
Estimation bande étroite des angles d'arrivée d'un signal...
41
ECOLE SUPERIEURE DE CHIMIE PHYSIQUE ELECTRONIQUE DE LYON FILIERE ETI - OPTION TELECOM PROJET DE FIN D'ETUDES stage effectué du 01/02/2003 au 31/07/2003 Estimation bande étroite des angles d'arrivée d'un signal radio-mobile en environnement Indoor Guillaume DE LA ROCHE Aout 2003 Laboratoire CITI - INSA Lyon 21 Avenue Jean Capelle F 69621 VILLEURBANNE 1/41
Transcript of Estimation bande étroite des angles d'arrivée d'un signal...
ECOLE SUPERIEURE DE CHIMIE PHYSIQUE ELECTRONIQUE DE LYONFILIERE ETI - OPTION TELECOM
PROJET DE FIN D'ETUDES
stage effectué du 01/02/2003 au 31/07/2003
Estimation bande étroite des angles d'arrivée d'un signal radio-mobile
en environnement Indoor
Guillaume DE LA ROCHEAout 2003
Laboratoire CITI - INSA Lyon21 Avenue Jean Capelle
F 69621 VILLEURBANNE
1/41

Résumé du rapport
L'équipemodélisationde réseauxdu CITI a mis au point un simulateurpermettantde prédire lacouvertureradio en environnementintra-muros(ou Indoor).Ce simulateurest le coeurd'un projetdont l'objectif est de fournir un outil d'aide au déploiement de solutions sans fil.Devant le succèsde ces techniqueset la nécessitéd'obtenir de meilleures performances,lesrecherchesse focalisentaujourd'huisur l'améliorationde la bandepassante,et la limitation desinterférences,pouraccroîtrela capacitéde cesréseauxsansfil et les rendreréellementcompétitifspar rapport aux réseaux filaires.Le traitementd'antennesmulti-capteurs,appelécommunémentantennesintelligentes,constitueundes axesmajeursde recherchepour l'amélioration de la bandepassanteet ainsi de l'efficacitéspectrale.Il s'agit de remplacerl'antenneuniqued'émission-réceptionassociéeà chaqueterminalmobile,par un ensembledecapteurs.Cescapteursfournissentchacunun signalà un DSPqui doitmettreen oeuvredesalgorithmesde traitementd'antennes,afin d'améliorerle signal utile, et dedimuinuerla contributiondesinterférents.Cettetechniquerevientà faire de la focalisationmulti-directionnel (plusieurs angles d'arrivée peuvent être privilégiés), et adaptative(la focalisations'adapte continuellement).Le simulateurdéveloppéau CITI constitueune baseintéressantepour évalueret comparerlesperformancesde ces algorithmes.Ce simulateurpermet de simuler successivementdifférentessources(représentantdes points d'accèsou des terminauxmobiles). Cependant,le canal radioIndoor est très complexepar la présencede nombreuxcheminsradio entre 2 points, suite auxréflexionsmultiples.C'estun canalà étalementangulaire.Le simulateur,danssaversionoriginale,ne permetpasd'obteniren chaquepoint unecartographiede l'étalementangulairedu signal reçu,pourtant nécessaire pour la simulation des antennes intelligentes.Pourtantle simulateurfourni le champen chaquepixel de l'image,avecuneforte précision.Il estdonc possible de copier ce qui se fait en radar, pour la détection des angles d'arrivée des cibles, et dechercherà retrouverla répartitionangulairedu champà partir d'unepetiteimagecentréeautourdupoint de réception.Cestechniquessont connuessousle nom de méthodeshaute-résolution[11].Cetteproblématiqueest connueen radarcommeen radio sousle nom de «estimationde DOA»(pour Direction Of Arrival). Aprèsunesynthèsedecesméthodes,nousproposonsla miseenoeuvrededeuxdecestechniques,une méthodeappeléesmoothing-MUSIC,et une méthodede maximisationde vraisemblanceparminimisation quadratique.Ces deux méthodessont testéesdansle contextede notre application,et un certain nombrederésultats en termes de performances sont fournis.Enfin, après avoir choisi la méthode smoothing MUSIC nous illustrons par l'exemple d'unenvironnementpluscomplexele problèmedesmultiplescheminsdansunenvironnementin door,eten particulier l'apparition des échos dus aux obstacles.
2/41

Remerciements
Je tiens tout particulièrement à remercier,
M. StéphaneUbeda,directeurdu CITI, où j'ai pu réalisermon stage,ainsi que tous les autresmembres de ce laboratoire.
M. Jean-MarieGorce,mon tuteur pendantce stagede DEA, qui a pu me conseilleret m'aideràavancer dans mon travail de recherche.
Mme MoniqueChiollazpouravoir étémoninterlocuteurécoleauprèsdeCPEet pouravoir acceptéde me rencontrer et de m'aider dans la recherche de références bibliographiques.
Mme Nicole Gache, responsable de la promotion ETI3, qui assistera à ma soutenance de stage.
3/41
Sommaire
1. Introduction ..................................................................................................................................5
2. Positionnement du problème ......................................................................................................62.1. Le simulateur 62.2. Les antennes intelligentes 72.3. Les conditions de travail 8
3. Les algorithmes de DOA .............................................................................................................93.1. Méthode de base: la transformée de Fourier spatiale 93.2. Méthode de prédiction linéaire: Prony 103.3. Méthode du maximum de vraisemblance: Capon 103.4. Méthodes des sous espaces 12
3.4.1. Méthode MUSIC 123.4.1.1. La version de base 123.4.1.2. Les améliorations apportées à MUSIC 13
3.4.2. Méthode ESPRIT 153.4.2.1. La version de base 153.4.2.2. Les améliorations apportées à ESPRIT 16
3.5. Minimisation quadratique 16
4. Implémentation de deux méthodes dans le moteur ..................................................................174.1. Choix de deux méthodes 174.2. Adaptation de ces deux méthodes 18
4.2.1. Adaptation de smoothing-MUSIC 194.2.1.1. calcul de la matrice d'auto corrélation 194.2.1.2. calcul de la matrice des vecteurs direction 194.2.1.3. décomposition en sous réseaux 21
4.2.2. Adaptation de la méthode de minimisation quadratique 214.2.2.1. la minimisation du critère 224.2.2.2. Évaluation du nombre de sources 22
5. Résultats des simulations ............................................................................................................235.1.Tests sur des ondes planes théoriques 23
5.1.1. Génération des ondes planes théoriques 235.1.2. Précision des mesures 24
5.1.2.1. Sur la détection d'une source 245.1.2.2. Capacité à séparer les sources 25
5.1.3. Influence de la distance inter capteurs 265.1.4.1. avec smoothing MUSIC 265.1.4.2. avec la méthode de minimisation 27
5.1.4. Nombre de sources détectables 285.1.4.3. avec smoothing MUSIC 285.1.4.4avec la méthode de minimisation 30
5.2.Tests sur des zones de couverture du moteur de propagation 315.2.1. Environnement composé de une source 315.2.2. Environnement composé de deux sources 335.2.3. Un avantage de MUSIC 34
5.3Choix d'une méthode 355.4Exemple d'un environnement plus complexe 35
6. Perspectives et Conclusion ...........................................................................................................38
4/41
1. Introduction
Cesdernièresannéesnousont montréun développementimportantdesréseauxlocauxsansfils, qui ont l'avantagedesupprimerlescâblages,et depouvoircommuniquerdefaçonmobile.La norme 802.11 a été définie par l'organismeIEEE pour essayerde donner des règles etuniformiser les différents fabriquants,elle a en particulier défini un mode d'utilisation "Pointd'accès"qui se base sur le modèle de la téléphoniecellulaire: Des relais fixes assurantlacommunicationentreles utilisateursmobilessontplacésendifférentsendroitsde l'environnement,de manièreà assurerune meilleurezonede couverturepossible(pasde coupurequandon passed'unrelaisà l'autre).Il estdoncintéressantde développerdessimulateursderéseauxsansfils, quinouspermettentdecalculerlesendroitsoptimauxoù placerles relais,et doncd'avoirunequalitédeservice la meilleure possible.
De plus on assisteaussices dernierstempsau développementd'un nouveautyped'antennepour les réseauxradio: ce sont les antennesintelligentesqui devraientpouvoir apporterunesolutionauproblèmede saturationdansles réseaux,du aunombretrop élevéd'utilisateursparrapportaunombrede fréquencesdisponibles.Il seraitdoncintéressantd'essayerd'intégrerdansunsimulateurde réseaumobile le modèledesantennesintelligentes,pour simuler les avantagesréelsque présenterait ce type d'antenne.
Dansla partie2, aprèsavoir présentéle principedu simulateur,nousintroduisonslesbasesdu traitementd'antennes.Nousexpliquonsalorspourquoiil estnécessairedanscesimulateurd'effectuerunedécompositiondesdifférentsanglesd'arrivéesdu signalémispar uneseulesourceen un point de réception donné.Aprèsunecourtedescriptiondu modèledecanalsous-jacent,nousexpliquonsl'objectif de la miseen placedestechniquesde DOA dansce simulateur: il s'agit de pouvoir simuler et évaluerlestechniques de traitement d'antennes.
La 3ième partieprésenteun résumédesdifférentestechniquesd'estimationdeDOA, trouvéesdanslalittérature,et nousconcluonspar une comparaisonet une analyseadaptéeà notre problèmequiconduisent au choix de 2 méthodes.
Dans la 4ième partie, nous présentons la mise en oeuvre de ces deux méthodes (smoothing-MUSIC, etune méthode de type MLE (Maximum Likelihood Estimation).
Nousprésentonsquelquestestseffectuésaveccesdeuxméthodessurdesondesplanespuissurdesrésultatsde simulationsdans la partie 5, pour ensuitechoisir une méthodeet illustrer par unexemple.
Enfin dans la dernière partie nous présentons quelques perspectives et conclusions.
5/41

2. Positionnement du problème
2.1.Le simulateur
K. Runsernousdécrit dans[18] les différentsmodèlesqui ont étédéveloppéspourpouvoir calculer les zones de couvertures d'une source dans un environnement.
Les premiersà avoir été utilisés sont des modèlesempiriquesstatistiqueset sontutilisés par les opérateursde téléphonie.Ils sont baséssur descampagnesde mesuresen milieurural ou urbain,etpermettentd'avoirunebonneapproximationdela réceptiondansdessystèmesdegrandetaille. ils sont en revanchemal adaptésaux milieux indoor du fait des phénomènesderéflexion et de diffraction .
Ensuiteles méthodesde lancerde rayon (Ray Tracing) ont été utiliséesà partir de1991 par McKnown pour simuler la propagationdansdes environnementsfortementréflectifs,comme les milieux urbains denses, ou plus récemment les milieux indoor Ces techniquesbaséessur une approximation géométriquedu phénomènede propagationsontpotentiellementtrès rapide.Malheureusement,plus le nombrede réflexionsestgrand,plus letempsdecalculaugmente.Si cestechniquessemblentadaptéesauurbaindense,pour lequel3 ou 4réflexionssuffisentà prendreen comptela majorité du signal, elles sont en revanchebeaucoupmoinsefficacesen Indoor où le nombrede rayonsà lanceraugmentefortement.D'autrepart, leseffetsdediffraction à prendreencompteenIndoor (anglesdemurs,portes,...) , exigentla miseenoeuvre de la théorie unifiée de la diffraction (UTD), très coûteuse en nombre de rayons à lancer.
Lesméthodesdiscrètes,parélémentsfinis, n'ontétéquepeuutiliséesdansle contextede la planification radio, à causede leurs besoinsen ressourcesde calcul. Toutefois,en 1997,Choppardet al. [30] ont proposéd'adapterla méthodeTLM (méthodedesmatricesde lignesdetransmission).Ils ont mis en place un automatetemporelqui calcul le champexact (dansunecertainemesure),en tout point. Bien querelativementlong certainesapproximationset l'utilisationdu calcul parallèleont permisla miseen oeuvred'un logiciel de simulationpour le GSM en zonesurbaines. Cetteméthodea étérepriseparGorceet al. en2001[29]. Danscettedernièreapproche,le problèmea été transposédansle domainefréquentiel, se ramenantalorsà un problèmede résolutiond'unsystèmelinéaire.Une approchemulti-résolutiona étémiseen oeuvre,réduisantdrastiquementlestemps de calcul.
Fig.1 : exemple de zone de couverture calculée par le moteur en dB
remarque: l'échelle de couleur correspond à une reception de 20 (foncé) à -140 (clair) dBm environ.
6/41

Ce simulateur, nécessite plusieurs fichiers de données en entrée, permettant de définirl'environnement(les différents élémentset leur indices), les sources(leur position et leurscaractéristiques),et les ondes (vitesse, fréquence).On obtient en sortie la valeur du champ(amplitudeet phase)en chaquepoint de l'espace(la distanceentreles pointsc'està dire le pasderésolutionestconfigurable).La figure 1 nousreprésentel'allure d'unezonede couverturecalculéepar le moteur(logarithmede la valeurabsoluedu champcalculépar le moteur)pour unesourcedans un environnement formé de quatre murs obstacles.Dansnotrecas,et pour l'analysedesanglesd'arrivée,le moteurde calcul nousfourni directementune image complexe décrivant amplitude et phase en chaque point du plan, de l'onde résultante.
2.2.Les antennes intelligentes
Les antennesintelligentes ou "smart antennas"sont en plein développementcesdernièresannées,car elles peuventapporterune solution efficace aux problèmesde saturationrencontrés avec les réseaux mobiles lorsqu'il n'y a pas de canal disponible ([20],[4]). Au début des réseauxradio, on associaità chaqueutilisateur une porteuse(FDMA, FrequencyDivision Multiple Access)ce qui limitait énormémentla capacitédu réseau.Puis l'arrivée dunumériquea permis de diviser en intervallesde tempsallouésà différents utilisateurs(TDMA,Time Division Multiple Access).C'estpar exemplele casdu GSM. Initialementdansle domainemilitaire pour desraisonsde brouillage,puis plus récemmentdansle domainecivil,sont apparuesles techniquesde divisionspar codes(CDMA, CodeDivision Multiple Access)qui travaillentsurdesbandesde fréquencesplus larges,maispermettentparuneaffectationdecode,uneplusgrandesouplessedela répartitiondesressources(UMTS, parexemple).Lesantennesintelligentesontpourbut de partagerencoreplus le canal en séparantles utilisateursdans l'espace(SDMA, SpaceDivision Multiple Access).Cette approchepeut être vue commeune extensiondu principe descellulesen radio-mobiles,les cellulesétantrenduesdynamiques,par le traitementd'antennes.Eneffet au lieu de diffuser danstoutesles directions,il nousest montrédans[8] que les antennesintelligentespermettentd'orienterdeslobesprincipauxdanslesdirectionsdesutilisateursdésirés,etdemettredeszérosdanslesdirectionsdesinterférents(voir illustrationfigure 2) cequi a poureffetde réduire les interférenceset donc d'augmenterle nombred'utilisateurspar porteuse,donc lacapacité du réseau.
Fig.2 : exemple de cas possible
F. Breslin et K. Varmadans[2] et [24] nousdécriventle principede fonctionnementdesantennesintelligentes.Lesantennesintelligentessontenfait desréseauxd'antennes,c'està direun ensembled'antennesdisposéesselonunegéométriebiendéfinie.En exploitantlessignauxreçusau niveaude chaqueantenne(amplitudeset phases),et en connaissantla géométriedu réseaude
7/41

capteurs(disposition et distancesinter capteurs),il est alors possiblegrâce à des traitementsd'antennede trouver les directions des utilisateurs,et de créer des lobes qui favorisent desdirections,et deszérosqui pénalisentlesautres.Nousnerentreronspasplusdanslesdétailssurcestechniquesde traitementd'antennes,mais cettebrève introductionmet en évidenceque la seuleconnaissancedu champen un point dansles simulationsnepermetpasde simulercessystèmes.Ilest en effet nécessaire de connaître les différents angles d'arrivée des ondes. C'estdonc ce queproposece travail, c'està dire la mise en oeuvrede techniquesde DOA, pourl'analyse de la répartition angulaire des ondes émises par une source, dans une zone du plan simulé.
2.3.Les conditions de travail
Le simulateur fourni, pour une source donnée, une cartographie du champélectromagnétique (en 2D). Pour implémenterdifférentesméthodesde DOA dansle simulateur,nousdevonsrécupérerunepetite zone de l'image, centrée autour du point de réception.
Les méthodesclassiquesde DOA travaillenten généralavecune barrettelinéairedecapteurs. Il faudra dans notre cas étendre les méthodes retenues aux réseaux 2D d'antennes.Il faudraévaluerl'influence du paset du nombrede capteurssur la précisiondesrésultatset lenombre de raies résolvables.
Avantdetravaillersurlessimulationsdu moteurdepropagation,noustravailleronssurdessimulationsobtenuespar la superpositiond'ondesplanes(voir paragraphe5.1), permettantdeconnaître la répartition angulaire théorique.
Il est important de préciserque dans notre cas nous avons une utilisation assezparticulièredesalgorithmesde DOA: on necherchepasà séparerdifférentessources(commec'estnormalementle cas),mais on n'a une seulesourcequi se propagesur un canal radio à cheminsmultiples. (à cause des différentes réflexions de l'environnement indoor.)
Les méthodesde DOA étantdiversesnousprésentonsdansla partiesuivanteun brefaperçu des principales familles de ces méthodes.Comme le simulateur travaille en régimeharmonique(mono-fréquence)nous présentonsici uniquementles méthodesde DOA à bandeétroite, Les techniqueslarge bande, qui exploitent plusieurs raies du spectre,nécessiteraientplusieurssimulationsharmoniques.Bien qu'envisageable,nousavonsexcludansun premiertempsleur mise en oeuvre dans ce travail.
Enfin, cesméthodessebasentsur l'approximationondeplane,il faudradoncvérifier quecelaneposepasde problèmeavecle simulateur,car en réalitéles sourcesémettentdesondessphériques(plus on s'éloigne de la source plus l'approximation sera bonne).
8/41

3. Les algorithmes de DOA
Dans toute la suite de ce rapport on utilisera les appellations suivantes:� M le nombre d'antennes du réseau linéaire.� L le nombre de sources à détecter.� f la fréquence de la porteuse.� d la distance entre les capteurs.� c la vitesse de propagation de l'onde
3.1.Méthode de base: la transformée de Fourier spatiale
Le transforméede Fourier est la premièreméthodequi a été utilisée pour détecterles anglesd'arrivéesdes signaux.Le principe est de réaliser la transforméede Fourier dans l'espacedessignauxreçus.Si on tracecettefonctionpour uneondedonnée,on obtiendraun pic d'énergiepourla directiondanslaquellesesituela source,doncdansle casde la superpositiondeplusieursondeson a despics pourchaqueDOA. Cettetechniquenécessitede prendrede nombreuxcapteurssi onveut arriver à desrésultatsprécis.Dans [21] MehrdadSoumekhmontrequ'on arriveraà séparerdeux ondes planes d'angles
�1 et
�2 si:
sin � 1 � sin � 2
� �2Md (1)
Si ces techniquesont longtempsété utiliséespour détecterdes sources,en particulier dans lesdomainesdesradarset dessonars,ellesn'offraientpasdesprécisionssuffisanteset il a rapidementfallu faire appelà destechniquesplus puissantes.Ainsi détecterunesourceavecun réseaude 8capteurspermetd'avoir une précisionde l'ordre de 30 degrés.Dans les années80 ont donc étédéveloppéesles méthodesà haute résolution permettantd'avoir des précisionsbeaucoupplusimportantes.En effet si Fourier nouspermetde déterminerles anglesen parcourantune courbeforméed'autantde pointsquede capteurs,les méthodeshautesrésolutionont un pasqui peutêtreaussi faible que désiré.Lesfigures3 et 4 nousmontrentl'allure desspectresobtenuspourunesourceet un réseaulinéairede 10 antennes, par Fourier puis par une méthode haute résolution (MUSIC).
Fig.3: spectre Fourier (1 source 10 capteurs)Fig.4 : spectre MUSIC (1 source 10 capteurs)
9/41

3.2.Méthode de prédiction linéaire: Prony
Cetteméthodea été la basedesméthodesà hauterésolution,elle a été présentéeen 1795et estbaséesur une décompositiondu signal en une sommed'exponentielles.Prony à montré ([11,p58],[6]) qu'une exponentielle e
j �kt echantillonnée en e
j �kn t �
zkn verifie la relation de
récurrence: x p� zL x p � 1
� 0 ce qui équivaut à 1 � z l z � 1 X l z � 0Si L exponentielles sont présentes et qu'il n'y a aucun bruit la relation devient:
X z 1 � z1 z� 1 � 1 � zL z
� 1 � 0 (2)
En posantalors b z 1 z1
z� 1 � 1 zL z
� 1 1 b1
z� 1 b
2 z� 2 � bL z
� L la relation (2) est
équivalenteà une relation de récurrence x p� b1 x p � 1
��� bL x p � L . On peut déduirede cette
relation un système à L équations et L inconnues du type:
xn �x
L � 1
xL � 2�x 2L
�xL � x
1
xL � 1 � x2� � �x 2L � 1 � xL
b1
b2�bL
(3)
En résolvantce systèmeet dansle casoù il n'y a aucunbruit la solutionestuniqueet on peutendéduire les L DOAs.
3.3.Méthode de maximum de Vraisemblance: Capon
Les méthodesde maximum de vraisemblance, sont baséessur une estimationsansbiais et àvarianceminimale,l'estimationestd'autantmeilleurequele nombrede réalisationsest important.La méthodela plusconnuedanscedomainea étédéveloppéeparCapon([11 p117]),elle permetàpartir deplusieurséchantillonsdesignauxreçusx, d'estimerl'amplituded'unesourceenfonctiondela direction � , en l'écrivant sous la forme:
f � � h �H x (4)
Pour chaque source le schéma est le suivant:
Fig.5: arrivée du signal sur un réseau linéaire de capteurs
10/41

Si on appelle les sources s et x les signaux reçus, pour chaque capteur du réseau linéaire le signalreçu est tel que
xm t � �l � 1
L
a l � l s l t ��� m � l � �l � 1
L
a l � l s l t e� j2 � f m l
avec � m retard du au capteur m.et a � vecteur direction ou reponse impulsionnelle du réseau de capteurs dans la direction
si on pose: a � l � a1 � l e� j2 � f
c � 1 � l a2 � l e � j2 � fc � 2 � l � aM � l e� j2 � f
c � k � l T
et:A � � a �
1a �
2 � a � L , x t x1 t x2 t � xM t T , s t � s1 t s2 t � sL t T
on a alors: x t � A � s t (5)
en réalité il y a du bruit qui s'ajoute donc (5) devient:
x t � A � s t � b t (6)
Commel'amplitudes doit être restituéesansbiais cela imposeque h T a � � 1 . De plus b estsupposéde valeurmoyennenulle et décorréléavecs, la variancedu bruit doit êtreminimale,donc
h �H Rb h � doit être minimale. On déduit de ces hypothèse que tout ceci équivaut à
h �H RX h �! a2 " h �H Rb h � minimale, dont la solution est:
h #%$ aH & RX' 1 a & ' 1 RX' 1 a & (7)
La puissance moyenne du signal dans la direction est:(f 2 ) * h +H E x xH h + * h +H RX h + (8)
En remplaçant (7) dans (8) on obtient la formule du critère de Capon:,f 2 - . 1
a - H RX/ 1 a - (9)
11/41

cette fonction est maximale pour� correspondant à l'angle de la source.Pour calculer Rx on a une estimée grâce à la formule suivante:
�RX � 1
N
�
t � 1
t � N
x t xH t (10)
avecN le nombred'échantillons, c'estpourquoiplus le nombredemesuresestélevéplusle résultatsera pertinent.
Notonscependant,quecelaestvrai à conditionqueles sourcessoientdécorrélées.C'estle casengénéral,quandon récupèreun signal x(t) contenantplusieurssourcesradiosdistinctes,et que lessignauxsontdécorrélésdansle temps.Ce n'estpasle caslors de la présenced'uneseulesource,etde plusieurséchosliés aux cheminsmultiples. Nous revenonssur ce problèmedansle chapitresuivant.
3.4. Méthodes des sous espaces.
Les méthodesdessousespaces([9],[1]), font suite historiquementà la méthodede Capon,elless'appuientsur unedécompositionde l'espaceen un espacebruit et un espacesignalpar recherchedes valeurs propres. C'estPisarenkoqui a eul'idéeen1973defaire uneSVD sur la matriced'auto-corrélationdu signal,et d'exploiterlesdonnées,enmontrantquela pluspetitevaleurproprecorrespondaitaubruit, cequipermettait de faire une décomposition de l'espace et de déduire les angles.A partir de là deuxméthodeson étédéveloppées,la méthodeMUSIC et la méthodeESPRIT,ellessont très largement utilisées dans de nombreuses applications.
3.4.1La méthode MUSIC (MUltiple SIgnal Classification)
3.4.1.1.La version de base
Cette méthode est très répandue car facile à mettre en oeuvre c'est pourquoi elle a été utilisée dansde nombreuses applications. Elle nous est décrite dans [1].Si on reprends la relation (6) montrée dans le paragraphe précédent x t � A � s t � b t ondéduit E x t xH t � RX � ARS AH � RB d'où:
RX � ARS AH �n2 I (11)
où � est la variance du bruit.
En calculant les valeurs propres de Rx estimé (formule 10), puis les vecteurs proprescorrespondants(classéspar ordre de valeurspropresdécroissantes),on obtient donc M vecteurspropres,dont lesL premierscorrespondentausousespacedu signalEs,et lesM-L derniersausousespace du bruit Eb
ES e1 e2 � eL EB eL � 1eL � 2 � eM (12)
12/41

En pratiqueon ne connaîtpasforcementla valeur L, on peut donc utiliser un seuil, les valeurspropres faibles correspondant au bruit, et les autres au signal.On va ensuitetracerune fonction de coût qui réaliseune projectionde l'espacebruit sur l'espacesignal,doncqui chercheen fait pour quellesvaleursde � l'espacebruit estorthogonalà l'espacesignal ce qui correspondà une DOA. Cette fonction est en fait un spectreen fonction de �maximal pour une DOA (car dénominateurtend vers 0). La fonction de coût de MUSIC est lasuivante:
PMUSIC
� � a � �a�
a � �En En� a
� (13)
Pour que l'algorithmefonctionneil faut forcémentavoir un espacebruit et un espacesignal, ladimensionde l'espacetotal étantégalà M, si on prendun espacebruit de taille minimalesoit 1 ladimensionde l'espacesignalnousdonnele nombremaximaldesourcespouvantêtredétectéessoitM-1. La condition de fonctionnement de l'algorithme est donc:
L � M � 1 (14)
Comme pour la méthodede Capon, cette approchemarche exclusivementpour des sourcesdécorrélées.
3.4.1.2.Les améliorations apportées à MUSIC
Différentesversionsontétédéveloppéespourfaire faceà différentsproblèmesdela versiondebasede MUSIC et pour répondre à certaines conditions particulières.
Root-MUSIC ([17])
Cette techniquea pour objectif de décorréler les signaux. Si les signaux sont parfaitementdécorrélés, la matrice Rs est diagonale et dans ce cas R est centro-hermitienne ce qui équivaut a:
RX rm � J RX
�J avecJ matriced'échangecontenantdeszérospartoutsaufsur son antidiagonale
qui est à 1. On appliquedoncMUSIC avecunenouvellematriced'autocorrélation Rx root construitecommela moyenne de deux matrices:
RX root � 1 2
RX J RX
J (15)
ceci estéquivalentà doublerle nombreN deséchantillonsdemesures.La relation(11) deMUSICde base devient donc:
1 2
RX � J RX
J � A
1 2
RS � D RS
D AH �� n
2 I (16)
avec D � diag e� j 2 ����� d M � 1 sin �1 � e� j 2 ����� d M � 1 sin �
L
Unitary-MUSIC ([17])
Cetteméthodeà pourobjectif d'accélérerlescalculsenréduisantla complexitédeceuxci. En effet
13/41

avecMUSIC de baseles valeursde x(t) sont complexeset on travaille doncavecdesmatricesàvaleurscomplexespourtouslescalculs.Pesaventoet Gershman,ont montrésqu'end'effectuantunetransformationT pour rendreles matricesR à valeursréelleson simplifie les calculset on obtientles mêmes résultats.La nouvelle matrice d'auto corrélation à valeurs réelles devient:
C � QMH RQM (17)
avec suivant si M est pair ou impair:
Q2n� 1
2
I n jI n�n � j
�n
et Q2n � 1 �
1
2
I n 0 jI n
0T 2 0T
�n 0 � j
�n
Smoothing MUSIC ([10],[22])
Lors de la décomposition en valeurssingulièresde la matriceR, si le nombred'échantillonsdemesuresestinsuffisant,ou si lessourcessontcorrélées,l'ordredela matriceR peutêtretrop faible,donc on obtiendra un nombre de valeurs propres trop faible et on ne détectera que peu de DOAs. Pour remédierà ce problèmela méthodesmoothingse proposed'augmenterl'ordre de la matriced'autocorrélation, en la calculantcommela sommedesmatricesd'autocorrélationsdesousréseauxd'antennes.En fait on découpesimplementle réseaudeM capteursenN sousréseaux,et on fait lasomme des N matrices d'auto corrélation.
Rtotal �
i 1
M � N � 1
Rsousréseau i (18)
On peutvérifier facilementquele nombredesousréseauxdelongueurN d'unréseaudeM capteursest (M-N+1).Cette approchepermetde décorrélerdessourcescorrélées(ou des échosmultiples d'une mêmesource).En effet, le déplacementd'un sous-réseaupermetde décorrélerdeux sourcesdont lesdirections d'incidence diffèrent.
Cyclic-MUSIC ([28])
La méthodecycliquea étédéveloppéescesdernierstempsavecla découvertedesphénomènesdecyclostationnarité.En effet il a étémontréquedanstouslessignauxcréésparl'homme,on arriveàretrouverdesphénomènescycliques([27]). En tenantcomptedecesévènementcycliques,on arriveà créerdenouveauxparamètresdansl'équationdeMUSIC cequi augmentele nombred'inconnuespouvantêtretrouvées.Ainsi aulieu deM-1 DOAs avecMUSIC, cyclic-MUSIC permetderésoudre2M-1 DOA, ce qui équivaut à doubler virtuellement le nombre de capteurs.Cestechniquesessayentd'améliorerla décorrélationdessources,bandeétroiteensebasantsur lespériodicités intrinsèques des différents signaux émis.
3.4.2.La méthode ESPRIT (Estimation of Signal Parameters via Rotationnal InvarianceTechniques
14/41
3.4.2.1.La version de base
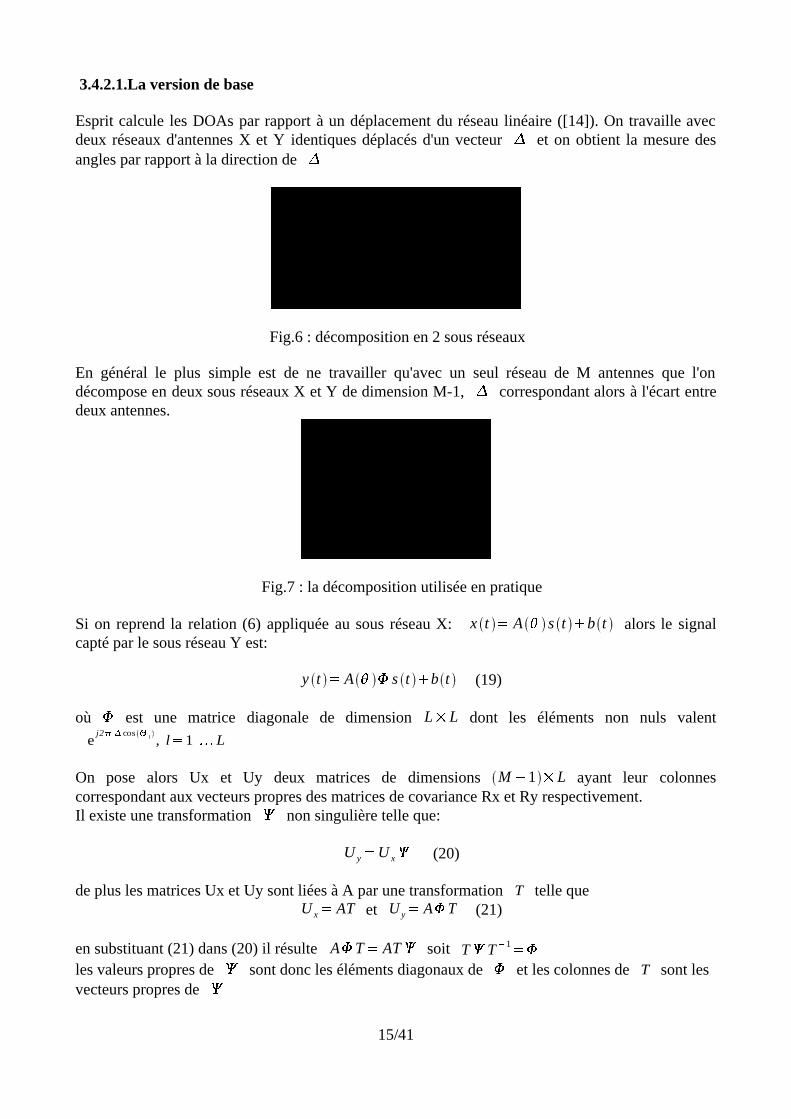
Esprit calculeles DOAs par rapportà un déplacementdu réseaulinéaire([14]). On travaille avecdeux réseauxd'antennesX et Y identiquesdéplacésd'un vecteur � et on obtient la mesuredesangles par rapport à la direction de�
Fig.6 : décomposition en 2 sous réseaux
En généralle plus simple est de ne travailler qu'avecun seul réseaude M antennesque l'ondécomposeen deuxsousréseauxX et Y dedimensionM-1, � correspondantalorsà l'écartentredeux antennes.
Fig.7 : la décomposition utilisée en pratique
Si on reprendla relation(6) appliquéeau sousréseauX: x t � A � s t � b t alors le signalcapté par le sous réseau Y est:
y t � A � � s t � b t (19)
où � est une matrice diagonale de dimension L L dont les éléments non nuls valent
ej2 �� cos
l , l � 1 � L
On pose alors Ux et Uy deux matrices de dimensions M � 1 � L ayant leur colonnescorrespondant aux vecteurs propres des matrices de covariance Rx et Ry respectivement.Il existe une transformation� non singulière telle que:
U y � U x
� (20)
de plus les matrices Ux et Uy sont liées à A par une transformationT telle queU x � AT et U y � A � T (21)
en substituant (21) dans (20) il résulteA � T � AT � soit T � T � 1��
les valeurs propres de� sont donc les éléments diagonaux de� et les colonnes deT sont lesvecteurs propres de�
15/41
on trouve ensuite les angles d'arrivée par la formule suivante:
�n � arccos
arg � l
2 ���, l � 1 � L (21)
avec � les valeurs propres de�
Cetteméthodeestassezprochede MUSIC saufqu'aulieu decalculerla SVD d'unematriced'autocorrelationpuis parcourirun spectreon fait deux SVD desmatricesRx et Ry puis on cherchelamatrice permettant de passer de l'une à l'autre.
3.4.2.2.Les améliorations apportées à ESPRIT
Les mêmesmodificationsquepour MUSIC ont étéappliquéesà ESPRITà savoir la versionrootpourdécorréler, la versionunitarypouraccélérerles calculs,la versionsmoothingpour augmenterl'ordre desmatricesd'autocorrélation, et enfin la méthodecyclic qui permetde détecterplus desourcesen tenantcomptedesinformationscyclostationnairescontenuesdansle signal.([11],[14],[25],[26])
3.5.Minimisation quadratique
C'estméthodesont pourbutdeminimiserun critère,pouravoir le maximumdevraisemblanceavecle résultat théorique ([3], [12]).Il est possible de procéder de diverses manières, nous présenterons la méthode décrite dans [16].On travailledansle casd'unréseaulinéaired'antennes,avecL le nombredesourceset M le nombrede capteurs. Si on reprendla relation 6 on a x t A s t � b t et en passanten Fourier on peut écrire
X � A S � B avec A � la matrice qui contient les déphasage apporté par le réseau linéaire:
A � �
1 � 1exp � j � 0 � 1 � exp � j � 0 � L� � �
exp � j � 0 M � 1 � 1 � exp � j � 0 M � 1 � L
avec � l �d sin � l
c
Danscetteméthoden considèrele problèmecommeun problèmeinverse,enessayantdeminimiserun critère MCR aux moindres carrés:
mcr � X � AS2 (24)
l'objectif est de trouver pour quelle valeur de� mcr est minimal.
Si on fait comme dans le cours de Giovanelli ([7]), on développe cette norme et on obtient:mcr � X � AS H X � AS � XH X � XH AS � SH AX X � SH AH A S
et en calculant la dérivée de mcr selon S:d mcr
dS d XH X ! XH AS ! SH AH X " SH AH A S
dS ! 2AH X " 2AH AS
16/41

la valeur de S qui annule la dérivée est:
S � AH A �1 AH X (25)
en remplaçant ce terme S (25) dans (24) on obtient:
mcr � X � A AH A� 1 AH X
2 (26)
c'estce termequ'on doit minimiser et qui ne contientcommeseuleinconnueque le vecteur �
contenu dans A.
4. Implémentation de deux méthodes dans le moteur
Nousavonsbrièvementprésentélesprincipalesméthodesutiliséespourdétecterlesanglesd'arrivéedessources,il nousfaut maintenanten choisir certaineset les implémenterpour les testerdanslecas de notre application.Nous les adapteronsau simulateuren tenantcomptede noscontraintes,en particulieren utilisantdes réseauxde capteursbidimensionnels,qui pourront nousapporterplus de précisiondanslesrésultats.
4.1.Choix de deux méthodes
Le nombredesméthodesprésentéesprécédemmentestrelativementimportantmais il estpossibled'en écarter un certain nombre du fait des spécificités de notre application.
Nouséliminonsla méthodede Fourierqui n'estpasdu tout assezpréciseen ce qui nousconcerne(En travaillant en environnementindoor, la complexité de l'environnementet les nombreusesréflexionssur les obstacles,nousobligentà opter pour des résultatsprécis,et une forte capacitédiscriminante)
La méthodede Pronypourraitêtre intéressante,car si elle est trèssensibleau bruit, ce qui estunproblèmedansles applicationspratiques,ce n'est en revanchepas un problèmeen simulation,puisque les simulations sont exemptesde bruit additif. Elle est baséesur la modélisationautorégressive, d'une somme de sinusoïde. En pratique deux phénomènes l'excluent dans notre cas: -les ondesque l'on traite ne sontpastout à fait desondesplanes.Il s'ensuit quele signalspatialobtenusurunréseaulinéairedecapteursneserapastout à fait sinusoïdal,on risquedoncd'avoirungrand nombre de raies parasites.-L'extensionau réseaubidimensionneln'estpastriviale car la modélisationAR qui reposesur lacausalité,n'a pasde sensen 2D. Il existeplusieursmodélisationsAR, quenousne développeronspas dans ce mémoire.
Les méthodessuivantes(Capon,MUSIC,ESPRIT)se basentsur le calcul de la matrice d'auto-corrélationRx dessignauxreçussur les différentscapteurs.La recherchedesanglesd'arrivéeest
17/41

baséesur la recherchedes valeurspropresde cette matrice, et sur l'hypothèseque les sourcesémettentdessignauxdécorrélés.Or, dansle problèmed'unesourceet de cheminsmultiples, lessources sont par définition corrélées puisqu'elles constituent le même signal. La notion de tempsn'existepas,c'estd'ailleurs la raison pour laquellenous travaillonsdanslesimulateur en mode fréquentiel. le calcul de Rx est équivalent àRx=x n xH n
Si noussouhaitonsadapteruneméthodequi sebasesur le calculde la matriced'autocorrélationRxdu signal il faut donc créer de la diversité, ou décorréler les différents échos de la même source. C'est ce que permet de faire la méthode smoothing MUSIC (ou MUSIC lissé).
Danscetteapprocheon décomposeun réseaulinéairede capteursen sous-réseaux..Chaquesous-réseaureçoit donc un signal. Chacun de ces signaux est considérécomme une réalisationparticulière. Lorsque l'on compare les signaux reçus sur deux sous réseaux,les différencesdépendent entièrement de l'angle d'arrivée de l'onde. On crée de cette façon une diversité de sources, bien que la source soit la même initialement.
Le rangde R (donc le nombremaximalde DOAs détectables)seraau mieux égal au nombredesous réseaux ([5],[13]).
Ce principeaurait pu êtreappliquéégalementà la méthodede Capon,ou à ESPRIT.Cependant,nousresteronssur la versioninitiale baséesurMUSIC. En effet l'utilisation deESPRIT,auraitpourconséquencede réduire le nombrede raies,puisqu'il faut déjà deux sous-réseauxpour ESPRITavantle lissage.On pourraitenvisagerd'utiliser la méthodedeCaponlissée,tant il estvrai quelesavantagesde MUSIC et ESPRIT,tels queprésentésdansla littératurefont surtoutréférenceà unemeilleure robustesse au bruit, ce qui n'est pas un critère déterminant dans notre problème. Nousn'avonscependantpasredéveloppéuneméthodeCaponlissée,car rien ne permetde penserque cela apportera quelquechose par rapport à smoothing MUSIC.
Nouschoisissonsaussid'implémenterla méthodedeminimisationquadratique,présentéeen3.5,etqui nécessitede minimiser une fonction, ce qui est assezfacile à réalisersousMatlab et nouspermettra de faire un comparatif avec smoothing-MUSIC.
Dansles deuxcasil faut adaptercesméthodesau simulateur,en particulierpour tenir compteducaractère bidimensionnel de nos réseaux d'antennes virtuels.
4.2.Adaptation de ces méthodes au simulateur
Nous allons maintenantnous focaliser sur les méthodessmoothing-MUSICet la minimisationquadratique pour essayer de les adapter à notre moteur.Comme les zonescalculéespar le moteur de propagationsont en réalité une grandematricecontenantlesamplitudeset phasesenchaquepoint, il estintéressantd'exploiterle plusde donnéespossiblespour une meilleure précisiondes résultat,c'estpourquoiau lieu de nous limiter à desréseauxlinéairesdeM capteursnousallonsadapterlesméthodesaucasM*M capteurs,c'està direque nousallons simuler des réseauxcarrésd'antennes.Cetteévolution 2D permettraen plus deleveruneindéterminationdueauxréseauxlinéaires:eneffetun algorithmedeDOA appliquésurunréseaulinéaire va en étudiantles déphasagesentrecapteursdéduirela valeur de l'angle sansenconnaîtrele signe, alors qu'en exploitant les donnéesen deux dimensionson pourra faire la
18/41

différence entre un angle���
et un angle � �
4.2.1.Adaptation de smoothing-MUSIC
Nousavonsvus précédemmentqueles étapesde l'algorithmesmoothing-MUSIClinéairesont lessuivante:-couper le réseau de M capteurs en m sous réseaux-pourchaquesousréseaui calculerla matriced'autocorrélationRi du signalàpartir desvaleursdeschamps du sous réseau.-calculer la matrice d'auto corrélation globale R comme la somme des matrice Ri.-réaliserunedécompositionen valeurssingulièresde cettematrice,et trier les vecteurspropresenfonction des valeurs propres pour obtenir un espace signal et un espace bruit.-Pourchaque � calculerla matricedesvecteursdirection a � (la matricequi permetde tenircomptedes déphasagesintroduits par la géométriedu réseau)puis calculer la fonction de coût
PMUSIC
� � a � � a�
a � � E n E n� a�
-rechercher les DOA qui sont les valeurs de� correspondant à des pics de cette fonction de coût. Il va falloir adapterle calcul de a � puis le calcul de la matriced'autocorrélation, et enfin ladécomposition en sous réseaux, au cas de deux dimensions.
4.2.1.1calcul de la matrice d'autocorrélation
La précisionde l'algorithmeMUSIC dépendseulementde la taille des sousespaces,et plus ladimensiondesespacesestélevée,plus il serapossiblede détecterde sources.Si nousprenonsunsousréseaulinéaire de M capteurs,lors du calcul de R on obtiendraune matricede dimension
M MAvec un réseaucarré,nousavonsM*M capteurs,donc si nousne tenonspasencorecompteduproblèmede la corrélationentre les signauxil est possibled'avoir une matrice R de dimension
M 2 M 2 ce qui permetde détecterbeaucoupplus de sources.Pour cela il faut créer un
nouveau vecteur x(t) de dimensionM 2 1 à partir du champ reçu.
champ �x1 x
M � 1 xM � 1 M � 1
x2 xM � 2 x
M � 1 M � 2�
�xM x2M x
M 2
-> x t �x
1
x2�x
M 2
On obtient donc bien une matrice R de taille de tailleM 2 M 2
4.2.1.2calcul de la matrice des vecteurs direction
Lorsqu'unesourceSémetuneondeplanequi arrivesurun réseaulinéairedecapteursavecunangle� celà implique des déphasages entre les signaux perçus sur chaque capteur (voir figure 8).
19/41
Fig.8 : onde plane arrivant sur un réseau linéaire
On remarque assez facilement que la distance dr du déphasage entre deux capteurs vautd sin �La matricedesvecteursdirection a � qui contient tous les déphasagesapportéspar le réseauentre chaque capteur est donc la suivante:
a � �
1
e
� j2 � f
cd sin �
�
e
� j2 � f
cM � 1 d sin �
Dansle casd'unréseaurectangulaireil faut tenir comptedesdéphasagesdanslesdeuxdimensions(voir figure 9)
Fig.9 : onde plane arrivant sur un réseau carré
La distancedr estcettefois construiteà partir dedr1 et dr2 et on peutvérifier que dr1 � d sin �et dr2 � d cos �Ainsi le déphasage correspondant au champ en deux dimensions est:
20/41
déphasage � �
1 e
� j 2 � f d
ccos � �
e
� j 2 � f d
cM � 1 cos �
e
� j 2 � f d
csin �
e
� j 2 � f d
csin ��� cos � �
e
� j 2 � f d
csin ��� M � 1 cos �
e
� j 2 � f d
cM � 1 sin �
e
� j 2 � f d
cM � 1 sin �� cos � �
e
� j 2 � f d
cM � 1 sin �� M � 1 cos �
Tout commenousavonsfait pourx(t) on créeàpartir decettematricedesdéphasagesdedimensionM M un vecteur a � de dimension M 2 1 c'està dire qu'on transformela matrice en
vecteur: déphasage � ->
a � 1 e
� j2 � f d
ccos ���
e
� j2 � f d
cM � 1 cos �
e
� j2 � f d
ccos � � �
e
� j2 � f d
cM � 1 cos �� M � 1 si n � T
Nousavonsdoncmodifié lesmatricesx(t) et a � pourle cas2D, cequi a poureffet d'augmenterla dimensionde l'espacedonc le nombrede sourcesdétectables.Il faut aussiadapterla variantesmoothing en 2D, donc adapter la décomposition en sous réseaux pour le cas 2D.
4.2.1.3.décomposition en sous réseaux
La figure 10 nousmontre la décompositionen sousréseauxdu réseaudansle cas linaire, et ladécomposition dans le cas 2D que nous avons choisie.
Fig.10 : la décomposition en sous réseaux du réseau d'antennes
Dansle caslinéaire,le nombrede sousréseauxétait de M-m+1, dansle casdesdeuxdimensionsnous avons donc (M-m+1)² sous réseaux.
Nous avonsdonc adaptéla méthodesmoothing-MUSICau cas 2D, ce qui nous permettradetravailler sur plus de capteurs et d'améliorer la détection.
4.2.2Adaptation de la méthode de minimisation quadratique
Les étapes de l'algorithme de minimisation quadratique sont les suivantes:-récupérer le champs X
21/41

-calculer la matrice A des vecteurs direction.-appliquer une méthode de recherche de valeur de minimisation du critère:
mcr � X � A AH A� 1 AH X
2
Pourla méthodederécupérationdechampon fait la mêmeadaptationquepourMUSIC à savoirlatransformation de la matrice de champ en un vecteur colonne. Tout commeles méthodesde Capon,Esprit ou MUSIC, A
� �a�
1 a�
2 � a�
L , saufquedanscesméthodeson utilisait juste un critère qui tenait en compte a � . Pour pouvoir doncconstuire A � celà nécessitede connaîtrele nombreL de sources,nous proposeronsdansleparagraphesuivantune méthodequi peut permettrede déterminerce nombre.Pour le calcul de
a � on fait exactementla mêmechosequepour smoothing-MUSIC,c'està dire qu'oncalculeles déphasages et qu'on en transforme la matrice en vecteur.
4.2.2.1La minimisation du critère
Pourminimiserce critèreon utilise un algorithmededescente.On chercheunesolutioninitiale enseplaçantdansle casoù L=1 ce qui nouspermetd'obtenirunesource,puis on minimisele critèreaux moindres carré en fonction de�� � 1 � 2 � L en partant de cette solution initiale.
4.2.2.2Méthode pour évaluer le nombre de sources
L'idéal pourappliquercet algorithmeestdeconnaîtrele nombrede sourcesmaiscelan'est pas forcémentle cas.Dans l'article [19] V. Serebryakovnousproposeune techniquepourévaluerle nombrede signauxarrivant,uneautreméthodequenousproposonssebasesur la SVD,elle est très simple à mettreen oeuvremais ne permetpas de trouver un nombreimportantdesources (fonctionne seulement si L<=M-1)
Si on propageuneondeplanedevaleurinitiale 1 et d'angle � sonchampdansun environnement
de taille n*n est le suivant en posant K=� j2 � fc
d :
1 eK cos e2K cos � e n � 1 K cos eK sin eK cos � sin eK 2cos � sin � eK n � 1 cos � sin e2Ksin eK cos � 2sin eK 2cos � 2sin � �� � � � �
e n � 1 Ksin eK cos � n � 1 sin � � eK n � 1 cos � n � 1 sin
En faisant le rapport entre deux lignes successives on obtienteK sin � donc cette matrice est derang 1 (quand on connaît K toutes les lignes se déduisent de la première)
Dansle casdela superpositiondel ondesplanes,on fait l'additionde l matricesderang1, donconobtient une matriceau maximumde rang l (en fait on trouve toujoursl saufsi il y a desondesd'angles � identiques).Si on veut connaîtrele nombred'ondesplanesil suffit alorsde faire unedécompositionen valeurssingulièresd'unematricedu champ,le nombredevaleurspropres(c'està dire le rangdela matrice)serale nombrede sources.L'avantagede cettetechniqueest la simplicité à mettreen oeuvresousMatlab,maisl'inconvénientestqu'ellen'estpasoptimaleentermedenombredesourcesdétectables(car le rang de la matrice est équivalent au maximum au nombre de lignes de la matrice)
22/41
5. Résultats des simulations
Nousallonsessayerd'évaluerles deuxméthodes, tout d'aborden réalisantdestestssur desondesplanesthéoriquesquenouscréons,pour essayerde faire un comparatifdesdeux algorithmes,endégageantles caractéristiquesprincipalesde chacun.Nous pourronsensuitefaire dessimulationssur les zones de couvertures calculées par le simulateur.
5.1.Tests sur des ondes planes théoriques
5.1.1Génération d'une onde plane théorique
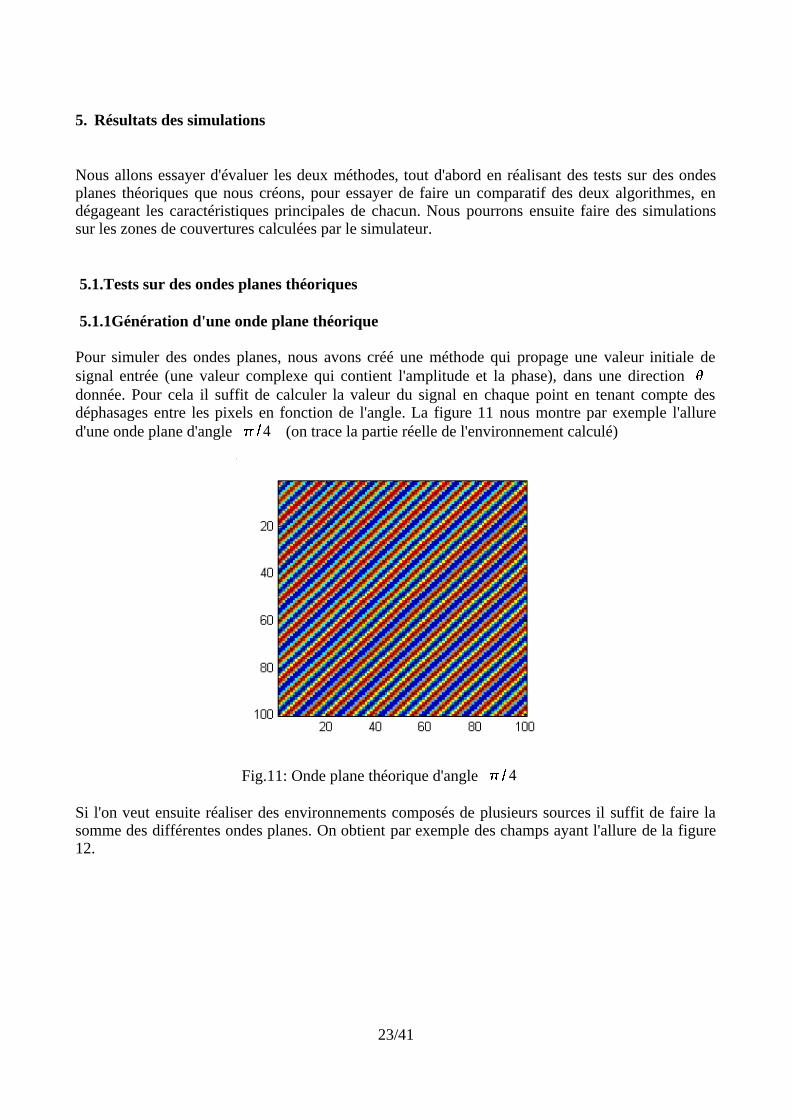
Pour simuler desondesplanes,nousavonscrééune méthodequi propageune valeur initiale designal entrée(une valeur complexequi contient l'amplitudeet la phase),dansune direction �donnée.Pour cela il suffit de calculer la valeur du signal en chaquepoint en tenantcomptedesdéphasagesentreles pixels en fonction de l'angle.La figure 11 nousmontrepar exemplel'allured'une onde plane d'angle��� 4 (on trace la partie réelle de l'environnement calculé)
Fig.11: Onde plane théorique d'angle��� 4
Si l'on veut ensuiteréaliserdesenvironnementscomposésde plusieurssourcesil suffit de faire lasommedesdifférentesondesplanes.On obtientparexempledeschampsayantl'allure dela figure12.
23/41
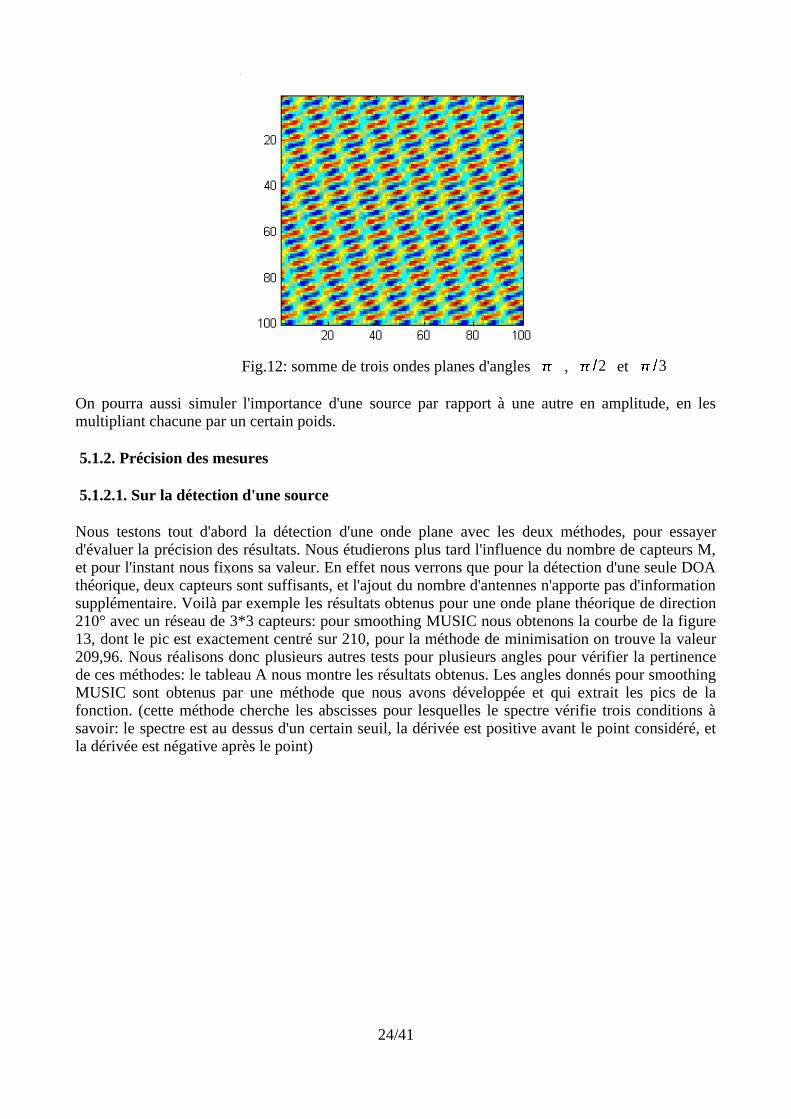
Fig.12: somme de trois ondes planes d'angles� , � � 2 et � � 3
On pourraaussisimuler l'importanced'une sourcepar rapportà une autre en amplitude,en lesmultipliant chacune par un certain poids.
5.1.2. Précision des mesures
5.1.2.1. Sur la détection d'une source
Nous testonstout d'abord la détectiond'une onde plane avec les deux méthodes, pour essayerd'évaluerla précisiondesrésultats.Nousétudieronsplus tard l'influencedu nombredecapteursM,et pour l'instantnousfixons savaleur.En effet nousverronsquepour la détectiond'uneseuleDOAthéorique,deuxcapteurssontsuffisants,et l'ajout du nombred'antennesn'apportepasd'informationsupplémentaire.Voilà parexempleles résultatsobtenuspouruneondeplanethéoriquededirection210°avecun réseaude3*3 capteurs:poursmoothingMUSIC nousobtenonsla courbedela figure13, dont le pic estexactementcentrésur210,pour la méthodede minimisationon trouvela valeur209,96.Nousréalisonsdoncplusieursautrestestspour plusieursanglespourvérifier la pertinencedecesméthodes:le tableauA nousmontrelesrésultatsobtenus.LesanglesdonnéspoursmoothingMUSIC sont obtenuspar une méthodeque nous avonsdéveloppéeet qui extrait les pics de lafonction. (cetteméthodechercheles abscissespour lesquellesle spectrevérifie trois conditionsàsavoir:le spectreestaudessusd'uncertainseuil, la dérivéeestpositiveavantle point considéré,etla dérivée est négative après le point)
24/41
Fig.13: spectre de smoothing-MUSIC pour un angle de 210° et un réseau de 3*3 antennes.
angle théorique smoothing MUSIC minimisation quadratique
45 45.0000 44.9989
90 90.0000 90.0000
135 135.0000 134.9982
180 180.0000 180.0000
225 225.0000 224.9989
270 270.0000 269.7490
315 315.0000 315.0000Tableau A: Résultats de détection d'une onde plane avec les 2 méthodes.
On remarqueque la précisiondesrésultatsdépenddu pasde résolutionque nousutilisons pourchercherlesangles,cepasderésolutioncorrespondantpourMUSIC aupasquenousfixons pourlacréationdu spectre,et pour la méthodede minimisationau pasdansl'algorithmede descente(onutilise la fonction FMINSEARCH de Matlab). Donc pour détecterune sourcel'erreur angulairemaximaleest égaleau pasde résolutionchoisi dansl'applicationdesalgorithmes(c'estd'ailleursunedescaractéristiquesdesalgorithmesdeDOA à hauterésolutionoù pluson augmentela quantitéde calculs, plus on tend vers la ''vraie'' valeur.)
5.1.2.2. Capacité à séparer des sources
Nous essayonsde vérifier cette précisiondansle cas de plusieursondesplanessuperposéesdedirectiondepropagationproche(on seplacedansle casoù le nombredecapteursestsuffisantpourdétecter le nombre de sources, nous étudierons plus tard l'évaluation de ce nombre): nous observonsle mêmerésultatque précédemmentà savoir que les deux algorithmessont capablesde séparerdeuxsourcessi la différenced'angleentrecessourcesest inférieureau pasde résolutionangulairedes algorithmes multiplié par deux.On peut illustrer cela avec la figure 14:
25/41
Fig.14 :Spectre de smoothing MUSIC avec un pas de 0.5° pour des angles de 224° et 225°.
En pratiquedansla suitedessimulationson gardeun pasderecherchede0.5°, cequi nouspermetde séparer des sources voisines de 1° et qui serait un résultat très satisfaisant pour notre simulateur.
5.1.3.Influence de la distance inter capteurs
Si ces algorithmesnous semblentdonner des résultatssatisfaisantsil doit y avoir certainesconditionsà respecterpour queles résultatssoientpertinents.La premièreconcernela dispositiongéométriquedes capteursdansl'espace,et en particulier la distanceentre ceux ci. Nous avonseffectuéplusieurstestsavecles deuxméthodespourévaluerl'erreursur l'anglemesuréen fonctionde la distance entre les capteurs.
5.1.3.1.avec smoothing MUSIC
Fig.15 : Spectre de smoothing MUSIC pour un angle de 220° et pour différentes valeurs de r.
26/41
La figure 15 nousmontrele spectreobtenuavecsmoothingMUSIC pour uneDOA théoriquede220°,pour lequelon fait varier le rapportr desorteque d �
���r . Nousobservonsquepourune
valeurder inférieureouégaleà 2 il y apparitiondepicssecondairessur le spectre,etnousavonspuvérifier avecde nombreuxautrescasquecettevaleur r doit êtresupérieureà 2 pour qu'uneDOAdonne un seul pic sur le spectre.
5.1.3.2.avec la méthode de minimisation
En ce qui concernela méthodede minimisationquadratique,nous avonstracésur la figure 16l'erreur obtenuesur le résultaten faisantvarier la valeur de r, et nousavonspu vérifier que lesrésultats ne sont corrects que pour un rapport r supérieur à 2.
Fig.16 : erreur sur la mesure de DOA par la méthode de minimisation en fonction du rapport r et pour un angle de 220° et un réseau de 3*3 capteurs.
Ainsi, nousavonsmontréque pour que cesalgorithmesde DOA soientefficaces,il faut que ladistanceentrelescapteurssoit inférieureà
���2 . C'estla conditiondevalidité decesalgorithmes,
et si la distanceestsupérieurel'informationcontenuedanslesdéphasagesnepermetpasdedéduireles angles.
On peut interprêterce résultatpar le théorèmede Shannon:En effet, une distanceinter-capteurssupérieureà
���2 est équivalent à un échantillonnagedu champ electromagnétiqueà une
fréquence supérieure à deux fois la fréquence spatiale de l'onde.
Dansla suitede nossimulationsnousnousplaceronsdansle casoù la distanceentreles antennesesttelle que d �
���6 carc'estunevaleurqui respectela conditionquenousvenonsdemontrer,et
27/41
c'estaussile pasutilisé par défautdansle moteurde propagation.(Remarque:Dansle simulateurles valeursgénéralementutiliséespour simulerun réseaumobile sontune fréquencede 1 GHz etune vitesse c=3e8 m.s-1 ce qui représente donc une distance entre antennes de 5 cm)
5.1.4. Nombre de sources détectables
Si cesméthodesde DOA noussemblenttoutesdeuxintéressantes, car ellesdonnentdesrésultatsaussiprécisquela résolutionà laquellenoussouhaitonsmonter,et ellesrespectentlesconditionsdedistancesentrecapteursdenotremoteurdepropagation,il restele problèmedu nombredesourcesdétectablesqui dépendentièrementdu nombredecapteurs.Ainsi lorsqu'ontravaillerasur leszonesde couverturescalculéespar le moteur, l'environnementin door peut vite devenir complexe(nombreuxmurset obstacles,voir exempleen 5.6) ce qui peutentraînerun nombretrèsélevéderéflexions du signal sur les parois, donc une seule sourceréelle sera en fait vue comme denombreusessourcesvirtuelles à causedesnombreuxtrajets. Il faut donc être capablede savoircombien on détectera d'échos avec un nombre donné de capteurs.
5.1.4.1 avec smoothing MUSIC
Pour la méthode smoothing MUSIC, nous avons déjà vu précédemmentque n'ayant qu'unéchantillonde mesurele rangde la matriced'autocorrélationseraégalau nombrede sousréseauxdu réseauxde capteurssoit (M-m+1)², donc si on projettesur un espacebruit de taille minimalec'està dire 1 on a un espacesignal de dimension(M-m+1)²-1 qui représentele nombremaximalthéorique de sources pouvant être détecté.
La figure 17 illustre lesrésultatsquenousavonsobtenuspourunenvironnementthéoriquecomposéde la somme de 8 ondes planes pour 3 cas différents.
Fig.17: Spectre de smoothing MUSIC obtenu pour un environnement composé de 8 sources et pour des réseaux de N*N capteurs et des sous réseaux de n*n capteurs.
Le cas1 permeten théoriede détecter(3-2+1)²-1soit 3 sources,le deuxièmecas8 sourceset letroisièmecas15 sources.Le cas2 auraitdoncdu suffire enthéoriepourdétecterles8 sourcesmais
28/41
nousnedistinguonsenréalitéque7 pics,c'estpourquoiil faut toujoursavoir unnombredecapteurssupérieur au nombre théorique minimal (comme dans le cas 3 par exemple)
Celaillustre doncle problèmedu dimensionnementqui esttrèsimportantà prendreencompte,plusle nombredecapteursseraélevéplus leschancesd'avoirun résultatcorrectsontélevées.La figuresuivantenousmontrele mêmespectrepourun environnementde12 ondesplanes,avecenhautunsur dimensionnement du nombre de capteurs minimal et en bas un nombre de capteurs insuffisant:
Fig.18 :détection de 12 sources de même amplitude avec en haut 8*8 capteurs et en bas 3*3 capteurs.
Nombre optimal de sous réseaux
Commenous l'avonsvu précédemment,smoothingMUSIC fait intervenir la taille du réseaudecapteurset la taille dessousréseaux,il y a doncdeuxparamètres(M et m) à utiliser,alorsquepourla méthodedeminimisationseulle nombreM intervientc'estpourquoiil estintéressantdechercherla valeuroptimalepourm enfonctiondeM. (ainsion supprimeceparamètresupplémentaireet lesdeux méthodes seront mieux comparables)Avec smoothingMUSIC, plus le nombrede sousréseauxestélevépluson détectedesources(carplus le rangde R seraimportant),maissi le nombredesousréseauxestélevécelasignifie quelessousréseauxsontde petite taille d'où unedétectionmoinsélevée(car R serade plus petite tailledonc moins de valeurs propres)! Il faut trouver le compromis entre ces deux facteurs.On a donccherchépourdifférentestaillesdesréseauxla taille desousréseauqui permetdedétecterun nombre maximal de sources.
M m optimal
3 2
4 2
5 3
29/41
M m optimal
6 3
7 4
8 4Tableau B: dimension moyenne des sous réseaux de taille m*m permettant de trouver le plus de sources possibles avec des réseaux de M*M capteurs.
On en déduit expérimentalementque la valeur m optimale est égale à M/2 arrondi à l'entiersupérieur.C'estla valeurqu'ongarderadansla suitedessimulations,maisessayonstout d'aborddeprouver ce résultat:
Le nombre maximal de sourcesdétectablesest égal au minimum entre le nombre de sourcesdétectablespar un sousréseau(m²-1) et le nombrede sousréseaux-1 (nombrede valeurspropresnon nulles) ce qui ce traduit par:Lmax � Min M � m
�1 ² � 1,m² � 1
Sur l'intervalle d'intérêt,0<m<M, la deuxièmefonction (m²-1) estcroissanteen m et la première((M-m+1))²-1 décroissante.Donc le minimum obtenu pour 0<m<M, est tel que les 2 fonctions soient égalesce qui est
équivalent à M-m+1=m soit m �M
�1
2Commem est un entier cela correspondbien à l'arrondi à la valeur supérieurede M/2 trouvéprécédemment.
A partir de là on peutdéduirele tableaumontrantle nombredecapteursthéoriquesnécessaires(parla formule Lmax � M � m
�1 ² � 1 � M � M
�1
�2
�1 ² � 1 ) puis pratique (valeur moyenne
obtenue par nos test) suivant le nombre de sources.
Nombre de sources Ldétectables
Nombre théorique de capteursnécessaires
Nombre moyen réel decapteurs nécessaire
1 2*2 2*2
2 3*3 3*3
3 3*3 3*3
4 4*4 4*4
5 4*4 4*4
6 4*4 4*4
7 4*4 5*5
8 4*4 5*5 Tableau C: Nombres théoriques et pratiques de capteurs nécessaires à détecter L sources
5.1.4.2.avec la méthode de minimisation
Pour la méthodede minimisationquadratiqueon peux testerle nombrede sourcesdétectablesenfonction de deux critères:soit le nombrede sourcesest connu par l'utilisateur, et on appliquel'algorithme,soit le nombreestinconnuet il faut tout d'abordestimerce nombreavantd'appliquer
30/41

l'algorithme.(soit par la méthodeproposéedansl'article [16] par la minimisation d'un termeenfonctiondu nombrede sources,maiscetteméthodeestlourdeen tempsennousn'obtenonspasderésultatsintéressants, soit par la méthodede SVD que nousavonsdécriteen 4.2.2.2et quenousutilisonsici) Voici lesnombredeDOA détectablesmoyensquenousobtenonsaprèsavoir effectuédes tests sur plusieurs environnements.
Nombre de sources Ldétectables
Nombre de capteurs nécessaire(cas L connu)
Nombre de capteurs nécessaire(cas L inconnu)
1 2*2 2*2
2 3*3 3*3
3 3*3 4*4
4 4*4 5*5
5 4*4 6*6
6 4*4 7*7
7 5*5 8*8
8 5*5 9*9TableauB : nombredecapteursnécessairespourdétectercorrectementles sourcesavecuneerreur
inférieure à 1%.
On a vérifié quelesdeuxméthodeschoisiesontéquivalentesauniveaude la précisiondesrésultatsobtenus,dela capacitéangulaireà séparerdessources,et dela conditiond'espacementmaximaldescapteurs d'une distance de��� 2 .On a tout de mêmeremarquéun avantagede la méthodesmoothingMUSIC qui est la capacitéàdétecterlessourcesenutilisantun nombreinférieurdecapteurs.Il resteàvoir si cespropriétéssontaussivérifiéespour les ondescalculéespar le moteur,et en particulier le fait qu'ona travaillé surdes ondesplanespour nos tests,alors qu'on ne fait pas cette approximationdansle moteur depropagation.
5.2.Tests sur des zones de couverture du moteur de propagation
Nous allons maintenanttravailler sur desenvironnementscalculéspar le moteurde propagation.Nous utilisons le moteurde propagationdéveloppépar le CITI soussa versionMatlab, et nousrécupéronsunematricedesortiecontenantlesvaleursdel'amplitudeet dela phaseenchaquepointde l'environnement.La distanceentreles capteursest de
� � 6 ce qui représenteunedistancede5cm.
5.2.1.Environnement composé d'une source
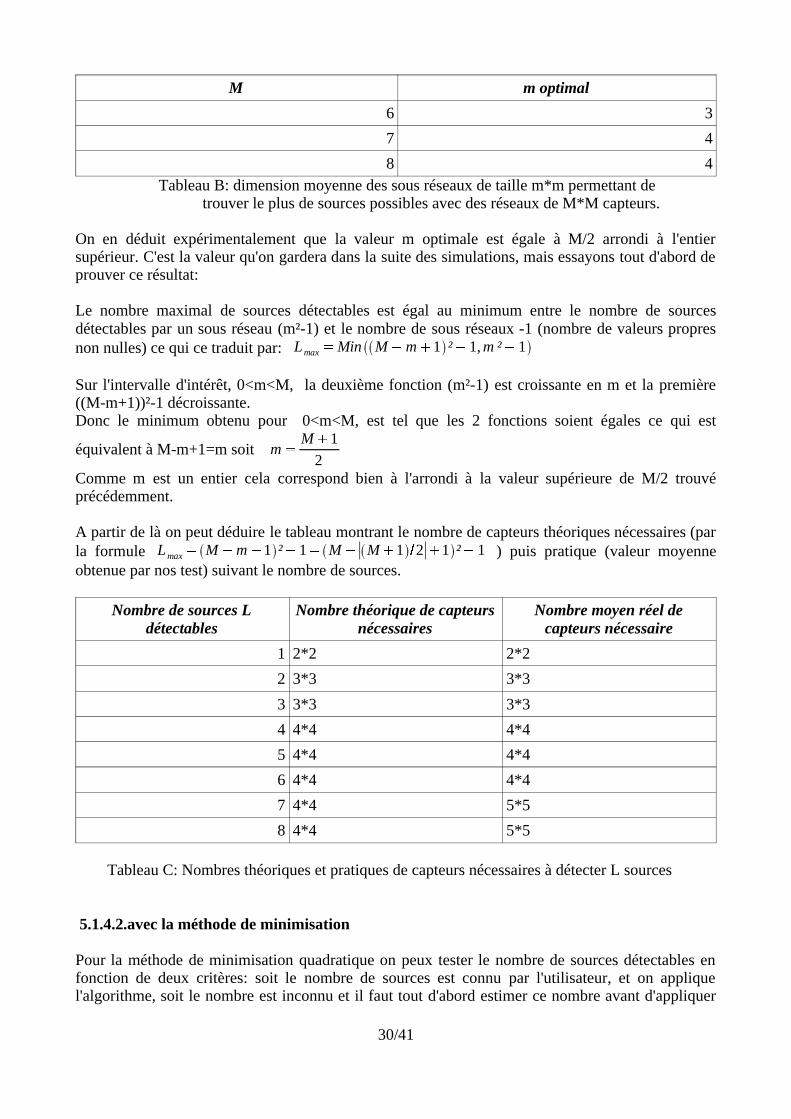
Le premierenvironnementquenouschoisissonsd'utiliser pour nostestsest la zonede couvertured'une source placée dans du vide. Voila la représentation de la valeur absolue du champ calculé.
31/41
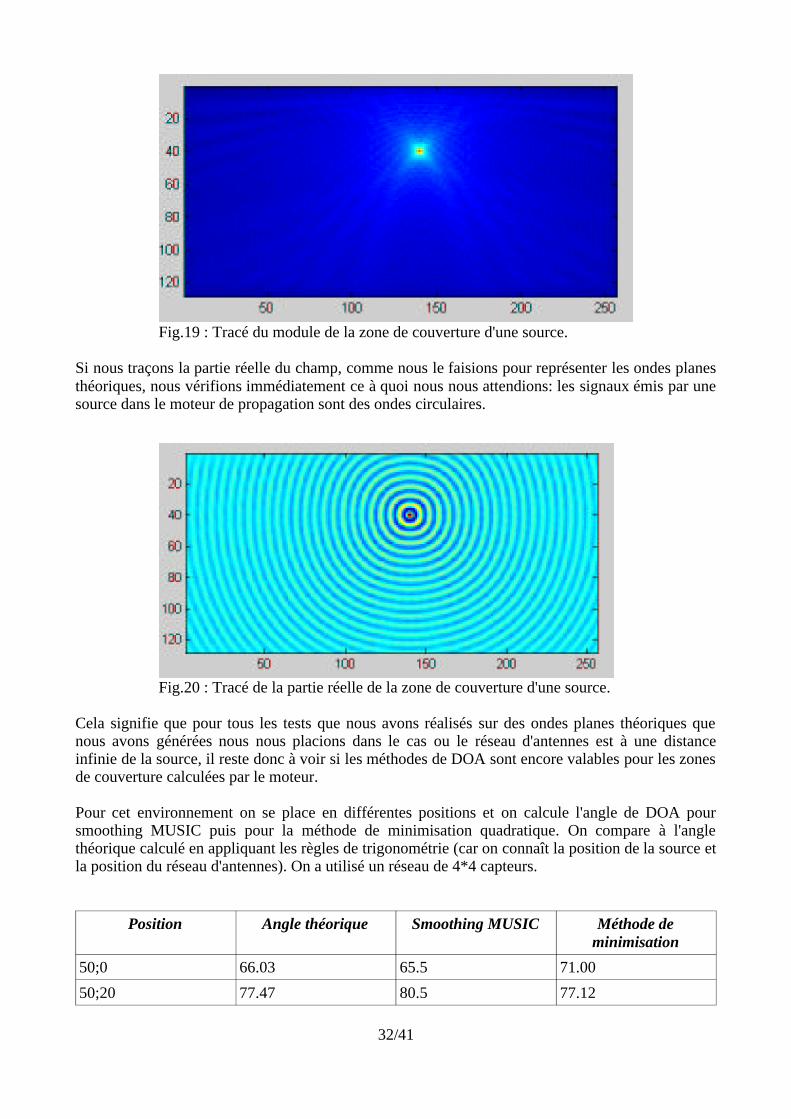
Fig.19 : Tracé du module de la zone de couverture d'une source.
Si noustraçonsla partieréelledu champ,commenousle faisionspourreprésenterlesondesplanesthéoriques,nousvérifionsimmédiatementceà quoi nousnousattendions:les signauxémisparunesource dans le moteur de propagation sont des ondes circulaires.
Fig.20 : Tracé de la partie réelle de la zone de couverture d'une source.
Cela signifie quepour tous les testsquenousavonsréaliséssur desondesplanesthéoriquesquenousavonsgénéréesnous nousplacionsdansle cas ou le réseaud'antennesest à une distanceinfinie dela source,il restedoncà voir si lesméthodesdeDOA sontencorevalablespourleszonesde couverture calculées par le moteur.
Pour cet environnementon se placeen différentespositionset on calcule l'angle de DOA poursmoothingMUSIC puis pour la méthodede minimisation quadratique.On compareà l'anglethéoriquecalculéenappliquantlesrèglesdetrigonométrie(caron connaîtla positiondela sourceetla position du réseau d'antennes). On a utilisé un réseau de 4*4 capteurs.
Position Angle théorique Smoothing MUSIC Méthode deminimisation
50;0 66.03 65.5 71.00
50;20 77.47 80.5 77.12
32/41
Position Angle théorique Smoothing MUSIC Méthode deminimisation
50;40 90.00 91.5 90.00
50;60 102.53 103.0 94.29
50;80 113.97 112.0 111.62
50;100 123.69 124.5 122.21 Tableau C: angles obtenus en différents points de l'espace avec les deux méthodes.
Les deux méthodespermettentdonc d'estimerl'angle de DOA pour une sourceavec dans cetexempleuneerreurmaximalede 4% pour MUSIC et 8% pour la méthodede minimisation.Nousétudions ensuite l'influence du nombre de capteurs pour la cinquième position (anglethéorique=113.97°)
Nombre de capteurs Smoothing MUSIC Méthode de minimisation
2*2 97.0 111.07
3*3 111.5 116.55
4*4 114.0 111.62
5*5 114.0 110.22
6*6 114.5 112.28
7*7 116.0 199.38
8*8 115.0 188.00
9*9 116.5 181.04
10*10 116.0 176.97 Tableau D: angles obtenus en fonction du nombre de capteurs avec les deux méthodes.
On remarqueimmédiatementles faits suivants:la méthodede minimisation donneun meilleurrésultatpour un nombrede capteursfaible (2*2) où smoothingMUSIC échoue,mais par contrequandle nombrede capteursdevienttrop élevél'algorithmede minimisationn'estplus capablededonnerun résultatcorrect(la fonctionà minimiserdevienttrèscomplexeet lescalculsprennentdutemps,cela est très probablementdu au fait que, la taille du réseauaugmentantle modèleondeplanene s'appliqueplus bien) ce qui n'estpasle casavecsmoothingMUSIC. On remarqueaussiquepourMUSIC, tantquele nombredecapteursestsuffisant,nousn'observonspasd'améliorationdu résultatquandle nombredecapteurscroit. (le fait d'ajouterunemultitudedecapteursnepermetpas de tendre plus vers la ''vraie'' valeur.)
5.2.2 Environnement composé de deux sources.
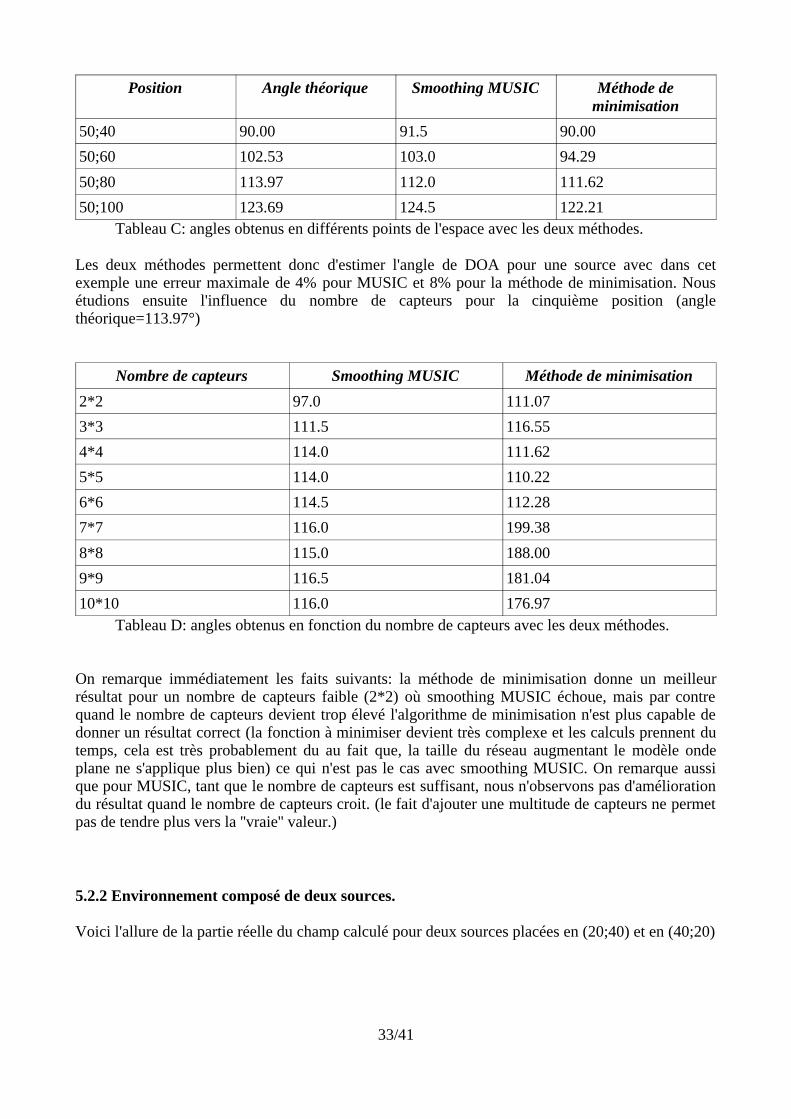
Voici l'allure de la partie réelle du champ calculé pour deux sources placées en (20;40) et en (40;20)
33/41
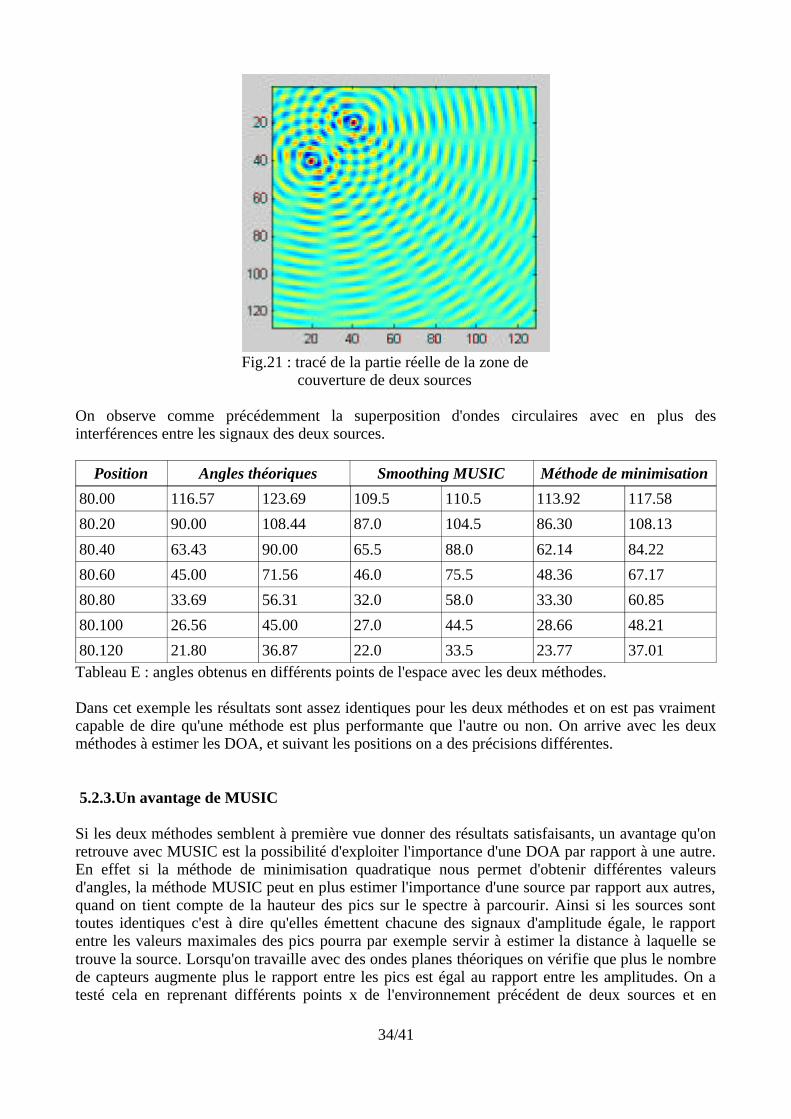
Fig.21 : tracé de la partie réelle de la zone de couverture de deux sources
On observe comme précédemmentla superposition d'ondes circulaires avec en plus desinterférences entre les signaux des deux sources.
Position Angles théoriques Smoothing MUSIC Méthode de minimisation
80.00 116.57 123.69 109.5 110.5 113.92 117.58
80.20 90.00 108.44 87.0 104.5 86.30 108.13
80.40 63.43 90.00 65.5 88.0 62.14 84.22
80.60 45.00 71.56 46.0 75.5 48.36 67.17
80.80 33.69 56.31 32.0 58.0 33.30 60.85
80.100 26.56 45.00 27.0 44.5 28.66 48.21
80.120 21.80 36.87 22.0 33.5 23.77 37.01Tableau E : angles obtenus en différents points de l'espace avec les deux méthodes.
Danscetexempleles résultatssontassezidentiquespour lesdeuxméthodeset on estpasvraimentcapablede dire qu'uneméthodeest plus performanteque l'autreou non. On arrive avecles deuxméthodes à estimer les DOA, et suivant les positions on a des précisions différentes.
5.2.3.Un avantage de MUSIC
Si lesdeuxméthodessemblentà premièrevue donnerdesrésultatssatisfaisants,un avantagequ'onretrouveavecMUSIC estla possibilitéd'exploiterl'importanced'uneDOA par rapportà uneautre.En effet si la méthodede minimisation quadratiquenous permet d'obtenir différentesvaleursd'angles,la méthodeMUSIC peutenplusestimerl'importanced'unesourcepar rapportauxautres,quandon tient comptede la hauteurdespics sur le spectreà parcourir.Ainsi si les sourcessonttoutesidentiquesc'està dire qu'ellesémettentchacunedessignauxd'amplitudeégale,le rapportentreles valeursmaximalesdespics pourrapar exempleservir à estimerla distanceà laquellesetrouvela source.Lorsqu'ontravailleavecdesondesplanesthéoriqueson vérifie queplusle nombrede capteursaugmenteplus le rapportentreles pics estégalau rapportentreles amplitudes.On atestécela en reprenantdifférents points x de l'environnementprécédentde deux sourceset en
34/41

calculant l'erreur entre le rapport r 1 �distance source 1,x
distance source2 ,xthéorique que l'on mesure,et le
rapport r 2� hauteur pic source1
hauteur pic source2que l'on mesuresur le spectrede MUSIC. La figure 22 nous
permet de voir qu'à partir d'un réseaude 4*4 capteurson a une erreur inférieure à 20% surl'évaluation des distances à laquelle se trouvent les deux sources.
Fig.22: erreur entrer1 et r2 en pourcentage (tracé de
r 2 � r 1
r 1
)
5.3. Choix d'une méthode
Après les différents tests que nous avons effectués, si ces deux méthodessemblent assezéquivalentesau niveaudesrésultatsquandon travaille sur desondesplanesthéoriques,il ressortnéanmoins des avantages pour la méthode MUSIC.En effet MUSIC a pour premieravantagede ne pasnécessiterla phasede recherchepréalabledunombre de sources,contrairementà la méthodede minimisation quadratique.Les principalestechniquespour détecterle nombrede sourcesavecla méthodede minimisationquadratiquesontcelleproposéepar P.Moghaddamdans[16] qui réaliseuneminimisationpourchercherunevaleuroptimalede L maisnousn'obtenonspasde résultatssatisfaisant,ou la méthodede SVD quenousavons proposée mais qui ne permet pas de détecter un nombre optimal de sources. Le deuxièmeavantagede la méthodeMUSIC estla possibilitéd'exploiterla hauteurdespics pourconnaître l'importance d'une source par rapport aux autres.
Poursimulerla phasededétectiondesanglesd'arrivéed'uneantenneintelligentedansle moteurdepropagation,nouschoisissonsdoncla méthodesmoothingMUSIC quenousavonsadaptée,qui depart les avantages précédemment cités est plus intéressante.
5.4. Exemple d'un environnement plus complexe
Ayant choisi la méthodesmoothingMUSIC, nousallonseffectuerdestestssur un environnementcomplexecalculépar le moteur.Commenousl'avonscité précédemmentle simulateurtravaille àunefréquencede 1 GHz et unevitessec=3e8m.s-1. Commele moteurestconfigurésur un pasderésolutionde
���6 on a doncunedistanceentrecapteursde5 cm.Essayonsdesimulerlesrésultats
qu'on obtiendraitavecune smart antennade dimension20cm X 20cm (ce qui sembleune tailleréalisable),ona doncunréseaude4*4 capteursqui devraitpermettreaumieuxdetrouver(4-2+1)²-1=8 DOAs. Nousutilisonsun environnementformé de quatreobstacleset unesourceplacéedans
35/41
l'angle supérieur droit. La figure 23 nous montre l'allure de la zone de couverture de cette source.
Fig.23 : Tracé du logarithme décimal de la valeur absolue de la zone de couverture)
Nousallonsmaitenantobserverles DOA obtenuespourdifférentspointsde l'environnement.Nouschoisissons les points A, B, C et D suivants:
A(200;60)B(125;10)C(100;10)D(50;60)
La figure 24 nous représente les spectres obtenus pour ces différents points:
point A point B
point C point D
Fig.24 : Spectres de smoothing MUSIC obtenu pour l'environnement précédent pour les points A, B, C et D. (ordonnées en absisse décimal et non log)
36/41
remarque:contrairementauxtestsprécédentsle spectren'estpastracéendécibel,ainsiun pic deuxfois plus petit que l'autre correspond seulement à une atténuation de 3dB.
Lesanglesobtenussontdonclessuivants(lesanglessontcalculésparrapportà un axevertical,enpartant du bas, dans le sens trigonométrique):
point coordonnées Angles trouvés
A 200;60 24° / 139° / 242°
B 125;110 129.5°
C 100;10 95° / 282°
D 50;60 94° / 263Tableau F : Valeurs des angles correspondant aux spectres de la figure 24.
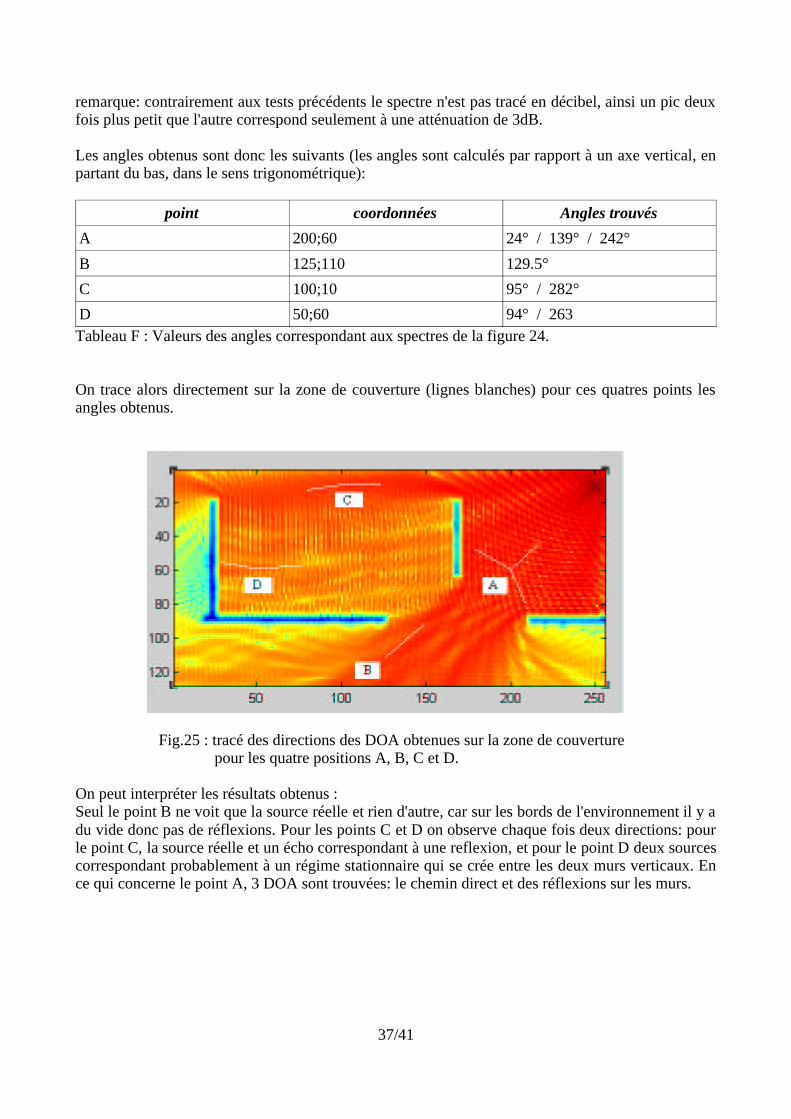
On tracealorsdirectementsur la zonede couverture(lignesblanches)pour cesquatrespoints lesangles obtenus.
Fig.25 : tracé des directions des DOA obtenues sur la zone de couverture pour les quatre positions A, B, C et D.
On peut interpréter les résultats obtenus :Seulle pointB nevoit quela sourceréelleet rien d'autre,carsurlesbordsdel'environnementil y adu vide doncpasderéflexions.PourlespointsC et D on observechaquefois deuxdirections:pourle pointC, la sourceréelleet un échocorrespondantà unereflexion,etpourle pointD deuxsourcescorrespondantprobablementà un régimestationnairequi secréeentreles deuxmursverticaux.Ence qui concerne le point A, 3 DOA sont trouvées: le chemin direct et des réflexions sur les murs.
37/41

6. Conclusion, Perspectives
Aprèsavoir présentél'intérêt de simuler les antennesintelligentesdansun simulateurde réseauxmobiles en milieu in door, nous avons montré que notre but était de calculer larépartitionangulairedu signal,à partir d'un bloc imageextraitdu champcalculépar le simulateur.Pour se faire nous avonsdécidéd'implémenterles méthodesde traitementdu signal appeléesalgorithmes de DOA.Aprèsavoir présentébrièvementlesdifférentesméthodesfréquemmentemployéespourla détectiondesanglesd'arrivée,nousavonsressortideuxméthodesintéressantesétantdonnénosconditionsdetravail: -La méthodesmoothingMUSIC qui estuneaméliorationdela méthodedesousespacesMUSIC etqui par unephasepréalablesupprimela corrélationdessignauxdueau fait quenousnedisposonsd'un échantillonde mesureuniqueet queles signauxsontcorrélés(car ce sont les échosdusauxréflexions d'une même souce).-La méthode de minimisation quadratique qui considère la détection des angles comme un problèmeinverse et qui recherche les angles par un algorithme de descente.Nousavonsensuiteadaptécesméthodesaucasdenotremoteurc'està dire enutilisantdesréseauxbidirectionnels,et nousavonssimulé les résultatsen travaillant tout d'abordsur desondesplanesthéoriques,puis enfin sur des zonesde couverturescalculéespar le moteur.Ces testsnous ontpermisdechoisirdepréférencela méthodesmoothingMUSIC qui présentequelquesavantagesauxniveau des résultats et de la simplicité de mise en oeuvre.Nous avonsconclu nosexpérimentationspar l'exempled'un environnementcomposéd'obstacles,pour mettre en évidence la detection des différents echos dus aux obstacles.
Nous sommesmaintenantcapablesde trouver, à partir d'un petit bloc image de lasimulation calculéepar le moteur de propagation,les directionsdanslesquellesse trouvent lesdifférents échos de l'environnement indoor. La prochaine étape qui serait intéressante à implémenterestla simulationdestraitementsd'antenneseffectuésparl'antenneintelligentepourmettredeslobesprincipaux et des zéros dans les directions des sources et des interférents.De plus on pourraitaussieffectuerdesmesuresréellesen utilisant un vrai réseaud'antennes,pourvalider les résultats de nos simulations.
38/41
Bibliographie
[1] Mark H. Brady. Angle Resolution Techniquesfor Cellular Radio. EE 359 WirelessCommunications, December 2001, 12p.
[2] DonaldF. Breslin.AdaptiveAntennaArrays Appliedto PositionLocation: Thesissubmittedtothe Faculty of the Virginia Polytechnic Institute and State University; August 1997, 67p.
[3] Mats Cedervall, Randolph L. Moses. Efficient Maximum Likelihood DOA Estimation forSignalswith Known Waveformsin the Presenceof Multipath. In: IEEE Transactionson SignalProcessing, vol 45 n°3, March 1997. pp. 808-810.
[4] C-N Chuah,G.J. Foschini, R.A. Valenzuela.Capacity Growth of Multi-Element Arrays inIndoor and Outdoor Wireless Channels. EECS Department, University of California.
[5] A. Delis, G. Papadopoulos.Enhencedforward/backwardspatial filtering methodfor DOAestimationof narrowbandcoherentsources.In: IEEE Proc Radar,Sonar,vol 143 n°1, February1996. pp. 10-15.
[6] Giacinto Gelli, Luciano Izzo, Antonio Napolitano, Luigi Paura. Multipath-channel identificationby an improved Prony algorithm based on spectral correlation measurements. In: Signal Processing31, pp. 17-29, june 1992.
[7] JF.GiovanelliProblèmesInverses.Coursdu DEA Imageset Systèmesde l'INSA Lyon. Année2002-2003, 35p.
[8] PanagiotisD. Karaminas,AthanassiosManikas.Super-ResolutionBroad Null BeamformingforCochannel Interference Cancellation in Mobile Radio Networks. In: IEEE Transactionsonvehicular Technology, vol 49 n°3, May 2000, pp689-697.
[9] Suk Chan Kim, Iickho Song, SeokhoYoon, So Ryoung Park. DOA EstimationofAngle-PerturbedSourcesfor WirelessMobile Communications.In: IEICE Trans.Commun.Vol E83-Bn°11 November 2000.
[10] Ching-WenMa, Ching-ChengTeng.Detectionof CoherentSignalsUsingWeightedSubspaceSmoothing.In: IEEE Transactionson AntennasansPropagation,vol 44 n°2, fevruary 1996.pp.179-187.
[11] S.Marcos.Lesméthodesà hauterésolution-Traitementd'antenneet analysespectrale.EditionHermes, Paris 1998, 783p.
[12] T.G. Manickam,R.J. Vaccaro,D.W. Tufts. A Least-SquaresAlgorithm for Multipath Time-DealayEstimation.In: IEEE Transactionson SignalProcessing,vol 42 n°11,November1994,pp.3229-3233.
39/41
[13] A. Manikas,T.RatnarajahBEng,JinsockLee.Evaluationof SuperresolutionArray-Techniquesas applied to CoherentSources.In: InternationalJournalof Electronics:22nd September1995Published: January 1997, 31p.
[14] CherianP. Mathews,Martin Haardt,MichaelD. Zoltowski. PerformanceAnalysisof Closed-Forme, ESPRITBased2D Angle Estimator for RectangularArrays. In: IEEE Signal ProcessingLetters, vol 3 n°4 April 1996, pp124-126.
[15] Tuan Nguyen,Zhi Ding. Blind CMA Beamformingfor NarrowbandSignalswith MultipathArrivals. In: Internationaljournalof AdaptiveContralandSignalProcessing,vol 12, pp. 157-172,1998.
[16] Peyman Poor Moghaddam,Hamidreza Amindavar. Direction of Arrival Estimation inMultipath: a New Approch. Amir Kabir University of technology. Hafez Ave, 15914, 4p, 1999.
[17] Marius Pesavento,Alex B. Gershman,Martin Haardt. Unitary Root-MUSICwith a Real-Valued Eigendecomposition:A Theoretical and Experimental PerformanceStudy. In: IEEETransactions on Signal Processing, vol 48, n°5 pp1306-1314, May 2000.
[18] Katia Runser.La PlanificationdeRéseauxLocauxsansFils: RapportdestagedeDEA Imageset Systèmes INSA Lyon, 2002, 43p.
[19] GeorgeV. Serebryakov.Direction-of-Arrival Estimationof CorrelatedSourcesby AdaptiveBeamforming.In: IEEE Transactionson SignalProcessing,vol 43 n°11,November1995.pp.2782-2796.
[20] Shiann-Shiun,Garret Toshio Okamoto,GuanghanXu. ExperimentalEvaluation of SmartAntennaSystemPerformancefor WirelessCommunications.In: IEEE Trans. on AntennasandPropagation, vol 46 n°6, june 1998. pp749-754.
[21] Mehrdad Soumekh. Fourier Array Imaging. PTR Prentice Hall Edited in 1994. 559p.
[22] Kah-Chye Tan, Geol-Lian Oh. Estimating Directions-of-Arrival of Coherent Signals inUnknownCorrelatedNoisevia SpatialSmoothing.In: IEEE Transactionson SignalProcessing,vol45 n°4, April 1997. pp. 1087-1091.
[23] John S. Thompson,PeterM. Grant, BernardMulgrew. Performanceof Spatial SmoothingAlgorithmsfor CorrelatedSources.In: IEEE Transactionson SignalProcessing,vol 44 n°4, April1996. pp. 1040-1046.
[24]KrishnarajVarma.Time-Delay-EstimateBasedDirection-of-Arrival Estimationfor SpeechinReverberantEnvironments:Thesis submitted to the Faculty of The Bradley DepartmentofElectrical and ComputerEngineeringVirginia PolytechnicInstitute and StateUniversity, october2002, 140p.
[25] Vladimir I. Vasilishin Kharkov, Direction of Arrival Estimationvia Unitary TLS-ESPRITAlgorithm with structureweighting.In: IEE Trans.On Signal Processing,vol39,pp.975-977,April1991.
[26] MichaelD. Zoltowski,Martin Haardt,CherianP.Mathews,Closed-Form2D AngleEstimationwith Rectangular Arrays in Element Space or Beamspacevia Unitary ESPRIT. In IEEETransactions on Signal Processings, vol44 n°2, February 1996, pp. 316-328.
40/41
[27] P. Gourmay, P. Nicolas. Analyse Spectrale Cyclique et Analyse temps-fréquencepourl'identificationAutomatiquedetransmissions. ThomasonCFS-DivisionRGSDocumentation.1995,4p.
[28] S.V. Schell. Performanceanalysisof the cyclic MUSIC methodof direction estimationforcyclostationarysignals.In: IEEE Transactionson SignalProcessing,vol 42 n°11,November1994,pp. 3043-3053.
[29] J-M. Gorce,S. Ubeda.Propagationsimulationwith the ParFlow method:fast computationusinga multi-resolutionscheme. In: IEEE 54th Vehicular TechnologyConference,Fall 2001,NJ,USA, October 2001.
[30] B. Chopard,P.O.Luthi, J;F.Wagen,A lattice boltzmanmethodfor wavepropagationin urbanmicrocells. In: IEEE Proceedings-Microwaves,Antennasand Propagation,vol 144 pp. 251-255,1997.
41/41


















