Étude et simulation d’un variateur de vitesse … · La tension de sortie avec un rapport...
64
UNIVERSITE KASDI MERBAH OUARGLA Faculté des Sciences Appliquées Département de Génie Electrique Mémoire MASTER ACADEMIQUE Domaine : Sciences et technologies Filière : Génie électrique Spécialité : Electrotechnique Industrielle Présenté par : BEKKOUCHE Charaf Eddine TOUGGOURTI Abdel Kader Thème: Soutenu publiquement Le : 01/06/2016 Devant le jury : Année universitaire 2015/2016 M r BOUDJELLA Houari MA (A) Président UKM Ouargla M r LOUAZENE Mohamed Lakhdar MC (B) Encadreur/rapporteur UKM Ouargla M r IDER Zahir MA (A) Examinateur UKM Ouargla Étude et simulation d’un variateur de vitesse commande un moteur à courant continu
Transcript of Étude et simulation d’un variateur de vitesse … · La tension de sortie avec un rapport...
UNIVERSITE KASDI MERBAH OUARGLA
Faculté des Sciences Appliquées
Département de Génie Electrique
Mémoire MASTER ACADEMIQUE
Domaine : Sciences et technologies
Filière : Génie électrique
Spécialité : Electrotechnique Industrielle
Présenté par :
BEKKOUCHE Charaf Eddine TOUGGOURTI Abdel Kader
Thème:
Soutenu publiquement
Le : 01/06/2016
Devant le jury :
Année universitaire 2015/2016
Mr BOUDJELLA Houari MA (A) Président UKM Ouargla
Mr LOUAZENE Mohamed
Lakhdar
MC (B) Encadreur/rapporteur UKM Ouargla
Mr IDER Zahir MA (A) Examinateur UKM Ouargla
Étude et simulation d’un variateur
de vitesse commande un moteur à
courant continu
Dédicaces
Je suis dédis ce modeste travail à :
* Ma très chère mère.
* Mon très cher père.
* Mes sœurs et mes frères
* toutes mes familles Touggourti
* Mon binôme
* Tout mes amis.
* Tout la promotion 2015/2016
AdbEl kader
Dédicaces
Je dédie ce modeste travail à :
Ma très chère mère et très cher père
(Que Dieu Bénisse son âme)
Mes très chers frères.
Mes très chères sœurs.
Sans oublier Haythem, Warda et Wisham.
Mon Toute ma famille Bekkouche.
Tous mes amis (es) et Toute ma promotion.
Charaf Eddine
Remerciements
En préambule à ce mémoire
Nous remerciant ALLAH qui nous aide et nous donne la patience et le courage
durant
ces langues années d’étude.
Nous souhaitons adresser nos remerciements les plus sincères aux personne qui
nous
ont apporté leur aide et qui ont contribué à l’élaboration de ce mémoire
ainsi qu’à la
réussite de cette formidable année universitaire.
Nous tenant à remercier sincèrement Mr Mohamed Lakhdar LOUAZENE,
en tant que Encadreur, qui à
toujours montré à l’écoute et très disponible tout au long de la réalisation de ce
mémoire,
Enfin, nous adressons nos plus sincères remerciements à tous nos proches et amis,
qui nous ont toujours soutenue et encouragée
au cours de la réalisation de ce mémoire.
Merci à tous
Sommaire
Introduction générale
Chapitre I : Machines à Courant Continu
I.1. Introduction
I.2. Définition
I.3. Constitution
I.3.1. L‟inducteur
I.3.2. Le rotor (l‟induit)
I.3.3. Le collecteur et les balais
I.4. Principe de fonctionnement
I.5. Force contre électromotrice
I.6. Les différents types de moteurs
I.6.1. Les moteurs à inducteur à aimant permanent
I.6.2. Les moteurs à inducteur bobiné
I.7. Variation de vitesse
I.8. Les avantages et les inconvénients
I.9. Bilan de la puissance
I.10. Le rendement
I.11. Utilisation de la machine à courant continu
I.12. Conclusion
Chapitre II : Convertisseurs statiques
II.1. Introduction
II.2. Définition
II.3. Les redresseurs
II.4. Les onduleurs
II.5. Les gradateurs
II.6. Les hacheurs
II.6.1. Principe de fonctionnement
II.6.2. Le rapport cyclique α
II.7. Différents types d‟hacheurs
II.7.1. Convertisseur Buck
II.7.2. Convertisseur Boost
II.8. Hacheur à quatre quadrants
II.9. Technique de commande MLI
II.10. Les montages d‟électronique de puissance
II.10.1. Circuit de commande
01
03
03
04
04
05
05
06
07
07
07
08
12
12
13
14
14
14
15
15
16
18
18
19
19
19
19
20
22
23
25
27
27
II.10.2. Circuit de puissance
II.10.3. Circuit d‟amplification
II.10.4. Circuit de protection
II.11. Conclusion
Chapitre III : Simulation d’un variateur de vitesse
III.1. Introduction
III.2. Partie de simulation
III.2.1. Simulation d‟un hacheur à un seul quadrant commande un moteur à
courant continu excitation séparée
III.2.1.1. Schéma bloc de la simulation
III.2.1.2. Paramètre du moteur à courant continu
III.2.1.3. Les courbes et résultats de simulation
III.2.2. Simulation d‟un hacheur quatre quadrants commande un moteur à
courant continu à excitation séparée
III.2.2.1. Schéma bloc de la simulation
III.2.2.2. Les courbes et résultats de simulation
III.2.3. Analyse des résultats obtenus
III.3. Partie expérimentale
III.3.1. Définition du module Arduino
III.3.2. L‟environnement de la programmation
III.3.3. Génération du signale MLI par la carte Arduino
III.3.4. Etage d‟amplification
III.3.5. Les afficheurs LCD
III.3.6. Affichage de rapport cyclique
III.4. Conclusion
Conclusion Générale
Références bibliographiques
Annexes
27
27
27
28
29
29
29
30
31
31
35
35
36
39
39
39
40
41
42
42
42
43
44
46
47
Figure (I.1) :
Figure (I.2) :
Figure (I.3) :
Figure (I.4) :
Figure (I.5) :
Figure (I.6) :
Figure (I.7) :
Figure (I.8) :
Figure (I.9) :
Figure (I.10) :
Figure (I.11) :
Figure (I.12) :
Figure (II.1) :
Figure (II.2) :
Figure (II.3) :
Figure (II.4) :
Figure (II.5) :
Figure (II.6) :
Figure (II.7) :
Figure (II.8) :
Figure (II.9) :
Figure (II.10) :
Figure (II.11) :
Figure (III.1) :
Figure (III.2) :
Figure (III.3) :
Figure (III.4) :
Figure (III.5) :
Figure (III.6) :
Figure (III.7) :
Figure (III.8) :
Fonctionnement de machine à courant continu
Description de la machine à courant continu
l‟inducteur de la machine à courant continu
Le rotor de la machine à courant continu
Le dispositif collecteur / balais
Principe de fonctionnement d‟un moteur à courant continu
Moteur à aimant permanent
Caractéristiques d‟un moteur à excitation séparée
Le couple en fonction de courant d‟alimentation
Caractéristique de vitesse d‟un moteur série
Caractéristique de couple d‟un moteur série
Bilan de la puissance
Diagramme des divers types de convertisseurs statiques en électronique de
puissance
Redresseur commandé pont mixte symétrique
La tension aux bornes de la charge avec un redresseur commande
Le fonctionnement d‟un hacheur BUCK
La tension aux bornes de la charge avec un hacheur série
La valeur moyenne en fonction de rapport cyclique (α)
Hacheur série commande un moteur à courant continu
Hacheur à quatre quadrants
La tension aux bornes de la charge avec un hacheur quatre quadrants
Principe du fonctionnement d‟un hacheur quatre quadrants
Réalisation du signal MLI.
Hacheur série commande un moteur à courant continu
Fenêtre de réglage des paramètres du moteur à courant continu
La tension d‟entré d‟hacheur
La tension de sortie avec un rapport cyclique de 40 %
La vitesse de moteur avec un rapport cyclique de 40 %
Le courant de moteur avec un rapport cyclique de 40 %
La tension de sortie avec un rapport cyclique de 80 %
La vitesse de moteur avec un rapport cyclique de 80 %
03
04
04
05
05
06
08
09
10
11
11
13
15
16
17
20
20
21
21
23
23
24
26
30
31
31
32
32
33
33
34
Liste des figures
Figure (III.9) :
Figure (III.10) :
Figure (III.11) :
Figure (III.12) :
Figure (III.13) :
Figure (III.14) :
Figure (III.15) :
Figure (III.16) :
Figure (III.17) :
Figure (III.18) :
Figure (III.19) :
Figure (III.20) :
Figure (III.21) :
Figure (III.22) :
Le courant de moteur avec un rapport cyclique de 80 %
Hacheur quatre quadrants commande un moteur à courant continu
La tension de sortie avec un rapport cyclique de 60%
La vitesse de moteur avec un rapport cyclique de 60 %
Le courant de moteur avec un rapport cyclique de 60 %
La tension de sortie d‟un hacheur quatre quadrants avec un rapport cyclique de
40 %
La vitesse de moteur commandé par un hacheur quatre quadrants avec un
rapport cyclique de 40 %
Le courant de moteur commandé par un hacheur quatre quadrants avec un
rapport cyclique de 40 %
Carte Arduino „‟Méga‟‟
Interface IDE Arduino
Communication de carte Arduino avec MATLAB
Photo d‟un signale MLI par Arduino
Afficheurs LCD
Affichage de rapport cyclique en utilise carte Arduino et afficheur LCD
34
35
36
36
37
37
38
38
39
40
41
41
42
42
Introduction générale
Présentation du champ de
Production 2016
Introduction générale
Page 1
Introduction générale
De nos jours, du fait de l‟utilisation croissante des variateurs de vitesse dans les
applications industrielles. Un variateur de vitesse est un équipement permettant de faire
varier la vitesse d‟un moteur, une nécessité pour de nombreuses applications industrielles.
En effet, la plupart des moteurs tournent à vitesse constante. Pour moduler la vitesse
des équipements de procédé, on a longtemps eu recours à divers dispositifs mécaniques.
Aujourd‟hui, on fait surtout appel à des variateurs de vitesse électroniques.
Pour les applications industrielles exigeant une régulation précise de la vitesse, on a
d‟abord utilisé des moteurs à courant continu (CC) commandés par des variateurs
électroniques à semi-conducteurs. Cette technique consistait à faire varier la vitesse
proportionnellement à la tension.
La liaison d'un moteur à courant continu à une source du même type se fait à l'intermédiaire
d'un convertisseur statique « Hacheur » qui permet la variation de la tension moyenne aux bornes
de l'induit, jusqu'à ces dernières années ; la commande des convertisseurs statiques industriels était
réalisée à l'aide des circuits électroniques à faible ou moyenne puissance.
La tension moyenne d'entrée de la machine à courant continu varie et par conséquent la
vitesse de cette dernière varie proportionnellement à cette tension. Diverses procédures de
régulation de la vitesse existent dans l'industrie.
Dans les premiers variateurs de vitesse électroniques à courant continu, le dispositif de
commande utilisé était le thyristor.
Le recours aux variateurs de vitesse offre plusieurs avantages :
démarrage progressif des moteurs réduisant les chutes de tension dans le réseau
et limitant les courants de démarrage.
précision accrue de la régulation de vitesse.
prolongement de la durée de service du matériel entraîné.
Dans notre mémoire, on présente plusieurs cas que ce soit l‟étude du moteur à courant
continu, puis la technique de la variation de vitesse, et enfin la simulation de notre model sur
logiciel de simulation MATLAB et réalisation par une carte arduino.
Introduction générale
Page 2
L'objectif de ce travail est une étude et simulation d‟un variateur de vitesse commande
un moteur à courant continue.
Ce mémoire comportera par la suite : une introduction, trois chapitres, une conclusion
générale, et on terminera par une bibliographie.
Le premier chapitre est consacré à l'étude des composants et du fonctionnement de la
machine à courant continu. Après une brève introduction des constitutions de la machine et
leurs principes de fonctionnement. Nous présentons les différents types du moteur à courant
continu, nous terminons ce chapitre par l‟utilisation de cette machine.
Le deuxième chapitre est consacré à l'étude des convertisseurs statiques. Nous
présentons les Technique de commande MLI et leur principe, nous terminons ce chapitre par
description générale du montage d‟électronique de puissance.
Le troisième chapitre est consacré à une partie de simulation et réalisation d‟un circuit
de commande par une carte Arduino du moteur à courant continu.
CHAPITRE I
Machines à
Courant Continu
Production 2016
Chapitre I Machines à courant continu
Page 3
I.1 Introduction :
Les moteurs à courant continu sont très utilisés dans les systèmes automatiques qui
nécessitent une variation précise de la vitesse de rotation.
Dans ce chapitre, on présenté la constitution de la machine à courant continu et leur
principe de fonctionnement. Il s‟agit d‟établir les différents types des moteurs à courant
continu. Ensuit nous donnerons les avantage et les inconvénients. Enfin le domaine
d‟utilisation.
I.2 Définition :
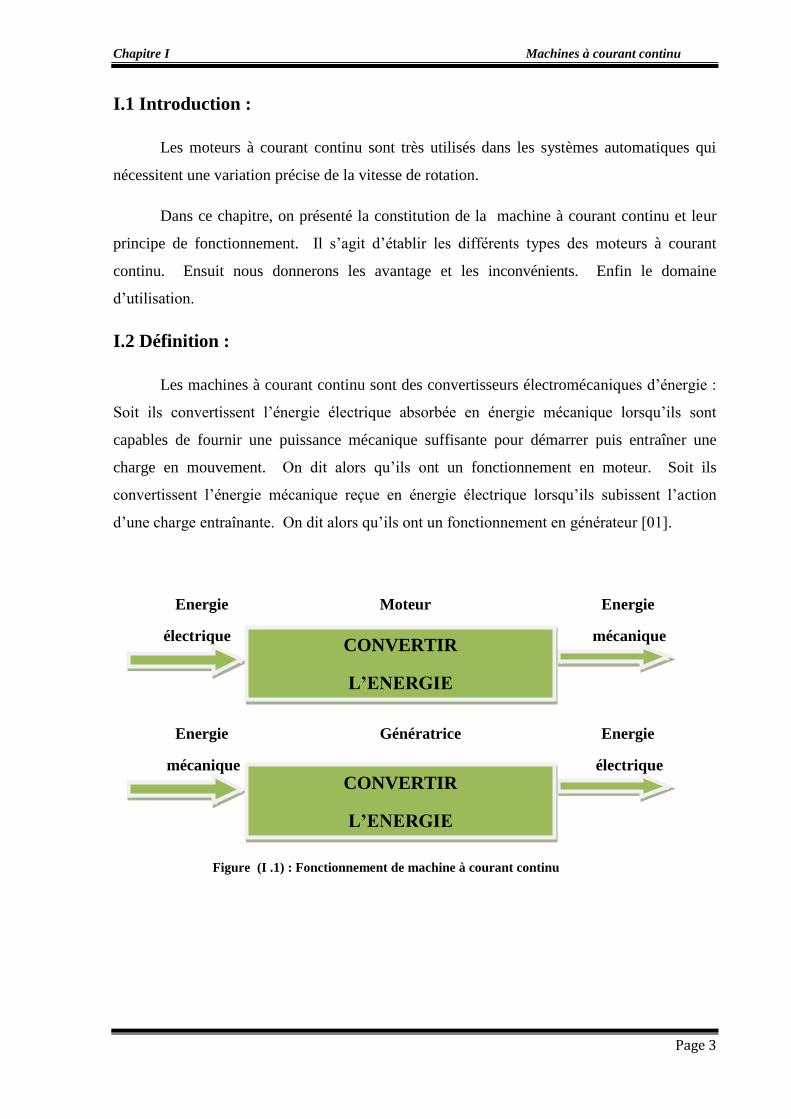
Les machines à courant continu sont des convertisseurs électromécaniques d‟énergie :
Soit ils convertissent l‟énergie électrique absorbée en énergie mécanique lorsqu‟ils sont
capables de fournir une puissance mécanique suffisante pour démarrer puis entraîner une
charge en mouvement. On dit alors qu‟ils ont un fonctionnement en moteur. Soit ils
convertissent l‟énergie mécanique reçue en énergie électrique lorsqu‟ils subissent l‟action
d‟une charge entraînante. On dit alors qu‟ils ont un fonctionnement en générateur [01].
Energie Moteur Energie
électrique mécanique
Energie Génératrice Energie
mécanique électrique
CONVERTIR
L’ENERGIE
CONVERTIR
L’ENERGIE
Figure (I .1) : Fonctionnement de machine à courant continu
Chapitre I Machines à courant continu
Page 4
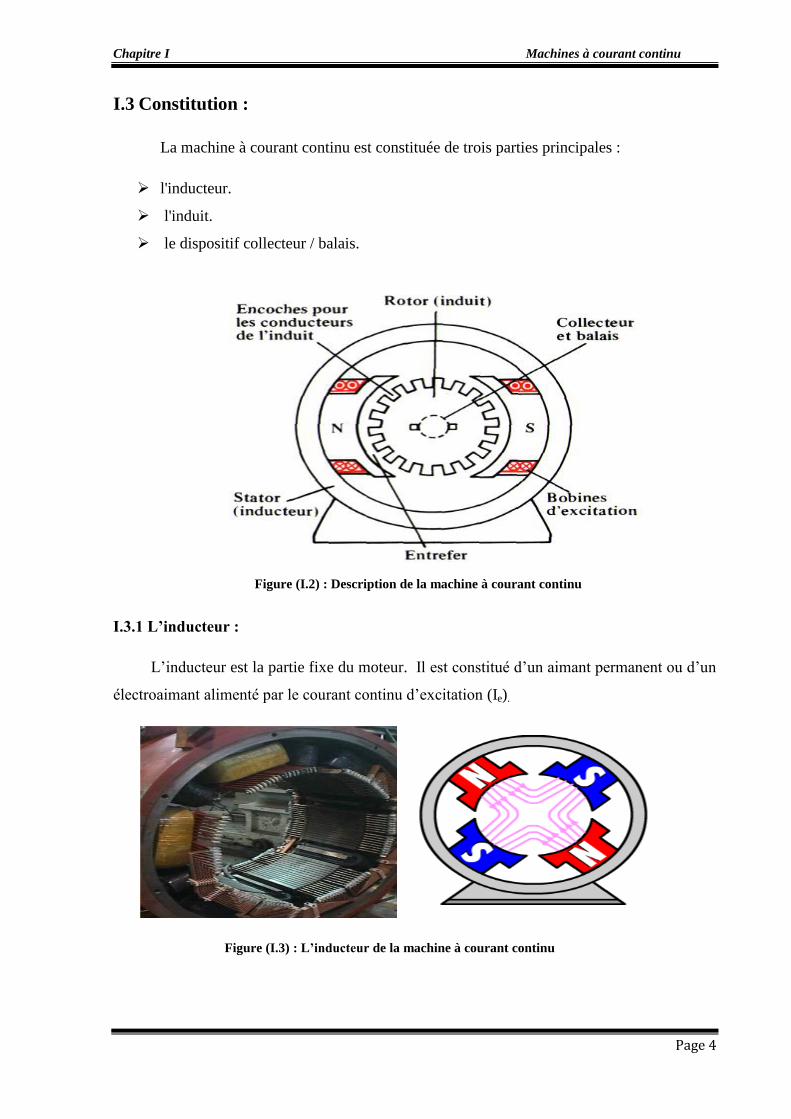
I.3 Constitution :
La machine à courant continu est constituée de trois parties principales :
l'inducteur.
l'induit.
le dispositif collecteur / balais.
I.3.1 L’inducteur :
L‟inducteur est la partie fixe du moteur. Il est constitué d‟un aimant permanent ou d‟un
électroaimant alimenté par le courant continu d‟excitation (Ie).
Figure (I.2) : Description de la machine à courant continu
Figure (I.3) : L’inducteur de la machine à courant continu
Chapitre I Machines à courant continu
Page 5
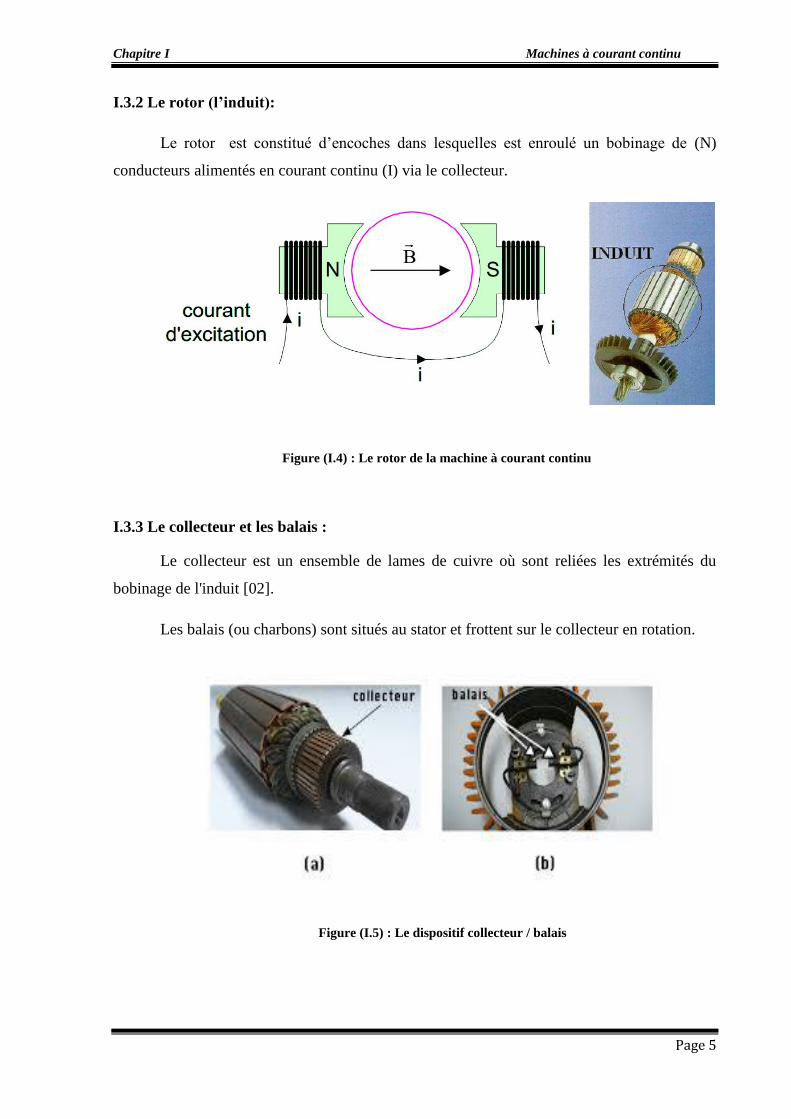
I.3.2 Le rotor (l’induit):
Le rotor est constitué d‟encoches dans lesquelles est enroulé un bobinage de (N)
conducteurs alimentés en courant continu (I) via le collecteur.
I.3.3 Le collecteur et les balais :
Le collecteur est un ensemble de lames de cuivre où sont reliées les extrémités du
bobinage de l'induit [02].
Les balais (ou charbons) sont situés au stator et frottent sur le collecteur en rotation.
Figure (I.4) : Le rotor de la machine à courant continu
Figure (I.5) : Le dispositif collecteur / balais
Chapitre I Machines à courant continu
Page 6
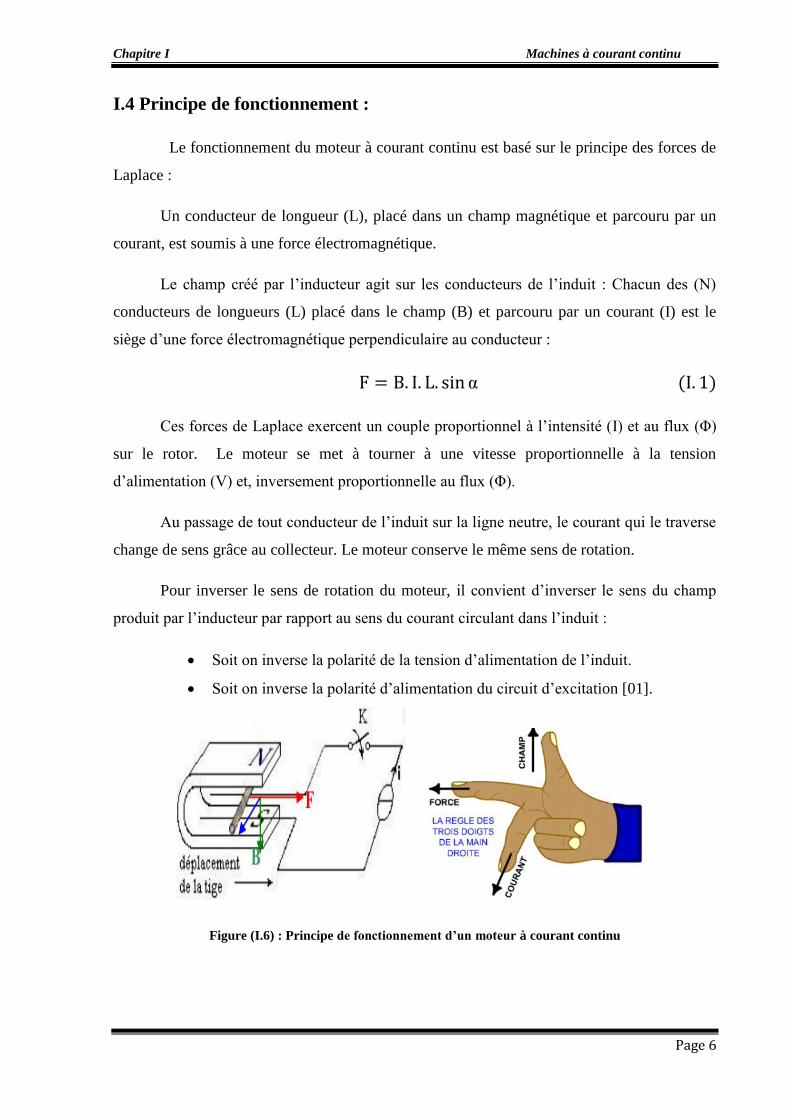
I.4 Principe de fonctionnement :
Le fonctionnement du moteur à courant continu est basé sur le principe des forces de
Laplace :
Un conducteur de longueur (L), placé dans un champ magnétique et parcouru par un
courant, est soumis à une force électromagnétique.
Le champ créé par l‟inducteur agit sur les conducteurs de l‟induit : Chacun des (N)
conducteurs de longueurs (L) placé dans le champ (B) et parcouru par un courant (I) est le
siège d‟une force électromagnétique perpendiculaire au conducteur :
F = B. I. L. sin α (I. 1)
Ces forces de Laplace exercent un couple proportionnel à l‟intensité (I) et au flux (Φ)
sur le rotor. Le moteur se met à tourner à une vitesse proportionnelle à la tension
d‟alimentation (V) et, inversement proportionnelle au flux (Φ).
Au passage de tout conducteur de l‟induit sur la ligne neutre, le courant qui le traverse
change de sens grâce au collecteur. Le moteur conserve le même sens de rotation.
Pour inverser le sens de rotation du moteur, il convient d‟inverser le sens du champ
produit par l‟inducteur par rapport au sens du courant circulant dans l‟induit :
Soit on inverse la polarité de la tension d‟alimentation de l‟induit.
Soit on inverse la polarité d‟alimentation du circuit d‟excitation [01].
Figure (I.6) : Principe de fonctionnement d’un moteur à courant continu

Chapitre I Machines à courant continu
Page 7
I.5 Force contre électromotrice :
Elle est donnée par la relation d‟électrotechnique :
La force électromotrice (E) est la tension produite par le rotor (l‟induit) lors de sa
rotation dans le flux magnétique produit par la partie fixe (l‟inducteur). Elle dépend des
éléments de construction de la machine.
E = P
aN. n. Φ (I. 2)
P : nombre de paire de pôles de la machine.
N : nombre de conducteurs actifs de la périphérie de l'induit.
a : nombre de paires de voies de l'enroulement entre les deux balais.
n : fréquence de rotation de l'induit (en t/s).
Φ: flux sous un pole de la machine en Webers.
Finalement :
E = K. Ω. Φ (I. 3)
Avec :
K = P
2πaN (I. 4)
I.6 Les différents types de moteurs :
On distingue deux types de moteurs à courant continu :
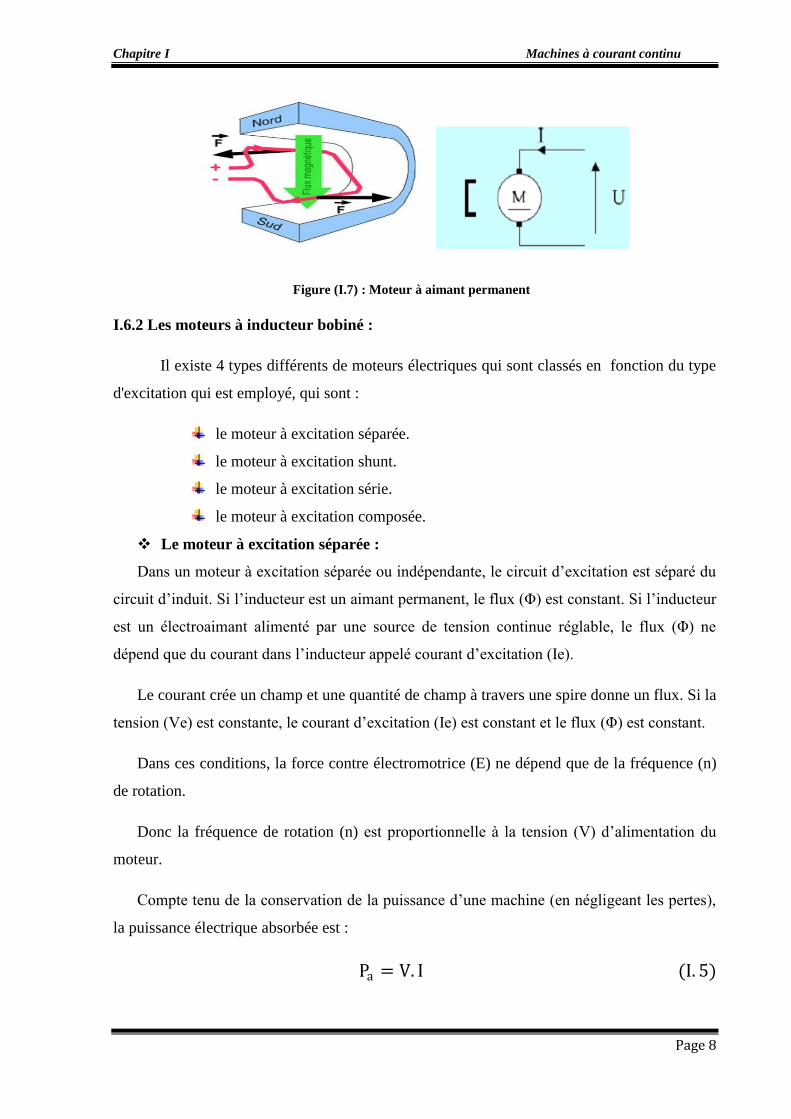
I.6.1 Les moteurs à inducteur à aimant permanent :
Il n‟y a pas de circuit inducteur, le flux inducteur est produit par un aimant permanent.
Tous les moteurs à courant continu de faible puissance et les micromoteurs sont des
moteurs à aimant permanent. Ils représentent maintenant la majorité des moteurs à courant
continu. Ils sont très simples d‟utilisation [03].
Chapitre I Machines à courant continu
Page 8
I.6.2 Les moteurs à inducteur bobiné :
Il existe 4 types différents de moteurs électriques qui sont classés en fonction du type
d'excitation qui est employé, qui sont :
le moteur à excitation séparée.
le moteur à excitation shunt.
le moteur à excitation série.
le moteur à excitation composée.
Le moteur à excitation séparée :
Dans un moteur à excitation séparée ou indépendante, le circuit d‟excitation est séparé du
circuit d‟induit. Si l‟inducteur est un aimant permanent, le flux (Φ) est constant. Si l‟inducteur
est un électroaimant alimenté par une source de tension continue réglable, le flux (Φ) ne
dépend que du courant dans l‟inducteur appelé courant d‟excitation (Ie).
Le courant crée un champ et une quantité de champ à travers une spire donne un flux. Si la
tension (Ve) est constante, le courant d‟excitation (Ie) est constant et le flux (Φ) est constant.
Dans ces conditions, la force contre électromotrice (E) ne dépend que de la fréquence (n)
de rotation.
Donc la fréquence de rotation (n) est proportionnelle à la tension (V) d‟alimentation du
moteur.
Compte tenu de la conservation de la puissance d‟une machine (en négligeant les pertes),
la puissance électrique absorbée est :
Pa = V. I (I. 5)
Figure (I.7) : Moteur à aimant permanent
Chapitre I Machines à courant continu
Page 9
et la puissance mécanique fournie est :
Pu = Tu . Ω = Tu . 2π. n (I. 6)
Si (V) est proportionnelle à (n) cela signifie que (Tu) est proportionnel à (I).
Donc le couple utile (Tu) est proportionnel à l‟intensité du courant d‟alimentation du moteur.
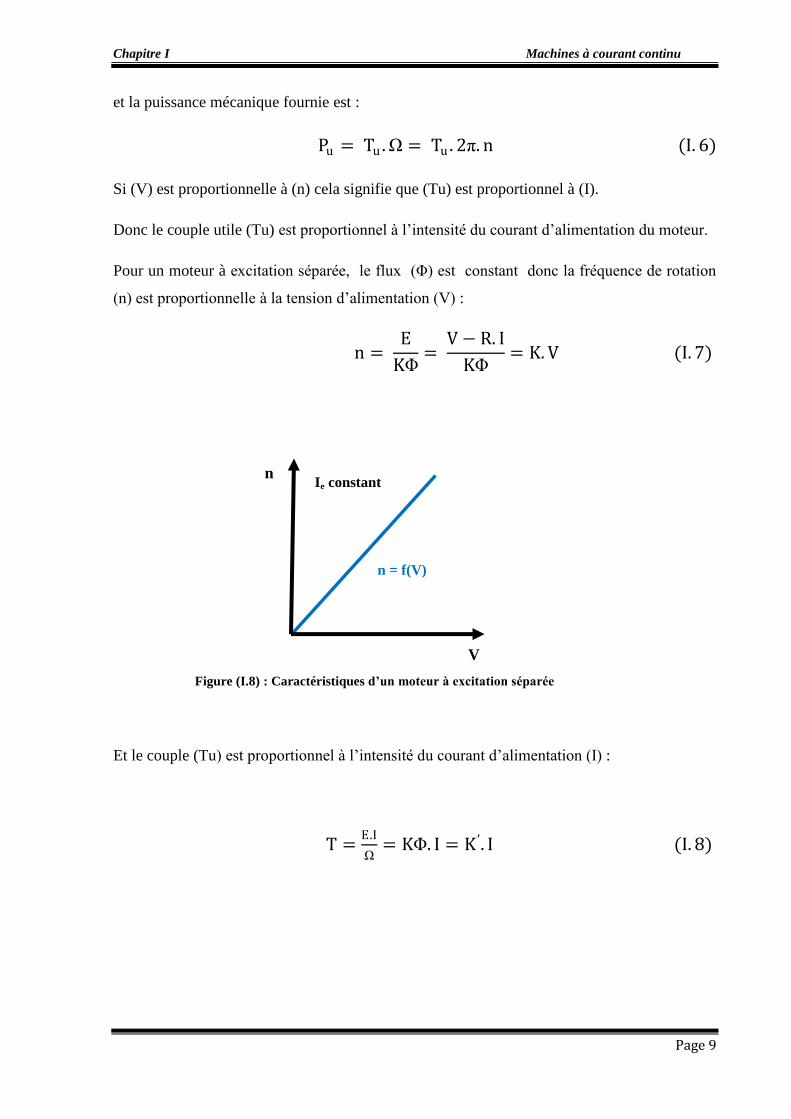
Pour un moteur à excitation séparée, le flux (Φ) est constant donc la fréquence de rotation
(n) est proportionnelle à la tension d‟alimentation (V) :
n = E
KΦ=
V − R. I
KΦ= K. V (I. 7)
Et le couple (Tu) est proportionnel à l‟intensité du courant d‟alimentation (I) :
T =E.I
Ω= KΦ. I = K′. I (I. 8)
Figure (I.8) : Caractéristiques d’un moteur à excitation séparée
n
V
Ie constant
n = f(V)
Chapitre I Machines à courant continu
Page 10
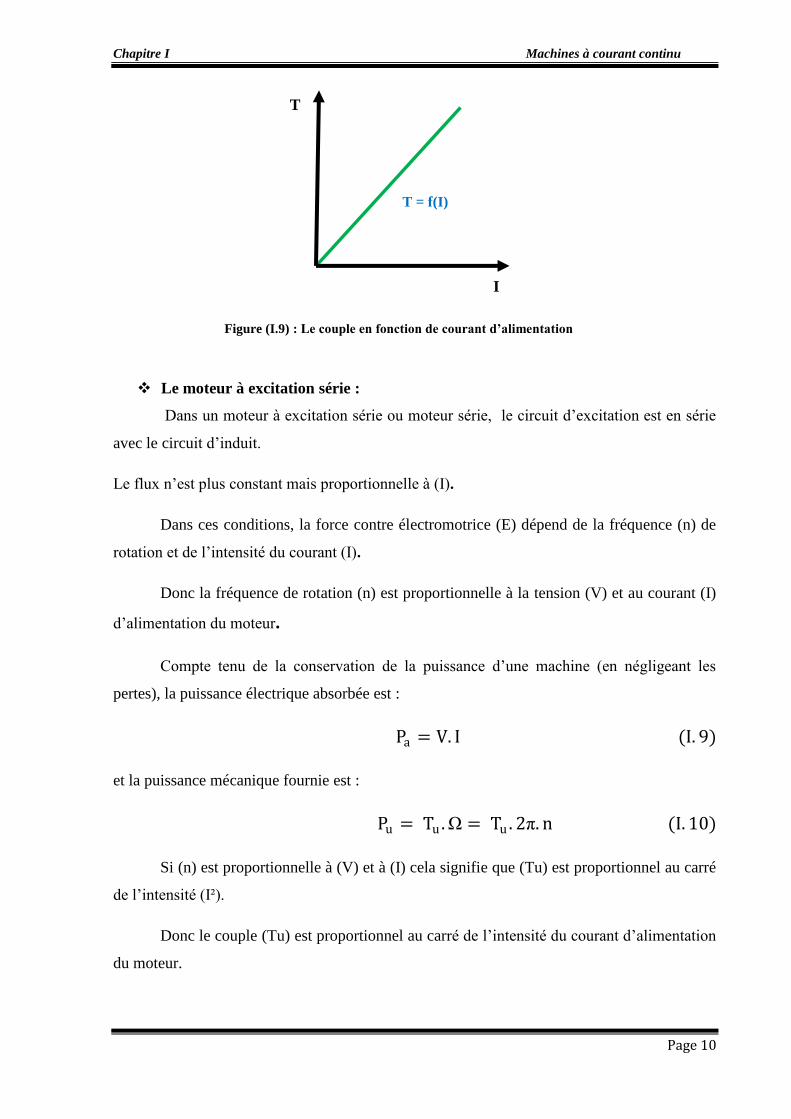
Le moteur à excitation série :
Dans un moteur à excitation série ou moteur série, le circuit d‟excitation est en série
avec le circuit d‟induit.
Le flux n‟est plus constant mais proportionnelle à (I).
Dans ces conditions, la force contre électromotrice (E) dépend de la fréquence (n) de
rotation et de l‟intensité du courant (I).
Donc la fréquence de rotation (n) est proportionnelle à la tension (V) et au courant (I)
d‟alimentation du moteur.
Compte tenu de la conservation de la puissance d‟une machine (en négligeant les
pertes), la puissance électrique absorbée est :
Pa = V. I (I. 9)
et la puissance mécanique fournie est :
Pu = Tu . Ω = Tu . 2π. n (I. 10)
Si (n) est proportionnelle à (V) et à (I) cela signifie que (Tu) est proportionnel au carré
de l‟intensité (I²).
Donc le couple (Tu) est proportionnel au carré de l‟intensité du courant d‟alimentation
du moteur.
Figure (I.9) : Le couple en fonction de courant d’alimentation
T
I
T = f(I)
Chapitre I Machines à courant continu
Page 11
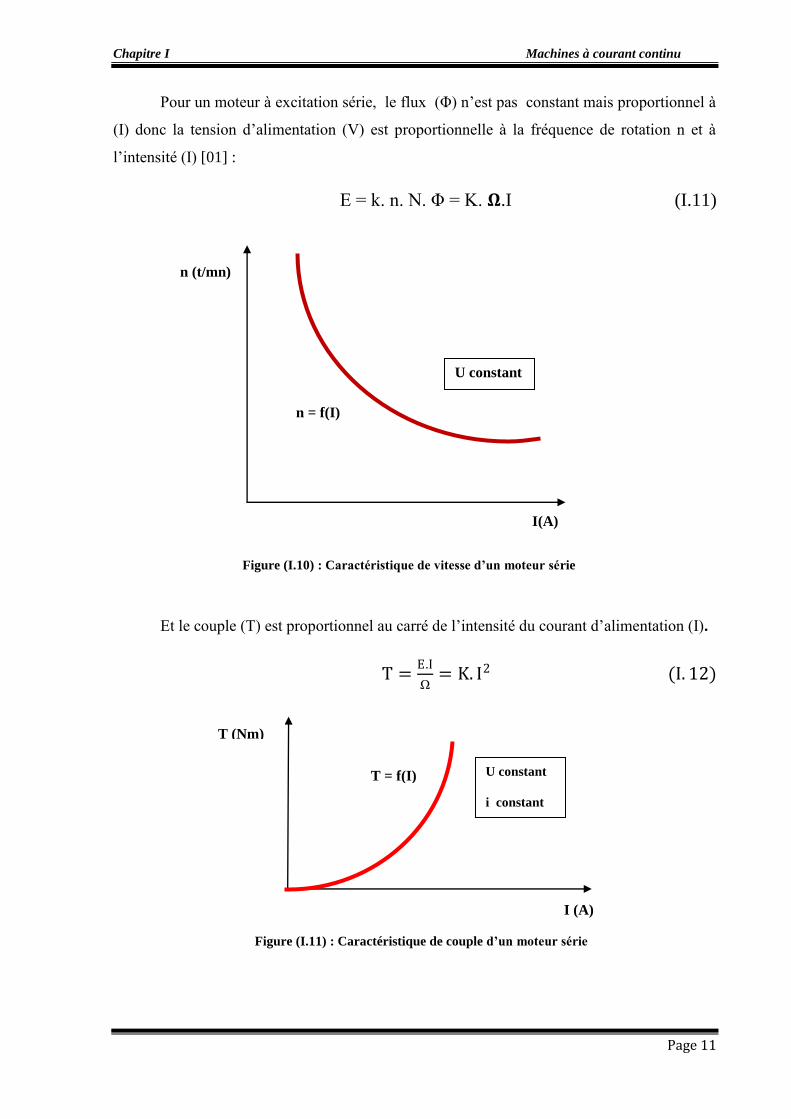
Pour un moteur à excitation série, le flux (Φ) n‟est pas constant mais proportionnel à
(I) donc la tension d‟alimentation (V) est proportionnelle à la fréquence de rotation n et à
l‟intensité (I) [01] :
E = k. n. N. Φ = K. 𝛀.I (I.11)
Et le couple (T) est proportionnel au carré de l‟intensité du courant d‟alimentation (I).
T =E.I
Ω= K. I2 (I. 12)
U constant
i constant
I (A)
T (Nm)
T = f(I)
Figure (I.11) : Caractéristique de couple d’un moteur série
Figure (I.10) : Caractéristique de vitesse d’un moteur série
n (t/mn)
I(A)
U constant
n = f(I)

Chapitre I Machines à courant continu
Page 12
Le moteur à excitation shunt :
La même source d‟alimentation alimente l‟induit et l‟inducteur. L‟inducteur est mis en
parallèle avec l‟induit.
Les propriétés du moteur à excitation dérivation sont les mêmes que celle du moteur à
excitation indépendante.
Le moteur à excitation composée :
Modes de branchement :
Courte dérivation : L‟enroulement est shunté directement avec l‟induit.
Long dérivation : L‟enroulement est shunté en parallèle avec l‟induit.
I.7 Variation de vitesse :
Pour faire varier la vitesse d'un moteur à courant continu, on peut agir sur la tension
aux bornes de l'induit. La tension d'induit est directement proportionnelle à la vitesse de
rotation. La puissance varie mais le couple reste constant. On dit alors que l'on fait de la
variation de vitesse à couple constant.
I.8 Les avantages et les inconvénients :
Les avantages :
Alimentation aisée dans les systèmes transportant leur réserve
d‟énergie (autonome) : pile ou batterie.
La variation de fréquence de rotation est simple à réaliser.
Les inconvénients :
Le principal problème de ces machines vient de la liaison entre les balais, ou
charbons et le collecteur rotatif.
Plus la vitesse de rotation est élevée, plus les balais doivent appuyer
fort pour rester en contact et plus le frottement est important.
Aux vitesses élevées les charbons doivent être remplacés très
régulièrement.
Le contact électrique imparfait cause des arcs électriques, usant
rapidement le commutateur et générant des parasites dans le circuit
d'alimentation.
Chapitre I Machines à courant continu
Page 13
Pour des fonctionnements en moteur de petite puissance, ce problème peut être résolu
grâce à la technologie du moteur à courant continu sans balai communément appelé moteur
brushless. Un dispositif d'électronique de puissance remplace l'ensemble balai collecteur. La
position du rotor est détectée par des capteurs à effet Hall et le courant est commuté par des
transistors à effet de champ [04].
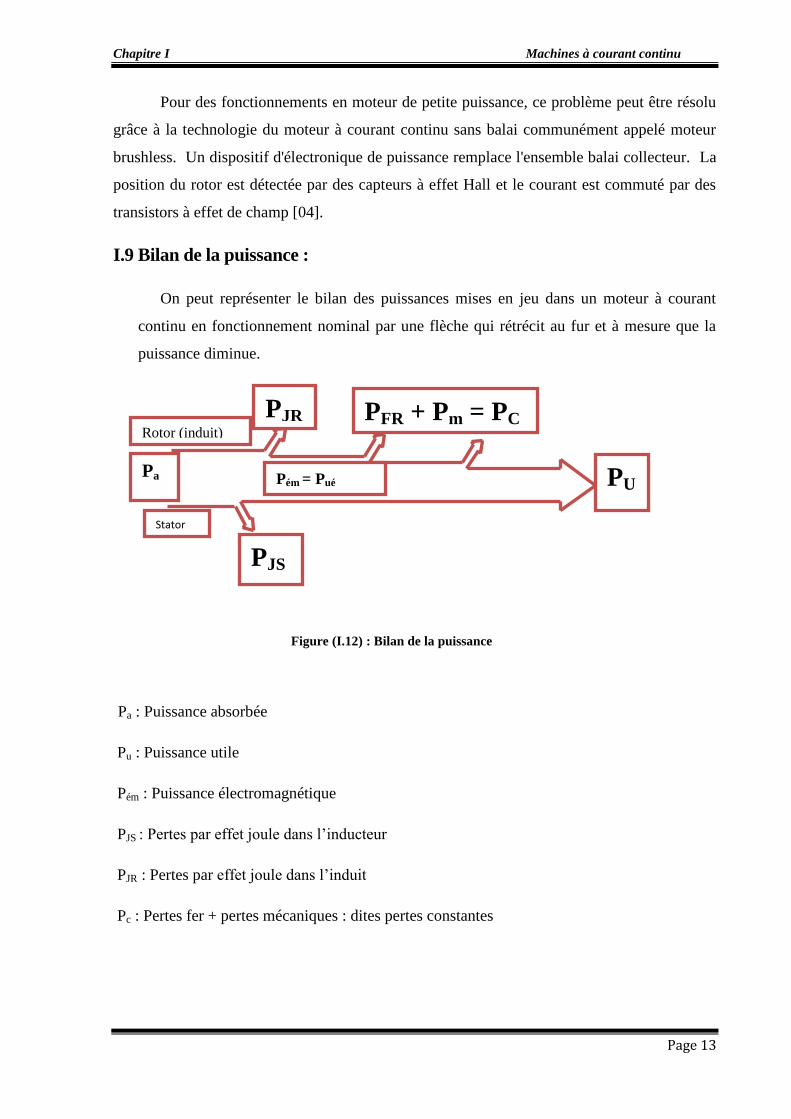
I.9 Bilan de la puissance :
On peut représenter le bilan des puissances mises en jeu dans un moteur à courant
continu en fonctionnement nominal par une flèche qui rétrécit au fur et à mesure que la
puissance diminue.
Pa : Puissance absorbée
Pu : Puissance utile
Pém : Puissance électromagnétique
PJS : Pertes par effet joule dans l‟inducteur
PJR : Pertes par effet joule dans l‟induit
Pc : Pertes fer + pertes mécaniques : dites pertes constantes
PJR
PFR + Pm = PC
Pa
PJS
PU
Stator
Rotor (induit)
Pém = Pué
Figure (I.12) : Bilan de la puissance
Chapitre I Machines à courant continu
Page 14
I.10 Le rendement :
Les moteurs à courant continu consomment une partie de l‟énergie absorbée pour leur
fonctionnement. L‟énergie mécanique fournie sera toujours plus petite que l‟énergie
électrique absorbée. Le rapport entre l‟énergie fournie et l‟énergie absorbée est le
rendement.
η = Pu
Pa (I. 13)
Pu : Puissance utile.
Pa : Puissance absorbée.
I.11 Utilisation de la machine à courant continu :
Le moteur série est intéressant quand la charge impose d'avoir un gros couple, au
démarrage et à faible vitesse de rotation.
Le moteur sépare est particulièrement adapté aux entraînements de machines
nécessitant des vitesses réglables (action sur la tension) et présentant un couple important en
basse vitesse (machines outils).
démarreur (automobile ...).
moteur de traction (locomotive, métro ...).
appareils de levage.
Ventilateurs, pompes centrifuges, compresseurs, pompes à piston.
Machines-outils à couple variable ou a mouvement alternatif (étaux-limeurs,
raboteuses).
I.12 Conclusion:
Ce chapitre à permis de rappeler les différents éléments qui constituent une machine à
courant continu et le principe de fonctionnement. Aprés notre étude nous avons constaté que
les moteurs à excitation séparée et a aimant périmant sont les plus adaptée pour la variation de
vitesse. Dans le chapitre suivant, nous allons études les convertisseurs statiques.
CHAPITRE II
Convertisseurs
Statiques
Production 2016
Chapitre II Convertisseurs statiques
Page 15
II.1 Introduction :
L‟utilisation des convertisseurs de puissance pour des différentes applications devient
de plus en plus importante.
Dans ce chapitre, nous allons présenter les différents hacheurs qui sont utilisés dans les
processus de variation de vitesse du moteur à CC. Ensuite, nous donnerons une description
détaillée de la stratégie d‟obtention d‟une onde MLI utilisée pour la commande d‟ouverture et
de fermeture des interrupteurs électroniques installés au niveau du hacheur.
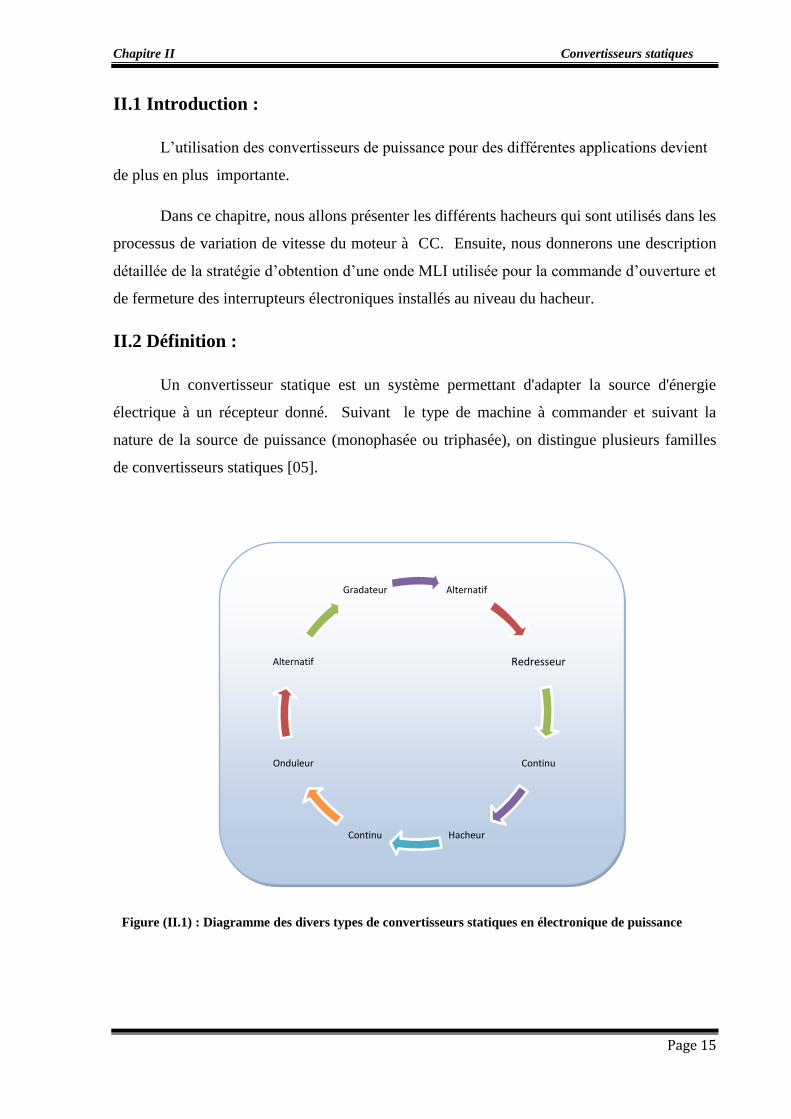
II.2 Définition :
Un convertisseur statique est un système permettant d'adapter la source d'énergie
électrique à un récepteur donné. Suivant le type de machine à commander et suivant la
nature de la source de puissance (monophasée ou triphasée), on distingue plusieurs familles
de convertisseurs statiques [05].
Alternatif
Redresseur
Continu
HacheurContinu
Onduleur
Alternatif
Gradateur
Figure (II.1) : Diagramme des divers types de convertisseurs statiques en électronique de puissance
Chapitre II Convertisseurs statiques
Page 16
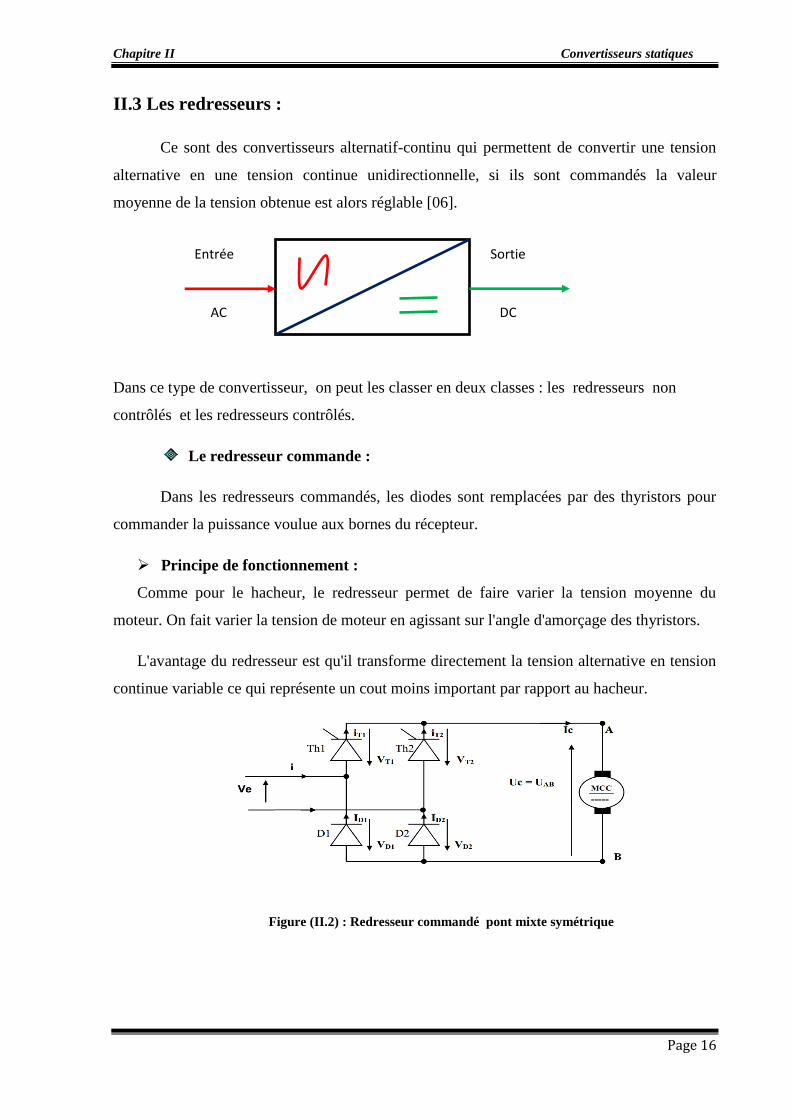
II.3 Les redresseurs :
Ce sont des convertisseurs alternatif-continu qui permettent de convertir une tension
alternative en une tension continue unidirectionnelle, si ils sont commandés la valeur
moyenne de la tension obtenue est alors réglable [06].
Dans ce type de convertisseur, on peut les classer en deux classes : les redresseurs non
contrôlés et les redresseurs contrôlés.
Le redresseur commande :
Dans les redresseurs commandés, les diodes sont remplacées par des thyristors pour
commander la puissance voulue aux bornes du récepteur.
Principe de fonctionnement :
Comme pour le hacheur, le redresseur permet de faire varier la tension moyenne du
moteur. On fait varier la tension de moteur en agissant sur l'angle d'amorçage des thyristors.
L'avantage du redresseur est qu'il transforme directement la tension alternative en tension
continue variable ce qui représente un cout moins important par rapport au hacheur.
Entrée Sortie
AC DC
Figure (II.2) : Redresseur commandé pont mixte symétrique

Chapitre II Convertisseurs statiques
Page 17
Valeur moyenne de la tension redressée:
UCmoy =1
T UC t d t
T
0
=1
π U sin θ dθ =
U
π
π
δ
[− cos θ]δ π
UCmoy =U
π 1 + cos δ (II. 1)
𝛿 : L‟angle d'amorçage.
Réglage de la vitesse de rotation d‟un moteur à courant continu. Le pont mixte
alimente un moteur à courant continu à excitation indépendante et constante, sa fém
s‟exprime en fonction de la vitesse de rotation par la relation :
E = K. n (II. 2)
n : vitesse de rotation (en tr/s).
La tension Uc s‟exprime en fonction des éléments de la charge par la relation :
E = UC − R. i − Ldi
dt II. 3
En valeur moyenne :
E =< UC > −R. < 𝑖 > = 𝐾. 𝑛 (II. 4)
La vitesse de rotation du moteur s‟exprime en fonction de l‟angle 𝛿 :
n = 1
K [
U
π 1 + cos δ − R. < 𝑖 > ] (II. 5)
Figure (II.3) : La tension aux bornes de la charge avec un redresseur commande
Chapitre II Convertisseurs statiques
Page 18
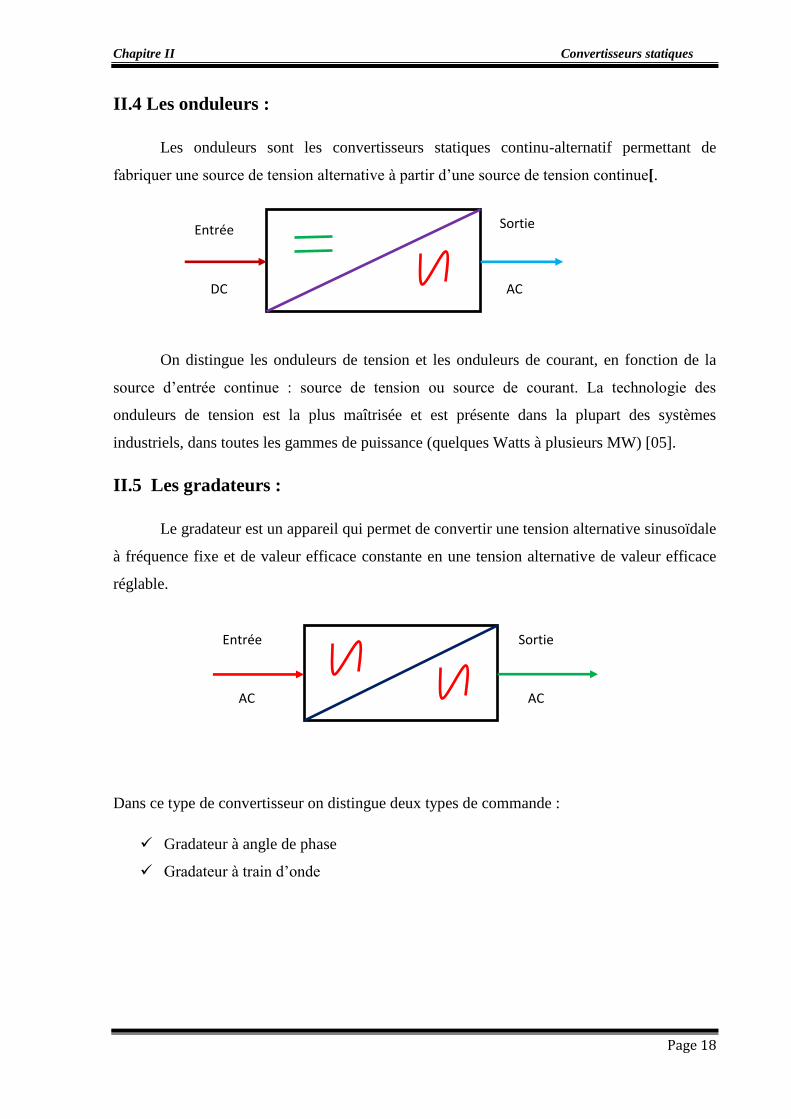
II.4 Les onduleurs :
Les onduleurs sont les convertisseurs statiques continu-alternatif permettant de
fabriquer une source de tension alternative à partir d‟une source de tension continue[.
On distingue les onduleurs de tension et les onduleurs de courant, en fonction de la
source d‟entrée continue : source de tension ou source de courant. La technologie des
onduleurs de tension est la plus maîtrisée et est présente dans la plupart des systèmes
industriels, dans toutes les gammes de puissance (quelques Watts à plusieurs MW) [05].
II.5 Les gradateurs :
Le gradateur est un appareil qui permet de convertir une tension alternative sinusoïdale
à fréquence fixe et de valeur efficace constante en une tension alternative de valeur efficace
réglable.
Dans ce type de convertisseur on distingue deux types de commande :
Gradateur à angle de phase
Gradateur à train d‟onde
Entrée
DC
Sortie
AC
Entrée Sortie
AC AC
Chapitre II Convertisseurs statiques
Page 19
II.6 Les hacheurs :
L‟hacheur est un dispositif permettant d‟obtenir une tension continue de valeur
moyenne réglable à partir d‟une source de tension continue fixe (batterie d‟accumulateurs ou
bien pont redresseur - alimenté par le réseau de distribution).
Un hacheur peut être réalisé à l‟aide des interrupteurs électroniques commandables à la
fermeture et à l‟ouverture telle que les transistors bipolaires ou IGBT ou les thyristors GTO.
II.6.1 Principe de fonctionnement :
Le principe du hacheur consiste à établir puis interrompre périodiquement la liaison
source- charge à l‟aide d‟un interrupteur électronique [07].
II.6.2 Le rapport cyclique α :
Le rapport cyclique est défini comme le temps (tF) pendant lequel l‟interrupteur est
fermé divisé par la période de fonctionnement du montage (T).
α = tF
T (II. 6)
La valeur de rapport cyclique : 0 ≤ 𝛼 ≤ 1
II.7 Différents types d’hacheurs :
Selon la position du commutateur et du hacheur, différents types de convertisseurs de
tension peuvent être réalisés :
abaisseur de tension «Buck »
élévateur de tension « Boost »
Entrée Sortie
DC DC
Chapitre II Convertisseurs statiques
Page 20
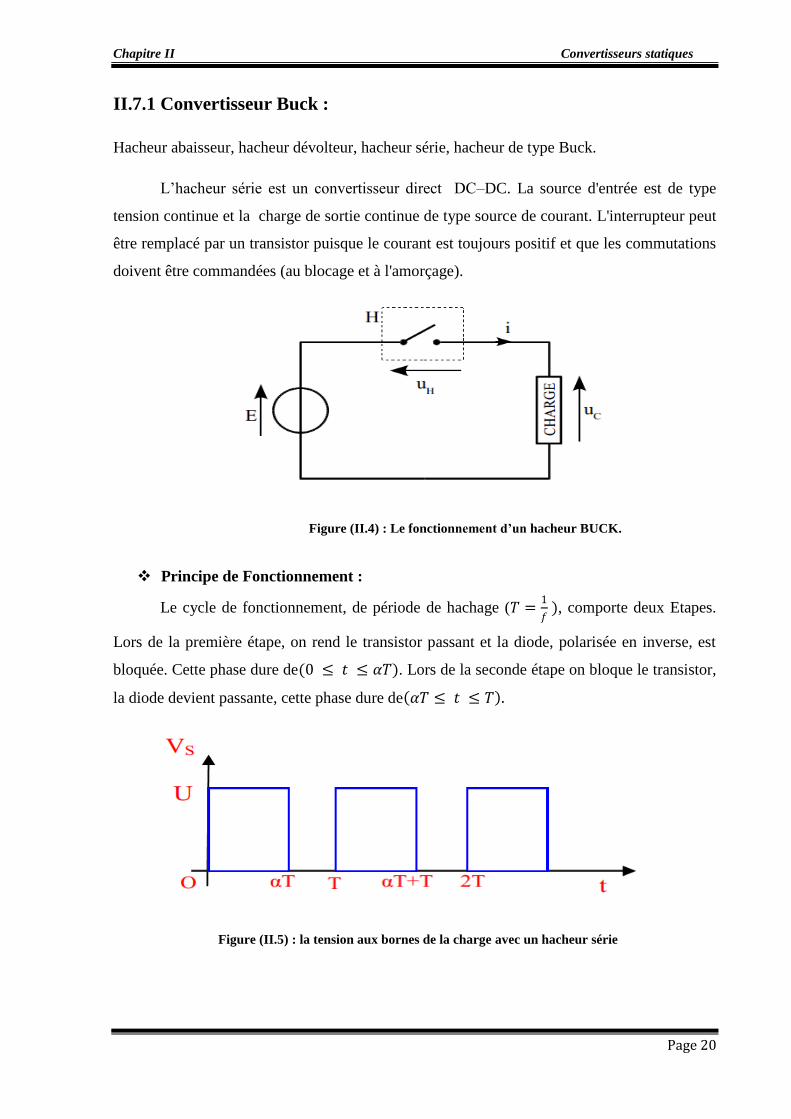
II.7.1 Convertisseur Buck :
Hacheur abaisseur, hacheur dévolteur, hacheur série, hacheur de type Buck.
L‟hacheur série est un convertisseur direct DC–DC. La source d'entrée est de type
tension continue et la charge de sortie continue de type source de courant. L'interrupteur peut
être remplacé par un transistor puisque le courant est toujours positif et que les commutations
doivent être commandées (au blocage et à l'amorçage).
Principe de Fonctionnement :
Le cycle de fonctionnement, de période de hachage (𝑇 =1
𝑓 ), comporte deux Etapes.
Lors de la première étape, on rend le transistor passant et la diode, polarisée en inverse, est
bloquée. Cette phase dure de(0 ≤ 𝑡 ≤ 𝛼𝑇). Lors de la seconde étape on bloque le transistor,
la diode devient passante, cette phase dure de 𝛼𝑇 ≤ 𝑡 ≤ 𝑇 .
Figure (II.4) : Le fonctionnement d’un hacheur BUCK.
Figure (II.5) : la tension aux bornes de la charge avec un hacheur série

Chapitre II Convertisseurs statiques
Page 21
Valeur moyenne de la tension:
𝑉𝑆𝑚𝑜𝑦 =1
𝑇 𝑉𝑆 𝑡 𝑑 𝑡
𝑇
0
=1
𝑇 𝑈𝑑 𝑡
𝛼𝑇
0
+1
𝑇 0. 𝑑 𝑡
𝑇
𝛼𝑇
VSmoy =U
T αT − 0 = αU (II. 7)
La valeur moyenne de la tension 𝑉𝑆𝑚𝑜𝑦 peut être ajustée en jouant sur la valeur du rapport
cyclique α Quand on fait varier α de 0 à 1, 𝑉𝑆𝑚𝑜𝑦 varie linéairement de 0 à U.
Intérêt d’utiliser un hacheur série :
Le hacheur série permet de faire varier la vitesse de rotation des moteurs à courant
continu. On rappelle que la vitesse d‟un tel moteur est proportionnelle à la tension
d‟alimentation.
Pour un bon fonctionnement du moteur, il est préférable que le courant soit le plus
régulier possible, d‟où la présence d‟une bobine de lissage. Si son inductance est
suffisamment grande, on pourra considérer le courant comme constant (∆i ≈0) [07].
Figure (II.6) : La valeur moyenne en fonction de rapport cyclique (α)
Figure (II.7) : Hacheur série commande un moteur à courant continu

Chapitre II Convertisseurs statiques
Page 22
Loi des mailles :
VS = UM + UL (II. 8)
On passe aux valeurs moyennes :
< 𝑉S >=< 𝑈M > +< 𝑈L >
Et comme pour un signal périodique : < 𝑈L > = 0
Nous obtenons pour le moteur :
< 𝑉S >=< 𝑈M > = 𝐸
< VS >= 𝐸 = 𝛼𝑈 (II. 9)
E = K. Φ. Ω = αU (II. 10)
𝛺 : La vitesse de rotation du moteur.
𝛷 : Le flux d‟inducteur (égale à constant pour le moteur à excitation séparé).
Finalement la f.é.m. du moteur peuvent être régler grâce au rapport cyclique par la relation :
E = K′ . Ω = αU
Ω = K′′ . α (II. 11)
Avec : K′′ =U
K ′
On voit ici que la vitesse varie linéairement avec le rapport cyclique α, lequel est
proportionnel à la tension de commande.
II.7.2 Convertisseur Boost :
Hacheur élévateur, hacheur survolteur, hacheur parallèle, hacheur de type Boost.
C‟est un convertisseur direct DC–DC. La source d'entrée est de type courant continu
et la charge de sortie est de type tension continue l'interrupteur peut être remplacé par un
transistor puisque le courant est toujours positif et que les commutations doivent être
commandées (au blocage et à l'amorçage) [05].
Chapitre II Convertisseurs statiques
Page 23
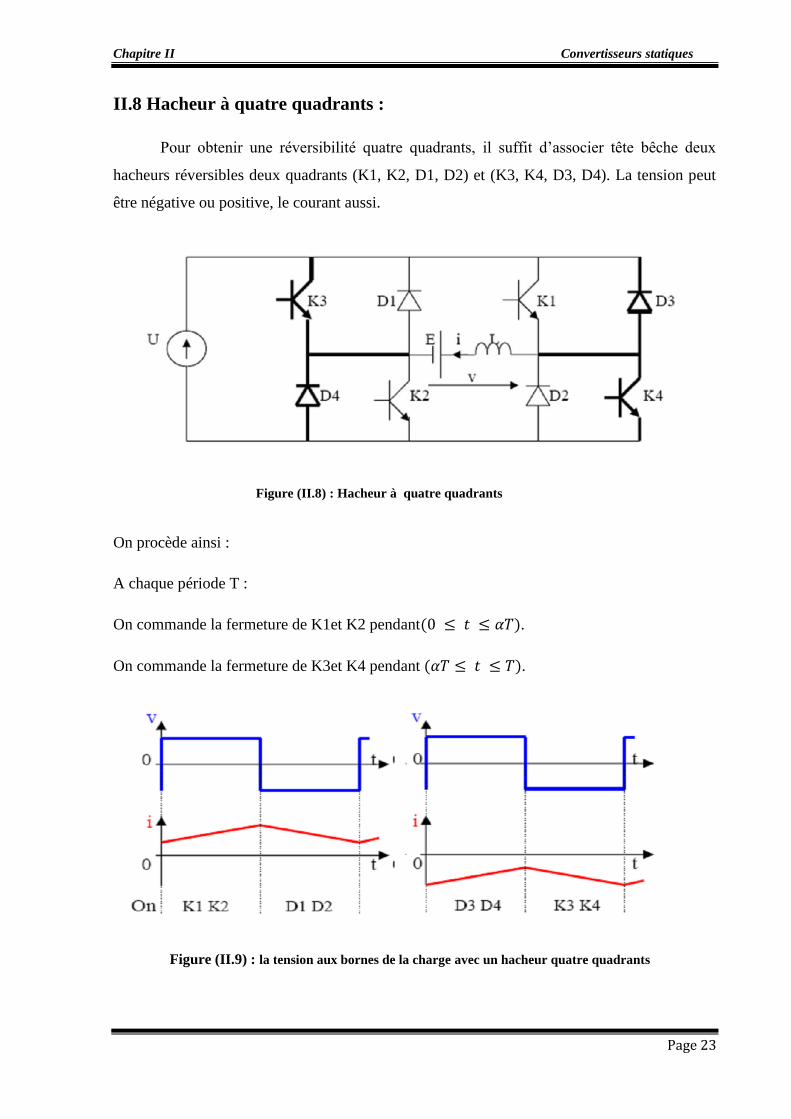
II.8 Hacheur à quatre quadrants :
Pour obtenir une réversibilité quatre quadrants, il suffit d‟associer tête bêche deux
hacheurs réversibles deux quadrants (K1, K2, D1, D2) et (K3, K4, D3, D4). La tension peut
être négative ou positive, le courant aussi.
On procède ainsi :
A chaque période T :
On commande la fermeture de K1et K2 pendant(0 ≤ 𝑡 ≤ 𝛼𝑇).
On commande la fermeture de K3et K4 pendant (𝛼𝑇 ≤ 𝑡 ≤ 𝑇).
Figure (II.8) : Hacheur à quatre quadrants
Figure (II.9) : la tension aux bornes de la charge avec un hacheur quatre quadrants
Chapitre II Convertisseurs statiques
Page 24
Valeur moyenne de la tension aux bornes de la charge :
𝑉𝑆𝑚𝑜𝑦 =1
𝑇 𝑉𝑆 𝑡 𝑑 𝑡
𝑇
0
=1
𝑇 𝑈𝑑 𝑡
𝛼𝑇
0
+1
𝑇 −𝑈𝑑 𝑡
𝑇
𝛼𝑇
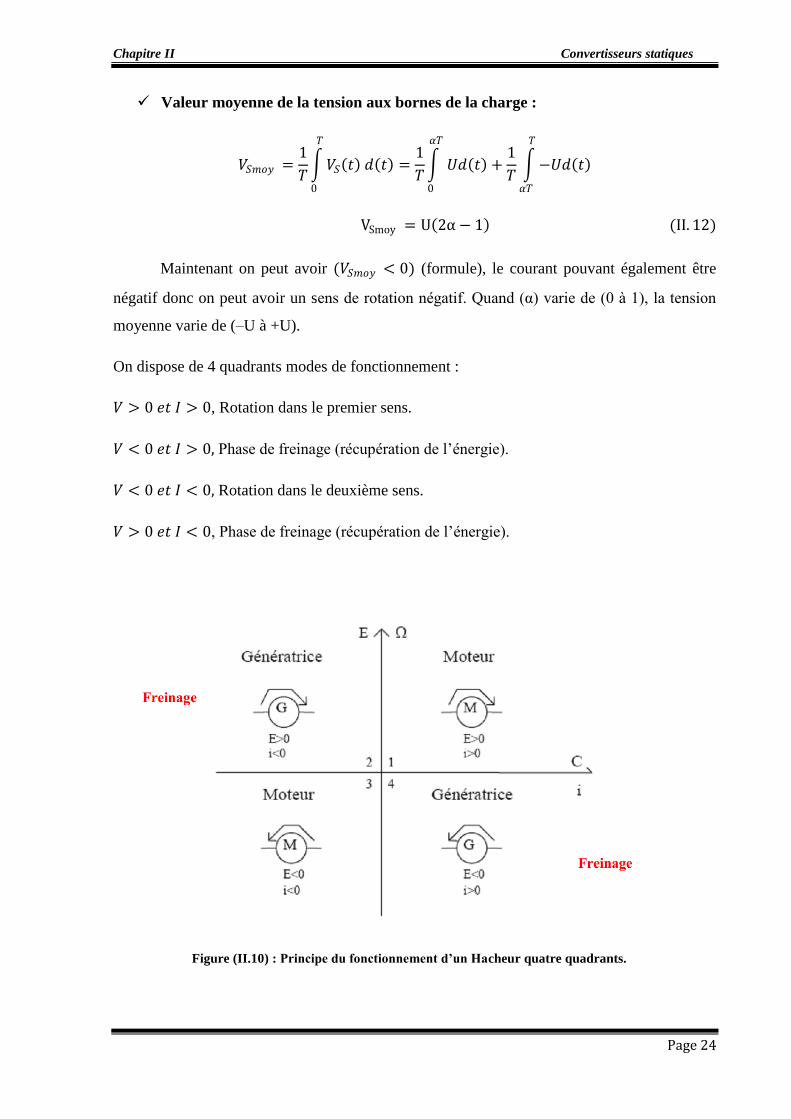
VSmoy = U 2α − 1 (II. 12)
Maintenant on peut avoir (𝑉𝑆𝑚𝑜𝑦 < 0) (formule), le courant pouvant également être
négatif donc on peut avoir un sens de rotation négatif. Quand (α) varie de (0 à 1), la tension
moyenne varie de (–U à +U).
On dispose de 4 quadrants modes de fonctionnement :
𝑉 > 0 𝑒𝑡 𝐼 > 0, Rotation dans le premier sens.
𝑉 < 0 𝑒𝑡 𝐼 > 0, Phase de freinage (récupération de l‟énergie).
𝑉 < 0 𝑒𝑡 𝐼 < 0, Rotation dans le deuxième sens.
𝑉 > 0 𝑒𝑡 𝐼 < 0, Phase de freinage (récupération de l‟énergie).
Figure (II.10) : Principe du fonctionnement d’un Hacheur quatre quadrants.
Chapitre II Convertisseurs statiques
Page 25
II.9 Technique de commande MLI :
La qualité de la tension de sortie d‟un hacheur dépend largement de la technique de
commande utilisée pour commander les interrupteurs de ce hacheur. Il existe plusieurs
techniques de commande et le choix d‟une technique parmi toutes les possibilités dépend
essentiellement du type d‟application auquel l‟appareil est désigné. La technique la plus
utilisée dans les variateurs de vitesse pour MCC est la commande par modulation de la largeur
d‟impulsion MLI.
Les techniques de modulation de largeur d‟impulsions sont multiples. Cependant, 04
catégories de MLI ont été développées :
Les modulations sinus-triangle effectuant la comparaison d‟un signal de
référence à une porteuse, en général, triangulaire.
Les modulations pré-calculées pour lesquelles les angles de commutation sont
calculés hors ligne pour annuler certaines composantes du spectre.
Les modulations post-calculées encore appelées MLI régulières symétriques
ou MLI vectorielles dans lesquelles les angles de commutation sont calculés en
ligne.
Les modulations stochastiques pour lesquelles l‟objectif fixé est le blanchiment
du spectre (bruit constant et minimal sur l‟ensemble du spectre). Les largeurs
des impulsions sont réparties suivant une densité de probabilité représentant la
loi de commande.
Le développement considérable de la technique de modulation en largeur d‟impulsion
ouvre une large étendue d‟application dans les systèmes de commande et beaucoup d‟autres
fonctions. Elle permet une réalisation souple et rentable des circuits de commande des
hacheurs.
Principe de la commande MLI :
Le Principe de base de la Modulation de la Largeur d‟impulsion MLI est fondé sur le
découpage d‟une pleine onde rectangulaire. Ainsi, la tension de sortie est formée par une
succession de créneau d‟amplitude égale à la tension continue d‟alimentation et de largeur
variable. La technique la plus répondue pour la production d‟un signal MLI est de comparer
entre deux signaux.
Chapitre II Convertisseurs statiques
Page 26
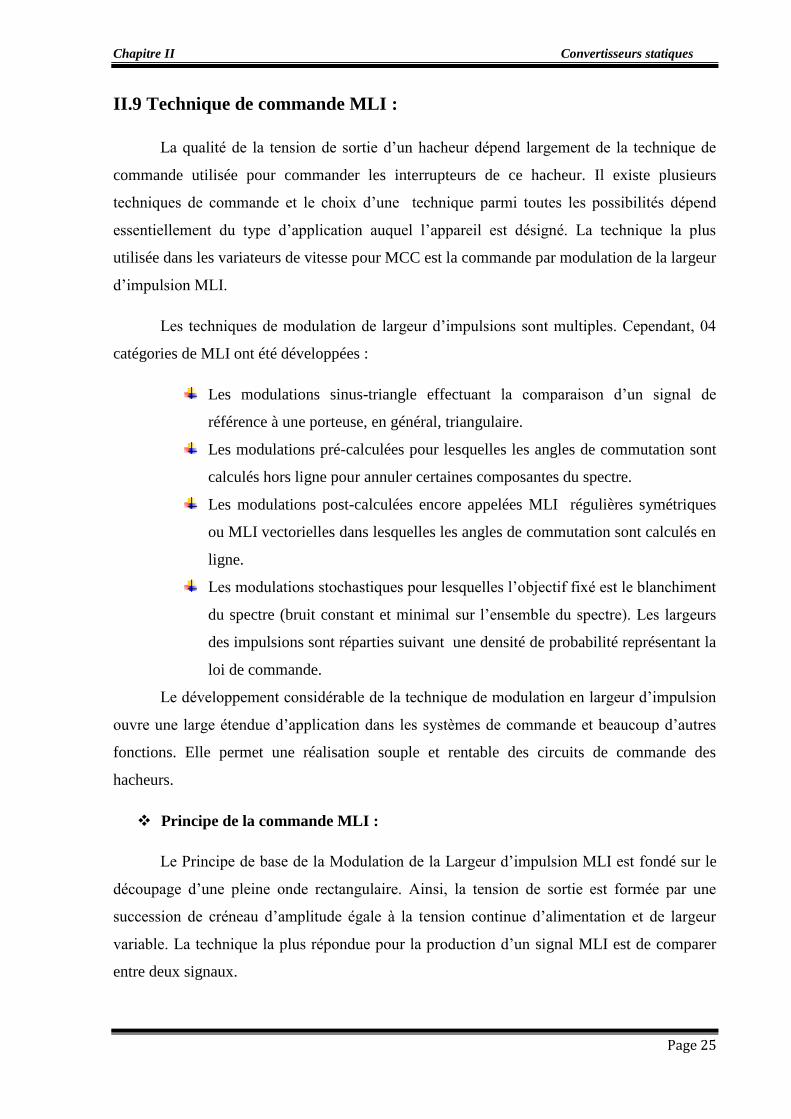
• Le premier, appelé signal de référence, est un signal continue qui varie entre deux seuils
définis en fonction de notre application.
• Le second, appelé signal de la porteuse, définit la cadence de la commutation des
interrupteurs statiques du convertisseur. C‟est un signal de haute fréquence par rapport au
signal de référence.
• L‟intersection de ces signaux donne les instants de commutation des interrupteurs.
L‟intersection de la référence avec la porteuse, en sens croissant, commande
l‟ouverture du transistor (T), son intersection avec la porteuse, en sens décroissant,
commande la fermeture de (T). Le principe se fait par comparaison entre les deux signaux
utilisant un amplificateur opérationnel [04].
Figure (II.11) : Réalisation du signal MLI.
Chapitre II Convertisseurs statiques
Page 27
II.10 Les montages d’électronique de puissance:
Le montage est constitué de quatre circuits de base, suivante :
II.10.1 Circuit de commande :
Il comporte l'appareillage nécessaire à la commande des circuits de puissance.
On trouve:
La source d'alimentation de faible puissance.
Un appareil d'isolement (sectionneur).
Une protection du circuit.
Un appareil de commande ou de contrôle (bouton poussoir, détecteur de grandeur
physique).
Organes de commande (bobine du contacteur).
II.10.2 Circuit de puissance :
Il comporte l'appareillage nécessaire au fonctionnement des récepteurs de puissance
Suivant un automatisme bien défini [08].
On trouve:
Une source de puissance (généralement réseau triphasé).
Un appareil d'isolement (sectionneur).
Un appareil de protection (fusible, relais thermique).
les contacts de puissance.
Des récepteurs de puissance (moteurs).
II.10.3 Circuit d’amplification :
Ce bloc est utilisé pour le but d‟amplifier le signal généré par le bloc de commande
transmise vers la base ou la gâchette des interrupteurs électroniques.
II.10.4 Circuit de protection :
Assure l‟isolation galvanique (optocoupleur-transformateur d‟impulsion) entre la
partie puissance et la partie commande (faible puissance).
Chapitre II Convertisseurs statiques
Page 28
II.11 Conclusion :
Dans ce chapitre, on a vu la stratégie de commande d‟une MCC utilisant les
convertisseurs DC-DC. Les différentes méthodes et hacheurs utilisés pour commander la
vitesse de la machine courant continu (MCC) ont été développés. Parmi les méthodes, nous
avons choisi le réglage par tension pour sa facilité, et le hacheur série qui commande le débit
d‟une source de tension pour commander une charge de courant. Dans notre projet, cette
charge représente le moteur à courant continu.
CHAPITRE III
Simulation d’’un
variateur de vitesse
Production 2016
Chapitre III Simulation d’un variateur de vitesse
Page 29
III.1 Introduction :
Pour faire varier la vitesse d'un moteur à courant continu on varier la tension
d'alimentation à ses bornes. Pour atteindre cette objectif on utilise un hacheur, ce dernier
commande la variation de la tension moyenne aux bornes de notre moteur est par la suite la
variation de la vitesse de rotation. On parle alors de Modulation par Largeur d'Impulsions
(MLI).
Dans ce chapitre, nous allons simuler et réaliser les circuits des hacheurs à un seul
quadrant et quatre quadrants pour varier la vitesse d‟un moteur à courant continu.
III.2 Partie de simulation :
Le logiciel MATLAB/SIMULINK, est un bon moyen d‟étude du fonctionnement des
machines à courant continus et d‟autres types de machines également dans les conditions de
fonctionnement voulues. Il nous permet d‟observer de manière réaliste des phénomènes
électriques et physiques (couple, vitesse, courant).
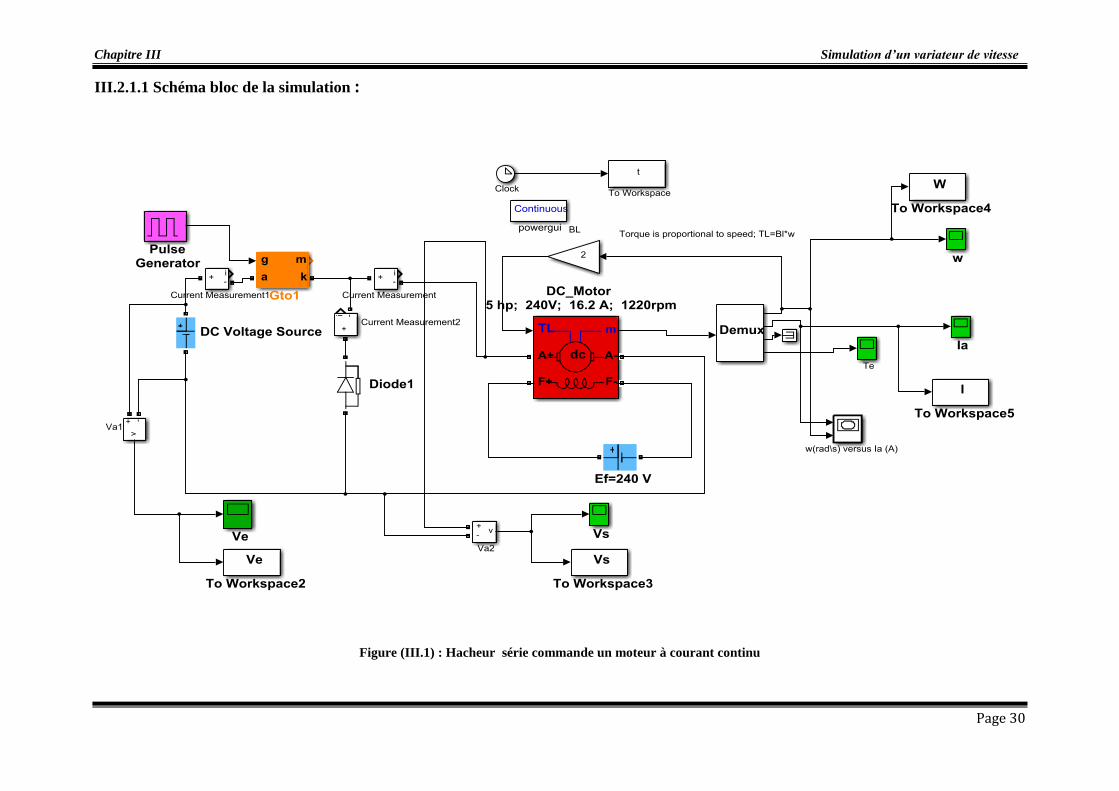
III.2.1 Simulation d’un hacheur à un seul quadrant commande un moteur à
courant continu à excitation séparée :
Un hacheur est un dispositif électrique permettant de faire varier la vitesse d'un moteur
à courant continu en faisant varier la tension moyenne d'alimentation du moteur.
Chapitre III Simulation d’un variateur de vitesse
Page 30
III.2.1.1 Schéma bloc de la simulation :
Figure (III.1) : Hacheur série commande un moteur à courant continu
Chapitre III Simulation d’un variateur de vitesse
Page 31
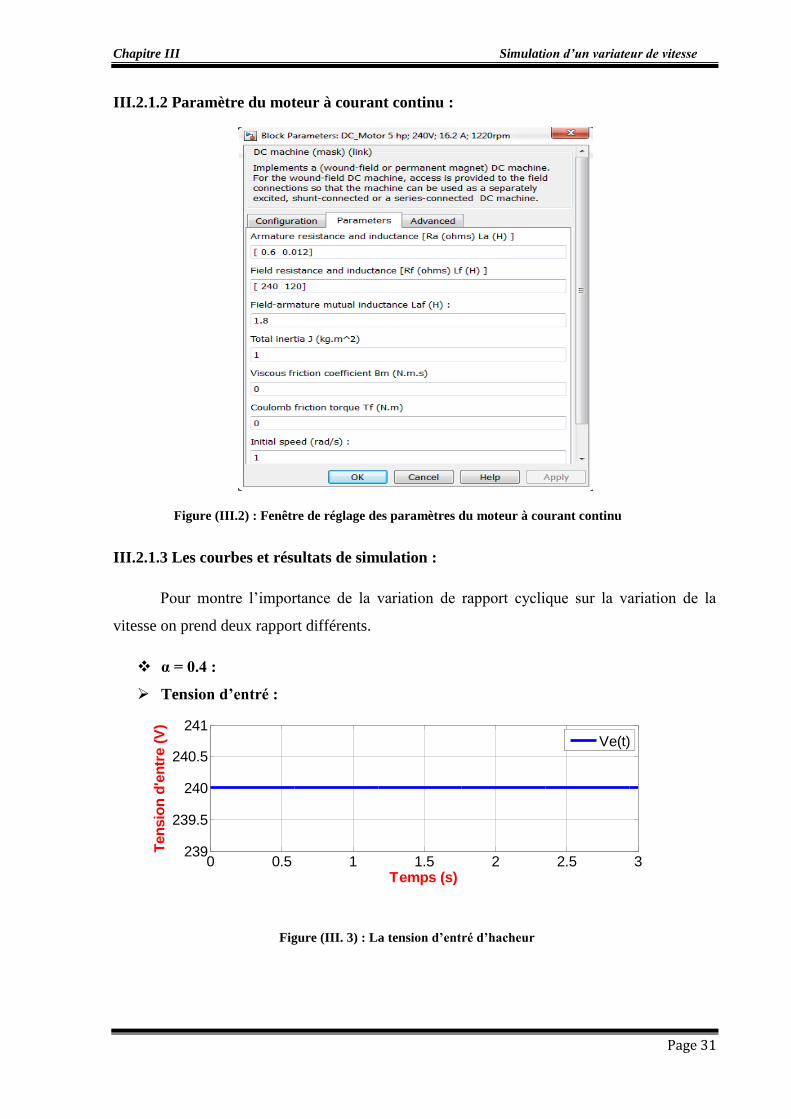
III.2.1.2 Paramètre du moteur à courant continu :
III.2.1.3 Les courbes et résultats de simulation :
Pour montre l‟importance de la variation de rapport cyclique sur la variation de la
vitesse on prend deux rapport différents.
α = 0.4 :
Tension d’entré :
0 0.5 1 1.5 2 2.5 3239
239.5
240
240.5
241
Temps (s)
Ten
sio
n d
'en
tre (
V)
Ve(t)
Figure (III. 3) : La tension d’entré d’hacheur
Figure (III.2) : Fenêtre de réglage des paramètres du moteur à courant continu
Chapitre III Simulation d’un variateur de vitesse
Page 32
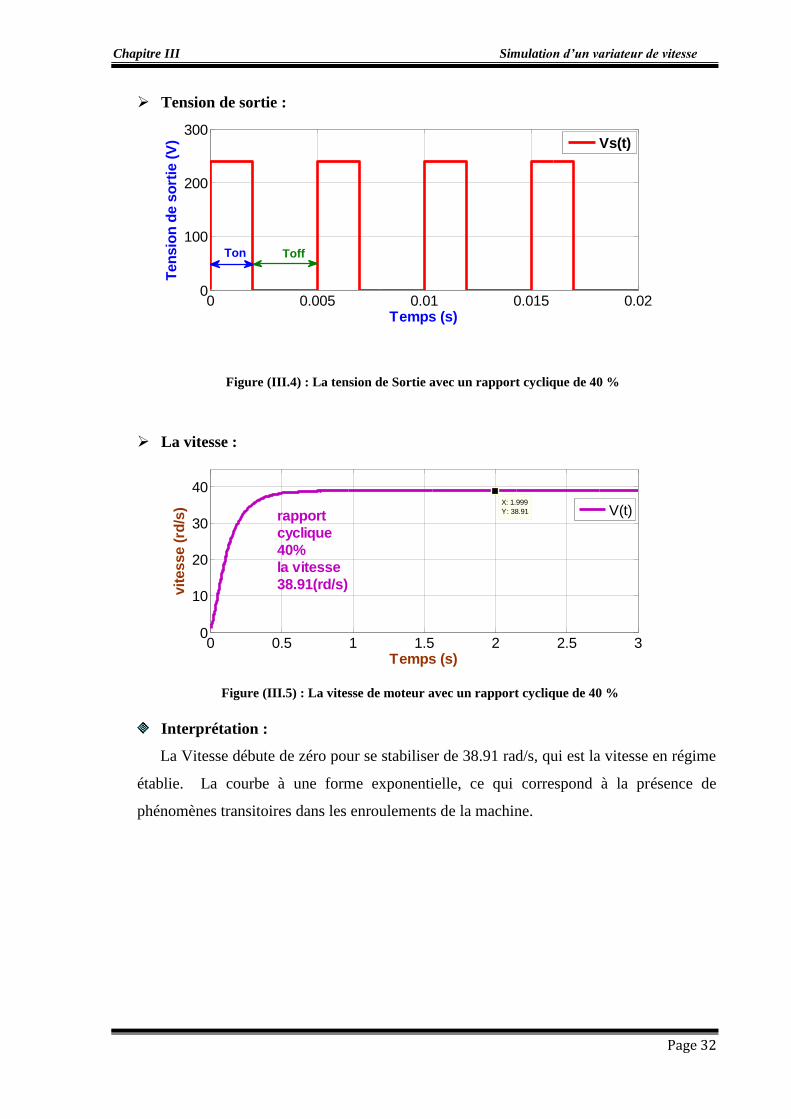
Tension de sortie :
La vitesse :
Interprétation :
La Vitesse débute de zéro pour se stabiliser de 38.91 rad/s, qui est la vitesse en régime
établie. La courbe à une forme exponentielle, ce qui correspond à la présence de
phénomènes transitoires dans les enroulements de la machine.
0 0.005 0.01 0.015 0.020
100
200
300
Temps (s)
Ten
sio
n d
e s
ort
ie (
V)
Vs(t)
Ton Toff
0 0.5 1 1.5 2 2.5 30
10
20
30
40X: 1.999
Y: 38.91
Temps (s)
vit
esse (
rd/s
) V(t)rapport
cyclique
40%
la vitesse
38.91(rd/s)
Figure (III.4) : La tension de Sortie avec un rapport cyclique de 40 %
Figure (III.5) : La vitesse de moteur avec un rapport cyclique de 40 %
Chapitre III Simulation d’un variateur de vitesse
Page 33
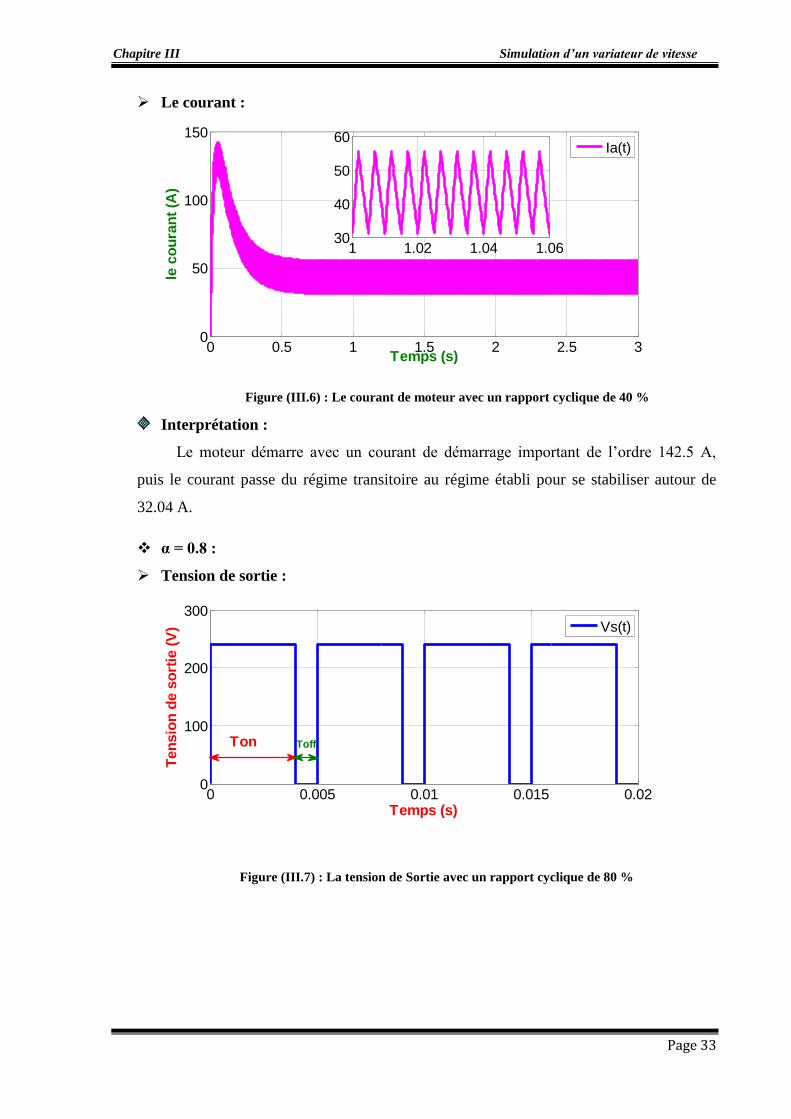
Le courant :
Interprétation :
Le moteur démarre avec un courant de démarrage important de l‟ordre 142.5 A,
puis le courant passe du régime transitoire au régime établi pour se stabiliser autour de
32.04 A.
α = 0.8 :
Tension de sortie :
0 0.5 1 1.5 2 2.5 30
50
100
150
Temps (s)
le c
ou
ran
t (A
)
Ia(t)
1 1.02 1.04 1.0630
40
50
60
0 0.005 0.01 0.015 0.020
100
200
300
Temps (s)
Ten
sio
n d
e s
ort
ie (
V)
Vs(t)
Ton Toff
Figure (III.6) : Le courant de moteur avec un rapport cyclique de 40 %
Figure (III.7) : La tension de Sortie avec un rapport cyclique de 80 %
Chapitre III Simulation d’un variateur de vitesse
Page 34
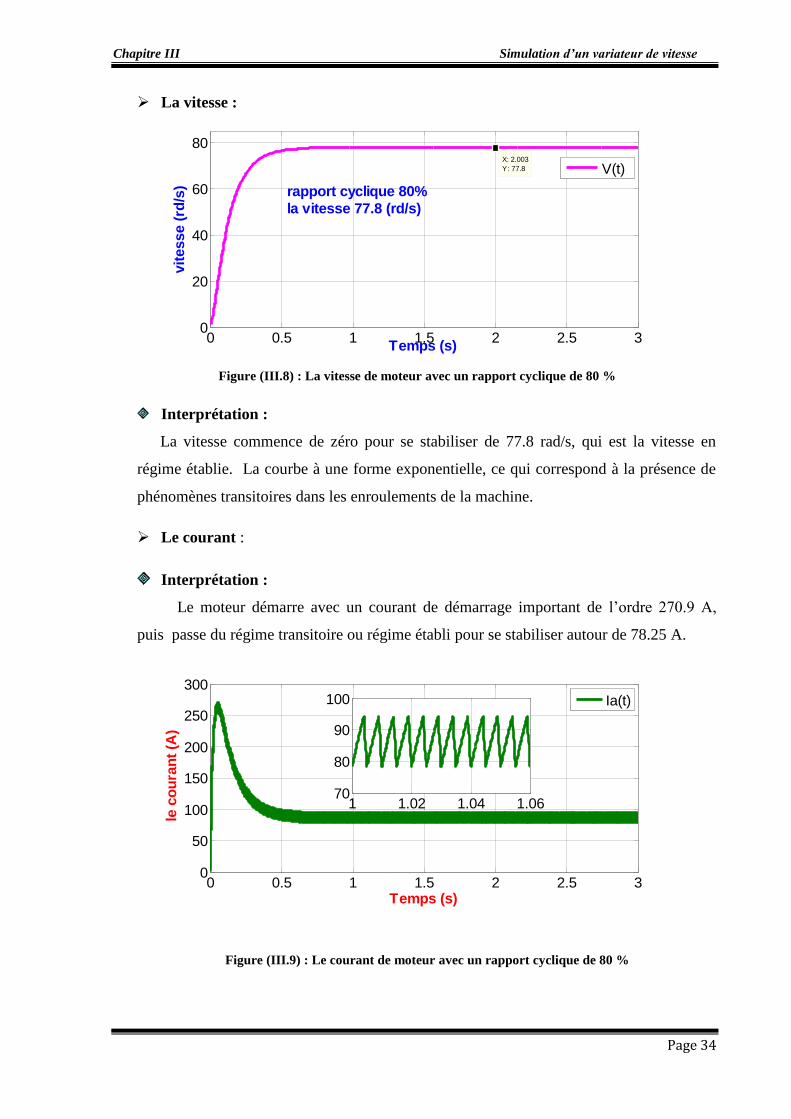
La vitesse :
Interprétation :
La vitesse commence de zéro pour se stabiliser de 77.8 rad/s, qui est la vitesse en
régime établie. La courbe à une forme exponentielle, ce qui correspond à la présence de
phénomènes transitoires dans les enroulements de la machine.
Le courant :
Interprétation :
Le moteur démarre avec un courant de démarrage important de l‟ordre 270.9 A,
puis passe du régime transitoire ou régime établi pour se stabiliser autour de 78.25 A.
0 0.5 1 1.5 2 2.5 30
20
40
60
80
X: 2.003
Y: 77.8
Temps (s)
vit
esse (
rd/s
)V(t)
rapport cyclique 80%
la vitesse 77.8 (rd/s)
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
Temps (s)
le c
ou
ran
t (A
)
1 1.02 1.04 1.0670
80
90
100 Ia(t)
Figure (III.8) : La vitesse de moteur avec un rapport cyclique de 80 %
Figure (III.9) : Le courant de moteur avec un rapport cyclique de 80 %
Chapitre III Simulation d’un variateur de vitesse
Page 35
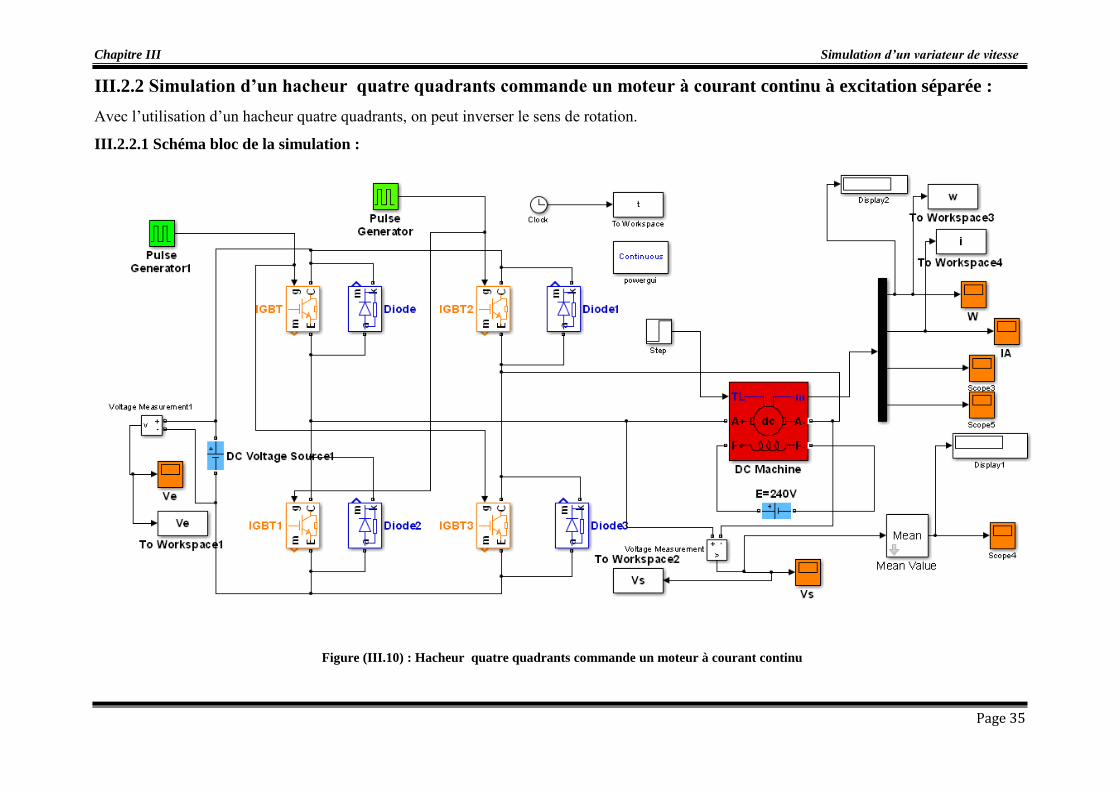
III.2.2 Simulation d’un hacheur quatre quadrants commande un moteur à courant continu à excitation séparée :
Avec l‟utilisation d‟un hacheur quatre quadrants, on peut inverser le sens de rotation.
III.2.2.1 Schéma bloc de la simulation :
Figure (III.10) : Hacheur quatre quadrants commande un moteur à courant continu
Chapitre III Simulation d’un variateur de vitesse
Page 36
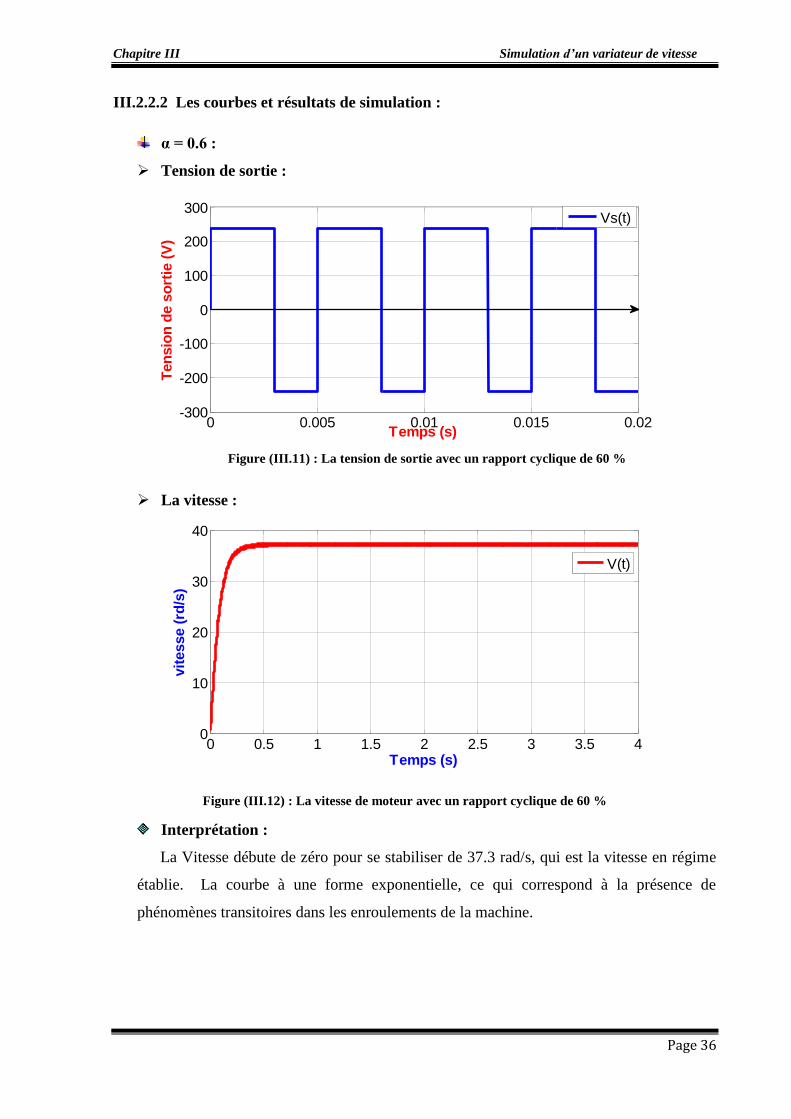
III.2.2.2 Les courbes et résultats de simulation :
α = 0.6 :
Tension de sortie :
La vitesse :
Interprétation :
La Vitesse débute de zéro pour se stabiliser de 37.3 rad/s, qui est la vitesse en régime
établie. La courbe à une forme exponentielle, ce qui correspond à la présence de
phénomènes transitoires dans les enroulements de la machine.
0 0.005 0.01 0.015 0.02-300
-200
-100
0
100
200
300
Temps (s)
Ten
sio
n d
e s
ort
ie (
V)
Vs(t)
0 0.5 1 1.5 2 2.5 3 3.5 40
10
20
30
40
Temps (s)
vit
esse (
rd/s
)
V(t)
Figure (III.11) : La tension de sortie avec un rapport cyclique de 60 %
Figure (III.12) : La vitesse de moteur avec un rapport cyclique de 60 %
Chapitre III Simulation d’un variateur de vitesse
Page 37
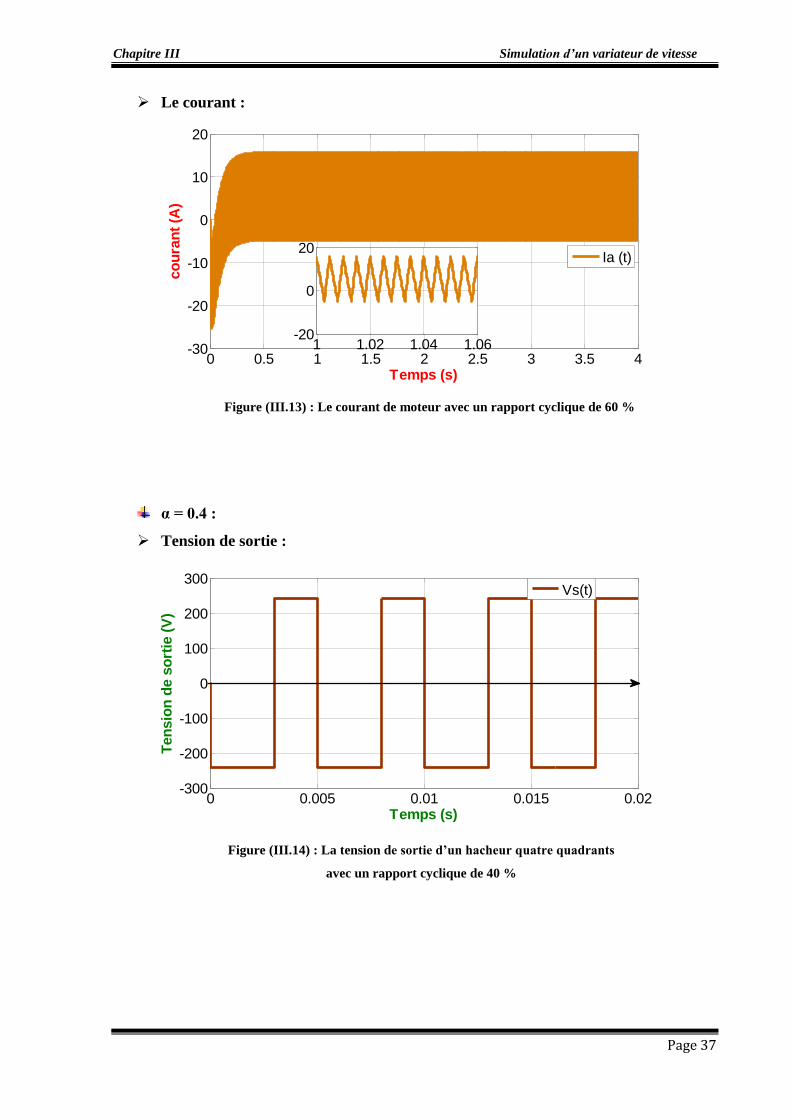
Le courant :
α = 0.4 :
Tension de sortie :
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
10
20
Temps (s)
co
ura
nt
(A)
1 1.02 1.04 1.06-20
0
20Ia (t)
0 0.005 0.01 0.015 0.02-300
-200
-100
0
100
200
300
Temps (s)
Ten
sio
n d
e s
ort
ie (
V)
Vs(t)
Figure (III.13) : Le courant de moteur avec un rapport cyclique de 60 %
Figure (III.14) : La tension de sortie d’un hacheur quatre quadrants
avec un rapport cyclique de 40 %
Chapitre III Simulation d’un variateur de vitesse
Page 38
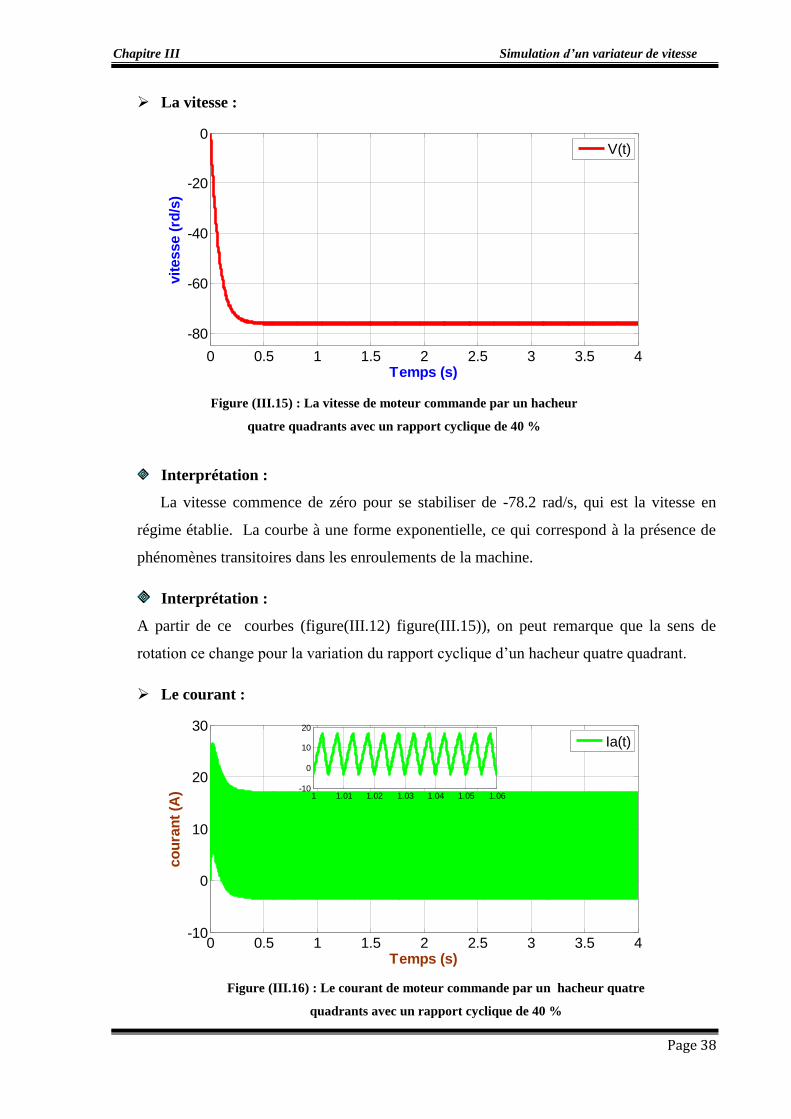
La vitesse :
Interprétation :
La vitesse commence de zéro pour se stabiliser de -78.2 rad/s, qui est la vitesse en
régime établie. La courbe à une forme exponentielle, ce qui correspond à la présence de
phénomènes transitoires dans les enroulements de la machine.
Interprétation :
A partir de ce courbes (figure(III.12) figure(III.15)), on peut remarque que la sens de
rotation ce change pour la variation du rapport cyclique d‟un hacheur quatre quadrant.
Le courant :
0 0.5 1 1.5 2 2.5 3 3.5 4
-80
-60
-40
-20
0
Temps (s)
vit
esse (
rd/s
)
V(t)
0 0.5 1 1.5 2 2.5 3 3.5 4-10
0
10
20
30
Temps (s)
co
ura
nt
(A)
1 1.01 1.02 1.03 1.04 1.05 1.06-10
0
10
20
Ia(t)
Figure (III.15) : La vitesse de moteur commande par un hacheur
quatre quadrants avec un rapport cyclique de 40 %
Figure (III.16) : Le courant de moteur commande par un hacheur quatre
quadrants avec un rapport cyclique de 40 %

Chapitre III Simulation d’un variateur de vitesse
Page 39
III.2.3 Analyse des résultats obtenus :
Dans ce travail, les différentes caractéristique nous montre que :
La variation de rapport cyclique varie la vitesse de moteur à courant continu
La vitesse de rotation d‟un moteur à courant continu dépend sa tension d‟alimentation
On peut inverse la sens de rotation du moteur avec un hacheur quatre quadrant.
III.3 Partie expérimentale :
Pour valider notre résultat obtenu par simulation nous allons aussi réalise un circuit de
commande expérimentale.
III.3.1 Définition du module Arduino :
Le module Arduino est un circuit imprimé en matériel libre (plateforme de contrôle)
dont les plans de la carte elle-même sont publiés en licence libre dont certains composants de
la carte : comme le microcontrôleur et les composants complémentaires qui ne sont pas en
licence libre. Un microcontrôleur programmé peut analyser et produire des signaux
électriques de manière à effectuer des tâches très diverses. Arduino est utilisé dans beaucoup
d'applications comme l'électrotechnique industrielle et embarquée ; le modélisme, la
domotique mais aussi dans des domaines différents comme l'art contemporain et le pilotage
d'un robot, commande des moteurs et faire des jeux de lumières, communiquer avec
l'ordinateur, commander des appareils mobiles (modélisme). Chaque module d‟Arduino
possède un régulateur de tension +5 V et un oscillateur à quartez 16 MHz (ou un résonateur
céramique dans certains modèles). Pour programmer cette carte, on utilise l‟logiciel IDE
Arduino [09].
Figure (III.17) : Carte Arduino ‘’Méga’’
Chapitre III Simulation d’un variateur de vitesse
Page 40
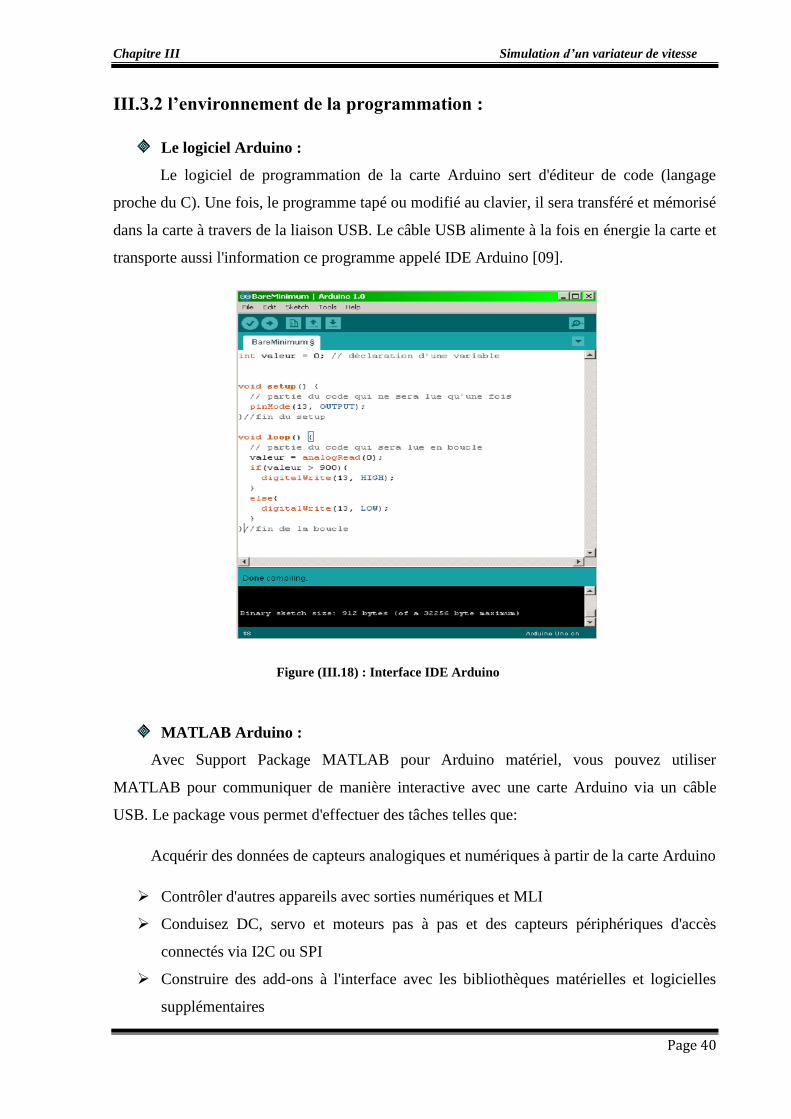
III.3.2 l’environnement de la programmation :
Le logiciel Arduino :
Le logiciel de programmation de la carte Arduino sert d'éditeur de code (langage
proche du C). Une fois, le programme tapé ou modifié au clavier, il sera transféré et mémorisé
dans la carte à travers de la liaison USB. Le câble USB alimente à la fois en énergie la carte et
transporte aussi l'information ce programme appelé IDE Arduino [09].
MATLAB Arduino :
Avec Support Package MATLAB pour Arduino matériel, vous pouvez utiliser
MATLAB pour communiquer de manière interactive avec une carte Arduino via un câble
USB. Le package vous permet d'effectuer des tâches telles que:
Acquérir des données de capteurs analogiques et numériques à partir de la carte Arduino
Contrôler d'autres appareils avec sorties numériques et MLI
Conduisez DC, servo et moteurs pas à pas et des capteurs périphériques d'accès
connectés via I2C ou SPI
Construire des add-ons à l'interface avec les bibliothèques matérielles et logicielles
supplémentaires
Figure (III.18) : Interface IDE Arduino
Chapitre III Simulation d’un variateur de vitesse
Page 41
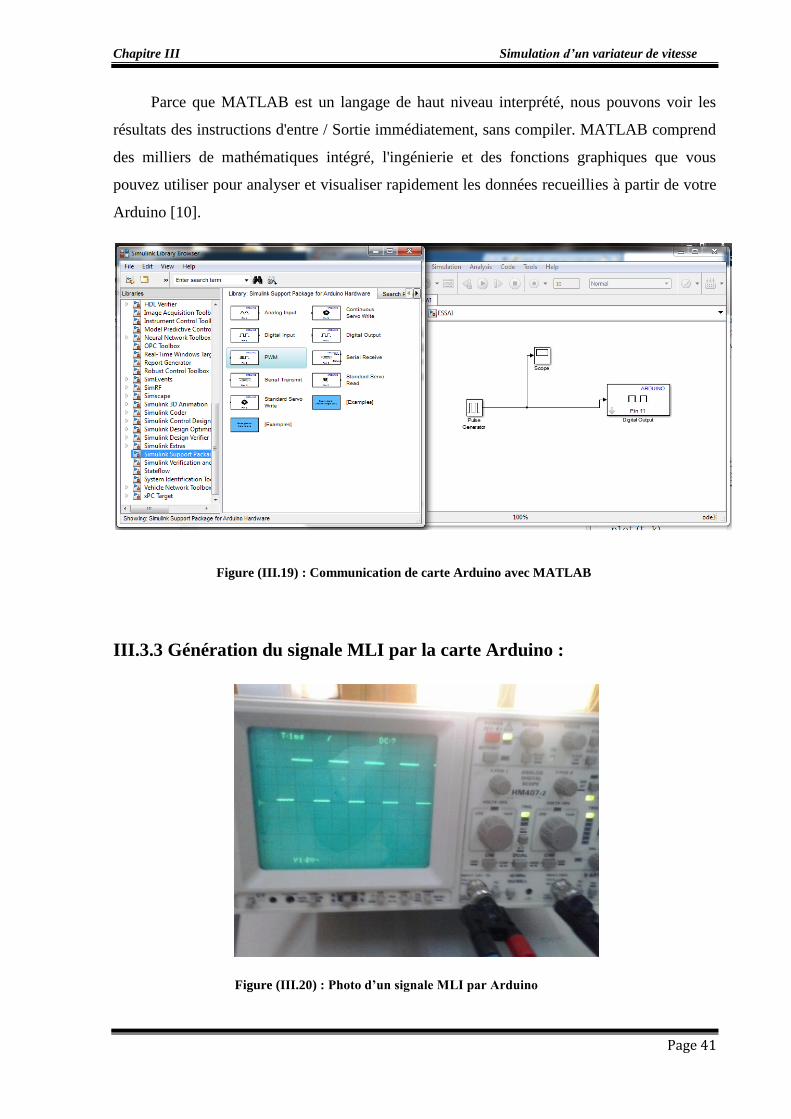
Parce que MATLAB est un langage de haut niveau interprété, nous pouvons voir les
résultats des instructions d'entre / Sortie immédiatement, sans compiler. MATLAB comprend
des milliers de mathématiques intégré, l'ingénierie et des fonctions graphiques que vous
pouvez utiliser pour analyser et visualiser rapidement les données recueillies à partir de votre
Arduino [10].
III.3.3 Génération du signale MLI par la carte Arduino :
Figure (III.20) : Photo d’un signale MLI par Arduino
Figure (III.19) : Communication de carte Arduino avec MATLAB

Chapitre III Simulation d’un variateur de vitesse
Page 42
III.3.4 Etage d’amplification :
Généralement les signaux délivré par les cartes électroniques à des faibles puissances
incapable d‟attaquée les composants de grande puissance, pour cette raison on ajoute un étage
d‟amplification dans le circuit.
III.3.5 Les afficheurs LCD :
Les afficheurs LCD sont devenus indispensables dans les systèmes techniques qui
nécessitent l‟affichage des paramètres de fonctionnement.
Ces Afficheurs permettent d'afficher des lettres, des chiffres et quelques caractères
spéciaux. Les caractères sont prédéfinis [09].
III.3.6 Affichage de rapport cyclique :
Figure (III.21) : Afficheurs LCD
Figure (III.22) : Affichage de rapport cyclique en utilise carte arduino et afficheur LCD

Chapitre III Simulation d’un variateur de vitesse
Page 43
III.4 Conclusion :
Dans ce chapitre, nous avons présenté les résultats de simulation avec logiciel
MATLAB. Cette dernière montre que la vitesse de rotation d‟un moteur à courant continu
dépend sa tension d‟alimentation, la variation de rapport cyclique varie la tension ou borne de
moteur à courant continu et on peut aussi inverse la sens de rotation du moteur avec un
hacheur quatre quadrant. Le résultat obtenu et valider par la réalisation d‟un circuit de
commande avec la carte Arduino.
Conclusion générale
Présentation du champ de
Production 2016
Conclusion générale
Page 44
Conclusion générale
Ce travail a été consacré à une étude et simulation d‟un variateur de vitesse commande
un moteur à courant continu. Malgré le développement des moteurs à vitesse variable, les
moteurs à courant continu sont très utilisés de nos jours, notamment dans les applications
automobiles, dans des applications de faible puissance utilisant des batteries ou encore pour la
traction électrique.
Les structures et les principes de fonctionnement des machines à courant continu sont
relativement bien connus. Aussi, il y a peu de travaux de recherche qui sont développés sur ce
type de machine depuis plusieurs années. En fait, l'essentiel de la recherche sur ces machines
est mené par des industriels. Cette recherche porte plus particulièrement sur les matériaux qui
sont utilisés pour réaliser les collecteurs et les balais.
D‟après l‟étude des différents types de moteur et suivant ces caractéristiques, on a vu
que le moteur à excitation indépendante c‟est lui qui s‟adapte pour notre projet, il est
caractérisé par une vitesse réglable par tension et indépendante de la charge. En association
avec un convertisseur statique (hacheur) fournissant une tension réglable, la vitesse peut
varier sur une large plage. Il fournit un couple important à faible vitesse.
Dans ce travaille, nous avons présente l‟étude du moteur à courant continu, puis la
technique de la variation de vitesse, et enfin la simulation de notre model sur logiciel de
simulation MATLAB.
Dans le premier chapitre, nous avons rappelé les principaux éléments de constitution
de la machine à courant continu. Puis nous avons présenté les différents types du moteur à
courant continu ainsi que les avantages et les inconvénients.
Dans le deuxième chapitre, nous avons rappelé les différents convertisseurs statiques.
Puis nous avons présenté les techniques de commande MLI ainsi que les montages
d‟électronique de puissance.
Dans le troisième chapitre, nous avons simulé et réalisé d‟un circuit de commande par
une carte Arduino du moteur à courant continu. Nous avons montre que La vitesse de rotation
d‟un moteur à courant continu dépend sa tension d‟alimentation.

Conclusion générale
Page 45
Perspectives du projet :
Nous souhaitons vivement que ce projet puisse servir comme élément de base pour
d‟autres études plus pratique sur un cas réelle, comme le projet de tramway d‟Ouargla.
Références bibliographiques
Présentation du champ de
Production 2016
Bibliographie
Page 46
[01]
[02]
[03]
[04]
[05]
[06]
[07]
[08]
[09]
[10]
www.elec.jbd.free.fr, « Machine électromagnétique », Chapitre 13.
Luc Lasne, Notions de base et machine électrique, Dunod, Pairs, 2005.
Fabrice DESCHAMP, « Cours BAC S SI – Convertir L‟énergie – Machine à Courant
Continu » Sciences de L‟ingénieur, LYCEE JACQUES PREVERT.
Amine AYAD, « Etude et réalisation d‟un commande MLI pilotant un hacheur série »,
Mémoire de Master, Université Abou BekrBelkaid Tlemcen, 2014.
Mr ZEMOURI Azeddine, « Etudes expérimentales d‟un convertisseur
DC/DC contrôler par une commande robuste », Mémoire de Magister,
Université de Batna, 2014.
BRAHIMI Abdelkrim et GUEZOULI Housseyne, « Etude et réalisation d‟une carte de
commande à base d‟un microcontrôleur PIC 16F877 pour ponts redresseurs triphasés à
thyristors », Mémoire de Master, Université Abou-BekrBelkaїd Tlemcen, 2014.
M.L.LOUAZENE, « Cours d‟électroniques de puissance », université
d‟Ouargla, 2011.
Adel SAID et Yassine JEMAI, « Installation industrielles », Institut Supérieur des
Etudes Technologiques de Nabeul, 2013.
KRAMA Abdelbasset et GOUGUI Abdelmoumen, « Etude et réalisation d‟une carte de
contrôle par Arduino via le système Androïde », Mémoire de Master, université
d‟Ouargla, 2015.
Serial – How can I communicate from Arduino to MATLAB Arduino stack
Exchange “www.arduino.stakexchange.com”.
Bibliographies
Annexes
Présentation du champ de
Production 2016
Annexes
Page 47
Annexes
Programme – Chapitre III
Le programme produit le signal MLI (PWM) et affiche la valeur du rapport cyclique.
/*
//Le programme produit le signal MLI (PWM) et affiche la
valeur du rapport
cyclique
*/
// include the library code:
#include<LiquidCrystal.h>
constint A = 0;
intvalueLue;
// initialise l'écran avec les bonnes broches
// ATTENTION, REMPLACER LES NOMBRES PAR VOS BRANCHEMENTS À
VOUS !
LiquidCrystallcd(1, 2, 4, 5, 6, 7);
voidsetup() {
lcd.begin(16, 2); //utilisation d'un écran 16 colonnes et 2
lignes
}
void loop() {
// Turn off the blinking cursor:
lcd.setCursor(0,0);
lcd.print("Rapport Cyclique");
valueLue = analogRead(A);
lcd.setCursor(2,1);
lcd.print(valueLue*100.0/1023);
lcd.setCursor(8,1);
lcd.print("%");
delay(1000);
analogWrite(9,valueLue);
}
Annexes
Page 48
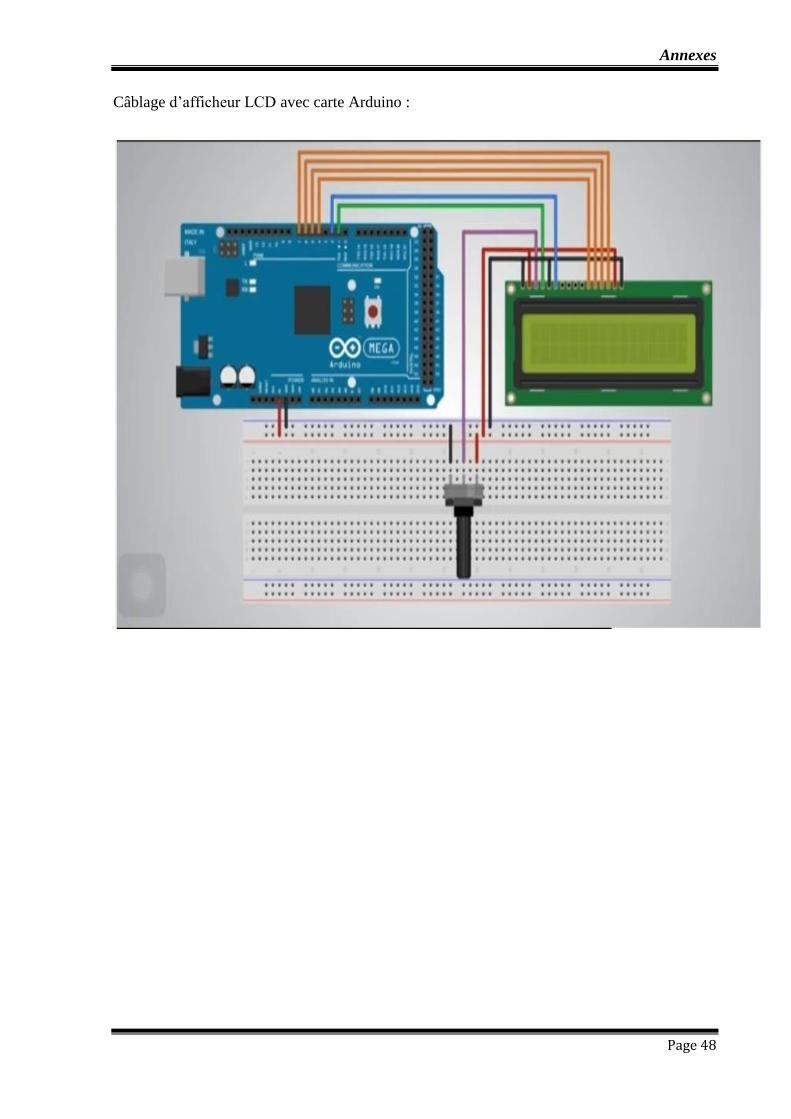
Câblage d‟afficheur LCD avec carte Arduino :
Résumé L‟évolution des technologies conduit à utiliser des machines nécessitant des vitesses de
rotation précises et variables pour l‟entraînement de TGV par exemple.
L'avantage principal des machines à courant continu réside dans leur adaptation simple
aux moyens permettant de régler ou de faire varier leur vitesse, leur couple et leur sens de
rotation ainsi que leur raccordement direct à une source d'énergie (batteries d'accumulateur,
piles, etc.) Malgré leur principal problème qui se pose au niveau de la liaison entre les balais,
ou « charbons » et le collecteur rotatif, le moteur à courant continu continue d‟exister à travers
de nombreuses applications.
Dans ce travaille, on présente plusieurs cas que ce soit étude du moteur à courant
continu, puis la technique de la variation de vitesse, et enfin la simulation de notre model sur
logiciel de simulation MATLAB et réalisation d‟un circuit de commande avec la carte Arduino.
Mots clés :Machine à courant continu, les convertisseurs statiques, la technique MLI.
Abstract The evolution of technologies leads to use machines requiring precise and variable
speeds for the TGV drive for example.
The main advantage of DC machines lies in their easy adaptation to ways to adjust or
vary their speed, torque and direction of rotation as well as their direct connection to a power
source (accumulator, batteries, etc.) Despite their major problem at the connection between the
brushes, or "coal" and the rotary collector, the DC motor continues to exist across many
applications.
In this work, we present several cases whether study of DC motor, then the technique of
the speed variation, and finally the simulation of our model on MATLAB simulation software
and implementation of a control circuit with the card Arduino.
Keywords: DC machine, static converters, PWM technique.
ملخص
تطور التكنولوجيا يؤدي إىل استخدام اآلالت اليت تتطلب سرعات دقيقة ومتغرية على سبيل املثال قطار فائق .السرعة
تكمن يف تكيفها السهل يف سبل تعديل أو تغيري سرعتها، وعزم دوراهنا و اجتاه املستمرامليزة الرئيسية حملرك التيار .الدوران باإلضافة إىل االتصال املباشر ملصدر الطاقة ال يزال حمرك التيار املستمر يتواجد عرب العديد من التطبيقاتيف هذا العمل، حنن نقوم بدراسة حمرك التيار املستمر، مث أساليب تغري السرعة، وأخريا حماكاة منوذجنا على برامج
.وتنفيذ دارة حتكم بواسطة بطاقة اردوينوماتالب احملاكاة MLIتقنية, احملوالت الثابتة, حمركات التيار املستمر:الكلمات المفتاحية