David Ryckelynck Centre des Materiaux, Mines...
40
I NTRODUCTION ` A LA TH ´ EORIE DES POUTRES David Ryckelynck Centre des Mat ´ eriaux, Mines ParisTech [email protected] 16 mars 2012
Transcript of David Ryckelynck Centre des Materiaux, Mines...

INTRODUCTION A LA THEORIE DES POUTRES
David Ryckelynck
Centre des Materiaux, Mines [email protected]
16 mars 2012

Pourquoi s’interesser a la theorie des poutres aujourd’hui ?
La theorie des poutres est un outil supplementaire pour determiner des solutions analytiques enconsiderant des hypotheses additionnelles.
L’avantage des solutions analytiques sur les previsions obtenues par des methodes numeriquesest de permettre de visualiser l’influence de differents parametres (de forme, de taille, decomportement du materiau, d’heterogeneite).
Ceci permet de mieux comprendre un systeme mecanique ou de mieux optimiser sonarchitecture, dans le cadre d’une premiere approche d’un probleme de mecanique.
MMS 2012, Introduction Introduction a la theorie des poutres 2/28
Repenser la description de l’etat de certains systemes mecaniques
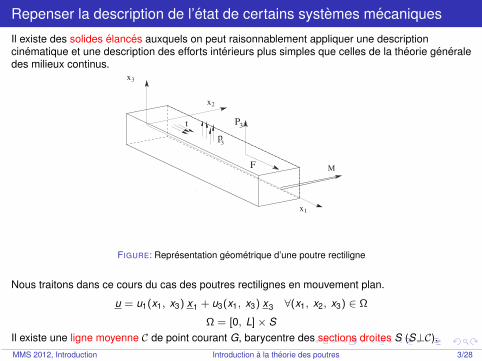
Il existe des solides elances auxquels on peut raisonnablement appliquer une descriptioncinematique et une description des efforts interieurs plus simples que celles de la theorie generaledes milieux continus.
x3
x2
1x
F
pt
3
3P
M
FIGURE: Representation geometrique d’une poutre rectiligne
Nous traitons dans ce cours du cas des poutres rectilignes en mouvement plan.
u = u1(x1, x3) x1 + u3(x1, x3) x3 ∀(x1, x2, x3) ∈ Ω
Ω = [0, L]× SIl existe une ligne moyenne C de point courant G, barycentre des sections droites S (S⊥C).MMS 2012, Introduction Introduction a la theorie des poutres 3/28
Repenser la modelisation des actions mecaniques
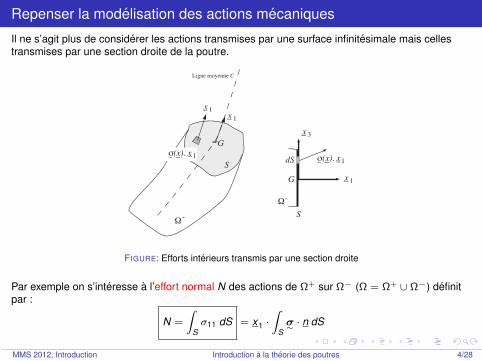
Il ne s’agit plus de considerer les actions transmises par une surface infinitesimale mais cellestransmises par une section droite de la poutre.
Ligne moyenne C
x 1
σ(x). x1~ _ _S
Ω
_
x 1_
x 1_
x 3_G
G
Ω
S
σ(x). x1~ _ _dS
-
-
FIGURE: Efforts interieurs transmis par une section droite
Par exemple on s’interesse a l’effort normal N des actions de Ω+ sur Ω− (Ω = Ω+ ∪ Ω−) definitpar :
N =
∫Sσ11 dS = x1 ·
∫Sσ∼ · n dS
MMS 2012, Introduction Introduction a la theorie des poutres 4/28
Repenser la modelisation des actions mecaniques
Travaillons l’equation suivante :
N = x1 ·∫
Sσ∼ · n dS
Prenons un vecteur U∗ x1 tel que U∗,2 = U∗,3 = 0. On a :
N U∗ = U∗ x1 ·∫
Sσ∼ · n dS =
∫Sσ∼ · n · U
∗ x1 dS ∀U∗
Nous allons exploiter le theoreme des travaux virtuels comme un principe des travaux virtuels sesubstituant au principe fondamental de la statique.
La modelisation des efforts de cohesion est deduite du choix d’une description cinematiquevirtuelle x → u∗ ∀x ∈ Ω.
Nous allons etudier la theorie des poutres de Timoshenko et celle de Navier–Bernoulli (poutresminces).
MMS 2012, Introduction Introduction a la theorie des poutres 5/28

Repenser la modelisation des actions mecaniques
Travaillons l’equation suivante :
N = x1 ·∫
Sσ∼ · n dS
Prenons un vecteur U∗ x1 tel que U∗,2 = U∗,3 = 0. On a :
N U∗ = U∗ x1 ·∫
Sσ∼ · n dS =
∫Sσ∼ · n · U
∗ x1 dS ∀U∗
Nous allons exploiter le theoreme des travaux virtuels comme un principe des travaux virtuels sesubstituant au principe fondamental de la statique.
La modelisation des efforts de cohesion est deduite du choix d’une description cinematiquevirtuelle x → u∗ ∀x ∈ Ω.
Nous allons etudier la theorie des poutres de Timoshenko et celle de Navier–Bernoulli (poutresminces).
MMS 2012, Introduction Introduction a la theorie des poutres 5/28
Repenser la modelisation des actions mecaniques
Travaillons l’equation suivante :
N = x1 ·∫
Sσ∼ · n dS
Prenons un vecteur U∗ x1 tel que U∗,2 = U∗,3 = 0. On a :
N U∗ = U∗ x1 ·∫
Sσ∼ · n dS =
∫Sσ∼ · n · U
∗ x1 dS ∀U∗
Nous allons exploiter le theoreme des travaux virtuels comme un principe des travaux virtuels sesubstituant au principe fondamental de la statique.
La modelisation des efforts de cohesion est deduite du choix d’une description cinematiquevirtuelle x → u∗ ∀x ∈ Ω.
Nous allons etudier la theorie des poutres de Timoshenko et celle de Navier–Bernoulli (poutresminces).
MMS 2012, Introduction Introduction a la theorie des poutres 5/28

Repenser la modelisation des actions mecaniques
Travaillons l’equation suivante :
N = x1 ·∫
Sσ∼ · n dS
Prenons un vecteur U∗ x1 tel que U∗,2 = U∗,3 = 0. On a :
N U∗ = U∗ x1 ·∫
Sσ∼ · n dS =
∫Sσ∼ · n · U
∗ x1 dS ∀U∗
Nous allons exploiter le theoreme des travaux virtuels comme un principe des travaux virtuels sesubstituant au principe fondamental de la statique.
La modelisation des efforts de cohesion est deduite du choix d’une description cinematiquevirtuelle x → u∗ ∀x ∈ Ω.
Nous allons etudier la theorie des poutres de Timoshenko et celle de Navier–Bernoulli (poutresminces).
MMS 2012, Introduction Introduction a la theorie des poutres 5/28

Repenser la modelisation des actions mecaniques
Travaillons l’equation suivante :
N = x1 ·∫
Sσ∼ · n dS
Prenons un vecteur U∗ x1 tel que U∗,2 = U∗,3 = 0. On a :
N U∗ = U∗ x1 ·∫
Sσ∼ · n dS =
∫Sσ∼ · n · U
∗ x1 dS ∀U∗
Nous allons exploiter le theoreme des travaux virtuels comme un principe des travaux virtuels sesubstituant au principe fondamental de la statique.
La modelisation des efforts de cohesion est deduite du choix d’une description cinematiquevirtuelle x → u∗ ∀x ∈ Ω.
Nous allons etudier la theorie des poutres de Timoshenko et celle de Navier–Bernoulli (poutresminces).
MMS 2012, Introduction Introduction a la theorie des poutres 5/28

Repenser la modelisation des actions mecaniques
Les efforts interieurs peuvent etre discontinus du fait d’efforts exterieurs ponctuels (Exemple del’effort normal discontinu).
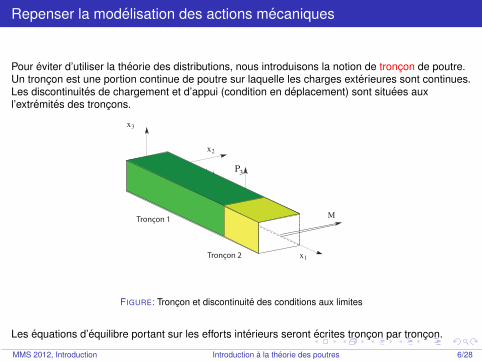
Pour eviter d’utiliser la theorie des distributions, nous introduisons la notion de troncon de poutre.Un troncon est une portion continue de poutre sur laquelle les charges exterieures sont continues.Les discontinuites de chargement et d’appui (condition en deplacement) sont situees auxl’extremites des troncons.
x3
x2
1x
F
pt
3
3P
MTronçon 1
Tronçon 2
FIGURE: Troncon et discontinuite des conditions aux limites
Les equations d’equilibre portant sur les efforts interieurs seront ecrites troncon par troncon.
MMS 2012, Introduction Introduction a la theorie des poutres 6/28

Repenser la modelisation des actions mecaniques
Les efforts interieurs peuvent etre discontinus du fait d’efforts exterieurs ponctuels (Exemple del’effort normal discontinu).
Pour eviter d’utiliser la theorie des distributions, nous introduisons la notion de troncon de poutre.Un troncon est une portion continue de poutre sur laquelle les charges exterieures sont continues.Les discontinuites de chargement et d’appui (condition en deplacement) sont situees auxl’extremites des troncons.
x3
x2
1x
F
pt
3
3P
MTronçon 1
Tronçon 2
FIGURE: Troncon et discontinuite des conditions aux limites
Les equations d’equilibre portant sur les efforts interieurs seront ecrites troncon par troncon.
MMS 2012, Introduction Introduction a la theorie des poutres 6/28
Repenser la modelisation des actions mecaniques
Les efforts interieurs peuvent etre discontinus du fait d’efforts exterieurs ponctuels (Exemple del’effort normal discontinu).
Pour eviter d’utiliser la theorie des distributions, nous introduisons la notion de troncon de poutre.Un troncon est une portion continue de poutre sur laquelle les charges exterieures sont continues.Les discontinuites de chargement et d’appui (condition en deplacement) sont situees auxl’extremites des troncons.
x3
x2
1x
F
pt
3
3P
MTronçon 1
Tronçon 2
FIGURE: Troncon et discontinuite des conditions aux limites
Les equations d’equilibre portant sur les efforts interieurs seront ecrites troncon par troncon.
MMS 2012, Introduction Introduction a la theorie des poutres 6/28

Application du principe des travaux virtuels
La definition d’actions mecaniques et la formulation des conditions d’equilibre associees sontobtenues en mettant en œuvre les etapes suivantes :
Choisir une description des champs virtuels definissant le nouveau modele mecanique apartir du modele 3D usuel (x ∈ Ω→ u(x) ∈ H1(Ω)).
Calculer les differents travaux virtuelsAppliquer le principe des travaux virtuels pour obtenir les equations d’equilibreCompleter les equations d’equilibre par des lois de comportementCompleter les equations aux derivees partielles par des conditions aux limites
Choisir une geometrie, un materiau et des conditions aux limites
Resoudre les equations aux derivees partielles
Analyser les resultats obtenus
Une autre possibilite est d’appliquer le theoreme de l’energie potentielle pour les systemesconservatifs. Le modele obtenu n’est pas necessairement le meme.
MMS 2012, Application du principe des travaux virtuels Introduction a la theorie des poutres 7/28

Theorie de Timoshenko
Premiere etape de la mise en œuvre du principe des travaux virtuels pour definir les actionsde cohesion : choisir un champ de deplacement virtuel.
* *
*
FIGURE: Description du champ de deplacement virtuel choisi.
u∗ = u∗1 (x1, x3) x1 + u∗3 (x1, x3) x3 ∀(x1, x2, x3) ∈ Ω (1)
u∗1 = U∗(x1) + θ∗(x1)x3 u∗3 = V∗(x1) (2)
ε∗11 = U∗,1 + θ∗,1x3 2ε∗13 = V∗,1 + θ∗
(3)
Il y a trois champs unidimensionnels (U∗, V∗, θ∗), definis sur l’intervalle [0, L].
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 8/28

Theorie de Timoshenko
Premiere etape de la mise en œuvre du principe des travaux virtuels pour definir les actionsde cohesion : choisir un champ de deplacement virtuel.
* *
*
FIGURE: Description du champ de deplacement virtuel choisi.
u∗ = u∗1 (x1, x3) x1 + u∗3 (x1, x3) x3 ∀(x1, x2, x3) ∈ Ω (1)
u∗1 = U∗(x1) + θ∗(x1)x3 u∗3 = V∗(x1) (2)
ε∗11 = U∗,1 + θ∗,1x3 2ε∗13 = V∗,1 + θ∗ (3)
Il y a trois champs unidimensionnels (U∗, V∗, θ∗), definis sur l’intervalle [0, L].
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 8/28
Theorie de Timoshenko
Calcul des travaux virtuels.? Travail virtuel des efforts internes
W∗int =−∫
Ω
ε∗ij σij dV (4)
=−∫
Ω
(ε∗11σ11 + 2ε∗13σ13)dV
(5)
=−∫C
(U∗,1
∫Sσ11dS + θ
∗,1
∫S
x3σ11dS + (V∗,1 + θ∗)
∫Sσ13dS
)dx1
(6)
On introduit alors naturellement les quantites N, T , M conjuguees de U∗,1, (V∗,1 + θ∗), θ∗,1. Pardefinition ce sont l’effort normal, l’effort tranchant et le moment flechissant (exprime au point G).
N =
∫Sσ11dS T =
∫Sσ13dS M =
∫S
x3σ11dS (7)
Ce sont les composantes du torseur des efforts interieurs. Ceci donne :
W∗int = −∫C
(N U∗,1 + M θ∗,1 + T (V∗,1 + θ∗)
)dx1 (8)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 9/28
Theorie de Timoshenko
Calcul des travaux virtuels.? Travail virtuel des efforts internes
W∗int =−∫
Ω
ε∗ij σij dV (4)
=−∫
Ω
(ε∗11σ11 + 2ε∗13σ13)dV (5)
=−∫C
(U∗,1
∫Sσ11dS + θ
∗,1
∫S
x3σ11dS + (V∗,1 + θ∗)
∫Sσ13dS
)dx1
(6)
On introduit alors naturellement les quantites N, T , M conjuguees de U∗,1, (V∗,1 + θ∗), θ∗,1. Pardefinition ce sont l’effort normal, l’effort tranchant et le moment flechissant (exprime au point G).
N =
∫Sσ11dS T =
∫Sσ13dS M =
∫S
x3σ11dS (7)
Ce sont les composantes du torseur des efforts interieurs. Ceci donne :
W∗int = −∫C
(N U∗,1 + M θ∗,1 + T (V∗,1 + θ∗)
)dx1 (8)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 9/28

Theorie de Timoshenko
Calcul des travaux virtuels.? Travail virtuel des efforts internes
W∗int =−∫
Ω
ε∗ij σij dV (4)
=−∫
Ω
(ε∗11σ11 + 2ε∗13σ13)dV (5)
=−∫C
(U∗,1
∫Sσ11dS + θ
∗,1
∫S
x3σ11dS + (V∗,1 + θ∗)
∫Sσ13dS
)dx1 (6)
On introduit alors naturellement les quantites N, T , M conjuguees de U∗,1, (V∗,1 + θ∗), θ∗,1. Pardefinition ce sont l’effort normal, l’effort tranchant et le moment flechissant (exprime au point G).
N =
∫Sσ11dS T =
∫Sσ13dS M =
∫S
x3σ11dS (7)
Ce sont les composantes du torseur des efforts interieurs. Ceci donne :
W∗int = −∫C
(N U∗,1 + M θ∗,1 + T (V∗,1 + θ∗)
)dx1 (8)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 9/28
Theorie de Timoshenko
Calcul des travaux virtuels.? Travail virtuel des efforts internes
W∗int =−∫
Ω
ε∗ij σij dV (4)
=−∫
Ω
(ε∗11σ11 + 2ε∗13σ13)dV (5)
=−∫C
(U∗,1
∫Sσ11dS + θ
∗,1
∫S
x3σ11dS + (V∗,1 + θ∗)
∫Sσ13dS
)dx1 (6)
On introduit alors naturellement les quantites N, T , M conjuguees de U∗,1, (V∗,1 + θ∗), θ∗,1. Pardefinition ce sont l’effort normal, l’effort tranchant et le moment flechissant (exprime au point G).
N =
∫Sσ11dS T =
∫Sσ13dS M =
∫S
x3σ11dS (7)
Ce sont les composantes du torseur des efforts interieurs. Ceci donne :
W∗int = −∫C
(N U∗,1 + M θ∗,1 + T (V∗,1 + θ∗)
)dx1 (8)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 9/28
Theorie de Timoshenko
Calcul des travaux virtuels.? Travail virtuel des efforts internes? Travail virtuel des efforts exterieurs
W∗ext = F0U∗(0) + FLU∗(L) + P0V∗(0) + PLV∗(L) +M0θ∗(0) +MLθ
∗(L) (9)
+
∫C
(p V∗ + t U∗)
)dx1 (10)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 10/28
Theorie de Timoshenko, application du principe des travaux virtuels
Principe des travaux virtuels pour la theorie de Timoshenko :
W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗) (11)
On en deduit les conditions d’equilibre suivantes :
N,1 + t = 0 T,1 + p = 0 M,1 − T = 0 (12)
N(0) = −F0 N(L) = FL T (0) = −P0 T (L) = PL (13)
M(0) = −M0 M(L) =ML (14)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 11/28
Theorie de Timoshenko, application du principe des travaux virtuels
Demonstration.
W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗)
⇓
W∗int + W∗ext = 0 ∀ U∗, avec V∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ V∗, avec U∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ θ∗, avec U∗ = 0, V∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0&L) = 0, θ∗(L) = 0
On integre classiquement par parties le travail des efforts interieurs, par exemple :∫C
NU∗,1dx1 =
∫C
((NU∗),1 − N,1U∗
)dx1 = [NU∗]L0 −
∫C
N,1U∗dx1 (15)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 12/28

Theorie de Timoshenko, application du principe des travaux virtuels
Demonstration.
W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗)
⇓
W∗int + W∗ext = 0 ∀ U∗, avec V∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ V∗, avec U∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ θ∗, avec U∗ = 0, V∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(L) = 0, θ∗(0&L) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0) = 0W∗int + W∗ext = 0 ∀ (U∗, V∗, θ∗), avec U∗(0&L) = 0, V∗(0&L) = 0, θ∗(L) = 0
On integre classiquement par parties le travail des efforts interieurs, par exemple :∫C
NU∗,1dx1 =
∫C
((NU∗),1 − N,1U∗
)dx1 = [NU∗]L0 −
∫C
N,1U∗dx1 (15)
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 12/28
Theorie de Timoshenko, application du principe des travaux virtuels
Demonstration (suite).
W∗int + W∗ext = 0 ∀ U∗, avec V∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0
⇒ −∫C
N U∗,1 dx1 +
∫C
t U∗ dx1 = 0 ∀ U∗, avec U∗(0) = U∗(L) = 0
⇒ − [NU∗]L0 +
∫C
N,1U∗ dx1 +
∫C
t U∗ dx1 = 0 ∀ U∗, avec U∗(0) = U∗(L) = 0
⇒ N,1 + t = 0 ∀x1 ∈ C
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 13/28

Theorie de Timoshenko, application du principe des travaux virtuels
Demonstration (suite).
W∗int + W∗ext = 0 ∀ V∗, avec U∗ = 0, θ∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0
⇒ −∫C
T V∗,1 dx1 +
∫C
p V∗ dx1 = 0 ∀...
⇒ − [T V∗]L0 +
∫C
T,1 V∗ dx1 +
∫C
p V∗ dx1 = 0 ∀...
⇒ T,1 + p = 0 ∀x1 ∈ C
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 14/28

Theorie de Timoshenko, application du principe des travaux virtuels
Demonstration (suite).
W∗int + W∗ext = 0 ∀ θ∗, avec U∗ = 0, V∗ = 0, U∗(0&L) = 0, V∗(0&L) = 0, θ∗(0&L) = 0
⇒ −∫C
M θ∗,1 + T θ∗ dx1 + 0 = 0 ∀...
⇒ − [M θ∗]L0 +
∫C
M,1 θ∗ − T θ∗ dx1 + 0 = 0 ∀...
⇒ M,1 − T = 0 ∀...
MMS 2012, Theorie de Timoshenko Introduction a la theorie des poutres 15/28
Cas particulier des systemes isostatiques
Definition : Un systeme est isostatique si et seulement si on peut determiner toutes les inconnuesstatiques (reactions aux appuis et efforts interieurs) en utilisant exclusivement les conditionsd’equilibre.
Methode de resolution des systemes isostatiques :
Identifier quelles sont les inconnues statiques pour chaque liaison,
Rechercher les reactions aux appuis (efforts transmis par les liaisons avec l’exterieur),
Identifier les differents troncons de la poutre,
Considerer l’equilibre de portions de troncon pour chaque troncon de la poutre,
En deduire N, T, et M,
Utiliser les lois de comportement pour obtenir U,1, θ,1 et V,1 + θ,
Exploiter les conditions aux limites en deplacement et les conditions de continuite entre lestroncons, pour obtenir U, V , θ.
Pour les systemes qui ne sont pas isostatiques, on peut adopter une methode en deplacement quiconsiste a prendre les deplacements et les rotations comme inconnues principales.
MMS 2012, Les systemes isostatiques Introduction a la theorie des poutres 16/28
Cas particulier des systemes isostatiques
Definition : Un systeme est isostatique si et seulement si on peut determiner toutes les inconnuesstatiques (reactions aux appuis et efforts interieurs) en utilisant exclusivement les conditionsd’equilibre.
Methode de resolution des systemes isostatiques :
Identifier quelles sont les inconnues statiques pour chaque liaison,
Rechercher les reactions aux appuis (efforts transmis par les liaisons avec l’exterieur),
Identifier les differents troncons de la poutre,
Considerer l’equilibre de portions de troncon pour chaque troncon de la poutre,
En deduire N, T, et M,
Utiliser les lois de comportement pour obtenir U,1, θ,1 et V,1 + θ,
Exploiter les conditions aux limites en deplacement et les conditions de continuite entre lestroncons, pour obtenir U, V , θ.
Pour les systemes qui ne sont pas isostatiques, on peut adopter une methode en deplacement quiconsiste a prendre les deplacements et les rotations comme inconnues principales.
MMS 2012, Les systemes isostatiques Introduction a la theorie des poutres 16/28
Les lois de comportement pour la theorie de Timoshenko
On considere un champ de deplacement de la forme du champ de deplacement virtuel :
u = u1(x1, x3) x1 + u3(x1, x3) x3 ∀(x1, x2, x3) ∈ Ω (16)
u1 = U(x1) + θ(x1)x3 u3 = V (x1) (17)
ε11 = U,1 + θ,1x3 2ε13 = V,1 + θ (18)
Propriete : Les sections droites restent planes.
Lois de comportement lineaires pour un materiau elastique homogene dans S :
Traction-compressionN = E S U,1 (19)
Flexion, avec I =
∫S
x23 dS, moment quadratique par rapport a x2 :
M = E I θ,1 (20)
CisaillementT = µ S (θ + V,1) (21)
MMS 2012, Les lois de comportement pour la theorie de Timoshenko Introduction a la theorie des poutres 17/28

Solution de de Saint-Venant
Sous certaines hypotheses, la theorie des poutres et la theorie generale des milieux continuscoıncident pour la solution de de Saint-Venant.
L’hypothese de de Saint-Venant consiste a chercher la solution du probleme d’equilibre d’untroncon de poutre droite sous la forme d’un etat de contrainte contenant uniquement deuxcisaillements et un terme de contrainte axiale :
(σ..)
=
σ11 σ12 σ13σ21 0 0σ31 0 0
(22)
Les formulations des lois de comportement sont alors liees.
N =
∫Sσ11dS =
∫S
Eε11dS =
∫S
Eu1,1dS =
∫S
EU,1dS +
∫S
E(θx3),1dS (23)
M =
∫S
x3σ11dS =
∫S
x3Eε11dS =
∫S
x3E U,1dS +
∫S
E x3(θx3),1dS (24)
T =
∫Sσ13dS =
∫S
2µε13dS =
∫Sµ(u1,3 + u3,1)dS =
∫Sµ(θ + V,1
)dS (25)
MMS 2012, Solution de de Saint-Venant Introduction a la theorie des poutres 18/28
Theoreme de de Saint-Venant
Loin du point d’application des charges, l’influence des contraintes sur la solution en deplacementne depend que du torseur resultant de la distribution des contraintes dans les sections droites.
Ainsi, si deux chargements induisent un meme troseur d’effort interieur, alors loin du pointd’application de ces chargements, ils auront des consequences quasiment identiques sur lesdeformations.
MMS 2012, Theoreme de de Saint-Venant Introduction a la theorie des poutres 19/28
Probleme aux limites issu de la theorie de Timoshenko
Les conditions d’equilibre et les lois de comportement donnent un ensemble d’equations auxderivees partielles qu’il faut completer par des conditions aux limites et eventuellement desconditions de continuite du deplacement.
Probleme de traction, equation d’ordre 2 sur le deplacement longitudinal :
N,1 + t = 0 N = E S U,1 ⇒ E S U,11 + (E S),1 U,1 + t = 0 (26)
Pour avoir une solution unique, il faut 2 conditions aux limites sur U, 1 (N) ou U, pour chaquetroncon.
Probleme de flexion (hypothese de section constante), equation d’ordre 3 sur les rotations :
T,1 + p = 0 M,1 − T = 0 (27)
V,1 = −θ +Tµ S
M = EIθ,1 (28)
⇒ E I θ,111 + p = 0 (29)
Pour obtenir une solution unique en θ, il faut 3 conditions aux limites sur θ, θ,1 ou θ,11, pourchaque troncon. La continuite du deplacement impose la continuite de θ et de V .
MMS 2012, Probleme aux limites Introduction a la theorie des poutres 20/28

Expression des contraintes locales
Connaissant x1 → (U, V , θ) ∀ x1 ∈ [0, L], il est possible de calculer ε∼(u) et d’en deduire σ∼ enutilisant la loi de comportement de la theorie generale des milieux continus.
(ε..)
=
U,1 + θ,1x3 0V,1+θ
20 0 0
V,1+θ
2 0 0
(30)
On obtient en particulier :σ11 = E (U,1 + θ,1 x3)
⇒ σ11 =NS
+MI
x3
Le maximum de contrainte est obtenu au point le plus eloigne en x3 de la ligne moyenne. Ce pointa pour coordonnee x3 = ρ :
max(x2, x3)∈S
σ11 =NS
+MIρ
MMS 2012, Contraintes locales Introduction a la theorie des poutres 21/28
Theorie de Navier-Bernoulli
Dans la theorie qui a ete developpee jusque la, une section plane reste plane, mais pasperpendiculaire a l’axe neutre. Si les cisaillements sont faibles (effet du moment dominant), il estraisonnable de rajouter cette derniere hypothese a l’aide d’une liaison interne. On retrouve alors latheorie dite classiquement de Navier-Bernoulli.
* *
*
FIGURE: Description du champ de deplacement virtuel choisi.
u∗ = u∗1 (x1, x3) x1 + u∗3 (x1, x3) x3 ∀(x1, x2, x3) ∈ Ω (31)
u∗1 = U∗(x1) + θ∗(x1)x3 u3 = V∗(x1) V∗,1 + θ∗ = 0 (32)
ε∗11 = U∗,1 + θ∗,1x3 2ε∗13 = 0 (33)
Il y a deux champs unidimensionnels independants (U∗, V∗), definis sur l’intervalle [0, L].
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 22/28
Theorie de Navier-Bernoulli
Probleme de traction, equation d’ordre 2 sur le deplacement longitudinal :
N,1 + t = 0 N = E S U,1 ⇒ E S U,11 + (E S),1 U,1 + t = 0 (34)
Pour avoir une solution unique, il faut 2 conditions aux limites sur U, 1 (N) ou U, pour chaquetroncon.
Probleme de flexion (hypothese de section constante), equation d’ordre 4 sur le deplacementtransverse :
M,11 + p = 0 T = M,1 (35)
M = −E I V,11 (36)
⇒ E I V,1111 = p (37)
Pour obtenir une solution unique il faut 4 conditions aux limites sur V , V,1, V,11 ou V,111, pourchaque troncon. La continuite du deplacement impose la continuite de θ = −V,1 et de V .
Pour etablir les conditions d’equilibre, il faut tenir compte de l’independance des fonctions V,1 et V .
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 23/28

Theorie de Navier-Bernoulli, exemple d’une poutre encastree soumisea son poids propre
1x
x3
L0
FIGURE: Poutre encastree, p = −ρ S g, U(0) = V (0) = 0, θ(0) = 0, N(L) = 0, M(L) = 0, T (L) = M,1(L) = 0.
Il n’y a qu’un seul troncon.
Probleme de traction :E S U,11 = 0 U(0) = 0 U,1(L) = 0 (38)
Probleme de flexion :
E I V,1111 = p V (0) = 0 V,1(0) = 0 V,11(L) = 0 V,111(L) = 0 (39)
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 24/28
Theorie de Navier-Bernoulli, exemple d’une poutre encastree soumisea son poids propre
Solution :U = 0 ∀x1
V =p
2 E I(
x41
12−
L3
x31 +
L2
2x2
1 )
Fleche de la poutre :
V (L) =p
8 E IL4
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 25/28

Theorie de Navier-Bernoulli, approche par le theoreme de l’energiepotentielle
Nous introduisons l’energie potentielle qui sera exploitee dans le cours sur la theorie desbifurcations et pour celui sur la theorie de stabilite.
Il possible de deduire les lois de comportement des relations issues de la theorie generale desmilieux continus en appliquant le theoreme de l’energie potentielle avec l’hypothese cinematiquede Navier-Bernoulli.
u = u1(x1, x3) x1 + u3(x1, x3) x3 ∀(x1, x2, x3) ∈ Ω (40)
u1 = U(x1) + θ(x1)x3 u3 = V (x1) V,1 + θ = 0 (41)
(ε..)
=
U,1 − V,11x3 0 00 0 00 0 0
(42)
W (ε∼) =E2ε2
11
F(U, V ) =
∫C
∫S
W (ε∼) dS dx1 (43)
− F0U(0)− FLU(L)− P0V (0)− PLV (L)−M0θ(0)−MLθ(L) (44)
−∫C
(p V + t U) dx1 (45)
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 26/28
Theorie de Navier-Bernoulli, approche par le theoreme de l’energiepotentielle
Pour eliminer les mouvements de corps rigide on considere une poutre encastree en x1 = 0 :δV (0) = 0 et δV,1(0).
F,V (U, V )[δV ] =
∫C
∫S
W ′(ε∼) : ε∼,V [δV ] dS dx1 (46)
− P0δV (0)− PLδV (L)−M0δθ(0)−MLδθ(L) (47)
−∫C
p δV dx1 (48)
avec : (ε,V [δV ]
)=
−δV,11x3 0 00 0 00 0 0
(49)
donc (hypothese de section constante) :∫C
∫S
W ′(ε∼) : ε∼,V [δV ] dS dx1 =
∫C
E I V,11 δV,11 dx1 (50)
=[E I V,11 δV,1
]L0 −
∫C
E I V,111 δV,1 dx1 (51)
= −[E I V,11 δθ
]L0 −
[E I V,111 δV
]L0 +
∫C
E I V,1111 δV dx1
(52)
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 27/28
Theorie de Navier-Bernoulli, approche par le theoreme de l’energiepotentielle
F,V (U, V )[δV ] =−[E I V,11 δθ
]L0 −
[E I V,111 δV
]L0 (53)
+
∫C
E I V,1111 δV dx1 (54)
− P0δV (0)− PLδV (L)−M0δθ(0)−MLδθ(L) (55)
−∫C
p δV dx1 (56)
Application du theoreme de l’energie potentielle :
F,U (U, V )[δU] = 0 ∀ δU
F,V (U, V )[δV ] = 0 ∀ δV
On retrouve les equations obtenues avec le principe des travaux virtuels en prenant δU = U∗ etδV = V∗.
MMS 2012, Theorie de Navier-Bernoulli Introduction a la theorie des poutres 28/28