La caractérisation de la rigi dité des assemblages d...
19
32 TECHNOLOGIE 190 MARS 2014 i la première partie présentait la démarche de caractérisation de la rigidité d’un assemblage « parfait », nous allons maintenant nous attacher à répondre au problème scientifique suivant : caractéri- ser l’influence des composants d’assemblage (vis, écrou noyé, tourillons…) dans la rigidité de l’assemblage réel, avec prise en compte du serrage de la vis et du contact unilatéral entre les montants. Cette caractérisation permettra de définir des éléments finis 0D (ponctuels) pour représenter une jonction entre deux poutres d’une modélisation par éléments finis d’un meuble. Dans un premier temps, il convient de « transpor- ter » la matrice de rigidité (ou de souplesse) établie grâce aux relations de la RDM anisotrope au centre de l’assemblage défini comme l’intersection des deux lignes moyennes du montant et de la traverse du lit. Malgré l’absence de résultat démontré théoriquement, nous verrons, dans un second temps, que, pour l’as- semblage réel prenant en compte les vis et tourillons, l’écrou noyé et le serrage des vis, nous pouvons suivre la démarche de la première partie et définir une matrice de rigidité différente pour le coin réel par rapport au coin parfait. Enfin, nous expliquerons la démarche d’in- tégration de ce nouvel élément dans un code éléments finis de poutre, et nous simulerons la déformation du lit haut soumis au chargement de validation normalisé. Le rappel des résultats sur la rigidité d’un coin parfait Dans la première partie, nous avons caractérisé la rigidité d’un coin constitué d’un montant vertical et d’une traverse horizontale parfaitement assemblés 1 . Les résultats connus de RDM permettent de représenter cette rigidité sous la forme d’une matrice symétrique. La décomposition des efforts en 6 cas, X, Y, Z et L, M, N, et l’évaluation des déformées par une solution simplifiée RDM Afin de caractériser complètement les effets d’un chargement sur la déformation du coin, nous avons mis en œuvre, dans la première partie, le calcul des six cas de charge indépendants qui peuvent reconstituer n’importe quelle configuration de chargement du coin. Ainsi, le torseur le plus général des efforts appliqués au point B s’écrit : { } ⎧ ⎨ ⎪ ⎩ ⎪ ⎧ ⎨ ⎪ ⎩ ⎪ F F = Xx + Yy + Zz ext = → → → → M B = Lx + My + Nz → → → → B Il donne des déplacements de la section en B dont la forme la plus générale est : { } = Ψ=α +β +γ = + + ⎧ ⎨ ⎪ ⎩ ⎪ ⎫ ⎬ ⎪ ⎭ ⎪ U xxz uuxvywz B B B B B B Les calculs de ces déplacements peuvent se synthétiser dans une unique matrice 6 × 6, la matrice de souplesse du coin notée [S B ] : voir équation a p. 34. Elle permet de calculer toutes les composantes du torseur des petits déplacements en B pour n’importe quel torseur d’effort exprimé en B. Elle est donc fortement dépendante du choix fait pour la distance d (et pour h) ; pour s’en affranchir, nous proposons une démarche de soustraction que nous verrons plus loin. Le transport des termes de la matrice de souplesse en O Dans une modélisation à base de poutres du lit haut, le coin est représenté géométriquement par un point unique qui est le centre O de l’assemblage. Ce point correspond à l’intersection des lignes moyennes des deux poutres. Pour représenter la rigidité (ou la souplesse) du coin réduit à un point, on propose de ramener en O toute la déformation, « comme si » les deux poutres étaient parfaitement rigides et que les déplacements relatifs étaient localisés en O 2 . Cette localisation peut La caractérisation de la rigi d’éléments de meuble par (seconde partie) LUC CHEVALIER, HEBA MAKHLOUF ET BENOîT JACQUET-FAUCILLON [1] mots-clés modélisation, résistance des matériaux, simulation La première partie, dans le numéro 187 de septembre-octobre, étudiait la rigidité d’un assemblage bois « parfait ». Nous allons maintenant nous pencher sur l’influence des composants d’un assemblage réel. [1] Respectivement : professeur à l’université Paris-Est Marne- la-Vallée, directeur de l’école d’ingénieurs ESIPE ; doctorante au laboratoire MSME UMR 8208 CNRS à l’université Paris-Est Marne- la-Vallée ; professeur agrégé à l’université Paris-Est Marne-la-Vallée, dirige la formation d’ingénieurs en génie mécanique de l’ESIPE.
Transcript of La caractérisation de la rigi dité des assemblages d...

3 2 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 33
i la première partie présentait la démarche de caractérisation de la rigidité d’un assemblage « parfait », nous allons maintenant nous attacher à
répondre au problème scientifique suivant : caractéri-ser l’influence des composants d’assemblage (vis, écrou noyé, tourillons…) dans la rigidité de l’assemblage réel, avec prise en compte du serrage de la vis et du contact unilatéral entre les montants. Cette caractérisation permettra de définir des éléments finis 0D (ponctuels) pour représenter une jonction entre deux poutres d’une modélisation par éléments finis d’un meuble.
Dans un premier temps, il convient de « transpor-ter » la matrice de rigidité (ou de souplesse) établie grâce aux relations de la RDM anisotrope au centre de l’assemblage défini comme l’intersection des deux lignes moyennes du montant et de la traverse du lit. Malgré l’absence de résultat démontré théoriquement, nous verrons, dans un second temps, que, pour l’as-semblage réel prenant en compte les vis et tourillons, l’écrou noyé et le serrage des vis, nous pouvons suivre la démarche de la première partie et définir une matrice de rigidité différente pour le coin réel par rapport au coin parfait. Enfin, nous expliquerons la démarche d’in-tégration de ce nouvel élément dans un code éléments finis de poutre, et nous simulerons la déformation du lit haut soumis au chargement de validation normalisé.
Le rappel des résultats sur la rigidité d’un coin parfaitDans la première partie, nous avons caractérisé la rigidité d’un coin constitué d’un montant vertical et d’une traverse horizontale parfaitement assemblés 1 .
Les résultats connus de RDM permettent de représenter cette rigidité sous la forme d’une matrice symétrique.
La décomposition des efforts en 6 cas, X, Y, Z et L, m, N, et l’évaluation des déformées par une solution simplifiée rDmAfin de caractériser complètement les effets d’un chargement sur la déformation du coin, nous avons mis en œuvre, dans la première partie, le calcul des six cas de charge indépendants qui peuvent reconstituer n’importe quelle configuration de chargement du coin. Ainsi, le torseur le plus général des efforts appliqués au point B s’écrit :
{ } ⎧⎨⎪
⎩⎪
⎧⎨⎪
⎩⎪
F F = Xx + Yy + Zzext =
→ → → →
MB = Lx + My + Nz→ → → →
B
Il donne des déplacements de la section en B dont la forme la plus générale est :
{ } =Ψ = α +β + γ
= + +
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪U
x x z
u u x v y w zB
B B B BB
Les calculs de ces déplacements peuvent se synthétiser dans une unique matrice 6 × 6, la matrice de souplesse du coin notée [SB] : voir équation a p. 34.
Elle permet de calculer toutes les composantes du torseur des petits déplacements en B pour n’importe quel torseur d’effort exprimé en B. Elle est donc fortement dépendante du choix fait pour la distance d (et pour h) ; pour s’en affranchir, nous proposons une démarche de soustraction que nous verrons plus loin.
Le transport des termes de la matrice de souplesse en O Dans une modélisation à base de poutres du lit haut, le coin est représenté géométriquement par un point unique qui est le centre O de l’assemblage. Ce point correspond à l’intersection des lignes moyennes des deux poutres. Pour représenter la rigidité (ou la souplesse) du coin réduit à un point, on propose de ramener en O toute la déformation, « comme si » les deux poutres étaient parfaitement rigides et que les déplacements relatifs étaient localisés en O 2 . Cette localisation peut
La caractérisation de la rigi dité des assemblagesd’éléments de meuble par la simulation numérique(seconde partie)Luc cHEVALIER, HEbA MAKHLOuF Et bEnOît JAcQuEt-FAucILLOn [1]
mots-clés modélisation, résistance des matériaux, simulation
La première partie, dans le numéro 187 de septembre-octobre, étudiait la rigidité d’un assemblage bois « parfait ». Nous allons maintenant nous pencher sur l’influence des composants d’un assemblage réel.
[1] Respectivement : professeur à l’université Paris-Est Marne-la-Vallée, directeur de l’école d’ingénieurs ESIPE ; doctorante aulaboratoire MSME UMR 8208 CNRS à l’université Paris-Est Marne-la-Vallée ; professeur agrégé à l’université Paris-Est Marne-la- Vallée, dirige la formation d’ingénieurs en génie mécanique de l’ESIPE.

3 2 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 33
se faire aisément en transportant au point O le torseur des petits déplacements de la section en B :
u u= OBO B + ∧Ψ
Ce qui donne ici :uO = uB vO = vB – dg wO = wB + dbAvec bien sûr a, b et g inchangés.Il faut bien comprendre qu’il s’agit non pas du
déplacement du point O dans la déformation réelle de la structure, mais du déplacement du point O coïncident dans le mouvement de la section rigide en B.
On peut représenter ces composantes comme en 2 : si chacune des deux poutres est infiniment rigide, le même torseur des petits déplacements en B peut être obtenu en localisant les déplacements relatifs en O. Les poutres AO et OB étant rigides, les déplacements relatifs en O s’obtiennent en écrivant la différence entre le torseur des petits déplacements de la section B et celui de la section A, tous deux transportés au point O. Puisque la section A est encastrée, seul le torseurde la section B est à considérer.
Pour représenter la souplesse (ou la rigidité) du coin dans cette nouvelle modélisation (2 poutres rigides et une liaison élastique en O), il est nécessaire de transporter aussi les actions mécaniques des six cas de charge en O : voir équation b .
Pour représenter le comportement élastique linéaire de la liaison en O, on peut relier ces six composantes d’efforts aux six composantes du déplacement par une relation matricielle qui peut s’écrire :
La matrice [SO] est la matrice de souplesse du coin parfait. Elle est constituée de 36 termes, et, comme la matrice [SB] présentée plus tôt, elle est symétrique.
À partir des calculs de RDM déjà réalisés, on peut effectuer les transports des composantes du torseur des petits déplacements et procéder à l’identification des termes Sij. Pour le cas X, on obtient :
uO = uB = [(h3 / 3E1xI1z) + (h / G1xyS1)]X
u u
v v d
w w d
d
d
S S
S S
XYZ
L L
M M Z
N N YS
O B
O B
O B
XX XN
NX NN
matrice desouplesse dela liaison :
O
O
OO
…γ
β
αβγ
=
= −
= + = =
= −
= +[ ]
La caractérisation de la rigi dité des assemblages d’éléments de meuble par la simulation numérique(seconde partie)Luc cHEVALIER, HEbA MAKHLOuF Et bEnOît JAcQuEt-FAucILLOn [1]
1 La modélisation RDM d’un assemblage « coin parfait » entre deux éléments du lit haut (bout de montant de hauteur h et bout de garde-corps de longueur d). Iy et Iz sont les moments quadratiques des sections droites. notons que le montant, nommé poutre (1), est à section carrée et que le garde-corps, nommé poutre (2), ne l’est pas. J est le moment polaire de torsion ; s’agissant de sections rectangulaires, on se référera aux tableaux disponibles dans la littérature pour l’estimation de ces grandeurs. E et G sont respectivement les modules élastiques en traction et en cisaillement du matériau
2 À gauche, la déformée réelle du coin ; à droite, la modélisation où toute la déformation est localisée en O. Entre les deux poutres parfaitement rigides, un système élastique autorise tous les déplacements et toutes les rotations sous l’effet des charges appliquées sur la liaison
γ γ

3 4 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 3 5
vO = vB – dg = 0et bien sûr g = – (h2 / 2E1xI1z)X inchangé. Cette première série de calculs permet d’identifier les termes de la première colonne :
SXX = (h3 / 3E1xI1z) + (h / G1xyS1)SYX = 0 SNX = – (h2 / 2E1xI1z)
Compte tenu de la symétrie du chargement, le déplacement wO et les rotations a et b sont nuls, ce qui permet aussi de dire que
SZX = SLX = SMX = 0En procédant de même pour le couple N, on obtient
six résultats supplémentaires :SXN = – (h2 / 2E1xI1z)SYN = – (d 2 / 2E2xI2z)SZN = SLN = SMN = 0
SNN = (h / E1xI1z) + (d / E2xI2z)On peut déjà noter la symétrie des termes SXN et SNX,
ce qui est une conséquence attendue de l’existence d’une énergie potentielle élastique pour ce coin.
Dans le cas de la charge Y, l’identification des termes de [SO] est un tout petit peu plus délicate, car le terme
dY fait aussi travailler les composantes de la sixième colonne. On obtient donc les relations :
SXY + dSXN = – (dh2 / 2E1xI1z) ⇒ SXY = 0SYY + dSYN = – (d 3 / 6E2I2) + (d / G2xzS2)
⇒ SYY = (d 3 / 3E2I2) + (d / G2xzS2)SYN + dSNN = (dh / E1xI1z) + (d 2 / 2E2xI2z)
⇒ SYN = – (d 2 / 2E2xI2z)et SZY = SLY = SMY = 0
La symétrie de [SO] reste vérifiée avec les nouveaux résultats obtenus. On peut voir aussi que les effets des charges X, Y et N restent découplés des effets des charges Z, L et M. Par symétrie, l’inverse sera aussi vérifié.
De même, on procède d’abord à l’identification des colonnes 4 et 5 correspondant aux couples L et M de la matrice de souplesse, et on garde la colonne 3 pour la fin à cause du terme en – dZ. Pour le couple L, on a :
SZL = h2 / 2E1xI1y
SLL = (h / E1xI1y) + (d / G2xzJ2)
h hS
h d h
h d hd d dS
hd d
hd h d hS
dS
h hd d
h h dG
hdG
d h d
h hd d h d
S
3E I G 2E I0 0 0
2E I
2E I E I 3E I G0 0 0
E I 2E I
0 0G J 3E I 3E I G G 2E I G J 2E I
0
0 02E I E I J
0 0
0 0J 2E I
0G J E I
0
2E I E I 2E I0 0 0
E I E I
B
x z xy x z x z
x z x z x z xy x z x z
xz x y x y xz xz x y xz x y
x y x y xz
xz x y xz x y
x z x z x z x z x z
3
1 1 1 1
2
1 1
2
1 1
2
1 1
2
1 1
3
2 2 2 2 1 1
2
2 2
2
1 1
3
1 1
3
2 2 1 1 2 2
2
1 1 1 1
2
2 2
2
1 1 1 1 2 2
1 1
2
2 2 1 1 2 2
2
1 1 1 1
2
2 2 1 1 2 2
=
+ − −
− + + +
+ + + + − +
+
− +
+
− + +
a
x y z
x d y d zF
F X Y Z
M M OB F L M Z N YO B O
ext( ) ( )
{ } { }== + +
= + ∧ = + − + +b
h
I
h h
d d d
h
I
d d h h
E I
d
h h d
d h d
h d h d
E
S
3E G S0 0 0 0
2E I
03E I G S
0 0 02E I
0 03E 3E I G S G S 2 2E I
0
00 02E I E I G J
0
0 02E I
0G J E I
0
2E I 2E I0 0 0
E I I
x z xy x
x z xy x z
x y x y xz xz x z x y
x y x y xz
x y xz x y
x z x z x z x z
O
3
1 1 1 1
2
1 1
3
2 2 2 2
2
2 2
3
1 1
3
2 2 2 2 1 1
2
1 1
2
2 2
2
1 1 1 1 2 2
2
2 2 1 1 2 2
2
1 1
2
2 2 1 1 2 2
[ ] =
+ −
+ −
+ + +
+
+
− − +
c

3 4 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 3 5
SML = 0 et SXL = SYL = SNL = 0
Pour le couple M :SZM = d 2 / 2E2xI2y
SLM = 0SMM = (h / G1xzJ1) + (d / E2xI2y)
SXM = SYM = SNM = 0
Et pour la force Z :SZZ – dSZM = (h3 / 3E1xI1y) – (d 3 / 6E2xI2y)
⇒ SZZ = (h3 / 3E1xI1y) + (d 3 / 3E2xI2y) + (d / G2xzS2)+ (h / G1xzS1)
SLZ – dSLM = (h2 / 2E1xI1y) ⇒ SLZ = (h2 / 2E1xI1y)SMZ – dSMM = – (hd / G1xzJ1) + (d 2 / 2E2xI2y)
⇒ SMZ = (d 2 / 2E2xI2y)et SXZ = SYZ = SNZ = 0
Au final, la théorie des poutres et le transport en O permettent de définir la matrice de souplesse du coin parfait qui servira de référence par rapport à celle du coin réel, dont on va définir la forme numériquement grâce à une étude 3D par éléments finis : voir équation c .
Compte tenu des dimensions et caractéristiques mécaniques retenues, les valeurs numériques des com-posantes de cette matrice valent : voir équation d .
Les unités sont en mmi/N ou i peut valoir 1, 0 ou – 1 suivant les cases : 1 pour le bloc (1 – 3) × (1 – 3),– 1 pour le bloc (4 – 6) × (4 – 6), et 0 pour les blocs(1 – 3) × (4 – 6) et (4 – 6) × (1 – 3). Malgré la présencede termes négatifs, la diagonalisation donne des valeurs propres toutes strictement positives : cette matrice estdonc bien définie positive, comme il se doit pour unematrice de souplesse ou de raideur.
L’intérêt des formules analytiques issues de la RDM est que nous pourrons dans l’avenir traiter n’importe quelle géométrie de coin avec n’importe quels matériaux constitutifs sans être obligés de faire tourner une nouvelle série de calculs par éléments finis.
La modélisation CAO modulaire d’un coin réelNous allons maintenant voir la constitution des assemblages réels (il en existe plusieurs types sur le même lit), la modélisation CAO et la mise en œuvre des simulations par éléments finis. Dans ce cas, plusieurs problèmes sont à étudier de plus près : la finesse du maillage autour des éléments d’assemblage, la nature des contacts (collants, parfaits ou avec frottement), la modélisation du serrage de la vis… et l’impact de ces non-linéarités de comportement sur les résultats de calcul. Il n’est pas du tout assuré que, d’une part, le comportement reste représentable par une matrice à coefficients constants, et que, d’autre part, la matrice en question, si elle existe, soit symétrique.
Le paramétrage des vis et des tourillonsLa diversité des assemblages dans le domaine de la literie nécessite de mettre en œuvre une modélisation permettant de modifier rapidement les dimensions et de passer facilement d’une famille de coins à une autre,
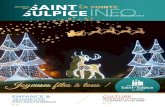
3 Photo de l’assemblage réel entre le montant vertical du lit et la traverse réalisé avec une vis et un écrou noyé (la partie extérieure cylindrique est insérée dans un alésage de la traverse). Deux tourillons complètent les éléments d’assemblage et empêchent la rotation de la traverse autour de l’axe de la vis
5 La mise en place du squelette fonctionnel dont les cotes sont pilotées par un tableur
4 Photo d’un second type d’assemblage réel dont la géométrie complémentaire permet de lier un montant vertical du lit avec une seconde traverse. cette fois, l’assemblage est réalisé avec deux systèmes « vis - écrou noyé » et un seul tourillon pour la mise en position de la traverse
[S ]
0,0038 0 0 0 0 1,12 10
0 0,00083 0 0 0 1,73 10
0 0 0,028 1,12 10 8,49 10 0
0 0 1,12 10 2,85 10 0 0
0 0 8,49 10 0 1,11 10 0
1,12 10 1,73 10 0 0 0 5,49 10
O
5
6
5 5
5 6
5 6
5 6 8
=
− ×
− ×
× ×
× ×
× ×
− × − × ×
−
−
− −
− −
− −
− − −
d

3 6 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 37
d’une configuration TVT (tourillon-vis-tourillon) 3 à une VTV (vis-tourillon-vis) 4 ou à une double traverse composée d’un assemblage TVT et d’un autre VTV 5 . La prise en charge des différentes dimensions du modèle est gérée par l’intermédiaire d’un squelette fonctionnel composé d’esquisses schématiques et d’un plan. Les différentes cotes de ce squelette sont pilotées par des configurations renseignées dans un tableur.
L’ensemble des cotes sont ainsi mises à la dimension par un simple clic de souris 5 . L’ensemble des pièces de l’assemblage est ensuite construit en s’appuyant sur le squelette fonctionnel. La mise à jour des pièces se réduit à sélectionner la configuration dimensionnelle voulue dans la liste de familles de pièces 6 .
Chaque configuration dimensionnelle est elle-même déclinée en deux autres configurations dérivées : VTV
6 Exemples de configurations dimensionnelles obtenues. De gauche à droite : « 57×550-50×140×400-50×200×1000 » et « 40×550-20×140×400-20×140×1000 »
7 La mise en place des configurations par défaut (double traverse), TVT et VTV

3 6 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 37
et TVT. Nous aurons ainsi la possibilité de choisir la configuration par défaut (comportant les deux tra-verses), la configuration VTV et la configuration TVT à partir d’une même configuration dimensionnelle. Cela nécessite de créer, à partir de la pièce correspondant au montant vertical, les configurations adéquates, com-portant tantôt les perçages de la configuration VTV, tantôt ceux de la configuration TVT et tantôt les deux.
Il faut ensuite supprimer, pour les configurations VTV et TVT, les pièces qui doivent être absentes de celles-ci 7 afin de disposer d’un modèle entièrement configuré et paramétré, exploitable pour la simulation par éléments finis 8 .
Le modèle CaO de l’assemblage réel et la modélisation par éléments finisLa mise en place de la simulation par éléments finis en recourant à des assemblages dans des logiciels tels que SolidWorks et le module SolidWorks Simulation nécessite de soigner le maillage et de gérer les connexions entre les composants.
Concernant le maillage, la géométrie engendrée par les composants de l’assemblage (tourillons, vis et écrous) conduit à des concentrations de contrainte. Pour assurer la rapidité de convergence des données (voir la première partie), il est donc judicieux d’affi-ner le maillage dans ces zones « sensibles » plutôt que d’affiner plus globalement le maillage de l’ensemble de l’assemblage.
SolidWorks Simulation propose d’appliquer des « contrôles de maillage » à des surfaces (comme le perçage recevant l’écrou 9 ), à des arêtes ou à des sommets. Les surfaces peuvent également être frac-tionnées (découpées par une ligne de séparation définie par une esquisse), comme le montre la zone rectan-gulaire que nous avons définie sur la face de contact, autour des composants 9 .
Affiner le maillage via l’application d’un contrôle de maillage consiste à définir une taille moyenne de maille inférieure à celle de l’assemblage au niveau de l’entité sélectionnée et de renseigner un « ratio local d’expan-sion ». Ce ratio est le rapport de propagation, c’est-à-dire le facteur d’augmentation de la taille de l’élément d’une couche à l’autre radialement par rapport à l’en-tité sur laquelle est appliqué le contrôle de maillage.
Appliquer un contrôle de maillage peut conduire à augmenter localement l’élancement des éléments, aussi faut-il procéder par itérations successives en vérifiant ce critère de qualité à chaque étape.
Notons que le logiciel propose une option de « transi-tion automatique » pour le schéma de maillage Voronoi-Delaunay. Lors du maillage, des contrôles de maillage sont alors appliqués de manière automatique aux per-çages, aux congés, aux chanfreins, etc. Si cette option simplifie l’application de raffinement local du maillage aux singularités géométriques typiques engendrées par des fonctions technologiques, elle n’en demeure pas moins une « boîte noire » dont il faut se méfier.
Notons également qu’il est possible de scinder la géo-métrie des pièces simples en concevant celles-ci par la méthode des corps multiples (les fonctions volumiques ne sont pas toutes fusionnées). Ainsi, un maillage dif-férent peut être appliqué sur chaque corps de la pièce afin de raffiner le maillage sur des volumes entiers. Là encore, le maillage au niveau des jonctions entre les corps doit être soigné. Lorsque les contrôles de mail-lage ont été définis et le maillage jugé de qualité satis-faisante, il est nécessaire de définir le comportement au niveau des contacts appelés connexions.
SolidWorks Simulation propose différentes manières de gérer les contacts : « pas de pénétration » (il y a glis-sement entre les surfaces sans interférence, le jeu est permis), « solidaire » (il n’y a pas de glissement entre les surfaces et, si le maillage est compatible, il y a fusion
8 Exemples à partir de la configuration dimensionnelle « 57×550-50×140×400-50×200×1000 »

3 8 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 39
des nœuds coïncidents de l’interface), « serré » (il y a une interférence initiale entre les surfaces).
Dans notre cas, les contacts ne sont pas aisément modélisables, puisqu’ils sont, en réalité, unilatéraux et non-linéaires (du décollement ou du glissement peuvent apparaître entre deux solides). Mais il n’est pas possible de mettre en place aussi finement le modèle. Aussi est-il nécessaire d’émettre des hypothèses pour simplifier un peu le problème. Il n’est pas déraisonnable de considérer une solution de compromis de la manière suivante 9 :
– l’écrou noyé dans le montant vertical est considéréen contact solidaire avec celui-ci et avec la vis ;
– la tête de vis est en contact solidaire avec le montantvertical (le comportement est considéré comme linaire au niveau du contact) ;
– un tourillon est choisi en contact solidaire dans lemontant, mais sans pénétration (glissant) dans la traverse.
La mise en place du serrageLa modélisation du serrage de la vis sous SolidWorks n’apparaissait pas particulièrement simple ; en pratique, on tourne la vis dans l’écrou jusqu’à obtenir le contact avec la pièce de bois ; au-delà, chaque tour de vis supplémentaire impose une déformation à la
vis ou au boulon (qui s’allonge d’une valeur db) et aux pièces comprimées (qui se contractent d’une valeur da).
Il s’agit d’un problème assez classique en construction mécanique. La figure 10 montre qu’un état d’équilibre s’établit en fonction de la raideur de la vis (ou du boulon) notée ici Kb et de la raideur de l’assemblage Ka, et qu’il donne la valeur de la précharge F0. Par la suite, si on sollicite l’assemblage en traction par un effort F, l’équilibre évolue : la charge augmente dans le boulon, et diminue dans l’assemblage. Le décollement des pièces assemblées finit par apparaître pour une valeur de F légèrement supérieure à celle de la précharge F0.
Il existe une manière astucieuse de mettre l’assemblage sous précharge. On met en place le modèle de la vis et des éléments à assembler sans jeu ni précharge, puis on impose une tension en refroidissant la vis alors que le reste de l’assemblage est à température ambiante, comme on peut le voir en 11.
Compte tenu du coefficient de dilatation a du matériau de la vis, un écart DT° induit une déformation ev = – aT° et donc une diminution d de la longueur de la vis :
d = a ⋅ Lv ⋅ DT°Lv : longueur de vis initiale
9 Le modèle CAO du 1er type d’assemblage. La vis et l’écrou sont considérés comme un seul solide, la tête de vis est en contact solidaire avec le bois, de même le pourtour de l’écrou est en contact solidaire avec la traverse. Les deux tourillons sont en contact solidaire dans le montant, mais glissant dans la traverse. La liaison plane entre le montant et la traverse est parfaite (glissement sans frottement)

3 8 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 39
L’équilibre de l’assemblage induit une tension dans la vis et une compression de l’assemblage. La contraction de la vis ne donne pas directement la tension X0 ; il faut prendre en compte la rigidité du bois comprimé…
La modélisation de la matrice de souplesse du coin réel type I Aucun théorème ne permet d’être assuré qu’il existe bien une matrice de souplesse dans ce cas. En effet, compte tenu de la présence d’éléments de contact ayant des comportements différents suivant qu’il y a appui ou décollement et de la valeur de la précharge, il est possible que les termes de la matrice dépendent des valeurs des efforts appliqués dans les différentes directions. Pire, la détermination des termes de la
matrice de souplesse se fait en appliquant le principe de superposition : ce principe est en fait un théorème dans le cas de l’élasticité linéaire, mais pour le cas d’un assemblage avec des éléments de contact il n’est pas certain qu’on puisse s’appuyer dessus.
L’influence de l’intensité des efforts sur les déplacements obtenusPartant de l’idée que le principe de superposition est néanmoins valable, nous cherchons à valider l’existence d’une matrice de rigidité ; le principe consiste donc à multiplier les calculs par éléments finis en faisant varier tour à tour l’intensité d’une des composantes (environ une dizaine de valeurs sont testées pour chaque com-posante) tout en maintenant les autres constantes.
Ce faisant, on peut construire les réponses en dépla-cement sous la forme des graphes de la figure 10. On voit que les réponses sont pratiquement rectilignes et que les droites des moindres carrés qui passent au mieux des points de calcul donnent des coefficients de corrélation très proches de 1 (c’est-à-dire entre 0,9900 et 0,9999).
Au préalable, étudions la figure 12, qui montre le cas particulier de l’influence de la charge X sur le déplacement u du point B, mais aussi la pente u/X qui représente la souplesse. Sur ce second graphe, on voit une légère fluctuation quand la charge X approche la valeur de la précharge. C’est assez logique, puisqu’il y a contact pour les charges X inférieures à X0 alors qu’il y a un risque de décollement lorsque X dépasse cette valeur. On voit aussi que le ratio u/X évolue au voisi-nage de X = 0 ; cela est dû à l’imprécision numérique du calcul du rapport, qui est très semblable pour les « petites » valeurs de X. Une dernière remarque sur ce graphe : le rapport reste dans la même gamme de valeurs, même lorsque la charge extérieure change de signe. On aurait pu penser que le contact aurait un comportement différent en tension par rapport à la compression, mais les différences sont minimes.
On peut donc conclure qu’une représentation linéaire de chaque composante est licite. Grâce aux pentes des
10 L’assemblage boulonné juste avant et après serrage. Le nombre de tours de vis impose un écrasement global δ qui se répartit entre l’allongement δb du boulon et l’écrasement δa de l’assemblage
11 La mise en place d’une précharge X0 due au serrage dans SolidWorks. Afin de simuler le serrage, on modélise un assemblage sans jeu entre les élément du lit haut et l’ensemble « vis + écrou noyé », et on impose une température plus basse à cet ensemble : la contraction qui en découle induit une compression des éléments assemblés et une tension dans la vis (ici 36 MPa)

4 0 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 41
courbes 13 et 14, on peut déterminer les composantes de la matrice de souplesse du coin réel !
L’influence du serrage des visQuatre cas de précharge X0 entre 500 et 2 000 N on été testés. Les termes de la matrice de souplesse varient peu, certains peuvent même être considérés comme constants. Pour les autres, une interpolation par une fonction affine est largement suffisante pour rendre compte des petites variations provenant du serrage. Cette modélisation est d’autant plus satisfaisante que l’effort de serrage ne varie pas tant que cela d’un uti-lisateur à l’autre.
En effet, plusieurs mesures du couple nécessaire au desserrage d’une vis ont été réalisées alors que le serrage avait été assuré par différentes personnes de constitutions très différentes, et ces mesures fluctuent très faiblement autour d’un couple de 4 Nm. Si l’on considère la classique relation de Kellerman et Klein qui relie le couple de serrage à l’effort de serrage, on peut chiffrer la contribution des deux termes.
Le couple Ctete nécessaire pour vaincre le frottement sous la tête de vis est tel que
Ctete = (2μtF / 3) (Re3 – Ri
3) / (Re2 – Ri
2) ≈ μtFDm / 2
F : effort de serrage (idem XO)μt : coefficient de frottement entre la tête de vis en acier et le montant en boisRe : rayon extérieur de la surface d’appui de la tête de visRi : rayon intérieur de la surface d’appui de la tête de visDm : diamètre moyen entre 2Re et 2Ri
Le couple Cecrou nécessaire pour vaincre le frottement entre le filet de la vis et l’écrou est tel que
Cecrou = (2F / 3) [(μe cos b + sin b) / (cos b – μe sin b)]
(r e3 – r i
3) / (r e2 – r i
2) ≈ [(μedm / 2) + (p / 2π)]F
β : angle d’hélice du filet (lié au pas p de la vis)μe : coefficient de frottement entre la vis et l’écroure : rayon extérieur du filetri : rayon intérieur du filetdm : diamètre moyen entre 2re et 2ri
Par ailleurs, la force de serrage va certainement être limitée par la pression maximale Pc sous la tête de vis avant que le bois ne soit marqué. Or :
Pc = F / [π (Re2 – Ri
2)] < 6 MPa (résistance à la compression de l’épicéa)
Si l’on considère les valeurs réalistes des coefficients de frottement μt (entre 0,2 et 0,6) et μe (entre 0,05 et 0,2) et les dimensions d’une vis M6, on constate que :
– le couple sous tête est très nettement prépondérant(de 5 à 10 fois plus élevé que le couple vis-écrou) ;
– le couple sous tête vaut effectivement environ4 Nm ;
– l’effort de serrage associé est de l’ordre de 1 100 N.En définitive, même si l’on peut s’attendre à une forte
variation dans la façon de chacun de serrer les assem-blages lors du montage d’un meuble, la résistance du bois régule bien cette variation, et peu de fluctuations sont à prévoir de ce côté.
Le tableau 15 récapitule les coefficients de la matrice du coin réel pour la partie 3 × 3 correspondant aux sollicitations planes X, Y et N, puis la partie 3 × 3 des sollicitations hors plan Z, L et M. Lorsque la valeur de souplesse Sij n’est pas sensible à l’effet de la précharge, le graphe de la figure 16 donne la valeur de la composante X0. Dans le cas contraire, on suppose que Sij = AijXO + Bij (le tableau 15 donne les coefficients Aij et Bij).
La contribution des éléments d’assemblage dans la rigidité du coin par soustractionCette dernière partie répond à la problématique qui était proposée : prendre en compte les éléments d’assem-blage dans le comportement de la structure « lit haut » modélisée comme une structure à base de poutres. Pour cela, il nous reste trois étapes à réaliser :
– isoler la contribution des éléments d’assemblagedans le comportement du coin réel ;
– décrire cette contribution sous forme d’un élé-ment fini ponctuel localisé à l’intersection des lignes moyennes du montant et des traverses ;
– implanter cet élément dans un code éléments finisRDM, et comparer la réponse de la structure avec un
12 En parallèle, le déplacement u = f (X) et u/X = f (x). On observe que si la pente du graphe u = f (X) semble bien rectiligne, on peut tout de même noter une différence de pente au voisinage de X = X0. cette fluctuation pourra permettre de détecter le moment critique du décollement de la surface de contact entre le montant et la traverse
u = f (X) u/X = f (X)

4 0 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 41
modèle par éléments finis 3D complet afin de valider l’approche.
La contribution des éléments d’assemblage par rapport à la solution rDmLors de la première partie, nous avions calculé les déplacements de la section en B dans l’hypothèse que le coin était parfait et dans le cadre de la théorie des
poutres anisotropes. Cela nous a permis de détermi-ner, pour différents cas de chargement, le torseur des petits déplacements : voir équation e .
Lors de cette seconde partie, nous avons mené des calculs par éléments finis 3D sur le coin réel, ce qui nous a permis de déterminer, pour les mêmes diffé-rents cas de chargement, le torseur des petits dépla-cements : voir équation f .
13 La visualisation des termes de la matrice de souplesse pour la partie plane des sollicitations. En dessus, on peut voir l’origine des différences entre coin réel et coin parfait. Sur les figures Y et n, on voit très nettement le décollement du contact en partie basse de l’assemblage, ce qui explique la raideur assez nettement différente pour ces deux cas de charge par rapport à la RDM. En dessous, la pente de chaque droite correspond à la valeur qui apparaît dans la matrice de souplesse (en rouge la matrice issue de l’analyse élastique RDM et en bleu le dépouillement des calculs par éléments finis sur l’assemblage réel préchargé). On peut remarquer une différence significative et sur certains termes une légère perte de symétrie
u = f (X)
X = 900 N Y = 900 N N = 520 Nm
v = f (X) v = f (Y) v = f (N)
r = f (X) r = f (Y) r = f (N)
Chargement (N)Chargement (N)
Chargement (N)
Dép
lace
men
t (m
m)
Dép
lace
men
t (m
m)
Rota
tion
(rad)
Dép
lace
men
t (m
m)
Dép
lace
men
t (m
m)
Dép
lace
men
t (m
m)
Dép
lace
men
t (m
m)
Rota
tion
(rad)
Rota
tion
(rad)
Chargement (N)
Chargement (N)
Chargement (N-mm)
Chargement (N-mm)
Chargement (N) Chargement (N-mm)
u = f (Y) u = f (N)
Real
ass
embl
yPe
rfec
t ass
embl
y
AEF RDM

4 2 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 4 3
14 La visualisation des termes de la matrice de souplesse pour la partie 3 × 3 des sollicitations hors plan. On peut voir le décollement important des cas de charge Z et M. En dessous, on peut remarquer la différence significative sur ces termes et aussi une légère perte de symétrie due à la non-linéarité des éléments de contact
w = f (Z)
Z = 250 N L = 90 Nm M = 90 Nm
p = f (Z) p = f (L) p = f (M)
q = f (Z) q = f (L) q = f (M)
Chargement (N) Chargement (N-mm)
Chargement (N)
Dép
lace
men
t (m
m)
Rota
tion
(rad)
Rota
tion
(rad)
Dép
lace
men
t (m
m)
Rota
tion
(rad)
Dép
lace
men
t (m
m)
Rota
tion
(rad)
Rota
tion
(rad)
Rota
tion
(rad)
Chargement (N)
Chargement (N-mm)
Chargement (N-mm)
Chargement (N-mm)
Chargement (N-mm) Chargement (N-mm)
w = f (L) w = f (M)
Real
ass
embl
yPe
rfec
t ass
embl
y
AEF RDM
x y z
u u x v y w zUB
RDM RDM RDM RDM
B BB
RDM
RDM RDM BRDM BRDM
ψ α β γ{ } }{=
= + +
= + +e
x y z
u u x v y w zUB
reel reel reel reel
B B B BB
reel
reel reel reel reel
ψ α β γ{ } =
= + +
= + + }{f
U U U U U UB B B B B Breel RDM ass ass reel RDM{ } { } { } { }{ } { }= + ⇒ = −
g

4 2 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 4 3
Si l’on considère une nouvelle fois le principe de superposition, on peut en déduire la contribution des éléments d’assemblage dans le déplacement réel par rapport à la solution RDM en considérant que : voir équation g .
Or, dans les deux cas (RDM et réel), les composantes des déplacements s’écrivent sous forme matricielle : voir équation h .
La différence des matrices de souplesse [SBreel] et [SBRDM] donne donc la matrice de souplesse [SBass] qui est la contribution des éléments d’assemblage au comportement du coin. Cette matrice doit ensuite être transportée en O, point de jonction des lignes moyennes des deux poutres constituant le coin (on pourra se reporter au paragraphe « Le transport des termes de la matrice de souplesse en O ») : voir équation i .
On peut finalement soit soustraire les matrices en B et transporter en O la différence 17 soit transporter chacune des deux matrices en O et faire la différence. En définitive, l’assemblage est représenté par une
matrice non symétrique [SOass] qui dépend de la valeur de la précharge X0 pour certains termes :
[SOass] = [SOreel] – [SORDM]
L’écriture des éléments ponctuels d’assemblage dans un code rDm Pour bien comprendre ce qui suit, un petit rappel des bases sur la méthode des éléments finis appliqués aux poutres n’est pas superflu (voir en annexe). La prise en compte de la flexibilité des assemblages revient à ajouter des éléments ponctuels analogues à des res-sorts aux jonctions entre poutres 18.
On considère le cas du coin, et on propose un maillage extrêmement rudimentaire : 1 élément pour le montant et 1 élément pour la traverse, soit 3 nœuds au total. Si le problème est 3D, il faut 6 ddl (degré de liberté) par nœud (3 translations et 3 rotations), et la taille de la matrice de raideur globale est donc de 18 × 18 pour l’exemple de gauche de la figure 18. Cette matrice est non inversible, mais si on prend en compte le fait
u
v
w
u
v
wS S
S S
XYZLMN
et
S S
S S
XYZLMN
B
B
B
reel
reel
reel
XX XN
NX NN
matrice desouplesse dela liaison : S
B
B
B
RDM
RDM
RDM
XX XN
NX NN
matrice desouplesse dela liaison : S
reel
reel
reel
Breel
RDM
RDM
RDM
BRDM
… …
α
β
γ
α
β
γ
= =
h
u
v
w
u
v
wS S
S S
XYZLMN
et
S S
S S
XYZLMN
B
B
B
reel
reel
reel
XX XN
NX NN
matrice desouplesse dela liaison : S
B
B
B
RDM
RDM
RDM
XX XN
NX NN
matrice desouplesse dela liaison : S
reel
reel
reel
Breel
RDM
RDM
RDM
BRDM
… …
α
β
γ
α
β
γ
= =
i
SXYN SZLMSij A ij Bij Sij A ij Bij
S11 (mm/n) - - S11 (mm/n) – 4,73 E – 05 2,86 E – 01
S12 (mm/n) – 2,06 E – 07 – 4,07 E – 03 S12 (mm/n⋅mm) 1,95 E – 09 2,53 E – 05
S13 (mm/n⋅mm) – 8,392 E – 10 – 1,00 E – 05 S13 (mm/n⋅mm) 1,08 E – 07 – 6,33 E – 04
S21 (mm/n) - - S21 (rad/n) 1,70 E – 09 2,08 E – 05
S22 (mm/n) – 1,67 E – 06 1,94 E – 02 S22 (rad/n⋅mm) - -
S23 (mm/n⋅mm) – 8,15 E – 09 4,24 E – 05 S23 (rad/n⋅mm) – 6,06 E – 12 – 2,48 E – 08
S31 (rad/n) - - S31 (rad/n) 1,20 E – 07 – 7,12 E – 04
S32 (rad/n) – 4,23 E – 09 4,67 E – 05 S32 (rad/n⋅mm) – 4,59 E – 12 – 3,17 E – 08
S33 (rad/n⋅mm) – 2,07 E – 11 1,07 E – 07 S33 (rad/n⋅mm) – 2,746 E – 10 1,73 E – 06
15 Les coefficients d’interpolation affine des termes Sij de la matrice de souplesse lorsque la précharge XO évolue

4 4 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 4 5
SZLMij = f (Xo)
SXYNij = f (Xo)
16 La visualisation de l’influence du serrage de la vis sur les termes de la matrice de souplesse (partie 3 × 3 plane en haut et partie 3 × 3 hors plan en dessous). certains termes ne varient quasiment pas, pour les autres une interpolation par une fonction affine semble suffisante pour traduire le plus ou moins fort serrage

4 4 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 4 5
déplacements relatifs entre les sections (3) et (2). Ces sections sont au même endroit, aussi il n’y a pas de changement de point à faire pour effectuer la différence {DU} = {U3} – {U2}. Ce pseudo-ressort ajoute un terme dans le travail virtuel des sollicitations internes : voir équation j .
Cette dernière expression peut aussi se mettre sous une forme plus facile à intégrer dans un code éléments finis : voir équation k .
Si l’on considère maintenant le cas du coin avec élément d’assemblage tel que maillé de manière rudi-mentaire sur la droite de la figure 18 : 1 élément pour le montant et 1 élément pour la traverse + 1 élément ponctuel pour l’assemblage, soit 4 nœuds au total, il faut 6 ddl par nœud. La taille de la matrice de raideur globale est donc, cette fois, de 24 × 24. Cette matrice est non symétrique et, a priori, non inversible. Si on prend en compte le fait que le nœud (1) correspond à une section encastrée, alors on peut réduire la taille du problème en éliminant les 6 premières colonnes de
que le nœud (1) correspond à une section totalement encastrée, alors pour ses 6 premières composantes la colonne des déplacements est constituée de 0. On peut ainsi réduire la taille du problème en éliminant les 6 premières colonnes de [Kglob]. Les 6 premières équations servent à déterminer les efforts en A qui sont inconnus au départ ; ainsi, le système 12 × 12 restant permet d’obtenir les 12 ddl inconnus en fonction des efforts imposés X, Y, Z, L, M et N 19.
Considérons maintenant le cas de droite de la figure 18 : les éléments d’assemblage, dont on a vu qu’ils pou-vaient être représentés par une matrice de souplesse [SOass] dont les termes sont des constantes, peuvent être considérés comme un pseudo-ressort entre les deux éléments de poutre. Dès lors, il faut 4 nœuds dont les ddl seront indépendants, car les déplace-ments des nœuds (2) et (3) ne sont pas identiques si l’assemblage est flexible.
Soit {F0} le torseur des sollicitations internes qui transite par le coin, soit {DU} le torseur des
( ){ } { } =−
−
[ ]
U u v w u v w
u
v
w
u
v
w
FS
*O 2
*2*
2*
2*
2*
2*
3*
3*
3*
3*
3*
3*
O
–1 –1
–1 –1
Matrice de raideur élémentairede l’élément ponctuel K
2
2
2
2
2
2
3
3
3
3
3
3
assSOass
SOassSOass
ass
α β γ α β γ
α
β
γ
α
β
γ
Δ ⊗] ]]
]]]]]
k
j
( )
( ) ]]
{ } { }− = − − − − − − −
= − − − − − − −
−
−−
−
−
−
−
u u v v w w
u u v v w w
u u
v vw w
U F
XYZL
M
N
S
*O 3
*2*
3*
2*
3*
2*
3*
2*
3*
2*
3*
2*
O
O
O
3*
2*
3*
2*
3*
2*
3*
2*
3*
2*
3*
2*
O
1
3 2
3 2
3 2
3 2
3 2
3 2
ass
α α β β γ γ
α α β β γ γα α
β β
γ γ
Δ ⊗

4 6 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 47
[Kglob]. Ainsi le système restant est de taille 18 × 18, et permet d’obtenir les 18 ddl inconnus en fonction des efforts imposés X, Y, Z, L, M et N 20.
Évidemment, pour une plus grande précision sur l’allure des déformées du montant et de la traverse, il faut mailler plus finement les deux montants, mais l’insertion de la matrice de raideur élémentaire de l’élément d’assemblage dans la matrice de raideur globale reste identique.
La validation de l’approche par éléments ponctuels pour représenter un assemblage entre montant et traverseNous allons procéder en deux temps pour valider l’ap-proche proposée : premièrement, valider l’implémen-tation dans le code RDM de l’élément d’assemblage ponctuel en comparant les calculs sur coins réels avec les résultats de notre code ; secondement, valider la pertinence de l’approche en comparant les déformées obtenues sur des exemples plus proches d’un véritable meuble avec SolidWorks d’une part et avec notre code d’autre part 21 22.
L’écart reste inférieur à 1,5 % sur les composantes du déplacement, et sur une étude plus exhaustive des 6 cas de charge (X, Y, Z, L, M, N), pour plusieurs niveaux de précharge (X0 = 1 000, 1 200, 1 400 et 1 600 N), le plus grand écart entre la simulation SolidWorks et l’approche simplifiée « RDM + élément d’assemblage » est de 1,9 %.
La comparaison est donc excellente sur ces diffé-rents cas, et ce n’est pas une surprise car ils ont servi à identifier la matrice de souplesse de l’assemblage. Néanmoins, cette étape permet de s’assurer qu’il n’y a pas eu de problème de programmation. Plus critique sera la comparaison sur un exemple de structure plus complexe.
Nous avons considéré une structure représentative d’un lit haut : nous n’avons retenu que deux des quatre montants et une seule traverse. La simulation est faite sous SolidWorks avec une configuration « tourillon-vis-tourillon » pour les deux assemblages serrés avec une précharge X0 de 1 000 N. Nous avons considéré deux cas de charge : une charge horizontale appliquée sur la tête de vis du montant de gauche 23a et une charge verticale appliquée au centre de la traverse 23b . Le modèle 3D, même simplifié par rapport à un lit haut complet, est constitué de près de 400 000 nœuds, soit 1,2 million de degrés de liberté.
Dans les deux cas, le temps de calcul est d’environ 55 minutes. Ce qui est beaucoup plus que pour le calcul réalisé par le code élément finis à base de poutres de Timoshenko dans lequel nous avons introduit l’élément d’assemblage aux deux coins. La traverse est découpée en 8 tronçons et les montants en 2 tronçons, ce qui donne ici un total de 15 nœuds, soit 90 ddl ; le calcul s’effectue instantanément… et l’écart ne dépasse pas 3 % entre les deux simulations !
Nœud (2)
Nœud (2)
Nœud (1) Nœud (1)
Nœud (3)
Nœud (3)
Élément (II)
Élément (II)
Élément (I)Élément (I)
Nœud (4)
18 À gauche, maillage classique d’une structure à base de poutres par deux éléments : le nœud (1) est encastré et les efforts sont appliqués en b au nœud (3), les déplacements et rotations sont identiques au nœud (2) qu’il appartienne au montant vertical ou à la traverse horizontale. À droite, le maillage qui prend en compte la flexibilité de l’assemblage : les efforts sont désormais appliqués au nœud (4) car la flexibilité de l’assemblage nécessite de distinguer les nœuds (2) et (3), qui auront des déplacements et des rotations différents
sB reel – FEa
0,003 96 – 0,004 15 0 0 0 – 0,000 009 6
– 0,004 90 0,018 74 0 0 0 0,000 045
0 0 0,270 761 9 0,000 025 – 0,000 677 8 0
0 0 0,000 022 0,000 003 1 0 0
0 0 – 0,000 676 4 0 0,000 001 8 0
– 0,000 011 5 0,000 045 0 0 0 0,000 000 1
sB rDm
0,003 89 – 0,004 79 0 0 0 – 0,000 011 2
– 0,004 79 0,009 45 0 0 0 0,000 022
0 0 0,159 632 1 0,000 011 2 – 0,000 391 0
0 0 0,000 011 2 0,000 002 8 0 0
0 0 – 0,000 391 0 0,000 001 1 0
– 0,000 011 2 0,000 022 0 0 0 0,000 000 1
[s reel – srDm]B
0,000 07 0,000 63 0 0 0 0,000 001 6
– 0,000 12 0,009 30 0 0 0 0,000 023
0 0 0,112 129 9 0,000 013 6 – 0,000 287 0
0 0 0,000 010 6 0,000 000 2 0 0
0 0 – 0,000 285 0 0,000 000 7 0
– 0,000 000 3 0,000 023 2 0 0 0 0,000 000 1
[sO ass]0,000 07 – 0,000 06 0 0 0 0,000 001 6
0,000 01 0,000 21 0 0 0 – 0,000 002
0 0 0,000 758 0,000 013 6 0,000 025 4 0
0 0 0,000 010 6 0,000 000 2 0 0
0 0 0,000 026 9 0 0,000 000 7 0
– 0,000 000 3 – 1,8 × 10–6 0 0 0 0,000 000 1
17 La soustraction des matrices B puis le transport au point O

4 6 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 47
Vers des essais virtuels sur meubles en bois avec prise en compte de la flexibilité des assemblages et des dispersions de propriétésLa réalisation d’un essai virtuel sur des meubles en épicéa (et plus généralement en bois) ne peut se réduire à un seul calcul par éléments finis. En effet, les incertitudes sont grandes à la fois sur les propriétés du bois utilisé
et sur la manière dont les éléments d’assemblage ont été serrés.
Afin de conduire à une prédiction fiable de la bonne tenue du meuble, il convient donc de réaliser un grand nombre de simulations numériques en faisant varier chaque paramètre incertain suivant sa propre loi de probabilité. Cette approche, appelée simulation de
19 Illustration de l’assemblage de la matrice globale et de la prise en compte des conditions d’encastrement pour la résolution du système 12 × 12 restant
Prise en compte des conditions limites
Matrice [Kglob] 18 × 18 généralement non inversible
Matrice [K] 12 ×12 à inverser
20 Illustration de l’assemblage de la matrice globale dans le cas de la présence d’un élément d’assemblage (zone grisée) et de la prise en compte des conditions d’encastrement pour la résolution du système 18 × 18 restant. Attention ! La matrice restante n’est pas symétrique, et certaines méthodes numériques d’inversion (triangulation de cholesky par exemple) ne sont pas possibles
Prise en compte des conditions limites
Matrice [Kglob] 24 × 24 non symétrique et généralement non inversible
Matrice [K] 18 ×18 à inverser

4 8 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 49
Rappel sur les éléments finis appliqués aux poutresLe principe des travaux virtuels (PtV) est à la base de l’approximation des éléments finis. Dans le cas des poutres sous sollicitations quasi statiques, le PtV s’écrit sous la forme :
∫ ∫ ∑{ } { } { }{ } { } { }= +x x ds x x ds x xT( ) D ( ) F( ) U ( ) F( ) U ( )i ii0
L*
0
L* *⊗ ⊗ ⊗
où {u} est le torseur des petits déplacements dans la section d’abscisse x et {D} le torseur des petites déformations, donnés par :
⇒}} }}= =− +u v w
ddx
ddx
ddx
dudx
dvdx
dwdx
U Dα β φ
α β φ
φ β
��
�
��
�
Le travail virtuel des sollicitations internes se développe en Wi* :
∫
∫
{ }{ }=−
=− + + + + − + +
x x dx
ddx
ddx
ddx
dudx
dvdx
dwdx
dx
W T( ) D ( )
M M M N T ( ) T ( )
i
t f y fz y z
L
*
0
L*
* * * * **
**
0
α β φφ β
⊗
ou :
∫= − + + + + − − + + +ddx
ddx
ddx
ddx
ddx
ddx
dudx
dudx
dvdx
dvdx
dwdx
dwdx
dxGJW EI EI ES GS( )( ) GS ( )*
*
yi
*
z
* **
**
0
L α α β β β βφφ φ φ
si on prend en compte les relations de comportement élastiques (isotropes ou anisotropes). Dans le cas isotrope, E et G sont liés par la relation G = E / 2(1 + u) ; dans le cas anisotrope, ces deux caractéristiques sont indépendantes. Dans le cas d’une poutre en bois, E est le module d’élasticité Eℓ où ℓ désigne la direction longitudinale des fibres du bois, G est le module de cisaillement Gℓt ou Gℓr entre la direction longitudinale et les directions transversales, radiale (notée « r ») ou tangente (notée « t ») par rapport aux anneaux du tronc. Pour une poutre en bois, on confond généralement les caractéristiques radiale et tangentielle.L’expression du travail virtuel des forces extérieures est :
∫ ∑{ } { }{ } { }= +x x ds x xW F( ) U ( ) F( ) U ( )i ie*
0
L* *
i
⊗ ⊗
où le 1er terme correspond aux forces distribuées le long de la poutre et le 2d aux charges concentrées aux sections d’abscisses xi. Si on découpe une poutre en éléments finis de longueurs Le et que l’on choisit une fonction de forme affine pour représenter chaque degré de liberté des sections extrêmes de l’élément, on peut réécrire le travail virtuel des sollicitations internes sous la forme :
∑ [ ][ ][ ]= −W u * K ui* t
eelt
e e
où [Ke] est la matrice locale de rigidité de l’élément :
=[K ]e
e e
e e
e e
e e
e e
e e
e e
e e
e e
e e
e e
e e
ES
L0 0 0 0 0 –
ES
L0 0 0 0 0
0GS
L0 0 0
GS
20 –
GS
L0 0 0
GS
2
0 0GS
L0 –
GS
20 0 0 –
GS
L0 –
GS
20
0 0 0GJ
L0 0 0 0 0
GJ
L0 0
0 0 –GS
20
GSL
3+EIy
L0 0 0
GS
20
GSL
6–EIy
L0
0GS
20 0 0
GSL
3+EIz
L0 –
GS
20 0 0
GSL
6–EIz
L
–ES
L0 0 0 0 0
ES
L0 0 0 0 0
0 –GS
L0 0 0 –
GS
20
GS
L0 0 0 –
GS
2
0 0 –GS
L0
GS
20 0 0
GS
L0
GS
20
0 0 0GJ
L0 0 0 0 0
GJ
L0 0
0 0 –GS
20
GSL
6–EIy
L0 0 0
GS
20
GSL
3–EIy
L0
0GS
20 0 0
GSL
6–EIz
L0 –
GS
20 0 0
GSL
3–EIz
L
Le travail virtuel des forces extérieures peut aussi s’écrire sous une forme matricielle où la colonne [Fe] représente les forces extérieures :
∑ ( )[ ]=W U Fee* T
e*
elt
Après assemblage de la matrice de raideur globale [K] (tenant compte de l’orientation de la poutre dans le repère global de la structure) et de la colonne de force globale [F], on prend en compte les conditions limites en déplacement, ce qui conduit à un système linéaire à résoudre :
[ ][ ][ ] [ ][ ][ ]
[ ][ ] [ ] [ ] [ ] [ ]=
∀= =
−U* K U U* F
U*K U F U K F
T T1⇒ ⇒
ce qui donne accès à la déformée globale de la structure à base de poutres étudiée.

4 8 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4 m a r s 2 0 1 4 t e c h n o l o g i e 1 9 0 49
22 La comparaison dans le cas d’un effort de 1 000 N appliqué suivant Y au point B. Malgré la précharge de 1 000 n, on peut voir un décollement sur la simulation SW. Sur la figure de droite, même sans très fort grossissement, on peut voir se déployer le « ressort » (en vert) qui représente la déformation de l’élément d’assemblage
21 La comparaison dans le cas d’un effort de 500 N appliqué suivant X au point B. La précharge est de 1 000 n aussi il n’y a pas de décollement, et sur la figure de droite il faut effectuer un grossissement très fort pour voir se déployer le « ressort » (en vert) qui représente la déformation de l’élément d’assemblage

5 0 t e c h n o l o g i e 1 9 0 m a r s 2 0 1 4
Monte-Carlo, n’est pas réaliste à l’heure actuelle sur des modèles 3D complets. En effet, les temps de calcul sur un lit haut, compte tenu de la finesse du maillage au voisinage des éléments d’assemblage et des itéra-tions nécessaires pour résoudre les non-linéarités introduites par les éléments de contact, est de l’ordre de plusieurs heures sur un PC muni d’un processeur Intel Core i7. Une simulation de Monte-Carlo impli-quant plus de 1 000 simulations n’est pas raisonnable, notamment dans un contexte industriel.
Grâce aux éléments d’assemblage ponctuels mis en place dans le cadre d’une simulation du meuble à base de poutres, le nombre de degrés de liberté est bien plus réduit. L’assemblage est pris en compte globalement, et ne nécessite pas de raffinement de maillage spécifique. Au final, un calcul ne dure que quelques secondes, et ainsi la simulation de Monte-Carlo ne dure que quelques heures, au bout desquelles il est possible de
faire une étude statistique du comportement (rigidité et résistance) du meuble étudié.
Cette approche est une étape du travail de thèse de Heba Makhlouf au laboratoire MSME UMR 8082 CNRS à Marne-la-Vallée. Elle est décrite en détail dans une publication à paraître dans le Forest Products Journal. n
Références bibliographiquescHAtEAunEuF (A.), Comprendre les éléments finis, Ellipses, collection « technosup », 2010
cHEVALIER (L.), Mécanique des systèmes et des milieux déformables : Cours, exercices et problèmes corrigés, Ellipses, 2007
KuROWSKI (P. M.), Engineering Analysis with SolidWorks Simulation, SDc Publications, 2012
StEFFEn (J. R.), Analysis of Machine Elements Using SolidWorks Simulation, SDc Publications, 2011
23 La comparaison entre une simulation 3D sous SolidWorks et une simulation RDM avec prise en compte des éléments d’assemblage
a Effort horizontal de 300 N sur un montant (facteur de grossissement 50 sur les déplacements)
b Effort vertical de 1 000 N au centre de la traverse (facteur de grossissement 300 sur les déplacements)
R E S E A U - C A N O P E . F R
SCÉRÉN [CNDP-CRDP] DEVIENT CANOPÉ
Une nouvelle offre éditorialeUne nouvelle offre numériqueUne relation de proximité réaffirmée
C A N O P
R É S E A U
P A R T A G E
P R O X I M I T É
D I V E R S I T ÉN U M É R I Q U E
R E S E A U - C A N O P E . F R
Plus d’informations sur reseau-canope.fr