Etude fonctionnel - lycee-ferry-versailles.fr:8081 · Sciences et Technologies de l’Industrie et...
6
Sciences et Technologies de l’Industrie et du Développement Durable 1 erm STI2D TP Transmition : Le Soléotec Notion de puissance et de rendement. TP (1h30) TRANS TP engrenage soléotec Lycée Jules Ferry – Versailles 1/6 1. Objectif du TP Etudier la transmission de mouvement du trackeur. Etude fonctionnel Le trackeur solaire est constitué d’un motoréducteur (moteur électrique + réducteur associé) et d’un réducteur. Q1. Ouvrir à l’aide du logiciel edrawing, le fichier « ENSEMBLE TRACKEUR.EASM ». Puis cliquer sur puis sur , et démonter virtuellement le système. Puis, noter sur votre feuille la nature de chacun des étages de réduction, et le nom des pièces qui le constitue. Q2. Entourer sur le dessin ci-dessous, le moteur électrique, le premier étage de réduction, le deuxième étage de réduction. Q3. Expliquer comment le mouvement est transmis. (faire des phrases du type : Le moteur électrique entraine la pièce appelée….. qui entraine en rotation, la pièce appelée…….. .La pièce……………..doit faire……………. pour que la pièce fasse un tour.)
Transcript of Etude fonctionnel - lycee-ferry-versailles.fr:8081 · Sciences et Technologies de l’Industrie et...

Sciences et Technologies de l’Industrie et du Développement Durable 1erm STI2D TP Transmition : Le Soléotec
Notion de puissance et de rendement. TP (1h30) TRANS
TP engrenage soléotec Lycée Jules Ferry – Versailles 1/6
1. Objectif du TP
Etudier la transmission de mouvement du trackeur.
Etude fonctionnel
Le trackeur solaire est constitué d’un motoréducteur (moteur électrique + réducteur associé) et d’un réducteur.
Q1. Ouvrir à l’aide du logiciel edrawing, le fichier « ENSEMBLE TRACKEUR.EASM ». Puis cliquer sur
puis sur , et démonter virtuellement le système. Puis, noter sur votre feuille la nature de chacun des étages de réduction, et le nom des pièces qui le constitue.
Q2. Entourer sur le dessin ci-dessous, le moteur électrique, le premier étage de réduction, le
deuxième étage de réduction.
Q3. Expliquer comment le mouvement est transmis. (faire des phrases du type : Le moteur électrique entraine la pièce appelée….. qui entraine en rotation, la pièce appelée…….. .La pièce……………..doit faire……………. pour que la pièce fasse un tour.)
1ère STI2D MCC Cours
Lycée Jules Ferry – Versailles 2/6
Q4. Comptez le nombre de dents que possède la roue du réducteur 1. (la bonne réponse est parmi les propositions suivantes : 70, 80, 90, 100)
On rappelle que le rapport de réduction d’un système roue vis sans fin est donné par la relation suivante :
Q5. Sachant que la vis sans fin possède 1 filet, déterminer le rapport de réduction du
motoréducteur noté R1.
Q6. Comptez le nombre de dents que possède la roue du réducteur 2. (la bonne réponse est parmi les propositions suivantes : 44, 46, 48, 50, 52)
Q7. Sachant que la vis sans fin possède 1 filet, déterminer le rapport de réduction du
motoréducteur noté R2.
Q8. Déterminez le rapport de réduction total .
2. Simulation du fonctionnement du motoréducteur
Q9. Télécharger puis exécuter le fichier, « Motoréducteur.exe ». Puis ouvrir à partir de solidWorks,
ouvrir le fichier « Ensemble motoréducteur CC 12V Eleve V2010.SLDASM ». Et suivre les indication ci-dessous :
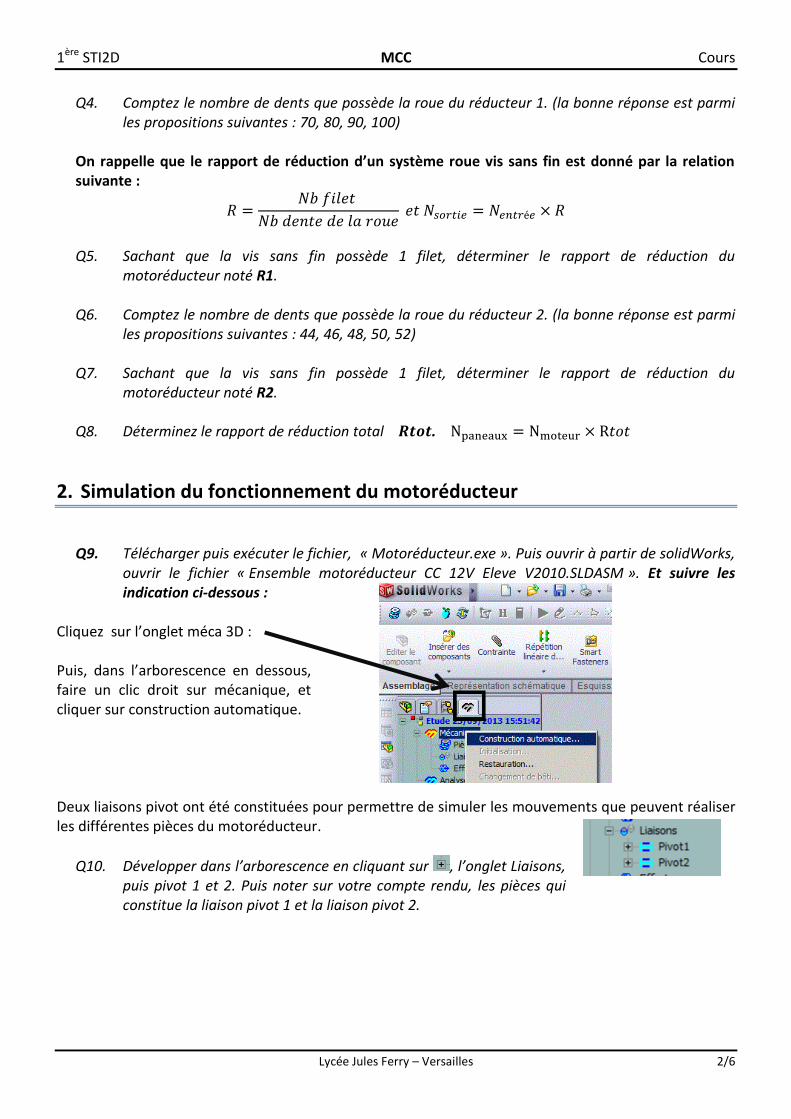
Cliquez sur l’onglet méca 3D : Puis, dans l’arborescence en dessous, faire un clic droit sur mécanique, et cliquer sur construction automatique. Deux liaisons pivot ont été constituées pour permettre de simuler les mouvements que peuvent réaliser les différentes pièces du motoréducteur.
Q10. Développer dans l’arborescence en cliquant sur , l’onglet Liaisons, puis pivot 1 et 2. Puis noter sur votre compte rendu, les pièces qui constitue la liaison pivot 1 et la liaison pivot 2.

1ère STI2D MCC Cours
Lycée Jules Ferry – Versailles 3/6
Q11. Faire bouger la vis sans fin en maintenant un clique sur la souri. Faire de même pour la roue crantée. , tracer sur l’image ci-contre, les axes de rotation :
Q12. Il manque une liaison. Expliquer quelle liaison est manquante.( Mouvement autorisé par le logiciel qui n’a pas de sens réel.)
Q13. Suivre les indications ci-dessous, pour ajouter la liaison, roue vis sans fin.
1 Faire un clic droit sur liaison-
>Ajouter, sélectionner la bonne liaison, puis cliquer sur suivant :
2 Cliquer sur la vis sans fin, puis
sur la roue. Ils doivent ensuite apparaitre dans la fenêtre rose. Puis cliquer sur suivant.

1ère STI2D MCC Cours
Lycée Jules Ferry – Versailles 4/6
3 En maintenant le bouton contrôle du
clavier appuyé, sélectionner l’arête de la vis sans fin (voir figure ci-contre), puis l’arête de l’axe de sortie de la roue crantée. Des drapeaux verts doivent apparaitre dans la fenêtre rose. Renseigner la denture de la liaison, a savoir 1 filet pour la roue I et 80 dents pour la roue II
2.1. Maintenant pouvoir simuler le mouvement.
Faire un clic droit sur analyse, ->calcul mécanique, suivant
Faire une étude cinématique, sur 1000 points, pendant une durée de 1s. Avec comme mouvement d’entrée, la liaison pivot 1 (donc la vis sans fin) qui tourne à 1000 tr/min.
Q14. Appuyer sur Calcul, fermer la fenêtre, puis faire un clic droit sur résultat, et lancer la simulation
pour observer le mouvement.

1ère STI2D MCC Cours
Lycée Jules Ferry – Versailles 5/6
Faire un clic droit sur résultat, puis sélectionner courbe ->simple. Cliquer sur la vis sans fin, cocher vitesse, rotation et norme. Puis cliquer sur consulter.
Q15. Relever la vitesse en Rad/s. Vérifier qu’elle est conforme à celle entrée dans la simulation. (1000 tr/min)
Q16. Faire de même pour observer la vitesse de rotation de la roue. Relever la vitesse en Rad/s. Puis
déterminer sa vitesse en tr/min.
Q17. Calculer le rapport de réduction
. Comparer avec les résultats théoriques de la 1ere
partie.
3. Simulation du fonctionnement du réducteur
Q18. Télécharger puis exécuter le fichier, « Réducteur roue-vis.exe ». Puis ouvrir à partir de
solidWorks, ouvrir le fichier « Ensemble réducteur élève 2010.SLDASM».
Q19. Reprendre exactement la même démarche que précédemment pour réaliser la simulation du mouvement. Au moment de définir la liaison puis le calcul, faire comme ci-dessous :
3 En maintenant le bouton contrôle du
clavier appuyé, sélectionner l’arête de la vis sans fin (voir figure ci-contre), puis l’arête de l’axe de sortie de la roue cranté. Des drapeaux verts doivent apparaitre dans la fenêtre rose. Renseigner la denture de la liaison, a savoir 1 filet pour la roue I et 48 dents pour la roue II
Pour lancer le calcul : Faire une étude cinématique, sur 1000 points, pendant une durée de 1s. Avec comme mouvement d’entrée, la liaison pivot 1 (donc la vis sans fin) qui tourne à 12.5 tr/min.

1ère STI2D MCC Cours
Lycée Jules Ferry – Versailles 6/6
Q1. Relever la vitesse en Rad/s. Vérifier qu’elle est conforme à celle entrée dans la simulation. (12.5 tr/min)
Q2. Faire de même pour observer la vitesse de rotation de la roue. Relever la vitesse en Rad/s. Puis
déterminer sa vitesse en tr/min.
Q3. Calculer le rapport de réduction
. Comparer aux résultats théoriques de la 1ere
partie.
4. Simulation du fonctionnement du trackeur complet