Ilot: 02 - DAE - Joint de Cardan · alimentée par l'alternateur et la batterie, ... embrayage...
11
Page 1/11 TP S.I.I. Cycle 5 : Etude du comportement cinématique des systèmes mécaniques Lycée Ferdinand Buisson Cinématique PTSI Cycle 5 : Etude du comportement cinématique des systèmes Compétences : B2, C Ilot: 02 - DAE - Joint de Cardan Activités Contenu Compétences 1 Analyse fonctionnelle B2 2 Etude du modèle de connaissance : Loi E/S C 3 Etude du modèle de comportement : Loi E/S C 4 Etude du modèle simulé : Loi E/S C 5 Analyse des écarts et conclusion C
Transcript of Ilot: 02 - DAE - Joint de Cardan · alimentée par l'alternateur et la batterie, ... embrayage...
Page 1/11
TP S.I.I. Cycle 5 : Etude du comportement
cinématique des systèmes mécaniques
Lycée Ferdinand
Buisson
Cinématique PTSI
Cycle 5 :
Etude du comportement cinématique des systèmes
Compétences :
B2, C
Ilot: 02 - DAE - Joint de Cardan
Activités Contenu Compétences
1 Analyse fonctionnelle B2
2 Etude du modèle de connaissance : Loi E/S C
3 Etude du modèle de comportement : Loi E/S C
4 Etude du modèle simulé : Loi E/S C
5 Analyse des écarts et conclusion C

Page 2/11
OBJECTIF du TP – Démarche d’Ingénieur
Durant ce TP, l’étudiant sera amené à s’inscrire dans la démarche de l’ingénieur d’analyse et de résolution de problèmes
sur un système complexe industriel, qui se représente symboliquement par le schéma suivant :
Cette démarche consiste à vérifier les performances attendues d’un joint de cardan (quantification de l’écart
1) via des expérimentations faites sur la maquette DELTALAB, à valider une modélisation à partir
d’expérimentations sur la maquette DELTALAB (quantification de l’écart 2) et à prévoir les performances
d’un système à partir d’une modélisation pour un double joint de cardan (quantification de l’écart 3).
Objectif et problématique : s’assurer que la vitesse de rotation du pignon qui entraine la crémaillère est la même
que la vitesse de rotation de la partie haute de la colonne entrainée par le volant et le motoréducteur
d’assistance (transmission homocinétique) et justifier le choix d’implantation sur la colonne de la DAE d’un
double joint de cardan.
1. Présentation de la Direction Assistée Electrique (DAE) :
La commande de direction des véhicules automobile impose au conducteur de vaincre, par l'intermédiaire du
volant, la résistance au pivotement des roues directrices due à l'action du sol. Pour cela il est nécessaire de
transformer le mouvement de rotation de la colonne de direction en pivotement des roues.
Différents systèmes peuvent être utilisés :
- systèmes vis écrou,
- roues et vis sans fin,
- pignon crémaillère.
Ce dernier principe est le plus couramment utilisé sur les véhicules de tourisme car il permet de transformer la
rotation de la colonne de direction en une translation au niveau des biellettes de direction.
Cette commande manuelle, qui a prévalue pendant presque un siècle, est maintenant assistée par un dispositif
d'assistance qui soulage le conducteur des efforts qu'il doit produire pour exécuter des manœuvres. L'énergie
utilisée était essentiellement sous forme hydraulique.
La direction assistée hydraulique, avec ses nombreux constituants (pompe, circuits...), étant onéreuse et prenant
une place importante dans le compartiment moteur, a motivé une exploration sur des énergies nouvelles.
Les progrès constants en électricité et en électronique ont alors orienté les constructeurs Japonais et Européens
vers une assistance électrique. Les premières Directions Assistées Electriques Variables DAEV sont apparues à la
fin des années 80.
L'arrivée à maturité de cette technologie électrique et sa caractéristique de compacité ont conduit Renault à
implanter ce type de DAEV sur la Twingo, véhicule à forte contrainte d'encombrement.

Page 3/11
La direction assistée électrique variable utilise le courant électrique comme énergie de travail. Elle est
alimentée par l'alternateur et la batterie, donc il n'y a pas d'interaction directe avec le moteur thermique. C'est une
des différences importantes avec la direction assistée hydraulique.
L'assistance apportée par la DAEV permet de réduire les efforts tout particulièrement en manœuvre de parking et
à basse vitesse. Ce gain est encore plus appréciable sur les versions équipées d'options lourdes (climatisation,
embrayage piloté) et ainsi participe à la bonne image urbaine du véhicule.
PRINCIPE DE FONCTIONNEMENT
La DAEV assiste les efforts de direction dès la sollicitation du volant. Le couple d'assistance est fourni à l'aide
d'un moteur électrique, s'additionnant au couple volant appliqué par le conducteur.
Quand un effort volant apparaît, celui-ci est transmis mécaniquement à la crémaillère et électriquement au
calculateur par l'intermédiaire du capteur de couple. Ensuite, le calculateur fournit au moteur électrique un courant
d'alimentation en fonction :
- du couple au volant,
- de la vitesse véhicule.
Un embrayage, puis un réducteur, transmettent l'effort d'assistance du moteur électrique à la colonne.

Page 4/11
Fonction globale : Assister le conducteur dans ses manœuvres à l'arrêt et (ou) à vitesse réduite
2. Présentation de la maquette du « Joint de Cardan » :
Dans ce TP nous allons travailler sur le joint de cardan. Pour cela, nous disposons d’une maquette DELTALAB
permettant la détermination de la loi entrée-sortie d'une transmission par joint de cardan.
- Etude de la cinématique d'un joint de cardan simple.
- Justification du montage par double joint de cardan.
La maquette est composée :
- un cardan ré-usiné pour permettre le montage, le démontage et l'analyse du mécanisme,
- deux cardans pour l'étude des caractéristiques de la transmission à joint simple ou double,
Apprécier
l'opportunité de
l'assistance
Mesurer le couple exercé par le
conducteur sur le volant
Mesurer la vitesse du véhicule
Ordonner l'assistance
Capteurs 9,10 et 13
Capteur Halmo
Calculateur
Activer ou désactiver
l'assistance
Effectuer l'assistance
Générer
l'assistance
Embrayage
Moteur CC +
réducteur
Solutions techniques

Page 5/11
02 - DAE Activité Contenu
1 Analyse fonctionnelle
Acteur Pilote de projet
3. Modélisation cinématique de la direction de la DAE :
3.1. Faire fonctionner la direction (avec et sans assistance) et identifier sur le système du laboratoire ses différents
composants repérés sur la figure 1 ci dessous. Aidez vous du dossier technique si besoin.
Appelez le professeur pour une synthèse sur les principaux constituants.
Figure 1 : Cinématique de la direction assistée électrique (DAE)
Figure 2 : Solution 1 de direction automobile Figure 3 : Solution 2 de direction automobile
3.2. Justifier, en comparant les 2 solutions de direction proposées ci-dessus, la présence obligatoire de 2 joints de
cardan dans la chaine cinématique de commande d’une direction automobile.
Dans quel cas particulier la 2ème solution est elle envisageable ?

Page 6/11
02 - DAE Activité Contenu
2 Etude du modèle de connaissance : loi d’entrée/sortie
Acteur Modélisateur – Pilote de groupe
4. Etude de la transmission de mouvement par joint de Cardan (simple) :
Problématique : on s’intéresse donc maintenant à cette solution technique qui permet de réaliser la fonction
« transmettre un mouvement de rotation entre 2 arbres concourants non coaxiaux », afin de justifier la présence
de 2 joints de cardan dans la direction.
Schéma cinématique spatial associé au mécanisme
Le joint de cardan simple est constitué :
Cette transmission par joint de cardan est représentée sous la forme du schéma cinématique paramétré suivant :
Page 7/11
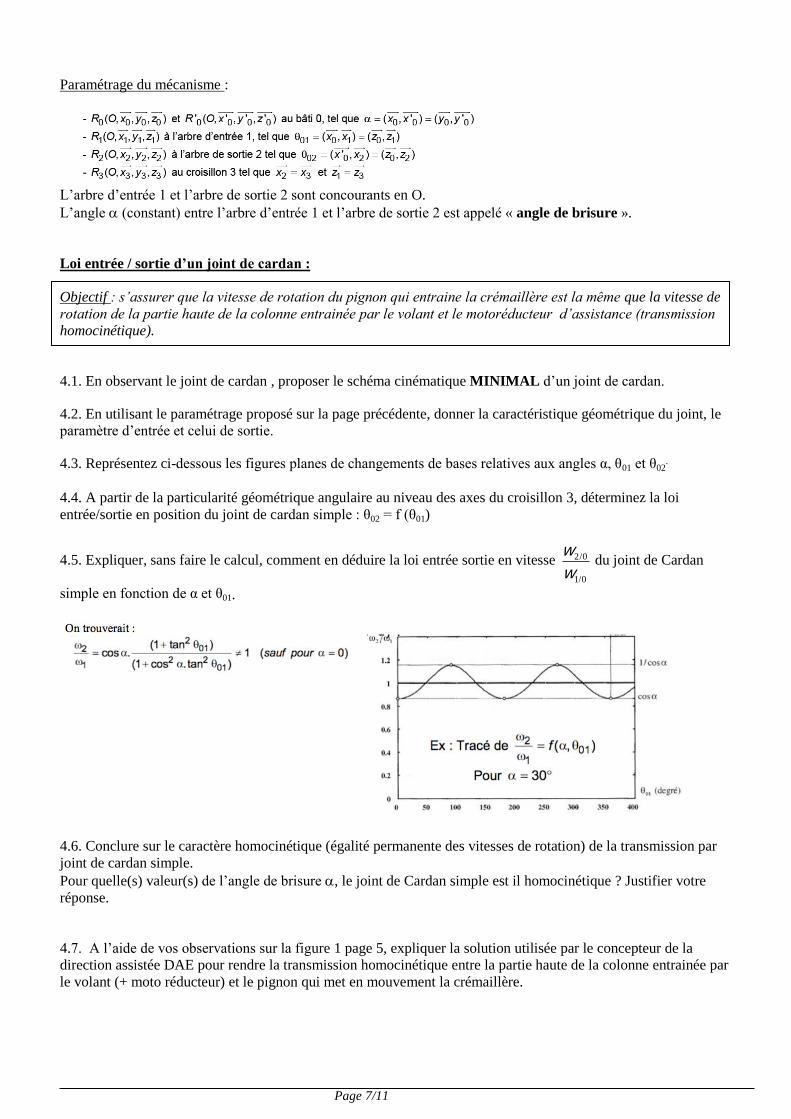
Paramétrage du mécanisme :
L’arbre d’entrée 1 et l’arbre de sortie 2 sont concourants en O.
L’angle (constant) entre l’arbre d’entrée 1 et l’arbre de sortie 2 est appelé « angle de brisure ».
Loi entrée / sortie d’un joint de cardan :
Objectif : s’assurer que la vitesse de rotation du pignon qui entraine la crémaillère est la même que la vitesse de
rotation de la partie haute de la colonne entrainée par le volant et le motoréducteur d’assistance (transmission
homocinétique).
4.1. En observant le joint de cardan , proposer le schéma cinématique MINIMAL d’un joint de cardan.
4.2. En utilisant le paramétrage proposé sur la page précédente, donner la caractéristique géométrique du joint, le
paramètre d’entrée et celui de sortie.
4.3. Représentez ci-dessous les figures planes de changements de bases relatives aux angles α, θ01 et θ02.
4.4. A partir de la particularité géométrique angulaire au niveau des axes du croisillon 3, déterminez la loi
entrée/sortie en position du joint de cardan simple : θ02 = f (θ01)
4.5. Expliquer, sans faire le calcul, comment en déduire la loi entrée sortie en vitesse w2/0
w1/0
du joint de Cardan
simple en fonction de α et θ01.
4.6. Conclure sur le caractère homocinétique (égalité permanente des vitesses de rotation) de la transmission par
joint de cardan simple.
Pour quelle(s) valeur(s) de l’angle de brisure , le joint de Cardan simple est il homocinétique ? Justifier votre
réponse.
4.7. A l’aide de vos observations sur la figure 1 page 5, expliquer la solution utilisée par le concepteur de la
direction assistée DAE pour rendre la transmission homocinétique entre la partie haute de la colonne entrainée par
le volant (+ moto réducteur) et le pignon qui met en mouvement la crémaillère.
Page 8/11
02 - DAE Activité Contenu
3 Etude du modèle de comportement : loi d’entrée/sortie
Acteur Expérimentateur
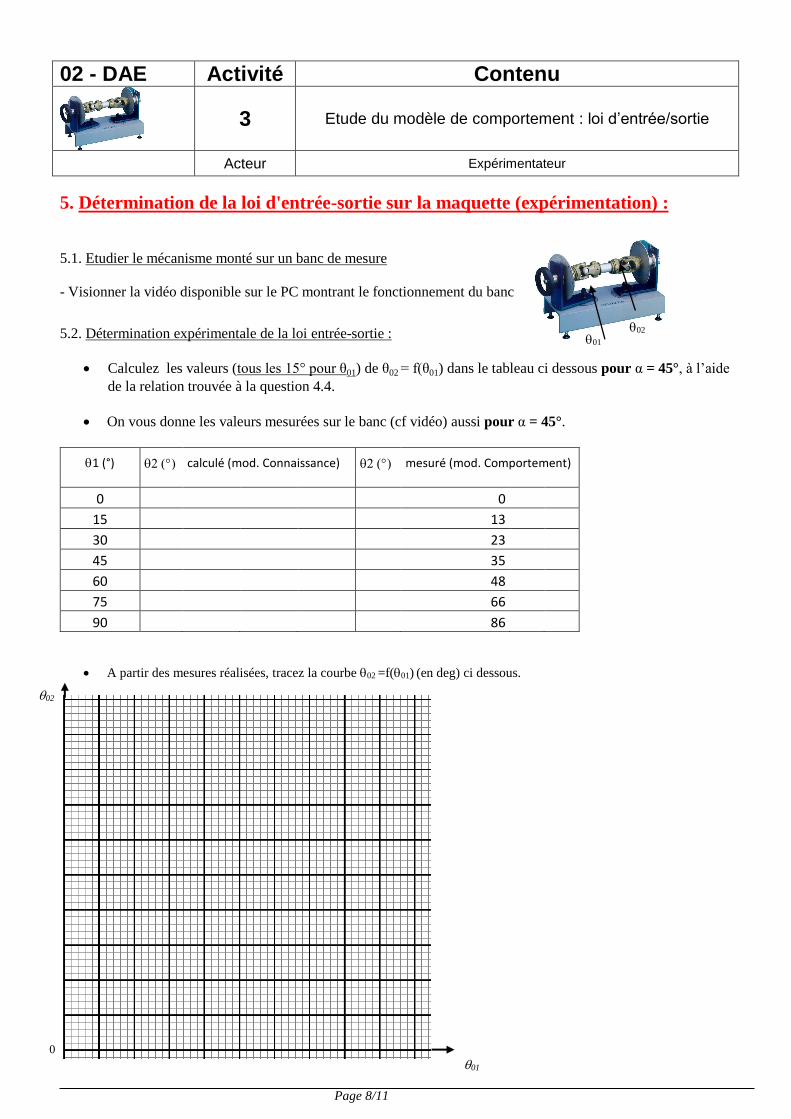
5. Détermination de la loi d'entrée-sortie sur la maquette (expérimentation) :
5.1. Etudier le mécanisme monté sur un banc de mesure
- Visionner la vidéo disponible sur le PC montrant le fonctionnement du banc
5.2. Détermination expérimentale de la loi entrée-sortie :
Calculez les valeurs (tous les 15° pour θ01) de θ02 = f(θ01) dans le tableau ci dessous pour α = 45°, à l’aide
de la relation trouvée à la question 4.4.
On vous donne les valeurs mesurées sur le banc (cf vidéo) aussi pour α = 45°.
1 (°) calculé (mod. Connaissance) mesuré (mod. Comportement)
0 0
15 13
30 23
45 35
60 48
75 66
90 86
A partir des mesures réalisées, tracez la courbe 02 =f(01) (en deg) ci dessous.
01
0
02
01 02

Page 9/11
5.3. Conclure sur l’homocinétisme de la transmission uniquement sur la base de votre relevé de valeurs en
position.
5.4. Quelle est l’influence de l’angle de brisure sur la loi E/S ?
02 - DAE Activité Contenu
4 Etude du modèle simulé : loi d’entrée/sortie
Acteur Modélisateur
6. Détermination de la loi d'entrée-sortie à l’aide d’un modeleur volumique :
Le calcul du rapport w2/0
w1/0
représentant la loi d'entrée sortie étant fastidieux à la main, on vous propose d’exploiter
la maquette numérique du joint de cardan , avec le module de calcul « méca 3D » de Solidworks et d'exploiter les
résultats obtenus grâce à la simulation.
6.1. Sur le PC, récupérez le répertoire « cardan simple SDW » et ouvrir l’assemblage « joint cardan simple
élève ». Vous retrouvez le modèle d’un joint simple de cardan avec ses composants (fourchettes et croisillon).
Le modèle est paramétré avec un angle de brisure = 45°
6.2. Observer les liaisons proposées et comparer avec le modèle théorique.
6.3. Paramétrer le mouvement d’entrée sur la pivot 1 (10tr/min, 100 pts, 10s)
puis lancer la simulation.
6.4. Réaliser la courbe permettant de voir la loi ES et
analyser le tracé de la position de θ02 =f(θ01). Recopier l’allure de la loi.
6.5. Affichez également la loi entrée sortie en vitesse w2/0
w1/0
.
6.6. Conclure sur l’homocinétisme du joint simple de cardan.
arbre entrée 1

Page 10/11
7. Détermination de la loi d'entrée-sortie sur Solidworks d’un joint DOUBLE :
7.1. Sur le PC, récupérez le répertoire « cardan double SDW » et ouvrir l’assemblage « joint cardan double
élève ». Vous retrouvez le modèle d’un joint double de cardan avec ses composants (fourchettes et croisillon).
Nous allons étudiez la cinématique d’un joint de cardan double proposé à l’aide de l’environnement « méca 3D »
7.2. Ouvrir l’assemblage du joint de cardan double proposé : « joint cardan double élève »
Attention : Le modèle est paramétré avec un angle de brisure de 30°
7.3. Avec la même méthode que pour le cardan simple, observer la vitesse
de l’arbre de sortie.
7.4. Conclure quand à l'homocinétisme de ce joint double.
Expliquez la raison de ce constat et les conditions nécessaires pour
qu'il y ait homocinétisme en vous aidant d'un dessin.
7.5. Afin d’obtenir l’homocinétisme, quitter « méca 3D » et modifiez « l’embase assemblée » en l’enregistrant
dans votre répertoire.
7.6. Retournez dans l’environnement « méca 3d » du joint double (la mise à jour de l’embase s’effectue) et
relancez votre simulation et afficher la loi E/S.
Que constatez vous ?
7.7. Vérifiez sur la DAE le type de joint de cardan double monté. Est-il homocinétique ?

Page 11/11
02 - DAE Activité Contenu
5 Analyser et comparer les écarts
Acteur Groupe
Comparer les lois E/S obtenues par expérimentation, modèle de connaissance et simulation. Conclure.
Vérification théorique de d’homocinétisme d’un joint double :Au vu des conditions exposées dans
7.4., voici un double joint de cardan paramétré qui peut être monté selon les 2 configurations proposées,
nous allons étudier la condition d'homocinétisme:
Rappel :
7.8. Indépendamment de la configuration, exprimez w3/w2 en vous aidant la relation ci-dessus.
7.9. Déduisez en la relation w3/w1 et concluez.