Étude du double pas de calcul pour la simulation numérique des ...
132
MAXIM BERGERON Etude du double pas de calcul pour la simulation numérique des réseaux électriques Mémoire présenté à la Faculté des Études Supérieures de l'Université Laval dans le cadre du programme de maîtrise en génie électrique pour l'obtention du grade de Maître es sciences (M.Sc.) DÉPARTEMENT DE GÉNIE ELECTRIQUE ET DE GENIE INFORMATIQUE FACULTÉ DES SCIENCES ET DE GÉNIE UNIVERSITÉ LAVAL QUÉBEC 2011 Maxim Bergeron, 2011
Transcript of Étude du double pas de calcul pour la simulation numérique des ...

MAXIM BERGERON
Etude du double pas de calcul pour la simulation numérique des réseaux électriques
Mémoire présenté à la Faculté des Études Supérieures de l'Université Laval
dans le cadre du programme de maîtrise en génie électrique pour l'obtention du grade de Maître es sciences (M.Sc.)
DÉPARTEMENT DE GÉNIE ELECTRIQUE ET DE GENIE INFORMATIQUE FACULTÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2011
Maxim Bergeron, 2011

Résumé Ce mémoire présente une étude sur la simulation en temps réel des réseaux électriques
comportant des convertisseurs électronique de puissance, en utilisant deux pas de calcul
différents.
L'impact du double pas de calcul sur la précision de la simulation est d'abord étudié à l'aide
de SimPowerSystems (MATLAB) puis validé en temps différé avec Hypersim, le logiciel
de simulation temps réel d'Hydro-Québec. L'impact est étudié par l'observation des formes
d'onde, par l'analyse harmonique, ainsi que par les mesures de puissance au point de
découplage, entre les deux parties du réseau.
La méthode de simulation à double pas de calcul pourrait être implantée, en temps réel, par
l'utilisation d'une unité de calcul rapide dans Hypersim. La technologie FPGA « Field
Programmable Gate Array » est considérée pour remplir cette fonction et ses
caractéristiques sont passées en revue.
Avant-Propos Je tiens à remercier mon directeur de recherche, Hoang Le-Huy de l'Université Laval, mon
codirecteur, Louis A. Dessaint de l'École de technologie supérieure ainsi que Sylvain
Guérette du laboratoire de simulation de réseau de TIREQ. Leur confiance, support et aide
m'ont permis de mener ce projet à terme.
Je tiens aussi à remercier les membres du LEEPCI pour leur aide sporadique, discussions et
camaraderie. Ce milieu composé de gens stimulants, intéressés et intéressants est le berceau
de grandes idées.
Mes remerciements s'adressent aussi à la Chaire de recherche TransÉnergie pour le support
financier des travaux.
Table des matières Résumé 3 Avant-Propos 4 Table des matières 5 Liste des tableaux 7 Liste des figures 8 Chapitre I - Introduction 11
1.1. Historique de la simulation temps réel de réseaux électriques 11 1.2. Problématique et contexte 13 1.3. Description du projet de recherche 14 Description des apports 14 Organisation du mémoire 15
Chapitre II - Méthodes numériques de simulation de réseaux 17 2.1. Composants de réseaux 18 2.2. Équations de réseaux électriques 19 2.3. Génération des équations de réseaux électriques 20 Méthode nodale 20 Méthode des variables d'état 22 2.4. Méthodes d'intégration numérique 24 Discrétisation des composants linéaires : 25 Méthode EMTP 27 Discrétisation des équations d'état 28 Exemple de l'effet du choix du procédé d'intégration numérique 31 2.5. Méthodes générales de simulation numérique 35 Méthode générale EMTP (Hypersim) 36 Méthode générale par variables d'état (SimPowerSystems) 39
Chapitre III - Simulation numérique à plusieurs pas de calcul 41 3.1. Introduction au double pas de calcul 42 3.2. Problématiques du double pas de calcul 43 3.3. Résultats des études antérieures 44 3.4. Critères d'évaluation de la précision des résultats 46 3.5. Exemple d'un circuit monophasé 47 3.6. Conclusion 51
Chapitre IV - Simulation à double pas de calcul d'un réseau sans commutations 53 4.1. Méthodologie générale 54 4.2. Réseau avec charge passive découplée 56 4.3. Stabilité numérique 58 Méthodologie 58 4.4. Puissance non caractéristique 59 Méthodologie 59 4.5. Résultats de simulation et analyse 60 1 - Stabilité numérique et puissance non caractéristique dans le réseau 50-5jis 60 Estimation de la puissance non caractéristique 63 Discussion sur les résultats 63 2 - Étude de différentes configurations de point de découplage 64
VI
4.6. Réseau avec deux sources de tension découplées 66 Analyse des résultats 71 4.7. Conclusion 72
Chapitre V - Simulation à double pas de calcul d'un réseau avec convertisseur de puissance 73
5.1. Convertisseur de puissance : D-STATCOM 74 Description du contrôleur 75 Partie lente du contrôleur (50us) 76 Partie rapide du contrôleur (5 us) 78 Impact du schéma de contrôle sur les fonctionnements possibles 79 5.2. Découplage du réseau et du D-STATCOM 80 5.3. Stabilité numérique avec commutations 81 5.4. Puissance non caractéristique avec commutations 82 5.5. Impact sur les formes d'onde 87 5.6. Impacts sur le fonctionnement du D-STATCOM 92 5.7. Conclusion 95
Chapitre VI - Implantation de la simulation à double pas de calcul dans Hypersim 97 6.1. Simulation à double pas de calcul dans Hypersim 98 6.2. Résumé des essais 99 6.3. Cas 1 - Charge simple découplée 100 6.4. Cas 2 - Deux sources de tension découplées 103 6.5. Cas 3 - Charge avec commutations 104 j\nalyse des résultats de la charge avec commutations 111 6.6. Technologie FPGA 116 Algorithme d'intégration 117 Logique de fonctionnement - Optimisation des commutations 117 6.7. Conclusion 119
Conclusion 121 Bibliographie 125 Annexe A - Code UCM convertisseur 129
Liste des tableaux Tableau 1 : Résultats de simulation sur réseau à double pas de calcul (50-5 us) 61 Tableau 2 : Résultats de simulation pour le réseau à simple pas de calcul (50-50 (is) 65 Tableau 3 : Résultats de simulation pour différentes conditions de point de découplage ....65 Tableau 4 : Puissance non caractéristique provoquée par deux sources de tension découplées 70 Tableau 5 : Résistance parasite limite avec commutations 81 Tableau 6 : Comparaison des résultats avec un condensateur au bus DC 84 Tableau 7 : Comparaison des résultats avec une source idéale au bus DC 86 Tableau 8 : Résultats obtenus avec l'ajout du filtre passe bas sur le contrôleur 93 Tableau 9 : Résultats de simulation Hypersim et SPS sur charge simple 101 Tableau 10 : Mesures de puissance en fonction de l'indice de modulation 115 Tableau 11 : Erreur sur l'évaluation de la puissance réactive 115
Liste des figures Figure 1 : Circuit équivalent monophasé du réseau à étudier 19 Figure 2 : Modèles équivalents de L et C selon Euler arrière et la méthode du trapèze 25 Figure 3 : Modèle EMTP de l'inductance et du condensateur 27 Figure 4 : Circuit équivalent avec la méthode EMTP (dicrétisation trapézoïdale) 27 Figure 5 : Différentes formes de discrétisation avec SPS 30 Figure 6 : Circuit simple pour démontrer l'effet du pas de calcul et du procédé d'intégration
31 Figure 7 : Formes du courant avec différents procédés d'intégration, pas de 100 us 32 Figure 8 : Effet du procédé d'intégration, première bosse de courant, pas de 100 ps 32 Figure 9 : Effet du pas de calcul sur l'intégration par Euler avant 33 Figure 10 : Effet du pas de calcul sur Euler arrière 33 Figure 11 : Effet du pas de calcul sur l'intégration trapézoïdale 34 Figure 12 : Fonctionnement de l'algorithme SPS 39 Figure 13 : Réseau électrique comprenant un D-STATCOM avec double pas de calcul.... 42 Figure 14 : Circuit monophasé sans point de découplage 47 Figure 15 : Circuit monophasé avec point de découplage 48 Figure 16 : Échange des signaux - Séquence de fonctionnement 50 Figure 17 : Représentation Simulink du réseau complet 54 Figure 18 : Implantation du point de découplage au secondaire du transformateur 57 Figure 19 : Profil d'énergie mesuré de chaque côté du point de découplage 60 Figure 20 : Comparaison du courant « la » au bus « charge » du cas #4 62 Figure 21 : Réseau de référence pour étudier l'effet d'avoir deux sources 67 Figure 22 : Réseau avec deux sources simulées à double pas de calcul 68 Figure 23: Comparaison des courants « la » au bus « charge » pour « m=l.l » 69 Figure 24 : Tracé des puissances pour une variation d'amplitude 70 Figure 25 : Tracé des puissances pour une variation de phase 70 Figure 26 : D-STATCOM proposé 74 Figure 27 : Implantation haut niveau de l'algorithme de contrôle 75 Figure 28 : Partie lente du contrôleur (PLL, régulateurs, calcul consigne pour MLI) 76 Figure 29 : Détail du « Phase Lock Loop » de la Figure 28 77 Figure 30 : Partie rapide de l'algorithme de contrôle 78 Figure 31 : Générateur MLI 78 Figure 32 : Partie lente du contrôleur modifié pour enlever la régulation de Vac 79 Figure 33 : D-STATCOM avec point de découplage 80 Figure 34 : Profil d'énergie avec le condensateur comme bus DC 82 Figure 35 : Profil d'énergie avec la source idéale comme bus DC 83 Figure 36 : Comparaison de la mesure et de l'approximation de la puissance non caractéristique 85 Figure 37 : Profil d'énergie dans la simulation de référence 85 Figure 38 : Comparaison du contenu harmonique de la tension « Va » au bus « charge » . 87 Figure 39 : Comparaison de la forme de la tension « Va » au bus « charge » 88 Figure 40 : Comparaison du contenu harmonique du courant « la » au bus « charge » 89 Figure 41 : Comparaison harmonique du courant « la », [9000 - 11 000 Hz] 90 Figure 42 : Comparaison des formes d'onde de courant « la » au bus « charge » 91
IX
Figure 43 : Contenu harmonique du courant « la » au bus « charge » avec l'ajout du filtre93 Figure 44 : Schéma Hypersim avec double pas de calcul 101 Figure 45 : Réseau à double pas de calcul SPS pour la charge commutée 104 Figure 46 : Réseau de référence Hypersim pour la charge commutée 105 Figure 47 : Schéma Hypersim à double pas de calcul pour la charge commutée 106 Figure 48 : Courant « la » dans l'inductance de fuite dans les simulations de référence... 107 Figure 49 : Gros plan sur la première fausse amorce, courant « la » de l'inductance de fuite dans les simulations de référence 108 Figure 50 : Gros plan sur la première fausse amorce, effet sur la tension « Va » au bus « charge » pour les simulations de référence 109 Figure 51 : Courant « la » dans l'inductance de fuite dans SPS et Hypersim à double pas de calcul 109 Figure 52 : Gros plan sur la première fausse amorce dans la simulation à double pas de calcul 110 Figure 53 : Comparaison des courants « la » de référence, courant rapide et lent dans l'inductance de fuite 111 Figure 54 : Comparaison du contenu harmonique du courant « la » dans l'inductance de fuite 112 Figure 55 : Comparaison de la tension « Va » au bus « charge » dans la simulation de référence et dans la simulation à double pas de calcul 113 Figure 56 : Comparaison du contenu harmonique de la tension « Va » au bus « charge » 114
Chapitre I - Introduction Ce chapitre présente le projet de recherche. L'historique de la simulation de réseaux est
premièrement présenté suivi d'une discussion sur la problématique actuelle. La description
du projet et ses apports sont ensuite présentés.
1.1. Historique de la simulation temps réel de réseaux électriques
Les premiers simulateurs temps réel remontent au milieu des années 1950. Ils ont été
développés afin de subvenir au besoin de tester des contrôleurs réels en rétroaction avec la
simulation. On utilisait alors des simulateurs analogiques composés de sources CA et CC,
de composants R, L, C, de modèles physiques de lignes et de machines électriques. Les
simulations étaient réalisées avec un facteur d'échelle afin de faciliter la réalisation
physique des composants.
Les simulateurs analogiques ont été une solution préférée pendant de nombreuses années.
En fait, on a utilisé des simulateurs complètement analogiques jusqu'au milieu des années
1980. Il y a des désavantages aux simulateurs analogiques tels que le coût d'opération
élevé, le volume encombrant, le temps de préparation important, la difficulté à représenter
les non-linéarités [1], mais leur plus grande facilité à respecter le temps réel a poussé leur
utilisation pendant de nombreuses années.
C'est vers la fin des années 60 que les premiers simulateurs numériques, en temps différé,
ont été développés. Les travaux de Hermann Dommel sur TEMTP « Electromagnetic
Transient Program » sont généralement considérés comme la pierre d'assise de la
simulation numérique des réseaux électriques [2] [3]. À l'inverse d'une simulation en
temps réel, une simulation en temps différé n'est pas contrainte sur le temps maximal pour
retourner les résultats de la simulation. Comme le temps de résolution est lié à la puissance
de calcul disponible, les premiers ordinateurs n'étaient pas adaptés à la simulation temps
réel des réseaux électriques.
12
Les premiers modèles numériques destinés à de la simulation temps réel ont pris la forme
de modèles simulés sur des DSP interfaces à un simulateur analogique par des
convertisseurs analogiques numériques. On retrouve ces simulateurs hybrides à partir de
1985 [4]. Les premiers simulateurs hybrides étaient réalisés pour des modèles présentant
une dynamique lente permettant un pas de calcul relativement long [5] [6]. On doit noter
que le pas de calcul utilisé en simulation temps réel est fixe, cela permet d'avoir un temps
de résolution connu et garantir le respect du temps réel.
Les simulateurs temps réel complètement numériques ont été développés progressivement
avec les avancées dans la microélectronique [7] [8]. La première conférence traitant de ce
sujet s'est tenue en 1995 [9]. Dans ces mêmes années, plusieurs groupes ont débuté leurs
travaux sur les simulateurs temps réel complètement numériques. Hydro-Québec a mis en
fonction Hypersim en 1996, RTDS technologies a commencé le développement du
simulateur RTDS en 1994 [10], on peut également mentionner OPAL-RT qui a débuté ses
opérations en 1998.
Dans les simulateurs temps réel entièrement numérique d'aujourd'hui, le pas de calcul
minimal atteignable, pour l'ensemble de la simulation, est aux alentours de 10 ps [11]. Le
pas de calcul minimal est directement lié à la complexité du réseau simulé. En pratique, on
peut s'attendre à obtenir une valeur plus réaliste de 20 ps. Cela est adéquat pour simuler le
comportement de la majorité des éléments du réseau. En fait, un pas de calcul de 50 ps est
typiquement suffisant. Cependant, si Ton souhaite inclure le modèle détaillé d'un
équipement présentant une dynamique trop rapide pour le pas de calcul utilisé, il faut
utiliser son modèle moyen [12] [5].
Cette problématique est rencontrée pour différents équipements dont le D-STATCOM
« Distribution Static Synchronous Compensator ». La commande par modulation de largeur
d'impulsion (MLI) de son convertisseur est réalisée à une fréquence de Tordre du kHz ce
qui impose l'utilisation d'un pas de calcul de Tordre de la microseconde pour représenter
adéquatement le modèle détaillé. L'application de la méthode de simulation à double pas de
calcul peut donc être envisagée pour simuler ce type d'équipement.
13
1.2. Problématique et contexte
La problématique considérée dans ce mémoire est liée à la limitation de pas de calcul
minimal imposée par la puissance de calcul du simulateur et au besoin de simuler le
comportement détaillé d'un convertisseur électronique de puissance. Pour résoudre ce
problème, il est possible d'utiliser une simulation à pas multiples ou plus spécifiquement à
double pas de calcul [13]. Cette approche consiste à séparer le réseau en une partie rapide et
une partie lente, les deux étant reliées par un point de découplage qui gère l'échange
d'information. La partie lente est simulée sur le simulateur standard et la partie rapide est
simulée par une unité de calcul plus performante. Cette approche a été explorée et semble
adéquate pour représenter la dynamique du modèle électronique de puissance dans la partie
rapide de la simulation [14] [15].
L'application du double pas de calcul ajoute un point de découplage qui sépare les régions
avec des pas de calcul différents. Ce point de découplage est non caractéristique, c'est-à-
dire qu'il provoque des comportements absents d'une simulation de référence utilisant un
seul pas de calcul, soit le pas de calcul de la partie rapide. La stabilité numérique et la
précision des résultats en sont affectées [16]. Quelques approches d'atténuation des
comportements non caractéristiques ont été étudiées dans la littérature [17].
L'explication de la provenance du comportement non caractéristique demeure
généralement peu ou pas documentée. Lors de l'implantation de la méthode, il est
important de connaître les phénomènes non caractéristiques auxquels on peut s'attendre
ainsi que les méthodes d'atténuations possibles.
Les travaux de recherche sont réalisés dans le contexte d'une implantation éventuelle de la
méthode sur Hypersim. La méthode pourrait être implantée avec la technologie FPGA
« Field Programmable Gate Array ». Cette technologie aurait accès aux signaux de
commande provenant d'un contrôleur réel et exécuterait la simulation rapide qui requiert
ces signaux. Elle s'est avérée adaptée pour implanter des équations de réseaux [15].
14
1.3. Description du projet de recherche
Ce mémoire présente une étude des problèmes liés à l'implantation du double pas de calcul
sur une simulation de réseaux électriques en temps réel. Les solutions possibles sont aussi
étudiées. Cela est réalisé dans le contexte de l'implantation éventuelle de la méthode sur
Hypersim. Pour les besoins du projet, le superordinateur nécessaire à l'exécution temps réel
d'Hypersim n'a pas été utilisé. Aussi, l'implantation sur FPGA a été abstraite à l'étude.
L'étude des effets de l'implantation du double pas de calcul a été réalisée dans Matlab à
l'aide de SPS « SimPowerSystems ». Pour se rapprocher de l'objectif final, les conditions
présentes lors d'une simulation temps réel, avec un vrai contrôleur, ont été reproduites en
temps différé dans Hypersim. Il faut noter que la méthode utilisée par Hypersim en temps
différé est la même que celle utilisée en temps réel. Un artifice est utilisé pour simuler la
présence d'une unité de calcul rapide dans la simulation d'Hypersim. Les contraintes
particulières d'implantation FPGA sont abstraites des simulations réalisées, mais celles-ci
sont passées en revue.
Description des apports
Il est connu que le double pas de calcul provoque des problèmes, mais ceux-ci demeurent
peu explorés et peu détaillés [16] [17]. Le projet explore ces phénomènes pour un cas
typique pouvant bénéficier d'une simulation à double pas de calcul, un D-STATCOM.
L'implantation du double pas de calcul peut aussi provoquer de l'instabilité numérique et
faire diverger la simulation. Ce phénomène est peu compris, mais connu des gens versés
dans l'art. Pour le présent travail, la stabilité numérique est assurée par un artifice connu :
l'ajout d'une résistance parasite pour amortir les oscillations. Les observations sont
présentées afin de mieux comprendre le phénomène.
Pour quantifier le comportement non caractéristique, en plus de la comparaison des formes
d'onde, un second paramètre de surveillance est considéré : la puissance échangée au point
de découplage.
15
Organisation du mémoire
Le chapitre 2 présente les notions sous-jacentes à la simulation de réseaux en temps réel.
Les outils de simulation utilisés dans le travail de recherche y sont présentés pour illustrer
les différentes méthodes utilisées et les astuces liées au temps réel.
Le chapitre 3 présente la méthode de découplage utilisée et la théorie du double pas de
calcul. Un exemple simple de circuit électronique de puissance est présenté.
Le chapitre 4 présente la méthodologie proposée pour étudier les comportements non
caractéristiques et l'instabilité numérique dans la simulation à double pas de calcul d'un
réseau électrique. Dans ce chapitre, on étudie l'effet du double pas de calcul sur un réseau
qui ne comporte pas de commutation. On se concentre sur les effets de perturbation de
lecture de puissance et sur la stabilité numérique.
Dans le chapitre 5, on étudie l'effet du double pas de calcul sur la simulation d'un D-
STATCOM. On observe les effets sur les mesures de puissance et sur l'instabilité
numérique. On observe aussi les effets sur le contenu harmonique des formes d'onde.
Le chapitre 6 présente une implantation de la méthode du double pas de calcul dans
l'environnement d'Hypersim. Les résultats obtenus avec SPS et Hypersim sont présentés.

Chapitre II - Méthodes numériques de simulation de réseaux
Ce chapitre introduit les notions importantes de la simulation numérique de réseaux
électriques. Elles sont présentées pour le cas général et pour le cas de la simulation temps
réel qui impose des contraintes particulières. Pour illustrer les différences entre un outil
destiné aux simulations en temps différé et un outil destiné aux simulations en temps réel,
SimPowerSystem et Hypersim sont comparés.
Le chapitre présente premièrement les principaux composants des réseaux électriques.
Ensuite on présente la génération des équations de réseaux avec la méthode nodale et avec
la méthode des variables d'état. Un exemple de réseau composé uniquement d'éléments
linéaires est utilisé pour illustrer ces méthodes.
Les méthodes d'intégration numérique typiquement employées dans la simulation sont
présentées puis on présente la discrétisation des équations de réseaux avec ces méthodes.
Les notions de stabilité et de précision de la simulation numérique sont illustrées dans un
exemple simple.
Les méthodes générales de simulation de réseaux sont finalement présentées.
18
2.1. Composants de réseaux
Il existe trois grands types de composants permettant la construction des équations de
réseaux : les modèles de composants linéaires (RLC), les modèles basés sur la propagation
des ondes (lignes de transport) et les modèles non linéaires (interrupteurs, éléments
saturables, parafoudre). Il y a aussi les autres modèles (mécaniques, chimiques, thermiques,
etc.).
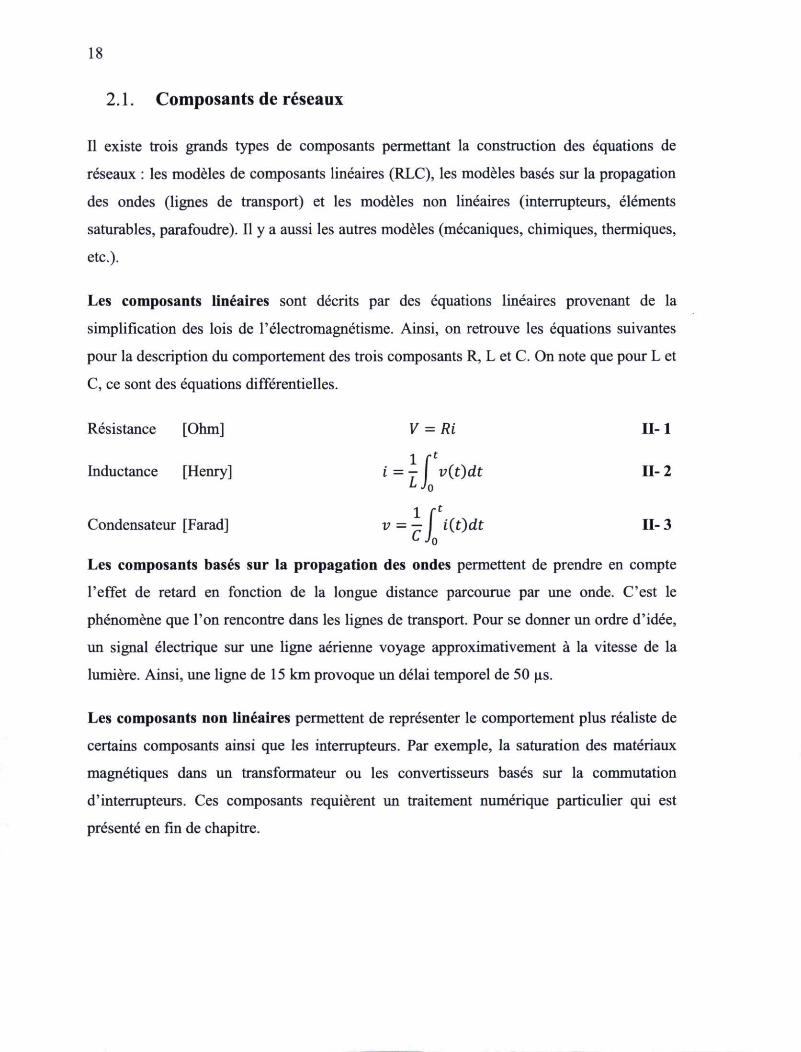
Les composants linéaires sont décrits par des équations linéaires provenant de la
simplification des lois de T électromagnétisme. Ainsi, on retrouve les équations suivantes
pour la description du comportement des trois composants R, L et C. On note que pour L et
C, ce sont des équations différentielles.
Résistance [Ohm] V = Ri I I -1 t
Inductance [Henry] i — — I v(t)dt II- 2 1 f 1
Condensateur [Farad] v = — I i(t)dt II- 3 •■K Les composants basés sur la propagation des ondes permettent de prendre en compte
l'effet de retard en fonction de la longue distance parcourue par une onde. C'est le
phénomène que Ton rencontre dans les lignes de transport. Pour se donner un ordre d'idée,
un signal électrique sur une ligne aérienne voyage approximativement à la vitesse de la
lumière. Ainsi, une ligne de 15 km provoque un délai temporel de 50 ps.
Les composants non linéaires permettent de représenter le comportement plus réaliste de
certains composants ainsi que les interrupteurs. Par exemple, la saturation des matériaux
magnétiques dans un transformateur ou les convertisseurs basés sur la commutation
d'interrupteurs. Ces composants requièrent un traitement numérique particulier qui est
présenté en fin de chapitre.
19
2.2. Equations de réseaux électriques
Les équations de réseaux sont des équations différentielles qui définissent les liens entre les
différents composants du réseau et les sources qui s'y trouvent. Il existe différentes
méthodes pour construire les équations de réseau, dont la méthode nodale et la méthode des
variables d'état qui seront présentées.
Pour exprimer les relations entre les éléments, il faut utiliser la loi des mailles et la loi des
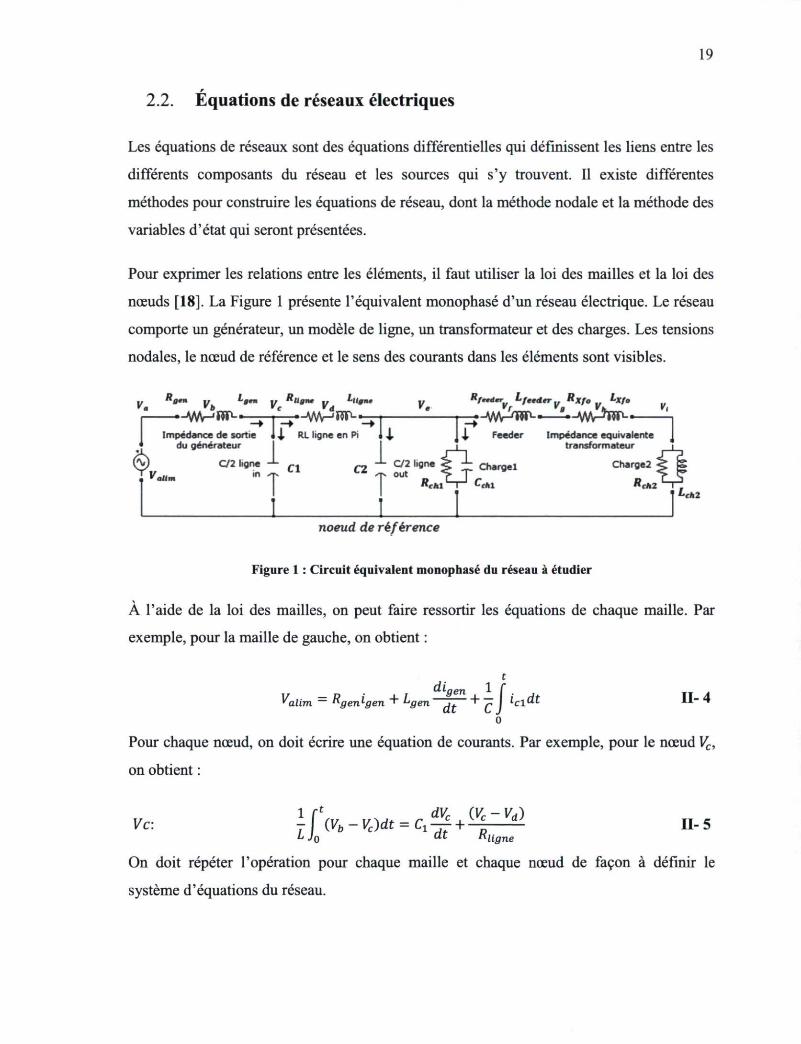
nœuds [18]. La Figure 1 présente l'équivalent monophasé d'un réseau électrique. Le réseau
comporte un générateur, un modèle de ligne, un transformateur et des charges. Les tensions
nodales, le nœud de référence et le sens des courants dans les éléments sont visibles.
vm ***" vb * * " v *"*"• v t"*"* v R ' - * * rv h — t c y Rxr<> v
L*r» v _ _ ^ _ I B Ï Î - _ -—WHÏT-- . ^^ n r - f c ^ .^p W ï v .
Impédance de sortie i X R L ' 'Qne en Pi i 4 1X Feeder Impédance équivalente du générateur transformateur
© C/2 ligne - L c % a -»- C/2 ligne ^ f - c h a r g e l Charge2
T t t * 2
noeud de référence
Figure 1 : Circuit équivalent monophasé du réseau à étudier
À l'aide de la loi des mailles, on peut faire ressortir les équations de chaque maille. Par
exemple, pour la maille de gauche, on obtient :
t
Valim = Rgenigen + L g e n , + — I i c l d t I I - 4 0
Pour chaque nœud, on doit écrire une équation de courants. Par exemple, pour le nœud Vc,
on obtient :
i r ( dvc (y. Vc: - (Vb-Vc)dt = C 1 - ^ + ^
L J0 dt R 1 ligne
On doit répéter l'opération pour chaque maille et chaque nœud de façon à définir le
système d'équations du réseau.
20
2.3. Génération des équations de réseaux électriques
Les simulateurs modernes construisent automatiquement les équations de réseaux par
différentes approches qui se retrouvent dans les deux outils utilisés dans le projet.
SimPowerSystems utilise la représentation par variables d'état en temps différé et
Hypersim utilise une méthode nodale optimisée pour le temps réel, soit la méthode EMTP.
La méthode nodale et la méthode des variables d'état sont d'abord présentées sans
discrétisation. La considération des éléments non linéaires est présentée dans la dernière
section sur les méthodes générales.
Méthode nodale
La méthode nodale est basée sur l'application des lois des tensions et des courants de
Kirchoff. Pour présenter la méthode, le circuit de la Figure 1 est utilisé comme exemple.
Voici les étapes de l'algorithme :
1. Définir un nœud de référence et définir les tensions des nœuds par rapport à ce noeud.
2. Exprimer les tensions de branche en fonction des tensions nodales. 3. Exprimer les équations de courant pour tous les nœuds sauf pour le nœud de
référence. 4. Insérer les relations de tension dans les équations de courant. 5. Manipuler les équations pour obtenir un système de la forme Yv- i .Y est la matrice
d'admittance nodale, v le vecteur de tension nodale et i le vecteur d'injection de courant.
6. Inverser la matrice d'admittance. 7. On peut ensuite résoudre le système matriciel obtenu avec un procédé d'intégration
numérique.
Les étapes 1 à 3 de l'algorithme de résolution sont relativement simples, elles ne sont pas
détaillées pour alléger le texte. Une fois rendu à l'étape 4, on obtient un système à 8
équations et 8 inconnues, soit le nombre de nœuds où la tension doit être déterminée. Les
équations ici-bas, exprimées avec la transformée de Laplace, dans le domaine des s,
décrivent la loi des courants à chaque nœud en fonction des tensions nodales.
21
Vb:
Vc:
Vd:
Ve:
Vf:
Vg:
Vh:
Vi:
(Va Vb) (Vb Vc) x gen
(vb vc) sL
l\ npfl 5JU
= v e c l S +
■gen
(Vc ~ Va)
g e n " l i g n e
(vc vd) (Vd Ve)
R l igne sL l igne
(Vg ~ Ve) ve (ye Vf) VeC2s+^+VeCchls+>
Rchl
( .VeVf)_(VfVg)
R f e e d e r
R f e e d e r sL f eede r
( V f V g ) _ ( V 9 V h ) sL f e e d e r *Xfo
{Vg Vh) (Vh Vt)
R Xfo sL Xfo
(vh vo v, sL* Rr +
Vt sLr
II6
II7
II8
U9
1110
H l l
U12
1113 "Xfo n c h 2 zL'chl
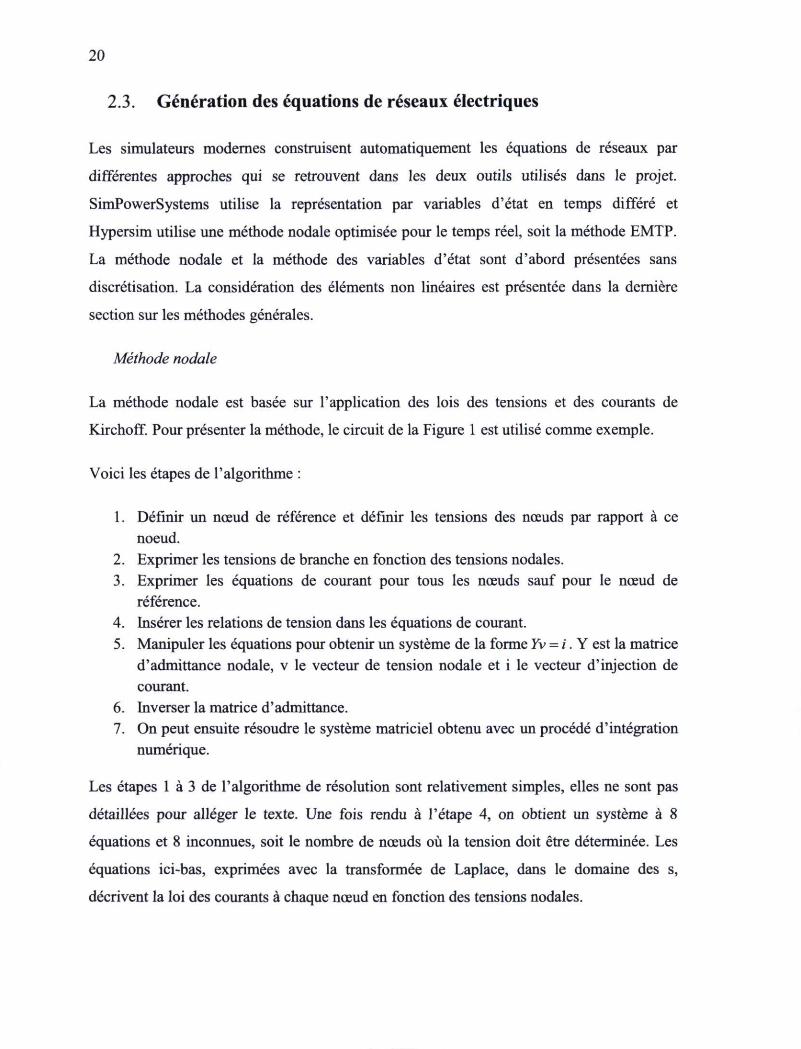
Il est ensuite possible de construire le système matriciel, sous la forme Yv = i. H faut noter
que les nœuds où la tension est imposée par une source, leur contribution est considérée
dans le vecteur d'injection de courant et non dans le vecteur de tension nodale. S'il y avait
une source de courant, elle serait considérée dans le vecteur d'injection de courant.
* + I t .
1 •L
0 0 0
1 1 + C\s + **. **.
^ 0 0 0
0 * < * . V + ) iv rf.
0 0
0 0 1
"» . rC,S + — + C M S4
1 R ! m m . «zf^ 0
0 0 0 1
« J .
1 1
Rfmm. S^Jm,mW
Aî^s 0 0 0
1
« J .
1 1
Rfmm. S^Jm,mW s L ^ ,
0 0 0 0 1 s L j n , R}
0 0 0 0 0 1
0 0 0 0 0 0
««
s l „ 1 1
*A» *L» **
o 0 0 0 0 0 0
ï ï V I
Y = Matrice d'admittance typiquement creuse
II-14
Les matrices obtenues sont typiquement creuses, c'estàdire que la matrice contient
principalement des valeurs non nulles sur la diagonale principale (II 14).
22
Méthode des variables d'état
Un réseau électrique peut être représenté par le système d'équations suivant :
Équation d'état : x = Ax + Bu II 15
Équation de sortie : y = Cx + Du II 16
où « x » est le vecteur des variables d'état, « x » représente la dérivée en fonction du temps
de ces variables d'état, « u » est le vecteur d'entrée qui définit des sources, « y » est le
vecteur des variables de sortie et A, B, C, D sont les matrices d'état. Dans un réseau
électrique, les variables d'état sont les courants dans les inductances et les tensions aux
bornes des condensateurs.
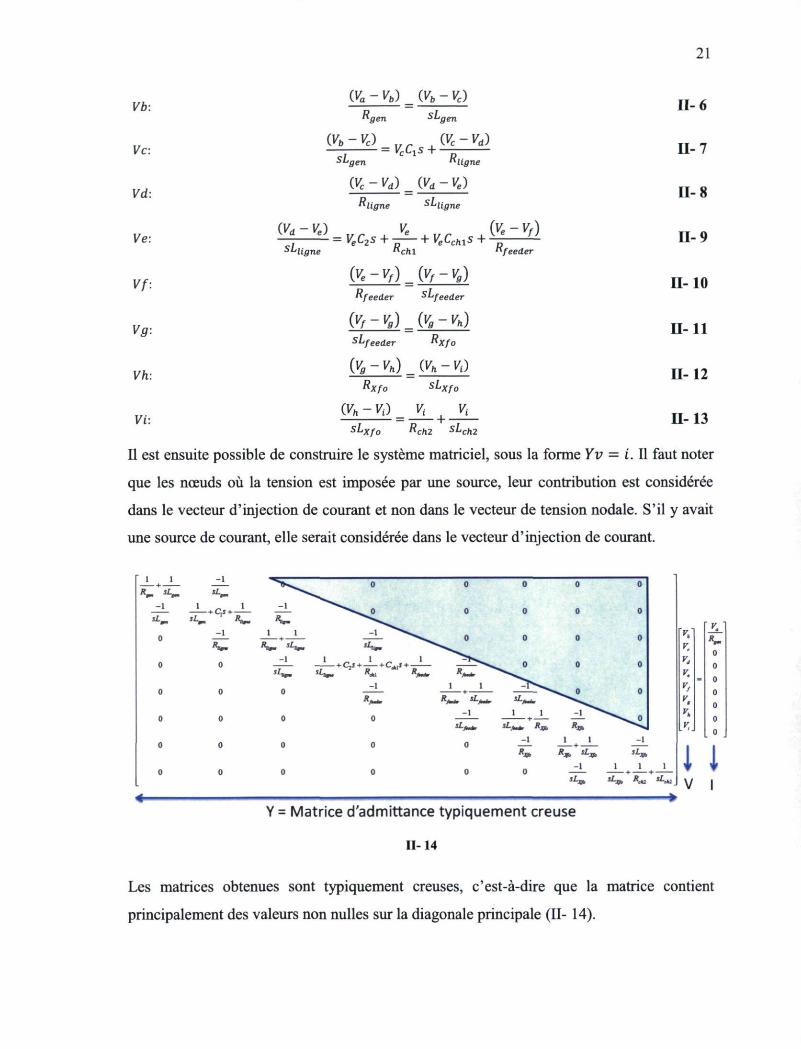
Dans l'exemple du réseau électrique simplifié, huit équations définissent les huit variables
d'états observées. On formule les équations d'état continu en faisant ressortir les boucles de
tension pour les inductances et les courants aux nœuds des condensateurs.
Par exemple, pour l'inductance Lgen et le condensateur C1 on obtient :
VAlim = VRgen + VLgen + VCl I I 17
kgen = ÏRLigne + lCl H 18
On peut ensuite exprimer les équations sous leur forme différentielle :
\vAlim R g e n " h g e n ) ~ VC 'C,
dt Lgen Lgen
d tgen ''Ligne
c.
1119
1120
Exprimées sous cette forme, les équations sont plus faciles à mettre sous forme matricielle.
À noter qu'il faut reformuler vR en et iRu ne (en gras) pour que leur forme soit compatible
avec la formulation voulue.
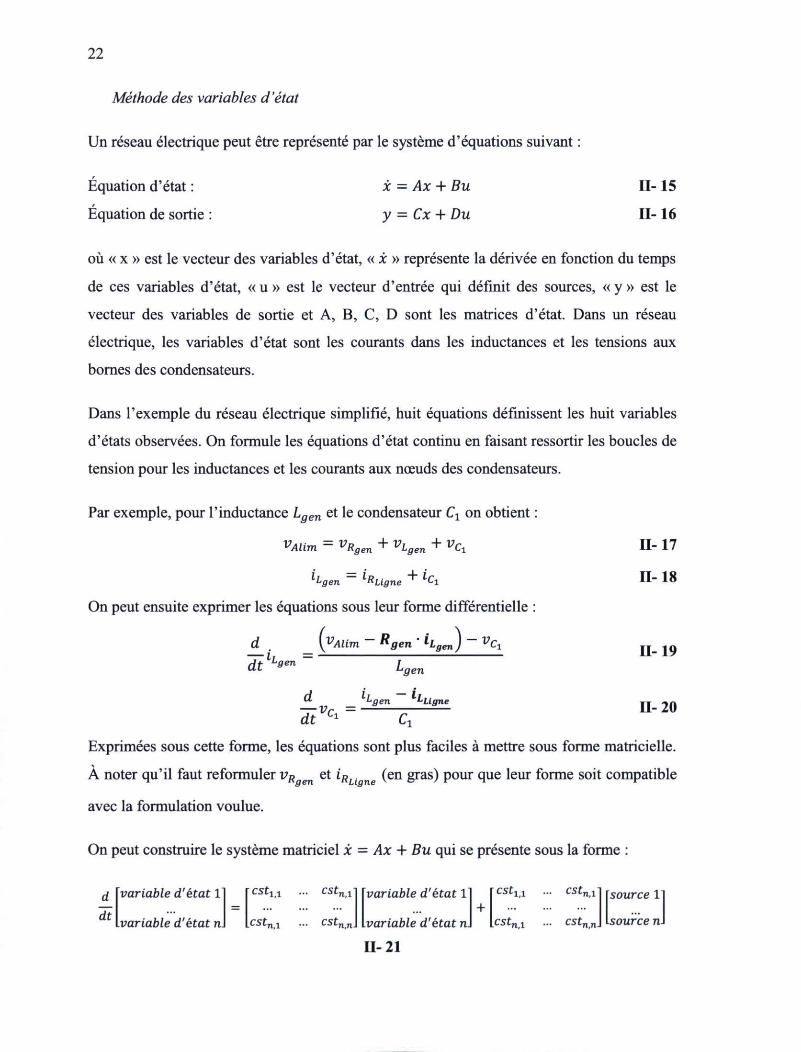
On peut construire le système matriciel x = Ax + Bu qui se présente sous la forme :
d di
variable d'état 1
variable d'état n.
CSLJ ^ ... CStn j
c s t n , l ■•• c s^n,n
variable d'état 1
variable d'état n.
1121
+ fCStn ... cstn
C S t n l ... C S t n n j
source 1
sourcen

23
Pour la formulation de l'équation de sortie y = Cx + Du, on définit ce que Ton souhaite
observer, comme courant ou comme tension. Par exemple, si on souhaite uniquement
surveiller une variable d'état, la tension du condensateur C2, on obtient l'équation de sortie
suivante :
r c _ [ 0 0 0 1 0 0 0 0]
gen v c
' 'Ligne V C 2
V C c h l
^feeder
^ X f o
l l c h 2
+ [0][Valim] 11-22
La méthode des variables d'état est la méthode utilisée par SimPowerSystem pour générer
les équations de réseaux.
24
2.4. Méthodes d'intégration numérique
Pour résoudre les équations de réseau de façon numérique, on doit discrétiser les équations
et les intégrer avec un procédé d'intégration numérique. On peut classer les méthodes
d'intégration en deux catégories, les méthodes à pas variable et les méthodes à pas fixe. Les
méthodes à pas variable permettent d'ajuster le pas de calcul pendant la simulation de façon
à ajuster Terreur locale à un niveau acceptable prédéterminé, mais le temps de résolution
n'est pas déterministe. Ainsi, le pas variable n'est pas approprié à la simulation temps réel.
Pour les simulations en temps réel, la charge de calcul doit être minimale de façon à obtenir
un temps de résolution inférieur au pas de calcul. Il faut cependant un compromis entre le
temps de résolution, la précision et la stabilité numérique. Le procédé d'intégration doit
donc offrir le maximum de stabilité et de précision tout en ne requérant que peu
d'opérations mathématiques.
Les méthodes d'intégration les plus simples sont les méthodes d'Euler avant, arrière et la
méthode trapézoïdale. Leur objectif est d'approximer le point futur à l'aide de la
connaissance de l'état actuel et d'une approximation de la pente qui donne le point futur.
L'algorithme de chacune de ces méthodes est présenté ici-bas :
Euler avant : x n + 1 = x n + h • x'n II- 23
Euler arrière : x n + 1 = x n + h • x 'n + 1 II- 24
( x' -\- x' \ —— n + 1 J 11-25
La prochaine valeur (xn + 1) est approximée à l'aide de la valeur présente et de l'addition de
la multiplication du pas de temps (/i) avec la pente de la fonction au point présent (x^),
futur(jt^+1) ou la moyenne des deux I ——^^J respectivement pour les méthodes d'Euler
avant, arrière et la méthode trapézoïdale. Dans le cas où il faut prendre la valeur de la pente
au point futur, ce point est approximé à l'aide de la méthode Euler avant.
La complexité numérique de la méthode trapézoïdale est plus grande que celle des deux
autres méthodes, mais elle est reconnue pour être plus juste et plus stable. La méthode
arrière est moins lourde que la méthode trapézoïdale, mais elle est moins juste, elle a
25
cependant la propriété d'être stable, et ce, même avec des grands pas de calcul. La méthode
avant est simple à implanter et légère, mais sa stabilité est très dépendante du pas de calcul.
Discrétisation des composants linéaires :
On peut appliquer ces trois méthodes d'intégration aux composants des réseaux électriques.
Dans le cas de la résistance, comme il n'y a pas d'effet de mémoire, la relation est directe
entre le courant, la tension et la résistance. Dans le cas de l'inductance, le flux présent est
en fonction de l'historique de la tension à ses bornes et dans le cas du condensateur, le
champ électrique est fonction de l'historique du courant le traversant.
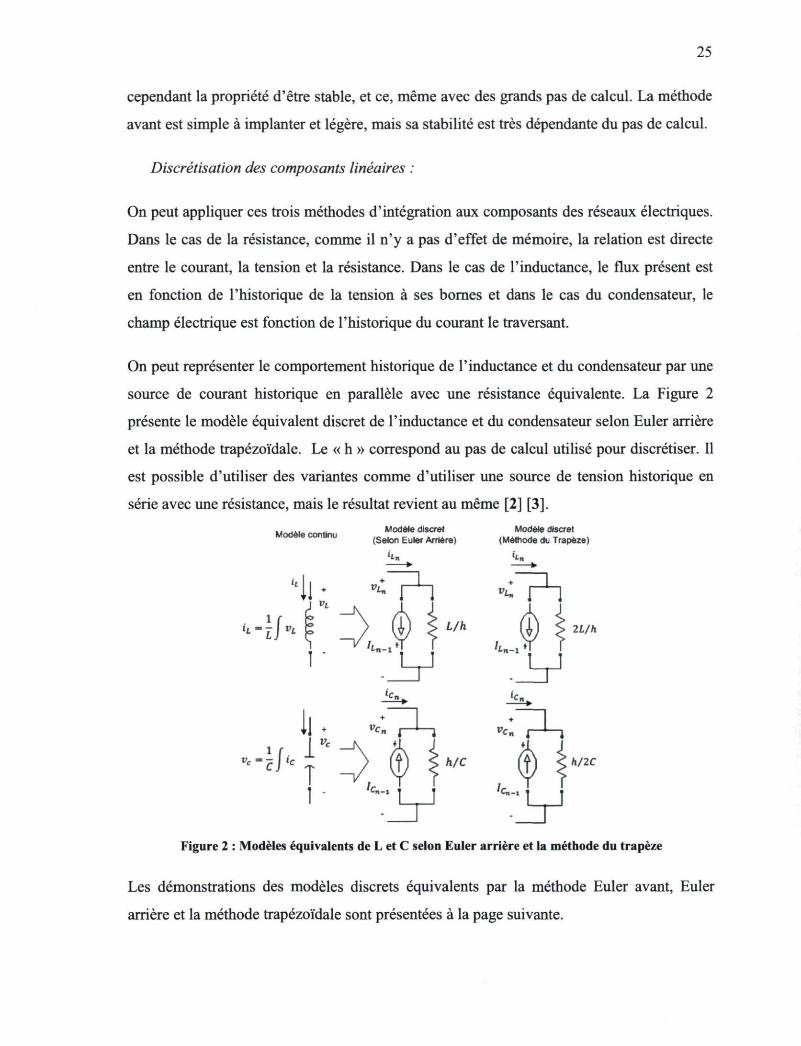
On peut représenter le comportement historique de l'inductance et du condensateur par une
source de courant historique en parallèle avec une résistance équivalente. La Figure 2
présente le modèle équivalent discret de l'inductance et du condensateur selon Euler arrière
et la méthode trapézoïdale. Le « h » correspond au pas de calcul utilisé pour discrétiser. Il
est possible d'utiliser des variantes comme d'utiliser une source de tension historique en
série avec une résistance, mais le résultat revient au même [2] [3].
Modèle continu Modèle discret (Selon Euler Arrière)
Modèle discret (Méthode du Trapèze)
VLm f^-J
' l » - l *
2L/h
L_J
h/ZC
Figure 2 : Modèles équivalents de L et C selon Euler arrière et la méthode du trapèze
Les démonstrations des modèles discrets équivalents par la méthode Euler avant, Euler
arrière et la méthode trapézoïdale sont présentées à la page suivante.

26
Résistance : V = Ri
Euler avant, arrière et méthode du trapèze : vRn = RiR n
Inductance : i: = / v(t)dt
Euler avant Euler arrière Trapézoïdale
x n + i — x n + h • x n
V L L n + 1 , n F
lL» ~ L/h + l t 1
V, h n L/h + l L n 1
X n + l = X n + h X n + 1 X n + i = X n + h . Çr. + X n ^
L l Ln+l l Ln + h \ 2L )
iLn = 2 Ï ( v L n l + V L n ) + k n . 1
lLn = V L n ,
TJh^ + /,. V,
i = n 4 I L n L/h L n " 1
Vin l L n 2L/h l L»i
Condensateur : v = / 0 i(t)dt
Euler avant Euler arrière Trapézoïdale
x n + i — x n + "■• x'n x „ t l = x n + hxL, + 1 x n t l = x „ + h ( X " *"+')
* « • * . + «■£ "cnt l=VCn + k ^ VCnti=VCn + h . ( ^ l ^
<V_ = u c n vCn_1
n h/C h/C
v c ir = —— + Ir c n h / r C n \ h/C
vCn+1 vCn 2C/h 2C/h
C n h / l C h/2C c 1
Vf ir = — + Ir C n h / 2 C Cn"1
27
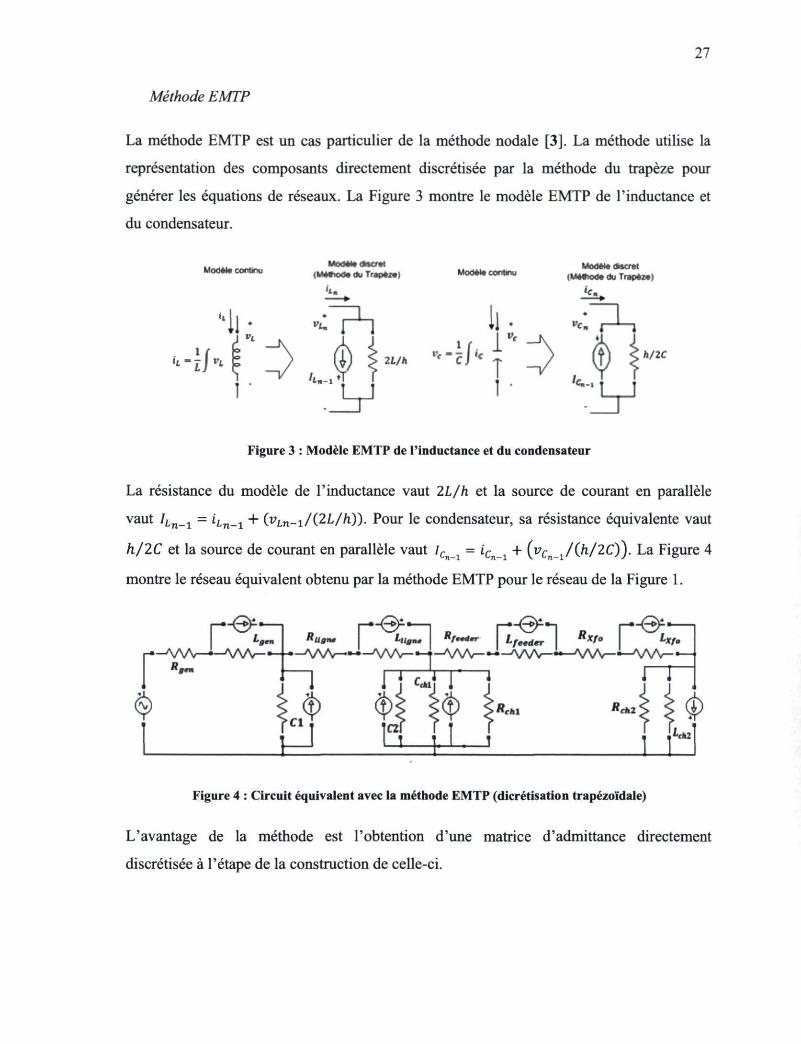
Méthode EMTP
La méthode EMTP est un cas particulier de la méthode nodale [3]. La méthode utilise la
représentation des composants directement discrétisée par la méthode du trapèze pour
générer les équations de réseaux. La Figure 3 montre le modèle EMTP de l'inductance et
du condensateur.
Model* continu (Méthode du Trapèze)
km
"Il ; -̂ "Pn W B A à\ i 2L/H
Modèle continu
•V-i/ 'c
il-1* T I ■
(Méthode du Trapèze)
(t) | hnC
Figure 3 : Modèle EMTP de l'inductance et du condensateur
La résistance du modèle de l'inductance vaut 2L/h et la source de courant en parallèle
vaut ILn_1 = hn! + (vj,ni/(2£/J0). Pour le condensateur, sa résistance équivalente vaut
h/2C et la source de courant en parallèle vaut lCni = i(̂ _ + {yCn J (h /2C)) . La Figure 4
montre le réseau équivalent obtenu par la méthode EMTP pour le réseau de la Figure 1.
• A W - M / W »
Figure 4 : Circuit équivalent avec la méthode EMTP (dicrétisation trapézoïdale)
L'avantage de la méthode est l'obtention d'une matrice d'admittance directement
discrétisée à l'étape de la construction de celleci.

28
Discrétisation des équations d'état
On peut discrétiser les équations d'état en appliquant une des méthodes d'intégration
numérique.
Équation d'état continu:
Équation de sortie continu:
x = Ax + Bu
y = Cx + Du
Euler avant x ( k + l ) = x(k) + hx'(k)
x ( k + l ) = x(k) + h[Ax(k) + Bu(k)]
11-26
II-27
11-28
Où I est la matrice unité.
11-29
Euler arrière x(k+1) = x(k) + hx ' (k+1)
Commençons par traiter l'équation d'état :
x ( k + l ) = x(k) + h [Ax(k+ l ) + B u ( k + l ) ]
x ( k + l ) - h A x ( k + l ) - h B u ( k + l ) = x(k)
[ I - h A ] x ( k + l ) - h B u ( k + l ) = x(k)
On effectue le changement de variable :
w . [ I - h A ] x - h B u
h
11-30
11-31
11-32
11-33
11-34
On en déduit
x = [ I - h A ] 'h[w + Bu]
L'équation d'état (II- 33) devient alors:
11-35

29
h w ( k + l ) = x(k) = [ I - h A ] 'h[w(k) + Bu(k)] II-
II-
36
w ( k + l ) = [ I - h A ] 'w(k) + [I < v ' ^ -
- h A ] l Bulk)
II-
II- 17 w ( k + l ) = [ I - h A ] 'w(k) + [I
< v ' ^ -
Bd
Bulk)
II-
II-
Pour l'équation de sortie, on effectue le même changement de variable :
II-
II-
y(k) = Cx(k) + Du(k) II- 38
y(k) = C [ [ I - h A ] 'h[w(k) + Bu(k)]] + Du(k) II-
II-
39
y(k) = < : [ I - h A ] [ i iw(k) + [D + C[ I -hA] - 1 hB]u( k)
II-
II- 40 y(k) = <
cd
iw(k) +
Dd
k)
II-
II- 40
Traoèze x ( k + l ) = x(k)+ ^[x'(k) + x ' (k+1)] II -41
x ( k + l ) = x(k) + ^[Ax(k) + Bu(k) + A x ( k + l ) + B u ( k + l ) ] II -42
x(k + 1 ) - ^Ax(k + 1 ) - | f iu(k + 1 ) = x(k) + ^Ax(k) + ^Bu(k) II -43
MA' 2 _
x(k+ l ) - ^ B u ( k + l ) = "î + ; A~ 2
x(k) + ^Bu(k) II -44
On effectue le changement de variable :
['-H x - - B u 2 II- 45
On en déduit :
I - 2 -A W + BH 2
II-46
L'équation d'état (II- 44) devient
h w ( k + l ) = HA x(k) + |Bu(k) II-47
30
h w ( k + l ) I + | A 2
- i w(k) + | u ( k ) + pu(k)
w(k+ 1) = 2 [.|A] "w(k) + iïl + ^A [■H
i + i fu(k)
Ad Bd
y(k) = Cx(k) + Du(k)
y(k) = c[[ n 1
l ~ 2 A w(k) + | u ( k ) + Du(k)
y(k) C [ I | A " l
hw(k) + D + C MA] >] u(k)
Cd Dd
II48
II49
1150
1151
II52
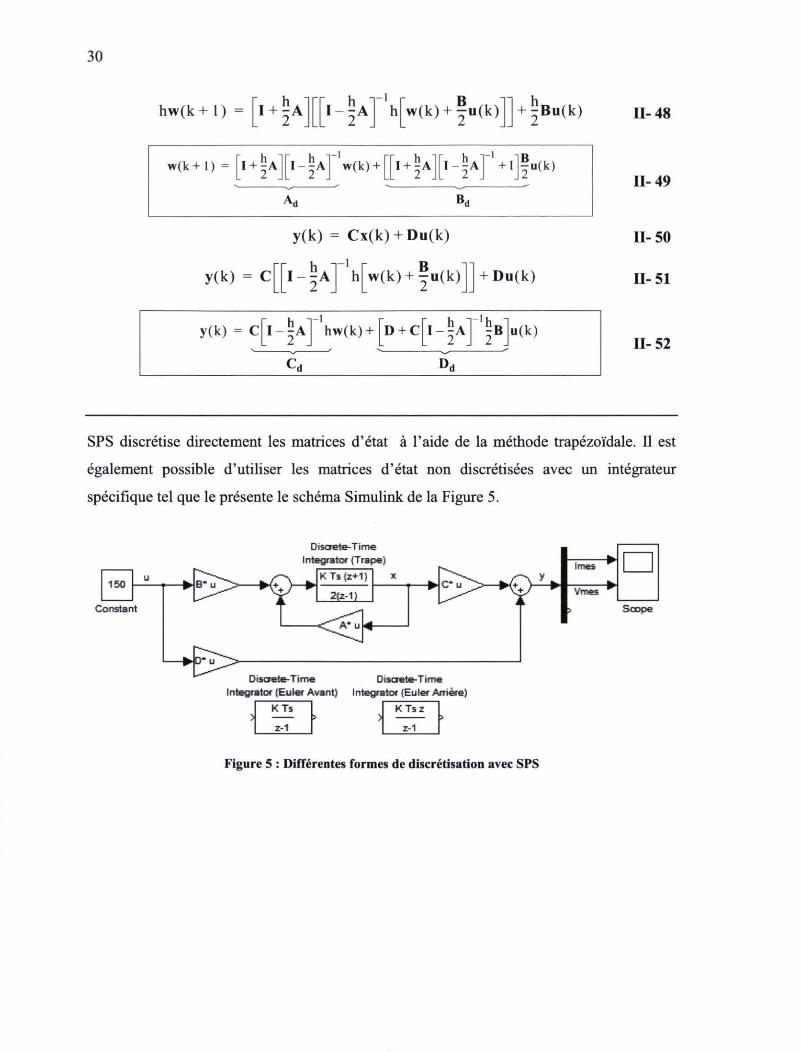
SPS discrétise directement les matrices d'état à l'aide de la méthode trapézoïdale. Il est
également possible d'utiliser les matrices d'état non discrétisées avec un intégrateur
spécifique tel que le présente le schéma Simulink de la Figure 5.
150
Constant
Disorete-Time Integrator (Trape)
B*u -*?+)-+ KTs{z+1)
afej]
A * u
C * u
* > D - u
Discrete-Time Disarete-Time Integrator {Euler Avant) Integrator {Euler Arrière)
K T s
z-1
K T s z
z-1
I N - »l I £>'»IZ>|
l> Scope
Figure 5 : Différentes formes de discrétisation avec SPS
31
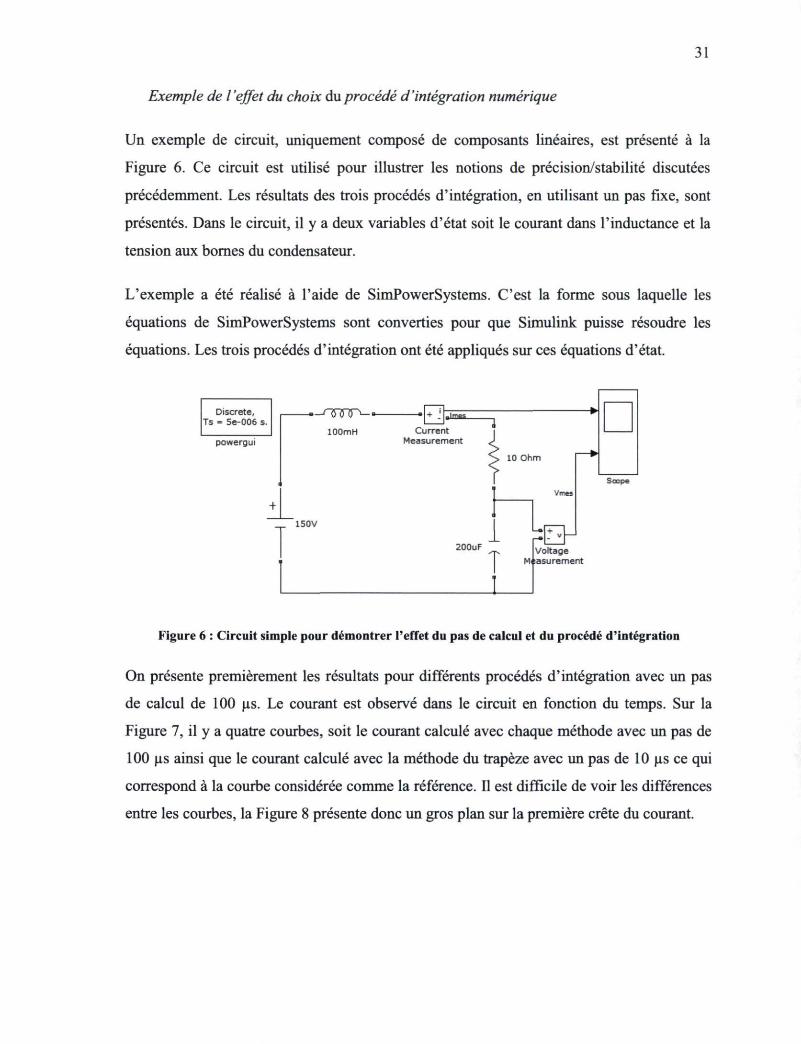
Exemple de l'effet du choix Au procédé d'intégration numérique
Un exemple de circuit, uniquement composé de composants linéaires, est présenté à la
Figure 6. Ce circuit est utilisé pour illustrer les notions de précision/stabilité discutées
précédemment. Les résultats des trois procédés d'intégration, en utilisant un pas fixe, sont
présentés. Dans le circuit, il y a deux variables d'état soit le courant dans l'inductance et la
tension aux bornes du condensateur.
L'exemple a été réalisé à l'aide de SimPowerSystems. C'est la forme sous laquelle les
équations de SimPowerSystems sont converties pour que Simulink puisse résoudre les
équations. Les trois procédés d'intégration ont été appliqués sur ces équations d'état.
Discrete, Ts - 5e-006 s.
powergui
-•-jn5T!T'-»-lOOmH
150V
' . n l m f 5
Current Measurement
10 Ohm
200uF Voltage M :asurement
Scope
Figure 6 : Circuit simple pour démontrer l'effet du pas de calcul et du procédé d'intégration
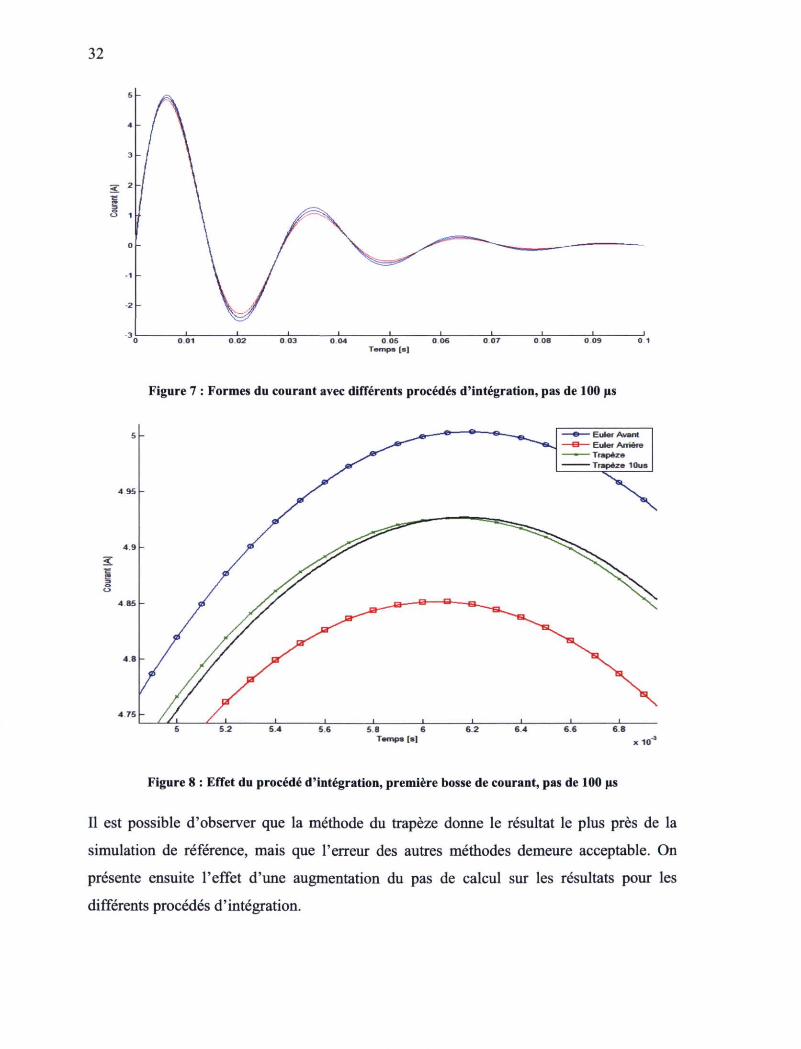
On présente premièrement les résultats pour différents procédés d'intégration avec un pas
de calcul de 100 ps. Le courant est observé dans le circuit en fonction du temps. Sur la
Figure 7, il y a quatre courbes, soit le courant calculé avec chaque méthode avec un pas de
100 ps ainsi que le courant calculé avec la méthode du trapèze avec un pas de 10 ps ce qui
correspond à la courbe considérée comme la référence. Il est difficile de voir les différences
entre les courbes, la Figure 8 présente donc un gros plan sur la première crête du courant.
32
Figure 7 : Formes du courant avec différents procédés d'intégration, pas de 100 JUS
e» © - ■ E u l e r A v a n t
5 8 6 Temps [s]
Figure 8 : Effet du procédé d'intégration, première bosse de courant, pas de 100 us
Il est possible d'observer que la méthode du trapèze donne le résultat le plus près de la
simulation de référence, mais que Terreur des autres méthodes demeure acceptable. On
présente ensuite l'effet d'une augmentation du pas de calcul sur les résultats pour les
différents procédés d'intégration.
33
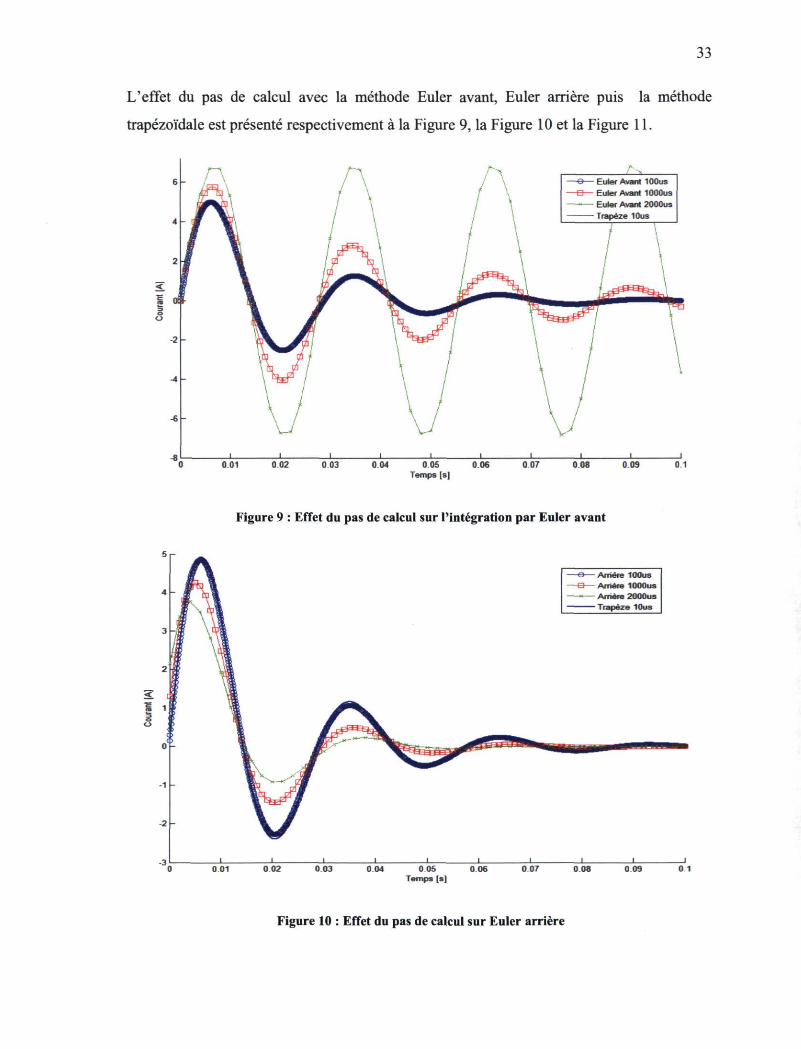
L'effet du pas de calcul avec la méthode Euler avant, Euler arrière puis la méthode
trapézoïdale est présenté respectivement à la Figure 9, la Figure 10 et la Figure 11.
■9— Euler Avant 10Ous e — Euter Avant 10OOus
Euler Avant 2000us Trapèze 10us
Figure 9 : Effet du pas de calcul sur l'intégration par Euler avant
- e — A m ë r e 100us - B — Arrière 1000us —"—Arr ière 2O00us
Trapèze 10us
Figure 10 : Effet du pas de calcul sur Euler arrière
34
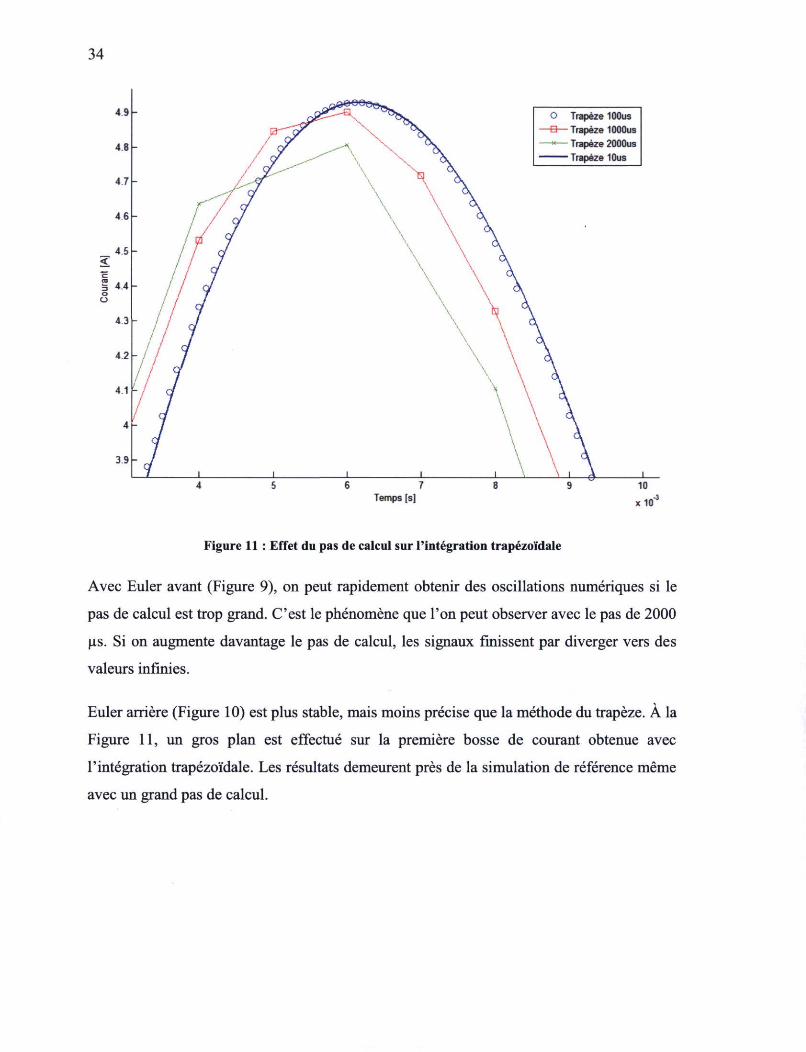
O Trapèze 100us Q—Trapèze lOOOus
Trapèze 2000us Trapèze 10us
x 10"
Figure 11 : Effet du pas de calcul sur l'intégration trapézoïdale
Avec Euler avant (Figure 9), on peut rapidement obtenir des oscillations numériques si le
pas de calcul est trop grand. C'est le phénomène que Ton peut observer avec le pas de 2000
ps. Si on augmente davantage le pas de calcul, les signaux finissent par diverger vers des
valeurs infinies.
Euler arrière (Figure 10) est plus stable, mais moins précise que la méthode du trapèze. À la
Figure 11, un gros plan est effectué sur la première bosse de courant obtenue avec
l'intégration trapézoïdale. Les résultats demeurent près de la simulation de référence même
avec un grand pas de calcul.
35
2.5. Méthodes générales de simulation numérique
Cette section présente les méthodes générales de simulation numérique capables de
considérer tous les types de composants. Jusqu'à présent, seules les considérations avec des
composants linéaires ont été présentées. L'accent est mis sur les composants non linéaires,
puisque ce sont eux qui sont visés par la méthode du double pas de calcul.
En réalité, tous les composants ne sont linéaires que dans une certaine plage de
fonctionnement ou sont fondamentalement non linéaires. Par exemple, les composants RLC
peuvent typiquement être considérés linéaires alors que les composants à commutation
naturelle ou forcée sont fondamentalement non linéaires. Les non-linéarités viennent
modifier les valeurs des composants utilisées dans les matrices ou viennent enlever ou
ajouter des éléments.
Un exemple typique de non-linéarité qui modifie la valeur des composants est la saturation
d'un transformateur. Cette non-linéarité modifie la valeur de l'inductance équivalente, ce
qui vient modifier les valeurs contenues dans les matrices. Dans la catégorie des
composants qui viennent modifier les dimensions des matrices, on peut nommer les
interrupteurs. Leur commutation vient modifier la topologie du circuit ce qui provoque une
modification de la taille des matrices.
La modification de la valeur numérique impose le calcul de la nouvelle matrice
d'admittance nodale ainsi que de son inverse ou des nouvelles matrices ABCD discrétisées
pour la méthode par variable d'état. Ce sont les opérations les plus coûteuses en termes de
temps de calcul.
En pratique, il est possible de tirer un gain de la discrétisation en utilisant quelques astuces.
L'étude de la méthode générale d'EMTP permet de mettre en évidence ces astuces. La
méthode est présentée pour Hypersim.
36
Méthode générale EMTP (Hypersim)
Composants linéaires (RLC): Ils sont discrétisés selon l'approche EMTP, par la
discrétisation trapézoïdale.
Lignes de transport : Pour faciliter les calculs de ligne, la transformation de Fortescue est
appliquée sur les paramètres de la ligne. Elle permet de transformer un système
déséquilibré triphasé sous forme de trois systèmes équilibrés. Le phénomène de
propagation de Tonde est mis à profit pour utiliser les lignes comme point de découplage
afin de distribuer les calculs sur plusieurs processeurs.
Ce phénomène peut être utilisé à partir du moment que la ligne est suffisamment longue
pour mettre un délai temporel supérieur ou égal au pas de calcul utilisé. Tel que mentionné
précédemment, avec une ligne de 15km, il y a approximativement un retard de 50 ps entre
les signaux à l'entrée et à la sortie de la ligne.
Éléments non linéaires (ne modifiant pas la topologie): Les éléments non linéaires qui ne
modifient pas la topologie (RLC) sont traités comme une résistance équivalente ( Req ) en
parallèle avec une source de courant historique ( ifttet) ), sauf pour la résistance variable qui
n'a pas de source en parallèle. La non-linéarité est représentée par une courbe
caractéristique approximée par des segments linéaires à résistance constante (ou à pente
constante sur un graphique v — i).
En théorie, il faudrait évaluer la nouvelle valeur de Req pour les conditions du pas actuel,
mais on peut uniquement utiliser les résultats du dernier pas de calcul puisque les résultats
actuels ne sont pas disponibles. Par conséquent, le changement d'un segment linéaire à un
autre est retardé d'un pas de calcul, il est donc judicieux d'éviter des changements de pente
rapide. On va ainsi mettre plus de points où la pente réelle varie rapidement.
Éléments non linéaires (modifiant la topologie): Les éléments non linéaires qui modifient
la topologie (à commutation forcée ou naturelle) sont également traités comme une
résistance variable où la résistance est très faible pour l'état de conduction et élevée pour
l'état bloqué. En simulation de réseaux, on ne s'intéresse pas à la caractéristique transitoire
d'ouverture ou de fermeture du composant. C'est pour cette raison qu'un modèle
37
pratiquement idéal peut être utilisé. On peut observer qu'en utilisant cette méthode, la
topologie n'est pas changée; d'un point de vue de la construction des équations du réseau.
Les dimensions des matrices restent inchangées.
Pour connaître quelle valeur de résistance utiliser, le simulateur doit connaître l'état de ces
éléments avant de construire la matrice d'admittance. Cela implique qu'un événement se
produisant entre deux pas de calcul ne sera considéré qu'au prochain pas. Cette contrainte
est surtout problématique avec les diodes. L'extinction du courant peut se produire entre
deux pas, cela engendre un courant négatif dans Télément et de l'oscillation numérique. Il a
été proposé d'utiliser le CDA (Critical Damping Ajustaient) [19], pour compenser
l'occurrence d'un tel événement.
Approches numériques de résolution : Il existe différentes astuces pour accélérer les
calculs. Ces astuces peuvent varier d'un simulateur à l'autre, mais les points d'optimisation
demeurent similaires dans tous les cas. Par exemple, la matrice d'admittance est
typiquement creuse et symétrique, retenir la position des zéros permet donc d'éviter des
calculs et la matrice symétrique permet d'utiliser une conversion de matrice plus efficace
(LDU vs LU). On peut aussi noter qu'il est possible de réduire la charge de calcul en
positionnant les éléments non linéaires dans la section inférieure droite de la matrice
d'admittance. Une modification de valeur demande ainsi seulement de recalculer la partie
inférieure droite de la matrice.
38
Séquence d'opération
Les simulateurs temps réel fonctionnent en deux étapes : ils commencent par la phase de
préparation de simulation où les calculs préparatoires sont réalisés. La simulation temps
réel peut ensuite débuter.
Étapes de préparation :
1. Lire les paramètres des éléments du schéma graphique. 2. Définir les signaux des nœuds (tension et courant). 3. Définir les signaux associés aux éléments : les tensions (exceptées les tensions de
nœuds), les courants (sources et sources historiques) ainsi que les signaux de contrôle.
4. Calculer la partie fixe de Tadmittance et de la matrice d'admittance Yinitial de tous les éléments ainsi que les autres paramètres requis durant la simulation.
5. Initialiser Y à Yinitial et repositionner Y pour que les éléments variables n'affectent que la partie inférieure droite de Y.
Étapes de simulation (temps réel ou différé):
À chaque pas de calcul, les opérations suivantes sont réalisées :
1. Déterminer l'état des composants commutés et la commande appliquée. 2. Si un composant commuté doit changer d'état ou un élément non linéaire change de
plage linéaire d'opération (point 6 du dernier pas de calcul) : a. Déterminer la partie de Y qui doit être recalculée due à un ou des éléments
qui changent de valeur. b. Effectuer la décomposition matricielle de la section inférieure droite.
3. Calculer les courants imposés par les sources. (Source de courant et source de tension par son modèle équivalent.)
4. Additionner les sources de courant au vecteur d'injection de courant (/). 5. Résoudre YV = / pour calculer V, les tensions nodales. 6. Si un élément non linéaire change de point d'opération (nouvelle tension) :
a. Calculer la nouvelle conductance équivalente pour cet élément, l'effet de la modification va être pris en compte au prochain pas de calcul.
7. Calculer le courant historique Inis t (pour le prochain pas). 8. Réinitialiser le vecteur d'injection (/) à zéro pour le prochain pas de calcul. 9. Additionner Ihis t au vecteur d'injection de courant (/). 10. Calculer les fonctions de contrôle.
39
Méthode générale par variables d'état (SimPowerSystems)
Lors de l'initialisation d'une simulation, un mécanisme construit le modèle d'état du circuit
électrique et construit le système équivalent qui peut être simulé par Simulink. Cela est
réalisé en plusieurs étapes par SimPowerSystems:
1. Obtenir les paramètres des blocs et évaluer la topologie du circuit. Les blocs sont
divisés en blocs linéaires et non linéaires.
2. Le modèle d'état (A, B, C, D) est calculé pour la partie linéaire du circuit. Cela
inclut les calculs de régime permanent, d'initialisation et de représentation discrète
des matrices. C'est la méthode de Tustin, équivalent à la méthode du trapèze, qui est
utilisée pour discrétiser les matrices.
3. SimPowerSystems donne alors un modèle interprétable par Simulink. Simulink gère
ensuite la simulation.
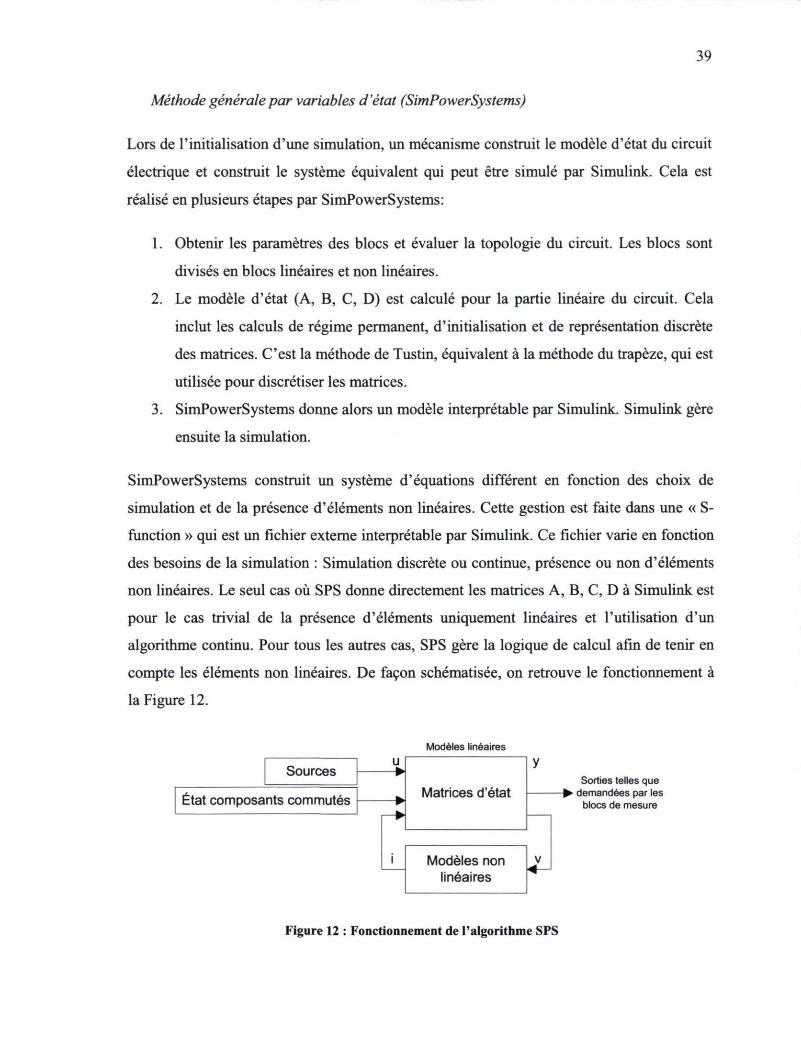
SimPowerSystems construit un système d'équations différent en fonction des choix de
simulation et de la présence d'éléments non linéaires. Cette gestion est faite dans une « S-
function » qui est un fichier externe interprétable par Simulink. Ce fichier varie en fonction
des besoins de la simulation : Simulation discrète ou continue, présence ou non d'éléments
non linéaires. Le seul cas où SPS donne directement les matrices A, B, C, D à Simulink est
pour le cas trivial de la présence d'éléments uniquement linéaires et l'utilisation d'un
algorithme continu. Pour tous les autres cas, SPS gère la logique de calcul afin de tenir en
compte les éléments non linéaires. De façon schématisée, on retrouve le fonctionnement à
la Figure 12.
Modèles linéaires
y Sources u
Matrices d'état
y Sources Matrices d'état
y Sorties telles que
État composants commutés Matrices d'état
y
État composants commutés Matrices d'état
v
État composants commutés w Matrices d'état
v
blocs de mesure
i
Matrices d'état
v i v i Modèles non linéaires
v
Figure 12 : Fonctionnement de l'algorithme SPS
40
Dans le modèle d'état linéaire, on retrouve les composants commutés qui sont modélisés
comme des sources de courant et commandées par l'état qui provient du circuit. Les
composants non linéaires sont modélisés à l'extérieur du modèle linéaire. Comme dans
Hypersim, l'effet du changement de zone linéaire de fonctionnement a un pas de calcul de
retard.
On peut utiliser différents modèles pour représenter les éléments commutés, mais avec la
discrétisation, il y a seulement le modèle de résistance pure variable qui est disponible. La
résistance est représentée par une source de courant, commandée par l'état des composants,
dans la partie linéaire de l'algorithme.
Le lecteur est référé au manuel de l'utilisateur de SPS pour plus d'informations. [20]
Chapitre III - Simulation numérique à plusieurs pas de
calcul
Ce chapitre présente les notions et principes liés aux simulations à plusieurs pas de calcul et
plus précisément pour le double pas de calcul, soit la présence d'un seul point de
découplage, séparant deux systèmes avec des pas de calcul différents, dans un réseau
électrique.
Le chapitre présente premièrement les avantages généraux de la simulation à double pas de
calcul et présente un exemple de réseau électrique avec un équipement électronique de
puissance pouvant bénéficier du double pas de calcul.
Les problématiques associées au double pas de calcul sont présentées ainsi que les résultats
des études publiées dans la littérature. Les critères d'évaluation de la précision des résultats,
qui sont utilisés pour évaluer les problématiques de la méthode, sont ensuite introduits.
La dernière section présente un exemple de circuit monophasé simple permettant d'illustrer
l'implantation d'un point de découplage à double pas de calcul. Le circuit a été choisi de
façon à illustrer la séquence d'échange d'information dans un contexte de simulation temps
réel. Il permet également d'illustrer quelques problématiques.
42
3.1. Introduction au double pas de calcul
L'objectif d'utiliser deux pas de calcul est d'éviter d'avoir à utiliser un simulateur très
performant pour l'ensemble de la simulation, qui permettrait d'atteindre le pas de calcul
nécessaire pour un modèle qui présente une dynamique rapide. On propose donc d'utiliser
du matériel plus performant pour le modèle rapide et de conserver un pas de calcul lent
pour le reste de la simulation, qui est atteignable par le matériel standard.
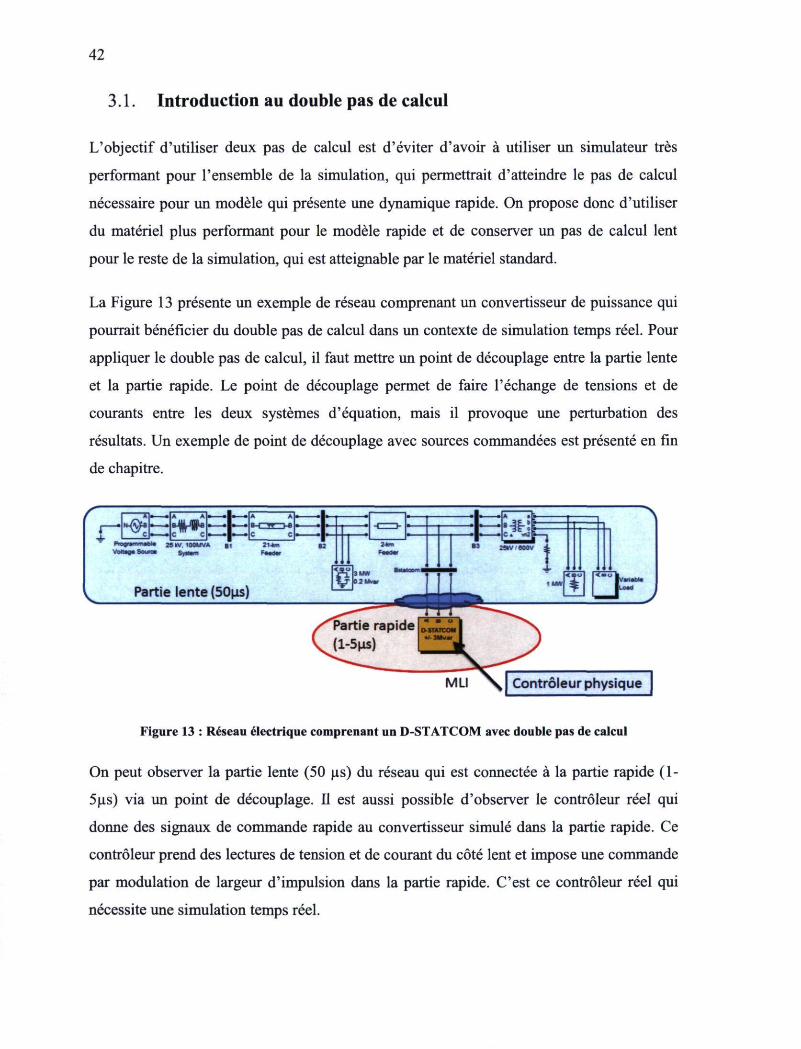
La Figure 13 présente un exemple de réseau comprenant un convertisseur de puissance qui
pourrait bénéficier du double pas de calcul dans un contexte de simulation temps réel. Pour
appliquer le double pas de calcul, il faut mettre un point de découplage entre la partie lente
et la partie rapide. Le point de découplage permet de faire l'échange de tensions et de
courants entre les deux systèmes d'équation, mais il provoque une perturbation des
résultats. Un exemple de point de découplage avec sources commandées est présenté en fin
de chapitre.
c •—• c e P n v - w r n W 26IV. 100MVA B 1 VO««g»SoiM» Syaan
Contrôleur physique
Figure 13 : Réseau électrique comprenant un D-STATCOM avec double pas de calcul
On peut observer la partie lente (50 ps) du réseau qui est connectée à la partie rapide (1-
5ps) via un point de découplage. Il est aussi possible d'observer le contrôleur réel qui
donne des signaux de commande rapide au convertisseur simulé dans la partie rapide. Ce
contrôleur prend des lectures de tension et de courant du côté lent et impose une commande
par modulation de largeur d'impulsion dans la partie rapide. C'est ce contrôleur réel qui
nécessite une simulation temps réel.
43
3.2. Problématiques du double pas de calcul
Il y a trois problématiques associées à l'implantation du double pas de calcul : l'instabilité
numérique, le retard de communication du point de découplage et la différence de la largeur
de bande des deux régions simulées.
L'instabilité numérique s'avère très peu documentée et dépendante de nombreux facteurs.
On attribue typiquement la source de l'instabilité à un problème de conditionnement de
matrice et de topologie réseau. Le présent travail présente les actions réalisées pour
stabiliser la simulation.
Le retard provient du fait que les régions découplées ne partagent pas le même système
d'équation. L'échange d'information doit donc être réalisé suite à un délai équivalent à un
pas de calcul de la région lente. La région lente doit premièrement évaluer la tension ou le
courant à passer du côté rapide. La partie rapide peut ensuite utiliser cette valeur, après un
certain délai de communication, pour réaliser les calculs rapides. La valeur finale calculée
par la partie rapide est ensuite retournée, après un autre délai de communication, à la partie
lente. Dans [15], on associe les formes d'onde non caractéristiques de la tension au nœud de
découplage à cet effet de retard de communication.
La différence de largeur de bande est la dernière problématique du double pas de calcul.
Pendant les calculs de la partie rapide, la variable d'état passée par le côté lent demeure
fixe. Cependant, en réalité, cette variable devrait continuer d'évoluer pendant le pas de
calcul et son influence n'est pas considérée dans la partie rapide. De façon à limiter cet
effet, la variable d'état utilisée du côté lent est typiquement liée à un élément réactif
important qui limite la variation.
Dans [17], un procédé d'extrapolation est utilisé afin de prédire la prochaine valeur de la
variable d'état du point de découplage. Il est mentionné que ce procédé provoque moins
d'erreurs. L'auteur utilise de l'interpolation linéaire pour déterminer la valeur instantanée à
utiliser dans la partie rapide.
Le système lent est aussi affecté par cette problématique, il reçoit la valeur finale calculée
du côté rapide. Comme le contenu harmonique de la partie rapide est plus étendu que celui
44
de la partie lente, la valeur finale passée peut ne pas être représentative du comportement
moyen. Pour limiter cet effet, à l'instar du côté lent, on tente d'utiliser une variable d'état
liée à un élément réactif important.
Ce problème est approché dans [17], avec l'application d'une moyenne sur l'ensemble des
points de la simulation rapide sur un pas de calcul de la simulation lente. Cette approche a
été préférée après avoir appliqué une moyenne glissante et un filtre passe-bas.
Tel que mentionné plus tôt, en simulation temps réel, il est parfois nécessaire de placer un
point de découplage, à pas de calcul unique, de façon à diviser une matrice de sous-système
trop importante pour être résolue en temps réel. L'implantation peut être diverse, mais dans
tous les cas, le point de découplage induit un retard de passage des variables d'état. Dans ce
cas particulier, on rencontre uniquement l'effet du retard de communication.
3.3. Résultats des études antérieures
Le principe général de la simulation à pas de calcul multiples consiste en l'intégration
numérique de groupes de variables d'état avec une largeur de pas de calcul adéquat pour
représenter les phénomènes locaux dans chaque groupe de variables d'état. La simulation à
pas multiple est un concept relativement simple, mais il demeure beaucoup de problèmes et
de questions ouvertes en ce qui concerne la théorie, les expressions décrivant la précision,
la stabilité ainsi que sur leur implantation [16].
En [16] et [21], les auteurs présentent une approche pour le choix du pas de calcul des
régions de façon à rencontrer les critères de précision, stabilité et convergence. Ils
optimisent le choix du pas de calcul de chaque groupe de variables d'état de façon à obtenir
le plus grand pas de calcul possible permettant de rencontrer Terreur maximale permise
(LTE - Local Truncation Error). Ils n'utilisent cependant pas d'équipement électronique de
puissance présentant un fonctionnement détaillé.
Dans [14] et [15], les auteurs implantent le double pas de calcul pour découpler un circuit
électronique de puissance d'un réseau électrique. Dans les deux cas, on observe un
comportement acceptable du circuit, mais dans [15], l'auteur mentionne la présence
d'ondulations importantes, non caractéristiques, sur la tension du point de découplage.
45
Le procédé d'intégration généralement utilisé est le procédé d'intégration trapézoïdale pour
chaque région découplée [14] [16]. Dans [15], Euler arrière est utilisé du côté rapide afin
d'éliminer l'oscillation numérique provoquée par la méthode trapézoïdale lors de la
commutation naturelle sur un élément inductif.
On rappelle une utilisation particulière de point de découplage en simulation de réseau,
sans double pas de calcul. Il est parfois nécessaire de découpler une partie de réseau qui ne
comporte pas de lignes suffisamment longues pour avoir un retard naturellement présent. Il
est alors nécessaire de mettre un point de découplage pour être en mesure de respecter le
temps réel. Typiquement, on place le point de découplage sur un élément fortement réactif
qui présente une inertie importante sur sa variable d'état.
Il est connu que de placer le point de découplage sur un élément réactif permet de réduire
son effet déstabilisant. Il est aussi connu que pour aider à la stabilité, il est possible
d'augmenter la valeur de Télément réactif ou d'ajouter des résistances en parallèle avec le
point de découplage. Cependant, ces modifications viennent inévitablement modifier les
résultats de simulation, tout comme le retard du point de découplage. Typiquement, on
s'intéresse premièrement à obtenir une simulation stable et qui donne des résultats
acceptables pour valider le comportement de l'équipement en rétroaction avec la
simulation.
Le travail va comparer des résultats obtenus avec un point de découplage à simple et double
pas de calcul.
46
3.4. Critères d'évaluation de la précision des résultats
L'erreur de calcul provoquée par un point de découplage se trouve dans le temps, c'est-à-
dire qu'à un instant donné, il existe une différence entre une simulation de référence et la
simulation à double pas de calcul. L'évaluation de Terreur est généralement réalisée en
observant le contenu spectral des signaux de courant et de tension de chaque côté du point
de découplage. Le contenu spectral permet de mettre en évidence l'impact de la méthode à
double pas de calcul sur le taux de distorsion harmonique et sur la distribution des
harmoniques.
C'est le critère de quantification de Terreur typiquement utilisé en simulation de réseau
puisqu'il évalue Terreur de façon globale. L'observation du contenu spectral permet de
mettre en évidence des effets du point de découplage qu'il serait impossible de constater
uniquement en observant les formes d'onde. Il est d'autant plus nécessaire d'avoir un
critère global en sachant que les signaux observés s'échelonnent typiquement sur plusieurs
périodes du réseau.
Un second critère global, qui peut être utilisé, est la mesure de l'énergie ou de la puissance
échangée au point de découplage. C'est un critère d'évaluation global qui peut renseigner
sur la précision des résultats. Il n'y a cependant pas de référence de l'utilisation d'une telle
méthode appliquée à un point de découplage, ce travail présente donc les mesures de
puissance réalisées de chaque côté du point de découplage. Il est intéressant de noter que
certains auteurs ont utilisés ce principe pour déterminer Terreur d'échange d'énergie à
chaque pas de calcul. Cela était réalisé afin d'appliquer une correction sur le pas de calcul
utilisé et réduire itérativement cette erreur à un seuil acceptable [22]. Ce n'était pas
appliqué à un contexte de simulation temps réel.
Le prochain exemple présente l'implantation d'un point de découplage à double pas de
calcul ainsi que la séquence d'échange d'information qui est imposée dans un contexte de
simulation temps réel. Les problématiques de la méthode y sont introduites.
47
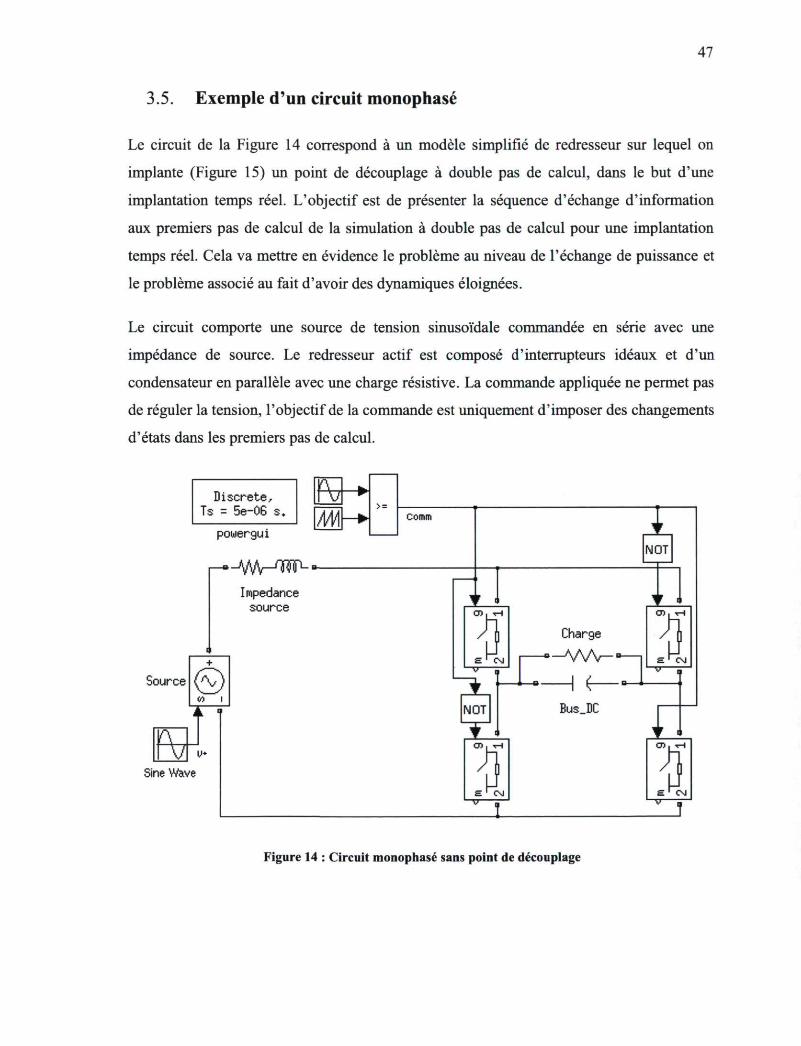
3.5. Exemple d'un circuit monophasé
Le circuit de la Figure 14 correspond à un modèle simplifié de redresseur sur lequel on
implante (Figure 15) un point de découplage à double pas de calcul, dans le but d'une
implantation temps réel. L'objectif est de présenter la séquence d'échange d'information
aux premiers pas de calcul de la simulation à double pas de calcul pour une implantation
temps réel. Cela va mettre en évidence le problème au niveau de l'échange de puissance et
le problème associé au fait d'avoir des dynamiques éloignées.
Le circuit comporte une source de tension sinusoïdale commandée en série avec une
impédance de source. Le redresseur actif est composé d'interrupteurs idéaux et d'un
condensateur en parallèle avec une charge résistive. La commande appliquée ne permet pas
de réguler la tension, l'objectif de la commande est uniquement d'imposer des changements
d'états dans les premiers pas de calcul.
Discrete, Ts = 5e-0G s.
powergui
fV m
>-VW-W— Impedance
source
Source ©
FV Sine Wave
comm
ti NOT
Charge
Bus.DC
T NOT
I
Figure 14 : Circuit monophasé sans point de découplage
48
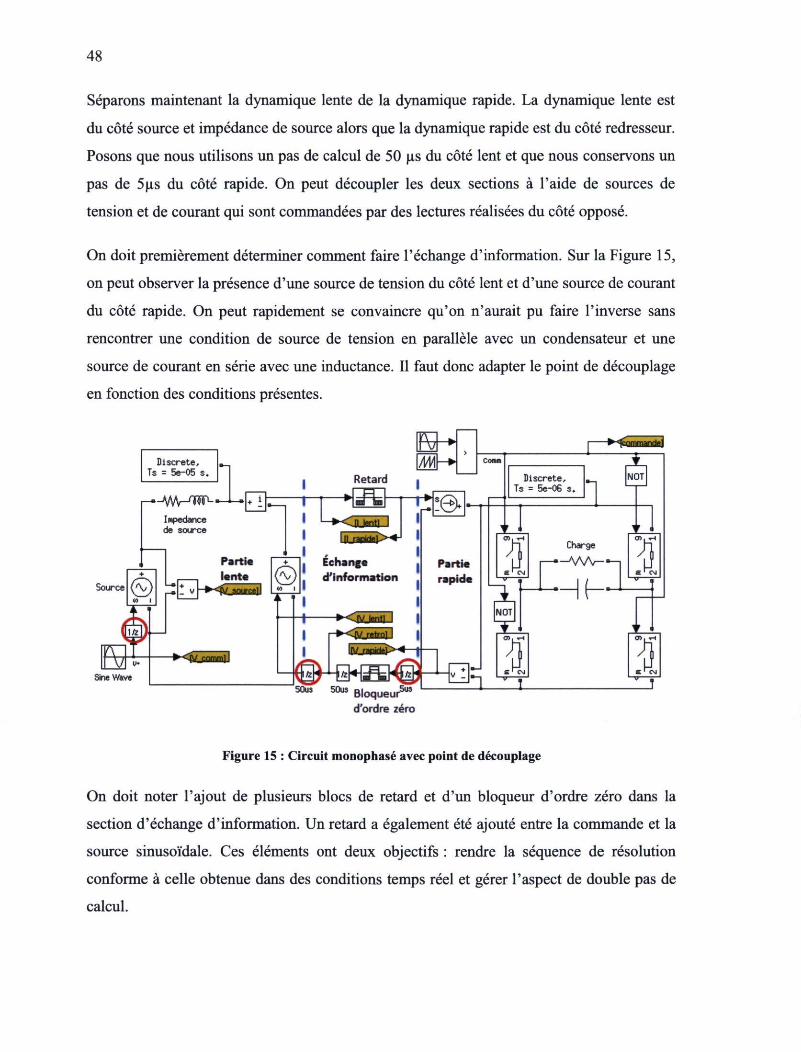
Séparons maintenant la dynamique lente de la dynamique rapide. La dynamique lente est
du côté source et impédance de source alors que la dynamique rapide est du côté redresseur.
Posons que nous utilisons un pas de calcul de 50 ps du côté lent et que nous conservons un
pas de 5ps du côté rapide. On peut découpler les deux sections à l'aide de sources de
tension et de courant qui sont commandées par des lectures réalisées du côté opposé.
On doit premièrement déterminer comment faire l'échange d'information. Sur la Figure 15,
on peut observer la présence d'une source de tension du côté lent et d'une source de courant
du côté rapide. On peut rapidement se convaincre qu'on n'aurait pu faire l'inverse sans
rencontrer une condition de source de tension en parallèle avec un condensateur et une
source de courant en série avec une inductance. Il faut donc adapter le point de découplage
en fonction des conditions présentes.
Discrete, Ts = 5e-05 s.
r—vw-w--Impedance de source
Source O Partie lente ©
I t | * v | - iX iy «nim-ll [_£ L
8Sine Wave
t^fjjztmm] I
Retard
L[i_taàdêî>*J
Echange d' in format ion
- » < | V | « i ' l
rK^ïjëtoDD
H m
50us 50U3 o i Sus '■ a Bloqueur* d'ordre zéro
:6>
Partie rapide
Discrete, Ts = 5e-06 s
NOT
S1 CM
3. NOT
Charge
—VW-—i
H ( -
v , OT|jrl
il E ' CM
en i r i
Figure 15 : Circuit monophasé avec point de découplage
On doit noter l'ajout de plusieurs blocs de retard et d'un bloqueur d'ordre zéro dans la
section d'échange d'information. Un retard a également été ajouté entre la commande et la
source sinusoïdale. Ces éléments ont deux objectifs : rendre la séquence de résolution
conforme à celle obtenue dans des conditions temps réel et gérer l'aspect de double pas de
calcul.
49
Pour rendre la séquence conforme à celle d'un simulateur temps réel, on doit considérer
l'effet du retard d'un pas de calcul entre l'application d'une commande à une source et la
disponibilité des résultats de tension et de courant aux différents endroits dans le circuit.
Comme SPS donne le résultat de façon instantané, on peut compenser cet effet en lui
passant les commandes en retard. La lecture des résultats se fait donc dans le bon pas de
calcul. Cela peut devenir important pour synchroniser des événements si on compare les
résultats avec un simulateur temps réel. Ce sont les retards encerclés qui remplissent cette
fonction. Pour le côté rapide, on a préféré mettre le retard en sortie pour illustrer l'impact
de la position du retard (voir la Figure 16).
Pour gérer le double pas de calcul, on passe la valeur finale calculée de chaque côté de
l'autre côté en ajoutant un retard de communication d'un multiple entier du pas de calcul
utilisé du côté lent. On choisit un retard égal au pas de calcul lent. En pratique, il est
raisonnable d'atteindre un temps de communication inférieur à 50 ps.
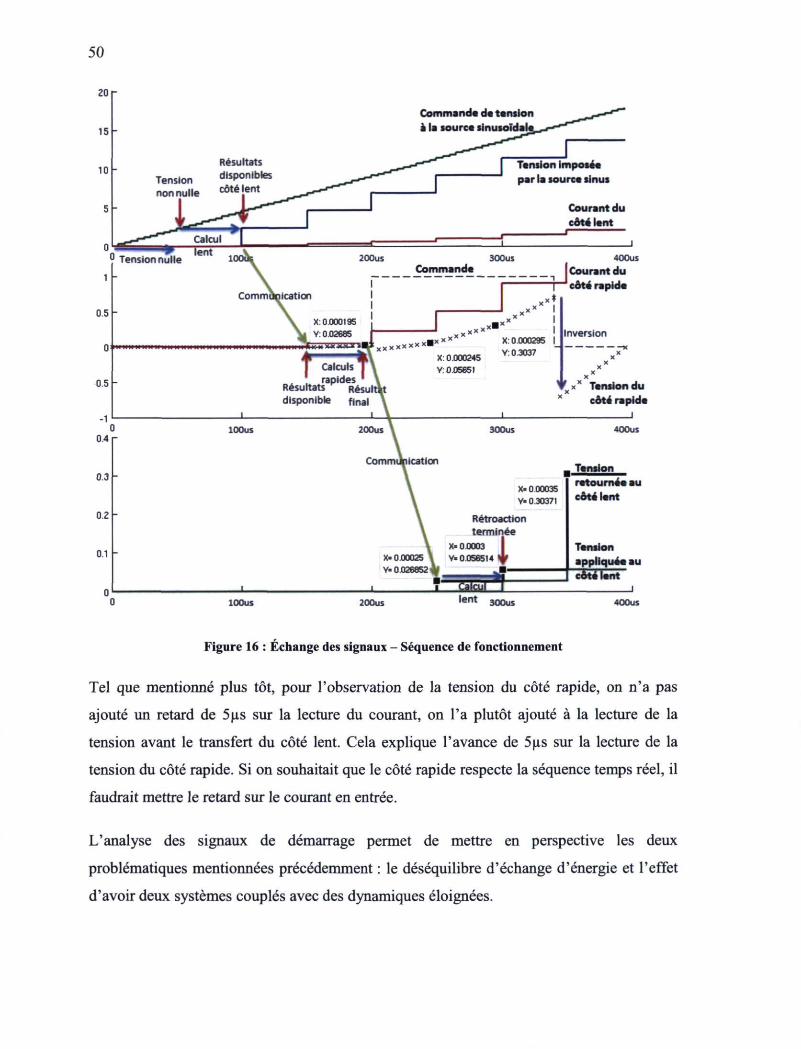
La Figure 16 permet d'observer les différents signaux identifiés sur la Figure 15. Pour
analyser la séquence de fonctionnement, il est plus simple de se concentrer sur les premiers
pas de calcul de la simulation. La séquence s'analyse complètement sur cinq pas de calcul
en suivant l'effet de l'application d'une tension non nulle (à t = 50 ps).
1. Durant le premier pas de calcul lent, les tensions et courants sont calculés du côté
lent. Le résultat de courant à donner au côté rapide devient disponible après 50 ps.
2. Durant le second pas de calcul lent, la valeur de courant calculée au pas précédent
est transférée du côté rapide de la simulation.
3. Durant le troisième pas de calcul lent, la valeur de courant est disponible du côté
rapide pour calculer la tension aux bornes du condensateur. Après 10 pas de calcul
rapide, le résultat de tension finale est disponible.
4. Durant le quatrième pas de calcul lent, la valeur finale de tension calculée du côté
rapide est transférée du côté lent.
5. Durant le cinquième pas de calcul lent, les calculs sont réalisés du côté lent avec
l'effet de la rétroaction de la tension calculée du côté rapide.
50
Figure 16 : Échange des signaux - Séquence de fonctionnement
Tel que mentionné plus tôt, pour l'observation de la tension du côté rapide, on n'a pas
ajouté un retard de 5ps sur la lecture du courant, on Ta plutôt ajouté à la lecture de la
tension avant le transfert du côté lent. Cela explique l'avance de 5ps sur la lecture de la
tension du côté rapide. Si on souhaitait que le côté rapide respecte la séquence temps réel, il
faudrait mettre le retard sur le courant en entrée.
L'analyse des signaux de démarrage permet de mettre en perspective les deux
problématiques mentionnées précédemment : le déséquilibre d'échange d'énergie et l'effet
d'avoir deux systèmes couplés avec des dynamiques éloignées.
51
Au niveau du déséquilibre d'échange de puissance ou d'énergie, on observe rapidement ce
phénomène en évaluant le produit tension courant à chaque pas de calcul, de chaque côté du
point de découplage, aux bornes du point de découplage. Au niveau des variables d'état, le
retard ne provoque qu'un décalage de leur valeur. Pour l'énergie, les calculs sont réalisés
pour des valeurs de courant et de tension qui ne sont plus en lien de causalité. Par exemple,
à 100 ps, le courant est non nul du côté lent, mais la source de tension commandée donne
une valeur nulle. Ce n'est qu'à 300 ps que la source de tension commandée retourne la
rétroaction de tension calculée du côté rapide. Il y a donc un retard de rétroaction de 200
ps. En calculant l'énergie échangée entre 300 et 350 ps, on utilise une valeur de courant
actuelle avec une valeur « passée » de rétroaction de tension. Le prochain chapitre présente
une analyse plus poussée de l'effet en régime permanent. On appelle cette erreur sur le
calcul de puissance, la puissance non caractéristique.
Au niveau de l'effet des dynamiques différentes, il est possible d'observer la problématique
très clairement au moment de la commutation des interrupteurs. Au temps 350 ps, on peut
observer l'inversion de la tension aux bornes du convertisseur. Comme il peut se produire
plusieurs événements avant de passer la valeur finale, la valeur finale passée peut être non
représentative du comportement moyen, qui a pris place du côté rapide.
Le circuit étudié ne se prête pas bien à l'implantation de la technique du double pas de
calcul. Comme la tension se fait inverser à chaque commutation, une inversion complète de
la direction de l'énergie s'y produit. Le côté lent peut donc se faire passer des valeurs qui
sont grandement différentes du comportement moyen qui a pu prendre place du côté rapide.
Le circuit a tout de même permis de montrer simplement les notions de base du double pas
de calcul.
3.6. Conclusion
Ce chapitre a permis de présenter les notions de base liées à la simulation à double pas de
calcul et d'introduire les perturbations que la méthode entraîne. Les perturbations ont été
observées sur un circuit simple où on a pu constater la différence des valeurs de tension et
de courant dans les premiers pas de calculs et le phénomène de déséquilibre d'énergie. Ces
notions étant introduites, il est maintenant possible de traiter des cas plus complets.

Chapitre IV - Simulation à double pas de calcul d'un réseau sans commutations. Ce chapitre présente les problèmes liés à l'implantation de simulations à double pas de
calcul dans un réseau électrique qui ne contient pas de convertisseur de puissance.
Évidemment, il n'y a pas d'avantages à implanter le double pas de calcul sur un tel réseau.
Cependant, l'étude du cas sans commutations permet de mieux mettre en perspective les
résultats d'un réseau avec commutations.
Le chapitre commence par présenter la méthodologie suivie, aux chapitres 4 et 5, pour
expliquer le comportement de l'instabilité numérique et de la puissance non caractéristique
liée au double pas de calcul.
Le premier objectif du chapitre est de présenter la notion d'instabilité numérique due à la
présence de l'utilisation du double pas de calcul. Ce phénomène est connu, mais très peu
détaillé dans la littérature. Des moyens d'amortissement sont connus pour rendre la
simulation numériquement stable, mais encore une fois peu détaillés. Le chapitre va ainsi
présenter les notions associées à l'amortissement, par charge résistive, d'un point de
découplage.
Le second objectif est de présenter les mesures de puissance dans un réseau avec un point
de découplage. Les sources de la distorsion de cette mesure ont été présentées au chapitre
précédent.
54
4.1. Méthodologie générale
Lors des travaux, il s'est avéré judicieux de partir de cas simples pour expliquer la source
des différents comportements rencontrés avec un réseau comprenant du double pas de
calcul avec une charge commutée. Pour présenter les résultats, il est aussi préférable de
suivre cette logique. Ainsi, dans le chapitre 4, on s'intéresse d'abord à des cas simplifiés
qui vont permettre d'isoler et comprendre les comportements rencontrés dans un réseau
pouvant bénéficier du double pas de calcul. Le chapitre 5 traite ensuite le cas d'un réseau
avec un DSTATCOM.
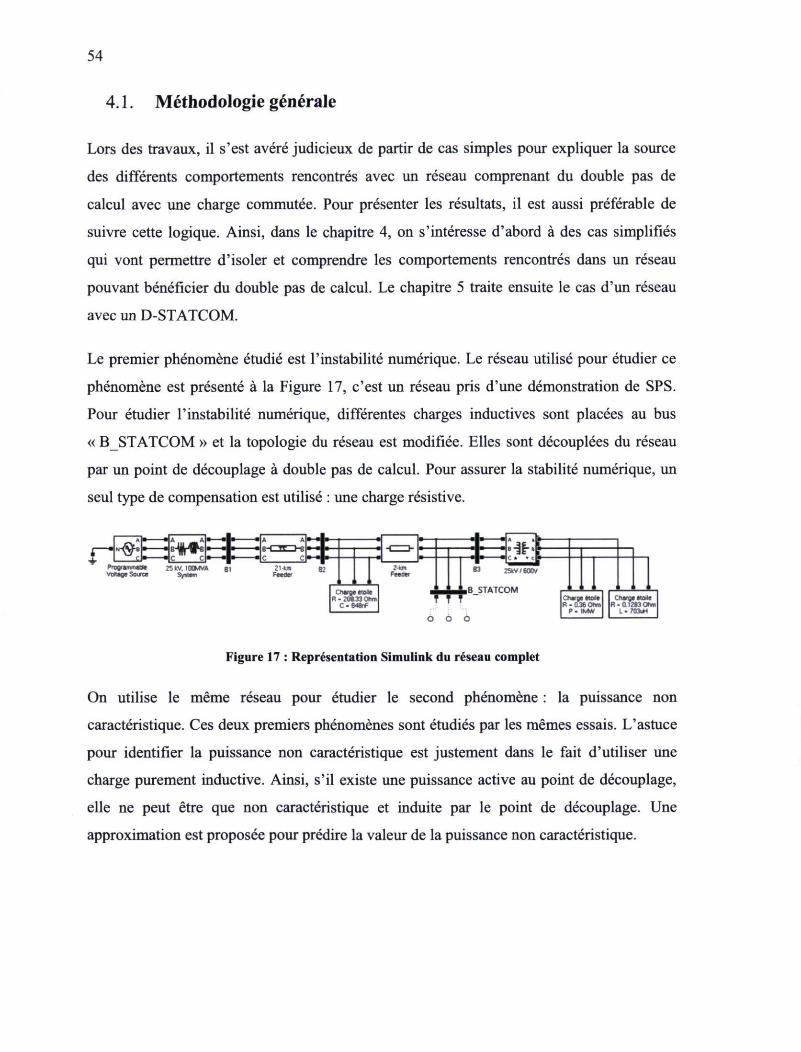
Le premier phénomène étudié est l'instabilité numérique. Le réseau utilisé pour étudier ce
phénomène est présenté à la Figure 17, c'est un réseau pris d'une démonstration de SPS.
Pour étudier l'instabilité numérique, différentes charges inductives sont placées au bus
« BSTATCOM » et la topologie du réseau est modifiée. Elles sont découplées du réseau
par un point de découplage à double pas de calcul. Pour assurer la stabilité numérique, un
seul type de compensation est utilisé : une charge résistive.
" r Q . 1 . A A
• * * c C
î - O O î c c
Programma» 25 tf/. 100MVA s i voltage Soi/ce System
21 Im f e e »
B *
t : iwge eioiie R - 208.33 Ohm
C-8.KJnF
I" • [ * «I
■H+ B STATCOM Charge étale R-036C»m
~ . llvlW
Charge tune R-01283Ohm
L-703KH
Figure 17 : Représentation Simulink du réseau complet
On utilise le même réseau pour étudier le second phénomène : la puissance non
caractéristique. Ces deux premiers phénomènes sont étudiés par les mêmes essais. L'astuce
pour identifier la puissance non caractéristique est justement dans le fait d'utiliser une
charge purement inductive. Ainsi, s'il existe une puissance active au point de découplage,
elle ne peut être que non caractéristique et induite par le point de découplage. Une
approximation est proposée pour prédire la valeur de la puissance non caractéristique.
55
Ensuite, pour étendre la compréhension de la puissance non caractéristique, un réseau
comprenant deux sources de tensions qui s'échangent de la puissance via une impédance
est étudié. Une des deux sources est découplée par un point de découplage à double pas de
calcul. Le comportement de la puissance non caractéristique diffère du cas où une charge
simple est découplée. Ce cas est l'équivalent d'un fonctionnement idéal d'un compensateur
réseau de type D- STATCOM.
Le chapitre 5 explore ensuite l'effet des commutations sur l'instabilité numérique et sur la
puissance non caractéristique. Un compensateur statique, soit un D-STATCOM, est utilisé.
Celui-ci est positionné au bus « BSTATCOM » de la Figure 17 et il est connecté au réseau
par un point de découplage à double pas de calcul. C'est le premier cas présenté où le pas
de calcul du côté rapide doit effectivement être de 5ps pour bien représenter le
comportement. Les relations développées sur les deux cas simples étudiés permettent de
mettre en perspective les notions d'instabilité numérique et de puissance non
caractéristiques rencontrées avec le D-STATCOM. C'est au chapitre 5 que les premières
analyses de formes d'onde et de contenu harmonique sont présentées.
Il est intéressant de noter que le chapitre 6 permet ensuite d'enrichir la compréhension des
phénomènes en traitant un cas de convertisseur triphasé avec une commande simplifiée.
Ces résultats sont présentés dans l'optique de comparer les résultats entre SPS et Hypersim.
56
4.2. Réseau avec charge passive découplée
Le réseau utilisé pour étudier le phénomène d'instabilité numérique et la puissance non
caractéristique a été présenté à la Figure 17. C'est un réseau simple composé d'une source
de 25 kV avec une puissance de courtcircuit de 100 MVA. La source est connectée à une
ligne de 21 km modélisée par un modèle en n. La sortie de la ligne est connectée à une
compensation shunt et à une ligne courte (feeder) de 2 km qui alimente le bus « B
STATCOM » ainsi qu'un transformateur abaisseur connecté à une charge. Voici les valeurs
importantes :
• Impédance de source :
[((25 x 103)2 /100 x 106)/10] H et [((25 x 103)2 /100 x 10 6 ) / (2TT ■ 60)] H
• Ligne: [RI = 0.1153, RO = 0.3963, Ll = 1.048, L0 = 2.73, Cl = 11.33, C0 = 5.338]
Les unités sont en Q/km, mH/km et pF/km.
• Compensation shunt : 208.33 Q. en parallèle avec un condensateur de 0.848 pF
• Ligne courte (feeder): [RI = 0.2306 R0 = 0.7926, Ll = 0.002096, L0 = 0.00546]
Les unités sont en Q. et H.
• Transformateur : 6 MVA, 25000/600 V
• Charge connectée : Il y a trois éléments en parallèle par phase : une résistance de
0.36 Q, une seconde de 0.1283 Q. et une inductance de 703 pH.
La charge inductive découplée est connectée au bus « BSTATCOM ». La charge est
connectée au secondaire d'un transformateur abaisseur idéal (25000/2165 V) qui est
simplifié dans la logique d'échange par un rapport de transformation. La Figure 18 présente
l'ensemble des éléments du modèle. On doit noter la position du bus « parasite » et du bus
« charge ». Les résistances parasites sont connectées au bus « parasite » et les sources de
courant au bus « charge ». On doit également noter la position de la charge simple avec les
sources de tension commandées du côté rapide de la simulation. On utilise les mêmes bus
dans la simulation de référence pour mesurer séparément l'influence de la charge parasite et
de la charge simple. On remarque que les sources commandées sont installées dans le sens
opposé de ce qui a été présenté au chapitre 3. On retrouve Télément inductif du côté rapide
dans ce casci.
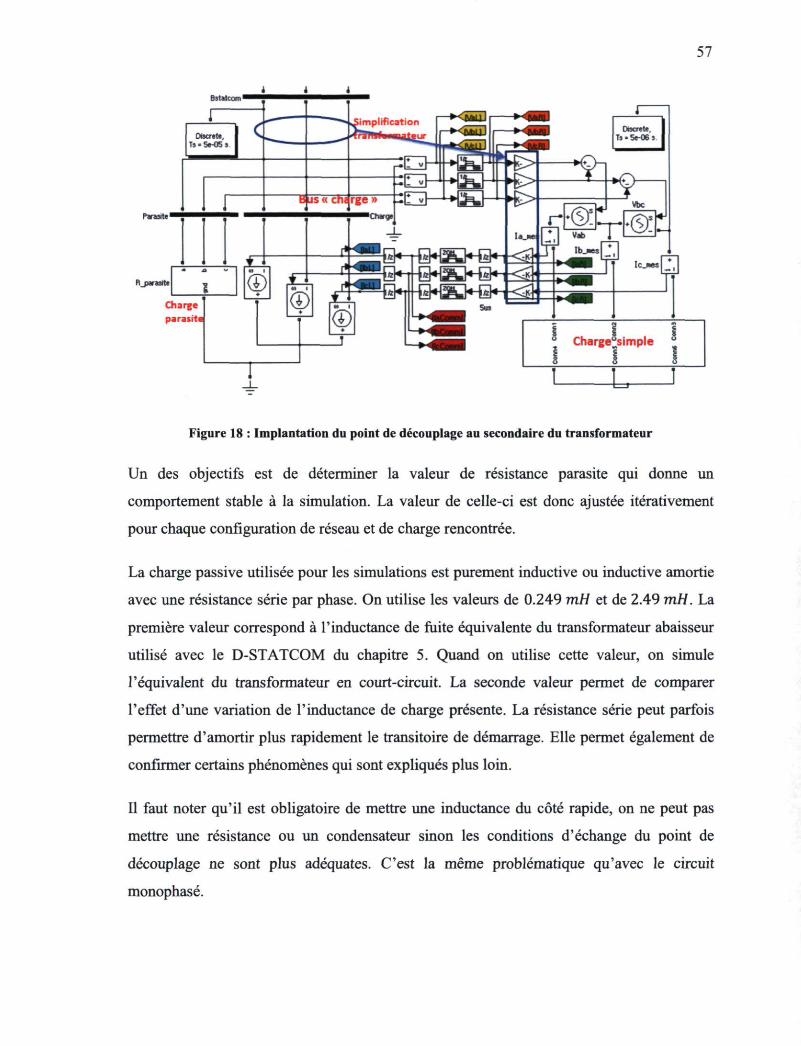
57
Parasite11
R_psrasite
Charge
parasiti
i i r
(D (D
o^na1^ B JS « ch: rge » Hl! v\
■Charge *@ÏH->È>
EH-rB*STKS*i^i5 0<-r-EH^HiKi^:
(D / I • < I 5w
lajm r
$ ■
Vbc
Varb T ©:
I Charge_simple
Figure 18 : Implantation du point de découplage au secondaire du transformateur
Un des objectifs est de déterminer la valeur de résistance parasite qui donne un
comportement stable à la simulation. La valeur de celleci est donc ajustée itérativement
pour chaque configuration de réseau et de charge rencontrée.
La charge passive utilisée pour les simulations est purement inductive ou inductive amortie
avec une résistance série par phase. On utilise les valeurs de 0.249 mH et de 2.49 mH. La
première valeur correspond à l'inductance de fuite équivalente du transformateur abaisseur
utilisé avec le DSTATCOM du chapitre 5. Quand on utilise cette valeur, on simule
l'équivalent du transformateur en courtcircuit. La seconde valeur permet de comparer
l'effet d'une variation de l'inductance de charge présente. La résistance série peut parfois
permettre d'amortir plus rapidement le transitoire de démarrage. Elle permet également de
confirmer certains phénomènes qui sont expliqués plus loin.
Il faut noter qu'il est obligatoire de mettre une inductance du côté rapide, on ne peut pas
mettre une résistance ou un condensateur sinon les conditions d'échange du point de
découplage ne sont plus adéquates. C'est la même problématique qu'avec le circuit
monophasé.
58
4.3. Stabilité numérique
On rappelle premièrement qu'il est connu que l'ajout d'un point de découplage peut
provoquer de l'instabilité numérique. C'est le cas lors de l'ajout de point de découplage
dans les simulations avec un seul pas de calcul. Il n'existe cependant pas de publications
connues sur ce sujet et les conditions de stabilité demeurent difficiles à définir. Pour éviter
l'instabilité, il est connu, mais non rapporté, qu'il est possible de mettre une charge
résistive ou réactive supplémentaire au point de découplage rencontré.
Méthodologie
On souhaite premièrement déterminer la valeur de charge résistive critique qui permet
d'obtenir la stabilité numérique pour différentes configurations de réseau. Une simulation
est réalisée pour chaque configuration avec les deux charges purement inductives
mentionnées précédemment. Le réseau est simulé à 50 ps et la charge inductive à 5ps.
Comme il peut être désiré d'utiliser un pas de calcul plus petit pour le côté rapide, il est
pertinent de déterminer l'impact sur la stabilité numérique de l'utilisation de différentes
valeurs de pas de calcul. C'est pour cette raison qu'en deuxième partie on observe l'effet
sur la stabilité numérique de l'utilisation de différentes configurations de point de
découplage à double et simple pas de calcul.
C'est cette méthodologie qui est suivie dans la section « Résultats de simulation ». Les
résultats sont présentés conjointement pour les notions de stabilité numérique et de
puissance non caractéristique.
59
4.4. Puissance non caractéristique
Dans le précédent chapitre, la notion de puissance non caractéristique a été introduite avec
l'étude du circuit monophasé. Il a été possible d'observer que les calculs de puissance ou
d'énergie sont nécessairement perturbés par le point de découplage, mais on n'a observé
que l'effet instantané en début de simulation. Avec le réseau, on évalue l'impact du point
de découplage sur le calcul de puissance comparativement à ce qui est obtenu avec une
simulation de référence, soit une simulation sans point de découplage.
Pour calculer la puissance ou l'énergie on utilise les valeurs instantanées de courant et de
tension présentes de chaque côté du point de découplage. C'est-à-dire qu'on n'apporte pas
de compensation pour ajouter un retard sur les valeurs de tension. On calcule les puissances
actives et réactives comme suit :
P = VaIa + VbIb + VcIc I V 1
Q = -i= (ybcia + vcaib + vabic) IV"2
Méthodologie
Tel que mentionné précédemment, les résultats sont présentés en même temps pour
présenter les notions d'instabilité numérique et de puissance non caractéristique. La
première section des résultats présente donc le comportement de la puissance non
caractéristique rencontré dans le réseau avec différentes configurations et avec les deux
valeurs de charge inductive. Le réseau est simulé à 50 ps et la charge inductive à 5ps.
En deuxième partie, on cherche l'effet du choix de pas de calcul de chaque côté du point de
découplage sur la puissance non caractéristique. On observe donc l'effet de la variation du
pas de calcul utilisé ainsi que l'effet du double et du simple pas de calcul.
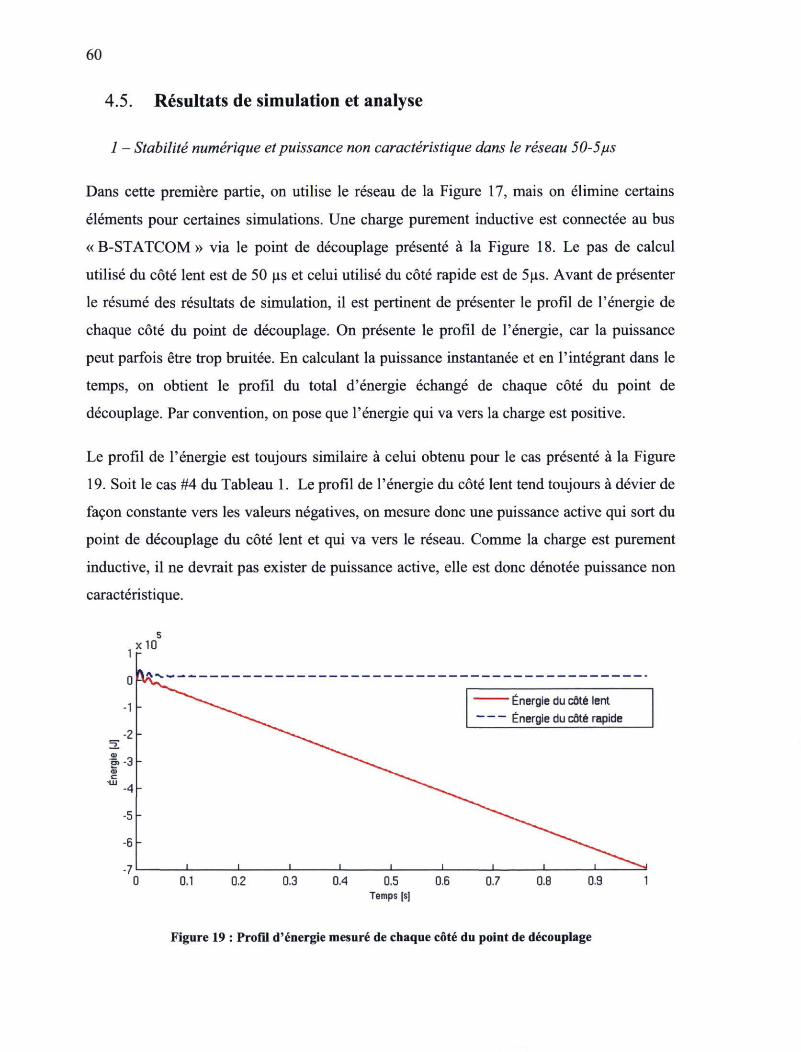
60
4.5. Résultats de simulation et analyse
1 - Stabilité numérique et puissance non caractéristique dans le réseau 50-5fis
Dans cette première partie, on utilise le réseau de la Figure 17, mais on élimine certains
éléments pour certaines simulations. Une charge purement inductive est connectée au bus
«B-STATCOM» via le point de découplage présenté à la Figure 18. Le pas de calcul
utilisé du côté lent est de 50 ps et celui utilisé du côté rapide est de 5ps. Avant de présenter
le résumé des résultats de simulation, il est pertinent de présenter le profil de l'énergie de
chaque côté du point de découplage. On présente le profil de l'énergie, car la puissance
peut parfois être trop bruitée. En calculant la puissance instantanée et en l'intégrant dans le
temps, on obtient le profil du total d'énergie échangé de chaque côté du point de
découplage. Par convention, on pose que l'énergie qui va vers la charge est positive.
Le profil de l'énergie est toujours similaire à celui obtenu pour le cas présenté à la Figure
19. Soit le cas #4 du Tableau 1. Le profil de l'énergie du côté lent tend toujours à dévier de
façon constante vers les valeurs négatives, on mesure donc une puissance active qui sort du
point de découplage du côté lent et qui va vers le réseau. Comme la charge est purement
inductive, il ne devrait pas exister de puissance active, elle est donc dénotée puissance non
caractéristique.
x10
Énergie du côté lent Énergie du côté rapide
0.5 Temps [s]
Figure 19 : Profil d'énergie mesuré de chaque côté du point de découplage
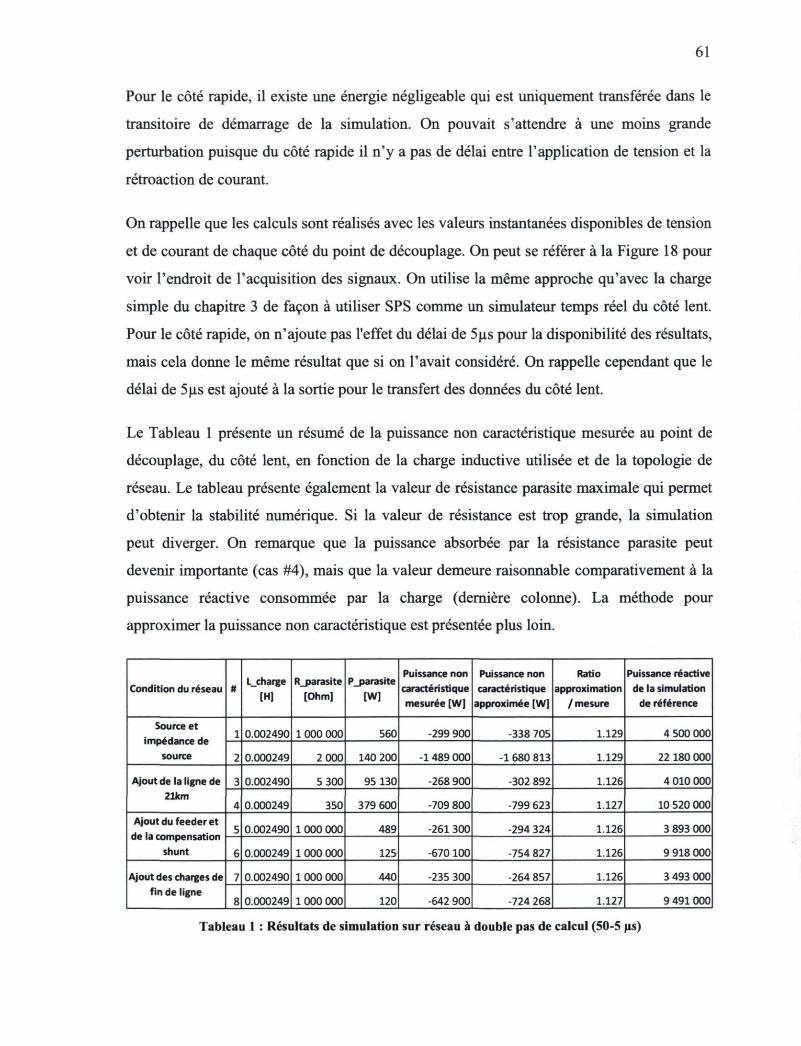
61
Pour le côté rapide, il existe une énergie négligeable qui est uniquement transférée dans le
transitoire de démarrage de la simulation. On pouvait s'attendre à une moins grande
perturbation puisque du côté rapide il n'y a pas de délai entre l'application de tension et la
rétroaction de courant.
On rappelle que les calculs sont réalisés avec les valeurs instantanées disponibles de tension
et de courant de chaque côté du point de découplage. On peut se référer à la Figure 18 pour
voir l'endroit de l'acquisition des signaux. On utilise la même approche qu'avec la charge
simple du chapitre 3 de façon à utiliser SPS comme un simulateur temps réel du côté lent.
Pour le côté rapide, on n'ajoute pas l'effet du délai de 5ps pour la disponibilité des résultats,
mais cela donne le même résultat que si on l'avait considéré. On rappelle cependant que le
délai de 5ps est ajouté à la sortie pour le transfert des données du côté lent.
Le Tableau 1 présente un résumé de la puissance non caractéristique mesurée au point de
découplage, du côté lent, en fonction de la charge inductive utilisée et de la topologie de
réseau. Le tableau présente également la valeur de résistance parasite maximale qui permet
d'obtenir la stabilité numérique. Si la valeur de résistance est trop grande, la simulation
peut diverger. On remarque que la puissance absorbée par la résistance parasite peut
devenir importante (cas #4), mais que la valeur demeure raisonnable comparativement à la
puissance réactive consommée par la charge (dernière colonne). La méthode pour
approximer la puissance non caractéristique est présentée plus loin.
Condition du réseau n L charge [H]
R parasite [Ohm]
P_parasite [W]
Puissance non caractéristique mesurée [W]
Puissance non caractéristique
approximée [W]
Ratio approximation
/ mesure
Puissance réactive de la simulation
de référence
Source et impédance de
source
i 0.002490 1 000 000 560 -299 900 -338 705 1.129 4 500 000 Source et
impédance de source 2 0.000249 2 000 140 200 -1 489 000 -1 680 813 1.129 22 180 000
Ajout de la ligne de 21km
3 0.002490 5 300 95 130 -268 900 -302 892 1.126 4 010 000 Ajout de la ligne de 21km
4 0.000249 350 379 600 -709 800 -799 623 1.127 10 520 000 Ajout du feeder et de la compensation
shunt
5 0.002490 1000 000 489 -261 300 -294 324 1.126 3 893 000 Ajout du feeder et de la compensation
shunt 6 0.000249 1000 000 125 -670 100 -754 827 1.126 9 918 000
Ajout des charges de fin de ligne
7 0.002490 1 000 000 440 -235 300 -264 857 1.126 3 493 000 Ajout des charges de fin de ligne
8 0.000249 1000 000 120 -642 900 -724 268 1.127 9 491 000
Tableau 1 : Résultats de simulation sur réseau à double pas de calcul (50-5 fis )
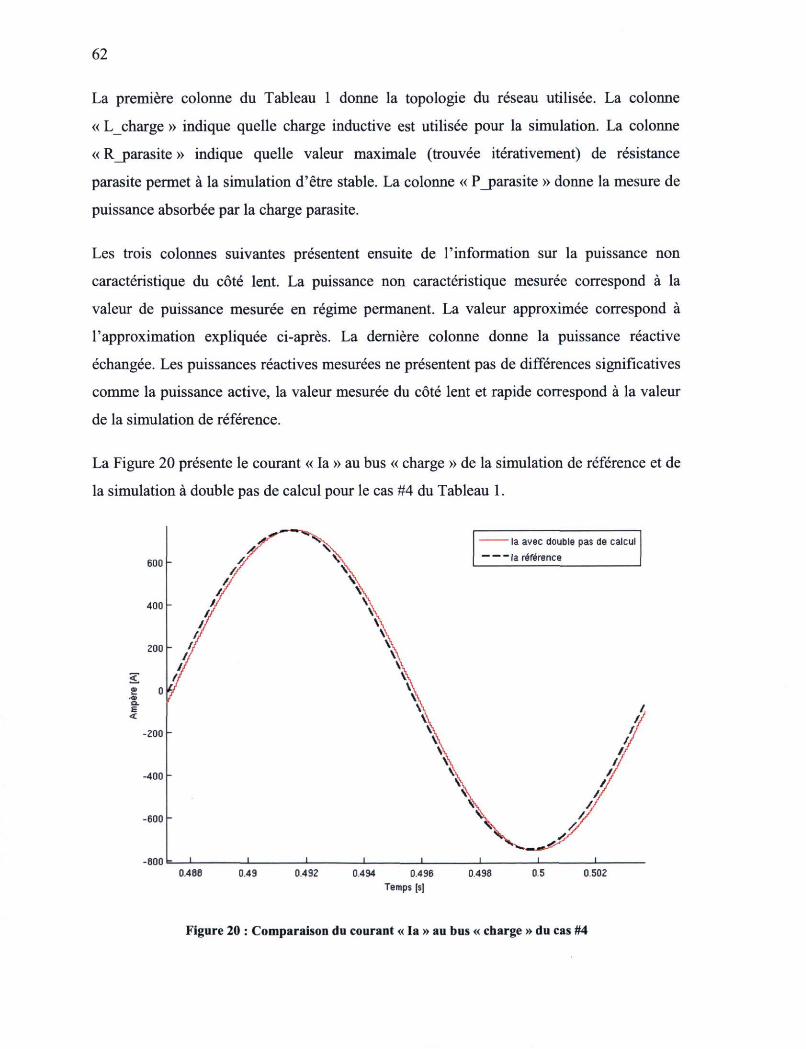
62
La première colonne du Tableau 1 donne la topologie du réseau utilisée. La colonne
« Lcharge » indique quelle charge inductive est utilisée pour la simulation. La colonne
« R_parasite » indique quelle valeur maximale (trouvée itérativement) de résistance
parasite permet à la simulation d'être stable. La colonne « P_parasite » donne la mesure de
puissance absorbée par la charge parasite.
Les trois colonnes suivantes présentent ensuite de l'information sur la puissance non
caractéristique du côté lent. La puissance non caractéristique mesurée correspond à la
valeur de puissance mesurée en régime permanent. La valeur approximée correspond à
l'approximation expliquée ci-après. La dernière colonne donne la puissance réactive
échangée. Les puissances réactives mesurées ne présentent pas de différences significatives
comme la puissance active, la valeur mesurée du côté lent et rapide correspond à la valeur
de la simulation de référence.
La Figure 20 présente le courant « la » au bus « charge » de la simulation de référence et de
la simulation à double pas de calcul pour le cas #4 du Tableau 1.
s <
0.488 0.49
A ? V A ? V la avec double pas de calcul
600 - ~ ~ l a référence
t f \v t f V.
400 rf \ i f \ i f \
t f Y zoo - t f V
t f \ / / V tf V
0 { \ V \ / Vi /
200 V / V / \ / \ /
400 . V», / V t f V /
S. * f 600 V s/
arm i i 1 1 1 1 1 1
0.492 0.494 0.496 Temps [s]
0.498 0.5 0.502
Figure 20 : Comparaison du courant « la » au bus « charge » du cas #4
63
Estimation de la puissance non caractéristique
L'approximation est basée sur l'hypothèse que la puissance non caractéristique du côté lent
peut être approximée par la mesure de l'amplitude des signaux de tension et de courant au
point de découplage ainsi que du retard induit par le point de découplage. En supposant que
seul le retard est la cause de la puissance non caractéristique, on obtient la relation suivante
pour approximer la puissance non caractéristique :
Pnon.carac = 3VIcos(n/2 + re tard) IV~3
Comme le retard est positif, l'angle est supérieur à n/2 et la puissance active est négative.
L'équation n'est cependant pas exacte. Selon l'équation, pour le cas particulier de la
configuration étudiée, si on pose un retard de rétroaction de 200 ps (voir chapitre 3), la
puissance non caractéristique devrait être de Tordre de -7.53% de la puissance apparente au
point de découplage, ce qui est relativement acceptable comme perturbation. La puissance
non caractéristique est donc dépendante du niveau de charge :
l n 200 x 2 + î
IO - 6
" — - 3V'C0S [ 2 + — ï " * *" ' " - ° °7 5 3 '3V' ^ V 60
La Figure 20 montre bien l'effet du retard sur le courant mesuré du côté lent dans la
simulation à double pas de calcul.
Discussion sur les résultats
Il est possible de tirer quelques conclusions préliminaires des simulations réalisées pour
construire le Tableau 1. Premièrement, on doit rappeler que la première tâche qui doit être
réalisée pour chaque simulation est d'obtenir la valeur maximale de résistance parasite qui
apporte la stabilité. Lorsque la simulation est stable avec une résistance de 1 MQ, on se
limite à cette valeur. La valeur est obtenue par itération en recherchant approximativement
la valeur qui permet d'éviter l'apparition d'oscillations divergentes. De façon générale, la
divergence est observable dès les premiers pas de calcul de la simulation.
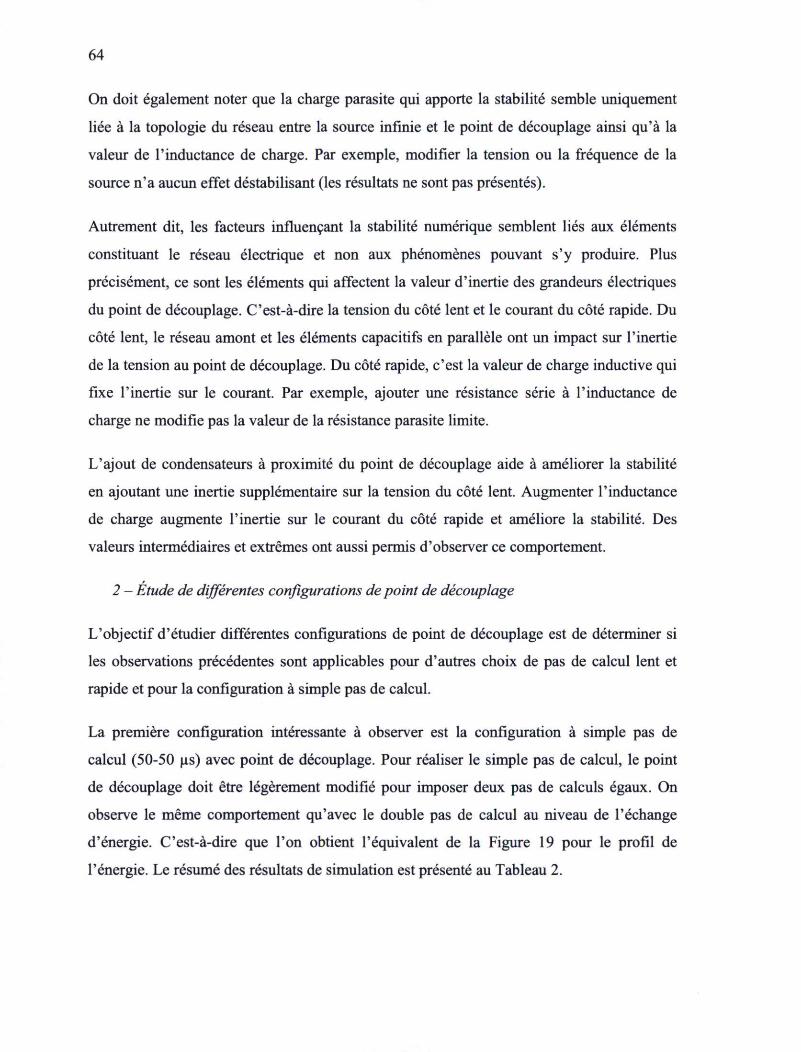
64
On doit également noter que la charge parasite qui apporte la stabilité semble uniquement
liée à la topologie du réseau entre la source infinie et le point de découplage ainsi qu'à la
valeur de l'inductance de charge. Par exemple, modifier la tension ou la fréquence de la
source n'a aucun effet déstabilisant (les résultats ne sont pas présentés).
Autrement dit, les facteurs influençant la stabilité numérique semblent liés aux éléments
constituant le réseau électrique et non aux phénomènes pouvant s'y produire. Plus
précisément, ce sont les éléments qui affectent la valeur d'inertie des grandeurs électriques
du point de découplage. C'est-à-dire la tension du côté lent et le courant du côté rapide. Du
côté lent, le réseau amont et les éléments capacitifs en parallèle ont un impact sur l'inertie
de la tension au point de découplage. Du côté rapide, c'est la valeur de charge inductive qui
fixe l'inertie sur le courant. Par exemple, ajouter une résistance série à l'inductance de
charge ne modifie pas la valeur de la résistance parasite limite.
L'ajout de condensateurs à proximité du point de découplage aide à améliorer la stabilité
en ajoutant une inertie supplémentaire sur la tension du côté lent. Augmenter l'inductance
de charge augmente l'inertie sur le courant du côté rapide et améliore la stabilité. Des
valeurs intermédiaires et extrêmes ont aussi permis d'observer ce comportement.
2-Étude de différentes configurations de point de découplage
L'objectif d'étudier différentes configurations de point de découplage est de déterminer si
les observations précédentes sont applicables pour d'autres choix de pas de calcul lent et
rapide et pour la configuration à simple pas de calcul.
La première configuration intéressante à observer est la configuration à simple pas de
calcul (50-50 ps) avec point de découplage. Pour réaliser le simple pas de calcul, le point
de découplage doit être légèrement modifié pour imposer deux pas de calculs égaux. On
observe le même comportement qu'avec le double pas de calcul au niveau de l'échange
d'énergie. C'est-à-dire que Ton obtient l'équivalent de la Figure 19 pour le profil de
l'énergie. Le résumé des résultats de simulation est présenté au Tableau 2.
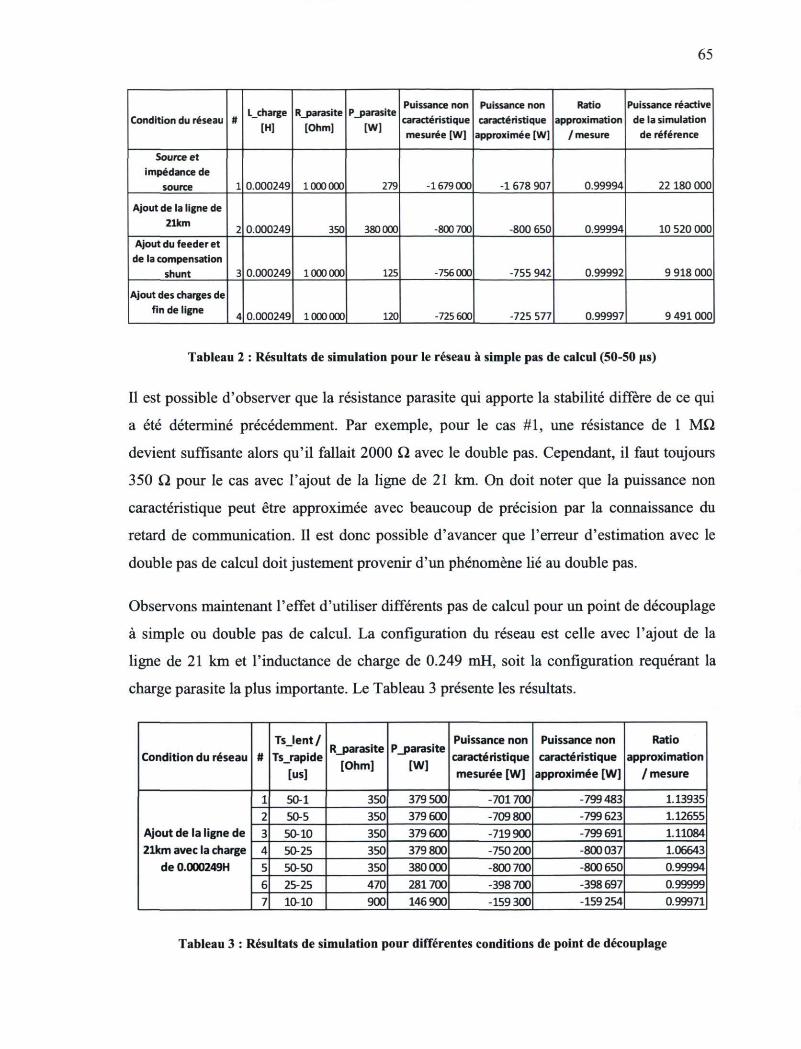
65
Condition du réseau # L_charge [H]
R_parasite [Ohm]
P_parasite [W]
Puissance non caractéristique mesurée [W]
Puissance non caractéristique
approximée [W]
Ratio approximation
/ mesure
Puissance réactive de la simulation
de référence
Source et impédance de
source 1 0.000249 1000000 279 -1679 000 -1 678 907 0.99994 22 180 000
Ajout de la ligne de 21km 2 0.000249 350 380000 -800 700 -800 650 0.99994 10 520 000
Ajout du feeder et de la compensation
shunt 3 0.000249 1000 000 125 -756000 -755 942 0.99992 9 918 000
Ajout des charges de fin de ligne 4 0.000249 1000000 120 -725 600 -725 577 0.99997 9 491 000
Tableau 2 : Résultats de simulation pour le réseau à simple pas de calcul (50-50 ps)
Il est possible d'observer que la résistance parasite qui apporte la stabilité diffère de ce qui
a été déterminé précédemment. Par exemple, pour le cas #1, une résistance de 1 MQ
devient suffisante alors qu'il fallait 2000 Q avec le double pas. Cependant, il faut toujours
350 Q pour le cas avec l'ajout de la ligne de 21 km. On doit noter que la puissance non
caractéristique peut être approximée avec beaucoup de précision par la connaissance du
retard de communication. Il est donc possible d'avancer que Terreur d'estimation avec le
double pas de calcul doit justement provenir d'un phénomène lié au double pas.
Observons maintenant l'effet d'utiliser différents pas de calcul pour un point de découplage
à simple ou double pas de calcul. La configuration du réseau est celle avec l'ajout de la
ligne de 21 km et l'inductance de charge de 0.249 mH, soit la configuration requérant la
charge parasite la plus importante. Le Tableau 3 présente les résultats.
Condition du réseau # T s j e n t / Ts_rapide
[us]
R_parasite [Ohm]
P_parasite [W]
Puissance non caractéristique mesurée [W]
Puissance non caractéristique
approximée [W]
Ratio approximation
/ mesure
Ajout de la ligne de 21km avec la charge
de 0.000249H
1 50-1 350 379 500 -701700 -799483 1.13935
Ajout de la ligne de 21km avec la charge
de 0.000249H
2 50-5 350 379 600 -709 800 -799 623 1.12655 Ajout de la ligne de 21km avec la charge
de 0.000249H
3 50-10 350 379 600 -719 900 -799691 1.11084 Ajout de la ligne de 21km avec la charge
de 0.000249H 4 50-25 350 379 800 -750200 -800037 1.06643
Ajout de la ligne de 21km avec la charge
de 0.000249H 5 50-50 350 380000 -800700 -800 650 0.99994
Ajout de la ligne de 21km avec la charge
de 0.000249H
6 25-25 470 281700 -398700 -398697 0.99999
Ajout de la ligne de 21km avec la charge
de 0.000249H
7 10-10 900 146900 -159 300 -159 254 0.99971
Tableau 3 : Résultats de simulation pour différentes conditions de point de découplage
66
Il est possible d'observer deux comportements généraux. Premièrement, la stabilité
numérique est dépendante du retard de communication. Deuxièmement, l'approximation
est juste pour le simple pas de calcul, mais elle surévalue la valeur avec le double pas de
calcul. Le retard utilisé par l'approximation a été ajusté pour les cas #6 et #7.
On remarque aussi que la puissance non caractéristique est plus faible avec un grand écart
entre le pas de calcul lent et le pas de calcul rapide (cas # 1, 2, 3, 4). Ce comportement peut
être expliqué par l'effet prédictif du double pas de calcul. C'est-à-dire que pour le premier
pas de calcul rapide, la tension utilisée pour le calcul du courant est la moyenne de la
tension du pas lent précédent et du pas lent actuel. Pour les pas de calcul rapide suivants, la
moyenne est réalisée sur deux fois la valeur de la tension du pas lent actuel. Ainsi, plus il y
a de pas de calcul rapide dans un pas de calcul lent, plus le résultat de l'intégration tend
vers le résultat qui aurait été obtenu avec Euler arrière. Cela a pour effet de donner une
valeur de courant en avance, ce qui réduit légèrement l'effet de retard du point de
découplage sur le calcul de la puissance.
4.6. Réseau avec deux sources de tension découplées
Le précédent réseau avec la charge passive découplée a permis de développer des relations
sur la stabilité numérique et sur la puissance non caractéristique. Le cas est cependant
particulier puisqu'il n'existe qu'une seule source du côté réseau du point de découplage.
Cette section explore maintenant le comportement de la puissance non caractéristique pour
un cas où il y a une source de tension de chaque côté du point de découplage. L'objectif est
toujours d'avoir un cas simple permettant de se rapprocher du comportement pouvant être
observé avec un D-STATCOM.
La Figure 21 présente un réseau simplifié comprenant deux sources alternatives reliées par
une impédance. Ce réseau va servir de référence pour comparer les résultats obtenus avec
l'ajout du point de découplage. Sur la Figure 21, le secondaire du transformateur idéal
(25000/2165 V) est ramené au primaire. On ne voit donc que son inductance de fuite
(0.0332 H, soit 0.249 mH ramené au primaire) et la source de tension. La source de tension
commandée « VI » est imposée en tension « m » et phase « phi ».
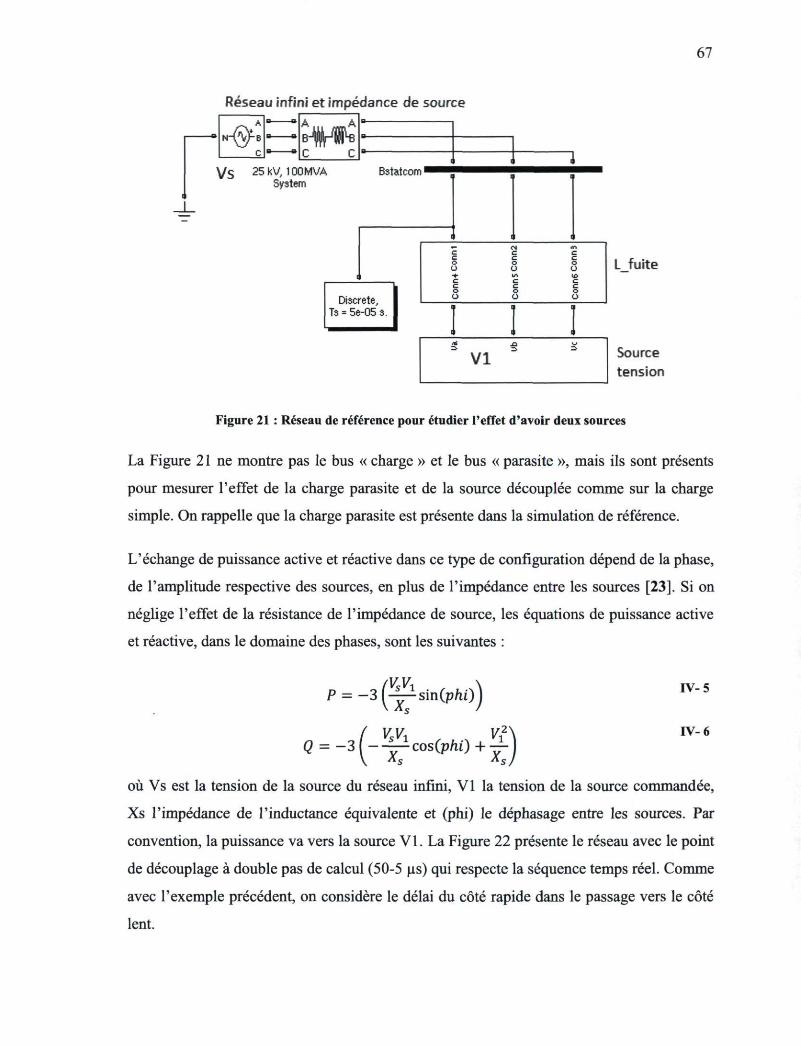
67
Réseau infini et impédance de source
" & * *
V S 25 kV, 100 MVA System
>! Bstatcom :
i
1
c t
:
i
1
c
1
• - d m C C C C C C o o o o o o -*■ i r t (JO C C C C C C
o o o o o u
Discrete, Ts = 5e-05s.
• - d m C C C C C C o o o o o o -*■ i r t (JO C C C C C C
o o o o o u
Discrete, Ts = 5e-05s. ( c
1 1
E
c
1 4
VI
L fuite
Source tension
Figure 21 : Réseau de référence pour étudier l'effet d'avoir deux sources
La Figure 21 ne montre pas le bus « charge » et le bus « parasite », mais ils sont présents
pour mesurer l'effet de la charge parasite et de la source découplée comme sur la charge
simple. On rappelle que la charge parasite est présente dans la simulation de référence.
L'échange de puissance active et réactive dans ce type de configuration dépend de la phase,
de l'amplitude respective des sources, en plus de l'impédance entre les sources [23]. Si on
néglige l'effet de la résistance de l'impédance de source, les équations de puissance active
et réactive, dans le domaine des phases, sont les suivantes :
P = 3 ( Y i s i n ( p h i ) )
Ç = - 3 VSV1
cos(phi) + — Yl) X s )
IV5
IV6
où Vs est la tension de la source du réseau infini, VI la tension de la source commandée,
Xs l'impédance de l'inductance équivalente et (phi) le déphasage entre les sources. Par
convention, la puissance va vers la source VI. La Figure 22 présente le réseau avec le point
de découplage à double pas de calcul (505 ps) qui respecte la séquence temps réel. Comme
avec l'exemple précédent, on considère le délai du côté rapide dans le passage vers le côté
lent.
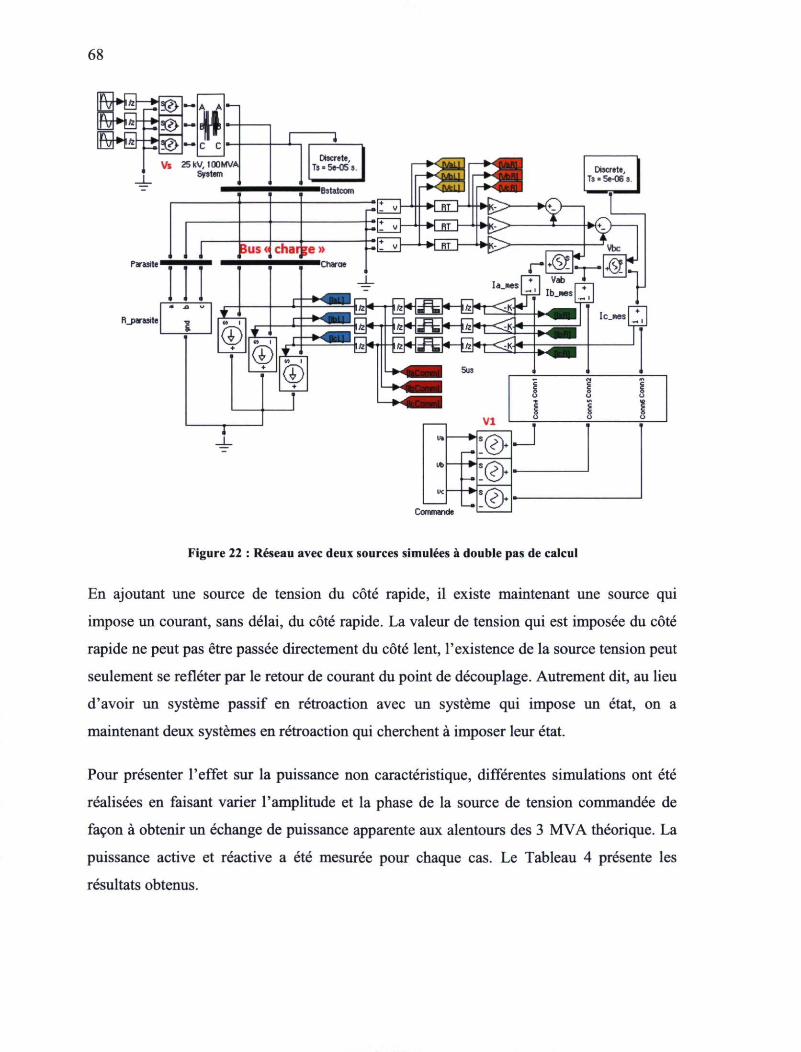
68
—*~^Ê —K54 r-fr"4i
EH-rWSH-riKT^3*L 0+T -[ iWSMftKr^^ EK ■ - 0 * S M * K t r ^ i !
Ia_«es
Ic.nes
Commande
:©• :©• :©•
J
Figure 22 : Réseau avec deux sources simulées à double pas de calcul
En ajoutant une source de tension du côté rapide, il existe maintenant une source qui
impose un courant, sans délai, du côté rapide. La valeur de tension qui est imposée du côté
rapide ne peut pas être passée directement du côté lent, l'existence de la source tension peut
seulement se refléter par le retour de courant du point de découplage. Autrement dit, au lieu
d'avoir un système passif en rétroaction avec un système qui impose un état, on a
maintenant deux systèmes en rétroaction qui cherchent à imposer leur état.
Pour présenter l'effet sur la puissance non caractéristique, différentes simulations ont été
réalisées en faisant varier l'amplitude et la phase de la source de tension commandée de
façon à obtenir un échange de puissance apparente aux alentours des 3 MVA théorique. La
puissance active et réactive a été mesurée pour chaque cas. Le Tableau 4 présente les
résultats obtenus.
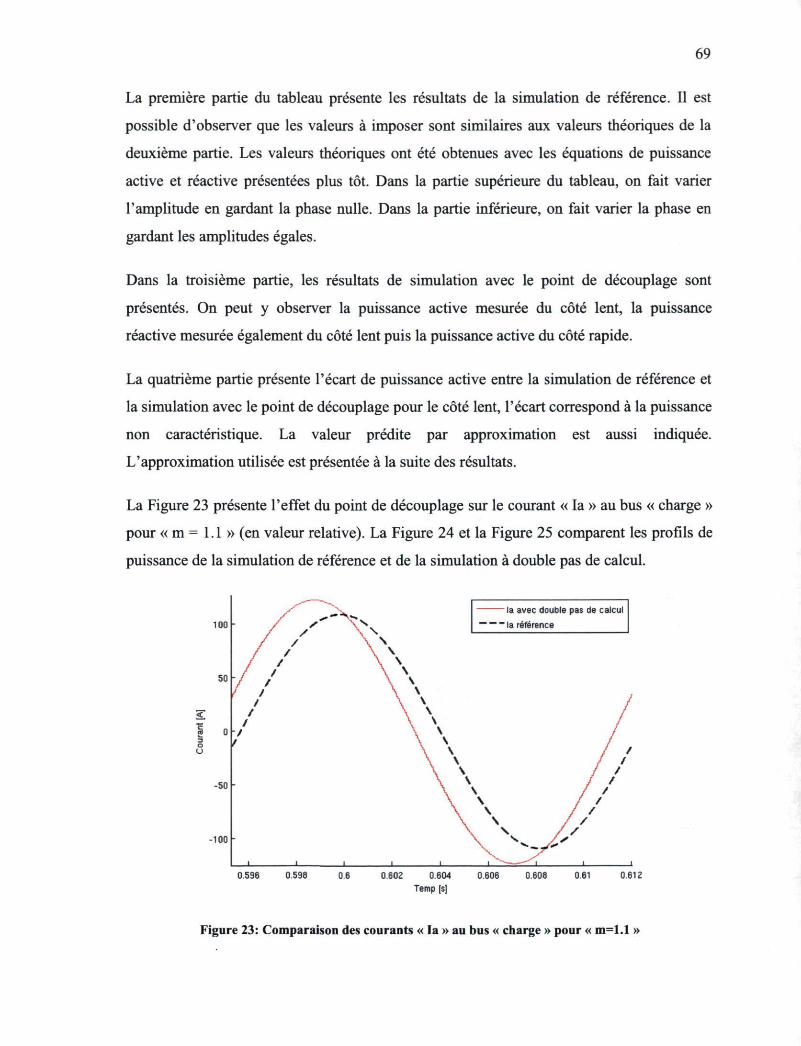
69
La première partie du tableau présente les résultats de la simulation de référence. Il est
possible d'observer que les valeurs à imposer sont similaires aux valeurs théoriques de la
deuxième partie. Les valeurs théoriques ont été obtenues avec les équations de puissance
active et réactive présentées plus tôt. Dans la partie supérieure du tableau, on fait varier
l'amplitude en gardant la phase nulle. Dans la partie inférieure, on fait varier la phase en
gardant les amplitudes égales.
Dans la troisième partie, les résultats de simulation avec le point de découplage sont
présentés. On peut y observer la puissance active mesurée du côté lent, la puissance
réactive mesurée également du côté lent puis la puissance active du côté rapide.
La quatrième partie présente l'écart de puissance active entre la simulation de référence et
la simulation avec le point de découplage pour le côté lent, l'écart correspond à la puissance
non caractéristique. La valeur prédite par approximation est aussi indiquée.
L'approximation utilisée est présentée à la suite des résultats.
La Figure 23 présente l'effet du point de découplage sur le courant « la » au bus « charge »
pour « m = 1.1 » (en valeur relative). La Figure 24 et la Figure 25 comparent les profils de
puissance de la simulation de référence et de la simulation à double pas de calcul.
100 \ x 100 \ x la avec double pas de calcul
— — ~ la référence f / \ \ f / \ \ f / \ N
/ / \ \ / / \ \
/ / \ \ 50 "/ / \ \ f i \ * i \ N /
<£ t N v / 1 V N / ai 0
f \ * / \ * /
u \ \ f * \ * f t \ * t
-50 \ * / / Y N f t \ N / t \ N / '
-100
' ' i i i ~ - - — i i i
0.596 0 598 0.6 0.602 0.604 0.606 0.608 0.61 0.612 Temp [s]
Figure 23: Comparaison des courants « la » au bus « charge » pour « m=l.l »
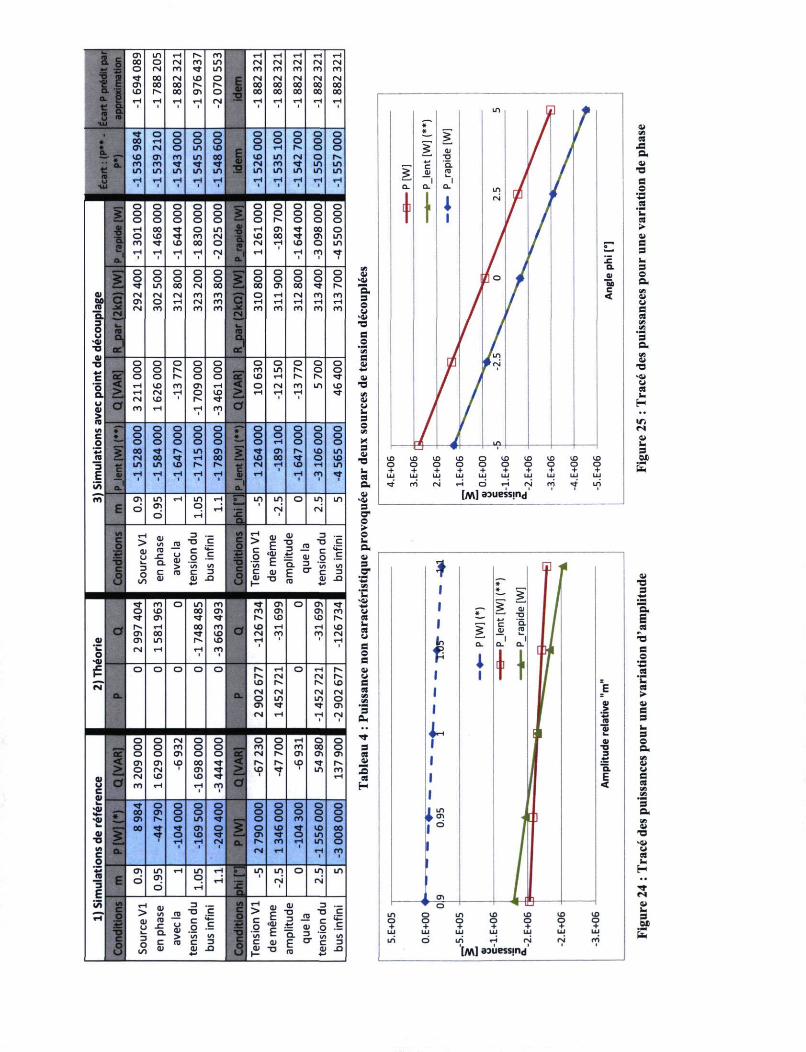
c ro _
C l i n T H r-» m 1 TH T - H T-H T-H ^H
S- s ÏZL ï =
00 o rM ro m ( N (N CM CM O I S- s ÏZL ï =
o (N ro «tf i n ro ro ro ro ro «tf 00 ( N 1 0 O C rM (N rM rM O I a i 00 00 r~ r- S 00 00 00 00 oo
°" 1 VO o- 00 CTI o -a 00 00 00 00 00 Q. 9 T - l T-H T-H T H rM S T-H T-H T-H T-H T-H
s s-i
' I I
' 1 i
' ' m m
, «tf o O O O o O O o O
* 00 T-H o O O o O o o o * Q-
a» f N o m I O
i 2
o T-H r^ o o * Q-
10 a i ro m 00 i 2
I O m ( N o o. " Q. m m «tf - t <tf i
2 rM ro «* m m
t m LD LO LTI i n i 2 m m m LT) m
ro u T - l T - l T - l TH T - l T - l T - l «H T-H «H
l u 1 1 1 1 1 ■
o o O o o o O o o o o o o o o o o o o o o o o o o o r-. o o o T" l 00 «tf o i n l H tn «* 00 o o I O «tf ro PM I O 00 «tf en i n m «tf I O 00 o CM T-H us o m T-H
i T - l
1 T - l
1 T H
■ rM
■ T-H T-H ro «tf
O o o O O O O O O o o o o o o O o O O o •f m 0 0 rM 00 00 en 00 «tf l~~
Oj . O I rM rM ro ro a o T-H f N ro ro oo C en o r H ( N ro a T-H <-H T-H T-H T - H
r t H O I ro ro ro ro -mL ro ro ro ro ro Q.£$H CM 3 o (5 ru " ■ Q .
•01 n ■ o B M ce
1
m * o o O O O O o o o O
■M C
o o !-» O O ro m 1 ^ O O ■M C o o o. O o ( 0 T-H r » r v «tf '5 a u ai
T-H <o ro en TH O r-M ro m (O '5 a u ai
r H ( N TH o I D T-H T-H T H «tf
'5 a u ai
r N I O i rv. * t 1 1 '5 a u ai
ro T-H TH ro > ■ ' ro VI ro VI # O o O o O # o O O o O C * o o o o o » o o o o O o ■—■
o o o o o — - ■ o T-H o o o
'mm ? 00 «tf o> i n en 5 «tf en r̂ 10 i n m ? (N 00 «tf T H oo 5 I O 00 «tf o i e 3
1 i n m I O r-- o. S
CM T-H ( 0 T-H m E 1 T - l T H T H T H T H S T H t H ro «tf 55 o.
1
7 = . ru °ï u i T - l i n T H O m i n O i n m
o en q T-i
T-i IE Q .
rsi rvi
T— > a
a i U l
1 _ro u ai >
3 T3 C O
E m— C
VI c O ■t:
<-H > C
p
ai . E
<ai E ■
0)
§ 1 i - (
3 .—
u o .— k.
C 1/
a
_ro u ai > ' l / ï LT) T J '(/>
ai . E
<ai E ■ S- ; L ' t a « i
k.
C 1/
c m C 3 c a i E ' 7 C -■ k.
C 1/ a. ai
4-t .Q a i
r -"O E ' ai -Q
* m
«tf ro O m ro *r en O en «tf o 10 oo en ro en en r o
«tf en ■ * ■ « * r~ I O l O r-» rv T-H oo ro a I O T-H T-H (O en 00 ■t f vo a ( N ro ro OJ
OJ i n LO r-- 10 T H
' 1 T H
ml 0
•01
rM TH TH ro ml 0
•01 £f o o o O O c- T-H O T-H o . £f r~ ( N (N r~-(N
I O o. Ps ( 0 (N
_ ( N rM (N O I u_ O m m o
en «tf «tf en
- _
™
( N T-H T-H O I
^ o o CM o o T H O o ^ o o ro o O — ro o ro 00 o o o en o o 5 rM r-» en en en en en I O oo «tf < r- r-» «o «tf r-. o (NI 1 en «tf > ( 0 «tf ■ m ro
OJ ^ j i ( N I O 1 0 "* p; 1 ■ T-H U m T-H TH rn a c 01
-a i «tf O o O o o o o o o -a i
00 en o o o o o o o o •ai # en r^ o m «tf o o ro o o ^ oo «tf «tf en o § o I O ^ ■
i o 00 a i «tf o t o «* en «tf O m o
■ o T H T - H ( N Q. l-v ro T-H m o c rM T-H T H ro o
en o
LO en
T H m q T-i
î _ m LO
oi o i n
oi m
3 o T - I l e i
E _& iTî g T—
0J i n
> 1 3 U l T H
ai E
<ai E '
ai L L L . . —
S" 5 5 a C c c
1/
0J i n
> 1 _ro u a i >
-a
p E c
C O
1 > o
ai E
<ai E '
5 s ë < 6 ;
u o .E 1 '3 «
5 a C c c
1/ C ro c 3 c ai E '
ro
7 C 3
5 a C c c
1/ a i ai
' ÏA ■i -a E ' ro
0J _D 49
m) •mt
a. S o u '01 ■d e o
•■■ S 01 -w ai
■O «i OJ u h 3 O
ai ■a h .
o > o h fiai 3 sr •c -0J u cs !cs m)
e o s ai u B CS
es ZJ
es
LO LD LD LD O O O O + + + +
TH O
[ /VAlBsuessmd'
a> i n cs
ai ■a s o
S es -— b es > «i e s u 3 O a. C es
3 C
H
un CM O) L» 3 OJD
* 1 1 1 *
f a.
i 1
f
1 m k m 1 °
« ^ ~ m o +
o o +
LO o +
KD O +
o +
o i n TH rsi [/V\] BDuessmd
a a.
s es T3 S O
•■c es
. •c F es
> S! o> > S % 3 ai h k S ai O 3 B ,
Oi a. m )
F B < CS
•D - >
3
71
Analyse des résultats
On doit premièrement mentionner que la résistance parasite qui apporte la stabilité est une
résistance de 2000 Q, soit la même valeur qui apporte la stabilité pour le réseau équivalent
avec la charge simple. Si on fait varier le réseau et ou la valeur de l'inductance du côté
rapide, on observera que les conditions de stabilité sont rencontrées dans les mêmes
conditions. Cela renforce l'observation que la stabilité semble dépendante de la topologie
du réseau et non des phénomènes qui peuvent s'y produire.
Pour les lectures de puissance, on observe que les mesures avec le double pas de calcul
dévient d'une valeur relativement constante des mesures réalisées avec la simulation de
référence. Dans la dernière partie du tableau, à droite, la colonne (P** - P*) présente la
différence de puissance entre la simulation de référence et l'énergie mesurée du côté lent.
La différence de puissance entre la référence et le côté rapide n'est pas présentée dans le
Tableau 4. La Figure 24 montre cependant qu'avec une variation d'amplitude, la puissance
calculée du côté rapide dévie légèrement de celle mesurée du côté lent alors que les
différences sont négligeables avec une variation de phase (Figure 25).
L'approximation proposée est basée uniquement sur l'effet du retard effectif entre les deux
sources. Avec les deux sources, la mesure de la puissance échangée doit être faite par
l'équation suivante qui a été présentée précédemment. L'angle entre les deux sources peut
être posé égal au retard effectif.
V,V, Pmm_carac = - 3 ( ^ sin ( r e t a r d ) J
Pour le cas présenté, on a posé le retard égal à 150 ps pour calculer les valeurs du Tableau
4. Cela découle du fait qu'on a choisi de ne pas mettre de retard de 50 ps sur la source du
côté rapide ce qui aurait permis de la synchroniser avec le côté lent. On note que
l'approximation est relativement éloignée de la valeur mesurée et qu'elle surestime toujours
la puissance non caractéristique. Ce qui semble expliquer que l'approximation surévalue la
puissance non caractéristique doit être lié à un effet prédictif sur la prochaine valeur de
courant, soit un phénomène similaire à celui rencontré sur charge simple.
72
Ce qui est important de retenir est que la puissance non caractéristique mesurée est
indépendante du niveau de charge et que le niveau de perturbation correspondant est
inacceptable (1.5 MW), même pour les cas où on échange une puissance réactive
importante (3 MVAR). La forme du courant est toujours sinusoïdale, mais elle est très
perturbée (Figure 23). On doit cependant noter que la mesure de puissance réactive est
relativement peu affectée par la présence du point de découplage.
4.7. Conclusion
Le chapitre a permis de présenter les problèmes d'instabilité numérique et de puissances
non caractéristiques rencontrées dans les simulations à double pas de calcul appliqué à un
réseau ne comportant pas de charge commutée.
La technique de stabilisation numérique par charge résistive en parallèle avec le point de
découplage a été détaillée. La valeur limite qui apporte la stabilité numérique semble être
seulement dépendante de la configuration du réseau. De façon générale, plus il y a
d'éléments entre la source et le point de découplage, plus la résistance parasite doit être
faible. L'ajout d'éléments augmentant l'inertie de l'état du composant aux bornes du point
de découplage favorise la stabilisation de la simulation.
Il a ensuite été démontré que la puissance non caractéristique est en fonction du niveau de
charge si le point de découplage est réalisé sur une charge simple et qu'elle en est
indépendante lorsque le point de découplage est entre deux sources de tension. Pour les
deux cas, il est possible d'approximer la puissance non caractéristique par des équations de
réseau, mais ces approximations ne tiennent pas compte de tous les phénomènes
numériques. On peut également mentionner que la perturbation de puissance est acceptable
pour la charge simple, mais qu'elle est inacceptable pour les deux sources de tension. De
façon générale, il a été possible d'observer que le point de découplage affecte peu le calcul
de puissance réactive.
Chapitre V - Simulation à double pas de calcul d'un
réseau avec convertisseur de puissance Ce chapitre présente les problèmes liés à la simulation d'un convertisseur de puissance
connecté à un réseau électrique par un point de découplage à double pas de calcul. Le
premier objectif du chapitre est de présenter l'impact d'une charge avec commutations sur
la stabilité numérique et sur les mesures de puissance. Le second objectif est de déterminer
l'effet du point de découplage sur les formes d'onde et les harmoniques.
Le convertisseur considéré est un modèle relativement complet de D-STATCOM avec un
transformateur idéal, un pont triphasé et un bus DC assuré par un condensateur. Une
commande MLI, dans le domaine de Park, permet la régulation de la tension réseau et de la
tension du bus DC. Le D-STATCOM est installé dans le réseau qui a été présenté au
chapitre 4. L'approche utilisée pour implanter le point de découplage sur un D-STATCOM
est expliquée et les résultats obtenus sont présentés.
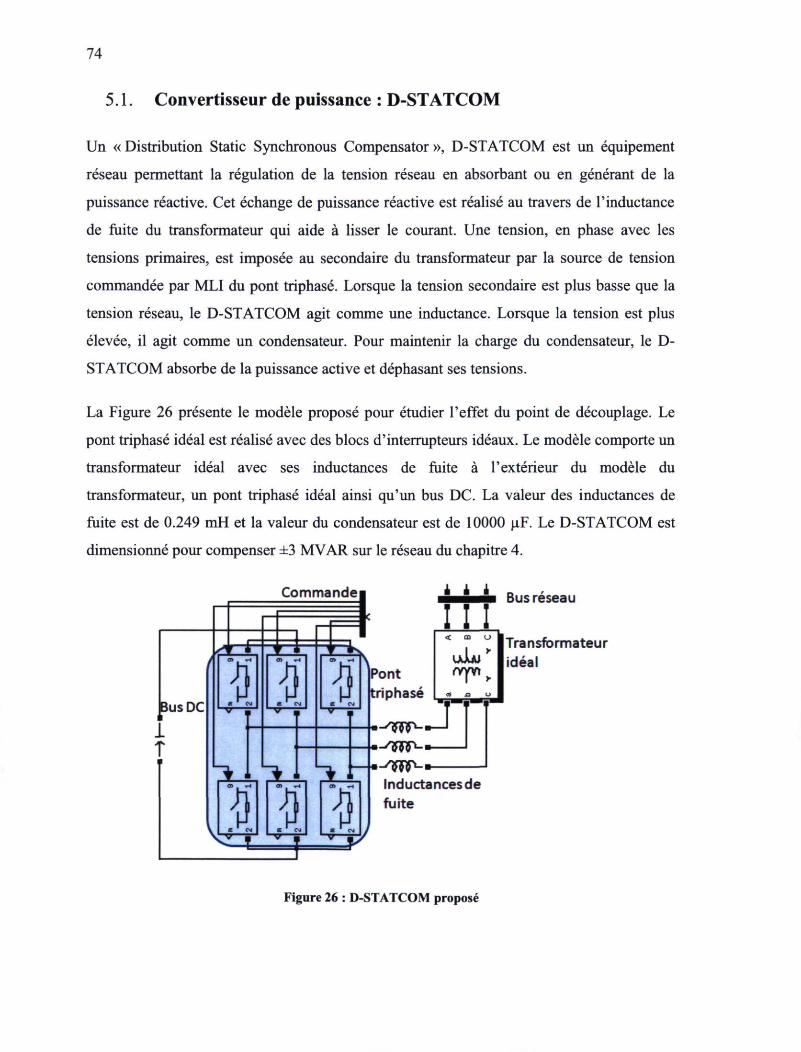
74
5.1. Convertisseur de puissance : DSTATCOM
Un « Distribution Static Synchronous Compensator », DSTATCOM est un équipement
réseau permettant la régulation de la tension réseau en absorbant ou en générant de la
puissance réactive. Cet échange de puissance réactive est réalisé au travers de l'inductance
de fuite du transformateur qui aide à lisser le courant. Une tension, en phase avec les
tensions primaires, est imposée au secondaire du transformateur par la source de tension
commandée par MLI du pont triphasé. Lorsque la tension secondaire est plus basse que la
tension réseau, le DSTATCOM agit comme une inductance. Lorsque la tension est plus
élevée, il agit comme un condensateur. Pour maintenir la charge du condensateur, le D
STATCOM absorbe de la puissance active et déphasant ses tensions.
La Figure 26 présente le modèle proposé pour étudier l'effet du point de découplage. Le
pont triphasé idéal est réalisé avec des blocs d'interrupteurs idéaux. Le modèle comporte un
transformateur idéal avec ses inductances de fuite à l'extérieur du modèle du
transformateur, un pont triphasé idéal ainsi qu'un bus DC. La valeur des inductances de
fuite est de 0.249 mH et la valeur du condensateur est de 10000 pF. Le DSTATCOM est
dimensionné pour compenser ±3 MVAR sur le réseau du chapitre 4.
îusDC
I C É
m Ë CM
1 V . ■
Commande
4 m . «J™ *M T I uv «n
{} {} {} ■ CM £ CM £ CM
~V
n o e | i, i ■
î Ht Pont
triphasé
mS$fômy
Inductances de fuite
Bus réseau
4 | " ITransformateur
Figure 26 : DSTATCOM proposé
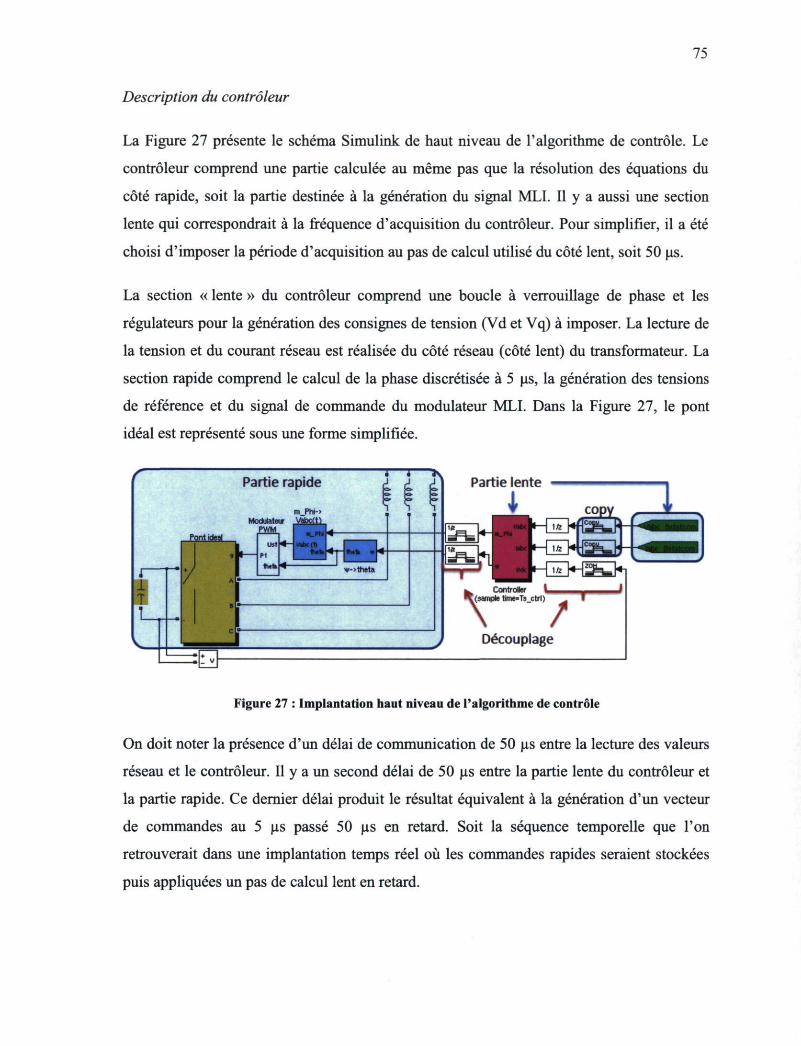
75
Description du contrôleur
La Figure 27 présente le schéma Simulink de haut niveau de l'algorithme de contrôle. Le
contrôleur comprend une partie calculée au même pas que la résolution des équations du
côté rapide, soit la partie destinée à la génération du signal MLI. Il y a aussi une section
lente qui correspondrait à la fréquence d'acquisition du contrôleur. Pour simplifier, il a été
choisi d'imposer la période d'acquisition au pas de calcul utilisé du côté lent, soit 50 ps.
La section « lente » du contrôleur comprend une boucle à verrouillage de phase et les
régulateurs pour la génération des consignes de tension (Vd et Vq) à imposer. La lecture de
la tension et du courant réseau est réalisée du côté réseau (côté lent) du transformateur. La
section rapide comprend le calcul de la phase discrétisée à 5 ps, la génération des tensions
de référence et du signal de commande du modulateur MLI. Dans la Figure 27, le pont
idéal est représenté sous une forme simplifiée.
Figure 27 : Implantation haut niveau de l'algorithme de contrôle
On doit noter la présence d'un délai de communication de 50 ps entre la lecture des valeurs
réseau et le contrôleur. Il y a un second délai de 50 ps entre la partie lente du contrôleur et
la partie rapide. Ce dernier délai produit le résultat équivalent à la génération d'un vecteur
de commandes au 5 ps passé 50 ps en retard. Soit la séquence temporelle que l'on
retrouverait dans une implantation temps réel où les commandes rapides seraient stockées
puis appliquées un pas de calcul lent en retard.
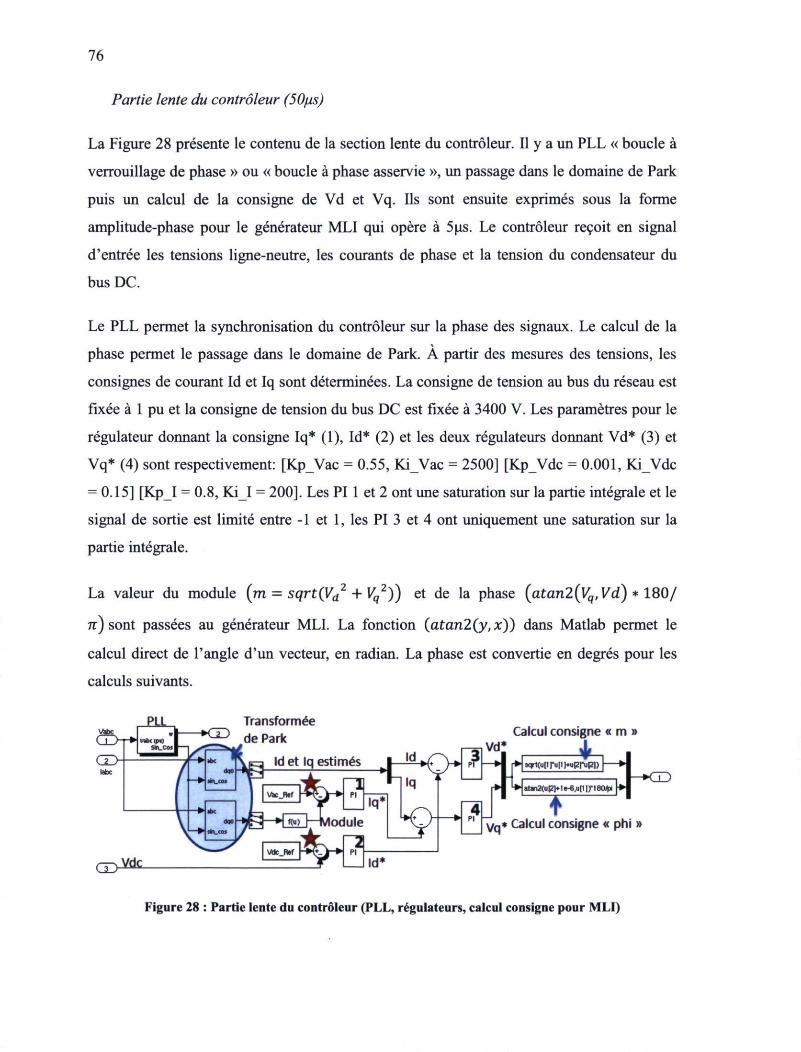
76
Partie lente du contrôleur (50/is)
La Figure 28 présente le contenu de la section lente du contrôleur. Il y a un PLL « boucle à
verrouillage de phase » ou « boucle à phase asservie », un passage dans le domaine de Park
puis un calcul de la consigne de Vd et Vq. Ils sont ensuite exprimés sous la forme
amplitude-phase pour le générateur MLI qui opère à 5ps. Le contrôleur reçoit en signal
d'entrée les tensions ligne-neutre, les courants de phase et la tension du condensateur du
bus DC.
Le PLL permet la synchronisation du contrôleur sur la phase des signaux. Le calcul de la
phase permet le passage dans le domaine de Park. À partir des mesures des tensions, les
consignes de courant Id et Iq sont déterminées. La consigne de tension au bus du réseau est
fixée à 1 pu et la consigne de tension du bus DC est fixée à 3400 V. Les paramètres pour le
régulateur donnant la consigne Iq* (1), Id* (2) et les deux régulateurs donnant Vd* (3) et
Vq* (4) sont respectivement: [KpVac = 0.55, KiVac = 2500] [KpVdc = 0.001, KiVdc
= 0.15] [Kpl = 0.8, K i l = 200]. Les PI 1 et 2 ont une saturation sur la partie intégrale et le
signal de sortie est limité entre -1 et 1, les PI 3 et 4 ont uniquement une saturation sur la
partie intégrale.
La valeur du module (m = sqrt(Vd2 + Vq
2)) et de la phase {atan2{yq, Vol) * 180/
TZ) sont passées au générateur MLI. La fonction (atan2(y,x)) dans Matlab permet le
calcul direct de l'angle d'un vecteur, en radian. La phase est convertie en degrés pour les
calculs suivants.
Transformée ' * Œ ) de Park
Id et Iq estimés
Calcul consigne « m »
I K * V « * pr —->*| r-H»ciTtcuiiru['i*uprLiPi)|—*i
" |> l H> at»i2(u|2)»t«H5,u|l]rl80<pi * ë
Vq* Calcul consigne « phi »
Figure 28 : Partie lente du contrôleur (PLL, régulateurs, calcul consigne pour MLI)
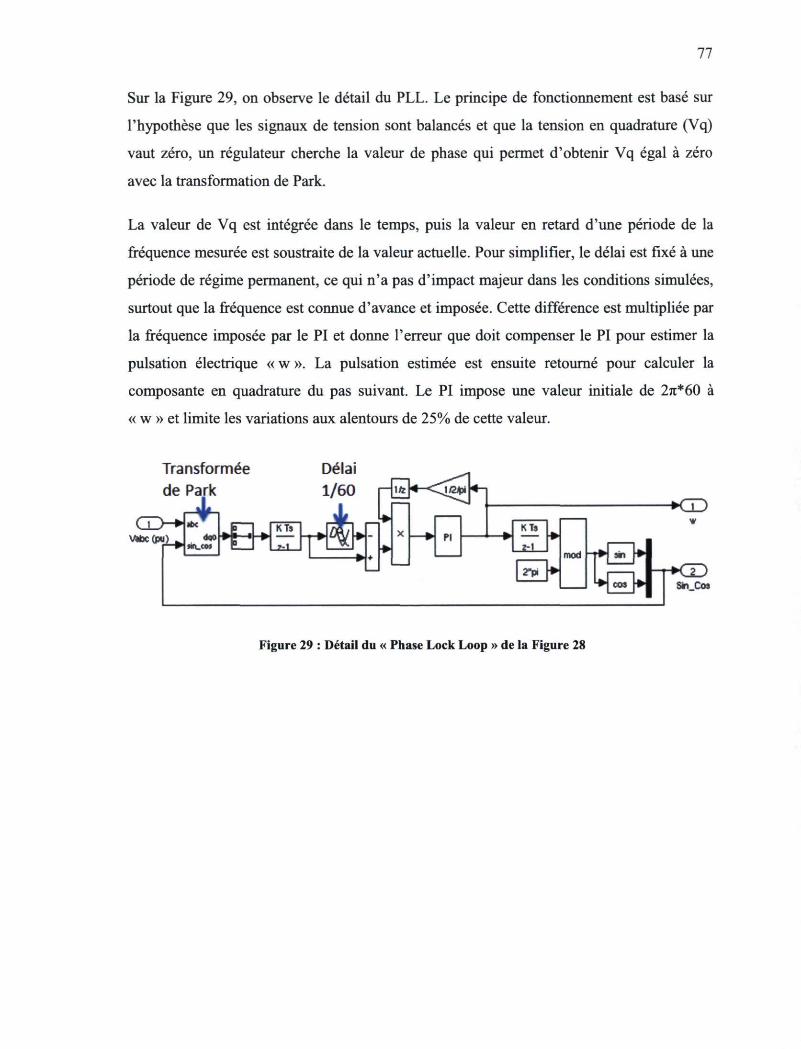
77
Sur la Figure 29, on observe le détail du PLL. Le principe de fonctionnement est basé sur
l'hypothèse que les signaux de tension sont balancés et que la tension en quadrature (Vq)
vaut zéro, un régulateur cherche la valeur de phase qui permet d'obtenir Vq égal à zéro
avec la transformation de Park.
La valeur de Vq est intégrée dans le temps, puis la valeur en retard d'une période de la
fréquence mesurée est soustraite de la valeur actuelle. Pour simplifier, le délai est fixé à une
période de régime permanent, ce qui n'a pas d'impact majeur dans les conditions simulées,
surtout que la fréquence est connue d'avance et imposée. Cette différence est multipliée par
la fréquence imposée par le PI et donne l'erreur que doit compenser le PI pour estimer la
pulsation électrique « w ». La pulsation estimée est ensuite retourné pour calculer la
composante en quadrature du pas suivant. Le PI impose une valeur initiale de 2JT*60 à
« w » et limite les variations aux alentours de 25% de cette valeur.
VttcQw) »
Transformée de Park
Délai 1/60
ttrt
«ri_«>» Eiffel I f t i /2*
PI
- K J D KTs
_fcl_
2"pi
mod I»[*LH * [ M » J * | Sn_Co»
Figure 29 : Détail du « Phase Lock Loop » de la Figure 28
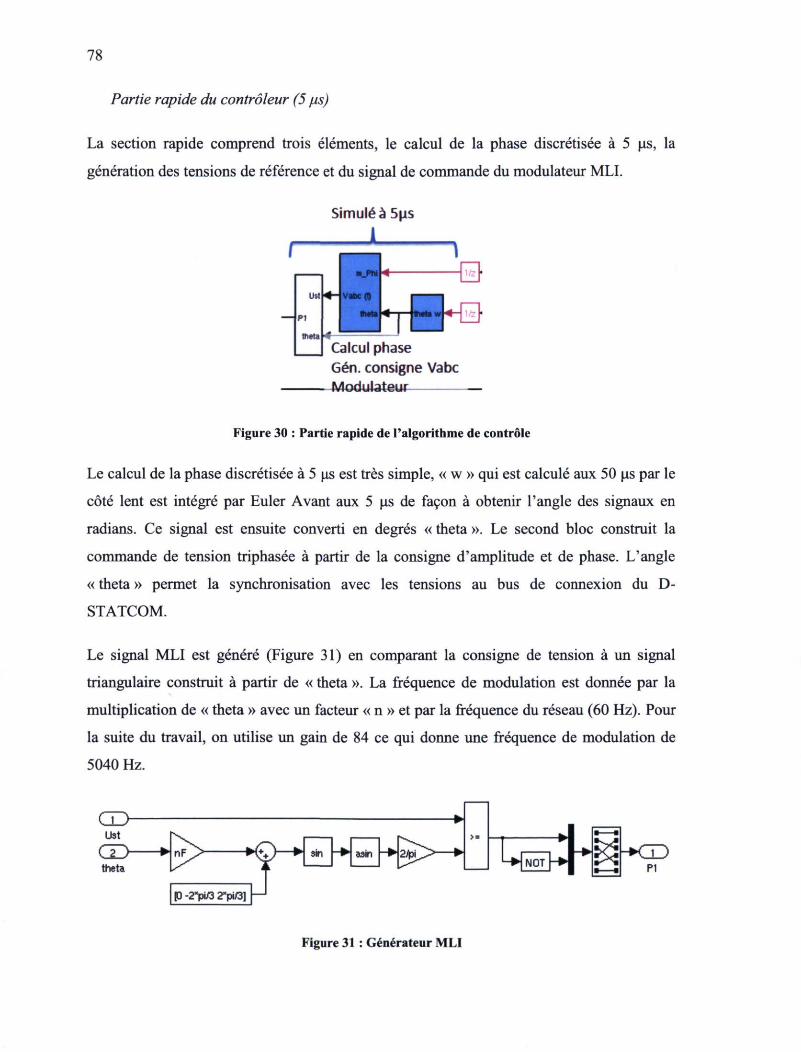
78
Partie rapide du contrôleur (5 us)
La section rapide comprend trois éléments, le calcul de la phase discrétisée à 5 ps, la
génération des tensions de référence et du signal de commande du modulateur MLI.
Simulé à 5ps
IM
Pi
■ v«bc(0
T """"I l/Z
Calcul phase Gén. consigne Vabc MCrdulateui:
Figure 30 : Partie rapide de l'algorithme de contrôle
Le calcul de la phase discrétisée à 5 ps est très simple, « w » qui est calculé aux 50 ps par le
côté lent est intégré par Euler Avant aux 5 ps de façon à obtenir l'angle des signaux en
radians. Ce signal est ensuite converti en degrés « theta ». Le second bloc construit la
commande de tension triphasée à partir de la consigne d'amplitude et de phase. L'angle
« theta » permet la synchronisation avec les tensions au bus de connexion du D
STATCOM.
Le signal MLI est généré (Figure 31) en comparant la consigne de tension à un signal
triangulaire construit à partir de « theta ». La fréquence de modulation est donnée par la
multiplication de « theta » avec un facteur « n » et par la fréquence du réseau (60 Hz). Pour
la suite du travail, on utilise un gain de 84 ce qui donne une fréquence de modulation de
5040 Hz.
Figure 31 : Générateur MLI
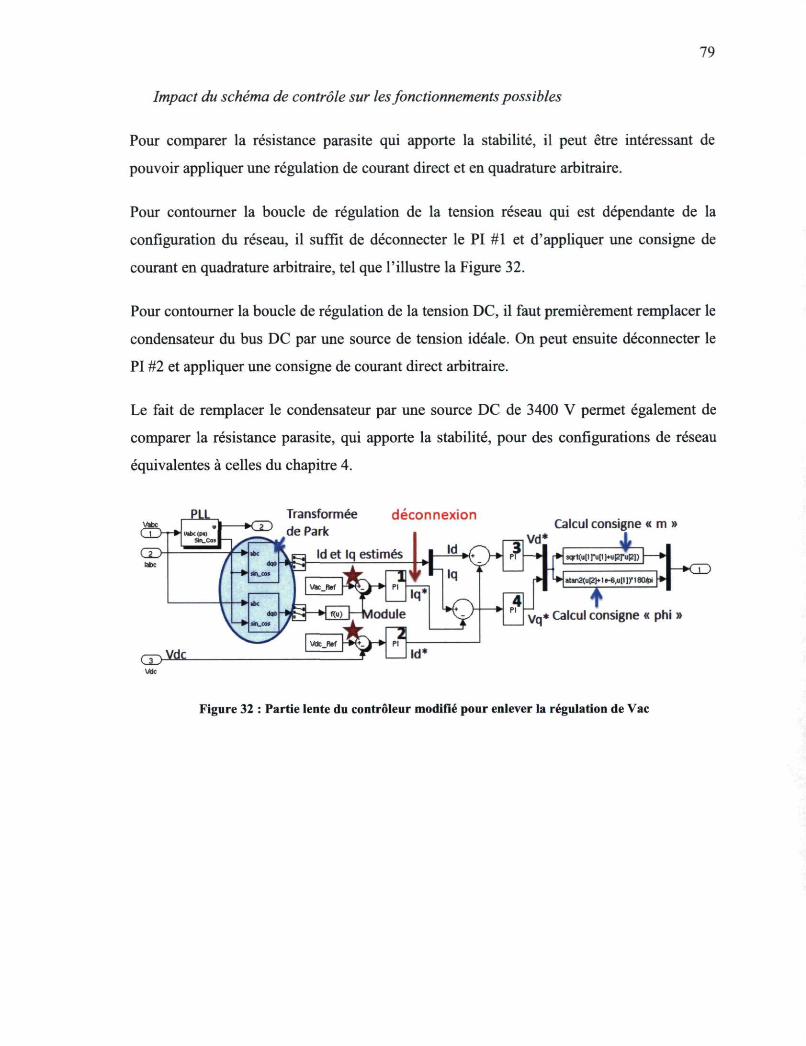
79
Impact du schéma de contrôle sur les fonctionnements possibles
Pour comparer la résistance parasite qui apporte la stabilité, il peut être intéressant de
pouvoir appliquer une régulation de courant direct et en quadrature arbitraire.
Pour contourner la boucle de régulation de la tension réseau qui est dépendante de la
configuration du réseau, il suffit de déconnecter le PI #1 et d'appliquer une consigne de
courant en quadrature arbitraire, tel que l'illustre la Figure 32.
Pour contourner la boucle de régulation de la tension DC, il faut premièrement remplacer le
condensateur du bus DC par une source de tension idéale. On peut ensuite déconnecter le
PI #2 et appliquer une consigne de courant direct arbitraire.
Le fait de remplacer le condensateur par une source DC de 3400 V permet également de
comparer la résistance parasite, qui apporte la stabilité, pour des configurations de réseau
équivalentes à celles du chapitre 4.
_PLL Transformée déconnexion ' * Œ ) de Park Calcul consigne « m »
Id et Iq estimés I—^-*f^)-»• p ' ~ *1 H«rt(u[iru{iNgnigi)|—H
^ ^ f U ^ L-, r4ij ^P h-HjW-Hviodule * W * Pl
v * Calcul consigne « phi » i .«EN -1~3 V* fief - K * - ! - * PI
^-^-* y _ Id*
Figure 32 : Partie lente du contrôleur modifié pour enlever la régulation de Vac
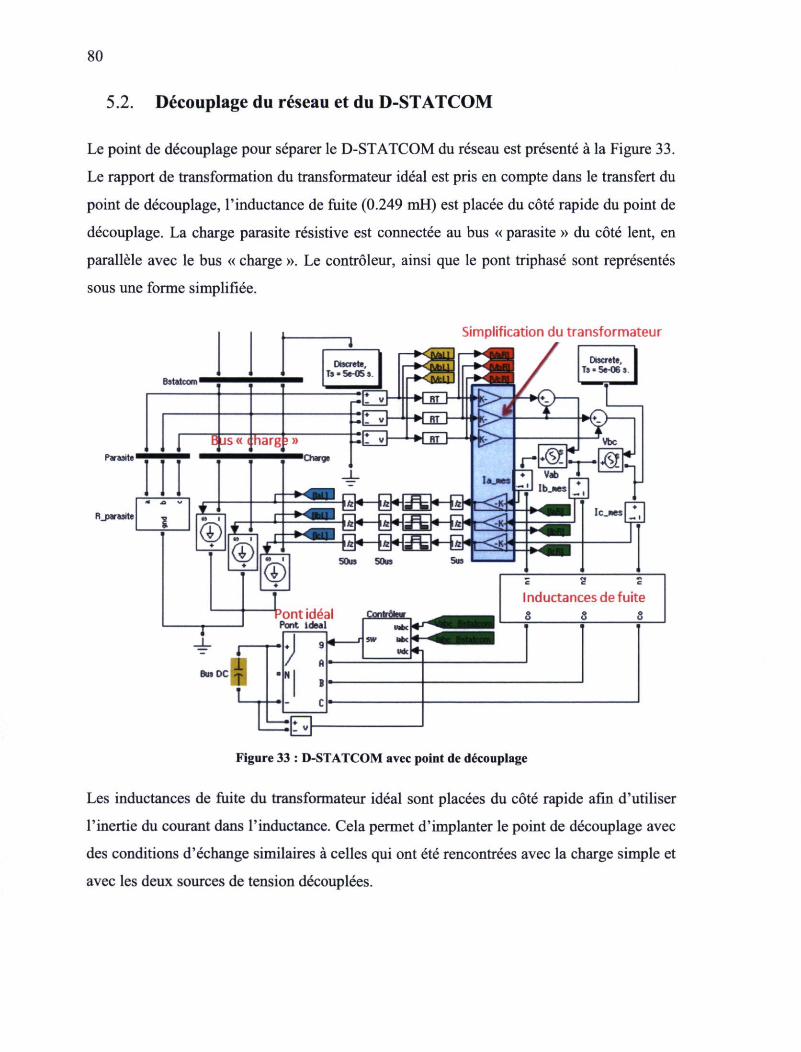
80
5.2. Découplage du réseau et du D-STATCOM
Le point de découplage pour séparer le D-STATCOM du réseau est présenté à la Figure 33.
Le rapport de transformation du transformateur idéal est pris en compte dans le transfert du
point de découplage, l'inductance de fuite (0.249 mH) est placée du côté rapide du point de
découplage. La charge parasite résistive est connectée au bus « parasite » du côté lent, en
parallèle avec le bus « charge ». Le contrôleur, ainsi que le pont triphasé sont représentés
sous une forme simplifiée.
Simplification du transformateur
Parasite
Pi_parasitrj
Figure 33 : D-STATCOM avec point de découplage
Les inductances de fuite du transformateur idéal sont placées du côté rapide afin d'utiliser
l'inertie du courant dans l'inductance. Cela permet d'implanter le point de découplage avec
des conditions d'échange similaires à celles qui ont été rencontrées avec la charge simple et
avec les deux sources de tension découplées.
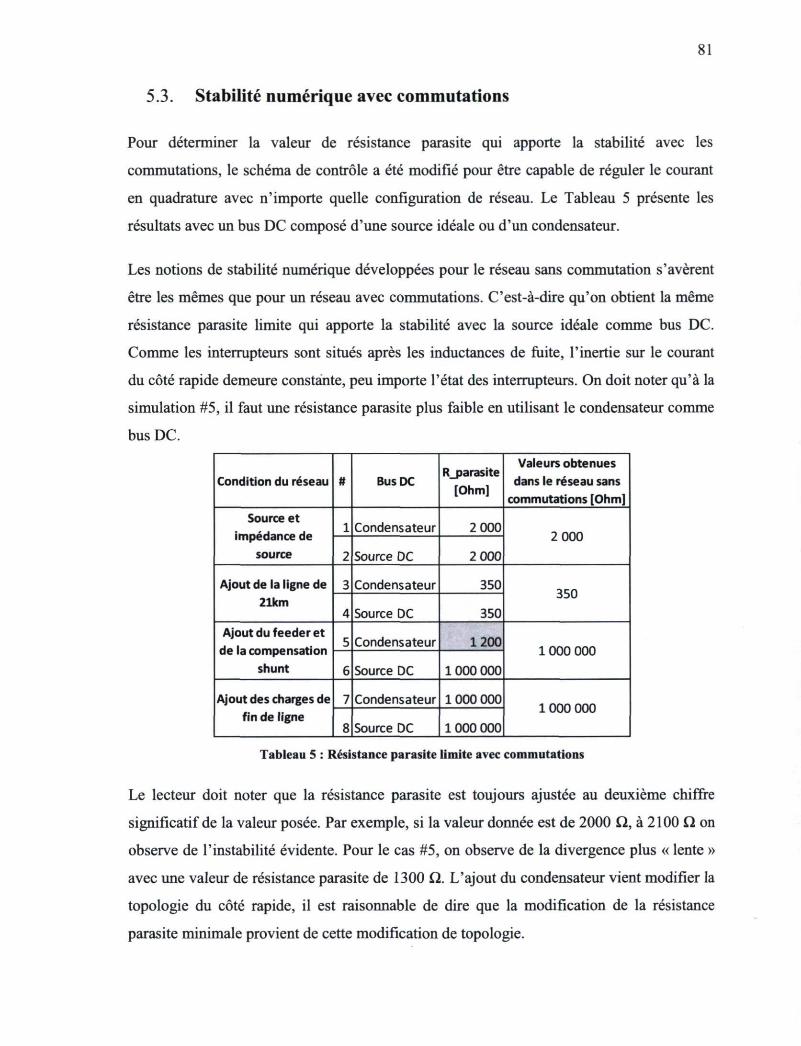
81
5.3. Stabilité numérique avec commutations
Pour déterminer la valeur de résistance parasite qui apporte la stabilité avec les
commutations, le schéma de contrôle a été modifié pour être capable de réguler le courant
en quadrature avec n'importe quelle configuration de réseau. Le Tableau 5 présente les
résultats avec un bus DC composé d'une source idéale ou d'un condensateur.
Les notions de stabilité numérique développées pour le réseau sans commutation s'avèrent
être les mêmes que pour un réseau avec commutations. C'est-à-dire qu'on obtient la même
résistance parasite limite qui apporte la stabilité avec la source idéale comme bus DC.
Comme les interrupteurs sont situés après les inductances de fuite, l'inertie sur le courant
du côté rapide demeure constante, peu importe l'état des interrupteurs. On doit noter qu'à la
simulation #5, il faut une résistance parasite plus faible en utilisant le condensateur comme
bus DC.
Condition du réseau # Bus OC Rparasite
[Ohm]
Valeurs obtenues dans le réseau sans
commutations [Ohm] Source et
impédance de source
1 Condensateur 2 000 2 000
Source et impédance de
source 2 Source DC 2 000 2 000
Ajout de la ligne de 21km
3 Condensateur 350 350
Ajout de la ligne de 21km
4 Source DC 350 350
Ajout du feeder et de la compensation
shunt
5 Condensateur 1200 1 000 000
Ajout du feeder et de la compensation
shunt 6 Source DC 1 000 000 1 000 000
Ajout des charges de fin de ligne
7 Condensateur 1 000 000 1 000 000
Ajout des charges de fin de ligne
8 Source DC 1 000 000 1 000 000
Tableau 5 : Résistance parasite limite avec commutations
Le lecteur doit noter que la résistance parasite est toujours ajustée au deuxième chiffre
significatif de la valeur posée. Par exemple, si la valeur donnée est de 2000 Q, à 2100 Q. on
observe de l'instabilité évidente. Pour le cas #5, on observe de la divergence plus « lente »
avec une valeur de résistance parasite de 1300 Q. L'ajout du condensateur vient modifier la
topologie du côté rapide, il est raisonnable de dire que la modification de la résistance
parasite minimale provient de cette modification de topologie.
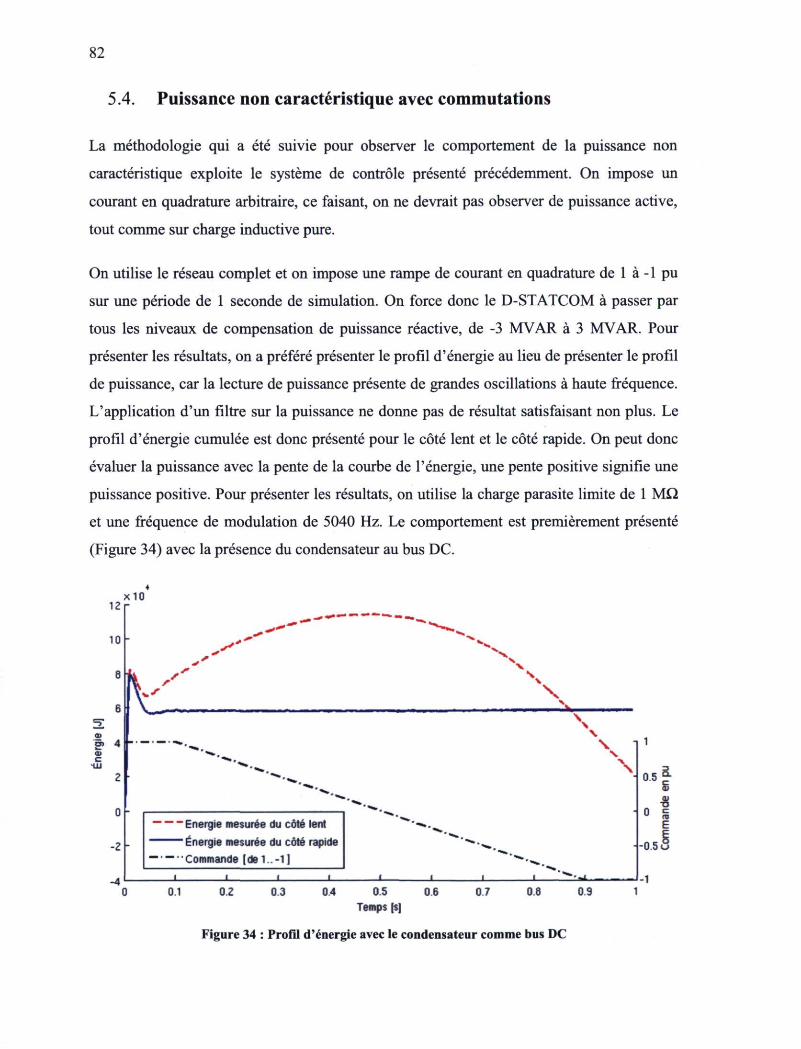
82
5.4. Puissance non caractéristique avec commutations
La méthodologie qui a été suivie pour observer le comportement de la puissance non
caractéristique exploite le système de contrôle présenté précédemment. On impose un
courant en quadrature arbitraire, ce faisant, on ne devrait pas observer de puissance active,
tout comme sur charge inductive pure.
On utilise le réseau complet et on impose une rampe de courant en quadrature de 1 à 1 pu
sur une période de 1 seconde de simulation. On force donc le DSTATCOM à passer par
tous les niveaux de compensation de puissance réactive, de 3 MVAR à 3 MVAR. Pour
présenter les résultats, on a préféré présenter le profil d'énergie au lieu de présenter le profil
de puissance, car la lecture de puissance présente de grandes oscillations à haute fréquence.
L'application d'un filtre sur la puissance ne donne pas de résultat satisfaisant non plus. Le
profil d'énergie cumulée est donc présenté pour le côté lent et le côté rapide. On peut donc
évaluer la puissance avec la pente de la courbe de l'énergie, une pente positive signifie une
puissance positive. Pour présenter les résultats, on utilise la charge parasite limite de 1 MQ
et une fréquence de modulation de 5040 Hz. Le comportement est premièrement présenté
(Figure 34) avec la présence du condensateur au bus DC.
x10
V .
\
o i 4 — ■•■»
LU
2 •
\
Energie mesurée du côté lent Énergie mesurée du côté rapide
— ■— '• Commande [de i -1]
0.5 » OJ
o S E
--0.5c§
0.1 02 0.3 0.4 0.5 0.6 Temps [s]
07 0.8 0.9
Figure 34 : Profil d'énergie avec le condensateur comme bus DC
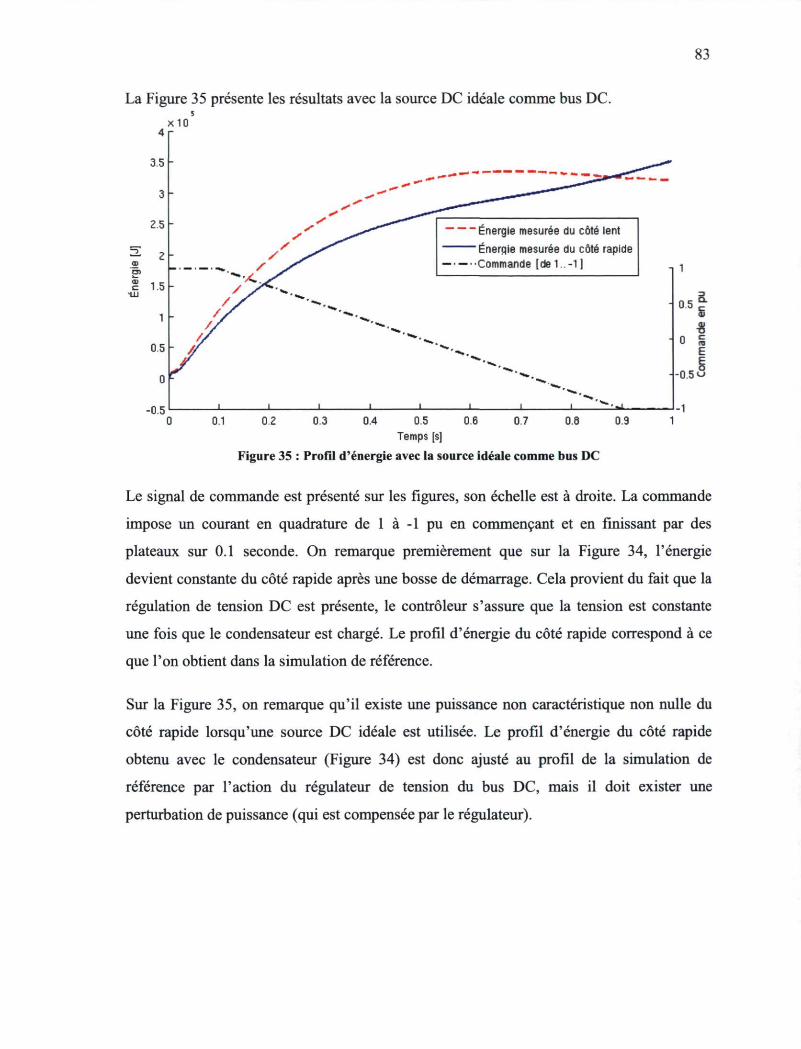
83
La Figure 35 présente les résultats avec la source DC idéale comme bus DC. x 10
4
-0.5
' Énergie mesurée du côté lent
"Énergie mesurée du côté rapide •Commande [de 1..-1]
0.1 02 0.3 0.7 0.8 0.4 0.5 0.6 Temps [s]
Figure 35 : Profil d'énergie avec la source idéale comme bus DC
0.9
0.5 c ai
0 % E E
-1-0.5 S
Le signal de commande est présenté sur les figures, son échelle est à droite. La commande
impose un courant en quadrature de 1 à -1 pu en commençant et en finissant par des
plateaux sur 0.1 seconde. On remarque premièrement que sur la Figure 34, l'énergie
devient constante du côté rapide après une bosse de démarrage. Cela provient du fait que la
régulation de tension DC est présente, le contrôleur s'assure que la tension est constante
une fois que le condensateur est chargé. Le profil d'énergie du côté rapide correspond à ce
que l'on obtient dans la simulation de référence.
Sur la Figure 35, on remarque qu'il existe une puissance non caractéristique non nulle du
côté rapide lorsqu'une source DC idéale est utilisée. Le profil d'énergie du côté rapide
obtenu avec le condensateur (Figure 34) est donc ajusté au profil de la simulation de
référence par l'action du régulateur de tension du bus DC, mais il doit exister une
perturbation de puissance (qui est compensée par le régulateur).
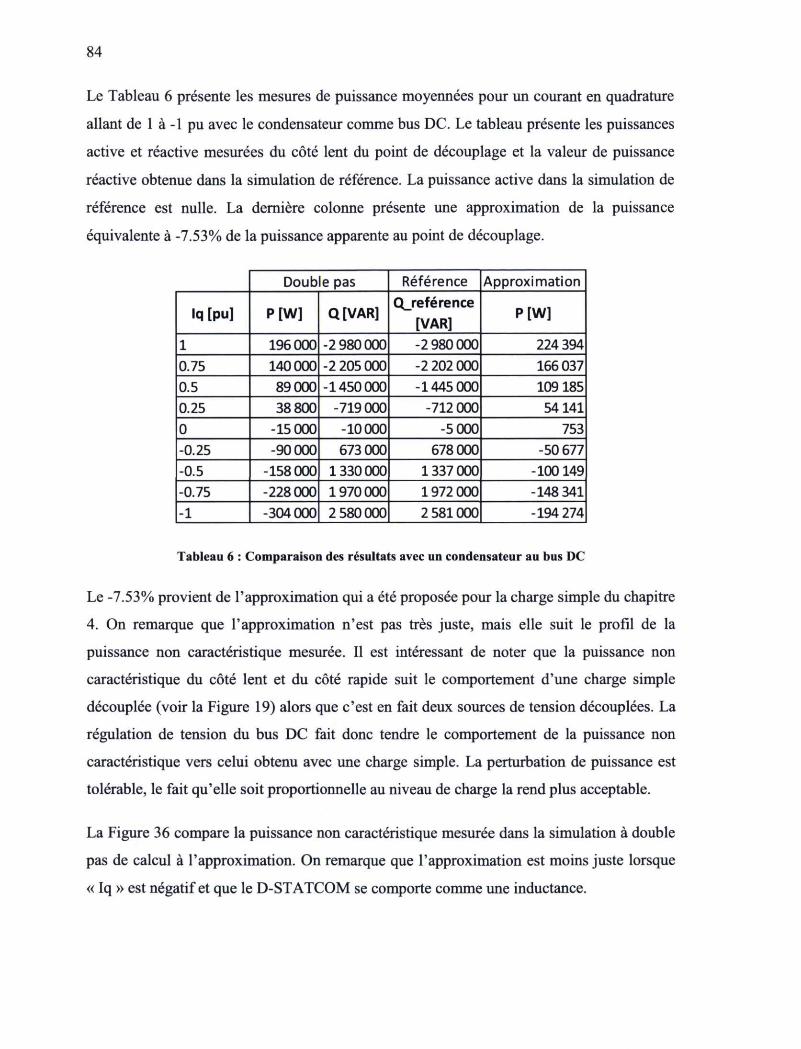
84
Le Tableau 6 présente les mesures de puissance moyennées pour un courant en quadrature
allant de 1 à -1 pu avec le condensateur comme bus DC. Le tableau présente les puissances
active et réactive mesurées du côté lent du point de découplage et la valeur de puissance
réactive obtenue dans la simulation de référence. La puissance active dans la simulation de
référence est nulle. La dernière colonne présente une approximation de la puissance
équivalente à -7.53% de la puissance apparente au point de découplage.
Doub e pas Référence Approximation
Iq [pu] P[W] Q [VAR] Qj-eférence
[VAR] P[W]
1 196000 -2 980 000 -2 980000 224 394 0.75 140000 -2 205000 -2 202 000 166037 0.5 89000 -1450000 -1445 000 109185 0.25 38800 -719000 -712 000 54141 0 -15 000 -10000 -5 000 753 -0.25 -90000 673 000 678000 -50 677 -0.5 -158000 1330000 1337 000 -100149 -0.75 -228000 1970000 1972000 -148 341 -1 -304 000 2 580000 2 581000 -194 274
Tableau 6 : Comparaison des résultats avec un condensateur au bus DC
Le -7.53% provient de l'approximation qui a été proposée pour la charge simple du chapitre
4. On remarque que l'approximation n'est pas très juste, mais elle suit le profil de la
puissance non caractéristique mesurée. Il est intéressant de noter que la puissance non
caractéristique du côté lent et du côté rapide suit le comportement d'une charge simple
découplée (voir la Figure 19) alors que c'est en fait deux sources de tension découplées. La
régulation de tension du bus DC fait donc tendre le comportement de la puissance non
caractéristique vers celui obtenu avec une charge simple. La perturbation de puissance est
tolerable, le fait qu'elle soit proportionnelle au niveau de charge la rend plus acceptable.
La Figure 36 compare la puissance non caractéristique mesurée dans la simulation à double
pas de calcul à l'approximation. On remarque que l'approximation est moins juste lorsque
« Iq » est négatif et que le D-STATCOM se comporte comme une inductance.
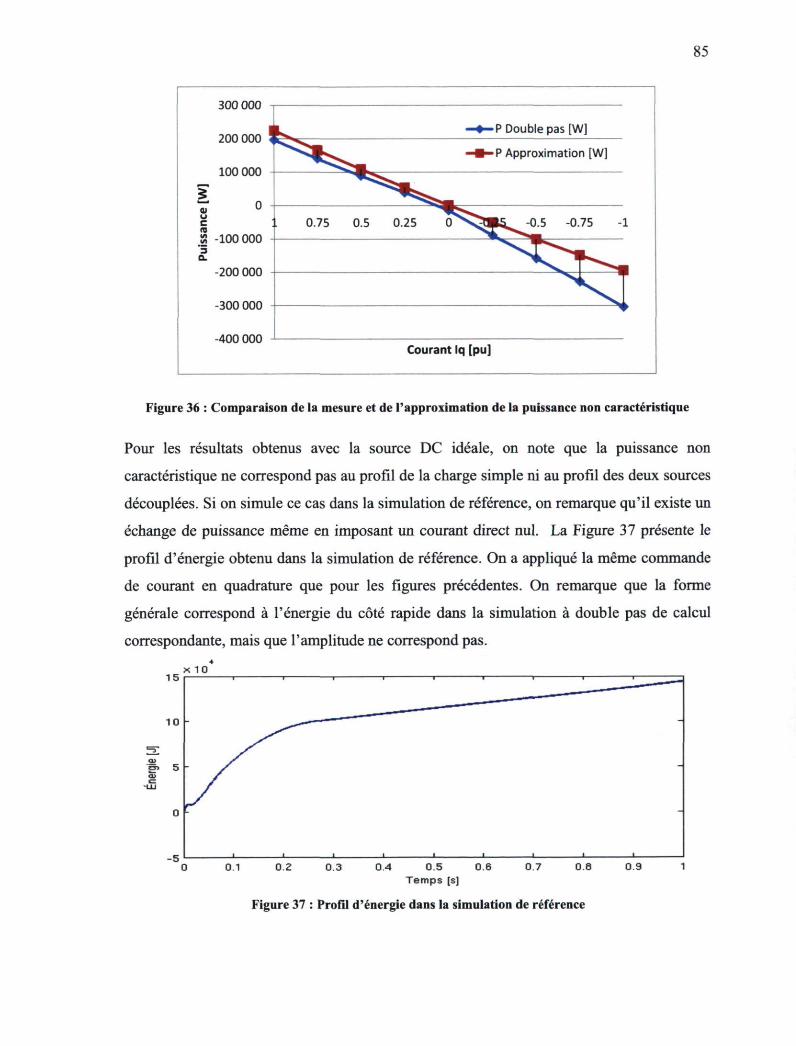
85
-400 000 Courant Iq [pu]
Figure 36 : Comparaison de la mesure et de l'approximation de la puissance non caractéristique
Pour les résultats obtenus avec la source DC idéale, on note que la puissance non
caractéristique ne correspond pas au profil de la charge simple ni au profil des deux sources
découplées. Si on simule ce cas dans la simulation de référence, on remarque qu'il existe un
échange de puissance même en imposant un courant direct nul. La Figure 37 présente le
profil d'énergie obtenu dans la simulation de référence. On a appliqué la même commande
de courant en quadrature que pour les figures précédentes. On remarque que la forme
générale correspond à l'énergie du côté rapide dans la simulation à double pas de calcul
correspondante, mais que l'amplitude ne correspond pas.
x 10
Figure 37 : Profil d'énergie dans la simulation de référence
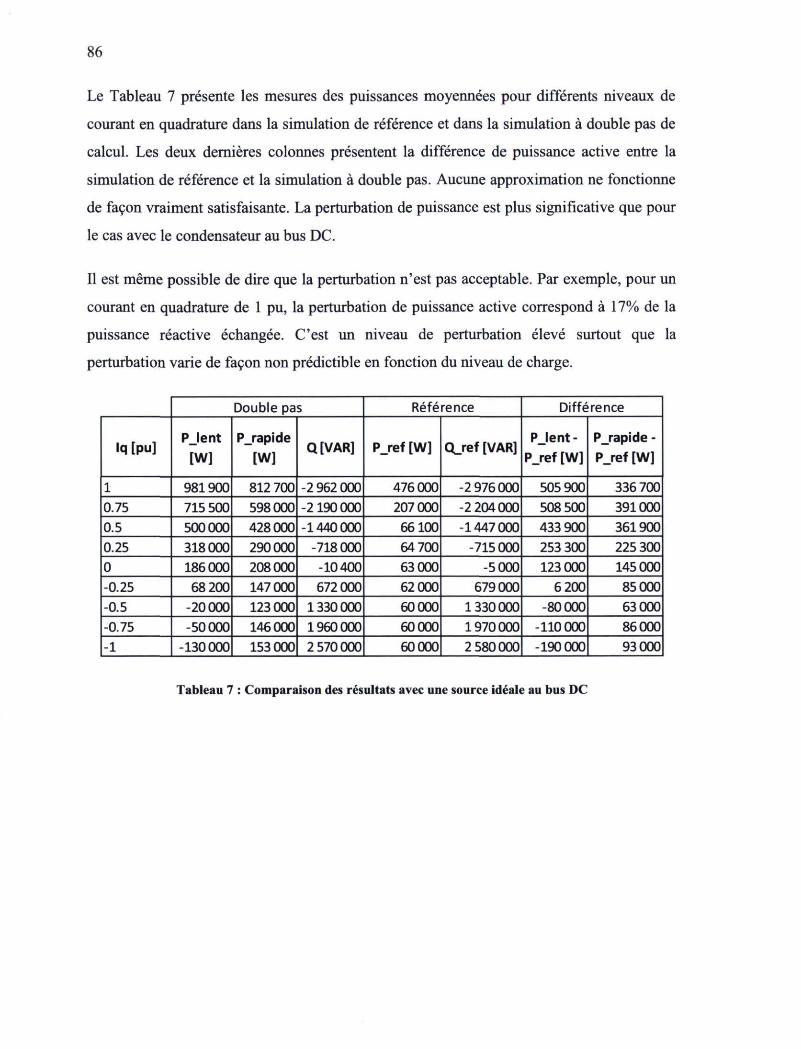
86
Le Tableau 7 présente les mesures des puissances moyennées pour différents niveaux de
courant en quadrature dans la simulation de référence et dans la simulation à double pas de
calcul. Les deux dernières colonnes présentent la différence de puissance active entre la
simulation de référence et la simulation à double pas. Aucune approximation ne fonctionne
de façon vraiment satisfaisante. La perturbation de puissance est plus significative que pour
le cas avec le condensateur au bus DC.
Il est même possible de dire que la perturbation n'est pas acceptable. Par exemple, pour un
courant en quadrature de 1 pu, la perturbation de puissance active correspond à 17% de la
puissance réactive échangée. C'est un niveau de perturbation élevé surtout que la
perturbation varie de façon non prédictible en fonction du niveau de charge.
Double pas Référence Différence
Iq [pu] PJent
[W] P_rapide
[W] Q[VAR] P_ref [W] Qj-ef [VAR]
PJent -P_ref [W]
P_rapide -P_ref [W]
1 981900 812 700 -2 962 000 476000 -2 976000 505 900 336700 0.75 715 500 598000 -2190000 207 000 -2 204000 508 500 391000 0.5 500000 428000 -1440000 66100 -1447000 433 900 361900 0.25 318000 290000 -718000 64 700 -715000 253 300 225 300 0 186000 208000 -10400 63 000 -5000 123 000 145 000 -0.25 68 200 147000 672 000 62 000 679000 6 200 85000 -0.5 -20000 123 000 1330 000 60000 1330000 -80000 63 000 -0.75 -50000 146000 1960000 60000 1970000 -110000 86000 -1 -130000 153 000 2 570000 60000 2 580000 -190000 93 000
Tableau 7 : Comparaison des résultats avec une source idéale au bus DC
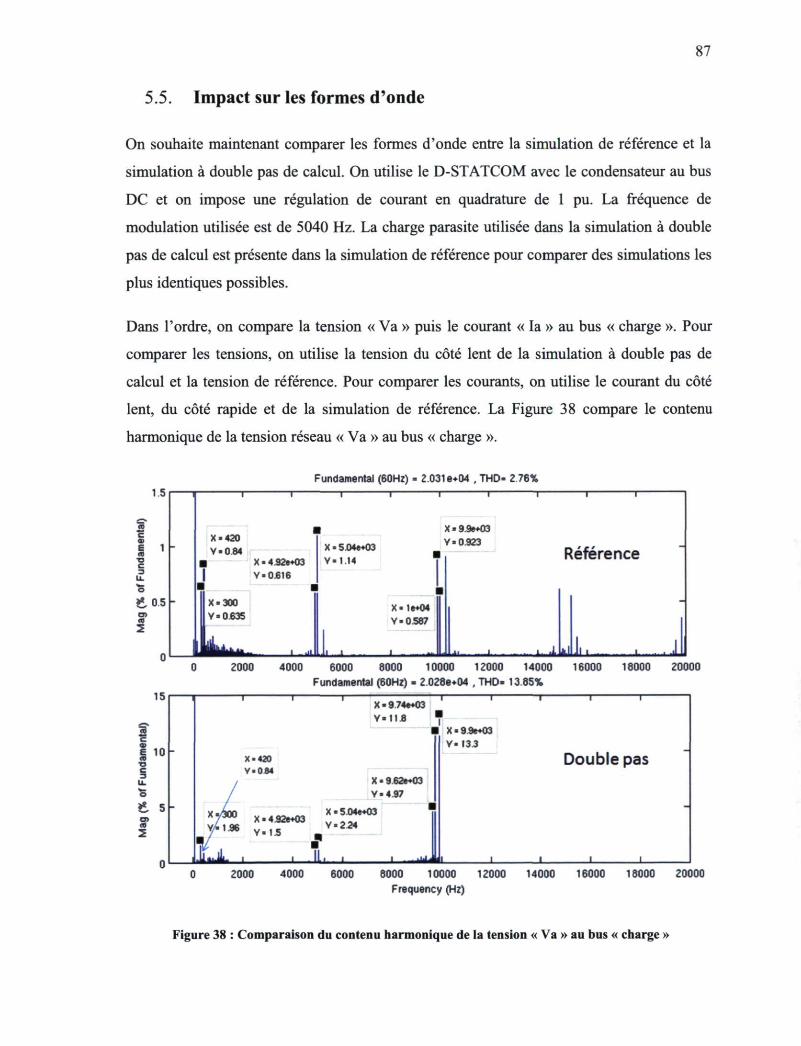
87
5.5. Impact sur les formes d'onde
On souhaite maintenant comparer les formes d'onde entre la simulation de référence et la
simulation à double pas de calcul. On utilise le DSTATCOM avec le condensateur au bus
DC et on impose une régulation de courant en quadrature de 1 pu. La fréquence de
modulation utilisée est de 5040 Hz. La charge parasite utilisée dans la simulation à double
pas de calcul est présente dans la simulation de référence pour comparer des simulations les
plus identiques possibles.
Dans l'ordre, on compare la tension « Va » puis le courant « la » au bus « charge ». Pour
comparer les tensions, on utilise la tension du côté lent de la simulation à double pas de
calcul et la tension de référence. Pour comparer les courants, on utilise le courant du côté
lent, du côté rapide et de la simulation de référence. La Figure 38 compare le contenu
harmonique de la tension réseau « Va » au bus « charge ».
15
Li. O £.0.5 o> m 5
15
I1 0
c 3
O
& 5
Fundamental (60Hz) • 2.031 e-04 , THD- 2 76% 1 1 i 1 r
X-420 Y-0.84
'4.92e+03 0 616
X>5.04e*O3 Y-1.14
X99e*03 Y .0.923
X300 Y0.635
x» ie+04 ¥ • 0 5 8 7
I -, ULlU L
Référence
_!_ L Jjfc LU. L. — 2000 4000 6000 8000 10000 12000 14000 16000 18000
Fundamental (60Hz) • 2.028e*04 , THD- 13 85% 20000
X-420 Y . 0 84
X»492e*03 Y-1J5
X = 974*4-03
Y.11.8
X«962e*03 Y - 4 5 7
X-S.04e+03 Y-2.24
■ ' ■ * - ■ " ■
X>9.9e*03 Y - 1 3 J
Double pas
_i_ _i_ _ i _ _ L
2000 4000 6000 8000 10000 Frequency (Hz)
12000 14000 16000 18000 20000
Figure 38 : Comparaison du contenu harmonique de la tension « Va » au bus « charge »
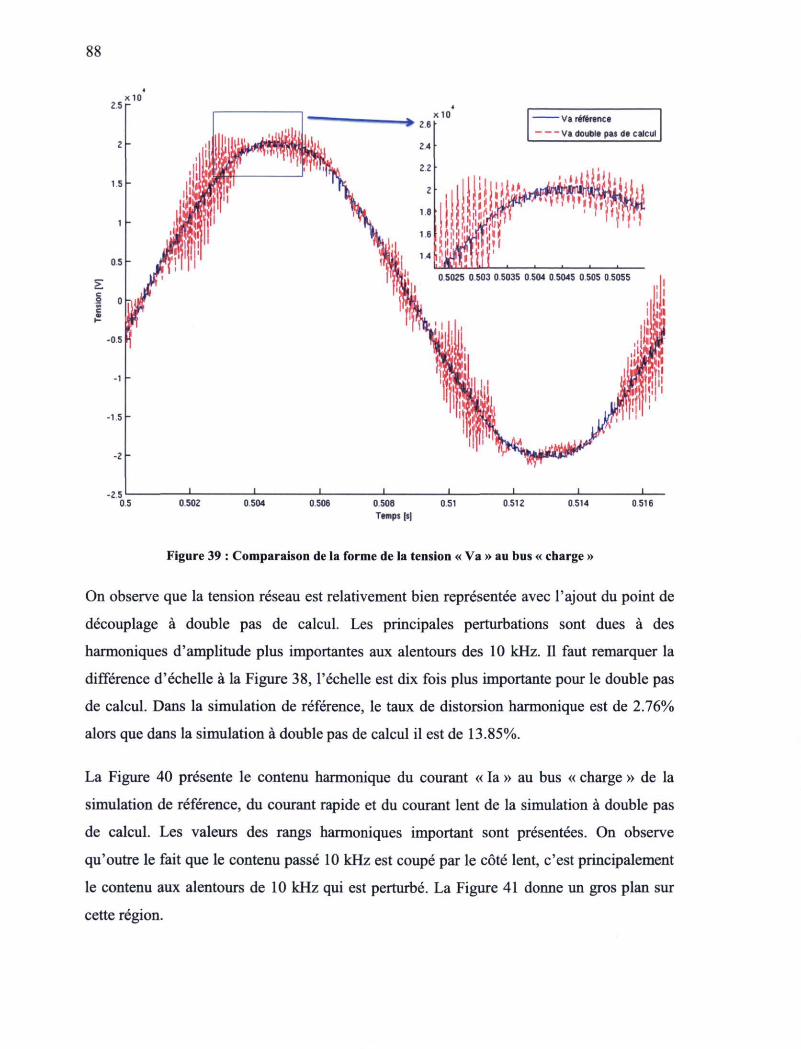
88
x10
0508 Temps |s]
Figure 39 : Comparaison de la forme de la tension « Va » au bus « charge »
On observe que la tension réseau est relativement bien représentée avec l'ajout du point de
découplage à double pas de calcul. Les principales perturbations sont dues à des
harmoniques d'amplitude plus importantes aux alentours des 10 kHz. Il faut remarquer la
différence d'échelle à la Figure 38, l'échelle est dix fois plus importante pour le double pas
de calcul. Dans la simulation de référence, le taux de distorsion harmonique est de 2.76%
alors que dans la simulation à double pas de calcul il est de 13.85%.
La Figure 40 présente le contenu harmonique du courant « la » au bus « charge » de la
simulation de référence, du courant rapide et du courant lent de la simulation à double pas
de calcul. Les valeurs des rangs harmoniques important sont présentées. On observe
qu'outre le fait que le contenu passé 10 kHz est coupé par le côté lent, c'est principalement
le contenu aux alentours de 10 kHz qui est perturbé. La Figure 41 donne un gros plan sur
cette région.
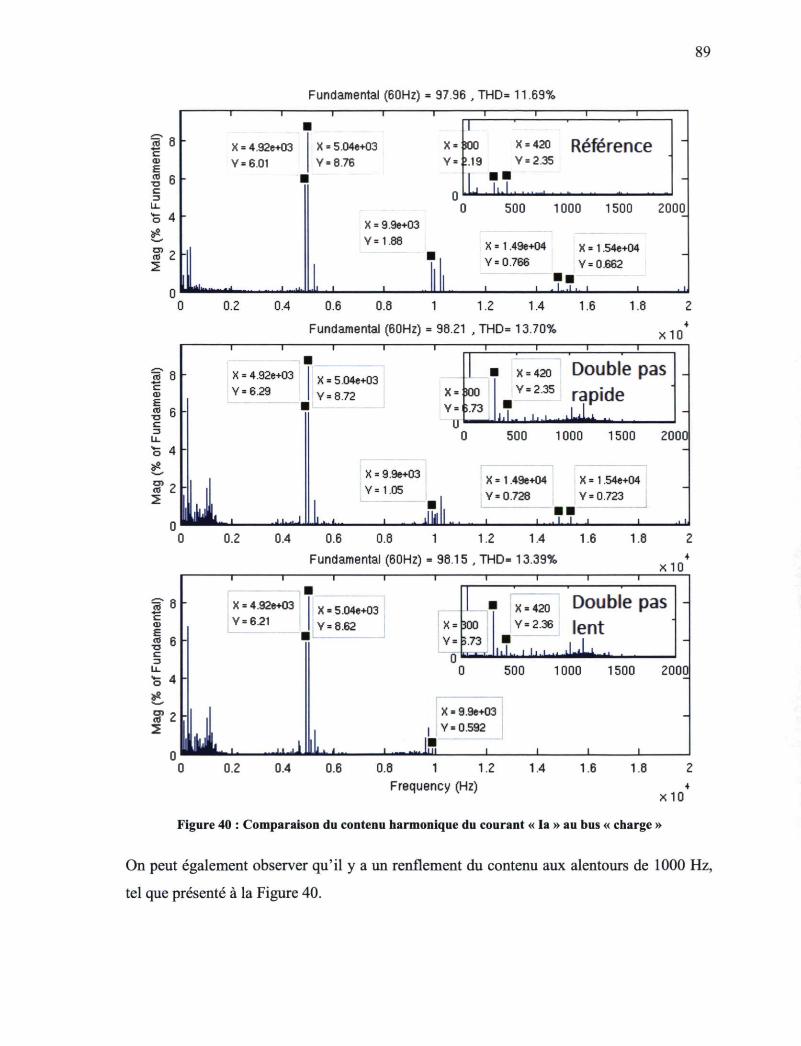
89
Fundamental (60Hz) = 97.96 , THD= 11.69%
"5 8 -
£
C =3
LL.
•5 4 mi a) 2
1 1 i i i i i i i
■ 1 «o x = 42o Référence M 9 Y =2.35
-X = 4.92e+03 Y =6.01
X = 5.04e+03 X = Y = 8.76 Y =
1 «o x = 42o Référence M 9 Y =2.35
-
■ 0
( X = 9.9e+03
■ ■ LJ . Il.l
-
■ 0
( X = 9.9e+03
) 500 1000 1500 2000_
■
V=1.88
1 , , "l 1
X = 1.49e+04 Y =0.766
X = 1 54e+04 Y =0.662
-
■
V=1.88
1 , , "l 1 ?? , , | 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Fundamental (60Hz) = 98.21 , THD= 13.70% 1.8
x10
rt 8 " mm.
sz
£ c =5 LL
m m. «t 2
T T
X = 4.92e+03 Y =6.29
X = 5.04e+03 Y =8.72
llil ■ . . . . . - .
■
Double rapide
pas 1
500 5.73
■ Y =
= 420 = 2.35
Double rapide
pas 1
500 5.73 ■
i,L,,
Double rapide
pas
2000
- L j É É
X = 9.9e+03 Y=1.05
I U
r X = 1 43e+04 Y =0.728
L
x = = 1 54e+04 Y» = 0.723
_L I i l I I
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Fundamental (60Hz) = 98.15 , THD= 13.39%
1.8
x10
« 8 -+-.
£ S 6 sz Zl
L L
«5 4h
2
T 1
X = 4.92e+03 Y = 6.21
X = 5.04e+03 Y = 8.62
* IL ^A
X Y =
0
300 3.73
i x = 420 Double pas B
Y=
2 3 6 lent | i 1
- - ■ ' ■ ■ ■ ■ ^ - ^ ■
500 1000 1500 2000
LL 1 — m m . I l l
X » 9.9e+03 Y =0.592
I 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Frequency (Hz) + x10
Figure 40 : Comparaison du contenu harmonique du courant « la » au bus « charge »
On peut également observer qu'il y a un renflement du contenu aux alentours de 1000 Hz,
tel que présenté à la Figure 40.
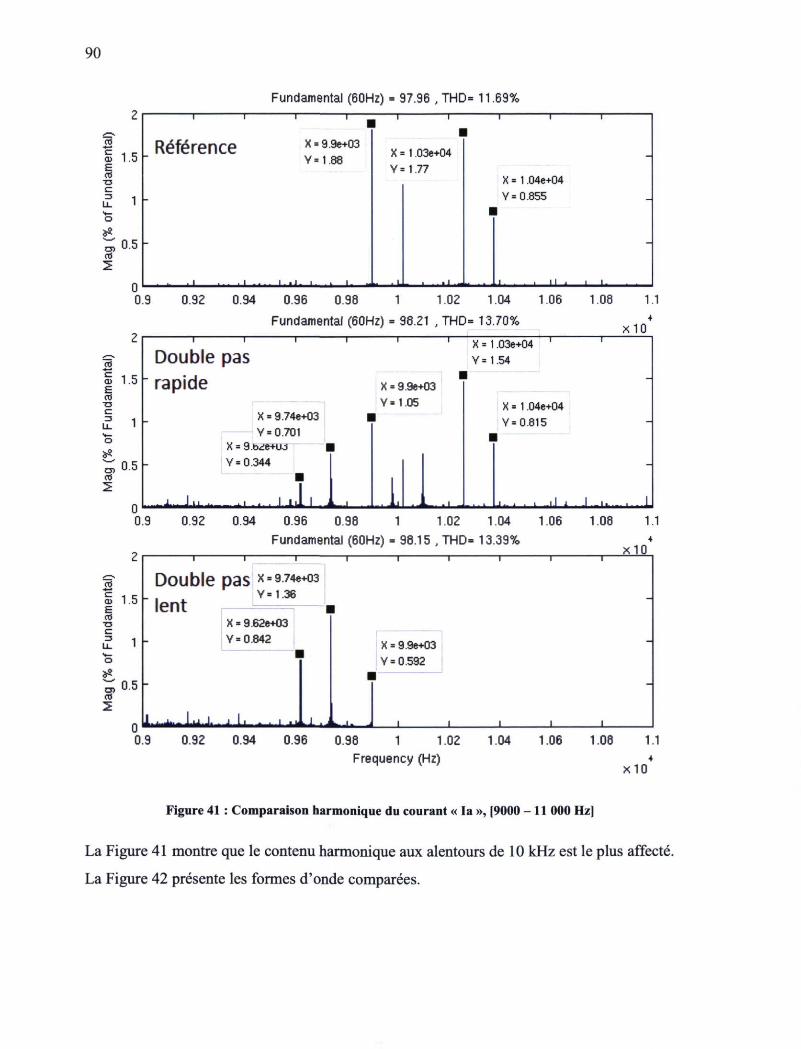
90
2
1.5
1
0.5 h
Fundamental (60Hz) = 97.96 , THD= 11.69% i 1———i 1 1
£Z-(TJ
O) E (Tj £Z
tLLT) (Ti
Référence X = 9.9e+03 Y» 1.88
- L - L ' ■ ■ ' - ' ■ '
X = 1 03e+04 Y=1.77
L * - ■ • '
X = 1.04e+04 Y =0.855
0.9 0.92 094 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1
Fundamental (60Hz) = 98.21 , THD= 13.70% x10
(TJ -t—' SZ <D £ (Tj
T5
1.5
Ï . 1 o
en 0.5
r- ■-
Double " rapide
i
pas i i i
X = 1,03e+04 ' ' Y=1.54
1 1
1 _
r- ■-
Double " rapide
. X = 9.9e+03 Y = 1.05
i 1
X = 1.04e+04
1 1
1 _
r- ■-
Double " rapide
X = 9. Y = 0 .
A = a./4e+uj Y» 0.701
b^e+uj | 344
1
■ 1
1, .J L .
i
1 Y= 0.815
1
J.. i . ■ i.lJ i , . L . l i
1 1
1 _
r- ■-
Double " rapide
■ . ^ i . . . . . L J . I 1 1
1
■ 1
1, .J L .
i
1 Y= 0.815
1
J.. i . ■ i.lJ i , . L . l i
1 1
1 _
0.9 0.92 0.94 0.96 0.98 1.02 1.04 1.06 1.08 1.1
£ (Tj
T3
O
(0
2 Fundamental (60Hz) = 98.15 , THD= 13.39% 4
x 1 0 2 i
Double "lent
i i i i i i i
"
1.5
i
Double "lent
D a S X = 9.74e+03 Y=1.36
i i i i i
"
1
i
Double "lent
X = 9.62e+03 Y =0.842
■
■
■
1
X = 9.9e+03 Y =0.592
"
1
■
■
■
1
X = 9.9e+03 Y =0.592
"
0.5
n
1
■
■
■
1 1
i i i i " 0.9 0.92 0.94 0.96 0.98 1 1.02
Frequency (Hz) 1.04 1.06 1.08 1.1
+ x10
Figure 41 : Comparaison harmonique du courant « la », [9000 11 000 Hz]
La Figure 41 montre que le contenu harmonique aux alentours de 10 kHz est le plus affecté.
La Figure 42 présente les formes d'onde comparées.
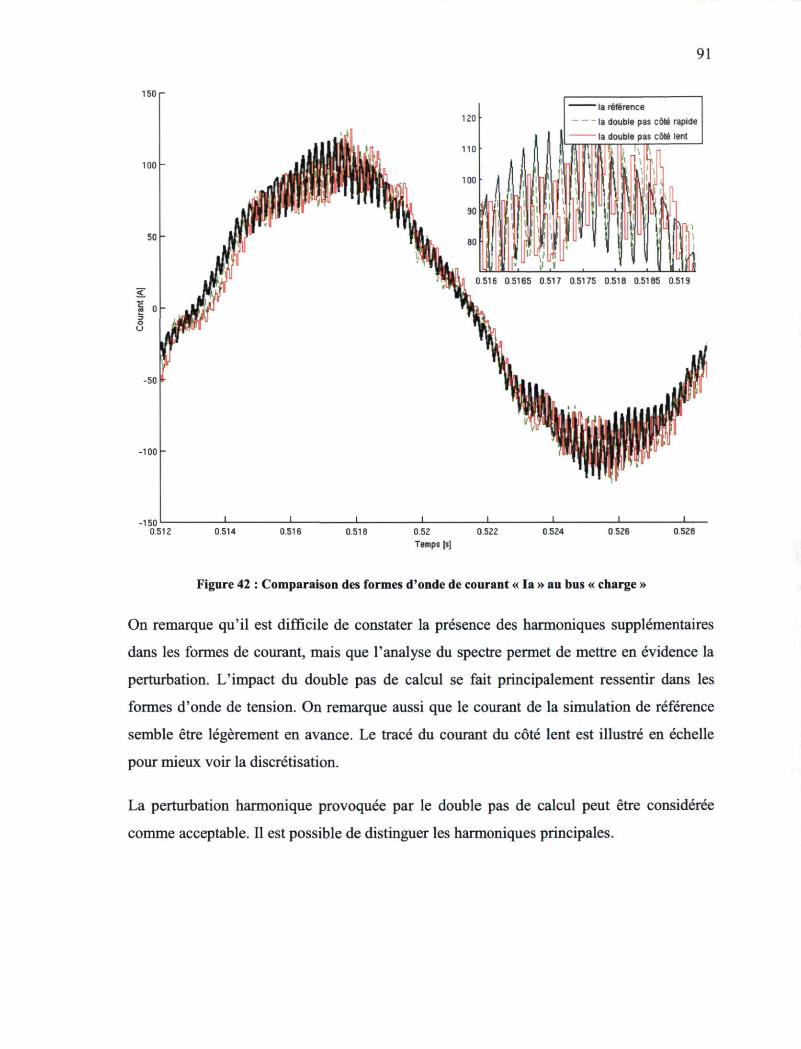
91
150
-150 0 512
120 " la référence * la double pas côté rapide la double pas côté lent
0514 0 516 0.518 0.52 Temps [s]
0.522 0.524 0 526 0528
Figure 42 : Comparaison des formes d'onde de courant « la » au bus « charge »
On remarque qu'il est difficile de constater la présence des harmoniques supplémentaires
dans les formes de courant, mais que l'analyse du spectre permet de mettre en évidence la
perturbation. L'impact du double pas de calcul se fait principalement ressentir dans les
formes d'onde de tension. On remarque aussi que le courant de la simulation de référence
semble être légèrement en avance. Le tracé du courant du côté lent est illustré en échelle
pour mieux voir la discrétisation.
La perturbation harmonique provoquée par le double pas de calcul peut être considérée
comme acceptable. Il est possible de distinguer les harmoniques principales.
92
5.6. Impacts sur le fonctionnement du D-STATCOM
Nous voulons maintenant déterminer comment le double pas de calcul affecte les résultats
si nous faisons fonctionner le D-STATCOM en régulation de tension réseau. Si nous
prenons le réseau complet, sans la présence du D-STATCOM, la tension ligne neutre crête
au bus « BSTATCOM » est 18 980 V. Si nous branchons la régulation de tension du D-
STATCOM, nous devrions obtenir une tension ligne neutre crête approximative de 20 412
V (réseau 25 kVLLRMS).
Dans la simulation de référence, l'amplitude de l'harmonique fondamentale est de 20300 V
avec un THD (Taux de distorsion harmonique) de 2.78%. La fondamentale de courant est
de 96.82 A avec un THD de 11.87%. La lecture de puissance réactive est de -2.956 MVAR,
le fonctionnement du D-STATCOM est donc capacitif.
Dans la simulation à double pas de calcul, l'amplitude de l'harmonique fondamentale est de
19 990 V avec un THD de 13.99%. La fondamentale de courant est de 76.6 A avec un THD
de 17.05%. La lecture de puissance réactive est de -2.301 MVAR. On remarque que les
fonctionnements ne correspondent pas, la simulation à double pas de calcul dévie du
comportement attendu. En régulation de courant, on obtenait un fonctionnement adéquat,
mais ce n'est plus le cas avec la régulation de tension.
Cette divergence de comportement peut s'expliquer en sachant que les tensions du côté lent
sont très bruitées par le double pas de calcul et qu'il n'y a pas de filtre de lecture en entrée
du régulateur. Typiquement on ajoute un filtre, mais comme on obtenait un bon
comportement avec la simulation de référence sans filtre, il a été décidé de ne pas en
mettre.
On reprend maintenant les simulations en ajoutant un filtre passe-bas d'ordre 2 sur la
lecture de la tension réseau, du courant réseau et de la tension du bus DC. Les résultats sont
résumés au Tableau 8. On peut constater que la grande divergence des résultats provenait
de l'effet déstabilisant de l'absence de filtre en entrée du contrôleur.
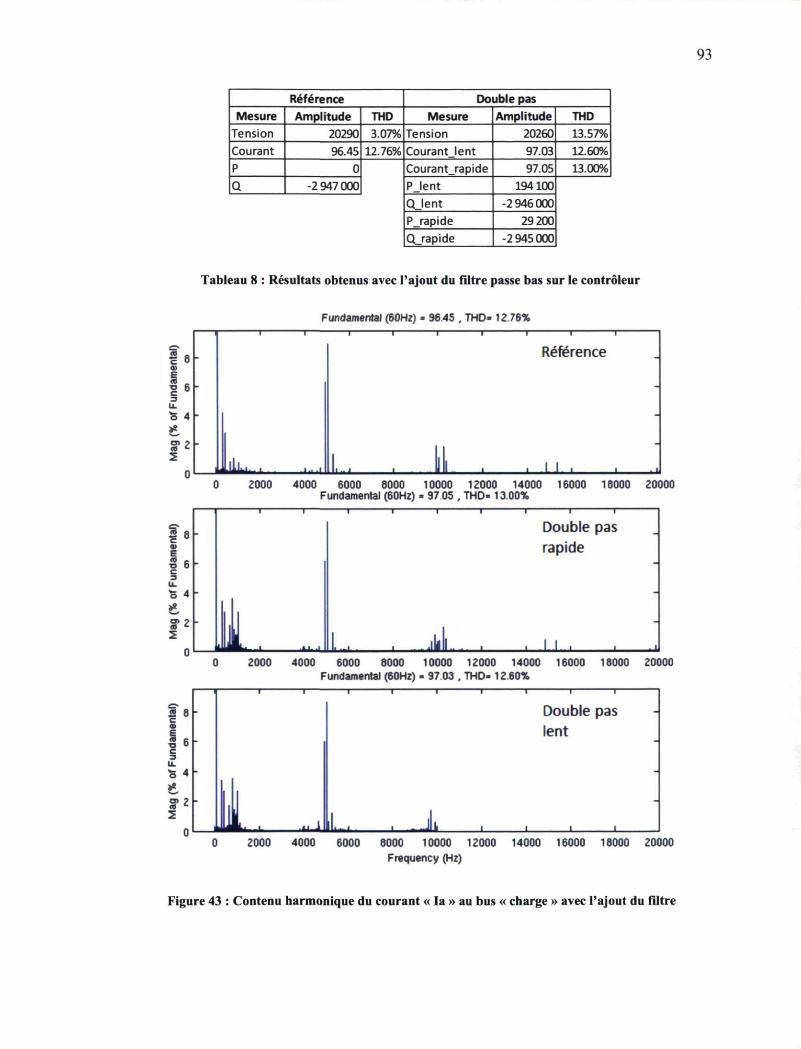
93
Référence Double pas Mesure Amplitude THD Mesure Amplitude THD
Tension 20290 3.07% Tension 20260 13.57% Courant 96.45 12.76% Courant lent 97.03 12.60% P 0 Courant_rapide 97.05 13.00% Q -2 947 000 P lent 194100
QJent -2946000 P_rapide 29 200 Q_rapide -2945000
Tableau 8 : Résultats obtenus avec l'ajout du filtre passe bas sur le contrôleur
Fundamental (60Hz) • 96.45 , THD- 12.76%
îs tu i. w
6 z , LU o 4
1 i i l l l l l l l
Référence
*
2 1 ■ll l l i i l ' ' -L^_J 1.... . Ill . i l . . .
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000 Fundamental (60Hz) = 97 05 , THD- 13.00%
4000 6000 8000 10000 12000 14000 16000 18000 20000 Fundamental (60Hz) - 97.03 , THD- 12.60%
S 8
1 1 1 i - T 1̂ 1-
1̂ 1̂ i
Double pas tn
1 6 c z, U.
lent
o * *
5 i 11 ILI-I . JL i i i
2000 4000 6000 8000 10000 12000 14000 16000 18000 20000 Frequency (Hz)
Figure 43 : Contenu harmonique du courant « la » au bus « charge » avec l'ajout du filtre
94
Dans le Tableau 8, on peut constater que le courant du côté lent présente un THD
légèrement plus faible que la simulation de référence. En régulation de courant (Figure 40),
on avait constaté un THD plus élevé, on aurait donc pu s'attendre à avoir une plus grande
distorsion que celle observée. On explique ce THD plus faible en observant le contenu
harmonique du courant de la Figure 43. Pour ce cas particulier, on constate qu'il n'y a pas
de grandes différences entre le contenu harmonique de la simulation de référence (12.76%)
et le côté rapide de la simulation à double pas de calcul (13%). On observe également que
le contenu harmonique du côté lent est très similaire à celui du côté rapide. La partie au-
delà des 10 kHz est coupée, mais l'amplitude des autres harmoniques principales est très
similaire. On remarque aussi que quelques composantes sont coupées dans la région des 10
kHz. On constate donc un THD du côté lent (12.60%) légèrement plus faible, ce qui nous
donne un cas où le point de découplage d'augmenté pas le THD.
Le régulateur a un impact sur le contenu harmonique observé dans la simulation à double
pas de calcul. Il est difficile de spécifier l'impact, mais on peut donner une ébauche
d'explication en sachant que l'on passe la valeur de courant du côté rapide vers le côté lent
à des moments précis. L'ensemble des valeurs passées peuvent donc parfois bien
représenter le comportement présent du côté rapide, passer uniquement des valeurs
extrêmes ou des valeurs plus moyennes. Il est donc difficile d'évaluer l'impact du double
pas de calcul sur le contenu harmonique, mais pour les cas traités, on observe une
correspondance acceptable du contenu entre la simulation de référence et la simulation à
double pas de calcul.
95
5.7. Conclusion
Le chapitre a permis d'étudier l'effet des commutations sur un point de découplage à
double pas de calcul. Il a premièrement été possible d'observer que les conditions de
stabilité numérique sont identiques à celles rencontrées dans le chapitre 4 sur une charge
simple et deux sources de tension découplées.
On a ensuite observé le comportement de la puissance non caractéristique du côté lent et du
côté rapide du point de découplage. Il a été possible de constater qu'il devient plus difficile
de l'approximer de façon juste, comme il était possible de le faire sur charge simple ou sur
charge commutée. En fait, pour le modèle de D-STATCOM avec le condensateur comme
bus DC, on observe que le comportement de la puissance non caractéristique est
comparable à ce qui serait attendu avec une charge simple et que la perturbation est d'un
niveau relativement acceptable. Avec une source idéale au bus DC, le comportement de la
puissance non caractéristique ne correspond pas à un profil rencontré précédemment et la
perturbation est non acceptable.
Les formes d'onde ont ensuite été comparées pour le cas avec un condensateur au bus DC.
Le point de découplage provoque une perturbation des harmoniques. La perturbation qui est
d'importance est au niveau des tensions du côté réseau. Lorsque la régulation en courant est
appliquée, les perturbations au niveau des courants sont suffisamment faibles pour ne pas
perturber le comportement des régulateurs, mais en régulation de tension, il est nécessaire
d'ajouter un filtre passe-bas en entrée du régulateur pour obtenir des résultats acceptables.
La perturbation la plus notable est l'ajout de composantes hautes fréquences sur la tension
réseau. Pour ce cas, la perturbation harmonique et de puissance active est acceptable. La
puissance réactive est bien représentée.
Il faut noter que les résultats ont été obtenus pour un cas particulier. Il serait hasardeux de
généraliser les résultats liés à la perturbation harmonique puisqu'on a constaté une
augmentation du THD dans un cas et une diminution dans un autre. Les conditions de
stabilité semblent cependant plus généralisables pour une topologie de réseau donnée.

Chapitre VI - Implantation de la simulation à double pas
de calcul dans Hypersim Ce chapitre présente une comparaison des résultats obtenus, des simulations à double pas
de calcul, dans SPS et dans Hypersim. Cette comparaison a pour objectif de se rapprocher
de l'objectif final du projet où la méthode serait appliquée en utilisant Hypersim comme
simulateur lent. On veut connaître l'effet du double pas de calcul dans Hypersim.
Le chapitre commence par présenter la méthode qui a été utilisée pour réaliser du double
pas de calcul dans une simulation Hypersim en temps différé. On présente ensuite les essais
qui sont réalisés pour comparer Hypersim à SPS. Les résultats de simulation sont ensuite
détaillés.
Comme il pourrait être souhaitable d'implanter le nœud de calcul rapide avec la
technologie FPGA, les particularités de la technologie dans le contexte de la résolution
d'équations de réseaux seront présentées dans ce chapitre.
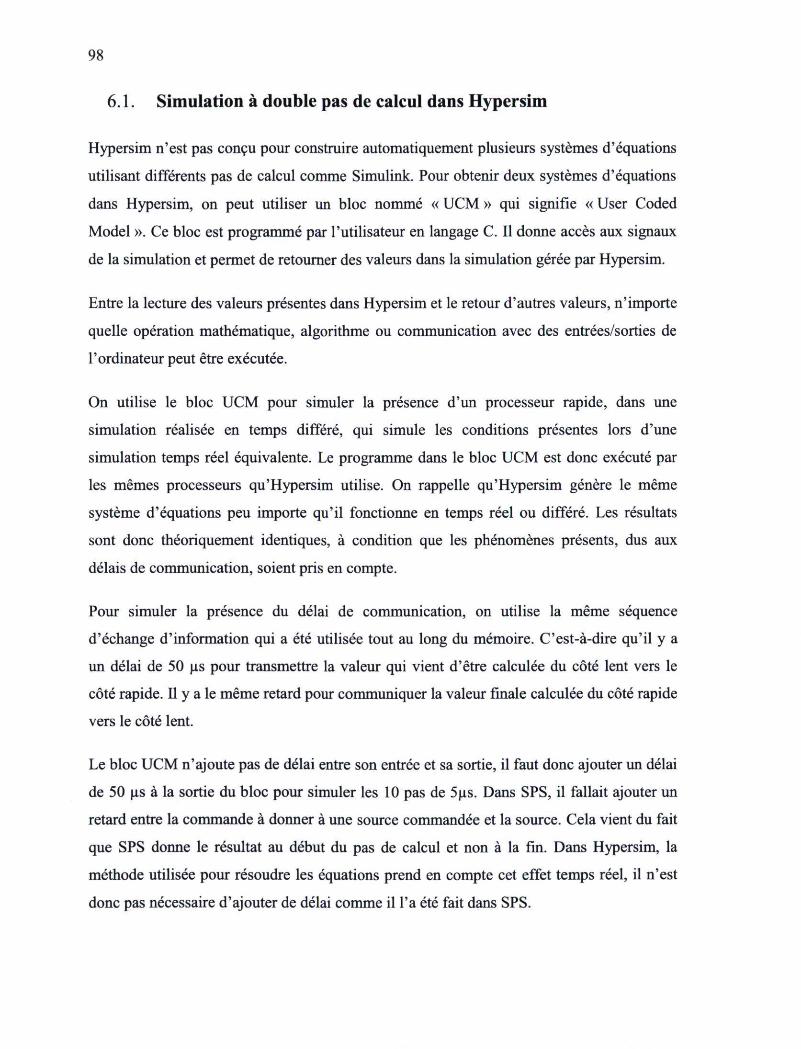
98
6.1. Simulation à double pas de calcul dans Hypersim
Hypersim n'est pas conçu pour construire automatiquement plusieurs systèmes d'équations
utilisant différents pas de calcul comme Simulink. Pour obtenir deux systèmes d'équations
dans Hypersim, on peut utiliser un bloc nommé « UCM » qui signifie « User Coded
Model ». Ce bloc est programmé par l'utilisateur en langage C. Il donne accès aux signaux
de la simulation et permet de retourner des valeurs dans la simulation gérée par Hypersim.
Entre la lecture des valeurs présentes dans Hypersim et le retour d'autres valeurs, n'importe
quelle opération mathématique, algorithme ou communication avec des entrées/sorties de
l'ordinateur peut être exécutée.
On utilise le bloc UCM pour simuler la présence d'un processeur rapide, dans une
simulation réalisée en temps différé, qui simule les conditions présentes lors d'une
simulation temps réel équivalente. Le programme dans le bloc UCM est donc exécuté par
les mêmes processeurs qu'Hypersim utilise. On rappelle qu'Hypersim génère le même
système d'équations peu importe qu'il fonctionne en temps réel ou différé. Les résultats
sont donc théoriquement identiques, à condition que les phénomènes présents, dus aux
délais de communication, soient pris en compte.
Pour simuler la présence du délai de communication, on utilise la même séquence
d'échange d'information qui a été utilisée tout au long du mémoire. C'est-à-dire qu'il y a
un délai de 50 ps pour transmettre la valeur qui vient d'être calculée du côté lent vers le
côté rapide. Il y a le même retard pour communiquer la valeur finale calculée du côté rapide
vers le côté lent.
Le bloc UCM n'ajoute pas de délai entre son entrée et sa sortie, il faut donc ajouter un délai
de 50 ps à la sortie du bloc pour simuler les 10 pas de 5ps. Dans SPS, il fallait ajouter un
retard entre la commande à donner à une source commandée et la source. Cela vient du fait
que SPS donne le résultat au début du pas de calcul et non à la fin. Dans Hypersim, la
méthode utilisée pour résoudre les équations prend en compte cet effet temps réel, il n'est
donc pas nécessaire d'ajouter de délai comme il l'a été fait dans SPS.
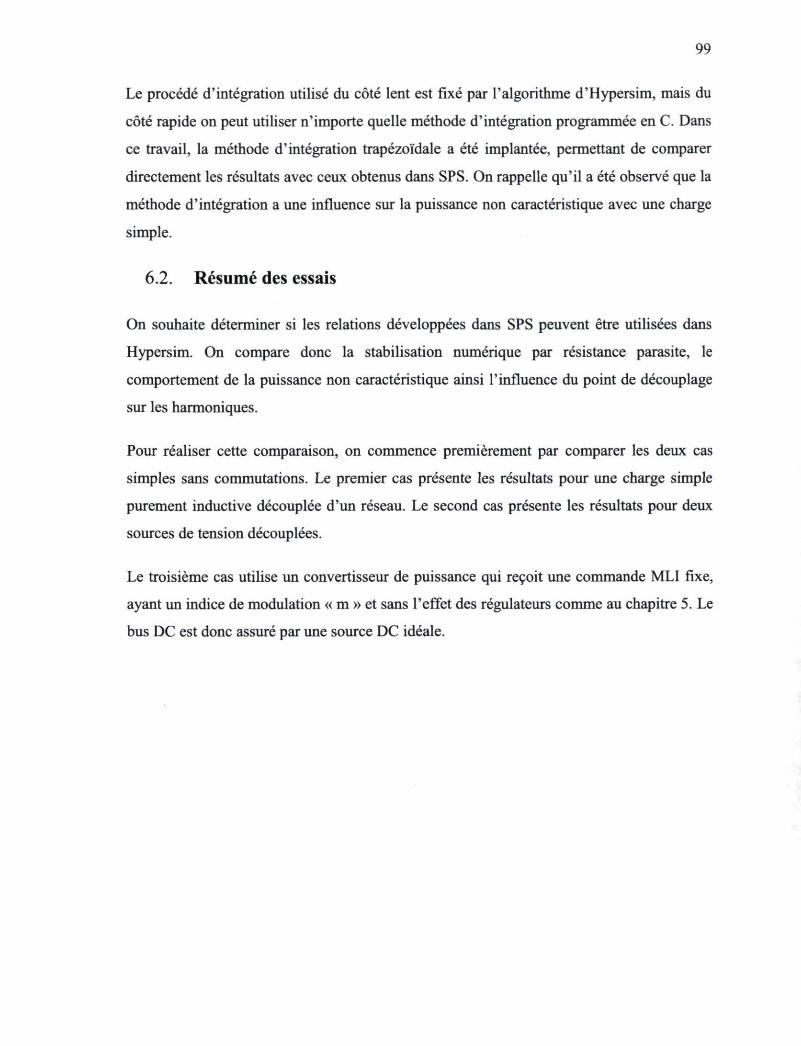
99
Le procédé d'intégration utilisé du côté lent est fixé par l'algorithme d'Hypersim, mais du
côté rapide on peut utiliser n'importe quelle méthode d'intégration programmée en C. Dans
ce travail, la méthode d'intégration trapézoïdale a été implantée, permettant de comparer
directement les résultats avec ceux obtenus dans SPS. On rappelle qu'il a été observé que la
méthode d'intégration a une influence sur la puissance non caractéristique avec une charge
simple.
6.2. Résumé des essais
On souhaite déterminer si les relations développées dans SPS peuvent être utilisées dans
Hypersim. On compare donc la stabilisation numérique par résistance parasite, le
comportement de la puissance non caractéristique ainsi l'influence du point de découplage
sur les harmoniques.
Pour réaliser cette comparaison, on commence premièrement par comparer les deux cas
simples sans commutations. Le premier cas présente les résultats pour une charge simple
purement inductive découplée d'un réseau. Le second cas présente les résultats pour deux
sources de tension découplées.
Le troisième cas utilise un convertisseur de puissance qui reçoit une commande MLI fixe,
ayant un indice de modulation « m » et sans l'effet des régulateurs comme au chapitre 5. Le
bus DC est donc assuré par une source DC idéale.
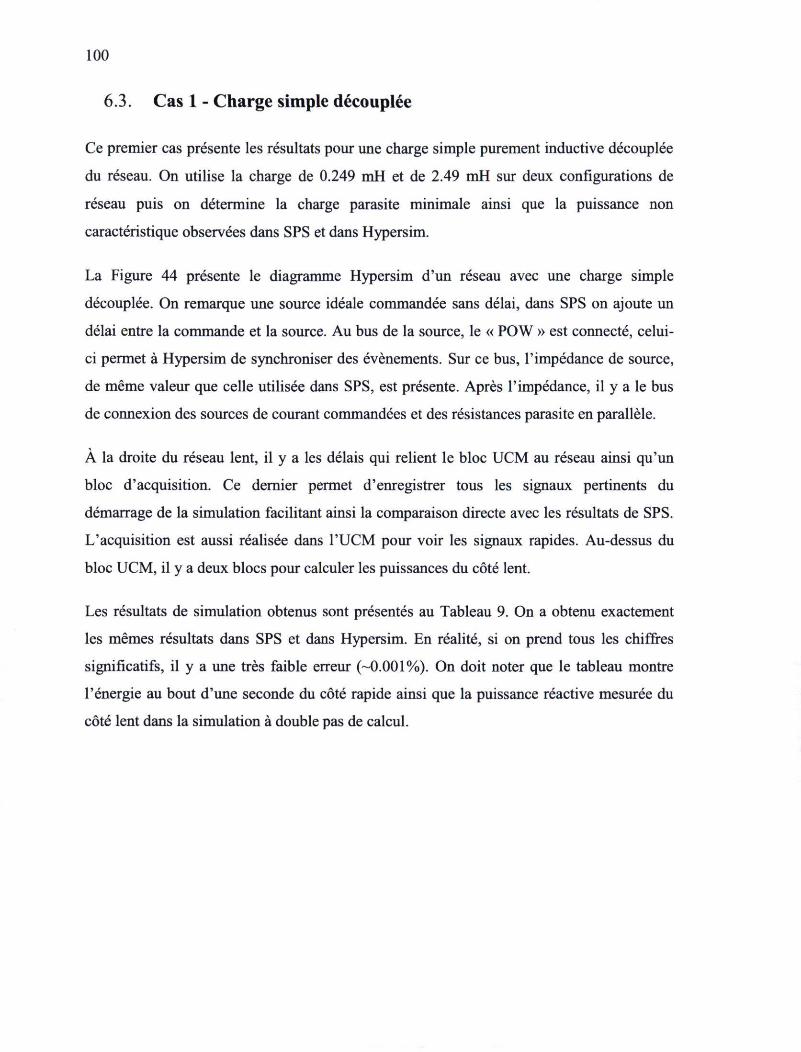
100
6.3. Cas 1 - Charge simple découplée
Ce premier cas présente les résultats pour une charge simple purement inductive découplée
du réseau. On utilise la charge de 0.249 mH et de 2.49 mH sur deux configurations de
réseau puis on détermine la charge parasite minimale ainsi que la puissance non
caractéristique observées dans SPS et dans Hypersim.
La Figure 44 présente le diagramme Hypersim d'un réseau avec une charge simple
découplée. On remarque une source idéale commandée sans délai, dans SPS on ajoute un
délai entre la commande et la source. Au bus de la source, le « POW » est connecté, celui-
ci permet à Hypersim de synchroniser des événements. Sur ce bus, l'impédance de source,
de même valeur que celle utilisée dans SPS, est présente. Après l'impédance, il y a le bus
de connexion des sources de courant commandées et des résistances parasite en parallèle.
À la droite du réseau lent, il y a les délais qui relient le bloc UCM au réseau ainsi qu'un
bloc d'acquisition. Ce dernier permet d'enregistrer tous les signaux pertinents du
démarrage de la simulation facilitant ainsi la comparaison directe avec les résultats de SPS.
L'acquisition est aussi réalisée dans l'UCM pour voir les signaux rapides. Au-dessus du
bloc UCM, il y a deux blocs pour calculer les puissances du côté lent.
Les résultats de simulation obtenus sont présentés au Tableau 9. On a obtenu exactement
les mêmes résultats dans SPS et dans Hypersim. En réalité, si on prend tous les chiffres
significatifs, il y a une très faible erreur (-0.001%). On doit noter que le tableau montre
l'énergie au bout d'une seconde du côté rapide ainsi que la puissance réactive mesurée du
côté lent dans la simulation à double pas de calcul.
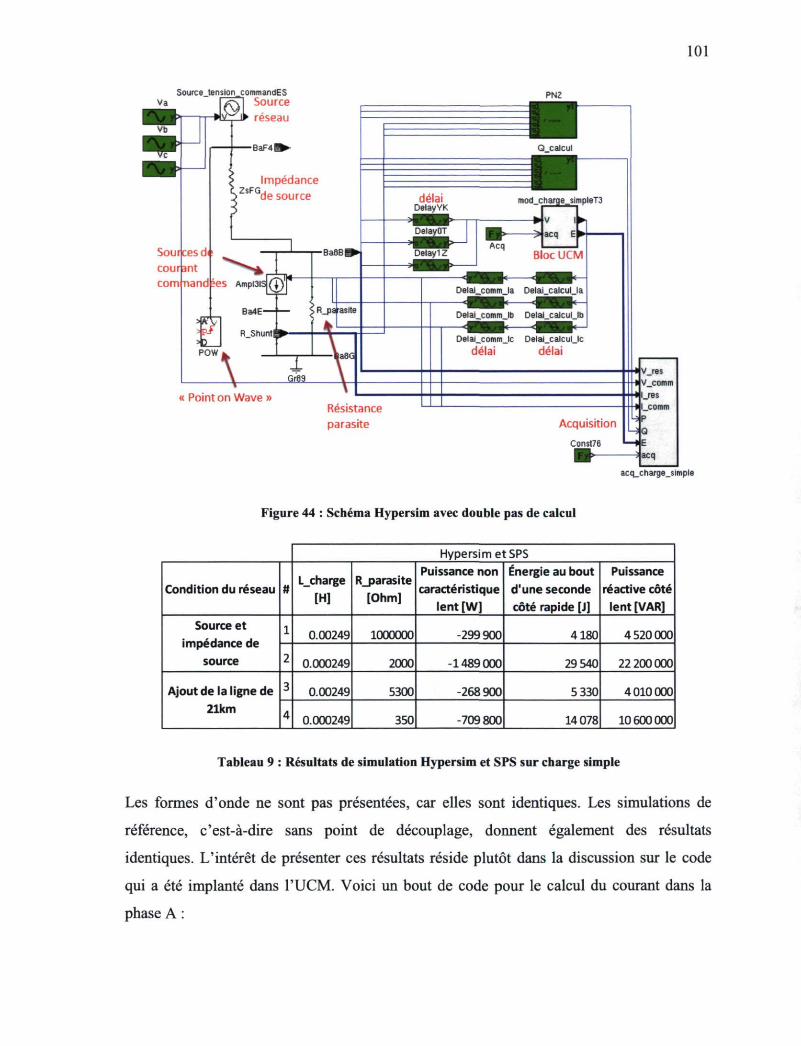
101
Source_tension_commandES Source PN2
« Point on Wave »
acq_charge_simple
Figure 44 : Schéma Hypersim avec double pas de calcul
Hypersim et SPS
Condition du réseau # L_charge
[H] R_parasite
[Ohm]
Puissance non caractéristique
lent [W]
Énergie au bout d'une seconde côté rapide [J]
Puissance réactive côté
lent [VAR] Source et
impédance de source
1 0.00249 1000000 -299 900 4180 4520000 Source et
impédance de source 2 0.000249 2000 -1489000 29 540 22 200000
Ajout de la ligne de 21km
3 0.00249 5300 -268900 5 330 4010000 Ajout de la ligne de 21km 4 0.000249 350 -709 800 14 078 10600000
Tableau 9 : Résultats de simulation Hypersim et SPS sur charge simple
Les formes d'onde ne sont pas présentées, car elles sont identiques. Les simulations de
référence, c'est-à-dire sans point de découplage, donnent également des résultats
identiques. L'intérêt de présenter ces résultats réside plutôt dans la discussion sur le code
qui a été implanté dans l'UCM. Voici un bout de code pour le calcul du courant dans la
phase A :
102
int i; double Iarapide = Ihista; %% La valeur de courant de départ = la dernière valeur calculée double Lcharge; %% Inductance de charge double ratioxfo; %% Rapport de transformation du transformateur idéal
for(i=0;i<10;i++) {
Ia_rapide = (((Va_reseau+Vnist_a)/2*ratio_xfo)/(L_charge/0.000005)+Ia_rapide; Vhista = Va reseau;
}
Ihist a = Iarapide; Iareseau = Ihist_a*ratio_xfo %% On passe au côté lent la dernière valeur calculée.
Ce bout de code illustre comment le côté rapide réalise une intégration trapézoïdale avec
deux valeurs de tension différentes pour le premier pas de calcul, mais que pour les pas de
calculs suivants, il réalise l'équivalent d'une intégration Euler arrière. « Vareseau » est
donné par le point de découplage au premier pas de calcul, le code présenté ne montre pas
l'acquisition de cette valeur. Au premier passage dans la boucle « for », « Iarapide » est
calculé avec la valeur actuelle de tension et la valeur historique qui correspond à la dernière
valeur de tension lente passée par le point de découplage. Pour les neuf pas suivants, la
valeur historique devient la nouvelle valeur de tension et on obtient l'équivalent d'une
intégration par Euler arrière.
103
6.4. Cas 2 - Deux sources de tension découplées
Le cas des deux sources découplées est également présenté pour montrer la particularité du
code dans l'UCM dû à la source de tension du côté rapide. Au niveau des résultats de
simulation, on obtient exactement les mêmes résultats avec SPS et avec Hypersim. Les
résultats ont été présentés au chapitre 4.
int i; double Iarapide = Ihista; %% La valeur de courant de départ = la dernière valeur calculée double Lcharge; %% Inductance de charge double ratio xfo; %% Rapport de transformation du transformateur idéal double Temps = Tempshist; %% On a besoin du temps pour générer les sources rapides double Vacomm; %% Source du côté rapide double theta; %% Angle de la source double Vln_peak; %% Amplitude de la source du réseau lent
for (i=0;i<10;i++) { theta = fmod(Temps, l/60)/(l/60))*2*Pi; Vacomm = m*Vln_peak*ratio_xfo*sin(theta); Ia_rapide=(((Va_reseau+Vhist_a)/2*ratio_xfo)-(Va_comm+Va_comm_hist)/2))/(L_charge/0.000005) +Ia rapide; Vhist_a = Vareseau; Temps = Temps + 0.000005; Va comm hist = Va comm; } '
Tempshist = Temps; Ihist a = Iarapide; la reseau = Ihist a*ratio xfo
En suivant la logique du code pour le calcul du courant, on remarque que la tension utilisée
pour calculer le courant varie à chaque pas de calcul puisque la source de tension du côté
rapide est discrétisée aux 5 ps. Pour le calcul de la tension du côté source de tension rapide
de l'inductance (en gras dans le code) il faut utiliser l'intégration trapézoïdale sur tous les
pas de calcul. Pour le calcul de tension avec la source alimentée par la tension mesurée du
côté lent, on pourrait utiliser l'intégration trapézoïdale seulement sur le premier pas de
calcul et utiliser Euler arrière pour les pas de calcul suivants.
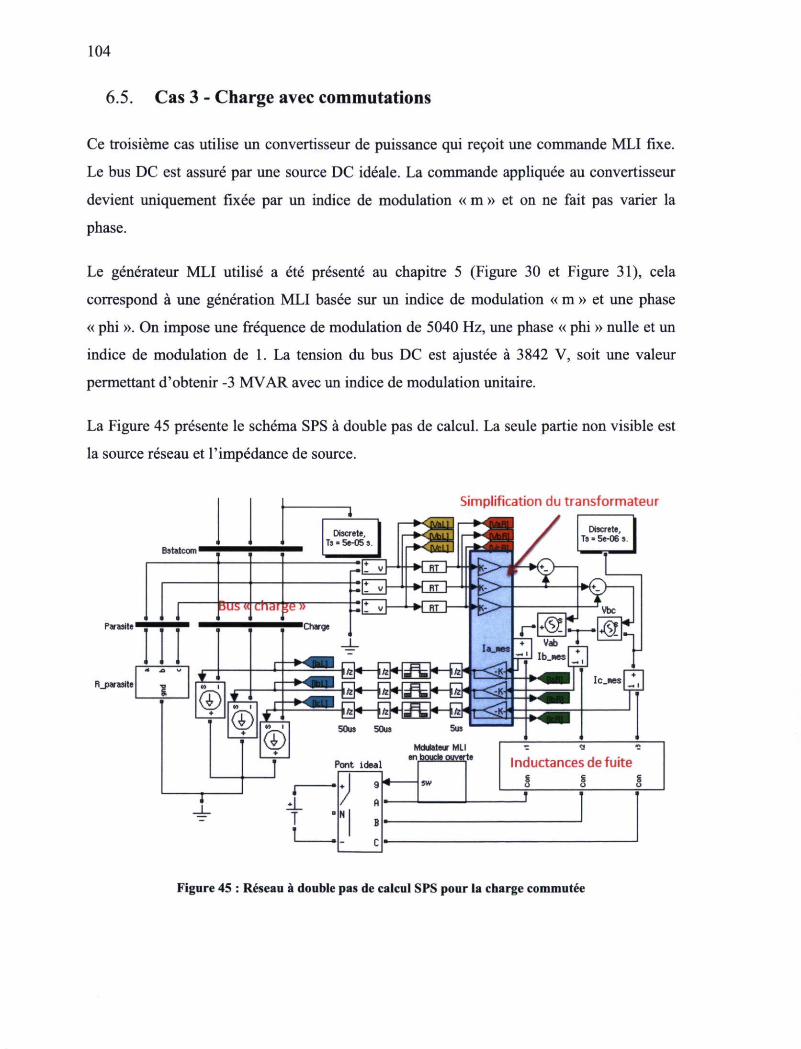
104
6.5. Cas 3 - Charge avec commutations
Ce troisième cas utilise un convertisseur de puissance qui reçoit une commande MLI fixe.
Le bus DC est assuré par une source DC idéale. La commande appliquée au convertisseur
devient uniquement fixée par un indice de modulation « m » et on ne fait pas varier la
phase.
Le générateur MLI utilisé a été présenté au chapitre 5 (Figure 30 et Figure 31), cela
correspond à une génération MLI basée sur un indice de modulation « m » et une phase
« phi ». On impose une fréquence de modulation de 5040 Hz, une phase « phi » nulle et un
indice de modulation de 1. La tension du bus DC est ajustée à 3842 V, soit une valeur
permettant d'obtenir -3 MVAR avec un indice de modulation unitaire.
La Figure 45 présente le schéma SPS à double pas de calcul. La seule partie non visible est
la source réseau et l'impédance de source.
Parasite
RjDarasite
Discrete, Ts = 5e-05 s.
Simplification du transformateur
=a *Œ3-±->fè> -H_ai_
liH^Sh^t^il R«—W^M^ r<^ tm 5ÛU3 50us
Pont ideal Mdulateur MLI
en boucle ouverte Inductances de fuite ! i i
J
Figure 45 : Réseau à double pas de calcul SPS pour la charge commutée
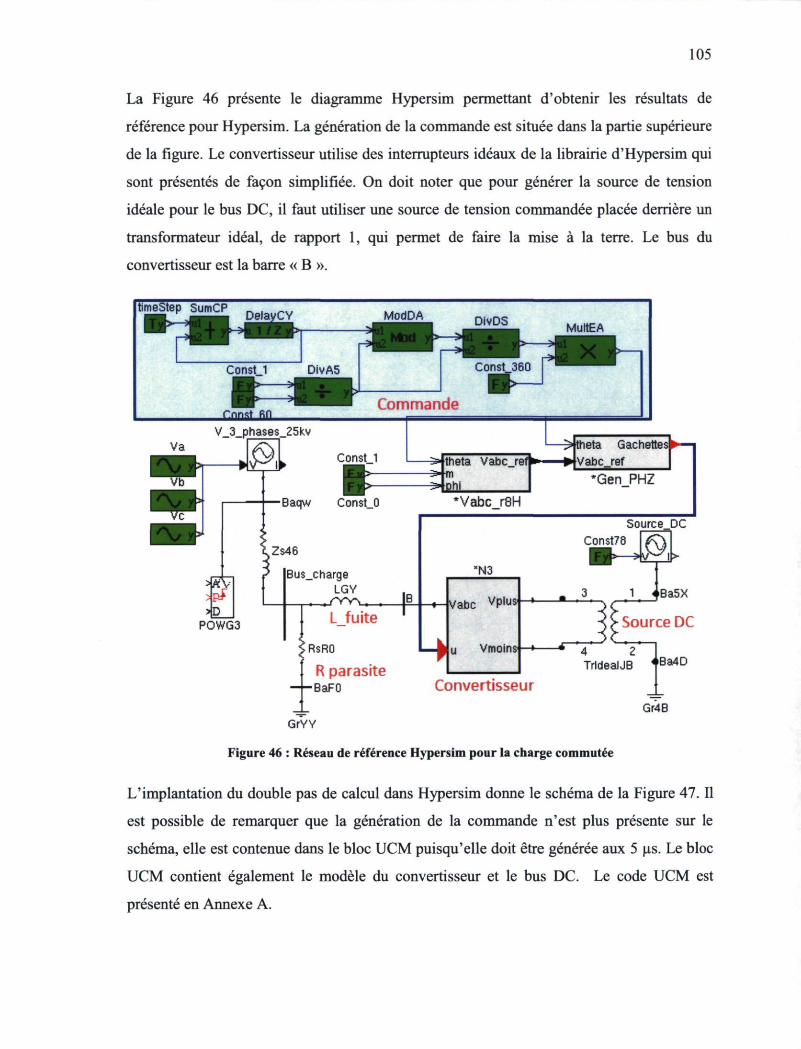
105
La Figure 46 présente le diagramme Hypersim permettant d'obtenir les résultats de
référence pour Hypersim. La génération de la commande est située dans la partie supérieure
de la figure. Le convertisseur utilise des interrupteurs idéaux de la librairie d'Hypersim qui
sont présentés de façon simplifiée. On doit noter que pour générer la source de tension
idéale pour le bus DC, il faut utiliser une source de tension commandée placée derrière un
transformateur idéal, de rapport 1, qui permet de faire la mise à la terre. Le bus du
convertisseur est la barre « B ».
timeStep SumCP DelayCY ModDA
DivDS MultEA
Const 1 DivA5 Const 360
Cinnst fin Commande
V-3-Phases 25kv
theta Vabc_re
phi
$4theta Gâchettes Vabc ref
'Gen PHZ ■Baqw Const_0 'Vabc r8H
Zs46
POWG3
Bus_charge LGY
L_fuite
RsRO
R parasite BaFO
Source DC Const78
*N3
Vabc v
Pl u s
u Vmoins
1 <>Ba5X
Source DC
TrldealJB <l B a 4 D
Convertisseur Gr4B
GrYY
Figure 46 : Réseau de référence Hypersim pour la charge commutée
L'implantation du double pas de calcul dans Hypersim donne le schéma de la Figure 47. Il
est possible de remarquer que la génération de la commande n'est plus présente sur le
schéma, elle est contenue dans le bloc UCM puisqu'elle doit être générée aux 5 ps. Le bloc
UCM contient également le modèle du convertisseur et le bus DC. Le code UCM est
présenté en Annexe A.
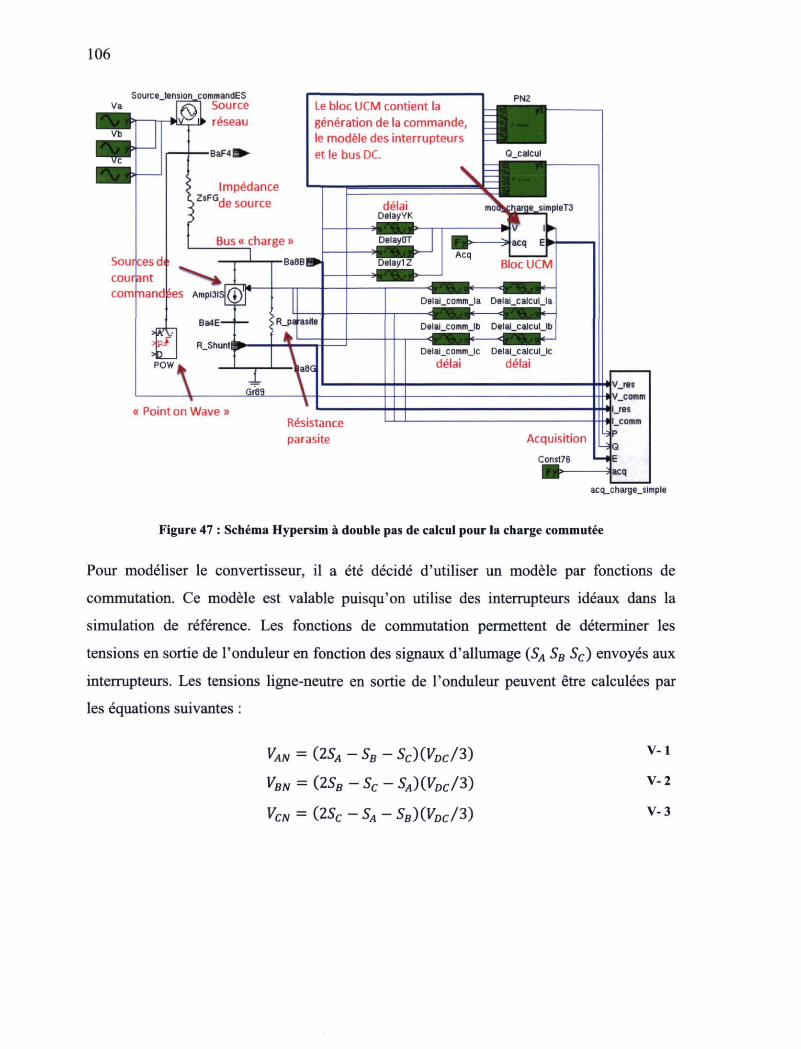
106
Sourcejension commandES Source
« Point on Wave »
acq_charge_simple
Figure 47 : Schéma Hypersim à double pas de calcul pour la charge commutée
Pour modéliser le convertisseur, il a été décidé d'utiliser un modèle par fonctions de
commutation. Ce modèle est valable puisqu'on utilise des interrupteurs idéaux dans la
simulation de référence. Les fonctions de commutation permettent de déterminer les
tensions en sortie de l'onduleur en fonction des signaux d'allumage (SA SB Sc) envoyés aux
interrupteurs. Les tensions ligne-neutre en sortie de l'onduleur peuvent être calculées par
les équations suivantes :
VAN = ( 2 S A - S B - S c ) ( V D C / 3 )
VBN = ( 2 S B - S c - S A ) ( V D C / 3 )
VCN = ( 2 S c - S A - S B ) ( V D C / 3 )
V - l
V-2
V-3
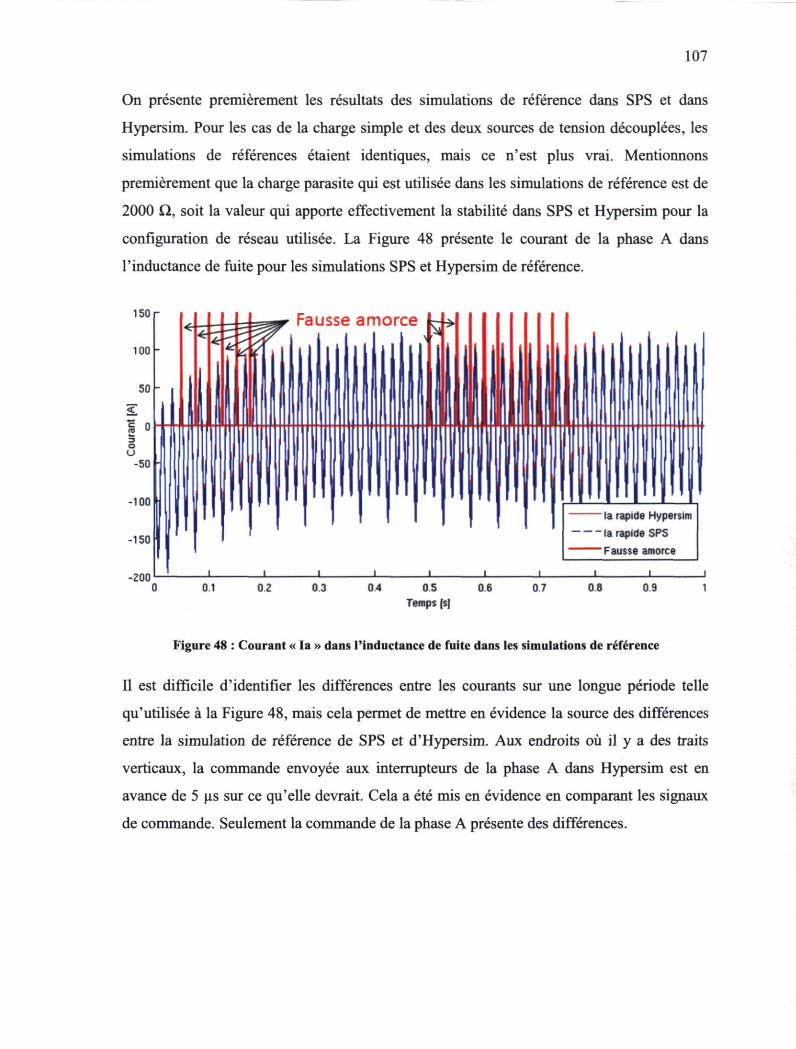
107
On présente premièrement les résultats des simulations de référence dans SPS et dans
Hypersim. Pour les cas de la charge simple et des deux sources de tension découplées, les
simulations de références étaient identiques, mais ce n'est plus vrai. Mentionnons
premièrement que la charge parasite qui est utilisée dans les simulations de référence est de
2000 Q, soit la valeur qui apporte effectivement la stabilité dans SPS et Hypersim pour la
configuration de réseau utilisée. La Figure 48 présente le courant de la phase A dans
l'inductance de fuite pour les simulations SPS et Hypersim de référence.
la rapide SPS
Fausse amorce
Figure 48 : Courant « la » dans l'inductance de fuite dans les simulations de référence
Il est difficile d'identifier les différences entre les courants sur une longue période telle
qu'utilisée à la Figure 48, mais cela permet de mettre en évidence la source des différences
entre la simulation de référence de SPS et d'Hypersim. Aux endroits où il y a des traits
verticaux, la commande envoyée aux interrupteurs de la phase A dans Hypersim est en
avance de 5 ps sur ce qu'elle devrait. Cela a été mis en évidence en comparant les signaux
de commande. Seulement la commande de la phase A présente des différences.

108
Il n'a pas été possible de trouver de solution à ce problème sans devoir enregistrer la
commande SPS puis de l'imposer dans l'environnement Hypersim. La source du problème
n'a pas pu être identifiée clairement sinon elle aurait été corrigée. À priori, le problème
devrait provenir d'une précision numérique dans la commande. Cependant, ce problème ne
nous a pas empêchés de valider la correspondance des simulations de référence. La Figure
49 présente un gros plan sur la première « fausse » amorce dans Hypersim.
0.0498 00499 005 0 0501 0 0502 0 0503
la Hypersim
la SPS
Fausse amorce
0.047 0.048 0049 0.05 0.051 0.052 Temps [s]
0.053 0.054 0.055 0.056
Figure 49 : Gros plan sur la première fausse amorce, courant « la » de l'inductance de fuite dans les simulations de référence
Il est possible d'observer que les courants sont pratiquement identiques (différence très
négligeable) avant la fausse amorce. Dès que la fausse amorce se produit, les courants
décalent légèrement, ce qui modifie les lectures pour le reste de la simulation. L'effet se fait
ressentir sur les formes de tension, mais de façon moins prononcée. La Figure 50 présente
la tension « Va » au bus « charge » pour les simulations de référence.
La Figure 51 présente le courant « la » dans l'inductance de fuite pour les simulations SPS
et Hypersim à double pas de calcul. On rencontre le même problème de fausse amorce que
dans les simulations de référence. Sur la Figure 51, les moments de fausse amorce sont
présentés tout comme sur les simulations de référence. Les fausses amorces se produisent
aux mêmes moments que dans la simulation de référence.
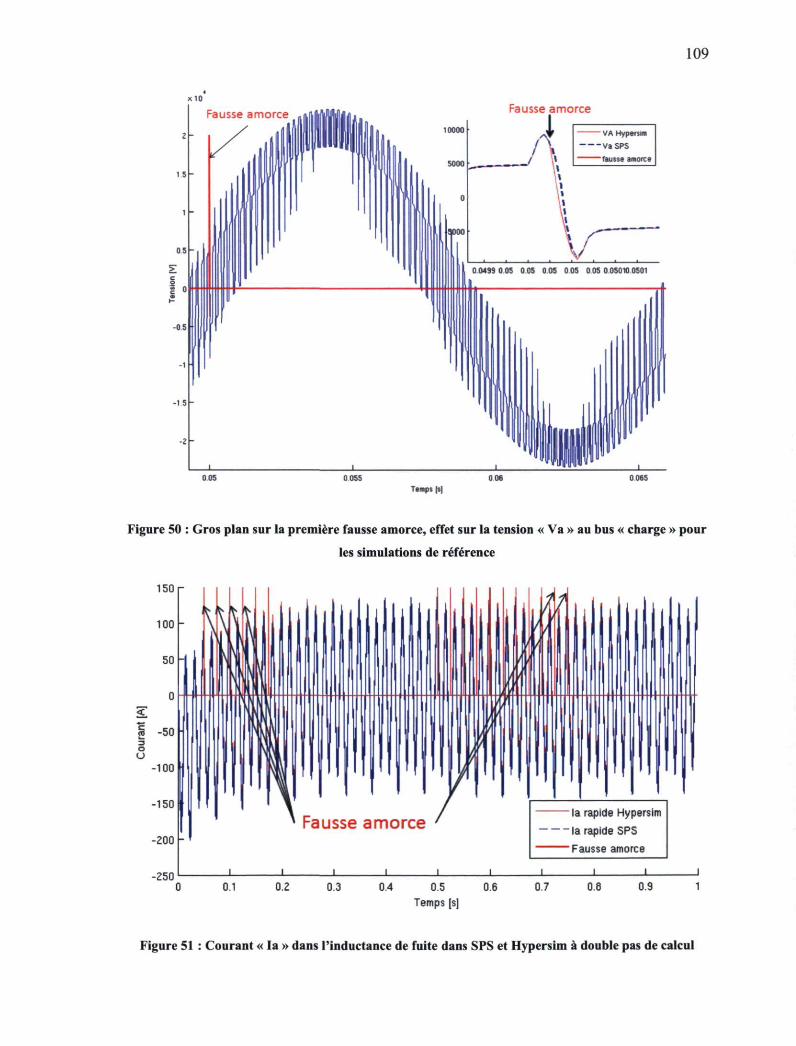
109
0 055
Fausse amorce
VA Hypers» V»SPS fausse amorce
006 Temps [s]
Figure 50 : Gros plan sur la première fausse amorce, effet sur la tension « Va » au bus « charge » pour
les simulations de référence
150r
0.4 0.5 Temps [s]
Figure 51 : Courant « la » dans l'inductance de fuite dans SPS et Hypersim à double pas de calcul
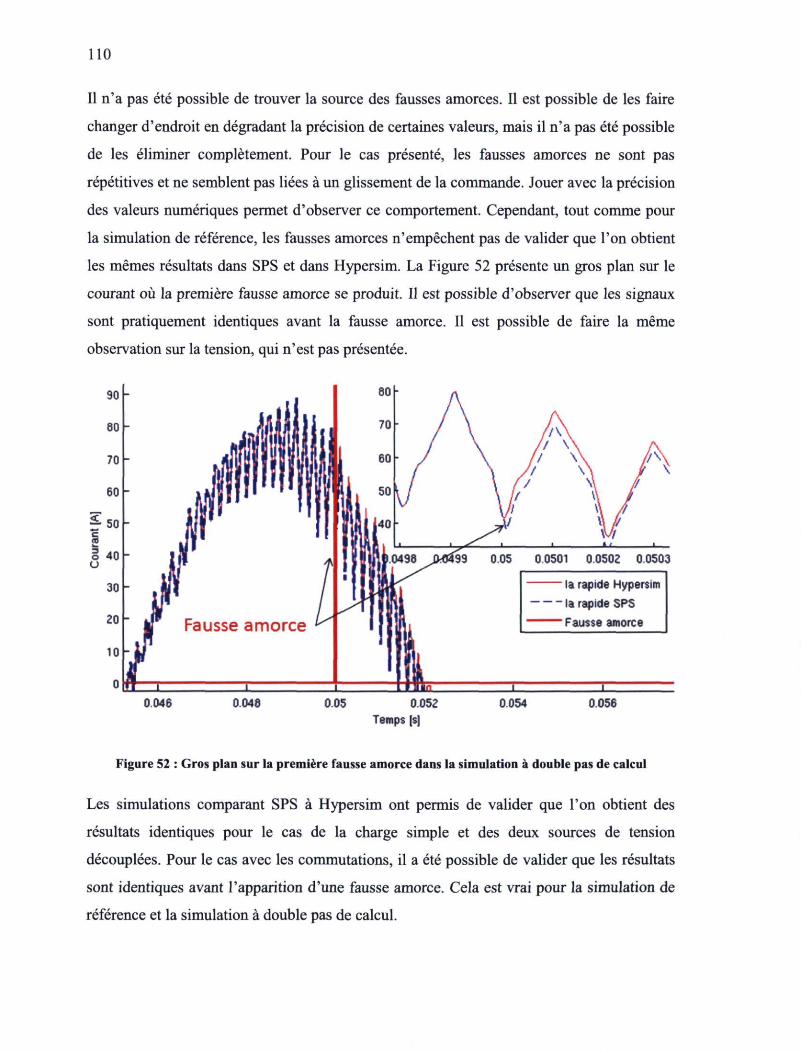
110
Il n'a pas été possible de trouver la source des fausses amorces. Il est possible de les faire
changer d'endroit en dégradant la précision de certaines valeurs, mais il n'a pas été possible
de les éliminer complètement. Pour le cas présenté, les fausses amorces ne sont pas
répétitives et ne semblent pas liées à un glissement de la commande. Jouer avec la précision
des valeurs numériques permet d'observer ce comportement. Cependant, tout comme pour
la simulation de référence, les fausses amorces n'empêchent pas de valider que l'on obtient
les mêmes résultats dans SPS et dans Hypersim. La Figure 52 présente un gros plan sur le
courant où la première fausse amorce se produit. Il est possible d'observer que les signaux
sont pratiquement identiques avant la fausse amorce. Il est possible de faire la même
observation sur la tension, qui n'est pas présentée.
0.0501 0.0502 00503
la rapide Hypersim la rapide SPS Fausse amorce
0046 0.048 0.05 0.052 Temps [s]
0.054 0.056
Figure 52 : Gros plan sur la première fausse amorce dans la simulation à double pas de calcul
Les simulations comparant SPS à Hypersim ont permis de valider que l'on obtient des
résultats identiques pour le cas de la charge simple et des deux sources de tension
découplées. Pour le cas avec les commutations, il a été possible de valider que les résultats
sont identiques avant l'apparition d'une fausse amorce. Cela est vrai pour la simulation de
référence et la simulation à double pas de calcul.
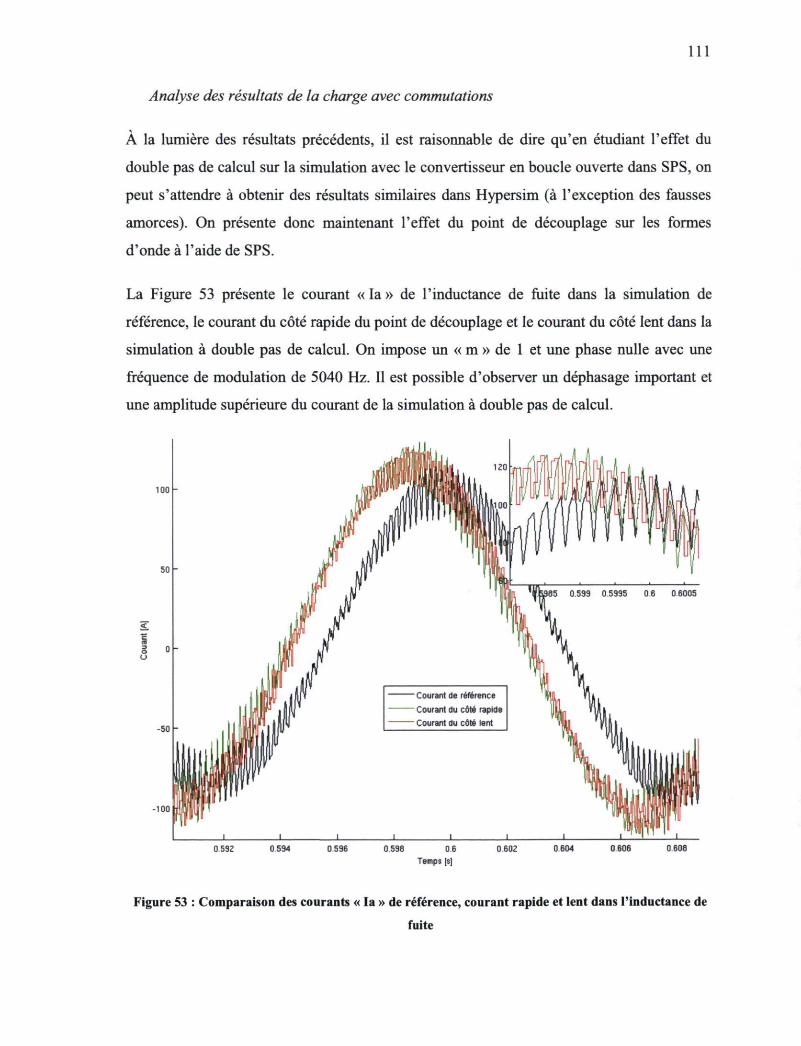
I l l
Analyse des résultats de la charge avec commutations
À la lumière des résultats précédents, il est raisonnable de dire qu'en étudiant l'effet du
double pas de calcul sur la simulation avec le convertisseur en boucle ouverte dans SPS, on
peut s'attendre à obtenir des résultats similaires dans Hypersim (à l'exception des fausses
amorces). On présente donc maintenant l'effet du point de découplage sur les formes
d'onde à l'aide de SPS.
La Figure 53 présente le courant « la » de l'inductance de fuite dans la simulation de
référence, le courant du côté rapide du point de découplage et le courant du côté lent dans la
simulation à double pas de calcul. On impose un « m » de 1 et une phase nulle avec une
fréquence de modulation de 5040 Hz. Il est possible d'observer un déphasage important et
une amplitude supérieure du courant de la simulation à double pas de calcul.
100 -
-100
0592 0 594 0.596 0598 0.6 Temps [s)
0602 0 604 0 606 0608
Figure 53 : Comparaison des courants « la » de référence, courant rapide et lent dans l'inductance de
fuite
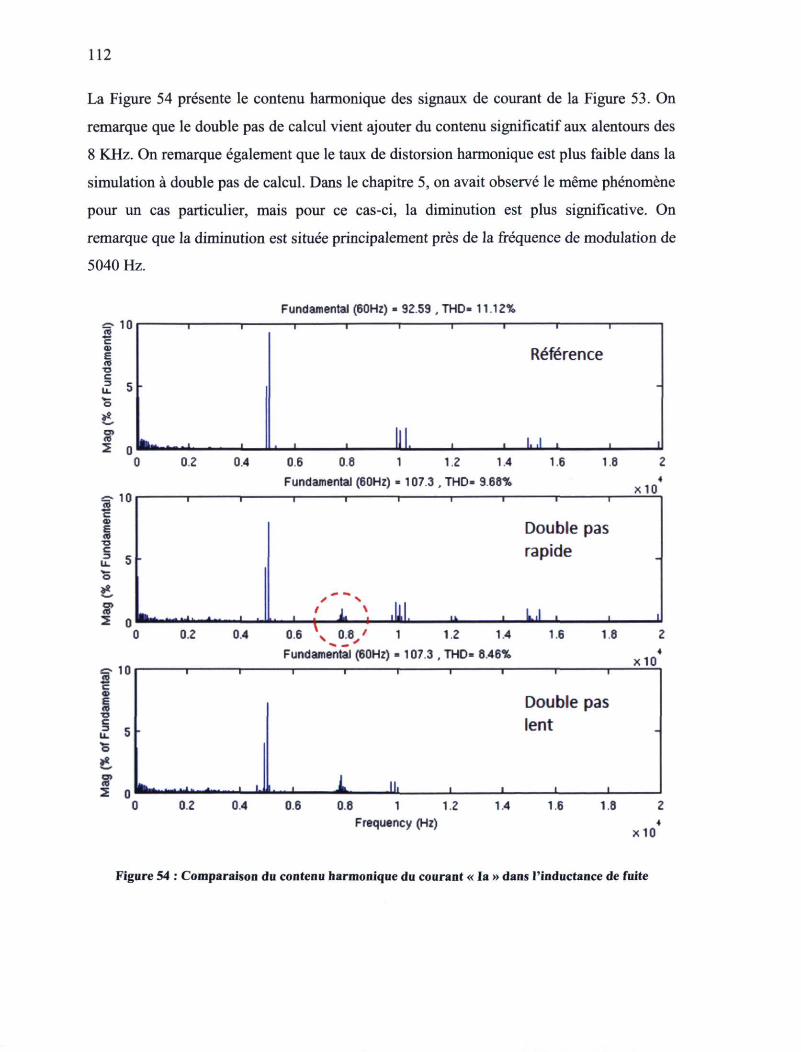
112
La Figure 54 présente le contenu harmonique des signaux de courant de la Figure 53. On
remarque que le double pas de calcul vient ajouter du contenu significatif aux alentours des
8 KHz. On remarque également que le taux de distorsion harmonique est plus faible dans la
simulation à double pas de calcul. Dans le chapitre 5, on avait observé le même phénomène
pour un cas particulier, mais pour ce casci, la diminution est plus significative. On
remarque que la diminution est située principalement près de la fréquence de modulation de
5040 Hz.
OJ
•o
2 o e i? 2 O
1
Fundamental (60Hz) - 92.59 , THD- 11.12%
Référence
. , . m. . . I..I .
=• 10 c
•o 2 5 o (t 5 2 0
0.2 0 4 0.6 0 8 1 1.2 1.4 Fundamental (60Hz) - 107.3 , THD- 9.68%
1 6 1.8
r
2 4
x10
- - • - * ■ • ■
02
10
T3
I 5
y s 0
0.4 ■ 1 ^ I L
0.6 \ 0 .8 / 1 1.2 1.4 Fundamental (60Hz) 107.3 , THD 8.46%
Double pas rapide
JuL 1 6 1 8
0.2 0.4 0.6 0 8 1 1.2 Frequency (Hz)
14 1 6 18
2 *
X10 1̂ -1 1̂ 1̂ ' 1 1 1
Double pas - lent
U_L ■ ■ 1 II, i i i i
* 1 0
Figure 54 : Comparaison du contenu harmonique du courant « la » dans l'inductance de fuite
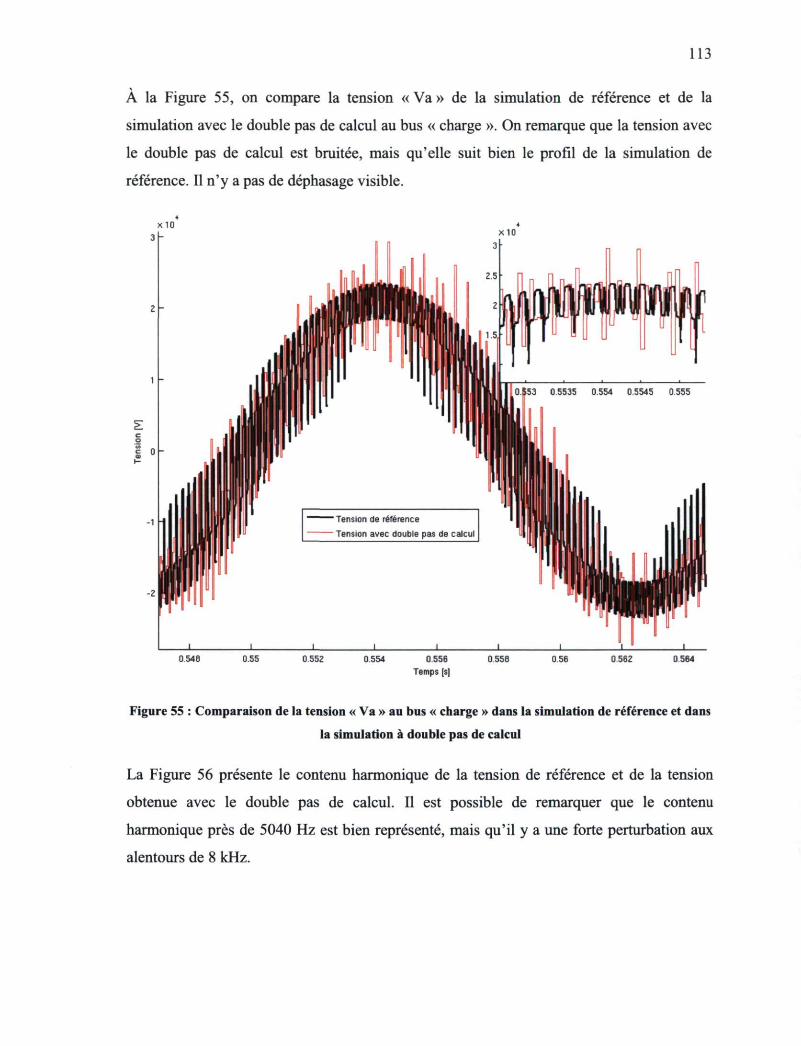
113
A la Figure 55, on compare la tension « Va » de la simulation de référence et de la
simulation avec le double pas de calcul au bus « charge ». On remarque que la tension avec
le double pas de calcul est bruitée, mais qu'elle suit bien le profil de la simulation de
référence. Il n'y a pas de déphasage visible.
x10 x lO
ittfrt 10.153 0.5535 0.554 0.5545 0555
" Tension de référence Tension avec double pas de calcul
0.548 0.55 0 552 0.554 0556 Temps [s|
0558 0 56 0 562 0 564
Figure 55 : Comparaison de la tension « Va » au bus « charge » dans la simulation de référence et dans la simulation à double pas de calcul
La Figure 56 présente le contenu harmonique de la tension de référence et de la tension
obtenue avec le double pas de calcul. Il est possible de remarquer que le contenu
harmonique près de 5040 Hz est bien représenté, mais qu'il y a une forte perturbation aux
alentours de 8 kHz.
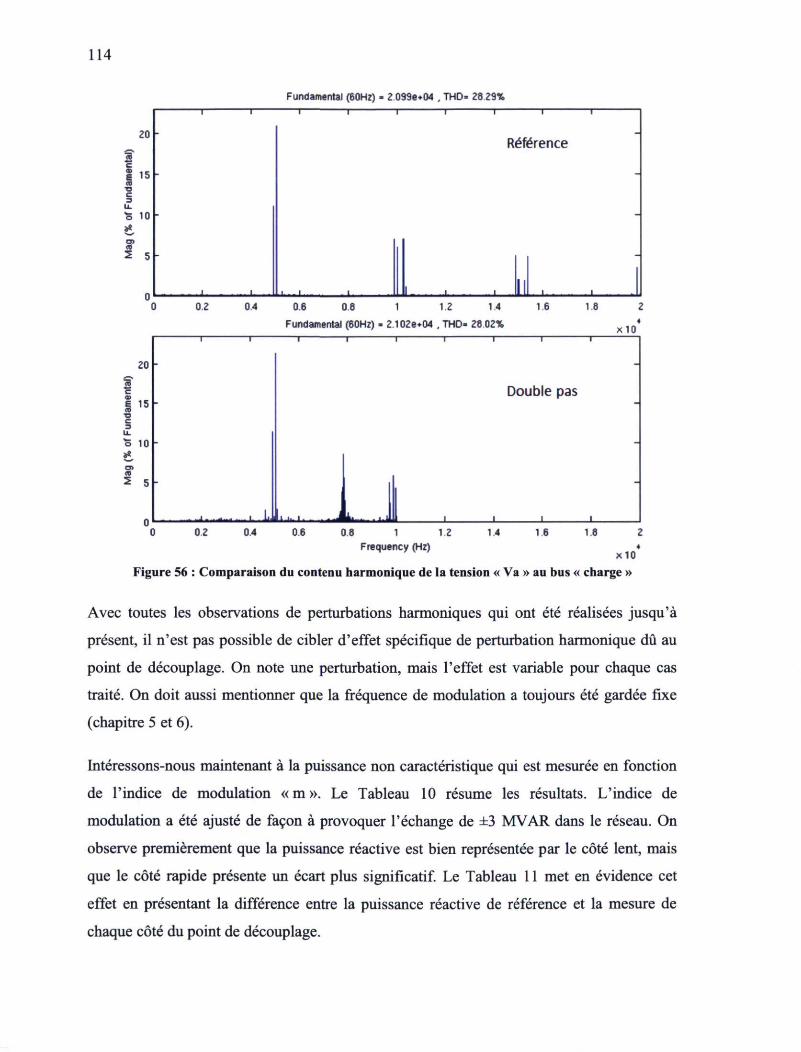
114
Fundamental (60Hz) - 2 099e*M , THD- 28.29%
20
l i I I I I I I I
Référence -
f c i
1 5 ■o c 3 U.
-i1 5
■o c 3 U. •S 10 -& « 2 5
. . . . j . . . . . . i . . . J L _ _ . - _ L _ „ - 1 . li , . , n 1 m II ' • 0.2 0.4 0.6 0.6 1 1.2 1.4 1.6
Fundamental (60Hz) - 2.102e+04 , THD- 28 02% 1 8
x lO
0.8 1 1.2 Frequency (Hz)
x lO
Figure 56 : Comparaison du contenu harmonique de la tension « Va » au bus « charge »
Avec toutes les observations de perturbations harmoniques qui ont été réalisées jusqu'à
présent, il n'est pas possible de cibler d'effet spécifique de perturbation harmonique dû au
point de découplage. On note une perturbation, mais l'effet est variable pour chaque cas
traité. On doit aussi mentionner que la fréquence de modulation a toujours été gardée fixe
(chapitre 5 et 6).
Intéressonsnous maintenant à la puissance non caractéristique qui est mesurée en fonction
de l'indice de modulation « m ». Le Tableau 10 résume les résultats. L'indice de
modulation a été ajusté de façon à provoquer l'échange de ±3 MVJAPV dans le réseau. On
observe premièrement que la puissance réactive est bien représentée par le côté lent, mais
que le côté rapide présente un écart plus significatif. Le Tableau 11 met en évidence cet
effet en présentant la différence entre la puissance réactive de référence et la mesure de
chaque côté du point de découplage.
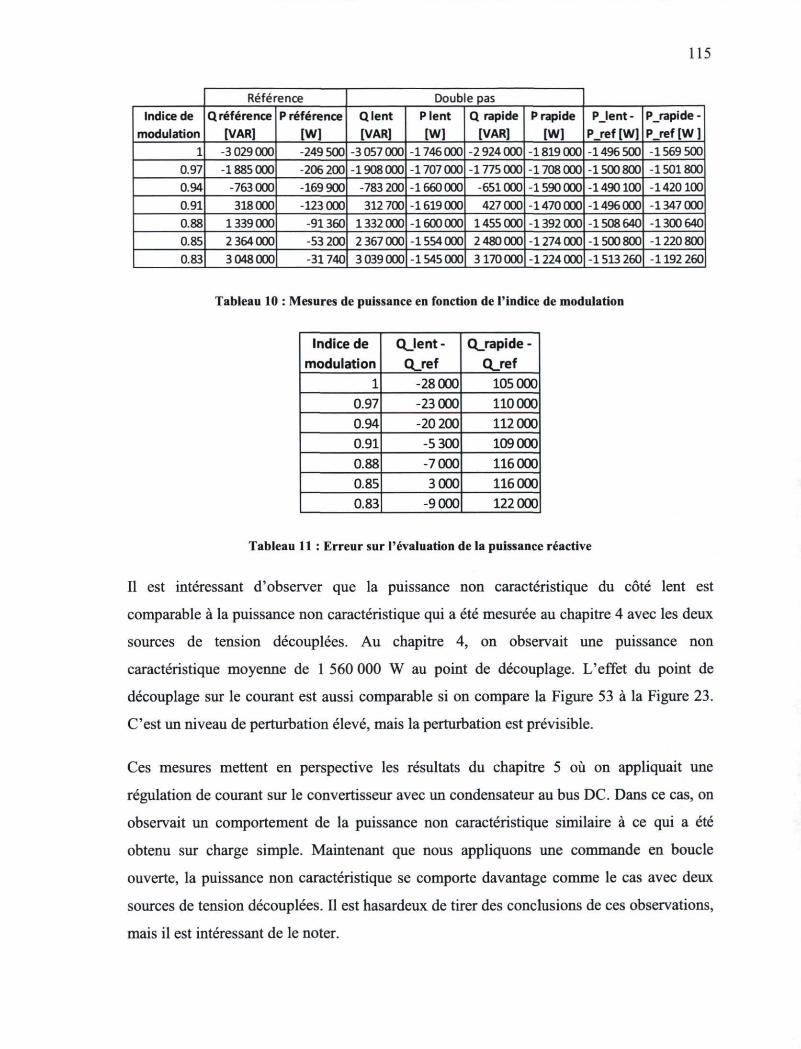
115
Référence Double pas Indice de
modulation Q référence
[VAR] P référence
[W] Qlent [VAR]
Plent [W]
Q rapide [VAR]
P rapide [W]
PJent -P_ref [W]
P_rapide -P_ref [W ]
1 -3 029000 -249 500 -3 057000 -1746000 -2 924000 -1819 000 -1496 500 -1569 500 0.97 -1885 000 -206 200 -1908000 -1707000 -1775 000 -1708 000 -1500800 -1501800 0.94 -763000 -169 900 -783 200 -1660000 -651000 -1590000 -1490100 -1420100 0.91 318000 -123 000 312 700 -1619000 427 000 -1470 000 -1496000 -1347 000 0.88 1339000 -91360 1332000 -1600 000 1455 000 -1392 000 -1508640 -1300 640 0.85 2364000 -53 200 2 367000 -1554000 2480000 -1274000 -1500800 -1220800 0.83 3048000 -31740 3 039 000 -1545 000 3170000 -1224 000 -1513 260 -1192 260
Tableau 10 : Mesures de puissance en fonction de l'indice de modulation
Indice de modulat ion
Q J e n t -
Q j -e f
Q_rapide -
CLref 1 -28000 105 000
0.97 -23 000 110000 0.94 -20 200 112 000 0.91 -5 300 109 000 0.88 -7000 116000 0.85 3000 116000 0.83 -9 000 122 000
Tableau 11 : Erreur sur l'évaluation de la puissance réactive
Il est intéressant d'observer que la puissance non caractéristique du côté lent est
comparable à la puissance non caractéristique qui a été mesurée au chapitre 4 avec les deux
sources de tension découplées. Au chapitre 4, on observait une puissance non
caractéristique moyenne de 1 560 000 W au point de découplage. L'effet du point de
découplage sur le courant est aussi comparable si on compare la Figure 53 à la Figure 23.
C'est un niveau de perturbation élevé, mais la perturbation est prévisible.
Ces mesures mettent en perspective les résultats du chapitre 5 où on appliquait une
régulation de courant sur le convertisseur avec un condensateur au bus DC. Dans ce cas, on
observait un comportement de la puissance non caractéristique similaire à ce qui a été
obtenu sur charge simple. Maintenant que nous appliquons une commande en boucle
ouverte, la puissance non caractéristique se comporte davantage comme le cas avec deux
sources de tension découplées. Il est hasardeux de tirer des conclusions de ces observations,
mais il est intéressant de le noter.
116
6.6. Technologie FPGA
La technologie visée pour implanter réellement un nœud de calcul rapide est la technologie
FPGA. Dans le cadre des besoins futurs du projet, cette technologie est attrayante par le fait
qu'on l'utilise présentement pour faire l'acquisition des signaux de commande rapide
provenant d'un contrôleur de convertisseur. Il serait donc théoriquement possible d'utiliser
le même FPGA pour faire l'acquisition rapide et implanter le nœud de calcul rapide.
La technologie FPGA « Field Programmable Gate Array » consiste en un circuit intégré qui
comporte différents éléments logiques programmables après fabrication. Il comporte
également des ressources spécifiques pour optimiser certaines opérations mathématiques ou
faciliter certaines implantations, comme un processeur embarqué. L'ensemble des
ressources logiques du FPGA sont programmables et cela apporte des choix d'optimisation
(rapidité, précision numérique, puissance utilisée) pour une application donnée. Dans le cas
présent, c'est la rapidité qui est visée.
Il existe des différences fondamentales de fonctionnement des FPGA comparativement aux
processeurs standards. Par exemple, le format de nombre à virgule flottante peut
difficilement être implanté sur FPGA, car les ressources exigées deviennent prohibitives à
l'implantation d'un algorithme rapide. Aussi, une fois programmé, les opérations sont
fixées dans le matériel du FPGA. Il faut donc que les opérations soient répétitives.
Les processeurs standards et le matériel périphérique sont optimisés pour traiter de façon
séquentielle des opérations. Il est possible de paralléliser des opérations sur différents
processeurs, mais le temps de communication vient limiter le pas de calcul minimal [24].
La technologie FPGA vient répondre au besoin de paralléliser en offrant la possibilité de
programmer directement au niveau matériel. Le choix de la représentation des nombres et
de l'algorithme a directement un impact sur l'utilisation des ressources et de la rapidité de
l'algorithme [25]. L'utilisation de FPGA en simulation de réseaux en temps réel a été
étudiée. [14] [15] [26] [27] [28] [17]
117
Algorithme d'intégration
Tel que mentionné précédemment, on utilise typiquement l'intégration trapézoïdale, en
simulation de réseau, pour sa stabilité et précision. Son avantage est de permettre
l'utilisation d'un pas de calcul relativement grand tout en conservant des résultats
suffisamment justes. Comme il a été possible de le voir au chapitre 2, Euler avant et arrière
donnent tout de même des résultats acceptables avec l'utilisation d'un pas de calcul faible.
Aussi, comme on sait que la tension passée par le côté lent demeure fixe pendant les calculs
sur le côté rapide, il pourrait être possible d'enlever l'intégration trapézoïdale sur une partie
des calculs sans trop affecter les résultats. Le lecteur est référé au code présenté pour le cas
#2 « Deux sources de tension découplées » de ce présent chapitre.
Dans [14] et [28] on conserve un algorithme d'intégration trapézoïdale, mais on se
concentre à porter les équations de réseau générales vers le FPGA, sans considérer
l'optimisation. Dans [15], on préfère utiliser Euler arrière afin d'éliminer l'oscillation
numérique provoquée par l'intégration trapézoïdale lors de la commutation sur un élément
inductif.
Logique de fonctionnement - Optimisation des commutations
La séquence logique de fonctionnement rencontrée sur un circuit logique s'exprime sous la
forme d'une machine d'état. La machine d'état permet de savoir à quelle étape est rendu
l'algorithme et de savoir quels sont les prochains états possibles. Par exemple, la machine
d'état gère les entrées-sorties et les calculs. Pour chaque état, une région de logique
programmable est utilisée pour réaliser la fonction voulue. Des différents états, c'est la
résolution des équations qui présente un choix face à l'optimisation de la vitesse de
résolution ou de la quantité de ressources utilisées.
Ce sont les commutations qui apportent ce choix d'optimisation puisqu'elles rendent les
équations non linéaires. Pour favoriser une résolution rapide, il est possible de stocker les
matrices d'admittance déjà inversées pour toutes les configurations de circuit pouvant être
rencontrées. Dans le cas du convertisseur traité dans le mémoire, il faut 8 matrices pour
représenter les 8 états pouvant être rencontrés. Il y a 6 interrupteurs, mais ils fonctionnent
118
en paires. Utiliser cette astuce permet d'éviter l'inversion de la matrice d'admittance à
chaque changement d'état, mais elle demande de stocker les matrices d'admittance au
préalable [15].
Dans [17], on présente une implantation complète des équations dans le FPGA et c'est
l'approche des variables d'état qui est utilisée. Les éléments non linéaires sont traités à
l'extérieur de la partie fixe des matrices d'état.
Dans [28], la méthode générale EMTP est implantée sur FPGA pour des réseaux complets.
On modifie la matrice d'admittance en fonction de l'état des éléments commutés, mais il
n'y a pas de précision sur les éléments non linéaires qui ne modifient pas la topologie. C'est
la méthode générale qui est implantée.
Dans [13], on n'utilise pas de FPGA, mais on présente une approche qui permet de
conserver la matrice d'admittance constante peu importe l'état des interrupteurs. On
modélise les interrupteurs par une inductance lorsque l'interrupteur est en conduction et
comme une capacité en série avec une résistance lorsqu'il est bloqué. On choisit L et RC de
façon à obtenir : 2L/h = R + h/2C avec l'approche EMTP et la discrétisation
trapézoïdale. On tient alors compte de l'état de l'interrupteur uniquement pour le calcul du
vecteur d'injection de courant.
119
6.7. Conclusion
Ce chapitre a présenté trois exemples d'implantation de double pas de calcul dans
Hypersim en temps différé, suivant la même approche utilisée dans SPS. Les exemples ont
permis de valider que les effets d'un point de découplage à double pas de calcul, qui ont été
observés dans SPS, sont transposables à Hypersim temps réel puisque Hypersim utilise le
même système d'équation qu'il fonctionne en temps différé ou en temps réel. Cela a été
démontré pour une charge simple découplée, deux sources de tension découplées ainsi que
pour un convertisseur de puissance découplé. Des difficultés ont été rencontrées au niveau
de la génération de la commande par largeur d'impulsion, mais il a été démontré qu'au
niveau de la résolution des équations de réseaux, les résultats sont pratiquement identiques.
L'exemple avec le convertisseur découplé a permis d'observer l'effet du double pas de
calcul sur un convertisseur qui reçoit une commande en boucle ouverte. L'effet du point de
découplage sur les harmoniques a été étudié. Au chapitre 5, on avait constaté qu'il était
difficile de prévoir l'effet du point de découplage sur les harmoniques. Les résultats
obtenus avec le convertisseur en boucle ouverte ont permis de confirmer que les effets sont
effectivement difficilement prévisibles. Le fonctionnement d'un convertisseur en boucle
ouverte découplé ne donne pas des résultats acceptables, la perturbation de puissance est
élevée et indépendante du niveau de charge.
Le chapitre a également présenté la technologie FPGA dans l'optique de son utilisation
comme unité de calcul rapide pour une implantation à double pas de calcul. Les
particularités de la technologie face à l'algorithme d'intégration, du traitement des non-
linéarités et de la représentation des nombres ont été présentées. Il a été possible de
constater les attraits de la technologie pour la réalisation d'un nœud de calcul rapide
compte-tenu des choix d'optimisation possibles entre les ressources et le temps de calcul
qui permettent d'atteindre des temps de résolution de l'ordre de la microseconde.

Conclusion L'objectif visé par le projet de recherche est d'améliorer la connaissance des problèmes
provoqués par une méthode de simulation numérique à double pas de calcul dans un
contexte d'émulation d'une simulation temps réel. Cette méthode permet d'utiliser un pas
de calcul plus faible pour le modèle détaillé d'un convertisseur dans un réseau qui est
simulé avec un plus grand pas de calcul. Elle introduit cependant des comportements non
désirables, dont l'instabilité numérique, une perturbation des harmoniques et une
perturbation de la puissance échangée au point de découplage.
Les effets de la méthode à double pas de calcul ont premièrement été étudiés avec deux cas
simples. Le premier cas présente une charge passive découplée d'un réseau et le second cas
présente deux sources de tension découplées. Il a été possible d'identifier les effets du point
de découplage sur les mesures de puissance de chaque côté du point de découplage. Sur
charge simple découplée (50-5 ps), la perturbation de puissance active est de l'ordre de -
7.53% de la puissance apparente au point de découplage, ce qui s'avère être une
perturbation acceptable. Il a été démontré que la perturbation provient du déphasage du
courant lié au délai de rétroaction engendré par la méthode. Cette perturbation ne se
manifeste que du côté lent. Du côté rapide, la perturbation est négligeable. Les mesures de
puissance réactive sont très peu perturbées.
Dans l'exemple des deux sources de tension découplées (50-5 ps), la perturbation de la
puissance active devient plus importante et elle est indépendante du niveau de charge. Il est
possible d'approximer l'amplitude de la perturbation, mais de façon moins juste qu'avec la
charge simple. La perturbation est présente des deux côtés du point de découplage et elle
est approximativement de l'ordre de la puissance qui serait échangée par deux sources de
tension déphasées d'un angle équivalent au retard de communication. La perturbation de
puissance active est inacceptable, mais on mesure des valeurs justes de puissance réactive.
Ces deux cas ont permis d'observer que la perturbation de puissance provoquée par le point
de découplage est d'autant plus significative que le délai entre les deux systèmes est grand.
122
Pour ces deux cas, différentes configurations de réseau ont été simulées. Ces résultats ont
permis d'observer que les conditions d'instabilité numérique sont rencontrées lorsque la
topologie des réseaux est équivalente. Pour stabiliser les simulations, la valeur des
résistances parasites, en parallèle avec les sources de courant du côté lent du point de
découplage, a été ajustée itérativement. Il a été observé que de façon générale, plus l'inertie
des grandeurs électriques sur les variables d'état utilisées au point de découplage est
grande, plus la simulation est stable.
À la suite de ces cas simples, la méthode de double pas de calcul a été implantée sur un
réseau comprenant un D-STATCOM. Le D-STATCOM a premièrement été utilisé en mode
de régulation de courant où le bus DC était soit un condensateur soit une source de tension
idéale. Dans les deux cas, on a rencontré une perturbation de la puissance active
difficilement prévisible. Pour le cas avec le condensateur, il y a des similitudes avec le
profil observé sur charge simple, mais ce n'est pas exact. Le profil suit la même tendance,
mais avec une perturbation de la puissance active plus faible en comportement capacitif et
plus importante en comportement inductif. La perturbation de puissance active demeure
toutefois d'un niveau acceptable. Pour le cas avec la source idéale, le profil ne correspond
pas à des observations précédentes et la perturbation de la puissance active devient plus
problématique, voire inacceptable. La lecture de la puissance réactive demeure toutefois
valide.
Le D-STATCOM a ensuite été utilisé en mode de régulation de tension. Il a été possible
d'observer que le point de découplage affecte beaucoup les résultats et fait même dévier
grandement le comportement. L'observation des tensions réseau au point de découplage a
permis d'identifier des harmoniques hautes fréquences qui perturbent le régulateur de
tension. Un filtre passe-bas a été ajouté en entrée du régulateur ce qui permet de stabiliser
la simulation et d'obtenir des résultats acceptables. Il a également été possible de valider
que la résistance parasite qui apporte la stabilité numérique correspond à la même valeur
qui a été déterminée à l'aide des cas simples.
123
La méthode à double pas de calcul a finalement été implantée dans Hypersim en temps
différé, en utilisant un bloc UCM pour la partie rapide. Certaines difficultés ont été
rencontrées pour générer des commandes identiques dans les environnements d'Hypersim
et de SPS, mais il a été possible de vérifier qu'il est possible d'obtenir des résultats
pratiquement identiques au niveau de la résolution des équations de réseau. Il est donc
raisonnable de croire que les résultats obtenus dans SPS sont transposables à Hypersim
temps réel puisque Hypersim utilise le même système d'équation qu'il fonctionne en temps
différé ou en temps réel. Les résultats ont été présentés pour un cas de charge simple
découplée, pour deux sources de tension découplées ainsi que pour un convertisseur
fonctionnant en boucle ouverte.
Pour plusieurs cas où un convertisseur a été simulé, l'observation de la perturbation
harmonique a été réalisée. Il a été possible d'observer que dans tous les cas, c'est la tension
réseau qui est la plus affectée. On rencontre typiquement du contenu harmonique
supplémentaire aux hautes fréquences. Il s'est avéré difficile de généraliser l'effet du point
de découplage sur les harmoniques de courant et de tension. Dans tous les cas on observe
une perturbation, mais il ne semble pas y avoir de tendance claire.
En conclusion, la méthode de simulation à double pas de calcul s'avère avantageuse pour
simuler les convertisseurs de puissance puisqu'elle permet de mieux représenter la
commutation des interrupteurs. Une attention doit cependant être portée sur les effets du
point de découplage. Il est important de valider que les effets sur les mesures de puissance
et sur la perturbation harmonique soient acceptables pour une simulation donnée. Dans le
cas où de l'instabilité numérique survient, il est possible de stabiliser la simulation à l'aide
de résistances parasites en parallèle avec les sources commandées du côté lent. Il est
également possible d'ajouter des éléments réactifs à proximité du point de découplage,
mais ces compensations peuvent modifier passablement le comportement du réseau.
Bibliographie
[1] P. G McLaren, P. Forsyth, A. Perks, and P. R. Bishop, "New simulation tools for power Systems," IEEE/PES, Transmission and Distribution Conference and Exposition, vol.l, pp.91-96 vol. 1,2001.
[2] H. W. Dommel, "Digital Computer Solution of Electromagnetic Transients in Single-and Multiphase Networks," IEEE Transactions on Power Apparatus and Systems, vol.PAS-88, no.4, pp.388-399, April 1969.
[3] H. W. Dommel, "Electromagnetic Transients Program Reference Manual (EMTP theory book)", Vancouver, B.C., Canada, 1986.
[4] R. Joetten, T. Web, J. Wolters, H. Ring, and B. Bjoernsson, "A New Real Time Simulator for Power System Studies," Power Engineering Review, IEEE, vol.PER-5, no.9, pp.58-59, Sept. 1985.
[5] V. .-Q. Do and A. O. Barry, "A real-time model of the synchronous machine based on digital signal processors," IEEE Transactions on Power Systems, vol.8, no.l, pp.60-66, Feb 1993.
[6] M. Jerosolimski, P. Erthard, D. Descause, and J. Y. Boussion, "Real-time simulation of electromagnetic transients for interactive testing of power system relays and control systems: general trend at EDF," APT 93. Athens Power Tech, Joint International Power Conference Proceedings , vol.2, pp.732-737, 5-8 Sep 1993.
[7] S. R. MacMinn and R. J. Thomas, "Microprocessor Simulation of Synchronous Machine Dynamics in Real-Time," Power Engineering Review, IEEE, vol.PER-6, no.8, pp.49-50, Aug. 1986.
[8] Y. Kokai, I. Matori, and J. Kawakami, "Multiprocessor based generator module for a real-time power system simulator," IEEE Transactions on Power Systems, vol.3, no.4, pp.1633-1639, Nov 1988.
[9] ICDS, "Proceedings of ICDS '95, first international conference on Digital Power System Simulator," may 1995.
[10] P. Forsyth and R. Kuffel, "Utility applications of a RTDS® Simulator," IPEC 2007. International Power Engineering Conference, pp. 112-117, 3-6 Dec. 2007.
126
[11] J. N. Paquin, J. Bélanger, L. A. Snider, C. Pirolli, and W. Li, "Monte-carlo study on a large-scale power system model in real-time using eMEGAsim," ECCE 2009. IEEE Energy Conversion Congress and Exposition, pp.3194-3202, 20-24 Sept. 2009.
[12] H. Le-Huy, G. Sybille, R. Gagnon, and V. Q. Do, "Real-Time Simulation of PWM Power Converters in a Doubly-Fed Induction Generator Using Switching-Function-Based Models," IEEE, IECON 2006 - 32nd Annual Conference on Industrial Electronics, pp.1878-1883, 6-10 Nov. 2006.
[13] P. F. a. R. K. T. Maguire, "Small time-step (<2us) VSC Machine Drive for the Real Time Digital Simulation," Proceedings of Electrimacs 2005, Hammamet, Tunisia, April 17-20, 2005.
[14] G Parma and V. Dinavahi, "Real-Time Digital Hardware Simulation of Power Electronics and Drives," Power Engineering Society General Meeting, 2007. IEEE, pp.1, 24-28 June 2007.
[15] P. Le-Huy, S. Guerette, L. A. Dessaint, and H. Le-Huy, "Real-Time Simulation of Power Electronics in Power Systems using an FPGA," CCECE '06. Canadian Conference on Electrical and Computer Engineering, pp.873-877, May 2006.
[16] M. L. Crow and J. G. Chen, "The multirate simulation of FACTS devices in power system dynamics," 1995 IEEE Power Industry Computer Application Conference, Conference Proceedings, pp.290-296, 7-12 May 1995.
[17] J. C. G. Pimentel, "Implementation of Simulation Algorithms in FPGA for Real Time Simulation of Electrical Networks with Power Electronics Devices," ReConFig 2006. IEEE International Conference on Reconfigurable Computing and FPGA's, pp. 1-8, Sept. 2006.
[18] H. Le-Huy, Circuits Électriques, Les presses de l'Université Laval, Canada, 2004.
[19] H. F. K. Strunz, "Space Variant Integration in Digital Real Time Simulators for Electromagnetic Transients," Proceedings ofICDS'99, Vàsteras, May 25-28, 1999.
[20] SimPowerSystems, SimPowerSystems User's Guide. Mars 2009.
[21] J. G. Chen and M. L. Crow, "A study of numerically efficient algorithms for power system dynamic analysis," Proceedings of the 36th Midwest Symposium on Circuits and Systems, pp.712-715 vol.1, 16-18 Aug 1993.
[22] A. Brambilla and D. D'Amore, "Energy-based control of numerical errors in time-domain simulation of dynamic circuits," IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, vol.48, no.5, pp.543-551, May 2001.
127
[23] T. Wildi, Électrotechnique, 4th éd., Les presses de l'université Laval, Canada, 2005.
[24] D. Strenski. (2007 janvier) hpcwire.com. [Online]. http://www.hpcwire.com/features/FPGA Floating Point Performance.html
[25] Xilinx. (2010, février) [Online], http://www.xilinx.com/
[26] M. Lavoie and L. A. Dessaint, "FPGAs as Accelerators for the Real-Time Digital Power System Simulators," Proceedings of ICDS'97, Montréal, Canada, May28-30, 1997.
[27] M. Matar, M. Abdel-Rahman, and A. Soliman, "Developing an FPGA coprocessor for real-time simulation of power systems," ICEEC '04. International Conference on ElectricalElectronic and Computer Engineering, pp. 791- 794, 5-7 Sept. 2004.
[28] M. Matar, M. A.-Rahman, and A. M. Soliman, "FPGA-Based Real-Time Digital Simulation," International Conference on Power Systems Transients (IPST'05), Montréal, Canada, June 19-23, 2005.

Annexe A - Code UCM convertisseur Voici les parties importantes du code UCM qui a été construit pour modéliser le
convertisseur du cas 3 du chapitre 6. Le lecteur est référé au manuel d'utilisateur
d'Hypersim pour plus de détail sur le fonctionnement de l'UCM.
%% BEGIN CONTROL IOS - Enter control IOs table after this line...
Va reseau V double in auto V "Vareseau" Vbreseau V double in auto V "Vbreseau" Vc reseau V double in auto V "Vcreseau" m - double in auto - "m"
Iareseau A double out auto I "la reseau" Ibreseau A double out auto I "Ibreseau" Icreseau A double out auto I "Icreseau"
%% END CONTROL IOS
%% BEGIN HISTORICAL VALUES - Enter the table after this line...
Tempshist double 1 0 "Tempshist"
Ihist_a double 1 0 "Ihista" Ihistb double 1 0 "Ihistb" Ihistc double 1 0 "Ihistc"
Ehista double 1 0 "Ehista" Ehist_b double 1 0 "Ehistb" Ehistc double 1 0 "Ehistc"
Vhista double 1 0 "Vhista" Vhistb double 1 0 "Vhist_b" Vhistc double 1 0 "Vhistc"
Vanconvhist double 1 0 "Vanconvhist" Vbnconvhist double 1 0 "Vanconvhist" Vcnconvhist double 1 0 "Vanconvhist"
Van_conv_hist_2 double 1 0 "Van_conv_hist_2" Vbn_conv_hist_2 double 1 0 "Van_conv_hist_2" Vcn_conv_hist_2 double 1 0 "Van_conv_hist_2"
%% END HISTORICAL VALUES
130
%% BEGIN AFTER VOLTAGE CALCULATION - Enter code ->.
int i;
double Temps = Tempshist;
/* calcul des courants */ double Iarapide = Ihista; double Ibrapide = Ihistb; double Icrapide = Ihistc; double la total = 0; double lb total = 0; double Ictotal = 0; double la moy = 0; double Ibmoy = 0; double Ic moy = 0;
/* Partie contrôle */ double theta; double Vacomm; double Vbcomm; double Vc comm; double PWM a; double PWM b; double PWM c; double SW a; double SW b; double SW c;
/* Partie électrique */ double Vcc = 3842; double Vanconv; double Vbnconv; double Vcnconv; double Lfiiite = 0.000249;
for(i=0;i<10;i++) {
theta = (ftnod(Temps, 0.01666666666)/(0.01666666666))*2*3.14159265; Vacomm = m*sin(theta); Vb_comm = m*sin(theta-2*3.14159265/3); Vc comm = m*sin(theta+2*3.14159265/3); P W M a = (2/3.14159265)*asin(sin(84*theta)); PWM_b = (2/3.14159265)*asin(sin(84*theta-2*3.14159265/3)); PWM_c = (2/3.14159265)*asin(sin(84*theta+2*3.14159265/3));
if(Va_comm > PWMa)
SW_a=l ;
else
SW_a = 0;
f(Vb_comm > PWM b)
131
SW _b= 1; } else {
S W b = 0; } if(Vc comm > PWM c) { SW_c=l; } else { SW c = 0; }
Van_conv = Vcc/3*(2*SW_a-SW_b-SW_c); Vbnconv = Vcc/3*(2*SW_b-SW_c-SW_a); Vcnconv = Vcc/3*(2*SW_c-SW_a-SW_b);
Iarapide = 0.000005*(((Va_reseau+Vhist_a)/2)*0.086604-(Van_conv_hist+Van_conv_hist_2)/2)/L_fuite + Iarapide; Ibrapide = 0.000005*(((Vb_reseau+Vhist_b)/2)*0.086604-(Vbn_conv_hist+Vbn_conv_hist_2)/2)/L_fuite + Ibrapide; Icrapide = 0.000005*(((Vc_reseau+Vhist_c)/2)*0.086604-(Vcn_conv_hist+Vcn_conv_hist_2)/2)/L_fiiite + Icrapide;
Temps = Temps + 0.000005;
Vhista = Vareseau; Vhistb = Vbreseau; Vhistc = Vcreseau;
Van_conv_hist_2 = Vanconvhist; Vbn_conv_hist_2 = Vbnconvhist; Vcn_conv_hist_2 = Vcnconvhist;
Vanconvhist = Vanconv; Vbnconvhist = Vbnconv; Vcnconvhist = Vcnconv; }
Tempshist = Temps;
/* On repasse la valeur finale de courant pour la prochaine itération */ Ihist a = la rapide; Ihistb = Ibrapide; Ihistc = Icrapide;
la reseau = Ihist a*0.086604; Ib_reseau = Ihist_b*0.086604; le reseau = Ihist_c*0.086604; %% END AFTER VOLTAGE CALCULATION CODE