IUT GEII Nîmes 0.3cm - DUT 2 - Alternance Séance d'Automatique n˚3
86
DUT2-Alt Automatique TP : Correction proportionnelle d’un système du premier ordre Cours/TD :Correction proportionnelle d’un système du premier ordre Précision d’un système asservi TP : Correction proportionnelle intégrale d’un système du premier ordre IUT GEII Nîmes DUT 2 - Alternance Séance d’Automatique n°3 Yaël Thiaux [email protected] 18 Septembre 2013 1
Transcript of IUT GEII Nîmes 0.3cm - DUT 2 - Alternance Séance d'Automatique n˚3

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
IUT GEII Nîmes
DUT 2 - AlternanceSéance d’Automatique n°3
Yaël [email protected]
18 Septembre 2013
1

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)
1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)
2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)
3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)
4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)
5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)
6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)
7 TP : Correction proportionnelle intégrale d’un système du premier ordre(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance
1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance1 Comprendre l’intérêt d’un correcteur proportionnel
2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’uncahier des charges
3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges
3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique
4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral
5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Séance n°3
Déroulement de la séance (4h)1 Contrôle de connaissance (∼ 45 min)2 TP : Correction proportionnelle d’un système du premier ordre (∼ 1 h)3 Pause (15 min)4 Cours : Correction d’un système du premier ordre (∼ 50 min)5 Pause (15 min)6 Cours : Précision d’un système asservi (15 min)7 TP : Correction proportionnelle intégrale d’un système du premier ordre
(∼ 40 min)
Objectifs de la séance1 Comprendre l’intérêt d’un correcteur proportionnel2 Savoir calculer le gain d’un correcteur proportionnel en fonction d’un
cahier des charges3 Savoir calculer une erreur statique4 Comprendre l’intérêt d’un correcteur proportionnel intégral5 Parfaire sa connaissance du logiciel SCILAB
2

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
1 TP : Correction proportionnelle d’un système du premier ordre
2 Cours/TD :Correction proportionnelle d’un système du premier ordre
3 Précision d’un système asservi
4 TP : Correction proportionnelle intégrale d’un système du premier ordre
3

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreOn insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel (un simple gain G) :
VCMDE 31+4×p
Vs
+−
VeCorrecteur
Réaliser ce système sous SCILAB, le schéma réalisé devra ressembler àcelui ci-dessous :
4

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreOn insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel (un simple gain G) :
VCMDE 31+4×p
Vs
+−
VeCorrecteur
Réaliser ce système sous SCILAB, le schéma réalisé devra ressembler àcelui ci-dessous :
4

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriée
Simuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableauConclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriéeSimuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.
Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableauConclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriéeSimuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableauConclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriéeSimuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableauConclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriéeSimuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableau
Conclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Au vu de la constante du système, choisir une durée de simulationappropriéeSimuler le comportement de ce système pour un correcteur de gainG = 1, G = 5, G = 10 et G = 100.Pour chacun de ces 4 essais, déterminer la constante de temps en bouclefermée (τBF ) et l’écart entre entrée et sortie en régime permanent (ε∞).
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF
ε∞
Regrouper tous les résultats dans un tableauConclusion ?
5

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
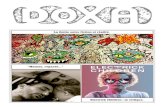
Correction proportionnelle d’un système du premier ordre
Courbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :
1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreCourbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :
1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreCourbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :
1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreCourbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :
1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreCourbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreCourbes :
Valeurs mesurées :G τBF ε∞ %1 1 s 25%5 0,3 s 6%10 0,12 s 3%100 0,013 s 0,3%
Intérêt du correcteur proportionnel :1 Plus G ↗, plus τBF ↘⇒ Le correcteur proportionnel augmente la rapidité de l’asservissement
2 Plus G ↗, plus ε∞ ↘⇒ Le correcteur proportionnel améliore la précision de l’asservissement
6

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
1 TP : Correction proportionnelle d’un système du premier ordre
2 Cours/TD :Correction proportionnelle d’un système du premier ordre
3 Précision d’un système asservi
4 TP : Correction proportionnelle intégrale d’un système du premier ordre
7

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.
Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?
Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?
Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordreAprès avoir observé les avantages du correcteur proportionnel en simulation,nous allons démontrer théoriquement ses intérêts. Reprenons le mêmeasservissement, en généralisant le système :
K1+τ×p
Vs
+−
Ve G
Exercice :
Déterminer la fonction de transfert en boucle fermée du système.Mettre celle-ci sous la forme généralisée suivante :
FTBF (p) =KBF
1+ τBF ×p
Que vaut la constante de temps τBF ?Que vaut le gain statique KBF ?Application : pour un gain G = 5, représenter la réponse indicielle dusystème à un échelon de 1V.
8

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :
Fonction de transfert en boucle fermée :
FTBF (p) =G×K1+τ×p
1+ GK1+τ×p
=G×K
1+G×K + τ ×p
Forme généralisée :
FTBF (p) =G×K
G×K +1×
11+ τ
G×K+1 ×p=
KBF1+ τBF ×p
Constante de temps en boucle fermée :
τBF =τ
G×K +1< τ
Gain statique en boucle fermée :
KBF =G×K
G×K +1< 1
9

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :Fonction de transfert en boucle fermée :
FTBF (p) =G×K1+τ×p
1+ GK1+τ×p
=G×K
1+G×K + τ ×p
Forme généralisée :
FTBF (p) =G×K
G×K +1×
11+ τ
G×K+1 ×p=
KBF1+ τBF ×p
Constante de temps en boucle fermée :
τBF =τ
G×K +1< τ
Gain statique en boucle fermée :
KBF =G×K
G×K +1< 1
9

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :Fonction de transfert en boucle fermée :
FTBF (p) =G×K1+τ×p
1+ GK1+τ×p
=G×K
1+G×K + τ ×p
Forme généralisée :
FTBF (p) =G×K
G×K +1×
11+ τ
G×K+1 ×p=
KBF1+ τBF ×p
Constante de temps en boucle fermée :
τBF =τ
G×K +1< τ
Gain statique en boucle fermée :
KBF =G×K
G×K +1< 1
9

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :Fonction de transfert en boucle fermée :
FTBF (p) =G×K1+τ×p
1+ GK1+τ×p
=G×K
1+G×K + τ ×p
Forme généralisée :
FTBF (p) =G×K
G×K +1×
11+ τ
G×K+1 ×p=
KBF1+ τBF ×p
Constante de temps en boucle fermée :
τBF =τ
G×K +1< τ
Gain statique en boucle fermée :
KBF =G×K
G×K +1< 1
9

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :Fonction de transfert en boucle fermée :
FTBF (p) =G×K1+τ×p
1+ GK1+τ×p
=G×K
1+G×K + τ ×p
Forme généralisée :
FTBF (p) =G×K
G×K +1×
11+ τ
G×K+1 ×p=
KBF1+ τBF ×p
Constante de temps en boucle fermée :
τBF =τ
G×K +1< τ
Gain statique en boucle fermée :
KBF =G×K
G×K +1< 1
9

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
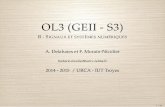
Correction proportionnelle d’un système du premier ordre
Solution :
Réponse indicielle du système en BF à un échelon de 1V :
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF = 0,25 s
∼ 0,94V
10

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle d’un système du premier ordre
Solution :Réponse indicielle du système en BF à un échelon de 1V :
ve(t), vsBF (t)
t
1V
63%×Vs∞
τBF = 0,25 s
∼ 0,94V
10

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
1 TP : Correction proportionnelle d’un système du premier ordre
2 Cours/TD :Correction proportionnelle d’un système du premier ordre
3 Précision d’un système asservi
4 TP : Correction proportionnelle intégrale d’un système du premier ordre
11

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asserviNous nous intéressons toujours au système asservi ci-dessous :
K1+τ×p
Vs+ −
Ve G
Précision d’un système⇒ Déterminer la précision d’un système revient à déterminer l’erreur enrégime permanent (ε∞) entre l’entrée et la sortie du système. Pour ladéterminer, nous utiliserons le théorème suivant :
ε∞ = limt→∞
ε(t) = limp→0
p× ε(p)
ve(t), vs(t)
t
ε∞
12

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asserviNous nous intéressons toujours au système asservi ci-dessous :
K1+τ×p
Vs+ −
Ve G
Précision d’un système⇒ Déterminer la précision d’un système revient à déterminer l’erreur enrégime permanent (ε∞) entre l’entrée et la sortie du système. Pour ladéterminer, nous utiliserons le théorème suivant :
ε∞ = limt→∞
ε(t) = limp→0
p× ε(p)
ve(t), vs(t)
t
ε∞
12

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asserviNous nous intéressons toujours au système asservi ci-dessous :
K1+τ×p
Vs+ −
Ve G
Précision d’un système⇒ Déterminer la précision d’un système revient à déterminer l’erreur enrégime permanent (ε∞) entre l’entrée et la sortie du système. Pour ladéterminer, nous utiliserons le théorème suivant :
ε∞ = limt→∞
ε(t) = limp→0
p× ε(p)
ve(t), vs(t)
t
ε∞
12

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)
Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)
En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)
A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
K1+τ×p
Vs
+−
εVe G
Exercice :
On considère une entrée échelon d’1 V : Ve(p) = 1p
Exprimer ε(p) en fonction de Ve(p) et de Vs(p)Exprimer Vs(p) en fonction d’ε(p)En déduire l’expression d’ε(p)A l’aide du théorème de la diapositive précédente, déterminer alorsl’erreur en régime permanent (ε∞) pour ce système asservi
13

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :
Relation 1 :ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Relation 1 :
ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Relation 1 :
ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Relation 1 :
ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Relation 1 :
ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Relation 1 :
ε(p) = Ve(p)−Vs(p)
Relation 2 :Vs(p) = ε(p)×
GK1+ τ ×p
D’où :ε(p) =
1p− ε(p)×
GK1+ τ ×p
Par suite :ε(p)(1+
GK1+ τ ×p
) =1p
ε(p)(GK +1+ τ ×p
1+ τ ×p) =
1p
Et donc :ε(p) =
1+ τ ×pp× (GK +1+ τ ×p)
14

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p×1+ τ ×p
p× (GK +1+ τ ×p)
D’où :ε∞ =
1+ τ ×0(GK +1+ τ ×0)
=1
GK +1Par exemple, pour un gain G = 5 et un gain statique de boucle ouverte
K = 3, l’erreur en régime permanent vaudra :
ε∞ =1
5×3+1=
116∼ 6,2% (cf . diapo 6)
15

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p×1+ τ ×p
p× (GK +1+ τ ×p)
D’où :ε∞ =
1+ τ ×0(GK +1+ τ ×0)
=1
GK +1Par exemple, pour un gain G = 5 et un gain statique de boucle ouverte
K = 3, l’erreur en régime permanent vaudra :
ε∞ =1
5×3+1=
116∼ 6,2% (cf . diapo 6)
15

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p×1+ τ ×p
p× (GK +1+ τ ×p)
D’où :ε∞ =
1+ τ ×0(GK +1+ τ ×0)
=1
GK +1
Par exemple, pour un gain G = 5 et un gain statique de boucle ouverteK = 3, l’erreur en régime permanent vaudra :
ε∞ =1
5×3+1=
116∼ 6,2% (cf . diapo 6)
15

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Précision d’un système asservi
Solution :Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p×1+ τ ×p
p× (GK +1+ τ ×p)
D’où :ε∞ =
1+ τ ×0(GK +1+ τ ×0)
=1
GK +1Par exemple, pour un gain G = 5 et un gain statique de boucle ouverte
K = 3, l’erreur en régime permanent vaudra :
ε∞ =1
5×3+1=
116∼ 6,2% (cf . diapo 6)
15

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
1 TP : Correction proportionnelle d’un système du premier ordre
2 Cours/TD :Correction proportionnelle d’un système du premier ordre
3 Précision d’un système asservi
4 TP : Correction proportionnelle intégrale d’un système du premier ordre
16

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
On insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel intégral :
F (p) = 31+4×p
Vs
+−
Ve KPI (1+τPI×p)τPI×p
Réaliser ce système sous SCILABLe correcteur PI sera réalisé avec un bloc système à temps continu, onfixera les constantes suivantes : C(p) = KPI × 1+τPI×p
τPI×p
KPI = 1τPI = τ = 4s
17

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
On insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel intégral :
F (p) = 31+4×p
Vs
+−
Ve KPI (1+τPI×p)τPI×p
Réaliser ce système sous SCILAB
Le correcteur PI sera réalisé avec un bloc système à temps continu, onfixera les constantes suivantes : C(p) = KPI × 1+τPI×p
τPI×p
KPI = 1τPI = τ = 4s
17

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
On insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel intégral :
F (p) = 31+4×p
Vs
+−
Ve KPI (1+τPI×p)τPI×p
Réaliser ce système sous SCILABLe correcteur PI sera réalisé avec un bloc système à temps continu, onfixera les constantes suivantes : C(p) = KPI × 1+τPI×p
τPI×p
KPI = 1τPI = τ = 4s
17

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
On insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel intégral :
F (p) = 31+4×p
Vs
+−
Ve KPI (1+τPI×p)τPI×p
Réaliser ce système sous SCILABLe correcteur PI sera réalisé avec un bloc système à temps continu, onfixera les constantes suivantes : C(p) = KPI × 1+τPI×p
τPI×pKPI = 1
τPI = τ = 4s
17

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
On insère entre la sortie du comparateur et l’entrée du système un correcteurproportionnel intégral :
F (p) = 31+4×p
Vs
+−
Ve KPI (1+τPI×p)τPI×p
Réaliser ce système sous SCILABLe correcteur PI sera réalisé avec un bloc système à temps continu, onfixera les constantes suivantes : C(p) = KPI × 1+τPI×p
τPI×pKPI = 1τPI = τ = 4s
17

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indicielMesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)Que constatez-vous ?Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indicielMesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)Que constatez-vous ?Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indiciel
Mesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)Que constatez-vous ?Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indicielMesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)
Que constatez-vous ?Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indicielMesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)Que constatez-vous ?
Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordre
Le système réalisé sous SCILAB doit ressembler à celui ci-dessous :
Réaliser un essai indicielMesurer alors la constante de temps du système en boucle fermée (τBF )ainsi que l’erreur en régime permanent (ε∞)Que constatez-vous ?Si il vous reste du temps : calculer théoriquement ε∞.
18

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :
Relation 1 :ε(p) = Ve(p)−Vs (p) =
1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :
Relation 1 :ε(p) = Ve(p)−Vs (p) =
1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×p
D’où :ε(p) =
1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19

DUT2-AltAutomatique
TP : Correctionproportionnelle d’unsystème du premierordre
Cours/TD :Correctionproportionnelle d’unsystème du premierordre
Précision d’un systèmeasservi
TP : Correctionproportionnelleintégrale d’un systèmedu premier ordre
Correction proportionnelle intégrale d’un système du premierordreSolution :
ε∞ :Relation 1 :
ε(p) = Ve(p)−Vs (p) =1p−Vs (p)
Relation 2 : (KPI = 1 et τPI = τ)
Vs (p) = ε(p)×KPI ×1+ τ ×p
τ ×p×
K1+ τ ×p
Vs (p) = ε(p)×K
τ ×pD’où :
ε(p) =1p− ε(p)×
Kτ ×p
Par suite :ε(p) =
τ
K + τ ×p
Erreur en régime permanent :
ε∞ = limp→0
p× ε(p) = limp→0
p× τ
K + τ ×p= 0
⇒ Le correcteur proportionnel intégral permet d’annuler l’erreur statique !
19