La cinématique des plaques · Les anomalies magnétiques du plancher océaniques c) A l’échelle...
19
La cinématique des plaques Leçon d’agrégation SV-STU ; Secteur C Proposition de correction par Mathieu Rodriguez Introduction : -Définition des plaques lithosphériques/ tectoniques : -La distribution de la sismicité mondiale montre que l’essentiel de la déformation (~90%) est localisée aux frontières des plaques. Les plaques lithosphériques constituent des ensembles rigides au premier ordre, cependant il existe une part de déformation intraplaque. Les frontières de plaques sont soit localisées, avec de la déformation concentrée sur un système de failles bien défini (ex. faille du Levant), soit diffuse (ex. frontière convergente Inde-Eurasie), avec une déformation distribuée sur plusieurs systèmes de failles. - Différents types de mouvements et de déformation aux limites de plaques (à présenter sur une carte) : extensive (rift, dorsale) ; convergente (subduction, chaîne de montagne) ; décrochante (coulissement de plaques). -La Lithosphère est l’enveloppe solide la plus superficielle de la Terre. La base de la lithosphère, la LVZ, est définie par les études sismologiques autour de 120 km de profondeur en moyenne. Il existe différentes définitions de la lithosphère selon le point de vue considéré (voir corrections de leçons sur la lithosphère continentale et la lithosphère océanique). 2 types de lithosphères : océanique et continentale, aux propriétés rhéologiques différentes. -Les propriétés de la lithosphère (résistance i.e. profil de contrainte différentielle ; présence et profondeur du niveau de décollement), sont variables selon le contexte (température et âge de la lithosphère) et contrôlent le degré de localisation de la déformation aux frontières de plaques. -25 plaques tectoniques principales incorporées dans le dernier modèle cinématique en date (MORVEL, DeMets et al., 2010), représente 97% de la surface de la Terre. Le nombre de plaques total, incluant les microplaques, est de 56 (Argus et al., 2011). Nous n’aborderons pas la complexité cinématique liée aux microplaques dans le cadre de cette leçon.
Transcript of La cinématique des plaques · Les anomalies magnétiques du plancher océaniques c) A l’échelle...

La cinématique des plaques
Leçon d’agrégation SV-STU ; Secteur C
Proposition de correction par Mathieu Rodriguez
Introduction :
-Définition des plaques lithosphériques/ tectoniques :
-La distribution de la sismicité mondiale montre que l’essentiel de la déformation (~90%) est
localisée aux frontières des plaques. Les plaques lithosphériques constituent des ensembles
rigides au premier ordre, cependant il existe une part de déformation intraplaque. Les
frontières de plaques sont soit localisées, avec de la déformation concentrée sur un système de
failles bien défini (ex. faille du Levant), soit diffuse (ex. frontière convergente Inde-Eurasie),
avec une déformation distribuée sur plusieurs systèmes de failles.
- Différents types de mouvements et de déformation aux limites de plaques (à présenter sur
une carte) : extensive (rift, dorsale) ; convergente (subduction, chaîne de montagne) ;
décrochante (coulissement de plaques).
-La Lithosphère est l’enveloppe solide la plus superficielle de la Terre. La base de la
lithosphère, la LVZ, est définie par les études sismologiques autour de 120 km de profondeur
en moyenne. Il existe différentes définitions de la lithosphère selon le point de vue considéré
(voir corrections de leçons sur la lithosphère continentale et la lithosphère océanique). 2 types
de lithosphères : océanique et continentale, aux propriétés rhéologiques différentes.
-Les propriétés de la lithosphère (résistance i.e. profil de contrainte différentielle ; présence et
profondeur du niveau de décollement), sont variables selon le contexte (température et âge de
la lithosphère) et contrôlent le degré de localisation de la déformation aux frontières de
plaques.
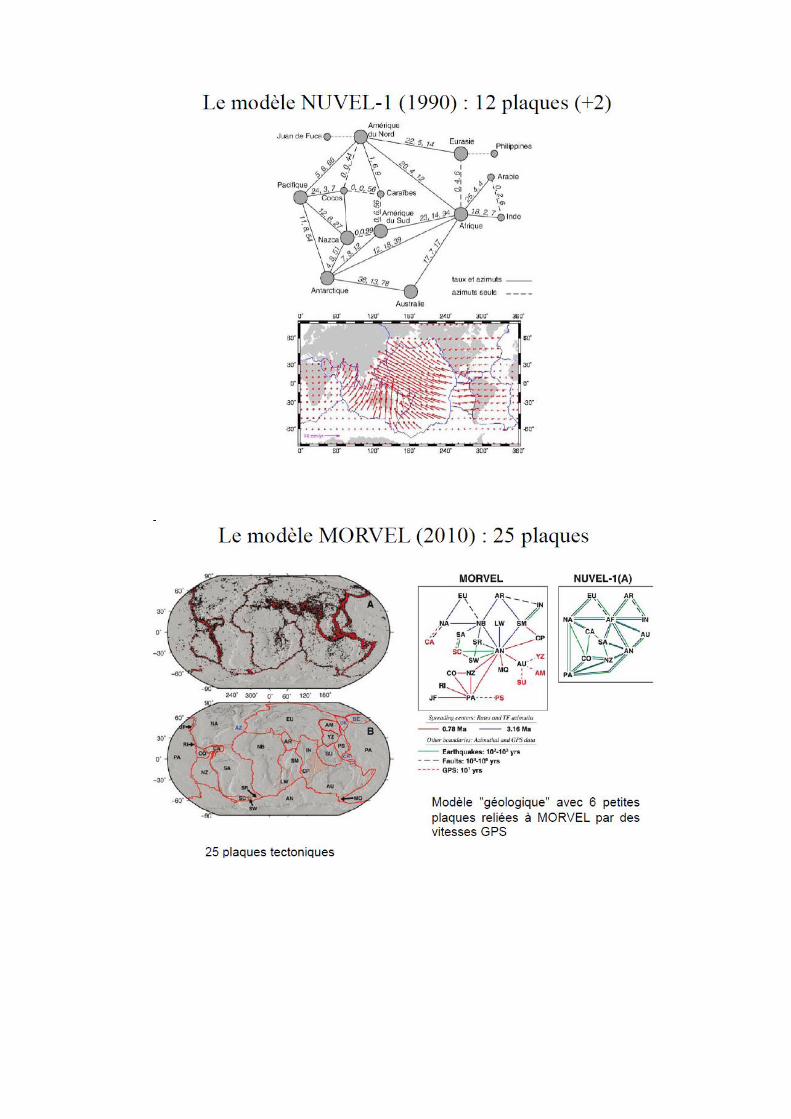
-25 plaques tectoniques principales incorporées dans le dernier modèle cinématique en date
(MORVEL, DeMets et al., 2010), représente 97% de la surface de la Terre. Le nombre de
plaques total, incluant les microplaques, est de 56 (Argus et al., 2011). Nous n’aborderons pas
la complexité cinématique liée aux microplaques dans le cadre de cette leçon.

Les principales plaques tectoniques. Frontières localisées et diffuses.
-La Cinématique des plaques est la discipline des géosciences qui a pour objet la
quantification de la mobilité horizontale des plaques lithosphériques. Le premier modèle
cinématique global a été formulé par X. LePichon en 1968.
-Cependant, la notion de mobilité des plaques lithosphériques a été proposée par Wegener,
dès 1912, sur la base de divers arguments (paléontologie, géographie, assemblage des cratons,
anciens dépôts glaciaires). Dans un premier temps, la théorie de Wegener a été rejetée faute
d’un moteur et d’une quantification convaincante des mouvements des plaques. Wegener
proposait la force d’Eötvos comme moteur de la dérive des continents, mais celle-ci est trop
faible pour expliquer le mouvement des plaques. Wegener avait fait une erreur en estimant le
taux de l’ouverture de l’Atlantique de l’ordre du mètre par an ! alors que le mouvement est de
l’ordre du cm/an en réalité… Les théories des ‘ponts continentaux’, et des ‘géosynclinaux’
persistèrent donc jusqu’au début des années 60 (modèles de Terre fixe).
-Problématique :
-Comment quantifier les mouvements des plaques ?
Dans un premier temps nous verrons comment estimer les mouvements relatifs de plaques
lithosphériques au niveau de différents types de frontières, et à différentes échelles de temps.
Puis nous verrons comment construire un modèle cinématique global, à n plaques.
-Quelles sont les forces motrices de la mobilité des plaques?
Après un bref rappel historique des différents moteurs proposés pour le mouvement des
plaques, nous mettrons en évidence quel est le moteur principal du mouvement des plaques, et
quelles sont les différents types de forces impliquées dans la cinématique.
-Sujet limité à la mobilité horizontale des plaques, nous n’aborderons pas en détail la mobilité
verticale (isostasie, subsidence, etc…).
1) Quantifier la mobilité relative de deux plaques lithosphériques à différentes
échelles de temps
Objectifs de cette partie : Différents outils, différentes méthodes selon l’échelle de temps à
étudier. Avantages et limites de chacune des méthodes, leur complémentarité. Ici on se
limite au mouvement entre 2 plaques.
a) A l’échelle de la décennie : les mesures satellitaires (GPS et VLBI).
-Techniques récentes, développées durant les années 80-90. Objectif : donner la direction
et la vitesse du mouvement ; i.e. établir un vecteur mouvement, à l’échelle de la décennie.
Précision millimétrique. Mesures continues.
-Permet d’accéder à la cinématique sur les continents.
-Principe du GPS : Positionnement de stations dans une région d’intérêt.
Positionnement de la station par satellite, par rapport à une surface de référence. Le
satellite renseigne sur la position de la balise au cours du temps. Sensible à la
déformation élastique de la lithosphère (cycle sismique, rebond postglaciaire),
nécessité d’apporter des corrections basées sur des modèles de lithosphère élastique
pour obtenir le mouvement horizontal ‘réel’ de la plaque. Les mouvements estimés par
GPS permettent de calculer les taux de déformation/ et contrainte sur une faille au
cours du cycle sismique.
Si niveau de décollement au sein de la lithosphère ou de la pile sédimentaire
(tectonique gravitaire), le GPS ne capture que le mouvement de surface, pas de la
plaque dans son ensemble.
-Principe du VLBI : mesures par des radiotéléscopes d’ondes électromagnétiques
émises par un quasar, dont la position est parfaitement connue. L’écart de temps de
réception du signal entre 2 radiotéléscopes (distants de plusieurs milliers de km)
permet de les positionner l’un par rapport à l’autre. Lorsque les radiotélescopes
s’éloignent ou se rapprochent sous l’effet de la tectonique, alors nous avons accès à
une mesure de la cinématique avec une précision millimétrique.
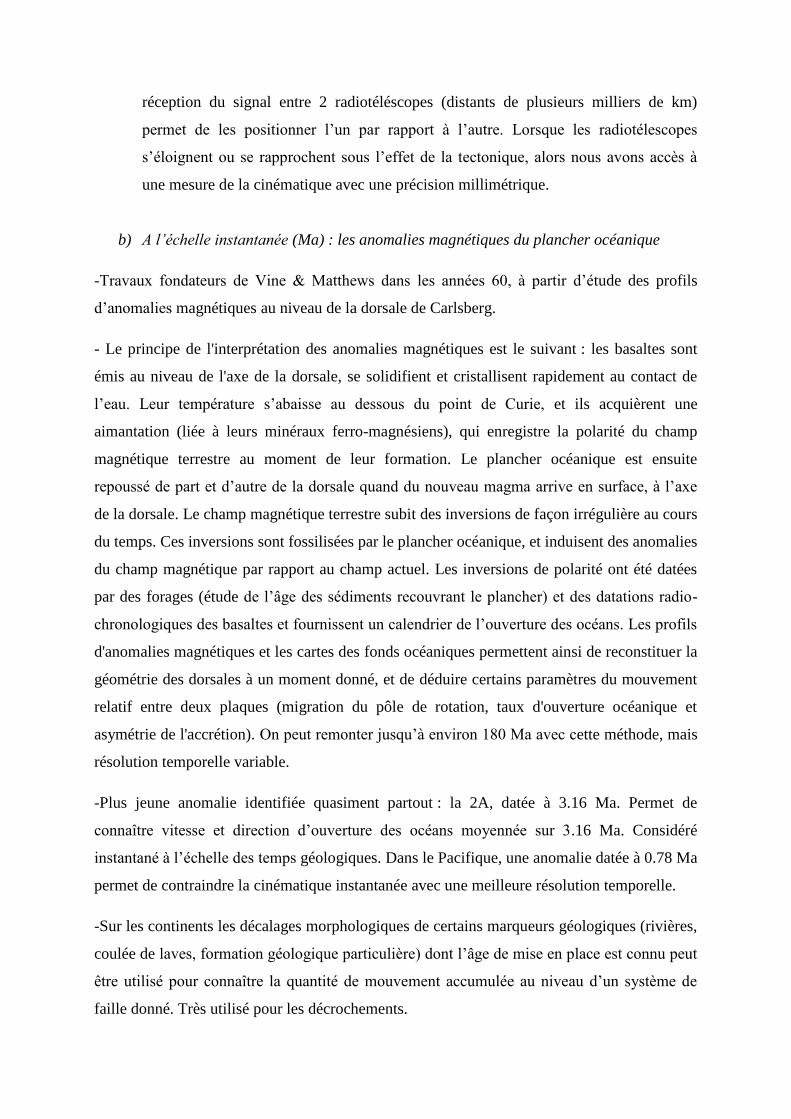
b) A l’échelle instantanée (Ma) : les anomalies magnétiques du plancher océanique
-Travaux fondateurs de Vine & Matthews dans les années 60, à partir d’étude des profils
d’anomalies magnétiques au niveau de la dorsale de Carlsberg.
- Le principe de l'interprétation des anomalies magnétiques est le suivant : les basaltes sont
émis au niveau de l'axe de la dorsale, se solidifient et cristallisent rapidement au contact de
l’eau. Leur température s’abaisse au dessous du point de Curie, et ils acquièrent une
aimantation (liée à leurs minéraux ferro-magnésiens), qui enregistre la polarité du champ
magnétique terrestre au moment de leur formation. Le plancher océanique est ensuite
repoussé de part et d’autre de la dorsale quand du nouveau magma arrive en surface, à l’axe
de la dorsale. Le champ magnétique terrestre subit des inversions de façon irrégulière au cours
du temps. Ces inversions sont fossilisées par le plancher océanique, et induisent des anomalies
du champ magnétique par rapport au champ actuel. Les inversions de polarité ont été datées
par des forages (étude de l’âge des sédiments recouvrant le plancher) et des datations radio-
chronologiques des basaltes et fournissent un calendrier de l’ouverture des océans. Les profils
d'anomalies magnétiques et les cartes des fonds océaniques permettent ainsi de reconstituer la
géométrie des dorsales à un moment donné, et de déduire certains paramètres du mouvement
relatif entre deux plaques (migration du pôle de rotation, taux d'ouverture océanique et
asymétrie de l'accrétion). On peut remonter jusqu’à environ 180 Ma avec cette méthode, mais
résolution temporelle variable.
-Plus jeune anomalie identifiée quasiment partout : la 2A, datée à 3.16 Ma. Permet de
connaître vitesse et direction d’ouverture des océans moyennée sur 3.16 Ma. Considéré
instantané à l’échelle des temps géologiques. Dans le Pacifique, une anomalie datée à 0.78 Ma
permet de contraindre la cinématique instantanée avec une meilleure résolution temporelle.
-Sur les continents les décalages morphologiques de certains marqueurs géologiques (rivières,
coulée de laves, formation géologique particulière) dont l’âge de mise en place est connu peut
être utilisé pour connaître la quantité de mouvement accumulée au niveau d’un système de
faille donné. Très utilisé pour les décrochements.
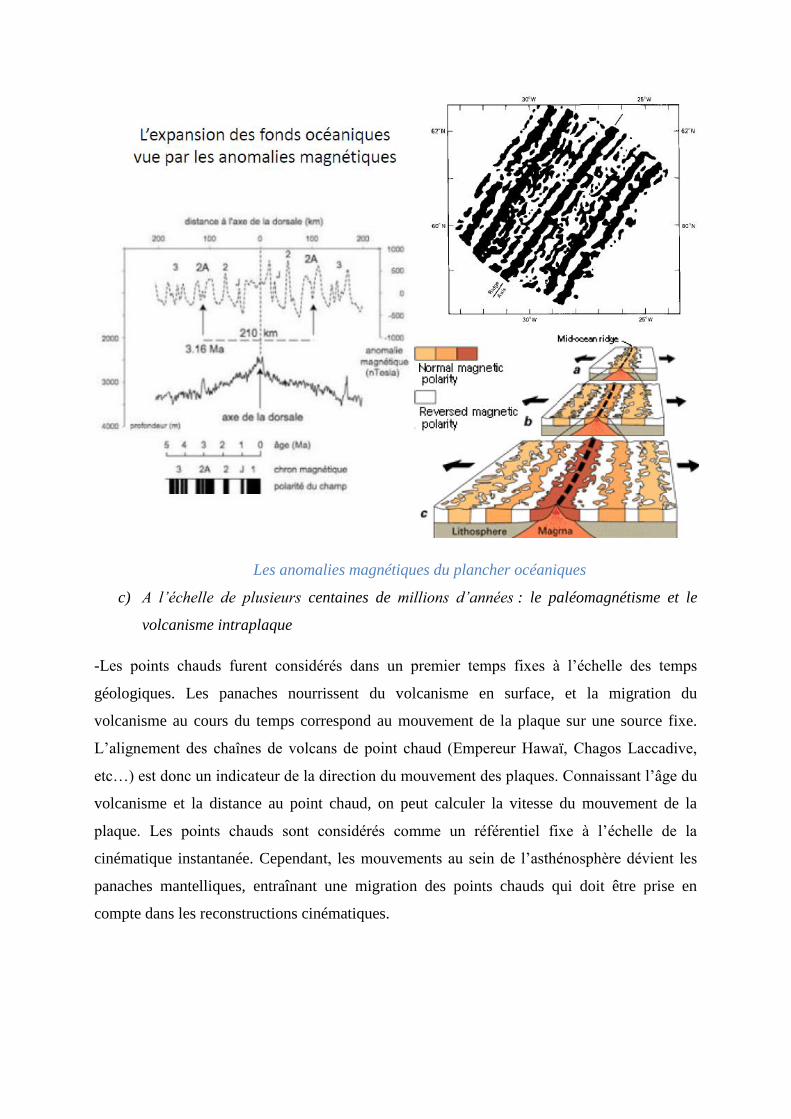
Les anomalies magnétiques du plancher océaniques
c) A l’échelle de plusieurs centaines de millions d’années : le paléomagnétisme et le
volcanisme intraplaque
-Les points chauds furent considérés dans un premier temps fixes à l’échelle des temps
géologiques. Les panaches nourrissent du volcanisme en surface, et la migration du
volcanisme au cours du temps correspond au mouvement de la plaque sur une source fixe.
L’alignement des chaînes de volcans de point chaud (Empereur Hawaï, Chagos Laccadive,
etc…) est donc un indicateur de la direction du mouvement des plaques. Connaissant l’âge du
volcanisme et la distance au point chaud, on peut calculer la vitesse du mouvement de la
plaque. Les points chauds sont considérés comme un référentiel fixe à l’échelle de la
cinématique instantanée. Cependant, les mouvements au sein de l’asthénosphère dévient les
panaches mantelliques, entraînant une migration des points chauds qui doit être prise en
compte dans les reconstructions cinématiques.
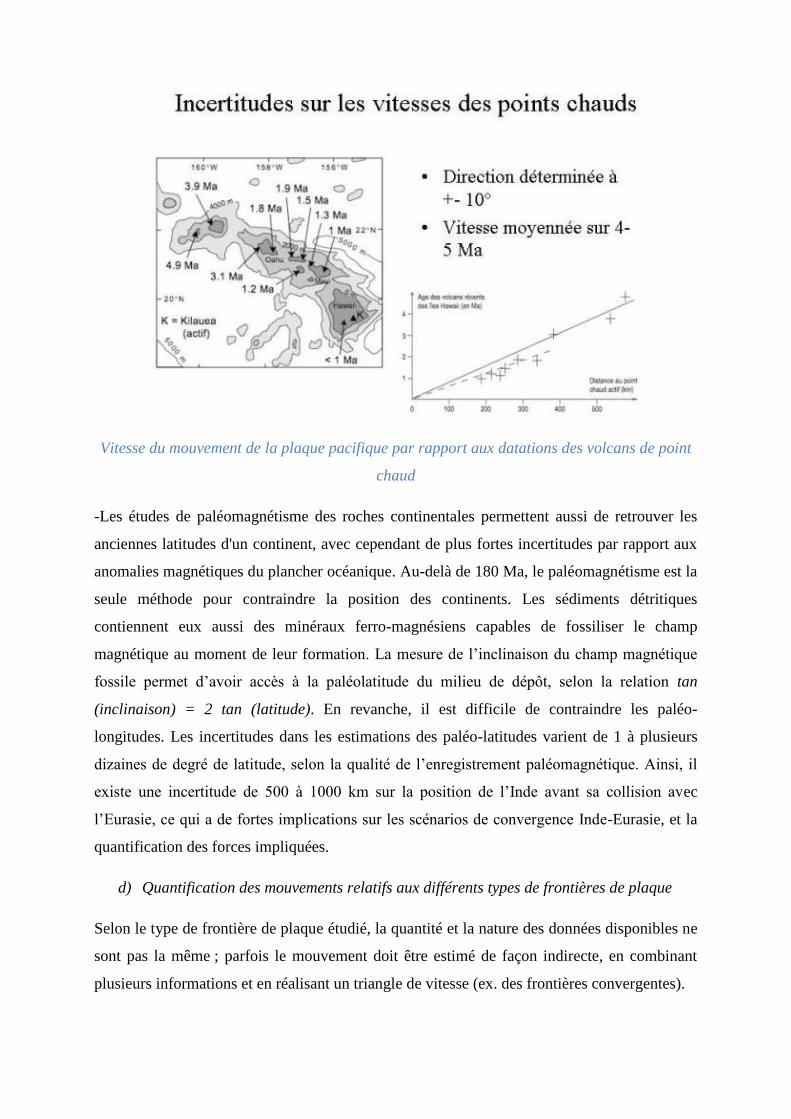
Vitesse du mouvement de la plaque pacifique par rapport aux datations des volcans de point
chaud
-Les études de paléomagnétisme des roches continentales permettent aussi de retrouver les
anciennes latitudes d'un continent, avec cependant de plus fortes incertitudes par rapport aux
anomalies magnétiques du plancher océanique. Au-delà de 180 Ma, le paléomagnétisme est la
seule méthode pour contraindre la position des continents. Les sédiments détritiques
contiennent eux aussi des minéraux ferro-magnésiens capables de fossiliser le champ
magnétique au moment de leur formation. La mesure de l’inclinaison du champ magnétique
fossile permet d’avoir accès à la paléolatitude du milieu de dépôt, selon la relation tan
(inclinaison) = 2 tan (latitude). En revanche, il est difficile de contraindre les paléo-
longitudes. Les incertitudes dans les estimations des paléo-latitudes varient de 1 à plusieurs
dizaines de degré de latitude, selon la qualité de l’enregistrement paléomagnétique. Ainsi, il
existe une incertitude de 500 à 1000 km sur la position de l’Inde avant sa collision avec
l’Eurasie, ce qui a de fortes implications sur les scénarios de convergence Inde-Eurasie, et la
quantification des forces impliquées.
d) Quantification des mouvements relatifs aux différents types de frontières de plaque
Selon le type de frontière de plaque étudié, la quantité et la nature des données disponibles ne
sont pas la même ; parfois le mouvement doit être estimé de façon indirecte, en combinant
plusieurs informations et en réalisant un triangle de vitesse (ex. des frontières convergentes).

Les différentes limites de plaques, et les données qu’elles apportent pour contraindre la
cinématique
-Frontières divergentes :
-Ouverture d’un rifting : ex. du rift est-africain au niveau des Afars. Dans les années
80, premières mesures de l’ouverture en temps réel par Satellite à Djibouti, 2 m en une
seule crise sismique.
-Ouverture d’une dorsale à partir des anomalies magnétiques.
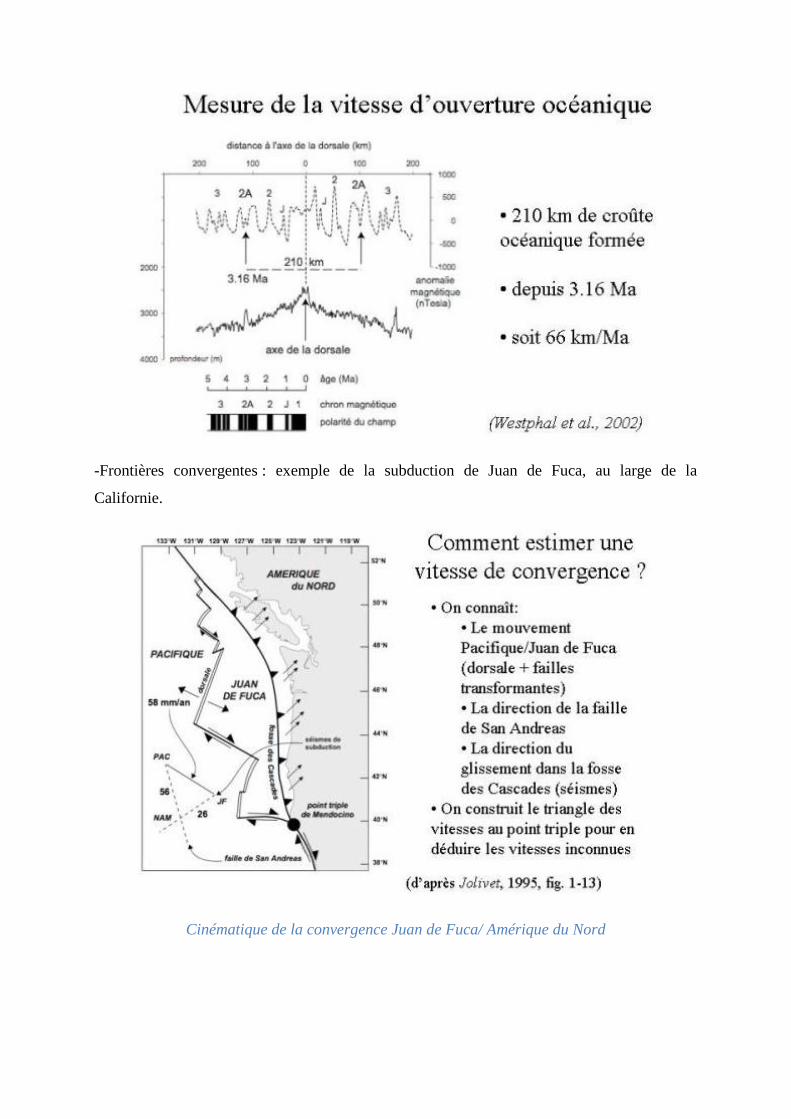
-Frontières convergentes : exemple de la subduction de Juan de Fuca, au large de la
Californie.
Cinématique de la convergence Juan de Fuca/ Amérique du Nord
-Les frontières diffuses :
-Ex. de la faille de San Andreas, et des décrochements associés au système Queen
Charlotte-Fairweather au NW du Canada/ Alaska. Une partie du mouvement
Pacifique/ N Amérique est pris sur chacune des failles, qui délimitent des microblocs
pris en cisaillement (système diffus). Le mouvement Pac/NAM est la somme des
mouvements pris sur chacune des failles composant la frontière diffuse.
-Ex. de l’extrusion latérale de l’Anatolie, ou des blocs asiatiques, extrudés sous l’effet
de la convergence Inde-Eurasie.
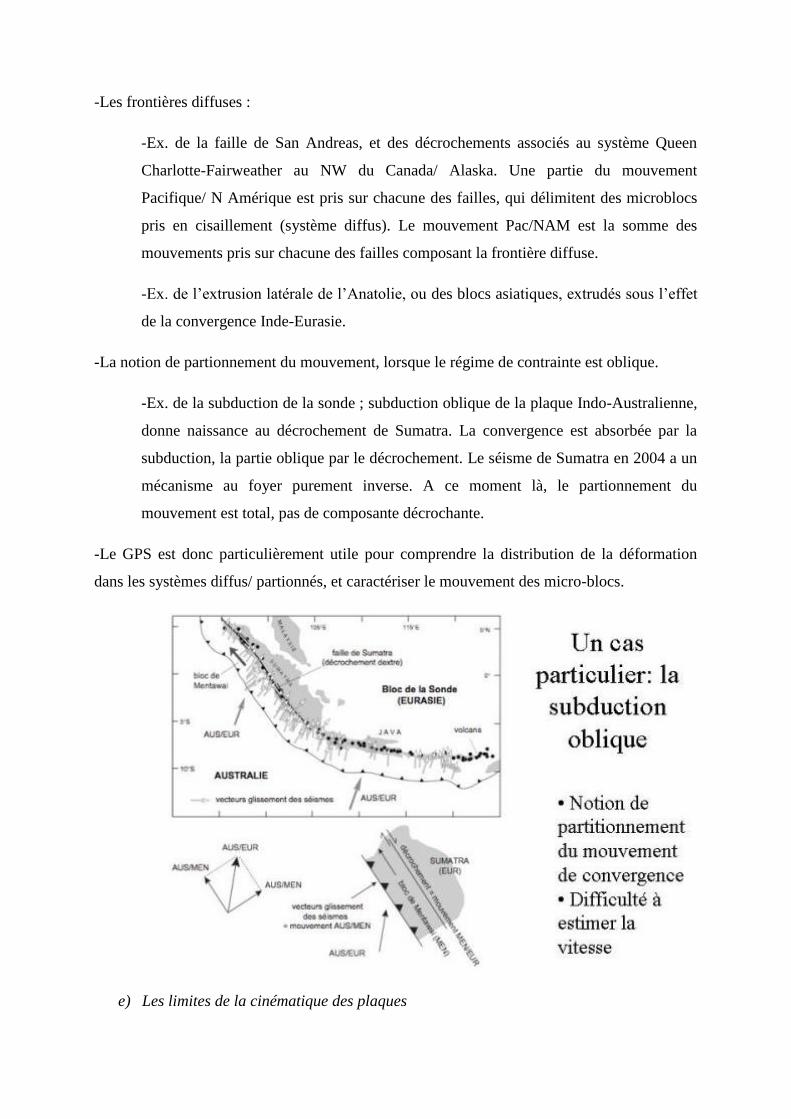
-La notion de partionnement du mouvement, lorsque le régime de contrainte est oblique.
-Ex. de la subduction de la sonde ; subduction oblique de la plaque Indo-Australienne,
donne naissance au décrochement de Sumatra. La convergence est absorbée par la
subduction, la partie oblique par le décrochement. Le séisme de Sumatra en 2004 a un
mécanisme au foyer purement inverse. A ce moment là, le partionnement du
mouvement est total, pas de composante décrochante.
-Le GPS est donc particulièrement utile pour comprendre la distribution de la déformation
dans les systèmes diffus/ partionnés, et caractériser le mouvement des micro-blocs.
e) Les limites de la cinématique des plaques
-Les vitesses de subduction sont prédites pour ce qui concerne la cinématique instantanée.
-Difficulté de quantifier les mouvements à l’échelle de quelques milliers à centaines de
milliers d’années, vide d’observations et de marqueurs sur cette gamme de temps.
-Bien sûr, GPS difficile à installer dans les océans, mais ça existe ! ex. subduction du Japon.
-Cependant, 90% des vitesses déterminées par le GPS sont en accord avec celle déterminées à
partir de l’anomalie 2A, i.e. vitesse moyenne sur 3 Ma en général équivalente à vitesse
mesurée par satellites. Peu de variations de la cinématique des plaques sont attendues à
l’échelle inférieure au Ma… mais dans certains endroits la différence est significative, proche
du cm/an ; en particulier au niveau des zones de convergence affectées par des phénomènes
de mousson ou El Nino/La Nina. Les différences dans les estimations de vitesse entre
cinématique instantanée et GPS sont-elles dues à des problèmes de mesure ? ou changement
cinématique plus récent que 3 Ma ? Rôle possible des changements climatiques Pléistocène
sur la vitesse des plaques ? Cela n’est pas encore bien compris.
-Problème de variabilité dans la résolution temporelle des marqueurs, ex. période magnétique
calme du Crétacé.
-Difficulté pour déterminer les mouvements dans certains contextes ; comment faire quand
pas d’anomalie ou quand pas de GPS? Nécessité d’établir des circuits de plaques globaux,
pour déduire les mouvements de toutes les plaques à partir des couples de plaques dont le
mouvement est bien contraint.
2) Les modèles cinématiques globaux
Objectifs de cette partie : comment calculer le mouvement d’une plaque sur une sphère ?
comment établir un modèle cinématique global à n plaques?
a) La rotation de plaques sur une sphère : éléments de géométrie eulérienne
-Approximation d’une Terre sphérique (en réalité ellipsoïde, coeff. d’aplatissement de 1/298).
-Le déplacement d’une plaque sur une sphère correspond à une rotation, autour d’un axe
passant par le centre de la Terre. L’intersection entre l’axe de rotation d’une plaque par
rapport à une plaque supposée fixe et la surface de la Terre définit le pôle de rotation. Le
mouvement d’une plaque par rapport à l’autre suit des petits cercles centrés sur le pôle de

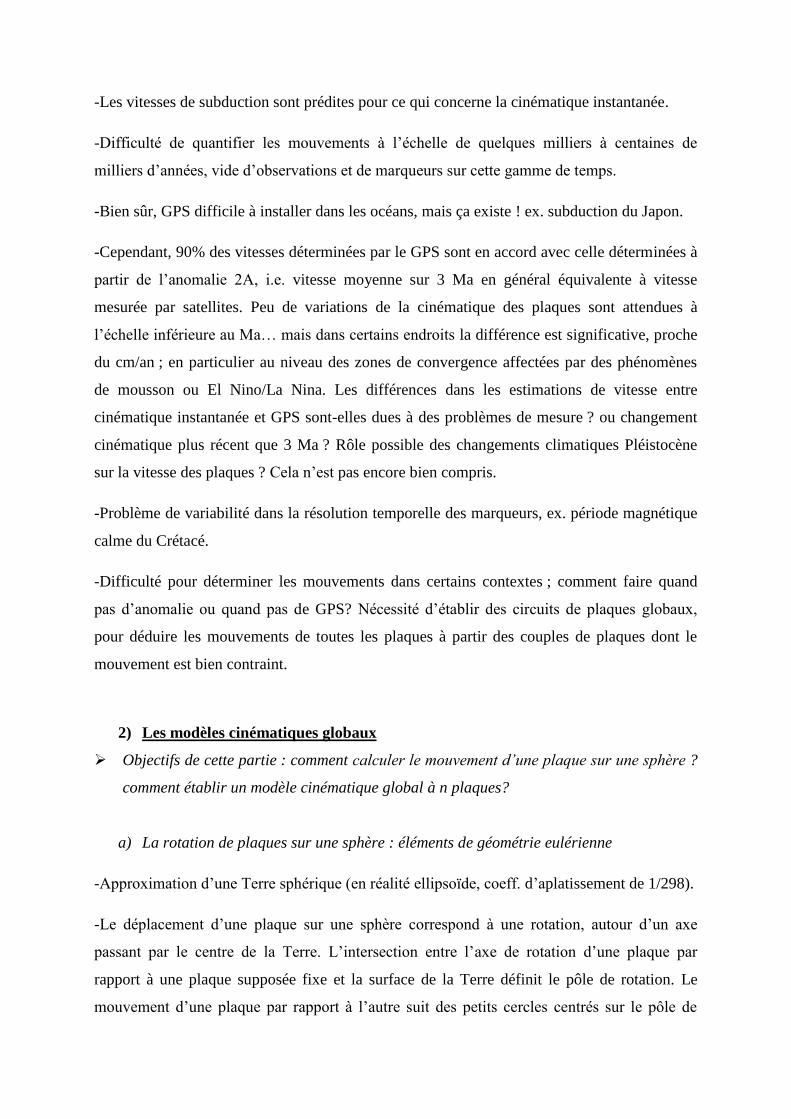
rotation. Les failles transformantes s’inscrivent sur des petits cercles. L’intersection des
grands cercles perpendiculaires aux transformantes correspond au pôle de rotation du couple
de plaque considéré. Les cartes des fonds océaniques établies par altimétrie satellitaire ont
donc été une révolution pour la cinématique, car elles permettent de cartographier les
transformantes sur plusieurs milliers de km !!!
Estimation des pôles de rotation à partir des transformantes
-La vitesse de rotation (vitesse angulaire) d’une plaque sur une sphère est déterminée par :
ω = dө/dt
où ө valeur de l’angle caractérisant la rotation, t le temps.
Il est plus intuitif d’exprimer la vitesse linéaire d’une plaque :
V= R. ω. Sin a
R : rayon de la Terre (6370 km) ; a distance angulaire entre le pôle de rotation et le point en
mouvement sur la sphère. V est nulle au pôle de rotation (R=0) et maximale à 90° du pôle.
A vitesse angulaire identique, V augmente avec le sinus de la distance au pôle de rotation.
Cinématique et géométrie eulérienne
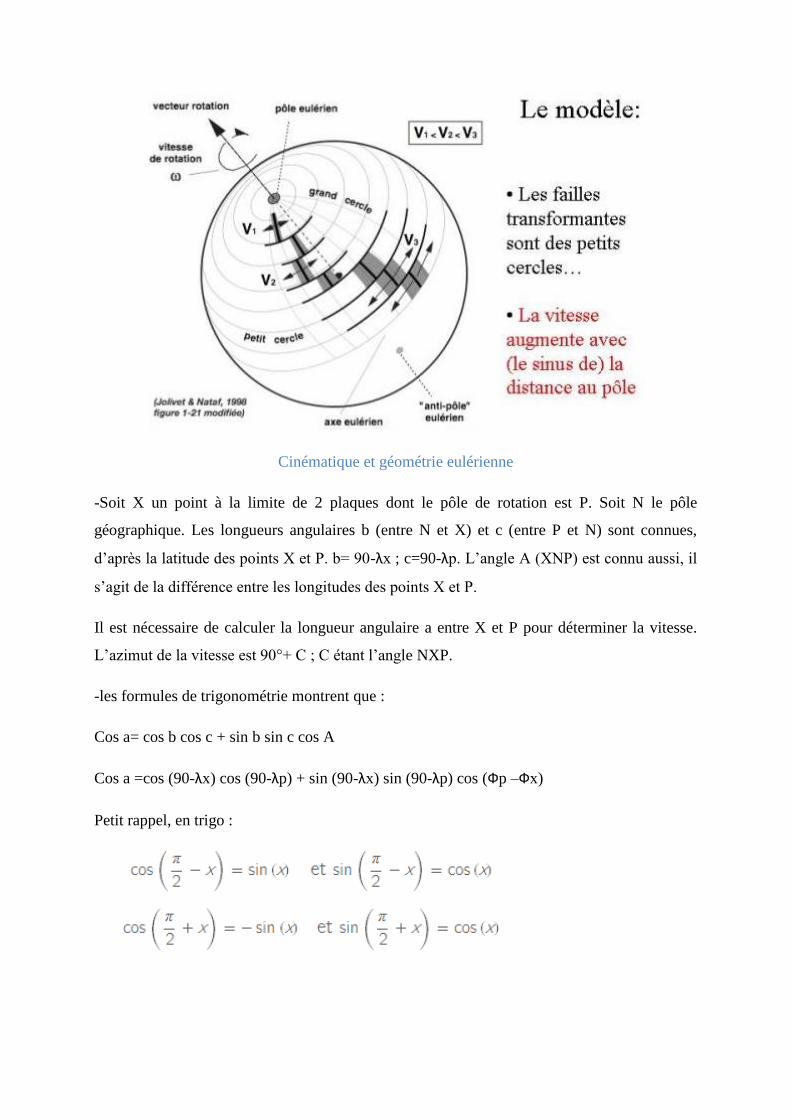
-Soit X un point à la limite de 2 plaques dont le pôle de rotation est P. Soit N le pôle
géographique. Les longueurs angulaires b (entre N et X) et c (entre P et N) sont connues,
d’après la latitude des points X et P. b= 90-λx ; c=90-λp. L’angle A (XNP) est connu aussi, il
s’agit de la différence entre les longitudes des points X et P.
Il est nécessaire de calculer la longueur angulaire a entre X et P pour déterminer la vitesse.
L’azimut de la vitesse est 90°+ C ; C étant l’angle NXP.
-les formules de trigonométrie montrent que :
Cos a= cos b cos c + sin b sin c cos A
Cos a =cos (90-λx) cos (90-λp) + sin (90-λx) sin (90-λp) cos (Фp –Фx)
Petit rappel, en trigo :

Donc :
a= arcos (sin λx sin λp + cos λx cos λp cos (Фp –Фx))
-de plus, sina/sinA=sinb/sinB=sinc/sinC
Sin a/sin (Фp –Фx)=sin (90- λp)/sinC
C=arcsin (cos λp sin (Фp –Фx)/sina)
On peut donc calculer la vitesse linéaire et l’azimut du mouvement.
Calcul d’un vecteur vitesse, en résumé
-Une configuration particulière est celle des points triples, où 3 plaques différentes sont en
contact. Les triangles de vitesse pour les différentes configurations possibles montrent que
seule les configurations ride-ride-ride (ride=dorsale) sont stables au cours du temps, avec sous
certaines conditions, la configuration transformante-fosse-fosse. Les points triples R-R-R
sont utilisés pour tester la fermeture des circuits des plaques. Si un circuit ne se ferme pas au
niveau d’un point triple R-R-R, alors cela signifie que le circuit de plaque est mal définit. Par
exemple, la fermeture du point triple de Rodriguez dans l’Océan Indien ne se fait que si on
prend en compte l’existence de la plaque Somalie, qui a longtemps été négligée. Une autre
source d’erreur dans la fermeture d’un circuit au niveau d’un point triple R-R-R est la
présence de déformation intraplaque.

Stabilité des points triples Ride-Ride-Ride
b) Les modèles cinématiques : du premier modèle proposé en 1968 (LePichon) à
MORVEL (DeMets et al., 2010).
-Modèles cinématiques construits à partir des données d’anomalies magnétiques, des
données d’altimétrie satellitaire (cartes des fonds océaniques, nécessité de bien
cartographier les transformantes pour avoir les pôles de rotation) ; des mécanismes au
foyer des séismes (direction des mouvements), et du GPS. Toutes les données n’ont pas le
même poids dans les modèles. Tests de fermeture permettent de les valider.
3) Les moteurs de la tectonique des plaques
Objectifs de cette partie: identifier les différentes forces à l’œuvre dans la mobilité
horizontale des plaques, et déterminer quelle force domine : couplage mécanique des
plaques lithosphériques avec la convection mantellique, ou traction exercée par le
plongement du slab au niveau des zones de subduction ?
-Différents moteurs ont été proposés au cours du 20° siècle :
-Holmes, en 1928, propose que le manteau soit animé de mouvements de
convection, avec des mouvements ascendants et descendants, et que ces
mouvements entraîneraient le mouvement des plaques lithosphériques
-Modèle du tapis roulant, formation des océans par Hess au début des années
60.
-Découverte des plans de Wadati-Benioff dans les années 50 : rôle de la
subduction dans les mouvements des plaques ?
-Dans les hypothèses fixistes, telle que celle du geosynclinal, il y a la notion de
mouvements gravitaires …à rejeter complètement… ?
-Relations entre vitesse des plaques et la nature de leur frontière : la diversité des
forces mises en jeu :
-Forte corrélation entre la vitesse des plaques (déterminées par les méthodes et
modèles ci-dessus) et le pourcentage de frontière en subduction : la subduction
est donc le moteur principal de la tectonique des plaques ! Vitesses les plus
rapides au niveau du Pacifique, entièrement bordé de subductions ; vitesses les
plus lentes en Atlantique ou au niveau de la SW Indienne, absence de
subduction majeure.
-Plus la surface des continents sur une plaque est grande, plus sa vitesse est
faible : une explication serait que les continents auraient une plus grande
résistance au mouvement p/r aux océans.
-Difficile de quantifier le degré de couplage mécanique entre lithosphère et
manteau
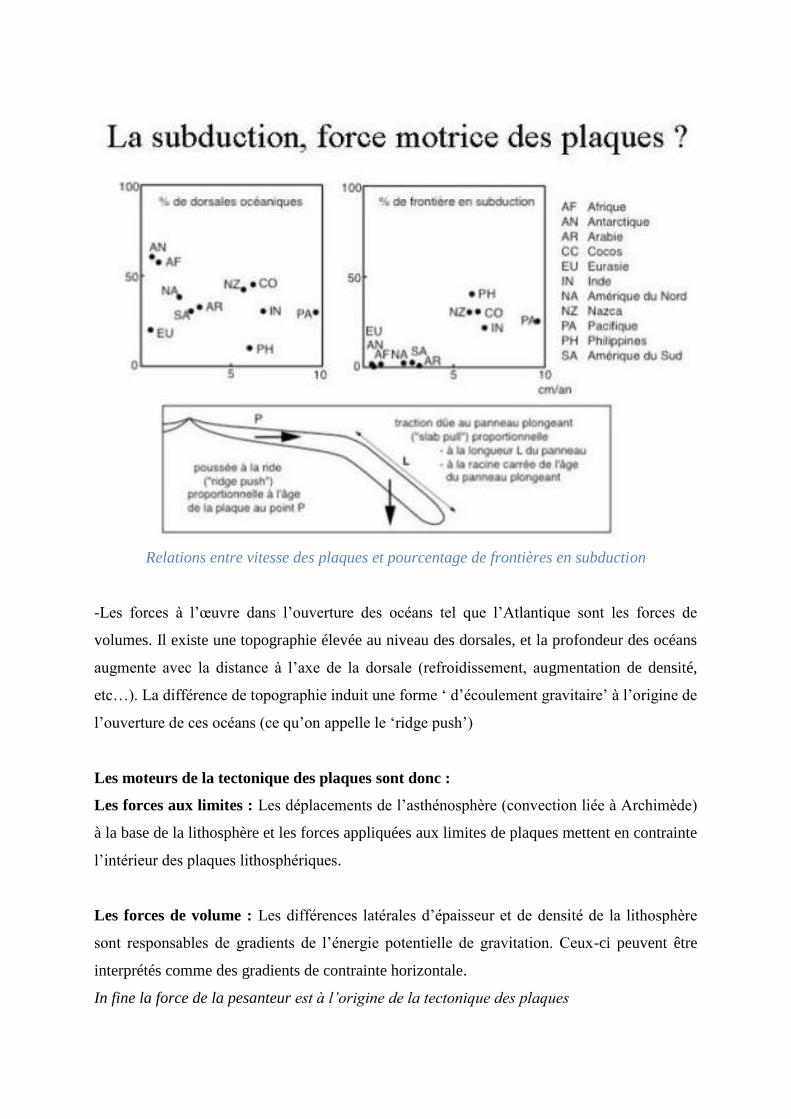
Relations entre vitesse des plaques et pourcentage de frontières en subduction
-Les forces à l’œuvre dans l’ouverture des océans tel que l’Atlantique sont les forces de
volumes. Il existe une topographie élevée au niveau des dorsales, et la profondeur des océans
augmente avec la distance à l’axe de la dorsale (refroidissement, augmentation de densité,
etc…). La différence de topographie induit une forme ‘ d’écoulement gravitaire’ à l’origine de
l’ouverture de ces océans (ce qu’on appelle le ‘ridge push’)
Les moteurs de la tectonique des plaques sont donc :
Les forces aux limites : Les déplacements de l’asthénosphère (convection liée à Archimède)
à la base de la lithosphère et les forces appliquées aux limites de plaques mettent en contrainte
l’intérieur des plaques lithosphériques.
Les forces de volume : Les différences latérales d’épaisseur et de densité de la lithosphère
sont responsables de gradients de l’énergie potentielle de gravitation. Ceux-ci peuvent être
interprétés comme des gradients de contrainte horizontale.
In fine la force de la pesanteur est à l’origine de la tectonique des plaques
Conclusions :
-Quantification du mouvement résolue au premier ordre, mais nécessité de nombreuses
données variées pour préciser les modèles. De façon générale les modèles marchent bien,
mais il y a de nombreux problèmes en de nombreux endroits. Les zones les plus compliquées
sont les zones de déformation diffuse. La cinématique avance donc par l’étude détaillée de
zones clefs qui ne sont pas parfaitement expliquées par les modèles.
-Même remarque à grande échelle de temps : certaines périodes sont moins bien comprises
que d’autres, selon la disponibilité des données.
-Les moteurs aussi sont bien identifiés, mais il y a encore des problèmes pour quantifier les
forces mises en œuvre, notamment pour le couplage asthénosphère/lithosphère.
-origine des différences entre GPS et MORVEL pas bien expliquées : problème de mesure ou
différence réelle ?
-Est-ce que les changements climatiques ont un rôle sur la cinématique ?
Bibliographie
-Convergence lithosphérique, Lallemand et al. Vuibert eds., la leçon est traitée entièrement
dans le chapitre de P. Huchon, mais il y a 2-3 coquilles dans les équations
-Physique de la Terre solide, Larroque et Virieux, GIB eds (les équations sont justes, mais il
faut bien lire le chapitre dédié à la géodynamique avant les oraux sinon c’est un peu dur à
première lecture)
-Géosciences, de Robert et Bousquet ; Belin eds ; pour les docs en couleur, les cartes
cinématiques à jour, etc.
_La carte ‘Plate tectonics from space’ de Rabaute et Chamot-Rooke
Bon courage !