Grégory Maclair 5 décembre 2008
44
Développement d’algorithmes temps réel de traitement de séquences d’images biomédicales animées pour la thermothérapie guidée par IRM Grégory Maclair 5 décembre 2008 Laboratoire d’Imagerie Moléculaire et Fonctionnelle (IMF) – CNRS-UMR 5231 Laboratoire Bordelais de Recherche en Informatique (LaBRI) – CNRS-UMR 5800 1
description
Développement d’algorithmes temps réel de traitement de séquences d’images biomédicales animées pour la thermothérapie guidée par IRM. Grégory Maclair 5 décembre 2008 Laboratoire d’Imagerie Moléculaire et Fonctionnelle (IMF) – CNRS-UMR 5231 - PowerPoint PPT Presentation
Transcript of Grégory Maclair 5 décembre 2008

1
Développement d’algorithmes temps réel de traitement de séquences
d’images biomédicales animées pour la thermothérapie guidée par IRM
Grégory Maclair5 décembre 2008
Laboratoire d’Imagerie Moléculaire et Fonctionnelle (IMF) – CNRS-UMR 5231Laboratoire Bordelais de Recherche en Informatique (LaBRI) – CNRS-UMR 5800

2
Introduction et problématique Analyse et algorithmes de correction d’un
mouvement reproductible et applications pour la thermothérapie guidée par IRM
Modélisation des perturbations de champ magnétique
Conclusion et Perspectives
Plan de la présentation

3
Hyperthermie locale
IRM
Outils de chauffage
Radiofréquences
Laser
Ultrasons focalisés
Mesures dynamiques

4
Imagerie IRMA chaque unité de volume est associé un nombre complexe
M
iMe

Phase, température et dose thermique
5
Fréquence de résonance des protons (PRFS) :
Dose thermique :
[Sapareto, 1984 ]dtrtTDt tT 0
))(43()()43( 50.0)43( 25.0CTrCTr
1995] Poorter, [de ....)( 0BTT Etref

6
Mouvement
Effet de susceptibilité magnétique
Problèmes

7
Abdomen d’un volontaire sain en respiration libre
Etape 2 : estimation des mouvements locaux (Cornelius-Kanade [Kanade,
1983])
Etape 1 : estimation du mouvement global
[Friston, 1995]
Mouvement [Denis de Senneville, 2005]

8
…
…
…
…
InterventionApprentissage
…
… …
…
Méthode de l’atlas [Denis de Senneville, 2004]
t=0 t=n-1

9
Changement des propriétés IRM [Graham, 1999]
Influence sur le contraste de l’image Non conservation de l’intensité lumineuse :
Estimation du mouvement biaisée localement
Problématique liée à l’estimation de mouvement
),,(),,(),,( tyxItyxIdttdyydxxI

10
Problématique liée à l’atlas Mouvements
périodiques Problème :
Echantillonnage précis du mouvement observé
Problème de densité de population de l’atlas
Une même valeur dans l’atlas = plusieurs position de l’organe
Position de l’organe [mm]
Vale
ur d
e la
pha
se [r
ad]
n=10

11
Introduction & problématique Analyse et algorithmes de correction d’un mouvement
reproductible et applications pour la thermothérapie guidée par IRM◦ Modèle de mouvement basé sur l’Analyse en Composantes Principales (ACP)◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique induites par le mouvement◦ Modélisation sur organes mobiles◦ Modélisation sur organes non-mobiles
Conclusion & Perspectives
Plan de la présentation

12
Problématique : ◦ Trouver une méthode d’estimation de mouvement robuste
aux changements locaux d’intensité◦ Profiter du caractère périodique du mouvement observé
Solution proposée : ◦ Pendant l’apprentissage
Estimation de mouvement à l’aide d’un algorithme basé flot optique
Calcul d’un modèle de mouvement à l’aide d’une ACP [Black, 1997]
◦ Pendant l’intervention Estimation du mouvement à partir du modèle de manière globale
Analyse et modélisation d’un mouvement reproductible
Maclair G. et al., ICIP, 2007

13
Création d’une matrice d’apprentissage du mouvement F :
Analyse en Composantes Principales sur F Obtention d’une base de mouvement B :
, avec k défini tel que :
Utilisation de l’ACP
)12(
)0( , ),,( 10
sf
ffffF
i
i
in
))12(),0(( ,
1
0
sbbbb
bB iii
k
12
0
21
0
)var(et , %95)var(s
jjii
k
ii

14
Calculer Tt entre It et I0 :
Trouver at minimisant l’expression suivante :
Utilisation de la méthode Levenberg-Marquardt
Estimation des paramètres du modèle
),,( avec , 10
1
0
tk
ttk
ii
tit aaabaT
20 ))((
21
tt ITIs
EQM

Estimation des paramètres du modèle : illustration
15
a0 x
a1x
Recalage
+Combinaison linéaire des éléments de la base calculée par ACP
Sans recalage Avec recalage

16
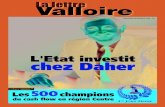
Application pratique (Ex Vivo) A & B : Distribution de
température après 40s de chauffage RF A : estimation basée flot
optique B : estimation basée ACP
C & D : Cartes de dose thermique correspondantes

17
Application pratique (Ex Vivo)
Evolution temporelle de la température : en bleue, basée flot optiqueen rouge, basée ACP

18
Abdomen d’un volontaire sain en respiration libre
Application pratique (In Vivo)
Base calculée

19
Approche de l’atlas – Flot optique Approche de l’atlas - ACP
Estimation de mouvement: 150 ms Estimation de mouvement: 75 ms
Stabilité de la méthode comparée à l’approche existante (1,1°C)
Compatibilité avec les contraintes temps réel
Application pratique (In Vivo)

20
Introduction & problématique Analyse et algorithmes de correction d’un mouvement
reproductible et applications pour la thermothérapie guidée par IRM◦ Modèle de mouvement basé ACP◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique induites par le mouvement◦ Modélisation sur organes mobiles◦ Modélisation sur organes non-mobiles
Conclusion & Perspectives
Plan de la présentation

21
Remplacer le critère d’inter-corrélation sur l’image anatomique
Utiliser le descripteur principal comme critère de recherche
Associer avec
Utilisation du modèle pour améliorer la recherche dans l’atlas
),( ttM ta0
ta0

22
Résultat non satisfaisant
Cause : ◦ Index dans l’atlas
erroné Solution :
◦ Prise en compte de l’effet d’hystérèse
Résultats

23
Mouvement entre l’inspiration et l’expiration non symétrique
Modification de la phase différente en fonction de l’état de la respiration (inspiration/expiration)
Marquage de la phase d’inspiration
Prise en compte de l’effet d’hystérèse apparent

24
Incertitude sur la T°C équivalente à l’approche traditionnelle
Temps de recherche dans l’atlas amélioré d’un facteur 3
Résultats

25
Introduction & problématique Analyse d’un mouvement reproductible et applications
pour la thermothérapie guidée par IRM◦ Modèle de mouvement basé ACP◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique induites par le mouvement◦ Modélisation sur organes mobiles◦ Modélisation sur organes non-mobiles
Conclusion & Perspectives
Plan de la présentation

26
Problématique : ◦ Eviter
l’apparition/disparition de structures anatomiques
◦ Orienter le volume d’intérêt dans la direction du mouvement dominant
Calcul du plan de coupe optimal
Avec Bruno Quesson, Mathilde Merle, Thibault Carteret

27
Méthode proposée (1/2): ◦ Acquisition dynamique de 2 coupes orthogonales
◦ Recherche du mouvement dominant sur la cible dans les 2 orientations à l’aide d’une ACP
◦ Obtention du vecteur de mouvement 3D Dxyz(u,v,w)
Méthode itérative
uv v w

28
Méthode proposée (2/2) :◦ Calcul des angles de corrections α et β◦ Mise à jour des paramètres IRM et acquisition◦ Recherche du nouveau vecteur de mouvement
dominant◦ Nouveau calcul des angles de corrections
Si |α|<5° et |β|<5° : fin de l’algorithme Sinon : nouvelle itération
Méthode itérative

29
Après correction : ◦ Mouvement dominant dans la direction de l’axe Oy
de l’aimant
Résultats après optimisation

30
Optimisation effectuée après une itération
Comparatif avant/après optimisation
Series1
05
10152025303540
Patients
α(°)
Series1
02468
1012
Avant optimisationAprès optimisation
Patientsβ(°)

31
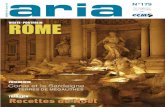
Acquisition après optimisation
Temps (s)Dé
plac
emen
t (m
m)
Vue coronale après optimisationdu plan de coupe
Evolution temporelle des déplacements suivant :
• l’axe Oy• l’axe Ox• l’axe Oz

32
Introduction & problématique Analyse d’un mouvement reproductible et applications
pour la thermothérapie guidée par IRM◦ Modèle de mouvement basé ACP◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique◦ Modélisation sur organes mobiles◦ Thermométrie sur le sein
Conclusion & Perspectives
Plan de la présentation

33
Hypothèse : ◦ Déplacement observé principalement dans la
direction longitudinale de l’aimant◦ Observation autour du centre de l’aimant◦ Organe observé éloigné de l’interface air/tissus
Alors : ◦ Approximation du changement de champ
magnétique par un modèle linéaire
Modélisation de champ magnétique sur organes mobiles

34
Méthode
…
t=0
Donnée en entrée : ◦ La base de mouvement calculée précédemment
0<t<n-1
et
tk
t
t
a
aa
1
0
0<t<n-1
Maclair G. et al., MICCAI, 2007

35
Utilisation d’une Décomposition en Valeur Singulière (SVD) pour calculer les
Pendant l’intervention : ◦ Utilisation des permettant l’estimation de
mouvement afin de calculer
Méthode proposée
tref
ta
ip

36
Méthode proposée : illustration
+
Différence avec la phase à l’instant
courant
Combinaison linéaire des composantes de la base de phase pondérées par leurs coefficients.
a0x
a1x

37
Amélioration de l’incertitude sur la mesure de température
Solution au problème de peuplement de l’atlas
Temps de calcul réduit d’environ 20%
Résultats In Vivo
n=10

38
Introduction & problématique Analyse d’un mouvement reproductible et applications
pour la thermothérapie guidée par IRM◦ Modèle de mouvement basé ACP◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique◦ Modélisation sur organes mobiles◦ Thermométrie sur le sein
Conclusion & Perspectives
Plan de la présentation

39
Traitement du cancer du sein :◦ Pas de mouvement◦ Effet de susceptibilité induit par la variation du
volume d’air pulmonaire◦ Utilisation d’une mesure extérieure à l’image
Echo navigateur : ◦ Acquisition d’une ligne de l’espace de Fourier◦ Obtention d’un profil d’intensité caractérisant la
respiration
Exemple d’application (En collaboration avec S.Hey, M.Lepetit-Coiffé)
Hey S., Maclair G., MRM, 2008

40
Atlas de capteurs : ◦ Apprentissage :
Associer chaque valeur du capteur Nt au couple Prendre en compte de l’effet d’hystérèse
◦ Intervention : Récupérer dans l’atlas en utilisant la valeur
courante du capteur Modèle de champ magnétique :
◦ Remplacer les at du modèle précédent par les Nt
Thermométrie sur organes non mobiles
),( ttM
tref

41
Etude menée sur 5 volontaires :◦ Séquence d’acquisition
optimisée◦ Effet de susceptibilité
différent d’une volontaire à l’autre
◦ Utilisation de l’atlas de capteur et du modèle de champ magnétique
Résultats
Représentation statistiquedes écart-types temporels
de la température

42
Introduction & problématique Analyse d’un mouvement reproductible et applications pour
la thermothérapie guidée par IRM◦ Modèle de mouvement basé ACP◦ Amélioration de la recherche dans l’atlas◦ Optimisation de plan d’acquisition
Modélisation des perturbations de champ magnétique induites◦ Modélisation sur organes mobiles◦ Thermométrie sur le sein
Conclusion & Perspectives
Plan de la présentation

43
Conclusion : ◦Méthode d’estimation de mouvement robuste
◦Modèle de champ magnétique fiable
◦Thermométrie sur le sein
Conclusion & Perspectives

44
Perspectives :◦Etude des méthodes proposées à 3T ◦Evaluer les méthodes proposées sur le cœur
◦Optimisation des algorithmes en utilisant les cartes graphiques
Conclusion & Perspectives