GPS et localisation par satellites Aspects pratiques
53
G P S e t l o c a l i s a t i o n p a r s a t e l l i t e s T h i e r r y D u d o k d e W i t L i c e n c e d e C h i m i e - P h y s i q u e 1 è r e a n n é e 1 Aspects pr atiques Organisation de ce cours 4 séances de cours-TD groupe A : le cours du mardi 24/10 aura lieu le mardi 7/11 à 8h00 1 séance de TP avec récepteur GPS groupe A1 : mercredi 6/12 à 15h45 (pas d’électricité) groupe A2 : lundi 4/12 à 13h00 (pas d’électricité) groupe B3 : lundi 4/12 à 9h (à confirmer) groupe B4 : lundi 4/12 à 15h45 (pas d’électricité) groupe C5 : jeudi 7/12 à 15h45 (pas d’électricité) groupe C6 : mercredi 6/12 à 9h00 (pas d’électricité) groupe D7 : vendredi 8/12 à 13h00 (pas d’électricité) groupe D8 : jeudi 7/12 à 13h00 (pas d’électricité) contrôle écrit final (date à confirmer)
Transcript of GPS et localisation par satellites Aspects pratiques
GPS et localisation par satellites
Thierry Dudok de WitLicence de Chimie-Physique 1ère année
1
Aspects pratiques
Organisation de ce cours
4 séances de cours-TD
groupe A : le cours du mardi 24/10 aura lieu le mardi 7/11 à 8h00
1 séance de TP avec récepteur GPS
groupe A1 : mercredi 6/12 à 15h45 (pas d’électricité)
groupe A2 : lundi 4/12 à 13h00 (pas d’électricité)
groupe B3 : lundi 4/12 à 9h (à confirmer)
groupe B4 : lundi 4/12 à 15h45 (pas d’électricité)
groupe C5 : jeudi 7/12 à 15h45 (pas d’électricité)
groupe C6 : mercredi 6/12 à 9h00 (pas d’électricité)
groupe D7 : vendredi 8/12 à 13h00 (pas d’électricité)
groupe D8 : jeudi 7/12 à 13h00 (pas d’électricité)
contrôle écrit final (date à confirmer)

Aspects pratiques
Objectif
comprendre la physique associée à la localisation par satellites (divers phénomènes de nature très différente)
évaluer des ordres de grandeur
! apprendre une liste de formules par coeur
pour me contacter
Thierry Dudok de Wit
Laboratoire de Physique et Chimie de l’Environnement (campus CNRS)
courriel [email protected]
! site web http://lpce.cnrs-orleans.fr/~ddwit/gps/
4
Le GPS permet de réaliser un vieux rêve : se repérer exactement dans le temps et dans l’espace
Coordonnées géographiques
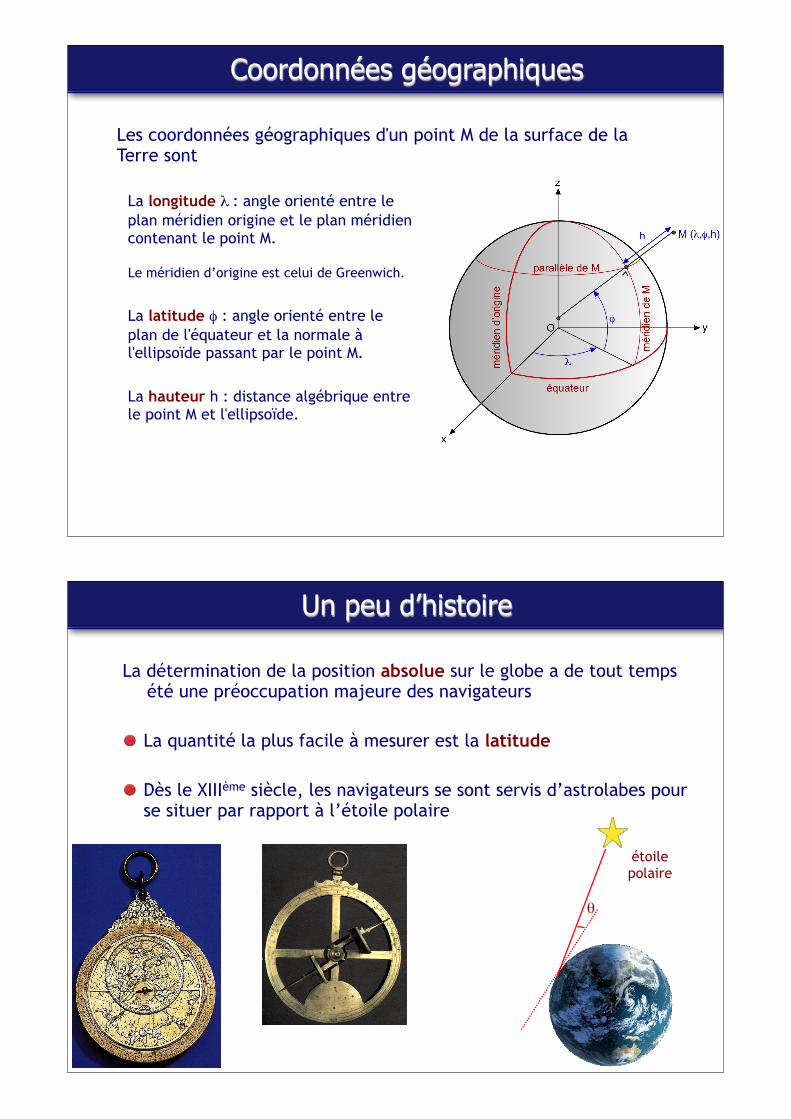
Les coordonnées géographiques d'un point M de la surface de la Terre sont"
La longitude ! : angle orienté entre le plan méridien origine et le plan méridien contenant le point M.
Le méridien d’origine est celui de Greenwich.
La latitude " : angle orienté entre le plan de l'équateur et la normale à l'ellipsoïde passant par le point M.
La hauteur h : distance algébrique entre le point M et l'ellipsoïde."
Un peu d’histoire
La détermination de la position absolue sur le globe a de tout temps été une préoccupation majeure des navigateurs
La quantité la plus facile à mesurer est la latitude
Dès le XIIIème siècle, les navigateurs se sont servis d’astrolabes pour se situer par rapport à l’étoile polaire
#
étoilepolaire
La latitude
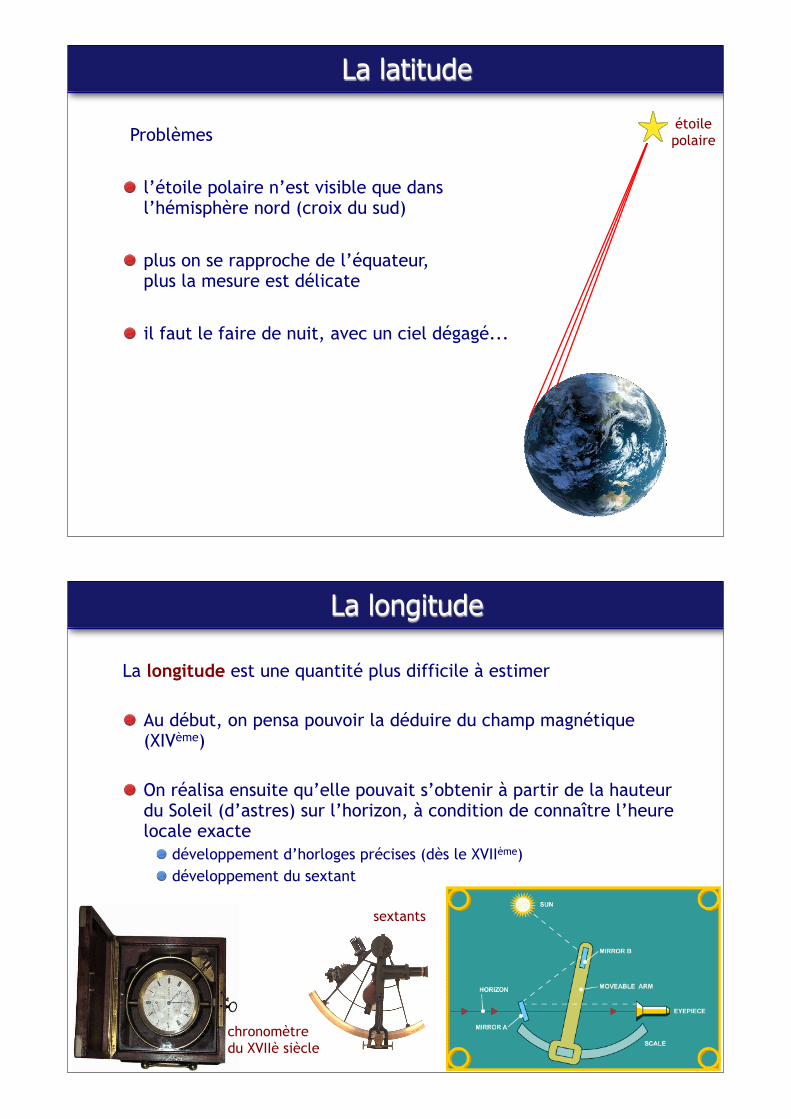
Problèmes
l’étoile polaire n’est visible que dans l’hémisphère nord (croix du sud)
plus on se rapproche de l’équateur, plus la mesure est délicate
il faut le faire de nuit, avec un ciel dégagé...
étoilepolaire
La longitude
La longitude est une quantité plus difficile à estimer
Au début, on pensa pouvoir la déduire du champ magnétique (XIVème)
On réalisa ensuite qu’elle pouvait s’obtenir à partir de la hauteur du Soleil (d’astres) sur l’horizon, à condition de connaître l’heure locale exacte
développement d’horloges précises (dès le XVIIème)
développement du sextant
sextants
chronomètredu XVIIè siècle
La précision
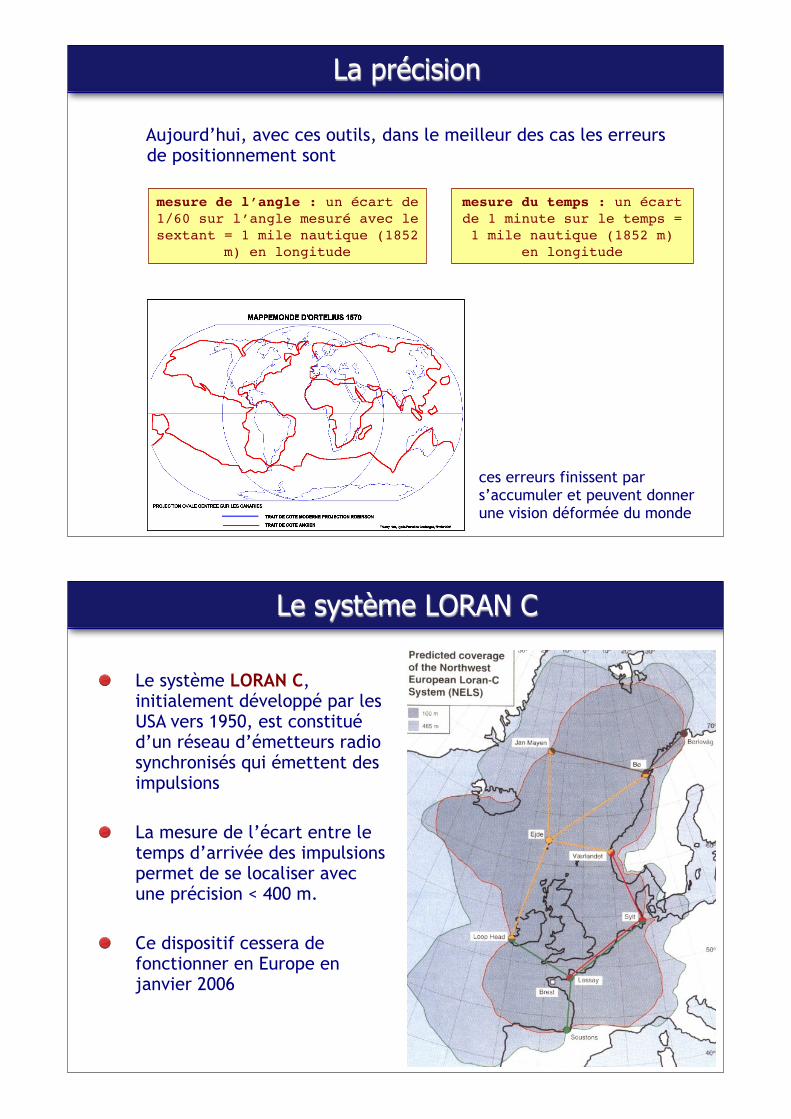
Aujourd’hui, avec ces outils, dans le meilleur des cas les erreurs de positionnement sont
mesure de l’angle : un écart de
1/60 sur l’angle mesuré avec le
sextant = 1 mile nautique (1852
m) en longitude
mesure du temps : un écart
de 1 minute sur le temps =
1 mile nautique (1852 m)
en longitude
ces erreurs finissent par s’accumuler et peuvent donner une vision déformée du monde
Le système LORAN C
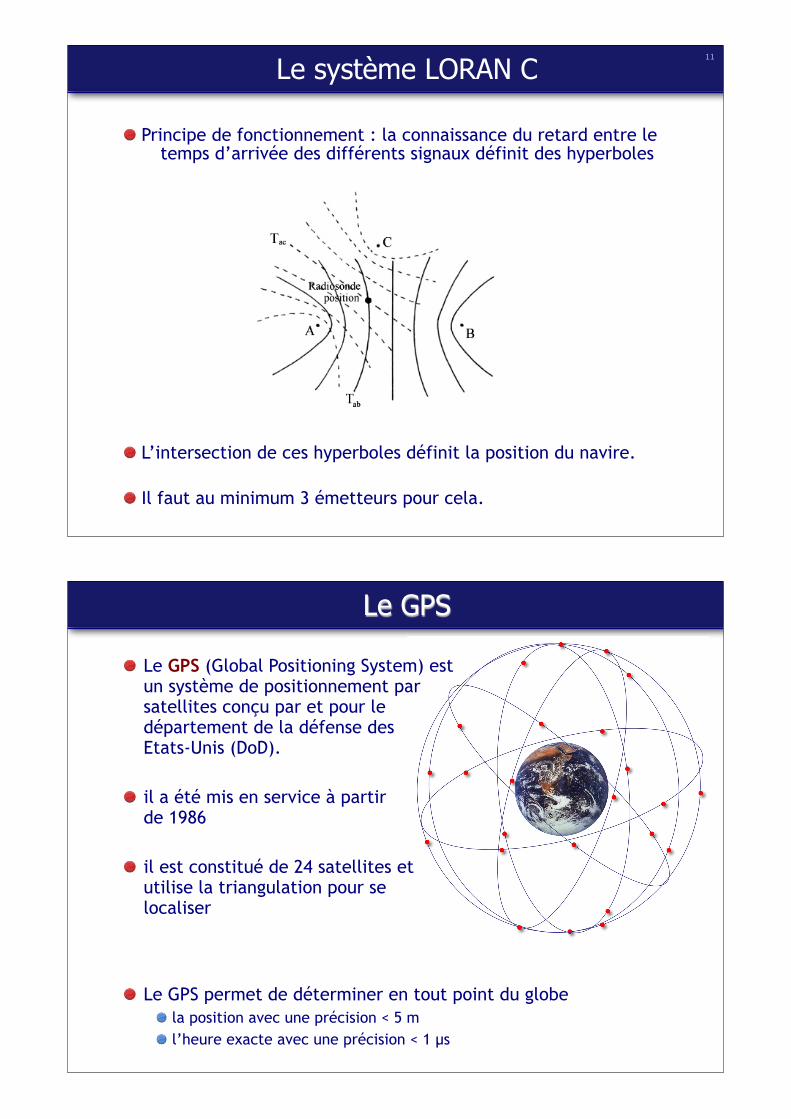
Le système LORAN C, initialement développé par les USA vers 1950, est constitué d’un réseau d’émetteurs radio synchronisés qui émettent des impulsions
La mesure de l’écart entre le temps d’arrivée des impulsions permet de se localiser avec une précision < 400 m.
Ce dispositif cessera de fonctionner en Europe en janvier 2006
Le système LORAN C
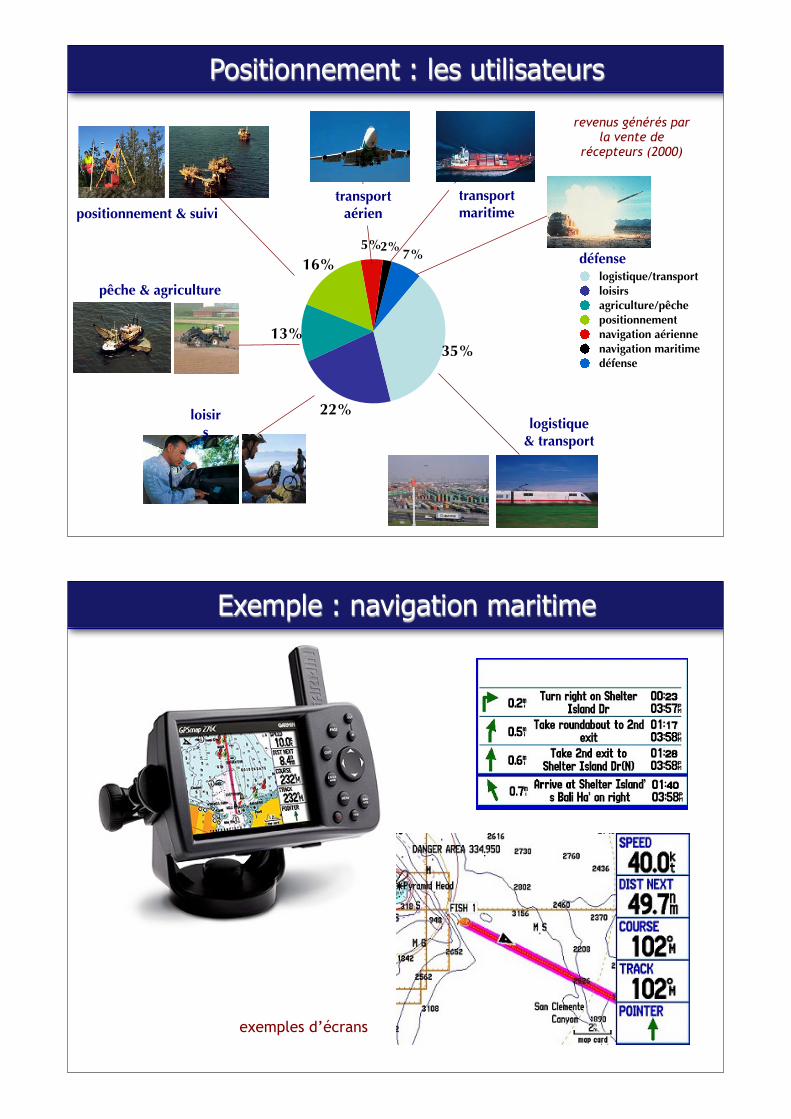
Principe de fonctionnement : la connaissance du retard entre le temps d’arrivée des différents signaux définit des hyperboles
L’intersection de ces hyperboles définit la position du navire.
Il faut au minimum 3 émetteurs pour cela.
11
Le GPS
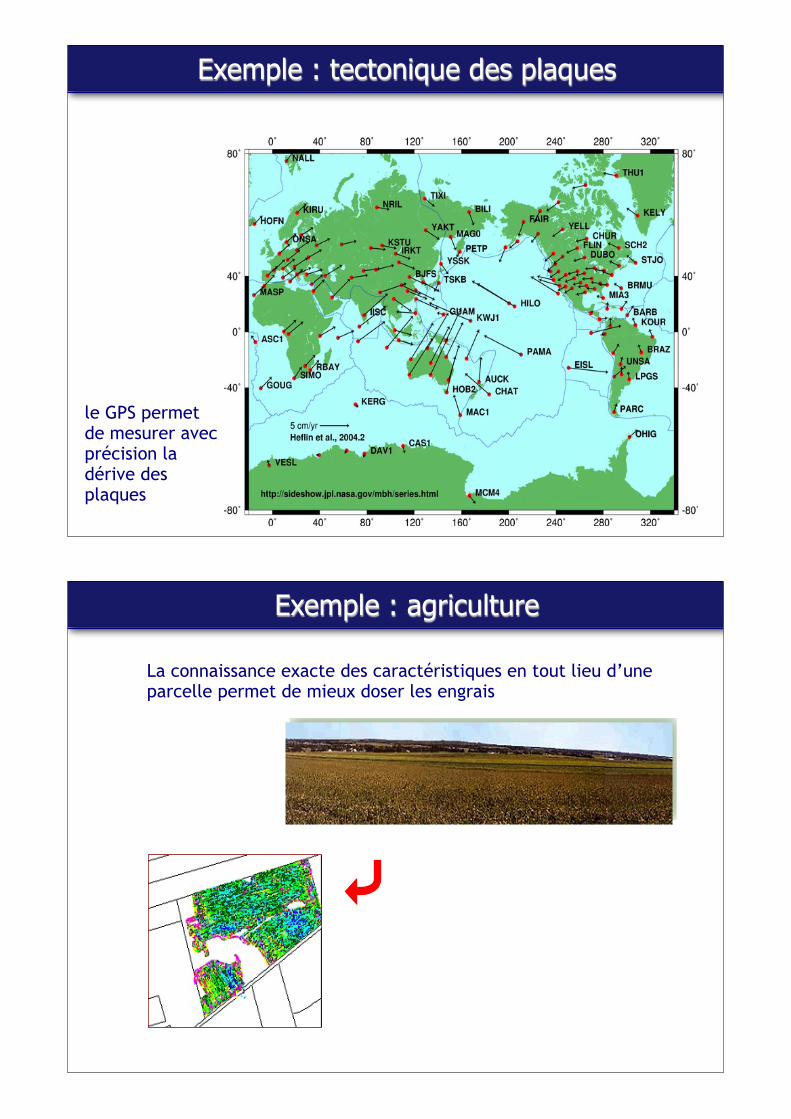
Le GPS (Global Positioning System) est un système de positionnement par satellites conçu par et pour le département de la défense des Etats-Unis (DoD).
il a été mis en service à partirde 1986
il est constitué de 24 satellites etutilise la triangulation pour selocaliser
Le GPS permet de déterminer en tout point du globela position avec une précision < 5 m
l’heure exacte avec une précision < 1 #s
7%2%5%
16%
13%
22%
35%
Positionnement : les utilisateurs
positionnement & suivi
pêche & agriculture
loisirs
logistique & transport
défense
transportmaritime
transportaérien
revenus générés par la vente de
récepteurs (2000)
logistique/transportloisirsagriculture/pêchepositionnementnavigation aériennenavigation maritimedéfense
Exemple : navigation maritime
exemples d’écrans
Exemple : tectonique des plaques
le GPS permet de mesurer avec précision la dérive des plaques
Exemple : agriculture
La connaissance exacte des caractéristiques en tout lieu d’une parcelle permet de mieux doser les engrais
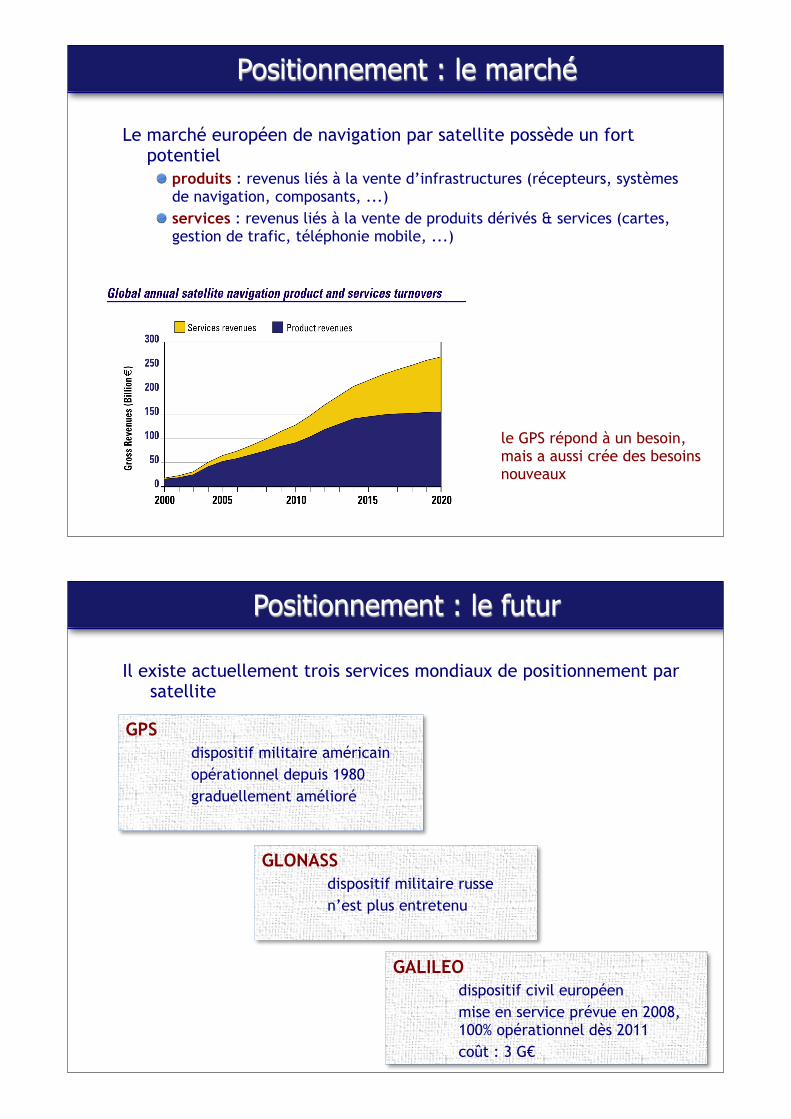
Positionnement : le marché
Le marché européen de navigation par satellite possède un fort potentiel
produits : revenus liés à la vente d’infrastructures (récepteurs, systèmes de navigation, composants, ...)
services : revenus liés à la vente de produits dérivés & services (cartes, gestion de trafic, téléphonie mobile, ...)
le GPS répond à un besoin, mais a aussi crée des besoins nouveaux
Positionnement : le futur
Il existe actuellement trois services mondiaux de positionnement par satellite
GPS
dispositif militaire américain
opérationnel depuis 1980
graduellement amélioré
GLONASS
dispositif militaire russe
n’est plus entretenu
GALILEO
dispositif civil européen
mise en service prévue en 2008, 100% opérationnel dès 2011
coût : 3 G$

Qu’est-ce que le GPS ?
La constellation GPS est constituée de 24 satellites NAVSTAR placés sur 6 orbites circulaires
l’altitude de ces satellites : 20184 km. Ils font ainsi un tour d’orbite en 12 h.
la position de chaque satellite est connue avec une précision < 1 m
19
Satellites NAVSTAR
Quelques chiffres
masse d’un satellite : 1150 kg
puissance consommée : 1140 W
durée de vie : environ 10 ans
coût d’un satellite : env. 200 M$
coût annuel du système GPS (entretien, R&D) : 750 M$
Le choix des orbites répond à des raisons pratiques et à des impératifs stratégiques
20
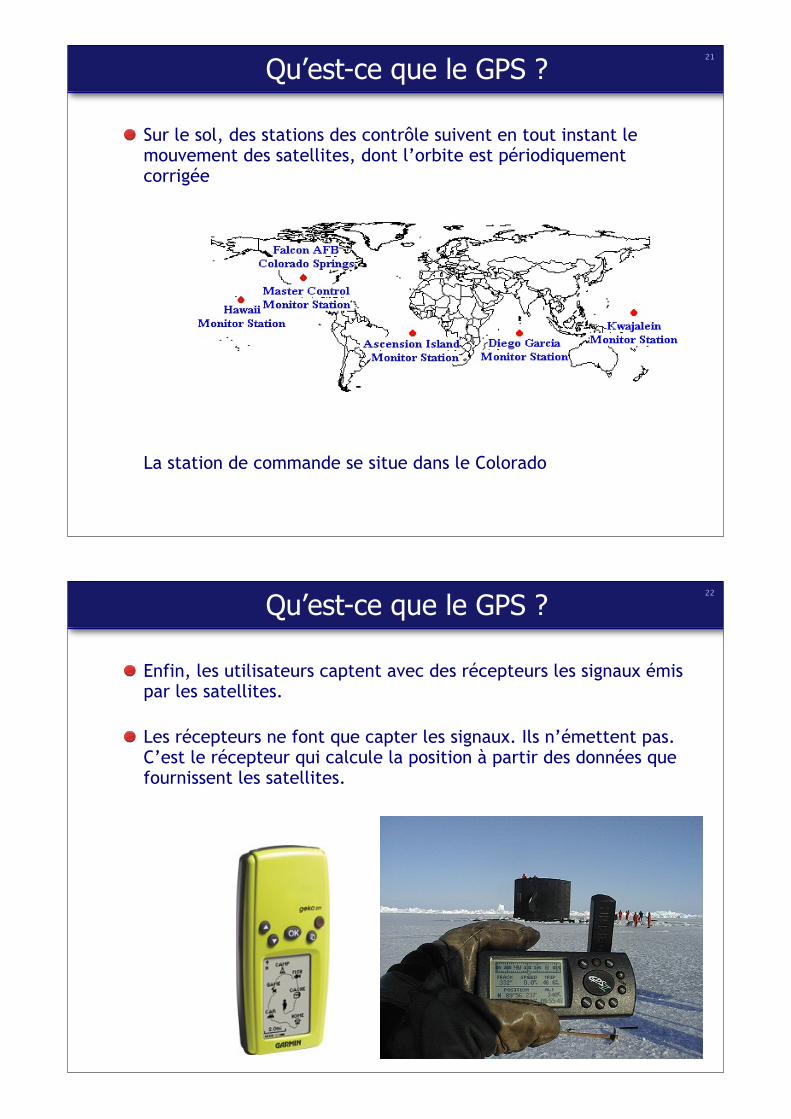
Qu’est-ce que le GPS ?
Sur le sol, des stations des contrôle suivent en tout instant le mouvement des satellites, dont l’orbite est périodiquement corrigée
La station de commande se situe dans le Colorado
21
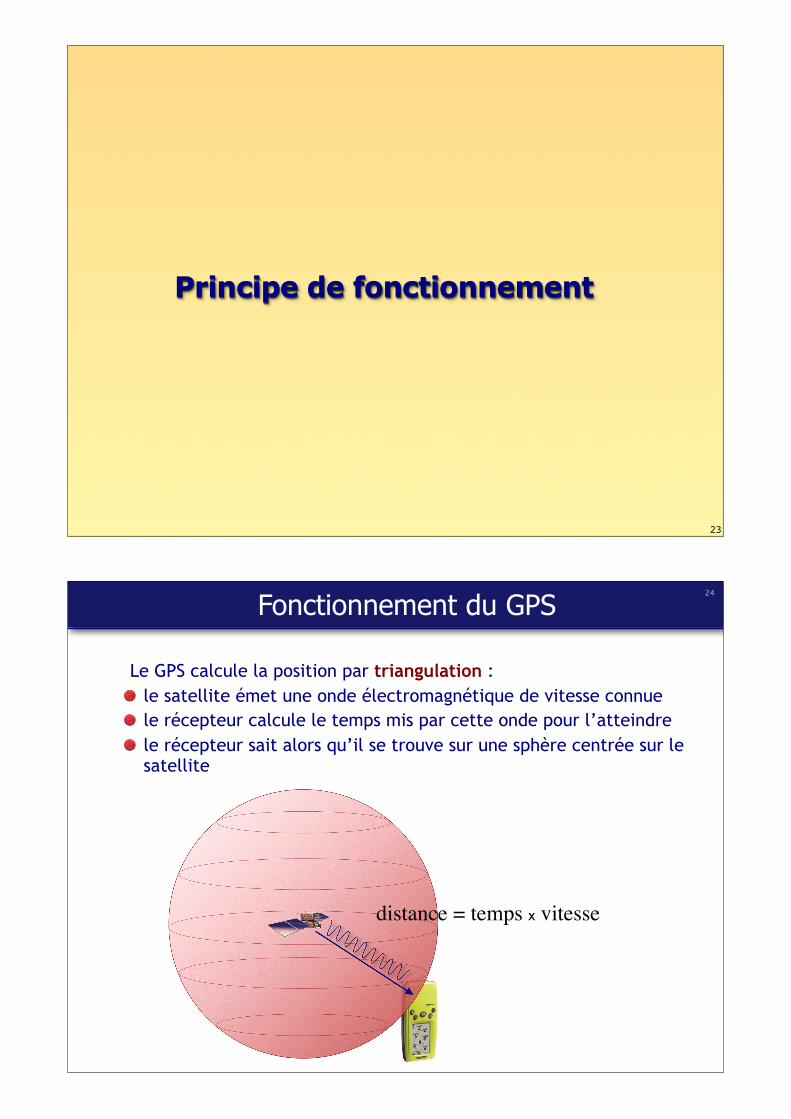
Qu’est-ce que le GPS ?
Enfin, les utilisateurs captent avec des récepteurs les signaux émis par les satellites.
Les récepteurs ne font que capter les signaux. Ils n’émettent pas. C’est le récepteur qui calcule la position à partir des données que fournissent les satellites.
22
Principe de fonctionnement
23
Fonctionnement du GPS
Le GPS calcule la position par triangulation :
le satellite émet une onde électromagnétique de vitesse connue
le récepteur calcule le temps mis par cette onde pour l’atteindre
le récepteur sait alors qu’il se trouve sur une sphère centrée sur le satellite
24
distance = temps x vitesse

Fonctionnement du GPS
En recoupant les informations de 2 satellites, le lieu géométrique du récepteur devient un cercle
25
Fonctionnement du GPS
Avec 3 satellites, l’intersection se réduit à un (ou 2) points
26
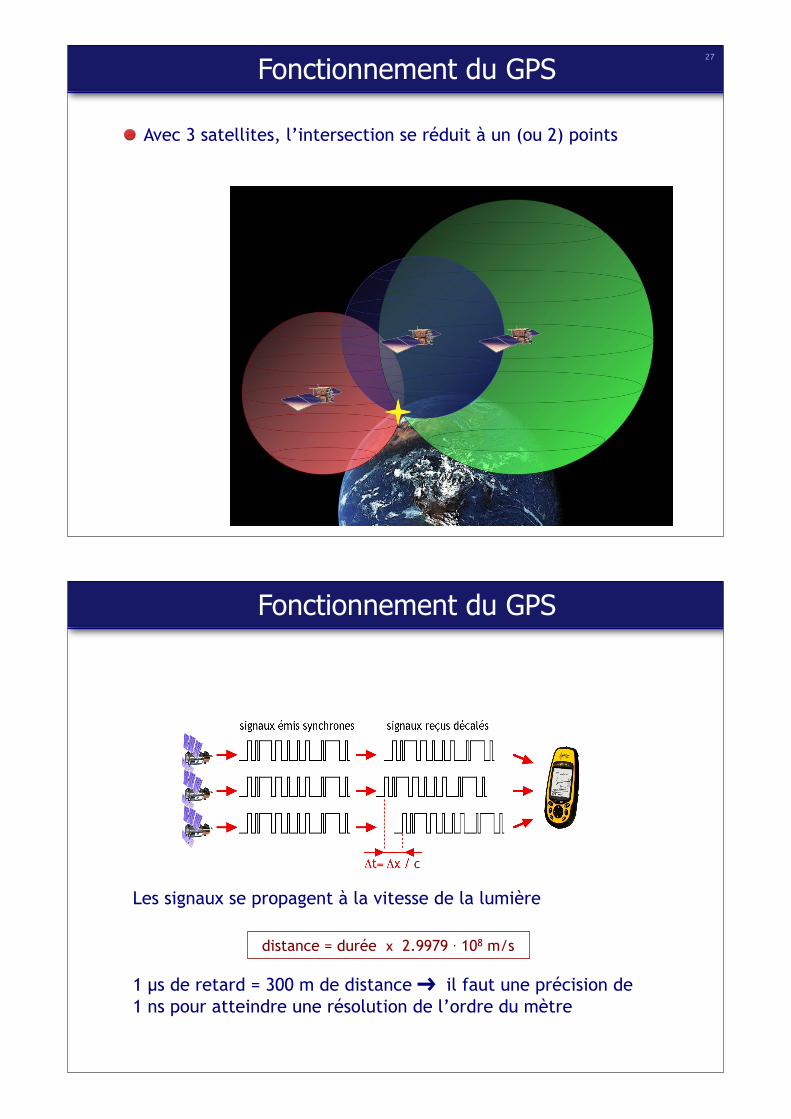
Fonctionnement du GPS
Avec 3 satellites, l’intersection se réduit à un (ou 2) points
27
Fonctionnement du GPS
Les signaux se propagent à la vitesse de la lumière
1 #s de retard = 300 m de distance ! il faut une précision de 1 ns pour atteindre une résolution de l’ordre du mètre
distance = durée x 2.9979 . 108 m/s
Fonctionnement du GPS
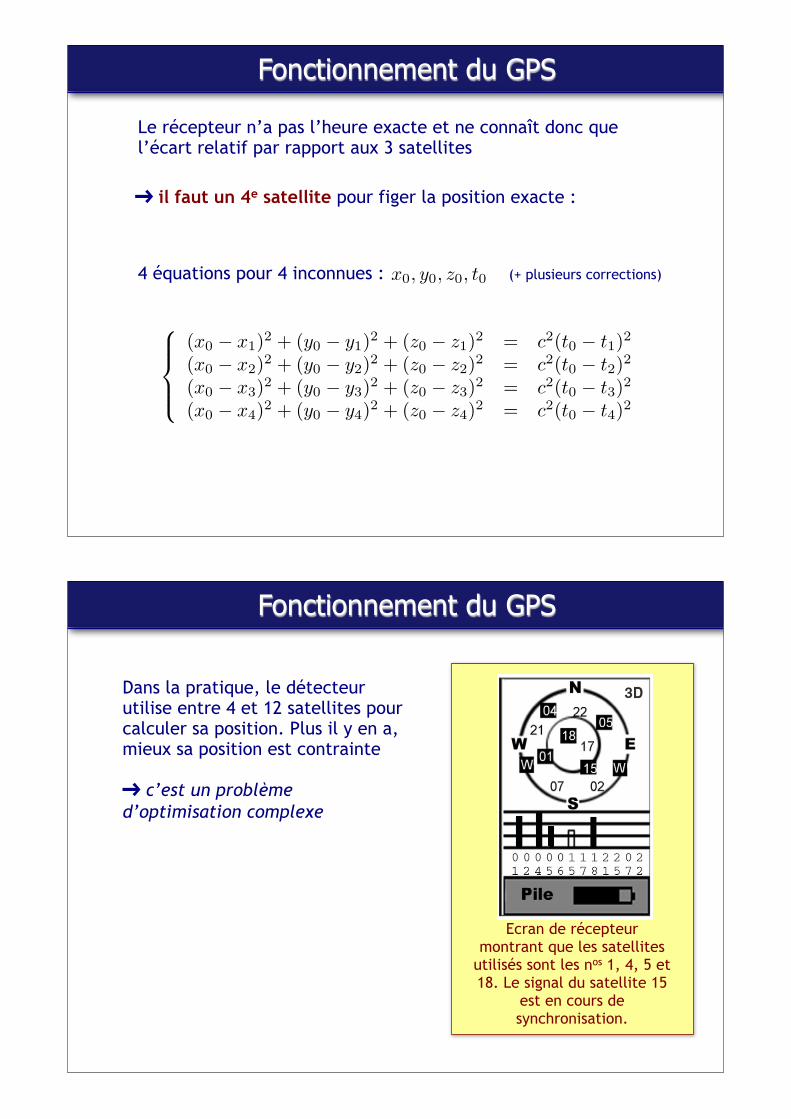
Le récepteur n’a pas l’heure exacte et ne connaît donc que l’écart relatif par rapport aux 3 satellites
! il faut un 4e satellite pour figer la position exacte :
4 équations pour 4 inconnues : (+ plusieurs corrections)
x0, y0, z0, t0
!
"
"
#
"
"
$
(x0 ! x1)2 + (y0 ! y1)2 + (z0 ! z1)2 = c2(t0 ! t1)2
(x0 ! x2)2 + (y0 ! y2)2 + (z0 ! z2)2 = c2(t0 ! t2)2
(x0 ! x3)2 + (y0 ! y3)2 + (z0 ! z3)2 = c2(t0 ! t3)2
(x0 ! x4)2 + (y0 ! y4)2 + (z0 ! z4)2 = c2(t0 ! t4)2
Fonctionnement du GPS
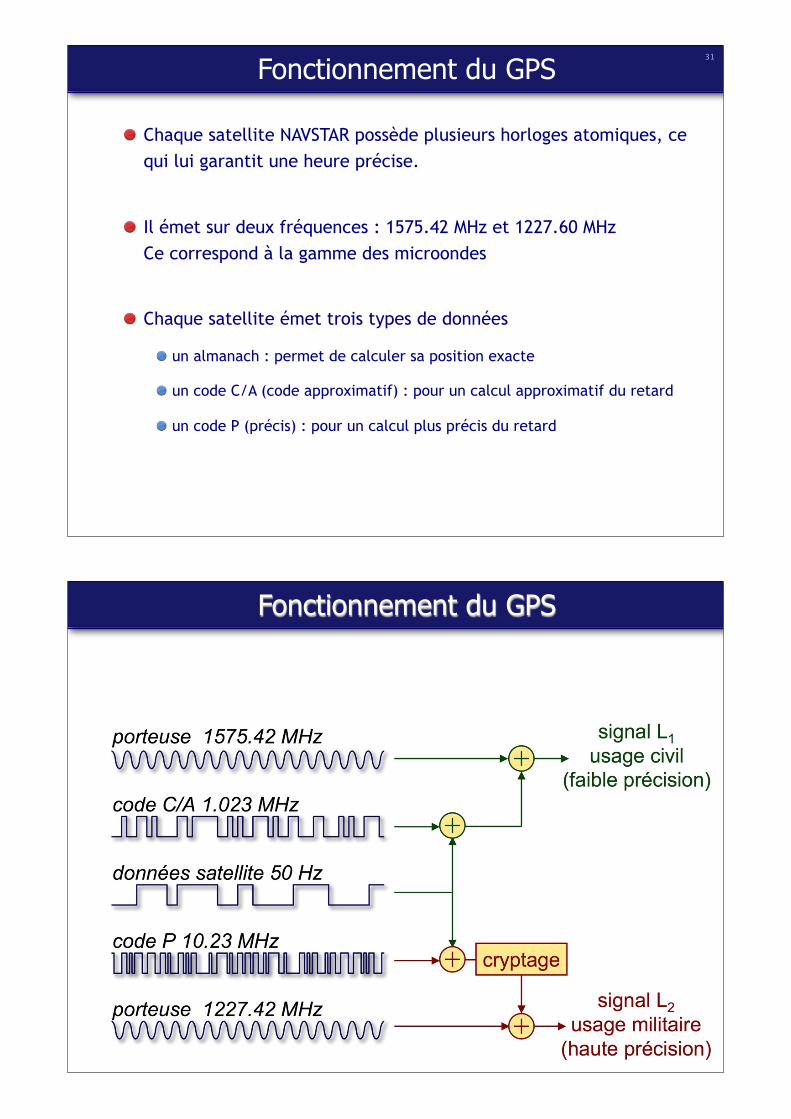
Dans la pratique, le détecteur utilise entre 4 et 12 satellites pour calculer sa position. Plus il y en a, mieux sa position est contrainte
! c’est un problème
d’optimisation complexe
Ecran de récepteur montrant que les satellites
utilisés sont les nos 1, 4, 5 et 18. Le signal du satellite 15
est en cours de synchronisation.
Fonctionnement du GPS
Chaque satellite NAVSTAR possède plusieurs horloges atomiques, ce
qui lui garantit une heure précise.
Il émet sur deux fréquences : 1575.42 MHz et 1227.60 MHz
Ce correspond à la gamme des microondes
Chaque satellite émet trois types de données
un almanach : permet de calculer sa position exacte
un code C/A (code approximatif) : pour un calcul approximatif du retard
un code P (précis) : pour un calcul plus précis du retard
31
Fonctionnement du GPS
Fonctionnement du GPS
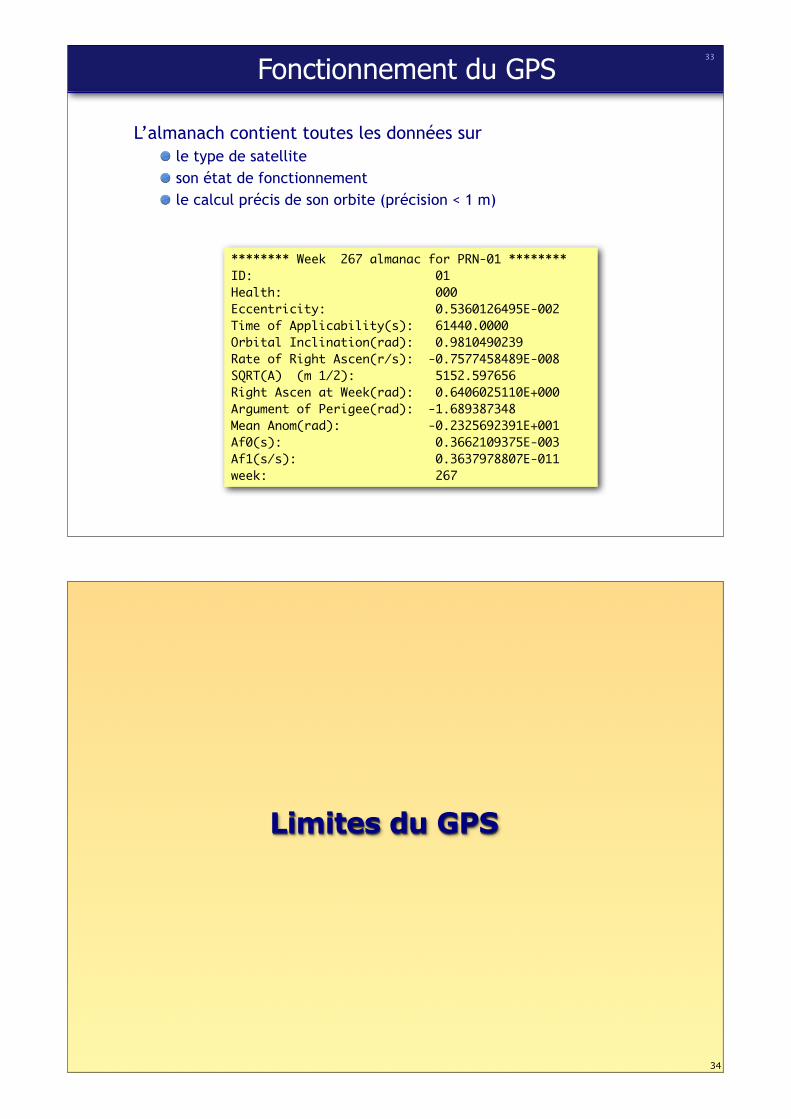
L’almanach contient toutes les données surle type de satellite
son état de fonctionnement
le calcul précis de son orbite (précision < 1 m)
33
******** Week 267 almanac for PRN-01 ********
ID: 01
Health: 000
Eccentricity: 0.5360126495E-002
Time of Applicability(s): 61440.0000
Orbital Inclination(rad): 0.9810490239
Rate of Right Ascen(r/s): -0.7577458489E-008
SQRT(A) (m 1/2): 5152.597656
Right Ascen at Week(rad): 0.6406025110E+000
Argument of Perigee(rad): -1.689387348
Mean Anom(rad): -0.2325692391E+001
Af0(s): 0.3662109375E-003
Af1(s/s): 0.3637978807E-011
week: 267
Limites du GPS
34
Fonctionnement du GPS
Animation: impact de la géométrie des satellites sur la précision
Animation: code pseudo-aléatoire
35
Fonctionnement du GPS
Le GPS ne fonctionne qu’en des lieux découverts.
Endroits à éviter :
l’intérieur de bâtiments
rues encaissées
forêts avec feuillage dense
vitre recouvertes d’un dépôt métallisé
36
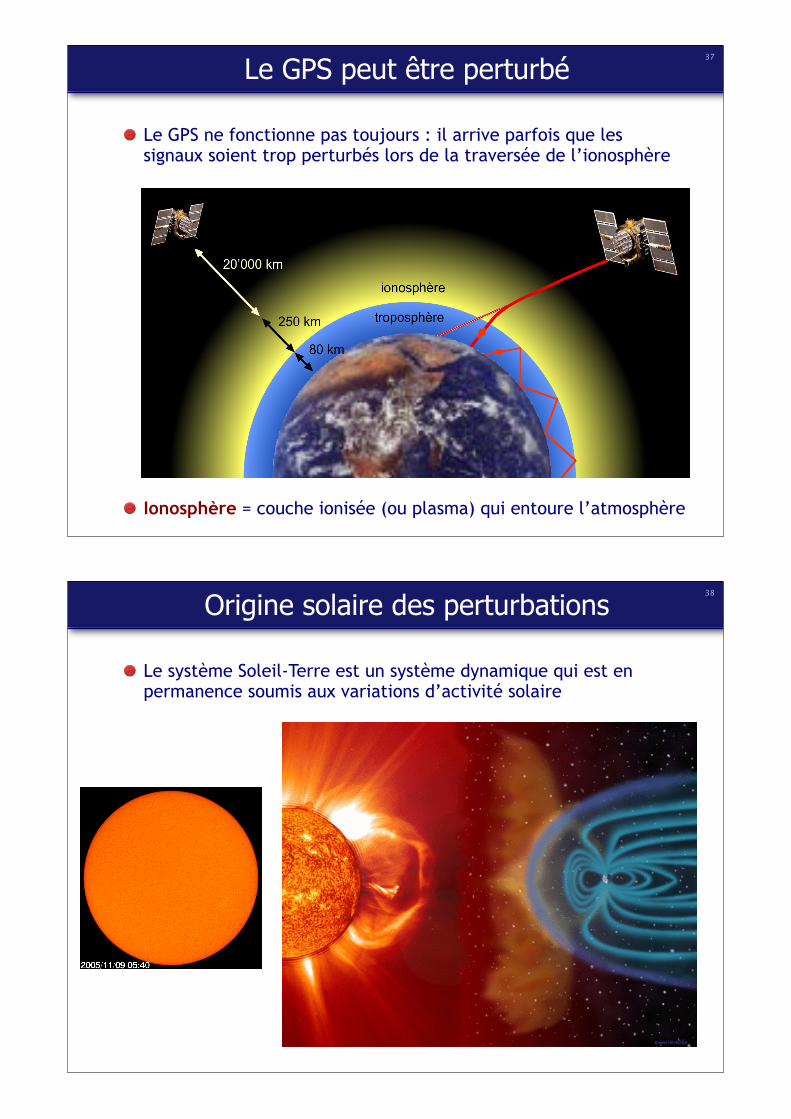
Le GPS peut être perturbé
Le GPS ne fonctionne pas toujours : il arrive parfois que les signaux soient trop perturbés lors de la traversée de l’ionosphère
Ionosphère = couche ionisée (ou plasma) qui entoure l’atmosphère
37
Origine solaire des perturbations
Le système Soleil-Terre est un système dynamique qui est en permanence soumis aux variations d’activité solaire
38
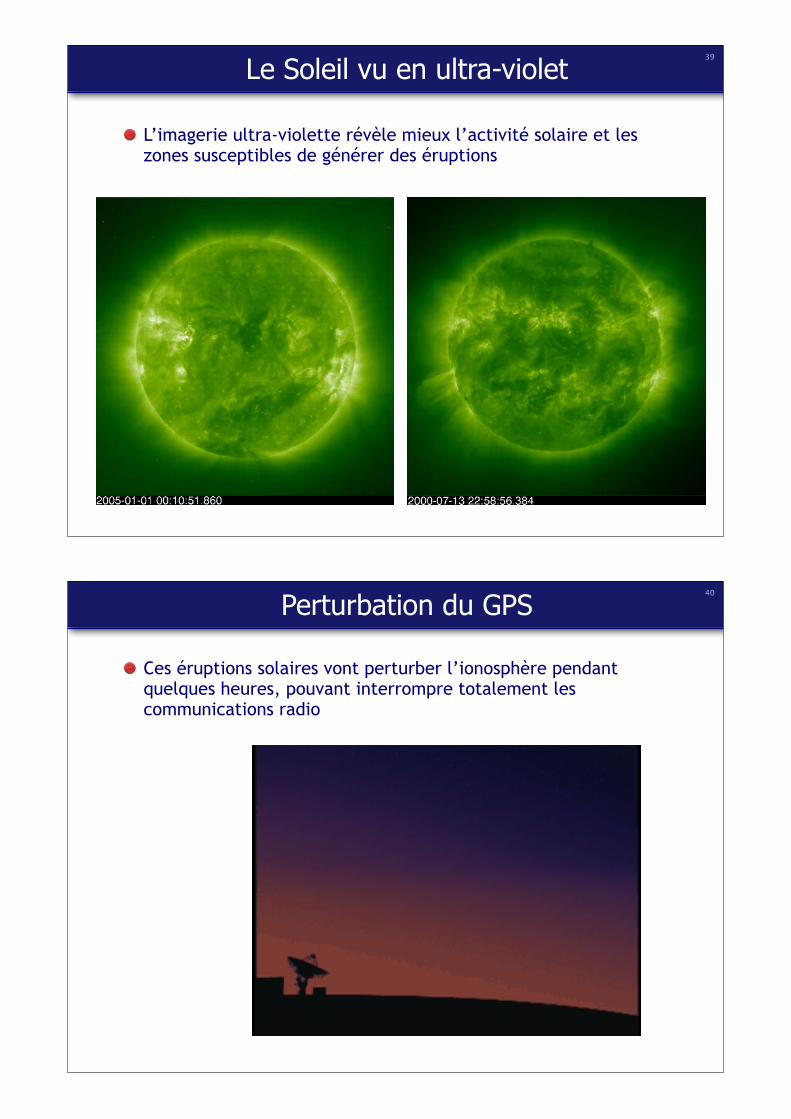
Le Soleil vu en ultra-violet
L’imagerie ultra-violette révèle mieux l’activité solaire et les zones susceptibles de générer des éruptions
39
Perturbation du GPS
Ces éruptions solaires vont perturber l’ionosphère pendant quelques heures, pouvant interrompre totalement les communications radio
40
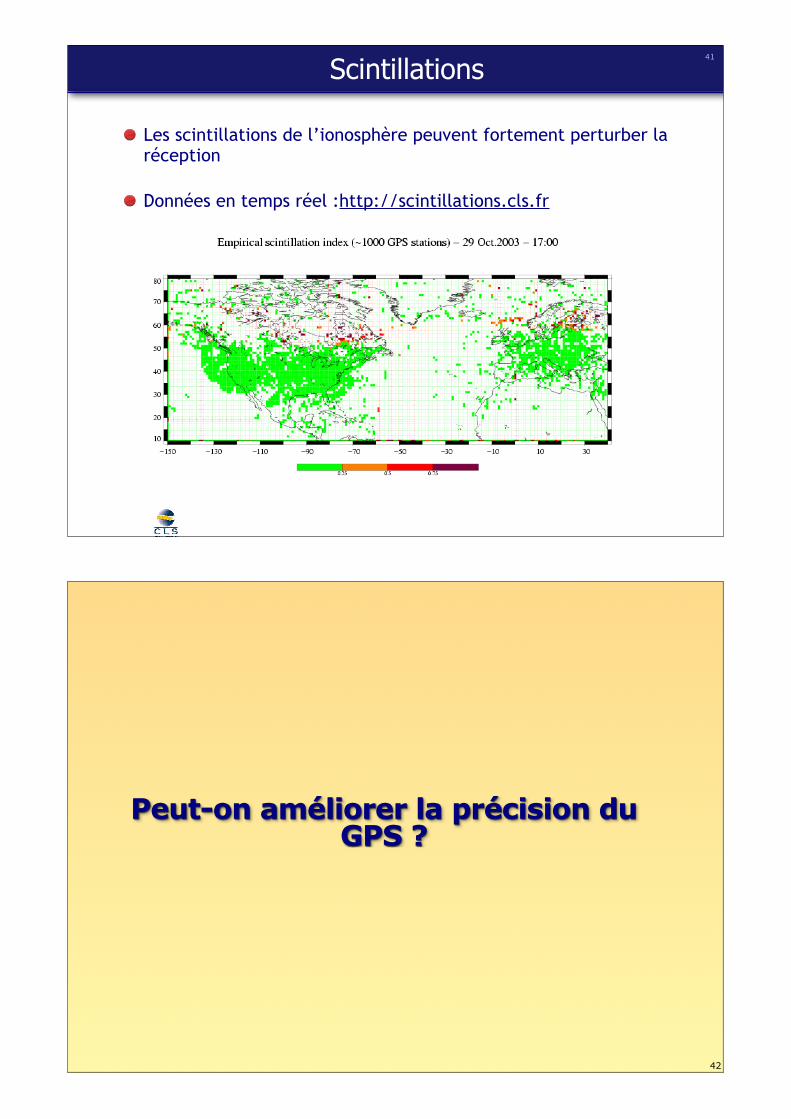
Scintillations
Les scintillations de l’ionosphère peuvent fortement perturber la réception
Données en temps réel :http://scintillations.cls.fr
41
Peut-on améliorer la précision du GPS ?
42
GPS différentiel
Principe du GPS différentiel: on mesure sa position par rapport à un récepteur fixe, dont la position est connue et permet d’appliquer des corrections
Ce service (payant) se développe à proximité des aéroports et des côtes
43
Erreur sur la position
Il existe d’autres types de corrections (WAAS en Amérique du Nord, EGNOS en Europe)
Précision moyenne du GPS :
44
type de mesure précision moyenne
GPS (usage civil) 3 - 8 m
GPS (usage militaire) 1 - 3 m
GPS différentiel < 1 m
GPS différentiel avec post-traitement quelques cm

Se localiser avec le GPS
45
Géodésie
Une fois que le récepteur a calculé sa position par rapport aux satellites, il reste à calculer sa position par rapport à la Terre
Il reste à calculer la position absolue (latitude, longitude, altitude) dans le référentiel terrestre
Pour cela il faut un modèle de la forme du globe : géodésie
46
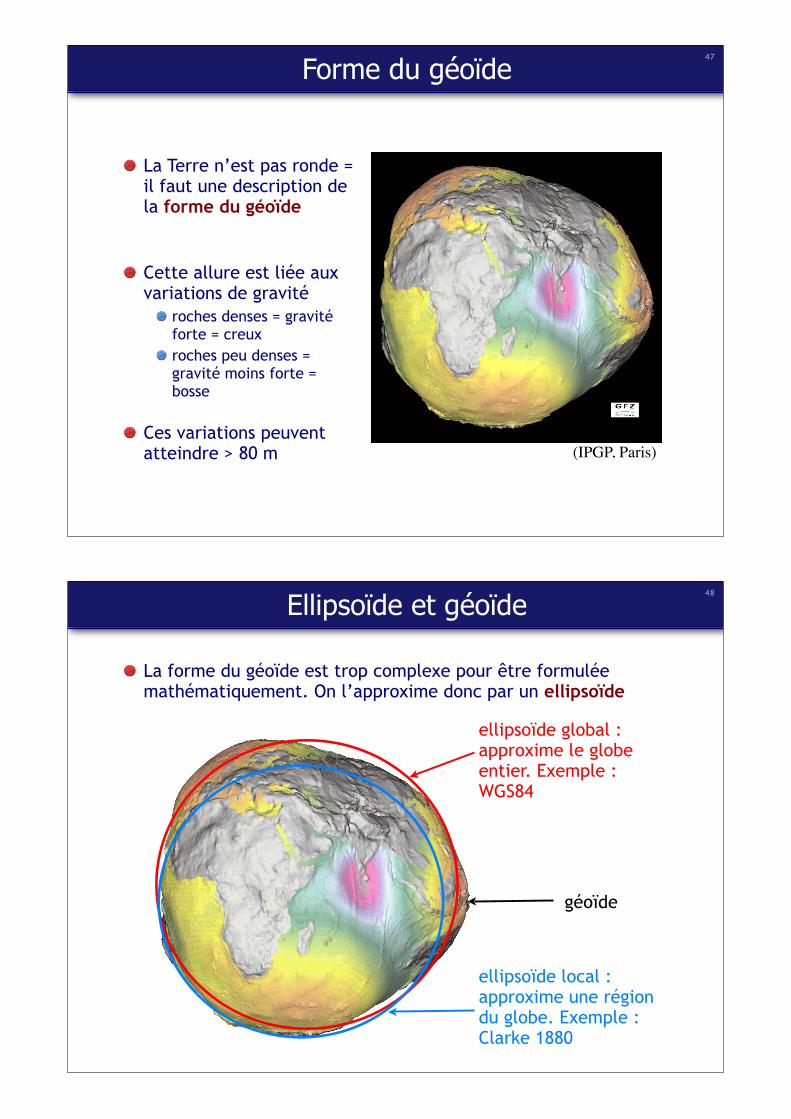
Forme du géoïde
La Terre n’est pas ronde = il faut une description de la forme du géoïde
Cette allure est liée aux variations de gravité
roches denses = gravité forte = creux
roches peu denses = gravité moins forte = bosse
Ces variations peuvent atteindre > 80 m
47
(IPGP, Paris)
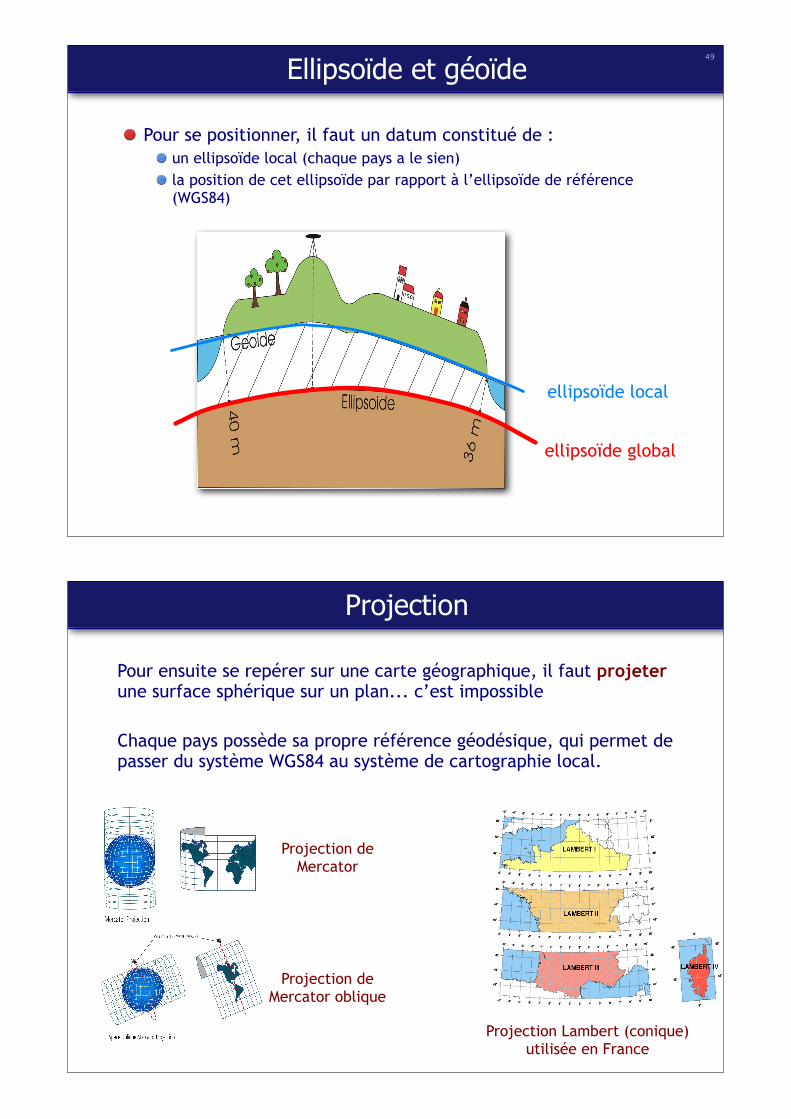
Ellipsoïde et géoïde
La forme du géoïde est trop complexe pour être formulée mathématiquement. On l’approxime donc par un ellipsoïde
48
ellipsoïde global : approxime le globe entier. Exemple : WGS84
ellipsoïde local : approxime une région du globe. Exemple : Clarke 1880
géoïde
Ellipsoïde et géoïde
Pour se positionner, il faut un datum constitué de :un ellipsoïde local (chaque pays a le sien)
la position de cet ellipsoïde par rapport à l’ellipsoïde de référence (WGS84)
49
ellipsoïde global
ellipsoïde local
Projection
Pour ensuite se repérer sur une carte géographique, il faut projeter une surface sphérique sur un plan... c’est impossible
Chaque pays possède sa propre référence géodésique, qui permet de passer du système WGS84 au système de cartographie local.
Projection de Mercator
Projection de Mercator oblique
Projection Lambert (conique) utilisée en France
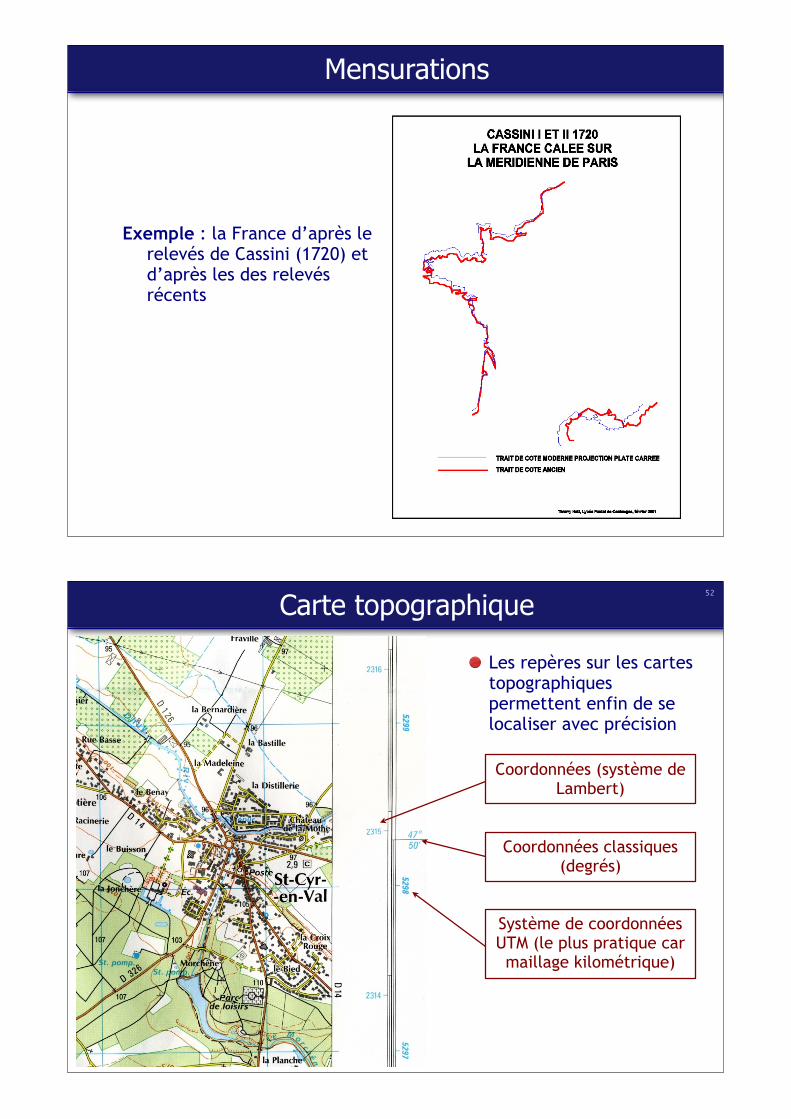
Mensurations
Exemple : la France d’après le relevés de Cassini (1720) et d’après les des relevés récents
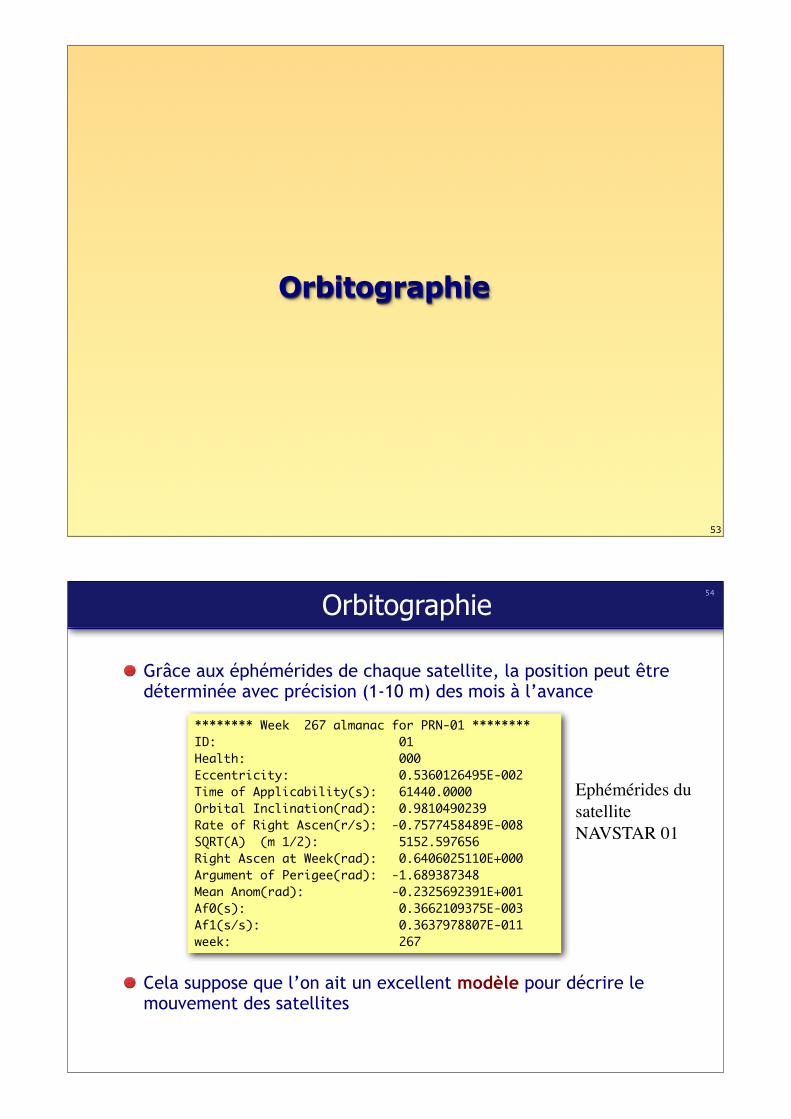
Carte topographique
Les repères sur les cartes topographiques permettent enfin de se localiser avec précision
52
Coordonnées (système de Lambert)
Coordonnées classiques (degrés)
Système de coordonnées UTM (le plus pratique car maillage kilométrique)
Orbitographie
53
Orbitographie
Grâce aux éphémérides de chaque satellite, la position peut être déterminée avec précision (1-10 m) des mois à l’avance
Cela suppose que l’on ait un excellent modèle pour décrire le mouvement des satellites
54
******** Week 267 almanac for PRN-01 ********
ID: 01
Health: 000
Eccentricity: 0.5360126495E-002
Time of Applicability(s): 61440.0000
Orbital Inclination(rad): 0.9810490239
Rate of Right Ascen(r/s): -0.7577458489E-008
SQRT(A) (m 1/2): 5152.597656
Right Ascen at Week(rad): 0.6406025110E+000
Argument of Perigee(rad): -1.689387348
Mean Anom(rad): -0.2325692391E+001
Af0(s): 0.3662109375E-003
Af1(s/s): 0.3637978807E-011
week: 267
Ephémérides du
satellite
NAVSTAR 01
Orbites
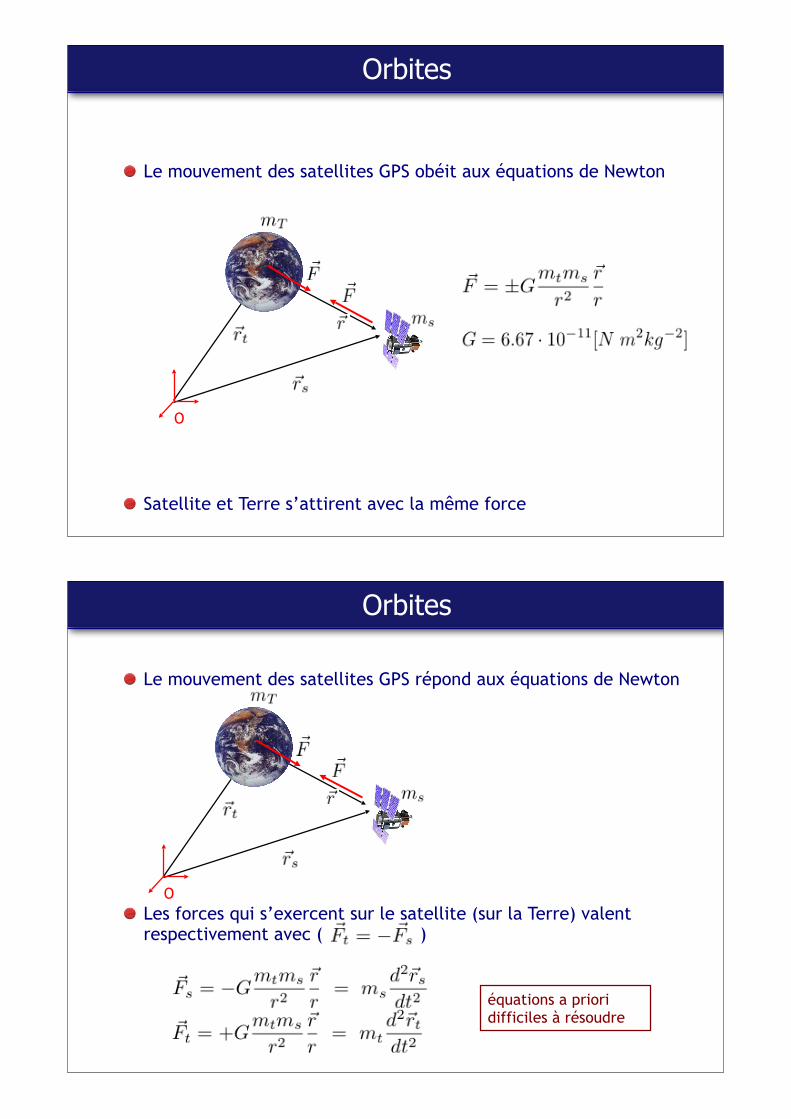
Le mouvement des satellites GPS obéit aux équations de Newton
Satellite et Terre s’attirent avec la même force
O
Orbites
Le mouvement des satellites GPS répond aux équations de Newton
Les forces qui s’exercent sur le satellite (sur la Terre) valent respectivement avec ( )
O
équations a priori difficiles à résoudre
Orbites
Calculons
Or le barycentre du système Terre-satellite vaut
On en conclut que le barycentre n’est pas accéléré, puisque
L’ensemble Terre-satellite subit donc un mouvement rectiligne uniforme ! on peut dissocier le mouvement de l’ensemble Terre-satellite de celui du satellite autour de la Terre
!Ft + !Fs = 0
!Ft + !Fs = mt
d2!rt
dt2+ ms
d2!rs
dt2= 0
!rB =mt!rt + ms!rs
mt + ms
d2!rB
dt2= 0
Orbites
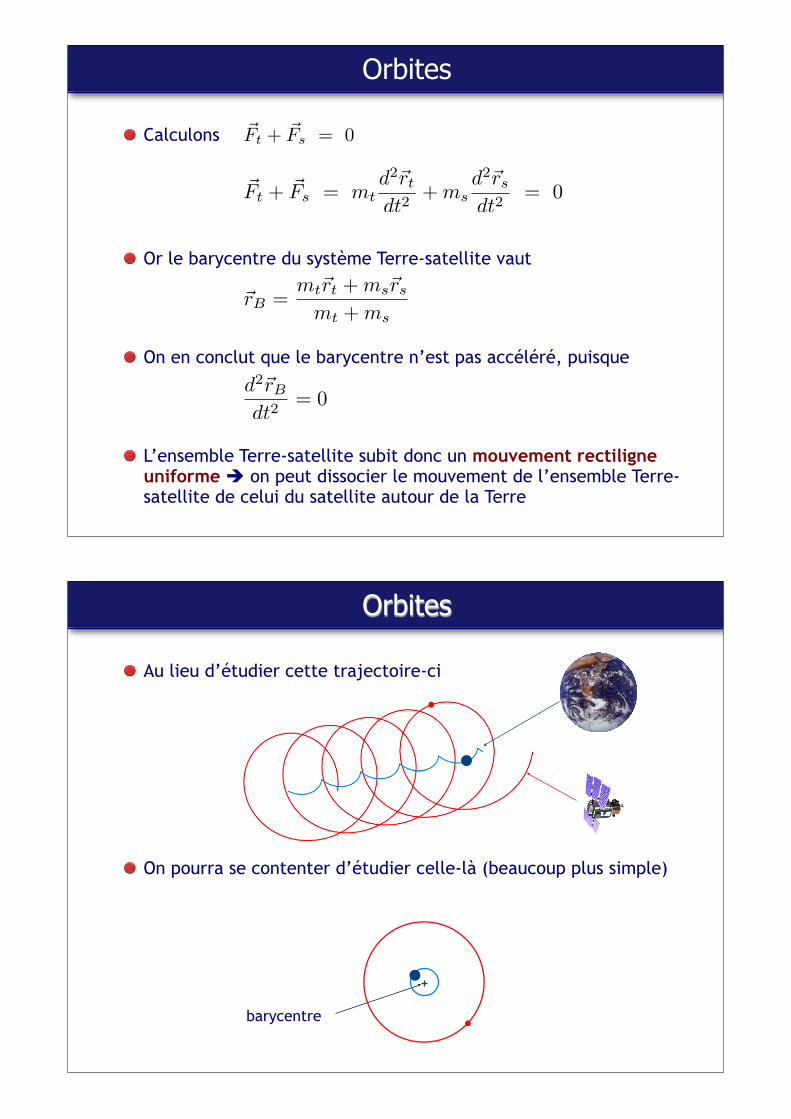
Au lieu d’étudier cette trajectoire-ci
On pourra se contenter d’étudier celle-là (beaucoup plus simple)
barycentre
Orbites
Calculons
on trouve
O
!Fs −!Ft
!Fs !!Ft = ms
d2!rs
dt2! mt
d2!rt
dt2
µd2!r
dt2= !
GµM
r2
!r
r
M = mt + ms
µ =mtms
mt + ms
!r = !rs − !rt
masse totale
masse réduite
séparation Terre-satellite
Orbites
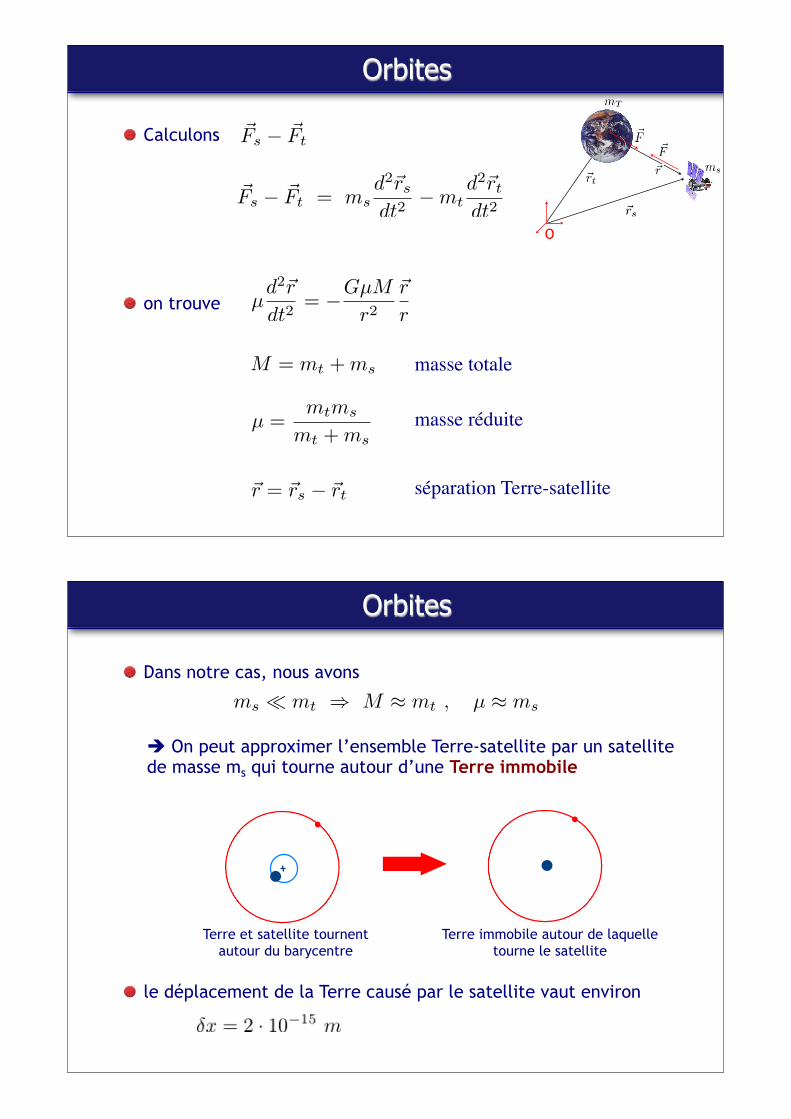
Dans notre cas, nous avons
! On peut approximer l’ensemble Terre-satellite par un satellite de masse ms qui tourne autour d’une Terre immobile
le déplacement de la Terre causé par le satellite vaut environ
Terre et satellite tournentautour du barycentre
Terre immobile autour de laquelletourne le satellite
ms ! mt " M # mt , µ # ms

Orbites
Une étude plus détaillée de l’équation
montre quele mouvement du satellite se situe dans un plan et conserve l’énergie (pas de dissipation)
les solutions sont des coniques (cercle, ellipse, parabole, hyperbole)
Au début du XVIIème siècle, Johannes Kepler proposa une série de lois (empiriques) qui décrivent relativement bien les orbites des satellites
il trouva ces lois sans connaître la solution analytique de l’équation
ces lois s’avèrent être en bon accord avec les équations de Newton
une loi générale est souvent plus utile qu’une solution analytique détaillée
Lois de Kepler
Première loi de Kepler (loi des orbites) : l’orbite du satellite est une ellipse dont un des foyers est occupé par la Terre. L’orbite des satellites NAVSTAR sont en réalité des cercles.
a a
ellipse de demi-grand axe a cercle de rayon a
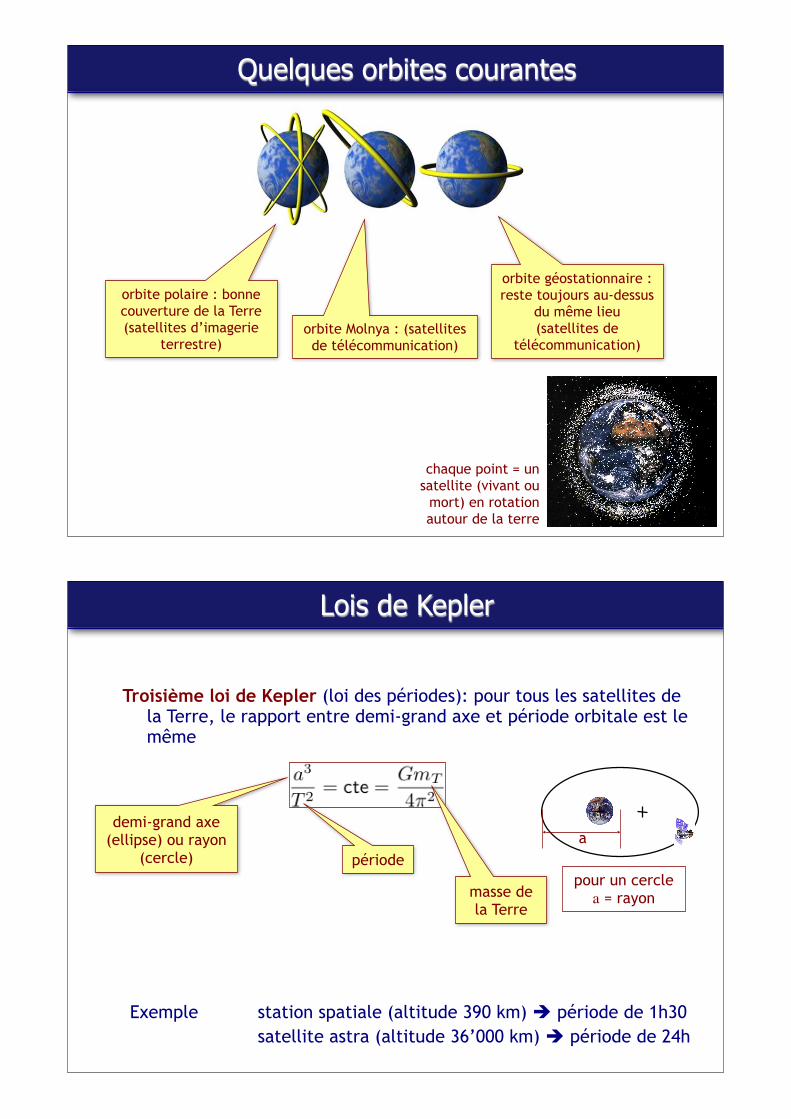
Quelques orbites courantes
chaque point = un satellite (vivant ou
mort) en rotation autour de la terre
orbite polaire : bonne couverture de la Terre(satellites d’imagerie
terrestre)orbite Molnya : (satellites de télécommunication)
orbite géostationnaire : reste toujours au-dessus
du même lieu(satellites de
télécommunication)
Lois de Kepler
Troisième loi de Kepler (loi des périodes): pour tous les satellites de la Terre, le rapport entre demi-grand axe et période orbitale est le même
demi-grand axe (ellipse) ou rayon
(cercle) période
pour un cercle a = rayon
a
masse de la Terre
Exemple station spatiale (altitude 390 km) ! période de 1h30
satellite astra (altitude 36’000 km) ! période de 24h
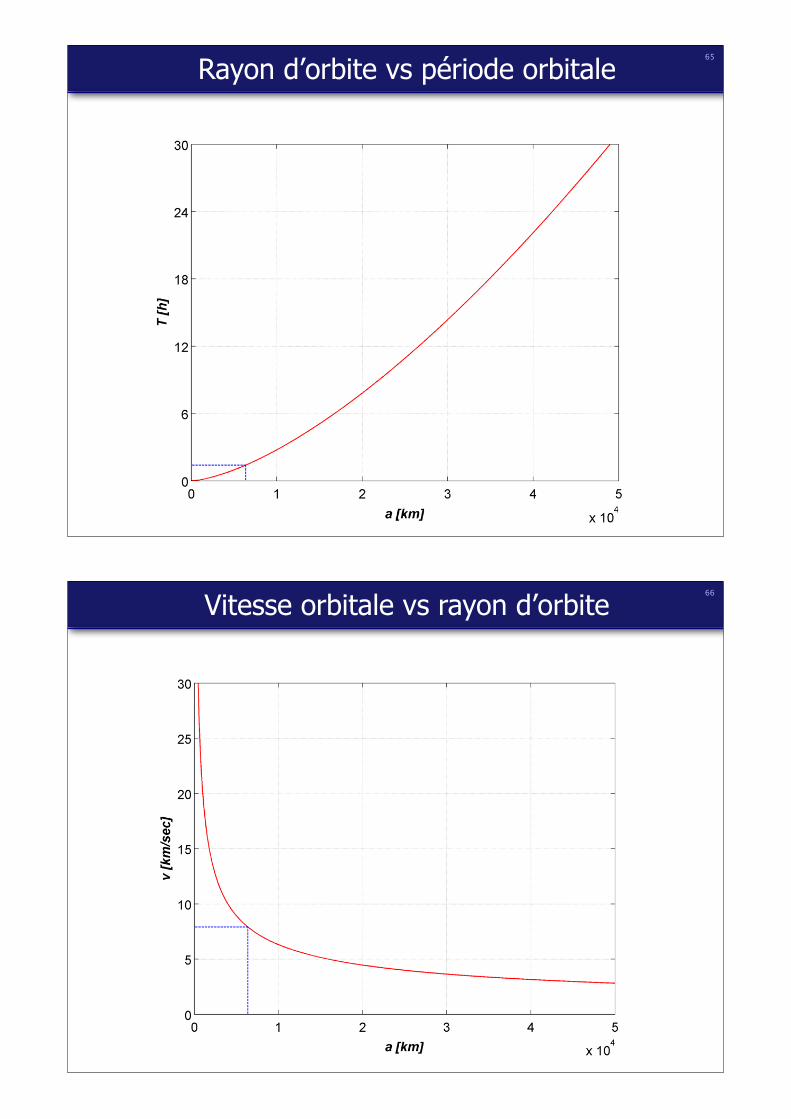
Rayon d’orbite vs période orbitale65
Vitesse orbitale vs rayon d’orbite66
La mesure du temps
67
Mesure du temps
La mesure précise du temps est un élément essentiel du positionnement par satellite
! 10 ns d’écart = 3 m d’erreur !
Ancienne définition de la seconde (avant 1968) :
Définition actuelle de la seconde
La seconde est égale à 1/86400 d’un jour
solaire moyen
La seconde est la durée de 9’192’631’770
périodes de la radiation correspondant à la
transition entre les deux niveaux hyperfins
F=3 et F=4 de l'état fondamental 6S1/2 de
l'atome de césium 133.
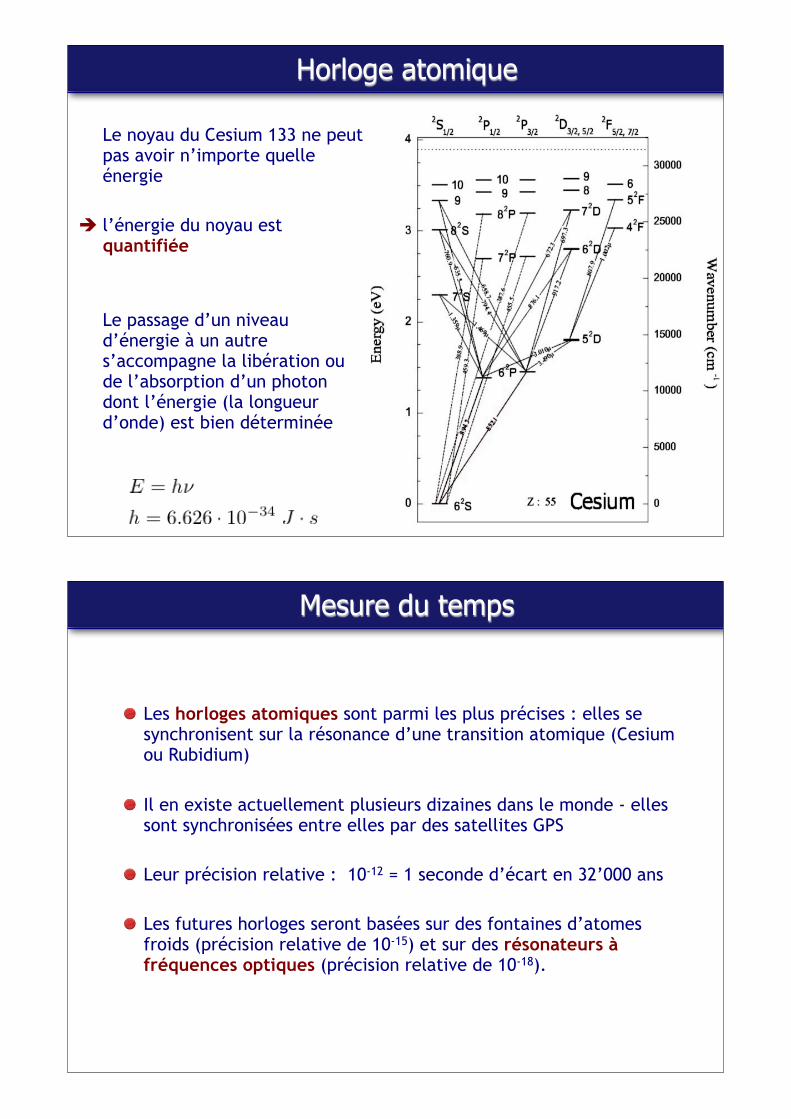
Horloge atomique
Le noyau du Cesium 133 ne peut pas avoir n’importe quelle énergie
! l’énergie du noyau est quantifiée
Le passage d’un niveau d’énergie à un autre s’accompagne la libération ou de l’absorption d’un photon dont l’énergie (la longueur d’onde) est bien déterminée
Mesure du temps
Les horloges atomiques sont parmi les plus précises : elles se synchronisent sur la résonance d’une transition atomique (Cesium ou Rubidium)
Il en existe actuellement plusieurs dizaines dans le monde - elles sont synchronisées entre elles par des satellites GPS
Leur précision relative : 10-12 = 1 seconde d’écart en 32’000 ans
Les futures horloges seront basées sur des fontaines d’atomes froids (précision relative de 10-15) et sur des résonateurs à fréquences optiques (précision relative de 10-18).
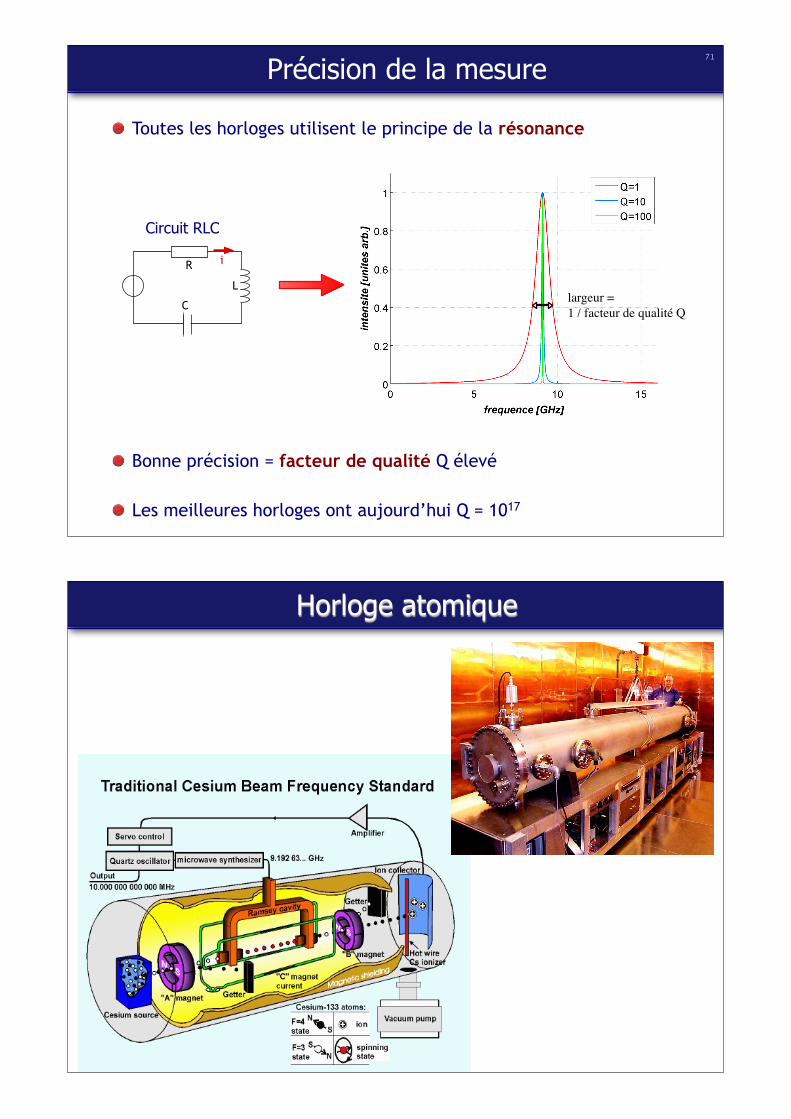
Précision de la mesure
Toutes les horloges utilisent le principe de la résonance
Bonne précision = facteur de qualité Q élevé
Les meilleures horloges ont aujourd’hui Q = 1017
71
iR
C
L
largeur =
1 / facteur de qualité Q
Circuit RLC
Horloge atomique
Effet Doppler
73
Effet Doppler
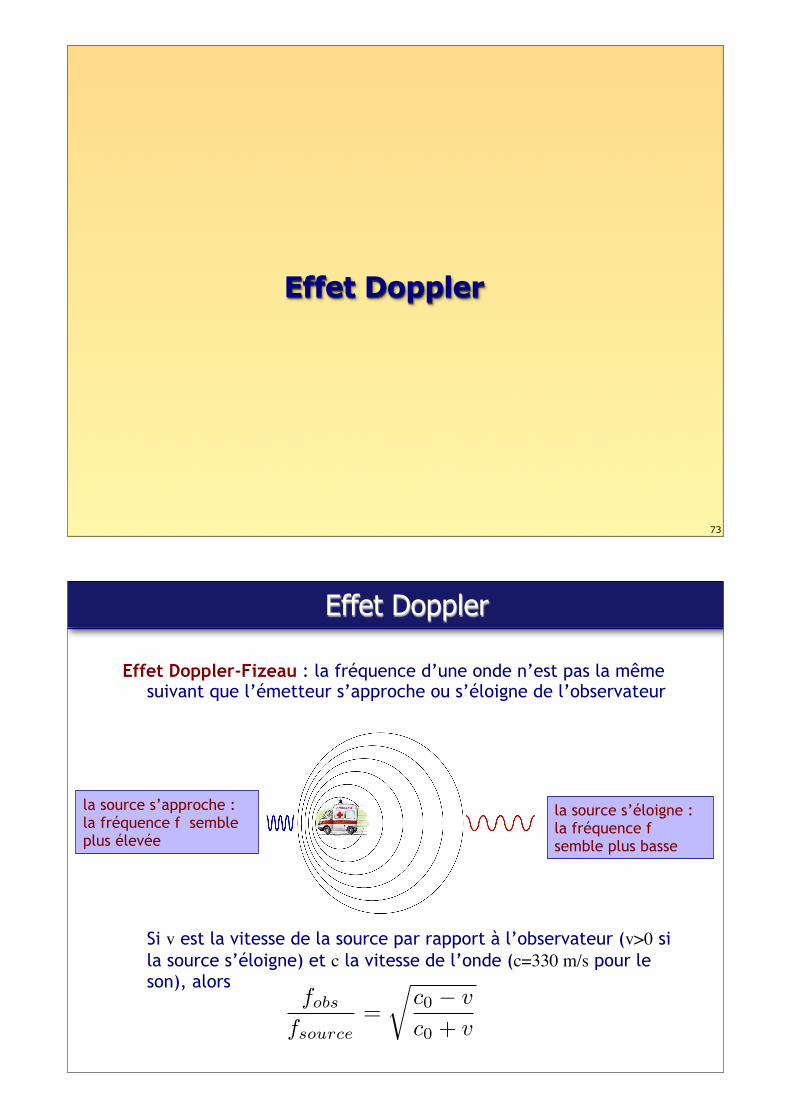
Effet Doppler-Fizeau : la fréquence d’une onde n’est pas la même suivant que l’émetteur s’approche ou s’éloigne de l’observateur
Si v est la vitesse de la source par rapport à l’observateur (v>0 si la source s’éloigne) et c la vitesse de l’onde (c=330 m/s pour le son), alors
la source s’approche : la fréquence f semble plus élevée
la source s’éloigne : la fréquence f semble plus basse
fobs
fsource
=
!
c0 ! v
c0 + v
Effet Doppler
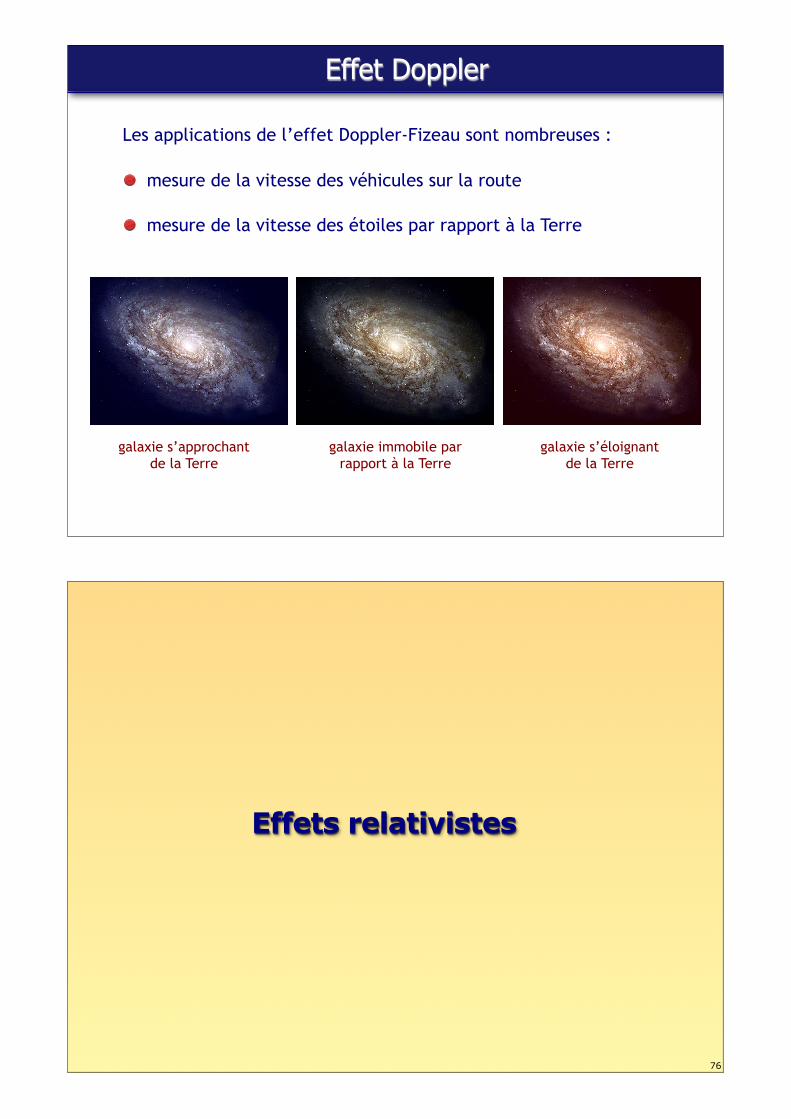
Les applications de l’effet Doppler-Fizeau sont nombreuses :
mesure de la vitesse des véhicules sur la route
mesure de la vitesse des étoiles par rapport à la Terre
galaxie immobile par rapport à la Terre
galaxie s’éloignant de la Terre
galaxie s’approchant de la Terre
Effets relativistes
76
La relativité
Toute la physique classique repose sur le principe de relativité
Exemple : la tasse de café qui se renverse alors que vous êtes
dans l’avion produira le même effet, que l’avion vole ou soit à
l’arrêt
Les lois de la physique dans un
référentiel inertiel (qui subit
un mouvement rectiligne
uniforme) restent les mêmes,
quelle que soit la vitesse de
ce référentiel
La relativité
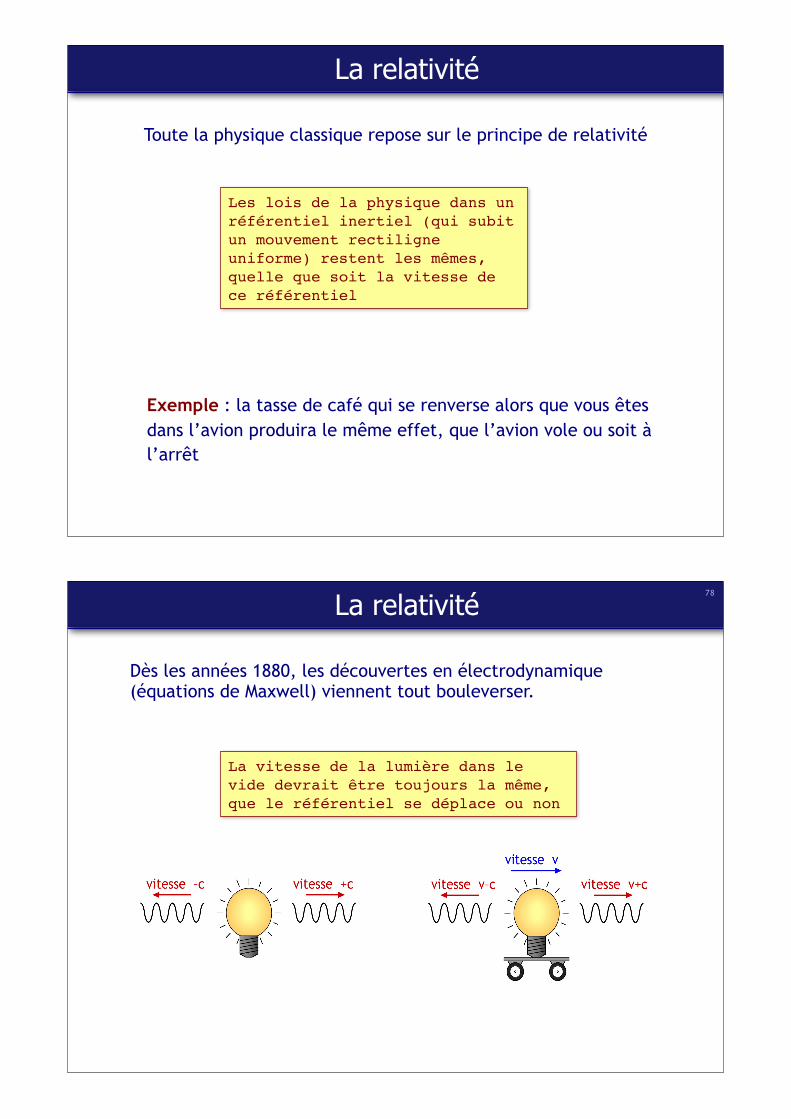
Dès les années 1880, les découvertes en électrodynamique (équations de Maxwell) viennent tout bouleverser.
78
La vitesse de la lumière dans le
vide devrait être toujours la même,
que le référentiel se déplace ou non
La relativité
Cette contradiction est résolue en 1905 par Albert Einstein (+ d’autres), qui formule sa théorie de la relativité restreinte
79
La vitesse de la lumière dans le
vide est la même pour tous les
observateurs
Théorie de la relativité
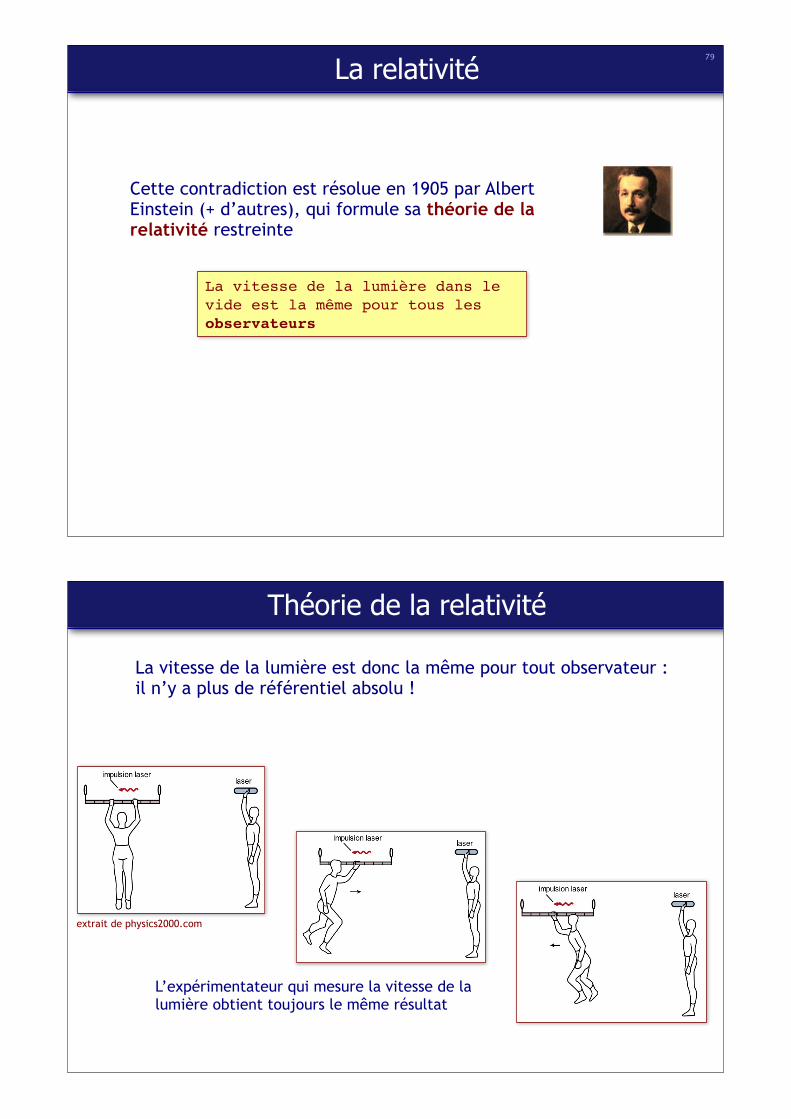
La vitesse de la lumière est donc la même pour tout observateur : il n’y a plus de référentiel absolu !
L’expérimentateur qui mesure la vitesse de la lumière obtient toujours le même résultat
extrait de physics2000.com
Théorie de la relativité
Conséquences :
1) la vitesse de la lumière ne me dit rien sur la vitesse à laquelle je me déplace !
2) le temps n’est plus absolu : il peut se dilater
3) les dimensions de l’espace ne sont plus absolues : l’espace peut se déformer
Nous vivons dans un monde à 4 dimensions : x, y, z et t
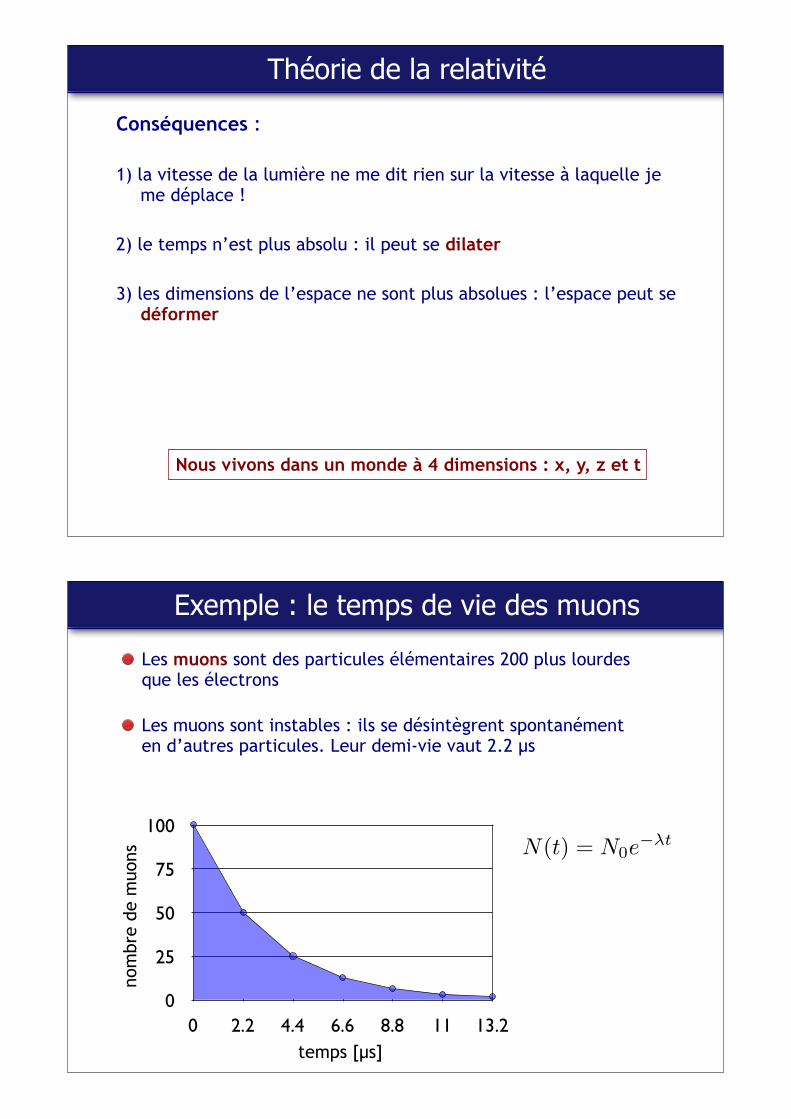
Exemple : le temps de vie des muons
Les muons sont des particules élémentaires 200 plus lourdes que les électrons
Les muons sont instables : ils se désintègrent spontanément en d’autres particules. Leur demi-vie vaut 2.2 #s
0
25
50
75
100
0 2.2 4.4 6.6 8.8 11 13.2
nom
bre
de m
uons
temps [#s]
N(t) = N0e!!t
Exemple : le temps de vie des muons
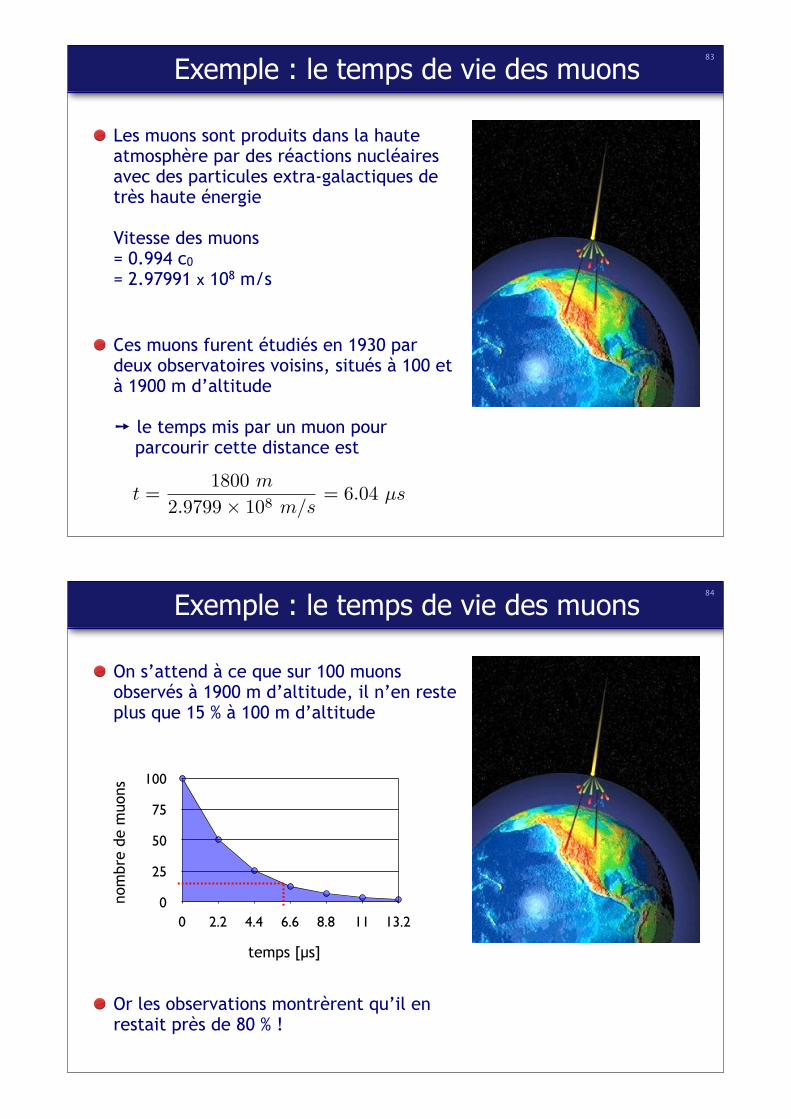
Les muons sont produits dans la haute atmosphère par des réactions nucléaires avec des particules extra-galactiques de très haute énergie
Vitesse des muons = 0.994 c0
= 2.97991 x 108 m/s
Ces muons furent étudiés en 1930 par deux observatoires voisins, situés à 100 et à 1900 m d’altitude
! le temps mis par un muon pour parcourir cette distance est
83
t =1800 m
2.9799 ! 108 m/s= 6.04 µs
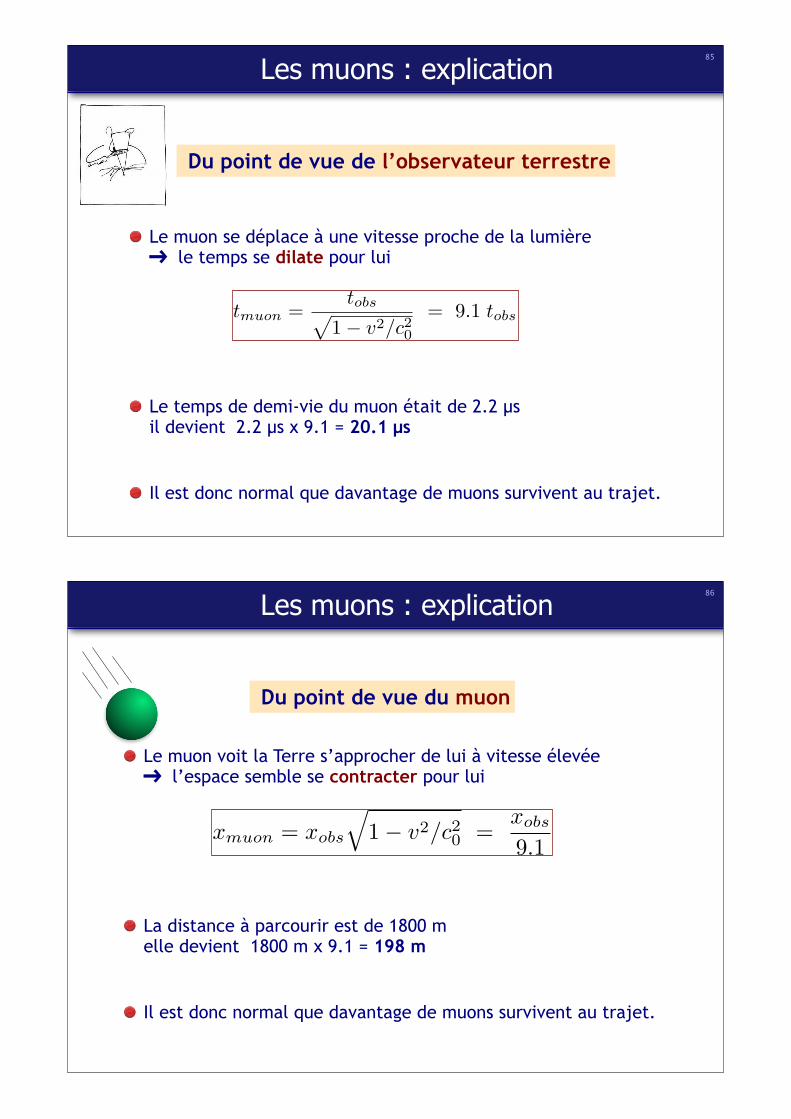
Exemple : le temps de vie des muons
On s’attend à ce que sur 100 muons observés à 1900 m d’altitude, il n’en reste plus que 15 % à 100 m d’altitude
Or les observations montrèrent qu’il en restait près de 80 % !
84
0
25
50
75
100
0 2.2 4.4 6.6 8.8 11 13.2
nom
bre
de m
uons
temps [#s]
Les muons : explication
Le muon se déplace à une vitesse proche de la lumière ! le temps se dilate pour lui
Le temps de demi-vie du muon était de 2.2 #s il devient 2.2 #s x 9.1 = 20.1 !s
Il est donc normal que davantage de muons survivent au trajet.
85
Du point de vue de l’observateur terrestre
tmuon =tobs
!
1 − v2/c20
= 9.1 tobs
Les muons : explication
Le muon voit la Terre s’approcher de lui à vitesse élevée ! l’espace semble se contracter pour lui
La distance à parcourir est de 1800 melle devient 1800 m x 9.1 = 198 m
Il est donc normal que davantage de muons survivent au trajet.
86
Du point de vue du muon
xmuon = xobs
√
1 ! v2/c20
=xobs
9.1
Relativité
Relativité : deux explications différentes pour une même réalité
Théorie de la relativité= il n’y a plus de temps absolu= il n’y a plus de référentiel absolu
87
Pour l’observateur: le
temps se dilate
Pour les muons:
l’espace se contracte
réalité
Relativité et GPS
La relativité joue un rôle important dans le positionnement GPS :
Chaque satellite se déplace par rapport au sol à une vitesse de
Pour un observateur terrestre, le temps à bord du satellite se dilate
Après 24h, cela équivaut à un décalage temporel de
tsat =tobs
!
1 ! v2/c20
= 1.00000000008 tobs
v = 3870 m/s = 0.000013 c0
tsat ! tobs = 6.9 µs = 2070 m d’erreur sur la position
Relativité et GPS
Mais par rapport à quel référentiel faut-il mesurer la
vitesse du satellite NAVSTAR ?
89
Autres effets
90
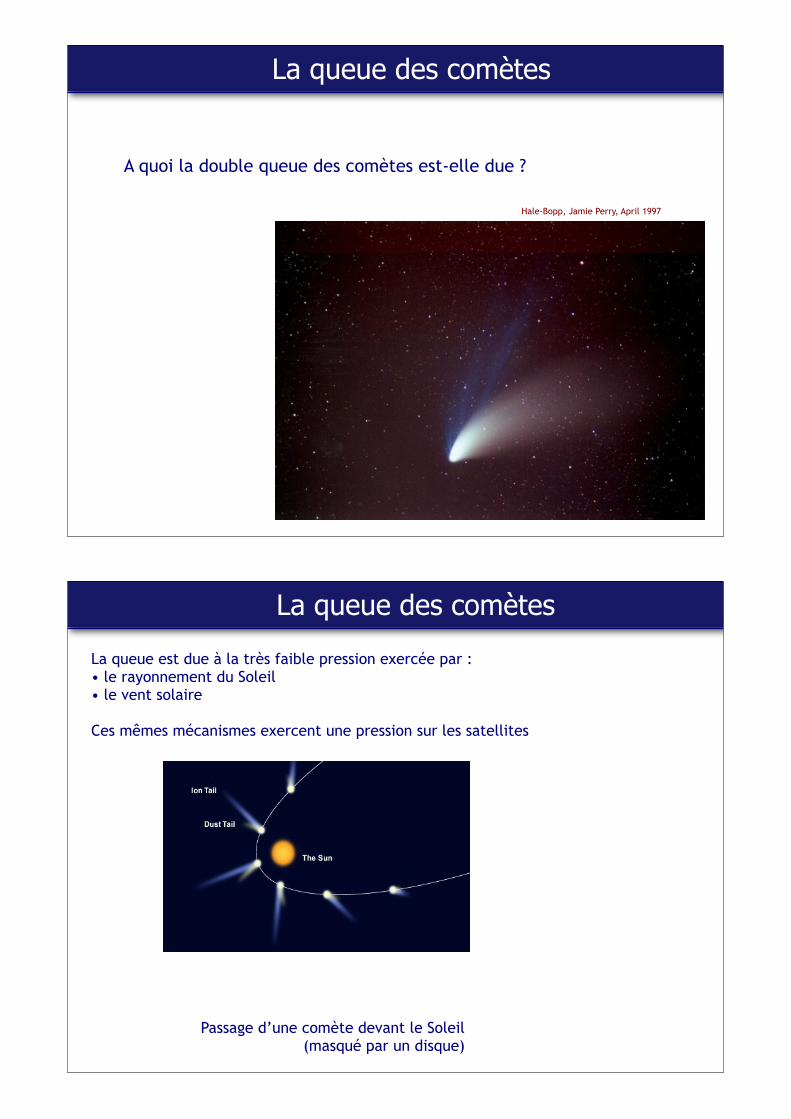
La queue des comètes
Hale-Bopp, Jamie Perry, April 1997
A quoi la double queue des comètes est-elle due ?
La queue des comètes
La queue est due à la très faible pression exercée par :• le rayonnement du Soleil• le vent solaire
Ces mêmes mécanismes exercent une pression sur les satellites
Passage d’une comète devant le Soleil (masqué par un disque)
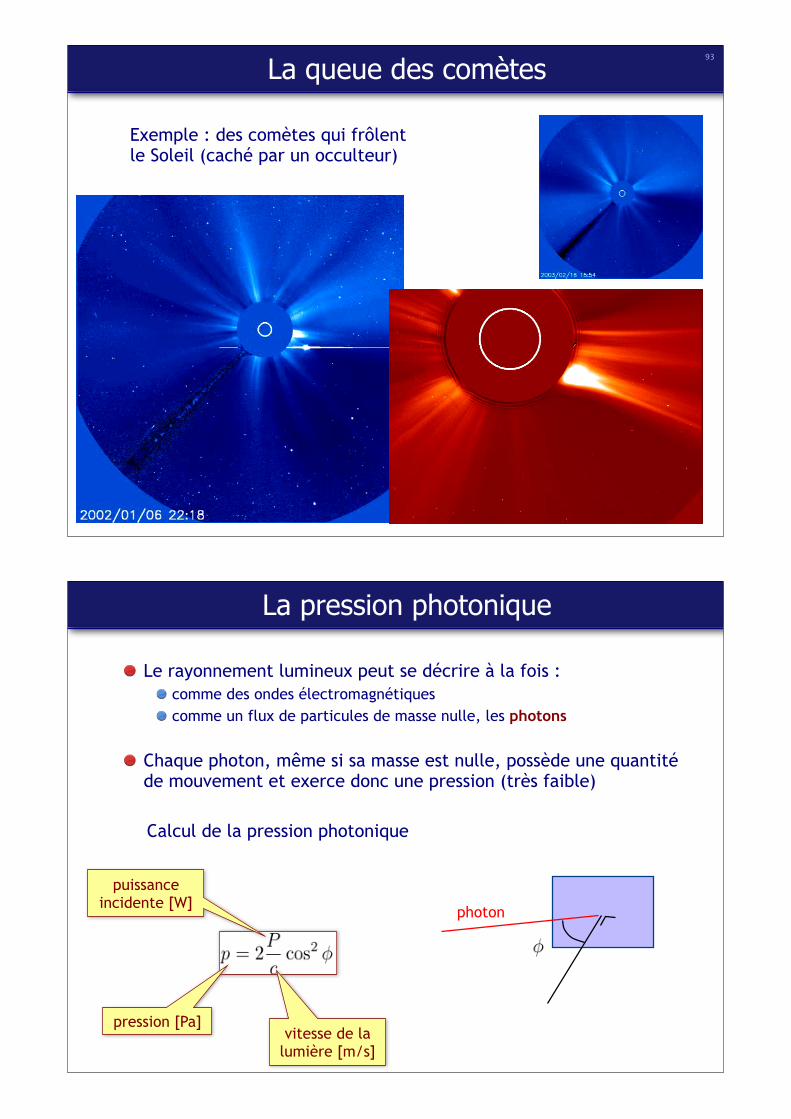
La queue des comètes
Exemple : des comètes qui frôlent le Soleil (caché par un occulteur)
93
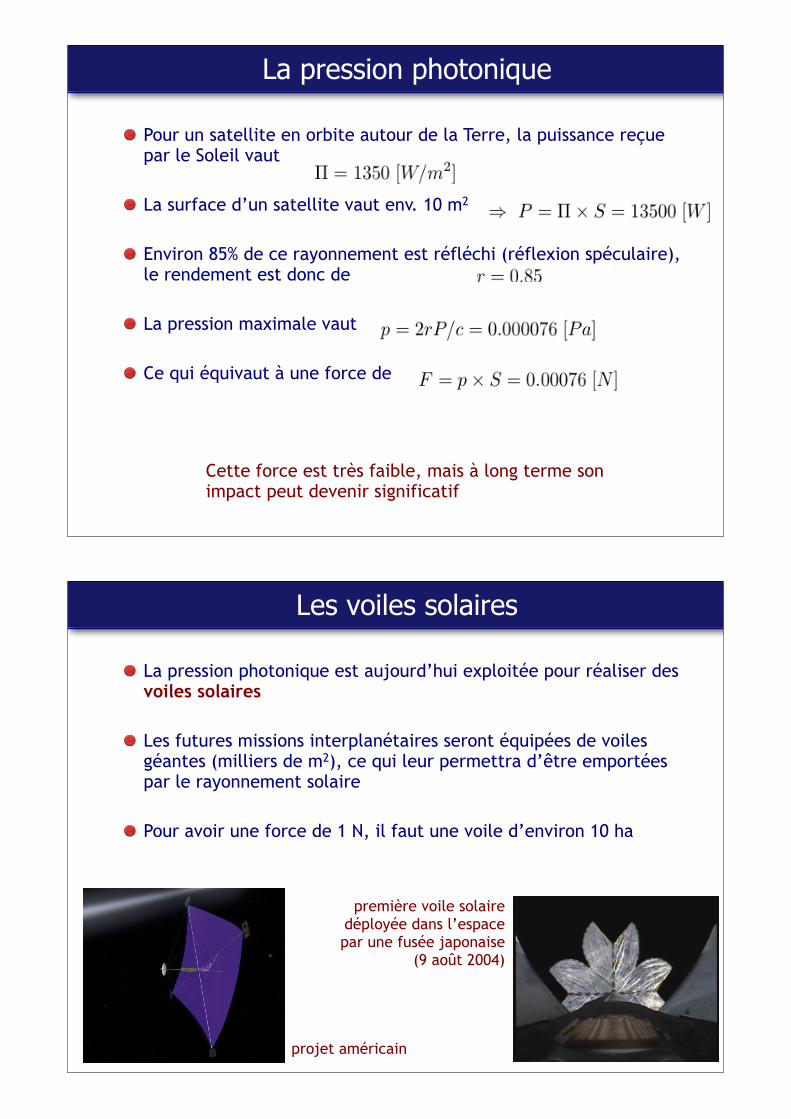
La pression photonique
Le rayonnement lumineux peut se décrire à la fois :comme des ondes électromagnétiques
comme un flux de particules de masse nulle, les photons
Chaque photon, même si sa masse est nulle, possède une quantité de mouvement et exerce donc une pression (très faible)
Calcul de la pression photonique
puissanceincidente [W]
pression [Pa]vitesse de la
lumière [m/s]
photon
La pression photonique
Pour un satellite en orbite autour de la Terre, la puissance reçue par le Soleil vaut
La surface d’un satellite vaut env. 10 m2
Environ 85% de ce rayonnement est réfléchi (réflexion spéculaire), le rendement est donc de
La pression maximale vaut
Ce qui équivaut à une force de
Cette force est très faible, mais à long terme son impact peut devenir significatif
Les voiles solaires
La pression photonique est aujourd’hui exploitée pour réaliser des voiles solaires
Les futures missions interplanétaires seront équipées de voiles géantes (milliers de m2), ce qui leur permettra d’être emportées par le rayonnement solaire
Pour avoir une force de 1 N, il faut une voile d’environ 10 ha
première voile solaire déployée dans l’espace par une fusée japonaise
(9 août 2004)
projet américain
Gérer les erreurs du GPS
97
Calculer les erreurs
Dans un système opérationnel comme le GPS il est essentiel de connaître sa position mais aussi l’incertitude (ou erreur) sur la position
Un résultat du genre x = 102’456.56 m n’a aucun sens si on n’a pas une idée de sa qualité !
Or, le calcul de l’incertitude est délicat car il fait intervenir de nombreux facteurs qu’on ne maîtrise pas
! l’incertitude est toujours approximative (ordre de grandeur)
Exemple : si le GPS n’est toujours
pas homologué pour l’aviation
civile, c’est en partie parce que
les erreurs de position ne sont pas
toujours connues avec exactitude
Quelle précision ?
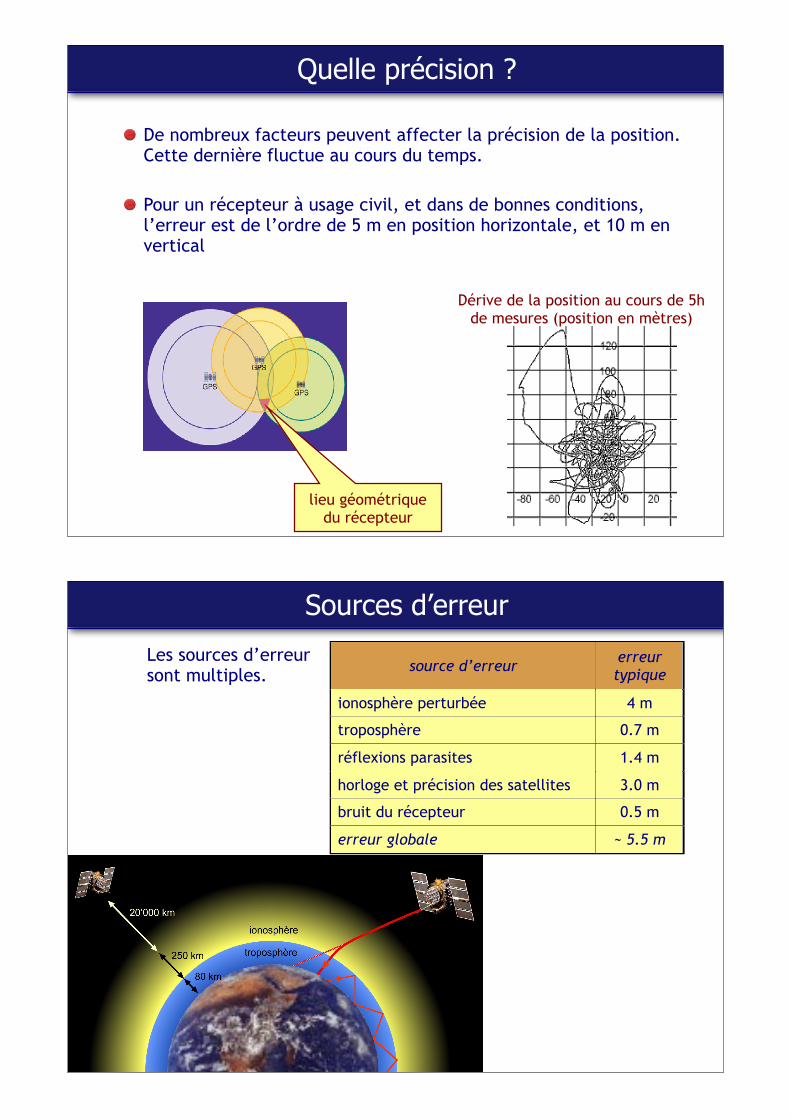
De nombreux facteurs peuvent affecter la précision de la position. Cette dernière fluctue au cours du temps.
Pour un récepteur à usage civil, et dans de bonnes conditions, l’erreur est de l’ordre de 5 m en position horizontale, et 10 m en vertical
Dérive de la position au cours de 5hde mesures (position en mètres)
lieu géométrique du récepteur
Sources d’erreur
Les sources d’erreur sont multiples.
source d’erreurerreur typique
ionosphère perturbée 4 m
troposphère 0.7 m
réflexions parasites 1.4 m
horloge et précision des satellites 3.0 m
bruit du récepteur 0.5 m
erreur globale ~ 5.5 m
Sources d’erreur
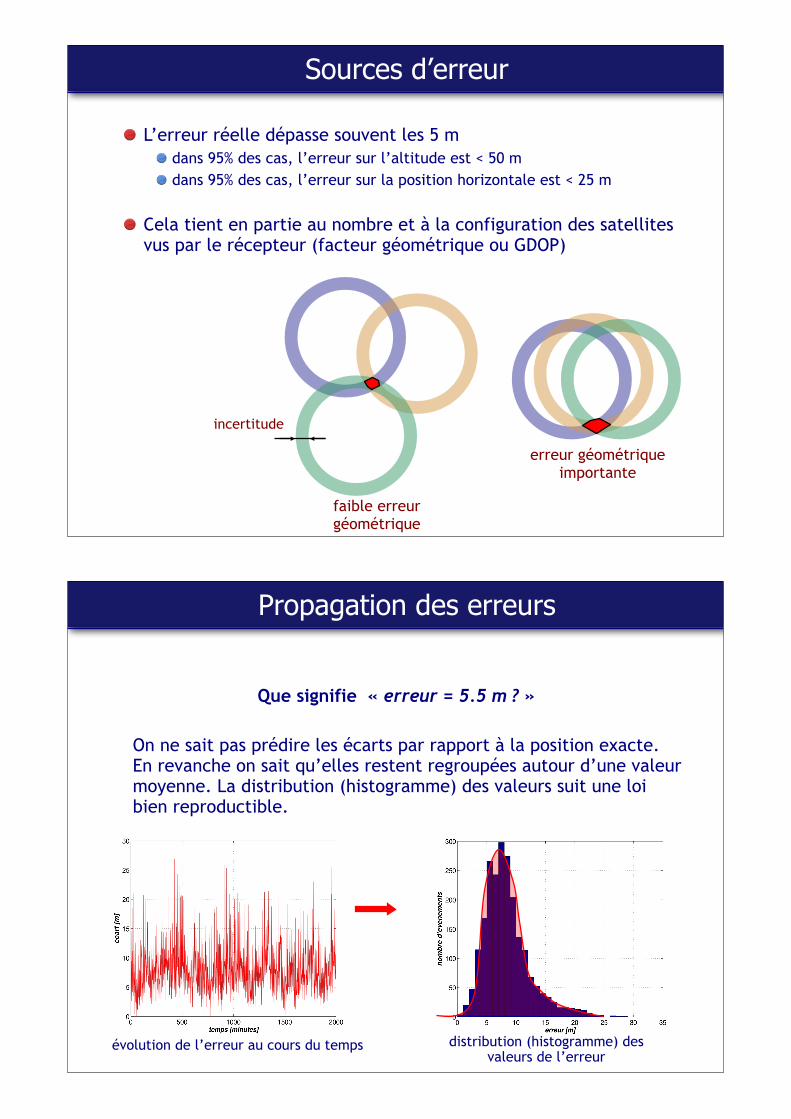
L’erreur réelle dépasse souvent les 5 mdans 95% des cas, l’erreur sur l’altitude est < 50 m
dans 95% des cas, l’erreur sur la position horizontale est < 25 m
Cela tient en partie au nombre et à la configuration des satellites vus par le récepteur (facteur géométrique ou GDOP)
faible erreur géométrique
erreur géométrique importante
incertitude
Propagation des erreurs
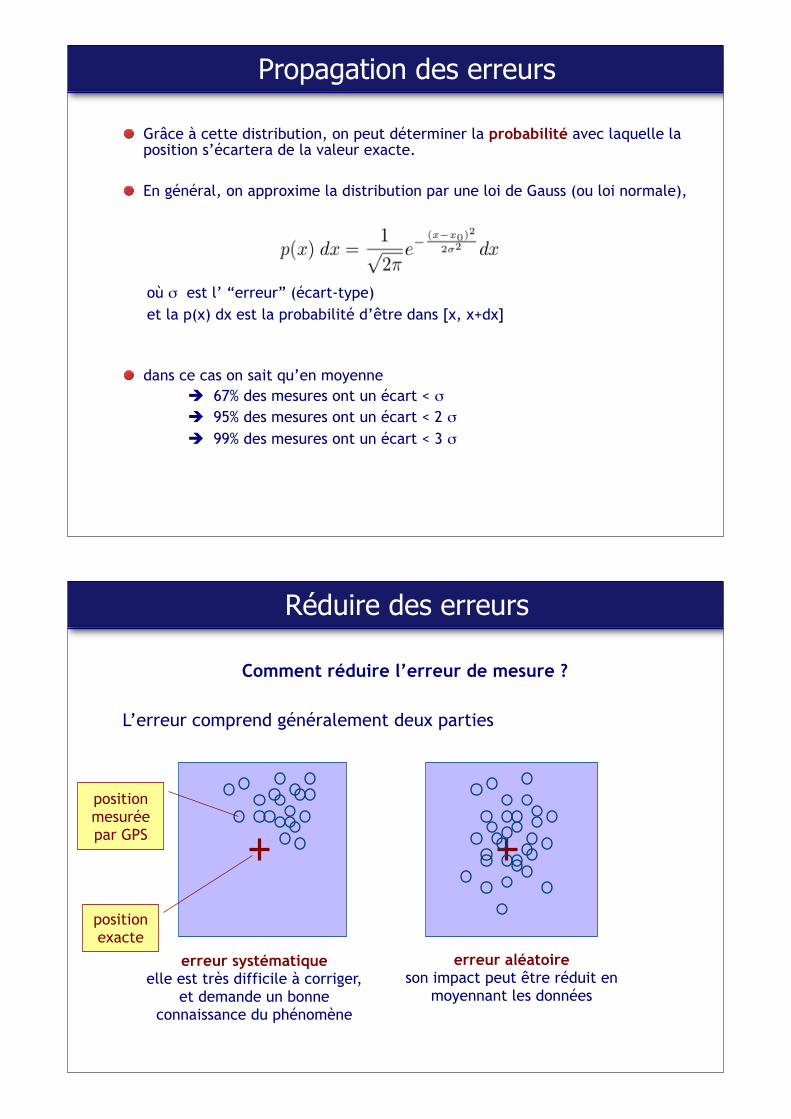
Que signifie «"erreur = 5.5 m ?!»
On ne sait pas prédire les écarts par rapport à la position exacte. En revanche on sait qu’elles restent regroupées autour d’une valeur moyenne. La distribution (histogramme) des valeurs suit une loi bien reproductible.
évolution de l’erreur au cours du temps distribution (histogramme) des valeurs de l’erreur
Propagation des erreurs
Grâce à cette distribution, on peut déterminer la probabilité avec laquelle la position s’écartera de la valeur exacte.
En général, on approxime la distribution par une loi de Gauss (ou loi normale),
où $ est l’"“erreur” (écart-type)
et la p(x) dx est la probabilité d’être dans [x, x+dx]
dans ce cas on sait qu’en moyenne
! 67% des mesures ont un écart < $
! 95% des mesures ont un écart < 2 $
! 99% des mesures ont un écart < 3 $
Réduire des erreurs
Comment réduire l’erreur de mesure ?
L’erreur comprend généralement deux parties
erreur systématiqueelle est très difficile à corriger,
et demande un bonne connaissance du phénomène
erreur aléatoireson impact peut être réduit en
moyennant les données
position exacte
positionmesurée par GPS
Réduire les erreurs
L’erreur due aux fluctuations aléatoires du signal peut être réduite en moyennant la position sur plusieurs observations (pendant laquelle les conditions de mesure ne doivent pas changer)
dans ce cas ! en moyennant sur 4 mesures, on réduit l’erreur de 2 ! en moyennant sur 10 mesures, on réduit l’erreur de 3.2
! en moyennant sur 100 mesures, on réduit l’erreur de 10
Si on fait n mesures indépendantes de la position, alorssi $ est l’erreur sur une seule mesure x
i
l’erreur sur la moyenne est
x̄ =1
n
n!
i=1
xi σx̄ =
σx
!
n