
De la Théorie du Signal à la pratique du Traitement du …mailhes/documents/TNS_Mailhes.pdf · 2...
65
1 TNS – 2En – Corinne Mailhes – dernière modification 2010 De la Théorie du Signal à la pratique du Traitement du Signal
Transcript of De la Théorie du Signal à la pratique du Traitement du …mailhes/documents/TNS_Mailhes.pdf · 2...
1TNS – 2En – Corinne Mailhes – dernière modification 2010
De la Théorie du Signalà la pratique du Traitement du Signal
2
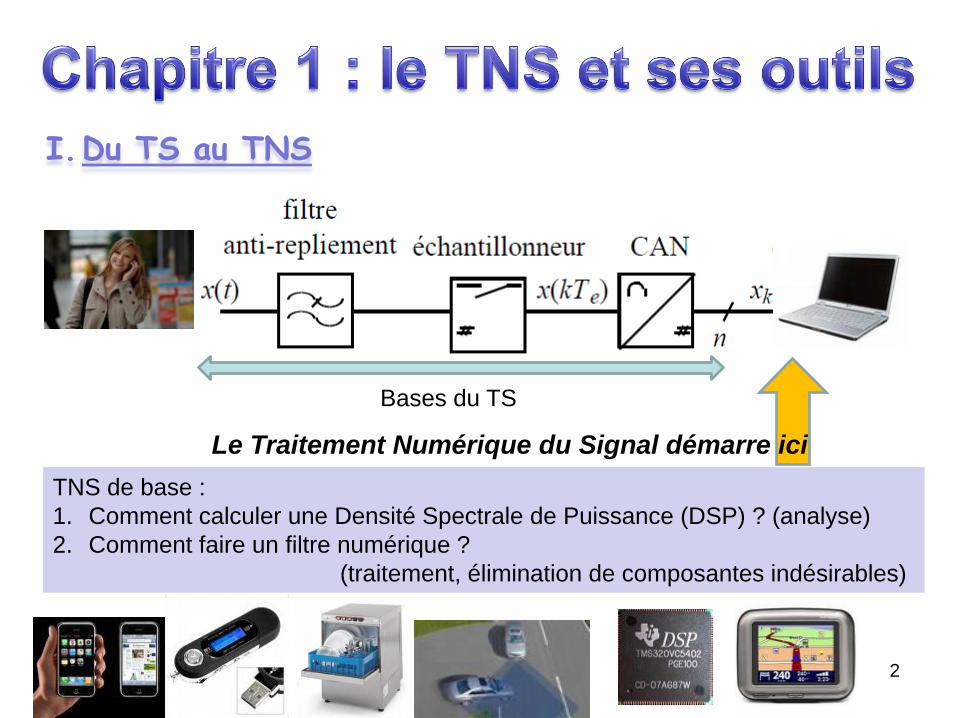
I.Du TS au TNS
Bases du TS
Le Traitement Numérique du Signal démarre ici
TNS de base :
1. Comment calculer une Densité Spectrale de Puissance (DSP) ? (analyse)
2. Comment faire un filtre numérique ?
(traitement, élimination de composantes indésirables)
3
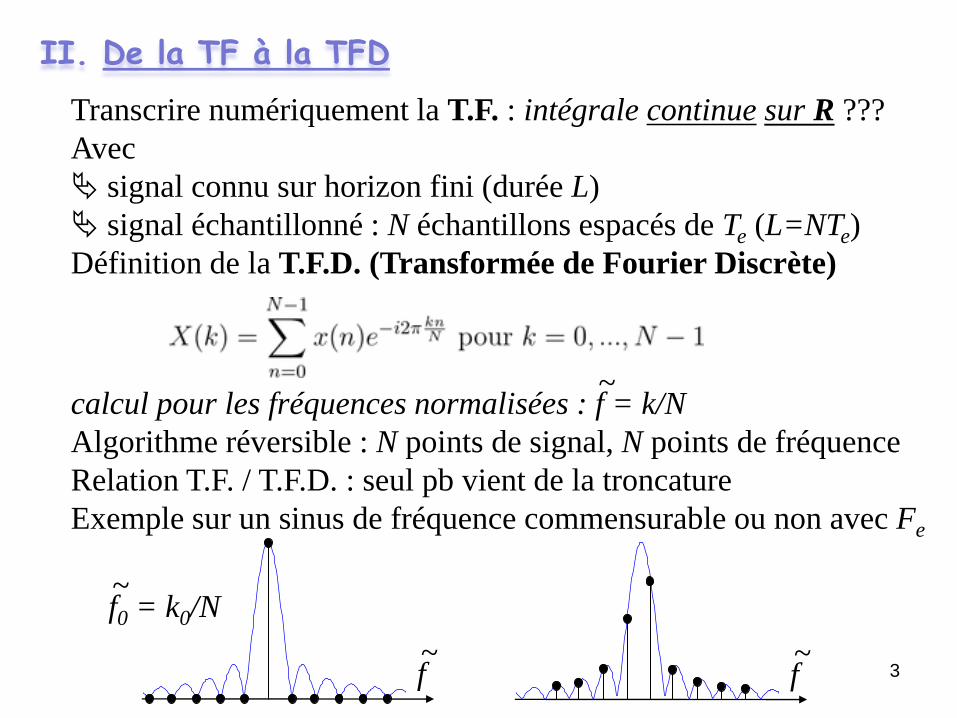
Transcrire numériquement la T.F. : intégrale continue sur R ???
Avec
signal connu sur horizon fini (durée L)
signal échantillonné : N échantillons espacés de Te (L=NTe)
Définition de la T.F.D. (Transformée de Fourier Discrète)
calcul pour les fréquences normalisées : f = k/N
Algorithme réversible : N points de signal, N points de fréquence
Relation T.F. / T.F.D. : seul pb vient de la troncature
Exemple sur un sinus de fréquence commensurable ou non avec Fe
~
f ~
f ~
f0 = k0/N ~
II. De la TF à la TFD
4
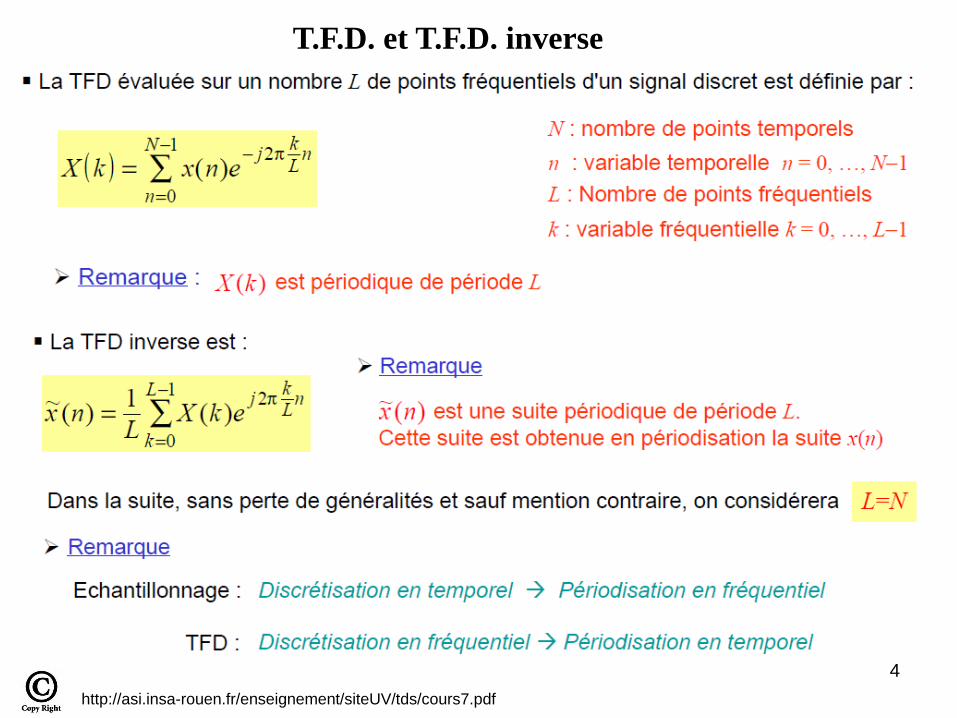
T.F.D. et T.F.D. inverse
http://asi.insa-rouen.fr/enseignement/siteUV/tds/cours7.pdf
5
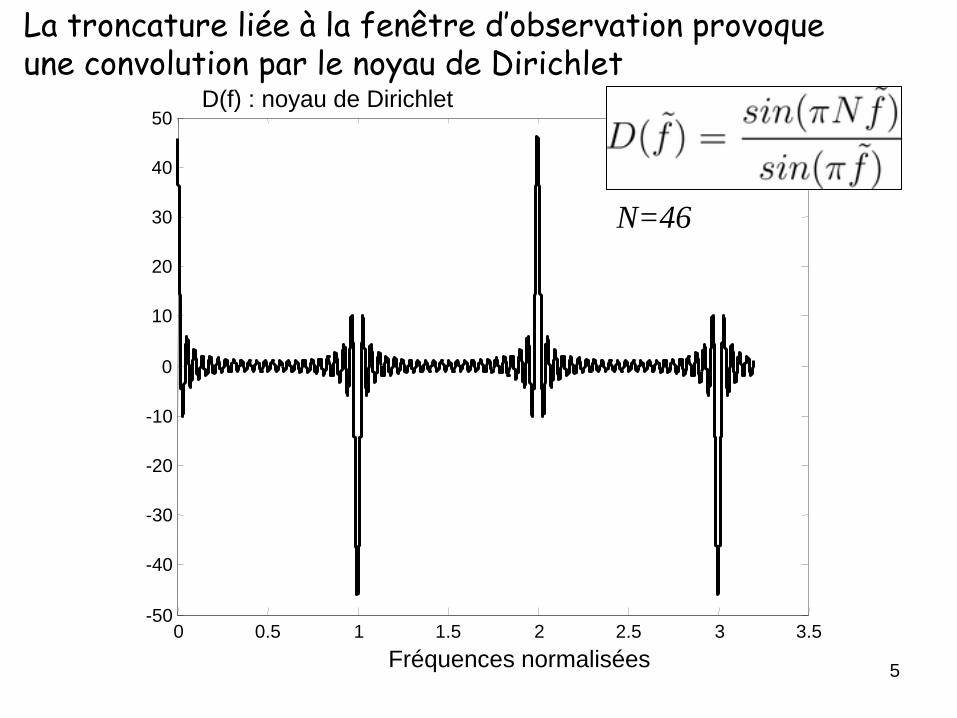
D(f) : noyau de Dirichlet
Fréquences normalisées
N=46
0 0.5 1 1.5 2 2.5 3 3.5-50
-40
-30
-20
-10
0
10
20
30
40
50
La troncature liée à la fenêtre d’observation provoqueune convolution par le noyau de Dirichlet
6
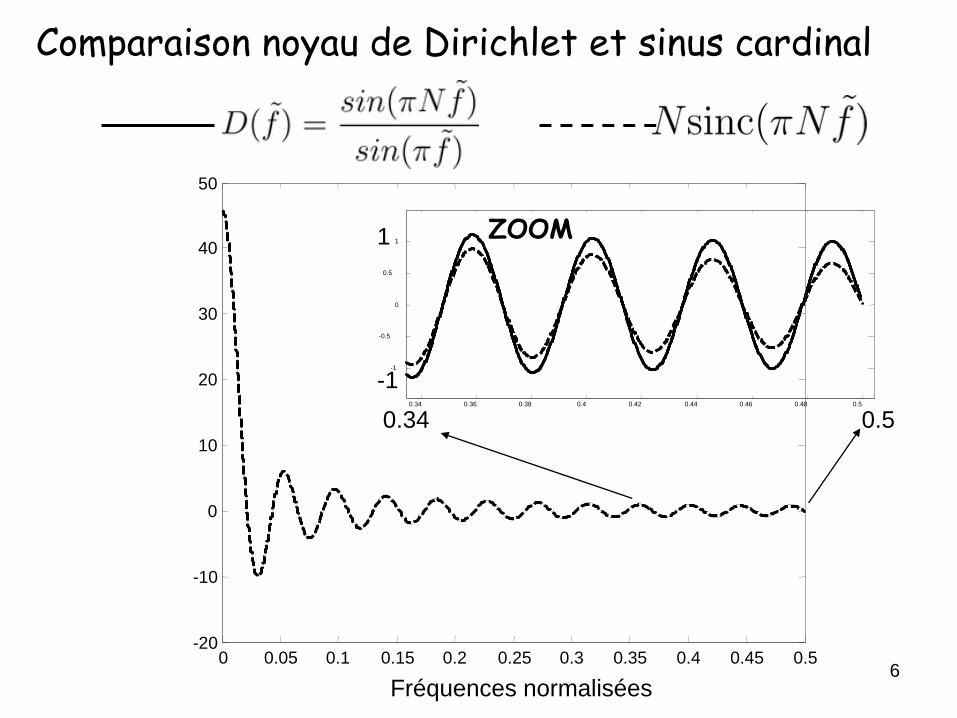
Comparaison noyau de Dirichlet et sinus cardinal
Fréquences normalisées
ZOOM
0.34 0.5
1
-10.34 0.36 0.38 0.4 0.42 0.44 0.46 0.48 0.5
-1
-0.5
0
0.5
1
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-20
-10
0
10
20
30
40
50
7
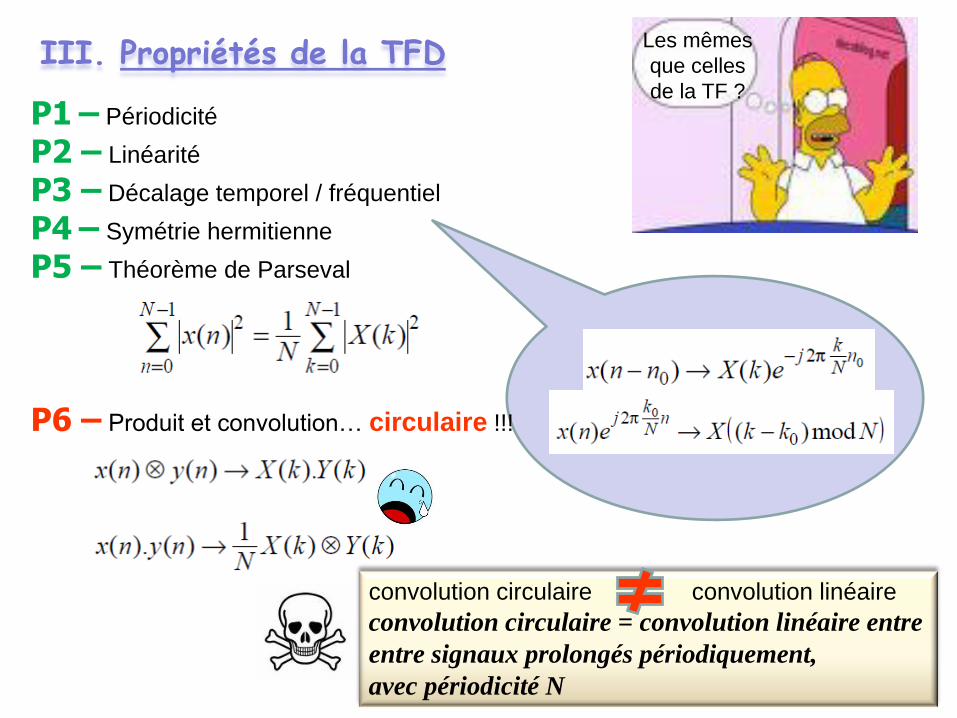
III. Propriétés de la TFD Les mêmes
que celles
de la TF ?
P1 – Périodicité
P2 – Linéarité
P3 – Décalage temporel / fréquentiel
P4 – Symétrie hermitienne
P5 – Théorème de Parseval
P6 – Produit et convolution… circulaire !!!
convolution circulaire convolution linéaire
convolution circulaire = convolution linéaire entre
entre signaux prolongés périodiquement,
avec périodicité N
8
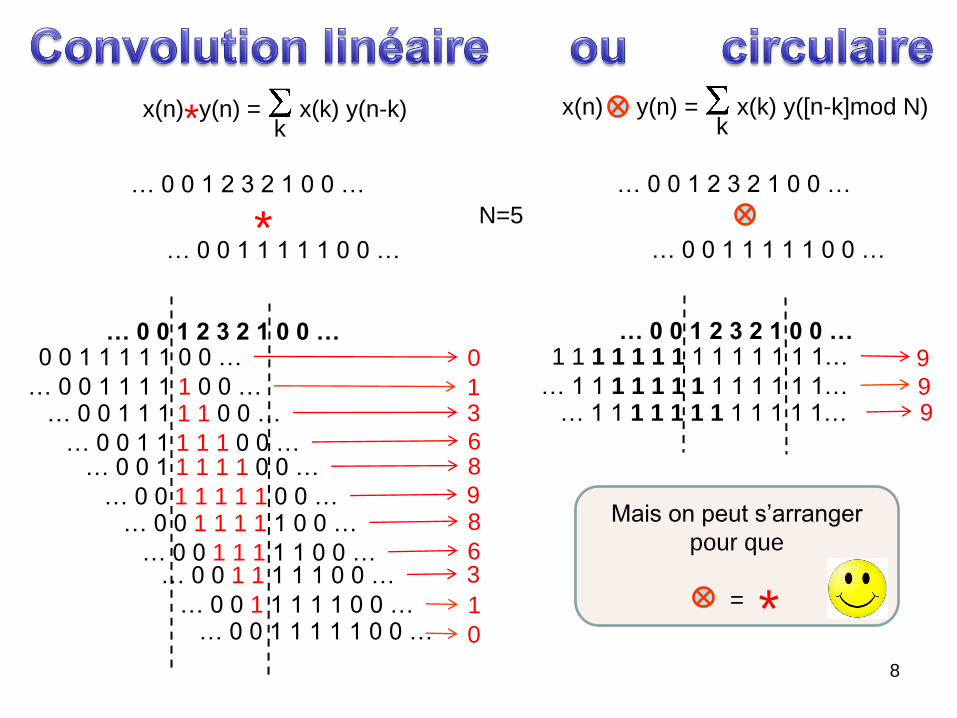
… 0 0 1 2 3 2 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …*
x(n)*y(n) = x(k) y(n-k) k
… 0 0 1 2 3 2 1 0 0 …0 0 1 1 1 1 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …… 0 0 1 1 1 1 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …… 0 0 1 1 1 1 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …… 0 0 1 1 1 1 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …… 0 0 1 1 1 1 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …… 0 0 1 1 1 1 1 0 0 …
0
13
68
98
63
1
0
x(n) y(n) = x(k) y([n-k]mod N) k
… 0 0 1 2 3 2 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …
… 0 0 1 2 3 2 1 0 0 …1 1 1 1 1 1 1 1 1 1 1 1 1 1…
… 1 1 1 1 1 1 1 1 1 1 1 1 1…… 1 1 1 1 1 1 1 1 1 1 1 1…
9
99
N=5
Mais on peut s’arranger
pour que
= *
9
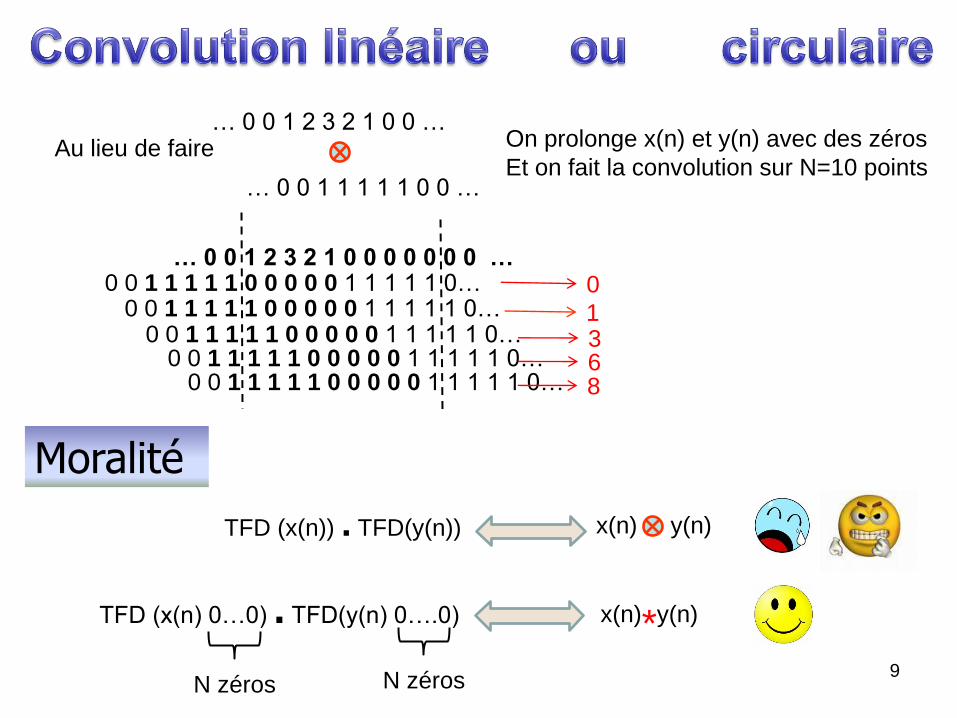
… 0 0 1 2 3 2 1 0 0 …
… 0 0 1 1 1 1 1 0 0 …
Au lieu de faire On prolonge x(n) et y(n) avec des zéros
Et on fait la convolution sur N=10 points
… 0 0 1 2 3 2 1 0 0 0 0 0 0 0 …0 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 0… 0
13
0 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 0…0 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 0…
0 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 0…0 0 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 0…
68
Moralité
TFD (x(n)) . TFD(y(n)) x(n) y(n)
TFD (x(n) 0…0) . TFD(y(n) 0….0) x(n)*y(n)
N zéros N zéros
10
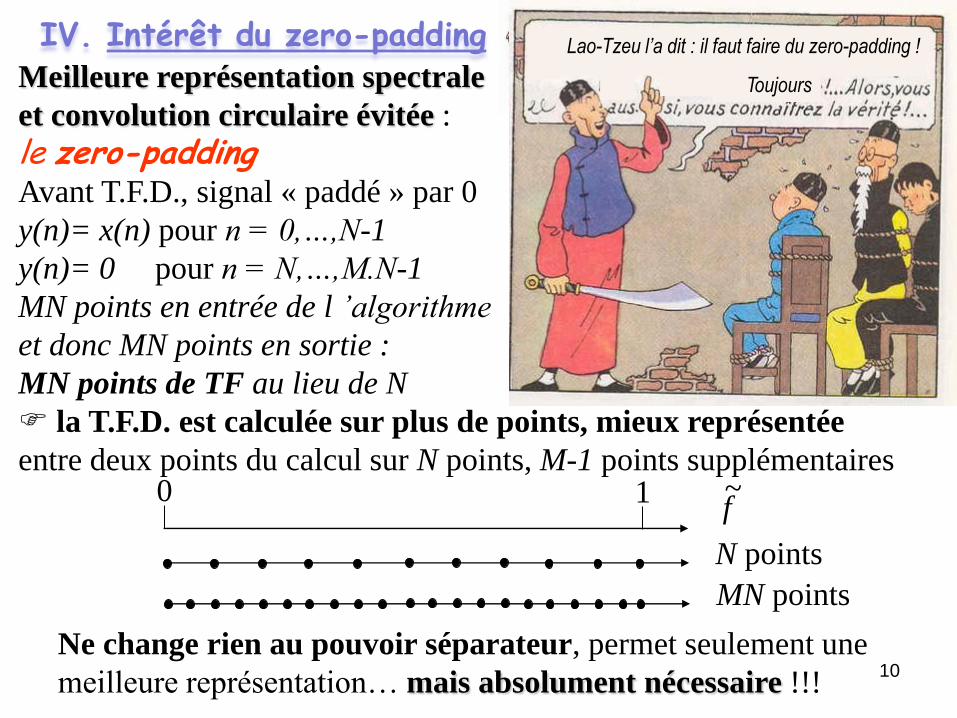
Meilleure représentation spectrale
et convolution circulaire évitée :
le zero-paddingAvant T.F.D., signal « paddé » par 0
y(n)= x(n) pour n = 0,…,N-1
y(n)= 0 pour n = N,…,M.N-1
MN points en entrée de l ’algorithme
et donc MN points en sortie :
MN points de TF au lieu de N
la T.F.D. est calculée sur plus de points, mieux représentée
entre deux points du calcul sur N points, M-1 points supplémentaires0 1
f ~
N points
MN points
Ne change rien au pouvoir séparateur, permet seulement une
meilleure représentation… mais absolument nécessaire !!!
IV. Intérêt du zero-padding Lao-Tzeu l’a dit : il faut faire du zero-padding !
Toujours
11
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
0.5
1
1.5
2
2.5
3
3.5
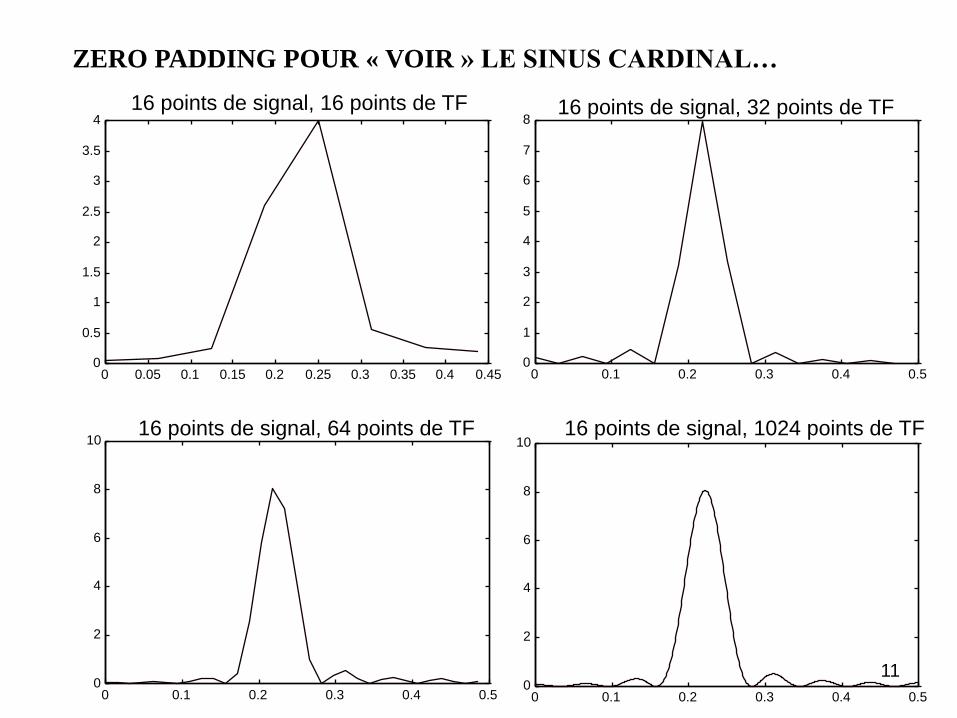
416 points de signal, 16 points de TF
0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
5
6
7
816 points de signal, 32 points de TF
0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
1016 points de signal, 64 points de TF 16 points de signal, 1024 points de TF
0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
10
ZERO PADDING POUR « VOIR » LE SINUS CARDINAL…
12
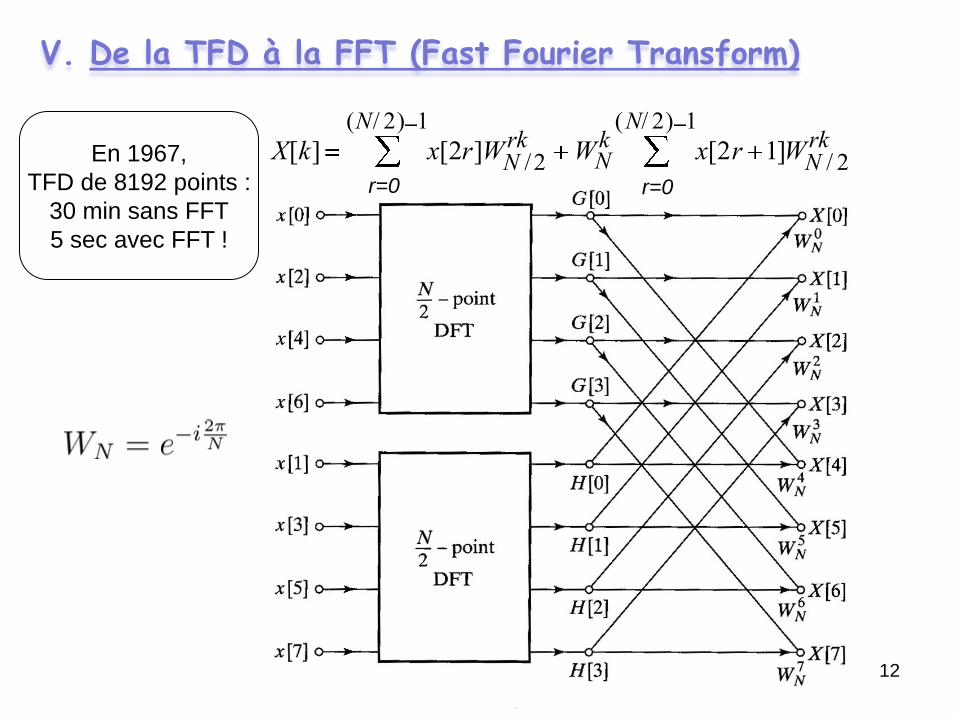
X[k]
n 0
(N/ 2) 1
x[2r]WN /2rk WN
k
n 0
(N/ 2) 1
x[2r 1]WN / 2rk
r=0 r=0
En 1967,
TFD de 8192 points :
30 min sans FFT
5 sec avec FFT !
V. De la TFD à la FFT (Fast Fourier Transform)
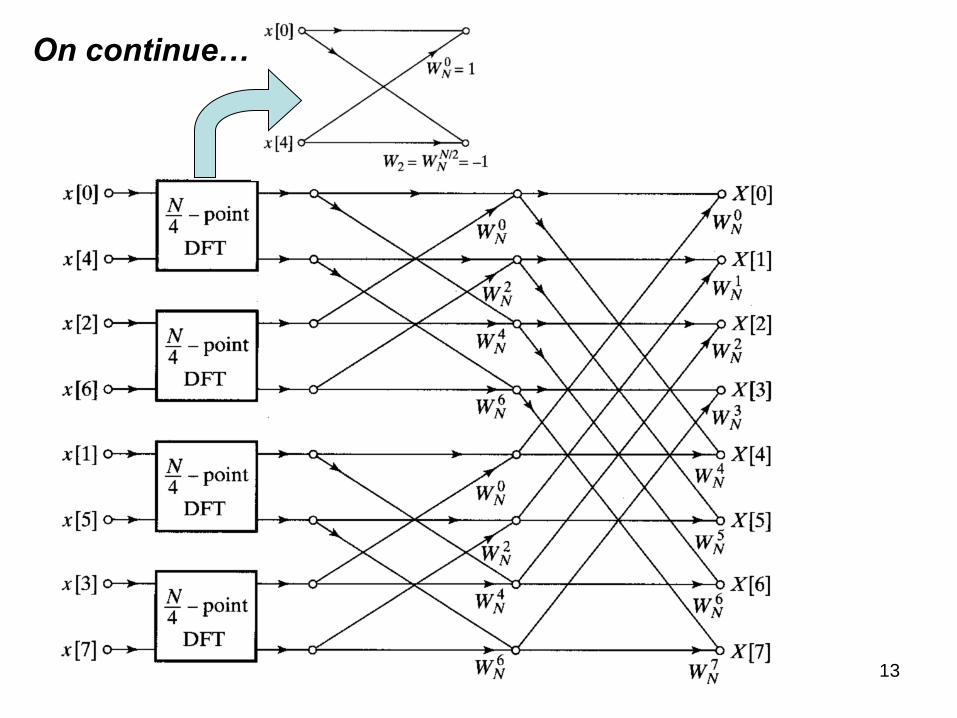
13
On continue…
14
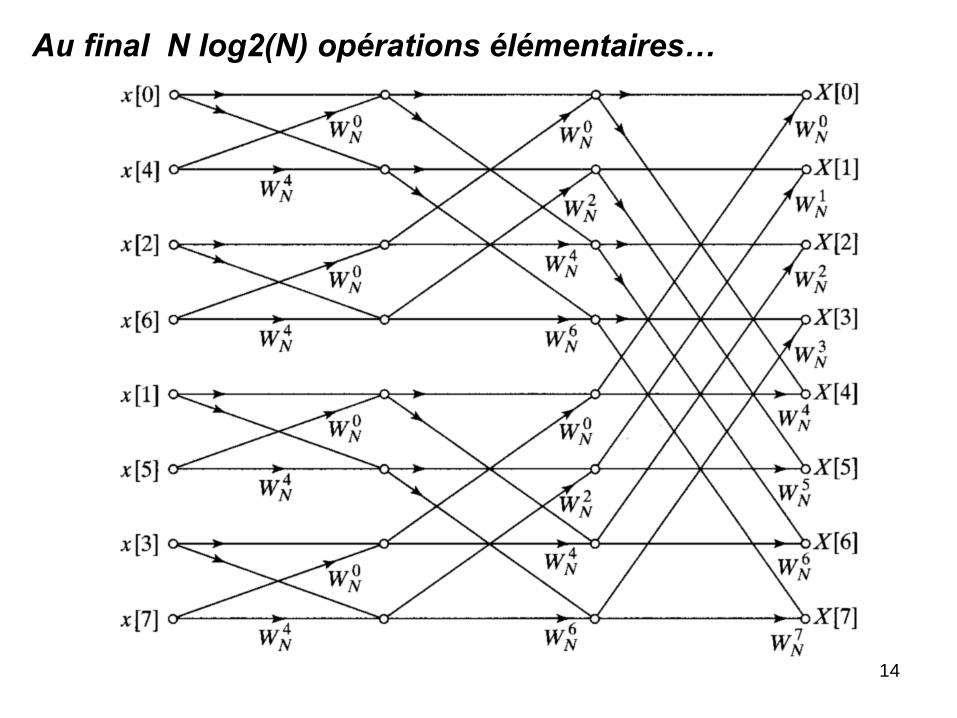
Au final N log2(N) opérations élémentaires…
15
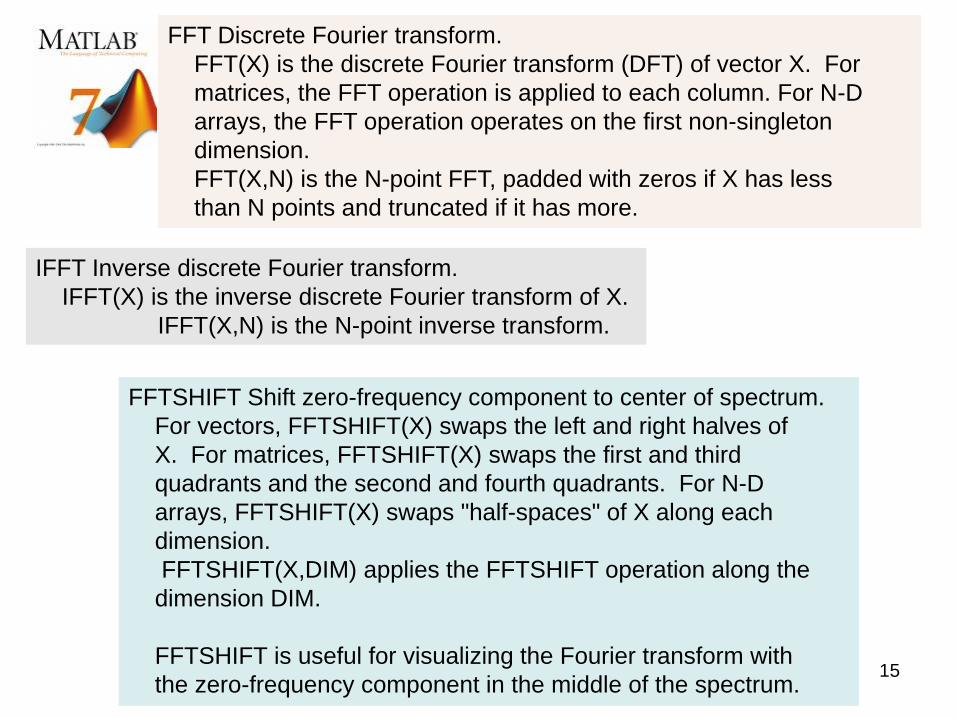
FFT Discrete Fourier transform.
FFT(X) is the discrete Fourier transform (DFT) of vector X. For
matrices, the FFT operation is applied to each column. For N-D
arrays, the FFT operation operates on the first non-singleton
dimension.
FFT(X,N) is the N-point FFT, padded with zeros if X has less
than N points and truncated if it has more.
IFFT Inverse discrete Fourier transform.
IFFT(X) is the inverse discrete Fourier transform of X.
IFFT(X,N) is the N-point inverse transform.
FFTSHIFT Shift zero-frequency component to center of spectrum.
For vectors, FFTSHIFT(X) swaps the left and right halves of
X. For matrices, FFTSHIFT(X) swaps the first and third
quadrants and the second and fourth quadrants. For N-D
arrays, FFTSHIFT(X) swaps "half-spaces" of X along each
dimension.
FFTSHIFT(X,DIM) applies the FFTSHIFT operation along the
dimension DIM.
FFTSHIFT is useful for visualizing the Fourier transform with
the zero-frequency component in the middle of the spectrum.
16
I.Problème de l’estimation spectrale
Rappels :
DSP : 2 définitions équivalentes si la fonction
d’autocorrélation décroît suffisamment.
1
2
Estimation de la DSP :
• méthodes non paramétriques, basées sur la TF et sur ces
deux définitions (corrélogramme et périodogramme)
• méthodes paramétriques
17
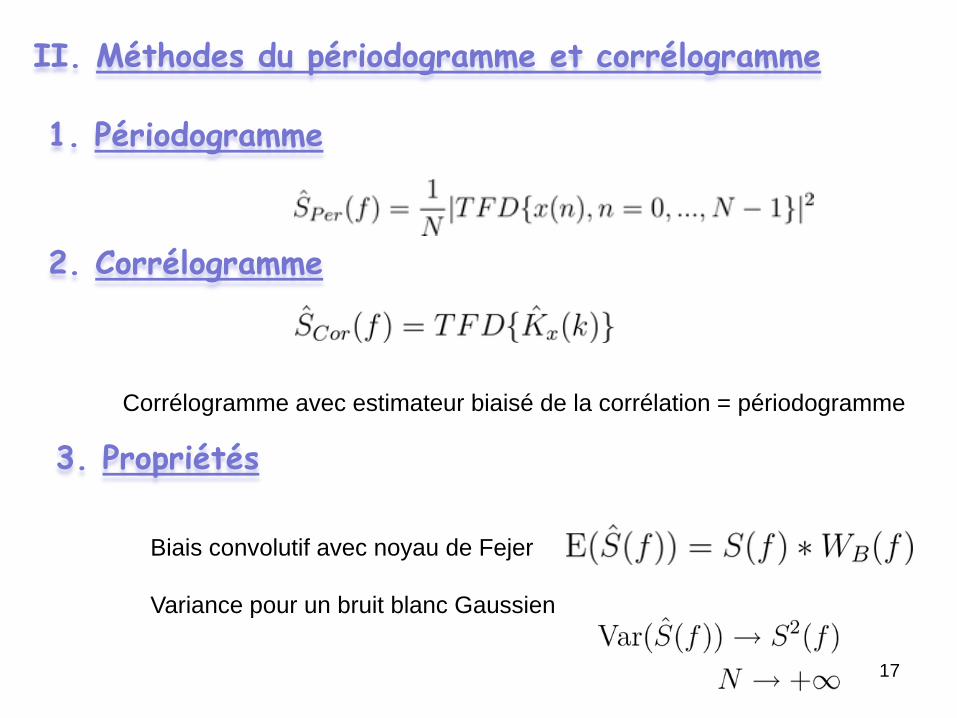
II. Méthodes du périodogramme et corrélogramme
1. Périodogramme
2. Corrélogramme
3. Propriétés
Corrélogramme avec estimateur biaisé de la corrélation = périodogramme
Biais convolutif avec noyau de Fejer
Variance pour un bruit blanc Gaussien
18
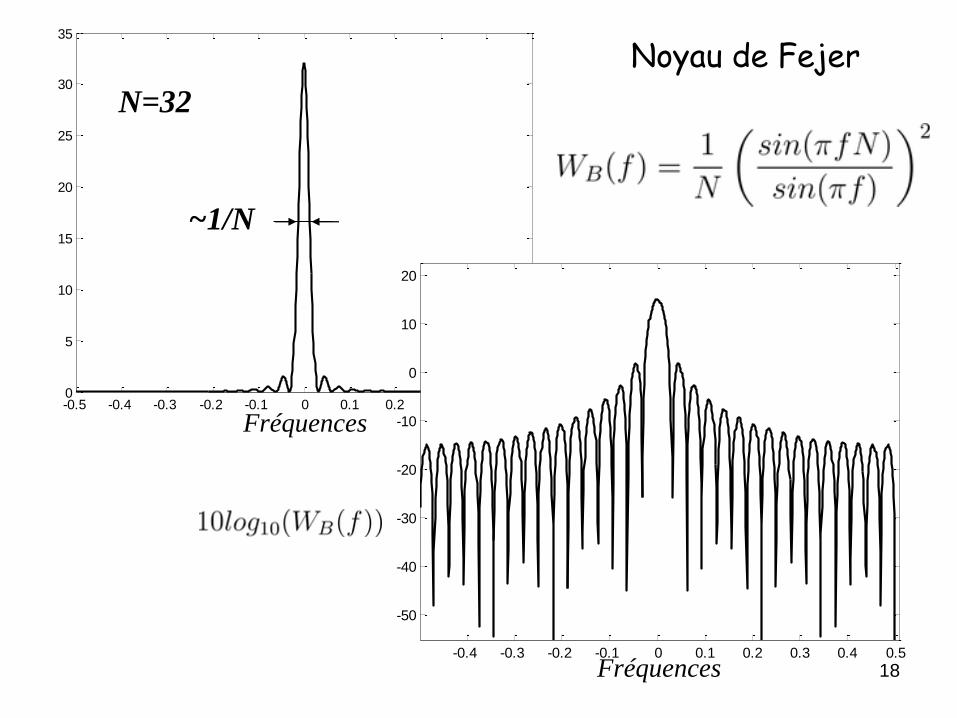
Noyau de Fejer
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
15
20
25
30
35
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-50
-40
-30
-20
-10
0
10
20
N=32
~1/N
Fréquences
Fréquences
19
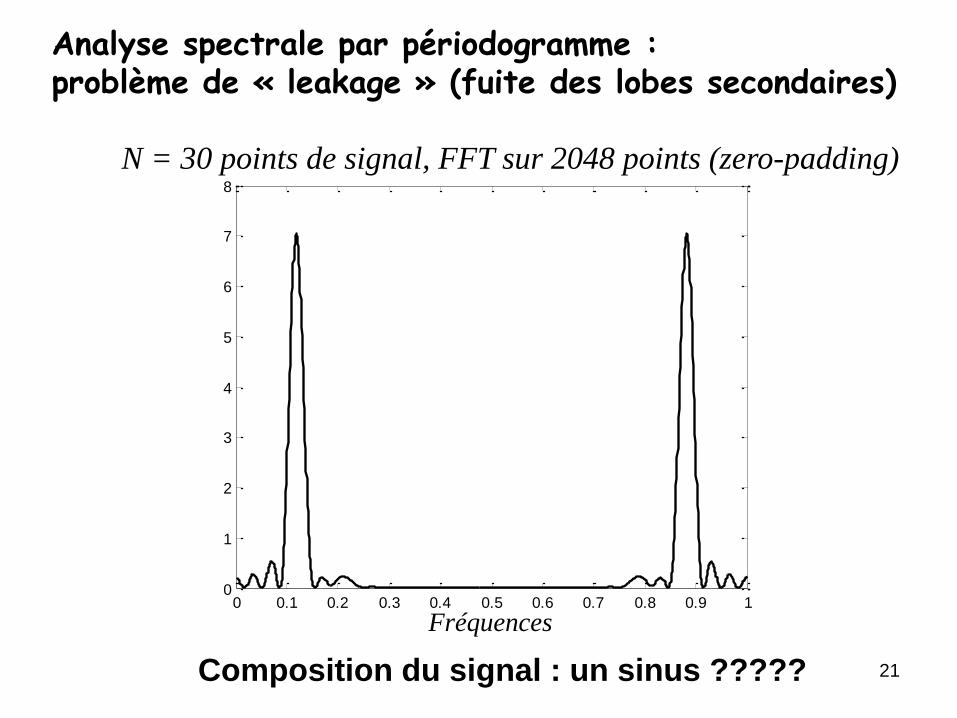
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
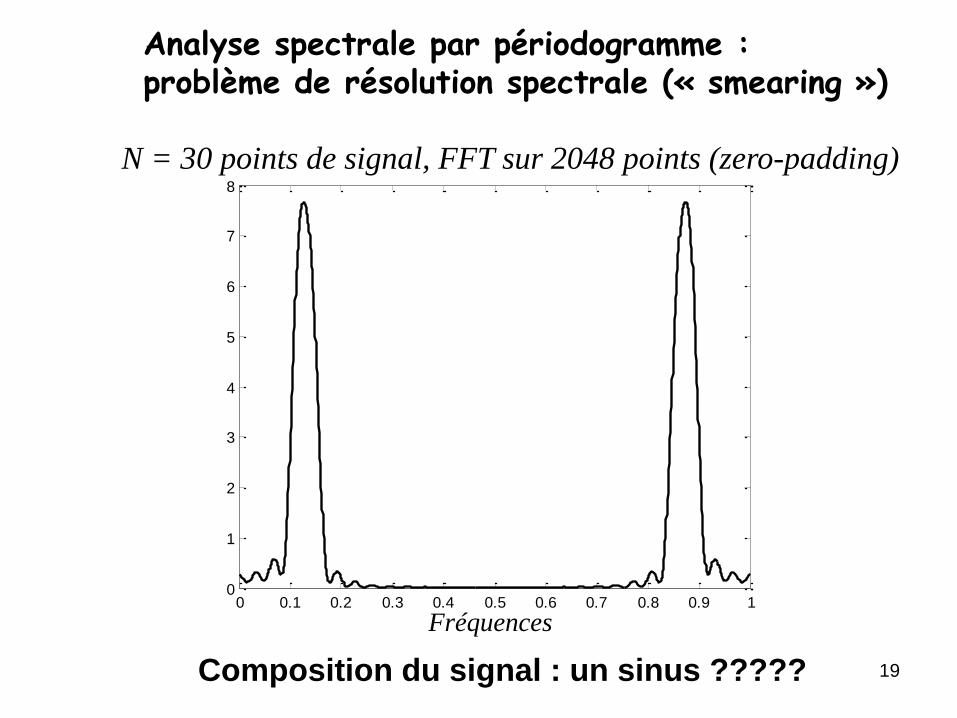
N = 30 points de signal, FFT sur 2048 points (zero-padding)
Analyse spectrale par périodogramme :problème de résolution spectrale (« smearing »)
Composition du signal : un sinus ?????
Fréquences
20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
12
14
16
Fréquences
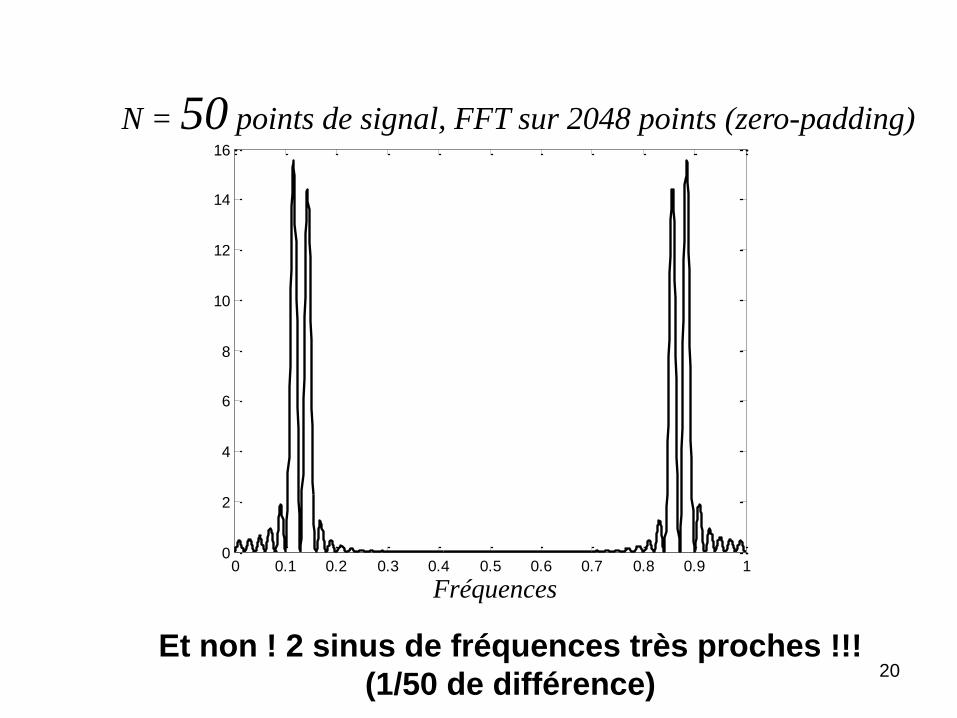
N = 50 points de signal, FFT sur 2048 points (zero-padding)
Et non ! 2 sinus de fréquences très proches !!!
(1/50 de différence)
21
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
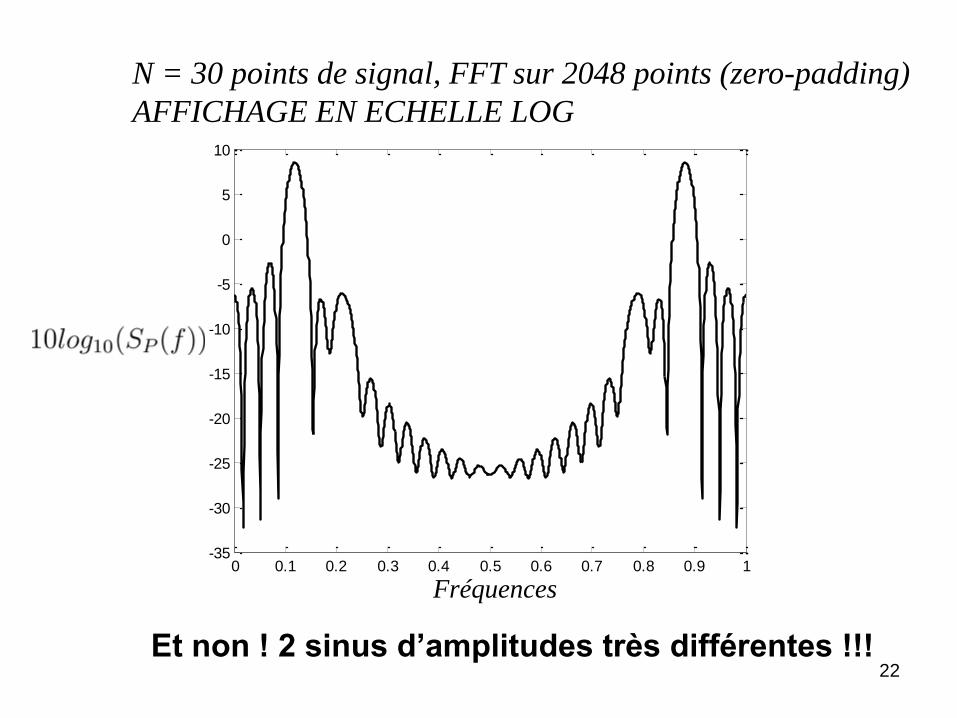
N = 30 points de signal, FFT sur 2048 points (zero-padding)
Composition du signal : un sinus ?????
Fréquences
Analyse spectrale par périodogramme :problème de « leakage » (fuite des lobes secondaires)
22
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-35
-30
-25
-20
-15
-10
-5
0
5
10
Fréquences
Et non ! 2 sinus d’amplitudes très différentes !!!
N = 30 points de signal, FFT sur 2048 points (zero-padding)
AFFICHAGE EN ECHELLE LOG
23
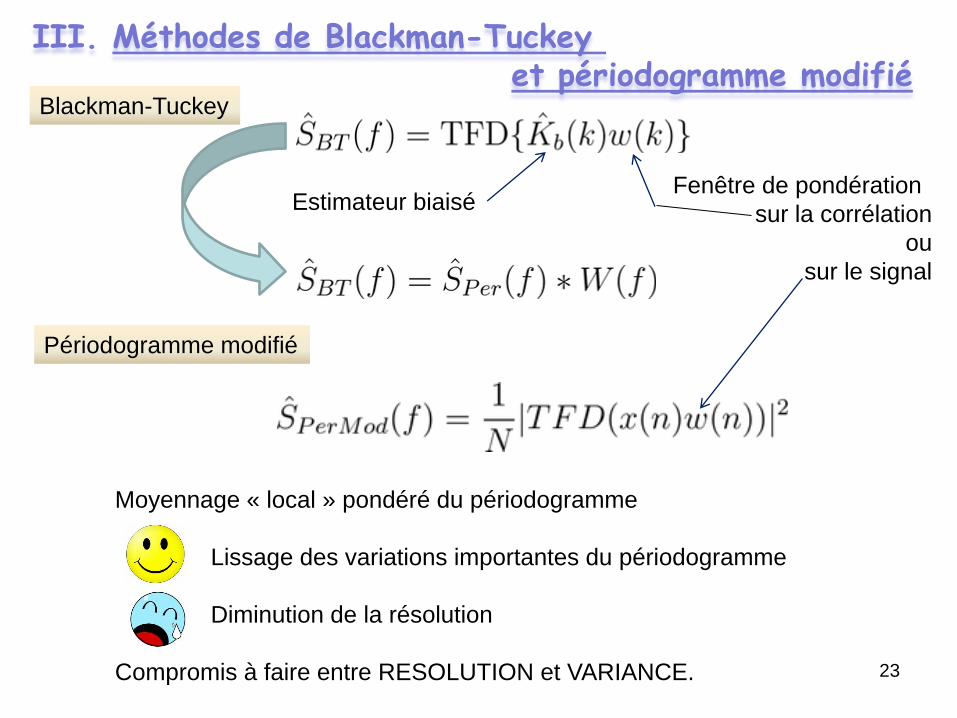
III. Méthodes de Blackman-Tuckeyet périodogramme modifié
Estimateur biaiséFenêtre de pondération
sur la corrélation
ou
sur le signal
Moyennage « local » pondéré du périodogramme
Lissage des variations importantes du périodogramme
Diminution de la résolution
Compromis à faire entre RESOLUTION et VARIANCE.
Blackman-Tuckey
Périodogramme modifié
24
0 0.1 0.2 0.3 0.4 0.510
-10
10-8
10-6
10-4
10-2
100
102
fréquences normalisées
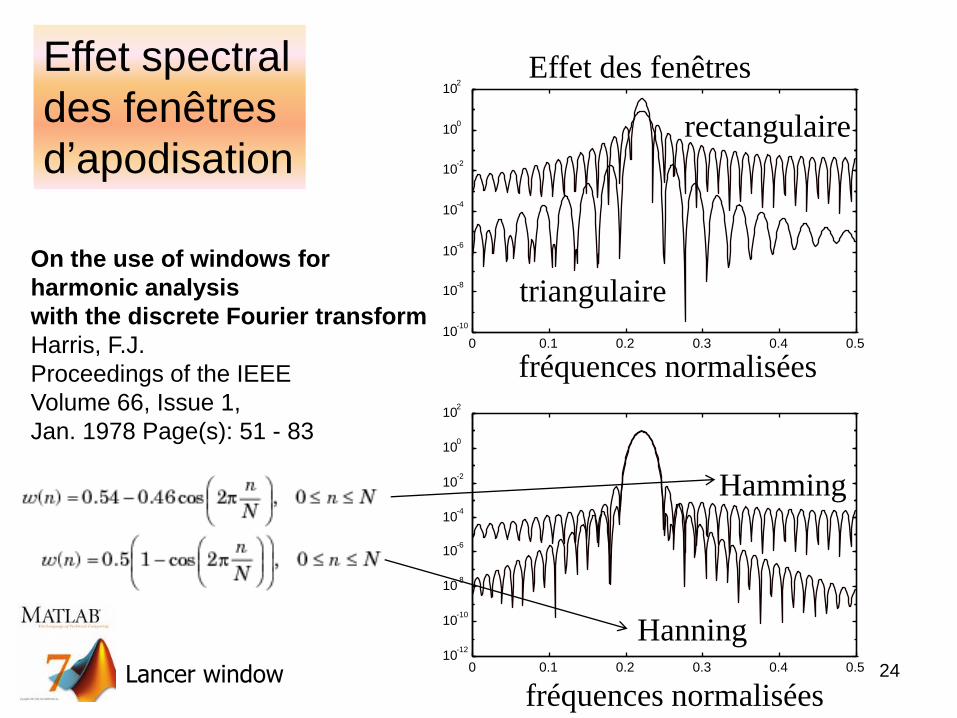
rectangulaire
triangulaire
Effet des fenêtres
0 0.1 0.2 0.3 0.4 0.510
-12
10-10
10-8
10-6
10-4
10-2
100
102
fréquences normalisées
Hamming
Hanning
On the use of windows for
harmonic analysis
with the discrete Fourier transform
Harris, F.J.
Proceedings of the IEEE
Volume 66, Issue 1,
Jan. 1978 Page(s): 51 - 83
Effet spectral
des fenêtres
d’apodisation
Lancer window
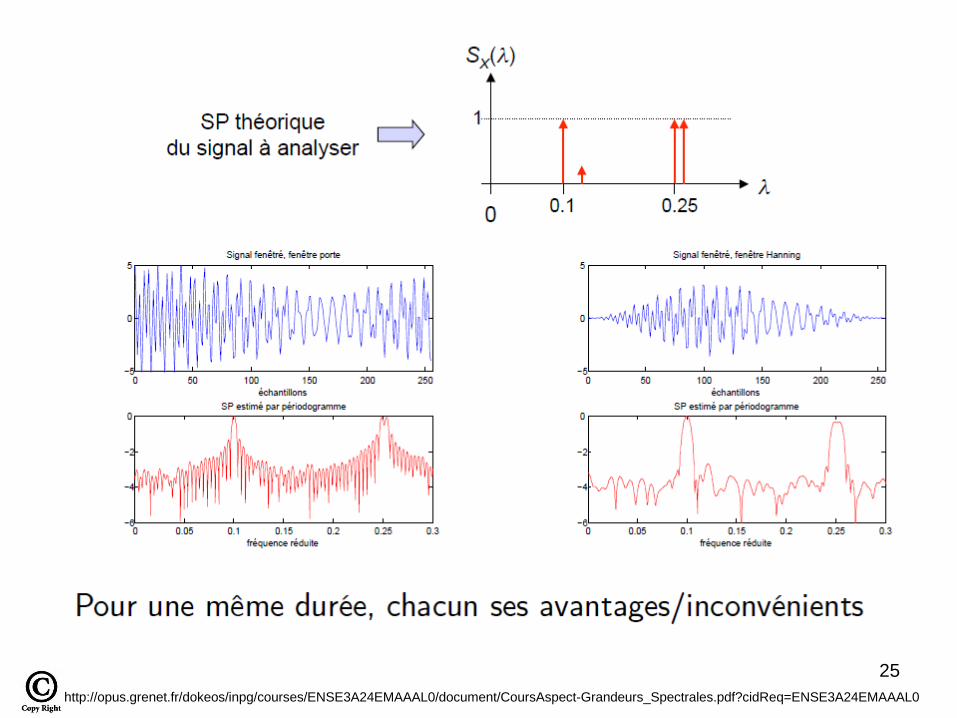
25
http://opus.grenet.fr/dokeos/inpg/courses/ENSE3A24EMAAAL0/document/CoursAspect-Grandeurs_Spectrales.pdf?cidReq=ENSE3A24EMAAAL0
26
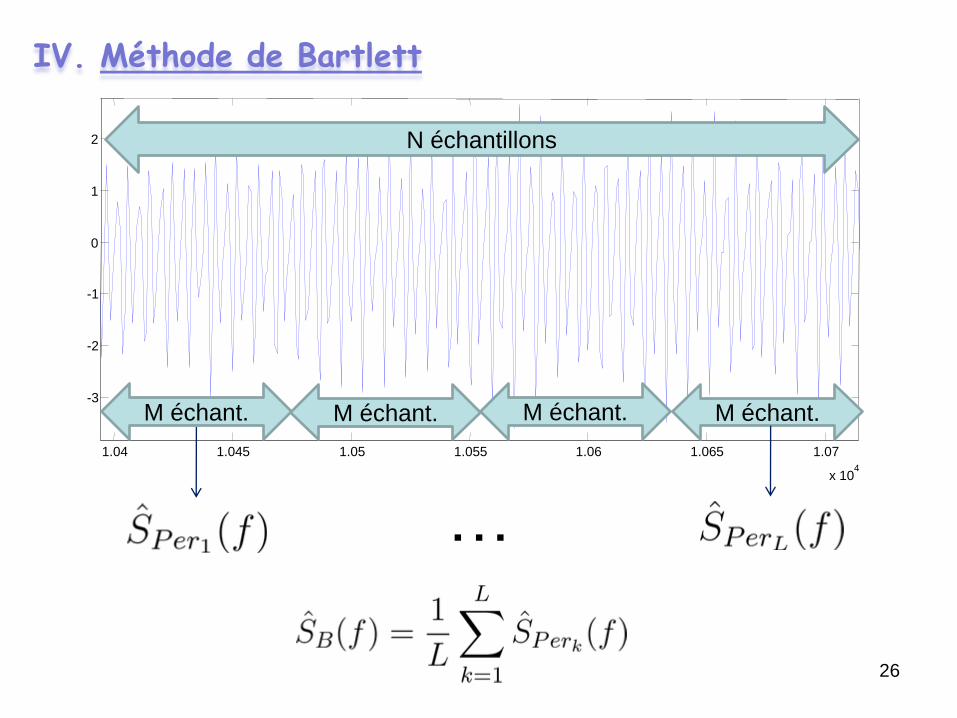
IV. Méthode de Bartlett
1.04 1.045 1.05 1.055 1.06 1.065 1.07
x 104
-3
-2
-1
0
1
2
M échant.
N échantillons
M échant. M échant. M échant.
…
2727
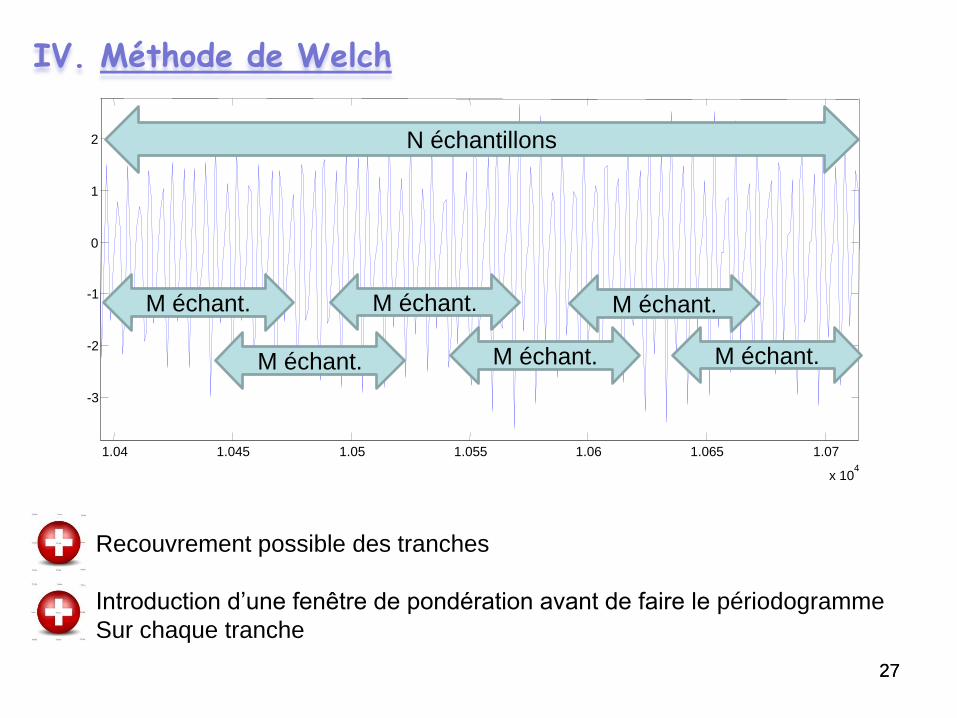
IV. Méthode de Welch
1.04 1.045 1.05 1.055 1.06 1.065 1.07
x 104
-3
-2
-1
0
1
2
M échant.
N échantillons
M échant.
M échant.
M échant.
M échant.
M échant.
Recouvrement possible des tranches
Introduction d’une fenêtre de pondération avant de faire le périodogramme
Sur chaque tranche
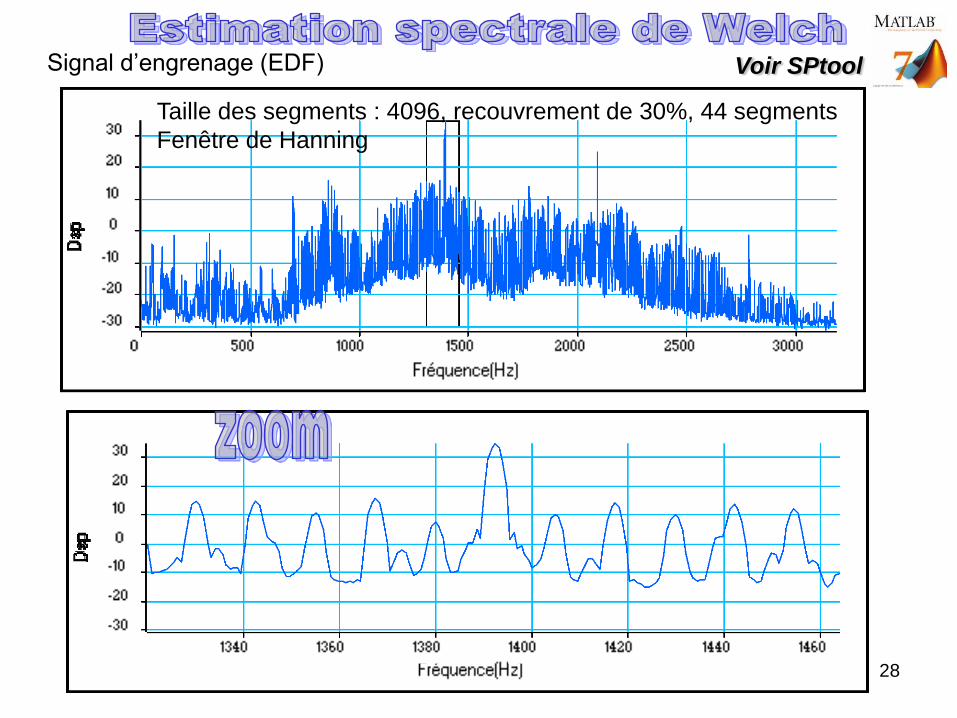
28
Taille des segments : 4096, recouvrement de 30%, 44 segments
Fenêtre de Hanning
Signal d’engrenage (EDF) Voir SPtool
29
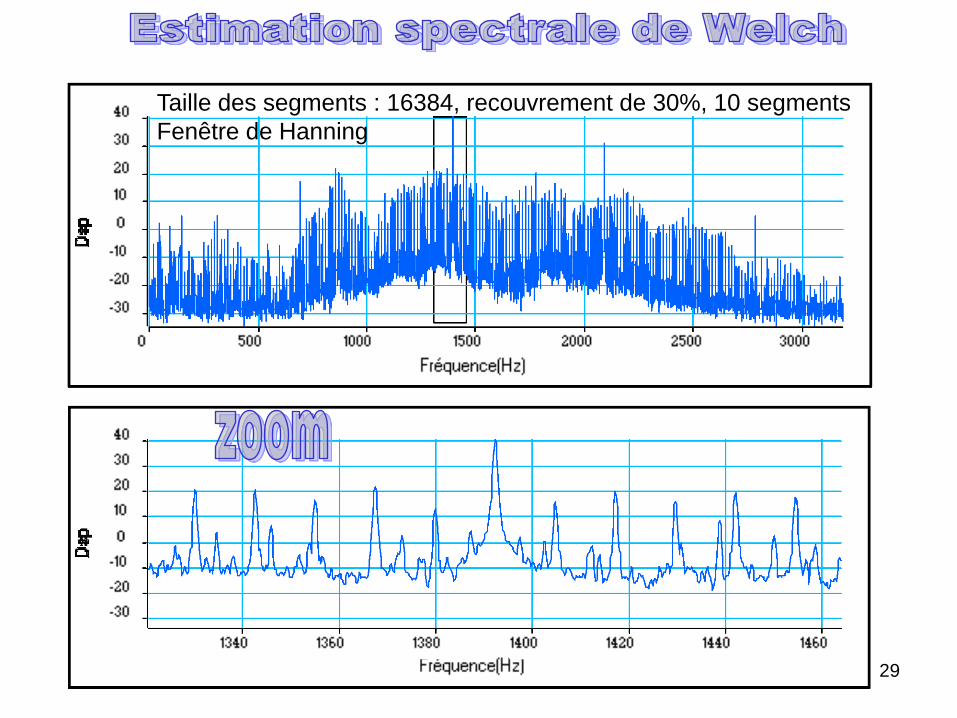
Taille des segments : 16384, recouvrement de 30%, 10 segments
Fenêtre de Hanning
30
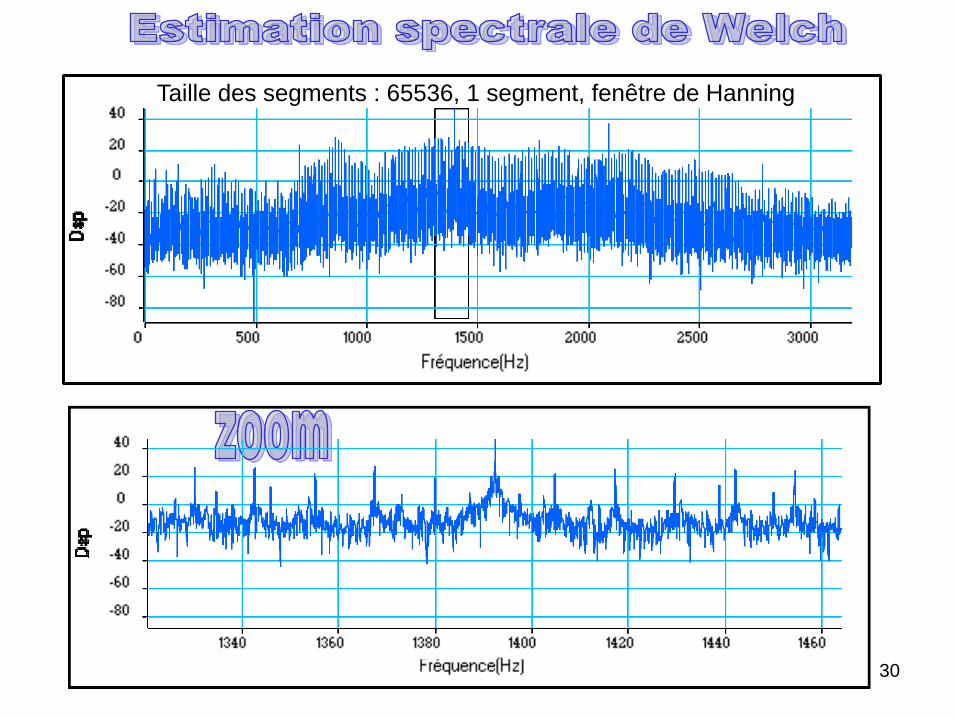
Taille des segments : 65536, 1 segment, fenêtre de Hanning
31
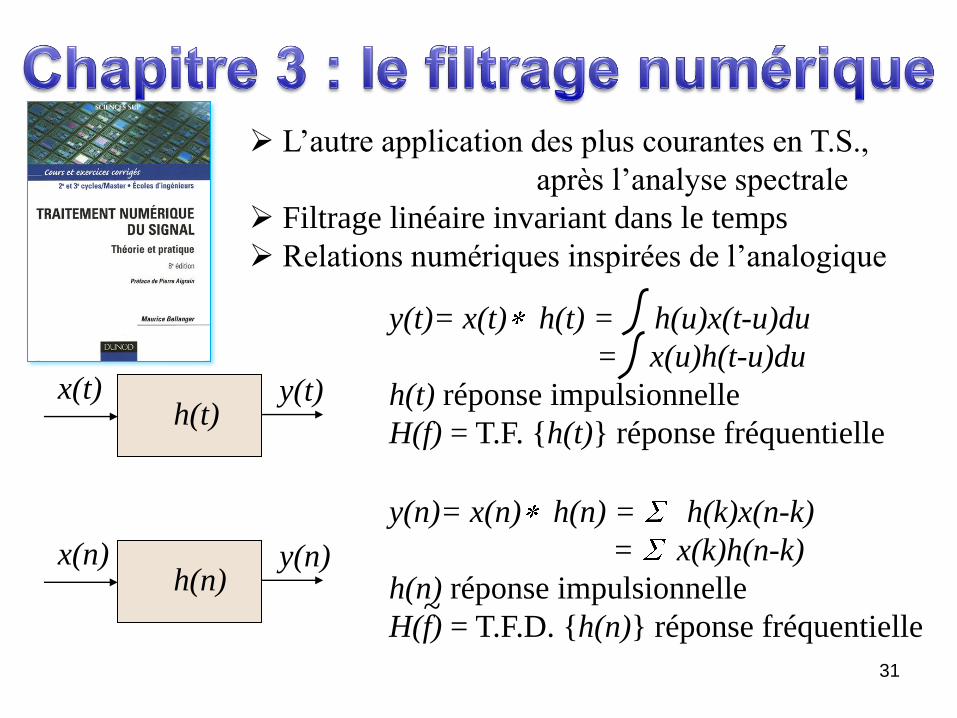
L’autre application des plus courantes en T.S.,
après l’analyse spectrale
Filtrage linéaire invariant dans le temps
Relations numériques inspirées de l’analogique
h(n)x(n) y(n)
y(n)= x(n) h(n) = h(k)x(n-k)
= x(k)h(n-k)
h(n) réponse impulsionnelle
H(f) = T.F.D. {h(n)} réponse fréquentielle
h(t)x(t) y(t)
y(t)= x(t) h(t) = h(u)x(t-u)du
= x(u)h(t-u)du
h(t) réponse impulsionnelle
H(f) = T.F. {h(t)} réponse fréquentielle
~
32
0 20 40 60 80 100-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
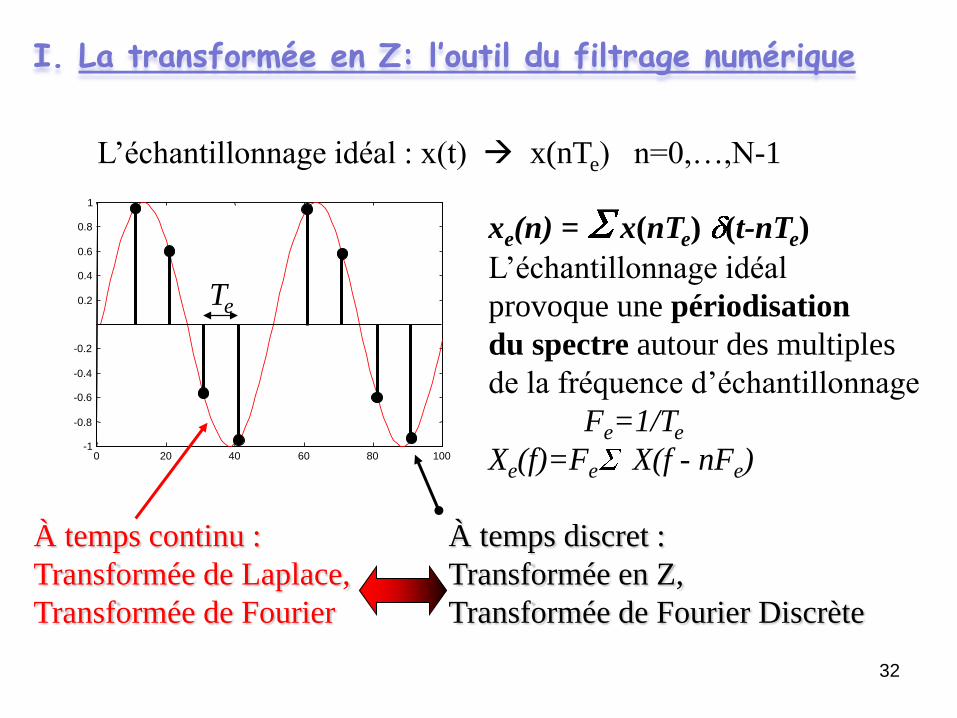
Te
L’échantillonnage idéal : x(t) x(nTe) n=0,…,N-1
xe(n) = x(nTe) (t-nTe)
L’échantillonnage idéal
provoque une périodisation
du spectre autour des multiples
de la fréquence d’échantillonnage
Fe=1/Te
Xe(f)=Fe X(f - nFe)
À temps continu :
Transformée de Laplace,
Transformée de Fourier
À temps discret :
Transformée en Z,
Transformée de Fourier Discrète
I. La transformée en Z: l’outil du filtrage numérique
33
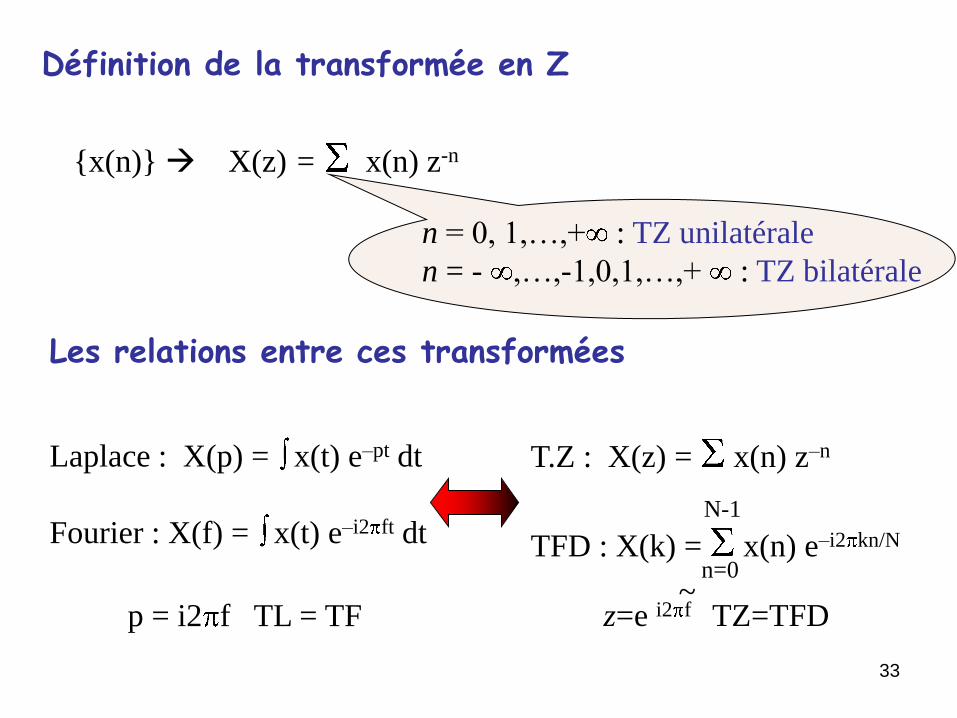
Définition de la transformée en Z
{x(n)} X(z) = x(n) z-n
n = 0, 1,…,+ : TZ unilatérale
n = - ,…,-1,0,1,…,+ : TZ bilatérale
Les relations entre ces transformées
Laplace : X(p) = x(t) e–pt dt
Fourier : X(f) = x(t) e–i2 ft dt
z=e i2 f TZ=TFD~
p = i2 f TL = TF
T.Z : X(z) = x(n) z–n
TFD : X(k) = x(n) e–i2 kn/N
n=0
N-1
34
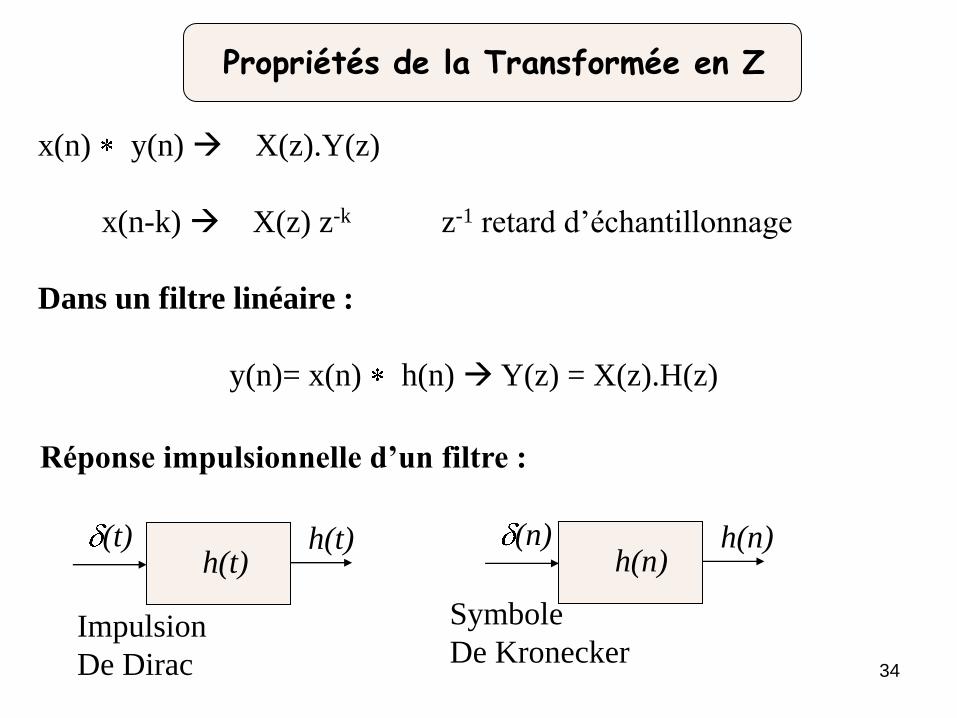
Propriétés de la Transformée en Z
x(n) y(n) X(z).Y(z)
x(n-k) X(z) z-k z-1 retard d’échantillonnage
Dans un filtre linéaire :
y(n)= x(n) h(n) Y(z) = X(z).H(z)
h(t)(t) h(t)
Réponse impulsionnelle d’un filtre :
Impulsion
De Dirac
h(n)(n) h(n)
Symbole
De Kronecker
35
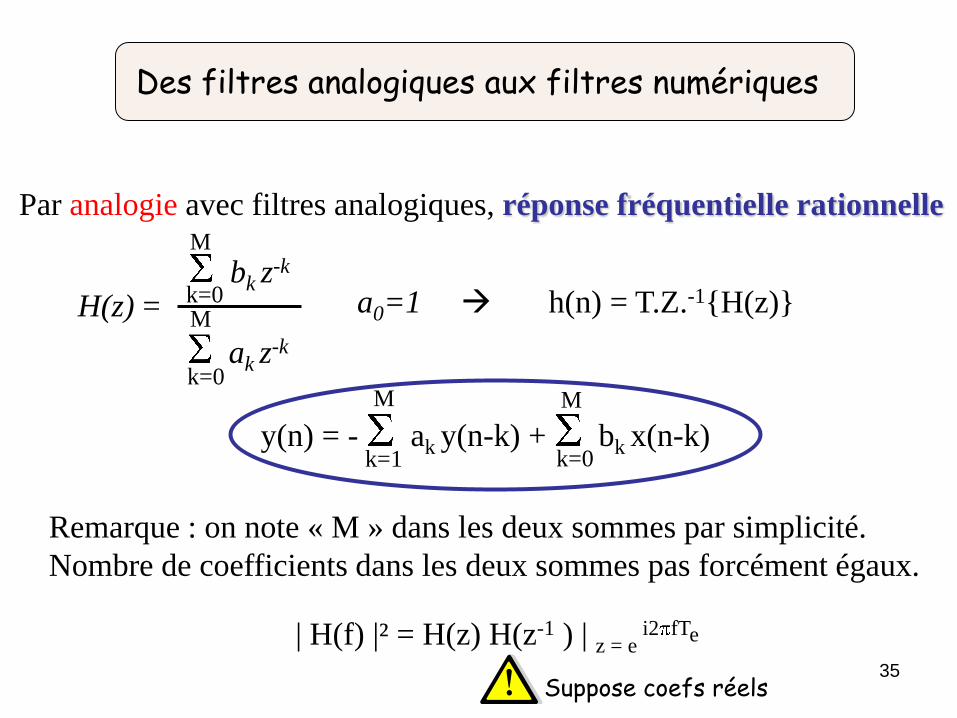
Par analogie avec filtres analogiques, réponse fréquentielle rationnelle
H(z) = a0=1 h(n) = T.Z.-1{H(z)}bk z
-k
ak z-k
k=0
k=0
M
M
y(n) = - ak y(n-k) + bk x(n-k)
M M
k=1 k=0
Des filtres analogiques aux filtres numériques
Remarque : on note « M » dans les deux sommes par simplicité.
Nombre de coefficients dans les deux sommes pas forcément égaux.
| H(f) |² = H(z) H(z-1 ) | z = e i2 fTe
Suppose coefs réels
36
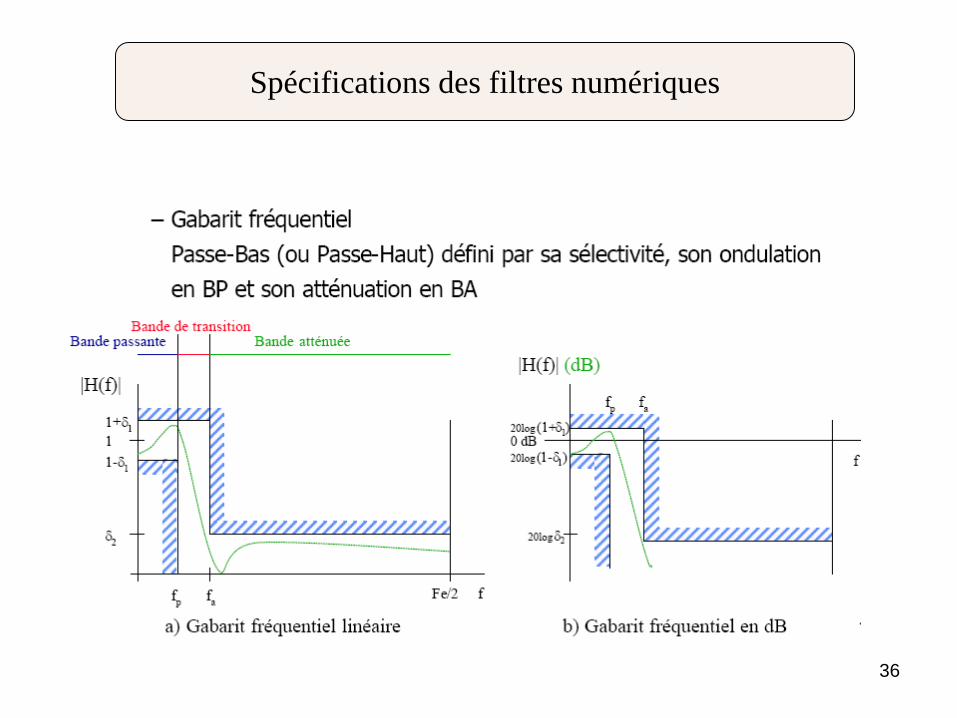
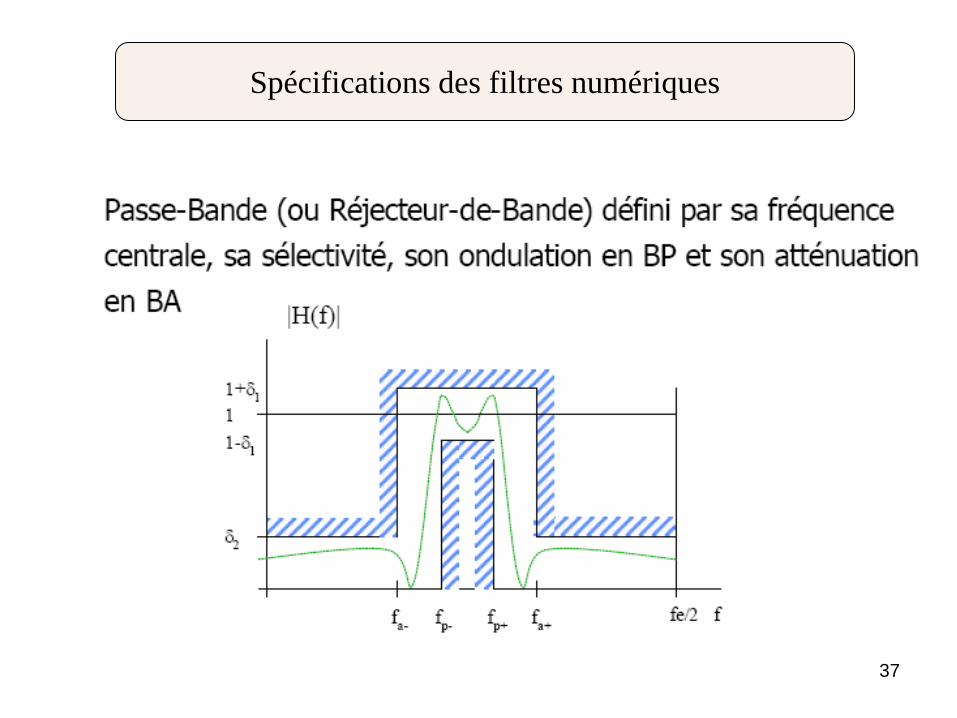
Spécifications des filtres numériques
37
Spécifications des filtres numériques
38
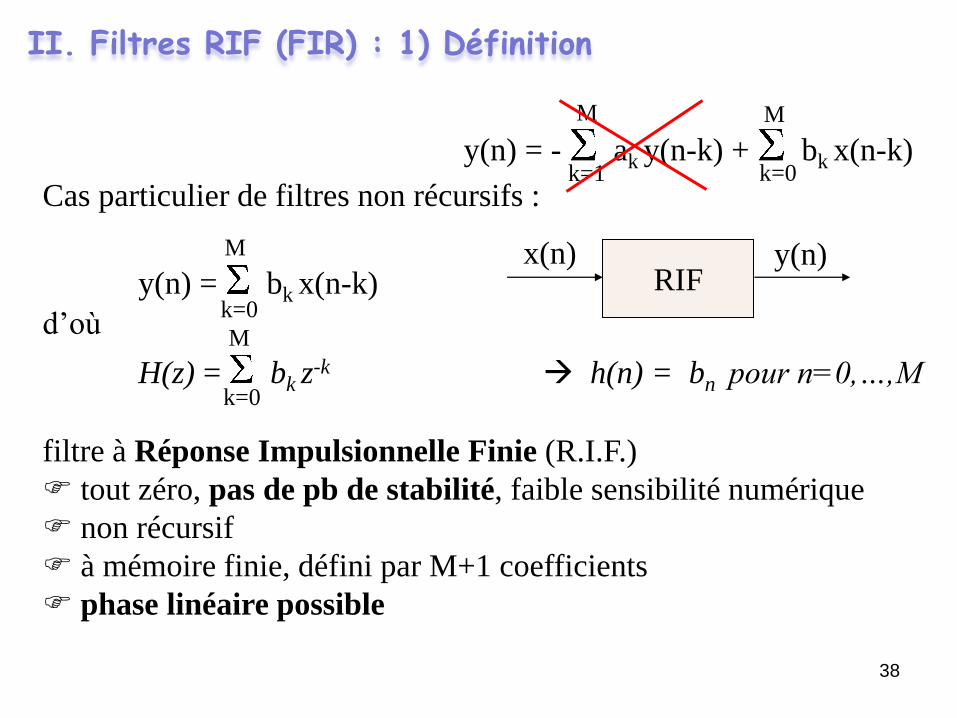
Cas particulier de filtres non récursifs :
y(n) = bk x(n-k)
d’où
H(z) = bk z-k h(n) = bn pour n=0,…,M
filtre à Réponse Impulsionnelle Finie (R.I.F.)
tout zéro, pas de pb de stabilité, faible sensibilité numérique
non récursif
à mémoire finie, défini par M+1 coefficients
phase linéaire possible
k=0
k=0
M
M
RIFx(n) y(n)
y(n) = - ak y(n-k) + bk x(n-k)
M M
k=1 k=0
II. Filtres RIF (FIR) : 1) Définition
39
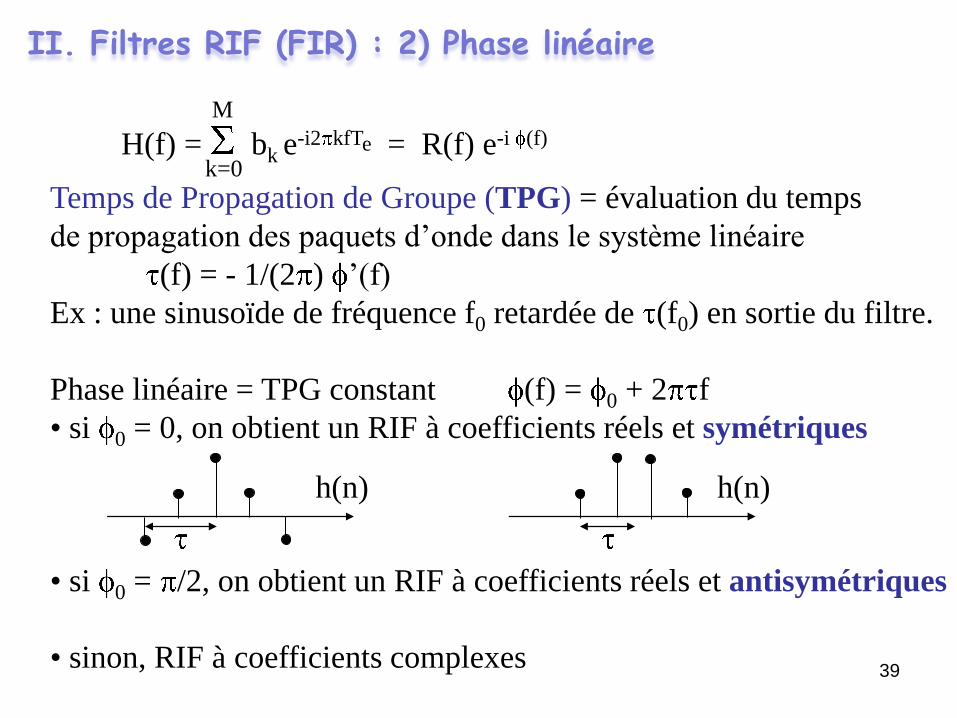
H(f) = bk e-i2 kfTe = R(f) e-i (f)
k=0
M
Temps de Propagation de Groupe (TPG) = évaluation du temps
de propagation des paquets d’onde dans le système linéaire
(f) = - 1/(2 ) ’(f)
Ex : une sinusoïde de fréquence f0 retardée de (f0) en sortie du filtre.
Phase linéaire = TPG constant (f) = 0 + 2 f
• si 0 = 0, on obtient un RIF à coefficients réels et symétriques
• si 0 = /2, on obtient un RIF à coefficients réels et antisymétriques
• sinon, RIF à coefficients complexes
h(n) h(n)
II. Filtres RIF (FIR) : 2) Phase linéaire
40
H(f)
f
0 0.5
n
H(f)
f
0 0.5M+1 coefficients
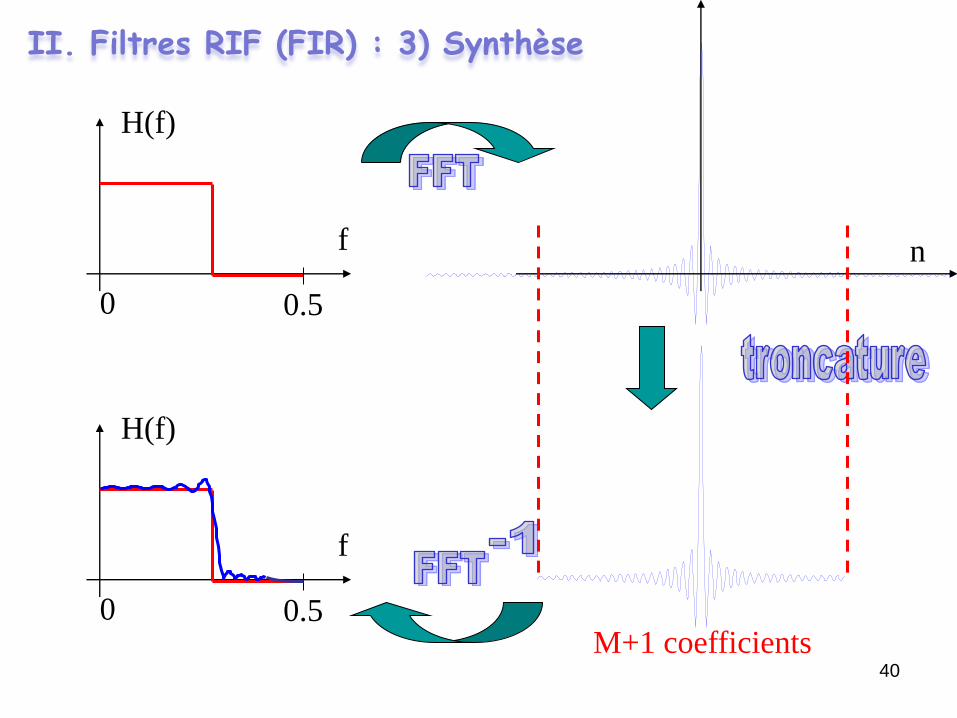
II. Filtres RIF (FIR) : 3) Synthèse
41
À partir d’un filtre idéal et troncature de la réponse impulsionnelle
hRIF(n)=hI(n).w(n) soit HRIF(f)=HI(f) W(f)
w(n) : fenêtre d’apodisation de support : n=-p,…,p
conditionne l’ordre du filtre : filtre RIF d ’ordre 2p+1 = M+1
filtre causal : décalage de la réponse impulsionnelle :
hRIF(n)= hRIF(n-p)
influence des paramètres : ordre du filtre, fenêtre d’apodisation
Ondulations en bande passante et affaiblie égales
Amplitude des ondulations non constante
existe algorithmes d’optimisation pour égaliser les ondulations
dans la bande et hors bande : REMEZ
II. Filtres RIF (FIR) : 3) Synthèse
42
Voir fdatoolFonctions Matlab pour synthèse de filtres RIF• fir1 : FIR filter design using the window method.
B = FIR1(N,Wn) designs an N'th order lowpass FIR digital filter
and returns the filter coefficients in length N+1 vector B.
B = FIR1(N,Wn,'high') designs an N'th order highpass filter.
You can also use B = FIR1(N,Wn,'low') to design a lowpass filter.
If Wn is a multi-element vector, Wn = [W1 W2 W3 W4 W5 ... WN],
FIR1 returns an order N multiband filter with bands
• fir2 : FIR2 FIR arbitrary shape filter design using the frequency sampling method.
B = FIR2(N,F,A) designs an N'th order FIR digital filter with the
frequency response specified by vectors F and A, and returns the
filter coefficients in length N+1 vector B. Vectors F and A specify
the frequency and magnitude breakpoints for the filter such that
PLOT(F,A) would show a plot of the desired frequency response.
• voir aussi firls, firpm (optimisations moindres carrés et norme Lsup)
• autre fonction utile, FREQZ Digital filter frequency response.
[H,W] = FREQZ(B,A,N) returns the N-point complex frequency response
vector H and the N-point frequency vector W in radians/sample of
the filter, given numerator and denominator coefficients in vectors B and A. The
frequency response is evaluated at N points equally spaced around the
upper half of the unit circle. If N isn't specified, it defaults to 512.
43
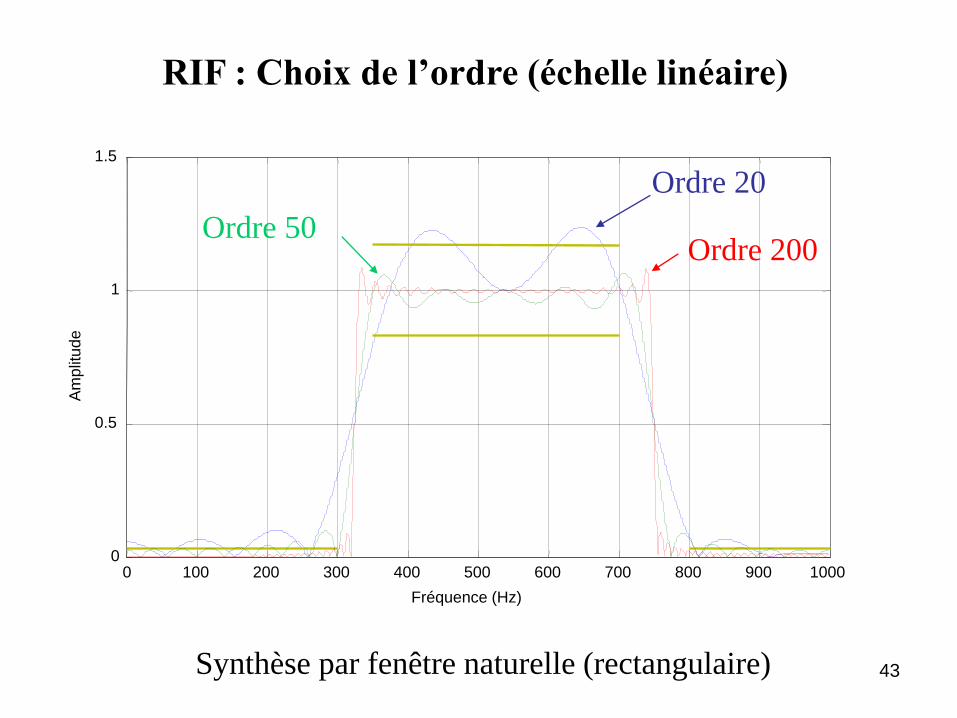
RIF : Choix de l’ordre (échelle linéaire)
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
Fréquence (Hz)
Am
plit
ude
Ordre 20
Ordre 50Ordre 200
Synthèse par fenêtre naturelle (rectangulaire)
44
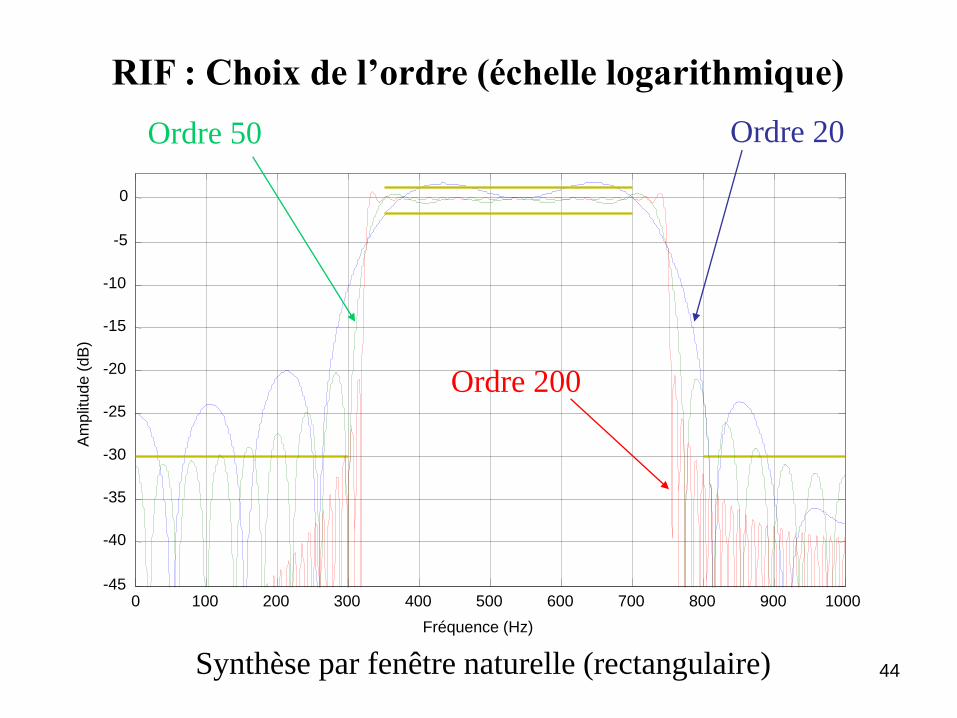
RIF : Choix de l’ordre (échelle logarithmique)
0 100 200 300 400 500 600 700 800 900 1000-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Fréquence (Hz)
Am
plit
ude
(dB
)
Ordre 20Ordre 50
Ordre 200
Synthèse par fenêtre naturelle (rectangulaire)
45
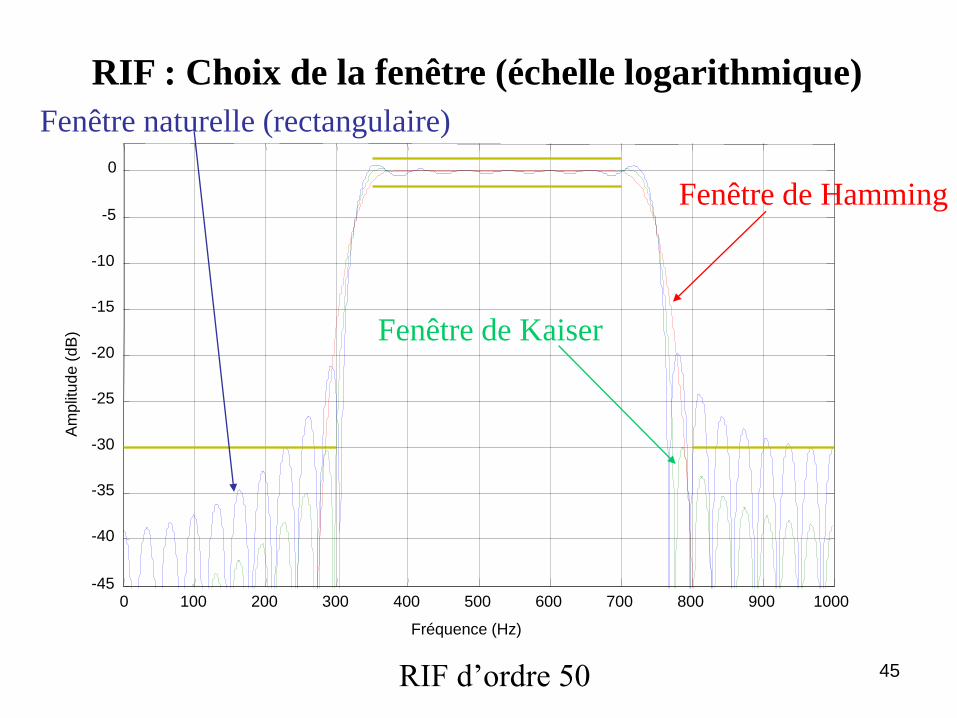
RIF : Choix de la fenêtre (échelle logarithmique)
0 100 200 300 400 500 600 700 800 900 1000-45
-40
-35
-30
-25
-20
-15
-10
-5
0
Fréquence (Hz)
Am
plit
ud
e (
dB
)
RIF d’ordre 50
Fenêtre naturelle (rectangulaire)
Fenêtre de Kaiser
Fenêtre de Hamming
46
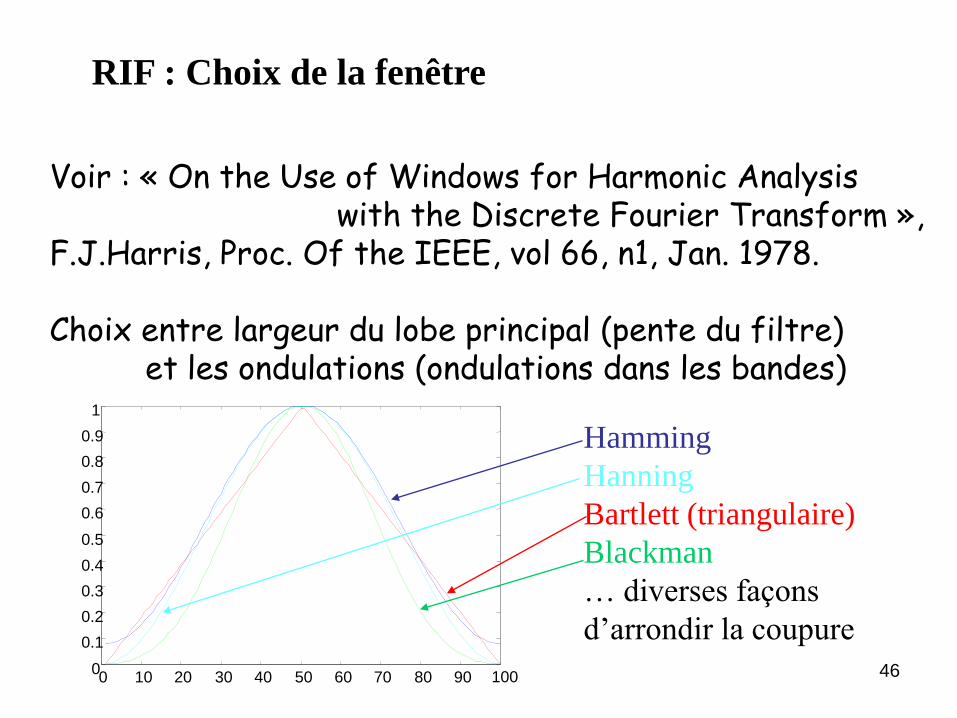
RIF : Choix de la fenêtre
Voir : « On the Use of Windows for Harmonic Analysiswith the Discrete Fourier Transform »,
F.J.Harris, Proc. Of the IEEE, vol 66, n1, Jan. 1978.
Choix entre largeur du lobe principal (pente du filtre)et les ondulations (ondulations dans les bandes)
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Hamming
Hanning
Bartlett (triangulaire)
Blackman
… diverses façons
d’arrondir la coupure
47
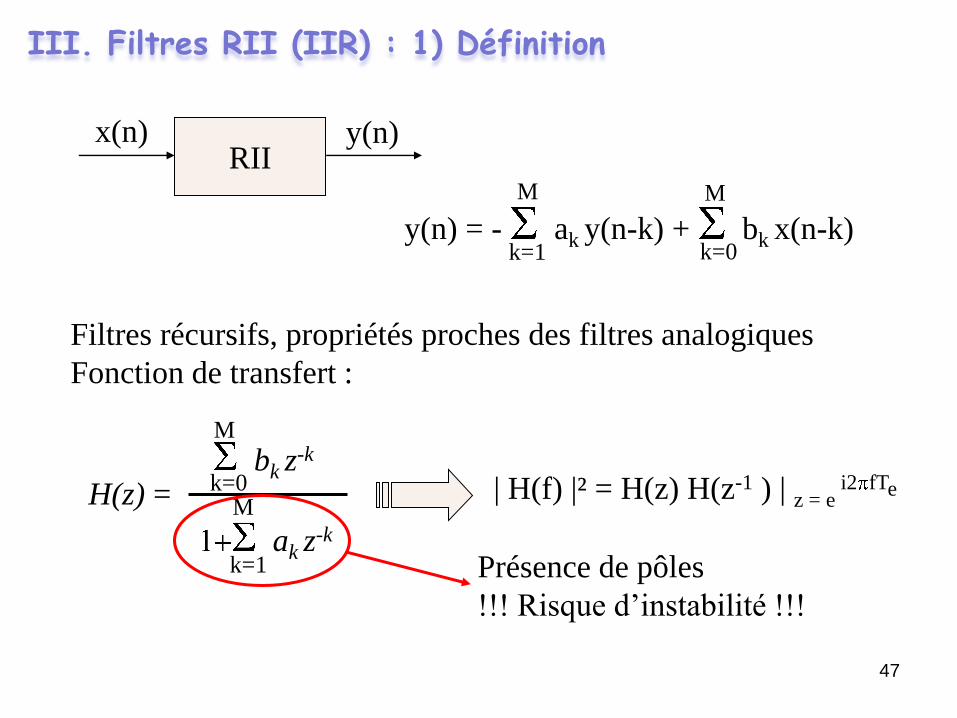
RIIx(n) y(n)
y(n) = - ak y(n-k) + bk x(n-k)
M M
k=1 k=0
Filtres récursifs, propriétés proches des filtres analogiques
Fonction de transfert :
H(z) = bk z
-k
ak z-k
k=0
k=1
M
M
| H(f) |² = H(z) H(z-1 ) | z = e i2 fTe
Présence de pôles
!!! Risque d’instabilité !!!
III. Filtres RII (IIR) : 1) Définition
48
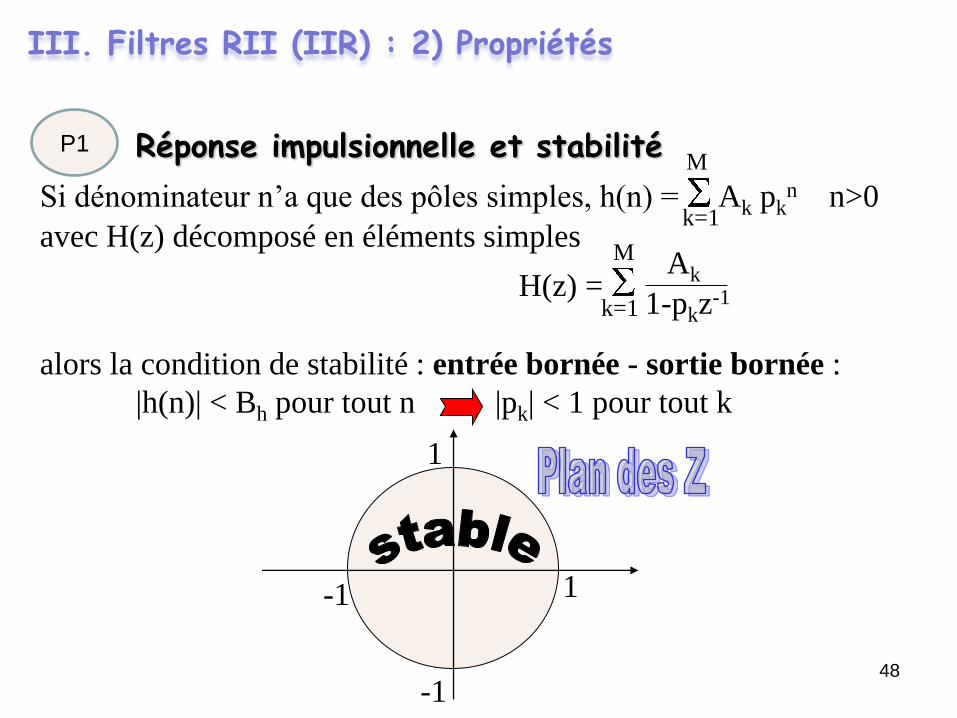
Réponse impulsionnelle et stabilité
Si dénominateur n’a que des pôles simples, h(n) = Ak pkn n>0
avec H(z) décomposé en éléments simples
H(z) =
alors la condition de stabilité : entrée bornée - sortie bornée :
|h(n)| < Bh pour tout n |pk| < 1 pour tout k
k=1
M
1-pkz-1
Ak
k=1
M
1
1
-1
-1
III. Filtres RII (IIR) : 2) Propriétés
P1
49
Réponse en phase : systèmes à minimum de phaseDéfinition :tous les zéros du numérateur du filtres sont dans le cercle unité
(tous en dehors : système à maximum de phase)
(en dehors et en dedans : système à phase mixte)
Intérêt du minimum de phase : système inverse stable
Propriété recherchée dans beaucoup d’applications
Réponse en phase : TPGOn démontre :
filtres rationnels ne peuvent pas avoir de phase linéaire (sauf RIF)
P2
P3
50
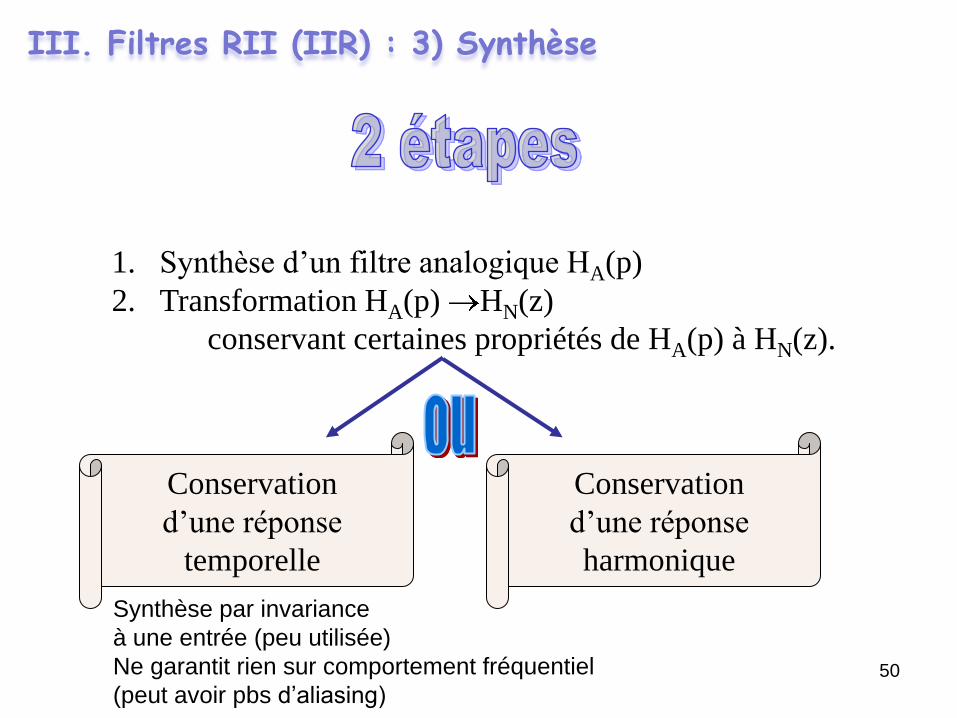
1. Synthèse d’un filtre analogique HA(p)
2. Transformation HA(p) HN(z)
conservant certaines propriétés de HA(p) à HN(z).
Conservation
d’une réponse
temporelle
Conservation
d’une réponse
harmonique
III. Filtres RII (IIR) : 3) Synthèse
Synthèse par invariance
à une entrée (peu utilisée)
Ne garantit rien sur comportement fréquentiel
(peut avoir pbs d’aliasing)
51
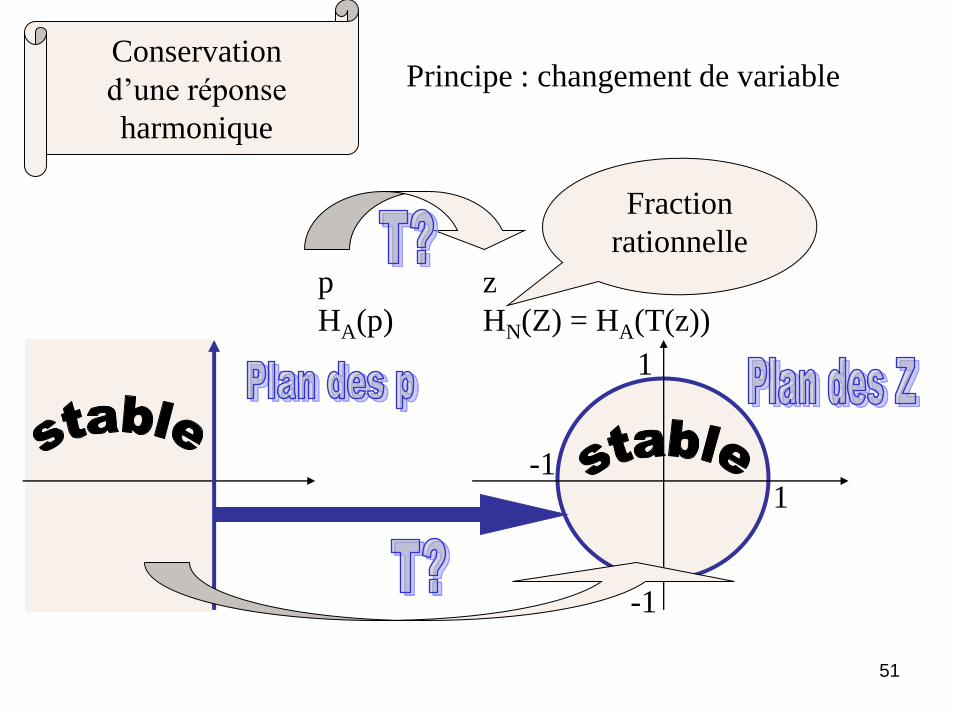
p
HA(p)
z
HN(Z) = HA(T(z))
Principe : changement de variable
1
1
-1
-1
Fraction
rationnelle
Conservation
d’une réponse
harmonique
52
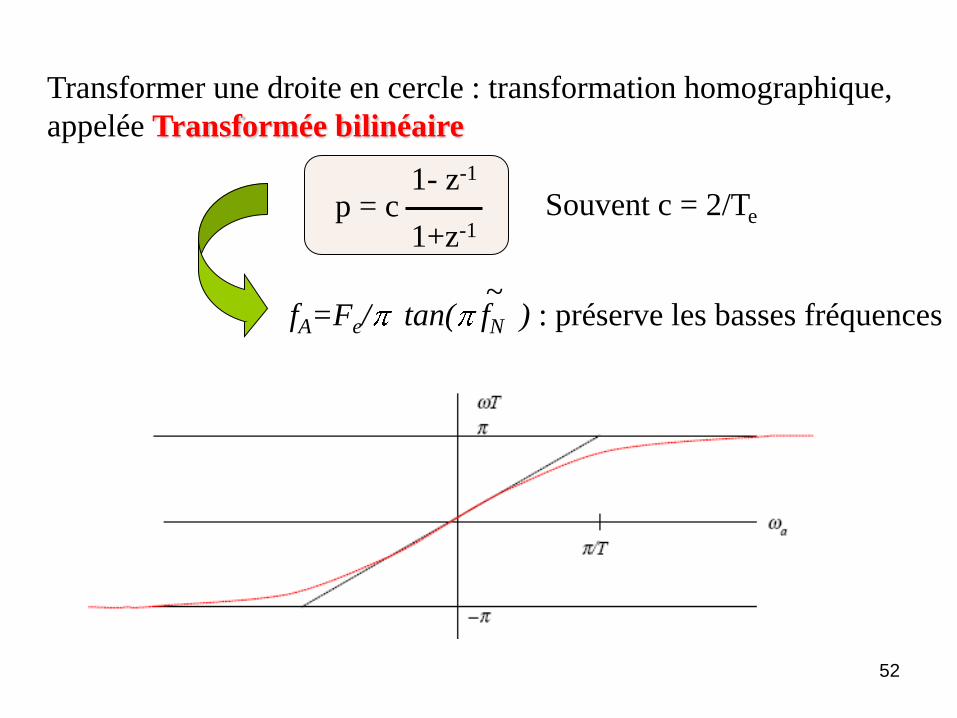
Transformer une droite en cercle : transformation homographique,
appelée Transformée bilinéaire
1- z-1
1+z-1p = c Souvent c = 2/Te
fA=Fe/ tan( fN ) : préserve les basses fréquences~
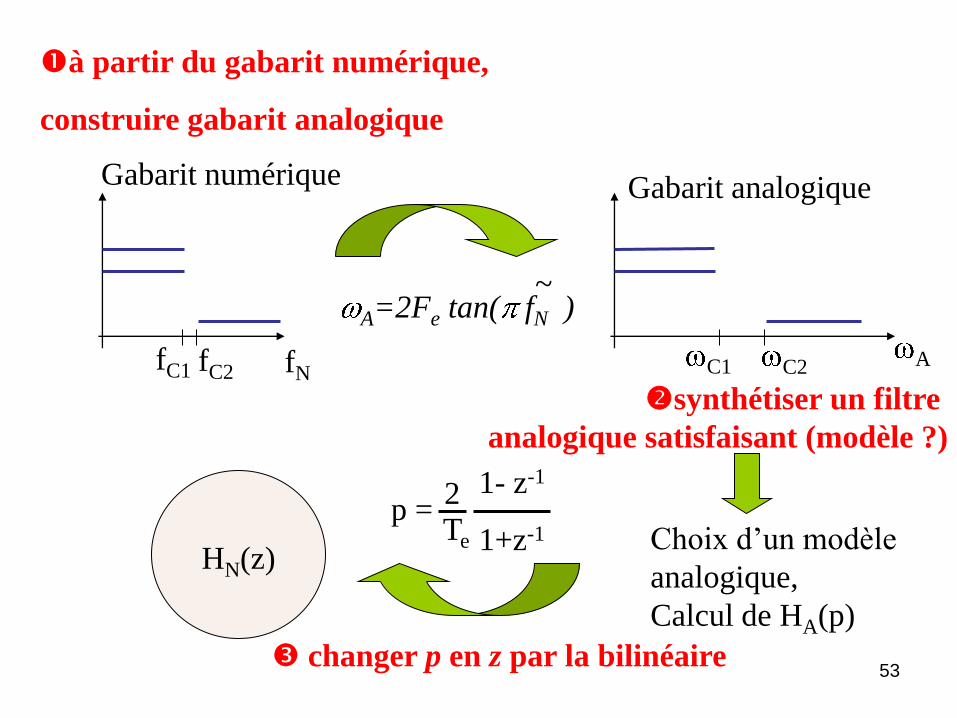
53
fN
Gabarit numérique
fC1 fC2
A=2Fe tan( fN ) ~
AC1 C2
Gabarit analogique
Choix d’un modèle
analogique,
Calcul de HA(p)
1- z-1
1+z-1p =
2Te
HN(z)
changer p en z par la bilinéaire
à partir du gabarit numérique,
construire gabarit analogique
synthétiser un filtre
analogique satisfaisant (modèle ?)
54
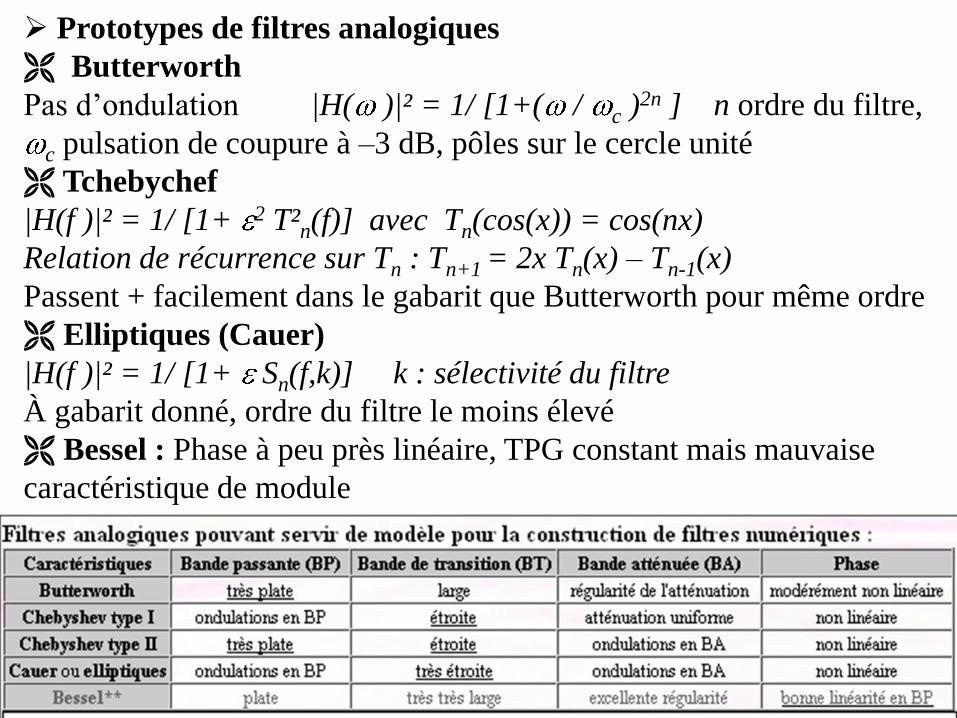
Prototypes de filtres analogiques
Butterworth
Pas d’ondulation |H( )|² = 1/ [1+( / c )2n ] n ordre du filtre,
c pulsation de coupure à –3 dB, pôles sur le cercle unité
Tchebychef
|H(f )|² = 1/ [1+ 2 T²n(f)] avec Tn(cos(x)) = cos(nx)
Relation de récurrence sur Tn : Tn+1 = 2x Tn(x) – Tn-1(x)
Passent + facilement dans le gabarit que Butterworth pour même ordre
Elliptiques (Cauer)
|H(f )|² = 1/ [1+ Sn(f,k)] k : sélectivité du filtre
À gabarit donné, ordre du filtre le moins élevé
Bessel : Phase à peu près linéaire, TPG constant mais mauvaise
caractéristique de module
55
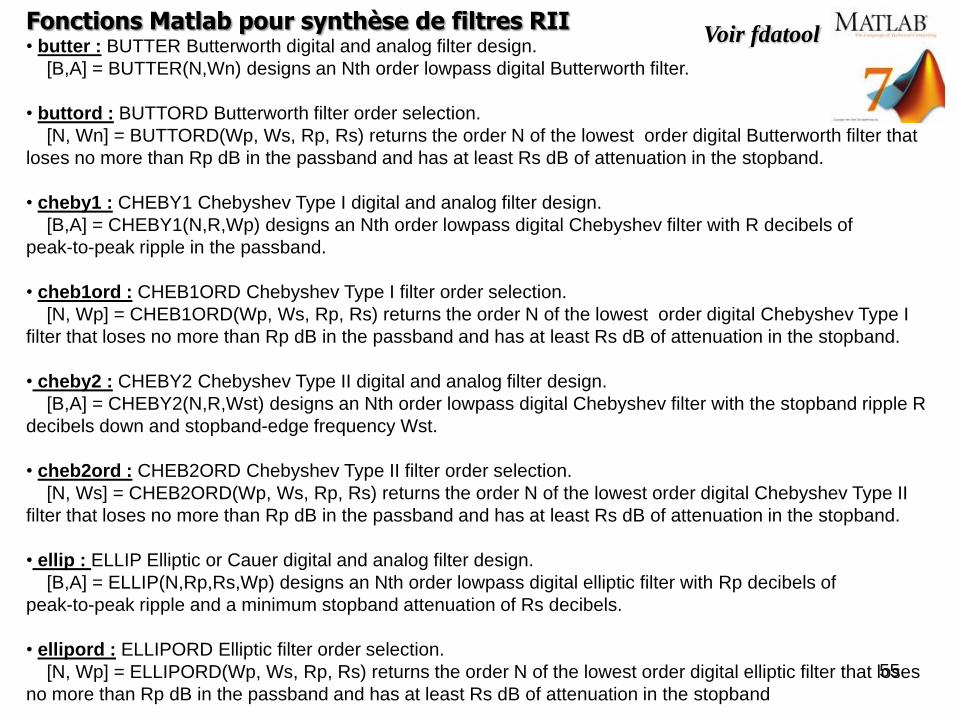
Voir fdatoolFonctions Matlab pour synthèse de filtres RII• butter : BUTTER Butterworth digital and analog filter design.
[B,A] = BUTTER(N,Wn) designs an Nth order lowpass digital Butterworth filter.
• buttord : BUTTORD Butterworth filter order selection.
[N, Wn] = BUTTORD(Wp, Ws, Rp, Rs) returns the order N of the lowest order digital Butterworth filter that
loses no more than Rp dB in the passband and has at least Rs dB of attenuation in the stopband.
• cheby1 : CHEBY1 Chebyshev Type I digital and analog filter design.
[B,A] = CHEBY1(N,R,Wp) designs an Nth order lowpass digital Chebyshev filter with R decibels of
peak-to-peak ripple in the passband.
• cheb1ord : CHEB1ORD Chebyshev Type I filter order selection.
[N, Wp] = CHEB1ORD(Wp, Ws, Rp, Rs) returns the order N of the lowest order digital Chebyshev Type I
filter that loses no more than Rp dB in the passband and has at least Rs dB of attenuation in the stopband.
• cheby2 : CHEBY2 Chebyshev Type II digital and analog filter design.
[B,A] = CHEBY2(N,R,Wst) designs an Nth order lowpass digital Chebyshev filter with the stopband ripple R
decibels down and stopband-edge frequency Wst.
• cheb2ord : CHEB2ORD Chebyshev Type II filter order selection.
[N, Ws] = CHEB2ORD(Wp, Ws, Rp, Rs) returns the order N of the lowest order digital Chebyshev Type II
filter that loses no more than Rp dB in the passband and has at least Rs dB of attenuation in the stopband.
• ellip : ELLIP Elliptic or Cauer digital and analog filter design.
[B,A] = ELLIP(N,Rp,Rs,Wp) designs an Nth order lowpass digital elliptic filter with Rp decibels of
peak-to-peak ripple and a minimum stopband attenuation of Rs decibels.
• ellipord : ELLIPORD Elliptic filter order selection.
[N, Wp] = ELLIPORD(Wp, Ws, Rp, Rs) returns the order N of the lowest order digital elliptic filter that loses
no more than Rp dB in the passband and has at least Rs dB of attenuation in the stopband
56
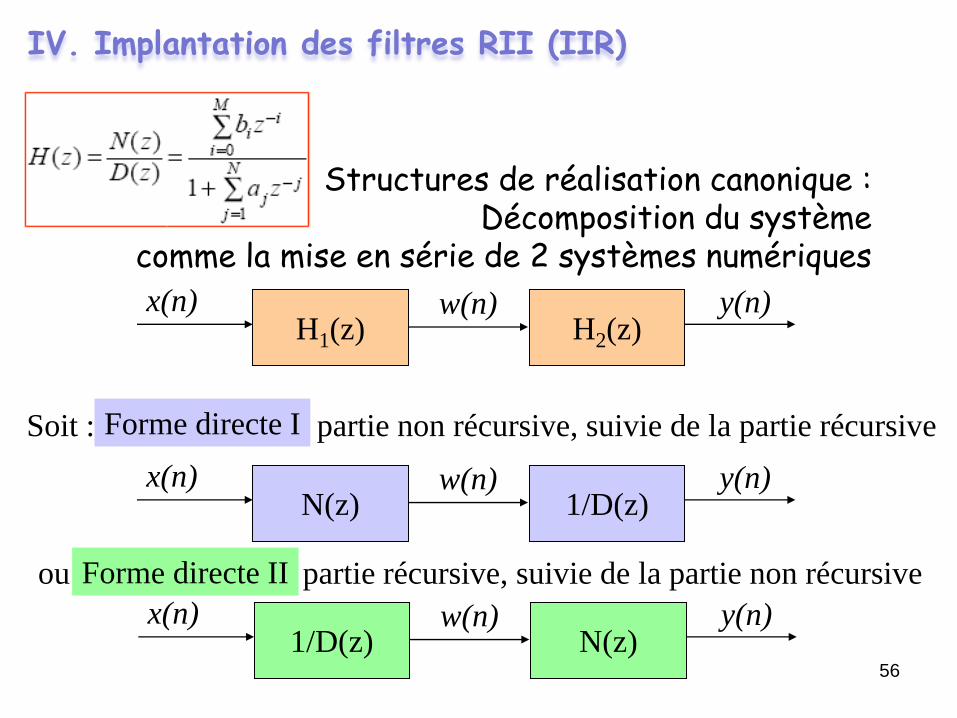
Structures de réalisation canonique :Décomposition du système
comme la mise en série de 2 systèmes numériques
H1(z) H2(z)x(n) w(n) y(n)
N(z) 1/D(z)x(n) w(n) y(n)
1/D(z) N(z)x(n) w(n) y(n)
Soit : forme directe I : partie non récursive, suivie de la partie récursive
ou forme directe II : partie récursive, suivie de la partie non récursive
IV. Implantation des filtres RII (IIR)
Forme directe I
Forme directe II
57
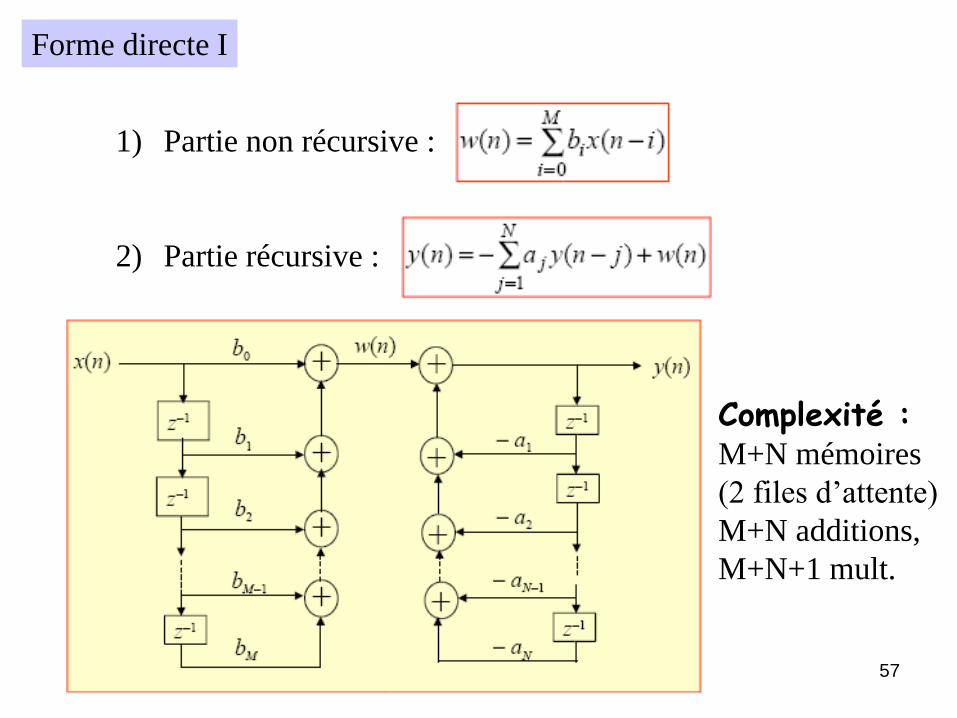
Forme directe I
1) Partie non récursive :
2) Partie récursive :
Complexité :M+N mémoires
(2 files d’attente)
M+N additions,
M+N+1 mult.
58
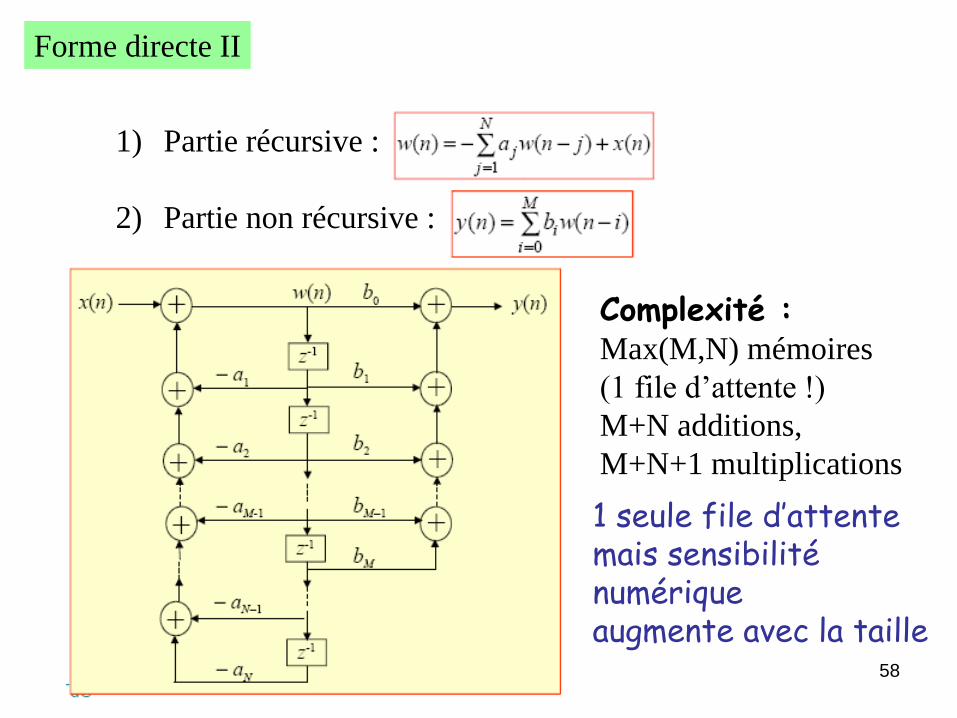
Forme directe II
1) Partie récursive :
2) Partie non récursive :
Complexité :Max(M,N) mémoires
(1 file d’attente !)
M+N additions,
M+N+1 multiplications
1 seule file d’attentemais sensibilité numériqueaugmente avec la taille
59
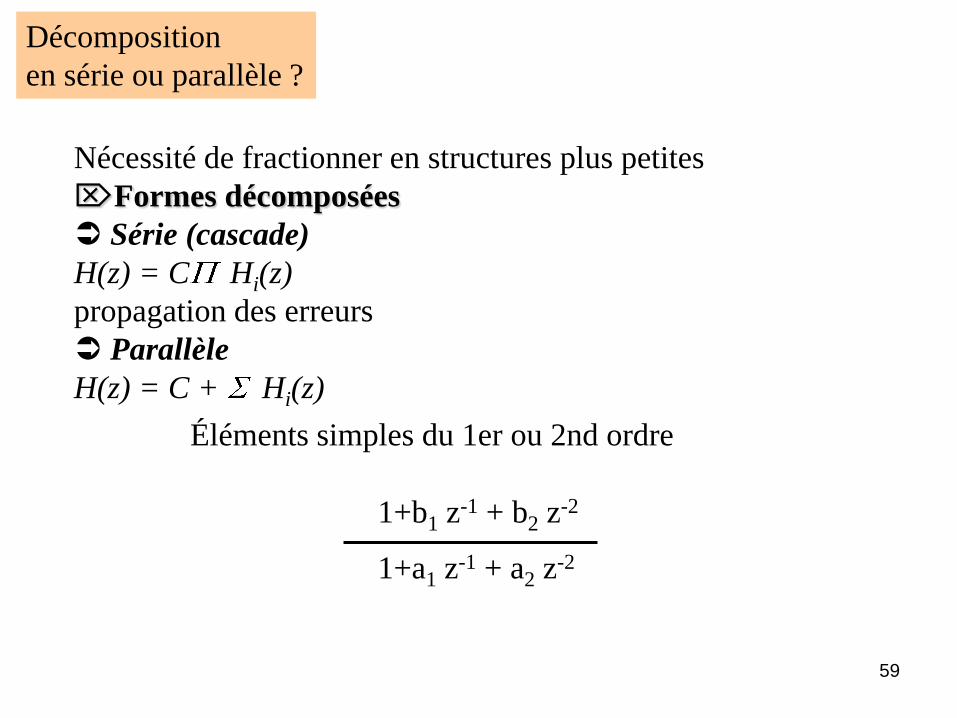
Nécessité de fractionner en structures plus petites
Formes décomposées
Série (cascade)
H(z) = C Hi(z)
propagation des erreurs
Parallèle
H(z) = C + Hi(z)
Éléments simples du 1er ou 2nd ordre
1+b1 z-1 + b2 z-2
1+a1 z-1 + a2 z-2
Décomposition
en série ou parallèle ?
60
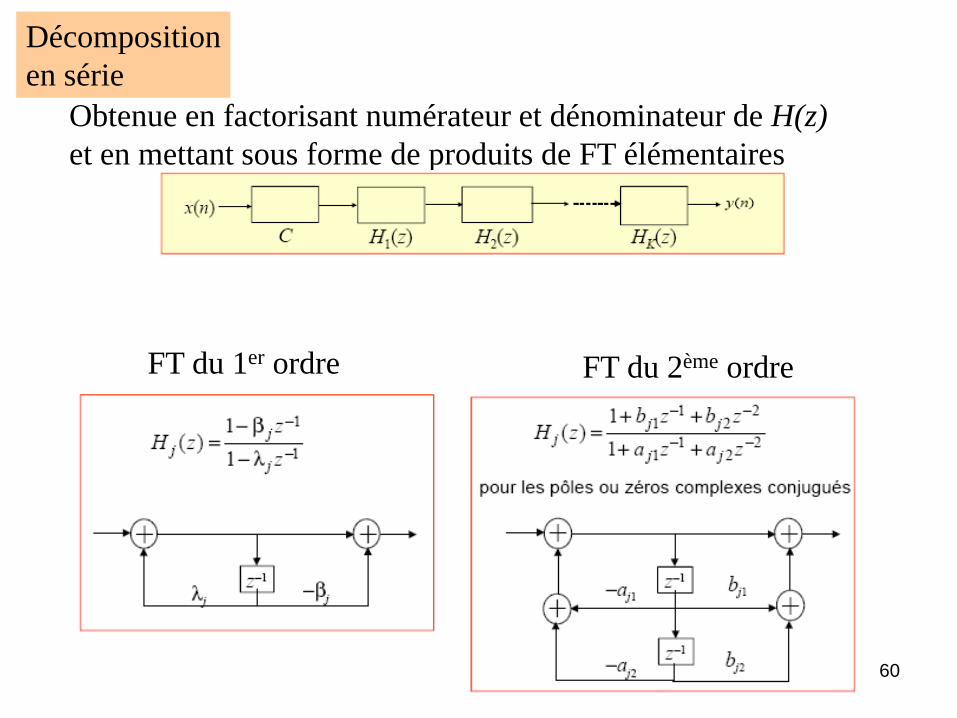
Décomposition
en série
Obtenue en factorisant numérateur et dénominateur de H(z)
et en mettant sous forme de produits de FT élémentaires
FT du 1er ordre FT du 2ème ordre
61
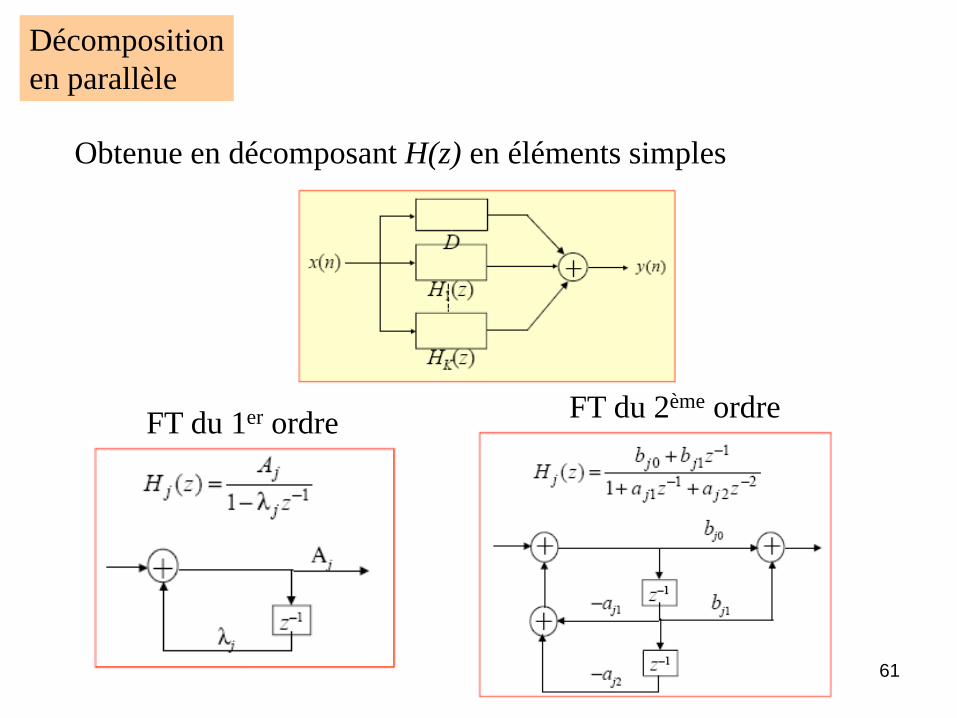
Décomposition
en parallèle
Obtenue en décomposant H(z) en éléments simples
FT du 1er ordreFT du 2ème ordre
62
Sources d’erreur dans l’implémentation des filtres
63
-1.5 -1 -0.5 0 0.5 1 1.5 2
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
-
2
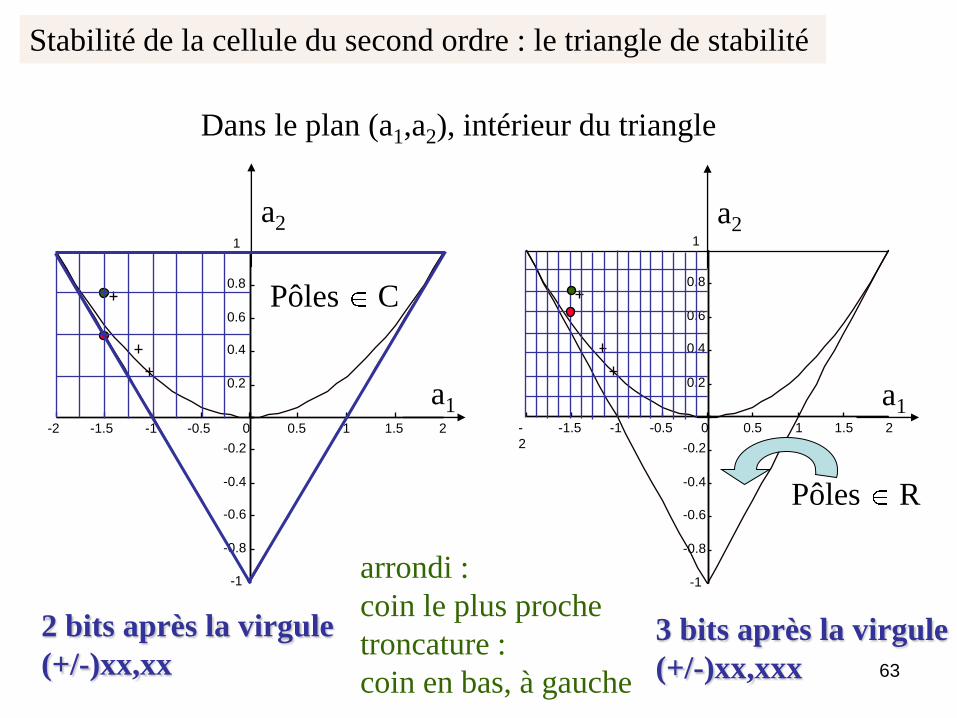
3 bits après la virgule
(+/-)xx,xxx
2 bits après la virgule
(+/-)xx,xx
arrondi :
coin le plus proche
troncature :
coin en bas, à gauche
a1
a2 a2
a1
Dans le plan (a1,a2), intérieur du triangle
Pôles C
Pôles R
Stabilité de la cellule du second ordre : le triangle de stabilité
64
65
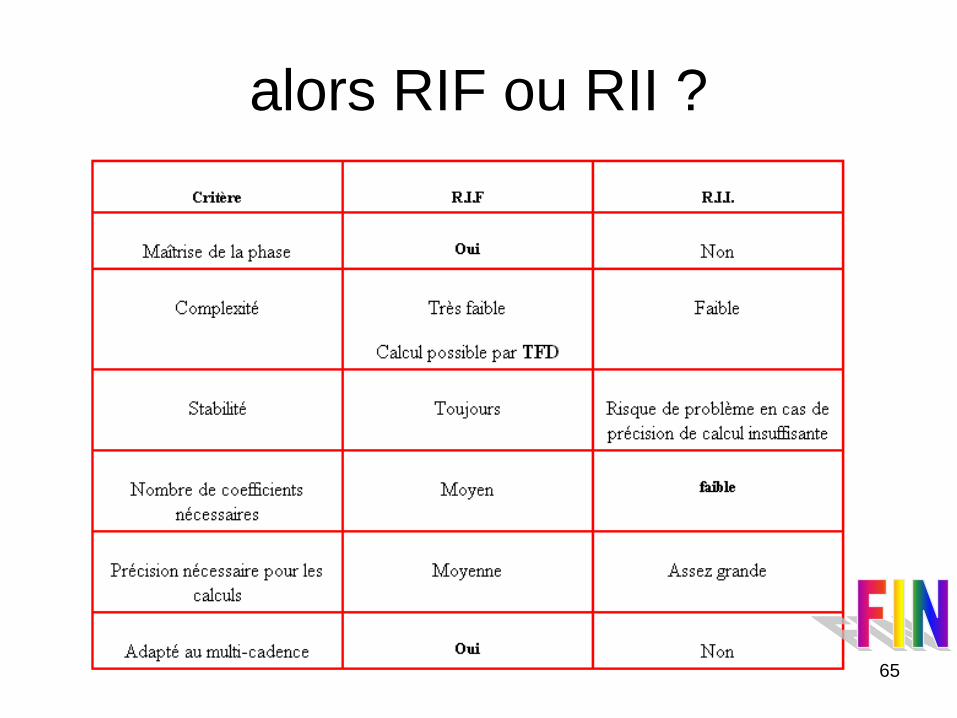
alors RIF ou RII ?


















