IFT 702 Planification en intelligence artificielle Reconnaissance de plans Froduald Kabanza...
12
IFT 702 Planification en intelligence artificielle Reconnaissance de plans Froduald Kabanza Département d’informatique Université de Sherbrooke planiart.usherbrooke.ca/ kabanza Modifications par Simon Chamberland
-
Upload
rodolphe-hamon -
Category
Documents
-
view
110 -
download
0
Transcript of IFT 702 Planification en intelligence artificielle Reconnaissance de plans Froduald Kabanza...

IFT 702Planification en intelligence artificielle
Reconnaissance de plans
Froduald Kabanza
Département d’informatique
Université de Sherbrooke
planiart.usherbrooke.ca/kabanza
Modifications par Simon Chamberland

F. Kabanza IFT 702 - Reconnaissance de plans 2
RappelRappelProcessus de décision de MarkovProcessus de décision de Markov
• Modélise un processus stochastique discret
– Décision à prendre dans chaque état
– Transitions non déterministes
– Fonction de récompenses
• Propriété de Markov: probabilités des états futurs dépend uniquement de l’état courant (pas de l’historique)
• MDP + politique (plan) = chaîne de Markov

F. Kabanza IFT 702 - Reconnaissance de plans 3
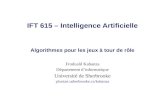
RappelRappelRéseaux bayésiensRéseaux bayésiens
• Un arc d’un nœud X vers un nœud Y signifie que la variable X influence la variable Y.
– Un cambriolage peut déclencher l’alarme.
– Un séisme aussi.
– L’alarme peut inciter Jean à appeler.
– Idem pour Marie à appeler.
• Pour chaque nœud, on a une table de probabilité conditionnelle (TPC) ou une fonction de densité de probabilité conditionnelle.
Cambriolage Séisme
Alarme
JeanApelle MarieAppelle
C S P(A|C,S)
T T .95T F .94 F T .29 F F .001
A P(J|A)T .90F .05
A P(M|A)T .70F .01
P(C)
.001
P(S)
.002

F. Kabanza IFT 702 - Reconnaissance de plans 4
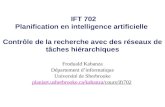
RappelRappelRéseaux bayésiens dynamiques / Chaînes cachées de MarkovRéseaux bayésiens dynamiques / Chaînes cachées de Markov
• Contexte: Un gardien de sécurité passe un mois dans un édifice sous-terrain, sans sortir. Il s’amuse à prévoir le temps en observant si le patron amène un parapluie.
• Variables: Xt = {Rt} (pour « Rain ») et Et={Ut} (pour « Umbrella »).
1tRaintRain1tRain
1tUmbrellatUmbrella1tUmbrella
Modèle des transitions: P(Rt | Rt-1). Modèle d’observation: P(Et | Rt).

F. Kabanza IFT 702 - Reconnaissance de plans 5
RappelRappelRéseaux bayésiens dynamiques / Chaînes cachées de MarkovRéseaux bayésiens dynamiques / Chaînes cachées de Markov
• Type d’inférence
• Estimation de l’état P(Xt | e1:t )
• Prédiction P(Xt+k | e1:t )
• Lissage (hindsight) P(Xk | e1:t )
• Découverte de la séquence la plus probable P(X1:t | e1:t )
1tRaintRain1tRain
1tUmbrellatUmbrella1tUmbrella
Modèle des transitions: P(Rt | Rt-1). Modèle d’observation: P(Et | Rt).

F. Kabanza IFT 702 - Reconnaissance de plans 6
• D. Pynadath and M. Wellman. Accounting for Context in Plan Recognition, with Application to Traffic Monitoring. Proc. of Conference on Uncertainty in Artificial Intelligence, 1995.
Approche probabilisteApproche probabilistePar réseau bayésienPar réseau bayésien

F. Kabanza IFT 702 - Reconnaissance de plans 7
• D. Pynadath and M. Wellman. Accounting for Context in Plan Recognition, with Application to Traffic Monitoring. Proc. of Conference on Uncertainty in Artificial Intelligence, 1995.
Approche probabilisteApproche probabilistePar réseau bayésienPar réseau bayésien

F. Kabanza IFT 702 - Reconnaissance de plans 8
• C. Geib and R. Goldman. Plan Recognition in Intrusion Detection Systems. Conference of the Association for the Advancement of Artificial Intelligence, 2006.
Approche probabilisteApproche probabilistePlus ou moins chaînes cachées de MarkovPlus ou moins chaînes cachées de Markov

F. Kabanza IFT 702 - Reconnaissance de plans 9
• C. Geib and R. Goldman. Plan Recognition in Intrusion Detection Systems. Conference of the Association for the Advancement of Artificial Intelligence, 2006.
Approche probabilisteApproche probabilistePlus ou moins chaînes cachées de MarkovPlus ou moins chaînes cachées de Markov

F. Kabanza IFT 702 - Reconnaissance de plans 10
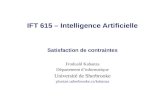
Approche probabilisteApproche probabilisteRéseau Bayésien dynamiqueRéseau Bayésien dynamique
Kautz et al.http://www.cs.rochester.edu/u/kautz/talks/converging-technology-kautz-v3.ppt

F. Kabanza IFT 702 - Reconnaissance de plans 11
Approche probabilisteApproche probabilisteRéseau Bayésien dynamiqueRéseau Bayésien dynamique
Transportation mode
x=<Location, Velocity>
GPS reading
Goal
Trip segment
xk-1
zk-1 zk
xk
mk-1 mk
tk-1 tk
gk-1 gk
Kautz et al.http://www.cs.rochester.edu/u/kautz/talks/converging-technology-kautz-v3.ppt

F. Kabanza IFT 702 - Reconnaissance de plans 12
Références
• C. Schmidt, N. Sridharan and J. Goodson. The plan recognition problem: An intersection of psychology and artificial intelligence. Artificial Intelligence 11(1-2):1978, pages 45-83.
• D. Pynadath and M. Wellman. Accounting for Context in Plan Recognition, with Application to Traffic Monitoring. Proc. of Conference on Uncertainty in Artificial Intelligence, 1995.
• R. Goldman, C. Geib and C. Miller. A new model of plan recognition. Proc. of Conference on Uncertainty in Artificial Intelligence, 1999.
• C. Geib and R. Goldman. Plan Recognition in Intrusion Detection Systems. Conference of the Association for the Advancement of Artificial Intelligence, 2006.
• N. Blaylock and J. Allen. Fast Hierarchical Goal Schema Recognition. Proc. of Conference of the Association for the Advancement of Artificial Intelligence, 2006.