Etude d’une Trottinette électrique - Site Vincent...
25
Janvier 2008 [Projet Trottinette Electrique] [Sophie Richet - Sébastien Péré] Rapport de projet : Etude d’une Trottinette électrique A l’attention de : M. Boitier M. Baget
-
Upload
truongtuong -
Category
Documents
-
view
222 -
download
0
Transcript of Etude d’une Trottinette électrique - Site Vincent...

Janvier 2008
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Rapport de projet :
Etude
d’une
Trottinette
électrique A l’attention de :
M. Boitier
M. Baget

Janvier 2008
2
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Sommaire
I. Présentation de la trottinette .............................................................................................. 5
1. Caractéristiques principales ........................................................................................... 5
2. Décomposition de la trottinette ....................................................................................... 5
3. Caractéristiques des différents éléments .......................................................................... 5
Batteries ........................................................................................................................ 5
Chargeur ....................................................................................................................... 6
Boitier électronique .......................................................................................................... 6
Moteur ........................................................................................................................... 6
4. Tests de la trottinette .................................................................................................... 6
Vitesse de la trottinette ..................................................................................................... 6
Vitesse de rotation de la roue ............................................................................................ 7
Autonomie de la trottinette ................................................................................................ 7
1. Schéma électrique ....................................................................................................... 8
2. Description du fonctionnement ....................................................................................... 8
Remarque ...................................................................................................................... 8
III. Etude du Chargeur de la batterie .................................................................................... 9
1. Mesures ..................................................................................................................... 9
En entrée ....................................................................................................................... 9
En sortie ........................................................................................................................ 9
2. Allure des grandeurs .................................................................................................... 9
Analyse spectrale de l’entrée ............................................................................................. 9
Analyse temporelle des courants efficaces ........................................................................ 10
3. Rendement ............................................................................................................... 10
IV. Etude des pertes ....................................................................................................... 11

Janvier 2008
3
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
1. Bilan des pertes du banc d’essai .................................................................................. 11
Rotor bloqué ................................................................................................................. 11
A vide (avec galet) ......................................................................................................... 11
2. Bilan des pertes du moteur de la trottinette ..................................................................... 12
Rotor bloqué ................................................................................................................. 12
A vide .......................................................................................................................... 13
3. Bilan des pertes du réducteur ...................................................................................... 14
4. Bilan des pertes frottements entre roue et sol ................................................................. 15
5. Essais ...................................................................................................................... 15
En charge .................................................................................................................... 15
6. Rendement ............................................................................................................... 16
TP Contrôle du couple d’une machine à courant continu ............................................................. 17
1. Valeur et paramètres .................................................................................................. 17
Hacheur quatre quadrants .............................................................................................. 17
Machine à courant continu .............................................................................................. 17
Dynamo-Tachymétrique ................................................................................................. 17
Sonde de courant .......................................................................................................... 17
2. Banc moteur ............................................................................................................. 17
3. Contrôle du courant .................................................................................................... 18
Facteur d’échelle ........................................................................................................... 18
Commande à hystérésis ................................................................................................. 19
Essais ......................................................................................................................... 20
TP asservissement de vitesse ................................................................................................ 21
1. Point de fonctionnement ............................................................................................. 21
2. Mise à l’échelle .......................................................................................................... 21
3. Identification ............................................................................................................. 22

Janvier 2008
4
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
4. Correcteur ................................................................................................................ 22
Détermination de τi ....................................................................................................... 22
Détermination de Ki ....................................................................................................... 22
Choix des composants ................................................................................................... 23
5. Essais ...................................................................................................................... 23
Conclusion .......................................................................................................................... 24
Bibliographie ....................................................................................................................... 25
1. Documentation technique de la trottinette en français ...................................................... 25
2. Décomposition de la trottinette ..................................................................................... 25

Janvier 2008
5
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
I. Présentation de la trottinette
1. Caractéristiques principales Poids total : 7,5 kg Vitesse : entre 8 et 12 Km/h Autonomie : de 6 à 10 Km Dimensions : 750 x 160 x 900 mm Poids maximum conseillé : 60 kg Fabriqué en chine
2. Décomposition de la trottinette
3. Caractéristiques des différents éléments Batteries 12V 4Ah
Moteur
Chargeur
Boitier électronique
Starter Frein
2 batteries de 12V
Fusible

Janvier 2008
6
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Chargeur Délivre du 24V DC et 400mA en sortie. Puissance 16W
Boitier électronique
- 2 résistances - 1 transistor - 1 condensateur - 1 relais (SHA T90 SA, NO : 30A/240VAC, NC : 20A/240VAC,
DC24V)
Moteur Puissance 100W MY68 24DC – 6A
4. Tests de la trottinette
Vitesse de la trottinette Nous effectuons 4 mesures de la vitesse de la trottinette sur une distance de 23,4m.
Temps (s) Vitesse (km/h)
8,3 10,14
8,5 9,91
8,9 9,47
8,6 9,80
En moyenne, on parcourt une distance de 23,4m en 8,6s à une vitesse de 9,8km/h (soit 2,73 m/s)
Janvier 2008
7
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
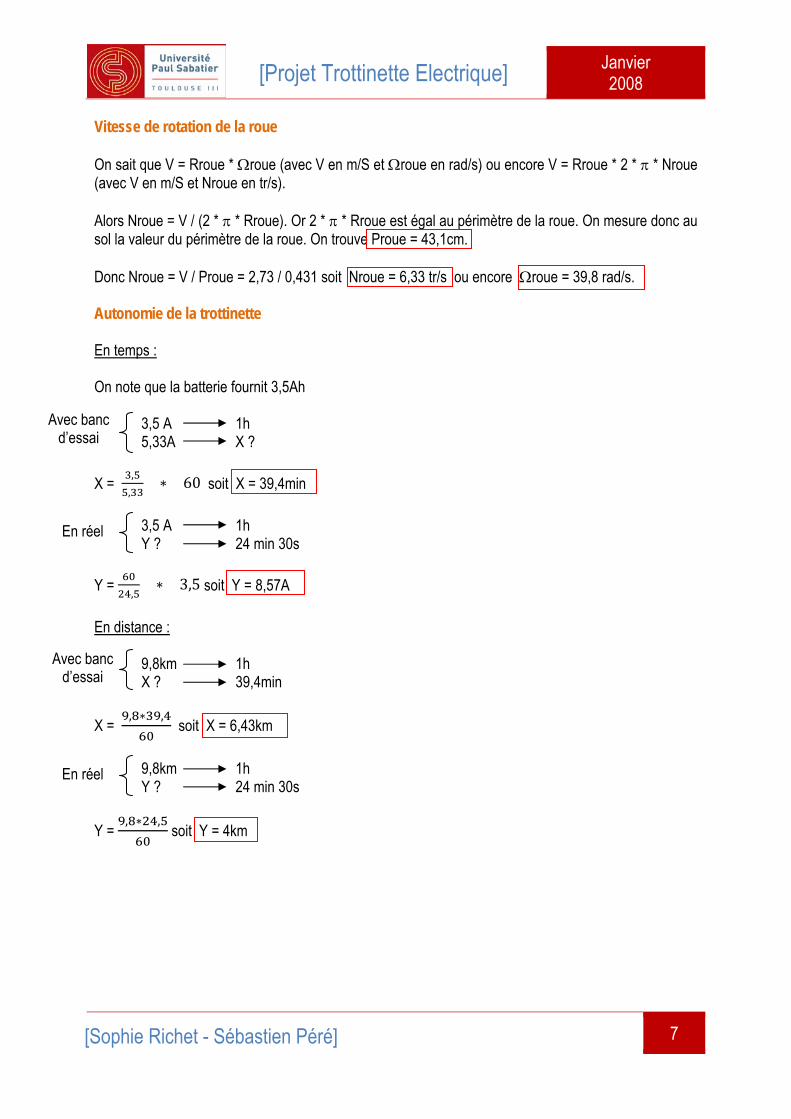
Vitesse de rotation de la roue On sait que V = Rroue * roue (avec V en m/S et roue en rad/s) ou encore V = Rroue * 2 * * Nroue (avec V en m/S et Nroue en tr/s). Alors Nroue = V / (2 * * Rroue). Or 2 * * Rroue est égal au périmètre de la roue. On mesure donc au sol la valeur du périmètre de la roue. On trouve Proue = 43,1cm. Donc Nroue = V / Proue = 2,73 / 0,431 soit Nroue = 6,33 tr/s ou encore roue = 39,8 rad/s. Autonomie de la trottinette En temps : On note que la batterie fournit 3,5Ah
3,5 A 1h 5,33A X ?
X = ,
,60 soit X = 39,4min
3,5 A 1h Y ? 24 min 30s
Y = ,
3,5 soit Y = 8,57A
En distance :
9,8km 1h X ? 39,4min
X = , ,
soit X = 6,43km
9,8km 1h Y ? 24 min 30s
Y = , ,
soit Y = 4km
Avec banc d’essai
En réel
En réel
Avec banc d’essai

Janvier 2008
8
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
II. Etude du boitier électronique
1. Schéma électrique
2. Description du fonctionnement Pour lancer le moteur de la trottinette, il faut d’abord prendre un petit élan puis fermer l’interrupteur S (c'est-à-dire appuyer sur le starter). Cela fait apparaître une force électromotrice aux bornes de C2 et permet d’amener le transistor Q1 à saturation. La commutation du relais s’effectue alors et par conséquent le moteur est alimenté. Lorsqu’on relâche le starter (c'est-à-dire qu’on ouvre l’interrupteur S) ou qu’on appuie sur le frein (c'est-à-dire qu’on ouvre l’interrupteur F), le moteur s’arrête automatiquement. Remarque D2 est une diode de roue libre qui permet d’évacuer le courant de la bobine du relais. D1 est également une diode de roue libre qui permet de recharger la batterie en faisant fonctionner le moteur en génératrice. R2 et C1 forment un filtre qui permet d’éliminer les parasites de tension du moteur.

Janvier 2008
9
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
III. Etude du Chargeur de la batterie
1. Mesures
En entrée On mesure sur le secteur la tension efficace, le courant efficace et la puissance.
U1 (V) I1 (mA) P1 (W)
234,43 69,17 10,83
En sortie On mesure la tension efficace, le courant efficace et la puissance que délivre le chargeur à la batterie.
U2 (V) I2 (A) P2 (W)
27,27 0,35 6,95
2. Allure des grandeurs
Analyse spectrale de l’entrée

Janvier 2008
10
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Analyse temporelle des tensions efficaces
Analyse temporelle des courants efficaces
3. Rendement Le rendement correspond au rapport P2 sur P1.
Alors . Donc

Janvier 2008
11
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
IV. Etude des pertes
1. Bilan des pertes du banc d’essai
Le banc d’essai est composé d’un tachymètre (6mV pour 1000tr/min) et d’une machine à courant continue en génératrice. La plaque de celle-ci indique une tension nominale de Un = 52V et une courant nominal de In = 9,7A.
On bloque d’abord le rotor afin de calculer la résistance de l’induit. On pourra ainsi en déduire les pertes joules du banc d’essai. Rotor bloqué Cela implique que nous n’avons aucune perte de frottement. On fournit au banc d’essai un courant nominal de 9,7A. On mesure à l’aide d’un voltmètre la valeur de U et on en déduit Rinduit. On mesure U = 4,33V donc Rinduit = U / In = 4,33 / 9,7 soit Rinduit = 0,446. A partir de Rinduit, on peut calculer les pertes joules Pj du banc d’essai. Pj = Rinduit * In² = 0,446 * 9,7². Donc Pj = 41,96W A vide (avec galet) On considère que le rayon du galet est de 2 fois plus petit que celui de la roue de la trottinette. Le galet fait donc 2 fois plus de tour en une seconde que la roue de la trottinette. Or nous avons précédemment que Nroue = 6,33 tr/s. En arrondissant, on peut dire que le galet a une vitesse de 15 tr/s. Nous allons donc faire varier la vitesse du galet pour mesurer l’impact sur les pertes. Rappel : 15 tr/s équivaut à 900 tr/min. Cela correspond à une tension de 900 * 0,006 soit 5,4V.
Tension image de la vitesse (V)
Vitesse (tr/min)
U (V) I (A) Pertes joules Pj (W)
Pertes frottements et fer Pf (W)
Pertes totales Pt (W)
1 166,7 4,2 0,58 0,150 2,286 2,436
2 333,3 7,05 0,65 0,188 4,394 4,582
3 500 9,83 0,69 0,212 6,570 6,782
4 666,7 12,57 0,72 0,231 8,819 9,050
5 833,3 15,2 0,73 0,238 10,858 11,096
5,4 900 16,32 0,74 0,244 11,833 12,077

Janvier 2008
12
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
On observe ici que les pertes sont linéaires en fonction de la vitesse. On en déduit donc la relation entre les pertes frottements et fer et la vitesse. Pf = 0,013 *N avec Pf en W et N en tr/min.
2. Bilan des pertes du moteur de la trottinette
On cherche maintenant à calculer les pertes du moteur de la trottinette à vide. Les caractéristiques du moteur nous donnent un courant nominal In de 6A et une tension nominale Un de 24V. Comme précédemment, on bloque le rotor pour calculer la résistance de l’induit et en déduire les pertes joules du moteur.
Rotor bloqué On fournit au moteur un courant de 1. On mesure à l’aide d’un voltmètre la valeur de U et on en déduit Rinduit. On mesure U = 0,96V donc Rinduit = U / I = 0,96 / 1 soit Rinduit = 0,96. A partir de Rinduit, on peut calculer les pertes joules Pj du banc d’essai. Pj = Rinduit * I² = 0,96 * 1². Donc Pj = 0,96W
0
2
4
6
8
10
12
14
0 200 400 600 800 1000
Pertes en W
Vitesse en tr/min
Pertes du banc en fonction de la vitesse
Pertes frottements et fer
Pertes totales

Janvier 2008
13
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
A vide On fait varier la vitesse jusqu’à atteindre la tension nominale (Un = 24V). On mesure alors le courant et la tension aux bornes du moteur. Nous pourrons alors calculer les pertes en fonction de la vitesse. On utilise un tachymètre qui compte le nombre de tour que le rotor effectue en une seconde. Rappel : 1tr/min correspond à 1Hz.
Fréquence image de la vitesse (Hz)
Vitesse (tr/min)
U (V) I (A) Pertes joules Pj (W)
Pertes frottements et fer Pf (W)
Pertes totales Pt (W)
450 450 3,37 0,227 0,049 0,716 0,765
750 750 5,53 0,251 0,060 1,328 1,388
1000 1000 7,41 0,268 0,069 1,917 1,986
1250 1250 9,03 0,279 0,075 2,445 2,520
1500 1500 10,8 0,291 0,081 3,062 3,143
1750 1750 12,55 0,301 0,087 3,691 3,778
2000 2000 14,47 0,311 0,093 4,407 4,500
2250 2250 16,02 0,317 0,096 4,982 5,078
2500 2500 17,86 0,326 0,102 5,720 5,822
3400 3400 24 0,345 0,114 8,166 8,280
0
1
2
3
4
5
6
7
8
9
0 500 1000 1500 2000 2500 3000 3500 4000
Pertes en W
Vitesse en tr/min
Pertes du moteur de la trottinette en fonction de la vitesse
Pertes frottements et fer
Pertes totales

Janvier 2008
14
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
On observe ici que les pertes sont linéaires en fonction de la vitesse. On en déduit donc la relation entre les pertes frottements et fer et la vitesse. Pf = 0,002 *N avec Pf en W et N en tr/min.
3. Bilan des pertes du réducteur Pour connaître les pertes du réducteur, on réalise un essai de la trottinette à vide, c'est-à-dire on étudie les pertes du moteur avec le réducteur. Comme nous avons déjà étudié le moteur, on en déduira les pertes du réducteur.
Vitesse (tr/min) U (V) I (A) Pertes joules Pj (W)
Pertes frottements et fer Pf (W)
Pertes totales Pt (W)
450 3,37 0,39 0,146 1,168 1,314
750 5,53 0,41 0,161 2,106 2,267
1000 7,41 0,43 0,178 3,008 3,186
1250 9,03 0,45 0,194 3,870 4,064
1500 10,8 0,48 0,221 4,963 5,184
1750 12,55 0,49 0,230 5,920 6,150
2000 14,47 0,5 0,240 6,995 7,235
2250 16,02 0,51 0,250 7,920 8,170
2500 17,86 0,52 0,260 9,027 9,287
3400 24 0,54 0,280 12,680 12,960
On en déduit donc les pertes du réducteur.
Vitesse (tr/min) Pertes du moteur à
vide (W) Pertes du moteur +
réducteur (W) Pertes du réducteur
Pr (W)
450 0,765 1,314 0,549
750 1,388 2,267 0,879
1000 1,986 3,186 1,200
1250 2,520 4,064 1,544
1500 3,143 5,184 2,041
1750 3,778 6,150 2,372
2000 4,500 7,235 2,735
2250 5,078 8,170 3,092
2500 5,822 9,287 3,465
3400 8,280 12,960 4,680

Janvier 2008
15
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
On observe ici que les pertes sont linéaires en fonction de la vitesse. On en déduit donc la relation entre les pertes du réducteur et la vitesse. Pr = 0,001 *N avec Pr en W et N en tr/min.
4. Bilan des pertes frottements entre roue et sol Nous avons effectué l’ensemble des pertes de la trottinette. Il nous reste cependant les pertes frottements entre la roue et le sol. Nous réalisons donc des essais pour déterminer ces pertes. Nous en déduirons alors les pertes roue/sol grâce à toutes les autres pertes.
5. Essais
En charge Nous positionnons la trottinette sur le banc d’essai afin de simuler un trajet et faciliter nos mesures. Nous nous mettons en condition réel, c'est-à-dire que la trottinette doit atteindre une vitesse de 9,8km/h. Nous mesurons donc en entrée la tension et le courant du moteur de la trottinette et en sortie la tension et le courant de la génératrice du banc d’essai.
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
0 500 1000 1500 2000 2500 3000 3500 4000
Pertes en W
Vitesse en tr/min
Pertes du réducteur en fonction de la vitesse
Pertes du réducteur
Janvier 2008
16
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
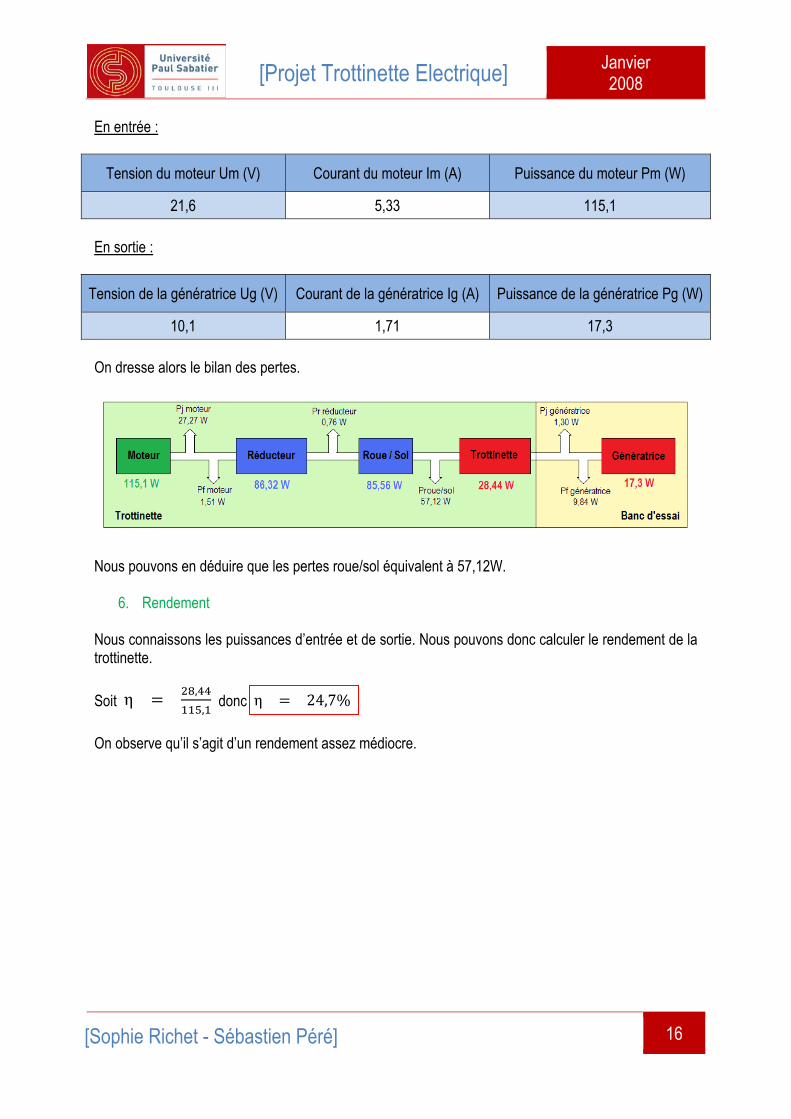
En entrée :
Tension du moteur Um (V) Courant du moteur Im (A) Puissance du moteur Pm (W)
21,6 5,33 115,1
En sortie :
Tension de la génératrice Ug (V) Courant de la génératrice Ig (A) Puissance de la génératrice Pg (W)
10,1 1,71 17,3
On dresse alors le bilan des pertes.
Nous pouvons en déduire que les pertes roue/sol équivalent à 57,12W.
6. Rendement Nous connaissons les puissances d’entrée et de sortie. Nous pouvons donc calculer le rendement de la trottinette.
Soit η,
, donc η 24,7%
On observe qu’il s’agit d’un rendement assez médiocre.

Janvier 2008
17
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
TP Contrôle du couple d’une machine à courant continu
1. Valeur et paramètres Hacheur quatre quadrants Valim max = 300V Imax = 15A Machine à courant continu Vn = 52V In = 7,85A Nn = 3000tr/min KФ = 0,158 r = 0,3Ω Dynamo-Tachymétrique Kg = 6mV/tr/min Sonde de courant Kmes = 0,5
2. Banc moteur Pour contrôler le courant de l’induit du moteur, il nous suffit de contrôler le couple moteur. L’équation
Φ nous montre bien que le courant de l’induit est proportionnel au couple moteur. Pour une charge constante (Cr = constante) Si Cm augmente alors la vitesse Ω augmente. Si Cm diminue alors la vitesse Ω diminue. Pour une charge variable (Cm = constante) Si Cr augmente alors la vitesse Ω diminue. Si Cr diminue alors la vitesse Ω augmente.

Janvier 2008
18
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
3. Contrôle du courant Facteur d’échelle On souhaite avoir un asservissement tel que pour une consigne de 1 V, on ait un courant de 0,5 A. On a Vmes Kech Kmes I soit Kech V
K I
Donc Kech, ,
4.
Gain du montage en fonction de R1 et R2 : Il y a une contre réaction négative donc l’amplificateur fonctionne en linéaire. Alors V+ = V- On a V Vsonde et V Vmes R
R R
Alors Vmes R R
RVsonde. Or Vmes Kech Vsonde
Donc Kech R R
R
Valeur de R1 et R2 : On a Kech 1 R
R4
Alors
R
R3 soit R1 3 R2
Correcteur Hacheur + MCC
Kech Kmes
Vcons
Vmes Vsonde
Vcom I

Janvier 2008
19
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
On choisit R1 = 10 kΩ et R2 = 3,3 kΩ Commande à hystérésis
Il y a une contre réaction positive donc l’amplificateur fonctionne en saturation. On a Ved = V+ - V- avec V
V R V R
R R et V Vmes
Donc Ved V R V R
R R Vmes
Hypothèse 1 : Ved > 0 soit V+ > V- avec Vcom = +Vsat Donc Vmes Vcons R
R R Vsat R
R R
Hypothèse 2 : Ved < 0 soit V+ < V- avec Vcom = -Vsat Donc Vmes Vcons R
R RVsat R
R R
Cycle d’hystérésis :
Janvier 2008
20
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
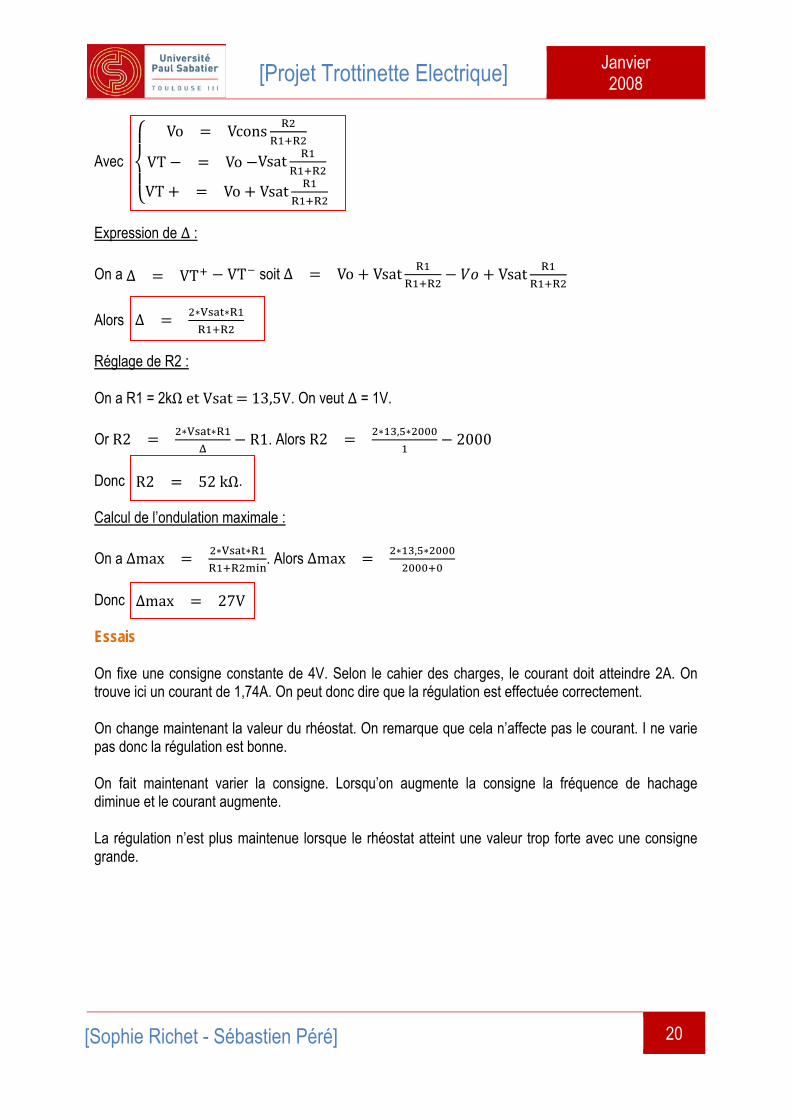
Avec
Vo Vcons R
R R
VT Vo Vsat R
R R
VT Vo Vsat R
R R
Expression de Δ : On a Δ VT VT soit Δ Vo Vsat R
R RVsat R
R R
Alors Δ
V R
R R
Réglage de R2 : On a R1 = 2kΩ et Vsat 13,5V. On veut Δ = 1V. Or R2 V R
R1. Alors R2 ,2000
Donc R2 52 kΩ. Calcul de l’ondulation maximale : On a Δmax V R
R R. Alors Δmax ,
Donc Δmax 27V Essais On fixe une consigne constante de 4V. Selon le cahier des charges, le courant doit atteindre 2A. On trouve ici un courant de 1,74A. On peut donc dire que la régulation est effectuée correctement. On change maintenant la valeur du rhéostat. On remarque que cela n’affecte pas le courant. I ne varie pas donc la régulation est bonne. On fait maintenant varier la consigne. Lorsqu’on augmente la consigne la fréquence de hachage diminue et le courant augmente. La régulation n’est plus maintenue lorsque le rhéostat atteint une valeur trop forte avec une consigne grande.

Janvier 2008
21
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
TP asservissement de vitesse
1. Point de fonctionnement Le point de fonctionnement choisi est 3A, 1800tr/min. Le système étant asservi en courant, on doit mettre une consigne de 6V sur Vcons_i. En effet, 1V sur la consigne correspond à 0,5A en sortie de l’asservissement (voir TP précédent). Pour régler le rhéostat, on utilise la Dynamo-Tachymétrique. Sachant que 6V correspond à 1000tr/min, on en déduit que 1800tr/min correspond à 10,8V.
2. Mise à l’échelle Rappel : Kg = 6mV/tr/min Comme on connait Kg ainsi que le cahier des charges, on peut en déduire le gain Kech_n.
On a Kech_n V _
K soit Kech_n
,
Donc Kech_n 0,83 Gain du montage en fonction de R1 et R2 : On a Vmes_n Vtachy R
R RVtachy Kech_n
Alors Kech_n R
R R
Valeur de R1 et R2 : Or Kech = 0,83. Alors
R
R R0,83
Soit R
R1
,.
Kg Kech_n
C(p) Limiteur Cor_i Hacheur
+ MCC +
Charge
Kmes_i Kech_i
Vcons_n
Vmes_n
Vtachy
n Vcom Vcons_i
Janvier 2008
22
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
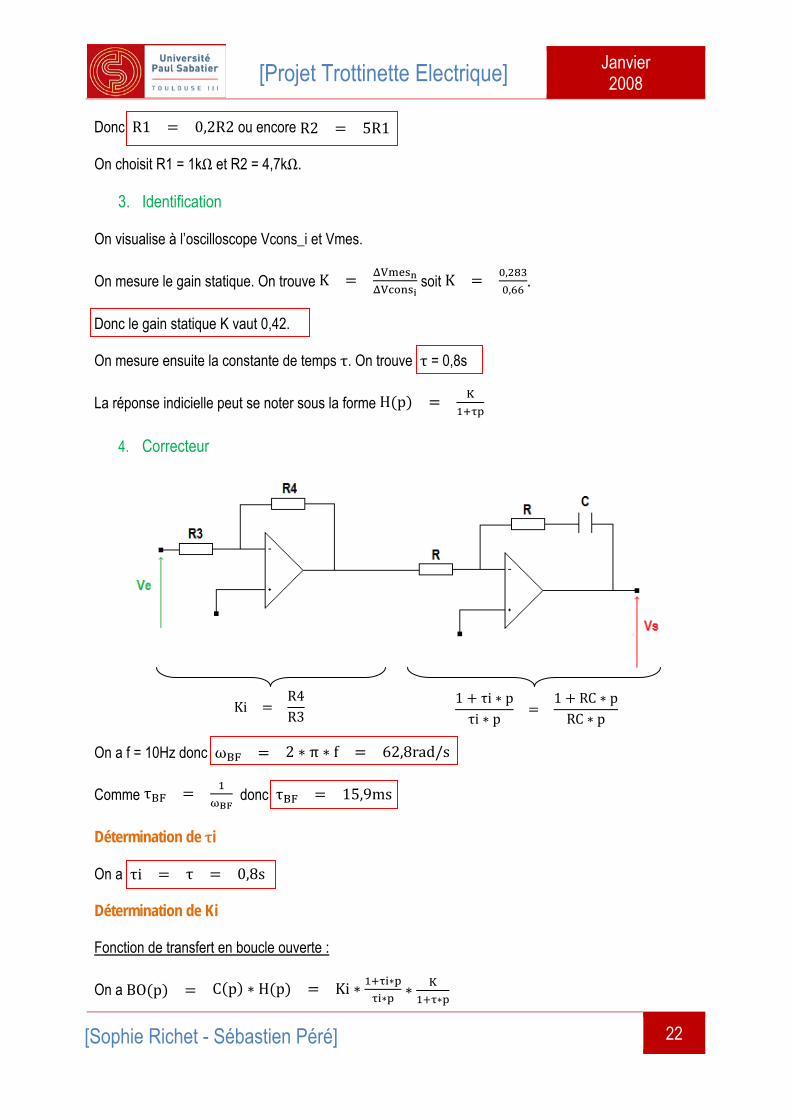
Donc R1 0,2R2 ou encore R2 5R1 On choisit R1 = 1kΩ et R2 = 4,7kΩ.
3. Identification On visualise à l’oscilloscope Vcons_i et Vmes.
On mesure le gain statique. On trouve KV
V soit K
,
,.
Donc le gain statique K vaut 0,42. On mesure ensuite la constante de temps τ. On trouve τ = 0,8s
La réponse indicielle peut se noter sous la forme H p K
4. Correcteur
On a f = 10Hz donc ωBF 2 π f 62,8rad/s
Comme τBFBF
donc τBF 15,9ms
Détermination de τi On a τi τ 0,8s Détermination de Ki Fonction de transfert en boucle ouverte :
On a BO p C p H p Ki K
KiR4R3
1 τi p
τi p1 RC p
RC p

Janvier 2008
23
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
PI pour compensation de pôle τi τ donc
Fonction de transfert en boucle fermée :
On a BF p BO
BO BO K KBF
Comme τBF K K doncKi
BF K
,
, ,
Donc Ki 120 Choix des composants On a Ki
R
R120 donc R4 120 R3
On prend R3 1,8kΩ R4 220kΩ On a τi R C 0,8
Si C = 2,2µF alors RC
,
,363,6kΩ
On prend C 2,2μF R 330kΩ
5. Essais On visualise Vcons_n et Vmes_n à l’oscilloscope. On fait varier la consigne. On remarque que l’erreur en régime permanent est nulle uniquement quand on met le condensateur. On rajoute sur la consigne de petits échelons et on mesure la bande passante du système en boule fermée. On trouve BP = [0 ;10Hz]. On regarde maintenant le comportement du système en faisant varier la tension d’alimentation et la charge. Lorsqu’on diminue la tension d’alimentation la vitesse est correctement régulée. De même lorsqu’on diminue la charge, la vitesse est toujours bonne. On visualise maintenant Vmes_n (la vitesse) et Vmes_i (le courant). Lorsqu’on envoie de gros échelons de consigne, on observe une saturation sur Vmes_i. La limitation de courant fonctionne donc bien. On peut en conclure que l’asservissement est réussi.
Janvier 2008
24
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Conclusion
Au regard de toutes les mesures que nous avons effectué, nous pouvons tirer les avantages et les inconvénients de la trottinette. Au niveau des avantages, nous constatons, tout d’abord, que cette trottinette électrique est compacte et facile à utiliser. De plus, elle est très robuste et est vendu à un prix très correct (environ 80 euros). Enfin, le moteur est assez bien choisi par rapport à la charge que la trottinette peut supporter (environ 65 kg). En ce qui concerne les inconvénients, on remarque le rendement de cette trottinette est faible. De plus, l’autonomie est assez limitée. Nous pourrions ainsi apporter quelques améliorations à cette trottinette. La batterie est une batterie au plomb. Elle a donc une très mauvaise puissance massique. Par ailleurs, elle se dégrade rapidement (décharge complète, oxydation, cyclage). On pourrait utiliser une batterie au lithium ion car elle a une faible autodécharge et ne nécessite pas de maintenance. Ensuite, le chargeur aurait un meilleur rendement avec plus d’électronique. Enfin, la commande Tout Ou Rien du boitier électronique pourrait être remplacée afin de réaliser un asservissement de vitesse du moteur avec un hacheur par exemple. Cependant, si ces améliorations étaient réalisées, elles entraineraient des changements sur le prix (batterie au lithium ion plus chère) ainsi que sur la structure de la trottinette.
Janvier 2008
25
[Projet Trottinette Electrique]
[Sophie Richet - Sébastien Péré]
Bibliographie
1. Documentation technique de la trottinette en français http://www.ac-poitiers.fr/apprend/TICE/techno6/not-acnice.pdf
2. Décomposition de la trottinette http://technoargia.free.fr/cms2/?Techno:6%E8me:Trottinette