
La robotique pédagogique
5
J.F. CECI – 30/10/2015 Page 1 Et la robotique pédagogique ? Ou l’art de se sentir bien seul. Oui, il y a effectivement des moments où l’on se sent bien seul ! [Pause-café en salle des profs, dans notre galaxie…] E - Ca va cher Jeff ? Tu as l’air épuisé ! JF - A vrai dire Manu, tu n’as pas tort. Mes cours me fatiguent et je ne sais plus quoi faire pour intéresser les élèves. J’ai beau raconter ce que je veux, rien n’y fait ! E - Je te comprends. J’ai pour ma part presque arrêté de raconter… JF - Comment ça ? E - Je me fatiguais aussi à trop vouloir transmettre, raconter sans cesse les mêmes choses … JF - Et que fais-tu alors ? E - Je fais travailler les élèves et je parle quand c’est nécessaire, après tout c’est à eux d’apprendre, moi je sais déjà… JF - Pas faux, vu comme ça ! Mais comment t’y prends-tu ? E - Il y a tout un tas de stratégies. Connais-tu par exemple la robotique pédagogique ? JF - Heuuuuuu [Fin : Pause-café en salle des profs, dans notre galaxie] Il y a des moments où l’on se sent bien seul, disais-je. Mais de quoi est-il question ici ? Le prof sera-t-il remplacé par un robot qui fera cours et corrigera les copies ? La qualité du cours dépendrait alors du talent de codeur du prof? Je vous rassure, nous n’en sommes pas là…pas encore ! La robotique pédagogique est un outil et un scénario pédagogique incluant des petits robots permettant de mettre en application des notions de logique, de programmation et de compréhension de phénomènes. J’ai pu assister à l’atelier sur « les robots en classe et en activités périscolaires » animé par le Canopé lors des Boussoles du numérique à Cenon, le 14 octobre dernier. L’objectif de cet atelier était de découvrir le fonctionnement et les usages d’un robot comme le petit Thymio2, fort sympathique au demeurant, même si son langage n’est pas des plus naturel. Après une courte explication sur le déroulement de l’atelier, les participants ont été mis à contribution et placés en situation d’exploration du fonctionnement de thymio2.
-
Upload
jean-francois-ceci -
Category
Education
-
view
718 -
download
0
Transcript of La robotique pédagogique
J.F. CECI – 30/10/2015 Page 1
Et la robotique pedagogique ? Ou l’art de se sentir bien seul. Oui, il y a effectivement des moments où l’on se sent bien seul !
[Pause-café en salle des profs, dans notre galaxie…]
E - Ca va cher Jeff ? Tu as l’air épuisé ! JF - A vrai dire Manu, tu n’as pas tort. Mes cours me fatiguent et je ne sais plus quoi faire pour intéresser les élèves. J’ai beau raconter ce que je veux, rien n’y fait ! E - Je te comprends. J’ai pour ma part presque arrêté de raconter… JF - Comment ça ? E - Je me fatiguais aussi à trop vouloir transmettre, raconter sans cesse les mêmes choses … JF - Et que fais-tu alors ?
E - Je fais travailler les élèves et je parle quand c’est nécessaire, après tout c’est à eux d’apprendre, moi je sais déjà… JF - Pas faux, vu comme ça ! Mais comment t’y prends-tu ? E - Il y a tout un tas de stratégies. Connais-tu par exemple la robotique pédagogique ? JF - Heuuuuuu
[Fin : Pause-café en salle des profs, dans notre galaxie]
Il y a des moments où l’on se sent bien seul, disais-je. Mais de quoi est-il question ici ? Le prof sera-t-il remplacé par un robot qui fera cours et corrigera les copies ? La qualité du cours
dépendrait alors du talent de codeur du prof?
Je vous rassure, nous n’en sommes pas là…pas encore !
La robotique pédagogique est un outil et un scénario pédagogique incluant des petits robots permettant de mettre en application des notions de logique, de programmation et de compréhension de phénomènes.
J’ai pu assister à l’atelier sur « les robots en classe et en activités périscolaires » animé par le Canopé lors
des Boussoles du numérique à Cenon, le 14 octobre dernier. L’objectif de cet atelier était de découvrir le fonctionnement et les usages d’un robot comme le petit Thymio2, fort sympathique au demeurant, même si son langage n’est pas des plus naturel.
Après une courte explication sur le déroulement de l’atelier, les participants ont été mis à contribution et placés en situation d’exploration du fonctionnement de thymio2.
J.F. CECI – 30/10/2015 Page 2
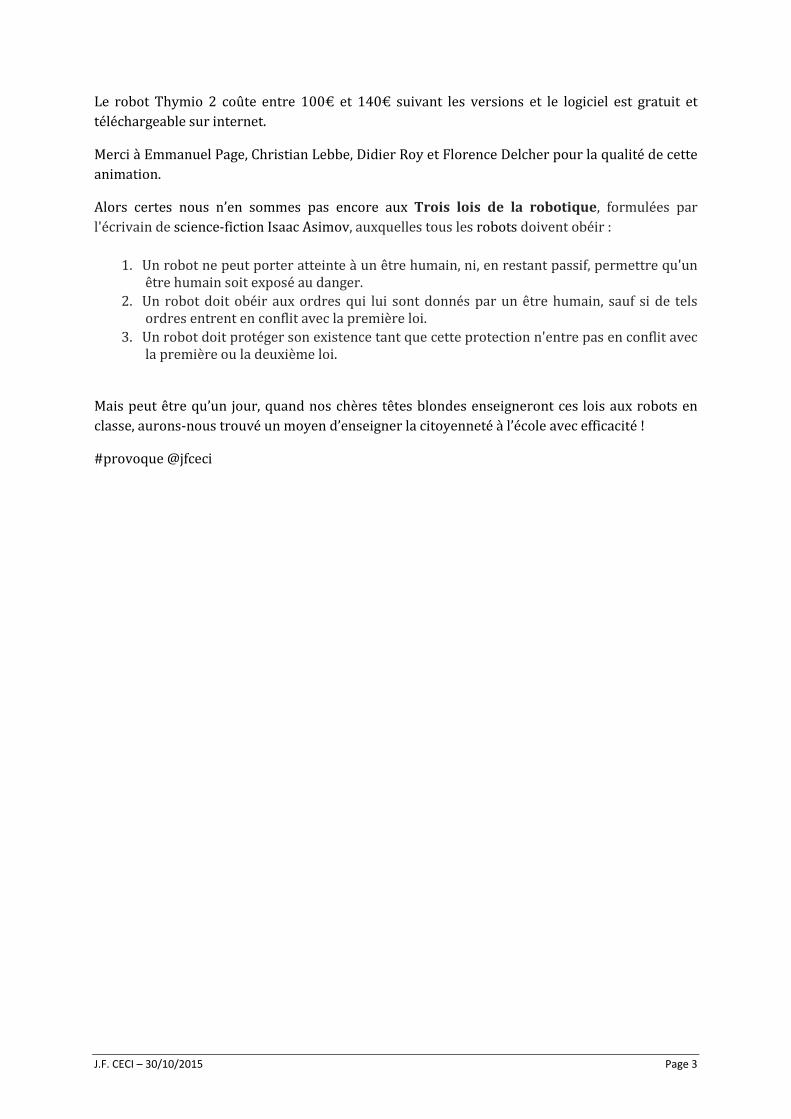
Ici, la pédagogie active est de rigueur : donc point de cours expliquant pas à pas le mode d’emploi de l’engin, juste une fiche d’exploration (voir fiche pages 4 et 5) avec des expériences à mener et des conclusions à tirer.
L’élève découvre le concept à partir de l’expérience en alternant une démarche inductive et déductive pour comprendre la logique du robot. Pour que l’expérience soit la plus concluante possible, les échanges de groupe sont importants pour installer le bon vocabulaire et une compréhension homogène des concepts découverts.
Voyons un exemple, celui du mode rouge du robot :
Expérience : J’approche ma main du robot -> il recule
Dialogue : Peut-on appeler ce mode « fuite » ou « robot peureux » ? Etudions la fuite pour préciser
Expérience : J’approche ma main, quand j’arrive à quelques centimètres du robot, il recule puis s’arrête.
Dialogue : Il ne fuit pas donc, il recule ! Oui mais quelles sont les règles de ce recul ? Quelle est sa logique ?
Expérience : J’approche ma main, jusqu’à 6 cm il ne se passe rien. Si je me rapproche encore le robot recule et s’arrête à 6 cm.
Dialogue : Alors comment peut-on appeler cela ? Il se tient à distance de 6 cm…il préserve son espace !
La fiche fournie lors de l’atelier permet de déduire et de comprendre les différents modes de fonctionnement du robot. Chemin faisant, nous pouvons découvrir les bases de l’algorithmique de manière très intéressante et interactive. Il faut reconnaitre que les échanges de groupes et le côté très ludique de l’activité facilitent cet apprentissage !
Thymio2 peut être adressé via le logiciel libre Scratch ou par une interface graphique permettant de faire de la programmation visuelle très simplement. Cela permet d’aller au-delà des modes préprogrammés dans le robot. Il suffit d’associer un évènement (parmi 6 possibilités : par exemple détection via un des nombreux capteurs) et une action (parmi 5 possibilités : par exemple jouer une musique ou éclairer en rouge) pour créer ainsi des séquences programmées.
Pour en savoir plus : https://www.thymio.org/fr:visualprogramming
Cela vous semble intéressant ?
J.F. CECI – 30/10/2015 Page 3
Le robot Thymio 2 coûte entre 100€ et 140€ suivant les versions et le logiciel est gratuit et téléchargeable sur internet.
Merci à Emmanuel Page, Christian Lebbe, Didier Roy et Florence Delcher pour la qualité de cette animation.
Alors certes nous n’en sommes pas encore aux Trois lois de la robotique, formulées par l'écrivain de science-fiction Isaac Asimov, auxquelles tous les robots doivent obéir :
1. Un robot ne peut porter atteinte à un être humain, ni, en restant passif, permettre qu'un être humain soit exposé au danger.
2. Un robot doit obéir aux ordres qui lui sont donnés par un être humain, sauf si de tels ordres entrent en conflit avec la première loi.
3. Un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la première ou la deuxième loi.
Mais peut être qu’un jour, quand nos chères têtes blondes enseigneront ces lois aux robots en classe, aurons-nous trouvé un moyen d’enseigner la citoyenneté à l’école avec efficacité !
#provoque @jfceci
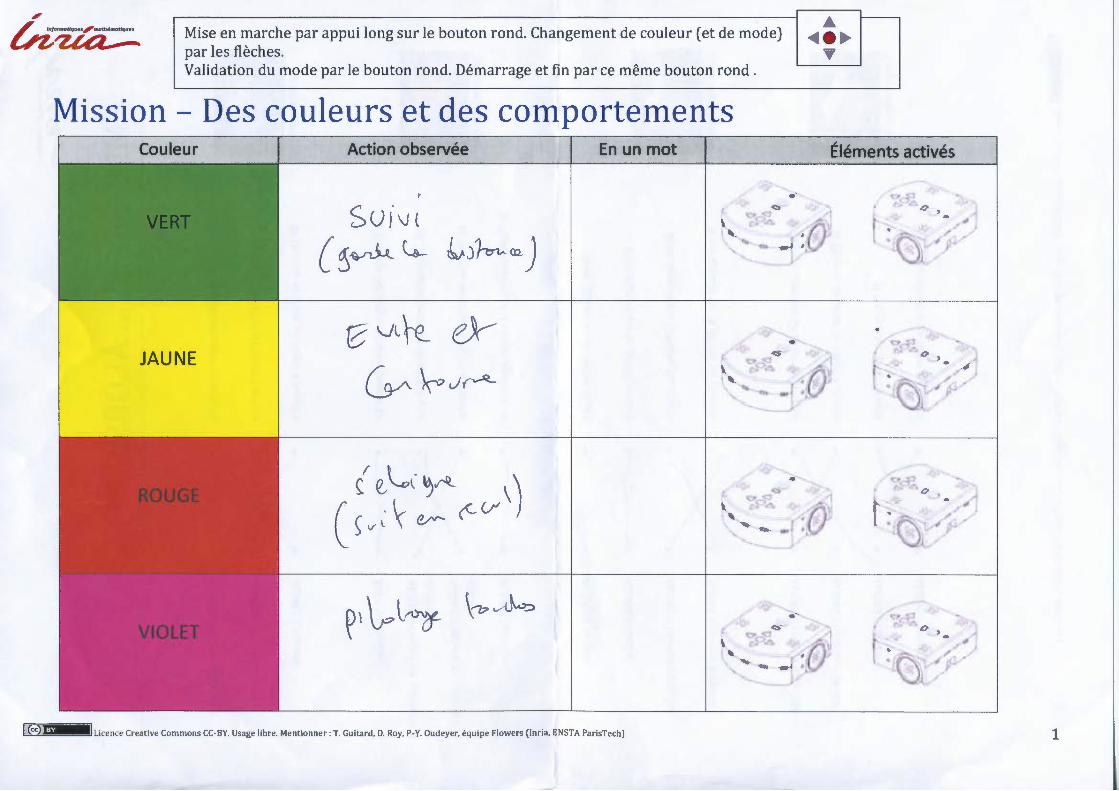
, bi?Zifi"'-;: Mise en marche par appui long sur le bouton rond. Changement de couleur (et de mode)
par les flèches. Validation du mode par le bouton rond. Démarrage et fin par ce même bouton rond .
Mission - Des couleurs et des comportements
JAUNE
Action observée
SU{\J(
c~~~ ~J~~J
8 vLfe_ &-~~J~
{ ~ \.o~· ~~ ( ç.,; \ 10- r:-v')
~ \ \.r, l"'(f \-» vtko
En un mot
1 (c9 h- 1 Lice nce Creative Co rn mons CC- BY. Usage libre. Mentionner : T. Guitard, D. Roy, P-Y. Oudeyer, équipe Flowers (Inria, ENSTA ParisTech)
·' \
\ l -.
~ ' ' ......,. __ _ '
b. <J e t>
\1
Éléments activés
1
, U;z:za:.·"-::
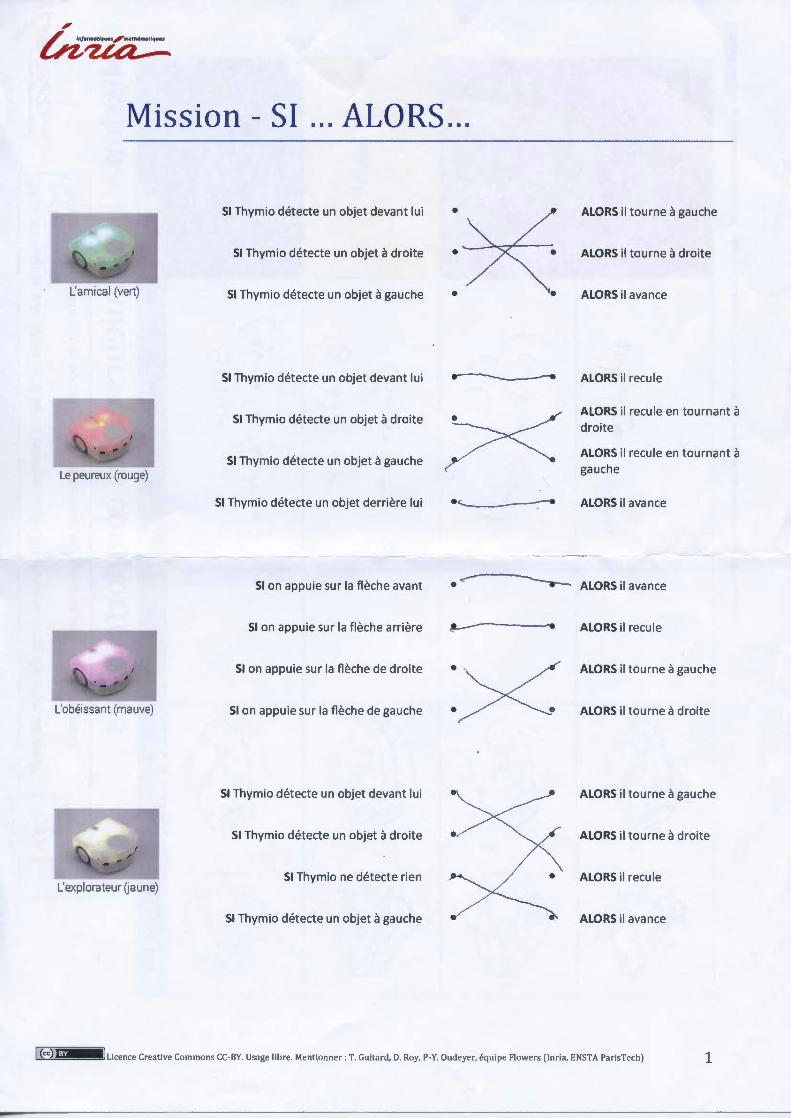
Mission- SI ... ALORS ...
SI Thymio détecte un objet devant lui
SI Thymio détecte un objet à droite
L'amical (vert) SI Thymio détecte un objet à gauche
SI Thymio détecte un objet devant lui
SI Thymio détecte un objet à droite
SI Thymio détecte un objet à gauche Le peureux (rouge)
SI Thymio détecte un objet derrière lui
SI on appuie sur la flèche avant
SI on appuie sur la flèche arrière
SI on appuie sur la flèche de droite
L'obéissant (mauve) SI on appuie sur la flèche de gauche
SI Thymio détecte un objet devant lui
SI Thymio détecte un objet à droite
L'explorateur Qaune) SI Thymio ne détecte rien
SI Thymio détecte un objet à gauche
•
• •
• •
·~
ALORS il tourne à gauche
ALORS il tourne à droite
ALORS il avance
ALORS il recule
ALORS il recule en tournant à droite
ALORS il recule en tournant à gauche
ALORS il avance
• ~ ALORS il avance
· -~/
·~·
ALORS il recule
ALORS il tourne à gauche
ALORS il tourne à droite
ALORS il tourne à gauche
ALORS il tourne à droite
ALORS il recule
ALORS il avance
01 ~~cc)~i~41iii!lïiJI Licence Creative Corn mons CC-BY. Usage libre. Mention ner: T. Guitard, O. Roy, P-Y. Oudeyer, équipe Flowers (Inria, ENSTA ParisTech) 1


















