Etude des machines synchrones a démarrage direct sur le réseau (line start permanent magnet...
85
République Algérienne Démocratique et Populaire Ministère de l’Enseignement Supérieur et de la Recherche Scientifique Université des Sciences et de la Technologie HOUARI BOUMEDIENNE Faculté d'Electronique et d'Informatique Département d’Electrotechnique Projet de Fin d’Etude Présentée pour l'obtention du Diplôme de MASTER en Electrotechnique Industrielle et Process Par : Thème : Soutenue publiquement le 18 juin 2014 devant la commission d'examen : Président : B. FIALA Maître de Conférences USTHB Examinateurs : S. TAHI Maître de Conférences USTHB Promoteur : L. HADJOUT Maître de Conférences USTHB Co-promoteur : Y. OUAZIR Professeur USTHB Etude des machines synchrones à démarrage direct sur le réseau SAIDANI Zaki & YETTOU Abdel Karim
-
Upload
zaki-saidani -
Category
Engineering
-
view
2.267 -
download
27
description
these de master en électrotechnique industrielle porte sur l’étude des machines synchrone a démarrage direct
Transcript of Etude des machines synchrones a démarrage direct sur le réseau (line start permanent magnet...

République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université des Sciences et de la Technologie HOUARI BOUMEDIENNE
Faculté d'Electronique et d'Informatique
Département d’Electrotechnique
Projet de Fin d’Etude
Présentée pour l'obtention du Diplôme de MASTER
en Electrotechnique Industrielle et Process
Par :
Thème :
Soutenue publiquement le 18 juin 2014 devant la commission d'examen :
Président : B. FIALA Maître de Conférences USTHB Examinateurs : S. TAHI Maître de Conférences USTHB Promoteur : L. HADJOUT Maître de Conférences USTHB Co-promoteur : Y. OUAZIR Professeur USTHB
Etude des machines synchrones à démarrage
direct sur le réseau
SAIDANI Zaki & YETTOU Abdel Karim

بسم هللا الر حمن الرحیم
د وسلم علىوصلى هللا .وأصحابھ وعلى آلھنبینا محم
.بنعمتھ تتم الصالحات الحمد � الذي
Nous remercions nos promoteurs Monsieur HADJOUT Larbi et Monsieur OUAZIR Youcef, Enseignants à l’USTHB pour nous avoir proposé ce sujet et pour leur disponibilité, leurs nombreux encouragements et les conseils qu’ils nous ont prodigués le long de ce travail.
Nous adressons nos chaleureux remerciements aux membres du jury.
Nous souhaitons également remercier nos camarades de labo et Monsieur BENSAIDANE et tous les enseignants ayant assurés nos années d’études.
Notre gratitude va à tous ceux qui ont contribué, de près ou de loin, à ce travail et à tous nos amis (es) dont l’aide nous a été très bénéfique.
Nous finissons ces remerciements par nos familles et tout particulièrement nos parents pour leurs encouragements, conseils et leur soutien inconditionnel tout au long de nos études.
Remerciements

A la mémoire de mon Père Abdelhakim
Aucune dédicace ne saurait exprimer l’amour, l’estime, le dévouement et le
respect que j’ai toujours eu pour vous. Rien au monde ne vaut les efforts fournis
jour et nuit pour notre éducation et notre bienêtre. Ce travail est le fruit de tes
sacrifices que tu as consentis pour mon éducation et ma formation.
A ma très chère mère Houria
Affable, honorable, aimable : Tu représentes pour moi le symbole de la bonté par
excellence, la source de tendresse et l’exemple du dévouement qui n’a pas cessé de
m’encourager et de prier pour moi.
A ma très chère tante Radia Qui a tant sacrifié et qui a toujours été présents pour nous. Dans la joie et le
malheur. Votre affection et votre soutien m’ont été d’un grand secours au long de
ma vie. En témoignage de l’attachement, de l’amour que je porte pour toi.
A mon frère Hichem, et ma sœur maya
A mes oncles Abdelfattah et Ahmed et abdelghani
Pour votre soutien, vos conseils, vos encouragements et votre gentillesse sans
égal, m'ont permis de réussir mes études.
A tous les membres de ma famille, petits et grands, a tous mes amis
youcef ‘s , bilel ,samir ,ishak ,karim, et tous ceux qui m'aiment.
SAIDANI Zaki

Je dédie ce modeste travail
À Celle à qui mon cœur depuis sa naissance n’a pas pu éprouver
qu’amour et reconnaissance, à celle qui a donné un sens à mon existence
en m’offrant une éducation digne de confiance
À ma très chère Mère.
À mon père, pour son soutien moral depuis mon enfance.
Père merci.
À la mémoire de mon cher grand père
A tous les membres de ma famille ; ma sœurs, Houda, mon frères Mohamed et tous mes
frères, et mes sœurs.
À toutes ma famille.
À mon collègue et mon meilleur amis :
Zaki.
À mes meilleurs amis :
Salim et Mourad.
À mes amis de l’université :
Amine, Ismail, Mohamed, Adel, Abdenour, Islam, Youcef, Farouk, Omar, Mahdi, Yacine et
Claud.
et à tous qui m’ont connu et aidé de prés et de loin dans la réalisation
de ce travail.
Y. Karim

Table des matières
Table des matières
Introduction générale ........................................................................................................................ 1
Chapitre I:Généralités sur les moteurs synchrones à démarrage direct
I.1 Introduction .................................................................................................................................. 3
I.2 Généralités sur les machines synchrones ................................................................................... 3
I.2.1 Constitution ........................................................................................................................................... 3
I.2.2 Classement des machines synchrones ................................................................................................... 4
I.2.3 Fonctionnement moteur d’une machine synchrone ............................................................................... 5
I.3 Problème de démarrage des moteurs synchrones ..................................................................... 5
I.3.1 Démarrage des moteurs synchrones à l’aide d’un moteur auxiliaire .................................................... 5
I.3.2 Démarrage des moteurs synchrones à l’aide d’une cage d’écureuil ...................................................... 6
I.4 Machine synchrone à réluctance variable à démarrage direct ................................................ 6
I.5 Moteur synchrone à aimants permanent à démarrage direct sur le réseau ........................... 7
I.5.1 Les aimants permanents standards utilisés dans ce type de moteurs ..................................................... 7
I.5.2 Aimants en surface ................................................................................................................................ 8
I.5.3 Aimants insérés ..................................................................................................................................... 9
I.5.4 Aimants enterrés .................................................................................................................................... 9
I.5.5 types d’alimentation de ces machines ................................................................................................. 10
I.6 Conclusion ................................................................................................................................... 10
Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
II.1 Introduction ............................................................................................................................... 11
II.2 Modèles circuits des machines étudiées .................................................................................. 11
II.2.1 Hypothèses simplificatrices ............................................................................................................... 12
II.2.2 Equations électriques dans le repère du stator a, b, c ......................................................................... 12
II.2.3 Relation entre flux et courants ........................................................................................................... 13
II.2.4 Expressions des inductances en fonction de ................................................................................... 13
II.2.5 Flux produit par l’inducteur à aimants dans une phase du stator ....................................................... 14
II.2.6 Modèles avec variables d’état ............................................................................................................ 15
II.3 Modèle de la machine étudiée dans le référentiel (d-q) de Park ........................................... 15
II.3.1 Equations des tensions ....................................................................................................................... 16
II.3.2.Expressions des flux en fonction des courants dans le repère (d-q) .................................................. 17

Table des matières
II.3.3 Expression du couple électromagnétique ........................................................................................... 18
II.4 Modèle linéaire à inductances de fuites séparées ................................................................... 19
II.4.1 Séparation des inductances de fuites .................................................................................................. 19
II.5 Modèle linéaire de la machine à inductances de fuites totalisées au stator ......................... 20
II.5.1 Expressions des courants magnétisants.............................................................................................. 20
II.5.2 Expressions des flux .......................................................................................................................... 21
II.5.3 Modèle d’état de la machine avec les flux comme variables ............................................................. 22
II.6 Modèle saturé de la machine synchrone à aimants à démarrage direct .............................. 25
II.6.1 Prise en compte de la saturation dans les expressions des flux.......................................................... 25
II.6.2 Expression du coefficient de saturation KST ...................................................................................... 29
II.6.3 Modèle saturé où les flux sont choisis comme variables d’état ......................................................... 30
II.7 Cas particulier de la machine synchrone à réluctance variable ........................................... 31
II.8 Cas particulier de la machine asynchrone .............................................................................. 31
II.9 Conclusion ................................................................................................................................. 31
Chapitre III : Simulation en régime transitoire et permanent
III.1 Introduction ............................................................................................................................. 32
III.2 Présentation de la machine étudiée ........................................................................................ 32
III.3 Effet du niveau de saturation sur le couple de décrochage ................................................. 35
III.3.1 Expression du couple statique .......................................................................................................... 35
III.3.2 Couple maximale de décrochage ...................................................................................................... 37
III.4 Transitoire de la MSA à démarrage direct ........................................................................... 38
III.4.1 Démarrage sous tension réduite ........................................................................................................ 38
III.4.2 Démarrage sous tension nominale .................................................................................................... 40
III.4.3 Application d’un échelon de couple résistant ................................................................................... 42
III.5 Simulation des cas particuliers ............................................................................................... 43
III.5.1 Simulation de la MRV à démarrage direct ....................................................................................... 43
a)- Démarrage sous tension réduite ........................................................................................................ 43
b)- Démarrage de la machine sous tension nominale ............................................................................. 45
c)- Application d’un échelon de couple ................................................................................................... 47
III.5.2 Simulation de la machine asynchrone .............................................................................................. 48
III.6 Comparaison entre MRV, MAS et MSA permanents ......................................................... 51
a)- Régime transitoire .................................................................................................................................. 51
b)- Régime permanent ................................................................................................................................. 52
III.7 Conclusion ................................................................................................................................ 57

Table des matières
conclusion generale ..................................................................................................................... 58
Bibliographie ................................................................................................................................. 60
ANNEXE.1 ........................................................................................................................................ 63
ANNEXE.2 ........................................................................................................................................ 67
Nomenclature ................................................................................................................................ 69

Introduction générale

Introduction générale
1
Introduction générale
La tendance actuelle dans la plupart des pays est à l'utilisation de moteurs de plus en plus
performants. Aux E.U. par exemple, une nouvelle législation (Energy Policy Act, 1992 - Public
Law 102-486) requiert que tous les moteurs de 2 à 6 pôles d'usage général construits après octobre
1997 se doivent de posséder un rendement minimum de 90%. En Asie le même phénomène est
observé. Selon cette loi révisée, 10 types d'appareils domestiques devront atteindre un niveau de
rendement minimum. Il est prévisible qu'un tel type de Législation sera adopté dans nombreux pays
dans les années à venir [MES99].
Les moteurs asynchrones couvrent une grande gamme dans ce domaine, en raison des
avantages qu’ils présentent, à savoir, robustesse, entretient simple, prix de fabrication assez faible.
Cependant, sa vitesse dépend de la charge entrainée, sa modélisation est complexe, et elle présente
des pertes considérables au rotor [MAY 05].
Une autre machine avec une simple structure et une robustesse leurs ont permis d’entrer dans
les entraînements à vitesse variable est la machine synchrones à réluctance variable à démarrage
direct, néanmoins cette machine présente un mauvais facteur de puissance et nécessite une
électronique de commande assez compliqué [RAM 06].
L’idée de combinée la grande efficacité de la machine synchrone à aimants permanents avec
la capacité de démarrage en mode asynchrone date d’avant 1950. Pour des besoins d’entrainements
à vitesse constante comme le cas des pompes et des ventilateurs, l’utilisation des moteurs
synchrones avec une capacité de démarrage direct sur le réseau est très intéressante [DIN 11].
Son rotor est équipé d’une cage d’écureuil utilisée comme amortisseurs pour améliorer la stabilité
de la machine à la phase transitoire, la capacité du démarrage autonome comme un moteur
asynchrone et la synchronisation ensuite avec le champ tournant est connu sous le nom de moteurs
synchrones à démarrage direct sur le réseau ou moteurs asynchrones synchronisés. Cette spécificité
est obtenue par une construction spéciale du rotor qu’on présentera par la suite [MES99] [STO 09a].
L’objectif de notre travail est d’étudier le fonctionnement et les performances des moteurs
synchrones à aimants et à réluctance variable à démarrage direct sur le réseau. Il s’agit notamment
de développer des modèles circuits pout analyser les caractéristiques et les performances de ces
moteurs en régimes transitoire et permanent.

Introduction générale
2
Au premier chapitre nous présentons brièvement les différents types des machines
synchrone, en se basant sur le fonctionnement moteur en mettant en évidence les problèmes de
démarrage de ce dernier quand ils sont couplés directement sur le réseau.
Dans le deuxième chapitre, nous développons des modèles en linéaire et en saturé basés sur
la théorie des circuits magnétiquement couplés et qui ne font apparaitre que des paramètres
mesurables.
Dans le troisième et dernier chapitre, nous exposons les résultats obtenues par la simulation
du modèle développé en chapitre II sous l’environnement MATLAB. Nous analysons différents
régimes de fonctionnement et étudions l’effet de la saturation magnétique sur les performances de
ce type de moteurs.
Une étude en régime permanent sera développées qui tiendra compte les différents problèmes
liés au bon fonctionnement de la machine, à savoir, le facteur de puissance, le rendement et le
courant absorbé.
Enfin, nous terminons par une conclusion générale permettant une synthèse globale de notre travail.

Chapitre I
Généralités sur les moteurs synchrones à démarrage
direct

Chapitre I : Généralités sur les machines synchrones
3
I.1 Introduction
Dans ce chapitre nous présentons des généralités sur les machines synchrones en fonctionnement
moteur. Nous mettons en évidence les problèmes de démarrage des moteurs synchrones quand ils
sont directement alimentés par le réseau. On s’intéresse dans ce cadre aux machines synchrones à
aimants et à réluctance variable à démarrage direct sur le réseau.
I.2 Généralités sur les machines synchrones
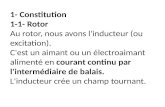
I.2.1 Constitution
La machine synchrone est une machine à courant alternatif constituée d’une partie fixe (stator) et
d’une partie mobile (rotor), voir Figure. I.1. La vitesse de rotation de l’arbre de cette machine est
égale à la vitesse de rotation du champ tournant du stator. Cette vitesse est liée à la fréquence de la
source et comme cette fréquence est constante, la vitesse du moteur est rigoureusement constante.
Elle ne varie ni avec la charge, ni avec la tension de la source.
a- Stator
Le stator de la machine synchrone est similaire à celui d’une machine asynchrone. Le bobinage formé
par des enroulements triphasé répartis dans des encoches portées dans un circuit magnétique feuilleté.
Ce bobinage constitue l’induit de la machine car il est le siège de forces électromotrices induites par
le champ tournant crée par l’inducteur.
b- Rotor
Le rotor représente en fait l’inducteur, il peut prendre diverses formes car l’excitation peut être
produite soit par des aimants montés en surfaces ou enterrés, soit par un bobinage placé dans des
encoches ou sur des pôles saillants. Cet enroulement, destiné à être alimenté en continu, constitue
l’inducteur du moteur car il sert à créer le champ magnétique qui va balayer les conducteurs de
l’induit. Une variante particulière ne comporte aucune excitation au rotor et fonctionne grâce aux
variations de réluctance [MAY 05], [WIL 05].

Chapitre I : Généralités sur les machines synchrones
4
Fig. I.1. Machine synchrone à rotor bobiné [AMA 01]
I.2.2 Classement des machines synchrones
On peut classer l'ensemble des machines synchrones comme l'indique la Figure. I.2. Les machines
sont distinguées par leurs modes d’excitation (bobinages, aimants permanents, etc.) et par leurs
rapport de saillance : Ld
Lq=d [CHE 04].
Fig.I.2. Classement des machines synchrones
Stator Enroulement d’excitation
Rotor bobiné Double excitation Aimants permanents Réluctance variable
Machines synchrones
Pôles
saillants
Pôles
lisses
AP internes
saillance
inverse
AP internes
saillance
normal
AP
surfaciques
1 1 1 1 1 1 ou 1
Aimants permanents

Chapitre I : Généralités sur les machines synchrones
5
I.2.3 Fonctionnement moteur d’une machine synchrone
La machine synchrone est réversible ; elle peut fonctionner comme générateur ou comme moteur.
Lorsqu’on l’utilise comme moteur (en la raccordant à une source de tensions triphasées équilibrées
de courants de pulsation sw ), on l’appelle moteur synchrone, le rotor de ce moteur tourne en
synchronisme avec le champ tournant du stator, c’est-à-dire à la même vitesse que ce champ.
ps
sw
=W
Avec :
sW : La vitesse synchrone,
P : Pair de pôles.
I.3 Problème de démarrage des moteurs synchrones
Le moteur synchrone ne peut pas démarrer seul, car au démarrage, le champ magnétique créé par le
courant continu dans l’enroulement d’excitation ou par des aimants est fixe par rapport au rotor.
L’interaction de ce champ avec le champ tournant du stator crée un couple qui a une valeur moyenne
nulle. Le démarrage autonome d’un moteur synchrone alimenté à fréquence fixe n’est pas possible.
Pour que le moteur développe un couple de valeur moyenne non nulle au démarrage, il faut entrainer
le rotor à la vitesse de synchronisme pour qu’il puisse accrocher à la vitesse du champ tournant du
stator [MAY 06], [WIL 05].
Il existe différents techniques de démarrage pour le moteur synchrone. Les moteurs synchrones de
très grande puissance (20MW et plus) sont parfois amenés à leur vitesse du synchronisme à l’aide
d’un moteur auxiliaire. Dans l’autre cas, soit on utilise un convertisseur électronique à fréquence
variable pour accélérer le moteur jusqu'à la vitesse synchrone, soit on le démarre comme un moteur
asynchrone à l’aide d’une cage d’écureuil.
I.3.1 Démarrage des moteurs synchrones à l’aide d’un moteur auxiliaire
Le démarrage du moteur synchrone est effectué en employant un moteur asynchrone auxiliaire qui
entraine le rotor (qui est excité soit par des aimants permanents soit par un électro-aimant) jusqu'à la
vitesse de synchronisme. Le moteur auxiliaire doit être suffisamment puissant pour qu’il puisse
amener le moteur à sa vitesse synchrone. Dès que le moteur atteint une vitesse proche de la vitesse
de synchronisme, il est branché alors sur le réseau et il se synchronise [MAY 06], [WIL 05].

Chapitre I : Généralités sur les machines synchrones
6
I.3.2 Démarrage des moteurs synchrones à l’aide d’une cage d’écureuil
Le démarrage se fait en asynchrone, on place une cage d’écureuil sur le rotor du moteur synchrone
afin qu’il puisse démarrer en moteur asynchrone (Figure. I.3). En appliquant la pleine tension
triphasée sur le stator, on crée un champ tournant qui amène rapidement le moteur à une vitesse
légèrement inférieure à sa vitesse de synchronisme. En général, la résistance de la cage d’écureuil est
assez élevée afin d’assurer un fort couple de démarrage [WIL 05], [STO 09a].
Fig. I.3. Rotor d’une machine synchrone à aimants muni d’une cage d’écureuil [STO 09].
I.4 Machine synchrone à réluctance variable à démarrage direct
La machine synchrone à réluctance variable est structurellement une machine synchrone à pôles
saillants dépourvue d’excitation. La forme classique de la machine possède un rotor saillant muni
d’une cage d’écureuil, il ne contient ni aimants, ni bobinage d'excitation (voir Figure. I.4). Le stator
a la même structure que celui d’une machine asynchrone. La cage permet d’assurer le démarrage
direct sur le réseau et permet d’améliorer la stabilité de fonctionnement au synchronisme (lors d’un
à-coup de couple résistant par exemple). Cette machine présente l’avantage de conserver une vitesse
constante en charge jusqu’à une certaine valeur du couple résistant, ce que ne permet pas une machine
asynchrone à cause du glissement [LUB 03] [MOG 07].
a) Stator b) Rotor
Fig. I.4-Machine synchrone à réluctance variable [VID 05].
aimant cage barrière de flux

Chapitre I : Généralités sur les machines synchrones
7
I.5 Moteur synchrone à aimants permanent à démarrage direct sur le réseau
L’idée de combinée la grande efficacité de la machine synchrone à aimants permanents avec la
capacité de démarrage de la machine asynchrone date d’avant 1950.
Dans le cas où la vitesse d’un moteur électrique doit être constante comme le cas des pompes et des
ventilateurs, l’utilisation des moteurs synchrones avec une capacité de démarrage direct sur le réseau
est très intéressante. Cette machine avec auto-démarrage a été utilisée pendant plusieurs décennies.
Son rotor est équipé d’une cage d’écureuil est aussi utilisée comme amortisseurs pour améliorer la
stabilité de la machine à la phase transitoire. La combinaison de la capacité de l’auto-démarrage
comme un moteur asynchrone et la synchronisation ensuite avec le champ tournant est généralement
connu sous le nom de moteurs synchrones à démarrage direct sur le réseau ou moteurs asynchrones
synchronisés. Ils sont des moteurs à induction. Lors de la phase de démarrage, le moteur fonctionne
en mode asynchrone et lorsqu'il atteint une vitesse proche du synchronisme, il passe en mode
synchrone [DIN 11], [LU 12], [MES 99], [STO 09a]. Cette particularité est obtenue par une
construction spéciale du rotor qu’on présentera par la suite.
Le moteur synchrone à aimants permanent a eu une pénétration limitée dans le marché, probablement
en raison d'un certain nombre de facteurs, dont certains sont :
· Le coût supplémentaire de matériau magnétique par rapport moteur asynchrone.
· La construction du rotor complexe et donc augmentation du coût de la production
· La conception complexe de la machine, ce qui la rend difficile à optimiser.
Une des principales raisons est sans doute que le marché des moteurs est assez conservateur et qu'il
a peu d'incitation à développer des moteurs avec rendement élevé [MOD 07].
Le rotor contient des aimants permanents et un dispositif de démarrage qui représente une cage
constitué par des conducteurs électriques qui fonctionne comme amortisseurs pour produire
l’accélération du couple asynchrone pendant la phase de démarrage et assure aussi la stabilité du
moteur.
I.5.1 Les aimants permanents standards utilisés dans ce type de moteurs
Ils ont été utilisés depuis les premiers jours de l’industrie électrique, mais ce n’est que très
récemment que les aimants de terres rares avec de grandes performances deviennent disponibles, avec

Chapitre I : Généralités sur les machines synchrones
8
une densité d'énergie suffisante pour être utilisé dans des applications exigeantes. Le Coûts réduits
des aimants et avantages de taille et l'efficacité font PM moteurs de plus en plus populaire.
· Les ferrites sont connues pour leur longévité, et la disponibilité de l'ingrédient Fe2O3 en tant
qu’un dérivé de la fabrication de l'acier ce qui leur donne un prix bas. Leurs principaux
inconvénients sont la faible rémanence (0.4T) et faible densité énergétique.
· Aimants samarium-cobalt ont été mis au point dans les années 1970 et ils ont une densité
d'énergie beaucoup plus élevé que les ferrites. Ils peuvent fonctionner dans une plage de
température très large, leurs principaux inconvénients étant le prix élevé et la densité d'énergie
plutôt faible rémanence que les Nd-Fe-B aimants.
· Néodyme-fer-bore aimants ont été développés dans les années 1980 en partie en réponse à la
forte augmentation des prix du cobalt à l'époque. Ils ont une densité d'énergie et une meilleure
rémanence mais une température de Curie inférieure à celle de Sm-Co. Protection contre
l'humidité est nécessaire à cause de la teneur en néodyme. Ceci est habituellement réalisé par
une couche mince d'oxyde métallique. [TAY 01].
Différents structures de moteurs synchrones à démarrage direct sont envisageables qui sont surtout
liées à l’emplacement des aimants au niveau du rotor. En effet, les aimants peuvent être collés en
surface, insérés ou enterrés au rotor.
I.5.2 Aimants en surface
Ce type de rotor a des aimants en surface avec des conducteurs en anneau qui forme la cage (voir
Figure. I.5). La cage est assemblée à l’extérieur du rotor. La machine synchrone est alors dite à pôles
lisses car la perméabilité relative des aimants est proche de celle de l’air. Il n’y a donc pas de variation
de réluctance du rotor vue du stator. Notant que cette structure donne au moteur une robustesse
mécanique [DIN 11], [TAR 09], [VID 05],
Fig. I.5-Aimants en surface
aimant

Chapitre I : Généralités sur les machines synchrones
9
I.5.3 Aimants insérés
Les aimants permanents sont déposés à la surface du rotor, mais ils sont cette fois-ci séparés par des
plots magnétiques alors qu’ils étaient séparés par de l’air dans le cas des aimants montés en surface
(voir Figure. I.6). L’aimantation des aimants peut être radiale ou tangentielle. L’arc du pole peut être
optimisé en changeant la taille de l’ouverture qui porte les aimants, le flux magnétique est concentré
au milieu des pôles magnétiques. Le fer entre les aimants joue le rôle d’un rotor massif pour le moteur
à induction. La machine est dite à pôles saillants et il est donc possible de profiter du couple réluctant
de la machine synchrone. De ce fait, ces machines ont un meilleur couple volumique que les machines
avec des aimants montés en surface, mais sont aussi plus lourdes à dimensions égales [DIN 11], [NEK
11], [VID 05].
Fig. I.6-aimants insérés [DING].
I.5.4 Aimants enterrés
Le rotor est équipé d’aimants à l’intérieur qui peuvent prendre diverses formes (voir Figure. I.7). En
agissant sur la hauteur des aimants et sur la surface d’un pôle magnétique, il est possible d’obtenir
une induction magnétique dans l’entrefer plus importante que dans l’aimant. On parle alors de
concentration de flux.
L’aimantation des aimants pour de telles structures à concentration de flux est ortho-radiale. Par suite,
l’induction magnétique dans l’entrefer étant plus grande que dans les aimants. Ce type de structure
est à pôles saillants, donc il est possible de profiter aussi du couple réluctante [DIN 11], [VID 05].

Chapitre I : Généralités sur les machines synchrones
10
Fig. I.7.Rotor à aimants enterrés [NEE 00], [TAR 09].
I.5.5 Moteurs synchrones monophasés à aimants à démarrage direct
Il existe de nombreux documents techniques et des brevets dans le domaine des machines synchrones
à démarrage direct dans les deux versions monophasés et triphasés. Qui explique clairement le
processus de synchronisation en tenant compte des catégories et de couples agissant pendant le
démarrage. Ce moteur électrique monophasé est adapté pour des applications dans les appareils
ménagers, tels que les compresseurs de réfrigérateurs.
La construction des moteurs synchrones à aimants à démarrage direct monophasée permanent est
assez similaire à celui des moteurs triphasés, avec en plus on doit ajouter un condensateur auxiliaire.
Le principal problème dans ce type de moteurs est leur culasse de rotor relativement étroite de sorte
que le volume pour la mise en place des aimants permanents soit très limité, et cela provoque des
difficultés supplémentaires dans la conception des moteurs monophasée synchrones à aimants
permanents à démarrage directe [ZAW 12].
I.7 Conclusion
Dans ce chapitre nous avons introduit des généralités sur le moteur synchrone. Nous avons
mis l’accent sur le problème de démarrage quand ses moteurs sont directement alimentés par un
réseau à tensions et à fréquence fixes. Nous avons passé en revue différents types de machines
synchrones à aimants à démarrage direct qui constituent actuellement parmi les solutions adoptées
pour y remédier au problème de démarrage direct des moteurs synchrones. Dans le chapitre qui suit
nous présentons la modélisation de la machine en développant un modèle basé sur la théorie des
circuits magnétiquement couplés.

Chapitre II
Modélisation de la machine synchrone à aimants
permanents à démarrage direct

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
11
II.1 Introduction
Dans ce chapitre, nous développons un modèle basé sur la théorie des circuits magnétiquement
couplés, pour simuler les fonctionnements en régime transitoires des machines synchrones triphasées
à aimants à pôles saillants à démarrage direct. Ce modèle tient compte de la saturation des circuits
magnétiques. Ce type de machine comporte au rotor une cage inaccessible, le modèle qu’on
développera, sera surtout exprimé avec des paramètres électriques mesurables
II.2 Modèles circuits des machines étudiées
Le type de machines synchrones étudiées est représenté sur la figure. II.1. Le stator est muni de 3
enroulements repérés a, b et c, décalés de 120 degrés électrique. Le rotor à reluctance variable
comporte une cage conductrice que nous représentons par deux enroulements équivalents, répartis
selon deux axes : l'axe direct d correspondant à l’axe du faible entrefer et l'axe en quadrature q,
perpendiculaire au précédent. Au niveau des encoches rotoriques sont insérés des aimants
d’aimantation radiale. Nous plaçons arbitrairement l'axe en quadrature en retard sur l'axe direct par
rapport au sens de rotation.
La machine synchrone peut être modélisée par des circuits électriques magnétiquement couplés, à
paramètres localisés, constitués d’éléments que sont les inductances et les résistances.
La position du rotor par rapport au stator est indiquée par l'angle θ. Cet angle est défini entre l'axe de
l'enroulement de la phase a et l'axe polaire d, mesuré positivement dans le sens anti-horaire. p étant
le nombre de paires de pôles.
Fig.II.1.Représentation symbolique de la machine.
Axe d Axe q
isb
isc
isa
q
Vsa jpm

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
12
II.2.1 Hypothèses simplificatrices
- On considère que les f.m.m. des enroulements statoriques sont à distribution sinusoïdale dans
l’espace.
- Le champ produit par les aimants a une distribution sinusoïdale dans l’entrefer
- On néglige l’hystérésis et les courants induits dans les parties conductrices.
- On néglige l’effet de peau (en particulier dans les barres du rotor).
- On néglige le couplage capacitif entre enroulements.
- On néglige l’effet de la température sur les résistances.
II.2.2 Equations électriques dans le repère du stator a, b, c
L’induit est considéré comme récepteur. Cette convention de signe est sans intérêt pour les
enroulements représentant la cage. En effet, ceux-ci sont en court-circuit. Dans ces conditions, les
équations des tensions de la machine synchrone sont :
Pour les phases stator
(II.1)
Pour les circuits rotor
(II.2)
En regroupant les deux systèmes d’équations, on obtient le système global sous forme matricielle
suivant :
úúúúúú
û
ù
êêêêêê
ë
é
+
úúúúúú
û
ù
êêêêêê
ë
é
´
úúúúúúúú
û
ù
êêêêêêêê
ë
é
=
úúúúúú
û
ù
êêêêêê
ë
é
qr
dr
cs
bs
as
qr
dr
cs
bs
as
qr
dr
S
S
S
cs
bs
as
dtd
i
i
i
i
i
R
R
R
R
R
0
0
v
v
v
j
j
j
j
j
(II.3)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
13
II.2.3 Relation entre flux et courants
On peut écrire l’expression du flux en régime linéaire, sous la forme :
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( )( )
( )( )
( )( ) ú
úúúúú
û
ù
êêêêêê
ë
é
+
úúúúúú
û
ù
êêêêêê
ë
é
×
úúúúúú
û
ù
êêêêêê
ë
é
=
úúúúúú
û
ù
êêêêêê
ë
é
pmrq
0
pmc
pmb
pma
rq
rd
sc
sb
sa
rq
rd
crq
crd
brq
brd
arq
ard
crqcrdccbca
brqbrdbcbba
arqardacaba
rq
rd
sc
sb
sa
i
i
ii
i
L
0
0
L
L
L
L
L
L
LLLLLL
LLLLL
LLLLL
j
jjj
qqqqqqqqqqqqqqq
jjjjj
(II.4)
II.2.4 Expressions des inductances en fonction de
La présence de la saillance au rotor induit une dépendance des inductances propres stator et mutuelles
entre phase stator avec la position. Ces inductances sont évidemment des fonctions périodiques (Voir
figures. II.2 et II.3), développées en série de Fourier, celles-ci comportent, en principe, des
harmoniques d’espace.
Fig. II.2 : Inductance propre La Fig. II.3 : Inductance mutuelle Mab
Inductance propre
Les inductances propres La , Lb et Lc sont des fonctions périodiques de θ, de période π dont les
développements en série de Fourier d'harmoniques donnent :
(II.5)
On remarque que l’inductance propre peut être décomposée en une composante continue et une
somme infinie.
Dans l’hypothèse de la répartition sinusoïdale de la force magnétomotrice, les inductances propres et
mutuelles relatives à l’induit seul sont la somme d’un terme constant et d’un harmonique de rang 2.
En approximation du premier harmonique, nous pouvons donc supposer que pour les trois phases, on
obtient alors:

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
14
(II.6)
Il est à noter que la self-inductance de la phase statorique est maximale quand l'axe direct coïncide
avec l'axe de cette phase (θ = 0). En effet, les lignes de champ trouvent alors le chemin maximal
dans le matériau ferromagnétique. Pour la même raison, la self-inductance est minimale quand l'axe
en quadrature coïncide avec l'axe de la phase a .
Inductance mutuelle entre phase stator
(II.7)
Les inductances propres et mutuelles relatives à l’induit seul sont la somme d’un terme constant et
d’un harmonique de rang 2. Le coefficient étant le même pour les inductances propres et mutuelles.
On peut définir un rapport entre les coefficients Lo et Mo et entre les coefficients L2 et M2 dans les
équations (II.6 et II.7) des inductances propres et mutuelles du stator :
1L
M
2
1
L
M
2
2
0
0 =-= (II.8)
Inductance mutuelle entre enroulements stator et rotor
Les inductances mutuelles dans (II.4) entre les enroulements statoriques et rotoriques ont comme
expressions :
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ÷ø
öçè
æ +×=÷ø
öçè
æ +×=
÷ø
öçè
æ -×=÷ø
öçè
æ -×=
×=×=
3
2sinML
3
2oscML
3
2sinML
3
2oscML
sinML cosML
srqcrqsrdcrd
srqbrqsrdbrd
srqarqsrdard
pqq
pqq
pqq
pqq
qqqq
(II.9)
II.2.5 Flux produit par l’inducteur à aimants dans une phase du stator
Nous pouvons définir l’expression du flux par phase comme suit :
pmAcAbAaA jjjjj +++= (II.10)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
15
Soit pmj le flux des aimants, jmax est l’amplitude du flux par phase.
En supposant que le champ produit par les aimants est à répartition sinusoïdale dans l’entrefer, les
flux par phase s’écrivent :
qjj psinmaxpm ×= (II.11)
Les équations des flux des aimants dans le repère a, b, c du stator s’exprime :
[ ]( )
ïïï
î
ïïï
í
ì
+
-×=
)3
2sin(
)3
2sin(
sin
maxabcpm
pq
pq
q
jj (II.12)
II.2.6 Modèles avec variables d’état.
En choisissant les courants de phases comme variables d’état et en remplaçant (II.4) dans (II.3), on
aboutit au système d’équations suivant :
[ ] úû
ùêë
é ×××--= - iLdt
dRivLi
dt
d)()(1 qwq (II.13)
Le système, ainsi obtenu, est non linéaire (L(θ)) et sa résolution numérique est assez lourde du fait de
la nécessité d’inversion de la matrice inductance à chaque pas d’intégration, le problème est simplifié
en adoptant la transformation de Park.
II.3 Modèle de la machine étudiée dans le référentiel (d-q) de Park
Le modèle circuit de la machine dans le repère du stator a, b, c défini précédemment nous montre que
la plupart des grandeurs dépendant de l’angleq , ainsi que l’ordre élevé du système, qui présente des
difficultés pour la résolution.
Donc, pour éliminer la dépendance de l’angleq et d’abaisser l’ordre du système, nous exploitons la
transformation de Park qui permet d’éliminer la dépendance vis-à-vis de q et de baisser l’ordre du
système.
La matrice de Park normée s’écrit :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
16
[ ]
úúúúúú
û
ù
êêêêêê
ë
é
+---
+-
-×=
21
21
21
)3
2sin()
3
2sin(sin
)3
2cos()
3
2cos(cos
32)(P
pq
pqq
pq
pqq
q (II.14)
Avec :
[ ] [ ]tPP )()( 1 qq =- (II.15)
Toutes les grandeurs électriques triphasées sont projetées sur le repère lié au rotor par la
transformation de Park, nous écrivons alors dans le cas général :
[ ]úúú
û
ù
êêê
ë
é×=
úúú
û
ù
êêê
ë
é
h
q
dt
c
b
a
x
x
x
P
x
x
x
)(q (II.16)
II.3.1 Equations des tensions
En appliquant la transformée de Park sur le système (II.1), on aura :
[ ] [ ] [ ] [ ] [ ] [ ]abcabcsdq sdt
d)(pisR)(pUs jqq ×+××= (II.17)
[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]dq1
dq1
dq1
dq s)(pdt
d)(pis
dt
d)(pL)(pis)(pRs)(pUs jqqqqqq ×÷
ø
öçè
æ×+×××+×××= ---
(II.18)
Sachant que :
[ ] [ ] 1)(p)(p 1 =× -qq (II.19)
Dans l’équation (II.18) et après calcul, on trouve :
[ ] [ ]úúú
û
ù
êêê
ë
é -
×=÷ø
öçè
æ× -
000
001
010
dt
d)(p
dt
d)(p 1 q
qq (II.20)
La transformée de Park appliquée au flux des aimants donne :
[ ] [ ] [ ]abcpmdqpm )(P jqj ×= (II.21)
Les flux des aimants dans le repère (d-q) de Park deviennent :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
17
ïî
ïíì
×=
=
max23
0
pmq
pmd
jj
j (II.22)
On retrouve la même chose pour les flux des aimants dans le rotor cte=p =p =p mrdmdm .
Les équations des tensions statoriques dans le nouveau repère s’écrivent :
ïïî
ïïí
ì
×++×=
×-+×=
sdesq
sqssq
sqesd
sdssd
dt
diRU
dt
diRU
jwj
jwj
(II.23)
Dans les nouvelles expressions (II.23), on voit apparaître les termes ( qse jw ×- et dse jw ×+ ) qui
représente les fem de rotation.
De la même façon, on peut obtenir les équations des tensions rotoriques, (les enroulements
équivalents sont en court-circuit, donc les tensions à ces bornes sont nulles) :
ïïî
ïïí
ì
+×=
+×=
dt
diRo
dt
diRo
rqrqrq
rdrdrd
j
j
(II.24)
II.3 .2.Expressions des flux en fonction des courants dans le repère (d-q)
En appliquant la transformation de Park aux équations (II.4), la matrice d’inductances est obtenue en
reliant le vecteur des flux au vecteur des courants en ajoutant le vecteur des flux des aimants
permanents, après calculs on obtient :
úúúú
û
ù
êêêê
ë
é
×+
úúúúú
û
ù
êêêêê
ë
é
×
úúúúú
û
ù
êêêêê
ë
é
=
úúúúú
û
ù
êêêêê
ë
é
1
0
1
0
i
i
i
i
L0M0
0L0M
M0Lq0
0M0L
pm
rq
rd
sq
sd
rqq
rdd
q
dd
qr
dr
qs
ds
j
jjjj
(II.25)
Les flux totalisés au rotor et au stator d’axes d et q ont comme expression :
ïï
î
ïï
í
ì
+×+×=
×+×=
+×+×=
×+×=
pmsqqrqrqqr
sddrdrddr
pmrqqsqqqs
rddsddds
iMiL
iMiL
iMiL
iMiL
jj
j
jj
j
(II.26)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
18
Notant que Ld, Lq, sont respectivement l’inductance synchrone longitudinale et l’inductance
synchrone transversale, et Lh est l’inductance homopolaire, qui ont comme expression :
ïïï
î
ïïï
í
ì
-=
---=
+-+=
00h
2020q
2020d
MLL
MML21
LL
MML21
LL
(II.27)
Le modèle électrique équivalent de la machine dans le repère (d, q) lié au rotor est représenté sur la
Fig. II.4
Fig.II.4. Modèle équivalent dans le repère (d-q).
II.3.3 Expression du couple électromagnétique
Le couple électromagnétique est produit par l'interaction entre les pôles formés par les aimants au
rotor et les pôles engendrés par les Fmm dans l'entrefer généré par les courants statoriques. Il
s’exprime comme suit :
[ ] [ ] [ ] [ ]
[ ] [ ]
ïïïï
î
ïïïï
í
ì
×-××-×=
×
úúú
û
ù
êêê
ë
é -
××=
׶¶××=
)iii)LL((p
i
000
00L
0L0
ip21
ie
Lpi
21
T
sdpmsqsdqd
dqhd
qt
dqh
dqhtt
dqhem
j
q
(II.28)
On obtient l’expression du couple électromagnétique en fonction des flux et courant statoriques des
axes d et q :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
19
)sd
isqsq
isd
(pem
T ×-××= jj (II.29)
On peut définir la relation fondamentale de la dynamique des systèmes en rotation comme suit :
rem TTfdt
dJ -=W×+
W× (II.30)
Où :
W : représente la vitesse de rotation du rotor,
J : représente le moment d’inertie du système,
f : représente le coefficient de frottements visqueux,
Tem : représente le couple électromagnétique,
Tr : représente le couple résistant.
II.4 Modèle linéaire à inductances de fuites séparées
Nous développons un modèle linéaire pour la machine synchrone à aimants permanents à démarrage
direct en ne faisant apparaître que des paramètres mesurables.
II.4.1 Séparation des inductances de fuites
Les inductances propres des enroulements statoriques et rotoriques peuvent être décomposées en deux
termes, un terme qui représente les fuites magnétiques et l’autre terme représentant le flux commun
(inductance mutuelle) :
îíì
+=
+=
MlL
MlL
qsq
dsd
îíì
+=
+=
qrqrq
drdrd
MlL
MlL (II.31)
Dans ces équations, ls, lrd et lrq représentent respectivement l’inductance de fuites d’un enroulement
statorique, l’inductance de fuites de l’enroulement rotorique d’axe d et les inductances de fuites de
l’enroulement rotorique d’axe q.
Nous pouvons alors, écrire les expressions (II.26) des flux totaux statoriques et rotoriques de la
machine de la façon suivante :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
20
ïï
î
ïï
í
ì
××
××
××
××
pmrqsqqrqrqrq
rdsddrdrdrd
pmrqsqqsqsq
rdsddsdsd
+)i+(iM+il=
)i+(iM+il=
+)i+(iM+ils=
)i+(iM+ils=
jj
j
jj
j
(II.32)
On peut définir les flux magnétisants des axes d et q qui sont fonction des courants magnétisants Imd
et Imq. Ils sont des flux commun entre les enroulements statorique et rotorique, leurs expressions sont
définies comme suit :
îíì
×
×
pmmqqmq
mddmd
+ iM=
iM=
jj
jAvec
îíì
=
=
i+iI
i+iI
rqsqmq
rdsdmd (II.33)
II.5 Modèle linéaire de la machine à inductances de fuites totalisées au stator
Dans le cas d’un moteur à cage d’écureuil, les paramètres du rotor Rr et Lr et le paramètre de couplage
M ne sont pas mesurables directement puisqu’aucune connexion n’est possible sur ce rotor. Il est
donc intéressant de réécrire les équations en utilisant des grandeurs accessibles par l’expérimentation
[MAY 05].
II.5.1 Expressions des courants magnétisants
A partir des équations de Park développées précédemment, on peut obtenir les courants magnétisants
rotoriques des axes d et q en divisant les expressions des flux rotoriques des équations (II.32) par Md
et Mq respectivement :
ïï
î
ïï
í
ì
=
×=
rqq
rqsqmrq
rdd
rdsdmrd
iM
L+iI
iM
L+iI
(II.33)
On peut obtenir les courants rotoriques ird et irq à partir de ces deux expressions précédentes :
ïïî
ïïí
ì
×-=
×-=
rq
qsqmrqrq
rd
dsdmrdrd
L
M)iI(i
L
M)iI(i
(II.34)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
21
II.5.2 Expressions des flux
Nous pouvons exprimer les flux statoriques dans les relations (II.32) de la façon suivante :
îíì
××××
××××
pmjssj
ssj
+I)-(1L+iL=
I)-(1L+iL=
mrqqqsqqqsq
mrdddsdddsd (II.35)
Les termes sd et sq représentent les coefficients de dispersion de Blondel suivant les axes d et q.
ïï
î
ïï
í
ì
×
×
rqq
2q
q
rdd
2d
d
LL
M-1=
LL
M-1 =
s
s
(II.36)
De la même façon, les flux rotoriques s’écrivent :
îíì
×
×
pmmrqqrq
mrddrd
+IM=
IM=
jj
j (II.37)
Les termes (σd.Ld.isd et σq.Lq.isq) qui apparaissent dans l’équation (II.35) représentent respectivement
les fuites magnétiques totalisées au stator et les termes ( )-(1L dd s× et ×× )-(1L qq s ) les flux commun
stator-rotor (ou flux magnétisant) vu par les enroulements statoriques.
On peut exprimer les flux magnétisants statoriques des axes d et q en fonction des courants
magnétisants Imrd et Imrq:
îíì
××
××
mrqqqmsq
mrdddmsd
I)-(1L=
I)-(1L=
sj
sj (II.38)
Les flux statoriques des équations(II.35) s’écrivent alors :
îíì
××
××
pmmsqsqqqsq
msdsdddsd
++iL=
+iL=
jjsj
jsj (II.39)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
22
Pour la suite, nous supposons que les termes (σd.Ld et σq.Lq) qui représente les inductances de fuites
totalisées au stator sont indépendants de la saturation. En effet, les fuites magnétiques correspondent
à des lignes de champ traversant une grande partie d'air (encoches) et sont par conséquent peu
affectées par la saturation [LUB 03].
On exprime les termes σd.Ld et σq.Lq en fonction de l'inductance de fuites statoriques ls et des
inductances de fuites rotoriques lrd et lrq, on aura :
ïï
î
ïï
í
ì
×÷÷ø
öççè
æ×
×÷÷ø
öççè
æ×
rqrq
qsqq
rdrd
dsdd
lL
M+l=L
lL
M+l=L
s
s
(II.40)
On suppose pour la suite que les inductances de fuites statoriques et rotoriques (ls, lrd et lrq) sont
indépendantes de la saturation. Les inductances de fuites totalisées au stator seront indépendantes de
la saturation si les rapports ÷÷ø
öççè
æ
rd
d
L
M et ÷÷ø
öççè
æ
rq
q
L
M qui apparaissent dans les équations précédentes sont
constants.
En utilisant les expressions des coefficients de dispersion σd et σq, on peut obtenir une relation entre
les flux rotoriques (II.37) en fonction des flux magnétisants statoriques(II.38), on aura :
ïï
î
ïï
í
ì
×÷÷ø
öççè
æ
×÷÷ø
öççè
æ
msqq
rqrq
msdd
rdrd
M
L=
M
L=
jj
jj
(II.41)
II.5.3 Modèle d’état de la machine avec les flux comme variables
Pour pouvoir effectuer la simulation en régime linéaire, nous présentons un modèle où les flux sont
choisis comme variables d’état. Le vecteur d’état est composé des flux totaux statoriques et des flux
magnétisant statoriques, il est donné par :
[ ]sqmsdsqsd =X mjjjj (II.42)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
23
Des équations (II.39), on fait ressortir les courants statoriques isd et isq:
( )
( )ïï
î
ïï
í
ì
--××
=
-××
=
pmmsqsq qLq
1sqi
msdsd dLd
1sdi
jjjs
jjs
(II.43)
Il suffit donc de remplacer ces deux relations précédentes dans les expressions des tensions
statoriques(II.23) pour obtenir les deux premières équations d’état du modèle :
( )
( )ïï
î
ïï
í
ì
×---×-=
×+-×-=
sdepmmsqsqqLq
RssqU
dtsqd
sqemsdsddLd
RssdU
dtsdd
jwjjjs
j
jwjjs
j
(II.44)
Pour trouver les équations d’état des flux magnétisants, on remplace les équations des flux rotoriques
(II.43) dans les équations des tensions rotoriques (II.25) :
ïï
î
ïï
í
ì
+÷÷ø
öççè
æ××=
+÷÷ø
öççè
æ××=
dt
d
L
MiRo
dt
d
L
MiRo
msq
rq
qrqrq
msd
rd
drdrd
j
j
(II.45)
On peut obtenir l’expression des courants magnétisants rotoriques Imrd et Imrq à partir des relations
(II.38) des flux magnétisants statoriques msd et msq :
ïïî
ïïí
ì
×-
=
×-×
=
msqqq
mrq
msddd
mrd
)1(L
1I
)1(L
1I
js
js
(II.46)
On obtient aussi les expressions des courants rotoriques ird et irq à partir des équations (II.34) des
courants magnétisants rotoriques des axes d et q :
ïïî
ïïí
ì
×-=
×-=
rq
qsqmrqrq
rd
dsdmrdrd
L
M)iI(i
LM
)iI(i
(II.47)
On remplace les expressions des courants rotoriques ird et irq dans (II.45), on trouve :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
24
ïï
î
ïï
í
ì
+÷÷ø
öççè
æ×÷÷ø
öççè
æ×-×=
+÷÷ø
öççè
æ×÷÷ø
öççè
æ×-×=
dt
d
L
M
L
M)iI(R0
dtd
LM
LM
)iI(R0
msq
rq
q
rq
qsqmrqrq
msd
rd
d
rd
dsdmrdrd
j
j
(II.48)
On définit Trd, Trq comme les constantes du temps rotorique des axes d et q respectivement, leurs
expressions sont les suivants :
ïïî
ïïí
ì
=
=
rq
rqrq
rd
rdrd
R
LT
RL
T
(II.49)
Enfin, on obtient :
ïï
î
ïï
í
ì
+××
=
+××
=
dt
d
L
M
T
iI0
dtd
LM
TiI
0
msq
rq
2q
rq
sqmrq
msd
rd
2d
rd
sdmrd
j
j
(II.50)
On exprime les expressions des courants rotoriques (II.50) en fonction des coefficients de dispersion
de Blondel :
ïïî
ïïí
ì
+×-×-
=
+×-×-
=
dt
dLq)q1(
T
)iI(0
dtd
Ld)d1(T
)iI(0
msq
rq
sqmrq
msd
rd
sdmrd
js
js
(II.51)
Il suffit maintenant de remplacer les expressions des courants statoriques (II.43) et les expressions
des courants de magnétisation rotoriques (II.46) dans le système (II.51) pour obtenir les deux autres
équations d’état, celles des flux magnétisants :
ïï
î
ïï
í
ì
--××
-+-=
-××-
+-=
)(T
)1(
T
1
dt
d
)(T
)1(
T
1
dt
d
pmmsqsqqrq
qmsq
rd
msq
msdsddrd
dmsd
rd
msd
jjjs
sj
j
jjss
jj
(II.52)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
25
II.6 Modèle saturé de la machine synchrone à aimants à démarrage direct
La saturation affecte les matériaux magnétiques. C’est un phénomène physique local. Dans les
machines électriques, la saturation apparaît surtout dans les régions où l’induction magnétique est la
plus intense. Elle affecte habituellement les dents statoriques et rotoriques mais également les
épanouissements polaires pour les machines à réluctance variable. La saturation magnétique se traduit
donc par une diminution de la perméabilité des parties magnétiques
Pour tenir compte de la saturation dans un modèle basé sur la théorie des circuits, on considère son
effet sur les grandeurs globales mesurables telles que les courants ou les flux magnétiques. Ainsi, les
inductances et mutuelles qui sont considérées constantes dans un modèle linéaire seront fonction des
courants circulants dans les enroulements de la machine.
La démarche qui sera adoptée dans notre travail consiste à modifier le modèle linéaire développé dans
le repère de Park.
On note que l’hypothèse du premier harmonique est toujours conservée. De plus, la machine est
toujours couplée en étoile à neutre isolé annulant ainsi la composante homopolaire du courant
statorique.
II.6.1 Prise en compte de la saturation dans les expressions des flux
Les inductances de fuites sont considérées constantes. En effet, les flux de fuites correspondant à ces
inductances traversent des parties situées dans l’air comme les têtes de bobines et les encoches.
Alors seules les inductances représentant les flux circulant dans les circuits magnétiques statoriques
ou rotoriques sont affectées par la saturation. Ainsi, ces flux sont des fonctions non linéaires avec les
courants magnétisants.
En observant les expressions des flux statoriques (II.39) et des flux rotoriques (II.40), on note que les
termes sddd iL ××s et sqqq iL ××s correspondent aux flux de fuites. Donc, seuls les flux magnétisants
(II.38) peuvent être affectés par la saturation. Pour tenir compte de la saturation dans le modèle
développé, il suffit donc de réécrire les expressions des flux magnétisants sous la forme :
( )( )ïî
ïíì
×××
×××
mrqqqmrqmrdSTqmsq
mrdddmrqmrdSTdmsd
I)-(1LI,IK=
I)-(1LI,IK=
sj
sj (II.53)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
26
Ou :
( )mrqmrdSTd IIK , et ( )mrqmrdSTq IIK , sont des coefficients dépendant des courants de magnétisation
mrqmrd II , qui expriment la non linéarité entre ces courants et les flux magnétisants msdj et msqj
Pour la machine synchrone à aimants à démarrage direct étudiée, on a défini un coefficient de
saturation pour chaque axe. Ainsi, comme montré sur la figure II.5, le vecteur flux (
et le vecteur courant ( ne sont pas colinéaires.
Pour éviter d’utiliser deux coefficients de saturation, il est possible de définir une transformation
mathématique qui permet de rendre colinéaire les deux vecteurs courant magnétisant rotorique et
flux magnétisant statorique. On obtient alors une machine équivalente à pôles lisses.
La figure traduit les relations (II.34) entre les flux et les courants magnétisants suivant les deux axes.
Fig.II.5 : Représentation des flux et courants magnétisants dans la machine.
La machine à pôles lisses équivalente permet d’utiliser un seul coefficient de saturation. En effet,
pour ce type de machines le vecteur flux magnétisant statorique ms et le vecteur courant magnétisant
rotorique Imr soient colinéaires. Il faut donc trouver un vecteur flux magnétisant équivalent qu’on
appellera MS et un vecteur courant magnétisant rotorique IMR comme c’est indiqué dans la partie a
sur la Figure. II.5.
Pour la suite, on considère le rapport :
( )d1LdIMR
MS sj
-×= (II.54)
Axe d
MSQ
IMRQ
Axe q
IMR
Imrd msd
MS
Axe d
Imrd msd
Imrq
msq
Axe q
Imr
ms

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
27
Ainsi, on prendra le terme ( )dLd s-× 1 comme étant le rapport entre le flux et le courant magnétisant
équivalent, on introduit une transformation mathématique pour l’axe q en gardant la caractéristique
magnétique d’axe d, On introduit deux coefficients k et k’ tels que :
÷÷ø
öççè
æ×úû
ùêë
é=÷÷
ø
öççè
æ
mrq
mrd
MRQ
MRD
I
I
k0
01
I
I (II.55)
÷÷ø
öççè
æ×úû
ùêë
é=÷÷
ø
öççè
æ
msq
msd
MSQ
MSD
'k0
01
jj
jj
(II.56)
A partir de cette transformation, on peut constater que les grandeurs suivant l’axe d sont conservées
De (II.55) et (II.56), nous obtenons :
'
msqMSQmrqMRQ
msdMSDmrdMRD
kIkI
II
jj
jj
×=×=
== (II.57)
On constate qu’on peut définir une relation entre ces deux coefficients à partir de la figure. II.3 - (a).
( )( ) ( ) MRMS
MRQdMSQ
mrddmsd Id1Ld Id1L
Id1L×-×=Û
îíì
×-×=
×-×=sj
sj
sj (II.58)
A partir des équations (II.55) et (II.56), on introduit la valeur de flux et courant magnétisant
équivalent, on obtient alors la relation suivante :
( ) mrqmsq Ikd1Ld'k ××-×=× sj (II.59)
On remplace les équations (II.46) dans la relation précédente, on obtient le rapport suivant :
( )( )d1Ld
d1Lq'k
kss
-×-×
= (II.60)
L’expression de l’énergie magnétique dans l’entrefer de la machine à pôles saillants est la suivante :
( )mrqmsqmrdmsdemps II21
W ×+××= jj (II.61)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
28
L’expression de l’énergie magnétique pour la machine à pôles lisses équivalente, et après changement
de variable, sera :
( )MRQMSQmrdmsdempl II21
W ×+××= jj (II.62)
L’égalité ( empsW = emplW ) permet de noter que la machine à pôles lisses équivalente est physiquement
identique à la machine à pôles saillants.
Alors de cette égalité, on établit une nouvelle relation entre les coefficients k et k’ :
1k'k =×Þ×=× mrqmsqMRQMSQ II jj (II.63)
Finalement, on peut définir un seul coefficient noté KS qu’on appelle le coefficient de saillance de la
machine :
( )( )d1Ld
q1LqKK 1s s
s-×-×
== (II.64)
Avec la colinéarité du vecteur courant magnétisant équivalent et le vecteur flux magnétisant
équivalent, nous pouvons définir notre coefficient de saturation qui est seul et unique.
En reprenant l’expression liant ces deux grandeurs à partir de (II.49) en faisant introduire notre
coefficient de saturation noté KST :
( ) ( ) MRMRMS Id1LdIKST
×-××= sj (II.65)
2mrq
2s
2mrdMR IKII ×+= (II.66)
En introduisant le coefficient de saturation KST dans les expressions (II.38) des flux magnétisants
statoriques des axes d et q, on aura :
( ) ( )( ) ( )î
íì
×-××=
×-××=
mrqMRSTmsq
mrdMRSTmsd
Id1LqIK
Id1LdIK
sj
sj (II.67)

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
29
II.6.2 Expression du coefficient de saturation KST
Cas où les flux sont des variables d’état
Dans le modèle où les flux sont choisis comme variable d’état le coefficient de saturation peut se
décomposer en deux parties l’un pour la zone linéaire et l’autre pour la zone saturée dépendant du
courant IMR [LUB 03] :
A5.1 I pour Ib1
aK
A5.1 I pour 1K
MRMR
ST
MRST
>×+
=
£=
(II.68)
Les paramètres a et b sont donnés dans la suite [LUB 03] :
0.9b 35.2 ==a (II.69)
Le coefficient de saturation KST varie en fonction du courant magnétisant rotorique équivalent IMR, et
ce dernier dépend des courants circulants dans les enroulements de la machine, à savoir Imrd, Imrq
qu’on peut avoir à partir des équations des flux statoriques :
îíì
××××
××××
pmjssj
ssj
+I)-(1L+iL=
I)-(1L+iL=
mrqqqsqqqsq
mrdddsdddsd (II.70)
On obtient ainsi :
( )ïï
î
ïï
í
ì
×
+××
×××
)-(1L
iL-=I
)-(1L
iL-=I
qd
sqqmrq
dd
sddmrd
s
jsj
ssj
pmqsq
dsd
(II.71)
Cas où les courants sont pris comme variables d’état
On peut choisir des fonctions mathématiques différentes pour représenter le coefficient de saturation
KST. La fonction mathématique adoptée pour représenter le coefficient de saturation est un rapport de
polynômes d’ordre 4, définis ci-dessous [LUB 03] :
( ) 1
1432
432
MRMRMRMR
MRMRMRMRMRST
IhIgIfIe
IdIcIbIaIK
×+×+×+×+
×+×+×+×+= (II.72)
On donne les paramètres de l’équation (II.73) :

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
30
0.033h -0.080 g 0.619f -1.381e
0.005d -0.0247c 0.586b 1.376- a
====
==== (II.73)
II.6.3 Modèle saturé où les flux sont choisis comme variables d’état
Le modèle qu’on développera pour tenir compte de la saturation est donc un modèle à un seul
coefficient de saturation. Le coefficient de saturation KST varie en fonction des courants magnétisants
rotoriques, donc on n’aura aucun changement pour les deux premières équations d’état du modèle en
régime linéaire représentant les équations du stator (Eq.II.44).
En introduisant le coefficient de saturation KST, les expressions des courants magnétisants rotoriques
Imrd et Imrq deviennent :
ïïî
ïïí
ì
×-×
=
×-××
=
msqqqST
mrq
msdddST
mrd
)1(LK
1I
)1(LK
1I
js
js
(II.74)
En remplaçant les expressions des courants statoriques ( isd, isq) données par les équations.(II.43) et
celles des courants magnétisants rotoriques (Imrd, Imrq) exprimées dans les équations (II.74) dans les
deux équations (II.51), on obtient après simplification les deux dernières équations d’état de la
machine qui sont:
ïïî
ïïí
ì
--××
-+
×-=
-××-
+×
-=
)(T
)1(
TK1
dt
d
)(T
)1(TK
1dt
d
pmmsqsqqrq
qmsq
rdST
msq
msdsddrd
dmsd
rdST
msd
jjjss
jj
jjss
jj
(II.75)
II.7 Cas particulier de la machine synchrone à réluctance variable
La machine synchrone à réluctance variable représente un cas spécial de la machine synchrone à
aimants permanents à démarrage direct. D’un point de vue de constitution, le stator des deux machines
est identique. Donc, on peut construire une machine synchrone à aimants permanents à démarrage
direct à partir d’une machine synchrone à réluctance variable à démarrage direct en modifiant la
structure de son rotor.Nous pouvons alors, exploiter directement le modèle saturé qu’on a obtenu pour
la machine synchrone à aimants permanents à démarrage direct à La machine synchrone à réluctance
variable. Il suffit juste d’imposer le flux produit par les aimants égal à zéro dans le modèle développé.

Chapitre II : Modélisation de la machine synchrone à aimants permanents à démarrage direct
31
II.8 Cas particulier de la machine asynchrone
Le modèle saturé que nous avons développé peut aussi s’appliquer à la machine asynchrone en
reprenant les équations de la machine synchrone à aimants permanents à démarrage direct qu’on a
développé précédemment en respectant deux conditions, à savoir :
· On pose : 0=pmj ,
· On prend des valeurs identiques pour les paramètres électriques des axes d et q, c-à-dire :
ïî
ïí
ì
==
==
==
Rrqrd
qd
sqd
TTT
lll
sss (II.76)
Dans ce cas il faut noter que le coefficient de saillance k définit par l’équation (II.64) soit égal à un :
( )( )
1d1Ldq1Lq
Ks =-×-×
=ss
(II.77)
Nous pouvons alors, obtenir le modèle saturé de la machine asynchrone à partir du modèle de la
machine synchrone à aimants permanents à démarrage direct en modifiant légèrement les équations
de ce dernier, en prenant en considération les égalités précédentes.
II.9 Conclusion
Dans ce chapitre, nous avons étudié la modélisation de la machine synchrone à aimants permanents
à démarrage direct.
Le modèle qu’on a obtenu est un modèle à un seul coefficient de saturation, donc on peut utiliser cette
fonctionnalité pour obtenir les deux modèles possibles de la machine. Un modèle représentant le
régime non saturé (en posant KST= 1) et l’autre représente le régime saturé.
Nous avons montré que ce modèle peut également s’appliquer à la machine synchrone à réluctance
variable et à la machine asynchrone qui représentent des cas particuliers de la machine synchrone à
aimants permanents à démarrage direct.
Au chapitre suivant nous exploitons les modèles développés pour analyser les performances des
machines étudiées en régimes transitoires et permanents.

Chapitre III
Simulation en régime transitoire et permanent

Chapitre III : Simulation en régime transitoire et permanent
32
III.1 Introduction
Dans ce chapitre nous exploitons les modèles développés dans le chapitre précédent pour
analyser les performances de la machine à aimants permanents à démarrage direct en régimes
transitoire et permanent. La particularité de la structure du rotor de la machine étudiée (reluctance
variable, aimants permanents et cage) et le modèle généralisé développé, nous donne la possibilité
d’analyser des fonctionnements de la machine à reluctance variable et la machine asynchrone.
Nous nous intéresserons d’abord à l’effet de la saturation sur le couple de décrochage dans le
cas des deux machines à démarrage direct. Cette étude sera faite sur la base de l’expression du couple
en fonction de l’angle interne en régime permanent. Nous analyserons par la suite les régimes
transitoires des machines considérées, en particulier la machines à aimants à démarrage direct, sous
tension réduite pour déterminer la tension d’accrochage et sous la tension nominale pour mettre en
évidence l’effet de la saturation sur les performances électromécaniques. Nous terminerons cette
étude par une comparaison des performances de ces machines en régimes dynamique et permanent.
III.2 Présentation de la machine étudiée
Une vue en coupe de la machine que nous avons étudié est donnée sur la figure III.1 avec des
photographies [LUB 03]. La structure du stator est identique à celle d’une machine à réluctance
variable. Les enroulements statoriques sont à simple couche sans raccourcissement. Le nombre
d’encoches statoriques est de 36. Il y a 3 encoches par pôle et par phase, le nombre de conducteur
dans chaque encoche est de 50.
Le rotor est constitué d’une cage de démarrage comportant 28 barres en cuivre. Ces barres sont court-
circuitées en permanence par des anneaux placés aux deux extrémités du rotor. Les barres rotoriques
ont une profondeur de 12 mm et une épaisseur de 2 mm. La longueur utile du rotor est de 70 mm,
Cette machine est tétra polaire. Le rapport entre l’arc polaire (partie de faible entrefer) et le pas polaire
du rotor est égal à 0.57, l’épaisseur de l’entrefer est de 0.25 mm.
Au niveau des encoches rotoriques on prévoit d’insérer des aimants permanents de type NdFeBr. Ces
aimants sont aimantés radialement. Ils ont une induction rémanente Br de 1.21 T. Ils ont une ouverture
43% du pas polaire avec une épaisseur de 12 mm.
Les résultats de l’identification des paramètres de la machine qu’on a utilisée pour la simulation
sont donnés dans le tableau III.1 [LUB 03] et Les caractéristiques nominales de la machine sont
données dans le tableau III.2.

Chapitre III : Simulation en régime transitoire et permanent
33
Tableau III.1. Résultats de l’identification [LUB 03]
Rs (W) Ld(H) Lq(H) sd sq Trd(s) Trq(s) JKgm2 f(Nm.s/rd) jpm(Wb)
7.8 0.54 0.21 0.056 0.2 0.1 0.046 0.038 0.0029 1.0016
Tableau III.2. Caractéristiques Nominales de la machine étudiées
Is (A) N (tr/mn) Cu(N.m) P(W) V(Volts)
3 1500 3.38 600 220/380
Fig.III.1. Structure de la machine
Fig. III.2. Vues détaillées du rotor [LUB 03]
Axe d
Axe q

Chapitre III : Simulation en régime transitoire et permanent
34
Les résultats de simulation présentés dans ce chapitre sont issus de l’exploitation des modèles
développés (saturé et non saturé) que nous avons programmé sous environnement MATLAB. La
procédure de simulation se déroule selon l’organigramme représenté sur la figure III.3.
Fig.III.3. Organigramme de simulation.
t < T-final ?
INTEGRATION DES EQUATIONS D’ETAT(II.44) (II.75)
CALCUL DE (isd) ET DE (isq) (II.43)
CACUL DU COUPLE ELECTROMAGNETIQUE (II.29) CALCUL DE LA VITESSE (II.30)
CALCUL DE Ks (II.64) CALCUL DE Imrd ET Imrq (II.71)
CALCUL DE IMR (II.66) CALCUL DE KST (IMR) (II.68) (II.72)
INITIALISATION DES
PARAMETRES DE LA MACHINE
RESULTATS
t = t + Δt
CALCUL DU FLUX PRODUIT PAR LES AIMANTS PERMANENTS
Oui
Non

Chapitre III : Simulation en régime transitoire et permanent
35
III.3 Effet du niveau de saturation sur le couple de décrochage
Le couple électromagnétique d’une machine synchrone a une limite, au-delà de laquelle la machine
décroche, qui dépend des paramètres de la machine et du carré de la valeur efficace de la tension
d’alimentation. C’est cette limite qui détermine la zone de stabilité de fonctionnement. Elle dépend
surtout de l’angle interne.
L’étude de la stabilité statique consiste à déterminer la valeur maximale du couple électromagnétique
que peut développer la machine. On se place alors dans le cas où le couple résistant appliqué à la
machine évolue progressivement pour pouvoir considérer une suite de régimes permanents. Dans ce
cas, le modèle à considérer pour faire l’étude de la stabilité est celui du régime permanent. Par contre,
lors de l’application d’un échelon de couple résistant important, pour lequel on ne peut plus considérer
la vitesse constante, l’étude de la stabilité nécessite l’emploi du modèle transitoire complet de la
machine et on parle alors de stabilité dynamique.
III.3.1 Expression du couple statique
Nous reprenons dans cette étude les équations de tensions et du couple en régime permanent :
Usd Rs isd ωe φsq
Usq Rs isq ωe φsd
= × - ×ìí
= × + ×î (III.1)
Les flux statoriques sont donnés en fonction des courants par les relations suivantes :
( (1 ) )
( (1 ) )
φ σdLd K σd Ld isd sdST
φ σdLq K σq Lq i φsq sq pmST
= + - ×ìïí
= + - × +ïî (III.2)
Le couple électromagnétique développé est donné par :
( )Tem p φsd isq φsq isd= × × - × (III.3)
En injectant (III.2) dans (III.3), on obtient l’expression générale du couple qui regroupe en même
temps les trois couples (de reluctance, asynchrone et des aimants) :
([ (1 ) ] [ (1 ) ])Tem p σdLd σd Ld σdLq σq Lq isq isd φ isdpm= × + - - + - × × + × (III.4)
En utilisant le diagramme de Fresnel (Figure.III.4) et sachant que :
3Us Vs= ×
On peut écrire en fonction de l’angle interne entre la tension et le courant :

Chapitre III : Simulation en régime transitoire et permanent
36
îíì
´´=
´´-=
dd
cosVs3Usq
sinVs3Usd (III.5)
En injectant (III.5) dans (III.1), on aura :
3 sin ([ (1 ) ] )Vs δ Rs isd ω σdLq K σq Lq isq φpmST- × × = × - × + - × + (III.6)
)isd]Ld)d1(ST
KdLd([isqRscosVs3 ×-+×-×=×× sswd (III.7)
On pose
îíì
×-+×=
×-+×=
)Lq)q1(KLqq(
)Ld)d1(KLdd(
ST
ST
ssb
ssa
On retrouve :
Rs
)pmisq(sinVs3isd
jbwd +××+××-= (III.8)
Rs)isd(cosVs3
isq××-××
=awd
(III.9)
Finalement on remplace (III.9) dans (III.8) on trouve
bawjwdbwd
××+××+××××+×××-
=22Rs
pmRscosVs3sinVsRs3isd (III.10)
bawjawdawd
××+××-××××+×××
=22
2
Rs
pmsinVs3cosVsRs3isq (III.11)
Il suffit maintenant de remplacer dans l’équation du couple électromagnétique
Tem= p×((α - β )isd×isq-φpm×isd) (III.12)
Fig. III.4. Diagramme de Fresnel des tensions en régime permanent
jpm
isd
Us
Usd
Is isq
Axe q
d
Usq
Axe d

Chapitre III : Simulation en régime transitoire et permanent
37
III.3.2 Couple maximale de décrochage
Nous avons représenté sur la figure III.5 la variation du couple statique en fonction de l’angle interne
d pour les cas de machines synchrone à aimants et synchrone à reluctance variable à démarrage direct
en régimes linéaire et saturé.
Ce résultat intéressant montre que le couple maximum correspondant au décrochage augmente avec
le niveau de saturation et il est plus important pour la machine à aimants permanents. En effet, pour
la machine à reluctance variable le couple de décrochage obtenu est de 4 Nm en modèle linéaire (KST=
1) et il est de 5,7 Nm en modèle saturé. Avec l’introduction des aimants, le couple de décrochage
s’améliore considérablement et vaut 11 Nm en modèle linéaire (KST= 1) et 17 Nm en modèle saturé.
On constate aussi sur cette figure que l’angle interne correspondant au maximum du couple diminue
légèrement avec le niveau de saturation.
La saturation magnétique a pour effet d’améliorer la plage de fonctionnement (stabilité statique) de
la machine en augmentant la valeur du couple maximal.
Fig. III.5. Couple électromagnétique en fonction de l’angle interne
-50 0 50 100 150 200 250-30
-25
-20
-15
-10
-5
0
5
10
15
20
angle interne(degré)
cou
ple
élé
ctro
mag
net
iqu
e (N
m)
MRV KST=1
MSA KST=1
MSA KST=0.5
MRV KST=0.5

Chapitre III : Simulation en régime transitoire et permanent
38
III.4 Transitoire de la MSA à démarrage direct
Nous présentons dans cette partie le transitoire de la MSA lors d’un démarrage à vide sous une tension
réduite pour voir la tension d’accrochage, puis sous tension nominale avec application d’un échelon
de couple de charge critique pour mettre en évidence le couple de décrochage de la machine.
III.4.1 Démarrage sous tension réduite
Lorsque la machine synchrone à aimants démarre, le couple de démarrage comprend le couple
asynchrone produit par la cage du rotor, le couple réluctant et le couple de freinage produit par les
aimants permanents. Le couple résultant est principalement déterminée par la tension, la résistance
du rotor et du stator, le glissement, les FEMs et la réactance synchrone.
Nous appliquons ici deux niveaux de tension réduite (127 et 135 V). Normalement la machine n’est
pas saturée et le modèle linéaire suffit pour les simulations. Les résultats obtenus sont représentés sur
les figures (III.6) à (III.8) respectivement pour la vitesse, le courant de démarrage et le couple
électromagnétique.
On constate que sous 127V la machine trouve des difficultés pour démarrer, la vitesse se stabilise
autour de 160 tr/min (Figure.III.6) et le courant reste très élevé (environs 10 fois le courant nominale
Figure.III.7).
Sous la tension de135V, la machine démarre et vint le couple de freinage ; elle s’accroche au bout
d’un temps lent d’environ 3.5 s. Avant l’accrochage le courant absorbé est de 10 fois supérieures et
il contient beaucoup d'harmoniques. Sur la figure.III.8, on remarque que le couple électromagnétique
est très oscillant, cela veut dire que le moteur est soumis à de fortes contraintes mécaniques lors du
démarrage.
Le choix de la tension minimale d’alimentation a une grande influence sur le transitoire de vitesse et
du courant en raison des FEMs induites et du couple de freinage produit par les aimants permanents.

Chapitre III : Simulation en régime transitoire et permanent
39
Fig.III.6.Vitesse à vide sous tension réduite
Fig.III.7.Courant de démarrage à vide sous tension réduite (Vs=135 Volts)
Fig.III.8. Couple électromagnétique en fonction du temps (Vs=135 Volts)
0 0.5 1 1.5 2 2.5 3 3.5 40
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
135 V
127 V
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
temps(s)
cou
ran
t d
e p
has
e (A
)
127 V
135 V
0 0.5 1 1.5 2 2.5 3 3.5 4-30
-20
-10
0
10
20
30
40
temps(s)
couple
ele
ctro
mag
net
ique
(N.m
)
2.8 3 3.2 3.4 3.6 3.8 4
1480
1490
1500
1510
1520
1530
1540
1550
1560
1570

Chapitre III : Simulation en régime transitoire et permanent
40
III.4.2 Démarrage sous tension nominale
La machine est alimentée sous une tension de 220V correspondant à la tension nominale. La machine
est normalement saturée. Les relevés de simulation sont donnés pour les deux modèles saturés (KST1
et KST2) et pour le modèle linéaire (KST= 1).
Le transitoire de la vitesse, représenté sur la figure III.9 est caractérisée par un régime oscillant à
cause de la présence des aimants. L’accrochage est réalisé au bout d’une durée d’environ 0.7 s pour
le modèle saturé et un peu moins pour le modèle linéaire (0.55 s). La figure III.10 représentant le
transitoire du courant, montre des modulations de courant plus importantes pour le modèle saturé.
La figure III.11montre que le couple électromagnétique contient moins d’oscillations sous cette
tension donc moins de contraintes mécaniques. Les aimants permanents développent un couple de
freinage qui s'oppose au couple produit par la cage ce qui réduit le couple de démarrage donc un
temps de démarrage plus lent.
Ces résultats montrent bien l’influence de la saturation par apport au modèle linéaire et on voit aussi
que les deux modèles saturés sont presque identiques.
Nous représentons sur la figure III.12, l’évolution du courant magnétisant Imr et des coefficients de
saturation KST1 et KST2 pendant le démarrage. On observe que le courant magnétisant est faible au
début du démarrage et que la machine n’est pas saturée. Ensuite, la valeur du courant dans les barres
du rotor diminue, le champ magnétique pénètre dans le rotor, le courant magnétisant augmente et la
machine se sature. En régime permanent, les coefficients de saturation valent (KST1=1.5 et KST2 =1).
Fig.III.9.Vitesse à vide sous tension nominale (Vs=220 Volts)
0 0.2 0.4 0.6 0.8 1 1.20
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle saturé
Modèle linéaire
Modèle linéaire 2
0.4 0.45 0.5 0.55 0.6 0.65 0.7
1000
1100
1200
1300
1400
1500
1600

Chapitre III : Simulation en régime transitoire et permanent
41
Fig.III.10. Courant de démarrage à vide sous tension nominale (Vs=220 Volts)
Fig.III.11.Couple électromagnétique en fonction du temps (Vs=220 V)
Fig. III.12. Evolution du courant magnétisant et du coefficient de saturation lors du démarrage à vide sous tension nominale (Vs = 220 V)
0 0.2 0.4 0.6 0.8 1 1.2-40
-20
0
20
40
60
80
temps(s)
co
up
le e
lectr
om
ag
neti
qu
e (
N.m
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
0 0.2 0.4 0.6 0.8 1 1.20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
temps(s)
cou
ran
t m
agn
etis
ant
(A)
Modèle saturé
Modèle saturé 2
0 0.2 0.4 0.6 0.8 1 1.20.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
temps(s)
coef
fici
ent
de
satu
rati
on
Modèle saturé
Modèle saturé 2
0 0.2 0.4 0.6 0.8 1 1.2-30
-20
-10
0
10
20
30
temps(s)
cou
ran
t d
e p
has
e (A
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
0.57 0.58 0.59 0.6 0.61 0.62 0.63 0.64 0.65 0.66
-6
-4
-2
0
2
4
6
8

Chapitre III : Simulation en régime transitoire et permanent
42
III.4.3 Application d’un échelon de couple résistant
Sous tension nominale et après un démarrage à vide, nous avons appliqué à la machine un couple
résistant de 8 Nm et de 11 Nm à l’instant (t = 1s). Nous avons représenté sur les figures(III.13) à
(III.15), respectivement, l’évolution de la vitesse du courant et le couple électromagnétique développé
par la machine synchrone pour le modèle linéaire et saturé.
Sur la figure.III.13-a on remarque qu’avec un couple résistant de 8 Nm la vitesse diminue à une valeur
(autour de 1400 tr/mn) pour le modèle linéaire est saturé ensuit elle se rétablit à la vitesse nominale.
Par contre, avec un couple de 11 Nm (figure.III.13-b) le modèle linéaire (KST=1) conduit à une perte
du synchronisme et la machine décroche. On voit apparaître des oscillations sur la vitesse (phénomène
de pompage). La vitesse de rotation oscille alors autour d’une valeur moyenne différente de la vitesse
synchrone. Tandis que le modèle saturé garde le synchronisme. Ce résultat montre que la saturation
magnétique améliore la plage de fonctionnement stable de la machine.
On peut observer la même chose concernant les courants de phases et le couple électromagnétique
pour cet échelon de couple (Figures (III.14 a et b) et (III.15 a et b). Le courant de ligne est modulé à
la fréquence de ces oscillations (phénomène de pompage).
(a)-8 Nm. (b) - 11 Nm
Fig.III.13. Vitesse de rotation (Vs = 220 V) : Application d’un Echelon de couple.
(a)- 8 Nm. (b) - 11 Nm
Figure.III.14. Courant de ligne ; Vs = 220 V ; Echelon de couple résistant
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
1300
1350
1400
1450
1500
1550
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
1300
1350
1400
1450
1500
1550
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.1 1.2 1.3 1.4 1.5
-6
-4
-2
0
2
4
6
temps(s)
cou
ran
t d
e p
has
e (A
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
-10
-5
0
5
10
temps(s)
cour
ant d
e ph
ase
(A)

Chapitre III : Simulation en régime transitoire et permanent
43
(a)- 8 Nm. (b) - 11 Nm
Fig.III.15.couple électromagnétique ; Vs = 220 V ; Echelon de couple résistant
III.5 Simulation des cas particuliers
III.5.1 Simulation de la MRV à démarrage direct
Pour simuler le comportement transitoire de la MRV à démarrage direct, on annule l’effet des aimants
permanent dans le modèle développé.
a)- Démarrage sous tension réduite
Sous une tension réduite de 127 volts on a représenté pour les deux modèles, respectivement sur les
Figures (III.16) à (III.19) le courant de phase, la vitesse, le courant magnétisant, le coefficient de
saturation et le couple lors d’un démarrage à vide.
On peut remarquer que les résultats sont presque identiques en régime linéaire et en saturé car à ce
niveau de tension la machine n’est pas saturée. Le courant magnétisant prend des valeurs faibles lors
de démarrage (environ 1.1A), puis il augmente progressivement en provoquant des phases de
fonctionnement saturé (quand il dépasse 1.5A), et de passer à un fonctionnement non saturé en régime
permanent (il se stabilise autour de 1,3A).
Globalement le comportement de cette machine lors du démarrage est très semblable à une machine
asynchrone classique. Mise à part une petite inflexion d’amplitude du courant juste avant le
synchronisme due au phénomène de faible glissement provoqué par la variation de réluctance dans la
machine.
1 1.2 1.4 1.6 1.8 2
-5
0
5
10
15
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
0
5
10
15
20
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé
Modèle saturé 2

Chapitre III : Simulation en régime transitoire et permanent
44
Fig.III.16.Courant de démarrage à vide sous tension réduite (Vs=127 Volts)
Fig.III.17.Vitesse lors de démarrage à vide (Vs=127 Volts)
Fig.III.18.Courant magnétisant et du coefficient de saturation lors du démarrage à vide sous
tension réduite
0 0.5 1 1.5 2 2.5 3-15
-10
-5
0
5
10
15
temps(s)
cou
ran
t d
e p
has
e (A
)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0 0.5 1 1.5 2 2.5 30
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
temps(s)
cou
ran
t m
agn
etis
ant
(A)
Modèle saturé 2
Modèle saturé
0 0.5 1 1.5 2 2.5 30.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
temps(s)
coef
fici
ent
de
satu
rati
on
Ks
Modèle saturé 2
Modèle saturé
1.2 1.4 1.6 1.8 2
1400
1420
1440
1460
1480
1500
1520

Chapitre III : Simulation en régime transitoire et permanent
45
Fig.III.19.Couple lors de démarrage à vide et sous tension réduite (Vs=127 Volts)
b)- Démarrage de la machine sous tension nominale
Nous avons simulé un démarrage à vide de la machine sous la tension nominale Vs = 220V. Les
résultats obtenus pour les deux modèles linéaire et saturé sont représentés sur les figures (III.20) à
(III.23). On peut constater que lors du démarrage, la machine fait appel à un fort courant avant de
s’établir à sa valeur nominale en régime permanent. Par contre le courant de magnétisation prend des
valeurs faibles lors de démarrage puis il augmente progressivement en provoquant des phases de
fonctionnement saturé et il se stabilise à 2.2 A.
L’effet de la variation de reluctance du rotor apparait clairement dans la zone de faible glissement au
niveau des caractéristiques électromécanique de la machine (courant, vitesse et couple).
En comparant les différentes courbes, on peut bien évidement voir que pour la tension nominale, le
modèle saturé permet de prévoir les caractéristiques dynamiques du démarrage avec beaucoup plus
de précision que le modèle linéaire.
Fig.III.20.Courant de phase lors de démarrage à vide sous tension nominal
0 0.5 1 1.5 2 2.5 3-2
0
2
4
6
8
10
12
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0 0.2 0.4 0.6 0.8 1 1.2-20
-15
-10
-5
0
5
10
15
20
temps(s)
cou
ran
t d
e p
has
e (A
)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0.5 0.52 0.54 0.56 0.58 0.6 0.62 0.64 0.66
-5
-4
-3
-2
-1
0
1
2
3
4
5

Chapitre III : Simulation en régime transitoire et permanent
46
Fig.III.21.Courant magnétisant et le coefficient de saturation lors du démarrage à vide sous tension
nominal
Fig.III.22.Variations de vitesse lors de démarrage à vide sous tension nominal
Fig.III.23.Couple lors de démarrage sans charge et sous tension nominal
0 0.2 0.4 0.6 0.8 1 1.20
0.5
1
1.5
2
2.5
3
temps(s)
cou
ran
t m
agn
etis
ant
(A)
Modèle saturé
Modèle saturé 2
0 0.2 0.4 0.6 0.8 1 1.2
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
temps(s)
coef
fici
ent
de
satu
rati
on
Ks
Modèle saturé
Modèle saturé 2
0 0.2 0.4 0.6 0.8 1 1.20
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0 0.2 0.4 0.6 0.8 1 1.2-5
0
5
10
15
20
25
30
35
40
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0.4 0.5 0.6 0.7 0.8
1360
1380
1400
1420
1440
1460
1480
1500
1520

Chapitre III : Simulation en régime transitoire et permanent
47
c)- Application d’un échelon de couple
Dans cet essai, nous avons appliqué un couple résistant de 3.5 N.m et 4N.m en gardant la tension
nominale (Vs=220 volts). Les courbes correspondant au courant de ligne lors de l’application d’un
couple résistant de 3.5 N.m, puis 4N.m sont données sur les Figures. III.24.
(a)-charge de 3.5N.m (b)-charge de 4N.m
Fig.III.24.Courant de ligne lors de l’application d’un échelon de couple (Vs=220)
La figure III.25, représente l’évolution de la vitesse de rotation de la machine. On remarque pour le
modèle saturé que lors de démarrage à vide, les valeurs varient d’une manière identique à celle qu’on
a présenté précédemment (essai à vide sous tension nominale), et à l’instant où on applique un couple
résistant, on remarque que la vitesse diminue (en passant par un régime transitoire), afin de revenir à
sa valeur nominale quand la machine reprendre sa vitesse synchrone. Par contre, on constate que le
modèle linéaire nous donne un fonctionnement instable (sachant que pour un couple résistant égal à
4 N.m, la machine décroche).
Nous avons représenté sur la Figure. III.26, l’évolution du couple électromagnétique de la machine.
On a fait également présenter sur cette figure, la caractéristique mécanique (le couple
électromagnétique en fonction de la vitesse de rotation). On remarque que pour le modèle linéaire,
on aura des oscillations du couple (fonctionnement instables, décrochage de la machine pour Cr = 4
N.m). On voit que les résultats obtenus à l’aide du modèle saturé sont plus précis et la machine plus
performantes lorsqu’elle est saturée.
Nous constatons que le modèle linaire nous donne un fonctionnement instable (pour un couple
résistant égal à 4 N.m la machine décroche). On voit apparaître des oscillations sur le courant et la
vitesse (phénomène de pompage). Ces résultats nous montrent encore que la saturation magnétique
améliore stabilité dynamique de la machine pour ce mode de fonctionnement.
0 0.5 1 1.5 2-20
-15
-10
-5
0
5
10
15
20
temps(s)
cou
ran
t d
e p
has
e (A
)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.2 1.4 1.6 1.8 2
-5
-4
-3
-2
-1
0
1
2
3
4
5
temps(s)co
ura
nt
de
ph
ase
(A)

Chapitre III : Simulation en régime transitoire et permanent
48
(a)-charge de 3.5N.m (b)-charge de 4N.m
Fig.III.25.Vitesse lors de l’application d’un échelon de couple (Vs=220)
(a)-charge de 3.5N.m (b)-charge de 4N.m Fig.III.26.Couple électromagnétique lors de l’application d’un échelon de couple (Vs=220)
III.5.1 Simulation de la machine asynchrone
En éliminant la saillance et les aimants permanents dans le modèle développé on obtient le modèle
de la machine asynchrone. Sous la tension nominale de 220 V, nous avons simulé le comportement
transitoire lors d’un démarrage à vide et avec application d’un échelon de couple à l’instant t=1s en
régime permanent. Les résultats obtenus sont représentés sur les figures (III.27) à (III.32).Ces
résultats reproduisent les caractéristiques classiques de la machine asynchrone.
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3
1450
1500
1550
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé
Modèle saturé2
1 1.2 1.4 1.6 1.8 2
1300
1350
1400
1450
1500
1550
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
Modèle linéaire
Modèle saturé 2
Modèle saturé
0 0.5 1 1.5 2-5
0
5
10
15
20
25
30
35
40
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé
Modèle saturé 2
1 1.2 1.4 1.6 1.8 2
0
1
2
3
4
5
6
7
8
9
10
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
Modèle linéaire
Modèle saturé 2
Modèle saturé

Chapitre III : Simulation en régime transitoire et permanent
49
Fig. III.27.Courant de phase lors de démarrage à vide sous tension nominal (Vs=220volts).
Fig.III.28.Vitesse lors de démarrage à vide sous tension nominal (Vs=220volts).
Fig.III.29.Couple lors de démarrage à vide sous tension nominal (Vs=220volts).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
-15
-10
-5
0
5
10
15
20
temps(s)
cou
ran
t d
e p
has
e (A
)
MAS Modèle linéaire
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
MAS Modèle linéaire
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
30
35
40
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
MAS Modèle linéaire

Chapitre III : Simulation en régime transitoire et permanent
50
Fig.III.30.Courant de phase lors de démarrage à vide sous 220V avec application d’une charge de 4N.m.
Fig.III.31.Vitesse lors de démarrage à vide sous tension nominal application d’une charge de 4N.m
Fig.III.32.Couple lors de démarrage à vide sous tension nominale ; application d’une charge de 4N.m
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-20
-15
-10
-5
0
5
10
15
20
temps(s)
cou
ran
t d
e p
has
e (A
)
MAS Modèle linéaire
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
MAS Modèle linéaire
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-5
0
5
10
15
20
25
30
35
40
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
MAS Modèle linéaire

Chapitre III : Simulation en régime transitoire et permanent
51
III.6 Comparaison entre MRV, MAS et MSA permanents
Afin de justifier l’intérêt que nous portons à la machine synchrone à aimants permanents à démarrage
direct, nous allons faire une étude comparative de ses performances statique (régime permanent) et
dynamique (régime transitoire) avec celles des deux autres machines électriques. Cette comparaison
est faite avec les deux modèles linéaire et saturé.
a)- Régime transitoire
Sur les figures III.33 (a) à (c), représentant respectivement les transitoires du courant, de la vitesse et
du couple, on peut observer l’effet du flux des aimants permanents qui crée une grande influence sur
le régime transitoire. Cet effet est caractérisé par une modulation du courant transitoire. En effet
l’appel de courant au démarrage est très important en présence des aimants (Fig.III.33.b) et il devient
faible en régime permanent du fait que la f.e.m créée est importante. C’est le couple de freinage créé
par ces f.e.ms qui fait que la machine a aimant prend quelque milliseconde de plus pour atteindre le
régime permanent. On peut dire que la machine asynchrone est la plus rapide dans cette phase
(Figure.III.33.b).
Le couple (Figure.III.33.d) électromagnétique de la machine à aimant contient une partie négative,
qu’on ne trouve pas sur les couples des autres machines, causé par le couple de freinage produit par
les aimants. En effet la machine à aimants à démarrage direct développe un couple de démarrage plus
important que la machine a reluctance à démarrage direct et la machine asynchrone.
(a)-Transitoire du courant
0 0.2 0.4 0.6 0.8 1 1.2-30
-20
-10
0
10
20
30
temps(s)
cou
ran
t d
e p
has
e (A
)
MAS Modèle linéaire
MRV Modèle linéaire
MSA Modèle linéaire
0 0.2 0.4 0.6 0.8 1 1.2-25
-20
-15
-10
-5
0
5
10
15
20
25
temps(s)
cou
ran
t d
e p
has
e (A
)
MSA saturé
MRV saturé
MAS saturé

Chapitre III : Simulation en régime transitoire et permanent
52
(b)–Transitoire de la vitesse
(c)–Transitoire du couple
Fig. III.33.Comparaison en régime transitoire à vide sous Vs=220 Volts
b)- Régime permanent
Nous allons dans cette partie calculer les performances (rendement, facteur de puissance, puissance
utile et le courant absorbé.) en régime permanent des machines étudiées lorsque qu’ils sont alimentés
sous tension nominale.
0 0.2 0.4 0.6 0.8 1 1.2-40
-20
0
20
40
60
80
temps(s)
co
up
le e
lectr
om
ag
neti
qu
e (
N.m
)
MAS Modèle linéaire
MRV Modèle linéaire
MSA Modèle linéaire
0 0.2 0.4 0.6 0.8 1 1.2-40
-20
0
20
40
60
80
temps(s)
cou
ple
ele
ctro
mag
net
iqu
e (N
.m)
MSA Modèle saturé
MRV Modèle saturé
MAS Modèle saturé
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65
1300
1350
1400
1450
1500
1550
1600
1650
1700
0 0.2 0.4 0.6 0.8 1 1.20
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
itess
e d
e r
ota
tio
n (
tr/m
in)
MAS Modèle linéaire
MRV Modèle linéaire
MSA Modèle linéaire
0 0.2 0.4 0.6 0.8 1 1.20
200
400
600
800
1000
1200
1400
1600
temps(s)
la v
ites
se d
e ro
tati
on
(tr
/min
)
MSA Modèle saturé
MRV Modèle saturé
MAS Modèle saturé
0.3 0.4 0.5 0.6 0.7 0.8
1420
1430
1440
1450
1460
1470
1480
1490
1500
1510
1520

Chapitre III : Simulation en régime transitoire et permanent
53
Pour calculer les performances des machines étudiées nous avons utilisé le modèle linéaire et saturé
en considérant les équations électrique en régime permanent. Nous appliquons à la machine un couple
résistant qui varie progressivement et pour ces diffèrent valeur nous calculons le courant statorique
absorbé par ces machines. Sous tension nominale de 220V, et pour chaque point fonctionnement dans
le régime permanent caractérisé par des courant statorique (isd, isq) on calcule la valeur du courant
efficace statorique par :
3
isqisdIs
22 += (III.13)
Les puissances active absorbée et électromagnétique sont calculées comme suit :
j spa= pem+p
(II.14)
Ωpem=Tem× (II.15)
D’autre part, la puissance apparente S est définie par :
S = 3VI (III.16)
Le facteur de puissance est défini par le cosinus du déphasage j entre le courant et la tension
pacosφ=
S (III.17)
Le stator est le siège de perte par effet Joule Pjs :
2IRs3pjs ××= (III.18)
Pour obtenir la puissance utile, c’est-à-dire celle qui est utilisable par la charge entrainée, il reste à
retrancher les pertes mécanique. Cette définition ne prend pas en compte les pertes par ventilation et
les pertes fer mais donne tout de même une bonne indication de la performance de la machine :
Pu= pa- pj - pmec
(III.19)
Ω Ωpmec = (cr + f )
(III.20)

Chapitre III : Simulation en régime transitoire et permanent
54
Le rendement défini le rapport de la puissance utile à la puissance électrique totale fournie au moteur :
puη
pa= (III.21)
A partir de là, nous avons déterminé les quelques performance de ces machines en régime permanent.
Les variations du courant absorbé, de la puissance utile, du facteur de puissance et du rendement en
fonction du couple résistant sont représentées respectivement sur les figures (III.34) à (III.37).
On observe sur cette figure (III.34) que le courant dans le cas de la machine à aimants et est moins
important que dans la machine à reluctance et la machine asynchrone pour une même valeur de couple
résistant. Donc ce qu’on peut dire est que la machine à aimants permanents consomme moins de
courant en régime permanent. On peut voir aussi que la machine asynchrone ce situe au milieu tandis
que la machine a reluctance variable saturé consomme le plus de courant.
Un autre avantage important pour le moteur MSA concerne son facteur de puissance qui est élevé par
rapport à celui des deux autres machines (Figure.III.36).La valeur maximale qu’on a atteint avec la
MSA est de 0.98 pour un couple de 7 Nm alors que la MRV en saturé il ne dépasse pas 0.5 à sa limite
de décrochage. Pour la machine asynchrone il atteint les 0.75 à 5 N.m.
En fin le moteur à aimants à démarrage direct présente un rendement élevé, pour une grande plage de
fonctionnement (Figure.III.37), par rapport à celui de la MRV et la machine asynchrone. En effet, à
la vitesse de synchronisme, il y a peu de courants induits dans les barres du rotor, et par conséquent,
presque pas de pertes Joule au niveau du rotor. Les contraintes thermiques sont alors plus faibles en
régime permanent. En régime nominale sa valeur est de 87% celui de la MRV de 75 %.
En terme de puissance utile, les trois machines développe la même puissance, mais la MSA développe
une puissance plus importante allons jusqu’à 1700 Watt avant le décrochage tandis que la MRV se
décroche au environ de 600 Watt (Figure.III.37).

Chapitre III : Simulation en régime transitoire et permanent
55
Fig.III.34.Courant en fonction du couple résistant
Fig.III.36.Facteur de puissance en fonction du couple résistant
0 1 2 3 4 5 6 7 80.5
1
1.5
2
2.5
3
couple resistant (Nm)
le c
oura
nt
(A)
MSA saturé
MSA
MRV
MRV saturé
MAS
0 1 2 3 4 5 6 7 80.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
couple resistant (Nm)
fact
eur
de
puis
sance
MSA saturé
MSA
MRV
MRV saturé
MAS

Chapitre III : Simulation en régime transitoire et permanent
56
Fig.III.37.évolution du rendement en fonction du couple résistant et de puissance utile
III.7 Conclusion
Nous avons simulé les modèles circuit de la machine synchrone à aimants à démarrage direct
développés en régimes linéaire et saturé. Il s’avère que le modèle saturé pris en régime statique
conduit à une valeur du couple de décrochage (MRV ou à aimants) plus important par rapport au
modèle linéaire. Ce résultat est confirmé par les résultats de simulation de différents régimes
transitoires des trois machines à démarrage direct qui ont démontré le bien fondé du modèle saturé
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
couple resistant (Nm)
ren
dem
ent
MSA saturé
MSA
MRV
MRV saturé
MAS
0 200 400 600 800 1000 1200 14000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
la puissance utile(W)
le
ren
dem
ent

Chapitre III : Simulation en régime transitoire et permanent
57
par rapport au modèle linéaire en termes d’illustration de phénomène intervenant dans la phase
transitoire de démarrage.
A travers la comparaison des performances des trois types de machines, en régime dynamique ou
permanent, nous pouvons conclure que la machine à aimants à démarrage direct est très avantageuse
par rapport aux autres, sur le plan rendement, facteur de puissance et Elle a une large plage de
fonctionnement sans décrochage ; toutefois son démarrage est moins rapide que les autres machines
avec un appel de courant au démarrage plus important, causés par le couple de freinage dû aux f.e.ms
créées par les aimants permanents.

Conclusion générale

Conclusion générale
58
CONCLUSION GENERALE
L’objectif de notre travail était d’étudier le fonctionnement en régimes transitoire et permanent des
moteurs synchrones à aimants et à réluctance variable à démarrage direct sur le réseau
Dans un premier temps, on a donné un rapide aperçu sur les caractéristiques des machines
électriques qui ont été développées jusqu’à présent, leur fonctionnement et leur problème lié au
démarrage directe et leurs différentes structures rotorique.
Nous avons ensuite développé des modèles basés sur la théorie des circuits magnétiquement
couplés qui peuvent tenir compte de la saturation magnétique.
Ses modèles linéaire et saturé, relativement simples, déterminés à partir de la transformation de
Park de la machine ont un avantage par rapport aux modèles classique habituels est qu’ils ne font
apparaître que des paramètres électriques mesurables accessible depuis le stator.
La difficulté d’introduire la saturation dans le modèle de la machine qui est à pôles saillants a été
surmontée par la recherche d’une machine équivalente à pôles lisses ou l’utilisation d’un seul
coefficient de saturation suffit pour considérer la saturation.
Les modèles développés pour la machine synchrone à aimants s’appliquent facilement au cas des
machines synchrones à réluctances et machines asynchrones.
Les simulations des modèles circuits de la machine synchrone à aimants à démarrage direct,
développés en régimes linéaire et saturé, montrent que le modèle saturé pris en régime statique
conduit à une valeur du couple de décrochage (MRV ou à aimants) plus important par rapport au
modèle linéaire. Ce résultat est confirmé par les résultats de simulation de différents régimes
transitoires des trois machines à démarrage direct
La comparaison des performances des trois types de machines, en régime transitoire ou permanent,
nous permet d’affirmer que la machine à aimants à démarrage direct est très avantageuse par
rapport aux autres en termes de rendement et de facteur de puissance. De plus, elle présente une
large plage de fonctionnement sans décrochage. Toutefois son démarrage est moins rapide que les
autres machines avec un appel de courant au démarrage plus important, causés par le couple de
freinage dû aux f.e.ms créées par les aimants permanents.

Conclusion générale
59
Il serait souhaitable comme suite à notre travail de :
-coupler le modèle circuit avec un modèle électromagnétique permettant ainsi de mieux considérer
la caractéristique de magnétisation et d’étudier l’effet éventuel de la démagnétisation des aimants.
-installer un banc d’essais pour valider par des essais expérimentaux les résultats qu’on a obtenue
avec la simulation et de voir à quel point le modèle saturé qu’on a développé est proche du
comportement réel de la machine.

Bibliographie

Bibliographie
60
Bibliographie
[AMA 01] Y. Amara. Contribution à la conception et à la commande des machines synchrones
à double excitation. Application au véhicule hybride. Thèse doctorat, Université de
Paris XI, Ecole Normale Supérieure de Cachan – Laboratoire Electricité Signaux et
Robotique, Décembre 2001.
[CHE 04] L. Chédot. Contribution à l'étude des machines synchrones à aimants permanents
internes à large espace de fonctionnement. Application à l'alterno-démarreur, Thèse
de Doctorat de l'Université de Technologie de Compiègne, Novembre 2004.
[DIN 11] T. DING. Etude et Optimisation de Machines à Aimants Permanents à Démarrage
Direct sur le Réseau (Study and Optimization of line-start Permanent Magnet
Motors), Thèse de Doctorat de l'Université de Nancy I, Avril 2011.
[JAM 12] Y. Jamet. Gaucheron, Moteurs WEG à aimants permanents et à démarrage direct sur
réseau, Présentation Moteurs WQuattro, WEG France, Avril 2012.
[LAM 03] M.I. Lamghari-Jamal, Modélisation magnéto-thermique et optimisation de machines
rapides : Application à la machine synchrone à réluctance variable, Thèse de
Doctorat de l’Université de Nantes, Octobre 2006.
[LOU 04] J.P. Louis, Modélisation des machines électriques en vue de leur commands,
concepts généraux, pp.50-69, Lavoisier, Paris, 2004,
[LU 12] Q. Lu, X. Huang, Y. Ye Y. Fang, Three Phase Line Start Claw Poles Permanent
Magnet Motor with Pole Changing Winding, Zhejiang University, Revue. 88, no. 2,
pp. 274-277, 2012.

Bibliographie
61
[LUB 03] T. Lubin, Modélisation et commande de la machine synchrone à réluctance variable,
Prise en compte de la saturation magnétique, Thèse de Doctorat de Nancy, Avril
2003.
[MAY 05] P. Mayé, Moteurs Electriques Industriels, Dunod, Paris, pp179-344, 2005.
[MAY 06] P. Mayé, « Aide-mémoire d’électrotechnique », Dunod, Paris, pp181-205, 2006.
[MES 99] C. Messier, Modélisation et Conception de Moteurs à Aimants Permanents
Asynchrones Synchronisés à L’aide du Calcul des Champs, Thèse doctorat de
l'Université Laval, Août 1999.
[MOD 07] T. MODEER, Modeling and Testing of Line Start Permanent Magnet Motors,
Licentiate Thesis Stockholm, Sweden, 2007.
[MOG 07] R. Rajabi Moghaddam, Synchronous Reluctance Machine (SynRM) Design, Master
Thesis Of Royal Institute of Technology, Stockholm, 2007.
[MOR 92] J. C. Moreira and T. A. Lipo, Modeling of saturated ac machines including air gap
flux harmonic components," IEEE Trans. Ind. Applicat., vol. 28, no. 2, pp. 343-349,
1992.
[NEK 11] A. Nekoubin, Design a Line Start synchronous Motor and Analysis Effect of the
Rotor Structure on the Efficiency, World Academy of Science, Engineering and
Technology, Vol. 5, pp. 5-9, 2011.
[RAM 06] T. Raminosoa, Optimisation des performances des machines synchro-Réluctantes
Par Réseaux De Perméances, Thèse de Doctorat de l’Institut National Polytechnique
de Lorraine, Octobre 2006.
[STO 09a] D. Stoia, M. Cerant, K. Hameyer, D.Ban, Line-Start Permanent Magnet Synchronous
Motors. Analysis and Design, Dubrovnik, Croatia, October 2009.

Bibliographie
62
[STO 09b] D. Stoia, M. Cerant, D. Ilea, Educational Bench ENCH of Line-Start Permanent
Magnet Synchronous Motors Part I: Operating Point of Permanent Magnet, The 4th
ICIE, pp. 153 -159, Vilnius, Lithuania, May 2009.
[TAR 09] İ. Tarımer, Investigation of the Effects of Rotor Pole Geometry and Permanent
Magnet to Line Start Permanent Magnet Synchronous Motor’s Efficiency, , vol. 90,
No. 2, pp. 67-71, Muğla University, Turkey, 2009.
[TAY 01] N. Taylor, Network Effects of Line Start Permanent Magnet Synchronous Motors as
Replacements for Induction Motors, MSc Thesis, Royal Institute of Technology,
2001.
[VID 05] L. Vido, Etude d’actionneurs électriques à double excitation destinés au transport.
Dimensionnement de structures synchrones, Thèse doctorat de l’Ecole Normale
Supérieure de Cachan, 2005.
[WIL 05] T. Wildi, S. Gilbert, Électrotechnique, 4ème Édition, de Boeck, Canada, pp.643-646,
2005.
[ZAW 12] T. Zawilak, J. Zawilak, single-phase motor, synchronous motor, permanent magnet
high efficiency motor, Articles scientifiques de l'Institut de machines électriques,
lecteurs et mesures, Université de technologie de Wroclaw, 2012.

Annexes

Annexes
63
Annexe.1
AI. Calcul de l’induction magnétique dans l’entrefer
Le calcul de l’induction dans l’entrefer est un des points essentiels de la modélisation et s’appuie sur
le théorème d’Ampère. Le contour choisi pour appliquer ce dernier est présenté sur la Figure.AI.1
åò =×=× 0INdlH (AI.1)
Fig. AI.1.Circulation d’une ligne de champ
Ce chemin doit nécessairement prendre en compte la contribution des aimants, Ha est le champ
magnétique de l’aimant pour un point de fonctionnement donné, He est le champ dans l’entrefer.
En appliquant le théorème d’ampère (AI.1) au circuit magnétique, on obtient :
0=×+×+× ffea lHeHaH (AI.2)
D’où :
a : la longueur des aimants,
e : l’épaisseur de l’entrefer.
Le terme ff lH × est négligé devant les termes aHa × et eHe × , donc l’équation (AI.2) devienne :
0=×+× eHaH ea (AI.3)

Annexes
64
D’une façon générale, le champ d’excitation magnétique modifie les propriétés du milieu dans lequel
il agit. Il induit un champ d’induction magnétique. Ainsi au vecteur d’excitation magnétique, H
Correspond à un vecteur d’induction magnétique B tel que :
HB ×= m (AI.4)
Selon le principe conservation du flux l’induction magnétique dans l’entrefer est égale à l’induction
magnétique des aimants, on peut écrire alors :
ae BB = (AI.5)
Soit :
Ba : l’induction de l’aimant pour un point de fonctionnement donné,
Br : l’aimantation rémanente.
Lorsque le fer est soustrait de l’influence du champ magnétique extérieur, son aimantation ne disparait
pas totalement car un certain nombre de domaines resteront orientés dans le même sens et créeront
ainsi un faible pôle nord et un faible pôle sud [WIL 05].
L’induction magnétique des aimants peut s’exprimer comme suit :
raaa BHB +×= m (AI.6)
Les lignes de flux de l’aimant circulent dans la direction de l’épaisseur de l’aimant, en supposant que
la perméabilité relative du fer est infinie, 0m la perméabilité absolue. L’induction dans l’entrefer est
donnée par :
ee HB ×= 0m (AI.7)
A partir des équations (AI.6) et (AI.7) on peut exprimer l’induction magnétique dans l’entrefer
comme suit :
raae BHB +×= m (AI.8)
On peut tirer le champ magnétique de l’aimant à partir de l’équation (AI.3) du flux aimants, on obtient
alors :
ea Ha
eH ×-= (AI.9)

Annexes
65
En remplace l’équation précédente dans l’expression obtenue en (AI.9), l’induction magnétique dans
l’entrefer peut s’écrit :
reae BHa
eB +×-= )(m (AI.10)
On exprime le champ magnétique dans l’entrefer en fonction de l’induction et la perméabilité :
0me
eB
H = (AI.11)
On reprend l’équation de l’induction magnétique dans l’entrefer définit dans (AI.11) en introduisant
l’expression du champ magnétique dans l’entrefer obtenue précédemment, on aura :
ïïï
î
ïïï
í
ì
úû
ùêë
é×+
=Þ
+×-=
0
0
1
)(
mm
mm
a
re
re
ae
ae
BB
BB
a
eB
(AI.12)
Sachant que 0mm =a , on peut écrire :
÷÷ø
öççè
æ
×+×
××=
ea
aBB
are mm
m
0
0 (AI.13)
Finalement, de l’induction magnétique dans l’entrefer s’écrit :
re Bea
aB ×÷
ø
öçè
æ+
= (AI.14)
La Figure AI.1 représente l’induction magnétique dans l’entrefer de la machine et sa teneur en
harmonique en (%)

Annexes
66
a) b)
Fig.AI.2. (a) Induction magnétique dans l’entrefer ; (b) taux d’harmoniques contenue en %
On Remarque que la courbe de l’aimantation figure.AI.2 (a) , a une forme d’un signal carrée, qu’on
peut la décomposer à l’aide de la DSF (décomposition en série de Fourier) en une fondamentale
sinusoïdale plus les harmoniques .On remarque de la figure AI.2 (b) que les harmoniques paires sont
nulles.
En supposant que cette forme est proche d'une onde carrée, la densité de flux dans l'entrefer peut être
exprimée approximativement comme suit [LOC 06] :
å=n
n npBBe )cos()( qq (AI.15)
Où :
)2
sin(4 bp
npn
BB e
n ×= (AI.16)
Selon l’hypothèse du premier harmonique, on peut écrire :
qpBBe cos1 ×= (AI.17)
Où :
÷øöç
èæ ××
×= 2sin
41
bp
pB
B e (AI.18)
0 5 10 15 20 25-40
-20
0
20
40
60
80
100
ordre
amp
litu
de
des
har
mo
niq
ues
(%
)
-40 -20 0 20 40 60 80 100 120-1.5
-1
-0.5
0
0.5
1
1.5
theta (°mec)
ind
uct
ion
(T
esla
)

Annexes
67
ANNEXE.2
AII.1 Calcul de la Force électromotrice par phase
Le flux sous un pôle peut être déterminé par l’équation suivante :
ïï
î
ïï
í
ì
××××-
=××××=Þ
××===
ò ò
òò òòòò
-
qp
pqqj
qj
p
p
pp
BRLap
p
dRLapB
dspBdsBdsB
p
p
sp
esp
sin1
12
2
cos
cos
2
2
1
1
(AII.1)
Si on considère que le bobinage d’une phase contient 3 encoche / pôle /phase alors :
2
nsin
np
2BRLa 1
pj ××××= (AII.2)
Le flux sous un pôle obtenu est le suivant :
pBRLasp
21 ×××=j (AII.3)
Le flux par phase qui représente le flux maximal aura pour expression :
spsdphase Nk jj ××= 1 (AII.4)
Sa valeur efficace devient :
sps
effN
kd jj ××=2
1 (AII.5)
Ns représente le nombre de spire en série par pôle et(m) est le nombre d’encoche/pôle/phase :
pmNN cs ××= (AII.6)

Annexes
68
Le coefficient de distribution du bobinage statorique a comme expression :
÷øö
çèæ×
=
mm
kd
6sin
6sin
1 p
p
(AII.7)
AII.2 Calcule de la FEM
Le flux j embrassé variant dans le temps crée une FEM sinusoïdale induite dans la spire et dans notre
cas la répartition ce fait sur plusieurs encoche donc on introduit le coefficient de distribution kd pour
obtenir le flux par phase.
dt
de
j-= )tsin(ph wjw ××= (AII.8)
Sa valeur efficace devient
phf2
2E j
p××= =180 V (AII.9)

Nomenclature

Nomenclature
69
Nomenclature
Symboles ACRONYMES Unité
a Angle d’ouverture des aimants rd
d angle de charge rd
Br Induction rémanente Tesla
Be Induction dans l’entrefer Tesla
E Valeur efficace de la Force électromotrice Volts
m Perméabilité du fer H.m−1
m0 Perméabilité du vide H.m−1
Ha le champ magnétique de l’aimant Atr
He le champ magnétique d’entrefer Atr4
h rendement
W vitesse mécanique du rotor tr/min
ω vitesse angulaire rd/s
ωe vitesse de synchronisme rd/s
sd coefficient de dispersion d’axe d
sq coefficient de dispersion d’axe q
f coefficient de frottement visqueux Nm.s/rd
q position électrique du rotor rd
jsd flux magnétisant d’axe d Wéber
jsq flux magnétisant d’axe q Wéber
jmsd flux magnétisant statorique d’axe d Wéber
jmsq flux magnétisant statorique d’axe q Wéber
jsp Flux sous 1 pole Wéber
jpm Flux max produit par les aimants Wéber
IMR courant magnétisant rotorique équivalent Ampère
Imd courant magnétisant d’axe d Ampère
Imq courant magnétisant d’axe q Ampère

Nomenclature
70
Imrd courant magnétisant rotorique d’axe d Ampère
Imrq flux magnétisant statorique d’axe q Ampère
J moment d’inertie Kgm2
Ks coefficient de saillance
KST coefficient de saturation
KSD coefficient de saturation dynamique
Ld inductance propre statorique d’axe d Henry
Lq inductance propre statorique d’axe q Henry
Lrd inductance propre rotorique d’axe d Henry
lrd inductance de fuites rotoriques d’axes (d) Henry
lrq inductance de fuites rotoriques d’axes (q) Henry
Lrq inductance propre rotorique d’axe q Henry
ls inductance de fuites statoriques Henry
Md inductance mutuelle stator-rotor d’axe d Henry
Mq inductance mutuelle stator-rotor d’axe q Henry
Nc nombre de conducteurs dans une encoche
Ns représente le nombre de spire en série par pôle
p nombre de paires de pôles Watt
Pem Puissance électromagnétique Watt
pjs Pertes Joule statorique Watt
pmec Pertes mécanique Watt
Pa puissance absorbée Watt
pu Puissance utile Watt
Rrd Résistance rotorique d’axe d ohm
Rrq Résistance rotorique d’axe q ohm
Rs Résistance d’un enroulement statorique ohm
S Puissance apparente VA
Tem couple électromagnétique N.m
Tr couple résistant N.m
Trd constante de temps rotorique d’axe d S
Trq constante de temps rotorique d’axe q S
Vs tension simple statorique efficace Volts
m nombre d’encoches par pôle et par phase
![AimAnts PermAnents Aimants ndFeB, AlniCo, smCo et … · NdFeB BLS Magnet [6] Aimants permanents BLS Magnet [7] Aimants permanents AimAnts neODYme Nuance Rémanence Rémanence Intensité](https://static.fdocuments.fr/doc/165x107/5b915de609d3f210288b829e/aimants-permanents-aimants-ndfeb-alnico-smco-et-ndfeb-bls-magnet-6-aimants.jpg)