Routeurs de systèmes SCADA : Les 10 principaux facteurs à ...

IUT
BREST
DEP.GMP UN LOGICIEL SCADA : PC VUE 2010

Cri supervision_PCVUE.docx Page 2
Table des matières 1. Introduction à la supervision- logiciel SCADA ..................................................................................... 4
1.A. Définition d’un logiciel SCADA /Supervision ................................................................................ 4
1.B. Ou trouve-t-on des systèmes SCADA ? ........................................................................................ 4
1.C. Fonctions d’un système de supervision ....................................................................................... 4
1.D. Présentation de PCVUE : un logiciel SCADA complet .................................................................. 8
2. Synoptique ......................................................................................................................................... 10
2.A. Création d’un nouveau synoptique : menu fichier /nouveau ................................................... 10
2.B. Enregistrer votre synoptique en le nommant ........................................................................... 10
2.C. Propriétés d’un synoptique ....................................................................................................... 11
2.D. Ouverture d’un synoptique à l’ouverture de PCVUE ................................................................. 11
2.E. Création d’un modèle pour une présentation homogène ......................................................... 12
2.F. Liens entre synoptiques ............................................................................................................. 13
2.F.1. Création du bouton ............................................................................................................. 13
2.F.2. Ouverture d’un synoptique ................................................................................................. 15
2.F.3. Fermeture d’une synoptique ............................................................................................... 15
2.G. Exécution d’un synoptique ........................................................................................................ 16
3. La communication avec un automate ............................................................................................... 17
3.A. Cas d’un réseau MODBUS RTU avec PCVUE maître du réseau ................................................. 17
3.A.1. Création du réseau MODBUS RTU ...................................................................................... 17
3.A.2. Définition de l’automate ..................................................................................................... 18
3.B. Cas d’un réseau MODBUS TCP/IP avec PCVUE client sur le réseau éthernet............................ 18
3.B.1. Création du réseau Ethernet : SCHNEIDER/ XBUS-IP-MASTER ........................................... 19
3.B.2. Définition de l’automate ..................................................................................................... 20
3.C. Trame d’information à récupérer dans l’automate ................................................................... 20
3.C.1. Création d’une trame de bits en lecture ............................................................................. 21
3.C.1. Création d’une trame de bits en lecture/écriture ............................................................... 22
3.C.2. Création d’une trame de mot en lecture ............................................................................ 23
4. Variables ............................................................................................................................................ 25
4.A. Attribut Domaine et Nature des variables de la supervision .................................................... 25
4.A. Création d’une variable mesure ................................................................................................ 25
4.B. Création d’une variable état ...................................................................................................... 27
4.C. Types d’animations associés à une variable .............................................................................. 28

Cri supervision_PCVUE.docx Page 3
4.D. Animation avec un affichage de la valeur d’une variable de l’automate dans la supervision :
info automate -> supervision ............................................................................................................ 29
4.E. Envoi d’une mesure ou d’un état depuis la supervision vers l’automate .................................. 30
4.F. Cas d’une animation composée de plusieurs variables booléennes ou d’états. ....................... 31
5. Alarmes .............................................................................................................................................. 32
5.A. Variables alarmes ...................................................................................................................... 32
5.B. Cycle de vie d'une alarme .......................................................................................................... 32
5.C. Création d’une variable alarme ................................................................................................. 33
5.D. Insertion d’une fenêtre d’alarme .............................................................................................. 33
6. Tendances .......................................................................................................................................... 34
7. Consignation évènements ................................................................................................................. 35
8. Recettes ............................................................................................................................................. 36
9. Variables VB ....................................................................................................................................... 37
10. Adaptation d’un programme automate pour mettre en œuvre une supervision Erreur ! Signet non
défini.
11. Travail à effectuer ...................................................................................... Erreur ! Signet non défini.

Cri supervision_PCVUE.docx Page 4
1. Introduction à la supervision- logiciel SCADA
1.A. Définition d’un logiciel SCADA /Supervision Un logiciel SCADA (Supervisory Control And Data Acquisition) est un logiciel permettant de faire
l’acquisition de données en provenance d’un SAP dans le but dans le but de le superviser ou réaliser
une télésurveillance.
Pour réaliser un système SCADA il est donc nécessaire d’avoir au minimum un ou plusieurs
automates, un réseau pour les interconnecter, un logiciel d’acquisition des données, une basse de
donnée pour archiver les données et une IHM pour piloter et surveiller le SAP.
1.B. Ou trouve-t-on des systèmes SCADA ? Système production discontinu
Surveillance de processus industriels : agro-alimentaires, automobiles,….
Système production continu
Transport de : produits chimiques, eau, pétrole, énergie électrique, efficacité énergétique….
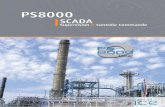
1.C. Fonctions d’un système de supervision Pour mettre en œuvre et visualiser les différentes informations d’un SAP, un logiciel de supervision
est organisé sous forme de fenêtre IHM appelé synoptiques. Les synoptiques sont utilisées pour les
menus, vues de synthèse, synoptiques d'usine, d’affichages de tendance, d’alarmes, etc..
Acquisition de données du SAP et gestion du SAP avec l’IHM
Exemple d’un synoptique d’un process de gestion de traitement de boue

Cri supervision_PCVUE.docx Page 5
Base de données
La base de données est le cœur du logiciel de supervision. Elle est composée d'un certain nombre de
variables (tags en anglais). Les variables peuvent avoir différents types (logiques, analogiques, texte)
et elles peuvent être internes au logiciel ou au contraire associée à une entrées/sorties d’un
automate.
Exemple de variables d’E/S d’un moteur qui sont ici hiérarchisées
Gestion des alarmes, défaillances
Les alarmes sont regroupées dans un synoptique d’alarmes et l’opérateur peut interagir dans
ce synoptique pour changer le statut d’une alarme (au repos, présente non acquittée,
présente acquittée, absente non acquittée,….)

Cri supervision_PCVUE.docx Page 6
Suivi statistique, archives
Les données sont mémorisées et il est ensuite possible de les restituer La fenêtre de
tendance permet de tracer jusqu'à des courbes de valeurs analogiques ou logiques en
fonction du temps
Services (mails, gestion utilisateurs …)
Avant d'utiliser le Superviseur, un utilisateur doit se connecter en utilisant un compte. La configuration de ce compte utilisateur détermine les caractéristiques du projet disponibles en exploitation (par exemple les fenêtres que l'utilisateur peut ouvrir) ainsi que l'accès aux outils de configuration et au système d'exploitation.
Service : Recettes
Un autre service très utile est la mise en place de recette qui permet à partir de gérer l’envoie d’une liste de valeurs associées à des variables de la base de données à un équipement automate. Elles sont envoyées simultanément pour réaliser par exemple un type de production avec un dosage particulier et une quantité définie.
Communications
PcVue permet de dialoguer avec un plusieurs équipements (automates, capteurs, actionneurs). Pour échanger il utilise des protocoles de communications comme Modbus, Ethernet, Profibus, BACnet

Cri supervision_PCVUE.docx Page 7
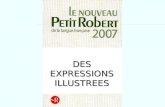
Le diagramme suivant décrit une architecture classique :
Les deux structures les plus courantes entre les automates et la supervision sont :
La structure maitre/ esclaves avec la supervision qui est maître et les automates esclaves.
La structure clients/ serveur avec l’automate comme serveur et le poste de supervision
comme client.
Pour échanger des données entre la supervision et les automates d’un réseau, les données sont
groupées en trames. La durée entre chaque phrases ou trame est appelée la période de
scrutation.
supervision
Automates

Cri supervision_PCVUE.docx Page 8
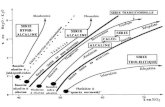
1.D. Présentation de PCVUE : un logiciel SCADA complet PcVue est un logiciel modulaire exécutant plusieurs processus. Chaque processus est responsable
d'une fonction. Le diagramme suivant montre les différents processus et les fonctions mises en
œuvre par chaque processus.

Cri supervision_PCVUE.docx Page 9
Les projets sont stockés dans le dossier qui a été défini pendant l’installation. Un projet est constitué d’un ensemble de répertoires qui peuvent copiés et déplacés.
Au démarrage de l’application, l’utilisateur a le choix entre plusieurs projets. PCVue peut être démarré en mode démonstration si le nombre de variables de l’équipement(automate) n’excède pas 25. Pour créer un nouveau projet il est possible d’entrer un nouveau nom de projet.

Cri supervision_PCVUE.docx Page 10
2. Synoptique
2.A. Création d’un nouveau synoptique : menu fichier /nouveau
2.B. Enregistrer votre synoptique en le nommant

Cri supervision_PCVUE.docx Page 11
2.C. Propriétés d’un synoptique
2.D. Ouverture d’un synoptique à l’ouverture de PCVUE
Utiliser la commande Configuration / Projet / Paramètres ... et ouvrir l'onglet Démarrage.
Vous pouvez au démarrage :
choisir un synoptique particulier
démarrer la communication avec l’équipement

Cri supervision_PCVUE.docx Page 12
2.E. Création d’un modèle pour une présentation homogène Pour une présentation homogène des synoptique on utilise un modèle identique pour toute les
pages. Un modèle pourra comporter les logos, les menus de navigation et une fenêtre d’alarme.

Cri supervision_PCVUE.docx Page 13
Pour enregistrer votre modèle il faut aller dans fichier/enregistrer/ modèles de synoptiques
Pour que les synoptiques bénéficie de ce modèle il faut faire : fichier/nouveau/ puis choisir votre
modèle dans une liste de modèle déjà établi.
Pour modifier un modèle il faut sélectionner : fichier/nouveau/puis choisir le modèle à modifier
2.F. Liens entre synoptiques
2.F.1. Création du bouton
Il faut utiliser dans la barre des icônes l’objet de dessin « TEXTE » puis écrire le nom de votre
menu ici Alarmes

Cri supervision_PCVUE.docx Page 14
Il peut être ensuite possible de modifier la police du texte
Puis transformer le texte en aspect bouton
Il faut ensuite ajouter à votre bouton qui est sélectionné une animation appelée chaînage pour
l’ouverture ou la fermeture d’un autre synoptique.

Cri supervision_PCVUE.docx Page 15
2.F.2. Ouverture d’un synoptique
[A]: Synoptique à ouvrir. Cliquer sur le bouton pour sélectionner le synoptique à ouvrir.
[B]: Comportement du synoptique appelant.
Garder : Le synoptique courant reste ouvert.
Fermer : Le synoptique courant est fermé.
2.F.3. Fermeture d’une synoptique
Vous devez utiliser cette animation lorsque vous désirez fermer un synoptique.
[A]: Synoptique à fermer. Cliquer sur le bouton pour sélectionner le synoptique à fermer.

Cri supervision_PCVUE.docx Page 16
2.G. Exécution d’un synoptique Mode RUN (exécution des synoptiques) ou édition
Remarque : Pour supprimer la barre de menu il faut appuyer sur F8 et F6 pour la faire réapparaître

Cri supervision_PCVUE.docx Page 17
3. La communication avec un automate Pour établir une communication entre un ou plusieurs automate(s) et la supervision il faut définir
successivement le type de réseau, les automates qui fournissent les données à la supervision et les
trames de bits ou de mots en émission ou réception entre la supervision et les automates.
3.A. Cas d’un réseau MODBUS RTU avec PCVUE maître du réseau
3.A.1. Création du réseau MODBUS RTU
Une seconde fenêtre s’ouvre, vous devez alors nommez
votre réseau ici flex
puis définir les différents paramètres de vitesse, bit de
données, bit de stop, parité
Il faut ensuite Valider puis ….. annuler.

Cri supervision_PCVUE.docx Page 18
3.A.2. Définition de l’automate
Il faut nommer l’automate, ici frais,
et l’associer à un port de type
MODICON (MODBUS).
Cet automate a pour valeur
d’adresse d’esclave : 1.
3.B. Cas d’un réseau MODBUS TCP/IP avec PCVUE client sur le réseau
éthernet

Cri supervision_PCVUE.docx Page 19
3.B.1. Création du réseau Ethernet : SCHNEIDER/ XBUS-IP-MASTER
Une seconde fenêtre s’ouvre, vous devez alors nommez votre réseau ici ethernet
Il faut ensuite Valider puis …..annuler.

Cri supervision_PCVUE.docx Page 20
3.B.2. Définition de l’automate
Il faut nommer l’automate, ici
frais, et l’associer à un port de
type MODICON (MODBUS).
Type de codage de la trame
Modbus et base des numéros
d’adresse : MODBUS_DEC
Cet automate a pour valeur
d’adresse : 192.168.1.40.
3.C. Trame d’information à récupérer dans l’automate Les données de l’automate sont stockées dans la mémoire de l’automate. Ces données peuvent être
lues dans l’automate ou écrites dans la mémoire de l’automate. Pour limiter les scrutations de
l’automate de l’automate en lecture ou écriture les données sont groupées en bloc appelé trame.
Dans l’exemple ci-dessous la trame (lect_bits) de 90 données binaire est lue dans l’automate (adresse
de M0 à M89) et cette trame est récupérée par la supervision. A cette trame on peut alors associer
des variables dans la supervision pour réaliser les animations, alarmes, etc…
Adresse dans l’automate Contenu de l’adresse (type bit ici)
Variable de supervision
M0 . …
… . …
M50 0 Transpal_bas
M51 0 Transpal_haut
…. . …
M89 . …
Nom des trames Adresse dans l’automate Variables supervision

Cri supervision_PCVUE.docx Page 21
3.C.1. Création d’une trame de bits en lecture
Dans la colonne Trames faire un double-clic sur *Création*, puis nommer votre trame ici « lect_bits »
au format bit avec une autorisation en lecture. La trame créée sera lue de façon cyclique toutes les
secondes.
Il faut ensuite définir la taille de la trame, c'est-à-dire le nombre de données ou d’éléments binaire
qui seront lu dans l’automate. Il faut aussi préciser dans quel zone de l’automate (ou adresse) les
données seront lues.
Pour cela cliquer sur la flèche verte et définir l’adresse de départ, et l’adresse de fin de la trame à lire
dans l’automate. Ici c’est une trame de bit en lecture (Bit Input)d’une longueur de 90 éléments, qui
commence à l’adresse de l’automate M0 et qui finira à l’adresse M89.

Cri supervision_PCVUE.docx Page 22
Il faut ensuite valider puis annuler.
3.C.1. Création d’une trame de bits en lecture/écriture
L’exemple ci-dessous permet de créer une trame en lecture/écriture de données qui sont des bits.
Ces bits sont lus ou écrits dans l’automate de l’adresse %M0 à %M15

Cri supervision_PCVUE.docx Page 23
Il faut ensuite valider puis annuler.
3.C.2. Création d’une trame de mot en lecture
L’exemple ci-dessous permet de créer une trame en lecture de données qui sont des mots. Ces mots
sont lu dans l’automate de l’adresse %MW0 à %MW15

Cri supervision_PCVUE.docx Page 24
Il faut ensuite valider puis annuler.
La communication étant paramétrée, il ne reste plus qu’à activer la communication avec le bouton
Marche. Si la communication est disponible avec l’automate les compteurs de flux de la
communication doivent s’incrémenter.
Pas de communication
Communication

Cri supervision_PCVUE.docx Page 25
4. Variables Les variables peuvent être interne à la supervision ou dite de communications lorsqu’elles connectée
à une zone mémoire ou variables de l’automate
4.A. Attribut Domaine et Nature des variables de la supervision Pour filtrer les variables supervision (liées à un poste, alarme, tendance…) il est possible de les
cataloguer en domaine et nature. D’ autres attributs sont disponibles (14) pour classifier plus
finement les variables. Pour cela il faut les sélectionner la commande
Configuration/Variables/Domaines/ajouter ... ou Configuration/Variables/Nature/ajouter
Ensuite à chaque déclaration de variable, il faudra lui associer un domaine et une nature.
4.A. Création d’une variable mesure Pour créer une variable il faut sélectionner la commande Configuration/variables/sélecteur. Il est
possible ds variables parmi 3 types
Variable état (booléen, 0 ou 1) variable texte (date,..)
variable mesure (nombre entier de 0 à 65535)
Il faut indiquer un nom, éventuellement un domaine, une nature puis préciser si la variable sera dans
le sens supervision -> automate (commande) ou dans le sens inverse ( ne rien cocher).
Sens écriture

Cri supervision_PCVUE.docx Page 26
Exemple de création d’une variable de type mesure nommée « consigne » qui viendra affecter
(commande) une variable de l’automate (%MW8)
Création de la variable type mesure
Si c’est une variable interne (source interne) la variable est créée
mais dans le cas ou cette variable est en lien avec un équipement
comme un automate, il faut préciser sur quelle zone mémoire
pointe la variable dans l’automate (onglet source).
La commande lien permet de choisir la variable automate à laquelle sera associée la variable
supervision. Ici la variable de la supervision « consigne »est reliée à %MW8 de l’automate

Cri supervision_PCVUE.docx Page 27
4.B. Création d’une variable état Exemple de création d’une variable de type état ou booléen nommée « transpal_droite » qui sera
affectée (lecture) par une variable de l’automate (%M52)

Cri supervision_PCVUE.docx Page 28
4.C. Types d’animations associés à une variable Une animation permet de rendre un objet graphique dynamique en modifiant une ou plusieurs
propriétés. Il faut sélectionner l’objet (texte, boutons, motifs géométrique…) puis sélectionner une
animation.
Propriétés qui peuvent faire l’objet d’une animation :
Couleur
Texte : valeur d’une variable de mesure
Symbole : changement de symbole
Position : déplacer un objet sur un synoptique en fonction d’une variable de mesure
Visibilité : cache ou rend visible un objet
Exécution : active une application comme Excel ou lance un script VBA, Macros …
Chaînage : Ouverture/fermeture d’un synoptique
Sécurité : gestion des utilisateurs

Cri supervision_PCVUE.docx Page 29
4.D. Animation avec un affichage de la valeur d’une variable de
l’automate dans la supervision : info automate -> supervision Exemple : Visualisation du capteur présence du transpaletteà droite (variable de supervision
transpal_droite)
Etape 1
Dessiner la représentation du capteur, ici un simple rectangle
Etape 2
Associer à l’objet une variable automate. La variable est précédé du symbole @
Ici dans l’exemple le motif géométrique sera :
vert si la variable transpal_droite = 1,
transparent si la variable transpal_droite= 0
rose si la communication avec l’équipement est coupée.

Cri supervision_PCVUE.docx Page 30
4.E. Envoi d’une mesure ou d’un état depuis la supervision vers
l’automate Il faut d’abord sélectionner l’objet lui associer une variable et enfin créer une animation d’envoi :
d’une commande pour une variable binaire (état),
d’une consigne pour une variable numérique.
Exemple : l’information le bouton ACY appuyé depuis la supervision est envoyée dans l’automate
par le biais de la variable « super_acy » Un beep d’information informe l’utilisateur d’un appui sur
le bouton, le bouton est monostable (impulsionnel).
Il s’agit de faire une animation d’envoi de type binaire ou commande.
Il est possible de caractériser le type de comportement de la commande lors d’un appui par l’usager.

Cri supervision_PCVUE.docx Page 31
4.F. Cas d’une animation composée de plusieurs variables booléennes
ou d’états. Il est possible de créer une équation logique complexe avec plusieurs variables de la façon suivante :
l’expression débute avec le signe d’égalité et un espace doit séparer les variables.

Cri supervision_PCVUE.docx Page 32
5. Alarmes
5.A. Variables alarmes Les variables alarmes sont des variables d’état avec des statuts en suppléments :
2 valeurs booléennes (0 ou 1)
5 statuts :
Repos ou alarme disparue et acquittée (OFF)
présente et non acquittée (NOACKON)
présente et acquittée (ACKON)
alarme disparue et non acquittée (NOACKOFF)
invalide
o perte de communication : NS COM,
o action de masquage d’alarme :
NS OP masqué par opérateur,
NS M[1 à 4]: Masqué par script, ).
NS DE: Masqué par une autre variable.
5.B. Cycle de vie d'une alarme .

Cri supervision_PCVUE.docx Page 33
5.C. Création d’une variable alarme Au moment de la création d’une variable alarme (configuration/variables/sélecteur) il faut choisir
une variable d’état ou booléenne et cochez la spécificité « alarme »
Dans les propriétés des variables alarmes on peut sélectionner la transition pour que l’alarme devienne active, définir un niveau de priorité entre les alarmes de 0 à 29, définir la temporisation qui est la période entre le moment ou l’alarme est active et ou elle passe à NOACKON.
5.D. Insertion d’une fenêtre d’alarme
Les alarmes sont automatiquement gérées dans la fenêtre d’alarme, il suffit juste d’afficher la fenêtre avec ses icônes spécifiques. Il est possible d’afficher une fenêtre par le menu Insertion/Fenêtre d'alarme d’alarme.
Un double-clic sur la barre des icones de commandes du menu de gestion des alarmes permet de les
gérer (NOACKON, ACKON,…)

Cri supervision_PCVUE.docx Page 34
6. Tendances PcVue permet d'enregistrer deux types de données pour une tendance : Etat et Mesure. Pour créer une fenêtre de tendance il faut aller dans le menu insertion/courbe de tendance.
Caractéristiques de la macro-animation tendance :
Jusqu'à 8 variables mesures et/ou états peuvent être visualisées dans chaque tendance.
2 modes o Mode historique (utilisé pour enregistrer les points enregistrés. La courbe de
tendance ajuste la période à la valeur de capacité de temps) o Mode temps-réel.
Axe des Y (valeurs) indépendamment configurable pour chaque tracé.
Axe des X (temps) configurable de 1 seconde à 32767 jours.
Barre d'outils pour modifier la configuration en exploitation.
Zoom sur les deux axes X ou Y.
Barre de défilement pour l'axe des X.
Zone de légende configurable affichant le détail de chaque tracé.
Apparence entièrement configurable.
Possibilité d'incorporer une fenêtre de tendance dans n'importe quel synoptique.
Nombre illimité de fenêtres de tendance dans chaque projet.

Cri supervision_PCVUE.docx Page 35
7. Consignation évènements PcVue est capable d'enregistrer trois types d'événements :
Evénement d'état : Changement de status ou de valeur d'un état.
Evénement d'alarme : Changement de status d'une alarme.
Evénement d'action utilisateur : o Connexion / Déconnexion
o Acquittement d'une alarme,
o Masquage d'une alarme,
o Position d'une valeur,
o Exécution d'un programme
Pour consigner une variable dans le menu configuration / variables/sélecteur il suffit de
sélectionner la variable et de cocher l’option de consignation.

Cri supervision_PCVUE.docx Page 36
8. Recettes Une recette est une liste de variables de type Equipement don connecté à un SAP, au moment de la recette on affecte à chaque variable de la liste une valeur qui a été prédéfinie à l’avance. Cette méthode permet la production des lots de différents produits en provenance d’un superviseur. Si les variables sont dans la même trame, toutes les commandes seront envoyées en même temps. La recette permet aussi l’envoi de commande à destination d’automates de GTB/GTC. Ces derniers contrôlent des bâtiments (par exemple on allume toutes les lumières a 7h et on les éteint a 19h). Sélectionner la commande Configuration / Postes / Recettes puis sélectionner un numéro et libellé pour la recette.
La commande Composition permet d’insérer des variables et de leur affecter une valeur pré définie.
La commande insérer permet d’insérer la variable dans la recette.
Il faut ensuite sauvegarder la recette dans un fichier

Cri supervision_PCVUE.docx Page 37
Et enfin associer une commande permettant de déclencher le lancement de la recette.
9. Variables VB Les variables de la supervision peuvent être utilisées pour être manipulées avec des macros
Visualbasic. Il suffit de les placer entre des crochets.
Private Sub Shape12_Click()
[affich_message1] = [super_auto] Or [ci] And Not [etape_init_gc]
End Sub
Pour accéder aux macros visualbasic : menu Affichage/Editeur Visual Basic
Pour associer un objet à une macro visualbasic, il suffit de sélectionner l’objet puis dans le menu
contextuel choisir Visualiser le script.
Par défaut une procédure évènementielle sur clic de souris sera défini.
Private Sub Shape12_Click()
End Sub

Cri supervision_PCVUE.docx Page 38