I - Introduction - gon35balledefeu.e-monsite.com/medias/files/schemas-biomeca-p... ·...
50
I - Introduction
Transcript of I - Introduction - gon35balledefeu.e-monsite.com/medias/files/schemas-biomeca-p... ·...
I - Introduction
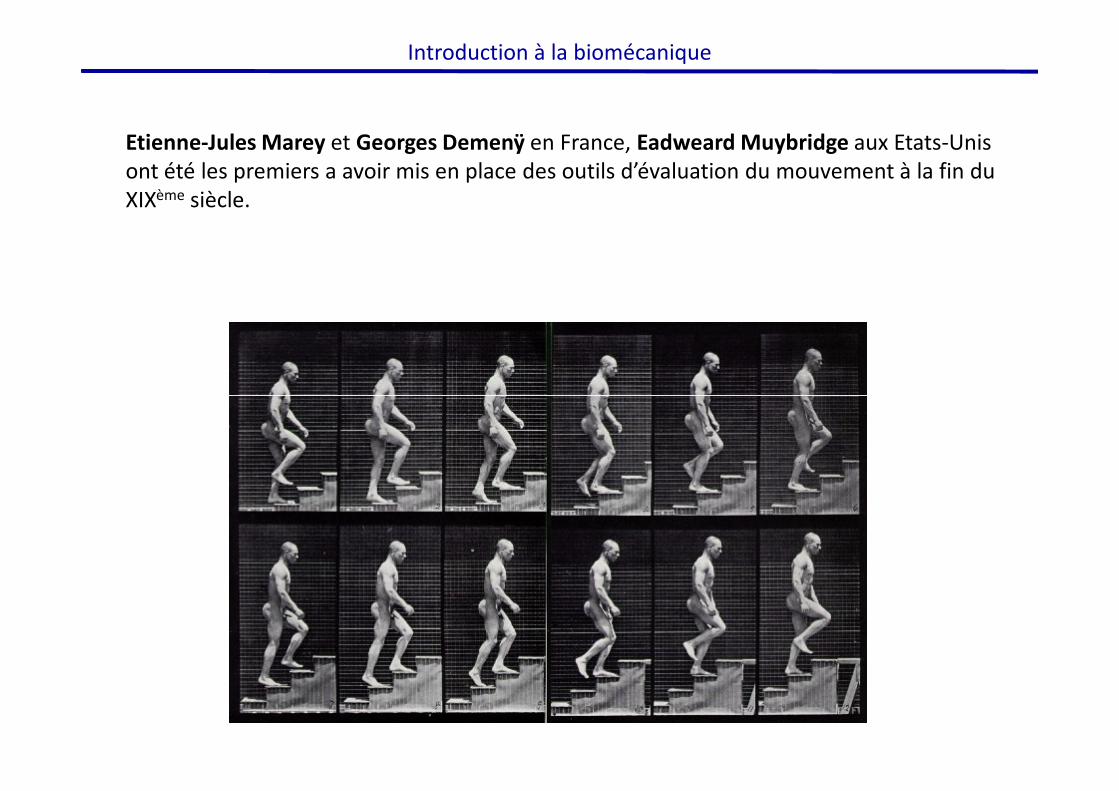
Introduction à la biomécanique
Etienne-Jules Marey et Georges Demenÿ en France, Eadweard Muybridge aux Etats-Unis
ont été les premiers a avoir mis en place des outils d’évaluation du mouvement à la fin du
XIXème siècle.
I. Description du mouvement
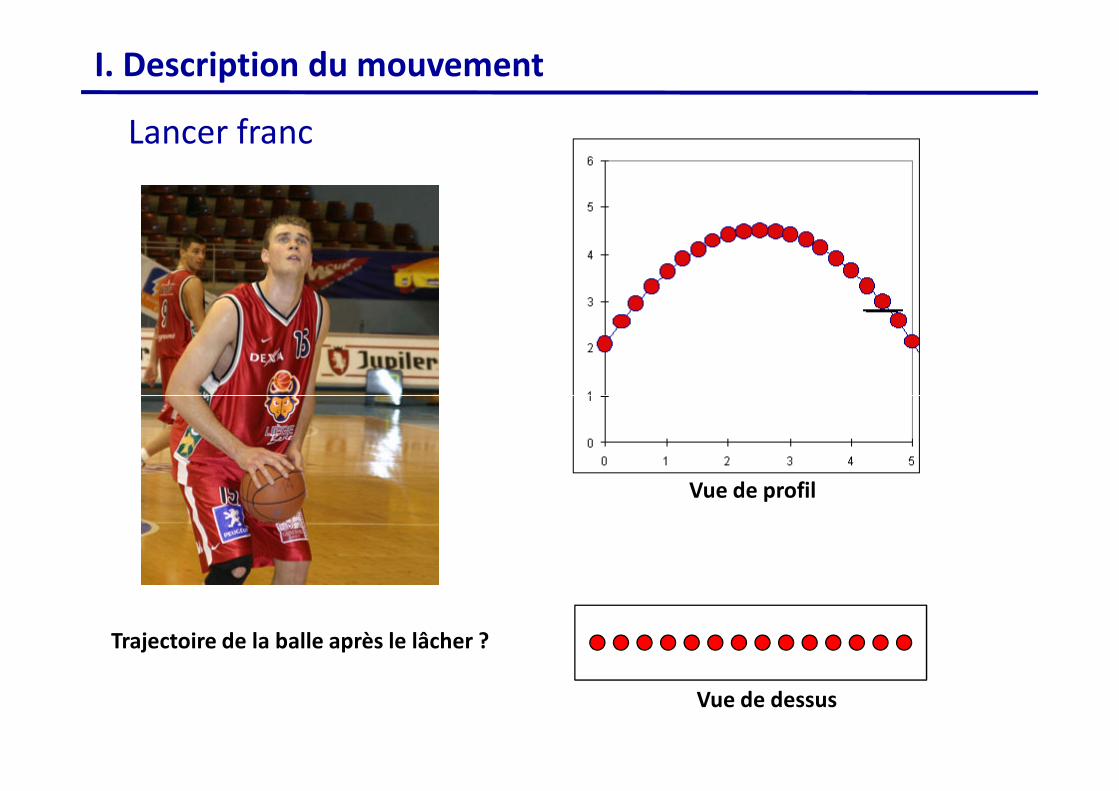
Lancer franc
Vue de profil
Vue de dessus
Trajectoire de la balle après le lâcher ?
I. Description du mouvement
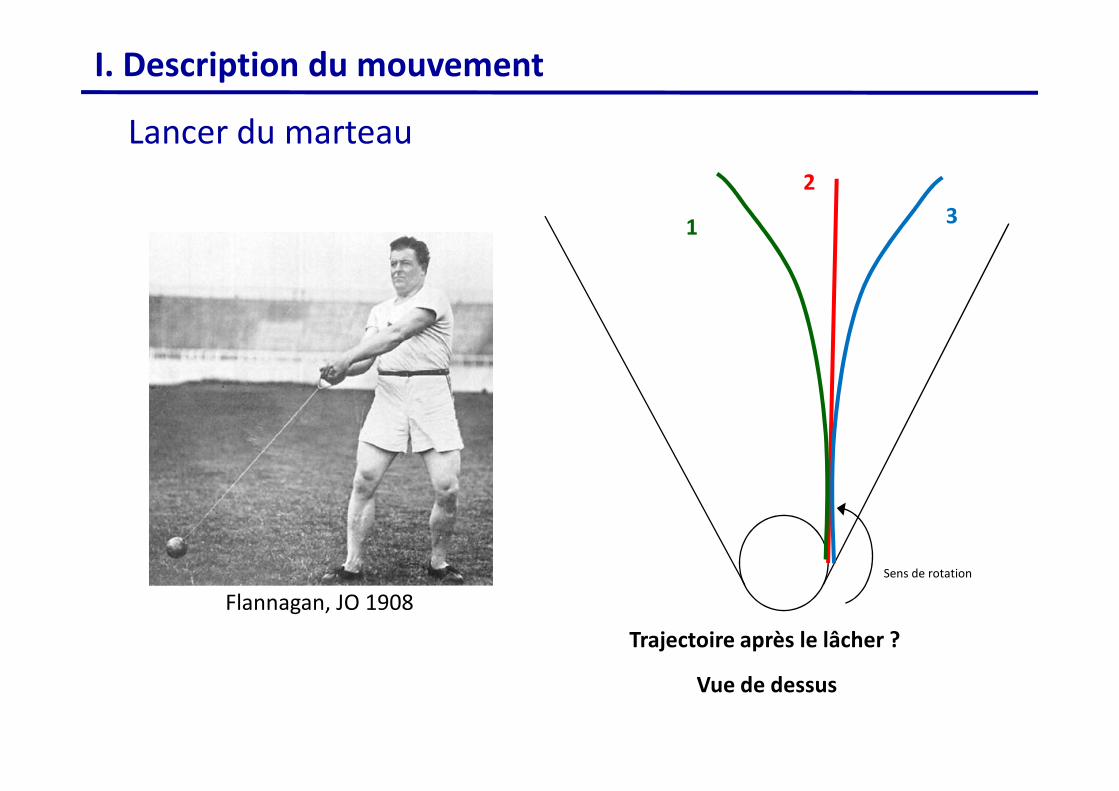
Lancer du marteau
1
2
3
Trajectoire après le lâcher ?
Vue de dessus
Flannagan, JO 1908
Sens de rotation
I. Description du mouvement
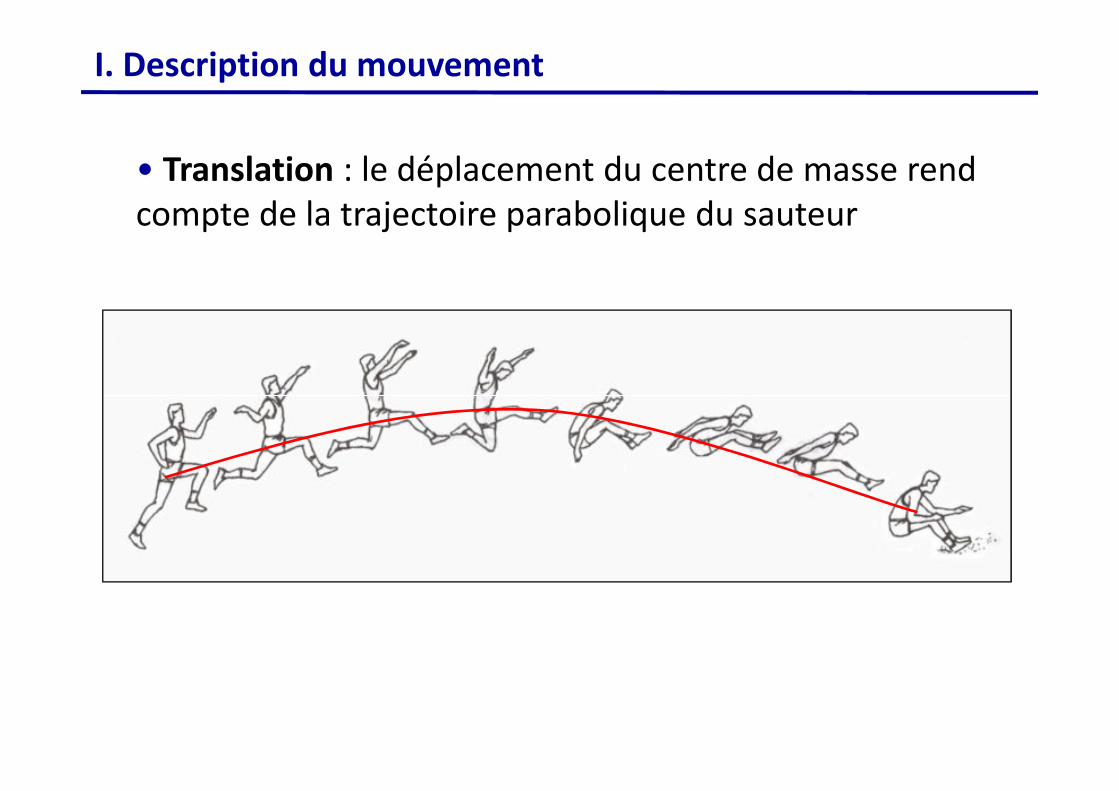
• Translation : le déplacement du centre de masse rend
compte de la trajectoire parabolique du sauteur
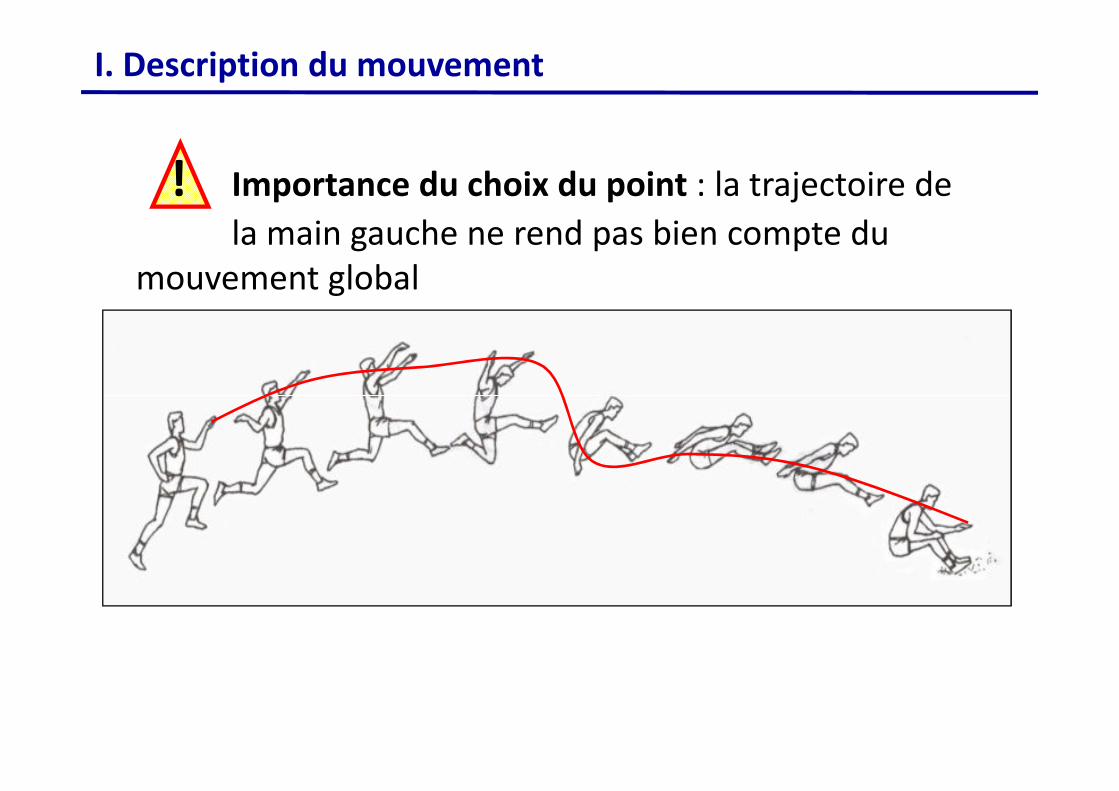
I. Description du mouvement
! Importance du choix du point : la trajectoire de
la main gauche ne rend pas bien compte du
mouvement global
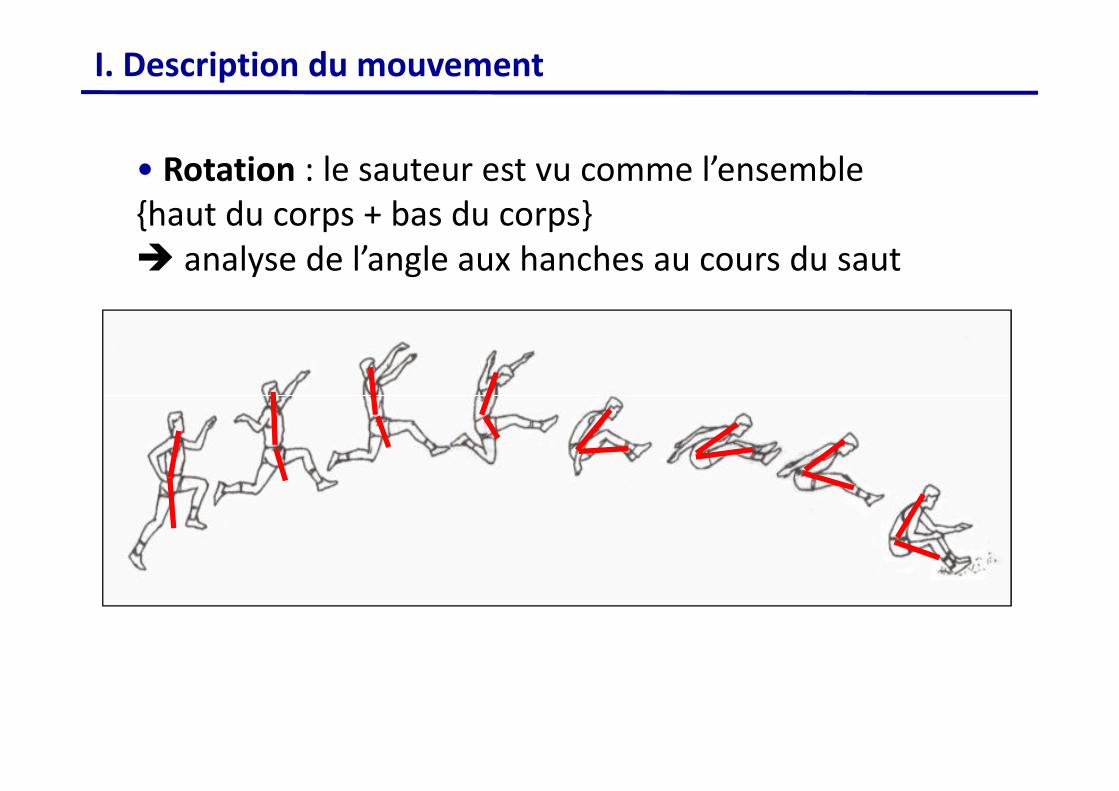
I. Description du mouvement
• Rotation : le sauteur est vu comme l’ensemble
{haut du corps + bas du corps}
� analyse de l’angle aux hanches au cours du saut
II. Représentation du mouvement
Un mouvement humain se passe toujours dans les trois
dimensions de l’espace
La représentation de ce mouvement doit se faire dans
un repère bien défini
� Repère cartésien
ir j
r
kr
O
x
y
z
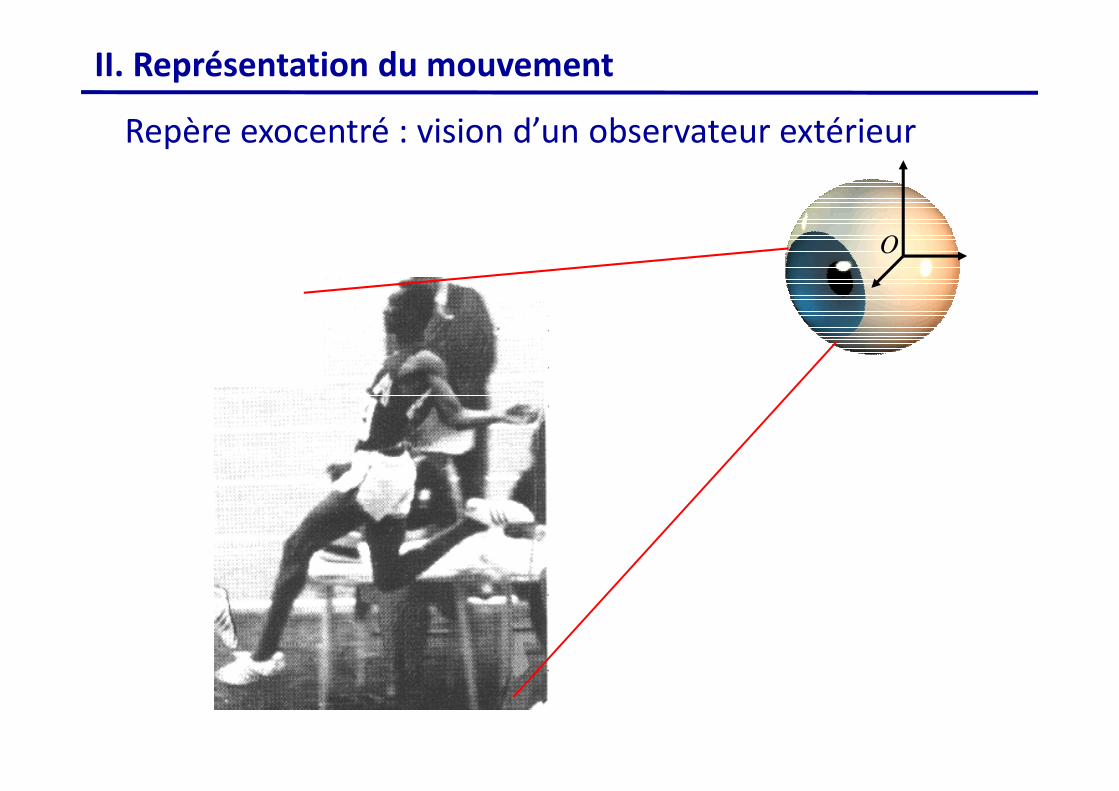
II. Représentation du mouvement
Repère exocentré : vision d’un observateur extérieur
O
II. Représentation du mouvement
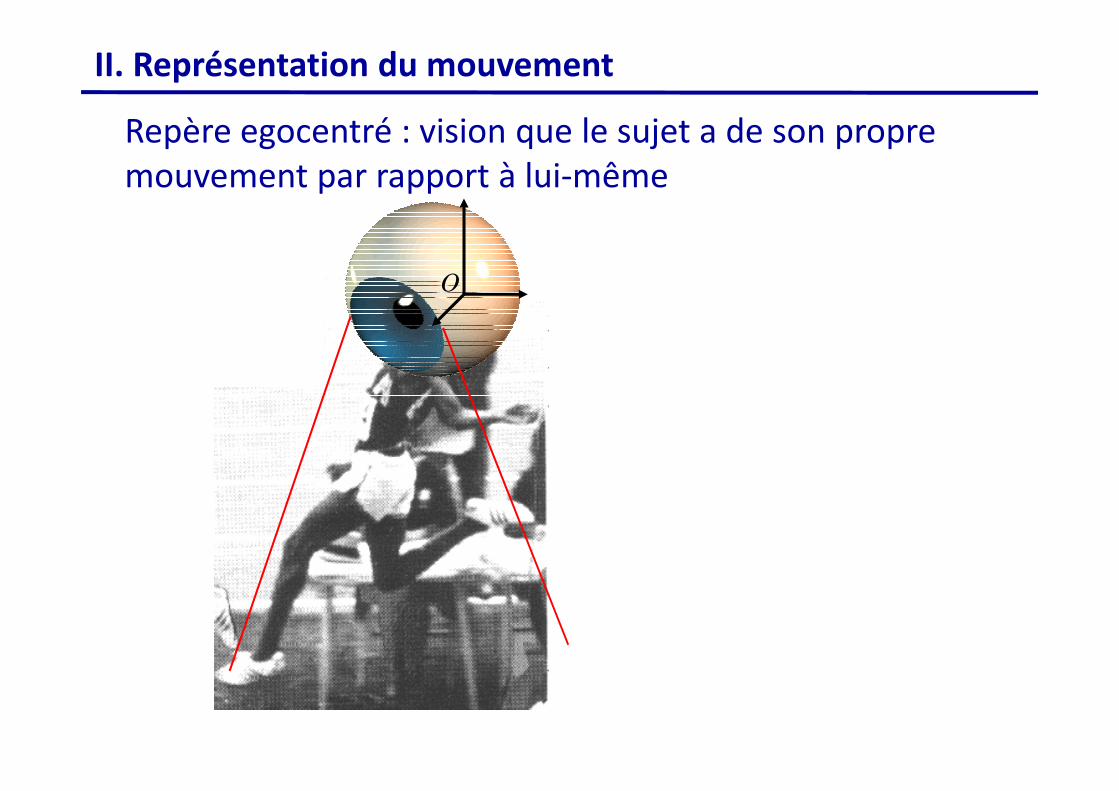
Repère egocentré : vision que le sujet a de son propre
mouvement par rapport à lui-même
O
II. Représentation du mouvement
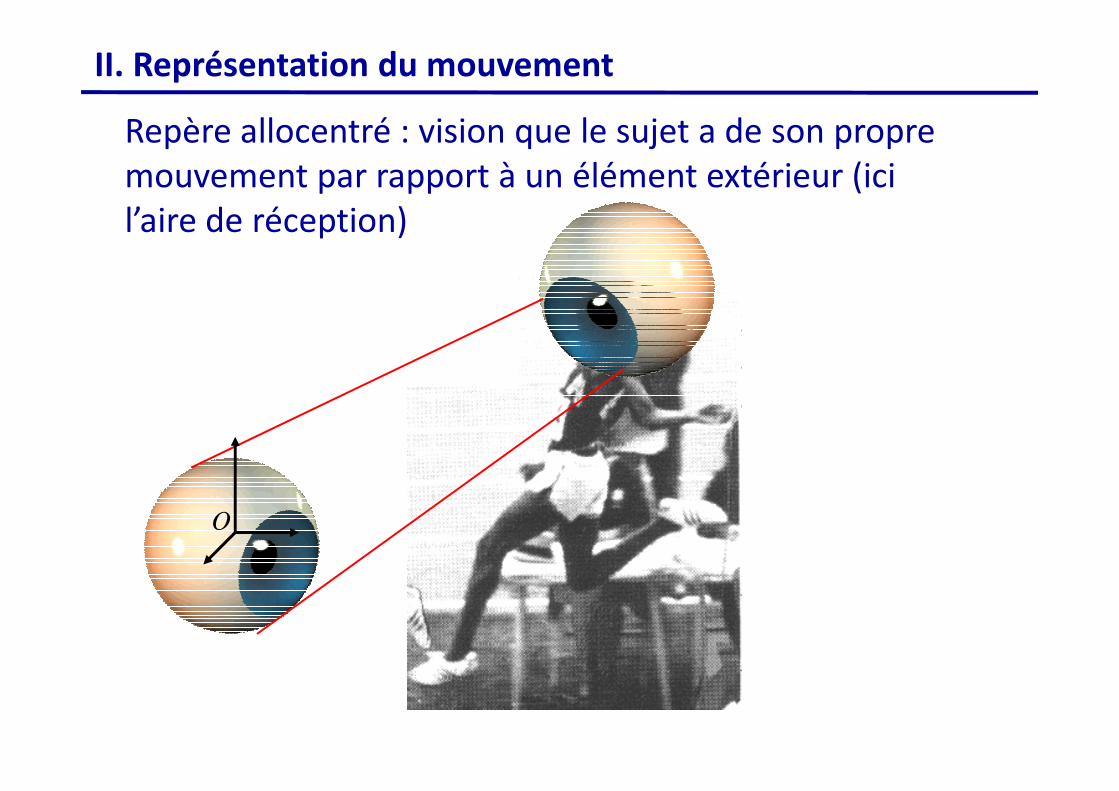
Repère allocentré : vision que le sujet a de son propre
mouvement par rapport à un élément extérieur (ici
l’aire de réception)
O
II. Représentation du mouvement
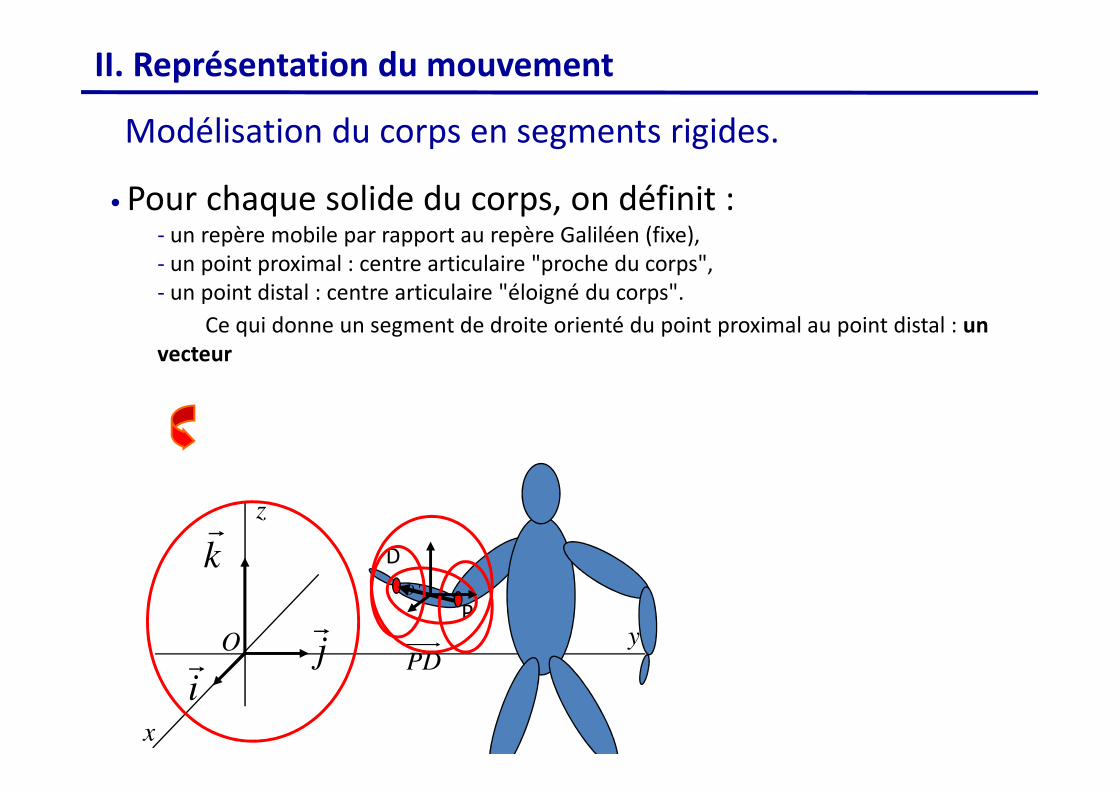
Modélisation du corps en segments rigides.
• Pour chaque solide du corps, on définit :- un repère mobile par rapport au repère Galiléen (fixe),
- un point proximal : centre articulaire "proche du corps",
- un point distal : centre articulaire "éloigné du corps".
Ce qui donne un segment de droite orienté du point proximal au point distal : un
vecteur
ir j
r
kr
O
x
y
z
P
D
PD
'O
II. Représentation du mouvement
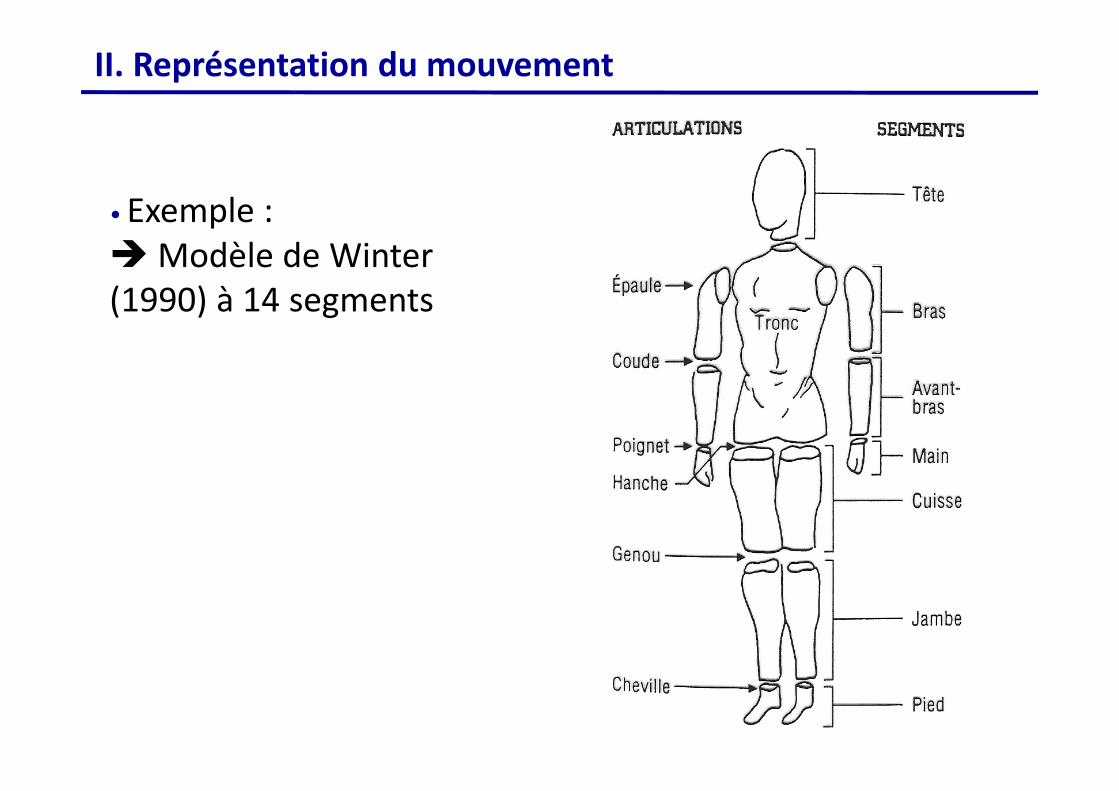
• Exemple :
� Modèle de Winter
(1990) à 14 segments
II – Vitesse linéaire
I. Référentiels et coordonnées cartésiennes.
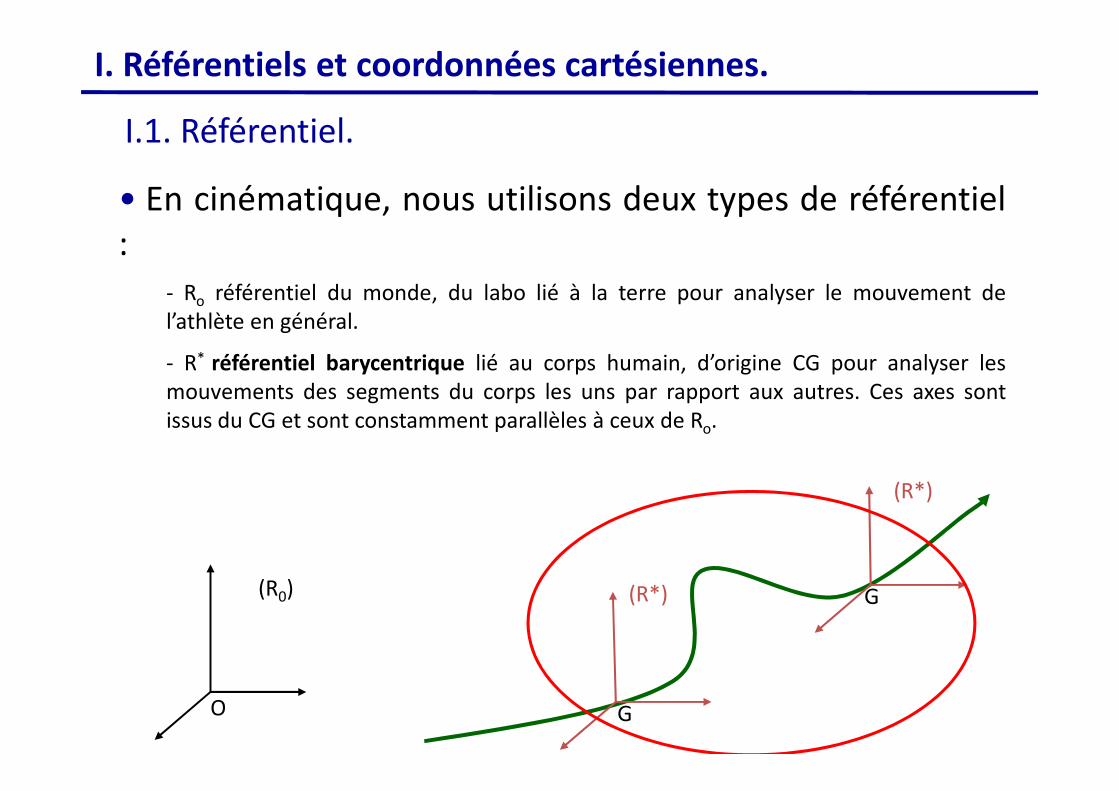
• En cinématique, nous utilisons deux types de référentiel
:
- Ro référentiel du monde, du labo lié à la terre pour analyser le mouvement de
l’athlète en général.
- R* référentiel barycentrique lié au corps humain, d’origine CG pour analyser les
mouvements des segments du corps les uns par rapport aux autres. Ces axes sont
I.1. Référentiel.
mouvements des segments du corps les uns par rapport aux autres. Ces axes sont
issus du CG et sont constamment parallèles à ceux de Ro.
(R0)
O
(R*)
G
(R*)
G
I.2. Coordonnées cartésiennes.
I. Référentiels et coordonnées cartésiennes.
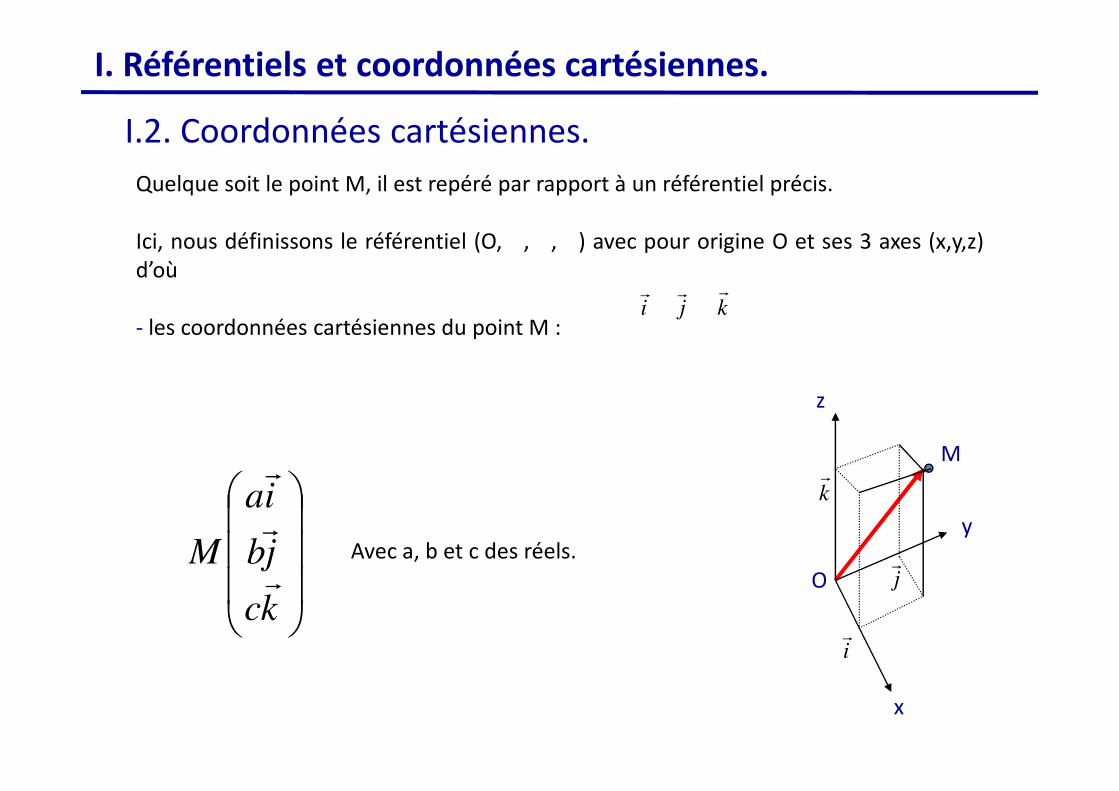
Quelque soit le point M, il est repéré par rapport à un référentiel précis.
Ici, nous définissons le référentiel (O, , , ) avec pour origine O et ses 3 axes (x,y,z)
d’où
- les coordonnées cartésiennes du point M : r i
r j
r k
z
kc
jb
ia
Mr
r
r
Avec a, b et c des réels.
M
O
y
x
z
r i
r j
r k
II. Vitesse linéaire.
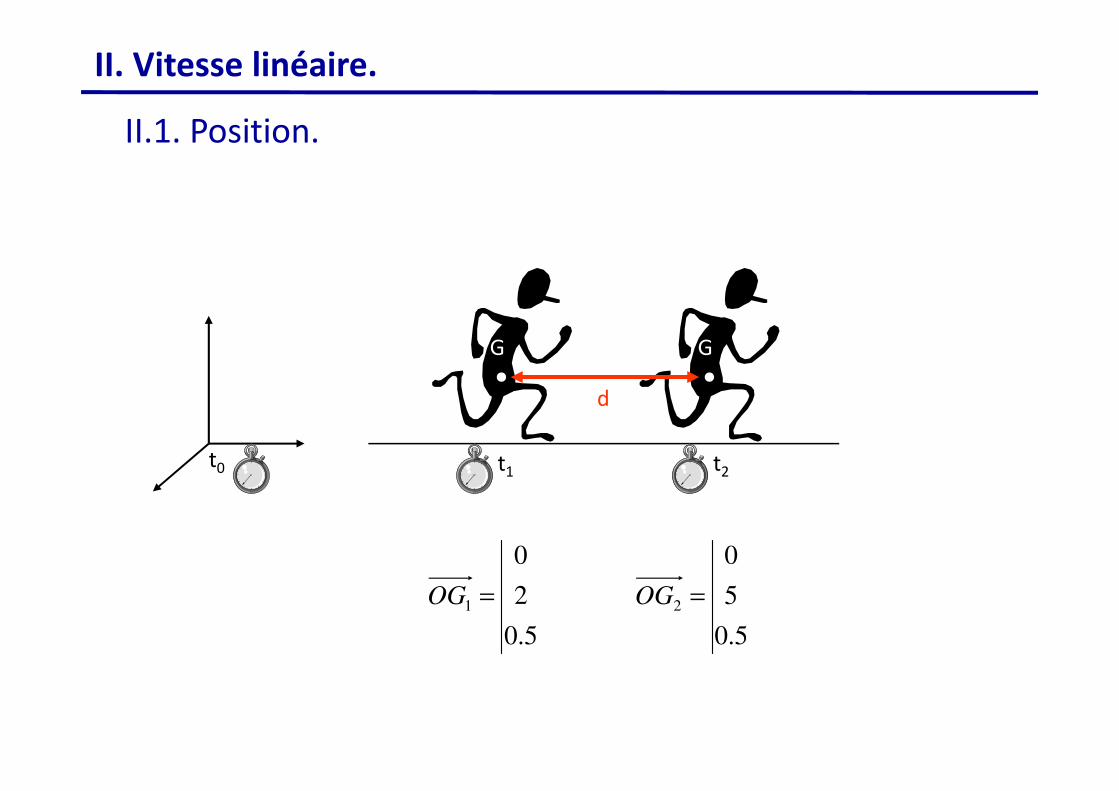
II.1. Position.
d
G G
5.0
2
0
1 =OG
5.0
5
0
2 =OG
t0 t1 t2
d
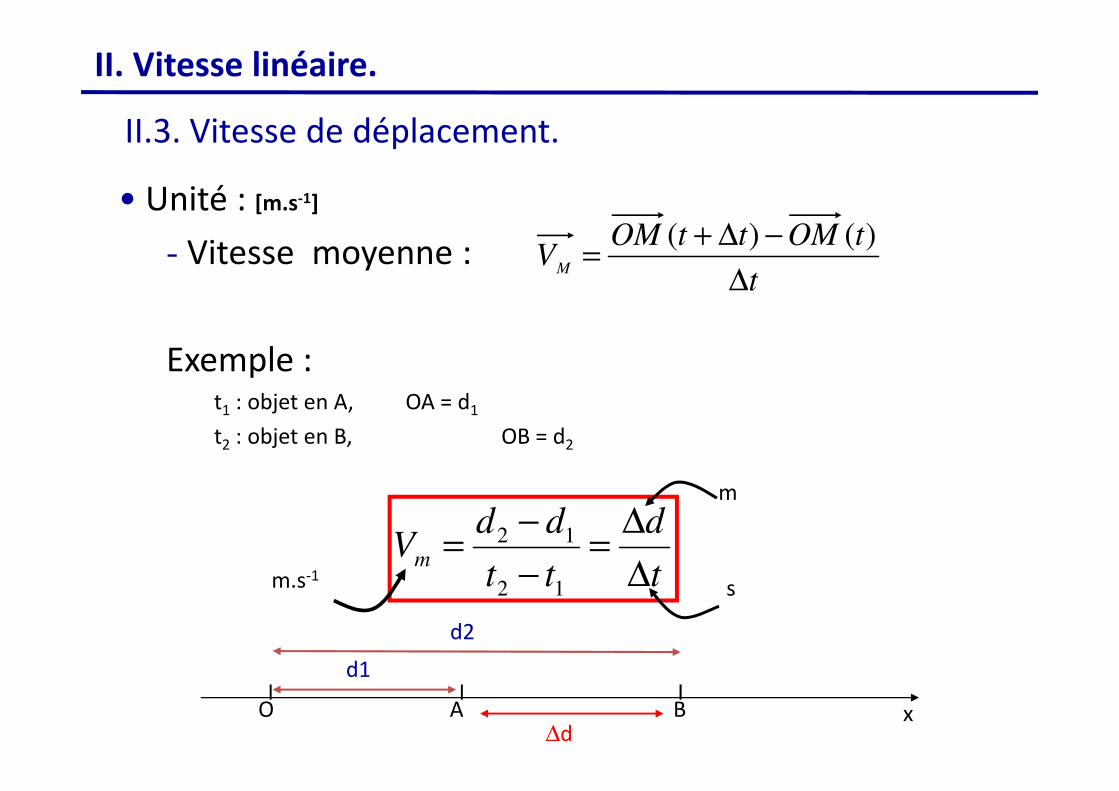
II. Vitesse linéaire.
II.3. Vitesse de déplacement.
• Unité : [m.s-1]
- Vitesse moyenne :
Exemple :t : objet en A, OA = d
VM
=OM (t + ∆t) − OM (t)
∆t
t1 : objet en A, OA = d1
t2 : objet en B, OB = d2
t
d
tt
ddVm
∆
∆=
−
−=
12
12
m.s-1
m
s
xO A B
d1
d2
∆d
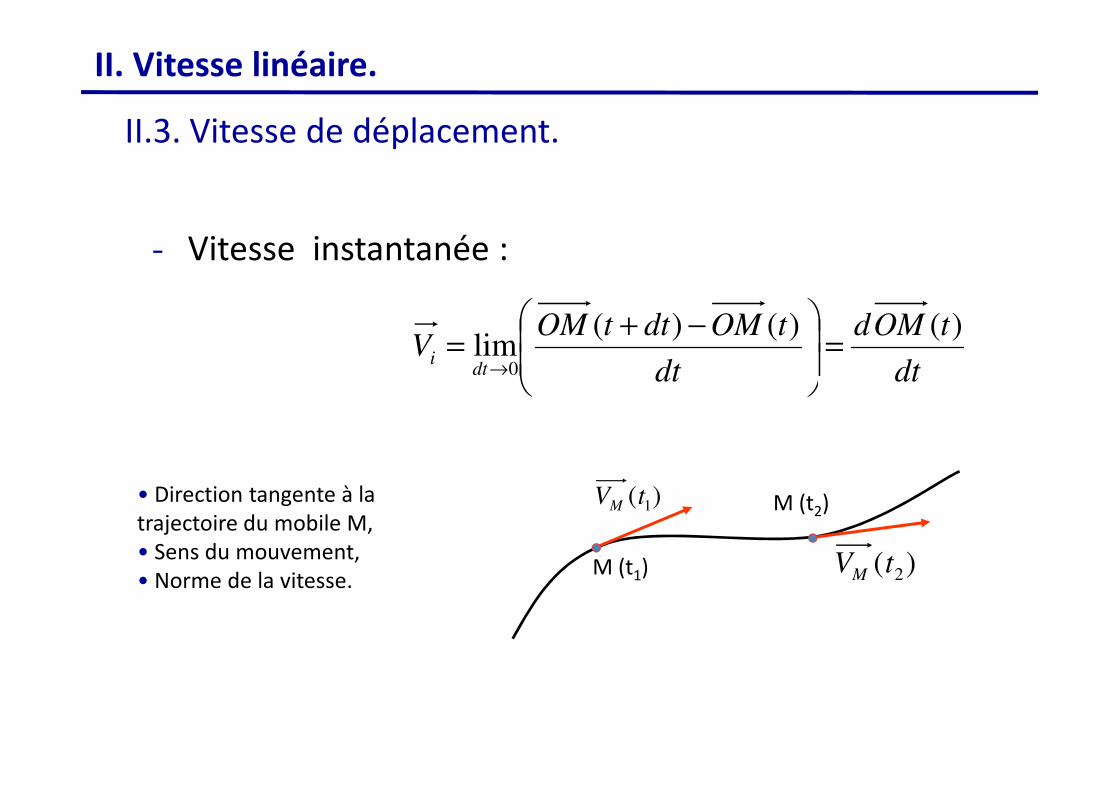
II. Vitesse linéaire.
II.3. Vitesse de déplacement.
- Vitesse instantanée :
dt
tOMd
dt
tOMdttOMV
dti
)()()(lim
0=
−+=
→
• Direction tangente à la
trajectoire du mobile M,
• Sens du mouvement,
• Norme de la vitesse. M (t1)
M (t2)VM (t1)
VM (t2)
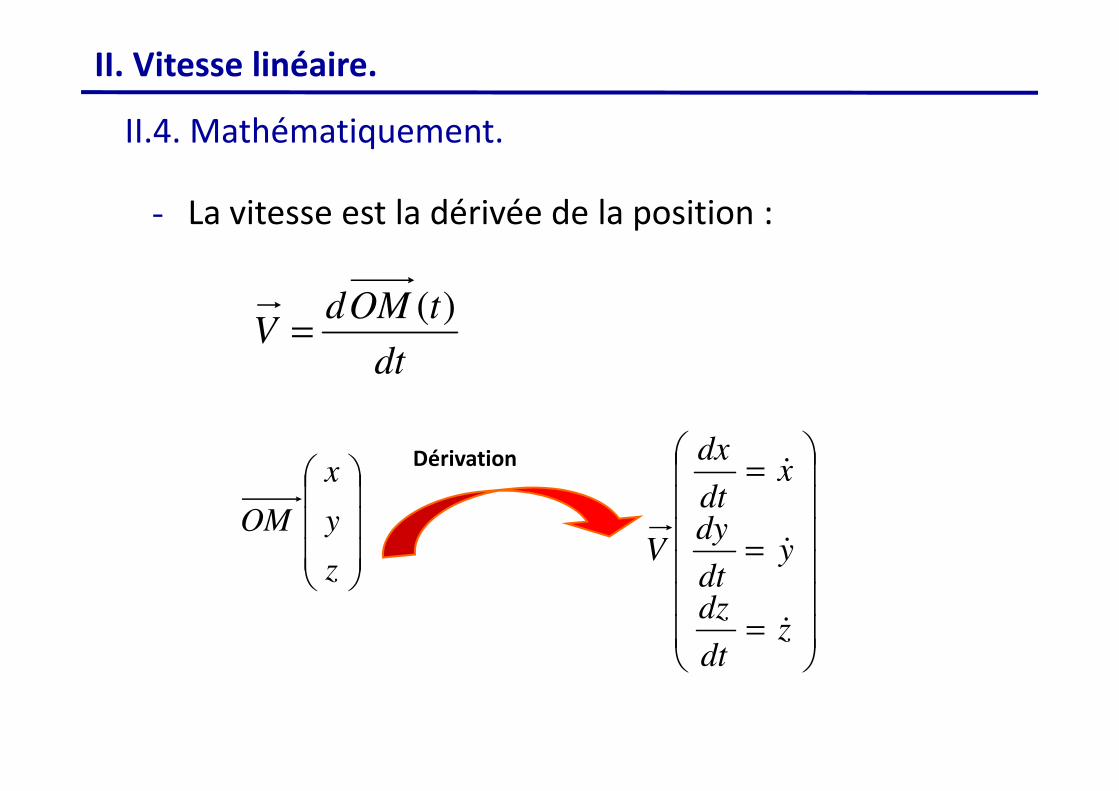
II. Vitesse linéaire.
II.4. Mathématiquement.
dt
tOMdV
)(=
- La vitesse est la dérivée de la position :
z
y
x
OM
=
=
=
zdt
dz
ydt
dy
xdt
dx
V
&
&
&Dérivation
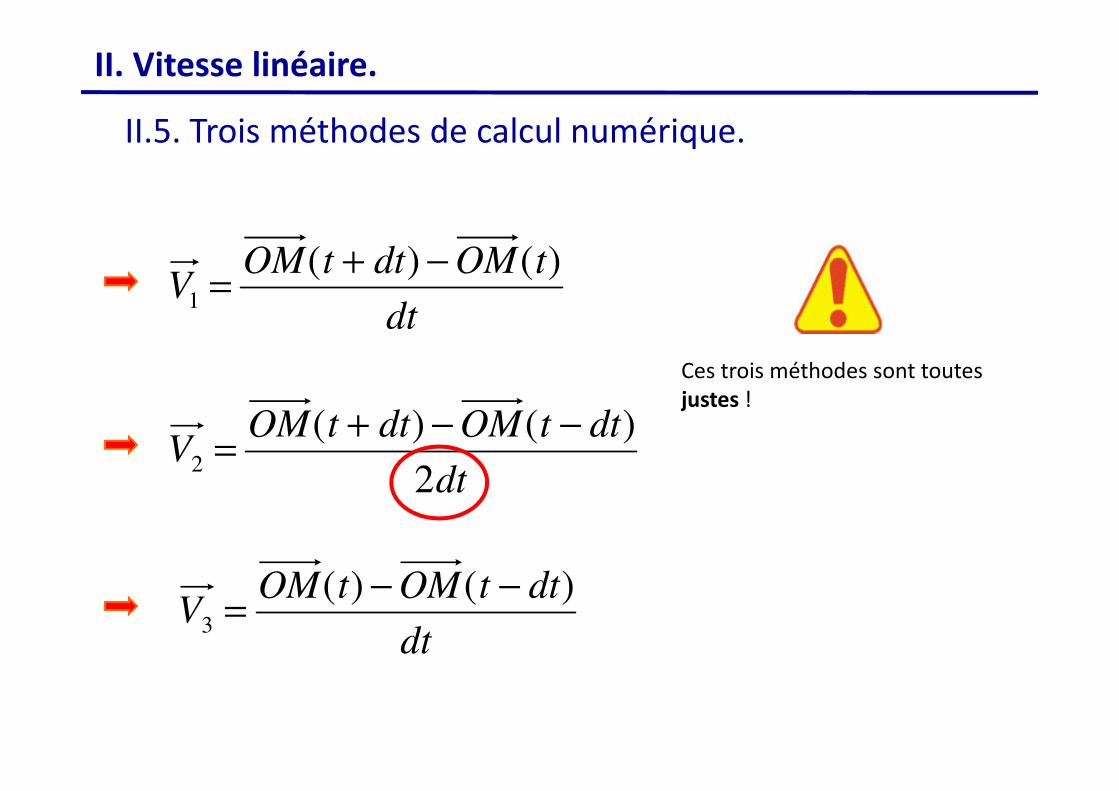
II. Vitesse linéaire.
V1 =OM(t + dt) − OM(t)
dt
II.5. Trois méthodes de calcul numérique.
Ces trois méthodes sont toutes
justes !
V2 =OM(t + dt) − OM(t − dt)
2dt
V3
=OM(t) − OM(t − dt)
dt
justes !
III. Accélération linéaire.
III.1. Accélération moyenne.
• Unité : [m.s-2]
- L’accélération est la variation de vitesse entre deux
instants t1 et t2.
am
=V (t + ∆t) − V (t)
∆t
t
v
tt
vvam
∆
∆=
−
−=
12
12
m.s-2
m.s-1
s
III. Accélération linéaire.
III.2. Accélération instantanée.
dt
tVd
dt
tVdttVa
dti
)()()(lim
0=
−+=
→
- L’accélération est la dérivée de la vitesse :
2
2
dt
OMd
dt
vda ==
••
••
••
=
=
=
za
ya
xa
a
z
y
x
Dérivation
=
=
=
zdt
dz
ydt
dy
xdt
dx
V
&
&
&
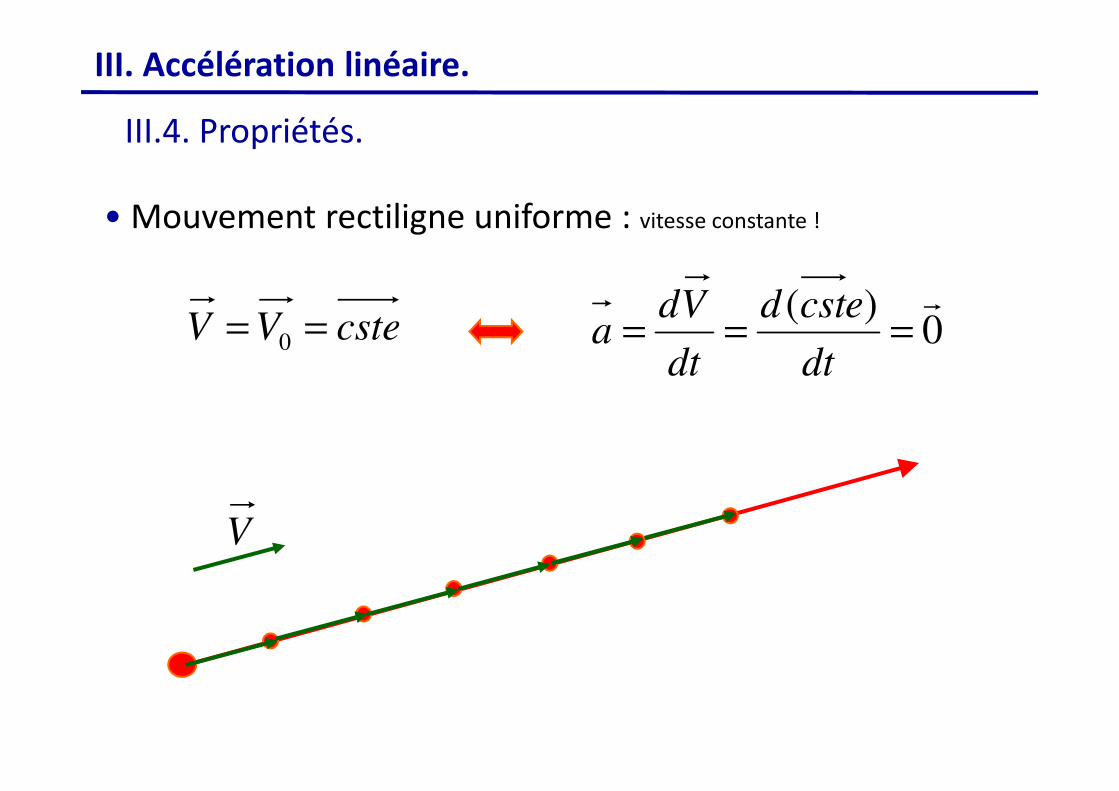
III. Accélération linéaire.
III.4. Propriétés.
• Mouvement rectiligne uniforme : vitesse constante !
csteVV == 0 0)( r
===dt
ecstd
dt
Vda
V
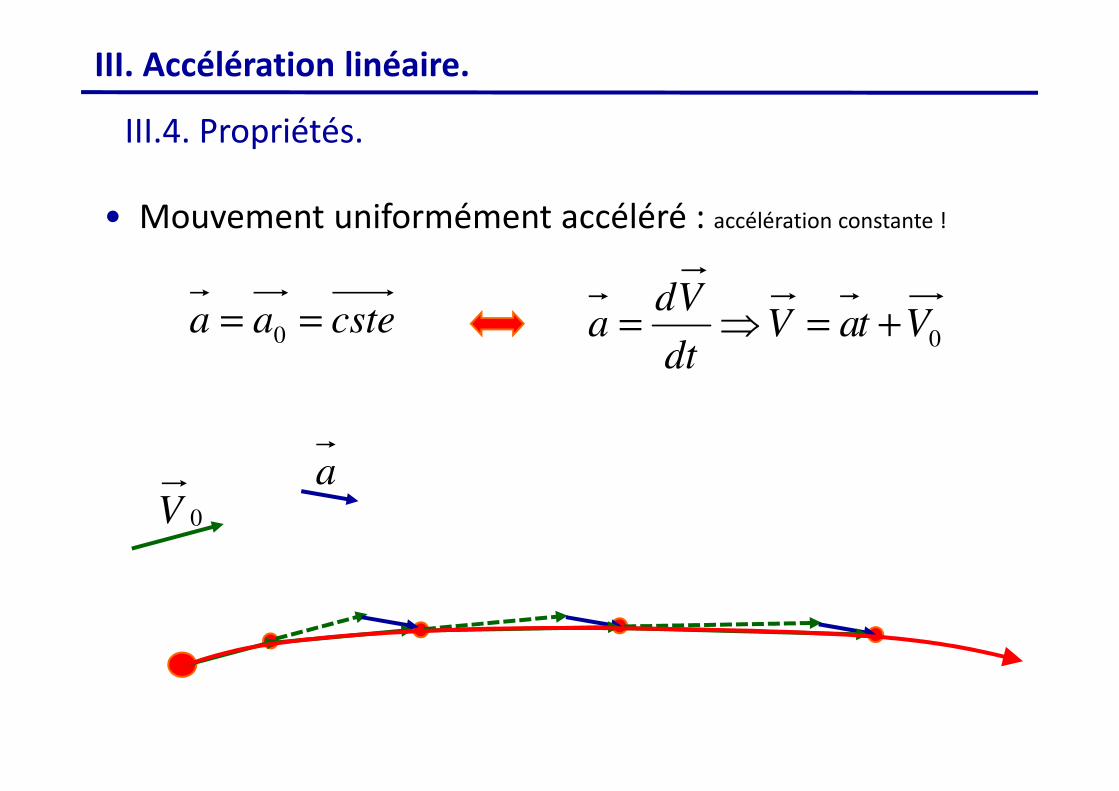
III. Accélération linéaire.
III.4. Propriétés.
• Mouvement uniformément accéléré : accélération constante !
csteaa == 0 0VtaVdt
Vda +=⇒=
0Va
III – Angles articulaires
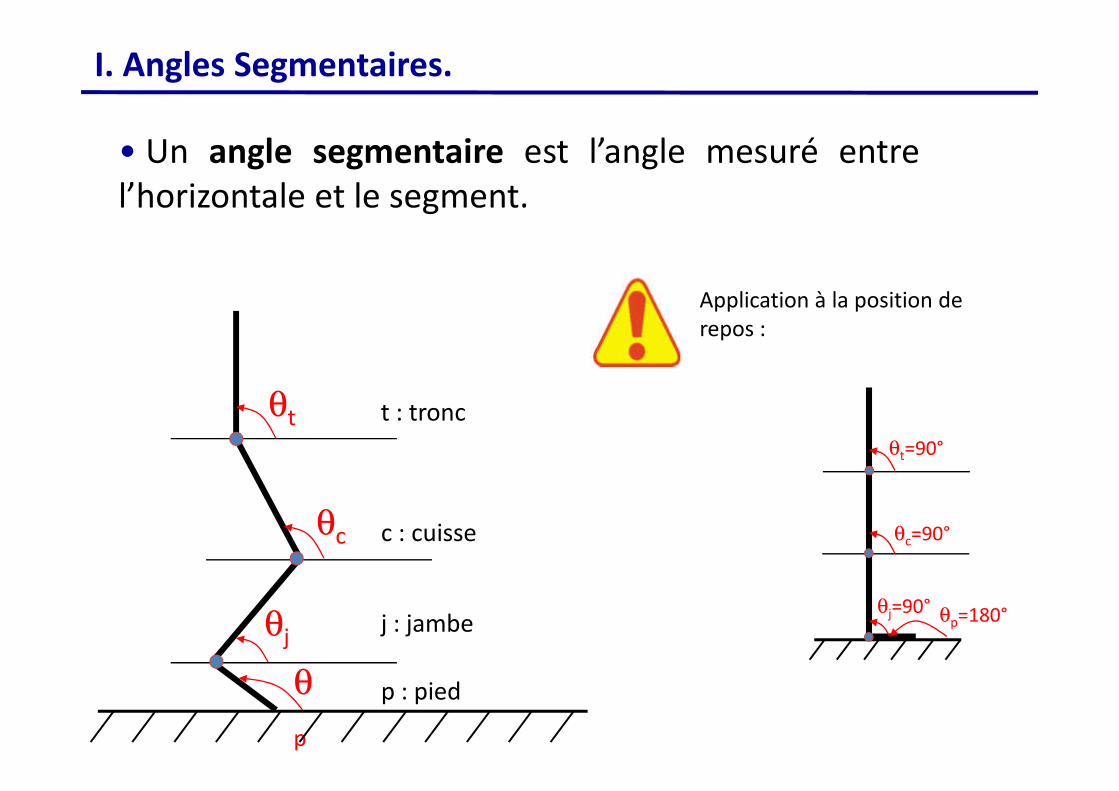
I. Angles Segmentaires.
• Un angle segmentaire est l’angle mesuré entre
l’horizontale et le segment.
θ
Application à la position de
repos :
t : troncθt
θc
θj
θ
p
θt=90°
θc=90°
θj=90° θp=180°
t : tronc
c : cuisse
j : jambe
p : pied
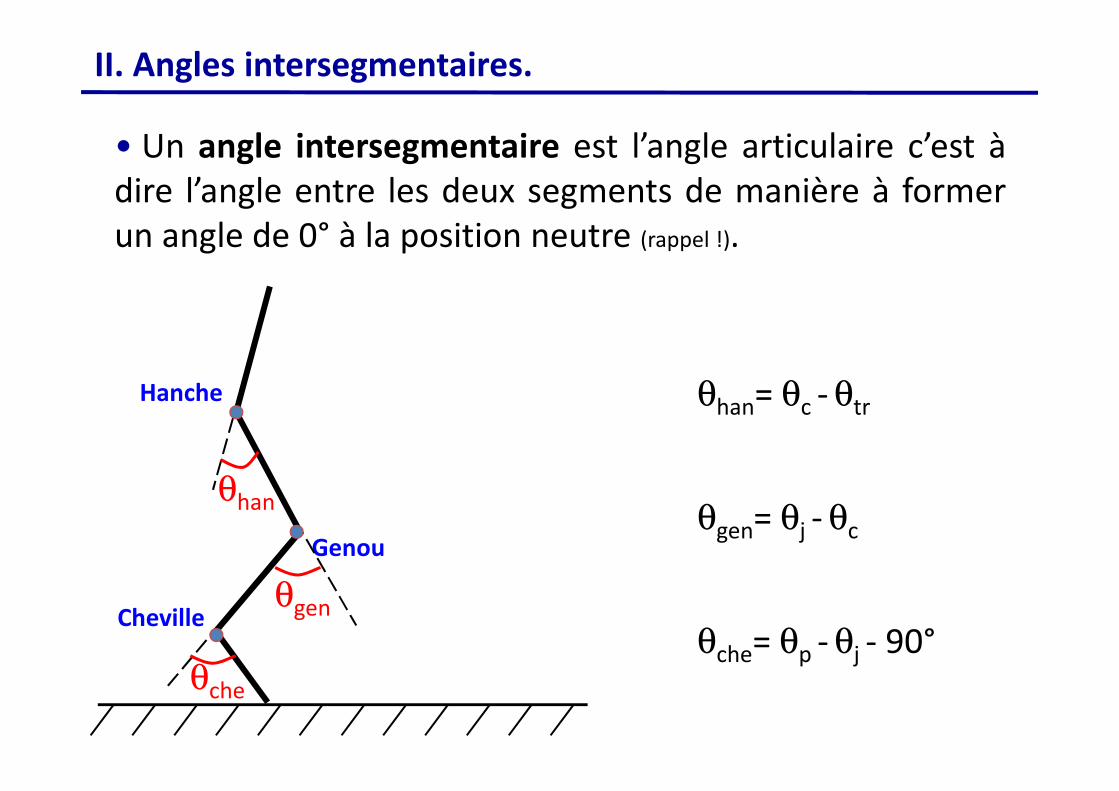
II. Angles intersegmentaires.
• Un angle intersegmentaire est l’angle articulaire c’est à
dire l’angle entre les deux segments de manière à former
un angle de 0° à la position neutre (rappel !).
Hanche θhan= θc - θtr
θhan
θgen
θche
Hanche
Genou
Cheville
θhan= θc - θtr
θgen= θj - θc
θche= θp - θj - 90°
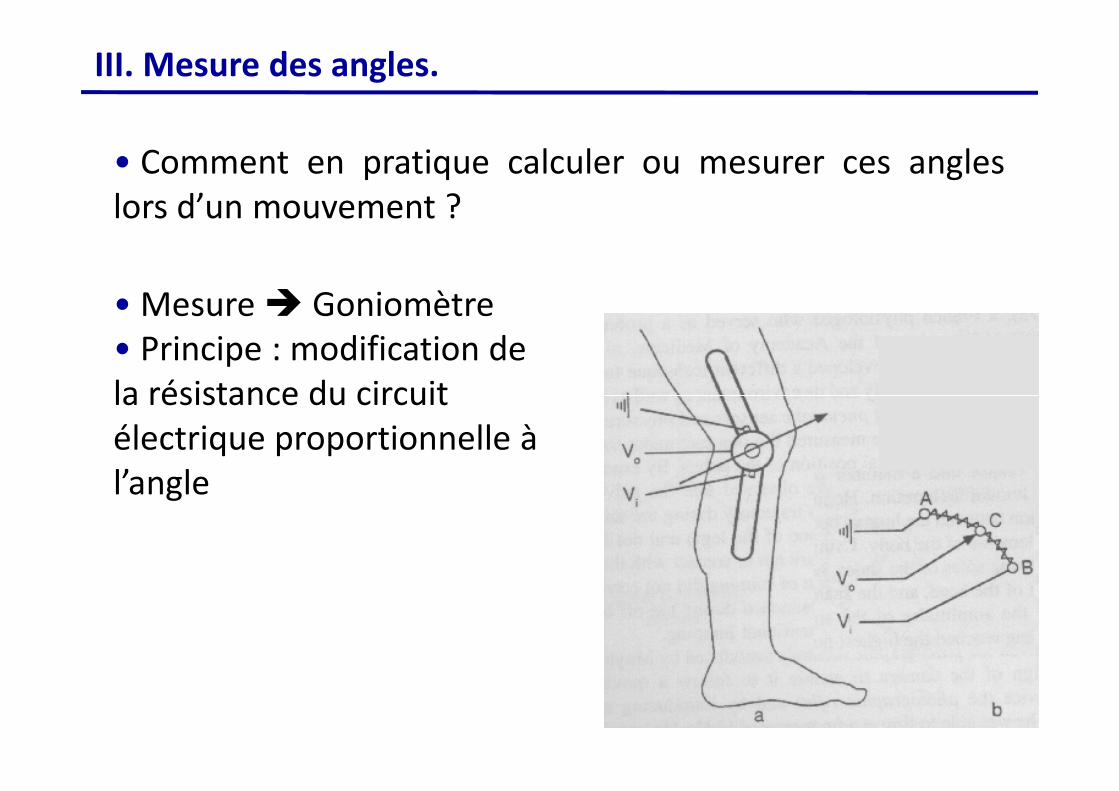
III. Mesure des angles.
• Mesure � Goniomètre
• Principe : modification de
la résistance du circuit
• Comment en pratique calculer ou mesurer ces angles
lors d’un mouvement ?
la résistance du circuit
électrique proportionnelle à
l’angle
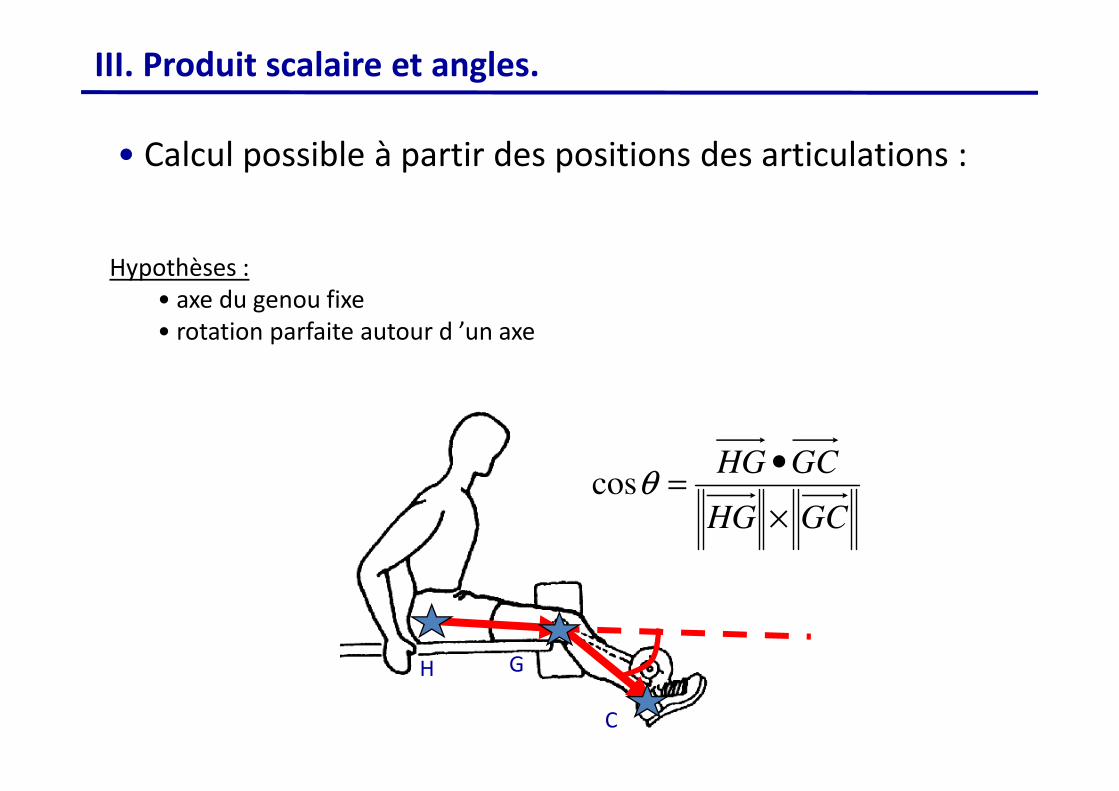
• Calcul possible à partir des positions des articulations :
Hypothèses :
• axe du genou fixe
• rotation parfaite autour d ’un axe
III. Produit scalaire et angles.
H G
C
GCHG
GCHG
×
•=θcos
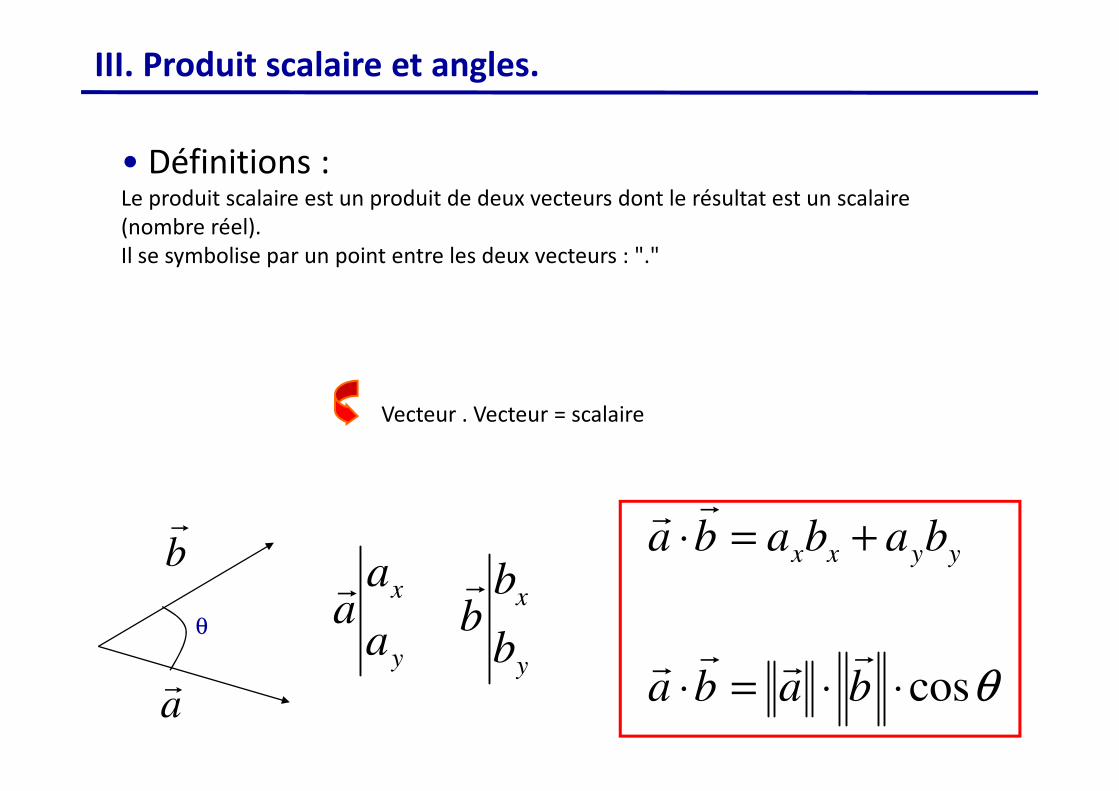
III. Produit scalaire et angles.
• Définitions :Le produit scalaire est un produit de deux vecteurs dont le résultat est un scalaire
(nombre réel).
Il se symbolise par un point entre les deux vecteurs : "."
Vecteur . Vecteur = scalaire
θ
ar
br
y
x
a
aar
y
x
b
bbr
θcos⋅⋅=⋅
+=⋅
baba
bababa yyxx
rrrr
rr
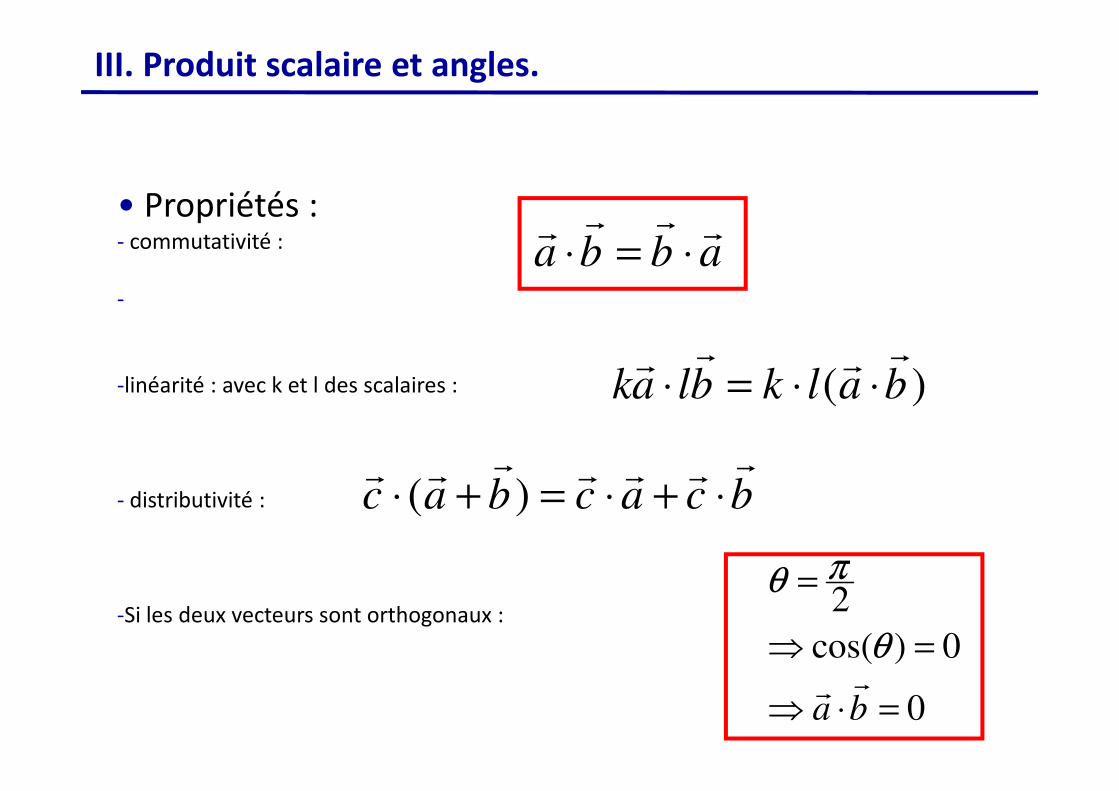
• Propriétés :- commutativité :
-
-linéarité : avec k et l des scalaires :
abbarrrr
⋅=⋅
)( balkblakrrrr
⋅⋅=⋅
III. Produit scalaire et angles.
-linéarité : avec k et l des scalaires :
- distributivité :
-Si les deux vecteurs sont orthogonaux :
)( balkblak ⋅⋅=⋅
bcacbacrrrrrrr
⋅+⋅=+⋅ )(
0
0)cos(
2
=⋅⇒
=⇒
=
barr
θ
πθ
IV – Vitesse angulaire
• On s’intéresse au mouvement d’un point pour une trajectoire quelconque (� pas
forcément en ligne droite !)
• On étudie la relation entre la vitesse linéaire et la courbure
Principe.
I. Trajectoire curviligne.
Courbure faibleCourbure faible
Courbure
élevée
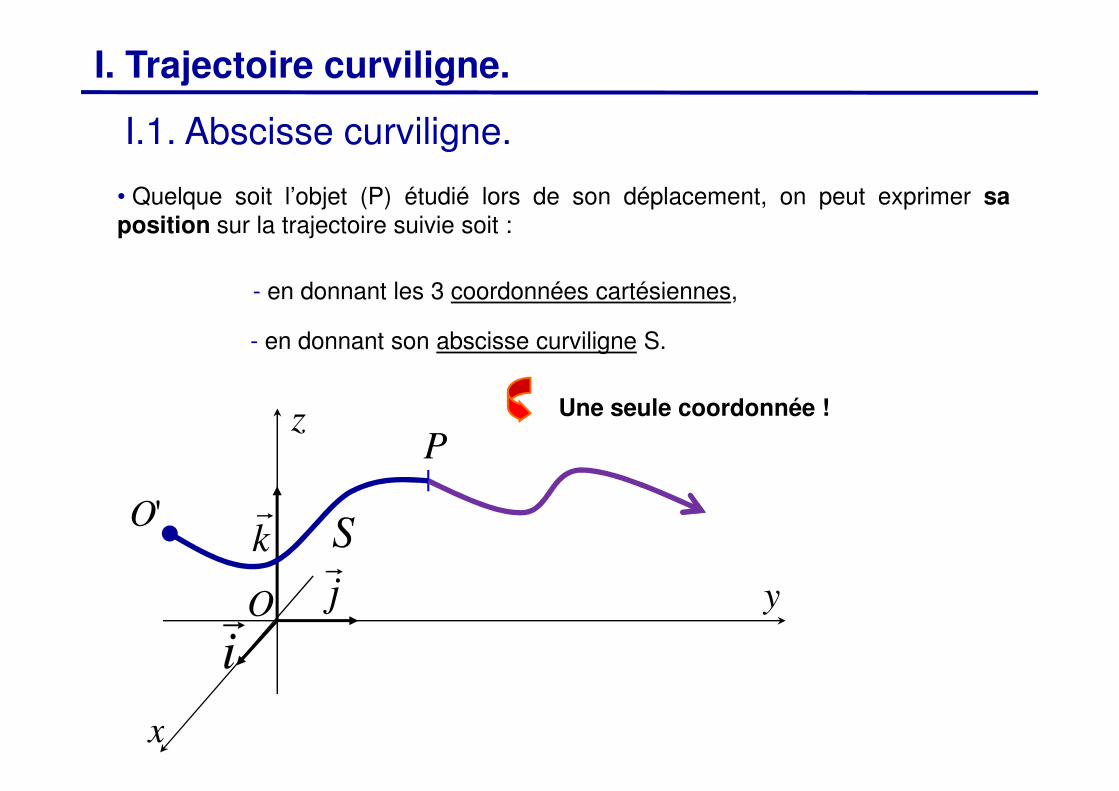
• Quelque soit l’objet (P) étudié lors de son déplacement, on peut exprimer saposition sur la trajectoire suivie soit :
I.1. Abscisse curviligne.
I. Trajectoire curviligne.
Une seule coordonnée !
- en donnant les 3 coordonnées cartésiennes,
- en donnant son abscisse curviligne S.
ir
jr
kr
O
x
y
z
'O
PUne seule coordonnée !
S
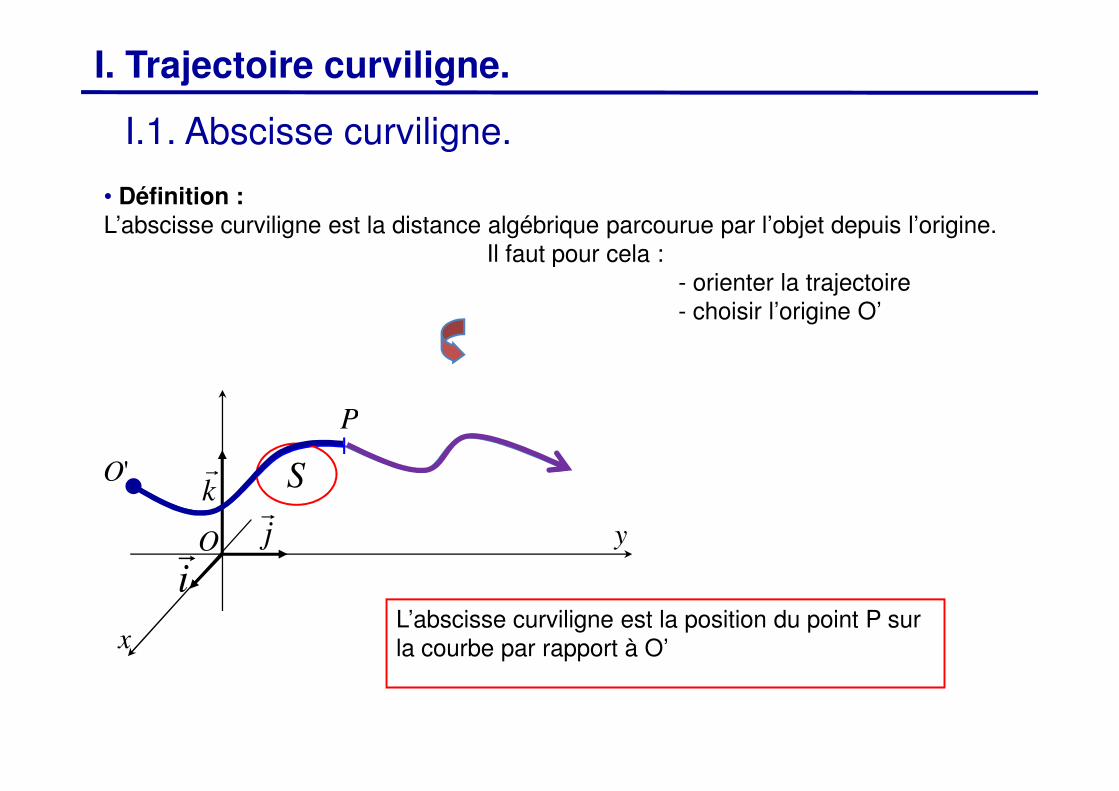
• Définition :L’abscisse curviligne est la distance algébrique parcourue par l’objet depuis l’origine.
Il faut pour cela :
- orienter la trajectoire
- choisir l’origine O’
I.1. Abscisse curviligne.
I. Trajectoire curviligne.
ir
jr
kr
O
x
y
'O
P
S
L’abscisse curviligne est la position du point P sur
la courbe par rapport à O’
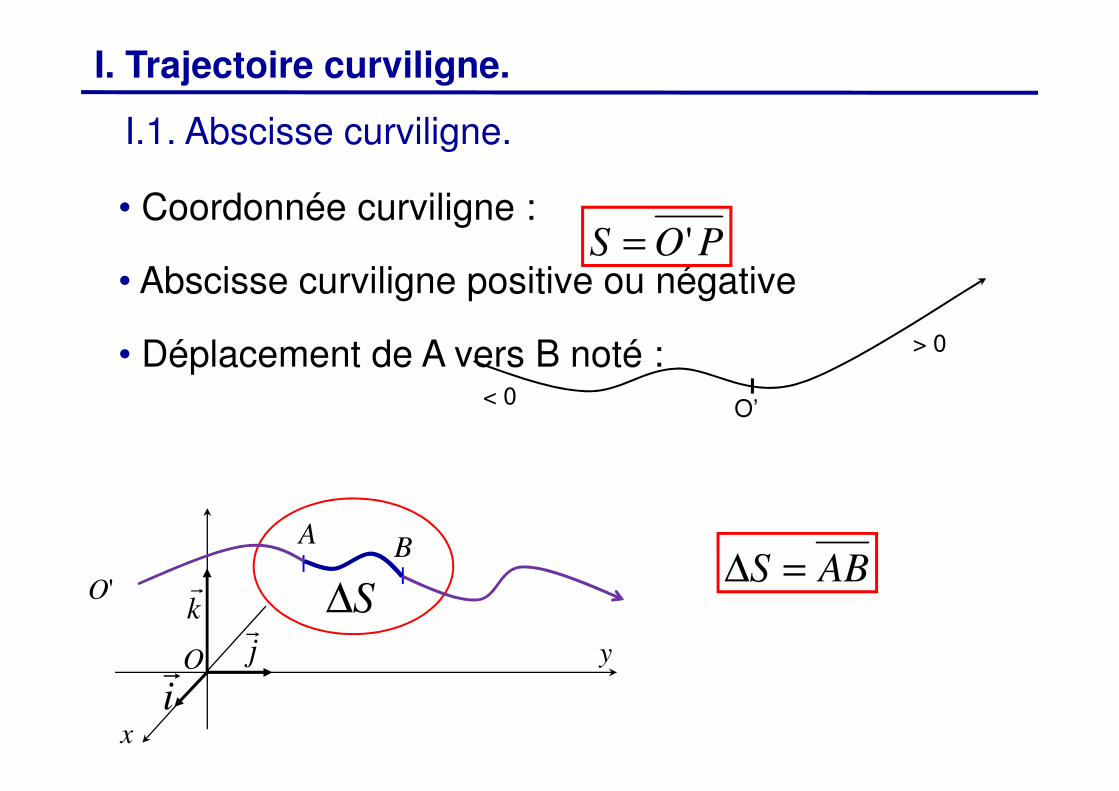
• Coordonnée curviligne :
• Abscisse curviligne positive ou négative
• Déplacement de A vers B noté :
I. Trajectoire curviligne.
I.1. Abscisse curviligne.
POS '=
< 0O’
> 0
ABS =∆
< 0O’
ir
jr
kr
O
x
y
'O
BA
∆S
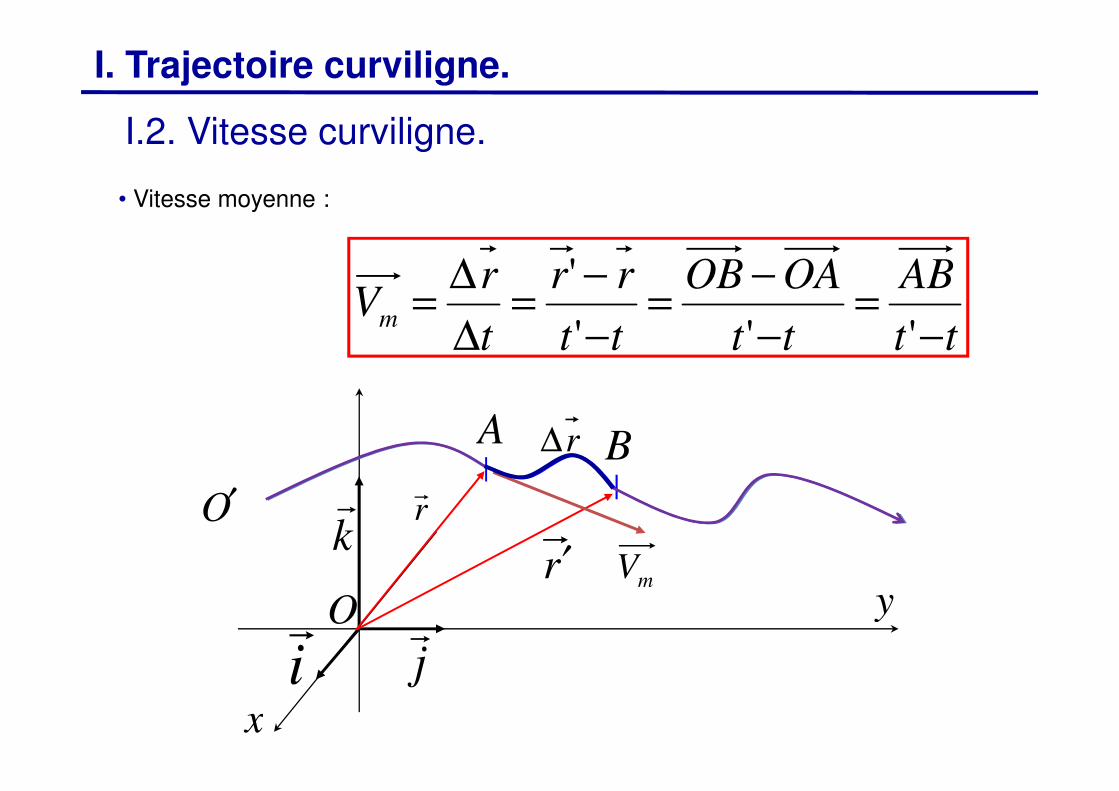
• Vitesse moyenne :
I. Trajectoire curviligne.
I.2. Vitesse curviligne.
Vm =∆r
∆t=
r' − r
t'−t=
OB − OA
t'−t=
AB
t '−t
ir
jr
kr
O
x
y
O′
BA
Vm
r r
′ r
∆r
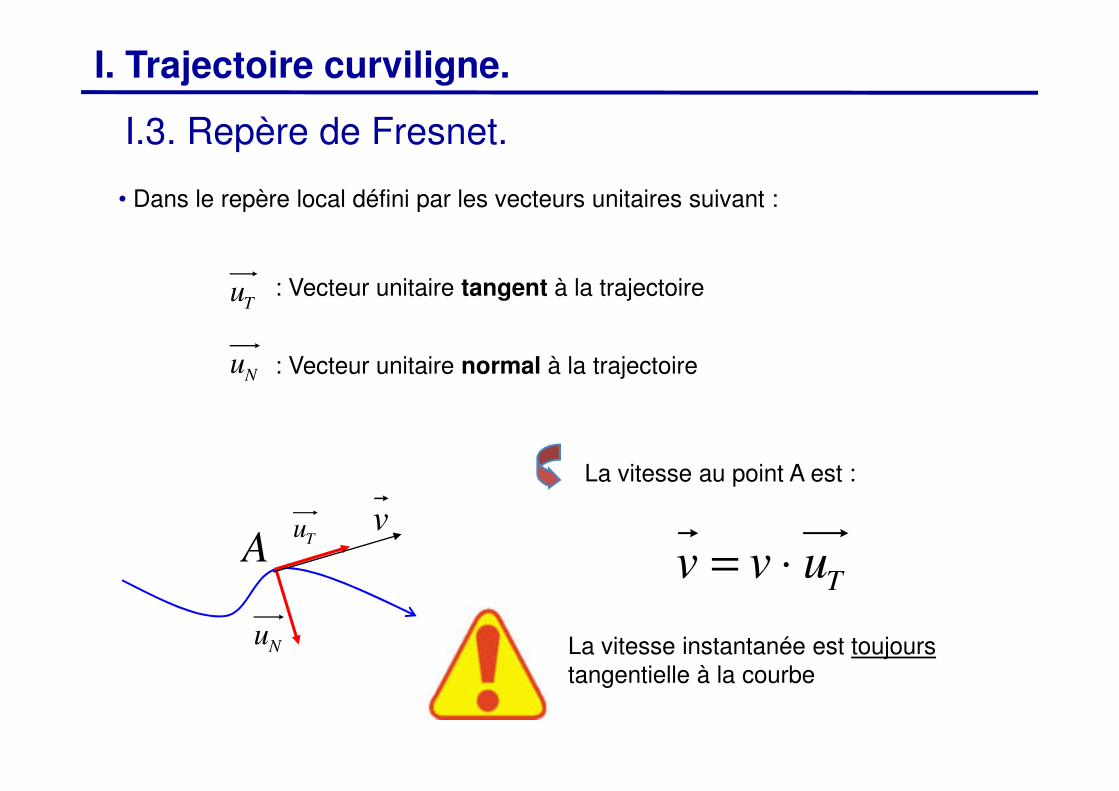
I. Trajectoire curviligne.
I.3. Repère de Fresnet.
: Vecteur unitaire tangent à la trajectoire
: Vecteur unitaire normal à la trajectoire
• Dans le repère local défini par les vecteurs unitaires suivant :
uT
uN
A
La vitesse au point A est :
v = v ⋅ uT
uT
uN
v
La vitesse instantanée est toujours
tangentielle à la courbe
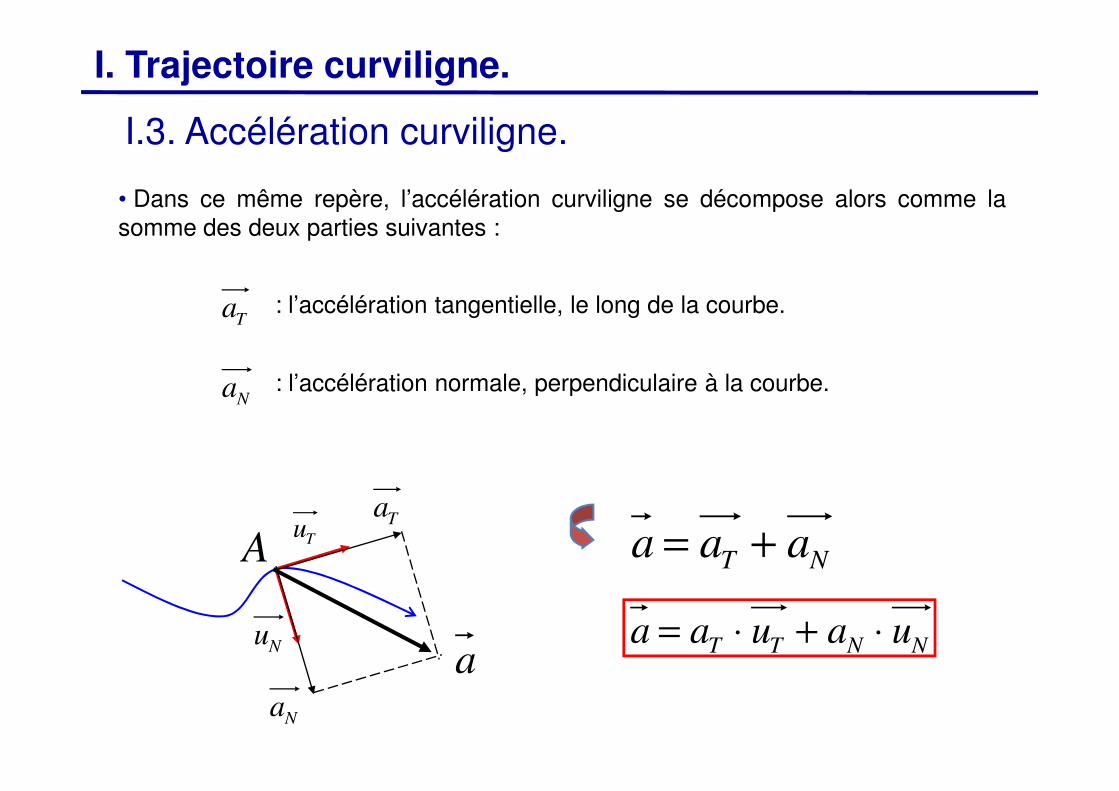
I. Trajectoire curviligne.
I.3. Accélération curviligne.
: l’accélération tangentielle, le long de la courbe.
• Dans ce même repère, l’accélération curviligne se décompose alors comme la
somme des deux parties suivantes :
: l’accélération normale, perpendiculaire à la courbe.aN
aT
A
: l’accélération normale, perpendiculaire à la courbe.aN
aN
aT
a
uT
uN
a = aT + aN
a = aT ⋅ uT + aN ⋅ uN
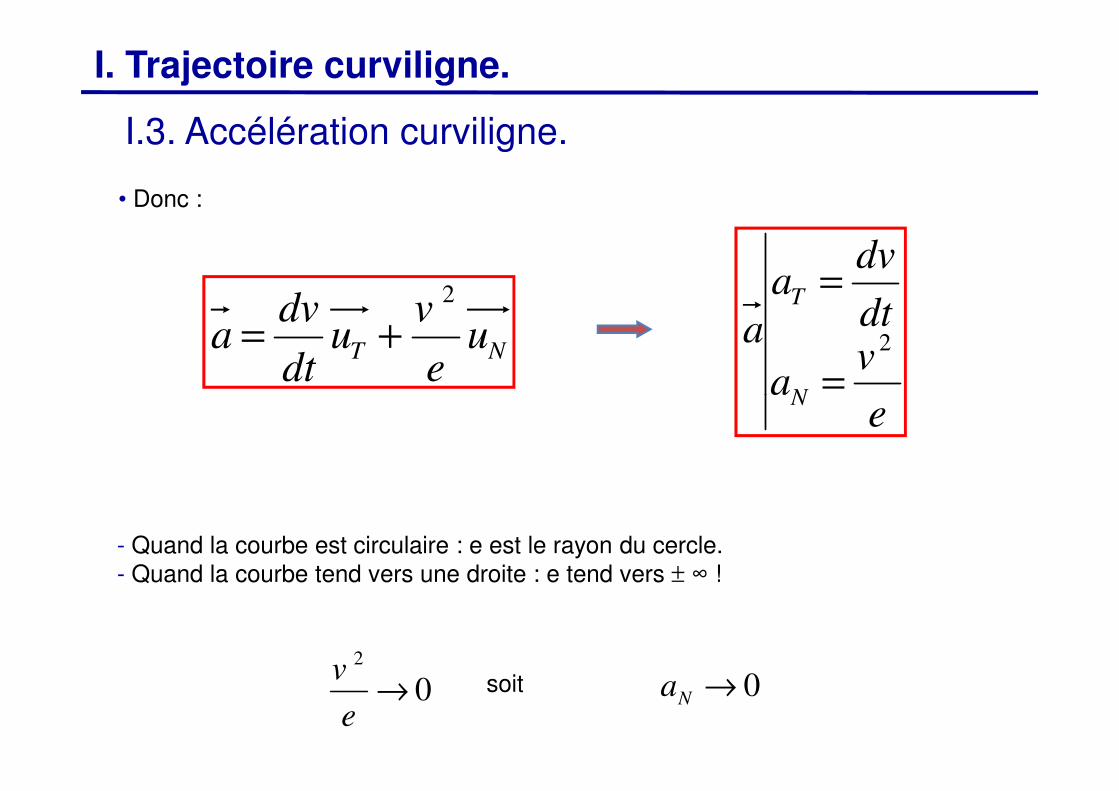
I. Trajectoire curviligne.
I.3. Accélération curviligne.
• Donc :
a =dv
dtuT +
v2
euN
a
aT =dv
dt
aN =v
2
e
- Quand la courbe est circulaire : e est le rayon du cercle.
- Quand la courbe tend vers une droite : e tend vers ± ∞ !
v2
e→ 0 soit 0→Na
aN =e
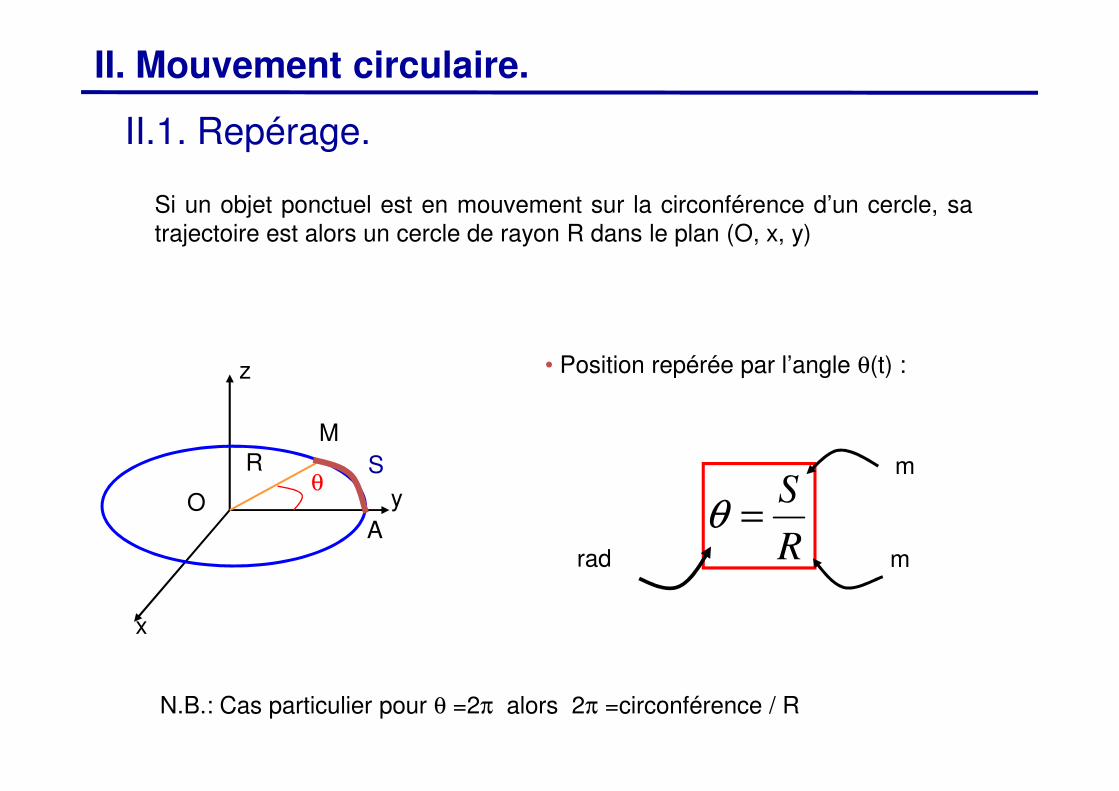
II. Mouvement circulaire.
Si un objet ponctuel est en mouvement sur la circonférence d’un cercle, sa
trajectoire est alors un cercle de rayon R dans le plan (O, x, y)
II.1. Repérage.
z • Position repérée par l’angle θ(t) :
θR
M
A
S
O
x
y
R
S=θ
N.B.: Cas particulier pour θ =2π alors 2π =circonférence / R
rad
m
m
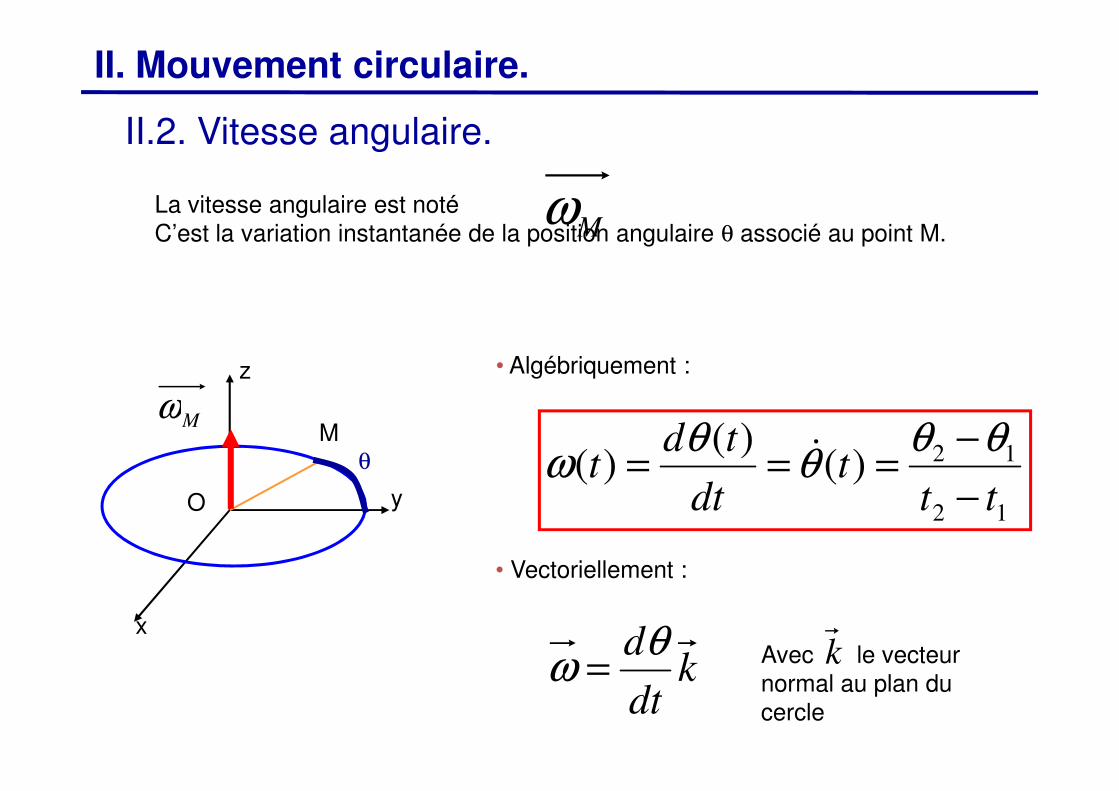
II. Mouvement circulaire.
La vitesse angulaire est noté
C’est la variation instantanée de la position angulaire θ associé au point M.
II.2. Vitesse angulaire.
z • Algébriquement :
Mω
ω
θM
O
x
y12
12)()(
)(tt
tdt
tdt
−
−===
θθθ
θω &
• Vectoriellement :
ω =dθ
dtk Avec le vecteur
normal au plan du
cercle
k
ωM
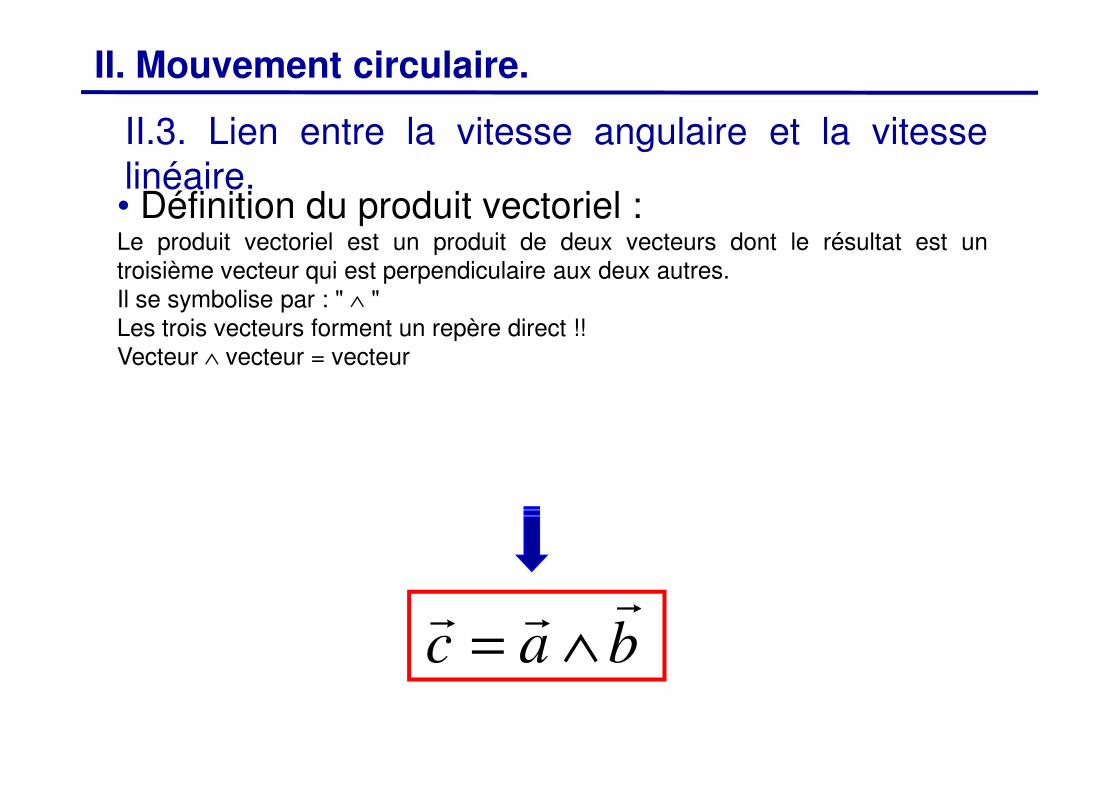
• Définition du produit vectoriel :Le produit vectoriel est un produit de deux vecteurs dont le résultat est un
troisième vecteur qui est perpendiculaire aux deux autres.
Il se symbolise par : " ∧ "
Les trois vecteurs forment un repère direct !!
Vecteur ∧ vecteur = vecteur
II. Mouvement circulaire.
II.3. Lien entre la vitesse angulaire et la vitesse
linéaire.
bacrrr
∧=
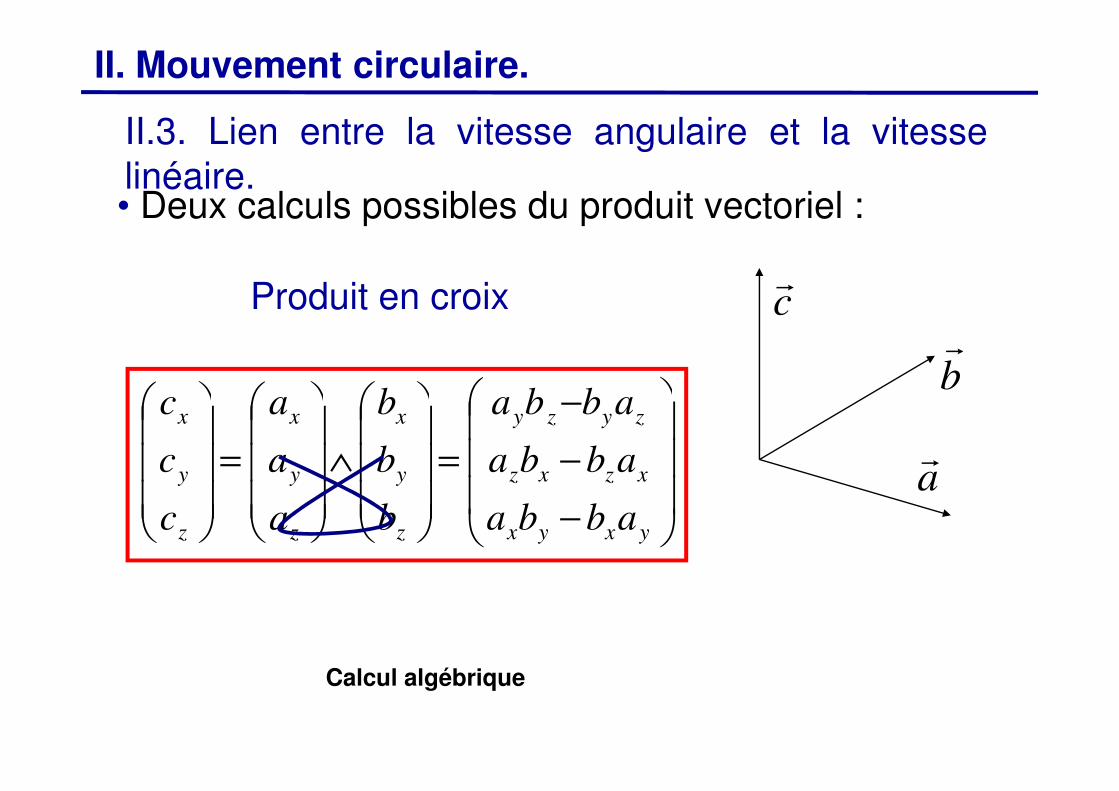
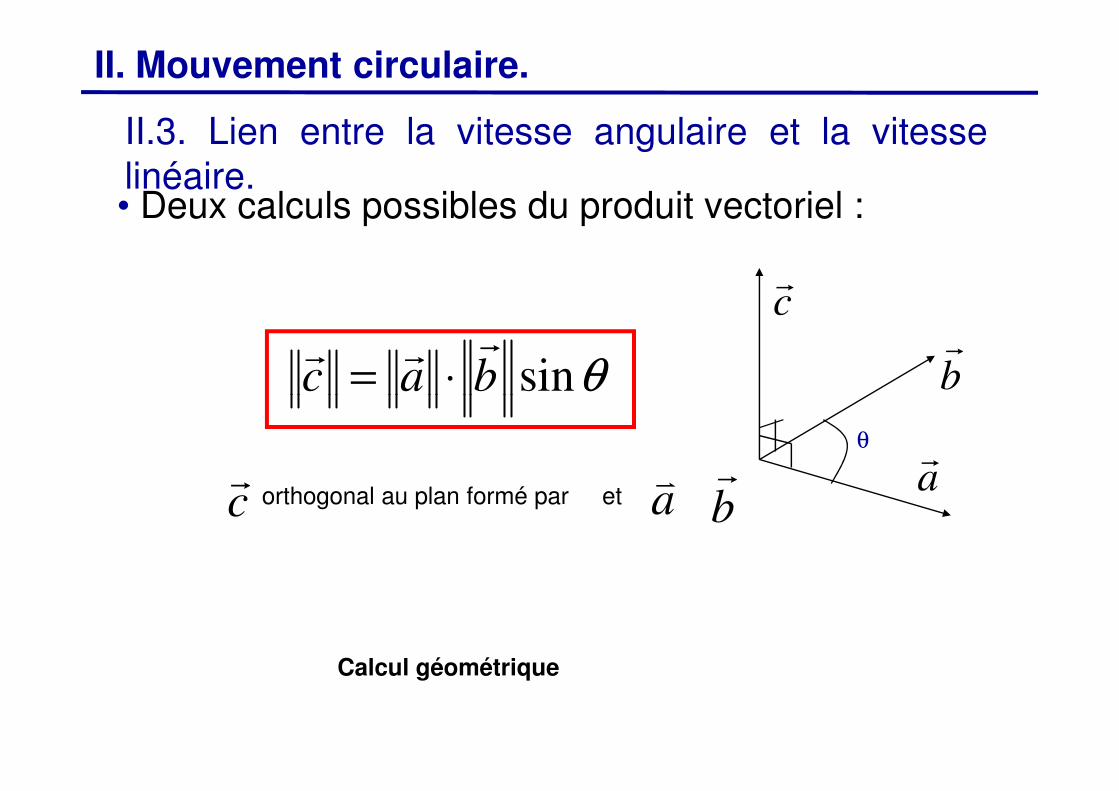
• Deux calculs possibles du produit vectoriel :
br
cr
− abbabac
Produit en croix
II. Mouvement circulaire.
II.3. Lien entre la vitesse angulaire et la vitesse
linéaire.
ar
b
−
−
−
=
∧
=
yxyx
xzxz
zyzy
z
y
x
z
y
x
z
y
x
abba
abba
abba
b
b
b
a
a
a
c
c
c
Calcul algébrique
• Deux calculs possibles du produit vectoriel :
br
cr
θsinbacrrr
⋅=
II. Mouvement circulaire.
II.3. Lien entre la vitesse angulaire et la vitesse
linéaire.
θ
ar
bθsinbac ⋅=
cr
orthogonal au plan formé par et av
br
Calcul géométrique
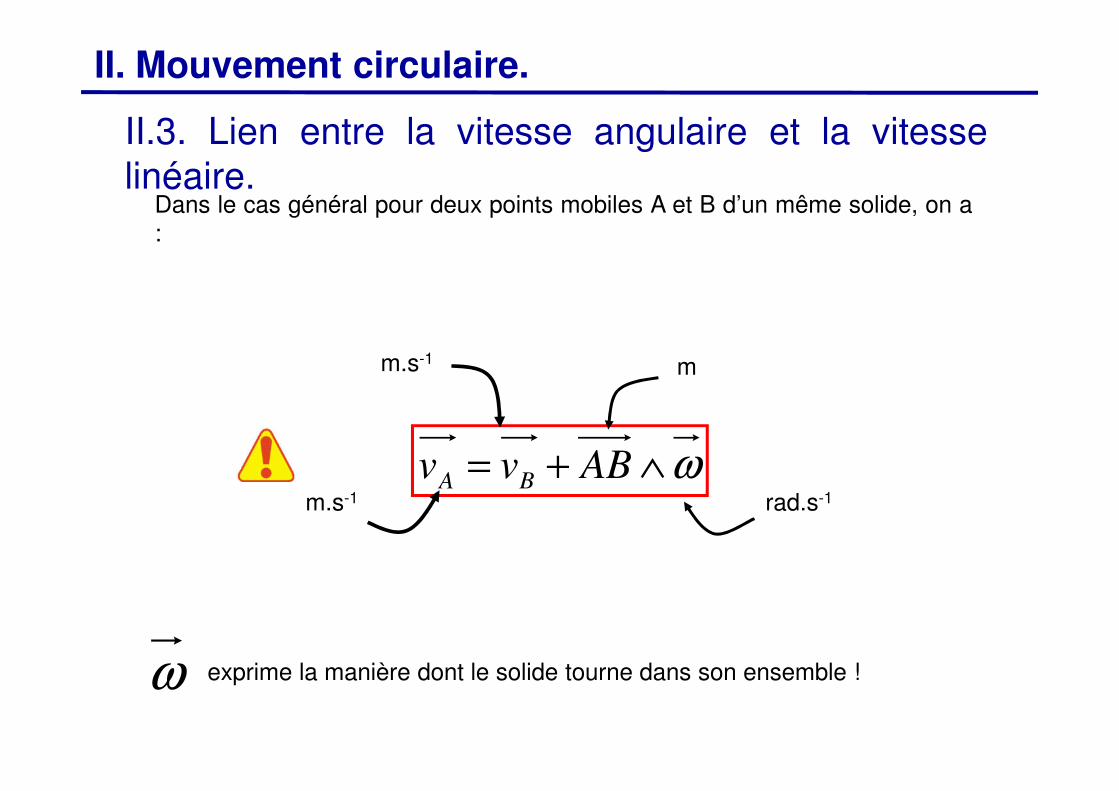
II. Mouvement circulaire.
Dans le cas général pour deux points mobiles A et B d’un même solide, on a
:
II.3. Lien entre la vitesse angulaire et la vitesse
linéaire.
mm.s-1
ω∧+= ABvv BAm.s-1 rad.s-1
exprime la manière dont le solide tourne dans son ensemble !ω
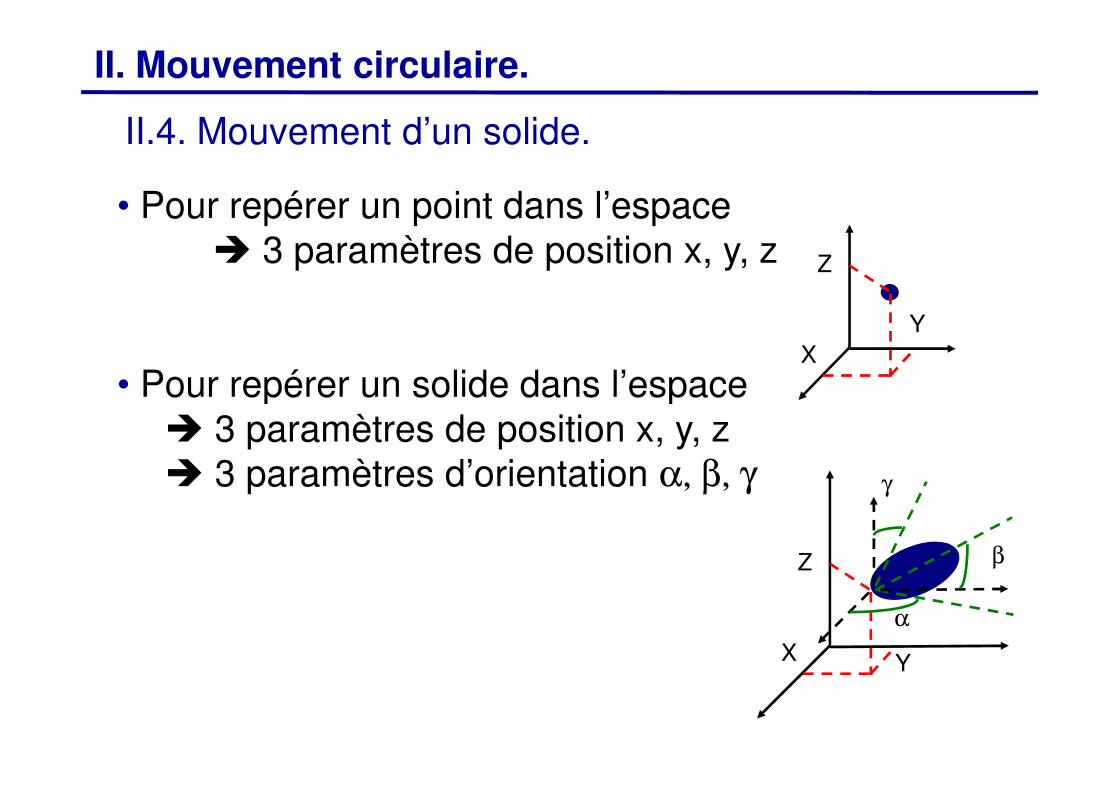
• Pour repérer un point dans l’espace
� 3 paramètres de position x, y, z
• Pour repérer un solide dans l’espace
II. Mouvement circulaire.
II.4. Mouvement d’un solide.
X
Y
Z
• Pour repérer un solide dans l’espace
� 3 paramètres de position x, y, z
� 3 paramètres d’orientation α, β, γ
X Y
Z
α
β
γ
α
β
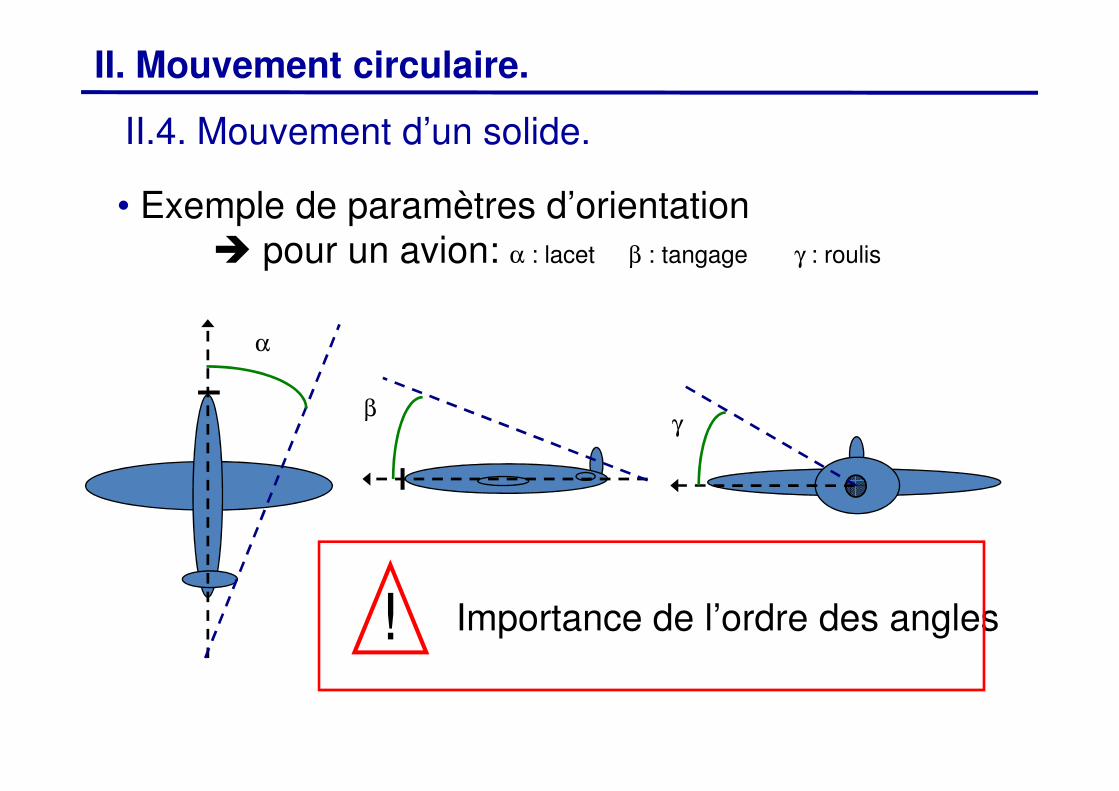
II. Mouvement circulaire.
II.4. Mouvement d’un solide.
• Exemple de paramètres d’orientation
� pour un avion: α : lacet β : tangage γ : roulis
βγ
! Importance de l’ordre des angles
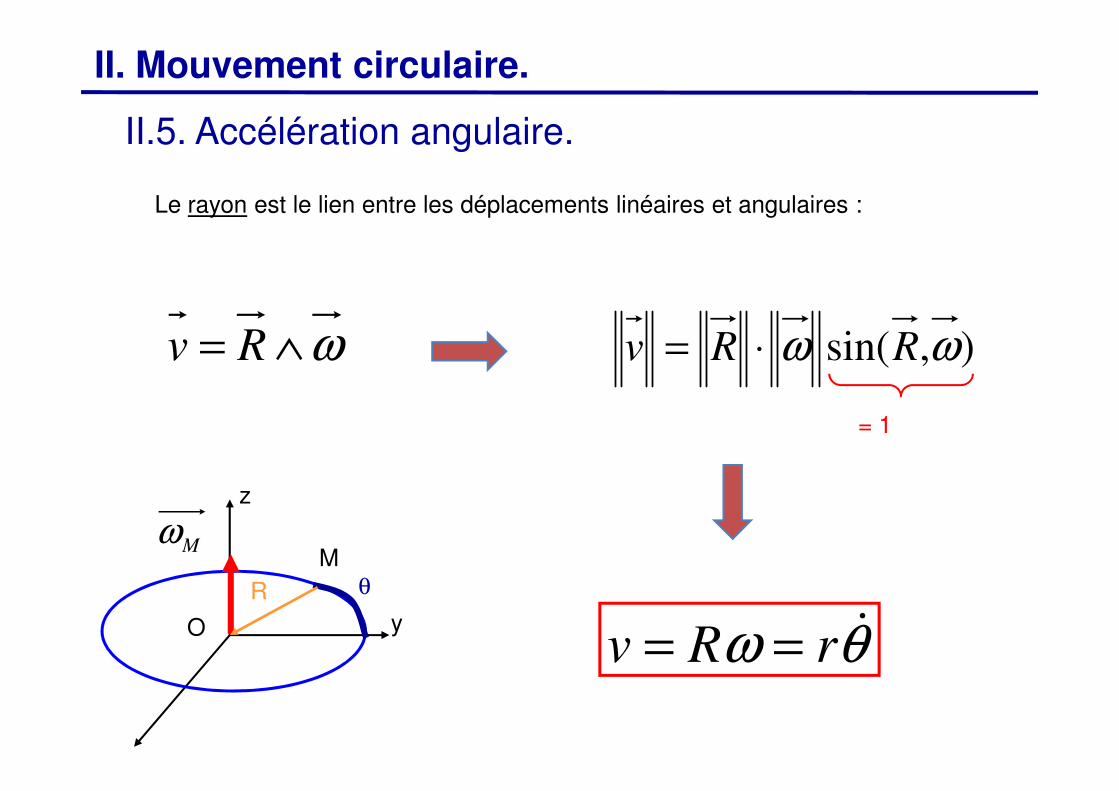
II. Mouvement circulaire.
Le rayon est le lien entre les déplacements linéaires et angulaires :
II.5. Accélération angulaire.
ω∧= Rv ),sin( ωω RRv ⋅=
θω &rRv ==
= 1
θM
O y
z
ωM
R