de l’origine et de la qualité des données utiles à l’action, de la profondeur temporelle d’action et du compromis cognitif entre niveau de performance souhaité et investissement cognitif. Ces derniers points, fondamentaux, et dans le cadre de la conception d’un support d’aide à l’anticipation pour permettre une meilleure gestion de la charge cognitive, posent la question du rapport entre l’apport des données affichées et le coût cognitif d’un tel support. Cette question fait ainsi l’objet de notre expérimentation préliminaire.
27 Cet état de l’art a fait l’objet de publications en conférences internationales (Lini, Favier,
Servantie, Vallespir, & Hourlier, 2011 ; Lini, Hourlier, Servantie, Vallespir, & Favier, 2011)
Etat de l’art autour de l’anticipation
En résumé
Sami LINI - 2013 83
En résumé
• L’anticipation est un processus métacognitif s’inscrivant dans une dynamique : un processus nécessitant tant une conscience de soi que de la situation, des capacités mnésiques immédiates et de long terme, dans un but d’économie des ressources cognitives.
• Aucun modèle de la littérature ne s’est intéressé à notre connaissance exclusivement à la question de l’anticipation, cet état de l’art pose donc les bases d’une proposition théorique.
• Cet état de l’art alimente également le cahier des charges du cœur fonctionnel de notre outil de support à l’anticipation :
o représentation multi-facettes de la situation, o ordonnancement dans le temps des tâches à réaliser, o favoriser les outils cognitifs d’anticipation (choix et validation d’un plan
d’action, marges temporelles) o possibilité de tester des hypothèses et de préparer des solutions à des situations
probables. • La conception d’un support d’aide à l’anticipation pour permettre une meilleure gestion
de la charge cognitive pose la question de la bonne gestion du compromis cognitif entre investissement en ressources pour son utilisation et amélioration du niveau de performance poursuivi.
• Cette question fera l’objet de notre expérimentation préliminaire.


Sami LINI - 2013 85
Chapitre 3.
Expérimentation préliminaire
Expérimentation préliminaire
Introduction
Sami LINI - 2013 86
Introduction 3.1Le pilotage d’un avion en phase d’atterrissage présente cette particularité d’impliquer des
anticipations à court terme et à moyen terme, ce qui pose la question du choix de la profondeur temporelle afin de maintenir l’efficience du pilotage. L’anticipation peut prendre place dans un délai compris entre la présentation de l’information et le début de l’action.
Lorsque le délai est trop faible, il n’y a pas d’anticipation possible, ce qui constitue la limite basse en dessous de laquelle la performance commence à se dégrader par manque de temps. Cependant on peut également se demander ce qui se passe pour des délais d’anticipations suffisamment importants pour introduire une grande distance temporelle entre la fin des traitements cognitifs et leur exploitation. Dans ce cas des mécanismes d’accès à la mémoire doivent être mis en œuvre, ce qui a priori augmente le coût cognitif. L’incertitude croissante découlant d’une anticipation à trop long terme en environnement dynamique est également un facteur complexifiant.
Hoc, Amalberti, & Plee (2000) étudient un micromonde de feu de forêt (NEWFIRE, Løvborg & Brehmer, 1991) et établissent que face à un environnement ayant une dynamique extrêmement lente et offrant la possibilité d’anticipations à long terme, l’anticipation porte exclusivement sur les aspects tactiques de la tâche requise, négligeant les aspects stratégiques et dégradant les performances.
Aussi, tout comme Hoc & Amalberti (2007), peut-on se demander s’il n’existe pas une limite temporelle au-delà de laquelle anticiper n’est plus rentable du point de la vue de la gestion des ressources cognitives. Cette question est particulièrement légitime en aéronautique civile commerciale : les profondeurs temporelles variant du court terme (quelques secondes en phase finale d’atterrissage) au long terme (quelques heures en phase de croisière), la dynamique d’évolution de la situation variant de très lente (évolution de certaines conditions météorologiques) à très rapide (atterrissage d’urgence).
Nous rappelons qu’en 2.7.2, nous avons présenté que Hancock & Caird (1993) établissent qu’une projection à long terme est cognitivement coûteuse (charge cognitive élevée) quand une projection à court terme l’est moins (charge cognitive plus faible). Ce résultat fait apparaître un point critique qui doit être adressé pour la conception de notre support à l’anticipation, destiné à fournir un moyen de gestion de la charge cognitive : la présentation d’informations pour permettre une préparation à l’action doit pouvoir se faire tant sur le court que sur le long terme.
Le modèle de Hoc & Amalberti (1994) met en relation profondeur temporelle et niveau de contrôle cognitif, au sens de Rasmussen (1983) : un bas niveau de contrôle (routines mentales) permet une projection à court terme quand une projection à long terme nécessite un haut niveau de contrôle (construction de solutions par la mise en œuvre de connaissances). Ainsi, une solution cognitivement optimale est un changement de niveau de contrôle à mesure d’une projection plus lointaine.
Ces résultats font apparaître un second point critique : rien n’indique que seules des informations de haut niveau soient nécessaires pour une projection à long terme. Je peux planifier un voyage de 800 km et souhaiter définir précisément l’aire d’autoroute pour la pause déjeuner et la station-service où j’irai faire le plein d’essence car elle offre le meilleur tarif sur le trajet. Je peux souhaiter avoir sous les yeux en permanence le déroulement précis des actions à effectuer dans les deux heures à venir tout comme je peux ne souhaiter avoir que la prochaine action et avoir les moyens de prendre de la hauteur pour me projeter sur les tâches à venir : m’informer sur la prochaine sortie d’autoroute et avoir la possibilité de « dézoomer » pour me représenter la distance qu’il me reste jusqu’à la destination.
De la même manière qu’un GPS, un support à l’anticipation doit permettre une projection dans le temps et la représentation d’informations sur le devenir de la situation et les tâches à réaliser. L’avènement d’écrans de contrôle de plus en plus complexe au sein de systèmes à

Expérimentation préliminaire
Hypothèses exploratoires
Sami LINI - 2013 87
risque a mis en avant la nécessité d’évaluer l’impact de ces interfaces sur la cognition et la performance des opérateurs.
La problématique de la surcharge informationnelle (display clutter), prégnante dans le milieu de l’ergonomie des interfaces, en particulier dans le web (Bastien & Scapin, 1993; Nielsen & Molich, 1990), est ainsi devenu l’un des points critiques lors des phases de conception et d’évaluation. Au sein des cockpits, elle fait aujourd’hui l’objet d’effort tant de qualification que de quantification de son effet sur la cognition des opérateurs (Kaber et al., 2008; Meitzler, Gerhart, & Singh, 1998).
Norman & Bobrow (1975) avaient introduit la distinction entre processus limités par les ressources cognitives de l’opérateur et processus limités par les données disponibles pour la bonne réalisation de la tâche. Un processus hautement contraint par les données ne permet pas d’atteindre un niveau de performance satisfaisant, quelle que soit la quantité de ressources cognitive investie. Dans le cadre de la conception de notre support à l’anticipation, contraindre la projection dans le temps revient à limiter la taille de la fenêtre temporelle de présentation des informations, ce qui revient à limiter les données.
Ce support doit offrir les moyens d’améliorer la performance par une meilleure gestion de la charge cognitive des opérateurs. Cette performance ne saurait être bridée par le manque d’informations nécessaires à l’activité de ces opérateurs. Il est d’ailleurs probable que, sans dégrader la performance, l’outil ne serait alors d’aucune utilité. Ne pas limiter la taille de la fenêtre temporelle de présentation des informations revient à offrir la possibilité de se projeter à long terme, ce qui selon Hancock & Caird (1993) induit une augmentation de la charge cognitive et qui selon Hoc & Amalberti (1994) nécessite un changement de niveau de contrôle de l’action.
La question qui se pose alors est celle de la profondeur temporelle (quantité d’information affichée) au-delà de laquelle un changement de niveau de contrôle est nécessaire.
Nous élaborons à ce stade une étude expérimentale préliminaire afin d’analyser les relations entre taille de la fenêtre temporelle de présentation d’informations sur les tâches à venir (limitation sur les données) et charge cognitive, à niveau de contrôle défini. Il ne s’agit pas encore d’une étude portant sur un large panel de pilotes professionnels afin de valider un outil d’aide à l’anticipation en contexte aéronautique complètement développé mais d’un travail préliminaire permettant l’évaluation d’hypothèses sur la définition d’un tel outil.
Les scenarii définis sont simples et facilement reproductibles. Ils permettent la mise en place de mesures croisées de la charge cognitive sur une tâche simulée. Ils permettent également la validation de l’environnement de simulation comme outil d’évaluation d’hypothèses relevant du facteur humain.
Les sections suivantes présentent les hypothèses exploratoires investiguées et le plan d’expérimentation élaboré à cette fin. Les résultats sont ensuite présentés puis analysés et discutés.
Hypothèses exploratoires 3.2L’objectif de cette partie est d’étudier le rapport entre taille de la fenêtre temporelle de
présentation d’informations sur les tâches à venir (limitation sur les données) et charge cognitive, à niveau de contrôle défini. Il s’agit d’évaluer, en termes de charge cognitive, l’effet induit par la présentation plus ou moins précoce d’informations sur une tâche à venir.
L’hypothèse posée est ainsi la suivante : « il existe une fenêtre de temps au sein de laquelle les informations d’aide à l’anticipation fournies permettent une réduction significative de la charge cognitive ». L’hypothèse complémentaire est la suivante : « il existe une profondeur temporelle au-delà de laquelle le surplus de charge induit par la présentation d’une information ne serait pas compensé par l’apport de cette information dans la représentation de la situation ».

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 88
Les hypothèses opérationnelles de notre étude sont donc les suivantes :
• variabilité intra-individuelle (H1) : il est attendu que la charge cognitive soit maximale pour une profondeur temporelle « long terme » et minimale pour une profondeur temporelle « court terme », la profondeur temporelle ayant un impact sur la quantité de données présentées ;
• la définition de la taille de la fenêtre temporelle se fait en regard d’un compromis cognitif entre information nécessaire et charge induite par cette information (H2) : l’apparition d’une « profondeur temporelle optimale » est attendue, soit une « profondeur au-delà de laquelle le surplus de charge induit par l’information présentée n’est pas compensé par l’apport de cette information dans la représentation de la situation ».
Plan d’expérimentation 3.3Pour répondre aux hypothèses posées nous avons choisi un guidage de type « radar » :
guidage pour un vol aux instruments, où le sujet saisit dans le pilote automatique des consignes d’altitude, de vitesse et de cap, ce qui n’implique pas la maitrise d’un geste technique particulier. Il s’agit d’une tâche facilement reproductible, écologique de l’environnement considéré dans le cadre de la conception d’un outil d’aide à l’anticipation. Elle permet de s’adresser à des connaisseurs du milieu (pilotes civils) et des sujets naïfs afin d’adresser un échantillon large de sujets.
3.3.1 Guidage L’accent est mis sur la cohérence du guidage proposé. Pour parvenir à un résultat réaliste,
nous nous appuyons sur la démarche itérative de capitalisation des connaissances mise en œuvre et présentée plus tôt.
De la modélisation réalisée sont extraites les tâches relevant exclusivement des catégories « pilotage » et « navigation ». Les tâches relevant de la navigation permettent le déplacement tridimensionnel et le suivi de la trajectoire de l’avion quand celles relevant du pilotage permettent d’assurer le bon déroulement du vol et le maintien continu de la portance. La trajectoire et les vitesses limites de sortie des hypersustentateurs étant déterminées, un ensemble de tâche permet de reconstituer pas à pas l’activité de navigation des pilotes, sur cet exemple précis. Nous utilisons le formalisme employé lors de l’analyse de l’activité pour conserver les liens de précédence entre tâches.
Une seconde session de validation est réalisée, par multiples itérations sur simulateur. L’ensemble du scénario défini par l’analyse de l’activité est rejoué et l’attention est portée sur la cohérence entre l’horodatage et la position spatiale de l’aéronef. Il est ainsi vérifié que la chaîne causale menant à un atterrissage réussi est bien respectée.
Un second pilote civil intervient à cette étape pour validation finale. Le scénario du guidage est alors découpé en tâches séquentielles de bas niveau séparées de 30 secondes à une minute : la réalisation des tâches reste purement séquentielle et cela nous permet de nous positionner sur de l’anticipation à « court terme » (30 secondes) tout en maintenant un flux continu d’activités. La limite basse de 30 secondes est imposée par les perspectives industrielles envisagées par Thales Avionics. Aucune tâche ne nécessite d’être réalisée en parallèle d’une autre.
En reprenant l’exemple de la séquence de tâches présentée lors de l’analyse de l’activité du 0, la Figure 46 présente la transformation réalisée pour passer du graphe global des tâches au guidage « radar » utilisé lors de cette expérimentation préliminaire : seules les tâches relevant du pilotage (sortie du train et des volets) et de la navigation (capture du GLIDE28) sont
28 Voir glossaire

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 89
conservées et enchainées séquentiellement selon une logique métier : par exemple, le train d’atterrissage, dégradant la portance, est généralement sorti après le dernier cran de volets, améliorant la portance. Afin de définir un guidage précis, nous complétons ces tâches de consignes plus spécifiques, telle que la vitesse, l’altitude, le cap ou encore la vitesse verticale (consigne de vitesse : 140 kts) permettant le suivi de la trajectoire et le respect des contraintes de l’approche suivie.
Figure 46 : Exemple de création du guidage « radar » à partir du graphe des tâches issu de l’analyse
de l’activité
3.3.2 Description de la tâche Le scénario prend place dans un simulateur d’avion civil (Figure 47). Il est demandé au
sujet d’interagir avec le cockpit en effectuant différentes tâches, présentées sur un écran situé à sa gauche, qui constituent un guidage « radar » en phases de descente et d’approche sur l’aéroport de Rio de Janeiro, en provenance de Paris.
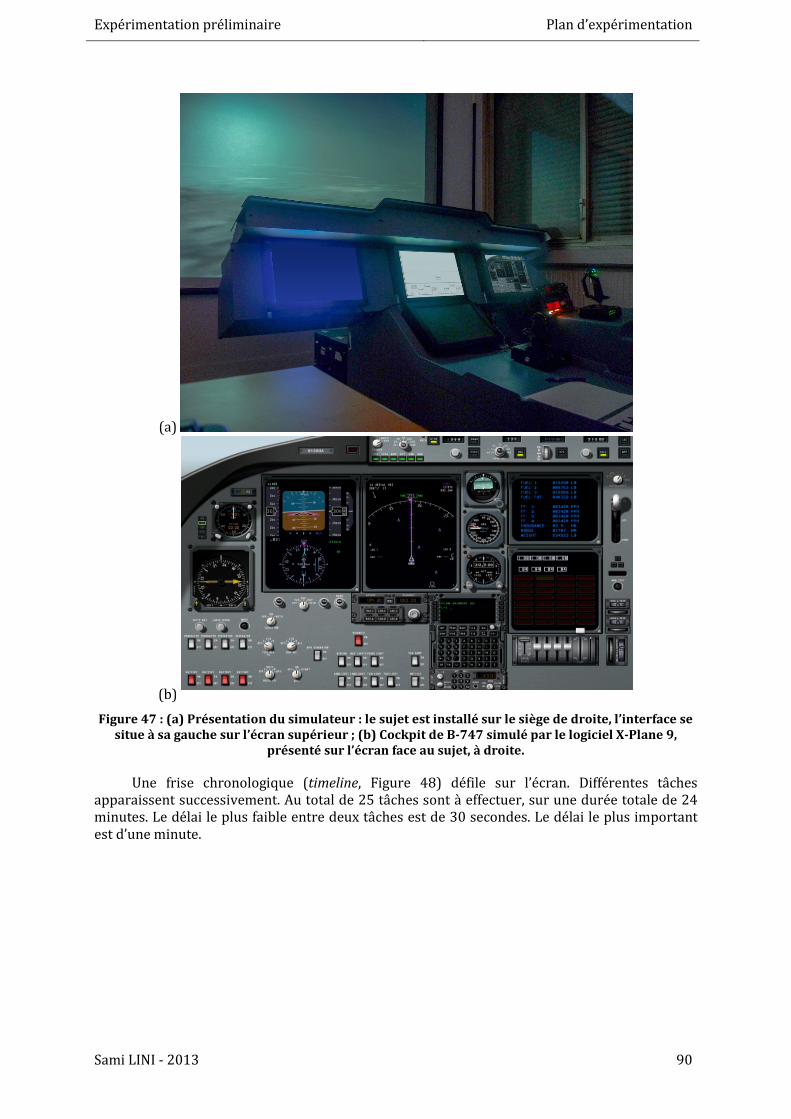
Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 90
(a)
(b) Figure 47 : (a) Présentation du simulateur : le sujet est installé sur le siège de droite, l’interface se
situe à sa gauche sur l’écran supérieur ; (b) Cockpit de B-747 simulé par le logiciel X-Plane 9, présenté sur l’écran face au sujet, à droite.
Une frise chronologique (timeline, Figure 48) défile sur l’écran. Différentes tâches apparaissent successivement. Au total de 25 tâches sont à effectuer, sur une durée totale de 24 minutes. Le délai le plus faible entre deux tâches est de 30 secondes. Le délai le plus important est d’une minute.

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 91
Figure 48 : Interface de présentation des tâches (ici pour la modalité personnalisée, en haut à
droite le curseur de réglage de taille de la fenêtre, à gauche la ligne repère)
Les types de tâches à accomplir sont les suivantes : changement d’altitude, changement de vitesse, changement de cap, changement de vitesse verticale, sortie des volets, sortie du train d’atterrissage, manipulation des interrupteurs (presser le bouton NAV, presser le bouton APR). Les quatre derniers types sont dits ponctuels car ne nécessitant la manipulation que d’un seul élément (pas de valeur à saisir en paramètre).
Trois modalités de passation successives sont distinguées, où seule la profondeur temporelle de présentation d’information varie : les informations sont présentées au sujet soit 30 secondes avant leur réalisation, soit sur les 24 minutes à venir ou selon une durée personnalisable en temps réel. L’ensemble de l’écran est utilisé pour présenter la timeline (Figure 49).
Pour la présentation « personnalisée » un curseur positionné en haut à droite de l’écran permet de régler la profondeur temporelle d’apparition des informations. En manipulant le curseur via l’écran tactile, le pilote contracte ou dilate la frise chronologique, affichant les informations dans une fenêtre de temps allant de 30 secondes à 24 minutes : par exemple, une profondeur d’une minute permet d’avoir au moins une tâche affichée à l’écran, une profondeur de 24 minutes permet d’avoir en permanence l’ensemble des tâches à réaliser. Le temps pour réaliser chacune des tâches est mesuré.
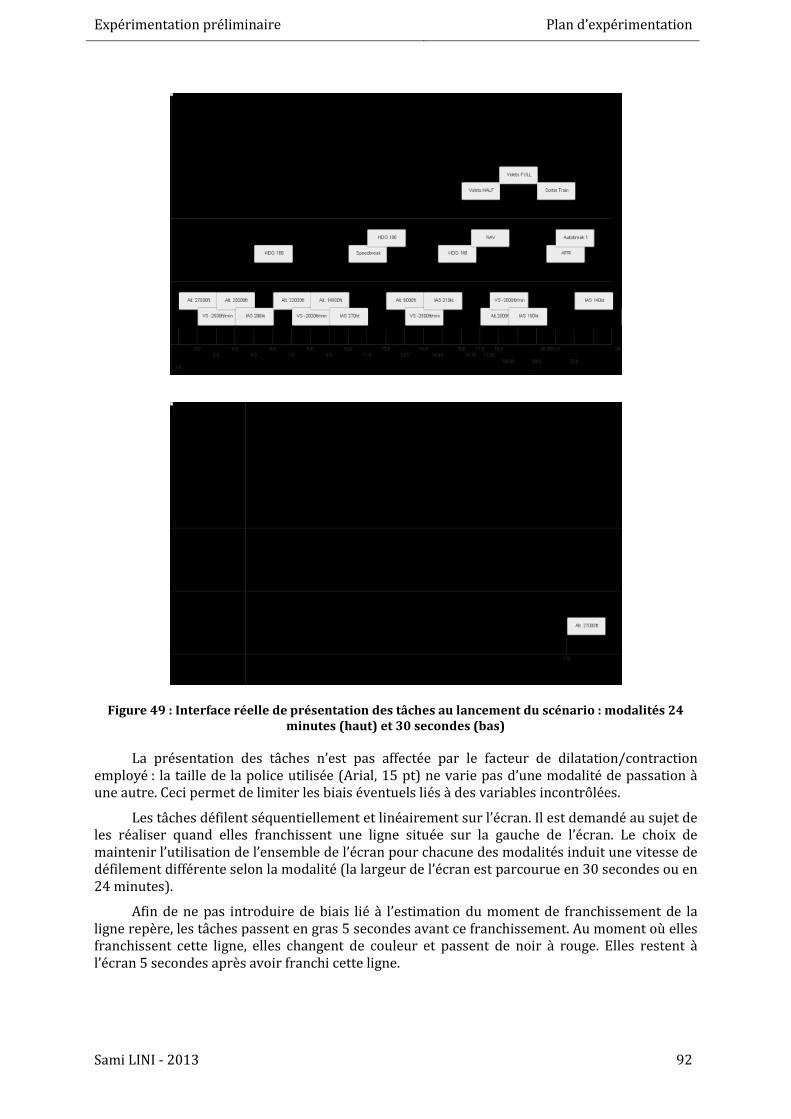
Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 92
Figure 49 : Interface réelle de présentation des tâches au lancement du scénario : modalités 24
minutes (haut) et 30 secondes (bas)
La présentation des tâches n’est pas affectée par le facteur de dilatation/contraction employé : la taille de la police utilisée (Arial, 15 pt) ne varie pas d’une modalité de passation à une autre. Ceci permet de limiter les biais éventuels liés à des variables incontrôlées.
Les tâches défilent séquentiellement et linéairement sur l’écran. Il est demandé au sujet de les réaliser quand elles franchissent une ligne située sur la gauche de l’écran. Le choix de maintenir l’utilisation de l’ensemble de l’écran pour chacune des modalités induit une vitesse de défilement différente selon la modalité (la largeur de l’écran est parcourue en 30 secondes ou en 24 minutes).
Afin de ne pas introduire de biais lié à l’estimation du moment de franchissement de la ligne repère, les tâches passent en gras 5 secondes avant ce franchissement. Au moment où elles franchissent cette ligne, elles changent de couleur et passent de noir à rouge. Elles restent à l’écran 5 secondes après avoir franchi cette ligne.
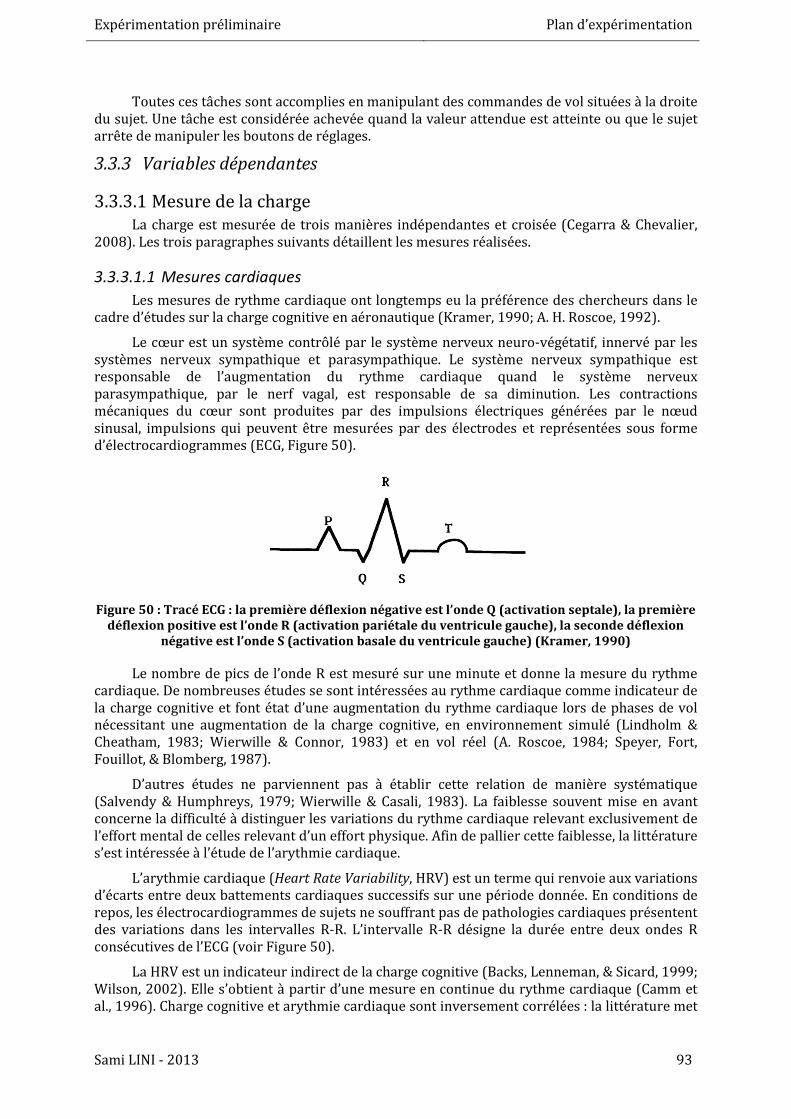
Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 93
Toutes ces tâches sont accomplies en manipulant des commandes de vol situées à la droite du sujet. Une tâche est considérée achevée quand la valeur attendue est atteinte ou que le sujet arrête de manipuler les boutons de réglages.
3.3.3 Variables dépendantes
3.3.3.1 Mesure de la charge La charge est mesurée de trois manières indépendantes et croisée (Cegarra & Chevalier,
2008). Les trois paragraphes suivants détaillent les mesures réalisées.
3.3.3.1.1 Mesures cardiaques Les mesures de rythme cardiaque ont longtemps eu la préférence des chercheurs dans le
cadre d’études sur la charge cognitive en aéronautique (Kramer, 1990; A. H. Roscoe, 1992).
Le cœur est un système contrôlé par le système nerveux neuro-végétatif, innervé par les systèmes nerveux sympathique et parasympathique. Le système nerveux sympathique est responsable de l’augmentation du rythme cardiaque quand le système nerveux parasympathique, par le nerf vagal, est responsable de sa diminution. Les contractions mécaniques du cœur sont produites par des impulsions électriques générées par le nœud sinusal, impulsions qui peuvent être mesurées par des électrodes et représentées sous forme d’électrocardiogrammes (ECG, Figure 50).
Figure 50 : Tracé ECG : la première déflexion négative est l’onde Q (activation septale), la première
déflexion positive est l’onde R (activation pariétale du ventricule gauche), la seconde déflexion négative est l’onde S (activation basale du ventricule gauche) (Kramer, 1990)
Le nombre de pics de l’onde R est mesuré sur une minute et donne la mesure du rythme cardiaque. De nombreuses études se sont intéressées au rythme cardiaque comme indicateur de la charge cognitive et font état d’une augmentation du rythme cardiaque lors de phases de vol nécessitant une augmentation de la charge cognitive, en environnement simulé (Lindholm & Cheatham, 1983; Wierwille & Connor, 1983) et en vol réel (A. Roscoe, 1984; Speyer, Fort, Fouillot, & Blomberg, 1987).
D’autres études ne parviennent pas à établir cette relation de manière systématique (Salvendy & Humphreys, 1979; Wierwille & Casali, 1983). La faiblesse souvent mise en avant concerne la difficulté à distinguer les variations du rythme cardiaque relevant exclusivement de l’effort mental de celles relevant d’un effort physique. Afin de pallier cette faiblesse, la littérature s’est intéressée à l’étude de l’arythmie cardiaque.
L’arythmie cardiaque (Heart Rate Variability, HRV) est un terme qui renvoie aux variations d’écarts entre deux battements cardiaques successifs sur une période donnée. En conditions de repos, les électrocardiogrammes de sujets ne souffrant pas de pathologies cardiaques présentent des variations dans les intervalles R-R. L’intervalle R-R désigne la durée entre deux ondes R consécutives de l’ECG (voir Figure 50).
La HRV est un indicateur indirect de la charge cognitive (Backs, Lenneman, & Sicard, 1999; Wilson, 2002). Elle s’obtient à partir d’une mesure en continue du rythme cardiaque (Camm et al., 1996). Charge cognitive et arythmie cardiaque sont inversement corrélées : la littérature met
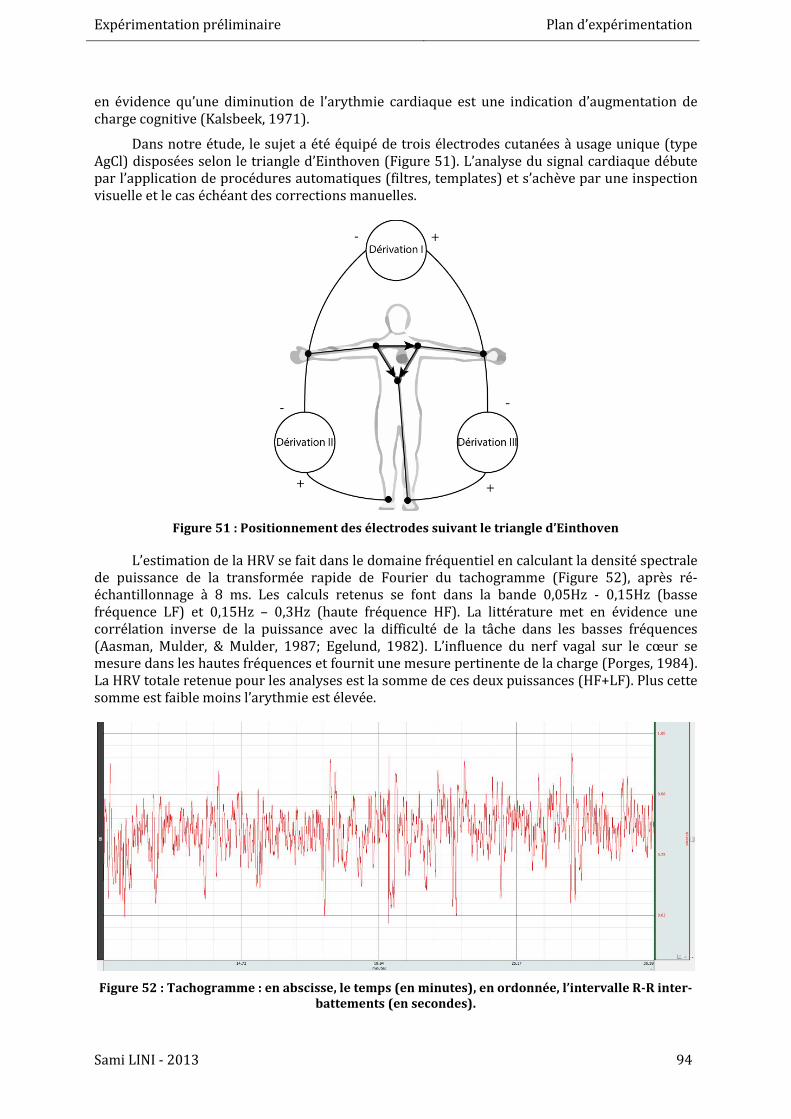
Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 94
en évidence qu’une diminution de l’arythmie cardiaque est une indication d’augmentation de charge cognitive (Kalsbeek, 1971).
Dans notre étude, le sujet a été équipé de trois électrodes cutanées à usage unique (type AgCl) disposées selon le triangle d’Einthoven (Figure 51). L’analyse du signal cardiaque débute par l’application de procédures automatiques (filtres, templates) et s’achève par une inspection visuelle et le cas échéant des corrections manuelles.
Figure 51 : Positionnement des électrodes suivant le triangle d’Einthoven
L’estimation de la HRV se fait dans le domaine fréquentiel en calculant la densité spectrale de puissance de la transformée rapide de Fourier du tachogramme (Figure 52), après ré-échantillonnage à 8 ms. Les calculs retenus se font dans la bande 0,05Hz - 0,15Hz (basse fréquence LF) et 0,15Hz – 0,3Hz (haute fréquence HF). La littérature met en évidence une corrélation inverse de la puissance avec la difficulté de la tâche dans les basses fréquences (Aasman, Mulder, & Mulder, 1987; Egelund, 1982). L’influence du nerf vagal sur le cœur se mesure dans les hautes fréquences et fournit une mesure pertinente de la charge (Porges, 1984). La HRV totale retenue pour les analyses est la somme de ces deux puissances (HF+LF). Plus cette somme est faible moins l’arythmie est élevée.
Figure 52 : Tachogramme : en abscisse, le temps (en minutes), en ordonnée, l’intervalle R-R inter-
battements (en secondes).

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 95
Sur les 24 minutes de passation, les 21 minutes d’enregistrement cardiaque centrales sont analysées afin d’éliminer les effets de bord. Nous nous intéressons à l’évolution du rythme cardiaque et à l’arythmie cardiaque
3.3.3.1.2 Mesures subjectives A la fin de chaque modalité, il est demandé au sujet d’évaluer subjectivement sa charge par
le biais d’un questionnaire, le NASA-TLX, en version francophone (Cegarra & Morgado, 2009).
Le NASA Task Load Index est un outil d’évaluation subjective de la charge cognitive. Il s’agit d’un outil multidimensionnel qui permet le calcul d’un score de charge cognitive global sur la base d’une pondération des scores obtenus à six sous-dimensions. Les sous-scores sont obtenus par évaluation sur six échelles de Likert des dimensions suivantes : demande mentale, demande physique, demande temporelle, effort, performance et niveau de frustration.
Les dimensions sont présentées comme suit :
1. Exigence mentale : Dans quelle mesure des opérations mentales et perceptives ont-elles été requises (par ex.: penser, décider, calculer, se rappeler, regarder, chercher, etc.) ? La tâche était-elle plutôt facile ou difficile, simple ou complexe, abordable ou exigeante ?
2. Exigence physique : Dans quelle mesure des opérations physiques ont-elles été requises (par ex.: pousser, tirer, tourner, superviser, activer, etc.) ? Avez-vous trouvé la tâche plutôt facile ou difficile, lente ou rapide, lâche ou vigoureuse, reposante ou ardue ?
3. Exigence temporelle : Quelle quantité de pression liée au temps à cause du rythme ou de l’allure des tâches ou de l’apparition des éléments de la tâche avez-vous ressenti ?
4. Effort : Quelle a été la difficulté d’accomplir (mentalement et physiquement) la tâche avec un niveau de performance tel que le vôtre ?
5. Performance : Quelle réussite vous attribuez-vous en ce qui concerne l'atteinte des buts de la tâche fixés par l’expérimentateur (ou par vous-même) ? Dans quelle mesure êtes-vous satisfait de votre performance dans l’accomplissement de ces buts ?
6. Frustration : Au cours de la tâche, quel sentiment d'être peu sûr de vous, découragé, irrité, stressé et agacé avez-vous ressenti contrairement au fait d'être sûr de vous, satisfait, content, détendu et complaisant ?
Les sous-dimensions sont présentées au participant après chaque modalité et il est demandé aux sujets de les évaluer sur un intervalle de valeurs entre 0 (faible) et 100 (haut).
Une phase de pondération par comparaison de paires est ensuite réalisée. Quinze paires de dimensions sont présentées successivement au sujet et il lui est demandé de choisir celle qu’il estime prépondérante dans sa charge cognitive. Le NASA-TLX est l’outil d’évaluation subjective de la charge cognitive le plus communément utilisé dans la littérature.
Le NASA-TLX est soumis au sujet en utilisant l’interface Tholos (Cegarra & Chevalier, 2008, Figure 53) et est analysé en version pondérée pour chacun des sujets.

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 96
Figure 53 : Logiciel Tholos (Cegarra & Chevalier, 2008) pour la présentation du NASA-TLX
3.3.3.1.3 Temps de réaction Posner & Boies (1971) posent les bases des paradigmes de double tâche et de mesure des
temps de réaction : ils établissent une corrélation entre allongement des temps de réaction à une tâche secondaire et augmentation de la charge cognitive. Dans un paradigme centré sur la gestion du temps, les temps de réaction sont une mesure intéressante de la charge cognitive. Ainsi le temps de réaction à la réalisation de chaque tâche est consigné et analysé.
Ces trois mesures de charge alimentent nos variables dépendantes.
3.3.3.2 Mesure de la performance L’indice de performance est défini en concertation avec des pilotes civils. Une bonne
performance lors d’un guidage radar consiste à répondre à la requête du contrôle aérien le plus rapidement et le plus précisément possible. Le temps réalisé pour chacune des tâches est mesuré : sur l’ensemble des 25 tâches réalisées nécessaire, 17 tâches sont conservées, 8 tâches de type ponctuel (appui sur un bouton, activation de la manette de sortie de train, sortie des volets…) ne permettent pas de mesures de temps d’effectuation et ne peuvent donc être intégrées à l’analyse.
Un bref entretien dirigé est réalisé à l’issue de la passation « personnalisée » afin de donner un éclairage sur les stratégies éventuelles mises en œuvre dans le réglage de la fenêtre. Le caractère bref de l’entretien est imposé par la disponibilité très réduite que les sujets nous accordaient bénévolement.

Expérimentation préliminaire
Plan d’expérimentation
Sami LINI - 2013 97
3.3.4 Matériel et participants La timeline est implémentée en JAVA. Le simulateur utilisé est basé sur le comportement
de X-Plane 9. L’ensemble des affichages du simulateur est réalisé grâce à 8 PC. L’interface entre les différents logiciels sur chacun des PC et X-Plane est réalisée en utilisant une API développée en interne par Thales Avionics.
La projection de la frise chronologique est réalisée sur un écran tactile 15.4 pouces situé à portée de bras à la gauche du sujet. Les boutons de réglage sont constitués de deux modules : Saïtek Pro Flight Switch Panel et Saïtek Pro Flight Multi Panel (Figure 54), et situés à portée de bras à la droite du sujet. Le paysage défile sur un écran de 3 mètres de diagonale situé à 1,5 mètre du sujet.
Figure 54: Saïtek Pro Flight Switch Panel and Saïtek Flight Multi Panel
Le signal cardiaque est recueilli sur la seconde dérivation par un amplificateur Biopac MP36 avec une fréquence d’échantillonnage de 1000 Hz (Figure 55). Les électrodes sont positionnées selon le triangle d’Einthoven.
Figure 55 : Biopac MP36 : appareillage pour l’enregistrement de mesures cardiaques
16 volontaires ont été recrutés, 4 femmes et 12 hommes, 3 d’entre eux ont été exclus de l’analyse des résultats, en raison de problèmes techniques rencontrés lors de la passation. Les sujets sont recrutés parmi les étudiants de l’Ecole Nationale Supérieure de Cognitique, les chercheurs du Laboratoire de l’Intégration du Matériau au Système (IMS, CNRS UMR-5218) et l’aérodrome de Saucats. Certains sujets sont ainsi pilotes civils quand d’autres sont naïfs du domaine aéronautique. Les données qualitatives les concernant sont présentées en Tableau 1.

Expérimentation préliminaire
Résultats
Sami LINI - 2013 98
Tableau 1 : Données descriptives des sujets ayant pris part à l’expérimentation retenus
Sujet Genre Age Nombre d'heures de vol
AL F 19 70 AM H 27 600 DC H 54 250 FC H 46 100 PF H 55 200 SR H 22 100 YD H 69 6000 AB F 23 0 AJ H 25 0 JF H 26 0 KS F 23 0 NR H 22 25 TS H 24 0
3.3.5 Déroulement de la passation. Après une phase de présentation du système, une phase de familiarisation et de formation
à son utilisation est menée. Les sujets sont informés du fonctionnement complet de l’interface. Les types de tâches à réaliser durant la phase expérimentale sont présentés et le sujet est amené à manipuler les éléments d’interaction en réalisant ces tâches. Un premier exercice intégrant l’ensemble des tâches est soumis au sujet. La bonne réussite de l’exercice est la condition pour le démarrage de l’expérimentation. Dans le cas contraire, l’exercice est recommencé.
Il est ensuite demandé au sujet de réaliser les 25 tâches, liées à un guidage radar, qui défilent sur l’écran à sa gauche suivant les contraintes définies plus haut.
Dans un souci de disponibilité des sujets, il a été décidé d’effectuer la passation des trois modalités successivement. L’expérimentation est alors divisée en trois modalités où seule la profondeur temporelle de présentation des informations varie (variable indépendante) : 30 secondes, 24 minutes ou une durée personnalisable en temps réel. Les passations sont contrebalancées selon un carré latin pour lisser tout biais d’apprentissage.
3.3.6 Traitement des données En raison de la taille de notre échantillon, il est choisi d’utiliser des tests statistiques non-
paramétriques :
• test de Wilcoxon signé pour l’analyse de la variabilité intra-individuelle entre les trois modalités, court terme, long terme et personnalisée (échantillons appariés) ;
• test de corrélation de Spearman pour l’analyse de la corrélation entre mesures de charge et profondeur temporelle choisie, lors de la modalité personnalisée.
Les données sont analysées avec le logiciel Excel 2010 équipé du logiciel additionnel XLSTAT 2012.6.03. Les données de performance et de temps de réaction sont extraites de fichiers de plusieurs milliers de lignes par une macro Visual Basic développée pour l’occasion et validées manuellement a posteriori.
Résultats 3.4Trois types de données ont été recueillis : le score au NASA-TLX (NTLX), la variabilité du
rythme cardiaque (HRV) et le temps de réaction (RT). Ils ont été analysés en fonction de la profondeur temporelle de présentation (Délai) qui est soit de 30 secondes (D0.5), 24 minutes
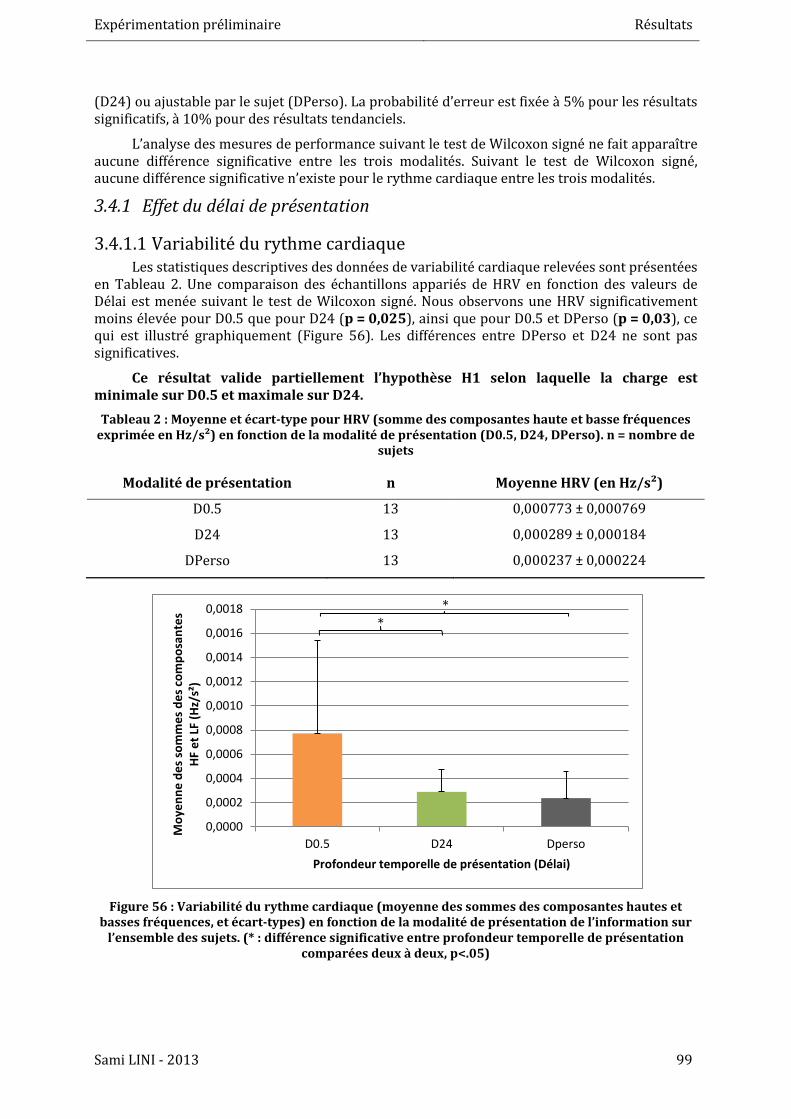
Expérimentation préliminaire
Résultats
Sami LINI - 2013 99
(D24) ou ajustable par le sujet (DPerso). La probabilité d’erreur est fixée à 5% pour les résultats significatifs, à 10% pour des résultats tendanciels.
L’analyse des mesures de performance suivant le test de Wilcoxon signé ne fait apparaître aucune différence significative entre les trois modalités. Suivant le test de Wilcoxon signé, aucune différence significative n’existe pour le rythme cardiaque entre les trois modalités.
3.4.1 Effet du délai de présentation
3.4.1.1 Variabilité du rythme cardiaque Les statistiques descriptives des données de variabilité cardiaque relevées sont présentées
en Tableau 2. Une comparaison des échantillons appariés de HRV en fonction des valeurs de Délai est menée suivant le test de Wilcoxon signé. Nous observons une HRV significativement moins élevée pour D0.5 que pour D24 (p = 0,025), ainsi que pour D0.5 et DPerso (p = 0,03), ce qui est illustré graphiquement (Figure 56). Les différences entre DPerso et D24 ne sont pas significatives.
Ce résultat valide partiellement l’hypothèse H1 selon laquelle la charge est minimale sur D0.5 et maximale sur D24.
Tableau 2 : Moyenne et écart-type pour HRV (somme des composantes haute et basse fréquences exprimée en Hz/s²) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de
sujets
Modalité de présentation n Moyenne HRV (en Hz/s²)
D0.5 13 0,000773 ± 0,000769
D24 13 0,000289 ± 0,000184
DPerso 13 0,000237 ± 0,000224
Figure 56 : Variabilité du rythme cardiaque (moyenne des sommes des composantes hautes et
basses fréquences, et écart-types) en fonction de la modalité de présentation de l’information sur l’ensemble des sujets. (* : différence significative entre profondeur temporelle de présentation
comparées deux à deux, p<.05)
0,0000
0,0002
0,0004
0,0006
0,0008
0,0010
0,0012
0,0014
0,0016
0,0018
D0.5 D24 Dperso
Moy
enne
des
som
mes
des
com
posa
ntes
HF
et L
F (H
z/s²
)
Profondeur temporelle de présentation (Délai)
*
*
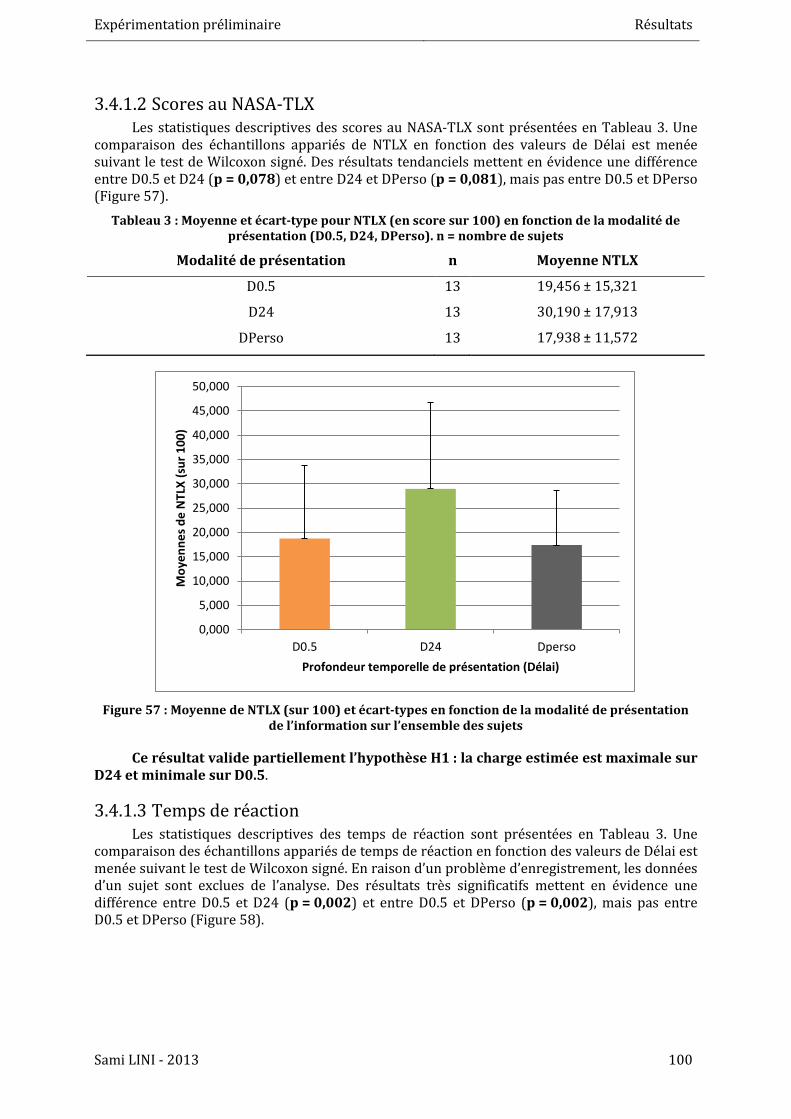
Expérimentation préliminaire
Résultats
Sami LINI - 2013 100
3.4.1.2 Scores au NASA-TLX Les statistiques descriptives des scores au NASA-TLX sont présentées en Tableau 3. Une
comparaison des échantillons appariés de NTLX en fonction des valeurs de Délai est menée suivant le test de Wilcoxon signé. Des résultats tendanciels mettent en évidence une différence entre D0.5 et D24 (p = 0,078) et entre D24 et DPerso (p = 0,081), mais pas entre D0.5 et DPerso (Figure 57).
Tableau 3 : Moyenne et écart-type pour NTLX (en score sur 100) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de sujets
Modalité de présentation n Moyenne NTLX
D0.5 13 19,456 ± 15,321
D24 13 30,190 ± 17,913
DPerso 13 17,938 ± 11,572
Figure 57 : Moyenne de NTLX (sur 100) et écart-types en fonction de la modalité de présentation
de l’information sur l’ensemble des sujets
Ce résultat valide partiellement l’hypothèse H1 : la charge estimée est maximale sur D24 et minimale sur D0.5.
3.4.1.3 Temps de réaction Les statistiques descriptives des temps de réaction sont présentées en Tableau 3. Une
comparaison des échantillons appariés de temps de réaction en fonction des valeurs de Délai est menée suivant le test de Wilcoxon signé. En raison d’un problème d’enregistrement, les données d’un sujet sont exclues de l’analyse. Des résultats très significatifs mettent en évidence une différence entre D0.5 et D24 (p = 0,002) et entre D0.5 et DPerso (p = 0,002), mais pas entre D0.5 et DPerso (Figure 58).
0,000
5,000
10,000
15,000
20,000
25,000
30,000
35,000
40,000
45,000
50,000
D0.5 D24 Dperso
Moy
enne
s de
NTL
X (s
ur 1
00)
Profondeur temporelle de présentation (Délai)

Expérimentation préliminaire
Résultats
Sami LINI - 2013 101
Tableau 4 : Moyenne et écart-type pour RT (en secondes) en fonction de la modalité de présentation (D0.5, D24, DPerso). n = nombre de sujets
Modalité de présentation n Moyenne et écart type des temps de réaction (RT)
D0.5 12 0,677 ± 0,431
D24 12 1,234 ± 0,622
DPerso 12 1,047 ± 0,387
Figure 58 : Moyenne des temps de réaction (en secondes) et écart-types en fonction de la modalité
de présentation de l’information sur l’ensemble des sujets (** : p<0,01)
Une analyse de la variance à mesures répétées est utilisée pour comparer les temps de réaction (DilationR) le long des scenarii en fonction des modalités. Des temps de réaction significativement plus faibles sont notés (F (2, 36) = 4,412, p = 0,019) pour la modalité D0.5 par rapport aux modalités D24 et DPerso.
Ce résultat valide totalement l’hypothèse H1 : la charge estimée est maximale sur D24 et minimale sur D0.5.
3.4.2 Corrélation entre la profondeur temporelle choisie par l’utilisateur et les mesures de charge
Afin d’étudier les relations existant entre DPrés, NTLX et HRV, nous utilisons le test de corrélation de Spearman. La corrélation entre DPrés et NTLX est significative (p = 0,043, r = 0,572). La corrélation entre DPrés et RT est significative (p = 0,012, r = -0,687). Il n’apparaît pas de corrélation significative entre DPrés et HRV (r = 0,008, p = 0,772). Au cours des passations, nous observons très peu d’interactions (nbInter nombre d’interactions) des sujets avec le curseur de définition de la taille de la fenêtre (Tableau 5).
0,00
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
1,80
2,00
D0.5 D24 Dperso
Moy
enne
des
tem
ps d
e ré
actio
n (e
n se
cond
es)
Profondeur temporelle de présentation (Délai)
** **

Expérimentation préliminaire
Résultats
Sami LINI - 2013 102
Tableau 5 : Moyenne et écart-type des profondeurs temporelles choisies (DPrés en minute) du nombre d’interactions avec le curseur de définition de taille de la fenêtre (nbInter). n Nombre de
sujets
n Moyenne des profondeurs temporelles choisies (en minute)
Moyenne du nombre d’interactions avec le curseur de définition de taille de la
fenêtre
13 5,9 ± 4,4 4,8 ± 3,9
Nous n’observons pas de corrélation significative entre le nombre d’interaction nbInter et NTLX (r = 0,336, p = 0,258), de même qu’entre nbInter et HRV (r = 0,292, p = 0,328) ou entre nbInter et RT (r = -0,359, p = 0,229).
Les corrélations inverses des variables NTLX et RT avec DPrés sont indicatrices de la nécessité de la recherche d’un compromis entre charge ressentie et charge réelle comme établi par l’hypothèse H2. Ce point sera abordé plus en détails lors de la discussion.
3.4.3 Effets de l’expertise A des fins d’exploration, et en fonction de l’expertise de pilotage, deux groupes sont
distingués. Le premier groupe est constitué de 6 sujets naïfs dont deux femmes, âgés de 22 à 26 ans. Le second groupe est constitué de 7 pilotes civils dont une femme, âgés de 19 à 69 ans, cumulant entre 100 et 6000 heures de vol (M = 950, σ = 2000).
L’analyse des mesures de performance suivant le test de Wilcoxon signé ne fait apparaître aucune différence significative entre les trois modalités, quel que soit le groupe considéré (experts, naïfs).
Les valeurs de HRV et NTLX obtenus sur les sujets experts et naïfs sont comparées par un test U de Mann-Whitney. Pour HRV, les résultats ne font pas apparaître de différences significatives entre experts et naïfs (Tableau 6, Figure 59). Tableau 6 : U de Mann-Whitney et p-value pour la comparaison naïfs/experts pour la variable HRV
Profondeur temporelle de présentation (Délai)
U de Mann-Whitney p-value
D0.5 23,00 0,830
D24 11,00 0,175
DPerso 22,00 0,943

Expérimentation préliminaire
Résultats
Sami LINI - 2013 103
Figure 59 : Variabilité du rythme cardiaque (moyenne des sommes des composantes hautes et
basses fréquences, et écart-types) en fonction de la modalité de présentation (D0.5, D24, DPerso) de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts)
De la même façon, pour NTLX, les résultats ne font pas apparaître de différences significatives entre experts et naïfs (Tableau 7, Figure 60).
Tableau 7 : U de Mann-Whitney et p-value pour la comparaison naïfs/experts pour la variable NTLX
Profondeur temporelle de présentation (Délai)
U de Mann-Whitney p-value
D0.5 26,50 0,474
D24 30,00 0,225
DPerso 11,50 0,198
Figure 60 : Moyenne de NTLX (sur 100) et écart-types en fonction de la modalité de présentation
de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts)
0,000
0,001
0,001
0,002
0,002
0,003
D0.5 D24 DPerso
Moy
enne
des
som
mes
des
com
posa
ntes
HF
et L
F (H
z/s²
)
Profondeur temporelle de présentation (Délai) par groupes
Naïfs
Experts
0
10
20
30
40
50
60
D0.5 D24 DPerso
Moy
enne
de
NTL
X (s
ur 1
00)
Profondeur temporelle de présentation (Délai) par groupes
Naïfs
Experts
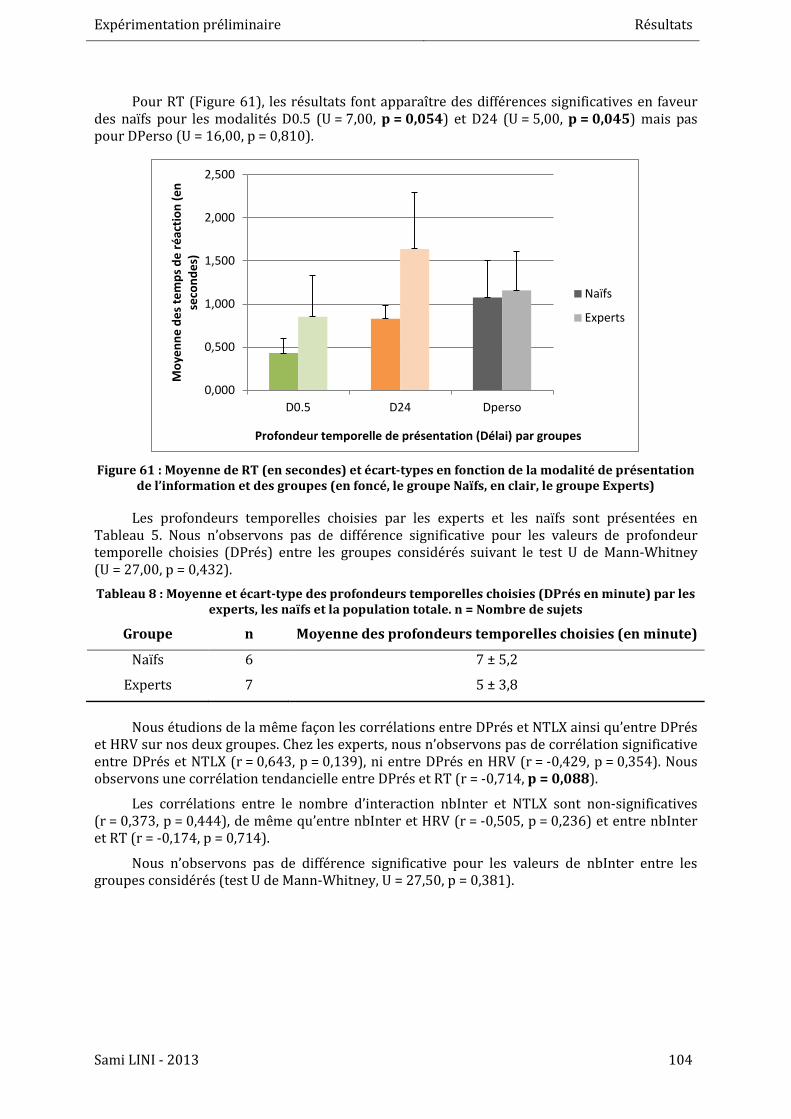
Expérimentation préliminaire
Résultats
Sami LINI - 2013 104
Pour RT (Figure 61), les résultats font apparaître des différences significatives en faveur des naïfs pour les modalités D0.5 (U = 7,00, p = 0,054) et D24 (U = 5,00, p = 0,045) mais pas pour DPerso (U = 16,00, p = 0,810).
Figure 61 : Moyenne de RT (en secondes) et écart-types en fonction de la modalité de présentation
de l’information et des groupes (en foncé, le groupe Naïfs, en clair, le groupe Experts)
Les profondeurs temporelles choisies par les experts et les naïfs sont présentées en Tableau 5. Nous n’observons pas de différence significative pour les valeurs de profondeur temporelle choisies (DPrés) entre les groupes considérés suivant le test U de Mann-Whitney (U = 27,00, p = 0,432). Tableau 8 : Moyenne et écart-type des profondeurs temporelles choisies (DPrés en minute) par les
experts, les naïfs et la population totale. n = Nombre de sujets
Groupe n Moyenne des profondeurs temporelles choisies (en minute)
Naïfs 6 7 ± 5,2
Experts 7 5 ± 3,8
Nous étudions de la même façon les corrélations entre DPrés et NTLX ainsi qu’entre DPrés et HRV sur nos deux groupes. Chez les experts, nous n’observons pas de corrélation significative entre DPrés et NTLX (r = 0,643, p = 0,139), ni entre DPrés en HRV (r = -0,429, p = 0,354). Nous observons une corrélation tendancielle entre DPrés et RT (r = -0,714, p = 0,088).
Les corrélations entre le nombre d’interaction nbInter et NTLX sont non-significatives (r = 0,373, p = 0,444), de même qu’entre nbInter et HRV (r = -0,505, p = 0,236) et entre nbInter et RT (r = -0,174, p = 0,714).
Nous n’observons pas de différence significative pour les valeurs de nbInter entre les groupes considérés (test U de Mann-Whitney, U = 27,50, p = 0,381).
0,000
0,500
1,000
1,500
2,000
2,500
D0.5 D24 Dperso
Moy
enne
des
tem
ps d
e ré
actio
n (e
n se
cond
es)
Profondeur temporelle de présentation (Délai) par groupes
Naïfs
Experts

Expérimentation préliminaire
Discussion
Sami LINI - 2013 105
Tableau 9 : Moyenne et écart-type du nombre d’interactions avec le curseur de définition de taille de la fenêtre (nbInter) par les experts, les naïfs et la population totale. n = Nombre de sujets
Groupe n Moyenne du nombre d’interactions avec le curseur de définition de taille de la fenêtre
Naïfs 6 7 ± 4,8
Experts 7 3,5 ± 2,8
En revanche, chez les sujets naïfs, nous observons une corrélation très significative entre NTLX et DPrés (p<0,0001, r = 1). La corrélation entre DPrés et HRV n’est pas significative (p = 0,242, r = 0,600) ni entre DPrés et RT (p = 0,297, r = -0,543). Les corrélations entre le nombre d’interaction nbInter et NTLX sont non-significatives (r -0.319, p = 0,497), de même qu’entre nbInter et HRV (r = 0,116, p = 0,803) et qu’entre nbInter et RT (r = -0,281, p = 0,556).
Très peu de différences sont observées entre sujets naïfs et experts. Ce résultat confirme que la phase d’entrainement rend l’ensemble des résultats exploitables, quelle que soit l’expertise des sujets.
Discussion 3.5Les hypothèses opérationnelles de notre étude étaient les suivantes :
• variabilité intra-individuelle : il était attendu que tous groupes confondus, la charge cognitive soit maximale pour une profondeur temporelle « long terme » et minimale pour une profondeur temporelle « court terme » ;
• définition de la taille de la fenêtre temporelle de présentation des informations : il était attendu que la définition de la taille de la fenêtre temporelle se fasse en regard d’un compromis cognitif entre information nécessaire et charge induite par cette information et qu’une « profondeur temporelle optimale » apparaisse, une « profondeur au-delà de laquelle, le surplus de charge induit par la présentation d’une information ne serait pas compensé par l’apport de cette information dans la représentation de la situation ».
Les résultats obtenus à partir des mesures physiologiques, l’évaluation subjective de la charge cognitive et les temps de réaction sont cohérents pour les modalités D0.5 et D24. Tous indiquent que la charge est plus faible lorsque le délai est faible, plus élevée quand le délai est élevé. A niveau de contrôle défini (bas), et pour des tâches nécessitant peu de temps pour leur réalisation, une augmentation de la profondeur temporelle de projection provoque une augmentation de la charge. Ce résultat est conforme à l’hypothèse H1 et au modèle de Hancock & Caird (1993).
Cette augmentation de la charge cognitive mériterait d’être analysée avec le niveau de performance des opérateurs. Nous constatons que les performances mesurées ne sont pas sensibles aux variations de profondeur temporelle. Cela peut s’expliquer par le fait que la tâche proposée ne présente pas de difficultés particulières, et donc que les sujets ont toujours les ressources nécessaires pour la réaliser avec un maximum de précision, selon la borne inférieure de la loi de Yerkes & Dodson (1908). Cette interprétation pourrait également s’appliquer à l’absence de différences significatives, pour les évaluations subjective et physiologique de la charge, entre sujets naïfs de la tâche et sujets plus experts. Les différences sur les temps de réaction entre experts et naïfs peuvent justement être interprétées comme un manque d’investissement chez les experts, pour qui la tâche ne présentait pas un défi suffisant.
Les travaux de Sperandio (1977) et Wickens & Hollands (2000) soulignent que jusqu’à ce que les sujets atteignent un niveau dit de « surcharge », la performance globale reste relativement peu affectée par l’augmentation de la charge cognitive induite par une
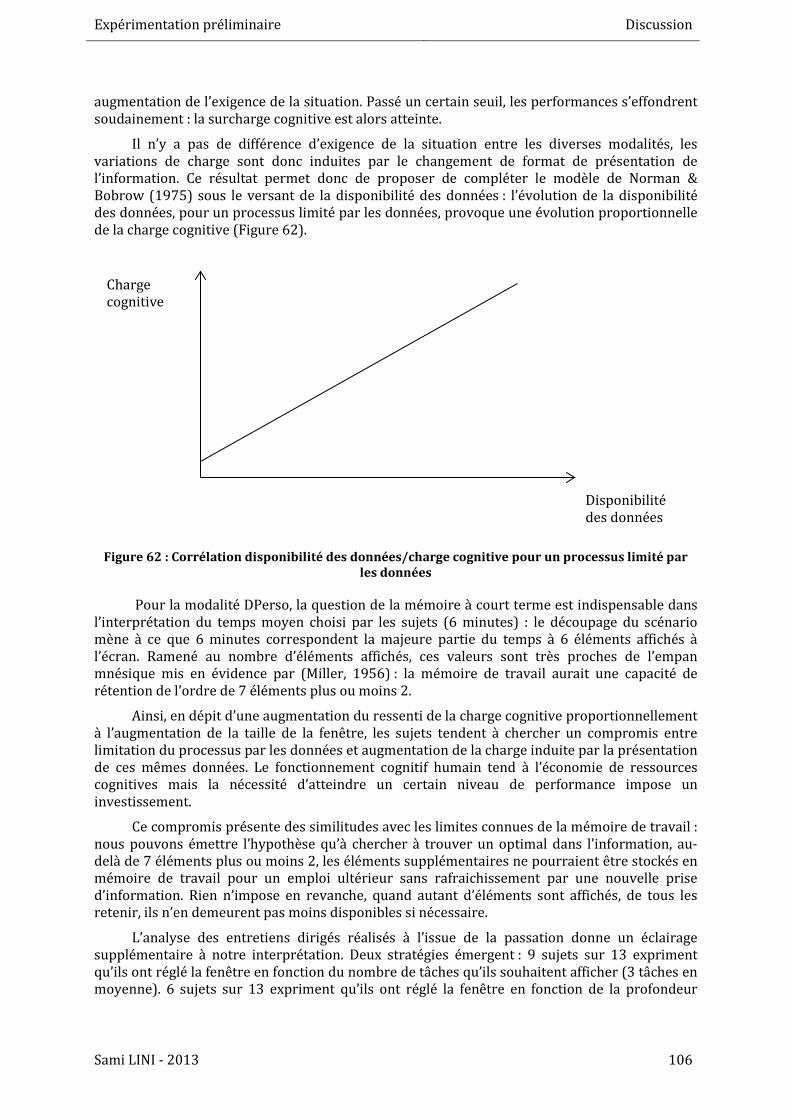
Expérimentation préliminaire
Discussion
Sami LINI - 2013 106
augmentation de l’exigence de la situation. Passé un certain seuil, les performances s’effondrent soudainement : la surcharge cognitive est alors atteinte.
Il n’y a pas de différence d’exigence de la situation entre les diverses modalités, les variations de charge sont donc induites par le changement de format de présentation de l’information. Ce résultat permet donc de proposer de compléter le modèle de Norman & Bobrow (1975) sous le versant de la disponibilité des données : l’évolution de la disponibilité des données, pour un processus limité par les données, provoque une évolution proportionnelle de la charge cognitive (Figure 62).
Figure 62 : Corrélation disponibilité des données/charge cognitive pour un processus limité par
les données
Pour la modalité DPerso, la question de la mémoire à court terme est indispensable dans l’interprétation du temps moyen choisi par les sujets (6 minutes) : le découpage du scénario mène à ce que 6 minutes correspondent la majeure partie du temps à 6 éléments affichés à l’écran. Ramené au nombre d’éléments affichés, ces valeurs sont très proches de l’empan mnésique mis en évidence par (Miller, 1956) : la mémoire de travail aurait une capacité de rétention de l’ordre de 7 éléments plus ou moins 2.
Ainsi, en dépit d’une augmentation du ressenti de la charge cognitive proportionnellement à l’augmentation de la taille de la fenêtre, les sujets tendent à chercher un compromis entre limitation du processus par les données et augmentation de la charge induite par la présentation de ces mêmes données. Le fonctionnement cognitif humain tend à l’économie de ressources cognitives mais la nécessité d’atteindre un certain niveau de performance impose un investissement.
Ce compromis présente des similitudes avec les limites connues de la mémoire de travail : nous pouvons émettre l’hypothèse qu’à chercher à trouver un optimal dans l’information, au-delà de 7 éléments plus ou moins 2, les éléments supplémentaires ne pourraient être stockés en mémoire de travail pour un emploi ultérieur sans rafraichissement par une nouvelle prise d’information. Rien n’impose en revanche, quand autant d’éléments sont affichés, de tous les retenir, ils n’en demeurent pas moins disponibles si nécessaire.
L’analyse des entretiens dirigés réalisés à l’issue de la passation donne un éclairage supplémentaire à notre interprétation. Deux stratégies émergent : 9 sujets sur 13 expriment qu’ils ont réglé la fenêtre en fonction du nombre de tâches qu’ils souhaitent afficher (3 tâches en moyenne). 6 sujets sur 13 expriment qu’ils ont réglé la fenêtre en fonction de la profondeur
Disponibilité des données
Charge cognitive
Expérimentation préliminaire
Discussion
Sami LINI - 2013 107
temporelle qu’ils souhaitaient afficher (entre 4 et 7 minutes). Compte tenu de l’aspect cadencé de la présentation des tâches, ces deux stratégies se rejoignent dans l’interprétation.
Les experts adaptent la taille de la fenêtre à leur représentation de la situation : « Dans les phases de vol confortables en altitude moins il y a d'infos plus c'est confortable. Par contre avoir l'action et l'action suivante présentes parait mieux que d'avoir qu'une seule info. Après dans la phase d'approche, je préfère avoir plus d'infos, j'ai tendance à afficher trois événements. » 29.
Cette tendance est en fait théorique puisque nous constatons très peu d’interactions avec l’interface et aucun choix de réduction de la profondeur temporelle lors de la phase d’approche. Nous émettons l’hypothèse d’un phénomène de filtrage attentionnel plutôt qu’un véritable filtrage physique de l’information (sortie de l’écran). Quand elles sont utilisées, elles nécessitent des ressources en termes de stockage de l’information, quand elles ne le sont pas, elles font l’objet d’un filtrage de l’attention.
L’apparition de ce compromis valide notre hypothèse H2.
Un résultat remarquable sur la modalité « personnalisée » concerne l’absence de concordance entre les mesures de charge, par opposition aux deux autres modalités. Les différences significatives dans les différentes mesures de charge entre les modalités « court » et « long terme » confirment que pour la tâche réalisée, plus la fenêtre temporelle de présentation de l’information est importante plus la charge cognitive des sujets est élevée. Cette corrélation est validée significativement sur la modalité personnalisée avec l’évaluation subjective de la charge : les résultats de cette évaluation sont d’autant plus élevés que la fenêtre de présentation de l’information est grande.
Les résultats obtenus à partir des mesures physiologiques et l’évaluation de charge ressentie ne sont pas cohérents : les résultats du NTLX indiquent que les sujets sont fortement chargés alors que la HRV indique une faible charge. Pour expliquer cette discordance, il faut considérer la nature des mesures :
• Le NASA-TLX évalue le ressenti subjectif de la charge, c’est-à-dire que ses résultats dépendent de processus de planification mémorielle, réputés impliquer le cortex préfrontal.
• L’amplitude de la HRV dépend quant à elle de relations biologiques entre le cortex et les structures non-corticales, comme l’amygdale (Berntson, Quigley, & Lozano, 2007; Thayer & Lane, 2009), ou les centres cardio-régulateurs du tronc cérébral (Thayer & Lane, 2009).
Les évaluations ne se font pas au même moment. Les indicateurs psychophysiologiques sont recueillis directement, pendant la réalisation de la tâche ; les réponses au NASA-TLX sont recueillies une fois la tâche achevée, sur la base d’indices mémoriels. Ce ne sont donc pas les mêmes supports neurobiologiques qui sont impliqués, sinon à des moments différents.
Dans notre situation expérimentale, les sujets ajustent la profondeur temporelle en fonction de leur estimation du coût associé à un contrôle volontaire de l’action. Cela augmenterait le ressenti de la charge. Des routines automatiques sont probablement toujours nécessaires, libérant l’activité corticale et mobilisant d’autres structures sous-corticales associées au contrôle de l’action, conduisant au maintien de la mesure physiologique de la charge.
Les résultats exploratoires observés au niveau des deux groupes experts/naïfs montrent une corrélation positive entre taille de la fenêtre et charge évaluée subjectivement chez les sujets naïfs : chez ces derniers, l’augmentation de la taille de la fenêtre induit une augmentation de la sensation de charge. Chez les experts en revanche, on constate une tendance à la corrélation négative entre les temps de réaction et la taille de la fenêtre : ainsi les temps diminuent à mesure que la taille de la fenêtre augmente, suggérant une diminution de la charge cognitive.
29 verbatim sujet PF_150911_E
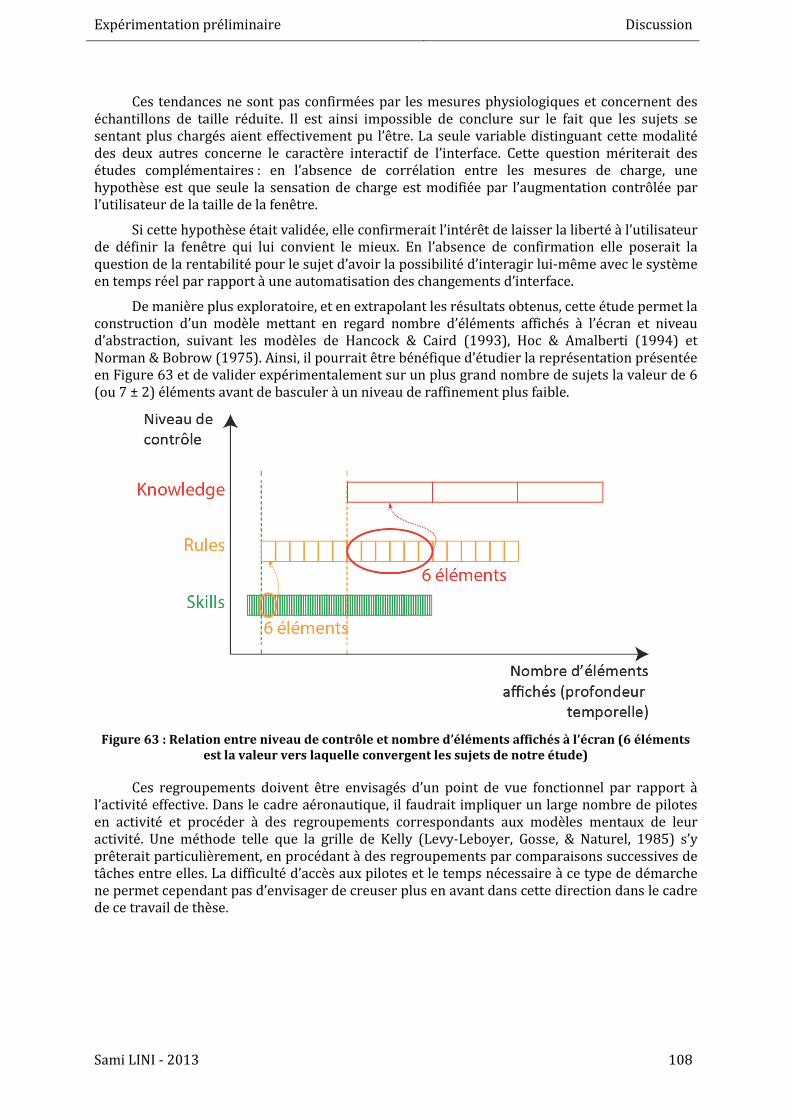
Expérimentation préliminaire
Discussion
Sami LINI - 2013 108
Ces tendances ne sont pas confirmées par les mesures physiologiques et concernent des échantillons de taille réduite. Il est ainsi impossible de conclure sur le fait que les sujets se sentant plus chargés aient effectivement pu l’être. La seule variable distinguant cette modalité des deux autres concerne le caractère interactif de l’interface. Cette question mériterait des études complémentaires : en l’absence de corrélation entre les mesures de charge, une hypothèse est que seule la sensation de charge est modifiée par l’augmentation contrôlée par l’utilisateur de la taille de la fenêtre.
Si cette hypothèse était validée, elle confirmerait l’intérêt de laisser la liberté à l’utilisateur de définir la fenêtre qui lui convient le mieux. En l’absence de confirmation elle poserait la question de la rentabilité pour le sujet d’avoir la possibilité d’interagir lui-même avec le système en temps réel par rapport à une automatisation des changements d’interface.
De manière plus exploratoire, et en extrapolant les résultats obtenus, cette étude permet la construction d’un modèle mettant en regard nombre d’éléments affichés à l’écran et niveau d’abstraction, suivant les modèles de Hancock & Caird (1993), Hoc & Amalberti (1994) et Norman & Bobrow (1975). Ainsi, il pourrait être bénéfique d’étudier la représentation présentée en Figure 63 et de valider expérimentalement sur un plus grand nombre de sujets la valeur de 6 (ou 7 ± 2) éléments avant de basculer à un niveau de raffinement plus faible.
Figure 63 : Relation entre niveau de contrôle et nombre d’éléments affichés à l’écran (6 éléments
est la valeur vers laquelle convergent les sujets de notre étude)
Ces regroupements doivent être envisagés d’un point de vue fonctionnel par rapport à l’activité effective. Dans le cadre aéronautique, il faudrait impliquer un large nombre de pilotes en activité et procéder à des regroupements correspondants aux modèles mentaux de leur activité. Une méthode telle que la grille de Kelly (Levy-Leboyer, Gosse, & Naturel, 1985) s’y prêterait particulièrement, en procédant à des regroupements par comparaisons successives de tâches entre elles. La difficulté d’accès aux pilotes et le temps nécessaire à ce type de démarche ne permet cependant pas d’envisager de creuser plus en avant dans cette direction dans le cadre de ce travail de thèse.
Expérimentation préliminaire
Conclusions
Sami LINI - 2013 109
Conclusions 30 3.6D’un point de vue expérimental, des conclusions sont tirées de cette première étude. En
matière de mesure de la charge cognitive, l’approche par mesures croisées et indépendantes est validée : cette approche ouvre la porte tant à la validation des cas consensuels qu’à la discussion quand les indicateurs divergent.
Deux points avaient justifié l’analyse de l’arythmie cardiaque comme mesure physiologique de la charge cognitive : le premier était la littérature du domaine. Le second concernait les empans temporels considérés dans l’étude, qui ne nécessitaient pas une analyse événementielle fine de la charge cognitive. Les résultats, significatifs et validant nos hypothèses, ne doivent cependant pas masquer les difficultés expérimentales rencontrées.
En tout premier lieu, le dispositif expérimental reste lourd et relativement contraignant pour les sujets : l’installation des électrodes sur la peau du sternum n’est pas forcément une expérience qui leur est très agréable, ce qui ne les met pas forcément dans les meilleures dispositions. De plus, la gaine de câbles est contraignante dans les mouvements, pour ne pas décoller les électrodes.
En second lieu, les données collectées, très bruitées, doivent faire l’objet d’un traitement manuel lourd et long. Un effort important a été apporté afin d’assurer la répétabilité des analyses, mais il a pu être constaté que des erreurs de manœuvre mineures dans la sélection des plages d’analyse pouvait mener à d’importants écarts dans les résultats. A ce titre, la moindre erreur de manipulation des données ne peut être tolérée, alourdissant encore le traitement.
Les conclusions sur le plan du dispositif expérimental sont donc contrastées. Des retours ont été très positifs, en particulier concernant l’environnement de simulation ou l’utilisation du NASA-TLX et des mesures de temps de réaction comme moyens croisés d’analyse de la charge cognitive, le bilan est plus mitigé concernant l’arythmie cardiaque.
Cette étude a enfin et surtout permis de mettre en avant l’existence d’un lien entre charge cognitive et profondeur temporelle de présentation de l’information. La cohérence entre les mesures objectives et subjectives de la charge sur les modalités court et long termes valide l’hypothèse d’une augmentation de la charge cognitive avec l’augmentation de la projection temporelle.
Lors de la modalité « personnalisée », la valeur moyenne de la profondeur temporelle choisie (6 minutes 6 éléments) correspond à l’empan mnésique de la mémoire de travail. Un compromis cognitif semble être recherché par les sujets pour la présentation de l’information et une hypothèse d’interprétation est que ce compromis correspond à la valeur maximale tolérée par la mémoire de travail. Nous le définissons comme étant un compromis entre utilisation contrôlée de la mémoire de travail et représentation suffisante dans le temps de la situation. Dans notre démarche, nous émettons l’hypothèse qu’il s’agit également d’un moyen d’optimiser l’exploitation du support.
La recherche par les sujets d’un compromis entre information utilisable pour la réalisation de la tâche et charge induite indique que la conception d’un support aidant à l’anticipation répond à un besoin. Son caractère interactif doit permettre l’obtention du compromis cognitif entre complétion de la conscience de la situation par les informations fournies et la charge que cela induit.
30 Cette expérimentation a fait l’objet d’une publication en conférence internationale (Lini, Favier, et
al., 2012)
Expérimentation préliminaire
En résumé
Sami LINI - 2013 110
A la question de savoir s’il fallait contraindre la profondeur temporelle d’anticipation en limitant automatiquement le nombre d’informations affichées, notre étude expérimentale répond que pourvoir l’utilisateur en moyens de personnaliser l’interface et de définir lui-même la taille de la fenêtre de présentation, même avec des informations de bas niveau, semble être une voie pour l’aider à gérer sa charge mentale.
Les résultats obtenus sont intégrés dans le cahier des charges du cœur fonctionnel de notre support d’aide à l’anticipation Chapitre 5. Les prochains développements illustrent ainsi nos travaux sur la compréhension de l’anticipation puis la prise en compte de ces résultats dans la conception de notre support d’aide à l’anticipation.
En résumé
• La conception d’une interface présentant des informations dans le temps impose de s’interroger sur la quantité acceptable d’informations affichées.
• Nous démontrons, dans le cadre d’une tâche limitée par les données, que l’augmentation du nombre d’éléments d’information affichés induit une augmentation proportionnelle de la charge cognitive.
• Nous démontrons que, cette information étant indispensable à l’activité, un compromis cognitif est recherché entre information nécessaire et charge induite par la présentation de l’information.
• Nous émettons l’hypothèse que ce compromis se rapproche de l’empan mnésique de la mémoire de travail (7±2 éléments).
• Nous émettons l’hypothèse qu’au-delà de ce compromis cognitif un changement du niveau de contrôle est nécessaire.
• Nous mettons en évidence une divergence entre les différentes mesures de la charge cognitive dans le cas où l’interface est interactive, en faveur d’une sensation (subjective) amoindrie de la charge.

Sami LINI - 2013 111
Chapitre 4.
L’anticipation : pistes de réflexion
L’anticipation : pistes de réflexion
Introduction
Sami LINI - 2013 112
Introduction 4.1L’état de l’art a mis en lumière la question de l’anticipation dans de nombreux modèles de
la littérature sans parvenir à identifier un modèle répondant parfaitement à notre problématique. Poursuivant l’effort d’une approche d’ingénierie cognitique, il convient d’adosser à l’analyse de l’activité menée un modèle du processus cognitif « anticipation ».
Dans un contexte pluridisciplinaire et avec la volonté d’introduire des concepts provenant de diverses communautés, nous posons les bases d’une proposition théorique en la confrontant continument aux contraintes effectives rencontrées en aéronautique afin de les y inclure et d’y apporter un éclairage. Nous précisons ici que le terme « modèle » sera employé par simplification pour parler de notre ébauche de proposition théorique. Il s’agira donc de l’introduction de notre réflexion, visant à représenter ce qui constitue notre hypothèse de compréhension de l’anticipation, laquelle ne constitue pas en l’état une formalisation conceptuelle complète à proprement parler.
Le découpage qui structure cette proposition offre un cadre pour une conception centrée sur l’utilisateur : les différentes couches fournissent des niveaux de raffinement que la littérature a déjà évaluées utiles dans la conception et l’évaluation d’interfaces utilisateurs (Vicente & Burns, 1996).
Une brève recontextualisation reviendra sur les éléments-clés identifiés préalablement. Partant de l’hypothèse que l’aéronautique de combat est caractérisée par un niveau d’exigence et de contraintes temporelles supérieur à l’aéronautique civile, nous illustrerons ensuite au travers d’un exemple issu de ce domaine l’occurrence de ces éléments-clés. Nous présenterons enfin notre contribution.
Recontextualisation : les éléments-clés 4.2L’anticipation est parfois confondue avec le niveau 3 du modèle de conscience de la
situation de Endsley (1995). Il s’agit du niveau au sein duquel les informations de l’environnement, une fois perçues (niveau 1) et comprises (niveau 2), sont projetées dans le temps. Cette projection vise à évaluer leur état futur. Le postulat sous-tendant cette idée est que la capacité à se projeter demande du temps disponible et une capacité d’abstraction.
Les études menées sur l’expertise, l’abstraction et la mémoire (Chase & Simon, 1973; Larkin & Reif, 1979) mettent en avant leurs relations étroites. Experts et novices se distinguent dans la capacité à abstraire les données d’un problème. L’expert a en mémoire les cadres génériques prêts à accueillir ces données qui vont le spécifier à la situation rencontrée. Ce résultat va dans le sens d’Amalberti (1996) qui associe bonne anticipation et expertise.
Deux types d’anticipation sont distingués (Denecker, 1999) :
• court terme, dite subsymbolique : elle relève d’actions-réflexe et nécessite un faible niveau de contrôle de l’action ;
• long terme, dite symbolique : elle relève de la construction de solutions basées sur un ensemble de règles d’inférence et/ou de connaissances.
Le fonctionnement différencié de ces deux types d’anticipation est un élément fondamental mettant en relation profondeur temporelle et niveaux de contrôle.
L’expérimentation préliminaire a souligné le lien entre charge cognitive, niveaux de contrôle et profondeur temporelle. L’incertitude concernant l’évolution de l’environnement est un élément fondamental dans la relation entre ces trois éléments.
Sur le court terme, l’expertise perceptivo-motrice est le socle de la capacité d’anticipation (Crognier & Fery, 2007; Mundutéguy & Darses, 2007). Une structure mentale orientée vers l’action est activée par la perception dans l’environnement d’un ensemble d’indices sensoriels concordants. Cette boucle perceptivo-motrice, de bas niveau, fonctionne en parallèle de boucles
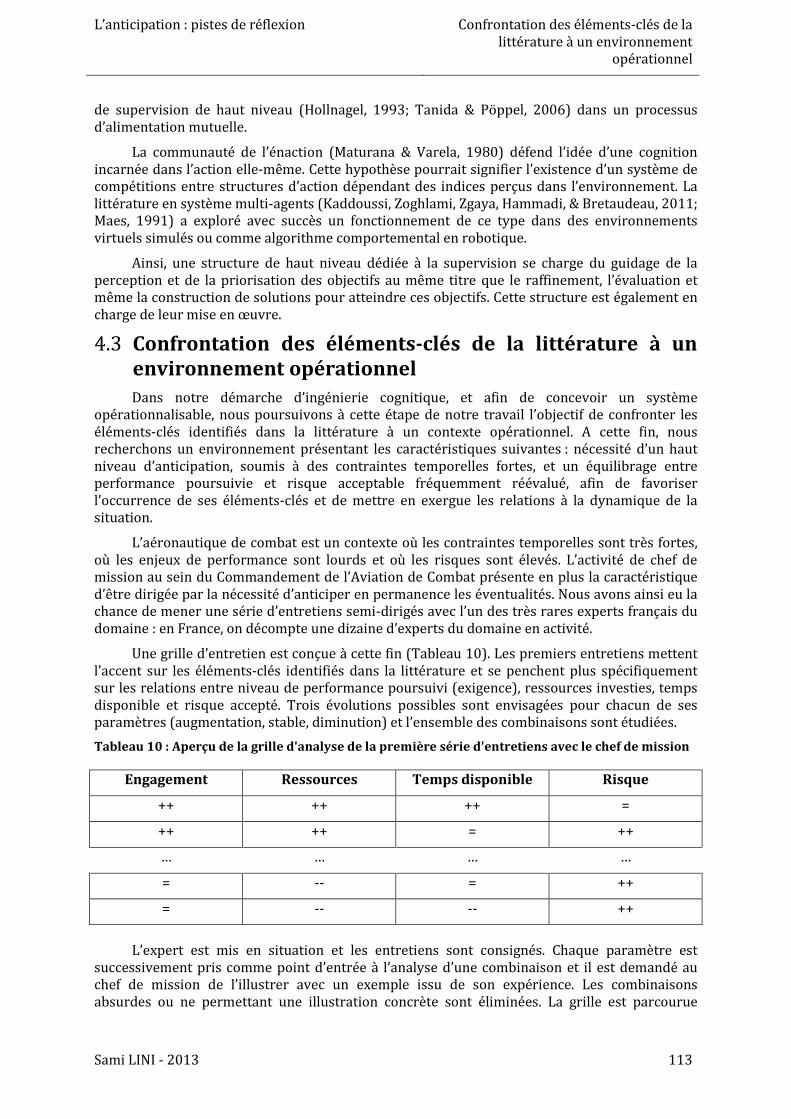
L’anticipation : pistes de réflexion
Confrontation des éléments-clés de la
littérature à un environnement opérationnel
Sami LINI - 2013 113
de supervision de haut niveau (Hollnagel, 1993; Tanida & Pöppel, 2006) dans un processus d’alimentation mutuelle.
La communauté de l’énaction (Maturana & Varela, 1980) défend l’idée d’une cognition incarnée dans l’action elle-même. Cette hypothèse pourrait signifier l’existence d’un système de compétitions entre structures d’action dépendant des indices perçus dans l’environnement. La littérature en système multi-agents (Kaddoussi, Zoghlami, Zgaya, Hammadi, & Bretaudeau, 2011; Maes, 1991) a exploré avec succès un fonctionnement de ce type dans des environnements virtuels simulés ou comme algorithme comportemental en robotique.
Ainsi, une structure de haut niveau dédiée à la supervision se charge du guidage de la perception et de la priorisation des objectifs au même titre que le raffinement, l’évaluation et même la construction de solutions pour atteindre ces objectifs. Cette structure est également en charge de leur mise en œuvre.
Confrontation des éléments-clés de la littérature à un 4.3environnement opérationnel Dans notre démarche d’ingénierie cognitique, et afin de concevoir un système
opérationnalisable, nous poursuivons à cette étape de notre travail l’objectif de confronter les éléments-clés identifiés dans la littérature à un contexte opérationnel. A cette fin, nous recherchons un environnement présentant les caractéristiques suivantes : nécessité d’un haut niveau d’anticipation, soumis à des contraintes temporelles fortes, et un équilibrage entre performance poursuivie et risque acceptable fréquemment réévalué, afin de favoriser l’occurrence de ses éléments-clés et de mettre en exergue les relations à la dynamique de la situation.
L’aéronautique de combat est un contexte où les contraintes temporelles sont très fortes, où les enjeux de performance sont lourds et où les risques sont élevés. L’activité de chef de mission au sein du Commandement de l’Aviation de Combat présente en plus la caractéristique d’être dirigée par la nécessité d’anticiper en permanence les éventualités. Nous avons ainsi eu la chance de mener une série d’entretiens semi-dirigés avec l’un des très rares experts français du domaine : en France, on décompte une dizaine d’experts du domaine en activité.
Une grille d’entretien est conçue à cette fin (Tableau 10). Les premiers entretiens mettent l’accent sur les éléments-clés identifiés dans la littérature et se penchent plus spécifiquement sur les relations entre niveau de performance poursuivi (exigence), ressources investies, temps disponible et risque accepté. Trois évolutions possibles sont envisagées pour chacun de ses paramètres (augmentation, stable, diminution) et l’ensemble des combinaisons sont étudiées. Tableau 10 : Aperçu de la grille d'analyse de la première série d'entretiens avec le chef de mission
Engagement Ressources Temps disponible Risque
++ ++ ++ =
++ ++ = ++
… … … …
= -- = ++
= -- -- ++
L’expert est mis en situation et les entretiens sont consignés. Chaque paramètre est successivement pris comme point d’entrée à l’analyse d’une combinaison et il est demandé au chef de mission de l’illustrer avec un exemple issu de son expérience. Les combinaisons absurdes ou ne permettant une illustration concrète sont éliminées. La grille est parcourue
L’anticipation : pistes de réflexion
Confrontation des éléments-clés de la
littérature à un environnement opérationnel
Sami LINI - 2013 114
intégralement une deuxième fois à quelques entretiens d’intervalle pour s’assurer qu’aucune combinaison n’a été éliminée indûment. La liste restreinte de combinaison de paramètres constitue une base décrivant les effets mutuels de l’ensemble des paramètres considérés.
Un point commun à l’ensemble des illustrations présentées par le chef de mission interviewé concerne l’existence de plusieurs niveaux de contrôle s’alimentant mutuellement et poursuivant des objectifs distincts.
Au cours de ces entretiens, de fortes corrélations furent mises en évidence entre la construction intellectuelle de la situation par de tels experts et nos hypothèses de modèle. L’identification des éléments relevant de l’anticipation dans l’activité guida l’entretien et permit de confronter les éléments majeurs identifiés dans l’état de l’art aux contraintes effectives de l’exercice de l’anticipation.
Une nouvelle série d’entretiens est alors engagée pour co-construire un exemple recouvrant l’ensemble des éléments considérés, les mettant en regard et permettant ainsi de confirmer ou d’infirmer nos hypothèses de compréhension de l’anticipation. Le cas d’étude choisi est l’élaboration d’un raid derrière les lignes ennemies nécessitant un tir de précision laser. Un raid, aussi appelé COMAO (COMposite Air Operations, voir Figure 64) est composé de plusieurs dizaines d’aéronefs de capacités diverses, réunis en groupes.

L’anticipation : pistes de réflexion
Confrontation des éléments-clés de la
littérature à un environnement opérationnel
Sami LINI - 2013 115
Figure 64 : Exemple d’un raid (COMAO) issu de l’interface de contrôle d’un exercice militaire de grande ampleur : gestion stratégique d’ensemble (en haut) et gestion tactique et déconfliction
inter-patrouille en fonction des paramètres de vol (en bas)31
La gestion de ces divers groupes représente un vrai défi en termes d’organisation, d’efficacité et de sûreté. Il s’agit de systèmes complexes soumis à de fortes contraintes temporelles, dans un environnement hautement dynamique, au sein d’un espace lui-même sujet à une évolution rapide. Ainsi les risques d’événements imprévus sont d’autant plus importants qu’il n’est pas rationnel d’envisager tous les cas possibles pendant la phase de planification : une explosion combinatoire qui justifie également l’inutilité d’une anticipation trop long terme dans ces situations.
31 Ces images sont issues du documentaire Fighter Pilot: Operation Red Flag.

L’anticipation : pistes de réflexion
Confrontation des éléments-clés de la
littérature à un environnement opérationnel
Sami LINI - 2013 116
L’activité courante des experts consiste en :
• une planification couvrant la mission initiale et un nombre significatif de plans alternatifs ;
• la préparation de planifications alternatives répondant à ces objectifs, afin de faire face aux aléas pouvant intervenir durant la mission.
Le cœur de la planification est ainsi d’envisager les aléas et d’avoir des solutions préconçues en réponse. Lors de la mission, ces plans sont en permanence confrontés à la réalité de l’environnement et adaptés. Pour ces experts, la clé du succès réside dans la possibilité de prendre rapidement de la distance pour réévaluer la situation et redéfinir éventuellement les objectifs et les moyens pour les atteindre, navigant entre niveau de contrôle le plus élevé, que nous appellerons la métapolitique, et mise en œuvre des solutions.
Le tout premier critère dans la construction de la représentation de la situation est l’engagement, c’est-à-dire efficacité attendue et risque corollaire. Cette considération est supérieure à l’objectif lui-même. Par exemple, les directives peuvent être de contenir les offensives ennemies tout en limitant les risques de perte directe. Pour être en adéquation avec cette demande, l’objectif poursuivi pourra en conséquence être la neutralisation pendant 24h d’un terminal pétrolier. Le choix d’un objectif par rapport à un autre se fait en regard de son efficacité mais surtout des risques qui y sont associés.
« Pour ralentir les offensives ennemies, les solutions les plus efficaces consistent à frapper son ravitaillement (munitions, eau, nourriture, carburant) afin de limiter sa progression. Les terminaux de pétrole qui sont des structures très vulnérables et étendues permettent d’atteindre cet objectif à moindre risque (très étendu donc défenses moins efficaces et limitant les effets collatéraux sur les populations locales) et à moindre coût (large choix d’armement efficace et nombre de vecteurs offensifs limité) »32.
Ces choix sont faits au niveau de contrôle le plus élevé. C’est ce que nous identifions comme étant le rapport entre performance poursuivie et risque accepté.
Pour un objectif défini et choisi, il est nécessaire de prendre en compte les divers sous-objectifs nécessaires à son accomplissement ainsi que les moyens de l’atteindre, en utilisant des solutions existantes (exploitation) ou en construisant de nouvelles solutions (exploration) en fonction de l’expérience du chef de mission. Cela se déroule à un niveau de contrôle intermédiaire.
Dans le cas présent, « les points d’impacts souhaités (DMPIs, Desired Points of Impact) doivent être définis ainsi que toutes les conditions devant être remplies, tels que le support des moyens de guerre électronique ou les tactiques et axes d’attaque à mettre en œuvre en fonction de la nature de la cible et de ses moyens de défense ».
Il reste ensuite à traiter des problématiques de plus bas niveau (ravitaillement en vol, contraintes tactiques).
Depuis la solution initiale (objectif/sous-objectifs), il est nécessaire de définir et organiser les diverses tâches à réaliser, leurs liens mutuels et la criticité de chacune d’entre elles.
« Ce qui est important c’est de pouvoir passer en permanence du micro au macro : si une patrouille doit avoir 75% d’efficacité à l’objectif, je dois pouvoir intégrer cette donnée dans ma vision globale et je dois pouvoir vérifier à tout moment la réussite du contrat, afin d’intégrer cette donnée dans mes tests d’hypothèses. Inversement, je dois pouvoir évaluer rapidement les conséquences d’un changement majeur au niveau global sur ma patrouille afin de maintenir un contrat efficient ».
32 Les prochains extraits en italique sont des verbatims de ces entretiens
L’anticipation : pistes de réflexion
Confrontation des éléments-clés de la
littérature à un environnement opérationnel
Sami LINI - 2013 117
L’accent est mis sur la cohérence des tâches à réaliser et sur l’identification des tâches discriminantes.
Les séquences de tâches en rapport avec un sous-objectif donné sont agrégées en une méta-tâche afin d’en faciliter la manipulation mentale. Cet outil cognitif permet aux chefs de mission de garder une vision globale des tâches en cours tout en gardant un niveau de réactivité élevé en cas d’occurrence de l’une des hypothèses envisagées lors de la planification initiale. C’est ce que nous identifions comme un réseau de solutions liées.
Il s’agit d’un mécanisme parallèle permanent qui alimente de façon continue les plus hauts niveaux d’abstraction : les boucles de bas niveaux fonctionnent en parallèle des hauts niveaux.
Une simulation mentale des événements à venir durant le vol est effectuée au sol. L’accent est mis sur les sous-objectifs. Il est alors nécessaire de prendre en compte :
• les contraintes de l’axe d’arrivée ; • la préparation de l’armement (fusée, délais, intervallométrie, retard) ; • le choix du mode de tir ; • la configuration des paramètres du tir laser ; • l’identification de la cible avec les critères de tir associés ; • les contraintes de déploiement.
Cet élément est identifié comme une projection dans le temps en tenant compte de l’incertitude de la situation.
A partir du plan initial et des tâches associées, une estimation dynamique des solutions potentielle est menée, à la fois en termes de faisabilité et de robustesse face au risque
« D’un point de vue global, on arrête des solutions, et ensuite on vérifie que ces solutions restent robustes : on a prévu plein de cas réalistes (ce qui est statistiquement le plus probable), à ce moment-là tu commences à envisager des cas moins probables (météo divergente, forces en présence différentes…) ».
Le critère premier est celui de la faisabilité (atteinte de l’objectif dans un contexte donné) car il s’appuie plus sur les problématiques de gestion de ressources que la robustesse qui est, elle, plus dépendante de la sensibilité à l’environnement. Nous identifions cela à une sensibilité à l’évolution de l’environnement.
Est ensuite déterminée la pertinence de chaque solution en fonction du risque associé. Pour y parvenir il est nécessaire d’établir les facteurs d’incidents potentiels et d’évaluer les ressources nécessaires effectives pour réaliser la tache (niveau approprié d’activation). L’expertise est un facteur déterminant à ce niveau : le coût de mise en œuvre d’une solution est d’autant plus facile à estimer que la solution a souvent été mise en œuvre. L’usage répété d’une solution permet également d’en décroître le coût.
L’expertise est aussi très importante au travers des leçons tirées, afin de comparer les ressources impliquées dans l’efficience de la solution. L’expérience permet de gérer les imprévus potentiels et d’adapter les solutions pour chaque tâche selon leur robustesse (sensibilité à l’évolution de l’environnement), ceci afin de limiter le coût cognitif :
« quand on fait ça longtemps, on a des solutions sur étagères ».
Le changement de solutions dans le décours temporel et leur confrontation à l’évolution de l’environnement a pour objectif de consolider ou d’invalider leur pertinence. Ces éléments sont identifiés comme étant une validation de solutions et une concurrence entre solutions viables.
Le choix de solutions est directement impacté par les contraintes induites par la navigation, le décours temporel, les changements de météo ainsi que par les menaces. La solution la plus pertinente face à ces potentielles dérives de plan sera mise en œuvre. Nous y

L’anticipation : pistes de réflexion
Description du modèle
Sami LINI - 2013 118
identifions un crédit de ressources pour les solutions viables et la mise en œuvre de celle ayant le plus haut crédit.
Cette série d’entretiens avec un expert de l’aéronautique de combat, présentant de fortes contraintes temporelles et une réelle nécessité d’anticiper, nous a permis de retrouver un certain nombre d’éléments-clés, que l’état de l’art nous avait déjà permis d’identifier, et de dessiner les relations les liant. Nous y retrouvons les contours d’une architecture de contrôle et des processus relevant de niveaux s’alimentant mutuellement et poursuivant des objectifs complémentaires.
Ces entretiens consolident et complètent notre compréhension de l’anticipation. Nous travaillons en suivant à mettre en regard les éléments-clés mis en exergue et à les incorporer à notre représentation globale du processus anticipation.
Description du modèle 4.44.4.1 Introduction
La partie précédente a repositionné les éléments-clés pour un modèle de l’anticipation, indispensable à notre démarche d’ingénierie cognitique et que nous ne sommes pas parvenus à trouver dans la littérature. Nous présentons ici notre contribution : les pistes de réflexion vers un modèle fondé sur la sélection contextualisée et pondérée de schèmes, basé sur des niveaux d'activation et d'un mécanisme d'excitation/inhibition, s’inscrivant dans une dynamique temporelle.
La charpente de ce modèle est constituée de plusieurs niveaux de contrôle. La structure de niveau le plus bas, la structure d’action est le schème (Piaget, 1952). La mise en œuvre de schèmes représente un coût cognitif au même titre que la construction de nouveaux schèmes : quel que soit le niveau de contrôle considéré, toute action nécessite des ressources cognitives pour être validée puis réalisée. Un système de gestion des ressources cognitives est ainsi nécessaire.
L’objectif de ce travail de formalisation est la modélisation de l’anticipation. Afin d’éviter le débat autour des modèles de ressources cognitive, une tendance du monde informatique est employée : nous considérons un système de jetons de ressources. Chaque fois qu’un schème se valide partiellement, il reçoit en retour un jeton de ressources. Les schèmes visent à collecter suffisamment de jetons pour atteindre un niveau d’activation qui leur est propre et qui leur permettra d’être mis en œuvre à échéance. Les niveaux de contrôle supérieurs contrôlent le processus de récompense et le montant total de ressources (jetons) disponibles.
Ce principe nécessite une vue récursive du cadre que nous avons établi pour ce modèle. La définition d’un objectif à un haut niveau de contrôle nécessite des jetons de ressources au même titre que la réalisation d’une action sensori-motrice. Cela signifie que chaque niveau peut être vu au travers du prisme à la fois de la définition de ce qui doit être accompli, de la philosophie pour l’accomplir et des moyens effectifs pour y parvenir.
Afin de collecter des jetons de ressources, une compétition entre schèmes a lieu visant à leur propre activation. Tout schème appartient à un réseau de semblables partageants des traits communs. Suivant un processus d’activation/inhibition, la validation partielle d’un schème fait bénéficier le réseau de jetons de ressources selon un principe de propagation décroissante : plus les schèmes du réseau partagent de traits communs plus ils sont crédités. Les schèmes concurrents se voient eux inhibés : ils perdent des jetons de ressource.
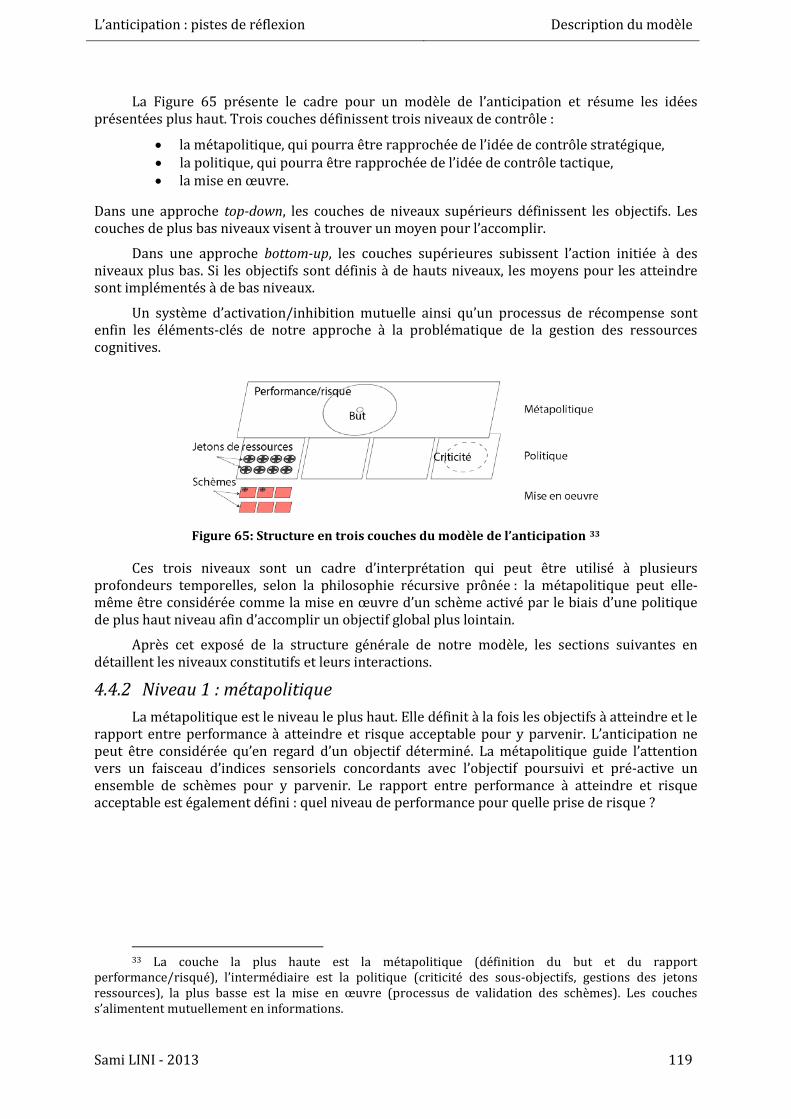
L’anticipation : pistes de réflexion
Description du modèle
Sami LINI - 2013 119
La Figure 65 présente le cadre pour un modèle de l’anticipation et résume les idées présentées plus haut. Trois couches définissent trois niveaux de contrôle :
• la métapolitique, qui pourra être rapprochée de l’idée de contrôle stratégique, • la politique, qui pourra être rapprochée de l’idée de contrôle tactique, • la mise en œuvre.
Dans une approche top-down, les couches de niveaux supérieurs définissent les objectifs. Les couches de plus bas niveaux visent à trouver un moyen pour l’accomplir.
Dans une approche bottom-up, les couches supérieures subissent l’action initiée à des niveaux plus bas. Si les objectifs sont définis à de hauts niveaux, les moyens pour les atteindre sont implémentés à de bas niveaux.
Un système d’activation/inhibition mutuelle ainsi qu’un processus de récompense sont enfin les éléments-clés de notre approche à la problématique de la gestion des ressources cognitives.
Figure 65: Structure en trois couches du modèle de l’anticipation 33
Ces trois niveaux sont un cadre d’interprétation qui peut être utilisé à plusieurs profondeurs temporelles, selon la philosophie récursive prônée : la métapolitique peut elle-même être considérée comme la mise en œuvre d’un schème activé par le biais d’une politique de plus haut niveau afin d’accomplir un objectif global plus lointain.
Après cet exposé de la structure générale de notre modèle, les sections suivantes en détaillent les niveaux constitutifs et leurs interactions.
4.4.2 Niveau 1 : métapolitique La métapolitique est le niveau le plus haut. Elle définit à la fois les objectifs à atteindre et le
rapport entre performance à atteindre et risque acceptable pour y parvenir. L’anticipation ne peut être considérée qu’en regard d’un objectif déterminé. La métapolitique guide l’attention vers un faisceau d’indices sensoriels concordants avec l’objectif poursuivi et pré-active un ensemble de schèmes pour y parvenir. Le rapport entre performance à atteindre et risque acceptable est également défini : quel niveau de performance pour quelle prise de risque ?
33 La couche la plus haute est la métapolitique (définition du but et du rapport
performance/risqué), l’intermédiaire est la politique (criticité des sous-objectifs, gestions des jetons ressources), la plus basse est la mise en œuvre (processus de validation des schèmes). Les couches s’alimentent mutuellement en informations.

L’anticipation : pistes de réflexion
Description du modèle
Sami LINI - 2013 120
4.4.3 Niveau 2 : politique La politique est le niveau intermédiaire. C’est à ce niveau que sont gérés les moyens pour
atteindre le but global :
• Le rapport entre l’exploration de nouvelles solutions et l’exploitation de solutions existantes : en fonction du contexte et de l’expertise, il sera plutôt choisi de créer de nouvelles solutions que d’adapter des solutions existantes au contexte courant. En situation nominale, les experts tendent à moins créer de nouvelles solutions et à plus exploiter les solutions existantes (Amalberti, 1996). En situation critique, les experts sont en revanche capables de faire évoluer ce rapport et d’innover pour trouver de nouveaux moyens d’atteindre un objectif.
• La criticité des sous-objectifs : en fonction de l’objectif global, il établit à un niveau local la criticité de chaque sous-objectif. Les conséquences d’un échec sont pondérées et les exigences en résultant sont définies.
• La distribution de ressources dans les niveaux inférieurs : selon la validité des solutions des niveaux inférieurs, la politique distribue des jetons de ressource.
Les paramètres définissant le nombre global de jetons de ressources et le nombre de jetons attribués par l’activation partielle d’une solution sont gérés à ce niveau. Il peut donc être envisagé différents types de politique de distribution des jetons soient en compétition dans la poursuite d’un même objectif, suivant la logique récursive présentée plus tôt.
Un équilibre délicat doit également être défini entre coût de spécification d’une solution existante par rapport à la création d’une solution : le rapport entre exploration et exploitation doit toujours permettre de trouver une solution aux problèmes rencontrés.
Ces paramètres et les équations les régissant ne sont pas définis à ce stade de notre effort de modélisation : les pistes présentées ne peuvent prétendre pouvoir être considérées comme une proposition formalisée, tout au plus comme ses fondations.
4.4.4 Niveau 3 : mise en œuvre Le niveau traitant de la mise en œuvre des solutions est le dernier niveau. Un processus de
présélection et de raffinement de schèmes répondant à la situation rencontrée en constitue. Ces structures d’action sont ensuite progressivement validées pour qu’enfin une solution émerge et soit mise en œuvre. Ce découpage, que nous avons mis en évidence lors des entretiens introductifs à cette partie, est détaillé ici.
4.4.4.1 Processus de présélection La mise en œuvre est le niveau le plus bas. Des schèmes sont rappelés pendant que de
nouveaux schèmes sont construits. Chacune de ces structures a un modèle de l’évolution de la situation. Ce modèle interne est une représentation de l’action du schème sur l’environnement (ici et maintenant) et de ses conséquences.
Les schèmes sont pondérés en fonction de la dynamique de la situation : la sensibilité de leur action à l’incertitude de l’environnement (probabilité qu’un événement imprévu se produise) et l’adéquation de leur durée aux contraintes temporelles. Le temps de réalisation est une donnée majeure du schème. Le temps disponible pour agir est une représentation interne de la distance à échéance.
En fonction du rapport entre exploration et exploitation défini au niveau politique, de nouveaux schèmes sont conçus en parallèle. Ce processus, relevant lui-même de la mise en œuvre d’un schème d’action, est un processus coûteux, qui nécessite des jetons de ressources au même titre que les autres schèmes.

L’anticipation : pistes de réflexion
Description du modèle
Sami LINI - 2013 121
4.4.4.2 Processus de validation La Figure 66 représente le processus de validation. De nouveaux schèmes sont créés ( ) et
des schèmes existants tendent à valider leur propre représentation de la situation en cherchant dans l’environnement des indices la confirmant ( ). Si des indices concordants sont trouvés, le schème est activé et reçoit en conséquence un jeton de ressources ( ). Tous les schèmes partageant des traits communs et constituant un réseau d’affinités sont également activés ( ). Inversement, les schèmes concurrents sont inhibés et perdent des jetons de ressources ( ).
Figure 66: Processus d’activation/inhibition 34
Ainsi à chaque instant des schèmes sont progressivement activés et inhibés, dans un processus parallèle continu et en fonction des informations de l’environnement. Ils complètent progressivement leur représentation interne de leur action sur l’environnement pour accomplir le but ( ).
Le processus d’inhibition (perte de jetons) encourage la validation progressive des schèmes ayant le plus haut niveau d’activation. Plus un schème est activé, plus sa recherche d’éléments concordants est prioritaire. Tous les schèmes n’ont pas le même niveau d’activation par défaut. Le phénomène de renforcement est celui qui dicte le niveau d’activation par défaut. Ainsi l’expérience et l’expertise permettent des choix préférentiels parmi les schèmes disponibles : la mise en œuvre répétée d’une solution en diminue le seuil d’activation. Ainsi, plus une solution est employée, plus elle a de chance de l’être.
Le schème a une représentation de son effet (cercle gris ( )) sur l’objectif cible : la distance à l’action ( ) en regard de sa sensibilité à l’évolution ( ) de l’environnement. Il vise à atteindre son but ( ) en respectant le rapport performance/risque ( ) et la criticité ( ).
La mise en œuvre préférentielle d’un schème par rapport à un autre est fonction de la représentation qu’a le schème de son temps disponible avant action et de son niveau interne
34 Les schèmes tendent à s’auto-valider par une recherche dans l’environnement d’éléments
concordants (activation). Dans ce cas, le schème et son réseau sont accrédités de jetons de ressources tandis que les structures concurrentes en sont délestées (inhibition). Le schème a une représentation de son effet (cercle gris) sur l’objectif cible : la distance à l’action en regard de sa sensibilité à l’évolution de l’environnement. Il vise à intercepter le centre de la cible (but) en demeurant dans le cercle performance/risque (cercle extérieur) et la criticité (cercle intérieur).
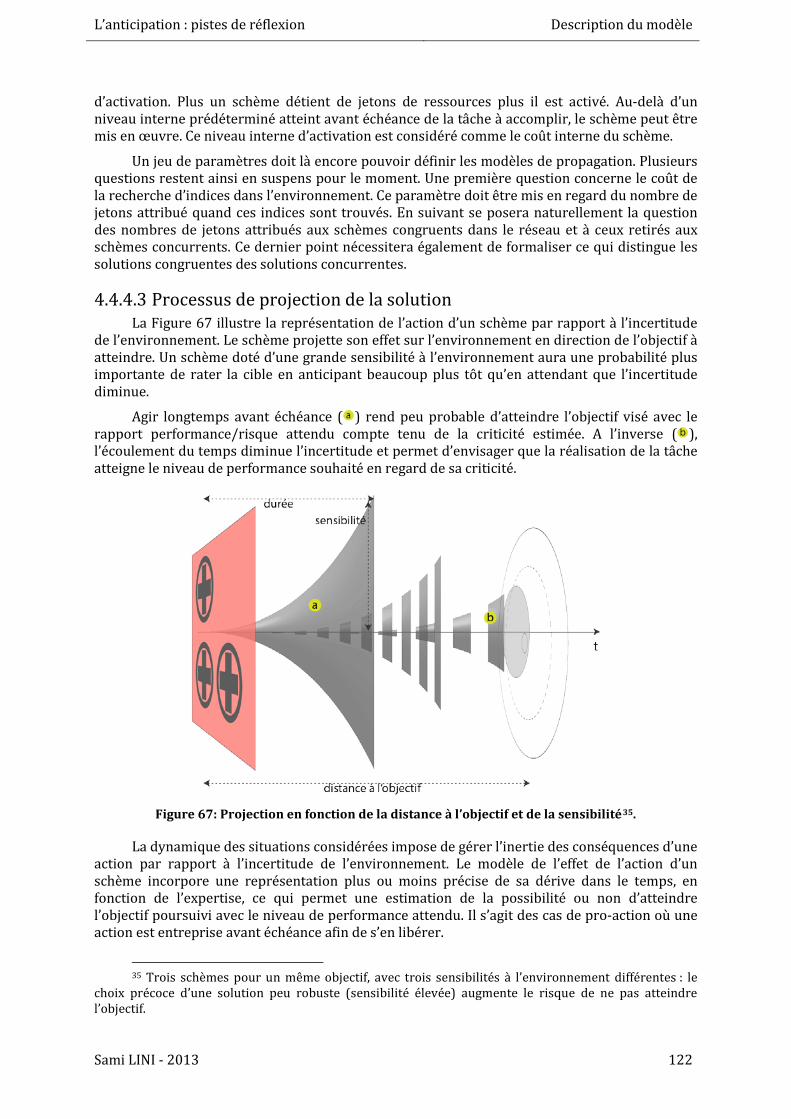
L’anticipation : pistes de réflexion
Description du modèle
Sami LINI - 2013 122
d’activation. Plus un schème détient de jetons de ressources plus il est activé. Au-delà d’un niveau interne prédéterminé atteint avant échéance de la tâche à accomplir, le schème peut être mis en œuvre. Ce niveau interne d’activation est considéré comme le coût interne du schème.
Un jeu de paramètres doit là encore pouvoir définir les modèles de propagation. Plusieurs questions restent ainsi en suspens pour le moment. Une première question concerne le coût de la recherche d’indices dans l’environnement. Ce paramètre doit être mis en regard du nombre de jetons attribué quand ces indices sont trouvés. En suivant se posera naturellement la question des nombres de jetons attribués aux schèmes congruents dans le réseau et à ceux retirés aux schèmes concurrents. Ce dernier point nécessitera également de formaliser ce qui distingue les solutions congruentes des solutions concurrentes.
4.4.4.3 Processus de projection de la solution La Figure 67 illustre la représentation de l’action d’un schème par rapport à l’incertitude
de l’environnement. Le schème projette son effet sur l’environnement en direction de l’objectif à atteindre. Un schème doté d’une grande sensibilité à l’environnement aura une probabilité plus importante de rater la cible en anticipant beaucoup plus tôt qu’en attendant que l’incertitude diminue.
Agir longtemps avant échéance ( ) rend peu probable d’atteindre l’objectif visé avec le rapport performance/risque attendu compte tenu de la criticité estimée. A l’inverse ( ), l’écoulement du temps diminue l’incertitude et permet d’envisager que la réalisation de la tâche atteigne le niveau de performance souhaité en regard de sa criticité.
Figure 67: Projection en fonction de la distance à l’objectif et de la sensibilité35.
La dynamique des situations considérées impose de gérer l’inertie des conséquences d’une action par rapport à l’incertitude de l’environnement. Le modèle de l’effet de l’action d’un schème incorpore une représentation plus ou moins précise de sa dérive dans le temps, en fonction de l’expertise, ce qui permet une estimation de la possibilité ou non d’atteindre l’objectif poursuivi avec le niveau de performance attendu. Il s’agit des cas de pro-action où une action est entreprise avant échéance afin de s’en libérer.
35 Trois schèmes pour un même objectif, avec trois sensibilités à l’environnement différentes : le
choix précoce d’une solution peu robuste (sensibilité élevée) augmente le risque de ne pas atteindre l’objectif.
L’anticipation : pistes de réflexion
Conclusion
Sami LINI - 2013 123
Rapport entre temps de mise en œuvre et temps disponible, rapport entre incertitude et sensibilité à l’environnement et niveau interne d’activation constituent les trois facteurs à pondérer pour choisir un schème par rapport à un autre. Comme pour les parties précédentes, ces éléments seront à définir plus précisément pour formaliser les pistes proposées ici.
Conclusion 36 4.5La littérature a depuis longtemps abordé la question de l’anticipation, sans que nous
puissions y trouver un modèle répondant tout à fait à notre problématique. Dans une démarche contextualisée, nous avons réalisé une série d’entretiens avec un expert du domaine aéronautique pour identifier d’un point de vue opérationnel les éléments relevant de l’anticipation. Au cours de ces entretiens, nous avons retrouvé un certain nombre d’éléments-clés, identifiés lors de l’état de l’art, nous avons ensuite présenté notre contribution sur le sujet : notre hypothèse de compréhension de l’anticipation.
Nous avons mis en évidence les limites de notre contribution, dans son stade actuel de développement : il ne s’agit pour le moment que d’une hypothèse de modèle, laquelle manque encore du formalisme en assurant tant le fonctionnement que la convergence, et qui mériterait également d’être évaluée expérimentalement. La volonté de nous inspirer de plusieurs communautés scientifiques pour ce travail offre tant un regard neuf sur notre problématique qu’elle en complique la modélisation formelle.
Pour autant, dans notre démarche d’ingénierie cognitique, ce modèle permet de compléter le cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation. La question de la hiérarchisation des tâches, dont l’impossibilité dans le cadre de ce travail a déjà été abordée plus tôt, coule de sens. Le point fondamental suivant concerne alors la possibilité d’offrir la possibilité de tester diverses solutions potentielles, qui constituent des hypothèses sur la situation, et de mettre en regard le temps par rapport aux solutions envisageables.
A défaut d’avoir les moyens d’accéder au panel de solutions connues de l’opérateur pour résoudre un problème donné, il faut donc lui offrir les moyens d’évaluer ces solutions et de faire le bon choix parmi elles. Dans le compromis présenté entre coût de la solution, niveau d’activation de cette solution et temps disponible pour la mise en œuvre, seul le dernier point est objectivable et peut à ce titre faire l’objet d’une assistance informatisée. Le chapitre à venir traitera donc de la solution proposée afin de fournir une planification dynamique en temps réel répondant à notre cahier des charges. Les éléments-clés de notre hypothèse de modèle ayant alimenté ce cahier des charges, l’étude qui sera présentée lors du Chapitre 7 en permettra également une évaluation expérimentale.
36 Ce travail a fait l’objet d’une publication en conférence internationale et a fait à ce titre l’objet
d’un chapitre d’ouvrage (Lini, Bey, et al., 2012).

L’anticipation : pistes de réflexion
En résumé
Sami LINI - 2013 124
En résumé
• En l’absence de modèle répondant pleinement à notre problématique, nous avons présenté une proposition reprenant les éléments-clés de la littérature et les articulant.
• La démarche a reposé sur un ensemble d’entretiens avec un chef de mission au sein du Commandement de l’Aviation de Combat, pendant lesquels nous avons travaillé à illustrer des éléments-clés identifiés dans la littérature par des exemples issus de son expérience.
• Notre contribution est fondée sur la sélection contextualisée et pondérée de schèmes, basé sur des niveaux d'activation et d'un mécanisme d'excitation/inhibition, s’inscrivant dans une dynamique temporelle.
• Dans une démarche d’ingénierie cognitique, ce modèle nous fournit des éléments objectivables supplémentaires au cahier des charges du cœur fonctionnel de notre outil d’aide à l’anticipation.

Sami LINI - 2013 125
Chapitre 5.
Algorithme de planification
dynamique

Algorithme de planification dynamique
Le besoin
Sami LINI - 2013 126
Le besoin 5.1Les parties précédentes l’ont établi, un outil d’aide à l’anticipation nécessite de fournir une
représentation à jour de la situation ainsi que la possibilité d’émettre et de tester des hypothèses sur la situation à venir. Le cas d’étude considéré, en aéronautique civile, impose que cet outil ait les moyens d’effectuer des opérations de calcul et de mise à jour sur des données en constante évolution, en fonction de l’environnement.
Des travaux de recherche en productique, logistique et intelligence artificielle ont depuis longtemps investigué les moyens d’automatiser des actions complexes de planification, intégrant de multiples dimensions à pondérer et optimiser. L’état de l’art sur la question des algorithmes et des moyens disponibles pour une planification automatisée fournit le canevas et la base de réflexion pour le développement d’un algorithme de planification dynamique en temps réel répondant aux contraintes de notre cahier des charges et de l’environnement considéré.
Nous commencerons donc par présenter le cahier des charges défini par l’analyse de l’activité puis les différents courants de planification ayant alimenté notre réflexion avant de détailler notre contribution.
Cahier des charges 5.2En premier lieu, lors de l’analyse de l’activité, nous avons établi la nécessité de fournir une
représentation à jour de la situation (voir Chapitre 1). Cette représentation est d’autant plus efficace qu’elle permet d’être abordée sous différents prismes. Dans le cadre de l’activité de pilotage, le plan de vol est la structure de base : la trajectoire suivie et l’ensemble des tâches à réaliser dans le décours du vol. Cela constitue un premier objectif pour notre algorithme de planification : offrir la possibilité de visualiser un plan de vol synchronisé dynamiquement avec la situation en vol (position, altitude, vitesse) selon différentes facettes.
L’étude préliminaire nous a fourni un second objectif (voir Chapitre 3) : ce plan de vol doit être interactif, des hypothèses doivent pouvoir être testées à son propos. Dans ce cadre, il est nécessaire de pouvoir manipuler informatiquement des plans de vol tant génériques que spécifiques à un aéroport ou une trajectoire donnés.
Dans une démarche d’aide à l’anticipation, un point crucial identifié lors de l’état de l’art (voir Chapitre 2) et mis en avant dans notre effort de formalisation (voir Chapitre 4) concerne les marges de faisabilité des tâches : elles constituent un outil cognitif fondamental de la gestion du temps. L’anticipation reposant elle-même sur la représentation du temps, nous postulons que la visualisation des marges de faisabilité des tâches favorise une bonne anticipation. Ce point sera abordé plus en détails lors du Chapitre 7. Cela constitue ainsi un troisième objectif pour notre algorithme.

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 127
Les spécifications à venir répondent donc au cahier des charges fonctionnel suivant :
• spécification d’un plan de vol à un aéroport particulier : représentation de la trajectoire suivie,
• recalage spatio-temporel des tâches (avance/retard par rapport à une heure d’arrivée donnée, ETA37, en fonction de la situation actuelle) : représentation à jour de la situation actuelle,
• représentation des marges de faisabilité des tâches : aide la gestion dans le temps et l’ordonnancement temporel des tâches
• test d’hypothèses (what if : simulation, validation, …) : permet la préparation mentale à des scenarii probables,
• replanification à la volée (ex. : déroutement/dégagement38) : représentation à jour en fonction des décisions prises
• représentation multi-variée des tâches (temps, paramètres de vol) : améliore la capacité de représentation globale de la situation.
Un démonstrateur de concept sera implémenté : il s’agira d’afficher l’ensemble des tâches constituant le plan de vol, sur une phase de vol donnée (approche), avec leurs marges de faisabilité, en fonction de paramètres de vol définis manuellement via des curseurs.
Les buts poursuivis pour ce démonstrateur seront :
1. d’observer les variations de représentation induites par différentes situations de vol à l’abord de la phase de vol étudiée ;
2. de mettre en évidence les points durs éventuels, les combinaisons non-interceptées ;
3. de valider la cohérence et le réalisme de la modélisation proposée.
Etat de l’art des approches de planification 5.3Le problème de la planification peut se formuler comme suit : étant donné un état initial,
un objectif est poursuivi et peut-être atteint suivant une succession d’actions (Weld, 1999). La résolution du problème est donc une séquence d’actions qui, exécutée depuis un état correspondant aux conditions de l’état initial, permet d'atteindre l’objectif poursuivi.
On distingue deux types de planification qui seront présentés successivement : l’approche statique et l’approche dynamique. A l’approche statique, l’approche dynamique ajoute la nécessité d‘une mise à jour permanente de l’état de l’environnement du problème et une adaptation de la résolution à cet état du problème. Dans cet état de l’art, nous essaierons d’exprimer les philosophies de chaque algorithme en les illustrant en langage naturel. L’accent sera mis sur l’utilisation d’un vocabulaire ne relevant pas exclusivement des domaines techniques desquels relèvent les différentes approches et le choix sera parfois fait de simplifier aux concepts essentiels à la compréhension.
5.3.1 L’approche statique
5.3.1.1 STRIPS
5.3.1.1.1 Algorithme L’algorithme STRIPS (STanford Research Institute Problem Solver, Fikes & Nilsson, 1971)
fait partie des premiers algorithmes de planification définis en intelligence artificielle. Il suit une logique d’analyse des moyens et des fins : quels sont les objectifs poursuivis, quels sont les moyens pour les atteindre. Ces moyens définissent de nouveaux buts pour lesquels on cherche de nouveaux moyens pour les atteindre, jusqu’à atteindre l’état initial. Entre deux états du
37 Voir glossaire 38 Voir glossaire

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 128
monde, l’algorithme calcule les différences et établit les actions pour les réduire. Ces actions sont combinées pour construire un plan.
Les principales hypothèses de mise en œuvre de l’algorithme sont les suivantes (Vidal, 2001):
• l’environnement est statique : aucun événement imprévu n’y survient. Les seuls changements du monde sont ceux effectués par l’agent responsable des actions, lequel agit seul ;
• cet agent est omniscient : il a une connaissance absolue du monde et de ses actions ;
• les actions ont des effets déterminés et connus; • l’enchainement des actions est séquentiel.
L’environnement est défini par les objets le composant et les relations les liant. Un ensemble de propositions logiques définit l’état du monde. L’état initial est l’état du monde avant une quelconque action le modifiant. L’état final est l’état du monde avec les buts poursuivis atteints. On définit une action par ses conditions de mise en œuvre, dites préconditions, et ses effets. Le résultat d’une action est de modifier l’état du monde de manière déterministe. La planification consiste à trouver une succession d’actions faisant évoluer le monde de son état initial jusqu’à l’état final.
L’aspect statique de l’environnement d’application de l’algorithme et l’obligation d’une planification séquentielle sont des conditions rédhibitoires à son utilisation pour notre problématique.
5.3.1.1.2 Illustration Vidal (2001) présente l’exemple classique des cubes à empiler sur une table. Les faits
logiques décrivant le monde sont les suivants :
• le cube X est sur le cube Y ; • le cube Y est sur la table ; • le cube X n’est pas recouvert par un autre cube ; • le cube Z est sur la table ; • le cube Z n'est pas recouvert par un autre cube.
L’état initial présente les trois cubes posés sur la table. L’objectif final est l’empilement des cubes sur la table. Trois actions sont définies :
1. Le cube X est déplacé depuis la table sur le cube Y : a. Les conditions sont :
i. X est sur la table ii. X n’est pas recouvert par un autre cube
iii. Y n’est pas recouvert par un autre cube, iv. X est différent de Y
b. Le monde évolue : i. on ajoute « le cube X est sur le cube Y »
ii. on retire « le cube X est sur la table » et « Y n’est pas recouvert par un autre cube »
2. Le cube X est déplacé depuis le cube Y sur la table, a. Les conditions sont :
i. X est sur Y ii. X n’est pas recouvert par un autre cube
b. Le monde évolue : i. on ajoute « le cube X est sur la table » et « Y n’est pas recouvert par
un autre cube » ii. on retire « le cube X est sur le cube Y »

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 129
3. Le cube X est déplacé depuis le cube Y vers le cube Z : a. Les conditions sont :
i. X est sur Y ii. X n’est pas recouvert par un autre cube
iii. Z n’est pas recouvert par un autre cube, iv. X est différent de Z
b. Le monde évolue : i. on ajoute « le cube X est sur le cube Y » et « Y n’est pas recouvert
par un autre cube » ii. on retire « le cube X est sur Y » et « Z n’est pas recouvert par un
autre cube »
En partant de l’objectif « X empilé sur Y empilé sur Z posé sur la table », on détermine la dernière action permettant de l’atteindre : « X sur Y » est déplacé depuis la table vers le cube Z. Cette action nécessite des préconditions qui déterminent elles-mêmes un état du monde à atteindre par une action précédente. On remonte ainsi jusqu’à l’état initial.
5.3.1.2 GraphPlan
5.3.1.2.1 Représentation et algorithme de résolution Weld (1999) décrit le fonctionnement de la représentation GraphPlan (Blum & Furst,
1995) et de son algorithme de résolution. Comme son nom le suggère, la structure fondamentale de GraphPlan est un graphe de planification. Ce graphe contient deux types de nœuds :
• les actions possibles (Figure 68, nombres impairs) : un nœud correspond à une action possible dont les préconditions sont présentes au niveau précédent ;
• les états potentiels du monde (Figure 68, nombres pairs).
Figure 68 : Le graphe de planification alterne les niveaux d’états (cercles) et d’actions.
Les lignes grises horizontales entre niveaux d’états indiquent l’absence de changement d’état qui ouvre la possibilité qu’un état n’ayant pas été modifié persiste jusqu’au niveau suivant.
Le niveau zéro désigne l’état initial du problème de planification. Les arcs liant les actions du niveau Ni aux états du monde du niveau Ni+1 représentent les effets des actions. Les arcs liant les actions du niveau Ni aux états du monde du niveau Ni-1 représentent les préconditions des actions. Ainsi les effets des actions du niveau Ni rendent vraies les préconditions des actions du niveau Ni+2. Une ligne horizontale reliant deux états du monde successifs indique que ces états n’ont pas été modifiés.

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 130
Ce graphe de planification représente des actions parallèles à chaque niveau. Il s’agit d’une différence majeure par rapport à STRIPS. Ainsi un graphe disposant de k niveaux d’action peut représenter un plan doté de plus de k actions.
En partant du dernier niveau contenant les buts, l’algorithme de recherche de solution sélectionne les actions permettant de les atteindre. En remontant successivement jusqu’à l’état initial, la solution est extraite. A un même niveau, on peut cependant identifier des actions mutuellement incompatibles, par leurs effets, leurs préconditions ou par interférence des actions de l’une sur l’autre. La recherche de la solution permet d’ajouter des états et actions supplémentaires au graphe pour trouver la combinaison ne présentant pas d’incompatibilité entre actions et permettant de passer de l’état initial à l’état final.
L’aspect statique de l’approche ainsi que son objectif exclusif de construire un séquencement d’actions dans un environnement déterministe ne permet pas de répondre à notre problématique de planification temporelle d’un séquencement existant de tâches. En revanche, la structure du graphe répond bien à l’organisation de notre modèle d’activité. Nous emploierons ainsi cette structure.
5.3.1.2.2 Illustration Weld (1999) présente l’exemple de la préparation d’un dîner romantique surprise à un
conjoint endormi. Le but est de sortir la poubelle, préparer le dîner et emballer un cadeau. Quatre actions sont disponibles : (1) cuisiner, (2) emballer, (3) porter, (4) déplacer sur un chariot. Cuisiner demande d’avoir les mains propres et a comme conséquence le dîner prêt. Emballer a comme condition d’être silencieux (car le cadeau est une surprise et qu’il ne faut pas réveiller le conjoint) et comme conséquence d’avoir le cadeau emballé. « Porter » élimine la poubelle mais le contact avec le containeur salit les mains. Le déplacement sur un chariot élimine également la poubelle mais ne permet pas d’être silencieux. En état initial, les mains sont propres, la poubelle doit être sortie et l’environnement est silencieux.
La Figure 69 présente le graphe de planification du problème. Il y a de multiples incompatibilités dans le graphe, telles que les liens entre éléments de même niveau font apparaître : l’utilisation du chariot est par exemple incompatible avec l’emballage du cadeau car il supprime la condition silence. L’objectif poursuivi est de remplir les conditions suivantes : « poubelle sortie » ET « dîner prêt » ET « cadeau emballé ». Ces buts étant tous présents au niveau 2 du graphe, il y a une probabilité pour qu’une solution existe.
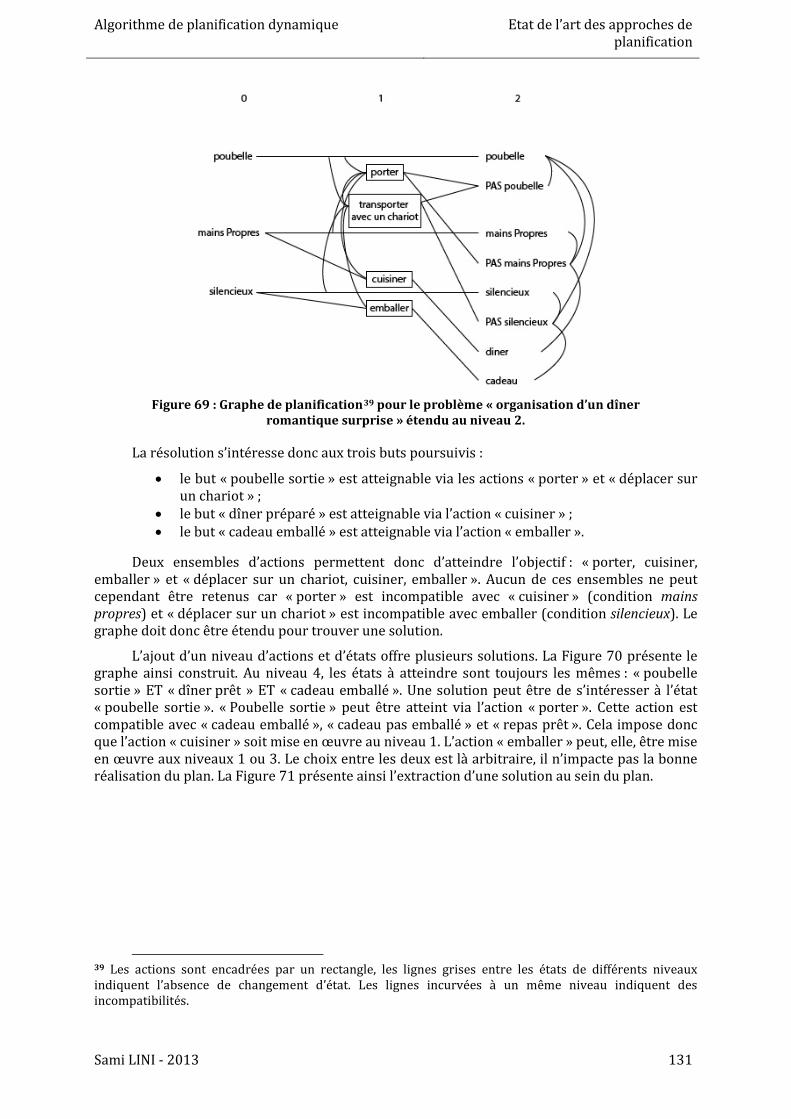
Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 131
Figure 69 : Graphe de planification39 pour le problème « organisation d’un dîner
romantique surprise » étendu au niveau 2.
La résolution s’intéresse donc aux trois buts poursuivis :
• le but « poubelle sortie » est atteignable via les actions « porter » et « déplacer sur un chariot » ;
• le but « dîner préparé » est atteignable via l’action « cuisiner » ; • le but « cadeau emballé » est atteignable via l’action « emballer ».
Deux ensembles d’actions permettent donc d’atteindre l’objectif : « porter, cuisiner, emballer » et « déplacer sur un chariot, cuisiner, emballer ». Aucun de ces ensembles ne peut cependant être retenus car « porter » est incompatible avec « cuisiner » (condition mains propres) et « déplacer sur un chariot » est incompatible avec emballer (condition silencieux). Le graphe doit donc être étendu pour trouver une solution.
L’ajout d’un niveau d’actions et d’états offre plusieurs solutions. La Figure 70 présente le graphe ainsi construit. Au niveau 4, les états à atteindre sont toujours les mêmes : « poubelle sortie » ET « dîner prêt » ET « cadeau emballé ». Une solution peut être de s’intéresser à l’état « poubelle sortie ». « Poubelle sortie » peut être atteint via l’action « porter ». Cette action est compatible avec « cadeau emballé », « cadeau pas emballé » et « repas prêt ». Cela impose donc que l’action « cuisiner » soit mise en œuvre au niveau 1. L’action « emballer » peut, elle, être mise en œuvre aux niveaux 1 ou 3. Le choix entre les deux est là arbitraire, il n’impacte pas la bonne réalisation du plan. La Figure 71 présente ainsi l’extraction d’une solution au sein du plan.
39 Les actions sont encadrées par un rectangle, les lignes grises entre les états de différents niveaux indiquent l’absence de changement d’état. Les lignes incurvées à un même niveau indiquent des incompatibilités.

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 132
Figure 70 : Graphe de planification pour le problème « organisation d’un dîner
romantique surprise » étendu au niveau 440.
Figure 71 : L’un des quatre plans résolvant le problème.
Les actions en noir sont exécutées, celles en gris non.
5.3.1.3 PERT : la planification en gestion de projet Le Program (ou Project) Evaluation and Review Technique (PERT, Fazar, 1959) est un
outil de planification communément utilisé en productique et en gestion de projets. Il permet, à partir de la connaissance des tâches à réaliser et de leurs relations, de déterminer le temps nécessaire à la réalisation de chacune des tâches et le temps minimum pour la réalisation de l’ensemble du projet. Une tâche est définie comme une opération faisant évoluer l’état du problème de planification vers son état final. Plusieurs types de contraintes peuvent être envisagés pour la résolution de ce problème de planification : les contraintes de moyens (disponibilité d’une machine-outil par exemple) ou les contraintes de délais sont les plus
40 Même si aucune nouvelle action n’est disponible en ajoutant ce niveau, les états dîner et cadeau
peuvent bénéficier d’une absence de changement d’état, cela ouvre donc des possibilités supplémentaires de résolution.
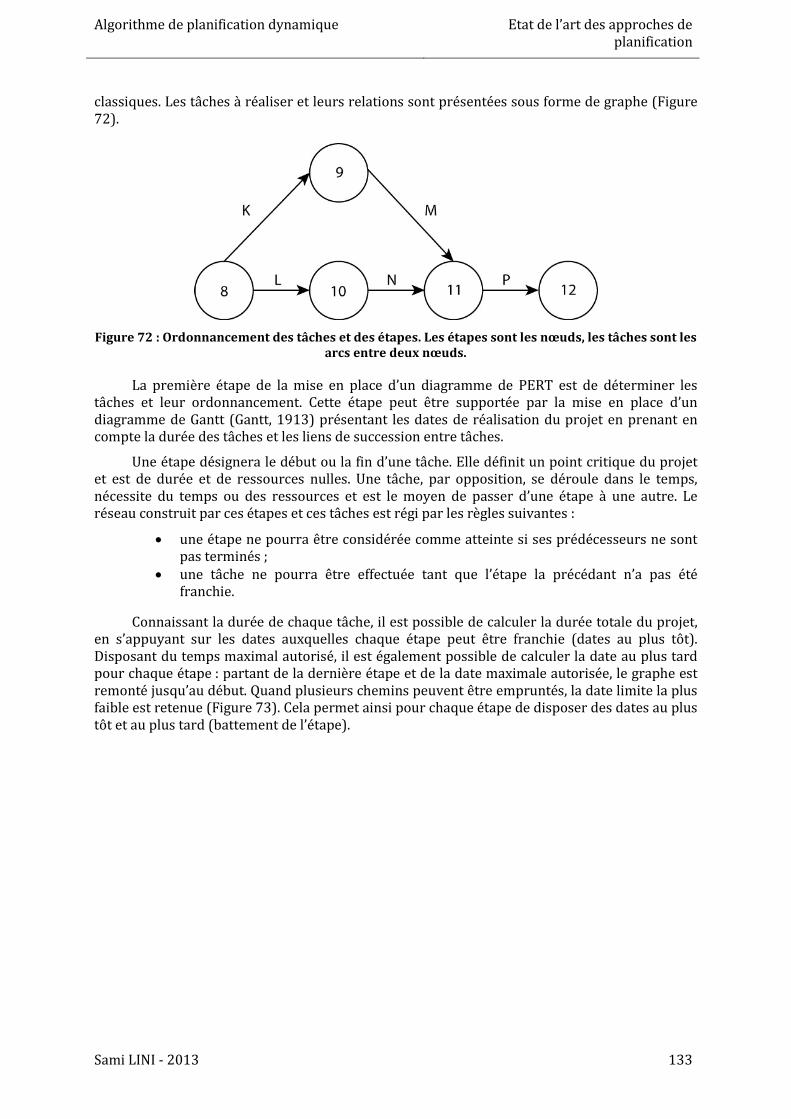
Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 133
classiques. Les tâches à réaliser et leurs relations sont présentées sous forme de graphe (Figure 72).
Figure 72 : Ordonnancement des tâches et des étapes. Les étapes sont les nœuds, les tâches sont les
arcs entre deux nœuds.
La première étape de la mise en place d’un diagramme de PERT est de déterminer les tâches et leur ordonnancement. Cette étape peut être supportée par la mise en place d’un diagramme de Gantt (Gantt, 1913) présentant les dates de réalisation du projet en prenant en compte la durée des tâches et les liens de succession entre tâches.
Une étape désignera le début ou la fin d’une tâche. Elle définit un point critique du projet et est de durée et de ressources nulles. Une tâche, par opposition, se déroule dans le temps, nécessite du temps ou des ressources et est le moyen de passer d’une étape à une autre. Le réseau construit par ces étapes et ces tâches est régi par les règles suivantes :
• une étape ne pourra être considérée comme atteinte si ses prédécesseurs ne sont pas terminés ;
• une tâche ne pourra être effectuée tant que l’étape la précédant n’a pas été franchie.
Connaissant la durée de chaque tâche, il est possible de calculer la durée totale du projet, en s’appuyant sur les dates auxquelles chaque étape peut être franchie (dates au plus tôt). Disposant du temps maximal autorisé, il est également possible de calculer la date au plus tard pour chaque étape : partant de la dernière étape et de la date maximale autorisée, le graphe est remonté jusqu’au début. Quand plusieurs chemins peuvent être empruntés, la date limite la plus faible est retenue (Figure 73). Cela permet ainsi pour chaque étape de disposer des dates au plus tôt et au plus tard (battement de l’étape).
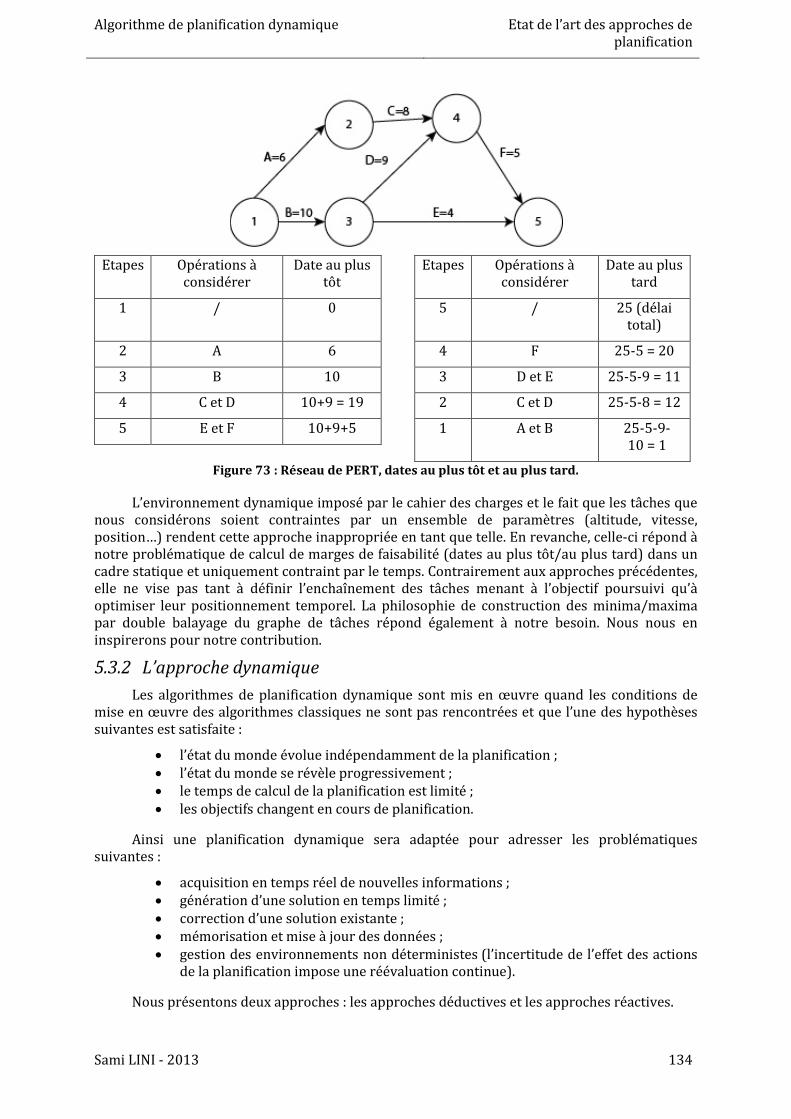
Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 134
Etapes Opérations à
considérer Date au plus
tôt
1 / 0
2 A 6
3 B 10
4 C et D 10+9 = 19
5 E et F 10+9+5
Etapes Opérations à
considérer Date au plus
tard
5 / 25 (délai total)
4 F 25-5 = 20
3 D et E 25-5-9 = 11
2 C et D 25-5-8 = 12
1 A et B 25-5-9-10 = 1
Figure 73 : Réseau de PERT, dates au plus tôt et au plus tard.
L’environnement dynamique imposé par le cahier des charges et le fait que les tâches que nous considérons soient contraintes par un ensemble de paramètres (altitude, vitesse, position…) rendent cette approche inappropriée en tant que telle. En revanche, celle-ci répond à notre problématique de calcul de marges de faisabilité (dates au plus tôt/au plus tard) dans un cadre statique et uniquement contraint par le temps. Contrairement aux approches précédentes, elle ne vise pas tant à définir l’enchaînement des tâches menant à l’objectif poursuivi qu’à optimiser leur positionnement temporel. La philosophie de construction des minima/maxima par double balayage du graphe de tâches répond également à notre besoin. Nous nous en inspirerons pour notre contribution.
5.3.2 L’approche dynamique Les algorithmes de planification dynamique sont mis en œuvre quand les conditions de
mise en œuvre des algorithmes classiques ne sont pas rencontrées et que l’une des hypothèses suivantes est satisfaite :
• l’état du monde évolue indépendamment de la planification ; • l’état du monde se révèle progressivement ; • le temps de calcul de la planification est limité ; • les objectifs changent en cours de planification.
Ainsi une planification dynamique sera adaptée pour adresser les problématiques suivantes :
• acquisition en temps réel de nouvelles informations ; • génération d’une solution en temps limité ; • correction d’une solution existante ; • mémorisation et mise à jour des données ; • gestion des environnements non déterministes (l’incertitude de l’effet des actions
de la planification impose une réévaluation continue).
Nous présentons deux approches : les approches déductives et les approches réactives.
Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 135
5.3.2.1 Les approches déductives : l’exemple du Procedural Reasoning System (PRS)
Les approches déductives utilisent une mémoire contenant la représentation du monde et les actions possibles. Cette mémoire évolue en fonction de l’environnement, des actions sont acquises et déduites. Préfigurant l’approche dite BDI (Belief, Desire and Intentional) dont le lecteur pourra trouver des implémentations telle que l’Intelligent Resource-bounded Machine Architecture (Bratman, 1987), le Procedural Reasoning System (PRS, Georgeff & Lansky, 1987) est une architecture de planification dynamique traitant de l’acquisition en temps réel d’informations et réagissant en fonction. Le système se compose de plusieurs modules :
• la base de données des connaissances : elle contient la représentation du monde. Elle est alimentée des éléments qui la composent (les observations) et des propriétés en régissant le fonctionnement (déduites des observations).
• l’ensemble des buts à satisfaire : il s’agit d’états du monde à atteindre et éventuellement à maintenir et non d’états statiques, comme lors de l’approche statique.
• un ensemble de procédures (appelées des zones de connaissances) : elles consistent en séquences d’actions et de tests répondant à des événements spécifiques (conditions de mise en œuvre)
• un interpréteur : il régit le fonctionnement de l’ensemble. Il hiérarchise les buts à atteindre et les moyens pour les atteindre.
A chaque instant le système dispose d’une pile d’objectifs en cours de résolution, ce qui agit directement sur l’état du monde, le modifie et modifie en conséquence la base de connaissances. Ce point est critique tant pour cette approche que pour notre problématique : dans la perspective de généricité et d’adaptabilité rendant possible la replanification, la question du choix du formalisme est cruciale. Celui-ci permet-il d’intercepter tous les cas possibles et si ce n’est pas le cas comment gérer les cas inattendus ? La présentation de notre contribution abordera ce point.
La lourdeur structurelle de ce type d’approche la rend inappropriée pour notre problématique où le plan réactualisé doit pouvoir être calculé et affiché très rapidement. De plus, elle présente l’inconvénient majeur d’être difficilement formalisable et donc à ce titre de ne pouvoir garantir la convergence vers une solution.
Wickens, Gempler, & Morphew (2000) identifient que l’absence de fiabilité dans un système à capacité prédictive n’est pas rédhibitoire : les résultats sont simplement manipulés avec beaucoup plus de prudence par les opérateurs qui ne fondent pas exclusivement leurs prises de décision dessus. Nous ne pouvons en revanche pas envisager une divergence dans la recherche de la solution qui mènerait à l’impossibilité d’afficher l’information attendue. Ce second point est donc rédhibitoire.
5.3.2.2 Les approches réactives Les approches réactives compensent les limites en termes de rapidité d’exécution et de
réactivité des approches déductives : en fonction de l’environnement une branche est sélectionnée au sein d’un graphe de l’ensemble des actions disponibles.
5.3.2.2.1 L’approche téléoréactive Katz (1998) présente une description du paradigme téléo-réactif (Nilsson, 1992, 1994),
qui poursuit l’objectif de fournir à des entités autonomes, telles des robots mobiles, les moyens « d’opérer dans des environnements dynamiques et incertains ». La philosophie est d’adapter au monde informatique des idées de la théorie du contrôle. Ainsi une séquence téléoréactive est dirigée vers un but (d’où téléo) tout en réagissant aux changements circonstanciels de

Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 136
l’environnement (réactive). L’approche prônée est continue plutôt que par changements d’états comme présenté précédemment.
Le paradigme téléo-réactif se positionne comme une couche algorithmique intermédiaire entre les couches de planification de très haut niveau et les couches de mise en œuvre des actions définies. La mise en défaut des stratégies élaborées au niveau téléo-réactif déclenche une action au niveau supérieur de méta-planification afin de gérer l’imprévu.
Une séquence téléoréactive contient un ensemble de règles de production simples : à une condition est associée une action. Les conditions sont des expressions booléennes portant sur des entrées sensorielles et diverses informations concernant l’état de l’environnement. Les conditions sont hiérarchisées. Au sein de cette hiérarchie, la première condition satisfaite détermine l’action exécutée.
Les actions associées ont des effets sur l’environnement et sont considérées continues : par opposition aux actions considérées discrètes, leur effet dure tant que l’action est exécutée. Deux cas de figures permettent l’arrêt de leur exécution : la condition de mise en œuvre n’est plus satisfaite, ou une condition de plus haut niveau dans la hiérarchie se trouve satisfaite et devient donc la première condition satisfaite.
Une action peut être une action simple, primitive, un ensemble agrégé d’actions ou encore une séquence téléoréactive, laquelle répond au fonctionnement décrit précédemment. Cette organisation permet un découpage hiérarchique en plusieurs niveaux. A chacun de ces niveaux et en permanence, l’ensemble des conditions est évalué et des actions sont exécutées en fonction. Une condition satisfaite provoque l'action qui lui est liée tout en inhibant les actions de niveaux inférieurs.
5.3.2.2.2 Illustration (Nilsson, 1994) décrit l’exemple d’un robot chargé de déplacer des barres dans un univers
bidimensionnel : un monde simulé en deux dimensions où des robots peuvent se déplacer, tourner dans le sens horaire, saisir une barre et la déplacer à divers endroits. Le robot a connaissance de son environnement et peut évaluer les conditions suivantes :
• la barre est déjà portée ; • le robot est face à la barre ; • le robot est face au centre de la zone intermédiaire ; • le robot est face au centre de la barre.
Les actions suivantes sont disponibles : porter la barre, se déplacer et tourner (dans le sens horaire). L’exécution de la séquence téléoréactive de la Figure 74.a a pour résultat la mise en mouvement du robot qui se déplace pour porter la barre.
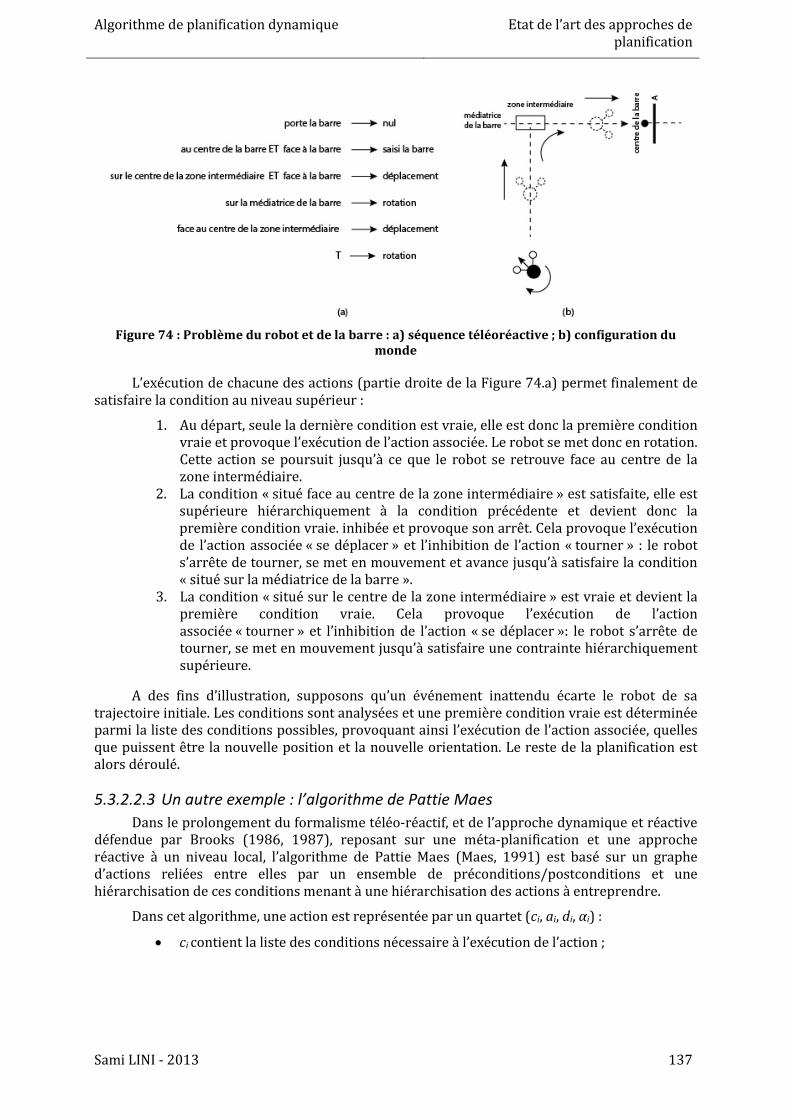
Algorithme de planification dynamique
Etat de l’art des approches de
planification
Sami LINI - 2013 137
Figure 74 : Problème du robot et de la barre : a) séquence téléoréactive ; b) configuration du
monde
L’exécution de chacune des actions (partie droite de la Figure 74.a) permet finalement de satisfaire la condition au niveau supérieur :
1. Au départ, seule la dernière condition est vraie, elle est donc la première condition vraie et provoque l’exécution de l’action associée. Le robot se met donc en rotation. Cette action se poursuit jusqu’à ce que le robot se retrouve face au centre de la zone intermédiaire.
2. La condition « situé face au centre de la zone intermédiaire » est satisfaite, elle est supérieure hiérarchiquement à la condition précédente et devient donc la première condition vraie. inhibée et provoque son arrêt. Cela provoque l’exécution de l’action associée « se déplacer » et l’inhibition de l’action « tourner » : le robot s’arrête de tourner, se met en mouvement et avance jusqu’à satisfaire la condition « situé sur la médiatrice de la barre ».
3. La condition « situé sur le centre de la zone intermédiaire » est vraie et devient la première condition vraie. Cela provoque l’exécution de l’action associée « tourner » et l’inhibition de l’action « se déplacer »: le robot s’arrête de tourner, se met en mouvement jusqu’à satisfaire une contrainte hiérarchiquement supérieure.
A des fins d’illustration, supposons qu’un événement inattendu écarte le robot de sa trajectoire initiale. Les conditions sont analysées et une première condition vraie est déterminée parmi la liste des conditions possibles, provoquant ainsi l’exécution de l’action associée, quelles que puissent être la nouvelle position et la nouvelle orientation. Le reste de la planification est alors déroulé.
5.3.2.2.3 Un autre exemple : l’algorithme de Pattie Maes Dans le prolongement du formalisme téléo-réactif, et de l’approche dynamique et réactive
défendue par Brooks (1986, 1987), reposant sur une méta-planification et une approche réactive à un niveau local, l’algorithme de Pattie Maes (Maes, 1991) est basé sur un graphe d’actions reliées entre elles par un ensemble de préconditions/postconditions et une hiérarchisation de ces conditions menant à une hiérarchisation des actions à entreprendre.
Dans cet algorithme, une action est représentée par un quartet (ci, ai, di, αi) :
• ci contient la liste des conditions nécessaire à l’exécution de l’action ;
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 138
• ai et di sont les effets des actions sur le monde : la liste des ajouts et retraits à l’état du monde ;
• αi est le niveau d’activation du module : variable en fonction de l’environnement, il détermine par rapport à une valeur seuil si l’action est ou non exécutable.
Plusieurs moyens permettent une augmentation du niveau d’activation :
• activation par l’état actuel de l’environnement : les actions dont une partie des préconditions correspondent à l’état actuel de l’environnement reçoivent de l’énergie ;
• activation par les buts poursuivis : les actions qui disposent de l’un des objectifs poursuivis dans leur liste d’ajout sont fournis en énergie ;
• inhibition par les buts protégés : les actions qui disposent de l’un des objectifs poursuivis dans leur liste de retrait se voient retirer de l’énergie.
Trois types de liens connectent les actions entre elles :
• des liens de succession, si un élément de la liste d’ajouts de la première action correspond à une des préconditions de la seconde ;
• des liens de précédence, si une action x a un lien de succession avec une action y alors l’action y a un lien de précédence avec l’action x ;
• des liens conflictuels, si un élément de la liste de retrait de la première action correspond à une précondition de la seconde.
Au sein du graphe des actions, ces liens permettent d’activer ou inhiber les actions entre elles en se communiquant mutuellement de l’énergie en fonction de leur niveau d’activation. Les successeurs et les prédécesseurs d’une action ayant reçu de l’énergie en perçoivent également : une action pré-activée tend à pré-activer ses prédécesseurs afin de réunir les conditions permettant sa mise en œuvre. Elle favorise également ses successeurs pour qu’ils puissent s’activer ultérieurement. Une action activée inhibera les actions avec lesquelles elle entretient des liens conflictuels : une action pré-activée tente d’empêcher l’exécution des actions nuisant à sa propre activation.
L’action dont le niveau d’activation est le plus élevé et donc les préconditions sont validées est exécutée.
Pour cela, l’algorithme se déroule comme suit :
1. Les informations de l’environnement, les buts poursuivis et protégés alimentent les quartets d’action qui sont ainsi fournies et délestées d’énergie.
2. L’énergie est propagée dans le réseau par les liens entre actions. 3. L’énergie globale du graphe est régulée afin de demeurer constante. 4. L’action ayant ses préconditions satisfaites et le niveau d’activation supérieur au
seuil défini est mise en œuvre. Si aucune action n’atteint ce seuil, celui-ci est diminué d’un pourcentage, paramètre modifiable du modèle et dépendant de l’environnement d’exploitation.
Cette approche permet la sélection de l’action la plus à même de mener au but mais n’offre pas la possibilité de calculer à une échelle globale les enveloppes temporelles de faisabilité des tâches. De surcroit, elles permettent rarement une bonne adaptabilité et un niveau d'abstraction permettant la description de plans complexes. Elle se prêterait donc plus idéalement à la réactualisation dynamique.
Contribution 5.4L’état de l’art nous a fourni les tendances existant en matière de planification numérique
pour remplir notre cahier des charges. Aucune des méthodes exposées n’y répond tout à fait, nous faisons donc le choix de présenter une contribution originale.
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 139
5.4.1 Structure des données La première étape de la conception de l’algorithme est la modélisation du plan de vol : il
s’agit des éléments à afficher et sur lesquels les calculs seront effectués. Nous nous appuyons à cette fin sur le modèle de la tâche présenté lors de l’analyse de l’activité (0). Un plan de vol est un graphe orienté pour lequel les étapes de vol sont les sommets et les changements d’état entre deux étapes de vol sont les arcs.
Chaque étape de vol est définie par :
• un nom : il décrit la tâche à réaliser ; • l’état aérodynamique de l’aéronef : il s’agit d’une propriété indispensable afin de
prendre en compte l’état de l’avion dans le calcul des marges de faisabilité . Quel cran de volets est sorti ? Le train est-il ou non sorti ? La prise en compte de cette information permet de considérer précisément l’enveloppe de vitesse maximale et minimale de l’aéronef dans le calcul des marges temporelles.
Ainsi le plan de vol décrit structurellement tout ce qu’il est nécessaire de réaliser pendant le vol et la dynamique de l’état aérodynamique de l’avion pendant ces mêmes tâches.
Une liste de contraintes peut être liée à une étape de vol. Une contrainte peut être générique (partagée entre plusieurs plans de vol) ou spécifique à un plan de vol. La gestion du vol n’est pas spécifique à une trajectoire particulière. Des règles générales sont employées pour piloter un avion. Il est nécessaire de compléter ces règles générales d’informations spécifiques locales. Il est donc nécessaire de distinguer ce qui est générique à tout plan de vol de ce qui est spécifique à une trajectoire donnée.
Une contrainte est définie par :
• un nom : il décrit la contrainte à satisfaire ; • un ensemble de variables (altitude, position, vitesse…) : une ou plusieurs variables
de vol peuvent être contraintes. L’état aérodynamique de l’avion impose par exemple des contraintes de vitesse. Sur un plan de vol, il est usuel de rencontrer des limitations en termes de vitesse mais également d’altitude ou de position ;
• un intervalle de valeurs au sein duquel se situer pour chaque variable : la variable peut être contrainte par une seule valeur (contrainte dure) ou par un intervalle de valeurs (par exemple, vitesse air indiquée entre 250 et 280 nœuds).
Deux types de contraintes sont distingués :
• un prérequis est une contrainte d’entrée, un état défini du monde, sans laquelle une étape ne peut être prise en compte ;
• un post-requis est un nouvel état du monde après que la tâche précédente a été réalisée. Cette contrainte est nécessaire pour déterminer s’il est ou non possible d’évoluer vers l’étape suivante ;
Une liste de prédécesseurs (étapes de vol) et une liste de successeurs (étapes de vol) sont liées à chaque étape de vol. Ces prédécesseurs et successeurs permettent à partir de chaque sommet d’avoir une représentation d’où les valeurs ont été propagées et à qui elles le seront en suivant.
Un arc est une paire (p,q) où p et q sont deux sommets distincts. Une transition permet le passage du sommet p au sommet q si et seulement si les contraintes comprises dans la liste de p sont satisfaites et s’il existe un arc, c’est-à-dire un lien relationnel, entre p et q.
Le modèle de la tâche conçu sur la base de l’analyse de l’activité assure qu’il intercepte les actions et contraintes relevant de la phase de vol considérée. S’il devait être étendu à d’autres phases, des tests devraient être menés pour garantir l’adéquation de la base de connaissances employée.
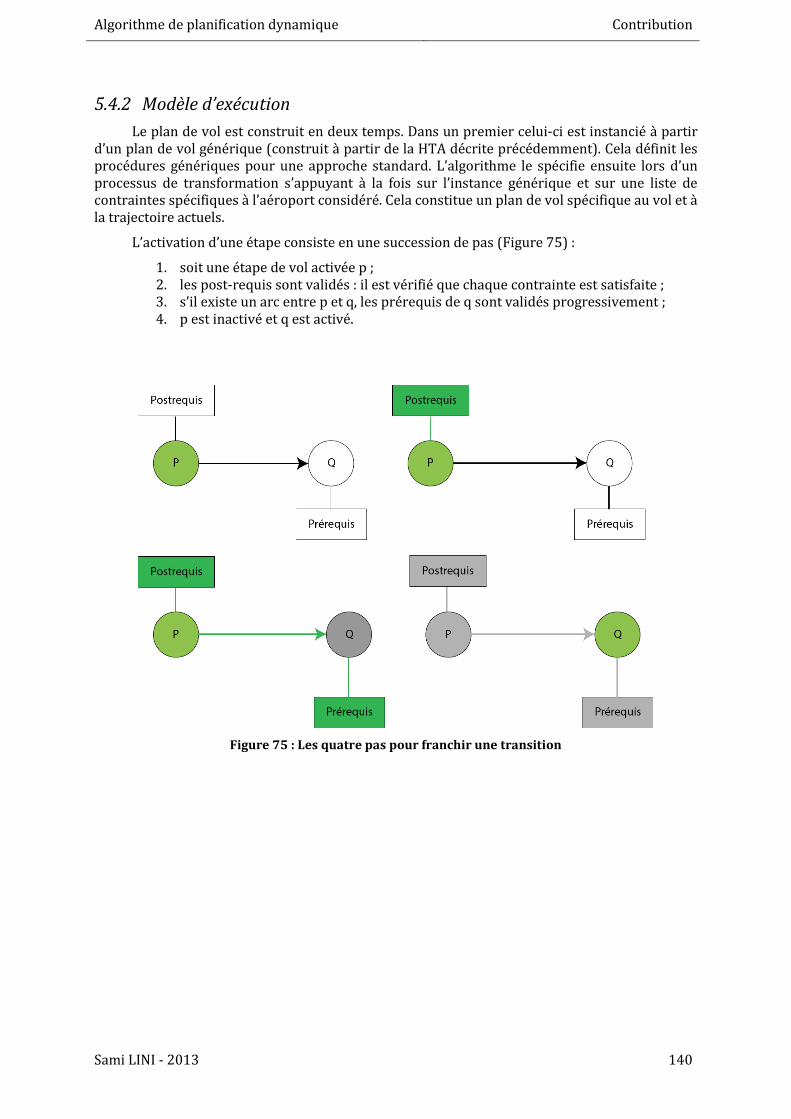
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 140
5.4.2 Modèle d’exécution Le plan de vol est construit en deux temps. Dans un premier celui-ci est instancié à partir
d’un plan de vol générique (construit à partir de la HTA décrite précédemment). Cela définit les procédures génériques pour une approche standard. L’algorithme le spécifie ensuite lors d’un processus de transformation s’appuyant à la fois sur l’instance générique et sur une liste de contraintes spécifiques à l’aéroport considéré. Cela constitue un plan de vol spécifique au vol et à la trajectoire actuels.
L’activation d’une étape consiste en une succession de pas (Figure 75) :
1. soit une étape de vol activée p ; 2. les post-requis sont validés : il est vérifié que chaque contrainte est satisfaite ; 3. s’il existe un arc entre p et q, les prérequis de q sont validés progressivement ; 4. p est inactivé et q est activé.
Figure 75 : Les quatre pas pour franchir une transition
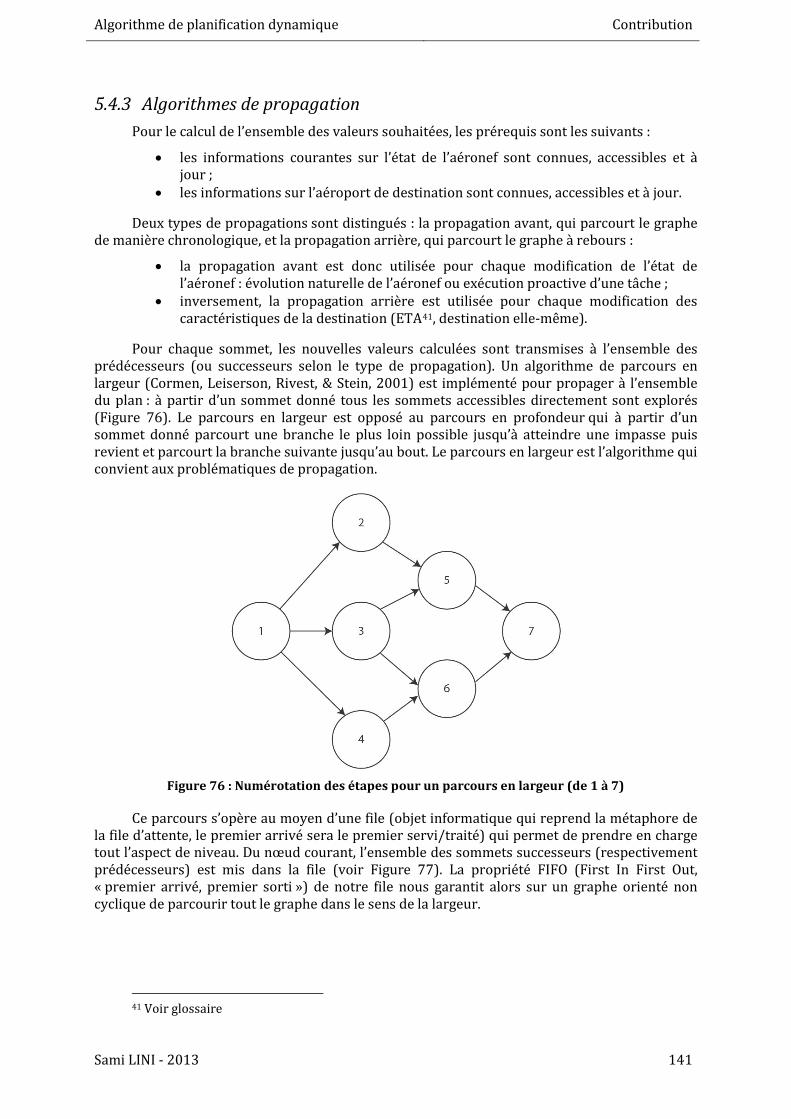
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 141
5.4.3 Algorithmes de propagation Pour le calcul de l’ensemble des valeurs souhaitées, les prérequis sont les suivants :
• les informations courantes sur l’état de l’aéronef sont connues, accessibles et à jour ;
• les informations sur l’aéroport de destination sont connues, accessibles et à jour.
Deux types de propagations sont distingués : la propagation avant, qui parcourt le graphe de manière chronologique, et la propagation arrière, qui parcourt le graphe à rebours :
• la propagation avant est donc utilisée pour chaque modification de l’état de l’aéronef : évolution naturelle de l’aéronef ou exécution proactive d’une tâche ;
• inversement, la propagation arrière est utilisée pour chaque modification des caractéristiques de la destination (ETA41, destination elle-même).
Pour chaque sommet, les nouvelles valeurs calculées sont transmises à l’ensemble des prédécesseurs (ou successeurs selon le type de propagation). Un algorithme de parcours en largeur (Cormen, Leiserson, Rivest, & Stein, 2001) est implémenté pour propager à l’ensemble du plan : à partir d’un sommet donné tous les sommets accessibles directement sont explorés (Figure 76). Le parcours en largeur est opposé au parcours en profondeur qui à partir d’un sommet donné parcourt une branche le plus loin possible jusqu’à atteindre une impasse puis revient et parcourt la branche suivante jusqu’au bout. Le parcours en largeur est l’algorithme qui convient aux problématiques de propagation.
Figure 76 : Numérotation des étapes pour un parcours en largeur (de 1 à 7)
Ce parcours s’opère au moyen d’une file (objet informatique qui reprend la métaphore de la file d’attente, le premier arrivé sera le premier servi/traité) qui permet de prendre en charge tout l’aspect de niveau. Du nœud courant, l’ensemble des sommets successeurs (respectivement prédécesseurs) est mis dans la file (voir Figure 77). La propriété FIFO (First In First Out, « premier arrivé, premier sorti ») de notre file nous garantit alors sur un graphe orienté non cyclique de parcourir tout le graphe dans le sens de la largeur.
41 Voir glossaire
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 142
procedure BFS (G, v) create a queue Q enqueue v onto Q mark v while Q is not empty :
t Q.dequeue() if t is what we are look for :
return t for all edges e in G.incidentEdges(t) fo
o G.opposite(t, e) if o is not marked :
mark o enqueue o onto Q
Figure 77 : Exemple d’algorithme de parcours en largeur d’un graphe (source Wikipédia)
La propagation avant se déroule comme suit :
• à partir d’un sommet activé, chaque successeur se voit successivement mis à jour suivant l’algorithme Q3PM antérograde (voir ci-dessous) ;
• une fois l’ensemble des successeurs mis à jour, le premier successeur dans la file devient le sommet actif.
Inversement, la propagation arrière se déroule comme suit :
• à partir d’un sommet activé, chaque prédécesseur se voit successivement mis à jour suivant l’algorithme Q3PM rétrograde (voir ci-dessous) ;
• une fois l’ensemble des prédécesseurs mis à jour, le premier prédécesseur dans la file devient le sommet actif.
5.4.4 Algorithmes Q3PM rétrograde et antérograde La philosophie de l’algorithme Q3PM (Qui Peut le Plus Peut le Moins) rétrograde est la
suivante : étant donné un sommet dont chacune des caractéristiques est connue (temporelle, spatiale, aérodynamique), chaque prédécesseur est étudié. Ces prédécesseurs sont contraints d’une ou plusieurs manières.
Ces contraintes sont analysées successivement et hiérarchiquement. Elles sont considérées dans l’ordre d’importance suivant : altitude, vitesse, vitesse verticale, position. Cet ordonnancement provient de l’analyse menée in situ, qui a mis en avant la priorité du contrôle de l’énergie de l’aéronef. Le temps nécessaire à satisfaire chacune de ces contraintes est calculé suivant un modèle d’évolution : une contrainte définit un état du monde (vitesse, position, …). Pour cette phase, le modèle d’évolution utilisé est un modèle simplifié.
Le temps nécessaire pour évoluer de l’état du monde donné à ce sommet à l’état du monde à son successeur est calculé. Suivant l’adage « qui peut le plus peut le moins », la plus faible valeur calculée est conservée. L’algorithme est ensuite propagé aux prédécesseurs suivant le parcours en largeur.
L’algorithme Q3PM antérograde suit la même philosophie de manière antérograde.
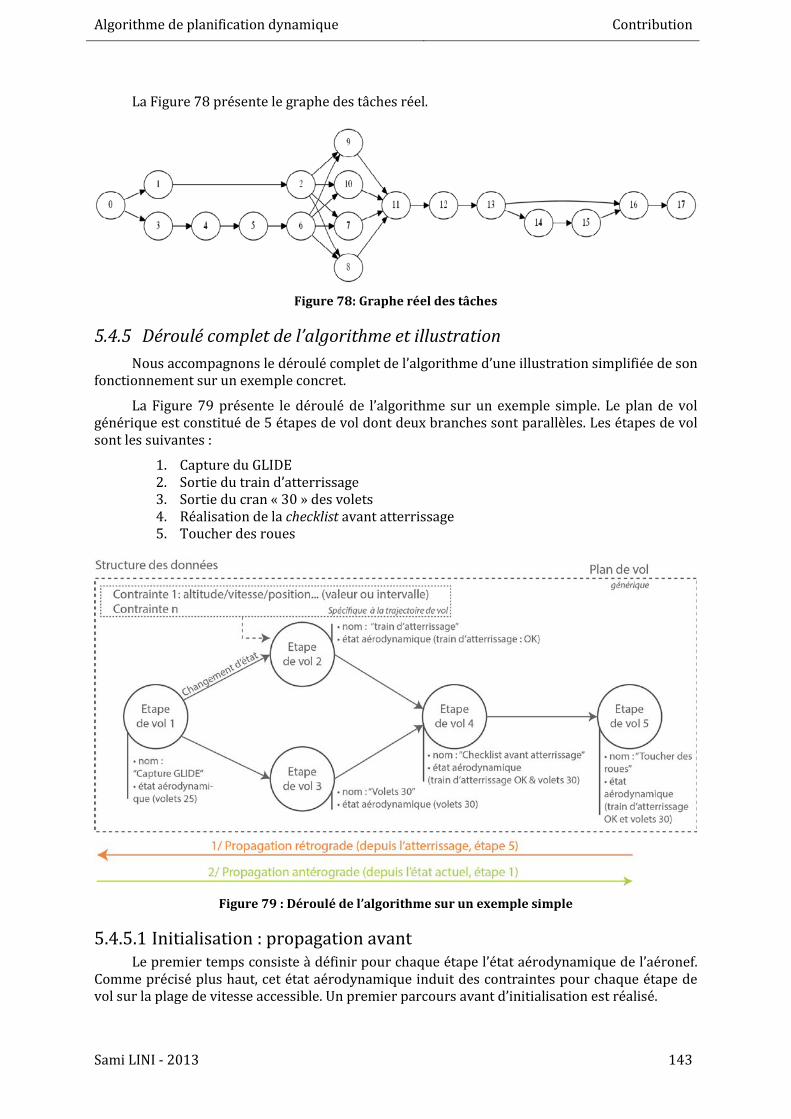
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 143
La Figure 78 présente le graphe des tâches réel.
Figure 78: Graphe réel des tâches
5.4.5 Déroulé complet de l’algorithme et illustration Nous accompagnons le déroulé complet de l’algorithme d’une illustration simplifiée de son
fonctionnement sur un exemple concret.
La Figure 79 présente le déroulé de l’algorithme sur un exemple simple. Le plan de vol générique est constitué de 5 étapes de vol dont deux branches sont parallèles. Les étapes de vol sont les suivantes :
1. Capture du GLIDE 2. Sortie du train d’atterrissage 3. Sortie du cran « 30 » des volets 4. Réalisation de la checklist avant atterrissage 5. Toucher des roues
Figure 79 : Déroulé de l’algorithme sur un exemple simple
5.4.5.1 Initialisation : propagation avant Le premier temps consiste à définir pour chaque étape l’état aérodynamique de l’aéronef.
Comme précisé plus haut, cet état aérodynamique induit des contraintes pour chaque étape de vol sur la plage de vitesse accessible. Un premier parcours avant d’initialisation est réalisé.

Algorithme de planification dynamique
Contribution
Sami LINI - 2013 144
Il propage l’état aérodynamique d’une étape à une autre : une hypothèse simplificatrice est utilisée ici, dans un premier temps, pour la phase de descente : il est supposé que si les volets sont sortis à un certain cran, pour les étapes suivantes les volets seront sortis à ce même cran, voire à un cran supérieur, sauf à remettre les gaz. A la fin de cette phase d’initialisation, l’ensemble des étapes de vol se voient attaché un état aérodynamique. Chaque étape de vol a donc au minimum une contrainte à respecter : une plage de vitesse.
Dans notre exemple, l’état actuel (étape 1) est le début de l’approche finale. L’état aérodynamique de l’avion est défini par le train d’atterrissage qui est rentré et les volets qui sont sortis au cran « 25 ». La première étape du déroulement de l’algorithme est donc la propagation des états aérodynamiques :
• L’étape de vol 2 a l’état aérodynamique « train d’atterrissage sorti » et se voit propager la propriété « volets 25 sortis ».
• L’étape de vol 3 a l’état aérodynamique « volets 30 sortis » qui prévaut sur la propriété « volets 25 sortis », laquelle n’a donc pas besoin de lui être propagée.
• L’étape de vol 4 se voit propager : o par l’étape de vol 2, les états aérodynamiques « train sorti » et « volets
25 » ; o par l’étape de vol 3, l’état aérodynamique « volets 30 » qui remplace donc
« volets 25 ». Il est donc considéré à cette étape que les volets sont sortis au cran 30 et que le train d’atterrissage est sorti.
• On propage l’ensemble des propriétés aérodynamiques à l’étape de vol 5.
5.4.5.2 Initialisation : propagation arrière Cette phase d’initialisation réalisée, les enveloppes supérieures de faisabilité sont définies
dans un second temps par propagation arrière et algorithme Q3PM rétrograde : l’étape « toucher des roues » est identifiée par analyse des contraintes. Cette étape identifiée, les informations de position et heure d’arrivée prévue sont disponibles. Le raisonnement est le suivant : connaissant le point d’arrivée (en position et en altitude) et l’heure prévue d’arrivée, quelles sont les valeurs les plus contraignantes pour chacun des paramètres de vol à atteindre afin de valider les étapes précédentes en satisfaisant l’ensemble de leurs contraintes ?
L’algorithme Q3PM rétrograde permet le calcul des dates maximales de satisfaction de chacune des contraintes. Comme explicité plus haut, la date minimale est conservée. Cette date étant à présent disponible, il est possible de calculer la position la plus éloignée, la vitesse minimale et l’altitude maximale pour l’atteindre. Si des contraintes de position, de vitesse ou altitude existent, elles sont comparées aux valeurs calculées, et les valeurs les plus contraignantes sont conservées.
Une fois ces valeurs calculées, le prédécesseur suivant est considéré, et le même processus suivi. Une fois que chacun des prédécesseurs de l’étape « toucher des roues » ont été considérés, l’étape précédente devient l’étape courante. Les calculs sont réalisés comme décrit précédemment. Ce processus se poursuit jusqu’à atteindre la première étape du graphe.
L’ensemble des valeurs calculées alors constitue l’enveloppe supérieure de faisabilité. Celle-ci dépendant exclusivement du terrain d’atterrissage et d’une heure donnée, elle ne sera pas réévaluée tant que ces éléments ne le seront pas.
Ainsi, dans notre exemple, l’étape de vol 5 est contrainte en position (coordonnées GPS), il s’agit de l’aéroport d’arrivée. Elle est également contrainte en altitude. Elle dispose d’une heure estimée d’arrivée. Elle dispose également de contraintes aérodynamiques qui fournissent une enveloppe de vitesse (vitesse maximum/minimum).
La question à laquelle la propagation rétrograde permet de répondre pour l’étape 4 est la suivante : compte-tenu des contraintes de position, altitude, heure et vitesse de l’étape de vol 5,
Algorithme de planification dynamique
Contribution
Sami LINI - 2013 145
quelles sont les valeurs limites de position, altitude, heure et vitesse acceptables pour l’étape de vol 4 afin de satisfaire l’ensemble de ces contraintes ainsi que les contraintes de cette même étape de vol 4 ?
Ainsi, supposons que la checklist avant atterrissage doive être réalisée au-dessus d’une altitude donnée. Cette valeur d’altitude est une contrainte forte qui ne doit pas être franchie. L’algorithme procède donc au calcul du temps nécessaire à parcourir la hauteur entre cette contrainte d’altitude et l’altitude de l’aéroport d’arrivée. Si l’étape de vol 4 était également contrainte en vitesse, il calculerait de même le temps nécessaire à la décélération. Les valeurs calculées sont comparées. La valeur minimale satisfaisant l’ensemble des contraintes est alors retenue.
Le temps étant la variable centrale du calcul, la valeur calculée sert ensuite à établir l’enveloppe de valeurs acceptables pour chacune des autres variables. Ces valeurs acceptables sont comparées aux contraintes auxquelles est soumise l’étape de vol pour s’assurer que ces nouvelles valeurs sont compatibles. Dans le cas contraire, elles sont remplacées par les valeurs contraintes : par exemple, s’il est possible d’atteindre l’altitude de 8000 pieds dans le temps calculé, mais que l’étape de vol ne peut être réalisée qu’en dessous de 6000 pieds, la valeur retenue est alors 6000 pieds.
L’ensemble des variables ayant été calculées, l’algorithme procède au basculement de l’étape 5 vers l’étape 4 et procède de même à partir de cette dernière. Les étapes 4 puis 3 sont ainsi analysées, et ainsi de suite jusqu’à atteindre l’étape 1. Cette étape atteinte, les enveloppes supérieures de faisabilité sont définies pour chacune des étapes de vol. Ces valeurs sont figées pour les valeurs de l’étape 5 données et ne nécessiteront pas d’être actualisées tant que l’étape 5 demeurera la dernière étape du plan de vol considéré.
5.4.5.3 Propagation avant La troisième phase est celle de la propagation avant : il s’agit d’une propagation
s’appuyant sur l’état actuel réel de l’aéronef. En premier lieu, l’étape courante est déterminée : l’ensemble des étapes et leurs contraintes sont analysées jusqu’à parvenir à celle correspondant à l’état actuel de la situation.
En s’appuyant sur les informations à jour de la situation, la propagation avant est la réciproque de la propagation arrière. La question qui se pose est la suivante : connaissant la situation actuelle, quelles sont les valeurs les moins contraignantes pour chacun des paramètres de vol à atteindre afin de valider les étapes suivantes en ayant la possibilité de satisfaire l’ensemble de leurs contraintes ?
L’algorithme Q3PM antérograde permet le calcul des dates maximales de satisfaction de chacune des contraintes. Comme explicité plus haut, la date minimale est conservée. Cette date étant à présent disponible, il est possible de calculer la position la moins éloignée, la vitesse maximale et l’altitude minimale pour l’atteindre. Si des contraintes de position, de vitesse ou altitude existent, elles sont comparées aux valeurs calculées, et les valeurs les moins contraignantes sont conservées.
Une fois ces valeurs calculées, le successeur suivant est considéré, et le même processus suivi. Une fois que chacun des successeurs de l’étape courante ont été considérés, l’étape suivante devient l’étape courante. Les calculs sont réalisés comme décrit précédemment. Ce processus se poursuit jusqu’à atteindre la dernière étape du graphe.
L’ensemble des valeurs calculées alors constitue l’enveloppe inférieure de faisabilité. Celle-ci dépendant de la situation actuelle, ce calcul par propagation avant est répété à chaque nouvelle information sur la situation, soit à chaque pas de temps de la simulation.
Ainsi, supposons pour notre exemple que notre avion vole à une vitesse de 230 nœuds. L’étape de vol « sortie du train d’atterrissage » (étape de vol 2) est contrainte par l’aérodynamique : supposons que le train ne puisse être sorti au-dessus d’une vitesse de 190

Algorithme de planification dynamique
Prototype
Sami LINI - 2013 146
nœuds. L’algorithme calcule donc le temps nécessaire à la décélération de 230 à 190 nœuds. Supposons ainsi que le train puisse être sorti à t+TA. L’algorithme procède à la même estimation pour la sortie du cran 30 des volets (étape de vol 3). Supposons que les volets 30 ne puissent être sortis au-dessus d’une vitesse de 170 nœuds. Le temps calculé est alors t+V30.
Pour l’étape de vol 4, le temps nécessaire à la satisfaction des contraintes de cette étape de vol 4 est calculé, en partant des nouvelles valeurs calculées : t+TA pour l’étape 2, t+V30. La valeur la plus contraignante calculée à partir de ces valeurs est conservée pour l’étape de vol 4 selon le précepte « qui peut le plus peut le moins ».
Comme décrit pour la propagation rétrograde, les autres variables sont considérées au même titre pour chacune des étapes, et la propagation se poursuit jusqu’atteindre l’étape de vol 5. Les nouvelles valeurs calculées définissent les enveloppes inférieures de faisabilité. L’algorithme de propagation avant peut alors être remis en œuvre avec les nouvelles valeurs issues des paramètres de vol actualisés.
Prototype 5.5L’architecture développée permet l’affichage d’une interface pour l’évaluation de la bonne
cohérence des modèles et équation de propagation (Figure 80 et Figure 81). Trois panneaux y sont définis : un panneau temporel, présentant l’ensemble des étapes de vol avec leurs marges temporelles, un panneau de vitesse, représentant les enveloppes de vitesse pour chaque étape, et un panneau d’altitude présentant les intervalles d’altitude pour chaque étape.
Figure 80 : Panneau temporel du prototype statique de validation de l’algorithme de propagation :
17h00 et altitude égale à 1000ft pour l’image de gauche, 17h10 et altitude égale à 2000ft pour l’image de droite

Algorithme de planification dynamique
Prototype
Sami LINI - 2013 147
Figure 81: Panneau altitude du prototype statique de validation de l’algorithme de propagation
Le bandeau inférieur contient des curseurs et listes déroulantes permettant de modifier les paramètres de vol afin de voir évoluer le plan de vol. Ces paramètres de vol simulés sont injectés dans l’algorithme selon le protocole de communication du simulateur de vol et permettent en cela de tester un large panel de combinaison des 5 variables considérées : deux listes déroulantes permettent de modifier la date et la position, tandis que des curseurs permettent de modifier la vitesse, l’altitude et la vitesse verticale. Il est ainsi rendu possible de jouer sur les différents paramètres afin de voir l’impact de ces derniers sur le planning des tâches.
Une étude de la littérature en productique ne nous a pas fourni de méthodologie pour éprouver la validité aéronautique des plans générés par notre algorithme autre que l’analyse experte couplée à un stress test42 itératif. Ce démonstrateur permet d’atteindre cet objectif. A la fin de cette phase, il est établi que les équations et le modèle de propagation permettent la génération de plans cohérents pour des pilotes. L’algorithme conçu peut donc être implémenté dans l’interface ASAP (Anticipation Support for Aeronautical Planning).
42 Voir glossaire
Algorithme de planification dynamique
Conclusion
Sami LINI - 2013 148
Conclusion 43 5.6Les chapitres précédents nous ont permis d’établir un cahier des charges du cœur
fonctionnel de notre outil d’aide à l’anticipation. Un état de l’art ne nous a pas permis de trouver dans la littérature de réponse pleinement satisfaisante à notre problématique. Il s’agit d’un problème de planification particulier puisque ne nécessitant que l’ordonnancement temporel de tâches connues et organisées causalement. Les approches en intelligence artificielle nous ont fourni un cadre conceptuel que nous avons complété par une approche plus classique issue du monde de la productique.
Nous avons ainsi élaboré une proposition consistant en un algorithme de planification dynamique multi-contraint répondant à notre problématique visant à offrir les moyens d’une planification dynamique en temps réel, une capacité de replanification et le calcul des marges de faisabilité des éléments du plan de vol considérés (waypoints44 et tâches). Un effort particulier a été fourni quant à la généricité, la modularité et maintenabilité de l’architecture mise en place (voir Annexes), afin d’assurer les extensions potentielles du démonstrateur.
Une première version de ce démonstrateur a été implémentée visant à tester dans un environnement contrôlé l’effet de variations des différentes variables de vol considérées sur la planification dynamique, la replanification et le calcul des marges de faisabilité. Les plans calculés ont été soumis à un pilote et leur cohérence validée. L’algorithme, fonctionnel, peut enfin être implémenté dans ASAP (Anticipation Support for Aeronautical Planning) présenté dans le chapitre à venir.
43 Ce travail a fait l’objet d’une publication en conférence internationale (Lini, Vallespir, Hourlier,
Labat, & Favier, 2013) 44 Voir glossaire
En résumé
• Les chapitres précédents nous ont permis la rédaction d’un cahier des charges pour le cœur fonctionnel de notre outil d’aide à l’anticipation.
• L’état de l’art en intelligence artificielle et en productique ne nous a pas fourni de solution répondant tout à fait à notre problématique.
• Nous avons élaboré une solution permettant la planification dynamique et en temps réel du plan de vol, la replanification ainsi que le calcul des marges de faisabilité des éléments de ce plan de vol.
• Les modèles et équations de propagation ont été validés par le biais d’un démonstrateur simulant les paramètres de vol et permettant la mise en œuvre de l’algorithme.

Sami LINI - 2013 149
Chapitre 6.
ASAP (Anticipation Support for
Aeronautical Planning)
ASAP (Anticipation Support for Aeronautical Planning)
Etat de l’art : les supports d’aide à
l’anticipation
Sami LINI - 2013 150
Etat de l’art : les supports d’aide à l’anticipation 6.1Si l’état de l’art n’est pas pléthorique, quelques études dans la littérature font la preuve de
l’intérêt de supports à l’anticipation. Ainsi, Denecker & Hoc (1997) étudient l’impact d’un support à l’anticipation pour les opérateurs de hauts fourneaux. Ils distinguent deux types d’anticipation : l’anticipation explicite, la prédiction, et l’anticipation implicite, l’attente. Chez ces opérateurs, il est constaté un changement de stratégie dans l’activité lors de l’utilisation du support d’aide à l’anticipation : celui-ci fournissant des informations quant à l’évolution de la situation, les opérateurs prédisent plus (anticipation explicite) et ont moins d’attentes (anticipation implicite).
Les auteurs soulignent que l’augmentation de la charge cognitive induite par une augmentation des prédictions est contrebalancée par une amélioration de l’efficacité des stratégies mises en place. Les opérateurs reviennent ainsi plus facilement sur leurs propres prédictions, en ont une analyse plus fine et exhaustive, appréhendent également mieux la situation elle-même et finalement gèrent mieux les situations à risques.
Les auteurs montrent également qu’une condition majeure à ce que le support améliore la performance est que les opérateurs aient une attitude active à son égard. Dans le cas étudié, les opérateurs se servent du support pour raffiner leurs prédictions, et non passivement pour obtenir des prédictions toutes faites. Ainsi, l’opérateur contrôle le contenu affiché par le support et, une fois ce contenu validé, se l’approprie.
Dans le milieu maritime, Van Breda (2000) met en avant lors d’une étude en situation simulée l’intérêt d’un support à l’anticipation par la présentation d’informations concernant les marges de manœuvrabilité à venir. Ce support favorisant le raffinement des prédictions permet une amélioration de l’anticipation des navigateurs ainsi qu’une amélioration significative des performances de navigation.
Wickens et al. (2000) étudient dans le milieu de l’aéronautique l’impact d’un outil de prédiction des trajectoires sur l’évitement de collisions. Cet outil permet une amélioration significative des performances, une diminution significative de la charge cognitive et l’étude établit que l’ajout d’un écran supplémentaire dans le cockpit n’impacte pas les performances dans un paradigme de double tâche. Un point fondamental de cette étude concerne la fiabilité des prédictions émises : les pilotes informés du niveau de fiabilité des prédictions en font tout de même usage et en pondèrent l’importance dans leur prise de décision.
Roth & Woods (1988) s’intéressent à des supports d’aide à la décision et à l’anticipation pour des installateurs de chaudière. Les auteurs insistent sur l’intérêt de supports d’aides à l’anticipation fournissant des informations prédictives et agrégées de plusieurs sources différentes sur les performances d’opérateurs. Sur la base d’une analyse cognitive de l’activité des installateurs de chaudière, les paramètres critiques devant être anticipés sont identifiés et une interface présentant ces estimations est conçue. L’accent est mis sur la visualisation de la situation actuelle, les causes y ayant conduit ainsi que les conséquences à venir.
La représentation des causes et des conséquences permet la formulation de stratégies de contrôle de plus haut niveau, basées sur l’évaluation de l’état actuel du système et sur son évolution. La compréhension du système en est améliorée ainsi que l’anticipation des événements à venir et leur contrôle a priori, améliorant également la performance. L’utilisation de ce support a donc des effets bénéfiques sur l’activité individuelle mais également sur l’activité commune. La définition d’un référentiel de connaissances agrégées communes aux différents acteurs impliqués permet un travail en meilleure coordination.
Nous déduisons de cet état de l’art les bons préceptes pour le développement et les critères d’évaluation d’un support d’aide à l’anticipation, qui viennent compléter les éléments préalablement abordés dans le mémoire :
• nécessité d’une représentation à jour de la situation,

ASAP (Anticipation Support for Aeronautical Planning)
Présentation d’ASAP
Sami LINI - 2013 151
• possibilité de représentation de la situation selon différents prismes, • possibilité de tester des hypothèses sur la situation à venir, • représentation des marges de faisabilité sur le plan de vol, • interactivité du support.
Présentation d’ASAP 6.2Développée en parallèle des travaux présentés, ASAP (Anticipation Support for
Aeronautical Planning) est l’interface conçue par Thales Avionics comme support d’aide à l’anticipation. Alimenté par le fruit des recherches présentées plus tôt, il s’agit d’un démonstrateur de concept industriel, valorisé au sein d’un projet européen ARTEMIS.
Porté par des experts en facteur humain de Thales Avionics, son développement a été axé sur une architecture adaptable et une philosophie suivant les hiérarchies de Rasmussen : plusieurs panneaux distincts (voir plus bas) permettent une représentation multi-facettes de la situation en cours et au sein desquels il est possible de naviguer en profondeur à différents niveaux de raffinement.
L’accent est mis sur la dimension fonctionnelle du support développé. Ainsi, afin de ne pas nuire à l’ergonomie, tout en maintenant un niveau de design satisfaisant, des éléments d’interaction simples sont développés (un bouton, une fonction) permettant la mise en place et l’évaluation rapide des fonctionnalités visées. C’est avec cette interface graphique qu’est connecté notre système de planification dynamique.
6.2.1 Le « task panel » : panneau des tâches à effectuer Le premier panneau au sein de l’interface ASAP est le « task panel » ou panneau des tâches
(Figure 82). Ce panneau présente l’ensemble des tâches à réaliser par les pilotes avec les marges temporelles de faisabilité pour chacune d’entre elles, suivant un axe gradué en temps de passage. Issue de l’analyse hiérarchisée présentée plus tôt, la liste des tâches comporte l’ensemble des actions à réaliser ainsi que les points de passage.

ASAP (Anticipation Support for Aeronautical Planning)
Présentation d’ASAP
Sami LINI - 2013 152
Figure 82 : Panneau de présentation des tâches à effectuer avec les marges temporelles de
faisabilité
L’algorithme de planification permet l’affichage des marges temporelles de faisabilité (date au plus tôt et au plus tard) pour chacun des points de passage ainsi que pour les tâches. Ces dernières sont ensuite ordonnées chronologiquement suivant la date de faisabilité au plus tôt : plus une tâche (ou un waypoint45) peut être réalisée tôt, plus elle apparaît haut dans la liste.
L’interface est manipulable par le biais d’un écran tactile. Une pression sur la tâche la valide et permet le calcul actualisé du reste du plan de vol. Un nouvel appui la réactive et corrige le plan ainsi que les marges de faisabilité affichés. Une tâche validée est grisée et reste présente à l’écran. Un module d’auto-validation des tâches par extraction des données de l’environnement a été développé mais ne s’est pas montré suffisamment fiable à ce stade pour être intégré à cette évaluation.
Une pression continue et un mouvement du doigt permet le déplacement du panneau des tâches et la navigation dans la liste des tâches. Un module de navigation automatique permet le défilement automatique de l’interface et le repositionnement pour ne laisser affichée que la dernière tâche validée et les tâches à venir. Une barre de zoom au sommet de l’écran permet de zoomer ou dézoomer à volonté par une pression maintenue sur l’écran accompagnée d'un mouvement vers la gauche ou la droite.
Interfacé avec le simulateur, ce panneau des tâches est mis à jour en continu avec les données provenant de la simulation : le déplacement de l’avion dans l’espace, son avance ou son retard éventuels par rapport aux dates calculées sont pris en compte dans la mise à jour des informations affichées suivant le principe de déroulement de l’algorithme décrit plus tôt.
A chaque instant, les butées temporelles sont ainsi recalculées et leur affichage est ajusté. Le pas de temps de mise à jour est choisi suffisamment fin (100 ms) pour que les changements ne perturbent pas l’affichage de l’information ou sa recherche par le pilote. Comme décrit plus tôt, les butées temporelles supérieures ne bougent pas pour un aéroport donné, et seules les butées inférieures se déplacent lentement. Pour un toucher des roues à l’heure prévue (ETA,
45 Voir glossaire
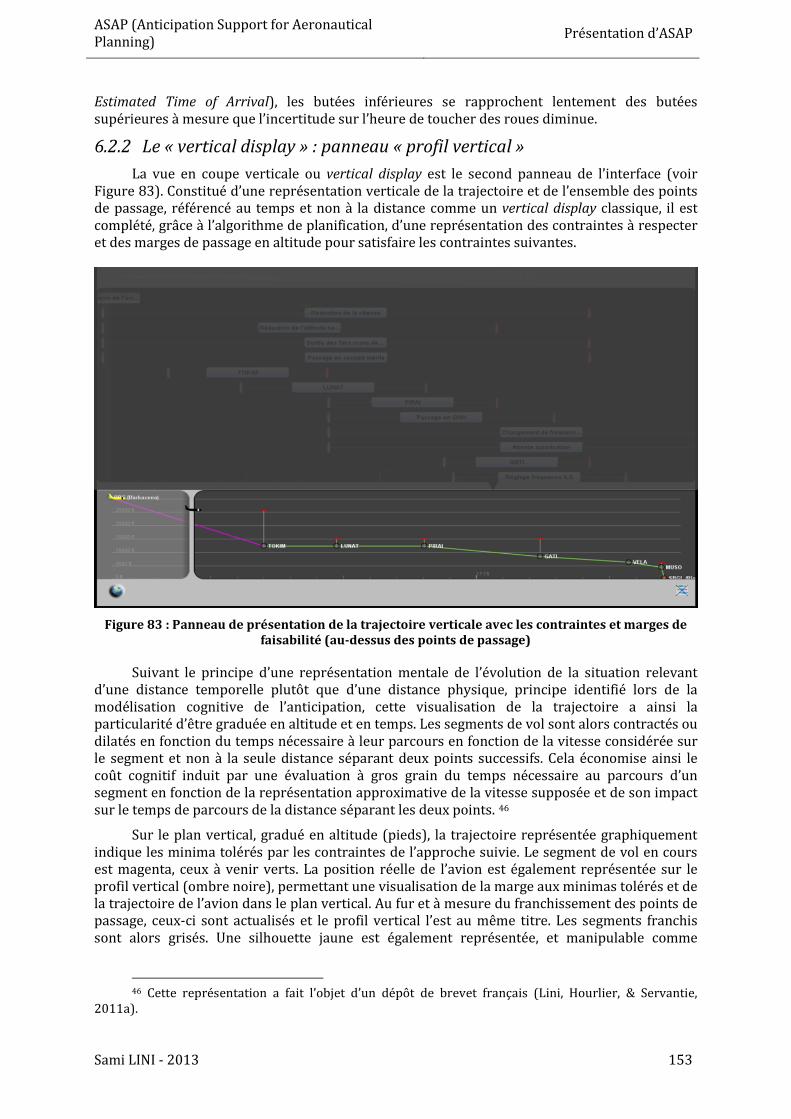
ASAP (Anticipation Support for Aeronautical Planning)
Présentation d’ASAP
Sami LINI - 2013 153
Estimated Time of Arrival), les butées inférieures se rapprochent lentement des butées supérieures à mesure que l’incertitude sur l’heure de toucher des roues diminue.
6.2.2 Le « vertical display » : panneau « profil vertical » La vue en coupe verticale ou vertical display est le second panneau de l’interface (voir
Figure 83). Constitué d’une représentation verticale de la trajectoire et de l’ensemble des points de passage, référencé au temps et non à la distance comme un vertical display classique, il est complété, grâce à l’algorithme de planification, d’une représentation des contraintes à respecter et des marges de passage en altitude pour satisfaire les contraintes suivantes.
Figure 83 : Panneau de présentation de la trajectoire verticale avec les contraintes et marges de
faisabilité (au-dessus des points de passage)
Suivant le principe d’une représentation mentale de l’évolution de la situation relevant d’une distance temporelle plutôt que d’une distance physique, principe identifié lors de la modélisation cognitive de l’anticipation, cette visualisation de la trajectoire a ainsi la particularité d’être graduée en altitude et en temps. Les segments de vol sont alors contractés ou dilatés en fonction du temps nécessaire à leur parcours en fonction de la vitesse considérée sur le segment et non à la seule distance séparant deux points successifs. Cela économise ainsi le coût cognitif induit par une évaluation à gros grain du temps nécessaire au parcours d’un segment en fonction de la représentation approximative de la vitesse supposée et de son impact sur le temps de parcours de la distance séparant les deux points. 46
Sur le plan vertical, gradué en altitude (pieds), la trajectoire représentée graphiquement indique les minima tolérés par les contraintes de l’approche suivie. Le segment de vol en cours est magenta, ceux à venir verts. La position réelle de l’avion est également représentée sur le profil vertical (ombre noire), permettant une visualisation de la marge aux minimas tolérés et de la trajectoire de l’avion dans le plan vertical. Au fur et à mesure du franchissement des points de passage, ceux-ci sont actualisés et le profil vertical l’est au même titre. Les segments franchis sont alors grisés. Une silhouette jaune est également représentée, et manipulable comme
46 Cette représentation a fait l’objet d’un dépôt de brevet français (Lini, Hourlier, & Servantie,
2011a).

ASAP (Anticipation Support for Aeronautical Planning)
Présentation d’ASAP
Sami LINI - 2013 154
représentation virtuelle de l’aéronef. Son utilité principale sera présentée avec le panneau cartographique.
Un effet d’opacité conjugué à une fenêtre glissante fait le lien entre les panneaux « tâche » et « profil vertical » : sur le profil vertical, la zone en transparence (par opposition à la zone opaque) indique la partie commune aux deux panneaux. Il s’agit ainsi d’une représentation globale de la tranche de vol affichée sur l’écran des tâches. Un glisser-déposer en permet le déplacement, conjugué au déplacement des tâches correspondantes dans le « task panel ». Une pression sur le bord de la fenêtre de transparence permet la manipulation de sa taille. La réduction de cette fenêtre, représentant la partie commune aux deux panneaux résulte ainsi en une réduction, au sein du panneau des tâches, aux tâches présentes dans la fenêtre nouvellement définie. Il s’agit en cela d’un moyen de contrôle du zoom.
Une pression sur le bouton en forme de globe terrestre dans le bandeau inférieur de l’écran initie le basculement vers le module cartographique. Ce basculement est progressif : une transition glissante continue est effectuée de la trajectoire verticale à la trajectoire horizontale suivant le principe illustré en Figure 84. Cette transition continue permet le maintien des repères spatiaux dans la visualisation47.
Figure 84 : Procédé d’affichage séquentiel de représentations bidimensionnelles d’une trajectoire
verticale et d’une trajectoire latérale associées à une trajectoire tridimensionnelle48
47 Cette fonctionnalité a également fait l’objet d’un dépôt de brevet français (Lini, Hourlier, &
Servantie, 2011b). 48 Une pression sur le bouton de changement de module provoque la transition de l’état tout en
haut à l’état tout en bas (et vice et versa) en passant par les étapes intermédiaires
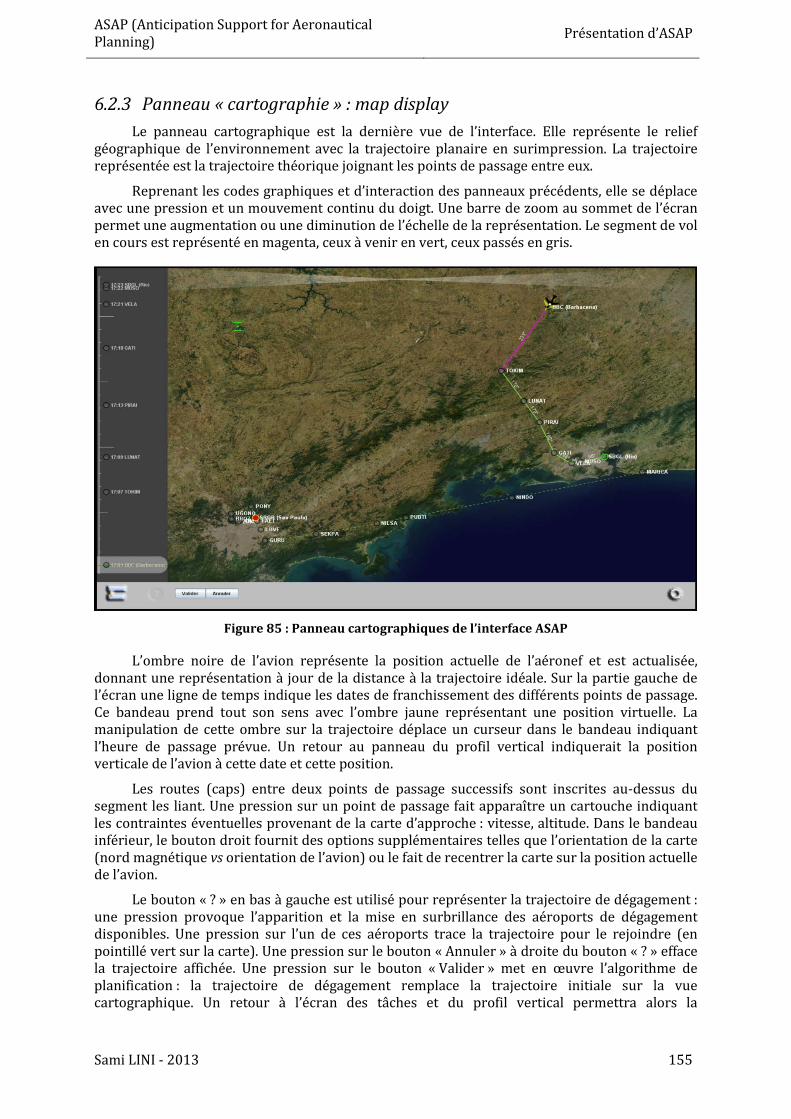
ASAP (Anticipation Support for Aeronautical Planning)
Présentation d’ASAP
Sami LINI - 2013 155
6.2.3 Panneau « cartographie » : map display Le panneau cartographique est la dernière vue de l’interface. Elle représente le relief
géographique de l’environnement avec la trajectoire planaire en surimpression. La trajectoire représentée est la trajectoire théorique joignant les points de passage entre eux.
Reprenant les codes graphiques et d’interaction des panneaux précédents, elle se déplace avec une pression et un mouvement continu du doigt. Une barre de zoom au sommet de l’écran permet une augmentation ou une diminution de l’échelle de la représentation. Le segment de vol en cours est représenté en magenta, ceux à venir en vert, ceux passés en gris.
Figure 85 : Panneau cartographiques de l’interface ASAP
L’ombre noire de l’avion représente la position actuelle de l’aéronef et est actualisée, donnant une représentation à jour de la distance à la trajectoire idéale. Sur la partie gauche de l’écran une ligne de temps indique les dates de franchissement des différents points de passage. Ce bandeau prend tout son sens avec l’ombre jaune représentant une position virtuelle. La manipulation de cette ombre sur la trajectoire déplace un curseur dans le bandeau indiquant l’heure de passage prévue. Un retour au panneau du profil vertical indiquerait la position verticale de l’avion à cette date et cette position.
Les routes (caps) entre deux points de passage successifs sont inscrites au-dessus du segment les liant. Une pression sur un point de passage fait apparaître un cartouche indiquant les contraintes éventuelles provenant de la carte d’approche : vitesse, altitude. Dans le bandeau inférieur, le bouton droit fournit des options supplémentaires telles que l’orientation de la carte (nord magnétique vs orientation de l’avion) ou le fait de recentrer la carte sur la position actuelle de l’avion.
Le bouton « ? » en bas à gauche est utilisé pour représenter la trajectoire de dégagement : une pression provoque l’apparition et la mise en surbrillance des aéroports de dégagement disponibles. Une pression sur l’un de ces aéroports trace la trajectoire pour le rejoindre (en pointillé vert sur la carte). Une pression sur le bouton « Annuler » à droite du bouton « ? » efface la trajectoire affichée. Une pression sur le bouton « Valider » met en œuvre l’algorithme de planification : la trajectoire de dégagement remplace la trajectoire initiale sur la vue cartographique. Un retour à l’écran des tâches et du profil vertical permettra alors la

ASAP (Anticipation Support for Aeronautical Planning)
Conclusion
Sami LINI - 2013 156
visualisation de la liste des tâches mises à jour pour le nouvel aéroport de destination. Les nouveaux points de passage seront intégrés et toutes dates de faisabilité seront recalculées pour la nouvelle situation. Le vertical display affiche également le profil vertical mis à jour. En cas de besoin, il est toujours possible de sélectionner l’aéroport initial ultérieurement en utilisant le même procédé pour remettre à jour l’ensemble du plan de vol et les représentations des trajectoires correspondant.
Conclusion 6.3L’interface ASAP propose de combler un manque dans les cockpits modernes : les moyens
dont disposent les pilotes actuellement n’offrent pas de représentation multi-facettes agrégée de la situation. Cette interface permet ainsi de mettre en regard représentation spatiale, suivant des coupes horizontale et verticale, et représentation des tâches à réaliser.
L’implémentation de notre algorithme a agrémenté ASAP de fonctionnalités orientées vers une amélioration de l’anticipation. La planification dynamique du plan des tâches en permet une représentation à jour dépendant de la situation actuelle. La représentation des marges de faisabilité (spatiales et temporelles) permet une gestion et une projection dans le temps facilitées. Le test d’hypothèses (dégagement) offre les moyens de préparer concrètement un panel de solutions puis d’avoir une représentation actualisée de la situation quand la décision est prise.
Ces fonctionnalités, développées selon un cahier des charges ayant impliqué des pilotes, doivent à présent être évaluées à l’aulne de leur expertise. Cela fera ainsi l’objet de la dernière partie de ce travail.
En résumé
• ASAP (Anticipation Support for Aeronautical Planning) est l’interface développée par Thales Avionics.
• ASAP permet la représentation en regard de visualisations spatiales et des tâches à réaliser.
• L’algorithme de planification dynamique présenté plus tôt agrémente ASAP de fonctionnalités visant à améliorer l’anticipation des pilotes.
• Représentation de la situation en temps réel à jour, visualisation des marges de faisabilité et test d’hypothèses concernant le dégagement constituent les principales fonctionnalités destinées à l’anticipation.
Sami LINI - 2013 157
Chapitre 7.
Evaluation centrée pilotes
Evaluation centrée pilotes
Introduction
Sami LINI - 2013 158
Introduction 7.1Ce travail a été placé sous le sceau de l’implication des utilisateurs finaux et de l’ingénierie
cognitique. Partant d’une analyse de l’activité en milieu opérationnel et d’un état de l’art en psychologie cognitive, nous avons tout d’abord dessiné les pistes menant vers un modèle de l’anticipation.
La modélisation de l’activité et du processus cognitif « anticipation », ainsi que l’implication régulière et itérative de pilotes dans ces étapes, ont ensuite constitué les bases du cahier des charges de notre algorithme de planification dynamique. Cet algorithme implémenté au sein de l’interface ASAP et l’agrémentant de nouvelles fonctionnalités, la dernière étape indispensable et naturelle à cette démarche en était l’évaluation centrée pilotes.
Nous présentons dans cette partie le protocole expérimental et les résultats de cette évaluation en simulateur à laquelle 36 pilotes civils commerciaux ont pris part. Les conclusions tant expérimentales que pour les développements futurs viendront clore ce chapitre.
Objectifs et hypothèses 7.2Comme présenté dans l’état de l’art, l’anticipation est une composante majeure de la
gestion des ressources cognitives et de la conscience de la situation (SA). L’objectif de cette dernière partie est donc d’évaluer l’impact de l’interface ASAP sur la conscience de la situation, la charge cognitive et la performance en vol de pilotes en activité. Deux groupes seront comparés : pour le premier, l’interface ASAP sera disponible durant le premier scénario mais pas durant le second. Pour le second groupe, nous procéderons de la manière opposée.
Les hypothèses opérationnelles de cette étude peuvent être résumées comme suit :
• variabilité entre les groupes en termes de conscience de la situation (H1) : pour chaque scénario, une différence de conscience de la situation est attendue entre les deux groupes. Le groupe doté de l’interface ASAP est supposé avoir une meilleure conscience de la situation.
• Variabilité entre les groupes en termes de charge cognitive (H2) : pour chaque scénario une différence de charge cognitive est attendue entre les deux groupes. Le groupe doté de l’interface ASAP est supposé montrer une charge cognitive inférieure.
• Variabilité entre les groupes en termes de performance (H3) : pour chaque scénario, une différence de performance est attendue entre les deux groupes. Le groupe doté de l’interface ASAP est supposé montrer de meilleures performances.
Plan d’expérimentation 7.3Dans le cadre du projet ASAP, et comme lors de l’expérimentation préliminaire, la phase
de vol choisie est celle de la descente et de l’approche d’un avion civil commercial. Comme précédemment, et pour les mêmes raisons, nous étudierons la trajectoire d’un aéronef venant de Paris en direction de l’aéroport international de Rio de Janeiro, avec l’aéroport de Sao Paulo comme terrain de dégagement.
7.3.1 Description de la tâche Les scenarii sont réalisés dans un simulateur civil (Figure 86). Il est demandé aux pilotes
participant d’interagir avec le cockpit comme ils en ont l’habitude dans l’exercice de leur activité quotidienne. Après une phase de familiarisation, il leur est demandé de suivre la trajectoire affichée sur le Navigation Display49 face à eux en utilisant uniquement le pilote automatique (guidage en cap et en vitesse verticale). Les cartes d’approche et de percée leur ont été fournies
49 Voir glossaire

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 159
préalablement. Lors de l’approche finale, ils sont autorisés à utiliser le guidage ILS50. Les participants sont installés au poste droit, à 70 cm de l’écran principal sur lequel sont affichés le Primary Flight Display51 et le Navigation Display52. Un expérimentateur (ancien pilote) joue le rôle de copilote et de pilot monitoring53 et est installé au poste gauche. Un autre expérimentateur surveille le déroulement de l’expérimentation sur les écrans de contrôle et joue le rôle de contrôleur aérien en suivant un script. Le choix d’un suivi « manuel » au pilote automatique a été dicté par la volonté de maintenir les pilotes dans une boucle perception/action, favorisant l’accès aux processus cognitifs mis en jeu : nous n’évaluons pas les automatismes et la compréhension de ces automatismes par les pilotes mais bien la conscience de la situation et la charge cognitive induite par l’activité et les éléments de prise de décision contextualisée.
Figure 86 : Vue globale du simulateur54.
Deux scenarii ont été conçus avec un pilote-instructeur comme suit.
• Scénario 1 (Figure 87) : Le scénario 1 est une descente nominale sur l’aéroport international de Rio de Janeiro en provenance de Paris, pour un atterrissage en piste 10. Le scénario commence au top of descent, le début de la descente. L’altitude est de 30 000 pieds, le cap de 233°, la vitesse air indiquée est de 320 nœuds. Le scénario se conclut quand l’aéronef est au sol, en position d’arrêt sur la piste 10 de l’aéroport de Rio de Janeiro. Les informations sur la position de l’aéronef étaient données avant le démarrage, de même que le kérosène disponible.
50 Voir glossaire 51 Voir glossaire 52 Voir glossaire 53 Voir glossaire 54 Le participant s’installe sur le siège droit. Les informations du cockpit sont affichées sur l’écran
face à lui tandis que l’interface ASAP et la 3D-SART sont affichées sur les écrans centraux. Le paysage est affiché sur un écran de 3m de diagonale sur le mur face à lui. Un expérimentateur surveille le bon déroulement depuis le poste à gauche de la pièce.
Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 160
Le pétrole disponible est calculé pour ne laisser qu’une attente de 10 minutes avant dégagement sur Sao Paulo en cas de remise de gaz. • Scénario 2 (Figure 88) :
Le scénario 2 présente les mêmes conditions initiales. Une minute après avoir atteint le premier point de passage, le participant est informé par le contrôle approche que la piste 10 est actuellement engagée et que la piste 15 est fermée. Les pistes 10 et 15 sont les seules disponibles sur l’aéroport international de Rio de Janeiro. Il leur est demandé de se préparer à un tour d’attente à un point de passage ultérieur (PIRAI). Une minute avant d’atteindre le point PIRAI, l’information leur est confirmée et il leur est demandé de se mettre en attente pour approximativement 10 minutes. Cette durée correspond volontairement au temps d’attente possible avec le pétrole restant. Le scénario se conclut quand la décision de dégager est annoncée par le pilote au contrôle. En cas de questions sur la situation à l’aéroport, le contrôle approche répond qu’un appareil est immobilisé sur la piste et qu’aucune information supplémentaire n’est disponible pour le moment. Les pilotes ont la liberté de gérer leur tour d’attente comme ils le souhaitaient (altitude, vitesse, taille du tour d’attente).

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 161
Figure 87 : Cartes d’approche du scénario 1. En rouge la trajectoire à suivre. Ce scénario est une
descente sans incident.
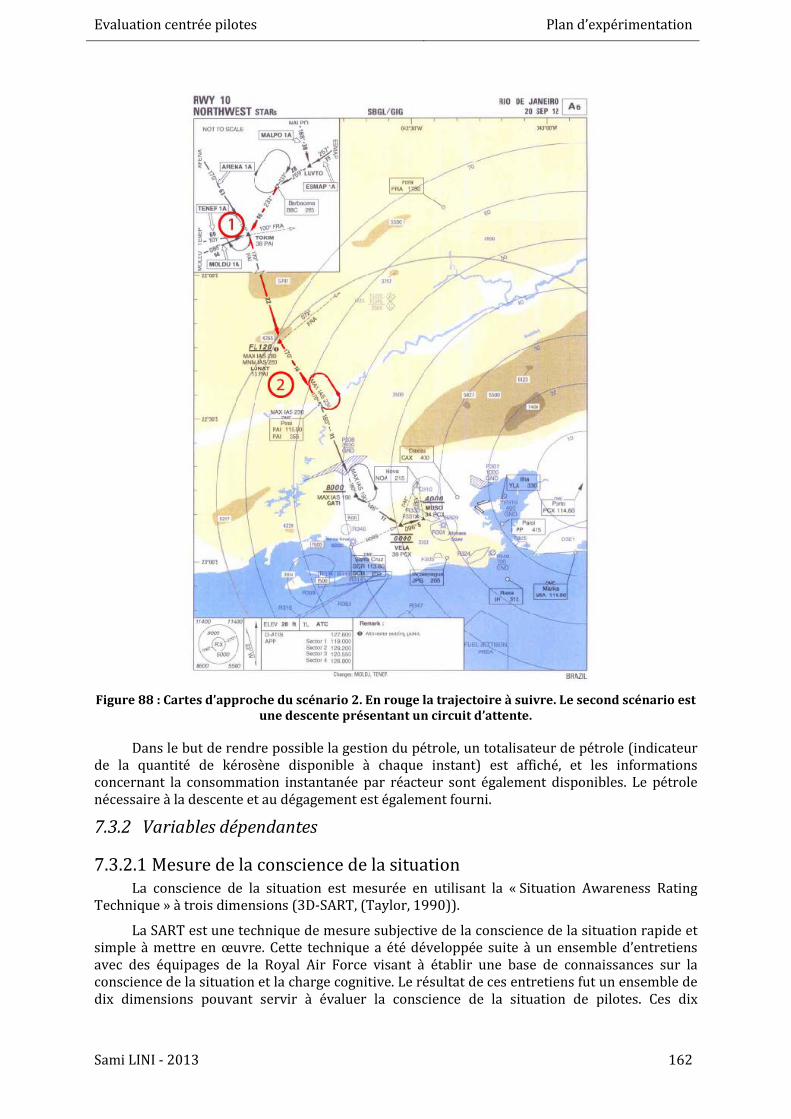
Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 162
Figure 88 : Cartes d’approche du scénario 2. En rouge la trajectoire à suivre. Le second scénario est
une descente présentant un circuit d’attente.
Dans le but de rendre possible la gestion du pétrole, un totalisateur de pétrole (indicateur de la quantité de kérosène disponible à chaque instant) est affiché, et les informations concernant la consommation instantanée par réacteur sont également disponibles. Le pétrole nécessaire à la descente et au dégagement est également fourni.
7.3.2 Variables dépendantes
7.3.2.1 Mesure de la conscience de la situation La conscience de la situation est mesurée en utilisant la « Situation Awareness Rating
Technique » à trois dimensions (3D-SART, (Taylor, 1990)).
La SART est une technique de mesure subjective de la conscience de la situation rapide et simple à mettre en œuvre. Cette technique a été développée suite à un ensemble d’entretiens avec des équipages de la Royal Air Force visant à établir une base de connaissances sur la conscience de la situation et la charge cognitive. Le résultat de ces entretiens fut un ensemble de dix dimensions pouvant servir à évaluer la conscience de la situation de pilotes. Ces dix

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 163
dimensions sont utilisées en comparaison paire à paire, via des échelles de Likert ou encore par catégorie (haut vs bas).
Les dix dimensions sont les suivantes :
1. Familiarité de la situation 2. Division de l’attention 3. Quantité d’information 4. Instabilité de la situation 5. Concentration de l’attention 6. Complexité de la situation 7. Variabilité de la situation 8. Excitation 9. Qualité de l’information 10. Surplus de capacité mentale
Pour la 3D-SART, les dix dimensions usuelles de la SART sont groupées en trois dimensions :
1. « demand » (demande) en ressources attentionnelles : combinaison de la complexité, la variabilité et l’instabilité de la situation ;
2. « supply » (fourniture) en ressources attentionnelles : combinaison de l’excitation, division de l’attention, le surplus de capacité mentale et la concentration de l’attention ;
3. « understand » (compréhension) de la situation : combinaison de la quantité d’information, la qualité de l’information et la familiarité de la situation.
Il est demandé au sujet d’estimer chacune des dimensions sur une échelle de Likert à 7 points (1 bas, 7 haut). Un score global est calculé comme suit :
Score « understand » – (score « demand » – score « supply »)
(Salmon, Stanton, & Walker, 2009) soulignent le fait que « la SART apporte une approche multidimensionnelle de la conscience de la situation qui est congruente avec la vision de (Taylor, 1990) selon laquelle la conscience de la situation comprend le niveau de la demande en ressources imposé par une situation, la fourniture en ressources attentionnelles en réponse aux demandes de la situation, et la compréhension de la situation qui en découle ». Comme cette évaluation vise à évaluer les effets de l’interface ASAP à la fois sur la conscience de la situation et la charge cognitive, l’utilisation de la SART fait tout à fait sens. La SART est avec la Situation Awareness Global Assessment Technique (SAGAT, (Endsley, 1988) la méthode d’évaluation de la conscience de la situation la plus largement utilisée et évaluée (Endsley, Selcon, Hardiman, & Croft, 1998; Endsley, 2000).
Une faiblesse parfois mise en avant de la SART concerne le fait qu’il peut être difficile a posteriori pour les sujets d’effectuer une évaluation réflexive de leur propre conscience de la situation durant l’activité qui vient de se dérouler (Endsley, 1995). Afin de pallier cette faiblesse, tout au long des scenarii nous faisons le choix original de demander aux participants de répondre régulièrement au questionnaire 3D-SART : une minute après le début du scénario puis toutes les deux minutes, le questionnaire est affiché sur un écran tactile tandis qu’une alerte sonore concomitante – de type sonnerie de téléphone, distincte de l’environnement sonore habituel – résonne.
7.3.2.2 Mesure de la charge cognitive Comme lors de l’étude préliminaire, la charge cognitive est évaluée suivant trois méthodes
indépendantes et croisées (Cegarra & Chevalier, 2008).
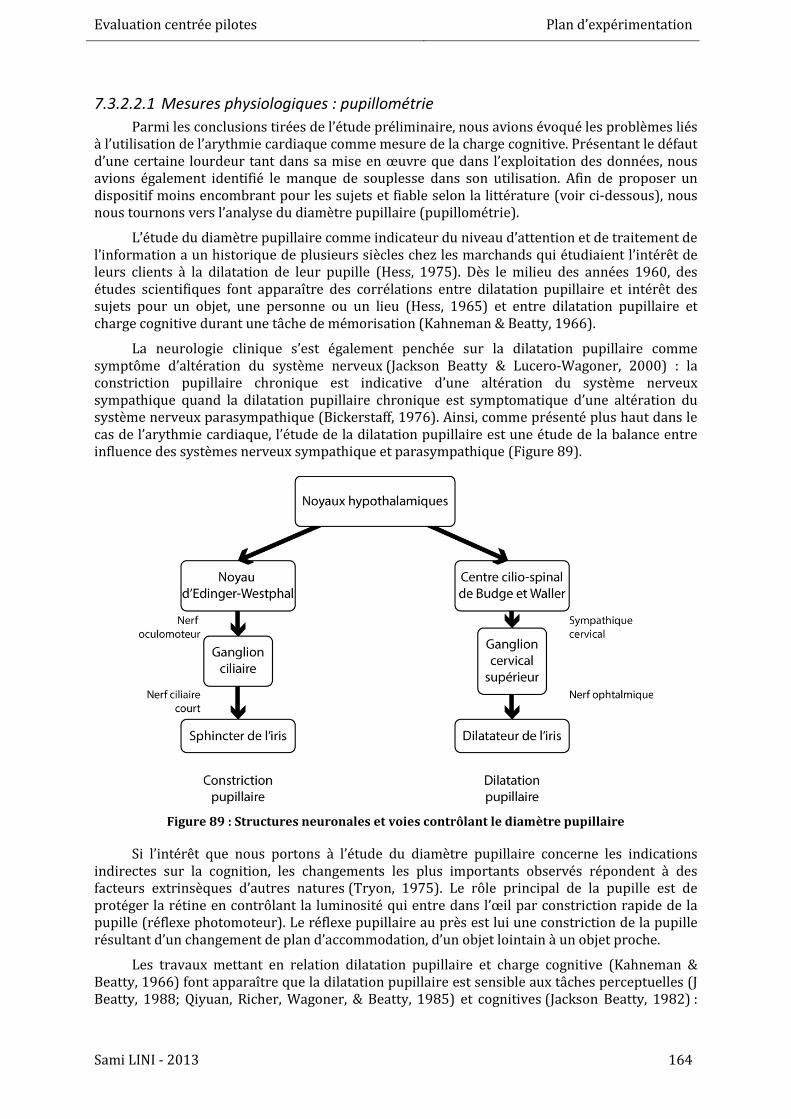
Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 164
7.3.2.2.1 Mesures physiologiques : pupillométrie Parmi les conclusions tirées de l’étude préliminaire, nous avions évoqué les problèmes liés
à l’utilisation de l’arythmie cardiaque comme mesure de la charge cognitive. Présentant le défaut d’une certaine lourdeur tant dans sa mise en œuvre que dans l’exploitation des données, nous avions également identifié le manque de souplesse dans son utilisation. Afin de proposer un dispositif moins encombrant pour les sujets et fiable selon la littérature (voir ci-dessous), nous nous tournons vers l’analyse du diamètre pupillaire (pupillométrie).
L’étude du diamètre pupillaire comme indicateur du niveau d’attention et de traitement de l’information a un historique de plusieurs siècles chez les marchands qui étudiaient l’intérêt de leurs clients à la dilatation de leur pupille (Hess, 1975). Dès le milieu des années 1960, des études scientifiques font apparaître des corrélations entre dilatation pupillaire et intérêt des sujets pour un objet, une personne ou un lieu (Hess, 1965) et entre dilatation pupillaire et charge cognitive durant une tâche de mémorisation (Kahneman & Beatty, 1966).
La neurologie clinique s’est également penchée sur la dilatation pupillaire comme symptôme d’altération du système nerveux (Jackson Beatty & Lucero-Wagoner, 2000) : la constriction pupillaire chronique est indicative d’une altération du système nerveux sympathique quand la dilatation pupillaire chronique est symptomatique d’une altération du système nerveux parasympathique (Bickerstaff, 1976). Ainsi, comme présenté plus haut dans le cas de l’arythmie cardiaque, l’étude de la dilatation pupillaire est une étude de la balance entre influence des systèmes nerveux sympathique et parasympathique (Figure 89).
Figure 89 : Structures neuronales et voies contrôlant le diamètre pupillaire
Si l’intérêt que nous portons à l’étude du diamètre pupillaire concerne les indications indirectes sur la cognition, les changements les plus importants observés répondent à des facteurs extrinsèques d’autres natures (Tryon, 1975). Le rôle principal de la pupille est de protéger la rétine en contrôlant la luminosité qui entre dans l’œil par constriction rapide de la pupille (réflexe photomoteur). Le réflexe pupillaire au près est lui une constriction de la pupille résultant d’un changement de plan d’accommodation, d’un objet lointain à un objet proche.
Les travaux mettant en relation dilatation pupillaire et charge cognitive (Kahneman & Beatty, 1966) font apparaître que la dilatation pupillaire est sensible aux tâches perceptuelles (J Beatty, 1988; Qiyuan, Richer, Wagoner, & Beatty, 1985) et cognitives (Jackson Beatty, 1982) :
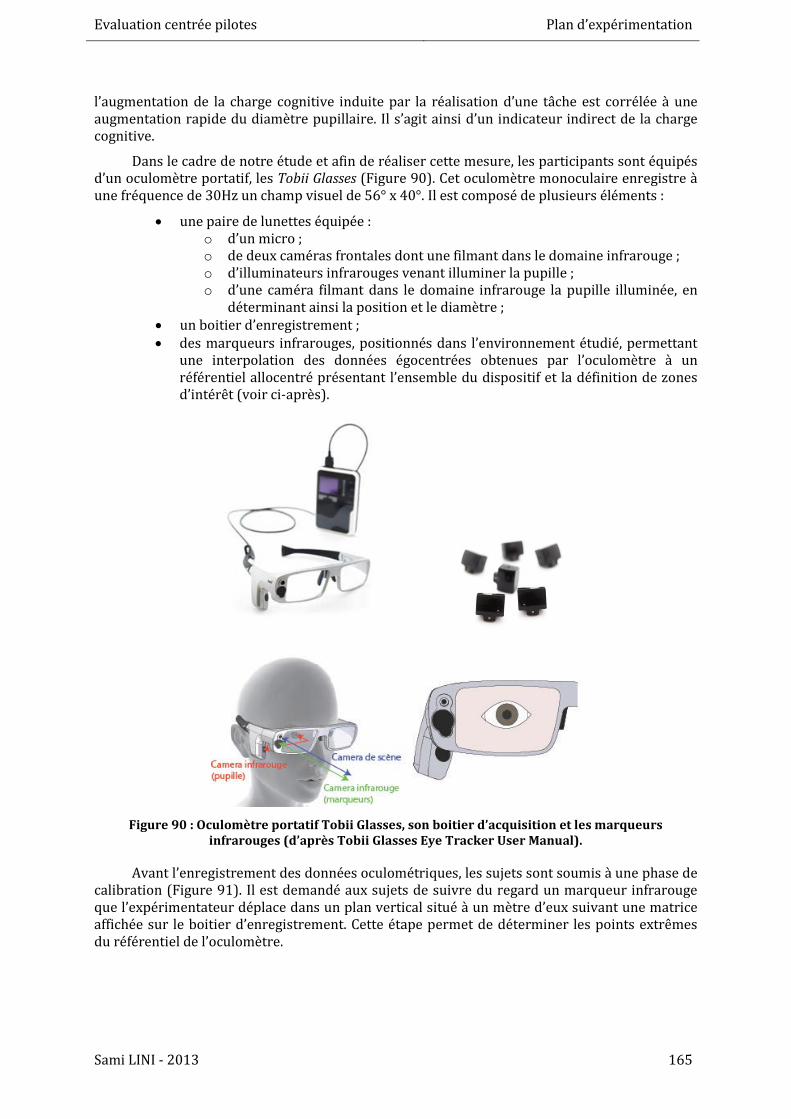
Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 165
l’augmentation de la charge cognitive induite par la réalisation d’une tâche est corrélée à une augmentation rapide du diamètre pupillaire. Il s’agit ainsi d’un indicateur indirect de la charge cognitive.
Dans le cadre de notre étude et afin de réaliser cette mesure, les participants sont équipés d’un oculomètre portatif, les Tobii Glasses (Figure 90). Cet oculomètre monoculaire enregistre à une fréquence de 30Hz un champ visuel de 56° x 40°. Il est composé de plusieurs éléments :
• une paire de lunettes équipée : o d’un micro ; o de deux caméras frontales dont une filmant dans le domaine infrarouge ; o d’illuminateurs infrarouges venant illuminer la pupille ; o d’une caméra filmant dans le domaine infrarouge la pupille illuminée, en
déterminant ainsi la position et le diamètre ; • un boitier d’enregistrement ; • des marqueurs infrarouges, positionnés dans l’environnement étudié, permettant
une interpolation des données égocentrées obtenues par l’oculomètre à un référentiel allocentré présentant l’ensemble du dispositif et la définition de zones d’intérêt (voir ci-après).
Figure 90 : Oculomètre portatif Tobii Glasses, son boitier d’acquisition et les marqueurs
infrarouges (d’après Tobii Glasses Eye Tracker User Manual).
Avant l’enregistrement des données oculométriques, les sujets sont soumis à une phase de calibration (Figure 91). Il est demandé aux sujets de suivre du regard un marqueur infrarouge que l’expérimentateur déplace dans un plan vertical situé à un mètre d’eux suivant une matrice affichée sur le boitier d’enregistrement. Cette étape permet de déterminer les points extrêmes du référentiel de l’oculomètre.

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 166
Figure 91 : Procédure de calibration (d’après Tobii Glasses Eye Tracker User Manual).
Avec le matériel utilisé et dans le cadre d’une étude en pupillométrie, cette phase de calibration doit être exécutée précautionneusement. Les données en la matière fournies par l’oculomètre sont en effet une mesure sans unité du rapport entre le diamètre pupillaire enregistré à un instant t et la moyenne du diamètre pupillaire enregistré lors de la phase de la calibration.
Nous souhaitons pouvoir effectuer des comparaisons intra-individuelles entre nos deux scenarii. A cette fin il n’est pas problématique d’utiliser une mesure normalisée, à condition que le facteur de normalisation soit le même pour les variables comparées. Au sein du simulateur où la luminosité est plus faible qu’à l’extérieur, une dilatation initiale est attendue puis une constriction progressive par adaptation à la luminosité. Cette constriction se stabilise au bout de 40 minutes. Ainsi, contrairement aux préconisations, une seule phase de calibration par sujet servira de référence et permettra la comparaison du diamètre pupillaire lors des deux scenarii sur une base commune.
7.3.2.2.2 Mesures subjectives : NASA-TLX L’utilisation du NASA Task Load indeX ayant été satisfaisante lors de l’étude préliminaire,
il est de nouveau utilisé comme outil d’évaluation subjective de la charge cognitive. Il est également analysé en version pondérée.
7.3.2.2.3 Temps de réaction Tout comme lors de l’expérimentation préliminaire, les temps de réaction servent de
mesure de la charge cognitive suivant le paradigme de (Posner & Boies, 1971). La méthode SPAM, Situation Present Assessment Method (Durso, Hackworth, & Truitt, 1999), introduit dans la mesure de la conscience de la situation une mesure de la charge cognitive : pendant que les sujets réalisent la tâche principale qui leur est demandée, un téléphone sonne et il leur est demandé de répondre à des requêtes portant sur leur conscience de la situation.
La validité de la réponse et le temps à la soumettre sont pris en compte comme une mesure de la conscience de la situation quand le temps de réponse au téléphone est un indicateur valide de la charge cognitive (Jones & Endsley, 2000).
Ainsi, il est demandé aux sujets de répondre le plus rapidement possible au questionnaire 3D-SART dès son apparition sur l’écran, dans un paradigme de type double tâche.
7.3.2.3 Mesure de la performance Comme indice de performance pour le premier scénario, le respect des contraintes des
cartes de percée et d’approche est vérifié (Alexander & Teller, 2013) : quatre contraintes d’altitude et trois de vitesse sont ainsi prises en compte. La dernière contrainte d’altitude est comptée double compte tenu du fait que les pilotes sont informés du caractère quasi

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 167
rédhibitoire de son manquement : si la contrainte n’est pas vérifiée, le guidage vertical du pilote automatique ne peut être effectué. L’ensemble des contraintes est affiché dans l’interface ASAP.
Pour le scénario 2, le temps nécessaire à la prise de décision de dégagement depuis l’annonce du circuit d’attente est mesuré. Le pétrole restant a été calculé afin de ne laisser que dix minutes d’attente pour pouvoir dégager sur Sao Paulo.
Une décision de dégagement précoce dans le circuit d’attente ferme totalement la possibilité d’atteindre l’objectif poursuivi (atterrissage à Rio de Janeiro). A l’opposé, il est attendu de la part des pilotes qu’il dégage quand il leur apparaît certain qu’ils devront attendre plus que ne leur permet leur pétrole disponible. Une bonne performance est donc atteinte quand la décision de dégager est prise tôt dans le deuxième tour du circuit d’attente.
Une fois la décision prise, la qualité de la solution retenue est évaluée par un jury constitué d’un expert en facteur humain et un ancien pilote. Cette note constitue un second index de performance pour le second scénario.
7.3.3 Matériel et participants L’interface ASAP et le questionnaire 3D-SART sont implémentés en JAVA. Le simulateur
fonctionne sur une version parallélisée sur 8 PC de X-Plane 9. L’interface entre tous les composants, PC et X-Plane est réalisée en utilisant une API interne développée par Thales Avionics.
L’interface ASAP et le questionnaire 3D-SART (Figure 93) sont affichés sur deux écrans tactiles de 15.4 pouces placés à la gauche du sujet (Figure 92). Les boutons de réglage sont constitués de deux modules : Saïtek Pro Flight Switch Panel et Saïtek Pro Flight Multi Panel, et situé à portée de bras à la droite du sujet. Le paysage défile sur un écran de 3 mètres de diagonale situé à 1,5 mètre du sujet. Le cockpit (Figure 93) était affiché sur un écran de 15.4 pouces face au sujet.
Dans une première partie de l’expérimentation, l’écran présentant le questionnaire 3D-SART était en position centrale supérieure et l’écran présentant l’interface ASAP en position centrale inférieure. Au bout de 5 passations, nous avons identifié que dans cette disposition l’interface ASAP était hors du circuit visuel habituel (circuit en T), ce qui nuisait à sa consultation et son utilisation. Nous avons donc fait le choix d’intervertir les deux affichages. Ce facteur sera pris en compte dans l’analyse des résultats.
Figure 92 : Vue depuis le siège du pilote

Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 168
Figure 93 : Interface de réponse au questionnaire 3D-SART et cockpit X-Plane 9 présenté aux
pilotes.
Cet écran et celui affichant l’interface ASAP sont enregistrés en temps réel en utilisant deux cartes d’acquisition AVerMedia DarkCrystal HD C729. Une caméra GoPro Hero 2 est utilisée comme caméra de scène et capturée en temps réel sur une troisième carte d’acquisition AVerMedia DarkCrystal HD C729. Les paramètres de vol sont enregistrés en temps réel en utilisant l’API de Thales Avionics. Ce matériau est utilisé pour une analyse post-expérimentale la plus fine possible.
36 pilotes (Air France et aviation d’affaire) sont recrutés, 2 femmes et 34 hommes, sur la base du volontariat et du bénévolat. Les résultats de trois sujets sont exclus de l’analyse pour de multiples difficultés techniques rencontrées lors des passations.
Le premier groupe est constitué de 17 pilotes commerciaux, dont une femme, âgés de 28 à 52 ans, cumulant entre 3000 et 16 000 heures de vol (M = 7,670, σ = 3,900). Le second groupe est constitué de 16 pilotes commerciaux, dont une femme, âgés de 26 à 53 ans, cumulant entre 2000 et 17 000 heures de vol (M = 7,610, σ = 4,100). 22 d’entre eux sont pilotes d’Airbus, 9 de Boeing, un de Bombardier, et le dernier sur Falcon 7X (Dassault).
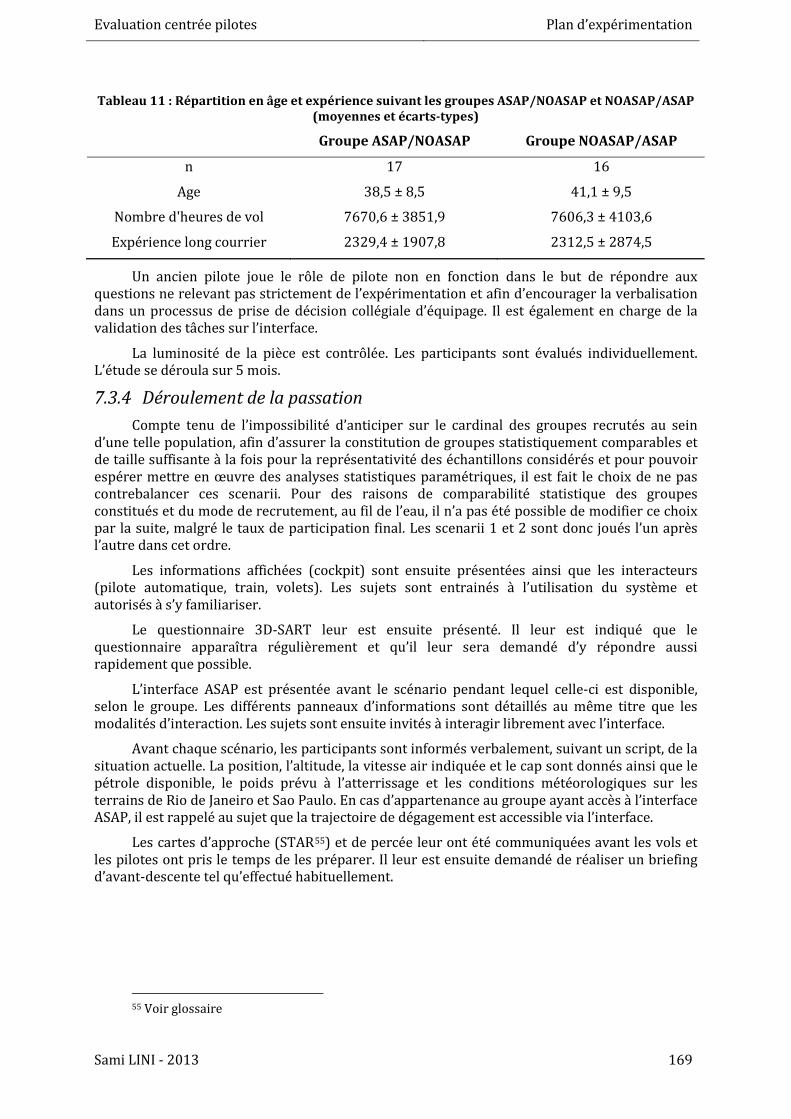
Evaluation centrée pilotes
Plan d’expérimentation
Sami LINI - 2013 169
Tableau 11 : Répartition en âge et expérience suivant les groupes ASAP/NOASAP et NOASAP/ASAP (moyennes et écarts-types)
Groupe ASAP/NOASAP Groupe NOASAP/ASAP
n 17 16
Age 38,5 ± 8,5 41,1 ± 9,5
Nombre d'heures de vol 7670,6 ± 3851,9 7606,3 ± 4103,6
Expérience long courrier 2329,4 ± 1907,8 2312,5 ± 2874,5
Un ancien pilote joue le rôle de pilote non en fonction dans le but de répondre aux questions ne relevant pas strictement de l’expérimentation et afin d’encourager la verbalisation dans un processus de prise de décision collégiale d’équipage. Il est également en charge de la validation des tâches sur l’interface.
La luminosité de la pièce est contrôlée. Les participants sont évalués individuellement. L’étude se déroula sur 5 mois.
7.3.4 Déroulement de la passation Compte tenu de l’impossibilité d’anticiper sur le cardinal des groupes recrutés au sein
d’une telle population, afin d’assurer la constitution de groupes statistiquement comparables et de taille suffisante à la fois pour la représentativité des échantillons considérés et pour pouvoir espérer mettre en œuvre des analyses statistiques paramétriques, il est fait le choix de ne pas contrebalancer ces scenarii. Pour des raisons de comparabilité statistique des groupes constitués et du mode de recrutement, au fil de l’eau, il n’a pas été possible de modifier ce choix par la suite, malgré le taux de participation final. Les scenarii 1 et 2 sont donc joués l’un après l’autre dans cet ordre.
Les informations affichées (cockpit) sont ensuite présentées ainsi que les interacteurs (pilote automatique, train, volets). Les sujets sont entrainés à l’utilisation du système et autorisés à s’y familiariser.
Le questionnaire 3D-SART leur est ensuite présenté. Il leur est indiqué que le questionnaire apparaîtra régulièrement et qu’il leur sera demandé d’y répondre aussi rapidement que possible.
L’interface ASAP est présentée avant le scénario pendant lequel celle-ci est disponible, selon le groupe. Les différents panneaux d’informations sont détaillés au même titre que les modalités d’interaction. Les sujets sont ensuite invités à interagir librement avec l’interface.
Avant chaque scénario, les participants sont informés verbalement, suivant un script, de la situation actuelle. La position, l’altitude, la vitesse air indiquée et le cap sont donnés ainsi que le pétrole disponible, le poids prévu à l’atterrissage et les conditions météorologiques sur les terrains de Rio de Janeiro et Sao Paulo. En cas d’appartenance au groupe ayant accès à l’interface ASAP, il est rappelé au sujet que la trajectoire de dégagement est accessible via l’interface.
Les cartes d’approche (STAR55) et de percée leur ont été communiquées avant les vols et les pilotes ont pris le temps de les préparer. Il leur est ensuite demandé de réaliser un briefing d’avant-descente tel qu’effectué habituellement.
55 Voir glossaire
Evaluation centrée pilotes
Résultats
Sami LINI - 2013 170
7.3.5 Traitement des données Compte tenu de la taille de notre échantillon, nous faisons le choix d’utiliser des tests
statistiques paramétriques :
• Test t de Student afin d’analyser la variabilité interindividuelle entre les deux groupes (échantillons non appariés) pour chaque scénario ;
• Analyse de la variance (ANOVA) à mesures répétées pour analyser l’influence des groupes sur des mesures répétées pour chaque scénario.
Compte tenu des différences de difficulté et de durée des deux scenarii, et que ceux-ci sont réalisés par les deux groupes selon des modalités différentes (avec ou sans ASAP), aucune analyse n’est menée indépendamment des scenarii.
Les données sont analysées avec le logiciel Excel 2010 équipé du logiciel additionnel XLSTAT 2012.6.03. Des macros Visual Basic sont développées pour l’occasion afin d’accélérer le traitement et de permettre l’agrégation des multiples sources de données.
Résultats 7.47.4.1 Types de données collectées
Dix types de données sont collectés :
• Les scores globaux de la 3D-SART (3DSO), les scores de la dimension « demand » de la 3D-SART (3DSD), les scores de la dimension « supply » de la 3D-SART (3DSS) et les scores de la dimension « understand » de la 3D-SART (3DSU) ;
• Les scores pondérés totaux du NASA-TLX (NTLX) ; • Les temps de réaction au questionnaire 3D-SART suivant chaque dimension
(3DSDTime/3DSSTime/3DSUTime) ; • Le ratio de dilatation pupillaire (DilationR) ; • Les trois indices de performance :
o Pour le scénario 1 : le pourcentage de contraintes non satisfaites (perConst) : plus le score est bas, meilleure est la performance. Il est demandé aux pilotes de satisfaire l’ensemble des contraintes du terrain, moins il y a de contraintes non satisfaites, meilleure est la performance ;
o Pour le scénario 2 : Le temps pris pour prendre la décision de dégager (timeDiv) : une
bonne performance est atteinte quand la décision est prise tôt dans le second tour du circuit d’attente. Une tour d’attente moyen dure 5 minutes ;
La décision et la solution de dégagement évaluée par un jury (divSol).
Les données sont analysées en fonction de la disponibilité ou non de l’interface ASAP (groupe ASAP vs NOASAP) et du scénario (S1 et S2). La probabilité d’erreur est fixée à 5% pour les résultats significatifs, à 10% pour des résultats tendanciels.
7.4.2 Note sur les données portant sur l’utilisation d’ASAP Des statistiques descriptives peuvent être présentées concernant l’utilisation de l’interface
ASAP elle-même. Elles ont été enregistrées mais doivent cependant être pondérées par les limitations relevant du protocole expérimental et de la chaîne de traitement instrumenté des données.
Ainsi, l’articulation entre le pilote en fonction (sujet) et le pilote non en fonction (expérimentateur) faisant partie des scenarii joués, aucune conclusion ne peut être tirée des données qualitatives enregistrées quant aux interactions avec l’interface : ces informations

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 171
peuvent relever tant de l’interaction du sujet que de l’expérimentateur à qui le sujet aurait demandé une information ou une manipulation avec l’interface.
Les données oculométriques sont, elles, représentatives d’une partie de la prise d’informations visuelles. Des précautions les concernant sont cependant à souligner : en premier lieu, ces données ne concernent que la vision fovéale. Dans le cadre d’une activité nécessitant la vision périphérique (surveillance de multiples sources d’informations), une information peut donc être perçue sans pour autant être enregistrée par l’oculomètre.
Une seconde difficulté provient du caractère portable de l’oculomètre et des caractéristiques du matériel. La liberté de mouvement quasi-totale offerte aux sujets impose un travail important sur les données a posteriori. La caméra de l’oculomètre définit un référentiel local au sein duquel les données de la position de la pupille sont enregistrées (Figure 94, à gauche, représentation égocentrée). A deux instants différents de l’expérimentation, les sujets peuvent avoir la tête tournée dans deux directions opposées, et regarder deux écrans différents. Le référentiel local au sujet ne permet pas une étude globale du dispositif expérimental, en particulier des différents écrans utilisés (Figure 94, à droite, représentation allocentrée).
En première analyse, la seule information exploitable est descriptive : « le sujet a regardé tel ou tel écran ». Cette analyse est locale à la fois au sujet et à l’événement considéré. Il peut être intéressant de déterminer sur l’ensemble d’un scénario les statistiques descriptives pour chaque zone d’intérêt considérée : le temps passé à regarder une zone d’intérêt par rapport à une autre, l’ordre de consultation, etc… Il est donc nécessaire de pouvoir agréger l’ensemble des données enregistrées dans le référentiel local du sujet et les ramener au référentiel global de la scène. Afin d’effectuer cette étude globale, le logiciel Tobii Studio 3.1 de visualisation et analyse des mesures oculométriques procède à une transformation géométrique des données enregistrées.
Figure 94 : Exemples de vues égocentrée (à gauche, le point rouge représente la position de la
vision centrale) et allocentrée (à droite)
La position des marqueurs infrarouges dans l’environnement expérimental est enregistrée sur chaque image de l’oculomètre (référentiel égocentré, Figure 95). Les coordonnées de ces marqueurs sont ensuite définies dans l’environnement expérimental global (référentiel allocentré, voir Figure 96). Les coordonnées de ces marqueurs dans deux référentiels différents permettent le calcul d’un opérateur mathématique décrivant la transformation d’un référentiel en l’autre : une matrice de transformation (matrice d’homographie). L’application de cette transformation aux coordonnées de la pupille dans le référentiel des lunettes permet d’obtenir ses coordonnées dans le référentiel de l’environnement et donc le calcul de statistiques descriptives concernant la position du regard dans ce référentiel.

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 172
Figure 95 : Position et coordonnées du regard et des marqueurs infrarouges sur une image issue
de la caméra de l’oculomètre (référentiel égocentré)
Figure 96 : Positionnement des marqueurs infrarouges dans le simulateur
Une première contrainte forte au calcul de cette matrice de transformation est qu’il est nécessaire de pouvoir établir une correspondance entre au moins quatre couples de points. Cette contrainte revient à ce que, sur chaque image enregistrée par la caméra de l’oculomètre, les coordonnées d’au moins quatre marqueurs soient enregistrées. Les mouvements des sujets par rapport à la géométrie de la scène et la fréquence d’échantillonnage de la caméra sont la cause de nombreuses pertes d’informations sur les positions des marqueurs. Sur les segments où l’information est perdue, aucune statistique fiable ne peut être calculée.

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 173
Une seconde contrainte forte pour calculer la matrice de transformation est que les marqueurs doivent être coplanaires, ce que la géométrie de notre simulateur ne rend pas nécessairement possible. La Figure 96 illustre le positionnement de ces marqueurs dans le simulateur : aux quatre coins de chaque écran utilisé par le sujet, sur la casquette du carénage du simulateur (marqueurs 24 et 15) et sur l’écran du paysage (marqueurs 22 et 16). Les deux écrans supérieurs, sur lesquels sont affichés ASAP et le cockpit, sont coplanaires. Ainsi, si sur une image de la caméra de l’oculomètre ne sont affichés que des marqueurs détectant ces deux écrans, la transformation se fait aisément et correctement. Cependant, dans le cadre de notre dispositif, il s’agit du seul cas ne posant pas problème.
La capture d’un seul marqueur supplémentaire ne relevant pas de ces deux écrans fournit une géométrie erronée pour le calcul de la matrice de transformation. Supposons par exemple que sur une image de la caméra seuls les marqueurs 18, 20 (marqueurs supérieurs de l’écran ASAP) et 27, 28 (marqueurs inférieurs de l’écran 3D-SART) soient enregistrés. La matrice de transformation est alors calculée en supposant que ces 4 marqueurs forment un plan, ignorant l’angle formé par les deux écrans considérés. L’erreur en découlant est probablement faible, mais sans possibilité de l’évaluer, l’interpolation de données doit être manipulée avec grande prudence.
Une solution possible est alors de ne considérer les zones d’intérêt qu’à un niveau local puis de réintégrer manuellement à la scène globale les éléments calculés. Une raison majeure fait obstacle à cette solution : les statistiques et visualisations générées (type carte de chaleur par exemple) ne font sens que dans l’analyse locale de données globales agrégées. Par exemple une carte de chaleur permet de représenter qu’une aire d’intérêt a été plus regardée qu’une autre. La représentation des données est indexée sur leurs maxima : sur une carte de chaleur, plus une zone est regardée plus elle sera représentée en rouge, suivant un gradient de chaleur traditionnel (du vert au rouge). La simple intégration de cartes de chaleurs générées localement dans un référentiel global mène donc à la représentation équivalente de données différentes.
Pour illustrer ce problème, dans l’exemple de notre dispositif expérimental, l’écran face au pilote était majoritairement consulté puisque présentant les paramètres de vol. L’écran présentant le questionnaire 3D-SART ne l’était lui que brièvement, lors de leurs réponses. La zone la plus « regardée » en vision centrale pour chaque écran sera représentée en rouge sur les cartes générées (Figure 97).
Figure 97 : Cartes de chaleur des écrans de présentation du questionnaire 3D-SART et du cockpit
L’intégration de ces cartes de chaleur dans une représentation globale mènera donc à penser que ces deux écrans ont été tout autant consultés (Figure 98). Il en va de même pour les autres statistiques descriptives comparatives concernant l’interpolation de la position du regard.

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 174
Figure 98 : Cartes de chaleur incorporées dans la vue globale : les cartes de chaleur, justes à une
échelle locale, laissent ici à penser que les deux écrans ont été tout autant regardés, ce qui est faux
Les algorithmes de classification en saccades et fixations (Komogortsev, Gobert, Jayarathna, & Gowda, 2010) utilisés par le logiciel de traitement et d’analyse des données constituent un argument supplémentaire en faveur d’une analyse descriptive prudente des données. Ces algorithmes ne sont en effet pas adaptés à un dispositif où la distance à chacun des écrans analysés varie dans le temps avec la position du sujet. En l’absence de distinction entre saccades et fixations, un indicateur du parcours d’une zone d’intérêt est défini sous le terme de « visite ». Une visite est définie comme l’intervalle entre la première fixation au sein de la zone d’intérêt considérée et la première fixation hors de cette zone d’intérêt.
Dans le cas d’un oculomètre portable, il s’agit donc uniquement d’un indicateur d’un intervalle de temps au sein duquel toutes les coordonnées du regard dans le repère local de l’oculomètre peuvent être interpolées dans la zone d’intérêt considérée. La borne supérieure de cet intervalle est définie par la première valeur interpolée hors de la zone d’intérêt considérée. Il s’agit donc d’une mesure à manipuler avec grande précaution, et qui en l’état ne fournit qu’un indicateur informel du parcours visuel de cette zone d’intérêt, quand les données d’interpolation ont pu être calculées. La position du regard étant une information secondaire à notre étude, cette première analyse suffit à confirmer l’utilisation de l’interface lors de nos scenarii.
Les deux scenarii ne présentent par la même longueur, il n’est pas possible d’agréger indifféremment les données collectées. A titre purement descriptif, et en considérant les précautions évoquées plus tôt, lors du premier scénario une moyenne de 119 « visites » (SD = 75) de la zone d’intérêt définie par l’interface a été enregistrée par sujet. Concernant le second scénario une moyenne de 152 « visites » (SD = 88) de l’aire d’intérêt définie par l’interface est notée par sujet. Relativement à la durée des scenarii, l’interface ASAP a été plus utilisée lors du second scénario que lors du premier, ce qui sera discuté ultérieurement.
Les informations de pupillométrie, ne dépendant que de la capture d’une image de la pupille et du calcul de son diamètre, sont bien moins contraignantes que celles concernant la position du regard, lesquelles résultent de l’interpolation de points multiples. Elles sont contraintes par les éléments extrinsèques se positionnant entre la caméra et l’œil du sujet. Les lunettes et lentilles sont par exemple des facteurs compliquant l’enregistrement de données. Les difficultés potentielles sont généralement identifiées dès la phase de calibration, mais des surprises peuvent arriver. L’autre principale source de perte de signal est, elle, incontrôlable : il s’agit des clignements d’yeux. La donnée de diamètre pupillaire est donc bien moins sujette au bruit expérimental que celles de position du regard.
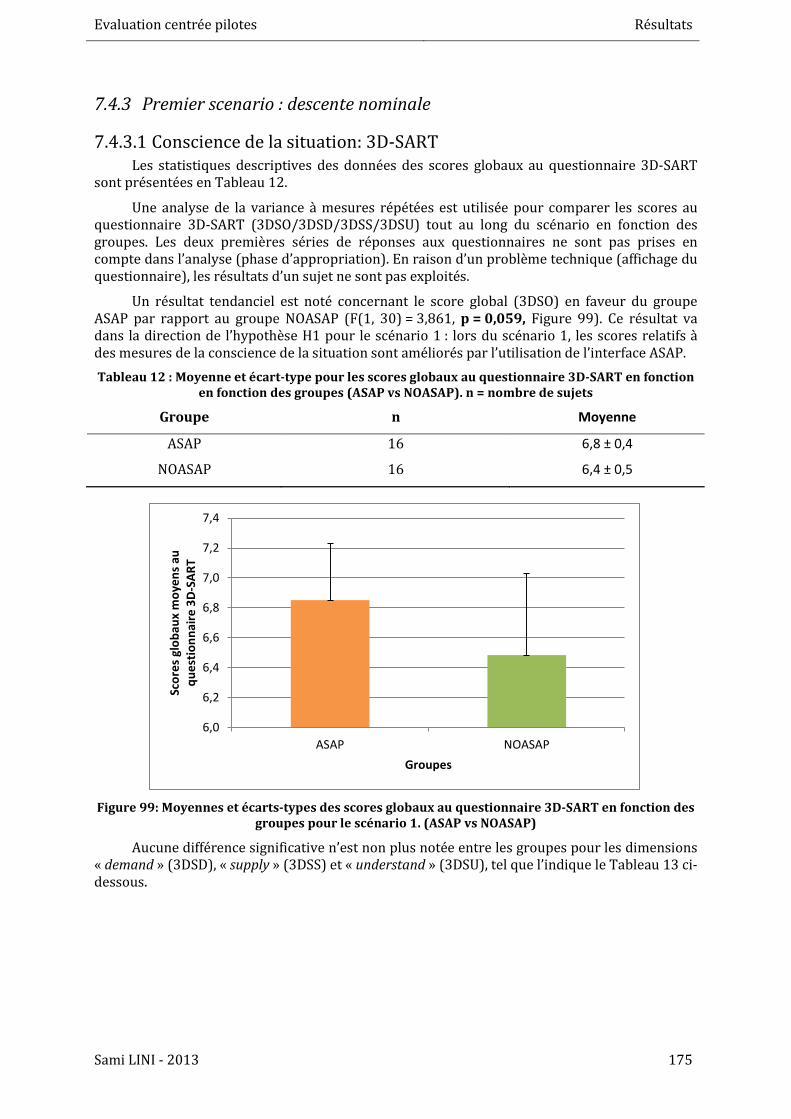
Evaluation centrée pilotes
Résultats
Sami LINI - 2013 175
7.4.3 Premier scenario : descente nominale
7.4.3.1 Conscience de la situation: 3D-SART Les statistiques descriptives des données des scores globaux au questionnaire 3D-SART
sont présentées en Tableau 12.
Une analyse de la variance à mesures répétées est utilisée pour comparer les scores au questionnaire 3D-SART (3DSO/3DSD/3DSS/3DSU) tout au long du scénario en fonction des groupes. Les deux premières séries de réponses aux questionnaires ne sont pas prises en compte dans l’analyse (phase d’appropriation). En raison d’un problème technique (affichage du questionnaire), les résultats d’un sujet ne sont pas exploités.
Un résultat tendanciel est noté concernant le score global (3DSO) en faveur du groupe ASAP par rapport au groupe NOASAP (F(1, 30) = 3,861, p = 0,059, Figure 99). Ce résultat va dans la direction de l’hypothèse H1 pour le scénario 1 : lors du scénario 1, les scores relatifs à des mesures de la conscience de la situation sont améliorés par l’utilisation de l’interface ASAP. Tableau 12 : Moyenne et écart-type pour les scores globaux au questionnaire 3D-SART en fonction
en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne
ASAP 16 6,8 ± 0,4
NOASAP 16 6,4 ± 0,5
Figure 99: Moyennes et écarts-types des scores globaux au questionnaire 3D-SART en fonction des
groupes pour le scénario 1. (ASAP vs NOASAP)
Aucune différence significative n’est non plus notée entre les groupes pour les dimensions « demand » (3DSD), « supply » (3DSS) et « understand » (3DSU), tel que l’indique le Tableau 13 ci-dessous.
6,0
6,2
6,4
6,6
6,8
7,0
7,2
7,4
ASAP NOASAP
Scor
es g
loba
ux m
oyen
s au
ques
tionn
aire
3D-
SART
Groupes

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 176
Tableau 13 : Résultats de l’analyse de la variance à mesures répétées des scores au questionnaire 3D-SART (3DSD/3DSS/3DSU) le long du scénario en fonction des groupes.
Variable DDL (Effet fixe, erreur)
F p-value
3DSD 1, 30 0,825 0,371
3DSS 1, 30 0,443 0,511
3DSU 1, 30 2,202 0,148
7.4.3.2 Charge cognitive
7.4.3.2.1 NASA-TLX Le test t de Student a été utilisé pour comparer les scores pondérés obtenus au NASA-TLX
(NTLX) en fonction du groupe. En raison de résultats incohérents, deux sujets sont exclus de l’analyse. Aucune différence significative n’est notée (p = 0,123).
7.4.3.2.2 Temps de réaction (3D-SART) Une analyse de la variance à mesures répétées est utilisée pour comparer les temps de
réaction au questionnaire 3D-SART (3DSxTime) suivant chaque dimension. En raison de problèmes rencontrés en cours de passation, deux sujets sont exclus de l’analyse. Aucune différence significative n’est non plus notée entre les groupes pour les dimensions « demand » (3DSDTime), « supply » (3DSSTime) et « understand » (3DSUTime), tel que l’indique le Tableau 14 ci-dessous.
Tableau 14 : Résultats de l’analyse de la variance à mesures répétées des temps de réaction au questionnaire 3D-SART (3DSDTime/3DSSTime/3DSUTime) le long du scénario en fonction des
groupes.
Variable DDL (Effet fixe, erreur)
F p-value
3DSDTime 1, 29 0,425 0,519
3DSSTime 1, 29 0,793 0,381
3DSUTime 1, 29 0,891 0,353
7.4.3.2.3 Dilatation pupillaire Une analyse de la variance à mesures répétées est utilisée pour comparer le ratio de
dilatation pupillaire (DilationR) le long du scénario en fonction des groupes. En raison d’une interversion précoce des deux afficheurs centraux (voir 7.3.3), cinq sujets sont exclus de l’analyse. Aucune différence significative n’est notée entre les deux groupes (F(1, 26) = 2,397, p = 0,134).
Ces résultats invalident l’hypothèse H2 pour le scénario 1 : lors du scénario 1, les scores relatifs à la charge cognitive ne sont pas améliorés par l’utilisation de l’interface ASAP.
7.4.3.3 Performance Le test t de Student est utilisé pour comparer les pourcentages de contraintes non
satisfaites (perConst) en fonction des groupes. Aucune différence significative n’est notée (p = 0,484). Ce résultat invalide l’hypothèse H3 pour le premier scénario : lors du premier scénario, les résultats relatifs à la mesure de la performance ne sont pas améliorés par l’utilisation de l’interface ASAP.
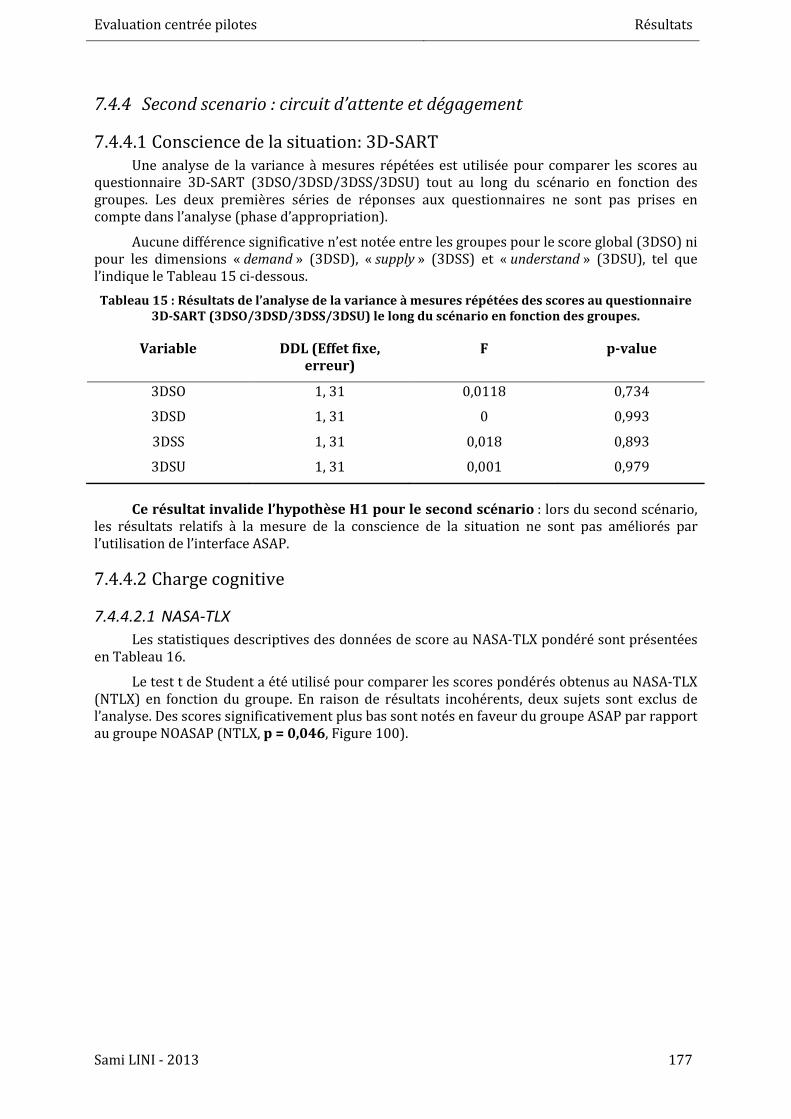
Evaluation centrée pilotes
Résultats
Sami LINI - 2013 177
7.4.4 Second scenario : circuit d’attente et dégagement
7.4.4.1 Conscience de la situation: 3D-SART Une analyse de la variance à mesures répétées est utilisée pour comparer les scores au
questionnaire 3D-SART (3DSO/3DSD/3DSS/3DSU) tout au long du scénario en fonction des groupes. Les deux premières séries de réponses aux questionnaires ne sont pas prises en compte dans l’analyse (phase d’appropriation).
Aucune différence significative n’est notée entre les groupes pour le score global (3DSO) ni pour les dimensions « demand » (3DSD), « supply » (3DSS) et « understand » (3DSU), tel que l’indique le Tableau 15 ci-dessous. Tableau 15 : Résultats de l’analyse de la variance à mesures répétées des scores au questionnaire
3D-SART (3DSO/3DSD/3DSS/3DSU) le long du scénario en fonction des groupes.
Variable DDL (Effet fixe, erreur)
F p-value
3DSO 1, 31 0,0118 0,734
3DSD 1, 31 0 0,993
3DSS 1, 31 0,018 0,893
3DSU 1, 31 0,001 0,979
Ce résultat invalide l’hypothèse H1 pour le second scénario : lors du second scénario, les résultats relatifs à la mesure de la conscience de la situation ne sont pas améliorés par l’utilisation de l’interface ASAP.
7.4.4.2 Charge cognitive
7.4.4.2.1 NASA-TLX Les statistiques descriptives des données de score au NASA-TLX pondéré sont présentées
en Tableau 16.
Le test t de Student a été utilisé pour comparer les scores pondérés obtenus au NASA-TLX (NTLX) en fonction du groupe. En raison de résultats incohérents, deux sujets sont exclus de l’analyse. Des scores significativement plus bas sont notés en faveur du groupe ASAP par rapport au groupe NOASAP (NTLX, p = 0,046, Figure 100).

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 178
Tableau 16 : Moyenne et écart-type pour les scores globaux au NASA-TLX en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne
ASAP 16 43,7 ± 18,4
NOASAP 16 50,0 ± 19,9
Figure 100 : Moyennes et écarts-types des scores globaux au NASA-TLX (/100) en fonction des
groupes pour le scenario 2 (ASAP vs NOASAP, * : différences significatives, p<0,05)
7.4.4.2.2 Temps de réaction (3D-SART) Une analyse de la variance à mesures répétées est utilisée pour comparer les temps de
réaction au questionnaire 3D-SART (3DSxTime) suivant chaque dimension. En raison de problèmes rencontrés en cours de passation, trois sujets sont exclus de l’analyse.
Aucune différence significative n’est notée pour la dimension « demand » (3DSDTime, F (1, 28) = 0,661, p = 0,423) et la dimension « understand » (3DSUTime, F (1, 28) = 0,400, p = 0,532). Pour la dimension « supply », un temps de réaction tendanciellement plus faible (3DSSTime, F (1, 28) = 4,123, p = 0,063) est noté en faveur du groupe ASAP par rapport au groupe NOASAP (Figure 101). Les statistiques descriptives des données de temps de réaction à la dimension « supply » de la SART sont présentées en Tableau 17.
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
ASAP NOASAP
*
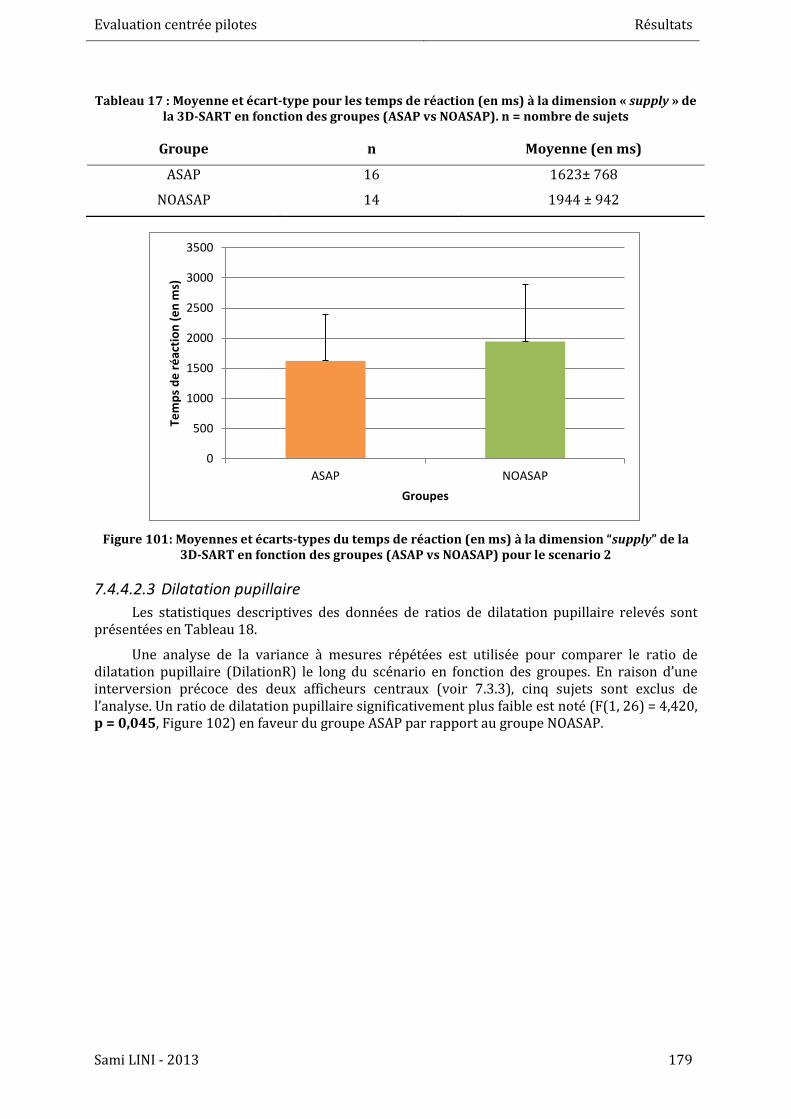
Evaluation centrée pilotes
Résultats
Sami LINI - 2013 179
Tableau 17 : Moyenne et écart-type pour les temps de réaction (en ms) à la dimension « supply » de la 3D-SART en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne (en ms)
ASAP 16 1623± 768
NOASAP 14 1944 ± 942
Figure 101: Moyennes et écarts-types du temps de réaction (en ms) à la dimension “supply” de la
3D-SART en fonction des groupes (ASAP vs NOASAP) pour le scenario 2
7.4.4.2.3 Dilatation pupillaire Les statistiques descriptives des données de ratios de dilatation pupillaire relevés sont
présentées en Tableau 18.
Une analyse de la variance à mesures répétées est utilisée pour comparer le ratio de dilatation pupillaire (DilationR) le long du scénario en fonction des groupes. En raison d’une interversion précoce des deux afficheurs centraux (voir 7.3.3), cinq sujets sont exclus de l’analyse. Un ratio de dilatation pupillaire significativement plus faible est noté (F(1, 26) = 4,420, p = 0,045, Figure 102) en faveur du groupe ASAP par rapport au groupe NOASAP.
0
500
1000
1500
2000
2500
3000
3500
ASAP NOASAP
Tem
ps d
e ré
actio
n (e
n m
s)
Groupes

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 180
Tableau 18 : Moyenne et écart-type pour le ratio de dilatation pupillaire (en % de la moyenne du diamètre pupillaire de la phase de calibration) en fonction des groupes (ASAP vs NOASAP).
n = nombre de sujets
Groupe n Moyenne et écart-type (% de la moyenne du diamètre pupillaire de la phase de calibration)
NOASAP 14 85,5 ± 6,9
ASAP 14 80,2 ± 6,4
Figure 102: Moyennes et écarts-types du rapport de dilatation pupillaire (en pourcentage du
diamètre pupillaire moyen lors de la phase de calibration) en fonction des groupes pour le scénario 2 (ASAP vs NOASAP, * : différences significatives, p<0,05)
Ces résultats valident l’hypothèse H2 pour le scenario 2 : lors du scenario 2, les résultats relatifs aux mesures de la charge cognitive se voient significativement améliorés par l’utilisation de l’interface ASAP.
7.4.4.3 Performance Les statistiques descriptives des données de temps de prise de décision de dégagement
sont présentées en Tableau 19.
Le test t de Student est utilisé pour comparer le temps nécessaire à la prise de décision de dégagement (timeDiv) en fonction des groupes. En raison d’une prise de décision incohérente (incompréhension) et de raisons techniques, trois sujets sont exclus de l’analyse. Un temps de prise de décision de dégagement (timeDiv) significativement plus élevé (p = 0,038, Figure 103) est noté en faveur du groupe ASAP par rapport au groupe NOASAP.
74
76
78
80
82
84
86
88
90
92
94
ASAP NOASAP
Ratio
de
dila
tatio
n pu
pilla
ire (e
n %
)
Groupes
*

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 181
Tableau 19 : Moyenne et écart-type pour les temps de prise de décision de dégagement en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne et écart-type (en mm:ss)
NOASAP 17 04:19 ± 02:50
ASAP 16 06:42 ± 02:36
Figure 103: Moyennes et écarts-types du temps nécessaire (en mm:ss) à la prise de décision en
fonction des groups (ASAP vs NOASAP, * : différences significatives, p<0,05)
Les statistiques descriptives des données de temps de prise de décision de dégagement ramené aux tours d’attente sont présentées en Tableau 20.
Un test t de Student est utilisé pour comparer le temps nécessaire à la prise de décision de dégagement ramené au circuit d’attente en fonction des groupes. Des différences très significatives sont notées entre les deux groupes : les sujets appartenant au groupe ASAP prennent leur décision tôt dans le second tour du circuit d’attente quand les sujets appartenant au groupe NOASAP préfèrent une décision tard dans le premier tour (p = 0,008, Figure 104).
00:00
01:26
02:53
04:19
05:46
07:12
08:38
10:05
ASAP NOASAP
Tem
ps (e
n m
m:s
s)
Groupes
*

Evaluation centrée pilotes
Résultats
Sami LINI - 2013 182
Tableau 20 : Moyenne et écart-type pour les temps de prise de décision ramenés aux temps de tours d’attente en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne et écart-type (en hh:mm:ss)
NOASAP 17 - 00:01:11 ± 00:02:50
ASAP 16 00:01:42 ± 00:02:36
Figure 104 : Moyennes et écarts-types du temps de prise de décision ramené au temps de tours d’attente en fonction des groupes (ASAP vs NOASAP, ** : différences très significatives, p<0,01)
Les statistiques descriptives des évaluations notées des solutions de dégagement sont présentées en Tableau 21.
Un test t de Student est utilisé pour comparer comment les décisions et les solutions de dégagement sont évaluées par un jury (divSol) en fonction des groupes. En raison de problèmes expérimentaux, les résultats de deux sujets ne sont pas impliqués dans l’analyse. Les décisions et solutions de dégagement sont significativement mieux notées pour le groupe ASAP que pour le groupe NOASAP (p = 0,032, Figure 105).
00:00
01:26
02:53
04:19
05:46
ASAP NOASAP
Tem
ps (m
m:s
s)
Groupes
**
- 01:26
- 02:53
- 04:19
- 05:46
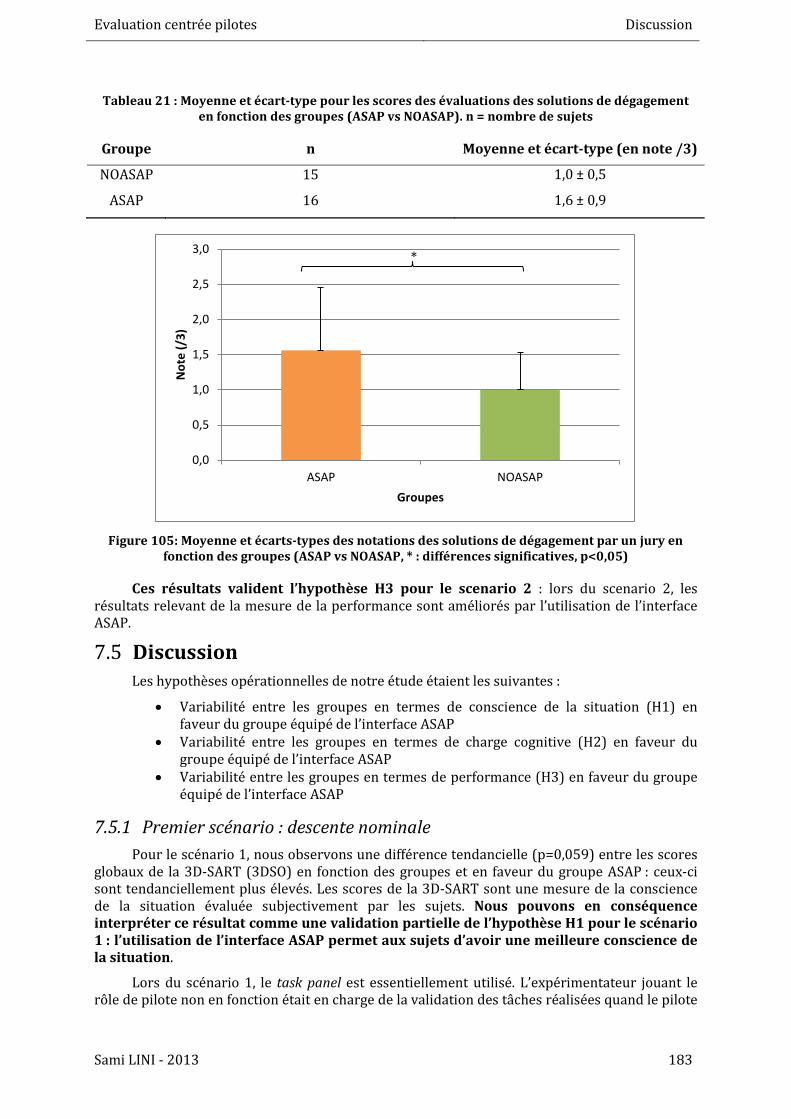
Evaluation centrée pilotes
Discussion
Sami LINI - 2013 183
Tableau 21 : Moyenne et écart-type pour les scores des évaluations des solutions de dégagement en fonction des groupes (ASAP vs NOASAP). n = nombre de sujets
Groupe n Moyenne et écart-type (en note /3)
NOASAP 15 1,0 ± 0,5
ASAP 16 1,6 ± 0,9
Figure 105: Moyenne et écarts-types des notations des solutions de dégagement par un jury en
fonction des groupes (ASAP vs NOASAP, * : différences significatives, p<0,05)
Ces résultats valident l’hypothèse H3 pour le scenario 2 : lors du scenario 2, les résultats relevant de la mesure de la performance sont améliorés par l’utilisation de l’interface ASAP.
Discussion 7.5Les hypothèses opérationnelles de notre étude étaient les suivantes :
• Variabilité entre les groupes en termes de conscience de la situation (H1) en faveur du groupe équipé de l’interface ASAP
• Variabilité entre les groupes en termes de charge cognitive (H2) en faveur du groupe équipé de l’interface ASAP
• Variabilité entre les groupes en termes de performance (H3) en faveur du groupe équipé de l’interface ASAP
7.5.1 Premier scénario : descente nominale Pour le scénario 1, nous observons une différence tendancielle (p=0,059) entre les scores
globaux de la 3D-SART (3DSO) en fonction des groupes et en faveur du groupe ASAP : ceux-ci sont tendanciellement plus élevés. Les scores de la 3D-SART sont une mesure de la conscience de la situation évaluée subjectivement par les sujets. Nous pouvons en conséquence interpréter ce résultat comme une validation partielle de l’hypothèse H1 pour le scénario 1 : l’utilisation de l’interface ASAP permet aux sujets d’avoir une meilleure conscience de la situation.
Lors du scénario 1, le task panel est essentiellement utilisé. L’expérimentateur jouant le rôle de pilote non en fonction était en charge de la validation des tâches réalisées quand le pilote
0,0
0,5
1,0
1,5
2,0
2,5
3,0
ASAP NOASAP
Not
e (/
3)
Groupes
*

Evaluation centrée pilotes
Discussion
Sami LINI - 2013 184
ne le faisait pas lui-même, afin de permettre l’actualisation du plan de vol et des tâches à venir, dans un processus de délégation et de répartition des tâches d’équipage (CRM, Crew Resource Management56).
Dans le cas de la validation par le pilote en fonction (sujet) comme par le pilote non en fonction (expérimentateur), le résultat est que les sujets viennent chercher l’information affichée sur l’écran, par leur interaction avec l’interface, ou parce que leur regard est attiré par le mouvement du pilote non en fonction interagissant. Dans un cas comme dans l’autre, ils réactualisent leur représentation des tâches réalisées et de celles à venir ainsi que des informations concernant leur faisabilité et leur enchainement chronologique. Il en résulte une amélioration de leur conscience de la situation.
Nous n’avons pas noté de différences significatives entre les groupes en termes de résultats relevant de mesures liée à la charge cognitive, quelles que soient ces mesures –évaluée subjectivement (NASA-TLX), variation du ratio de dilatation pupillaire ou temps de réaction de double tâche. Cela invalide l’hypothèse H2 pour le scénario 1 : la charge cognitive n’est pas diminuée par l’utilisation de l’interface ASAP.
Une première explication peut être que le scénario 1 était systématiquement joué en premier. Malgré la phase de familiarisation, lors de ce scénario les pilotes pouvaient encore être en train de se familiariser au cockpit et au pilote automatique. Dans un tel contexte, l’ajout d’une interface supplémentaire pourrait induire une augmentation de la charge cognitive, résultant d’une surcharge informationnelle. Il est cependant à noter qu’en l’absence de résultats indiquant une augmentation de la charge cognitive, pendant une phase pouvant relever encore de l’apprentissage, ce résultat peut également être interprété comme une manifestation du compromis cognitif évoqué lors de l’expérimentation préliminaire (Chapitre 3) : l’apport de cette information complémentaire contrebalance le coût cognitif de sa consultation.
Une autre explication peut provenir du fait que ce scénario est un scénario de routine pour les pilotes, rien d’extraordinaire ne s’y produit. Dans ce contexte, qui est souvent rencontré, il est possible que ceux-ci aient une sensation de sous-charge. De futurs travaux pourraient s’intéresser à l’impact de l’interface ASAP sur la vigilance des pilotes, résultat d’une meilleure conscience de la situation et d’une augmentation de la charge cognitive, les sortant ainsi de la zone de sous-charge (Yerkes & Dodson, 1908).
L’hypothèse H3 d’amélioration des résultats relevant de la mesure de la performance grâce à l’interface ASAP n’est pas validée non plus lors du scénario 1. Les explications précédentes peuvent s’appliquer ici. Une autre explication peut résider dans le fait qu’habituellement le respect de ces contraintes terrain est assuré par le FMS et que l’interface ASAP ne vise pas exclusivement à favoriser le meilleur respect de ces contraintes : même s’il est employé dans la littérature (Alexander & Teller, 2013), cet indice de performance ne permet peut-être pas de distinguer finement des différences de performances de manière écologique. Ce point met en avant la difficulté à définir, dans le domaine de l’aéronautique civile, un indice de performance à la fois écologique de l’activité réalisée et pertinent en matière d’exploitation statistique.
Initialement, un indice de performance basé sur la variation de la distance à la trajectoire idéale était également prévu. Pour des raisons techniques (perte de données due à un problème d'interfaçage entre ASAP et X-Plane 9), il n’a pas été possible d’exploiter cet indice de performance.
Il est intéressant de souligner qu’en dépit de l’ajout d’une nouvelle interface au dispositif expérimental, et même si aucun résultat significatif n’est à noter, le ratio de dilatation pupillaire moyen est plus faible pour le groupe ne disposant pas de l’interface ASAP que pour l’autre. L’un des prérequis à l’étude de la dilatation pupillaire comme indicateur de la charge cognitive est le
56 Voir glossaire
Evaluation centrée pilotes
Discussion
Sami LINI - 2013 185
contrôle de la luminosité : la pupille se contracte quand la luminosité augmente. Ce résultat est donc révélateur du fait que l’ajout de l’interface ASAP au dispositif n’impacte pas la luminosité ambiante. Comparer la dilatation pupillaire avec et sans l’interface ASAP dans un but d’évaluation de la charge cognitive fait donc sens.
7.5.2 Second scénario : attente et dégagement Lors du scénario 2, nous n’observons pas de différences significatives entre les deux
groupes en termes de scores globaux au questionnaire 3D-SART, ce qui invalide l’hypothèse H2 pour le scénario 2. Il s’agit d’un résultat surprenant car lors des passations il fut observé en de multiples occasions que le module cartographique se révélait précieux en particulier lors du circuit d’attente et pour évaluer les diverses options de dégagement qui s’offraient. Cependant, cela peut se justifier par le fait que les pilotes appartenant au groupe NOASAP étaient pourvus des cartes auxquelles ils sont habitués.
Des différences significatives entre les groupes sont notées en termes de charge cognitive, quelles que soient les mesures considérées, ce qui valide l’hypothèse H2 pour le scénario 2. Toutes indiquent une diminution de la charge cognitive lors de l’utilisation de l’interface ASAP : subjective (NASA-TLX), temps de réaction (3DSTime) ou ratio de dilatation pupillaire (DilationR).
Les résultats concernant les temps de réaction méritent de plus amples explications. Lors des passations, il fut observé que le temps de réaction à la dimension « demand » était un indicateur de la disponibilité à répondre au questionnaire. Dans le cockpit, la priorité demeure toujours la mission. Nous avons observé à l’inverse que la réponse à la dimension « supply » demandait plus de réflexion pour évaluer précisément l’évolution dans le décours des scenarii. Des résultats tendanciels sont notés en faveur du groupe ASAP.
La validation de l’hypothèse H2 doit être particulièrement mise en avant dans le contexte du scénario 2, qui est une situation extraordinaire. L’évaluation subjective de la charge cognitive est très significativement plus élevée que lors du scénario 1 (NTLX, p = 0,01). Les dimensions « demand » et « supply » de la 3D-SART évaluent « le degré d’exigence de la tâche sur vos ressources attentionnelles » et « la quantité de ressources attentionnelles fournie à la situation ». Concernant ces dimensions, nous observons également des résultats significativement plus élevés pour le scénario 2 que le scénario 1 (3DSD, p = 0,05, 3DSS, p = 0,053).
Les scenarii 1 et 2 n’étant pas contrebalancés, la dilatation pupillaire et les temps de réaction ne peuvent être comparés entre les deux scenarii : la luminosité au sein du simulateur est bien plus faible qu’à l’extérieur, et le scénario 2 se déroulait une heure après l’entrée dans la pièce. Ainsi, la variation du diamètre pupillaire entre les scenarii 1 et 2 ne découle pas tant d’une variation de la charge cognitive que de l’adaptation progressive de la pupille au changement de luminosité ambiante (Passer & Smith, 2004). Les temps de réaction ne peuvent pas non plus être comparés entre les scenarii, la variation relevant également d’un effet d’apprentissage.
Dans une situation extraordinaire, nous observons que la charge cognitive des pilotes dotés de l’interface ASAP est significativement plus faible que la charge cognitive de ceux n’en disposant pas. Il s’agit d’un résultat important pour le projet ASAP : l’un des principaux buts poursuivis dans le cadre de ce projet était d’aider les pilotes de ligne à mieux gérer leur charge cognitive par le biais d’une interface servant de support à leur anticipation.
Des différences significatives sont également notées pour les indices de performance lors de ce même scénario 2 : les pilotes appartenant au groupe ASAP prennent un temps significativement plus long pour prendre la décision de dégager. Cette décision est également souvent prise tôt dans le second tour du circuit d’attente quand les pilotes appartenant au groupe NOASAP la prennent souvent tard dans le premier tour de ce circuit d’attente. Ce résultat peut s’expliquer comme suit : l’utilisation de l’interface ASAP permettant une diminution de la charge cognitive, les pilotes ont plus de disponibilité pour envisager les
Evaluation centrée pilotes
Conclusions
Sami LINI - 2013 186
différentes possibilités sans se précipiter sur la seule décision qui soit réellement disponible à cet instant, le dégagement.
Les résultats font également apparaître que les pilotes dotés de l’interface ASAP prennent des décisions significativement meilleures au moment de dégager que ceux appartenant au groupe NOASAP. L’utilisation du module cartographique est une explication à ce résultat : les retours des pilotes à son propos sont évocateurs du grand confort ressenti au moment de s’interroger sur le meilleur moyen de rejoindre le terrain de dégagement en utilisant l’interface ASAP par rapport aux moyens statiques (papier ou équivalent numérique sur tablette) actuels.
Conclusions 57 7.6D’un point de vue expérimental, les résultats significatifs valident l’utilisation de la 3D-
SART comme une mesure discrétisée de la charge cognitive et de la conscience de la situation. Cela illustre également que le temps de réaction au questionnaire 3D-SART, et plus spécifiquement la dimension « supply », est une mesure valide de la charge cognitive.
Une autre conclusion expérimentale concerne l’utilisation d’oculomètres portatifs dans des études telles que celle-ci : même si le dispositif souffre encore de quelques limitations (sujets presbytes, résolution de la caméra, difficultés aléatoires de calibration…), il s’agit aujourd’hui d’un moyen difficilement substituable ou contournable pour une approche écologique, en simulateur ou in situ, de l’activité réelle de l’opérateur.
Des études (Denecker & Hoc, 1997; Roth & Woods, 1988; Van Breda, 2000; Wickens et al., 2000) avaient mis en avant le besoin réel pour un support à l’anticipation dans le milieu de l’industrie de l’acier, des processus chimiques ou de l’aéronautique civile ou de combat. Cette étude illustre le fait que l’aéronautique est un champ d’application potentiel pour de tels supports. En situation nominale ou dégradée, et avec un échantillon représentatif de 36 pilotes, les résultats soulignent une amélioration de la conscience de la situation, une diminution de la charge cognitive et une amélioration de la performance pour les pilotes dotés de l’interface ASAP, en fonction des scenarii considérés.
57 Ce travail a fait l’objet d’une publication en conférence internationale (Lini, Bey, et al., 2013)
Evaluation centrée pilotes
En résumé
Sami LINI - 2013 187
En résumé
• Nous avons évalué l’apport de l’interface ASAP sur la conscience de la situation, la charge cognitive et les performances de 36 pilotes de ligne durant 2 scenarii réalistes en simulateur.
• Des résultats tendanciels et significatifs montrent que les pilotes dotés de l’interface ASAP ont une meilleure conscience de la situation, une charge cognitive plus faible et de meilleures performances (en prise de décision).
• Expérimentalement, nous avons mis en évidence : o l’apport de l’utilisation du questionnaire 3D-SART comme mesure distribuée de
la conscience de la situation, o l’apport des temps de réaction au questionnaire 3D-SART comme mesure
distribuée dans le temps de la charge cognitive (paradigme de double tâche), o l’apport de l’oculométrie comme mesure objectivable de la charge cognitive et
de l’activité.


Sami LINI - 2013 189
Chapitre 8.
Conclusions, limites et
perspectives
Conclusions, limites et perspectives
A propos du cadre expérimental
Sami LINI - 2013 190
A propos du cadre expérimental 8.1Pour commencer un mot doit être dit du dispositif expérimental auquel nous avons eu
accès pour ce travail. Ainsi, sans la mise à disposition :
• de l’environnement de simulation par Thales Avionics ; • du matériel de mesure oculométrique et d’analyse de l’activité par le groupe
Cognitique (équipe Cognitique et Ingénierie Humaine, CIH) du Laboratoire de l’Intégration du Matériau au Système (IMS, CNRS UMR 5218) ;
• du matériel de mesure cardiaque par l’équipe CLLE du Laboratoire Travail et Cognition (LTC, CNRS UMR 5263) ;
• des locaux par l’Ecole Nationale Supérieure de Cognitique ; ce travail n’aurait pas été le même. A ce titre, je les remercie chaleureusement.
De nombreuses conclusions peuvent être tirées des deux expérimentations menées. En premier lieu, nous regrettons évidemment de ne pas avoir eu la possibilité de mettre en œuvre des méthodologies de verbalisation a posteriori, de type entretiens d’explicitation ou auto-confrontation. Le temps disponible des sujets nous rendant visite bénévolement et volontairement a constitué le facteur limitant. Souhaitant alléger l’ensemble de la démarche, nous avons fait le choix de favoriser le temps passé au sein du simulateur et le recueil des données quantitatives, au détriment d’entretiens détaillés. Pour autant, les verbalisations spontanées dans le décours des deux études et a posteriori ont constitué un matériau précieux au moment de dessiner les perspectives de développement.
En dernier lieu, nous l’aurons validé expérimentalement, l’étude de l’activité et de la cognition humaine tire grandement parti d’une analyse de mesures croisées, relevant tant de paramètres objectivables, tel que le temps de réaction, d’évaluations subjectives, que de données physiologiques. Pour autant, ce dernier point ne doit pas être surévalué. L’objectivation des processus cognitifs, en particulier de la gestion des ressources cognitives et de la conscience de la situation, est une forme de Graal que poursuit l’ensemble de la communauté facteur humain.
La littérature sur le sujet est pléthorique et met ainsi en évidence la difficulté à établir une mesure absolue de ces différents processus. En l’état, nous avons pu observer expérimentalement la faisabilité d’analyses comparatives de ces données, mais en aucun cas la possibilité de calculer un indice personnel absolu relevant de la charge cognitive ou de la conscience de la situation. Nous demeurons cependant persuadés qu’une approche pluridisciplinaire, au croisement des statistiques, de la physiologie, du traitement du signal et du facteur humain bénéficierait grandement à la démarche d’objectivation des processus cognitifs. Ce point sera abordé plus en détails dans la partie suivante.
Concernant les données oculométriques, les analyses menées se sont focalisées sur la comparaison du rapport de dilatation pupillaire entre les groupes. Par manque de temps, nous n’avons pas pu mettre en œuvre des analyses se penchant plus en détails sur les maxima de dilatation pupillaire lors des fixations. A cette fin, une adaptation pour notre oculomètre portatif de l’algorithme de Komogortsev et al. (2010) a été implémentée afin de distinguer saccades et fixations. Son exploitation est en cours et devrait permettre également de mener des analyses sur le rapport entre saccades et fixations.
De très nombreuses données comportementales ont également été collectées : un travail statistique important est toujours prévu afin d’analyser les corrélations entre types de prise de décision, anticipation et comportements, ainsi que l’influence des profils personnels, formation et expérience professionnelle, et de personnalité sur toutes ces données. Là encore, l’information est stockée, le travail d’analyse, lourd et fastidieux, n’a pas pu être réalisé dans le temps imparti mais alimente des perspectives de recherche à court et moyen terme enthousiasmantes.
Nous avons entamé ce paragraphe en traitant du matériel expérimental mettant ainsi l’accent sur le caractère « in vitro », mettant en œuvre le simulateur aéronautique, de notre

Conclusions, limites et perspectives
A propos de la démarche d’ingénierie
cognitique
Sami LINI - 2013 191
démarche expérimentale. Une perspective majeure aux travaux menés consiste à sortir le matériel de mesures du contexte du laboratoire et l’amener sur un terrain beaucoup plus opérationnel. Des questions se posent alors quant à la faisabilité technique de telles études au sein de cockpits réels. La réglementation encadre strictement ce qui est autorisé dans un aéronef en vol mais la question de l’adéquation du matériel à cet environnement est épineuse et mériterait des études « in vivo ».
La reproductibilité des scenarii en simulateur en fonde la légitimité expérimentale face à un environnement qui ne peut qu’être une représentation simplifiée de la réalité : dans un simulateur aéronautique, les pilotes n’ont pas la pression d’avoir leurs propres vies en plus de celles de centaines de passagers entre leurs mains. Les artefacts éventuels pour reproduire une forme de pression sont autant de biais expérimentaux. En situation réelle, la reproductibilité est très compliquée à assurer, c’est encore plus vrai dans un cockpit d’aéronef en vol : les conditions météorologiques conditionnent trop le déroulement du vol pour qu’il puisse être assuré que deux vols soient strictement identiques, quand bien même les instructions données seraient exactement les mêmes. C’est ainsi une toute autre méthodologie qui doit être construite à cette fin qui représente des perspectives et enjeux passionnants dans lesquels m’investir.
A propos de la démarche d’ingénierie cognitique 8.2Nous l’avions mis en exergue lors de l’introduction de ce travail, les enjeux le concernant
étaient de deux types. En tout premier lieu, ils concernaient la conception du support d’anticipation en tant que telle : la définition du cahier des charges et l’implémentation ainsi que la démonstration de concept et de l’intérêt d’un tel support constituaient donc la partie visible du travail à entreprendre, nous reviendrons sur les conclusions tirées.
Le second enjeu relevait de la démarche entreprise pour la conception. Une démarche relevant réellement d’une approche de Cognitique, à mi-chemin entre les domaines techniques et la prise en compte du facteur humain, un travail en va-et-vient destiné à faire la preuve qu’il est possible d’entreprendre un travail d’ingénierie cognitique prenant en compte tant les contraintes relevant du technique que de l’humain, une démarche gommant les frontières entre ingénieries technique et cognitive.
Le travail proposé n’est évidemment pas exempt de reproches et de faiblesses propres. Si cette approche, à la croisée des disciplines, a apporté à ce travail en transversalité, elle en a compliqué l’exhaustivité. Si la démarche propose de faire le pont entre disciplines, elle n’en demeure ainsi pas moins dépendante des artisans de chacun des mondes pour être couronnée de succès. C’est ainsi que j’ai eu le plaisir et la chance de pouvoir interagir avec des spécialistes tant des milieux opérationnels que techniques pour m’accompagner dans ce travail. Ce « nous » qui aura accompagné votre lecture leur rend hommage.
La transversalité disciplinaire constitue également tout autant la richesse que la complexité de l’approche. L’implication d’utilisateurs finaux dans une démarche intégrée constitue une difficulté majeure de la démarche. Ainsi, la nécessité de les intégrer dès les balbutiements de la conception mène très vite à constater que peu de personnes disposent de la capacité d’abstraction nécessaire à s’impliquer à hauteur de ce que la démarche demande, tout en faisant une confiance presque aveugle à leurs interlocuteurs qui leurs promettent des perspectives à la hauteur de leur investissement. Notre demande initiale lors de ces phases initiales misait sur le volontariat et le bénévolat. Cela mène à un biais regrettable mais inévitable dans le recrutement des experts : seuls ceux présentant la curiosité à s’investir dans ce type de démarche sans autre rétribution que nos remerciements et la démarche intellectuelle de s’impliquer se verront pleinement représentés dans les modèles alimentant notre démarche de conception. A l’inverse, une démarche qui aurait rémunéré les acteurs aurait pu introduire le biais de représenter des personnes uniquement motivées par l’appât du gain.
De manière étendue, nous avons pu constater le même phénomène lors de l’expérimentation finale, laquelle reposait également sur le volontariat et le bénévolat. Nous
Conclusions, limites et perspectives
A propos du cœur fonctionnel d’ASAP
Sami LINI - 2013 192
avons eu le plaisir d’accueillir des profils d’une immense curiosité et richesse humaine, extrêmement disponibles pour nous aider à mieux concevoir et enrichir notre réflexion. L’ensemble des 36 rencontres a été émaillé de débriefings passionnants, et pas une seule ne connut le moindre accroc. Comme tout dispositif expérimental, le nôtre ne fut pas exempt de problèmes, plus ou moins importants, qui ne vinrent jamais faire obstacle à l’excellent contact que nous avons pu entretenir avec chacun de nos visiteurs. Ce constat relève sans aucun doute de ce biais de recrutement qui nous a amené des pilotes curieux et motivés.
Un mot doit être dit à propos du recrutement pour cette expérimentation finale. Après avoir un temps envisagé de transformer l’évaluation en une étude de trois cas lors des premières semaines, grâce au jeu de relations personnelles, à la bonne volonté et la gentillesse des uns, la générosité des autres, nous avons eu la chance de voir notre appel à participation volontaire et bénévole relayé à l’ensemble des pilotes Air France de la région bordelaise. L’excellent taux de participation que nous avons alors connu pour un unique email envoyé témoigne de l’intérêt de la communauté tant à l’égard de la démarche que des produits conçus. Un discours est revenu plusieurs fois dans leur bouche à ce sujet : « si nous nous plaignons toute l’année dans nos cockpits, ce n’est pas pour laisser passer l’occasion de l’améliorer ».
Nous espérons en avoir fait l’illustration : la démarche d’ingénierie cognitique n’est en rien différente d’une démarche d’ingénierie de système traditionnelle au sein duquel l’Homme est un élément nécessitant également d’être caractérisé pour la bonne conception du système. Seule une démarche holistique peut permettre de parvenir au bon compromis entre performance visée et risque acceptable quand l’Homme est un maillon indispensable de la chaîne de fonctionnement. Dans un but d’optimisation globale du système conçu, il est ainsi nécessaire d’intégrer dans le cycle de conception la prise en compte de ses limites ontologiques et de ses capacités, de les caractériser et de les mettre en regard des composantes techniques.
Dans cet effort, plusieurs perspectives sont envisagées. En tout premier lieu, un effort de formalisation doit permettre de confirmer ou d’infirmer la direction empruntée lors de la présentation de notre hypothèse de compréhension de l’anticipation (Chapitre 4) : caractérisation des paramètres de fonctionnement, implémentation informatique et formalisation mathématique sont quelques-unes des pistes à emprunter.
En second lieu, et poursuivant un enjeu épistémologique bien supérieur, les ingénieries technique et cognitive souffrent aujourd’hui de l’absence d’une sémantique commune leur permettant de communiquer et de travailler ensemble à caractériser l’Homme et à l’intégrer dans les processus innovants de conception. Une démarche d’unification des approches et de définition d’un vocable commun doit ainsi permettre de consolider le pont encore fragile que l’ingénierie cognitique permet de construire.
La formalisation et la mise en œuvre de méthodologies de conception relevant de l’ingénierie technique et de l’ingénierie humaine constituent en suivant un enjeu complémentaire majeur pour une ingénierie de système intégrant pleinement les contraintes ontologiques humaines : l’articulation dans le temps d’experts issus de ces deux mondes nécessite aujourd’hui l’assistance d’un intermédiaire leur assurant une bonne communication (Bey & Rossignol, 2012). L’ingénieur cogniticien peut également jouer ce rôle, ce travail l’aura, nous l’espérons, illustré.
A propos du cœur fonctionnel d’ASAP 8.3Les développements parallèles du cœur fonctionnel et de l’interface ASAP méritent un
éclairage. Poursuivant initialement l’objectif de mener en parallèle le développement rapide d’un démonstrateur de concept et une démarche d’ingénierie cognitique l’alimentant et visant à la définition d’un outil final distinct, il fut rapidement mis en évidence qu’il n’était pas possible de mener ces deux efforts de front. Furent ainsi distingués le cœur fonctionnel et l’interface constituant un démonstrateur de concept industriel et accueillant notre algorithme à terme. Il
Conclusions, limites et perspectives
Sami LINI - 2013 193
faut ici souligner que la possibilité d’implémenter notre proposition dans un démonstrateur industriel était une vraie chance.
Concernant le premier enjeu de ce travail de thèse, la conception du support d’aide à l’anticipation, les retours des pilotes soulignent leur intérêt pour un tel outil en particulier en situation dégradée. Dans un tel contexte, des moyens doivent être fournis aux pilotes afin de trier ce qui relève de la sécurité absolue de l’aéronef de ce qui est secondaire. Il s’agit donc d’une direction pour les développements futurs de l’interface ASAP : mêler anticipation et moyens de rappel de ce qui devrait être réalisé, en offrant aux pilotes les moyens de hiérarchiser les tâches à réaliser. Ce faisant, ce n’est plus tant un objectif d’amélioration de la performance qui serait poursuivi mais bien de maintien du niveau de sécurité dans des situations imprévues. Ce point permet de reboucler avec notre propos initial, au cours duquel nous avions identifié l’anticipation comme un outil cognitif complémentaire à la distribution dynamique des priorités.
Ces heures passées en la compagnie des pilotes dans le simulateur ont également été riches d’enseignements. Elles nous ont en particulier permis de valider et raffiner la modélisation de l’activité que nous avions effectuée : celle-ci n’est évidemment pas sans erreur mais son organisation fait sens et elle pourra être exploitée, corrigée et complétée sans difficultés. Un enjeu à court terme serait d’ailleurs d’y ajouter les phases de décollage et de montée, lesquelles nécessiteront le même effort d’analyse de l’activité, et quelques modifications de l’algorithme, afin d’en assurer une généricité supérieure.
Nous l’avons abordé plusieurs fois au long de ce travail, la hiérarchisation des tâches représente également un enjeu important en termes d’usage. La mobilisation de moyens, en particulier humains, permettant la mise en œuvre de méthodologies de regroupements statistiques d’éléments est incontournable pour atteindre cet objectif. C’est à cette condition unique qu’il sera rendu possible l’apparition d’un compromis satisfaisant assurant la bonne architecture de l’information au sein de l’interface.
Le second axe d’amélioration de l’interface concerne son utilisabilité et son design : les fonctionnalités ayant été validées, un travail important doit à présent être effectué afin d’en faciliter autant que possible l’utilisation en l’intégrant dans son environnement naturel d’usage. Compte tenu des moyens à disposition, un arbitrage fut nécessaire entre le développement des fonctionnalités souhaitées ou d’une interface ergonomique.
Le choix volontaire et assumé de mener la démarche d’ingénierie cognitique dans l’ordre et jusqu’à son terme, impliquant que l’évaluation finale relève exclusivement du fonctionnel au détriment de l’ergonomique et du design, en complique les enseignements relevant du potentiel industriel à court terme. Pour autant, ce choix permet la validation de l’ensemble des fonctionnalités développées, et trace la perspective d’un travail d’ergonomie visant à une intégration respectant les usages ainsi qu’à la refonte de l’interface existante.
Notre travail a posé les bases d’un outil visant à assister la cognition de ses utilisateurs car conçu dans une démarche l’ayant intégré à chaque étape. Des pistes d’amélioration ont été tracées et ne sauraient être envisagées sans la mise en œuvre de la démarche qui a permis le travail présenté. Les retours des utilisateurs en ont mis en lumière tout le potentiel. De nombreuses étapes de prototypage et de démonstrations de concepts seront encore nécessaires avant qu’un produit fini n’aboutisse entre les mains de pilotes professionnels au début de la descente vers Rio de Janeiro.


Sami LINI - 2013 195
Valorisation scientifique Conférences internationales à comité de lecture
Lini, S., Favier, P.-A., Servantie, X., Vallespir, B., & Hourlier, S. (2011). Developing ASAP (Anticipation Support for Aeronautical Planning). Proceedings of the 16th International Symposium on Aviation Psychology (pp. 627–632). Dayton, OH.
Lini, S., Hourlier, S., Servantie, X., Vallespir, B., & Favier, P.-A. (2011). Helping pilots better anticipate: a user-centered HMI concept for flight displays. Proceedings of the EURODISPLAY conference (pp. 103–105). Arcachon, France.
Lini, S., Favier, P.-A., Hourlier, S., Vallespir, B., Bey, C., & Baracat, B. (2012). Influence of a temporally-customizable HMI on pilots’ cognitive load in civil aviation: a comparative study. Proceedings of the HCI Aero conference. Bruxelles, Belgium.
Lini, S., Vallespir, B., Hourlier, S., Labat, F. & Favier, P.-A. (2013). A cognitive engineering approach for showing feasibility margins on an in-flight planning. Proceedings of the 17th International Symposium on Aviation Psychology. Dayton, OH.
Lini, S., Bey, C., Hourlier, S., Vallespir, B., Johnston, A., & Favier, P.-A. (2013). Evaluating ASAP (Anticipation Support for Aeronautical Planning): a user-centered case study. Proceedings of the 17th International Symposium on Aviation Psychology. Dayton, OH.
Chapitre d’ouvrage Lini, S., Bey, C., Hourlier, S., Vallespir, B., Johnston, A., & Favier, P.-A. (2012).
Anticipation in aeronautics: exploring pathways toward a contextualized aggregative model based on existing concepts. In D. de Waard, K. Brookhuis, F. Dehais, C. Weikert, S. Röttger, D. Manzey, S. Biede, et al. (Eds.), Human Factors: a view from an integrative perspective. ISBN: 978-0-945289-44-9
Articles Lini, S., P.-A. Favier, André, J.-M., Hourlier, S., Bey, C., Vallespir, B. & Baracat, B. (2013).
Influence of anticipatory time depth on cognitive load in an aeronautical context, (soumis).
Lini, S., Bey, C., Hourlier, S., Vallespir, B., Johnston, A. & Favier, P.-A. (2013). Effect of an anticipation support HMI on commercial pilots’ cognition in a simulated context (soumis).
Suhir, E., Lini, S., Bey, C. & Claverie, B. (2013). Anticipation in aeronautics: probabilistic assessments. International Journal of Human Factors Modelling and Simulation (sous presse).
Brevets Lini, S., Hourlier, S. & Servantie, X. (2011). Procédé d’affichage séquentiel de
représentations bidimensionnelles d’une trajectoire verticale et d’une trajectoire latérale associées à une trajectoire tridimensionnelle. Brevet français FR 11-03886.
Lini, S., Hourlier, S. & Servantie, X. (2011). Relation continue entre temps et espace dans les IHM de pilotage. Brevet français FR 11-03946.

Sami LINI - 2013 197
Références Aasman, J., Mulder, G., & Mulder, L. J. (1987). Operator effort and the measurement of heart-rate
variability. Human factors, 29(2), 161–70.
Alexander, A. L., & Teller, T. L. (2013). Sequential required time of arrival intervals utilizing existing technologies. In Proceedings of the 17th International Symposium on Aviation Psychology (pp. 14–19). Dayton, OH.
Allen, J. F., & Koomen, J. A. (1983). Planning using a temporal world model. Proceedings of the Eighth international joint conference on Artificial intelligence - Volume 2. Karlsruhe, West Germany: Morgan Kaufmann Publishers Inc.
Amalberti, R. (1995). Anticipation. In M. de Montmollin (Ed.), Vocabulaire de l’Ergonomie. Octares.
Amalberti, R. (1996). La conduite de systèmes à risques. Paris: Presses Universitaires de France.
Amalberti, R. (2001). La maîtrise des situations dynamiques. Psychologie française, 46(2), 107–118.
Annett, J., & Stanton, N. A. (2000). Task analysis. Taylor and Francis.
Anticipation. (2005). In Oxford advance learner’s dictionary 7th edition.
Anticipation. (2010). In Le Grand Robert et Collins online.
Anticipation. (2012). In Le grand Robert de la langue française.
Backs, R. W., Lenneman, J. K., & Sicard, J. L. (1999). The Use of Autonomic Components to Improve Cardiovascular Assessment of Mental Workload in Flight. The International Journal of Aviation Psychology, 9(1), 33–47.
Baddeley, A. (1986). Working memory (Vol. 11). Oxford: Clarendon Press.
Bartlett, F. C. (1932). Remembering : A Study in Experimental and Social Psychology. Cambridge University Press.
Bastien, J. M. C., & Scapin, D. L. (1993). Critères ergonomiques pour l’évaluation d’interfaces utilisateurs. Rapport technique INRIA.
Baumann, M., & Krems, J. F. (2009). A Comprehension Based Cognitive Model of Situation Awareness. In Proceedings of the 11th HCI Conference : Digital Human Modeling (pp. 192–201). San Diego, CA, USA.
BEA. (2012). Rapport Final Vol AF 447 du 1er juin 2009 A330-203.
Beatty, J. (1988). Pupillometric signs of selective attention in man. In E. Donchin, G. Galbraith, & M. L. Kietzman (Eds.), Neurophysiology and psychophysiology: Experimental and clinical applications (pp. 138–143).
Références
Sami LINI - 2013 198
Beatty, Jackson. (1982). Phasic Not Tonic Pupillary Responses Vary With Auditory Vigilance Performance. Psychophysiology, 19(2), 167–172. doi:10.1111/j.1469-8986.1982.tb02540.x
Beatty, Jackson, & Lucero-Wagoner, B. (2000). The pupillary system. In Handbook of psychophysiology (2nd ed., pp. 142–162). New York, NY, US: Cambridge University Press.
Berntson, G. G., Quigley, K. S., & Lozano, D. (2007). Cardiovascular psychophysiology. In J. T. Cacioppo, L. G. Tassinary, & G. G. Berntson (Eds.), Handbook of psychophysiology (3rd ed., pp. 182–210). New York, NY, US: Cambridge University Press. doi:10.1017/CBO9780511546396.008
Berthoz, A. (1997). Le sens du mouvement. Paris: Odile Jacob.
Bey, C., & Rossignol, V. (2012). A COTS Approach to Post-WIMP Interactive Display Systems. In Proceeding of SAE 2012 Aerospace Electronics and Avionics Systems Conference (pp. 5–12). Phoenix.
Bi, S., & Salvendy, G. (1994). Analytical modeling and experimental study of human workload in scheduling of advanced manufacturing systems. International Journal of Human Factors in Manufacturing, 4(2), 205–234.
Bickerstaff, E. R. (1976). Neurological examination in clinical practice. Oxford: Blackwell.
Bisseret, A. (1995). Représentation et décision experte: Psychologie cognitive de la décision chez les aiguilleurs du ciel. Octares Editions.
Blum, A., & Furst, M. (1995). Fast planning through planning graph analysis. Artificial Intelligence, 90(1), 279–289.
Bobrow, D. G., & Norman, D. A. (1975). Some Principles of Memory Schemata. In D. Bobrow (Ed.), Representation and Understanding : Studies in Cognitive Science (pp. 131–150). Palo Alto, CA: Xerox Palo Alto Research Center.
Boeing. (2000). Boeing 747-441 Operations Manual.
Boeing. (2011). Statistical summary of commercial jet airplane accidents - Worldwide operations 1959 2011.
Bratman, M. (1987). Intention, plans, and practical reason. Cambridge, MA ; London: Harvard University Press.
Brooks, R. A. (1986). A Robust Layered Control System for A Mobile Robot. IEEE J. of Robotics and Automaton, (1), 14–23.
Brooks, R. A. (1987). Planning is Just a Way of Avoiding Figuring Out What To Do Next. Cambridge, MA: MIT Artificial Intelligence Laboratory.
Camm, A. J., Malik, M., Bigger, J. T., Breithardt, G., Cerutti, S., Cohen, R. J., & Coumel, P. (1996). Task force of the European Society of Cardiology and the North American Society of Pacing and Electrophysiology. Heart rate variability: standards of measurement, physiological interpretation and clinical use. Circulation, 93(5), 1043.
Références
Sami LINI - 2013 199
Carrilho, M.-M. (2012). La rhétorique. (CNRS, Ed.). Les Essentiels d’Hermès.
Cegarra, J., & Chevalier, A. (2008). The use of Tholos software for combining measures of mental workload: Toward theoretical and methodological improvements. Behavior Research Methods, 40(4), 988–1000. doi:10.3758/brm.40.4.988
Cegarra, J., & Morgado, N. (2009). Etude des propriétés de la version francophone de NASA-TLX. In B. Cahour, F. Anceaux, & A. Giboins (Eds.), EPIQUE 2009 : 5ème Colloque de Psychologie Ergonomique (pp. 233–239). Nice: France.
Cellier, J. M. (1996). Exigences et gestion temporelle dans les environnements dynamiques. In Cellier, J.-M., V. De Keyser, & C. Valot (Eds.), La gestion du temps dans les environnements dynamiques (pp. 20–48). Paris: Presses Universitaires de France.
Chase, W. G., & Simon, H. A. (1973). The mind’s eye in chess. In W. G. Chase (Ed.), Visual information processing (pp. 215–281). New York: Academic Press.
Cheng, P. W., & Holyoak, K. J. (1985). Pragmatic reasoning schemas. Cognitive psychology, 17(4), 391–416. doi:Doi: 10.1016/0010-0285(85)90014-3
Claverie, B. (2005). Cognitique: science et pratique des relations à la machine à penser. Harmattan.
Cormen, T., Leiserson, C., Rivest, R., & Stein, C. (2001). Introduction to algorithms. Cambridge, MA: MIT Press.
Craik, F. I., & Lockhart, R. S. (1972). Levels of processing: A framework for memory research. Journal of Verbal Learning & Verbal Behavior. Vol, 11(6), 671–684.
Crognier, L., & Fery, Y.-A. (2007). 40 ans de recherches sur l’anticipation en tennis : une revue critique (p. 27). Louvain-la-Neuve, Belgique: De Boeck Université.
De Keyser, V. (1991). Temporal reasoning in continuous processes, segmentation and temporal reference systems. In Proceedings of the Third European Conference on Cognitive Science Approaches to Process Control (pp. 311–334). Cardiff, UK.
Dehais, F. (2004). Modélisation des conflits dans l’activité de pilotage. Thèse de doctorat : Université de Toulouse.
Denecker, P. (1999). Les composantes symboliques et subsymboliques de l’anticipation dans la gestion des situations dynamiques. Le Travail Humain, 62(4), 363–385.
Denecker, P., & Hoc, J.-M. (1997). Analysis of the effects of a support to anticipation in the supervision of a long time lag process: the blast furnace. In S. Bagnara, E. Hollnagel, M. Mariani, & L. Norros (Eds.), Time and space in process control - 6th European Conference on Cognitive Science Approach to Process Control (pp. 165–170). Roma: CNR, Istituto di Psicologia.
Durso, F., Hackworth, C., & Truitt, T. (1999). Situation Awareness As a Predictor of Performance in En Route Air Traffic Controllers. Air Traffic Control Quarterly, 6(1), 1–20.
Egelund, N. (1982). Spectral analysis of heart rate variability as an indicator of driver fatigue. Ergonomics, 25(7), 663–72. doi:10.1080/00140138208925026

Références
Sami LINI - 2013 200
Endsley, M. R. (1987). SAGAT: A methodology for the measurement of situation awareness. NOR DOC (p. NOR DOC 87–83). Hawthorne, CA: Northrop Corporation.
Endsley, M. R. (1988). Situation awareness global assessment technique (SAGAT). In Aerospace and Electronics Conference, 1988. NAECON 1988., Proceedings of the IEEE 1988 National (pp. 789–795).
Endsley, M. R. (1995). Measurement of situation awareness in dynamic systems. Human Factors: The Journal of the Human Factors and Ergonomics Society, 37(1), 65–84.
Endsley, M. R. (2000). Situation awareness: A comparison of measures. In Proceedings of the Human Performance, Situation Awareness and Automation: User-Centered Design for the New Millennium. Savannah, GA.
Endsley, M. R., Selcon, S. J., Hardiman, T. D., & Croft, D. G. (1998). A comparative analysis of SAGAT and SART for evaluations of situation awareness. In Proceeding of the Human Factors and Ergonomics Society Annual Meeting (Vol. 1, pp. 82–86). SAGE Publications.
Ericsson, K. A., & Kintsch, W. (1995). Long-term working memory. Psychological Review, 102(2), 211–244.
Fazar, W. (1959). Program Evaluation and Review Technique. The American Statistician, 13(2), 10.
Fikes, R., & Nilsson, N. (1971). STRIPS: A New Approach to the Application of Theorem Proving to Problem Solving’. Artificial Intelligence.
Friedman, W. (1990). About time: Inventing the fourth dimension. Cambridge, MA: MIT Press.
Gantt, H. (1913). Work, wages, and profits. New York: The Engineering Magazine.
Georgeff, M. P., & Lansky, A. L. (1987). Reactive reasoning and planning. In AAAI’87 Proceedings of the sixth National conference on Artificial intelligence (pp. 677–682).
Gopher, D. (1986). In defence of resources: On structures, energies, pools and the allocation of attention. Energetics and human information processing, 353–371.
Hancock, P. A., & Caird, J. K. (1993). Experimental evaluation of a model of mental workload. Human Factors: The Journal of the Human Factors and Ergonomics Society, 35(3), 413–429.
Hancock, P. A., & Szalma, J. L. (2002). On mental resources and performance under stress. US Army Research Office, MURI-OPUS. White Paper.
Hart, S. G., & Staveland, L. E. (1988). Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In P. A. Hancock & N. Meshkati (Eds.), Human Mental Workload (pp. 139–183). Amsterdam: North-Holland, Elsevier Science.
Henneman, M. C. (1989). Les ajustements préparatoires. In A. Vom Hoffe (Ed.), Taches, traitement de l’information et comportement dans les Activités Physiques et Sportives (pp. 161–191). Issy les Moulineaux: EAP.

Références
Sami LINI - 2013 201
Hess, E. H. (1965). Attitude and Pupil Size. Scientific American, 212(4), 46–54. doi:10.1038/scientificamerican0465-46
Hess, E. H. (1975). The Tell-Tale Eye: How Your Eyes Reveal Hidden Thoughts and Emotions. New York: Van Nostrand Reinhold.
Hoc, J.-M. (1987). Psychologie cognitive de la planification. Presses Universitaires de Grenoble.
Hoc, J.-M., & Amalberti, R. (1994). Diagnostic et prise de décision dans les situations dynamiques. Psychologie française, 39(2), 177–192.
Hoc, J.-M., & Amalberti, R. (2007). Cognitive Control Dynamics for Reaching a Satisficing Performance in Complex Dynamic Situations. Journal of Cognitive Engineering and Decision Making, 1(1), 22–55. doi:10.1177/155534340700100102
Hoc, J.-M., Amalberti, R., & Plee, G. (2000). Vitesse du processus et temps partagé: planification et concurrence attentionnelle. L’année psychologique, 100(4), 629–660.
Hoc, J.-M., & Nguyen-Xuan, A. (1987). Les modèles informatiques de la résolution de problème. J. Piaget Mounoud, P., Bronckart, J.-P.(Eds.), Psychologie, 1712–1756.
Hollnagel, E. (1993). Human reliability analysis: Context and control. London: Academic Press.
Hollnagel, E. (1998). Context, cognition and control. In Co-operative process management, cognition and information technology (pp. 27–52).
Hollnagel, E. (2003). Cognition as control: A pragmatic approach to the modelling of joint cognitive systems. IEEE Transactions on Systems, Man and Cybernetics.
Holyoak, K. J., & Spellman, B. A. (1993). Thinking. Annual review of psychology, 44(1), 265–315. doi:doi:10.1146/annurev.ps.44.020193.001405
Huttenlocher, J., Hedges, L. V, & Prohaska, V. (1992). Memory for day of the week: A 5+ 2 day cycle. Journal of Experimental Psychology: General, 121(3), 313–325.
Johnson, C., & Holloway, C. (2004). On the over-emphasis of human “error”as a cause of aviation accidents:’systemic failures' and “human error”in US NTSB and Canadian TSB aviation reports 1996–2003. In Proceedings of the 22nd International System Safety Conference (ISSC). Providence, RI.
Jones, D., & Endsley, M. R. (2000). Can real-time probes provide a valid measure of situation awareness. In Proceedings of the Human Performance, Situation Awareness and Automation: User-Centered Design for the New Millennium (pp. 245–250). Savannah, GA.
Kaber, D. B., Alexander, A. L., Stelzer, E. M., Kim, S.-H., Kaufmann, K., & Hsiang, S. (2008). Perceived clutter in advanced cockpit displays: measurement and modeling with experienced pilots. Aviation, space, and environmental medicine, 79(11), 1007–1018.
Kaddoussi, A., Zoghlami, N., Zgaya, H., Hammadi, S., & Bretaudeau, F. (2011). A preventive anticipation model for crisis management supply chain. In 2011 IEEE International Conference on Systems, Man, and Cybernetics (pp. 109–114). IEEE. doi:10.1109/ICSMC.2011.6083651
Références
Sami LINI - 2013 202
Kahneman, D. (1973). Attention and effort. Englewood Cliffs, NJ: Prentice Hall.
Kahneman, D., & Beatty, J. (1966). Pupil diameter and load on memory. Science, 154(3756), 1583–1585.
Kalsbeek, J. (1971). Sinus arrhythmia and the dual task method in measuring mental load. In J. Fox & D. Whitfield (Eds.), Measurement of Man at Work (pp. 101–113). London: Taylor and Francis.
Katz, E. (1998). A simplifying diagrammatic representation of crisp and fuzzy Teleo-Reactive semantic circuitry for application in robotic agent task control. In 1998 IEEE International Conference on Systems, Man, and Cybernetics. (pp. 2119–2125). IEEE.
Kintsch, W. (1998). Comprehension: A paradigm for cognition. Cambridge, MA: University Press.
Komogortsev, O. V, Gobert, D. V, Jayarathna, S., & Gowda, S. M. (2010). Standardization of automated analyses of oculomotor fixation and saccadic behaviors. IEEE Transactions on Biomedical Engineering, 57(11), 2635–2645.
Kramer, A. F. (1990). Physiological metrics of mental workload: A review of recent progress. In Multiple task performance (D. Damos., pp. 279–328). London: Taylor and Francis.
Larkin, J. H., & Reif, F. (1979). Understanding and Teaching Problem-Solving in Physics. European Journal of Science Education, 1(2), 191–203.
Lavigne, F., & Lavigne, P. (2000). Anticipatory semantic processes. International Journal of Computing Anticipatory Systems, 7, 3–31.
Leplat, J., & Hoc, J.-M. (1983). Tâche et activité dans l’analyse psychologique des situations. Cahiers de psychologie cognitive, 3(1), 49–63.
Leplat, J., & Rocher, M. (1985). Ergonomie du contrôle de processus en marche simultanée : un cas dans l’industrie biochimique. Psychologie et Education, 9(1-2), 5–26.
Levy-Leboyer, C., Gosse, M., & Naturel, V. (1985). Une nouvelle vieille méthode: la grille de Kelly. Revue Européenne de Psychologie Appliquée, 4(35), 255–271.
Lindholm, E., & Cheatham, C. M. (1983). Autonomic activity and workload during learning of a simulated aircraft carrier landing task. Aviation, space, and environmental medicine, 54(5), 435–9.
Lindsay, P. H., Norman, D. A., & Jobin, R. (1980). Traitement de l’information et comportement humain: une introduction à la psychologie. Editions Etudes vivantes.
Lini, S., Bey, C., Hourlier, S., Vallespir, B., Johnston, A., & Favier, P.-A. (2012). Anticipation in aeronautics: exploring pathways toward a contextualized aggregative model based on existing concepts. In D. de Waard, K. Brookhuis, F. Dehais, C. Weikert, S. Röttger, D. Manzey, … P. Terrier (Eds.), Human Factors: a view from an integrative perspective (pp. 157–168).
Lini, S., Bey, C., Hourlier, S., Vallespir, B., Johnston, A., & Favier, P.-A. (2013). Evaluating ASAP (Anticipation Support for Aeronautical Planning): a user-centered case study. In Proceedings of the 17th International Symposium on Aviation Psychology (pp. 377–382). Dayton, OH.
Références
Sami LINI - 2013 203
Lini, S., Favier, P.-A., Hourlier, S., Vallespir, B., Bey, C., & Baracat, B. (2012). Influence of a temporally-customizable HMI on pilots’ cognitive load in civil aviation: a comparative study. In Proceedings of the HCI Aero conference. Bruxelles, Belgium.
Lini, S., Favier, P.-A., Servantie, X., Vallespir, B., & Hourlier, S. (2011). Developing ASAP (Anticipation Support for Aeronautical Planning). In Proceedings of the 16th International Symposium on Aviation Psychology (pp. 627–632). Dayton, OH.
Lini, S., Hourlier, S., & Servantie, X. (2011a). Relation continue entre temps et espace dans les IHM de pilotage. Brevet français FR 11-03946.
Lini, S., Hourlier, S., & Servantie, X. (2011b). Procédé d’affichage séquentiel de représentations bidimensionnelles d’une trajectoire verticale et d’une trajectoire latérale associées à une trajectoire tridimensionnelle. Brevet français FR 11-03886.
Lini, S., Hourlier, S., Servantie, X., Vallespir, B., & Favier, P.-A. (2011). Helping pilots better anticipate: a user-centered HMI concept for flight displays. In Proceedings of the EURODISPLAY conference (pp. 103–105). Arcachon, France.
Lini, S., Vallespir, B., Hourlier, S., Labat, F., & Favier, P.-A. (2013). A cognitive engineering approach for showing feasibility margins on an in-flight planning. In Proceedings of the 17th International Symposium on Aviation Psychology (pp. 430–435). Dayton, OH.
Lories, G., Dubois, M., & Gaussin, J. (1997). Judgmental forecasting and anticipation in human process control. Le Travail Humain, 60(1), 87–101.
Løvborg, L., & Brehmer, B. (1991). NEWFIRE - A flexible system for running simulated fire-fighting experiments. Roskilde: Risø National Laboratory.
Maes, P. (1991). The agent network architecture (ANA). ACM SIGART Bulletin, 2(4), 115–120. doi:10.1145/122344.122367
MASK méthode d’ingéniérie des connaissances. (2013). Wikipedia.
Matta, N., Ermine, J. L., Aubertin, G., & Trivin, J. Y. (2002). Knowledge Capitalization with a knowledge engineering approach: the MASK method. Knowledge management and organizational memories, 17–28.
Maturana, H. R., & Varela, F. J. (1980). Autopoiesis and cognition: The realization of the living (Vol. 42). Springer.
Meitzler, T., Gerhart, G., & Singh, H. (1998). A relative clutter metric. Aerospace and Electronic Systems, IEEE Transactions on, 34(3), 968–976.
Michon, J. A. (1985). The complete time experience time experience. In J. A. Michon & J. L. Jackson (Eds.), Time, mind and behavior (pp. 20–52). Heidelberger: Springer Verlag.
Michon, J. A. (1990). Implicit and explicit representations of time. Cognitive models of psychological time, 37–58.
Michon, J. A. (1993). Concerning the time sense: The seven pillars of time psychology. Psychologica Belgica, 33(2), 329–345.

Références
Sami LINI - 2013 204
Miller, G. (1956). The Magical Number Seven, Plus or Minus Two: Some Limits on Our Capacity for Processing Information. The Psychological Review, 63(2), 343–352.
Minkowski, E. (1968). Le temps vécu. Delachaux et Niestlé.
Miyake, Y., & Onishi, Y. (2004). Two types of anticipation in synchronization tapping. Acta Neurobiologiae Experimentalis, 64(3), 415–426.
Moray, N. (1967). Where is capacity limited? A survey and a model. Acta Psychologica, 27, 84–92. doi:Doi: 10.1016/0001-6918(67)90048-0
Mundutéguy, C., & Darses, F. (2007). Perception et anticipation du comportement d’autrui en situation simulée de conduite automobile. Le Travail Humain, 70(1), 1–32.
Navon, D., & Gopher, D. (1979). On the economy of the human-processing system. Psychological Review, 86(3), 214–255.
Nielsen, J., & Molich, R. (1990). Heuristic evaluation of user interfaces. In Proceedings of the SIGCHI conference on Human factors in computing systems: Empowering people (pp. 249–256). ACM.
Nilsson, N. J. (1992). Toward agent programs with circuit semantics. Department of Computer Science, Stanford University.
Nilsson, N. J. (1994). Teleo-Reactive Programs for Agent Control. Journal of Artificial Intelligence Research, 1, 139–158. Artificial Intelligence.
Norman, D. A., & Bobrow, D. G. (1975). On data-limited and resource-limited processes. Cognitive psychology, 7(1), 44–64.
Norman, D. A., & Shallice, T. (1980). Attention to Action: Willed and Automatic Control of Behavior (Technical Report No. 8006) (p. 43). California University, La Jolla. Center for Human Information Processing.
O’Hara, K. P., & Payne, S. J. (1998). The Effects of Operator Implementation Cost on Planfulness of Problem Solving and Learning. Cognitive psychology, 35(1), 34–70. doi:citeulike-article-id:3374472
O’Hara, K. P., & Payne, S. J. (1999). Planning and the user interface: The effects of lockout time and error recovery cost. International Journal of Human Computer Studies, 50(1), 41–60.
O’Hare, D., Wiggins, M., Batt, R., & Morrison, D. (1994). Cognitive failure analysis for aircraft accident investigation. Ergonomics, 37(11), 1855–1869. doi:10.1080/00140139408964954
Passer, M., & Smith, R. (2004). Psychology: The science of mind and behavior (Vol. 39, p. 1007). McGraw Hill.
Piaget, J. (1952). Naissance de l’intelligence chez l'enfant. International Universities Press.
Piaget, J. (1975). L’équilibration des structures cognitives: problème central du développement. Presses Universitaires de France, Paris.

Références
Sami LINI - 2013 205
Piaget, J., & Buscaglia, M. (1967). Biologie et connaissance: essai sur les relations entre les régulations organiques et les processus cognitifs. Gallimard Paris.
Porges, S. (1984). Heart rate oscillations: An index of neural mediation. In M. Coles, R. Jennings, & J. Stern (Eds.), Psychophysiological Perspectives (Van Nostra., pp. 144–162). New York.
Posner, M., & Boies, S. (1971). Components of attention. Psychological Review.
Poulton, E. E. (1957). On prediction in skilled movements. Psychological Bulletin, 54(6), 467–478.
Qiyuan, J., Richer, F., Wagoner, B. L., & Beatty, J. (1985). The Pupil and Stimulus Probability. Psychophysiology, 22(5), 530–534. doi:10.1111/j.1469-8986.1985.tb01645.x
Rasmussen, J. (1983). Skills, rules, and knowledge; signals, signs, and symbols, and other distinctions in human performance models. IEEE transactions on systems, man, and cybernetics, 13(3), 257–266.
Rasmussen, J. (1986). A cognitive engineering approach to the modelling of decision making and its organization. In Information processing and human-machine interaction.
Reason, J. (1990). Human error. Cambridge University Press.
Requin, J. (1978). Spécificité des ajustements préparatoires à l’exécution du programme moteur. In H. Hécaen & M. Jeannerod (Eds.), Du contrôle moteur à l’organisation du geste (pp. 84–129). Paris: Masson.
Reynolds, H. (2006). Modeling the Air Traffic Controller’s Cognitive Projection Process. PhD Thesis, Cambridge, MA: Massachusetts Institute of Technology.
Richard, J.-F. (1990). Les activités mentales. Armand Colin, Paris.
Robinson, J. A. (1986). Temporal reference systems and autobiographical memory. In D. C. Rubin (Ed.), Autobiographical memory (pp. 159–188). New York: US: Cambridge University Press.
Roscoe, A. (1984). Assessing Pilot Workload in Flight. Royal Aircraft Establishment Bedford (England).
Roscoe, A. H. (1992). Assessing pilot workload. Why measure heart rate, HRV and respiration? Biological psychology, 34(2-3), 259–87.
Rosen, R. (1985). Anticipatory systems: philosophical, mathematical, and methodological foundations. Pergamon.
Roth, E., & Woods, D. (1988). Aiding human performance I: cognitive analysis. Le travail humain.
Salmon, P., Stanton, N., & Walker, G. (2009). Measuring Situation Awareness in complex systems: Comparison of measures study. International Journal of Industrial Ergonomics, 39(3), 490–500.
Salvendy, G., & Humphreys, A. P. (1979). Effects of personality, perceptual difficulty and pacing of a task on productivity, job satisfaction, and physiological stress. Perceptual and motor skills, 49(1), 219–22.
Références
Sami LINI - 2013 206
Simon, H. A. (1982). Models of bounded rationality: Empirically grounded economic reason (3rd ed., Vol. 2). Cambridge, MA: MIT press.
Smith, E. E., Langston, C., & Nisbett, R. E. (1992). The case for rules in reasoning. Cognitive science, 16(1), 1–40. doi:Doi: 10.1016/0364-0213(92)90016-n
Sougné, J. (1996). Le raisonnement temporel. In Cellier, J.-M., V. De Keyser, & C. Valot (Eds.), La gestion du temps dans les environnements dynamiques (pp. 60–90). Paris: Presses Universitaires de France.
Sperandio, J. C. (1977). La régulation des modes opératoires en fonction de la charge de travail chez les contrôleurs de trafic aérien. Le Travail Humain, 40(2), 249–256.
Speyer, J., Fort, A., Fouillot, J., & Blomberg, R. (1987). Assessing Workload for Minimum Crew Certification. Part 1. Static Workload Analysis and Performance Analysis. Part 2. Dynamic Methods. Blagnac, France: Airbus Industrie Flight Division.
Sutter, J. (1983). L’anticipation (pp. 21–53). Presses Universitaires de France, Paris.
Tanida, K., & Pöppel, E. (2006). A hierarchical model of operational anticipation windows in driving an automobile. Cognitive Processing, 7(4), 275–287.
Taylor, R. (1990). Situational Awareness Rating Technique (SART): The development of a tool for aircrew systems design. In Situational Awareness in Aerospace Operations (AGARD-CP-478) (pp. 3/1 – 3/17). Neuilly Sur Seine, France: NATO - AGARD.
Thayer, J. F., & Lane, R. D. (2009). Claude Bernard and the heart-brain connection: further elaboration of a model of neurovisceral integration. Neuroscience & Biobehavioral Reviews, 33(2), 81–88.
Tryon, W. W. (1975). Pupillometry: A Survey of Sources of Variation. Psychophysiology, 12(1), 90–93. doi:10.1111/j.1469-8986.1975.tb03068.x
Tulving, E. (1972). Episodic and semantic memory. In E. Tulving & W. Donaldson (Eds.), Organization of memory. Oxford England: Academic Press.
Tversky, A., & Kahneman, D. (1974). Judgment under Uncertainty: Heuristics and Biases. Science, 185(4157), 1124–1131. doi:citeulike-article-id:100015
Valax, M. F. (1986). Cadre temporel et planification des tâches quotidiennes: étude de la structure des plans journaliers chez les agriculteurs. Thèse de Doctorat, Université de Toulouse Le Mirail.
Van Breda, L. (2000). Capability prediction : An effective way to improve navigational performance. Journal of Navigation, 53(2), 343–354.
Van Daele, A., & Carpinelli, F. (1996). Anticipation de l’action et anticipation du processus : l'influence de la situation. In J.-M. Cellier, V. De Keyser, & C. Valot (Eds.), La gestion du temps dans les environnements dynamiques (pp. 200–220). Paris: Presses Universitaires de France.
Vergnaud, G. (1985). Concepts et schèmes dans la théorie opératoire de la représentation. Psychologie française, 30(3-4), 245–251.
Références
Sami LINI - 2013 207
Vicente, K. J., & Burns, C. M. (1996). An experimental evaluation of functional displays in process supervision and control (pp. 96–09). Toronto: Cognitive Engineering Laboratory, University of Toronto.
Vidal, V. (2001). Recherche dans les graphes de planification, satisfiabilité et stratégies de moindre engagement: les systèmes LCGP et LCDPP. Universidad Simon Bolivar, Caracas, Venezuela.
Von Holst, E., & Mittelstaedt, H. (1950). Das reafferenzprinzip. Naturwissenschaften, 37, 464–476.
Weld, D. (1999). Recent advances in AI planning. AI magazine.
Wickens, C. D. (1984). Processing resources in attention. In R. Parasuraman & R. Davies (Eds.), Varieties of attention (pp. 63–102). New York: Academic Press.
Wickens, C. D. (2008). Multiple Resources and Mental Workload. Human Factors: The Journal of the Human Factors and Ergonomics Society, 50(3), 449–455. doi:10.1518/001872008x288394
Wickens, C. D., Gempler, K., & Morphew, M. E. (2000). Workload and Reliability of Predictor Displays in Aircraft Traffic Avoidance. Transportation Human Factors, 2(2), 99–126. doi:10.1207/STHF0202_01
Wickens, C. D., & Hollands, J. G. (2000). Engineering psychology and human performance (2nd ed.). New Jersey: Prentice Hall.
Wierwille, W. W., & Casali, J. G. (1983). A validated rating scale for global mental workload measurement applications. In Proceeding of the Human Factors and Ergonomics Society Annual Meetin (Vol. 1, pp. 129–133). SAGE Publications.
Wierwille, W. W., & Connor, S. A. (1983). Evaluation of 20 workload measures using a psychomotor task in a moving-base aircraft simulator. Human factors, 25(1), 1–16.
Wilson, G. F. (2002). An analysis of mental workload in pilots during flight using multiple psychophysiological measures. The International Journal of Aviation Psychology, 12(1), 3–18.
Yerkes, R. M., & Dodson, J. D. (1908). The relation of strength of stimulus to rapidity of habit-formation. Journal of Comparative Neurology and Psychology, 18(5), 459–482. doi:10.1002/cne.920180503

Sami LINI - 2013 208
Annexes

Sami LINI - 2013 209
Annexe I : Formulaire de Consentement libre, éclairé et exprès (expérimentation préliminaire)
Laboratoire HEAL (Human Engineering for Aerospace Laboratory)
Thales/ENSC
146 rue Léo Saignat – 33076 Bordeaux
Participant n°………………………
Je certifie avoir donné mon accord pour participer à une étude de cognitique impliquant des mesures physiologiques cardiaques. J'accepte volontairement de participer à cette étude et je comprends que ma participation n'est pas obligatoire et que je peux stopper ma participation à tout moment sans avoir à me justifier ni encourir aucune responsabilité. Mon consentement ne décharge pas les organisateurs de la recherche de leurs responsabilités et je conserve tous mes droits garantis par la loi.
Au cours de cette expérience, j’accepte que soient recueillies des données. Je comprends que les informations recueillies sont strictement confidentielles et à usage exclusif des investigateurs concernés.
J’ai été informé que mon identité n’apparaîtra dans aucun rapport ou publication et que toute information me concernant sera traitée de façon confidentielle. J’accepte que les données enregistrées à l’occasion de cette étude puissent être conservées dans une base de données et faire l’objet d’un traitement informatisé non nominatif par le laboratoire HEAL. J’ai bien noté que le droit d’accès prévu par la loi « informatique et libertés » s’exerce à tout moment auprès du laboratoire HEAL.
Date : ........................
Nom du volontaire : ……………..
Signature du volontaire (précédée de la mention « lu et approuvé ») :
Nom de l’expérimentateur: ...............................................
Signature de l’expérimentateur : ...........................
Nom de l’expérience : ………………
Sami LINI - 2013 210
Annexe II : Formulaire d’informations générales (expérimentation préliminaire)
Quel est le but de cette étude ? Cette étude a pour but d’évaluer l’empan d’anticipation optimal dans une tâche de vol civil
simulée. Il s’agit de déterminer à l’aide de mesures physiologiques et de performance quelle est la profondeur temporelle optimale pour présenter des informations afin d’aider un pilote dans son processus d’anticipation durant son activité de pilotage.
Qui est chargé de cette étude ? Cette étude est menée dans le cadre du laboratoire HEAL (Human Engineering for
Aerospace Laboratory) par Sami Lini, ingénieur cogniticien en thèse. Pour toute question concernant cette étude, vous trouverez les informations de contact en bas de cette page.
Qu’implique cette étude ? Il sera demandé aux participants de prendre part à une phase de vol en simulateur. Après
une phase de formation, il leur sera demandé de manipuler les commandes du cockpit afin d’accomplir une phase de vol réaliste. Ils seront guidés de près dans cette tâche. Des mesures physiologiques et de temps de réalisation seront prises. Un questionnaire leur sera posé en fin de tâche. Les mesures physiologiques sont des mesures cardiaques : à cet effet, il sera demandé aux participants de poser des électrodes sur le torse. Cela ne présente aucun risque : les électrodes sont utilisées passivement, et ne font que mesurer un signal.
Combien de temps l’étude dure-t-elle ? L’étude est divisée en trois phases de 30 minutes. L’ensemble de la passation dure un peu
moins de deux heures.
Puis-je me retirer de cette étude ? La participation à cette étude se fait sur la base du volontariat et du consentement
volontaire. Si vous consentez à participer à cette étude, vous pouvez vous retirer quand vous le souhaitez, sans la moindre explication. Vous pouvez également demander à ce que les données vous concernant soient détruites.
Qu’en est-il des résultats de cette étude ? Tous les aspects de cette étude, impliquant les résultats, sont strictement confidentiels et
soumis à la seule discrétion des chercheurs qui auront seuls accès aux informations concernant les participants. Un compte-rendu de cette étude pourra être soumis à publication mais aucune information individuelle n’y sera identifiable. L’anonymat de tous les participants est garanti par l’utilisation de pseudonymes.
Puis-je parler autour de moi de cette étude ? Vous pouvez tout à fait communiquer sur cette étude.
Et si je souhaite avoir plus d’informations sur cette étude ? Après avoir lu cette notice d’information, l’expérimentateur répondra à toutes vos
questions et en parlera librement avec vous. Si vous souhaitiez obtenir de plus amples informations à un quelconque moment, vous pouvez contacter directement Sami Lini :

Sami LINI - 2013 211
Sami LINI
Ingénieur/Doctorant Thales/ENSC (Ecole Nationale Supérieure de Cognitique, Bordeaux, France)
HEAL - Human Engineering for Aerospace Laboratory
Bureau 21 – 2ème étage – Bâtiment 2A
Ecole Nationale Supérieur de Cognitique - 146 rue Léo Saignat – 33076 Bordeaux
05 57 57 47 92
Sami LINI - 2013 212
Annexe III : Formulaire d’informations personnelles (expérimentation préliminaire)
Laboratoire HEAL (Human Engineering for Aerospace Laboratory)
Thales/ENSC
146 rue Léo Saignat – 33076 Bordeaux
Participant n°………………………
Age : ……………………………
Profession : ……………………………..
Sexe : Homme Femme
Latéralité : Droitier Gaucher
Connaissances aéronautiques : Aucune Faibles Moyennes Expert
Expérience aéronautique : Aucune Novice Intermédiaire Expert
Nombre d’heures de vol : ……………
BIA : Oui Non
Connaissances annexes : Jeux vidéo Simulateurs
Consommation de cigarettes aujourd’hui : Oui Non
Consommation de caféine/théine aujourd’hui : Oui Non
Consommation d’alcool dans les 12 dernières heures : Oui Non
Sami LINI - 2013 213
Annexe IV : Détails de l’implémentation de l’algorithme
Le démonstrateur statique a été réalisé en JAVA. L’architecture est basée sur une architecture MVC (Modèle Vue Contrôleur). Cette architecture est un modèle destiné à répondre aux besoins des applications interactives en séparant les problématiques liées aux différents composants au sein de leur architecture respective.
Ce paradigme regroupe les fonctions nécessaires en trois catégories :
• un modèle (modèle de données), • une vue (présentation, interface utilisateur) • un contrôleur (logique de contrôle, gestion des événements, synchronisation)
Le projet se compose de 77 paquets (package) au sein desquels :
• Le package Plan est en charge à la fois du modèle de données et les contrôleurs relatifs aux données (fichier se terminant par *Controller.java).
• Le package UI contient tout ce qui est relatif à la Vue, c’est-à-dire la représentation des données et à l’interface utilisateur.
• Le package Graph est en charge de la gestion des aspects relatifs aux graphes (structure de donnée + traitements) d’un plan de vol (liens entre les tâches).
• Le package MVC définit l’architecture du Modèle-Vue-Contrôleur utilisé pour le démonstrateur statique.
• Le package Util définit un certain nombre d’utilitaires communs à tous les packages.
• Le package XML encapsule l’ensemble des opérations de lecture du plan de vol à partir d’un fichier XML.
Le MVC (Modèle-Vue-Contrôleur) Le MVC est principalement utilisé dans des interfaces interactives en vue de dissocier les
trois notions suivantes :
• L’ensemble des données et des traitements et des mises à jour sur ces données. • Le graphisme de l’interface, notamment la mise à jour de celui-ci. • L’aspect évènementiel de synchronisation des traitements.
L’architecture MVC permet ainsi de bien séparer les rôles de chaque composant logiciel.
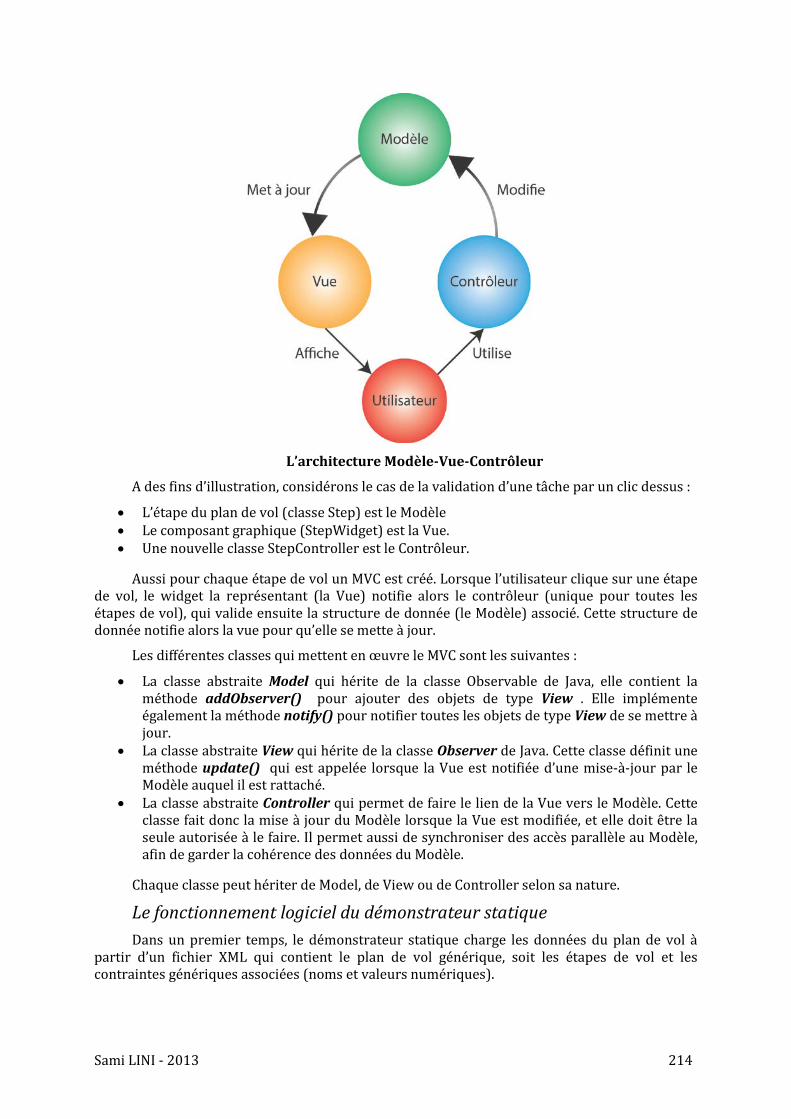
Sami LINI - 2013 214
L’architecture Modèle-Vue-Contrôleur
A des fins d’illustration, considérons le cas de la validation d’une tâche par un clic dessus :
• L’étape du plan de vol (classe Step) est le Modèle • Le composant graphique (StepWidget) est la Vue. • Une nouvelle classe StepController est le Contrôleur.
Aussi pour chaque étape de vol un MVC est créé. Lorsque l’utilisateur clique sur une étape de vol, le widget la représentant (la Vue) notifie alors le contrôleur (unique pour toutes les étapes de vol), qui valide ensuite la structure de donnée (le Modèle) associé. Cette structure de donnée notifie alors la vue pour qu’elle se mette à jour.
Les différentes classes qui mettent en œuvre le MVC sont les suivantes :
• La classe abstraite Model qui hérite de la classe Observable de Java, elle contient la méthode addObserver() pour ajouter des objets de type View . Elle implémente également la méthode notify() pour notifier toutes les objets de type View de se mettre à jour.
• La classe abstraite View qui hérite de la classe Observer de Java. Cette classe définit une méthode update() qui est appelée lorsque la Vue est notifiée d’une mise-à-jour par le Modèle auquel il est rattaché.
• La classe abstraite Controller qui permet de faire le lien de la Vue vers le Modèle. Cette classe fait donc la mise à jour du Modèle lorsque la Vue est modifiée, et elle doit être la seule autorisée à le faire. Il permet aussi de synchroniser des accès parallèle au Modèle, afin de garder la cohérence des données du Modèle.
Chaque classe peut hériter de Model, de View ou de Controller selon sa nature.
Le fonctionnement logiciel du démonstrateur statique Dans un premier temps, le démonstrateur statique charge les données du plan de vol à
partir d’un fichier XML qui contient le plan de vol générique, soit les étapes de vol et les contraintes génériques associées (noms et valeurs numériques).

Sami LINI - 2013 215
Afin de garder une trace du plan générique, celui-ci est cloné. La copie est ensuite spécifiée en y rattachant les données des contraintes spécifiques issues d’un second fichier XML : il s’agit de l’étape de spécification du plan de vol.
Suit alors la phase d’initialisation du plan spécifique (voir figure ci-dessous) qui consiste, comme décrit précédemment, à propager en avant les états de l’aéronef (Plan::propagateForwardInit) dans le plan, puis à propager en arrière, les butées temporelles et les états estimés futurs de l’aéronef.
Diagramme de l'initialisation du plan spécifique
Une fois cette initialisation terminée, le démonstrateur statique se met en boucle d’interaction avec l’utilisateur qui interagit alors avec l’interface utilisateur (la Vue dans le modèle MVC) du démonstrateur. Le plan est représenté à l’écran et l’utilisateur peut modifier les paramètres de vol et voir le plan évoluer en fonction.
Ce type d’interaction demande au système de mettre à jour les données du plan spécifique (figure ci-dessous) au moyen du couple propagation avant puis arrière.
Diagramme simplifié (sans MVC) de mise à jour du démonstrateur statique
Les classes et méthodes du démonstrateur Dans cette partie, nous allons présenter le rôle et l’implémentation (données et
traitements) de chaque classe et méthode nécessaires à la compréhension de l’implémentation du démonstrateur statique.

Sami LINI - 2013 216
La classe Loader La classe Loader contient 2 instances de plan de vol:
• Une liste d’étapes de vols • Une liste de contraintes génériques • Une liste de contraintes spécifiques • Le plan de vol générique (ou plan de vol avec contraintes génériques) • Le plan de vol générique avec des contraintes spécifiques (appelé aussi plan spécifique,
plan générique spécifié)
Cette classe charge une liste d’étapes de vol et une liste de contraintes génériques à partir d’un fichier XML dit « générique ».
Puis le loader construit le plan générique avec la liste des étapes de vol et la liste des contraintes, puis le loader parcoure à nouveau le fichier XML générique pour construire les transitions entre les sommets du plan. La classe Plan joue le rôle de Modèle dans l’architecture MVC.
Le loader charge une liste de contraintes spécifiques à partir d’un fichier XML dit « spécifique ». Une nouvelle instance du plan générique est alors construite auquel les contraintes du plan spécifique sont rattachées. Il en résulte un plan spécifique à la trajectoire considérée.
La classe Graph La classe Graph implémente un graphe générique sur lequel des opérations sur ses
sommets peuvent être effectuée ainsi que sur chaque élément et attribut générique d’un sommet. Elle est paramétrée comme suit Graph<E, U> :
• E représente l’élément du nœud (exemple d’élément : la classe Step, étape de vol) • U représente un attribut du nœud, une contrainte dans notre cas (la classe Constraint,
contrainte sur une étape de vol)
La classe Graph implémente également le parcours en largeur.
La classe Vertex L’interface Vertex est une représentation d’un sommet pour les traitements qui ne
demandent à modifier ni l’élément ni les attributs attachés au sommet. Les classes suivant implémentent Vertex et ce qui permet de traiter les éléments et les attributs d’un sommet du graphe (E et U sont les mêmes paramètres que ceux de la class Graph):
• La classe Current<E,U> modélise un sommet courant paramétré (qui manipule les éléments et les attributs du sommet).
• La classe Predecessor<E,U> modélise un sommet paramétré qui précède un sommet courant.
• La classe Successor<E,U> modélise un sommet paramétré qui succède à un sommet courant.
Un sommet peut alors être typé tour à tour en Vertex, Current, Predecessor, Successor suivant les opérations autorisées et suivant sa position dans la file de traitement. Cela permet de régler finement les liens entre nos sommets.
La classe Plan La classe Plan est une paramétrisation de la classe Graph, avec « une étape de vol »
comme élément (paramètre E), et une contrainte de vol comme attribut (paramètre U). Elle
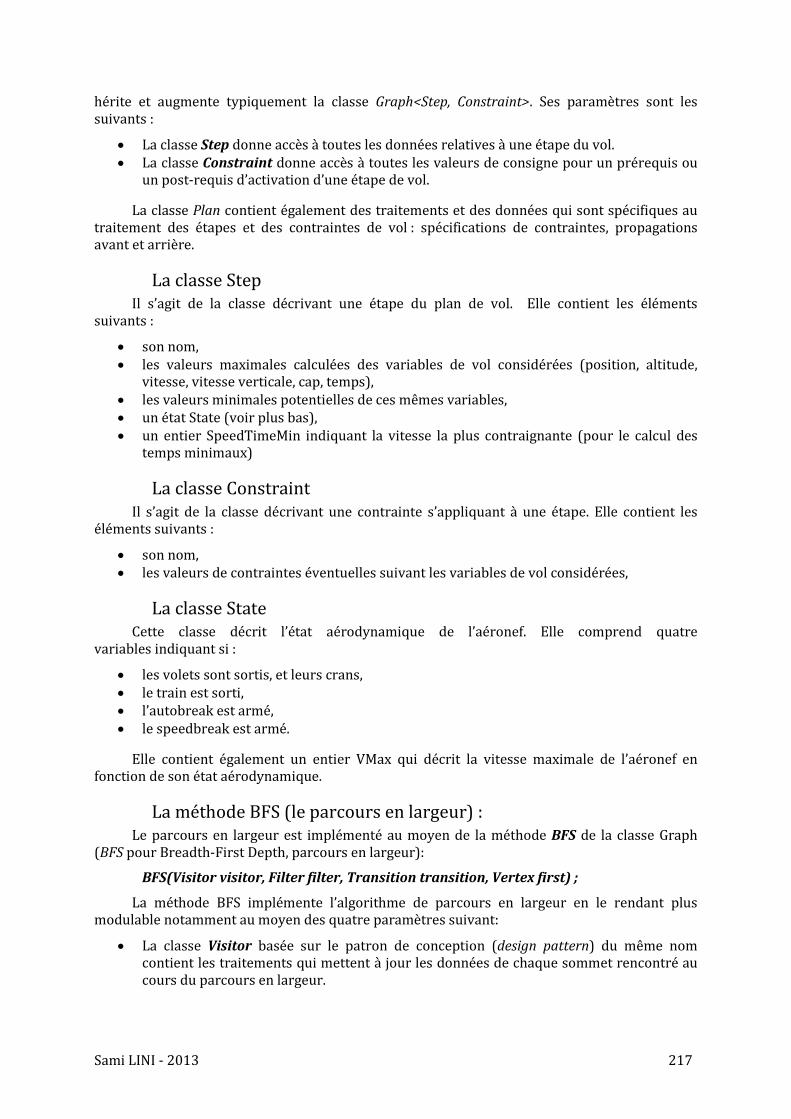
Sami LINI - 2013 217
hérite et augmente typiquement la classe Graph<Step, Constraint>. Ses paramètres sont les suivants :
• La classe Step donne accès à toutes les données relatives à une étape du vol. • La classe Constraint donne accès à toutes les valeurs de consigne pour un prérequis ou
un post-requis d’activation d’une étape de vol.
La classe Plan contient également des traitements et des données qui sont spécifiques au traitement des étapes et des contraintes de vol : spécifications de contraintes, propagations avant et arrière.
La classe Step Il s’agit de la classe décrivant une étape du plan de vol. Elle contient les éléments
suivants :
• son nom, • les valeurs maximales calculées des variables de vol considérées (position, altitude,
vitesse, vitesse verticale, cap, temps), • les valeurs minimales potentielles de ces mêmes variables, • un état State (voir plus bas), • un entier SpeedTimeMin indiquant la vitesse la plus contraignante (pour le calcul des
temps minimaux)
La classe Constraint Il s’agit de la classe décrivant une contrainte s’appliquant à une étape. Elle contient les
éléments suivants :
• son nom, • les valeurs de contraintes éventuelles suivant les variables de vol considérées,
La classe State Cette classe décrit l’état aérodynamique de l’aéronef. Elle comprend quatre
variables indiquant si :
• les volets sont sortis, et leurs crans, • le train est sorti, • l’autobreak est armé, • le speedbreak est armé.
Elle contient également un entier VMax qui décrit la vitesse maximale de l’aéronef en fonction de son état aérodynamique.
La méthode BFS (le parcours en largeur) : Le parcours en largeur est implémenté au moyen de la méthode BFS de la classe Graph
(BFS pour Breadth-First Depth, parcours en largeur):
BFS(Visitor visitor, Filter filter, Transition transition, Vertex first) ;
La méthode BFS implémente l’algorithme de parcours en largeur en le rendant plus modulable notamment au moyen des quatre paramètres suivant:
• La classe Visitor basée sur le patron de conception (design pattern) du même nom contient les traitements qui mettent à jour les données de chaque sommet rencontré au cours du parcours en largeur.

Sami LINI - 2013 218
• La classe Filter permet de filtrer les graphes, de traiter ou non les sommets en fonction de paramètres définis. Cela permet d’affiner les traitements liés au parcours de l’arbre et d’optimiser ces traitements.
• La classe Transition renvoie pour un sommet donné les prochains sommets à parcourir selon un ordre et certaines conditions (un filtrage des sommets par exemple). Elle permet par exemple de spécifier un déplacement avant ou arrière au cours du parcours en largeur (du premier sommet vers le dernier, ou du dernier vers le premier respectivement).
• Le paramètre first est le sommet à partir duquel on commence le parcours en largeur du graphe.
L’implémentation en JAVA retenue pour l’algorithme de parcours en largeur (Figure 77) est la suivante :
public void BFS(Visitor visitor, Filter filter, Transition transition, Vertex start) { Queue<Vertex> queue = new LinkedList<Vertex>(); queue.add(start); while (!queue.isEmpty()) { Vertex current = queue.poll();
if (current.accept(filter)) current.update(visitor); for (Vertex vertex : transition.execute(current)) if (!queue.contains(vertex)) queue.add(vertex);
} }
Le plan encapsule ainsi l’implémentation des deux algorithmes de propagation avant et arrière, implémentés comme suit :
propagateBackward() { BFS(new PropagateBackward(), new NoFilter(), new
BackwardTransition(), getLastConstrained()); } propagateForward() { BFS(new PropagateForward(), new NoFilter(), new
ForwardTransition(), getFirstNonExecuted()); }
Ainsi par exemple la propagation avant se produit en prenant un objet visiteur PropagateBackward qui applique pour chaque nœud la mise à jour de ses prédécesseurs. L’objet NoFilter signifie qu’il n’y a pas de filtre. L’objet BackwardTransition renvoie tous les prédécesseurs comme sommets accessibles à chaque transition. getLastConstrained est la méthode du plan qui renvoie le dernier sommet temporellement contraint (fin du parcours du graphe). La méthode BFS dans cet exemple se charge de faire un parcours en largeur en respectant le modèle décrit au travers de nos trois objets.
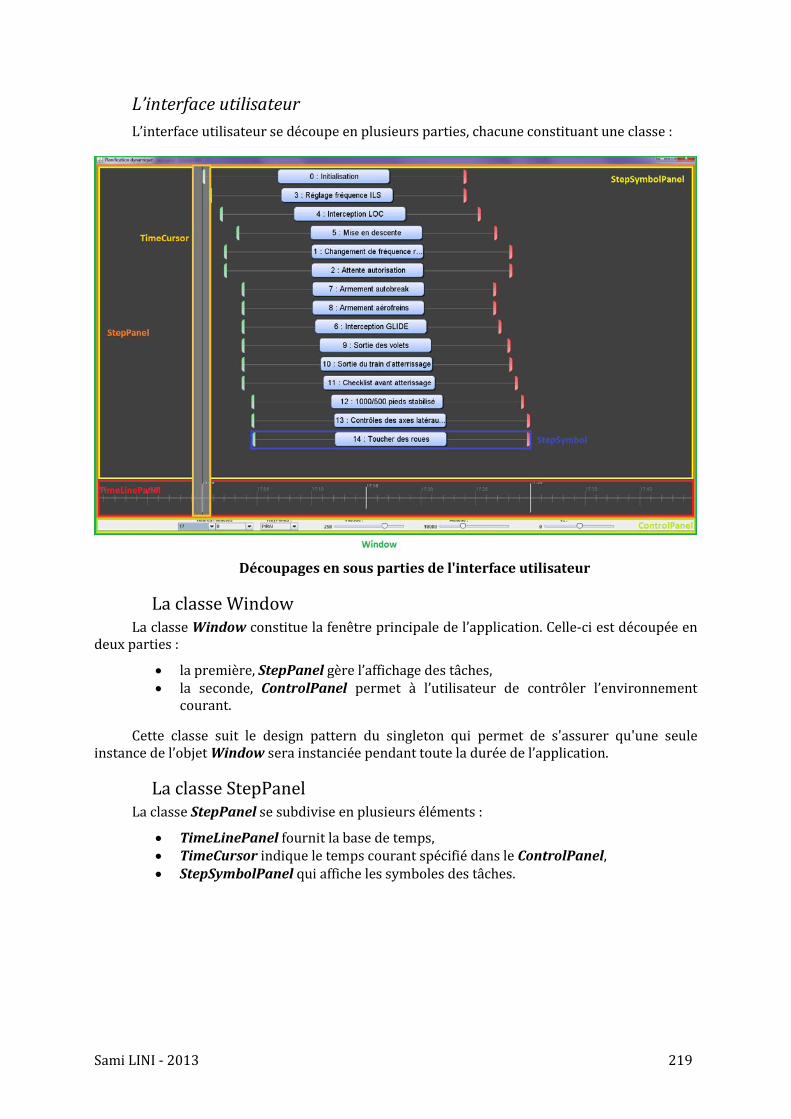
Sami LINI - 2013 219
L’interface utilisateur L’interface utilisateur se découpe en plusieurs parties, chacune constituant une classe :
Découpages en sous parties de l'interface utilisateur
La classe Window La classe Window constitue la fenêtre principale de l’application. Celle-ci est découpée en
deux parties :
• la première, StepPanel gère l’affichage des tâches, • la seconde, ControlPanel permet à l’utilisateur de contrôler l’environnement
courant.
Cette classe suit le design pattern du singleton qui permet de s'assurer qu'une seule instance de l’objet Window sera instanciée pendant toute la durée de l’application.
La classe StepPanel La classe StepPanel se subdivise en plusieurs éléments :
• TimeLinePanel fournit la base de temps, • TimeCursor indique le temps courant spécifié dans le ControlPanel, • StepSymbolPanel qui affiche les symboles des tâches.
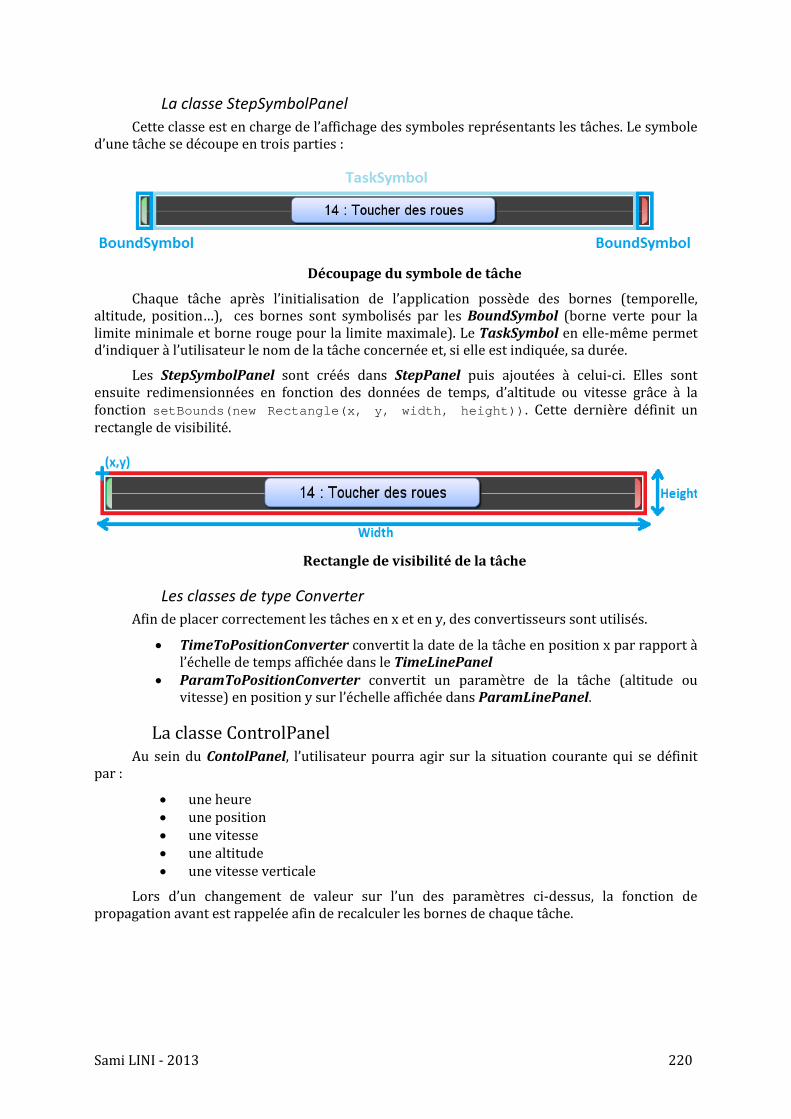
Sami LINI - 2013 220
La classe StepSymbolPanel Cette classe est en charge de l’affichage des symboles représentants les tâches. Le symbole
d’une tâche se découpe en trois parties :
Découpage du symbole de tâche
Chaque tâche après l’initialisation de l’application possède des bornes (temporelle, altitude, position…), ces bornes sont symbolisés par les BoundSymbol (borne verte pour la limite minimale et borne rouge pour la limite maximale). Le TaskSymbol en elle-même permet d’indiquer à l’utilisateur le nom de la tâche concernée et, si elle est indiquée, sa durée.
Les StepSymbolPanel sont créés dans StepPanel puis ajoutées à celui-ci. Elles sont ensuite redimensionnées en fonction des données de temps, d’altitude ou vitesse grâce à la fonction setBounds(new Rectangle(x, y, width, height)). Cette dernière définit un rectangle de visibilité.
Rectangle de visibilité de la tâche
Les classes de type Converter Afin de placer correctement les tâches en x et en y, des convertisseurs sont utilisés.
• TimeToPositionConverter convertit la date de la tâche en position x par rapport à l’échelle de temps affichée dans le TimeLinePanel
• ParamToPositionConverter convertit un paramètre de la tâche (altitude ou vitesse) en position y sur l’échelle affichée dans ParamLinePanel.
La classe ControlPanel Au sein du ContolPanel, l’utilisateur pourra agir sur la situation courante qui se définit
par :
• une heure • une position • une vitesse • une altitude • une vitesse verticale
Lors d’un changement de valeur sur l’un des paramètres ci-dessus, la fonction de propagation avant est rappelée afin de recalculer les bornes de chaque tâche.
Sami LINI - 2013 221
Annexe V : Formulaire d’informations générales (expérimentation finale)
Quel est le but de cette étude ? Cette étude a pour but d’évaluer l’influence d’un outil d’aide à l’anticipation sur la charge
cognitive et l’activité de pilotes commerciaux. Il s’agit de déterminer à l’aide de mesures oculométriques et d’une analyse de l’activité si la présentation sous forme numérique d’informations sur le vol permet une amélioration du résultat de ses mesures.
Qui est chargé de cette étude ? Cette étude est menée dans le cadre du laboratoire HEAL (Human Engineering for
Aerospace Laboratory) par Sami Lini, ingénieur cogniticien en thèse dans le cadre du projet ASAP (projet européen ASTUTE, Thales Avionics/ENSC). Pour toute question concernant cette étude, vous trouverez les informations de contact en bas de cette page.
Qu’implique cette étude ? Il sera demandé aux participants de prendre part à une phase de vol en simulateur. Après
une phase de formation, il leur sera demandé de manipuler les commandes du cockpit afin d’accomplir une phase de vol réaliste. Des mesures physiologiques et d’activité seront réalisées. Des questions leur seront posées en cours de vol et à la fin de chaque phase. Les seules mesures physiologiques sont des mesures oculométriques : à cet effet, il sera demandé aux participants de porter des lunettes filmant leur pupille. Ce procédé n’est pas invasif.
Combien de temps l’étude dure-t-elle ? L’étude est divisée en trois phases de 30 minutes. L’ensemble de la passation dure un peu
moins de deux heures et demi.
Puis-je me retirer de cette étude ? La participation à cette étude se fait sur la base du volontariat et du consentement
volontaire. Si vous consentez à participer à cette étude, vous pouvez vous retirer quand vous le souhaitez, sans la moindre explication. Vous pouvez également demander à ce que les données vous concernant soient détruites.
Qu’en est-il des résultats de cette étude ? Tous les aspects de cette étude, impliquant les résultats, sont strictement confidentiels et
soumis à la seule discrétion des chercheurs qui auront seuls accès aux informations concernant les participants. Un compte-rendu de cette étude pourra être soumis à publication mais aucune information individuelle n’y sera identifiable. L’anonymat de tous les participants est garanti par l’utilisation de pseudonymes. A cet effet, une charte éthique sera co-signée avant le début de l’expérimentation.
Puis-je parler autour de moi de cette étude ? Vous pouvez tout à fait communiquer sur cette étude à l’exception du détail des interfaces
graphiques qui vous auront été présentées, pour des raisons de confidentialité industrielle.

Sami LINI - 2013 222
Et si je souhaite avoir plus d’informations sur cette étude ?
Après avoir lu cette notice d’information, l’expérimentateur répondra à toutes vos questions. Si vous souhaitiez obtenir de plus amples informations à un quelconque moment, vous pouvez contacter directement Sami Lini :
Sami LINI
Ingénieur/Doctorant Thales/ENSC (Ecole Nationale Supérieure de Cognitique, Bordeaux, France)
HEAL - Human Engineering for Aerospace Laboratory
Bureau 18 – 1er étage – Bâtiment 2A
Ecole Nationale Supérieur de Cognitique - 146 rue Léo Saignat – 33076 Bordeaux
05 57 57 47 92 – 06 86 62 40 71

Sami LINI - 2013 223
Annexe VI : Formulaire d’informations personnelles (expérimentation finale)
Laboratoire HEAL (Human Engineering for Aerospace Laboratory)
Thales/ENSC
146 rue Léo Saignat – 33076 Bordeaux
Participant n°………………………
Age : ……………………………
Profession : …………………………….. CdB : Copilote :
Sexe : Homme Femme
Latéralité : Droitier Gaucher
Œil directeur : Droit Gauche
Cursus : ……………………………..………
Nombre d’heures de vol : ……………h
Expérience long courrier : ……………h
Aéronef : …………………………… Court courrier Long courrier
Nombre d’heures de vol sur l’aéronef actuel : …………………h
Aéronef le plus utilisé : ……………………………………………..
Nombre d’heures de vol sur cet aéronef : …………………h
Connaissance de l’aéroport de Rio de Janeiro : Oui Non
Connaissances annexes : Jeux vidéo Simulateurs
Consommation de cigarettes aujourd’hui : Oui Non
Consommation de caféine/théine aujourd’hui : Oui Non
Temps de sommeil : …………………h
Heure de lever : …………………h
Etes-vous correctement hydraté et alimenté : Oui Non

Sami LINI - 2013 224
Annexe VII : Scripts scénarios (expérimentation finale)
En amont : Informations sur la mesure de la qualité des interactions (briefing, etc…), précision du vol,
respect de l’ETA et pétrole restant.
Scénario 1 Vous êtes à bord d’un B747 PAX. Vous entamez la descente vers SBGL (Rio de Janeiro).
Vous serez sur l’ILS 10.
Avant d’entamer la descente, vous réalisez un briefing présentant les spécificités de cette approche en envisageant les cas possibles (dégagement sur Sao Paulo/remise de gaz/plancher de stabilisation).
SI ASAP : Comme illustré lors de la phase de familiarisation, ASAP vous permet de préenregistrer les what-if envisagés. Je vous invite donc à préparer votre trajectoire de dégagement sur l’aéroport de Sao Paulo tel que nous l’avons vu précédemment.
La réserve de carburant finale est de 10 000 livres. La masse prévue à l’atterrissage est de 474 000 livres. Il est 17.00Z vertical Barbacena. Pétrole restant 48600 livres. Météo CAVOK destination et dégagement. QNH 1013. Vent nul. Température 20/15.
Vous êtes positionnés à une altitude de 30000 pieds vertical Barbacena (BBC), votre cap est de 233°, votre vitesse IAS est de 320 noeuds. Vous êtes autorisé approche 10 via ESMAP 1A.
Briefing descente Elément de contrôle A VELA : « vous êtes autorisé atterrissage ».
Scénario 2 Vous êtes à bord d’un B747 PAX. Vous entamez la descente vers SBGL (Rio de Janeiro).
Vous serez sur l’ILS 10.
Avant d’entamer la descente, vous réalisez un briefing présentant les spécificités de cette approche en envisageant les cas possibles (dégagement sur Sao Paulo/remise de gaz/plancher de stabilisation).
SI ASAP : Comme illustré lors de la phase de familiarisation, ASAP vous permet de préenregistrer les what-if envisagés. Je vous invite donc à préparer votre trajectoire de dégagement sur l’aéroport de Sao Paulo tel que nous l’avons vu précédemment.
La réserve de carburant finale est de 10 000 livres. La masse prévue à l’atterrissage est de 474 000 livres. Il est 17.00Z vertical Barbacena. Pétrole restant 48600 livres. Météo CAVOK destination et dégagement. QNH 1013. Vent nul. Température 20/15.
Vous êtes positionnés à une altitude de 30000 pieds vertical Barbacena (BBC), votre cap est de 233°, votre vitesse IAS est de 320 noeuds. Vous êtes autorisé approche 10 via ESMAP 1A.
Contrôle Après le point TOKIM : le contrôle approche vous informe que la piste 10 L est fermée en
raison d’un appareil immobilisé et que la 15 est fermée. Veuillez vous préparer à un tour d’attente au point PIRAI.
Sami LINI - 2013 225
Peu avant PIRAI : le contrôle approche vous confirme que la piste n’est toujours pas dégagée, veuillez vous mettre en attente. 10 minutes d’attente environ.