Cours Methodes de Programmations
171
Nombre de pages : 171 Mise à jours 28 janvier 2001 Révision : 2.690 Ce document peut être téléchargé à son dernier indice à l’adresse suivante: http://coursducnam.free.fr/ Pour tous commentaires sur ce support de cours contacter nous sur : [email protected]
-
Upload
rahmani-mohamed-elhadi -
Category
Documents
-
view
224 -
download
0
Transcript of Cours Methodes de Programmations

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 1/171
Nombre de pages : 171
Mise à jours 28 janvier 2001 Révision : 2.690
Ce document peut être téléchargé à son dernier indice à l’adresse suivante: http://coursducnam.free.fr/ Pour tous commentaires sur ce support de cours contacter nous sur : [email protected]

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 2/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS Page 2
Il est autorisé de copier, distribuer et/ou modifier ce documentsuivant les termes de la Licence de Documentation Libre GNU (GNU Free Documentation License)Version 1.1 ou plus récente de la Fondation de logiciel libre (Free Software Foundation) ;avec les sections invariantes qui sont listée avec leurs titres,et avec les textes des pages de garde et pages de fin de ce document.Une copie de cette licence est inclue dans ce document à la section "GNUFree Documentation License".Pour plus d’informations, consulter l’adresse : http://www/gnu.org/copyleft/fdl.html

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 3/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS Table de mises à jours Page 3
Table de mises à jours
Version Date Commentaires1 30/09/2000 Edition originale2 28/01/2001 Mise à jours des travaux dirigés

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 4/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS SOMMAIRE Page 4
Sommaire
1. COURS : INTRODUCTION AUX METHODES DEPROGRAMMATION ..........................................................................................................................9
1.1. / PRESENTATION GENERALE..............................................................................................................................10 1.1.1. / INTRODUCTION............................................................................................................................................10 1.1.2. / LE ROLE D’UN SYSTEME D’EXPLOITATION..............................................................................................11 1.1.3. / LES FONCTIONS D’UN SYSTEME D’EXPLOITATION.................................................................................12 1.1.4. / HISTORIQUE .................................................................................................................................................13
1.1.4.1. / Première génération (1945-1955) tubes à vides et panneaux de raccordement...........................................13 1.1.4.2. / Deuxième génération (1955-1965) Transistors et systèmes par lots ..........................................................14 1.1.4.3. / Troisième génération (1965-1980) Circuits intégrés et multiprogrammation............................................16 1.1.4.4. / Quatrième génération (1980-1990) Ordinateurs personnels......................................................................18 1.1.4.5. / Génération multimédia (1990-à nos jours)................................................................................................20
1.1.5. / LES DIVERS TYPES DE SYSTEMES D’EXPLOITATION MULTITACHE.......................................................24 1.1.5.1. / Les systèmes multitâche monoprocesseur.................................................................................................24 1.1.5.2. / Les systèmes multi-utilisateur ..................................................................................................................25 1.1.5.3. / Les systèmes temps-réel ...........................................................................................................................26 1.1.5.4. / Les systèmes transactionnels....................................................................................................................28 1.1.5.5. / Les systèmes multitraitement ...................................................................................................................29
1.1.6. / STRUCTURE GENERALE D’UN SYSTEME D’EXPLOITATION....................................................................30 1.1.6.1. / Le noyau.......................................................................................... ........................................................30 1.1.6.2. / Le gestionnaire de tâches .........................................................................................................................31 1.1.6.3. / Le gestionnaire de mémoire............................................................. ........................................................31 1.1.6.4. / La gestion des entrées-sorties...................................................................................................................31 1.1.6.5. / La gestion des fichiers .............................................................................................................................32 1.1.6.6. / Le dialogue homme-machine........................................................... ........................................................33
1.1.7. / CONCLUSION................................................................................................................................................33 1.2. / LA GESTION DES TACHES.................................................................................................................................34
1.2.1. / INTRODUCTION............................................................................................................................................34 1.2.2. / NOTION DE TACHE ......................................................................................................................................34 1.2.3. / STRUCTURER UNE APPLICATION EN TACHES..........................................................................................35 1.2.4. / LES ETATS D’UNE TACHE............................................................................................................................37
1.2.4.1. / L’état ACTIF...........................................................................................................................................37
1.2.4.2. / L’état PRET.............................................................................................................................................38 1.2.4.3. / L’état EN ATTENTE ..............................................................................................................................38 1.2.4.4. / L’état SUSPENDU ..................................................................................................................................38
1.2.5. / CHANGEMENT D’ETAT D’UNE TACHE .............................................. ........................................................39 1.2.5.1. / Création et destruction.............................................................................................................................39 1.2.5.2. / La préhension..........................................................................................................................................40 1.2.5.3. / L’endormissement ...................................................................................................................................40 1.2.5.4. / La suspension ..........................................................................................................................................40 1.2.5.5. / Le réveil ..................................................................................................................................................41 1.2.5.6. / La résomption..........................................................................................................................................41 1.2.5.7. / Notion de contexte........................................................................... ........................................................41
1.2.6. / LES LISTES ASSOCIEES AUX ETATS............................................................................................................42 1.2.7. / STRUCTURE DES DONNEES ASSOCIEES AUX TACHES ............................................................................43
1.2.7.1. / La pile .....................................................................................................................................................43 1.2.7.2. / Le descripteur de tâche ............................................................................................................................44
1.2.8. / TRAITEMENT DU TEMPS .............................................................................................................................45

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 5/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS SOMMAIRE Page 5
1.2.8.1. / Les interruptions d’horloge interne ..........................................................................................................45 1.2.8.2. / L’horloge temps réel................................................................................................................................46 1.2.8.3. / Traitement des attentes ............................................................................................................................46
1.2.9. / ALLOCATION DU PROCESSEUR..................................................................................................................49 1.2.9.1. / Objectifs de l’allocation ...........................................................................................................................49
1.2.9.2. / Critères d’allocation ................................................................................................................................50 1.2.9.3. / Les priorités.............................................................................................................................................51 1.2.10. / MECANISMES D’ORDONNANCEMENT.......................................................................................................51
1.2.10.1. / Algorithmes sans réquisition....................................................................................................................52 1.2.10.1.1. / Ordonnancement par ordre d’arrivée (FIFO)......................................................................................52 1.2.10.1.2. / Ordonnancement « Plus court d’abord»..............................................................................................53
1.2.10.2. / Algorithmes avec réquisition ...................................................................................................................53 1.2.10.2.1. / Ordonnancement « Plus court temps restant » ....................................................................................53 1.2.10.2.2. / Le tourniquet......................................................................................................................................54 1.2.10.2.3. / Ordonnancement par priorité .............................................................................................................55 1.2.10.2.4. / Ordonnancement par files multiples...................................................................................................56
1.2.10.2.4.1. / Les files prioritaires.....................................................................................................................56
1.2.10.2.4.2. / Les files rétroactives....................................................................................................................57 1.2.11. / LES PROCEDURES DE GESTION DE TACHES............................................................................................58 1.2.11.1. / Les procédures de base.............................................................................................................................58 1.2.11.2. / Les procédures de haut niveau .................................................................................................................59
1.3. / LA GESTION DES INTERRUPTIONS..................................................................................................................62 1.3.1. / INTRODUCTION............................................................................................................................................62 1.3.2. / NOTION D’INTERRUPTION..........................................................................................................................62 1.3.3. / DIFFERENTES CAUSES D’INTERRUPTION ................................................................................................63
1.3.3.1. / Les interruptions internes ........................................................................................................................63 1.3.3.2. / Les interruptions externes................................................................ ........................................................64
1.3.4. / MODE SYSTEME ET MODE UTILISATEUR..................................................................................................64 1.3.5. / LE MECANISME D’INTERRUPTION.............................................................................................................65
1.3.5.1. / Le masquage des interruptions.................................................................................................................67 1.3.5.2. / Reconnaissance d’une interruption...........................................................................................................69 1.3.5.3. / Identification de la source........................................................................................................................69
1.3.5.3.1. / Identification directe ............................................................................................................................70 1.3.5.3.2. / Identification par scrutation .................................................................................................................70 1.3.5.3.3. / Reprise de la tâche interrompue ...........................................................................................................70
1.3.6. / NOTION DE NIVEAU D'INTERRUPTION......................................................................................................71 1.3.6.1. / Niveau unique à priorité unique....................................................... ........................................................72 1.3.6.2. / Niveau unique à priorités multiples..........................................................................................................72 1.3.6.3. / Niveaux multiples à priorités multiples............................................ ........................................................73
1.3.6.3.1. / Systèmes à une ligne d’interruption......................................................................................................74 1.3.6.3.2. / Systèmes à lignes d’interruption multiples............................................................................................75 1.3.6.3.3. / Notion de contrôleur d’interruption......................................................................................................76
1.3.7. / TRAITEMENT DES INTERRUPTIONS INTERNES.........................................................................................77 1.3.7.1. / Les appels au superviseur.........................................................................................................................77 1.3.7.2. / Les déroutements............................................................................. ........................................................78
1.4. / LA GESTION DU PARALLÉLISME ET DE LA COOPÉRATION ENTRE LES TÂCHES...................................79 1.4.1. / INTRODUCTION............................................................................................................................................79 1.4.2. / L’EXCLUSION MUTUELLE...........................................................................................................................79
1.4.2.1. / Le mécanisme d’attente active .................................................................................................................82 1.4.2.2. / Le Sémaphore.................................................................................. ........................................................83
1.4.3. / SYNCHRONISATION ENTRE TACHES..........................................................................................................85 1.4.3.1. / Mécanisme d’action directe .....................................................................................................................86 1.4.3.2. / Mécanismes d'action indirecte .................................................................................................................87 1.4.3.3. / Synchronisation par événements ..............................................................................................................88
1.4.3.4. / Synchronisation par sémaphores..............................................................................................................88 1.4.4. / LA COMMUNICATION ENTRE TACHES.......................................................................................................91 1.4.4.1. / Communication par variables communes.................................................................................................91 1.4.4.2. / Communication par boîtes aux lettres ......................................................................................................92

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 6/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS SOMMAIRE Page 6
1.4.4.3. / Communication par Rendez-vous.............................................................................................................95 1.5. / LA GESTION DE LA MÉMOIRE..........................................................................................................................97
1.5.1. / INTRODUCTION............................................................................................................................................97 1.5.2. / HIERARCHIE DES MEMOIRES.....................................................................................................................98
1.5.2.1. / Les registres.............................................................................................................................................98
1.5.2.2. / La mémoire cache....................................................................................................................................98 1.5.2.3. / La mémoire centrale ................................................................................................................................98 1.5.2.4. / La mémoire d’arrière-plan.......................................................................................................................98 1.5.2.5. / La mémoire de masse...............................................................................................................................99
1.5.3. / ESPACE PHYSIQUE ET ESPACE VIRTUEL..................................................................................................99 1.5.3.1. / Espace physique supérieur à l’espace virtuel.............................................................................................99 1.5.3.2. / Espace physique inférieur à l’espace virtuel............................................................................................101
1.5.4. / LES FONCTIONS DE BASE .........................................................................................................................101 1.5.4.1. / Transformation adresses logiques / adresses physiques...........................................................................101 1.5.4.2. / Partage de la mémoire physique............................................................................................................. 102 1.5.4.3. / Allocation de la mémoire....................................................................................................................... 102
1.5.4.3.1. / Allocation statique .............................................................................................................................102
1.5.4.3.2. / Allocation dynamique ........................................................................................................................102 1.5.4.4. / La protection .........................................................................................................................................103 1.5.4.5. / Extension de l’espace mémoire ..............................................................................................................103
1.5.4.5.1. / Technique de l’overlay................................................................. ......................................................104 1.5.4.5.2. / Technique du chaining (ou pagination manuelle) ...............................................................................104 1.5.4.5.3. / Technique du swapping......................................................................................................................104
1.5.5. / LA MEMOIRE VIRTUELLE..........................................................................................................................104 1.5.5.1. / Les informations accessibles à une tâche................................................................................................ 105 1.5.5.2. / Organisation de la mémoire virtuelle .....................................................................................................106
1.5.5.2.1. / Mémoire virtuelle linéaire............................................................ ......................................................106 1.5.5.2.2. / Mémoire virtuelle segmentée..............................................................................................................106
1.5.5.3. / La segmentation ....................................................................................................................................106 1.5.5.3.1. / La table des segments.........................................................................................................................107 1.5.5.3.2. / Adressage d’une mémoire virtuelle segmentée ...................................................................................109 1.5.5.3.3. / Traitement d’un défaut de segment ....................................................................................................110
1.5.5.4. / La pagination.........................................................................................................................................110 1.5.5.4.1. La table des pages ................................................................................................................................111 1.5.5.4.2. / Adressage d’une mémoire virtuelle paginée .......................................................................................112 1.5.5.4.3. / Traitement d’un défaut de page..........................................................................................................113 1.5.5.4.4. / Notion d’espace de travail.................................................................................................................. 113
1.5.5.5. / Segmentation paginée............................................................................................................................ 114 1.5.5.5.1. / Association des tables des segments et des tables des pages................................................................ 114 1.5.5.5.2. / Adressage d’une mémoire segmentée et paginée ................................................................................115
1.5.5.6. / Algorithmes de remplacement ...............................................................................................................116 1.5.5.6.1. / Algorithme aléatoire (random)........................................................................................................... 116
1.5.5.6.2. / Algorithme PEPS............................................................................................................................... 117 1.5.5.6.3. / Algorithme MRU............................................................................................................................... 117 1.5.5.6.4. / Algorithme MFU ...............................................................................................................................117
1.6. / LA GESTION DES ENTRÉES/SORTIES ............................................................................................................118 1.6.1. / INTRODUCTION..........................................................................................................................................118 1.6.2. / ORGANISATION GENERALE DES ENTREES/SORTIES..............................................................................118
1.6.2.1. / Les périphériques d’entrées-sorties ........................................................................................................119 1.6.2.2. / Les interfaces......................................................................................................................................... 119
1.6.2.2.1. / Les instructions spéciales ...................................................................................................................119 1.6.2.2.2. / La cartographie mémoire ...................................................................................................................120 1.6.2.2.3. / Les entrées-sorties contrôlées par interruptions ..................................................................................120
1.6.2.3. / Les contrôleurs de périphériques...................................................... ......................................................120
1.6.2.3.1. / L’accès direct à la mémoire................................................................................................................122 1.6.2.3.2. / Programmation d’un contrôleur .........................................................................................................123 1.6.2.4. / Les canaux d’entrées-sorties ..................................................................................................................124
1.6.2.4.1. / Le sélecteur........................................................................................................................................ 125

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 7/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS SOMMAIRE Page 7
1.6.2.4.2. / Le multiplexeur par octet ...................................................................................................................126 1.6.2.4.3. / Le multiplexeur par bloc ....................................................................................................................127 1.6.2.4.4. / Programmation d’un canal................................................................................................................. 127
1.6.3. / PILOTAGE DES PERIPHERIQUES..............................................................................................................128 1.6.3.1. / Notion de conducteur de périphérique.................................................................................................... 128
1.6.3.2. / Pilotage d 'entrées-sorties synchrones.....................................................................................................130 1.6.3.3. / Pilotage d’entrées-sorties asynchrones ...................................................................................................132 1.6.4. / PRINCIPE DU GESTIONNAIRE D’ENTREES/SORTIES.............................................................................. 134
1.6.4.1. / Structure du gestionnaire d’entrées/sorties .............................................................................................135 1.6.4.2. / Le LIOCS..............................................................................................................................................135 1.6.4.3. / Le PIOCS ..............................................................................................................................................136 1.6.4.4. / Le gestionnaire de tampons....................................................................................................................136
1.6.4.4.1. / Le double tampon...............................................................................................................................136 1.6.4.4.2. / Le tampon circulaire ..........................................................................................................................137 1.6.4.4.3. / Le pool de tampons ............................................................................................................................138
1.6.5. / PRISE EN CHARGE DES ENTREES/SORTIES PAR LE SYSTEME..............................................................139 1.6.5.1. / Les routines de services des entrées/sorties.............................................................................................139
1.6.5.2. / Structure de données associées aux entrées/sorties..................................................................................139 1.6.6. / MECANISMES D’EXECUTION DE REQUETES D’ENTREES/SORTIES ..................................................... 141
2. TRAVAUX DIRIGES ..................................................................................143
2.1. / EXERCICE 1 : LA GESTION DES LISTES DE TACHES D’UN SYSTEME TR........................................................................144 2.1.1. / Enoncé..........................................................................................................................................................144 2.1.2. / Solutions .......................................................................................................................................................144
2.1.2.1. / La procédure S’ENDORMIR .................................................................................................................144 2.1.2.2. / La procédure ENDORMIR.....................................................................................................................145 2.1.2.3. / La procédure SUSPENDRE ...................................................................................................................146 2.1.2.4. / La procédure DESSUSPENDRE............................................................................................................147
2.2. / EXERCICE 2 : LA GESTION DE L’INTERRUPTION DE L’HORLOGE TR ...........................................................................148 2.2.1. / Enoncé..........................................................................................................................................................148 2.2.2. / Solutions .......................................................................................................................................................148
2.3. / EXERCICE 3 : ORDONNANCEMENT DE TACHES DANS UN SYSTEME TR .......................................................................150 2.3.1. / Enoncé..........................................................................................................................................................150 2.3.2. / Solutions .......................................................................................................................................................151
2.4. / EXERCICE 4 : ADRESSAGE D’UNE MEMOIRE VIRTUELLE PAGINEE ..............................................................................158 2.4.1. / Enoncé..........................................................................................................................................................158 2.4.2. / Solutions .......................................................................................................................................................158
2.5. / EXERCICE 5 : ADRESSAGE D’UNE MEMOIRE VIRTUELLE SEGMENTEE ET PAGINEE .......................................................159 2.5.1. / Enoncé..........................................................................................................................................................159 2.5.2. / Solutions .......................................................................................................................................................159
2.6. / EXERCICE 6 : GESTION D’UNE MEMOIRE VIRTUELLE PAGINEE ...................................................................................160 2.6.1. / Enoncé..........................................................................................................................................................160 2.6.2. / Solutions .......................................................................................................................................................160
2.7. / EXERCICE 7 : GESTION D’UNE MEMOIRE VIRTUELLE ET DEFAUTS DE PAGES ...............................................................161 2.7.1. / Enoncé..........................................................................................................................................................161 2.7.2. / Solutions .......................................................................................................................................................161
2.8. / EXERCICE 8 : TEMPS D’EXECUTION D’UNE INSTRUCTION ET DEFAUT DE PAGE............................................................162 2.8.1. / Enoncé..........................................................................................................................................................162 2.8.2. / Solutions .......................................................................................................................................................162
2.9. / EXERCICE 9 : TEMPS D’EXECUTION D’UNE INSTRUCTION ET HEURE D’ARRIVEE..........................................................162 2.9.1. / Enoncé..........................................................................................................................................................162 2.9.2. / Solutions .......................................................................................................................................................162
3. INDEX................................................................................................................................................164

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 8/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS SOMMAIRE Page 8
4. LEXIQUE ..................................................................................................................................168
5. LICENCE DE DOCUMENTATION LIBRE..............................................................................................................170

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 9/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 9
1. COURS : Introduction aux méthodes deprogrammation

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 10/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 10
1.1. / PRESENTATION GENERALE
1.1.1. / INTRODUCTION
Un ordinateur est caractérisé par une structure matérielle qui définit ses possibilités et ses limitesphysiques. L’exploitation plus ou moins heureuse des potentialités offertes par l’architecture matérielledu système en vue d’effectuer un travail donné, dépend des programmes mis en oeuvre par l’ordinateur.Sans programme, un ordinateur n’est qu’un ensemble d’équipements matériels inutilisables. L’efficacitéglobale d’un système dépend donc tout autant du matériel que du logiciel. Le logiciel (software) peutêtre sommairement décomposé en deux classes :
· Les programmes d’application: écrits par le ou les utilisateurs pour apporter une solution à unproblème donné (contrôle-commande de procédés industriels, gestion de systèmes bancaires,réservations de places dans un avion ou un train, jeux...)
· Les programmes systèmes : développés par le constructeur de l’ordinateur ou le concepteur dusystème pour, d’une part, aider l’utilisateur dans sa démarche de programmation et lui apporterles outils de développement dont il a besoin et d’autre part tirer le maximum de bénéfice despossibilités de l’ordinateur. Le système d’exploitation (O.S. . Operating Svstem) est le plusimportant de tous ces programmes systèmes. C’est lui qui contrôle toutes les ressources de lamachine et qui fournit les éléments de base permettant l’écriture des programmes d’application.
Du point de vue de l’utilisateur, le système d’exploitation fournit l’environnement destiné à faciliter ledéveloppement des programmes et leur exécution. A ce titre, il met à la disposition des usagers toute
une série de logiciels (éditeurs, compilateurs, assembleurs...) qui permettent d’assembler, de charger etd’exécuter les programmes d’application. De plus, Il fournit à l’utilisateur toute une série de commandessimples qui lui permettent de traiter les opérations d’entrée-sortie et la gestion de l’information d’unefaçon logique, sans entrer au niveau du détail de l’implantation.
Du point de vue du concepteur du système, le système d’exploitation contrôle et alloue les ressourcesmatérielles et logicielles de l’ordinateur, telles que le processeur, la mémoire centrale, les périphériquesou les programmes systèmes. Les systèmes d’exploitation possèdent chacun une spécificité qui les rendeplus ou moins faciles à utiliser, plus ou moins efficaces aussi. Cependant, ils sont tous basés sur desconcepts et des techniques communs.
Le but de ce cours est d’abord de donner les principes sur lesquels sont fondés tous les systèmesd’exploitation et de montrer très vite à l’utilisateur que le système d’exploitation travaille pour lui. Eneffet, les programmes réalisés s’exécutent sur une sorte de machine virtuelle et toutes lescaractéristiques de son matériel sont cachés. Il en résulte un plus grand confort de programmation, uneplus grande rapidité de mise au point et une plus grande transportabilité des logiciels devenant alorsindépendants des machines réelles.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 11/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 11
1.1.2. / LE ROLE D’UN SYSTEME D’EXPLOITATION
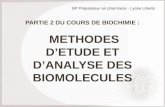
Dans un système informatique la place du système d’exploitation est dans la plupart des cas présentéepar référence à un ensemble de niveaux ou de couches, tel que sur la figure 1.1. Aux extrémités hauteset basses de cette figure sont situés respectivement l’utilisateur (ou les utilisateurs) et la machine (ou lesmachines).
Le système d’exploitation apparaît alors comme constituant la charnière entre le logiciel et le matériel.Son rôle consiste à gérer au mieux l’utilisation des ressources matérielles dont le logiciel va disposerprocesseur(s), mémoire(s), entrées-sorties... Pour cela il doit constituer une interface entre lesressources physiques et l’utilisateur en fournissant à ce dernier un langage de commande (avecinterpréteur associé) plus ou moins complexe (graphique ou textuel) et des programmes utilitaires.
Ainsi, l’utilisateur voit une machine virtuelle standard plus facile à utiliser que la machine réelle. Cette
machine virtuelle le décharge de la connaissance des caractéristiques exactes de l’architecture matériellesur lequel ses programmes d’application vont fonctionner ou encore des caractéristiques physiques despériphériques annexes (disques, bandes magnétiques, imprimantes, scanners...).
Figure 1.1 Découpage en niveau d’un système informatique
Cette notion de machine virtuelle évite que les opérations imposées par la machine accaparentl’utilisateur au détriment du vrai problème et de sa solution. Les systèmes d’exploitation ont doncplusieurs motivations et objectifs :
· Réduire et dominer la complexité des machines,
· Paire en sorte que les possibilités de la machine soient utilisées au mieux.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 12/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 12
· Préserver les investissements,
· Faciliter le travail des utilisateurs et leur permettant, par exemple, de spécifier et d’obtenir des
solutions sans référence à des considérations reliées à la machine...
1.1.3. / LES FONCTIONS D’UN SYSTEME D’EXPLOITATION
Les fonctions couvertes par un système d’exploitation peuvent varier considérablement selon lesobjectifs visés par le constructeur et l’importance de l’ordinateur, mais d’une manière générale, lesprincipales d’entre elles sont les suivantes:
- Gestion et ordonnancement des tâches,
- Communication et synchronisation,
- Gestion de la mémoire centrale,
- Gestion des interruptions,
- Gestion des périphériques,
- Gestion des fichiers,
- Traitement des erreurs et reprise,
- Gestion des programmes,
- Gestion des travaux,
- Gestion du temps,
- Programmes utilitaires.
Les algorithmes mis en oeuvre pour réaliser ces différentes fonctions varient beaucoup d’un système àl’autre selon les objectifs visés et ils peuvent être par exemple très différents selon que le concepteurcherche avant tout une utilisation optimum des ressources ou, au contraire, un temps de réponseminimum. D’une manière générale, l’implantation de toutes ces fonctions conduit à des logiciels trèscomplexes qui doivent nécessairement être structurés pour pouvoir être maîtrisés.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 13/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 13
1.1.4. / HISTORIQUE
L’informatique n’existe que depuis la deuxième guerre mondiale. En fait, les différents composants d’unordinateur sont arrivés avec une série de prototypes. On peut rappeler que les machines à calculer ontleurs origines dans des travaux tels que ceux de Schickard en 1623, Blaise Pascal en 1643, Leibniz en1673 et plus récemment ceux de Babbage en 1833. Les systèmes informatiques ont considérablementévolué à travers les années. Les systèmes d’exploitation étant très liés aux machines qu’ils exploitent,nous pouvons les classer par génération de la même manière que le sont les ordinateurs
1.1.4.1./ Première génération (1945-1955) tubes à vides et panneaux de raccordement
Au milieu des années 1940, un groupe de personnes composé entre autres de John von Neumann àl’Université de Princeton, J. Presper Eckert et William Mauchley de l’Université de Pennsylvanie et
Konrad Zuse en Allemagne, a réussit à construire le premier calculateur électronique, appelé ENIAC(Electronie Numerical Integrator And Computer). L’ENIAC pouvait effectuer 5000 additions ou 350multiplications par seconde. Sa mémoire était de 20 mots de 10 chiffres décimaux. Cette machine, bienque beaucoup moins puissante que la plupart des calculettes programmables de poche, pesait près de 30tonnes, occupait une surface au sol de 160 m², consommait 175 kW/h et comprenait près de 20000tubes à vide.
Les systèmes d’exploitation et les langages de programmation n’existaient pas encore (pas même leslangages assembleurs). Toute programmation était Laite en langage machine par le câblage, en enfichantdes prises du type «jack », d’un tableau de connexion (plugboard) qui commandait directement lesfonctions de base de la machine. Le mode d’utilisation de la machine consistait alors pour unprogrammeur à venir s’inscrire sur une feuille de réservation de la machine pour une heure donnée etpour un temps limité. Puis, à venir à l’heure prévue dans la salle machine insérer son tableau deconnexion dans le calculateur et enfin à attendre, quelques heures, les résultats du calcul en espérantqu’aucune des 20000 tubes à vide ne grillerait pendant l’exécution du travail Au début des années 1950,les cartes perforées (punched cards) pour l’introduction des programmes ont remplacé les tableaux deconnexion. Néanmoins la procédure d’utilisation du calculateur était la même.
IBM (International Business Machine corporation) réclame la paternité du premier «vrai » ordinateuravec le SSEC qui fut livré en 1948 par F. Hamilton et R. Sheeber. C’était la première machineélectronique avec programme enregistré. En 1949, en Angleterre, M.H. Newman, F.C. Williams, T.
Kilburn et I.J. Good sortirent la machine de Manchester (MADM) qui intégrait des mémoires de 128mots de 40 bits, à tubes électrostatiques, un tambour de 1024 mots et disposait d’un jeu de 26instructions de 20 bits. Toujours en Angleterre, A. Turing travailla pendant la deuxième guerremondiale sur la machine ACE sortie en 1950, commercialisée en 50 exemplaires (de 1955 à 1964) sousle nom de DEUCE et dont le détail est toujours resté secret.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 14/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 14
Le premier ordinateur Français, le CUBA fut livré en 1952 à l’armée par le SEA. La société desmachines BULL travailla aussi sur la conception de machine informatique dès 1950 et sortit en 1958 leBULL GAMMA ET qui avait une mémoire principale de 96 lignes à retard, de 12 chiffres décimauxchacune et d’un tambour de 8 Kmots.
Cependant, la transition entre cette génération de prototypes et celle des premières machinescommercialisées a été vraiment réalisée par deux grands projets américains : le WHIRLWIND et leJAS:
· Le « Whirlwind », machine très innovatrice, fut à l’origine de Il grandes « premières dont lesmémoires à tores (2048 mots de 16 bits), une ébauche de langage de programmation, desutilitaires... Très rapide pour l’époque (elle exécutait jusqu’à 20000 instructions par secondes).elle fit partie du système de défense de l’armée américaine dès 1951.
· Le «IAS » a une importance historique en tant que concrétisation des idées publiées par VonNeumann. Mis au point en 1951, elle ne fut exploitée qu’en 1952 avec une mémoire,considérée à l’époque comme considérable, de 4096 mots de 40 bits.
Ainsi, le premier ordinateur, le FERRANTI MARK 1, successeur de la machine de Manchester, futcommercialisé, dès 1951. Puis en 1952, J.P. Eckert et W. Mauchley sortirent le successeur de l’ENIAC: UNIVAC-1. Un an plus tard IBM sortit l’IBM 650 qui fut le premier ordinateur vendu en plus de1000 exemplaires, et la série IBM 701, 702, 709...
1.1.4.2./ Deuxième génération (1955-1965) Transistors et systèmes par lots
L’introduction des transistors au milieu des années 1950 changea radicalement l’image des ordinateursqui devinrent suffisamment fiables et sûrs pour être fabriqués et vendus en grande quantité. Pour lapremière fois, il y eut une séparation nette entre concepteurs, fabricants, programmeurs, opérateurs etmainteneurs. Ces calculateurs étaient enfermés dans des pièces climatisées et utilisés par des personnelshautement qualifiés. Seules des grandes compagnies d’état ou de grandes universités pouvaient s’offrirces ordinateurs qui coûtaient plusieurs millions de dollars.
A cette époque (entre 1956 et 1958), une équipe d’IBM, créa le premier langage de programmation leFORTRAN, acronyme de FORmula TRANslation. Il était au départ destiné à la traduction de formulesmathématiques et est devenu le langage de base des utilisateurs numériciens. En dépit de ses lacunesévidentes, sa position historique fait qu’il demeure un des langages principaux aujourd’hui.
Pour exécuter un travail (job) (un programme ou un ensemble de programmes), un programmeur devaitd’abord écrire le programme sur papier (en langage FORTRAN ou assembleur), puis le transcrire surcartes perforées. Il devait ensuite amener le jeu de cartes perforées dans la pièce des entrées de lamachine (input room) et le remettre à un opérateur. Une fois le travail terminé, les résultats produits parle calcul étaient imprimés. Un opérateur récupérait les listings sur l’imprimante et les déposait dans lapièce des sorties de la machine (output room) où les programmeurs pouvaient venir les récolter. Si lecompilateur FORTRAN était nécessaire, un opérateur était chargé de l’introduire dans le calculateur.Enormément de temps était perdu pendant l’exécution de toutes ses opérations. Etant donné le coût de
ce type d’équipement, les constructeurs ont rapidement tenté de réduire la perte de temps.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 15/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 15
Figure 1.2 : Principe du traitement par lots
La solution généralement adoptée est le traitement par lots (batch system). L’idée de départ consistait àcollecter un maximum de travaux sur cartes perforées dans la salle des entrées de la machine et à lestransférer sur une bande magnétique (tape). Cette opération était réalisée par un ordinateur (type « IBM1401 ») moins cher que l’ordinateur central (type « IBM 7094 ») et spécialisé dans la lecture de cartes,la copie sur bandes magnétiques et l’impression à partir de ces bandes (cf. figure 1.2). Après avoircollecté un lot suffisant de travaux, la bande était rembobinée et amenée sur l’ordinateur central où elleétait montée sur un lecteur de bandes (tape drive). Un opérateur chargeait alors un programme spécial,ancêtre des systèmes d’exploitation actuels, qui lisait le premier travail enregistré sur la bande etl’exécutait. Après chaque fin de travail, le système d’exploitation lisait automatiquement le travail
suivant stocke sur la bande d’entrée et commençait son exécution. En sortie les résultats étaient stockéssur une autre bande magnétique. Quand le lot complet avait été traité, l’opérateur enlevait les bandesd’entrée et de sortie pour charger les bandes du lot suivant. La bande de sortie était alors amenée surune machine du type « IBM 1401 » qui se chargeait de l’impression des résultats hors-ligne (sansaucune connexion au calculateur central).
Figure 1.3: Principe du traitement par lot
Par conséquent, un système « batch » était un système monotâche (single task system) qui ne pouvaitexécuter qu’un seul programme quels que soient sa taille et son temps d’exécution. Le programme encours de traitement accaparait donc complètement la machine pendant toute la durée de son exécution.Les programmes étaient traités en séquence (cf. figure 1.3). Les utilisateurs travaillant avec cessystèmes n’avaient aucune possibilité d’interaction avec leur programme qui se déroulait d’une manièreautonome, avec un temps de réponse imprévisible puisqu’il dépendait du nombre de travaux soumis.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 16/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 16
1.1.4.3./ Troisième génération (1965-1980) Circuits intégrés et multiprogrammation
Au début des années 1960, la plupart des constructeurs d’ordinateurs avaient mis en oeuvre de deux
types de lignes de fabrication d’ordinateurs totalement distinctes l’une de l’autre et, de surcroît,incompatibles
. Les lignes de fabrication et de montage des calculateurs scientifiques, tels que les « IBM 7094 »,très largement utilisés pour le calcul numérique en science et en ingénierie.
. Les lignes de fabrication et de montage des calculateurs à caractère commercial, tels que les «IBM 1401 », qui étaient très largement utilisés résultats par les banques et les compagniesd’assurances pour le stockage et le tri de bandes magnétiques, et pour la gestion des impressions.
Ils ont été très rapidement confrontés au problème du coût très élevé du développement et du maintientde deux lignes de production. De plus, un grand nombre de leurs clients qui, dans un premier temps,n’avaient besoin que de petites machines se sont très vite développés et ont voulu alors s’équiper demachines plus performantes sur lesquelles leurs anciens programmes devaient pouvoir être plusrapidement exécutés. IBM tenta alors de résoudre ces problèmes par l’introduction sur le marché dusystème 360. Le « 360 » était une série de machines composées d’un ensemble compatible logiciel-matériel et pouvant intégrer les possibilités qu’offraient les IBM 1401 et IBM 7094. Les machines decette nouvelle gamme étaient toutes construites suivant la même architecture et disposaient toutes dumême jeu d’instructions ce qui permettait à un programme d’être exécuté sur n’importe laquelle d’entreelles. Les machines de la série « 360» étaient les premières à utiliser des circuits imprimés (ICs), offrantainsi un grand avantage prix/performance par rapport aux machines de deuxième génération. Ce fut un
succès immédiat et l’idée fut reprise par la grande majorité des constructeurs. Depuis, IBM a développéde nombreux successeurs au système « 360 » tels que les systèmes « 370 ». « 4300 », « 3080 » et «3090 » dont certains sont encore en service dans de grands centres de calcul.
Tous les logiciels, y compris le système d’exploitation, devaient alors répondre à un grand nombre decontraintes. Ils devaient être capables de tourner sur de petits calculateurs pour remplacer les « 1401 »ou sur de gros calculateurs pour remplacer des « 7094 », sur des machines utilisant peu depériphériques ou sur d’autres en utilisant beaucoup, pour des environnements scientifiques ousimplement commerciaux, et bien entendu être performants dans tous les cas. Ceci a conduit audéveloppement d’un énorme et très complexe système d’exploitation composé de plusieurs millions delignes en langage assembleur écrits par des milliers de programmeurs et contenant des milliers de bogs(bugs) dont chaque correction en engendrait d’autres Beaucoup de temps et de patience furentnécessaires pour aboutir à un système d’exploitation satisfaisant pour la plupart des utilisateurs desséries « 360 » et des autres machines de troisième génération développées par d’autres constructeurs.Bien que ces systèmes étaient toujours à la base des systèmes de traitement par lot, ils ont contribué audéveloppement de grands concepts tels que ceux de la multiprogrammation et du spooling
Le concept de la multiprogrammation (multiprogramning) consiste à utiliser les temps morts decalcul du processeur pour exécuter d’autres travaux. Ainsi sur une machine du type 7094, lorsqu’untravail était en attente d’une entrée-sortie (chargement d’une bande, positionnement d’une bande pourune lecture ou une écriture...) le processeur était bloqué jusqu’à la fin de l’opération d’entrée-sortie.
Lors du traitement de calcul scientifique, les opérations d’entrée-sortie sont peu fréquentes et ce tempsperdu à attendre n’est pas significatif.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 17/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 17
Par contre, lors du traitement de données commerciales sur supports externes, tel qu’une bandemagnétique, les temps d’attente atteignent régulièrement 80% à 90% du temps de traitement total. Lasolution a consisté partitionner la mémoire de travail en segments pouvant chacun recevoir un travail
donné. Quand un des travaux chargés en mémoire était en attente de la réalisation d’une opérationd’entrée-sortie, un autre travail pouvait alors utiliser le processeur. Si suffisamment de travaux étaientprésents en mémoire centrale, le processeur pouvait être ainsi rentabilisé à 100%.
Le concept du spooling (Simultaneous Peripherical Operation On Line) est né du besoin de supprimertoutes les manipulations de bandes magnétiques en entrée comme en sortie des calculateurs. Pour cela,tout nouveau travail soumis à la machine était retranscrit en entrée à partir des cartes perforées surdisque (disk). Ainsi, dès qu’un travail sur la machine se terminait. le système d’exploitation pouvaitimmédiatement aller chercher sur le disque un nouveau travail et le charger en mémoire dans la partitionqui venait de se libérer. Ce principe était également appliqué en sortie et conduisit ainsi à la mort des «1401 ».
Au cours des années 1960, IBM mit au point le système VMICMS. Il ne s’agit pas d’un système, maisde deux, voire même plusieurs avec un hyperviseur (virtual machine system) auquel on pouvait greffern’importe quel système d’exploitation classique. Les chercheurs du Centre Scientifique d’IBM àCambridge (Etats-Unis) éprouvaient une gêne pour utiliser l’ordinateur puissant dont il disposait car,étant donné que leurs recherches portaient sur les systèmes d’exploitation, ils passaient à tour de rôle,en monoprogrammation, sur l’ordinateur. En effet, comme leurs expériences avaient lieu en « modesystème », ils risquaient toujours de perturber les travaux en cours. C’est donc pour des raisons desécurité qu’il a fallu trouver le moyen de donner à chaque utilisateur la possibilité de travailler en «mode système » sans perturber les autres. Le concept de machine virtuelle répond à cette nécessité. Ce
concept a représenté un pas important dans les recherches sur les systèmes d’exploitation. C’est leprogramme de commande (Control Pro gram) VM (Virtual Machine) qui gérait (et gère toujours...) lesmachines virtuelles, alors que CMS (Cambridge Monitor System, maintenant appelé « ConversationalMonitor Svstem ») était le système d’exploitation classique. L’hyperviseur simule un ordinateur completpour chaque utilisateur. Avec un système de machines virtuelles, la simulation de la machine offre toutesles possibilités de l’ordinateur à chaque utilisateur. L’utilisateur de VM/CMS passe toujours par lesdeux systèmes pour se connecter la première fois, il faut créer une machine virtuelle sous VM endéfinissant ses limites (mémoire, périphériques...), puis y générer le système CMS ; par la suite, aumoment de la connexion, il faut passer par deux étapes se connecter sous VM, puis charger CMS dansla machine virtuelle.
Avec ces systèmes de troisième génération, il fallait souvent plusieurs heures pour récupérer desrésultats d’un travail une fois que celui-ci avait été soumis (ce pouvait être encore plus long lorsqu’un «point virgule » mal placé dans un programme entraînait une erreur de compilation). Le désir desutilisateurs d’avoir des résultats plus rapidement, amena les concepteurs à se pencher sur la notion detemps partagé (time-sharing ). Cette notion est une variante du concept de la multiprogrammation.Avec un système en temps partagé, si 20 utilisateurs ont ouvert une session (logon) sur le système et 17d’entre eux ne l’utilisent pas (ils pensent à leur programme ou discutent en buvant un café ...)l’allocation du processeur se fera que sur les trois tâches en service chargées en mémoire. Ce concept apermis de fournir un service rapide et interactif aux utilisateurs que se soit pour des travaux courts (telque la compilation de cinq pages de programme) ou pour des travaux plus longs (tel que le classement
d’un million d’enregistrements sur bande).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 18/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 18
Cette notion vit le jour dès 1962 au M.I.T. (Massachusetts Institut of Technologv) sur un « 7094 »modifié, grâce à une collaboration entre « Bell Lobs » et « General Electric ». Néanmoins, pour lamettre en oeuvre, il était absolument nécessaire que la machine qui devait supporter un tel système
puisse matériellement assurer à tous les travaux chargés en même temps en mémoire, une protection deszones mémoire utilisées. Ce qui fut fait seulement avec l’avènement de nouvelles technologies sur lesmachines de troisième génération. Le premier système temps partagé fut le système MULTICS(MULTIplexed Information and Computing Service) qui tournait sur les machines du type GE645développé conjointement par Bell Labs et General Electric.
D’autre part, la troisième génération fut aussi celle des mini-ordinateurs (minicomputers) dont lespremiers, appelés « PDP-I », furent développés par «DEC » (Digital Equipment Corporation). Cesmini-ordinateurs qui pouvaient gérer que 8 Ko de mots de 18 bits mais coûtaient que 120.000$ (soitmoins de 5% du prix d’un 7094), se sont très vite et très bien vendus. Ils donnèrent naissance à touteune série de machines « PDP », du « PDP-I » au «PDP-II ». A la même époque (en 1969), un desscientifiques de «Bell Labs », Ken Thompson, qui avait travaillé sur le projet MULTICS, trouva un jourun mini-ordinateur « PDP7» non utilisé et décida d’y développer une version simplifiée de MULTICS.Ce sont ses travaux qui furent à la base du développement du système UNIX qui est depuis devenu lestandard des systèmes d’exploitation sur les mini-ordinateurs et les stations de travail.
En 1978, DEC disposait d’une bonne gamme de mini-ordinateurs 16 bits avec la série «PDP-l1 »équipée d’un système d’exploitation multitâche temps-réel (real-time multitasking), le « RSX-11M».Mais la limitation de l’espace d’adressage des machines 16 bits commençait à poser de sérieuxproblèmes. L’extension de cette machine en une machine 32 bits, appelé VAX, conçue dès le départpour supporter une gestion de mémoire paginée, a nécessité l’écriture d’un nouveau système
d’exploitation, VMS (Virtual Management System). A l’origine, VMS était donc qu’un noyau degestion de la mémoire virtuelle et utilisait un grand nombre d’utilitaires de RSX-IIM, et le processeurdu VAX disposait d’un microcode capable d’exécuter des instructions du processeur PDP-II. Ensuite,VMS a évolué vers un système d’exploitation complet et performant écrit en assembleur VAX.
1.1.4.4./ Quatrième génération (1980-1990) Ordinateurs personnels
Avec le développement des circuits intégrés L.S.I. (Large Scale Integration) qui sont des pucesélectroniques (chips) pouvant contenir des milliers voire même des millions de transistors sur un cm2 deSilicium, l’âge des ordinateurs personnels (P.C. : Personal Computer) et des stations de travail(workstations) était venu. En insérant dans des puces de quelques mm2 les composants d’une unitécentrale, cette nouvelle technologie a permis de réduire de manière considérable l’encombrement desmachines. En terme d’architecture, ces calculateurs n’étaient pas très différents des mini-ordinateurs dela classe des « PDP-11 ». Par contre, en terme de prix, leurs productions en grandes séries les ontrendus beaucoup moins chers. Alors que les mini-ordinateurs ont permis aux petits départementsuniversitaires ou aux petites entreprises d’avoir leur propre ordinateur, les P.C. ont permis à un simpleindividu de posséder le sien. Ils ont favorisé de manière considérable le développement del’informatique et la Création d’un grand nombre d’entreprises produisant des logiciels pour P.C.. Lepremier ordinateur personnel fut le « Altair » développé par la société américaine MITS et sur lequel,un jeune homme, appelé Bill Gates, développa un langage de programmation évolué, le BASIC (Be
ginner’s All-purpose Symbolic Instruction Code), qui devint très vite populaire parmi les utilisateurs demicro-ordinateurs (par opposition avec le FORTRAN) et qui fit alors sa fortune.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 19/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 19
Deux grands systèmes d’exploitation ont alors dominé le marché des ordinateurs personnels et desstations de travail
UNIX qui est le système d’exploitation le plus utilisé sur les micro-ordinateurs n’utilisant pas latechnologie INTEL, les stations de travail (ordinateurs personnels plus puissants) et plusparticulièrement celles mettant en oeuvre des processeurs RISC. Il est issu des travaux de KenThompson et D.M. Ritchie qui développèrent, à partir du système MULTICS. pour leurs propresbesoins sur un « PDP-7 », un système d’exploitation mono-utilisateur (single-user system) apte àsupporter la multiprogrammation. Il fut dans un premier temps appelé UNICS (UNiplexed Informationand Coinputing Service) par opposition à MULTICS et par plaisanterie de la part d’un autre chercheurde Bell Labs, Brian Kernighan. (« Eunuchs » voulant dire eunuque en anglais ce qui correspondait bien àl’utilisation «castrée » faite alors de MULTICS pour créer ce nouveau système temps partagé) avant deprendre plus tard son appellation définitive
En 1973, les utilitaires et la plus grande partie du noyau furent réécrits en langage C (langage mis aupoint dans l’intervalle par D.M. Ritchie à partir d’un autre langage, moins complet, qui s’appelait lelangage « B »). Cette version rendit UNIX portable sur d’autres machines que des « PDP ».
Microsofts MS-DOS qui est le système d’exploitation le plus utilisé sur les micro-ordinateurs IBMP.C. et compatibles (toutes les machines utilisant des processeurs de la famille Intel 8088 (et sessuccesseurs les « 80286 », « 80386 », « 80486 »). Lorsque la compagnie IBM s’intéressa audéveloppement de la micro-informatique, elle décida de fabriquer son propre ordinateur personnel endouze mois. En si peu de temps, il n’était pas question qu’elle fasse tout elle-même La plus grandepartie des composants fut achetée à d’autres compagnies, assemblée et testée dans les usines d’IBM.
C’est le processeur « 8088 » qui fut choisi pour composer l’architecture de base des ordinateurs IBMP.C.. Il avait l’avantage d’être peu cher et de permettre ainsi à IBM de vendre ses P.C. à faible prix. Cependant, ces machines ne disposaient pas de disque dur et n’avaient que 64 Ko de mémoire vive. Ceslimites ne permirent pas l’utilisation d’UNIX comme système d’exploitation puisque, développé pourdes mini-ordinateurs, il nécessitait l’uti1isation d’un disque dur et demandait 100 Ko de mémoire viverien que pour le système. Bill Gates suggéra alors à IBM d’utiliser le système d’exploitation CPM-86qui était en cours de conception chez Digital Research. Mais « CP/M-86 » était beaucoup trop en retardsur le calendrier et IBM ne pouvait pas attendre. IBM revint alors tout naturellement demander à BillGates qui avait créé depuis l’entreprise Microsoft pour commercialiser son interpréteur BASIC, s’ilpouvait développer un système d’exploitation équivalent à CP/M-86 pour leur P.C. Bill Gates savaitqu’il n’avait pas suffisamment de temps pour cela mais savait aussi qu’une compagnie voisine, SeattleComputer Products, avait écrit un système d’exploitation du type CP/M, appelé 86-DOS, pour testerles différents types mémoires qu’elle fabriquait et vendait. En avril 1981, il décida d’acheter 86-DOS etd’embaucher son principal auteur, Tîm Paterson, pour le mettre au point et le développer. Ils lerenommèrent alors MS-DOS (Micro Soft - Disk Operating System) et le livrèrent en temps voulu àIBM qui put annoncer dès août 1981 la sortie de son P.C. livré avec une première version de MS-DOS.Depuis, avec plus de 60 millions de licences vendues, il est devenu maintenant le système d’exploitationle plus utilisé au monde.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 20/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 20
Les années 1980 connurent aussi l’avènement des machines Macintosh développées par APPLE.L’architecture de base de cet ordinateur personnel était constituée du microprocesseur 32 bits, le «68000 » de MOTOROLA avec une mémoire vive de 512 Ko, étendue en 1986 à I Mo, extensible
jusqu’à 4 Mo et une unité de disquettes externe de 3,5 pouces. Mais l’innovation majeure du « Mac»était son écran graphique à mémoire de trame associé à des menus déroulant (pull down menu)entièrement commandée par une souris (mouse). L’ensemble, correctement intégré et accompagné dequelques logiciels bien choisis et innovateurs (pour l’époque), mettait ainsi à la portée du plus grandnombre des techniques de programmation et un mode de relation avec la machine jusqu’alors confinésdans quelques laboratoires de recherche.
Au milieu des années 1980, le développement des réseaux informatiques (networks) et plusparticulièrement celui des réseaux de micro-ordinateurs, pris une importance considérable. Avec euxdeux autres types de systèmes d’exploitation ont été développés les systèmes administrateurs de réseaux(Network Operating Systems) et les systèmes d’exploitation distribués (distributed Operating Systems)
Avec un système «administrateur de réseaux », les utilisateurs peuvent ouvrir une session sur lesdifférentes machines connectées et copier des fichiers d’une machine vers une autre. Chaque machine ason propre système d’exploitation locale et ses propres utilisateurs. Ces systèmes d’exploitation sontpeu différents des systèmes d’exploitation monoprocesseur (uniprocessor System). Ils ont simplementbesoin de gérer en plus un contrôleur d’interface réseau et son pilote afin d’assurer à distancel’ouverture d’une session sur un poste sur le réseau et l’accès aux fichiers, mais cela ne change pas lastructure et les fonctions essentielles d’un système d’exploitation.
Un système d’exploitation distribué apparaît aux yeux des utilisateurs comme un système
monoprocesseur traditionnel alors qu’il est vraiment composé de plusieurs processeurs. Avec cessystèmes, un utilisateur peut très bien ne pas savoir sur quelle machine ses programmes seront exécutésni où sont physiquement localisés ses fichiers. Tout cela étant automatiquement et efficacement pris encharge par le système d’exploitation. Dans leur conception, les systèmes d’exploitation distribuésdiffèrent beaucoup des systèmes centralisés. Ils peuvent, par exemple, demander l’exécution desprogrammes sur plusieurs processeurs en même temps, ce qui implique des algorithmes d’allocation deprocesseur beaucoup plus complexes afin d’optimiser la gestion du parallélisme. Les délais descommunications sur un réseau font qu’en plus ces algorithmes doivent souvent tourner avec desdonnées incomplètes, souvent incorrectes ou pas mises à jour. Cette situation est très différente de celledes systèmes à processeur unique dont le système d’exploitation dispose toujours de la totalité desinformations sur l’état du système.
1.1.4.5./ Génération multimédia (1990-à nos jours)
Depuis le début des années 1990, la puissance des micro-ordinateurs et de leurs périphériques n’a jamais cessé de croître pendant que leur prix, par contre, devenait de plus en plus bas. La puissance et laqualité des cartes d’adaptation entre l’ordinateur et l’écran (notamment la carte VGA) ont offert degrandes possibilités telles que le travail sur écran en mode graphique et le remplacement du texte pardes pictogrammes, appelés icônes (icon).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 21/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 21
Ces techniques ont rendu le travail sur ordinateurs beaucoup plus simple et beaucoup plus agréable. Cephénomène a permis l’ouverture du marché à la Bureautique et au grand public. Cette ouverture ne putse faire que grâce au développement de systèmes d’exploitation interactifs (interactive systems) et
conviviaux (user-friendly systems) permettant la mise en oeuvre et l’utilisation simple d’une machine.La plupart de ces systèmes ont été développés pour des utilisateurs novices, ne connaissant rien àl’informatique en général, et n’ayant, de plus, aucune intention d’apprendre.
Les innovations principales concernèrent alors l’interface de communication entre l’utilisateur et lamachine, communément appelé interface homme-machine (Human-Computer Interface) et lestechniques multimédia qui permettent la gestion d’images, de vidéo et de sons.
Dès 1982, un groupe d’informaticiens du centre de recherche de la société XEROX à Palo Alto enCalifornie, avait mis au point un ordinateur révolutionnaire baptisé STAR. Celui-ci était doté d’unemémoire peu commune pour l’époque (plusieurs centaines de Ko), d’un écran à haute résolutiongraphique et d’un nouveau type de périphérique curieusement appelé souris (mouse). Cette machineintégrait le concept de menus déroulants et celui de multifenêtrage (multiwindowing ). Tout ce quisuscite l’engouement des utilisateurs d’aujourd’hui et quià contribué au développement et à lavulgarisation de l’informatique se trouvait déjà dans la machine « STAR » Cependant, cette machine neconnut aucun succès commercial, à cause de la politique de «XEROX» mais valut un prestigeconsidérable à l’équipe « PARC » (Palo Alto Research Center). C’est ce concept qui fut repris ensuitepar les gens de chez APPLE lors du développement du Macintosh.
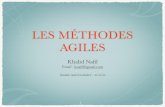
Le concept d’interaction homme-machine développé alors est la métaphore du bureau (desktop). Lafigure 1.4 est un exemple d’interface homme-machine graphique développée selon cette métaphore. Sur
ces machines, l’interface s’efforce d’être la reproduction miniature du monde du bureau. Par exemple,dans cet environnement, un dossier électronique (répertoire ou fichier) a la même présentation externequ’un dossier réel il comporte une chemise et un nom.
Comme le dossier du monde réel, il peut être ouvert, reproduit, déplacé sur le bureau, rangé dans unautre dossier, jeté à la poubelle, etc. Toutes ces actions s’effectuent avec la souris (ou un autre dispositif de pointage) qui sert de substitut électronique de la main. L’utilisation d’un ordinateur est devenue alorsextrêmement simple et ne nécessita plus de qualification et de formation particulières.
Ce concept fit la gloire d’APPLE qui imposa pendant très longtemps les systèmes « Macintosh »comme un standard en Bureautique. Néanmoins, la politique d’APPLE qui consistait à développer desproduits complètement fermés destinés à des non-informaticiens, l’a conduit, depuis le milieu des années1990, à une rude concurrence avec les machines P.C. qui elles sont totalement ouvertes et offrent ainside très grandes possibilités d’évolution.
Pour faire accepter les P.C. aussi bien par les particuliers que par les entreprises, il fallait rendre cesmachines beaucoup plus simples d’utilisation qu’elles ne l’étaient à travers le système MS-DOS. C’est letravail que Microsoft a entrepris dès 1985 en développant une première version du système WINDOWSqui connut alors qu’un succès d’estime, et qui fut suivie d’une deuxième version, fin 1987, qui suscitasuffisamment d’intérêt pour décider plusieurs éditeurs d’applications, et notamment de conception oude publication assistées par ordinateur, à développer leurs applications sous WINDOWS. Ce n’est que
la version 3 de WINDOWS, sortie fin 1991, qui suscita l’enthousiasme. En fait WINDOWS 3.1/3.11,n’est pas un système d’exploitation (même Si Microsoft l’appelle ainsi...).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 22/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 22
Il s’agit simplement d’une interface utilisateur de la version 6 de MS-DOS (MS-DOS 6.22). Il offre unmoyen confortable d’accéder â la machine et permet un fonctionnement multitâche (chaque tâchepouvant s’exécuter dans une fenêtre différente) ainsi que l’échange de données entre applications. Il secharge donc uniquement de la partie gestion des entrées-sorties, laissant la gestion de toutes les autres
tâches du système d’exploitation.
Le système WINDOWS 95, réalise le mariage attendu du système d’exploitation MS-DOS et del’interface utilisateur. Ainsi, il n’est plus besoin de lancer d’abord DOS et ensuite WINDOWS ouencore d’adapter les deux éléments l’un à l’autre ils ne forment plus qu’un seul ensemble. Il constitue enfait un clone du système Macintosh sur PC. en offrant toutes les possibilités et tous les conceptsdéveloppés par APPLE, et propose en plus d’autres services tels que l’accès aux réseaux et la gestionmultitâche des programmes.
Figure 1.4 . Exemple d’interface graphique du type « métaphore du bureau » (LINUX - KDE)
Au début des année 90, un jeune étudiant finlandais LINUS B. TORVALDS commença à écrire lesfondements d’un système UNIX pour ces études en informatique. Il mit a disposition ces codes sourcessur Internet et initia le développement logiciel en coopération par l’intermédiaire du réseaux mondial.Ce modèle de développement appeler Open Source évolua rapidement, donna naissance à un système
UNIX compatible POSIX basé avec des extensions System V et Berkeley nommé LINUX.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 23/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 23
Ce système d’exploitation fonctionnant sous un nombre considérable d’architectures matérielles, pris savéritable grandeur tout d’abord sur Internet pour la création de serveur WEB. Plus tard, d’autresprojets Open Source, on permit de démarqué LINUX des systèmes UNIX traditionnels par desinterfaces graphiques particulièrement soignées (CF figure 1.4) à l’effigie du bureaux de travail virtuels
WINDOWS et MAC.
Sa gratuité et sa robustesse le place en sérieux concurrent des systèmes d’exploitation commerciauxaussi bien pour les processus industriels que pour la bureautique personnelle grâce à une multituded’applications disponibles gratuitement sur le WEB.
Le multimédia est né dans les années 1980, avec la vidéo interactive qui consistait alors à utiliser unvidéodisque entièrement analogique pour stocker des sons, des images fixes et des images vidéo. Il neconstitue pas un domaine particulier de l’informatique mais n’est que le prolongement logique etl’aboutissement de l’évolution technologique, tant matérielle que logicielle. C’est aussi le mariage detechniques issues de l’audiovisuel, de l’informatique et des télécommunications. Certaines avancéestechnologiques ont contribué à son développement :
· Le développement des technologies de stockage optique pour des volumes importants dedonnées, telles que les disques otiques compacts (CD-ROM).
· Le développement des méthodes de compression et de décompression de textes. d’images fixesou animées.
· L’accroissement continu des performances, en terme de capacité de traitement desmicroprocesseurs.
· Le développement des technologies de transfert de données numériques volumineuses.
L’objectif du multimédia est à la fois d’acquérir, de gérer et d’utiliser non seulement des valeursnumériques et du texte, mais aussi des graphiques, des images, du son (données audio) et de l’imageanimée (vidéo). Il permet de travailler ou d’apprendre mieux et plus vite en intégrant, par exemple, descommentaires sonores ou des séquences vidéo dans des logiciels de formation. dans des systèmes d’aideà la vente, à la réparation et à l’entretien d’appareillages divers, dans des présentations assistées parordinateur... Il a ouvert également la voie à la messagerie électronique multimédia, ainsi qu’à lavidéoconférence.
Son véritable lancement s’est fait avec l’apparition du logiciel Hypercard sur Macintosh, grâce auquelles utilisateurs pouvaient stocker des données, telles que du texte, des images et du son, dans des pilesde cartes et naviguer au sein de cet ensemble de piles par association d’idées à l’aide de techniqueshypertextes utilisant des boutons et des icônes. Les principales caractéristiques des données multimédiaconcernent d’une part leur volume, nécessitant des capacités de stockage qui s’expriment en mégaoctets(megabytes) voire même en gigaoctets (gigabytes) et des méthodes de compression de données, etd’autre part le fait quelles soient, dans l’état actuel des technologies, à la fois numériques etanalogiques, bien que s’orientant à terme vers le tout-numérique.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 24/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 24
Les applications multimédia se distinguent en deux catégories les applications professionnelles quiconcernent la formation, la présentation assistée par ordinateur, la Bureautique, la gestion de documentstechniques et la vidéoconférence, et les applications domestiques grand public qui concernent les jeux,le tourisme et les catalogues. Elles se répartissaient en 1997 de la manière suivante :
· Formation : 25%
· Points de vente et de renseignements (bornes) 14%
· Loisirs :12%
· Bureautique: 12%
· Publicité, présentation :11%
· Communications: 11%
· Autres : 15%
En dehors des coûts des matériels et des logiciels, on peut noter, pour les applications multimédia, lecoût, non négligeable, d’acquisition des informations à partir de sources diverses: micros ou interfacesMIDI pour le son, scanners pour la numérisation de schémas, d’images ou de textes, systèmes dereconnaissance optique de caractères à partir de textes scannés, caméras vidéo pour les images... Ainsi,pour donner un ordre de grandeur, il faut compter de 1 à 10 MF pour le développement d’uneapplication et de 50 à 500 KF pour la création d’une borne interactive.
1.1.5. / LES DIVERS TYPES DE SYSTEMES D’EXPLOITATION MULTITACHE
La nature de la machine virtuelle peut être très diverse et cela donne naissance à divers types desystèmes d’exploitation multitâche (multitasking Operating Systems). Nous en avons répertorié deuxgrandes classes : les systèmes multitâche monoprocesseur et les systèmes multitâche multiprocesseur.
1.1.5.1./ Les systèmes multitâche monoprocesseur
Ces systèmes ont pour rôle de permettre le partage du processeur par plusieurs programmes qui, vus del’utilisateur, se déroulent en même temps. Cette notion de simultanéité apparente d’exécution. est baséesur une utilisation optimisée du processeur. L’allocation du processeur aux programmes est effectuéeselon leurs priorités et leurs besoins au moyen de règles d’ordonnancement plus ou moins sophistiquées.Ce concept de multiprogrammation (multiprogramming) permet de faire cohabiter des programmes quipeuvent être totalement indépendants ou qui peuvent au contraire coopérer pour réaliser un objectif commun. Dans ce contexte, une application peut être décomposée en tâches (ou processus) créées,activées et détruites donnant une vue dynamique d’un programme. Cette organisation est beaucoup plussouple que celle d’une application mise en oeuvre par un seul programme monolithique, mais pose uncertain nombre de problèmes comme, par exemple :

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 25/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 25
· Comment partager l’unité de traitement entre plusieurs programmes et sauvegarder le contexte(l’état d’exécution) de chaque programme ?
· Comment gérer la mémoire centrale en permettant le chargement d’un nombre élevé deprogrammes dans un espace mémoire limité ?
· Comment gérer les entrées-sorties des différents programmes, en assurant un trafic ordonné dedonnées entre la mémoire et les unités périphériques tout en empêchant le système de mélanger ouconfondre les informations appartenant à ces différents programmes ?
· Comment protéger les programmes et les données stockés dans la mémoire centrale et surdisques, des erreurs éventuelles (des programmes, du système et de la machine) qui pourraientavoir des conséquences graves sur le déroulement des opérations ?
Suivant le domaine d’application retenu, divers systèmes d’exploitation multitâche ont été développés àpartir de ce concept de base. Ces systèmes procèdent tous selon des principes différents
1.1.5.2./ Les systèmes multi-utilisateur
La caractéristique principale des systèmes multi-utilisateur (multi-user systems) est qu’ils donnentl’impression à chaque utilisateur d’être le seul à utiliser la machine. Un système d’exploitation Multi-Utilisateur doit, en conséquence, gérer l’ensemble des ressources (processeurs, mémoires, disques...) enassurant une certaine protection aux utilisateurs, de manière a éviter la destruction non intentionnelle ou
malveillante des données d’un utilisateur par un autre. De plus cette gestion des ressources doit êtreéquitable afin d’assurer une bonne cohabitation des tâches des utilisateurs sur la machine.
Pour ce qui concerne le processeur, ce partage équitable est souvent résolu en attribuant à chaqueutilisateur une tranche de temps de façon périodique ce qui correspond à la notion de systèmes à tempspartagé (time-sharing systems). Lorsque le temps alloué à un utilisateur s’est écoulé, le systèmesauvegarde le contexte de cet utilisateur de façon à pouvoir le rétablir au cycle suivant (cf. figure 1.5).Avec un tel système une partie du temps processeur est évidemment perdue lors des changements decontextes. Néanmoins, le rendement global reste satisfaisant si les utilisateurs ne sont pas tropnombreux.
Les délais d’exécution des petits travaux sont considérablement raccourcis, sans pénalisation excessivedes travaux importants. En effet, si l’ordinateur est partagé entre 10 utilisateurs, par tranches de tempsde 25 ms, avec un temps de traitement égal à 1 minute pour 9 des utilisateurs et égal à I heure pour ledixième utilisateur, les 9 programmes rapides seront terminés au bout de 10 mn alors que le programmelent le sera au bout de 1 heure et 10 mn.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 26/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 26
Figure 1.5 Allocation du temps processeur dans un système en temps partagé
Ce type d’exploitation ne convient évidemment pas dans le cas où les travaux soumis à l’ordinateur ontune durée très importante, car ils sont tous uniformément retardés, alors que certains d’entre euxauraient pu être terminés plus rapidement, par exemple avec un traitement par lots. Ainsi, l’exécutionsimultanée de 10 programmes requérant chacun 1 heure de traitement prend 10 heures avec un systèmeen temps partagé, alors que le premier programme est terminé au bout d’une heure dans le cas d’untraitement par lots.
1.1.5.3./ Les systèmes temps-réel
La caractéristique principale des systèmes temps-réel est de permettre le traitement en temps réeld’événements (event), c’est-à-dire de garantir une réponse dans un temps donné. Cette contrainteconcernant le temps d’exécution amène à classer les travaux à effectuer selon divers niveaux de priorité,les plus prioritaires étant ceux dont les contraintes de temps de réponse sont les plus fortes. Dans un telcontexte, chaque travail à effectuer correspond à une tâche avec une priorité donnée dont ledéroulement peut être suspendu à tout moment pour permettre l’exécution d’une tâche plus prioritaire.Dans cet environnement, l’exécution des différentes tâches est assurée sous le contrôle d’un moniteurqui commande le déroulement en fonction des priorités, des événements extérieurs et des contraintes detemps. Les systèmes d’exploitation temps-réel sont, en général, appelés exécutifs temps-réel.
La figure 1.6 illustre le fonctionnement d’un système en mode multitâche temps-réel. On considère danscet exemple deux tâches A et B de priorités respectives 2 et 1 devant être exécutées de manièrecyclique, sous le contrôle d’une horloge temps-réel qui provoque une interruption au début de chaquecycle. Par ailleurs, certaines tâches asynchrones peuvent être exécutées à tout instant à la suite d’uneinterruption provoquée par un événement.
Au temps t1 la première interruption d’horloge provoque l’activation de la tâche A qui est la plusprioritaire à cet instant. La tâche A s’exécute jusqu’à l’instant t2 où elle se bloquedans l’attente de la find’une opération d’entrée-sortie. L’exécutif reprend alors le contrôle et passe la main à la tâche B qui estla seule en attente.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 27/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 27
Au temps t3, une interruption d’alarme signale au processeur une demande d’exécution d’une tâche degestion d’alarme de priorité 3. Comme cette tâche est plus prioritaire que la tâche B, l’exécutif suspendle traitement de la tâche B et passe la main à la tâche de gestion d’alarme qui s’exécute jusqu’à sa fin
survenant à l’instant t4. La tâche B reprend alors son exécution qui est de nouveau suspendue à l’instantt5 par une interruption d’entrée-sortie dont l’apparition signale que les informations attendues par latâche A sont arrivées. L’exécutif passe alors le contrôle à la tâche A qui termine son exécution àl’instant t6, pour être ensuite suivie par la fin du traitement de la tâche B. Le cycle suivant démarre à laprochaine interruption de l’horloge temps-réel, à l’instant t8.
Figure 1.6: Exemple d’exécution multitâche temps-réel
Les systèmes d’exploitation temps-réel sont destinés à fonctionner dans un contexte industriel où le oules calculateurs sont connectés à un procédé physique. Les domaines d’application des systèmes temps-réel sont extrêmement divers et étendus
On trouve ainsi dans l’industrie manufacturière, pétrolière ou chimique, des systèmes de commande deprocédés industriels où le calculateur est utilisé pour automatiser, c’est-à-dire réguler une installation ouordonnancer une production. L’intégration des différents niveaux d’automatisation, depuis lacommande locale jusqu’à la planification de la production, est l’une des composantes de la productique.
Les calculateurs chargés de la commande locale sont en interaction constante avec le procédé industrielau moyen de capteurs et d’actionneurs.
La diversité des procédés fait que les temps de réponse peuvent varier de quelques millisecondes(commande de robots en mouvement), à quelques minutes (industrie céramique et commande de fours),voire à quelques heures (procédés biologiques).
On rencontre également des systèmes de télécommunication où la tâche du calculateur consiste àcomposer, transmettre et traiter des messages. La reconstitution des messages transmis à haute vitesse(en général sur des lignes en série ou par faisceaux hertziens), découpés en paquets, codés, encryptés,
compactés et modulés, s’effectue en temps-réel avec des constantes de temps très courtes (en généralinférieures à la milliseconde).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 28/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 28
Les applications militaires, où l’on retrouve de nombreux problèmes centrés autour des communicationset du pilotage à distance (avec un degré de complexité accru par des contraintes très sévères de sécurité
amenant à utiliser des redondances logicielles et matérielles), sont un autre domaine d’application dessystèmes temps-réel.
Enfin, les systèmes interactifs de simulation dont le but est de fournir à l’utilisateur un moyen deremplacer un système physique par un système informatique ayant le même comportement, travaillenten temps-réel et nécessitent, en général, un système graphique de haute performance.
Remarque:
La différence principale entre les systèmes multi-utilisateur et les systèmes temps-réel réside dans le faitque les tâches sont souvent indépendantes dans les premiers, puisque chacune correspond à unutilisateur différent, alors que dans les seconds les tâches coopèrent toutes d’une manière ou d’uneautre à la commande d’un procédé. Elles ont donc besoin dans ce cas de se synchroniser et de setransmettre des messages afin d’atteindre l’objectif de commande souhaité. D’autre part, dans lessystèmes temps-réel il ne faut surtout pas chercher à être équitable dans le partage des ressources. Aucontraire, les tâches les plus urgentes doivent accaparer totalement le processeur en suspendant ledéroulement des tâches les moins urgentes pendant tout le temps nécessaire au traitement des tâchesprioritaires. Les problèmes liés à la concurrence entre les tâches et traités dans le chapitre 4 prennentdonc toute leur importance lors du traitement d’applications devant se dérouler en temps-réel et traitéespour cela par des systèmes d’exploitation temps-réel.
1.1.5.4./ Les systèmes transactionnels
Les systèmes d’exploitation transactionnels sont basés sur l’utilisation d’un programme commun parplusieurs utilisateurs en même temps. Les systèmes bancaires et de réservation de places sur lignesaériennes ou ferroviaires en sont des applications. Ses systèmes sont caractérisés par des bases dedonnées mises à jour très fréquemment (plusieurs fois par seconde). Dans le premier cas, la base dedonnées contient le détail des comptes bancaires mis à jour par chaque opération de débit ou de crédit etdans le second cas, la base de données enregistre toutes les réservations de places d’avions.
La principale contrainte des systèmes transactionnels résulte de la nécessité de maintenir les bases dedonnées à jour car il est clair que le système est inefficace si les transactions portent sur des donnéeserronées. Les difficultés s’accroissent lorsqu’il faut pouvoir prendre en compte simultanément deuxtransactions affectant la même donnée (par exemple, deux agences de voyages désirant réserver aumême moment la même place d’avion). Dans de tels systèmes, le système d’exploitation du calculateurdoit prendre en charge ces problèmes afin d’assurer en permanence la cohérence, l’intégrité et lasécurité de la base de données partagée.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 29/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 29
1.1.5.5./ Les systèmes multitraitement
Avec les systèmes monoprocesseur, le parallélisme dans l’exécution est obtenu par le partage du
processeur entre plusieurs tâches. L’évolution actuelle de la microélectronique va plutôt dans le sens del’abaissement du coût des circuits que dans le sens d’un accroissement de leur vitesse defonctionnement. On est donc amené aujourd’hui à concevoir des ensembles informatiques quicomportent plusieurs processeurs. Cette évolution est évidemment très intéressante pour lesapplications d’informatique industrielle, car elle va dans le sens d’une amélioration de la modularité etde la fiabilité des systèmes.
Avec les systèmes multitraitement (concurrent processing systems), la simultanéité réelle d’exécution deplusieurs programmes est possible du fait de l’existence de plusieurs processeurs. Les systèmesd’exploitation ont alors pour objet d’ordonnancer le traitement sur plusieurs processeurs qui peuventêtre semblables ou non
Le fonctionnement s’effectue selon le principe du partage de charge (Load sharin g), c’est-à-dire qu’unprogramme, au cours de son déroulement peut être amené à être exécuté successivement sur desprocesseurs différents à chaque fois que son exécution est interrompue et reprise. L’attribution desprocesseurs aux programmes s’effectue de façon à équilibrer au mieux, à chaque instant, la charge desprocesseurs. Les caractéristiques des processeurs étant connues, des algorithmes efficacesd’ordonnancement ont été définis. Cependant, un problème se pose au niveau des processeursd’entrées-sorties puisque les temps de transfert et de réponse sont quelques fois difficiles à prévoir. Onfait alors à nouveau appel aux mécanismes de multiprogrammation.
Dans ce type de système, que les processeurs aient des caractéristiques identiques ou qu’ils soient préaffectés et dévolus à des tâches spécialisées (processeurs de traitement de signaux. processeursd’entrées-sorties...), le système d’exploitation est situé sur un processeur central qui coordonnel’activité des autres processeurs.
Par contre, il existe des systèmes où les processeurs ont, non seulement des propriétés différentes, maisen plus possèdent une certaine autonomie et un certain pouvoir de décision. Dans ce cas, sur chaqueprocesseur se trouve un système d’exploitation et suffisamment de mémoire pour qu’il puisse constituerun calculateur à lui seul. Les liaisons entre calculateurs sont en général de nature série ce qui entraîne ladéfinition de protocoles de communication complexes. On parle alors de systèmes informatiquesdistribués (distribured systems) dont Les réseaux locaux en sont un exemple type.
Il faut alors adjoindre aux fonctions habituelles du système d’exploitation qui est obligatoirement dutype multitâche (afin de gérer la simultanéité de la gestion des communications et du déroulement desprogrammes utilisateurs) des procédures qui permettent d’assurer la cohérence et l’intégrité desdonnées partagées. En effet, avec ces systèmes la simultanéité des événements peut être totale car leparallélisme et vrai et non pas simulé.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 30/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 30
1.1.6. / STRUCTURE GENERALE D’UN SYSTEME D’EXPLOITATION
Pour que l’utilisateur ait une vision simplifiée de la machine virtuelle et puisse utiliser les fonctions lesmieux adaptées à son application, les systèmes d’exploitation comportent un certain nombre de modulesdistincts. Chaque module prend en compte une des fonctions ou un sous-ensemble d’une fonction dusystème. Ces modules sont bien délimités et communiquent avec les autres selon une procédure préciseà travers une interface. Les modules logiciels constituant un système d’exploitation sont ainsi organisésen niveaux ou couches selon la structure en pelures d'oignon présentée en figure 1.7.
Toutes les couches ne sont pas obligatoires, mais lorsqu’elles n’existent pas ou qu’elles ne conviennentpas à l’application, c’est à l’utilisateur de les créer. Avec cette structure, chaque niveau communiqueavec le niveau supérieur et le niveau inférieur à travers des interfaces bien définies. Chaque niveau peutalors être considéré comme une machine virtuelle qui met en oeuvre les logiciels et les matérielscorrespondant aux niveaux qui lui sont inférieurs. Le niveau le plus bas est celui du processeur qui est
accessible par l’intermédiaire d’instructions en langage machine.
Figure 1.7: Structure en couches d’un système d’exploitation
Mis à part les systèmes d’exploitation mono-utilisateur dérivés des systèmes basés sur la soumission destravaux (batch) dont sont dotés les micro-ordinateurs personnels, les systèmes d’exploitation sontconstruits à partir d’un noyau (nucleus, kernel) assurant des fonctions de base dont le nombre varie
selon le type de système, de sa politique d’allocation du ou des processeurs, de sa politique de gestionde mémoire (virtuelle ou non, paginée ou segmentée..)... Autour de ce noyau gravitent des coucheslogiciels comportant: les fonctions de gestion des entrées-sorties, les fonctions de gestion de fichiers etles fonctions d’interaction homme-machine.
1.1.6.1./ Le noyau
Le noyau d’un système d’exploitation, appelé également moniteur, comprend généralement deuxfonctions principales : la gestion de tâches et la gestion de mémoire (les systèmes les plus simples(systèmes monotâche), ne disposant pas en fait de gestionnaire de tâches).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 31/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 31
1.1.6.2./ Le gestionnaire de tâches
Le rôle du gestionnaire de tâches (task manager) d’un système d’exploitation, appelé également
distributeur de tâches (dispatcher, job-controller ou encore scheduler) est d’attribuer le contrôle duprocesseur aux différentes tâches utilisateur en compétition pour leur exécution. Il comprend au moinsles trois fonctions suivantes
. Ordonnancement des tâches à exécuter selon des règles plus ou moins élaborées mises en oeuvrepar l’allocateur du processeur.
. Manipulation des tâches par un ensemble de procédures de bas niveau (inaccessibles auxutilisateurs),
. Prise en compte et le traitement des interruptions (l’horloge temps-réel est une interruption dehaut niveau, gérée à ce niveau).
Ces fonctions permettent le lancement, la synchronisation, la destruction de tâches. Il est égalementpossible la plupart du temps de faire transiter des informations d’une tâche à une autre (échanges demessages). Ces dernières fonctions, dites de communication, sont en fait à la limite entre le gestionnairede tâches et le gestionnaire de mémoire. Le gestionnaire de tâches est très souvent sollicité lorsqu’uneapplication se déroule. Il est écrit de façon très optimisée (en général en langage assembleur) et très liéau matériel.
1.1.6.3./ Le gestionnaire de mémoire
Le gestionnaire de mémoire (memory manager) est chargé d’allouer aux diverses tâches des zones de lamémoire qui est considérée comme une ressource partageable dans le temps. Il veille à ce qu’aucunetâche n’accède illégalement à l’espace mémoire alloué à une autre. Il prend toute son importance lorsquele concept de mémoire virtuelle est mis en oeuvre au moyen d'opérations de pagination de segmentationde la mémoire. Ce gestionnaire est encore plus souvent sollicité que le gestionnaire de tâches, c’estpourquoi la tendance actuelle consiste à intégrer le plus grand nombre de ses fonctions dans des circuitsspécialisés appelés M.M.U. (Memory Management Unit). C’est le cas des microprocesseurs 32 bits MC68020 de MOTOROLA, du WE32100 de AAT, du NS32032 de National Semiconductors et du 80386d’INTEL qui intègre les opérations de segmentation et de pagination.
1.1.6.4./ La gestion des entrées-sorties
Les diverses techniques de gestion des entrées-sorties ont pour objet de faire en sorte que chaqueutilisateur voit les unités périphériques de manière standard, d’où le concept de terminal virtuel. Enraison de la diversité des périphériques et leurs différences de caractéristiques, ce niveau souvent traitécas par cas dans les applications de type temps-réel.
Les gestionnaires d’entrées-sorties (input-output manager) permettent de traiter les périphériquescomme des unités logiques dont les caractéristiques physiques sont transparentes à l’utilisateur. Cettetransparence se fait au prix d’une baisse de performance puisqu’une véritable optimisation n’est pas
possible. Les unités logiques sont décrites de façon unifiée à l’aide d’un descripteur d’unité, leurspécificité étant donnée par des paramètres.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 32/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 32
L’utilisation de ces unités s’effectue alors par un gestionnaire d’unités (handler). Les utilisateurs secontentent alors d’effectuer des demandes qui sont placées en file d’attente. Pour rendre plus efficace letravail du gestionnaire d’unités d’entrées-sorties, on lui adjoint des mémoires tampon (buffer) pour la
mémorisation des demandes.
Les entrées-sorties les plus sollicitées peuvent être gérées par des gestionnaires spécialisés, appelésspoolers, capables de traiter en parallèle et de manière cohérente des demandes provenant de plusieursutilisateurs.
1.1.6.5./ La gestion des fichiers
Les différents objets manipulés par le système sont organisés sous forme de fichiers (file) quirassemblent sous une même dénomination une collection d’objets apparentés entre eux. Ces fichierssont des blocs d’informations permettant le stockage :
. Du système d’exploitation lui-même,
. Des programmes et des données des utilisateurs,
. Des programmes utilitaires (bibliothèques), des éditeurs, des compilateurs...
Certains blocs peuvent être résidents (c’est-à-dire constamment présents en mémoire centrale), c’estnotamment le cas des parties du système d’exploitation utilisées le plus fréquemment (le noyau enparticulier), d’autres sont situées en mémoire de masse.
La structure des fichiers étant définie (dimension des blocs), les fonctions de gestion des fichiers ontpour objet d’en gérer l’accès. Elles utilisent pour cela un répertoire ou catalogue des fichiers pouvantêtre organisés hiérarchiquement. Ces répertoires permettent de faire une correspondance entre l’adresselogique d’un fichier (son nom) et son adresse physique (le numéro de piste et de secteur correspondantau début du fichier sur un disque, par exemple).
Les fichiers peuvent être à accès séquentiel (on accédera toujours à une information en lisantle fichier àpartir du début) ou aléatoire (on peut lire et modifier une partie du fichier en y accédant directement) etde taille fixe ou variable. Certains fichiers peuvent être partagés par plusieurs utilisateurs et legestionnaire doit alors vérifier les droits d’accès avant de permettre leur utilisation.
Les fonctions du gestionnaire de fichiers directement accessibles aux utilisateurs sont celles d’ouverturede fichier (pour y lire ou y écrire) et celle de fermeture (remise à jour des répertoires aprèsmodification).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 33/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 33
1.1.6.6./ Le dialogue homme-machine
Ce dernier niveau d’un système d’exploitation permet à l’utilisateur le dialogue effectif avec le système
d’exploitation. Il constitue l’interface avec l’utilisateur (human-computer interface). C’est grâce à luique l’utilisateur peut créer son application, c’est-à-dire bâtir ses fichiers sources sous le contrôle d’unéditeur, appeler un compilateur ou un éditeur de liens, configurer le système vis-à-vis des unitésd’entrées-sorties utilisées, lancer l’application et suivre son exécution grâce à des utilitaires d’aide audéveloppement.
Pour solliciter toutes ces fonctions, il dispose d’un éditeur de lignes qui lui permet d’introduire desdirectives et de les modifier en cas d’erreurs. Ces directives sont écrites dans un langage de commande(command language) conçu de telle sorte que chaque instruction soit immédiatement traduite par lesystème à l’aide d’un interpréteur de commande (command interpreter).
L’interpréteur est généralement conçu pour que l’utilisateur puisse définir de nouvelles commandesappelées procédures cataloguées en regroupant sous le même nom une série de commandes simples.Enfin, les opérateurs du système disposent de commandes privilégiées qu’ils sont les seuls à pouvoirutiliser et qui leur permettent de régler le système en fonction des besoins des utilisateurs (affecter despriorités, des quotas de temps, des quotas de mémoire...).
Le système d’exploitation fournit également un certain nombre de programmes utilitaires dont lenombre et la nature varient beaucoup d’une installation à une autre et qui servent par exemple à calculerdes fonctions mathématiques d’intérêt général, à effectuer des opérations de tri, à organiser une partitionsur un disque, etc.
1.1.7. / CONCLUSION
Les fonctions qui doivent être assurées par le système d’exploitation sont très diverses et trèscomplexes. Dans ces conditions, il est souhaitable d’assurer le maximum d’indépendance entre lesdivers éléments logiciels et matériels du système afin d’éviter qu’une modification, même mineure, d’undes éléments n’entraîne une série de modifications qui affectent tout le système. Afin d’obtenir lemaximum d’indépendance vis-à-vis du matériel et un partage aussi grand que possible des ressourcesmatérielles et logicielles, on est amené à regrouper les fonctions en familles qui correspondent chacune àun niveau d’abstraction donné.
Dans les systèmes d’exploitation des micro calculateurs les divers niveaux que nous venons de précisersont plus ou moins développés selon les domaines d’applications visés. La montée en puissance desmicro calculateurs est telle que les systèmes d’exploitation du type multitâche ont tendance à segénéraliser. En conséquence, tous les niveaux décrits précédemment existent. Nous allons à présentdécrire ces niveaux en détail en examinant les concepts auxquels ils font appel.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 34/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 34
1.2. / LA GESTION DES TACHES
1.2.1. / INTRODUCTION
Le rôle du noyau d’un système d’exploitation consiste à gérer le processeur et la mémoire. Cet élémentprend une grande importance dans le cas des systèmes d’exploitation multitâches qu’ils soient dédiés àla commande de procédés industriels ou multi-utilisateurs. Le premier cas implique l’existence deplusieurs tâches coopérant pour la réalisation d’un but commun, le second correspond à des tâchesfonctionnellement indépendantes mais en compétition pour l’utilisation des ressouçces communes dusystème informatique.
Dans les deux cas, il s’agit de définir des techniques permettant une utilisation optimisée du processeuret de l’espace mémoire. Ces techniques procèdent par découpage de temps et/ou de l’espace mémoire.Ce sont ces techniques que nous allons expliciter dans ce chapitre et dans les deux chapitres suivants.
Le rôle du gestionnaire de tâches d’un système d’exploitation est principalement de gérer l’allocation duprocesseur en fonction des contraintes d’exécution et d’ordonnancement des tâches selon des règlesplus ou moins évoluées et caractéristiques du système. Le problème principal du gestionnaire de tâchesconsiste alors à déterminer à chaque instant quelle tâche doit être allouée au processeur, en fonction descritères d’optimisation choisis par le concepteur ou par l’exploitant. La gestion de tâches n’intervientqu’au sein des systèmes multitâches, à savoir lorsque différentes tâches se partagent un seul processeurou un nombre limité de processeurs (cas des systèmes multiprocesseur).
1.2.2. / NOTION DE TACHE
Une tâche (task), appelée également processus (process), correspond à une suite d’actions obtenues parl’exécution d’une séquence d’instructions, c’est-à-dire d’un programme. Une tâche a une existenceéphémère elle est créée, elle exécute un programme ou plusieurs, puis elle est tuée par le systèmed’exploitation. Elle représente donc une entité dynamique créée à un instant donné et qui disparaît engénéral au bout d’un temps fini. La notion de tâche est donc dynamique, par opposition à la notion deprogramme, qui est statique.
Le traitement effectué par un ordinateur est généralement du type multitâche, avec exécution quasi-parallèle ou parallèle d’un certain nombre de tâches appartenant au système d’exploitation ou àl’utilisateur. Aucune tâche n’est totalement isolée des autres. Toute tâche peut communiquer avec les
autres (par exemple, pour échanger des informations), elle peut parfois les créer, les détruire, les arrêterprovisoirement et les faire repartir.
Une tâche est donc plus qu’un simple programme elle doit contenir toutes les informations nécessairesau système d’exploitation pour permettre la gestion de l’ensemble des tâches. L’activation d’une tâcheest effectuée par l’intermédiaire d’un agent appelé processeur qui exécute le programme associé. Cetagent est mis en oeuvre exclusivement à partir de matériel ou sous forme de combinaison de matériel etlogiciel.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 35/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 35
Remarque : La simultanéité d’exécution est considérée comme l’activation de plusieurs tâches, c’est-à-dire l’exécution de plusieurs programmes au même moment. S’il y a autant de processeurs que detâches, le problème est facilement résolu en attribuant une tâche à chaque processeur. Mais
habituellement, il y a moins de processeurs que de tâches, si bien que la simultanéité sera obtenue enbasculant les processeurs d’une tâche à l’autre. Si le basculement est réalisé à des intervalles de tempssuffisamment courts, le système donne l’illusion de la simultanéité. Ainsi, la simultanéité apparented’exécution est, en fait, réalisée par l’exécution « enchevêtrée » de plusieurs tâches sur un seulprocesseur.
1.2.3. / STRUCTURER UNE APPLICATION EN TACHES
La première étape de la conception d’une application, consiste à spécifier cette application. Pour menerà bien cette étape, une approche descendante, dans laquelle on commence à spécifier les fonctions
principales et leurs interactions, semble la mieux appropriée. Ces fonctions peuvent être considéréescomme des tâches que doit accomplir le système de commande. Le détail des opérations, c’est-à-dire lecorps des tâches, peut être spécifié à part et il ne doit pas remettre en cause les interactions prihcipalespour que la procédure soit valable.
Prenons comme exemple la commande d’un système de fabrication de feuilles de papier :
Il s’agit de concevoir une application permettant d’obtenir des feuilles de papier d’épaisseur régulière,en régulant la température d’un bac de pâte à papier et la pression des rouleaux de calandrage à traverslesquels la pâte va s’écouler. De plus l’opérateur doit pouvoir être en relation avec le système s’il veutmodifier les consignes de température et de pression ou encore demander l’affichage de l’état duprocédé. Dans cet exemple, on peut identifier un certain nombre de fonctions principales distinctes :
· Lecture et interprétation des commandes de l’opérateur,
· Changement des paramètres de régulation,
· Régulation de température,
· Régulation de la pression,
· Affichage de l’état du procédé sur console.
Certaines de ces opérations sont indépendantes et peuvent se dérouler en même temps. Certaines sontprioritaires et ne doivent pas être interrompues trop longtemps (cas des régulations). Il est doncimportant, pour que la gestion des tâches soit judicieuse, de bien spécifier leurs interactions.
Un déroulement séquentiel systématique est bien entendu possible. Il consisterait à réunir ces opérationsen un programme unique et monolithique, tel que, par exemple, celui présenté figure 2.1.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 36/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 36
Figure 2.1 : Exemple de programme de commande
On voit bien qu’une telle structure de programme est coûteuse en temps puisque à chaque cyclel’algorithme teste si l’opérateur est intervenu et si cette intervention nécessite un changement deparamètres ou demande un affichage de valeurs caractéristiques de l’état du procédé. Or, ces opérationsne devraient être exécutées que plus rarement et de manière asynchrone à la demande de l’opérateur afind’éviter un travail inutile au processeur. Ceci n’est possible que si le système de commande est pourvud’un mécanisme d’exploitation répondant au concept de multiprogrammation et mettant en oeuvre une
gestion multitâche.
Dans ce cas, chaque fonction principale pourra être définie de manière autonome : certaines commetâches de fond (régulation de température et régulation de pression), d’autre comme tâchesd’interruption (changement de paramètres) et d’autres encore comme tâches cycliques (affichage del’état du procédé). Bien que corrélées afin de pouvoir communiquer ou de se synchroniser, ellespourront être exécutées les unes indépendamment des autres. Cet exemple tend à montrer l’intérêtd’utiliser d’un système d’exploitation multitâche pour mettre en oeuvre une gestion dynamique desfonctions à accomplir. Ainsi, les fonctions de régulation de température et de pression pourraient êtreexécutées en même temps, alors que les fonctions de lecture et d’interprétation, de changement deparamètres et d’affichage pourraient être exécutées que lorsqu’elles sont nécessaires.
Programme Commande de la fabrication de feuilles de papier
Début
Tant que pas fini
Faire • Lecture et interprétation des consignes de l’opérateur
•• Si Paramètre_Température changé
Alors Modifier Température de consigne
• Affichage (Température de consigne, Température instantanée)
•• Si Paramètre_Pression changé
Alors Modifier Pression de consigne
• Affichage (Pression de consigne, Pression instantanée)
• Régulation de température
• Régulation de Pression
FinTantQue
Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 37/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 37
D’autre part, la mise en oeuvre d’une application de ce type doit être précédée d’une modélisationformelle et globale à l’aide d’un outil de modélisation (GRAFCET, Réseaux de Pétri...) capable dedécrire les évolutions simultanées (parallélisme) et asynchrones de ces fonctions ainsi que leurs
interactions. L’avantage d’une modélisation globale est multiple :
- Elle permet de valider le schéma de synchronisation de l’application et de justifier partiellementle découpage des tâches (à compléter par l’analyse des données partagées entre les différentesfonctions),
- Elle permet aussi une mise en oeuvre quasiment directe des interactions entre tâches avec undébogage aidé par l’existence d’un schéma de synchronisation auquel on peut se référer.
1.2.4. / LES ETATS D’UNE TACHE
Au niveau fonctionnel, c’est-à-dire vue de l’utilisateur, une tâche est soit en cours d’exécution Soitarrêtée parce que ses données de travail ne sont pas prêtes ou bien parce que son exécution n’estmomentanément pas utile. Au niveau du système d’exploitation d’un calculateur, c’est-à-dire vue duprocesseur, une tâche peut passer en fait par quatre états (cf. figure 2.2) : l’état ACTIF, l’état PRET,l’état EN ATTENTE et l’état SUSPENDU.
1.2.4.1./ L’état ACTIF
Une tâche est active (current state) lorsqu’elle est en train d’être exécutée par le processeur (on ditaussi «qu’elle a la main »). Dans les systèmes monoprocesseur une seule tâche peut être
active, puisqu’un processeur ne peut travailler qu’avec une seule tâche à la fois. Dans les systèmesmultitâches, la tâche active est choisie par l'algorithme d’ordonnancement des tâches mis en oeuvre parI ‘allocateur du processeur.
Figure 2.2 : Les états d’une tâche

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 38/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 38
1.2.4.2./ L’état PRET
Une tâche est prête (ready state) ou éligible lorsqu’elle possède toutes les ressources nécessaires à son
exécution, tant matérielles (mémoires, dispositifs d’entrées-sorties...) que logicielles (données,message...), sauf le processeur. Elle est donc prête à être exécutée et le sera dés que son tour arrivera oudés qu’elle deviendra la tâche la plus prioritaire. C’est parmi l’ensemble des tâches prêtes quel’allocateur du processeur va choisir la tâche à exécuter. Dans un contexte temps réel, la tâche active estcelle qui a la plus haute priorité parmi les tâches prêtes. Avec un système en temps partagé, la tâcheactive est celle qui dispose de la tranche de temps d’exécution à l’instant considèrè.
1.2.4.3./ L’état EN ATTENTE
Une tâche est en attente (waiting state) lorsqu’elle attend un événement. Si une ressource lui manque(imprimante, espace mémoire...) elle attend une interruption physique (fin d’entrées/sorties, défaut depage...) ou un message lui signalant que cette ressource vient de lui être attribuée. A part dans lessystèmes temps réel où l’endormissement peut être commandé par une instruction générée par la tâched’application active, cet état est entièrement géré par le système d’exploitation.
1.2.4.4./ L’état SUSPENDU
Une tâche est suspendue (suspended state) quand l’utilisateur ne veut plus qu’elle soit en concurrenceavec les autres vis-à-vis du processeur. Une tâche suspendue est donc une tâche que l’utilisateur ne veut
plus avoir dans l’état prêt, mais qui ne peut être en attente car elle dispose de toutes les ressourcesnécessaires à son exécution. Elle peut être suspendue dans le cas où elle n’est plus utile momentanément(tâche d’initialisation, tâche de test ou d’autotest, tâche de maintenance...). Cet état est pris en comptepar le système qu’après l’émission d’un ordre généré par une instruction exécutée par une tâched’application.
Remarque : Certains systèmes d’exploitation du type temps réel, gèrent un cinquième état l’état «Enattente - Suspendu ». Cet état hybride est la conséquence de la suspension par une tâche utilisateurd’une autre tâche utilisateur déjà mise en attente par le système, ou bien de la mise en attente d’unetâche utilisateur déjà suspendue. Pour devenir prête, une tâche se trouvant dans l’état «en attente-
suspendue » doit recevoir deux informations dont l’ordre d’arrivée n’a aucune importance :
· Une information la prévenant que l’événement qu’elle attendait s’est produit. La tâche passealors dans l’état suspendu,
· Une information provenant de la tâche active sous la forme d’un ordre de résomption. La tâchepasse alors dans l’état en attente.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 39/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 39
1.2.5. / CHANGEMENT D’ETAT D’UNE TACHE
Dans un système monoprocesseur, une seule tâche est active à un instant donné. Cependant, sur unepériode de temps de quelques centaines de millisecondes, un grand nombre de tâches prêtes, suspenduesou en attente peuvent devenir actives. Les changements d’états sont ainsi très fréquents. Lors d’unchangement d’état, on peut rencontrer l’un des cas suivants illustrés par la figure 2.3
Figure 2.3 : Les changements d’état d’une tâche
1.2.5.1./ Création et destruction
Pour être exécutée, une tâche doit tout d’abord faire l’objet d’un ordre de création. Cet ordre decréation émanant soit d’une tâche d’application, soit directement du système, permet de générerl’ensemble des opérations et des paramètres nécessaires au gestionnaire de tâches pour lancerl’exécution de la tâche concernée : allocation de l’espace mémoire nécessaire, création du descripteurde la tâche et de sa pile (cf. §7 de ce chapitre), mise à jour des paramètres du descripteur, insertion dudescripteur dans la liste des tâches prêtes (cf. §6 de ce chapitre)... La création d’une tâche ne peut êtregénérée que par une tâche active. Créer une tâche ne veut pas dire l’exécuter. Lorsqu’elle est créée, une
tâche est mise dans l’état prêt afin qu’elle puisse s’exécuter quand son tour viendra (selon la politiqued’allocation du processeur mise en oeuvre par le système).
Nous avons vu qu’une tâche a une durée de vie limitée. Pour arrêter définitivement l’exécution d’unetâche celle-ci doit être simplement détruite. L’ordre de destruction émanant de la tâche active réalise lasuppression de la tâche de toute liste. Cette opération permet au système de récupérer tous les espacesmémoire qu’occupait la tâche afin de les redistribuer aux autres tâches. La tâche n’apparaissant plusdans aucune des listes du système est alors inconnue de l’allocateur et nécessitera un nouvel ordre decréation pour être de nouveau exécutée. Une destruction de tâche peut être exécutée quel que soit l’étatde la tâche concernée.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 40/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 40
1.2.5.2./ La préhension
Il y a préhension lorsque la tâche active cesse de l’être mais reste dans l’état prêt. Cette tâche
démissionne alors et le système d’exploitation doit élire une autre tâche parmi celles qui sont prêtes. Cechangement d’état peut se produire du fait :
· D’un événement extérieur à la tâche (interruption de l’horloge temps-réel, événement attendupar une tâche...) qui nécessite l’exécution d’une tâche associée à cet événement et plusprioritaire que la tâche active,
· D’un événement provoqué par la tâche active elle-même, tel que, par exemple, l’envoi d’unmessage à une autre tâche plus prioritaire qu’elle et qui était en attente de ce message.
1.2.5.3./ L’endormissement
Il y a endormissement lorsqu’une tâche active ou suspendue passe dans l’état en attente. Ce changementest géré par le gestionnaire de tâches quand :
· Le temps alloué à la tâche active est écoulé et qu’il existe des tâches prêtes. Ce mécanisme, ditde tranche de temps, est mis en oeuvre sur les systèmes multi-utilisateurs plutôt que sur lessystèmes temps réel,
· La tâche active se met en attente d’un événement. Cet événement peut être un message, une
interruption interne provenant, par exemple de l’horloge temps réel et la prévenant qu uncertain temps s’est écoulé (délai), ou encore une interruption externe (cf. chapitre 3),
· La tâche suspendue est mise en attente par le système qui anticipe sur les besoins en ressourcesqui seront nécessaires à son exécution lors de la fin de sa suspension.
1.2.5.4./ La suspension
Il y a suspension lorsque qu’une tâche prête ou en attente passe dans l’état suspendu. Ce changement
d’état est géré par le gestionnaire mais ne peut être généré que sur un ordre de la tâche active.
Il peut se produire soit quand la tâche active se suspend elle-même (autosuspension), ou suspend uneautre tâche, ou encore dans certains cas, quand le système suspend une tâche en attente afin que celle-cine puisse pas s’exécuter à la fin de son attente.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 41/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 41
1.2.5.5./ Le réveil
Il y a réveil lorsqu’une tâche en attente devient prête ou redevient dans l’état suspendu après un passage
dans l’état en attente - suspendue. Ce changement d’état se produit quand :
· Un événement externe et attendu, signalé par une interruption, se produit,
· La tâche active provoque elle-même l’événement attendu par une tâche plus prioritaire qu’elle(tel que l’envoi d’un message),
· Le temps d’attente d’une tâche est écoulé.
1.2.5.6./ La résomption
Il y a résomption lorsqu’une tâche qui était suspendue ou dans l’état en attente et suspendue reçoit unordre de réveil de la part de la tâche active, ce changement d’état ne peut se produire que sur l’ordre dela tâche active et donc être généré soit par une tâche d’application, soit par une tâche du systèmed’exploitation.
1.2.5.7./ Notion de contexte
Une tâche peut obtenir le contrôle du processeur, le perdre, l’obtenir de nouveau.., de nombreuses fois
en quelques millisecondes. Un certain nombre d’informations propres à la tâche et nécessaires à sonexécution doivent être sauvegardées lors de la perte du contrôle du processeur, afin d’être restaurées encas de reprise de la tâche. Ces informations constituent le contexte de la tâche et sont regroupées sousle nom de mot d’état (process status word) :
· Le compteur ordinal donnant l’adresse de la prochaine instruction à exécuter,
· Les contenus des registres généraux du processeur,
· Un registre d’état indiquant son statut (prête, en attente, suspendue),
· Les registres décrivant son espace mémoire virtuel,
· Les registres décrivant l’espace mémoire physique qu’elle occupe,
· D’autres informations telles que l’espace mémoire minimum nécessaire à son exécution. lesadresses de ses tâches filles...
Lorsqu’une tâche active s’arrête, le gestionnaire de tâche donne la main à l'allocateur du processeurdont le rôle consiste à attribuer le contrôle de l’unité centrale, à tour de rôle, aux différentes tâches encompétition suivant une politique définie à l’avance par les concepteurs du système (temps partagé,
préemption...).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 42/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 42
L’allocateur du processeur se charge alors de l’opération de changement de contexte (contextswitching) qui consiste en trois opérations :
· Sauvegarde du contexte de la tâche qui s’arrête à partir des différents registres du processeur
utiles au rétablissement de la tâche,
· Sélection parmi les tâches prêtes de la tâche devant alors être exécuter (tâche suivante, tâcheplus prioritaire...),
· Restauration du contexte de la tâche choisie en initialisant les registres du processeur avec lecontexte précédemment sauvegardé.
Le passage effectif du contrôle du processeur à une tâche (passage de la tâche de l’état prêt à l’étatactif) est réalisé par l’opération de commutation du mot d’état. La stratégie d’allocation du processeurvarie beaucoup selon le mode d’exploitation et le degré de sophistication du système (cf. §9 et §10 dece chapitre). En général, le contrôle est donné à une tâche prête une fois que la tâche en coursd’exécution ait été interrompue, suspendue, mise en attente ou se soit terminée naturellement.
1.2.6. / LES LISTES ASSOCIEES AUX ETATS
Pour gérer les changements d’état de manière simple et rapide, à chaque état est associée une listecontenant l’ensemble des tâches figurant dans l’état correspondant. Sur les systèmes de typemonoprocesseur, il existe en général trois listes la liste des tâches prêtes (LTP), la liste des tâches enattente (LTA) et la liste des tâches suspendues (LTS).
Il n’existe pas de liste des tâches actives puisque ces systèmes ne peuvent exécuter qu’une seule tâche àla fois (ce qui est faux dans le cas des systèmes multiprocesseur qui par définition peuvent exécuterplusieurs tâches simultanément et dont le gestionnaire de tâches gère alors une liste des tâches activesen plus des trois autres listes). En général, la tâche active se trouve alors en tête de la liste des tâchesprêtes. Chaque tâche du système figure sur une liste et une seule. L’ordre des taches dans ces listesdépend à la fois de l’instant elles y ont été placées, de leur priorité et des algorithmes mis en oeuvre parle gestionnaire de tâches. Les tâches les plus prioritaires Sont placées, en général, en tête de liste. Ainsi,selon la politique d’allocation du processeur, lors d’un changement d’état, une tâche ne sera pasnécessairement rajoutée en queue de liste mais insérée, par exemple, à un endroit précis dans la listeselon sa priorité.
Ces listes sont constituées d’éléments répartis liés par un chaînage à l’aide de pointeurs. Un pointeur estune variable particulière qui, au lieu de contenir directement une information, contient l’adresse du blocmémoire où se trouve cette information. Les avantages de cette structure résident dans le fait que leséléments associés aux tâches conservent toujours la place qui leur a été affectée en mémoire (pas dedéplacement d’espaces mémoire coûteux en temps), et les procédures d’insertion sont simples etextrêmement rapides (les modifications ne concernant que quelques pointeurs).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 43/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 43
Figure 2.4 : Constitution d’une liste à l’a ide de pointeurs
Pour insérer une tâche Tj dans une liste des tâches entre les tâches Ti et Tk, il suffit au gestionnaire de
tâches de modifier, comme le montre la figure 2.4, la valeur de trois pointeurs :
· Le pointeur suite de la tâche Ti doit contenir l’adresse de la tâche
· Le pointeur suite de la tâche tj doit contenir l’adresse de la tache Tk,
· Le pointeur de début de la liste des tâches prêtes doit alors prendre pour valeur, l’adresse de latache qui va prendre le contrôle.
1.2.7. / STRUCTURE DES DONNEES ASSOCIEES AUX TACHES
En plus, des données connues et définies par le programmeur de l’application, d’autres sont associées àchaque tâche. Celles-ci sont nécessaires aux algorithmes mis en oeuvre par les fonctions de gestion detâches (allocation du processeur, changement de contexte, manipulation des listes...). Ces données sontcréées par le système d’exploitation qui est alors le seul à pouvoir y accéder. La structure de donnéesassociée à chaque tâche et illustrée par la figure 2.5, est ainsi composée d’une pile et d’un descripteur detâche.
1.2.7.1./ La pile
La pile a pour rôle de stocker l’ensemble des données nécessaires à la reconstitution de l’état de latâche. Il s’agit essentiellement des valeurs des registres internes du processeur (accumulateurs, lecompteur ordinal...). Lorsqu’une tâche perd le contrôle du processeur, la fonction de sauvegarde de soncontexte, exécutée par l’allocateur du processeur, consiste à ranger toutes les données utiles à la reprisede cette tâche dans la pile qui lui est associée. Lorsque cette tâche reprendra le contrôle du processeur,l’allocateur du processeur restaurera Son contexte en copiant, dans les registres concernés, les valeursprécédemment sauvegardées dans la pile. Ce n’est qu’une fois cette restauration de contexte réalisé quela tâche pourra prendre la main.
Afin de rendre plus souples les fonctions du gestionnaire de mémoire, les piles sont des éléments
répartis pouvant donc être logés n’importe où en mémoire (là où il reste de la place). Chaque pile estliée à son descripteur par l’intermédiaire d’un pointeur (cf. figure 2.5).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 44/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 44
Figure 2.5: Ordonnancement des données associées aux tâches
1.2.7.2./ Le descripteur de tâche
Le descripteur de tâches contient des paramètres utilisés par l’allocateur du processeur pour gérer leschangements d’états des tâches et former les listes (cf. figure 2.5). Le nombre de paramètres contenusdans le descripteur dépend de la complexité du système d’exploitation. On y trouve généralement leséléments de base suivants :
· Le statut contient l’état présent de la tâche : actif, prêt, en attente, suspendu...
· La priorité sert à l’ordonnancement des tâches dans la liste des tâches prêtes. Elle est engénérale identifiée par un numéro,
· Délai représente un délai d'endormissement ou un temps d’attente maximum,
· Le code représente le code exécutable de la tâche et les données,
· L’adresse de la pile, la longueur de la pile et le pointeur de pile permettant la localisation de lapile en mémoire,
· Le pointeur de liste assure le chaînage des descripteurs de tâches dans la liste des tâches prêtesou dans celle des tâches suspendues. On y trouve généralement l’adresse du descripteur de latâche suivante dans la liste,
· Le pointeur d’attente joue le même rôle que le pointeur de liste dans le cas de la liste des tâchesattente...

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 45/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 45
Le système peut facilement identifier la liste dans laquelle figure une tâche en consultant le paramètrestatut de son descripteur. Deux cas peuvent se présenter alors la tâche est en attente ou elle n’y est pas.Lorsqu’elle n’est pas en attente, son pointeur de liste indique alors l’adresse de la tâche suivante dans la
liste des tâches prêtes, si la tâche est dans l’état prêt, ou dans la liste des tâches suspendues, si elle estdans l’état suspendu. Dans le cas ou la tâche est en attente, le pointeur d’attente de son descripteurdonne alors l’adresse du descripteur de la tâche suivante dans la liste des tâches en attente.
La liste des tâches en attente est généralement traitée à part car la plupart des moniteurs prévoientl’association d’un temps d’attente maximum (éventuellement infini) quel que soit l’événement attendu(cf. §8.3 de ce chapitre).
1.2.8. / TRAITEMENT DU TEMPS
Quels que soient le type et la nature d’un système d’exploitation, un gestionnaire de tâches nécessitetoujours une connaissance précise du temps, afin par exemple :
· De rythmer le travail du ou des processeurs du système,
· De mettre en oeuvre des mécanismes de partage du processeur par tranches de temps,
· D’activer périodiquement des tâches,
· D’enregistrer l’heure exacte à laquelle certains événements se sont produits,
· De mettre certaines tâches en attente de synchronisation d’une application temps réel,
· De synchroniser le travail des différents processeurs (systèmes multitraitement),
· De gérer des mécanismes du type chien de garde (watch dog) afin d’interrompre une attentetrop longue ou délai de garde (timeout) pour interrompre des tâches qui ne sont pas terminéesaprès un certain délai d’exécution...
La mesure du temps est basée sur la génération de signaux électroniques déclenchés par les circuitsd’horlogerie du système informatique.
1.2.8.1./ Les interruptions d’horloge interne
Tout système informatique dispose d’une horloge interne (dock) dont la fréquence (proportionnelle à lafréquence de l’oscillateur à quartz utilisé par le système 16 Mhz, 33 Mhz, 66 Mhz...) est généralementconnue aussi bien par le système que par l’utilisateur. Cette horloge (cf. figure 2.6) est un métronomeélectronique dont le rôle est de cadencer le travail du processeur.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 46/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 46
Figure 2.6: Génération de l’horloge temps-réel et calibrage de la base de temps
A chaque top (dock tick) ou cycle de cette horloge une opération du processeur est générée. Uneopération de base (accès mémoire, addition...) nécessite un certain nombre de tops d’horloge. Ainsi,plus la fréquence de l’horloge interne est élevée plus la quantité de travail que peut accomplir unsystème informatique pendant une durée déterminée augmente.
1.2.8.2./ L’horloge temps réel
Pour évaluer le temps qui s’écoule et être ainsi capable de gérer finement le temps, la plupart dessystèmes d’exploitation utilisent le comptage d’impulsions de l’horloge interne. Le calibrage desimpulsions de cette horloge permet de définir sa période appelée également base de temps du système.
Cette base de temps peut être modifiée et programmée (cf. figure 2.6). Elle se situe généralement entre0,1 microsecondes et 100 millisecondes.
Sa programmation permet de définir le nombre de tops d’horloge interne nécessaires au déclenchementd’une interruption dite de l’horloge temps réel (real time dock). Cette interruption est une interruptionde très haut niveau qui nécessite un traitement très court et très rapide afin que les autres interruptionsne restent pas masquées trop longtemps (cf. chapitre 3). L’horloge temps réel d’un système aide àgarantir des temps de réponse acceptables dans un système interactif, évite au système de restermonopolisé dans une boucle de programme et permet en outre de traiter des applications en temps réel.
1.2.8.3./ Traitement des attentes
Le paramètre « Délai » du descripteur de tâche en attente mémorise pour chaque tâche le tempsd’attente maximum pour une ressource ou encore son temps d’endormissement. Ce paramètre estdécrémenté à chaque top de l’horloge temps réel. Lorsqu’il vaut zéro la tâche est mise automatiquementdans la liste des tâches prêtes. Ainsi, l’ordre des tâches dans la liste des tâches en attente a une grandeimportance.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 47/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 47
Effectivement, si les tâches étaient rangées dans cette liste dans un ordre quelconque ou encore parordre de priorité, chaque interruption de l’horloge temps réel nécessiterait pour toutes les tâches enattente : une décrémentation de leur paramètre délai, un test à zéro de ce paramètre et, selon la valeur
de ce test, un changement d’état de la tâche concernée. Le traitement de l’interruption de l’horlogetemps réel serait alors beaucoup trop coûteux en temps d’exécution et dépendrait, de plus, du nombrede tâches en attente.
Pour augmenter l’efficacité du système les tâches sont en fait rangées dans l’ordre des délais d’attentecroissants. Le paramètre délai contient alors le supplément d’attente vis à vis de la tâche précédentedans la liste. Ainsi, quel que soit le nombre de tâches dans la liste des tâches en attente, seul leparamètre délai de la tâche en tête de cette liste est décrémenté à chaque top d’horloge temps réel. Dèsque ce paramètre atteint la valeur zéro, le temps d’attente de la tâche est écoulé.
La tâche est alors de nouveau prête à être exécutée. Elle doit donc quitter la liste des tâches en attentepour entrer dans la liste des tâches prêtes. La tâche qui se trouvait en deuxième position dans la liste destâches en attente passe alors en tête de cette liste et c’est alors son paramètre délai qui sera décrémentéau prochain top de l’horloge temps réel.
Dans l’exemple de la figure 2.5, la tâche Ti doit encore attendre 50 unités de temps avant de redevenirprête. Les tâches Tj et Tk devront attendre, quant à elles, respectivement 110 unités et 205 unités. Dèsque le paramètre délai d1, de Ti vaudra zéro, Ti sera insérée dans la liste des tâches prêtes. Tj seretrouvera alors en tête de la liste des tâches en attente avec un délai dj de 60 unités de temps d’attentesupplémentaire, par rapport à Ti.
Le paramètre délai dj serra décrémenté d’une unité au top d’horloge temps réel suivant. Dès que djvaudra zéro, la tâche Tj serra placée dans la liste des tâches prêtes et la tâche Tk se retrouvera alors entête de la liste des tâches en attente avec un délai d’attente supplémentaire Tk de 95 unités de temps.
L’algorithme mis en oeuvre, lors de l’insertion d’un descripteur de tâches dans la liste des tâches enattente est présenté figure 2.7, avec :
· i : le rang d’une tâche dans la liste des tâches en attente,
· di: le paramètre délai de la tâche de rang i,
· Tj: la tâche à insérer dans la liste des tâches en attente,
· dj: le paramètre délai de la tâche à insérer,
· Si: la valeur de la somme des délais au rang i.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 48/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 48
Figure 2.7: Algorithme d’insertion d’une tâche en liste d’attente
Cet algorithme réalise la sommation des délais d’attente d, en avançant tâche par tâche dans la liste destâches en attente. La place du descripteur est localisée dés que la somme des délais S, est supérieure à lavaleur du paramètre délai dj du descripteur concerné. Le système doit alors mettre à jour ce paramètredj ainsi que le paramètre délai di de la tâche qui suit la tâche Tj dans la liste des tâches en attente. Il
suffit alors de mettre en oeuvre le chaînage des pointeurs d’attente pour terminer l’opérationd’insertion. Le traitement de la tâche d’insertion peut être coûteux en temps d’exécution dans la mesureoù il dépend du nombre de tâches en attente. Ce temps de traitement n’a néanmoins qu’une importancerelative dans la mesure où la tâche d’insertion n’opère pas sur interruption.
i 1 2 3Si 200 500 1000
Exemple d’ajout d’une tâche T4 dans une liste des tâches enattente.T4 doit s ‘endormir pendant 7s. Avec 1000 tops d’horlogecorrespondant à 1s on a dj=200 pour T4. Dans LTA, on
a déjà T2, T3, et T1 qui ont respectivement un délais d’attentede 2s, 5s, et 10s.
Insertion en liste d’attente
Début
i ß 0
Si ß 0
Répéter
• i ß i + 1
• Si <— Si+ di
Jusqu’à Si > didi.ß dj -Si-1 di ßß di - dj
Pointeur d’attente de Ti-1ß Adresse de Tj.
Pointeur d’attente de Tj ßß Adresse de Ti
Fin
LTA T3
d2=300
(i=2)
T2
d1=200
(i=1)
T1
d3=300
(i=3)
T4
dj=200

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 49/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 49
1.2.9. / ALLOCATION DU PROCESSEUR
Le gestionnaire de tâches d’un système d’exploitation possède un allocateur de processeur (dispatcherou job-controller ou encore scheduler). Son rôle est d’attribuer le contrôle de l’unité centrale auxdifférentes tâches en compétition en mettant en oeuvre une politique d’allocation propre à chaquesystème. L’allocateur du processeur dispose d’un algorithme de choix (cf. figure 2.8) qui met en oeuvreune politique d’ordonnancement des tâches selon le type de travail que nécessite chacune d’elles(entrées-sorties, calculs...) et de telle sorte que chaque utilisateur ait l’impression que son travail avancerégulièrement.
Comme le montre la figure 2.8, seules les tâches prêtes sont en compétition pour obtenir le contrôle duprocesseur. Une seule d’entre elles sera choisie par l’allocateur et sera dite alors élue. Elle gardera lecontrôle de l’unité centrale pendant un certain temps dépendant fortement de la politique d’allocationmise en oeuvre. Lorsque ce temps d’exécution est écoulé, la tâche élue perd alors la main et retourne
alors soit dans la liste des tâches prêtes, soit dans une des autres listes selon son statut.
Figure 2.8 . Attribution du contrôle du processeur
1.2.9.1./ Objectifs de l’allocation
La mise en oeuvre d’une politique d’allocation du processeur doit répondre pour le systèmed’exploitation aux objectifs suivants :
· Etre équitable dans le partage si toutes les tâches doivent être considérées de la même manière(cas des systèmes multi-utilisateurs),
· Mettre en oeuvre les priorités et éventuellement les réajuster dynamiquement,
· Faire en sorte de satisfaire le plus grand nombre de demandes par unités de temps,
· Prendre en charge le maximum d’utilisateurs interactifs tout en leur assurant des temps deréponse acceptables,
· Exécuter une même tâche dans un temps à peu près équivalent quelle que soit la charge dusystème,

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 50/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 50
· Favoriser les tâches peu exigeantes en nombre de ressources,
· Ne pas accepter de nouveaux travaux lorsque le système est en surcharge,
· Etre la moins coûteuse possible pour ne pas éprouver les performances du système...
La liste de ces objectifs est loin d’être exhaustive, ce qui dénote une grande complexité dans ladétermination de la tâche active et qui est justement en complète opposition avec le dernier point lié à laperformance du système. Ces objectifs ont pour but d’optimiser le rendement du système informatiquedans le cadre de systèmes mettant en oeuvre le concept de multiprogrammation.
1.2.9.2./ Critères d’allocation
L’optimisation du rendement d’un système informatique sous-entend des règles d’ordonnancement destâches qui prennent en compte efficacement des critères d’allocation. Pour réaliser tout ou partie desobjectifs de l’allocation du processeur, le mécanisme d’ordonnancement d’un système d’exploitationdoit considérer :
· Le taux d’utilisation du processeur pour chaque tâche,
· Le taux des entrées/sorties de chaque tâche,
· Le taux de défaut de pages pour chaque tâche : certaines politiques d’allocation tendent à
favoriser les processus ayant un taux de défaut de pages faible car la place mémoire qui leur estallouée suffit à contenir leur espace de travail (cf. chapitre 5),
· Le degré d’urgence de la tâche qui est lié à la nature du système (une tâche d’un procédé tempsréel nécessite des réponses très rapides alors que les tâches d’un système batch ne requièrentpas de réponses immédiates),
· Le fonctionnement interactif ou par lot : les utilisateurs interactifs émettent en général desrequêtes simples devant être satisfaites très rapidement, alors que les utilisateurs batch n’étantpas présents peuvent subir des délais (devant toutefois restés raisonnables),
· La priorité des tâches : les tâches de forte priorité doivent bénéficier d’un meilleur traitementque les tâches de priorité plus faible,
· Le taux de réquisition du processeur qui est très lié à la priorité de la tâche concernée (plus lapriorité est faible, plus il est élevé) et qui permet d’éviter des temps de commutation en pureperte lors de forte probabilité de réquisition,
· Le temps d’utilisation restant qui permet de restreindre le temps d’attente de tâches prêtes enexécutant de préférence les tâches réclamant un temps d’exécution minimum pour s’achever.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 51/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 51
1.2.9.3./ Les priorités
Les priorités peuvent être allouées automatiquement par le système ou de manière externe par
l’utilisateur. Elles peuvent être allouées de manière rationnelle ou arbitraire, en particulier lorsque lesystème est contraint de faire une distinction entre plusieurs tâches sans avoir les moyens d’être sûr defaire le bon choix. Ceci engendre deux types de priorité :
· Les priorités statiques qui, par définition, ne changent pas une fois allouées. C’est le cas desapplications temps-réel pour lesquelles les priorités sont définies par le programmeur enfonction de l’ensemble des tâches de l’application et par rapport à leur degré d’urgence. Ellesne peuvent en aucun cas être modifiées par le système d’exploitation qui ne connaît pas lestenants et aboutissants de chacune des tâches de l’application. Elles sont, par contre,insensibles aux changements survenus dans l’environnement et nécessitant, dans certains cas,un ajustement des priorités.
· Les priorités dynamiques qui peuvent changer en fonction des modifications del’environnement. Leur gestion est beaucoup plus complexe et engendre des coûts plus grandsque ceux engendrés avec des priorités statiques. Par contre, leur emploi permet d’accroîtreconsidérablement le débit et la souplesse du système.
1.2.10./ MECANISMES D’ORDONNANCEMENT
Le choix de la tâche à laquelle le système va donner la main, c’est-à-dire celle qui va être allouée auprocesseur, est réalisé par un algorithme dit d’ordonnancement. Cet algorithme de choix utilise uncertain nombre de paramètres pour prendre des décisions :
· L’état de chaque tâche correspondant à son statut,
. La priorité associée à chaque tâche (de nombreux algorithmes utilisent les notions de prioritéde base et la priorité actuelle),
· La tranche de temps qui représente le temps maximum pendant lequel une tâche peut garder lamain sans ré-exécution de l’algorithme de choix...
Les différents algorithmes d’ordonnancement utilisent les structures de listes que nous avons vuesprécédemment et mettent en oeuvre deux concepts importants :
· Le concept d’événement significatif (fin d’une entrée/sortie, interruption d’horloge indiquant lafin d’une tranche de temps...) qui, lorsqu’il survient, provoque obligatoirement l’exécution parle système de l’algorithme de choix,
· Le concept de préemption lorsqu’une tâche importante (de haute priorité) passe dans l’étatprêt. l’algorithme de choix doit décider d’arrêter l’exécution de la tâche en cours (même si ellen’a pas épuisé sa tranche de temps) pour passer la main à la tâche prioritaire.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 52/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 52
Le mécanisme de choix peut être plus ou moins complexe selon qu’il opère sur réquisition duprocesseur ou non, ou encore qu il prenne en compte la notion de priorité statique ou de prioritédynamique.
1.2.10.1./ Algorithmes sans réquisition
Les algorithmes d’ordonnancement sans réquisition ne permettent pas au système de retirer le contrôle àune tâche dés lors que le processeur lui a été attribué. Ainsi, la tâche élue ne rendra la main quelorsqu’elle sera complètement achevée.
Le principe de la non-réquisition est gênant pour les travaux courts lorsqu’ils doivent attendre qu’untravail très long s’achève. Il reste néanmoins équitable du fait que les travaux à forte priorité ne viennentpas perturber l’ordre des travaux en attente.
Parmi les algorithmes mettant en oeuvre une politique de non-réquisition nous avons retenu les deuxprincipaux.
1.2.10.1.1./ Ordonnancement par ordre d’arrivée (FIFO)
La technique d’ordonnancement par ordre d’arrivée est la manière la plus simple et la plus naturelled’ordonnancer les tâches à exécuter. Elle consiste à choisir la tâche qui est depuis de plus long tempsdans la liste des tâches prêtes.
Cette politique (premier arrivé, premier servi) revient à organiser la liste de tâches prêtes comme une filed’attente du type FIFO (First In First Out). Cette file est unique et les tâches y sont gérées sans prendreen compte leur priorité.
Figure 2.9 : Ordonnancement FIFO de la liste des tâches prêtes
Ainsi, le descripteur d’une tâche arrivant dans la liste des tâches prêtes est ajouté en queue de liste (cf.figure 2.9). Dès que le processeur est libre, l’algorithme d’ordonnancement choisit alors simplement latâche dont le descripteur se trouve en tête de la liste pour lui donner le contrôle. Les tâches en fin
d’exécution sont détruites par le système par leur suppression. de la liste des tâches prêtes.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 53/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 53
1.2.10.1.2./ Ordonnancement « Plus court d’abord»
La politique d’ordonnancement dite «Plus court d’abord» (SJF : Shortest Job First) est une technique
sans réquisition dans laquelle la tâche ayant le plus faible temps estimé d’exécution jusqu’à achèvementest prioritaire. Les travaux à exécuter sont alors ordonnés dans la liste des tâches prêtes selon leur tempsde service supposé connu à l’avance. Les travaux les plus courts sont classés en tête de liste. Cetteméthode d’ordonnancement favorise donc les travaux brefs au détriment des travaux les plusimportants. Le but de cet algorithme consiste à achever dès que possible les petits travaux. Ceci à pourconséquence de diminuer le nombre de travaux en attente du processeur dans la liste des tâches prêteset ainsi à diminuer la moyenne des temps d’attente des tâches dans cette liste. Sur le plan pratique, cetalgorithme présente deux inconvénients :
. Il y a un risque non négligeable de privation du processeur pour les travaux longs si le tauxd’arrivée des travaux courts est élevé. Un moyen d’y remédier consiste à attribuer à chaquetâche prête une priorité croissante avec le temps de séjour dans la liste des tâches prêtes,
. Il nécessite une connaissance exacte a priori des temps de service. L’évaluation de ce tempsd’exécution peut être correcte dans des environnements de production (cas des applicationstemps réel) mais s’avère rarement possible dans les environnements de développement.
1.2.10.2./ Algorithmes avec réquisition
Les algorithmes d’ordonnancement avec réquisition permettent au système de retirer à tout moment le
contrôle à une tache active. Le principe de la réquisition est absolument nécessaire tant sur les sitessupportant des applications temps réel que sur les systèmes multi-utilisateurs. Cette technique estindispensable dans les systèmes interactifs à cause des fortes contraintes de temps de ces systèmes.Néanmoins, la réquisition engendre un surcoût non négligeable à l’exploitation occasionnéprincipalement par les changements de contextes incessants mais également par l’ensemble desmécanismes liés au principe de multiprogrammation mis en place sur la plupart de ces systèmes.
1.2.10.2.1./ Ordonnancement « Plus court temps restant »
L’algorithme d’ordonnancement «Plus court temps restant » (SRT . Shortest Remaining Time) est laversion avec réquisition de l’algorithme «Plus court d’abord» (SJF). Avec cette technique, la priorité estdonnée à la tâche dont le temps d’exécution restant est le plus faible. Cette méthode permet doncd’interrompre une tâche active au profit d’une nouvelle tâche ayant un temps d’exécution estimé pluscourt que le temps nécessaire à l’achèvement de la tâche qui est interrompue. Le coût d’exécution decet algorithme est supérieur à celui occasionné par l’algorithme SJF. En effet, il doit tenir compte dutemps déjà alloué aux tâches en cours et effectuer immédiatement les commutations à chaque arrivéed’un travail dont le traitement est plus court que celui de la tâche active. La tâche interrompue pourraêtre relancée ensuite, à moins qu’un travail encore plus court intervienne.
L’algorithme SRT appelle les mêmes remarques que l’algorithme SJF, concernant son implantation.
Mais il fournit, néanmoins, la valeur optimale de la durée moyenne de traitement, pour l’ensemble desalgorithmes d’ordonnancement avec réquisition.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 54/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 54
1.2.10.2.2./ Le tourniquet
L’algorithme d’ordonnancement par tourniquet (round robin) s’inspire de la technique FIFO et ne tient
pas compte des priorités. Les tâches prêtes sont rangées dans la liste de tâches prêtes gérée, dans ce cas,sous la forme d’une liste circulaire. L’allocateur du processeur alloue le contrôle à la tâche en tête deliste pour un temps donné, appelé quantum. Lorsque ce temps d’exécution expire avant l’achèvement dela tâche active, celle-ci est placée en queue de liste (cf. figure 2.10) et le contrôle est alors donné à latâche suivante dans la liste pour, en principe, le même quantum.
Figure 2.10: principe d’ordonnancement par tourniquet
Cette technique est principalement mise en oeuvre dans les systèmes multi-utilisateurs où lesapplications interactives doivent bénéficier de temps de réponse corrects et équitables (contrairementaux applications temps réel devant elles être gérées d’après leur niveau d’urgence définie par leurpriorité). Le coût de la réquisition peut être maintenu faible si les mécanismes de commutation sontefficaces et la mémoire suffisante pour contenir plusieurs tâches en même temps. Il est à noter qu’unréglage judicieux du quantum permet d’accroître le taux d’utilisation du processeur et de diminuer ainsi
les temps de réponse.
Avec cette méthode, le temps de réponse maximum (temps d’attente d’une tâche dans la liste des tâchesprêtes avant d’obtenir le contrôle du processeur) est donné par:
Tr = NbT * Q où NbT représente le nombre de tâches prêtes et Q le quantum.
Le tourniquet garanti ainsi Q secondes de service toutes les NbT * Q secondes. Le produit NbT * Qpeut devenir grand lorsque la charge du système augmente. Ainsi, avec, par exemple, Q = 0,1 secondeet NbT = 30 tâches, le temps de réponse maximum est alors de 3 secondes. Pour pallier ce problème,
certains systèmes utilisent alors un dérivé : le tourniquet à cycle fixe (cyclic round robin).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 55/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 55
Avec ce tourniquet, le quantum Q est choisi par le système et le nombre de tâches prêtes donne le tempsde réponse Tr Le système choisit alors le temps de réponse Tr et le quantum Q est donné par :
Q = Tr / NbT où Tr est le temps de réponse et NbT représente le nombre de tâches.
L’inconvénient de ce mécanisme est que si NbT est très grand, Q devient très petit et le temps dechangement de contexte devient très important par rapport à Q.
1.2.10.2.3./ Ordonnancement par priorité
La méthode d’ordonnancement par priorité (highest priority first) réalise le classement des tâches parordre croissant de priorité dans la liste des tâches prêtes. Pour choisir une tâche prête à exécuter, oupour reprendre son exécution, le système va alors toujours prendre la tâche qui se trouve en tête deliste. Cette tâche sera exécutée et gardera le contrôle du processeur soit jusqu’à ce qu’elle se termine,soit jusqu’à ce qu’elle se bloque (mise en attente, auto-suspension, destruction...). L’entrée dans la listede tâches prêtes d’une tâche de priorité supérieure à celle de la tâche active constitue un événementsignificatif Cet événement provoque l’exécution de l’algorithme de choix qui doit alors interrompre latâche active pour donner le contrôle à cette tâche de plus haute priorité en effectuant la commutation ducontexte. La tâche interrompue est alors renvoyée dans la liste des tâches prêtes (en général endeuxième position).
Ces algorithmes sont principalement implantés dans les systèmes d’exploitation temps réel oùl’allocation du processeur ne doit pas être équitable mais doit répondre à un souci d’un ordonnancement
de tâches permettant de réaliser un objectif commun (tel que la commande d’un procédé physique).Dans ce type d’application, on considère que la tâche active correspond au travail courant nécessaire àla réalisation de cet objectif. Avec ce type d’ordonnancement il n’y a pas de notion de tranche de tempsla tâche la plus prioritaire s’exécutera pendant tout le temps où elle restera la plus prioritaire. Plus unetâche a un niveau de priorité élevé, plus elle fournira des résultats rapidement, dans la mesure où ellerisque d’être beaucoup moins souvent interrompue qu’une tâche de priorité basse.
Dans les systèmes multi-utilisateurs le service rendu par le système doit être équitable pour la majoritédes utilisateurs. Néanmoins, il doit être possible d’accepter qu’un usager bénéficie d’un traitementparticulier. Celui-ci ayant, par exemple, un travail particulièrement urgent peut désirer payer unsupplément de service pour acquérir une priorité plus forte afin que son application soit exécutée plusrapidement. Ces priorités sont appelées priorités acquises. Elles sont fortement utilisées par lespersonnels responsables de l’équipement informatique lors, par exemple des phases de maintenance.
Dans ces conditions, à chaque tâche est affecté un numéro de priorité pouvant être fixe (prioritéstatique) ou, au contraire, pouvant évoluer dans le temps (priorité dynamique). L’affectation depriorités fixes présente des risques de famine une tâche de faible priorité risque de ne jamais êtreexécutée si des tâches plus prioritaires se présentent constamment. Pour éviter le risque de famine lesystème doit être capable de gérer des priorités dynamiques. L’affectation de priorités dynamiquesnécessite de recalculer périodiquement le numéro de priorité des tâches prêtes non exécutées.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 56/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 56
Le système peut alors augmenter périodiquement d’une unité le numéro de priorité de toutes les tâchesprêtes. Ce calcul s’effectue à la fin de chaque quantum, lorsque l’interruption d’horloge redonne lecontrôle à l’algorithme d’ordonnancement qui choisira alors la tâche la plus prioritaire. Ainsi, une tâche
initialisée avec un niveau de priorité faible, pourra atteindre au bout d’un certain temps un niveau depriorité qui lui permettra d’être élue.
1.2.10.2.4./ Ordonnancement par files multiples
Afin de réduire l’attente du processeur de certaines tâches prêtes, sans avoir à abaisser la valeur duquantum et ainsi produire un surcoût dû aux nombreux changements de contexte, les algorithmesd’ordonnancement par files multiples répartissent les tâches prêtes dans plusieurs files. Ces algorithmesgèrent alors chaque file à l’aide d’un tourniquet, en associant à chacune d’elle un numéro de prioritéstatique et des quanta de temps différents. Il existe deux variantes à ce type de traitement.
1.2.10.2.4.1./ Les files prioritaires
Avec ce type de traitement, la répartition du temps processeur entre les files est réaliséeproportionnellement à leur priorité (cf. figure 2.11). Ainsi, la file de plus haute priorité peut recevoir unquantum correspondant par exemple à 60% du temps d’unité centrale, la suivante un quantum de 30%,etc. Chaque file représente une liste de tâches prêtes. Pour exécuter les tâches prêtes, l’allocateur duprocesseur suit l’ordre d’exécution représenté sur la figure 2.11 par les flèches en pointillés.
Figure 2.11 : Ordonnancement utilisant plusieurs files de priorité différentes
Tourniquetfile 1
Tourniquetfile 2
Tourniquetfile 3
Séquencementdu Tourni uet
Séquencement destâches actives

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 57/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 57
Chaque file est alors gérée par un algorithme d’ordonnancement spécifique au type des tâches qui sontcensées s’y trouver. Les tâches qui ne supportent pas une attente trop longue (par exemple les tâchessystème) sont placées dans la file disposant du plus grand temps d’unité centrale. Pour lutter contre le
phénomène de famine, les niveaux de priorité des tâches peuvent être traités dynamiquement.L’allocateur du processeur doit alors augmenter régulièrement le numéro de la priorité associé auxtâches non encore exécutées et organiser la remontée de ces tâches des files de bas niveau vers les filesde plus haut niveau.
1.2.10.2.4.2./ Les files rétroactives
Cette méthode d’ordonnancement, appelée également tourniquet multi-niveau, consiste à ordonnerhiérarchiquement les différentes files (cf. figure 2. 12).
Figure 2.12 : Ordonnancement par files rétroactives
Elle utilise n files F1 à Fn. A chaque file Fi est associée un quantum Qi dont la valeur croît avec i. Unetâche d’une file Fi ne peut être élue par l’allocateur que si les files de niveau inférieur à i sont toutesvides. Lorsqu’une tâche issue de Fi a épuisé son quantum sans être terminée, elle entre dans la file Lestâches issues de Fn retournent dans Fn après épuisement de leur quantum. Toute nouvelle tâche entredans Fi.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 58/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 58
1.2.11./ LES PROCEDURES DE GESTION DE TACHES
La gestion des tâches est réalisée par deux types de procédures les procédures de base qui sonttransparentes à l’utilisateur et les procédures de haut niveau qui sont accessibles à l’utilisateur. Cesprocédures sont présentées ici de manière générique (les noms cités le sont simplement à titred’exemple) et non exhaustive (elles sont plus ou moins nombreuses selon le type du gestionnaire detâches).
1.2.11.1./ Les procédures de base
Les procédures de base sont utilisées par le système d’exploitation pour mettre en oeuvre la gestion deslistes associées aux états des tâches et l’ordonnancement des tâches dans ces listes. Parmi les pluscourantes on rencontre :
· INSERER : qui permet d’insérer le descripteur d’une tâche au bon endroit dans n’importequelle des listes traitées par le gestionnaire, en fonction de différents critères : priorité, ordred’attente, délais d’attente...
· INSERER_H : qui effectue l’insertion d’un descripteur de tâche directement en tête de liste,pour la liste des tâches suspendues et la liste des tâches en attente, ou derrière la tâche active(c’est-à-dire en deuxième position) pour la liste des tâches prêtes. Les listes formées àl’aide decette procédure sont gérées sous forme de piles du type LIFO (Last In First Out).
· AJOUTER : qui réalise l’ajout d’un descripteur de tâche directement en queue d’une deslistes traitées par le système. Les listes formées à l’aide de cette procédure sont gérées sous laforme d’une file d’attente du type FIFO (First In First Out).
· ENLEVER : qui permet d’enlever un descripteur de tâche d’une des listes du système. Cetteopération doit être réalisée avant chaque insertion (une tâche ne peut être insérée dans une listeque si elle est au préalable enlevée d’une autre liste) ou lors de chaque destruction.
· ORDONNER (schedule) : qui permet de classer les différentes listes gérées par legestionnaire de tâches selon divers critères qui dépendent de la politique d’ordonnancement etd’allocation du système :
- Lancée par l’allocateur du processeur et appliquée sur la liste des tâches prêtes. ellepermet, de déterminer à chaque démission qu’elle est la tâche qui doit être alors élue,
- Lancée et appliquée sur la liste des tâches en attente, elle permet de classer cette liste,par exemple par ordre d’arrivée ou encore par délais d’attente supplémentaires...
· TRANSFERER (dispatch) : qui permet au gestionnaire de tâches de lancer la tâche qui passedans l’état actif (tâche en général se trouvant en tête de la liste des tâches prêtes aprèsl’exécution de la procédure ORDONNE). Pour réaliser cette opération, cette procéduredéclenche l’opération de commutation du mot d’état (cf. §5.7 de ce chapitre), c’est-à-dire la
sauvegarde du contexte de la tâche qui démissionne, s’endort ou se suspend, et la restaurationdu contexte de la tâche élue.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 59/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 59
1.2.11.2./ Les procédures de haut niveau
Les procédures de haut niveau sont fournies par le système d’exploitation à l’utilisateur afin de lui
permettre de concevoir, définir et mettre en oeuvre une application multitâche. Elles sont appelées parles tâches d’application pour exprimer la synchronisation et la communication et dans certains cas lamise en attente et la suspension. Ces procédures sont accessibles à l’utilisateur au moyen de primitives(procédures exécutées de manière ininterruptible). Les plus courantes sont les suivantes :
· CREER (Ti, Priorité, Pile, Statut...) : permet de créer la tâche Ti et d’initialiser lesparamètres nécessaires à sa gestion. Lors de son exécution, le gestionnaire de tâches fait appelau gestionnaire de mémoire (cf. chapitre 5) afin d’allouer un emplacement mémoire audescripteur de la tâche Ti. Ce descripteur est alors inséré dans la liste des tâches prêtes et saposition dans cette liste dépend de l’algorithme d’ordonnancement. Créer une tâche ne signifiepas exécuter la tâche : la tâche créée ne sera exécutée que lorsque son descripteur se trouveraen tête de la liste des tâches prêtes. Néanmoins, son exécution peut provoquer, selon lapolitique d’allocation du processeur, le déclenchement de l’algorithme de choix de l’allocateurafin de vérifier si la tâche nouvellement créée ne nécessite pas une exécution immédiate.
· DETRUIRE (Ti) : permet la destruction d’une tâche, c’est-à-dire l’arrêt de son exécution. Elleprovoque la libération de l’espace mémoire qui avait été affecté à Ti lors de sa création et ladisparition de toute liste de son descripteur. Si le paramètre Ti représente la tâche active, il y aalors autodestruction de Ti. L’exécution d’une autodestruction provoque nécessairement ledéclenchement de l’algorithme de choix de l’allocateur du processeur afin d’élire une nouvelletâche à exécuter.
· ATTENDRE (événement) : permet à une tâche de se mettre en attente de l’événement préciséen paramètre. La tâche active lançant cette primitive perd la main, prend l’état en attente. Cetteopération est réalisée par l’insertion du descripteur de la tâche active dans la liste des tâches enattente et le déclenchement de l’algorithme d’allocation afin d’élire une nouvelle tâche àexecuter.
· SIGNALER (événement) : permet de réveiller une tâche en attente en lui signalant laréalisation de l’événement attendu par cette tâche et précisé en paramètre. L’exécution de cetteprimitive provoque l’insertion du descripteur de la tâche réveillée dans la liste des tâches
prêtes, si la tâche était simplement en attente, ou encore son insertion dans la liste des tâchessuspendues, si la tâche était dans l’état «en attente-suspendu ». Selon la politique d’allocationdu processeur mise en oeuvre, l’algorithme de choix sera ou ne sera pas déclenché afin devérifier si la tâche nouvellement insérée ne nécessite pas une exécution immédiate.
· ENDORMIR (délai) : réalise l’arrêt de la tâche active pendant un certain temps précisé par lavaleur du paramètre délai (auto-endormissement). L’exécution de cette primitive provoque laperte du contrôle du processeur pour la tâche active et l’insertion de son descripteur dans laliste des tâches en attente. Le paramètre délai du descripteur est alors mis à jour en fonction dela valeur du paramètre d’appel de cette primitive et de la politique de gestion des attentes miseen oeuvre par le gestionnaire de tâches.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 60/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 60
Dans certains systèmes, en particulier dans les systèmes temps réel, une tâche peut égalementen endormir une autre alors précisée par un second paramètre.
· SUSPENDRE (Ti) : effectue la suspension ou l’auto-suspension de la tâche Ti précisée en
paramètre d’appel. Cette opération ne peut être commandée que par la tâche active. Elleprovoque le transfert du descripteur de la tâche Ti de la liste des tâches prêtes ou de la liste detâches en attente vers, respectivement, la liste des tâches suspendues ou la liste des tâches dansl’état «en attente-suspendue» (si le système gère ce type d’état et que la tâche à suspendre estdéjà dans l’état en attente). Lorsque le paramètre d’appel Ti identifie la tâche active, il y a alorsauto-suspension. Le descripteur de la tâche active est alors inséré dans la liste des tâchessuspendues et l’algorithme de choix de l’allocateur du processeur est déclenché afin d’élire unenouvelle tâche.
· DESUSPENDRE (Ti) : réalise la dé-suspension de la tâche Ti. Cette opération ne peut êtregénérée que par la tâche active. Elle provoque le transfert du descripteur de la tâche concernéede la liste des tâches suspendues vers la liste des tâches prêtes, ou encore de la liste des tâchesen attente-suspendues vers la liste des tâches en attente. Dans le cas où Ti devient prête,l’algorithme de choix de l’allocateur du processeur peut être exécuté afin de vérifier si T nenécessite pas une exécution immédiate.
· P(S) : permet de mettre en place un mécanisme de synchronisation indirecte par sémaphore (cf.chapitre 4) en effectuant le test de la variable de sémaphore S et en bloquant éventuellement dela tâche qui l’effectue. Le blocage est réalisé en insérant le descripteur de cette tâche dans lafile d’attente F(S) associée au sémaphore S. En cas de blocage, l’algorithme de choix estdéclenché afin d’élire une nouvelle tâche.
· V(S) : permet le déblocage d’une tâche en attente dans la file d’attente F(S) du sémaphore Sen réalisant le relâchement de ce sémaphore (cf. chapitre 4). Cette opération est réalisée parl’insertion du descripteur de la tâche concernée dans la liste des tâches prêtes. L’algorithme dechoix de l’allocateur du processeur peut être déclenché afin de vérifier si la tâche débloquée nenécessite pas une exécution immédiate.
· ENVOYER (Message, BaL) : permet de mettre en place un mécanisme de communicationindirecte entre tâches par boîtes aux lettres. La tâche exécutant cette procédure envoie unmessage ou l’adresse d’un message (précisé par le paramètre Message) dans la boîte aux lettresprécisée par le paramètre BaL (cf. chapitre 4).
· RECEVOIR (Message, BaL) : permet à une tâche de recevoir un message qui lui a étéenvoyé par une autre tâche dans une boîte aux lettres. De la même manière qu’avec la primitiveENVOYER, le paramètre Message peut contenir Soit le Message à transférer, soit son adresse,et le paramètre BaL représente la boîte aux lettres supportant la communication.
Les primitives de synchronisation permettent de réaliser une synchronisation pure entre plusieurs tâchesou de forcer le changement d’état des tâches. Néanmoins, il est rare qu’un mécanisme decommunication ne sollicite pas une synchronisation (rigoureuse ou non) entre les émetteurs et lesrécepteurs. Ainsi, les primitives de communication permettent aussi aux tâches de se synchroniser et
d’échanger des informations.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 61/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 61
Les mécanismes permettant aux tâches de coopérer sont, dans la majorité des cas associés à desprocédures de haut niveau trop nombreux pour être énumérées ici. Ces procédures, du typeCREER_SÉMAPHORE, CREER_BOITES_AUX_LETTRES, TEST_AND_SET, BLOQUER, E
VEILLER, DEPOSER, RETIRER, RvRENVOI, RvRECEPTION, RvREPONSE... sont nécessaires àla création des structures de données qu’elles utilisent et à leur mise en oeuvre.
Les procédures de haut niveau sont principalement utilisées par les concepteurs d’applications temps-réel pour lesquelles les problèmes de synchronisation et de communication sont primordiaux etcruciaux. Leur utilisation est précisée et détaillée au cours du chapitre 4 qui aborde les problèmes liés àla coopération entre tâches.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 62/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 62
1.3. / LA GESTION DES INTERRUPTIONS
1.3.1. / INTRODUCTION
Lorsque l’unité centrale d’une machine est en marche, elle exécute des instructions sans jamais s’arrêter.Lorsqu’elle n’a aucune tâche à exécuter, le système d’exploitation lui fait exécuter une boucle d’attente
jusqu’à ce qu’il ait quelque chose à lui proposer. Ainsi, lorsqu’une machine est contrôlée par un systèmed’exploitation, elle doit donc toujours exécuter des instructions. Le problème se pose alors de savoir àquel moment l’unité centrale va prendre en compte les événements extérieurs à la séquenced’instructions qu’elle exécute un utilisateur a frappé une touche sur un clavier, une imprimante vient determiner l’impression d’une page, un capteur envoie un signal... A chacun de ces événementscorrespond un certain travail à exécuter par l’unité centrale. Le traitement spécifique à l’événement estréalisé par une tâche ou par un ensemble de tâches. Ces tâches doivent être exécutées par l’unitécentrale le plus rapidement possible pour que les échanges d’informations avec l’extérieur se fassentdans les délais les plus brefs ou que les incidents dus à des défaillances matérielles et/ou logicielles soientpris en compte instantanément. Pour cela, elles sont pratiquement toujours d’un niveau de priorité élevépar rapport aux autres tâches (du système ou de l’utilisateur) de manière à ce que le système puissesuivre rapidement les évolutions de son environnement sans perte d’information. Mais en contre partieelles doivent être extrêmement courtes pour ne pas saturer le processeur.
Pour résoudre le problème de la réponse à ces événements, les noyaux des systèmes d’exploitationdispose d’un gestionnaire d’interruption. Chaque événement se traduit par une interruption du travail encours d’exécution par l’unité centrale au profit de l’exécution de la tâche de traitement de cetteinterruption.
1.3.2. / NOTION D’INTERRUPTION
Une interruption est un événement permettant d’arrêter provisoirement le déroulement d’une tâcheactive pour prendre en compte un événement extérieur nécessitant l’exécution d’un programmeconsidéré comme prioritaire. Déclenchée par une cause extérieure au déroulement de l’instruction encours d’exécution, elle se traduit par une rupture de séquence provoquée par la commutation decontexte d’un processeur (cf. figure 3.1). Physiquement, une interruption est générée par un signalenvoyé au processeur. Ce signal peut provenir d’un autre processeur, d’un organe d’entrées-sorties oude tout procédé physique extérieur au système informatique. Il permet de forcer le processeur àsuspendre, dès le premier point interruptible, l’exécution d’un programme afin d’exécuter une tâche
prédéfinie.
La rupture de séquence doit avoir lieu dans un temps raisonnablement court (on ne peut pas attendre lafin de l’exécution du programme en cours pour envoyer la page suivante à l’imprimante ou pour traiterun événement relatif à une alarme).
De plus, l’état de l’événement signalé par une interruption n’est pas toujours durable. Le processeurdoit donc, dés l’apparition d’une interruption, réagir très vite afin de prendre en compte aussirapidement que possible les évolutions de l’environnement du système informatique et/ou d’en optimiserle fonctionnement. Pour cela, le traitement d’une interruption est en général prioritaire par rapport àl’exécution des tâches et des programmes d’application.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 63/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 63
Figure 3. 1 : Ruptures de séquence provoquées par un événement extérieur
Une des caractéristiques principales d’une interruption est son aspect asynchrone. Effectivement, uneinterruption étant générée par l’environnement du système informatique, elle peut se produire à
n’importe quel moment, sans forcément qu’il y ait une relation directe avec la séquence en coursd’exécution qu’elle va temporairement interrompre. Ce phénomène donc pose le problème de lareconnaissance de l’événement.
1.3.3. / DIFFERENTES CAUSES D’INTERRUPTION
Selon la provenance de l’événement et la nature du traitement qui lui est lié, on est amené distinguerdeux types d’interruptions: les interruptions internes et les interruptions externes.
1.3.3.1./ Les interruptions internes
Les interruptions internes sont des événements provenant de l’unité centrale du système informatique.Elles peuvent être de plusieurs origines :
· Les interruptions de l’horloge temps-réel : permettant la gestion du temps par le systèmed’exploitation. Leur fréquence est programmable. Le système d’exploitation utilise cesinterruptions pour tenir à jour les temps d’attente des différentes tâches, lancer des tâchescycliquement..., et bien évidemment pour comptabiliser le temps passé par un programme dansla machine (constituant un des composants de la facturation des services).
· Les interruptions dues aux erreurs (EXCEPTION) : permettant de protéger le systèmed’exploitation et les applications des utilisateurs contre les erreurs et le fonctionnementerratique, voire même volontairement hostile, d’une des applications. Parmi les erreurs donnantlieu à ce type d’interruption, on trouve : la violation d’accès à la mémoire, l’exécution d’uneinstruction non conforme (division par zéro...), l’utilisation d’une instruction privilégiéeréservée au système d’exploitation (appel à des primitives de base...). Ce type d’interruption estappelé également déroutement (trap) ou exception.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 64/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 64
· Les interruptions logicielles : permettant à un programme de faire une requête au système(par exemple pour faire une demande d’opération d’entrées-sorties) en exécutant uneinstruction d’appel au superviseur (SVC. SuperVisor Call). Cette instruction effectueexplicitement le lancement d’une fonction du système d’exploitation. Lorsqu’une tâche exécute
une requête, cela provoque sa démission et consécutivement l’élection de la tâche exécutant leservice demandé. Ce service n’est réalisé qu’après vérification des arguments d’appel, afind’éviter des tentatives de pénétration frauduleuse à l’intérieur du système.
1.3.3.2./ Les interruptions externes
Les interruptions externes proviennent des périphériques ou d’éléments extérieurs au systèmeinformatique (lors de la commande de procédés physiques). Elles sont toutes de même type mais denature très diverse et concerne en général principalement le gestionnaire d’entrées-sorties du système :
· La mise en service d’un périphérique (mise sous tension) provoque une interruption dedemande de travail,
· Après la fin de la frappe d’une ligne ou d’une page, l’imprimante envoie une interruption poursignaler qu’elle est prête à recevoir la ligne ou la page suivante,
· Le retour chariot d’un clavier provoque une interruption signalant la présence dune ligne detexte dans une zone tampon,
· Un contrôleur de disques signale par une interruption que le travail préalablement demandé aété accompli,
· Dans un contexte de contrôle de procédés, les phénomènes physiques sont signalés parinterruptions (atteinte de butée génération d’une alarme, envoi d’une mesure...) quiproviennent des différents capteurs mis en place sur l’application...
1.3.4. / MODE SYSTEME ET MODE UTILISATEUR
Le traitement d’un événement ainsi que la nature prioritaire de ce traitement engendre des risques nonnégligeables pour le système d’exploitation et les programmes d’application. A ce titre les opérationsd’entrées-sorties sont particulièrement critiques (effacement une bande magnétique ou d’une partition
sur un disque appartenant à un autre utilisateur, modification du contenu d’une adresse dans une zonede mémoire appartenant à un autre utilisateur...). Il est donc nécessaire de les contrôler trèssoigneusement.
Pour protéger le système d’exploitation, ainsi que les différentes tâches d’application, contre desprogrammes erratiques ou inamicaux, il est crucial qu’une tâche d’application ne puisse pas influer (demanière malveillante ou maladroite) sur l’exécution du système d’exploitation lui-même ou surl’exécution d’une tâche d’un autre utilisateur. Pour cela, certaines instructions, telles que les opérationsd’entrées-sorties ne sont jamais exécutées directement par une tâche d’application, mais sont exécutéespar une tâche du système d’exploitation pour le compte et à la demande d’un programme utilisateur.Ces instructions, appelées instructions privilégiées sont totalement interdites aux programmes desutilisateurs.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 65/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 65
Afin qu’un utilisateur quelconque ne puisse accéder à des zones de mémoire ou à des registresparticuliers propres au système, une unité centrale devant supporter un système d’exploitation doit avoirla propriété essentielle de pouvoir fonctionner selon deux modes d’exécution :
· Le mode superviseur, appelé aussi mode système ou mode maître les tâches s’exécutant dansce mode peuvent utiliser n’importe quelle instruction (privilégiées ou non),
· Le mode utilisateur, appelé aussi mode esclave les tâches s’exécutant dans ce mode ne peuventpas exécuter les instructions privilégiées.
Dans ces conditions, les instructions privilégiées ne sont exécutables que si le système est en modesuperviseur. Ainsi, la protection du système et de son environnement dès l’apparition d’une interruptionest réalisée par la commutation automatique du processeur en mode superviseur. L’implantation de cesdeux modes et de ces deux sous-ensembles d’instructions nécessite un bit spécial, dans le format desinstructions, indiquant si elles sont ou non utilisateurs, indique le mode courant d’exécution. Avantchaque exécution d’une instruction (prélude d’exécution) un test, réalisé en général par le matériel,permet de vérifier la conformité des deux bits :
· Bits conformes l’exécution est autorisée et s’effectue normalement,
· Bits non conformes un signal d’interruption est émis par le matériel et provoque l’arrêt de latâche en cours et l’exécution de la routine d’interruption qui lui est associée.
1.3.5. / LE MECANISME D’INTERRUPTION
Le mécanisme de traitement d’une interruption externe est généré directement, au niveau matériel, parles circuits de traitement.
Figure 3.2 : Exemple de traitement d’une routine d'interruption
Routine d’interruptionDébut
Masquer les interruptionsAcquitter les interruptions
Tant que il reste une interruption non traitée
Faire Identifier la source de l’interruption
Traiter l’interruptionFinTantque
Démasquer les interruptions
Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 66/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 66
Ce sont eux qui lancent la routine d’interruption (interrupt handier), c’est-à-dire la procédure à mettreen oeuvre pour prendre en compte une interruption, reconnaître la source qui l’a émise et la traiter.
Dés que l’occurrence d’une interruption est détectée au niveau matériel, le fonctionnement normal du
processeur est arrêté. La tâche active doit alors perdre la main au profit de la routine d’interruption.Son contexte ainsi que le mot d’état sont sauvegardés. La copie dans le mot d’état d’une valeuradéquate permet ensuite de commuter le système en mode supervision. Un code correspondant au typede l’interruption est ensuite affiché à l’entrée des circuits responsables du traitement. Ces Circuitsutilisent ce code pour générer l’adresse physique de la routine d’interruption qui a été programmée pourtraiter le type de l’interruption détectée. Cette adresse est alors copiée dans le compteur ordinal.L’écriture automatique d’une nouvelle valeur dans le compteur ordinal provoque un branchement àcette adresse, et donc l’exécution de l’instruction qu’elle mémorise. Par cette méthode, le systèmereprend automatiquement la main.
Toutes ces opérations sont enchaînées automatiquement par le matériel, ce qui permet une réaction trèsrapide du système. Chaque type d’interruption peut faire l’objet d’un traitement différent. La figure 3.2donne un exemple de traitement d’une routine d’interruption externe. Lorsqu’une interruption seproduit, le système doit être capable de répondre à un certain nombre de questions concernant la miseen oeuvre du traitement correspondant :
· Quand et comment le processeur reconnaît-il qu’une interruption est arrivée ?
· Quelle est la source responsable de l’interruption ?
· Quelle action entreprendre ?
· Comment reprendre la tâche interrompue ?
L’activation d’une interruption pendant l’exécution d’un programme au niveau des instructionss’effectue pendant la période transitoire nommée ‘prélude de l’instruction’ comme le montre la figuresuivante :
Instruction 1
Instruction 2
Instruction 3Instruction 4 Préludes des instructions : temps transitoires pendantlequel on vérifie si :
- 1- Il y a une interruption.- 2- L’instruction à exécuter est en mode
système ou utilisateur.- 3- Le processeur est en mode système
ou utilisateur.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 67/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 67
1.3.5.1./ Le masquage des interruptions
Dans le cas où le système gère un grand nombre d’interruptions, plusieurs indicateurs d’événements
correspondant à des causes distinctes peuvent être modifiés en même temps. Il se produit alors unconflit lors du choix de la routine d’interruption à exécuter. Ce conflit est souvent réglé en fixant unordre de priorité à chaque interruption. Néanmoins, en gérant plusieurs niveaux de prioritéd’interruption, le système s’expose au risque de n’exécuter que des routines d’interruption et deschangements de contextes (dans la mesure où, une routine peut être Interrompue par une autre, puisune autre, puis une autre...).
De plus, il peut être utile de protéger l’exécution d’une suite instructions contre certaines interruptionset cela quel que soit le niveau traité. Par exemple, pendant l’exécution d’une partie vitale de la routined’interruption, il est nécessaire d’empêcher que le traitement puisse être interrompu une nouvelle fois :
· Avant d’avoir pu mémoriser la première interruption,
· Lors de la sauvegarde du contexte de la tâche interrompue,
· Lors du transfert du contrôle du processeur à la routine d’interruption...
Il est donc crucial de pouvoir inhiber, c’est-à-dire retarder, voire même annuler, la prise en compte d’unsignal d’interruption. Le retard dans la prise en compte d’une interruption d’un niveau donné est réalisépar le masquage d’un ou plusieurs niveaux d’interruption. Cette opération est automatiquement réaliséeau niveau matériel.
En pratique, le système positionne un indicateur, appelé masque d’interruption. Cet indicateur estconstitué d’un ensemble de bits de masquage, à raison d’un bit par niveau d’interruption. Une fois que lebit de masquage relatif à un niveau est positionné à 1, le niveau est dit masqué. Ce bit est consulté avanttout essai de prise en compte d’une interruption. Le masque d’interruption fait partie du mot d’état duprocesseur et peut ainsi être modifié à chaque commutation de ce mot. Ce procédé permet à touteroutine d’interruption de masquer d’autres niveaux d’interruption que celui en cours de service.
Il est évident que le masquage d’une interruption doit être très court. Effectivement, lorsque desinterruptions sont masquées, c’est une partie du système ou de son l’environnement qui est cachée. Lemasquage des interruptions ainsi que le niveau de priorité alloué à chaque événement. doivent donc fairel’objet d’études approfondies afin d’être certain qu’aucun événement important. lié à l’évolution ducomportement du système, ne sera perdu. La levée d’inhibition, appelée démasquage, est alors réaliséepar la commutation du mot d’état produit après la restauration du contexte de la tâche qui avait étéinterrompue. Cette opération consiste à autoriser de nouveau les interruptions.
Pour supprimer complètement la prise en compte d’un niveau d’interruption, le système peut mettre enoeuvre un processus de désarmement. Tout se passe alors comme si la cause de l’interruption étaitsupprimée. Pour rendre de nouveau sensible le niveau désarmé il suffit au système de le réarmer.L’armement et le désarmement sont réalisés par la modification d’un indicateur du mot d’état.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 68/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 68
Masquer une interruption c’est ne pas tenir compte de celle ci. Démasquer, c’est autoriser uneinterruption (en tenir compte) par exemple après le traitement de celle ci. Plusieurs IT peuvent êtremasquées en même temps. On traite les IT dans le registre d’IT par ordre de priorité du MSB au LSB.
1
1
IT2
IT1
Registre E/S :permet
d’identifierl’IT.
Registre demasquage
Registre d’IT
1 Vecteur d’@des IT (ou
vecteurd’Interruption)
ITi ITn
MSB LSB
&
≠≠ 0 : bit d’IT passe à 1 on aune ou plusieurs IT.= 0 : Il n’y a pas d’IT.
= 0 : IT masquée.= 1 : IT non masquée.
@IT1
@IT2@ITi @ITn
@ de la routine à exécuterlors de l’activation de l’IT.L’@ de l’IT est alorschargé dans le compteurordinal du

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 69/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 69
1.3.5.2./ Reconnaissance d’une interruption
Suivant le type de l’interruption (interne ou externe) la reconnaissance de son occurrence aura lieu à des
moments différents. Pour les interruptions externes, le processeur possède un bit spécial, appelé bitd’interruption, qui est mis à 1 par le matériel lorsque se produit un événement externe. Ce bitd’interruption est testé dans le prélude de chaque instruction (cf. figure 3.3) afin de savoir si uneinterruption s’est produite au cours de l’exécution de l’instruction précédente.
Figure 3.3 : Algorithme de reconnaissance d’une interruption
La reconnaissance d’un signal d’interruption est réalisée au niveau matériel, à l’aide de deux lignes decommande:
· Les périphériques signalent leurs requêtes en activant la ligne IRQ (interrupt request),
· Lorsque le processeur reçoit cette requête, il positionne ensuite la ligne ITA (interruptacknowledge) pour acquitter l’interruption, c’est-à-dire signaler au périphérique la prise encompte de l’interruption qu’il a générée.
Ainsi, une interruption externe n’est donc traitée qu’en début de l’instruction suivante de la tâche active(le processeur termine d’abord l’instruction en cours). Ceci n’est évidemment pas le cas d’uneinterruption interne du type exception, puisque l’interruption est alors déclenchée afin que l’instructionerronée ne s’exécute pas complètement. La reconnaissance de ce type d’interruption est réalisée lors de
l’opération de déroutement (cf. §7.2 de ce chapitre).
1.3.5.3./ Identification de la source
Pour traiter une interruption, il est nécessaire d’en connaître la source, c’est-à-dire d’identifier lepériphérique qui l’a émise. La manière d’effectuer cette identification dépend à la fois du matérielconcerné, du mécanisme d’identification, des niveaux d’appréhension d’un événement et enfin del’inhibition ou non de ces niveaux. Ces différentes méthodes d’identification ont conduit lesconstructeurs à concevoir plusieurs mécanismes de gestion d’interruption suivant le compromiscoût/performance approprié.
Reconnaissance d ‘une interruption
Début
Si (bit d’interruption =1) ET (interruption non masquée)
Alors Lancer la routine d’interruptionSinon Poursuivre la séquence en coursFinSi
Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 70/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 70
1.3.5.3.1./ Identification directe
Ce mode d’identification est utilisé principalement sur les systèmes de type temps-réel où il est très
important d’identifier rapidement les interruptions. La méthode ]a plus élémentaire consiste à disposerd’un registre d’interruption, dont chaque bit correspond à un événement externe. Il suffit alors,d’examiner ce registre pour savoir d’où vient l’interruption à traiter. Dans le cas où plusieursinterruptions se seraient produites chacun des bits de ce registre associé à l’événement prend la valeur 1.
Figure 3.4 : Algorithme d’identification directe
L’algorithme de la figure 3.4 est un exemple de traitement d’identification directe d’une sourced’interruption. La boucle de test de cet algorithme considère l’ensemble des interruptions qui se sontproduites à un instant donné et accepte même les interruptions qui arrivent au cours du traitement d’uneinterruption. Il est également possible de prendre en compte les niveaux de priorité des interruptions, enaffectant à chaque bit d’interruption une place dans le registre d’interruption en fonction de la prioritéde l'événement qui lui est associé, et en parcourant ce registre dans l'ordre adéquat.
1.3.5.3.2./ Identification par scrutation
Ce mode d’identification tien est utilisé dans des systèmes de type micro-ordinateur pour lesquelsl'amélioration des performances provenant de l‘utilisation d’un registre d’interruption ne justifie pas son
coût. Dans le cas d’une identification par scrutation (“polling") le système interroge individuellementchaque source possible d'interruption. Cette méthode permet de faire tout ce que permet l’utilisationd'un registre d’interruption, mais de manière moins rapide.
1.3.5.3.3./ Reprise de la tâche interrompue
Lorsqu'une routine d'interruption est déclenchée, la tâche active Tj perd le contrôle du processeur. Letraitement d’une interruption ne doit en aucun cas affecter le fonctionnement de cette tâche. La reprisede son exécution doit ainsi se faire à partir de la sauvegarde de son état au moment de son interruption.C’est pour cette raison qu'en général les routines d’interruption effectue la sauvegarde du contexte de latâche interrompue (cf figure 3.2)
Identification directeDébut
TantQue Registre d’interruption <> 0
Faire • Trouver un bit du registre d’interruption à1
• Traiter l’interruption correspondante
• Mettre le bit à0
FinTantque
Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 71/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 71
Figure 3.5 : Sauvegarde et restauration de contexte lors du traitement d'une interruption
Par contre, une fois la tâche d’interruption terminée et s’il n’y a plus d’autre interruption à traiter (leregistre d’interruption vaut zéro), la reprise de La tache interrompue Ti peut être effectuée. Cettereprise s'effectue par l’exécution d’une instruction spéciale RFI (Return From Interrupt) qui restaurenon seulement le contexte de cette tâche (cf figure 3.5) mais également le mot d'état remettant ainsi leprocesseur en mode utilisateur. Lors de la restauration du contexte de la tache Ti, l’adresse pointée parle compteur ordinal et qui avait été sauvegardée par la routine d’interruption, est recopiée dans lecompteur ordinal, Cette copie provoque automatiquement un branchement à l'instruction de la séquencede Ti précédemment interrompue. C’est ainsi que Ti reprend la main. La reprise de Ti s’effectue alorsau bon endroit dans sa séquence d’instructions. c'est-à-dire à l’endroit où celle-ci avait été interrompue.Il est à noter que si le traitement l’interruption a provoqué une modification dans l’ordre de la liste destâches prêtes, et que a tâche Ti qui avait été interrompue n’est plus en tête de cette liste ou plus dans laliste, l'exécution de l' instruction RFI provoquera la restauration du contexte de la tâche en tête de laliste des tâches prêtes
1.3.6. / NOTION DE NIVEAU D'INTERRUPTION
Les différentes causes d'interruption nécessitent l'exécution de tâches d'interruption on différentes. Laplupart des mécanismes de gestion des interruptions permettent de distinguer ces causes en mettant enoeuvre la notion de niveau d’interruption. Cette notion permet une hiérarchisation du traitement desinterruptions. Ainsi, lors du traitement d’une interruption IT de niveau ni, si L une interruption ITp deni veau supérieur se produit, le traitement de IT pourra être interrompue afin de traiter l’interruptionITp (cf. figure 3.6). A la fin du traitement d’ITp, le traitement d'IT pourra être repris, à conditionqu’aucune autre interruption de niveau supérieur à ni et inférieur à celui d’ITp ne soit intervenu pendantle traitement d’ITp.
Figure 3.6 : Ruptures de séquences provoquées par des événements hiérarchisés

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 72/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 72
La routine d’interruption est alors traitée soit par un programme unique Soit par un programme distinctassocié à chacun des niveaux. L’occurrence d’un événement est indiquée soit par un seul indicateur, soirpar plusieurs indicateurs (un par niveau).
L'utilisation de plusieurs indicateurs permet alors d'augmenter l'efficacité du gestionnaire d'interruptionqui peut ainsi déclencher directement la routine correspondant au niveau traité.
1.3.6.1./ Niveau unique à priorité unique
Certains systèmes informatiques ne permettent de traiter qu’un seul niveau d’interruption. Dans ce cas,toutes les lignes d'interruption provenant chacune d’un périphérique différent, sont réunies par un OUlogique câblé sur une bascule (flip-flop) (cf figure 3.7).
Cette bascule est directement connectée au bit d'interruption de l’unité centrale par la ligne IRQ. Sonchangement d’état provoque le déclenchement de la routine d’interruption. Celle-ci va alors tester laligne de chaque périphérique pour identifier la source qui a provoqué l'interruption.
Figure 3.7: Système d’interruption à niveau unique et priorité unique
Avec cette structure, l’algorithme de traitement de la routine d’interruption doit traiter les différentspériphériques équitablement (sans priorité), par exemple en ne commençant jamais le test des lignesd’interruption dans le même ordre.
1.3.6.2./ Niveau unique à priorités multiples
Avec ce montage, les périphériques sont chaînés en guirlande (daisy chain) sur une seule ligned’interruption par ordre de priorité. Ils sont connectés par un OU logique câblé sur la ligne IRQ, elle-même reliée à une bascule connectée au bit d’interruption (cf. figure 3.8). Par contre, la ligne ITA seconnecte sur chacun des périphériques.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 73/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 73
Ainsi, les interruptions du périphérique Pi ne sont prises en compte que si les périphériques précédentsP1, P2... ne sont pas en cours de service. De plus, lorsqu’il sert une interruption générée par lepériphérique Pi, le système peut être interrompu par une interruption provoquée par P1 ou P2 il peut
alors traiter complètement celle-ci qui est de niveau plus élevé pour revenir ensuite au traitement de P.Une requête d’interruption générée sur la ligne IRQ peut être activée par plusieurs périphériques enmême temps. Le processeur recevant une requête active alors la ligne ITA pour acquitter cettedemande. Dès que le signal ITA atteint un périphérique ayant fait une requête, sa propagation estarrêtée. Le périphérique envoie alors sur le bus de données du système un numéro d’identification quipermet d’accéder à une table de vecteurs d’interruption.
Ce numéro correspond, par exemple, à un index de cette tablé. Cette table contient pour toutes lesinterruptions traitées par le système l’adresse de la tache d’interruption à exécuter. Il suffit alors decommuter le contexte de cette tache pour lancer le traitement relatif à la requête formulée.
Cette méthode, dite des interruptions vectorisées, résout à la fois le problème de l’identification del’interruption et celui des conflits d’accès, puisque le système ne prend en compte qu’une interruption etune seule à la fois, même si plusieurs requêtes sont effectuées simultanément.
Figure 3.8 . Principe du chaînage daisy chain
Le périphérique servi le premier est celui qui est plus proche du processeur sur la ligne ITA. Lespriorités sont ainsi allouées par la position physique des périphériques le plus proche du processeurétant alors le plus prioritaire. Toutefois, cette méthode est moins souple que la précédente puisqu’ellene permet pas de modifier les priorités des interruptions par programme.
1.3.6.3./ Niveaux multiples à priorités multiples
Lorsque le système comporte un grand nombre de périphériques, il est généralement nécessaire decombiner plusieurs techniques permettant de mettre en oeuvre plusieurs niveaux d’interruption. De plus,chaque niveau doit permettre de distinguer les périphériques par ordre de priorité. On rencontre
plusieurs configurations matérielles mettant en oeuvre ce principe, selon que le processeur possède uneou plusieurs lignes d’interruption.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 74/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 74
1.3.6.3.1./ Systèmes àune ligne d’interruption
Avec ce montage, les différents niveaux d’interruption sont mis en oeuvre par un chaînage du type
guirlande. Chaque chaînage est réuni sur un OU logique câblé. Ce dernier est connecté une bascule quiest elle-même reliée au bit d’interruption. Un décodeur permet au système de sélectionner les niveauxd’interruption selon leur priorité (cf. figure 3.9). Cette sélection est réalisée de manière programmée.
Lorsqu’une interruption se produit, le processeur envoie sur le bus un code indiquant au décodeur leniveau d’interruption sur lequel ce dernier doit envoyer un signal ITA. Ce code peut être variable ce quioffre un grand nombre de combinaisons de sélection du premier niveau d’analyse. Le signal ITA sepropage ensuite dans la chaîne jusqu’à ce que le périphérique émetteur de l’interruption soit atteint, dela même manière qu’avec un chaînage en guirlande classique.
Figure 3.9.: Système à ligne d’interruption unique
Si ce périphérique ne se trouve pas sur le niveau sélectionné, un nouveau code est généré par ledécodeur afin de sélectionner le niveau suivant. Dès que [a source d’interruption est atteinte, letraitement est alors le même que pour un chaînage en guirlande le périphérique place sur le bus sonnuméro d’accès à la table des vecteurs d’interruption dans laquelle se trouve l’adresse de la tâche detraitement de l’interruption qui peut alors prendre le contrôle.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 75/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 75
1.3.6.3.2./ Systèmes àlignes d’interruption multiples
Certains processeurs possèdent plusieurs lignes d’interruption IRQ et ITA. Chaque niveau est mis en
oeuvre par un chaînage du type guirlande. Chacun des chaînages en guirlande est connecté sur une ligneIRQ (cf. figure 3.10). Les lignes d’interruption multiples sont souvent spécialisées. Ainsi, certainsprocesseurs (tels que les processeurs MOTOROLA) comportent trois lignes d’interruption
· La ligne NMI (Non Masquable Interrupt) réservée à des interruptions de très haute prioritésignalant en général une anomalie. Les interruptions générées sur cette ligne ne peuvent pasêtre masquées par le processeur,
· La ligne FIRQ (Fast Interrupt Request) réservée aux interruptions devant être traitées trèsrapidement. Avant de traiter une interruption générée sur cette ligne, seul le Compteur ordinalet le mot d’état sont sauvegardée automatiquement.
· La ligne IRQ (Interrupt Request) correspondant aux interruptions classiques pour lesquelles leprocesseur sauvegarde automatiquement tous les registres au moment de la prise en compted’une interruption.
Figure 3. 10 Système à lignes d’interruption multiples
Chaque niveau est traité indépendamment. Dès qu’une interruption est détectée sur un des niveaux, lemécanisme d’identification et de traitement des chaînages en guirlande est alors lancé sur le niveaucorrespondant.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 76/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 76
1.3.6.3.3./ Notion de contrôleur d’interruption
Pour les systèmes devant gérer un nombre élevé de périphériques, le nombre de lignes d’interruption
disponibles au niveau du processeur devient vite insuffisant. Il est alors nécessaire de déplacer une partieimportante de la logique d’interruption en dehors du processeur en la disposant au niveau d’une ou deplusieurs unités séparées (cf. figure 3.11), appelées contrôleur d’interruption (P.I.C. : ProgrammableInterrupt Controler). Leur rôle est de décharger le processeur des Opérations de masquage etd’identification des sources d’interruption. Un contrôleur d’interruption est composé de plusieursregistres configurables. C’est la configuration de ces registres qui permet la programmation de laroutine d’interruption. Ainsi, selon les valeurs contenues dans ces registres, le programmed’identification mettra en oeuvre une technique de scrutation de type polling ou encore une techniqued’identification directe permettant ou non de considérer chaque ligne d’interruption avec le mêmeniveau de priorité. Néanmoins, en plus des registres de programmation, la plupart des contrôleurscomportent au moins deux registres :
· Un registre d’interruption permettant d’identifier les interruptions,
· Un registre de masquage permettant d’inhiber les interruptions de manière sélectives.
Figure 3.11 Système d’interruption utilisant un contrôleur d’interruption
Chaque niveau d’interruption (ou chaque ligne d’interruption) est lié à un bit du registre d’interruption.Ce registre est testé bit à bit lors d’une modification de sa valeur afin de déterminer la source del’interruption. Dés que celle-ci est identifiée, le bit qui la représente dans le registre d’interruption estcomparé au bit qui lui est symétrique dans le registre de masquage. Selon le résultat de ce test,l’interruption sera masquée ou au contraire traitée. Si l’interruption n’est pas masquée, le contrôleurpeut mettre en oeuvre un mécanisme du même type que celui qui est réalisé avec une structure enguirlande simple ou complexe en utilisant ou non un décodeur. Le lancement effectif de la tâche de
traitement associée à l’interruption est effectué par le forçage de son adresse de base dans le registrecompteur ordinal.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 77/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 77
La mise en oeuvre des algorithmes d’identification et de gestion des niveaux de priorité est réalisée demanière câblée ce qui a pour effet d’augmenter considérablement la vitesse de traitement desinterruptions. De plus, en donnant la possibilité de traiter ces différentes opérations de manière
programmée, les structures utilisant des contrôleurs d’interruption offrent une grande souplesse de miseen oeuvre et d’utilisation.
1.3.7. / TRAITEMENT DES INTERRUPTIONS INTERNES
Contrairement à une interruption externe, une interruption interne est un événement provoquédirectement par l’instruction en cours d’exécution par le processeur. Cet événement peut intervenir lorsd’une demande d’exécution d’une procédure système formulée par la tâche en cours ou encore lorsd’une anomalie de fonctionnement du système.
1.3.7.1./ Les appels au superviseur
Un appel au superviseur (SVC : SuperVisor Call) est une instruction mise à la disposition desutilisateurs pour leur permettre, à partir de leurs programmes d’application d’effectuer un appel à uneprocédure du système d’exploitation exigeant des droits étendus. Ces droits concernent généralement lepassage du processeur du mode utilisateur au mode superviseur, le masquage d’interruptions ou deniveaux d’interruption, les droits d’accès...
Lorsqu’une tâche exécute une instruction d’appel au superviseur, cela a pour effet de provoquer unecommutation du contexte du processeur. Le mécanisme de commutation permet d’assurer la protectionde certaines ressources matérielles et logicielles (zones mémoires, registres, instructions privilégiées...).Cette protection est réalisée en imposant des conditions d’entrée dans la procédure appelée. Pour cela :
· Le nouveau contexte (mode, masquage...) remplace celui de la tâche effectuant l’appel dans lemot d’état logé dans une zone mémoire inaccessible aux utilisateurs,
· La routine de traitement de la requête d’appel au superviseur commence par une séquence devérification des droits de l’utilisateur à exécuter cet appel et de la validité des paramètrestransmis,
· En fin de traitement, le contexte de l’utilisateur est restitué par une simple permutation avec le
contexte spécifique de la routine qui vient d’être exécutée.
Chaque instruction SVC d’appel au superviseur représente en fait une macro-instruction. Cette macro-instruction permet de choisir les différentes procédures accessibles par un appel au superviseur. Lechoix de la procédure est réalisé à l’aide d’un paramètre. Ce mécanisme est mis en oeuvreprincipalement dans les couches de gestion des entrées-sorties et de gestion de fichiers d’un systèmed’exploitation dont les fonctions sont en général accessibles que par l’intermédiaire d’un appel ausuperviseur.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 78/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 78
1.3.7.2./ Les déroutements
Un déroutement (trap) correspond au traitement d’une interruption interne signalant une anomalie dans
le déroulement d’une instruction. Cette anomalie empêche un déroulement normal de l’exécution decette instruction. Les déroutements peuvent être classés en fonction de leurs causes qui peuvent êtrediverses :
· Données incorrectes rendant impossible l’exécution correcte de l’instruction (division par zéro,débordement arithmétique...)
· Tentatives d’exécution d’une instruction interdite par un dispositif de protection (violation deprotection de mémoire, exécution d’une instruction privilégiée en mode utilisateur...)...
· Instruction non exécutable (code de l’opération non affecté, adresse hors de la mémoireexistante, utilisation d’une ressource absente sur la configuration utilisée...).
Selon leur cause, certains déroutements peuvent être supprimés (les erreurs arithmétiques ou leslectures de fichiers au-delà de leur limite peuvent être signalées par une valeur de retour d’unparamètre). Toutefois, le caractère strictement synchrone des déroutements interdit leur retard de priseen compte, comme cela est possible lors du traitement d’interruptions externes. Ainsi, la notion demasquage ne peut pas s’appliquer aux déroutements.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 79/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 79
1.4. / LA GESTION DU PARALLÉLISME ET DE LA COOPÉRATION ENTRE LESTÂCHES
1.4.1. / INTRODUCTION
Les interruptions et autres phénomènes externes se produisent dans un ordre et avec un minutagealéatoires. Le système d’exploitation doit donc être capable d’accepter ces signaux à tout moment, ens’assurant qu’aucune confusion n’est possible. De plus, dans le cas de la multiprogrammation et dessystèmes temps-réel, les tâches ne sont jamais totalement indépendantes plusieurs d’entre elles désirentpar exemple agir sur une même variable ou accéder à un même périphérique. Cependant, quel que soit lesystème informatique considéré (monoprocesseur ou multiprocesseur), il ne peut y avoir à un instantdonné qu’une seule tâche ou un nombre limité de tâches actives en même temps. Mais, sur une périodede temps de quelques millisecondes, la plupart des tâches prêtes ou en attente peuvent devenir actives etprendre possession du processeur à un instant ou à un autre.
Ce type de traitement ne poserait pas de problème si les tâches étaient totalement indépendantes (sur unsystème monoprocesseur il pourrait être résolu par un simple multiplexage). En pratique les tâches sontbien indépendantes pour une bonne part de leur déroulement (ce qui justifie leur existence en tantqu’entités distinctes) mais elles doivent généralement être capables d’interagir en certains points de leurexécution, pour des opérations nécessitant le partage de ressources ou encore pour des opérations decommunication et de synchronisation très fréquentes dans le cadre d’applications temps-réel.
Pour résoudre les problèmes posés par les relations entre les différentes tâches d’une marne application,les systèmes d’exploitation mettent à la disposition des développeurs, des outils et des méthodes decommunication et de synchronisation qu’il met, d’autre part, lui-marne en oeuvre pour gérer les
relations entre ses propres tâches et celles des utilisateurs. Ces problèmes délicats de relations inter-tâches ne peuvent être résolus correctement que par des approches bien structurées que nous allonsétudier dans ce chapitre.
1.4.2. / L’EXCLUSION MUTUELLE
Le problème de l’exclusion mutuelle (mutual exclusion) se pose lorsque plusieurs tâches veulent separtager une même ressource qui ne peut être utilisée que par une seule tâche ou un nombre limité detâches (cf. figure 4.1). Lorsqu’une imprimante est partagée entre toutes les tâches traitées par lesystème d’exploitation et lorsque l’une d’elles a commencé à imprimer ses résultats, il faut que le
processus d’impression se déroule jusqu’à sa fin. Dans le cas contraire, les résultats listés seraientinexploitables.
Figure 3.1 : partage d’une ressource commune

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 80/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 80
Prenons un autre exemple considérons un local dans lequel des individus entrent et sortent par une ported’entrée et une porte de sortie. L’entrée dans le local déclenche une l’interruption ITE et la sortie dulocal déclenche l’interruption ITS (cf. figure 4.2).
Figure 3.2 : Exemple d’exclusion mutuelle
On désire compter le nombre d’individus présents en même temps dans le local à l’aide du compteur N.Le traitement des interruptions ITE et ITS peut alors se faire à l’aide des deux procédures suivantes (cf.figure 4.3) :
Traitement ITEDébut
Charger (N)à AccumulateurAccumulateur + 1à AccumulateurCharger (Accumulateur)à N
Fin
Traitement ITSDébut
Charger (N)à AccumulateurAccumulateur - 1à AccumulateurCharger (Accumulateur)à N
Fin
Figure 4.3 : Exemple d’algorithme pour ITE et ITS
Si on décide que l’interruption ITS est prioritaire par rapport à l’interruption ITE, le processeur arrêtele traitement de l’interruption ITE au moment où se produit une interruption ITS pour exécuter letraitement de ITS. Le traitement de ces deux interruptions consécutives sera alors le suivant (cf. figure4.4) :
Figure 3.4: Exemple de traitement d'ITE et ITS

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 81/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 81
La valeur finale du compteur N est alors erronée car en traitant ITS dès qu’elle se produit. on fait unemodification de sa valeur alors que la modification précédemment commencée, lors du traitementd’ITE, n’a pas été achevée. Chacune des deux routines d’interruption a besoin de la ressource N. Sil’une des routines interrompt l’autre, des risques d’incidents sur N sont probables. La variable N est
donc une ressource critique qu’il faut partager et donc protéger. Ceci signifie que lorsqu’une tâcheutilise déjà la variable N, elle doit interdire aux autres tâches de venir utiliser dans le même temps cettevariable pour ne pas engendrer d’erreurs.
On définit alors des sections critiques pour désigner la partie de code du code d’une tâche dans lequel latâche accède à une ressource critique (cf. figure 4.5). Ces sections critiques représentent l’ensemble desinstructions d’une tâche qui à l’instant considéré nécessitent l’utilisation de la ressource critique. Achaque instruction ou bloc d’instructions nécessitant l’utilisation d’une ressource critique, est associéeune section critique.
Figure 4.5 : Ressource Critique et Sections Critiques
Pour qu’une tâche puisse utiliser une ressource critique et à chaque fois qu’elle voudra y accéder, elledevra mettre en oeuvre deux types de primitive, signifiant :
· « Puis-je entrer en section critique ? » c’est à dire exécuter les instructions composant lasection critique et utilisant donc la ressource critique.
· « J'ai fini avec la ressource critique » : pour poursuivre le déroulement de la tâche par lesinstructions qui suivent la section critique, c’est à dire sortir de section critique.
Certaines règles doivent être respectées pour gérer correctement ce type de problème :
· Une tâche qui entre en section critique doit interdire aux autres tâches d’y entrer.
· Une tâche qui attend pour entrer en section critique doit être bloquée.
· Une tâche qui sort d’une section critique doit autoriser les autres tâches à entrer en sectioncritique et doit, éventuellement, débloquer une tâche bloquée.
Ressource critique : ressource acceptantun nombre limité de tâche.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 82/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 82
Ces impératifs nécessitent la mise en place de mécanismes dits d’exclusion mutuelle tels que l’attenteactive et le sémaphore
1.4.2.1./ Le mécanisme d’attente active
Le mécanisme d’attente active nécessite l’utilisation d’une variable booléenne « V» appelée Verrou quiprend la valeur 0 lorsque l’entrée en section critique est autorisée et la valeur i dans le cas contraire. Laprotection de la section critique est réalisée par une primitive appelée TAS (Test And Set) qui effectuede manière indivisible le test du Verrou et sa modification.
L’algorithme de cette primitive est présenté figure 4.6. L’appel de la primitive TAS doit être situé àl’entrée de la section critique de toutes les tâches désirant se partager et protéger la ressource critique(cf. figure 4.7). Cet appel constitue la demande d’entrer en section critique du type Puis-je entrer ensection critique ? Chaque tâche désireuse d’exécuter une section critique demandera l’autorisation de lefaire par l’intermédiaire de la primitive TAS qui consultera alors la variable «verrou ».
Figure 4.6 : Algorithme de la primitive TAS
Dans le cas où la section critique serait libre (V = O), la primitive TAS positionne le verrou à la valeur 1(V = 1) ce qui a pour effet de bloquer l’entrée de la section critique aux autres tâches. L’autorisation de
poursuivre l’exécution en section critique est ensuite donnée à la tâche par l’incrémentation de soncompteur ordinal. Cette incrémentation a pour effet de «sauter»l’instruction de saut et donc depositionner le compteur ordinal de la tâche à l’adresse de la première instruction de la section critique.
Dans le cas où la ressource critique serait occupée (V = 1), la primitive TAS provoque un bouclage surson propre appel. Ceci est réalisé par la non-modification de la valeur du compteur ordinal de la tâchedemandant de poursuivre son exécution en section critique. Ainsi. l’instruction qui sera exécutée par latâche après l’exécution de la procédure TAS est une instruction de branchement à l’appel de laprocédure TAS. A chaque nouvel appel. TAS se contente de tester la valeur de la variable verrou
jusqu’à ce que celui prenne pour valeur 0.
Primitive TAS (V: booleén)
Début
Lire le contenu de la variable verrou “V’Si V=0
Alors Vß1Compteur Ordinalß Compteur Ordinal + 1
FinSi
Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 83/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 83
La sortie de la section critique est effectuée par une remise à 0 de la variable verrou et constituel’information «j’ai fini avec la ressource critique». L’inconvénient majeur de ce mécanisme réside dansle fait que lorsqu’une ressource critique est occupée par une tâche, les autres tâches en attente pour
entrer en section critique sont toujours prêtes. Elles peuvent donc être activées et exécutent alors enpermanence une boucle sur l’appel à la primitive TAS chaque fois qu’elles le sont. Ce qui conduit à ungaspillage du temps processeur. De plus, l’utilisation de ce mécanisme n’est pas souhaitable.
Lorsqu’une section critique est longue, car le processeur est alors monopolisé par les attentes activesDans le cas de système temps-réel, car lorsqu’une tâche est activée, c’est en général parce qu’elle est laplus prioritaire, à l’instant considéré. Si elle entre alors dans un processus d’attente active, le processeurne fera que boucler sur l’appel de la primitive TAS et aucune autre tâche ne pourra être exécutée.
Figure 4. 7 : Utilisation du mécanisme d’attente active
Par contre, son utilisation est encore répandue dans les systèmes multitâches multiutilisateurs. En effet,ces systèmes fonctionnant en général en temps partagé toutes les tâches sont exécutées et si l’uned’elles entre en attente active, elle ne bouclera que pendant la période de temps qui lui est allouée.Ainsi, la tache utilisant la ressource critique pourra continuer en section critique, lorsque sa tranche de
temps lui sera allouée et pourra alors libérer la ressource critique attendue.
1.4.2.2./ Le Sémaphore
Le mécanisme de sémaphore a été développé dés 1968 par DIJKSTRA. Il est basé sur l’idée simplequ’il est inutile d’activer une tâche en attente pour entrer en section critique tant que la ressourcecritique correspondante n’est pas disponible. De plus la libération de la ressource critique peut être miseà profit pour débloquer une des taches en attente de celle-ci.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 84/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 84
A chaque ressource critique est associé un sémaphore permettant le partage et la protection de laressource. Un sémaphore est constitué d’une structure de données qui comporte :
· Une variable entière Mutex, appelée jeton de sémaphore.
· Une file d’attente F(Mutex).
Cette structure de données ne peut être manipulée que par les primitives ATTENDRE (wait) etSIGNALER (signal) qui sont généralement représentées par les symboles P(Mutex) et V(Mutex) etsignifiant respectivement « Puis-je entrer en section critique ? » pour P(Mutex) et « j’ai fini avec laressource critique pour V(Mutex) » (cf. figure 4.8).
Figure 4.8 : Algorithmes des primitives P(Mutex) et V(Mutex)
Les interruptions sont inhibées pendant le temps d’exécution de P(Mutex) et de V(Mutex). Ainsi, cesdeux primitives sont ininterruptibles mais pour un temps très court ce qui ne porte pas préjudice àl’exécution des applications en cours. De la même manière que celle utilisée pour l’attente active,l’implémentation de l’exclusion mutuelle par sémaphore est réalisée en plaçant (cf. figure 4.9) :
· La primitive P(Mutex) à l’entrée de la section critique de chaque tâche utilisant la ressourcecritique considérée.
· La primitive V(Mutex) à la sortie de la section critique de chaque tâche utilisant la ressourcecritique considérée.
Pour bien comprendre le mécanisme d’exclusion mutuelle par sémaphore, il faut noter que la variable desémaphore Mutex représente le nombre de droits d’entrée (ou de jetons d’accès) en section critiquelorsqu’elle est positive ou nulle. Sa valeur absolue représente le nombre de tâches présentes dans la filed’attente du sémaphore lorsqu’elle est strictement négative. Cette caractéristique permet ainsi de gérerdes ressources critiques conçues de telle sorte qu’elles peuvent être affectées à plusieurs tâches enmême temps, jusqu’à un maximum de N tâches.
P (Mutex) V (Mutex)
Début Début
Mutexß Mutex - 1 Mutexß Mutex + 1
Si Mutex <O Si Mutex <= 0
Alors Alors
• Enlever la tâche active de la liste des tâches prêtes • Enlever la tâche en tête de la file d’attente F (Mutex)
• Mettre la tâche active dans la file d’attente F (Mutex) • Mettre cette tâche dans la liste des tâches prêtes
FinSi FinSiFin Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 85/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 85
Ainsi, l’initialisation de la structure de données associée constituant le sémaphore se fera toujours de lamanière suivante :
· La variable de sémaphore Mutex doit être initialisée à une valeur > 0 représentant le nombre detâches pouvant être traitées en même temps par la ressource critique.
· La file d’attente F(Mutex) doit être vide à l’initialisation.
Figure 4.9 : Exclusion mutuelle par sémaphore
Le test sur le signe de Mutex permet de déterminer immédiatement si des tâches sont en attente de la
ressource critique associée au sémaphore. Le rôle de la primitive P(Mutex) est de donner des droitsd’accès aux tâches le demandant, tant qu’il en reste (on dit aussi que la tâche prend un jeton desémaphore). Le rôle de la primitive V(Mutex) apparaît alors clairement puisque l’incrémentation deMutex correspond au rétablissement d’un droit de passage (la tâche rend un jeton de sémaphore). Deplus, les tâches qui tentent d’entrer en section critique lorsque tous les droits d’accès ont été distribués,sont automatiquement bloquées et mises dans une file d’attente, ce qui évite qu’elles n’encombrent leprocesseur pour effectuer des tentatives inutiles.
Elles seront immédiatement libérées dés que la ressource critique sera libérée et qu’elles se trouveronten tête de la file d’attente du sémaphore concerné. Par contre lorsqu’on utilise des sémaphores il estimportant de ne pas détruire les tâches qui se trouvent en section critique afin d’éviter un blocage fatal
si une tâche est détruite alors qu’elle est en section critique, elle ne pourra pas exécuter V(Mutex) etrendre le droit d’accès qui lui a été accordé afin qu’une autre tâche puisse à son tour entrer en sectioncritique. La ressource critique sera dans ce cas inutilisable par aucune tâche.
1.4.3. / SYNCHRONISATION ENTRE TACHES
Dans le cas d’applications indépendantes traitées par un système d’exploitation multiutilisateurs, lasynchronisation entre tâches n’est pas une préoccupation majeure pour le système d’exploitation (ellerevient la plupart du temps à mettre en place un des mécanismes d’exclusion mutuelle, vuprécédemment).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 86/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 86
Par contre, la notion de synchronisation entre tâches prend toute son importance dans le casd’applications traitées en temps réel par un système d’exploitation temps-réel. D’une manière générale,la vitesse d’exécution de deux tâches est imprévisible puisque cela dépend d’une part de la fréquencedes interruptions pouvant intervenir au cours du déroulement de chaque tâche ainsi que de la durée et
de l’importance du travail exécuté et d’autre part de la fréquence d’attribution du (ou des) processeur(s)aux tâches.
Les tâches se déroulent donc de manière asynchrone les unes par rapport aux autres. Toutefois, pourassurer une certaine coopération, elles doivent synchroniser leurs activités à certains moments dutraitement lorsqu’une tâche ne peut se poursuivre avant qu’une autre n’ait achevé son traitement.Lorsque plusieurs tâches sont interdépendantes, elles doivent donc être capables d’interagir poursynchroniser leur déroulement. Sous sa forme la plus simple, la synchronisation de plusieurs tâchesentre elles nécessite l’utilisation de mécanismes permettant à une tâche :
· D’activer une autre tâche en lui transmettant éventuellement des informations,
· De se bloquer elle-même ou de bloquer une autre tâche en attendant un signal provenant d’uneautre tâche et l’informant de la réalisation d’un événement attendu,
· D’envoyer un signal permettant de débloquer une ou plusieurs tâches lorsque l’événement lié àla nécessité de synchronisation s’est produit.
Lorsqu’une tâche est encore active au moment de la synchronisation, le signal d’arrivée de l’événementpeut être mémorisé jusqu’à ce qu’elle en ait besoin (ce qui n’est généralement pas le cas dans lesapplications temps-réel où les signaux se périment rapidement).
1.4.3.1./ Mécanisme d’action directe
Dans le cas de la synchronisation directe, une tâche agit directement sur une autre tâche. Ce type desynchronisation peut être très utile pour bloquer, par exemple, une tâche qui boucle indéfiniment. Cemode de synchronisation implique que le nom (ou l’adresse) de la tâche àsynchroniser, soit connu de latâche qui a le contrôle.
La synchronisation est réalisée à l’aide de deux primitives BLOQUER (NomTâche) et EVEILLER(NomTâche) dont les algorithmes sont présentés figure 4.10 et qui agissent sur deux variablesbooléennes.
Figure 4. 10 : Algorithme des primitives de contrôle du mécanisme d’action directe
BLOQUER (Nom Tâche) EVEILLER (Nom Tâche)Début Début
Si FANION (NomTâche) = 1 Si ETAT (NomTâche) = 0Alors FANION (Nom Tâche)ß 0 Alors• ETAT (Nom Tâche) ß 1
Sinon • Mettre NomTâche dans la liste des tâches prêtes• ETAT (NomTâche)ß 0 • Mettre NomTâche dans la liste des tâches en attente Sinon FANION (NomTâche)ß 1
FinSi FinSiFin Fin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 87/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 87
Ce mécanisme met en oeuvre deux variables booléennes
- ETAT (NomTâche): qui prend la valeur 1 ou 0 selon que la tâche Nom Tâche est éveillée oubloquée et qui est initialisée à 1,
- FANION (NomTâche) : qui prend la valeur 1 lorsqu’un signal d’éveil a été envoyé à la tâcheNomTâche, et la valeur 0 dans le cas contraire et qui est initialisée à 0.
La mise en oeuvre de ce mécanisme (cf. figure 4.11) est réalisée par la tâche qui a le contrôle (enoccurrence la tâche A). La tâche contrôlée (en occurrence la tâche B) subit la synchronisation sansintervenir à aucun moment dans le mécanisme.
Figure 4.11 : Mise en oeuvre de l’action directe
L’exécution de la primitive BLOQUER(B) provoque la mise en attente de la tâche B si et seulement sila variable FANION(B) vaut zéro (aucun signal d’éveil n’a déjà été envoyé à la tâche B). L’exécution dela primitive EVEILLER(B) provoque l’éveil de la tâche B si et seulement si la variable ETAT(B) vautzéro (la tâche B est bloquée). Sinon, la variable FANION(B) est mise à 1, ce qui donne un droit de refusde blocage lors de la commande de blocage suivante qui pourra donc s’effectuer que si la variableFANION(B) vaut zéro.
1.4.3.2./ Mécanismes d'action indirecte
Les mécanismes d’action indirecte fonctionnent par l’intermédiaire d’objets qui peuvent être desévénements ou des sémaphores. Ces objets servent d’intermédiaire entre les tâches ce qui rend lesmécanismes de synchronisation plus souples et leur mise en place plus aisée.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 88/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 88
1.4.3.3./ Synchronisation par événements
La synchronisation par événement constitue le mécanisme de synchronisation le plus simple à mettre en
oeuvre. L’événement est représenté par une variable booléenne dont la valeur synchronise à l’aide d’uneinstruction ATTENTE (événement) qui la bloque si la variable événement est égale à 0. Elle restebloquée jusqu’à ce qu’une autre tâche mette la variable événement à la valeur 1 (cf. figure 4. 12). Latâche est dans une liste d’attente avec une gestion de délai.
Figure 4.12 : Synchronisation par événements
1.4.3.4./ Synchronisation par sémaphores
Les sémaphores utilisés pour la mise en oeuvre d’une synchronisation entre plusieurs tâches sontappelés Sémaphores Privés: on dit qu’un sémaphore Sp est un sémaphore privé d’une tâche T, si etseulement si seule la tâche T peut exécuter la primitive P(Sp). Les autres tâches ne peuvent agir sur Squ’à l’aide de la primitive V(Sp). Les algorithmes mis en oeuvre par les primitives P(Sp) et V(Sp) sontidentiques à ceux mis en oeuvre par les sémaphores d’exclusion mutuelle et présentés par la figure 4.8du §2.2 de ce chapitre.
Figure 4.13 : Synchronisation par sémaphore

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 89/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 89
En initialisant la variable de sémaphore Sp avec la valeur zéro, une tâche dont l’évolution estsubordonnée à l’émission d’un signal par une autre, se bloque au moyen de la primitive P(Sp). Elle seradébloquée par l’exécution de la primitive V(Sp) commandée une autre tâche.
L’exemple présenté par la figure 4.13 permet de synchroniser la tâche A avec la tâche B. Pour exécuterl’instruction ai de la tâche A, après l’instruction bj de la tâche B, il suffit de faire précéder l’instructionai de la tâche A par un appel à la primitive P(Sp) et de placer un appel à la primitive V(Sp)immédiatement après l’instruction b de la tâche B. Avec Sp initialisée avec la valeur zéro, la tâche A estimmédiatement mise dans F(Sp) si elle exécute P(Sp) avant que la tâche B ait exécuté V(Sp).
Figure 4.14 : Synchronisation de type OU entre 3 tâches
Une synchronisation peut être réalisée sur des conditions dépendant de plusieurs tâches, plus complexesque celles vues précédemment (cf. figure 4.13) et présentées par les figures 4.14 et 4.15. Le type desynchronisation obtenu dépend alors de l’initialisation des variables de sémaphores et du placement desappels aux primitives P(S) et V(S) dans l’algorithme des tâches concernées
Dans l’exemple de la figure 4.14, le problème consiste à exécuter l’instruction ai de la tâche A aprèsl’exécution d’au moins une des deux instructions bj ou Ck appartenant respectivement aux tâches B etC. La synchronisation est dite synchronisation de type OU.
Dans l’exemple de la figure 4.15, le problème consiste à exécuter l’instruction ai de la tâche Aseulement après l’exécution de deux autres instructions l’instruction bj de la tâche B et l’instruction ckde la tâche C. La synchronisation est dite alors synchronisation de type ET.
Dans le cas d’une synchronisation de type OU, on peut noter qu’un seul sémaphore est nécessaire S,alors que dans le cas d’une synchronisation de type ET, il faut autant de sémaphores que de conditionsde déblocage Sb et Sc.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 90/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 90
Figure 4.15: Synchronisation de type ET entre 3 tâches
Qu’il soit utilisé pour l’exclusion mutuelle ou pour mettre en oeuvre une synchronisation pure entreplusieurs tâches, le mécanisme de synchronisation par sémaphore est le même, La différentefondamentale existant entre ces deux mécanismes réside dans la valeur d’initialisation de la variable desémaphore :
· Utilisée pour réaliser une exclusion mutuelle, une variable de sémaphore doit être initialiséeavec une valeur strictement positive,
· Utilisée pour mettre en oeuvre une synchronisation entre plusieurs tâches, une variable desémaphore peut être initialisée avec n’importe quelle valeur positive, négative ou nulle.
Figure 4.16: Exemple de blocage entre deux tâches (interblocage)

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 91/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 91
L’étude de la synchronisation entre tâches doit être effectuée avec soin. En effet, lorsque lasynchronisation est complexe, on peut facilement trouver des cas d’interblocage où les tâches sebloquent mutuellement sans possibilité de réactivation, sauf par synchronisation directe. La figure 4.16est un exemple de blocage (deadlock) de deux tâches entre elles.
Les deux tâches A et B s’attendent mutuellement pour achever une séquence. Il est à noter que ce typede blocage, appelé aussi étreinte fatale peut se produire quelle que Soit la valeur d’initialisation desvariables de sémaphore Sa et Sb.
1.4.4. / LA COMMUNICATION ENTRE TACHES
Afin d’assurer la coopération entre tâches, il est nécessaire que celles-ci puissent échanger desinformations sous la forme de messages. Ces messages peuvent contenir directement les donnéestransmises entre les tâches ou bien servir de pointeur vers des messages plus importants. Nous allons
développer ici trois mécanismes de communication parmi les plus intéressants et les plus utilises.
1.4.4.1./ Communication par variables communes
A chaque tâche est, en général, associée une zone mémoire qui leur est propre. Le principe dumécanisme de communication par variables communes, consiste à affecter une zone de mémoirecommune à l’ensemble des tâches et à loger dans cette zone tous les messages pouvant être échangés.
Figure 4. 17 : communication par variables communesZoneCritique

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 92/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 92
Ces messages sont représentés par des variables appelées variables communes. Ce mécanisme decommunication fait alors intervenir à la fois la notion de sémaphore d’exclusion mutuelle [Exmu] et lanotion de sémaphores privés [Sb et Sc] (cf. figure 4.17) :
· Le sémaphore d’exclusion mutuelle permet aux tâches de protéger et de se partager l’accès à lazone mémoire commune (un sémaphore d’exclusion mutuelle par zone commune).
· Les sémaphores privés permettent aux tâches de se synchroniser afin que les tâches devantrecevoir des données puissent attendre l’émission de celles-ci.
La communication réalisée à l’aide de ce mécanisme, est qualifiée de communication directe, pour lesraisons suivantes :
· Ce mécanisme fait appel à aucun objet intermédiaire (les messages sont directement envoyésd’une tâche à une autre).
· Pour le mettre en oeuvre les sémaphores privés, il est nécessaire de connaître les tâches àsynchroniser de manière à placer correctement les primitives P(S) et V(S) dans le code dechaque tâche concernée.
1.4.4.2./ Communication par boîtes aux lettres
Lors de la communication par boîtes aux lettres l’échange de messages s’effectue de manière indirectepar l’intermédiaire d’une mémoire tampon (buffer) appelée boîte aux lettres (mailbox) organisée sous la
forme d’une file d’attente. Ce mécanisme de communication fonctionne selon le modèleProducteur/Consommateur (cf. figure 4. 1 8) avec une mémoire tampon d’une capacité maximum de Nmessages. En général, les informations échangées entre tâches sont constituées de messages de type etde nature quelconques mais de taille fixe. De plus. le nombre de messages à transmettre est indéterminé.
Figure 4.18 : le modèle Producteur/Consommateur
La communication entre deux tâches A et B est alors réalisée selon le principe suivant :
· La tâche A produit un message et le dépose dans une boîte aux lettres commune aux deuxtâches A et B.
· La tâche B prélève le message de la même boîte et l’utilise.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 93/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 93
La mémoire tampon est alimentée par des tâches productrices et elle est vidée par des tâchesconsommatrices dans l’ordre où les messages ont été déposés. Les tâches produisent les messages àl’aide d’une primitive du type DEPOSER (Message, NomBaL) et consomment les messages à l’aide
d’une primitive RETIRER (Message, NomBaL) qui effectuent le dépôt ou le retrait d’un Message de laboîte aux lettres NomBaL. Toutefois, un certain nombre de règles doivent être respectées pour éviterdes incidents de synchronisation :
· Un message déposé dans une boîte aux lettres ne doit pas être consommé simultanément (ilfaut attendre qu’il soit entièrement transmis).
· Une tâche productrice doit être mise en attente si elle veut déposer un message lorsque la boîteaux lettres est pleine.
· Une tâche consommatrice doit être mise en attente si elle veut retirer un message lorsque laboîte aux lettres est vide.
· Une tâche productrice en attente pour déposer un message doit être débloquée dès qu’unetâche consommatrice prélève un message (puisque à ce moment là la boîte aux lettres n’est pluspleine).
· Une tâche consommatrice en attente pour retirer un message doit être débloquée dès qu’unetâche productrice dépose un message (puisque à ce moment là la boîte aux lettres n’est plusvide).
Ces problèmes de synchronisation sont très simplement résolus à l’aide des notions de sémaphoresd’exclusion mutuelle et de sémaphores privés : En effet, pour ce qui concerne le point n0 1, unmécanisme d’exclusion mutuelle sur le message suffira à protéger ce dernier d’une écriture et d’unelecture simultanée. Il est à noter qu’actuellement dans la majeure partie des systèmes cette exclusionmutuelle est réalisée par un sémaphore protégeant l’accès à la boîte aux lettres concernée et que la miseen place de ce mécanisme est en général intégrée au sein même des deux primitives DEPOSER etRETIRER (ce qui dispense le concepteur de l’application de s’en préoccuper). D’autre part, pour ce quiconcerne les points 2, 3, 4 et 5, le problème de la synchronisation peut être résolu de manière simple àl’aide de deux sémaphores privés : l’un qu’on appellera PlacesLibres, l’autre qu’on nommera Messages:
· La variable de sémaphore PlacesLibres doit être initialisée avec le nombre de positions libresdans la boîte aux lettres susceptibles de recevoir un message (c’est à dire N).
· La variable de sémaphore Messages doit être initialisée avec le nombre de messagesdisponibles dans la boîte aux lettres et susceptibles d’être consommés (c’est à dire zéro).
· Dans les deux cas, les files d’attente F(PlacesLibres) et F(Messages) doivent, bien entendu,être vides à l’initialisation.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 94/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 94
On peut alors définir deux procédures capables de mettre en oeuvre une telle synchronisation (cf. figure4.19). Ainsi, toute tâche désireuse de déposer un message dans une boîte aux lettres doit pour cela faireappel à la procédure ENVOYER ayant pour paramètres: le message à proprement dit (Mess) et le nom
de la boîte aux lettres concernée (BaL). De même, toute tâche désireuse de retirer un message d’uneboîte aux lettres, doit pour cela utiliser un appel à la procédure RECEVOIR ayant les mêmes paramètresque la procédure ENVOYER, à savoir: le message Mess et le nom de la boîte aux lettres BaL.
Dans la procédure ENVOYER la primitive DEPOSER est protégée par un appel à la primitiveP(PlacesLibres). Ainsi, tant que la boîte n’est pas pleine, c’est à dire tant qu’il reste des places libresdans la boîte aux lettres (PlacesLibres > 0), les tâches désireuses de déposer un message prendront undroit d’accès à la boîte BaL et pourront y déposer leur message. Par contre, dès que la boite BaL estpleine (PlacesLibres ≤ O), l’appel à la primitive P(PlacesLibres) interdira tout dépôt de message enprovoquant la mise en attente, dans la file d’attente F(PlacesLibres), des tâches qui exécuteront alorscette primitive.
Figure 4.19 : Utilisation et algorithmes des procédures ENVOYER et RECEVOIR
De la même manière, la primitive RETIRER se trouvant dans la procédure RECEVOIR est protégéepar un appel à la primitive P(Messages). Ainsi, tant qu’il y a un message à consommer (Messages > 0),les tâches désireuses d’en retirer un prendront un droit d’accès aux messages et pourront alors retirer leleur. Par contre, dès qu’il n’y a plus de messages dans la boîte aux lettres (Messages ≤ 0), l’appel à laprimitive P(Messages) interdira tout retrait de message en provoquant la mise en attente, dans la file
d’attente F(Messages), des tâches qui exécuteront alors cette primitive.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 95/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 95
D’autre part, lorsqu’une tâche vient de déposer un message dans une boîte elle le signale grâce à laprimitive V(Messages) placée juste en sortie de la procédure ENVOYER. Ainsi, si la variable desémaphore Messages est inférieure ou égale à zéro, ce qui signifie donc qu’il existe des tâches en attente
dans la file d’attente du sémaphore F(Messages), la primitive V(Messages) débloqueraautomatiquement la tâche se trouvant en tête de cette file et qui pourra alors recevoir le message. De lamême manière, lorsqu’une tâche vient de retirer un message d’une boîte aux lettres, elle le signale àl’aide de la primitive V(PlacesLibres) placée juste en sortie de la procédure RETIRER. Ainsi, si lavariable de sémaphore PlacesLibres est inférieure ou égale à zéro, la primitive V(PlacesLibres)débloquera automatiquement la tâche se trouvant en tête de la file d’attente F(PlacesLibres) (s’il enexiste une) qui pourra alors déposer un message à l’emplacement libéré.
Avec cette méthode de communication, les tâches peuvent ainsi prendre et mettre des messages dansune boîte aux lettres sans se bloquer, sauf lorsque la boîte est pleine ou vide. Le mécanisme desynchronisation entre les tâches qui communiquent est alors réduit au minimum.
1.4.4.3./ Communication par Rendez-vous
Le mécanisme de communication par Rendez-vous met en oeuvre une communication entre deux tâchesde manière directe. Il est basé sur une synchronisation rigoureuse entre l’émetteur du message et lerécepteur du message. Ainsi, lorsque deux tâches doivent échanger un message, elles doivent chacunes’arrêter en un point convenu pour que la transmission puisse avoir lieu. Ce point d’arrêt est appelépoint de rendez-vous. Il est symbolisé sur la figure 4.20 par les appels aux procédures d’échange etmarqué par deux points.
Ce type d’échange est réglé par trois primitives :
· RvENVOI (Message, Récepteur, Réponse),
· RvRECEPTION (Message, Emetteur).
· RvREPONSE (Message’, Emetteur),
Où les paramètres sont les suivants :
· Le paramètre Récepteur représente le nom (ou l’adresse logique) de la tâche à qui le messageest adressé,
· Le paramètre Emetteur représente le nom (ou l’adresse logique) de la tâche qui envoie lemessage,
· Le paramètre Message représente enfin l’information échangée,
· Le paramètre Réponse est du type booléen et représente le fait que la tâche émettrice doit ounon attendre une réponse de la tâche réceptrice,
· Le paramètre Message’ représente la réponse du récepteur à l’émetteur.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 96/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 96
Ainsi, lorsque la tâche émettrice fait appel à la primitive RvENVOI, elle doit se bloquer en ce point derendez-vous jusqu’à ce que la tâche réceptrice exécute l’appel à la primitive RvRECEPTION, si celan’est pas déjà fait. De même, lorsque la tâche réceptrice fait appel à la primitive RvRECEPTION, elle
doit se bloquer en ce point jusqu’à ce que la tâche émettrice exécute l’appel à la primitive RvENVOI (sicela n’est pas déjà fait).
Figure 4.20 : Mise en oeuvre d’une communication pur Rendez-vous
Lorsque les deux tâches ont atteint chacune le point de rendez-vous, l’échange du message se produit.Après l’échange deux cas peuvent alors se présenter :
· La tâche émettrice n’a pas besoin d’une réponse du récepteur : à la fin de l’échange duMessage les deux tâches reprennent alors simultanément leur exécution,
· La tâche émettrice a besoin d’une réponse du récepteur : à la fin de l’échange la tâcheréceptrice reprend son exécution alors que la tâche émettrice reste bloquée au point de rendez-vous. Elle reprendra son exécution seulement lorsque la tâche réceptrice exécutera l’appel à laprimitive RvREPONSE qui constitue un point de rendez-vous « auxiliaire ». La réponseattendue (Message’) sera alors transmise à la tâche émettrice ce qui aura pour effet dedébloquer celle-ci.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 97/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 97
1.5. / LA GESTION DE LA MÉMOIRE
1.5.1. / INTRODUCTION
Un programme ne peut être exécuté que si ses instructions et ses données sont en mémoire physique. Sil’on désire exécuter plusieurs programmes simultanément, il faut donc que chacun soit chargé enmémoire (même partiellement). Le système d’exploitation doit alors allouer à chaque programme deszones de la mémoire. Chaque fois qu’un utilisateur demande le lancement d’un programme, le systèmedoit trouver une place en mémoire pour le charger. Cette allocation pose un certain nombre deproblèmes tous les programmes n’ont pas la même taille, ils sont lancés par les utilisateurs et seterminent à des moments que le système ne connaît pas à l’avance... Le concept de multiprogrammation implique donc que les programmes d’application soient chargésdans des zones de la mémoire dont la localisation n’est décidée qu’au moment de leur chargement. Legestionnaire de mémoire d’un système d’exploitation prend en charge la gestion de la mémoire centrale,il assure sa protection et fournit les informations qui permettent à chaque programme d’être exécutésans savoir à l’avance dans quelle zone de la mémoire il sera logé au moment de son exécution (cettezone pouvant d’ailleurs changer entre deux exécutions, voire même en cours d’exécution). Le rôle de lagestion de mémoire (memory management) consiste à donner à chaque utilisateur l’illusion qu’il a latotalité de la mémoire à sa disposition et même parfois qu’il dispose d’une mémoire virtuellementsupérieure à la mémoire réelle. Le but des fonctions de gestion de la mémoire est d’augmenter lerendement global du système en permettant l’exécution performante des programmes. L’accès d’unprogramme à une information se traduit par l’accès du processeur à un emplacement de mémoireadressable par ce processeur.
Dans ces conditions, la mémoire d’un calculateur est une ressource critique au même titre que leprocesseur. Cet organe est si important pour les ordinateurs actuels, que la plupart en sont dotés deplusieurs types, de différentes tailles et de différentes vitesses. Bien entendu, la taille d’une mémoire etsa vitesse d’accès conditionnent fortement les performances globales d’une machine et son prix. Laplupart des gestionnaires de mémoire utilisent des fonctions de gestion basées sur deux principesgénéraux :
- Le partage de l’espace : qui consiste à affecter à chaque utilisateur des zones différentes de lamémoire. Cette technique pose le problème de la capacité mémoire.
- Le partage du temps: qui consiste à allouer la mémoire à l’utilisateur dont le programme esten cours d’exécution par le processeur. Cette technique pose le problème du temps de gestionpuisqu’elle met en oeuvre des mécanismes de sauvegarde et de restauration de données entre lamémoire centrale et la mémoire de masse.
La meilleure utilisation de la mémoire réside donc d’un compromis entre l’espace mémoire offert auxutilisateurs et le temps d’exécution qui s’allongera si les sauvegardes et les restaurations des donnéessont trop fréquentes.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 98/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 98
1.5.2. / HIERARCHIE DES MEMOIRES
Les concepteurs de machines informatiques ont toujours déployé des trésors d’imagination afin de doterleurs machines de mémoires rapides, tout en évitant d’augmenter le prix de façon trop importante. C’estainsi qu’au milieu des années 80 est apparue une véritable hiérarchie des mémoires
1.5.2.1./ Les registres
Les registres sont des mémoires extrêmement rapides et donc très chères. On les trouve en petit nombre(en général inférieur à 100) dans une machine. Ils sont immédiatement accessibles par le processeur (engénéral en 1 cycle).
1.5.2.2./ La mémoire cache
Les mémoires du type cache ou antémémoire (cache memory) sont des mémoires accessibles en 1 à 10cycles. Elles contiennent quelques dizaines de milliers de mots (quelques Ko). Leur fonction consiste àaccélérer les accès à la mémoire par l’unité centrale. Elles jouent le rôle de mémoire tampon entre lamémoire centrale et les registres.
1.5.2.3./ La mémoire centrale
La mémoire centrale (main memory) est accessible en 5 à 20 cycles. Elle est composée de circuitsintégrés de type DRAM (Dynamic Random Access Memory) pouvant contenir chacun de 64 Kbits à IMbits. La taille d’une mémoire centrale peut varier de 1 à plusieurs centaines de Mo. Les circuits utilisésnécessitent un rafraîchissement périodique des données. Ce rafraîchissement est dû à la technologieutilisée qui est à base de transistors MOS dont la capacité de grille se décharge dans le temps et qu’ilfaut donc maintenir. Il est réalisé soit par l’unité centrale (cas des microprocesseurs), soit par uncontrôleur de mémoire qui décharge ainsi totalement l’unité centrale de cette tâche auxiliaire (cas desmini-ordinateurs ou des grosses machines).
1.5.2.4./ La mémoire d’arrière-plan
La mémoire d’arrière plan (background memory) se trouve aujourd’hui sur certaines machines. Elle estconstituée de circuits semi-conducteurs de faible vitesse (vitesse d’accès variant entre 20 et 100 cycles)et de faible prix. Les mémoires d’arrière-plan sont généralement connectées de la même manière qu’undisque magnétique. Elles jouent le rôle de mémoire tampon entre la mémoire centrale et la mémoire demasse.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 99/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 99
1.5.2.5./ La mémoire de masse
La mémoire de masse (mass storage) d’un ordinateur est constituée de supports magnétiques du type
disque, disquette, bande magnétique, disque optique... Ces mémoires sont permanentes (lesinformations restent valides lorsqu’on coupe l’alimentation). Elles peuvent être de très grande capacité1 Go à 100 Go pour les disques et 2 Go à 20 Go pour les bandes et les disques optiques. Par contre leurvitesse d’accès est élevée et varie de quelques milli-secondes à 50 ms pour les disques. Elle est encorebien supérieure pour les bandes magnétiques qui en raison de leur nature nécessitent obligatoirement unaccès séquentiel ce qui engendre donc des temps de recherche élevés.
Pour cette raison, avec les systèmes informatiques modernes, les bandes magnétiques ne servent qu’àl’archivage ou au stockage de grands ensembles d’informations manipulées de manière ordonnée.
1.5.3. / ESPACE PHYSIQUE ET ESPACE VIRTUEL
L’espace mémoire virtuel est le nombre de cases de mémoire qu’un programme peut adresserdirectement. Ce nombre dépend du nombre de bits dans une adresse, c’est à dire de la taille des mots dela mémoire qui contiennent les adresses. Par exemple :
- Sur une machine à mots de 16 bits (où les adresses sont codées sur 16 bits) on peut adresser216 positions mémoires. Si l’unité d’adressage est l’octet, on dispose donc d’un espace virtuelde 64 Ko (ou 32 Kmots de 16 bits).
- Sur une machine 32 bits, on peut adresser 232 positions. Si l’unité est l’octet, l’espaceaccessible sera alors de 4 Go.
La mémoire physique disponible sur une machine peut avoir une taille différente de l’espace virtueldisponible pour chaque programme. Deux cas peuvent se présenter : soit l’espace physique estsupérieur à l’espace virtuel, soit il lui est inférieur.
1.5.3.1./ Espace physique supérieur à l’espace virtuel
On rencontre ce type de configuration lorsque l’espace virtuel est « petit » (cas des machines 16 bits).
Dans ce cas, plusieurs programmes ou plusieurs modules d’un même programme pourront être chargésà la fois. Par exemple, avec une mémoire de 1 Mo sur une machine 16 bits, chaque programme nepourra accéder individuellement qu’à 64 Ko de mémoire (du fait des adresses codées sur 16 bits). Parcontre, l’exécution de plusieurs tâches ou de plusieurs programmes pourra s’enchaîner immédiatement,sans avoir à attendre le chargement de la tâche ou du programme devant être exécuté. L’unité centraledoit donc être capable de générer des adresses physiques comportant un plus grand nombre de bits queles adresses virtuelles. Cette génération d’adresses est réalisée par le gestionnaire de mémoire, souventaidé par un mécanisme matériel spécial du type M.M.U. (Management Memory Unit), constitué decircuits intégrant directement des fonctions de gestion de mémoire.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 100/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 100
La méthode la plus courante pour gérer ce type de mémoire est celle des registres de base (baseregister). Ce mécanisme est le suivant (cf. figure 5.1) :
- Les programmes sont relogeables et toutes les adresses sont logiques (relatives à l’adresse zérocorrespondant au début de l’espace virtuel du programme),
- Un registre spécial de l’unité centrale, appelé registre de base, contient l’adresse physique dudébut du programme dans la mémoire,
- Chaque accès à la mémoire s’effectue en ajoutant à l’adresse virtuelle trouvée dans leprogramme le contenu du registre de base associé.
L’adresse physique du mot désigné dans le programme par son adresse virtuelle est calculéedynamiquement (pendant l’exécution du programme). Le mécanisme de gestion de la mémoire doit fairel’opération :
Adresse logique + (Registre de base) = Adresse physique
Ainsi, si le gestionnaire de mémoire désire changer la localisation mémoire d’une tâche, il lui suffira demettre, la nouvelle adresse physique du début de la zone mémoire qui lui est allouée, dans le registre debase et de continuer l’exécution. Ce changement de place sera alors totalement transparent pour latâche.
Figure 5.1 : Principe de l’adressage par registre de base
Le registre de base fait partie du contexte d’un programme : les programmes qui sont en mémoire, maispas en cours d’exécution, ont une copie de leur registre de base dans leur descripteur. Cette copie estchargée dans le registre physique de l’unité centrale, en même temps que les registres généraux, dès quele système donne la main au programme.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 101/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 101
1.5.3.2./ Espace physique inférieur à l’espace virtuel
On rencontre ce type de configuration actuellement dans la plupart des machines 32 bits (ou plus),
puisque pratiquement aucune machine ne dispose de 4 Go de mémoire physique.
Figure 5.2 : Principe de la mémoire virtuelle
Ainsi, pour permettre une utilisation efficace de la mémoire centrale, la plupart des machines quidisposent d’un espace virtuel très grand ont actuellement recours à une technique de gestion demémoire virtuelle (cf. figure 5.2), non seulement pour des raisons de prix mais également pour desraisons d’efficacité du partage de la mémoire. Le principal intérêt de cette méthode réside dans le faitque l’on peut exécuter un programme dont la taille est supérieure à la taille de la mémoire physiquedisponible. Puisque tout le programme ne peut pas être logé en mémoire, le mécanisme de gestion demémoire doit être capable de charger, à un moment donné, les parties du programme nécessaires à sonexécution.
Deux mécanismes de gestion de mémoire virtuelle, rendant ce chargement automatique, ont étédéveloppés la pagination et la segmentation. Ces deux mécanismes seront présentés de manière détailléedans ce chapitre (cf. §5 de ce chapitre).
1.5.4. / LES FONCTIONS DE BASE
Quelle que soit la méthode de gestion de la mémoire d’un calculateur, les techniques utilisées font appelà cinq fonctions de base.
1.5.4.1./ Transformation adresses logiques / adresses physiques
Afin d’éviter que l’utilisation de la mémoire soit figée, les adresses manipulées directement parl’utilisateur sont des adresses logiques (nom de variables, symboles...) et non des adresses physiques(adresses réelles). Pour faire l’opération de transformation des adresses logiques en adresses réelles, legestionnaire de mémoire utilise une carte de la mémoire (memory mapping) ou des registres de base.Ainsi, les adresses physiques peuvent être fixées :

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 102/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 102
- Quand des modules compilés séparément sont traités par un éditeur de liens (linker) pourproduire du code exécutable,
- Quand le programme (code relogeable utilisant des adresses logiques) est chargé en mémoire àpartir de la mémoire de masse (loader) en vue de son exécution (translation d’adressesstatiques),
- Quand le programme est en cours d’exécution (translation dynamique) pour lui permettre unegestion dynamique de données ou lors de l’exécution par le gestionnaire de mémoire defonctions spécifiques de récupération d’emplacements libres...
1.5.4.2./ Partage de la mémoire physique
Le problème du partage de la mémoire physique se pose lorsqu’un module logiciel doit être partagéentre plusieurs utilisateurs ou bien lorsque plusieurs tâches doivent se partager une structure de donnéesqui leur est commune. Dans le premier cas, le problème peut être résolu simplement en effectuant uneduplication du module concerné. Chaque utilisateur possède alors une copie de ce module dans l’espacemémoire qui lui est alloué. Dans le cas d’une structure de données partagée, une duplication n’est paspossible. Il faut donc que les taches se synchronisent entre elles pour que la structure de données restecohérente. Des mécanismes de synchronisation tels que ceux que nous avons développés au cours duchapitre 4, peuvent alors être utilisés afin de gérer l’utilisation de la structure au moyen de sectionscritiques, par exemple.
1.5.4.3./ Allocation de la mémoire
L’allocation de la mémoire consiste à allouer des blocs de la mémoire physique aux tâches des diversutilisateurs. Cette allocation peut être statique ou dynamique
1.5.4.3.1./ Allocation statique
Lorsque l’allocation de la mémoire est statique, une zone de mémoire est affectée à un utilisateur une
fois pour toutes, pendant toute son activité. Un utilisateur ne peut pas déborder de sa zone même si lesautres utilisateurs n’utilisent pas toute la mémoire qui leur a été allouée. La traduction des adresseslogiques en adresses physiques est alors réalisée au moment du chargement du programme.
1.5.4.3.2./ Allocation dynamique
Lorsque l’allocation de la mémoire est dynamique, un bloc de mémoire n’est alloué à une tâche quelorsque celle-ci en a réellement besoin. Les blocs ne sont pas toujours de taille fixe. Suivant leurdisposition en mémoire, une quantité de mémoire plus ou moins grande sera morcelée et deviendrainutilisable pour être allouée sous la forme de bloc.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 103/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 103
Ainsi, pendant le déroulement de la tâche, le gestionnaire de mémoire peut être amené àdéplacer un blocalloué d’une adresse physique à une autre pour optimiser l’utilisation de la mémoire (dynamic relation).L’allocation dynamique et le déplacement de blocs ne sont possibles que lorsque le système
informatique dispose d’unité de gestion de la mémoire du type M.M.U. Dans le cas contraire, les tempsde gestion deviendraient prohibitifs.
1.5.4.4./ La protection
Lorsque plusieurs tâches se partagent la mémoire, il est essentiel pour leur intégrite qu’aucune d’entreelles ne puisse altérer les zones de la mémoire allouées aux autres tâches. Le problème de la protectiondes espaces mémoire présente deux aspects :
- Le système doit être capable de détecter la pénétration (accidentelle ou malveillante) d’unespace mémoire alloué à une tâche par une tâche étrangère,
- Le système doit être capable de traiter et de maîtriser une pénétration une fois qu’elle a eu lieuet bien avant qu’elle ait des conséquences néfastes et définitives.
La protection des espaces traitée de manière logicielle est pratiquement impossible à cause des temps degestion démesurés qui seraient ajoutés au temps d’exécution des tâches. Néanmoins, certainesprotections peuvent être effectuées lors des translations d’adresses logiques en adresses physiques. Ellesne peuvent être réalisées que si le système informatique dispose de l’aide de circuits du type M.M.U.pour cette tâche et à condition qu’en plus des tables d’allocation. les droits d’accès des tâches aux blocs
de mémoire soient spécifiés.
1.5.4.5./ Extension de l’espace mémoire
Lorsque la mémoire réelle formée par l’ensemble de l’espace adressable (extensions physiquescomprises) est insuffisante pour l’application que l’on désire traiter, deux options sont possibles :
- Soit le système d’exploitation offre à l’utilisateur des primitives lui permettant de découper sonapplication afin qu’elle puisse être au moins partiellement logée en mémoire centrale,
- Soit il met en oeuvre un mécanisme transparent à l’utilisateur afin que celui-ci travaille sur unemémoire virtuelle plus grande que la mémoire réelle en prenant totalement en charge cedécoupage.
Parmi les principales techniques de découpage d’une application offertes par les systèmesd’exploitation, nous en avons retenu trois que nous allons définir ici, avant d’aborder dans lesparagraphes suivants les mécanismes de gestion de la mémoire virtuelle.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 104/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 104
1.5.4.5.1./ Technique de l’overlay
Avec cette technique, appelée également segmentation manuelle, le programme principal ainsi que
toutes les variables globales sont présents en mémoire centrale. Par contre, les procédures dont il abesoin ne sont chargées que pour leur exécution. Le découpage du programme est un découpagelogique.
Supposons que l’on dispose de 10 Ko de mémoire et que la compilation séparée d’un programmeprincipal A et des modules B, C, D, E et F donne les tailles suivantes d’occupation mémoire A (4 Ko) +B (1 Ko) + C (3 Ko) + D (3 Ko) + E (2 Ko) + F (1 Ko), soit 14 Ko au total. Dans ce cas, le programmeA sera chargé en mémoire et les routines B, C, D, E, et F seront stockées en mémoire de masse. Ellesseront chargées lorsque le programme en aura besoin et enlevées de la mémoire pour y faire de la placequand le programme n’en aura plus besoin.
1.5.4.5.2./ Technique du chaining (ou pagination manuelle)
Cette technique permet de découper une application dans le temps. Dans ce cas, seules les variablesglobales sont présentes en mémoire centrale. Le programme est découpé en blocs de taille identiquechargés en séquence au fur et à mesure de leur exécution. Le découpage du programme est undécoupage physique. La mise en oeuvre de ce mécanisme est identique celle de l’overlay.
1.5.4.5.3./ Technique du swapping
Cette technique, dite du va et vient, est la plus couramment utilisée dans les systèmes multitâches. Elleconsiste à suspendre temporairement certaines tâches en sauvegardant en mémoire de masse toutl’espace mémoire qui leur a été attribué, afin d’allouer cet espace aux autres tâches. Dans le cas d’unseul utilisateur, ce mécanisme impose de découper l’application en tâches autonomes. D’autre part, lasauvegarde et la restauration des espaces mémoire sont très coûteuses en temps dès que la taille destâches augmente. Ainsi, dans certains cas, une telle démarche est impossible dans les systèmes temps-réel.
Lorsque le système met en oeuvre de manière transparente à l’utilisateur la gestion d’un espaceadressable logique (adresses virtuelles) supérieur à un espace physique (adresses réelles). nous avons vuqu’il devait offrir un mécanisme de gestion de mémoire virtuelle. Ce sont ces mécanismes que nousallons maintenant détailler.
1.5.5. / LA MEMOIRE VIRTUELLE
Un programme n’a pas besoin d’être entièrement en mémoire à tout instant: la partie active d’unprogramme est souvent petite par rapport à sa longueur totale. En disposant d’un mécanisme permettantde charger en mémoire physique que la partie active de chaque programme (qui change au fur et àmesure de son déroulement) une place importante en mémoire serait gagnée. D’autre part, si de telsmécanismes étaient disponibles, l’exécution de programmes plus gros que la mémoire physiquedisponible ou encore celle d’un grand nombre de programmes (concurrents ou non) serait possible.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 105/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 105
Les mécanismes de mise en oeuvre et de gestion de la mémoire virtuelle que nous allons décrire ici,répondent à ces objectifs de manière transparente pour l’utilisateur. Ils se distinguent par leur façond’aborder à la fois le problème du découpage de l’espace virtuel (programme et données) et de l’espace
réel (mémoire physique). La notion de ressource virtuelle conduit à séparer les problèmes d’utilisationd’une ressource particulière, des problèmes d’allocation de cette ressource. Pour une tâche, la mémoirevirtuelle est le support de l’ensemble des informations potentiellement accessibles, c’est-à-direl’ensemble des emplacements dont l’adresse peut être engendrée par le processeur. L’allocation de lamémoire consiste à concrétiser cette mémoire virtuelle par des supports physiques d’informations, telsque la mémoire principale, les disques magnétiques... L’accès d’une tâche à une information se traduirade toute manière toujours par l'accès d’un processeur à un emplacement de mémoire adressable par ceprocesseur.
1.5.5.1./ Les informations accessibles à une tâche
Les informations auxquelles une tâche peut avoir accès sont définies par l’ensemble des informationsdésignables dans son programme : les objets, l’ensemble des informations de désignation : les noms et lamise en correspondance noms/objets. Dans un programme écrit en langage évolué, les noms et lesobjets sont définis par le langage lui-même. Ils sont différents de ceux que manipule le processeur.
Le programme doit donc subir une série de transformations, appelée liaison. Cette série comporte :
- Une étape de traduction : qui met en correspondance des objets avec les emplacementsmémoire et des noms avec les adresses relatives correspondantes,
- Une étape d’édition de liens : qui réalise la liaison entre des modules et des programmestraduits séparément ainsi qu’avec les bibliothèques du langage,
- Une étape de chargement: qui opère une fixation définitive des adresses (définies jusque là, àune translation près).
Figure 5.3 : Séparation des problèmes de désignation et d’allocation
La figure 5.3 est une schématisation de la séparation conceptuelle des problèmes de désignation etliaison, d’une part, et des problèmes d’allocation, d’autre part.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 106/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 106
1.5.5.2./ Organisation de la mémoire virtuelle
Les organisations de la mémoire virtuelle que l’on rencontre le plus souvent sont fonction, à la fois de la
structure et de l’organisation physique de la mémoire, ainsi que des algorithmes la réalisation de cettede gestion. Néanmoins les deux plus courantes sont les suivantes.
1.5.5.2.1./ Mémoire virtuelle linéaire
Une mémoire virtuelle linéaire est constituée d’une suite d’emplacements identiques appelés mots,organisés séquentiellement et désignés par des entiers consécutifs appelés adresses virtuelles.
Un objet est alors une information occupant un ou plusieurs mots consécutifs, désignée par l’adressevirtuelle du premier mot. Cette organisation est donc identique à celles des emplacements d’unemémoire physique.
1.5.5.2.2./ Mémoire virtuelle segmentée
Une mémoire virtuelle segmentée est constituée d’un ensemble d’emplacements de taille variableconstitués d’une suite de mots et regroupant des informations de même nature. Les mots contenus sontdésignés par des entiers consécutifs appelés déplacements (offset). L’adresse virtuelle d’un mot, alorsappelée adresse segmentée, est relative à l’adresse virtuelle de son segment.
1.5.5.3./ La segmentation
La segmentation est un mécanisme de gestion de la mémoire virtuelle qui consiste à découper l’espaceadressable d’un programme en segments qui n’ont aucun besoin d’occuper des emplacements contigusen mémoire.
Les segments correspondent à une division logique d’un programme en modules, sous programmes,données globales, données locales... Ils sont donc implicitement définis par l’utilisateur lors de la phasede conception du programme et dépendent du niveau de modularité de ce dernier.
Les segments regroupent en général des éléments de même nature segments de code, segments deconstantes ou de variables, segments contenant des structures, des tableaux ou encore des fichiers...
Ils sont logés en mémoire centrale ou en mémoire de masse. Le mécanisme de gestion (cf. figure 5.4)qui permet alors de passer d’une adresse logique à une adresse physique est basé sur l’utilisation d’unetable des segments.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 107/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 107
Figure 5.4 : Principe d’une mémoire segmentée
1.5.5.3.1./ La table des segments
A chaque segment est associé un descripteur qui contient l’ensemble des informations nécessaires à sonidentification et à son utilisation par le gestionnaire de mémoire. Ces informations sont en généralregroupées en deux champs distincts :
· Le champ Bits de contrôle indiquant si le segment est présent ou non en mémoire principale,
s’il a été modifié, ses autorisations de lecture et/ou d’écriture...,
· Le champ Adresse donnant au gestionnaire de mémoire la position effective du segment enmémoire principale, si le segment y est chargé, ou permettant sa localisation en mémoireauxiliaire dans le cas contraire.
A chaque programme est associée une table des segments regroupant l’ensemble des descripteurs desegment. Cette table est le dispositif qui permet de relier l’espace logique d’un programme segmenté etla mémoire physique. L’adresse physique du début de cette table est indiquée par le registre de base dela table des segments RTS (cf. figure 5.5).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 108/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 108
Figure 5.5 : Adressage dans une mémoire segmentée
1 L1 @B12 L2 @B23 L3 @B3
S1
S2
S3
@ réelle du mot.
offset
taille
@ dessegmentsen Mem
C
@ debasede latable.
@ dusegmentdans latable.
tâches
RTS
@B1
@B2
@B3
L1
L2
L3
Système
d
N° du segment Offset (d)
RTS
1 L3 @B3
S3
@

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 109/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 109
1.5.5.3.2./ Adressage d’une mémoire virtuelle segmentée
Le principe de l’adressage d’une mémoire segmentée est représenté par la figure 5.5. Pour adresser une
information dans ce type d’organisation, le gestionnaire de mémoire d’un système d’exploitation utilisela table des segments, le registre de base RTS et l’adresse logique du mot adressé. Cette adresse logiqueest composée de deux parties :
- Un Numéro de segment qui sert d’index dans la table des segments,
- Un Déplacement qui donne la position effective du mot dans le segment.
Le Numéro de segment est ajouté au contenu du registre RTS. Cette opération permet de calculerl’adresse du descripteur du segment contenant le mot adressé, dans la table des segments. Cette adressepermet d’identifier l’entrée et d’accéder ainsi aux bits de contrôle du segment concerné. Le gestionnairede mémoire peut alors tester le bit de contrôle de présence du segment. Deux cas peuvent alors seprésenter :
- Le segment est présent en mémoire centrale : dans ce cas, la valeur du champ Adressecomporte deux parties nécessaires pour son repérage : une partie Limite renseignant sur lalongueur effective du segment et une partie Base contenant l’adresse de base du segment,
- Le segment est absent de la mémoire centrale : dans ce cas, une interruption appelée faute desegment ou défaut de segment (segment fault) est générée. Le champ Adresse contient alorsles informations permettant de localiser le segment en mémoire auxiliaire.
Lorsque le segment est présent en mémoire principale, l’adresse physique du mot adressé est calculée enajoutant à l’adresse de Base du segment, contenue dans le descripteur, la valeur du Déplacement,contenu dans l’adresse logique. Dans le cas contraire, l’interruption défaut de segment signale augestionnaire que le segment n’est pas chargé. Le gestionnaire fait alors appel à une fonction dechargement du segment en mémoire centrale, qui va utiliser l’information se trouvant dans le champAdresse du descripteur de segment pour aller chercher le segment concerné sur disque, puis le copierdans un espace libre de la mémoire physique. Les bits de contrôle ainsi que le champ Adresse dudescripteur du segment concerné sont alors mis à jour. Il suffit ensuite d’ajouter la valeur duDéplacement à l’adresse de Base du segment, nouvellement calculée, pour obtenir l’adresse physique dumot en mémoire centrale.
On peut noter qu’en dehors des vérifications pouvant être réalisées par l’utilisation des bits de contrôle,une protection supplémentaire peut être mise en oeuvre lors de l’adressage d’un mot l’évitement de lapénétration de l’espace mémoire d’un segment voisin. Cette protection est réalisée en généraldirectement au niveau matériel par l’unité de gestion de mémoire (M.M.U.) qui compare la valeur duchamp Déplacement de l’adresse logique d’un mot avec la valeur du champ Limite du descripteur desegment qui contient ce mot :
Si Déplacement ≤ Limite Alors l’adresse est correcte
Si Déplacement > Limite Alors il y a violation de l’espace voisin

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 110/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 110
1.5.5.3.3./ Traitement d’un défaut de segment
Lorsqu’une interruption défaut de segment est générée, le gestionnaire de mémoire doit alors trouver un
emplacement en mémoire physique susceptible de recevoir le segment concerné. Dans ce cas, deuxpossibilités sont envisageables il existe ou non un emplacement libre et non attribué de taillesuffisamment importante pour y loger le segment. S’il en existe un, le gestionnaire mettra alors enoeuvre un mécanisme de copie du segment de la mémoire auxiliaire à la mémoire principale. S’il n’enexiste pas, le gestionnaire de mémoire doit alors choisir de libérer une partie de la mémoire pour y logerle segment. Il peut alors faire appel à des algorithmes plus ou moins complexes (cf. §5.6 de ce chapitre)réalisant la libération des segments les plus anciennement chargés en mémoire ou encore la libération deceux qui sont les plus rarement utilisés.
Si le gestionnaire dispose de l’aide d’un circuit spécialisé du type M.M.U., il peut aussi mettre enoeuvre un mécanisme permettant de regrouper des espaces libres afin d’en constituer un de taillesuffisamment importante. Une fois qu’une partie de la mémoire eut été libérée, le segment pourra alorsy être chargé à partir de la mémoire auxiliaire.
Nous avons vu qu’un segment correspondait à une entité de longueur variable. Sa taille dépend dans unelarge mesure de la taille des éléments elle contient et donc des habitudes de programmation desprogrammeurs et du découpage logique de leurs applications. Cette propriété peut amener à ungaspillage de l’espace mémoire résultant d’un phénomène de fragmentation de celui-ci. En effet,lorsqu’un programme se termine, l’espace mémoire qui lui avait été alloué est récupéré par le systèmepour pouvoir être affecté, par la suite à d’autres applications. La mémoire peut ainsi être très vitemorcelée en fragments difficilement utilisables du fait de leur trop petite taille. Il deviendra alors difficile
de loger dans ces espaces de nouveaux segments.
Le problème de la fragmentation de la mémoire qui était pratiquement transparent sur les processeurs16 bits du fait d’une limitation de 64 Ko par segment, prend toute son importance sur les processeurs32 bits où la taille des segments n’est alors limitée qu’à 4 Go. Avec ce type de processeur, la taille dessegments peut donc être très grande et surtout beaucoup plus élevée que celle de la mémoire réelle. Ledécoupage logique des applications peut alors entraîner la conception des segments de taille supérieureà la celle de la mémoire réelle. Il devient alors impossible d’exécuter des applications comportant dessegments de grande taille simplement avec une mémoire segmentée. C’est pour ces raisons que lesmécanismes de pagination et de segmentation paginée ont été développés.
1.5.5.4./ La pagination
La pagination est un mécanisme de gestion de la mémoire virtuelle qui permet un découpage de lamémoire de manière uniforme. Pour cela, l’espace logique de chaque programme est découpé en pagesde même taille. L’espace physique de la mémoire est quant à lui découpé en blocs de même taille que lataille des pages de l’espace logique. Chaque bloc peut alors contenir physiquement une page. Lemécanisme de gestion (cf. figure 5.6) qui permet de passer d’une adresse logique à une adresse physiqueest semblable à celui de la segmentation. Il est basé sur l’utilisation d’une table des pages.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 111/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 111
Figure 5.6 : Principe d’une mémoire virtuelle paginée
1.5.5.4.1.La table des pages
A chaque page est associé un descripteur de page qui contient l’ensemble des informations nécessaires àson identification et à son utilisation par les fonctions du gestionnaire de mémoire :
· Les Bits de contrôle indiquant si la page est oui ou non présente, Si elle a été modifiée ou non,les autorisations de lecture et/ou d’écriture...
· Le champ Adresse qui contient l’adresse effective d’un bloc si la page est présente ou uneinformation permettant la localisation d’un bloc en mémoire auxiliaire (en général un disque)dans le cas contraire.
La table des pages est le dispositif regroupant l’ensemble des descripteurs de page. Elle permet larelation entre l’espace logique d’un programme et la mémoire physique. Il y a une table des pages pourchaque programme (ou tâche). L’adresse de rangement du début de cette table est indiquée par unregistre de base RTP (cf. figure 5.7).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 112/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 112
Figure 5.7 : Mécanisme d’adressage d’un mot dans une mémoire paginée
1.5.5.4.2./ Adressage d’une mémoire virtuelle paginée
Le mécanisme d’adressage d’une information dans une mémoire paginée (cf. figure 5.7) est semblable àcelui que nous avons vu lors de l’adressage dans une mémoire segmentée. Le gestionnaire de mémoired’un système d’exploitation utilise la table des pages, un registre de base RTP et l’adresse logique de
l’information. Cette adresse est composée de deux parties :
· Un Numéro de page qui sert d’index dans la table des pages,
· Un Déplacement dans la page qui sera ajouté à l’adresse du bloc physique contenant la pagevirtuelle.
Le Numéro de page est ajouté au contenu du registre RTP. Cette opération permet de calculer l’adressede l’entrée correspondante dans la table des pages. Cette adresse permet d’accéder aux Bits de contrôlede la page. Le gestionnaire de mémoire teste le bit de contrôle de présence de la page. Deux cas
peuvent alors se présenter :

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 113/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 113
- La page est présente en mémoire centrale dans ce cas, la valeur du champ Adresse contient lenuméro du bloc physique dans laquelle se trouve la page virtuelle cherchée,
- La page est absente de la mémoire centrale : dans ce cas, une interruption appelée faute depage ou défaut de page (page fault) est générée.
Lorsque la page est présente, le gestionnaire assemble l’adresse du début du bloc dans laquelle se trouvela page avec le Déplacement pour obtenir l’adresse réelle complète. Lorsque la page n’est pas présenteen mémoire centrale, une interruption « défaut de page » signalant au gestionnaire que la page n’est paschargée, est alors générée. Le gestionnaire de mémoire doit alors charger la page en mémoire centrale àpartir de la mémoire auxiliaire.
1.5.5.4.3./ Traitement d’un défaut de page
Lorsqu’une interruption défaut de page est générée et qu’il n’existe pas de bloc libre en mémoireprincipale, le gestionnaire de mémoire doit alors choisir d’en libérer un. Ce choix peur faire appel à desalgorithmes plus ou moins complexes (cf. §5.6 de ce chapitre) du même type que ceux rencontrés lorsde la gestion d’une mémoire segmentée, et réalisant la libération de la page la plus anciennementchargée en mémoire ou encore la libération de celle qui est le plus rarement utilisée. Le choix effectif estmis en oeuvre par la tâche de traitement de l’interruption défaut de page dont le but est de réaliser léchargement en mémoire centrale à partir de la mémoire auxiliaire de la page manquante nécessaire audéroulement de la tâche en cours.
Le mécanisme de chargement de page est similaire à celui mis en oeuvre lors du traitement d’une
interruption défaut de segment : le gestionnaire de mémoire utilise l’information se trouvant dans lechamp Adresse de la table des pages pour aller chercher la page sur le disque de pagination (mémoireauxiliaire), puis la copier dans un bloc de la mémoire physique. L’adresse physique de ce bloc estensuite inscrite dans le champ Adresse de la table de page et le bit de contrôle c/e présence est mis à
jour. Il suffit alors d’assembler cette adresse avec le la valeur du Déplacement pour obtenir l’adressephysique cherchée.
1.5.5.4.4./ Notion d’espace de travail
Lorsque la mémoire virtuelle (le nombre de pages) est beaucoup plus grande que la mémoire physiquedisponible (nombre de blocs), la probabilité d’apparition d’interruptions défaut de page augmente demanière importante. En conséquence, le nombre de recopies en mémoire de masse des blocs libérés,ainsi que le nombre de chargements de pages augmentent proportionnellement, ce qui a pour effetd’augmenter fortement le temps de gestion de la mémoire. Cet état peut entraîner une situationd’effondrement (thrashing) lorsque le temps de gestion devient supérieur au temps de traitement desprogrammes en concurrence.
La notion d’espace de travail (working set) permet d’évaluer a priori le nombre de pages dont une tâchedoit disposer en mémoire pour d’éviter ces problèmes d’effondrement. Par définition, un espace detravail correspond au plus petit ensemble de pages qui doit résider en mémoire principale pour assurer àune application (ou programme) une certaine efficacité quant à son taux d’exécution. Si le nombre de
blocs disponibles est insuffisant pour charger l’espace de travail d’une tâche, cette dernière seratemporairement suspendue.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 114/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 114
1.5.5.5./ Segmentation paginée
Les mécanismes de segmentation et de pagination mettent en oeuvre des fonctions de gestion de la
mémoire virtuelle opérant suivant le même principe mais procédant de façon différente :
- Avec la segmentation le découpage du programme est logique et donc pas entièrementtransparent à l’utilisateur (aux méthodes et techniques qu’il utilise ainsi qu’à ses habitudes deprogrammation), alors qu’avec la pagination ce découpage est physique et reste complètementtransparent,
- La dimension des segments est variable et elle est fortement liée à la nature des programmes etdes modules, alors que les pages et les blocs sont de taille fixe de dimension établie à partir decontraintes matérielles.
L’association de ces deux techniques permet d’une part, de bénéficier du découpage logique desapplications afin de respecter les habitudes de programmation des utilisateurs et de mettre en oeuvre lestechniques de programmation structurée, et d’autre part, d’éviter le problème de la fragmentation de lamémoire afin qu’elle soit utilisée au mieux. Avec un mécanisme de gestion de la mémoire virtuellesegmentée et paginée, la mémoire physique est découpée en blocs, les programmes et les modules sontdécoupés de manière logique en segments et chaque segment est lui-même découpé en pages. Le rôledu gestionnaire de mémoire du système d’exploitation est de gérer ensuite les changements de pagesafin de diminuer le plus possible la fragmentation. Le mécanisme permettant la traduction d’adresseslogiques en adresses physiques dans une mémoire segmentée et paginée est basé sur l’utilisationcombinée de tables des segments auxquels sont associées des tables des pages.
1.5.5.5.1./ Association des tables des segments et des tables des pages
A chaque segment est associé un descripteur de segment ainsi qu’une table de descripteurs de page. Lesdescripteurs de segment et les descripteurs de page contiennent le même type d’informations que celuirencontré lors des techniques de segmentation seule (cf. §5.3.1. de ce chapitre) ou de pagination seule(cf. §5.4.1 de ce chapitre). Ainsi, les descripteurs de segment contiennent des bits de contrôle (bits deprésence de segment, bits de protection...) et un champ Adresse contenant l’adresse de base de la tabledes descripteurs de page (BTP) associée au segment ainsi que le nombre de pages composant lesegment. De même, les descripteurs de page contiennent des bits de contrôle (bits de présence, bits demodification, bits d’autorisation...) ainsi qu’un champ Adresse contenant l’adresse physique du bloc quireçoit la page ou la localisation de celui-ci en mémoire de masse. L’ensemble des descripteurs desegment est regroupé dans la table des descripteurs de segment qui est utilisée par les fonctions dugestionnaire de mémoire lors d’une opération d’adressage.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 115/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 115
1.5.5.5.2./ Adressage d’une mémoire segmentée et paginée
Le principe de l’adressage d’une mémoire segmentée et paginée (cf. figure 5.3) met en oeuvre la table
des descripteurs de segment, les tables de pages associées aux segments ainsi que le registre de base dela table des descripteurs de segments (RTS).
Figure 5.8 : Adressage d’une mémoire segmentée paginée
Les adresses logiques sont composées de trois parties :
- Le Numéro du segment qui sert d’index dans la table des descripteurs de segment
- Le Numéro de la page qui sert d’index dans la table des descripteurs de page
- Le Déplacement qui donne la position effective du mot adressé dans le bloc

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 116/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 116
L’adresse dans la table des segments du descripteur du segment contenant le mot adressé est obtenue enajoutant au Numéro du segment contenu dans l’adresse logique, la valeur du registre de base RTS. Lechamp Base de ce descripteur contient l’adresse de la table des pages associée à ce segment (BTP). En
ajoutant à BTP, le Numéro de la page contenu dans l’adresse logique, le système accède alors audescripteur de la page contenant le mot adressé. Il lui suffit alors d’ajouter à l’adresse de base du bloc(@) trouvée dans ce descripteur la valeur du Déplacement pour accéder à l’adresse physique du motadressé.
Dans le cas où la page ne serait pas chargée en mémoire, une interruption « défaut de page » estgénérée. La procédure de traitement d’un défaut de page et les algorithmes mis en oeuvre sont lesmêmes que ceux exposés précédemment (cf §5.4.3. de ce chapitre).
1.5.5.6./ Algorithmes de remplacement
Nous avons vu qu’un programme ne peut exécuter une instruction que si le segment ou la page qui lacontient est présente dans la mémoire physique. Pour cela le système peut mettre en oeuvre deuxpolitiques de chargement différentes
Le pré-chargement (prepaging) qui consiste à amener une page virtuelle en mémoire centraleavant qu’il y soit fait référence. Il est évidemment très difficile d’anticiper le comportement desprogrammes. Toutefois, lorsque l’exécution d’un programme provoque une interruption défaut depage (ou défaut de segment), il est possible de charger, en plus de la page demandée, les quelquespages qui lui sont contiguës, en espérant que les programmes aient un comportement
raisonnablement séquentiel.
Le chargement à la demande (demand paging) qui consiste à amener une page en mémoireseulement à la demande du programme. Ce mode de chargement est le plus utilisé à l’heureactuelle.
Plusieurs algorithmes de pagination ont été proposés pour répondre au problème du choix des pages quiseront retirées de la mémoire et copiées sur disque pour faire de la place
1.5.5.6.1./ Algorithme aléatoire (random)
Le principe de cet algorithme consiste à choisir de façon aléatoire la page à expulser. En pratique, lanotion d’aléatoire le système ne va pas utiliser un générateur de nombres aléatoires pour choisir la pageà vider il s’agit en fait de ne pas appliquer de stratégie particulière. En général le système choisira devider les pages dans l’ordre, ce qui revient à vider la plus ancienne. Cet algorithme est très simple maispeu efficace.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 117/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 117
1.5.5.6.2./ Algorithme PEPS
Le principe de l’algorithme PEPS Premier Entré Premier Sorti (FIFO : First In, First Out) est basé sur
l’expulsion de la page qui fut la première à être chargée en mémoire. Il suffit pour cela d’une liste despages. Les pages sont ajoutées à la fin de cette liste et retirées à partir du début de la liste. Le vidage despages est réalisé alors de manière circulaire dans l’ordre de leurs adresses.
L’inconvénient majeur de cet algorithme est qu’il marche très mal lorsque le système devientrelativement chargé. En effet, la page la plus ancienne n’est pas nécessairement la moins utile. D’autrepart, si l’on peut considérer que les références à un programme sont à peu près séquentielles (le code estexécuté «ligne par ligne »), il n’en est pas de même pour les références aux données. Bien qu’attirantpar sa simplicité, l’algorithme PEPS a de sérieuses limitations de performances, qui font qu’il est assezpeu utilisé dans sa forme pure.
1.5.5.6.3./ Algorithme MRU
L’algorithme MRU Moins Récemment Utilisé (LRU : Last Recently Used) est basé sur l’expulsion de lapage dont l’utilisation est la plus ancienne dans le temps. Cet algorithme suppose que si une page a étémaintes fois référencée, elle le sera probablement encore. Inversement, une page qui est ignorée estcandidate au remplacement. Cet algorithme utilise une table contenant une entrée pour chaque pagevirtuelle du programme présente en mémoire. Cette entrée contient un bit de marquage et un compteur.
Chaque fois qu’une page est référencée, le système met à 1 le bit de marquage. A la fin de chaque
intervalle de temps, toutes les pages qui n’ont pas été utilisées durant cet intervalle (bit de marquage àzéro) ont leur compteur augmenté d’une unité, alors que toutes les autres ont leur compteur remis àzéro. Les bits de marquage de toutes les pages sont alors remis à zéro pour l’intervalle suivant. Pourretirer une page, le système consulte alors cette table et retire la page dont le compteur est le plus élevé.Cette méthode est connue pour bien fonctionner dans la plupart des cas. Pour cette raison elle est doncsouvent rencontrée, surtout dans l’une ou l’autre des approximations simplifiées présentées ci-dessus.
1.5.5.6.4./ Algorithme MFU
L’algorithme MFU Moins Fréquemment Utilisé (LFU : Last Frequently Used) expulse la page qui a étéla moins souvent utilisée pendant le dernier intervalle de temps. Sa mise en oeuvre nécessite, commepour l’algorithme MRU, un bit d’utilisation et un compteur pour chaque page. Le principe defonctionnement est alors le même mais dans ce cas le compteur mémorise le nombre d’intervalles detemps durant lesquels il y a eu des références.
L'inconvénient de cette méthode est que la page la moins utilisée jusqu’à maintenant n’est pas forcémentcelle qui le sera le moins dans un futur proche. Cet algorithme est par conséquent moins efficace etmoins utilisé que le MRU.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 118/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 118
1.6. / LA GESTION DES ENTRÉES/SORTIES
1.6.1. / INTRODUCTION
Le processeur et la mémoire centrale constituent la partie principale d’un ordinateur, puisque letraitement de l’information est effectué essentiellement entre ces deux unités. Toutefois, pour traiter lesapplications des utilisateurs, le processeur doit être capable de recevoir de l’extérieur des programmeset leurs données à travers des dispositifs d’entrées. Il doit aussi être capable de retourner aux utilisateursles résultats du traitement effectué à travers des dispositifs de sorties. De plus, nous avons vu que lesmécanismes de gestion de la mémoire virtuelle utilisent les mémoires de masse, externes au système,afin d’étendre la capacité de la mémoire centrale. Il faut donc connecter au processeur et la mémoirecentrale, des mémoires de masse telles que des disques ou des unités à bandes. Un dispositif capable detransférer de l’information depuis ou vers un support externe est appelé périphérique.
Pour tous les systèmes d’exploitation, la gestion de ces différents mécanismes d’entrée/sorties atoujours été une tâche fondamentale. Cette tâche est d’autant plus fastidieuse dans les systèmes temps-réel destinés au contrôle de processus ou à l’automatisation, que ces systèmes comportent en général untrès grand nombre de capteurs et d’actionneurs qui sont des périphériques analogiques et numériquespermettant le suivi et le pilotage du procédé. La grande différence de vitesse de fonctionnement entrel’unité centrale (environ un million d’opérations àla seconde) et les périphériques (taux de transfertbeaucoup plus long) est à l’origine même des premiers systèmes d’exploitation. Dans les systèmesmodernes, l’ensemble des dispositifs d’entrées-sorties a pris une très grande importance et il n’est pasrare que l’investissement en unités d’entrées-sorties Soit égal, voire parfois supérieur à celui de l’unitécentrale. La communication entre le système informatique et le monde extérieur ne se peut se faire qu’àdeux conditions :
· Qu’il existe une entité, appelée interface, capable de transformer la vision du monde extérieuren informations utilisables par le système informatique,
· Qu’il existe au niveau du système informatique des instructions dites d’entrées-sorties,permettant de récupérer les informations venant ou allant vers cette interface.
1.6.2. / ORGANISATION GENERALE DES ENTREES/SORTIES
Un organe d’entrées-sorties est donc un dispositif capable de transférer des informations entre le
processeur et un support d’information externe. Ce transfert est commandé par une procédure d’entrée-sortie. Dans le cas le plus simple, cette procédure est réalisée par une instruction spéciale du processeurqui permet de transférer l’information entre le support externe et le processeur qui est alors occupépendant toute la durée du transfert. Dans un souci de meilleure utilisation du processeur, l’autonomiedes organes d’entrées-sorties a été augmentée et des fonctions de plus en plus complexesd’enchaînement et de commande leur ont été confiées. Dans ces conditions le processeur ne garde plusque l’initiative du lancement et le contrôle des opérations ce qui le rend plus disponible. Un soucid’économie conduit alors à séparer les organes périphériques proprement dits et leurs unités decommande afin de pouvoir partager ces derniers entre plusieurs dispositifs d’entrées-sorties.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 119/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 119
1.6.2.1./ Les périphériques d’entrées-sorties
Les périphériques d’entrées-sorties sont généralement catégorisés en deux groupes :
· Les périphériques « bloc » mémorisant les informations à transférer dans des blocs de taille fixedisposant chacun d’une adresse propre. Ils permettent la lecture ou l’écriture d’un blocindépendamment de tous les autres (une tâche peut, à tout moment lire ou écrire n’importequel bloc). Les disques sont des périphériques « bloc ».
· Les périphériques « caractère » acceptant un flot de caractères sans se soucier de leurorganisation. Les informations ainsi transmises ne peuvent pas être adressées indépendammentet aucune fonction de recherche n’est alors possible. La plupart des périphériques qui ne secomportent pas comme des disques (terminaux, imprimantes, cartes perforées, interfaces deréseaux, souris, traceurs...) peuvent être considérés comme des périphériques « caractère ».
1.6.2.2./ Les interfaces
Une interface est une carte électronique permettant de connecter un périphérique au systèmeinformatique. Elle peut comprendre une zone de mémoire tampon et des bits de contrôle bit d’état(prête ou occupée), bit de commande (lecture ou écriture). C’est en fait une boite noire qui transformeles informations extérieures en signaux acceptés par le système informatique et inversement. Cessignaux sont des suites de bits, symbolisés par des 0 ou des 1, généralement groupes par ensemble de 8appelés caractère (ou octet). Ces bits sont représentés par deux signaux électriques (ou deux états de la
ligne de communication) normalisés, pour un même type d’ordinateur ou pour une famille d’ordinateurscompatibles entres eux.
Il existe des équipements que l’on rencontre plus particulièrement dans les installations de contrôle deprocessus, mettant en oeuvre des applications temps-réel et qui permettent d’acquérir des valeursanalogiques. Avec ce type d’équipement, les interfaces doivent alors convertir des données analogiquesen données numériques ou des données numériques en données analogiques.
On distingue trois méthodes principales de commande des interfaces d’entrées-sorties l’utilisationd’instructions spéciales, la cartographie mémoire et la programmation des entrées-sorties par
interruption.
1.6.2.2.1./ Les instructions spéciales
Cette méthode de programmation des interfaces n’est principalement utilisée que sur les micro-ordinateurs. Avec cette technique, l’unité centrale génère un signal indiquant que le cycle qui débuteconcerne une entrée-sortie. Ce signal est utilisé par un circuit spécial qui va aiguiller les données issuesde l’unité centrale vers une interface d’entrées-sorties plutôt que vers la mémoire.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 120/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 120
1.6.2.2.2./ La cartographie mémoire
Avec cette méthode, également appelée méthode des entrées-sorties programmées avec attente de
disponibilité, l’interface possède des registres d’interface (device registers) situés à des adressesconsécutives un registre tampon et un registre de commande. La programmation (ou la commande)d’une interface à partir de l’unité centrale se fait par l’écriture et la lecture de données à ces adresses. L’unité centrale écrit les données à transférer (en sortie) ou lit les données transférées (en entrées) àl’adresse indiquée dans le registre tampon et écrit les valeurs conventionnelles destinées à donner lesordres à l’interface (par exemple exécuter une entrée ou exécuter une sortie) dans le registre decommande. Après la lecture ou l’écriture de chaque information, l’unité centrale doit attendre quel’interface soit de nouveau prête pour exécuter la lecture ou l’écriture d’une autre information. Ce qui apour inconvénient majeur d’occuper le processeur à un travail peu utile. Pour éviter cela la méthode laplus couramment utilisée consiste à endormir la tâche effectuant une entrée ou une sortie et d’attendrepour la reprendre que l’interface signale, en général par la génération d’une interruption, qu’elle estprête.
1.6.2.2.3./ Les entrées-sorties contrôlées par interruptions
Une façon d’annuler l’attente de disponibilité consiste à faire en sorte que le processeur initialisant ledispositif d’entrées-sorties, le configure pour qu’il transmette une interruption dès qu’il est prêt àdialoguer. Ce mode de programmation des entrées-sorties est lié au mode de pilotage dit asynchrone(cf. §3.3 de ce chapitre). Ainsi, en positionnant à 1 le bit d’autorisation d’interruption d’un registre du
dispositif d’entrées-sorties, le processeur sait qu’il sera interrompu lorsque le périphérique sera prêtpour l’échange. La gestion d’interruption (cf. Chapitre 3) dans une machine est une tache délicate, qu’ilfaut prendre en compte bien avant la programmation des entrées-sorties. Elle doit être menée avecattention. En effet, s’il est nécessaire d’émettre une interruption à chaque caractère échangé, il y a uneforte perte d’efficacité du processeur, car l’exécution d’une interruption est néanmoins coûteuse entemps de traitement.
Il existe d’autres modes d’échange qui permettent d’éviter une séquence répétée d’interruptions deprogramme. Ces autres modes consistent à faire en sorte que le processeur n’est plus à se préoccuper dela programmation des entrées-sorties pour la sous-traiter à un dispositif spécialisé du type contrôleurd’entrées-sorties, contrôleur DMA ou encore canal, dont c’est le rôle essentiel.
1.6.2.3./ Les contrôleurs de périphériques
L’équipement périphérique a son propre rythme de travail différent de celui de l’unité centrale. Il estdonc nécessaire à l’interface d’établir un dialogue entre le système informatique et l’équipementpériphérique et de gérer le flux d’informations entre ces deux entités. Les constructeurs ont alors étéamenés à installer une logique de gestion câblée ou micro programmée selon les besoins de l’application.Une telle interface, appelée contrôleur ou encore unité de commande (peripheral control unit) déchargel’unité centrale d’une partie importante du travail de contrôle et d’exécution des entrées-sorties. Son
rôle consiste à piloter un périphérique et à gérer l’accès au bus pour permettre au système et aupériphérique de communiquer.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 121/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 121
Par exemple, un contrôleur d’écran effectue une lecture en mémoire des octets contenant les caractèresà afficher et génère des signaux pour moduler le faisceau d’électrons qui dessine les caractères à l’écranou pour repositionner ce faisceau au début de la ligne suivante à la fin de chaque ligne ou bien en haut
de l’écran lorsque tout l’écran a été rempli. Sans lui, le programmeur d’un système d’exploitation auraità programmer directement le balayage du tube cathodique, alors qu’il suffit au système d’exploitationd’initialiser le contrôleur avec quelques paramètres (nombre de caractères par ligne, nombre de lignes àl’écran...) pour qu’il se charge de diriger le faisceau.
Chaque contrôleur est très lié au type d’équipement qu’il contrôle (une carte contrôleur possède engénéral un connecteur qui permet de la relier aux périphériques). On trouve ainsi des contrôleurs debandes magnétiques (tape controller), de disques (disk controller), d’écran (displav controller),d’imprimante (printer controller), de télécommunications (communication control unit)...
Un ensemble contrôleur/périphérique est défini par une interface, souvent de très bas niveau, quicomprend des fonctions d’entrées-sorties et une voie de communication servant au transfert del’information. L’autonomie d’un contrôleur est limitée à quelques opérations élémentaires enchaînementet synchronisation des opérations, envoi des signaux de fin de transfert ou d’incident...
Figure 6.1 : Organisation des entrées-sorties mettant en oeuvre des contrôleurs
Ce type d’organisation (cf. figure 6.1) se rencontre fréquemment sur des systèmes informatiques de typemini-ordinateur ou micro-ordinateur. Le principal intérêt de séparer contrôleur et périphérique est depouvoir connecter ainsi plusieurs périphériques de même type à un contrôleur unique (de nombreuxcontrôleurs acceptent deux, quatre et même huit périphériques identiques). Dans ce cas, un seulpériphérique à la fois peut transférer de l’information. Il est toutefois possible d’exécuter simultanémentsur les autres périphériques des opérations qui n’impliquent pas de transfert d’information déplacementdu bras d’un disque. rembobinage d’une bande magnétique...

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 122/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 122
1.6.2.3.1./ L’accès direct àla mémoire
Certains contrôleurs (en particulier ceux des périphériques « bloc ») permettent de transférer une
information directement de la mémoire à un périphérique ou inversement, sans que celle-ci transite parle processeur. Ces contrôleurs particuliers qui effectuent des opérations d’accès direct à la mémoire sontplus connus sous l’acronyme DMA (Direct Memory Access). Ils possèdent une électronique élaboréequi leur permet de générer successivement toutes les adresses concernées par le transfert, de lire lecontenu de chacune d’elle et d’écrire ce contenu sur le périphérique concerné, ou inversement. Le bussert aussi bien aux contrôleurs qu’au processeur lorsqu’ils dialoguent avec la mémoire.
Sachant qu’une seule communication peut être engagée sur un bus, que se passe-t-il lorsque leprocesseur et un contrôleur veulent utiliser le bus simultanément ? Un dispositif particulier, appeléarbitre de bus, analyse les demandes de bus et décide qui en sera l’allocataire. En général, en cas deconflit avec le processeur. la préférence est donnée au contrôleur d’entrées-sorties. En effet, unéquipement de type disque (ou du même genre) ne peut s’arrêter lorsqu’il est lancé à pleine vitesse(obliger un disque à attendre le bus entraîne alors une perte d’informations). Lorsque aucune opérationd’entrée-sortie n’est engagée, le processeur utilise le bus quand il le souhaite. En revanche, dès qu’uneopération d’entrée-sortie est en cours, le contrôleur transmet une requête de bus à l’arbitre et obtient lebus en cas de conflit :
· Soit en priorité lorsque le transfert d’informations est considéré comme prioritaire. Dans ce casle processeur est bloqué pendant toute la durée du transfert. Cette technique est dite de miseen veille du processeur.
· Soit de façon alternée avec le processeur ce qui a pour effet de ralentir faiblement le processeurdans l’exécution de sa tâche en cours. Cette technique est appelée vol de cycle (cycle stealing),
· Soit de manière transparente au processeur, en autorisant les accès aux bus uniquement lorsquele processeur n’y accède pas. Dans ce cas la priorité est donnée au traitement des informationset non aux transferts. Cette technique est dite du DMA multiplexé.
Les ordinateurs de grande puissance (ordinateurs universels ou mainframes) disposent de nombreux buspour tenter de minimiser le nombre de vol de cycles afin d’éviter une baisse de performance de l’unitécentrale, mais ce n’est pas toujours suffisant. De plus, il peut se produire un problème de partage deressources lorsque l’unité centrale et un contrôleur DMA qui peuvent agir en parallèle, décidentd’adresser simultanément (en lecture ou en écriture) la même cellule mémoire. Une solution à ceproblème est d’interdire par exclusion mutuelle les accès simultanés à une même cellule mémoire. Dansla pratique, cette exclusion mutuelle ne se fait pas par logiciel, ce qui serait trop coûteux en tempsd’exécution, mais physiquement à l’aide d’une bascule qui interdit au processeur d’accéder à une cellulependant l’accès direct.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 123/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 123
1.6.2.3.2./ Programmation d’un contrôleur
Chaque contrôleur communique avec le processeur par l’intermédiaire de quelques registres. Le
système d’exploitation effectue des entrées-sorties en écrivant les commandes et leurs paramètres dansles registres du contrôleur. Dès qu’une commande est acceptée le processeur peut alors effectuer unautre travail le contrôleur s’acquittant seul de la commande. Lorsque la commande est réalisée, lecontrôleur envoie une interruption au processeur pour lui signaler la fin de l’opération. Le processeurpeut alors récupérer des résultats et obtenir l’état du périphérique en lisant les registres du contrôleur.
Figure 6.2 : Organisation des entrées-sorties mettant en oeuvre un accès direct à la mémoire
L’initialisation des registres d’un contrôleur est réalisée soit au coup par coup avec les paramètresd’appel de l’instruction d’entrée-sortie exécutée par l’unité centrale, soit lors de la configuration dusystème ce qui permet de diminuer les temps de transfert. Ainsi, pour effectuer un transfert de donnéespar DMA, une seule instruction est nécessaire. Elle est exécutée par l’unité centrale avec commeparamètres l’adresse en mémoire centrale du début de la zone à transférer et sa taille. Le transfert est
réalisé alors sans le concours de l’unité centrale, cellule mémoire par cellule mémoire, jusqu’à ce que lataille de la zone soit atteinte. La programmation d’un contrôleur DMA se fait, comme pour uneinterface, par l’écriture de données dans au moins trois registres (cf. figure 6.2) :
· Un registre Adresse qui est un pointeur contenant l’adresse du mot mémoire à transférer etinitialisé avec l’adresse du début de la zone de mémoire à transférer,
· Un registre Longueur qui est un compteur contenant le nombre de données restant a transféreret initialisé avec la longueur de la zone mémoire à transférer,
· Un registre Commande qui est un mot d’état contenant la commande issue de l’unité centraleet qui spécifie l’opération souhaitée (sens du transfert (précisant si les données doivent êtrelues à l’extérieur ou écrites vers l’extérieur), désignation du périphérique concerné...).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 124/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 124
Pour réaliser une opération d’écriture (de sortie) d’un bloc de données situé en mémoire vers unpériphérique donné, le processeur initialise ces registres avec les paramètres de l’instruction de sortieexécutée. Une fois ces registres initialisés, le processeur peut alors reprendre son fonctionnementnormal.
Le contrôleur effectue alors une requête de bus pour réaliser la lecture du mot mémoire situé à l’adressefournie par le registre Adresse. Le mot reçu est ensuite transmis à l’interface ou au contrôleur dupériphérique concerné par l’échange. Le contrôleur DMA incrémente alors d’une unité le registreAdresse et décrémente d’une unité le registre Longueur. Ce processus se poursuit tant que le registreLongueur n’est pas égal à zéro. Dés que le compteur de mot est à zéro, le contrôleur DMA a terminél’échange et transmet une interruption au processeur pour le lui signaler.
1.6.2.4./ Les canaux d’entrées-sorties
Dans le cas des ordinateurs de grande puissance (souvent appelés mainframe), les échanges avec despériphériques rapides, tels que les disques, sont si nombreux que la technique de vol de cycle conduiraità une saturation du bus. A tel point que sur ce type de machine les constructeurs ont préféré aux circuitsDMA traditionnels, de véritables processeurs d’entrées-sorties appelés canaux d’entrées-sorties
Figure 6.3 : Organisation des entrées-sorties d’un ordinateur de grande puissance
Un canal (channel) d’entrées-sorties est un processeur spécialisé dans les opérations d’entrées-sortiesfonctionnant comme un dispositif DMA partagé entre plusieurs interfaces. Il peut donc commander unpériphérique unique de débit élevé (tel qu’un disque) ou être multiplexé entre plusieurs périphériques de
débit plus faible.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 125/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 125
Il ne peut être lancé que par un processeur central et possède un répertoire restreint d'instructions quilui permet d’actionner les contrôleurs et les périphériques qui lui sont connectés. Lorsque le processeurdoit effectuer une opération d’entrée-sortie, il la sous-traite au canal associé au périphérique. Il luitransmet alors les informations nécessaires à la réalisation de l’opération et lui demande de l’exécuter.
Ces informations sont préparées sous la forme d’un programme, appelé programme canal, et dépendantde l’opération d’entrée-sortie souhaitée. Un tel programme est de complexité bien plus élevée qu’unsimple échange en mode DMA. Les canaux sont souvent capables d’enchaîner une série de transferts, etmême d’aller plus loin en optimisant, par exemple, les mouvements de têtes de lecture/écriture desdisques. Le canal traite alors complètement ce programme qui lui est soumis de manière autonome, sansaucune relation avec le processeur central. Une fois le programme de transfert terminé le canal envoieéventuellement une interruption au processeur central qui a pour effet d’arrêter le traitement courant duprocesseur pour l’inciter à lui prêter attention.
Ce mode de travail décharge le processeur des opérations d’entrées-sorties qui sont souvent maladaptées à sa vitesse de traitement (il y a effectivement toujours une lenteur relative de réaction dupériphérique vis-à-vis du processeur). En outre, ce mode de fonctionnement offre l’avantage d’unesimultanéité de traitement du processeur et des canaux, conduisant à une amélioration sensible desperformances du système.
La mise en place d’un tel dispositif sur les ordinateurs de grande puissance nécessite une architecturematérielle (cf. figure 6.3) s’appuyant au moins sur trois bus afin d’optimiser leurs performances :
- Le bus «mémoire » permet aux canaux de lire et d’écrire directement des données en mémoire,
- Le bus « d’entrées-sorties » assure au processeur la faculté de communiquer aisément avec les
canaux d’entrées-sorties (transmission de commandes, transmission d’interruptions...),
- Un troisième bus permet enfin au processeur d’échanger des informations (programmes etdonnées) avec la mémoire.
Selon leur structure et leur complexité, on peut distinguer trois types de canaux.
1.6.2.4.1./ Le sélecteur
Un sélecteur (selector) est un canal spécialisé, dédié aux périphériques rapides à haut débit (disques,bandes...). Il sélectionne un seul périphérique à la fois (cf. figure 6.4). Quand une opération estcommencée, elle continue jusqu’à sa fin. Pendant tout le temps d’exécution, le canal est dit occupé(busy).
La sélection du périphérique est effectuée à l’aide d’un registre contenant l’adresse du périphériqueconcerné. Deux autres registres de commande contenant respectivement la longueur et l’adresse de lazone mémoire indiquent au module de contrôle du canal la zone de mémoire contenant les données àtransférer.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 126/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 126
Figure 6.4 : Structure d’un canal sélecteur
1.6.2.4.2./ Le multiplexeur par octet
Dans ce type de canal, les circuits sont partagés entre plusieurs sous-canaux (cf. figure 6.5). Ainsi,plusieurs périphériques à faible vitesse de transfert (tels que les terminaux) peuvent être alors contrôléssimultanément. Chaque sous-canal possède sa propre paire de registres de commande (Adresse etLongueur) leur indiquant la zone de mémoire contenant les données à transférer.
Figure 6.5 : Structure d'un canal multiplexeur par octet

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 127/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 127
Si. par exemple, le canal reçoit trois ordres d’entrées-sorties simultanément : écrire A0. A1. A2 sur lepériphérique A. B0, B1 et B2 sur le périphérique B et C0, Cl, C2 sur le périphérique C. Il pourraexécuter ses ordres dans l’ordre : A0, B0, C0, A1, Bl, Cl,... ou alors si C’est un périphérique beaucoupplus lent que A et B, il pourra entrelacer l’exécution : A0. B0, C0, puis A1, B1, A2, B2, Cl, C2.
1.6.2.4.3./ Le multiplexeur par bloc
Un canal multiplexeur par bloc est une combinaison d’un sélecteur et d’un multiplexeur par octet.Lorsqu’un périphérique est autorisé à prendre le canal pour lui seul pendant une courte période, on ditque celui-ci peut fonctionner en mode rafale (burst mode). Lorsqu’il travaille en rafale, il est équivalentà un sélecteur. Lorsqu’il travaille en mode multiplexeur, les octets sont remplacés par des blocs d’octets.
1.6.2.4.4./ Programmation d’un canal
Pour réaliser un transfert de données sur un ordinateur doté de canaux d’entrées-sorties, le processeurcommence par créer en mémoire principale un programme, appelé programme canal, dans le langage ducanal qui effectuera le transfert. Bien entendu, il ne s’agit pas pour le processeur d’écrire un programmedans le sens classique du terme, mais de prendre, dans une bibliothèque de programmes, la maquette duprogramme correspondant au transfert demandé et d’y insérer les paramètres appropriés, tels que :
· L’opération demandée (lecture, écriture, positionnement...),
· L’adresse du début de la zone mémoire où se trouvent les données à transférer,
· La longueur de cette zone,
· L’identification du périphérique concerné par l’échange,
· Les numéros de piste et de secteur lorsqu’il s’agît d’un disque...
Après avoir préparé le programme canal, le processeur exécute une instruction d’initialisation del’échange (du type START I/O sur les ordinateurs IBM) pour définir et initialiser le canal et lepériphérique concernés. Le canal peut alors mener à bien le transfert sans l’aide du processeur qui peutreprendre alors son fonctionnement normal en parallèle avec le canal. Ce dernier extrait d’unemplacement mémoire connu à l’avance l’adresse du programme canal qu’il doit exécuter. Il range cetteadresse dans son propre compteur ordinal, puis exécute en séquence les instructions du programmecanal. Comme les canaux travaillent en parallèle avec le processeur central, il y a concurrence entre euxpour accéder à la mémoire centrale. En effet, les canaux doivent lire et écrire dans la même mémoireque celle utilisée par l’unité centrale pour l’exécution des tâches en cours. Les canaux doivent alors, dela même manière qu’un contrôleur de type DMA, dérober des cycles d’accès à la mémoire auprocesseur central.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 128/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 128
1.6.3. / PILOTAGE DES PERIPHERIQUES
Le programme qui commande le fonctionnement élémentaire d’un périphérique est appelé conducteurde périphérique (device driver). Ce programme gère directement l’interface du contrôleur dupériphérique, traite les interruptions émises par celui-ci, détecte et traite les cas d’erreurs. Il estgénéralement transparent aux utilisateurs qui accèdent aux fonctions d’entrée/sorties au moyen deservices de plus ou moins haut niveau, réalisés par des appels au superviseur.
1.6.3.1./ Notion de conducteur de périphérique
Pour pouvoir écrire des programmes qui peuvent fonctionner sur n’importe quelle machine, sansrecourir à des modifications, il est nécessaire de parvenir à un maximum d’indépendance entre le logicielet le matériel. Pour exécuter une entrée-sortie sur un périphérique, le gestionnaire d’entrées-sorties du
système a besoin de connaître son « adresse» dans la machine. Ainsi, les programmes exécutent leursentrées-sorties en indiquant simplement au système un « nom logique » pour désigner le périphériqueconcerné par l’échange. Le système maintient une table interne de correspondance entre les nomslogiques et les adresses physiques des périphériques. Le gestionnaire d’entrées-sorties dirige ensuitechaque requête vers un programme spécial, appelé conducteur de périphériques (ou conducteurd’interfaces ou encore pilote de périphériques) (device driver), qui est le seul dans le système àconnaître l’emplacement physique (l’adresse réelle) du périphérique dans la machine. En outre, seul leconducteur connaît les particularités du périphérique qu’il contrôle, telles que les adresses des différentsregistres de commandes ou les bits à positionner pour effectuer chaque opération.
Un conducteur de périphériques est constitué de quelques routines qui s’appellent les unes les autres.L’écriture de ces routines est soumise à des contraintes fortes de réentrance. En effet, lorsqu’unconducteur est chargé de contrôler plusieurs entrées-sorties simultanément, il doit pouvoir êtreinterrompu par une interruption qui provoquera sa propre exécution. Il doit donc être capable des’exécuter en parallèle avec lui-même et donc être entièrement ré-entrant. Parmi les routinesconstitutives, on trouve presque toujours celles présentées par la figure 6.6
1. Une routine de pré-traitement qui vérifie que l’opération demandée est possible (par exemplequ’on ne demande pas une lecture sur une imprimante). Si la demande est correcte, cetteroutine appelle la routine de lancement,
2. Une routine de lancement qui est chargée d’initialiser l’interface et de commander le transfertde la première donnée. Après l’exécution de cette commande, cette routine effectue unbranchement sur la routine d’attente,
3. Une routine d’attente des entrées-sorties qui sauvegarde l’adresse de la routine de continuationdans le paquet associé à l’entrée-sortie en cours, puis rend la main au système,
4. Le système d’interruption du matériel,

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 129/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 129
5. Une routine de traitement d’interruption qui est exécutée par le système lorsque le périphériquecontrôlé par le conducteur envoie une interruption. Elle appelle une routine de mise en file quienregistre l’interruption pour différer son traitement complet et rend la main au système afin de
ne pas bloquer les autres interruptions qui pourraient survenir,
6. Lorsque le système n‘a plus de routines d’interruption à exécuter, l’interruption logicielleprovoquée par une des routines d’interruption d’un contrôleur d’interfaces va provoquerl’exécution d’une routine d’exploration de la file des entrées-sorties en attente decontinuation. Pour chacune d’elle, cette routine va appeler la routine de continuationconducteur correspondant,
7. Une routine de continuation de l’entrée-sortie en cours qui est appelée par la routine de sortiede file pour poursuivre l’entrée-sortie. Si l’entrée-sortie est terminée, elle appelle une routinede post-traitement du système. Sinon, elle lance le transfert de la donnée suivante et se branchesur la routine d’attente,
Figure 6.6 : Schéma d’un conducteur de périphériques

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 130/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 130
8. Une routine de post-traitement de l’entrée-sortie qui est appelée à sa fin et qui va mettre lepaquet de l’entrée-sortie dans la file de post-traitement et déclencher un événement post-traitement. Ainsi, le traitement correspondant sera remis à plus tard lorsque toutes lesentrées/sorties en attente auront été relancées.
L’enchaînement des appels aux routines pour une entrée-sortie est donc le suivant :
Démarrage de l’entrée-sortieContinuation…Fin de l’entrée-sortie
La séquence (3) (4) (5) (6) (7) est exécutée pour chaque interruption. Par exemple, dans le cas d’uneécriture sur un périphérique asynchrone, elle sera exécutée une fois pour chaque caractère écrit.
1.6.3.2./ Pilotage d 'entrées-sorties synchrones
Lorsqu’un programme fait une demande d’entrée-sortie, celle-ci est, en général, exécutée en modesynchrone, c’est à dire que le système ne rend la main à la tâche qui a demandé l’opération d’entrée-sortie qu’une fois celle-ci terminée. En mode synchrone, il n’y a donc aucun parallélisme possible entrele traitement d’une tâche et le transfert d’informations. Pendant toute la durée de l’opération d’entrée-sortie, la tâche en cours qui a généré la demande est bloquée dans un état en attente, la main passantalors à un autre programme (cf. figure 6.7). L’opération de base est le transfert d’une information
élémentaire entre un emplacement mémoire et un périphérique. La taille de cette information est fixe etdépend du périphérique considéré (nous la supposerons égale à un octet). L’état de l’ensemblecontrôleur/périphérique est défini par un mot d’état contenu dans le contrôleur. Ce mot d’état comporteun ensemble d’indicateurs booléens parmi lesquels on trouve en général :
· Prêt: signale que le périphérique est prêt à fonctionner (le détail des conditions à remplirdépend du périphérique),
· Fini: indique que le transfert est terminé. Le périphérique est alors prêt à transférer un nouveaucaractère,
· Erreur: signale qu’une erreur s’est produite au cours du transfert. Sa nature est précisée parun code qui fait partie du mot d’état.
Figure 6.7 : Entrée-Sortie synchrone

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 131/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 131
Le contrôleur est commandé par le processeur au moyen de trois instructions :
· ENTRER (@mem, @périph) demande le transfert d’un caractère en entrée,
· SORTIR (@mem, @périph) demande le transfert d’un caractère en sortie,
· TEST (@périph) copie le mot d’état dans un registre pour consulter les indicateurs.
On a @mem et @périph qui désignent respectivement les adresses de l’emplacement mémoire et dupériphérique.
Figure 6.8 : Exemple de pilote d’entrées-sorties synchrones
La figure 6.8 est un exemple de programme pilote d’entrées-sorties en mode synchrone et permettant desortir une suite de n caractères contenus dans un tableau T[0..n-1]. La tâche « Active » qui a la mainexécute une instruction d’affichage qui déclenche alors un appel au superviseur. Cet appel va réaliser leblocage de la tâche " Active " (mise en attente de "Active" ) et le lancement de la tâche « pilotagesynchrone » qui, elle, va réaliser le transfert effectif en sortie du tableau T[0...n-1]. Le transfert ducaractère T[i] ne pouvant être effectif qu’à la fin du transfert du caractère T[i-1], un test est itéré surl’indicateur Fini (attente active) avant le transfert de chaque caractère. Une fois le transfert des ncaractères terminé, la tâche « Pilotage synchrone » débloque la tâche « Active» qui pourra alorsreprendre son exécution quand son tour viendra.
Les entrées-sorties synchrones sont très utilisées sur les micro-ordinateurs les plus simples et dans tous
les cas où le processeur ne peut être utilement employé pendant le transfert (enregistrement de mesures,chargement initial d’un système...).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 132/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 132
1.6.3.3./ Pilotage d’entrées-sorties asynchrones
Il est toujours possible pour une tâche de demander au système d’exécuter des entrées-sorties de façon
asynchrone. Dans ce cas, le système lance l’opération d’entrée-sortie et redonne tout de suite la main àla tâche. Celle-ci peut alors reprendre son déroulement en parallèle avec le déroulement de l’entrée-sortie. Le système la prévient de la fin de l’opération d’entrée-sortie, soit par le positionnement d’undrapeau (flag) que la tâche ira tester, soit par l’exécution d’une routine particulière, dont la tâche afourni l’adresse au système lors du lancement de l’opération d’entrée/sortie (cf. figure 6.9). L’intérêt decette routine est qu’elle est décrite par le concepteur du programme. En contre partie l’écriture duprogramme doit tenir compte du caractère asynchrone de cette routine (il n’est pas possible de savoir àl’avance à quel moment il sera interrompu, lors de son exécution, par la fin de l’opération d’entrée-sortie). La figure 6.10 est un exemple de pilotage d’entrées-sorties en mode asynchrone permettant àune tâche de sortir une suite de n caractères contenus dans un tableau T[0...n-1] et de poursuivre enparallèle son déroulement.
Figure 6.9 : Entrées-Sorties asynchrones
Dans cet exemple, le transfert est demandé par la tâche active qui exécute une instruction de sortie.Cette instruction fait appel au superviseur en lui passant comme paramètres :
· L’adresse du périphérique concerné par le transfert,
· L’adresse d’origine du premier caractère à transférer,
· Le nombre total de caractères à transférer,
· Un indicateur booléen «Terminé », dont la mise à vrai signale la fin du transfert.
L’appel au superviseur a pour objet d’initialiser l’opération d’entrée-sortie et d’amorcer le processuspar le transfert du premier caractère (SORTIR (T[0], @périph)). La fin du transfert de chaque caractèreT[i] est signalée par une interruption. Le traitement de cette interruption consiste à lancer le transfert ducaractère suivant (SORTIR (T[i], @périph)), tant qu’il reste des caractères à transférer (i < n-1).

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 133/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 133
Figure 6.10 : Exemple de pilote d’entrées-sorties asynchrones
Dès que l’opération est amorcée, la tâche « Active » reprend son traitement en parallèle avecl’opération de Sortie et peut tester la fin de transfert afin de lancer alors une procédure adéquate oudemander un autre transfert de données en entrée comme en sortie. Le traitement parallèle de tâche «Active » et de la tâche de traitement des interruptions n’est en fait qu’un enchevêtrement de l’exécution
de ces deux tâches (cf. Figure 6.11). La tache «Active» prend la main dès qu’un transfert est lancé. Achaque interruption provenant du périphérique et signalant la fin du transfert commandé, le systèmereprend la main pour traiter l’interruption et continuer l’opération d’entrée ou de sortie en commandantun nouveau transfert. En fait, la tâche « Active » s’exécute pendant les temps d’attente des interruptions(correspondant à près de 90% du temps total de l’entrée-sortie).
Figure 6. 11 : « Parallélisme » entre tâche et entrée-sortie
Instructions de requêtes aux périphériques.
Exécution des requêtes pourle périphérique en parallèle.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 134/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 134
La mise en oeuvre du mécanisme de pilotage d’entrées-sorties asynchrones est une extension dumécanisme de pilotage d’entrées-sorties synchrones le passage à vrai de l’indicateur Fini provoque uneinterruption sur le niveau associé au périphérique considéré. Le choix entre le mode synchrone et le
mode asynchrone (donc par interruption) est commandé par l’armement ou le désarmement de ceniveau.
1.6.4. / PRINCIPE DU GESTIONNAIRE D’ENTREES/SORTIES
Le module de gestion des entrées-sorties d’un système d’exploitation a pour rôle de prendre en chargeles transferts de données entre la mémoire centrale et les périphériques, et d’isoler l’utilisateur desspécificités du matériel. Les gestionnaires d’entrées-sorties (IOM : Input-Output Manager) permettentainsi aux utilisateurs de voir les mécanismes d’entrées/sorties de manière virtuelle (cf. figure 6. 12).
Les tâches d’application peuvent alors communiquer de manière standard avec des entrées/sortieslogiques. Ce principe de terminal virtuel permet d’éviter qu’un programme qui effectue une opérationd’entrées/sorties (beaucoup plus lente qu’une opération de l’unité centrale) ne monopolise le processeurpendant tout un temps inutilement long, d’assurer le partage des unités périphériques entre les différentsutilisateurs et leurs applications, d’éviter des erreurs et enfin d’utiliser les unités avec toute l’efficacitévoulue. Du côté matériel, les gestionnaires d’entrées/sorties doivent se connecter aux gestionnaires desunités périphériques (device management ou device driver) qui s’occupent des transferts des donnéesphysiques sur les divers périphériques consoles, imprimantes, disques, bandes... Ces derniers sont trèsspécialisés et liés du matériel.
Figure 6. 12 : Principe de la gestion des entrées/sorties
Le problème dû à la différence de vitesse de travail entre l’unité centrale et les unités périphériques esten général résolu à l’aide d’un gestionnaire de tampons. Le gestionnaire d’entrées/sorties d’un systèmed’exploitation sert donc d’interface entre la vision logique qu’a un utilisateur des Unités périphériques(nom, type...) et la vision physique qu’a le système de ces unités (adresses réelles, vitesse detransfert...), à travers un ensemble de services auxquels l’utilisateur peut accéder.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 135/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 135
1.6.4.1./ Structure du gestionnaire d’entrées/sorties
Nous avons vu (cf. figure 6.12) qu’une manière de standardiser l’interface entre les tâches d’application
et les gestionnaires d’entrées/sorties est de considérer ces derniers comme des fichiers spéciaux(input/output files) dans lesquels les tâches lisent et écrivent.
Figure 6. 13 Structure d’un Gestionnaire d’entrées/sorties.
La conception de tels gestionnaires est ainsi liée au niveau supérieur du système d’exploitationconcernant la gestion des fichiers. Lorsqu’un utilisateur a ouvert un fichier ou déclaré qu’il voulait
utiliser une unité d’entrées-sorties (ouverture d’un fichier spécial, du type fichier INPUT ou fichierOUTPUT), c’est ensuite le gestionnaire d’entrées-sorties qui contrôle et gère toutes les demandesd’opérations (tant en lecture qu’en écriture) sur ce fichier.
Un gestionnaire d’entrées/sorties est constitué de deux niveaux (cf. figure 6.13) : l’un prend en chargela manipulation des données logiques et l’autre s’occupe du traitement des données physiques. Entre cesdeux niveaux, une interface transforme les données logiques en données physiques et inversement. Lesdonnées, dites données logiques, proviennent des tâches utilisateur. Quant aux données physiques, ellessont produites directement par le niveau physique du gestionnaire vers les dispositifs d’entrées/sorties.
1.6.4.2./ Le LIOCS
Le LIOCS (Logical Input-Output Control System) permet de considérer que les données à transférersont présentées sous la forme d’enregistrements logiques (records) stockés dans des fichiers. Ce niveaudu gestionnaire d’entrées/sorties gère les accès à ces fichiers du côté des utilisateurs en utilisant destampons (buffers) pour optimiser l’utilisation du processeur, c’est à dire faire en sorte que les tâchessoient le moins souvent possible mises en attente lorsqu’elles effectuent des demandes d’entrées/sorties.Il comprend un module de contrôle de la stratégie d’utilisation des unités physiques qui permet, parexemple, de grouper des demandes multiples à une même unité périphérique.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 136/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 136
1.6.4.3./ Le PIOCS
Le PIOCS (Physical Input-Output Control System) travaille sur des adresses réelles. Les données
physiques qu’il contrôle, sont envoyées en direction des unités d’entrées/sorties et permettent leurcommande effective en tenant de leurs caractéristiques physiques (adresses réelles, vitesse de travail...).Pour cela, il comprend un module de contrôle des entrées/sorties (device handier) en relation directeavec le gestionnaire de périphériques (device driver) et le gestionnaire d’interruption (interruptmanager) du système.
1.6.4.4./ Le gestionnaire de tampons
La fonction des mémoires tampon (buffer) est double :
- Servir d’adaptateur entre l’unité centrale et les unités périphériques qui travaillent à des vitessesdifférentes et ainsi optimiser les temps de transfert,
- Résoudre les problèmes d’adaptation des données logiques au support matériel, liés auxdifférences de taille et de structure entre les enregistrements logiques (visibles aux utilisateurs)et les enregistrements physiques (visibles aux unités d’entrées-sorties).
Lorsqu’une unité d’entrées/sorties est allouée à une tâche, un ensemble de tampons lui est associé.L’utilisation de ces tampons est dynamique. Il existe trois méthodes principales pour la gestion de cestampons
1.6.4.4.1./ Le double tampon
Le mécanisme de gestion d’un double tampon est le mécanisme le plus simple. Un groupe de deuxtampons est associé à l’unité d’entrées/sorties. Pendant qu’une tâche utilisateur travaille avec un desdeux tampons par l’intermédiaire du LIOCS, l’unité d’entrées/sorties travaille avec l’autre parl’intermédiaire du PIOCS (cf. figure 6.14).
Figure 6. 14 : Principe d’utilisation d’un mécanisme double tampon

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 137/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 137
Quand l’un des tampons est vide et l’autre rempli, ils sont alors échangés. L’inconvénient de cemécanisme réside dans le fait que si la tâche utilisateur (niveau logique) est très rapide par rapport àl’unité périphérique, elle sera souvent bloquée en attente de la disponibilité du deuxième tampon.
1.6.4.4.2./ Le tampon circulaire
Un tampon circulaire correspond à une zone mémoire égale à un multiple de la dimension d’unenregistrement physique. On accède à cette zone par l’intermédiaire de deux pointeurs début et Fin. Al’état initial ces deux pointeurs pointent sur la même adresse.
Le PIOCS écrit des enregistrements physiques à partir de l’adresse pointée par Fin et repositionne cepointeur à la fin du dernier enregistrement physique écrit. Le LIOCS quant à lui lit les enregistrementslogiques à partir de l’adresse pointée par Début. Après chaque lecture. Début est repositionné au débutdu premier enregistrement logique à lire. Entre Début et Fin, on trouve donc les informations produitespar le PIOCS et non encore utilisées par le LIOCS. Alors que de Fin vers Début on trouve l’espacedisponible dans lequel le PIOCS peut écrire. D’une certaine manière le LIOCS voit des tampons dont ladimension est celle d’un enregistrement logique (une ligne par exemple) alors que le PIOCS voit destampons dont la taille correspond à celle des enregistrements physiques (blocs de 128 octets, parexemple).
Figure 6.15 : Principe d’un tampon circulaire
Dans l’exemple de la figure 6.15-a, la zone occupée, c’est-à-dire celle contenant des informationsproduites par le PIOCS mais pas encore consommée, est contiguë, alors que dans la figure 6.15-b, bienque du point de vue logique rien ne change, l’adresse physique de Fin précède celle de Début.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 138/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 138
1.6.4.4.3./ Le pool de tampons
Lors de l’allocation d’une unité d’entrées/sorties à une tâche, un ensemble de tampons est réservé dans
l’espace libre de la mémoire. Chaque tampon a une dimension qui correspond à la taille d’unenregistrement physique. A chacun de ces tampons est associé un descripteur de tampon (buffer controlblock). Ces descripteurs sont chaînés entre eux et contiennent en général les éléments suivants :
· La dimension logique du tampon qui peut être différente de sa dimension physique qui est engénéral un multiple de la taille d’un bloc mémoire,
· Un index qui donne la page mémoire réelle contenant le tampon,
· Le statut du tampon qui indique si le tampon est plein, donc disponible pour être lu, ou vide etalors disponible pour être écrit,
· Un pointeur vers le descripteur suivant qui assure le chaînage des tampons.
La gestion de ces tampons peut alors être réalisée à l’aide de deux boîtes aux lettres (cf. figure 6.16) quisont créées lors de l’affectation d’une unité d’entrées/sorties à une tâche :
· BLP servant aux échanges du niveau logique vers le niveau physique,
· BPL servant aux échanges du niveau physique au niveau logique.
Dans le cas dune opération de lecture, les descripteurs de tampons sont alors tous chaînés à l’originedans la boîte BLP. Celle-ci constitue alors la liste des tampons disponibles pour la tâche du PIOCSchargée de leur recopie. Cette tâche remplit tous les tampons trouvés dans BLP, les uns après lesautres, et les envoie dans BPL. Lorsque BLP est vide la tâche du PIOCS est alors mise en attente. Laboîte BPL constitue alors la liste des tampons disponibles pour la tâche du LIOCS chargée de les vider.Cette tâche prend les tampons de BPL dans leur ordre d’arrivée et y lit, sous la forme d’enregistrementslogiques, les informations qui y ont été rangées. Lorsque toutes les informations contenues dans untampon de BPL ont été lues, ce tampon est envoyé dans BLP afin d’être de nouveau disponible pour latâche productrice du PIOCS. Quand BPL est vide, la tâche du LIOCS est alors mise en attente denouveaux tampons à consommer.
Lors d’une opération d’écriture, tous les descripteurs de tampons sont envoyés dans BPL. La tâcheréalisant l’opération les consomme au fur et à mesure qu’elle exécute des ordres d’écriture et les envoiedans BLP qui contient alors les descripteurs de tampons écrits par le LIOCS et prêts à être recopiés unetâche du PIOCS sur l’unité de sortie concernée par l’échange.
La figure 6.16 représente un exemple de gestion d’un port de sept tampons lors d’une opération delecture. Trois des tampons ont été remplis par le PIOCS et attendent d’être consommés par le LIOCS.Deux des tampons Sont vides et attendent d’être remplis par le PIOCS. Un sixième tampon est en coursd’exploitation par le LIOCS et un septième est simultanément exploité par le PIOCS. L’intérêt de ce
mécanisme est que le nombre de tampons n’est pas fixé a priori. Il est néanmoins limité à la placemémoire disponible.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 139/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 139
Figure 6.16. : Gestion d'un pool de tampon
1.6.5. / PRISE EN CHARGE DES ENTREES/SORTIES PAR LE SYSTEME
Le gestionnaire d’entrées/sorties doit permettre au système d’exploitation de :
· Offrir un ensemble de services suffisant pour que toutes les tâches utilisateur y trouvent dequoi satisfaire leurs besoins,
· Fournir une réponse rapide aux demandes d’entrées/sorties,
· Gérer une structure de données afin de pouvoir exécuter simultanément plusieurs centainesd’entrées/sorties (voire même plusieurs milliers sur les gros systèmes).
· Prendre en charge l’asynchronisme et offrir aux tâches des fonctions leur permettant de se re-synchroniser,
· Assurer l’indépendance logiciel-matériel, ce qui est généralement obtenu par la notion deconducteur d ‘interface.
1.6.5.1./ Les routines de services des entrées/sorties
A travers le gestionnaire d’entrées/sorties, un système d’exploitation offre aux programmes tout un
ensemble d’appels pour leur permettre de réaliser des opérations d’entrées/sorties sur les diverspériphériques disponibles sur la machine. Chaque type de périphérique possède son ensemble deroutines spécialisées.
1.6.5.2./ Structure de données associées aux entrées/sorties
Etant donné que plusieurs entrées/sorties peuvent être simultanément en cours sur différentspériphériques, pour stocker et retrouver facilement les paramètres relatifs à une entrée-sortie, unsystème d’exploitation dispose d’une structure de données (cf. figure 6.17) pour les entrées/sorties en
cours. A chaque type de périphérique (physique ou virtuel) est associée une table, appelée descripteurde périphérique, et située dans un espace mémoire réservé au système.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 140/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 140
Cette table décrit les caractéristiques du périphérique. Parmi les informations qu’elle détient, deuxindicateurs Init et Début pointent sur les routines de pré-traitement et de démarrage d’une entrée-sortiefaisant partie du pilote conducteur d’interface. Lorsqu’un périphérique comprend plusieurs unités (parexemple un contrôleur de terminaux possédant plusieurs lignes), à chaque unité sera associée une table
en mémoire, appelée descripteur d’unité contenant toutes les informations relatives à l’unitépériphérique considérée. Chaque entrée ou sortie demandée au système par une tâche est transforméeen un paquet d’informations (I/O packet) qui est stocké également dans l’espace mémoire réservé ausystème. Ce paquet est mis dans une file d’attente des entrées/sorties en attente d’exécution. Le paquetva contenir des informations telles que :
· Le type de l’opération d’entrée-sortie à effectuer (lecture ou écriture),
· L’adresse en mémoire de la zone tampon servant à l’échange,
· La longueur de l’entrée ou de la sortie (nombre d’informations à transférer),
· L’adresse dans le programme d’un mot d’état destiné à recevoir le statut final de l’opération oule numéro d’un drapeau que le système positionnera à la fin de l’opération,
· L’adresse d’une routine, fournie par la tâche et que le système exécutera à la fin de l’opération,dans le cas d’un pilotage asynchrone (cf. §3.2 de ce chapitre).
Figure 6.17 : Structure de données associées aux entrées-sorties

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 141/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 141
1.6.6. / MECANISMES D’EXECUTION DE REQUETES D’ENTREES/SORTIES
Nous avons vu que les gestionnaires d’entrées/sorties permettent aux tâches des utilisateurs decommuniquer avec les unités périphériques au moyen de noms logiques (nom de fichier spécial parexemple). Ce principe permet une définition dynamique de la connexion d’une tâche à une unité aucours de son exécution, de la même manière qu’un fichier doit être ouvert pour y écrire ou y lire desinformations.
Ainsi, la seule manière pour un programme d’exécuter une opération d’entrées/sorties, est de faire appelà la fonction correspondante du système. Cette fonction conçue par le concepteur du système est écritede façon optimisée afin de minimiser l’impact des opérations d’entrées/sorties sur les performances dusystème. Son utilisation est réalisée par un appel au système. La forme de cet appel au système est celled’un appel de procédure. Il peut être réalisé Soit à partir d’une interruption interne, soit directement àl’aide d’une instruction spéciale SVC (SuperVisor Call) qui crée une tâche de service chargée de
réaliser l’opération d’entrées/sorties. Cette instruction a deux paramètres :
· n : numéro de la routine du système,
· adresse: adresse de la zone mémoire contenant des informations concernant les données àentrer ou à sortir.
Ainsi, un utilisateur qui désire, au cours d’une application, faire afficher sur un terminal la valeur d’unevariable V, doit le prévoir dans son programme. Selon le langage de programmation utilisé, il a alorsdeux possibilités pour le faire :
· Soit l’application est écrite en langage assembleur et dans ce cas l’opération de sortie devraêtre écrite sous la forme d’un appel la routine du système d’exploitation directement à laide del’instruction SVC,
· Soit l’application est écrite en langage évolué et dans ce cas le programmeur devra utiliser unordre tout préparé sous forme d’instruction et prévu dans la syntaxe du langage (WRITE enlangage PASCAL ou FORTRAN ou encore PRINTF en langage C...). C’est alors lecompilateur du langage qui traduit cet ordre en une instruction SVC et l’éditeur de liens génèrealors l’appel à la primitive du système d’exploitation qui doit être exécutée. Cette primitive estréentrante de façon qu’elle puisse être utilisée par plusieurs tâches en même temps.
La figure 6.18 est un exemple de programme effectuant la lecture d’une donnée dans le fichier logiqueINPUT. C’est l’instruction LIRE (INPUT, V) qui effectue cette requête. Cette instruction s’interprèteainsi ‘Lire sur l’unité logique INPUT, une donnée qui doit être placée à l’adresse logique V’. Elle esttraduite lors de la compilation par l’instruction d’appel au superviseur SVC (Lecture, V) où leparamètre Lecture correspond au numéro de la routine système souhaitée. C’est alors cette routine quidéclenchera la tâche de service correspondante en mode synchrone ou asynchrone. Dans cet exemple, lafonction du LIOCS est remplie par un simple appel, réalisé par l’instruction SVC, à la tâche de serviceréalisée par le PIOCS. Cette tâche de service pourra bloquer la tâche du programme utilisateur si aucuntampon est disponible.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 142/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS COURS Page 142
Figure 6. 18 : Exemple d’exécution d’une opération de lecture
Dés que l’opération demandée est décodée, le gestionnaire d’entrées/sorties (I.O.M.) réalise les étapesnécessaires à l’exécution de cette opération :
· Vérification de la cohérence du service demandé (lors d’une demande de lecture, il contrôlepar exemple, que le périphérique demandé est bien un dispositif d’entrée),
· Activation des fonctions du LIOCS et du PIOCS qui utiliseront le gestionnaire de tamponschaque fois qu’elles auront besoin d’effectuer un transfert de tampons entre elles ou bienqu’elles en libéreront,
· Envoi d’un événement (interruption) de fin de service à la tâche qui avait demandé l’opération.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 143/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 143
2. TRAVAUX DIRIGES

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 144/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 144
2.1. / Exercice 1 : La gestion des listes de tâches d’un système TR
2.1.1. / Enoncé
A l’aide des procédures de base :
- ENLEVER (T, LT) : retire une tâche T d’une liste LT.- AJOUTER (T, LT): ajoute une tâche T d’une liste LT.- TRANSFERRER () : basculer le microprocesseur d’une tâche vers une autre.- ORDONNER (LT) : réorganise une liste de tâche LT en fonction de sa priorité (LTP) ou de
son temps d’attente (LTA & LTAS).
Ecrire l’algorithme des procédures de haut niveau suivantes :
1- S’ENDORMIR (Durée) : permet à la tâche active de s’arrêter pendant un certain temps ‘Durée’.2- ENDORMIR (NomTâche, Durée) : permet à la tâche active d’arrêter une autre tâche ‘NomTâche’pendant un certain temps ‘Durée’.
3- SUSPENDRE (Nomtâche) : permet de suspendre l’exécution de la tâche ‘NomTâche’.4- DESSUPENDRE (Nomtâche) : permet de reprendre l’exécution de la tâche ‘NomTâche’.
Notas :
- On considère que l’on est avec un système temps réel (TR) qui traite 4 liste de tâches qui sont :
. LTP : Liste des Tâches Prêtes.
. LTA : Liste des Tâches en Attentes.
. LTS : Liste des Tâches Suspendues.
. LTAS : Liste des Tâches en Attentes et Suspendues.
- Pour le traitement des listes de tâches, on se réfèrera au figure 2.3 du chapitre 2.
2.1.2. / Solutions
2.1.2.1./ La procédure S’ENDORMIR
S’ENDORMIR (Durée) {ENLEVER (T1, LPT) ;AJOUTER (T1, LTA) ;Delai (T1)ß Durée ; // Mettre le paramètre ‘Delais’ du descripteur de tâche de T1 à la valeur ‘Durée’.ORDONNER (LTA) ;TRANSFERER () ;}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 145/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 145
2.1.2.2./ La procédure ENDORMIR
ENDORMIR (NomTâche, Durée){Si NomTâche ∈ LTA Alors
{ENLEVER (NomTâche, LTP) ;AJOUTER (NomTâche, LTA) ;Delais (NomTâche)ß Durée ;ORDONNER (LTA) ;
TRANSFERER () ;Exit () ;}
Si NomTâche ∈ LTAS Alors{Delais (NomTâche)ß Delais (NomTâche) + Durée ;ORDONNER (LTAS) ;Exit () ;}
Si NomTâche ∈ LTS Alors{ENLEVER (NomTâche, LTS) ;AJOUTER (NomTâche, LTAS) ;Delais (NomTâche)ß Durée ;ORDONNER (LTAS) ;Exit () ;}
LTP T1
S’ENDORMIR(Durée)
LTA
T2
Tâche Active

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 146/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 146
Si NomTâche ∈ LTA Alors{Delais (NomTâche)ß Delais (NomTâche) + Durée ;ORDONNER (LTA) ;
Exit () ;}
Si NomTâche ∈ LTP Alors{Afficher (« Erreur, la tâche ne peut être endormie !!! ») ;Exit () ;}
Afficher (« La tâche est inconnue !!! ») ;}
2.1.2.3./ La procédure SUSPENDRE
SUSPENDRE (NomTâche){Si NomTâche ∈ LTP Alors
{ENLEVER (NomTâche, LTP) ;AJOUTER (NomTâche, LTS) ;Mettre le compteur de suspension de NomTâche à 1;
exit () ;}
Si NomTâche est Active Alors{ENLEVER (NomTâche, LTP) ;AJOUTER (NomTâche, LTS) ;Mettre le compteur de suspension de NomTâche à 1;TRANSFERER () ;exit () ;
}
Si (NomTâche ∈ LTAS) ou (NomTâche ∈ LTS) Alors{Incrémenter de 1 le compteur de suspension de NomTâche ;exit () ;}
…

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 147/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 147
…
Si NomTâche ∈ LTA Alors{
ENLEVER (NomTâche, LTA) ;AJOUTER (NomTâche, LTAS) ;Mettre le compteur de suspension de NomTâche à 1;ORDONNER (LTAS) ;exit () ;}
Afficher (« Erreur, la tâche n’a pas été trouvée !!! ») ;}
2.1.2.4./ La procédure DESSUSPENDRE
DESSUSPENDRE (NomTâche){Si NomTâche ∈ LTS Alors
{Décrémenter de 1 le compteur de suspension de NomTâche ;Si le Compteur de suspension de Nomtâche = 0 Alors
{ENLEVER (NomTâche, LTS) ;AJOUTER (NomTâche, LTP) ;
ORDONNER (LTP) ;Si NomTâche est en tête de LTP Alors
TRANSFERER () ;FinSi}
}
Si NomTâche ∈ LTAS Alors{Décrémenter de 1 le compteur de suspension de NomTâche ;
Si le Compteur de suspension de Nomtâche = 0 Alors{ENLEVER (NomTâche, LTAS) ;AJOUTER (NomTâche, LTA) ;ORDONNER (LTA) ;}
}
Si (NomTâche ∈ LTP) ou (NomTâche ∈ LTA) ou (NomTâche est active) Alors{Afficher (« Erreur : La tâche est non suspendue ») ;
}}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 148/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 148
2.2. / Exercice 2 : La gestion de l’interruption de l’horloge TR
2.2.1. / Enoncé
A l’aide des procédures de base définies dans l’exercice 1, écrire l’algorithme de la procédure de traitementde l’interruption de l’horloge temps réel pour les cas suivants :
- Dans le cas d’un système multiutilisateurs mettant en œ uvre un ordonnancement partourniquetavec les listes de taches LTP et LTA.
- Dans le cas d’un système temps réel avec les listes LTP, LTA, LTS, et LTAS.
2.2.2. / Solutions
Pour un système multiutilisateur :
ITR_MULTIUSERS (){Si LTA non vide Alors
{Delais (1ére tâche LTA)ß Delais (1ére tâche LTA) –1 ;Si Delais (1ére tâche LTA) = 0 Alors
{ENLEVER (1ére tâche LTA, LTA) ; // On retire la 1ere tâche de LTA de la tête de LTA.AJOUTER (1ére tâche LTA, LTP) ; // On la met à la fin de LTP.
Delais (1ére tâche LTA) = q ; // On réinitialise le quantum de temps de la tâche.}
}
Si LTP non vide Alors{Delais (1ére tâche LTP)ß Delais (1ére tâche LTP) –1 ;Si Delais (1ére tâche LTP) = 0 Alors
{ENLEVER (1ére tâche LTP, LTP) ; // On retire la 1ere tâche de LTP de la tête de LTP.
AJOUTER (1ére
tâche LTP, LTP) ; // On la met à la fin de LTP.Delais (1ére tâche LTP) = q ; // On réinitialise le quantum de temps de la tâche.TRANSFERER () ;}
}
}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 149/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 149
Pour un système Temps réel :
ITR_TR ()
{Si LTAS non vide Alors{Delais (1ére tâche LTAS)ß Delais (1ére tâche LTAS) –1 ;Si Delais (1ére tâche LTAS) = 0 Alors
{ENLEVER (1ére tâche LTAS, LTAS) ; // On retire la 1ere tâche de LTAS de la tête de LTAS.
AJOUTER (1ére tâche LTAS, LTS) ; // On la met à la fin de LTS.
}}
Si LTA non vide Alors{Delais (1ére tâche LTA)ß Delais (1ére tâche LTA) –1 ;Si Delais (1ére tâche LTA) = 0 Alors
{ENLEVER (1ére tâche LTA, LTA) ; // On retire la 1ere tâche de LTA de la tête de LTA.AJOUTER (1ére tâche LTA, LTP) ; // On la met à la fin de LTP.ORDONNER (LTP) ;TRANSFERER () ;}
}}
Nota : Les listes de tâches LTP et LTS n’ont pas à être traitées dans un système temps réel.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 150/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 150
2.3. / Exercice 3 : Ordonnancement de tâches dans un système TR
2.3.1. / Enoncé
Dans un contexte temps réel, on désire gérer une application composée de 4 tâches devant chacuneafficher à l’écran leur nom dans l’ordre suivant :
Tâche1, Tâche2, Tâche3↵ Tâche1↵ Tâche1, Tâche2↵ Tâche1↵ Tâche1, Tâche2, Tâche3↵
1/ A l’aide de la procédure ENDORMIR (Nom_Tâche, Durée) ; de l’exercice N°1, écrire l’algorithme
des 4 tâches et de l’exécutif temps réel. Les durées d’exécution des tâches 1, 2, 3, et 4 sontnégligeable par rapport à une seconde. Les 4 tâches sont indépendantes les unes des autres.L’exécutif temps réel créera les tâche 1, 2, 3, et 4, attendra 30 secondes, puis les détruira. Dans tousles cas, la tâche 1 affiche son message toutes les secondes.
2/ Ecrire le même algorithme que dans l’énoncé précédent mais en utilisant les procéduresSUSPENDRE (Nom_Tâche) et DESSUSPENDRE (Nom_Tâche). Dans ce cas, il n’y a pas denotion de temps pour l’exécution des tâches 1, 2, 3 et 4. On utilisera une 5éme tâche (Tâche5) pourgérer la dessuspenssion des tâches 1, 2, 3 et 4. La seule notion de temps qui doit être conservé estl’exécution pendant 30 secondes de l’exécutif temps réel.
3/ Ecrire le même algorithme que dans l’énoncé précédent mais en utilisant une 6éme tâche (Tâche6) quiest chargée des affichages à l’écran. On écrira l’algorithme des 6 tâches et de l’exécutif temps réelpour :
- Le cas d’une communication par variable commune.
- Le cas d’une communication par BaL.
4/ A partir de l’énoncé 2/, et en considérant que la tâche 5 est définie comme ci-dessous, écrire lesalgorithmes des tâches 1, 2, 3 et 4 et de l’exécutif temps réel pour tenir comme de cette définition.
Tâche5 (){TantQue ()
{DESSUSPENDRE (Tâche1) ;DESSUSPENDRE (Tâche2) ;DESSUSPENDRE (Tâche3) ;DESSUSPENDRE (Tâche4) ;}
}
Pendant 30 secondes avec âche1 toutes les secondes.Une 4éme tâche permettra l’affichage du caractèreretour chariot ’↵’.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 151/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 151
2.3.2. / Solutions
1/
2/
Tâche3 (){
TantQue (){Afficher (« Tâche3 ») ;ENDORMIR (Tâche3, 4s);}
}
Tâche4 (){TantQue ()
{
Afficher (« ↵ ») ;ENDORMIR (Tâche4, 1s);}
}
Tâche1 ()
{TantQue (){Afficher (« Tâche1 ») ;ENDORMIR (Tâche1, 1s);}
}
Tâche2 (){
TantQue (){Afficher (« Tâche2 ») ;ENDORMIR (Tâche2, 2s);}
}
EXECUTIF_TR(){CREER Tâche1 ;CREER Tâche2 ;CREER Tâche3 ;CREER Tâche4 ;
ENDORMIR (EXECUTIF_TR, 30s);
TUER Tâche1 ;
TUER Tâche2 ;TUER Tâche3 ;TUER Tâche4 ;}
Tâche1 (){TantQue ()
{Afficher (« Tâche1 ») ;SUSPENDRE (Tâche1);}
}
Tâche2 (){TantQue ()
{Afficher (« Tâche2 ») ;SUSPENDRE (Tâche2);}
}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 152/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 152
Nota : Dans l’exécutif temps réel, lors de la création des tâches, on défini leurs priorités. P1 est unepriorité qui est supérieure à P2. La tâche 5 doit être moins prioritaire que les tâche 1, 2, 3 et 4 sinon il n’yaurai pas d’affichage à l’écran.
Tâche3 (){
TantQue (){Afficher (« Tâche3 ») ;SUSPENDRE (Tâche3);}
}
Tâche4 (){
TantQue (){Afficher (« ↵ ») ;SUSPENDRE (Tâche4);}
}
EXECUTIF_TR()
{CREER (Tâche1, P1) ;CREER (Tâche2, P1) ;CREER (Tâche3, P1) ;CREER (Tâche4, P1) ;CREER (Tâche5, P2) ;
ENDORMIR (EXECUTIF_TR, 30s);
TUER Tâche1 ;TUER Tâche2 ;TUER Tâche3 ;TUER Tâche4 ;TUER Tâche5 ;}
Tâche5 ()
{TantQue (){DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);
DESSUSPENDRE (Tâche4);}}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 153/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 153
3/
Le cas d’une communication par variable commune
Tâche1 (){TantQue ()
{P(Exmu) ; // On charge le sémaphore du message.Ecrire (« Tâche 1 »àMess) ;V(Exmu) ; // On libère le sémaphore du message.SUSPENDRE (Tâche1);V(S) ; // Indique qu’il y a un message à faire afficher par Tâche6.
}}
Tâche2 (){TantQue ()
{P(Exmu) ; // On charge le sémaphore du message.Ecrire (« Tâche 2 »àMess) ;V(Exmu) ; // On libère le sémaphore du message.SUSPENDRE (Tâche2);V(S) ; // Indique qu’il y a un message à faire afficher par Tâche6.}
}
Tâche3 (){TantQue ()
{P(Exmu) ; // On charge le sémaphore du message.Ecrire (« Tâche 3 »àMess) ;V(Exmu) ; // On libère le sémaphore du message.SUSPENDRE (Tâche3);V(S) ; // Indique qu’il y a un message à faire afficher par Tâche6.}
}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 154/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 154
Nota : Dans l’exécutif temps réel, lors de la création des tâches, on a les priorités qui sont définies par :
P1 > P2 > P3.
Cette condition est nécessaire pour une bonne gestion du sémaphore de présence du message (S).
Tâche4 (){TantQue ()
{P(Exmu) ; // On charge le sémaphore du message.Ecrire (« ↵ »àMess) ;V(Exmu) ; // On libère le sémaphore du message.SUSPENDRE (Tâche4);V(S) ; // Indique qu’il y a un message à faire afficher par Tâche6.}
}
Tâche5 (){TantQue ()
{DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);
DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);DESSUSPENDRE (Tâche4);}
}
EXECUTIF_TR(){CREER (Tâche1, P2) ;CREER (Tâche2, P2) ;CREER (Tâche3, P2) ;CREER (Tâche4, P2) ;CREER (Tâche5, P3) ;CREER (Tâche6, P1) ;
ENDORMIR (EXECUTIF_TR, 30s);
TUER Tâche1 ;TUER Tâche2 ;TUER Tâche3 ;TUER Tâche4 ;TUER Tâche5 ;TUER Tâche6 ;}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 155/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 155
‚ Le cas d’une communication par BaL.
Tâche6 (){TantQue ()
{P(S); // Vérifie qu’il y a un message à afficher (sémaphore de présence).P(Exmu) ;Lire (Mess) ; // Gestion du sémaphore de message.Afficher (Mess) ;V(Exmu) ;}
}
Tâche1 (){TantQue ()
{P(PlaceLibre) ; // Vérifie s’il y a de la place dans la BaL.DEPOSER (« Tâche 1 », BaL) ;V(Message) ; // Incrémente le compteur de messages dans la BaL.
SUSPENDRE (Tâche1);}
}
Tâche2 (){TantQue ()
{P(PlaceLibre) ; // Vérifie s’il y a de la place dans la BaL.DEPOSER (« Tâche 2 », BaL) ;V(Message) ; // Incrémente le compteur de messages dans la BaL.SUSPENDRE (Tâche2);}
}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 156/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS TRAVAUX DIRIGES Page 156
Tâche3 (){TantQue ()
{P(PlaceLibre) ; // Vérifie s’il y a de la place dans la BaL.DEPOSER (« Tâche 3 », BaL) ;V(Message) ; // Incrémente le compteur de messages dans la BaL.SUSPENDRE (Tâche3);}
}
Tâche4 (){TantQue ()
{P(PlaceLibre) ; // Vérifie s’il y a de la place dans la BaL.DEPOSER (« ↵ », BaL) ;V(Message) ; // Incrémente le compteur de messages dans la BaL.SUSPENDRE (Tâche4);}
}
EXECUTIF_TR(){CREER (Tâche1, P2) ;CREER (Tâche2, P2) ;CREER (Tâche3, P2) ;CREER (Tâche4, P2) ;CREER (Tâche5, P3) ;
CREER (Tâche6, P1) ;ENDORMIR (EXECUTIF_TR, 30s);
TUER Tâche1 ;TUER Tâche2 ;TUER Tâche3 ;TUER Tâche4 ;TUER Tâche5 ;TUER Tâche6 ;}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 157/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 157
4/
Tâche1à Idem 2/ Tâche4à Idem 2/ EXECUTIF_TRà Idem 2/
Tâche5 (){TantQue ()
{DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);DESSUSPENDRE (Tâche4);
DESSUSPENDRE (Tâche1);DESSUSPENDRE (Tâche2);DESSUSPENDRE (Tâche3);DESSUSPENDRE (Tâche4);}
}
Tâche6 (){TantQue ()
{P(Message); // Vérifie le compteur de message dans la BaL et le décrémente.RETIRER (Mess, BaL) ;Afficher (Mess) ;V(PlacesLibre) ; // Libère le message de la BaL
}}

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 158/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 158
2.4. / Exercice 4 : Adressage d’une mémoire virtuelle paginée
2.4.1. / Enoncé
Supposons qu’une @ mémoire virtuelle nécessite 20 bits.
Bitsà |19 … 12|11 … 0|
1/ Quelle est la taille de cette mémoire virtuelle exprimée en nombre de mots et en nombre de pages.
2/ Qu’elle est l’@ hexa et octale du 970éme mot de la page 213.
3/ A quel mot de quelle page correspond l’@ hexa ‘ABCDE’. Donner le résultat en décimal.
2.4.2. / Solutions
1/ La page est sur 8 bits et l’offset est sur 12 bits. Il y a 28 pages (256) d’une taille de 212 mots (4096).
Soit : 256 pages x 4096 mots = 1 M mots.
2/ Comme on commence à l’@ mémoire 0, le 970éme mot est l’emplacement mémoire n°969.
Soit @ = [969 + (213 x 4096)]10 = (D53C9)16 = (3251711)8
3/ (A B C D E)16 = (1010 1011 1100 1101 1110)2
Tâche2 (){TantQue ()
{Afficher (« Tâche2 ») ;SUSPENDRE (Tâche2);SUSPENDRE (Tâche2);}
}
Tâche3 (){TantQue ()
{Afficher (« Tâche3 ») ;SUSPENDRE (Tâche3);SUSPENDRE (Tâche3);SUSPENDRE (Tâche3);SUSPENDRE (Tâche3);}
}
page offset
Page = (171)10
offset = (3294)10

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 159/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 159
2.5. / Exercice 5 : Adressage d’une mémoire virtuelle segmentée et paginée
2.5.1. / Enoncé
Supposons qu’une @ mémoire virtuelle nécessite 24 bits.
Bitsà |23 … 18|17 … 12|11 … 0|
1/ Quelle est la taille de cette mémoire virtuelle exprimée en nombre de segments, de pages, et de mots.
2/ Qu’elle est l’@ octale du 145éme mot de la page 11 du 32éme segment.
3/ A quel mot de quelle page et de quel segment correspond l’@ octale ‘41032567’. Donner le résultat endécimal.
2.5.2. / Solutions
1/ Le segment est sur 6 bits, la page est sur 6 bits et l’offset est sur 12 bits. Il y a 26 segments (64), 26 pages (64) pour un segment, et 212 mots (4096) pour une page.
Soit : 64 segments x 64 pages x 4096 mots = 16 M mots.
2/ Comme on commence à l’@ mémoire 0, le 145éme mot est l’emplacement mémoire n°144. Comme oncommence au segment 0, le 32éme segment est le n°31.
Soit @ = [31 11 0144]10 = (37 13 0220)8
3/ (41 03 2567)8 = (33 03 1399)10
segment page offset
Page
offset
Segment

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 160/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 160
2.6. / Exercice 6 : Gestion d’une mémoire virtuelle paginée
2.6.1. / Enoncé
Dans un système à mémoire paginée, un programme est constitué de 6 pages virtuelles numérotées de 0à 5. Chaque bloc a une taille de 2048 octets. A un instant donné, seules 4 pages de ce programme sontchargées en mémoire de la manière suivante :
Pour chaque adresse virtuelle données ci dessous, indiquer si elles provoquent un défaut de page. Dans lecas contraire, calculer en octets l’adresse réelle correspondante.
Les adresses virtuelles sont les suivantes : 00002 ; 02050 ; 05000 ; 09000 ; 11000.
2.6.2. / Solutions
Plages d’@virtuelles
Page Défautde page
@virtuelles
Blocscorrespondant
Plagesd’@ réelles
@ Réel Blocs
00000 00000|
020470 Non @00002 8 |
02047808 0
02048 02048|
040951 Non @02050 3 |
04095- 1
04096 04096|
061432
(absente)Oui @05000 - |
06143760+4096=4056 2
06144 06144|
081913
(absente)Oui - - |
081916144+2=6146 3
08192 08192|
102394 Non @09000 0 |
10239- 4
10240 10240|
122875 Non @11000 2 |
12287- 5
12288|
14323- 6
14324|
16383- 7
16384|
1841916384+2=16386 8
Pages virtuelles Blocs0 81 32 Absente3 Absente4 0
5 2

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 161/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 161
2.7. / Exercice 7 : Gestion d’une mémoire virtuelle et défauts de pages
2.7.1. / Enoncé
Soit un système informatique disposant de 24 pages virtuelles mais de seulement 4 blocs. La mémoireest considérée vide au départ. Un programme référence les pages virtuelles dans l’ordre suivant :
0 ; 1 ; 7 ; 1 ; 5 ; 7 ; 2 ; 7 ; 18 ; 9 ; 2 ; 17 ; 14 ; 4 ; 17 ; 2.
Quelles sont les références qui provoquent des défauts de pages pour :
- Une gestion avec un algorithme de remplacement du type FIFO (First In First Out).- Une gestion avec un algorithme de remplacement du type LRU (Last Recent Used).
2.7.2. / Solutions
Pages Etats des blocs(FIFO)
Défautsde pages
Pages Etats des blocs(LRU)
Défautsde pages
0 - - - 0 Oui 0 - - - 00 Oui1 - - 1 0 Oui 1 - - 10 01 Oui7 - 7 1 0 Oui 7 - 70 11 02 Oui1 - 7 1 0 Non 1 - 71 10 03 Non5 5 7 1 0 Oui 5 50 72 11 04 Oui7 5 7 1 0 Non 7 51 70 12 05 Non
2 5 7 1 2 Oui 2 52 71 13 20 Oui7 5 7 1 2 Non 7 53 70 14 21 Non18 5 7 18 2 Oui 18 54 71 180 22 Oui9 5 9 18 2 Oui 9 90 72 181 23 Oui2 5 9 18 2 Non 2 91 73 182 20 Non17 17 9 18 2 Oui 17 92 170 183 21 Oui14 17 9 18 14 Oui 14 93 171 140 22 Oui4 17 9 4 14 Oui 4 40 172 141 23 Oui17 17 9 4 14 Non 17 41 170 142 24 Non2 17 2 4 14 Oui 2 42 171 143 20 Non
Total : 11 Total : 10
Xn : X est la pagevirtuelle et n lecompteur deréférence ment dela page pour LRU

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 162/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 162
2.8. / Exercice 8 : Temps d’exécution d’une instruction et défaut de page
2.8.1. / Enoncé
L’exécution d’une instruction prend ‘1’ microseconde. Le temps additionnel nécessaire au traitement d’undéfaut de page prend ‘n’ microseconde. Donner une formule définissant le temps effectif d’exécution d’uneinstruction si des défauts de page se produisent toutes les ‘k’ instructions.
2.8.2. / Solutions
Le temps effectif d’exécution est défini par la formule suivante : k nT ee
+=
1
2.9. / Exercice 9 : Temps d’exécution d’une instruction et heure d’arrivée2.9.1. / Enoncé
Soit les 4 tâches suivantes ainsi que leurs temps d’exécution et leurs heures d’arrivée :
Tâches Heure d’arrivée Temps d ‘exécution antérieurA 0 8B 1 4C 2 9D 3 5
1/ Donnez les temps d’exécution de chacune des tâches ainsi que le temps moyen d’exécution des tâchesen utilisant l’algorithme d’ordonnancement du « plus court d’abord » (Shortest Job First).
1/ Donnez les temps d’attente de chacune des tâches ainsi que le temps d’attente moyen avec le mêmealgorithme en supposant que cet algorithme puisse préempter une tâche entrante dans le système avec untemps d’exécution plus faible que celui qui est en cours d’exécution avec l’algorithme du « plus courttemps restant » (Shortest Remaining Time). Donnez le nouveau temps moyen d’exécution des tâches.
2.9.2. / Solutions
1/ Algorithme d’ordonnancement du « plus court d’abord ».
Avec cet algorithme, la priorité est donnée à la tâche dont le temps d’exécution est le plus faible. C’est unalgorithme sans réquisition.
Tâches Heure d’arrivée Temps d ‘exécution antérieur Fin exécution Temps d’exécutionA 0 8 8 8B 1 4 (8+4)-1 11C 2 9 8+4+9+5 24
D 3 5 (8+4+9)-3 14

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 163/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 163
AAAAAAAA BBBB DDDDD CCCCCCCCC
25.144 2414118 =+++== NbTâchesTempsTotalTempsExé
2/ Algorithme du « plus court temps restant ».
Tâches Heure d’arrivée Temps d ‘exécution antérieur Temps d’attenteA 0 8 4+5 = 9B 1 4 0C 2 9 7+5+3 = 15D 3 5 2
A BBBB DDDDD AAAAAA CCCCCCCCC
5.64
2159=
++==
NbTâches
TempsTotalTempsExé
Temps exé. A = 8 4 5 9
Temps exé. B = 11
Temps exé. C = 24
Temps exé. D = 14
t=0
t=1
t=2
t=3
Temps exé.B = 4 5 9
Temps exé.D = 7
Temps exé. C = 24
Temps exé. A = 17
t=0
t=1
t=2
t=3
71

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 164/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 164
3. INDEX

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 165/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 165
A
adresse logique 32, 95, 106, 109, 110, 112, 116, 141adresse physique 32, 66, 100, 103, 106, 107, 109, 110, 113, 114, 116, 137adresses logiques 101, 102, 103, 114, 115allocateur 31, 37, 38, 39, 41, 42, 43, 44, 49, 54, 56, 57, 58, 59, 60allocation 17, 20, 24, 30, 34, 39, 42, 43, 49, 50, 55, 58, 59, 97, 102, 103, 105, 138antémémoire 98arrière plan 98
B
boîtes aux lettres 60, 92, 138
C
cache 98compteur ordinal 41, 43, 66, 71, 76, 82, 127contrôleur d’interruption 76
D
deadlock 91défaut de page 38, 50, 113, 116délai 40, 44, 45, 47, 48, 59
déroutements 78descripteur de tâches 44, 47device driver 128, 134, 136DMA 120, 122, 123, 124, 125, 127
E
entrées/sorties 38, 50, 130, 134, 135, 136, 138, 139, 140, 141, 142
F
FIFO 52, 54, 58, 117files 56, 57, 93, 135FIRQ 75flag 132
H
horloge 26, 27, 31, 40, 45, 46, 47, 48, 51, 56, 63
I
interblocage 91interruptions externes 63, 64, 69, 78interruptions internes 63IOM 134

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 166/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 166
IRQ 69, 72, 73, 75ITA 69, 72, 73, 74, 75
J
jetons d’accès
L
LFU 117LIOCS 135, 136, 137, 138, 141, 142liste des tâches 39, 42, 43, 44, 45, 46, 47, 48, 49, 52, 53, 54, 55, 58, 59, 60, 71, 84, 86LRU 117, 161, 169
M
M.M.U 31, 99, 103, 109, 110masquage 67, 76, 77, 78mémoire centrale 10, 12, 17, 25, 32, 97, 98, 101, 103, 104, 106, 109, 113, 116, 118, 123, 127, 134mémoire de masse 32, 97, 98, 99, 102, 104, 106, 113, 114mémoire virtuelle 18, 31, 97, 101, 103, 104, 105, 106, 109, 110, 111, 112, 113, 114, 118mémoire virtuelle linéaire 106mémoire virtuelle segmentée 106, 109, 114MFU 117mode rafale 127mode superviseur 65, 77mode utilisateur 65, 71, 77, 78monotâche 15, 30
MRU 117multiplexeur 126, 127multiprogrammation 16, 17, 19, 24, 29, 36, 50, 53, 79, 97multitâche 18, 22, 24, 25, 26, 27, 29, 33, 34, 36, 59multi-utilisateur 25, 28, 34, 40, 49, 53, 54, 55Mutex 84, 85
N
NMI 75
O
ordonnancement 12, 24, 29, 34, 37, 44, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59overlay 104
P
pagination 31, 101, 110, 113, 114, 116PEPS 117périphérique21, 64, 69, 72, 73, 74, 79, 118, 119, 120, 121, 122, 123, 124, 125, 127, 128, 129, 130, 131, 132, 133, 134, 135, 137,
139, 140, 142pile 39, 43, 44
PIOCS 136, 137, 138, 141, 142polling 70, 76prepaging 116

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 167/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS INDEX Page 167
priorités 24, 26, 33, 49, 51, 54, 55, 72, 73processus 24, 34, 50, 67, 79, 83, 118, 119, 124, 132
Q
quantum 54, 55, 56, 57
R
registres 41, 42, 43, 65, 75, 76, 77, 98, 100, 101, 120, 123, 124, 125, 126, 128Rendez-vous 95, 96round robin 54routine d'interruption 65, 70
S
scrutation 70, 76section critique 81, 82, 83, 84, 85segmentation 31, 101, 104, 106, 110, 114segmentation manuelle 104sélecteur 125, 126, 127sémaphore 60, 82, 83, 84, 85, 88, 89, 90, 91, 92, 93, 95spooling 16, 17synchronisation 12, 31, 37, 45, 59, 60, 61, 79, 85, 86, 87, 88, 89, 90, 91, 93, 94, 95, 102, 121
T
tâches 12, 17, 22, 24, 25, 26, 28, 29, 30, 31, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55,56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 71, 79, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 99, 102, 103, 104,127, 133, 134, 135, 139, 141, 144
TAS 82, 83temps d’attente 17, 41, 44, 45, 46, 47, 50, 53, 54, 63, 133temps partagé 17, 18, 19, 25, 26, 38, 41, 83temps-réel 18, 26, 27, 28, 31, 40, 46, 51, 61, 63, 70, 79, 83, 86, 104, 118, 119trap 63, 78
U
UNIX 18, 19, 22, 23
V
variables communes 91, 92vecteurs d’interruption 73, 74vol de cycle 122, 124

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 168/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
RESEAUX LEXIQUE Page 168
4. LEXIQUE

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 169/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
RESEAUX LEXIQUE Page 169
BaL Boîte aux LettresBTP Browser Table PageDMA Direct Memory Access
DRAM Dynamic Random Access MemoryFIFO First In, First OutFIRQ Fast Interrupt RequestIOM Input Ouput ManagerIRQ Interrupt RequestITA Interrupt AcknowledgeLFU Last Frequently UsedLIFO Last In First OutLIOCS Logical Input-Output Control SystemLRU Last Recently UsedLSB Less Signifiant BitLTA Liste des Tâches en AttentesLTAS Liste des Tâches en Attentes et SuspenduesLTP Liste des Tâches PrêtesLTS Liste des Tâches SuspenduesMFU Moins Fréquemment UtiliséMMU Memory Management UnitMRU Moins Récemment UtiliséMSB Most Signifiant BitNMI Non Masquable InterruptPEPS Premier Entré Premier Sorti
PIC Programmable Interrupt ControlerPIOCS Physical Input-Output Control SystemRTP Register Table PageRTS Register Table SegmentSJF Shostest Job FirstSRT Shostest remaining TimeSVC SuperVisor CallTAS Test And Set

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 170/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
METHODES DE PROGRAMMATIONS Licence de Documentation Libre Page 170
5. Licence de Documentation LibreVersion 1.1, mars 2000 Copyright (C) 2000 Free Software Foundation, Inc. 59 Temple Place, Suite 330, Boston, MA 02111-1307 États-Unis d'Amérique. La copie et la distribution de copies exactes de ce documentsont autorisées, mais aucune modification n'est permise.
PRÉAMBULE
Le but de la présente Licence est de « libérer » un ouvrage, un manuel, ou tout autre document écrit : assurer à chacun la liberté véritable et complète de le copier et de le redistribuer, en le modifiant ou non,commercialement ou non. De plus, la présente Licence garantit à l'auteur et à l'éditeur un moyen d'être remerciés pour leur travail, sans devoir assumer la responsabilité de modifications effectuées par des tiers.
La présente Licence est une variété de gauche d'auteur (copyleft), ce qui signifie que les travaux dérivés du document protégé doivent être libres dans la même acception du mot « libre ». Elle complète la LicencePublique Générale GNU ( GNU General Public License), qui est une licence de gauche d'auteur conçue pour le logiciel libre.
Nous avons conçu la présente licence dans le dessein de l'utiliser pour les manuels de logiciels libres, car les logiciels libres requièrent une documentation libre : un programme libre devrait être accompagné demanuels offrant la même liberté que le programme lui-même. Mais la présente Licence n'est pas limitée aux manuels de logiciels ; on peut l'utiliser pour tout travail textuel, indépendamment du sujet, de soncontenu, et de son mode de distribution (livre imprimé ou autres). Nous recommandons la présente Licence principalement pour les travaux à vocation d'instruction ou de référence.
1. DOMAINE D'APPLICATION ET DÉFINITIONS
La présente Licence s'applique à tout manuel ou travail contenant une mention placée par le détenteur du copyright indiquant que le document peut être distribué selon les termes de la présente Licence. Le terme «Document », ci-dessous, se réfère à tout manuel ou travail remplissant cette condition. Tout membre du public est bénéficiaire de la licence et se trouve ici désigné par « vous ».
Une « Version Modifiée » du Document signifie : tout travail contenant le Document, en intégralité ou en partie, aussi bien une copie verbatim ou avec des modifications qu'une traduction dans une autre langue.
Une « Section Secondaire » est une annexe ou un avant-propos du Document qui concerne exclusivement le rapport de l'éditeur ou des auteurs du Document avec le sujet général du Document (ou des domainesvoisins) et ne contient rien qui puisse tomber directement sous le coup du sujet général (par exemple, si le Document est en quelque partie un manuel de mathématiques, une Section Secondaire n'enseignera pasles mathématiques). Le rapport peut être une connexion historique avec le sujet ou des domaines voisins, ou une précision légale, commerciale, philosophique, éthique ou politique les concernant.
Les « Sections Invariables » sont certaines Sections Secondaires désignées par leurs titres comme Sections Invariables dans la mention qui indique que le Document est couvert par la présente Licence.
Les « Textes de Couverture » sont certains courts passages du texte listés comme « Textes de Première de Couverture » ou « Textes de Quatrième de Couverture » dans la mention qui indique que le Document estcouvert par la présente Licence.
Une copie « Transparente » du Document signifie : une copie lisible par une machine, réalisée dans un format dont les spécifications sont disponibles au grand public, et dont le contenu peut être directementvisualisé et édité avec des éditeurs de texte génériques ou (pour les images composées de pixels) avec des programmes de composition d'images génériques ou (pour les figures techniques) un éditeur de dessinvectoriel largement diponible, et qui soit approprié aux logiciels qui mettent le texte en forme et le calibrent (formateurs de texte) ou au transcodage automatique vers un assortiment de formats appropriés auxformateurs de texte. Une copie réalisée dans un format de fichier habituellement Transparent mais dont le balisage a été conçu pour contrecarrer ou décourager des modifications ultérieures par le lecteur n'est pasTransparente. Une copie qui n'est pas « Transparente » est appelée « Opaque ».
Les formats appropriés aux copies Transparentes sont par exemple l'ASCII brut sans balises, le format Texinfo, le format LaTeX, SGML ou XML utilisant une DTD publiquement disponible, et l'HTML simple etconforme à la norme, conçu en vue d'une modification manuelle. Les formats Opaques incluent PostScript, PDF, les formats propriétaires qui ne peuvent être lus et édités que par des traitements de textepropriétaires, SGML et XML dont les DTD et/ou les outils de rendu ne sont pas généralement disponibles, et l'HTML généré automatiquement par certains traitements de texte à seule fin d'affichage.
La « Page de Titre » désigne, pour un livre imprimé, la page de titre proprement dite, plus les pages suivantes qui sont nécessaires pour faire figurer, lisiblement, les éléments dont la présente Licence requiert qu'ilsapparaissent dans la Page de Titre. Pour les travaux dont le format ne comporte pas de page de titre en tant que telle, « Page de Titre » désigne le texte jouxtant l'apparition la plus marquante du titre de ce travail,qui précède le début du corps du texte.
2. COPIES VERBATIM
Vous pouvez copier et distribuer le Document sur tout support, aussi bien commercialement que non, pour autant que la présente Licence, les mentions de copyright, et les mentions de licence indiquant que laprésente Licence s'applique au Document soient reproduites sur toutes les copies, et que vous n'ajoutiez aucune autre condition à celles de la présente Licence. Vous ne pouvez pas user de moyens techniques à desfins d'obstruction ou de contrôle de la lecture ou de la duplication des copies que vous réalisez ou distribuez. Vous pouvez cependant accepter des compensations en échange de la cession de copies. Si vousdistribuez un assez grand nombre de copies, vous devez aussi suivre les conditions de la section Copies en quantité.
Vous pouvez aussi prêter des copies, selon les mêmes conditions que celles mentionnées ci-dessus, e t vous pouvez exposer publiquement des copies.
3. COPIES EN QUANTITÉ
Si vous publiez des copies imprimées du Document à plus de 100 exemplaires, et que la mention de la licence du Document exige des Textes de Couverture, vous devez inclure les copies dans des couvertures oùfigurent, clairement et lisiblement, tous ces Textes de Couverture : les Textes de Première de Couverture sur la première de couverture, et les Textes de Quatrième de Couverture sur la quatrième de couverture. Lesdeux faces de la couverture doivent également clairement et lisiblement vous identifier comme étant l'éditeur de ces copies. La première de couverture doit présenter le titre complet, titre dont tous les mots doiventêtre également mis en valeur et visibles. Vous pouvez a jouter des éléments supplémentaires sur les couvertures. Toute copie avec des changements limités aux couvertures, pour autant qu'ils préservent le titre duDocument et satisfont ces conditions, peut être considérée comme une copie verbatim à tous les autres égards.
Si les textes destinés à l'une ou l'autre page de couverture sont trop volumineux pour y figurer lisiblement, vous devez en mettre les premiers (autant qu'il est raisonnablement possible) sur la couverture proprementdite, et poursuivre sur les pages adjacentes.
Si vous publiez ou distribuez des copies Opaques du Document à plus de 100 exemplaires, vous devez soit inclure une copie Transparente dans un format lisible par une machine, adapté au traitement automatisé,
en accompagnement de chaque copie Opaque, soit indiquer aux côtés de ou dans chaque copie Opaque une adresse de réseau électronique publiquement accessible, qui permette d'obtenir une copie Transparentedu Document, sans éléments ajoutés, à laquelle le grand public puisse accéder pour téléchargement anonyme et sans fr ais en utilisant des protocoles de réseau publics et standard. Si vous retenez la dernière option,vous devez procéder prudemment et prendre les mesures nécessaires, lorsque vous commencez la distribution de copies Opaques en quantité, afin de vous assurer que cette copie Transparente demeureraaccessible au public pendant au moins une année après le moment de la distribution (directement ou par l'intermédiaire de vos agents ou revendeurs) de la dernière copie Opaque de cette édition.
Il est souhaité, mais non exigé, que vous contactiez les auteurs du Document bien avant la redistribution de tout grand nombre de copies, afin de leur laisser la possibilité de vous fournir une version mise à jour duDocument.
4. MODIFICATIONS
Vous pouvez copier et distribuer une Version Modifiée du Document selon les conditions des sections Copies verbatim et Copies en quantité qui précèdent, pourvu que vous diffusiez la Version Modifiée souscouvert précisément de la présente Licence, avec la Version Modifiée remplissant alors le rôle du Document, et ainsi autoriser la distribution et la modification de la Version Modifiée à quiconque en possède unecopie. En complément, vous devez accomplir ce qui suit sur la Version Modifiée :
A. Utilisez dans la Page de Titre (et sur les couvertures, le cas échéant) un titre distinct de celui du Document et de ceux des précédentes versions (qui doivent, s'il en existe, être citées dans la section «Historique » du Document). Vous pouvez utiliser le même titre qu'une version précédant la vôtre si l'éditeur original vous en donne la permission.
B. Indiquez sur la Page de Titre, comme auteurs, une ou plusieurs personnes ou entités responsables de l'écriture des modifications de la Version Modifiée, ainsi qu'au moins cinq des principaux auteursdu Document (ou tous les auteurs principaux, s'ils sont moins de cinq).
C. Apposez sur la Page de Titre de nom de l'éditeur de la Version Modifiée, en tant qu'éditeur.
D. Préservez toutes les mentions de copyright du Document.
E. Ajoutez une mention de copyright appropriée à vos modifications, aux côtés des autres mentions de copyright.

8/9/2019 Cours Methodes de Programmations
http://slidepdf.com/reader/full/cours-methodes-de-programmations 171/171
CONSERVATOIRE NATIONNAL DES ARTS ET METIERS Année 2000-2001
F. Incluez, immédiatement après les mentions de copyright, une mention de licence qui accorde la permission publique d'utiliser la Version Modifiée selon les termes de la présente Licence, sous la formeprésentée dans la section Addendum ci-dessous.
G. Préservez dans cette mention de licence les listes complètes des Sections Invariables et des Textes de Couverture exigés, données dans la mention de licence du Document.
H. Incluez une copie non altérée de la présente Licence.
I. Préservez la section intitulée « Historique », et son titre, et ajoutez-y un article indiquant au moins le titre, l'année, les nouveaux auteurs, et l'éditeur de la Version Modifiée telle qu'elle apparaît sur laPage de Titre. Si le Document ne contient pas de section intitulée « Historique », créez-en une et indiquez-y le titre, l'année, les auteurs et l'éditeur du Document tels qu'indiqués sur la Page de Titre, puisajoutez un article décrivant la Version Modifiée, comme exposé dans la phrase précédente.
J. Préservez, le cas échéant, l'adresse de réseau électronique donnée dans le Document pour accéder publiquement à une copie Transparente du Document, et préservez de même les adresses de réseauélectronique données dans le Document pour les versions précédentes, sur lequelles le Document se fonde. Cela peut être placé dans la section « Historique ». Vous pouvez omettre l'adresse de réseauélectronique pour un travail qui a été publié au moins quatre ans avant le Document lui-même, ou si l'éditeur original de la version à laquelle il se réfère en donne l'autorisation.
K. Dans toute section intitulée « Remerciements » ou « Dédicaces », préservez le titre de section et préservez dans cette section le ton et la substance de chacun des remerciements et/ou dédicaces donnéspar les contributeurs.
L. Préservez toutes les Sections Invariables du Document, non altérées dans leurs textes et dans leurs titres. Les numéros de sections ou leurs équivalents ne sont pas considérés comme faisant partie destitres de sections.
M. Supprimez toute section intitulée « Approbations ». Une telle section ne doit pas être incluse dans la Version Modifiée.
N. Ne changez pas le titre d'une section existante en « Approbations » ou en un titre qui entre en conflit avec celui d'une Section Invariable quelconque.
Si la Version Modifiée inclut de nouvelles sections d'avant-propos ou des annexes qui remplissent les conditions imposées aux Sections Secondaires et ne contiennent aucun élément tiré du Document, vouspouvez, à votre convenance, désigner tout au partie de ces sections comme « Invariables ». Pour ce faire, ajoutez leurs titres à la liste des Sections Invariables dans la mention de licence de la Version Modifiée. Cestitres doivent être distincts de tout autre titre de section.
Vous pouvez ajouter une section intitulée « Approbations », pourvu qu'elle ne contienne rien d'autre que l'approbation de votre Version Modifiée par diverses parties -- par exemple, indication d'une revue par lespairs ou bien que le texte a été approuvé par une organisation en tant que définition de r éférence d'un standard.
Vous pouvez ajouter un passage de cinq mots ou moins en tant que Texte de la Première de Couverture, et un passage de 25 mots ou moins en tant que Texte de Quatrième de Couverture, à la fin de la liste desTextes de Couverture de la Version Modifiée. Toute entité peut ajouter (ou réaliser, à travers des arr angements) au plus un passage en tant que Texte de la Première de Couverture et au plus un passage en tant queTexte de la Quatrième de Couverture. Si le Document inclut déjà un texte de Couverture pour la même couverture, précédemment ajouté par vous ou, selon arrangement, réalisé par l'entité pour le compte delaquelle vous agissez, vous ne pouvez en ajouter un autre ; mais vous pouvez remplacer l'ancien, avec la permission explicite de l'éditeur qui l'a précédemment ajouté.
Le ou les auteur(s) et le ou les éditeur(s) du Document ne confèrent pas par la présente Licence le droit d'utiliser leur nom à des fins publicitaires ou pour certifier ou suggérer l'approbation de n'importe quelleVersion Modifiée.
5. MÉLANGE DE DOCUMENTS
Vous pouvez mêler le Document à d'autres documents publiés sous la présente Licence selon les termes définis dans la section Modifications ci dessus traitant des versions modifiées pour autant que vous