Cours Laisons
18
MPSI/PCSI SI, cours sur les liaisons 1/18 MODELISATION CINEMATIQUE ET GEOMETRIQUE DES LIAISONS I. INTRODUCTION. But de la modélisation : On modélise un mécanisme afin de mettre en évidence : les efforts mis en jeu, c'est le domaine de la statique, les mouvements relatifs de ses composants, c'est le domaine de la cinématique, les puissances transmises, c'est le domaine de la dynamique. Degré de liberté : Une pièce libre dans tous ses déplacements est une pièce qui n'a aucune liaison avec une autre pièce. Dans ce cas elle peut se déplacer en translation et en rotation suivant trois axes (6 degrés de liberté). Définir la liaison entre deux pièces revient à préciser le nombre de degrés de liberté possibles entre ces deux pièces. A un degré de liberté supprimé correspond un degré de liaison. Dans tous les cas, dans une liaison entre deux pièces : Nbre de degrés de liberté + Nbre degrés de liaison = 6 Liaisons normalisées : Les mécanismes sont constitués de solides liés. Afin de simplifier l'étude des mécanismes, on associe aux liaisons réelles des modèles. Ces modèles font l’objet d’une norme, on parle de liaisons normalisées. On distingue : Les liaisons élémentaires : obtenues par contact entre des surfaces géométriques élémentaires appartenant aux deux pièces. On fait les hypothèses suivantes : le contact s'établit théoriquement en un point, une portion de ligne ou d'une surface de définition géométriquement simple: point, droite, cercle, plan, cylindre, sphère, surface hélicoïdale. les surfaces de chacune des pièces sont supposées géométriquement parfaites et le maintien du contact est toujours assuré. Ces surfaces de contact sont appelées surfaces fonctionnelles. la liaison est sans jeu. Les liaisons composées, réalisées par une association de 2 liaisons élémentaires.
-
Upload
aymen-hseini -
Category
Documents
-
view
212 -
download
0
description
Cours Laisons
Transcript of Cours Laisons
MPSI/PCSI SI, cours sur les liaisons
1/18
MODELISATION CINEMATIQUE ET GEOMETRIQUE DES LIAISONS
I. INTRODUCTION. But de la modélisation : On modélise un mécanisme afin de mettre en évidence :
les efforts mis en jeu, c'est le domaine de la statique, les mouvements relatifs de ses composants, c'est le domaine de la cinématique, les puissances transmises, c'est le domaine de la dynamique.
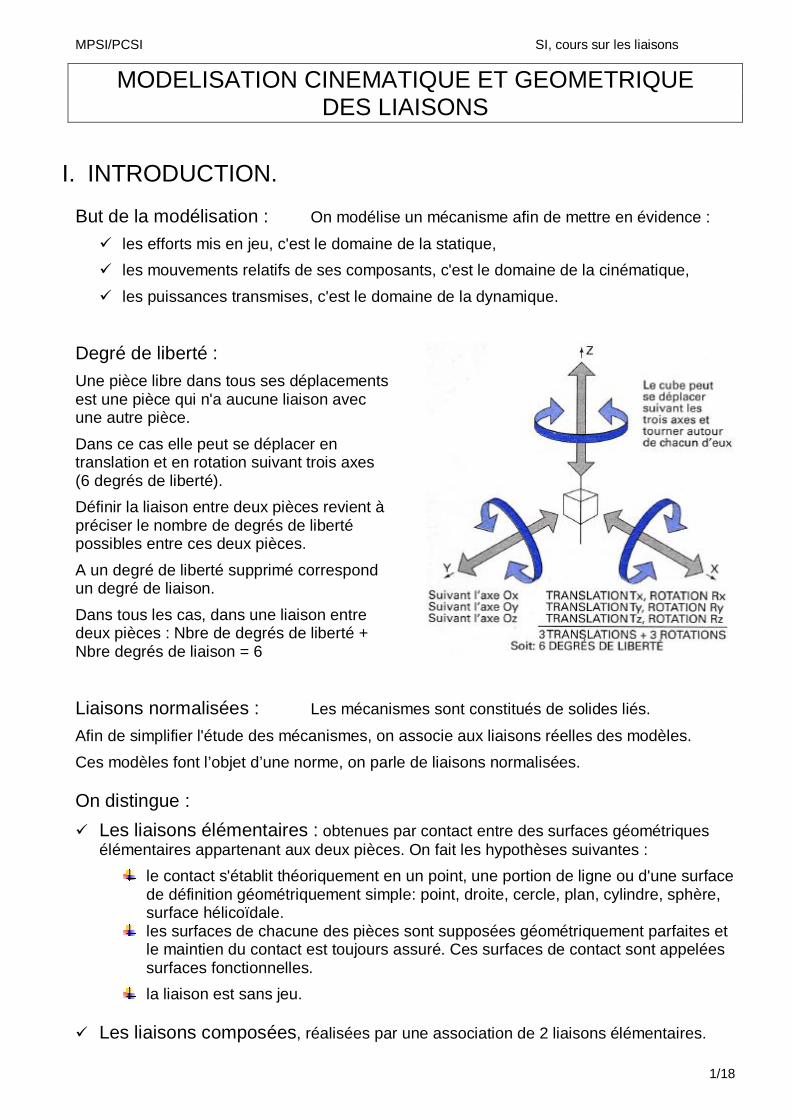
Degré de liberté : Une pièce libre dans tous ses déplacements est une pièce qui n'a aucune liaison avec une autre pièce. Dans ce cas elle peut se déplacer en translation et en rotation suivant trois axes (6 degrés de liberté). Définir la liaison entre deux pièces revient à préciser le nombre de degrés de liberté possibles entre ces deux pièces. A un degré de liberté supprimé correspond un degré de liaison. Dans tous les cas, dans une liaison entre deux pièces : Nbre de degrés de liberté + Nbre degrés de liaison = 6
Liaisons normalisées : Les mécanismes sont constitués de solides liés.
Afin de simplifier l'étude des mécanismes, on associe aux liaisons réelles des modèles. Ces modèles font l’objet d’une norme, on parle de liaisons normalisées. On distingue : Les liaisons élémentaires : obtenues par contact entre des surfaces géométriques
élémentaires appartenant aux deux pièces. On fait les hypothèses suivantes : le contact s'établit théoriquement en un point, une portion de ligne ou d'une surface
de définition géométriquement simple: point, droite, cercle, plan, cylindre, sphère, surface hélicoïdale.
les surfaces de chacune des pièces sont supposées géométriquement parfaites et le maintien du contact est toujours assuré. Ces surfaces de contact sont appelées surfaces fonctionnelles.
la liaison est sans jeu.
Les liaisons composées, réalisées par une association de 2 liaisons élémentaires.
MPSI/PCSI SI, cours sur les liaisons
2/18
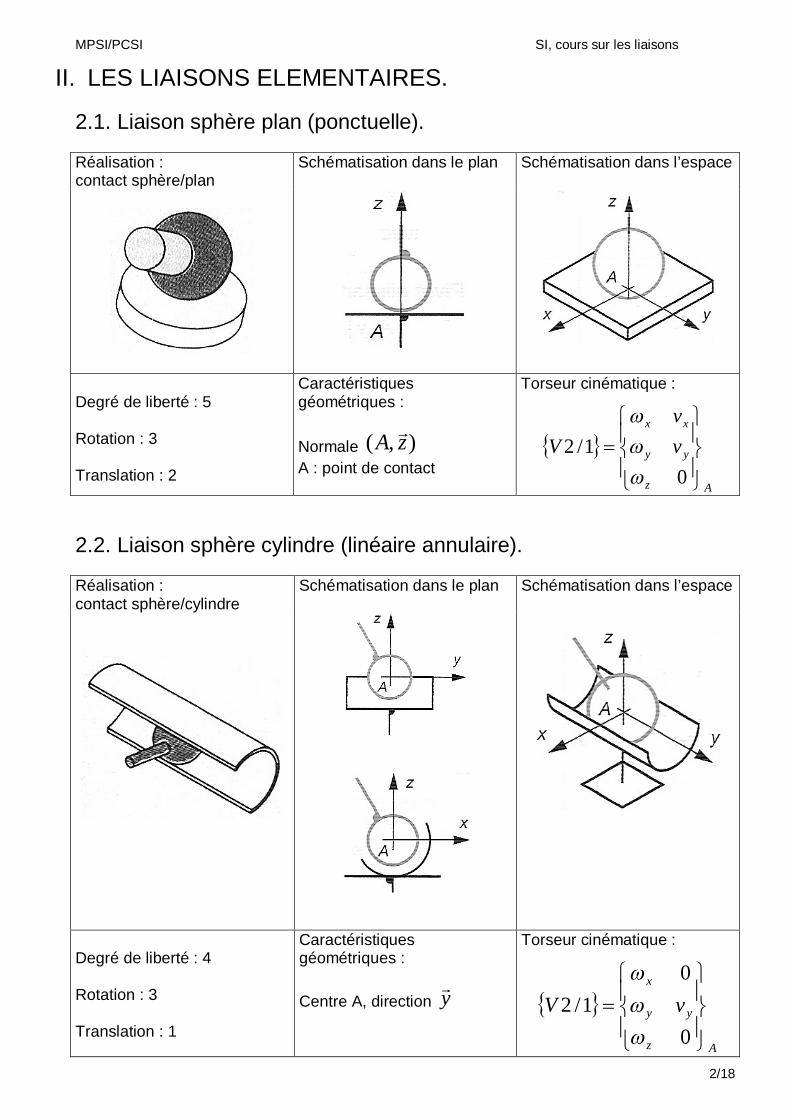
II. LES LIAISONS ELEMENTAIRES. 2.1. Liaison sphère plan (ponctuelle). Réalisation : contact sphère/plan
Schématisation dans le plan Schématisation dans l’espace
Degré de liberté : 5 Rotation : 3 Translation : 2
Caractéristiques géométriques : Normale ),( zA
A : point de contact
Torseur cinématique :
Az
yy
xx
vv
V
01/2
2.2. Liaison sphère cylindre (linéaire annulaire). Réalisation : contact sphère/cylindre
Schématisation dans le plan
Schématisation dans l’espace
Degré de liberté : 4 Rotation : 3 Translation : 1
Caractéristiques géométriques : Centre A, direction y
Torseur cinématique :
Az
yy
x
vV
0
01/2
MPSI/PCSI SI, cours sur les liaisons
3/18
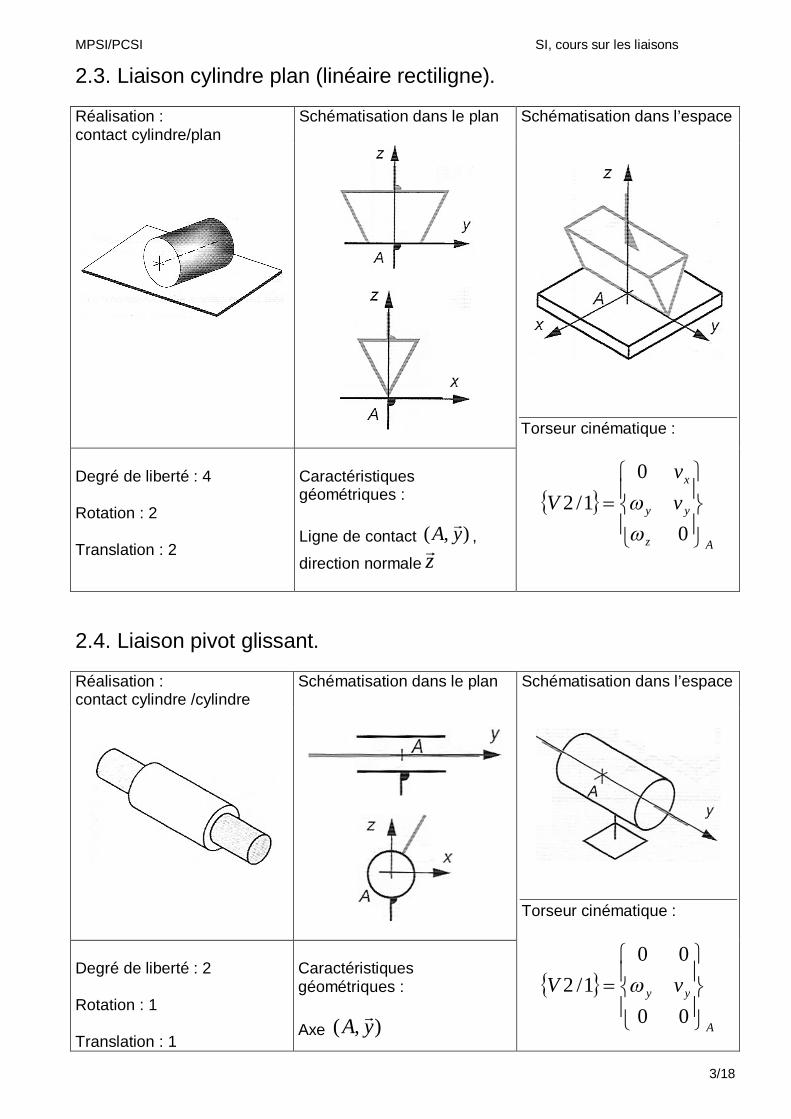
2.3. Liaison cylindre plan (linéaire rectiligne). Réalisation : contact cylindre/plan
Schématisation dans le plan Schématisation dans l’espace
Torseur cinématique :
Az
yy
x
vv
V
0
01/2
Degré de liberté : 4 Rotation : 2 Translation : 2
Caractéristiques géométriques : Ligne de contact ),( yA
,
direction normale z
2.4. Liaison pivot glissant. Réalisation : contact cylindre /cylindre
Schématisation dans le plan Schématisation dans l’espace
Torseur cinématique :
A
yy vV
00
001/2
Degré de liberté : 2 Rotation : 1 Translation : 1
Caractéristiques géométriques : Axe ),( yA
MPSI/PCSI SI, cours sur les liaisons
4/18
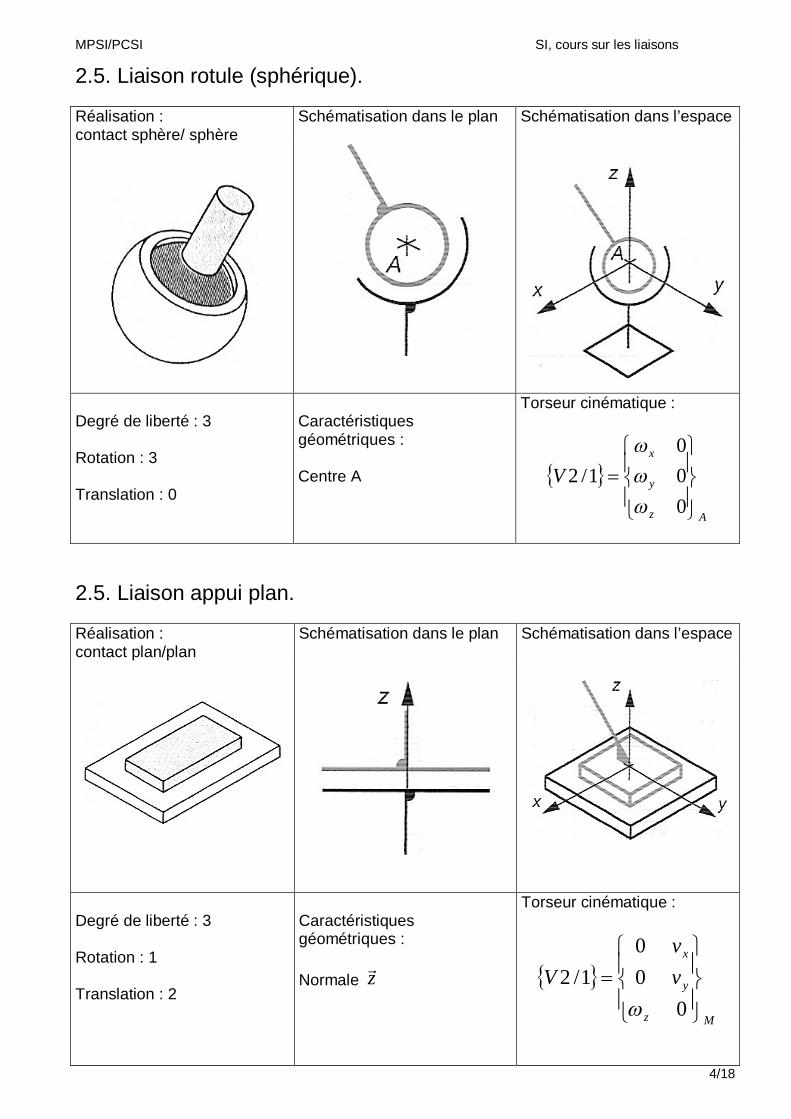
2.5. Liaison rotule (sphérique). Réalisation : contact sphère/ sphère
Schématisation dans le plan Schématisation dans l’espace
Degré de liberté : 3 Rotation : 3 Translation : 0
Caractéristiques géométriques : Centre A
Torseur cinématique :
Az
y
x
V
000
1/2
2.5. Liaison appui plan. Réalisation : contact plan/plan
Schématisation dans le plan Schématisation dans l’espace
Degré de liberté : 3 Rotation : 1 Translation : 2
Caractéristiques géométriques : Normale z
Torseur cinématique :
Mz
y
x
vv
V
000
1/2
MPSI/PCSI SI, cours sur les liaisons
5/18
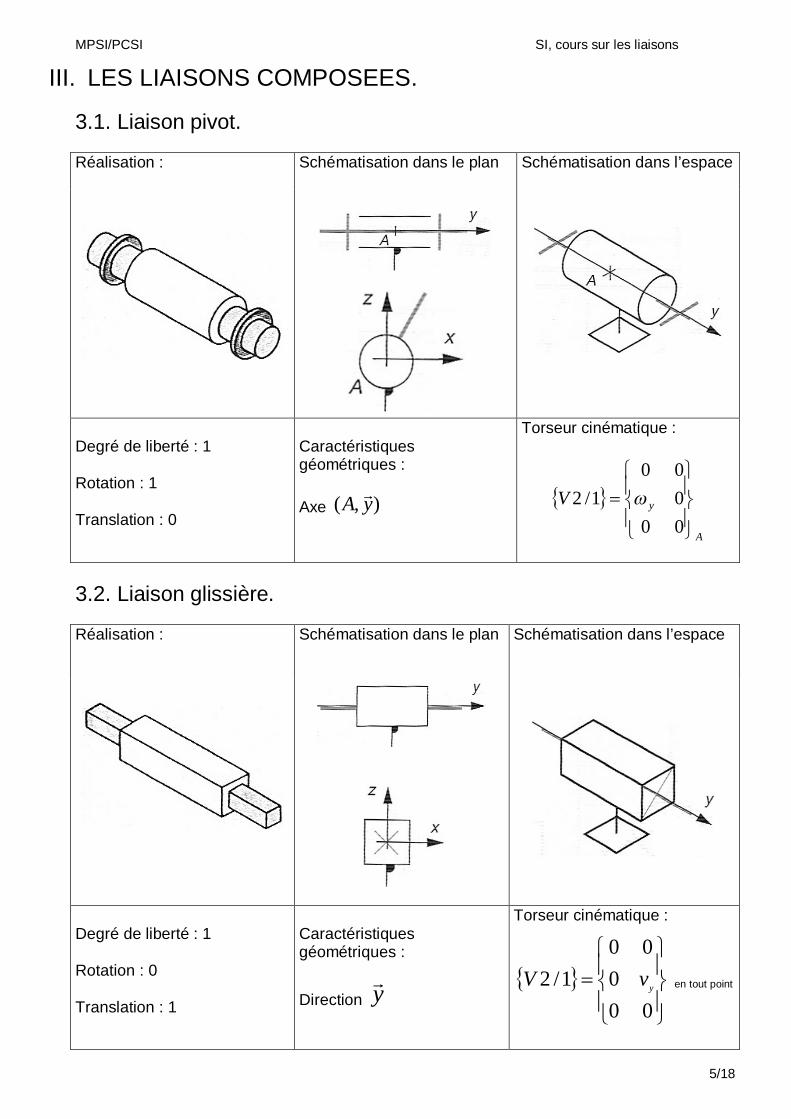
III. LES LIAISONS COMPOSEES. 3.1. Liaison pivot. Réalisation :
Schématisation dans le plan Schématisation dans l’espace
Degré de liberté : 1 Rotation : 1 Translation : 0
Caractéristiques géométriques : Axe ),( yA
Torseur cinématique :
A
yV
00000
1/2
3.2. Liaison glissière. Réalisation :
Schématisation dans le plan
Schématisation dans l’espace
Degré de liberté : 1 Rotation : 0 Translation : 1
Caractéristiques géométriques :
Direction y
Torseur cinématique :
000
001/2 yvV en tout point
MPSI/PCSI SI, cours sur les liaisons
6/18
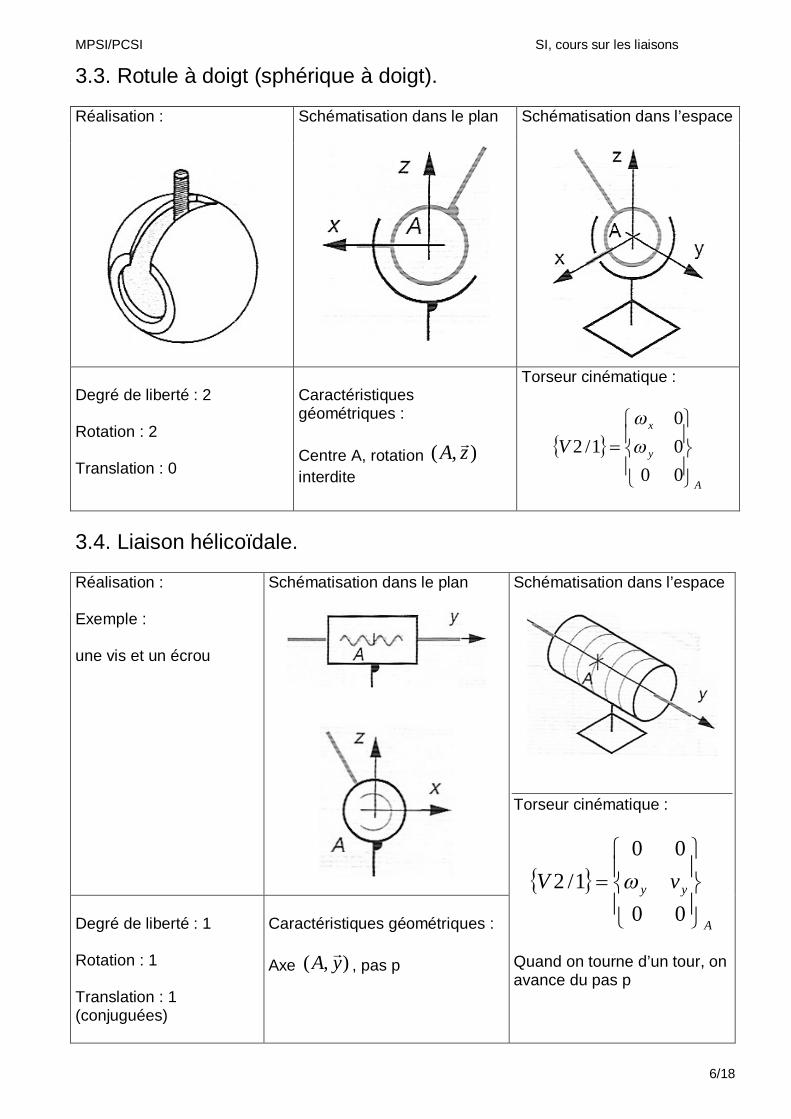
3.3. Rotule à doigt (sphérique à doigt). Réalisation :
Schématisation dans le plan Schématisation dans l’espace
Degré de liberté : 2 Rotation : 2 Translation : 0
Caractéristiques géométriques : Centre A, rotation ),( zA
interdite
Torseur cinématique :
A
y
x
V
0000
1/2
3.4. Liaison hélicoïdale. Réalisation :
Schématisation dans le plan
Schématisation dans l’espace
Exemple : une vis et un écrou
Torseur cinématique :
A
yy vV
00
001/2
Quand on tourne d’un tour, on avance du pas p
Degré de liberté : 1 Rotation : 1 Translation : 1 (conjuguées)
Caractéristiques géométriques : Axe ),( yA
, pas p
MPSI/PCSI SI, cours sur les liaisons
7/18
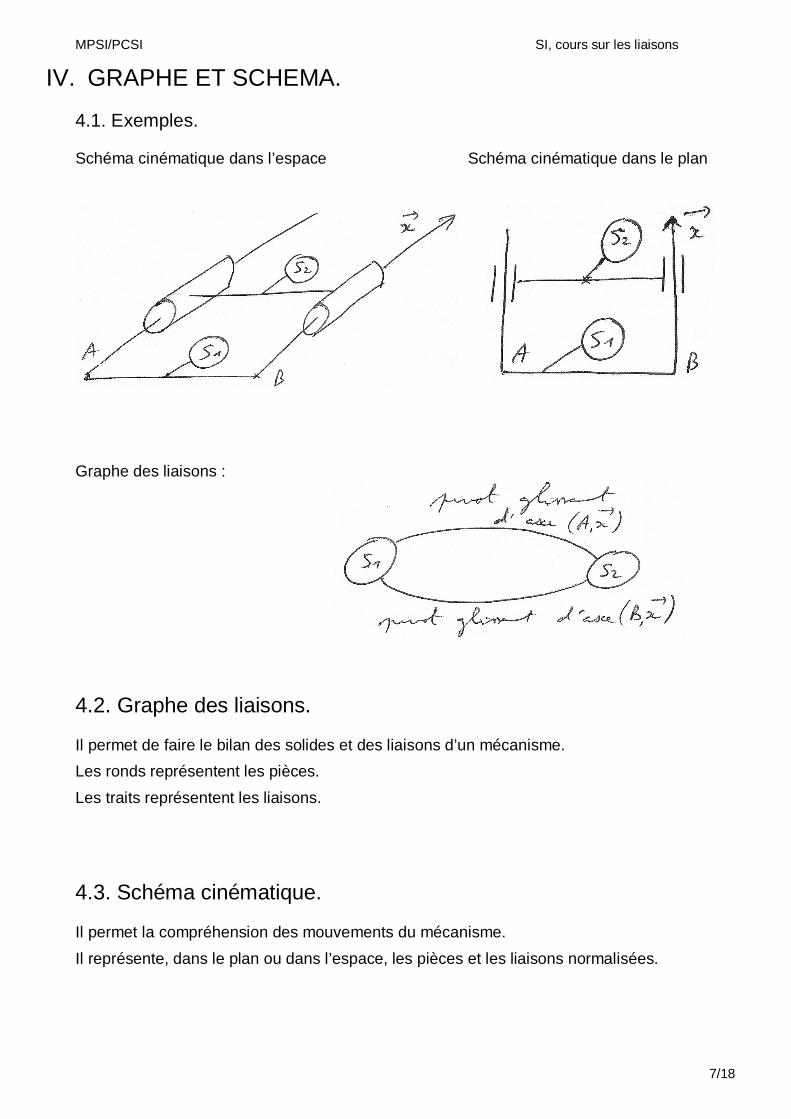
IV. GRAPHE ET SCHEMA. 4.1. Exemples. Schéma cinématique dans l’espace
Schéma cinématique dans le plan
Graphe des liaisons :
4.2. Graphe des liaisons. Il permet de faire le bilan des solides et des liaisons d’un mécanisme. Les ronds représentent les pièces. Les traits représentent les liaisons. 4.3. Schéma cinématique. Il permet la compréhension des mouvements du mécanisme. Il représente, dans le plan ou dans l’espace, les pièces et les liaisons normalisées.
MPSI/PCSI SI, cours sur les liaisons
8/18
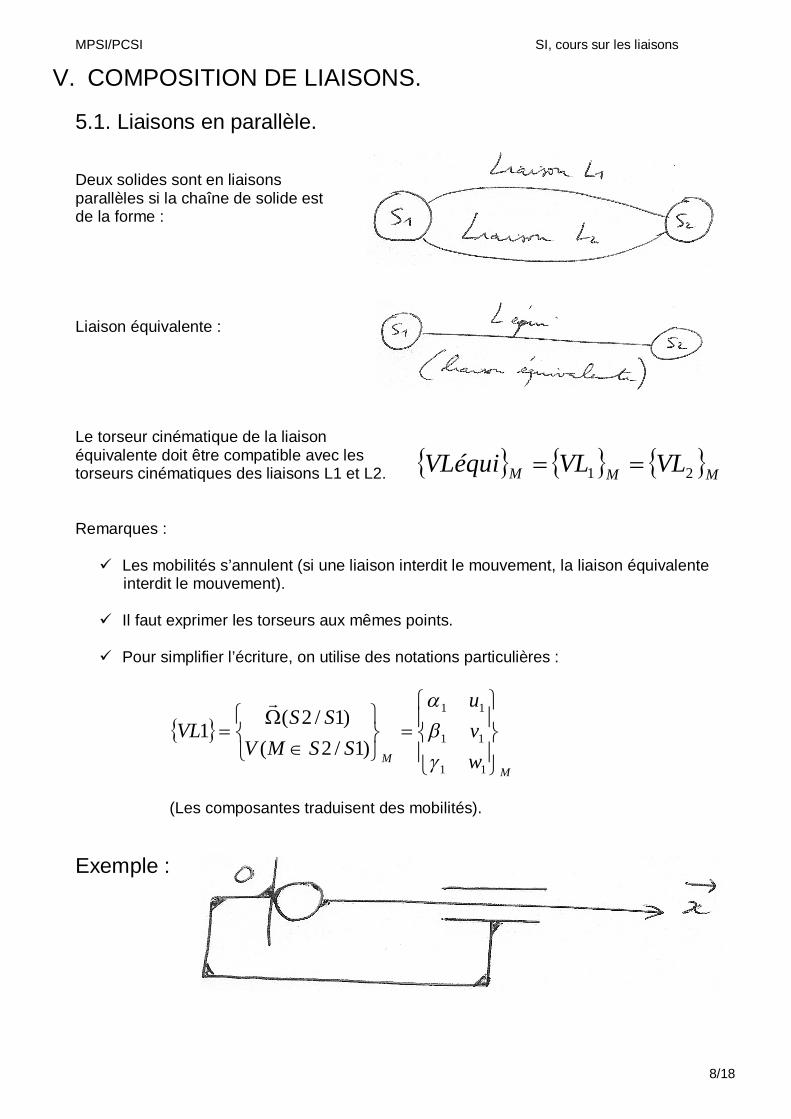
V. COMPOSITION DE LIAISONS. 5.1. Liaisons en parallèle. Deux solides sont en liaisons parallèles si la chaîne de solide est de la forme :
Liaison équivalente : Le torseur cinématique de la liaison équivalente doit être compatible avec les torseurs cinématiques des liaisons L1 et L2.
MMM VLVLVLéqui 21
Remarques : Les mobilités s’annulent (si une liaison interdit le mouvement, la liaison équivalente
interdit le mouvement). Il faut exprimer les torseurs aux mêmes points.
Pour simplifier l’écriture, on utilise des notations particulières :
M
M wvu
SSMVSSVL
11
11
11
)1/2()1/2(1
(Les composantes traduisent des mobilités).
Exemple :

MPSI/PCSI SI, cours sur les liaisons
9/18
L1 : ponctuelle en O de normale x L2 : pivot glissant d’axe ),( xO
O
wvVL
11
11
1 01
O
vVL
0000222
Owvu
VLéqui
OOO VLVLVLéqui 21
00
000
1
1
2
1
1
21
wwvv
uu
O
VLéqui
00000
Léqui : pivot d’axe ),( xO
5.2. Liaisons en séries. Trois solides sont en liaisons séries si la chaîne de solide est de la forme : Liaison équivalente :
La composition des torseurs cinématiques permet d’écrire :
MMM VLVLVLéqui 21 Remarque : Les mobilités s’ajoutent (si une liaison autorise le mouvement, la liaison
équivalente autorise le mouvement). Exemple :
MPSI/PCSI SI, cours sur les liaisons
10/18
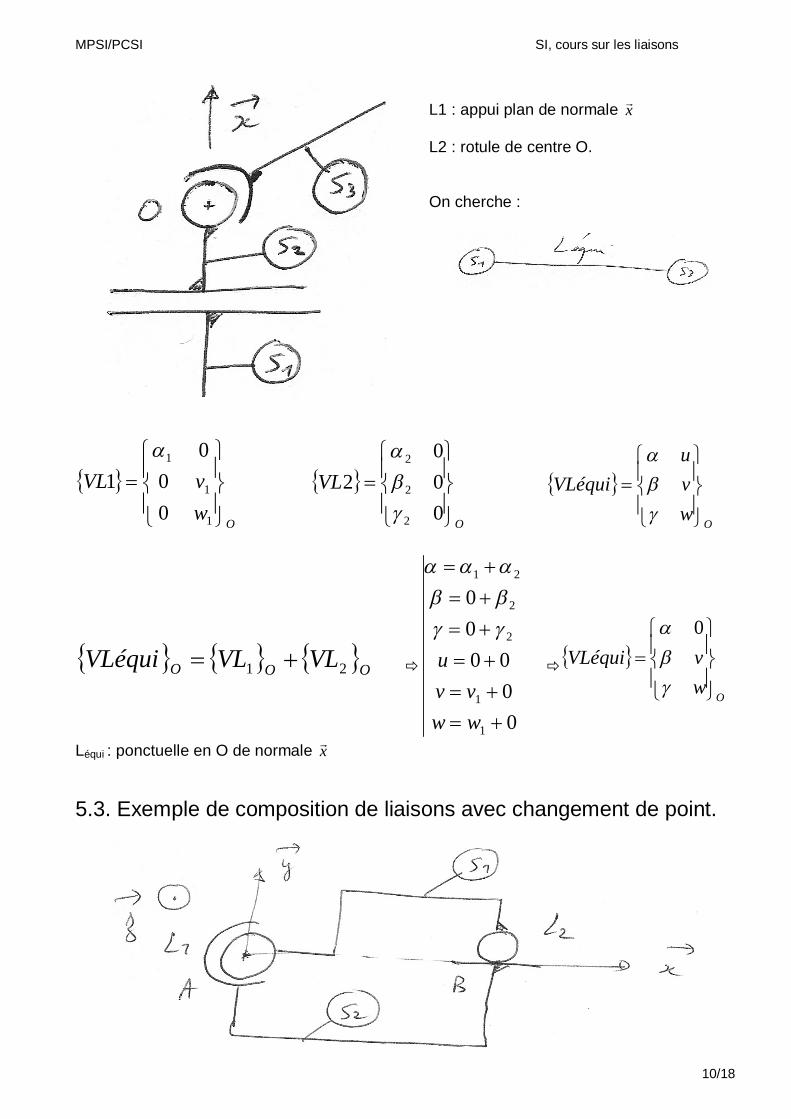
L1 : appui plan de normale x L2 : rotule de centre O. On cherche :
O
wvVL
1
1
1
00
01
O
VL
000
2
2
2
2
O
wvu
VLéqui
OOO VLVLVLéqui 21
0000
00
1
1
2
2
21
wwvv
u
O
wvVLéqui
0
Léqui : ponctuelle en O de normale x 5.3. Exemple de composition de liaisons avec changement de point.

MPSI/PCSI SI, cours sur les liaisons
11/18
A
VL
000
1
1
1
1
Bw
uVL
22
2
22
02
On cherche le torseur de la liaison équivalente au point A. Il faut exprimer les torseurs en A.
BBV
VL
)(
2
on veut AAV
VL
)(
2
BABVAV
)()(
22
2
2
2
2
2
2
2
..
000)(
lwlul
w
uAV
A
lwlu
VL
222
22
22
..2
A
wvu
VLéqui
AAA VLVLVLéqui 21
22
2
2
21
21
21
.0.0
0
lwwlvuu
A
VLéqui
0000
Rotule à doigt de centre A, rotation ),( zA interdite
5.4. Remarque. Une approche intuitive basée sur l’analyse des mouvements relatifs possibles permet généralement de déterminer la liaison équivalente.
VI. ETUDE DES CHAINES DE SOLIDES. 6.1. Les différentes chaines de solides.
MPSI/PCSI SI, cours sur les liaisons
12/18
Chaîne ouverte.
Chaîne fermée.
Chaîne complexe.
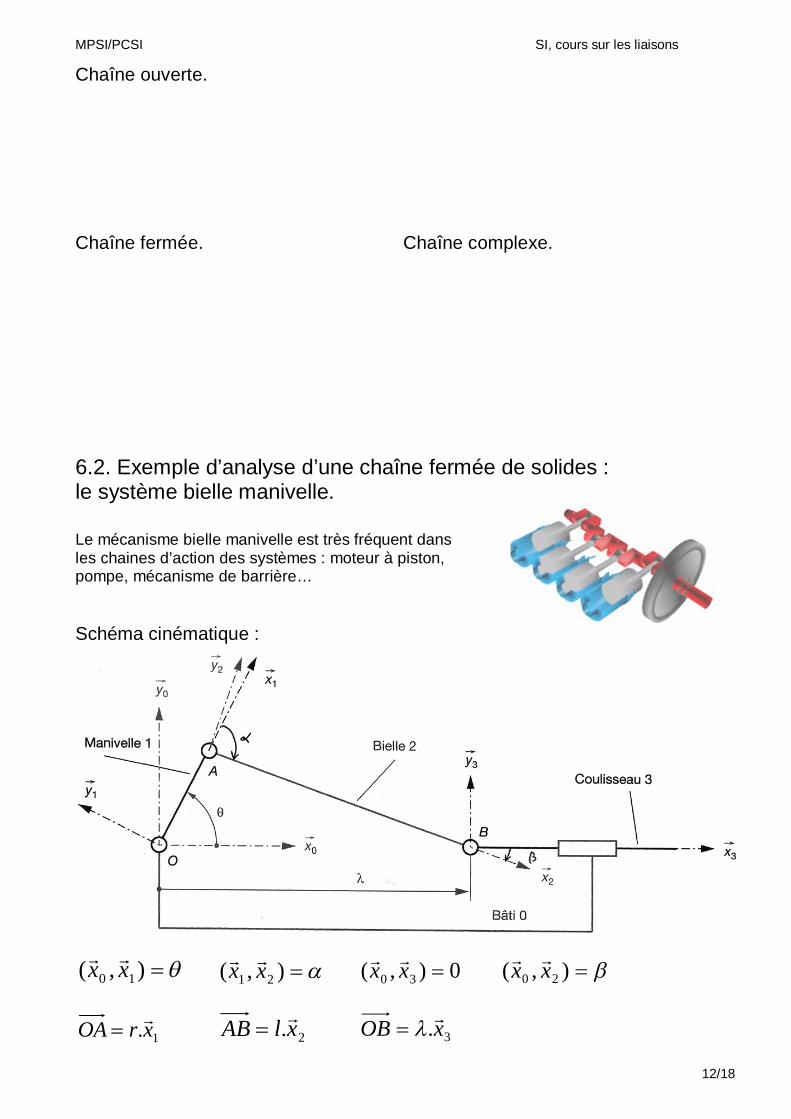
6.2. Exemple d’analyse d’une chaîne fermée de solides : le système bielle manivelle. Le mécanisme bielle manivelle est très fréquent dans les chaines d’action des systèmes : moteur à piston, pompe, mécanisme de barrière…
Schéma cinématique :
),( 10 xx ),( 21 xx
0),( 30 xx ),( 20 xx
1.xrOA 2.xlAB
3.xOB
MPSI/PCSI SI, cours sur les liaisons
13/18
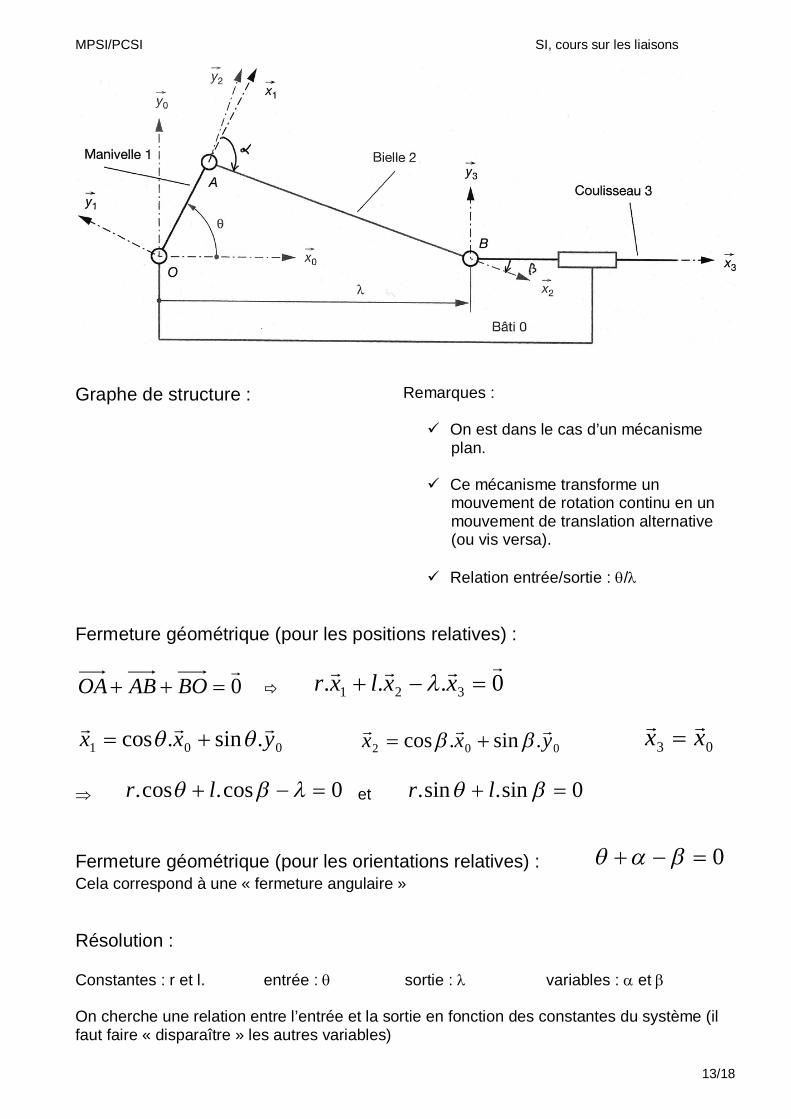
Graphe de structure :
Remarques : On est dans le cas d’un mécanisme
plan. Ce mécanisme transforme un
mouvement de rotation continu en un mouvement de translation alternative (ou vis versa).
Relation entrée/sortie : /
Fermeture géométrique (pour les positions relatives) :
0
BOABOA 0... 321
xxlxr
001 .sin.cos yxx 002 .sin.cos yxx 03 xx
0cos.cos. lr et 0sin.sin. lr
Fermeture géométrique (pour les orientations relatives) : 0 Cela correspond à une « fermeture angulaire » Résolution : Constantes : r et l. entrée : sortie : variables : et On cherche une relation entre l’entrée et la sortie en fonction des constantes du système (il faut faire « disparaître » les autres variables)

MPSI/PCSI SI, cours sur les liaisons
14/18
Solution 1. sin.sinlr
et cos.cos. lr
2)sin.(1.cos.
lrlr
Solution 2. 22 )cos.()cos.( rl et 22 )sin.()sin.( rl
222 cos...2 rrl
6.3. Analyse géométrique d’une chaîne fermée de solides. Fermeture géométrique.
La fermeture géométrique d’une chaîne fermée de solides donne dans l’espace 2 équations vectorielles.
Dans le cas d’un problème est plan, la projection de ces équations vectorielles donne 3 équations scalaires.
Dans le cas d’un problème spatial, la projection de ces équations vectorielles donne 6 équations scalaires.
6.4. Analyse cinématique d’une chaîne fermée de solides. Fermeture cinématique. Si on reprend l’exemple du système bielle manivelle, on peut écrire :
MMMM VVVV 0/11/22/30/3 Remarques. Les torseurs doivent être exprimés au même point. Cette relation donne 2 équations vectorielles, ce qui donne 6 équations scalaires ou 3
équations scalaires si le problème est plan. En dérivant la fermeture géométrique, on retrouve la fermeture cinématique.
MPSI/PCSI SI, cours sur les liaisons
15/18
CINEMATIQUE DU SOLIDE 5 : ETUDE CINEMATIQUE DU CONTACT ENTRE 2 SOLIDES
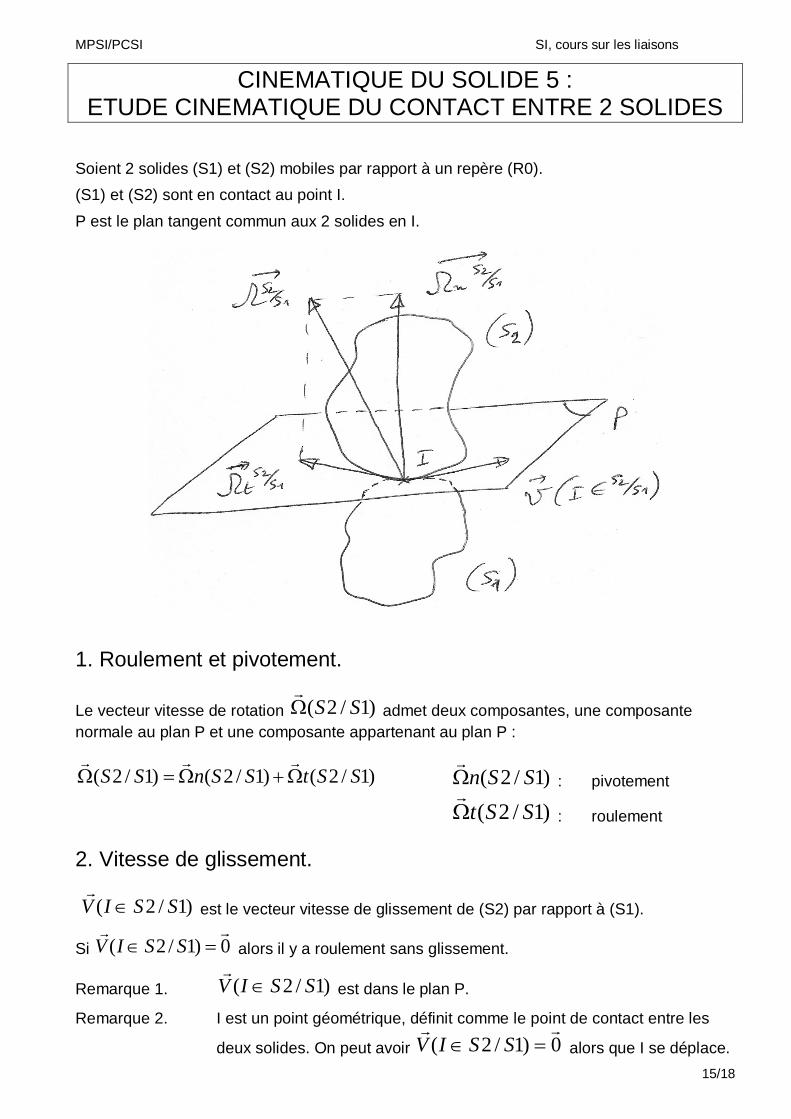
Soient 2 solides (S1) et (S2) mobiles par rapport à un repère (R0). (S1) et (S2) sont en contact au point I. P est le plan tangent commun aux 2 solides en I.
1. Roulement et pivotement.
Le vecteur vitesse de rotation )1/2( SS
admet deux composantes, une composante normale au plan P et une composante appartenant au plan P :
)1/2()1/2()1/2( SStSSnSS
)1/2( SSn
: pivotement
)1/2( SSt
: roulement
2. Vitesse de glissement.
)1/2( SSIV
est le vecteur vitesse de glissement de (S2) par rapport à (S1).
Si 0)1/2(
SSIV alors il y a roulement sans glissement.
Remarque 1. )1/2( SSIV
est dans le plan P.
Remarque 2. I est un point géométrique, définit comme le point de contact entre les
deux solides. On peut avoir 0)1/2(
SSIV alors que I se déplace.

MPSI/PCSI SI, cours sur les liaisons
16/18
3. Illustration.
On a 0)1/2(
SSIV , mais le point I se déplace (point géométrique de contact ).
Pour exprimer )1/2( SSIV
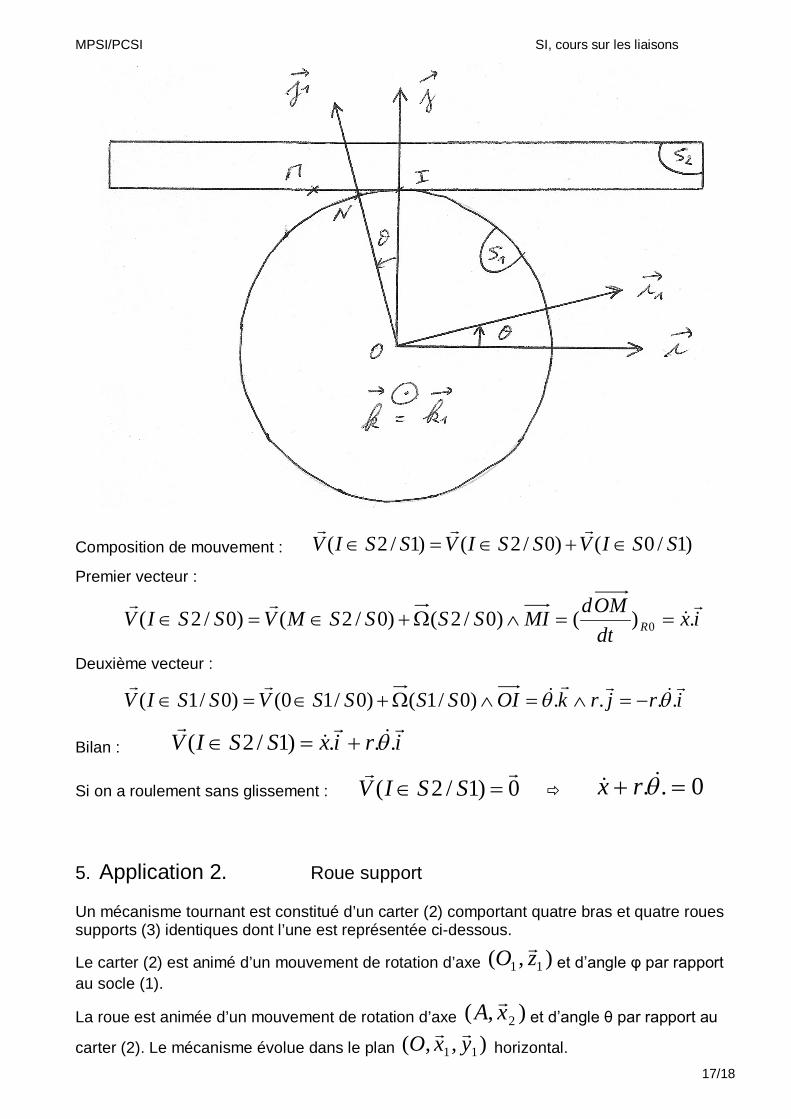
, on décompose cette vitesse (en passant par des solides qui conditionnement les mouvement de (S1) et (S2) et on passe par des points qui appartiennent aux solides (pas définis comme des points géométriques). 4. Application. Soit (S0) un solide de référence (non représenté)
auquel est rattaché le repère ),,,(0 kjiOR
Soit (S1) une roue animée d’un mouvement de
rotation d’axe ),( kO
par rapport à R0.
Le repère ),,,( 1111 kjiOR
est lié à (S1). On a
kk
1 et ),( 1ii
Soit (S2) un solide animé d’un mouvement de
direction i
par rapport à (S1).
M (S2) tel que ixjrOM.. avec r constant.(S1) et (S2) sont en contact en I.
Questions. Déterminer la vitesse de glissement )1/2( SSIV
Donner la relation obtenue si l’on a roulement sans glissement.
MPSI/PCSI SI, cours sur les liaisons
17/18
Composition de mouvement : )1/0()0/2()1/2( SSIVSSIVSSIV
Premier vecteur :
ixdtOMdMISSSSMVSSIV R
.)()0/2()0/2()0/2( 0
Deuxième vecteur :
irjrkOISSSSVSSIV
....)0/1()0/10()0/1(
Bilan : irixSSIV
...)1/2(
Si on a roulement sans glissement : 0)1/2(
SSIV 0.. rx 5. Application 2. Roue support Un mécanisme tournant est constitué d’un carter (2) comportant quatre bras et quatre roues supports (3) identiques dont l’une est représentée ci-dessous.
Le carter (2) est animé d’un mouvement de rotation d’axe ),( 11 zO et d’angle φ par rapport
au socle (1).
La roue est animée d’un mouvement de rotation d’axe ),( 2xA et d’angle θ par rapport au
carter (2). Le mécanisme évolue dans le plan ),,( 11 yxO horizontal.

MPSI/PCSI SI, cours sur les liaisons
18/18
Les repères R1, R2 et R3 sont liés respectivement aux solides (1), (2) et (3).
On donne : 2.xaAG 3.ybGB
(B n’est pas représenté)
Question : Déterminer la relation entre θ et φ lorsqu’on a roulement sans glissement en M.
Composition de mouvement : )1/2()2/3()1/3( MVMVMV
12 ..0)2/3()2/3()2/3( zRxGMGVMV
2..)2/3( yRMV
21 ..0)1/2()1/2()1/2( xLzOMOVMV
2..)1/2( yLMV
Bilan : 2)...()1/3( yLRMV
Si on a roulement sans glissement alors 0.. LR