Electroniques des composants et systèmes - Djamel...
46
Electroniques des composants et systèmes Enseigné par : Mme. Iness NEDJI MILAT 1 Université Constantine 2 – Abdelhamid Mehri Faculté des NTIC Département MI Cours de L1 - TRONC COMMUN DOMAINE MATHEMATIQUES – INFORMATIQUE 2016-2017
Transcript of Electroniques des composants et systèmes - Djamel...

Electroniques des composants et systèmes
Enseigné par :
Mme. Iness NEDJI MILAT
1
Université Constantine 2 – Abdelhamid MehriFaculté des NTICDépartement MI
Cours de L1 - TRONC COMMUN DOMAINE MATHEMATIQUES – INFORMATIQUE2016-2017

Chapitre 03 :
Architecture de base et carte mère
2

Qu’est ce qu’une architecture?
• L'architecture d'un système à microprocesseurreprésente l’organisation de ses différentes unitéset de leurs interconnexions.
• Le choix d'une architecture est toujours lerésultat d'un compromis :– entre performances et coûts,
– entre efficacité et facilité de construction,
– entre performances d'ensemble et facilité deprogrammation
– etc …
3

Architecture de base des ordinateurs (Modèle de von Neumann)
• Pour traiter une information, un microprocesseurseul ne suffit pas, il faut l’insérer au sein d’unsystème minimum de traitement automatique del’information.
• John Von Neumann est à l'origine d'un modèle demachine universelle de traitement automatiquede l’information (1946) appelé le modèle de vonNeumann
• Cette architecture sert de base à la plupart dessystèmes à microprocesseur actuel (ordinateurs).
4

Modèle de von Neumann
5
Ce modèle est composé des éléments suivants :1. une unité centrale de traitement (CPU) qui
traite les informations,2. une mémoire centrale (MC) qui stocke
temporairement ces informations à traitées3. des interfaces d’entrées/sorties qui
permettent d’assurer la communication entrele microprocesseur et les périphériquesd’E\S.
Les différents organes du système sont reliés pardes voies de communication appelées bus

Modèle de von Neumann
6
de traitement

Carte mère
• La carte mère est l'un des éléments essentielsd'un ordinateur.
• Elle assure la connexion physique desdifférents composants (CPU, mémoire, carted'entrées/sorties, ...) par l’intermédiaire dedifférents bus (adresses, données etcommande).
• La qualité de la carte mère est vitale puisquela performance de l’ordinateur dépendénormément d’elle.
7

8
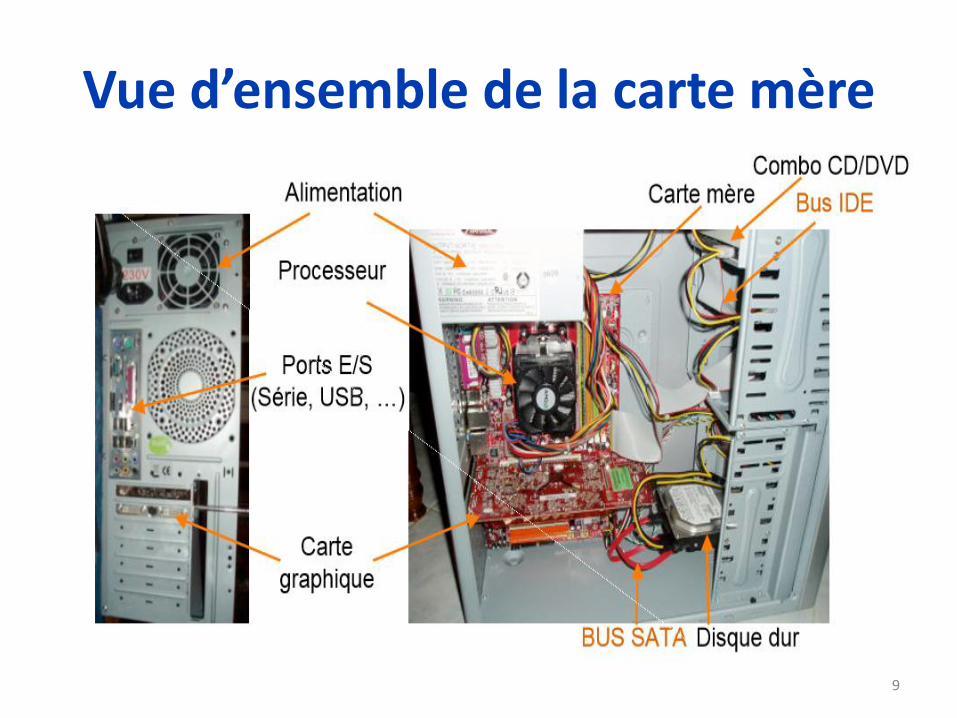
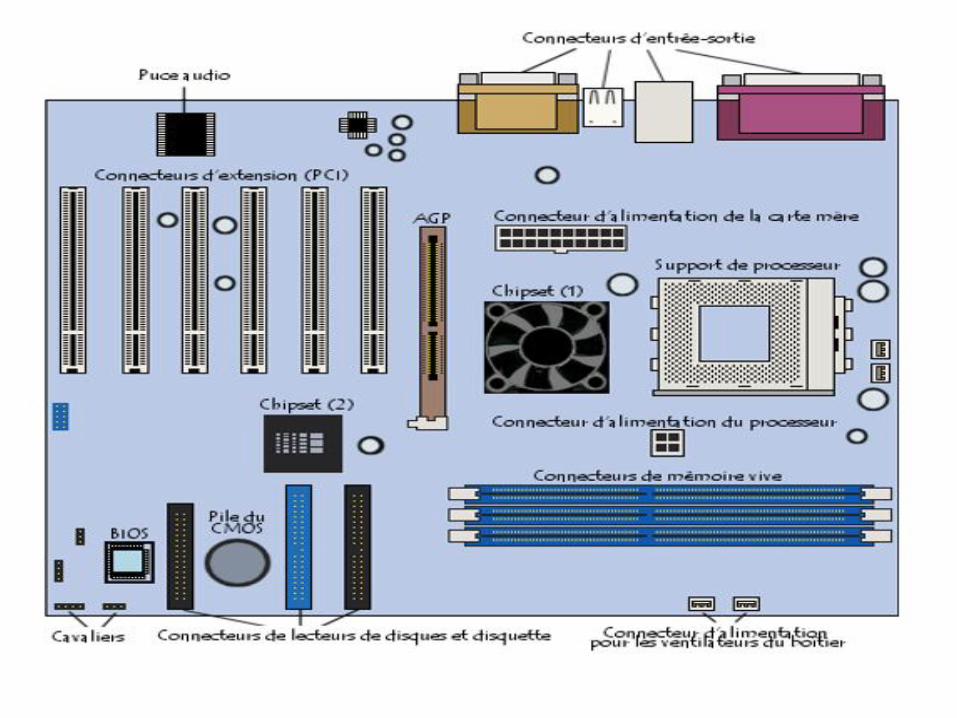
Vue d’ensemble de la carte mère
9

10

11
12

Les standards des cartes mèresAfin de fournir des cartes mères pouvant s'adapter dansdifférents boîtiers de marques différentes, des standardsont été mis au point.• ATX (Advanced Technology Extended) est un format de carte
mère créé en 1995 par Intel , conçu afin d’optimiser lesbranchements des périphériques (les connecteurs IDE sontpar exemple situés du côté des disques) d’une part et d’autrepart pour favoriser la dissipation de la chaleur ( lescomposants sont orientés parallèlement). Plusieurs modèles:ATX standard, Micro ATX, Flex ATX, mini ATX)
• BTX, optimisation de l'acoustique et amélioration de ladissipation de la chaleur (le processeur est situé à proximitédes aérations du boîtier): BTX standard, micro BTX, Pico BTX
• ITX, format extrêmement compact mini-ITX (17cm*17cm) etnano-ITX (12*12cm)
13

Les standards des cartes mères
14

Le facteur d’encombrement
• La carte mère est caractérisée par un facteurd'encombrement (ou facteur de forme, enanglais form factor) qui définit :
– la géométrie,
– les dimensions,
– l'agencement,
– et les caractéristiques électriques de la carte mère.
15

Composition de la carte mère
La carte mère se compose des éléments suivants :
Le chipset,
Les ports de connexion (connecteurs)
L’horloge temps réel (RTC),
Le CMOS,
Le BIOS,
Les cartes intégrées,
Les bus
16
Le chipset• le chipset est un circuit électronique chargé de
coordonner les échanges de données entre lesdivers composants de l'ordinateur (CPU, MC, DD,carte graphique...). Il représente une interfaced’entrée/sortie.
• Elle est constituée par un jeu de plusieurscomposants chargé de gérer la communicationentre le microprocesseur et les périphériques(autres composants).
• C’est le lien entre les différents bus de la cartemère.
17

Le chipset
Le chipset est composé par deux composants :
• Le pont Nord (North bridge) qui s’occuped’interfacer (connecter) le microprocesseur avecles périphériques rapides (mémoire et cartegraphique) nécessitant une bande passanteélevée,
• Le pont Sud (South bridge) qui s’occuped’interfacer le microprocesseur avec lespériphériques plus lents (disque dur, CDROM,lecteur de disquette, réseau, etc…).
18

19

Le chipset
20

Les ports de connexion
• les ports de connexion (connecteurs) permettent deconnecter des composants sur les différents bus de lacarte mère.
• Il existe trois types de ports de connexion :
– des ports internes : pour connecter des cartes d’extension(PCI, ISA, AGP) ou des périphériques de stockage (SCSI, IDE,Serial ATA),
– des ports externes : pour connecter des périphériques d’E\S(série, parallèle, USB, firewire, etc …)
– Le connecteur destiné au microprocesseur (support duprocesseur).
21

Connecteur du CPU• Le connecteur (support), destiné à connecter le
microprocesseur (CPU) à la carte mère, détermine le typede microprocesseur que l’on peut connecter.
• Il existe deux types de connecteur CPU :
– Slot (en français fente) : il s'agit d'un connecteurrectangulaire dans lequel on insère le processeurverticalement .
– Socket (en français embase) : il s'agit d'un connecteurcarré avec un nombre de petits connecteurs sur lequelle processeur vient directement s'enficher .
• Le support du processeur permet également de connecterle dissipateur thermique (ventirad: ventilateur + radiateur)
22

Slot pour un processeur Athlon
23

Socket pour un processeur AMD Athlon
24

Socket pour un processeur Intel(Pentium 4, core 2 duo, core 2 quad, core 2 extreme,
i3,…)
25
• Core : micro architecture,• Core2, i7,i5,i3 : marque• dual, quad ou multi core :nombre de Unité centrale detraitement sur une memepuce

L'horloge temps réel • L'horloge temps réel (notée RTC, pour Real Time Clock)
est un circuit chargé de la synchronisation des signaux dusystème.
• Elle permet de cadencer le traitement des instructionspar le microprocesseur ou la transmission desinformations sur les différents bus.
• Elle est constituée d'un cristal qui, en vibrant, donne desimpulsions (appelés tops d'horloge).
• On appelle fréquence de l'horloge (exprimée en MHz) lenombre de vibrations du cristal par seconde, c'est-à-direle nombre de tops d'horloge émis par seconde.
• Plus la fréquence est élevée, plus le système peut traiterd'informations
26
• Le CMOS (Complementary Metal OxideSemiconductor) est un circuit spécialisé quicontient une petite mémoire ainsi qu'une horlogemaintenues en fonctionnement permanent grâceà une pile (au format pile bouton) ou une batteriesituée sur la carte mère (rechargéautomatiquement lorsque l'alimentation est enservice).
• La technologie CMOS est ici privilégiée car, grâceà sa consommation extrêmement réduite (del'ordre de 10 µA), elle permet de longues duréesd'interruption de l'alimentation principale.
Le CMOS
18/11/2016 27

Le CMOS
La mémoire contient quelques dizaines d'octets,utilisés pour stocker :
• Des informations décrivant la configuration del'ordinateur (détail des disques durs…),
• Des données nécessaires au fonctionnement de sonBIOS,
• Des données nécessaires au système d'exploitation,
• L'heure et la date.
28

Le BIOS• le BIOS (Basic Input Output Service) est un
programme responsable de la gestion dumatériel : clavier, écran, disques durs, liaisonsséries et parallèles, etc...
• Il est sauvegardé dans une mémoire morte(EEPROM).
• Il utilise les données contenues dans le CMOSpour connaître la configuration matérielle de lamachine.
• Le BIOS est le programme basique servantd'interface entre le système d'exploitation et lacarte mère (matériel) .
29

Le BIOS
Les principales fonctionnalités du BIOS :
• Initialiser tous les composants de la carte mère,du chipset et de certains périphériques;
• Identifier tous les périphériques internes etexternes qui lui sont connectés ;
• Initialiser l'ordre de priorité des périphériquesd'entrée ;
• Démarrer le système d'exploitation présent surle premier périphérique disponible(généralement: le disque dur).
30
Les cartes intégrées
• Les cartes mères récentes embarquentgénéralement un certain nombre depériphériques multimédia et réseau pouvantêtre désactivés :– carte réseau intégrée ;
– carte graphique intégrée ;
– carte son intégrée ;
– contrôleurs de disques durs évolués.
• le simple fait de mettre en place une carted'extension suffit pour désactiver la carteintégrée.
31

Les bus
• Un bus est une voie de communication,formée d'un ou plusieurs conducteurs (fils) quiassure la transmission du même typed’information.
• Les données circulent sur le bus d'uneconnexion à l'autre. (tout comme lespassagers des transports en commun qui vontd'un arrêt à l'autre).
32

Les bus sur la carte mère
33
Composition des bus
Un bus est constitué de 3 sous bus :
• Un bus de données : bidirectionnel qui assure letransfert des informations entre le microprocesseur etson environnement, et inversement.
• Un bus d'adresses : unidirectionnel qui permet lasélection des informations à traiter dans un espacemémoire (ou espace adressable);
• Un bus de commande : (requête) il transporte les ordreset les signaux de synchronisation et de réponse entre leCPU et l’ensemble des composants matériels
34

Composition des bus
35

Composition des bus
36

Caractéristiques des busLes bus sont très différents les uns des autres, et ontdes caractéristiques très différentes.
La largeur : C'est le nombre de bits qui peuvent êtretransmis simultanément sur le bus.
Le débit binaire : C'est le nombre de bits que le buspeut transmettre par seconde. Plus celui-ci estélevé, plus le bus est rapide.
Le mode synchrone ou asynchrone : Certains buspossèdent un fil sur lequel circule un signald'horloge permettant de synchroniser les différentscomposants (synchrones). D'autres se passent designal d'horloge (asynchrone), 37
Caractéristiques des bus
Types de liaisons (mode de communication) :
• Liaison parallèle: tous les bits d’un mot sonttransmis simultanément sur plusieurs fils. permetdes transferts rapides mais reste limitée (faiblesdistances de transmission, coût et encombrementet des problèmes d’interférenceélectromagnétique)
• Liaison série: les bits constitutifs d’un mot sonttransmis les uns après les autres sur un seul fil. Lesdistances sont beaucoup plus importantes mais, lavitesse de transmission intéressante.
38

Les types de bus
39

Les types de bus
• Bus processeur : on l’appelle aussi bus système ou FSB(Front Side Bus). Il relie le microprocesseur au pontnord puis à la mémoire. C’est un bus 64 bits.
• Bus AGP (Accelered Graphic Port) : Il a été créé en 1997lors de l’explosion de l’utilisation des cartes 3D quinécessitent toujours plus de bandes passantes pourobtenir des rendus très réalistes. C’est uneamélioration du bus PCI. C’est un bus 32 bits et sondébit maximum est de 2 Go/s (en x8).
• Liaison pont nord/pont sud : elle connecte les deuxponts du chipset
40

Les types de bus• Bus PCI (Peripheral Component Interconnect) : Il a été créé
en 1991 par Intel. Il permet de connecter des cartesd’extension. C’est un bus de 32 bits ou de 64 bits et a unefréquence de 133 MHz.
• Le bus PCI Express : noté PCI-E est un bus d'interconnexionpermettant l'ajout de cartes d'extension dans l'ordinateur.Il a été mis au point en juillet 2002.
Contrairement au bus PCI, qui fonctionne en modeparallèle, le bus PCI Express fonctionne en mode série, cequi lui permet d'obtenir une bande passante beaucoup plusélevée que ce dernier.
En effet, le mode parallèle n'est pas prévu pour supporterdes fréquences élevées en raison des problèmes liés auxinterférences électromagnétiques entre les différents fils
41

42
PCI-E (x4, x16, x1 et x16)
PCI 32

Les types de bus
• Bus ISA (Industry Standard Architecture) :C’est l’ancêtre du bus PCI. On ne le retrouveplus sur les nouvelles générations de cartesmères.
• Bus IDE (ATA ou PATA) : il permet de relier aumaximum 2 périphériques de stockage internepar canal (disque dur ou lecteurDVDROM/CDROM). Son débit est de 133Mo/s.
43

Les types de bus
• Bus SCSI (Small Computer System Interface) :c’est un bus d’E/S parallèle permettant derelier un maximum de 7 ou 15 périphériques.C’est une interface concurrente à l’IDE quiprésente l’avantage de pouvoir connecter plusde périphériques pour des débits supérieurs.Mais son coût reste très élevé… il est utilisépour les serveurs.
44

Les types de bus
• Le bus Serial ATA (S-ATA ou SATA): est un busstandard permettant la connexion depériphériques de stockage haut débit sur lesordinateurs de type PC. apparu en février 2003afin de pallier les limitations de la norme "IDE" ,qui utilise un mode de transmission en parallèle.
• Bus USB (Universal Serial Bus ) : c’est un bus d’E/Splug-and-play série. Dans sa deuxième révision(USB 2.0), il atteint un débit de 60 Mo/s. Il peutthéoriquement 127 périphériques.
45

Remarque
Tous les bus « internes » (PCI, IDE, AGP) vont être amenésà disparaître très rapidement et seront remplacés par desbus série :
Le Serial ATA (SATA), remplaçant du bus IDE, présentedes débits de 300 Mo/s. Il permet de connecter desdisques durs ou des lecteurs optiques.
Le PCI Express, remplaçant des bus PCI et AGP, permetd’atteindre des débits de 250 Mo/s dans sa version debase qui peuvent monter jusqu’à 8Go/s dans sa versionx16 destinée à des périphériques nécessitant desbandes passantes très élevées (application graphique).
46