
La mécanique analytique - Olivier Castérao.castera.free.fr/pdf/Mecanique_analytique.pdf · Il me...
226
La m´ ecanique analytique Olivier Cast´ era E-mail address : [email protected] URL: http://o.castera.free.fr/
Transcript of La mécanique analytique - Olivier Castérao.castera.free.fr/pdf/Mecanique_analytique.pdf · Il me...

La mecanique analytique
Olivier Castera
E-mail address : [email protected]: http://o.castera.free.fr/

Resume. En 1586, Simon Stevin enonce le principe des travauxvirtuels en etudiant des palans. En 1717, Jean Bernoulli pose leprincipe des travaux virtuels comme loi fondamentale de la sta-tique : a l’equilibre, aucun travail n’est necessaire pour provoquerun deplacement infiniment petit d’un systeme mecanique donne.En 1743, Jean le Rond D’Alembert etend ce principe a la dyna-mique. Il devient alors une ecriture equivalente des equations de lamecanique de Newton.
Dans son ouvrage ≪ Mechanique analitique ≫ de 1788, Joseph-Louis de La Grange pose le principe des travaux virtuels a la basede la mecanique analytique. En appliquant les coordonnees ge-neralisees a ce principe, il enonce les equations de la mecaniqueanalytique. Comme les equations de Newton, les n equations deLagrange sont du deuxieme ordre par rapport au temps, du faitdes termes d’acceleration. En 1827, Sir William Rowan Hamiltoneffectue la transformation de Legendre du Lagrangien pour les vi-tesses generalisees. Les 2n equations de Hamilton sont du premierordre, et sont remarquables par leur symetrie.
Il me paraıt difficile de comprendre la mecanique analytiqueen partant du principe de Hamilton ou des equations de Newton,c’est pourquoi, comme le fit Lagrange dans son ouvrage, j’ai choiside partir du principe des travaux virtuels.

Table des matieres
Chapitre 1. Le principes des travaux virtuels en statique 51. Principe des deplacements virtuels 52. Principe des travaux virtuels 63. Formulation generale du principe 74. Comparaison avec la mecanique de Newton 135. Les types de liaisons 176. Multiplicateurs de Lagrange 217. Forces derivant d’une energie potentielle 228. Nature de l’equilibre 23
Chapitre 2. Le principes des travaux virtuels en dynamique 291. Generalisation du principe a la dynamique 292. Comparaison avec la mecanique de Newton 33
Chapitre 3. Mecanique de Lagrange 391. Equations de Lagrange 392. Proprietes du Lagrangien et des equations de Lagrange 553. Integrales premieres du mouvement 60
Chapitre 4. Mecanique de Hamilton 671. Transformation de Legendre 672. Equations de Hamilton 703. Conservation du Hamiltonien 744. Hamiltonien et energie mecanique 755. Coordonnees cycliques 786. Theoreme de Liouville 79
Chapitre 5. Transformations canoniques 831. Transformations de coordonnees 832. Fonctions generatrices d’une transformation 853. Transformations canoniques infinitesimales 974. Evolution d’un systeme 1005. Transformations invariantes 1026. Crochets de Poisson 104
Chapitre 6. Theorie de Hamilton-Jacobi 1171. Equation de Hamilton-Jacobi 1172. Representation en impulsions 1193. Separation des variables 120
3
4 Table des matieres
4. Representation de la fonction principale de Hamilton 1375. Fonction principale de Hamilton et Lagrangien 142
Chapitre 7. Principe variationnel 1451. Le principe de Heron d’Alexandrie 1452. Loi de Snell-Descartes 1453. Le principe de Fermat 1454. L’hypothese de Huygens 1475. La brachistochrone 1496. La Brachistochrone par le calcul des variations 1507. Principes de moindre action 1588. Derivation des equations de Hamilton 160
Chapitre 8. Applications 1631. Applications des travaux virtuels a la statique 1632. Comparaison des differentes mecaniques 183
Chapitre 1
Le principes des travaux virtuels en statique
1. Principe des deplacements virtuels
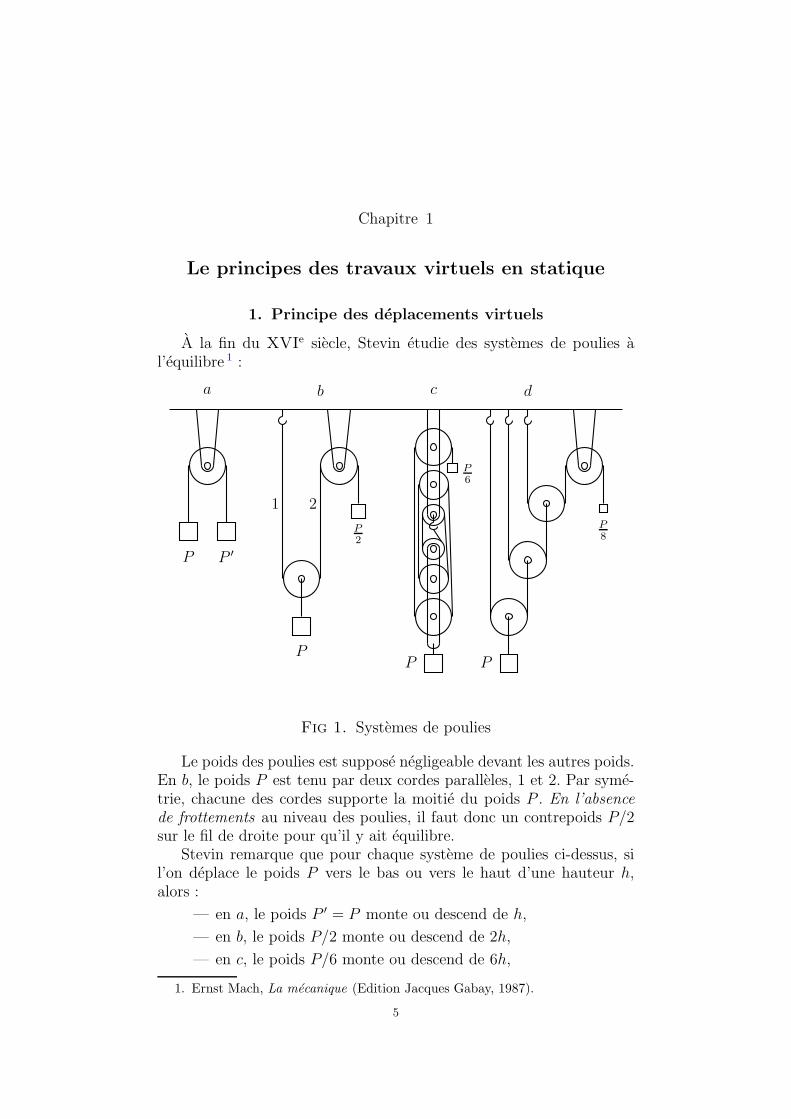
A la fin du XVIe siecle, Stevin etudie des systemes de poulies a
l’equilibre 1 :
a b c d
P P ′
P
P2
1 2
P
P6
P
P8
Fig 1. Systemes de poulies
Le poids des poulies est suppose negligeable devant les autres poids.En b, le poids P est tenu par deux cordes paralleles, 1 et 2. Par syme-trie, chacune des cordes supporte la moitie du poids P . En l’absencede frottements au niveau des poulies, il faut donc un contrepoids P/2sur le fil de droite pour qu’il y ait equilibre.
Stevin remarque que pour chaque systeme de poulies ci-dessus, sil’on deplace le poids P vers le bas ou vers le haut d’une hauteur h,alors :
— en a, le poids P ′ = P monte ou descend de h,
— en b, le poids P/2 monte ou descend de 2h,
— en c, le poids P/6 monte ou descend de 6h,
1. Ernst Mach, La mecanique (Edition Jacques Gabay, 1987).
5

6 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
— en d, le poids P/8 monte ou descend de 8h.
Ainsi, dans un systeme de poulies a l’equilibre, les produits de cha-cun des poids par les deplacements que l’on pourrait leur donner, sontegaux :
P × h = P2× 2h
= P6× 6h
= P8× 8h
Cette remarque contient en germe le principe des deplacements vir-tuels. On imagine le systeme dans une configuration toute proche decelle que l’on a, chaque poids subissant un deplacement dit virtuel, caril n’y a pas a proprement parler de deplacement. La notion de tempsn’intervient pas puisqu’il s’agit de comparer deux positions d’equilibred’un systeme, sans le passage de l’un a l’autre.
En notant P1 le premier poids et P2 le second poids, et en notanth1 la hauteur de chute de P1 et h2 celle de P2, nous avons :
P1 h1 = P2 h2
Si les hauteurs de chute sont comptees positivement vers le bas etnegativement vers le haut :
P1 h1 + P2 h2 = 0
En generalisant, la condition determinante de l’equilibre de p poids estdonnee par :
p∑
i=1
Pi hi = 0
2. Principe des travaux virtuels
En etudiant les plans inclines, Galilee constate la validite du prin-cipe des travaux virtuels et en trouve une formulation plus generale.
Un poids P repose sur un plan incline dont la longueur AB estdouble de la hauteur BC. En l’absence de frottements entre le poids Pet le plan incline, et au niveau de la poulie, ce poids est maintenu enequilibre par un poids P/2.
PP2
A
B
C
Fig 2. Equilibre d’un poids sur un plan incline

3. FORMULATION GENERALE DU PRINCIPE 7
Si l’on deplace le poids P sur une distance d le long du plan in-cline, alors le poids P/2 descend d’une hauteur d. Nous n’avons plusl’egalite trouvee par Stevin entre les poids multiplies par leur deplace-ment respectif :
P × d 6= P2× d
Mais Galilee constate que le poids P monte d’une hauteur h/2 etque le poids P/2 descend d’une hauteur h, et cette fois les produitssont egaux :
P × h2= P
2× h
L’equilibre est determine par les poids multiplies par leur hauteurde chute, et non par leur deplacement.
Par rapport a Stevin, Galilee precise que le deplacement a prendreen compte est celui effectue selon la verticale, autrement dit, celui dansle sens des forces de pesanteur.
Soient p poids P1, P2, . . . , Pp subissant respectivement les deplace-ments d1, d2, . . . , dp compatibles entre eux et avec les liaisons (compa-tibles avec le mecanisme, donc non independants). Soient h1, h2, . . . , hp,les projections de ces deplacements sur la verticale, affectees du signe+ ou du signe − selon qu’elles sont ou non de meme sens que les forcesdues aux poids. A l’equilibre, la somme des travaux virtuels est nulle :
p∑
i=1
Pi hi = 0
Les travaux virtuels Ph sont positifs ou negatifs suivant que l’angleentre la force due au poids et le deplacement est aigu ou obtus. Si l’onnote P i le vecteur force du i eme poids et ri le vecteur position de cepoids, le travail virtuel du i eme poids est le produit scalaire P i · ∆ri,et le principe des travaux virtuels s’ecrit,
p∑
i=1
P i ·∆ri = 0
ou les deplacements virtuels ∆ri sont compatibles entre eux et avec lesliaisons.
3. Formulation generale du principe
En 1717, Jean Bernoulli enonce la formulation generale du principedes deplacements virtuels pour tous les cas d’equilibre, en ce qu’ellene s’applique pas uniquemment aux forces de pesanteur. En effet, uneforce quelconque peut etre remplacee par la traction exercee par unpoids suspendu a un fil.
Soient p forces F 1,F 2, . . . ,F p actives (qui crees le mouvement) ap-pliquees aux p parties mobiles d’un systeme, subissant respectivementles deplacements virtuels infiniment petits δr1, δr2, . . . , δrp compatibles
8 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
entre eux et avec les liaisons. A l’equilibre, la somme des travaux vir-tuels des forces actives est nulle :
p∑
i=1
F activei · δri = 0 (1)
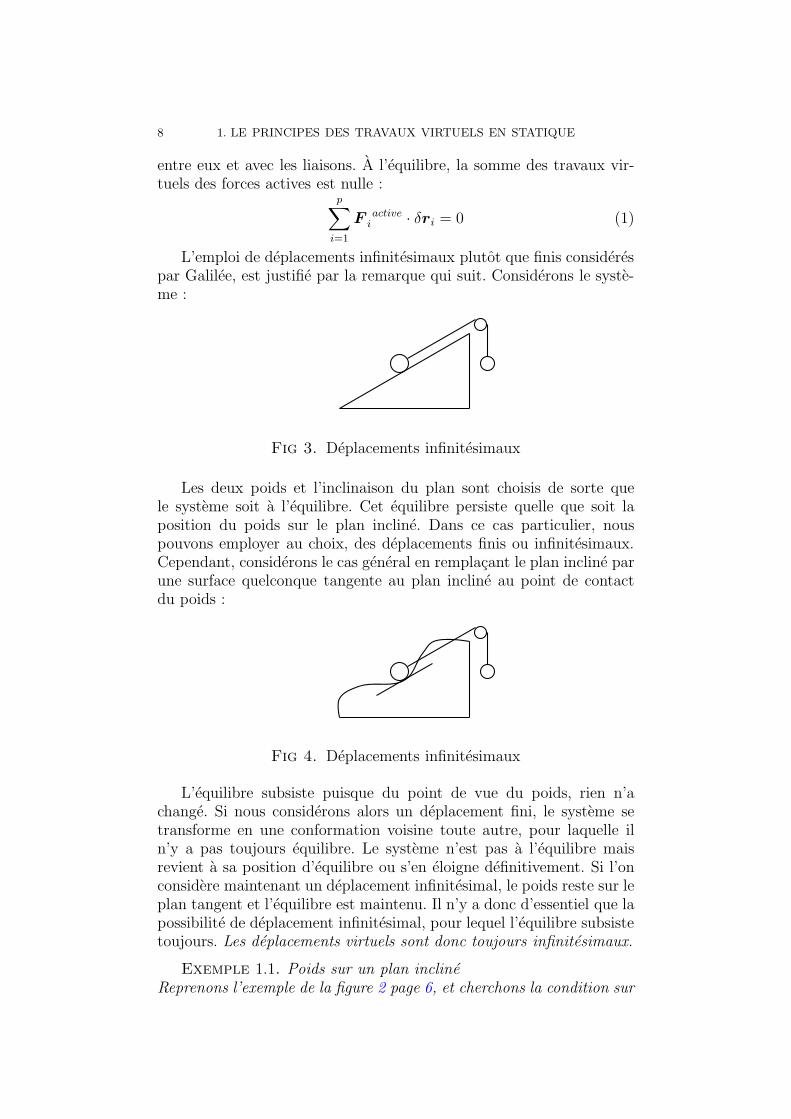
L’emploi de deplacements infinitesimaux plutot que finis considerespar Galilee, est justifie par la remarque qui suit. Considerons le syste-me :
Fig 3. Deplacements infinitesimaux
Les deux poids et l’inclinaison du plan sont choisis de sorte quele systeme soit a l’equilibre. Cet equilibre persiste quelle que soit laposition du poids sur le plan incline. Dans ce cas particulier, nouspouvons employer au choix, des deplacements finis ou infinitesimaux.Cependant, considerons le cas general en remplacant le plan incline parune surface quelconque tangente au plan incline au point de contactdu poids :
Fig 4. Deplacements infinitesimaux
L’equilibre subsiste puisque du point de vue du poids, rien n’achange. Si nous considerons alors un deplacement fini, le systeme setransforme en une conformation voisine toute autre, pour laquelle iln’y a pas toujours equilibre. Le systeme n’est pas a l’equilibre maisrevient a sa position d’equilibre ou s’en eloigne definitivement. Si l’onconsidere maintenant un deplacement infinitesimal, le poids reste sur leplan tangent et l’equilibre est maintenu. Il n’y a donc d’essentiel que lapossibilite de deplacement infinitesimal, pour lequel l’equilibre subsistetoujours. Les deplacements virtuels sont donc toujours infinitesimaux.
Exemple 1.1. Poids sur un plan inclineReprenons l’exemple de la figure 2 page 6, et cherchons la condition sur

3. FORMULATION GENERALE DU PRINCIPE 9
la norme du poids P2 pour qu’il y ait equilibre. Dans cet exemple on nepart pas du principe des travaux virtuels, mais on le fait apparaitre apartir de la mecanique de Newton.
R1
P 1
P 2
T 1 T 2
Fig 5. Equilibre d’un poids sur un plan incline
Notons F i la somme des forces exterieures s’exercant sur la ieme
partie articulee du systeme. Nous avons :{
F ext1 = P 1 + T 1 +R1
F ext2 = P 2 + T 2
Lorsque le systeme est a l’equilibre, chacune de ces somme de forcesexterieures est nulle :
{
F ext1 = 0
F ext2 = 0
Leur travail virtuel est donc nul pour tout ensemble de deplacementsvirtuels quelconques independants (pour le moment aucun lien entre δr1
et δr2) :{
∀δr1 F ext1 · δr1 = 0
∀δr2 F ext2 · δr2 = 0
Additionnons ces travaux virtuels nuls :
∀δr1, ∀δr2, F 1 · δr1 + F 2 · δr2 = 0
La force active est ici le poids P , les forces de contrainte sont latension T et la reaction du support R.
(P 1 + T 1 +R1) · δr1 + (P 2 + T 2) · δr2 = 0
(P 1 · δr1 + P 2 · δr2) + (T 1 · δr1 + T 2 · δr2 +R1 · δr1) = 0
Choisissons les deplacements virtuels δr1 et δr2 compatibles entreeux et avec les liaisons. Ils ne sont plus quelconques mais dependants.
En l’absence de frottements la reaction du support R1 est perpen-diculaire au deplacement virtuel et ne travaille pas :
(P 1 · δr1 + P 2 · δr2) + (T 1 · δr1 + T 2 · δr2) = 0

10 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
δr1
δr2
α
Fig 6. Deplacements virtuels compatibles entre eux etavec les liaisons
La tension de la corde travaille, T 1 · δr1 6= 0 et T 2 · δr2 6= 0, maisla somme de ses travaux virtuels est nulle. En effet, la tension etantconstante (T1 = T2) :
T 1 · δr1 + T 2 · δr2 = T1 δr1 − T2 δr2
= T (δr1 − δr2)
= 0
Il reste,
P 1 · δr1 + P 2 · δr2 = 0
qui est le principe des travaux virtuels, ou δr1 et δr2 sont lies par l’e-quation de liaison δr1 = δr2 qui remplace les forces de tension.
On resoud l’equation pour trouver la condition sur P2 :
−P1 sinα δr1 + P2 δr2 = 0
P2 = P1 sinα
Dans le cas de l’existence d’une force de frottement f entre la masseet le plan incline, nous avons :
−P1 sinα δr1 − f δr1 + P2 δr2 = 0
f = P2 − P1 sinα
Exemple 1.2. Le levier
Principe du levier.
Dans le repere cartesien (o, i, j), soit un levier a l’equilibre sous l’actionde deux forces actives :
{
F 1 = −F1 j
F 2 = −F2 j
Les vecteurs position des extremites du levier s’ecrivent :{
r1 = r1 cos θ i + r1 sin θ j
r2 = −r2 cos θ i− r2 sin θ j

3. FORMULATION GENERALE DU PRINCIPE 11
i
j
o
R
F 2
F 1
θ
Fig 7. Levier a l’equilibre quel que soit l’angle θ
Donnons au levier une rotation virtuelle d’angle δθ compatible avec laliaison R. Les variations des vecteurs positions ont pour expressions :
δr1 =∂r1
∂θδθ
δr2 =∂r2
∂θδθ
{
δr1 = −r1 sin θ δθ i + r1 cos θ δθ j
δr2 = r2 sin θ δθ i− r2 cos θ δθ j
R
F 2
F 1
δθ
Fig 8. Rotation virtuelle d’angle δθ
La reaction R ne travaille pas lors de ce deplacement virtuel (ellereste identique a elle-meme quel que soit l’angle). Le principe des tra-vaux virtuels s’ecrit :
p∑
i=1
F activei · δri = 0
F 1 · δr1 + F 2 · δr2 = 0
−F1 r1 cos θ δθ + F2 r2 cos θ δθ = 0
F1 r1 = F2 r2
Nous retrouvons le principe du levier, c’est a dire l’egalite des mo-ments de force.
Remarque : Le principe du levier est precisement le principe destravaux virtuels. Celui-ci aurait pu etre etabli en etudiant le levierplutot que les palans. Le principe de fonctionnement des palanset celui du levier etant a la base de la statique, ils ne sont pas

12 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
demontrables. Il en va de meme pour les poulies coaxiales, exemple(1.4) page 15.
En statique, lorsque l’on etudie l’equilibre d’un systeme, les depla-cements virtuels sont choisis de sorte que les forces de liaison ne tra-vaillent pas. Ces deplacements sont dits compatibles avec les liaisons.Ce n’est plus le cas lorsque l’on cherche l’expression des forces de liai-son.
Calcul de la force de reaction.
Lorsque l’on veut calculer une force de reaction, le deplacement virtueldoit etre incompatible avec cette liaison pour qu’elle travaille. La forcede liaison est alors traitee comme une force active. Pour calculer lareaction du point d’appui, on donne au levier une translation verticalevirtuelle δz.
RF 1
F 2
δz
Fig 9. Force de reaction d’un levier
Le principe des travaux virtuels s’ecrit :
R · δr + F 1 · δr + F 2 · δr = 0
R δz − F1 δz − F2 δz = 0
R = F1 + F2
Remarquons que la translation virtuelle aurait pu etre vers le bas, leresultat aurait ete le meme. Il est permis de considerer un deplacementvirtuel ou deux solides se compenetrent et ne respectent pas les liaisons.
Nous voyons sur cet exemple la difference entre un deplacementvirtuel et un deplacement reel. Dans ce dernier, si le levier se separede son appui, la reaction R devient nulle, et ne travaille pas. Dansle deplacement virtuel, la reaction reste la meme et effectue le travailvirtuel R δz.
Dans ce dernier exemple, nous ne cherchons pas l’equation d’equi-libre du systeme mais la force de reaction, c’est pourquoi le depla-cement virtuel choisi n’est pas compatible avec cette liaison. Lorsquenous etudierons l’equilibre d’un systeme, nous prendrons toujours desdeplacements virtuels compatibles avec les liaisons, c’est a dire pourlesquels le travail virtuel des forces de liaison est nul.

4. COMPARAISON AVEC LA MECANIQUE DE NEWTON 13
4. Comparaison avec la mecanique de Newton
En mecanique de Newton, un systeme est a l’equilibre lorsque lasomme de toutes les forces exterieures exercees sur ce systeme est nulle,et lorsque la somme des moments de ces forces est nulle 2. Pour un syste-me articule, on doit definir plusieurs sous-systemes, puis determiner lesforces exercees sur ces sous-systemes, dont les forces de liaison entre cessous-systemes. C’est la determination des forces de liaison qui permetde resoudre le probleme.
Exemple 1.3. Le palanReprenons l’exemple du palan de la figure 1.b page 5. Quelle doit etrela valeur du poids P2 pour equilibrer celle du poids P1 ?
Resolution par la mecanique de Newton :
T T T
P 1
P 2
Fig 10. Palan : inventaire des forces
Le premier sous-systeme etudie est la premiere poulie. Elle est im-mobile, donc la somme des forces exterieures exercees sur cette poulieest nulle :
P 1 + 2T = 0
T = −P 1
2Nous avons determine la force de liaison, la tension T de la corde.
Le second sous-systeme etudie est le poids P2. Il est immobile, donc :
P 2 + T = 0
P 2 = −T
Par consequent :
P 2 =P 1
22. Voir Mecanique classique.pdf
14 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
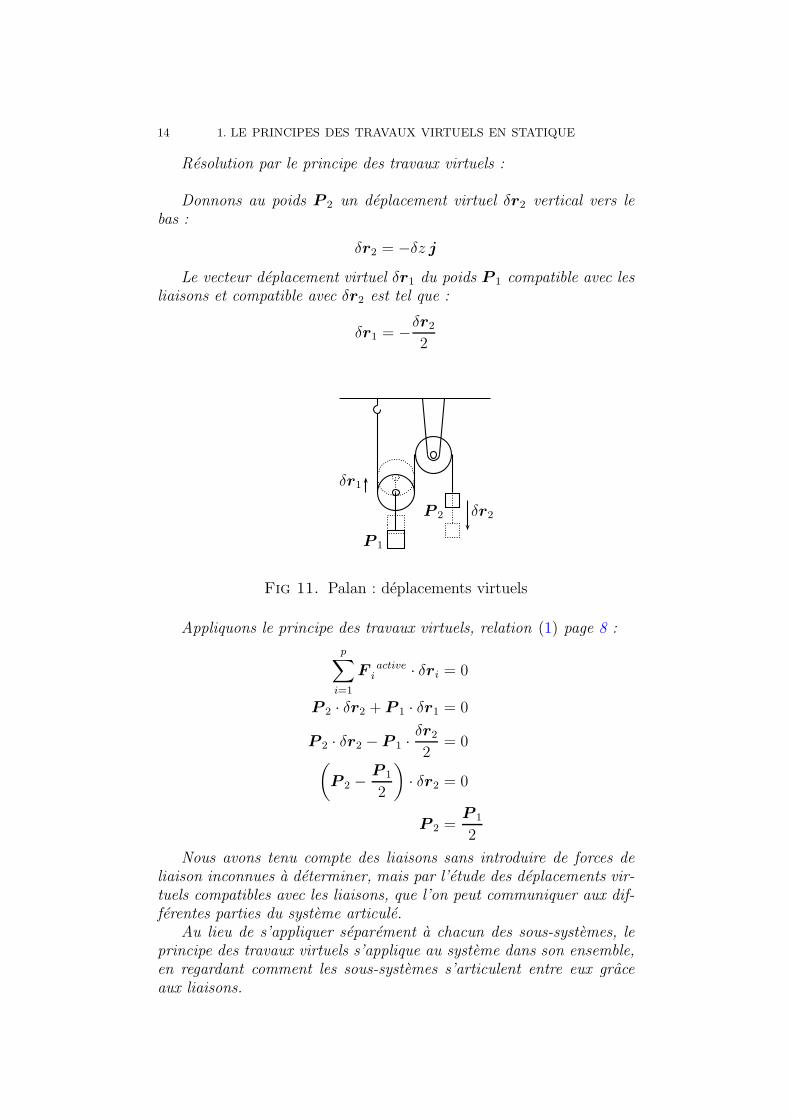
Resolution par le principe des travaux virtuels :
Donnons au poids P 2 un deplacement virtuel δr2 vertical vers lebas :
δr2 = −δz j
Le vecteur deplacement virtuel δr1 du poids P 1 compatible avec lesliaisons et compatible avec δr2 est tel que :
δr1 = −δr2
2
P 1
P 2
δr1
δr2
Fig 11. Palan : deplacements virtuels
Appliquons le principe des travaux virtuels, relation (1) page 8 :
p∑
i=1
F activei · δri = 0
P 2 · δr2 + P 1 · δr1 = 0
P 2 · δr2 − P 1 ·δr2
2= 0
(
P 2 −P 1
2
)
· δr2 = 0
P 2 =P 1
2
Nous avons tenu compte des liaisons sans introduire de forces deliaison inconnues a determiner, mais par l’etude des deplacements vir-tuels compatibles avec les liaisons, que l’on peut communiquer aux dif-ferentes parties du systeme articule.
Au lieu de s’appliquer separement a chacun des sous-systemes, leprincipe des travaux virtuels s’applique au systeme dans son ensemble,en regardant comment les sous-systemes s’articulent entre eux graceaux liaisons.

4. COMPARAISON AVEC LA MECANIQUE DE NEWTON 15
Exemple 1.4. Poulies coaxialesDeux poulies coaxiales de rayon R1 et R2 supportent respectivement lespoids P 1 et P 2. Quelle est la condition d’equilibre ?
Resolution par la mecanique de Newton :L’ensemble des poids et des poulies coaxiales constitue le systeme. A
+
P 1
P 2
T 1T 2
R1 R2c
Fig 12. Poulies coaxiales : inventaire des forces
l’equilibre, la somme des moments des forces exterieures est nulle parrapport a n’importe quel point. Par rapport au centre c de l’axe communaux deux poulies, nous avons :
MP 1/c +MP 2/c = 0
R1 × P 1 +R2 × P 2 = 0
P1R1 − P2R2 = 0
P1 =R2
R1
P2
Resolution par le principe des travaux virtuels :La position du systeme ne depend que de l’angle de rotation ϕ despoulies. Donnons aux poulies une rotation virtuelle d’angle δϕ. Les de-placements virtuels s’ecrivent :
δr1 = −R1 δϕ j
δr2 = R2 δϕ j

16 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
+
P 1
P 2
R1
R2
δϕ
δr1
δr2
Fig 13. Poulies coaxiales : deplacements virtuels
Appliquons le principe des travaux virtuels, relation (1) page 8 :p∑
i=1
F activei · δri = 0
P 1 · δr1 + P 2 · δr2 = 0
P1R1 δϕ− P2R2 δϕ = 0
P1R1 − P2R2 = 0
P1 =R2
R1P2
Nous avons montre avec l’exemple du palan, que le principe des travauxvirtuels contient le principe de l’equilibre des forces de la mecanique deNewton. Grace au principe des travaux virtuels, nous retrouvons aussil’equilibre des moments de force de la statique geometrique. Le principedes travaux virtuels contient donc les deux principes de la mecaniquede Newton, l’egalite des forces et l’egalite des moments de force.
4.1. Avantage de la methode.
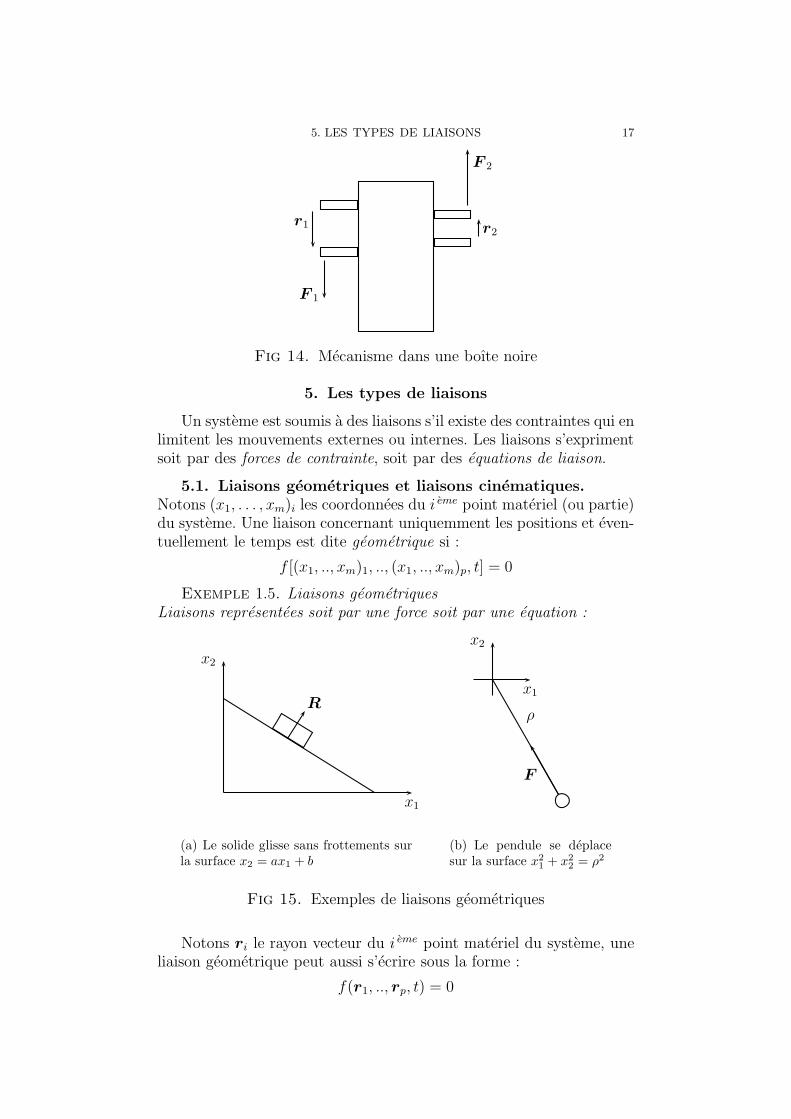
Imaginons qu’une machine inconnue soit placee dans une caisse fermeed’ou il ne sort que deux bras de levier, servant de point d’applicationaux forces F 1 et F 2. En observant les vecteurs deplacements simultanesreels r1 et r2, nous deduisons immediatement la condition d’equilibre :
F 1 · r1 + F 2 · r2 = 0
Dans cet exemple, les forces etant constantes, les deplacements vir-tuels se confondent avec les deplacements reels.
Ce type de probleme n’est pas soluble par la mecanique de Newtoncar nous n’avons pas acces aux mecanismes internes de la machine.
5. LES TYPES DE LIAISONS 17
F 1
F 2
r1 r2
Fig 14. Mecanisme dans une boıte noire
5. Les types de liaisons
Un systeme est soumis a des liaisons s’il existe des contraintes qui enlimitent les mouvements externes ou internes. Les liaisons s’exprimentsoit par des forces de contrainte, soit par des equations de liaison.
5.1. Liaisons geometriques et liaisons cinematiques.
Notons (x1, . . . , xm)i les coordonnees du i eme point materiel (ou partie)du systeme. Une liaison concernant uniquemment les positions et even-tuellement le temps est dite geometrique si :
f [(x1, .., xm)1, .., (x1, .., xm)p, t] = 0
Exemple 1.5. Liaisons geometriquesLiaisons representees soit par une force soit par une equation :
x1
x2
R
(a) Le solide glisse sans frottements surla surface x2 = ax1 + b
x1
x2
ρ
F
(b) Le pendule se deplacesur la surface x2
1+ x2
2= ρ2
Fig 15. Exemples de liaisons geometriques
Notons ri le rayon vecteur du i eme point materiel du systeme, uneliaison geometrique peut aussi s’ecrire sous la forme :
f(r1, .., rp, t) = 0
18 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
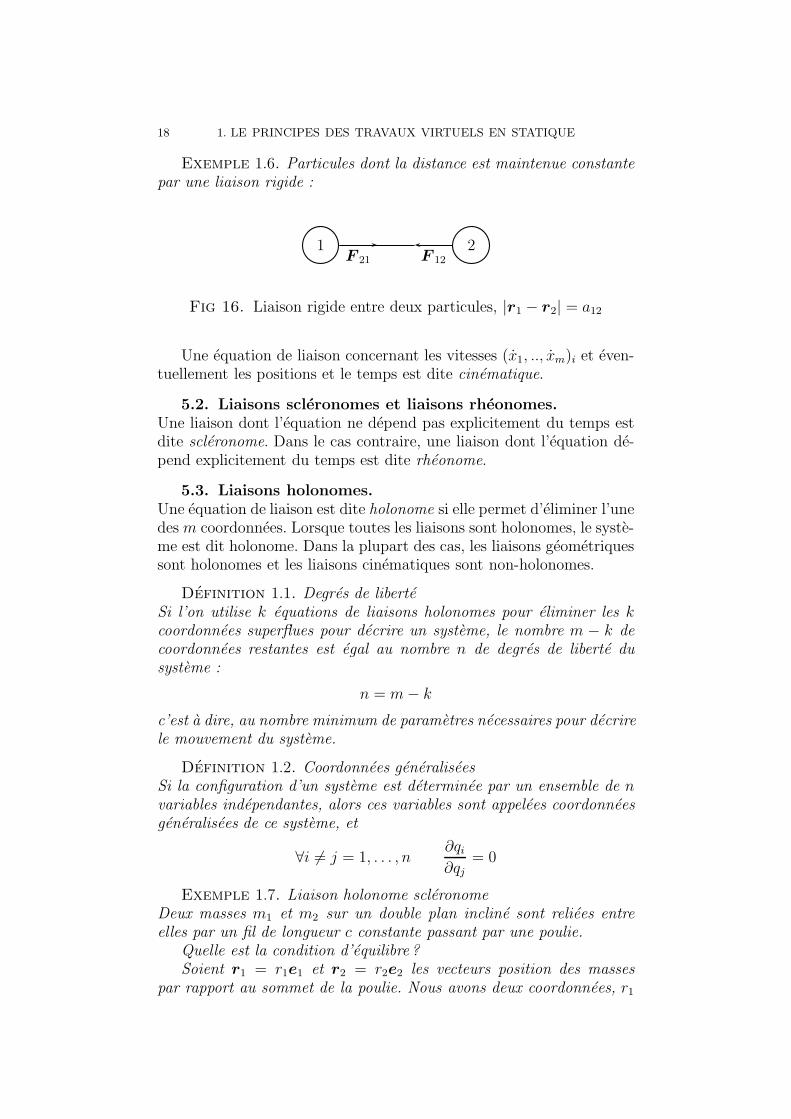
Exemple 1.6. Particules dont la distance est maintenue constantepar une liaison rigide :
F 21 F 121 2
Fig 16. Liaison rigide entre deux particules, |r1 − r2| = a12
Une equation de liaison concernant les vitesses (x1, .., xm)i et even-tuellement les positions et le temps est dite cinematique.
5.2. Liaisons scleronomes et liaisons rheonomes.
Une liaison dont l’equation ne depend pas explicitement du temps estdite scleronome. Dans le cas contraire, une liaison dont l’equation de-pend explicitement du temps est dite rheonome.
5.3. Liaisons holonomes.
Une equation de liaison est dite holonome si elle permet d’eliminer l’unedes m coordonnees. Lorsque toutes les liaisons sont holonomes, le syste-me est dit holonome. Dans la plupart des cas, les liaisons geometriquessont holonomes et les liaisons cinematiques sont non-holonomes.
Definition 1.1. Degres de liberteSi l’on utilise k equations de liaisons holonomes pour eliminer les kcoordonnees superflues pour decrire un systeme, le nombre m − k decoordonnees restantes est egal au nombre n de degres de liberte dusysteme :
n = m− k
c’est a dire, au nombre minimum de parametres necessaires pour decrirele mouvement du systeme.
Definition 1.2. Coordonnees generaliseesSi la configuration d’un systeme est determinee par un ensemble de nvariables independantes, alors ces variables sont appelees coordonneesgeneralisees de ce systeme, et
∀i 6= j = 1, . . . , n∂qi∂qj
= 0
Exemple 1.7. Liaison holonome scleronomeDeux masses m1 et m2 sur un double plan incline sont reliees entreelles par un fil de longueur c constante passant par une poulie.
Quelle est la condition d’equilibre ?Soient r1 = r1e1 et r2 = r2e2 les vecteurs position des masses
par rapport au sommet de la poulie. Nous avons deux coordonnees, r1

5. LES TYPES DE LIAISONS 19
α1α2
P 1 P 2
r1 r2
Fig 17. Double plan incline
et r2, donc m = 2, et le systeme est soumis a une liaison holonomescleronome telle que :
δr1 = δr2
donc k = 1 et nous avons n = 2 − 1 = 1 seul degre de liberte. Cetterelation permet d’eliminer la coordonnee r2, la coordonnee r1 devientalors l’unique coordonnee, appelee coordonnee generalisee. La force detension du fil est remplacee par l’equation de liaison. Nous pouvonsappliquer le principe des travaux virtuels :
p∑
i=1
F i · δri = 0
P 1 · δr1 + P 2 · δr2 = 0
On imagine un deplacement virtuel compatible avec la liaison, danslequel le poids P 1 monte et le poids P 2 descend :
−P1 sinα1 δr1 + P2 sinα2 δr2 = 0
(P1 sinα1 − P2 sinα2) δr1 = 0
P1 sinα1 = P2 sinα2
On peut verifier que pour α2 = π/2 on a P2 = P1 sinα1.
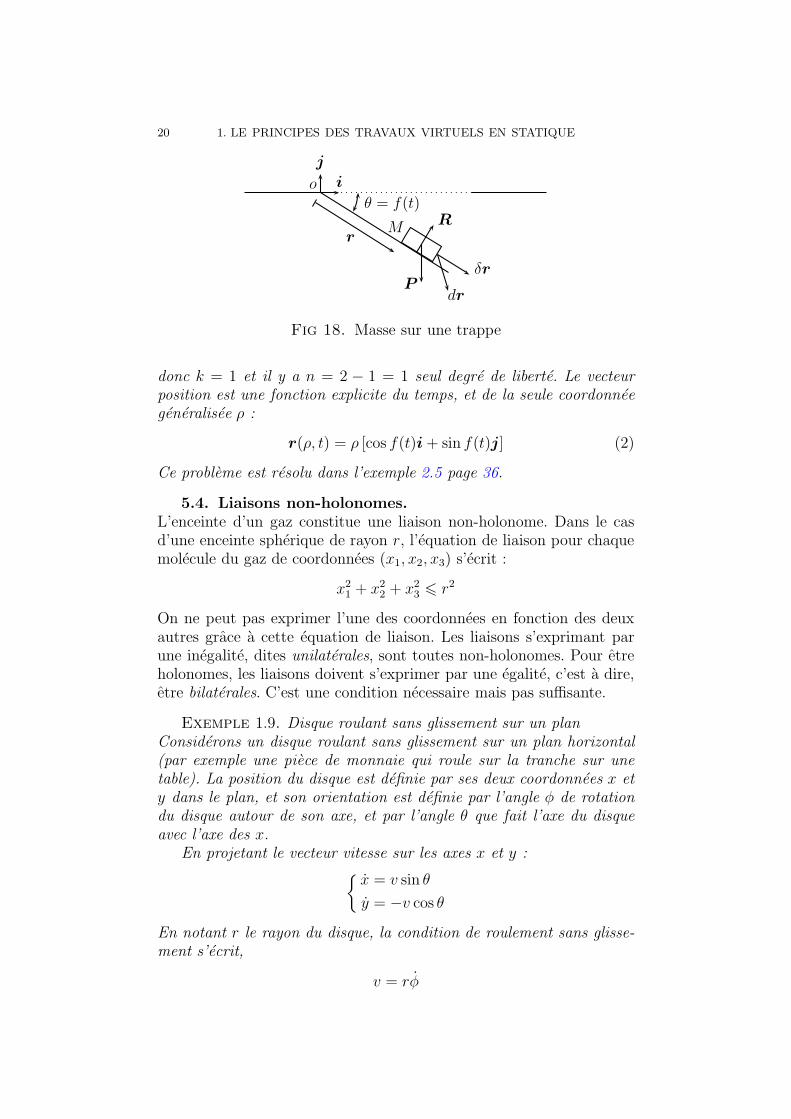
Exemple 1.8. Liaison holonome rheonomeUne masse M est posee sur une trappe qui s’ouvre, par exemple gracea un moteur, d’un angle θ donne en fonction du temps :
θ = f(t)
Le vecteur position de la masse s’ecrit :
r = ρ eρ
r(ρ, θ) = ρ(cos θ i+ sin θ j)
Nous avons deux coordonnees, ρ et θ, donc m = 2, mais le systemeest soumis a une liaison holonome rheonome,
θ − f(t) = 0
20 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
oθ = f(t)
δr
dr
R
P
Mr
i
j
Fig 18. Masse sur une trappe
donc k = 1 et il y a n = 2 − 1 = 1 seul degre de liberte. Le vecteurposition est une fonction explicite du temps, et de la seule coordonneegeneralisee ρ :
r(ρ, t) = ρ [cos f(t)i+ sin f(t)j] (2)
Ce probleme est resolu dans l’exemple 2.5 page 36.
5.4. Liaisons non-holonomes.
L’enceinte d’un gaz constitue une liaison non-holonome. Dans le casd’une enceinte spherique de rayon r, l’equation de liaison pour chaquemolecule du gaz de coordonnees (x1, x2, x3) s’ecrit :
x21 + x2
2 + x23 6 r2
On ne peut pas exprimer l’une des coordonnees en fonction des deuxautres grace a cette equation de liaison. Les liaisons s’exprimant parune inegalite, dites unilaterales, sont toutes non-holonomes. Pour etreholonomes, les liaisons doivent s’exprimer par une egalite, c’est a dire,etre bilaterales. C’est une condition necessaire mais pas suffisante.
Exemple 1.9. Disque roulant sans glissement sur un planConsiderons un disque roulant sans glissement sur un plan horizontal(par exemple une piece de monnaie qui roule sur la tranche sur unetable). La position du disque est definie par ses deux coordonnees x ety dans le plan, et son orientation est definie par l’angle φ de rotationdu disque autour de son axe, et par l’angle θ que fait l’axe du disqueavec l’axe des x.
En projetant le vecteur vitesse sur les axes x et y :{
x = v sin θ
y = −v cos θ
En notant r le rayon du disque, la condition de roulement sans glisse-ment s’ecrit,
v = rφ

6. MULTIPLICATEURS DE LAGRANGE 21
θ
y
x
z
v
φ
axe
Fig 19. Disque roulant sans glissement sur un plan horizontal
si bien que :{
x = rφ sin θ
y = −rφ cos θ
{
dx− r sin θ dφ = 0
dy + r cos θ dφ = 0
Ces equations differentielles ne peuvent etre integrees, il n’existe pas defacteur integrant qui les transformerait en differentielles totales exactes.Si cela etait possible, l’on pourrait exprimer une coordonnee en fonc-tion des trois autres. Or, pour une position du disque en un point (x, y),toutes les orientations en θ et φ sont possibles, en fonction de la tra-jectoire qu’il a prise pour venir en ce point. Les quatre coordonnees(x, y, θ, φ) sont necessaires pour definir completement la position etl’orientation du disque dans l’espace. Aucune coordonnee n’est super-flue, et par consequent la liaison est non-holonome.
6. Multiplicateurs de Lagrange
Soit a resoudre le systeme de deux equations a deux inconnues xet y suivant,
{
y = ax+ b
y = cx+ d
que l’on reecrit :{
y − ax− b = 0
y − cx− d = 0
Soit λ un multiplicateur indetermine, different de zero. Le systemeprecedent est equivalent a la seule equation suivante,
∀λ 6= 0, (y − ax− b) + λ(y − cx− d) = 0

22 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
soit,
∀λ 6= 0, y − ax− b+ λy − λcx− λd = 0
∀λ 6= 0, (1 + λ)y − (a+ λc)x− (b+ λd) = 0 (3)
Si l’on pose λ = −1 pour eliminer l’inconnue y, on obtient la solu-tion triviale,
(a− c)x− (b− d) = 0
equivalente au systeme :{
a = c
b = d
L’equation (3) doit etre valable ∀λ 6= 0, donc aussi pour λ = −a/c, quipermet d’eliminer la variable x,
(
1− a
c
)
y −(
b− ad
c
)
= 0
y =b− ad/c
1− a/c
=bc− ad
c− a
et l’on trouve l’expression de x grace a y = ax + b, ce qui finit deresoudre le systeme.
Exemple 1.10. Multiplicateurs de LagrangeResolvons le probleme du double plan incline de l’exemple 1.7 page 18en utilisant les multiplicateurs indetermines de Lagrange. Le systemeforme par le principe des travaux virtuels et l’equation de liaison holo-nome,
{ − P1 sinα1 δx1 + P2 sinα2 δx2 = 0
δx1 = δx2
est equivalent a la seule equation suivante,
∀λ 6= 0 − P1 sinα1 δx1 + P2 sinα2 δx2 + λ (δx1 − δx2) = 0
∀λ 6= 0 (−P1 sinα1 + λ) δx1 + (P2 sinα2 − λ) δx2 = 0
qui donne le systeme suivant,{
P1 sinα1 − λ = 0
P2 sinα2 − λ = 0
soit,
m1 sinα1 = m2 sinα2
7. Forces derivant d’une energie potentielle
Lorsque toutes les forces qui travaillent lors de leur deplacement vir-tuel derivent d’une energie potentielle 3 le principe des travaux virtuels
3. Voir Mecanique classique.pdf

8. NATURE DE L’EQUILIBRE 23
s’ecrit,
p∑
i=1
F i · δri = 0
p∑
i=1
−∇iVi · δri = 0
ou ∇i (∂xi, ∂yi , ∂zi) est l’operateur nabla, et ∇iVi le vecteur gradient de
l’energie potentielle Vi, tel que ∇iVi (∂xiVi, ∂yiVi, ∂ziVi).
p∑
i=1
(
∂Vi
∂xiex +
∂Vi
∂yiey +
∂Vi
∂ziez
)
· (δxi ex + δyi ey + δzi ez) = 0
p∑
i=1
(
∂Vi
∂xiδxi +
∂Vi
∂yiδyi +
∂Vi
∂ziδzi
)
= 0
p∑
i=1
δVi = 0
δ
p∑
i=1
Vi = 0
Soit V =∑p
i Vi la somme des energies potentielles de toutes les partiesmobiles. Sa variation lors du deplacement virtuel s’ecrit :
δV = 0n∑
j=1
∂V
∂qjδqj = 0 (4)
Les δqj etant independants, a l’equilibre :
∀j = 1, . . . , n∂V
∂qj= 0 (5)
8. Nature de l’equilibre
8.1. Systeme a un degre de liberte.
Soit q la seule coordonnee generalisee. D’apres la relation (5), la condi-tion d’equilibre en q = q (la notation q0 est reservee pour designer laposition a l’instant initial) est,
V ′(q) = 0
le prime indiquant une derivation par rapport a q.Pour q = q, l’energie potentielle V (q) est donc soit minimale, soit
maximale, soit constante, soit elle presente un point d’inflexion. Cela

24 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
correspond respectivement a un equilibre stable, instable, indifferent,et de nouveau, instable 4.
— Dans le premier cas, eloigne de sa position d’equilibre, le sys-teme gagne de l’energie potentielle, ∆V > 0, qu’il restitue plusou moins rapidement pour retrouver sa position initiale.
— Dans le second cas, eloigne de sa position d’equilibre, le syste-me perd de l’energie potentielle, ∆V < 0, il s’eloigne irreme-diablement de sa position d’equilibre.
— Dans le troisieme cas, l’energie potentielle est constante, ∆V =0. Toute nouvelle position est encore une position d’equilibre.
— Dans le dernier cas, dans un sens ∆V < 0 et dans l’autre∆V > 0. Un petit deplacement fait quitter son etat d’equilibreau systeme. Dans le premier sens, le systeme s’eloigne de sonpoint d’equilibre. Dans l’autre sens, il repasse momentanementpar son ancien etat d’equilibre avec une vitesse non nulle, puiss’en eloigne.
L’etude du signe de l’accroissement de potentiel au voisinage de l’e-quilibre se fait a l’aide du developpement de Taylor de V (q) pour q auvoisinage de q :
V (q) = V (q) + V ′(q)(q − q) + V ′′(q)(q − q)2
2!
+ V ′′′(q)(q − q)3
3!+ . . .
A l’equilibre nous avons vu que V ′(q) = 0, et la variation d’energiepotentielle s’ecrit,
∆V = V (q)− V (q)
= V ′′(q)(q − q)2
2!+ V ′′′(q)
(q − q)3
3!+ . . .
q etant au voisinage de q, q − q est petit, et donc le signe de ∆V estcelui du premier terme non nul.
— ∆V > 0 (equilibre stable), implique V ′′(q) > 0.
— ∆V < 0 (equilibre instable), implique V ′′(q) < 0.
— ∆V = 0 (equilibre indifferent), implique ∀n > 2, V (n)(q) = 0.
— Si V ′′(q) = 0, il faut etudier le signe de la premiere deriveep-ieme non nulle V (p)(q) selon la parite de p, avec p > 2 :
— Si p est pair et V (p)(q) > 0, l’equilibre est stable.
— Si p est impair et V (p)(q) > 0, l’equilibre est instable.C’est un point d’inflexion de V (q).
4. Yves Talpaert, Mecanique Generale et Analytique (Edition Cepadues, 1991).

8. NATURE DE L’EQUILIBRE 25
— Si V (p)(q) < 0 (p pair ou impair), l’equilibre est instable.
Exemple 1.11. Poulies coaxialesLes deux forces de ce probleme derivant d’une energie potentielle (degravitation), nous pouvons le resoudre grace a la relation (5) page 23.
P 1
P 2
ϕ
R1
R2
Fig 20. Poulies coaxiales
P i = −migk
Vi = migzi
ou les zi sont les hauteurs des masses mi par rapport a des originesarbitraires. L’energie potentielle totale est la somme des energies po-tentielles :
V = m1gz1 +m2gz2
= m1g (Cste1 +R1ϕ) +m2g (C
ste2 − R2ϕ)
A l’equilibre, le principe des travaux virtuels s’ecrit :
∂V
∂ϕ= 0
m1g R1 −m2g R2 = 0
m1 =R2
R1m2
De plus,
∀n > 2,∂nV
∂ϕn= 0
donc l’equilibre est indifferent. Le systeme est a l’equilibre quelle quesoit la valeur de l’angle ϕ. Eloigne de sa position, il ne revient ni nes’eloigne d’avantage de celle-ci.

26 1. LE PRINCIPES DES TRAVAUX VIRTUELS EN STATIQUE
Exemple 1.12. Double plan inclineLes deux forces de ce probleme derivant de l’energie potentielle (degravitation), nous pouvons le resoudre grace a la relation (5) page 23.
α1α2
P 1 P 2
x1 x2
Fig 21. Double plan incline
Prenons le sommet de la poulie pour origine des energies poten-tielles de gravitation. L’energie potentielle totale est la somme des ener-gies potentielles. Du fait de la liaison, la seule coordonnee generaliseeest x1 :
V = −m1g x1 sinα1 −m2g x2 sinα2
= −m1g x1 sinα1 −m2g (c− x1) sinα2
A l’equilibre, le principe des travaux virtuels s’ecrit :
∂V
∂x1
= 0
−m1 sinα1 +m2 sinα2 = 0
m1 sinα1 = m2 sinα2
De plus,
∀n > 2,∂nV
∂xn1
= 0
l’equilibre est indifferent.
8.2. Systeme a deux degres de liberte.
Soient q1 et q2 les coordonnees generalisees, et soient q01 et q02 les co-ordonnees generalisees de la position d’equilibre. Le developpement deTaylor de V (q1, q2) pour q1, q2 au voisinage de q01, q
02 s’ecrit :
V (q1, q2) = V (q01, q02) + ∂q1V (q01, q
02)(q1 − q01) + ∂q2V (q01, q
02)(q2 − q02)
+ 12
[
∂2q1V (q01, q
02)(q1 − q01)
2+ 2∂2q1,q2
V (q01, q02)(q1 − q01)(q2 − q02)
+ ∂2q2V (q01, q
02)(q2 − q02)
2]
+ . . .
A l’equilibre, les derivees partielles ∂q1V , et ∂q2V sont nulles. On pose :
A = ∂2q1V (q01 , q
02)
B = ∂2q1,q2V (q01, q
02)
C = ∂2q2V (q01, q
02)

8. NATURE DE L’EQUILIBRE 27
La variation d’energie potentielle s’ecrit alors :
∆V = 12
[
A(q1 − q01)2 + 2B(q1 − q01)(q2 − q02) + C(q2 − q02)
2]
+ . . .
C’est l’equation de la surface ∆V (q1, q2), de la forme :
∆V = A2x2 +Bxy + C
2y2 + . . .
Si l’on suppose A > 0,
∆V =
(
√
A2x+
√
2A× B
2y
)2
− 2B2
4Ay2 + C
2y2 + . . .
=
(
√
A2x+ B√
2Ay
)2
− y2
2
(
B2
A− C
)
+ . . .
Si B2 −AC 6 0, donc si C > 0, alors ∆V > 0 et l’equilibre est stable.Si B2 − AC > 0 alors,
∆V =
(
√
A2x+ B√
2Ay
)2
−(
y
√
B2
2A− C
2
)2
+ . . .
=
[(
√
A2x+ B√
2Ay
)
+
(
y
√
B2
2A− C
2
)]
×[(
√
A2x+ B√
2Ay
)
−(
y
√
B2
2A− C
2
)]
+ . . .
=
[
√
A2x+ y
(
B√2A
+
√
B2
2A− C
2
)]
×[
√
A2x+ y
(
B√2A
−√
B2
2A− C
2
)]
+ . . .
dont le signe depend des valeurs prises par x et y, donc par q1 − q01 etq2− q02, et de celles des derivees partielles secondes A,B,C. L’equilibreest stable ou instable selon les directions.
Si A = B = C = 0, l’equilibre est indetermine, il faut etudier lesigne des derivees d’ordre superieur a deux.
Si V = Cste, alors ∆V = 0, l’equilibre est indifferent.

Chapitre 2
Le principes des travaux virtuels en dynamique
1. Generalisation du principe a la dynamique
D’Alembert a generalise l’utilisation du principe des travaux vir-tuels en l’appliquant a la dynamique. Cherchons quelles sont les equa-tions du mouvement d’un systeme de solides soumis a des contraintes.Partons de la relation fondamentale de la dynamique 1 appliquee a l’unde ces solides en mouvement. En notant F i le modele de la force totale(forces actives et forces de contrainte) exercee sur la partie mobile i, etpi la quantite de mouvement de cette meme partie, nous avons :
∀i, F i = pi
Tout probleme de dynamique peut se ramener a un probleme destatique, simplement en ecrivant que,
∀i, F i − pi = 0
et en considerant que la force d’inertie pi est maintenant une forceappliquee. En sommant sur l’ensemble des p parties mobiles,
∀δri,
p∑
i
(F i − pi) · δri = 0
ou chaque terme est nul. D’Alembert montre alors que l’on peut s’af-franchir des forces de contrainte comme dans le cas de la statique.Pour le demontrer faisons un retour sur la statique. La somme desforces s’exercant sur chaque partie mobile d’un systeme a l’equilibreest nulle :
∀i, F i = 0
En sommant p termes nuls, nous avons :
∀δri,
p∑
i=1
F i · δri = 0
1. Voir Mecanique classique.pdf
29

30 2. LE PRINCIPES DES TRAVAUX VIRTUELS EN DYNAMIQUE
Decomposons la somme des forces s’exercant sur chacune des p partiesmobiles du systeme en une force active et une force de contrainte :
p∑
i
(F activei + F contrainte
i ) · δri = 0
p∑
i
F activei · δri +
p∑
i
F contraintei · δri = 0
En supposant l’absence de frottements et en appliquant le principe destravaux virtuels (1) page 8 pour des δri compatibles entre eux et avecles liaisons, on obtient :
p∑
i
F contraintei · δri = 0
Cette relation constitue le principe de D’Alembert (1743) : le travailtotal des forces de contrainte est nul lors d’un deplacement virtuelcompatible avec les liaisons. Ce principe est equivalent au principe destravaux virtuels.
Remarque : Notez bien qu’individuellement les forces de contrainte peuventtravailler lors d’un deplacement virtuel.
On peut donc s’affranchir des forces de contrainte et enoncer le prin-cipe des travaux virtuels en dynamique. En l’absence de frottements,
p∑
i
(F activei − pi) · δri = 0 (6)
ou les δri sont compatibles entre eux et avec les liaisons.
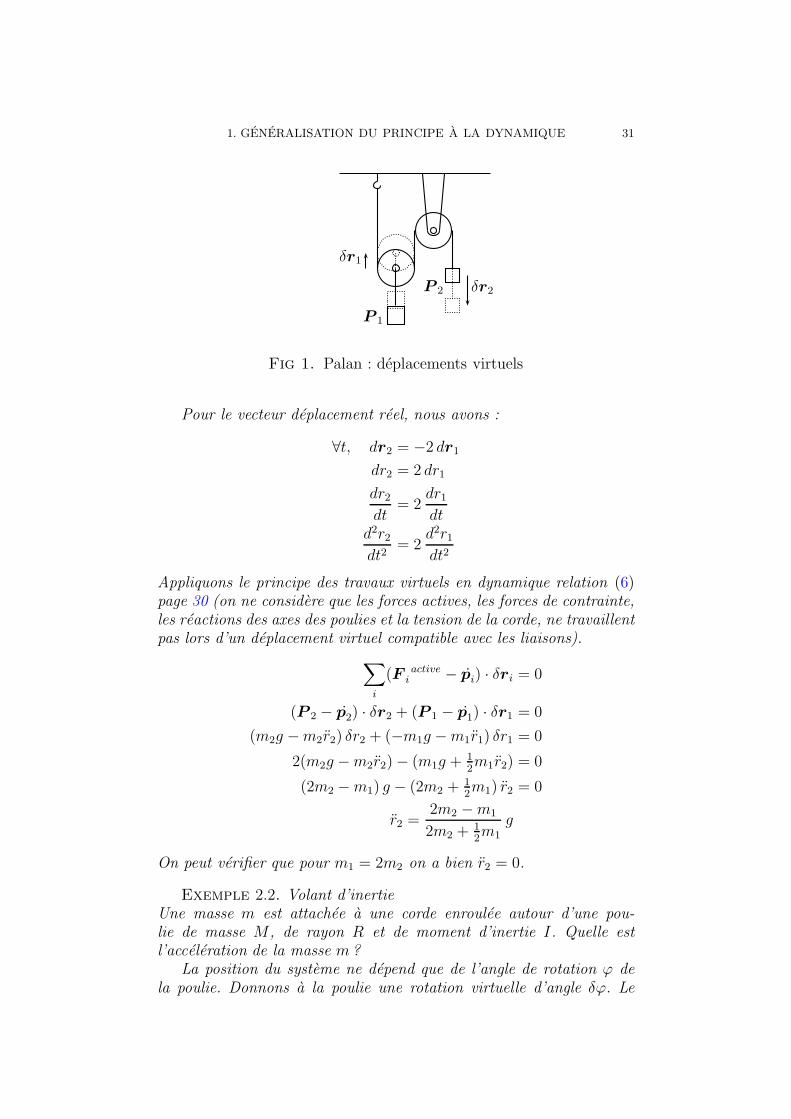
Exemple 2.1. PalanReprenons encore une fois l’exemple du palan de la figure 1.b page 5.Quelle est l’acceleration de la masse m2 ?Donnons au poids P 2 un deplacement virtuel δr2 vertical vers le bas :
δr2 = −δz j
Le vecteur deplacement virtuel δr1 du poids P 1 compatible avec lesliaisons est alors tel que :
δr1 =12δr2
δr1 = −12δr2
1. GENERALISATION DU PRINCIPE A LA DYNAMIQUE 31
P 1
P 2
δr1
δr2
Fig 1. Palan : deplacements virtuels
Pour le vecteur deplacement reel, nous avons :
∀t, dr2 = −2 dr1
dr2 = 2 dr1
dr2dt
= 2dr1dt
d2r2dt2
= 2d2r1dt2
Appliquons le principe des travaux virtuels en dynamique relation (6)page 30 (on ne considere que les forces actives, les forces de contrainte,les reactions des axes des poulies et la tension de la corde, ne travaillentpas lors d’un deplacement virtuel compatible avec les liaisons).
∑
i
(F activei − pi) · δri = 0
(P 2 − p2) · δr2 + (P 1 − p1) · δr1 = 0
(m2g −m2r2) δr2 + (−m1g −m1r1) δr1 = 0
2(m2g −m2r2)− (m1g +12m1r2) = 0
(2m2 −m1) g − (2m2 +12m1) r2 = 0
r2 =2m2 −m1
2m2 +12m1
g
On peut verifier que pour m1 = 2m2 on a bien r2 = 0.
Exemple 2.2. Volant d’inertieUne masse m est attachee a une corde enroulee autour d’une pou-lie de masse M , de rayon R et de moment d’inertie I. Quelle estl’acceleration de la masse m ?
La position du systeme ne depend que de l’angle de rotation ϕ dela poulie. Donnons a la poulie une rotation virtuelle d’angle δϕ. Le

32 2. LE PRINCIPES DES TRAVAUX VIRTUELS EN DYNAMIQUE
deplacement virtuel de la masse m vers le bas s’ecrit :
r = Rϕ
δr = R δϕ
δr = −R δϕ j
+
P
R
δϕ
δr
M
m
Fig 2. Volant d’inertie
Pour calculer la force d’inertie pM de la poulie en rotation, con-siderons un element de masse dM de cette poulie, a la distance ρ ducentre. Son deplacement virtuel δs a pour expression :
s = ρϕ
δs = ρδϕ
=ρ
Rδr
La norme de la force d’inertie de l’element dM s’ecrit :
pdM = dM s
= dM ρϕ
= dMρ
Rr
Le travail virtuel de la force d’inertie de l’element dM s’ecrit :
pdM · δs = dMρ
Rr eθ ·
ρ
Rδr eθ
= dMρ2
R2r δr

2. COMPARAISON AVEC LA MECANIQUE DE NEWTON 33
Le travail virtuel de la force d’inertie de la poulie s’ecrit :
pM · δr =
∫ M
0
pdM · δs
=r δr
R2
∫ M
0
ρ2 dM
=I
R2r δr
Appliquons le principe des travaux virtuels en dynamique, relation (6)page 30 (on ne considere que les forces actives, les forces de contrainte,la tension dans la corde et la reaction de l’axe de la poulie, ne travaillentpas lors d’un deplacement virtuel compatible avec les liaisons).
∑
i
(F activei − pi) · δri = 0
(P − pm − pM) · δr = 0
mgδr −mrδr − I
R2r δr = 0
r
(
m+I
R2
)
= mg
r =g
1 + ImR2
2. Comparaison avec la mecanique de Newton
Exemple 2.3. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline.
Quelle est l’equation de son mouvement ?
αP
R
m
q
Fig 3. Masse glissant sans frottements sur un plan incline
Resolution par la mecanique de Newton :Appliquons la relation fondamentale de la dynamique a la masse m :
R+ P = ma
En projection sur les axes tangent et orthogonal au plan incline :{
P sinα = mq
R− P cosα = 0

34 2. LE PRINCIPES DES TRAVAUX VIRTUELS EN DYNAMIQUE
{
q = g sinα
R = mg cosα
En notant q0 et q0 les conditions initiales sur la position et la vitesse,cherchons la solution q(t) en integrant cette equation differentielle dusecond ordre :
q(t) = g sinα
q(t) = g sinα t+ q0
q(t) = 12g sinα t2 + q0t + q0
Resolution par le principe de D’Alembert :
Le principe des travaux virtuels s’ecrit :
(P +R− p) · δr = 0
On choisit un deplacement virtuel confondu avec le deplacementreel. Le travail virtuel de la reaction R du plan sur la masse est alorsnul, et nous avons :
(mg sinα−mq) δq = 0
q = g sinα
Exemple 2.4. Masse glissant sans frottements sur un plan inclinemotoriseUne masse m glisse sans frottements sur un plan incline se deplacanthorizontalement selon une fonction du temps connue x(t).
Quelle est l’equation de son mouvement ?
X
Y
α
a
m R
x(t)P
O
Fig 4. Masse glissant sur un plan incline motorise
Resolution par la mecanique de Newton :Soit A l’acceleration du plan incline, et soit a l’acceleration de lamasse m relativement au plan incline. L’acceleration de la masse m

2. COMPARAISON AVEC LA MECANIQUE DE NEWTON 35
dans un referentiel galileen est la somme des accelerations a+A. Ap-pliquons la relation fondamentale de la dynamique a la masse m :
∑
F = m(a +A)
P +R = m(a +A)
Le vecteur acceleration a est parallele au plan incline. En projetant surles axes parallele et perpendiculaire au plan incline, nous avons :
{
P sinα = ma+mx cosα
− P cosα +R = mx sinα
{
g sinα = a+ x cosα
−mg cosα +R = mx sinα
{
a = g sinα− x cosα
R = m(x sinα + g cosα)
Lorsque x = 0 on retrouve le resultat de l’exemple precedent, et lorsque,
g sinα− x cosα < 0
g sinα < x cosα
g tanα < x
le vecteur a est vers le haut, la masse m remonte le plan incline.
Resolution par le principe de D’Alembert :
X
Y
α
m
q2
q1(t)P
O
Fig 5. Masse glissant sans frottements sur un plan in-cline motorise
Il y a un seul degre de liberte car la fonction q1(t) est donnee.Choisissons q2 comme coordonnee generalisee. Le deplacement virtueletant compatible avec la liaison, le principe des travaux virtuels s’ecrit :
(
F active − p)
· δq2 = 0
[P −m(q1 + q2)] · δq2 = 0

36 2. LE PRINCIPES DES TRAVAUX VIRTUELS EN DYNAMIQUE
Avec δq2 = δq2(cosα i− sinα j), nous avons :
mg sinα−m(q1 cosα + q2) = 0
q2 = g sinα− q1 cosα
Exemple 2.5. Masse sur une trappeReprenons l’exemple 1.8 de la page 19. Une masse M est posee sur unetrappe qui s’ouvre d’un angle θ(t) donne en fonction du temps.
Quelle est l’equation de son mouvement ?
oθ = f(t)
δr
dr
R
P
Mr
i
j
Fig 6. Masse sur une trappe
Resolution par la mecanique de Newton :Appliquons la relation fondamentale de la dynamique a la masse M :
R + P = Ma
En coordonnees polaires, l’acceleration s’ecrit 2 :
a =(
ρ− ρθ2)
eρ +(
ρθ + 2ρθ)
eθ (7)
En projetant dans le repere de centre o et de base (eρ, eθ) :
Mg sin θ = M(
ρ− ρθ2)
R−Mg cos θ = M(
ρθ + 2ρθ)
ρ− ρθ2 − g sin θ = 0
M(
ρθ + 2ρθ + g cos θ)
= R
Nous obtenons deux equations pour deux inconnues, ρ(t) et R(t).
Resolution par le principe de D’Alembert :
Le deplacement infinitesimal reel s’ecrit,
dr = d(ρeρ)
= dρ eρ + ρdeρ
= dρ eρ + ρdθ eθ
2. Voir Le probleme de Kepler.pdf

2. COMPARAISON AVEC LA MECANIQUE DE NEWTON 37
Remarque : Dans l’exemple 1.8 page 19 nous avions montre que :
r(ρ, t) = ρ [cos f(t)i+ sin f(t)j]
En differentiant,
dr(ρ, t) =
(
∂r
∂ρ
)
t
dρ+
(
∂r
∂t
)
ρ
dt
= eρ dρ+ ρ∂eρ∂t
dt
avec ∂eρ/∂t = θeθ,
dr(ρ, t) = dρeρ + ρdθ eθ
nous retrouvons le resultat.
Le travail reel de la force de contrainte R est non nul :
R · dr = R eθ · (dρ eρ + ρdθ eθ)
= Rρdθ
Choisissons le deplacement virtuel de sorte que la force de contraintene travaille pas,
δr = dρ eρ
ce qui revient a poser t = Cste dans le deplacement infinitesimal reelpour obtenir le deplacement virtuel :
δr =∂r
∂ρdρ
Le travail virtuel de R est alors nul :
R · δr = R eθ · dρ eρ
= 0
Le principe des travaux virtuels s’ecrit :
(P − p) · δr = 0
En se servant de l’expression (7) de l’acceleration en coordonneespolaires :
[Mg sin θeρ −Mg cos θeθ
−M(
ρ− ρθ2)
eρ −M(
ρθ + 2ρθ)
eθ
]
· dρ eρ = 0
ρ− ρθ2 − g sin θ = 0
Si l’on souhaite trouver l’expression de la reaction de la trappe surla masse M , on choisi un deplacement virtuel pour lequel cette reaction

38 2. LE PRINCIPES DES TRAVAUX VIRTUELS EN DYNAMIQUE
travaille. Avec un deplacement virtuel selon eθ, nous avons :
[R +Mg sin θeρ −Mg cos θeθ
−M(
ρ− ρθ2)
eρ −M(
ρθ + 2ρθ)
eθ
]
· ρdθ eθ = 0
R−Mg cos θ −M(
ρθ + 2ρθ)
= 0
R = M(
ρθ + 2ρθ + g cos θ)

Chapitre 3
Mecanique de Lagrange
1. Equations de Lagrange
Repartons du principe des travaux virtuels en dynamique, relation(6) page 30, pour p parties mobiles :
p∑
i=1
(pi − F i) · δri = 0
p∑
i=1
miri · δri −p∑
i=1
F i · δri = 0 (8)
Nous pouvons essayer de remplacer les produits scalaires par des sca-laires. Le produit scalaire d’une force d’inertie par un deplacementdonne une energie cinetique. En mecanique de Newton, pour faire ap-paraitre les vitesses, on ecrit :
p∑
i=1
miri · dri =
p∑
i=1
midri
dt· dri
=
p∑
i=1
mi dri ·dri
dt
=
p∑
i=1
mi dvi · vi
=
p∑
i=1
12miv
2i
Nous ne pouvons pas tenir le meme raisonnement car δri ne s’inscritpas dans le temps. Il n’est pas fonction du temps, ni explicitement,ni implicitement par l’intermediaire des coordonnees. Il represente unelongueur, et non une distance parcourue. Le terme δri/dt est bien unevitesse, une distance divisee par une duree, mais ce n’est pas la vi-tesse de i eme partie mobile. δri est fonction des coordonnees celles-cine variant pas dans le temps :
δri =
n∑
j=1
∂ri
∂xjδxj (9)
39

40 3. MECANIQUE DE LAGRANGE
Les variations des coordonnees δxj relient deux positions d’equilibre dusysteme et n’ont pas lieu dans le temps. En remplacant nous avons :
p∑
i=1
miri ·n∑
j=1
∂ri
∂xj
δxj −p∑
i=1
F i ·n∑
j=1
∂ri
∂xj
δxj = 0
n∑
j=1
(
p∑
i=1
miri ·∂ri
∂xj
−p∑
i=1
F i ·∂xi
∂xj
)
δxj = 0
Les coordonnees xj ne sont pas toujours independantes si bien que lasomme sur j est nulle mais pas chacun de ses termes. Il nous faututiliser les coordonnees generalisees car elles sont independantes ainsique leurs differentielles. Pour cela nous devons supposer que le syste-me est holonome pour utiliser les equations de liaison et supprimer lescoordonnees superflues. Nous avons alors,
n∑
j=1
(
p∑
i=1
miri ·∂ri
∂qj−
p∑
i=1
F i ·∂ri
∂qj
)
δqj = 0
∀δqj ,(
p∑
i=1
miri ·∂ri
∂qj−
p∑
i=1
F i ·∂ri
∂qj
)
δqj = 0
∀j = 1, . . . , n
p∑
i=1
miri ·∂ri
∂qj−
p∑
i=1
F i ·∂ri
∂qj= 0
Pour le second terme on pose la definition suivante :
Definition 3.1. Force generaliseeOn appelle force generalisee la quantite definie par :
Qj∆=
p∑
i=1
F i ·∂ri
∂qj
On a donc :
∀j = 1, . . . , n
p∑
i=1
miri ·∂ri
∂qj= Qj
Integrons par parties le terme de droite :
∀jp∑
i=1
[
d
dt
(
miri ·∂ri
∂qj
)
−miri ·d
dt
(
∂ri
∂qj
)]
= Qj (10)
Nous allons maintenant etablir les deux relations suivantes,
∂ri
∂qj=
∂ri
∂qj
d
dt
(
∂ri
∂qj
)
=∂
∂qj
(
dri
dt
)

1. EQUATIONS DE LAGRANGE 41
pour les remplacer dans la relation (10). Les derivations partielles sontissues du deplacement virtuel present dans la relation (8). Le vecteurposition est suppose dependre des coordonnees generalisees uniquem-ment, ces dernieres etant supposees independantes du temps.
Montrons que :
∂ri
∂qj=
∂ri
∂qj
A partir du deplacement virtuel present dans la relation (8) :
δri =n∑
k=1
∂ri
∂qkδqk
∀dτ, δri
dτ=
n∑
k=1
∂ri
∂qk
δqkdτ
Cette relation etant vraie quel que soit dτ , elle est vraie pour dτ telque δri/dτ = dri/dt, la vitesse reelle de la partie mobile consideree.On a alors δqk/dτ = qk :
dri
dt=
n∑
k=1
∂ri
∂qkqk (11)
∂
∂qj
(
dri
dt
)
=∂
∂qj
(
n∑
k=1
∂ri
∂qkqk
)
∂ri
∂qj=
∂ri
∂qj(12)
Etablissons la seconde relation :
d
dt
(
∂ri
∂qj
)
=∂
∂qj
(
dri
dt
)
Nous avons :
δ∂ri
∂qj=
n∑
k=1
∂2ri
∂qk∂qjδqk
δ
dτ
(
∂ri
∂qj
)
=n∑
k=1
∂2ri
∂qk∂qj
δqkdτ
d
dt
(
∂ri
∂qj
)
=n∑
k=1
∂2ri
∂qk∂qjqk (13)

42 3. MECANIQUE DE LAGRANGE
D’autre part, en derivant par rapport a qj la relation (11) :
∂
∂qj
(
dri
dt
)
=∂
∂qj
(
n∑
k=1
∂ri
∂qkqk
)
=n∑
k=1
(
∂2ri
∂qj∂qkqk +
∂ri
∂qk
∂qk∂qj
)
Les coordonnees generalisees et les vitesses generalisees ne dependentpas explicitement l’une de l’autre. Le terme ∂qk/∂qj est donc nul :
∂
∂qj
(
dri
dt
)
=n∑
k=1
∂2ri
∂qj∂qkqk
Comparons cette relation avec la relation (13). Les derivations par-tielles ∂/∂qj et ∂/∂qk etant continues, nous pouvons les intervertir.Nous obtenons la seconde relation cherchee :
d
dt
(
∂ri
∂qj
)
=∂
∂qj
(
dri
dt
)
(14)
Revenons a l’equation (10) page 40 :
∀j = 1, . . . , n
p∑
i=1
[
d
dt
(
miri ·∂ri
∂qj
)
−miri ·d
dt
(
∂ri
∂qj
)]
= Qj
Avec les relations (12) et (14) que nous venons de demontrer, le termedes forces d’inertie devient :
∀j = 1, . . . , n
p∑
i=1
[
d
dt
(
miri ·∂ri
∂qj
)
−miri ·∂ri
∂qj
}
= Qj
∀j = 1, . . . , nd
dt
p∑
i=1
mivi ·∂vi
∂qj−
p∑
i=1
mivi ·∂vi
∂qj= Qj
∀j = 1, . . . , nd
dt
(
∂
∂qj
p∑
i=1
12miv
2i
)
− ∂
∂qj
p∑
i=1
12miv
2i = Qj
En notant T la somme des energies cinetiques de toutes les partiesmobiles :
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj= Qj (15)
1.1. Forces derivant toutes d’une energie potentielle.
Lorsque toutes les forces F i derivent d’une energie potentielle totale

1. EQUATIONS DE LAGRANGE 43
V , les forces generalisees s’ecrivent :
Qj = −p∑
i=1
∇iV · ∂ri
∂qj
= −∂V
∂qj
Le principe des travaux virtuels en statique (1) page 8 s’ecrit :
p∑
i=1
(
F i ·n∑
j=1
∂ri
∂qjδqj
)
= 0
n∑
j=1
p∑
i=1
F i ·∂ri
∂qjδqj = 0
n∑
j=1
Qj δqj = 0
et l’on retrouve la relation (4) page 23 :n∑
j=1
∂V
∂qjδqj = 0
Les equations de Lagrange deviennent :
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj= −∂V
∂qj
Si l’energie potentielle totale V (q, t) ne depend pas des vitesses gene-ralisees q, nous pouvons ajouter le terme nul ∂V/∂qj :
∀j = 1, . . . , nd
dt
[
∂
∂qj(T − V )
]
− ∂
∂qj(T − V ) = 0
Definition 3.2. LagrangienLa fonction des n coordonnees generalisees qj, des n vitesses generali-sees qj, et du temps t :
L(q, q, t) ∆= T − V
est appelee fonction de Lagrange ou Lagrangien.
Remarque : Par l’intermediaire de l’energie potentielle V , le Lagrangiendepend du choix de l’origine des energies potentielles.
Nous obtenons les n equations de Lagrange (1788) :
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
= 0 (16)
Ces n equations differentielles sont du second ordre par rapport autemps. Chaque integration faisant apparaitre une constante, il faudra

44 3. MECANIQUE DE LAGRANGE
specifier 2n conditions initiales pour determiner les n coordonnees ge-neralisees independantes : n conditions initiales pour les qj et n pourles qj .
Exemple 3.1. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline.
Quelle est l’equation de son mouvement ?
α
m
q
Fig 1. Masse glissant sans frottements sur un plan incline
En prenant l’origine de l’energie potentielle de gravitation au som-met du plan incline, le Lagrangien a pour expression :
L ∆= T − V
= 12mq2 +mgq sinα
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂q
)
− ∂L∂q
= 0
d
dt(mq)−mg sinα = 0
q − g sinα = 0
1.2. Energie potentielle generalisee.
Lorsque les forces sont engendrees par une energie potentielle genera-lisee U(q, q, t) telle que,
Qj =d
dt
(
∂U
∂qj
)
− ∂U
∂qj
alors, a partir de l’equation (15) page 42 :
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj= Qj
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj=
d
dt
(
∂U
∂qj
)
− ∂U
∂qj
∀j = 1, . . . , nd
dt
[
∂
∂qj(T − U)
]
− ∂
∂qj(T − U) = 0

1. EQUATIONS DE LAGRANGE 45
En definissant le Lagrangien generalise par L ∆= T − U , nous re-
trouvons les equations de Lagrange (16) page 43 :
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
= 0
Exemple 3.2. Particule chargee en mouvement dans un champelectromagnetiqueLe champ electrique E et le champ magnetique B derivent du potentielscalaire φ(r, t) et du potentiel vecteur A(r, t) :
E = −∇φ − ∂A
∂tB = ∇×A
ou le produit vectoriel de l’operateur nabla avec le vecteur A est levecteur rotationnel de A. Soit q la charge electrique de la particule, etsoit v sa vitesse dans le champ magnetique. Sur cette particule s’exerceune force electromagnetique, appelee force de Lorentz, dont le modeleexperimental a pour expression :
F = q (E + v ×B)
= q
[
−∇φ− ∂A
∂t+ v × (∇×A)
]
En projetant sur les axes :
Fx = q
{
− (∇φ)x −(
∂A
∂t
)
x
+ [v × (∇×A)]x
}
Fy = q
{
− (∇φ)y −(
∂A
∂t
)
y
+ [v × (∇×A)]y
}
Fz = q
{
− (∇φ)z −(
∂A
∂t
)
z
+ [v × (∇×A)]z
}
Par exemple, pour la composante en x :
Fx = q
[
−∂φ
∂x− ∂Ax
∂t+ vy
(
∂Ay
∂x− ∂Ax
∂y
)
− vz
(
∂Ax
∂z− ∂Az
∂x
)]
Or,
dAx =∂Ax
∂tdt+
∂Ax
∂xdx+
∂Ax
∂ydy +
∂Ax
∂zdz
dAx
dt=
∂Ax
∂t+
∂Ax
∂xx+
∂Ax
∂yy +
∂Ax
∂zz
∂Ax
∂t=
dAx
dt− vx
∂Ax
∂x− vy
∂Ax
∂y− vz
∂Ax
∂z

46 3. MECANIQUE DE LAGRANGE
nous donne :
Fx = q
[
−∂φ
∂x− dAx
dt+ vx
∂Ax
∂x+ vy
∂Ax
∂y+ vz
∂Ax
∂z
+vy
(
∂Ay
∂x− ∂Ax
∂y
)
− vz
(
∂Ax
∂z− ∂Az
∂x
)]
= q
(
−∂φ
∂x− dAx
dt+ vx
∂Ax
∂x+ vy
∂Ay
∂x+ vz
∂Az
∂x
)
= q
[
−∂φ
∂x+
∂
∂x(v ·A)− dAx
dt
]
= q
{
− ∂
∂x(φ− v ·A)− d
dt
[
∂
∂vx(v ·A)
]}
= − ∂
∂x[q(φ− v ·A)] +
d
dt
{
∂
∂vx[q(φ− v ·A)]
}
On pose,
U = q(φ−A · v)l’energie potentielle generalisee qui engendre la force de Lorentz :
Fx =d
dt
(
∂U
∂vx
)
− ∂U
∂x
En prenant un Lagrangien generalise,
L = T − U
= 12mv2 − q(φ−A · v)
on retrouve les equations de Lagrange.
1.3. Forces ne derivant pas toutes d’une energie poten-
tielle.
Lorsque les forces ne derivent pas toutes d’une energie potentielle, lesequations de Lagrange s’ecrivent,
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj= −∂V
∂qj+
p∑
i=1
F i ·∂ri
∂qj
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
= Qj
dans lesquelles le Lagrangien contient les energies potentielles de toutesles forces derivant d’une energie potentielle independante des vitessesgeneralisees.
Exemple 3.3. Forces de frottement secSoit une masse m glissant avec frottements sur un plan incline d’unangle α. Quelle est l’equation de son mouvement ?

1. EQUATIONS DE LAGRANGE 47
α
m
q
P
f
Fig 2. Masse glissant avec frottements sur un plan incline
On prend comme modele de forces de frottements cinetiques, uneforce proportionnelle a la composante du poids qui s’exerce sur le planincline, et s’opposant au deplacement de la masse :
f = −µmg cosαv
v
En utilisant la coordonnee generalisee q, l’energie cinetique s’ecrit :
T = 12mq2
(la coordonnee y ne peut etre prise comme coordonnee generalisee carx apparaitrait dans l’expression de l’energie cinetique). Le Lagrangiens’ecrit :
L ∆= T − V
= 12mq2 +mgq sinα
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂q
)
− ∂L∂q
= Q
d
dt(mq)−mg sinα = f · ∂r
∂q
q − g sinα = −µ g cosα
Exemple 3.4. Forces de frottement visqueuxLes forces de frottement visqueux proportionnelles a la vitesse, s’ecri-vent :
f = −µv
Nous pouvons les reecrire sous la forme :
f = −∇v
(
12µv2)
Avec φ la fonction de dissipation de Rayleigh, definie par,
φ∆= 1
2µv2
nous avons :
f = −∇v φ

48 3. MECANIQUE DE LAGRANGE
En partant de la definition 3.1 page 40 des composantes de la forcegeneralisee, nous avons :
Qj =
p∑
i=1
f i ·∂ri
∂qj
= −p∑
i=1
∇v φ · ∂ri
∂qj
En utiliant la relation (12) page 41,
Qj = −p∑
i=1
∇v φ · ∂vi
∂qj
= − ∂φ
∂qj
Les equations de Lagrange s’ecrivent alors,
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
+∂φ
∂qj= 0
pour lesquelles il faudra specifier les fonctions scalaires L et φ.Soit une particule se deplacant dans un fluide, dans le champ de pe-
santeur terrestre. La force de frottement est supposee proportionnelle ala vitesse, par consequent la fonction de dissipation a pour expression :
φ = 12µ(
x2 + y2)
En prenant le zero de l’energie potentielle au fond du fluide, leLagrangien s’ecrit,
L ∆= T − V
= 12m(
x2 + y2)
−mgy
Les equations de Lagrange s’ecrivent :
d
dt
(
∂L∂x
)
− ∂L∂x
+∂φ
∂x= 0
d
dt
(
∂L∂y
)
− ∂L∂y
+∂φ
∂y= 0
{
mx+ µx = 0
my +mg + µy = 0
1.4. Forces de contraintes generalisees.
Soit un systeme a n degres de liberte, donc a n coordonnees indepen-dantes, dont toutes les liaisons sont holonomes. L’emploi des coordon-nees generalisees fait disparaitre les forces de liaison. Cependant, onpeut ne pas les utiliser et conserver n+ k coordonnees xj non indepen-dantes, et trouver l’expression des forces de liaison.

1. EQUATIONS DE LAGRANGE 49
Les k equations de liaison holonomes sont telles que :
∀i = 1, . . . , k fi(x1, . . . , xn+k, t) = 0 (17)
Imaginons un deplacement virtuel du systeme, donc a temps cons-tant. Si ce deplacement virtuel est compatible avec les liaisons, alorsl’equation de liaison est encore valable dans cette nouvelle position :
∀i = 1, . . . , k fi(x1 + δx1, . . . , xn+k + δxn+k, t) = 0 (18)
ou t ne varie pas. La difference entre (18) et (17) est nulle :
∀i, . . . , k fi(x1 + δx1, . . . , xn+k + δxn+k, t)− fi(x1, . . . , xn+k, t) = 0
∀i = 1, . . . , k δtfi(x1, . . . , xn+k, t) = 0
qui est la variation a temps constant de chaque fi, et qui s’ecrit :
∀i = 1, . . . , kn+k∑
j=1
∂fi∂xj
δxj = 0 (19)
appelees forces de contraintes instantanees.A partir de l’equation (15) page 42, l’equation de la dynamique
valable pour tous types de contraintes et de coordonnees s’ecrit,
n+k∑
j=1
[
d
dt
(
∂T
∂xj
)
− ∂T
∂xj
−p∑
i=1
F i ·(
∂ri
∂xj
)
t
]
δxj = 0
ou les δxj ne sont pas independants. On suppose sans perte de genera-lite, que ce sont les n premieres coordonnees xj qui sont independantes.Les coefficients devant les n premiers δxj sont donc nuls :
∀j = 1, . . . , nd
dt
(
∂T
∂xj
)
− ∂T
∂xj−
p∑
i=1
F i ·(
∂ri
∂xj
)
t
= 0
Les forces sont au maximum au nombre de n, une force (une compo-sante) par degre de liberte. Ajouter des coordonnees superflues n’ajoutepas de forces. On suppose donc a nouveau sans perte de generalite queces forces s’expriment en fonction des n premieres coordonnees, sup-posees independantes (voir la remarque dans l’exemple 3.5 page 51).On retrouve alors les forces generalisees Qj , et l’on a :
∀j = 1, . . . , nd
dt
(
∂T
∂xj
)
− ∂T
∂xj−Qj = 0
Si bien qu’il reste :
n+k∑
j=n+1
[
d
dt
(
∂T
∂xj
)
− ∂T
∂xj
]
δxj = 0 (20)

50 3. MECANIQUE DE LAGRANGE
Les n premieres coordonnees etant supposees independantes, les npremiers δxj dans la relation (19) sont independants, et leurs coeffi-cients respectifs sont nuls afin que la somme soit nulle :
∀i = 1, . . . , k ∀j = 1, . . . , n∂fi∂xj
= 0 (21)
Les equations de liaison ne sont donc pas des fonctions explicitesdes n premieres coordonnees. Il reste :
∀i = 1, . . . , k
n+k∑
j=n+1
∂fi∂xj
δxj = 0 (22)
En introduisant k multiplicateurs indetermines λi entre l’equation(20) et les k equations (22), nous obtenons :
n+k∑
j=n+1
[
d
dt
(
∂T
∂xj
)
− ∂T
∂xj
]
δxj =k∑
i=1
λi
n+k∑
j=n+1
∂fi∂xj
δxj
n+k∑
j=n+1
[
d
dt
(
∂T
∂xj
)
− ∂T
∂xj−
k∑
i=1
λi∂fi∂xj
]
δxj = 0
Les conditions sur les multiplicateurs λi pour que chacun des ktermes soit nul sont les suivantes :
∀j = n + 1, . . . , n+ kd
dt
(
∂T
∂xj
)
− ∂T
∂xj−
k∑
i=1
λi∂fi∂xj
= 0
Les equations de la dynamique sont donnees par le systeme d’equa-tions suivant :
∀j = 1, . . . , nd
dt
(
∂T
∂xj
)
− ∂T
∂xj−Qj = 0
∀j = n+ 1, . . . , n+ kd
dt
(
∂T
∂xj
)
− ∂T
∂xj−
k∑
i=1
λi∂fi∂xj
= 0
La relation (21) page 50 permet d’ecrire ce systeme d’equations enune seule equation ayant un indice j allant de 1 a n+ k.
∀j = 1, . . . , n+ kd
dt
(
∂T
∂xj
)
− ∂T
∂xj
−Qj −k∑
i=1
λi∂fi∂xj
= 0
Cette equation montre que les λ ∂xf sont homogenes a des forcesgeneralisees. On les appelle forces de contraintes generalisees.
Lorsque toutes les forces derivent d’une energie potentielle indepen-dante des vitesses generalisees,
p∑
i=1
F i ·∂ri
∂xj
= −∂V (q, t)
∂xj

1. EQUATIONS DE LAGRANGE 51
on peut ajouter le terme nul ∂V/∂xj , et en utilisant la definition 3.2
page 43 du Lagrangien L ∆= T − V , nous avons :
∀j = 1, . . . , n+ kd
dt
(
∂L∂xj
)
− ∂L∂xj
−k∑
i=1
λi∂fi∂xj
= 0
Exemple 3.5. Cylindre roulant sans glisser sur un plan inclineUn cylindre de masse m et de rayon r, roule sans glisser sur un planincline d’un angle α. Quelle est l’equation de son mouvement ?
θ
α
m
r
x
Fig 3. Cylindre roulant sur un plan incline
Soit θ l’angle de rotation du cylindre. Sans glissement, la distancesur le cylindre rθ est egale a celle parcourue x. La condition de roule-ment sans glissement s’ecrit donc,
rθ − x = 0 (23)
La liaison est de la forme,
f(x, θ) = 0
avec,
∂f
∂x= −1
∂f
∂θ= r
En choisissant x − rθ = 0 les signes seraient inverses. Il n’y aqu’un seul degre de liberte, mais nous utilisons les deux coordonnees xet θ reliees par l’equation de contrainte (23). L’expression de l’energiecinetique comporte un terme en translation et un terme en rotation,
T = 12mx2 + 1
2Jθ2
dans laquelle on conserve les deux variables x et θ. En choisissant l’ori-gine de l’energie potentielle au sommet du plan incline, le Lagrangiens’ecrit :
L ∆= T − V
= 12mx2 + 1
2Jθ2 +mgx sinα

52 3. MECANIQUE DE LAGRANGE
Remarque : On peut aussi choisir indifferemment de prendre :
L = 12mx2 + 1
2Jθ2 +mgrθ sinα
Les equations de Lagrange s’ecrivent,
d
dt
(
∂L∂x
)
− ∂L∂x
= λ∂f
∂x
d
dt
(
∂L∂θ
)
− ∂L∂θ
= λ∂f
∂θ
d
dt(mx)−mg sinα = −λ
d
dt
(
Jθ)
= λr
mx−mg sinα+ λ = 0
λ =Jθ
rL’equation de liaison (23) page 51 donne,
rθ = x
rθ = x
d’ou λ = Jx/r2,
mx−mg sinα +Jx
r2= 0
mr2λ
J−mg sinα + λ = 0
{
x(
mr2 + J)
−mr2g sinα = 0
λ(
mr2 + J)
−mJg sinα = 0
x− mr2
J +mr2g sinα = 0
λ =J
mr2 + Jmg sinα
Pour un cylindre plein, de longueur l, le moment d’inertie 1 s’ecrit,
J =
∫∫∫
V
r2dm
= ρ
∫ r
0
r2 2πrl dr
= 12ρπr4l
= 12mr2
1. Voir Tenseur d’inertie.pdf

1. EQUATIONS DE LAGRANGE 53
et l’on obtient,{
x− 23g sinα = 0
λ = 13mg sinα
Les forces de contraintes generalisees s’ecrivent,
fx∆= λ
∂f
∂x
fθ∆= λ
∂f
∂θ{
fx = −13mg sinα
fθ =13rmg sinα
fx est la force de frottement sur la ligne de contact du cylindre avec leplan incline. fθ est le moment de cette force de frottement par rapport al’axe du cylindre, qui provoque la rotation du cylindre sans glissement.
Pour un cylindre creux, de longueur l, le moment d’inertie s’ecrit,
J = r2∫∫∫
V
dm
J = mr2
et l’on obtient,{
x− 12g sinα = 0
λ = 12mg sinα
Les forces de contraintes generalisees s’ecrivent,{
fx = −12mg sinα
fθ =12rmg sinα
On verifie que l’on obtient le meme resultat en utilisant directementl’equation de contrainte dans l’expression de l’energie cinetique. Parexemple pour le cylindre plein :
T = 12mx2 + 1
4mr2θ2
= 34mx2
Le Lagrangien s’ecrit :
L = 34mx2 +mgx sinα
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂x
)
− ∂L∂x
= 0
d
dt
(
32mx)
−mg sinα = 0
x− 23g sinα = 0

54 3. MECANIQUE DE LAGRANGE
1.5. Liaison non-holonomes.
Lorsque les liaison sont non-holonomes il n’existe pas de methode ge-nerale pour eliminer les coordonnees superflues. Cependant, dans le casparticulier ou elles sont donnees sous forme differentielle non integrable,on peut eliminer les equations de la dynamique dependantes grace auxmultiplicateurs indetermines de Lagrange.
Considerons un systeme a n+ k coordonnees dependantes, dont lesk liaisons non-holonomes sont donnees sous la forme :
∀i = 1, . . . , kn+k∑
j=1
aij dxj + ait dt = 0
Ces equations differentielles sont supposees non integrables, car si-non on se ramenerait au cas de liaisons holonomes. Par exemple, lacondition de roulement sans glissement de l’exemple 3.5 page 51 estintegrable. Qu’il y ait glissement ou non, la vitesse d’un point quel-conque du cylindre est la composition vectorielle d’une vitesse de ro-tation autour de l’axe du cylindre, et de la vitesse en translation ducylindre. En l’absence de glissement, la vitesse en rotation et la vi-tesse en translation des points au contact du plan incline sont egalesen norme (et en direction, mais de sens oppose) :
rθ = x
Cette liaison s’ecrit sous forme differentielle,
rdθ − dx = 0
Les coefficients aij et ait s’ecrivent donc (une seule liaison donc k = 1) :
aθ = r
ax = −1
at = 0
Elle s’integre en une equation holonome,
rθ − x = 0
ou la constante d’integration est choisie nulle. Pour le cas des equationsdifferentielles non integrables, les deplacements virtuels ayant lieu atemps constant, nous avons,
∀i = 1, . . . , k
n+k∑
j=1
aij δxj = 0
Par analogie avec le paragraphe precedent, en introduisant k multi-plicateurs de Lagrange, les n+k equations de la dynamique s’ecrivent :
∀j = 1, . . . , n+ kd
dt
(
∂T
∂xj
)
− ∂T
∂xj
−Qj −k∑
i=1
λi aij = 0

2. PROPRIETES DU LAGRANGIEN ET DES EQUATIONS DE LAGRANGE 55
Lorsque toutes les forces derivent d’une energie potentielle indepen-dante des vitesses generalisees, nous avons :
∀j = 1, . . . , n+ kd
dt
(
∂L∂xj
)
− ∂L∂xj
−k∑
i=1
λi aij = 0
2. Proprietes du Lagrangien et des equations de Lagrange
2.1. Changement d’unites.
Multiplions le Lagrangien par une constante α, nous avons :
∀j = 1, . . . , nd
dt
[
∂(αL)∂qj
]
− ∂(αL)∂qj
= 0
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
= 0
Les equations du mouvement sont invariantes lorsque le Lagrangienest multiplie par une constante, ce qui correspond a un changementd’unites.
2.2. Caractere scalaire du Lagrangien.
Les quantites considerees sont toutes des scalaires, et non plus desvecteurs comme en mecanique de Newton. La mecanique analytiqueexploite directement le fait que la plupart des forces en physique deri-vent d’une energie potentielle,
F = −gradV
rotF = −rot gradV
= 0
soit,
∂yFz(x, y, z)− ∂zFy(x, y, z) = 0
∂zFx(x, y, z)− ∂xFz(x, y, z) = 0
∂xFy(x, y, z)− ∂yFx(x, y, z) = 0
Les trois composantes de la force F sont reliees entre-elles par troisequations, ce qui explique pourquoi on peut les remplacer par l’uniquescalaire V .
2.3. Additivite du Lagrangien.
Soient deux systemes physiques independants, d’energies cinetiques res-pectives T1 et T2, et d’energies potentielles respectives V1 et V2. Pour

56 3. MECANIQUE DE LAGRANGE
le systeme global nous avons :
T = T1 + T2
V = V1 + V2
T − V = (T1 + T2)− (V1 + V2)
= (T1 − V1) + (T2 − V2)
L = L1 + L2
La fonction de Lagrange est donc additive.
2.4. Invariance de jauge du Lagrangien.
Le Lagrangien est defini a la derivee totale par rapport au temps d’unefonction f des n coordonnees generalisees qi et du temps pres. Autre-ment dit, le Lagrangien,
L′ = L+df(q, t)
dt(24)
donne les memes equations du mouvement que le Lagrangien L.En effet, montrons que ∀j = 1, . . . , n :
d
dt
{
∂
∂qj
[
df(q, t)
dt
]}
− ∂
∂qj
[
df(q, t)
dt
]
= 0
Ecrivons la derivee totale par rapport au temps de f :
df =
n∑
i=1
∂f
∂qidqi +
∂f
∂tdt
df
dt=
n∑
i=1
∂f
∂qiqi +
∂f
∂t
Soit donc a prouver que ∀j = 1, . . . , n,
d
dt
[
∂
∂qj
(
n∑
i=1
∂f
∂qiqi +
∂f
∂t
)]
− ∂
∂qj
(
n∑
i=1
∂f
∂qiqi +
∂f
∂t
)
= 0
d
dt
(
∂f
∂qj
)
−(
n∑
i=1
∂2f
∂qj∂qiqi +
∂2f
∂qj∂t
)
= 0 (25)
Ecrivons la differentielle de ∂f/∂qj puis sa derivee totale par rap-port au temps :
d
(
∂f
∂qj
)
=n∑
k=1
∂
∂qk
(
∂f
∂qj
)
dqk +∂
∂t
(
∂f
∂qj
)
dt
=n∑
k=1
∂2f
∂qk∂qjdqk +
∂2f
∂t∂qjdt
d
dt
(
∂f
∂qj
)
=n∑
k=1
∂2f
∂qk∂qjqk +
∂2f
∂t∂qj

2. PROPRIETES DU LAGRANGIEN ET DES EQUATIONS DE LAGRANGE 57
La variable muette k peut etre remplacee par i, et la relation (25) estbien nulle. La fonction f(q, t) constitue une jauge pour le Lagrangien,qui est dit invariant de jauge.
2.5. Covariance des equations de Lagrange par change-
ment de coordonnees.
Lorsque nous avons etabli les equations de Lagrange (15) page 42, nousn’avons pas fait d’hypothese sur le systeme de coordonnees utilise. Parconsequent, quel que soit ce systeme de coordonnees nous trouveronsles equations de Lagrange. Les equations de Lagrange sont invariantesde forme par changement de coordonnees.
2.5.1. Comparaison avec les equations de Newton.Contrairement aux equations de Lagrange, les equations de Newton nesont pas covariantes par changement de coordonnees. En effet, soit uneparticule soumise a une force derivant d’une energie potentielle V , les e-quations de Newton de la dynamique en coordonnees cartesiennes (x, y)s’ecrivent :
mx = −∂V (x, y)
∂x
my = −∂V (x, y)
∂y
Mais, en passant en coordonnees polaires (ρ, θ) :
mρ 6= −∂V (ρ, θ)
∂ρ
mθ 6= −∂V (ρ, θ)
∂θ
2.6. Invariance du Lagrangien par changement de referen-
tiel galileen.
Un referentiel est caracterise par son mouvement relatif aux autres refe-rentiels. On lui associe une mesure du temps et un repere dans l’espace.Ainsi, deux referentiels se distingues par leur mouvement relatif, et nonpar les reperes auxquels on les a associes.
Les referentiels dans lesquels il n’y a pas de forces fictives sont ditsgalileens ou inertiels. En l’absence de champs de gravitation, les re-ferentiels inertiels se deplacent a vecteur vitesse relative constante lesuns par rapport aux autres.
Soit u la vitesse relative constante entre deux referentiels galileens.On note v la vitesse d’une particule dans le premier referentiel et v′ savitesse dans le second. Alors :
v = v′ + u (26)

58 3. MECANIQUE DE LAGRANGE
Dans le premier referentiel, le Lagrangien a pour expression,
L = 12mv2 − V
et dans le second,
L′ = 12mv′2 − V ′
En utilisant les relations (26) et (29) :
L = 12mv2 − V
= 12mv · v − V
= 12m(v′ + u) · (v′ + u)− V ′
= 12mv′2 +mv′ · u+ 1
2mu2 − V ′
En se rappelant que la vitesse relative u est constante, du/dt = 0 :
L = 12mv′2 − V ′ +m
d
dt(r′ · u) + 1
2m
d
dt
(
u2t)
Les deux derniers termes sont des derivees totales par rapport autemps de fonctions des coordonnees et du temps. En utilisant l’inva-riance de jauge du Lagrangien du paragraphe 2.4 page 56, nous pouvonsles supprimer,
L = 12mv′2 − V ′
= L′ (27)
et le Lagrangien est invariant par changement de referentiel galileen.
2.7. Covariance des equations de Lagrange par change-
ment de referentiel galileen.
Considerons deux referentiels galileens R et R′ de vecteur vitesse rela-tive constant u. Supposons que l’axe Ox′ du second glisse sur l’axe Oxdu premier, les axes Oy′ et Oz′ restant respectivement paralleles auxaxes Oy et Oz. Si (x, y, z, t) et (x′, y′, z′, t′) designent les coordonneeset le temps d’un meme evenement par rapport a chacun des referentielsgalileens, la transformation de Galilee s’ecrit :
x′ = x− ut
y′ = y
z′ = z
t′ = t
(28)
D’apres la relation (27) page 58,
L(x, v, t) = L′(x′, v′, t′)
dL(x, v, t) = dL′(x′, v′, t′)
∂L∂x
dx+∂L∂v
dv +∂L∂t
dt =∂L′
∂x′dx′ +
∂L′
∂v′dv′ +
∂L′
∂t′dt′

2. PROPRIETES DU LAGRANGIEN ET DES EQUATIONS DE LAGRANGE 59
En differentiant la transformation de Galilee :
dt′ = dt
dx′ = dx− udt
et,
v′ = v − u
dv′ = dv
Donc :
∂L∂x
dx+∂L∂v
dv +∂L∂t
dt =∂L′
∂x′dx− ∂L′
∂x′udt+
∂L′
∂v′dv +
∂L′
∂t′dt
Par consequent,
∂L∂x
=∂L′
∂x′
∂L∂v
=∂L′
∂v′
d
dt
(
∂L∂v
)
− ∂L∂x
=d
dt
(
∂L′
∂v′
)
− ∂L′
∂x′
La nullite des equations de Lagrange dans un referentiel galileenentraine la nullite des equations de Lagrange dans tout autre referen-tiel galileen. Les equations de Lagrange sont donc invariantes de formepar changement de referentiel galileen.
2.7.1. Comparaison avec les equations de Newton.Montrons que les equations de Newton sont egalement covariantes sousle groupe de transformation de Galilee. La masse est independante dela vitesse, donc m′ = m. L’acceleration est invariante par changementde referentiel galileen, en effet :
x′ = x− ut
x′ = x− u
x′ = x
donc a′ = a. Les modeles de forces sont aussi invariants par change-ment de referentiels galileens (le modele de force d’un ressort ne dependpas de la vitesse du referentiel dans lequel on mene l’experience), et l’ona∑
F ′ =∑
F . Si bien que la relation fondamentale de la dynamiques’ecrit dans le nouveau referentiel :
∑
F ′ = m′a′
Elle est donc invariante de forme par transformation de Galilee. Aucuneexperience de mecanique effectuee dans un referentiel galileen ne peutmettre en evidence le mouvement de ce referentiel. C’est le principe derelativite newtonien.

60 3. MECANIQUE DE LAGRANGE
L’invariance du modele de force F implique l’invariance de l’energiepotentielle V dont elle derive :
F ′ = F
−grad V ′ = −gradV
V ′ = V (29)
3. Integrales premieres du mouvement
Les integrales premieres sont des fonctions des coordonnees genera-lisees qj et des vitesses generalisees qj, qui se conservent au cours dumouvement. Une integrale premiere est donc de la forme :
f(q, q) = Cste
Ces equations differentielles sont du premier ordre par rapport auxvariables qj , et non plus du second ordre comme le sont les equationsdu mouvement. Ces dernieres sont integrees une premiere fois.
La resolution de l’equation du mouvement d’un systeme mecani-que ayant n degres de liberte necessite n conditions initiales sur lescoordonnees et n sur les vitesses, soit 2n constantes. Les coordonneesgeneralisees et les vitesses generalisees sont des fonctions du temps etde ces constantes :
∀j = 1, . . . , n qj = qj(t, q01, . . . , q
0n, q
01 . . . , q
0n)
∀j = 1, . . . , n qj = qj(t, q01, . . . , q
0n, q
01 . . . , q
0n)
Par exemple page 33, nous avions trouve q(t) = 12g sinα t2 + q0t + q0.
Il est toujours possible d’effectuer une translation dans le temps, quicorrespond a un changement d’origine du temps :
τ = t+ t0
Cela permet de supprimer l’une des constantes (voir l’exemple 3.7page 61), constantes que l’on note C dans ce qui suit :
∀j = 1, . . . , n qj = qj(τ, C1, . . . , C2n−1)
∀j = 1, . . . , n qj = qj(τ, C1, . . . , C2n−1)
En inversant ces relations, nous avons :
∀i = 1, . . . , 2n− 1 Ci = Ci(q, q)
Nous pouvons par consequent former au plus 2n−1 integrales premi-eres du mouvement pour un systeme a n degres de liberte. Cependant,toutes les integrales sont loins de jouer un role d’egale importance enmecanique 2.
Exemple 3.6. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline.
Quelle est l’equation de son mouvement ?
2. L. Landau, Mecanique (Editions Mir Moscou, 1982).

3. INTEGRALES PREMIERES DU MOUVEMENT 61
αP
R
m
q
Fig 4. Masse glissant sans frottements sur un plan incline
Pour n = 1 degre de liberte, il y a 2n − 1 = 1 integrale premi-ere. La force de pesanteur, seule force exterieure, derive d’une energiepotentielle, donc l’energie mecanique est une integrale premiere. Ellenous fournira une equation, pour une variable, donc la solution q(t).En prenant l’origine de l’energie potentielle de pesanteur au sommetdu plan incline, l’energie mecanique s’ecrit,
E∆= T + V
= 12mq2 −mgq sinα
= Cste
soit,
dE
dt= 0
d
dt
(
12mq2 −mgq sinα
)
= 0
mqq −mgq sinα = 0
q − g sinα = 0
Exemple 3.7. Pendule simple, planL’equation differentielle de l’elongation θ(t) du pendule simple de lon-gueur ρ est la suivante (voir l’application 2.5 page 205) :
ρθ + g sin θ = 0
Dans l’approximation des petites oscillations, on utilise le develop-pement limite de la fonction sinus a l’ordre un, sin θ ≈ θ. L’equationdevient :
ρθ + gθ = 0
La solution de cette equation differentielle lineaire du second ordreest de forme sinusoıdale, fonction sinus ou cosinus au choix, la phasea l’origine des temps ϕ0 permettant de passer d’une fonction a l’autre :
θ(t) = A sin(ωt+ ϕ0)
θ(t) = Aω cos(ωt+ ϕ0)
θ(t) = −Aω2 sin(ωt+ ϕ0)

62 3. MECANIQUE DE LAGRANGE
ou ϕ = ωt+ϕ0 est la phase du mouvement oscillatoire. En remplacantdans l’equation differentielle, on trouve l’expression de la pulsationpropre,
−ρAω2 sin(ωt+ ϕ0) + gA sin(ωt+ ϕ0) = 0
ω = ±√
g
ρ
pour laquelle on ne conserve que la valeur positive. L’amplitude (elon-gation maximale) A et la phase a l’origine des temps ϕ0 sont les deuxconstantes de ce systeme a un degre de liberte :
{
θ = θ(t, A, ϕ0)
θ = θ(t, A, ϕ0)
En posant ϕ0 = ωt0,{
θ = A sin(ωt+ ωt0)
θ = Aω cos(ωt+ ωt0)
puis τ = t + t0,{
θ = A sin(ωτ)
θ = Aω cos(ωτ)
nous supprimons la constante ϕ0. A l’instant initial τ = 0,{
θ0 = A
θ0 = 0
et l’on a :
θ(τ) = θ0 sin(ωτ)
A un facteur pres, l’integrale premiere A n’est autre que l’energie me-canique. En effet, en prenant l’origine de l’energie potentielle au pointle plus bas de la trajectoire :
E = 12mρ2θ2 +mgρ(1− cos θ)
Pour de petites oscillations cos θ ≈ 1− 12θ2 :
E ≈ 12mρ2θ2 +mgρ
(
12θ2)
Relation valable en particulier a l’instant initial :
E ≈ 12mgρA2

3. INTEGRALES PREMIERES DU MOUVEMENT 63
3.1. Fonction energie.
Dans le cas general, le Lagrangien depend des coordonnees generalisees,des vitesses generalisees et du temps explicitement, L(q, q, t) :
dL(q, q, t) =∑
j
∂L∂qj
dqj +∑
j
∂L∂qj
dqj +∂L∂t
dt
dLdt
=∑
j
∂L∂qj
qj +∑
j
∂L∂qj
qj +∂L∂t
En utilisant les equations de Lagrange,
dLdt
=∑
j
d
dt
(
∂L∂qj
)
qj +∑
j
∂L∂qj
qj +∂L∂t
=∑
j
d
dt
(
∂L∂qj
qj
)
+∂L∂t
si bien que,
d
dt
(
∑
j
qj∂L∂qj
− L)
= −∂L∂t
Definition 3.3. Fonction energieOn definit la fonction energie par :
h(q, q, t)∆=∑
j
qj∂L∂qj
−L
Nous avons alors :
dh
dt= −∂L
∂t
Lorsque le Lagrangien ne depend pas explicitement du temps,
d
dth(q, q) = 0
h(q, q) = Cste
et la fonction energie se conserve au cours du mouvement.
Exemple 3.8. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline. Quelle estl’equation de son mouvement ?
Le Lagrangien a pour expression :
L = 12mq2 +mgq sinα

64 3. MECANIQUE DE LAGRANGE
Il ne depend pas explicitement du temps, donc la fonction energiese conserve :
h = q∂L∂q
− L
= mq2 − 12mq2 −mgq sinα
= 12mq2 −mgq sinα
= Cste
Nous retrouvons l’integrale premiere de l’energie mecanique de l’e-xemple 3.6 page 60.
3.2. coordonnees cycliques.
Definition 3.4. Coordonnees cycliquesUne coordonnee generalisee qj qui n’apparait pas explicitement dans leLagrangien (mais dont la derivee par rapport au temps apparait), estdite cyclique ou ignorable :
∂L∂qj
= 0
Soit qj une coordonnee cyclique, en partant de l’equation de La-grange pour cette variable,
d
dt
(
∂L∂qj
)
− ∂L∂qj
= 0
d
dt
(
∂L∂qj
)
= 0
∂L∂qj
= Cste
∂qjL est donc une integrale premiere du mouvement.
Exemple 3.9.En coordonnees cartesiennes, si la coordonnee x est cyclique :
∂L∂x
= Cste
Si de plus l’energie potentielle ne depend pas de la vitesse :
∂
∂vx(T − V ) = 1
2m
∂v2x∂vx
= mvx
Notez que mvx est bien du premier ordre par rapport a la variable x.
Par suite, mvx etant l’impulsion selon l’axe des x, notee px, nousposons la definition suivante :
3. INTEGRALES PREMIERES DU MOUVEMENT 65
Definition 3.5. Impulsions generaliseesLes derivees partielles du Lagrangien par rapport aux vitesses genera-lisees,
pj∆=
∂L∂qj
sont appelees impulsions generalisees.
L’impulsion generalisee est a la base de la mecanique de Hamilton.

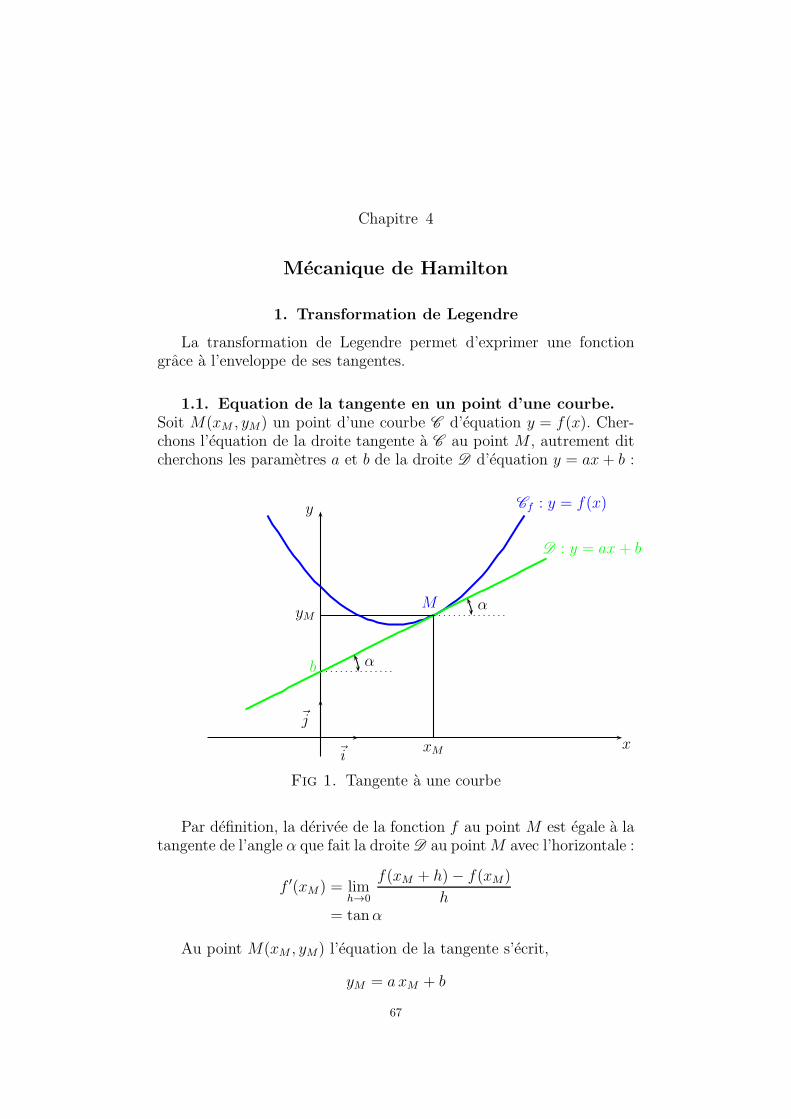
Chapitre 4
Mecanique de Hamilton
1. Transformation de Legendre
La transformation de Legendre permet d’exprimer une fonctiongrace a l’enveloppe de ses tangentes.
1.1. Equation de la tangente en un point d’une courbe.
Soit M(xM , yM) un point d’une courbe C d’equation y = f(x). Cher-chons l’equation de la droite tangente a C au point M , autrement ditcherchons les parametres a et b de la droite D d’equation y = ax+ b :
~i
~j
y
x
yM
xM
b
D : y = ax+ b
M
Cf : y = f(x)
α
α
Fig 1. Tangente a une courbe
Par definition, la derivee de la fonction f au point M est egale a latangente de l’angle α que fait la droite D au pointM avec l’horizontale :
f ′(xM) = limh→0
f(xM + h)− f(xM)
h= tanα
Au point M(xM , yM) l’equation de la tangente s’ecrit,
yM = a xM + b
67

68 4. MECANIQUE DE HAMILTON
si bien que,
a =yM − b
xM
= tanα
= f ′(xM)
et,
b = yM − a xM
= f(xM)− a xM (30)
= f(xM)− f ′(xM ) xM
Ayant les deux parametres a et b, nous pouvons ecrire l’equationde la tangente en M :
y = f ′(xM ) x+ f(xM)− f ′(xM ) xM
1.2. Equation de l’enveloppe.
Cherchons l’equation de toutes les tangentes, c’est a dire, b en fonctionde a. Pour cela nous repartons de l’equation (30) :
b(a) = f(xM)− a xM
Le point M parcourt maintenant toute la courbe C , et xM devientune variable. La transformee de Legendre de f(x) est donc la fonctionb(a) telle que :
b(a) = f(x)− a x (31)
Comme a est la nouvelle variable, il nous reste a exprimer f(x) etx en fonction de a. Pour cela il nous faut l’expression explicite de lafonction f .
Exemple 4.1.Trouver la transformee de Legendre de f(x) = x2. La nouvelle variablea s’ecrit,
a = f ′(x)
= 2x
soit,
x =a
2
On exprime f(x) en fonction de a :
f(x) = x2
=(2x)2
4
=a2
4

1. TRANSFORMATION DE LEGENDRE 69
La transformee de Legendre de f(x) est alors la fonction b(a) donneepar la relation (31) page 68 :
b(a) = f(x)− a x
=a2
4− a× a
2
= −a2
4
On retiendra que dans toute transformation de Legendre, la nou-velle variable a est la derivee de la fonction de depart f(x) par rapporta l’ancienne variable x.
1.3. Involution de la transformation de Legendre.
Si l’on applique deux fois la transformation de Legendre, on retombesur la fonction de depart. En effet, la transformee de Legendre de lafonction f(x) est donnee par :
b(a) = f(x)− a x
Si l’on applique de nouveau la transformation de Legendre, la nou-velle variable, notee n, est telle que,
n =db(a)
da
=df(x)
da− x− a
dx
da
et la transformee de Legendre de b(a) est la fonction g(n) telle que :
g(n) = b(a)− n a
= f(x)− a x−[
df(x)
da− x− a
dx
da
]
a
= f(x)−[
df(x)
da− df(x)
dx
dx
da
]
a
= f(x)
On en conclue que la transformation de Legendre ne perd ni n’ajouted’information a la fonction de depart.
Exemple 4.2.Poursuivons le premier exemple, et cherchons la transfomee de Le-gendre de b(a) = −a2/4. La nouvelle variable n s’ecrit,
n = b′(a)
= −a
2soit,
a = −2n

70 4. MECANIQUE DE HAMILTON
On exprime b(a) en fonction de n :
b(a) = −a2
4= −n2
La transformee de Legendre de b(a) est alors :
g(n) = b(a)− n a
= −n2 + 2n2
= n2
On retrouve la propriete d’involution de la transformee de Legendre.
2. Equations de Hamilton
2.1. Introduction de nouvelles variables independantes.
Les n equations de Lagrange sont des equations differentielles du se-cond ordre par rapport au temps. N’importe quelle equation differen-tielle du second ordre peut etre remplacee par deux equations differen-tielles du premier ordre, en introduisant une nouvelle variable indepen-dante.
Exemple 4.3. Soit a resoudre l’equation differentielle suivante :
x = 0
Nous pouvons poser v = x, et nous avons alors les deux equationsdifferentielles suivantes a resoudre :
{
v = 0
x = v
Ces equations differentielles sont resolues independamment l’une del’autre, et les variables v et v sont donc traitees comme independantes :
{
v = C1
x = v
x = C1t+ C2
Appliquons cette remarque aux equations de Lagrange :
∀j = 1, . . . , n
d
dt
(
∂L∂vj
)
− ∂L∂qj
= 0
vj = qj
ou le Lagrangien devient une fonction des nouvelles variables vj.Peut-on simplifier l’ecriture des equations de Lagrange ?Nous avons,
d
[
∂L(q, v, t)∂vj
]
=n∑
i=1
(
∂2L∂vi∂vj
dvi +∂2L
∂qi∂vjdqi
)
+∂2L∂t∂vj
dt

2. EQUATIONS DE HAMILTON 71
d’ou la derivee totale par rapport au temps :
d
dt
[
∂L(q, v, t)∂vj
]
=n∑
i=1
(
∂2L∂vi∂vj
vi +∂2L
∂qi∂vjvi
)
+∂2L∂t∂vj
Nous obtenons finalement le systeme d’equations differentielles du pre-mier ordre suivant :
∀j = 1, . . . , n
n∑
i=1
(
∂2L∂vi∂vj
vi +∂2L
∂qi∂vjvi
)
+∂2L∂t∂vj
− ∂L∂qj
= 0
vj = qj
L’introduction des nouvelles variables vj n’apporte pas de simplifica-tion.
2.2. Transformee de Legendre des qj.Dans les n equations de Lagrange,
∀j = 1, . . . , nd
dt
(
∂L∂qj
)
− ∂L∂qj
= 0
apparaissent les derivees partielles du Lagrangien par rapport aux vi-tesses generalisees : ∂L/∂qj . Cela suggere d’effectuer une transforma-tion de Legendre du Lagrangien pour les vitesses generalisees qj , enposant :
pj = ∂L/∂qjLes equations de Lagrange deviennent le systeme suivant :
∀j = 1, . . . , n
d
dtpj −
∂L∂qj
= 0
pj =∂L∂qj
soit,
∀j = 1, . . . , n
pj =∂L∂qj
(32)
pj =∂L∂qj
(33)
D’apres la definition 3.5 page 65, les n nouvelles variables sont lesimpulsions generalisees pj . La premiere relation est l’equation de la dy-namique. La seconde correspond a la creation des nouvelles variablespour la transformation de Legendre du Lagrangien. Par rapport aux re-lations obtenues au paragraphe 2.1 precedent, on remarque leur grandesimplicite.
Les n equations differentielles (32) sont resolues independammentdes n equations differentielles (33), les variables pj et qj sont donctraitees comme etant independantes l’une de l’autre.

72 4. MECANIQUE DE HAMILTON
2.3. Expression du Hamiltonien.
Il nous reste a effectuer la transformation de Legendre du lagrangien.Commencons par ne transformer que la premiere vitesse generalisee q1,et notons H1 la transformee de Legendre du Lagrangien :
H1(q, p1; q2, . . . , qn; t) = L − p1q1
Transformons maintenant la deuxieme vitesse generalisee q2 :
H2(q, p1, p2; q3, . . . , qn; t) = H1 − p2q2
= L − p1q1 − p2q2
Si l’on transforme toutes les vitesses generalisees, nous avons :
Hn(q, p, t) = L−n∑
j=1
pj qj
Nous posons alors la definition suivante (le signe de la transformationde Legendre est affaire de convention) :
Definition 4.1. HamiltonienLa fonction des n coordonnees generalisees qj, des n impulsions gene-ralisees pj, et du temps t :
H(q, p, t)∆=
n∑
j=1
pj qj − L
est appelee fonction de Hamilton ou Hamiltonien.qj sera exprimee en fonction de pj, en inversant la definition 3.5
page 65 des impulsions generalisees.
Remarque : Le Hamiltonien H(q, p, t) et la fonction energie h(q, q, t) ontmeme valeur, mais elles ne s’expriment pas dans les memes va-riables.
2.4. Demonstration des equations de Hamilton.
dH(q, p, t) =n∑
j=1
pjdqj +n∑
j=1
qjdpj −n∑
j=1
∂L∂qj
dqj −n∑
j=1
∂L∂qj
dqj −∂L∂t
dt
En se servant des relations (32) et (33) page 71,
dH(q, p, t) =
n∑
j=1
pjdqj +
n∑
j=1
qjdpj −n∑
j=1
pjdqj −n∑
j=1
pjdqj −∂L∂t
dt
=
n∑
j=1
qjdpj −n∑
j=1
pjdqj −∂L∂t
dt
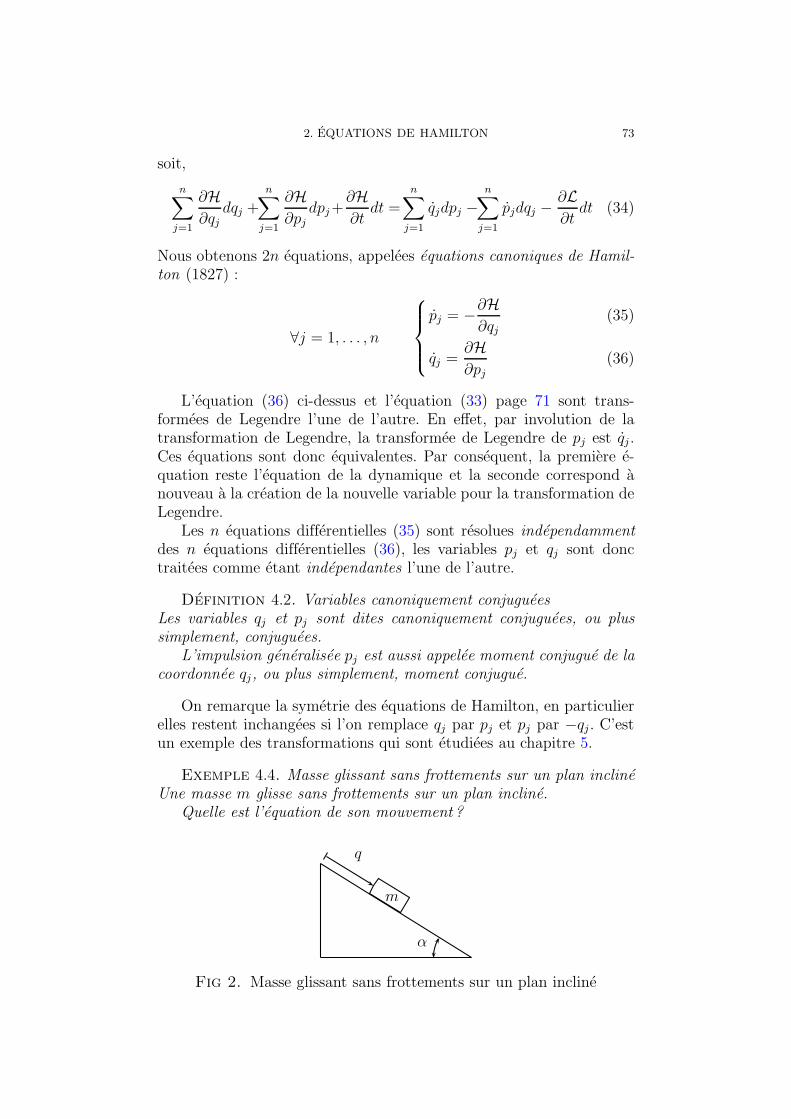
2. EQUATIONS DE HAMILTON 73
soit,
n∑
j=1
∂H∂qj
dqj +
n∑
j=1
∂H∂pj
dpj+∂H∂t
dt =
n∑
j=1
qjdpj −n∑
j=1
pjdqj −∂L∂t
dt (34)
Nous obtenons 2n equations, appelees equations canoniques de Hamil-ton (1827) :
∀j = 1, . . . , n
pj = −∂H∂qj
(35)
qj =∂H∂pj
(36)
L’equation (36) ci-dessus et l’equation (33) page 71 sont trans-formees de Legendre l’une de l’autre. En effet, par involution de latransformation de Legendre, la transformee de Legendre de pj est qj .Ces equations sont donc equivalentes. Par consequent, la premiere e-quation reste l’equation de la dynamique et la seconde correspond anouveau a la creation de la nouvelle variable pour la transformation deLegendre.
Les n equations differentielles (35) sont resolues independammentdes n equations differentielles (36), les variables pj et qj sont donctraitees comme etant independantes l’une de l’autre.
Definition 4.2. Variables canoniquement conjugueesLes variables qj et pj sont dites canoniquement conjuguees, ou plussimplement, conjuguees.
L’impulsion generalisee pj est aussi appelee moment conjugue de lacoordonnee qj, ou plus simplement, moment conjugue.
On remarque la symetrie des equations de Hamilton, en particulierelles restent inchangees si l’on remplace qj par pj et pj par −qj . C’estun exemple des transformations qui sont etudiees au chapitre 5.
Exemple 4.4. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline.
Quelle est l’equation de son mouvement ?
α
m
q
Fig 2. Masse glissant sans frottements sur un plan incline

74 4. MECANIQUE DE HAMILTON
Dans l’exemple 3.1 page 44, nous avions trouve l’expression suivantepour le Lagrangien :
L = 12mq2 +mgq sinα
Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee q. Le moment conjugue de la variable q a pour expression :
p∆=
∂L∂q
= mq (37)
relation que l’on inverse,
q =p
m
Le Hamiltonien s’ecrit :
H ∆= pq − L
=p2
m− p2
2m−mgq sinα
=p2
2m−mgq sinα
Les equations de Hamilton s’ecrivent :
p = −∂H∂q
q =∂H∂p
{
p = mg sinα
q =p
m
La seconde equation est bien equivalente a l’equation (37). Nous ob-tenons deux equations differentielles du premier ordre. En derivant qpar rapport au temps, nous obtenons l’equation differentielle du mou-vement :
q =p
mq = g sinα
3. Conservation du Hamiltonien
Les relations (32) page 71 et (35) page 73, ainsi que la comparai-son des derniers termes de l’expression (34) page 73, donnent les deux

4. HAMILTONIEN ET ENERGIE MECANIQUE 75
relations suivantes entre Hamiltonien et Lagrangien :
∀j = 1, . . . , n
(
∂H∂qj
)
pj ,t
= −(
∂L∂qj
)
qj ,t
(38)
(
∂H∂t
)
qj ,pj
= −(
∂L∂t
)
qj ,qj
(39)
Ecrivons la derivee par rapport au temps du Hamiltonien et utilisonsles equations de Hamilton :
dHdt
=
n∑
j=1
∂H∂qj
qj +
n∑
j=1
∂H∂pj
pj +∂H∂t
=n∑
j=1
−pj qj +n∑
j=1
qj pj +∂H∂t
=∂H∂t
(40)
Si le Hamiltonien n’est pas une fonction explicite du temps, ∂H/∂t = 0,alors il est constant, dH/dt = 0.
Avec la relation (39),
dHdt
= −∂L∂t
(41)
De meme, si le Lagrangien n’est pas une fonction explicite du temps,alors le Hamiltonien est constant.
4. Hamiltonien et energie mecanique
Nous cherchons les conditions pour avoir :
H = En∑
j=1
pj qj −L = T + V
n∑
j=1
∂L∂qj
qj − (T − V ) = T + V
n∑
j=1
∂L∂qj
qj = 2T (42)
Si l’on suppose que le potentiel V (q, t) n’est pas fonction des vitessesgeneralisees, la relation precedente devient :
n∑
j=1
∂T
∂qjqj = 2T

76 4. MECANIQUE DE HAMILTON
Cette relation n’est possible que si l’energie cinetique est une fonctionhomogene quadratique (de rang 2) des vitesses generalisees :
T (λq1, . . . , λqn) = λ2 T (q1, . . . qn) (43)
En effet, nous avons alors :
∂T
∂(λq1)d(λq1) + · · ·+ ∂T
∂(λqn)d(λqn) = d(λ2T )
∂T
∂(λq1)q1 + · · ·+ ∂T
∂(λqn)qn =
d(λ2T )
dλn∑
j=1
∂T
∂(λqj)qj = 2λ T
En posant λ = 1, nous retrouvons :
n∑
j=1
∂T
∂qjqj = 2T (44)
Ainsi, nous cherchons les conditions sur l’energie cinetique qui im-pliquent (43), qui a son tour implique (44), donc H = E.
L’energie cinetique a pour expression :
T = 12
p∑
i=1
miv2i
S’il existe une liaison rheonome (voir les applications 2.1 page 183 et2.7 page 217), le vecteur position depend explicitement du temps :
∀i = 1, . . . , p ri = ri(q1, . . . , qn, t)
∀i = 1, . . . , p dri =
n∑
j=1
∂ri
∂qjdqj +
∂ri
∂tdt
et l’energie cinetique s’ecrit :
T = 12
p∑
i=1
mi
(
n∑
j=1
∂ri
∂qjqj +
∂ri
∂t
)2
= 12
p∑
i=1
mi
(
∂ri
∂t
)2
+n∑
j=1
p∑
i=1
mi∂ri
∂t· ∂ri
∂qjqj
+ 12
n∑
j=1
n∑
k=1
p∑
i=1
mi∂ri
∂qj· ∂ri
∂qkqj qk
et n’est pas une fonction homogene quadratique des vitesses genera-lisees : T (λq) 6= λ2 T (q). S’il n’y a pas de contraintes rheonomes, le

4. HAMILTONIEN ET ENERGIE MECANIQUE 77
vecteur position ne contient pas explicitement le temps,
∀i = 1, . . . , p ri = ri(q)
∀i = 1, . . . , p∂ri
∂t= 0
et l’energie cinetique a pour expression :
T = 12
n∑
j=1
n∑
k=1
p∑
i=1
mi∂ri
∂qj· ∂ri
∂qkqj qk
= 12
n∑
j=1
n∑
k=1
ajk qj qk
qui est bien une fonction homogene quadratique des vitesses generali-sees :
T (λq) = 12
n∑
j=1
n∑
k=1
ajk λqj λqk
= λ2 12
n∑
j=1
n∑
k=1
ajk qj qk
= λ2 T (q)
Si le systeme est holonome scleronome et si le potentiel V (q, t) ne de-pend pas explicitement des vitesses generalisees, alors le Hamiltoniense confond avec l’energie mecanique. Dans ce cas, l’energie cinetiquene depend pas explicitement du temps. La relation (41) page 75 donnealors :
dHdt
= −∂L∂t
= − ∂
∂t[T − V (q, t)]
=∂V (q, t)
∂t
Si le potentiel ne depend pas explicitement du temps ∂V (q)/∂t = 0, lesysteme est conservatif et :
dHdt
= 0
H = E = Cste
Si le potentiel V (q, t) depend explicitement du temps alors,
H = E 6= Cste
Dans le cas ou le systeme est rheonome, nous pouvons avoirH constant,different de l’energie mecanique E.

78 4. MECANIQUE DE HAMILTON
Exemple 4.5. Masse glissant sans frottements sur un plan inclineLe Hamiltonien s’ecrit :
H =p2
2m−mgq sinα
Le Hamiltonien n’est pas une fonction explicite du temps, donc il seconserve. Le potentiel n’est pas fonction des vitesses generalisees et lescontraintes sont holonomes scleronomes, par consequent H = E.
5. Coordonnees cycliques
La relation de passage (38) page 75,(
∂H∂qj
)
pj ,t
= −(
∂L∂qj
)
qj ,t
montre que si une coordonnee n’apparait pas dans le Lagrangien alorselle n’apparait pas non plus dans le Hamiltonien. Cette coordonnee estdite cyclique.
Supposons que qn soit une coordonnee cyclique. Le Lagrangien restefonction de qn,
L = L(q1, . . . , qn−1; q, t)
L’equation de Lagrange (32) page 71 donne :
pn =∂L∂qn
= 0
pn = Cste
= pn(t = 0)
= α
ou la constante α est la valeur initiale de pn. Le moment conjugue detoute coordonnee cyclique est une integrale premiere du mouvement. Laresolution complete du probleme passe par la mecanique de Hamiltoncar elle utilise les moments conjugues p. Le Hamiltonien s’ecrit :
H = H(q1, . . . , qn−1; p1, . . . , pn−1, α; t)
Le probleme ne fait plus intervenir maintenant que 2n−2 coordon-nees et le temps. En integrant l’equation de Hamilton (36) page 73 :
qn =∂H∂α
nous obtenons le comportement de la coordonnee cyclique.

6. THEOREME DE LIOUVILLE 79
6. Theoreme de Liouville
Soit S un systeme dynamique, nous dirons que l’ensemble des confi-gurations de S constitue son espace de configuration. Un ensemble deparametres (q1, . . . , qn) pour le systeme S est alors un systeme de co-ordonnees pour l’espace de configuration.
L’espace des phases est un espace cartesien a 2n dimensions, dontles qj et les pj sont les coordonnees. Le sous-espace des qj est l’espacedes configurations, le sous-espace des pj est appele espace des moments.
A chaque instant, tout systeme dynamique est represente par un uniquepoint ayant 2n coordonnees dans l’espace des phases.
A tout ensemble de conditions initiales [q(0), p(0)], les equations deHamilton donnent une solution unique (a un depart, une seule arrivee)sous la forme de 2n equations parametriques :
∀j = 1, . . . , n
{
qj = qj [q(0), p(0), t]
pj = pj[q(0), p(0), t]
Ces equations etant reversibles dans le temps, a toute solution corres-pond un ensemble unique de conditions initiales (a toute arrivee, unseul depart).
Le point representatif du systeme decrit donc au cours du temps unecourbe unique, appelee trajectoire de phase, donnee par les fonctionsqj=1...n(t) et pj=1...n(t). Par exemple, pour le pendule plan simple, nousavons directement l’equation cartesienne a partir de la conservation del’energie donnee par la relation (102) page 210 :
H =p2θ
2mρ2−mgρ cos θ
pθ = ±√
2mρ2(H +mgρ cos θ)
L’unicite de solution des equations de Hamilton implique que deuxtrajectoires de l’espace des phases ne peuvent se croiser. Si c’etait lecas, a deux ensembles de conditions initiales differentes correspondraitun meme etat au point ou elles se croisent. Par consequent, le nombred’etats dynamiques initial se conserve. De meme, une trajectoire nepeut se couper car on aurait un mouvement perpetuel, le point decoupure servant de conditions initiales.
Les conditions initiales d’un systeme dynamique ne sont jamaisconnues avec une precision infinie. On considere donc un hypervolumeV de l’espace des phases, suffisamment grand pour que la probabilited’y trouver le systeme a l’instant initial soit proche de un. Cet hy-pervolume se deplace et se deforme au cours du temps. Prenons unelement d’hypervolume dV de cet hypervolume, et etudions commentvarie la densite d’etats ρ dans cet element d’hypervolume. On considerela projection de dV dans le plan de la coordonnee qk et de l’impulsionconjuguee pk :

80 4. MECANIQUE DE HAMILTON
qk
pk
dpk
dqkA B
CD
Fig 3. Projection de l’hypervolume elementaire dans leplan qk, pk
Nombre d’etats entrants par AD en un temps dt :
ρ qkdt dpk
Pour des raisons de lisibilite, nous n’indiquerons plus les indices k dansce qui suit, mais a la fin de la demonstration nous sommerons sur toutles k. Nombre d’etats sortants par BC en un temps dt :
(ρ+ δqρ)(q + δq q) dt dp = (ρq + δqρq + ρδq q + δqρδq q) dt dp
ou δqρ est la variation de densite ρ selon la coordonnee q, c’est a dire,
δqρ =∂ρ
∂qdq
En negligeant les elements differentiels d’ordre deux,
(ρ+ δqρ)(q + δq q) dt dp =
(
ρq +∂ρ
∂qdq q + ρ
∂q
∂qdq
)
dt dp
La difference entre ce qui entre et ce qui sort de l’element de volumepar les faces AD et BC en un temps dt vaut donc :
−(
∂ρ
∂qq + ρ
∂q
∂q
)
dt dp dq
De meme, la difference entre ce qui entre et ce qui sort de l’element devolume par les faces AB et DC en un temps dt vaut :
−(
∂ρ
∂pp+ ρ
∂p
∂p
)
dt dq dp
Puisqu’il n’y a ni creation, ni annihilation d’etats, la difference entrece qui entre et ce qui sort cree une variation locale du nombre d’etats

6. THEOREME DE LIOUVILLE 81
en un temps dt dans le volume considere :
δtρ dq dp = −(
∂ρ
∂qq + ρ
∂q
∂q+
∂ρ
∂pp+ ρ
∂p
∂p
)
dt dq dp
∂ρ
∂tdt = −
(
∂ρ
∂qq + ρ
∂q
∂q+
∂ρ
∂pp+ ρ
∂p
∂p
)
dt
ce qui donne, en remettant les indices,
∂ρ
∂tdt+
∂ρ
∂qkdqk +
∂ρ
∂pkdpk = −ρ
(
∂qk∂qk
+∂pk∂pk
)
dt
et en considerant l’element d’hypervolume :
∂ρ
∂tdt+
n∑
j=1
(
∂ρ
∂qjdqj +
∂ρ
∂pjdpj
)
= −ρ
n∑
j=1
(
∂qj∂qj
+∂pj∂pj
)
dt
dρ = −ρ
n∑
j=1
(
∂qj∂qj
+∂pj∂pj
)
dt
dρ
dt= −ρ
n∑
j=1
(
∂qj∂qj
+∂pj∂pj
)
Quel que soit le Hamiltonien, les equations de Hamilton s’ecrivent :
∀j = 1, . . . , n
pj = −∂H∂qj
qj =∂H∂pj
∀j = 1, . . . , n
∂pj∂pj
= − ∂2H∂pj∂qj
∂qj∂qj
=∂2H∂qj∂pj
Les derivees partielles etant continues, nous avons,
∂2H∂pj∂qj
=∂2H∂qj∂pj
∂pj∂pj
= −∂qj∂qj
Nous en deduisons le theoreme de Liouville : pour tout systeme dyna-mique qui suit les equations canoniques, quel que soit le Hamiltonien,la densite d’etats se conserve au cours du mouvement :
dρ
dt= 0
ρ = Cste


Chapitre 5
Transformations canoniques
1. Transformations de coordonnees
Exemple 5.1.Dans l’etude du mouvement d’une particule dans le plan, nous pouvonspar exemple utiliser comme ensemble de coordonnees generalisees, soitles coordonnees cartesiennes,
q1 = x, q2 = y,
soit les coordonnees polaires :
q1 = ρ, q2 = θ.
A ces deux ensembles de n = 2 coordonnees generalisees, correspond latransformation de coordonnees (changement de variables) suivante :
{
x(ρ, θ) = ρ cos θ
y(ρ, θ) = ρ sin θ
et reciproquement :
ρ(x, y) =√
x2 + y2
θ(x, y) = arctan(y
x
)
Soit L le nouveau Lagrangien exprime dans les nouvelles coordonnees.A chaque instant :
L (Q, Q, t) = L(q, q, t)
Par exemple, dans le cas d’un mouvement a force centrale,
T − V = T − V
m
2
(
ρ2 + ρ2θ2)
+k
ρ=
m
2
(
x2 + y2)
+k
√
x2 + y2
ou k > 0 pour une force dirigee vers le centre.Nous voyons que θ est une coordonnee cyclique alors que ni x ni
y n’est cyclique. Le nombre de coordonnees cycliques depend donc duchoix des coordonnees generalisees.
83

84 5. TRANSFORMATIONS CANONIQUES
1.1. Cas de la mecanique de Lagrange.
Nous avons vu au paragraphe 2.5 page 57 que les equations de Lagrangesont covariantes par transformation des n coordonnees generalisees :
∀j = 1, . . . n, Qj = Qj(q, t)
Ces changements de variables sont aussi appelees des transformationsponctuelles de l’espace des configurations (q). Apres le changement devariables, le Lagrangien dit transforme s’ecrit :
L(q, q, t) = L(q(Q, t), q(Q, Q, t), t)
= L (Q, Q, t)
C’est le meme Lagrangien exprime dans les nouvelles coordonnees. Deplus, nous avons vu au paragraphe 2.4 page 56 que le Lagrangien estinvariant de jauge, si bien que :
L (Q, Q, t) = L(q, q, t) + df(q, t)
dt
1.2. Cas de la mecanique de Hamilton.
En mecanique de Hamilton nous pouvons envisager une classe plus largede transformations. En effet celles-ci peuvent avoir lieu sur l’ensembledes 2n coordonnees de l’espace des phases :
∀j = 1, . . . n, Qj = Qj(q, p, t)
∀j = 1, . . . n, Pj = Pj(q, p, t)
Ces transformations sont appelees des transformations ponctuelles del’espace des phases (q, p). Les nouvelles variables doivent etre conju-guees, ce qui signifie que pour le Hamiltonien transforme,
H (Q,P, t) =n∑
j=1
PjQj − L (Q, Q, t)
=
n∑
j=1
PjQj −[
L(q, q, t) + df(q, t)
dt
]
=
n∑
j=1
PjQj − pj qj +H(q, p, t)− df(q, t)
dt
elles doivent satisfaire les equations de Hamilton :
∀j = 1, . . . , n
Pj = −∂H
∂Qj
Qj =∂H
∂Pj
Ces transformations sont alors dites canoniques.

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 85
Definition 5.1. Transformation canoniqueOn appelle transformation canonique une transformation,
∀j = 1, . . . n, Qj = Qj(q, p, t)
∀j = 1, . . . n, Pj = Pj(q, p, t)
qui preserve la forme des equations de Hamilton :
∀j = 1, . . . , n
Pj = −∂H
∂Qj
Qj =∂H
∂Pj
2. Fonctions generatrices d’une transformation
2.1. Fonctions generatrices de type 1.
Considerons un systeme a deux degres de liberte. Soit la transformationde coordonnees inversible suivante :
q1, q2 → Q1(q1, q2), q2 (45)
et soit L (Q1, q2, Q1, q2, t) le Lagrangien transforme decrivant le memesysteme physique. D’apres la relation (24) page 56, les Lagrangiens sontchacun definis a la derivee totale par rapport au temps d’une fonctiondes coordonnees et du temps pres :
L (Q1, q2, Q1, q2, t)−d
dtg(Q1, q2, t) = L(q1, q2, q1, q2, t)−
d
dth(q1, q2, t)
Les fonctions g et h peuvent etre reunies en une seule fonction F1 :
L − L =d
dtF1(q1, Q1, q2, t) (46)
D’apres la definition 4.1 du Hamiltonien, nous avons :
H(q1, q2, p1, p2, t) = (p1q1 + p2q2)− L(q1, q2, q1, q2, t)Pour le Hamiltonien transforme H , la relation (33) page 71 montreque puisque le Lagrangien est transforme, l’impulsion generalisee p1l’est egalement. Ainsi :
H (Q1, q2, P1, p2, t) = (P1Q1 + p2q2)− L (Q1, q2, Q1, q2, t)
En reprenant la relation (46),
[(p1q1 + p2q2)−H]− [(P1Q1 + p2q2)− H ] =d
dtF1(q1, Q1, q2, t)
p1dq1 − P1dQ1 + (H −H)dt = dF1(q1, Q1, q2, t)
soit,
p1dq1 − P1dQ1 + (H −H)dt =∂F1
∂q1dq1 +
∂F1
∂Q1dQ1 +
∂F1
∂q2dq2 +
∂F1
∂tdt

86 5. TRANSFORMATIONS CANONIQUES
Nous obtenons les trois relations suivantes,
∂F1
∂q1= p1
∂F1
∂Q1= −P1
∂F1
∂t= H −H
(47)
ainsi que ∂q2F1 = 0 qui montre que si la coordonnee q2 n’est pas trans-formee, F1 n’est pas une fonction de q2. La derniere relation permet dedeterminer H . Nous avons alors :
dF1(q1, Q1, t) = p1dq1 − P1dQ1 + (H −H)dt
qui est une differentielle totale exacte (dte). En particulier lorsque F1
n’est pas une foncton explicite du temps,
dF1(q1, Q1) = p1dq1 − P1dQ1 (48)
reste une dte.Etant donnee une fonction du type F1, nous obtenons la transforma-
tion des coordonnees grace aux equations aux derivees partielles (47).F1 est generatrice de la transformation canonique des coordonnees.
Reciproquement, etant donnee une transformation des coordonneesdu type (45) page 85, l’integration des equations aux derivees partielles(47) donne la fonction generatrice.
Les fonctions generatrices fonctions uniquemment des coordonneessont dites de type F1(q, Q), l’indice 1 servant a les distinguer des fonc-tions generatrices F2(q, P ), F3(p,Q), et F4(p, P ) que nous allons voirapres quelques exemples.
Exemple 5.2. Transformation d’echangeLa fonction generatrice F1(q1, Q1) = q1Q1 est un cas particulier. Enappliquant les relations (47), nous trouvons qu’elle genere la transfor-mation canonique suivante :
Q1 = p1
P1 = −q1
H = Happelee transformation d’echange. Cet exemple montre que l’on peutechanger la coordonnee generalisee q1 avec son moment conjugue p1,les equations de Hamilton etant invariantes sous la transformationpj → Qj et qj → −Pj. La distinction entre les variables q et p n’estplus qu’une question de nomenclature, c’est pourquoi en mecanique deHamilton on les appelle simplement variables conjuguees, sans preciserlesquelles sont des coordonnees ou des impulsions.
Si nous souhaitons appliquer cette transformation a deux coordon-nees, on additionne plusieurs fois la fonction precedente pour former

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 87
la fonction F1(q1, q2, Q1, Q2) = q1Q1 + q2Q2. Nous obtenons la trans-formation canonique suivante :
Q1 = p1
Q2 = p2
P1 = −q1
P2 = −q2
Si nous souhaitons l’appliquer aux n coordonnees, on choisit la fonctionF1(q, Q) =
∑
j qjQj, et nous obtenons :
∀j = 1, . . . , n
{
Qj = pj
Pj = −qj
Exemple 5.3. L’oscillateur harmoniqueLa fonction generatrice F1(q1, Q1) =
12mωq21 cotQ1 genere la transfor-
mation canonique suivante :
p1 = mωq1 cotQ1
P1 =mωq21
2 sin2Q1
H = H
q1 =
√
2P1
mωsinQ1
p1 =√
2mωP1 cosQ1
H = HF1 est ici la fonction generatrice de l’oscillateur harmonique simple aune dimension (voir l’exemple 5.10 page 109).
2.2. Fonctions generatrices de type 2.
En effectuant la transformation de Legendre, relation (31) page 68,de la fonction generatrice F1(q1, Q1, t) pour la coordonnee Q1, nousdefinissons une deuxieme fonction generatrice notee F2(q1, P1, t). Enutilisant les relations (47) page 86 :
F2(q1, P1, t) = F1(q1, Q1, t)−Q1∂F1
∂Q1
= F1(q1, Q1, t) +Q1P1 (49)
En reprenant la relation (46) page 85,
L − L =dF1(q1, Q1, t)
dt
=dF2(q1, P1, t)
dt− d
dt(Q1P1)

88 5. TRANSFORMATIONS CANONIQUES
nous avons,
p1q1 − P1Q1 −H + H =∂F2
∂q1q1 +
∂F2
∂P1P1 +
∂F2
∂t−Q1P1 − P1Q1
Nous obtenons les trois relations suivantes,
∂F2
∂q1= p1
∂F2
∂P1= Q1
∂F2
∂t= H −H
(50)
Exemple 5.4. Transformation identiteLa fonction F2 = q1P1 + q2P2 est un cas particulier, elle genere latransformation canonique identite :
P1 = p1
P2 = p2
q1 = Q1
q2 = Q2
H = HDans le cas general, la fonction F2 =
∑
j qjPj genere la transformationcanonique identite :
∀j = 1, . . . , n
Pj = pj
qj = Qj
H = H
Exemples 5.1. Transformations ponctuellesSoit la fonction F2 = f1(q1, q2, t)P1 + f2(q1, q2, t)P2, ou F1 et F2 sontdes fonctions differentiables quelconques. Elle genere la transformationcanonique :
∂f1∂q1
P1 +∂f2∂q1
P2 = p1
∂f1∂q2
P1 +∂f2∂q2
P2 = p2
f1(q1, q2) = Q1
f2(q1, q2) = Q2
H (Q1, Q2, P1, P2, t) = H(q1, q2, p1, p2, t) +∂f1∂t
P1 +∂f2∂t
P2
Les deux premieres relations sont une transformation lineaire des im-pulsions generalisees. Les deux relations suivantes sont une transfor-mation ponctuelle de l’espace des configurations, du type de celles quel’on rencontre en mecanique de Lagrange.

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 89
Dans le cas general, la fonction F2 =∑
i fi(q1, . . . qn)Pi genere latransformation canonique :
∀j = 1, . . . , n
n∑
i=1
∂fi∂qj
Pi = pj
fj(q, t) = Qj
H (Qj, Pj, t) = H(qj , pj, t) +n∑
i=1
∂fi∂t
Pi
(a) Translation spatialeCherchons la fonction generatrice de la transformation des co-ordonnees correspondant a la translation spatiale selon l’axedes x. Soit a une constante,
{
x′ = x+ a
p′x = px
or,
∂F2
∂x= px
∂F2
∂p′x= x′
donc,
∂F2
∂x= p′x
∂F2
∂p′x= x+ a
F2(x, p′x) = (x+ a)p′x
Dans le cas general d’une translation de vecteur a(ax, ay, az)nous avons :
{
r′ = r + a
p′ = p
F2(x, y, z, p′x, p
′y, p
′z) = (x+ ax)p
′x + (y + ay)p
′y + (z + az)p
′z
F2(r,p′) = (r + a) · p′ (51)
(b) Rotation spatialeCherchons la fonction generatrice de la transformation des co-ordonnees correspondant a la rotation spatiale d’un angle θautour de l’axe des z. Pour les nouvelles coordonnees, nousavons,
x′ = x cos θ − y sin θ
y′ = x sin θ + y cos θ
z′ = z

90 5. TRANSFORMATIONS CANONIQUES
∂F2
∂p′x= x′
∂F2
∂p′y= y′
∂F2
∂p′z= z′
d’ou,
F2(x, y, z, p′x, p
′y, p
′z) = (x cos θ − y sin θ)p′x + (x sin θ + y cos θ)p′y + zp′z
Pour les nouvelles impulsions, nous avons,
p′x = px cos θ − py sin θ
p′y = px sin θ + py cos θ
p′z = pz
que l’on inverse en multipliant par cos ou par sin :
px = p′x cos θ + p′y sin θ
py = −p′x sin θ + p′y cos θ
pz = p′z
∂F2
∂x= px
∂F2
∂y= py
∂F2
∂z= pz
et l’on retrouve la meme fonction F2 :
F2(x, y, z, p′x, p
′y, p
′z)=(p′x cos θ +p′y sin θ)x+(−p′x sin θ +p′y cos θ)y+zp′z
(c) Transformation de GalileeSoient deux referentiels R et R′ en translation selon l’axe desx a la vitesse uniforme vx, R′ se deplacant dans le sens desx croissants. Quelle est la fonction generatrice de la transfor-mation de Galilee ? La transformation de Galilee s’ecrit :
{
x′ = x− vxt
p′x = px −mvx
∂F2
∂x= px
∂F2
∂p′x= x′
∂F2
∂t= H −H

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 91
∂F2
∂x= p′x +mvx
∂F2
∂p′x= x− vxt
H = H +∂F2
∂t{
F2 = (p′x +mvx)x+ f(p′x) + g(t)
F2 = (x− vxt)p′x + h(x) + g(t)
soit,
F2(x, p′x, t) = (x− vxt)p
′x +mvxx+ g(t)
ou g(t) est une fonction quelconque du temps. Nous avonsalors :
∂F2
∂t= −p′xvx +
∂g(t)
∂t
Dans le cas general, la transformation de Galilee s’ecrit,{
r′ = r − vt
p′ = p−mv(52)
et la fonction generatrice devient,
F2=(x− vxt)p′x+mvxx+(y − vyt)p
′y+mvyy+(z − vzt)p
′z+mvzz+g(t)
= (r − vt) · p′ +mv · r + g(t) (53)
qui donne :
∂F2
∂t= −p′ · v +
∂g(t)
∂t
Le Hamiltonien transforme a pour expression :
H (r′,p′, t) = H(r,p, t)− p′ · v +∂g(t)
∂t
= H(r′ + vt,p′ +mv, t)− p′ · v +∂g(t)
∂t
Par exemple, la transformation de Galilee appliquee a une par-ticule libre (H = p2/(2m)) s’ecrit en choisissant g(t) nulle :
H (r′,p′, t) =p2
2m− p′ · v
=(p′ +mv)2
2m− p′ · v
=p′2 + 2mp′ · v +m2v2
2m− p′ · v
=p′2
2m+
mv2
2

92 5. TRANSFORMATIONS CANONIQUES
2.3. Fonctions generatrices de type 3.
Definissons une troisieme fonction generatrice, F3(p1, Q1, t), en effec-tuant :
— soit une transformation de Legendre de F1(q1, Q1, t) pour q1 :
F3(p1, Q1, t) = F1(q1, Q1, t)− q1∂F1
∂q1= F1(q1, Q1, t)− q1p1
— soit une transformation de Legendre de F2(q1, P1, t) pour P1 :
F3(p1, Q1, t) = F2(q1, P1, t)− P1∂F2
∂P1
= F2(q1, P1, t)− P1Q1
En reprenant la relation (46) page 85,
L− L =dF1(q1, Q1, t)
dt
=dF3(p1, Q1, t)
dt+
d
dt(q1p1)
nous avons,
p1q1 − P1Q1 −H + H =∂F3
∂p1p1 +
∂F3
∂Q1
Q1 +∂F3
∂t+ q1p1 + p1q1
Nous obtenons les trois relations suivantes :
∂F3
∂p1= −q1
∂F3
∂Q1
= −P1
∂F3
∂t= H −H
(54)
Exemple 5.5. Transformation identiteLa fonction F3(p1, Q1) = p1Q1 est un cas particulier, elle genere latransformation canonique identite avec changement de signe :
{
Q1 = −q1
P1 = −p1
Du coup, la transformation F3(p1, Q1) = −p1Q1 permet egalementd’engendrer la transformation identite.
Exemple 5.6.Nous pouvons additionner les differentes fonctions generatrices. En re-prenant la fonction generatrice F3 de l’exemple precedent et la fonctiongeneratrice F1 de exemple 5.2 page 86, la fonction,
F = F1(q1, Q1) + F3(p2, Q2)
= q1Q1 + p2Q2

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 93
genere la transformation canonique :
Q1 = p1
P1 = −q1
Q2 = −q2
P2 = −p2
2.4. Fonctions generatrices de type 4.
Une quatrieme et derniere fonction generatrice, F4(p1, P1, t), est obte-nue en effectuant :
— soit une transformation de Legendre de la fonction F2(q1, P1, t)pour la coordonnee q1 :
F4(p1, P1, t) = F2(q1, P1, t)− q1∂F2
∂q1= F2(q1, P1, t)− q1p1
= F1(q1, Q1, t)− q1p1 +Q1P1
— soit une transformation de Legendre de la fonction F3(p1, Q1, t)pour la coordonnee Q1 :
F4(p1, P1, t) = F3(p1, Q1, t)−Q1∂F3
∂Q1
= F3(p1, Q1, t) +Q1P1
= F1(q1, Q1, t)− q1p1 +Q1P1
En reprenant la relation (46) page 85,
L − L =dF1(q1, Q1, t)
dt
=dF4(p1, P1, q2, t)
dt+
d
dt(q1p1)−
d
dt(Q1P1)
nous avons,
−H + H =∂F4
∂p1p1 +
∂F4
∂P1
P1 +∂F4
∂q2q2 +
∂F4
∂t+ q1p1 −Q1P1
Nous obtenons les trois relations suivantes :
∂F4
∂p1= −q1
∂F4
∂P1
= Q1
∂F4
∂t= H −H
Exemple 5.7.La fonction F4(p1, P1) = p1P1 est un cas particulier, elle genere la

94 5. TRANSFORMATIONS CANONIQUES
transformation canonique d’echange avec un changement de signe :{
P1 = −q1
p1 = Q1
La composition successive de deux transformations canoniques estune transformation canonique. Cela suggere que les transformationscanoniques forment un groupe. La composition de transformations ca-noniques est associative. Il existe un element neutre qui est la transfor-mation canonique identite. A chaque transformation canonique il existeune transformation inverse qui est elle-meme canonique. Les transfor-mations canoniques forment donc un groupe, appele groupe des trans-formations canoniques.
2.5. Conditions d’integrabilite.
Reprenons la relation (48) page 86 :
dF1(q, Q) =
(
∂F1
∂q
)
dq +
(
∂F1
∂Q
)
dQ
= pdq − PdQ
Les conditions de Schwarz pour que dF1 soit une dte s’ecrivent :(
∂2F1
∂q∂Q
)
=
(
∂2F1
∂Q∂q
)
(
∂p
∂Q
)
= −(
∂P
∂q
)
Il existe une condition d’integrabilite valable pour chacune des formesdifferentielles dF1, dF2, dF3 et dF4. En effet,
dF1(q, Q) = pdq − PdQ
= pdq − P
(
∂Q
∂qdq +
∂Q
∂pdp
)
=
(
p− P∂Q
∂q
)
dq − P∂Q
∂pdp
Les conditions de Schwarz pour que dF1 soit une dte s’ecrivent main-tenant :
∂
∂p
(
p− P∂Q
∂q
)
=∂
∂q
(
−P∂Q
∂p
)
1− ∂P
∂p
∂Q
∂q− P
∂2Q
∂p∂q= −∂P
∂q
∂Q
∂p− P
∂2Q
∂q∂p
∂P
∂p
∂Q
∂q− ∂P
∂q
∂Q
∂p= 1

2. FONCTIONS GENERATRICES D’UNE TRANSFORMATION 95
Ce terme est appele crochet de Poisson de Q et P par rapport auxvariables q et p, on le note :
{Q,P}q,p ∆=
∂Q
∂q
∂P
∂p− ∂Q
∂p
∂P
∂q
De meme pour les autres formes differentielles :
dF2(q, P ) = pdq +QdP
= pdq +Q
(
∂P
∂qdq +
∂P
∂pdp
)
=
(
p+Q∂P
∂q
)
dq +Q∂P
∂pdp
avec la condition d’integrabilite :
∂
∂p
(
p+Q∂P
∂q
)
=∂
∂q
(
Q∂P
∂p
)
1 +∂Q
∂p
∂P
∂q+Q
∂2P
∂p∂q=
∂Q
∂q
∂P
∂p+Q
∂2P
∂q∂p
∂Q
∂q
∂P
∂p− ∂Q
∂p
∂P
∂q= 1
{Q,P}q,p = 1
De meme pour F3 :
dF3(p,Q) = −qdp− PdQ
= −qdp− P
(
∂Q
∂qdq +
∂Q
∂pdp
)
=
(
−q − P∂Q
∂p
)
dp− P
(
∂Q
∂q
)
dq
avec la condition d’integrabilite :
∂
∂q
(
−q − P∂Q
∂p
)
=∂
∂p
(
−P∂Q
∂q
)
−1 − ∂P
∂q
∂Q
∂p− P
∂2Q
∂q∂p= −∂P
∂p
∂Q
∂q− P
∂2Q
∂p∂q
∂P
∂p
∂Q
∂q− ∂P
∂q
∂Q
∂p= 1
{Q,P}q,p = 1

96 5. TRANSFORMATIONS CANONIQUES
De meme pour F4 :
dF4(p, P ) = −qdp+QdP
= −qdp+Q
(
∂P
∂qdq +
∂P
∂pdp
)
=
(
−q +Q∂P
∂p
)
dp+Q∂P
∂qdq
avec la condition d’integrabilite :
∂
∂q
(
−q +Q∂P
∂p
)
=∂
∂p
(
Q∂P
∂q
)
−1 +∂Q
∂q
∂P
∂p+ Q
∂2P
∂q∂p=
∂Q
∂p
∂P
∂q+Q
∂2P
∂p∂q
∂Q
∂q
∂P
∂p− ∂Q
∂p
∂P
∂q= 1
{Q,P}q,p = 1
Exemple 5.8.Montrer qu’une rotation d’angle α dans l’espace des phases (q, p), de-finie par la transformation des coordonnees,
{
Q = q cosα− p sinα
P = q sinα + p cosα
est une transformation canonique. Pour cela il faut montrer que lafonction generatrice est une dte :
∂Q
∂q= cosα
∂Q
∂p= − sinα
∂P
∂q= sinα
∂P
∂p= cosα
∂Q
∂q
∂P
∂p− ∂Q
∂p
∂P
∂q= cos2 α + sin2 α
= 1
Exemple 5.9.Montrer que la transformation Q = − ln sin p et P = q tan p est cano-nique.

3. TRANSFORMATIONS CANONIQUES INFINITESIMALES 97
Premiere methode :
dQ
dp= −cos p
sin p
dQ = − dp
tan p
Et l’on a :
dF1 = pdq − PdQ
= pdq + q tan pdp
tan p
= pdq + qdp
= d(pq)
qui est une differentielle totale exacte, donc la transformation est ca-nonique.
Remarque :
dF4 = −qdp− PdQ
= −qdp+ qdp
= 0
et F4 n’est pas generatrice de la transformation puisqu’elle est cons-tante.
Deuxieme methode :
∂Q
∂q= 0
∂Q
∂p= −cos p
sin p
∂P
∂q= tan p
∂P
∂p=
q
cos2 p
∂P
∂p
∂Q
∂q− ∂P
∂q
∂Q
∂p=
1
tan p× tan p
= 1
3. Transformations canoniques infinitesimales
L’exemple 5.4 page 88 montre que la fonction generatrice F2 =∑
j qjPj
genere la transformation identite. Soit ǫ un infinitesimal du premier

98 5. TRANSFORMATIONS CANONIQUES
ordre et soit G(q, P, t) une fonction quelconque, on considere la fonctiongeneratrice :
F2(q, P, t) =∑
j
qjPj + ǫG(q, P, t)
Elle genere une transformation proche de l’identite appelee transforma-tion canonique infinitesimale ou transformation de contact suivante :
∂F2
∂qj= pj
∂F2
∂Pj= Qj
∂F2
∂t= H −H
Pj + ǫ∂G(q, P, t)
∂q= pj
qj + ǫ∂G(q, P, t)
∂P= Qj
ǫ∂G(q, P, t)
∂t= H −H
Nous negligerons les termes infinitesimaux du second ordre, en ǫ2. Ladifference entre les nouvelles et les anciennes impulsions generaliseesetant du premier ordre en ǫ,
Pj − pj = −ǫ∂G(q, P, t)
∂q
et les termes impliquant G etant tous deja du premier ordre (terme ǫGdans F2), nous pouvons dans G remplacer P par p, et nous avons :
F2(q, P, t) =∑
j
qjPj + ǫG(q, p, t) (55)
ou ǫG(q, p, t) est appele generateur de la transformation.
Pj + ǫ∂G(q, p, t)
∂q= pj
qj + ǫ∂G(q, p, t)
∂p= Qj
ǫ∂G(q, p, t)
∂t= H −H
(56)
Exemples 5.2.
(a) Translation spatiale infinitesimale de vecteur δa

3. TRANSFORMATIONS CANONIQUES INFINITESIMALES 99
D’apres la relation (51) page 89 :
F2(r,p′) = (r + δa) · p′
= r · p′ + δa · p′
Dans la fonction G, nous pouvons remplacer p′ par p :
F2(r,p′) = r · p′ + δa · p
r · p′ est la transformation identite, et δa · p est le generateurde la transformation canonique infinitesimale.
(b) Rotation spatiale infinitesimale d’angle δθ
x′ = x cos δθ − y sin δθ
y′ = x sin δθ + y cos δθ
z′ = z
x′ = x
(
1− δθ2
2
)
− yδθ
y′ = xδθ + y
(
1− δθ2
2
)
z′ = z
x′ = x− yδθ
y′ = xδθ + y
z′ = z
∂F2
∂p′x= x′
∂F2
∂p′y= y′
∂F2
∂p′z= z′
d’ou,
F2(x, y, z, p′x, p
′y, p
′z) = (x− yδθ) p′x + (xδθ + y) p′y + zp′z
= xp′x + yp′y + zp′z + (x p′y − y p′x) δθ
Dans la fonction G, on peut remplacer p′y par py et p′x par px :
F2(x, y, z, p′x, p
′y, p
′z) = xp′x + yp′y + zp′z + (x py − y px) δθ
En notant Lz la composante en z du vecteur moment cinetique,
F2(r,p′) = r · p′ + Lz δθ
ou r · p′ est la transformation identite, et Lz δθ est le genera-teur de la transformation canonique infinitesimale.

100 5. TRANSFORMATIONS CANONIQUES
(c) Transformation de Galilee infinitesimale
A partir de la relation (52) page 91 :{
r′ = r − δvt
p′ = p−mδv
A partir de la relation (53) page 91, avec g(t) nulle et ennegligeant les termes infinitesimaux du second ordre :
F2(r,p′, t) = (r − δvt) · p′ +mδv · r
= r · p′ − δvt · p′ +mδv · r= r · p′ − δv · (tp′ +mr)
Dans la fonction G on remplace p′ par p :
F2(r,p′, t) = r · p′ + δv · (mr − pt) + g(t)
r · p′ est la transformation identite et δv · (mr − pt) est legenerateur de la transformation canonique infinitesimale.
4. Evolution d’un systeme
4.1. Evolution infinitesimale d’un systeme.
Prenons pour fonction G(q, p, t) le Hamiltonien H(q, p, t), et pour ǫ une
duree infinitesimale dt. A partir de la relation (55) page 98,
F2(q, P, t) =∑
j
qjPj +H(q, p, t)dt
et a partir des relations (56) page 98 :
Pj = pj −∂H(q, p, t)
∂qdt
Qj = qj +∂H(q, p, t)
∂pdt
H = H +∂H(q, p, t)
∂tdt
En utilisant les equations de Hamilton (35) et (36) page 73, et la rela-tion (40) page 75 :
Pj = pj + pjdt
Qj = qj + qjdt
H = H +dH(q, p, t)
dtdt
Pj = pj + dpj
Qj = qj + dqj
H = H + dH

4. EVOLUTION D’UN SYSTEME 101
Pj = pj(t+ dt)
Qj = qj(t+ dt)
H = H(t + dt)
Cette fonction generatrice transforme donc les coordonnees generali-sees et leurs moments conjugues, pris a l’instant t, en ceux a l’instantsuivant t + dt. Cela correspond au deplacement infinitesimal du pointrepresentatif du systeme dans l’espace des phases entre les instants tet t+ dt.
Effectuons la transformation de Legendre de la fonction generatriceF2 pour exprimer ce resultat avec la fonction generatrice F1. D’apresla relation (49) page 87 :
F1(q, Q, t) = F2(q, P, t)−∑
j
QjPj
=∑
j
qjPj +H(q, p, t)dt−∑
j
QjPj
=∑
j
(qj −Qj)Pj +H(q, p, t)dt
Or,
Qj − qj = dqj
donc, en negligeant les termes infinitesimaux du second ordre :
F1(q, Q, t) = −∑
j
Pjdqj +H(q, p, t)dt
= −∑
j
(pj + dpj)dqj +H(q, p, t)dt
= −[
∑
j
pj qj −H(q, p, t)
]
dt
= −Ldt
4.2. Evolution d’un systeme en un temps fini.
L’evolution temporelle d’un systeme est une succession infinie d’evo-lutions temporelles infinitesimales, chacune pouvant etre decrite parune transformation canonique infinitesimale. Une succession de trans-formations canoniques etant elle-meme une transformation canonique,on en deduit qu’une evolution temporelle finie peut etre decrite par unetransformation canonique finie de fonction generatrice :
−∫
Ldt

102 5. TRANSFORMATIONS CANONIQUES
5. Transformations invariantes
Lors d’une transformation canonique (q, p) → (Q,P ) les equationscanoniques s’ecrivent sous la meme forme, elles sont covariantes :
pj = −∂H∂qj
qj =∂H∂pj
→
Pj = −∂H
∂Qj
Qj =∂H
∂Pj
C’est la definition meme d’une transformation canonique. Dans le casparticulier ou H et H ont meme forme explicite, par exemple H =p2/(2m) et H = P 2/(2m) les equations canoniques ont elles aussimeme forme explicite. Le systeme est dit invariant sous la transforma-tion, elle-meme dite invariante. Supposons que la fonction generatriceinfinitesimale (55) page 98,
F2(q, P, t) =∑
j
qjPj + ǫG(q, P, t)
soit invariante. Nous avons,
ǫ∂G
∂t= H (Q,P, t)−H(q, p, t)
H et H ayant meme forme explicite,
ǫ∂G
∂t= H(Q,P, t)−H(q, p, t)
Avec les relations (56) pages 98 :
ǫ∂G
∂t= H
(
q + ǫ∂G
∂p, p− ǫ
∂G
∂q, t
)
−H(q, p, t)
= δH(q, p, t)
=∂H∂q
δq +∂H∂p
δp
= ǫ∂H∂q
∂G
∂p− ǫ
∂H∂p
∂G
∂q
= ǫ {H, G}soit, en utilisant le theoreme 6.1 page 107 sur les crochets de Poisson :
∂G
∂t+ {G,H} = 0
dG
dt= 0
Le generateur d’une transformation infinitesimale invariante est uneintegrale premiere du mouvement.
Exemples 5.3. Reprenons les exemples 5.2 page 98 pour le casd’une particule libre.

5. TRANSFORMATIONS INVARIANTES 103
(a) Lors d’une translation spatiale infinitesimale d’un vecteur δa,le Hamiltonien est invariant de forme explicite :
H =p2
2m→ H =
P 2
2m
Le generateur de la transformation est δa · p, et le vecteurquantite de mouvement est une constante du mouvement.
(b) Lors d’une rotation spatiale infinitesimale d’un angle δθ dansle plan (x, y), le Hamiltonien est invariant de forme explicite.Le generateur de la transformation est Lz δθ, et la composanteen z du vecteur moment cinetique est une constante du mou-vement.
(c) Pour une transformation de Galilee infinitesimale, la fonctiongeneratrice (53) page 91 s’ecrit :
F2(r,p′, t) = r · p′ + (mr − pt) · δv + g(t)
ou g(t) est une fonction quelconque du temps. De plus,
H = H +∂F2
∂t
=p2
2m− p · δv +
∂g(t)
∂t
=(p′ +mδv)2
2m− p · δv +
dg
dt
=p′2
2m+ 1
2mv2 +
dg
dt
Si l’on choisi,
g(t) = −12mv2t
alors,
H =p′2
2m
et, le Hamiltonien est bien invariant de forme. La fonctiongeneratrice s’ecrit :
F2(r,p′, t) = r · p′ + (mr − pt) · δv − 1
2mv2t
et le generateur de la transformation de Galilee infinitesimalea pour expression (mr − pt) · δv. Le terme entre parenthesesest une constante du mouvement. En effet,
mr − pt = m(r − vt)
= m[r − (r − r0)]
= mr0
ou r0 est la position initiale de la particule.

104 5. TRANSFORMATIONS CANONIQUES
6. Crochets de Poisson
6.1. Definition.
Definition 5.2. Crochet de PoissonOn appelle crochet de Poisson de deux fonctions f(q, p, t) et g(q, p, t) del’espace des phases, pour les variables canoniques (q1, . . . , qn; p1, . . . , pn)la quantite :
{f, g}q,p ∆=
n∑
k=1
(
∂f
∂qk
∂g
∂pk− ∂f
∂pk
∂g
∂qk
)
6.2. Proprietes.
Soient f et g deux fonctions de l’espace des phases. A partir de ladefinition, nous avons la propriete suivante :
{f, Cste}q,p =n∑
k=1
(
∂f
∂qk
∂Cste
∂pk− ∂f
∂pk
∂Cste
∂qk
)
= 0
6.2.1. Bilinearite.Linearite a gauche :
{f1 + f2, g} =n∑
k=1
(
∂(f1 + f2)
∂qk
∂g
∂pk− ∂(f1 + f2)
∂pk
∂g
∂qk
)
=n∑
k=1
(
∂f1∂qk
∂g
∂pk− ∂f1
∂pk
∂g
∂qk
)
+n∑
k=1
(
∂f2∂qk
∂g
∂pk− ∂f2
∂pk
∂g
∂qk
)
= {f1, g}+ {f2, g}
∀λ ∈ R, {λf, g} =n∑
k=1
(
∂(λf)
∂qk
∂g
∂pk− ∂(λf)
∂pk
∂g
∂qk
)
= λn∑
k=1
(
∂f
∂qk
∂g
∂pk− ∂f
∂pk
∂g
∂qk
)
= λ{f, g}
Linearite a droite :
{f, g1 + g2} = {f, g1}+ {f, g2}∀µ ∈ R, {f, µg} = µ{f, g}

6. CROCHETS DE POISSON 105
6.2.2. Antisymetrie.
{f, g} =
n∑
k=1
(
∂f
∂qk
∂g
∂pk− ∂f
∂pk
∂g
∂qk
)
= −n∑
k=1
(
∂g
∂qk
∂f
∂pk− ∂g
∂pk
∂f
∂qk
)
= −{g, f}
d’ou
{f, f} = 0
6.2.3. Crochet de Poisson et equations de Hamilton.
{qi,H}q,p =n∑
k=1
(
∂qi∂qk
∂H∂pk
− ∂qi∂pk
∂H∂qk
)
=∂H∂pi
{pi,H}q,p =n∑
k=1
(
∂pi∂qk
∂H∂pk
− ∂pi∂pk
∂H∂qk
)
= −∂H∂qi
si bien que les equations de Hamilton s’ecrivent de facon symetrique :
{
qi = {qi,H}q,ppi = {pi,H}q,p
(57)
6.2.4. Crochet de Poisson fondamentaux.Les variables canoniques q etant independantes les unes des autres, etles variables canoniques p etant elles aussi independantes les unes desautres, nous avons :
{qi, qj}q,p =n∑
k=1
(
∂qi∂qk
∂qj∂pk
− ∂qi∂pk
∂qj∂qk
)
= 0
{pi, pj}q,p =n∑
k=1
(
∂pi∂qk
∂pj∂pk
− ∂pi∂pk
∂pj∂qk
)
= 0
106 5. TRANSFORMATIONS CANONIQUES
{qi, pj}q,p =n∑
k=1
(
∂qi∂qk
∂pj∂pk
− ∂qi∂pk
∂pj∂qk
)
=
n∑
k=1
δikδjk
= δij
ou δij est le symbole de Kronecker, tel que :
δij =
{
1 si i = j
0 si i 6= j
6.3. Identites.
6.3.1. Identite de Leibniz.
{fg, h} = f{g, h}+ g{f, h}
Demonstration.
{fg, h} =n∑
k=1
[
∂(fg)
∂qk
∂h
∂pk− ∂(fg)
∂pk
∂h
∂qk
]
=
n∑
k=1
[
f∂g
∂qk
∂h
∂pk+ g
∂f
∂qk
∂h
∂pk− f
∂g
∂pk
∂h
∂qk− g
∂f
∂pk
∂h
∂qk
]
= f
n∑
k=1
[
∂g
∂qk
∂h
∂pk− ∂g
∂pk
∂h
∂qk
]
+ g
n∑
k=1
[
∂f
∂qk
∂h
∂pk− ∂f
∂pk
∂h
∂qk
]
= f{g, h}+ g{f, h}
�
6.3.2. Identite de Jacobi.
{f, {g, h}}+ {h, {f, g}}+ {g, {h, f}} = 0
Demonstration. Le premier terme s’ecrit :
{f, {g, h}} =n∑
k=1
(
∂f
∂qk
∂{g, h}∂pk
− ∂f
∂pk
∂{g, h}∂qk
)
=
n∑
k=1
[
∂f
∂qk
∂
∂pk
n∑
j=1
(
∂g
∂qj
∂h
∂pj− ∂g
∂pj
∂h
∂qj
)
− ∂f
∂pk
∂
∂qk
n∑
j=1
(
∂g
∂qj
∂h
∂pj− ∂g
∂pj
∂h
∂qj
)
]

6. CROCHETS DE POISSON 107
{f, {g, h}} =
n∑
k=1
n∑
j=1
(
∂f
∂qk
∂2g
∂pk∂qj
∂h
∂pj+
∂f
∂qk
∂g
∂qj
∂2h
∂pk∂pj
− ∂f
∂qk
∂2g
∂pk∂pj
∂h
∂qj− ∂f
∂qk
∂g
∂pj
∂2h
∂pk∂qj
− ∂f
∂pk
∂2g
∂qk∂qj
∂h
∂pj− ∂f
∂pk
∂g
∂qj
∂2h
∂qk∂pj
+∂f
∂pk
∂2g
∂qk∂pj
∂h
∂qj+
∂f
∂pk
∂g
∂pj
∂2h
∂qk∂qj
)
En effectuant la permutation circulaire des trois fonctions f, g, h, l’en-semble s’annule. Par consequent, la somme des crochets de Poissonobtenus par permutation circulaire de trois fonctions est nulle, et lecrochet de Poisson n’est pas associatif. �
6.4. Theoremes.
Theoreme 6.1. Crochet de Poisson et integrale premiereSi le crochet de Poisson d’une fonction independante du temps avec leHamiltonien est nul, alors cette fonction est une integrale premiere dumouvement.
Demonstration. La derivee par rapport au temps d’une fonctionf(q, p, t) de l’espace des phases s’ecrit :
df(q, p, t)
dt=
n∑
k=1
(
∂f
∂qkqk +
∂f
∂pkpk
)
+∂f
∂t
Si les coordonnees et les moments varient selon une trajectoire reelle,ils satisfont les equations de Hamilton et nous avons :
df(q, p, t)
dt=
n∑
k=1
(
∂f
∂qk
∂H∂pk
− ∂f
∂pk
∂H∂qk
)
+∂f
∂t
= {f,H}+ ∂f
∂tSi le crochet de Poisson avec le Hamiltonien est nul et si f ne dependpas explicitement du temps, alors,
df(q, p)
dt= 0
et f(q, p) est une integrale premiere.Reciproquement, si f est une integrale premiere dtf = 0, alors elle
ne depend pas explicitement du temps et son crochet de Poisson avecle Hamiltonien est nul. �
Theoreme 6.2. Theoreme de PoissonLe crochet de Poisson de deux integrales premieres du mouvement estune integrale premiere du mouvement.
108 5. TRANSFORMATIONS CANONIQUES
Demonstration.
d{f, g}dt
=d
dt
n∑
k=1
(
∂f
∂qk
∂g
∂pk− ∂f
∂pk
∂g
∂qk
)
=n∑
k=1
[
d
dt
(
∂f
∂qk
)
∂g
∂pk+
∂f
∂qk
d
dt
(
∂g
∂pk
)
− d
dt
(
∂f
∂pk
)
∂g
∂qk− ∂f
∂pk
d
dt
(
∂g
∂qk
)]
=
n∑
k=1
[
∂
∂qk
(
df
dt
)
∂g
∂pk+
∂f
∂qk
∂
∂pk
(
dg
dt
)
− ∂
∂pk
(
df
dt
)
∂g
∂qk− ∂f
∂pk
∂
∂qk
(
dg
dt
)]
=n∑
k=1
[
∂
∂qk
(
df
dt
)
∂g
∂pk− ∂
∂pk
(
df
dt
)
∂g
∂qk
]
+n∑
k=1
[
∂f
∂qk
∂
∂pk
(
dg
dt
)
− ∂f
∂pk
∂
∂qk
(
dg
dt
)]
=
{
df
dt, g
}
+
{
f,dg
dt
}
Si dtf = 0 et dtg = 0, alors dt{f, g} = 0. �
Ce theoreme permet de trouver de nouvelles integrales premieresdu mouvement.
Theoreme 6.3. Invariance canonique des crochets de PoissonUne transformation canonique preserve les crochets de Poisson.
Demonstration. Soit la transformation quelconque suivante :
{
Q = Q(q, p)
P = P (q, p)
dQ(q, p) =∂Q
∂qdq +
∂Q
∂pdp
dP (q, p) =∂P
∂qdq +
∂P
∂pdp
6. CROCHETS DE POISSON 109
Rappel sur la derivation des fonctions composees :
df(q, p) =∂f
∂qdq +
∂f
∂pdp
df(Q,P ) =∂f
∂QdQ+
∂f
∂PdP
=∂f
∂Q
(
∂Q
∂qdq +
∂Q
∂pdp
)
+∂f
∂P
(
∂P
∂qdq +
∂P
∂pdp
)
=
(
∂f
∂Q
∂Q
∂q+
∂f
∂P
∂P
∂q
)
dq +
(
∂f
∂Q
∂Q
∂p+
∂f
∂P
∂P
∂p
)
dp
∂f
∂q=
∂f
∂Q
∂Q
∂q+
∂f
∂P
∂P
∂q
∂f
∂p=
∂f
∂Q
∂Q
∂p+
∂f
∂P
∂P
∂p
Soient f(q, p) et g(q, p) deux fonctions des variables canoniques. Leurcrochet de Poisson s’ecrit :
{f, g}q,p =n∑
k=1
(
∂f
∂qk
∂g
∂pk− ∂f
∂pk
∂g
∂qk
)
=n∑
k=1
n∑
i=1
n∑
j=1
[(
∂f
∂Qi
∂Qi
∂qk+
∂f
∂Pi
∂Pi
∂qk
)(
∂g
∂Qj
∂Qj
∂pk+
∂g
∂Pj
∂Pj
∂pk
)
−(
∂f
∂Qi
∂Qi
∂pk+
∂f
∂Pi
∂Pi
∂pk
) (
∂g
∂Qj
∂Qj
∂qk+
∂g
∂Pj
∂Pj
∂qk
)]
=
n∑
i=1
n∑
j=1
(
∂f
∂Qi
∂g
∂Qj{Qi, Qj}q,p +
∂f
∂Pi
∂g
∂Pj{Pi, Pj}q,p
+∂f
∂Qi
∂g
∂Pj{Qi, Pj}q,p −
∂f
∂Pi
∂g
∂Qj{Qj, Pi}q,p
)
La transformation etant canonique par hypothese, on utilise les cro-chets de Poisson fondamentaux :
{f, g}q,p =n∑
i=1
n∑
j=1
(
∂f
∂Qi
∂g
∂Pi− ∂f
∂Pi
∂g
∂Qj
)
δij
= {f, g}Q,P
Le crochet de Poisson de deux fonctions quelconques des coordonneesest un invariant par transformations canoniques, ou invariant cano-nique. �
Reciproquement, une transformation qui preserve les crochets dePoisson est une transformation canonique.
Exemple 5.10. Oscillateur harmonique simple a une dimensionPour de petites oscillations d’un systeme a un degre de liberte, on peut

110 5. TRANSFORMATIONS CANONIQUES
developper le potentiel autour d’une position d’equilibre stable q. Laposition d’equilibre doit etre stable car sinon le systeme n’oscille pas.D’apres le paragraphe 8.1 page 23 cela implique V ′′(q) > 0 :
V (q) = V (q) + V ′(q) + 12V ′′(q)(q − q)2 + . . .
Comme l’on utilise toujours qu’une difference de potentiel, celui-ci n’estdefini qu’a une constante pres, et l’on peut supprimer V (q). De plus,l’equilibre est realise dans un minimum de potentiel, et V ′(q) = 0.
En posant k = V ′′(q), nous avons :
V (q) = 12k(q− q)2
En effectuant le changement de variable q = q− q :
V (q) = 12kq2
Le potentiel ne depend pas des vitesses generalisees, par consequentd’apres le paragraphe 4 page 75 le Hamiltonien se confond avec l’ener-gie mecanique :
H(p, q) = E
= T + V
=p2
2m+
kq2
2
Il ne depend pas explicitement du temps, donc d’apres la relation (40)page 75 il se conserve. En posant k = mω2 avec ω une vitesse angulaireen rad/s, nous avons :
H(p, q) =p2
2m+
mω2
2q2
=1
2m
(
p2 +m2ω2q2)
(58)
Le Hamiltonien est sous la forme d’une somme de deux carres. Nouscherchons une transformation des coordonnees q, p telle que l’une desnouvelles coordonnees soit cyclique, donc de la forme suivante :
p = f(P ) cosQ
q =f(P )
mωsinQ
car alors le nouvel Hamiltonien a pour expression :
H =1
2m
[
f 2(P ) cos2Q + f 2(P ) sin2Q]
=f 2(P )
2mou Q est cyclique. La fonction generatrice ne contenant pas explicite-ment le temps :
H = H

6. CROCHETS DE POISSON 111
Pour que les nouvelles variables Q et P soient des variables conjuguees,autrement dit pour que la transformation soit canonique, il faut que lecrochet de Poisson soit egale a l’unite :
[q, p]Q,P =∂q
∂Q
∂p
∂P− ∂q
∂P
∂p
∂Q
=f(P )
mωcosQ · ∂f(P )
∂PcosQ +
1
mω
∂f(P )
∂PsinQ · f(P ) sinQ
=f(P )
mω
∂f(P )
∂P
soit,
f(P )
mω
∂f(P )
∂P= 1
f(P )∂f(P )
∂P= mω
f(P ) =√2mωP
La transformation canonique s’ecrit donc :
p =√2mωP cosQ
q =
√
2P
mωsinQ
(59)
et le Hamiltonien s’ecrit,
H =2mωP
2m= ωP
Les equations de Hamilton pour les nouvelles coordonnees s’ecrivent :
P = −∂H
∂Q
Q =∂H
∂P
{
P = 0
Q = ω
soit,{
P = α
Q = ωt+ β(60)
Remarque : P = H /ω est homogene a une action (en J s), et Q =ωt+ β est homogene a un angle. Les variables action et angle sontdonc conjuguees.

112 5. TRANSFORMATIONS CANONIQUES
La solution en termes des anciennes coordonnees s’ecrit donc :
p(t) =√2mωα cos(ωt+ β)
q(t) =
√
2α
mωsin(ωt+ β)
En utilisant H = E = H = ωP = ωα :
p(t) =√2mE cos(ωt+ β)
q(t) =1
ω
√
2E
msin(ωt+ β)
(61)
La solution q(t) etant sinusoıdale, l’oscillateur est appele oscillateurharmonique.
Comparons les solutions donnees en termes d’anciennes et de nou-velles coordonnees. Pour les anciennes coordonnees (p, q), les equationsparametriques (61) donnent les courbes suivantes :
p
t
πω
+2πω
+
√2mE +
−√2mE +
0+
q
t
πω
+2πω
+
1ω
√
2Em
+
− 1ω
√
2Em
+
0+
Fig 1. Oscillateur harmonique, p = p(t) et q = q(t),avec β 6= 0
Cherchons l’equation cartesienne dans l’espace des phases. En pre-nant le carre des equations parametriques (61) page 112 :
p2
2mE= cos2(ωt+ β)
mω2q2
2E= sin2(ωt+ β)
soit,
p2
2mE+
q2
2E/ (mω2)= 1
qui est l’equation d’une ellipse 1 de demi-axes√2mE et 1
ω
√
2Em
:
1. Voir Coniques.pdf
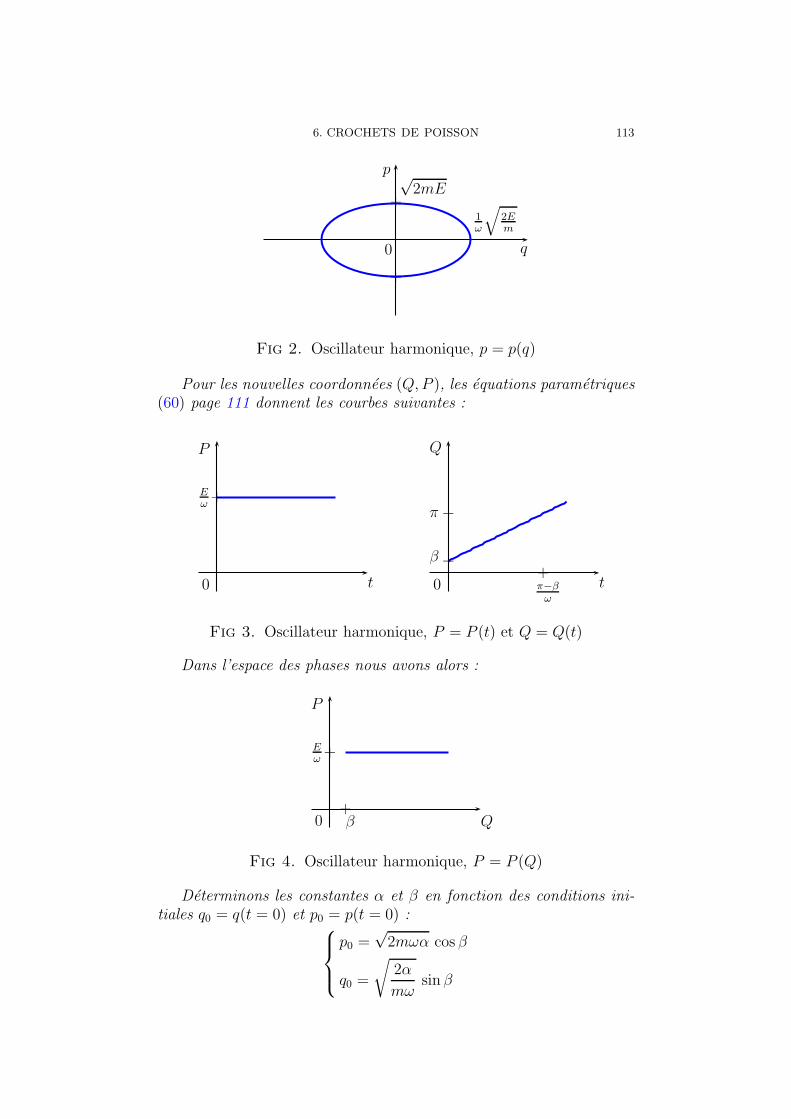
6. CROCHETS DE POISSON 113
p
q
√2mE
+1ω
√
2Em
+
0
Fig 2. Oscillateur harmonique, p = p(q)
Pour les nouvelles coordonnees (Q,P ), les equations parametriques(60) page 111 donnent les courbes suivantes :
P
t
Eω+
0
Q
tπ−βω
+0
β +
π +
Fig 3. Oscillateur harmonique, P = P (t) et Q = Q(t)
Dans l’espace des phases nous avons alors :
β+
P
Q
Eω+
0
Fig 4. Oscillateur harmonique, P = P (Q)
Determinons les constantes α et β en fonction des conditions ini-tiales q0 = q(t = 0) et p0 = p(t = 0) :
p0 =√2mωα cos β
q0 =
√
2α
mωsin β
114 5. TRANSFORMATIONS CANONIQUES
Avec la relation (58) page 110 a t = 0 :
α =1
2mω
(
p20 +m2ω2q20)
et pour β :
q0p0
=1
mωtan β
β = arctan
(
mωq0p0
)
p(t) =√
p20 +m2ω2q20 cos
[
ωt+ arctan
(
mωq0p0
)]
q(t) =1
mω
√
p20 +m2ω2q20 sin
[
ωt+ arctan
(
mωq0p0
)]
Cherchons l’expression de la fonction generatrice F1(q, Q) de l’oscilla-teur harmonique.
∂F1
∂q= p(q, Q)
∂F1
∂Q= −P (q, Q)
(62)
A partir de la solution (61) page 112, exprimons p et P en fonction deq et Q :
q =
√
2P
mωsinQ
p =√2mωP cosQ
{
mωq2 = 2P sin2Q
p =√2mωP cosQ
P =mωq2
2 sin2Q
p =
√
2mωmωq2
2 sin2QcosQ
P =mωq2
2 sin2Q
p = mωq cotQ
∂F1
∂q= mωq cotQ
∂F1
∂Q= − mωq2
2 sin2Q

6. CROCHETS DE POISSON 115
F1(q, Q) =mωq2
2cotQ + h(Q)
F1(q, Q) =mωq2
2cotQ + g(q)
La fonction generatrice s’ecrit donc :
F1(q, Q) = 12mωq2 cotQ
La theorie de Hamilton-Jacobi permet de trouver la fonction gene-ratrice qui rend toutes les nouvelles variables Q cycliques.


Chapitre 6
Theorie de Hamilton-Jacobi
1. Equation de Hamilton-Jacobi
Cherchons la fonction generatrice de la transformation canoniquequi rende toutes les nouvelles variables Q cycliques. Supposons quetoutes les variables Q soient cycliques. Elles n’apparaissent pas dans leHamiltonien et la premiere equation de Hamilton nous donne :
∀j = 1, . . . , n Pj = −∂H (P )
∂Qj
= 0
Pj = Cste
= Pj(t = 0)
= αj
La seconde equation de Hamilton s’ecrit alors :
∀j = 1, . . . , n Qj =∂H (P )
∂Pj
∣
∣
∣
∣
Pj=αj
= Cste
= wj
Qj = wjt + βj
ou wj et βj sont des constantes.Les coordonnees etant toutes cycliques et les impulsions constantes,
le nouvel Hamiltonien s’ecrit :
H = H (α1, . . . , αn)
= Cste
Nous pouvons choisir le zero de l’energie potentielle V de telle sorteque le nouvel hamiltonien soit nul :
H = 0
Les equations de Hamilton,
∀j = 1, . . . , n
Pj = −∂H
∂Qj
Qj =∂H
∂Pj
117
118 6. THEORIE DE HAMILTON-JACOBI
deviennent,
∀j = 1, . . . , n
{
Pj = 0
Qj = 0
soit,
∀j = 1, . . . , n
{
Pj = αj
Qj = βj(63)
ou les constantes αj et βj sont les conditions initiales de Pj et de Qj .Nous avons le choix parmi quatres fonctions generatrices. Com-
mencons par la fonction generatrice de type 1, F1(q, Q, t). En reprenantles relations (47) page 86 :
∀j = 1, . . . n
∂F1
∂qj= pj
∂F1
∂Qj= −Pj
∂F1(q, Q, t)
∂t= H −H(q, p, t)
soit, avec Pj = αj, Qj = βj et H = 0 :
∀j = 1, . . . n
∂F1
∂qj= pj
∂F1
∂βj= −αj
∂F1(q, β, t)
∂t+H
(
q,∂F1
∂q, t
)
= 0
Faisons a present le choix historique de Jacobi d’une fonction ge-neratrice de type 2. Notons S(q, P, t) cette fonction, appelee fonctionprincipale de Hamilton. En reprenant les relations (50) page 88 :
∀j = 1, . . . n
∂S
∂qj= pj
∂S
∂Pj= Qj
∂S(q, P, t)
∂t= H −H(q, p, t)
En injectant les equations (63) de la dynamique de Hamilton, Pj = αj
et Qj = βj, la deuxieme relation,
∂S
∂αj= βj (64)
donnera les equations du mouvement qj(t) lorsque l’on aura determine
S. On note que ∂S∂αj
est un abus de notation pour ∂S∂Pj
∣
∣
∣
Pj=αj
. La premiere
relation est reportee dans la troisieme, ainsi que l’equation Pj = αj .

2. REPRESENTATION EN IMPULSIONS 119
L’injection de la valeur du nouvel Hamiltonien H = 0 permettra dedeterminer la fonction principale de Hamilton S(q, α, t), seule inconnuerestante :
∂S(q, α, t)
∂t+H
(
q,∂S
∂q, t
)
= 0 (65)
S(q, α, t) sera de fait la fonction generatrice de la transformationdes coordonnees telle que toutes les nouvelles coordonnees Q soient cy-cliques. Cette equation differentielle aux derivees partielles du premierordre en q et du premier ordre en t, est appelee equation de Hamilton-Jacobi en representation q (1838). Elle est a n+1 variables qj , t, et estnon lineaire car H est une fonction quadratique (de degre deux) de p,donc de ∂S/∂q.
L’integration complete de l’equation de Hamilton-Jacobi fait ap-paraitre une constante d’integration pour chaque variable, soit n + 1constantes d’integration arbitraire γ, si bien que la solution de l’equa-tion differentielle est de la forme :
S = S(q; γ1, . . . , γn+1; t)
S n’apparait pas dans l’equation de Hamilton-Jacobi, seules ses deri-vees partielles sont presentes. Par consequent, si S est solution alorsS + Cste est aussi solution, et donc l’une des constantes est purementadditive :
S = S(q; γ1, . . . , γn; t) + γn+1
Mais, une constante additive n’a pas d’importance pour une fonctiongeneratrice puisque seules ses derivees partielles sont utilisees dans lestransformations canoniques. Par consequent nous garderons :
S = S(q; γ1, . . . , γn; t)
Les Pj = αj et les γj etant des constantes non encore fixees, nouspouvons poser γj = αj, et l’on retrouve :
S = S(q;α1, . . . , αn; t) (66)
= S(q, α, t) (67)
2. Representation en impulsions
Faisons a present le choix d’une fonction generatrice de type 3,F3(p,Q, t). En reprenant les relations (54) page 92 :
∂F3
∂pj= −qj
∂F3
∂Qj
= −Pj
∂F3
∂t= H −H

120 6. THEORIE DE HAMILTON-JACOBI
soit, avec Pj = αj, Qj = βj et H = 0 :
∀j = 1, . . . n
∂F3
∂pj= −qj (68)
∂F3
∂βj
= −αj (69)
∂F3(p, β, t)
∂t+H
(
−∂F3
∂p, p, t
)
= 0 (70)
Cette equation differentielle aux derivees partielles du premier ordreen p et du premier ordre en t, est appelee equation de Hamilton-Jacobien representation p. Elle est a n+1 variables pj , t, et son degre dependdu degre de H en fonction de q.
Avec une fonction de type 4, F4(p, P, t), nous obtenons le systemed’equations suivant,
∀j = 1, . . . n
∂F4
∂pj= −qj
∂F4
∂αj= βj
∂F4(p, α, t)
∂t+H
(
−∂F4
∂p, p, t
)
= 0
similaire au systeme d’equations d’une fonction de type 3.
3. Separation des variables
3.1. Cas ou le Hamiltonien se conserve.
Dans le cas ou H ne depend pas explicitement du temps, l’equation deHamilton-Jacobi en representation q s’ecrit :
∂S(q, α, t)
∂t= −H
(
q,∂S
∂q(q, α)
)
S(q, α, t) = −H(
q,∂S0
∂q
)
t+ S0(q, α)
ou l’on retrouve S0 dans le Hamiltonien car il n’est pas fonction dutemps par hypothese. S0(q, α) est appelee fonction caracteristique deHamilton. La relation (40) page 75 indique qu’un Hamiltonien ne de-pendant pas explicitement du temps se conserve, et donc n’est fonctionque des constantes d’integration :
S(q, α, t) = −H(α)t + S0(q, α)
Plutot que de garder H comme fonction des n constantes αj, nouspouvons poser H = α1. D’apres le paragraphe 4 page 75, lorsque le sys-teme est holonome scleronome et lorsque le potentiel V (q, t) ne depend

3. SEPARATION DES VARIABLES 121
pas explicitement des vitesses generalisees, le Hamiltonien se confondavec l’energie mecanique, et dans ce cas :
S(q, α, t) = −Et + S0(q, α) (71)
appelee equation de Hamilton-Jacobi reduite, dans laquelle α1 = H =E.
En representation p nous avons,
∂F3(p, β, t)
∂t= −H
(
−∂F3
∂p(p, β), p
)
F3(p, β, t) = −H(
−∂F30
∂p, p
)
t + F30(p, β)
= −H(β)t+ F30(p, β)
Exemple 6.1. Masse glissant sans frottements sur un plan inclineUne masse m glisse sans frottements sur un plan incline.
Quelle est l’equation de son mouvement ?
αP
R
m
q
Fig 1. Masse glissant sans frottements sur un plan incline
Le Lagrangien a pour expression :
L(q, q, t) ∆= T − V
L(q, q) = 12mq2 +mgq sinα
Le moment conjugue de la variable q a pour expression :
p∆=
∂L∂q
= mq (72)
relation que l’on inverse,
q =p
m
Le Lagrangien ne depend pas explicitement du temps. D’apres les re-lations (40) et (41) page 75, le Hamiltonien est constant et ne depend

122 6. THEORIE DE HAMILTON-JACOBI
pas explicitement du temps :
H(q, p)∆= pq − L
H(q, p) =p2
2m−mgq sinα
= Cste
L’energie mecanique s’ecrit :
E∆= T + V
=p2
2m−mgq sinα
= H(q, p)
Resolution en representation q :Avec la relation (64) page 118, on remplace p par ∂S/∂q dans le
Hamiltonien :
H(
q,∂S
∂q
)
=1
2m
(
∂S
∂q
)2
−mgq sinα
L’equation de Hamilton-Jacobi (65) page 119, s’ecrit :
∂S(q, α1, t)
∂t+H
(
q,∂S
∂q
)
= 0
∂S(q, α1, t)
∂t+
1
2m
(
∂S
∂q
)2
−mgq sinα = 0
Le temps etant cyclique (il n’apparait pas dans H), on se sert de l’e-quation de Hamilton-Jacobi reduite (71) page 121 :
S(q, α1 = E, t) = −Et + S0(q, E)
Nous avons alors,
∂S(q, E, t)
∂t= −E
et l’equation de Hamilton-Jacobi s’ecrit :
−E +1
2m
(
dS0
dq
)2
−mgq sinα = 0
Isolons S0(q, E) :
dS0
dq= ±
√
2mE + 2m2gq sinα
S0(q, E) = ±∫
√
2mE + 2m2gq sinα dq + c

3. SEPARATION DES VARIABLES 123
Nous pouvons oublier la constante d’integration c, car seules les deri-vees de la fonction principale de Hamilton interviennent dans la reso-lution du probleme. Elle a alors pour expression :
S(q, E, t) = −Et±∫
√
2mE + 2m2gq sinα dq
= −Et± 1
3m2g sinα
(
2mE + 2m2gq sinα)3/2
La relation (64) page 118, nous donne l’equation du mouvement t(q) :
β =∂S
∂E
= −t± 1
mg sinα
√
2mE + 2m2gq sinα
= −t± 1
g sinα
√
2E
m+ 2gq sinα (73)
Soit q0 la condition initiale sur la position, a t = 0 :
β = ± 1
g sinα
√
2E
m+ 2gq0 sinα
Remarque : On peut aussi garder S sous sa forme d’integrale, etderiver sous l’integrale :
β =∂S
∂E
= −t±∫
∂
∂E
√
2mE + 2m2gq sinα dq
= −t± m
∫
dq√
2mE + 2m2gq sinα
= −t±√
m
2E
∫
dq√
1 + mg sinαE q
Effectuons le changement de variable suivant :
q′ =mg sinα
Eq
q =E
mg sinαq′
dq =E
mg sinαdq′

124 6. THEORIE DE HAMILTON-JACOBI
qui donne,
β = −t±√
m
2E
E
mg sinα
∫
dq′√1 + q′
= −t± 2
g sinα
√
E
2m
√
1 + q′
= −t± 1
g sinα
√
2E
m
√
1 +mg sinα
Eq
= −t± 1
mg sinα
√
2mE + 2m2gq sinα
et l’on retrouve bien le resultat (73).
En isolant la coordonnee generalisee q, on trouve l’equation du mou-vement q(t) :
q =1
2m2g sinα
{
[±(t+ β)mg sinα]2 − 2mE}
= 12g sinα(t+ β)2 − E
mg sinα
= 12g sinα t2 + g sinα βt+ 1
2g sinαβ2 − E
mg sinα
Resolution en representation p :Avec la relation (68) page 120, on remplace q par −∂F3/∂p dans le
Hamiltonien :
H(
−∂F3
∂p, p
)
=p2
2m+mg
∂F3
∂psinα
l’equation de Hamilton-Jacobi (70) page 120, s’ecrit :
∂F3(p, β, t)
∂t+H
(
−∂F3
∂p, p
)
= 0
∂F3(p, β, t)
∂t+
p2
2m+mg
∂F3
∂psinα = 0
Le temps etant cyclique, on pose :
F3(p, β1 = E, t) = −Et + F30(p, E)
et l’equation de Hamilton-Jacobi reduite s’ecrit :
E +p2
2m+mg
dF30
dpsinα = 0

3. SEPARATION DES VARIABLES 125
Isolons F30 :
dF30
dp=
1
mg sinα
(
E − p2
2m
)
F30 =1
mg sinα
∫
E − p2
2mdp+ c
=1
mg sinα
(
Ep− p3
6m
)
+ c
et donc, en supprimant la constante d’integration c :
F3 = −Et +1
mg sinα
(
Ep− p3
6m
)
La relation (69) page 120, nous donne p(t) :
α1 = −∂F3
∂E
= t− p
mg sinα
p = mg sinα (t− α1)
Notons p0 la condition initiale sur l’impulsion,
p0 = −mg sinαα1
La relation (68) page 120 nous donne l’equation du mouvement q(t),
q = −∂F3
∂p
= − 1
mg sinα
(
E − p2
2m
)
= − E
mg sinα+
1
2m2g sinα
(
m2g2 sin2 α t2 + 2mg sinα tp0 + p20)
= − E
mg sinα+ 1
2g sinα t2 +
p0m
t+p20
2m2g sinα
= − E
mg sinα+ 1
2g sinα t2 − gt sinαα1 +
g sinαα21
2
Exemple 6.2. Oscillateur harmonique simple a une dimensionLe Lagrangien a pour expression :
L(q, q, t) ∆= T − V
L(q, q) = 12mq2 − 1
2kq2
Le moment conjugue de la variable q s’ecrit :
p∆=
∂L∂q
= mq

126 6. THEORIE DE HAMILTON-JACOBI
relation que l’on inverse,
q =p
m
Le Lagrangien ne depend pas explicitement du temps. D’apres les re-lations (40) et (41) page 75, le Hamiltonien est constant et ne dependpas explicitement du temps :
H(q, p, t)∆= pq −L
H(q, p) =p2
m−(
p2
2m− k
2q2)
=p2
2m+
k
2q2 (74)
= E
L’energie mecanique E se conserve car toutes les forces derivent d’unpotentiel. Avec la relation (64) page 118, le Hamiltonien s’ecrit,
H(
q,∂S
∂q
)
=1
2m
(
∂S
∂q
)2
+k
2q2
et l’equation de Hamilton-Jacobi (65) page 119 s’ecrit :
∂S(q, α1, t)
∂t+H
(
q,∂S
∂q
)
= 0
∂S(q, α1, t)
∂t+
1
2m
(
∂S
∂q
)2
+k
2q2 = 0
La variable temps etant cyclique, nous pouvons la separer :
S(q, α1 = E, t) = −Et + S0(q, E)
L’equation de Hamilton-Jacobi devient :
−E +1
2m
(
dS0
dq
)2
+k
2q2 = 0
Isolons S0(q, E) :
dS0
dq= ±
√m√
2E − kq2
S0(q, E) = ±√m
∫
√
2E − kq2 dq + c
et la fonction principale de Hamilton a pour expression,
S(q, E, t) = −Et±√2Em
∫
√
1− kq2
2Edq (75)

3. SEPARATION DES VARIABLES 127
definie a une constante additive pres. Effectuons le changement de va-riable suivant :
q′ = q
√
k
2E
q′2 =kq2
2E
q = q′√
2E
k
dq =
√
2E
kdq′
qui donne,
S(q, E, t) = −Et±√2Em
√
2E
k
∫
√
1− q′2 dq′
= −Et± 2E
√
m
k
(
q′√
1− q′2 + arcsin q′)
= −Et± 2E
√
m
k
[
q
√
k
2E
√
1− kq2
2E+ arcsin
(
q
√
k
2E
)]
= −Et± q√
2mE −mkq2 ± 2E
√
m
karcsin
(
q
√
k
2E
)
La relation (64) page 118, nous donne l’equation du mouvement t(q) :
β =∂S
∂E
= −t± qm√
2mE −mkq2± 2
√
m
karcsin
(
q
√
k
2E
)
∓ 2E
√
m
k× q
√
k/2
E√
4E − 2q2k
= −t±√
m
karcsin
(
q
√
k
2E
)

128 6. THEORIE DE HAMILTON-JACOBI
Remarque : On peut aussi garder S sous sa forme d’integrale, etderiver sous l’integrale :
β =∂S
∂E
=∂
∂E
(
−Et±∫
√
2mE −mkq2 dq
)
(76)
= −t±∫
mdq√
2mE −mkq2
= −t±√
m
2E
∫
dq√
1− k2E q2
Effectuons le changement de variable suivant :
q′ =
√
k
2Eq
q′2 =k
2Eq2
q =
√
2E
kq′
dq =
√
2E
kdq′
qui donne,
β = −t±√
m
2E
√
2E
k
∫
dq′√
1− q′2
= −t±√
m
karcsin q′
= −t±√
m
karcsin
(
q
√
k
2E
)
et l’on retrouve le meme resultat.
En isolant la coordonnee generalisee q, nous trouvons l’equation dumouvement q(t) :
arcsin
(
q
√
k
2E
)
= ±√
k
m(t+ β)
q = ±√
2E
ksin
[
√
k
m(t+ β)
]
En posant,
ω =
√
k
m(77)
ϕ0 = ωβ (78)

3. SEPARATION DES VARIABLES 129
nous avons :
q = ± 1
ω
√
2E
msin(ωt+ ϕ0) (79)
p = mq
= ±√2mE cos(ωt+ ϕ0) (80)
Determinons les constantes E et ϕ0 en fonction des conditions ini-tiales :
q0 = ± 1
ω
√
2E
msinϕ0
p0 = ±√2mE cosϕ0
Pour E nous avons :
q20 =2E
mω2sin2 ϕ0
p20 = 2mE cos2 ϕ0
2mE(
cos2 ϕ0 + sin2 ϕ0
)
= p20 +m2ω2q20
E =p202m
+k
2q20
relation que nous avions deja en (74) page 126. Pour ϕ0 nous avons,
q0p0
=1
mωtanϕ0
ϕ0 = arctan
(
mωq0p0
)
et a partir de la relation (78) :
β =ϕ0
ω
=1
ωarctan
(
mωq0p0
)
L’equation de Hamilton-Jacobi nous a permis de trouver la fonctiongeneratrice S(q, α, t). Cette fonction genere une transformation cano-nique vers les nouvelles variables P,Q, qui d’apres la relation (63)page 118 sont telles que P = E est l’energie mecanique, et Q = βest homogene a un temps. Les variables energie et temps sont doncconjuguees.

130 6. THEORIE DE HAMILTON-JACOBI
3.2. Cas general.
Nous cherchons la solution S a l’equation de Hamilton-Jacobi,
∂S(q, α, t)
∂t+H
(
q,∂S
∂q, t
)
= 0
sous la forme,
S(q, α, t) = S0(q2, . . . , qn;α2, . . . , αn; t) + S1(q1, α1)
L’equation de Hamilton-Jacobi devient,
∂S0(q2,...,n;α2,...,n; t)
∂t+H
(
q;dS1
dq1,∂S0
∂q2, . . . ,
∂S0
∂qn; t
)
= 0
Si dans le Hamiltonien, la variable q1 et la derivee correspondantedS1/dq1 n’apparaissent que dans une fonction S1 ne contenant que cesdeux variables, alors,
H = H1
(
q1,dS1
dq1
)
+H0
(
q2,...,n;∂S0
∂q2, . . . ,
∂S0
∂qn; t
)
L’equation de Hamilton-Jacobi s’ecrit :
∂S0(q2,...,n;α2,...,n; t)
∂t+H1
(
q1,dS1
dq1
)
+H0
(
q2,...,n;∂S0
∂q2, . . . ,
∂S0
∂qn; t
)
= 0
H1 etant la seule fonction de q1, nous obtenons le systeme suivant :
H1
(
q1,dS1
dq1
)
= α1
∂S0(q2,...,n;α2,...,n; t)
∂t+H0
(
q2,...,n;∂S0
∂q2, . . . ,
∂S0
∂qn; t
)
= −α1
La premiere equation differentielle, du premier ordre en q1 et du seconddegre en dS1/dq1, permet d’obtenir S1. Si la forme du Hamiltonien lepermet, nous pourrions de meme separer les autres variables.
3.3. Cas des variables cycliques.
Nous parlons ici des anciennes variables, les nouvelles etant toutes cy-cliques. Supposons qu’il n’y ait que deux coordonnees generalisees, q1et q2, et que q1 n’apparaisse pas dans le Hamiltonien. La coordonnee q1n’apparaissant pas dans le membre de droite, elle ne peut apparaitredans celui de gauche, par consequent l’equation de Hamilton-Jacobis’ecrit :
∂S
∂t(q2, α1, α2, t) = −H
(
q2,∂S
∂q1(q2, α1, α2, t),
∂S
∂q2(q2, α1, α2, t), t
)
3. SEPARATION DES VARIABLES 131
Nous avons les trois conditions suivantes :
∂S
∂t= f1(q2, α1, α2, t)
∂S
∂q1= g1(q2, α1, α2, t)
∂S
∂q2= h1(q2, α1, α2, t)
En integrant,
S = f1(q2, α1, α2, t) t+ f2(q1, q2, α1, α2)
S = g1(q2, α1, α2, t) q1 + g2(q2, α1, α2, t)
S = h1(q2, α1, α2, t) q2 + h2(q1, α1, α2, t)
Les fonctions de q1 doivent etre egales,
f2(q1, q2, α1, α2) = g1(q2, α1, α2, t) q1 = h2(q1, α1, α2, t)
La fonction g1 impose qu’elles soient toutes du premier degre en q1,
f2(q2, α1, α2) q1 = g1(q2, α1, α2, t) q1 = h2(α1, α2, t) q1
= S2(α1, α2) q1
Les autres fonctions doivent etre egales,
f1(q2, α1, α2, t) t = g2(q2, α1, α2, t) = h1(q2, α1, α2, t) q2
= S1(q2, α1, α2, t)
Finalement,
S(q1, q2, α1, α2, t) = S1(q2, α1, α2, t) + S2(α1, α2) q1
En derivant par rapport a la variable cyclique q1,
∂S
∂q1= S2(α1, α2)
Or, d’apres la relation (64) page 118,
∂S
∂q1= p1
S2(α1, α2) = α1
donc,
S(q1, q2, α1, α2, t) = S1(q2, α1, α2, t) + α1q1
La mecanique de Hamilton-Jacobi permet la separation des variablescycliques, et nous avons vu au paragraphe 3.2 qu’elle permet parfois laseparation de variables non cycliques, selon comment elles apparaissentdans le Hamiltonien.

132 6. THEORIE DE HAMILTON-JACOBI
Exemple 6.3. Coordonnees spheriquesEn coordonnees spheriques (r, θ, φ), la vitesse s’exprime par :
v = rer + rθeθ + r sin θφeφ
et l’energie cinetique s’ecrit,
T = 12mv2
= 12m(
r2 + r2θ2 + r2φ2 sin2 θ)
On considere une particule dans un champ de force d’energie poten-tielle V (q) independante des vitesses generalisees q. D’apres la defini-tion 3.5 page 65,
pj =∂L∂qj
Les impulsions generalisees ont alors pour expressions :
pr = mr
pθ = mr2θ
pφ = mr2 sin2 θ φ
et le Hamiltonien s’ecrit,
H =1
2m
(
p2r +p2θr2
+p2φ
r2 sin2 θ
)
+ V (r, θ, φ)
Les variables pourront etre separees si,
V (r, θ, φ) = a(r) +b(θ)
r2+
c(φ)
r2 sin2 θ
ou a(r), b(θ), et c(φ) sont des fonctions arbitraires. La symetrie sphe-rique etant rompue par le sin2 θ, le terme c(φ) est choisi nul :
V (r, θ) = a(r) +b(θ)
r2
L’equation de Hamilton-Jacobi s’ecrit,
∂S(q, α, t)
∂t+H
(
q,∂S
∂q, t
)
= 0
∂S
∂t+
1
2m
[
(
∂S
∂r
)2
+1
r2
(
∂S
∂θ
)2
+1
r2 sin2 θ
(
∂S
∂φ
)2]
+ a(r) +b(θ)
r2= 0
Nous avons vu, relation (66) page 119, que le nombre de constantesdans S est egale au nombre de coordonnees generalisees. Le Hamil-tonien ne dependant pas explicitement du temps, nous cherchons unesolution de la forme :
S(r, θ, φ, E, α2, α3, t) = −Et + S0(r, θ, φ, E, α2, α3)

3. SEPARATION DES VARIABLES 133
L’equation de Hamilton-Jacobi devient :
1
2m
[
(
∂S0
∂r
)2
+1
r2
(
∂S0
∂θ
)2
+1
r2 sin2 θ
(
∂S0
∂φ
)2]
+ a(r) +b(θ)
r2= E
La coordonnee φ etant cyclique (elle n’apparait pas dans H), son mo-ment conjugue pφ est constant et nous pouvons la separer :
S0(r, θ, φ, E, pφ, α3) = pφφ+ S1(r, θ, E, pφ, α3)
L’equation de Hamilton-Jacobi devient :
1
2m
[
(
∂S1
∂r
)2
+1
r2
(
∂S1
∂θ
)2
+p2φ
r2 sin2 θ
]
+ a(r) +b(θ)
r2= E
r2(
∂S1
∂r
)2
+ 2mr2a(r)− 2mr2E +
(
∂S1
∂θ
)2
+p2φ
sin2 θ+ 2mb(θ) = 0
Appliquons la methode de la separation des variables :
S0(r, θ, φ, E, pφ, α3) = pφφ+ S2(r, E, pφ, α3) + S3(θ, E, pφ, α3)
L’equation de Hamilton-Jacobi s’ecrit alors,
1
2m
[
(
dS2
dr
)2
+1
r2
(
dS3
dθ
)2
+p2φ
r2 sin2 θ
]
+ a(r) +b(θ)
r2= E
1
2m
(
dS2
dr
)2
+ a(r) +1
2mr2
[
(
dS3
dθ
)2
+p2φ
sin2 θ+ 2mb(θ)
]
= E
et donne le systeme suivant,
(
dS3
dθ
)2
+p2φ
sin2 θ+ 2mb(θ) = α3
1
2m
(
dS2
dr
)2
+ a(r) +α3
2mr2= E
ou α3 est la derniere constante arbitraire.
dS3
dθ= ±
√
α3 − 2mb(θ)−p2φ
sin2 θ
dS2
dr= ±
√
2m[E − a(r)]− α3
r2
L’integration donne,
S = −Et + pφφ±∫
√
α3 − 2mb(θ)−p2φ
sin2 θdθ
±∫
√
2m[E − a(r)]− α3
r2dr

134 6. THEORIE DE HAMILTON-JACOBI
La relation (64) page 118, nous donne les equations du mouvementt(q) :
∂S
∂E= β1
∂S
∂pφ= β2
∂S
∂α3= β3
Exemple 6.4. BalistiqueEtudions le mouvement dans le plan (x, y) d’un projectile dans le champde gravitation terrestre en l’absence de frottement de l’air. La force depesanteur derivant d’une energie potentielle, le Hamiltonien se conserveet est egal a l’energie mecanique :
H = m2
(
x2 + y2)
+mgy
= 12m
(
p2x + p2y)
+mgy
Avec la relation (64) page 118,
H =1
2m
[
(
∂S
∂x
)2
+
(
∂S
∂y
)2]
+mgy
l’equation de Hamilton-Jacobi s’ecrit :
∂S(x, y, α1, α2, t)
∂t+H
(
x, y,∂S
∂x,∂S
∂y, t
)
= 0
∂S
∂t+
1
2m
[
(
∂S
∂x
)2
+
(
∂S
∂y
)2]
+mgy = 0
La variable temps etant cyclique, on pose :
S(x, y, E, α2, t) = −Et + S0(x, y, E, α2)
et l’equation de Hamilton-Jacobi devient :
1
2m
[
(
∂S0
∂x
)2
+
(
∂S0
∂y
)2]
+mgy = E
La variable x etant cyclique, appliquons la separation des variables :
S0(x, y, E, α2, t) = α2x+ S1(y, E, α2, t)

3. SEPARATION DES VARIABLES 135
et l’equation de Hamilton-Jacobi s’ecrit :
1
2m
[
α22 +
(
dS1
dy
)2]
+mgy = E
(
dS1
dy
)2
= 2mE − 2m2gy − α22
S1 = ±∫
√
2mE − 2m2gy − α22 dy + c
= ∓ 1
3m2g
(
2mE − 2m2gy − α22
)3/2+ c
si bien que la fonction principale de Hamilton s’ecrit,
S = −Et + α2x∓ 1
3m2g
(
2mE − 2m2gy − α22
)3/2
definie a une constante additive pres. Avec la relation (64) page 118,nous avons d’une part l’equation du mouvement t(y) :
β1 =∂S
∂E
= −t∓ 1
3m2g× 3
2
(
2mE − 2m2gy − α22
)1/22m
= −t∓ 1
mg
√
2mE − 2m2gy − α22
Pour trouver la valeur de la constante β1, on considere l’instant initial :
β1 = ∓ 1
mg
√
2mE − 2m2gy0 − α22
On inverse la relation pour trouver l’equation du mouvement y(t) :
[mg(t+ β1)]2 = 2mE − 2m2gy − α2
2
2m2gy = −m2g2(t + β1)2 + 2mE − α2
2
y = −12g(t+ β1)
2 +E
mg− α2
2
2m2g
= −12gt2 − gtβ1 − 1
2gβ2
1 +E
mg− α2
2
2m2g
Nous pouvons exprimer β1 en fonction des conditions initiales :
y = −gt− gβ1
y0 = −gβ1
β1 = − y0g

136 6. THEORIE DE HAMILTON-JACOBI
D’autre part, avec la relation (64) page 118, nous avons l’equation dela trajectoire x(y) :
β2 =∂S
∂α2
=∂
∂α2
[
−Et + α2x∓ 1
3m2g
(
2mE − 2m2gy − α22
)3/2]
= x∓ 1
3m2g× 3
2
(
2mE − 2m2gy − α22
)1/2 × (−2)α2
= x± α2
m2g
√
2mE − 2m2gy − α22
Pour trouver la valeur de la constante β2, on considere l’instant initial :
β2 = x0 ±α2
m2g
√
2mE − 2m2gy0 − α22
= x0 −α2
mβ1
= x0 +α2
mgy0
On inverse la relation pour trouver l’equation de la trajectoire y(x) :
[
m2g
α2(β2 − x)
]2
= 2mE − 2m2gy − α22
2m2gy = −m4g2
α22
(β2 − x)2 + 2mE − α22
y = −m2g
2α22
(β2 − x)2 +E
mg− α2
2
2m2g
= −m2g
2α22
(
β22 − 2β2x+ x2
)
+ y0 +12gβ2
1
= −m2g
2α22
(
β22 − 2β2x+ x2
)
+ y0 +y202g
(81)
Notons x0 la condition initiale sur la position horizontale,
y0 = −m2g
2α22
(β22 − 2β2x0 + x2
0) + y0 +y202g
y202g
=m2g
2α22
(
β22 − 2β2x0 + x2
0
)

4. REPRESENTATION DE LA FONCTION PRINCIPALE DE HAMILTON 137
En remplacant y20/(2g) et β2 dans la relation (81) :
y =m2g
α22
β2(x− x0)−m2g
2α22
(
x2 − x20
)
+ y0
=m2g
α22
(
x0 +α2
mgy0
)
(x− x0)−m2g
2α22
(
x2 − x20
)
+ y0
=m2g
α22
(x− x0)
[
x0 +α2
mgy0 − 1
2(x+ x0)
]
+ y0
=m2g
α22
(x− x0)
[
α2
mgy0 − 1
2(x− x0)
]
+ y0
Avec la relation (64) page 118,
px =∂S
∂xmx0 = α2
nous avons l’equation de la trajectoire :
y = − g
2x20
(x− x0)2 +
y0x0
(x− x0) + y0 (82)
4. Representation de la fonction principale de Hamilton
Considerons une particule se deplacant dans un champ de forcesconservatives. Prenons les coordonnees cartesiennes comme coordon-nees generalisees, q1 = x, q2 = y, q3 = z et p1 = px, p2 = py, p3 = pz.D’apres la relation (64) page 118 :
px =∂S
∂x
py =∂S
∂y
pz =∂S
∂z
Supposons l’energie potentielle independante du temps. Nous avonsalors l’equation de Hamilton-Jacobi reduite (71) page 121,
S(x, y, z, α1, α2, α3, t) = −Et + S0(x, y, z, α1, α2, α3)
et,
px =∂S0
∂x
py =∂S0
∂y
pz =∂S0
∂z

138 6. THEORIE DE HAMILTON-JACOBI
Nous pouvons ecrire ces relations sous forme vectorielle,
p = gradS
= gradS0
Le gradient d’une fonction f est toujours perpendiculaire aux sur-faces equipotentielles (f = Cste) de cette fonction. Les trajectoires,tangentes au vecteur quantite de mouvement p, sont donc perpendicu-laires aux surfaces equipotentielles de S. Reciproquement, a un champS donne correspond toutes les trajectoires perpendiculaires aux sur-faces equipotentielles de S.
Les surfaces S0 = Cste sont fixes dans l’espace. Les surfaces S = Cste
se deplacent dans l’espace selon l’equation (71) page 121 :
S(q, α, t) = −Et + S0(q, α)
Suivons par exemple le trajet de la surface S = 0.A t = 0, S = S0. Elle est donc superposee avec la surface S0 = 0.A t = 1, S = S0 − E. Elle est superposee avec la surface S0 = E.A t = 2, S = S0 − 2E. Elle est superposee avec la surface S0 = 2E.
La surface S = 0 se deplace donc au cours du temps a travers lessurfaces S0 = Cste, dans le sens des S0 croissantes.
Exemple 6.5. Reprenons l’exemple 6.4 de balistique, en trois di-mensions pour l’exemple (bien entendu, la solution est en deux dimen-sions). L’equation de Hamilton-Jacobi reduite s’ecrit :
1
2m
[
(
∂S0
∂x
)2
+
(
∂S0
∂y
)2
+
(
∂S0
∂z
)2]
+mgz = E
Les variables x et y etant cycliques, nous appliquons la separationdes variables,
S0(x, y, z, E, αx, αy, t) = αxx+ αyy + Sz(z, E, αx, αy, t)
et l’equation de Hamilton-Jacobi s’ecrit :
1
2m
[
α2x + α2
y +
(
dSz
dz
)2]
+mgz = E
1
2m
(
dSz
dz
)2
+mgz = E −α2x + α2
y
2m
= αz
L’introduction de cette nouvelle constante αz permet de simplifierla resolution du probleme.
Sz = ±∫
√
2m(αz −mgz) dz + c
= ∓ 2
3g
√
2
m(αz −mgz)3/2 + c

4. REPRESENTATION DE LA FONCTION PRINCIPALE DE HAMILTON 139
On pose αz de la forme αz = mgH, avec H constante,
Sz = ∓2m
3
√
2g (H− z)3/2 + c
E = 12m
(
α2x + α2
y
)
+mgH
si bien que la fonction principale de Hamilton s’ecrit,
S = −Et + αxx+ αyy + Sz
= −[
12m
(
α2x + α2
y
)
+mgH]
t+ αxx+ αyy ∓2m
3
√
2g (H− z)3/2
definie a une constante additive pres. La relation (64) page 118 donneles equations du mouvement,
βx =∂S
∂αx
βy =∂S
∂αy
βz =∂S
∂αz
ou,
∂S
∂αz=
∂S
∂mgH
=1
mg
∂S
∂Het βz etant une constante, on peut supprimer mg et poser βz = ∂S/∂H.
βx = x− αx
mt
βy = y − αy
mt
βz = ∓m√
2g(H− z)−mgt
La relation (64) page 118 donne les impulsions generalisees :
px =∂S
∂x
py =∂S
∂y
pz =∂S
∂z
px = αx
py = αy
pz = ±m√
2g(H− z)

140 6. THEORIE DE HAMILTON-JACOBI
Nous avons alors,
p2z = 2gm2(H− z)12m
p2z = mgH−mgz
et l’on verifie que,
E = 12m
(
p2x + p2y)
+mgH
= 12m
(
p2x + p2y + p2z)
+mgz
mgz est l’energie potentielle, et H est la hauteur maximale atteinte parle projectile.
mx = αx
my = αy
mz = ±m√
2g(H− z)
mx0 = αx
my0 = αy
z0 = ±√
2g(H− z0) (83)
La fonction caracteristique de Hamilton s’ecrit :
S0 = αxx+ αyy + Sz
= mx0x+my0y ∓ 23m√
2g (H− z)3/2
Si l’on pose x0 = y0 = H = 0, qui correspond a un tir vers le haut,de hauteur maximale H = 0, alors :
S0 = ∓23m√
2g (−z)3/2
Par consequent z 6 0, et S0 = Cste implique z = Cste. Les surfacesS0 = Cste sont des plans a z constante inferieure a zero, paralleles auplan (x, y).
En z = 0, S0 = 0.En z = −1, S0 = ∓2
3m√2g.
En z = −2, S0 = ∓83m√g.
La fonction principale de Hamilton se propage dans la directiondes z, dans le sens des S0 croissantes. D’abord vers le haut car S0 estnegative et croit pour atteindre 0 en H, puis vers le bas car S0 estpositive et croit vers le bas. Les trajectoires sont donc des demi-droitesverticales ascendantes jusqu’a H, puis descendantes.
Prenons maintenant une vitesse horizontale constante strictementpositive, par exemple :
x0 = 0
y0 =23
√
2g
H = 0

4. REPRESENTATION DE LA FONCTION PRINCIPALE DE HAMILTON 141
La fonction caracteristique de Hamilton s’ecrit :
S0 = my0y ∓ 23m√
2g (−z)3/2
= 23m√
2g y ∓ 23m√
2g (−z)3/2
= 23m√
2g[
y ∓ (−z)3/2]
S0 = Cste implique,
y ∓ (−z)3/2 = Cste
y = Cste ± (−z)3/2
qui est l’equation de deux paraboles semi-cubiques, de sommet l’axedes y, representees figure 2 pour une constante egale a 1.
y = 1 + (−z)3/2
y = 1− (−z)3/2
y
z
1
0
Fig 2. y = 1± (−z)3/2
Les surfaces S0 = Cste sont deux cylindres engendres par une droitequi se deplace parallelement a l’axe des x, en suivant les deux parabolessemi-cubiques. Lorsque S0 augmente, le sommet des paraboles semi-cubiques se deplace dans le sens des y croissants.
En reprenant l’equation (82) page 137 avec l’axe z vertical et avecy0 = 0, nous avons,
z = − g
2y20y2 +
z0y0
y + z0
= − 916y2 +
3z02√2g
y + z0
et avec la relation (83) page 140 :
z = − 916y2 ± 3
2
√−z0 y + z0

142 6. THEORIE DE HAMILTON-JACOBI
Choisissons un tir vers le haut, z0 > 0,
z = − 916y2 + 3
2
√−z0 y + z0
z
y
z0 = 1
z0 = 2 z0 = 3
Fig 3. z = − 916y2 + 3
2
√−z0 y + z0
Les trajectoires sont des paraboles perpendiculaires aux parabolessemi-cubiques, ayant pour plus hauts points l’axe des y, le projectile sedeplacant selon les y croissants.
5. Fonction principale de Hamilton et Lagrangien
D’apres (63) page 118, les impulsions generalisees P etant cons-tantes dans la fonction principale de Hamilton S(q, p, t) :
dS(q, P, t) =∂S
∂qjdqj +
∂S
∂tdt
Avec les relations (50) page 88,
dS
dt= pj qj −H= L
S =
∫
Ldt
definie a une constante additive pres. La fonction principale de Hamil-ton est donc l’integrale indefinie du Lagrangien.
Exemple 6.6.Verifions le sur l’exemple de l’oscillateur harmonique 6.2 page 125.
5. FONCTION PRINCIPALE DE HAMILTON ET LAGRANGIEN 143
Reprenons l’expression (79) page 129 de la coordonnee generalisee :
q = ± 1
ω
√
2E
msin(ωt+ ϕ0)
q2 =2E
mω2sin2(ωt+ ϕ0)
dq
dt= ±
√
2E
mcos(ωt+ ϕ0)
dq = ±√
2E
mcos(ωt+ ϕ0)dt
En partant de l’expression (75) page 126 de la fonction principale deHamilton :
S = −Et±√2mE
∫
√
1− mω2
2Eq2 dq
= −Et +√2mE
∫
√
1− sin2(ωt+ ϕ0)
√
2E
mcos(ωt+ ϕ0) dt
= 2E
∫
[
cos2(ωt+ ϕ0)− 12
]
dt
= E
∫
cos 2(ωt+ ϕ0)dt
Reprenons l’expression (80) page 129 de l’impulsion :
p = ±√2mE cos(ωt+ ϕ0)
p2 = 2mE cos2(ωt+ ϕ0)
Le Lagrangien s’ecrit,
L =p2
2m− mω2
2q2
= E cos2(ωt+ ϕ0)−mω2
2
2E
mω2sin2(ωt+ ϕ0)
= 2E[
cos2(ωt+ ϕ0)− 12
]
= E cos 2(ωt+ ϕ0)

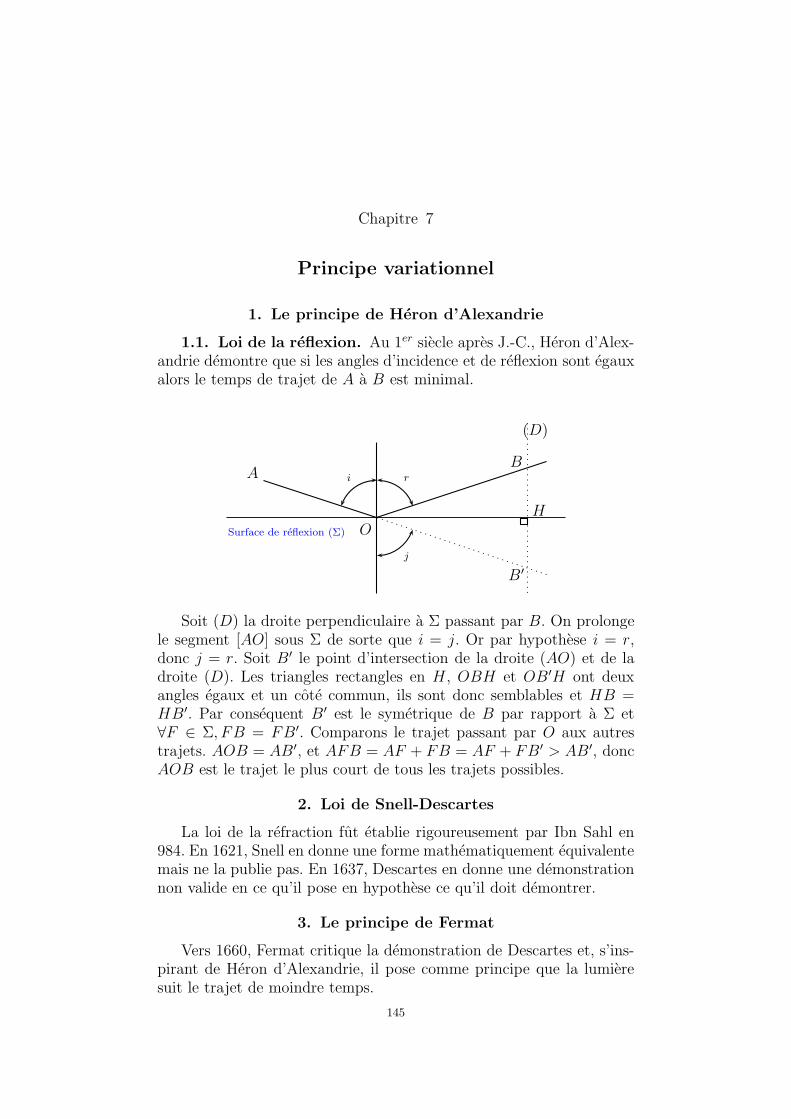
Chapitre 7
Principe variationnel
1. Le principe de Heron d’Alexandrie
1.1. Loi de la reflexion. Au 1er siecle apres J.-C., Heron d’Alex-andrie demontre que si les angles d’incidence et de reflexion sont egauxalors le temps de trajet de A a B est minimal.
Surface de reflexion (Σ) O
AB
B′
i r
j
(D)
H
Soit (D) la droite perpendiculaire a Σ passant par B. On prolongele segment [AO] sous Σ de sorte que i = j. Or par hypothese i = r,donc j = r. Soit B′ le point d’intersection de la droite (AO) et de ladroite (D). Les triangles rectangles en H , OBH et OB′H ont deuxangles egaux et un cote commun, ils sont donc semblables et HB =HB′. Par consequent B′ est le symetrique de B par rapport a Σ et∀F ∈ Σ, FB = FB′. Comparons le trajet passant par O aux autrestrajets. AOB = AB′, et AFB = AF + FB = AF + FB′ > AB′, doncAOB est le trajet le plus court de tous les trajets possibles.
2. Loi de Snell-Descartes
La loi de la refraction fut etablie rigoureusement par Ibn Sahl en984. En 1621, Snell en donne une forme mathematiquement equivalentemais ne la publie pas. En 1637, Descartes en donne une demonstrationnon valide en ce qu’il pose en hypothese ce qu’il doit demontrer.
3. Le principe de Fermat
Vers 1660, Fermat critique la demonstration de Descartes et, s’ins-pirant de Heron d’Alexandrie, il pose comme principe que la lumieresuit le trajet de moindre temps.
145
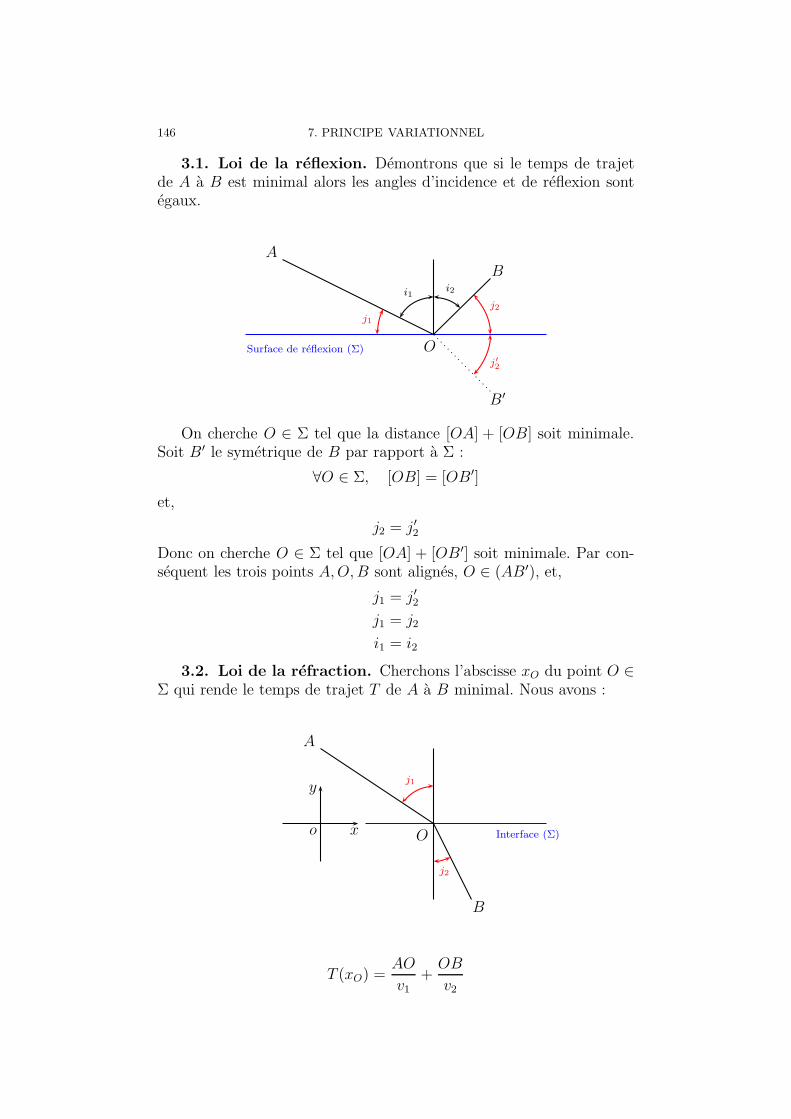
146 7. PRINCIPE VARIATIONNEL
3.1. Loi de la reflexion. Demontrons que si le temps de trajetde A a B est minimal alors les angles d’incidence et de reflexion sontegaux.
Surface de reflexion (Σ) O
AB
B′
j1
j2
j′2
i1i2
On cherche O ∈ Σ tel que la distance [OA] + [OB] soit minimale.Soit B′ le symetrique de B par rapport a Σ :
∀O ∈ Σ, [OB] = [OB′]
et,
j2 = j′2
Donc on cherche O ∈ Σ tel que [OA] + [OB′] soit minimale. Par con-sequent les trois points A,O,B sont alignes, O ∈ (AB′), et,
j1 = j′2j1 = j2
i1 = i2
3.2. Loi de la refraction. Cherchons l’abscisse xO du point O ∈Σ qui rende le temps de trajet T de A a B minimal. Nous avons :
o
A
B
j1
j2
x
y
Interface (Σ)O
T (xO) =AO
v1+
OB
v2
4. L’HYPOTHESE DE HUYGENS 147
Pour faire apparaitre les indices des milieux on multiplie par la cons-tante c de la vitesse de la lumiere dans le vide. En appelant L le cheminoptique tel que L = cT , nous avons :
cT (xO) =c
v1AO +
c
v2OB
L(xO) = n1AO + n2 OB
dL(xO)
dxO= n1
dAO
dxO+ n2
dOB
dxO
Or,
AO =√
y2A + x2O
dAO
dxO=
xO√
y2A + x2O
=xO
AO
et,
OB =√
y2B + (xB − xO)2
dOB
dxO= − xB − xO
√
y2B + (xB − xO)2
=xO − xB
OB
dL(xO)
dxO= n1
xO
AO+ n2
xO − xB
OB
La derivee de L(xO) est nulle si l’on a :
n1xO
AO= n2
xB − xO
OBn1 sin i1 = n2 sin i2
Comme nous pouvons facilement trouver un trajet plus long en en-voyant O a l’infini, ce n’est pas un maximum. la derivee seconde estnon nulle, c’est donc un minimum de la fonction L(xO).
4. L’hypothese de Huygens
En 1677, Christiaan Huygens faisant l’hypothese que la lumiere estune onde retrouve les lois de la reflexion et de la refraction de Snell-Descartes.
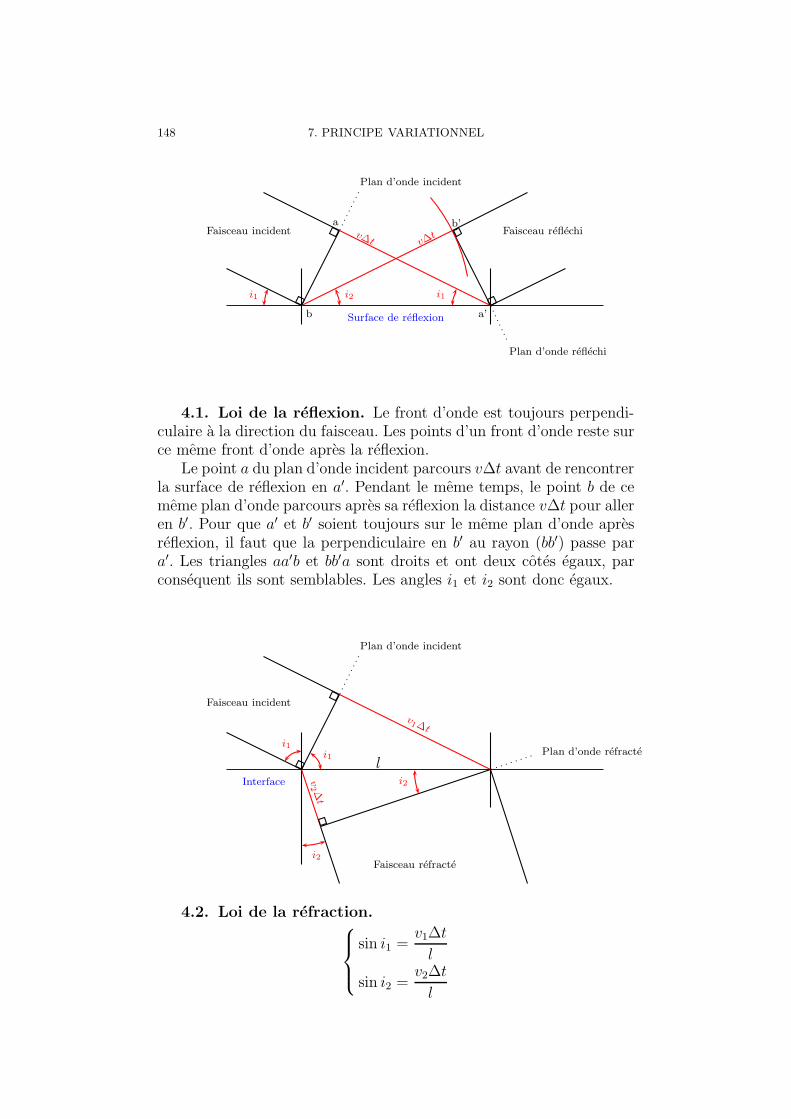
148 7. PRINCIPE VARIATIONNEL
Plan d’onde incident
Plan d’onde reflechi
Faisceau incident Faisceau reflechiv∆t v∆t
Surface de reflexion
a
b
b’
a’
i1 i1i2
4.1. Loi de la reflexion. Le front d’onde est toujours perpendi-culaire a la direction du faisceau. Les points d’un front d’onde reste surce meme front d’onde apres la reflexion.
Le point a du plan d’onde incident parcours v∆t avant de rencontrerla surface de reflexion en a′. Pendant le meme temps, le point b de cememe plan d’onde parcours apres sa reflexion la distance v∆t pour alleren b′. Pour que a′ et b′ soient toujours sur le meme plan d’onde apresreflexion, il faut que la perpendiculaire en b′ au rayon (bb′) passe para′. Les triangles aa′b et bb′a sont droits et ont deux cotes egaux, parconsequent ils sont semblables. Les angles i1 et i2 sont donc egaux.
Plan d’onde incident
Plan d’onde refracte
Faisceau incident
Faisceau refracte
l
v1∆t
v2 ∆
t
Interface
i1i1
i2
i2
4.2. Loi de la refraction.
sin i1 =v1∆t
l
sin i2 =v2∆t
l
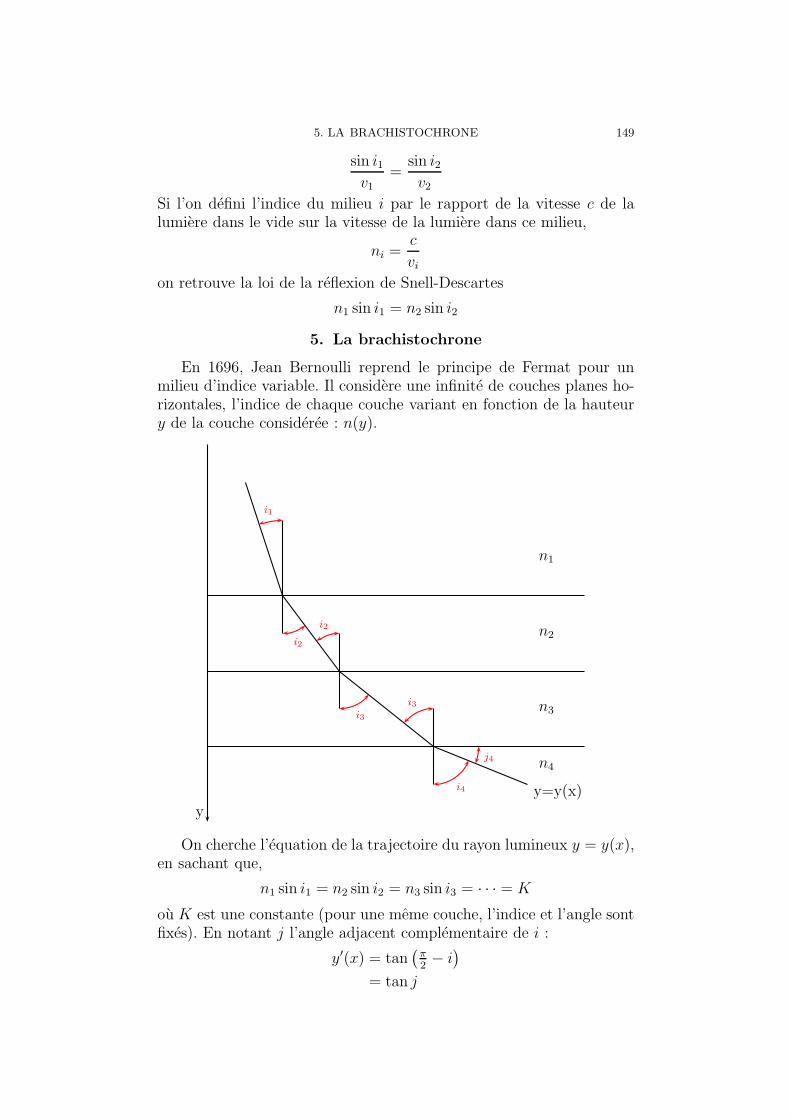
5. LA BRACHISTOCHRONE 149
sin i1v1
=sin i2v2
Si l’on defini l’indice du milieu i par le rapport de la vitesse c de lalumiere dans le vide sur la vitesse de la lumiere dans ce milieu,
ni =c
vion retrouve la loi de la reflexion de Snell-Descartes
n1 sin i1 = n2 sin i2
5. La brachistochrone
En 1696, Jean Bernoulli reprend le principe de Fermat pour unmilieu d’indice variable. Il considere une infinite de couches planes ho-rizontales, l’indice de chaque couche variant en fonction de la hauteury de la couche consideree : n(y).
y
i1
i2
i2
i3
i3
i4
j4
y=y(x)
n1
n2
n3
n4
On cherche l’equation de la trajectoire du rayon lumineux y = y(x),en sachant que,
n1 sin i1 = n2 sin i2 = n3 sin i3 = · · · = K
ou K est une constante (pour une meme couche, l’indice et l’angle sontfixes). En notant j l’angle adjacent complementaire de i :
y′(x) = tan(
π2− i)
= tan j

150 7. PRINCIPE VARIATIONNEL
De meme,
sin i = cos j
=1
√
1 + tan2 j
=1
√
1 + y′2(x)
On obtient l’equation :
n(y)√
1 + y′2(x)= K
avec n(y) = c/v(y). Jean Bernoulli choisit alors la variation de vitessed’un objet en chute libre,
v(y) =√
2gy
qui donne,
c√2gy√
1 + y′2(x)= K
On pose k = c/K, et l’on a,
√
2gy [1 + y′2(x)] = k
2gy[
1 + y′2(x)]
= k2
y[
1 + y′2(x)]
=k2
2g
qui est l’equation d’une cycloıde, elle est resolue dans le chapitre sui-vant.
6. La Brachistochrone par le calcul des variations
La brachistochrone est la courbe joignant deux points, telle qu’uneparticule partant au repos du point le plus haut A(xA, yA) et glissantsans frottements le long de cette courbe sous l’influence d’un champde gravitation uniforme, arrivera au point B(xB , yB) en un temps mi-nimum.
Cherchons l’expression de la duree d’un trajet quelconque entre lespoints A et B. Soit ds un element infinitesimal de cette trajectoire. Lavitesse (instantanee) a pour expression :
v =ds
dt

6. LA BRACHISTOCHRONE PAR LE CALCUL DES VARIATIONS 151
qui donne :
dt =ds
v
∆tAB =
∫ B
A
ds
v
Le carre de l’element infinitesimal de trajectoire a pour expression :
ds2 = dx2 + dy2
Nous pouvons mettre dx ou dy en facteur :
ds2 =
(
1 +dy2
dx2
)
dx2
ds2 =
(
dx2
dy2+ 1
)
dy2
{
ds2 = (1 + y′2) dx2
ds2 = (x′2 + 1) dy2
Lorsque la particule parcourt la trajectoire, l’abscisse curviligne s croıtet ds est positif, x croıt egalement et dx est positif, y decroıt et dy estnegatif :
{
ds =√
1 + y′2 dx
ds = −√x′2 + 1 dy
La conservation de l’energie mecanique s’ecrit :
12mv2 = mg(yA − y)
v =√
2g(yA − y) (84)
En remplacant v et ds nous obtenons les deux expressions suivantespour la duree d’un trajet quelconque :
∆tAB =
∫ xB
xA
√
1 + y′2
2g(yA − y)dx
∆tAB = −∫ yB
yA
√
x′2 + 1
2g(yA − y)dy
Pour ne pas avoir une fonction y(x) et la derivee de sa reciproque x′(y),nous ne conservons que la premiere expression. Posons :
f (y(x), y′(x)) =
√
1 + y′2(x)
2g(yA − y(x))(85)
152 7. PRINCIPE VARIATIONNEL
La duree d’un trajet ∆tAB le long d’une trajectoire quelconque est doncla fonction de fonction, appelee fonctionnelle, suivante :
∆tAB =
∫ xB
xA
f (y(x), y′(x)) dx
La premiere variation de la duree entre la trajectoire de duree minimaleet une trajectoire infiniment proche doit etre nulle,
δ∆tAB = 0
soit, si y(x) est la trajectoire de duree minimale :
δ
∫ xB
xA
f (y(x), y′(x)) dx = 0 (86)
Cette condition dite de duree stationnaire, est necessaire mais n’estpas suffisante pour avoir une duree minimale car elle peut aussi etremaximale ou admettre un point-selle (point d’inflexion horizontal, aussiappele point-col). C’est la comparaison de la duree du trajet solutionavec la duree de trajets voisins qui montrera que c’est effectivement letrajet de duree minimale.
Soit donc y(x) la trajectoire de duree minimale, et soit g(x) uneautre trajectoire entre les memes points de depart et d’arrivee. Com-parons leurs durees :
∆(∆tAB) =
∫ xB
xA
f (g(x), g′(x)) dx−∫ xB
xA
f (y(x), y′(x)) dx
=
∫ xB
xA
f (g(x), g′(x))− f (y(x), y′(x)) dx
Notons ∆y(x) la difference en ordonnees entre les fonctions y(x) etg(x), nulle aux points de depart et d’arrivee car les deux fonctionspassent par les points A et B :
∆(∆tAB) =
∫ xB
xA
f (y(x)+∆y(x), y′(x)+∆y′(x))− f (y(x), y′(x)) dx
On remarque qu’il n’y a pas de variation en x mais seulement en yet en y′ puisqu’on ne varie que la trajectoire. Autrement dit, pourune fonction f (y(x), y′(x), x), fonction explicite de la variable x, nousaurions la meme resolution. Supposons les deux trajectoires infinimentproches :
δ(∆tAB) =
∫ xB
xA
f (y(x) + δy(x), y′(x) + δy′(x))− f (y(x), y′(x)) dx
=
∫ xB
xA
(
∂f
∂yδy +
∂f
∂y′δy′)
dx
=
∫ xB
xA
∂f
∂yδy dx+
∫ xB
xA
∂f
∂y′δy′ dx

6. LA BRACHISTOCHRONE PAR LE CALCUL DES VARIATIONS 153
On integre par partie le second terme en posant u = ∂y′f et v′ = δy′ :
δ(∆tAB) =
∫ xB
xA
∂f
∂yδy dx+
[
∂f
∂y′δy
]xB
xA
−∫ xB
xA
d
dx
(
∂f
∂y′
)
δy dx
La variation δy etant nulle aux extremites de la trajectoire :
δ(∆tAB) =
∫ xB
xA
∂f
∂yδy dx−
∫ xB
xA
d
dx
(
∂f
∂y′
)
δy dx
=
∫ xB
xA
[
∂f
∂y− d
dx
(
∂f
∂y′
)]
δy dx
Ecrivons la condition necessaire :
∀δy,∫ xB
xA
[
∂f
∂y− d
dx
(
∂f
∂y′
)]
δy dx = 0
d
dx
(
∂f
∂y′
)
− ∂f
∂y= 0 (87)
La fonction f (y(x), y(x)) donnee par (85) page 151 ne dependant pasexplicitement de la variable x, nous pouvons integrer l’equation diffe-rentielle une premiere fois :
df(y, y′) =∂f
∂ydy +
∂f
∂y′dy′
df
dx=
∂f
∂yy′ +
∂f
∂y′y′′
En utilisant l’equation de Lagrange (87) pour remplacer le terme ∂yf :
df
dx=
d
dx
(
∂f
∂y′
)
y′ +∂f
∂y′y′′
=d
dx
(
∂f
∂y′y′)
d
dx
(
f − ∂f
∂y′y′)
= 0
f − ∂f
∂y′y′ =
1
k(88)
ou k est une constante par rapport a x. L’equation differentielle (87) estmaintenant du premier ordre en y(x). Dans l’expression (85) page 151de la fonction f , effectuons le changement de variable suivant,
y(x) = yA − y(x)
tel que l’axe ≪ y ≫ ait pour origine yA et soit dirige vers le bas. Nousavons,
y′ = −y′
y′2 = y′2
154 7. PRINCIPE VARIATIONNEL
et :
f (y(x), y′(x)) =
(
1 + y′2
2g(yA − y)
)1/2
f (y(x), y′(x)) =
(
1 + y′2
2gy
)1/2
∂f
∂y′=
1
2
(
1 + y′2
2gy
)−1/2
× 2y′
2gy
=
(
2gy
1 + y′2
)1/2
× y′
2gy
=y′
√
2gy(1 + y′2)
En notant que,
dy = −dy
df(y′, y) = df(y′, y)
∂f
∂ydy +
∂f
∂y′dy′ =
∂f
∂ydy +
∂f
∂y′dy′
∂f
∂y′= − ∂f
∂y′
remplacons dans l’equation differentielle (88) :
√
1 + y′2√2gy
− y′2√
2gy (1 + y′2)=
1
k
1√
2gy (1 + y′2)=
1
k
y(
1 + y′2)
=k2
2g(89)
Un changement de variable permet de trouver les equations parametri-ques y(θ) et x(θ) solutions de cette equation differentielle non lineairede degre deux. Posons :
y′(θ) = cot(
θ2
)
(90)
1 + y′2 = 1 + cot2(
θ2
)
=sin2
(
θ2
)
+ cos2(
θ2
)
sin2(
θ2
)
=[
sin2(
θ2
)]−1

6. LA BRACHISTOCHRONE PAR LE CALCUL DES VARIATIONS 155
En remplacant dans l’equation differentielle (89) on trouve y(θ),
y(θ) =k2
2gsin2
(
θ2
)
(91)
=k2
4g(1− cos θ)
Cherchons l’expression de x(θ) a partir de (90) :
dy
dx= cot
(
θ2
)
dx = tan(
θ2
)
dy
En derivant (91),
dy
dθ=
k2
2g2 sin
(
θ2
)
× 12cos(
θ2
)
dy =k2
2gsin(
θ2
)
cos(
θ2
)
dθ
on a alors :
dx =k2
2gtan(
θ2
)
sin(
θ2
)
cos(
θ2
)
dθ
∫ x
xA
dx =k2
2g
∫ θ
θA
sin2(
θ2
)
dθ
x− xA =k2
4g
∫ θ
0
1− cos θ dθ
x(θ) = xA +k2
4g(θ − sin θ)
et en posant x(θ) = x(θ) − xA, tel que l’axe ≪ x ≫ a pour origine xA,nous obtenons le systeme d’equations :
y(θ) =k2
4g(1− cos θ)
x(θ) =k2
4g(θ − sin θ)
Ceux sont les equations parametriques d’une cycloıde de parametre θdont la concavite est dirigee vers le bas. La solution du probleme estdonc un arc de cycloıde. En revenant aux variables de depart :
y(θ) =k2
4g(cos θ − 1) + yA (92)
x(θ) =k2
4g(θ − sin θ) + xA (93)
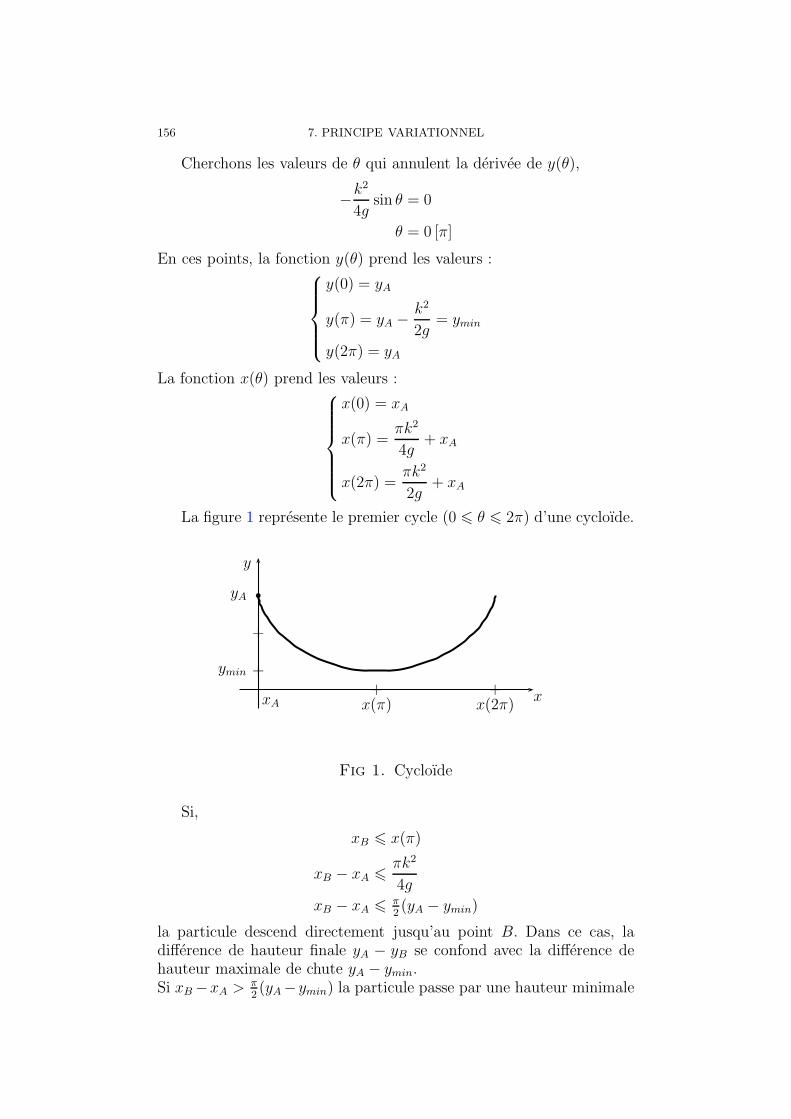
156 7. PRINCIPE VARIATIONNEL
Cherchons les valeurs de θ qui annulent la derivee de y(θ),
−k2
4gsin θ = 0
θ = 0 [π]
En ces points, la fonction y(θ) prend les valeurs :
y(0) = yA
y(π) = yA − k2
2g= ymin
y(2π) = yA
La fonction x(θ) prend les valeurs :
x(0) = xA
x(π) =πk2
4g+ xA
x(2π) =πk2
2g+ xA
La figure 1 represente le premier cycle (0 6 θ 6 2π) d’une cycloıde.
yA b
++
+
y
xx(2π)
ymin
+x(π)xA
Fig 1. Cycloıde
Si,
xB 6 x(π)
xB − xA 6πk2
4g
xB − xA 6 π2(yA − ymin)
la particule descend directement jusqu’au point B. Dans ce cas, ladifference de hauteur finale yA − yB se confond avec la difference dehauteur maximale de chute yA − ymin.Si xB −xA > π
2(yA−ymin) la particule passe par une hauteur minimale

6. LA BRACHISTOCHRONE PAR LE CALCUL DES VARIATIONS 157
puis remonte jusqu’au point B. Dans ce cas, la difference de hauteurfinale yA − yB n’est pas egale a la difference de hauteur maximale dechute yA − ymin.
A b
bB
xB − xA 6 π2(yA − ymin)
y
x
A b
bB
xB − xA > π2(yA − ymin)
y
x
Fig 2. Brachistochrones
Cherchons l’expression de la vitesse en fonction du parametre θ. Enderivant par rapport au temps les relations (92) et (93) :
v2 =
[
−k2
4gsin θ θ
]2
+
[
k2
4g(1− cos θ) θ
]2
=k4θ2
16g2(
sin2 θ + 1− 2 cos θ + cos2 θ)
=k4θ2
8g2(1− cos θ)
v =k2θ
2g√2
√1− cos θ
Cherchons la loi horaire θ(t). A partir du carre de la vitesse, equation(84) page 151 :
v2 = 2gh
= 2g[yA − y(θ)]
k4θ2
8g2(1− cos θ) =
k2
2(1− cos θ)
θ2 =4g2
k2
θ =2g
k∫ θB
θA=0
dθ =2g
k
∫ tB
tA
dt
θB =2g
k∆tAB

158 7. PRINCIPE VARIATIONNEL
Par exemple pour θB = π,
∆tAB =kπ
2g
Or, la hauteur de chute vaut :
k2
2g= yA − y(π)
= H
k =√
2gH
si bien que,
∆tAB =π
2
√
2H
g
= π2T
ou T est le temps de chute libre d’une hauteur H .
7. Principes de moindre action
7.1. Principe de moindre action de Hamilton.
Dans l’equation (87) page 153, en remplacant la fonction f par le La-grangien et la variable x par le temps, nous retrouvons l’equation deLagrange pour la coordonnee y :
d
dt
(
∂L∂y
)
− ∂L∂y
= 0
Par analogie de la relation (86) page 152 qui donne l’equation (87), ondeduit que les equations de Lagrange derive du principe variationnel,
δ
∫ tB
tA
L(y(t), y(t), t) dt = 0
ou le temps n’est pas varie.Pour generaliser le principe variationnel au cas de plusieurs fonc-
tions d’une meme variable, considerons une fonctionnelle de deux fonc-tions supposees lineairement independantes y1(x) et y2(x), de premierevariation nulle :
δ
∫
f (y1(x), y2(x), ∂xy1(x), ∂xy2(x), x) dx = 0 (94)

7. PRINCIPES DE MOINDRE ACTION 159
Appelons J cette fonctionnelle :
δJ =
∫ xB
xA
δf (y1(x), y2(x), ∂xy1(x), ∂xy2(x), x) dx
=
∫ xB
xA
(
∂f
∂y1δy1 +
∂f
∂y2δy2 +
∂f
∂y′1δy′1 +
∂f
∂y′2δy′2
)
dx
=
∫ xB
xA
(
∂f
∂y1δy1 +
∂f
∂y′1δy′1
)
dx+
∫ xB
xA
(
∂f
∂y2δy2 +
∂f
∂y′2δy′2
)
dx
En integrant par partie,
δJ =
∫ xB
xA
[
∂f
∂y1− d
dx
(
∂f
∂y′1
)]
δy1 dx+
∫ xB
xA
[
∂f
∂y2− d
dx
(
∂f
∂y′2
)]
δy2 dx
Les fonctions y1(x) et y2(x) etant lineairement independantes, δJ estnulle quelles que soient δy1 et δy2 si et seulement si f satisfait les e-quations :
d
dx
(
∂f
∂y′1
)
− ∂f
∂y1= 0
d
dx
(
∂f
∂y′2
)
− ∂f
∂y2= 0
(95)
En remplacant la fonction f par le Lagrangien et la variable x par letemps, nous retrouvons les equations de Lagrange pour les coordon-nees y1(t) et y2(t) :
d
dt
(
∂L∂y1
)
− ∂L∂y1
= 0
d
dt
(
∂L∂y2
)
− ∂L∂y2
= 0
La relation (94) donnant les equations (95), on en deduit que les equa-tions de Lagrange derive du principe variationnel,
δ
∫ tB
tA
L(y1(t), y2(t), y1(t), y2(t), t) dt = 0
appele principe de moindre action de Hamilton et ou l’integrale s’ap-pelle action d’Hamilton (l’action est extremale, tres souvent minimale).La generalisation a plus de deux coordonnees est immediate.
7.2. Principe de moindre action de Maupertuis.
Dans le cas particulier ou le Hamiltonien se conserve, nous pouvons

160 7. PRINCIPE VARIATIONNEL
l’ajouter comme constante dans l’integrale temporelle :
δ
∫ tB
tA
L+H dt = 0
δ
∫ tB
tA
n∑
i=1
piqi dt = 0
δ
∫ B
A
n∑
i=1
pidqi = 0
appele principe de moindre action de Maupertuis. Si de plus H = E,alors d’apres (42) page 75 :
δ
∫ tB
tA
n∑
i=1
piqi dt = 0
δ
∫ tB
tA
2T dt = 0
δ
∫ B
A
mv ds = 0
8. Derivation des equations de Hamilton
Nous avons :
δ
∫ tB
tA
L(y(t), y(t), t) dt = δ
∫ tB
tA
∑
j
pj qj −H(pj, qj , t) dt
=
∫ tB
tA
∑
j
(
δpj qj + pjδqj −∂H∂pj
δpj −∂H∂qj
δqj
)
dt
En integrant par partie le second terme du membre de droite :∫ tB
tA
pjδqj dt = [pjδqj ]tBtA
−∫ tB
tA
pjδqj dt
= −∫ tB
tA
pjδqj dt
Si bien que,
δ
∫ tB
tA
L(y(t), y(t), t) dt =∫ tB
tA
∑
j
(
δpj qj − pjδqj −∂H∂pj
δpj −∂H∂qj
δqj
)
dt
=
∫ tB
tA
∑
j
[(
qj −∂H∂pj
)
δpj −(
pj +∂H∂qj
)
δqj
]
dt
Dans l’espace des phases, les trajectoires variees peuvent avoir des coor-donnees et/ou des impulsions differentes, les variations δqj et δpj sont

8. DERIVATION DES EQUATIONS DE HAMILTON 161
donc independantes. Le principe de Hamilton s’ecrit :∫ tB
tA
∑
j
[(
qj −∂H∂pj
)
δpj −(
pj +∂H∂qj
)
δqj
]
dt = 0
soit :
qj =∂H∂pj
pj = −∂H∂qj

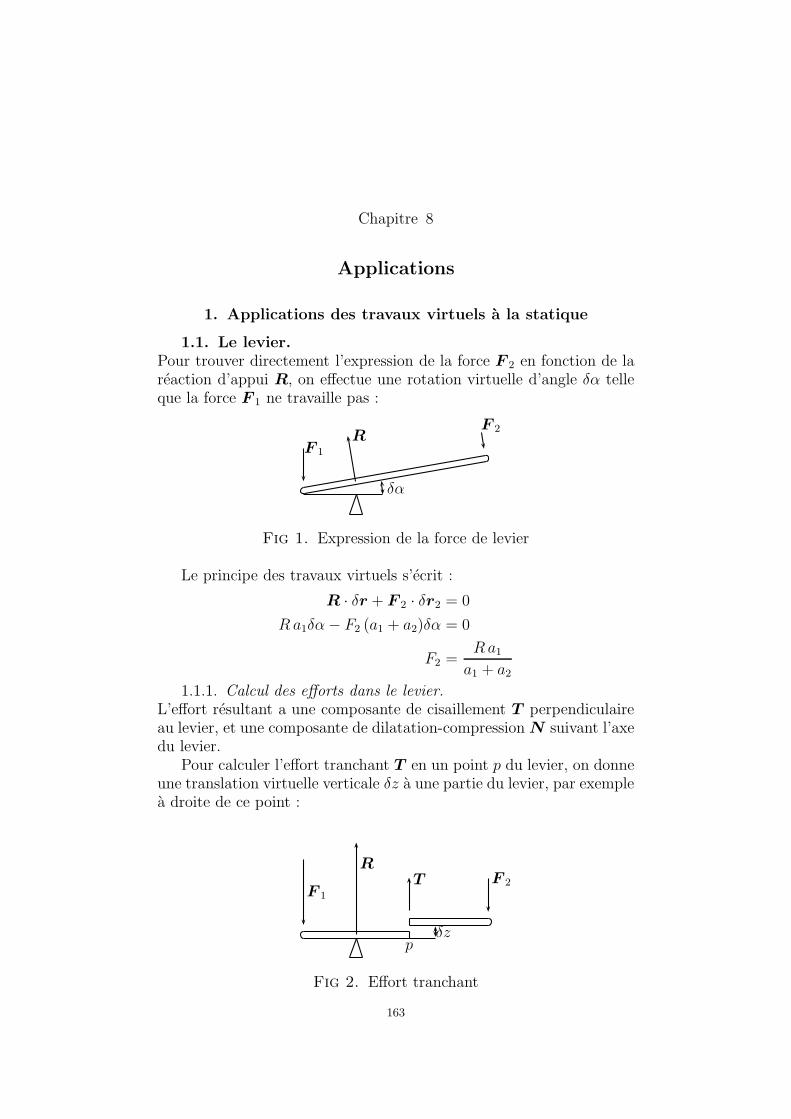
Chapitre 8
Applications
1. Applications des travaux virtuels a la statique
1.1. Le levier.
Pour trouver directement l’expression de la force F 2 en fonction de lareaction d’appui R, on effectue une rotation virtuelle d’angle δα telleque la force F 1 ne travaille pas :
RF 1
F 2
δα
Fig 1. Expression de la force de levier
Le principe des travaux virtuels s’ecrit :
R · δr + F 2 · δr2 = 0
Ra1δα− F2 (a1 + a2)δα = 0
F2 =Ra1
a1 + a21.1.1. Calcul des efforts dans le levier.
L’effort resultant a une composante de cisaillement T perpendiculaireau levier, et une composante de dilatation-compression N suivant l’axedu levier.
Pour calculer l’effort tranchant T en un point p du levier, on donneune translation virtuelle verticale δz a une partie du levier, par exemplea droite de ce point :
R
F 1
F 2T
δzp
Fig 2. Effort tranchant
163
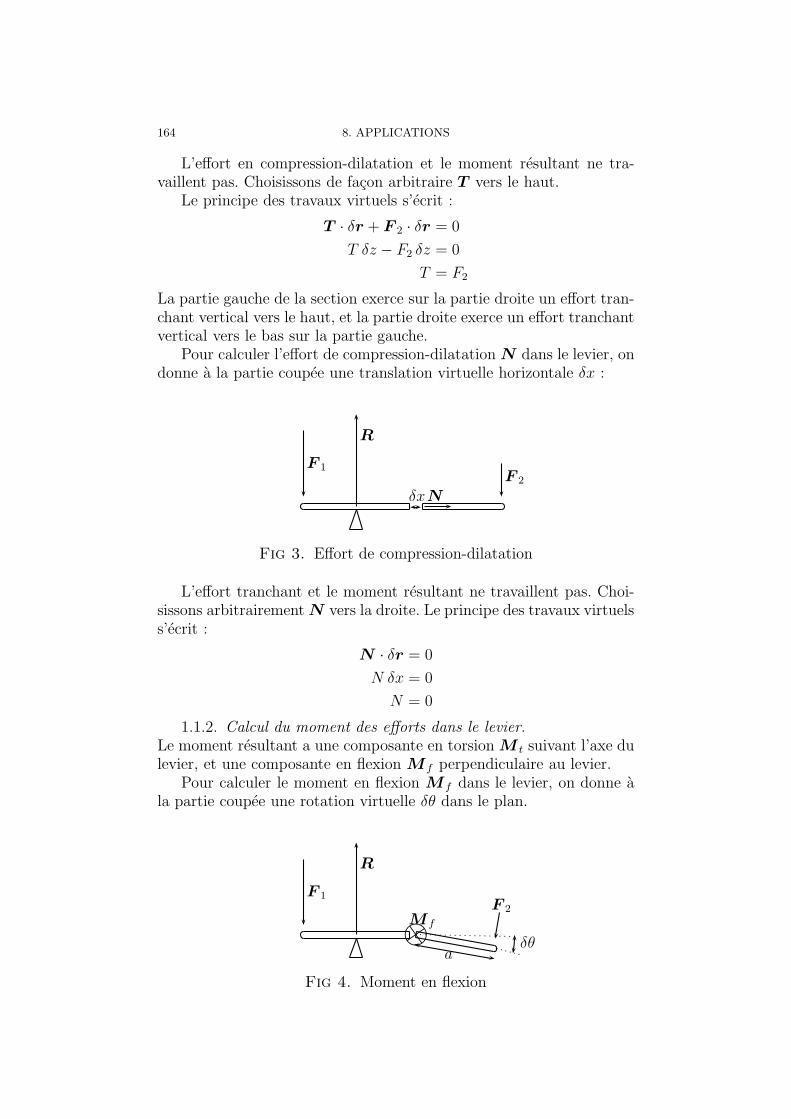
164 8. APPLICATIONS
L’effort en compression-dilatation et le moment resultant ne tra-vaillent pas. Choisissons de facon arbitraire T vers le haut.
Le principe des travaux virtuels s’ecrit :
T · δr + F 2 · δr = 0
T δz − F2 δz = 0
T = F2
La partie gauche de la section exerce sur la partie droite un effort tran-chant vertical vers le haut, et la partie droite exerce un effort tranchantvertical vers le bas sur la partie gauche.
Pour calculer l’effort de compression-dilatation N dans le levier, ondonne a la partie coupee une translation virtuelle horizontale δx :
R
F 1F 2
Nδx
Fig 3. Effort de compression-dilatation
L’effort tranchant et le moment resultant ne travaillent pas. Choi-sissons arbitrairement N vers la droite. Le principe des travaux virtuelss’ecrit :
N · δr = 0
N δx = 0
N = 0
1.1.2. Calcul du moment des efforts dans le levier.Le moment resultant a une composante en torsion M t suivant l’axe dulevier, et une composante en flexion M f perpendiculaire au levier.
Pour calculer le moment en flexion M f dans le levier, on donne ala partie coupee une rotation virtuelle δθ dans le plan.
⊗
R
F 1F 2
M f
δθa
Fig 4. Moment en flexion

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 165
L’effort tranchant, l’effort en compression-dilatation, et le momenten torsion ne travaillent pas. Choisissons arbitrairement le moment enflexion M f dirige vers l’arriere. le deplacement virtuel d’angle δθ sefaisant dans le sens du moment en flexion, nous avons un signe positifdevant Mf δθ. Le principe des travaux virtuels s’ecrit :
+Mf δθ + F 2 · δr2 = 0
Mf δθ + F2 a δθ = 0
Mf = −F2 a
Le moment en flexion exerce par la partie gauche de la section sur lapartie droite est donc dirige vers le lecteur.
Pour calculer le moment en torsion M t dans le levier, on donne ala partie coupee une rotation virtuelle δβ selon l’axe du levier :
R
F 1
F 2
M t δβ
Fig 5. Moment en torsion
L’effort tranchant, l’effort en compression-dilatation, et le momenten flexion ne travaillent pas. Choisissons le moment en torsion M t
dirige vers la droite. le deplacement virtuel d’angle δβ se faisant dans lesens oppose a celui du moment en torsion, nous avons un signe negatif.Le principe des travaux virtuels s’ecrit :
−Mt δβ = 0
Mt = 0
1.2. Le treuil.
Soit un treuil a l’equilibre sous l’action d’un poids P et d’une force F .Pour quelle valeur de la force F y a-t-il equilibre ?
Donnons au treuil une rotation virtuelle d’angle δθ :Le principe des travaux virtuels s’ecrit :
P · δr1 + F · δr2 = 0
−P rδθ + F aδθ = 0
F = Pr
a
Nous ne pouvons pas resoudre ce probleme en appliquant la relation(5) page 23, ∂V/∂θ = 0, car nous n’avons pas l’expression du potentielde la force F .
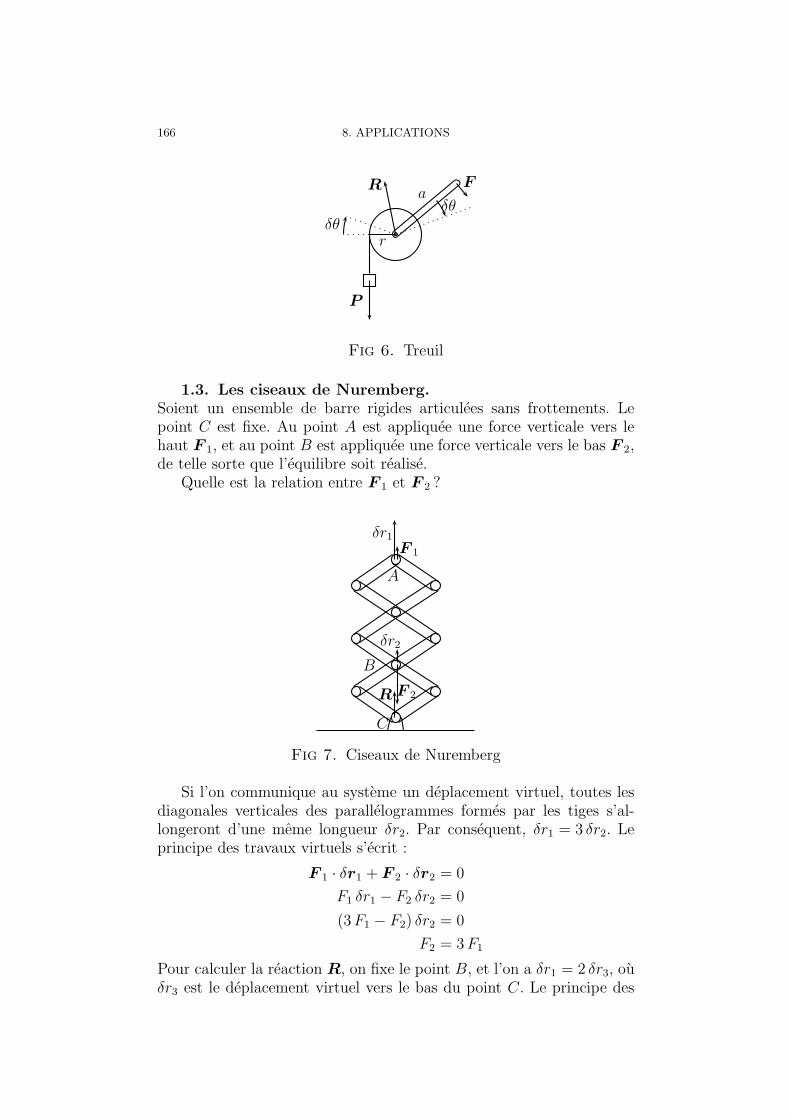
166 8. APPLICATIONS
P
FR
r
aδθ
δθ
Fig 6. Treuil
1.3. Les ciseaux de Nuremberg.
Soient un ensemble de barre rigides articulees sans frottements. Lepoint C est fixe. Au point A est appliquee une force verticale vers lehaut F 1, et au point B est appliquee une force verticale vers le bas F 2,de telle sorte que l’equilibre soit realise.
Quelle est la relation entre F 1 et F 2 ?
R
F 1
F 2
δr1
δr2
A
B
C
Fig 7. Ciseaux de Nuremberg
Si l’on communique au systeme un deplacement virtuel, toutes lesdiagonales verticales des parallelogrammes formes par les tiges s’al-longeront d’une meme longueur δr2. Par consequent, δr1 = 3 δr2. Leprincipe des travaux virtuels s’ecrit :
F 1 · δr1 + F 2 · δr2 = 0
F1 δr1 − F2 δr2 = 0
(3F1 − F2) δr2 = 0
F2 = 3F1
Pour calculer la reaction R, on fixe le point B, et l’on a δr1 = 2 δr3, ouδr3 est le deplacement virtuel vers le bas du point C. Le principe des

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 167
travaux virtuels s’ecrit :
F 1 · δr1 +R · δr3 = 0
F1 δr1 − Rδr3 = 0
(2F1 − R) δr3 = 0
R = 2F1
On verifie que la somme des forces sur la verticale est nulle :
R + F1 − F2 = 2F1 + F1 − 3F1
= 0
1.4. Probleme avec deux degres de liberte.
Trois poids sont relies par des fils passant par trois poulies fixes A,B,C,selon le schema de la figure 8 page 167.
P
2P
2PA
B
C
O
Fig 8. Probleme a deux degres de liberte
Pour quelle disposition des fils y a-t-il equilibre ?Supposons que l’equilibre soit realise et donnons au point O les depla-cements virtuels elementaires δr2 selon OB, et δr3 selon OC.
A
C
B
O
α
β
δr2
δr3
Fig 9. Deux degres de liberte. Vue de dessus.

168 8. APPLICATIONS
On peut ainsi realiser n’importe quel deplacement du point O dansle plan ABC, le deplacement selon OA etant la somme de deux depla-cements selon OB et OC. Le principe des travaux virtuels s’ecrit :
P B · δr2 + P C · δr2 + P A · δr2 + P C · δr3 + P B · δr3 + P A · δr3 = 0
2P · δr2 + 2P · δr2 + P · δr2 + 2P · δr3 + 2P · δr3 + P · δr3 = 0
2P δr2 + 2P δr2 cos(α+ β)− P δr2 cosα
+2P δr3 + 2P δr3 cos(α + β)− P δr3 cos β = 0
soit,
[2 + 2 cos(α + β)− cosα] δs2 + [2 + 2 cos(α + β)− cos β] δr3 = 0
Les deplacements virtuels etant independants, on a :{
2 + 2 cos(α + β)− cosα = 0
2 + 2 cos(α + β)− cos β = 0
{
cosα = cos β
2 + 2 cos(α + β)− cosα = 0
On ne traite pas le cas α = −β qui implique que les poids B et C soientconfondus.
{
α = β
2 + 2(2 cos2 α− 1)− cosα = 0{
α = β
4 cos2 α− cosα = 0{
α = β
cosα = 14
α = β = 75◦31′
1.5. Echelle contre un mur.
Une echelle homogene, de masse m et de longueur l, est appuyee contreun mur. La force de frottement contre le mur est nulle. On cherche lavaleur de la force de frottement f avec le sol pour qu’il y ait equilibre.
Par la methode des travaux virtuels :Pour s’affranchir des forces de reaction RA et RB, nous effectuons undeplacement virtuel compatible avec celles-ci. Pour ce deplacement,represente en pointilles, les forces de liaison ne travaillent pas. Le prin-cipe des travaux virtuels s’ecrit :
P · δrG + f · δrf = 0
mg δyG + f δxA = 0

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 169
A
B
θ
GδyG
PRA
RB
f δxA
δyB
X
Y
0
Fig 10. Echelle contre un mur
Il s’agit maintenant d’exprimer les deplacements virtuels en fonctionde la coordonnee generalisee θ. Nous avons :
xA = l cos θ
yG =l
2sin θ
δxA = −l sin θ δθ
δyG =l
2cos θ δθ
Si bien que,
mgl
2cos θ δθ − f l sin θ δθ = 0
mg
2cos θ − f sin θ = 0
f =mg
2cot θ
Pour calculer la force de reaction RA, il faut choisir un deplacementvirtuel qui la fasse travailler et compatible avec la liaison en B.
L’echelle tourne autour de B d’un angle δα, le deplacement virtuelest donc perpendiculaire a l’echelle :
Le principe des travaux virtuels s’ecrit :
P · δrG +RA · δrRA+ f · δrf = 0
−mgl
2cos θ δα +RAl cos θ δα− fl sin θ δα = 0
−mg
2cos θ +RA cos θ − f sin θ = 0
RA =mg
2+ f tan θ
= mg
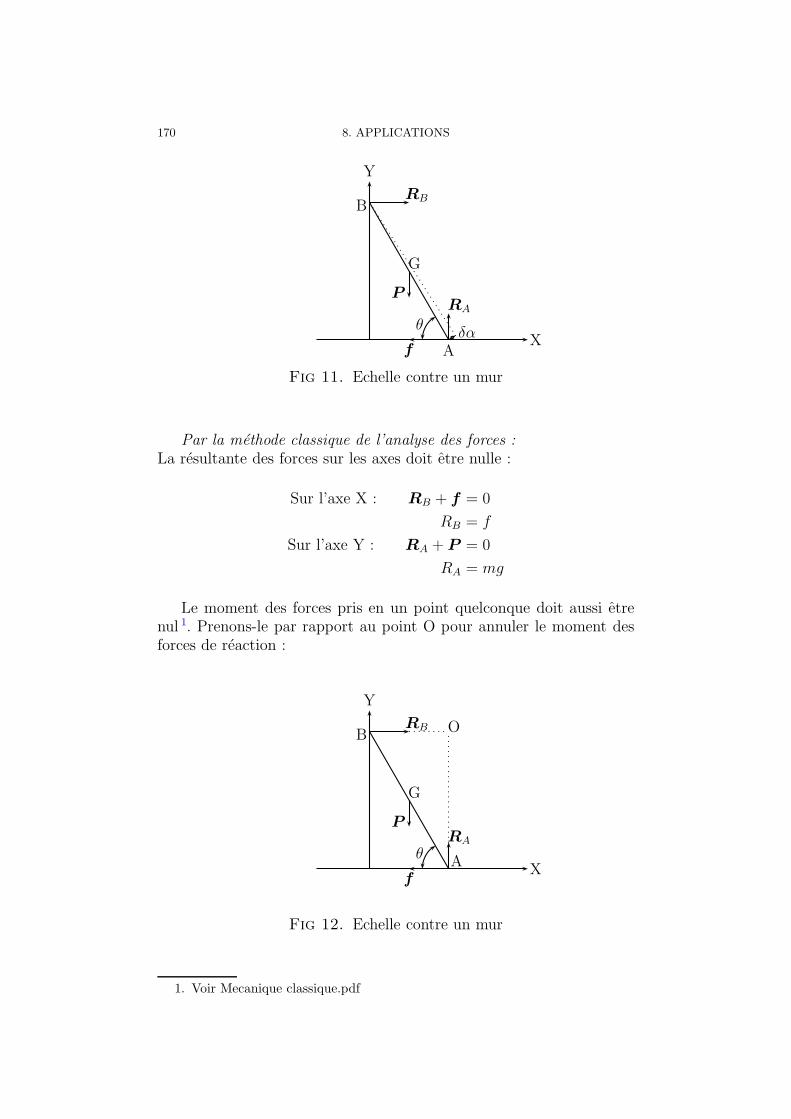
170 8. APPLICATIONS
A
B
θ
G
PRA
RB
fX
Y
δα
Fig 11. Echelle contre un mur
Par la methode classique de l’analyse des forces :La resultante des forces sur les axes doit etre nulle :
Sur l’axe X : RB + f = 0
RB = f
Sur l’axe Y : RA + P = 0
RA = mg
Le moment des forces pris en un point quelconque doit aussi etrenul 1. Prenons-le par rapport au point O pour annuler le moment desforces de reaction :
A
B
θ
G
PRA
RB
fX
Y
O
Fig 12. Echelle contre un mur
1. Voir Mecanique classique.pdf
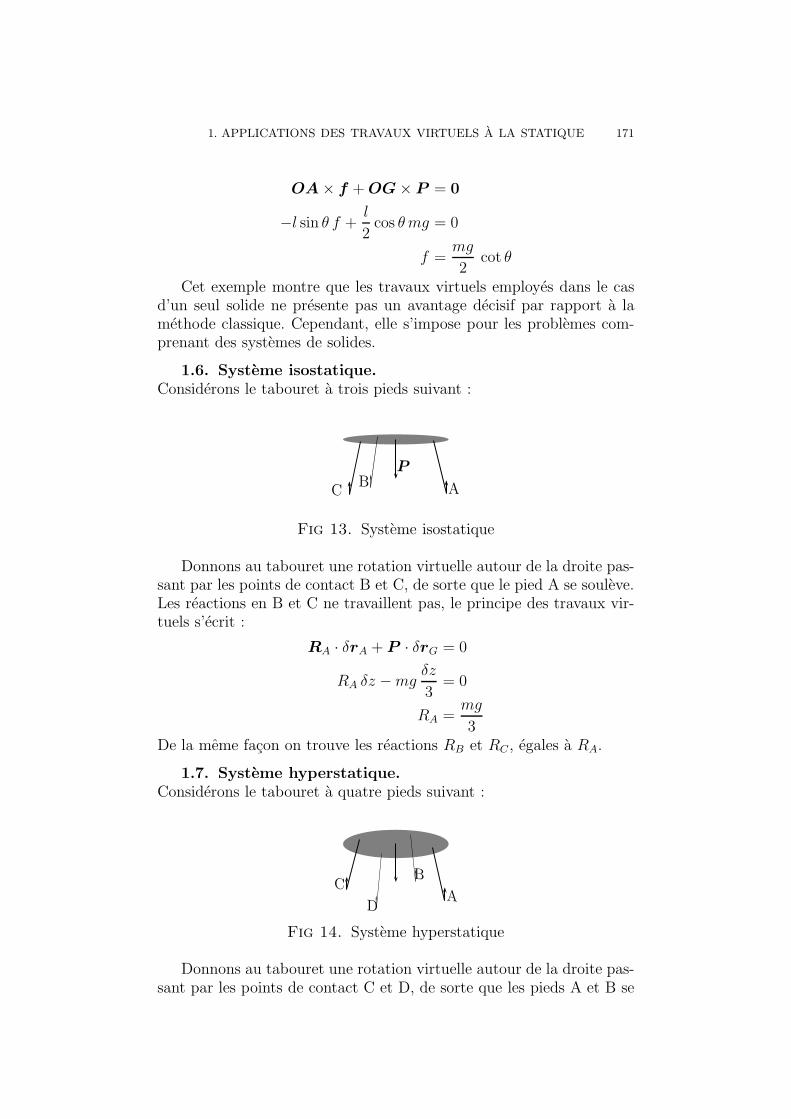
1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 171
OA× f +OG× P = 0
−l sin θ f +l
2cos θmg = 0
f =mg
2cot θ
Cet exemple montre que les travaux virtuels employes dans le casd’un seul solide ne presente pas un avantage decisif par rapport a lamethode classique. Cependant, elle s’impose pour les problemes com-prenant des systemes de solides.
1.6. Systeme isostatique.
Considerons le tabouret a trois pieds suivant :
A
PB
C
Fig 13. Systeme isostatique
Donnons au tabouret une rotation virtuelle autour de la droite pas-sant par les points de contact B et C, de sorte que le pied A se souleve.Les reactions en B et C ne travaillent pas, le principe des travaux vir-tuels s’ecrit :
RA · δrA + P · δrG = 0
RA δz −mgδz
3= 0
RA =mg
3De la meme facon on trouve les reactions RB et RC , egales a RA.
1.7. Systeme hyperstatique.
Considerons le tabouret a quatre pieds suivant :
AC
B
D
Fig 14. Systeme hyperstatique
Donnons au tabouret une rotation virtuelle autour de la droite pas-sant par les points de contact C et D, de sorte que les pieds A et B se

172 8. APPLICATIONS
soulevent. Les reactions en C et D ne travaillent pas, Le principe destravaux virtuels s’ecrit :
RA · δrA +RB · δrB + P · δrG = 0
RA δz +RB δz −mgδz
2= 0
RA +RB =mg
2
De la meme facon on trouve les relations suivantes :
RB +RC =mg
2
RC +RD =mg
2
RD +RA =mg
2
En utilisant ces quatres relations, on a :
RA = RC
RB = RD
On peut trouver ces deux relations directement en considerant des ro-tations selon les diagonales AC et BD. On en deduit :
RA +RB +RC +RD = mg
mais il est impossible de determiner la reaction individuelle de chaquepied, car aucun deplacement virtuel ne permet de faire travailler uneseule des reactions inconnues. Ce systeme est dit hyperstatique : l’e-quilibre peut etre realise avec un pied en moins.
1.8. Systeme articule.
On considere la bielle-manivelle suivante, supposee a l’equilibre :
α βF
f
R
O A
l
B
Fig 15. Systeme articule
Donnons au systeme un deplacement virtuel compatible avec lesliaisons. Le principe des travaux virtuels secrit :
F · δrB + f · δrA = 0
−F Rδα− f δ(OA) = 0

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 173
Il reste a trouver l’expression de δ(OA) :
OA = R cosα + l cos β
δ(OA) =∂OA
∂αδα +
∂OA
∂βδβ
= −R sinαδα− l sin βδβ
si bien que,
F Rδα− f(R sinαδα + l sin βδβ) = 0
(F − f sinα)Rδα− lf sin βδβ = 0
On ne peut pas annuler les coefficients devant les angles α et β carils ne sont pas independants. La relation existant entre les deux estdifferentiee :
R sinα = l sin β
−R cosαδα = −l cos βδβ
R cosαδα− l cos βδβ = 0
et ajoutee au travaux virtuels apres avoir ete multipliee par un multi-plicateur indetermine :
(F − f sinα)Rδα− lf sin βδβ + λ(R cosαδα− l cos βδβ) = 0
(F − f sinα + λ cosα)Rδα− (f sin β + λ cos β)l δβ = 0
On obtient le systeme d’equations suivant :
{
f sin β + λ cos β = 0
F − f sinα + λ cosα = 0
{
λ = −f tan β
F = f sinα− λ cosα
F = f
(
sinα +sin β cosα
cos β
)
= f
(
sinα cos β + sin β cosα
cos β
)
= fsin(α + β)
cos β
1.9. Vitesses et puissances virtuelles.
Nous pouvons resoudre le probleme precedent plus facilement en utili-sant les notions de vitesse virtuelle et de puissance virtuelle.

174 8. APPLICATIONS
α β
R
O A
l
B
I
α + βπ2− β
π2− α
Fig 16. Systeme articule
Soit O l’origine, et soient rA et rB les vecteurs position des pointsA et B. Leurs vitesses virtuelles s’ecrivent :
vA =δrA
dt
vB =δrB
dt
ou t est le temps. La bielle-manivelle est supposee a l’equilibre, lespoints A et B n’ont donc pas de vitesse, c’est en cela qu’elles sontvirtuelles. En multipliant la somme des travaux virtuels par dt, nousobtenons la somme des puissances virtuelles :
F · vB + f · vA = 0
F vB − f vA = 0
F = fvAvB
Soit I le centre instantane de rotation, commun aux points A et B.I est le point d’intersection des droites perpendiculaires aux vitessesvA et vB. Soit ω la vitesse angulaire commune aux points A et B :
vA = ω IA
vB = ω IB
Dans le triangle AIB, soit h la hauteur (non representee) passant parle point I. Nous avons les relations suivantes :
sin(π/2− β) = h/IA
sin(α + β) = h/IB
donc,
IA sin(π/2− β) = IB sin(α+ β)
IA
IB=
sin(α + β)
cos(β)

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 175
et,
F = fIA
IB
= fsin(α + β)
cos β
1.10. Poutre articulee.
Une poutre de masse negligeable, composee de deux barres articuleesen C, soutient une charge P .
Quelle est la pression exercee sur le support en B ?
AB C
D
PRA RB RD
a bρ1 ρ2
Fig 17. Poutre articulee
Communiquons au systeme un deplacement virtuel, pour lequel lesliaisons ne travaillent pas :
A
δsB C
δsD
δsP
Fig 18. Poutre articulee
Le principe des travaux virtuels s’ecrit :
RB · δsB + P · δsP +RD · δsD = 0
RB δsB − P δsP = 0
soit,
RB = PδsPδsB
La relation entre les deplacements virtuels s’ecrit :
δsBa
=δsCρ1
δsPb
=δsCρ2
D’ou,
δsPδsB
=b ρ1a ρ2

176 8. APPLICATIONS
par consequent,
RB = Pb ρ1a ρ2
Pour resoudre ce probleme par la methode de la mecanique de New-ton, il faut etudier l’equilibre de chacun des elements de la poutre. Laseconde barre exerce sur la premiere la force RC1
, et la premiere barreexerce sur la seconde la force RC2
, egale et opposee a RC1.
A D
PRA
RB
RD
RC2
RC1
Fig 19. Poutre articulee
On isole par la pensee la premiere barre. La somme des momentsdes forces exerces au point A sur la premiere barre s’ecrit alors :
aRB − ρ1 RC1= 0
RC1=
a
ρ1RB
La somme des moments des forces exerces au point D sur la secondebarre s’ecrit :
ρ2 RC2− P b = 0
RC2=
b
ρ2P
En se servant du fait que RC1= RC2
, nous obtenons :
RB =ρ1 b
a ρ2P
L’equilibre des forces sur la premiere barre donne :
RA +RB +RC1= 0
RA +RB − RC1= 0
RA = RC1−RB
=b
ρ2P − ρ1 b
a ρ2P
= Pb
ρ2
(
1− ρ1a
)
La force RA est toujours dirigee vers le haut car a < ρ1.
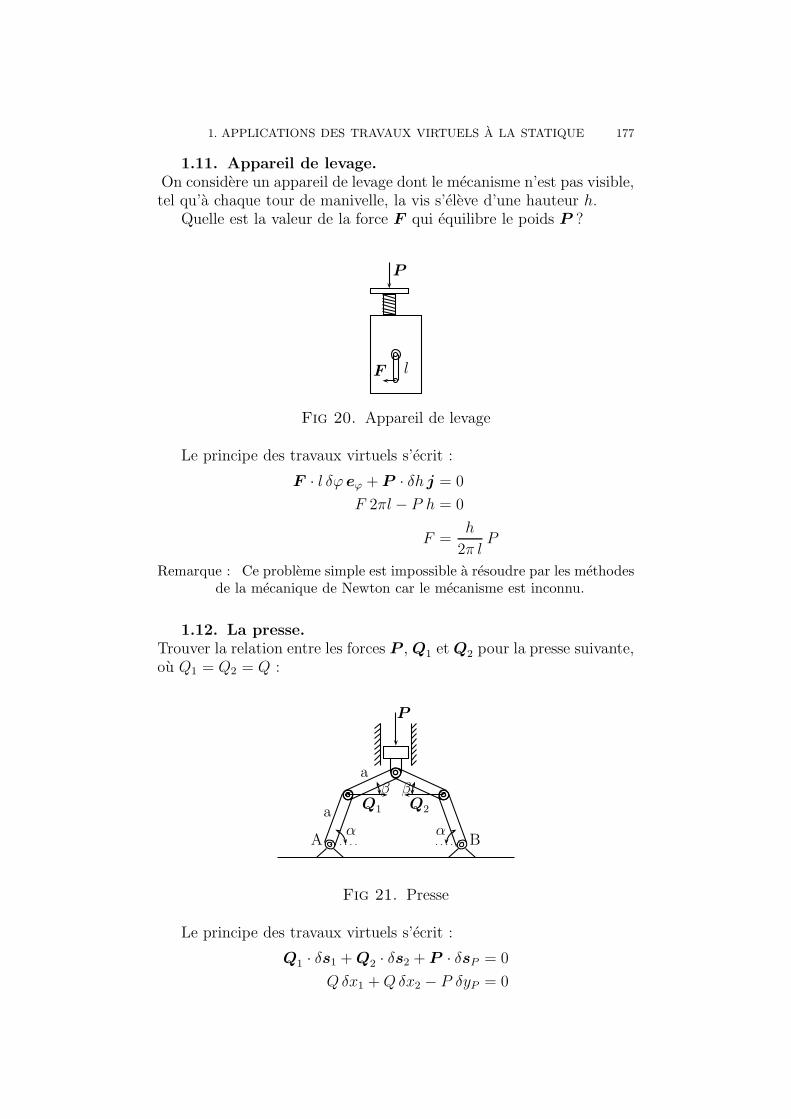
1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 177
1.11. Appareil de levage.
On considere un appareil de levage dont le mecanisme n’est pas visible,tel qu’a chaque tour de manivelle, la vis s’eleve d’une hauteur h.
Quelle est la valeur de la force F qui equilibre le poids P ?
F
P
l
Fig 20. Appareil de levage
Le principe des travaux virtuels s’ecrit :
F · l δϕ eϕ + P · δh j = 0
F 2πl − P h = 0
F =h
2π lP
Remarque : Ce probleme simple est impossible a resoudre par les methodesde la mecanique de Newton car le mecanisme est inconnu.
1.12. La presse.
Trouver la relation entre les forces P , Q1 et Q2 pour la presse suivante,ou Q1 = Q2 = Q :
A
a
a
B
P
Q1 Q2
α α
β β
Fig 21. Presse
Le principe des travaux virtuels s’ecrit :
Q1 · δs1 +Q2 · δs2 + P · δsP = 0
Qδx1 +Qδx2 − P δyP = 0
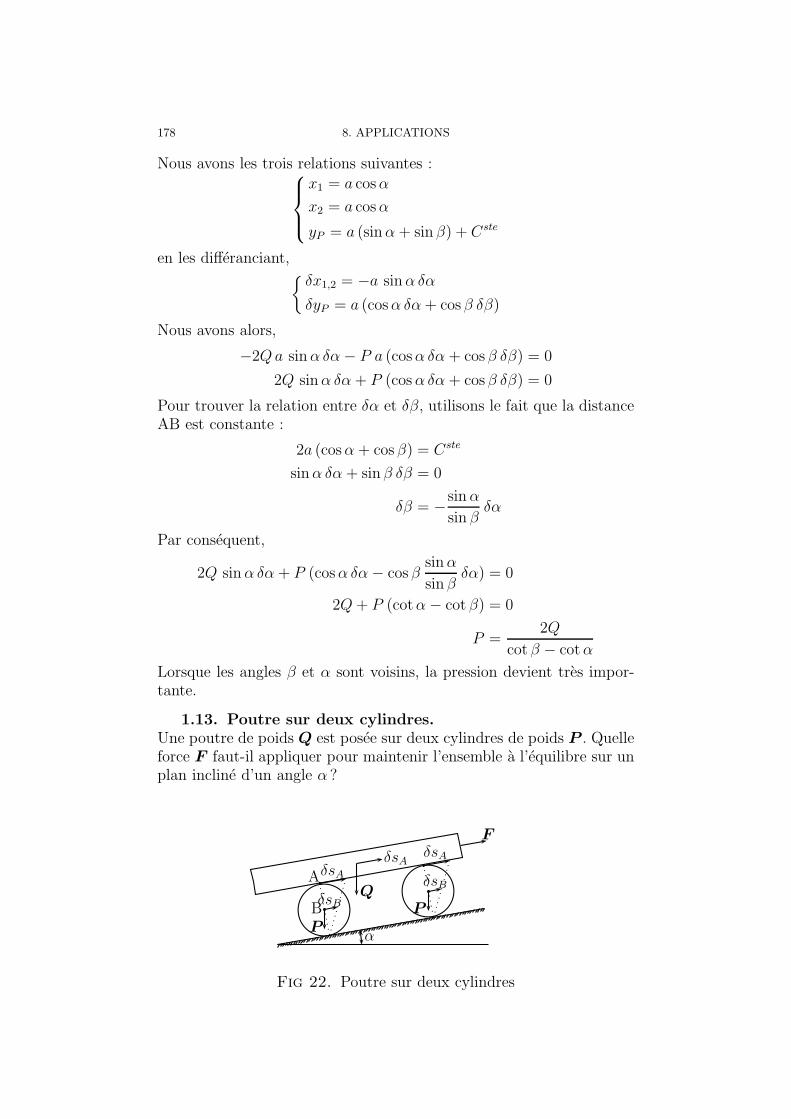
178 8. APPLICATIONS
Nous avons les trois relations suivantes :
x1 = a cosα
x2 = a cosα
yP = a (sinα + sin β) + Cste
en les differanciant,{
δx1,2 = −a sinα δα
δyP = a (cosα δα+ cos β δβ)
Nous avons alors,
−2Qa sinα δα− P a (cosα δα + cos β δβ) = 0
2Q sinα δα+ P (cosα δα + cos β δβ) = 0
Pour trouver la relation entre δα et δβ, utilisons le fait que la distanceAB est constante :
2a (cosα + cos β) = Cste
sinα δα + sin β δβ = 0
δβ = −sinα
sin βδα
Par consequent,
2Q sinα δα + P (cosα δα− cos βsinα
sin βδα) = 0
2Q+ P (cotα− cot β) = 0
P =2Q
cot β − cotα
Lorsque les angles β et α sont voisins, la pression devient tres impor-tante.
1.13. Poutre sur deux cylindres.
Une poutre de poids Q est posee sur deux cylindres de poids P . Quelleforce F faut-il appliquer pour maintenir l’ensemble a l’equilibre sur unplan incline d’un angle α ?
A
BP
PQ
F
δsA
δsAδsA
δsB
δsB
α
Fig 22. Poutre sur deux cylindres
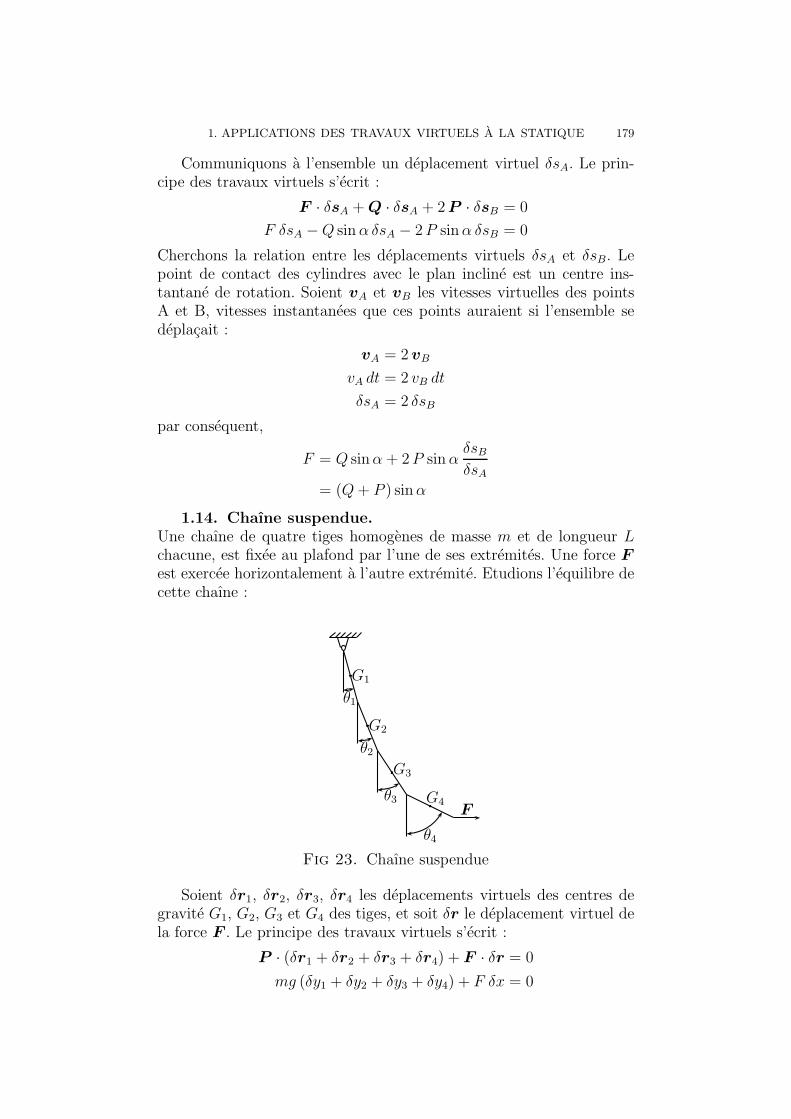
1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 179
Communiquons a l’ensemble un deplacement virtuel δsA. Le prin-cipe des travaux virtuels s’ecrit :
F · δsA +Q · δsA + 2P · δsB = 0
F δsA −Q sinα δsA − 2P sinα δsB = 0
Cherchons la relation entre les deplacements virtuels δsA et δsB. Lepoint de contact des cylindres avec le plan incline est un centre ins-tantane de rotation. Soient vA et vB les vitesses virtuelles des pointsA et B, vitesses instantanees que ces points auraient si l’ensemble sedeplacait :
vA = 2 vB
vA dt = 2 vB dt
δsA = 2 δsB
par consequent,
F = Q sinα + 2P sinαδsBδsA
= (Q+ P ) sinα
1.14. Chaıne suspendue.
Une chaıne de quatre tiges homogenes de masse m et de longueur Lchacune, est fixee au plafond par l’une de ses extremites. Une force F
est exercee horizontalement a l’autre extremite. Etudions l’equilibre decette chaıne :
F
G1
G2
G3
G4
θ1
θ2
θ3
θ4
Fig 23. Chaıne suspendue
Soient δr1, δr2, δr3, δr4 les deplacements virtuels des centres degravite G1, G2, G3 et G4 des tiges, et soit δr le deplacement virtuel dela force F . Le principe des travaux virtuels s’ecrit :
P · (δr1 + δr2 + δr3 + δr4) + F · δr = 0
mg (δy1 + δy2 + δy3 + δy4) + F δx = 0

180 8. APPLICATIONS
Or, nous avons les relations suivantes :
y1 =L
2cos θ1
y2 = L(
cos θ1 +12cos θ2
)
y3 = L(
cos θ1 + cos θ2 +12cos θ3
)
y4 = L(
cos θ1 + cos θ2 + cos θ3 +12cos θ4
)
x = L (sin θ1 + sin θ2 + sin θ3 + sin θ4)
qui donnent les expressions des deplacements virtuels :
δy1 = −L
2sin θ1 δθ1
δy2 = −L (sin θ1 δθ1 +12sin θ2 δθ2)
δy3 = −L (sin θ1 δθ1 + sin θ2 δθ2 +12sin θ3 δθ3)
δy4 = −L (sin θ1 δθ1 + sin θ2 δθ2 + sin θ3 δθ3 +12sin θ4 δθ4)
δx = L (cos θ1 δθ1 + cos θ2 δθ2 + cos θ3 δθ3 + cos θ4 δθ4)
si bien que,
mg
[
−L
2sin θ1 δθ1 − L
(
sin θ1 δθ1 +12sin θ2 δθ2
)
− L(
sin θ1 δθ1 + sin θ2 δθ2 +12sin θ3 δθ3
)
−L(
sin θ1 δθ1 + sin θ2 δθ2 + sin θ3 δθ3 +12sin θ4 δθ4
)]
+ FL (cos θ1 δθ1 + cos θ2 δθ2 + cos θ3 δθ3 + cos θ4 δθ4) = 0
On simplifie par L. Les δθi etant independants, nous avons :
− mg
2sin θ1 − 3mg sin θ1 + F cos θ1 = 0
− mg
2sin θ2 − 2mg sin θ2 + F cos θ2 = 0
− mg
2sin θ3 −mg sin θ3 + F cos θ3 = 0
− mg
2sin θ4 + F cos θ4 = 0
mg sin θ1(
12+ 3)
= F cos θ1
mg sin θ2(
12+ 2)
= F cos θ2
mg sin θ3(
12+ 1)
= F cos θ3mg
2sin θ4 = F cos θ4

1. APPLICATIONS DES TRAVAUX VIRTUELS A LA STATIQUE 181
tan θ1 =2
7
F
mg
tan θ2 =2
5
F
mg
tan θ3 =2
3
F
mg
tan θ4 =2F
mg
1.15. Poulie a ressort.
Une poulie de rayon R et de masse m est suspendue par un fil terminepar un ressort de force de rappel F = kx :
P
C I2h h
R
Fig 24. Poulie a ressort
A l’equilibre, si l’on note 2h l’allongement du ressort, alors le centrede gravite C de la poulie est descendu d’une hauteur h. On imagine undeplacement virtuel δh du centre de gravite, donc un allongement 2δhdu ressort. Le pincipe des travaux virtuels s’ecrit :
P · δh+ F · 2δh = 0
mg δh− k(2h) 2δh = 0
mg − 4kh = 0
h =mg
4k
Toutes les forces derivant d’un potentiel, nous pouvons resoudre leprobleme grace a la relation (5) page 23. Le potentiel est la somme despotentiels :
V = 12k(2h)2 −mgh
= 2kh2 −mgh
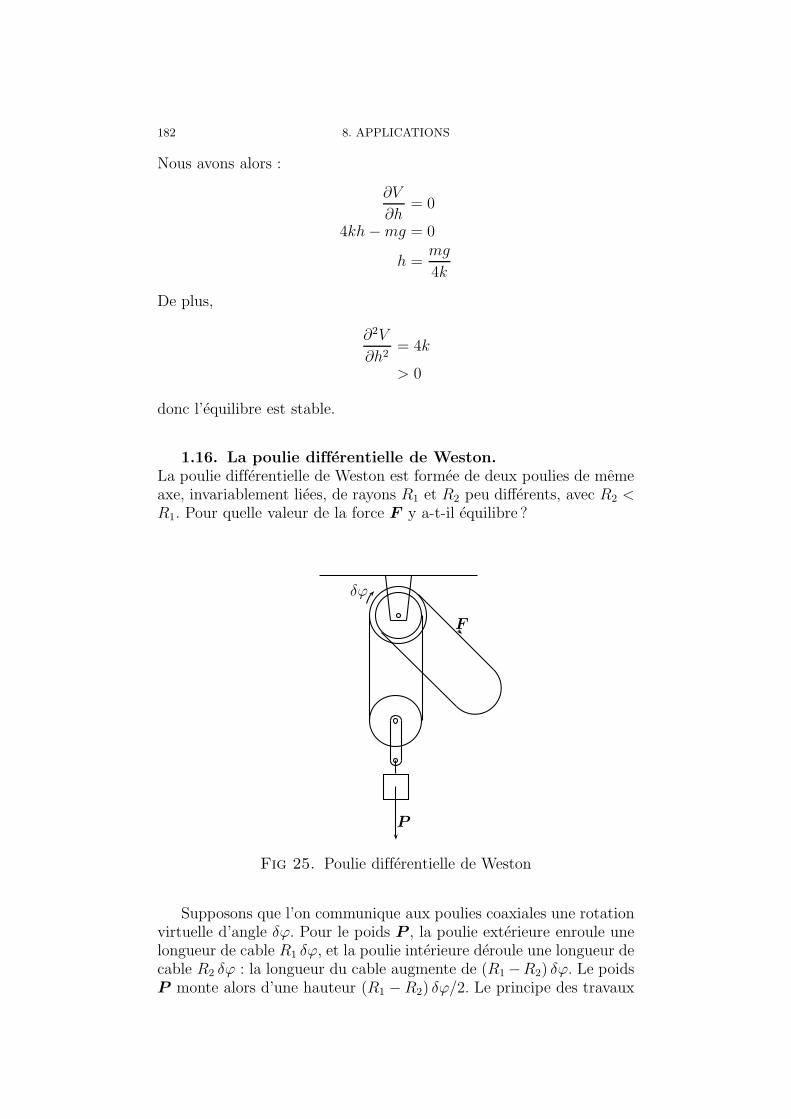
182 8. APPLICATIONS
Nous avons alors :
∂V
∂h= 0
4kh−mg = 0
h =mg
4k
De plus,
∂2V
∂h2= 4k
> 0
donc l’equilibre est stable.
1.16. La poulie differentielle de Weston.
La poulie differentielle de Weston est formee de deux poulies de memeaxe, invariablement liees, de rayons R1 et R2 peu differents, avec R2 <R1. Pour quelle valeur de la force F y a-t-il equilibre ?
P
F
δϕ
Fig 25. Poulie differentielle de Weston
Supposons que l’on communique aux poulies coaxiales une rotationvirtuelle d’angle δϕ. Pour le poids P , la poulie exterieure enroule unelongueur de cable R1 δϕ, et la poulie interieure deroule une longueur decable R2 δϕ : la longueur du cable augmente de (R1 −R2) δϕ. Le poidsP monte alors d’une hauteur (R1 −R2) δϕ/2. Le principe des travaux

2. COMPARAISON DES DIFFERENTES MECANIQUES 183
virtuels s’ecrit :
F · δr1 + P · δr2 = 0
F R1 δϕ− PR1 −R2
2δϕ = 0
F = PR1 −R2
2R1
2. Comparaison des differentes mecaniques
2.1. Masse sur une trappe.
Une masse m est posee sur une trappe qui s’ouvre d’un angle θ(t) donneen fonction du temps.
Quelle est l’equation de son mouvement ?
oθ(t)
δrdr
R
P
mρ
Fig 26. Masse sur une trappe
Resolution par la mecanique de Lagrange :Le Lagrangien a pour expression :
L ∆= T − V
= 12m(
ρ2 + ρ2θ2)
+mgρ sin θ
Il n’y a qu’une seule coordonnee generalisee, ρ. Le Lagrangien est unefonction explicite du temps par l’intermediaire de θ(t). L’equation deLagrange pour la coordonnee ρ s’ecrit :
d
dt
(
∂L∂ρ
)
− ∂L∂ρ
= 0
d
dt(mρ)−mρθ2 +mg sin θ = 0
ρ− ρθ2 − g sin θ = 0

184 8. APPLICATIONS
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee ρ. Le moment conjugue p de la variable ρ a pour expression :
p∆=
∂L∂ρ
= mρ
relation que l’on inverse,
ρ =p
mLe Hamiltonien s’ecrit :
H ∆= pρ−L
=p2
m− p2
2m− 1
2mρ2θ2 −mgρ sin θ
=p2
2m− 1
2mρ2θ2 −mgρ sin θ
Le Hamiltonien est une fonction explicite du temps par l’intermediairede θ(t) qui n’est pas une coordonnee generalisee, et qui est une fonctionquelconque du temps. Il ne se conserve pas. Les equations de Hamiltons’ecrivent :
p = −∂H∂ρ
ρ =∂H∂p
p = mρθ2 +mg sin θ
ρ =p
mNous pouvons verifier que l’on retrouve l’equation differentielle du se-cond ordre des methodes precedentes :
ρ =p
m
ρ = ρθ2 + g sin θ
L’energie mecanique a pour expression :
E∆= T + V
= 12m(
ρ2 + ρ2θ2)
−mgρ sin θ
L’energie mecanique ne se conserve pas car la liaison rheonome θ(t) estune fonction quelconque du temps.
Le vecteur position de la masse m a pour expression :
r = ρeρ
= ρ cos θ(t) i− ρ sin θ(t) j

2. COMPARAISON DES DIFFERENTES MECANIQUES 185
Il est fonction explicite du temps par l’intermediaire de la fonctionθ(t), c’est pourquoi le Hamiltonien et l’energie mecanique ne sont pasconfondus :
E =p2
2m+ 1
2mρ2θ2 −mgρ sin θ
= H +mρ2θ2
2.2. Double plan incline.
Deux masses m1 et m2 sur un double plan incline sont reliees entre ellespar un fil de longueur constante passant par une poulie. Les masses sedeplacent sans frottements.
Quelle est l’equation de leurs mouvements ?
Resolution par la mecanique de Newton :
α1 α2
P 1 P 2
R1R2
T 1 T 2
X1 X2
Y1 Y2
Fig 27. Double plan incline
Pour chaque masse, la relation fondamentale de la dynamique s’e-crit :
ma = P +R+ T
Pour la masse m1 :
m1x1i1 = P 1 +R1 + T
En projetant sur les axes X1 et Y1, on obtient le systeme,
{
m1x1 = P1 sinα1 − T
R1 = P1 sinα1
De meme, pour la masse m2, en projetant sur les axes X2 et Y2 :
{
m2x2 = P2 sinα2 − T
R2 = P2 sinα2
Avec ces choix d’axes de projection, nous avons,
x2 = −x1
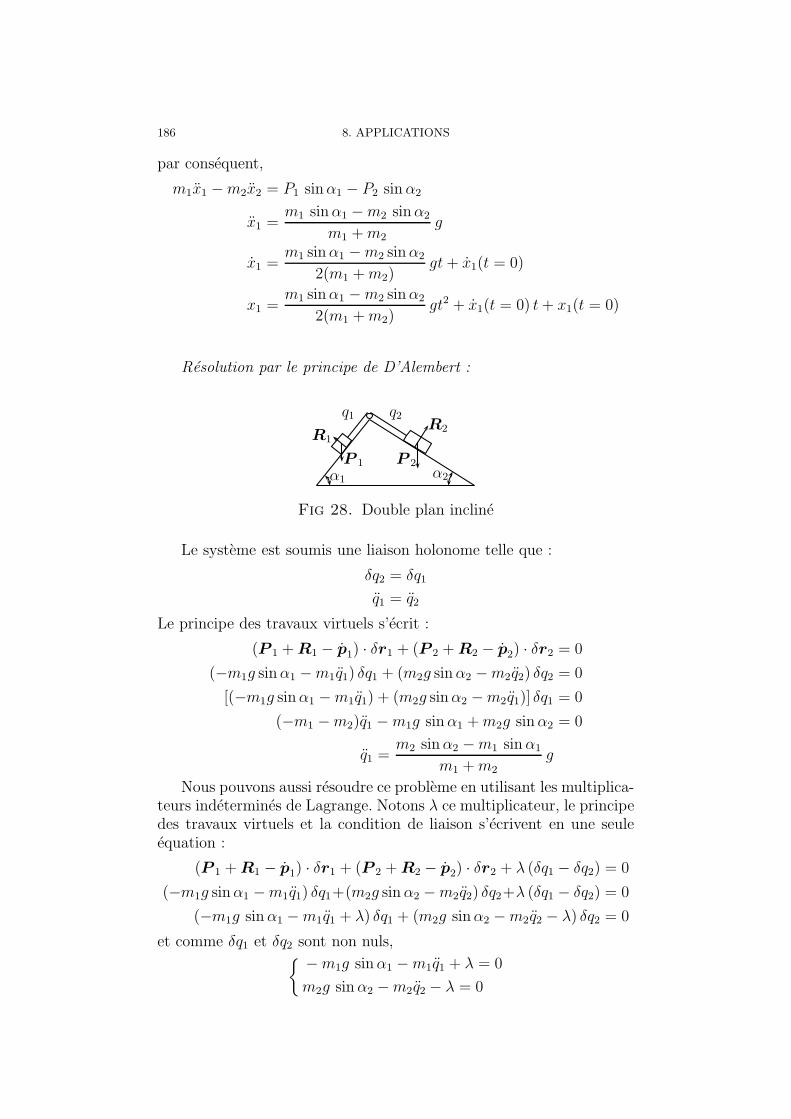
186 8. APPLICATIONS
par consequent,
m1x1 −m2x2 = P1 sinα1 − P2 sinα2
x1 =m1 sinα1 −m2 sinα2
m1 +m2
g
x1 =m1 sinα1 −m2 sinα2
2(m1 +m2)gt+ x1(t = 0)
x1 =m1 sinα1 −m2 sinα2
2(m1 +m2)gt2 + x1(t = 0) t+ x1(t = 0)
Resolution par le principe de D’Alembert :
α1 α2
P 1 P 2
R1R2
q1 q2
Fig 28. Double plan incline
Le systeme est soumis une liaison holonome telle que :
δq2 = δq1
q1 = q2
Le principe des travaux virtuels s’ecrit :
(P 1 +R1 − p1) · δr1 + (P 2 +R2 − p2) · δr2 = 0
(−m1g sinα1 −m1q1) δq1 + (m2g sinα2 −m2q2) δq2 = 0
[(−m1g sinα1 −m1q1) + (m2g sinα2 −m2q1)] δq1 = 0
(−m1 −m2)q1 −m1g sinα1 +m2g sinα2 = 0
q1 =m2 sinα2 −m1 sinα1
m1 +m2
g
Nous pouvons aussi resoudre ce probleme en utilisant les multiplica-teurs indetermines de Lagrange. Notons λ ce multiplicateur, le principedes travaux virtuels et la condition de liaison s’ecrivent en une seuleequation :
(P 1 +R1 − p1) · δr1 + (P 2 +R2 − p2) · δr2 + λ (δq1 − δq2) = 0
(−m1g sinα1 −m1q1) δq1+(m2g sinα2 −m2q2) δq2+λ (δq1 − δq2) = 0
(−m1g sinα1 −m1q1 + λ) δq1 + (m2g sinα2 −m2q2 − λ) δq2 = 0
et comme δq1 et δq2 sont non nuls,{ −m1g sinα1 −m1q1 + λ = 0
m2g sinα2 −m2q2 − λ = 0

2. COMPARAISON DES DIFFERENTES MECANIQUES 187
soit,
m2g sinα2 −m1g sinα2 − (m1 +m2)q1 = 0
q1 =m2 sinα2 −m1 sinα1
m1 +m2
g
Resolution par la mecanique de Lagrange :Le systeme est soumis a une liaison holonome telle que :
q1 = q2
Il n’y a qu’un seul degre de liberte, donc une seule coordonnee genera-lisee. Choisissons par exemple q1 comme coordonnee generalisee.
En prenant le sommet du double plan comme origine des potentiels,le Lagrangien s’ecrit :
L ∆= T − V
= 12m1q
21 +
12m2q
22 − (−m1g q1 sinα1 −m2g q2 sinα2)
= 12(m1 +m2) q
21 + [m1 q1 sinα1 +m2(C − q1) sinα2] g
= 12(m1 +m2) q
21 + (m1 sinα1 −m2 sinα2) gq1
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂q1
)
=∂L∂q1
(m1 +m2)q1 = (m1 sinα1 −m2 sinα2) g
q1 =m1 sinα1 −m2 sinα2
m1 +m2
g
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee q1. Le moment conjugue de la variable q1 a pour expression :
p1∆=
∂L∂q1
= (m1 +m2)q1
relation que l’on inverse,
q1 =p1
m1 +m2
(96)
188 8. APPLICATIONS
Le Hamiltonien s’ecrit :
H ∆= p1q1 − L
=p21
m1 +m2− 1
2(m1 +m2)
p21(m1 +m2)2
− (m1 sinα1 −m2 sinα2) gq1
=p21
2(m1 +m2)− (m1 sinα1 −m2 sinα2) gq1
Les equations de Hamilton s’ecrivent :
p1 = −∂H∂q1
q1 =∂H∂p1
p1 = (m1 sinα1 −m2 sinα2) g
q1 =p1
m1 +m2
p1 = (m1 sinα1 −m2 sinα2) gt+ p1(t = 0)
q1 =m1 sinα1 −m2 sinα2
m1 +m2gt+
p1(t = 0)
m1 +m2
soit, en utilisant la relation (96) page 187,
q1 =m1 sinα1 −m2 sinα2
2(m1 +m2)gt2 + q1(t = 0) t+ q1(t = 0)
Resolution par la mecanique de Hamilton-Jacobi :Le moment conjugue de la variable q1 a pour expression :
p1∆=
∂L∂q1
= mq1
Le Hamiltonien s’ecrit :
H =p21
2(m1 +m2)− (m1 sinα1 −m2 sinα2) gq1
=1
2(m1 +m2)
(
∂S
∂q1
)2
− (m1 sinα1 −m2 sinα2) gq1
L’equation de Hamilton-Jacobi s’ecrit :
∂S(q, α, t)
∂t+H
(
q,∂S
∂q, t
)
= 0
∂S
∂t+
1
2(m1 +m2)
(
∂S
∂q1
)2
− (m1 sinα1 −m2 sinα2) gq1 = 0
La resolution est alors similaire a celle de l’exemple 2.3 page 33.

2. COMPARAISON DES DIFFERENTES MECANIQUES 189
2.3. Masse glissant sans frottements sur un plan incline
non fixe.
Une masses m glisse sans frottements sur un plan incline de masse M ,lui-meme glissant sans frottements sur une surface horizontale.
Quelles sont les equations du mouvement de la masse m et du planincline ?
Resolution par la mecanique de Newton :
X
Y
αM
a
m Rm
A Pm
O
Fig 29. Masse glissant sans frottements sur un plan in-cline non fixe
Soit a le vecteur acceleration de la masse m relative au plan incline,et soit A le vecteur acceleration du plan incline.
Pour le plan incline de masse M , la relation fondamentale de ladynamique s’ecrit :
∑
FM = MA
La force exercee par la masse m sur le plan incline n’est pas son poidstotal Pm, mais sa composante perpendiculaire au plan incline, −Rm.A la limite ou l’angle α tend vers 90 degres, cette composante du poidstend vers zero et la masse m tombe en chute libre.
PM +RM + (−Rm) = MA
En projetant sur les axes X et Y , nous avons :{ −Rm sinα = MAx
−Mg + (Mg +Rm cosα)− Rm cosα = MAy
Ax = −Rm
Msinα
Ay = 0
donc le vecteur acceleration A est horizontal et la composante Ax estnegative. En notant A la norme de A,
A =√
A2x
= −Ax
Donc,
MA = Rm sinα (97)

190 8. APPLICATIONS
L’acceleration de la masse m dans un referentiel galileen est la sommedes accelerations a+A. Pour la masse m, la relation fondamentale dela dynamique s’ecrit :
∑
Fm = m(a+A)
Pm +Rm = m(a+A)
Le vecteur acceleration a est parallele au plan incline. En projetant surles axes X et Y , nous avons :
{
Rm sinα = max +mAx
−mg +Rm cosα = may
donc la composante ax est positive et la composante ay est negative.
{
Rm sin2 α = max sinα−mA sinα
Rm cos2 α = mg cosα +may cosα
En notant a la norme de a,
{
Rm sin2 α = ma cosα sinα−mA sinα
Rm cos2 α = mg cosα−ma sinα cosα
soit,
Rm = mg cosα−mA sinα (98)
On isole a en multipliant par cosα la premiere equation, et par sinαla seconde,
{
Rm sinα cosα = ma cos2 α−mA cosα
Rm cosα sinα = mg sinα−ma sin2 α
soit,
a = A cosα+ g sinα (99)
En combinant les relations (97) et (98),
MA = mg cosα sinα−mA sin2 α
A(m sin2 α +M) = mg cosα sinα
A =cosα sinα
sin2 α +M/mg

2. COMPARAISON DES DIFFERENTES MECANIQUES 191
En combinant les relations (99) page 190 et (97) page 189,
a =cos2 α sinα
sin2 α +M/mg + g sinα
=
(
cos2 α
sin2 α +M/m+ 1
)
g sinα
=m cos2 α +m sin2 α +M
m sin2 α +Mg sinα
=m+M
m sin2 α+Mg sinα
Si l’on suppose la masse du plan incline M tres petite devant celle dusolide m, on a :
a ≈ m
m sin2 αg sinα
≈ g
sinα> g
car 0 < α < π/2. Plus l’angle α est petit, et plus l’acceleration relativedu solide par rapport au plan incline est importante. L’accelerationverticale a sinα a pour expression,
a sinα ≈ g
la masse m tombe en chute libre. De meme, pour le plan incline nousavons :
A ≈ cosα sinα
sin2 αg
≈ g
tanα> g
Plus l’angle α est petit, plus le plan incline est accelere vers la gauche.Resolution par les integrales premieres :
X
Y
αM
m
q2
q1
O
Fig 30. Masse glissant sans frottements sur un plan in-cline non fixe
La seule force est la force de pesanteur qui derive d’un potentiel,donc l’energie mecanique se conserve. Soit v la vitesse de la masse m

192 8. APPLICATIONS
exprimee par rapport au point origine O, elle a pour composantes :
{
vx = q1 + q2 cosα
vy = q2 sinα
et le carre de sa norme vaut,
v2 = v2x + v2y
= q21 + 2q1q2 cosα + q22 cos2 α + q22 sin
2 α
= q21 + 2q1q2 cosα + q22
L’energie cinetique est la somme des energies cinetiques de m et M :
T = 12Mq21 +
12mv2
= 12Mq21 +
12m(
q21 + 2q1q2 cosα + q22)
= 12(M +m)q21 +
12mq22 +mq1q2 cosα
En choisissant l’origine de l’energie potentielle au sommet du plan in-cline, elle a pour expression :
V = −mgq2 sinα
L’energie mecanique s’ecrit :
E = T + V
= 12(M +m)q21 +
12mq22 +mq1q2 cosα−mgq2 sinα
= Cste
En derivant par rapport au temps,
(M +m)q1q1 +mq2q2 +mq1q2 cosα +mq2q1 cosα−mgq2 sinα = 0
Le systeme n’est pas isole puisque dans un champ de gravitation. Ce-pendant, ce champ est selon l’axe des Y , par consequent la quantite demouvement se conserve selon l’axe des X :
(M +m)q1 +mq2 cosα = Cste
(M +m)q1 +mq2 cosα = 0
q1 = − m
M +mq2 cosα
La conservation de l’energie mecanique s’ecrit maintenant :
−mq2q1 cosα +mq2q2 −m2 cos2 α
M +mq2q2 +mq2q1 cosα−mgq2 sinα = 0

2. COMPARAISON DES DIFFERENTES MECANIQUES 193
mq2 −m2 cos2
M +mq2 = mg sinα
q2
(
1− m cos2 α
M +m
)
= g sinα
q2M +m−m(1 − sin2 α)
M +m= g sinα
q2 =M +m
m sin2 α +Mg sinα
et pour la coordonnee q1 :
q1 = − m sinα cosα
m sin2 α +Mg
= − sinα cosα
sin2 α +M/mg
Resolution par le principe de D’Alembert :
X
Y
αM
m
q2
q1Pm
O
Fig 31. Masse glissant sans frottements sur un plan in-cline non fixe
Il y a deux degres de liberte. Choisissons q1 et q2 comme coordon-nees generalisees.
Le principe des travaux virtuels s’ecrit :(
∑
FM+m − pM+m
)
· δq1 +(
∑
Fm − pm
)
· δq2 = 0
Les deplacements virtuels δq1 et δq2 sont independants. Le premierterme concerne l’ensemble M +m. Posons δq1 = δq1i :
{PM +RM+m + Pm − [(M +m)q1 +mq2]} · δq1 = 0
(M +m)q1 +mq2 cosα = 0
Le second terme concerne la masse m seule.Posons δq2 = δq2(cosα i− sinα j) :
[Pm +Rm −m(q1 + q2)] · δq2 = 0
mg sinα−m(q1 cosα + q2) = 0
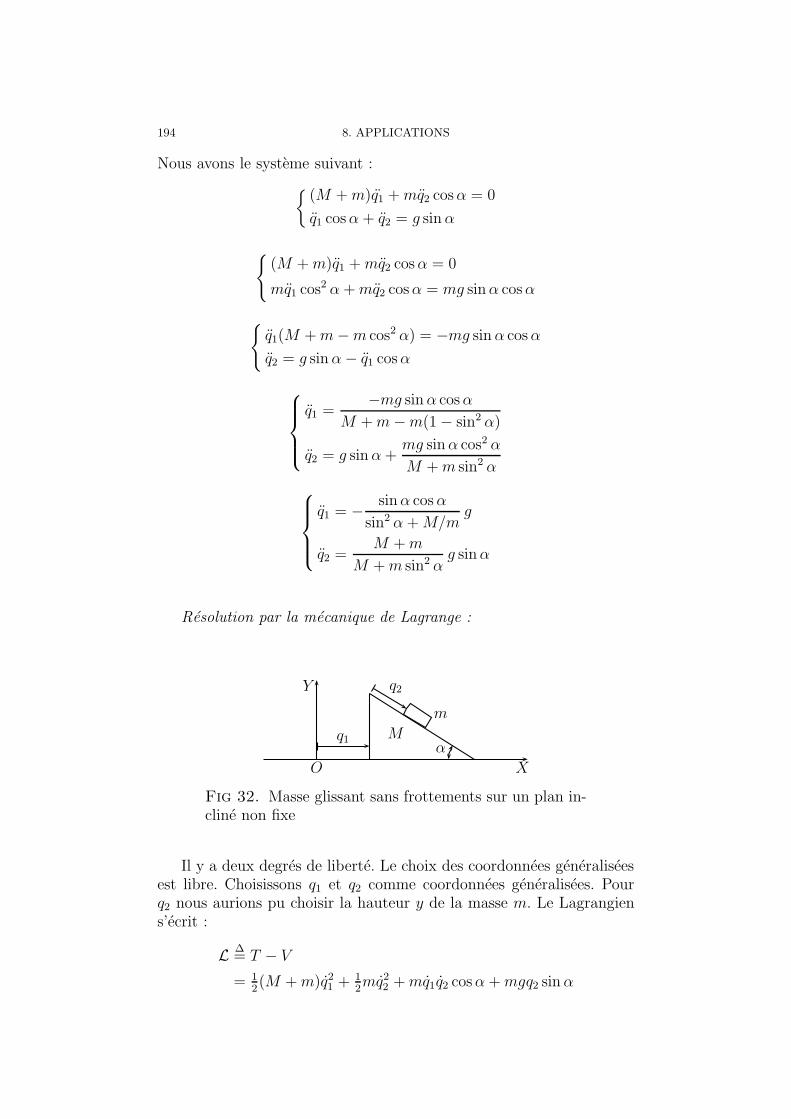
194 8. APPLICATIONS
Nous avons le systeme suivant :
{
(M +m)q1 +mq2 cosα = 0
q1 cosα + q2 = g sinα
{
(M +m)q1 +mq2 cosα = 0
mq1 cos2 α +mq2 cosα = mg sinα cosα
{
q1(M +m−m cos2 α) = −mg sinα cosα
q2 = g sinα− q1 cosα
q1 =−mg sinα cosα
M +m−m(1− sin2 α)
q2 = g sinα+mg sinα cos2 α
M +m sin2 α
q1 = − sinα cosα
sin2 α +M/mg
q2 =M +m
M +m sin2 αg sinα
Resolution par la mecanique de Lagrange :
X
Y
αM
m
q2
q1
O
Fig 32. Masse glissant sans frottements sur un plan in-cline non fixe
Il y a deux degres de liberte. Le choix des coordonnees generaliseesest libre. Choisissons q1 et q2 comme coordonnees generalisees. Pourq2 nous aurions pu choisir la hauteur y de la masse m. Le Lagrangiens’ecrit :
L ∆= T − V
= 12(M +m)q21 +
12mq22 +mq1q2 cosα +mgq2 sinα

2. COMPARAISON DES DIFFERENTES MECANIQUES 195
La coordonnee q1 est cyclique, elle n’apparaıt pas dans le Lagrangien.Nous avons alors :
d
dt
(
∂L∂q1
)
= 0
d
dt[(M +m)q1 +mq2 cosα] = 0
(M +m)q1 +mq2 cosα = Cste
On retrouve l’integrale premiere du mouvement correspondant a laconservation de la quantite de mouvement selon l’axe des X . Les e-quations de Lagrange pour chaque coordonnee generalisee s’ecrivent :
d
dt
(
∂L∂q1
)
=∂L∂q1
d
dt
(
∂L∂q2
)
=∂L∂q2
d
dt[(M +m)q1 +mq2 cosα] = 0
d
dt(mq1 cosα +mq2) = mg sinα
{
(M +m)q1 +mq2 cosα = 0
q1 cosα + q2 = g sinα
{
(M +m)q1 +mq2 cosα = 0
mq1 cos2 α +mq2 cosα = mg sinα cosα
{
q1(M +m−m cos2 α) = −mg sinα cosα
q2 = g sinα− q1 cosα
q1 =−mg sinα cosα
M +m−m(1− sin2 α)
q2 = g sinα+mg sinα cos2 α
M +m sin2 α
q1 = − sinα cosα
sin2 α +M/mg
q2 =M +m
M +m sin2 αg sinα

196 8. APPLICATIONS
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour les vi-tesses generalisees q1 et q2. Les moments conjugues des variables q1 etq2 ont pour expression :
p1∆=
∂L∂q1
p2∆=
∂L∂q2
{
p1 = (M +m)q1 +mq2 cosα
p2 = mq1 cosα +mq2
Inversons ces relations grace a la methode de Cramer :
q1 =mp1 −mp2 cosα
m(M +m)−m2 cos2 α
q2 =(M +m)p2 −mp1 cosα
m(M +m)−m2 cos2 α
Le Hamiltonien s’ecrit :
H ∆= p1q1 + p2q2 − L= p1q1 + p2q2 − 1
2(M +m)q21 − 1
2mq22 −mq1q2 cosα−mgq2 sinα
Inutile d’expliciter davantage le Hamiltonien en fonction de p1 et p1.Les equations de Hamilton pour la coordonnee q1 s’ecrivent :
p1 = −∂H∂q1
q1 =∂H∂p1
p1 = 0
q1 =mp1 −mp2 cosα
m(M +m)−m2 cos2 α
Les equations de Hamilton pour la coordonnee q2 s’ecrivent :
p2 = −∂H∂q2
q2 =∂H∂p2
p2 = mg sinα
q2 =(M +m)p2 −mp1 cosα
m(M +m)−m2 cos2 α
En integrant,{
p1 = Cste1
p2 = mg sinα t+ Cste2

2. COMPARAISON DES DIFFERENTES MECANIQUES 197
q1 =−m2gsinα cosα
m(M +m)−m2 cos2 αt + Cste
q2 =(M +m)mgsinα
m(M +m)−m2 cos2 αt + Cste
q1 = − sinα cosα
sin2 α +M/mgt+ Cste
q2 =M +m
m sin2 α +Mg sinα t + Cste
Resolution par la mecanique de Hamilton-Jacobi :Effectuons la transformation de Legendre du Lagrangien pour les vi-tesses generalisees q1 et q2. Les moments conjugues des variables q1 etq2 ont pour expression :
p1∆=
∂L∂q1
p2∆=
∂L∂q2
{
p1 = (M +m)q1 +mq2 cosα
p2 = mq1 cosα +mq2
Inversons ces relations grace a la methode de Cramer :(
P1
P2
)
=
[
M +m m cosαm cosα m
](
q1q2
)
Notons ∆ le determinant de la matrice,
q1 =1
∆
∣
∣
∣
∣
p1 m cosαp2 m
∣
∣
∣
∣
q2 =1
∆
∣
∣
∣
∣
M +m p1m cosα p2
∣
∣
∣
∣
q1 =mp1 −mp2 cosα
m(M +m)−m2 cos2α
q2 =(M +m)p2 −mp1 cosα
m(M +m)−m2 cos2α
Le Hamiltonien s’ecrit :
H ∆= p1q1 + p2q2 − L= p1q1 + p2q2 − 1
2(M +m)q21 − 1
2mq22 −mq1q2 cosα−mgq2 sinα

198 8. APPLICATIONS
H =mp21 −mp1p2 cosα
m(M +m)−m2 cos2α+
(M +m)p22 −mp1p2 cosα
m(M +m)−m2 cos2α
− 12(M +m)
[
mp1 −mp2 cosα
m(M +m)−m2 cos2α
]2
− 12m
[
(M +m)p2 −mp1 cosα
m(M +m)−m2 cos2α
]2
− (m2p1 cosα−m2p2 cos2α) [(M +m)p2 −mp1 cosα]
[m(M +m)−m2 cos2α]2
−mgq2 sinα
H =[
m(M +m)−m2 cos2α]−2 {[
mp21 + (M +m)p22 − 2mp1p2 cosα]
[
m (M+m)−m2 cos2α]
− 12(M+m)m2p21 − 1
2(M+m)m2p22 cos
2α
+ (M +m)m2p1p2 cosα− 12(M +m)2mp22 − 1
2m3p21 cos
2α
+ (M +m)m2p1p2 cosα− (M +m)m2p1p2 cosα
+ (M +m)m2p22 cos2α +m3p21 cos
2α−m3p1p2 cos3α}
−mgq2 sinα
H =[
m(M +m)−m2 cos2α]−2 [
(M +m)m2p21 + (M +m)2mp22
− 2(M +m)m2p1p2 cosα−m3p21 cos2α− (M +m)m2p22 cos
2α
+ 2m3p1p2 cos3α− 1
2(M +m)m2p21 +
12(M +m)m2p22 cos
2α
+ (M +m)m2p1p2 cosα− 12(M +m)2mp22 +
12m3p21 cos
2α
+ −m3p1p2 cos3α]
−mgq2 sinα
H =[
m(M +m)−m2 cos2α]−2 [1
2(M +m)m2p21 +
12(M +m)2mp22
− (M +m)m2p1p2 cosα− 12m3p21 cos
2α− 12(M +m)m2p22 cos
2α
+m3p1p2 cos3α]
−mgq2 sinα
H =mp21
2 [m(M +m)−m2 cos2α]+
(M +m)p222 [m(M +m)−m2 cos2α]
− mp1p2 cosα
m(M +m)−m2 cos2α−mgq2 sinα
=mp21 + (M +m)p22 − 2mp1p2 cosα
2[
mM +m2 −m2(
1− sin2α)] −mgq2 sinα
=mp21 + (M +m)p22 − 2mp1p2 cosα
2m(
m sin2α +M) −mgq2 sinα

2. COMPARAISON DES DIFFERENTES MECANIQUES 199
L’equation de Hamilton-Jacobi s’ecrit :
∂S (q1, q2, α1, α2, t)
∂t+H
(
q1, q2,∂S
∂q1,∂S
∂q2, t
)
= 0
∂tS +m∂q1S
2 + (M +m)∂q2S2 − 2m∂q1S ∂q2S cosα
2m(
m sin2α +M) −mgq2 sinα = 0
La variable temps etant cyclique, on pose :
S (q1, q2, E, α2, t) = −Et + S0 (q1, q2, E, α2)
et l’equation de Hamilton-Jacobi devient :
m∂q1S20 + (M +m)∂q2S
20 − 2m cosα ∂q1S0 ∂q2S0
2m(
m sin2α +M) −mgq2 sinα = E
La variable q1 etant cyclique, p1 = α2, et l’on pose :
S0 (q1, q2, E, α2) = S1 (q2, E, α2) + α2q1
et l’equation de Hamilton-Jacobi devient :
mα22 + (M +m)∂q2S
21 − 2mα2 cosα ∂q2S1
2m(
m sin2α +M) −mgq2 sinα = E
soit,
(M +m)∂q2S21 − 2mα2 cosα ∂q2S1
− 2m2gq2 sinα(
m sin2α+M)
mα22 − 2mE
(
m sin2α +M)
= 0
Polynome du second degre en ∂q2S1, de la forme,
a∂q2S21(q2) + b∂q2S1(q2) + c = 0
avec,
a = M +m
b = −2mα2 cosα
b′ = −mα2 cosα
c = d q2 + e
d = −2m2g sinα(
m sin2α+M)
e = mα22 − 2mE
(
m sin2α +M)
Le discriminant reduit s’ecrit,
∆′ = b′2 − ac
Les racines sont :
∂q2S1 =−b′
a±
√b′2 − ac
a
=−b′
a±√
b′2 − ad q2 − ae
a

200 8. APPLICATIONS
On integre :
S1(q2) =−b′
aq2 ∓
2 (b′2 − ad q2 − ae)3/2
3a2d
Nous avons donc,
S1 =mα2 cosα
M +mq2 ±
1
3(M +m)2m2g sinα(
m sin2α +M)
{
m2α22 cos
2α+ 2(M +m)m2g sinα(
m sin2α +M)
q2
−(M +m)mα22 + 2m(M +m)E
(
m sin2α +M)}3/2
=mα2 cosα
M +mq2 ±
1
3(M +m)2m2g sinα(
m sin2α +M)
{[
2(M +m) (E +mgq2 sinα)− α22
]
m(
m sin2α +M)}3/2
=±√m sin2α +M
3(M +m)2√mg sinα
[
2(M +m)(E +mgq2 sinα)− α22
]3/2
+mα2 cosα
M +mq2
La fonction principale de Hamilton s’ecrit :
S = S1 (q2, E, α2)− Et+ α2q1
= ±√m sin2α +M
3(M +m)2√mg sinα
[
2(M +m) (E +mgq2 sinα)− α22
]3/2
+mα2 cosα
M +mq2 − Et+ α2q1
Avec la relation (64) page 118, nous avons :
β1 =∂S
∂E
= ±
√
(
m sin2α +M)
[2 (M+m)(E+mgq2 sinα)− α22]
(M +m)√mg sinα
− t
Isolons q2,
2(M +m) (E +mgq2 sinα)− α22 =
m (β1 + t)2 [(M +m)g sinα]2
m sin2α +M(100)
mgq2 sinα =1
2(M +m)
{
m (β1 + t)2 [(M +m)g sinα]2 + α22
m sin2α +M
}
− E
q2 =α22 − 2(M +m)E
2(M +m)mg sinα+
(β21 + β1t+ t2) (M +m)g sinα
2(
m sin2α+M)
2. COMPARAISON DES DIFFERENTES MECANIQUES 201
Soit q20 = q2 (t = 0) la condition initiale sur q2,
q20 =α22 − 2(M +m)E
2(M +m)mg sinα+
β21(M +m)g sinα
2(
m sin2α +M)
q2 = q20 +(β1t+ t2) (M +m)g sinα
2(
m sin2α +M)
En derivant par rapport au temps :
q2 =(β1 + 2t) (M +m)g sinα
2(
m sin2α +M)
Soit q20 = q2 (t = 0) la condition initiale sur q2,
q20 =β1(M +m)g sinα
2(
m sin2α +M)
Si bien que,
q2 = q20 + q20t +M +m
2(
m sin2α +M) g sinα t2
Avec la relation (64) page 118, nous avons :
β2 =∂S
∂α2
= ∓ α2
√m sin2α +M
(M +m)2√mg sinα
√
2(M +m) (E +mgq2 sinα)− α22
+m cosα
M +mq2 + q1
Avec la relation (100) :
β2 = ∓ α2
√m sin2α +M
(M +m)2√mg sinα
×√m (β1 + t) (M +m)g sinα√
m sin2α +M
+m cosα
M +mq2 + q1
= ∓α2 (β1 + t)
M +m+
m cosα
M +mq2 + q1
Isolons q1,
q1 = β2 ±α2 (β1 + t)
M +m− m cosα
M +mq2
Soit q10 = q1 (t = 0) la condition initiale sur q1,
q10 = β2 ±α2β1
M +m− m cosα
M +mq20
En derivant par rapport au temps :
q1 = ± α2
M +m− m cosα
M +mq2

202 8. APPLICATIONS
Nous gardons le signe positif pour retrouver p1 = α2 :
q1 =α2
M +m− m cosα
M +mq2
Soit q10 = q1 (t = 0) la condition initiale sur q1,
q10 =α2
M +m− m cosα
M +mq20
par consequent,
q1 = q10 + q10t−cosα sinα
2(
sin2α +M/m) g t2
2.4. Poulies coaxiales.
Soient deux poulies coaxiales, de rayons R1 et R2, supportant les poidsP 1 et P 2.
Quelle est l’equation du mouvement des poids ?
P 1
P 2
T 1T 2
δϕ
R1R2
Fig 33. Poulies coaxiales
Resolution par la mecanique de Newton :On utilise le theoreme du moment cinetique 2.La derivee totale par rapport au temps du moment cinetique d’un sys-teme par rapport a un point o quelconque, est egale a la somme desmoments par rapport au meme point o des forces exterieures appliqueesa ce systeme :
dL0
dt=∑
Γ ext0
L’ensemble des poids et des poulies coaxiales constitue le systeme. Lestensions T 1 6= T 2 sont des forces interieures qui n’interviennent pas.En prenant le centre commun des poulies coaxiales comme point o,
2. Voir Mecanique classique.pdf

2. COMPARAISON DES DIFFERENTES MECANIQUES 203
nous avons :
d
dt(R1 ×m1v1 +R2 ×m2v2) = R1 × P 1 +R2 × P 2
d
dt(R1 ·m1R1ϕ+R2 ·m2R2ϕ) = R1 ·m1g − R2 ·m2g
soit,
ϕ =m1R1 −m2R2
m1R21 +m2R
22
g
ϕ =m1R1 −m2R2
m1R22 +m1R2
2
gt+ ϕ(t = 0)
ϕ =m1R1 −m2R2
2 (m1R22 +m1R2
2)gt2 + ϕ(t = 0) t+ ϕ(t = 0)
Resolution par les integrales premieres :Toutes les forces exterieures derivent d’un potentiel, donc l’energie me-canique se conserve. Elle a pour expression :
E∆= T + V
= 12(m1R
21 +m2R
22)ϕ
2 − (m1R1 −m2R2)gϕ
= Cste
soit,
dE
dt= 0
12(m1R
21 +m2R
22)ϕϕ− (m1R1 −m2R2)gϕ = 0
ϕ =m1R1 −m2R2
m1R21 +m2R2
2
g
Resolution par le principe de D’Alembert :Donnons aux poulies une rotation virtuelle d’angle δϕ. Le principe destravaux virtuels s’ecrit :
(P 1 − p1) · δr1 + (P 2 − p2) · δr2 = 0
(m1g −m1R1ϕ)R1δϕ+ (−m2g −m2R2ϕ)R2δϕ = 0
m1gR1 −m1R21ϕ−m2gR2 −m2R
22ϕ = 0
ϕ(−m2R22 −m1R
21) = m2gR2 −m1gR1
ϕ =m1R1 −m2R2
m1R21 +m2R2
2
g

204 8. APPLICATIONS
Resolution par la mecanique de Lagrange :On choisit le centre des poulies coaxiales pour origine des potentiels :
V = −m1gh1 −m2gh2
= − [m1(C1 +R1ϕ) +m2(C2 − R2ϕ)] g
= −(m1R1 −m2R2)gϕ
Il n’y a qu’une seule coordonnee generalisee, q1 = ϕ. Le Lagrangiens’ecrit :
L ∆= T − V
= 12
(
m1R21 +m2R
22
)
ϕ2 + (m1R1 −m2R2) gϕ
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂ϕ
)
=∂L∂ϕ
(
m1R21 +m2R
22
)
ϕ = (m1R1 −m2R2) g
ϕ =m1R1 −m2R2
m1R21 +m2R2
2
g
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee ϕ. Le moment conjugue de la coordonnee generalisee ϕ apour expression :
p∆=
∂L∂ϕ
= (m1R21 +m2R
22) ϕ
relation que l’on inverse,
ϕ =p
m1R21 +m2R2
2
(101)
Le Hamiltonien a pour expression :
H ∆= pϕ−L
=p2
m1R21 +m2R2
2
− 12
(
m1R21 +m2R
22
)
ϕ2 − (m1R1 −m2R2) gϕ
=p2
2 (m1R21 +m2R2
2)− (m1R1 −m2R2) gϕ
= E

2. COMPARAISON DES DIFFERENTES MECANIQUES 205
Il ne depend pas explicitement du temps, donc il se conserve.Les equations de Hamilton s’ecrivent :
p = −∂H∂ϕ
ϕ =∂H∂p
p = (m1R1 −m2R2) g
ϕ =p
m1R21 +m2R2
2
p = (m1R1 −m2R2) gt+ p(t = 0)
ϕ =m1R1 −m2R2
m1R22 +m1R
22
gt+p(t = 0)
m1R22 +m1R
22
soit, en utilisant la relation (101) page 204,
ϕ =m1R1 −m2R2
2 (m1R22 +m1R
22)
gt2 + ϕ(t = 0) t+ ϕ(t = 0)
Resolution par la mecanique de Hamilton-Jacobi :Le moment conjugue de la variable ϕ a pour expression :
pϕ∆=
∂L∂ϕ
= (m1R21 +m2R
22) ϕ
Le Hamiltonien s’ecrit :
H =p2ϕ
2 (m1R21 +m2R2
2)− (m1R1 −m2R2) gϕ
=1
2 (m1R21 +m2R2
2)
(
∂S
∂ϕ
)2
− (m1R1 −m2R2) gϕ
L’equation de Hamilton-Jacobi s’ecrit :
∂S(q, α, t)
∂t+H
(
q,∂S
∂q, t
)
= 0
∂S
∂t+
1
2 (m1R21 +m2R2
2)
(
∂S
∂ϕ
)2
− (m1R1 −m2R2) gϕ = 0
La resolution est alors similaire a celle de l’exemple 2.3 page 33.
2.5. Pendule simple, plan.
Soit une masse m accrochee a une tige de longueur ρ constante, dansun champ de gravitation −gj, oscillant dans le plan (x, y).
Quelle est l’equation du mouvement de la masse m ?

206 8. APPLICATIONS
Resolution par la mecanique de Newton :
(a) Grace a la relation fondamentale de la dynamique
m
ρθ
P
F
Fig 34. Pendule simple, plan
On note F la force exercee par la tige sur la masse m et Pson poids. L’acceleration en coordonnees polaires est donneepar la relation (7) page 36.
ma = P + F
mρθeθ −mρθ2eρ = −mg sin θ eθ +mg cos θ eρ − Feρ
qui donne le systeme,{
mρθ2 +mg cos θ = F
ρθ + g sin θ = 0
Cette derniere equation differentielle est resolue dans l’exem-ple 3.7 page 61. Pour de petites oscillations, θ(t) est une fonc-tion sinusoıdale du temps :
θ(t) = A sin (ωt+ ϕ0)
avec ω =√
g/ρ. Nous pouvons exprimer les constantes A etϕ0 en fonction des conditions initiales sur la position θ0 et surla vitesse θ0 :
{
θ2 = A2 sin2 (ωt+ ϕ0)
θ2 = A2ω2 cos2 (ωt+ ϕ0)
donne pour l’amplitude A :
A =
√
√
√
√
(
θ
ω
)2
+ θ2

2. COMPARAISON DES DIFFERENTES MECANIQUES 207
ou l’on ne conserve que le signe positif car l’amplitude estpositive. A l’instant initial :
A =
√
√
√
√
(
θ0ω
)2
+ θ20
Pour la phase a l’origine des temps ϕ0, nous avons :
{
θ0 = A sinϕ0
θ0 = Aω cosϕ0
soit :
ϕ0 = arctan
(
ωθ0
θ0
)
La solution s’ecrit :
θ(t) =
√
√
√
√
(
θ0ω
)2
+ θ20 sin
[
ωt+ arctan
(
ωθ0
θ0
)]
(b) Grace au theoreme du moment cinetique
dLo
dt=∑
Γ exto
d
dt(ρ×mv) = ρ× P + ρ× F
d
dt
[
ρ eρ×m(ρ eρ + ρθ eθ)]
= ρ eρ×(−mg sin θ eθ +mg cos θ eρ − Feρ)
d
dt
(
mρ2θ ek
)
= −mgρ sin θ ek
ρθ + g sin θ = 0
(c) Grace aux integrales premieresIl y a n = 1 degre de liberte, donc 2n − 1 = 1 integrale pre-miere. La force de pesanteur est la seule force exterieure, ellederive d’une energie potentielle. L’energie mecanique est doncune integrale premiere qui fournira une equation pour la seulevariable θ. Prenons l’origine de l’energie potentielle de pesan-teur au point de suspension du pendule. La conservation de

208 8. APPLICATIONS
l’energie mecanique s’ecrit :
E∆= T + V
= 12m(
ρ2 + ρ2θ2)
−mgh
= 12mρ2θ2 −mgρ cos θ
= Cste
soit,
dE
dt= 0
mρ2θθ +mgρθ sin θ = 0
ρθ + g sin θ = 0
Resolution par le principe de D’Alembert :Le principe des travaux virtuels s’ecrit :
(P + F − p) · δr = 0
Choisissons un deplacement virtuel pour lequel la force de liaison netravaille pas :
δr = ρδθ eθ
L’acceleration en coordonnees polaires est donnee par la relation (7)page 36.Avec ρ constant, nous avons :
p = ma
= −mρθ2eρ +mρθeθ
donc,(
−mg sin θeθ +mg cos θeρ − Feρ +mρθ2eρ −mρθeθ
)
· ρδθeθ = 0(
−mg sin θ −mρθ)
ρδθ = 0
ρθ + g sin θ = 0
Pour trouver l’expression de la tension F dans la tige, on choisit undeplacement virtuel pour lequel la force de liaison travaille :
δr = δρ eρ
donc,(
−F +mg cos θ +mρθ2)
δρ = 0
mρθ2 +mg cos θ = F

2. COMPARAISON DES DIFFERENTES MECANIQUES 209
Resolution par la mecanique de Lagrange :Le systeme possede deux dimensions x et y, et une contrainte holo-nome :
√
x2 + y2 = ρ
= Cste
donc un seul degre de liberte. On choisit θ comme coordonnee genera-lisee. Le Lagrangien s’ecrit :
L ∆= T − V
= 12mρ2θ2 − (−mgρ cos θ)
= 12mρ2θ2 +mgρ cos θ
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂θ
)
=∂L∂θ
d
dt
(
mρ2θ)
= −mgρ sin θ
ρθ + g sin θ = 0
Remarque : Si l’on ne connait pas l’expression du potentiel V , on calcule laforce generalisee a partir de la definition 3.1 page 40. Par exemple,la force generalisee de pesanteur a pour expression :
Qj =m∑
i=1
P i ·∂ri∂qj
= −mgj · ∂(ρθ)∂θ
eθ
= −mgρ sin θ
puis l’on se sert de la relation (15) page 42 :
∀j = 1, . . . , nd
dt
(
∂T
∂qj
)
− ∂T
∂qj= Qj
d
dt
(
mρ2θ)
= −mgρ sin θ
ρθ + g sin θ = 0
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee θ. Le moment conjugue de la coordonnee generalisee θ apour expression :
p∆=
∂L∂θ
= mρ2θ

210 8. APPLICATIONS
relation que l’on inverse :
θ =p
mρ2
Le Hamiltonien s’ecrit :
H ∆= pθ − L
= mρ2θ2 −(
12mρ2θ2 +mgρ cos θ
)
= 12mρ2θ2 −mgρ cos θ
=p2
2mρ2−mgρ cos θ (102)
= E
Les equations de Hamilton s’ecrivent :
p = −∂H∂θ
θ =∂H∂p
p = −mgρ sin θ
θ =p
mρ2
Nous pouvons verifer que l’on retrouve l’equation differentielle du se-cond ordre obtenue par les methodes precedentes :
θ =p
mρ2
ρθ + g sin θ = 0
Resolution par la mecanique de Hamilton-Jacobi :Le moment conjugue de la variable θ a pour expression :
p∆=
∂L∂θ
= mρ2θ
Le Hamiltonien s’ecrit :
H =p2
2mρ2−mgρ cos θ
=1
2mρ2
(
∂S
∂θ
)2
−mgρ cos θ

2. COMPARAISON DES DIFFERENTES MECANIQUES 211
Pour de petites oscillations cos θ ≈ 1− 12θ2, nous avons :
H =1
2mρ2
(
∂S
∂θ
)2
−mgρ(
1− 12θ2)
=1
2mρ2
(
∂S
∂θ
)2
+mgρ
2θ2
a une constante pres. L’equation de Hamilton-Jacobi s’ecrit :
∂S(θ, α, t)
∂t+H
(
θ,∂S
∂θ, t
)
= 0
∂S
∂t+
1
2mρ2
(
∂S
∂θ
)2
+mgρ
2θ2 = 0
La variable temps etant cyclique, on pose :
S(θ, E, t) = −Et + S0(θ, E)
et l’equation de Hamilton-Jacobi devient :
1
2mρ2
(
dS0
dθ
)2
+mgρ
2θ2 = E
(
dS0
dθ
)2
= 2mρ2(
E − mgρ
2θ2)
dS0
dθ= ±ρ
√
2mE −m2gρθ2
S0 = ±ρ
∫
√
2mE −m2gρθ2 dθ
et la fonction principale de Hamilton a pour expression :
S = −Et± ρ
∫
√
2mE −m2gρθ2 dθ
Avec la relation (64) page 118, nous avons :
β =∂S
∂E
=∂
∂E
(
−Et± ρ
∫
√
2mE −m2gρθ2 dθ
)
En se servant de la resolution de l’equation (76) page 128, avec k =mgρ,
β = −t±√
ρ
garcsin
√
mgρ
2Eθ

212 8. APPLICATIONS
soit, en isolant la coordonnee generalisee θ :
arcsin
√
mgρ
2Eθ = ±
√
g
ρ(t+ β)
θ = ±√
2E
mgρsin
√
g
ρ(t + β)
Resolution en utilisant l’exemple 5.10 page 109 :
H =p2
2mρ2−mgρ cos θ
Pour de petites oscillations cos θ ≈ 1− 12θ2 :
H =p2
2mρ2+
mgρ
2θ2
On pose M = mρ2 et ω =√
g/ρ :
H =p2
2M− 1
2Mω2θ2
=1
2M(p2 −M2ω2θ2)
De la forme de l’equation (61) page 112. La solution est donc :
p(t) =√2ME cos(ωt+ β)
q(t) =1
ω
√
2E
Msin(ωt+ β)
soit,
p(t) = ρ√2mE cos(ωt+ β)
q(t) =
√
2E
mgρsin(ωt+ β)
2.6. Pendule simple a ressort, plan.
Soit un pendule simple, a ressort, de longueur ρ(t) variable. La massemest supposee osciller dans le plan.
Quelle est l’equation de son mouvement ?
m
ρ
P
F
θ
Fig 35. Pendule plan a ressort

2. COMPARAISON DES DIFFERENTES MECANIQUES 213
Resolution par la mecanique de Newton :L’acceleration en coordonnees polaires est donnee par la relation (7)page 36.En utilisant la relation fondamentale de la dynamique,
ma = P + F
m(
ρ− ρθ2)
eρ +m(
ρθ + 2ρθ)
eθ = −mg sin θ eθ +mg cos θ eρ + Feρ
qui donne le systeme,
ρ− ρθ2 − g cos θ =F
m
ρθ + 2ρθ + g sin θ = 0
Si le modele de la force de rappel du ressort est de la forme,
F = −k(ρ− ρ0)eρ
alors,
ρ− ρθ2 − g cos θ = − k
m(ρ− ρ0)
ρθ + 2ρθ + g sin θ = 0
Integrales premieres.Si le modele de la force de rappel du ressort ne derive pas d’une energiepotentielle, l’energie mecanique ne se conserve pas. Ce n’est plus le cassi le modele de force derive d’une energie potentielle. Supposons quele modele de la force de rappel soit de la forme F = −k(ρ− ρ0)eρ quiderive de l’energie potentielle 1
2k(ρ− ρ0)
2 :
E∆= T + V
= 12m(
ρ2 + ρ2θ2)
−mgρ cos θ + 12k(ρ− ρ0)
2
Nous obtenons alors l’equation differentielle :
dE
dt= 0
mρρ+mρρθ2 +mρ2θθ −mgρ cos θ +mgρθ sin θ + kρ(ρ− ρ0) = 0
ρρ+ ρρθ2 + ρ2θθ − gρ cos θ + gρθ sin θ +k
mρ(ρ− ρ0) = 0
Le systeme ayant 2 degres de liberte, il y a 2n− 1 = 3 integrales pre-mieres. Nous avons une equation pour deux inconnues ρ et θ. Il fautune seconde integrale premiere pour resoudre le probleme.

214 8. APPLICATIONS
Resolution par le principe de D’Alembert :Le principe des travaux virtuels s’ecrit :
(P + F − p) · δr = 0
L’acceleration en coordonnees polaires est donnee par la relation (7)page 36. Il y a deux coordonnees generalisees, donc deux deplacementsvirtuels.
[
−mg sin θeθ +mg cos θeρ + Feρ −m(
ρ− ρθ2)
eρ
−m(
ρθ + 2ρθ)
eθ
]
· δρeρ = 0[
−mg sin θeθ +mg cos θeρ + Feρ −m(
ρ− ρθ2)
eρ
−m(
ρθ + 2ρθ)
eθ
]
· ρδθeθ = 0
{
mg cos θ + F −mρ+mρθ2 = 0
−mg sin θ −mρθ − 2mρθ = 0
ρ− ρθ2 − g cos θ =F
m
ρθ + 2ρθ + g sin θ = 0
Si le modele de force est de la forme F = −k(ρ− ρ0)eρ, alors,
ρ− ρθ2 − g cos θ = − k
m(ρ− ρ0)
Resolution par la mecanique de Lagrange :Il y a deux degres de liberte, donc deux coordonnees generalisees, ρet θ. Le Lagrangien s’ecrit :
L ∆= T − V
= 12mρ2 + 1
2mρ2θ2 −
[
−mgρ cos θ + 12k(ρ− ρ0)
2]
= 12mρ2 + 1
2mρ2θ2 +mgρ cos θ − 1
2k(ρ− ρ0)
2
Les equations de Lagrange s’ecrivent :
d
dt
(
∂L∂ρ
)
− ∂L∂ρ
= 0
d
dt
(
∂L∂θ
)
− ∂L∂θ
= 0
d
dt(mρ)−mρθ2 −mg cos θ + k(ρ− ρ0) = 0
d
dt
(
mρ2θ)
+mgρ sin θ = 0

2. COMPARAISON DES DIFFERENTES MECANIQUES 215
ρ− ρθ2 − g cos θ +k
m(ρ− ρ0) = 0
mρ2θ + 2mρρθ +mgρ sin θ = 0
ρ− ρθ2 − g cos θ = − k
m(ρ− ρ0)
ρθ + 2ρθ + g sin θ = 0
Si le modele de la force de rappel du ressort ne derive pas d’un potentiel,on utilise la force generalisee Q dont les composantes sont donnees parla definition 3.1 page 40 :
Qj∆=
m∑
i=1
F i ·∂ri
∂qj
Qρ = Feρ ·∂ρeρ
∂ρ
= F
Qθ = 0
Les equations de Lagrange s’ecrivent :
d
dt
(
∂L∂ρ
)
− ∂L∂ρ
= F
d
dt
(
∂L∂θ
)
− ∂L∂θ
= 0
d
dt(mρ)−mρθ2 −mg cos θ = F
d
dt
(
mρ2θ)
+mgρ sin θ = 0
ρ− ρθ2 − g cos θ =F
m
ρθ + 2ρθ + g sin θ = 0
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour les vi-tesses generalisees ρ et θ. Les moments conjugues des variables ρ et θont pour expression :
pρ∆=
∂L∂ρ
pθ∆=
∂L∂θ
{
pρ = mρ
pθ = mρ2θ

216 8. APPLICATIONS
relations que l’on inverse,
ρ =pρm
θ =pθmρ2
Le Hamiltonien s’ecrit :
H ∆=∑
j
pj qj − L
= mρ2 +mρ2θ2 − 12mρ2 − 1
2mρ2θ2 −mgρ cos θ + 1
2k(ρ− ρ0)
2
= 12mρ2 + 1
2mρ2θ2 −mgρ cos θ + 1
2k(ρ− ρ0)
2
=p2ρ2m
+p2θ
2mρ2−mgρ cos θ + 1
2k(ρ− ρ0)
2
= E
Le Hamiltonien n’est pas une fonction explicite du temps, il se conserve.Les equations de Hamilton pour la variable ρ s’ecrivent :
pρ = −∂H∂ρ
ρ =∂H∂pρ
pρ =p2θmρ3
+mg cos θ − k(ρ− ρ0)
ρ =pρm
{
pρ = mρθ2 +mg cos θ − k(ρ− ρ0)
pρ = mρ
Nous verifions qu’elles redonnent bien l’equation :
ρ− ρθ2 − g cos θ = − k
m(ρ− ρ0)
Les equations de Hamilton pour la variable θ s’ecrivent :
pθ = −∂H∂θ
θ =∂H∂pθ
pθ = −mgρ sin θ
θ =pθmρ2
{
pθ = −mgρ sin θ
pθ = mρ2θ + 2mθρρ

2. COMPARAISON DES DIFFERENTES MECANIQUES 217
Nous verifions qu’elles redonnent bien l’equation :
ρθ + 2θρ+ g sin θ = 0
2.7. Pendule simple, plan, dont le point de suspension se
deplace verticalement.
Soit une masse m accrochee a une tige de longueur ρ constante, os-cillant dans le plan (x, y) et dont le point de suspension se deplaceverticalement selon la fonction h(t).
Quelle est l’equation du mouvement de la masse m ?
h(t)
m
ρ
θ
P
Fig 36. Pendule simple, plan, dont le point de suspen-sion se deplace verticalement
Resolution par la mecanique de Lagrange :Le systeme possede deux dimensions x et y,
{
x = ρ sin θ
y = −h(t)− ρ cos θ
et une liaison holonome rheonome :{
x cos θ = ρ sin θ cos θ
y sin θ = −h(t) sin θ − ρ cos θ sin θ
y sin θ = −h(t) sin θ − x cos θ
y − x cot θ = −h(t)
Il n’y a donc qu’une seule coordonnee generalisee, θ. Le potentiel a pourexpression :
V = −mg(h + ρ cos θ)
La vitesse s’ecrit :{
x = ρθ cos θ
y = ρθ sin θ − h

218 8. APPLICATIONS
L’energie cinetique a pour expression :
T = 12mv2
= 12m(
x2 + y2)
= 12m(
ρ2θ2 cos2 θ + ρ2θ2 sin2 θ − 2hρθ sin θ + h2)
= 12mρ2θ2 + 1
2mh2 −mhρθ sin θ
Le Lagrangien s’ecrit :
L ∆= T − V
= 12mρ2θ2 + 1
2mh2 −mhρθ sin θ +mgh+mgρ cos θ
L’equation de Lagrange s’ecrit :
d
dt
(
∂L∂θ
)
=∂L∂θ
d
dt
(
mρ2θ −mhρ sin θ)
= −mhρθ cos θ −mgρ sin θ
ρθ − h sin θ − hθ cos θ = −hθ cos θ − g sin θ
ρθ + (g − h) sin θ = 0
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour la vitessegeneralisee θ. Le moment conjugue de la coordonnee generalisee θ apour expression :
p∆=
∂L∂θ
= mρ2θ −mhρ sin θ
relation que l’on inverse,
θ =p
mρ2+
h sin θ
ρ
Le Hamiltonien s’ecrit :
H ∆= pθ − L= mρ2θ2 −mhρθ sin θ
−(
12mρ2θ2 + 1
2mh2 −mhρθ sin θ +mgh+mgρ cos θ
)
= 12mρ2θ2 − 1
2mh2 −mgh−mgρ cos θ
=p2
2mρ2+ 1
2mh2 sin2 θ +
ph sin θ
ρ− 1
2mh2 −mgh−mgρ cos θ

2. COMPARAISON DES DIFFERENTES MECANIQUES 219
Le Hamiltonien est un fonction explicite du temps par l’intermediairede h(t) et de h(t), il ne se conserve pas.Les equations de Hamilton s’ecrivent :
p = −∂H∂θ
θ =∂H∂p
p = −mh2 sin θ cos θ − ph cos θ
ρ−mgρ sin θ
θ =p
mρ2+
h sin θ
ρ
p = −mh2 sin θ cos θ − h cos θ
ρ
(
mρ2θ −mhρ sin θ)
−mgρ sin θ
θ =p
mρ2+
h sin θ
ρ+
hθ cos θ
ρ
p = −mρhθ cos θ −mgρ sin θ
θ = − hθ cos θ
ρ− g sin θ
ρ+
h sin θ
ρ+
hθ cos θ
ρ
ρθ + (g − h) sin θ = 0
L’energie mecanique s’ecrit :
E∆= T + V
= 12mρ2θ2 + 1
2mh2 −mhρθ sin θ −mgh−mgρ cos θ
= H +mh2 −mhρθ sin θ
L’energie mecanique est un fonction explicite du temps par l’interme-diaire de h(t), elle ne se conserve pas. Du fait de la liaison rheonome,le Hamiltonien et l’energie mecanique ne sont pas confondus.
2.8. Pendule spherique.
Soit un pendule de masse m et de longueur r pouvant osciller danstoutes les directions.
Quelle est l’equation du mouvement de la masse m ?
Resolution par la mecanique de Lagrange :En coordonnees spherique (r, θ, φ), le vecteur position s’ecrit :
r = r sin θ cosφi + r sin θ sinφj + r cos θk

220 8. APPLICATIONS
ij
k
m
rθ
φ
P
Fig 37. Pendule spherique
et le vecteur vitesse :
v =(
rθ cos θ cosφ− rφ sin θ sinφ)
i
+(
rθ cos θ sin φ+ rφ sin θ cosφ)
j
− rθ sin θ k
si bien que :
v2 = r2θ2 cos2 θ cos2 φ+ r2φ2 sin2 θ sin2 φ− 2r2θφ cos θ cosφ sin θ sin φ
+ r2θ2 cos2 θ sin2 φ+ r2φ2 sin2 θ cos2 φ+ 2r2θφ cos θ sinφ sin θ cos φ
+ r2θ2 sin2 θ
= r2θ2 + r2φ2 sin2 θ
L’energie cinetique s’ecrit :
T = 12mr2
(
θ2 + φ2 sin2 θ)
et l’energie potentielle,
V = −mgr cos θ
Le Lagrangien a pour expression :
L ∆= T − V
= 12mr2
(
θ2 + φ2 sin2 θ)
+mgr cos θ
La coordonnee generalisee φ etant cyclique, son moment conjugue pφest une integrale premiere du mouvement. Les equations de Lagranges’ecrivent :
d
dt
(
∂L∂θ
)
− ∂L∂θ
= 0
d
dt
(
∂L∂φ
)
− ∂L∂φ
= 0

2. COMPARAISON DES DIFFERENTES MECANIQUES 221
d
dt
(
mr2θ)
−mr2φ2 sin θ cos θ +mgr sin θ = 0
d
dt
(
mr2φ sin2 θ)
= 0
{
mr2θ −mr2φ2 sin θ cos θ +mgr sin θ = 0
φ sin2 θ = Cste
Nous obtenons l’equation differentielle du second ordre suivante :
θ = φ2 sin θ cos θ − g sin θ
r
= φ2 sin4 θcos θ
sin3 θ− g sin θ
r
= Cste × cos θ
sin3 θ− g sin θ
r
Resolution par la mecanique de Hamilton :Effectuons la transformation de Legendre du Lagrangien pour les vi-tesses generalisees θ et φ :
pθ =∂L∂θ
pφ =∂L∂φ
{
pθ = mr2θ
pφ = mr2φ sin2 θ
relations que l’on inverse,
θ =pθmr2
φ =pφ
mr2 sin2 θ
Le Hamiltonien s’ecrit :
H ∆=∑
j
pj qj −L
= pθθ + pφφ−[
12mr2
(
θ2 + φ2 sin2 θ)
+mgr cos θ]
=p2θmr2
+p2φ
mr2 sin2 θ− 1
2
p2θmr2
− 1
2
p2φmr2 sin2 θ
−mgr cos θ
=p2θ
2mr2+
p2φ2mr2 sin2 θ
−mgr cos θ
Le Hamiltonien n’est pas une fonction explicite du temps, il se conserve.On retrouve le fait que la coordonnee generalisee φ est cyclique et par
222 8. APPLICATIONS
consequent que pφ est une integrale premiere du mouvement. Deuxequations de Hamilton redonnent la transformation de Legendre :
θ =∂H∂pθ
φ =∂H∂pφ
θ =pθmr2
φ =pφ
mr2 sin2 θ
Les deux autres donnent les equations de la dynamique :
pθ = −∂H∂θ
pφ = −∂H∂φ
pθ =p2φ cos θ
mr2 sin3 θ−mgr sin θ
pφ = 0
Nous en deduisons l’equation differentielle du mouvement :
θ =pθmr2
=p2φ cos θ
m2r4 sin3 θ− g sin θ
r
= Cste × cos θ
sin3 θ− g sin θ
r
Remarque : Les forces derivant toutes d’un potentiel, l’energie mecaniquese conserve :
E∆= T + V
= 12mr2
(
θ2 + φ2 sin2 θ)
−mgr cos θ
=p2θ
2mr2+
p2φ
2mr2 sin2 θ−mgr cos θ
= H
2.9. Pendule plan, double.
Trouver l’equation du mouvement du pendule plan, double, de la figure38 page 223.

2. COMPARAISON DES DIFFERENTES MECANIQUES 223
m1
ρ1
θ1m2
ρ2
θ2
Fig 38. Pendule plan, double
Resolution par la mecanique de Lagrange :Cherchons l’expression du Lagrangien, donc de l’energie cinetique etpotentielle, en fonction des coordonnees generalisees. Il y a deux coor-donnees generalisees, θ1 et θ2, associees aux deux degres de liberte dusysteme. Cela suggere de passer en coordonnees polaires. Le change-ment de coordonnees s’ecrit :
x1 = ρ1 sin θ1
y1 = −ρ1 cos θ1
x2 = ρ1 sin θ1 + ρ2 sin θ2
y2 = −ρ1 cos θ1 − ρ2 cos θ2
En derivant par rapport au temps :
x1 = ρ1θ1 cos θ1
y1 = −ρ1θ1 sin θ1
x2 = ρ1θ1 cos θ1 + ρ2θ2 cos θ2
y2 = ρ1θ1 sin θ1 + ρ2θ2 sin θ2
Les vitesses au carre des masses m1 et m2 s’ecrivent en coordonneescartesiennes :
{
v21 = x21 + y21
v22 = x22 + y22
En coordonnees polaires nous avons :
v21 = ρ21θ21 cos
2 θ1 + ρ21θ21 sin
2 θ1
= ρ21θ21

224 8. APPLICATIONS
et,
v22 = ρ21θ21 cos
2 θ1 + ρ22θ22 cos
2 θ2 + 2ρ1θ1 cos θ1ρ2θ2 cos θ2
+ ρ21θ21 sin
2 θ1 + ρ22θ22 sin
2 θ2 + 2ρ1θ1 sin θ1ρ2θ2 sin θ2
= ρ21θ21 + ρ22θ
22 + 2ρ1θ1ρ2θ2(cos θ1 cos θ2 + sin θ1 sin θ2)
= ρ21θ21 + ρ22θ
22 + 2ρ1ρ2θ1θ2 cos(θ1 − θ2)
Nous en deduisons l’expression de l’energie cinetique :
T = 12m1v
21 +
12m2v
22
= 12m1ρ
21θ
21 +
12m2
[
ρ21θ21 + ρ22θ
22 + 2ρ1ρ2θ1θ2 cos(θ1 − θ2)
]
= 12(m1 +m2)ρ
21θ
21 +
12m2
[
ρ22θ22 + 2ρ1ρ2θ1θ2 cos(θ1 − θ2)
]
On prend le point de suspension du pendule double comme origine despotentiels :
V = m1gy1 +m2gy2
= −m1gρ1 cos θ1 −m2g(ρ1 cos θ1 + ρ2 cos θ2)
= −(m1 +m2)gρ1 cos θ1 −m2gρ2 cos θ2
d’ou le Lagrangien :
L = 12(m1 +m2)ρ
21θ
21 +
12m2
[
ρ22θ22 + 2ρ1ρ2θ1θ2 cos(θ1 − θ2)
]
+ (m1 +m2)gρ1 cos θ1 +m2gρ2 cos θ2
Les equations de Lagrange s’ecrivent :
d
dt
(
∂L∂θ1
)
− ∂L∂θ1
= 0
d
dt
(
∂L∂θ2
)
− ∂L∂θ2
= 0
Or :
∂L∂θ1
= (m1 +m2)ρ21θ1 +m2ρ1ρ2θ2 cos(θ1 − θ2)
∂L∂θ1
= −m2ρ1ρ2θ1θ2 sin(θ1 − θ2)− (m1 +m2)gρ1 sin θ1
∂L∂θ2
= m2ρ22θ2 +m2ρ1ρ2θ1 cos(θ1 − θ2)
∂L∂θ2
= m2ρ1ρ2θ1θ2 sin(θ1 − θ2)−m2gρ2 sin θ2
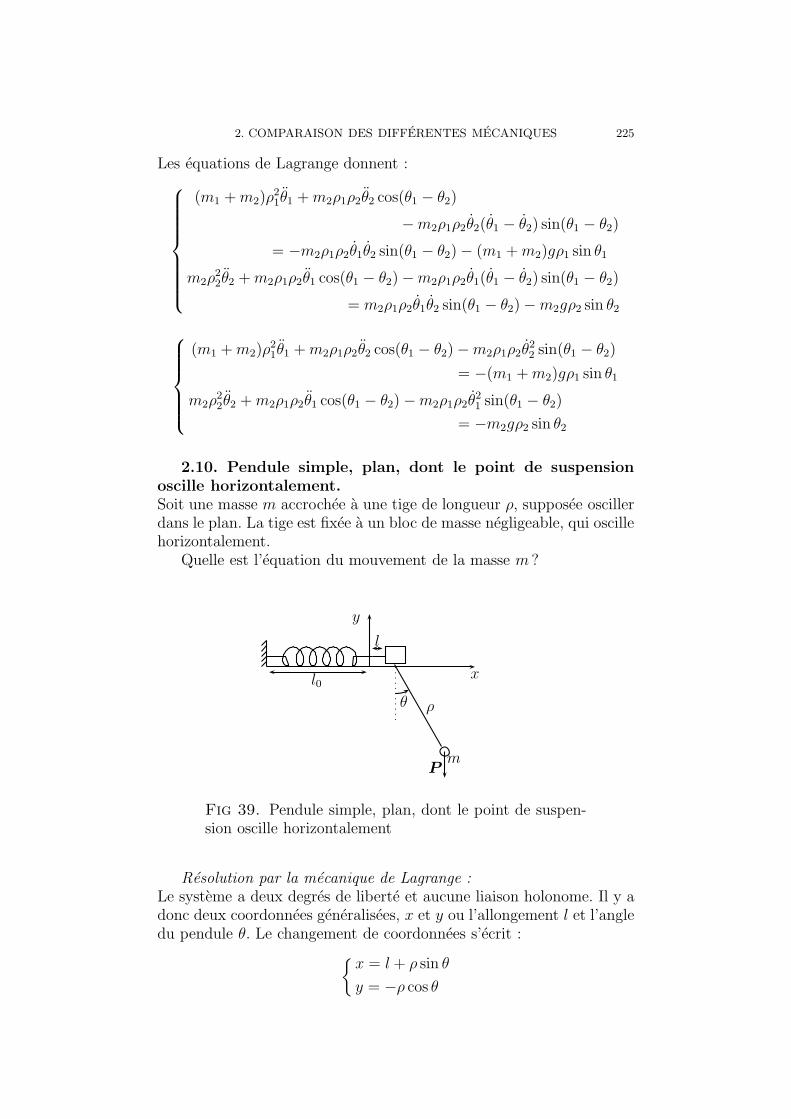
2. COMPARAISON DES DIFFERENTES MECANIQUES 225
Les equations de Lagrange donnent :
(m1 +m2)ρ21θ1 +m2ρ1ρ2θ2 cos(θ1 − θ2)
−m2ρ1ρ2θ2(θ1 − θ2) sin(θ1 − θ2)
= −m2ρ1ρ2θ1θ2 sin(θ1 − θ2)− (m1 +m2)gρ1 sin θ1
m2ρ22θ2 +m2ρ1ρ2θ1 cos(θ1 − θ2)−m2ρ1ρ2θ1(θ1 − θ2) sin(θ1 − θ2)
= m2ρ1ρ2θ1θ2 sin(θ1 − θ2)−m2gρ2 sin θ2
(m1 +m2)ρ21θ1 +m2ρ1ρ2θ2 cos(θ1 − θ2)−m2ρ1ρ2θ
22 sin(θ1 − θ2)
= −(m1 +m2)gρ1 sin θ1
m2ρ22θ2 +m2ρ1ρ2θ1 cos(θ1 − θ2)−m2ρ1ρ2θ
21 sin(θ1 − θ2)
= −m2gρ2 sin θ2
2.10. Pendule simple, plan, dont le point de suspension
oscille horizontalement.
Soit une masse m accrochee a une tige de longueur ρ, supposee oscillerdans le plan. La tige est fixee a un bloc de masse negligeable, qui oscillehorizontalement.
Quelle est l’equation du mouvement de la masse m ?
x
y
m
ρθ
P
l0
l
Fig 39. Pendule simple, plan, dont le point de suspen-sion oscille horizontalement
Resolution par la mecanique de Lagrange :Le systeme a deux degres de liberte et aucune liaison holonome. Il y adonc deux coordonnees generalisees, x et y ou l’allongement l et l’angledu pendule θ. Le changement de coordonnees s’ecrit :
{
x = l + ρ sin θ
y = −ρ cos θ

226 8. APPLICATIONS
et pour la vitesse nous avons :{
vx = l + ρθ cos θ
vy = ρ sin θ
L’energie cinetique s’ecrit :
T = 12m(
v2x + v2y)
= 12m(
l2 + ρ2θ2 cos2 θ + 2ρlθ cos θ + ρ2θ2 sin2 θ)
= 12m(
l2 + ρ2θ2 + 2ρlθ cos θ)
L’energie potentielle s’ecrit :
V = 12kl2 +mgy
= 12kl2 −mgρ cos θ
d’ou le Lagrangien suivant :
L =1
2m(
l2 + ρ2θ2 + 2ρlθ cos θ)
− 12kl2 +mgρ cos θ
Les equations de Lagrange s’ecrivent :
d
dt
(
∂L∂l
)
− ∂L∂l
= 0
d
dt
(
∂L∂θ
)
− ∂L∂θ
= 0
md
dt
(
l + ρθ cos θ)
+ kl = 0
md
dt
(
ρ2θ + ρl cos θ)
+mρlθ sin θ +mgρ sin θ = 0
m(
l + ρθ cos θ − ρθ2 sin θ)
+ kl = 0
mρ2θ +mρl cos θ −mρlθ sin θ +mρlθ sin θ +mρg sin θ = 0
ml + kl = mρ(
θ2 sin θ − θ cos θ)
ρθ + g sin θ = −l cos θ
Lorsque θ = Cste, c’est a dire lorsque θ = θ = 0, la premiere equationdevient l’equation de l’oscillateur harmonique.Lorsque l = Cste, c’est a dire lorsque l = l = 0, la seconde equationdevient l’equation du pendule simple, plan.


















