
Filtrage analogique - alteralpha.free.fralteralpha.free.fr/DOC/L3/S2/FILTRAGE/COURS.pdf · Filtrage...
39
MONTIGNY Eric Filtrage analogique Cours complet Juin 2006.
Transcript of Filtrage analogique - alteralpha.free.fralteralpha.free.fr/DOC/L3/S2/FILTRAGE/COURS.pdf · Filtrage...
MONTIGNY Eric
Filtrage analogique Cours complet
Juin 2006.

Filtrage analogique
Plan du cours
Chapitre 1 : Introduction et généralités sur le filtrage Chapitre 2 : Filtres élémentaires, et normalisation Chapitre 3 : Recherche des pôles dans une fonction de transfert Chapitre 4 : Filtres de Butterworth, de Chebycheff, de Legendre, de Bessel, et de Cauer. Chapitre 5 : Synthèse de filtres actifs Chapitre 6 : Synthèse de filtre par variable d’état Chapitre 7 : Sensibilité
« Je vois le monde à travers le filtre de mes émotions, quelle que soit leur force. Le filtre est toujours là, le monde aussi ». Esther ROCHON. Romancière québécoise.
MONTIGNY Eric Juin 2006.

MONTIGNY Eric
Page 1 sur 6
Filtrage analogique. [CHAPITRE 1]
1. Introduction et généralités sur le filtrageFiltrer un signal, c’est lui faire traverser un ensemble de dispositif électroniques, pour : - modifier son spectre de fréquence - modifier sa phase - extraire une partie de l’information liée au signal - éliminer des fréquences parasites On trouve des filtres dans les systèmes de communication (téléphonie, télévision, radio, transmission de données). Le domaine de fréquence s’étend jusqu’à la dizaine de gigahertz. Selon le domaine de fréquence considéré, les filtres seront différents : - En HF on utilise des filtres passifs LC. Cependant leur principal défaut reste leur difficile intégration, car les inductances sont volumineuses, lourdes et coûteuses… - En BF on utilise des filtres actifs, qui permettent l’obtention de composants intégrés (filtres à capacités commutées).
2. Rappels sur les signauxOn peut distinguer divers signaux : - Les signaux continus - Les signaux transitoires (signal qui commence à un instant, et se termine à un autre). - Les signaux périodiques
En électronique, et plus précisément en traitement du signal, trois signaux ont un usage privilégié :
La fonction porte La porte à une largeur T, et une hauteur ‘1/T’, de telle manière à ce que l’aire ce celle-ci soit égale à l’unité.
L’impulsion triangulaire
L’aire est égale à l’unité.
L’impulsion de Dirac
Il s’agit d’une distribution, et non d’une fonction. Sa largeur est nulle, et son aire vaut l’unité.
3. Système linéaire et invariantUn système est linéaire si )(.)(.)(.)(. 2121 tSBtSAtEBtEA .Un système est invariant dans le temps si )()( 11 tStE .
(t)
- T + T
1/T
- T/2 + T/2
1/T

MONTIGNY Eric
Page 2 sur 6
4. Stabilité des systèmes linéairesTout système linéaire peut se modéliser par une équation différentielle de la forme :
)(....)(.)(.)(....)(.)(. 01
1
101
1
1 teadt
tedadt
tedatsbdt
tsdbdt
tsdb m
m
mm
m
nn
n
nn
n
n
Ainsi, si on prend un circuit RLC série, on aura :
)()()(.²
)(².)(.)(
)()(.)(.)(tets
dttdsRC
dttsdLC
dttdsCti
tsdt
tdiLtiRte
L’ordre du système est défini par le plus haut degré du membre de gauche (celui représentatif de la sortie). On peut montrer que pour un système physique, on a n m.
)(....)(.)(.)(....)(.)(. 01
1
101
1
1 teadt
tedadt
tedatsbdt
tsdbdt
tsdb m
m
mm
m
nn
n
nn
n
n
Résolution de l’équation différentielle :Il s’agit de la somme de deux solutions : - Une solution générale, qui est solution de l’équation sans second membre (quand l’entrée est égale à zéro). Comme on n’impose rien en entrée, c’est le régime libre. - Une solution particulière qui est solution de l’équation avec second membre.
Stabilité d’un système :Un système est dit stable, si 0)(ts quand 0)0(te . Ainsi dans l’équation différentielle, cela donne :
0)(....)(.)(. 01
1
1 tsbdt
tsdbdt
tsdb n
n
nn
n
n
Les solutions de cette équation seront de la forme :
tpnn
tp
tp
tp
epts
epts
epts
ets
.)(
.
.
.
.)(
...².)(''
.)('
)(
En remplaçant dans l’équation, on aura 0........ 011ptpt
nnpt
nn ebepbepb .On peut aisément factoriser :
0......
0........
011
011
bpbpbe
ebepbepb
nnnnpt
ptptnn
ptnn
On sait qu’un produit de facteurs est nul si l’un des facteurs au moins est nul, or comme une exponentielle ne peut pas s’annuler, ce ne va pas être lui qui pourra annuler cette expression, cela nous simplifie l’équation 0..... 011 bpbpb nnnn .
Ve(t) Vs(t)
R
L
C

MONTIGNY Eric
Page 3 sur 6
L’équation 011 ..... bpbpb nnnn est appelée ‘équation caractéristique’. Les solutions de cette équation sont appelées les racines. Ces racines peuvent être : - Simple, de la forme iip- Complexe, de la forme iii jp- Double réelle, de la forme iii pp
Les solutions seront alors de la forme :- Racine simple tiets )(
- Racines complexes ).sin(..).cos(..)( twedtwects it
it ii
- Racines doubles réelles tiedtcts )..()(
Le système sera stable, si i est négatif. Ainsi ie ne va pas tendre vers l’infinie. Ainsi le système à une réponse stable, si 0)( ip
5. Transformée de LaplacePar définition, la transformée de Laplace est donnée par la formule :
0
. .).())()( dtetsPSts tpTL
A l’usage cette formule s’avère compliquée à utiliser, c’est pourquoi on préfère utiliser des tables de Laplace, qui nous permettent de nous affranchir des calculs… La transformée de Laplace est un outil pour résoudre les équations différentielles. Elle possède les propriétés suivantes : - Linéarité : )(.)(.)(.)(. 2121 pSbpSatsbtsa TL
- Dérivabilité : )0(.)()(' tSbppSts TL
- Intégrabilité : ppsts TL
T)()(
0
Exemple avec un système du premier ordre :
Système stable Système instable
Imaginaire
Réel
Ve(t) Vs(t)
RC

MONTIGNY Eric
Page 4 sur 6
Dans le domaine temporel, on a :
dtdsCi
iRse
.
.
Passons maintenant dans le domaine de Laplace :
pRCpEpS
pSpCRpSpEpSpCpI
pIRpSpE
dtdsCi
iRseTL
.11
)()(
)(...)()()(..)(
)(.)()(
.
.
Exemple avec un système du 2ème ordre :Considérons l’équation différentielle suivante, et cherchons à la résoudre :
)(.)(.)(.)(.)(.)(. 01
1
12
2
20
1
12
2
2 teadt
tedadt
tedatsbdt
tsdbdt
tsdb
Passons dans l’espace de Laplace :
012
012
012012
012012
.².
.².)()()(
)(..².)(..².)(.)(..)(²..)(.)(..)(²..
bpbpbapapa
pepspH
peapapapsbpbpbpeapepapepapsbpspbpspb
6. Transformée de FourierCas d’un signal périodique : Série de FourierN’importe quel signal périodique peut s’écrire sous la forme d’une somme de sinusoïdes :
2/
2/
...
...
.).(.1)(
.)(
T
T
twnjN
twnjN
dtetsT
tC
eCfs
On obtient alors un spectre de raies (à chaque harmonique correspond une raie).
f0 2.f0- 2.f0 f0f
|S(f)|
MONTIGNY Eric
Page 5 sur 6
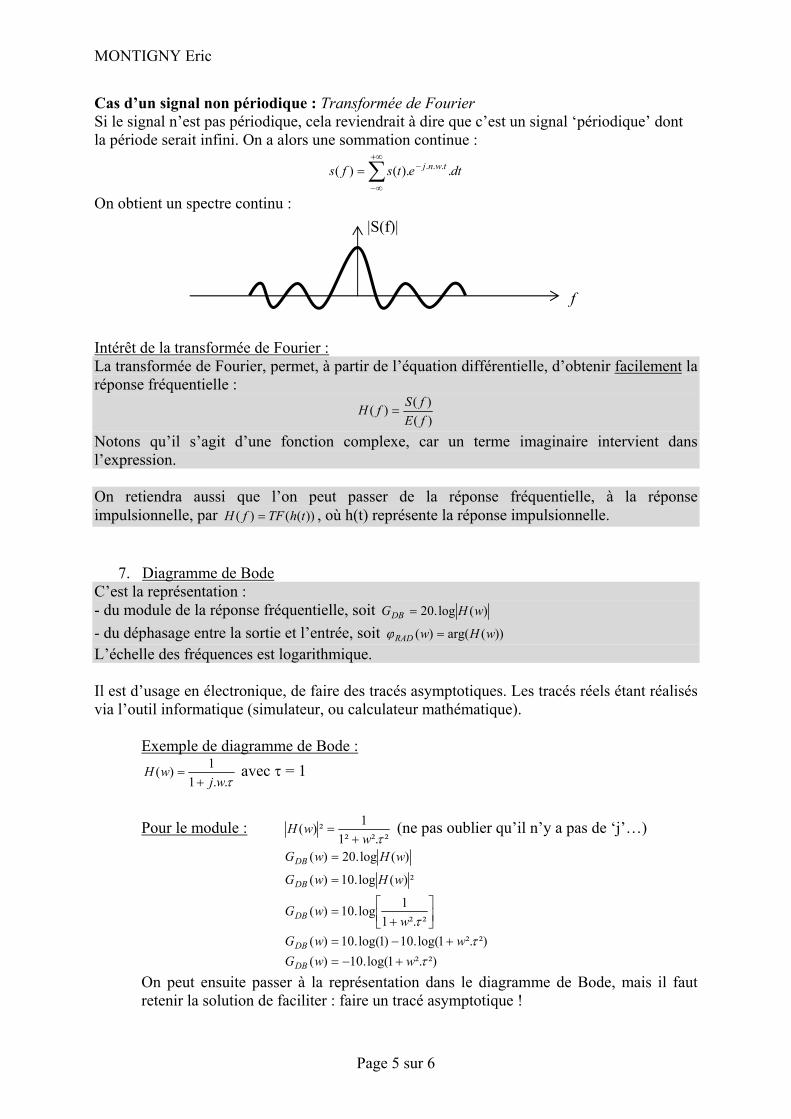
Cas d’un signal non périodique : Transformée de FourierSi le signal n’est pas périodique, cela reviendrait à dire que c’est un signal ‘périodique’ dont la période serait infini. On a alors une sommation continue :
dtetsfs twnj .).()( ...
On obtient un spectre continu :
Intérêt de la transformée de Fourier :La transformée de Fourier, permet, à partir de l’équation différentielle, d’obtenir facilement la réponse fréquentielle :
)()()(
fEfSfH
Notons qu’il s’agit d’une fonction complexe, car un terme imaginaire intervient dans l’expression.
On retiendra aussi que l’on peut passer de la réponse fréquentielle, à la réponse impulsionnelle, par ))(()( thTFfH , où h(t) représente la réponse impulsionnelle.
7. Diagramme de BodeC’est la représentation : - du module de la réponse fréquentielle, soit )(log.20 wHGDB
- du déphasage entre la sortie et l’entrée, soit ))(arg()( wHwRAD
L’échelle des fréquences est logarithmique.
Il est d’usage en électronique, de faire des tracés asymptotiques. Les tracés réels étant réalisés via l’outil informatique (simulateur, ou calculateur mathématique).
Exemple de diagramme de Bode :
..11)(
wjwH avec = 1
Pour le module :²².²1
1²)(w
wH (ne pas oublier qu’il n’y a pas de ‘j’…)
²)².1log(.10)(²)².1log(.10)1log(.10)(
²².11log.10)(
²)(log.10)(
)(log.20)(
wwGwwG
wwG
wHwG
wHwG
DB
DB
DB
DB
DB
On peut ensuite passer à la représentation dans le diagramme de Bode, mais il faut retenir la solution de faciliter : faire un tracé asymptotique !
f
|S(f)|
MONTIGNY Eric
Page 6 sur 6
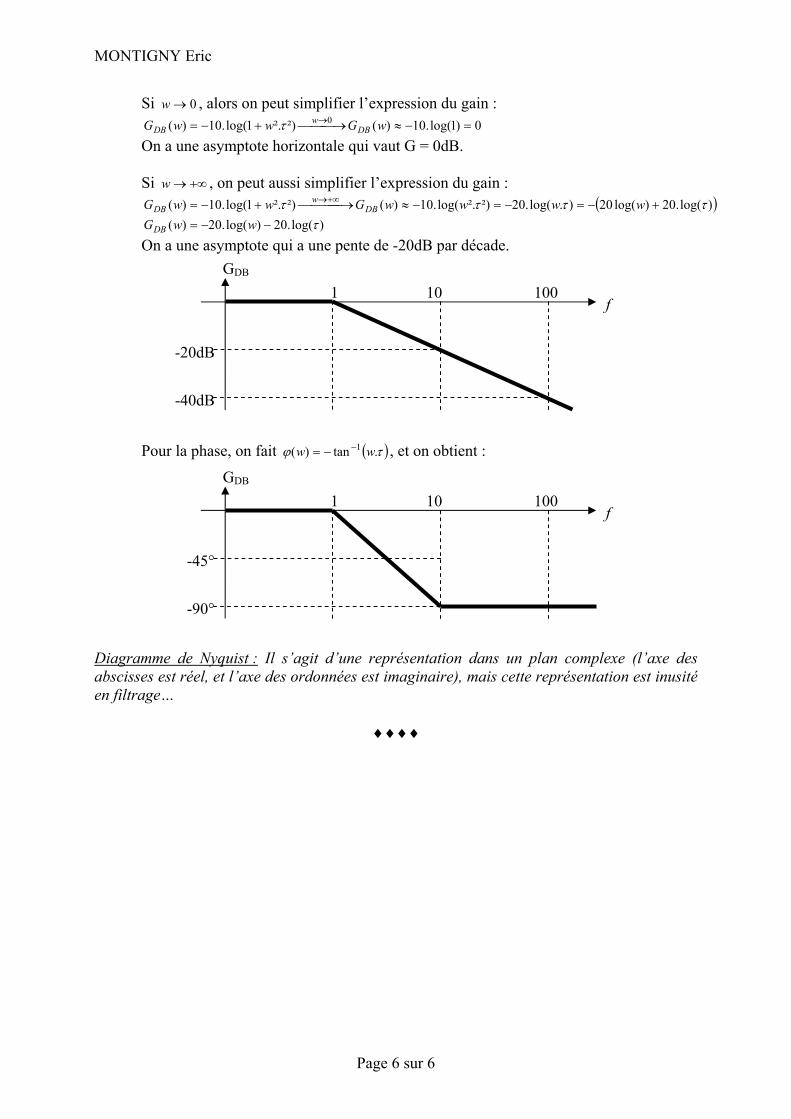
Si 0w , alors on peut simplifier l’expression du gain : 0)1log(.10)(²)².1log(.10)( 0 wGwwG DB
wDB
On a une asymptote horizontale qui vaut G = 0dB.
Si w , on peut aussi simplifier l’expression du gain :
)log(.20)log(.20)()log(.20)log(20).log(.20²)².log(.10)(²)².1log(.10)(
wwGwwwwGwwG
DB
DBw
DB
On a une asymptote qui a une pente de -20dB par décade.
Pour la phase, on fait .tan)( 1 ww , et on obtient :
Diagramme de Nyquist : Il s’agit d’une représentation dans un plan complexe (l’axe des abscisses est réel, et l’axe des ordonnées est imaginaire), mais cette représentation est inusité en filtrage…
1 10 100 f
GDB
-45°
-90°
1 10 100 f
GDB
-20dB
-40dB

MONTIGNY Eric
Page 1 sur 8
Filtrage analogique. [CHAPITRE 2]
1. Notion de filtre idéalConsidérons le gabarit d’un filtre idéal :
On sait, d’après ce que l’on a vu au précédent chapitre que ))(()( thTFwH , donc si on veut la réponse impulsionnelle, on prendra la transformée inverse de Fourier, soit ))(()( 1 wHTFth . Or si on fait la transformée de Fourier inverse à ce filtre idéal, on va obtenir un sinus cardinale :
Or, comme on peut le constater, la réponse n’est pas causale (l’axe des abscisses représente le temps). En effet, il s’agit là d’une réponse impulsionnelle (on applique une impulsion en t=0, et on observe les conséquences sur le signal). Sur cette figure, on observe que l’effet est obtenu avant la cause, car la fonction n’est pas nulle avant l’impulsion (qui serait en t=0), donc : - Le système n’est pas causal - Le filtre n’est physiquement pas réalisable - Le filtre idéal n’existe pas…
2. Notion de gabarit de filtreOn définit donc un gabarit à l’intérieur duquel doit se situer la fonction de transfert du filtre. Dans ce cours on adoptera une convention qui veut que l’on hachure la zone interdite.
a) Gabarit du filtre passe bas
Laisse passer
Ne laisse pas passer f
|H(w)|
f
GDB
GMIN
GMAX
Atténuation maximum dans la bande coupée
fp fa
MONTIGNY Eric
Page 2 sur 8
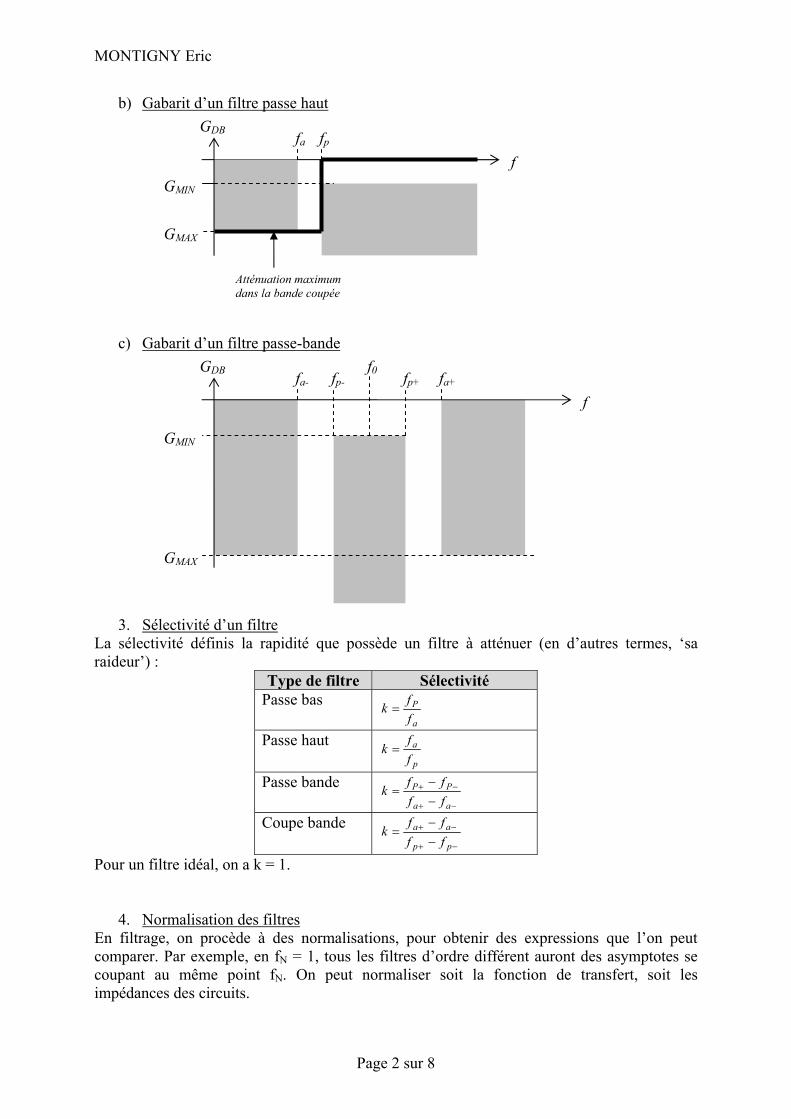
b) Gabarit d’un filtre passe haut
c) Gabarit d’un filtre passe-bande
3. Sélectivité d’un filtreLa sélectivité définis la rapidité que possède un filtre à atténuer (en d’autres termes, ‘sa raideur’) :
Type de filtre SélectivitéPasse bas
a
P
ff
k
Passe haut p
a
ff
k
Passe bande aa
PP
ffffk
Coupe bande pp
aa
ffff
k
Pour un filtre idéal, on a k = 1.
4. Normalisation des filtresEn filtrage, on procède à des normalisations, pour obtenir des expressions que l’on peut comparer. Par exemple, en fN = 1, tous les filtres d’ordre différent auront des asymptotes se coupant au même point fN. On peut normaliser soit la fonction de transfert, soit les impédances des circuits.
f
GDB
GMIN
GMAX
fa- fa+f0 fp+fp-
f
GDB
GMIN
GMAX
Atténuation maximum dans la bande coupée
fpfa

MONTIGNY Eric
Page 3 sur 8
a) Normalisation de la fréquenceLa première étape consiste à choisir une fréquence de référence, ce sera par rapport à cette fréquence que l’on normalisera. Il ne faut pas confondre : - La fréquence de normalisation (fréquence par rapport à laquelle on normalise) - La fréquence normalisée (qui est le résultat du rapport de la fréquence sur la fréquence de normalisation).
Fréquence normalisée IONNORMALISAT
NORMALISEE fff
Pulsation normalisée NORMALISEE
IONNORMALISATNORMALISEE f
www ..2
P normalisé (Laplace) IONNORMALISAT
NORMALISEE wPP
Exemple avec un filtre passe bas : Soit
COUPUREwp
pH1
1)(
On décide que la pulsation de normalisation est COUPUREIONNORMALISAT Ww .
On aura COUPURE
NORMALISEE wPP , soit en remplaçant dans l’expression :
NORMALISEE
COUPURE
pw
ppH
11
1
1)( , il convient de remarquer que l’on a toujours la
même expression, seules les variables ont changées.
ATTENTION : Il ne faut jamais oublier de préciser, par rapport à quelle fréquence on normalise.
b) Normalisation des impédancesIl faut en premier lieu définir une impédance de référence, que l’on notera ‘R0’ (c’est en générale l’impédance de sortie du générateur, mais ce peut en être une autre).
Résistance 0R
RrNORMALISEE
Inductance
NORMALISEENORMALISEEL
NORMALISEEL
LNORMALISEEL
wjz
ww
RwL
jz
RwLj
RZ
z
..
..
.
..
00
0
00
où0
0.Rw
L
Capacité
NORMALISEE
NORMALISEEC
NORMALISEE
CNORMALISEEC
C
wcjz
wwRCjRZ
z
wwwCjwCj
Z
..1
....1
...
1..
1
000
00
où 00 .. wCRc
MONTIGNY Eric
Page 4 sur 8
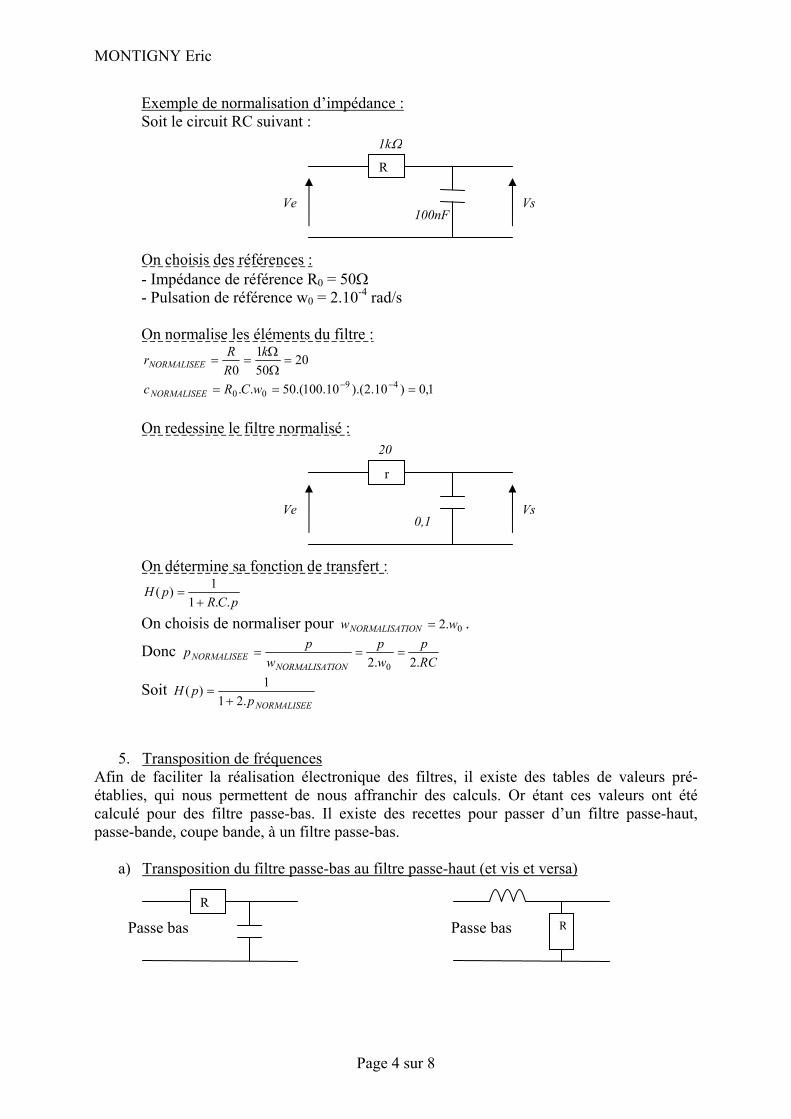
Exemple de normalisation d’impédance : Soit le circuit RC suivant :
On choisis des références :- Impédance de référence R0 = 50- Pulsation de référence w0 = 2.10-4 rad/s
On normalise les éléments du filtre :20
501
0k
RRrNORMALISEE
1,0)10.2).(10.100.(50.. 4900 wCRcNORMALISEE
On redessine le filtre normalisé :
On détermine sa fonction de transfert :
pCRpH
..11)(
On choisis de normaliser pour 0.2 ww IONNORMALISAT .
DoncRCp
wp
wpp
IONNORMALISATNORMALISEE .2.2 0
SoitNORMALISEEp
pH.21
1)(
5. Transposition de fréquencesAfin de faciliter la réalisation électronique des filtres, il existe des tables de valeurs pré-établies, qui nous permettent de nous affranchir des calculs. Or étant ces valeurs ont été calculé pour des filtre passe-bas. Il existe des recettes pour passer d’un filtre passe-haut, passe-bande, coupe bande, à un filtre passe-bas.
a) Transposition du filtre passe-bas au filtre passe-haut (et vis et versa)
r
20
0,1 Ve Vs
R
1k
100nF Ve Vs
R
RPasse bas Passe bas

MONTIGNY Eric
Page 5 sur 8
On remarque que les structures ‘passe-bas’ et les structures ‘passe-haut’ sont parfaitement similaires, à la différence prés que lorsqu’une structure à un condensateur, l’autre à une bobine, mais les éléments résistifs ont toujours la même place.
Pour passer d’une structure à une autre, il suffit de faire la transposition N
N pp 1 .
Capacité
ccp
zpzpc
z NIONTRANSPOSIT
NC
NC 1'
..1
...
Inductance1'
'.1
.'
1.
... cpcp
zp
cz
pz
NN
IONTRANSPOSIT
N
N
Exemple de transposition de fonction de transfert : Soit la fonction de transfert d’un passe-bas
NN p
pH.21
1)(
On veut obtenir la fonction de transfert d’un passe-haut, en transposant. On transpose en faisant :
N
IONTRANSPOSITN P
p 1...
2/12/
2.
21
121
1.21
1)( ...
N
N
N
N
N
N
NN
IONTRANSPOSIT
NN p
pp
ppp
ppp
pH
On a bien l’expression d’un filtre passe-haut.
Traçons les diagrammes de Bode associée à ces fonctions :
On constate que les deux courbes se coupent au même point (qui est calculé en faisant la moyenne géométrique des fréquences de coupures).
R
Passe haut Passe haut
1 20,5
f
GDB
-7dB
Passe bas
Passe haut
MONTIGNY Eric
Page 6 sur 8
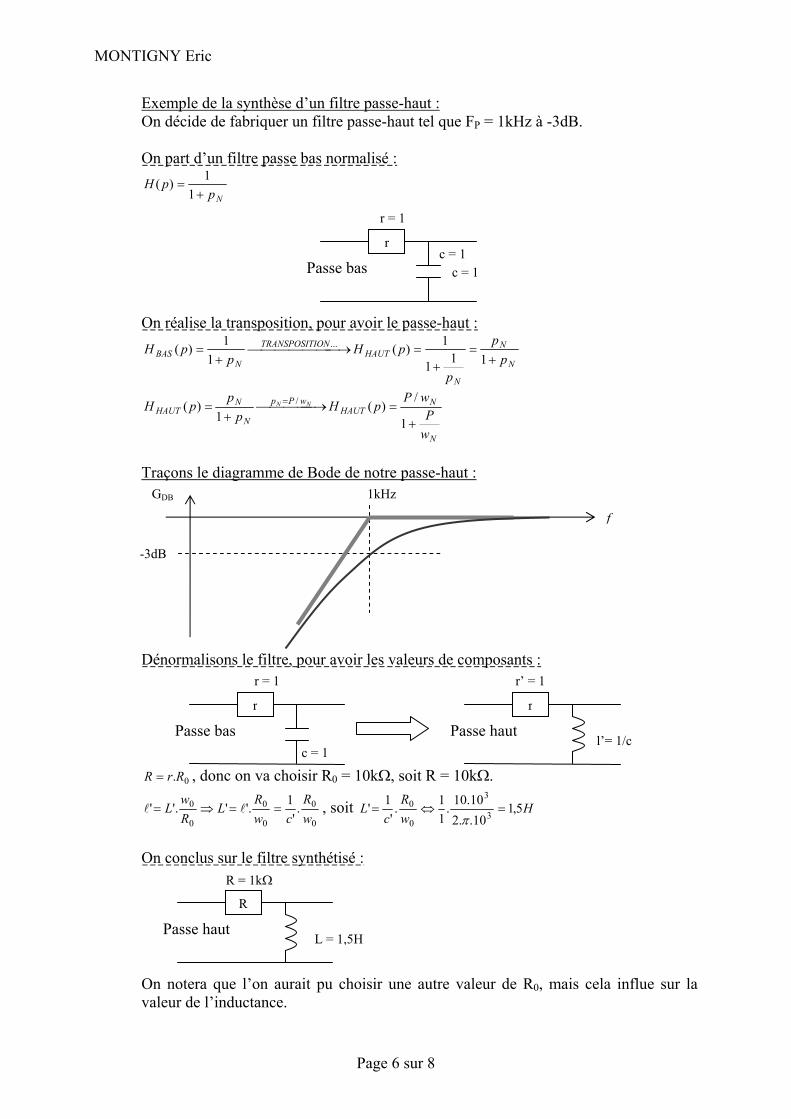
Exemple de la synthèse d’un filtre passe-haut : On décide de fabriquer un filtre passe-haut tel que FP = 1kHz à -3dB.
On part d’un filtre passe bas normalisé :
NppH
11)(
On réalise la transposition, pour avoir le passe-haut :
N
NHAUT
wPp
N
NHAUT
N
N
N
HAUTIONTRANSPOSIT
NBAS
wP
wPpH
pp
pH
pp
p
pHp
pH
NN
1
/)(
1)(
111
1)(1
1)(
/
...
Traçons le diagramme de Bode de notre passe-haut :
Dénormalisons le filtre, pour avoir les valeurs de composants :
0.RrR , donc on va choisir R0 = 10k , soit R = 10k .
0
0
0
0
0
0 .'
1'.''.'wR
cwR
LRw
L , soit HwR
cL 5,1
10..210.10.
11.
'1' 3
3
0
0
On conclus sur le filtre synthétisé :
On notera que l’on aurait pu choisir une autre valeur de R0, mais cela influe sur la valeur de l’inductance.
R
Passe haut
R = 1k
L = 1,5H
r
Passe bas r
Passe haut
r = 1
c = 1
r’ = 1
l’= 1/c
1kHz
f
GDB
-3dB
r
Passe basc = 1
r = 1
c = 1
MONTIGNY Eric
Page 7 sur 8
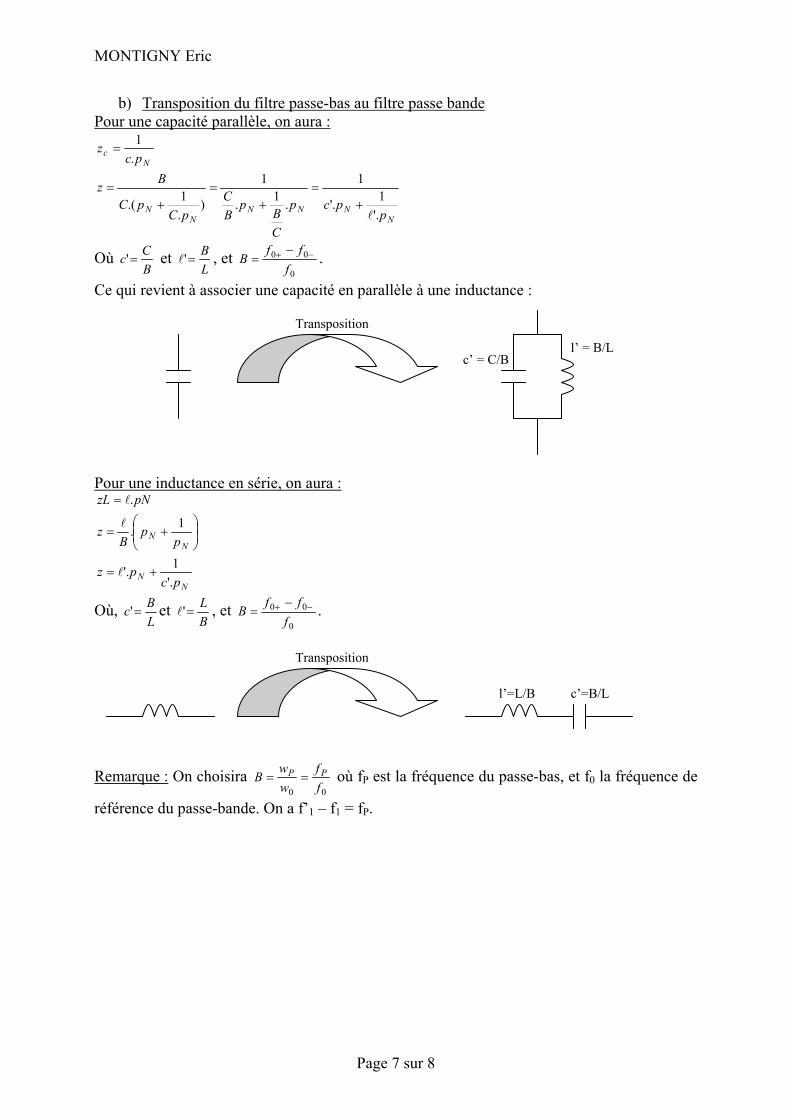
b) Transposition du filtre passe-bas au filtre passe bandePour une capacité parallèle, on aura :
NNNN
NN
Nc
ppcp
CB
pBC
pCpC
Bz
pcz
'.1'.
1
.1.
1
).1.(
.1
OùBCc' et
LB' , et
0
00
fff
B .
Ce qui revient à associer une capacité en parallèle à une inductance :
Pour une inductance en série, on aura :
NN
NN
pcpz
pp
Bz
pNzL
'.1'.
1.
.
Où,LBc' et
BL' , et
0
00
fff
B .
Remarque : On choisira 00 f
fwwB PP où fP est la fréquence du passe-bas, et f0 la fréquence de
référence du passe-bande. On a f’1 – f1 = fP.
Transposition
l’=L/B c’=B/L
c’ = C/B l’ = B/L
Transposition

MONTIGNY Eric
Page 8 sur 8
En faisant la transposition du gabarit, on aura :
c) Transposition passe-bas vers passe-bandeOn s’intéressera simplement aux conclusions, et non à la démonstration, car les coupes bande sont inusités dans ce cours. Un condensateur en parallèle se transpose en une inductance série. Un conducteur et une bobine en série se transposent en un condensateur en parallèle avec une bobine.
f
GDB
GMIN
GMAX
fpfa
f
GDB
GMIN
GMAX
fa- fa+f0 fp+fp-
MONTIGNY Eric
Page 1 sur 2
Filtrage analogique. [CHAPITRE 3]
1. Propriété de la fonction de transfert H(p) :Considérons un système du nième ordre, linéaire, et invariant :
On peut écrire l’équation différentielle :
)(....)(.)(.)(....)(.)(. 01
1
101
1
1 teadt
tedadt
tedatsbdt
tsdbdt
tsdb m
m
mm
m
nn
n
nn
n
n
On peut l’écrire sous la forme :
)()(
...)(...)(
).()(0
0
wDwN
bjwbajwa
wjpHwH nN
mN
On retiendra quatre propriétés remarquables : )()(* jwHwH
22
21
22
21
².
².)(
DwD
NwNwH
Le système est stable, si les pôles de H(p) sont à racines réelles négatives. On veut que le système soit à déphasage minimum, il est donc nécessaire que les
zéros de H(p) soient à partie réelle négative.
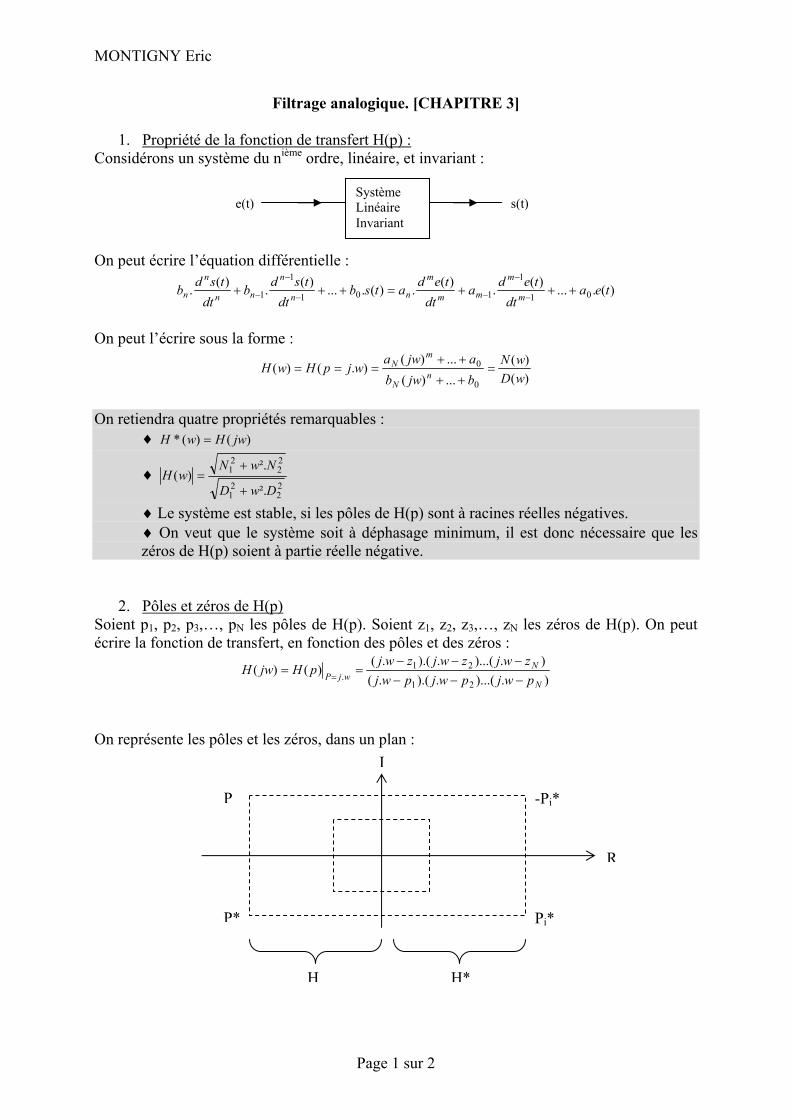
2. Pôles et zéros de H(p)Soient p1, p2, p3,…, pN les pôles de H(p). Soient z1, z2, z3,…, zN les zéros de H(p). On peut écrire la fonction de transfert, en fonction des pôles et des zéros :
).)...(.).(.().)...(.).(.(
)()(21
21.
N
NwjP pwjpwjpwj
zwjzwjzwjpHjwH
On représente les pôles et les zéros, dans un plan :
Système LinéaireInvariant
e(t) s(t)
R
I
H*H
P
P*
-Pi*
Pi*

MONTIGNY Eric
Page 2 sur 2
*.²)().)...(.)(.(
).)...(.)(.(.)1().()(*
21
21
HHjwHpwjpwjpwjzwjzwjzwj
wjHjwHN
Nnm
Il y a une symétrie quadrantale des pôles et des zéros de |H|².
3. Détermination des pôles et des zéros d’une fonction H(p)Considérons la fonction
².211²)(
wwH .
Déterminons 4.211
)²(211)().(
pppHpH
Cherchons les pôles de H(p).H(-p) :
4)12(4/1
)12(4
..2.4
4
.21
.21
.21
0.21
kj
kj
kj
ep
ep
ep
p
On peut représenter ces pôles sur un cercle trigonométrique :
On a donc : 1.8²..2
2.*)).((
1.)(4/1
11 ppK
ppppKpH , avec
21K .
44/1
.21 j
ep
4.74/1
.21 j
ep
434/1
.21 j
ep
4.54/1
.21 j
ep
R
I
Système instable

MONTIGNY Eric
Page 1 sur 8
Filtrage analogique. [CHAPITRE 4]
1. Les filtres de BUTTERWORTT :Les filtres de Butterwortt ont la réponse la plus plate possible dans la bande passante : il est ainsi transparent pour le système.
On retiendra donc que :Butterwortt = réponse la plus plate possible dans la bande passante.
Pour le montrer, il suffit de considérer ²
1²A
H , où l’on a :
1.....)²( )1(21
2 NN
NN wawawA
1.....)²( 11
NN
NN xaxawA où x =w²
On va ensuite chercher à annuler toutes les dérivées à l’origine (dans le but d’avoir la réponse la plus plate possible) :
00...).1(..0²101
21
0aaxnxan
dxdA
xnn
nx
00...............................................0²
00................................................0²
²²
00
)(
)(
200
Nxx
n
n
xx
axdAd
axdAd
Au final, il ne reste plus que 1.1.² 2nn
nn waxaA , soit n
n waH 2.1
1² .
On va maintenant chercher un wP, tel que 21²H , (ce qui revient à dire que 10.log|H|²=-3dB),
soit Npn wa 2. , et donc
n
np a
w 12 , donc
np
n
ww
H
2
21
1² , avec P
n www :
On retiendra l’expression de la fonction de transfert d’un filtre de Butterwortt :
nnw
H 211²
Le ‘n’ en indice, indique que la pulsation est normalisée. Le ‘n’ en exposant, indique l’ordre du filtre (si n=3, on a un ordre 3…)
Détermination de la fonction de transfert du filtre :On désire réaliser un filtre d’ordre n=2 de Butterwortt : en d’autres termes on veut connaître l’expression de la fonction de transfert.
NN
NN
WWNNNPp
wHpHpHPN 2.)1(1
1)²(1
1)²()().(
Pour notre filtre d’ordre 2, cela donne :
42.22 11
.)1(11)().(
nnNN PP
pHpH
MONTIGNY Eric
Page 2 sur 8
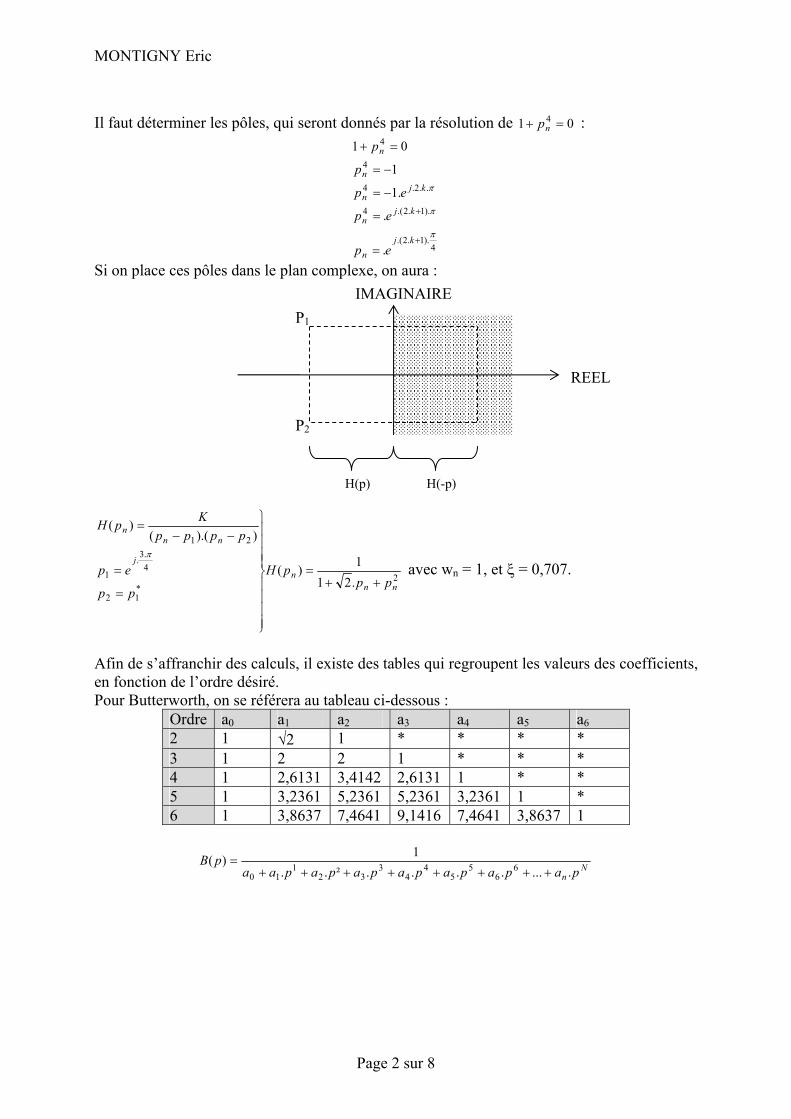
Il faut déterminer les pôles, qui seront donnés par la résolution de 01 4np :
4).1.2.(
).1.2.(4
..2.4
4
4
.
.
.1
1
01
kjn
kjn
kjn
n
n
ep
ep
ep
p
p
Si on place ces pôles dans le plan complexe, on aura :
2*12
4.3.
1
21
.211)(
)).(()(
nnn
j
nnn
pppH
pp
ep
ppppKpH
avec wn = 1, et = 0,707.
Afin de s’affranchir des calculs, il existe des tables qui regroupent les valeurs des coefficients, en fonction de l’ordre désiré.Pour Butterworth, on se référera au tableau ci-dessous :
Ordre a0 a1 a2 a3 a4 a5 a62 1 2 1 * * * * 3 1 2 2 1 * * * 4 1 2,6131 3,4142 2,6131 1 * * 5 1 3,2361 5,2361 5,2361 3,2361 1 * 6 1 3,8637 7,4641 9,1416 7,4641 3,8637 1
Nn papapapapapapaa
pB........²..
1)( 66
55
44
332
110
P1
P2
REEL
IMAGINAIRE
H(-p) H(p)
MONTIGNY Eric
Page 3 sur 8
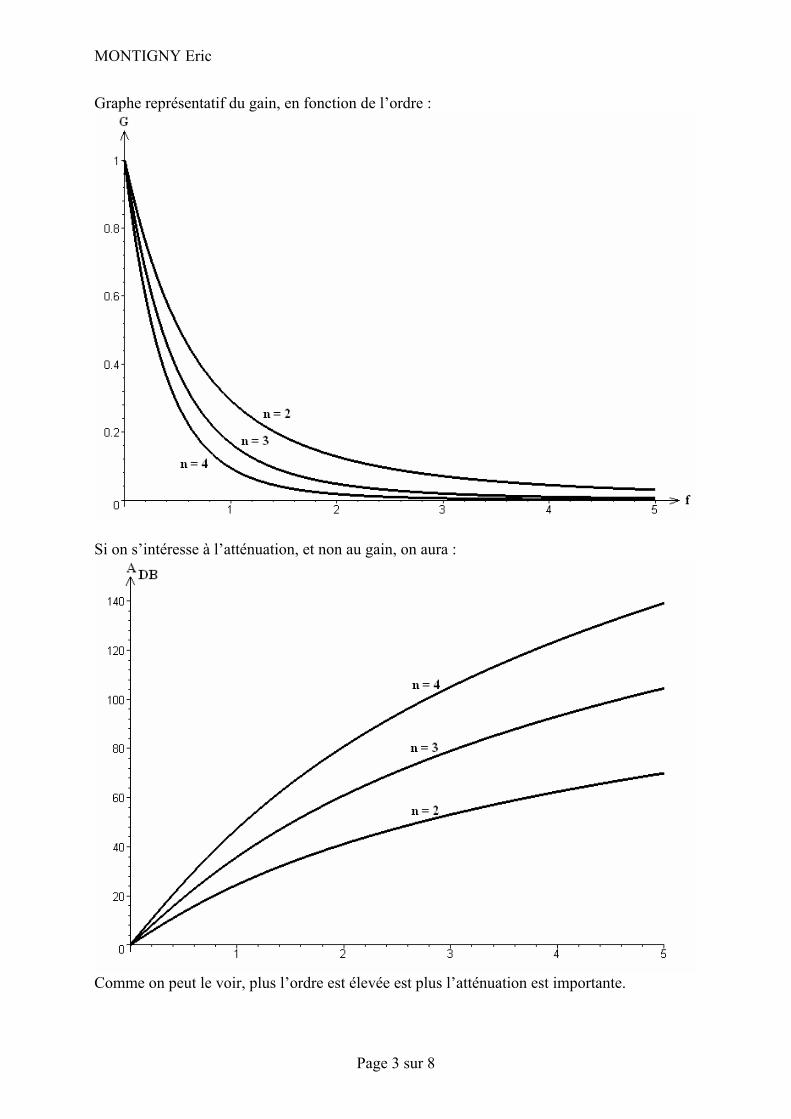
Graphe représentatif du gain, en fonction de l’ordre :
Si on s’intéresse à l’atténuation, et non au gain, on aura :
Comme on peut le voir, plus l’ordre est élevée est plus l’atténuation est importante.
MONTIGNY Eric
Page 4 sur 8
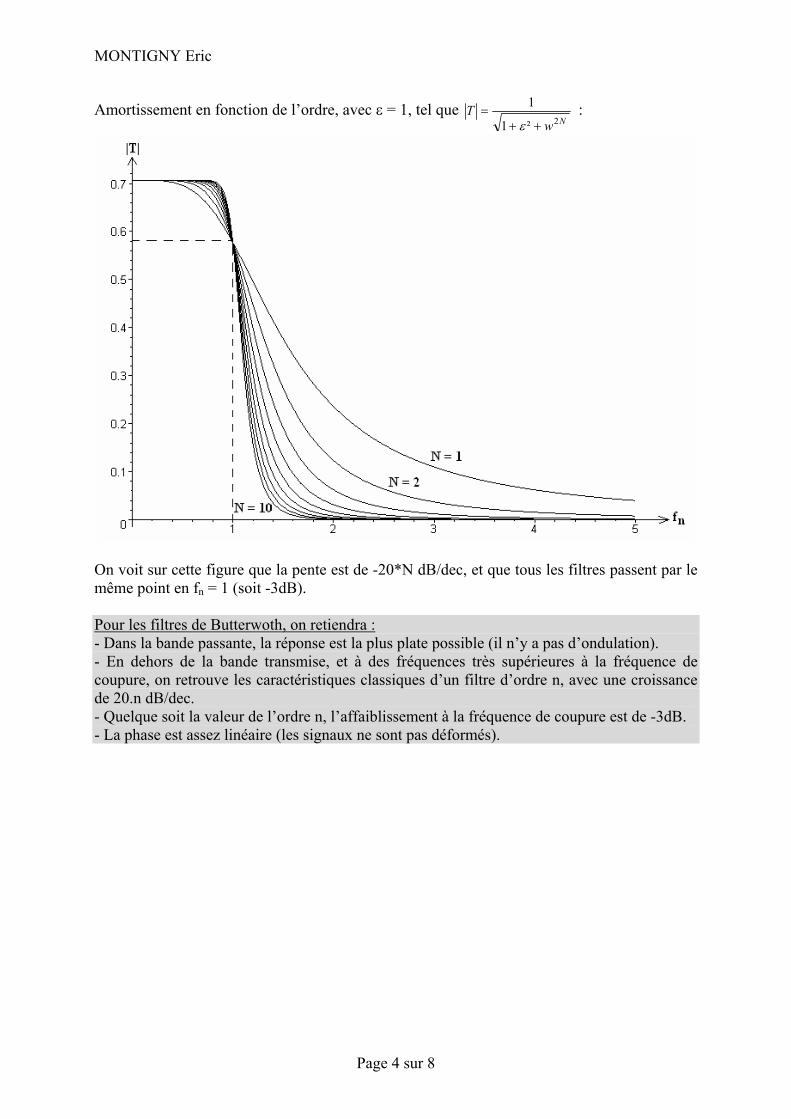
Amortissement en fonction de l’ordre, avec = 1, tel que Nw
T2²1
1 :
On voit sur cette figure que la pente est de -20*N dB/dec, et que tous les filtres passent par le même point en fn = 1 (soit -3dB).
Pour les filtres de Butterwoth, on retiendra :- Dans la bande passante, la réponse est la plus plate possible (il n’y a pas d’ondulation). - En dehors de la bande transmise, et à des fréquences très supérieures à la fréquence de coupure, on retrouve les caractéristiques classiques d’un filtre d’ordre n, avec une croissance de 20.n dB/dec. - Quelque soit la valeur de l’ordre n, l’affaiblissement à la fréquence de coupure est de -3dB. - La phase est assez linéaire (les signaux ne sont pas déformés).
MONTIGNY Eric
Page 5 sur 8
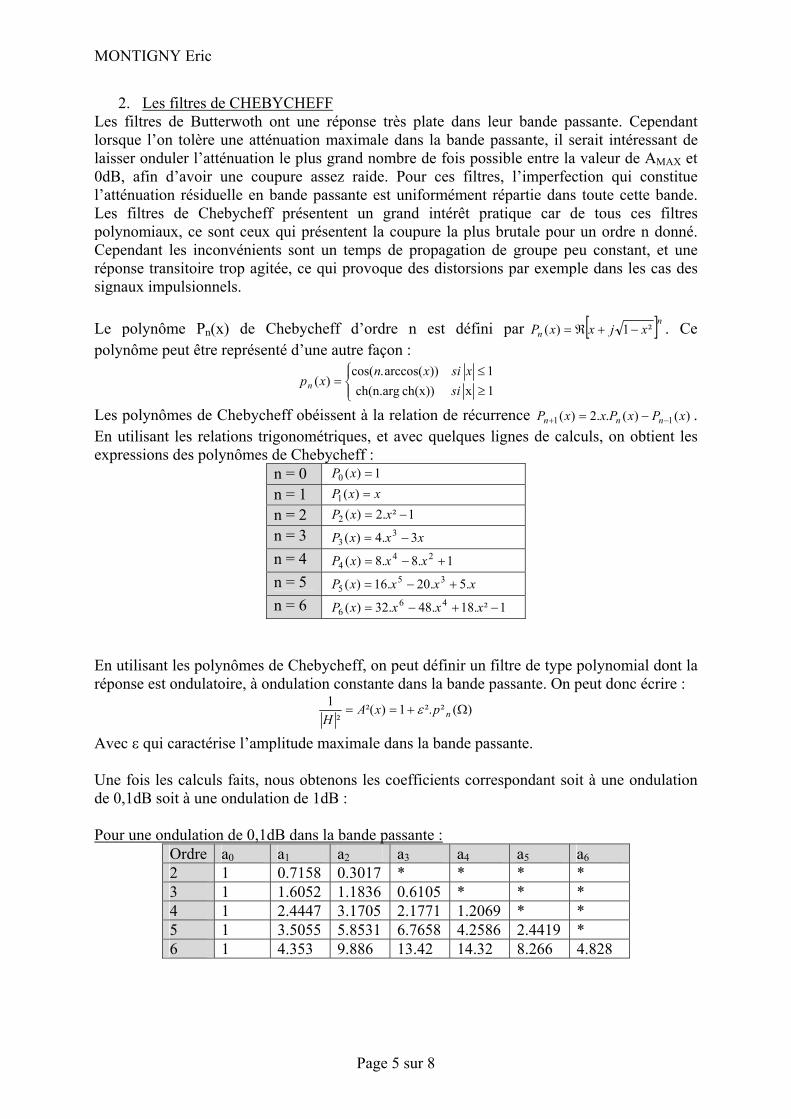
2. Les filtres de CHEBYCHEFFLes filtres de Butterwoth ont une réponse très plate dans leur bande passante. Cependant lorsque l’on tolère une atténuation maximale dans la bande passante, il serait intéressant de laisser onduler l’atténuation le plus grand nombre de fois possible entre la valeur de AMAX et 0dB, afin d’avoir une coupure assez raide. Pour ces filtres, l’imperfection qui constitue l’atténuation résiduelle en bande passante est uniformément répartie dans toute cette bande. Les filtres de Chebycheff présentent un grand intérêt pratique car de tous ces filtres polynomiaux, ce sont ceux qui présentent la coupure la plus brutale pour un ordre n donné. Cependant les inconvénients sont un temps de propagation de groupe peu constant, et une réponse transitoire trop agitée, ce qui provoque des distorsions par exemple dans les cas des signaux impulsionnels.
Le polynôme Pn(x) de Chebycheff d’ordre n est défini par nn xjxxP ²1)( . Ce
polynôme peut être représenté d’une autre façon :
1xch(x))ch(n.arg1))arccos(.cos(
)(si
xsixnxpn
Les polynômes de Chebycheff obéissent à la relation de récurrence )()(..2)( 11 xPxPxxP nnn .En utilisant les relations trigonométriques, et avec quelques lignes de calculs, on obtient les expressions des polynômes de Chebycheff :
n = 0 1)(0 xP
n = 1 xxP )(1
n = 2 1².2)(2 xxP
n = 3 xxxP 3.4)( 33
n = 4 1.8.8)( 244 xxxP
n = 5 xxxxP .5.20.16)( 355
n = 6 1².18.48.32)( 466 xxxxP
En utilisant les polynômes de Chebycheff, on peut définir un filtre de type polynomial dont la réponse est ondulatoire, à ondulation constante dans la bande passante. On peut donc écrire :
)(²².1)²(²
1npxA
H
Avec qui caractérise l’amplitude maximale dans la bande passante.
Une fois les calculs faits, nous obtenons les coefficients correspondant soit à une ondulation de 0,1dB soit à une ondulation de 1dB :
Pour une ondulation de 0,1dB dans la bande passante :Ordre a0 a1 a2 a3 a4 a5 a62 1 0.7158 0.3017 * * * * 3 1 1.6052 1.1836 0.6105 * * * 4 1 2.4447 3.1705 2.1771 1.2069 * * 5 1 3.5055 5.8531 6.7658 4.2586 2.4419 * 6 1 4.353 9.886 13.42 14.32 8.266 4.828
MONTIGNY Eric
Page 6 sur 8
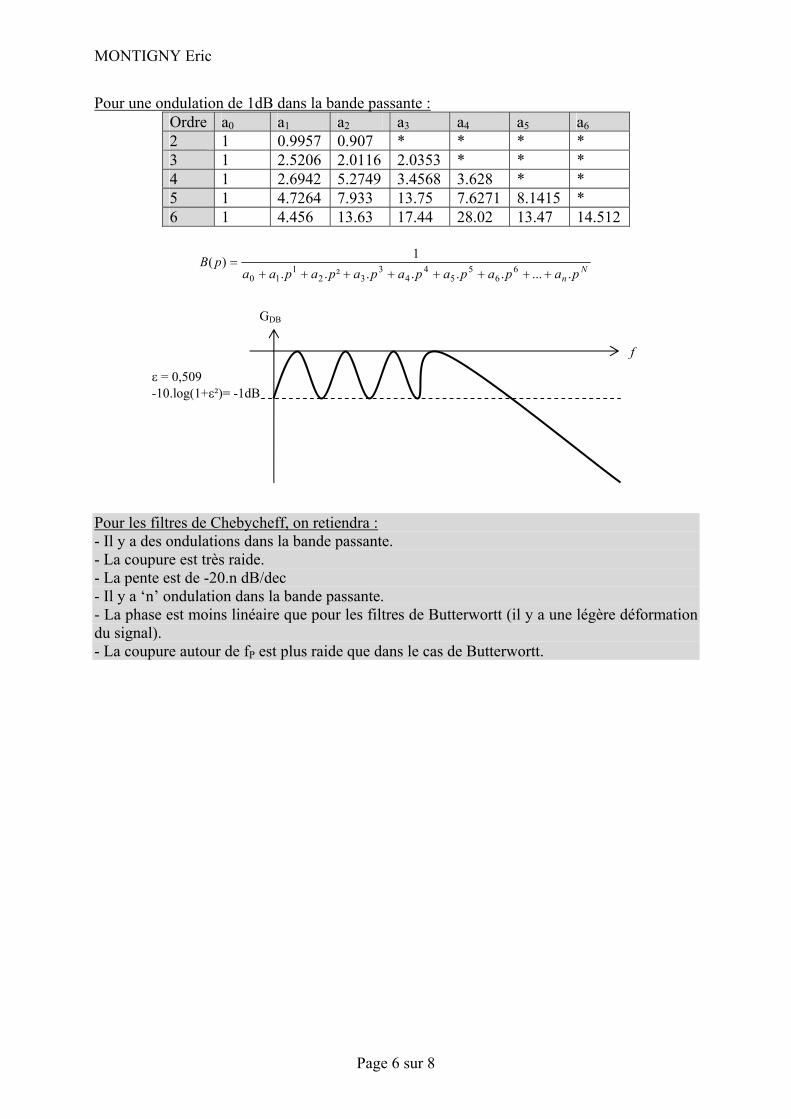
Pour une ondulation de 1dB dans la bande passante :Ordre a0 a1 a2 a3 a4 a5 a62 1 0.9957 0.907 * * * * 3 1 2.5206 2.0116 2.0353 * * * 4 1 2.6942 5.2749 3.4568 3.628 * * 5 1 4.7264 7.933 13.75 7.6271 8.1415 * 6 1 4.456 13.63 17.44 28.02 13.47 14.512
Nn papapapapapapaa
pB........²..
1)( 66
55
44
332
110
Pour les filtres de Chebycheff, on retiendra :- Il y a des ondulations dans la bande passante. - La coupure est très raide. - La pente est de -20.n dB/dec - Il y a ‘n’ ondulation dans la bande passante. - La phase est moins linéaire que pour les filtres de Butterwortt (il y a une légère déformation du signal). - La coupure autour de fP est plus raide que dans le cas de Butterwortt.
= 0,509 -10.log(1+ ²)= -1dB
GDB
f
MONTIGNY Eric
Page 7 sur 8
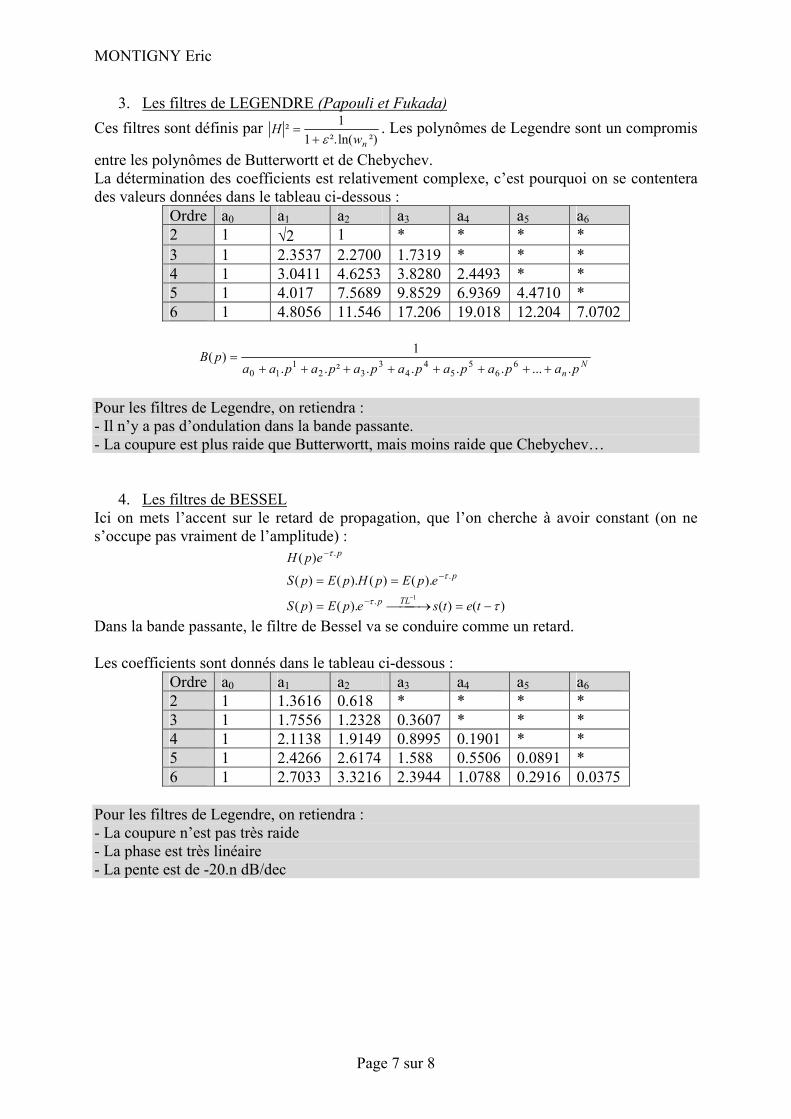
3. Les filtres de LEGENDRE (Papouli et Fukada)Ces filtres sont définis par
²)ln(².11²
nwH . Les polynômes de Legendre sont un compromis
entre les polynômes de Butterwortt et de Chebychev. La détermination des coefficients est relativement complexe, c’est pourquoi on se contentera des valeurs données dans le tableau ci-dessous :
Ordre a0 a1 a2 a3 a4 a5 a62 1 2 1 * * * * 3 1 2.3537 2.2700 1.7319 * * * 4 1 3.0411 4.6253 3.8280 2.4493 * * 5 1 4.017 7.5689 9.8529 6.9369 4.4710 * 6 1 4.8056 11.546 17.206 19.018 12.204 7.0702
Nn papapapapapapaa
pB........²..
1)( 66
55
44
332
110
Pour les filtres de Legendre, on retiendra : - Il n’y a pas d’ondulation dans la bande passante. - La coupure est plus raide que Butterwortt, mais moins raide que Chebychev…
4. Les filtres de BESSELIci on mets l’accent sur le retard de propagation, que l’on cherche à avoir constant (on ne s’occupe pas vraiment de l’amplitude) :
)()().()(
).()().()(
)(
1.
.
.
tetsepEpS
epEpHpEpS
epH
TLp
p
p
Dans la bande passante, le filtre de Bessel va se conduire comme un retard.
Les coefficients sont donnés dans le tableau ci-dessous : Ordre a0 a1 a2 a3 a4 a5 a62 1 1.3616 0.618 * * * * 3 1 1.7556 1.2328 0.3607 * * * 4 1 2.1138 1.9149 0.8995 0.1901 * * 5 1 2.4266 2.6174 1.588 0.5506 0.0891 * 6 1 2.7033 3.3216 2.3944 1.0788 0.2916 0.0375
Pour les filtres de Legendre, on retiendra : - La coupure n’est pas très raide - La phase est très linéaire - La pente est de -20.n dB/dec
MONTIGNY Eric
Page 8 sur 8
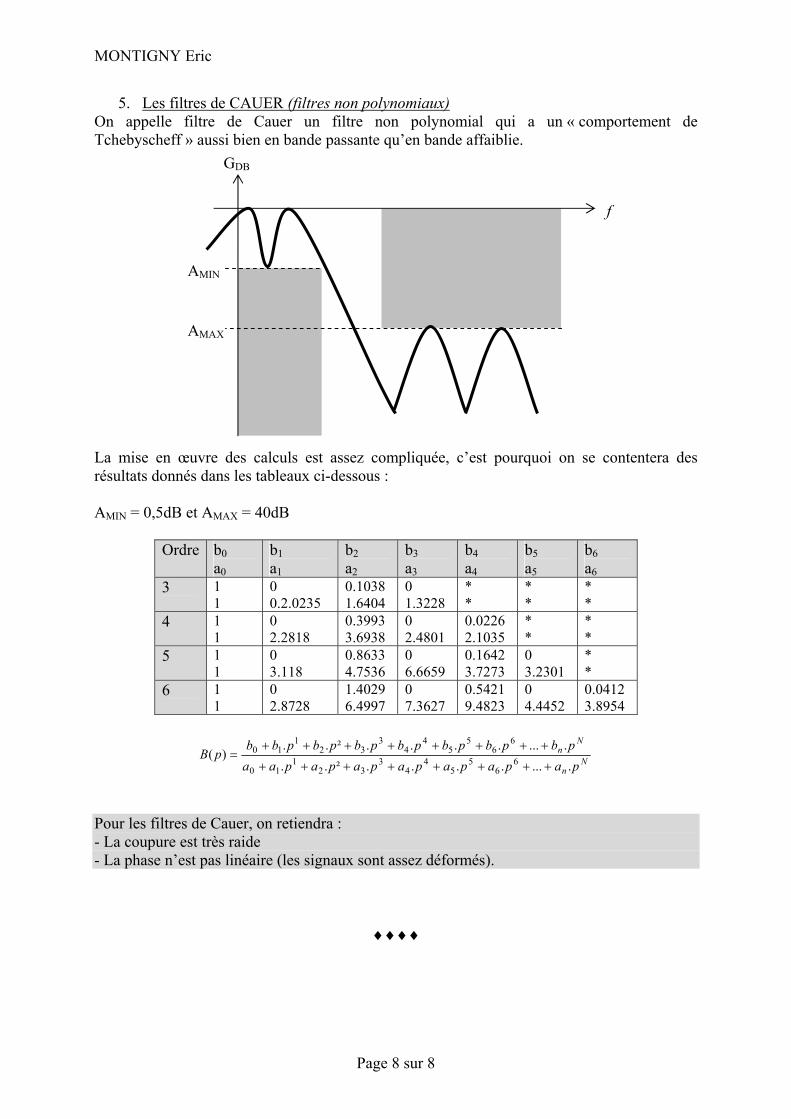
5. Les filtres de CAUER (filtres non polynomiaux)On appelle filtre de Cauer un filtre non polynomial qui a un « comportement de Tchebyscheff » aussi bien en bande passante qu’en bande affaiblie.
La mise en œuvre des calculs est assez compliquée, c’est pourquoi on se contentera des résultats donnés dans les tableaux ci-dessous :
AMIN = 0,5dB et AMAX = 40dB
Ordre b0a0
b1a1
b2a2
b3a3
b4a4
b5a5
b6a6
3 11
00.2.0235
0.1038 1.6404
01.3228
**
**
**
4 11
02.2818
0.3993 3.6938
02.4801
0.0226 2.1035
**
**
5 11
03.118
0.8633 4.7536
06.6659
0.1642 3.7273
03.2301
**
6 11
02.8728
1.4029 6.4997
07.3627
0.5421 9.4823
04.4452
0.0412 3.8954
Nn
Nn
papapapapapapaapbpbpbpbpbpbpbb
pB........²..
........²..)( 6
65
54
43
321
10
66
55
44
332
110
Pour les filtres de Cauer, on retiendra : - La coupure est très raide - La phase n’est pas linéaire (les signaux sont assez déformés).
GDB
f
AMIN
AMAX
MONTIGNY Eric
Page 1 sur 10
Filtrage analogique. [CHAPITRE 5]
1. Introduction à la synthèse de filtres actifsLa connaissance du cahier des charges permet dans un premier temps de choisir l’ordre et le type de filtre à réaliser, puis dans un second temps de calculer sa fonction de transfert. Il faut distinguer les filtres actifs, des filtres passifs : - les filtres actifs sont réalisés au moyen de résistances, de condensateurs et d’éléments actifs (AOP, transistors…). Ces filtres sont utilisables jusqu’à plus d’une centaine de kilohertz. - les filtres passifs sont réalisés uniquement au moyen d’éléments passifs (résistance, condensateur, bobine). La puissance de sortie est toujours inférieure à la puissance d’entrée.
Les filtres actifs sont généralement caractérisés par des impédance d’entrée très élevées et des impédances de sortie très faibles, ce qui permet la mise en cascade de plusieurs cellules sans se soucier du problème d’adaptation. Les filtres actifs ont un inconvénient : le coefficient de surtension peut devenir très élevée : dans ce cas il y a risque d’oscillations spontanées.
Le but est maintenant d’étudier quelques procédés qui permettent de déterminer la structure la mieux adaptée pour la réalisation du filtre et enfin calculer les éléments (résistances, et condensateurs) grâce à l’utilisation de la fonction de transfert et de la connaissance de la structure. On se limite dans ce cours à synthétiser quelques filtres actifs qui utilisent des amplificateurs opérationnels. On suppose que chaque amplificateur opérationnel est idéal : - gain en tension infini - impédance d’entrée infinie - impédance de sortie nulle - bande passante infinie
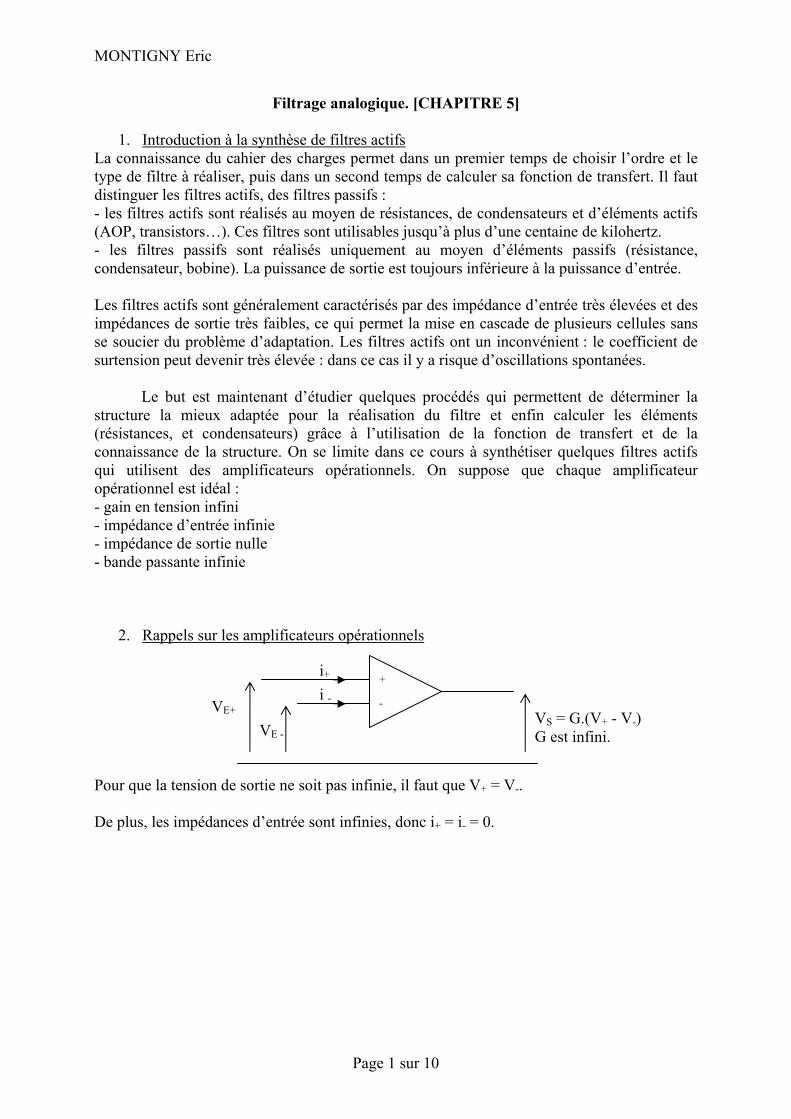
2. Rappels sur les amplificateurs opérationnels
Pour que la tension de sortie ne soit pas infinie, il faut que V+ = V-.
De plus, les impédances d’entrée sont infinies, donc i+ = i- = 0.
+
-
i+
i -
VS = G.(V+ - V-)G est infini.
VE+
VE -
MONTIGNY Eric
Page 2 sur 10
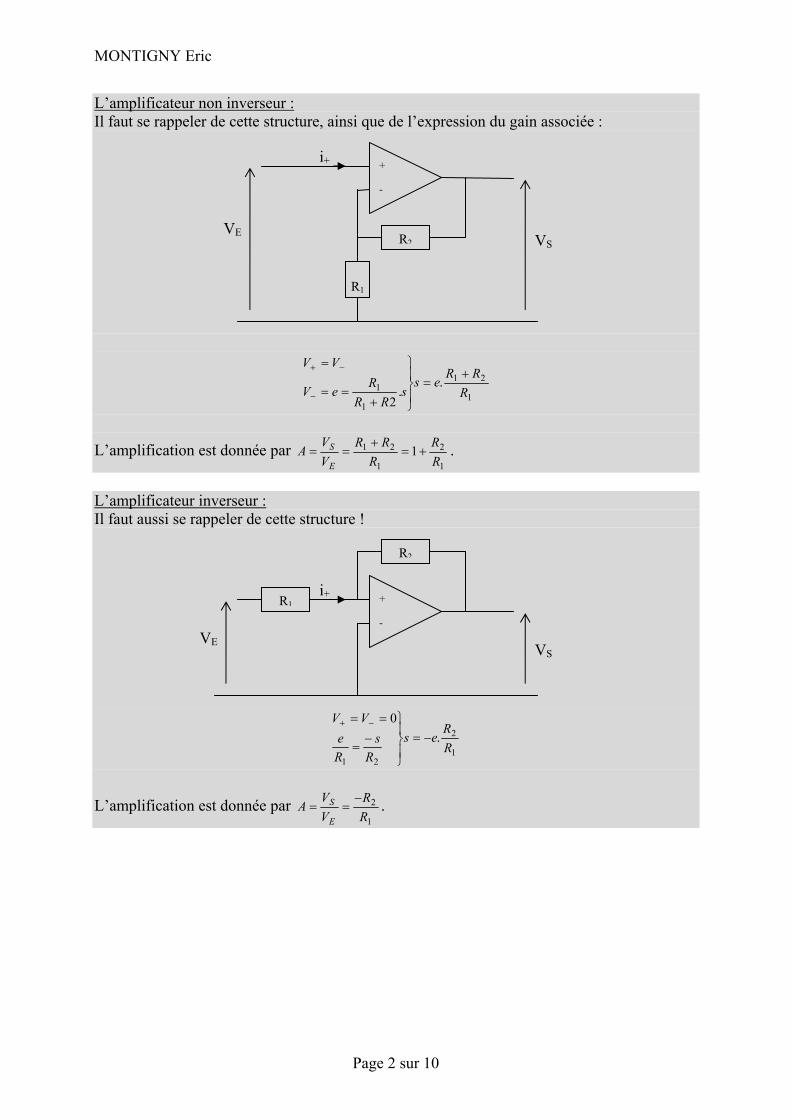
L’amplificateur non inverseur :Il faut se rappeler de cette structure, ainsi que de l’expression du gain associée :
1
21
1
1 ..
2R
RRes
sRR
ReV
VV
L’amplification est donnée par 1
2
1
21 1RR
RRR
VV
AE
S .
L’amplificateur inverseur :Il faut aussi se rappeler de cette structure !
1
2
21
.0
RRes
Rs
Re
VV
L’amplification est donnée par 1
2
RR
VV
AE
S .
+
-
i+
VSVE
R2
R1
+
-
i+
VSVE R2
R1

MONTIGNY Eric
Page 3 sur 10
3. Structure générale des SALEN-KEY du 2ème ordre :
La fonction de transfert associé est :
423232
541
21
..).(1..
YYKYYZZ
YYY
YYKH
Filtre passe-bas de SALEN-KEY :
On a :Z1 = R1Z2 = R2Y3 = C3.pY4 = C4.pZ5 = +
1)]1(.).[(².... 413214321 pKCRCRRpCCRRKH
Si maintenant, on pose :R1 = R2 = R0C4= m.C0C3 = q.C0K = 1
La fonction de transfert est alors : 1....2²)²..(.
1
0000 pCRmpCRqmH .
R1 R2
C4
K
e sC3
Z1 Z2
Z4
Z5 Z3
K
e s

MONTIGNY Eric
Page 4 sur 10
En mettant en forme cette expression, et en l’associant au schéma, on a :
mqQ
qm
qmCRw
wp
wp
H
pCRmpCRqmH
n
nn
.21
21
...1
1..2²
²1
1....2²)²..(.1
00
0000
Normalisation du filtre passe-bas de SALEN-KEY : Impédance de référence : R0 Pulsation de référence : w0 = 1/(R0.C0)
Pour le condensateur, on aura : 11..
10
000
00 c
ppCRRZC
Zn
c
Cela va considérablement simplifier les choses : R0 1 C0 1 m.c0 m q.c0 q
Pour le passe-bas de SALEN-KEY on retiendra la structure, et l’expression :
mqQ
qm
qmw
wp
wp
H
pmpqmH
n
nn
n
.21
21
.1
1..2²
²1
1..2²..1
1 1
q
1
e sm
R0 R0
q.C0
1
e sm.C0
MONTIGNY Eric
Page 5 sur 10
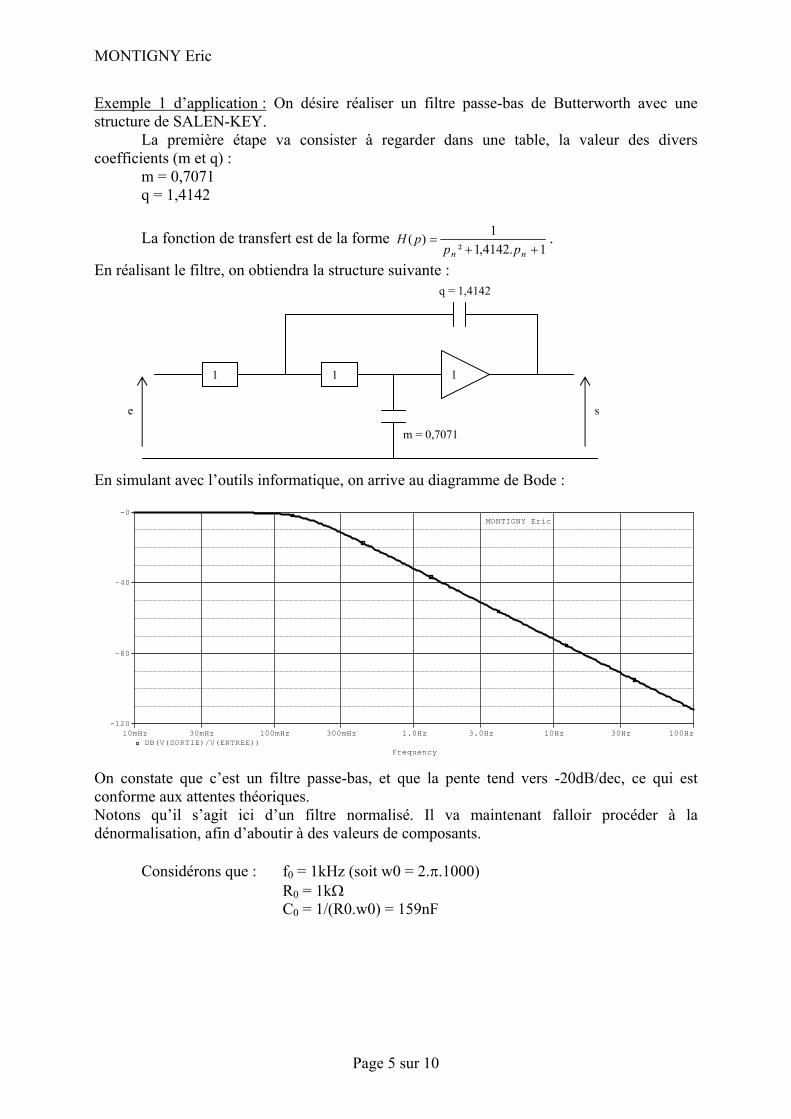
Exemple 1 d’application : On désire réaliser un filtre passe-bas de Butterworth avec une structure de SALEN-KEY. La première étape va consister à regarder dans une table, la valeur des divers coefficients (m et q) : m = 0,7071 q = 1,4142
La fonction de transfert est de la forme 1.4142,1²
1)(nn pp
pH .
En réalisant le filtre, on obtiendra la structure suivante :
En simulant avec l’outils informatique, on arrive au diagramme de Bode :
Frequency
10mHz 30mHz 100mHz 300mHz 1.0Hz 3.0Hz 10Hz 30Hz 100HzDB(V(SORTIE)/V(ENTREE))
-120
-80
-40
-0MONTIGNY Eric
On constate que c’est un filtre passe-bas, et que la pente tend vers -20dB/dec, ce qui est conforme aux attentes théoriques. Notons qu’il s’agit ici d’un filtre normalisé. Il va maintenant falloir procéder à la dénormalisation, afin d’aboutir à des valeurs de composants.
Considérons que : f0 = 1kHz (soit w0 = 2. .1000) R0 = 1k C0 = 1/(R0.w0) = 159nF
1 1
q = 1,4142
1
e s
m = 0,7071
MONTIGNY Eric
Page 6 sur 10
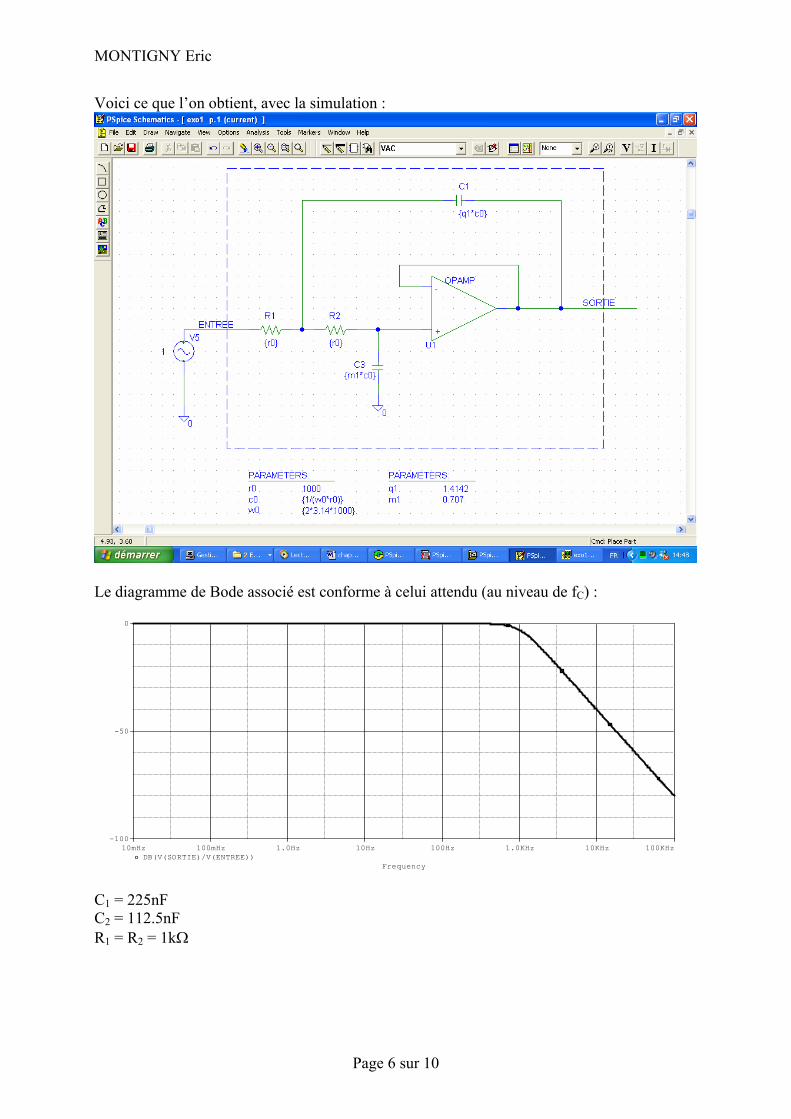
Voici ce que l’on obtient, avec la simulation :
Le diagramme de Bode associé est conforme à celui attendu (au niveau de fC) :
Frequency
10mHz 100mHz 1.0Hz 10Hz 100Hz 1.0KHz 10KHz 100KHzDB(V(SORTIE)/V(ENTREE))
-100
-50
0
C1 = 225nF C2 = 112.5nF R1 = R2 = 1k
MONTIGNY Eric
Page 7 sur 10
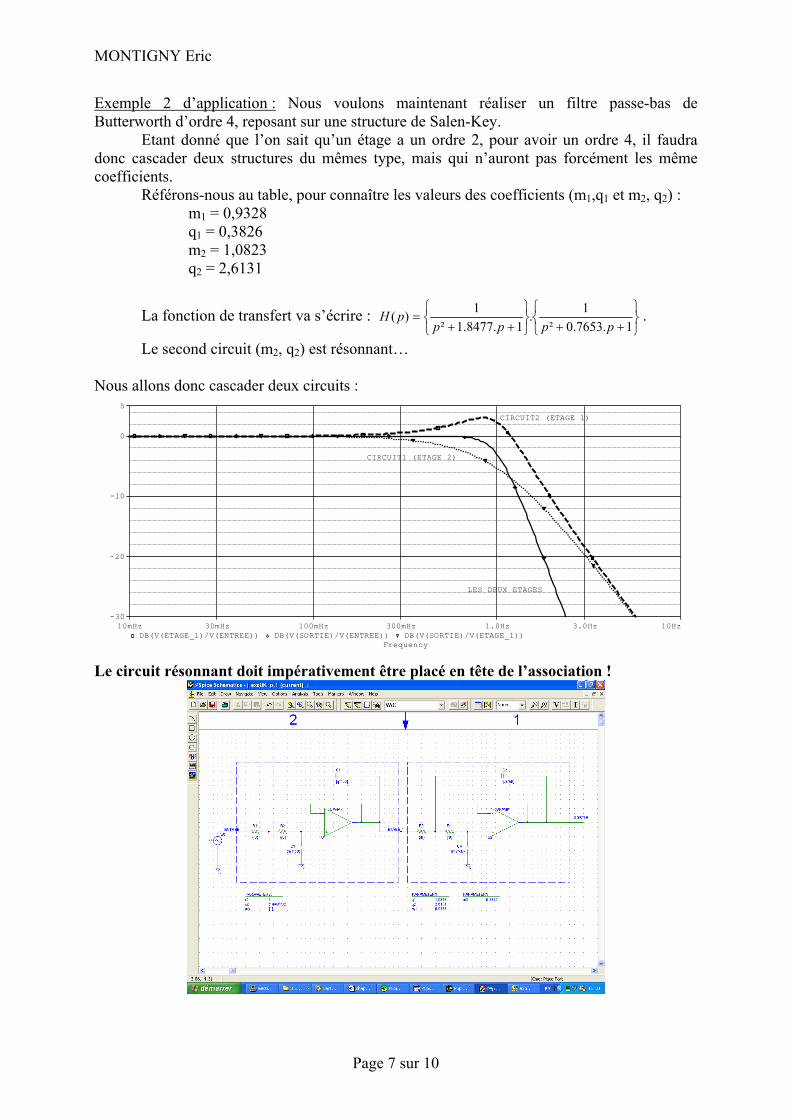
Exemple 2 d’application : Nous voulons maintenant réaliser un filtre passe-bas de Butterworth d’ordre 4, reposant sur une structure de Salen-Key. Etant donné que l’on sait qu’un étage a un ordre 2, pour avoir un ordre 4, il faudra donc cascader deux structures du mêmes type, mais qui n’auront pas forcément les même coefficients. Référons-nous au table, pour connaître les valeurs des coefficients (m1,q1 et m2, q2) : m1 = 0,9328 q1 = 0,3826 m2 = 1,0823 q2 = 2,6131
La fonction de transfert va s’écrire : 1.7653.0²
1.1.8477.1²
1)(pppp
pH .
Le second circuit (m2, q2) est résonnant…
Nous allons donc cascader deux circuits :
Frequency
10mHz 30mHz 100mHz 300mHz 1.0Hz 3.0Hz 10HzDB(V(ETAGE_1)/V(ENTREE)) DB(V(SORTIE)/V(ENTREE)) DB(V(SORTIE)/V(ETAGE_1))
-30
-20
-10
0
5
LES DEUX ETAGES
CIRCUIT1 (ETAGE 2)
CIRCUIT2 (ETAGE 1)
Le circuit résonnant doit impérativement être placé en tête de l’association !
MONTIGNY Eric
Page 8 sur 10
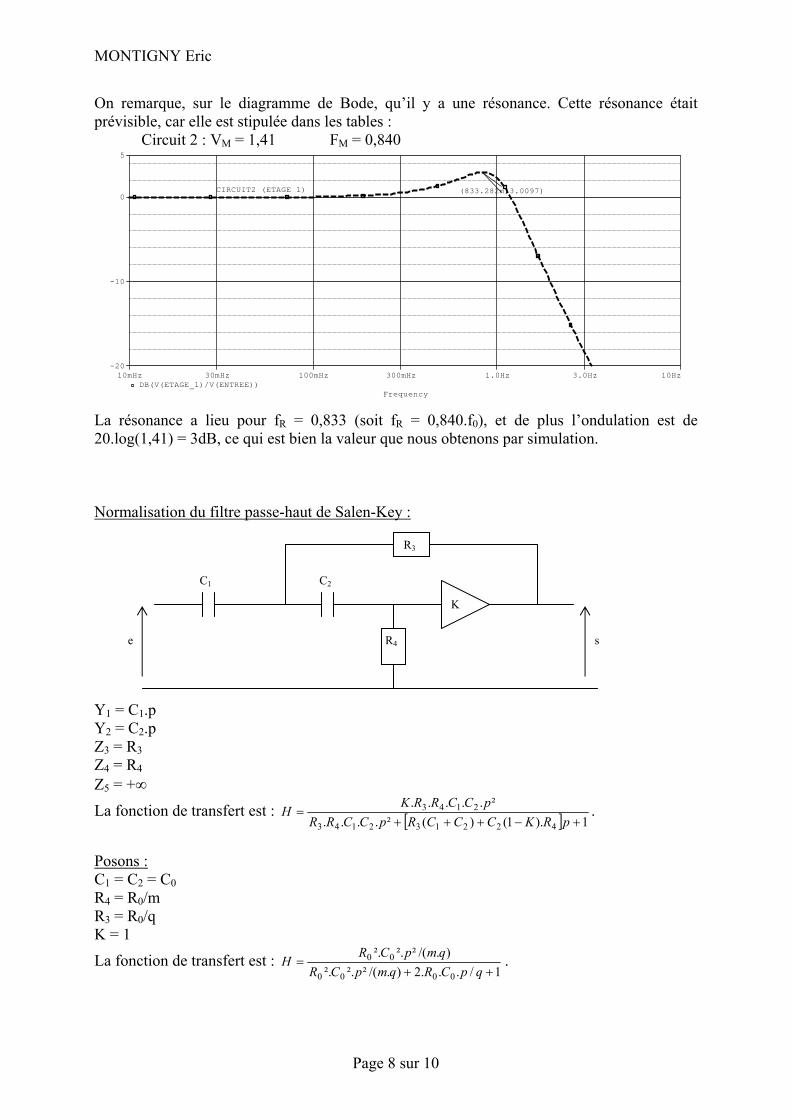
On remarque, sur le diagramme de Bode, qu’il y a une résonance. Cette résonance était prévisible, car elle est stipulée dans les tables : Circuit 2 : VM = 1,41 FM = 0,840
Frequency
10mHz 30mHz 100mHz 300mHz 1.0Hz 3.0Hz 10HzDB(V(ETAGE_1)/V(ENTREE))
-20
-10
0
5
(833.282m,3.0097)CIRCUIT2 (ETAGE 1)
La résonance a lieu pour fR = 0,833 (soit fR = 0,840.f0), et de plus l’ondulation est de 20.log(1,41) = 3dB, ce qui est bien la valeur que nous obtenons par simulation.
Normalisation du filtre passe-haut de Salen-Key :
Y1 = C1.pY2 = C2.pZ3 = R3Z4 = R4
Z5 = +
La fonction de transfert est : 1).1()(²....
².....
422132143
2143
pRKCCCRpCCRRpCCRRK
H .
Posons :C1 = C2 = C0R4 = R0/m R3 = R0/qK = 1
La fonction de transfert est : 1/...2)./(²².².
)./(²².².
0000
00
qpCRqmpCRqmpCR
H .
R3
C1
K
e s
C2
R4

MONTIGNY Eric
Page 9 sur 10
Par identification, on a :
qm
CRqm
w
wp
wp
wp
pH
qpCRqmpCRqmpCR
pH
n
nn
n 00
0000
00
..
1.2²
²²
²
)(
1/...2)./(²².².)./(²².².
)(
Si on pose : R0 1 C0 1 R0/q 1/q R0/m 1/m
Pour le passe-haut de SALEN-KEY, on retiendra la structure suivante, et l’expression :
1/.2)./(²)./(²)(
qpqmpqmppH
Normalisation du passe-bande de Salen-Key :Il existe une structure ‘passe-bande’ de Salen-Key, mais elle n’est jamais utilisée, car elle est trop sensible aux écarts de valeurs (une petite fluctuation sur une valeur, se traduit par une grande fluctuation du comportement). Pour contrecarrer ce problème, on utilise un passe-bas et un passe-haut, que l’on dispose en cascade :
1/q
1
1
e
1
1/m
1 1
q
1
sm
PASSE HAUT PASSE BAS
1/q
1
1
e s
1
1/m
MONTIGNY Eric
Page 10 sur 10
Notons que la structure précédente est composée : - D’un passe-bas d’ordre 2 - D’un passe-haut d’ordre 2 L’association résultante est donc d’ordre 4.
Pour réaliser un filtre passe-bande, on se référera bien sur aux tables idoines, tout en sachant qu’il faudra définir la bande passante relative (exprimée en pourcentage, est définie par
P
P
ff
B ).

MONTIGNY Eric
Page 1 sur 1
Filtrage analogique. [CHAPITRE 6]
1. Synthèse par variables d’étatLes structures de synthèse dite à ‘variable d’état’ ne fait appel qu’à des opérateurs mathématiques élémentaires pour constituer la fonction de transfert. Ces opérateurs sont des amplificateurs opérationnels bouclés et qui réalisent les fonctions sommation, inversion et intégration.
L’idée maîtresse est de partir de l’expression d’une fonction de transfert, et d’aboutir à une expression qui ne fait appel qu’à des opérateurs mathématiques.
Considérons un passe-haut du second ordre 1.2
²²
².)()()(
nn wp
wp
pKpEpSpH .
Exprimons S(p), soit ².).(1.2²
²).( pKpEwp
wppS
nn
Divisons par nwp ²/² , ce qui donne : ².).(²²
.21).( nnn wKpE
pw
pw
pS
Exprimons S(p), soit ²)(².)(..2)(.².)(
ppSw
ppSwpEwKpS nnn
Réalisons une TL-1 : dttswdttswtewKts nnn ).(.²).(...2)(.².)(
Sortie 1 : On a la sortie d’un filtre passe-haut du second ordre Sortie 2 : On a la sortie d’un passe-bande du second ordre Sortie 3 : On a la sortie d’un passe-bas du second ordre.
E(t) K.wn²
- wn²
-2. .wn
..dt ..dts(t).dt
s(t).dt
(1) (2) (3)
MONTIGNY Eric
Page 1 sur 2
Filtrage analogique. [CHAPITRE 7]
1. Rappel mathématique sur la sensibilitéConsidérons une fonction à plusieurs variables f(x1,x2,x3,…xN).
La sensibilité fxiS est définie par )ln(..
/.
// f
xx
fxf
xxxffS
ii
i
ii
fxi .
Cela revient à étudier les variations relatives de la fonction f, par rapport à la variation relative de paramètre xi.
Exemple : Soit la fonction f(x,y) = x² + 3.y
Sensibilité par rapport à x : yx
xxfdxfx
xxffS f
x .3².2./.
//
Sensibilité par rapport à y : yx
yfdyfy
yyffS f
Y .3²3./.
//
Plaçons-nous en x=1 et y=1, soit :
75,0)1.(3)²1(
3).1(
5,0)1.(3)²1(
)1(2).1(
fY
fx
S
S
Faisons varier x de 20%, et évaluons les répercutions sur la valeur de la fonction : Variation sur f = 0,2 . 0,5 = 10%
Faisons varier y de 20%, et évaluons les répercutions sur la valeur de la fonction : Variation sur f = 0,2 . 0,75 = 15%
La sensibilité sert à quantifier les variations d’une fonction, en fonction des variations de grandeurs. En filtrage, la sensibilité trouve son intérêt, car on veut savoir si une variation sur une valeur de composant influe sur le comportement attendu.
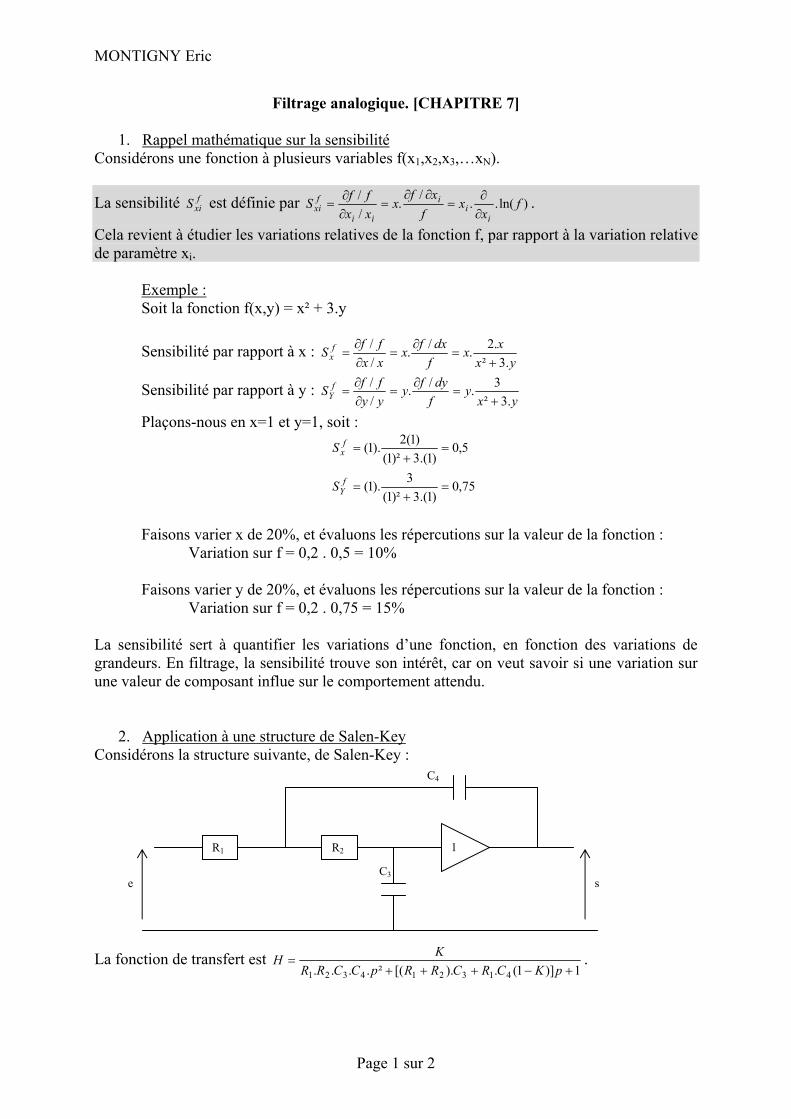
2. Application à une structure de Salen-KeyConsidérons la structure suivante, de Salen-Key :
La fonction de transfert est 1)]1(.).[(².... 413214321 pKCRCRRpCCRR
KH .
R1 R2
C4
1
e sC3

MONTIGNY Eric
Page 2 sur 2
On a aussi :
2121 ...1
CCRRwn
2121
211
....2].[
CCRRRRC
On cherche à étudier la sensibilité par rapport à R1, de la pulsation wn :
21
)ln(...21
)...ln(...21
)...
1ln(..
)ln(..//
1
11
11
21211
11
2121111
11
111
wnR
wnR
wnR
wnR
nnnwn
R
S
RR
RS
CCRRR
RS
CCRRRRS
wR
RRRww
S
En regardant l’expression, on a aussi 21
2121wnC
wnC
wnR
wnR SSSS .
Ainsi, si la valeur de R1 varie de 10%, alors wn varie de - 0,50 . 0,10 = - 5%. Ainsi, si la valeur de R2 varie de 10%, alors wn varie de - 0,50 . 0,10 = - 5%. Ainsi, si la valeur de C1 varie de 10%, alors wn varie de - 0,50 . 0,10 = - 5%. Ainsi, si la valeur de C2 varie de 10%, alors wn varie de - 0,50 . 0,10 = - 5%.
En d’autres termes, on peut écrire n
n
ww
RR
.21
1
1
3. Conclusion sur la sensibilitéLa structure de Salen-Key est appréciable, car les grandeurs importantes (amortissement et fréquence de résonance), ne sont pas très sensibles. Ainsi, une petite fluctuation sur un composant, n’engendrera pas une grande fluctuation sur l’amortissement ou sur la fréquence de résonance.


















