Fabio MORBIDI - home.mis.u-picardie.frfabio/Eng/documenti/Teaching/PARM... · 14 Capteurs...
39
UPJV, Département EEA Master 2 EEAII Parcours ViRob Fabio MORBIDI Laboratoire MIS Équipe Perception et Robotique E-mail: [email protected] Semestre 9, A.U. 2015-2016 Mardi 9h30-12h30 et 15h00-17h30 Salle TP101
Transcript of Fabio MORBIDI - home.mis.u-picardie.frfabio/Eng/documenti/Teaching/PARM... · 14 Capteurs...
UPJV, Département EEA
Master 2 EEAII
Parcours ViRob
Fabio MORBIDI
Laboratoire MIS !Équipe Perception et Robotique!
E-mail: [email protected]!
Semestre 9, A.U. 2015-2016
Mardi 9h30-12h30 et 15h00-17h30 Salle TP101
2
Plan du cours
Chapitre 1: Perception pour la robotique [F. Morbidi]
Chapitre 2: Modélisation d’incertitudes [D. Kachi]
1. Introduction
3. Typologies de capteur
2. Classification des capteurs
1. Introduction
3. Représentation statistique
2. Représentation de l’incertitude
4. Propagation de l’erreur: fusion des mesures de l’incertitude
Chapitre 3: Traitement des mesures [D. Kachi]
1. Réseau multi-capteurs
2. Fusion des mesures
Partie I : Perception Avancée

3
Capteurs de contact (1)
« Bumper » : plot de contact tout ou rien (fonctionnement basé sur la pression)
• Avantages: coût, calcul, vitesse, robustesse, sécurité
• Inconvénients: information pauvre, contrainte sur l’environnement
Chapitre 1: Perception pour la robotique
3. Typologies de capteur
Trois « bumpers »
4
Capteurs de contact (2)
Capteur d’efforts
• Permet de mesurer les efforts en force et/ou en couple sur un effecteur
• Applications : • Mains robotisées (capteurs tactiles/peau artificielle) • Interfaces haptiques • Robots industriels (coopératifs)
• Inconvénients : coût élevé, étalonnage, fragile, plage de mesures faibles
5
Capteurs de contact (2)
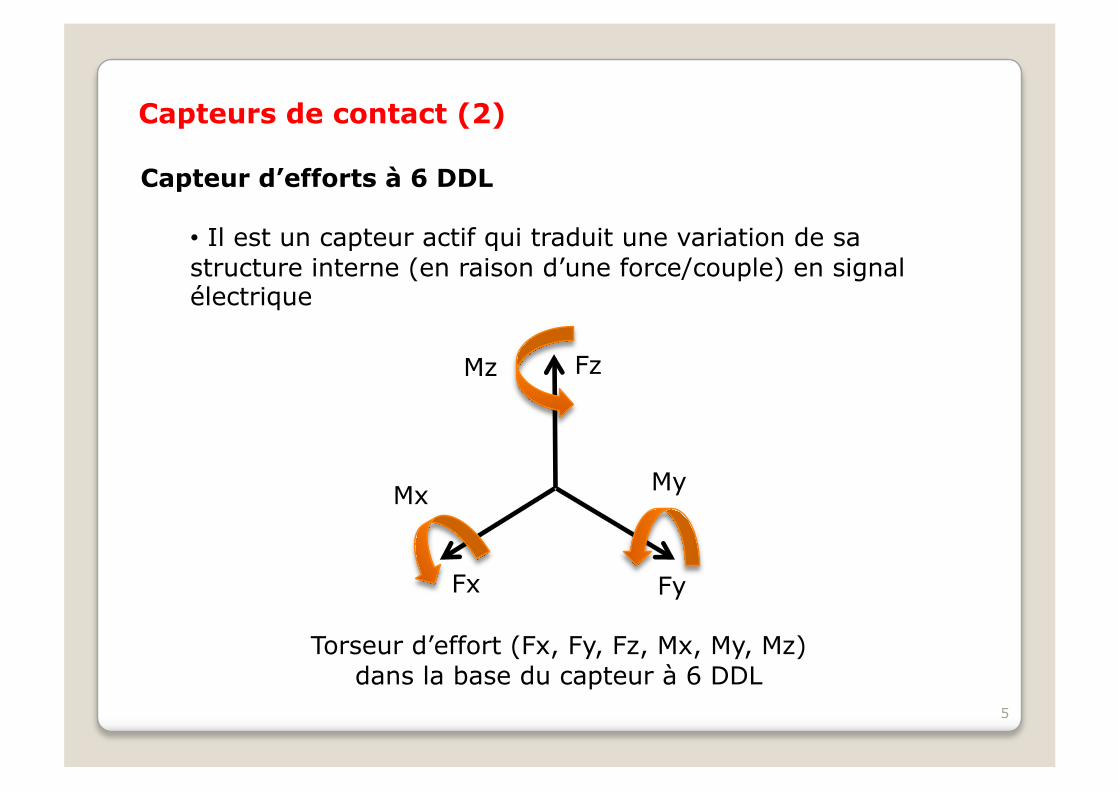
Torseur d’effort (Fx, Fy, Fz, Mx, My, Mz) dans la base du capteur à 6 DDL
Capteur d’efforts à 6 DDL
• Il est un capteur actif qui traduit une variation de sa structure interne (en raison d’une force/couple) en signal électrique
Fx
Fz Mz
Mx
Fy
My
6
Capteurs de contact (2)
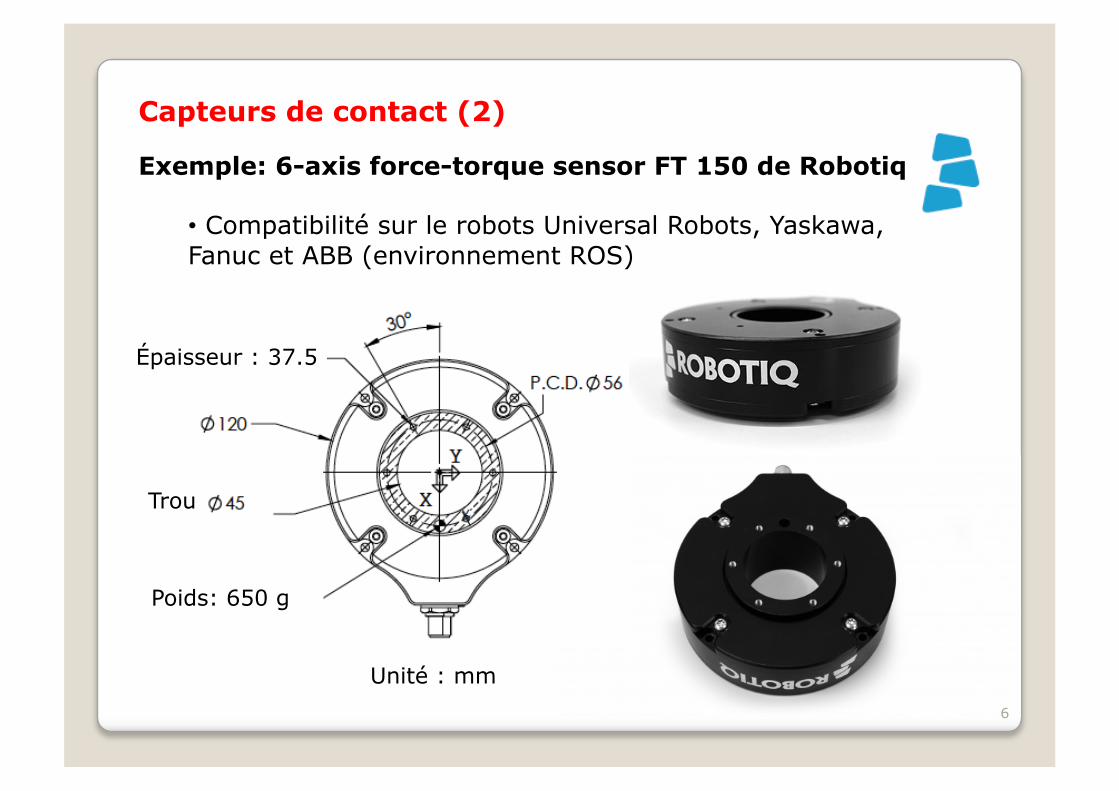
Exemple: 6-axis force-torque sensor FT 150 de Robotiq
• Compatibilité sur le robots Universal Robots, Yaskawa, Fanuc et ABB (environnement ROS)
Unité : mm
Épaisseur : 37.5
Poids: 650 g
Trou
7
Capteurs de contact (2)
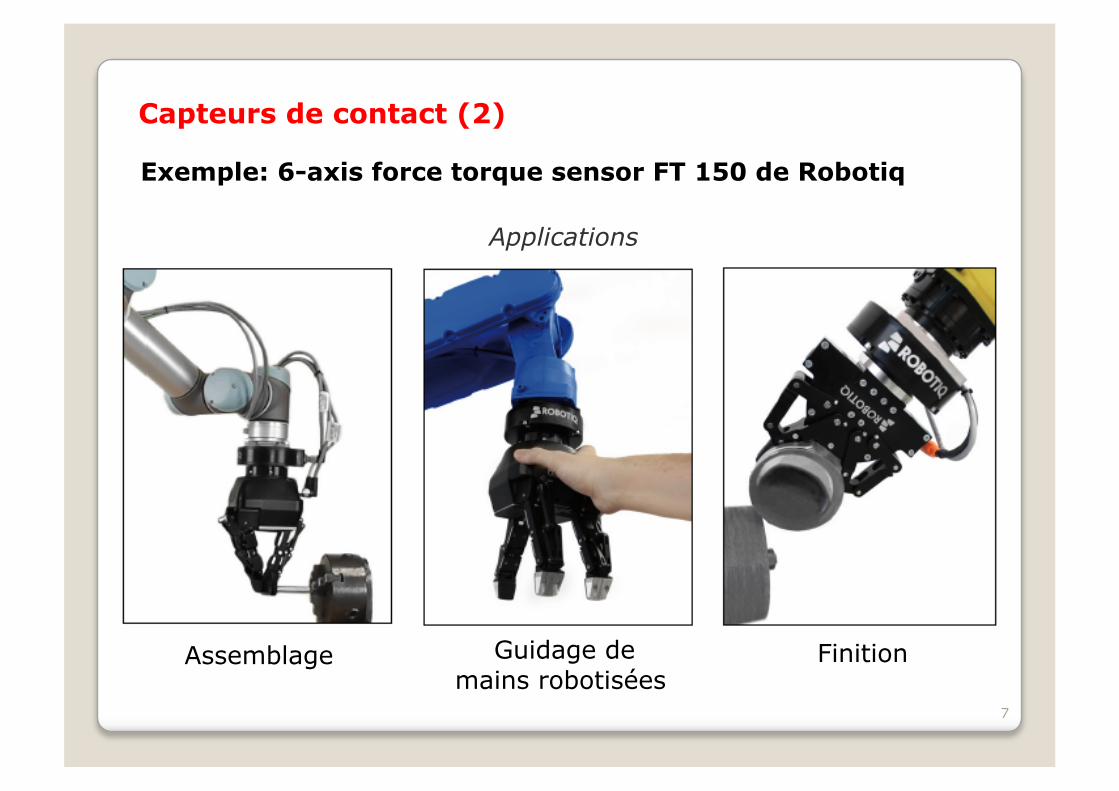
Exemple: 6-axis force torque sensor FT 150 de Robotiq
Guidage de mains robotisées
Assemblage Finition
Applications
8
Capteurs de contact (2)
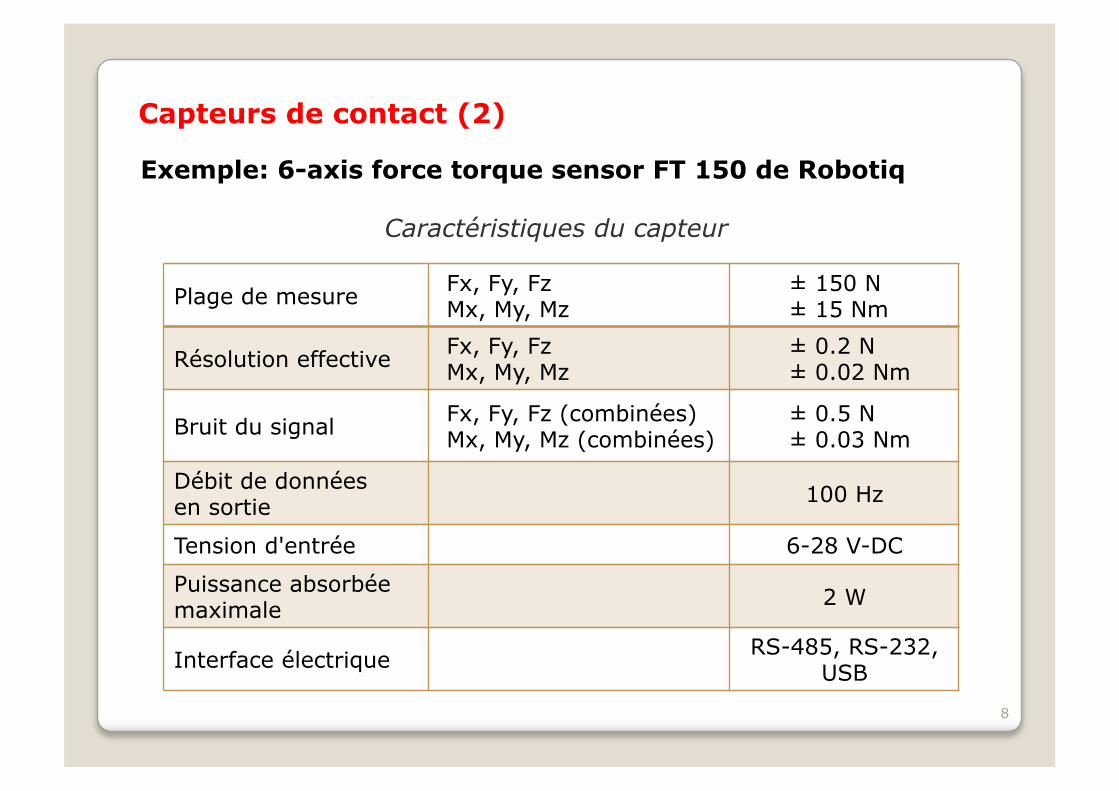
Exemple: 6-axis force torque sensor FT 150 de Robotiq
Plage de mesure Fx, Fy, Fz Mx, My, Mz
± 150 N ± 15 Nm
Résolution effective Fx, Fy, Fz Mx, My, Mz
± 0.2 N ± 0.02 Nm
Bruit du signal Fx, Fy, Fz (combinées) Mx, My, Mz (combinées)
± 0.5 N ± 0.03 Nm
Débit de données en sortie 100 Hz
Tension d'entrée 6-28 V-DC
Puissance absorbée maximale 2 W
Interface électrique RS-485, RS-232, USB
Caractéristiques du capteur
9
Capteurs de contact (2)
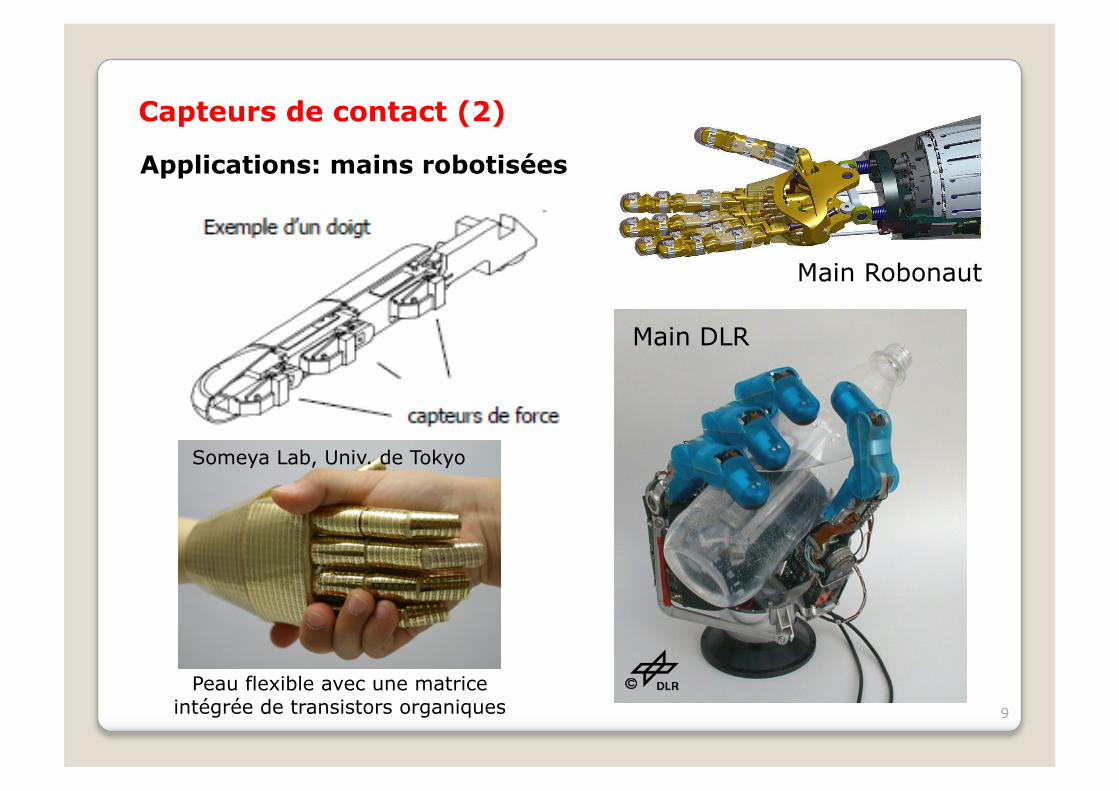
Applications: mains robotisées
Main Robonaut
Main DLR
Someya Lab, Univ. de Tokyo
Peau flexible avec une matrice intégrée de transistors organiques

10
Capteurs de contact (2)
Applications: interfaces haptiques (du grec haptikos = capable d'entrer en contact avec)
Omega 7 de Force Dimension
Falcon de Novint
11
Capteurs de contact (2)
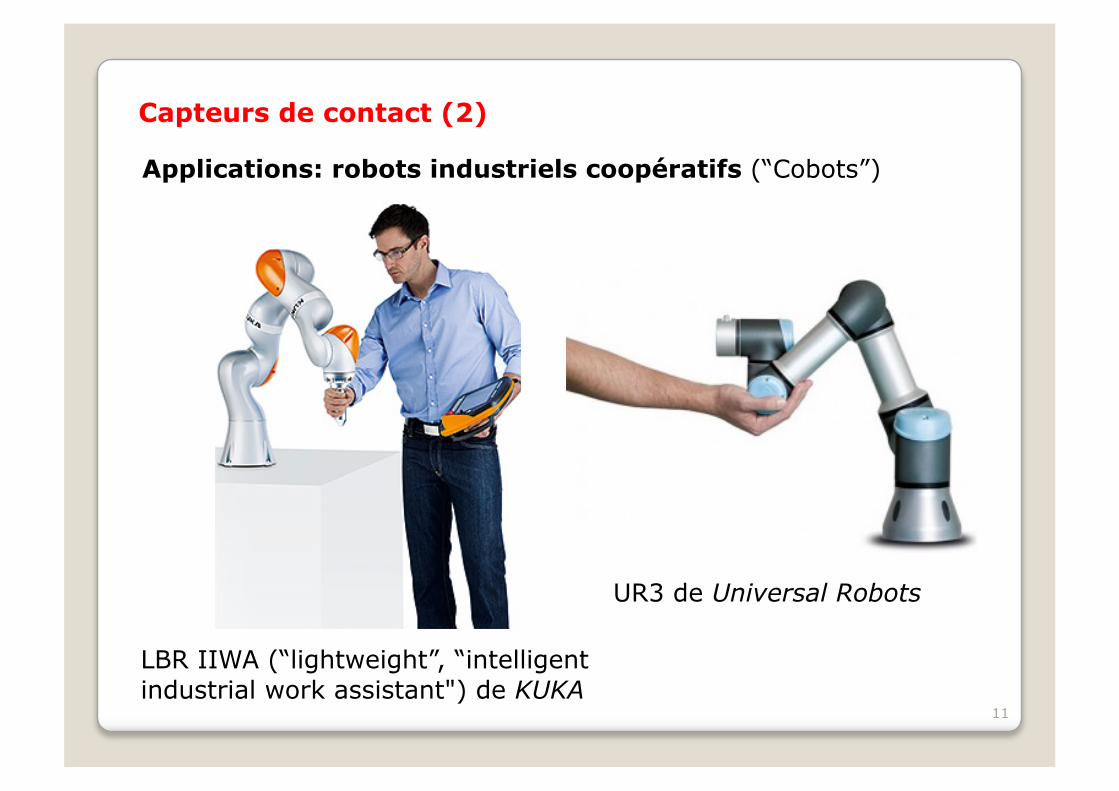
Applications: robots industriels coopératifs (“Cobots”)
LBR IIWA (“lightweight”, “intelligent industrial work assistant") de KUKA
UR3 de Universal Robots
12
Capteurs de contact (2)
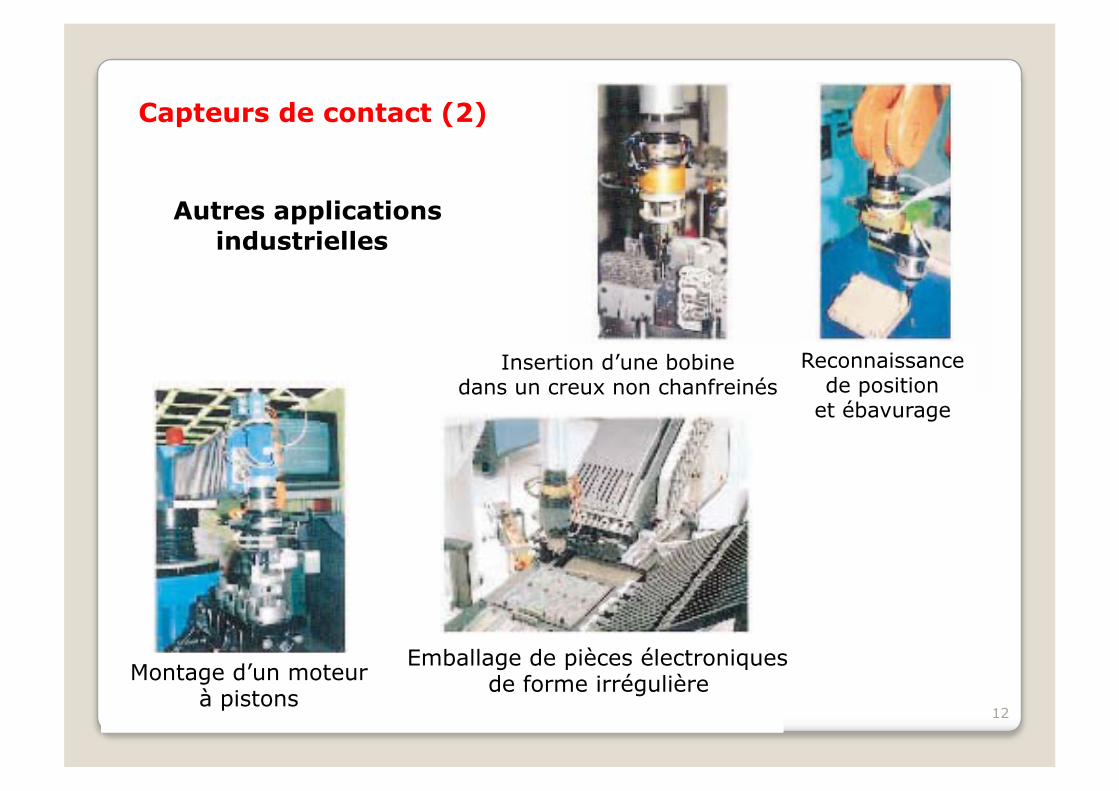
Montage d’un moteur à pistons
Insertion d’une bobine dans un creux non chanfreinés
Reconnaissance de position
et ébavurage
Autres applications industrielles
Emballage de pièces électroniques de forme irrégulière
13
Capteurs proprioceptifs
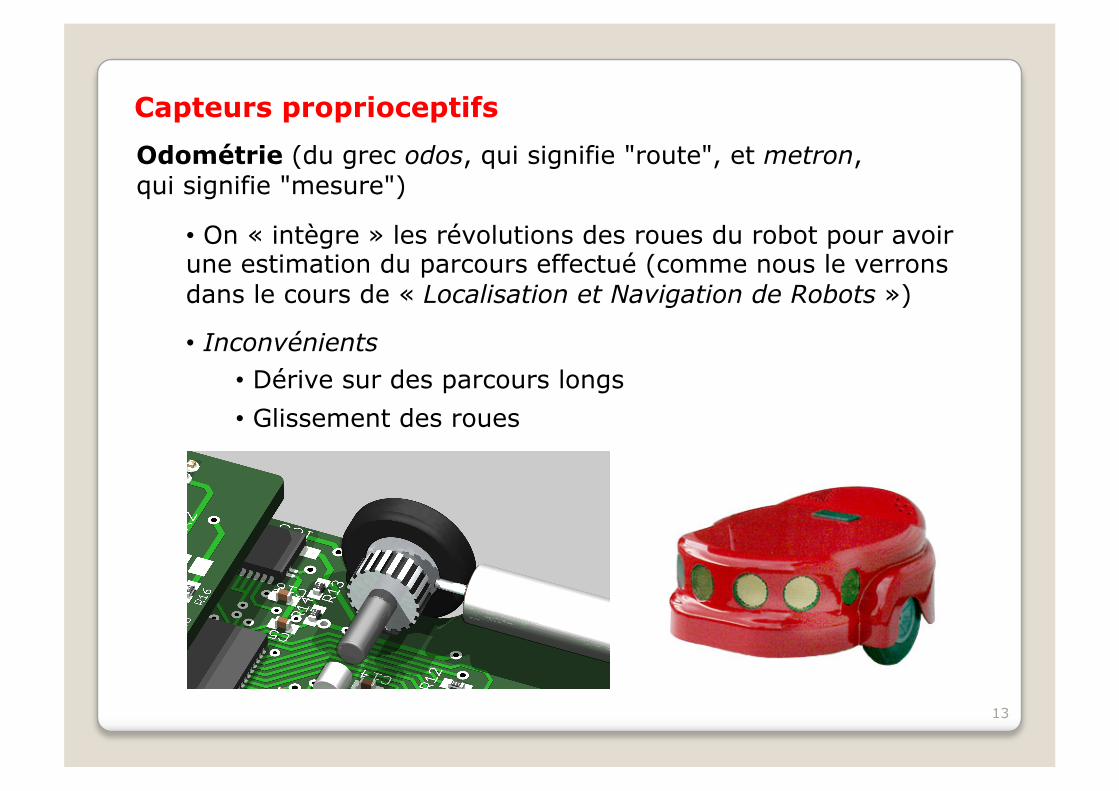
Odométrie (du grec odos, qui signifie "route", et metron, qui signifie "mesure")
• On « intègre » les révolutions des roues du robot pour avoir une estimation du parcours effectué (comme nous le verrons dans le cours de « Localisation et Navigation de Robots »)
• Inconvénients • Dérive sur des parcours longs
• Glissement des roues
14
Capteurs proprioceptifs
1. Accéléromètre • Intégré sur puce • Utilisé dans les smart-phones, drones, airbags,
Nintendo Wii, pacemakers, etc.
2. Gyroscope • Mesure du cap (ou heading), faible coût, dérive mieux
que 1 degré par heure (en avionique: 0.001 deg/h)
3. Inclinomètre (ou clinomètre) • Mesure des angles par rapport à la ligne d'horizon (ou horizontale) • Inclinomètres très sensibles: résolution 0.01o
• Applications: navigation des bateaux (anciens astrolables), commande de vol des avions
15
Capteurs proprioceptifs
4. Magnétomètre • Mesure l’intensité ou la direction (boussole/compas)
d’un champ magnétique • Magnétomètre vectoriel: à induction magnétique
(fluxmètre), à saturation (fluxgate), à effet Hall, etc. • En 2009, le prix d'un magnétomètre à 3 axes est tombé
en dessous de 1$ par appareil. Ils sont integrés sur la plupart des smart-phones
5. GPS • Exactitude standard: 10-15 mètres.
Elle peut être augmentée à quelques mètres
16
Capteurs exteroceptifs
Passifs
• Capteurs de vision
• Technologies: linéaire, matrice CCD, CMOS, etc.
• Plusieurs configurations (capteur single ou multiple, ex. stéréo) et « accessoires » (lentilles « fisheye », miroirs, etc.)
• Centrales inertielles
Actifs
• Capteurs IR (infra-rouge)
• Télémètres laser
• Sonars (ultrasons)
• Radars (ondes radio)
17
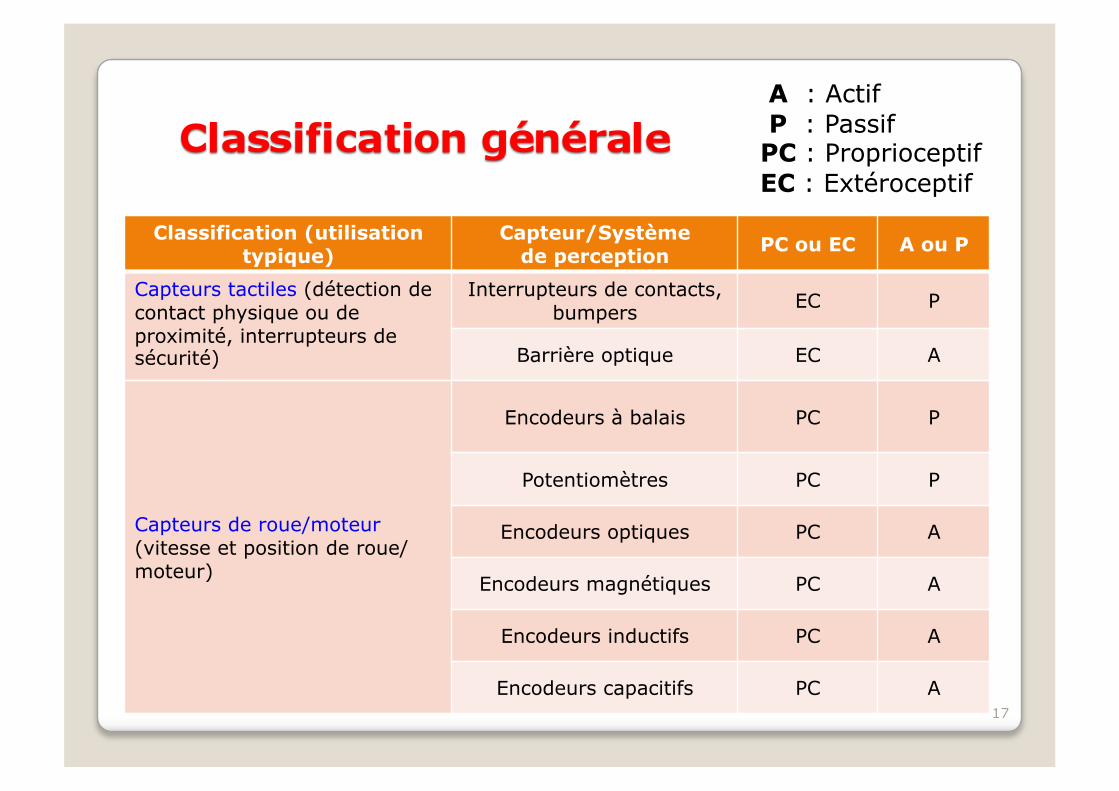
Classification (utilisation typique)
Capteur/Système de perception
PC ou EC A ou P
Capteurs tactiles (détection de contact physique ou de proximité, interrupteurs de sécurité)
Interrupteurs de contacts, bumpers
EC P
Barrière optique EC A
Capteurs de roue/moteur (vitesse et position de roue/moteur)
Encodeurs à balais PC P
Potentiomètres PC P
Encodeurs optiques PC A
Encodeurs magnétiques PC A
Encodeurs inductifs PC A
Encodeurs capacitifs PC A
A : Actif P : Passif PC : Proprioceptif EC : Extéroceptif
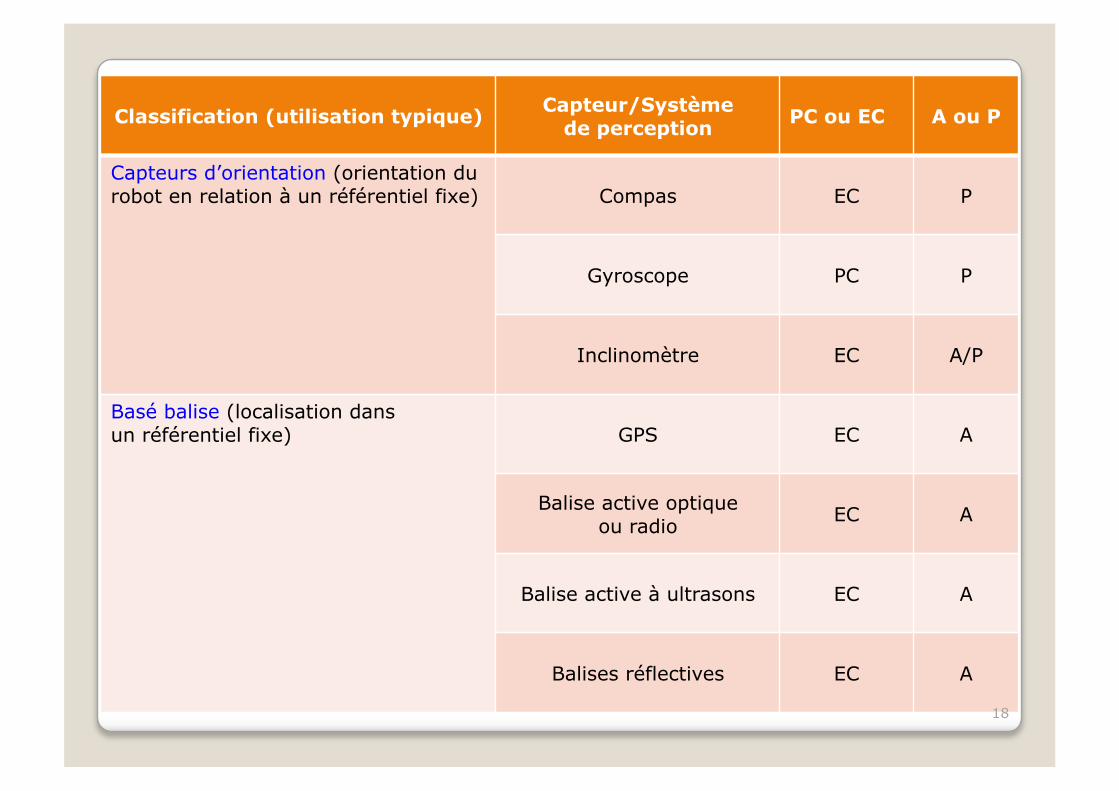
Classification (utilisation typique) Capteur/Système de perception
PC ou EC A ou P
Capteurs d’orientation (orientation du robot en relation à un référentiel fixe) Compas EC P
Gyroscope PC P
Inclinomètre EC A/P
Basé balise (localisation dans un référentiel fixe) GPS EC A
Balise active optique ou radio
EC A
Balise active à ultrasons EC A
Balises réflectives EC A
18
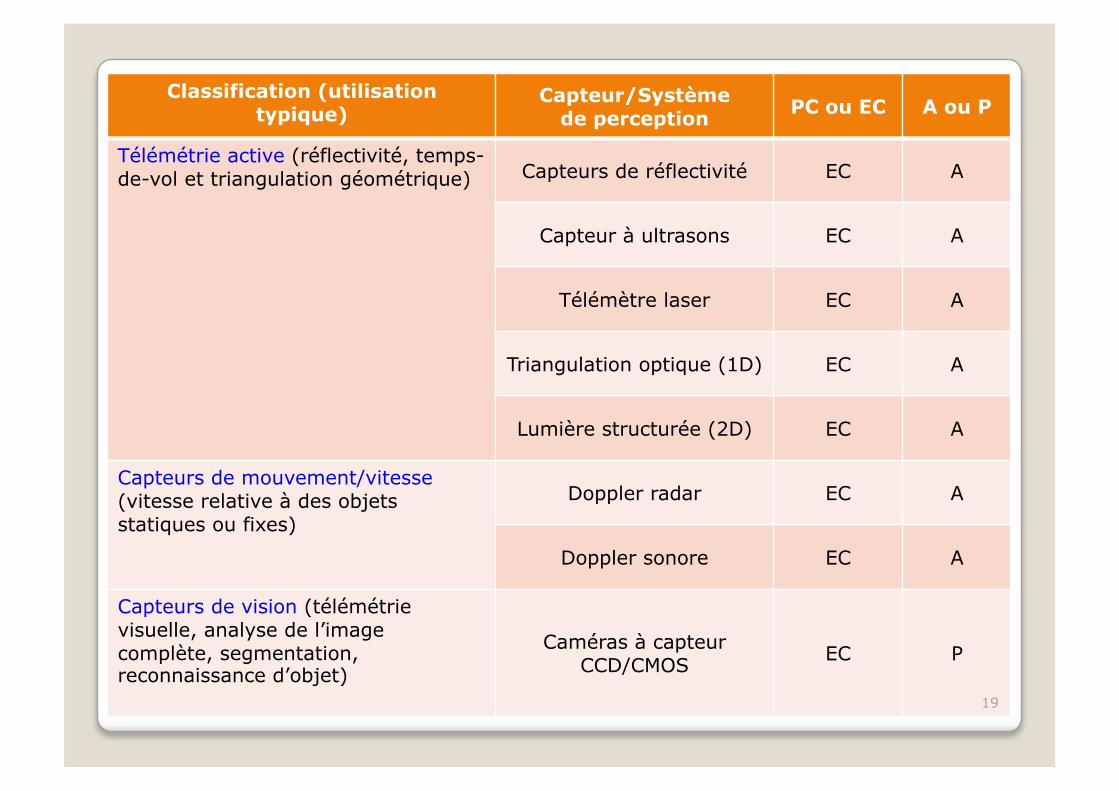
Classification (utilisation typique)
Capteur/Système de perception
PC ou EC A ou P
Télémétrie active (réflectivité, temps-de-vol et triangulation géométrique) Capteurs de réflectivité EC A
Capteur à ultrasons EC A
Télémètre laser EC A
Triangulation optique (1D) EC A
Lumière structurée (2D) EC A
Capteurs de mouvement/vitesse (vitesse relative à des objets statiques ou fixes)
Doppler radar EC A
Doppler sonore EC A
Capteurs de vision (télémétrie visuelle, analyse de l’image complète, segmentation, reconnaissance d’objet)
Caméras à capteur CCD/CMOS
EC P
19
Mesure de changement d’orientation
Trois principes de fonctionnement Mécanique (il repose sur le principe de conservation
du moment angulaire)
Optique (il repose sur l’effet de Sagnac)
MEMS (systèmes micro-électromécaniques)
Deux catégories Mesure directe d’angles (rare)
Gyroscopes fréquentiels: mesure de vitesse de rotation
Inconvénient: dérive Nécessité d’un recalage fréquent
Dérive parfois supérieure à l’exactitude requise
Gyroscopes (Gyros)
20
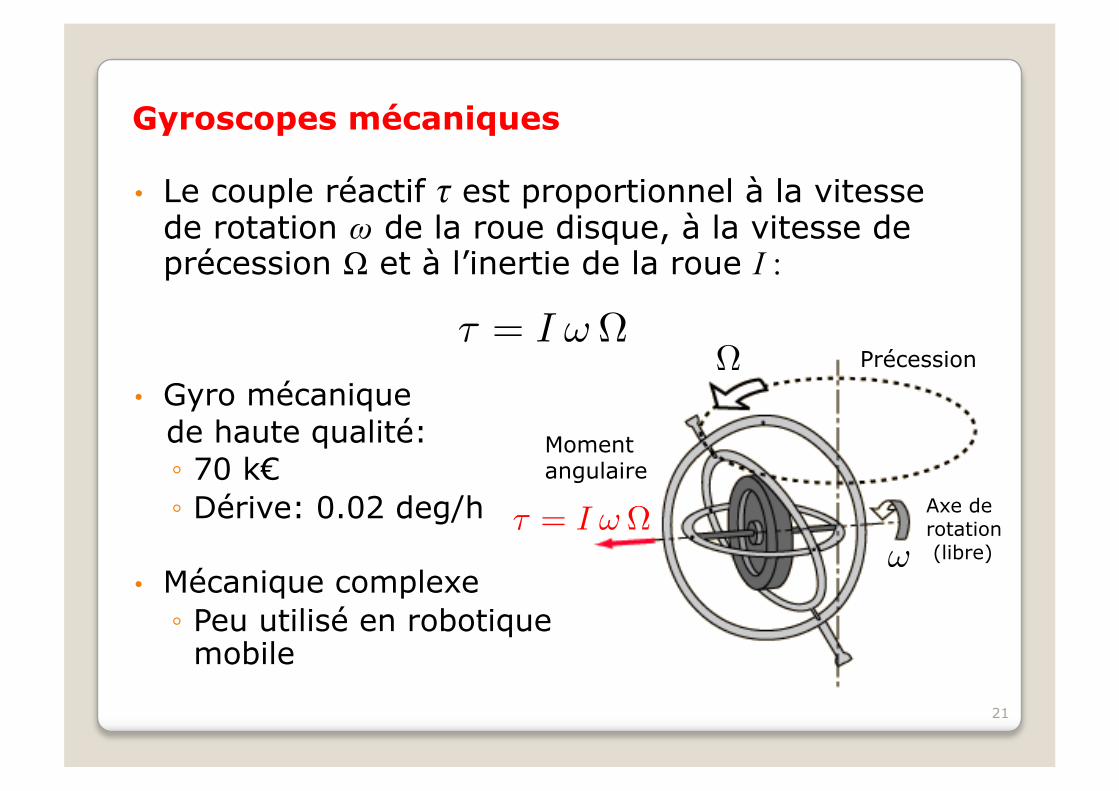
Gyroscopes mécaniques
• Le couple réactif τ est proportionnel à la vitesse de rotation ω de la roue disque, à la vitesse de précession Ω et à l’inertie de la roue I :
• Gyro mécanique de haute qualité: 70 k€ Dérive: 0.02 deg/h
• Mécanique complexe Peu utilisé en robotique
mobile
τ = I ωΩPrécession
Moment angulaire
τ = I ωΩ
Ω
ω
Axe de rotation (libre)
21
Gyroscopes optiques
• Basés sur le comportement d’une onde optique dans un repère en rotation (effet de Sagnac)
• Détection de rotation mécanique basée interférence lumineuse:
• Deux rayons lumineux en directions opposées • Le rayon voguant contre la rotation est plus court • Décalage de phase • Intensité combinée dépend de la fréquence de rotation
• Résolution de l’ordre du 0.0001 deg/s
22
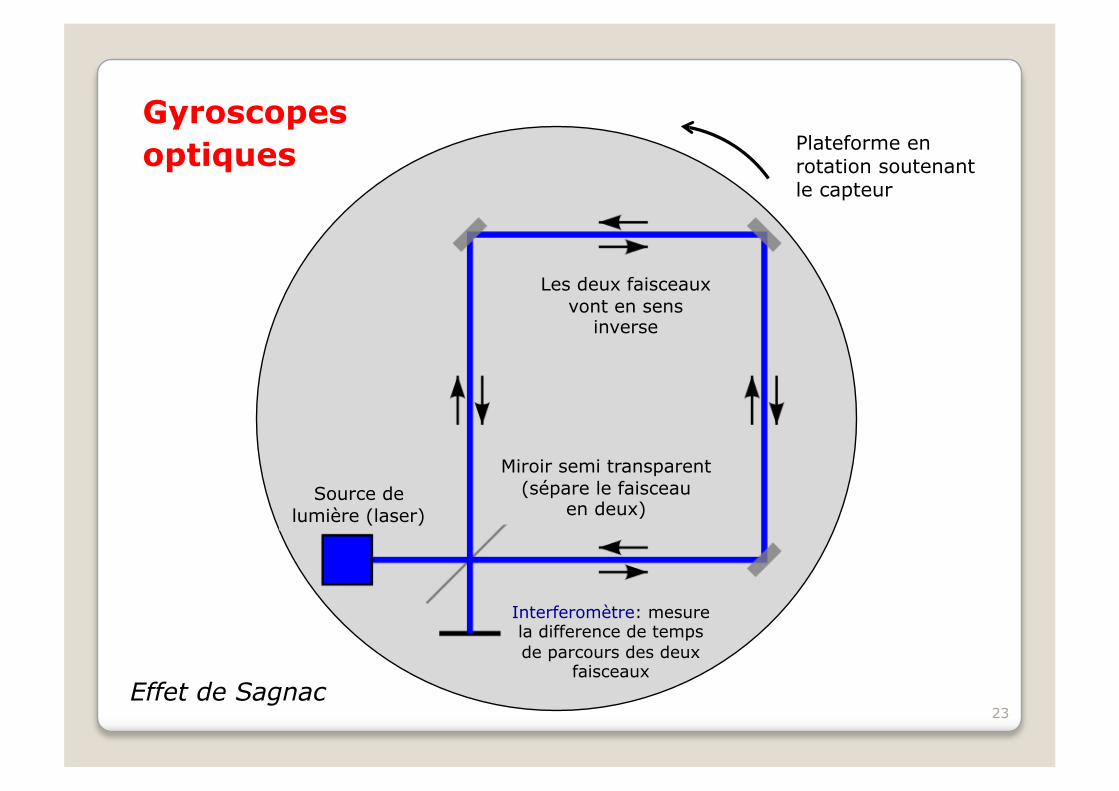
Gyroscopes optiques Plateforme en
rotation soutenant le capteur
Source de lumière (laser)
Miroir semi transparent (sépare le faisceau
en deux)
Les deux faisceaux vont en sens
inverse
Interferomètre: mesure la difference de temps de parcours des deux
faisceaux
23 Effet de Sagnac
Gyroscopes fréquentiels MEMS
Eléments mécaniques vibrant Perception de l’accélération de Coriolis
Accélération apparente d’un repère en rotation
Plusieurs structures possibles Roue vibrante Résonateur hémisphérique
Pas d’élément en rotation
Consommation et taille réduite
Excellents pour la robotique
24
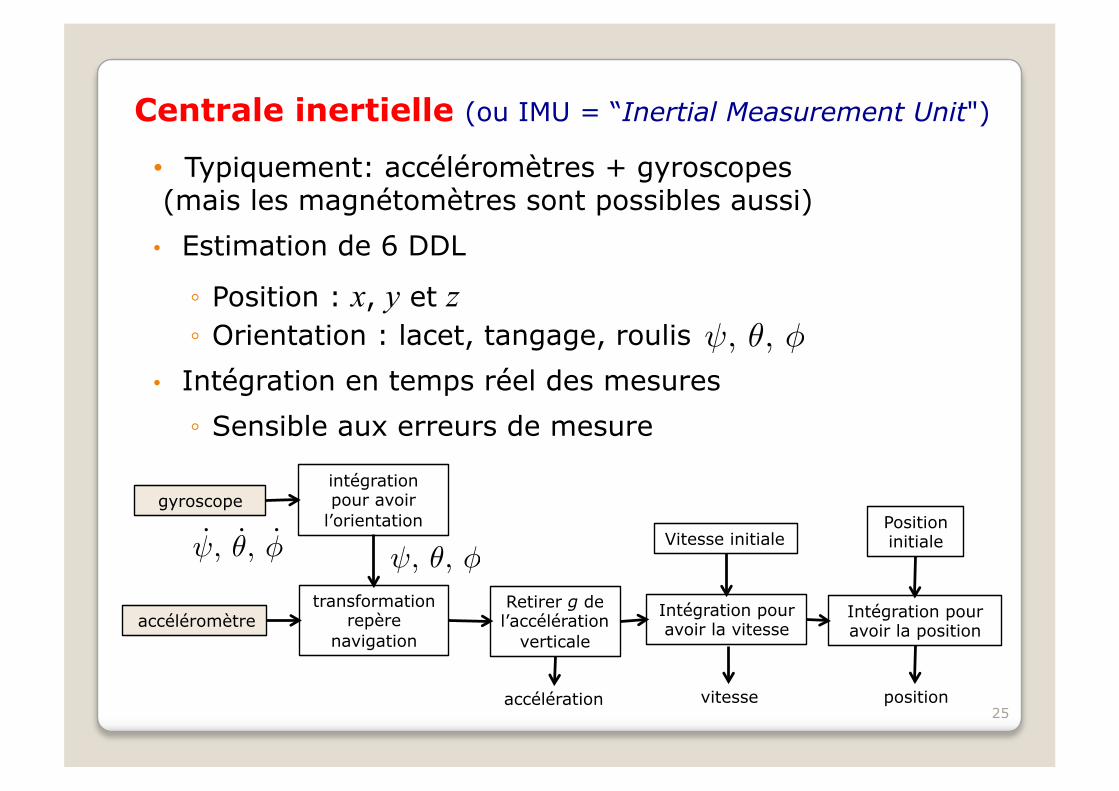
Centrale inertielle (ou IMU = “Inertial Measurement Unit")
25
• Typiquement: accéléromètres + gyroscopes (mais les magnétomètres sont possibles aussi)
• Estimation de 6 DDL
Position : x, y et z Orientation : lacet, tangage, roulis
• Intégration en temps réel des mesures
Sensible aux erreurs de mesure
ψ, θ, φ
gyroscope
accéléromètre
intégration pour avoir
l’orientation
transformation repère
navigation
Retirer g de l’accélération
verticale
Vitesse initiale
Intégration pour avoir la vitesse
Position initiale
Intégration pour avoir la position
accélération vitesse position
ψ, θ, φ ψ, θ, φ
Balises
26
Balises à position connue précisément Navigation basée balises: très ancienne Balises naturelles: étoiles, montagnes, soleil Balises artificielles: phares
Inconvénients des balises à l’intérieur Équiper l’environnement (cher) Changements de l’environnement
Flexibilité et adaptabilité limitées
GPS Capteur clé en robotique mobile à l’extérieur Inutilisable à l’intérieur ou à l’exterieur dans
des environnements fortement encombrés ("canyons urbains”)
(Eng. “beacon” ou “landmark”)
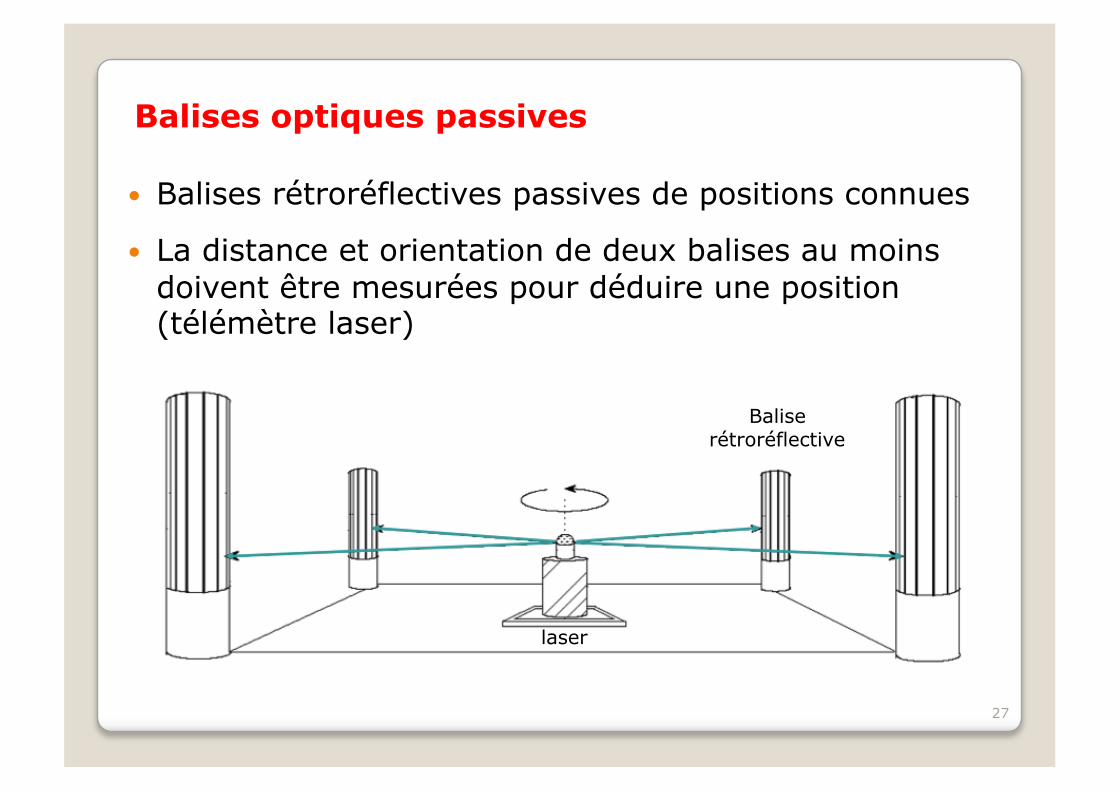
Balises optiques passives
27
Balises rétroréflectives passives de positions connues
La distance et orientation de deux balises au moins doivent être mesurées pour déduire une position (télémètre laser)
Balise rétroréflective
laser
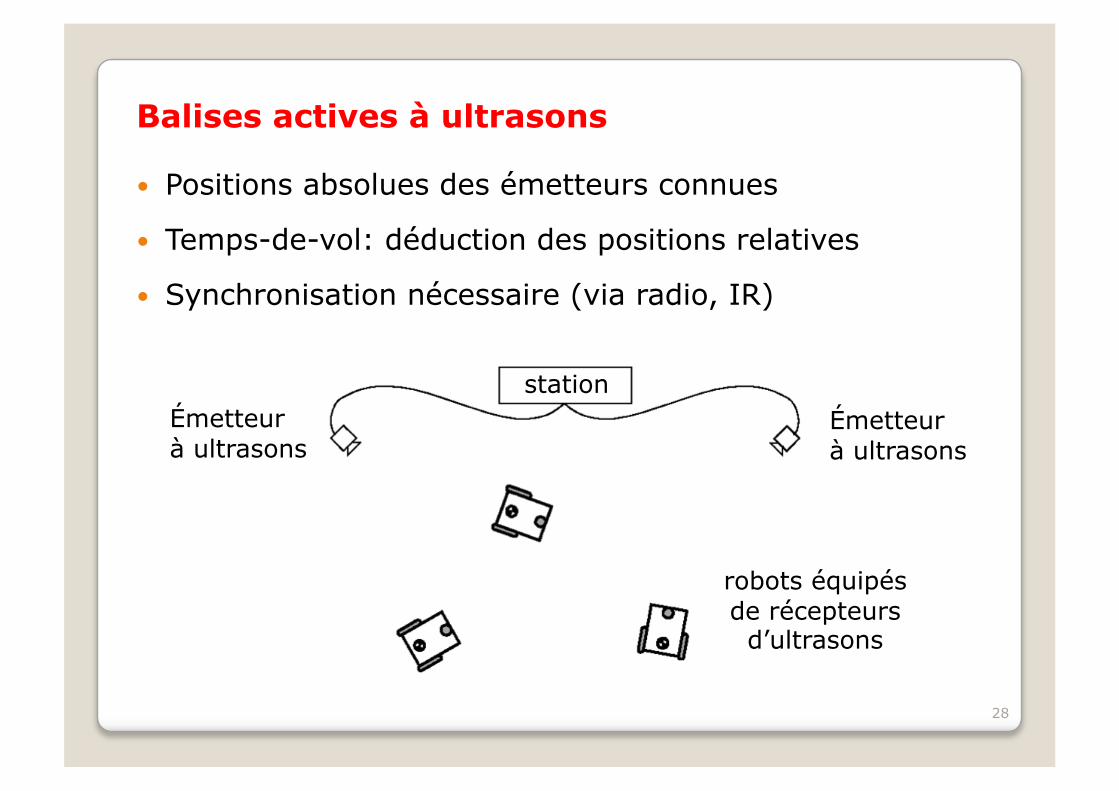
Balises actives à ultrasons
28
Positions absolues des émetteurs connues
Temps-de-vol: déduction des positions relatives
Synchronisation nécessaire (via radio, IR)
Émetteur à ultrasons
station
robots équipés de récepteurs
d’ultrasons
Émetteur à ultrasons
GPS
29
Origine militaire É.U. (1er satellite: 1978) 31 satellites en orbite à 20180 km Garantie d’avoir toujours 6 satellites dans la ligne
de visée d’un dispositif dans le monde entier Au moins 4 satellites pour estimer la position (x, y, z) Localisation basée GPS: mesure de temps-de-vol
Difficultés techniques Synchronisation
Entre les satellites Entre les satellites et le récepteur GPS
Mise à jour temps-réel de la position exacte des satellites Mesure précise du temps-de-vol Interférences, réflexions du signal, etc.
Autres systèmes analogues: GLONASS (Russie), COMPASS (Chine), Galileo (UE)
(Global Positioning System)
30
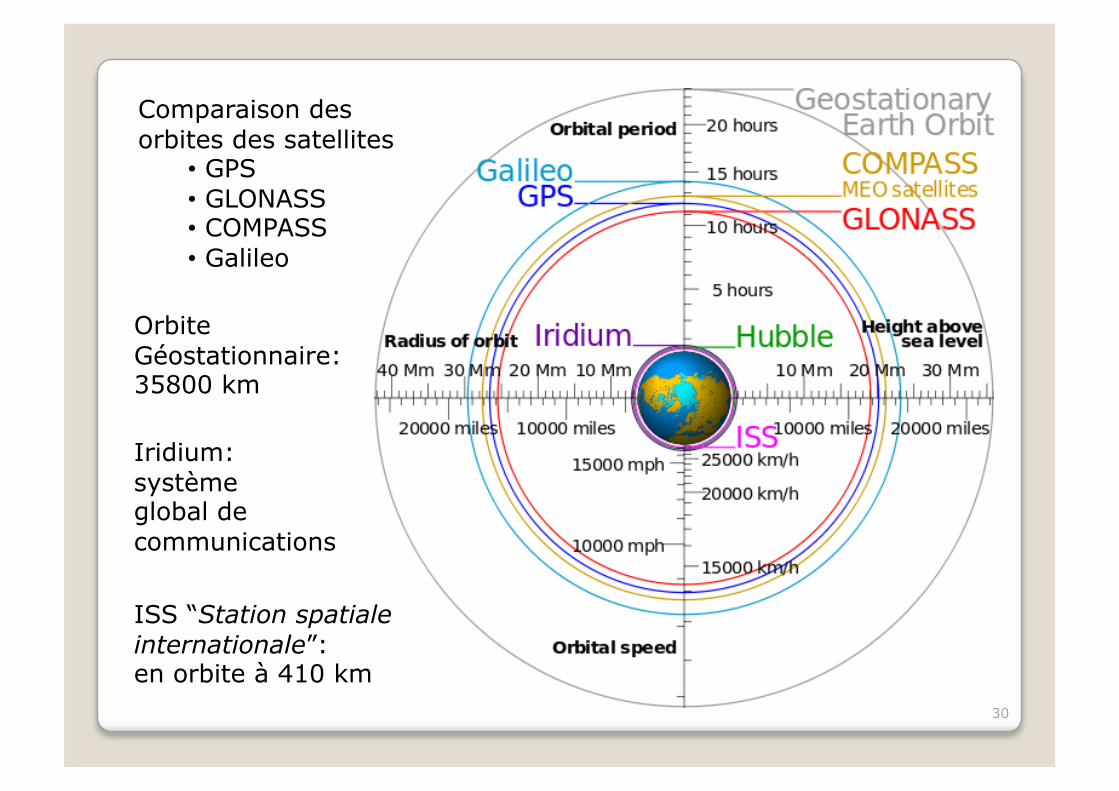
Comparaison des orbites des satellites
• GPS • GLONASS • COMPASS • Galileo
ISS “Station spatiale internationale”: en orbite à 410 km
Iridium: système global de communications
Orbite Géostationnaire: 35800 km
31
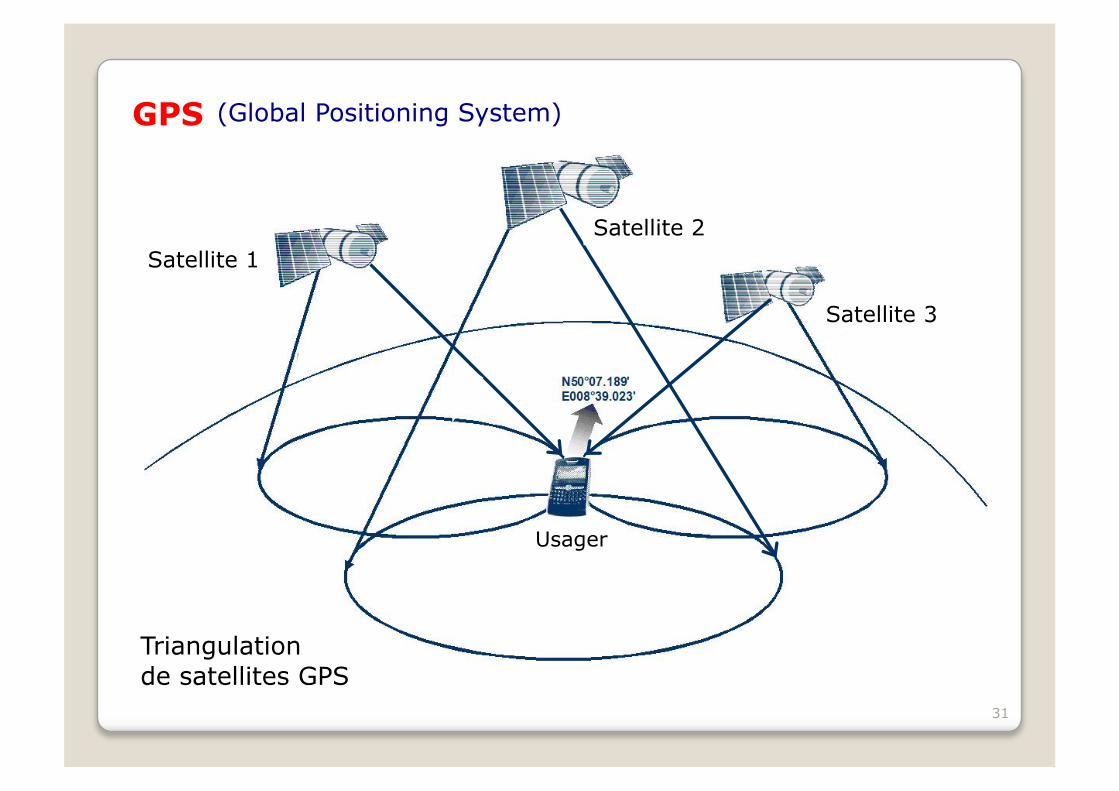
GPS
Triangulation de satellites GPS
(Global Positioning System)
Satellite 2
Satellite 3
Satellite 1
Usager
32
GPS
Synchronisation 0.3 m/ns : exactitude de position proportionnelle
à la mesure du temps Horloge atomique sur chaque satellite
Mise à jour temps-réel des positions de satellites Suivi par stations au sol Station principale analyse les mesures et transmets les
positions courantes à chaque satellite Mesure exacte du temps-de-vol Avec 4 satellites, identification de x, y, z et d’un facteur
de correction de délai Δt
GPS commerciaux Exactitude en position
10 m dans le plan horizontal 45 m selon la verticale
Mise à jour: entre 1 et 4 Hz GPS différentiel (DGPS)
• Exactitude en position ~ 10 cm
(Global Positioning System)
33
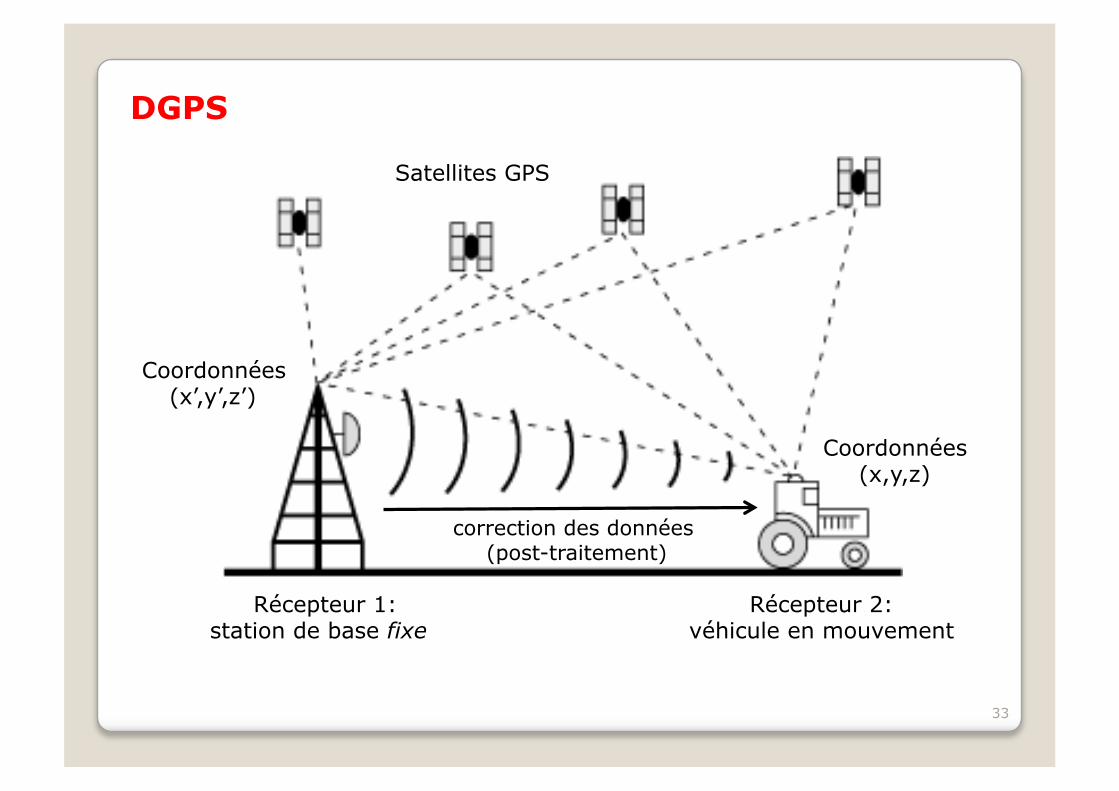
DGPS
Coordonnées (x,y,z)
Coordonnées (x’,y’,z’)
Récepteur 1: station de base fixe
Récepteur 2: véhicule en mouvement
Satellites GPS
correction des données (post-traitement)
34
Capteurs temps-de-vol
Information de distance, élément clé Évitement d’obstacle Localisation Modélisation d’environnement
Sonars et télémètres laser Exploitation de la vitesse de propagation de l’onde.
Pour une onde harmonique:
avec : vitesse de propagation de l’onde f , T : fréquence et période de l’onde : longueur d’onde : distance parcourue : temps-de-vol
v = λ f =λ
T
λ
v
d = v t/2t
35
Capteurs temps-de-vol
Caractéristiques Vitesse du son : 0.3 m/ms (c’est-à-dire, 300 m/s)
Sonar : 3 m 10 ms
Vitesse de la lumière : 0.3 m/ns (c’est-à-dire, 300000 km/s)
Télémètre laser : 3 m 10 ns Besoin d’électronique très rapide Télémètres lasers beaucoup plus chers et difficiles
à concevoir
La qualité dépend de: Inexactitudes dans la mesure du temps-de-vol Angle d’ouverture du rayon transmis (pour les sonars) Interaction avec la cible (surface, réflexions
spéculaires/diffuses) Variation de la vitesse propagation (son suivant le milieu) Vitesses du robot mobile et de la cible
(surtout si différentes)
36
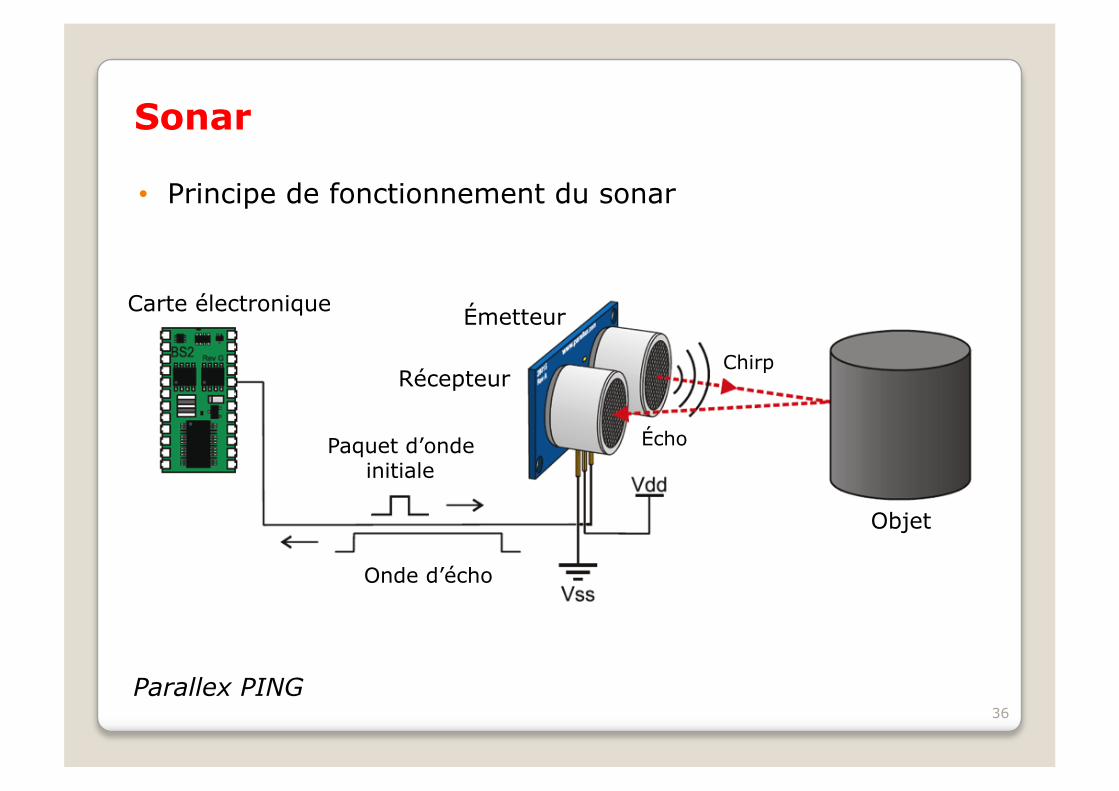
Sonar
• Principe de fonctionnement du sonar
Onde d’écho
Paquet d’onde initiale
Écho
Chirp
Objet
Récepteur
Émetteur Carte électronique
Parallex PING
37
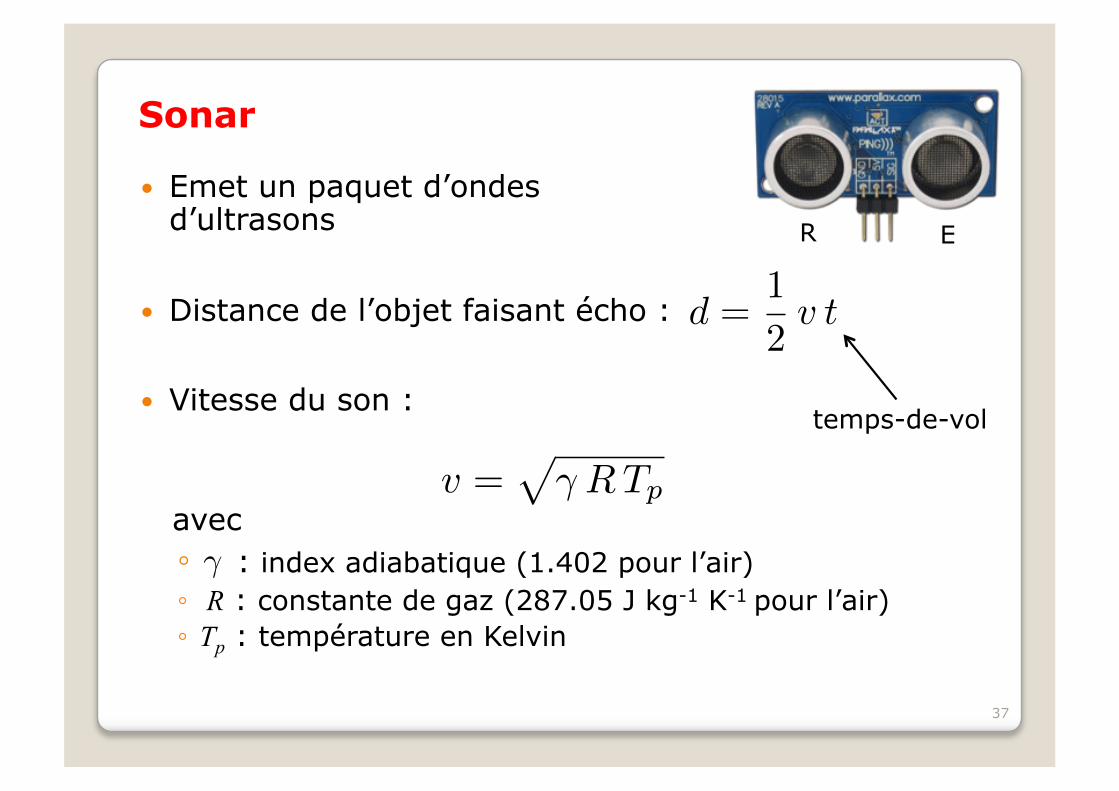
Sonar
Emet un paquet d’ondes d’ultrasons
Distance de l’objet faisant écho :
Vitesse du son :
avec : index adiabatique (1.402 pour l’air) R : constante de gaz (287.05 J kg-1 K-1 pour l’air) Tp : température en Kelvin
d =1
2v t
v =
γRTp
E R
temps-de-vol
γ
38
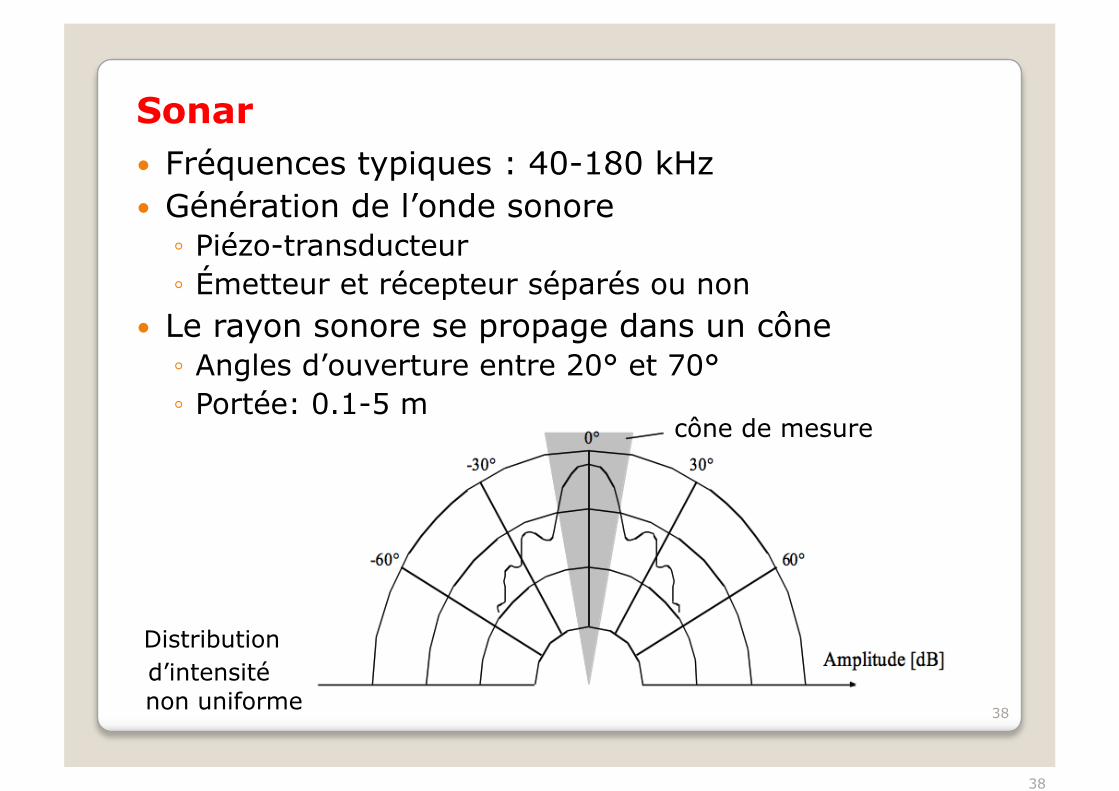
Sonar Fréquences typiques : 40-180 kHz Génération de l’onde sonore Piézo-transducteur Émetteur et récepteur séparés ou non
Le rayon sonore se propage dans un cône Angles d’ouverture entre 20° et 70° Portée: 0.1-5 m
38
cône de mesure
Distribution d’intensité
non uniforme
39
Sonar
39
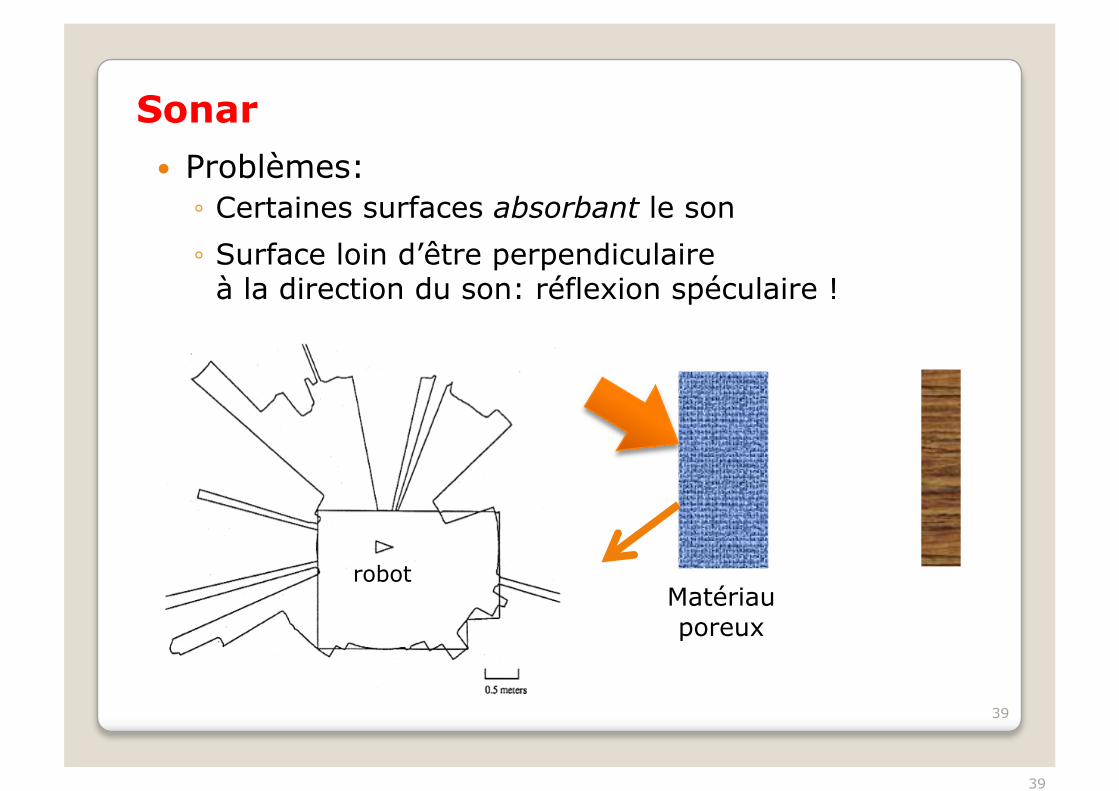
Problèmes: Certaines surfaces absorbant le son
Surface loin d’être perpendiculaire à la direction du son: réflexion spéculaire !
robot Matériau poreux
Matériau dur
ok
porte
fenêtre
?!