FORMATION PcVue habilis - ac-grenoble.fr · local/supervision Cordon entre Pc et TSX ... existe...
17
Table des matières FORMATION PcVue Module supervision du système HABILIS Programme PL7 PRO Journées de formation au logiciel de supervision PcVue 8.1 Lieu : Lycée Pablo Neruda Saint Martin d’hères Centre ressource Génie Electrique Enseignant formateur - Philippe RIGAUD FORMATION PcVue_habilis.doc Page 1 sur 17
-
Upload
nguyenkiet -
Category
Documents
-
view
237 -
download
1
Transcript of FORMATION PcVue habilis - ac-grenoble.fr · local/supervision Cordon entre Pc et TSX ... existe...
Table des matières
FORMATION PcVue
Module supervision du système HABILIS
Programme PL7 PRO
Journées de formation au logiciel de supervision PcVue 8.1
Lieu : Lycée Pablo Neruda Saint Martin d’hères
Centre ressource Génie Electrique
Enseignant formateur - Philippe RIGAUD
FORMATION PcVue_habilis.doc Page 1 sur 17
Table des matières
Table des matières :
1. Objectifs................................................................................................................................................. 3 2. Présentation de l’installation .............................................................................................................. 3
2.1. Structure....................................................................................................................................... 3 2.1.1. ..................................................................................................................................................... 3
3. Structure des programmes sous PL7 pro ........................................................................................ 4 3.1. Méthode d’écriture d’un programme en vue de sa supervision.......................................... 4 3.2. Ecriture d’une table d’échange entre la supervision et l’automate .................................. 4 3.3. Table d’échange entre PcVue et PL7 ....................................................................................... 5 3.4. Les GRAFCET................................................................................................................................ 7
3.4.1. Production ............................................................................................................................. 7 3.4.2. Le GRAFCET d’initialisation .............................................................................................. 8
3.5. Informations programmées dans le POST ............................................................................. 9 3.5.1. Rung de Descente du couvercle ....................................................................................... 9 3.5.2. Rung de Montée du couvercle........................................................................................... 9 3.5.3. Rung de LI3 ........................................................................................................................ 10 3.5.4. Rung de LI4 ........................................................................................................................ 10 3.5.5. Gestion position couvercle ...............................................................................................11 3.5.6. Température plaque chauffante.................................................................................... 12 3.5.7. Affichage du temps d’activité d’une étape pour animer les transitions............... 12 3.5.8. Recopie de l’état des étapes pour animer les GRAFCET de la supervision .......... 13 3.5.9. Recopie des entrées et sorties API.............................................................................. 14
4. La supervision ....................................................................................................................................... 15 4.1. La communication ....................................................................................................................... 15
4.1.1. ........................................................................................................................................................ 15 4.2. Synoptique pupitre de dialogue homme machine et Partie Opérative simulée ............ 16 4.3. La partie Opérative simulée .................................................................................................... 17
FORMATION PcVue_habilis.doc Page 2 sur 17
Présentation
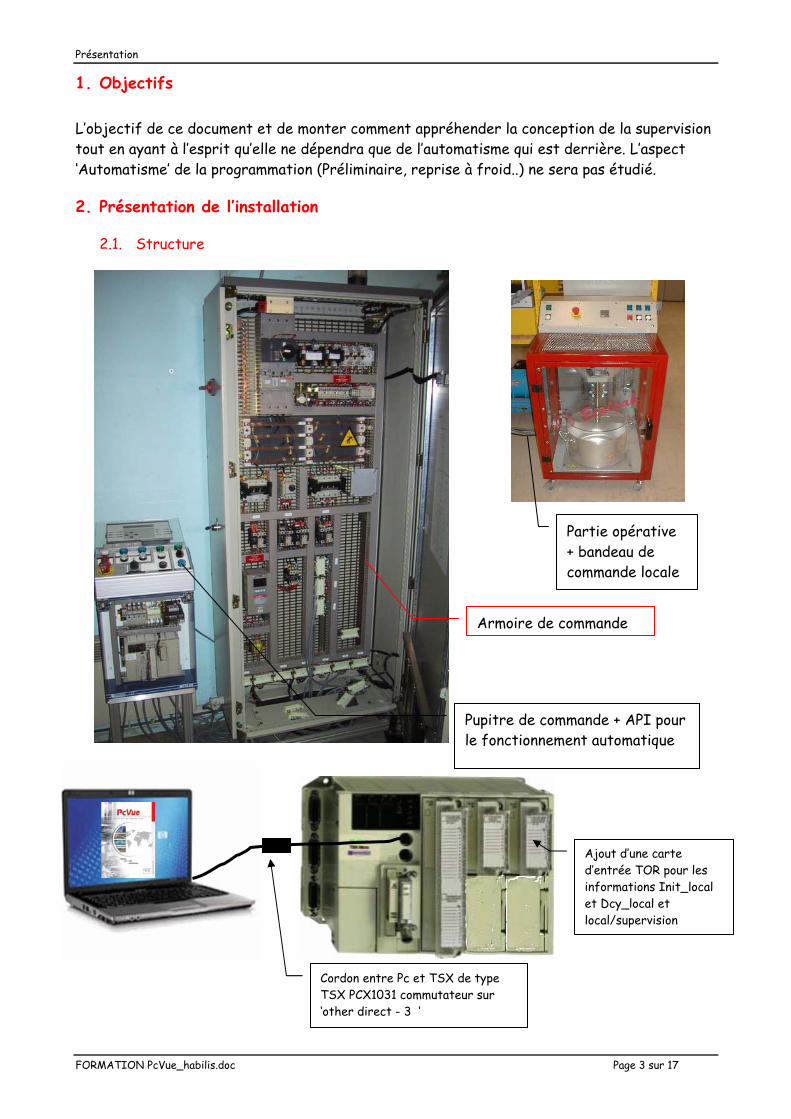
1. Objectifs L’objectif de ce document et de monter comment appréhender la conception de la supervision tout en ayant à l’esprit qu’elle ne dépendra que de l’automatisme qui est derrière. L’aspect ‘Automatisme’ de la programmation (Préliminaire, reprise à froid..) ne sera pas étudié.
2. Présentation de l’installation
2.1. Structure
Partie opérative + bandeau de commande locale
Armoire de commande
Pupitre de commande + API pour le fonctionnement automatique
Ajout d’une carte d’entrée TOR pour les informations Init_local et Dcy_local et local/supervision
Cordon entre Pc et TSX de type TSX PCX1031 commutateur sur ‘other direct - 3 ‘
FORMATION PcVue_habilis.doc Page 3 sur 17
Programme PL7
3. Structure des programmes sous PL7 pro
3.1. Méthode d’écriture d’un programme en vue de sa supervision L’outil de supervision n’est capable de lire dans l’automate que des BITS, des MOTS ou des BITS de MOTS. Il faut donc prévoir, lors de l’écriture des programmes, une recopie des informations à utiliser dans la supervision dans des bits, des mots ou des bits de mots. Seules ces informations seront exploitables dans la supervision.
3.2. Ecriture d’une table d’échange entre la supervision et l’automate Descriptif des différentes colonnes de la table d’échange présenté ci-après. Adresse : adresse de l’API ou est stockée l’information. Format : format de la trame d’échange entre la supervision et l’API R/W : type d’accessibilité des informations :
• R (read), trame accessible en lecture uniquement • W (write), trame accessible et lecture seulement
Variables : dénomination de la variable dans PcVue (le ‘.’ Est un séparateur de niveau dans PcVue – jusqu’à 6 niveaux possibles). Type : type de variable déclarée dans PcVue
• ETAT : variable binaire (bit ou bit de mot) • MESURE : variable analogique (mot) • Alarme : variable binaire (bit ou bit de mot)
Libellé : descriptif de la variable E/S : correspondance (si existante) entre l’adresse mémoire et les cartes physique de l’API. Zone adresse MODBUS : l’adressage MODBUS commence à l’adresse 1 alors que les variables sont rangées à partir de l’adresse 0, il existe donc un décalage de 1. Ce décalage existe uniquement avec une utilisation de la communication par la prise console de l’API.
FORMATION PcVue_habilis.doc Page 4 sur 17
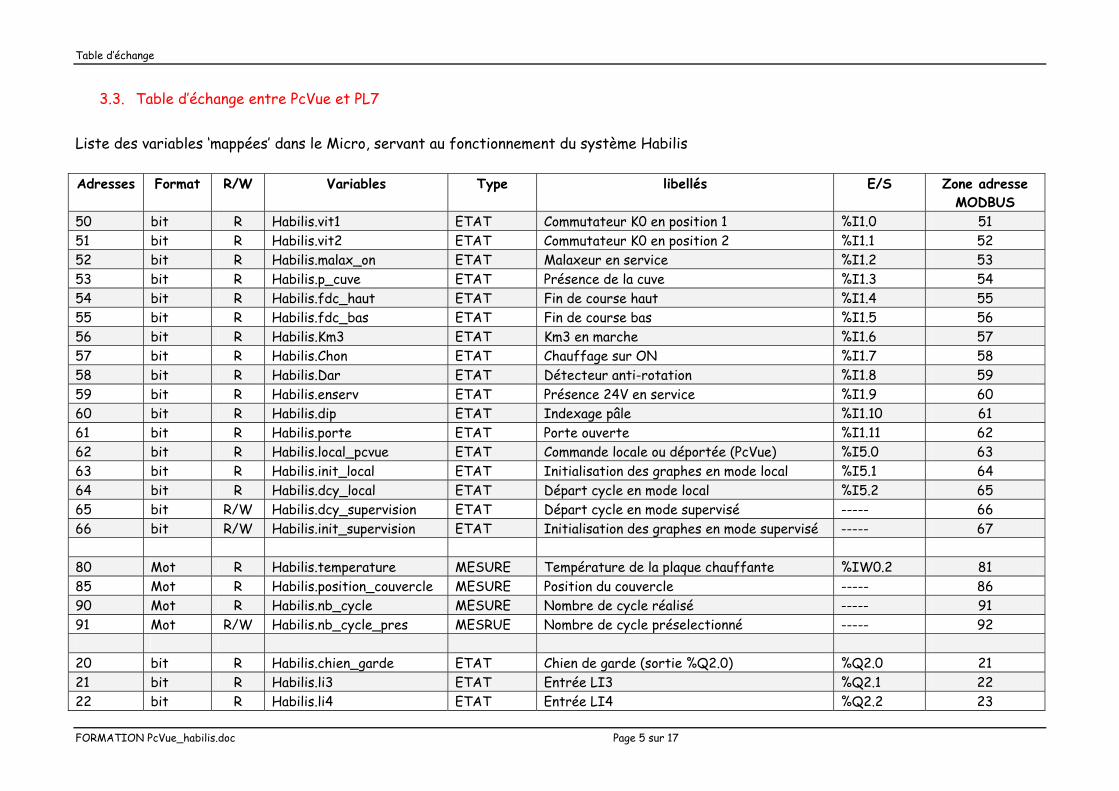
Table d’échange
3.3. Table d’échange entre PcVue et PL7 Liste des variables ‘mappées’ dans le Micro, servant au fonctionnement du système Habilis Adresses Format R/W Variables Type libellés E/S Zone adresse
MODBUS 50 bit R Habilis.vit1 ETAT Commutateur K0 en position 1 %I1.0 51 51 bit R Habilis.vit2 ETAT Commutateur K0 en position 2 %I1.1 52 52 bit R Habilis.malax_on ETAT Malaxeur en service %I1.2 53 53 bit R Habilis.p_cuve ETAT Présence de la cuve %I1.3 54 54 bit R Habilis.fdc_haut ETAT Fin de course haut %I1.4 55 55 bit R Habilis.fdc_bas ETAT Fin de course bas %I1.5 56 56 bit R Habilis.Km3 ETAT Km3 en marche %I1.6 57 57 bit R Habilis.Chon ETAT Chauffage sur ON %I1.7 58 58 bit R Habilis.Dar ETAT Détecteur anti-rotation %I1.8 59 59 bit R Habilis.enserv ETAT Présence 24V en service %I1.9 60 60 bit R Habilis.dip ETAT Indexage pâle %I1.10 61 61 bit R Habilis.porte ETAT Porte ouverte %I1.11 62 62 bit R Habilis.local_pcvue ETAT Commande locale ou déportée (PcVue) %I5.0 63 63 bit R Habilis.init_local ETAT Initialisation des graphes en mode local %I5.1 64 64 bit R Habilis.dcy_local ETAT Départ cycle en mode local %I5.2 65 65 bit R/W Habilis.dcy_supervision ETAT Départ cycle en mode supervisé ----- 66 66 bit R/W Habilis.init_supervision ETAT Initialisation des graphes en mode supervisé ----- 67 80 Mot R Habilis.temperature MESURE Température de la plaque chauffante %IW0.2 81 85 Mot R Habilis.position_couvercle MESURE Position du couvercle ----- 86 90 Mot R Habilis.nb_cycle MESURE Nombre de cycle réalisé ----- 91 91 Mot R/W Habilis.nb_cycle_pres MESRUE Nombre de cycle préselectionné ----- 92 20 bit R Habilis.chien_garde ETAT Chien de garde (sortie %Q2.0) %Q2.0 21 21 bit R Habilis.li3 ETAT Entrée LI3 %Q2.1 22 22 bit R Habilis.li4 ETAT Entrée LI4 %Q2.2 23
FORMATION PcVue_habilis.doc Page 5 sur 17
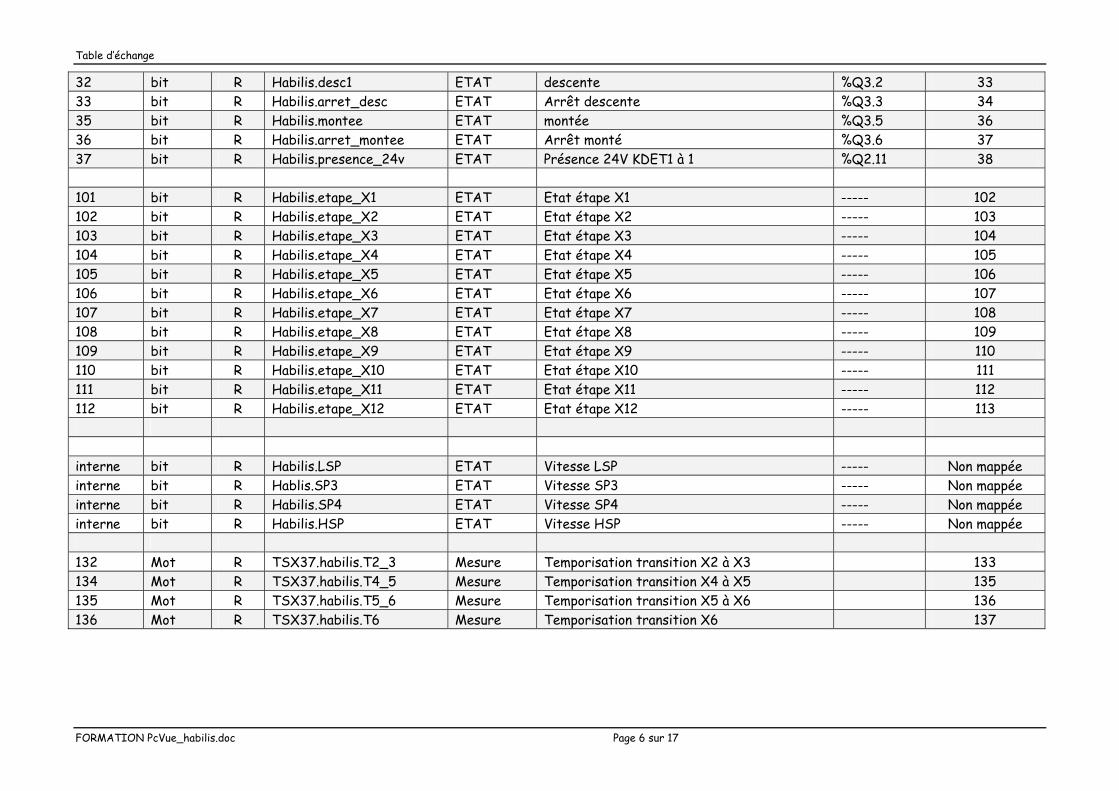
Table d’échange
32 bit R Habilis.desc1 ETAT descente %Q3.2 33 33 bit R Habilis.arret_desc ETAT Arrêt descente %Q3.3 34 35 bit R Habilis.montee ETAT montée %Q3.5 36 36 bit R Habilis.arret_montee ETAT Arrêt monté %Q3.6 37 37 bit R Habilis.presence_24v ETAT Présence 24V KDET1 à 1 %Q2.11 38 101 bit R Habilis.etape_X1 ETAT Etat étape X1 ----- 102 102 bit R Habilis.etape_X2 ETAT Etat étape X2 ----- 103 103 bit R Habilis.etape_X3 ETAT Etat étape X3 ----- 104 104 bit R Habilis.etape_X4 ETAT Etat étape X4 ----- 105 105 bit R Habilis.etape_X5 ETAT Etat étape X5 ----- 106 106 bit R Habilis.etape_X6 ETAT Etat étape X6 ----- 107 107 bit R Habilis.etape_X7 ETAT Etat étape X7 ----- 108 108 bit R Habilis.etape_X8 ETAT Etat étape X8 ----- 109 109 bit R Habilis.etape_X9 ETAT Etat étape X9 ----- 110 110 bit R Habilis.etape_X10 ETAT Etat étape X10 ----- 111 111 bit R Habilis.etape_X11 ETAT Etat étape X11 ----- 112 112 bit R Habilis.etape_X12 ETAT Etat étape X12 ----- 113 interne bit R Habilis.LSP ETAT Vitesse LSP ----- Non mappée interne bit R Hablis.SP3 ETAT Vitesse SP3 ----- Non mappée interne bit R Habilis.SP4 ETAT Vitesse SP4 ----- Non mappée interne bit R Habilis.HSP ETAT Vitesse HSP ----- Non mappée 132 Mot R TSX37.habilis.T2_3 Mesure Temporisation transition X2 à X3 133 134 Mot R TSX37.habilis.T4_5 Mesure Temporisation transition X4 à X5 135 135 Mot R TSX37.habilis.T5_6 Mesure Temporisation transition X5 à X6 136 136 Mot R TSX37.habilis.T6 Mesure Temporisation transition X6 137
FORMATION PcVue_habilis.doc Page 6 sur 17
GRAFCET et POS
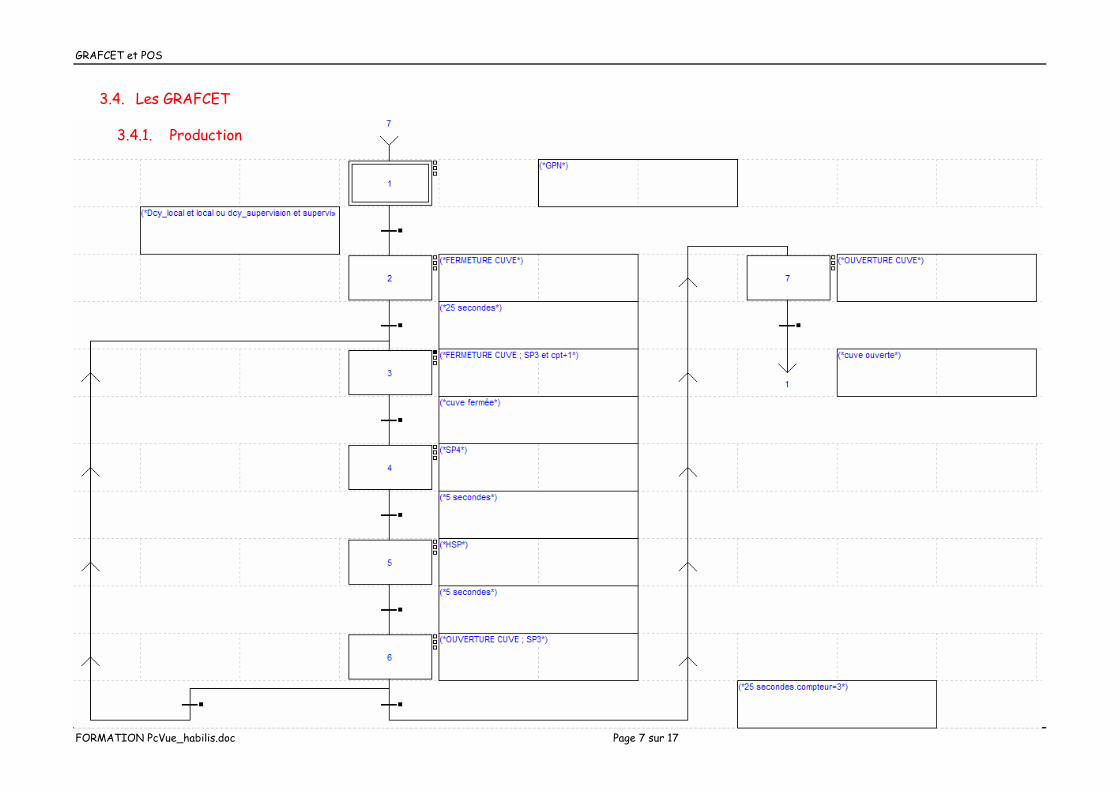
3.4. Les GRAFCET
3.4.1. Production
FORMATION PcVue_habilis.doc Page 7 sur 17
GRAFCET et POS
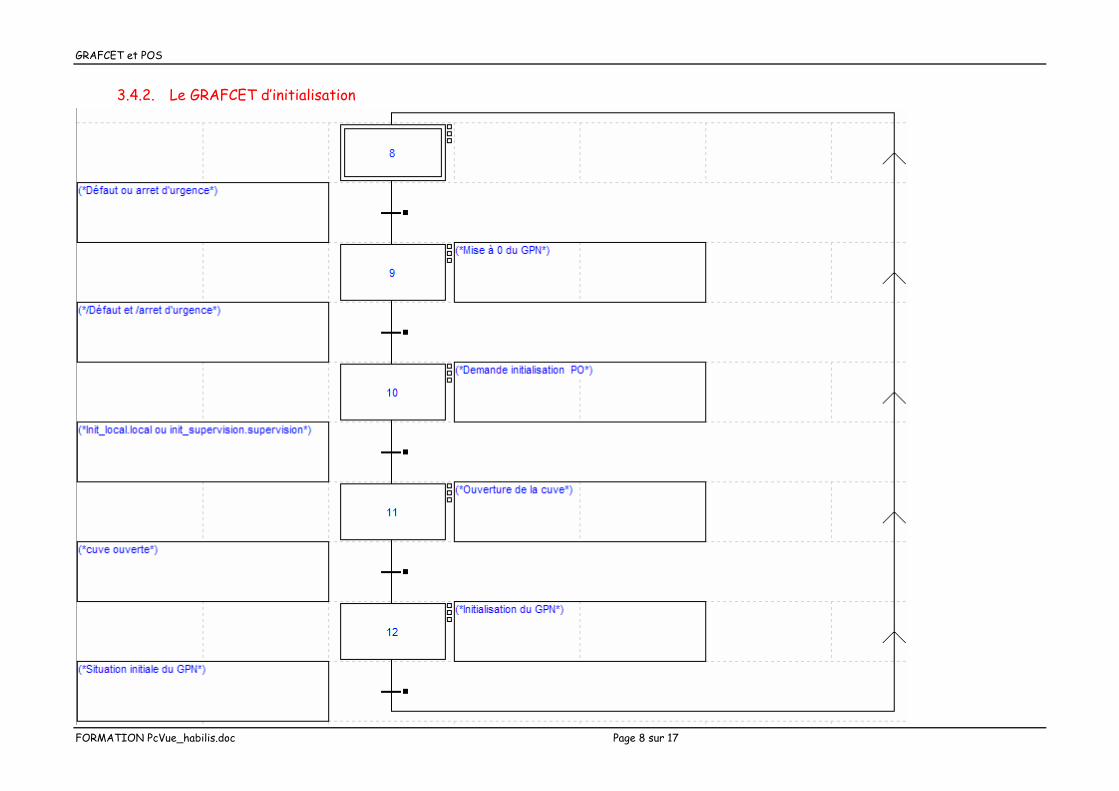
3.4.2. Le GRAFCET d’initialisation
FORMATION PcVue_habilis.doc Page 8 sur 17
GRAFCET et POS
3.5.
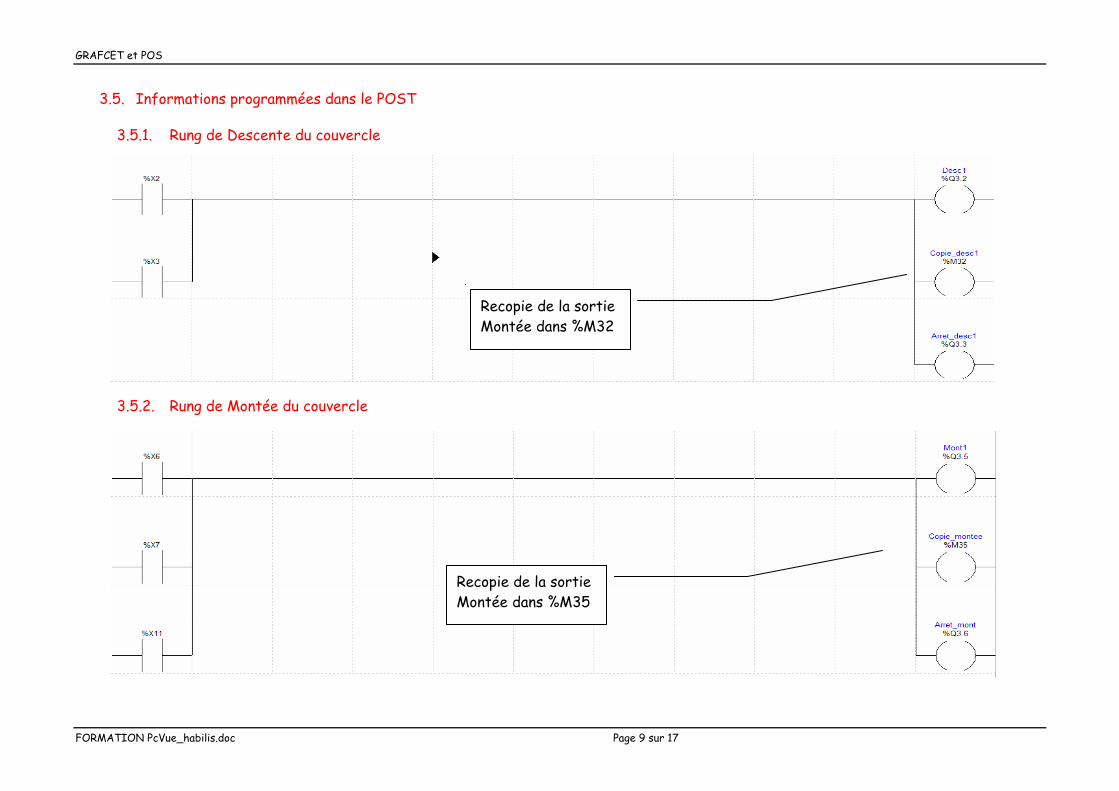
3.5.1. Rung de Descente du couvercle
3.5.2. Rung de Montée du couvercle
Informations programmées dans le POST
Recopie de la sortie Montée dans %M32
Recopie de la sortie Montée dans %M35
FORMATION PcVue_habilis.doc Page 9 sur 17
GRAFCET et POS
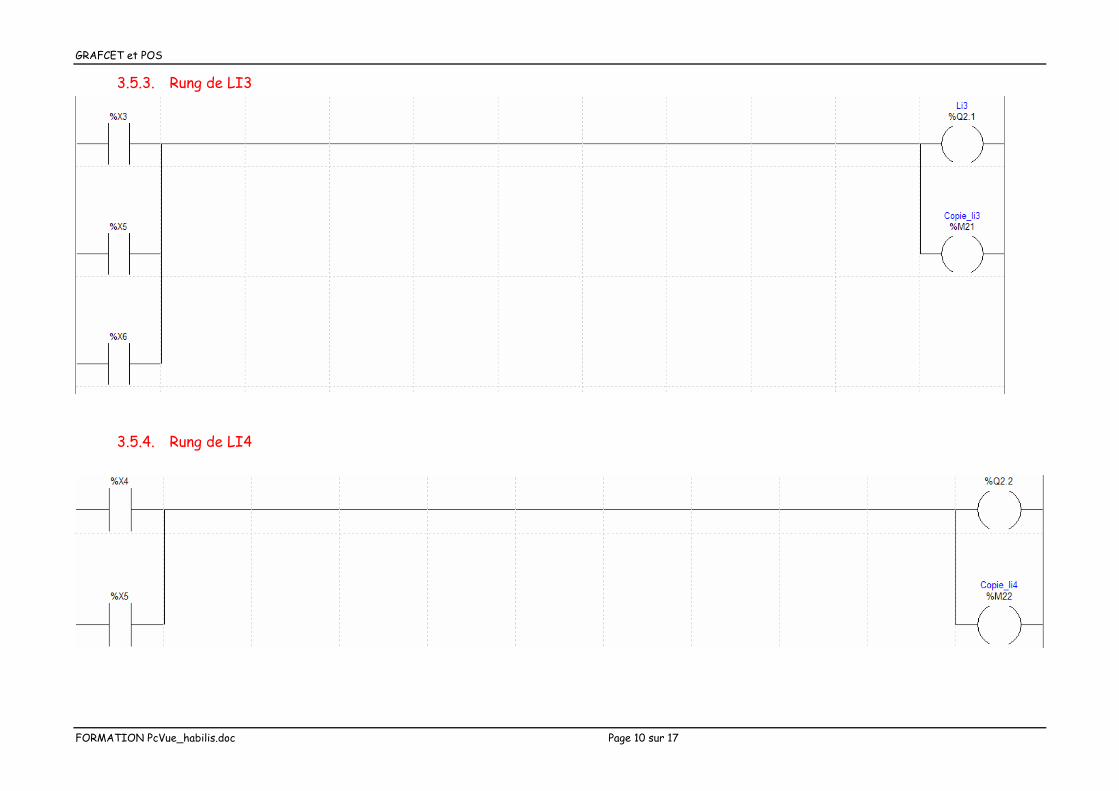
3.5.3. Rung de LI3
3.5.4. Rung de LI4
FORMATION PcVue_habilis.doc Page 10 sur 17
GRAFCET et POS
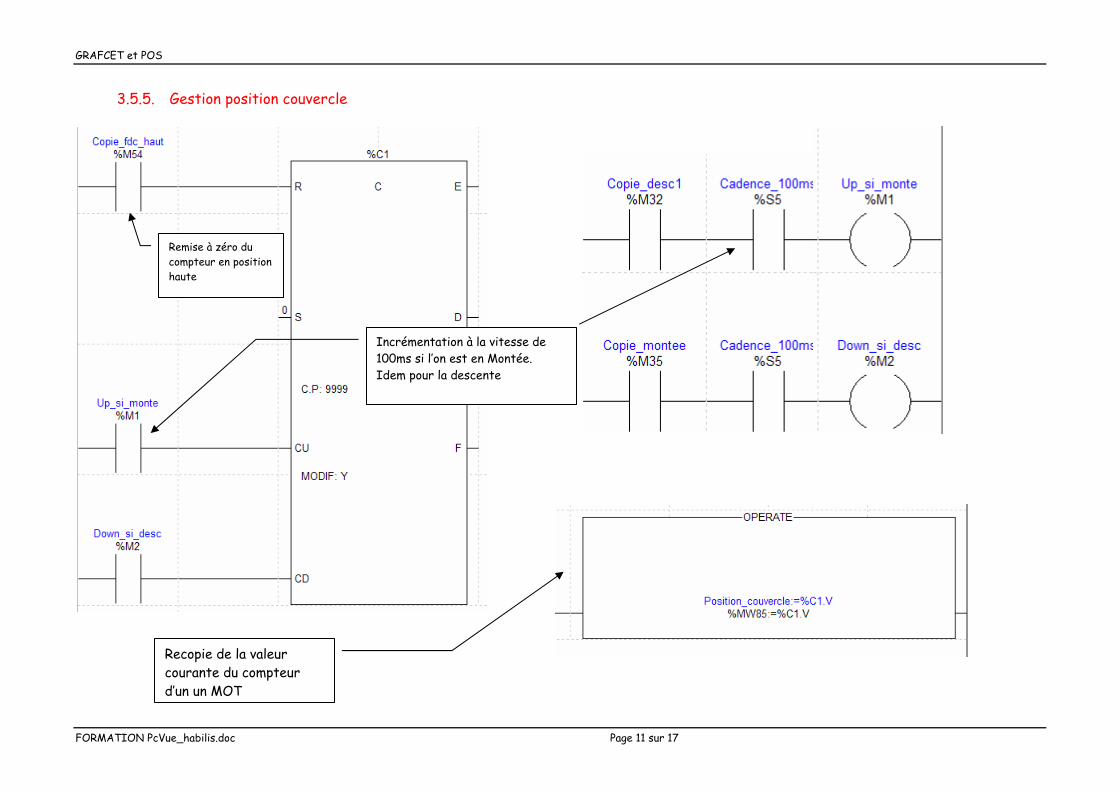
3.5.5. Gestion position couvercle
Remise à zéro du compteur en position haute
Incrémentation à la vitesse de 100ms si l’on est en Montée. Idem pour la descente
Recopie de la valeur courante du compteur d’un un MOT
FORMATION PcVue_habilis.doc Page 11 sur 17
GRAFCET et POS
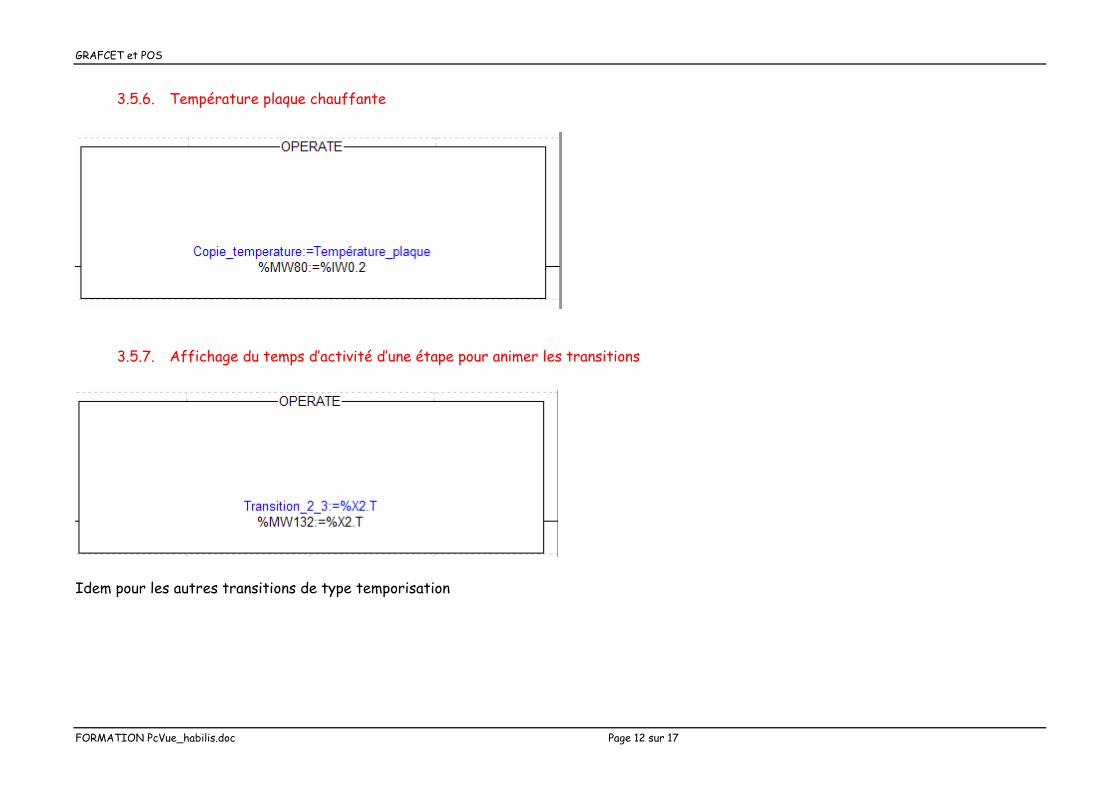
3.5.6. Température plaque chauffante
3.5.7. Affichage du temps d’activité d’une étape pour animer les transitions
Idem pour les autres transitions de type temporisation
FORMATION PcVue_habilis.doc Page 12 sur 17
AFCET et POS
FORMATION PcVue_habilis.doc Page 13 sur 17
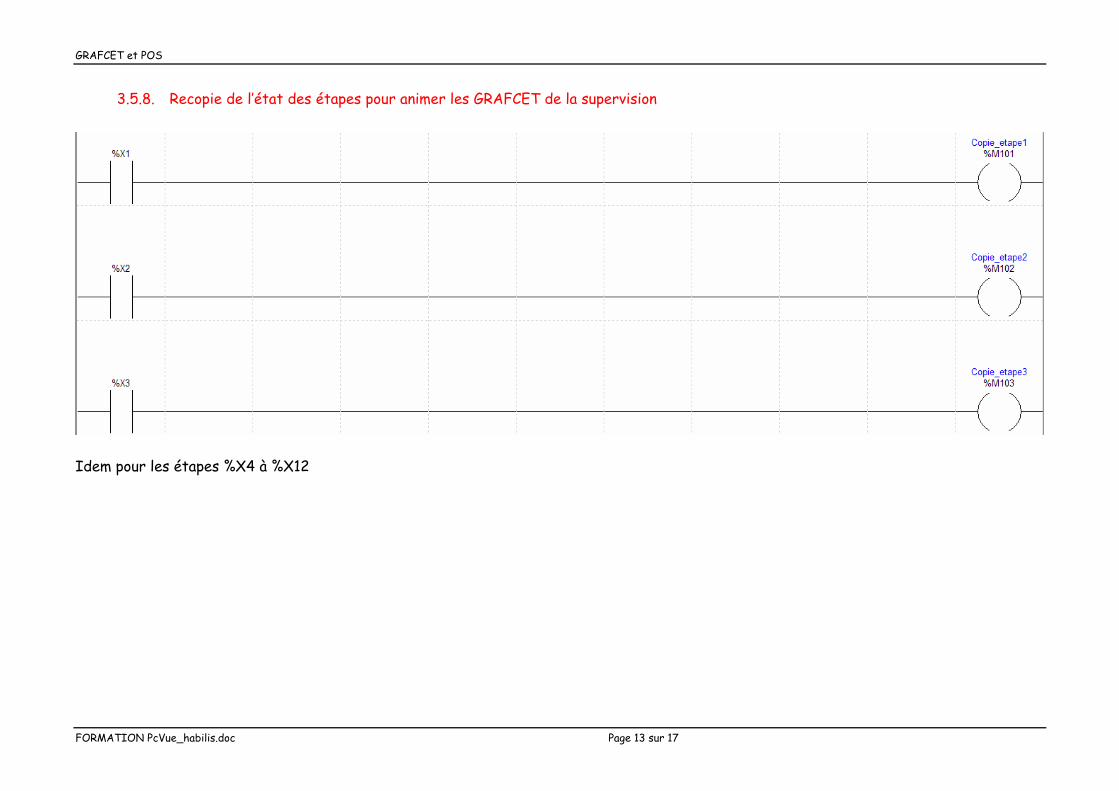
3.5.8. Recopie de l’état des étapes pour animer les GRAFCET de la supervision
Idem pour les étapes %X4 à %X12
GR
GRAFCET et POS
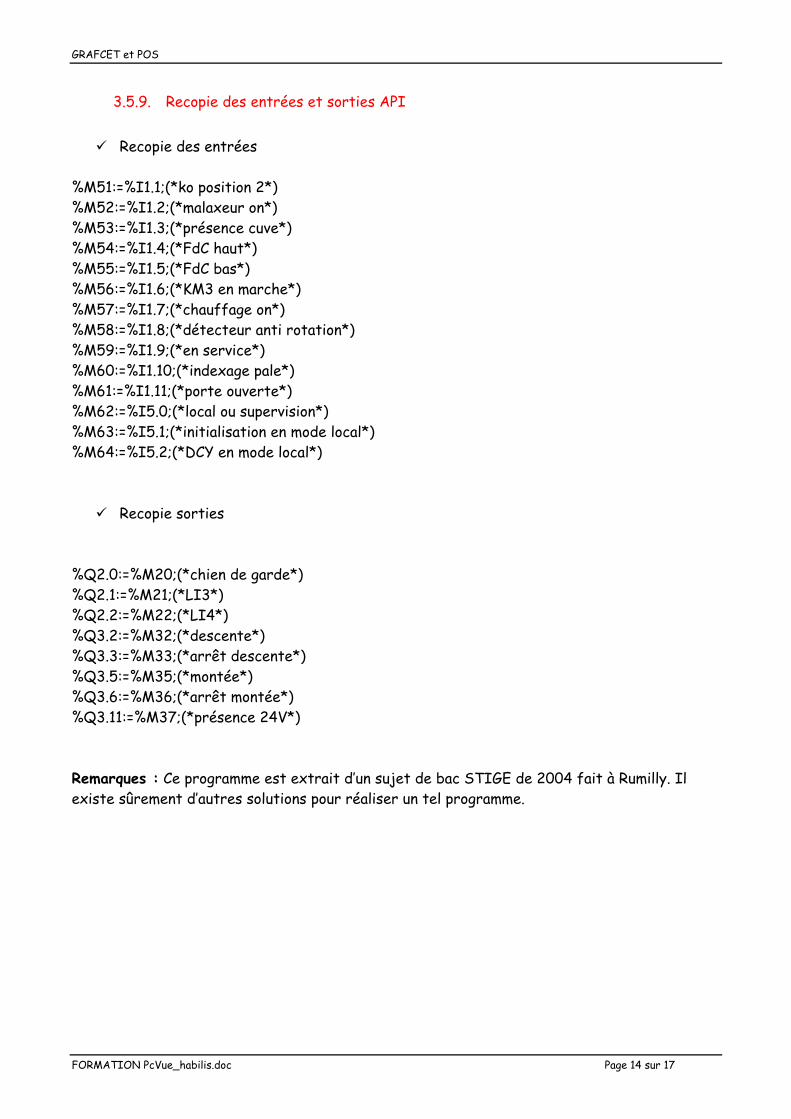
3.5.9. Recopie des entrées et sorties API
Recopie des entrées %M51:=%I1.1;(*ko position 2*) %M52:=%I1.2;(*malaxeur on*) %M53:=%I1.3;(*présence cuve*) %M54:=%I1.4;(*FdC haut*) %M55:=%I1.5;(*FdC bas*) %M56:=%I1.6;(*KM3 en marche*) %M57:=%I1.7;(*chauffage on*) %M58:=%I1.8;(*détecteur anti rotation*) %M59:=%I1.9;(*en service*) %M60:=%I1.10;(*indexage pale*) %M61:=%I1.11;(*porte ouverte*) %M62:=%I5.0;(*local ou supervision*) %M63:=%I5.1;(*initialisation en mode local*) %M64:=%I5.2;(*DCY en mode local*)
Recopie sorties %Q2.0:=%M20;(*chien de garde*) %Q2.1:=%M21;(*LI3*) %Q2.2:=%M22;(*LI4*) %Q3.2:=%M32;(*descente*) %Q3.3:=%M33;(*arrêt descente*) %Q3.5:=%M35;(*montée*) %Q3.6:=%M36;(*arrêt montée*) %Q3.11:=%M37;(*présence 24V*) Remarques : Ce programme est extrait d’un sujet de bac STIGE de 2004 fait à Rumilly. Il ex sûrement d’autres solutions pour réaliser un tel programme.
iste
FORMATION PcVue_habilis.doc Page 14 sur 17
Supervision
4. La
supervision
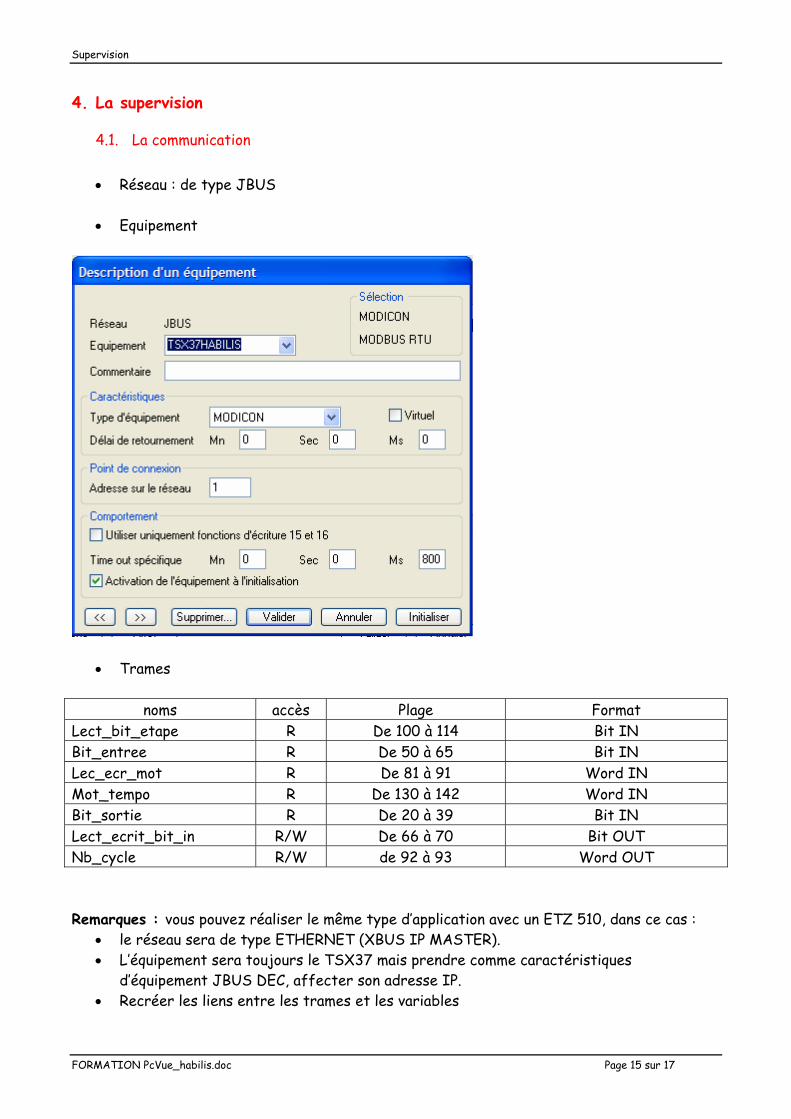
4.1. La communication
• Réseau : de type JBUS
• Equipement
• Trames
noms accès Plage Format Lect_bit_etape R De 100 à 114 Bit IN Bit_entree R De 50 à 65 Bit IN Lec_ecr_mot R De 81 à 91 Word IN Mot_tempo R De 130 à 142 Word IN Bit_sortie R De 20 à 39 Bit IN Lect_ecrit_bit_in R/W De 66 à 70 Bit OUT Nb_cycle R/W de 92 à 93 Word OUT Remarques : vous pouvez réaliser le même type d’application avec un ETZ 510, dans ce cas :
• le réseau sera de type ETHERNET (XBUS IP MASTER). • L’équipement sera toujours le TSX37 mais prendre comme caractéristiques
d’équipement JBUS DEC, affecter son adresse IP. • Recréer les liens entre les trames et les variables
FORMATION PcVue_habilis.doc Page 15 sur 17
Supervision
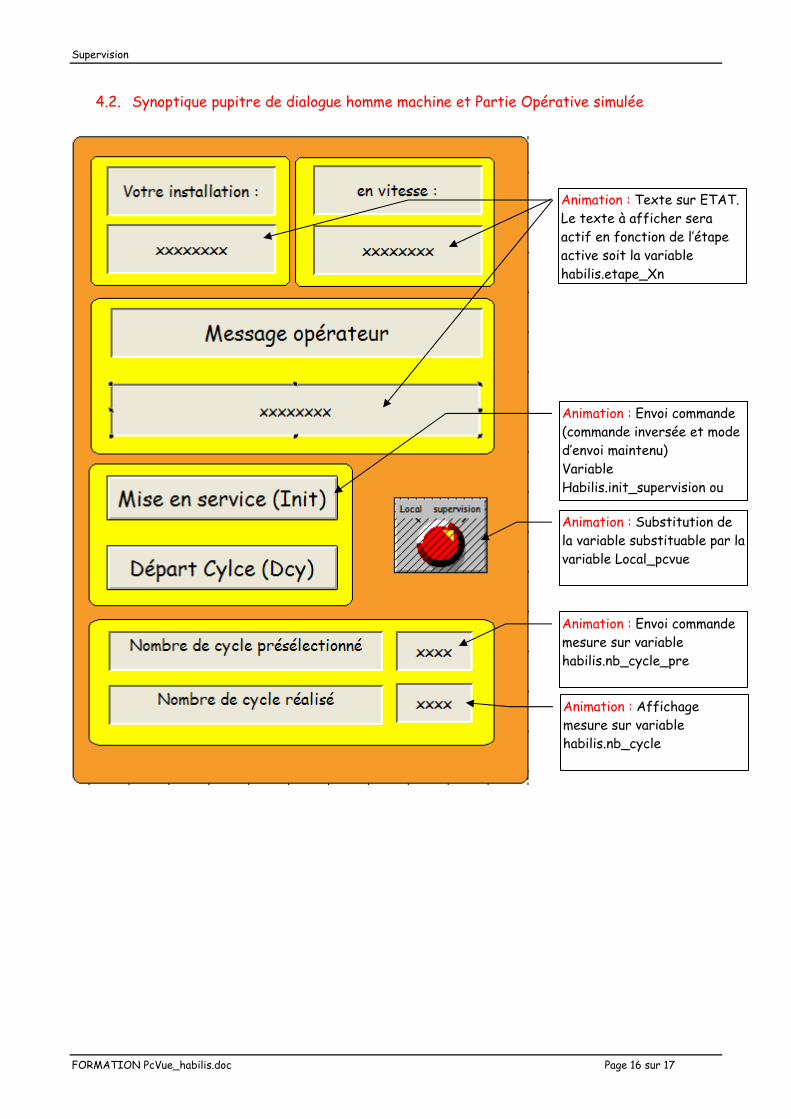
4.2. Synoptique pupitre de dialogue homme machine et Partie Opérative simulée
Animation : Texte sur ETAT. Le texte à afficher sera actif en fonction de l’étape active soit la variable habilis.etape_Xn
Animation : Envoi commande (commande inversée et mode d’envoi maintenu) Variable Habilis.init_supervision ou
Animation : Substitution de la variable substituable par la variable Local_pcvue
Animation : Envoi commande mesure sur variable habilis.nb_cycle_pre
Anim fichage mesu riable habil le
ation : Afre sur vais.nb_cyc
FORMATION PcVue_habilis.doc Page 16 sur 17
Supervision
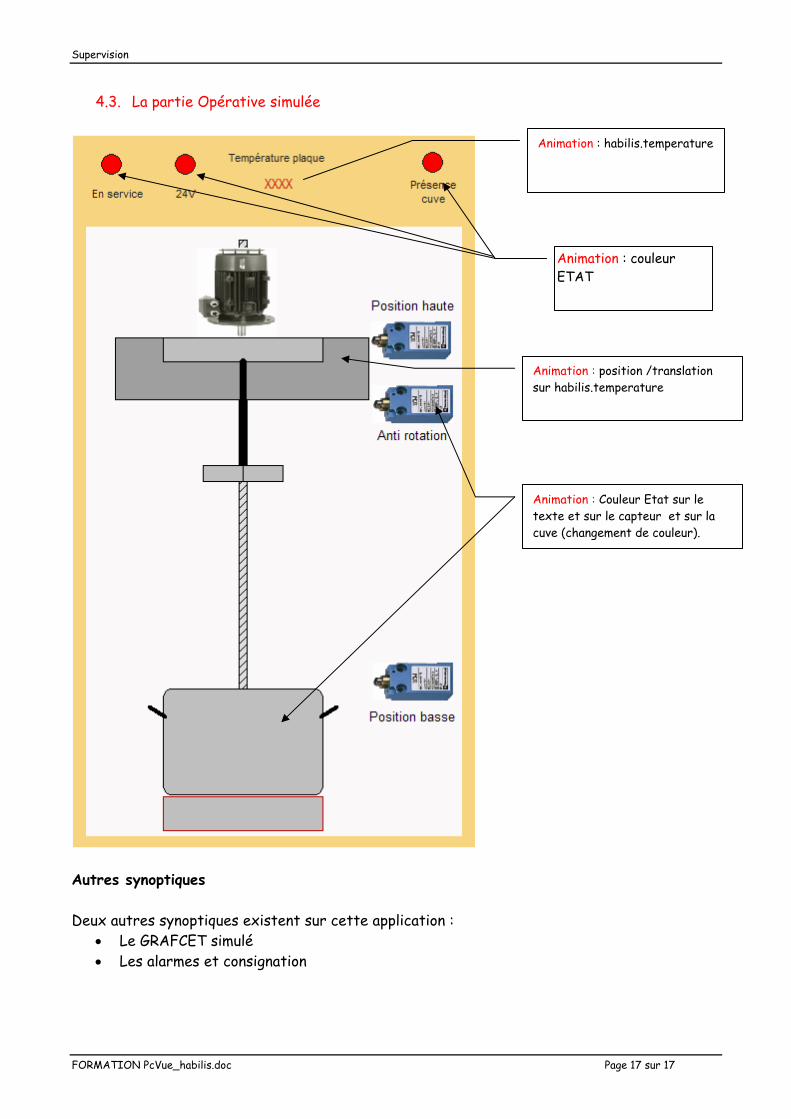
4.3. La partie Opérative simulée
Animation : couleur ETAT
Animation : habilis.temperature
Animation : position /translation sur habilis.temperature
Animation : Couleur Etat sur le textcuve
e et sur le capteur et sur la (changement de couleur).
Autres synoptiques Deux autres synoptiques existent sur cette application :
• Le GRAFCET simulé • Les alarmes et consignation
FORMATION PcVue_habilis.doc Page 17 sur 17