EÇON 42 ETUDE MÉTRIQUE DES COURBES...
25
LEÇON 42 ETUDE MÉTRIQUE DES COURBES PLANES Cette leçon, se situe dans le plan affine euclidien orienté E 2 muni d’un repère orthonormé R =(O, i, j ) et de la distance euclidienne ‖‖ associée au produit scalaire 〈 , 〉. Plan d’une leçon d’oral : I. Introduction, présentation des paramétrages cartésiens et polaires II. Propriétés du premier ordre 1. Abscisse curviligne 2. Longueur d’un arc 3. Paramétrage normal III. Propriétés du deuxième ordre 1. Repère de Frénet 2. Rayon de courbure 3. Centre de courbure, développée d’un arc. Comme toute leçon de géométrie, celle-ci devra être agrémentée de beaucoup d’exemples et de figures. Courbes paramétrées et polaires Soient f : I =[a, b] -→ E 2 un arc paramétré de classe C 1 , γ = f (I ) sa trajectoire. Pour t ∈ I , on pourra noter M (t) au lieu de f (t) et soit x(t) y (t) les coordonnées de M (t) dans R. On a : ----→ OM (t)= x(t) i + y (t) j. Remarque: Dans le cadre d’une représentation polaire, on a : ----→ OM (t)= ρ(θ) --→ u(θ), où θ(t) ≡ i, ----→ OM (t) (2π) et --→ u(θ) = cos θ i + sin θ j --→ v(θ)= - sin θ i + cos θ j = Rot π 2 --→ u(θ) . Le repère mobile M (θ), --→ u(θ), --→ v(θ) est alors un repère orthonormé direct de E 2 . 42. Etude métrique des courbes planes Fabien PUCCI
Transcript of EÇON 42 ETUDE MÉTRIQUE DES COURBES...

LEÇON 42
ETUDE MÉTRIQUE DES COURBES PLANES
Cette leçon, se situe dans le plan affine euclidien orienté E2 muni d’un repère orthonormé R = (O,~i,~j)et de la distance euclidienne ‖ ‖ associée au produit scalaire 〈 , 〉.
Plan d’une leçon d’oral :
I. Introduction, présentation des paramétrages cartésiens et polaires
II. Propriétés du premier ordre
1. Abscisse curviligne
2. Longueur d’un arc
3. Paramétrage normal
III. Propriétés du deuxième ordre
1. Repère de Frénet
2. Rayon de courbure
3. Centre de courbure, développée d’un arc.
Comme toute leçon de géométrie, celle-ci devra être agrémentée de beaucoup d’exemples et defigures.
Courbes paramétrées et polaires
Soient f : I = [a, b] 7−→ E2 un arc paramétré de classe C1, γ = f(I) sa trajectoire.
Pour t ∈ I, on pourra noter M(t) au lieu de f(t) et soit
(
x(t)y(t)
)
les coordonnées de M(t) dans R.
On a :
−−−−→OM(t) = x(t)~i + y(t)~j.
Remarque: Dans le cadre d’une représentation polaire, on a :
−−−−→OM(t) = ρ(θ)
−−→u(θ),
où θ(t) ≡(
~i,−−−−→OM(t)
)
(2π) et
−−→u(θ) = cos θ~i + sin θ~j−−→v(θ) = − sin θ~i + cos θ~j = Rotπ
2
(−−→u(θ)
) .
Le repère mobile(
M(θ),−−→u(θ),
−−→v(θ)
)
est alors un repère orthonormé direct de E2.
42. Etude métrique des courbes planes Fabien PUCCI
2 Etude métrique des courbes planes
I. Rectification d’un arc paramétré
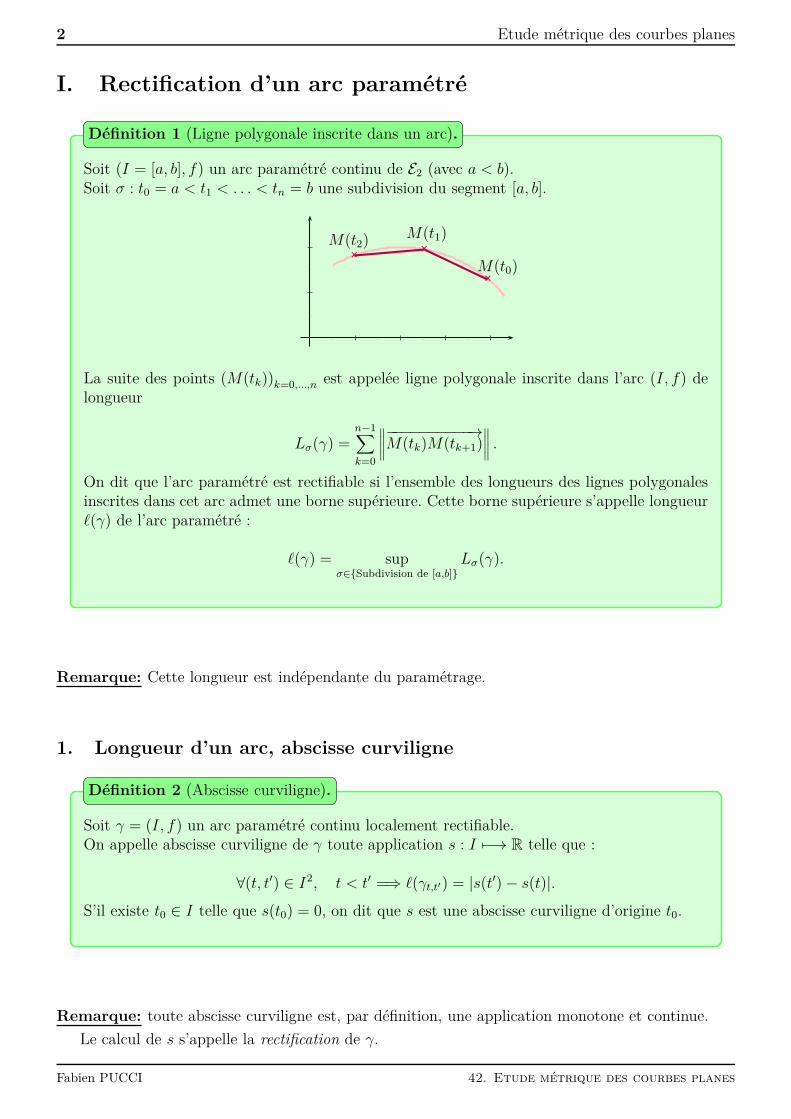
Soit (I = [a, b], f) un arc paramétré continu de E2 (avec a < b).Soit σ : t0 = a < t1 < . . . < tn = b une subdivision du segment [a, b].
×M(t0)
×M(t1)
×M(t2)
La suite des points (M(tk))k=0,...,n est appelée ligne polygonale inscrite dans l’arc (I, f) delongueur
Lσ(γ) =n−1∑
k=0
∥
∥
∥
∥
−−−−−−−−−−→M(tk)M(tk+1)
∥
∥
∥
∥
.
On dit que l’arc paramétré est rectifiable si l’ensemble des longueurs des lignes polygonalesinscrites dans cet arc admet une borne supérieure. Cette borne supérieure s’appelle longueur`(γ) de l’arc paramétré :
`(γ) = supσ∈Subdivision de [a,b]
Lσ(γ).
Définition 1 (Ligne polygonale inscrite dans un arc).
Remarque: Cette longueur est indépendante du paramétrage.
1. Longueur d’un arc, abscisse curviligne
Soit γ = (I, f) un arc paramétré continu localement rectifiable.On appelle abscisse curviligne de γ toute application s : I 7−→ R telle que :
∀(t, t′) ∈ I2, t < t′ =⇒ `(γt,t′) = |s(t′) − s(t)|.S’il existe t0 ∈ I telle que s(t0) = 0, on dit que s est une abscisse curviligne d’origine t0.
Définition 2 (Abscisse curviligne).
Remarque: toute abscisse curviligne est, par définition, une application monotone et continue.
Le calcul de s s’appelle la rectification de γ.
Fabien PUCCI 42. Etude métrique des courbes planes

I. Rectification d’un arc paramétré 3
Si l’arc (I, f) est de classe C1 par morceaux alors il est rectifiable est sa longueur (algébrique)est le réel s(b) − s(a) :
`(γ) =∫ b
a
∥
∥
∥
∥
−−−→M ′(t)
∥
∥
∥
∥
dt.
En particulier, ∀t ∈ I, s′(t) = ‖−−→f ′(t)‖.
Proposition 1.
Preuve de 1: Soit σ = (ti)06i6n une subdivision de [a, b]. f étant de classe C1, on a :
−−→f(ti) −
−−−−→f(ti−1) =
∫ ti
ti−1
−−→f ′(t)dt
∥
∥
∥
−−−−−−−−−−→M(ti−1)M(ti)
∥
∥
∥ 6
∫ ti
ti−1
∥
∥
∥
−−→f ′(t)
∥
∥
∥ dt
`(γ) 6
∫ b
a
∥
∥
∥
−−→f ′(t)
∥
∥
∥ dt
Soient alors s l’abscisse curviligne d’origine a, t ∈ [a, b] et h ∈ R∗
+1 tel que t + h ∈ [a, b].
Par définition, s(t + h − s(t) = `(γt,t+h), d’où :
s(t + h) − s(t) 6
∫ t+h
t
∥
∥
∥
−−→f ′(t)
∥
∥
∥ dt.
Or,∥
∥
∥
−−−−−−−−−−→M(t)M(t + h)
∥
∥
∥ 6 s(t + h) − s(t).
Donc
∥
∥
∥
∥
∥
−−−−−−−−−−→M(t)M(t + h)
h
∥
∥
∥
∥
∥
6s(t + h) − s(t)
h6
1
h
∫ t+h
t
∥
∥
∥
−−→f ′(t)
∥
∥
∥dt.
Par continuité de l’application u 7−→ ‖−−→f ′(t)‖, on obtient finalement :
limh→0h>0
s(t + h) − s(t)
h=∥
∥
∥
−−→f ′(t)
∥
∥
∥
s est donc dérivable sur [a, b] telle que s′(t) =∥
∥
∥
−−→f ′(t)
∥
∥
∥donc de classe C1 sur [a, b] et on a :
`(γ) = s(b) − s(a) =
∫ b
a
s′(t)dt
=
∫ b
a
∥
∥
∥
−−−→M ′(t)
∥
∥
∥ dt.
Remarque: Pour tout t ∈ I, s′(t) > 0 et s′(t) > 0 en tout point régulier de γ.
1. Le raisonnement est identique pour h ∈ R∗
−.
42. Etude métrique des courbes planes Fabien PUCCI

4 Etude métrique des courbes planes
2. Longueur d’arcs particuliers
– Pour un arc paramétré :
s′(t) =√
x′2(t) + y′2(t).
– Pour un arc en coordonnées polaires :
s′(t) =√
ρ2(θ) + ρ′2(θ).
Proposition 2.
Exemples:
• Rectification de la parabole (γ) : y2 = 2x. Une représentation paramétrique de γ est :
x(t) =t2
2y(t) = t
.
1
2
3
1 2 3 4s =0
s =1
s =2
s =3
s =4
s =5s′(t) =
√
x′2(t) + y′2(t) =√
t2 + 1
s(t) =∫ t
0
√u2 + 1 du =
∫ Argsh(t)
Argsh(0)ch2 v dv u = sh v
=1
2
∫ Argsh(t)
0(1 + ch 2v) dv
=1
2
(
Argsh(t) +1
2sh(
2 Argsh(t))
)
=1
2ln(
t +√
t2 + 1)
+t
2
√t2 + 1 Argsh t = ln
(
t +√
t2 + 1)
.
• Rectification de la Deltoïde (hypocycloïde à 3 rebrousse-ments) :
1
2
−1
−2
1 2 3−1
s =2
s =4s =6
s =8
s =10 s =12
s =14
s =16
x(t) = 2 cos t + cos 2t
y(t) = 2 sin t − sin 2t
s′(t) =√
8(1 − cos 3t) =
√
16 sin2 3t
2
= 4 sin3t
2si t ∈
[
0,3π
2
]
s(t) =8
3
(
1 − cos3t
2
)
> 0 si t ∈[
0,3π
2
]
.
• Rectification de la courbe d’équation polaire ρ = thθ
2.
Fabien PUCCI 42. Etude métrique des courbes planes

I. Rectification d’un arc paramétré 5
1
−1
1−1
ρ(θ) = thθ
2,
ρ′(θ) =1
2
(
1 − th2 θ
2
)
.
s′2(θ) = ρ2 + ρ′2 =1
4
(
1 + 2 th2 θ
2+ th4 θ
2
)
=
(
1
2
(
1 + th2 θ
2
))2
s′(θ) =1
2
(
1 + th2 θ
2
)
s(θ) =∫ θ
0
1
2
(
1 + th2 t
2
)
dt
∫ θ
01 − 1
2
(
1 − th2 t
2
)
dt
= θ − thθ
2.
Exemples:
• Longueur de la deltoïde : ` = 16.• Longueur de l’astroïde :
x(t) = cos3 t
y(t) = sin3 t
1
−1
1−1
1
3
5
Par raison de symétrie, `(γ) = 8`(γ1) où γ1 est l’arc
obtenu en faisant varier t dans[
0,π
4
]
.
s′(t) =√
x′2(t) + y′2(t)
=√
9 cos2 t sin2 t
= 3 cos t sin t,
`(γ1) =3
2
∫ π
4
0sin 2t dt =
3
4`(γ) = 6.
• Longueur de la cardioïde :
42. Etude métrique des courbes planes Fabien PUCCI

6 Etude métrique des courbes planes
1
−1
1 2
13
5 7
ρ(θ) = 1 + cos θ.
La cardioïde est symétrique par rapport à l’axe des abscisses,d’où :
`(γ) = 2∫ π
0
√
ρ2(θ) + ρ′2(θ) dθ
= 2∫ π
0
√
2((
1 + cos θ)
dθ
= 4∫ π
0cos
θ
2dθ
= 8
[
sinθ
2
]π
2
0
= 8.
• Longueur d’une ellipse :
1
2
−1
−2
1 2 3−1−2−3
x(t) = 3 cos t
y(t) = 2 sin t
`(γ) =∫ 2π
0
√
9 sin2 t + 4 cos2 t dt.
Quantité qui ne peut s’exprimer à l’aide de fonctionsélémentaires et dont l’étude à conduit à introduire lesfonctions dites elliptiques.
II. Représentation paramétrique en fonction de l’abscisse
curviligne
1. Paramétrage normal
On appelle paramétrage normal de f tout paramétrage admissible g : I 7−→ E2 de f de classeC1 tel que :
∀u ∈ I,
∥
∥
∥
∥
−−→g′(u)
∥
∥
∥
∥
= 1.
Définition 3.
Si f est régulier 2, alors :
(i) Pour toute abscisse curviligne s sur γ, f s−1 est un paramétrage normal de f .
(ii) Pour tout paramétrage normal g de f , il existe une abscisse curviligne s sur γ telleque :
g = f s−1 ou g = f (−s)−1.
Proposition 3.
Preuve de 3:
Fabien PUCCI 42. Etude métrique des courbes planes

II. Représentation paramétrique en fonction de l’abscisse curviligne 7
(i) L’application s est de classe C1 sur I et telle que ∀t ∈ I, s′(t) =∥
∥
∥
−−→f ′(t)
∥
∥
∥ > 0 car f est régulier donc elle établit
un C1-difféomorphisme de I sur s(I) = J de même que s−1.Ainsi, g = f s−1 est bien un paramétrage admissible qui vérifie, de plus :
∀u ∈ J,∥
∥
∥
−−−→g′(u)
∥
∥
∥ =
∥
∥
∥
∥
∥
1
s′
(
s−1(u)) ×
−−−−−−−→f ′(
s−1(u))
∥
∥
∥
∥
∥
=1
∥
∥
∥
−−−−−−−→f ′(
s−1(u))
∥
∥
∥
×∥
∥
∥
−−−−−−−→f ′(
s−1(u))
∥
∥
∥ = 1.
(ii) Réciproquement, soit g : J 7−→ E2 un paramétrage normal de f . Comme g est un paramétrage admissible de f ,il existe un C1-difféomorphisme ϕ : J 7−→ I tel que g = f ϕ. On a alors :
∀t ∈ I,∥
∥
∥
−−→f ′(t)
∥
∥
∥ =
∥
∥
∥
∥
−−−−−−−−−→(
g ϕ−1)′
(t)
∥
∥
∥
∥
=∣
∣
∣
(
ϕ−1)′
(t)∣
∣
∣×∥
∥
∥
−−−−−−−→g′(
ϕ−1(t))
∥
∥
∥
=∣
∣
∣
(
ϕ−1)′
(t)∣
∣
∣ .
Comme ϕ et ϕ−1 sont strictement monotone c’est-à-dire(
ϕ−1)′
> 0 ou(
ϕ−1)′
< 0, on obtient bien :
∀t ∈ I,(
ϕ−1)′
(t) =∥
∥
∥
−−→f ′(t)
∥
∥
∥ou(
ϕ−1)′
(t) = −∥
∥
∥
−−→f ′(t)
∥
∥
∥,
c’est-à-dire que ∀t ∈ I,(
ϕ−1)
′
ou −(
ϕ−1)
′
est une abscisse curviligne sur γ.
Conséquence, on peut alors paramétrer γ par un paramétrage normal qui est l’abscisse curviligne :s 7−→ M(s).
2. Repère de Frénet
– On appelle vecteur tangent unitaire (orientant) de γ en M(s), le vecteur :
−−→T (s) =
−−−−→dM(s)
ds.
– On note−−−→N(s) = Rotπ
2
(−−→T (s)
)
, le vecteur unitaire directement orthogonal au vecteur−−→T (s).
– Le repère orthonormé direct(
M(s),−−→T (s),
−−−→N(s)
)
est appelé repère de Frénet au point
M(s).
Définition 4 (Repère de Frénet).
2. f est dit régulier sur I si et seulement si ∀t ∈ I,−−→f ′(t) 6= ~0
42. Etude métrique des courbes planes Fabien PUCCI

8 Etude métrique des courbes planes
L’avantage de paramétrer la courbe par l’abscissecurviligne réside dans le fait que, pour tout M(s)
de γ, le vecteur tangent−−→T (s) est unitaire.
D’un point de vue cinématique, l’utilisation d’unparamétrage normal, en particulier l’abscisse cur-viligne permet de se déplacer sur l’arc à vitesseconstante.
1
1−1
−→T (s)−→T (t)
Soit f : I 7−→ E2 un arc paramétrée de classe au moins C2.Pour tout point M(s) de l’arc, il existe un réel c(s) appelé courbure de γ en M(s) tel que :
d−−→T (s)
ds= c(s)
−−−→N(s) et
d−−−→N(s)
ds= −c(s)
−−→T (s).
Théorème 4 (Formule de Frénet).
Preuve de 4: Comme précédemment, on note J = s(I) et on considère un arc de classe C2 birégulier.– Pout tout s ∈ J ,
−−→T (s) =
d−−→OM
ds=
(
ds
dt
)
−1
× d−−→OM
dt
=
∥
∥
∥
∥
∥
d−−→OM
dt
∥
∥
∥
∥
∥
−1
× d−−→OM
dt.
Donc−−→T (s) est bien unitaire comme vu précédemment.
– Comme∥
∥
∥
−−−→N(s)
∥
∥
∥ = 1, en dérivant, on voit qued−−→T (s)
dsest orthogonal à
−−−→N(s) donc colinéaire à
−−→T (s) d’où l’existence
de c(s).
– De même, en dérivant l’égalité⟨−−→
T (s),−−−→N(s)
⟩
= 0, on obtientd−−−→N(s)
ds= −c(s)
−−→T (s).
Soient un arc paramétré par son abscisse curviligne et M(s) un point birégulier 3de γ.
– On appelle rayon de courbure de γ en M(s) le réel R(s) =1
c(s).
– Le point Ω(s) = M(s) + R(s)−−−→N(s) est appelé centre de courbure de γ en M(s).
Définition 5.
Remarques:
2. Le rayon de courbure peut être infini.
3. Un point M(s) de γ et dit birégulier si
(
d−−−−→OM(s)
ds,
d2−−−−→OM(s)
ds2
)
est libre c’est-à-dire que la courbure c(s) est non
nulle.
Fabien PUCCI 42. Etude métrique des courbes planes
II. Représentation paramétrique en fonction de l’abscisse curviligne 9
– Le rayon de courbure peut être infini.– On appelle cercle osculateur 4, le cercle de centre Ω et de rayon R(s).
3. Calcul du rayon de courbure
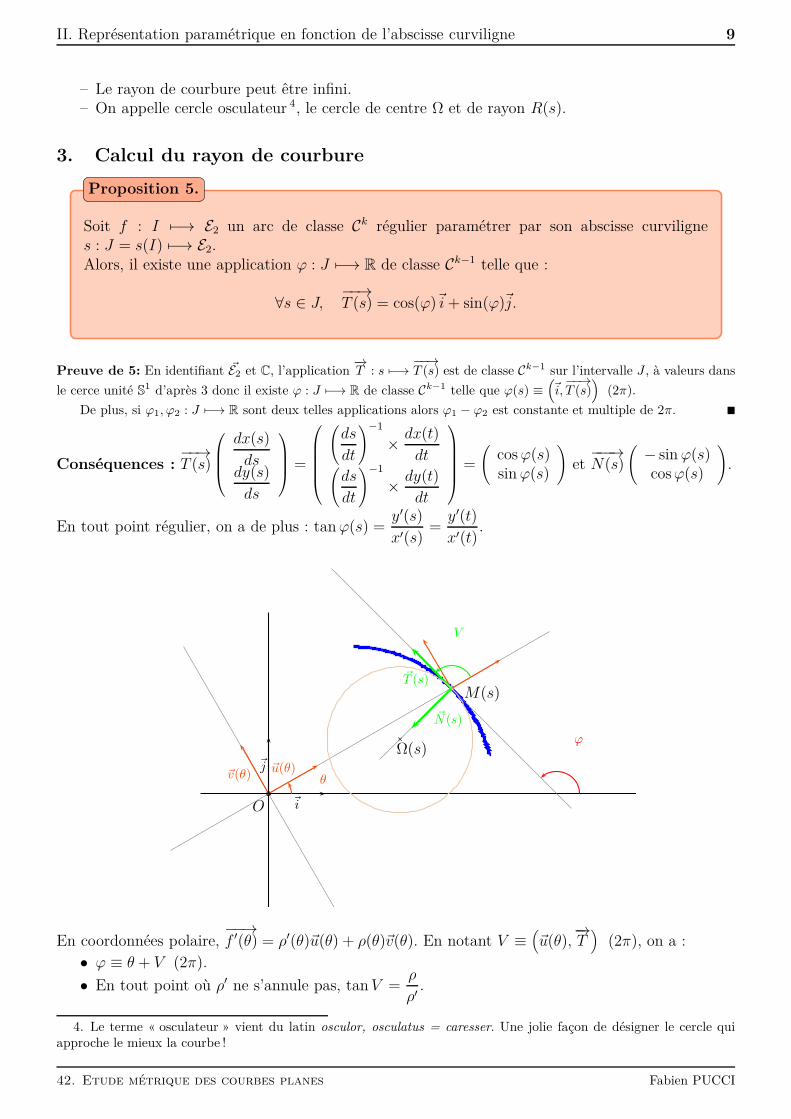
Soit f : I 7−→ E2 un arc de classe Ck régulier paramétrer par son abscisse curvilignes : J = s(I) 7−→ E2.Alors, il existe une application ϕ : J 7−→ R de classe Ck−1 telle que :
∀s ∈ J,−−→T (s) = cos(ϕ)~i + sin(ϕ)~j.
Proposition 5.
Preuve de 5: En identifiant ~E2 et C, l’application−→T : s 7−→ −−→
T (s) est de classe Ck−1 sur l’intervalle J , à valeurs dans
le cerce unité S1 d’après 3 donc il existe ϕ : J 7−→ R de classe Ck−1 telle que ϕ(s) ≡
(
~i,−−→T (s)
)
(2π).
De plus, si ϕ1, ϕ2 : J 7−→ R sont deux telles applications alors ϕ1 − ϕ2 est constante et multiple de 2π.
Conséquences :−−→T (s)
dx(s)
dsdy(s)
ds
=
(
ds
dt
)−1
× dx(t)
dt(
ds
dt
)−1
× dy(t)
dt
=
(
cos ϕ(s)sin ϕ(s)
)
et−−−→N(s)
(
− sin ϕ(s)cos ϕ(s)
)
.
En tout point régulier, on a de plus : tan ϕ(s) =y′(s)
x′(s)=
y′(t)
x′(t).
b
O
bcM(s)
~u(θ)~v(θ)
~i
~j
~T (s)
θ
V
ϕ×Ω(s)
~N(s)
En coordonnées polaire,−−→f ′(θ) = ρ′(θ)~u(θ) + ρ(θ)~v(θ). En notant V ≡
(
~u(θ),−→T)
(2π), on a :
• ϕ ≡ θ + V (2π).
• En tout point où ρ′ ne s’annule pas, tan V =ρ
ρ′.
4. Le terme « osculateur » vient du latin osculor, osculatus = caresser. Une jolie façon de désigner le cercle quiapproche le mieux la courbe !
42. Etude métrique des courbes planes Fabien PUCCI

10 Etude métrique des courbes planes
En tout point birégulier d’un arc paramétré, on a :
R(s) =ds
dϕ=
1
ϕ′(s).
Proposition 6.
Preuve de 6: considérons un paramétrage normal de γ en fonction de l’abscisse curviligne s :
f : s 7−→ x(s)~i + y(s)~j.
Comme ∀s ∈ J ,−−−→f ′(s) = x′(s)~i + y′(s)~j = cos(ϕ)~i + sin(ϕ)~j, on obtient successivement :
∀s ∈ J,
cos ϕ(s) = x′(s)sin ϕ(s) = y′(s)
.
En dérivant,
∀s ∈ J,
−ϕ′(s) sin ϕ(s) = x′′(s)ϕ′(s) cos ϕ(s) = y′′(s)
.
Par identification, on obtient : R(s) =1
ϕ′(s).
Remarque: En supposant (J = s(I), f s−1) birégulier, on adϕ(s)
ds= c(s) 6= 0. L’application ϕ de la variable s
établit donc une bijection strictement de J sur ϕ(J), de classe Ck−1 ainsi que sa réciproque.On peut donc définir s comme fonction dérivable de ϕ, ce qui permet d’écrire :
R(s) =1
dϕds
=ds
dϕ.
Poussons plus loin :
D’où ∀s ∈ J, ϕ′(s) = cos ϕ(s)y′′(s) − sin ϕ(s)x′′(s)
= x′(s)y′′(s) − y′(s)x′′(s)
=
∣
∣
∣
∣
x′(s) x′′(s)y′(s) y′′(s)
∣
∣
∣
∣
.
Conclusion, si
(
d−−−−→OM(s)
ds,
d2−−−−→OM(s)
ds2
)
est libre alors ϕ′(s) 6= 0 et R(s) est bien défini par R(s) =1
ϕ′(s). Dans le
cas seulement régulier, R peut donc prendre les valeurs 0, −∞ et +∞.
Exemples:
• Rayon de courbure en tout point de la cardioïde d’équation ρ = 1 + cos θ lorsque θ ∈] − π, π[.
ds
dθ=√
ρ2 + ρ′2 =√
2(1 + cos θ) = 2 cosθ
2.
tan V =ρ
ρ′= −1 + cos θ
sin θ= − cotan
θ
2= tan
(
θ
2+
π
2
)
.
D’où V ≡ θ
2+
π
2(π) puis
dV
dθ=
1
2.
dϕ
dθ= 1 +
dV
dθ=
3
2.
Enfin, R(θ) =
ds
dθdϕ
dθ
=4
3cos
θ
2.
Fabien PUCCI 42. Etude métrique des courbes planes

II. Représentation paramétrique en fonction de l’abscisse curviligne 11
• Rayon de courbure en tout point de la deltoïde :
x(t) = = 2 cos t + cos 2t
y(t) = 2 sin t − sin 2t
On a successivement et comme précédemment :
x′(t) = −2 sin t − 2 sin 2t
y′(t) = 2 cos t − 2 cos 2t
s′2(t) = 16 sin2 3t
2.
Si t ∈]
0,3π
2
[
,ds(t)
dt= 4 sin
3t
2.
tan ϕ =y′
x′= −cos t − cos 2t
sin t + sin 2t= −
2 sin3t
2sin
t
2
2 sin3t
2cos
t
2
= tan(
− t
2
)
.
D’où ϕ(t) ≡ − t
2(π) puis
dϕ(t)
dt= −1
2.
Enfin, R(t) =
ds
dtdϕ
dt
= −8 sin3t
2si t ∈
]
0,3π
2
[
.
Soit γ défini par paramétrage régulier de classe C2.
(i) Si γ est donné par le paramétrage
x(t)y(t)
:
R(t) =s′(t)
ϕ′(t)=
(
x′2(t) + y′2(t)) 3
2
∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
.
(ii) Si γ est le graphe d’une fonction y = f(x) :
R(x) =
(
1 + y′2(x))
3
2
f ′′(x).
(iii) Si γ est donnée en coordonnées polaires ρ = ρ(θ) :
R(θ) =
(
ρ2(θ) + ρ′2(θ)) 3
2
ρ2(θ) + 2ρ′2(θ) − ρ(θ)ρ′′(θ).
Proposition 7 (Calculs théoriques).
Preuve de 7:
(i) En paramétrique R(t) =ds(t)
dϕ=
dsdtdϕdt
et tan ϕ(s) =y′(t)
x′(t), d’où (1 + tan2 ϕ)
dϕ(t)
dt=
(
y′(t)
x′(t)
)
′
. Il ne reste plus
qu’à remplacer et simplifier :
42. Etude métrique des courbes planes Fabien PUCCI

12 Etude métrique des courbes planes
dϕ(t)
dt=
(
y′(t)
x′(t)
)
′
1 + tan2 ϕ=
y′′(t)x′(t) − y′(t)x′′(t)
x′2(t)
1 +
(
y′(t)
x′(t)
)2=
y′′(t)x′(t) − y′(t)x′′(t)
x′2(t)× x′2(t)
x′2(t) + y′2(t)
=y′′(t)x′(t) − y′(t)x′′(t)
x′2(t) + y′2(t)
R(t) =ds(t)
dt×(
dϕ(t)
dt
)
−1
=√
x′2(t) + y′2(t) × x′2(t) + y′2(t)
y′′(t)x′(t) − y′(t)x′′(t)
=
(
x′2(t) + y′2(t))
3
2
y′′(t)x′(t) − y′(t)x′′(t).
(ii) Il suffit de prendre le paramétrage
x = x
y = f(x)
(iii) En coordonnées polaires, R(θ) =ds(θ)
dϕ=
ds(θ)
dθdϕ
dθ
.
Comme tan V (θ) =ρ(θ)
ρ′(θ), en dérivant :
(
1 +ρ(θ)
ρ′(θ)
)
dV (θ)
dθ=
ρ′2(θ) − ρ(θ)ρ′′(θ)
ρ′2(θ)
dV (θ)
dθ=
ρ′2(θ) − ρ(θ)ρ′′(θ)
ρ2(θ) + ρ′2(θ)
De plus,
ϕ(θ) = θ + V (θ)
dϕ(θ)
dθ= 1 +
dV (θ)
dθ
=ρ2(θ) + 2ρ′2(θ) − ρ(θ)ρ′′(θ)
ρ2(θ) + ρ′2(θ)
Enfin,
R(θ) =
ds(θ)
dθdϕ(θ)
dθ
=
√
ρ2(θ) + ρ′2(θ)
ρ2(θ) + 2ρ′2(θ) − ρ(θ)ρ′′(θ)
ρ2(θ) + ρ′2(θ)
=
(
ρ2(θ) + ρ′2(θ))
3
2
ρ2(θ) + 2ρ′2(θ) − ρ(θ)ρ′′(θ).
Remarque: Dans le cas d’une courbe définie en coordonnées polaires, les points d’inflexion vérifientρ2 + 2ρ′2 − ρρ′′ = 0. On retrouve avec la formule ci-dessus que la courbure y est nulle et/ou le rayonde courbure infini.
Exemple:
• Rayon de courbure d’une ellipse :
x(t) = a cos t
y(t) = b sin t. (42.1)
Fabien PUCCI 42. Etude métrique des courbes planes

II. Représentation paramétrique en fonction de l’abscisse curviligne 13
R(t) =(x′2(t) + y′2(t))
3
2
∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
=(a2 sin2 t + b2 cos2 t)
3
2
∣
∣
∣
∣
∣
−a sin t −a cos t
b cos t −b sin t
∣
∣
∣
∣
∣
=(a2 sin2 t + b2 cos2 t)
3
2
ab
Soit M(s0) un point de l’arc γ paramétré par l’abscisse curviligne. Si(
X(s), Y (s))
sont les
coordonnées de M(s) dans le repère de Frénet centré en M(s0) alors :
R(s0) = lims→s0
X2(s)
2Y (s).
Proposition 8 (Calcul direct).
Preuve de 8: Au voisinage de s0, on a :
−−→OM(s) =
−−→OM (s0) + (s − s0)
−→T (s0) +
1
2(s − s0)2c(s0)
−→N (s0) + (s − s0)2~ε(s).
D’où X(s) ∼s→s0
s − s0 et Y (s) ∼s→s0
1
2(s − s0)2c(s0)
On en déduit que lims→s0
X2(s)
2Y (s)=
1
c(s0)= R(s0).
Remarque: D’une manière générale, un développement limité à l’ordre 2 de x(t) et y(t) ou de ρ(θ)permet de trouver facilement R :
– En paramétrique :
x(t) =t→t0
x(t0) + x′(t0)(t − t0) +x′′(t0)
2(t − t0)
2 + o(
t − t0)2)
y(t) =t→t0
y(t0) + y′(t0)(t − t0) +y′′(t0)
2(t − t0)2 + o
(
t − t0)2)
Il suffit alors d’extraire successivement x′(t0), x′′(t0), y′(t0) et y′′(t0) pour pouvoir calculer R(t0).– En coordonnées polaires :
ρ(θ) =θ→θ0
ρ(θ0) + ρ′(θ0)(θ − θ0) +ρ′′(θ0)
2(θ − θ0)2 + o
(
(θ − θ0)2)
.
De même, on extrait ρ(θ0), ρ′(θ0) et ρ′′(θ0) puis on calcule R(θ0).
Exemple: Calcul du rayon de courbure de la courbe d’équation polaire ρ(θ) =cos θ − 2 sin θ
1 + sin3 θpour
θ0 = 0 c’est-à-dire au point de coordonnées (0, 1).
42. Etude métrique des courbes planes Fabien PUCCI

14 Etude métrique des courbes planes
1
−1
−2
−3
−4
−5
1 2 3−1−2
bc
ρ(θ) =θ→0
1 − 2θ − θ
2+ o(θ2)
1 + o(θ2)
= 1 − 2θ − θ
2+ o(θ2).
D’où ρ(0) = 1, ρ′(0) = −2 et ρ′′(0) = −1. On en déduit :
R(0) =(ρ2(0) + ρ′2(0))
3
2
ρ2(0) + 2ρ′2(0) − ρ(0)ρ′′(0)=
53
2
10=
√5
2.
III. Calculs pratiques
Tout n’est qu’une question de simplification et de trigo-nométrie.
1. Rayon de courbure
• Pour une représentation d’un arc paramétré par
x(t)y(t)
, on peut :
– soit calculer successivement 5 x′(t), y′(t), s′2(t), s′(t) 6, tan ϕ(t), ϕ′(t) et R(t) =s′(t)
ϕ′(t).
– soit appliquer directement la formule de 7.
• Pour une représentation polaire ρ = ρ(θ), on peut :
– soit calculer successivement ρ′(θ), s′2(θ), s′(θ), tan V (θ), V ′(θ), ϕ′(θ) et R(θ) =s′(θ)
ϕ′(θ).
– soit appliquer directement la formule de 7.
2. Developpée
Avec les notations de 7, on a :
Ω(t) = M(t) + R(t)−−→N(t)
=
x(t) − dy(t)
ds
y(t) +dx(t)
ds
=
x(t) − y′(t)x′2(t) + y′2(t)∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
y(t) + x′(t)x′2(t) + y′2(t)∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
.
Corollaire 9.
5. et simplifier !6. On prendra garde à l’extraction de la racine carrée. Pout toute valeur du paramètre, s′(t) est TOUJOURS
strictement positive par définition
Fabien PUCCI 42. Etude métrique des courbes planes

III. Calculs pratiques 15
Preuve de 9: il suffit de remplacer et de simplifier avec−−→N(t)
−y′(t)√
x′2(t) + y′2(t)x′(t)
√
x′2(t) + y′2(t)
.
On appelle développée d’une courbe plane le lieu de ses centres de courbure.
Définition 6.
La développée d’une courbe est l’enveloppe de la famille des droites normales à la courbe.
Proposition 10.
Preuve de 10: On suppose la courbe suffisamment dérivable, birégulière et paramétrée par l’abscisse curviligne. Ladéveloppée ~g(s) est donnée par :
−−→g(s) =
−→OΩ(s) =
−−→OM(s) + R(s)
−−−→N(s).
Le vecteur dérivé de la développée est alors :
−−→g′(s) =
−−−→f ′(s) + R(s)
−−−→N(s)
ds+
dR(s)
ds
−−−→N(s)
=−−→T (s) − R(s) × 1
R(s)
−−→T (s) +
dR(s)
ds
−−−→N(s)
= R′(s)−−−→N(s).
La tangente de la développée est donc colinéaire à la normale à la courbe.
Remarque: les points stationnaires de la développée g correspondent aux extrema de la courbure 7 de f .
Exemples:
• Développée d’une ellipse paramétrée par 42.1 :
1
2
−1
−2
1 2 3−1−2−3
bc M0bc Ω0
bc M1
bc Ω1
bc M2
bc Ω2
bc M3
bc Ω3
bc M4
bc Ω4
bc M5
bc Ω5
bc M6 bc Ω6
bc M7
bc Ω7
bc M8
bc Ω8
bc M9
bc Ω9
bcM10
bc Ω10
bcM11
bc Ω11Ω(s) =
x(t) − y′(t)x′2(t) + y′2(t)∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
y(t) + x′(t)x′2(t) + y′2(t)∣
∣
∣
∣
∣
x′(t) x′′(t)y′(t) y′′(t)
∣
∣
∣
∣
∣
=
a cos t − b cos ta2 sin2 t + b2 cos2 t
ab
b sin t − a sin ta2 sin2 t + b2 cos2 t
ab
=1
ab
a2b cos t(
1 − sin2 t)
− b3 cos3 t
ab2 sin t(
1 − cos2 t)
− a3 sin3 t
=
(
a2 − b2
acos3 t,
b2 − a2
bsin3 t
)
.
A une affinité près, la développée d’une ellipseest une astroïde 8.
7. les sommets.8. Que donnerait cette développée si l’on utilisait l’abscisse curviligne au lieu de t ?
42. Etude métrique des courbes planes Fabien PUCCI

16 Etude métrique des courbes planes
3. Point de vue cinématique
Dans l’étuded’un mouvement t 7−→ M(t), le vecteurd−−→OM
dtreprésente la vitesse du point et
d2−−→OM
dt2son accélération.
On peut exprimer ces deux vecteurs dans la base de Frénet(−−→
T (s),−−−→N(s)
)
:
d−−−−→OM(s)
dt=
ds
dt× d
−−−−→OM(s)
ds=
ds
dt
−→T = v
−→T ,
où v représente la vitesse scalaire du point.Pour l’accélération, il suffit de dériver cette dernière égalité :
d2−−−−→OM(s)
dt2=
d
dt
(
v−−→T (s)
)
=dv
dt
−−→T (s) + v
d−−→T (s)
dt
=dv
dt
−−→T (s) + v × ds
dt
−−→T (s)
=dv
dt
−→T +
v2
R
−→N .
• dv
dt
−→T représente l’accélération tangentielle et indique les variations de la norme du vecteur
vitesse.
• v2
R
−→N est l’accélération centripète qui indique les variations de la direction du vecteur vitesse.
Fabien PUCCI 42. Etude métrique des courbes planes

IV. Un peu de culture 17
IV. Un peu de culture
Cycloïdes Une cycloïde est la trajectoire d’un point fixé à un cercle qui roule sans glisser sur unedroite.Une cycloïde peut être définie par l’équation paramétrique suivante :
x(t) = R(
1 − sin t)
y(t) = R(
t − cos t)
×
bbc
×b
bc
×
b
bc
×
b
bc
×
bbc
×
bbc
×
b
bc
×
b
bc
× b
bc
×
b bc
Une droite n’est qu’un cercle de longueur infinie. Donc, en considérant le roulement sans glis-sement d’un cercle sur un autre cercle, on obtient, suivant que le petit cercle roule sous ou surle grand cercle, des hypocycloïdes ou des épicycloïdes.
Hypocycloïdes : Les hypocycloïdes sont les courbes décrites par un point d’un cercle roulant sansglisser sur et intérieurement à un cercle de base ; le cercle roulant étant plus petit que le fixe.Ce sont donc des cas particuliers d’hypotrochoïdes.Une hypocycloïde peut être définie par l’équation paramétrique suivante :
x(t) = (R − r) cos t + r cosR − r
rt
y(t) = (R − r) sin t − r sinR − r
rt
où R est le rayon du cercle de base et r, celui du cercle roulant. En notant q =R
rles points de
rebroussements sont obtenus pour t =2kπ
q. La longueur d’une arche est de 8
q − 1
q2R.
Si q est entier, la longueur totale de la courbe vaut4
π
(
1 +1
q
)
fois la longueur du cercle de
base, et l’aire totale vaut
(
1 − 1
q
)(
1 − 2
q
)
fois celle du cercle de base.
bc M0b N0×
bcM1
bN1
×
bcM2
bN2
×bcM3
bN3
×
bcM4 b
N4
×
Hypocycloïde à 3 rebroussementsou Deltoïde
(R = 3 et r = 1)
bcb×
bcb ×
bcb×
bcb ×
bcb×
bcb×
bcb×
bcb×
bc
b×bcb×
Hypocycloïde à 20 rebroussements
(R = 20 et r = 1)
42. Etude métrique des courbes planes Fabien PUCCI

18 Etude métrique des courbes planes
b
b
×
b
b
×
b b
×
b
b
×
b
b ×
b
b
×
b
b
×
bb×
b
b
×
b
b
×
Hypocycloïde à 17 rebroussements
(R = 17 et r = 5)
Epicycloïdes : Les épicycloïdes sont les courbes décrites par un point d’un cercle roulant sans glissersur et extérieurement à un cercle de base.Une épicycloïde peut être définie par l’équation paramétrique suivante :
x(t) = (R + r) cos t − r cosR + r
rt
y(t) = (R + r) sin t − r sinR + r
rt
où R est le rayon du cercle de base et r, celui du cercle roulant.
En posant q =R
r, les points de rebroussement sont obtenus pour t =
2kπ
qet la longueur d’une
arche est de 8q + 1
q2R.
Fabien PUCCI 42. Etude métrique des courbes planes

IV. Un peu de culture 19
bcb ×
bc
b
×bcb
×
bcb
×
bc
b×
bc
b
×
bc
b
×
bc
b
×
bcb ×
bc
b
×
q = 1 : Cardioïde
(R = 2 et r = 2)
bcb ×
bc
b
×bc b
×bc
b
×
bc
b
×
bc
b×
bcb
×
bc
b
×
bcb×
bc
b
×
q = 2 : Néphoïde (en forme de rein)
(R = 2 et r = 1)
bcb ×
bc
b
×
bc
b×bc
b
×
bc
b ×
bcb
×
bc
b×
bc
b
×
bcb
×
bc
b
×
q = 3
(R = 3 et r = 1)
bcb ×
bcb
×
bcb
×
bc
b
×
bc
b
×
bcb
×
bc
b
×
bc
b
×
bc
b
×
bc
b
×
q =1
2
(R = 1 et r = 2)
42. Etude métrique des courbes planes Fabien PUCCI

20 Etude métrique des courbes planes
bcb ×
bc
b
×
bc
b
×bc
b
×
bcb
×
bc
b
×
bc
b
×
bc
b×
bc
b
×
bcb
×
q =17
5
(R = 17 et r = 5)
De manière plus générale, le point peut être lié au cercle mobile sans pour autant appartenir àce dernier. On parle alors d’hypotrochoïdes ou d’épitrochoïdes.
Hypotrochoïdes Les hypotrochoïdes sont les courbes décrites par un point lié à un cercle roulantsans glisser sur et intérieurement à un cercle de base. Les hypocycloïdes précédentes sont doncdes cas particuliers de celles-ci. Une hypotrochoïde peut être définie par l’équation paramétriquesuivante :
x(t) = (R − r) cos t + d cosR − r
rt
y(t) = (R − r) sin t − d sinR − r
rt
où R est le rayon du cercle de base, r, celui du cercle roulant et d la distance du point au centredu cercle mobile.Lorsque d = r, on retrouve une hypocycloïde.
Fabien PUCCI 42. Etude métrique des courbes planes

IV. Un peu de culture 21
bc b×
bc
b
×
bc
b
×
bc
b ×
bc
b
×
R = 4, r = 1 et d = 3
bcb×
bc
b×
bc
b
×
bc
b
×
bc
b
×
R = 2r = 4, r = 2 et d = 1Ellipse
bc b×
bc
b
×
bc
b
×
bc
b
×
bc
b
×
R = 5, r = 3 et d = 5
bcb×
bc
b×
bc
b
×
bc
b
×
bc
b ×
R = 3, r = 1 et d =1
2Triangle
bcb×
bc
b×
bc
b×
bc
b ×
bc
b×
R = 4, r = 1 et d =1
3Carré
bcb×
bc
b×
bc
b ×
bc
b×
bc
b×
R = 5, r = 1 et d =1
4Pentagone
Epitrochoïdes Les épitrochoïdes sont les courbes décrites par un point lié à un cercle roulant sansglisser sur et extérieurement à un cercle de base. Les épicycloïdes précédentes sont donc descas particuliers de celles-ci. Une épitrochoïde peut être définie par l’équation paramétriquesuivante :
42. Etude métrique des courbes planes Fabien PUCCI

22 Etude métrique des courbes planes
x(t) = (R + r) cos t − d cosR + r
rt
y(t) = (R + r) sin t − d sinR + r
rt
où R est le rayon du cercle de base, r, celui du cercle roulant et d la distance du point au centredu cercle mobile.Lorsque d = r, on retrouve une épicycloïde.
bc b ×
bc b×
bcb
×bc
b×
bc
b
×
bc
b ×
bc
b×
bc
b×
bc
b×
bc
b
×
bcb ×
bc
b×
bc
b× bc
b×
bc
b
×
R = 3, r = 1 et d =1
2
bc b ×
bc b×bc
b
×
bc
b
×
bc
b×
bc
b×
bc
b
×
bc
b
×
bc
b
×
bc
b
×
bcb ×bc
b× bc
b
×
bc
b
×
bc
b×
R = 2, r = 2 et d = 1Limaçon de Pascal
bcb ×bc
b
×bc
b
×bc
b
×
bcb
×
bc
b×
bc
b
×
bc
b
×
bc
b
×
bc
b
×
bcb ×bc
b
× bc
b
×
bc
b
×
bc
b
×
R = 2, r = 2 et d = R + r = 4Limaçon de Pascal
bc b ×
bc b×
bc b
×bc
b×
bc
b×
bc
b
×
bc
b
×
bc
b
×
bc
b ×
bcb×
bc
b
×
bc
b× bc
b×bc
b
×
bc
b
×
R = 3, r = 2 et d = 1
Fabien PUCCI 42. Etude métrique des courbes planes

V. Références 23
bcb ×
bc
b
×bc
b
×bc
b
×
bc
b×
bc
b
×
bc
b
×
bc
b
×
bc
b ×
bc
b
×
bc
b
×
bc
b
× bc
b×bc
b
×
bc
b
×
R = 3, r = 2 et d = R + r = 5
Trochoïdes Enfin, les trochoïdes sont les courbes obtenues en traçant le mouvement décrit par unpoint d’un disque roulant (sans glisser) sur une droite. Une trochoïde peut être définie parl’équation paramétrique suivante :
x(t) = Rt − d sin t
y(t) = R − d cos t
où R est le rayon du cercle et d la distance du point au centre du cercle mobile.Lorsque d = R, on retrouve une cycloïde.
×b
bc
×b
bc
×b
bc
×b
bc
×b
bc
×b
bc
×b
bc
×b
bc
× b
bc
×b
bc
R = 3 et d = 1
×
b
bc
×
b
bc
×b
bc
×
b
bc
×
b
bc
×bbc
×
bbc
×
b
bc
R = 1 et d = 3
V. Références
– J.M Monier, Géométrie PCSI-PTSI, Dunod– J. Quinet, Cours élémentaire de Mathématiques supérieures - Tome 5 Géométrie, Dunod
42. Etude métrique des courbes planes Fabien PUCCI

24 Etude métrique des courbes planes
– E. (Edmond) Ramis, C. (Claude) Deschamps, J. Odoux, Cours de mathématiques spéciales -
Tome 5 - Applications de l’analyse à la géométrie, Masson– J. Voedts, Cours de Mathématiques - MP, Ellipses
VI. Idées de développement
–
bc
Montrer que la développée de la sextique de Cayley d’équation
polaire ρ(θ) = 4a cos3 θ
3est la néphroïde centrée en
(
a
2, 0)
et pas-
sant par O.Montrer ensuite que la néphroïde a aussi pour développée une né-phroïde et conclure que la sextique de Cayley est l’une des courbesparallèles à la néphroïde.
– Etudier la spirale de Cornu ou clothoïde qui est une courbe dontla courbure est proportionnelle à l’abscisse curviligne. Le mot clo-thoïde vient du grec klothein : filer (la laine), la forme de la courberappelant celle du fil qui s’enroule autour du métier à tisser. La même racine apparaît dans lenom de Clotho, celle des trois Parques qui tient le fil des destinées humaines.La courbe peut être définie paramétriquement par l’équation suivante :
x(t) = a
∫ t
0cos u2 du
y(t) = a
∫ t
0sin u2 du
On peut également la définir par une équation intrinsèque :
2R(s)s = a2,
où R(s) représente le rayon de courbure et s l’abscisse curviligne.
1
1
En cinématique, la propriété fondamentale de la clothoïdese traduit par une trajectoire qui, parcourue à vitesse constante,est telle que sa courbure varie linéairement. La force centri-fuge subie par un observateur circulant de façon continuele long de cette courbe varie donc continûment.Concrètement, elle représente la trajectoire d’une automo-bile se déplaçant à vitesse stabilisée et dont on tourne levolant progressivement. C’est donc la trajectoire la plusconfortable, celle que l’on adopte pour le tracé des auto-routes. En pratique, on n’utilise cette courbe que pour as-surer le raccordement progressif d’un alignement droit etd’un arc de cercle.Pour les mêmes raisons, on utilise la clothoïde aux fins de courbes dans les tracés des cheminsde fer parce qu’un véhicule suivant ce tracé à une vitesse constante subit une accélération an-gulaire constante, ce qui réduit à la fois les efforts sur les rails et l’inconfort des passagers dansles voitures. On retrouve cette courbe dans les boucles verticales ou loopings des montagnesrusses pour le confort des passagers, afin que l’accélération verticale subie soit continue.Enfin, les sabots montés sur les pylônes de téléphériques, et qui supportent le câble porteur,adoptent cette forme. De fait, il est possible de faire circuler la cabine à sa vitesse maximalesur le pylône, sans incommoder les passagers.
Fabien PUCCI 42. Etude métrique des courbes planes

VI. Idées de développement 25
– Montrer que l’enveloppe des droites de Simson d’un triangle quelconque est une deltoïde centréeau centre du cercle d’Euler du triangle, appelée hypocycloïde de Steiner du triangle.
42. Etude métrique des courbes planes Fabien PUCCI