
Etude dynamique d'un véhicule ferroviaire de mesure
1
Projet de diplôme 2008-2009 Etude dynamique d’un véhicule ferroviaire de mesure réalisé par Jean-Frédéric Bonjour Professeur Claude Ramseyer Remerciements Jean-Jacques Stuby - CFF Christophe Krebs - Bombardier Transportation SA Stefan Senft - Raility AG Problématique Cette étude dynamique traite d’un véhicule de mesure sorti, en juillet 2008, des ateliers de MATISA qui est une société, située à Crissier sur Lausanne, active dans le domaine de l’entretien et le renouvellement de voies ferrées. Ce véhicule présente un comportement dyna- mique à améliorer, au niveau des accélérations verticales, lorsque le véhicule passe sur des défauts géométriques de la voie ou sur des aiguillages. Ces accélérations sont amplifiées et exacerbées par le châssis-poutre de la machine qui est assez flexible verticalement. Ceci est dû au très grand empattement entre bogies (19.5m) et à la masse du véhicule (env. 80t). Pour résoudre ce problème, ce projet a étudié l’apport d’un châssis-intégré, c’est-à-dire d’un châssis où l’habitacle fait partie de la structure porteuse. Il est à noter que la structure autoporteuse conçue dans ce projet n’est pas complète, mais permet de donner une idée réaliste des propriétés et du comportement de ce type de structure, qui est par définition plus rigide qu’un châssis-poutre. Mais d’un point de vue dynamique, il n’était pas sûr que cette seule modification parvienne à résoudre le problème, car cette solution n’a pas d’influence sur la source de l’inconfort, à savoir l’excitation du véhicule par des défauts géométriques de la voie. D’où l’idée qui consiste à modifier la suspension pour filtrer plus efficacement les défauts. Pour répondre à cette problématique, ce projet de diplôme s’est basé sur divers modèles, analytiques, éléments finis et multi-corps, validés notamment par des mesures, et faisant, pour certains, appel à des éléments en rapport avec le tracé et les défauts de la voie excitant le véhicule; tout en se référant au maximum aux normes appliquées dans le domaine ferroviaire, afin que les conclusions de cette étude soient aussi réalistes que possible. Modélisation Les modèles de dynamique multi-corps, qui font appel à des modèles éléments finis afin de prendre en compte la déformation du châssis, montrent que le passage à un châssis-intrégré améliore le confort du véhicule par rapport à un châssis-poutre, mais que sans un dimensionnement de la suspension en fonction des propriétés du véhicule (masse de la caisse, rigidité, position du centre de gravité, etc.), cette amélioration peut être amoindrie. Ces modèles sont partiellement validés par les mesures et les modèles analytiques. En plus de permettre la validation de modèles plus complets, les modèles analytiques possèdent l’avantage d’être moins lourds en terme de temps de calcul et de nombre de paramètres, ce qui permet de voir rapidement l’effet de tel ou tel autre paramètre et de pré-dimensionner des éléments, comme ceux de la suspension du véhicule, avant de passer aux modèles plus complets et plus fins. Analyse de mesures Des mesures d’accélérations, collectées lors de courses d’essais du véhicule de mesure, ont été analysées afin d’avoir une idée des fréquences excitées et des amplitudes atteintes. Ceci a permis de mieux cerner le problème. Dans ce même but, les récits de person- nes étant à bord du véhicule lors de ces courses d’essais ont été recueillis. Ces mesures ont aussi permis de valider en partie les modèles. Pour cela, deux types de traitement ont été effectués sur les signaux. A savoir des transformées de Fourier (FFT), afin d’obtenir les spectres des signaux pour déterminer ainsi les fréquences les plus excitées et des intégrations numériques, afin d’obtenir les amplitudes des déplacements, en plus de celles des accélérations. Détermination des propriétés mécaniques du véhicule Afin de réunir les propriétés mécaniques du véhicule, telles que masses, inerties, rigidités, coefficients d’amortissement, dimensions, différents moyens ont été utilisés, à savoir, mesures, méthodes d’estimations diverses, ouvrages et articles scientifiques, rapports d’ho- mologation de véhicules, etc. Géométrie de la voie La géométrie de la voie se compose du tracé auquel sont superposés les défauts. Le tracé est défini par quatre paramètres : la courbu- re horizontale, la courbure verticale, le dévers et l’écartement nominal. Quant aux défauts, ils en existent de quatre types : le dressage, l’écartement (par rapport à l’écartement nominal), le nivel- lement longitudinal et le gauche. Le tracé de la voie est déterminé par l’exploitant du réseau, tel que les CFF. Quant aux défauts, ils sont mesurés à l’aide de véhicules tels que les véhicules de mesure MATISA. y x z y x z y x z y x z Dressage Ecartement Nivellement longitudinal Gauche Déplacement latéral de la voie dans le plan de roulement La voie présente un sous ou sur écartement. Déplacement symétrique normal au plan de roulement. Différence de dévers. Surélévation d’un rail par rapport à l’autre. Nom Description Schéma Défauts d R File gauche (file basse) File droite (file haute) File centrale E Axe de la voie Plan de roulement ] [mm E : écartement ] [mm d : dévers ] [m R : rayon de courbure horizontale x y z Tracé y x z H H [m] : rayon de courbure verticale Normes Il existe plusieurs organismes de normes (EN, UIC, ISO, IN, etc.). Dans le domaine des machines de chantier ferroviaires, la norme mère est la EN 14033, d’où découlent différentes normes, comme celles traitant de la sécurité au déraillement (p. ex. UIC 518, EN 14363, UIC 530-2), du confort (p. ex. UIC 513, ISO 2631-1), ou encore du tracé de la voie (p. ex. EN 13848-1). Structure autoporteuse La conception du châssis-intégré s’est basée sur des ouvrages de mécanique des structures, sur les structures des grues, sur les «chaudrons» et voitures vus lors de visites chez des fabricants de ce type de structure. La structure autoporteuse conçue est, selon les modèles éléments finis, environ deux fois plus rigide en vertical que celle du véhicule sorti, en juillet 2008, des ateliers de MATISA. Et sa masse est environ deux fois moindre à celle du châssis-poutre et des cabines réunis. Les profilés utilisés pour le châssis-intégré sont des RHS rectangulaires creux, dont les fabricants en Suisse possèdent du stock en tout temps. Responsables Philippe Steiner Jacques Zürcher Structure autoporteuse conçue exemple de structure de grue appliquée au véhicule ferroviaire tiré de Omer W. Blodgett, Deisgn of weldments, the James F. Lincoln arc welding foundation, Cleveland Ohio, 1963 (8th printing 1976) Les modèles éléments finis permettent de prendre en compte les déformations des châssis-poutre et châssis-intégré, c’est-à-dire de calculer les modes et fréquences propres des systèmes. Ces modèles sont aussi utiles pour calculer les efforts et les contraintes que subissent les structures. Châssis Bogie moteur Bogie porteur Tracé et défauts Contrairement aux modèles éléments finis, qui ne traitent que la statique du système, les mo- dèles multi-corps permettent de prendre en compte les effets dynamiques. Ces modèles peuvent aussi intégrer des modèles éléments finis afin de prendre en considération les dé- formations du châssis sous des effets dyna- miques (dus au tracé et défauts) et non plus uniquement statiques. K SPéq K SSéq C SPéq Bogie Moteur Bogie Porteur l=19500 l B = 1000 2000 Sens de travail, v « Châssis » z C x C BP E z BP x BP BM E z BM x BM z BPu1 z BPu2 z BMu1 z BMu2 x CG C E C SSéq Les modèles analytiques développés ont l’avantage de pouvoir «jouer» assez facilement sur les paramètres pour voir en quoi ils influencent le modèle. De plus, ils permettent de valider en partie des modèles plus complexes, comme les modèles de dynamique multi-corps. Certains peuvent calculer en 2D, pour la suspension du véhicule, les formes des modes et leur fréquence propre respective, la réponse à une excitation verticale mesurée ou théorique en alignement (ligne droite), la proportion des défauts du rail ressentie aux différents étages de la suspension en fonction de la fréquence (le corps humain est plus sensible à certaines fréquences qu’à d’autres, d’où l’importance de la suspension). D’autres modèles traitent de la flexibilité verticale du châssis, ce qui permet de vérifier rapidement qu’un châssis-intégré est bien plus rigide qu’un châssis-poutre, avant de passer à des modèles plus complexes. De tels modèles permettent de va- lider des modèles éléments finis, notamment au niveau du premier mode vertical. En terme de validation, des modèles, calculant les efforts dans la suspension lorsque le véhicule est à l’arrêt, permettent de vérifier les modèles de dynamique multi-corps à l’état initial.
Transcript of Etude dynamique d'un véhicule ferroviaire de mesure

Projet de diplôme2008-2009
Etude dynamique d’un véhicule ferroviaire de mesureréalisé par
Jean-Frédéric Bonjour
Professeur
Claude Ramseyer
Remerciements
Jean-Jacques Stuby - CFFChristophe Krebs - Bombardier Transportation SA
Stefan Senft - Raility AG
Problématique
Cette étude dynamique traite d’un véhicule de mesure sorti, en juillet 2008, des ateliers de MATISA qui est une société, située à Crissier sur Lausanne, active dans le domaine de l’entretien et le renouvellement de voies ferrées. Ce véhicule présente un comportement dyna-mique à améliorer, au niveau des accélérations verticales, lorsque le véhicule passe sur des défauts géométriques de la voie ou sur des aiguillages. Ces accélérations sont amplifiées et exacerbées par le châssis-poutre de la machine qui est assez flexible verticalement. Ceci est dû au très grand empattement entre bogies (19.5m) et à la masse du véhicule (env. 80t).
Pour résoudre ce problème, ce projet a étudié l’apport d’un châssis-intégré, c’est-à-dire d’un châssis où l’habitacle fait partie de la structure porteuse. Il est à noter que la structure autoporteuse conçue dans ce projet n’est pas complète, mais permet de donner une idée réaliste des propriétés et du comportement de ce type de structure, qui est par définition plus rigide qu’un châssis-poutre. Mais d’un point de vue dynamique, il n’était pas sûr que cette seule modification parvienne à résoudre le problème, car cette solution n’a pas d’influence sur la source de l’inconfort, à savoir l’excitation du véhicule par des défauts géométriques de la voie. D’où l’idée qui consiste à modifier la suspension pour filtrer plus efficacement les défauts.
Pour répondre à cette problématique, ce projet de diplôme s’est basé sur divers modèles, analytiques, éléments finis et multi-corps, validés notamment par des mesures, et faisant, pour certains, appel à des éléments en rapport avec le tracé et les défauts de la voie excitant le véhicule; tout en se référant au maximum aux normes appliquées dans le domaine ferroviaire, afin que les conclusions de cette étude soient aussi réalistes que possible.
Modélisation
Les modèles de dynamique multi-corps, qui font appel à des modèles éléments finis afin de prendre en compte la déformation du châssis, montrent que le passage à un châssis-intrégré améliore le confort du véhicule par rapport à un châssis-poutre, mais que sans un dimensionnement de la suspension en fonction des propriétés du véhicule (masse de la caisse, rigidité, position du centre de gravité, etc.), cette amélioration peut être amoindrie. Ces modèles sont partiellement validés par les mesures et les modèles analytiques. En plus de permettre la validation de modèles plus complets, les modèles analytiques possèdent l’avantage d’être moins lourds en terme de temps de calcul et de nombre de paramètres, ce qui permet de voir rapidement l’effet de tel ou tel autre paramètre et de pré-dimensionner des éléments, comme ceux de la suspension du véhicule, avant de passer aux modèles plus complets et plus fins.
Analyse de mesures
Des mesures d’accélérations, collectées lors de courses d’essais du véhicule de mesure, ont été analysées afin d’avoir une idée des fréquences excitées et des amplitudes atteintes. Ceci a permis de mieux cerner le problème. Dans ce même but, les récits de person-nes étant à bord du véhicule lors de ces courses d’essais ont été recueillis.
Ces mesures ont aussi permis de valider en partie les modèles. Pour cela, deux types de traitement ont été effectués sur les signaux. A savoir des transformées de Fourier (FFT), afin d’obtenir les spectres des signaux pour déterminer ainsi les fréquences les plus excitées et des intégrations numériques, afin d’obtenir les amplitudes des déplacements, en plus de celles des accélérations.
Détermination des propriétés mécaniques du véhicule
Afin de réunir les propriétés mécaniques du véhicule, telles que masses, inerties, rigidités, coefficients d’amortissement, dimensions, différents moyens ont été utilisés, à savoir, mesures, méthodes d’estimations diverses, ouvrages et articles scientifiques, rapports d’ho-mologation de véhicules, etc.
Géométrie de la voie
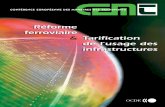
La géométrie de la voie se compose du tracé auquel sont superposés les défauts. Le tracé est défini par quatre paramètres : la courbu-re horizontale, la courbure verticale, le dévers et l’écartement nominal. Quant aux défauts, ils en existent de quatre types : le dressage,l’écartement (par rapport à l’écartement nominal), le nivel-lement longitudinal et le gauche. Le tracé de la voie est déterminé par l’exploitant du réseau, tel que les CFF. Quant aux défauts, ils sont mesurés à l’aide de véhicules tels que les véhicules de mesure MATISA.
y
x z
y
x z
y x
z
y x
z
Dressage
Ecartement
Nivellement longitudinal
Gauche
Déplacement latéral de la voie dans le plan de roulement
La voie présente un sous ou sur écartement.
Déplacement symétrique normal au plan de roulement.
Différence de dévers.
Surélévation d’un rail par rapport à l’autre.
Nom Description Schéma
Défauts
d R
File gauche (file basse)
File droite (file haute)
File centrale
E
Axe
de
la v
oie
Plan de roulement ][mmE : écartement ][mmd : dévers
][mR : rayon de courbure horizontale
x y
z
Tracé
y x
z
H
H [m] : rayon de courbure verticale
Normes
Il existe plusieurs organismes de normes (EN, UIC, ISO, IN, etc.). Dans le domaine des machines de chantier ferroviaires, la norme mère est la EN 14033, d’où découlent différentes normes, comme celles traitant de la sécurité au déraillement (p. ex. UIC 518, EN 14363, UIC 530-2), du confort (p. ex. UIC 513, ISO 2631-1), ou encore du tracé de la voie (p. ex. EN 13848-1).
Structure autoporteuse
La conception du châssis-intégré s’est basée sur des ouvrages de mécanique des structures, sur les structures des grues, sur les «chaudrons» et voitures vus lors de visites chez des fabricants de ce type de structure.La structure autoporteuse conçue est, selon les modèles éléments finis, environ deux fois plus rigide en vertical que celle du véhicule sorti, en juillet 2008, des ateliers de MATISA. Et sa masse est environ deux fois moindre à celle du châssis-poutre et des cabines réunis. Les profilés utilisés pour le châssis-intégré sont des RHS rectangulaires creux, dont les fabricants en Suisse possèdent du stock en tout temps.
Responsables
Philippe SteinerJacques Zürcher
Structure autoporteuse conçue
exemple de structure de grue appliquée au véhicule ferroviairetiré de Omer W. Blodgett, Deisgn of weldments, the James F. Lincoln arc welding foundation,
Cleveland Ohio, 1963 (8th printing 1976)
Les modèles éléments finis permettent de prendre en compte les déformations des châssis-poutre et châssis-intégré, c’est-à-dire de calculer les modes et fréquences propres des systèmes. Ces modèles sont aussi utiles pour calculer les efforts et les contraintes que subissent les structures.
Projet de diplôme : Etude dynamique d'un véhicule ferroviaire de mesure Bonjour Jean-Frédéric 15 septembre 2008 – 13 mars 2009
This document and/or data and their contents are confidential and remain the property of MATISA Matériel Industriel SA. They may only be used for the purpose for which they have been submitted and they may neither be copied nor disclosed to third parties without MATISA's
explicit written authorization
MATISA Matériel Industriel SA, Rue Arc-en-Ciel 2, CH – 1023 Crissier Tel: +41 21 631 21 11, Fax: + 41 21 631 21 68, [email protected]
126
5.3 Modèles multi-corps (SIMPACK) Les différents modèles multi-corps réalisés avec SIMPACK lors de ce projet se composent d'un châssis, de deux bogies (moteur et porteur), d'un tracé, de défauts, de propriétés relatives au contact roue-rail (profils des roues, des rails, etc.), de paramètres de simulation (vitesse, fréquence d'échantillonnage, type d'intégrateur, etc.)
Figure 5-77 : Modèle complet SIMPACK Les bogies sont des sous-modèles, ils reprennent les propriétés présentées au ch. 3 Propriétés mécaniques du véhicule. La transmission du bogie moteur n'a pas été modélisée car les propriétés des silentblocs des bielles n'ont toujours pas été transmises par le fabricant, malgré la demande qui lui a été formulée en début d'année 2009. Le fabricant argumentant que la personne responsable de ces éléments était en déplacement puis en vacances, mais ces propriétés devraient nous être transmises d'ici peu. Le manque de la transmission dans le modèle ne doit pas trop influencer le calcul des modes et fréquences propres, étant donné que la masse des éléments composant cette transmission est essentiellement non suspendue. En effet, une grande partie de la masse de la transmission repose sur les essieux. On peut penser qu'il aurait été alors judicieux de justement répartir cette masse sur les essieux, mais c'est sans compter sur le fait que les centres de gravité des éléments de transmissions sont désaxés par rapport aux essieux, ce qui engendre des balourds et ceci n'a aucun sens physique. On peut alors penser qu'il suffit de négliger ces centres de gravité désaxés, c'est-à-dire de les ramener sur les axes des essieux, mais c'est oublié qu'en même temps d'ajouter une masse, on ajoute aussi une inertie qui tourne et ceci non plus n'a pas de sens physique, car en réalité l'essieu tourne par rapport aux transmissions qui sont "fixes". Donc il est préférable de ne pas tenir compte des transmissions plutôt que de vouloir à tout prix les intégrer au modèle, et ainsi engendrer une erreur de modélisation encore plus grande.
Châssis
Bogie moteur
Bogie porteur
Tracé et défauts
Contrairement aux modèles éléments finis, qui ne traitent que la statique du système, les mo-dèles multi-corps permettent de prendre en compte les effets dynamiques. Ces modèles peuvent aussi intégrer des modèles éléments finis afin de prendre en considération les dé-formations du châssis sous des effets dyna-miques (dus au tracé et défauts) et non plus uniquement statiques.
Projet de diplôme : Etude dynamique d'un véhicule ferroviaire de mesure Bonjour Jean-Frédéric 15 septembre 2008 – 13 mars 2009
This document and/or data and their contents are confidential and remain the property of MATISA Matériel Industriel SA. They may only be used for the purpose for which they have been submitted and they may neither be copied nor disclosed to third parties without MATISA's
explicit written authorization
MATISA Matériel Industriel SA, Rue Arc-en-Ciel 2, CH – 1023 Crissier Tel: +41 21 631 21 11, Fax: + 41 21 631 21 68, [email protected]
68
5.1.3 Modèle multi-corps plan Considérons le modèle plan représenté par la Figure 5-12, linéarisé autour de la position d’équilibre.
Figure 5-12 : Modèle plan
Les paramètres du modèle sont :
mNkkK extSPSPSPéq int4 : la rigidité équivalente de la suspension primaire
mNkkK extSSSSSSéq int2 : la rigidité équivalente de la suspension secondaire
mNscC SPSPéq 2 : l’amortissement équivalent des amortisseurs verticaux de la suspension
primaire
mNscC SSSSéq 2 : l’amortissement équivalent des amortisseurs verticaux de la suspension
secondaire
mNkSP int : la rigidité du ressort intérieur de la suspension primaire
mNk extSP : la rigidité du ressort extérieur de la suspension primaire
mNkSS int : la rigidité du ressort intérieur de la suspension secondaire
mNk extSS : la rigidité du ressort extérieur de la suspension secondaire
kgM BM : la masse suspendue du bogie moteur
KSPéq
KSSéq
CSPéq
Bogie Moteur
Bogie Porteur
l=19500 lB =
1000
2000
Sens de travail, v
« Châssis »
zC
xC
BP zBP
xBP BM zBM
xBM
zBPu1 zBPu2 zBMu1 zBMu2
xCG
C
CSSéq
Les modèles analytiques développés ont l’avantage de pouvoir «jouer» assez facilement sur les paramètres pour voir en quoi ils influencent le modèle. De plus, ils permettent de valider en partie des modèles plus complexes, comme les modèles de dynamique multi-corps. Certains peuvent calculer en 2D, pour la suspension du véhicule, les formes des modes et leur fréquence propre respective, la réponse à une excitation verticale mesurée ou théorique en alignement (ligne droite), la proportion des défauts du rail ressentie aux différents étages de la suspension en fonction de la fréquence (le corps humain est plus sensible à certaines fréquences qu’à d’autres, d’où l’importance de la suspension). D’autres modèles traitent de la flexibilité verticale du châssis, ce qui permet de vérifier rapidement qu’un châssis-intégré est bien plus rigide qu’un châssis-poutre, avant de passer à des modèles plus complexes. De tels modèles permettent de va-lider des modèles éléments finis, notamment au niveau du premier mode vertical. En terme de validation, des modèles, calculant les efforts dans la suspension lorsque le véhicule est à l’arrêt, permettent de vérifier les modèles de dynamique multi-corps à l’état initial.












![miser I'organisation du ferroviaire [et] faire en sorte que la dynamique de croissance, d'efficacité et de compétitivité du système ferroviaire puisse apporter une part de la réponse](https://static.fdocuments.fr/doc/165x107/5f0f9ef17e708231d445120e/miser-iorganisation-du-ferroviaire-et-faire-en-sorte-que-la-dynamique-de-croissance.jpg)



