evn
31
Cours de Mathématiques INSA DE LYON Sport Etudes Groupe 37 Mohammed Jai ESPACES VECTORIELS NORMES 1
-
Upload
abdelkhalekbenomar -
Category
Documents
-
view
221 -
download
0
description
fcvbn,;
Transcript of evn
-
Cours de Mathmatiques
INSA DE LYON
Sport Etudes
Groupe 37
Mohammed Jai
ESPACES VECTORIELS NORMES
1
-
TABLE DES MATIRES TABLE DES MATIRES
Table des matires
1 Introduction 3
2 Normes et Distances 32.1 Dfinitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Exemples fondamentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 E = Kn avec K = R ou C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.2 Norme dfinie partir dun produit scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.3 Normes dfinies sur les espaces fonctionnels . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.4 Normes matricielles induites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Normes quivalentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.1 Dans un espace de dimension finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.2 Dans un espace de dimension infinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Continuit 103.1 Dfinitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Limite dune suite de points de E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.3 Limite dune fonction dans les espaces vectoriels norms . . . . . . . . . . . . . . . . . . . . . . . 143.4 Continuit dune fonction dans les espaces vectoriels norms . . . . . . . . . . . . . . . . . . . . . 15
4 Espaces vectoriels norms complets 164.1 Suites de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.2 Espaces vectoriels norms complets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.1 Dfinition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.2 Exemples fondamentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Thorme du point fixe 195.1 Le thorme de point fixe global . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.2 Le thorme de point fixe local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.3 Exemple en dimension 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.3.1 Graphiquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.3.2 Calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.3.3 Programme Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6 Rsolution des systmes linaires 236.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236.2 Principe des mthodes itratives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.3 Mthode de Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.4 Programme Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256.5 Mthode de Gauss Seidel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266.6 Programme Maple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7 Exercices 27
Mohammed Jai 2 Sport Etudes
-
2 NORMES ET DISTANCES
1 Introduction
Le but de ce chapitre est la gnralistion de la notion de la valeur absolue pour les rels ou le module pourles complexes au cas dun K espace vectoriel E avec K = R ou C. E peut tre Rn ,Cn , lespace des fonctionscontinues ou nimporte quel autre espace vectoriel. Nous pourrons ainsi gnraliser la notion de limite de suitedlments de E ainsi que la continuit dune application dun espace vectoriel E vers un autre espace vectorielF .
2 Normes et Distances
2.1 Dfinitions
Soit E un espace vectoriel sur le corps K = R ou C. Une norme sur E est une applicationN : E R+ qui possde les proprits suivantes :
(N 1) u E , N (u) = 0 u = 0 (Sparation)(N 2) K , u E ,N ( u) =| | N (u) ( Homognit)(N 3) u, v E , N (u + v) N (u) +N (v) ( Ingalit triangulaire)
Dfinition 1 (Norme).
Notation : La norme N est note ou E .Un espace vectoriel E muni dune norme est dit un espace vectoriel norm. On le note par (E , ).
Exemple 1 (Dans R et C ). Dans R : La valeur absoule est une norme dans le R-espace vectoriel Rpuisquelle vrifie les trois proprits dune norme : (i) x R, | x |= 0 x = 0 ;(ii) R, x R, | x |=| || x | ;(iii) x , y R, | x + y || x | + | y |.
Dans C le module dun complexe (pour z C, | z |= z z ) est une norme dans le C-espace vectoriel C.La preuve est similaire celle de la valeur absolue.
Exemple 2 (Dans R2 ). On montre que la norme euclidienne classique de R2 note par 2 et dfinie par
(x , y) R2, (x , y)2 =x 2 + y2
vrifie les trois proprits dune norme. En effet
(N1) : (x , y) R2, (x , y)2 =x 2 + y2 = 0 x 2 + y2 = 0 x 2 = y2 = 0 x = y = 0.
(N2) : R, (x , y) R2, (x , y)2 =
( x )2 + ( y)2 =| |x 2 + y2 =| | (x , y)2
(N3) Pour montrer lingalit triangulaire (N3) on utilise lingalit de Cauchy Schwarz dans R2 (voir ladmonstration plus loin) :
(x , y), (x , y ) R2 :| xx + yy |x 2 + y2
(x )2 + (y )2
Nous avons pour tout (x , y), (x , y ) R2
(x , y) + (x , y )22 = (x + x , y + y )22= (x + x )2 + (y + y )2
= x 2 + y2 + 2(xx + yy ) + (x )2 + (y )2
(x , y)22 + 2 | xx + yy | +(x , y )22 (x , y)22 + 2(x , y)2(x , y )2 + (x , y )22= ((x , y)2 + (x , y )2)2
et en prenant la racine carre on obtient lingalit demande.
Mohammed Jai 3 Sport Etudes
-
2 NORMES ET DISTANCES 2.2 Exemples fondamentaux
Soit E un ensemble quelconque. On dit que d est une distance sur E si et seulement si elle possdeles proprits suivantes :
D1. d est une application de E E dans R+D2. u, v E , d(u, v) = 0 u = v (Sparation)D3. u, v E , d(u, v) = d(v , u) ( Symtrie)D4. u, v ,w E , d(u, v) d(u,w) + d(w , v) ( Ingalit triangulaire)
Dfinition 2 (Distance).
Si d est une distance sur E alors (E , d) est appel espace mtrique.
Soit (E , ) un espace vectoriel norm. Alors lapplication (u, v) E E d(u, v) = u v R+est une distance sur E appele distance associe la norme .
Remarque 1.
Si (E , ) est un espace vectoriel norm, alors :
(u, v) E2, | u v | u v
Proprit 1.
2.2 Exemples fondamentaux
2.2.1 E = Kn avec K = R ou C
Pour une matrice A = (aij ) de type (m, n) on appelle matrice adjointe de A et on note A, la matrice de
type (n,m) dfinie par aij = aji , aji tant le nombre complexe cojugu de aji . Dans le cas o la matrice A estrelle, la matrice adjointe A est tout simplement la transpose de la matrice A.Le produit scalaire dans Kn est dfini par
(x | y) =n
i=1
xiyi = yx
Dans Kn on a les normes suivantes :Pour x = (x1, x2, , xn) Kn
1) x1 =n
i=1
| xi |
2) x2 = n
i=1
| xi |2 =x x
3) x = supi[1,n]
| xi |
Proposition 1.
Mohammed Jai 4 Sport Etudes
-
2 NORMES ET DISTANCES 2.2 Exemples fondamentaux
Dmonstration. Toutes les conditions de la dfinition dune norme se dmontrent facilement sauf lingalittriangulaire quon dmontrera pour les trois exemples :Nous avons pour tout , rels ou complexes : | + || | + | |. Soit x = (x1, x2, , xn) et y =(y1, y2, , yn) deux vecteurs de Kn .
1. Ingalit triangulaire pour 1
x + y1 =n
i=1
| xi + yi | n
i=1
(| xi | + | yi |)
=n
i=1
| xi | +n
i=1
| yi |
= x1 + y12. Ingalit triangulaire pour
Nous avons pour i = 1, 2, . . .n
| xi + yi || xi | + | yi | x + ydo x + y x + y.
3. Ingalit triangulaire pour 2Montrons tout dabord lingalit de Cauchy-Schwarz suivante
n
i=1
xiyi
n
i=1
| xi |2 n
i=1
| yi |2
On a pour tout R,x + y22 =n
i=1
| xi + yi |2 0. Or
ni=1
| xi + yi |2 =n
i=1
(xi + yi)(xi + yi)
=
ni=1
(xi + yi)(xi + yi)
=
ni=1
| xi |2 +n
i=1
(xiyi + yixi) +
ni=1
| yi |2
= x22 + 2Re() + 2 y22 (avec =n
i=1
xiyi)
On a alorsy22 2 +2Re()+x22 0 R
Lingalit prcdente nest vraie que si = 4(Re()2x22y22) 0, ce qui donne | Re() | x2y2.En utilisant la relation x + i y22 0 pour tout R et en faisant la mme dmonstration on trouve| Im() | x2y2. Ce qui donne | x2y2 qui est justement lingalit de Cauchy-Schwarzdemande.Montrons maintenant lingalit triangulaire.
x + y22 = x22 + 2Re(
ni=1
xiyi
)+ y22
et en utilisant lingalit de Cauchy-Schwarz on obtient lingalit triangulaire.
Mohammed Jai 5 Sport Etudes
-
2 NORMES ET DISTANCES 2.2 Exemples fondamentaux
Si E = Rn , x2 =(
ni=1
x 2i
)12
=(txx)12 est une norme euclidienne. Cest la norme associe au
produit scalaire usuel de Rn .
Remarque 2.
2.2.2 Norme dfinie partir dun produit scalaire
Soient E un espace vectoriel et f une forme bilinaire symtrique et dfinie positive (d.p) sur E . Soitq la forme quadratique associe. Lapplication N dfinie par :
N : E R+x 7 N (x ) =
q(x )
est une norme sur E .
Proposition 2.
Dmonstration. Vrifions les trois proprits dune norme :
(N1) : Si x = 0, alors N (x ) = 0. Vrifions la rciproque : Soit x E tel que N (x ) = 0, alors, daprs ladfinition de N , q(x ) = 0 et puisque q est dfinie positive x est forcment gal 0.
(N2) : K , x E ,N ( x ) =q( x ) =
2q(x ) =| |
q(x ). =| | N (x ).
(N3) : x , y E , N (x + y)2 = q(x + y) = f (x + y, x + y) = f (x , x ) + 2f (x , y) + f (y, y) car f estbilinaire et symtrique. De plus f est un produit scalaire donc, daprs lingalit de Cauchy Schwarz,| f (x , y) |
q(x )
q(y) = N (x )N (y). Donc N (x+y)2 N (x )2+2N (x )N (y)+N (y)2 = (N (x )+N (y))2
2.2.3 Normes dfinies sur les espaces fonctionnels
Dans cette partie nous considrons lespace C ([a, b],R), ensemble des fonctions continues sur [a, b] valeursdans R.
Dans C ([a, b],R) nous avons les normes suivantes :Pour tout f C ([a, b],R)
1) f 1 = ba
| f (x ) | dx
2) f 2 = b
a
f (x )2dx
3) f = supx[a,b]
| f (x ) |
Proposition 3.
Dmonstration. Montrons que lapplication 1 est une norme. (N1) :Si f 0 = f 1 = 0. Rciproquement, si f 1 =
ba| f (x ) | dx = 0, comme | f | est positive est
continue, on doit avoir f (x ) = 0, pour tout x [a, b].
Mohammed Jai 6 Sport Etudes
-
2 NORMES ET DISTANCES 2.2 Exemples fondamentaux
(N2) : R, f E , f 1 = ba| f (x ) | dx =| | b
a| f (x ) | dx =| | f 1.
(N3) : f , g E , [a, b], | f (x ) + g(x ) || f (x ) | + | g(x ) |. Donc ba| f (x ) + g(x ) | dx b
a| f (x ) |
dx + ba| g(x ) | dx = f 1 + g1.
2.2.4 Normes matricielles induites
Soit E = Mn(K), ensemble des matrices carres dordre n.Pour une matrice A E , on note A = (aij )i,j[1,n].
Si est une norme de Kn alorsA Mn(K),||| A |||= sup
xKn
x 6=0
Axx dfinit une norme de Mn(K).
Cest la norme matricielle induite par la norme de Kn .
Thorme 1 (Thorme et dfinition :).
Le rayon spectral dune matrice B , not (B) est le plus grand des modules des valeurs propres deB .
Exemple 3. Soit B =
(1 52 1
). Pour calculer les valeurs propres de A on considre le polynme
caractristique correspondant qui est P() = det(B I2) = det(1 52 1
)=
2+9. Les
racines sont complexes : = 3i. Par suite (B) = 3.
Dfinition 3 (et exemple).
La norme ||| ||| vrifie les proprits suivantes :
1. A Mn(K ),||| A |||= supx=1
Ax
2. x K n , Ax ||| A ||| x3. A,B Mn (K ), ||| AB |||||| A ||| . ||| B |||4. A Mn(C ), (A) ||| A |||.
Proprit 2.
Mohammed Jai 7 Sport Etudes
-
2 NORMES ET DISTANCES 2.2 Exemples fondamentaux
Nous avons que pour les normes usuelles de Rn ou Cn :
Norme de Rn ou Cn Norme matricielle induite
1 ||| A |||1= maxj[1,n]
(n
i=1
| aij |)
||| A |||= maxi[1,n]
n
j=1
| aij |
2 ||| A |||2= (AA)
Proposition 4.
Exemple 4. Soit A =
(1 23 0
). ||| A |||1= max(| 1 | + | 3 |, | 2 | + | 0 |) = 4 et ||| A |||= max(| 1 |
+ | 2 |, | 3 | + | 0 |) = 3. Pour calculer ||| A |||2 on a besoin des valeurs propres de la matrice B =t AA. On aB =
(1 32 0
)(1 2
3 0
)=
(10 22 4
)et det(B I2) = det
(10 22 4
)=
214+36. Les racinessont = 713. Donc ||| A |||2=
7 +
13.
Dmonstration. Nous montrons uniquement la norme ||| A |||1. La preuve de la norme ||| A ||| est similaire etcelle de la norme ||| A |||2 est faire dans lexercice 7.Soit x Rn , x 6= 0
Ax1 =n
i=1
n
j=1
aij xj
n
i=1
n
j=1
| aij | | xj |
=n
j=1
| xj |(
ni=1
| aij |) x1
(max
j
ni=1
| aij |)
Donc
supxRn
x 6=0
Axx maxj
ni=1
| aij |
Il reste montrer lautre ingalit. Soit k tel que
maxj
ni=1
| aij |=n
i=1
| aik |
Considrons le vecteur v de composantes vi :
vj =
{0 si j 6= k1 si j = k
Alors
Av1 =n
i=1
n
j=1
aij vj
=n
i=1
| aik |= maxj
ni=1
| aij |
Mohammed Jai 8 Sport Etudes
-
2 NORMES ET DISTANCES 2.3 Normes quivalentes
2.3 Normes quivalentes
Dans un espace vectoriel E , deux normes 1 et 2 sont dites quivalentes si et seulement si ilexiste deux constantes positives K1,K2 telles que :
u E : K1u1 u2 K2u1
Dfinition 4.
2.3.1 Dans un espace de dimension finie
Dans E = Rn , les trois normes usuelles sont quivalentes. Plus prcisment on a :
x Kn : x x2 x1 nxPlus gnralement nous avons le thorme suivant :
Dans un espace vectoriel norm de dimension finie, toute les normes sont quivalentes.
Thorme 2.
2.3.2 Dans un espace de dimension infinie
Le thorme prcdent nest plus valable dans un espace vectoriel norm de dimension infinie. Eneffet, considrons lespace E des fonctions continues, et les normes usuelles sur E , dfinies dans lasection 2.2.3. Nous avons les ingalites suivantes :
f E , f 1 b af 2 (b a)f
Remarque 3.
Mais les normes f 1, f 2, f ne sont pas quivalentes deux deux. Montrons par labsurde, par exemple,que les normes f 1 et f 2 ne sont pas quivalentes. Pour simplifier nous considrons le cas a = 0 et b = 1.Supposons que les deux normes sont quivalentes, cest dire il existe une constante positive K telle que
f E , f 1 f 2 Kf 1 (1)
et prenons la suite de fonctions fn dfinie par
fn : [0, 1] R
x 7 fn(x ) =
2nx si 0 x 12n
2nx + 2 si 12n
x 1n
0 si x 1n
Daprs la relation (1), nous avons fn2 Kfn1. Or fn1 = 12n
et fn2 =
3
2n. Par suite
3
2
n K .
Or K est une constante donne, donc pour n suffisamment grand lingalit est impossible.
Mohammed Jai 9 Sport Etudes
-
3 CONTINUIT
A laide de ce rsultat on montre que lespace E est de dimension infinie. Car sil tait de dimensionfinie on aurait quivalence entre les normes.
Remarque 4.
3 Continuit
3.1 Dfinitions
Soit (E , ) un espace vectoriel norm. Soit a E et r R+. On a les dfinitions suivantes :
Boule ouverte :On appelle boule ouverte de centre a et de rayon r lensemble B(a, r) dfinit par
B(a, r) = {u E , u a < r}
Boule ferme :On appelle boule ferme de centre a et de rayon r lensemble B(a, r) dfinit par
B(a, r) = {u E , u a r}
Sphre :On appelle sphre de centre a et de rayon r lensemble S (a, r) dfinit par
S (a, r) = {u E , u a = r}
Exemple 5. Soit E = R2. Dans ce cas les boules ouvertes B1(0, 1), B2(0, 1) et B(0, 1) correspondant succes-sivement aux normes 1, 2 et sont comme suit :
1
1
2
112
B1(0, 1)
1
1
2
112
B2(0, 1)
1
1
2
112
B(0, 1)
Une partie A dun espace vectoriel norm (E , ) est dite borne si et seulement si ilexiste un rel positif K tel que u K pour tout u A.Exemple 6. Soit E = R2 et A le sous ensemble de E dfinit par
A = {(3 sinn, 2 cosn), n N}
Dans R2 toutes les normes sont quivalentes. Si un sous ensemble est born pour une norme de R2
alors il est born pour toutes les autres normes de R2. Prenons par exemple la norme 2. Soit x A,alors il existe un entier non nul n tel que x = (3 sinn, 2 cosn). Or x2 =
9 sin2 n + 4 cos2 n 13.
Par suite A est une partie borne de R2.
Dfinition 5 (Ensemble born et exemple).
Mohammed Jai 10 Sport Etudes
-
3 CONTINUIT 3.1 Dfinitions
On dit quune application f dun espace vectoriel norm (E , E ) vers un espace vectorielnorm (F , F ) est borne si et seulement si la partie f (E ) de F est borne. Autrementdit, si et seulement si il existe un rel positif K tel que f (u)F K pour tout u E .Exemple 7. Soit E = R2, F = R. On munit R2, par exemple, de la norme 2. Soit la fonction fdfinie par
f : R2 R, f (x , y) =
xy
x 2 + y2si (x , y) 6= (0, 0)
0 si (x , y) = (0, 0)
f(R
2)={f (x , y), (x , y) R2}
Nous avons, pour tout (a, b) R2 lingalit 2ab a2 + b2 (il suffit de remarquer que (a b)2 0).Soit z f (R2). Il existe donc un couple (x , y) de R2 tel que z = f (x , y). Si (x , y) = (0, 0) alorsf (x , y) = 0 et si non, en utilisant lingalit prcdente, on obtient | f (x , y) | 12 . Donc f est bornepar 12 .
Dfinition 6 (Application borne et exemple).
Un ensemble U de E est dit ouvert si, pour tout lment a de U , on peut trouver uneboule ouverte centre en a et incluse dans lensemble U . Autrement dit
a U , r > 0 tel que B(a, r) U
Exemple 8. Soit E = R et U =]1, 3[. Montrons que U est un ouvert. Soit a ]1, 3[ et posonsr =
1
4min(3 a, a 1) par exemple. Pour montrer que U est un ouvert il faut montrer que la
boule B de centre a et de rayon r est incluse dans U . Autrement dit
B(a, r) = {x ]1, 3[:| x a |< r} ]1, 3[
On a | xa |< r a14min(3a, a1) < x < a+1
4min(3a, a1). Or a1
4min(3a, a1).
Or
a 14min(3 a, a 1) =
5a 34
si a > 2
3a + 1
4si a 2
Nous avons donc
si a 2, 3a + 14
> 1, donc x > 1
si a > 2,5a 3
4> 1, donc x > 1
Nous montrons de la mme faon que a +1
4min(3 a, a 1) < 3. Donc ]1, 3[ est un ensemle
ouvert.
Soit E = R et U =]0,+[. U est un ensemble ouvert car pour tout a > 0 la boule B(a, a2 ) =]a2 ,
3a2 [ est incluse dans ]0,+[
Dfinition 7 (Ensemble ouvert et exemple).
Une boule ouverte est un ensemble ouvert.
Proposition 5.
Mohammed Jai 11 Sport Etudes
-
3 CONTINUIT 3.2 Limite dune suite de points de E
Un ensemble U de E est dit ferm si son complmentaire dans E est un ouvert.
Exemple 9. Soit E = R et U =], 0]. Le complmentaire de U dans R est lintervalle ]0,+[qui est un ensemble ouvert de R. Donc U est un ensemble ferm de R.
Dfinition 8 (Ferm).
Soit (E , ) un espace vectoriel norm. et E sont la fois des ouverts et des ferms de E .
Si U et V sont des ouverts de E alors U V et U V sont des ouverts de E . Si U et V sont des fermets de E alors U V et U V sont des fermets de E .
Proprit 3.
Exemples : Dans E = R
Les ensembles du type ]a, b[ sont des ouverts.
Lensemble [0, 1[ nest pas un ouvert. En effet il nexiste pas de rel r > 0 tel que ] r , r [ [0, 1[.
3.2 Limite dune suite de points de E
Les dfinitions de suites de vecteurs dun espace vectoriel norms, de suites extraites, sont similaires cellesde nombres rels (ou complexes).
On appelle suite borne de lespace vectoriel norm E toute suite (un)nN dlments de E tellequil existe K R+ vrifiant
n N, un K
Dfinition 9.
Soit (un)nN une suite dlments de lespace vectoriel norm (E , ), cest dire une application
n N 7 un E
On dit que (un) est une suite convergente vers la limite E , on note limn
un = , si la suite des
nombres un tend vers zro lorsque n tend vers linfini, autrement dit
limn
un = limn
un = 0
Autrement dit > 0, N N : n > N un
Une suite qui ne converge pas est dite divergente.
Dfinition 10.
Mohammed Jai 12 Sport Etudes
-
3 CONTINUIT 3.2 Limite dune suite de points de E
Soit
(E , ) un espace vectoriel norm : N N une application strictement croissante (un)nN une suite dlments de (E , )
Alors la suite (u(n))nN est appele suite extraite ou sous-suite de (un)nN
Exemple 10. Si (n) = 2n, on obtient la suite exraite paire et si (n) = 2n+1, on obtient la suiteexraite impaire de (un)nN.
Dfinition 11 (Suite extraite).
Si une suite (un) de (E , ) est convergente alors sa limite est unique. Toute suite convergente est borne.
Si (n)nN est une suite de scalaires de K convergente vers et si (un)nN est une suitedlments dun espace vectoriel norm (E , ) convergente vers u alors la suite (n un)nNconverge vers u.
Si 1 et 2 sont deux normes quivalentes dun espace vectoriel E alors on a
limn
un = dans (E , 1) limn
un = dans (E , 2)
Ainsi, dans un sepace de dimension finie (toutes les normes sont quivalentes), pour prouverquune suite est convergente on choisit la norme la mieux adapte.
Si (un) converge vers a alors (un) converge vers a. Toute suite extraite dune suite convergente, est convergente et converge vers la mme limite.
Proprit 4.
Une suite (un)nN est dite convergente vers un lment dun espace espace vectoriel norm (E , )si et seulement si toutes les suites extraites de (un)nN convergent vers .
Exemple 11. On applique cette caractrisation essentiellement pour montrer quune suite nest pasconvergente. Par exemple si on prend E = R et un = (1)n , on voit que la suite extraite paire vautu2n = 1 (donc elle est convergente et converge vers 1) et la suite extraite impaire vaut u2n+1 = 1(donc elle est convergente et converge vers -1). On obtient ainsi deux suites extraites qui convergentvers deux limites distinctes. La caractrisation entrane donc que la suite (1)n nest pas convergentedans R.
Caractrisation 1 (des suites convergentes).
Mohammed Jai 13 Sport Etudes
-
3 CONTINUIT 3.3 Limite dune fonction dans les espaces vectoriels norms
Soient (E , ) un espace vectoriel norm et U un sous-ensemble de E . Alors les propositions suivantessont quivalente :
(i) U est ferm dans (E , )(ii) Toute suite (un)nN dlments de U qui converge vers un lment u de E entrane que u est
un lment de U .
Exemple 12. Soit E = R et U = [0,+[. Montrons, en utilisant cette caractrisation, que U estun ferm de R. Soit (xn)nN une suite relle dlments de U qui converge vers un lment x de R.Nous avons xn 0 pour tout n N et en passant la limite on obtient x 0. Donc x U et parsuite U est un ferm.
Caractrisation 2 (des ferms).
3.3 Limite dune fonction dans les espaces vectoriels norms
Soient (E , E ) et (F , F ) deux espaces vectoriels norms sur K et f une application de E dansF . Soit u0 un point de E .On dit que f admet une limite F au point u0 si et seulement si
> 0, > 0, u E , (u u0E < = f (u) F < )
Notation : limuu0
uE ,u 6=u0
f (u) = ou f (u) uu0
Dfinition 12.
Une fonction f admet pour limite en un point a E si, et seulement si pour toute suite(an)nN de points de E tendant vers a, la suite (f (an))n tend vers .
Pour montrer que f ne tend pas vers il suffit donc de trouver une suite (an)nN de points deE tendant vers a, et pour laquelle la suite (f (an ))nN ne tend pas vers .
Proprit 5.
Exemple 13. Soit f : (x , y) R2 f (x , y) = xyx 2 + y2
1
1
2
112 x
y
y = xy = x
Nous avons lim(x ,y)(0,0)
x=y,(x ,y) 6=(0,0)
f (x , y) =1
2et lim
(x ,y)(0,0)y=x ,(x ,y) 6=(0,0)
f (x , y) = 12. On obtient donc deux limites
distinctes et par suite lim(x ,y)(0,0)(x ,y) 6=(0,0)
f (x , y) nexiste pas.
Soit f : (x , y) R2 f (x , y) = x2y
x 2 + y2. Nous avons, pour tout (x , y) R2, | xy | 1
2(x 2 + y2). Par
Mohammed Jai 14 Sport Etudes
-
3 CONTINUIT 3.4 Continuit dune fonction dans les espaces vectoriels norms
suite, on a pour tout (x , y) 6= (0, 0), | f (x , y) | | x |2
.
Do lim(x ,y)(0,0)(x ,y) 6=(0,0)
| f (x , y) |= 0. Ce qui entrane lim(x ,y)(0,0)(x ,y) 6=(0,0)
f (x , y) = 0.
3.4 Continuit dune fonction dans les espaces vectoriels norms
Soient (E , E ) et (F , F ) deux espaces vectoriels norms sur K et f une application deE dans F . Soit u0 un point de E .On dit que f est continue au point u0 si et seulement si
limuu0uE
f (u) = f (u0)
Autrement dit
> 0, > 0, u E , (u u0E < = f (u) f (u0)F < )
On dira que f est continue sur une partie U de E si elle est continue en tout point u deU .
Exemple 14. Dans R2 : Soit f : (x , y) R2 f (x , y) =
x 2y
x 2 + y2si (x , y) 6= (0, 0)
0 si (x , y) = (0, 0).
Nous avons montr dans lexemple 13 que lim(x ,y)(0,0)(x ,y) 6=(0,0)
f (x , y) = 0 = f (0, 0). Donc f est continue en
(0, 0) et donc sur R2.
Dfinition 13 (Continuit et exemple).
Exemple 15. Donons ici un exemple de continuit dans les espaces fonctionnels. On pose E = C 1([0, 1])lespace vectoriel des fonctions u : [0, 1] R possdant une drive continue. Pour u E, on pose :
u = supx[0,1]
| u(x ) | + supx[0,1]
| u (x ) |
Soit F lespace vectoriel des fonctions v : [0, 1] R qui sont continues.Pour v F, on pose v = sup
x[0,1]
| v(x ) |.Soit : E F, qui tout u E on associe (u) = u dfinie par u(t) = u (t) + tu2(t), t [0, 1].Montrons que est une norme sur E et que est continue en tout point u E
Pour la norme, il suffit de remarquer que u = u + u . Soit u0 E. Montrons lim
uu0uE
(u) = (u0). Autrement dit
> 0, > 0, u E , (u u0 < = (u) (u0) < ) (2)
Nous avons, pour tout t [0, 1],
((u))(t) ((u0))(t) = u (t) u0(t)= u (t) u 0(t) + t(u2(t) u20 (t))
Mohammed Jai 15 Sport Etudes
-
4 ESPACES VECTORIELS NORMS COMPLETS
Donc,pour tout t [0, 1],
| ((u))(t) ((u0))(t) | | u (t) u 0(t) | +t | u2(t) u20 (t) || u (t) u 0(t) | + | u(t) u0(t) | (| u(t) | + | u0(t) |)| u (t) u 0(t) | + | u(t) u0(t) | (| u(t) u0(t) | +2 | u0(t) |) u u0(1 + u u0 + 2 | u0(t) |) u u0(1 + u u0 + 2u0)
Do (u) (u0) u u0(1 + u u0 + 2u0).Si, pour tout > 0, on trouve > 0 vrifiant ( + a) , avec a = 1 + 2u0, alors la relation (2) estmontre et est continue en u0. Or ( + a) 2 + a . En tudiant le polynme de degr 2en , cette dernire relation est vraie pour tout vrifiant 0 < 0, n0 N, p N, n N, (n n0 = un+p un < ) (3)
Exemple 17. Dans R : La suite relle xn =1
nest de Cauchy dans R. En effet, nous avons
pour tout entiers n et p, | xn+p xn |= pn(n + p)
1n. Par suite en prenant n0 = E
(1
)+1,
pour tout > 0 (avec E
(1
)la partie entire de
1
), on obtient la relation (3) pour la suite
xn .
Dans R2 : On munit R2, par exemple de la norme 1. La suite un =(1
n,1
n
)est une suite de
Cauchy dans (R2, 1). En effet un+p un1 = 2pn(n + p)
2n. On obtient donc la relation
(3) pour la suite un en prenant n0 = E
(2
)+ 1.
Dfinition 14.
De mme que la notion de convergence ne dpendait pas de la norme quivalente choisie sur E , demme la notion de suite de Cauchy nen dpend pas. Plus prcisment :
(un)nN est une suite de Cauchy de (E , 1) (un)nN est unesuite de Cauchy de (E , 2)lorsque 1 et 2 sont quivalentes
Remarque 5.
Mohammed Jai 17 Sport Etudes
-
4 ESPACES VECTORIELS NORMS COMPLETS 4.1 Suites de Cauchy
Toute suite convergente de (E , ) est une suite de Cauchy de (E , ) mais la rciproque est fausseen gnral.
Exemple 18. On considre lespace des fonctions continues sur lintervalle [0, 2] valeurs dans R
not par E = C ([0, 2],R) muni de la norme f 1 = 20 | f (x ) | dx . Montrons, en utilisant un contre
exemple, que (E , 1) nest pas complet. Pour cela prenons la suite de fonctions dfinie sur [0, 2]par
fn(x ) =
1 si 0 x 6 1 1/nn(1 x ) si 1 1/n x10 si 1 x 2
Nous avons, pour tout entiers n et p
fn+p(x ) fn(x ) =
0 si 0 x 6 1 1/n1 n(1 x ) si 1 1/n x 1 1/(n + p)p(1 x ) si 1 1/(n + p) x10 si 1 x 2
Do
fn+p fn1 = 11/(n+p)11/n
(1 n(1 x ))dx + 111/(n+p)
p(1 x )dx
11/(n+p)11/n
dx p2
[(1 x )2]1
x=11/(n+p)
=p
n(n + p)+
p
2
1
(n + p)2
1n+
1
2n=
3
2n
Soit > 0. Il existe alors un entier n0 tel que n n0, 32n
< . Par suite, nous avons
> 0, n n0, p N, fn+p fn1
Donc la suite de fonctions (fn) est une suite de Cauchy dans (E , 1).Pour finir, montrons, par labsurde, que la suite (fn) ne converge pas dans (E , 1). Supposons doncque la suite (fn ) converge vers une fonction f dans (E , 1). La fonction f est donc continue et ona fn f 1 qui tend vers 0 quand n tend vers linfini. Or 2
1
| fn(x ) f (x ) | dx 20
| fn(x ) f (x ) | dx 0
Donc 21 | f (x ) | dx = 0 et puisque la fonction x | f (x ) | est continue et positive, on a f (x ) =
0 pour tout x [1, 2]. Soit maintenant a ]0, 1[ fix. Il existe n0 N tel que pour tout n n0,a 1 1/n. Par suite, pour tout n n0, a
0
| fn(x ) f (x ) | dx = a0
| 1 f (x ) | dx 20
| fn(x ) f (x ) | dx 0
Donc 21 | 1 f (x ) | dx = 0 et puisque la fonction x | 1 f (x ) | est continue et positive, on a
f (x ) = 1 pour tout x [0, a]. En rsum, nous obtenons, puisque a est arbitraire dans ]0, 1[
f (x ) =
{1 si 0 x < 10 si 1 < x 2
ce qui contredit lhypothse de continuit de f .
Proposition 6.
Mohammed Jai 18 Sport Etudes
-
5 THORME DU POINT FIXE 4.2 Espaces vectoriels norms complets
4.2 Espaces vectoriels norms complets
4.2.1 Dfinition
1. Lespace vectoriel norm (E , ) est dit complet si toute suite de Cauchy de (E , ) estconvergente.
2. Plus gnralement, une partie U dun espace vectoriel norm (E , ) est complte si toutesuite de Cauchy dlments de U converge vers un lment de U .
Dfinition 15.
Exemple 19. (R, | ) et (C, | ) sont des espaces vectoriels norms complets.Ainsi dans un espace complet il ya identit entre suite de Cauchy et suite convergente. Puisque les notions
de suite de Cauchy et suite convergente ne dpendent pas des normes quivalentes choisies, on a :
Si 1 et 2 sont deux normes quivalentes de E et si U est une partie de E alors :U est complte pour la norme 1 U est complte pour la norme 2.
Proposition 7.
Exemple : Dans E = R, les intervalles de la forme [a, b], [a,+[, ], a] sont des parties compltes de (R, | ).
4.2.2 Exemples fondamentaux
Dans un espace de dimension finie
Tout espace vectoriel norm sur K = R ou C de dimension finie est complet.
Proposition 8.
Dans un espace de dimension infinie
Lespace vectoriel des fonctions continues sur lintervalle [a, b] et valeurs dans R, not C ([a, b],R),muni de la norme est complet.
Proposition 9.
5 Thorme du point fixe
But : Soit (E , E ) un espace vectoriel norm et f une fonction de E dans E . On sintresse la recherchedes solutions dquations de la forme
f (x ) = x
Une solution de lquation x = f (x ) sappelle point fixe de f .
Dfinition 16.
Mohammed Jai 19 Sport Etudes
-
5 THORME DU POINT FIXE 5.1 Le thorme de point fixe global
Sous certaines conditions, on peut affirmer lexistence et lunicit de ce point fixe et galement lui trouverune approximation.Soient (E , E ) et (F , F ) deux espaces vectoriels norms sur K et f une application de E dans F .
Une fonction f : U E F est dite lipschitzienne sur U si :
k > 0 telle que u, v U , f (u) f (v)F ku vEOn dit que f est lipschitzienne sur U de rapport k .
Dfinition 17.
Si la constante k est strictement plut petite que k la fonction f est dite contractante sur U de rapportk .
Dfinition 18.
Une fonction lipschitzienne sur U est continue sur U .
Proposition 10.
5.1 Le thorme de point fixe global
Soit (E , ) un espace vectoriel norm et f : E E une application .Si
1. E est complet,
2. f est contractante sur E de rapport k ,
alors
(i) f admet un unique point fixe dans E ,
(ii) la suite itre : {u0 Eun+1 = f (un)
est convergente vers
(iii) nous avons lestimation derreur
n N, un (
kn
1 k)u1 u0
Thorme 3 (Point fixe global).
Dmonstration. Unicit Supposons que f admet deux points fixes x et y distincts (f (x ) = x , f (y) = y etx 6= y). Comme f est contractante on a
x y = f (x ) f (y) kx y
or x y 6= 0, donc k 1, ce qui est absurde.
Mohammed Jai 20 Sport Etudes
-
5 THORME DU POINT FIXE 5.2 Le thorme de point fixe local
Convergence et existence Comme E est complet il suffit de montrer que (un)nN est une suite deCauchy de (E , ). Pour tout entier m on a
um+1 um = f (um) f (um1) kum um1 kmu1 u0 (4)
Grce lingalit triangulaire, et en utilisant lingalit (4), on a pour tout entiers p et n :
un+p un = (un+p un+p1) + (un+p1 un+p2) + + (un+1 un) (kn+p1 + kn+p2 + . . . kn+1 + kn)u1 u0=
kn
1 k u1 u0
On a alors montr que : un+p un kn
1 k u1 u0.Comme f est contractante, k < 1 et donc kn 0 quand n +. Pour > 0 donn, on peut alorstrouver n0 assez grand tel que si n > n0 et p > 0
kn
1 k u1 u0 < . Ceci prouve que la suite (un)nNest de Cauchy de (E , ). Comme (E , ) est complet, la suite (un)nN est convergente vers un lment de E . Il suffit de montrer que est un point fixe de f .
5.2 Le thorme de point fixe local
Soient (E , ) un espace vectoriel norm complet, U une partie de E et f : U E une application.Si
1. U est une partie ferme de E ,
2. f est contractante sur U de rapport k ,
3. U est stable par f (c..d. f (U ) U )alors f admet un unique point fixe dans U , et de plus la suite itre :{
u0 Uun+1 = f (un)
est convergente vers et nous avons lestimation derreur
n N, un (
kn
1 k)u1 u0
Thorme 4.
5.3 Exemple en dimension 1
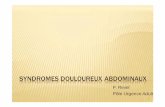
Dans cette partie nous considrons E = R. Nous allons appliquer le thorme du point fixe pour la rsolutionde lquation
x = 3ln(x ) (5)
Mohammed Jai 21 Sport Etudes
-
01
2
3
4
5
11 2 3 4 5
y = ln x
y = x
y = exp(x/3)
3
4
5
3 4 5
5.3.1 Graphiquement
On voit graphiquement que lquation (5) admet deux solutions notes a (la solution de droite) et b (lasolution de gauche). En utilisant les itrations de point fixe et en prenant x0 = 3 on converge vers la solutionde droite. On peut vrifier que quelque soit le point initial x0 on atteindra jamais la solution de gauche. Pour
lobtenir on prend lquation inverse de (5), cest dire x = e
x
3 .
5.3.2 Calcul
On applique le thorme du point fixe local. Il faut trouver un intervalle ferm I stable par f et sur lequelf est contractante. Pour cela on utilise le rsultat suivant :
Si f est de classe C 1 sur un intervalle I , alors on a
x , y I , | f (y) f (x ) |(supsI
| f (s) |). | y x |
Proposition 11.
En appliquant cette proposition on montre quon peut appliquer le thorme du point fixe local la fonctionf (x ) = 3ln(x ) sur I = [3.1,+[. On obtient ainsi la solution de droite b.
5.3.3 Programme Maple
local x,xanc,n;
x:=x0;n:=0;
label_1:
xanc:=x;
x:=evalf(f(x));
if ((evalf(abs(x-xanc)) < tol) or (n > nmax)) then
print("La m\ethode a converg\ee");
else
n:=n+1;
goto(label_1);
fi;
printf("Nombre dit\erations: \%d\\nLapproximation de a \\ \a \%f
est: \%f",n,tol,x);
end proc;
-
Approximation de b
f:=x->3*log(x);
ptfixe(f,10,0.0001,3);
f := x 3 log(x )
La mthode a convergeNombre ditrations : 11Lapproximation de b .000100 est : 4.514026
Approximation de a
f :=x->exp(x/3) ; ptfixe(f,10,0.0001,1) ;
f := x e(1/3 x)
"La mthode a converg" ;
La mthode a converge
Nombre ditrations : 11Lapproximation de a .000100 est : 1.855222
6 Rsolution des systmes linaires
6.1 Introduction
La rsolution de grands systmes (linaires et non linaires) est pratique courante de nos jours, spcialementen Gnie civil, Gnie Mcanique et Construction, Gnie Mcanique et Dveloppement, Gnie Electrique, et defaon gnrale, dans tous les domaines o lon sintresse la rsolution numrique dquations aux drivespartielles.Dans ce chapitre on sintresse la rsolution des systmes linaires de n quations n inconnues :
Ax = b (6)
qui est quivalent
a11x1 + a12x2 + + a1nxn = b1a21x1 + a22x2 + + a2nxn = b2. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
an1x1 + an2x2 + + annxn = bno A est une matrice carre dordre n (A Mn(K),K = R ou C), x et b sont des vecteurs de Kn .
On rappelle que si le dterminant de A est non nul, le systme est dit de Cramer et la solution existe et
est unique. Dans ce cas, la solution x peut tre dtermine par la mthode des dterminants : xi =det(Bi)
det(A)o Bi est la matrice obtenue en remplaant la ime colonne de A par le vecteur colonne b du second membredu systme. Cette mthode nest pas satisfaisante car elle suppose le calcul de n + 1 dterminants, et le calculdun dterminant est trs coteux. Si Dn est le nombre doprations effectuer pour le calcul dun dterminantdordre n, alors Dn = nDn1 + n > n!.
Un cas particulirement simple de systme de Cramer est celui des matrices triangulaires avec une trace nonnulle (pour mmoire, le dterminant dune matrice A triangulaire est gal au produit de ses lments diagonaux).
Pour le cas gnral dun systme linaire de n quations n inconnues, il existe deux types de mthodes :
les mthodes directes
-
les mthodes itratives
Les mthodes directes permettent dobtenir la solution exacte dun systme en un nombre fini dtapes :
Le procd dlimination de Gauss
Mthode de Choleski
Dcomposition LU
Mthode de Crout . . .
Les mthodes itratives consistent gnrer une suite de vecteurs qui converge vers la solution du systme
Mthode de Jacobi
Mthode de Gauss
Mthode de relaxation
6.2 Principe des mthodes itratives
Dans ce chapitre on ne sintressera quaux mthodes itratives de Jacobi et de Gauss Seidel.Le principe des mthodes itratives est bas sur lcriture de la matrice A sous la forme
A = M No M et N sont deux matrices carres dordre n. M est une matrice inversible (det(M ) 6= 0) choisir de tellefaon ce que M1 se calcule facilement. En gnral on la choisit triangulaire.Dans ce cas le systme linaire (6) devient
Mx = Nx + b
ce qui est quivalent x = Ex + d (7)
avec E = M1N et d = M1b.Le problme (7) est alors un problme de point fixe, du type x = f (x ), avec f : x Kn f (x ) = Ex + d Kn
La suite itre de Kn dfinie par {x 0 Knx k+1 = Ex k + d
converge vers lunique solution de (7) pour tout x 0 Kn et donc vers lunique solution (6) si etseulement si (E ) < 1.
Thorme 5.
6.3 Mthode de Jacobi
La mthode de Jacobi consiste prendre
M =
a11 0 . . . 00 a22 . . . 0...
.... . .
...0 0 . . . ann
et N =
0 a12 . . . a1na21 0 . . . a2n...
.... . .
...an1 an2 . . . 0
Dans ce cas E = M1N = I M1A = J , avec
M1 =
a111 0 . . . 00 a122 . . . 0...
.... . .
...0 0 . . . a1nn
La matrice J sappelle matrice ditration de Jacobi.
-
La mthode nest donc applicable que si aii 6= 0, pour i = 1, 2, . . . , n. La mthode converge si et seulement si (J ) < 1.
Les itrations de la mthode de Jacobi sont, daprs le thorme 5
x k+1i =1
aii
bi
nj=1j 6=i
aij xkj
, i = 1, 2, . . . , n
6.4 Programme Maple
#===================================================
# D\eclaration des variables globales et chargement
# des packages n\ecessaires
#===================================================
restart:
with(linalg):
n:=100:
f:=(x,y)->evalf(1/(x+y)):
A:=Matrix(n,n,f): # Cr\eation dune matrice diag. strictement dominante
for i from 1 to n do A[i,i]:=A[i,i]+100: od:
B:=Vector(n,1);
X:=Vector(n,0): # A initialiser !
A1 := array(1..n,1..n):
B1 := array(1..n):
for i from 1 to n do
for j from 1 to n do A1[i,j] := A[i,j]: od:
B1[i] := B[i]:
X1[i] := X[i]:
od:
epsilon:=10^(-6): # Pr\ecision recherch\ee
itermax:=1000: # Nombre max dit\erations
#=========================================================
# M\ethode de Jacobi
#=========================================================
Jacobi:=proc(AA,BB,nn)
# R\esolution de AX=B par la m\ethode de Jacobi. Jai mis 2 conditions
# suffisantes de sortie : "|Xn-Xn+1|
-
fi:
end:
#========================
# Ex\ecution
#========================
t:=time(): Jacobi(A1,B1,n); Temps_mis_par_Jacobi:=time()-t;
6.5 Mthode de Gauss Seidel
La mthode de Gauss-Seidel repose sur la constatation que litration dans la mthode de Jacobi ncessite,pour calculer x k+1i , tous les lments (x
kj )1ji1. Pourquoi ne pas utiliser, la place de ces lments les lments
(x k+1j )1ji1, frachement calculs ?Cette mthode correspond au choix de dcomposition de la matrice commesuit
A = D E Favec D est la matrice diagonale, E est la partie infrieure de A et F la partie suprieure. Dans ce casM = D E et N = F et la matrice, dite ditration de Gauss Seidel, est G = (D E )1F .
x k+1i =1
aii
bi i1
j=1
aij xk+1j
nj=i+1
aij xkj
, i = 1, 2, . . . , n
6.6 Programme Maple
#=================================================
# M\ethode de Gauss-Seidel
#=================================================
GaussSeidel:=proc(AA,BB,nn)
global epsilon,itermax;
local XXX,i,j,k,s,erreur;
XXX := vector(nn,0):
erreur:=2:
for k from 1 to itermax while erreur>epsilon do
for i from 1 to nn do
s:=evalf(BB[i]):
for j from 1 to nn do if ij then s:=s-AA[i,j]*XXX[j]: fi: od:
XXX[i]:=s/AA[i,i]:
od:
erreur:=norm(evalm(AA&*XXX-BB),2):
od:
if erreur
-
7 Exercices
Normes et distances
Exercice 1.
Pour tout (x , y) R2, on pose N1(x , y) = max(x 2 + y2, | x y |) et N2(x , y) =
x 2/9 + y2/4.
1. Montrer que N1 et N2 sont des normes sur R2 et reprsenter les boules units fermes associes ces
normes.
2. Montrer que N2 2 N1 1 18N2
3. Dterminer le plus petit rel k > 0, tel que 1 kN2(utiliser Cauchy-Schwarz).
Exercice 2.
Pour u = (x , y) R2, on pose N (u) = max(| x |, | y |, | x y |).1. Montrer que N dfinie une norme sur R2.
2. Dessiner la boule unit ferme de R2 pour la norme N .
3. Trouver les constantes optimales et telles que pour tout u R2,
N (u) u N (u)
Exercice 3. (Normes de polynmes)
Soit E = R[X ], lespace vectoriel des polynmes rels. Pour P =n
k=0
akXk , on pose
P1 =n
k=0
| ak |, P = max{| a0 |, | a1 |, . . . , | an |), P = max1t1
| P(t) |
Montrer quelles sont des normes et quelles sont deux deux non quivalentes. (On considreraPn(t) = (t 1)n et Qn(t) = 1 + t + t2 + . . . tn)
Exercice 4.
Soit (E , d) un espace mtrique.
1. Montrer que d1(x , y) =d(x , y) est une distance sur E . Enoncer des conditions suffisantes sur une
fonction f , dfinie de R+ dans R+ pour que (x , y) f (d(x , y)) soit une distance sur E .2. Montrer que lapplication d2 dfinie sur E E par d2(x , y) = d(x , y)
1 + d(x , y)est une distance sur E . Si la
distance d est associe une norme, est-il de mme pour d2.
3. Comparer les distances d et d2.
Exercice 5.
Soit E = C ([0, 1],R) lespace vectoriel rel des fonctions continues dfinies sur I = [0, 1], valeurs dans R.
1. Montrer que lon dfinit sur E trois normes en posant respectivement, pour tout f E :
N(f ) = supx[0,1]
| f (x ) |, N1(f ) = 10
| f (x ) | dx , N2(f ) = N1(f ) +N(f )
(a) Montrer que N et N2 sont quivalentes.
(b) Montrer que N et N1 ne sont pas quivalentes.
-
Exercice 6.
Soit E = C ([1, 1],R) lespace vectoriel rel des fonctions continues dfinies sur I = [1, 1], valeurs dans R,muni de la norme :
f =( 1
1
f (x )2dx
)12
Montrer que (E , ) nest pas complet, en considrant la suite fn dfinie par
fn(x ) =
0 si 1 x 0nx si 0 x 1
n
1 si1
n x 1
Exercice 7.
Soit E lespace vectoriel des fonctions continues de [1, 1] valeurs dans R muni de la norme
f 1 = 11
| f (x ) | dx
On va montrer que E muni de cette norme nest pas complet. Pour cela, on dfinit une suite (fn)nN par
fn(t) =
1 si 1 t 1n
nt si 1n t 1
n
1 si1
n t 1
1. Vrifier que fn E pour tout n 1.2. Montrer que
fn+p fn1 2n
et en dduire que (fn ) est une suite de Cauchy.
3. Supposons quil existe une fonction f E telle que (fn ) converge vers f dans (E , 1). Montrer qualorson a
limn+
1
| fn(t) f (t) | dt = 0 et limn+
1
| fn(t) f (t) | dt = 0
pour tout 0 < < 1. En dduire que {f (t) = 1 t [1, 0[f (t) = 1 t ]0, 1]
Conclure.
Exercice 8.
Soit Mn(R) lensemble des matrices relles carres dordre n 2 la norme euclidienne sur Rn . Le but de cetexercice est de montrer que | A 2 =
(tAA).
1. Montrer que si S est une matrice symtrique relle de Mn(R) et si m (respectivement M ) designent laplus petite (respectivement la plus grande) valeur propre de S alors :
-
(a) x Rn\{0},txSxtxx
[m,M ]
(b) x0 Rn\{0},tx0Sx0tx0x0
= M
2. Soit A Mn(R).(a) Montrer que tAA est une matrice symtrique relle dont les valeurs propres sont toutes positives ou
nulles.
(b) Montrer que | A 2 =(tAA)
Continuit dans les espaces vectoriels norms
Exercice 9.
Soit f la fonction dfinie sur R2 par f (x , y) = 2x sin(xy) et soit E ={(x , y) R2 : x
2
2+
y2
4 1}.
Reprsenter graphiquement lensemble E et dmontrer que la fonction f possde un minimum et un maximumsur E .
Exercice 10.
Soit f : R2\{(0, 0)} R, f (x , y) = x2y2
x 2y2 + (x y)2 .Dmontrer que
limx0
limy0
f (x , y) = limy0
limx0
f (x , y) = 0
et que lim(x ,y)(0,0)
f (x , y) nexiste pas.
Exercice 11.
Soit
f : R2 R, f (x , y) ={(x + y) sin 1
xcos 1
ysi xy 6= 0
0 si xy = 0
Dmontrer que les deux limites
limx0
limy0
f (x , y) et limy0
limx0
f (x , y)
nexistent pas, et que
lim(x ,y)(0,0)
f (x , y)
existe et est gale 0.
Exercice 12.
Etudier la continuit des fonctions dfinies sur R2 par
1. f (x , y) =xy
x 2 + y2, si (x , y) 6= (0, 0) f (0, 0) = 0
2. f (x , y) =x 3 + y3
x 2 + y2, si (x , y) 6= (0, 0) f (0, 0) = 0
3. f (x , y) =sin x sin y| x |+
| y | , si (x , y) 6= (0, 0) f (0, 0) = 0
4. f (x , y) = y x 2, si y > x 2 f (x , y) = 0 si y x 2
-
5. f (x , y) = y + x 2, si y > x 2 f (x , y) = 0 si y x 2
6. f (x , y) =(x + y)4
x 4 + y4, si (x , y) 6= (0, 0) f (0, 0) = 0
7. f (x , y) =x 4y
x 4 + y6, si (x , y) 6= (0, 0) f (0, 0) = 0
8. f (x , y) =exy 1x 2 + y2
, si (x , y) 6= (0, 0) f (0, 0) = 0
9. f (x , y) = ex/y , si y 6= 0 f (x , y) = 0 si y = 0
Exercice 13.
Soit E lespace vectoriel des fonctions continues de [1, 1] valeurs dans R muni de la norme
f 1 = 11
| f (x ) | dx
On conidre lapplication L : E R dfinie par L(f ) = f (1)1. Montrer que L est une application linaire.
2. En considrant les fonctions fn : x [1, 1] 7nxn , montrer que L nest pas continue.
Thorme du point fixe
Exercice 14.
Appliquer le thorme du point fixe aux fonctions suivantes dans leur intervalle I ( trouver) :
f (x ) = ex g(x ) = e
x
3
h(x ) =1
2(x +
a
x) (a > 0) e(x ) = kln(x )
Exercice 15.
On considre la fonction
F : R R R R(x , y) 7 F (x , y) = (f1(x , y), f2(x , y))
= (x 2 y2, x 3 y3 + 0.05)
On munit R2 de la norme 1.1. Montrer quil existe un nombre rel positif r tel que F soit contractante sur la boule ferme B(O , r)
2. Montrer que B(O , r) est stable par F .
3. Appliquer le thorme du point fixe pour la rsolution du systme non linaire{x = x 2 y2y = x 3 y3 + 0.05
Exercice 16.
Montrer que le systmex1 =
1
5(2 sin x1 + cos x2)
x2 =1
5(cos x1 + 3 sin x2)
-
admet une solution unique (x1, x2) R2.
Exercice 17.
Soit E = C ([1, 1],R) muni de la norme de la convergence uniforme. On considre lapplication
F : E Eu 7 F (u) / F (u)(x ) = 1 + 2
x0
tu(t)
1 + t2dt
x [1, 1]
1. Montrer que F est contractante sur E .
2. Trouver la solution y de lquation y = F (y) en drivant par rapport x .
3. On considre, dans E , la suite dfinie par{u0(x ) = 1 x [1, 1]un+1 = F (un)
(a) Calculer u1, u2, u3, u4 puis un .
(b) En tudiant les fonctions u0 y, u1 y puis un y calculer u0 y, u1 y, un y. Endduire que la limite
limn
nk=0
(ln2)k
k != 2
Rsolution des systmes linaires
Exercice 18.
1. Soit
A =
2 1 12 2 21 1 2
Montrer que pour la rsolution du systme Ax = b, la mthode de Jacobi diverge tandis que celle de GaussSeidel converge.
2. Montrer quon obtient le rsultat inverse avec la matrice
A =
1 2 21 1 12 2 1