Decoodt Clément Houzé-Jorant Grégoire - odpf.org · Nous nous sommes aperçus que les drones...
38
Projet réalisé par : Decoodt Clément Houzé-Jorant Grégoire Encadré par : Valant Karl Maximilien
Transcript of Decoodt Clément Houzé-Jorant Grégoire - odpf.org · Nous nous sommes aperçus que les drones...

Projet réalisé par :
Decoodt Clément
Houzé-Jorant Grégoire
Encadré par : Valant Karl Maximilien
1
TABLE DES MATIERES
INTRODUCTION ................................................................................................................................................ 4
PRESENTATION GLOBALE ................................................................................................................................ 4
FONCTIONNEMENT ET SYSTEMES..................................................................................................................... 5
TELECOMMANDE ......................................................................................................................................... 5
DÉTERMINER LA POSITION DES AXES ...................................................................................................... 5
SÉRIALISATION DES SIGNAUX REÇUS ..................................................................................................... 6
ÉMISSION ................................................................................................................................................ 7
CODE INTERNE DE REGULATION EN BOUCLE ............................................................................................... 8
ACQUISITION DES DONNEES | CENTRALE INERTIELLE ............................................................................. 8
TRAITEMENT DU SIGNAL......................................................................................................................... 9
CONTROLE DES DONNEES ...................................................................................................................... 10
ELECTRONIC SPEED CONTROLER .............................................................................................................. 11
LES HELICES .............................................................................................................................................. 12
HELICES ............................................................................................................................................... 12
ACTION … REACTION ! ........................................................................................................................ 12
TRANSPORT D’UNE MASSE DE A EN B ....................................................................................................... 13
TESTS ET PROTOTYPAGE ................................................................................................................................ 15
PREMIER PROTOTYPE ................................................................................................................................ 16
DEUXIEME PROTOTYPE ............................................................................................................................. 17
TROISIEME PROTOTYPE ............................................................................................................................. 17
CONCEPTION ........................................................................................................................................ 17
TESTS DU TROISIEME PROTOTYPE ......................................................................................................... 18
QUATRIEME PROTOTYPE ........................................................................................................................... 18
CONCEPTION ........................................................................................................................................ 18
STATION DE CONTROLE AU SOL ............................................................................................................. 19
CONCLUSION ................................................................................................................................................. 21
BIBLIOGRAPHIE........................................................................................................................................ 22

2
Résumé
Notre projet consiste en la création d’un drone, un aéronef sans pilote, qui a pour but de localiser la/les victime(s),
qui est étape cruciale dans tout sauvetage, puis de leur apporter des soins. Tout au long de l’année, nous avons donc
effectué divers prototypes qui mettaient fin à chaque fois aux problèmes rencontrés sur les prototypes précédents.
Cela nous a ainsi permis d’améliorer constamment notre drone dans l’optique de son application. Pour commencer
notre projet, nous avons tout d’abord pensé à l’utilisation d’un drone pour des applications de sauvetage grâce à des
défibrillateurs. Nous avons ensuite fait le choix des divers composants nécessaires à son fonctionnement et
répondants aux objectifs de l’application comme par exemple avec la caméra. Ces composants devaient également
être compatible entre eux et rentrer dans notre budget. Nous nous sommes ensuite attardés à leurs fonctionnements
puis nous avons effectué la réalisation du premier prototype. Viens ensuite une longue période où nous avons fait
les différents réglages comme le réglage des hélices dont certains compliqués ont été réalisés selon une succession
de tests. Différents crashs et problèmes comme la stabilité pour notre application sont alors apparues et nous avons
procédé à d’autres prototypes présentant de nombreuses évolutions notamment au niveau de la stabilité, de la
protection mais également dans la précision et le confort du contrôle du drone avec la fabrication d’un flightcase.
Dans un souci d’une meilleure précision des réglages, nous avons effectué une recherche plus approfondie des
notions physique que le drone soulève.
3
Préambule
Le point de départ a été la lecture d’un article sur internet concernant les défibrillateurs
(http://www.undefipourlavie.com/defibrillateur-automatise-externe-samaritan-pad/) où il est écrit :
« En France, on dénombre chaque année 60 000 décès dus à un arrêt cardiaque, soit 164 décès par jour. 88 %
de ces décès ont lieu dans des lieux publics : travail, transports publics, centres commerciaux, centres sportifs,
gares, voies publiques…. Chaque minute perdue fait diminuer de 10% les chances de rétablissement sans
séquelles. Idéalement la défibrillation doit être réalisée dans les 5 premières minutes suivant l’accident, afin
d’augmenter les chances de survie. Selon l’Inserm, une intervention rapide grâce au défibrillateur et au massage
cardiaque permettrait de sauver près de 12 000 vies chaque année. »
Nous nous sommes alors posé la question : comment pouvoir gagner ces précieuses minutes ?
En nous renseignant, nous avons vu qu’il existait de nombreux défibrillateurs publics, répertoriés et localisés
(http://defibrillateurs-en-france.com/). Mais le citoyen quelconque ne sait souvent pas où ils sont. Imaginons équiper
les défibrillateurs sur des drones pilotables à distance et gérés par les centres de secours. Le poids des nouveaux
défibrillateurs devrait le permettre. Dès qu’un appel aux urgences est lancé, sans problèmes de feux, de sens uniques,
d'embouteillages, toujours prêt, le drone est un moyen rapide, surtout en ville, d’accéder aux victimes! Il s'agirait de
gagner de précieuses minutes, le drone précédant l’arrivée physique des secours et permettant aux personne non
secouristes présentes sur les lieux de réaliser les premiers gestes vitaux. Le drone étant muni d'une caméra, d'un
microphone, d'un haut-parleur et d’un écran LCD, il y a d’autres possibilités : en attendant les premiers secours, on
peut envisager de filmer ce qui se passe, un secouriste en observant les images (via le web ou autre liaison), peut se
rendre compte de la situation et donner des ordres plus précis que s'il n'y avait qu'une communication téléphonique:
dans quelle position mettre la victime ou au contraire ne pas la déplacer, voir son état comateux ou pas, comment
réaliser un massage cardiaque...
Nous nous sommes aperçus que les drones existants étaient très chers et ne permettaient pas le transport d’objets ou
alors, n’avaient pas de possibilité d’évolution pour s’adapter à notre problématique (pilotage à distance,
éventuellement en immersion, communication etc...). Il faudrait donc tout réaliser soi-même.
Ce projet nous est très vite apparu très ambitieux pour un TPE. Cependant, nous nous sommes lancé le défi
d’apporter une contribution à la résolution de ce problème

4
INTRODUCTION
Dans le cadre de nos TPE, nous avions décidé d’entreprendre la réalisation d’un drone, un aéronef sans
pilote, pour mettre à l’épreuve nos compétences en matière d’électronique et d’aérodynamique, de développement et
de gestion de projet. Ce projet dans le cadre du TPE ayant très bien fonctionné, nous avons décidé de nous consacrer
à son amélioration dans un contexte touchant le milieu plus physique.
Après une présentation globale de notre projet ou nous expliquerons le choix d’un quadricoptère et justifierons le
titre d’un drone « au service de tous », nous nous intéresserons à la compréhension des différents composants
nécessaires à la réalisation d’un quadricoptère et de certains phénomènes physiques sous-jacents ainsi qu’a l’histoire
évolutive du drone à travers les différents prototypes que nous avons réalisés.
PRESENTATION GLOBALE
Pourquoi un quadricoptère comme drone ?
Passionnés d’électronique et de programmation nous avons décidé
de mêler les deux domaines en s’intéressant au domaine de la
robotique. En effet, celui-ci mène parfaitement ces deux sujets et
nous nous sommes donc mis d’accord pour mettre au point une
sorte de robot automatique. Puis un ami nous a montré cette vidéo:
http://www.youtube.com/watch?v=TI760jcFV2s
Elle montre des quadricoptères en train de construire une tour de 6
mètres de haut. Nous nous sommes donc demandé comment cela
était possible et nous sommes alors intéressés à la conception d’un
drone et plus particulièrement d’un quadricoptère. Nous avons
alors imaginé diverses applications comme la localisation de
victimes, la surveillance, la cartographie, etc. Remarquant les
immenses possibilités des quadricoptères, nous avons choisi d’étendre la problématique de notre drone sur sa
polyvalence et donc sur des diverses applications visant des usages civils, puis nous nous sommes intéressés à leur
application de SAR (Recherche et Sauvetage en Anglais).
Le principal avantage d’un quadricoptère dans notre cas est assez simple : Il est plus stable qu’un hélicoptère
classique pour le même prix et le même encombrement. Il peut également porter des charges plus lourdes. Plus le
multicoptère a de moteurs, plus il sera stable. Par exemple, un octocoptère est plus stable qu’un tricoptère ou un
hélicoptère (deux hélices). Autre chose entre cependant en compte : le budget. Il est donc nécessaire de trouver un
juste milieu entre budget et stabilité ; d’où le choix de quatre moteurs
Le budget dont nous disposions nous permettait simplement de réaliser un drone pouvant fonctionner et donc voler
sans équipements permettant une certaine application (comme le transport d’un défibrillateur). Nous avons donc
décidé de diriger notre drone vers une application touchant la surveillance civile ou la localisation de victimes car
ceci pour pouvait se faire avec une simple caméra.
Nous avons orienté notre projet vers un développement open-source, c’est-à-dire un développement qui pourra être
réutilisé librement. Ainsi, des personnes pourront réutiliser notre démarche comme nous nous pouvons réutiliser par
exemple le code interne du logiciel de traitement des images en relation avec la caméra d’une personne l’ayant placé
sous une licence libre de droit. Toujours dans un contexte de disponibilité pour tous, l’ensemble de notre projet sera
5
disponible sur internet (site http://ardufo.funpic.org), et l’ensemble des explications quant à son fonctionnement sera
destiné à une population très large. Dans une optique de polyvalence, nous avons décidé que notre quadricoptère
puisse être facilement modifiable dans son système interne de contrôle et de gestion. Nous avons donc décidé de
faire l’acquisition d’une carte de vol (carte électronique qui effectue tous les calculs de répartitions entre moteurs et
qui permet l’analyse des différentes positions vectorielles du drone) qui soit récente et surtout open-source : la carte
VRBrain. Cette carte peut facilement être modifiable par nous-même mais aussi par des centaines de personnes. De
plus cette carte inclut pour un même prix un autopilote, une télémétrie plus avancée que d’autres cartes comme les
cartes KK avec l’affichage d’un horizon virtuel qui peut être fusionné à une l’affichage de la caméra, un processeur
ARM Cortex M4 très puissant et peu consommateur d’énergie, … Nous avons alors choisi comme nom de projet
celui qui soutient le groupe de développement de la Carte ArduPilot Mega (la carte VRBrain est un fork – projet
dérivé – de cette carte) : le projet ArdUFO. Ainsi, notre projet s’en trouve constamment améliorable et peut alors à
tout moment basculer vers une application différente de celle que nous proposons.
Nous avons donc montré que le choix d’un quadricoptère était approprié pour le transport de défibrillateurs mais
que les champs d’application sont beaucoup plus nombreux. Dès son origine, ArdUFO qui s’oriente vers une mission
altruiste de sauvetage, a pour vocation d’être « au service de tous ». L’esprit du projet open-source renforce cette
notion en le rendant réalisable par tous et en étant le plus polyvalent possible.
FONCTIONNEMENT ET SYSTEMES
La première étape lors de la réalisation d’un produit est de comprendre comment il fonctionne, d’un point
de vue tant de la compréhension des phénomènes physiques que du développement du code interne.
TELECOMMANDE
La télécommande que nous avions lors des tests ne nous satisfaisant pas de par son manque de précision, nous avons
choisi d’en réaliser une par nos propres moyens. Un problème c’est alors posé : comment reproduire le
fonctionnement d’une télécommande ?
DÉTERMINER LA POSITION DES AXES
Le potentiomètre est indispensable dans tout joystick. Il permet en effet d’interpréter chaque position axiale du
joystick en une tension qui sera appliqué à un signal numérique pouvant être « lu » par la carte de contrôle de notre
drone.
Mais comment fonctionne-t-il ?
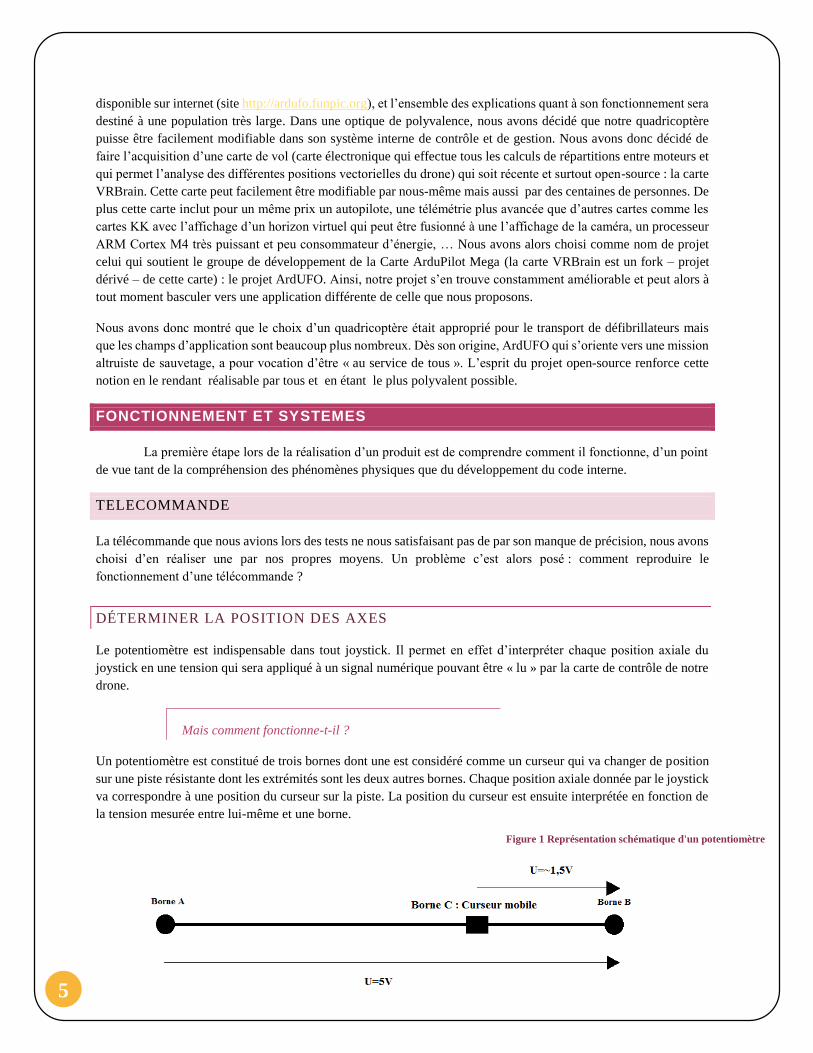
Un potentiomètre est constitué de trois bornes dont une est considéré comme un curseur qui va changer de position
sur une piste résistante dont les extrémités sont les deux autres bornes. Chaque position axiale donnée par le joystick
va correspondre à une position du curseur sur la piste. La position du curseur est ensuite interprétée en fonction de
la tension mesurée entre lui-même et une borne.
Figure 1 Représentation schématique d'un potentiomètre
6
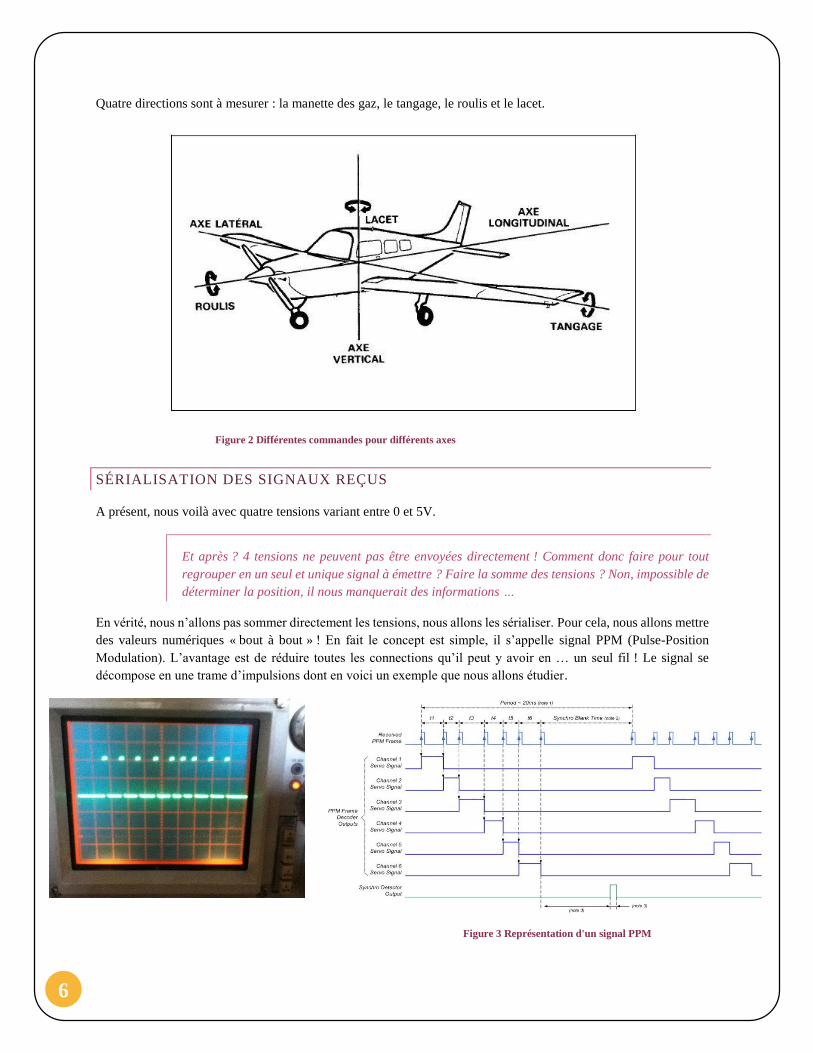
Quatre directions sont à mesurer : la manette des gaz, le tangage, le roulis et le lacet.
Figure 2 Différentes commandes pour différents axes
SÉRIALISATION DES SIGNAUX REÇUS
A présent, nous voilà avec quatre tensions variant entre 0 et 5V.
Et après ? 4 tensions ne peuvent pas être envoyées directement ! Comment donc faire pour tout
regrouper en un seul et unique signal à émettre ? Faire la somme des tensions ? Non, impossible de
déterminer la position, il nous manquerait des informations …
En vérité, nous n’allons pas sommer directement les tensions, nous allons les sérialiser. Pour cela, nous allons mettre
des valeurs numériques « bout à bout » ! En fait le concept est simple, il s’appelle signal PPM (Pulse-Position
Modulation). L’avantage est de réduire toutes les connections qu’il peut y avoir en … un seul fil ! Le signal se
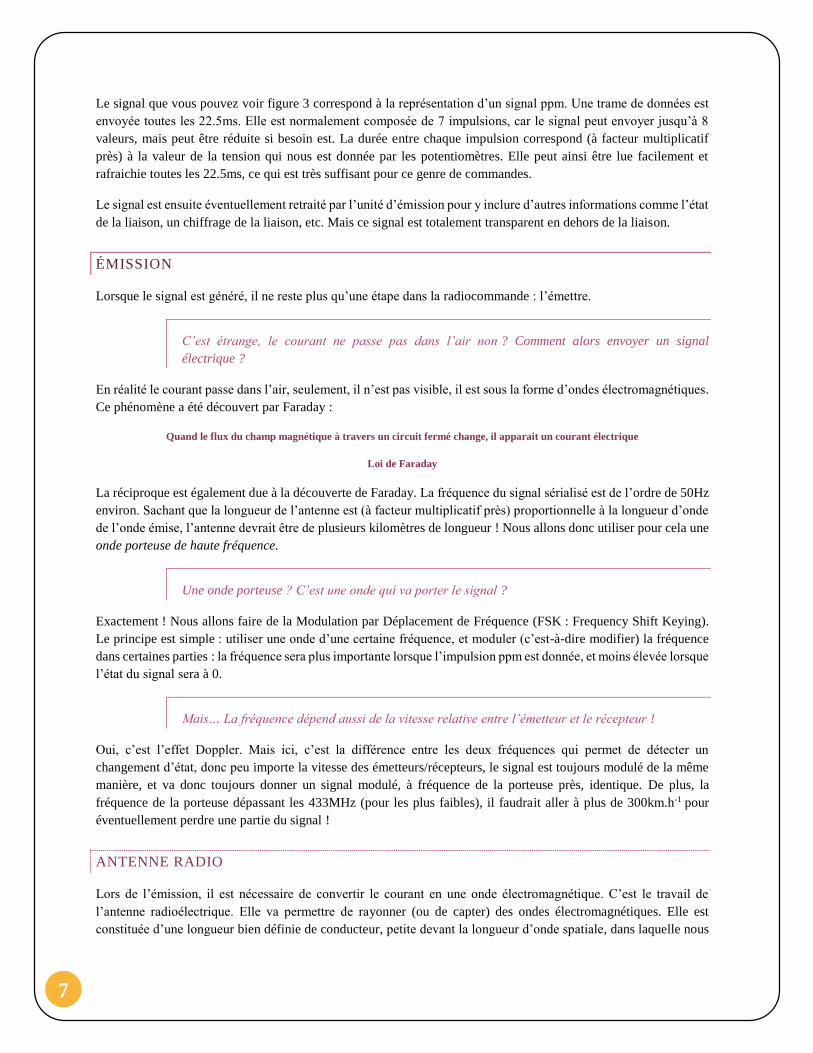
décompose en une trame d’impulsions dont en voici un exemple que nous allons étudier.
Figure 3 Représentation d'un signal PPM
7
Le signal que vous pouvez voir figure 3 correspond à la représentation d’un signal ppm. Une trame de données est
envoyée toutes les 22.5ms. Elle est normalement composée de 7 impulsions, car le signal peut envoyer jusqu’à 8
valeurs, mais peut être réduite si besoin est. La durée entre chaque impulsion correspond (à facteur multiplicatif
près) à la valeur de la tension qui nous est donnée par les potentiomètres. Elle peut ainsi être lue facilement et
rafraichie toutes les 22.5ms, ce qui est très suffisant pour ce genre de commandes.
Le signal est ensuite éventuellement retraité par l’unité d’émission pour y inclure d’autres informations comme l’état
de la liaison, un chiffrage de la liaison, etc. Mais ce signal est totalement transparent en dehors de la liaison.
ÉMISSION
Lorsque le signal est généré, il ne reste plus qu’une étape dans la radiocommande : l’émettre.
C’est étrange, le courant ne passe pas dans l’air non ? Comment alors envoyer un signal
électrique ?
En réalité le courant passe dans l’air, seulement, il n’est pas visible, il est sous la forme d’ondes électromagnétiques.
Ce phénomène a été découvert par Faraday :
Quand le flux du champ magnétique à travers un circuit fermé change, il apparait un courant électrique
Loi de Faraday
La réciproque est également due à la découverte de Faraday. La fréquence du signal sérialisé est de l’ordre de 50Hz
environ. Sachant que la longueur de l’antenne est (à facteur multiplicatif près) proportionnelle à la longueur d’onde
de l’onde émise, l’antenne devrait être de plusieurs kilomètres de longueur ! Nous allons donc utiliser pour cela une
onde porteuse de haute fréquence.
Une onde porteuse ? C’est une onde qui va porter le signal ?
Exactement ! Nous allons faire de la Modulation par Déplacement de Fréquence (FSK : Frequency Shift Keying).
Le principe est simple : utiliser une onde d’une certaine fréquence, et moduler (c’est-à-dire modifier) la fréquence
dans certaines parties : la fréquence sera plus importante lorsque l’impulsion ppm est donnée, et moins élevée lorsque
l’état du signal sera à 0.
Mais… La fréquence dépend aussi de la vitesse relative entre l’émetteur et le récepteur !
Oui, c’est l’effet Doppler. Mais ici, c’est la différence entre les deux fréquences qui permet de détecter un
changement d’état, donc peu importe la vitesse des émetteurs/récepteurs, le signal est toujours modulé de la même
manière, et va donc toujours donner un signal modulé, à fréquence de la porteuse près, identique. De plus, la
fréquence de la porteuse dépassant les 433MHz (pour les plus faibles), il faudrait aller à plus de 300km.h-1 pour
éventuellement perdre une partie du signal !
ANTENNE RADIO
Lors de l’émission, il est nécessaire de convertir le courant en une onde électromagnétique. C’est le travail de
l’antenne radioélectrique. Elle va permettre de rayonner (ou de capter) des ondes électromagnétiques. Elle est
constituée d’une longueur bien définie de conducteur, petite devant la longueur d’onde spatiale, dans laquelle nous

8
y faisons circuler le signal amplifié que nous avons généré avant. La relation liant la fréquence f du signal à émettre
(soit la porteuse) à la longueur effective d’une antenne (type omnidirectionnel : un fil conducteur) est la suivante :
𝑙 =𝜆
4 car le rendement est optimal lorsque l’émission est en quart d’onde ("l" correspond à la longueur effective de
l’antenne, 𝜆 =𝑐
𝑓 la longueur d’onde). Cette équation n’est valable que lorsque l’émission est réalisée sur une antenne
constituée d’un fil dénudé de longueur l.
Il existe de nombreux types d’antennes caractérisées comme telles : fréquence d’utilisation, impédance de l’antenne,
directivité, polarisation, rendement, dimensions, formes, etc.
Généralement, à un émetteur/récepteur n’est associé que très peu
d’antennes, la grande différence va souvent se jouer sur la directivité
et donc la forme du diagramme d’émission des antennes.
Voici un exemple de diagramme de rayonnement d’une antenne de
type cardioïde. En général les antennes utilisées sont de type
omnidirectionnel, ce qui permet d’émettre dans presque toutes les
directions. Les diagrammes sont réalisés en chambre anéchoïde (les
parois empêchent tout écho des ondes électromagnétiques en les absorbant).
CODE INTERNE DE REGULATION EN BOUCLE
Le signal d’ordre est à présent en possession de la carte de vol. Il faut alors récupérer les informations de son attitude
de vol et traiter les données pour en déduire ce qu’il faut envoyer à chaque moteur.
ACQUISITION DES DONNEES | CENTRALE INERTIELLE
ACCELEROMETRES
On en parle partout… Smartphones, tablettes, et même dans les disques durs ! Mais finalement …
Qu’est-ce que c’est ? Pourquoi en utilise-t-on partout et pourquoi en avoir mis un ici ?
Un accéléromètre, comme son nom l’indique, est un outil qui sert à mesurer une accélération. En réalité,
l’accéléromètre mesure une force. Or d’après la seconde loi de Newton, �⃗� = 𝑚. �⃗� donc une force mesurée
correspond à une accélération. A présent, réalisons une petite expérience : prenons un accéléromètre et posons-le
sur notre bonne vieille Terre. Que pensez-vous que l’accéléromètre mesurera ?
Qu’est-ce qu’il pourrait y avoir comme accélération ici ? Rien ! L’accéléromètre ne détecterait
aucune accélération !
Imaginons qu’aucune accélération n’existe sur Terre. Que se passerait-il ? Nous serions comme dans une salle sans
pesanteur : le système qui nous permet de rester dans une certaine position est constitué d’accéléromètres. S’il ne
détecte rien, alors nous aurons l’impression de tomber constamment. Il existe donc une accélération qui nous
attirerait vers le plancher de la salle, nous donnant une impression de pesanteur ! L’accélération détectée par un
accéléromètre est donc de 9.81 m.s-2 dirigée vers le haut !
9
Nous savons donc à présent comment mesurer les accélérations du drone grâce à trois accéléromètres (un par
dimension), mais il nous manque une information …
GYROSCOPES
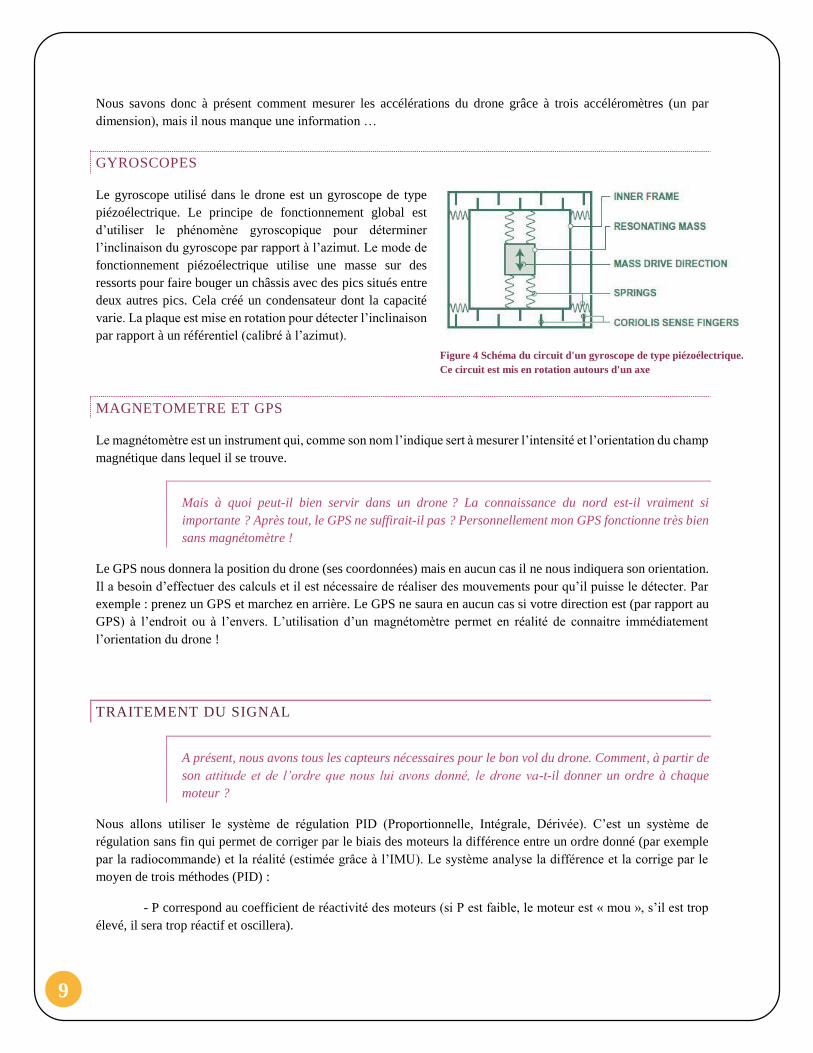
Le gyroscope utilisé dans le drone est un gyroscope de type
piézoélectrique. Le principe de fonctionnement global est
d’utiliser le phénomène gyroscopique pour déterminer
l’inclinaison du gyroscope par rapport à l’azimut. Le mode de
fonctionnement piézoélectrique utilise une masse sur des
ressorts pour faire bouger un châssis avec des pics situés entre
deux autres pics. Cela créé un condensateur dont la capacité
varie. La plaque est mise en rotation pour détecter l’inclinaison
par rapport à un référentiel (calibré à l’azimut).
MAGNETOMETRE ET GPS
Le magnétomètre est un instrument qui, comme son nom l’indique sert à mesurer l’intensité et l’orientation du champ
magnétique dans lequel il se trouve.
Mais à quoi peut-il bien servir dans un drone ? La connaissance du nord est-il vraiment si
importante ? Après tout, le GPS ne suffirait-il pas ? Personnellement mon GPS fonctionne très bien
sans magnétomètre !
Le GPS nous donnera la position du drone (ses coordonnées) mais en aucun cas il ne nous indiquera son orientation.
Il a besoin d’effectuer des calculs et il est nécessaire de réaliser des mouvements pour qu’il puisse le détecter. Par
exemple : prenez un GPS et marchez en arrière. Le GPS ne saura en aucun cas si votre direction est (par rapport au
GPS) à l’endroit ou à l’envers. L’utilisation d’un magnétomètre permet en réalité de connaitre immédiatement
l’orientation du drone !
TRAITEMENT DU SIGNAL
A présent, nous avons tous les capteurs nécessaires pour le bon vol du drone. Comment, à partir de
son attitude et de l’ordre que nous lui avons donné, le drone va-t-il donner un ordre à chaque
moteur ?
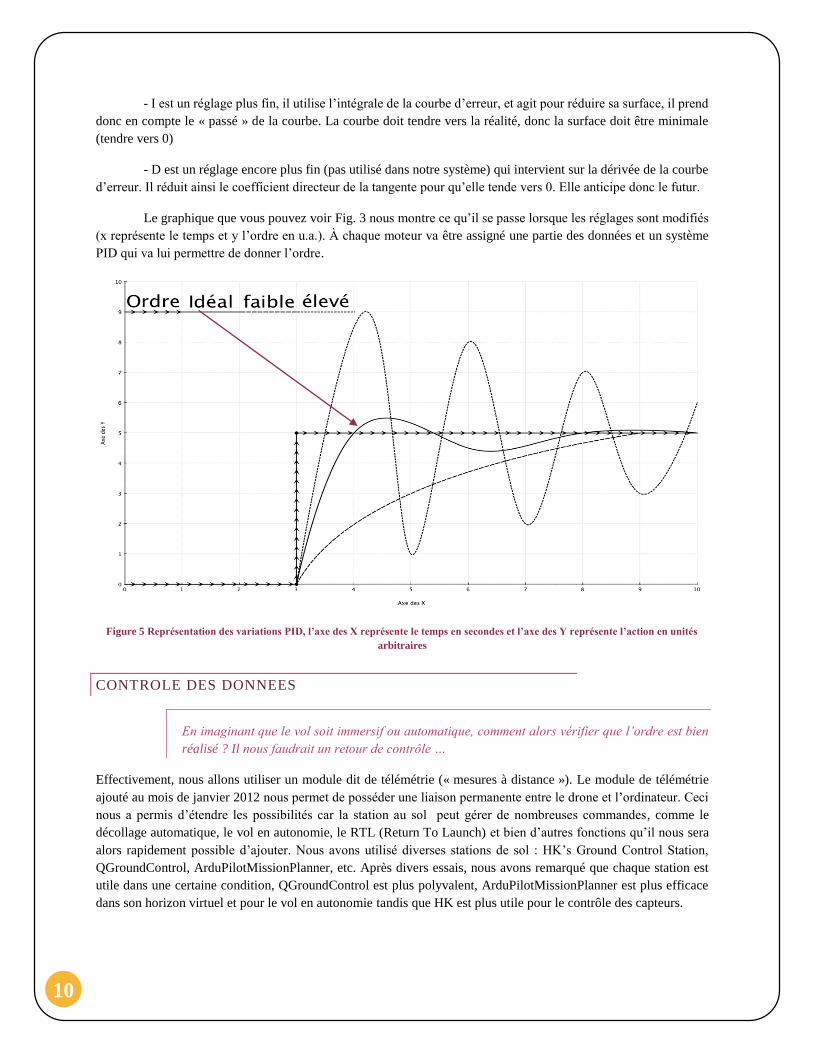
Nous allons utiliser le système de régulation PID (Proportionnelle, Intégrale, Dérivée). C’est un système de
régulation sans fin qui permet de corriger par le biais des moteurs la différence entre un ordre donné (par exemple
par la radiocommande) et la réalité (estimée grâce à l’IMU). Le système analyse la différence et la corrige par le
moyen de trois méthodes (PID) :
- P correspond au coefficient de réactivité des moteurs (si P est faible, le moteur est « mou », s’il est trop
élevé, il sera trop réactif et oscillera).
Figure 4 Schéma du circuit d'un gyroscope de type piézoélectrique.
Ce circuit est mis en rotation autours d'un axe
10
- I est un réglage plus fin, il utilise l’intégrale de la courbe d’erreur, et agit pour réduire sa surface, il prend
donc en compte le « passé » de la courbe. La courbe doit tendre vers la réalité, donc la surface doit être minimale
(tendre vers 0)
- D est un réglage encore plus fin (pas utilisé dans notre système) qui intervient sur la dérivée de la courbe
d’erreur. Il réduit ainsi le coefficient directeur de la tangente pour qu’elle tende vers 0. Elle anticipe donc le futur.
Le graphique que vous pouvez voir Fig. 3 nous montre ce qu’il se passe lorsque les réglages sont modifiés
(x représente le temps et y l’ordre en u.a.). À chaque moteur va être assigné une partie des données et un système
PID qui va lui permettre de donner l’ordre.
Figure 5 Représentation des variations PID, l’axe des X représente le temps en secondes et l’axe des Y représente l’action en unités
arbitraires
CONTROLE DES DONNEES
En imaginant que le vol soit immersif ou automatique, comment alors vérifier que l’ordre est bien
réalisé ? Il nous faudrait un retour de contrôle …
Effectivement, nous allons utiliser un module dit de télémétrie (« mesures à distance »). Le module de télémétrie
ajouté au mois de janvier 2012 nous permet de posséder une liaison permanente entre le drone et l’ordinateur. Ceci
nous a permis d’étendre les possibilités car la station au sol peut gérer de nombreuses commandes, comme le
décollage automatique, le vol en autonomie, le RTL (Return To Launch) et bien d’autres fonctions qu’il nous sera
alors rapidement possible d’ajouter. Nous avons utilisé diverses stations de sol : HK’s Ground Control Station,
QGroundControl, ArduPilotMissionPlanner, etc. Après divers essais, nous avons remarqué que chaque station est
utile dans une certaine condition, QGroundControl est plus polyvalent, ArduPilotMissionPlanner est plus efficace
dans son horizon virtuel et pour le vol en autonomie tandis que HK est plus utile pour le contrôle des capteurs.
11
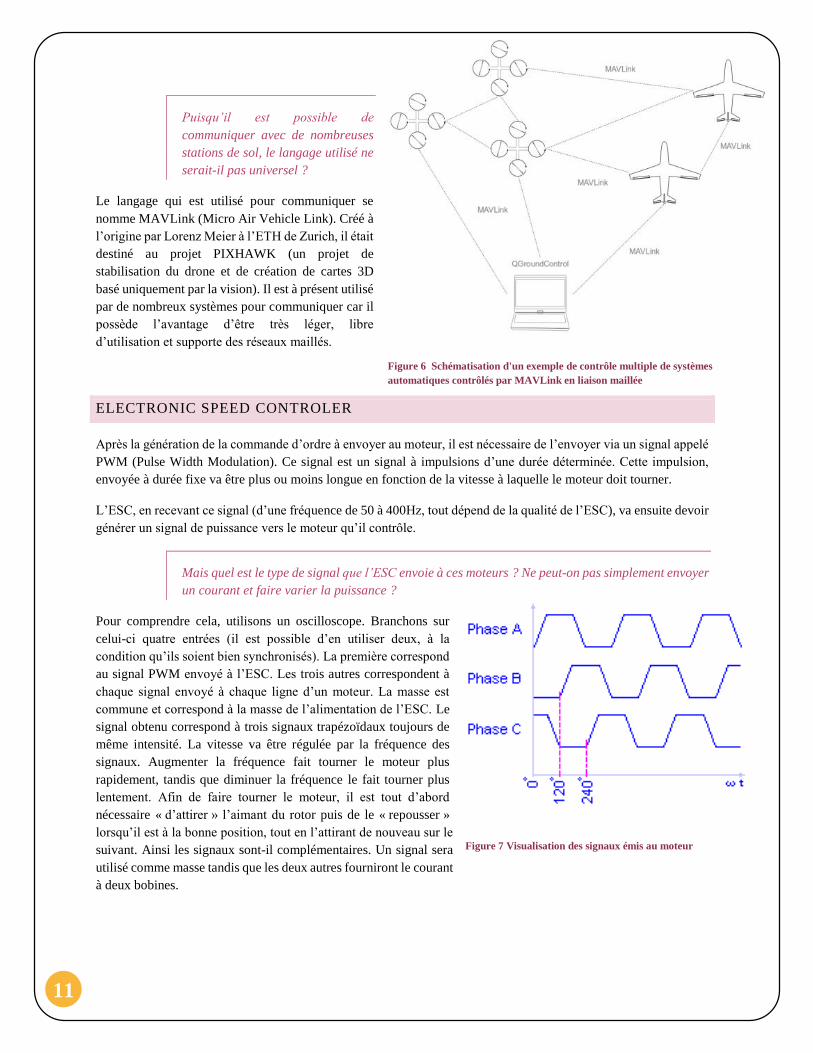
Puisqu’il est possible de
communiquer avec de nombreuses
stations de sol, le langage utilisé ne
serait-il pas universel ?
Le langage qui est utilisé pour communiquer se
nomme MAVLink (Micro Air Vehicle Link). Créé à
l’origine par Lorenz Meier à l’ETH de Zurich, il était
destiné au projet PIXHAWK (un projet de
stabilisation du drone et de création de cartes 3D
basé uniquement par la vision). Il est à présent utilisé
par de nombreux systèmes pour communiquer car il
possède l’avantage d’être très léger, libre
d’utilisation et supporte des réseaux maillés.
ELECTRONIC SPEED CONTROLER
Après la génération de la commande d’ordre à envoyer au moteur, il est nécessaire de l’envoyer via un signal appelé
PWM (Pulse Width Modulation). Ce signal est un signal à impulsions d’une durée déterminée. Cette impulsion,
envoyée à durée fixe va être plus ou moins longue en fonction de la vitesse à laquelle le moteur doit tourner.
L’ESC, en recevant ce signal (d’une fréquence de 50 à 400Hz, tout dépend de la qualité de l’ESC), va ensuite devoir
générer un signal de puissance vers le moteur qu’il contrôle.
Mais quel est le type de signal que l’ESC envoie à ces moteurs ? Ne peut-on pas simplement envoyer
un courant et faire varier la puissance ?
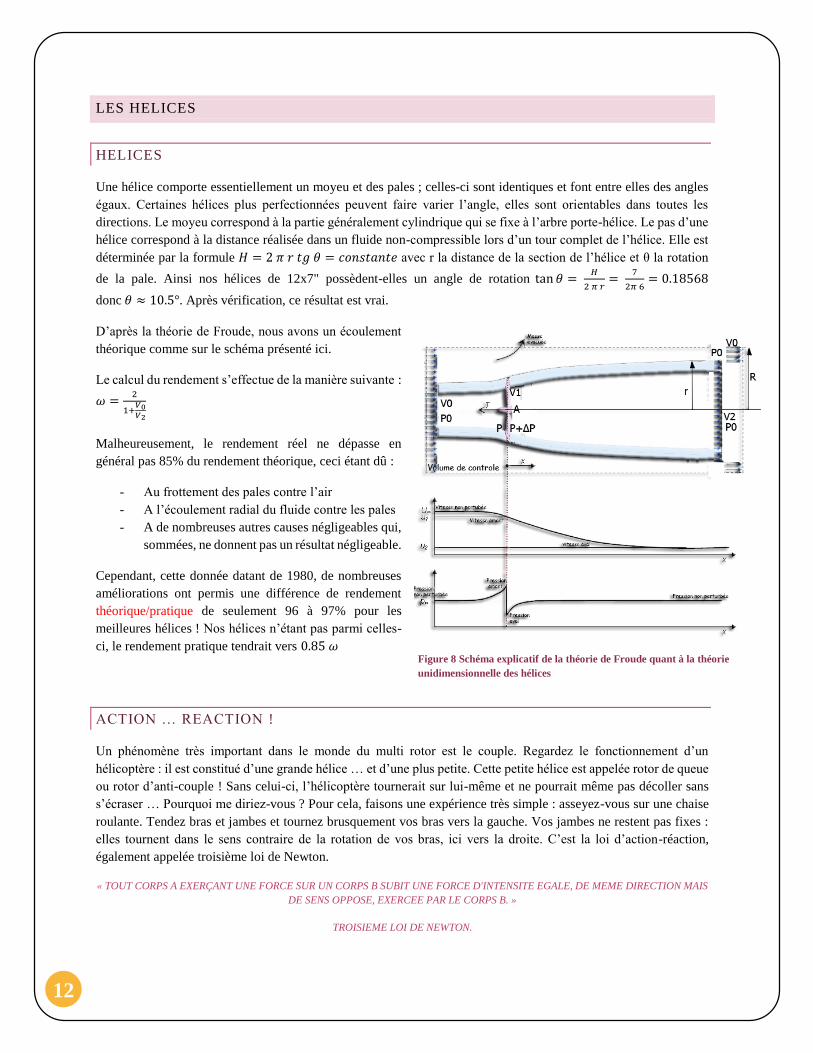
Pour comprendre cela, utilisons un oscilloscope. Branchons sur
celui-ci quatre entrées (il est possible d’en utiliser deux, à la
condition qu’ils soient bien synchronisés). La première correspond
au signal PWM envoyé à l’ESC. Les trois autres correspondent à
chaque signal envoyé à chaque ligne d’un moteur. La masse est
commune et correspond à la masse de l’alimentation de l’ESC. Le
signal obtenu correspond à trois signaux trapézoïdaux toujours de
même intensité. La vitesse va être régulée par la fréquence des
signaux. Augmenter la fréquence fait tourner le moteur plus
rapidement, tandis que diminuer la fréquence le fait tourner plus
lentement. Afin de faire tourner le moteur, il est tout d’abord
nécessaire « d’attirer » l’aimant du rotor puis de le « repousser »
lorsqu’il est à la bonne position, tout en l’attirant de nouveau sur le
suivant. Ainsi les signaux sont-il complémentaires. Un signal sera
utilisé comme masse tandis que les deux autres fourniront le courant
à deux bobines.
Figure 6 Schématisation d'un exemple de contrôle multiple de systèmes
automatiques contrôlés par MAVLink en liaison maillée
Figure 7 Visualisation des signaux émis au moteur
12
LES HELICES
HELICES
Une hélice comporte essentiellement un moyeu et des pales ; celles-ci sont identiques et font entre elles des angles
égaux. Certaines hélices plus perfectionnées peuvent faire varier l’angle, elles sont orientables dans toutes les
directions. Le moyeu correspond à la partie généralement cylindrique qui se fixe à l’arbre porte-hélice. Le pas d’une
hélice correspond à la distance réalisée dans un fluide non-compressible lors d’un tour complet de l’hélice. Elle est
déterminée par la formule 𝐻 = 2 𝜋 𝑟 𝑡𝑔 𝜃 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 avec r la distance de la section de l’hélice et θ la rotation
de la pale. Ainsi nos hélices de 12x7" possèdent-elles un angle de rotation tan 𝜃 = 𝐻
2 𝜋 𝑟=
7
2𝜋 6= 0.18568
donc 𝜃 ≈ 10.5°. Après vérification, ce résultat est vrai.
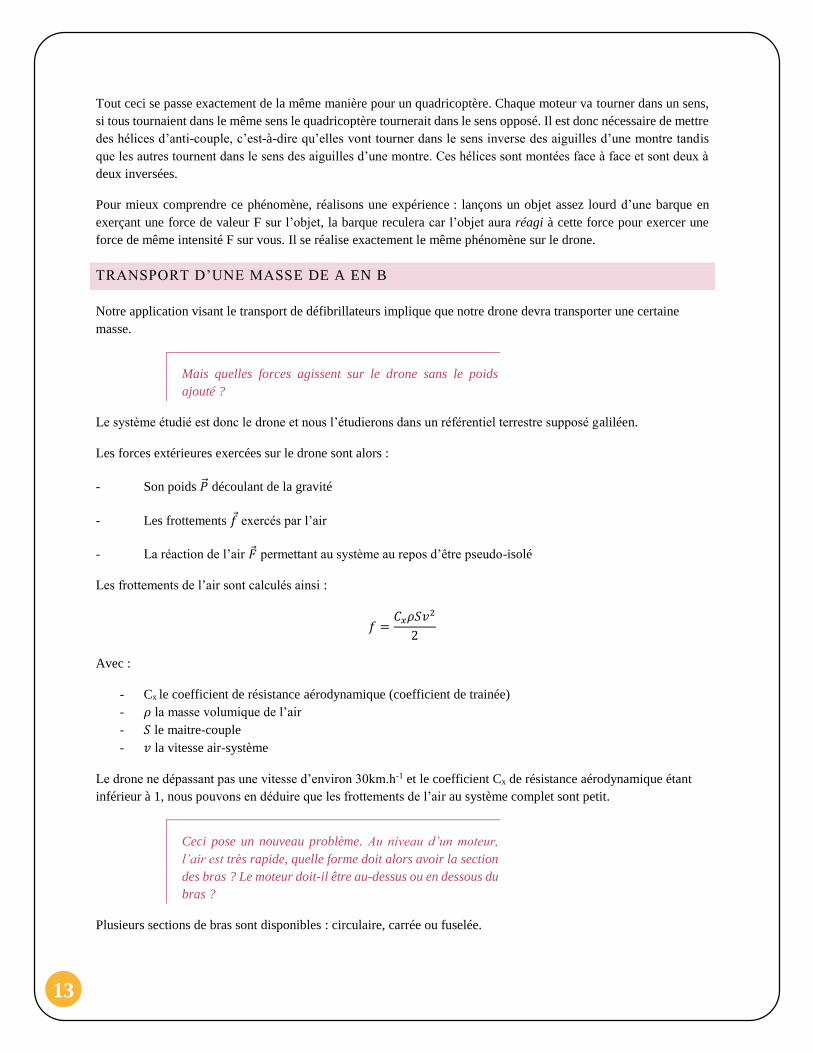
D’après la théorie de Froude, nous avons un écoulement
théorique comme sur le schéma présenté ici.
Le calcul du rendement s’effectue de la manière suivante :
𝜔 =2
1+𝑉0𝑉2
Malheureusement, le rendement réel ne dépasse en
général pas 85% du rendement théorique, ceci étant dû :
- Au frottement des pales contre l’air
- A l’écoulement radial du fluide contre les pales
- A de nombreuses autres causes négligeables qui,
sommées, ne donnent pas un résultat négligeable.
Cependant, cette donnée datant de 1980, de nombreuses
améliorations ont permis une différence de rendement
théorique/pratique de seulement 96 à 97% pour les
meilleures hélices ! Nos hélices n’étant pas parmi celles-
ci, le rendement pratique tendrait vers 0.85 𝜔
ACTION … REACTION !
Un phénomène très important dans le monde du multi rotor est le couple. Regardez le fonctionnement d’un
hélicoptère : il est constitué d’une grande hélice … et d’une plus petite. Cette petite hélice est appelée rotor de queue
ou rotor d’anti-couple ! Sans celui-ci, l’hélicoptère tournerait sur lui-même et ne pourrait même pas décoller sans
s’écraser … Pourquoi me diriez-vous ? Pour cela, faisons une expérience très simple : asseyez-vous sur une chaise
roulante. Tendez bras et jambes et tournez brusquement vos bras vers la gauche. Vos jambes ne restent pas fixes :
elles tournent dans le sens contraire de la rotation de vos bras, ici vers la droite. C’est la loi d’action-réaction,
également appelée troisième loi de Newton.
« TOUT CORPS A EXERÇANT UNE FORCE SUR UN CORPS B SUBIT UNE FORCE D'INTENSITE EGALE, DE MEME DIRECTION MAIS
DE SENS OPPOSE, EXERCEE PAR LE CORPS B. »
TROISIEME LOI DE NEWTON.
Figure 8 Schéma explicatif de la théorie de Froude quant à la théorie
unidimensionnelle des hélices
13
Tout ceci se passe exactement de la même manière pour un quadricoptère. Chaque moteur va tourner dans un sens,
si tous tournaient dans le même sens le quadricoptère tournerait dans le sens opposé. Il est donc nécessaire de mettre
des hélices d’anti-couple, c’est-à-dire qu’elles vont tourner dans le sens inverse des aiguilles d’une montre tandis
que les autres tournent dans le sens des aiguilles d’une montre. Ces hélices sont montées face à face et sont deux à
deux inversées.
Pour mieux comprendre ce phénomène, réalisons une expérience : lançons un objet assez lourd d’une barque en
exerçant une force de valeur F sur l’objet, la barque reculera car l’objet aura réagi à cette force pour exercer une
force de même intensité F sur vous. Il se réalise exactement le même phénomène sur le drone.
TRANSPORT D’UNE MASSE DE A EN B
Notre application visant le transport de défibrillateurs implique que notre drone devra transporter une certaine
masse.
Mais quelles forces agissent sur le drone sans le poids
ajouté ?
Le système étudié est donc le drone et nous l’étudierons dans un référentiel terrestre supposé galiléen.
Les forces extérieures exercées sur le drone sont alors :
- Son poids �⃗⃗� découlant de la gravité
- Les frottements 𝑓 exercés par l’air
- La réaction de l’air �⃗� permettant au système au repos d’être pseudo-isolé
Les frottements de l’air sont calculés ainsi :
𝑓 =𝐶𝑥𝜌𝑆𝑣2
2
Avec :
- Cx le coefficient de résistance aérodynamique (coefficient de trainée)
- 𝜌 la masse volumique de l’air
- 𝑆 le maitre-couple
- 𝑣 la vitesse air-système
Le drone ne dépassant pas une vitesse d’environ 30km.h-1 et le coefficient Cx de résistance aérodynamique étant
inférieur à 1, nous pouvons en déduire que les frottements de l’air au système complet sont petit.
Ceci pose un nouveau problème. Au niveau d’un moteur,
l’air est très rapide, quelle forme doit alors avoir la section
des bras ? Le moteur doit-il être au-dessus ou en dessous du
bras ?
Plusieurs sections de bras sont disponibles : circulaire, carrée ou fuselée.
14
Le coefficient de trainée (Cx) des sections citées ci-dessus est respectivement de 0.47 ; 1.05 et 0.04. Notre premier
prototype possédait des bras à section carrée, soit Cx=1.05, le troisième une section circulaire Cx=0.47 et le
quatrième une section fuselée soit Cx=0.04
La différence entre une section circulaire et une section fuselée est de 1.01 tandis qu’entre une section carrée et une
section circulaire, la différence est de 0.58.
La différence de frottements de l’air entre le premier (et le second) prototype et le troisième prototype est de 58%
tandis qu’entre le premier et le dernier (quatrième) la différence est de 101% ! Il est donc très intéressant de modifier
la section des bras ! De plus d’après la théorie de Froude, la vitesse au-dessus des bras est inférieure à la vitesse en
dessous des bras, il est donc plus intéressant de mettre les bras au-dessus qu’en dessous des moteurs.
Que se passe-t-il lorsque nous y ajoutons une masse ?
Tout d’abord, nous avons fait un test de vol sans le nouveau poids, où l’on a testé la durée maximale à laquelle le
drone pouvait voler. Elle s’élevait en théorie à 24.49 minutes. En pratique, le résultat était inférieur à une vingtaine
de minutes, à cause de conditions de température et de pression différentes, et d’arrêts réguliers lors du test
comprenant plusieurs phases de décollage/atterrissage. Pendant ce même test nous avons branché du début à la fin
une pince ampérométrique sur notre drone. L’intensité qui devait s’élever en moyenne à 9.58 A d’après eCalc c’est
révélé être entre 9 et 10A, soit une moyenne de 9.5A. Les résultats se sont donc révélés être très précis. Sachant que
la batterie fonctionne avec un voltage de 11,60 V avec les composants dont nous disposons, la relation P=UxI nous
permet de déterminer la puissance moyenne utilisée. Ainsi notre puissance moyenne s’élevait à environ 110 W pour
un poids total du drone de 1100 g. La théorie annonçait 113W. De plus, avec son poids « standard », nous avons
remarqué que le drone décollait au premier quart de la manette des gaz.
Nous avons ensuite répété cette expérience avec une masse de 1500 g (n’ayant pas de défibrillateur, nous avons
utilisé une masse quelconque) pour un poids total du drone de 2600 g et un temps de vol estimé vers 7 minutes.
Ainsi nous trouvâmes une intensité moyenne de 30.72 A et donc une puissance de 30,72x11,60 soit environ 356 W.
Pour le décollage, il a fallu pousser la manette des gaz à plus de la moitié. Cependant la manette se situait en dessous
de la valeur critique de 80%, permettant tout de même une assez bonne maniabilité.
Ainsi, pour déterminer la puissance qu’il faudra en plus, nous avons simplement fait la différence entre la puissance
fournie avec le défibrillateur et la puissance fournie sans celui-ci. Nous trouvâmes ainsi une puissance de 356-110
soit 246 W en plus. De même, pour ce qui est du temps de vol, le drone aurait perdu une autonomie maximale
d’environ 15 minutes et pour ce qui est du pourcentage de la manette des gaz au décollage, il faudra compter 40%
en plus.
Le temps de vol en est donc très réduit…Serait-il possible
de réduire la masse de l’ensemble drone-défibrillateur ?
N’ayant pas à notre disposition un vrai défibrillateur (car coûtant excessivement cher !) nous avons tenté d’estimer
la masse des piles qui sont à l’intérieur et du boitier qui protège l’ensemble. Les batteries NiCd de 650 mAh 12V
utilisées dans la plupart des défibrillateurs ont un poids variant aux alentours de 500g. Le boitier plastique serait
certainement d’un poids entre 200 et 700g. Il serait donc possible de réduire le poids jusqu’à environ 1.5Kg. Des
tests de portée de cette masse nous permettent d’en déduire que la manette des gaz est d’environ 30-35% pour un
temps de vol de près de 15 minutes à une puissance fournie de 14.00*11.60=162.4W.
La seconde solution serait d’utiliser des défibrillateurs de poche d’une masse totale d’environ 500g (batterie et
électrodes incluses). Cependant leur prix est presque le double de ceux d’un défibrillateur classique.
15
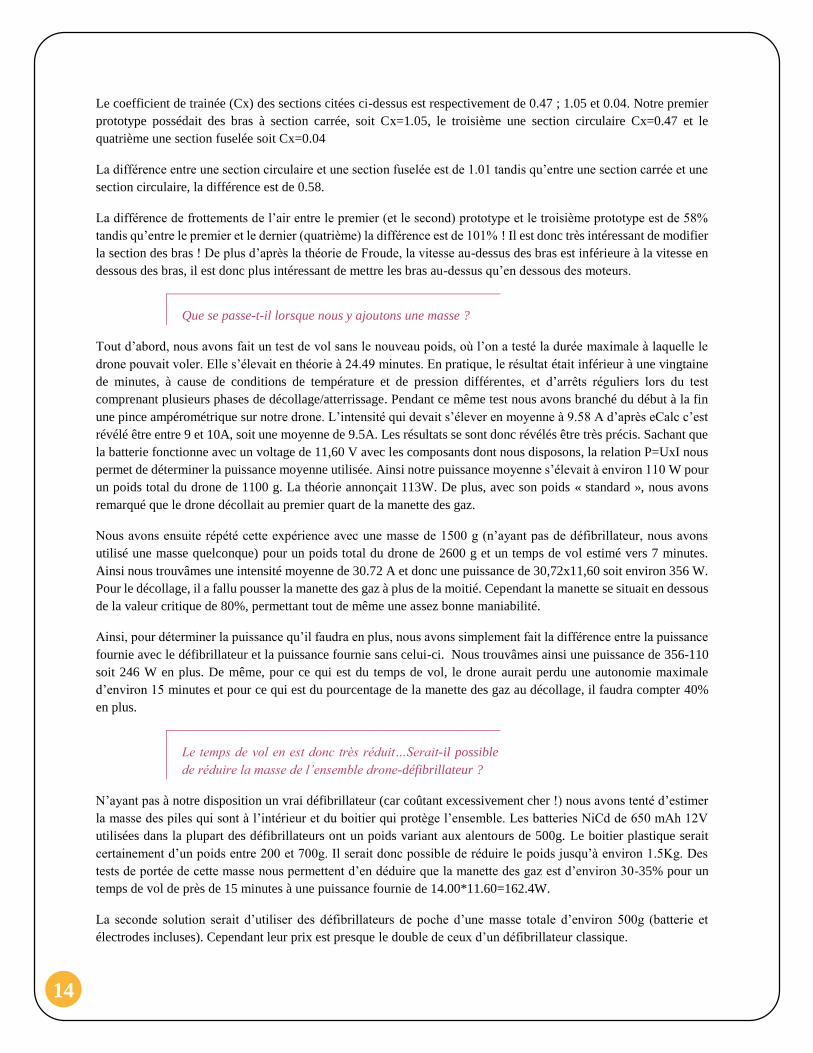
Le poids peut être réparti en dessous et au-dessus du drone. Le centre de gravité est actuellement plus bas que les
hélices. Il doit être en théorie dans le même plan que les hélices, ceci permettant de réduire au minimum la force
de poussée �⃗� nécessaire pour un déplacement et pour stopper l’inertie du drone.
Le défibrillateur pourrait donc être éventuellement divisé en deux parties : la première partie serait la commande et
les électrodes. Ayant une nécessité d’être à la disposition, elles devraient être placées au-dessus du drone. La partie
de puissance (transformateurs par exemple) et la batterie (à la condition de l’utiliser) pourraient se situer en
dessous, ceci permettant de recentrer le centre de gravité vers le plan des hélices.
Le fonctionnement précis du drone compris, nous pouvons à présent nous centrer sur la réalisation pratique de celui-
ci et aux différents tests qui nous ont permis de comprendre quels facteurs modifier pour optimiser les temps de vol,
la maniabilité, et la masse du drone.
TESTS ET PROTOTYPAGE
La conception est une étape importante, qui doit permettre d’évaluer la faisabilité du projet selon nos
capacités (connaissances, savoir-faire, finances,…) et d’identifier les différents composants nécessaires à la
réalisation d’un projet. Souvent, lors de la réalisation puis des essais, de nouvelles questions se posent auxquelles il
faut répondre en s’adaptant et en faisant évoluer le concept pour améliorer le projet. C’est la démarche que nous
avons adoptée en réalisant différents prototypes.
Une fois la carte déterminée et le fonctionnement du drone compris, nous nous sommes intéressés aux
autres composants nécessaires à son fonctionnement. Ces autres composants devaient rentrer dans notre budget et
être compatible avec la carte de contrôle sélectionnée. Nous avons donc fait l’acquisition de :
- carte de vol (VRBrain)
- moteurs sans balais (BLDC)
- contrôleurs de vitesse (ESC)
16
- hélices
- batterie (LiPo puis LiFe)
- caméra
- transmetteurs divers (Télémétrie à 433MHz, Radio à 2.4GHz, Audio/Vidéo à 1.2GHz)
- matériaux divers pour la structure (Fibre d’époxy, aluminium, fibre de verre)
Apres la réception de toutes nos pièces, nous avons procédé à la réalisation du châssis, de la structure de notre drone
puis nous avons fait le montage des divers composants qui nous a pris 3 jours.
PREMIER PROTOTYPE
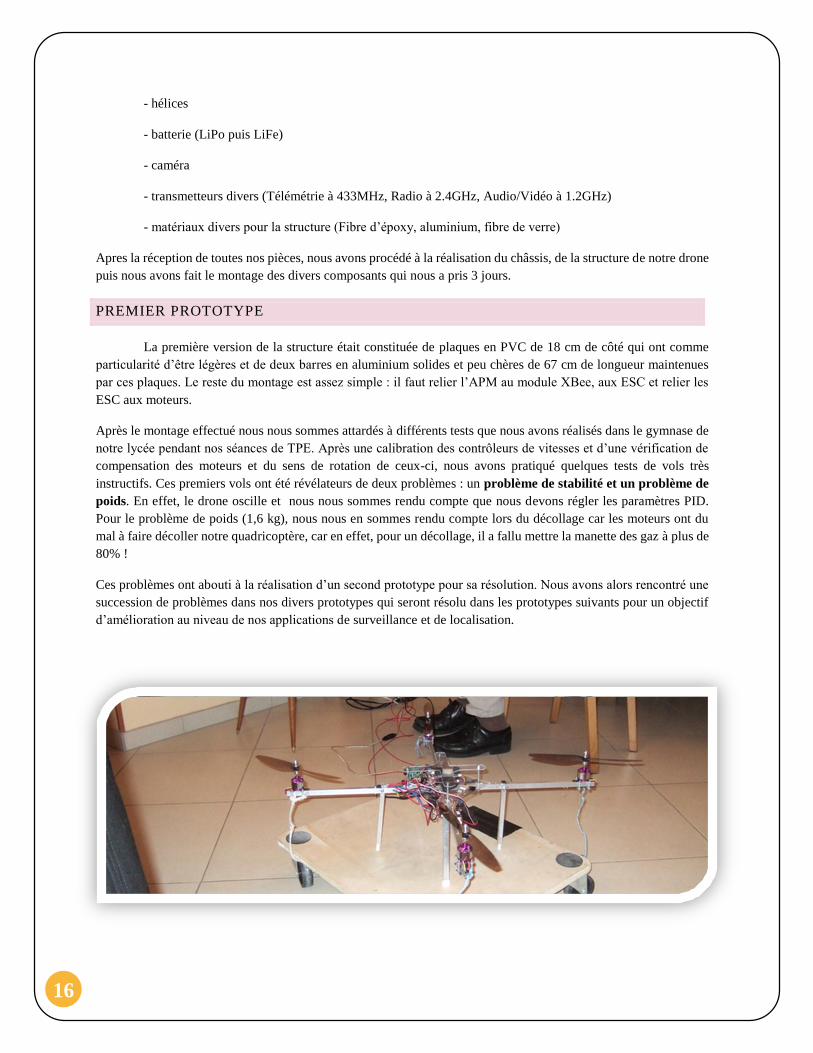
La première version de la structure était constituée de plaques en PVC de 18 cm de côté qui ont comme
particularité d’être légères et de deux barres en aluminium solides et peu chères de 67 cm de longueur maintenues
par ces plaques. Le reste du montage est assez simple : il faut relier l’APM au module XBee, aux ESC et relier les
ESC aux moteurs.
Après le montage effectué nous nous sommes attardés à différents tests que nous avons réalisés dans le gymnase de
notre lycée pendant nos séances de TPE. Après une calibration des contrôleurs de vitesses et d’une vérification de
compensation des moteurs et du sens de rotation de ceux-ci, nous avons pratiqué quelques tests de vols très
instructifs. Ces premiers vols ont été révélateurs de deux problèmes : un problème de stabilité et un problème de
poids. En effet, le drone oscille et nous nous sommes rendu compte que nous devons régler les paramètres PID.
Pour le problème de poids (1,6 kg), nous nous en sommes rendu compte lors du décollage car les moteurs ont du
mal à faire décoller notre quadricoptère, car en effet, pour un décollage, il a fallu mettre la manette des gaz à plus de
80% !
Ces problèmes ont abouti à la réalisation d’un second prototype pour sa résolution. Nous avons alors rencontré une
succession de problèmes dans nos divers prototypes qui seront résolu dans les prototypes suivants pour un objectif
d’amélioration au niveau de nos applications de surveillance et de localisation.
17
DEUXIEME PROTOTYPE
Objectif principal : diminuer le poids
Alors que nous pensions que 67cm d’entraxe moteurs permettait de faire un drone plus simplement car il
s’agit d’une distance moyenne entre plusieurs châssis trouvés sur le net, nous avons remarqué que l’aluminium que
nous utilisions pesait tout de même 1g.cm-1 et que les fils que nous avions mis à l’intérieur pesaient 3g.cm-1 – il
s’agit de fils de cuivre de récupération donc pas prévus pour la légèreté mais très robustes car ils supportaient très
bien les forts courants ! -. Après réflexion, nous avons donc décidé de réduire l’entraxe moteur à 40 cm, le minimum
raisonnable pour des hélices de 10x4.5" comme les nôtres, ce qui permet également de supprimer les fils de puissance
que nous avons utilisés pour la première version.
Les nouveautés de ce second prototype sont donc assez limitées : il nous a fallu couper les bras des moteurs
et changer la plaque de PVC par une d’un autre matériau. Très utilisée en électronique, la fibre d’époxy permet
d’offrir, pour un poids quasi-identique une résistance incomparable. Nous avons donc choisi ce matériau, nous
permettant dans un même temps de couper les barres en dessous du drone pour y placer la batterie, s’y trouvant ainsi
coincée entre une plaque d’époxy et une autre en mécano®. Nous obtenons au final un gain de 0,5Kg
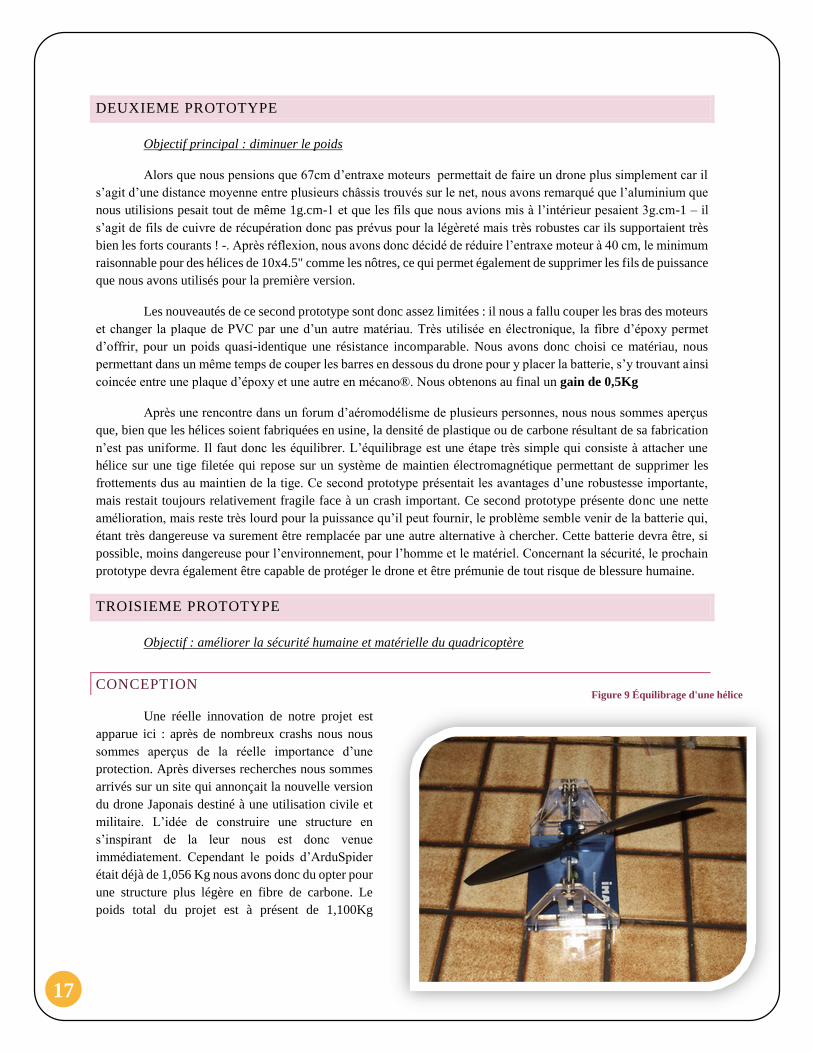
Après une rencontre dans un forum d’aéromodélisme de plusieurs personnes, nous nous sommes aperçus
que, bien que les hélices soient fabriquées en usine, la densité de plastique ou de carbone résultant de sa fabrication
n’est pas uniforme. Il faut donc les équilibrer. L’équilibrage est une étape très simple qui consiste à attacher une
hélice sur une tige filetée qui repose sur un système de maintien électromagnétique permettant de supprimer les
frottements dus au maintien de la tige. Ce second prototype présentait les avantages d’une robustesse importante,
mais restait toujours relativement fragile face à un crash important. Ce second prototype présente donc une nette
amélioration, mais reste très lourd pour la puissance qu’il peut fournir, le problème semble venir de la batterie qui,
étant très dangereuse va surement être remplacée par une autre alternative à chercher. Cette batterie devra être, si
possible, moins dangereuse pour l’environnement, pour l’homme et le matériel. Concernant la sécurité, le prochain
prototype devra également être capable de protéger le drone et être prémunie de tout risque de blessure humaine.
TROISIEME PROTOTYPE
Objectif : améliorer la sécurité humaine et matérielle du quadricoptère
CONCEPTION
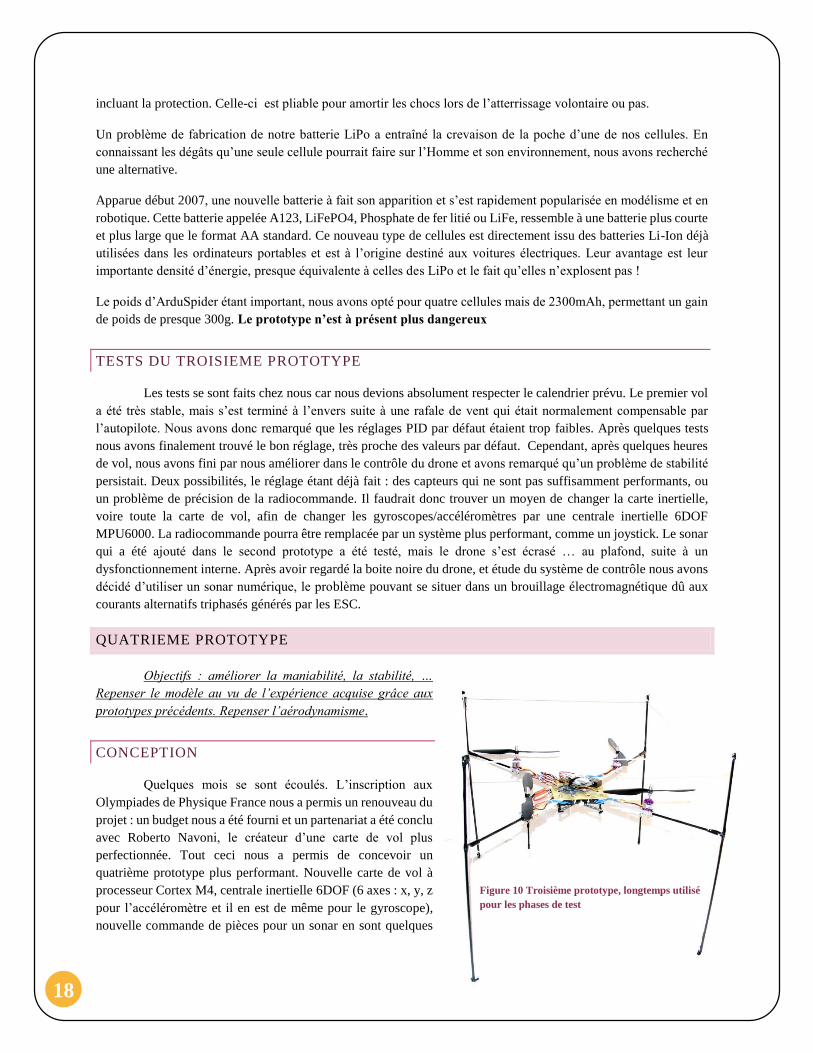
Une réelle innovation de notre projet est
apparue ici : après de nombreux crashs nous nous
sommes aperçus de la réelle importance d’une
protection. Après diverses recherches nous sommes
arrivés sur un site qui annonçait la nouvelle version
du drone Japonais destiné à une utilisation civile et
militaire. L’idée de construire une structure en
s’inspirant de la leur nous est donc venue
immédiatement. Cependant le poids d’ArduSpider
était déjà de 1,056 Kg nous avons donc du opter pour
une structure plus légère en fibre de carbone. Le
poids total du projet est à présent de 1,100Kg
Figure 9 Équilibrage d'une hélice
18
incluant la protection. Celle-ci est pliable pour amortir les chocs lors de l’atterrissage volontaire ou pas.
Un problème de fabrication de notre batterie LiPo a entraîné la crevaison de la poche d’une de nos cellules. En
connaissant les dégâts qu’une seule cellule pourrait faire sur l’Homme et son environnement, nous avons recherché
une alternative.
Apparue début 2007, une nouvelle batterie à fait son apparition et s’est rapidement popularisée en modélisme et en
robotique. Cette batterie appelée A123, LiFePO4, Phosphate de fer litié ou LiFe, ressemble à une batterie plus courte
et plus large que le format AA standard. Ce nouveau type de cellules est directement issu des batteries Li-Ion déjà
utilisées dans les ordinateurs portables et est à l’origine destiné aux voitures électriques. Leur avantage est leur
importante densité d’énergie, presque équivalente à celles des LiPo et le fait qu’elles n’explosent pas !
Le poids d’ArduSpider étant important, nous avons opté pour quatre cellules mais de 2300mAh, permettant un gain
de poids de presque 300g. Le prototype n’est à présent plus dangereux
TESTS DU TROISIEME PROTOTYPE
Les tests se sont faits chez nous car nous devions absolument respecter le calendrier prévu. Le premier vol
a été très stable, mais s’est terminé à l’envers suite à une rafale de vent qui était normalement compensable par
l’autopilote. Nous avons donc remarqué que les réglages PID par défaut étaient trop faibles. Après quelques tests
nous avons finalement trouvé le bon réglage, très proche des valeurs par défaut. Cependant, après quelques heures
de vol, nous avons fini par nous améliorer dans le contrôle du drone et avons remarqué qu’un problème de stabilité
persistait. Deux possibilités, le réglage étant déjà fait : des capteurs qui ne sont pas suffisamment performants, ou
un problème de précision de la radiocommande. Il faudrait donc trouver un moyen de changer la carte inertielle,
voire toute la carte de vol, afin de changer les gyroscopes/accéléromètres par une centrale inertielle 6DOF
MPU6000. La radiocommande pourra être remplacée par un système plus performant, comme un joystick. Le sonar
qui a été ajouté dans le second prototype a été testé, mais le drone s’est écrasé … au plafond, suite à un
dysfonctionnement interne. Après avoir regardé la boite noire du drone, et étude du système de contrôle nous avons
décidé d’utiliser un sonar numérique, le problème pouvant se situer dans un brouillage électromagnétique dû aux
courants alternatifs triphasés générés par les ESC.
QUATRIEME PROTOTYPE
Objectifs : améliorer la maniabilité, la stabilité, …
Repenser le modèle au vu de l’expérience acquise grâce aux
prototypes précédents. Repenser l’aérodynamisme.
CONCEPTION
Quelques mois se sont écoulés. L’inscription aux
Olympiades de Physique France nous a permis un renouveau du
projet : un budget nous a été fourni et un partenariat a été conclu
avec Roberto Navoni, le créateur d’une carte de vol plus
perfectionnée. Tout ceci nous a permis de concevoir un
quatrième prototype plus performant. Nouvelle carte de vol à
processeur Cortex M4, centrale inertielle 6DOF (6 axes : x, y, z
pour l’accéléromètre et il en est de même pour le gyroscope),
nouvelle commande de pièces pour un sonar en sont quelques
Figure 10 Troisième prototype, longtemps utilisé
pour les phases de test

19
nouvelles caractéristiques. Après la lecture de livres sur
la mécanique des fluides (Méthodes Comolet et
Rebuffet), nous avons tenté une nouvelle approche de
notre prototype : le faire le plus aérodynamique
possible. Nous voulions optimiser le rendement, et
pour ceci, il n’y avait que deux solutions : l’alléger ou
réduire au minimum la force de frottements de l’air sur
le drone, pour utiliser moins d’énergie. Ayant deux
possibilités pour réaliser une force de frottements
minimale, nous avons tenté les deux. La première est
un châssis en croix, tandis que la seconde est en H. Le
châssis en croix est un châssis très utilisé que nous
utilisons depuis le début, et présente l’avantage d’être
simple à construire. Le châssis en H, bien que plus
compliqué à construire, permet d’utiliser la moitié du
matériel des fixations et des barres, et donc un gain de poids
assez léger. Dans un même souci aérodynamique, nous avons souhaité
retourner les moteurs pour les mettre vers le sol. En effet, le flux d’air qui
s’écoule des hélices a une importance plus grande après être passé dans les
hélices qu’avant. Nous avons également modifié le profil des bras, passant
d’un bras carré en aluminium (qui entraine un écoulement tourbillonnaire du fluide) à un bras cylindrique en fibre
de verre (réduisant les tourbillons, légèrement présents mais entrainant une perte négligeable).
La nouvelle carte nous a été fournie pour 200€ les deux cartes au lieu de 570€ (prix public), mais toujours
afin de trouver une meilleure stabilité, nous avons choisi d’isoler les ESC, gros générateurs de champs
électromagnétiques, avec une plaque d’époxy cuivrée. Ceci permet au MPU6000 de ne pas être brouillé et donc
d’être plus précis.
Parmi les problèmes soulevés, le problème de poussée a été souvent négligé. Ainsi avons-nous testé une
autre paire d’hélices en 11x4.7" au lieu de 10x4. 5". Après simulations diverses (utilisation du site xcopter calc)
nous avons remarqué une autonomie bien supérieure par l’utilisation d’une batterie LiFe 4S2P (4 cellules en série et
2 en parallèle), passant de 10 à 25 minutes possibles de vol (ceci reste une simulation, en considérant que la batterie
est rodée et que la température et la pression soient exactement les mêmes que celles entrées dans le simulateur.
Le prototype n°4 est donc une étape importante dans l’évolution de notre projet. Mais notre travail ne s’est pas
concentré que sur la partie volante : pour améliorer le contrôle du quadricoptère, une grande modification de la
partie commande a été apportée.
STATION DE CONTROLE AU SOL
Lors de notre TPE et des trois premiers prototypes, nous avions utilisé une boite en carton et un ordinateur portable
dans lesquels nous avions implanté les composants, cependant, nous nous sommes très rapidement confrontés à un
problème : l’ordinateur portable est moins puissant qu’un ordinateur fixe et donc ne permet pas, sans risque de
plantage, d’enregistrer la vidéo et d’utiliser les logiciels de contrôle. Un second problème se posait : au fur et à
mesure de nos vols, nous avons remarqué que la télécommande, de par ses petits joysticks, ne permettait pas un
contrôle précis du drone, le faisant légèrement varier par rapport à ce que nous voulions. L’idéal étant bien sûr de se
passer de joystick mais les contrôles à la voix et au geste de sont pas assez précis et fiables pour se passer totalement
de joystick. Nous avons donc opté pour un « carton » plus conséquent et plus solide dans lequel nous aurions un
système fiable, solide et très évolutif. Concernant la solidité, nous avons opté pour le choix d’un Flight Case (cf.
Figure 11 Test de vol du quatrième prototype.
L’emplacement du vol est limité au carré en bois pour
des raisons de sécurité

20
Site internet pour sa construction) plus solide et plus gros
qu’un simple carton. Pour la fiabilité, ayant un Flight Case,
nous pouvons y mettre un ordinateur fixe, assurant ainsi une
meilleure fiabilité. Pour la partie évolutive, deux problèmes
se posaient : le choix d’une ou plusieurs interfaces de
communication et la puissance de calcul. La seconde sous-
partie est rapidement résolue en utilisant un second pc pour
les calculs secondaires éventuels comme des traitements du
son ou de l’image pour des simulations 3D, consommant
d’avantage mais empêchant le premier pc d’une surcharge
trop importante le faisant ralentir. Pour contrer au premier
problème, nous avons opté pour l’utilisation d’une carte
arduino contrôlant toute la partie radiocommande. Le reste
n’étant qu’alimentations et cartes à interface série/FTDI. Ainsi
avons-nous pu commencer à mieux concevoir le Flight Case.
La première étape a été de réaliser les plans de construction : choix des planches, de la taille du Flight Case,
des emplacements des composants, etc. C’est alors qu’un autre problème s’est posé : comment alimenter tous ces
modules ? Les ordinateurs ont une alimentation à découpage séparée propriétaire, nous n’y avons donc pas touché,
mais l’ensemble des autres modules qui ne s’alimentaient pas en USB utilisaient un transformateur 12 ou 9V continu.
Utiliser 5 alimentations auxiliaires non stabilisées (un pont de diode ne redresse pas très bien un signal alternatif)
consommant excessivement beaucoup pour le peu de courant qui en sortait nous paraissait totalement inenvisageable
car cela entrainait forcément une consommation excessive et une chaleur interne de plus de 30°C. Nous avons donc
opté pour la transformation d’une alimentation de PC en alimentation 12, 9, 5 et 3.3V. Le 12V est utilisé pour le
récepteur Audio/Vidéo et le chargeur. Le 9V est utilisé pour l’émetteur radio et le Switch vidéo tandis que le 5V et
le 3.3V sont utilisés en secours, car les modules utilisent en réalité des tensions similaires pour fonctionner. Une fois
le Flight Case réalisé (une cinquantaine d’heures de travail) il nous a été possible d’y aménager l’intérieur. Les
premiers périphériques que nous y avons mis ont été les PC et un écran. Les PC sont vissés et l’écran l’est également
sur une plaque collée et vissée sur le plafond. Nous y avons ensuite mis les alimentations (au total 3 alimentations)
puis les modules radio. Mais où les mettre ? Faut-il les laisser à l’intérieur ou laisser dépasser le connecteur de
l’antenne ? Nous avons, pour l’instant, mis les modules à l’intérieur, ceci évitant le risque d’oublier d’y mettre les
antennes et donc … de griller les amplificateurs opérationnels qui amplifient le signal avant de l’émettre. Cependant,
plusieurs types d’antennes existent, et parfois, il est préférable de les mettre à l’extérieur du flight case. Nous
parlerons de ceci dans le chapitre suivant. Lorsque tout est fixé, nous pouvons nous occuper de la télécommande.
Pour ceci de nombreuses solutions ont été envisagées :
- Utilisation d’un joystick de PC analogique (port MIDI/de jeu) : nous avions trouvé un joystick que nous avions
récupéré. Ce joystick Microsoft avait cependant plusieurs gros problèmes : il fonctionnait à retour de force, or nous
n’avons pas de retour de force possible, et sans ce retour, le joystick ne fonctionnait pas. Le second problème est
que le système de positionnement ne possédait aucun potentiomètre, il s’agissait d’un capteur qui utilisait une caméra
CMOS et quatre leds, ce qui est très difficilement récupérable.
-Utilisation d’un joystick USB : deux possibilités de branchement
O Sur l’ordinateur sans aucune modification : il faut donc utiliser le réseau télémétrique pour commander
intégralement le drone, donc risque important de latences, et donc de crashs …
O Sur l’ordinateur pour les commandes secondaires (boutons de changement de mode, etc.) et sur la carte
arduino pour les commandes primordiales (joystick pur). N’ayant pas de joystick USB, nous avons dû en acheter
Figure 12 Station de contrôle au sol réalisée à l'occasion du
quatrième prototype

21
un. Les joysticks possèdent deux possibilités pour reconnaitre la position des manches : l’effet Hall et le
potentiomètre. Le potentiomètre est la méthode la moins chère mais est moins précise et s’use plus rapidement que
le capteur à effet hall. C’est ce que nous avons choisi pour notre joystick car il est relativement simple à utiliser.
Le capteur à effet Hall utilise d’autres méthodes que nous ne décrirons pas ici.
La télécommande pouvait également être intégré ou mise à part à l’aide d’un câble. Ne sachant quoi choisir, nous
avons essayé les deux.
CONCLUSION
Ainsi ce projet nous a-t-il permis de relever un défi de conception électronique mais aussi d’apprendre de
nouvelles notions dans ce domaine, comme dans celui des mathématiques par l’apprentissage des intégrales ou
encore en physique et en automatique par les théories de Newton ou de Froude. Au terme de ce projet quelques
problèmes de conception de la structure, de crashs et de réglages très compliqués nous ont fait remarquer que
certaines connaissances très pointues devaient être acquises, connaissance d’un niveau bac+5 au moins (intégrales
triples, lois de l’aérodynamique,…). Peut-être nos travaux seront-ils repris par d’autres, peut-être nos travaux
apporteront-ils une modeste contribution à une application qui pourrait sauver des vies. Alors le projet « ArdUFO :
un drone au service de tous » aura pris tout son sens. A présent, notre but est de l’améliorer et, au fur et à mesure
que nos connaissances se développent et que le budget nous est fourni, nous améliorons le drone par des tests de
simulation de matériaux plus précis, plus fiables et plus réalistes. Nos prochaines étapes sont un développement
complet de l’interface du sonar permettant un démarrage et un atterrissage automatiques (moments les plus difficiles
pour le contrôle du drone) et par l’évitement d’obstacles sur tous les côtés, puis nous pourrons encore, si le temps et
le budget le permettent de déployer un système SLAM pour un meilleur contrôle automatique. D’autres idées sont
également envisagées, comme la commande à la voix, au geste voire à la pensée, les tests sur les grandes distances,
etc. Saurons-nous relever ces nouveaux défis ?
22
BIBLIOGRAPHIE
- DIYDrones [en ligne], DIY Drones, 2012 – [Consulté les 9, 11, 16, 19, 23, 27 et 30 décembre 2011 et les
1, 6, 10 et 21 janvier 2012]. Disponible sur http://diydrones.com/
- ArduPilot-Mega [en ligne], Google Code, 2012 – [Consulté les 9, 11, 16, 19, 23, 27 et 30 décembre 2011
et les 1, 6, 10 et 21 janvier 2012]. Disponible sur http://code.google.com/p/ardupilot-mega/
- ArduCopter [en ligne], Google Code, 2012 – [Consulté les 9, 11, 16, 19, 23, 27 et 30 décembre 2011 et les
1, 6, 10 et 21 janvier 2012]. Disponible sur http://code.google.com/p/arducopter/
- Conversations avec des aéromodélistes et fondateur des cartes de Virtualrobotix (Roberto Navoni)
- Cours d’électronique et de physique divers
- Mécanique expérimentale des fluides, R.COMOLET
- Aérodynamique expérimentale, P.REBUFFET
- Aérodynamique théorique, P.CALVET
23
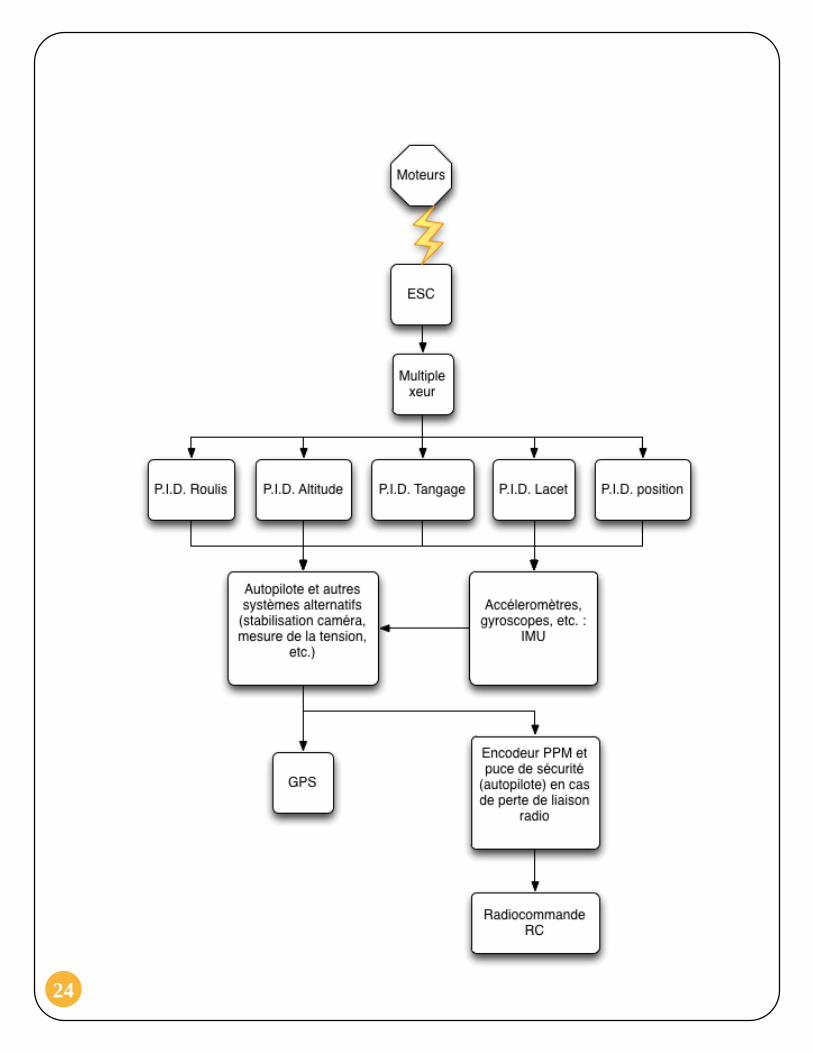
ANNEXE 1
Schéma de fonctionnement
global
24
25
ANNEXE 2
Code généré pour
le sérialiseur
26
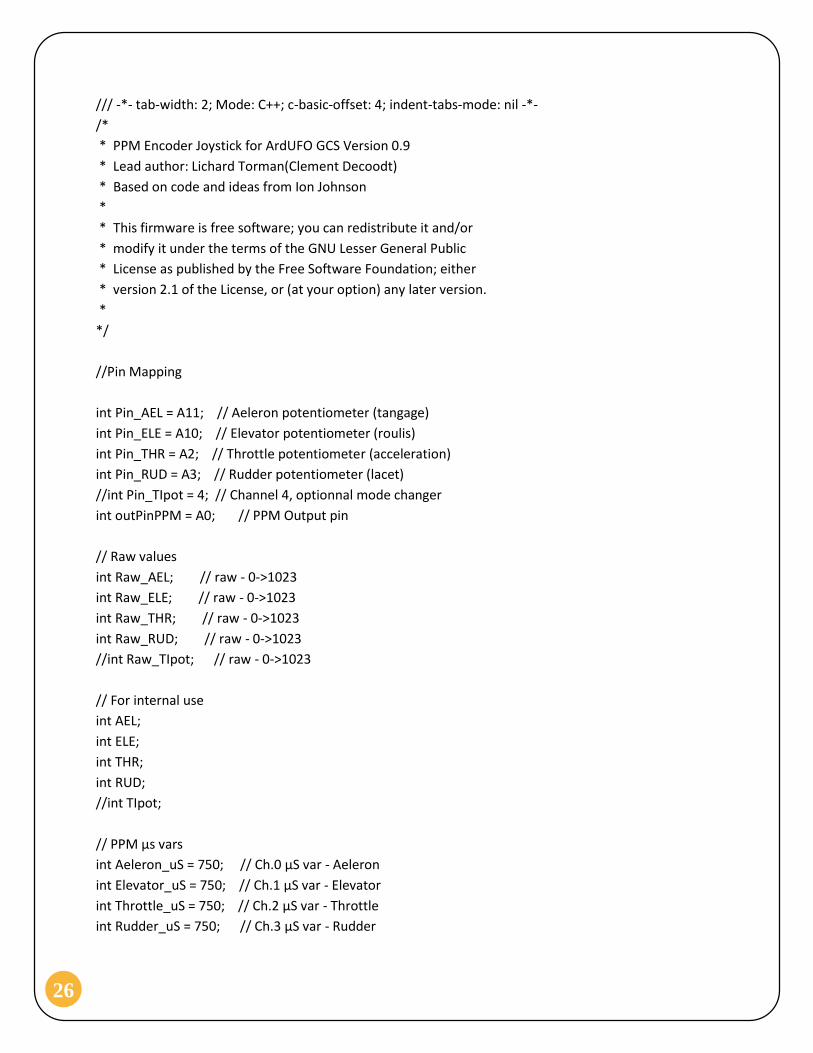
/// -*- tab-width: 2; Mode: C++; c-basic-offset: 4; indent-tabs-mode: nil -*-
/*
* PPM Encoder Joystick for ArdUFO GCS Version 0.9
* Lead author: Lichard Torman(Clement Decoodt)
* Based on code and ideas from Ion Johnson
*
* This firmware is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
*/
//Pin Mapping
int Pin_AEL = A11; // Aeleron potentiometer (tangage)
int Pin_ELE = A10; // Elevator potentiometer (roulis)
int Pin_THR = A2; // Throttle potentiometer (acceleration)
int Pin_RUD = A3; // Rudder potentiometer (lacet)
//int Pin_TIpot = 4; // Channel 4, optionnal mode changer
int outPinPPM = A0; // PPM Output pin
// Raw values
int Raw_AEL; // raw - 0->1023
int Raw_ELE; // raw - 0->1023
int Raw_THR; // raw - 0->1023
int Raw_RUD; // raw - 0->1023
//int Raw_TIpot; // raw - 0->1023
// For internal use
int AEL;
int ELE;
int THR;
int RUD;
//int TIpot;
// PPM µs vars
int Aeleron_uS = 750; // Ch.0 µS var - Aeleron
int Elevator_uS = 750; // Ch.1 µS var - Elevator
int Throttle_uS = 750; // Ch.2 µS var - Throttle
int Rudder_uS = 750; // Ch.3 µS var - Rudder
27
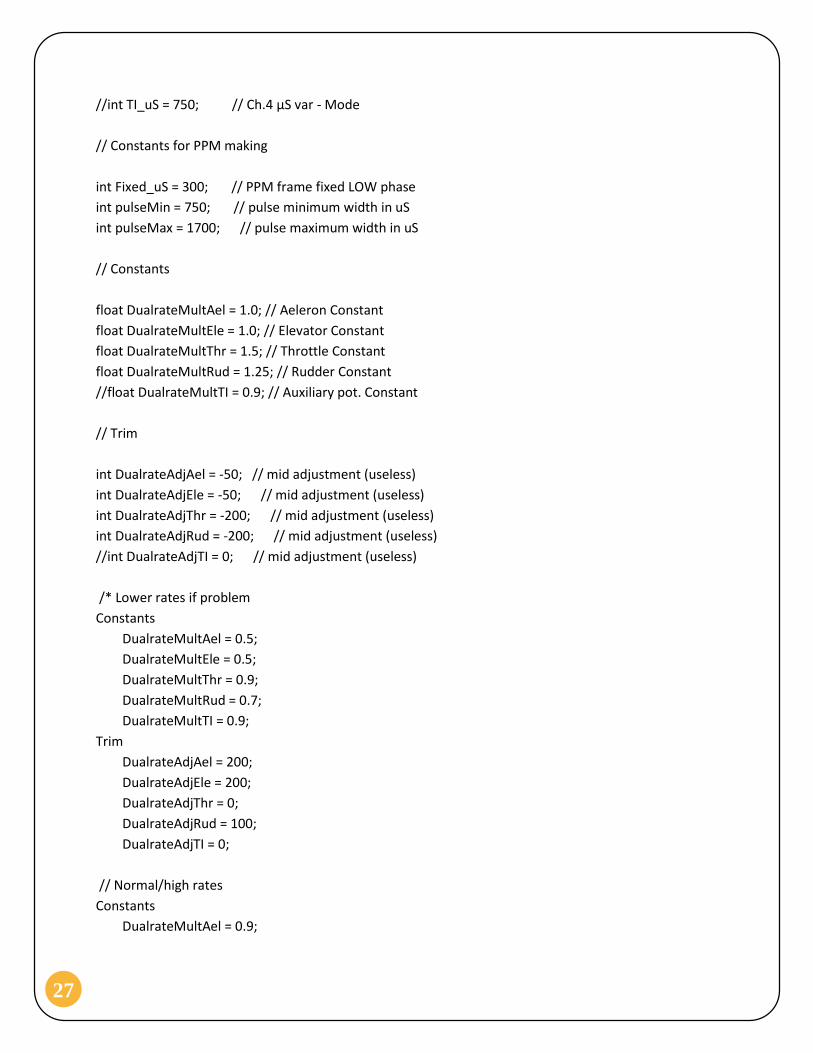
//int TI_uS = 750; // Ch.4 µS var - Mode
// Constants for PPM making
int Fixed_uS = 300; // PPM frame fixed LOW phase
int pulseMin = 750; // pulse minimum width in uS
int pulseMax = 1700; // pulse maximum width in uS
// Constants
float DualrateMultAel = 1.0; // Aeleron Constant
float DualrateMultEle = 1.0; // Elevator Constant
float DualrateMultThr = 1.5; // Throttle Constant
float DualrateMultRud = 1.25; // Rudder Constant
//float DualrateMultTI = 0.9; // Auxiliary pot. Constant
// Trim
int DualrateAdjAel = -50; // mid adjustment (useless)
int DualrateAdjEle = -50; // mid adjustment (useless)
int DualrateAdjThr = -200; // mid adjustment (useless)
int DualrateAdjRud = -200; // mid adjustment (useless)
//int DualrateAdjTI = 0; // mid adjustment (useless)
/* Lower rates if problem
Constants
DualrateMultAel = 0.5;
DualrateMultEle = 0.5;
DualrateMultThr = 0.9;
DualrateMultRud = 0.7;
DualrateMultTI = 0.9;
Trim
DualrateAdjAel = 200;
DualrateAdjEle = 200;
DualrateAdjThr = 0;
DualrateAdjRud = 100;
DualrateAdjTI = 0;
// Normal/high rates
Constants
DualrateMultAel = 0.9;
28
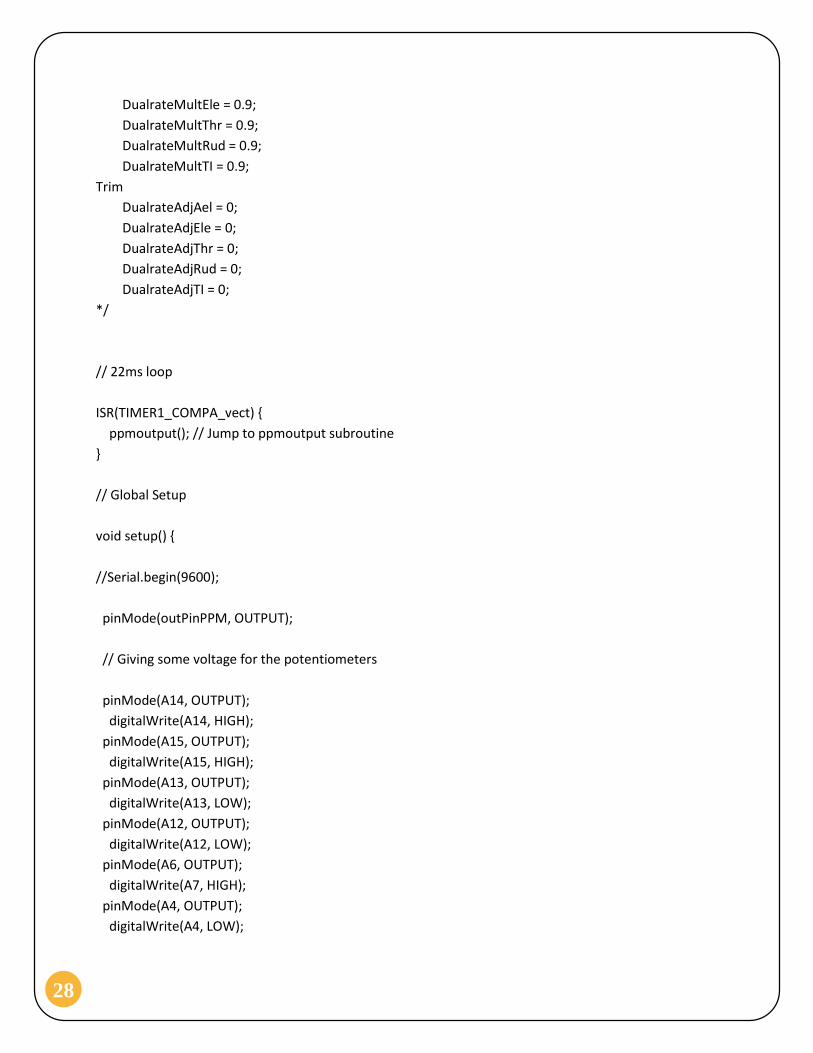
DualrateMultEle = 0.9;
DualrateMultThr = 0.9;
DualrateMultRud = 0.9;
DualrateMultTI = 0.9;
Trim
DualrateAdjAel = 0;
DualrateAdjEle = 0;
DualrateAdjThr = 0;
DualrateAdjRud = 0;
DualrateAdjTI = 0;
*/
// 22ms loop
ISR(TIMER1_COMPA_vect) {
ppmoutput(); // Jump to ppmoutput subroutine
}
// Global Setup
void setup() {
//Serial.begin(9600);
pinMode(outPinPPM, OUTPUT);
// Giving some voltage for the potentiometers
pinMode(A14, OUTPUT);
digitalWrite(A14, HIGH);
pinMode(A15, OUTPUT);
digitalWrite(A15, HIGH);
pinMode(A13, OUTPUT);
digitalWrite(A13, LOW);
pinMode(A12, OUTPUT);
digitalWrite(A12, LOW);
pinMode(A6, OUTPUT);
digitalWrite(A7, HIGH);
pinMode(A4, OUTPUT);
digitalWrite(A4, LOW);
29
pinMode(A5, OUTPUT);
digitalWrite(A5, HIGH);
pinMode(A6, OUTPUT);
digitalWrite(A6, LOW);
// Setup timer (from Ian Johnson Project, but how ?)
TCCR1A = B00110001; // Compare register B used in mode '3'
TCCR1B = B00010010; // WGM13 and CS11 set to 1
TCCR1C = B00000000; // All set to 0
TIMSK1 = B00000010; // Interrupt on compare B
TIFR1 = B00000010; // Interrupt on compare B
OCR1A = 22000; // 22mS PPM output refresh
OCR1B = 1000;
}
// PPM generation
void ppmoutput() {
// Channel 1 - Aeleron
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(Aeleron_uS); // Hold for Aeleron_uS microseconds
// Channel 2 - Elevator
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(Elevator_uS); // Hold for Elevator_uS microseconds
// Channel 3 - Throttle
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(Throttle_uS); // Hold for Throttle_uS microseconds
// Channel 4 - Rudder
digitalWrite(outPinPPM, LOW);
30
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(Rudder_uS); // Hold for Rudder_uS microseconds
/* Channel 5 - TI Switch
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(TIsw_uS); // Hold for TIsw_uS microseconds
// Channel 5 - Opt. Pot
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH);
delayMicroseconds(TI_uS); // Hold for TI_uS microseconds
*/
// Synchro pulse
digitalWrite(outPinPPM, LOW);
delayMicroseconds(Fixed_uS); // Hold
digitalWrite(outPinPPM, HIGH); // Start Synchro pulse
}
// From reading to µs values
void loop() { // Main loop
// Read Pot. ports for Aeleron, Elevator, Throttle, Rudder and the Auxiliary pot.
Raw_AEL = analogRead(Pin_AEL);
Raw_ELE = analogRead(Pin_ELE);
Raw_THR = analogRead(Pin_THR);
Raw_RUD = analogRead(Pin_RUD);
// Raw_TIpot = analogRead(Pin_TIpot);
// Compensate for discrepancy in pot inputs including centering offset.
// Also use this to invert inputs if necessary
AEL = map(Raw_AEL, 0, 1023, 1200, 0) - 100; // Invert Aeleron pot and slight
centre offset
ELE = map(Raw_ELE, 0, 1023, 1200, 0) - 120; // Invert Elevator pot and slight
centre offset
31
THR = map(Raw_THR, 0, 1023, 0, 1023) + 0; // Throttle (In case of 2nd trim
use)
RUD = map(Raw_RUD, 0, 1023, 0, 1023) + 0; // Rudder (In case of 2nd trim
use)
// TIpot = map(Raw_TIpot, 0, 1023, 1023, 0) + 0; // Auxiliary pot.
// Tranform 0-1023 inputs to µS Rates with trim adjustment
Aeleron_uS = (AEL * DualrateMultAel) + pulseMin + DualrateAdjAel;
Elevator_uS = (ELE * DualrateMultEle) + pulseMin + DualrateAdjEle;
Throttle_uS = (THR * DualrateMultThr) + pulseMin + DualrateAdjThr;
Rudder_uS = (RUD * DualrateMultRud) + pulseMin + DualrateAdjRud;
// TI_uS = (TIpot * DualrateMultTI) + pulseMin + DualrateAdjTI;
// Check the limits
if (Aeleron_uS <= 750) Aeleron_uS = 750;
if (Aeleron_uS >= 1700) Aeleron_uS = 1700;
if (Elevator_uS <= 750) Elevator_uS = 750;
if (Elevator_uS >= 1700) Elevator_uS = 1700;
if (Throttle_uS <= 750) Throttle_uS = 750;
if (Throttle_uS >= 1700) Throttle_uS = 1700;
if (Rudder_uS <= 750) Rudder_uS = 750;
if (Rudder_uS >= 1700) Rudder_uS = 1700;
// if (TI_uS <= 750) TI_uS = 750;
// if (TI_uS >= 1700) TI_uS = 1700;
}
32
33
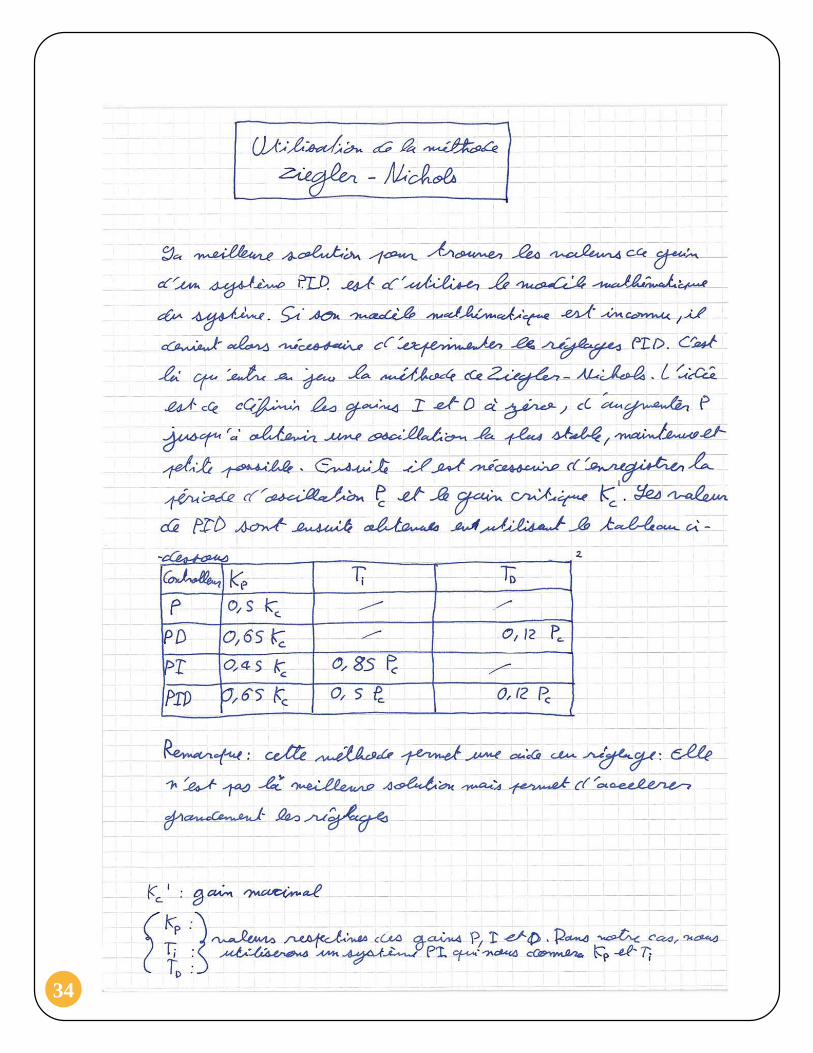
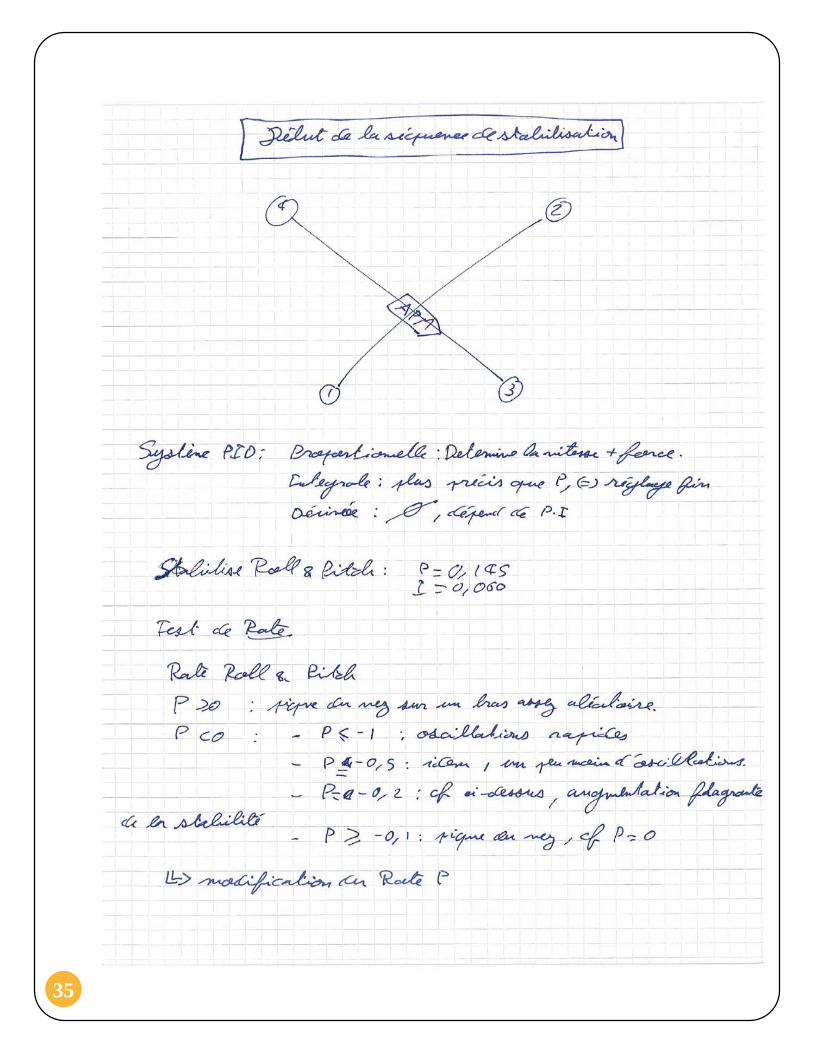
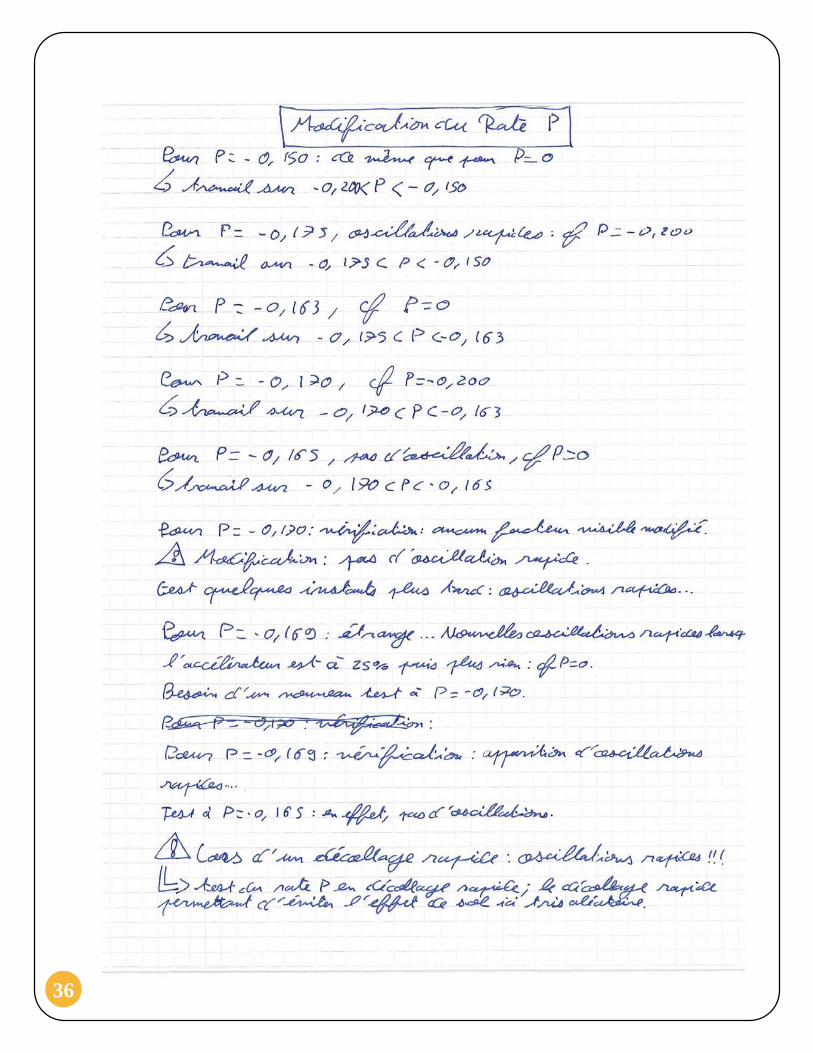
ANNEXE 3
Détermination du PID
Méthode Ziegler-Nichols
34
35
36
37