DIVERS régulateur P.I.D. numérique - scan78.free.frscan78.free.fr/Elektor/Elektor 1999...
6
Elektor 9/99 Le régulateur numérique P.I.D. à PIC se prête particulièrement bien à l’étude de l’influence des paramètres sur le comportement de sys- tèmes réglés simples. Mais rien n’empêche de l’incorporer dans une application concrète. La régulation complète d’une application requiert, outre le régula- teur P.I.D., un actionneur et un capteur appropriés. Un microcontrôleur éco- nomique PIC16C71 constitue le cœur du cir- cuit ; son convertisseur analogique-numérique numérise la valeur mesu- rée (valeur effective) et la transmet au programme. Ce dernier détermine la déviation de chaque valeur mesurée par rapport à la valeur de consigne et en tire la réponse transmise au conver- tisseur (externe) numérique-analo- gique. Les paramètres de régulation introduits par pavé de touches sont mémorisés à demeure dans une EEPROM. Pour ne pas dépasser les 1 k de mémoire de programmation du PIC, il faut positionner les paramètres en hexadécimal. Leur représentation sous forme de texte sur l’afficheur LC four- nit toutefois un peu plus de confort. I NFORMATIONS DE BASE Les circuits de régulation sont com- muns dans l’électronique, par exemple le régulateur de tension présent dans chaque circuit ou presque. Il est un peu plus compliqué d’asservir d’autres grandeurs physiques (comme le nombre de tours, la vitesse, la tempéra- ture, la pression, le débit, etc.). Les élé- ments de la technique de réglage, On se représente nor- malement un régula- teur P.I.D. sous la forme d’un circuit de régulation analogique basé sur quelques amplificateurs opéra- tionnels. Nous indi- quons ici comment réaliser un régulateur numérique de ce type. Ce circuit de régula- tion universel à PIC et convertisseur numé- rique-analogique per- met de spécifier par clavier tous les para- mètres de régulation en fonction de chaque application. 28 par Dieter Kohtz à PIC dans le système réglé Caractéristiques : ➤ Comportement de régulation P.I.D. ➤ Introduction des paramètres par clavier (hexa- décimal) et affichage LC (alphanumérique) ➤ Paramètres réglables : valeur de consigne grandeur réglante initiale limite supérieure limite inférieure intervalle d’échantillonnage (100 ms – 25 s) ➤ Mémoire EEPROM des paramètres ➤ Conversion analogique-numérique 8 bits et numérique analogique (valeur mesurée et gran- deur réglante) ➤ Microcontrôleur 16C71 DIVERS régulateur P.I.D. numérique
Transcript of DIVERS régulateur P.I.D. numérique - scan78.free.frscan78.free.fr/Elektor/Elektor 1999...

Elektor 9/99
Le régulateur numérique P.I.D. à PIC seprête particulièrement bien à l’étudede l’influence des paramètres sur le
comportement de sys-tèmes réglés simples.Mais rien n’empêche del’incorporer dans uneapplication concrète. Larégulation complèted’une applicationrequiert, outre le régula-teur P.I.D., un actionneuret un capteur appropriés.Un microcontrôleur éco-nomique PIC16C71constitue le cœur du cir-cuit ; son convertisseuranalogique-numériquenumérise la valeur mesu-rée (valeur effective) et latransmet au programme.Ce dernier détermine la
déviation de chaque valeur mesuréepar rapport à la valeur de consigne et
en tire la réponse transmise au conver-tisseur (externe) numérique-analo-gique. Les paramètres de régulationintroduits par pavé de touches sontmémorisés à demeure dans uneEEPROM.Pour ne pas dépasser les 1 k demémoire de programmation du PIC, ilfaut positionner les paramètres enhexadécimal. Leur représentation sousforme de texte sur l’afficheur LC four-nit toutefois un peu plus de confort.
I N F O R M A T I O N S D EB A S ELes circuits de régulation sont com-muns dans l’électronique, par exemplele régulateur de tension présent danschaque circuit ou presque. Il est un peuplus compliqué d’asservir d’autresgrandeurs physiques (comme lenombre de tours, la vitesse, la tempéra-ture, la pression, le débit, etc.). Les élé-ments de la technique de réglage,
On se représente nor-malement un régula-
teur P.I.D. sous laforme d’un circuit de
régulation analogiquebasé sur quelques
amplificateurs opéra-tionnels. Nous indi-quons ici comment
réaliser un régulateurnumérique de ce type.
Ce circuit de régula-tion universel à PIC et
convertisseur numé-rique-analogique per-
met de spécifier parclavier tous les para-mètres de régulation
en fonction de chaqueapplication.
28
par Dieter Kohtz
à PIC dans le système réglé
Caractéristiques : Comportement de régulation P.I.D. Introduction des paramètres par clavier (hexa-
décimal) et affichage LC (alphanumérique) Paramètres réglables :
valeur de consignegrandeur réglante initialelimite supérieurelimite inférieureintervalle d’échantillonnage (100 ms – 25 s)
Mémoire EEPROM des paramètres Conversion analogique-numérique 8 bits et
numérique analogique (valeur mesurée et gran-deur réglante)
Microcontrôleur 16C71
DIVERS
régulateur P.I.D.numérique

consacrée à ce genre de problème, sontbrièvement récapitulés ici.La technique de réglage désigne parprocessus l’objet de la régulation. Le butconsiste à maintenir la grandeur deconsigne d’un processus à la valeur deconsigne désirée, même sous l’influencede perturbations contraires. Il faut pourcela que le régulateur mesure la valeureffective y, calcule la déviation de réglagee par comparaison avec la valeur deconsigne w et, selon le résultat de cettecomparaison, produise une grandeurréglante u ayant le résultat désiré. Lacaractéristique de toute régulation estson caractère de boucle fermée (figure 1).Le signal d’entrée du processus asserviet du régulateur produit un signal desortie bien déterminé qui, dans la plu-part des cas, dépend du temps. La carac-téristique principale du processus et durégulateur se dénomme réponse à unéchelon. Elle indique la réaction à unsignal d’entrée u qui effectue un sautbrusque puis reste constant. Le com-portement reproduit dans la figure 2est celui de nombreux processus : si onapplique par exemple une tensionconstante à une résistance de chauf-fage, la température résultante suit uncomportement temporel similaire.Le régulateur peut être aussi considérécomme un élément de transfert quiréagit au signal d’entrée « déviation deréglage » par un signal de sortie « gran-deur réglante ».La forme que prend cette réaction dif-férencie les régulateurs proportionnels,intégraux et différentiels. L’élément detransfert d’un régulateur proportion-nel (régulateur P) n’est en fait riend’autre qu’un amplificateur. La modi-fication du signal de sortie est propor-tionnelle au signal d’entrée, l’amplifi-cation est le seul paramètre ajustable.Comme le laisse déjà supposer leurnom, l’élément de transfert d’un régu-lateur intégral (régulateur I) est un élé-ment d’intégration (intégrateur) etcelui d’un régulateur différentiel (régu-lateur D) un élément de dérivation(différentiateur). Les constantes detemps forment des paramètres supplé-mentaires à l’amplification. Un type derégulateur « tout-terrain » réunit cestrois types en un : le régulateur P.I.D.Comme l’indique la figure 3, la gran-deur réglante u est formée de lasomme des sorties des trois types derégulateurs ; la contribution de chaquerégulateur peut être « pondérée » dif-féremment selon le comportement derégulation désiré. La relation mathé-matique entre la grandeur réglante etla déviation de réglage se nomme algo-rithme de régulation et celle d’un régu-lateur P.I.D. analogique prend la formed’une équation différentielle.L’incapacité d’un régulateur analo-gique à saisir continuellement la valeureffective le distingue principalementd’un régulateur numérique. La saisie
de chaque mesure esteffectuée au rythmed’un intervalled’échantillonnage (T0) donné au coursduquel le régulateur évalue la dévia-tion de réglage et s’en sert pour calculerla grandeur réglante au moyen de l’al-gorithme de régulation. L’algorithmede régulation est basé sur l’équationsuivante (dérivation dans le texte enca-dré « Bases d’un régulateur P.I.D.numérique ») :
uk = u(k-1) + q0*ek + q1*e(k-1) + q2*e(k-2)
L’indice k est le numéro de séquencedes mesures.La grandeur e(k-1) représente donc ladéviation de réglage de la mesure pré-cédente. Les paramètres de régulationq0 bis q2 peuvent être approchés aumoyen des équations ci-dessous danslesquelles on introduit les valeursfournies par la réponse du processusà un échelon :
q0 = [1,5 TG/(Kp*Tu)]*(1 + Tu/2T0)
q1 = [1,5 TG/(Kp*Tu)]*(T0/2Tu - Tu/T0 - 1)
q2 = 3TG/4KpT0
La réponse du processus à un échelonest déterminée expérimentalement. Ilfaut aussi que les paramètres remplis-
sent les conditions sui-vantes :
q0 > 0q1 < 0, |q1| > q0|q0 + q1| < q2 < q0
L’intervalle d’échantillonnage T0devrait être de l’ordre d’un dixièmedu temps de réponse du processus àun échelon pour parvenir à 95 % de lavaleur définitive.
M A T É R I E LE T L O G I C I E LL’entrée du régulateur est prévue pourune tension de 0 à 5 V qui peut pro-venir de n’importe quel capteur et esttransmise au convertisseur analo-gique-numérique du PIC 16C71 parl’amplificateur opérationnel IC5a ser-vant de tampon. Le filtre passe-basR8/C8 à la sortie de l’amplificateuropérationnel retient les perturbationsde fréquence élevée à l’entrée A/D(RA0 du PIC).La sortie de régulation fournit aussiune tension de 0 à 5 V. Le courant desortie fourni par l’amplificateur opé-rationnel IC5b suffit largement pour lecircuit de simulation du processusasservi mentionné au début de cetarticle. Il faut naturellement prévoirun étage de puissance commandé par
29Elektor 9/99
régulateur processus
valeur deréglage
u
990038 - 12
erreur derégulation
e
valeur deconsigne
w
valeurréelle
y
grandeur perturbatricez
e = w - y
1
Figure 1. Boucle derégulation fermée d’unprocessus.
t
y (t)
t = 0Tu
Tu = retardTG = temps de transitionKp = gain
TG 990038 - 13
2Figure 2. Exemple deréponse à un échelon.

la tension de sortie du régulateur(charge limitée à 5 mA) si l’on veutasservir un « véritable » processus.IC5b adapte la plage de tension duconvertisseur numérique-analogiqueà celle du convertisseur analogique-numérique du PIC. L’amplification estréglée à 1,953 par R10 et R11.Le DAC AD557 8 bits de AnalogDevices utilisé comme convertisseurnumérique-analogique se contented’une tension de fonctionnement de
5 V et se passede tout éta-lonnage. Lecircuit externese borne au
découplage de la tension d’alimenta-tion au moyen du condensateur C7.Les deux résistances de forçage R2 etR3 sont reliées aux broches horloge etdonnées de l’EEPROM 24C01.Les besoins du PIC en matérielexterne sont aussi très modestes.Outre l’oscillateur à quartz 4 MHz, ilne faut munir le circuit de réinitialisa-tion que de quelques composants pas-sifs. La réinitialisation Power-on esteffectuée par R5/C5 et la réinitialisa-tion manuelle par R6 et S1.La LED d’alarme D1 est commandéedirectement par la sortie du port RA4,le convertisseur numérique-analo-gique et le module LCD sont eux aussi
directement reliés aux ports de sortiedu PIC. Ces mêmes connexions desports servent à scruter les contacts duclavier en mode d’introduction. Cescontacts, hormis S2, sont tous reliésselon une matrice 4x4 à quatreconnexions des ports. La touche SETS2 met RB0 à la masse, ce qui permetde confirmer l’introduction.L’alimentation est d’une aussi grandesimplicité : un régulateur 5 V, deuxcondensateurs électrolytiques et unediode d’irréversibilité aux bornes 9 Vauxquelles est branché l’adaptateursecteur externe.Au tour du programme : les tableauxdes textes affichés et les commandesdestinées à piloter l’EEPROM sérielleoccupent une place considérable ; lessous-programmes mathématiques quicalculent les grandeurs réglantes nesont pas en reste. Le programme derégulation, par contre, n’occupequ’une place modeste. L’horloge quisurveille le programme cause uneréinitialisation et une alarme si le pro-gramme est bloqué (la LED D1 cli-gnote) et positionne la grandeurréglante à zéro. Il faut alors remettrele régulateur en marche, mais sansintroduire de nouveaux paramètrescar les valeurs les plus récentes dansl’EEPROM sont réutilisées.Comme le programme a besoin denombreux registres, il a fallu en réuti-liser quelques uns. Cela ne pose aucun
30 Elektor 9/99
régulateurI
régulateurP
régulateurD
valeur deréglage
u
990038 - 15
erreur derégulation
e
3
Figure 3. Schéma-blocd’un régulateur P.I.D.
Figure 4. Schéma deconnexion du régula-teur P.I.D. numériqueavec PIC.
16C71
OSC2
IC2
OSC1
MCLR
RA4
RA0
RA1
RA2
RA3
RB0
RB1
RB2
RB3
RB4
RB5
RB6
RB7
PIC
17
18
13
12
11
10
16 15
14
1
3
9
8
7
6
2
4
5
AD557
IC3
VOUTD0
D1
D2
D3
D4
D5
D6
D7
12
11
13
16
15
14
CE
10CS
SA
SB
1
2
3
4
5
6
7
8 9
24C01
IC1 SDA
SCL
A0
A1
A0
WP
1
5
8
4
6
2
3
7
2
3
1IC5a
X14MHz
R4
27
0Ω
R5
10
k
R6
10
0Ω
R13
1M
C2
22p
C3
22p
C4
100n
C8
10n
C7
100n
C1
100n
R10
9k53
1%
R7
10Ω
R11
10
k0
1%
R2
10
k
R3
10
k
6
5
7IC5b
S1
RESET
C5
10µ10V
R8
1kR12
10k
S15
S11
S7
S3
S2
S16
S12
S8
S4
S17
S13
S9
S5
S18
S14
S10
S6
RB0
RB1
RB2
RB3
RB4
RB5
RB6
RB7
RB0
RB1
RB2
RB3
RB4
RB5
RB6
RB7
RB3
RB2
RB1
RB0
RB
4
RB
5
RB
6
RB
7
RB7
RB6
R1
1k
5
D1
1
2
3
4
5
6
7
8
9
10
11
12
13
K1
14
R9
10k
RB0
RB1
RB2
RB3
RB4
RB5
RB6
RB7
C6
10µ10V 10k
P1
7805
IC4
C10
10µ 10V
C9
100µ 25V
D2
1N4001
+9V +5V
+8V4 5V
5V 5V
VSS
VDD
VO
RS
R/W
E
D0
D1
D2
D3
D4
D5
D6
D7
5V
5V5V5V
5V
C D E F
8 9 A B
4 5 6 7
0 1 2 3
SET
990038 - 11
IC5
8
4
IC5 = TLC272
LM16A211
C11
100n
8V4
4

problème fondamentalcar les registres utiliséspar exemple pour le cal-cul ne le sont jamaispendant l’introduction des para-mètres. Il est par contre peu élégantque les noms des registres ne reflètent
pas toujours exacte-ment leur rôle. Pourqui veut examiner leprogramme de plus
près ou le modifier, il existe une dis-quette contenant le code source (dis-ponible auprès de sources habituelles).
C O N S T R U C T I O N E TU T I L I S A T I O NLe montage du régulateur sur la pla-tine ne requiert aucune dextérité par-ticulière. Comme il s’agit d’une platinesimple face, il faut parfois recourir àdes fils de liaison. Ne pas oublier deles monter !Les connexions internes ne permet-tent d’utiliser que le type de boutonspoussoirs d’introduction indiqué dansla liste des pièces détachées. Un adap-tateur secteur 9 V sans régulation suf-fit comme alimentation pourvu qu’ilpuisse fournir environ 200 mA auminimum. Pour mettre la platine derégulation en service, régler toutd’abord le contraste de l’affichageavec P1 pour obtenir la meilleure lisi-bilité possible.Le circuit simple proposé ici (figure 7)permet de tester le régulateur et de« bidouiller » en simulant le processusasservi. La réponse du processus à unéchelon est déterminée par lesconstantes de temps des trois filtrespasse-bas RC couplés en série. Il estfacile de modifier les constantes detemps de ces processus « électro-niques » et aussi de simuler les pertur-bations en raccordant la résistance decharge à la sortie.L’entrée du circuit de simulation estraccordé à la sortie du régulateur, la
31Elektor 9/99
Figure 5. Dispositionet plan de montage dela platine.
990038-1(C) ELEKTOR
C1
C2C3
C4 C5
C6
C7 C8
C9 C10
C11
D1
D2
H1 H2
H3H4
IC1
IC2
IC3
IC4
IC5
K1
OU
T
P1
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13
S1S2S3 S4 S5 S6
S7 S8 S9 S10
S11 S12 S13 S14
S15 S16 S17 S18
X1
T
0 1 2 3
4 5 6 7
8 9 A B
C D E F
Set Reset
T
T
0
+9V
+5V
0
990038-1
990038-1(C) ELEKTOR
5Liste des composants
Résistances :R1 = 1kΩ5R2,R3,R5,R9,R12 = 10 kΩR4 = 270 ΩR6 = 100 ΩR7 = 10 ΩR8 = 1 kΩR10 = 9kΩ53 1%R11 = 10 kΩ/1%R13 = 1 MΩP1 = 10 kΩ
Condensateurs :C1,C4,C7,C11 = 100 nF céramiqueC2,C3 = 22 pF céramiqueC5,C10 = 10 µF/10 V verticalC6 = 10 µF/10 VC8 = 10 nF MKTC9 = 100 µF/25 V vertical
Semi-conducteurs :D1 = LED rouge à haut rendementD2 = 1N4001IC1 = 24C01IC2 = PIC16C71(programmé :EPS
996504-1)IC3 = AD557JN (Analog Devices)IC4 = 7805IC5 = TLC272 CP
Divers :X1 = quartz 4 MHzK1 = affichage LCD à 2 rangées de
16 caractères tel que, par exemple,LM16A211 (Sharp)
S1 à S18 = bouton-poussoirD6-R-RD (ITC)

sortie du circuit de simulation à l’en-trée du régulateur. Il n’est possibled’introduire les paramètres qu’immé-diatement après la mise en marche durégulateur ou après sa réinitialisation.Le clavier sert à introduire les para-mètres sous forme hexadécimale. Ilfaut presser deux touches avant queles deux chiffres correspondantssoient affichés. Les données intro-duites ne sont acceptées et stockéesdans l’EEPROM que lorsque la toucheSET a été pressée. La valeur deconsigne et la grandeur réglante peu-vent être positionnées entre 00 et FFh,ce qui correspond à une plage de ten-sion de 0 V à 5 V. Il est aussi possiblede choisir la limite supérieure et lalimite inférieure entre 00 et FFh. L’in-tervalle d’échantillonnage (affichage« INTERVAL ») se compose d’un inter-valle de base de 0,1 s multiplié par lavaleur hexadécimale introduite.
Les paramètresq0, q1 et q2, quiforment une par-tie importante del’algorithme derégulation, appa-
raissent sous la forme de nombres àvirgule fixe d’un octet (deux chiffresHEX) avant et d’un autre après la vir-gule. Le poids des bits après la virguleest de :1/2n, où n est la position du bit(MSB = 1, LSB = 8). Le nombre HEX80 après la virgule exprime donc 1/2 =0,5 décimal. Comme q1 est toujoursnégatif, on récapitulera brièvement icila représentation des nombres binairesnégatifs : un nombre binaire négatifest formé par l’inversion des bits sui-vie de l’addition de 1. Exemple :
13d = 0000 1101b = 0Dhinverse : 1111 0010b = F2h
+1: 1111 0011b = F3h
Cela signifie que les valeurs desnombres de 8 bits précédés d’un signes’étendent de +127d = 7Fh à –128d =80h. On reconnaît les nombres de8 bits négatifs à ce que le MSB = 1.Lorsqu’on introduit q0 à q2, il fautintroduire séparément l’octet entier etl’octet fractionnaire (par exempleQ0HI et Q0LO, au moyen de deuxtouches chacun, comme pour l’intro-
duction des autres quantités numé-riques, et terminer chacun des deuxoctets par un SET).On a obtenu des résultats satisfaisantsavec le circuit de simulation de lafigure 7 en utilisant les paramètres sui-vants :
q0 = 13,5d = 0D80hq1 = –18,5d = ED80hq2 = 6,5d = 0680hIntervalle d’échantillonnage = 0,4 s(introduire : 04)Valeur de consigne = 80h (= 2,5 Venviron)Grandeur réglante initiale =A0h (= 3,1 V environ)
Comme les tolérances des condensa-teurs électrolytiques du circuit desimulation ne sont pas des plus rigou-reuses, il peut arriver que la régulationne fonctionne pas encore parfaite-ment avec ces paramètres. Il faut alorsajuster empiriquement q0 à q2.
La sortie du régulateur se trouve àzéro volts lors de l’introduction desparamètres. À la fin de l’introductiondes paramètres confirmée par SET, lavaleur initiale choisie pour la gran-deur réglante (MAN.VAR. = MANi-pulated VARiable) est appliquée jusqu’àce que la valeur de consigne (SETVA-LUE) soit atteinte. Le processus derégulation proprement dit entre alorsen action et maintient la valeur deconsigne même en présence de per-turbations avec plus ou moins de suc-cès selon les paramètres de régulationadoptés. La valeur instantanée de lagrandeur réglante (MAN.VAR.) et dela valeur effective (ACT.VAL. =ACTual VALue) sont continuellementaffichées pendant la régulation.Si la limite supérieure (UPPER LIMIT)est dépassée ou la limite inférieure(LOWER LIMIT) n’est pas atteinte, laLED d’alarme D1 clignote aussi long-temps que dure l’écart en plus ou enmoins. Pendant ce temps, les nou-velles données ne sont pas affichées.La sortie du régulateur devient nullequand la limite supérieure est dépas-sée et FFh = 5 volts quand la limiteinférieure n’est pas atteinte.Si le régulateur est remis en marchepar Reset, il faut effectuer la procé-dure d’introduction en confirmantchaque nouvelle valeur affichée parSET. L’afficheur contient tout d’abordSETVALUE avec la dernière valeurmémorisée. Suivent (en pressant SET)MAN.VAR., UPPER LIMIT, LOWERLIMIT et INTERVAL. Chaque donnéemémorisée est affichée et peut êtremodifiée si nécessaire.
(990038)
Référence :Hoffmann, N. : Digitale Regelung mitMikroprozessoren, Vieweg Verlag 1983
32 Elektor 9/99
6
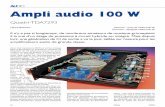
Figure 6. Platine derégulateur numériqueprête à l’emploi.
Figure 7. Ce petit cir-cuit sert à tester lerégulateur en simulantle « processus »asservi.
1k
100µ
10
0k
4k7
100µ
10k
100µ
990038 - 14
7

33Elektor 9/99
L’approche la plus simple consiste à prendre comme base lastructure connue d’un régulateur P.I.D. analogique en modecontinu pour ensuite en dériver une représentation discrète. Endomaine continu l’algorithme de régulation du régulateur P.I.D.répond à l’équation différentielle suivante :
Dans la présente équation les symboles KPR, KDR et KIR repré-sentent le gain (ajustable) des 3 régulateurs (P, D et I respective-ment) de la figure 3. Il est possible, par des transformées deLaplace de rendre cette équation pour le domaine des fré-quences :
formule qui suppose que les conditions de départ soient nulles.L’ingénieur de développement aura à définir les gains des3 régulateurs partiels (souvent baptisés valeurs partielles deproportionnalité, d’intégration et de différentiation du régulateurP.I.D.) en fonction du comportement de régulation souhaité.
L’étape suivante consiste à rechercher une représentation dis-crète du régulateur décrit par les équations [1] et [2]. La diffé-rence rétroactrice est définie comme étant l’équivalent temporeldiscret de la représentation chronologique en continu d’une fonc-
tion. Elle se traduit par :
formule dans laquelle T est la période du signal d’échantillonnage(= intervalle d’échantillonnage).La valeur de somme est définie comme l’équivalent chronologiquediscret de l’intégrale temporelle continue d’une fonction. Elle s’ob-tient par la formule suivante :
On obtient, si l’on applique les équations données en [3] et [4] àcelles des 2 premières formules, l’équation de l’algorithme derégulation du régulateur P.I.D. numérique donnée dans l’article :
L’indice k est à nouveau le numéro de séquence des différentesmesures :le facteur e(k-2) représente lui la déviation de réglage de la mesureprécédente.
u u q e q e q ek k k k k= + ⋅ + ⋅ + ⋅− − −( ) ( ) ( )1 0 1 1 2 2
f T f a T f a T f b
a
b
( ) ( ) ( ) . . . ( )τ = + + + + +[ ]∫ 2
∆f t f t f t T T( ) ( ) ( ) /= − −[ ]
u s K e s K s e s K s e sPR DR ID( ) ( ) ( ) ( / ) ( )= ⋅ + ⋅ ⋅ +
u t K e t K de t dt K e dPR DR IR
t
( ) ( ) ( )/ ( )= ⋅ + ⋅ + ⋅∫ τ τ
0
Bases d’un régulateur P.I.D numérique
Ce n’est peut-être qu’une illusion,mais il semble, qu’à la fin du 19èmesiècle, les découvertes se suivent àintervalle de plus en plus rapproché.En 1875, Alexander Graham Belldécouvrit le téléphone. Il utilisa,pour la capture du son, un capteur(micro) de forme plus ou moinsconique. Tout près de la fine mem-brane métallique montée à l’extré-mité de l’écouteur se trouvait unbarreau magnétique sur lequel étaitmontée une petite bobine. Lorsquel’on parlait dans le capteur la mem-brane entrait en oscillation de sorteque la distance entre la membrane et le barreau magnétique ne cessaitde varier.On avait de ce fait induction, dans la petit bobine, d’une tension alter-native qui variait en fonction du rythme des mots émis. Un correspon-dant pouvait, par la prise en parallèle de 2 de ces appareils intercon-nectés par un long câble, faire vibrer la membrane de l’autre appareil.On parlait dans, et on écoutait aussi, le même « appareil » que l’on met-tait alternativement devant la bouche (parole) et contre l’oreille (écoute).Le prototype fut rapidement amélioré par l’adjonction d’un écouteur dis-tinct. Dès 1878 on ouvrit aux États-Unis le premier réseau de téléphonepublic. La découverte de Bell est un indiscutable repère dans le domainede la communication à longue distance.Une découverte pour le moins aussi révolutionnaire vit, en 1877, le jourdans le laboratoire de Thomas Alva Edison. Il s’agissait d’un appareilservant à enregistrer mécaniquement le son. Ledit appareil prenait laforme d’un rouleau de bois tourné manuellement, pièce sur laquelle étaitmonté une feuille d’étain de faible épaisseur. À proximité immédiate durouleau on avait disposé une membrane dotée d’une pointe métalliquequi appuyait légèrement sur la feuille d’étain. Les ondes sonores faisaient
entrer la membrane en oscillation de sorte que la pointe gravait un sillonen forme de spirale dans la feuille d’étain, piste dont la profondeur variaiten fonction du rythme de la modulation. Lors de la reproduction le sillonainsi gravé faisait, à son tour, entrer la membrane en oscillation.Bien que la qualité de reproduction de ce « phonographe » ne soit pas desmeilleures, le système était parfaitement fonctionnel. En 1888 le rouleaurecouvert d’une feuille d’étain fut remplacé par un rouleau recouvert de cireet l’entraînement du moteur devint électrique; ces 2 modifications amé-liorèrent très sensiblement la qualité. Plus tard, Emile Berliner eut l’idéede ne pas moduler le sillon en profondeur mais en largeur. En 1888 Ber-liner remplaça le rouleau par un disque métallique dans lequel le sillonavait été écrit par un processus de gravure. Le disque microsillon qui fit sonapparition plus tard n’est en fait qu’un développement de cette approche.Évoquons, en guise de conclusion, un événement important qui a pris placeà la même époque. Vu la faible durée de vie de leurs filaments, les ampoulesà incandescence restaient une sorte de « jouet ». En 1879, Josef WilsonSwan démontra une ampoule à incandescence dont le ballon avait été vidéde son air ce qui empêchait la combustion du filament. Malheureusementpour lui il s’avéra que, quelques mois plus tôt, Edison avait déposé un bre-vet concernant une ampoule aux caractéristiques similaires. En 1882, lasociété « Edison Lamp Company » lança la production en série d’ampoulesà incandescence dotées, en guise de filament, d’un morceau de bamboujaponais. Ceci n’empêcha pas Swan de poursuivre le développement de sapropre ampoule à incandescence. Ilobtint, en 1880, un brevet anglaispour un exemplaire doté, en guisede filament, d’un morceau de fil decoton carbonisé. Aux Pays-Bas nonplus on ne resta pas les bras croisés;1884 vit la naissance, dans ce pays,de la première fabrique d’ampoulesà incandescence, la société « Elec-triciteits Maatschappij Systeem deKhotinskij ». (995073)
L’HISTOIRE DE L’ÉLECTRONIQUE (7)
Alexander Graham Bell(1847 - 1922)
Phonographe antique