Introduction aux Filtres Numériques -...
16
Introduction aux Filtres Numériques 2 Avantages du filtrage numérique ? Filtres analogiques (realisés AOP, composants passifs): Gamme de fréquence limitée (composants utilisés) Sensibles au bruit et non-linéarité Peu stables, peu flexibles, peu reproductible Mais reste moins cher… Filtrage numérique est majoritairement utilisé : Fiable Stable Adaptable
Transcript of Introduction aux Filtres Numériques -...
1
Introduction aux Filtres Numériques
2
Avantages du filtrage numérique ?
Filtres analogiques (realisés AOP, composants passifs):
Gamme de fréquence limitée (composants utilisés)Sensibles au bruit et non-linéaritéPeu stables, peu flexibles, peu reproductibleMais reste moins cher…
Filtrage numérique est majoritairement utilisé :
FiableStableAdaptable
2
3
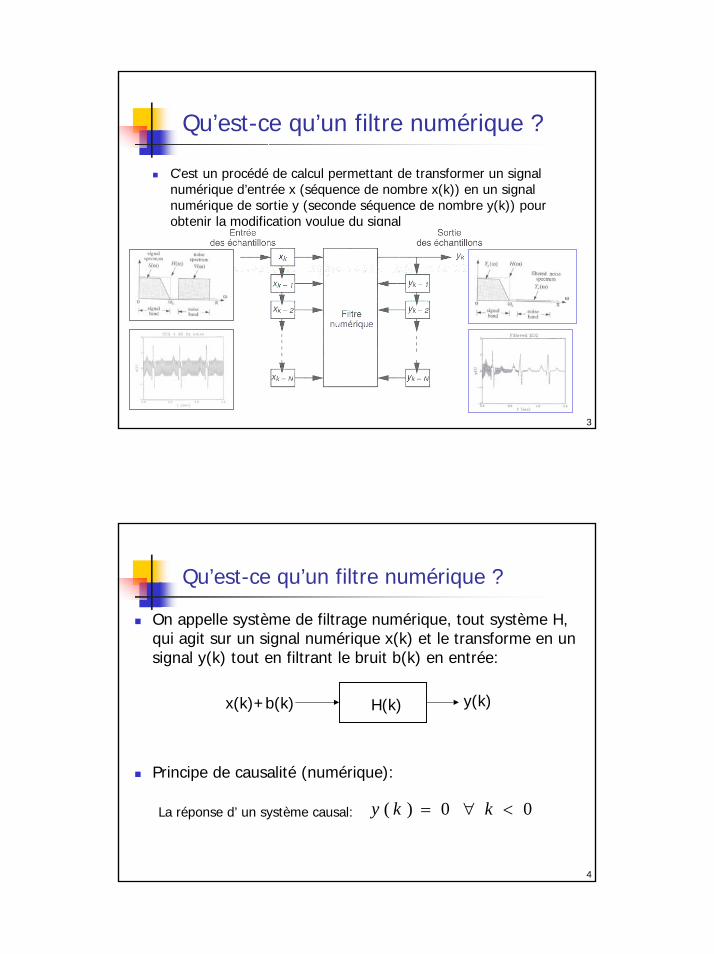
Qu’est-ce qu’un filtre numérique ?
C’est un procédé de calcul permettant de transformer un signal numérique d’entrée x (séquence de nombre x(k)) en un signal numérique de sortie y (seconde séquence de nombre y(k)) pour obtenir la modification voulue du signal
4
Qu’est-ce qu’un filtre numérique ?
On appelle système de filtrage numérique, tout système H, qui agit sur un signal numérique x(k) et le transforme en un signal y(k) tout en filtrant le bruit b(k) en entrée:
Principe de causalité (numérique):
La réponse d’ un système causal: 00)( <∀= kky
H(k) y(k)x(k)+b(k)
3
5
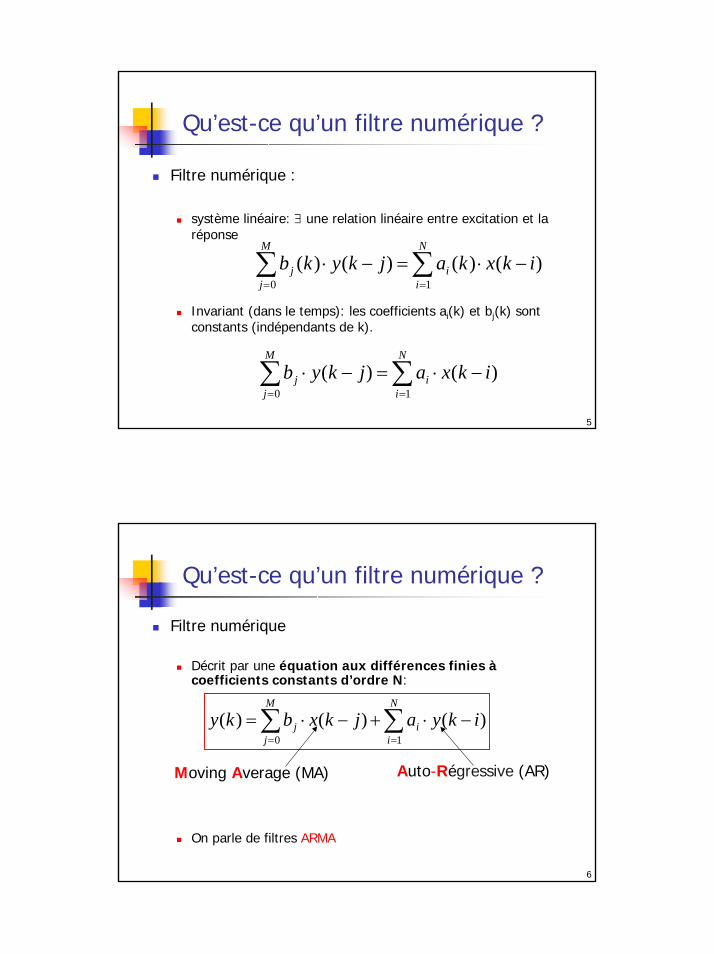
Qu’est-ce qu’un filtre numérique ?
Filtre numérique :
système linéaire: ∃ une relation linéaire entre excitation et la réponse
Invariant (dans le temps): les coefficients ai(k) et bj(k) sont constants (indépendants de k).
∑∑==
−⋅=−⋅N
ii
M
jj ikxkajkykb
10
)()()()(
∑∑==
−⋅=−⋅N
ii
M
jj ikxajkyb
10
)()(
6
Qu’est-ce qu’un filtre numérique ?
Filtre numérique
Décrit par une équation aux différences finies à coefficients constants d’ordre N:
On parle de filtres ARMA
∑∑==
−⋅+−⋅=N
ii
M
jj ikyajkxbky
10)()()(
Moving Average (MA) Auto-Régressive (AR)

4
7
Qu’est-ce qu’un filtre numérique ?
Fonction de transfert du filtre numérique en z
8
Propriétés générales
Un filtre numérique est de manière générale caractérisé par sa réponse impulsionnelle h(k) c’est à dire la sortie particulière obtenue pour une entrée
h permet de calculer la sortie du filtre à tout entrée x⎩⎨⎧
=≠=
==0)0(
1)0()()(
kxx
kkx δ
∑∑∞+
−∞=
∞+
−∞=−=−=∗=
nnnhnkxnkhnxkhxky )()()()())(()(
Convolution discrète
5
9
Propriétés générales
Par transformée en z, on retrouve
La réponse en fréquence H(ν) du filtre est obtenue par transformée de Fourier à temps discret
On a surtout
)()()( zXzHzY =
∑∞+
−∞=
−=k
kTi eekhH πνν 2)()(
)()(2
ei
ezHH νπν
ν == eνπνω 2= Quelques valeurs
particulières
10
La réponse en fréquence
Elle est complexe et périodique de période νe en ν et 2πνe en ωDeux notions importantes
Le module = le gainLa phase
On les représente dans l’intervalle
La bande passante est l’intervalle de fréquence dans lequel la gain du filtre reste supérieur à une valeur de référence
Passe basPasse hautPasse bandeCoupe bande
)()()( νφνν ieHH =
];0[ 2eν
6
11
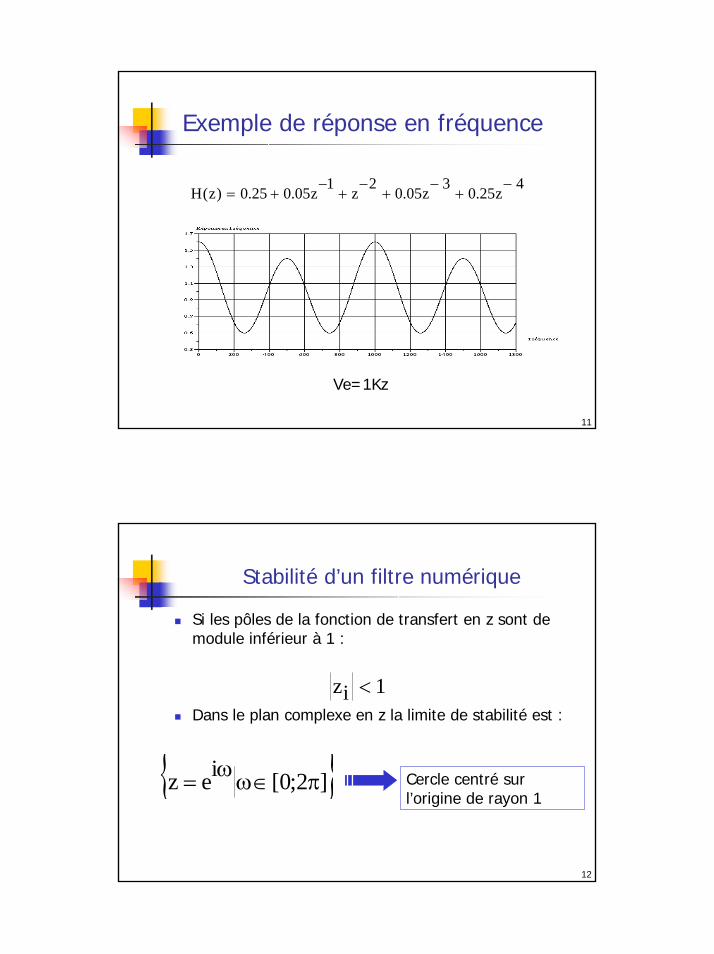
Exemple de réponse en fréquence
4z25.03z05.02z1z05.025.0)z(H −+
−+
−+
−+=
Ve=1Kz
12
Stabilité d’un filtre numérique
Si les pôles de la fonction de transfert en z sont de module inférieur à 1 :
Dans le plan complexe en z la limite de stabilité est :
1iz <
{ }]2;0[iez π∈ωω= Cercle centré sur l’origine de rayon 1
7
13
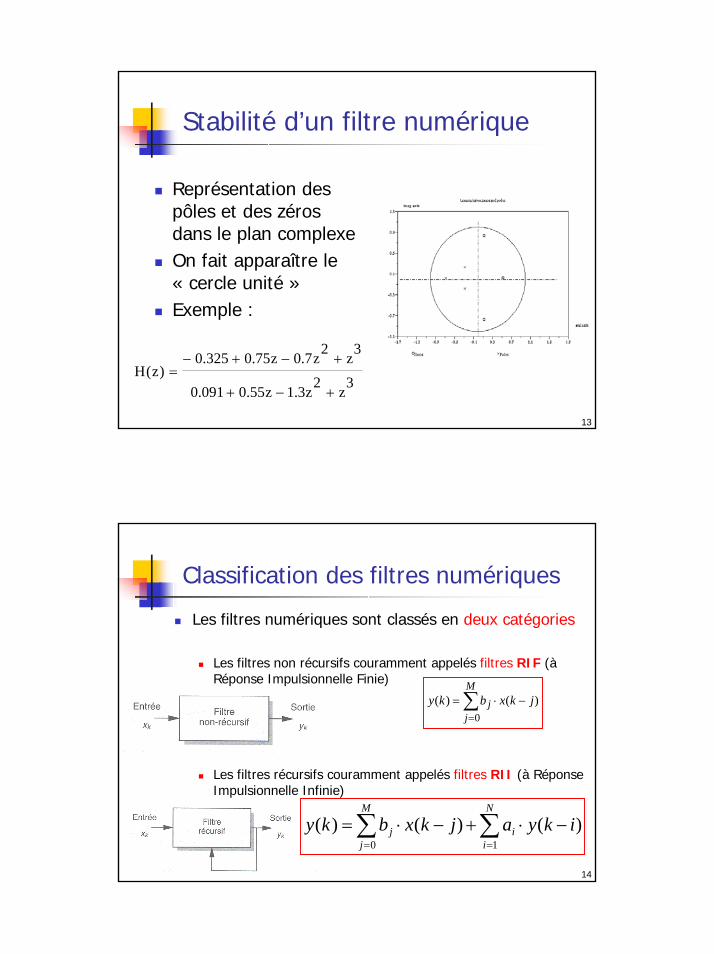
Stabilité d’un filtre numérique
Représentation des pôles et des zéros dans le plan complexeOn fait apparaître le « cercle unité »Exemple :
3z2z3.1z55.0091.0
3z2z7.0z75.0325.0)z(H
+−+
+−+−=
14
Classification des filtres numériques
Les filtres numériques sont classés en deux catégories
Les filtres non récursifs couramment appelés filtres RIF (à Réponse Impulsionnelle Finie)
Les filtres récursifs couramment appelés filtres RII (à Réponse Impulsionnelle Infinie)
∑=
−⋅=M
jj jkxbky
0)()(
∑∑==
−⋅+−⋅=N
ii
M
jj ikyajkxbky
10)()()(
8
15
Classification des filtres numériques
Les méthodes de détermination des filtres dépendent de la classe du filtre
Les filtres RIF permettent d’obtenir des filtres à phase linéaire ce qui n’est pas vrai, en général, pour les filtres RII
βαωωφ +=)(
16
RIF et phase linéaire
Réponse en fréquence d’un filtre numérique RIF
9
17
RIF et phase linéaire
18
RIF et phase linéaire
1ère hypothèse :
10
19
RIF et phase linéaire
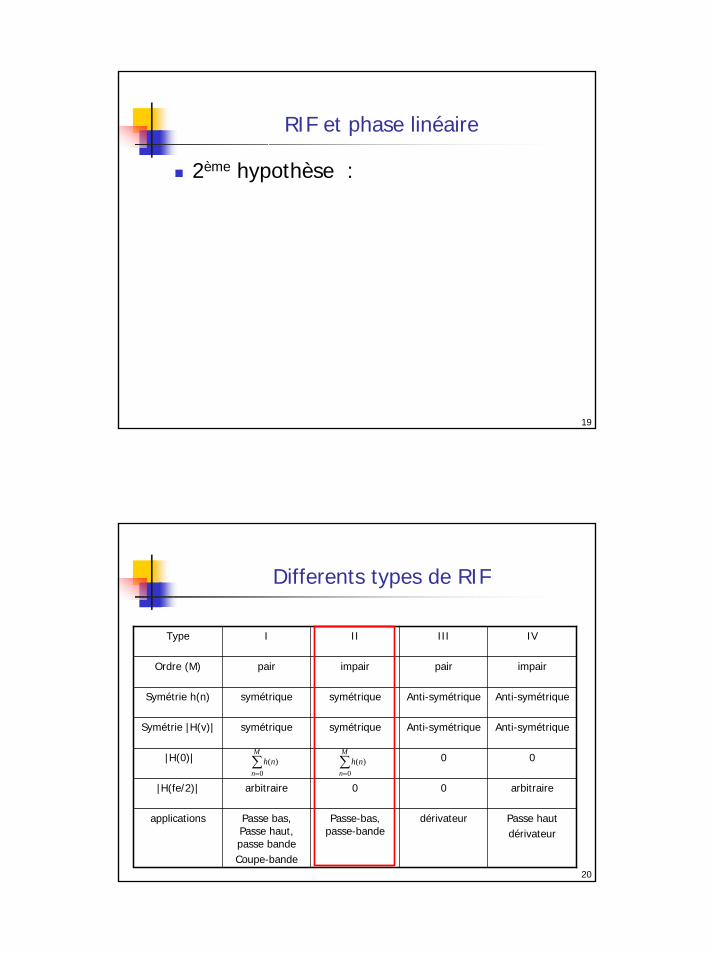
2ème hypothèse :
20
Differents types de RIF
Type I II III IV
Ordre (M) pair impair pair impair
Symétrie h(n) symétrique symétrique Anti-symétrique Anti-symétrique
Symétrie |H(v)| symétrique symétrique Anti-symétrique Anti-symétrique
|H(0)| 0 0
|H(fe/2)| arbitraire 0 0 arbitraire
applications Passe bas, Passe haut, passe bandeCoupe-bande
Passe-bas, passe-bande
dérivateur Passe hautdérivateur
∑=
M
nnh
0)( ∑
=
M
nnh
0)(
11
21
Exercice
Soit le filtre défini par :
1. Déterminer l'équation aux différences du filtre.
2. S'agit-il d'un filtre RIF ou RII ?3. Déterminer la réponse impulsionnelle du filtre.
4. Ce filtre est-il stable ?5. Déterminer analytiquement la réponse en fréquence du filtre. 6. Déterminer analytiquement le module et la phase du filtre.
7. Tracer une esquisse de la réponse en fréquence dans la bande [-5kHz;+5kHz].
4z25.03z05.02z1z05.025.0)z(H −+
−+
−+
−+=
22
Exercice
12
23
24
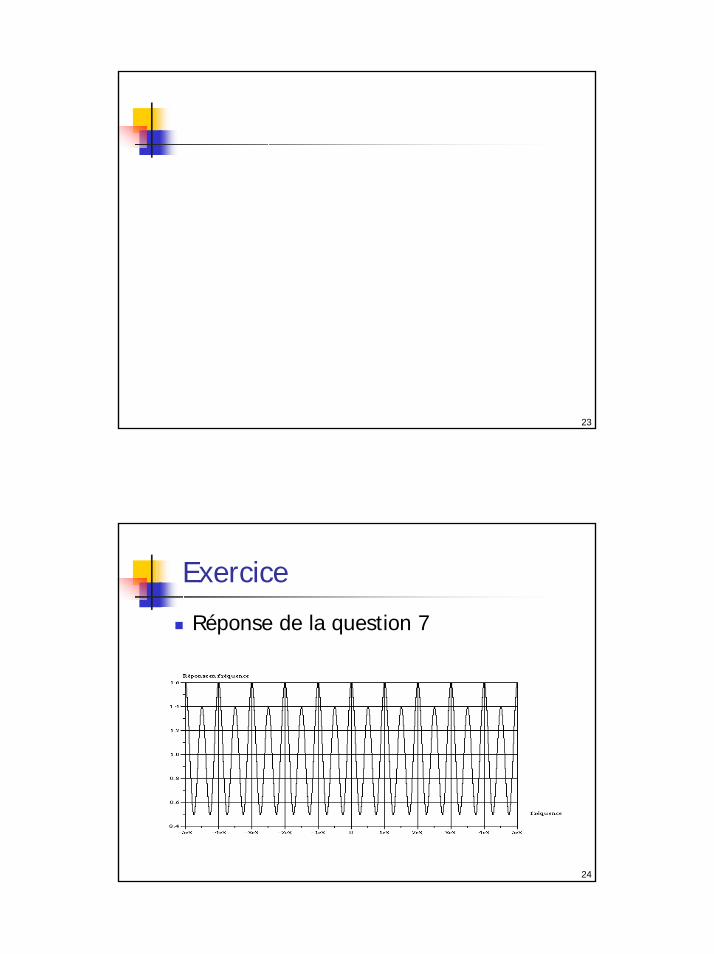
Exercice
Réponse de la question 7
13
25
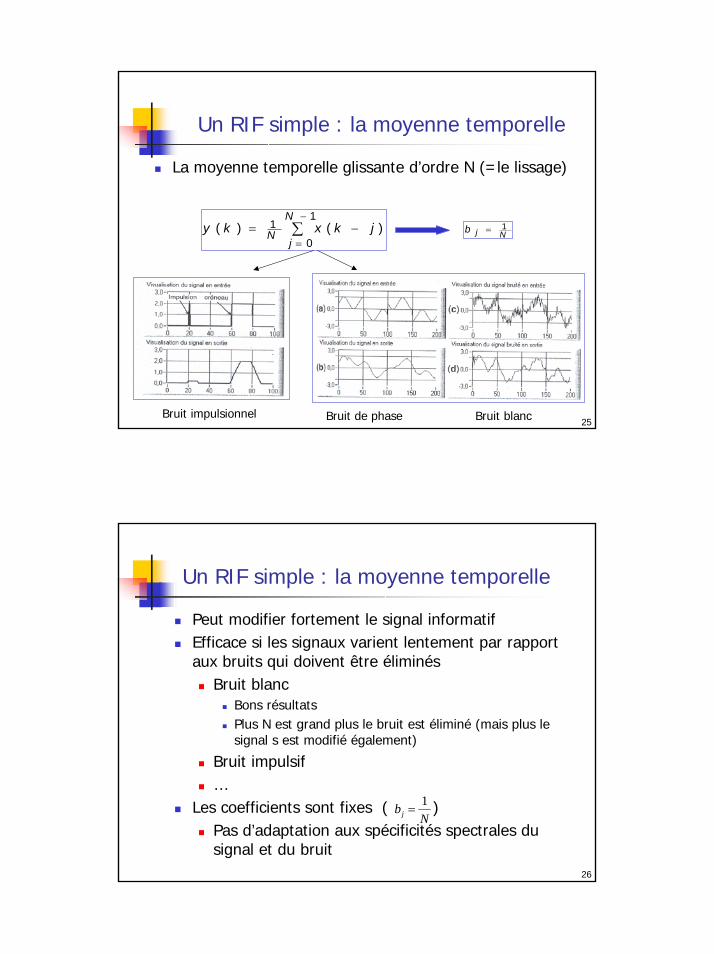
Un RIF simple : la moyenne temporelle
La moyenne temporelle glissante d’ordre N (=le lissage)
∑−
=−=
1
0
1 )()(N
jN jkxky Njb 1=
Bruit impulsionnel Bruit de phase Bruit blanc
26
Un RIF simple : la moyenne temporelle
Peut modifier fortement le signal informatifEfficace si les signaux varient lentement par rapport aux bruits qui doivent être éliminés
Bruit blancBons résultatsPlus N est grand plus le bruit est éliminé (mais plus le signal s est modifié également)
Bruit impulsif…
Les coefficients sont fixes ( )Pas d’adaptation aux spécificités spectrales du signal et du bruit
Nbj
1=
14
27
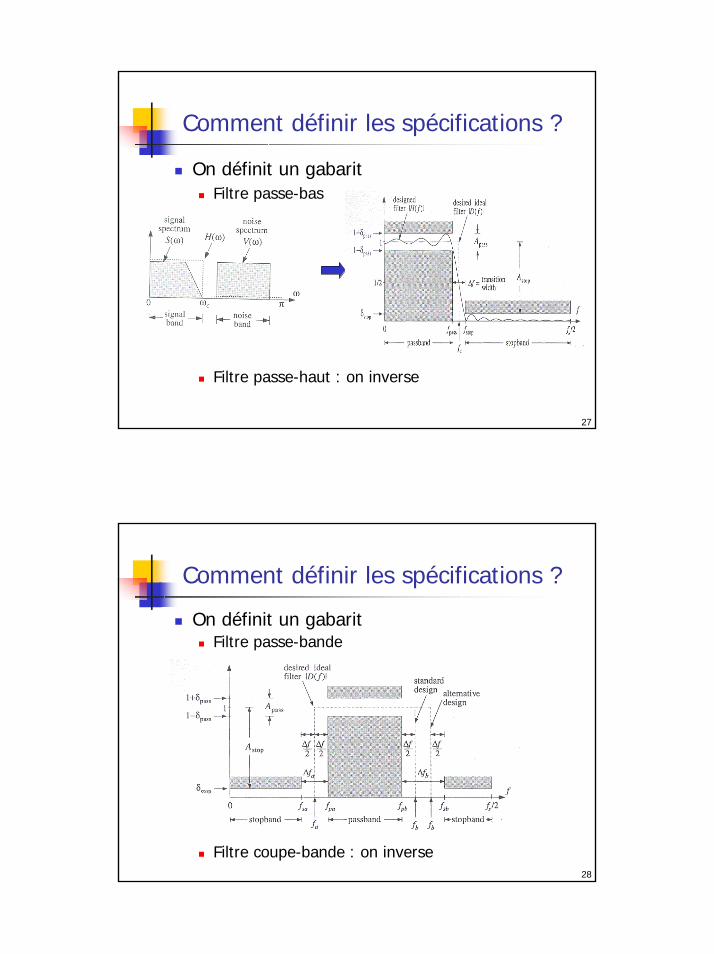
Comment définir les spécifications ?
On définit un gabaritFiltre passe-bas
Filtre passe-haut : on inverse
28
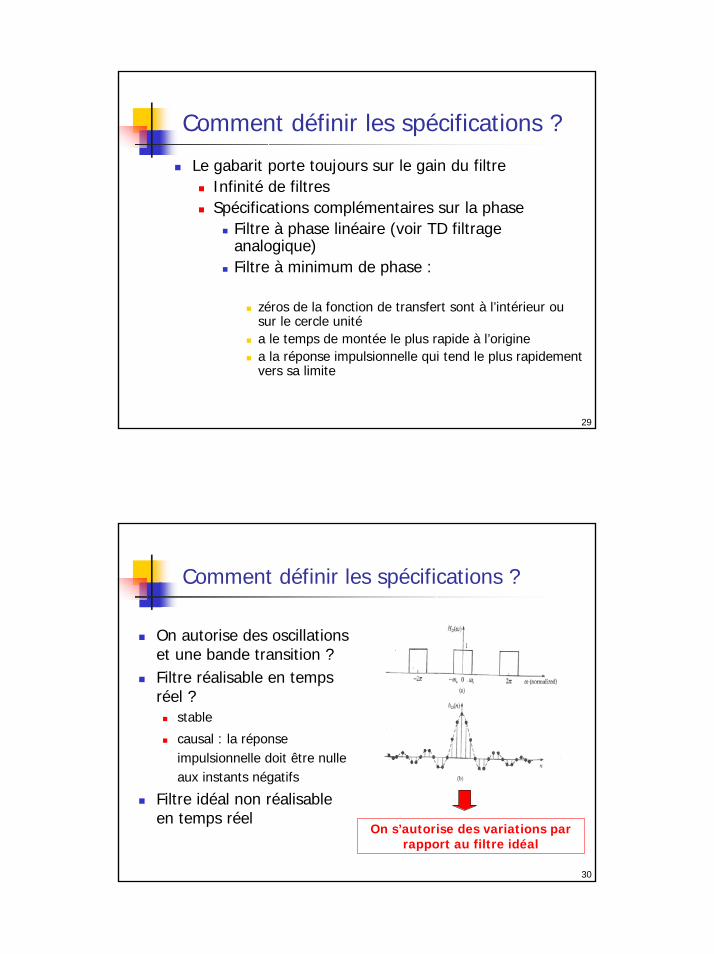
Comment définir les spécifications ?
On définit un gabaritFiltre passe-bande
Filtre coupe-bande : on inverse
15
29
Comment définir les spécifications ?
Le gabarit porte toujours sur le gain du filtreInfinité de filtresSpécifications complémentaires sur la phase
Filtre à phase linéaire (voir TD filtrage analogique)Filtre à minimum de phase :
zéros de la fonction de transfert sont à l’intérieur ou sur le cercle unitéa le temps de montée le plus rapide à l’originea la réponse impulsionnelle qui tend le plus rapidement vers sa limite
30
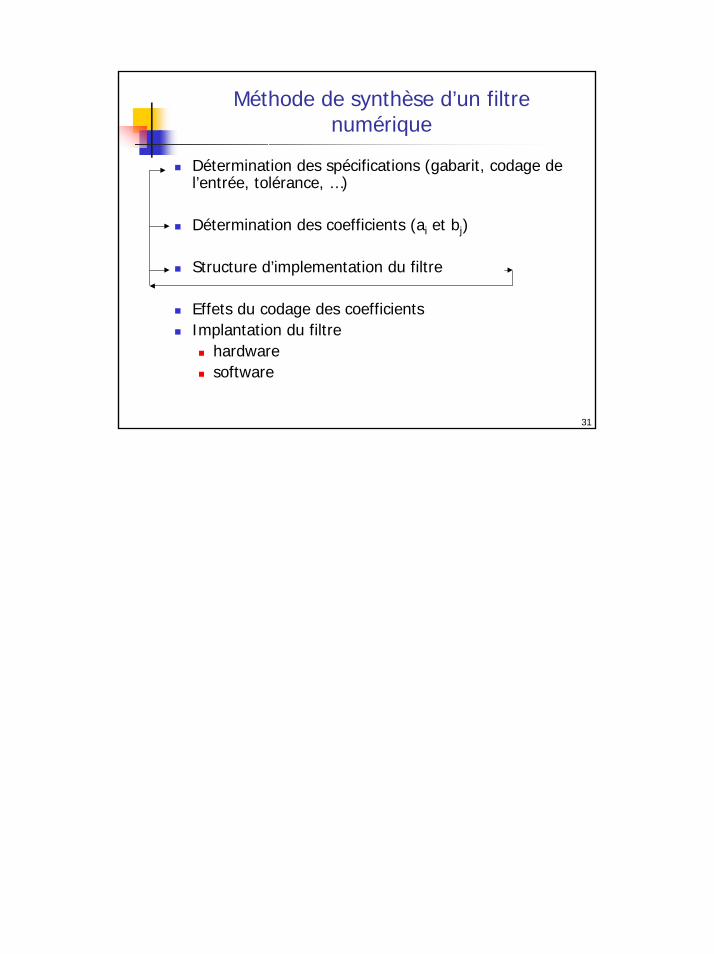
Comment définir les spécifications ?
On autorise des oscillations et une bande transition ?Filtre réalisable en temps réel ?
stable
causal : la réponse impulsionnelle doit être nulle aux instants négatifs
Filtre idéal non réalisable en temps réel
On s’autorise des variations par rapport au filtre idéal
16
31
Méthode de synthèse d’un filtre numérique
Détermination des spécifications (gabarit, codage de l’entrée, tolérance, …)
Détermination des coefficients (ai et bj)
Structure d’implementation du filtre
Effets du codage des coefficientsImplantation du filtre
hardwaresoftware